


ENGINEERING TOMORROW
Manuel d'utilisation
VLT® Midi Drive FC 280
vlt-drives.danfoss.com

Table des matières Manuel d'utilisation
Table des matières
1 Introduction
1.1 Objet de ce manuel
1.2 Ressources supplémentaires
1.3 Version de document et de logiciel
1.4 Vue d'ensemble des produits
1.5 Homologations et certications
1.6 Mise au rebut
2 Sécurité
2.1 Symboles de sécurité
2.2 Personnel qualié
2.3 Précautions de sécurité
3 Installation mécanique
3.1 Déballage
3.2 Environnement d'installation
3.3 Installation
4
4
4
4
4
6
6
7
7
7
7
9
9
10
10
4 Installation électrique
4.1 Consignes de sécurité
4.2 Installation selon critères CEM
4.3 Mise à la terre
4.4 Schéma de câblage
4.5 Accès
4.6 Raccordement du moteur
4.7 Raccordement au secteur CA
4.8 Câblage de commande
4.8.1 Types de bornes de commande 19
4.8.2 Câblage vers les bornes de commande 20
4.8.3 Activation du fonctionnement du moteur (borne 27) 20
4.8.4 Commande de frein mécanique 21
4.8.5 Communication de données par USB 23
4.9 Liste de contrôle avant l'installation
5 Mise en service
5.1 Consignes de sécurité
13
13
13
13
15
17
17
18
19
24
25
25
5.2 Application de l'alimentation
5.3 Utilisation du panneau de commande local
5.3.1 Panneau de commande local numérique (NLCP) 25
5.3.2 Fonction de la touche droite du NLCP 27
MG07A504 Danfoss A/S © 08/2018 Tous droits réservés. 1
25
25
Table des matières
VLT® Midi Drive FC 280
5.3.3 Menu rapide du NLCP 27
5.3.4 Menu principal du NLCP 29
5.3.5 Panneau de commande local graphique (GLCP) 31
5.3.6 Réglage des paramètres 32
5.3.7 Modication des réglages des paramètres à l'aide du GLCP 32
5.3.8 Chargement/téléchargement de données depuis/vers le LCP 33
5.3.9 Restauration des réglages par défaut à l'aide du LCP 33
5.4 Programmation de base
5.4.1 Conguration de moteur asynchrone 34
5.4.2 Conguration de moteur PM en VVC
5.4.3 Adaptation automatique au moteur (AMA) 35
+
5.5 Contrôle de la rotation du moteur
5.6 Contrôle de la rotation du codeur
5.7 Test de commande locale
5.8 Démarrage du système
5.9 Module de mémoire
5.9.1 Synchronisation des données du variateur de fréquence avec un nouveau module de mémoire (créer une sauvegarde du variateur) 37
5.9.2 Copier des données vers un autre variateur de fréquence 38
5.9.3 Copier des données vers plusieurs variateurs de fréquence 38
5.9.4 Transfert des informations du micrologiciel 38
5.9.5 Sauvergarder des modications de paramètres vers un module de mémoire 39
5.9.6 Eaçage de données 39
5.9.7 Transfert des performances et indications 39
5.9.8 Activer le convertisseur PROFIBUS 39
34
34
36
36
36
36
37
6 Safe Torque O (STO)
6.1 Précautions de sécurité pour la STO
6.2 Installation de la fonction Safe Torque O
6.3 Mise en service de la fonction STO
6.3.1 Activation de la fonction Safe Torque O 43
6.3.2 Désactivation de la fonction Safe Torque O 43
6.3.3 Essai de mise en service de la fonction STO 44
6.3.4 Test des applications STO en mode de redémarrage manuel 44
6.3.5 Test des applications STO en mode de redémarrage automatique 44
6.4 Maintenance et service de la fonction STO
6.5 Caractéristiques techniques de la fonction STO
7 Exemples d'applications
7.1 Introduction
7.2 Exemples d'applications
2 Danfoss A/S © 08/2018 Tous droits réservés. MG07A504
41
42
42
43
45
46
47
47
47
Table des matières Manuel d'utilisation
7.2.1 AMA 47
7.2.2 Vitesse 47
7.2.3 Marche/arrêt 48
7.2.4 Réinitialisation d’alarme externe 49
7.2.5 Thermistance du moteur 49
7.2.6 SLC 49
8 Maintenance, diagnostics et dépannage
8.1 Maintenance et service
8.2 Types d'avertissement et d'alarme
8.3 Achage d'avertissement et d'alarme
8.4 Liste des avertissements et alarmes
8.4.1 Liste des codes d'alarme/avertissement 53
8.5 Dépannage
9 Spécications
9.1 Données électriques
9.2 Alimentation secteur
9.3 Puissance et données du moteur
9.4 Conditions ambiantes
9.5 Spécications du câble
9.6 Entrée/sortie de commande et données de commande
9.7 Couples de serrage des raccords
9.8 Fusibles et disjoncteurs
9.9 Tailles de protection, dimensionnements puissance et dimensions
51
51
51
52
53
58
60
60
62
63
63
64
64
67
67
70
10 Annexe
10.1 Symboles, abréviations et conventions
10.2 Structure du menu des paramètres
Indice
MG07A504 Danfoss A/S © 08/2018 Tous droits réservés. 3
73
73
73
84
Introduction
VLT® Midi Drive FC 280
11
1 Introduction
1.1 Objet de ce manuel
Ce manuel d'utilisation contient des informations sur
l'installation et la mise en service sûres du variateur de
fréquence VLT® Midi Drive FC 280.
Ce manuel d’utilisation est réservé à du personnel qualié.
Pour utiliser le variateur de fréquence de façon sûre et
professionnelle, lire et suivre le manuel d'utilisation. Faire
particulièrement attention aux consignes de sécurité et aux
avertissements d’ordre général. Garder ce guide d'utilisation à proximité du variateur de fréquence, à tout
moment.
VLT® est une marque déposée.
1.2 Ressources supplémentaires
Ressources disponibles pour comprendre les fonctions
avancées, la programmation et la maintenance des
variateurs de fréquence :
Le manuel de conguration du VLT® Midi Drive
•
FC 280 fournit les informations détaillées relatives
à la conception et aux applications du variateur
de fréquence.
Le guide de programmation du VLT® Midi Drive
•
FC 280 fournit des informations sur la programmation et comporte une description complète
des paramètres.
Des publications et des manuels supplémentaires sont
disponibles auprès de Danfoss. Voir drives.danfoss.com/
knowledge-center/technical-documentation/ pour en obtenir
la liste.
Version de document et de logiciel
1.3
Ce manuel est régulièrement révisé et mis à jour. Toutes
les suggestions d'amélioration sont les bienvenues. Le
Tableau 1.1 indique la version du document et la version
logicielle correspondante.
Vue d'ensemble des produits
1.4
1.4.1 Utilisation prévue
Le variateur de fréquence est un contrôleur de moteur
électronique destiné :
à la régulation de la vitesse du moteur en
•
fonction du signal de retour du système ou des
ordres distants venant de contrôleurs externes.
Un entraînement électrique de puissance est
composé d'un variateur de fréquence, d'un
moteur et de l'équipement entraîné par le
moteur.
à la surveillance de l'état du moteur et du
•
système.
Le variateur de fréquence peut aussi servir de protection
du moteur contre la surcharge.
En fonction de la conguration, le variateur de fréquence
peut être utilisé dans des applications autonomes ou
intégré à un plus vaste ensemble (appareil ou installation).
Le variateur de fréquence est destiné à une utilisation dans
des environnements résidentiels, industriels et
commerciaux conformément aux lois et normes locales.
AVIS!
Dans un environnement résidentiel, ce produit peut
provoquer des interférences radioélectriques, auquel cas
des mesures d'atténuation supplémentaires peuvent être
requises.
Abus prévisible
Ne pas utiliser le variateur de fréquence dans des
applications qui ne sont pas conformes aux conditions
d'exploitation et aux environnements spéciés. Veiller à
assurer la conformité avec les conditions stipulées au
chapitre 9 Spécications.
Édition Remarques
MG07A5
4 Danfoss A/S © 08/2018 Tous droits réservés. MG07A504
Mise à jour du logiciel et module de
mémoire.
Tableau 1.1 Version de document et de logiciel
Version
logicielle
1.5
M
7
63
4
5
21
8
10
130BE200.12
M
7
63
4
5
21
8
9
T2/T4
S2
Introduction Manuel d'utilisation
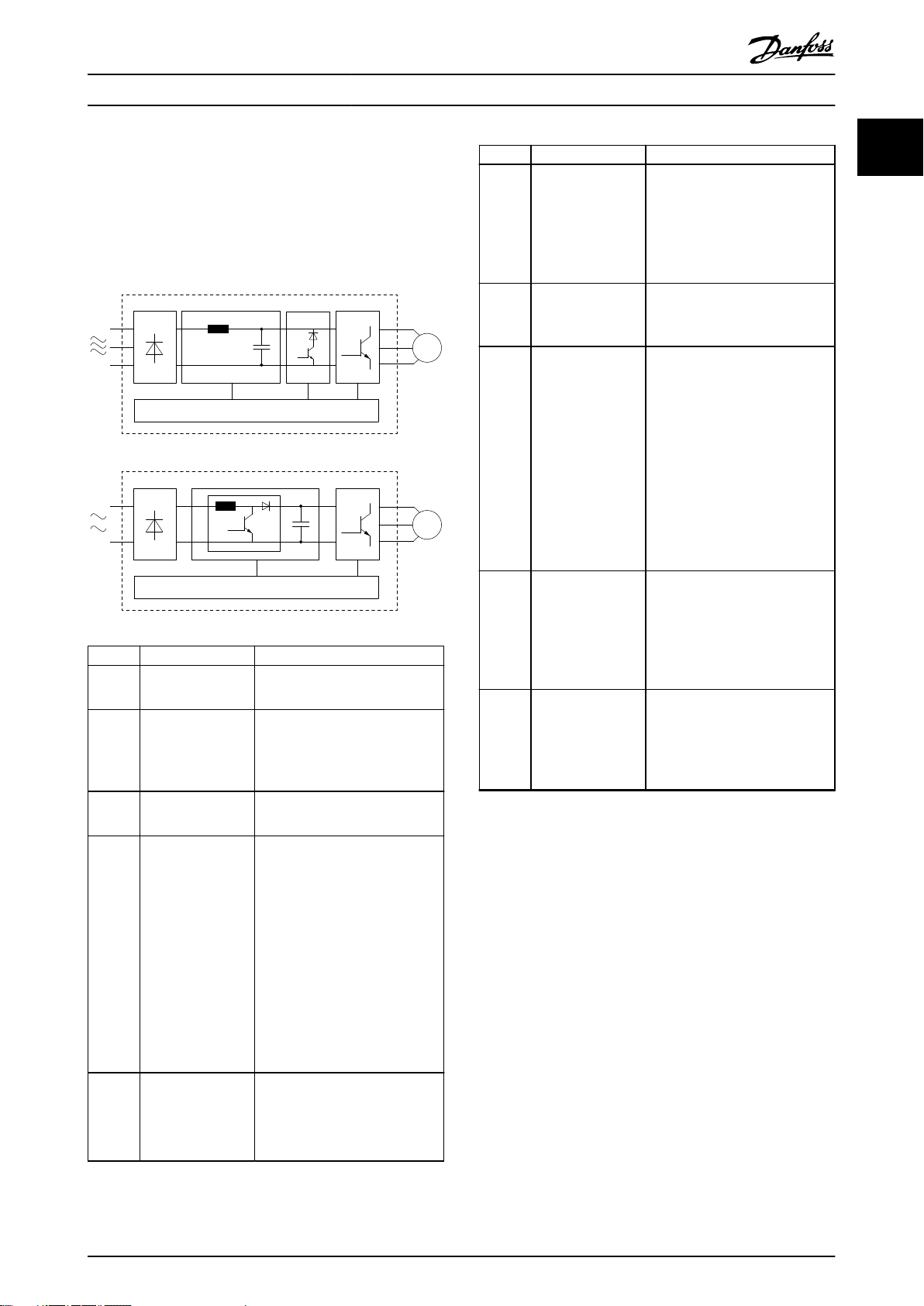
1.4.2 Schéma fonctionnel du variateur de
fréquence
L'Illustration 1.1 représente un schéma fonctionnel des
composants internes du variateur de fréquence.
Zone Composant Fonctions
Alimentation secteur CA du
1 Entrée secteur
2 Redresseur
3 Bus CC
4
5
Bobine de
réactance CC
Batterie de condensateurs
•
variateur de fréquence.
Le pont redresseur convertit
•
l'entrée CA en courant CC
pour alimenter le variateur de
fréquence.
Le circuit du bus intermédiaire
•
traite le courant CC.
Filtre le courant du circuit CC
•
intermédiaire.
Assure la protection contre les
•
transitoires secteur.
Réduit la valeur ecace (RMS)
•
du courant.
Augmente le facteur de
•
puissance répercuté vers la
ligne.
Réduit les harmoniques sur
•
l'entrée CA.
Stocke l'énergie CC.
•
Assure une protection anti-
•
panne pendant les courtes
pertes de puissance.
Zone Composant Fonctions
Convertit le courant CC en
•
une forme d'onde CA à
6 Onduleur
Sortie vers le
7
moteur
Circuit de
8
commande
9 CFP
Hacheur de
10
freinage
Illustration 1.1 Exemple de schéma fonctionnel d'un variateur
de fréquence
modulation d'impulsions en
durée (PWM) régulée pour
une sortie variable contrôlée
du moteur.
Alimentation de sortie
•
triphasée régulée vers le
moteur.
La puissance d'entrée, le
•
traitement interne, la sortie et
le courant du moteur sont
surveillés pour fournir un
fonctionnement et un
contrôle ecaces.
L'interface utilisateur et les
•
ordres externes sont surveillés
et mis en œuvre.
Le mot d'état et le contrôle
•
peuvent être assurés.
La correction du facteur de
•
puissance modie la forme
d'onde du courant prélevé par
le variateur de fréquence pour
améliorer le facteur de
puissance.
Le hacheur de freinage est
•
utilisé dans le circuit intermédiaire CC pour réguler la
tension CC lorsque la charge
renvoie de l'énergie.
1.4.3 Tailles de boîtier et
dimensionnements puissance
Pour les tailles de boîtier et les dimensionnements
puissance des variateurs de fréquence, se reporter au
chapitre 9.9 Tailles de protection, dimensionnements
puissance et dimensions.
1.4.4 Safe Torque O (STO)
Le variateur de fréquence VLT® Midi Drive FC 280 prend en
charge la fonction Safe Torque O (STO). Pour plus d'informations sur l'installation, la mise en service, la
maintenance et les caractéristiques techniques de la
fonction STO, se reporter au chapitre 6 Safe Torque O
(STO).
1 1
MG07A504 Danfoss A/S © 08/2018 Tous droits réservés. 5
089
Introduction
VLT® Midi Drive FC 280
11
1.5 Homologations et certications
Pour la conformité à l'Accord européen relatif au transport
international des marchandises dangereuses par voies de
navigation intérieures (ADN), se reporter au chapitre Instal-
lation conforme à l'ADN dans le manuel de conguration du
VLT® Midi Drive FC 280.
Le variateur de fréquence est conforme aux exigences de
sauvegarde de la capacité thermique de la norme UL508C.
Pour plus d'informations, se reporter au chapitre Protection
thermique du moteur dans le manuel de conguration du
VLT® Midi Drive FC 280.
Normes appliquées et conformité de la fonction STO
L'utilisation de la STO sur les bornes 37 et 38 nécessite de
se conformer à toutes les dispositions de sécurité, à savoir
les lois, les réglementations et les directives concernées. La
fonction STO intégrée est conforme aux normes suivantes :
CEI/EN 61508:2010, SIL2
•
CEI/EN 61800-5-2:2007, SIL2
•
CEI/EN 62061:2015, SILCL de SIL2
•
EN ISO 13849-1:2015 Catégorie 3 PL d
•
Mise au rebut
1.6
Ne pas jeter d'équipement contenant des
composants électriques avec les ordures
ménagères.
Il doit être collecté séparément conformément à la législation locale en vigueur.
6 Danfoss A/S © 08/2018 Tous droits réservés. MG07A504
Sécurité Manuel d'utilisation
2 Sécurité
2.1 Symboles de sécurité
Précautions de sécurité
2.3
2 2
Les symboles suivants sont utilisés dans ce document :
AVERTISSEMENT
Indique une situation potentiellement dangereuse qui
peut entraîner des blessures graves ou le décès.
ATTENTION
Indique une situation potentiellement dangereuse qui
peut entraîner des blessures supercielles à modérées.
Ce signe peut aussi être utilisé pour mettre en garde
contre des pratiques non sûres.
AVIS!
Fournit des informations importantes, notamment sur les
situations qui peuvent entraîner des dégâts matériels.
2.2 Personnel qualié
Un transport, un stockage, une installation, une exploitation et une maintenance corrects et ables sont
nécessaires au fonctionnement en toute sécurité et sans
problème du variateur de fréquence. Seul du personnel
qualié est autorisé à installer ou utiliser cet équipement.
dénition, le personnel qualié est un personnel formé,
Par
autorisé à installer, mettre en service et maintenir l’équipement, les systèmes et les circuits conformément aux lois
et aux réglementations en vigueur. En outre, il doit être
familiarisé avec les instructions et les mesures de sécurité
décrites dans ce manuel.
AVERTISSEMENT
HAUTE TENSION
Les variateurs de fréquence contiennent des tensions
élevées lorsqu'ils sont reliés à l'alimentation secteur CA,
à l'alimentation CC ou à la répartition de la charge. Le
non-respect de la réalisation de l'installation, du
démarrage et de la maintenance par du personnel
qualié peut entraîner la mort ou des blessures graves.
L'installation, le démarrage et la maintenance ne
•
doivent être eectués que par du personnel
qualié.
Avant tout entretien ou toute réparation, utiliser
•
un dispositif de mesure de tension approprié
pour s'assurer que le variateur de fréquence est
complètement déchargé.
AVERTISSEMENT
DÉMARRAGE IMPRÉVU
Lorsque le variateur de fréquence est connecté au
secteur CA, à l’alimentation CC ou est en répartition de
la charge, le moteur peut démarrer à tout moment. Un
démarrage imprévu pendant la programmation, une
opération d'entretien ou de réparation peut entraîner la
mort, des blessures graves ou des dégâts matériels. Le
moteur peut être démarré par un commutateur externe,
un ordre du bus série, un signal de référence d'entrée, à
partir du LCP, par commande à distance à l'aide du
Logiciel de programmation MCT 10 ou suite à la
suppression d'une condition de panne.
Pour éviter un démarrage imprévu du moteur :
Déconnecter le variateur de fréquence du
•
secteur.
Activer la touche [O/Reset] sur le LCP avant de
•
programmer les paramètres.
Câbler et assembler entièrement le variateur de
•
fréquence, le moteur et tous les équipements
entraînés avant de connecter le variateur de
fréquence au secteur CA, à l'alimentation CC ou
en répartition de la charge.
MG07A504 Danfoss A/S © 08/2018 Tous droits réservés. 7
Sécurité
VLT® Midi Drive FC 280
AVERTISSEMENT
TEMPS DE DÉCHARGE
22
Le variateur de fréquence contient des condensateurs
dans le circuit intermédiaire qui peuvent rester chargés
même lorsque le variateur de fréquence n'est pas
alimenté. Une haute tension peut être présente même
lorsque les voyants d'avertissement sont éteints. Le nonrespect du temps d'attente spécié après la mise hors
tension avant un entretien ou une réparation peut
entraîner le décès ou des blessures graves.
Arrêter le moteur.
•
Déconnecter le secteur CA et les alimentations à
•
distance du circuit CC, y compris les batteries de
secours, les alimentations sans interruption et
les connexions du circuit CC aux autres
variateurs de fréquence.
Déconnecter ou verrouiller les moteurs PM.
•
Attendre que les condensateurs soient complè-
•
tement déchargés. Le temps d'attente minimum
est indiqué dans le Tableau 2.1.
Avant tout entretien ou toute réparation, utiliser
•
un dispositif de mesure de tension approprié
pour s'assurer que les condensateurs sont
complètement déchargés.
AVERTISSEMENT
DANGERS LIÉS À L'ÉQUIPEMENT
Tout contact avec les arbres tournants et les matériels
électriques peut entraîner des blessures graves voire
mortelles.
L'installation, le démarrage et la maintenance
•
doivent être eectués par du personnel qualié
uniquement.
Veiller à ce que tous les travaux électriques
•
soient conformes aux réglementations
électriques locales et nationales.
Suivre les procédures décrites dans ce manuel.
•
ATTENTION
DANGER DE PANNE INTERNE
Une panne interne dans le variateur de fréquence peut
entraîner des blessures graves si le variateur de
fréquence n’est pas correctement fermé.
Avant d’appliquer de la puissance, s’assurer que
•
tous les caches de sécurité sont en place et
fermement xés.
Tension [V]
200–240 0,37–3,7 (0,5–5) 4
380–480
Tableau 2.1 Temps de décharge
Plage de puissance
[kW (HP)]
0,37–7,5 (0,5–10) 4
11–22 (15–30) 15
Temps d'attente
minimum
(minutes)
AVERTISSEMENT
RISQUE DE COURANT DE FUITE
Les courants de fuite à la terre dépassent 3,5 mA. Le fait
de ne pas mettre le variateur à la terre peut entraîner le
décès ou des blessures graves.
L'équipement doit être correctement mis à la
•
terre par un installateur électrique certié.
8 Danfoss A/S © 08/2018 Tous droits réservés. MG07A504
130BE616.14
VLT
MADE IN
DENMARK
T/C: FC-280PK37T4E20H1BXCXXXSXXXXAX
0.37kW 0.5HP
IN: 3x380-480V 50/60Hz, 1.2/1.0A
OUT: 3x0-Vin 0-500Hz, 1.2/1.1A
IP20
P/N: 134U2184 S/N: 000000G000
Midi Drive
www.danfoss.com
CAUTION / ATTENTION:
WARNING / AVERTISSEMENT:
See manual for special condition/mains fuse
Voir manual de conditions speciales/fusibles
Enclosure: See manual
5AF3 E358502 IND.CONT.EQ.
Stored charge, wait 4 min.
Charge r
é
siduelle, attendez 4 min.
21
1
2
4
3
5
11
20
19
18
16
15
14
13
10
8
9
6
17
R
US LISTED
www.tuv.com
ID 0600000000
Danfoss A/S, 6430 Nordborg, Denmark
12
7
Installation mécanique Manuel d'utilisation
3 Installation mécanique
3.1 Déballage
3.1.1 Éléments fournis
Les éléments fournis peuvent varier en fonction de la
conguration du produit.
Vérier que les éléments fournis et les
•
informations disponibles sur la plaque
signalétique correspondent à ceux de la conr-
mation de la commande.
Vérier visuellement l'emballage et le variateur de
•
fréquence pour s'assurer de l'absence de
dommage dû à une mauvaise manipulation
pendant le transport. Signaler tout dommage
auprès du transporteur. Conserver les pièces
endommagées à des ns de clarication.
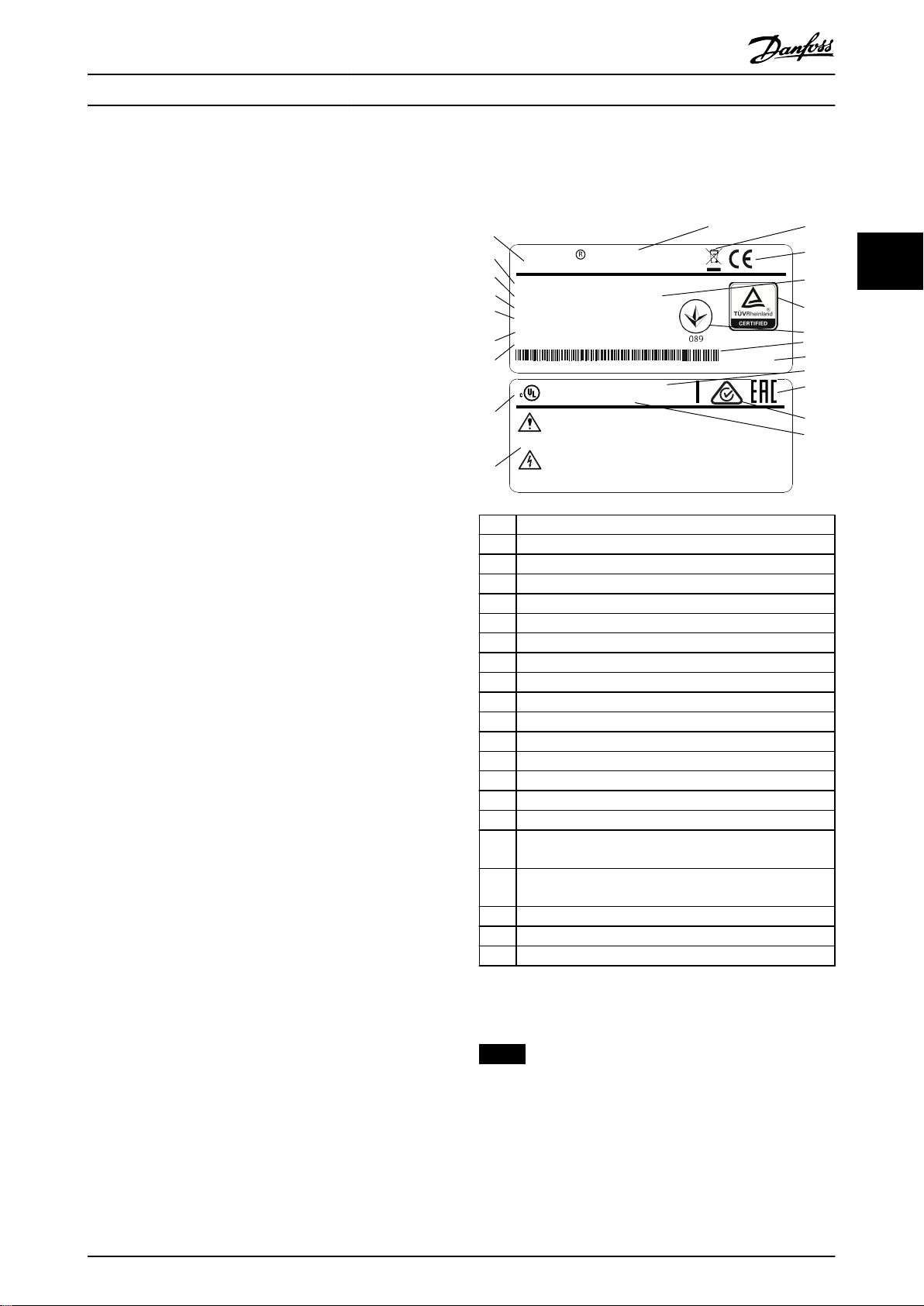
1 Logo du produit
2 Nom du produit
3 Mise au rebut
4 Marquage CE
5 Numéro de série
6 Logo TÜV
7 Logo UkrSEPRO
8 Code-barres
9 Pays d'origine
10 Référence au type de boîtier
11 Logo EAC
12 Logo RCM
13 Référence UL
14 Spécications d'avertissement
15 Logo UL
16 Classe IP
Tension, fréquence et courant de sortie (à basse/haute
17
tension)
Tension, fréquence et courant d’entrée (à basse/haute
18
tension)
19 Dimensionnement puissance
20 Référence
21 Code de type
3 3
MG07A504 Danfoss A/S © 08/2018 Tous droits réservés. 9
Illustration 3.1 Plaque signalétique (exemple)
AVIS!
Ne pas retirer la plaque signalétique du variateur de
fréquence (perte de garantie).
Pour plus d'informations sur le code de type, se reporter
au chapitre Code de type dans le manuel de congu-
ration du VLT® Midi Drive FC 280.
130BE615.12
Installation mécanique
VLT® Midi Drive FC 280
3.1.2 Stockage
S'assurer que les exigences de stockage sont respectées.
Pour plus de détails, se reporter au chapitre 9.4 Conditions
ambiantes.
33
3.2 Environnement d'installation
AVIS!
Dans des environnements exposés à des liquides, à des
particules ou à des gaz corrosifs en suspension dans l’air,
s’assurer que le type de protection/IP de l’équipement
correspond à l’environnement d’installation. En cas de
non-respect des exigences de conditions ambiantes, la
durée de vie du variateur de fréquence peut être réduite.
S'assurer que les critères d'humidité relative de l'air, de
température et d'altitude sont respectés.
Vibrations et chocs
Le variateur de fréquence répond aux spécications
relatives aux unités montées sur les murs et au sol des
locaux industriels ainsi qu'aux panneaux xés sur les sols
et les murs.
Pour connaître en détail les conditions ambiantes
spéciées, se reporter au chapitre 9.4 Conditions ambiantes.
Installation
3.3
AVIS!
Toute mauvaise installation peut entraîner une
surchaue et une réduction de la performance.
Refroidissement
S'assurer qu'un dégagement de 100 mm (3,9 po)
•
en haut et en bas est prévu pour le refroidissement.
Levage
Pour déterminer une méthode de levage sûre,
•
vérier le poids de l'unité. Se reporter au
chapitre 9.9 Tailles de protection, dimensionnements
puissance et dimensions.
S'assurer que le dispositif de levage est adapté à
•
la tâche à réaliser.
Si nécessaire, prévoir un élévateur, une grue ou
•
un chariot élévateur à fourche présentant les
caractéristiques qui conviennent au déplacement
de l'unité.
Pour le levage, utiliser les anneaux de levage sur
•
l'unité le cas échéant.
Montage
Pour une adaptation des trous de xation du VLT® Midi
Drive FC 280, contacter le fournisseur local Danfoss pour
commander une plaque arrière séparée.
Pour monter le variateur de fréquence :
1. Veiller à ce que l'emplacement d'installation soit
susamment résistant pour supporter le poids de
l'unité. Le variateur de fréquence permet l'installation côte à côte.
2. Placer l'unité le plus près possible du moteur.
Raccourcir au maximum les câbles du moteur.
3. Pour créer une circulation d'air de refroidissement, monter l'unité à la verticale sur une
surface plane solide ou sur la plaque arrière
optionnelle.
4. Utiliser les trous de xation ovalisés (le cas
échéant) sur l'unité pour le montage mural.
AVIS!
Pour les dimensions des trous de xation, voir le
chapitre 9.9 Tailles de protection, dimensionnements
puissance et dimensions.
3.3.1 Montage côte à côte
Montage côte à côte
Toutes les unités VLT® Midi Drive FC 280 peuvent être
montées côte à côte en position verticale ou horizontale.
Elles ne nécessitent pas de refroidissement latéral supplémentaire.
Illustration 3.2 Montage côte à côte
10 Danfoss A/S © 08/2018 Tous droits réservés. MG07A504
130BF642.10
G
130BF643.10
G
Installation mécanique Manuel d'utilisation
AVIS!
RISQUE DE SURCHAUFFE
Si le kit de conversion IP21 est utilisé, le montage des
unités côte à côte pourrait entraîner des surchaues et
endommager les unités.
Prévoir au moins 30 mm (1,2 po) entre les bords
•
du couvercle supérieur du kit de conversion
IP21.
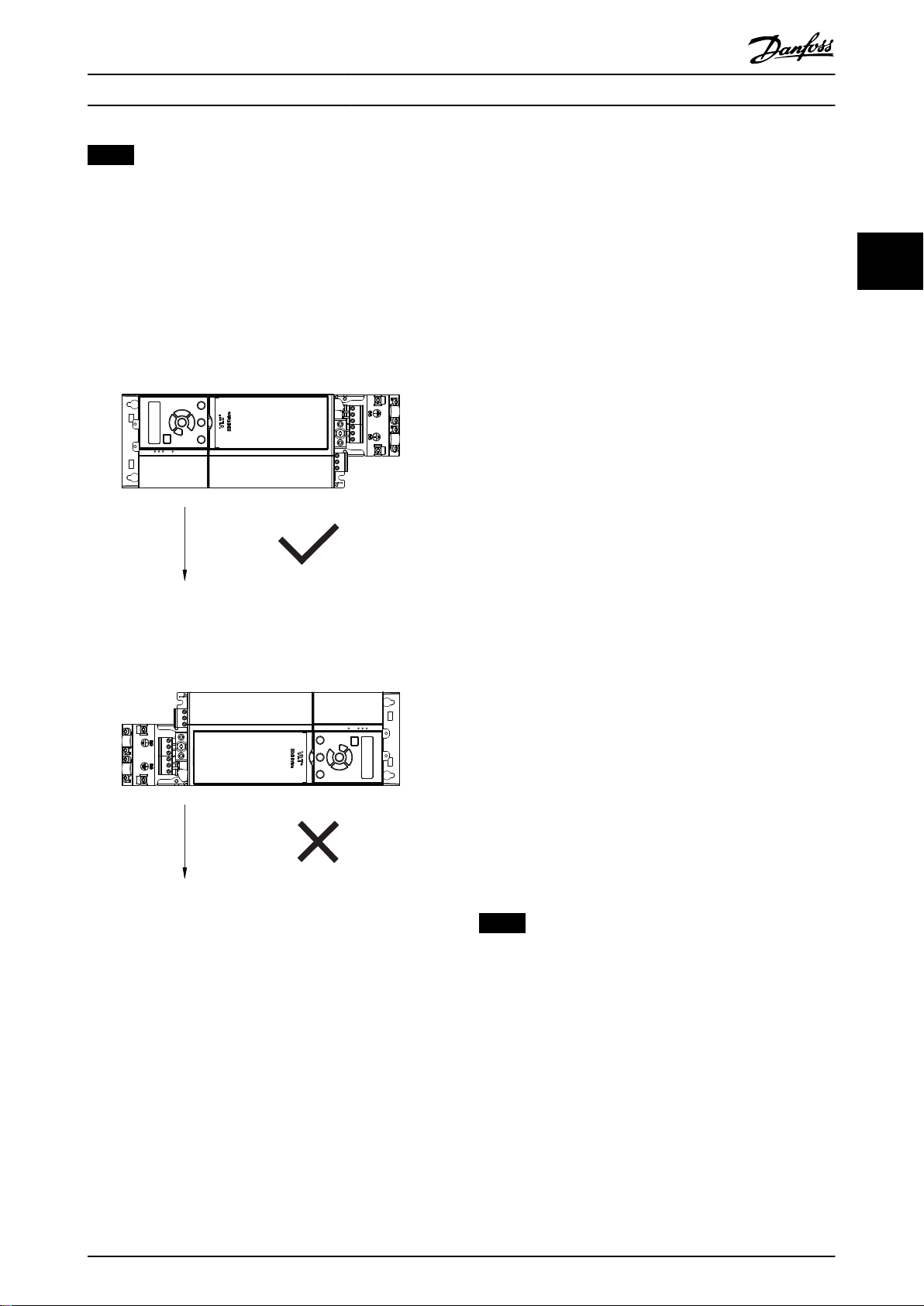
3.3.2 Montage horizontal
Illustration 3.3 Montage horizontal correct (côté gauche vers
le bas)
Illustration 3.4 Montage horizontal incorrect (côté droit vers
le bas)
3.3.3 Kit de connexion à la terre du bus
Le kit de connexion à la terre du bus assure la xation
mécanique et le blindage électrique des câbles pour les
versions de carte de commande suivantes :
Carte de commande avec PROFIBUS
•
Carte de commande avec PROFINET
•
Carte de commande avec CANOpen
•
Carte de commande avec Ethernet
•
Carte de commande avec POWERLINK
•
Chaque kit de connexion à la terre du bus contient une
plaque de connexion à la terre horizontale et une plaque
de connexion à la terre verticale. Le montage de la plaque
de connexion à la terre verticale est facultatif. La plaque de
connexion à la terre verticale fournit un meilleur soutien
mécanique aux connecteurs et câbles PROFINET, Ethernet
et POWERLINK.
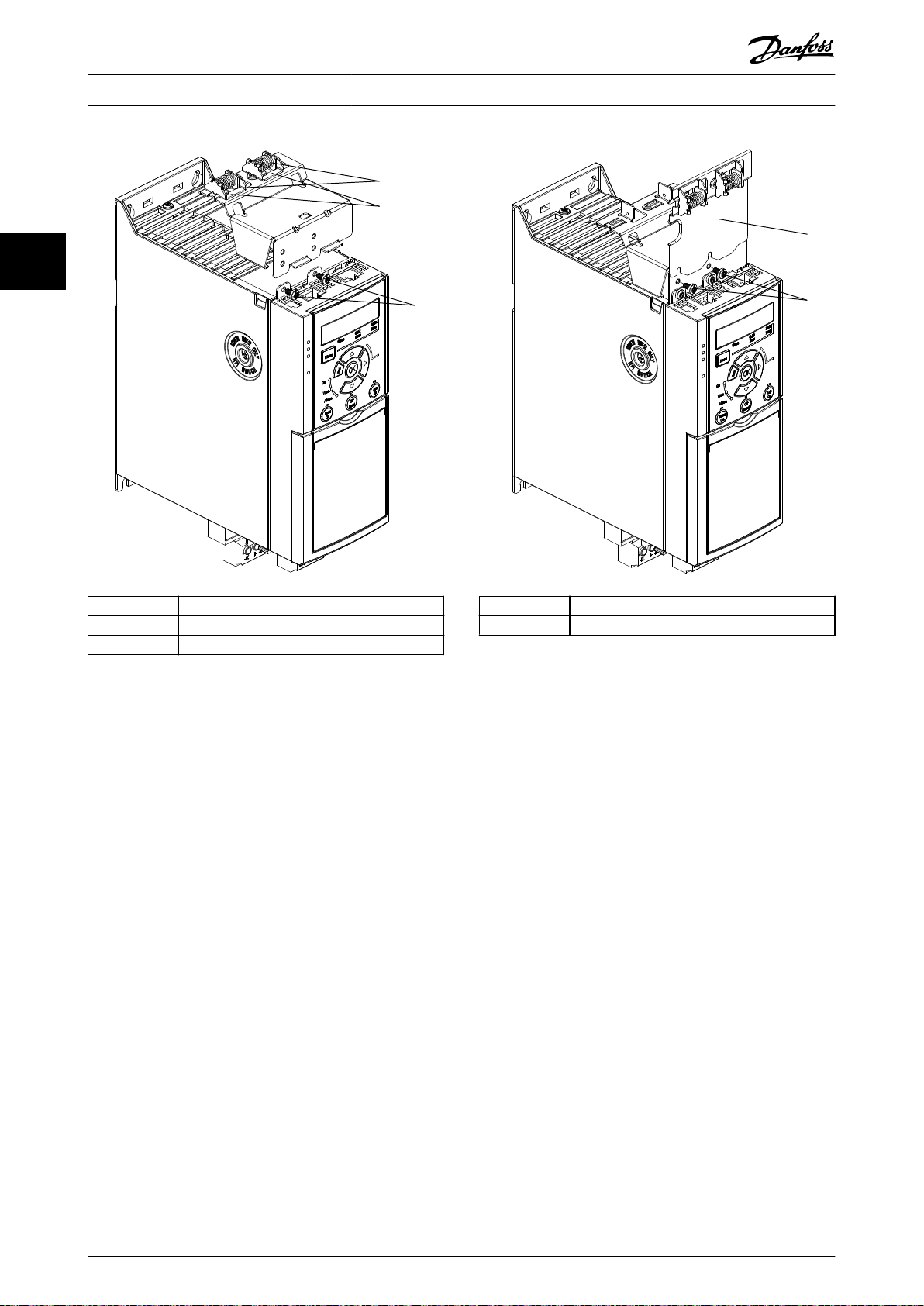
3.3.4 Montage
Pour monter le kit de connexion à la terre du bus :
1. Placer la plaque de connexion à la terre
horizontale sur la carte de commande montée sur
le variateur de fréquence et xer la plaque à
l'aide de 2 vis comme indiqué sur l'Illustration 3.5.
Couple de serrage 0,7-1,0 Nm (6,2-8,9 po-lb).
2. En option : installer la plaque de connexion à la
terre verticale comme suit :
2a Ôter les 2 ressorts mécaniques et les 2
étriers métalliques de la plaque
horizontale.
2b Monter les ressorts mécaniques et les
étriers métalliques sur la plaque
verticale.
2c Fixer la plaque à l'aide de 2 vis comme
indiqué sur l'Illustration 3.6. Couple de
serrage 0,7-1,0 Nm (6,2-8,9 po-lb).
AVIS!
Si le couvercle supérieur IP21 est utilisé, ne pas monter
la plaque de connexion à la terre verticale, car sa
hauteur aecte l'installation adéquate du couvercle
supérieur IP21.
3 3
MG07A504 Danfoss A/S © 08/2018 Tous droits réservés. 11
1
2
3
130BE480.10
130BE481.10
1
2
Installation mécanique
VLT® Midi Drive FC 280
33
1 Ressorts mécaniques
2 Étriers métalliques
3 Vis
Illustration 3.5 Fixer la plaque de connexion à la terre
horizontale à l'aide de vis
1 Plaque de connexion à la terre verticale
2 Vis
Illustration 3.6 Fixer la plaque de connexion à la terre verticale
à l'aide de vis
L'Illustration 3.5 et l'Illustration 3.6 représentent des
connecteurs Ethernet (RJ45). Le type de connecteur réel
dépend de la variante de bus de terrain sélectionnée du
variateur de fréquence.
3. Veiller au câblage correct des câbles du bus de
terrain (PROFIBUS/CANOpen) ou enfoncer les
connecteurs de câble (RJ45 pour PROFINET/
POWERLINK/Ethernet/IP) dans les prises de la
carte de commande.
4. 4a Placer les câbles PROFIBUS/CANOpen
entre les étriers métalliques à ressort
an d'établir une xation mécanique et
un contact électrique entre les sections
blindées des câbles et les étriers.
4b Placer les câbles PROFINET/POWERLINK/
Ethernet/IP entre les étriers métalliques
à ressort an d'établir une xation
mécanique entre les câbles et les étriers.
12 Danfoss A/S © 08/2018 Tous droits réservés. MG07A504
Installation électrique Manuel d'utilisation
4 Installation électrique
4.1 Consignes de sécurité
Consulter le chapitre 2 Sécurité pour connaître les
consignes de sécurité générales.
AVERTISSEMENT
TENSION INDUITE
La tension induite des câbles moteur de sortie de divers
variateurs de fréquence acheminés ensemble peut
charger les condensateurs de l'équipement, même
lorsque l'équipement est hors tension et verrouillé. Le
fait de ne pas acheminer les câbles du moteur de sortie
séparément ou de ne pas utiliser de câbles blindés peut
entraîner la mort ou des blessures graves.
Acheminer séparément les câbles du moteur.
•
Utiliser des câbles blindés.
•
Verrouiller tous les variateurs de fréquence en
•
même temps.
AVERTISSEMENT
CHOC ÉLECTRIQUE
Le variateur de fréquence peut entraîner un courant CC
dans le conducteur PE et, par conséquent, mener à des
blessures graves ou la mort.
Lorsqu'un relais de protection diérentielle
•
(RCD) est utilisé comme protection contre les
chocs électriques, seul un diérentiel de type B
est autorisé du côté alimentation de ce produit.
Le non-respect de la recommandation signie que le
RCD ne peut pas fournir la protection prévue.
Protection contre les surcourants
Un équipement de protection supplémentaire tel
•
qu'une protection thermique du moteur ou une
protection contre les courts-circuits entre le
variateur de fréquence et le moteur est requis
pour les applications à moteurs multiples.
Des fusibles d'entrée sont nécessaires pour
•
assurer une protection contre les courts-circuits et
les surcourants. S'ils ne sont pas installés en
usine, les fusibles doivent être fournis par l'installateur. Voir les calibres maximaux des fusibles au
chapitre 9.8 Fusibles et disjoncteurs.
Caractéristiques et types de câbles
L'ensemble du câblage doit être conforme aux
•
réglementations nationales et locales en matière
de sections de câble et de température ambiante.
Recommandations relatives au raccordement du
•
câblage de puissance : l de cuivre prévu pour
75 °C (167 °F) minimum.
Voir le chapitre 9.5 Spécications du câble pour connaître les
tailles et les types de câbles recommandés.
4.2 Installation selon critères CEM
Pour exécuter une installation conforme aux critères de la
CEM, suivre les instructions fournies au chapitre 4.3 Mise à
la terre, chapitre 4.4 Schéma de câblage, chapitre 4.6 Raccordement du moteur, et chapitre 4.8 Câblage de commande.
4.3 Mise à la terre
AVERTISSEMENT
RISQUE DE COURANT DE FUITE
Les courants de fuite à la terre dépassent 3,5 mA. Le fait
de ne pas mettre le variateur de fréquence à la terre
peut entraîner le décès ou des blessures graves.
L'équipement doit être correctement mis à la
•
terre par un installateur électrique certié.
Pour la sécurité électrique
Mettre le variateur de fréquence à la terre confor-
•
mément aux normes et directives en vigueur.
Utiliser un l de terre dédié pour l’alimentation
•
d’entrée, la puissance du moteur et le câblage de
commande.
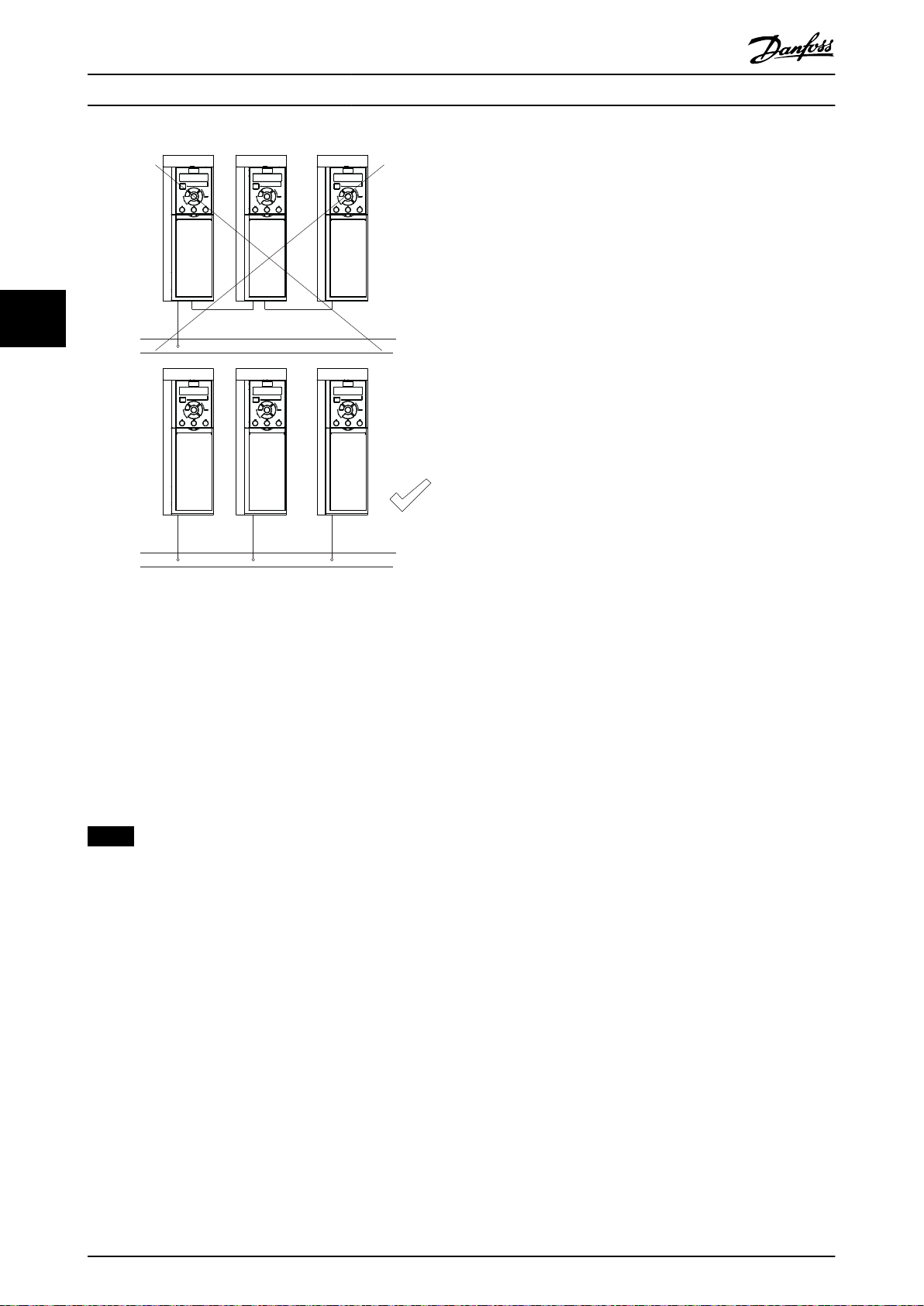
Ne pas mettre à la terre plusieurs variateurs de
•
fréquence en guirlande (voir l'Illustration 4.1).
Raccourcir au maximum les liaisons de mise à la
•
terre.
Respecter les exigences de câblage spéciées par
•
le fabricant du moteur.
Section de câble minimale pour les ls de terre :
•
10 mm² (7 AWG).
Deux ls de terre à terminaison séparée,
•
conformes aux critères de dimension.
4 4
MG07A504 Danfoss A/S © 08/2018 Tous droits réservés. 13
130BC500.10
FC 1
FC 1
FC 2
FC 2
FC 3
FC 3
PE
PE
Installation électrique
VLT® Midi Drive FC 280
44
Illustration 4.1 Principe de mise à la terre
Pour une installation conforme aux critères CEM
Établir un contact électrique entre le blindage du
•
câble et le boîtier du variateur de fréquence à
l'aide de presse-étoupes métalliques ou des
brides fournies avec l'équipement (voir le
chapitre 4.6 Raccordement du moteur).
Utiliser un câble à plusieurs brins pour réduire les
•
rafales/transitoires.
Ne pas utiliser de queues de cochon.
•
AVIS!
ÉGALISATION DE POTENTIEL
Risque de rafales/transitoires lorsque le potentiel de la
terre entre le variateur de fréquence et le système de
commande est diérent. Installer des câbles d’égalisation
entre les composants du système. Section de câble
recommandée : 16 mm² (6 AWG).
14 Danfoss A/S © 08/2018 Tous droits réservés. MG07A504
Power
input
Switch mode
power supply
Motor
Analog output
interface
(PNP) = Source
(NPN) = Sink
ON = Terminated
OFF = Open
Brake
resistor
91 (L1/N)
92 (L2/L)
93 (L3)
PE
50 (+10 V OUT)
53 (A IN)
2)
54 (A IN)
55 (COM digital/analog I/O)
0/4−20 mA
12 (+24 V OUT)
13 (+24 V OUT)
18 (D IN)
10 V DC
15 mA 100 mA
+ - + -
(U) 96
(V) 97
(W) 98
(PE) 99
(A OUT) 42
(P RS485) 68
(N RS485) 69
(COM RS485) 61
0 V
5 V
S801
0/4−20 mA
RS485
RS485
03
+10 V DC
0−10 V DC
24 V DC
02
01
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
19 (D IN)
24 V (NPN)
0 V (PNP)
17 V
0 V
0 V (PNP)
24 V (NPN)
29 (D IN)
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
33 (D IN)
32 (D IN)
38 (STO2)
4)
37 (STO1)
4)
95
P 5-00
21
ON
(+DC/R+) 89
(R-) 81
0−10 V DC
(-DC) 88
RFI
0 V
250 V AC, 3 A
Relay 1
1)
3)
5)
5)
130BE202.19
27 (D IN/OUT)
6)
Installation électrique Manuel d'utilisation
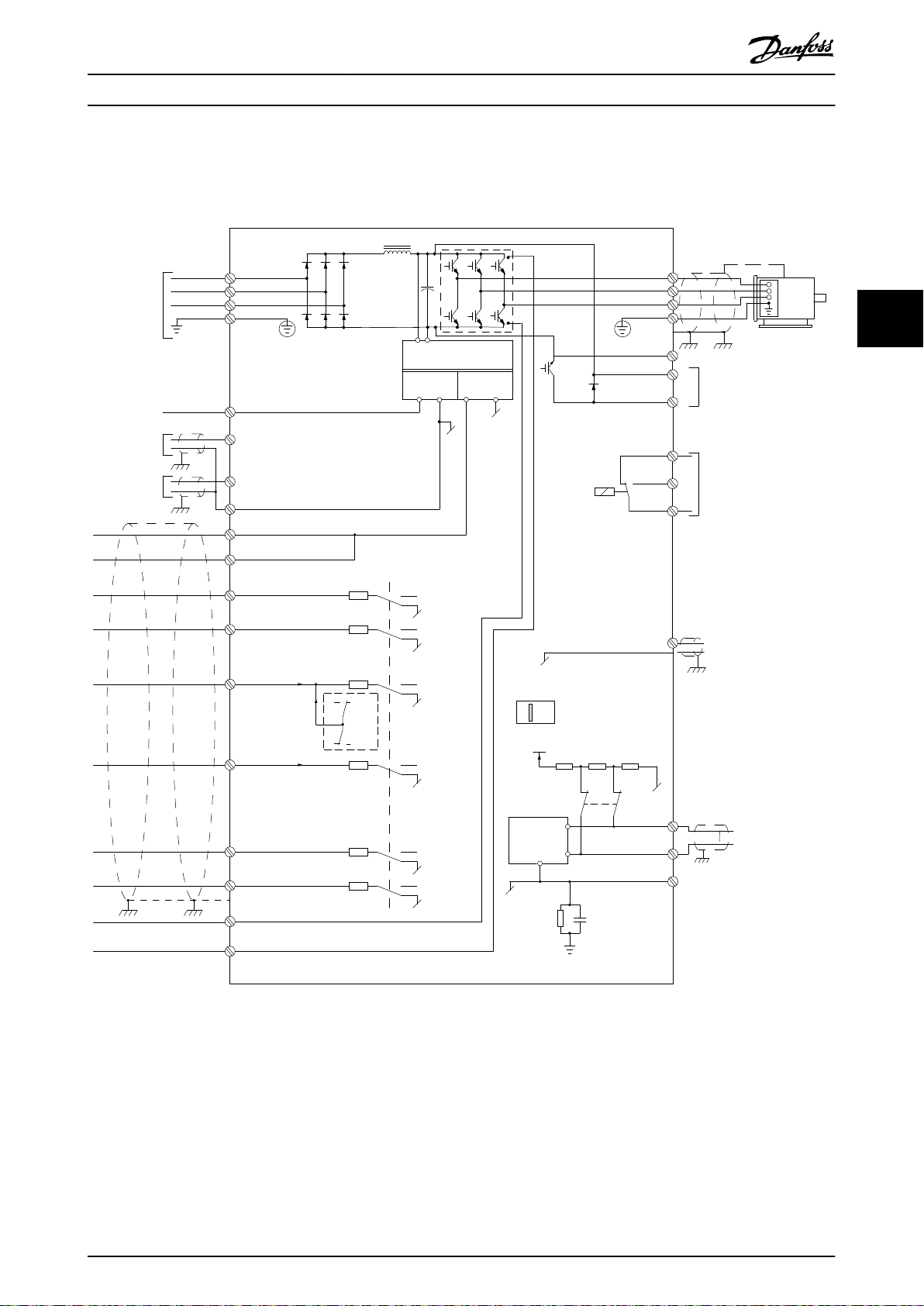
4.4 Schéma de câblage
Cette section décrit le câblage du variateur de fréquence.
4 4
Illustration 4.2 Dessin schématique du câblage de base
A = analogique, D = digitale
1) Le hacheur de freinage intégré n'est disponible que sur les unités triphasées.
2) La borne 53 peut également servir d'entrée digitale.
3) Le commutateur S801 (borne du bus) peut être utilisé pour permettre la terminaison sur le port RS485 (bornes 68 et 69).
4) Se reporter au chapitre 6 Safe Torque O (STO) pour le câblage adéquat de la fonction STO.
5) Le variateur de fréquence S2 (monophasé 200-240 V) ne prend pas en charge l'application de répartition de la charge.
6) La tension maximale est de 17 V pour la borne 27 utilisée comme sortie analogique.
MG07A504 Danfoss A/S © 08/2018 Tous droits réservés. 15
e30bf228.11
L1
L2
L3
PE
PE
u
v
w
2
1
3
5
16
17
18
14
12
8
7
10
9
4
11
13
4
6
15
90
4
Installation électrique
VLT® Midi Drive FC 280
44
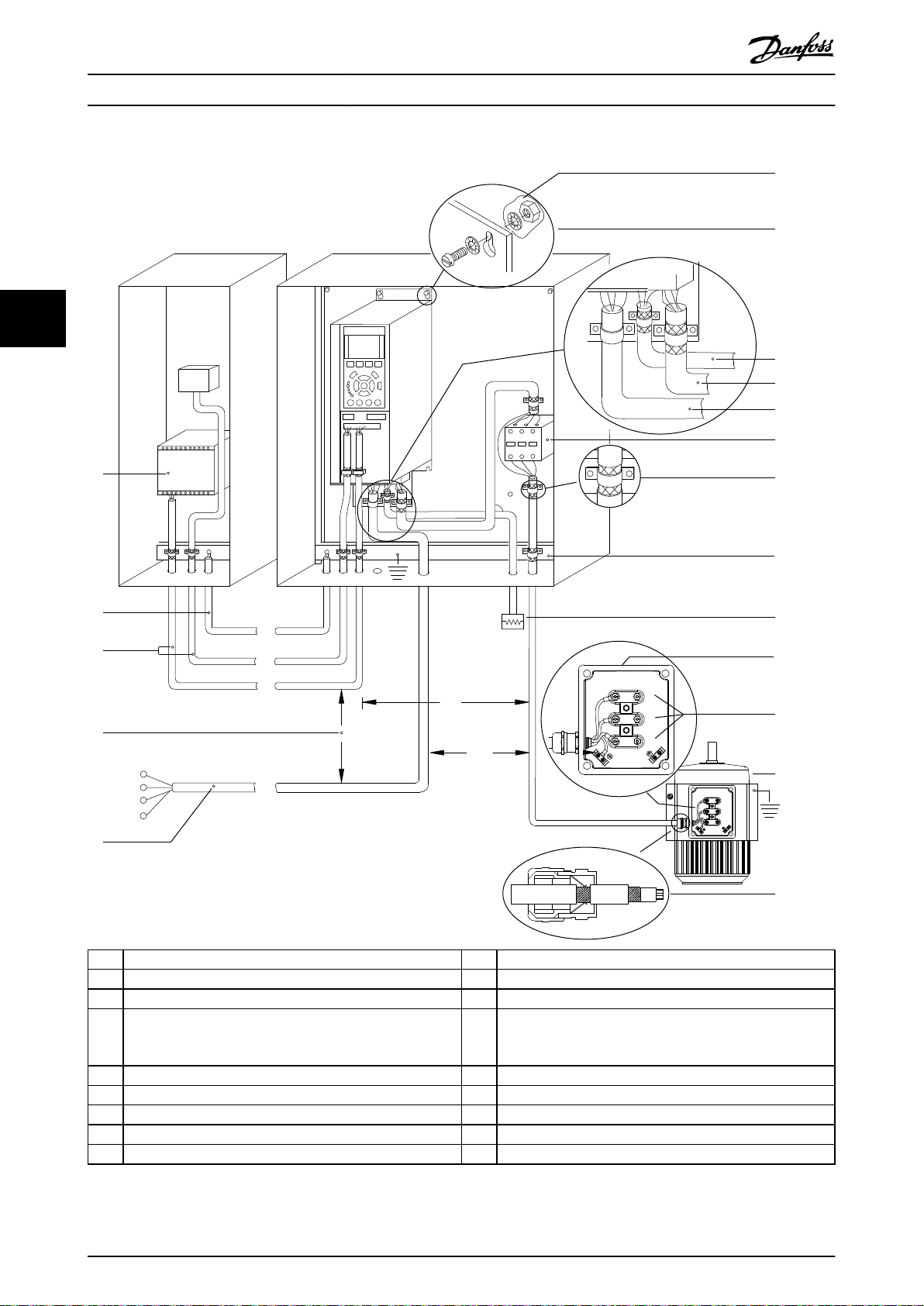
1 PLC 10 Câble secteur (non blindé)
2 Câble d’égalisation de 16 mm² (6 AWG) minimum 11 Contacteur de sortie, et plus.
3 Câbles de commande 12 Isolation de câble dénudée
4 Au moins 200 mm (7,87 po) entre les câbles de commande,
de moteur et secteur.
5 Alimentation secteur 14 Résistance de freinage
6 Surface nue (non peinte) 15 Boîtier métallique
7 Rondelles éventail 16 Raccordement au moteur
8 Câble de la résistance de freinage (blindé) 17 Moteur
9 Câble du moteur (blindé) 18 Presse-étoupe CEM
Illustration 4.3 Raccordement électrique typique
13 Barre omnibus de mise à la terre commune. Respecter les
réglementations nationales et locales relatives à la mise à la
terre d'armoire.
16 Danfoss A/S © 08/2018 Tous droits réservés. MG07A504
130BC504.11
130BD531.10
U
V
W
96
97
98
Installation électrique Manuel d'utilisation
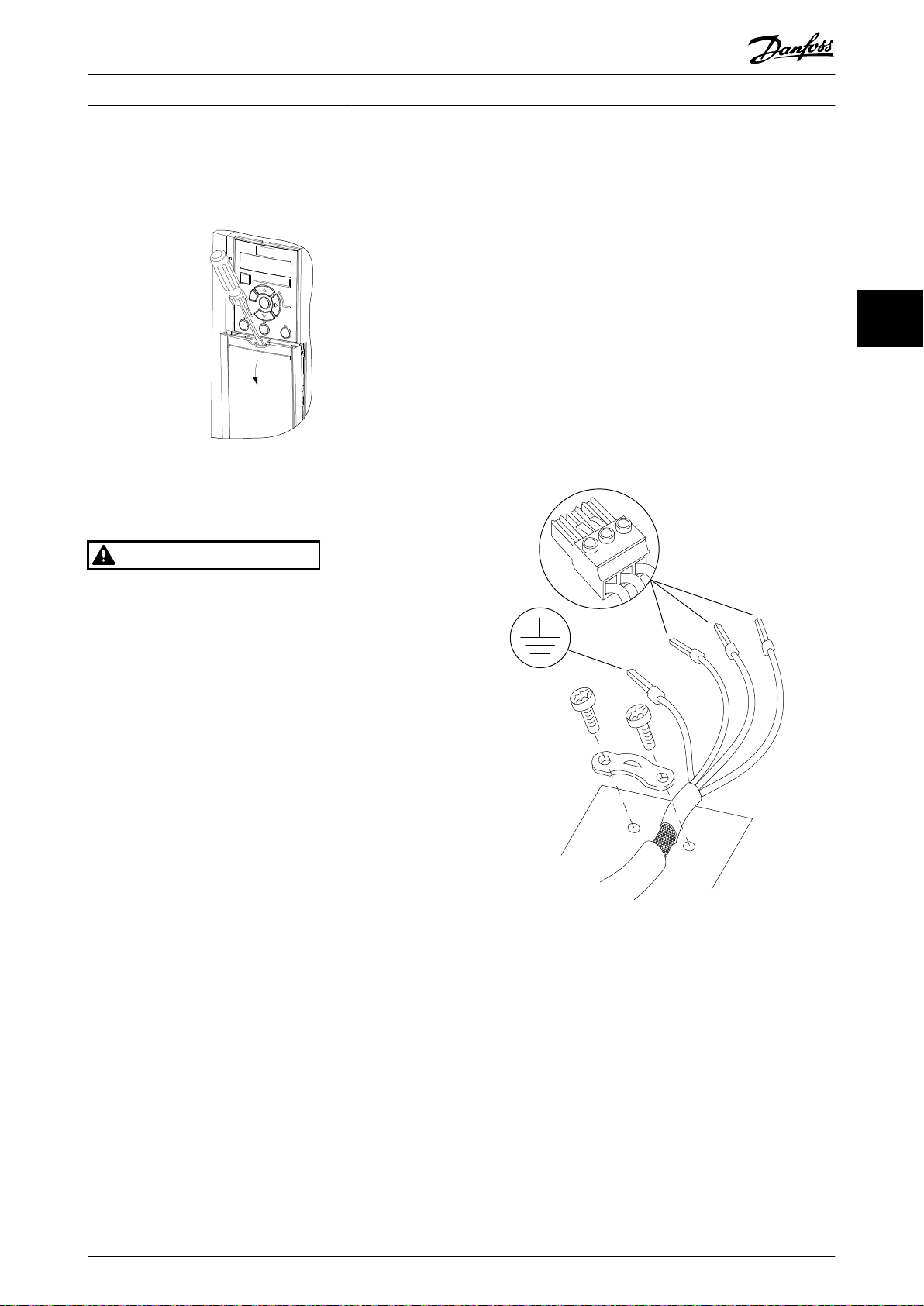
4.5 Accès
Retirer le couvercle à l'aide d'un tournevis. Voir
•
l’Illustration 4.4.
Illustration 4.4 Accès aux câbles de commande
4.6 Raccordement du moteur
AVERTISSEMENT
TENSION INDUITE
La tension induite des câbles du moteur de sortie
acheminés ensemble peut charger les condensateurs de
l'équipement, même lorsque ce dernier est hors tension
et verrouillé. Le fait de ne pas acheminer les câbles du
moteur de sortie séparément ou de ne pas utiliser de
câbles blindés peut entraîner la mort ou des blessures
graves.
Procédure
1. Dénuder une section de l’isolation extérieure du
câble.
2. Placer le l dénudé sous l'étrier de serrage an
d'établir une xation mécanique et un contact
électrique entre le blindage de câble et la terre.
3. Relier le câble de terre à la borne de mise à la
terre la plus proche conformément aux
instructions de mise à la terre fournies au
chapitre 4.3 Mise à la terre. Voir l’Illustration 4.5.
4. Raccorder le câblage du moteur triphasé aux
bornes 96 (U), 97 (V) et 98 (W) comme indiqué
sur l'Illustration 4.5.
5. Serrer les bornes en respectant les informations
fournies dans le chapitre 9.7 Couples de serrage
des raccords.
4 4
Acheminer séparément les câbles du moteur de
•
sortie.
Utiliser des câbles blindés.
•
Respecter les réglementations locales et
•
nationales pour les sections de câble. Pour les
sections de câble maximales, voir le
chapitre 9.1 Données électriques.
Respecter les exigences de câblage spéciées par
•
le fabricant du moteur.
Des caches amovibles pour câbles moteur ou des
•
panneaux d'accès sont prévus en bas des unités
IP21/de type 1.
Ne pas câbler un dispositif d'amorçage ou à pôles
•
commutables (p. ex. un moteur Dahlander ou un
moteur à bagues à induction) entre le variateur
de fréquence et le moteur.
Illustration 4.5 Raccordement du moteur
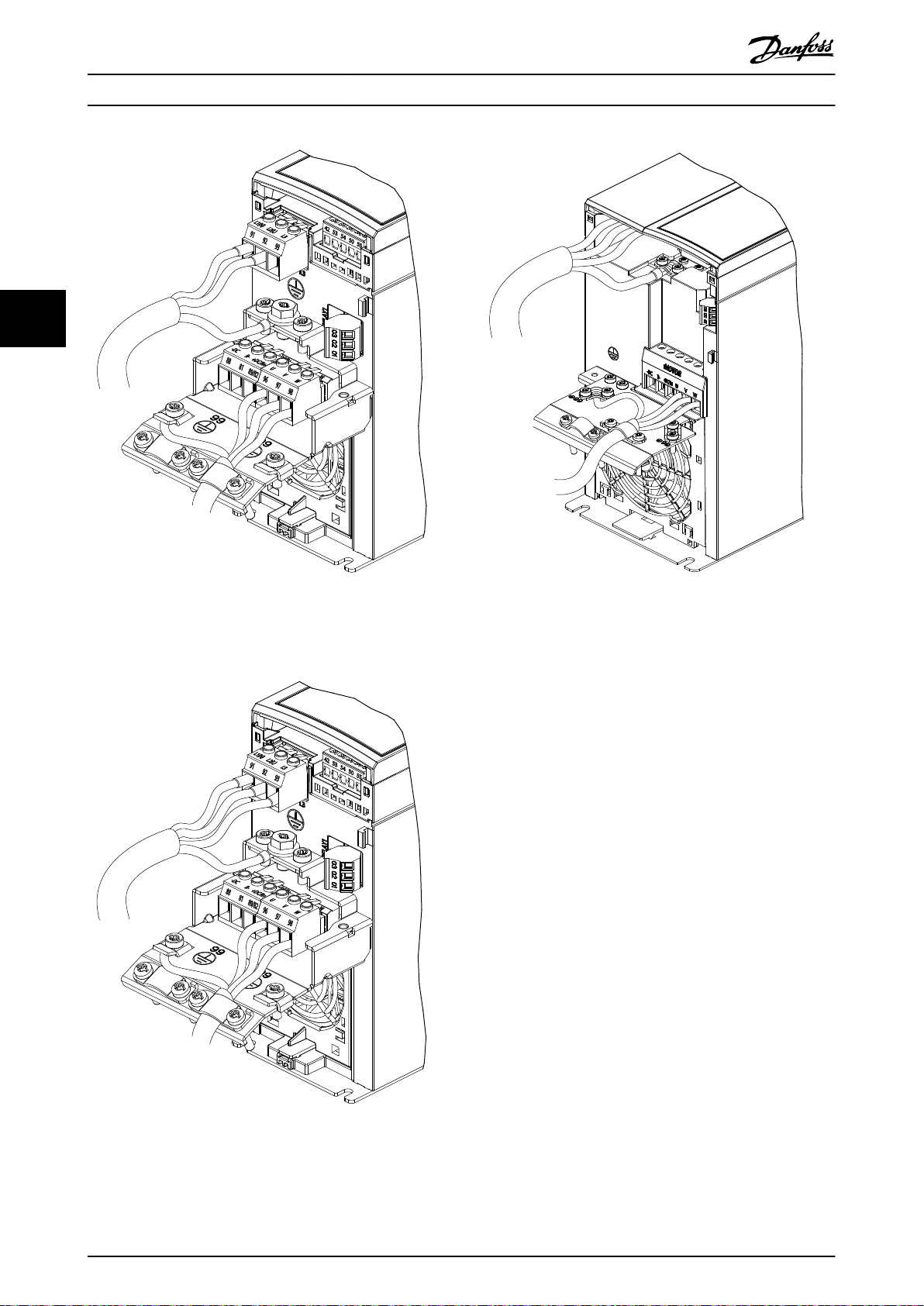
Le raccordement du secteur et du moteur, et la mise à la
terre des variateurs de fréquence monophasés et triphasés
sont représentés sur l'Illustration 4.6, l'Illustration 4.7 et
l'Illustration 4.8 respectivement. Les congurations réelles
peuvent varier selon les types d'unités et les équipements
optionnels.
MG07A504 Danfoss A/S © 08/2018 Tous droits réservés. 17
130BE232.11
130BE231.11
130BE804.10
Installation électrique
VLT® Midi Drive FC 280
44
Illustration 4.6 Mise à la terre et raccordement du secteur et
du moteur des
unités monophasées
Illustration 4.7 Mise à la terre et raccordement du secteur et
du moteur des unités triphasées (K1, K2, K3)
Illustration 4.8 Mise à la terre et raccordement du secteur et
du moteur des unités triphasées (K4, K5)
Raccordement au secteur CA
4.7
Dimensionner les câbles selon le courant d'entrée
•
du variateur de fréquence. Pour les sections de
câble maximales, consulter le chapitre 9.1 Données
électriques.
Respecter les réglementations locales et
•
nationales pour les sections de câble.
Procédure
1. Brancher les câbles de puissance d'entrée CA aux
bornes N et L pour les unités monophasées (voir
l'Illustration 4.6) ou aux bornes L1, L2 et L3 pour
les unités triphasées (voir l'Illustration 4.7).
2. En fonction de la conguration de l'équipement,
relier l'alimentation d'entrée aux bornes d'entrée
du secteur ou à un sectionneur d'entrée.
3. Relier le câble à la terre conformément aux
instructions de mise à la terre fournies au
chapitre 4.3 Mise à la terre.
4. Lorsque l'alimentation provient d'une source
secteur isolée (secteur IT ou triangle isolé de la
terre) ou d'un secteur TT/TN-S avec triangle mis à
la terre, s'assurer que la vis du ltre RFI est ôtée,
an d'éviter tout dommage au circuit intermédiaire et de réduire les courants à eet de masse
selon la norme CEI 61800-3 (voir l'Illustration 9.2,
la vis du ltre RFI se situe sur le côté du variateur
de fréquence).
18 Danfoss A/S © 08/2018 Tous droits réservés. MG07A504
130BE212.10
1 2
3
130BE214.10
37 38 12 13 18 19 27 29 32 33 61
42 53 54 50 55
68 69
1
3
2
Installation électrique Manuel d'utilisation
4.8 Câblage de commande
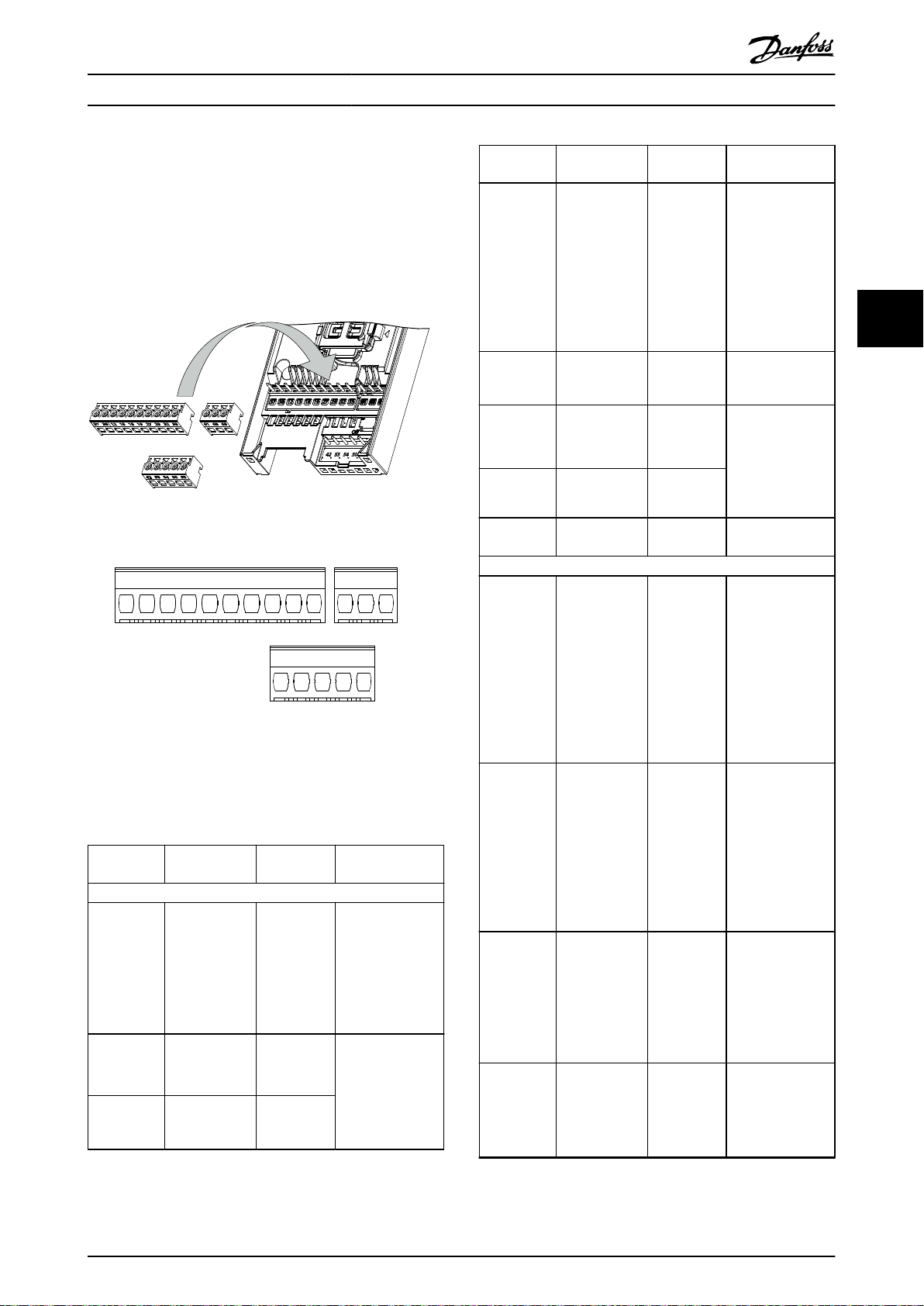
4.8.1 Types de bornes de commande
L'Illustration 4.9 montre les connecteurs amovibles du
variateur de fréquence. Les fonctions des bornes et leurs
réglages par défaut sont résumés dans le Tableau 4.1 et le
Tableau 4.2.
Illustration 4.9 Emplacement des bornes de commande
Illustration 4.10 Numéros des bornes
Voir le chapitre 9.6 Entrée/sortie de commande et données de
commande pour avoir des précisions sur les valeurs
nominales des bornes.
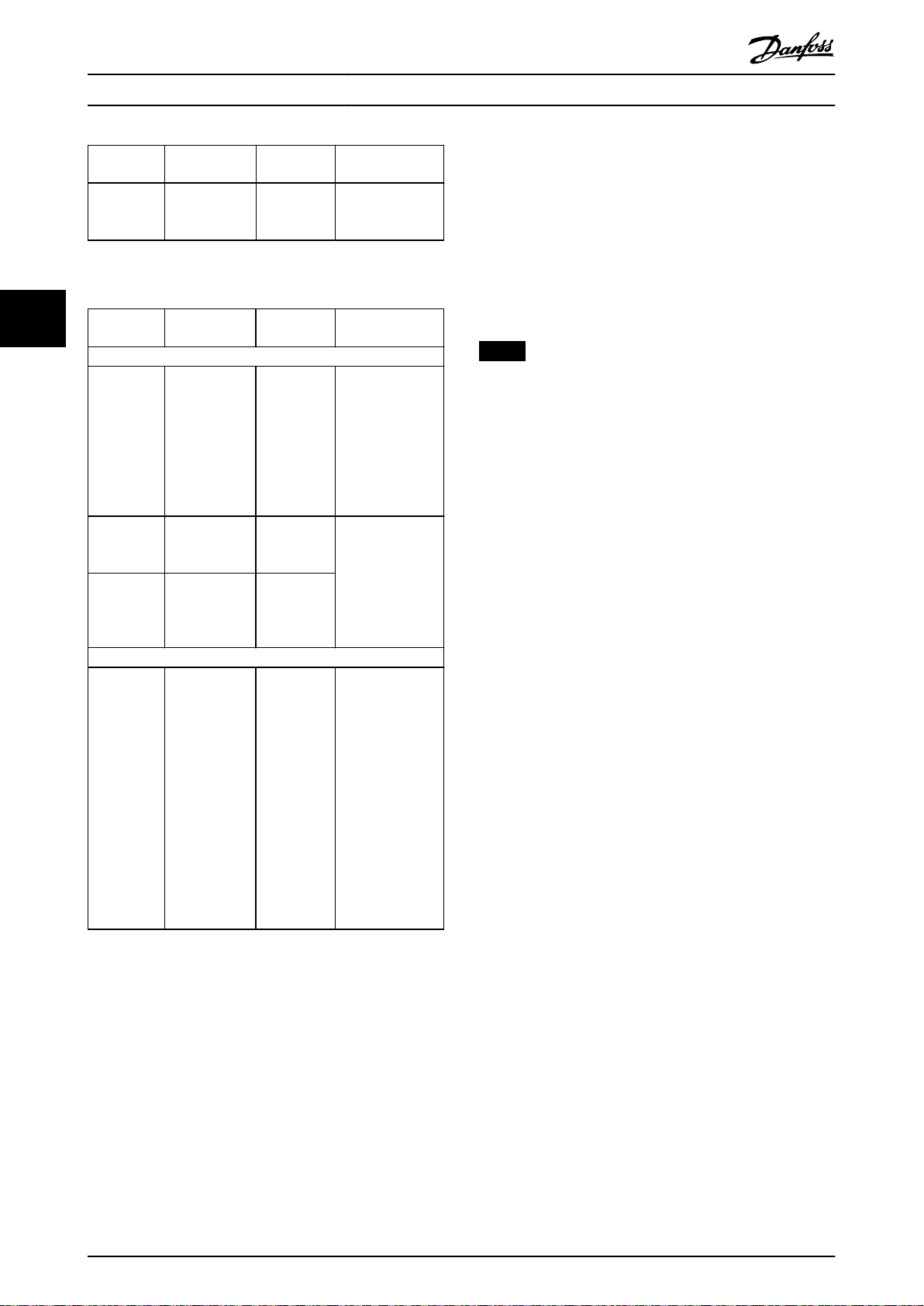
Borne Paramètre
E/S digitales, E/S impulsions, codeur
12, 13 – +24 V CC
18
19
Paramétre 5-10
E.digit.born.18
Paramétre 5-11
E.digit.born.19
Réglage par
défaut
[8]
Démarrage
[10] Inversion
Description
Tension d'alimentation 24 V CC. Le
courant de sortie
maximal est de
100 mA pour
toutes les charges
de 24 V.
Entrées digitales.
Borne Paramètre
Paramétre 5-01
Mode born.27
27
29
32
33
37, 38 – STO
42
50 – +10 V CC
53
54
Paramétre 5-12
E.digit.born.27
Paramétre 5-30
S.digit.born.27
Paramétre 5-13
E.digit.born.29
Paramétre 5-14
E.digit.born.32
Paramétre 5-15
E.digit.born.33
Entrées/sorties analogiques
Paramétre 6-91
Sortie ANA
borne 42
Groupe de
paramètres 6-1*
Entrée ANA 53
Groupe de
paramètres 6-2*
Entrée ANA 54
Réglage par
défaut
Entrée
digitale [2]
Lâchage
Sortie digitale
[0] Inactif
[14] Jogging Entrée digitale.
[0] Inactif
[0] Inactif
[0] Inactif
–
–
Description
Peut être
sélectionné pour
une entrée ou une
sortie digitale, ou
une sortie
impulsions. Le
réglage par défaut
est entrée
digitale.
Entrée digitale,
codeur 24 V. La
borne 33 peut
également servir
d'entrée
impulsions.
Entrées de sécurité
fonctionnelle.
Sortie analogique
programmable. Le
signal analogique
est de 0-20 mA ou
4-20 mA à un
maximum de
500 Ω. Peut aussi
être conguré
comme sorties
digitales.
Tension d'alimentation analogique
de 10 V CC. Un
maximum de
15 mA est généralement utilisé pour
un potentiomètre
ou une
thermistance.
Entrée analogique.
Seul le mode
tension est pris en
charge. Peut
également être
utilisé comme
entrée digitale.
Entrée analogique.
Peut être
sélectionnée pour
le mode tension
ou courant.
4 4
MG07A504 Danfoss A/S © 08/2018 Tous droits réservés. 19
Installation électrique
VLT® Midi Drive FC 280
Borne Paramètre
55 – –
Tableau 4.1 Description des bornes – Entrées/sorties digitales,
Entrées/sorties analogiques
44
Borne Paramètre
Communication série
61 – –
Groupe de
68 (+)
69 (-)
01, 02, 03
Tableau 4.2 Description des bornes – Communication série
paramètres 8-3*
FC Port Settings
Groupe de
paramètres 8-3*
FC Port Settings
Paramétre 5-40
Fonction relais
Réglage par
défaut
Réglage par
défaut
–
–
Relais
[1]
Comm.prete
Description
Commune aux
entrées digitales et
analogiques.
Description
Filtre RC intégré
pour le blindage
des câbles.
UNIQUEMENT pour
la connexion du
blindage en cas de
problèmes de
CEM.
Interface RS485.
Un commutateur
de carte de
commande est
fourni pour la
résistance de la
terminaison.
Sortie relais en
forme de C. Ces
relais se trouvent à
diérents
emplacements en
fonction de la
conguration du
variateur de
fréquence et de sa
taille. Utilisable
pour une tension
CA ou CC et des
charges résistives
ou inductives.
4.8.2 Câblage vers les bornes de
commande
Les connecteurs des bornes de commande peuvent être
débranchés du variateur de fréquence pour faciliter l'installation, comme indiqué sur l'Illustration 4.9.
Pour plus d'informations sur le câblage de la fonction STO,
se reporter au chapitre 6 Safe Torque
O (STO).
AVIS!
Raccourcir au maximum les câbles de commande et les
séparer des câbles de puissance élevée an de minimiser
les interférences.
1. Desserrer les vis pour les bornes.
2. Insérer les câbles de commande avec manchon
dans les fentes.
3. Serrer les vis pour les bornes.
4. S'assurer que le contact est bien établi et n'est
pas desserré. Un câblage de commande mal serré
peut être source de pannes ou d'un fonctionnement non optimal.
Voir le chapitre 9.5 Spécications du câble sur les tailles de
câble des bornes de commande et le chapitre 7 Exemples
d'applications sur les raccordements typiques des câbles de
commande.
4.8.3 Activation du fonctionnement du
moteur (borne 27)
Un cavalier est nécessaire entre la borne 12 (ou 13) et la
borne 27 pour que le variateur de fréquence fonctionne si
les valeurs de programmation d'usine par défaut sont
utilisées.
La borne d’entrée digitale 27 est conçue pour
•
recevoir un ordre de verrouillage externe de 24 V
CC.
Si aucun dispositif de verrouillage n’est utilisé,
•
installer un cavalier entre la borne de commande
12 (recommandée) ou 13 et la borne 27. Le
cavalier fournit un signal 24 V interne sur la
borne 27.
Uniquement pour le GLCP : lorsque la ligne d'état
•
en bas du LCP ache ROUE LIBRE DISTANTE AUTO,
ceci indique que l'unité est prête à fonctionner,
mais qu'il lui manque un signal d'entrée sur la
borne 27.
20 Danfoss A/S © 08/2018 Tous droits réservés. MG07A504
Installation électrique Manuel d'utilisation
AVIS!
INCAPABLE DE DÉMARRER
Le variateur de fréquence ne peut pas fonctionner sans signal à la borne 27 à moins que la borne 27 ne soit
reprogrammée.
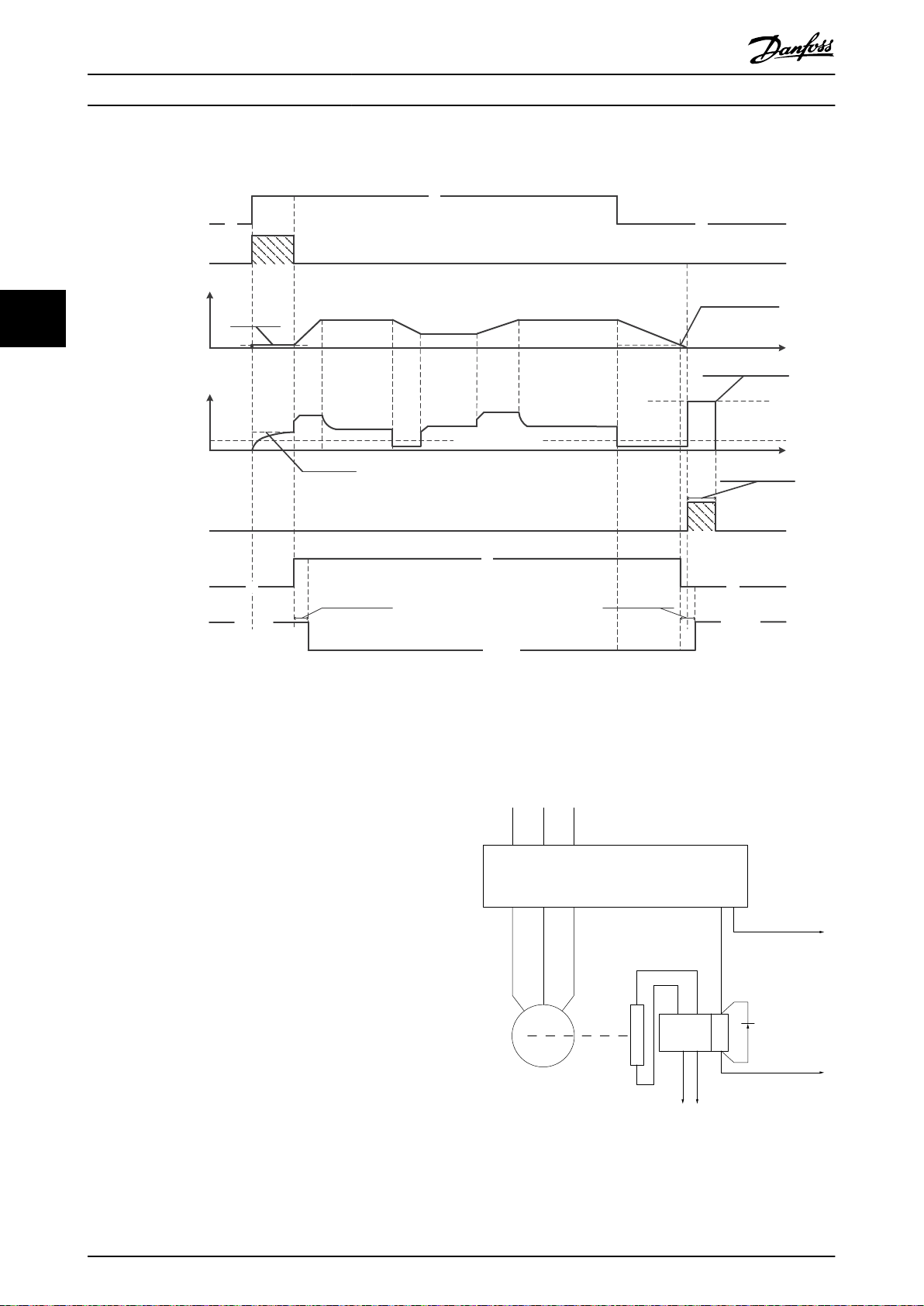
4.8.4 Commande de frein mécanique
Dans les applications de levage/abaissement, il est nécessaire de commander un frein électromécanique.
Contrôler le frein à l'aide d'une sortie relais ou d'une sortie digitale (borne 27).
•
La sortie doit rester fermée (hors tension) pendant tout le temps où le variateur de fréquence n'est pas capable de
•
maintenir le moteur en veille, p. ex. à cause d'une charge trop lourde.
Sélectionner [32] Ctrl frein mécanique dans le groupe de paramètres 5-4* Relais pour les applications dotées d'un
•
frein électromécanique.
Le frein est relâché lorsque le courant du moteur dépasse la valeur réglée au paramétre 2-20 Activation courant
•
frein.
Le frein est serré lorsque la fréquence de sortie est inférieure à la fréquence dénie au paramétre 2-22 Activation vit.
•
Frein[Hz] et seulement si le variateur de fréquence exécute un ordre d'arrêt.
Si le variateur de fréquence est dans une des situations suivantes, le frein mécanique se ferme immédiatement.
4 4
En mode alarme.
•
En situation de surtension.
•
La fonction STO est activée.
•
Un ordre de roue libre est émis.
•
MG07A504 Danfoss A/S © 08/2018 Tous droits réservés. 21
Start Current
2)
Only support in some products.
1)
DC injection current during “Active Brake Delay” after MAV reduced to “0” . Only support in some products.
Off
On
Off
Relay
/
DO Status
Active Brake Delay
Active Brake Delay
MAV
Start Speed
Active Brake Speed
0
t
Start Delay
Off
On
Off
Start Command
Released
Activated
Reaction time of
mech
.
brake
Reaction time of
mech
.
brake
Mech
.
Brake Status
Release Brake Current
Output Current
DC Injection Current
1)
0
t
130BF687.10
Activated
Note:
2)
130BE201.11
L1(N) L2(L) L3
U V W
02 01
A1
A2
Frequency converter
Output
relay
Command circuit
220 V AC
Mechanical
brake
ShaftMotor
Freewheeling
diode
Brake power circuit
380 V AC
Output
contactor
input
Installation électrique
VLT® Midi Drive FC 280
44
Illustration 4.11 Frein mécanique
Le variateur de fréquence n'est pas un dispositif de
sécurité. Il incombe au concepteur du système d'intégrer
des dispositifs de sécurité conformément aux réglementations nationales relatives aux grues et aux systèmes de
levage.
Illustration 4.12 Connexion du frein mécanique au variateur
de fréquence
22 Danfoss A/S © 08/2018 Tous droits réservés. MG07A504
e30bt623.11
61
68
69
+
130BB489.10
RS485
Installation électrique Manuel d'utilisation
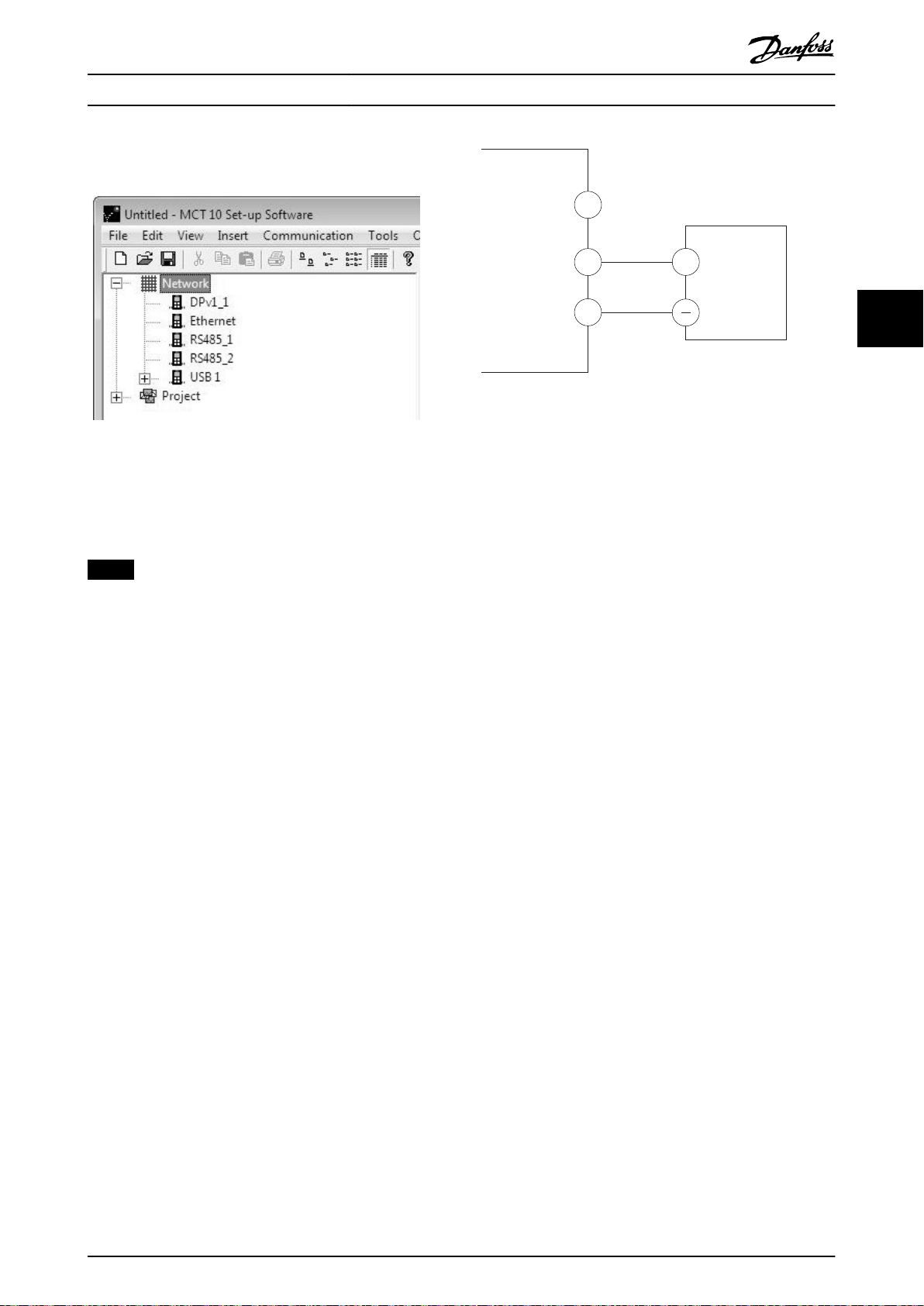
4.8.5 Communication de données par USB
Illustration 4.13 Liste de bus réseau
Lorsque le câble USB est débranché, le variateur de
fréquence connecté par le port USB est supprimé de la
liste de bus Réseau.
AVIS!
Un bus USB ne permet ni réglage d'adresse ni conguration du nom de bus. Si plusieurs variateurs de
fréquence sont connectés par USB, le nom du bus est
automatiquement suivi du numéro suivant dans la liste
de bus Réseau du Logiciel de programmation MCT 10.
Le raccordement de plusieurs variateurs de fréquence
par câble USB entraîne souvent la génération d'une
exception et d'un plantage sur les ordinateurs sous
Windows XP. Il est par conséquent recommandé de ne
connecter qu'un seul variateur de fréquence par USB à
l'ordinateur.
Illustration 4.14 Schéma de câblage de la communication
série
Pour un réglage de base de la communication série,
sélectionner les éléments suivants :
1. Type de protocole au paramétre 8-30 Protocole.
2. Adresse du variateur de fréquence au
paramétre 8-31 Adresse.
3. Vitesse de transmission au paramétre 8-32 Vit.
transmission.
Deux protocoles de communication sont intégrés au
variateur de fréquence. Respecter les exigences de câblage
spéciées par le fabricant du moteur.
Danfoss FC.
•
Modbus RTU.
•
Les fonctions peuvent être programmées à distance à l'aide
du logiciel de protocole et de la connexion RS485 ou dans
le groupe de paramètres 8-** Comm. and Options.
4 4
4.8.6 Communication série RS485
Raccorder le câblage de la communication série RS485 aux
bornes (+) 68 et (-) 69.
Un câble de communication série blindé est
•
recommandé.
Consulter le chapitre 4.3 Mise à la terre pour
•
réaliser correctement la mise à la terre.
MG07A504 Danfoss A/S © 08/2018 Tous droits réservés. 23
La sélection d'un protocole de communication
modie de nombreux réglages de paramètres par défaut
pour s'adapter aux spécications du protocole et rend
disponibles des paramètres spéciques au protocole
supplémentaires.
spécique
Installation électrique
VLT® Midi Drive FC 280
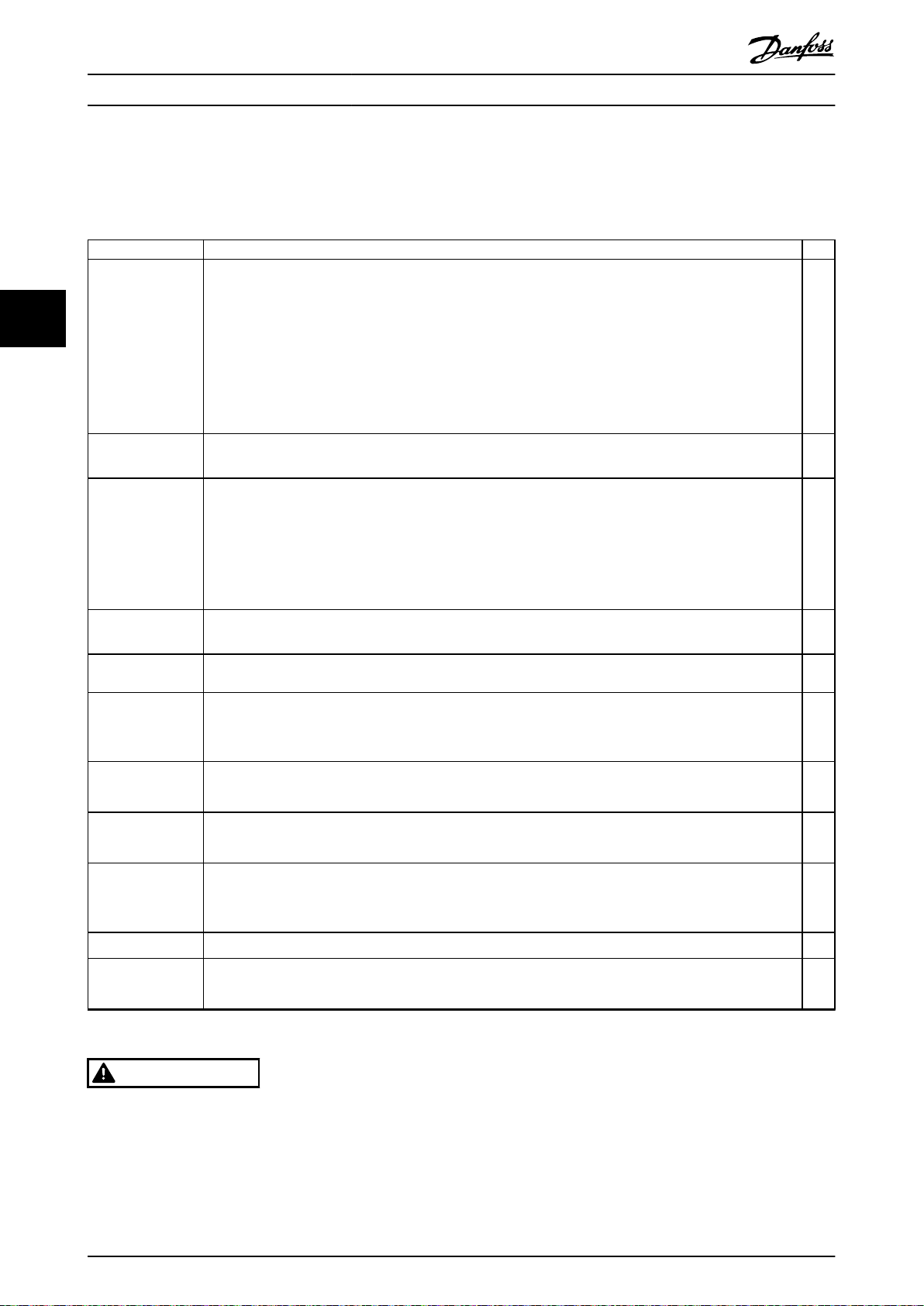
4.9 Liste de contrôle avant l'installation
Avant de terminer l’installation de l’unité, inspecter l’ensemble de l’installation de la façon décrite dans le Tableau 4.3. Cocher
les éléments une fois l’inspection nie.
À inspecter Description
Équipement
auxiliaire
44
Passage des câbles
Câblage de
commande
Dégagement pour
le refroidissement
Conditions
ambiantes
Fusibles et
disjoncteurs
Mise à la terre
Câble de puissance
d’entrée et de sortie
Intérieur du
panneau
Commutateurs
Vibration
Rechercher les équipements auxiliaires, commutateurs, sectionneurs ou fusibles d'entrée/disjoncteurs qui
•
peuvent se trouver du côté de la puissance d'entrée du variateur de fréquence ou du côté sortie du
moteur. S’assurer qu’ils sont prêts pour une exploitation à plein régime.
Vérier la fonction et l'installation des capteurs utilisés pour le signal de retour vers le variateur de
•
fréquence.
Retirer les condensateurs de correction du facteur de puissance du ou des moteur(s).
•
Ajuster les condensateurs de correction du facteur de puissance du côté secteur et s'assurer qu'ils sont
•
atténués.
Vérier que les câbles du moteur et les câbles de commande sont séparés, blindés ou placés dans 3
•
conduits métalliques distincts pour obtenir une isolation des interférences haute fréquence.
Rechercher d’éventuels ls cassés ou endommagés et des branchements desserrés.
•
Vérier que le câblage de commande est isolé de l'alimentation et du câble moteur pour l'immunité au
•
bruit.
Vérier la source de tension des signaux si nécessaire.
•
L'utilisation de câble blindé ou de paire torsadée est recommandée. Vérier que le blindage est correctement
terminé.
Veiller à ce que le dégagement en haut et en bas soit adéquat pour assurer la circulation de l'air à des ns
•
de refroidissement. Voir le chapitre 3.3 Installation.
Vérier que les critères des conditions ambiantes sont respectés.
•
Vérier que les fusibles et les disjoncteurs sont adaptés.
•
Vérier que tous les fusibles sont correctement insérés et en bon état et que tous les disjoncteurs sont en
•
position ouverte.
Vérier que les mises à la terre sont susantes, étanches et exemptes d'oxydation.
•
Il ne faut pas mettre à la terre vers un conduit, ni monter le panneau arrière sur une surface métallique.
•
Rechercher d’éventuelles connexions desserrées.
•
Vérier que les câbles moteur et secteur passent par des conduits ou des câbles blindés séparés.
•
Vérier que l’intérieur de l’unité est exempt de saletés, de particules métalliques, d’humidité et de
•
corrosion.
Vérier que l'unité est montée sur une surface métallique non peinte.
•
Vérier que les paramètres du commutateur et du sectionneur sont réglés correctement.
•
Vérier que l'unité est montée solidement ou que des supports amortisseurs sont utilisés si nécessaire.
•
Rechercher tout niveau de vibrations inhabituel.
•
☑
Tableau 4.3 Liste de contrôle avant l'installation
ATTENTION
DANGER POTENTIEL EN CAS DE PANNE INTERNE
Risque de blessure si le variateur de fréquence n'est pas fermé correctement.
Avant d'appliquer de la puissance, s'assurer que tous les caches de sécurité sont en place et fermement xés.
•
24 Danfoss A/S © 08/2018 Tous droits réservés. MG07A504

Mise en service Manuel d'utilisation
5 Mise en service
5.1 Consignes de sécurité
Voir le chapitre 2 Sécurité pour connaître les consignes de
sécurité générales.
AVERTISSEMENT
HAUTE TENSION
Les variateurs de fréquence contiennent des tensions
élevées lorsqu'ils sont reliés à l'alimentation secteur CA.
L'installation, le démarrage et la maintenance doivent
être réalisés par du personnel qualié uniquement. Le
non-respect de cette consigne peut entraîner la mort ou
des blessures graves.
L'installation, le démarrage et la maintenance
•
doivent être eectués uniquement par du
personnel qualié.
Avant de mettre sous tension :
1. Fermer correctement le cache.
2. Vérier que tous les presse-étoupes sont bien
serrés.
3. S'assurer que l'alimentation d'entrée de l'unité est
désactivée et verrouillée. Ne pas compter sur les
sectionneurs du variateur de fréquence pour
l'isolation de l'alimentation d'entrée.
4. Vérier l’absence de tension aux bornes d’entrée
L1 (91), L2 (92) et L3 (93), phase-phase et phaseterre.
5. Vérier l’absence de tension aux bornes de sortie
96 (U), 97 (V) et 98 (W), phase-phase et phaseterre.
6. Contrôler la continuité du moteur en mesurant
les valeurs en Ω aux bornes U-V (96-97), V-W
(97-98) et W-U (98-96).
7. Vérier la bonne mise à la terre du variateur de
fréquence et du moteur.
8. Inspecter le variateur de fréquence pour détecter
les connexions desserrées sur les bornes.
9. Contrôler que la tension d’alimentation
correspond bien à la tension du variateur de
fréquence et du moteur.
Application de l'alimentation
5.2
Appliquer une tension au variateur de fréquence en
procédant comme suit :
1. S'assurer que la tension d'entrée est équilibrée
avec une marge de 3 %. Si ce n'est pas le cas,
corriger le déséquilibre de la tension d'entrée
avant de continuer. Répéter la procédure après
avoir corrigé la tension.
2. S'assurer que le câblage des équipements
optionnels est adapté à l'application.
3. Veiller à ce que tous les dispositifs de l'opérateur
soient réglés sur la position OFF. Les portes du
panneau doivent être fermées et les couvercles
correctement xés.
4. Mettre l’unité sous tension. Ne pas démarrer le
variateur de fréquence pour le moment. Pour les
unités avec un sectionneur, utiliser la position ON
pour appliquer une tension au variateur de
fréquence.
5.3 Utilisation du panneau de commande
local
Le variateur de fréquence prend en charge le panneau de
commande local numérique (NLCP), le panneau de
commande local graphique (GLCP) et le couvercle aveugle.
Cette section décrit comment utiliser le NLCP et le GLCP.
AVIS!
Le variateur de fréquence peut être programmé à partir
d'un ordinateur dans le Logiciel de programmation MCT
10 via un port de communication RS485 ou USB. Ce
logiciel peut être commandé à l'aide de la référence
130B1000 ou téléchargé sur le site Internet de Danfoss :
drives.danfoss.com/downloads/pc-tools/#/.
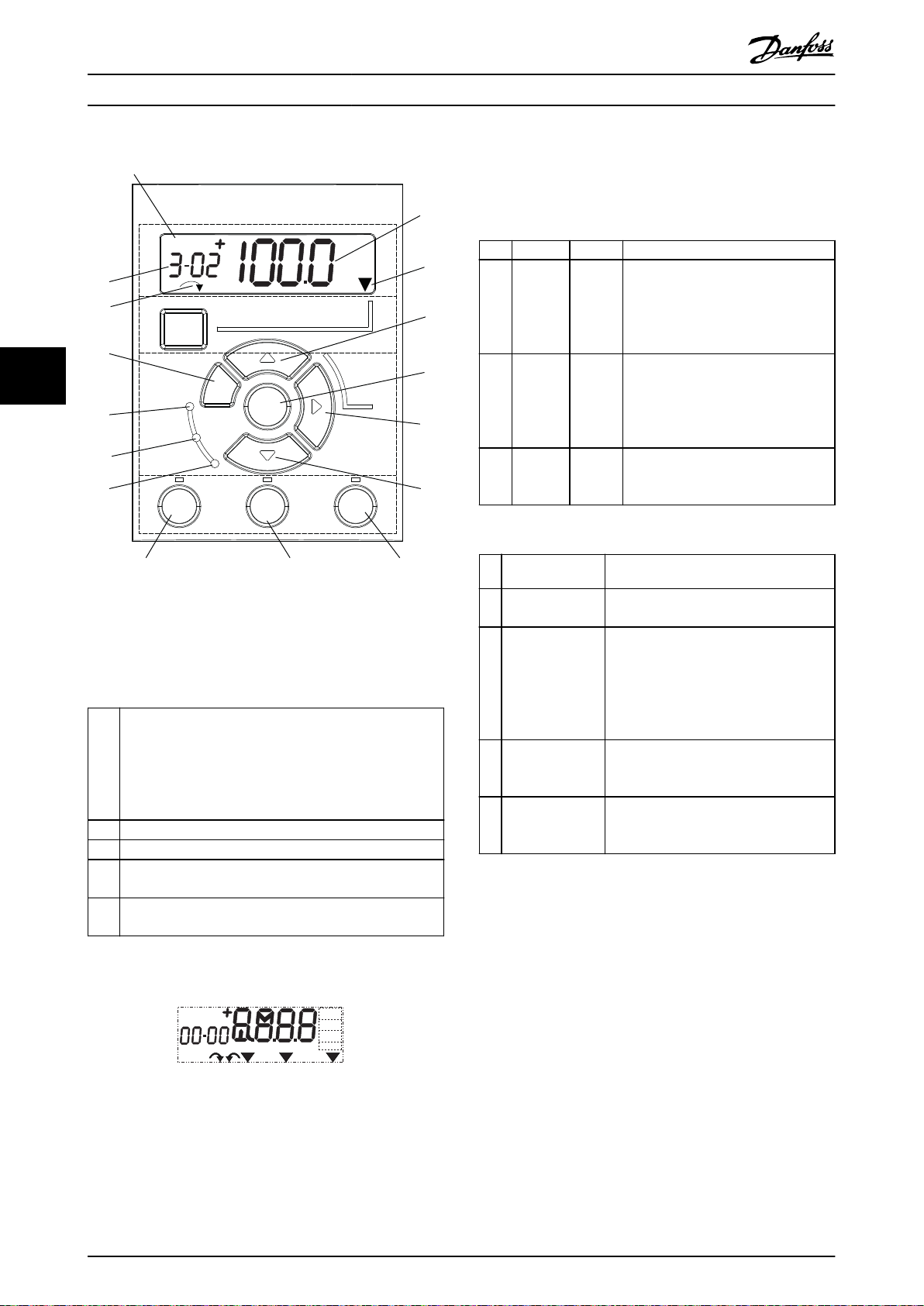
5.3.1 Panneau de commande local
numérique (NLCP)
Le panneau de commande local numérique (NLCP) est
divisé en 4 sections fonctionnelles.
A. Acheur numérique
B. Touche Menu
C. Touches de navigation et voyants (LED)
D. Touches d'exploitation et voyants (LED)
5 5
MG07A504 Danfoss A/S © 08/2018 Tous droits réservés. 25
130BC506.10
Setup 1
A
B
C
D
5
12
13 14 15
10
11
10
9
6
7
8
4
1
2
3
Menu
Status
Quick
Menu
Main
Menu
Hand
On
O
Reset
Auto
On
Back
OK
On
Warn
Alarm
130BD135.10
Setup 12
INDEX
AHP
VkW
srpm
Hz%
n2n1
n3
p5 p4
p3 p2 p1
Mise en service
VLT® Midi Drive FC 280
B. Touche Menu
Appuyer sur la touche [Menu] pour alterner entre état,
menu rapide et menu principal.
C. Touches de navigation et voyants (LED)
Voyant Couleur Fonction
Le voyant On s'allume lorsque le
variateur de fréquence est alimenté
6 On Vert
55
7 Warn Jaune
8 Alarm Rouge
Tableau 5.2 Légende de l'Illustration 5.1, Voyants (LED)
par la tension secteur, par une borne
du circuit CC ou par une alimentation
externe 24 V.
Lorsque des conditions d'avertissement sont présentes, le voyant
jaune Warn s'allume et un texte
apparaît dans la zone d'achage pour
signaler le problème.
Une condition de panne entraîne le
clignotement du voyant d'alarme
rouge et un message s'ache.
Touche Fonction
Illustration 5.1 Vue du NLCP
9 [Back]
A. Acheur numérique
L'écran LCD est rétroéclairé et comprend une ligne
numérique. Toutes les données sont achées sur le NLCP.
10
Le numéro de process montre le process actif et le process
modié. Lorsque le même process est à la fois actif et
modié, seul le numéro de ce process apparaît (réglage
1
d’usine). Lorsque les process dièrent, les deux numéros
11 [OK]
apparaissent à l'écran (p. ex. process 12). Le numéro qui
clignote indique le process modié.
2 Numéro de paramètre
12
3 Valeur de paramètre.
Le sens du moteur est indiqué en bas à gauche de l'écran,
4
Une petite èche désigne le sens.
Le triangle indique si le LCP est sur le menu d'état, le
5
menu rapide ou le menu principal.
Tableau 5.1 Légende de l'Illustration 5.1, Section A
Illustration 5.2 Achage
[▲] [▼]
[►]
Tableau 5.3 Légende de l'Illustration 5.1, Touches de
navigation
Renvoie à l’étape ou au niveau précédent
de la structure de navigation.
Pour se déplacer entre les groupes de
paramètres ou paramètres et au sein des
paramètres, ou pour augmenter/diminuer
les valeurs de paramètre. Les èches
peuvent aussi être utilisées pour régler la
référence locale.
Appuyer sur OK pour accéder aux
groupes de paramètres ou pour activer
un choix.
Pour se déplacer de gauche à droite dans
la valeur du paramètre an de modier
chaque chire.
26 Danfoss A/S © 08/2018 Tous droits réservés. MG07A504

130BC440.10
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Mise en service Manuel d'utilisation
D. Touches d’exploitation et voyants (LED)
Touche Fonction
Démarre le variateur de fréquence en
commande locale.
Un signal d'arrêt externe via une entrée de
13 Hand On
14 O/Reset
15 Auto On
Tableau 5.4 Légende de l'Illustration 5.1, Section D
•
commande ou la communication série
annule la commande locale (Hand On).
Arrête le moteur, mais ne coupe pas l'alimentation du variateur de fréquence, ou réinitialise
le variateur de fréquence manuellement après
qu'une panne a été corrigée. En mode alarme,
l'alarme est réinitialisée si la condition d'alarme
est supprimée.
Met le système en mode d'exploitation à
distance.
Répond à un ordre de démarrage externe
•
via des bornes de commande ou la
communication série.
5 5
AVERTISSEMENT
DANGER ÉLECTRIQUE
Même après l'activation de la touche [O/Reset], une
tension est présente aux bornes du variateur de
fréquence. La touche [O/Reset] ne déconnecte pas le
variateur de fréquence du secteur. Tout contact avec les
parties sous tension peut entraîner le décès ou des
blessures graves.
Ne toucher aucune pièce sous tension.
•
5.3.2 Fonction de la touche droite du NLCP
Appuyer sur [►] pour modier l'un des 4 chires sur l'écran
individuellement. Lorsque la touche [►] est activée une
fois, le curseur se déplace sur le premier chire et le chire
commence à clignoter comme indiqué sur l'Illustration 5.3.
Appuyer sur [▲] et [▼] pour changer la valeur. Appuyer sur
[►] ne change pas la valeur des chires et ne déplace pas
la virgule.
Illustration 5.3 Fonction de la touche droite
[►] peut aussi servir à se déplacer entre les groupes de
paramètres. Dans le menu principal, appuyer sur [►] pour
accéder au premier paramètre dans le groupe de
paramètres suivant (par exemple, pour passer de
paramétre 0-03 Réglages régionaux [0] International à
paramétre 1-00 Mode Cong. [0] Boucle ouverte vitesse).
AVIS!
Pendant le démarrage, le LCP ache le message INITIALISATION. Lorsque ce message n'apparaît plus, le variateur
de fréquence est prêt à fonctionner. L'ajout ou le retrait
d'options peut prolonger le temps du démarrage.
5.3.3 Menu rapide du NLCP
Le menu rapide permet d'accéder facilement aux
paramètres les plus fréquemment utilisés.
1. Pour entrer dans le menu rapide, appuyer sur la
touche [Menu] jusqu'à ce que l'indicateur à
l'écran se place au-dessus de Quick Menu.
2.
Appuyer sur [▲] [▼] pour sélectionner QM1 ou
QM2, puis appuyer sur [OK].
3.
Appuyer sur [▲] [▼] pour se déplacer d'un
paramètre à l'autre dans le menu rapide.
4. Appuyer sur [OK] pour sélectionner un paramètre.
5.
Appuyer sur [▲] [▼] pour modier la valeur de
réglage d’un paramètre.
MG07A504 Danfoss A/S © 08/2018 Tous droits réservés. 27

130BC445.13
1-22 XXXX V
Motor
nominal
speed
QM 1
0-01 [0]
1-10 [0]
1-24 XXXX A
Language
Motor Type
1-20 XXXX kW
Motor power
Motor voltage
1-26 XXXX 1-23 XXXX
Stator
Motor frequency
1-25 XXXX
1-30 XXXX
1-39 XXXX
1-40 XXXX
1-37 XXXX
1-25 XXXX
1-24 XXXX
A
3-02 XXXX
3-03 XXXX
3-41 XXXX S
3-42 XXXX S
5-12
[2]
1-29 [1]
AMA
Back EMF at
1000 RPM
d-axis
QM 2
BMS
AMS
ES
5-70 XXXX
5-71 [0]
1-30 XXXX
1-39 XXXX
1-90 [0]
2-10 [0]
4-16 XXXX %
4-17 XXXX %
4-18 XXXX %
1-00 [0]
1-01 [1]
1-10 [0]
1-24 XXXX A 1-20 XXXX kW
1-22 XXXX V
Motor
nominal
speed
Motor power
Motor voltage
1-26 XXXX 1-23 XXXX
Motor frequency
1-25 XXXX
1-30 XXXX
1-40 XXXX
1-37 XXXX
1-25 XXXX
1-24 XXXX
A
Back EMF at
1000 RPM
d-axis
1-39 XXXX
4-14 XXXX
4-19 XXXX
Stator
QM 3
QM 4 QM 5
L10C
SFS
TBD
Motor
nominal
speed
Motor
nominal
speed
Motor current
Motor cont.
rated torque
Resistance (Rs)
Motor poles
inductance (Ld)
Asynchronous motor
Motor current
Minimum reference
Maximum reference
Ramp 1 ramp-up time
Ramp 1 ramp-down time
Terminal 27 digital input
Basic motor set-up
mode
Motor control
principle
Motor type
PM motor
PM motor
Motor
current
Motor cont.
rated torque
Stator
Resistance (Rs)
Motor poles
inductance (Ld)
Motor speed high limit [Hz]
Maximum output frequency
Asynchronous motor
Motor current
RPM
RPM
RPM
Hz
RPM
Hz
Hz
Hz
Hz
Hz
Adv. motor set-up
Resistance (Rs)
Motor poles
Motor thermal
protection
Brake function
Torque limit motor mode
Torque limit generator mode
Current limit
Encoder set-up
Terminal 32/33
pulses per revolution
Terminal 32/33
encoder direction
Changes made
Last 10 changes Since factory setting
Alarm log
Mise en service
VLT® Midi Drive FC 280
6. Appuyer sur [OK] pour accepter la modication.
7. Pour quitter, appuyer sur [Back] deux fois (ou 3 fois depuis QM2 et QM3) pour accéder à Status ou appuyer sur
[Menu] une fois pour accéder au menu principal.
55
28 Danfoss A/S © 08/2018 Tous droits réservés. MG07A504
Illustration 5.4 Structure du menu rapide

130BC446.10
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
1
2
3
4
5
6
7
10
11
12
OK
OK
Back
8
Back
Setup 1
2 x
+
OK
9
OK
Mise en service Manuel d'utilisation
5.3.4 Menu principal du NLCP
Le menu principal permet d'accéder à l'ensemble des
paramètres.
1. Pour entrer dans le menu principal, appuyer sur
[Menu] jusqu'à ce que l'indicateur à l'écran se
place au-dessus de Main Menu.
2.
[▲] [▼] : parcourir les groupes de paramètres.
3. Appuyer sur [OK] pour sélectionner un groupe de
paramètres.
4.
[▲] [▼] : se déplacer entre les paramètres d'un
groupe
spécique.
5. Appuyer sur [OK] pour sélectionner le paramètre.
6.
[►] et [▲]/[▼] :
paramètre.
7. Appuyer sur [OK] pour accepter la valeur.
8. Pour quitter, appuyer sur [Back] deux fois (ou 3
fois pour les paramètres de tableau) pour accéder
au menu principal ou appuyer sur [Menu] une fois
pour accéder à État.
Voir l'Illustration 5.5, l'Illustration 5.6 et l'Illustration 5.7 pour
savoir comment
continus, énumérés et de tableau respectivement. Les
actions représentées sur les illustrations sont décrites dans
le Tableau 5.5, le Tableau 5.6 et le Tableau 5.7.
régler/modier la valeur du
modier la valeur des paramètres
5 5
Illustration 5.5 Interactions dans Main Menu - Paramètres
continus
1 [OK] : le premier paramètre du groupe s'ache.
2
Appuyer sur [▼] à plusieurs reprises pour faire déler vers le
bas jusqu'au paramètre.
3 Appuyer sur [OK] pour commencer la modication.
4
[►] : le premier chire clignote (il peut être modié).
5
[►] : le deuxième chire clignote (il peut être modié).
6
[►] : le troisième chire clignote (il peut être modié).
7
[▼] : diminuer la valeur du paramètre, la virgule se déplace
automatiquement.
8
[▲] : augmenter la valeur du paramètre.
9 [Back] : annuler les modications, revenir au point 2.
[OK] : valider les modications, revenir au point 2.
10
[▲][▼] : sélectionner le paramètre dans le groupe.
11 [Back] : supprimer la valeur et acher le groupe de
paramètres.
12
[▲][▼] : sélectionner le groupe.
Tableau 5.5 Modication des valeurs dans les paramètres
continus
MG07A504 Danfoss A/S © 08/2018 Tous droits réservés. 29

130BC447.11
Setup 1
Setup 1
Setup 1
1
2
3
4
5
6
OK
OK
Back
7
OK
Back
130BC448.10
1
2
4
5
6
7
8
9
10
OK
Back
Back
Back
5 x
Setup 1
Setup 1
Setup 1
Setup 1
%
INDEX
%
INDEX
%
INDEX
Setup 1
INDEX
%
OK
OK
OK
Mise en service
VLT® Midi Drive FC 280
Pour les paramètres énumérés, l'interaction est similaire,
mais la valeur du paramètre est indiquée entre crochets à
Les paramètres de tableau fonctionnent de la manière
suivante :
cause de la limitation des chires (4 grands chires) sur le
NLCP et la valeur énumérée peut dépasser 99. Lorsque la
valeur énumérée est supérieure à 99, le LCP peut
seulement acher le premier crochet.
55
Illustration 5.6 Interactions dans Main Menu - Paramètres
énumérés
1 [OK] : le premier paramètre du groupe s'ache.
2 Appuyer sur [OK] pour commencer la modication.
3
[▲][▼] : modier la valeur du paramètre (clignote).
4 Appuyer sur [Back] pour annuler les modications ou sur
[OK] pour les valider (revenir à l'écran 2).
5
[▲][▼] : sélectionner un paramètre dans le groupe.
6 [Back] : supprimer la valeur et acher le groupe de
paramètres.
7
[▲][▼] : sélectionner un groupe.
Tableau 5.6 Modication des valeurs dans les paramètres
énumérés
Illustration 5.7 Interactions dans Main Menu - Paramètres de
tableau
1 [OK] : acher les numéros de paramètre et la valeur du
premier indice.
2 [OK] : l'indice peut être sélectionné.
3
[▲][▼] : sélectionner l'indice.
4 [OK] : la valeur peut être modiée.
5
[▲][▼] : modier la valeur du paramètre (clignote).
6 [Back] : annuler les modications.
[OK] : valider les modications.
7 [Back] : annuler la modication de l'indice, sélectionner un
nouveau paramètre.
8
[▲][▼] : sélectionner le paramètre dans le groupe.
9 [Back] : supprimer la valeur de l'indice du paramètre et
acher le groupe de paramètres.
10
[▲][▼] : sélectionner le groupe.
Tableau 5.7 Modication des valeurs dans les paramètres de
tableau
30 Danfoss A/S © 08/2018 Tous droits réservés. MG07A504

130BD598.10
Auto
On
Reset
Hand
On
O
Status
Quick
Menu
Main
Menu
Alarm
Log
Back
Cancel
Info
OK
Status
1(1)
36.4 kW
Auto Remote Ramping
0.000
On
Alarm
Warn.
A
7.83 A
799 RPM
B
C
D
53.2 %
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18 19 20 21
Mise en service Manuel d'utilisation
5.3.5 Panneau de commande local
graphique (GLCP)
Le GLCP est divisé en 4 groupes fonctionnels (voir
l'Illustration 5.8).
A. Zone d'achage
B. Touches de menu de l'achage
C. Touches de navigation et voyants (LED)
D. Touches d'exploitation et reset
Achage Numéro de paramètre Réglage par défaut
1 0-20 [1602] Réf. [%]
2 0-21 [1614] Courant moteur
3 0-22
[1610] Puissance moteur
[kW]
4 0-23 [1613] Fréquence moteur
5 0-24 [1502] Compteur kWh
Tableau 5.8 Légende de l'Illustration 5.8, Zone d'achage
B. Touches de menu de l'achage
Les touches de menu permettent d'accéder aux menus, de
congurer des paramètres, de naviguer parmi les modes
d'achage d'état en fonctionnement normal et de
visualiser des données de la mémoire des défauts.
Touche Fonction
6 Status Indique les informations d’exploitation.
Permet d'accéder aux paramètres de
Quick
7
Menu
8 Main Menu
9 Alarm Log
programmation pour des instructions de
conguration initiale et de nombreuses
instructions détaillées pour l'application.
Permet d'accéder à tous les paramètres de
programmation.
Ache une liste des avertissements actuels,
les 10 dernières alarmes et le journal de
maintenance.
5 5
Tableau 5.9 Légende de l'Illustration 5.8, Touches de menu de
l'achage
C. Touches de navigation et voyants (LED)
Les touches de navigation servent à programmer des
fonctions et à déplacer le curseur à l’écran. Elles peuvent
aussi permettre de commander la vitesse en mode local.
Trois voyants d'état du variateur de fréquence se trouvent
également dans cette zone.
Illustration 5.8 Panneau de commande local graphique
(GLCP)
A. Zone d’achage
La zone d'achage est activée lorsque le variateur de
fréquence est alimenté par la tension secteur, par une
borne du circuit CC ou par une alimentation externe
24 V CC.
L'information achée sur le LCP peut être personnalisée
pour les applications de l'utilisateur. Sélectionner les
options dans le menu rapide Q3-13 Régl. achage.
MG07A504 Danfoss A/S © 08/2018 Tous droits réservés. 31
Touche Fonction
10 Back
Renvoie à l’étape ou à la liste du niveau
précédent de la structure de menu.
Annule la dernière modication ou
11 Cancel
commande tant que le mode d’achage n’a
pas été modié.
12 Info
Touches de
13
navigation
14 OK
Utiliser pour lire une dénition de la fonction
achée.
Utiliser les 4 touches de navigation pour se
déplacer entre les options du menu.
Appuyer sur OK pour accéder aux groupes
de paramètres ou pour activer un choix.
Tableau 5.10 Légende de l'Illustration 5.8, Touches de
navigation

Mise en service
VLT® Midi Drive FC 280
Voyant Couleur Fonction
Le voyant On s'allume lorsque le
variateur de fréquence est
15 On Vert
16 Warn Jaune
55
17 Alarm Rouge
Tableau 5.11 Légende de l'Illustration 5.8, Voyants (LED)
D. Touches d'exploitation et reset
Les touches d'exploitation se trouvent en bas du LCP.
Touche Fonction
Démarre le variateur de fréquence en mode
Hand On.
18 Hand On
19 O
20 Auto On
21 Reset
Tableau 5.12 Légende de l'Illustration 5.8, Touches
d'exploitation et reset
Arrête le moteur, mais ne coupe pas la
tension appliquée au variateur de fréquence.
Met le système en mode d'exploitation à
distance.
•
Réinitialise le variateur de fréquence manuellement après qu'une panne a été corrigée.
alimenté par la tension secteur, par
une borne du circuit CC ou par
une alimentation externe 24 V.
Lorsque des conditions d'avertissement sont présentes, le voyant
jaune Warn s'allume et un texte
apparaît dans la zone d'achage
pour signaler le problème.
Une condition de panne entraîne
le clignotement du voyant
d'alarme rouge et un message
s'ache.
Un signal d'arrêt externe via une
•
entrée de commande ou la
communication série annule la
commande locale (Hand On).
Répond à un ordre de démarrage externe
via des bornes de commande ou la
communication série.
AVIS!
Pour ajuster le contraste de l'achage, appuyer sur
[Status] et sur les touches [▲]/[▼].
5.3.6 Réglage des paramètres
La réalisation d'une programmation correcte des
applications nécessite souvent de régler des fonctions dans
plusieurs paramètres connexes. Les détails des paramètres
sont indiqués au chapitre 10.2 Structure du menu des
paramètres.
Les données de programmation sont enregistrées en
interne sur le variateur de fréquence.
Pour la sauvegarde, charger les données dans la
•
mémoire du LCP.
Pour télécharger des données vers un autre
•
variateur de fréquence, connecter le LCP à cette
unité et télécharger les réglages enregistrés.
La restauration des réglages d'usine par défaut ne
•
modie pas les données stockées dans la
mémoire du LCP.
5.3.7 Modication des réglages des
paramètres à l'aide du GLCP
Accéder aux réglages des paramètres et les modier à
partir de Quick Menu ou de Main Menu. Quick Menu permet
uniquement d'accéder à un nombre limité de paramètres.
1. Appuyer sur [Quick Menu] ou [Main Menu] sur le
LCP.
2.
Appuyer sur [▲] [▼] pour se déplacer dans les
groupes de paramètres et sur [OK] pour
sélectionner un groupe de paramètres.
3.
Appuyer sur [▲] [▼] pour se déplacer entre les
paramètres et sur [OK] pour sélectionner un
paramètre.
4.
Appuyer sur [▲] [▼] pour modier la valeur de
réglage d’un paramètre.
5.
Appuyer sur [◄] [►] pour changer de chire
quand un paramètre décimal est en cours de
modication.
6. Appuyer sur [OK] pour accepter la modication.
7. Appuyer deux fois sur [Back] pour entrer dans
Status, ou appuyer sur [Main Menu] une fois pour
accéder au menu principal.
32 Danfoss A/S © 08/2018 Tous droits réservés. MG07A504
Mise en service Manuel d'utilisation
Acher les modications
Quick Menu Q5 - Changes Made répertorie tous les
paramètres modiés par rapport aux réglages d'usine.
La liste indique uniquement les paramètres qui
•
ont été modiés dans la modication en cours.
Les paramètres restaurés aux valeurs par défaut
•
ne sont pas répertoriés.
Le message Vide indique qu’aucun paramètre n’a
•
été modié.
5.3.8 Chargement/téléchargement de
données depuis/vers le LCP
1. Appuyer sur [O] pour arrêter le moteur avant de
charger ou télécharger des données.
2. Appuyer sur [Main Menu] paramétre 0-50 Copie
LCP puis sur [OK].
3. Sélectionner [1] Lect.PAR.LCP pour charger les
données vers le LCP ou [2] Ecrit.PAR. LCP pour
télécharger les données depuis le LCP.
4. Appuyer sur [OK]. Une barre de progression
indique l'avancement du chargement ou du
téléchargement.
5. Appuyer sur [Hand On] ou [Auto On] pour revenir
au fonctionnement normal.
5.3.9 Restauration des réglages par défaut
à l'aide du LCP
AVIS!
Risque de perte de la programmation, des données
moteur, de la localisation et des dossiers de surveillance
lors de la restauration des réglages par défaut. Pour
réaliser une sauvegarde, charger les données vers le LCP
avant l'initialisation.
Pour restaurer les paramètres par défaut, initialiser le
variateur de fréquence. L'initialisation peut se faire via le
paramétre 14-22 Mod. exploitation (recommandé) ou
manuellement. L'initialisation ne réinitialise pas les réglages
du paramétre 1-06 Sens horaire et du
paramétre 0-03 Réglages régionaux.
L'initialisation manuelle eace toutes les données
•
du moteur, de programmation, de localisation et
de surveillance et restaure les réglages d'usine
par défaut.
Procédure d'initialisation recommandée, via le
paramétre 14-22 Mod. exploitation
1. Sélectionner le paramétre 14-22 Mod. exploitation
puis appuyer sur [OK].
2. Sélectionner [2] Restaura° régl.usine puis appuyer
sur [OK].
3. Mettre l'unité hors tension et attendre que
l'achage s'éteigne.
4. Mettre l’unité sous tension.
Les réglages des paramètres par défaut sont restaurés lors
du démarrage. Celui-ci peut prendre plus de temps que la
normale.
5. L'alarme 80, Drive initialised s'ache.
6. Appuyer sur [Reset] pour revenir au mode
d'exploitation.
Procédure d'initialisation manuelle
1. Mettre l'unité hors tension et attendre que
l'achage s'éteigne.
2. Appuyer simultanément sur [Status], [Main Menu]
et [OK] sur le GLCP ou sur [Menu] et [OK] sur le
NLCP lors de la mise sous tension de l'unité
(environ 5 s ou jusqu'à ce qu'un clic retentisse et
que le ventilateur démarre).
Les réglages des paramètres par défaut sont restaurés
pendant le démarrage. Celui-ci peut prendre plus de temps
que la normale.
L'initialisation manuelle ne réinitialise pas les informations
suivantes :
Paramétre 15-00 Heures mises ss tension.
•
Paramétre 15-03 Mise sous tension.
•
Paramétre 15-04 Surtemp.
•
Paramétre 15-05 Surtension.
•
5 5
L'initialisation à l'aide du paramétre 14-22 Mod.
•
exploitation ne réinitialise pas les réglages du
variateur de fréquence tels que les heures de
fonctionnement, les sélections de communication
série, le journal des pannes, le journal des
alarmes et les autres fonctions de surveillance.
MG07A504 Danfoss A/S © 08/2018 Tous droits réservés. 33
Mise en service
VLT® Midi Drive FC 280
5.4 Programmation de base
5.4.1 Conguration de moteur asynchrone
Saisir les données du moteur suivantes dans l'ordre
indiqué. Ces informations sont disponibles sur la plaque
signalétique du moteur.
1. Paramétre 1-20 Puissance moteur [kW].
2. Paramétre 1-22 Tension moteur.
3. Paramétre 1-23 Fréq. moteur.
55
4. Paramétre 1-24 Courant moteur.
5. Paramétre 1-25 Vit.nom.moteur.
Pour une performance optimale en mode VVC+, des
données de moteur supplémentaires sont nécessaires pour
le réglage des paramètres suivants.
6. Paramétre 1-30 Résistance stator (Rs).
7. Paramétre 1-31 Résistance rotor (Rr).
8. Paramétre 1-33 Réactance fuite stator (X1).
9. Paramétre 1-35 Réactance principale (Xh).
Les données sont disponibles sur la che technique du
moteur (ces données ne sont généralement pas
disponibles sur la plaque signalétique du moteur). Lancer
une AMA complète à l'aide du paramétre 1-29 Adaptation
auto. au moteur (AMA) [1] AMA activée compl. ou saisir les
paramètres manuellement.
Ajustement en fonction des applications en mode VVC
VVC+ est le mode de commande le plus robuste. Dans la
plupart des situations, il assure un fonctionnement optimal
sans nécessiter aucun autre réglage. Lancer une AMA
complète pour assurer une performance optimale.
5.4.2
Conguration de moteur PM en VVC
Étapes de programmation initiale
1. Régler le paramétre 1-10 Construction moteur sur
les options suivantes pour activer l'exploitation de
moteur PM :
1a [1] PM, non salient SPM
1b [3] PM, salient IPM
2. Sélectionner [0] Boucle ouverte vitesse au
paramétre 1-00 Mode Cong.
+
+
AVIS!
Le retour codeur n'est pas pris en charge pour les
moteurs PM.
Programmation des données du moteur
Une fois l'une des options de moteur PM sélectionnée au
paramétre 1-10 Construction moteur, les paramètres liés au
moteur PM dans les groupes de paramètres 1-2* Motor Data,
1-3* Données mot. av. I et 1-4* Données mot. av. II sont
actifs.
Les informations sont disponibles sur la plaque
signalétique du moteur et sur la che technique du
moteur.
Programmer les paramètres suivants dans l'ordre donné :
1. Paramétre 1-24 Courant moteur.
2. Paramétre 1-26 Couple nominal cont. moteur.
3. Paramétre 1-25 Vit.nom.moteur.
4. Paramétre 1-39 Pôles moteur.
5. Paramétre 1-30 Résistance stator (Rs).
Saisir la résistance des enroulements du stator de
la phase au commun (Rs). Si seules les données
phase à phase sont disponibles, diviser la valeur
phase à phase par 2 pour obtenir la valeur de la
phase au commun (point étoile).
Il est aussi possible de mesurer la valeur avec un
ohmmètre, qui tient également compte de la
résistance du câble. Diviser la valeur mesurée par
2 et saisir le résultat.
6. Paramétre 1-37 Inductance axe d (Ld).
Saisir l'inductance de l'axe direct du moteur PM
de la phase au commun.
Si seules les données phase à phase sont
disponibles, diviser la valeur phase à phase par 2
pour obtenir la valeur de la phase au commun
(point étoile).
Il est aussi possible de mesurer la valeur avec un
inductancemètre, qui tient également compte de
l'inductance du câble. Diviser la valeur mesurée
par 2 et saisir le résultat.
7. Paramétre 1-40 FCEM à 1000 tr/min.
Saisir la force contre-électromotrice du moteur
PM phase à phase à la vitesse mécanique de
1 000 tr/min (valeur ecace). La force contreélectromotrice est la tension générée par un
moteur PM lorsqu'aucun variateur de fréquence
n'est connecté et que l'arbre est tourné vers
l'extérieur. Généralement, la force contre-électromotrice est spéciée comme mesure entre deux
phases pour la vitesse nominale du moteur ou
pour 1 000 tr/min. Si la valeur n'est pas
disponible pour une vitesse de moteur de
1 000 tr/min, calculer la valeur correcte comme
suit : par exemple, si la force contre-électromotrice à 1 800 tr/min est de 320 V, la FCEM à
1 000 tr/min se calcule comme suit :
FCEM = (tension / tr/min) * 1 000 = (320/1 800) *
1 000 = 178.
Programmer cette valeur au paramétre 1-40 FCEM
à 1000 tr/min.
34 Danfoss A/S © 08/2018 Tous droits réservés. MG07A504

Mise en service Manuel d'utilisation
Test de fonctionnement du moteur
1. Démarrer le moteur à vitesse faible (100 à 200 tr/
min). Si le moteur ne tourne pas, vérier l'installation, la programmation générale et les données
de moteur.
Parking
Cette fonction est recommandée pour les applications où
le moteur tourne à faible vitesse (p. ex. le moulinet dans
les applications de ventilateur). Le Paramétre 2-06 Courant
de parking et le paramétre 2-07 Temps de parking peuvent
être ajustés. Augmenter le réglage d'usine de ces
paramètres pour les applications à forte inertie.
Démarrer le moteur à vitesse nominale. Si l'application ne
fonctionne pas bien, vérier les réglages PM VVC+. Le
Tableau 5.13 donne des recommandations en fonction des
applications.
Application Réglages
Applications à faible
inertie
I
charge/Imoteur
Applications à inertie
moyenne
50 > I
Applications à forte inertie
I
charge/Imoteur
Charge élevée à basse
vitesse
< 30 % (vitesse nominale)
< 5
charge/Imoteur
> 50
> 5
Multiplier la valeur du
•
paramétre 1-17 Const. temps de
ltre tension par un facteur
compris entre 5 et 10.
Réduire la valeur du
•
paramétre 1-14 Amort. facteur
gain.
Réduire la valeur (< 100 %) du
•
paramétre 1-66 Courant min. à
faible vitesse.
Conserver les valeurs calculées.
Augmenter les valeurs du
paramétre 1-14 Amort. facteur gain,
du paramétre 1-15 Const. temps de
ltre faible vitesse et du
paramétre 1-16 Const. temps de ltre
vitesse élevée.
Augmenter la valeur du
paramétre 1-17 Const. temps de ltre
tension.
Augmenter la valeur du
paramétre 1-66 Courant min. à faible
vitesse (s'il est > 100 % trop
longtemps, cela peut provoquer une
surchaue du moteur).
5.4.3 Adaptation automatique au moteur
(AMA)
Pour optimiser la compatibilité entre le variateur de
fréquence et le moteur en mode VVC+, lancer l'AMA.
Le variateur de fréquence construit un modèle
•
mathématique du moteur pour la régulation du
courant de sortie du moteur, ce qui améliore sa
performance.
Il est parfois impossible d'eectuer une version
•
complète du test sur certains moteurs. Dans ce
cas, sélectionner [2] AMA activée réduite au
paramétre 1-29 Adaptation auto. au moteur (AMA).
Si des avertissements ou des alarmes se
•
produisent, consulter le chapitre 8.4 Liste des
avertissements et alarmes.
Pour de meilleurs résultats, exécuter cette
•
procédure sur un moteur froid.
Pour lancer une AMA à l'aide du LCP
1. Selon le réglage du paramètre par défaut,
connecter les bornes 13 et 27 avant de lancer
une AMA.
2. Entrer dans le menu principal.
3. Naviguer jusqu'au groupe de paramètres 1-** Load
and Motor.
4. Appuyer sur [OK].
5. Régler les paramètres du moteur à l'aide des
données de la plaque signalétique pour le groupe
de paramètres 1-2* Motor Data.
Dénir la longueur du câble moteur dans le
6.
paramétre 1-42 Longueur câble moteur.
7. Aller au paramétre 1-29 Adaptation auto. au
moteur (AMA).
8. Appuyer sur [OK].
9. Sélectionner [1] AMA activée compl.
10. Appuyer sur [OK].
11. Le test s’eectue automatiquement, puis un
message indique la n du test.
En fonction de la puissance, l'AMA peut prendre 3 à 10
minutes.
5 5
Tableau 5.13 Recommandations en fonction des applications
Si le moteur commence à osciller à une certaine vitesse,
augmenter le paramétre 1-14 Amort. facteur gain.
AVIS!
La fonction AMA ne démarre pas le moteur et ne
l'endommage pas.
Augmenter la valeur par petits incréments.
Le couple de démarrage peut être réglé au
paramétre 1-66 Courant min. à faible vitesse. 100 % fournit
un couple de démarrage égal au couple nominal.
MG07A504 Danfoss A/S © 08/2018 Tous droits réservés. 35

Mise en service
VLT® Midi Drive FC 280
5.5 Contrôle de la rotation du moteur
Avant de faire fonctionner le variateur de fréquence,
vérier la rotation du moteur.
1. Appuyer sur [Hand On].
2.
Appuyer sur [▲] pour dénir une référence de
vitesse positive.
Vérier que la vitesse achée est positive.
3.
4. Vérier que le câblage entre le variateur de
55
5.6
Vérier la rotation du codeur seulement si le signal de
retour du codeur est utilisé.
fréquence et le moteur est correct.
5. Vérier que le sens de marche du moteur
correspond au réglage du paramétre 1-06 Sens
horaire.
5a Lorsque le paramétre 1-06 Sens horaire
est réglé sur [0] Normal (sens horaire par
défaut) :
a. Vérier que le moteur tourne
dans le sens horaire.
b.
Vérier que la èche de
direction du LCP est dans le
sens horaire.
5b Lorsque le paramétre 1-06 Sens horaire
est réglé sur [1] Inverse (sens
antihoraire) :
a. Vérier que le moteur tourne
en sens antihoraire.
b. Vérier que la èche de
direction du LCP est dans le
sens antihoraire.
Contrôle de la rotation du codeur
1. Sélectionner [0] Boucle ouverte vitesse au
paramétre 1-00 Mode Cong.
2. Sélectionner [1] Codeur 24 V au
paramétre 7-00 PID vit.source ret.
3. Appuyer sur [Hand On].
4.
Appuyer sur [▲] pour dénir une référence de
vitesse positive (paramétre 1-06 Sens horaire sur
[0] Normal).
5. Vérier dans le paramétre 16-57 Feedback [RPM]
que le signal de retour est positif.
AVIS!
RETOUR NÉGATIF
Si le signal de retour est négatif, le raccordement du
codeur est erroné. Utiliser le paramétre 5-71 Sens
cod.born.32 33 pour inverser le sens ou échanger les
câbles du codeur.
5.7 Test de commande locale
1. Appuyer sur [Hand On] pour envoyer un ordre de
démarrage local au variateur de fréquence.
2. Faire accélérer le variateur de fréquence jusqu'à
sa vitesse maximum en appuyant sur [▲]. En
déplaçant le curseur à gauche de la virgule, il est
possible de modier plus rapidement l'entrée.
3. Noter tout problème d'accélération.
4. Appuyer sur [O]. Noter tout problème de décélération.
En cas de problème d'accélération ou de décélération, se
reporter au chapitre 8.5 Dépannage. Voir le
chapitre 8.2 Types d'avertissement et d'alarme à propos de la
réinitialisation du variateur de fréquence après un déclenchement.
Démarrage du système
5.8
La procédure décrite dans cette partie exige que le
câblage d’installation et la programmation de l’application
soient terminés. La procédure suivante est recommandée
une fois la conguration de l’application terminée.
1. Appuyer sur [Auto On].
2. Appliquer un ordre de marche externe.
3. Ajuster la référence de la vitesse dans la plage de
vitesse.
4. Arrêter l’ordre de marche externe.
5. Vérier les niveaux sonore et de vibration du
moteur an de garantir que le système
fonctionne comme prévu.
Si des avertissements ou des alarmes se produisent, voir le
chapitre 8.2 Types d'avertissement et d'alarme à propos de la
réinitialisation du variateur de fréquence après un déclenchement.
36 Danfoss A/S © 08/2018 Tous droits réservés. MG07A504

Mise en service Manuel d'utilisation
5.9 Module de mémoire
Le VLT® Memory Module MCM est un petit dispositif de
mémoire contenant des données telles que :
Micrologiciel pour le variateur de fréquence
•
(n'inclut pas le micrologiciel pour la communication sur la carte de commande).
Fichier PUD.
•
Fichier SIVP.
•
Fichier de paramètres.
•
Le VLT® Memory Module MCM est un accessoire. Le
variateur de fréquence est fourni sans module de mémoire
installé en usine. Un nouveau module de mémoire peut
être commandé à l'aide des références suivantes.
Description Référence
VLT® Memory Module MCM 102
VLT® Memory Module MCM 103
Tableau 5.14 Référence
Chaque module de mémoire a un numéro de série unique
qui ne peut être modié.
132B0359
132B0466
AVIS!
Le VLT® Memory Module MCM peut être utilisé sur le
variateur de fréquence avec la version de micrologiciel
1.5 et les versions supérieures.
Sélectionner les options adéquates pour le
paramétre 31-40 Memory Module Function avant de
procéder à la conguration à l'aide du module de
mémoire.
Paramétre 31-40 Memory
Module Function
[0] Disabled La fonction de téléchargement ou
*[1] Only Allow Download Autoriser uniquement le téléchar-
[2] Only Allow Upload Autoriser uniquement le
Description
de chargement de données est
désactivée.
gement de données à partir du
module de mémoire vers le
variateur de fréquence. Il s'agit du
réglage par défaut du
paramétre 31-40 Memory Module
Function.
chargement de données à partir du
variateur de fréquence vers le
module de mémoire.
Paramétre 31-40 Memory
Module Function
[3] Allow Both Download
and Upload
Tableau 5.15 Description du
Paramétre 31-40 Memory Module Function
Description
Si cette option est sélectionnée, le
variateur de fréquence télécharge
d'abord les données du module de
mémoire, puis charge les données
du variateur de fréquence vers le
module de mémoire.
AVIS!
ÉVITER TOUT ÉCRASEMENT INVOLONTAIRE
Le réglage par défaut du paramétre 31-40 Memory
Module Function est [1] Only Allow Download. En cas de
mise à jour, par exemple lors de la mise à jour du
micrologiciel par le MCT 10 en utilisant un chier OSS,
lors de la mise à jour d'un paramètre via le LCP ou un
bus, lors de la réinitialisation de paramètres via le
paramétre 14-22 Mod. exploitation ou lors d'une réinitialisation manuelle du variateur de fréquence, les données
mises à jour seront perdues après un nouveau cycle de
mise hors/sous tensions, car le variateur de fréquence
télécharge à nouveau les données du module de
mémoire.
Après que les données ont été téléchargées du
•
module de mémoire vers le variateur de
fréquence, sélectionner [0] Disabled ou [2] Only
Allow Upload au paramétre 31-40 Memory
Module Function avant le nouveau cycle de mise
hors/sous tension.
5.9.1 Synchronisation des données du
variateur de fréquence avec un
nouveau module de mémoire (créer
une sauvegarde du variateur)
1. Brancher un nouveau module de mémoire vide
dans le variateur de fréquence.
2. Sélectionner [2] Only Allow Upload ou [3] Allow
Both Download and Upload au
paramétre 31-40 Memory Module Function.
3. Mettre le variateur de fréquence sous tension.
4. Attendre que la synchronisation soit terminée. Se
reporter au chapitre 5.9.7 Transfert des perfor-
mances et indications pour vérier les indications
de transfert sur le variateur de fréquence.
5 5
MG07A504 Danfoss A/S © 08/2018 Tous droits réservés. 37
Mise en service
VLT® Midi Drive FC 280
AVIS!
Pour éviter tout écrasement involontaire des données
dans le module de mémoire, penser à ajuster le réglage
du paramétre 31-40 Memory Module Function avant le
cycle de mise hors/sous tension suivant en fonction des
diérentes ns d'exploitation.
5.9.2 Copier des données vers un autre
variateur de fréquence
1. Veiller à ce que les données requises soient
55
chargées vers le module de mémoire (se reporter
au chapitre 5.9.1 Synchronisation des données du
variateur de fréquence avec un nouveau module de
mémoire (créer une sauvegarde du variateur)).
2. Débrancher le module de mémoire et le brancher
dans un nouveau variateur de fréquence.
3. Veiller à ce que [1] Only Allow Download ou [3]
Allow Both Download and Upload soit sélectionné
au paramétre 31-40 Memory Module Function sur
le nouveau variateur de fréquence.
4. Mettre le nouveau variateur de fréquence sous
tension.
5. Attendre la n du téléchargement et du transfert
des données. Se reporter au
chapitre 5.9.7 Transfert des performances et
indications pour vérier les indications de
transfert sur le variateur de fréquence.
AVIS!
Pour éviter tout écrasement involontaire des données
dans le module de mémoire, penser à ajuster le réglage
du paramétre 31-40 Memory Module Function avant le
cycle de mise hors/sous tension suivant en fonction des
diérentes ns d'exploitation.
5.9.3 Copier des données vers plusieurs
variateurs de fréquence
Si plusieurs variateurs de fréquence ont la même tension/
puissance, les informations d'un variateur de fréquence
peuvent être transférées aux autres via un module de
mémoire.
1. Respecter la procédure décrite au
chapitre 5.9.1 Synchronisation des données du
variateur de fréquence avec un nouveau module de
mémoire (créer une sauvegarde du variateur) pour
charger les données d'un variateur de fréquence
vers un module de mémoire.
2. Pour éviter tout chargement involontaire de
données vers le module de mémoire maître,
veiller à ce que [1] Only Allow Download soit
sélectionné au paramétre 31-40 Memory Module
Function sur les autres variateurs de fréquence.
3. Débrancher le module de mémoire et le brancher
dans un nouveau variateur de fréquence.
4. Mettre le nouveau variateur de fréquence sous
tension.
5. Attendre la n du téléchargement et du transfert
des données. Se reporter au
chapitre 5.9.7 Transfert des performances et
indications pour vérier les indications de
transfert sur le variateur de fréquence.
6. Répéter les étapes 3 à 5 pour le variateur de
fréquence suivant.
AVIS!
Les données peuvent également être téléchargées vers le
module de mémoire à partir d'un PC via le VLT® Memory
Module Programmer.
AVIS!
Si un module de mémoire vide est branché dans un des
variateurs de fréquence à des ns de sauvegarde des
données, ajuster les réglages du paramétre 31-40 Memory
Module Function sur [2] Only Allow Upload ou [3] Allow
Both Download and Upload avant le cycle de mise hors/
sous tension suivant.
5.9.4 Transfert des informations du
micrologiciel
Si deux variateurs de fréquence ont la même tension et la
même puissance, les informations du micrologiciel peuvent
être transférées d'un variateur de fréquence à un autre.
1. Respecter la procédure décrite au
chapitre 5.9.1 Synchronisation des données du
variateur de fréquence avec un nouveau module de
mémoire (créer une sauvegarde du variateur) pour
charger les données de micrologiciel d'un
variateur de fréquence vers un module de
mémoire.
2. Respecter la procédure décrite au
chapitre 5.9.2 Copier des données vers un autre
variateur de fréquence pour transférer les
informations de micrologiciel vers un autre
variateur de fréquence de même tension et de
même puissance.
AVIS!
Les informations du micrologiciel peuvent également
être téléchargées vers le module de mémoire à partir
d'un PC via le VLT® Memory Module Programmer.
38 Danfoss A/S © 08/2018 Tous droits réservés. MG07A504

Mise en service Manuel d'utilisation
5.9.5 Sauvergarder des modications de
paramètres vers un module de
mémoire
1. Brancher un nouveau module de mémoire ou un
module de mémoire formaté dans le variateur de
fréquence.
2. Sélectionner [2] Only Allow Upload ou [3] Allow
Both Download and Upload au
paramétre 31-40 Memory Module Function.
3. Mettre le variateur de fréquence sous tension.
4. Attendre que la synchronisation soit terminée. Se
reporter au chapitre 5.9.7 Transfert des perfor-
mances et indications pour vérier les indications
de transfert sur le variateur de fréquence.
5. Toute modication des réglages de paramètres
est automatiquement synchronisée vers le
module de mémoire.
5.9.6 Eaçage de données
Le module de mémoire peut être formaté en réglant le
paramétre 31-43 Erase_MM sans eectuer un nouveau cycle
de mise hors/sous tension.
1. S'assurer que le module de mémoire est installé
dans le variateur de fréquence.
2. Sélectionner [1] Erase MM au
paramétre 31-43 Erase_MM.
3. Tous les chiers du module de mémoire sont
eacés.
4. Le réglage du Paramétre 31-43 Erase_MM revient
sur [0] No function.
5.9.7 Transfert des performances et
indications
Le temps nécessaire au transfert de diérentes données
entre le variateur de fréquence et le module de mémoire
varie, consulter le Tableau 5.16.
Fichier de données Temps
Il faut environ 2 minutes pour charger
•
des données du variateur de fréquence
vers le module de mémoire.
Fichier du micrologiciel
Fichier SIVP Environ 10 s.
Fichier de
paramètres
Tableau 5.16 Transfert de performances
1) Si un paramètre est modié dans le variateur de fréquence,
attendre au moins 5 s avant la mise hors tension pour charger le
paramètre mis à jour.
Fichier de
données
Fichier
de micrologiciel
Fichier SIVP
Fichier
de
paramètres
Tableau 5.17 Indications de transfert
1) Le voyant On est sur le LCP. Se reporter au chapitre 5.3.1 Panneau
de commande local numérique (NLCP) et au chapitre 5.3.5 Panneau
de commande local graphique (GLCP) pour la position et les
fonctions du voyant On.
1)
« Synchronisation
avec module de
mémoire » s'ache
pendant le
transfert.
Aucun texte.
Il faut environ 6 minutes pour
•
télécharger des données du module de
mémoire vers le variateur de
fréquence.
Environ 5 s.
Indications
GLCP NLCP
Aucun
texte.
Voyant
Le voyant
clignote
lentement
pendant le
transfert.
Le voyant ne
clignote pas.
1)
5 5
5.9.8 Activer le convertisseur PROFIBUS
Le VLT® Memory Module MCM 103 fonctionne comme une
combinaison de module de mémoire et de module d'activation pour activer la fonction du convertisseur PROFIBUS
dans le micrologiciel. Le VLT® Memory Module MCM 103
contient un chier PBconver.MME, qui est associé au
numéro de série individuel du module de mémoire. Le
chier PBconver.MME est la clé pour activer la fonction du
convertisseur PROFIBUS.
Pour activer le convertisseur PROFIBUS, choisir la version
au paramétre 14-70 Compatibility Selections.
MG07A504 Danfoss A/S © 08/2018 Tous droits réservés. 39

Mise en service
VLT® Midi Drive FC 280
Paramétre 14-70 Compatibility
Selections
*[0] No Function La sélection de la fonction de
[12] VLT2800 3M Sélectionner le mode de
[13] VLT2800 3M incl. MAV Sélectionner le mode de
[14] VLT2800 12M Sélectionner le mode de
55
[15] VLT2800 12M incl. MAV Sélectionner le mode de
Description
compatibilité est désactivée.
compatibilité VLT2800 3M pour
le variateur de fréquence.
compatibilité VLT2800 3M incl.
MAV pour le variateur de
fréquence.
compatibilité VLT2800 12M
pour le variateur de fréquence.
compatibilité VLT2800 12M incl.
MAV pour le variateur de
fréquence.
Activer le convertisseur PROFIBUS via les réglages des
paramètres
1. Sélectionner [1] Enabled au paramétre 31-47 Time
Limit Function.
2. Sélectionner [12] VLT 2800 3M ou [14] VLT 2800
12M au paramétre 14-70 Compatibility Selections.
3. Procéder à un cycle de mise hors/sous tension
pour démarrer le variateur de fréquence conformément au numéro et au mode d'identication
du VLT® 2800 PROFIBUS.
4. Le Paramétre 31-48 Time Limit Remaining Time
commence le compte à rebours après le cycle de
mise hors/sous tension et indique le temps d'utilisation restant.
Au bout de 720 heures de fonctionnement, le variateur de
fréquence émet un avertissement. Le convertisseur
PROFIBUS fonctionne toujours. Lorsque le compteur de
Tableau 5.18 Description du
paramétre 14-70 Compatibility Selections
temps du paramétre 31-48 Time Limit Remaining Time
atteint 0, le variateur de fréquence émet une alarme
verrouillée lors de la commande de démarrage suivante.
Activer le convertisseur PROFIBUS via le VLT® Memory
Module MCM 103
1. Brancher le module de mémoire dans le variateur
de fréquence.
2. Sélectionner [12] VLT 2800 3M ou [14] VLT 2800
12M au paramétre 14-70 Compatibility Selections.
3. Procéder à un cycle de mise hors/sous tension
pour démarrer le variateur de fréquence conformément au numéro et au mode
d'identication
du VLT® 2800 PROFIBUS.
AVIS!
Pour que le VLT® Memory Module MCM 103 fonctionne
comme convertisseur PROFIBUS, le
paramétre 31-40 Memory Module Function ne doit pas
être réglé sur [0] Disabled.
Il est possible d'activer le convertisseur PROFIBUS sans le
VLT® Memory Module MCM 103 pour une durée limitée.
Avant la
Module MCM 103 pour maintenir la fonction de convertisseur PROFIBUS.
n de cette durée, brancher un VLT® Memory
40 Danfoss A/S © 08/2018 Tous droits réservés. MG07A504
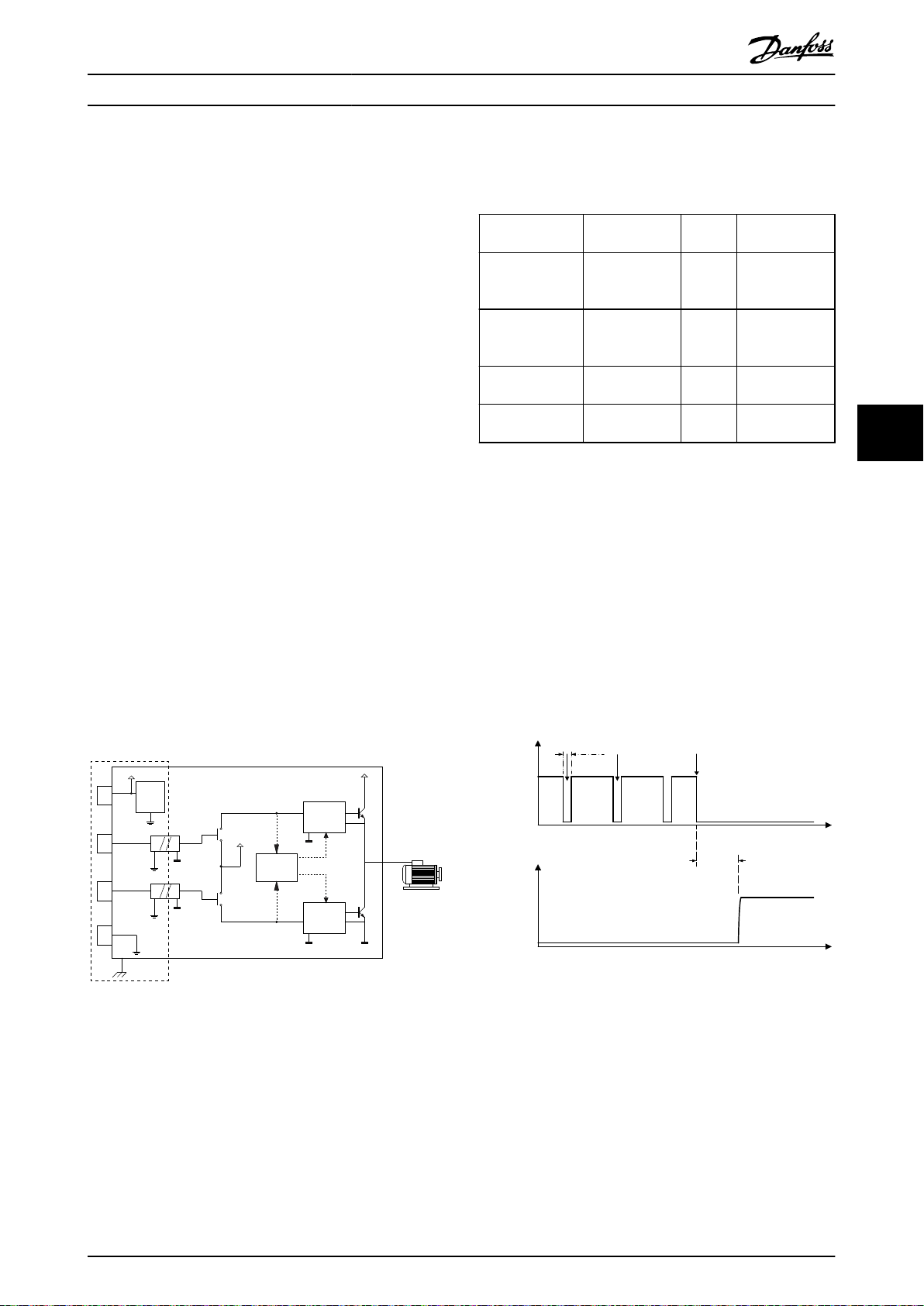
24 V
17 V
IGBT
+UDC
X3
IGBT
PELV
X3
X3
24 V
voltage
source
high-side
gate driving
circuit
diagnostic
circuit
low-side
gate driving
circuit
12
38
37
55
130BE463.12
Time
5 ms max.
Debounce time
Time
STO valid
STO invalid
Voltage
T37/38
Test pulse STO demanded
STO request
state
130BE587.12
Safe Torque O (STO) Manuel d'utilisation
6 Safe Torque O (STO)
La fonction Safe Torque O (STO) est un composant du
système de contrôle de la sécurité, qui empêche l'unité de
générer l'énergie requise pour faire tourner le moteur. La
sécurité est ainsi assurée dans les situations d'urgence.
La fonction STO est conçue et approuvée comme
acceptable pour les exigences suivantes :
CEI/EN 61508 : 2010 SIL2
•
CEI/EN 61800-5-2 : 2007 SIL2
•
CEI/EN 62061 : 2012 SILCL de SIL2
•
EN ISO 13849-1 : 2008 catégorie 3 PL « d »
•
Pour obtenir le niveau requis de sécurité fonctionnelle,
sélectionner et appliquer correctement les composants du
système de contrôle de la sécurité. Avant d'utiliser la
fonction STO, procéder à une analyse approfondie des
risques de l'installation an de déterminer si la fonction
STO et les niveaux de sécurité sont appropriés et susants.
La fonction STO sur le variateur de fréquence est
commandée via les bornes de commande 37 et 38.
Lorsque la fonction STO est activée, l'alimentation des
côtés haut et bas des circuits de commande de gâchette
des IGBT est coupée. L'Illustration 6.1 représente l'architecture de la fonction STO. Le Tableau 6.1 indique les
statuts de la fonction STO selon l'état de tension des
bornes 37 et 38.
Borne 37 Borne 38 Couple Avertissement
ou alarme
Sous tension
1)
Sous tension
Oui
2)
Pas d'avertissements ou
d'alarmes
3)
Hors tension
Hors tension Non Avertissement/
alarme 68 : Safe
Torque O
Hors tension Sous tension Non Alarme 188 : STO
Function Fault.
Sous tension Hors tension Non Alarme 188 : STO
Function Fault.
Tableau 6.1 Statut de la fonction STO
1) La plage de tension est 24 V ± 5 V, la borne 55 étant la borne de
référence.
2) Un couple est présent uniquement lorsque le variateur de
fréquence fonctionne.
±
3) Circuit ouvert ou tension dans la plage de 0 V
1,5 V, la borne 55
étant la borne de référence.
Filtrage des impulsions d'essai
Pour les dispositifs de sécurité qui génèrent des impulsions
d'essai sur les lignes de commande de la fonction STO : si
ces signaux restent à un faible niveau (≤ 1,8 V) pendant
moins de 5 ms, ils sont ignorés, comme l'indique
l'Illustration 6.2.
6
6
Illustration 6.2 Filtrage des impulsions d'essai
Illustration 6.1 Architecture de la fonction STO
Tolérance d'une entrée asynchrone
Les signaux d'entrée aux 2 bornes ne sont pas toujours
synchrones. Si l'écart entre les 2 signaux dépasse 12 ms,
l'alarme de défaut STO (alarme 188, STO Function Fault) se
produit.
MG07A504 Danfoss A/S © 08/2018 Tous droits réservés. 41
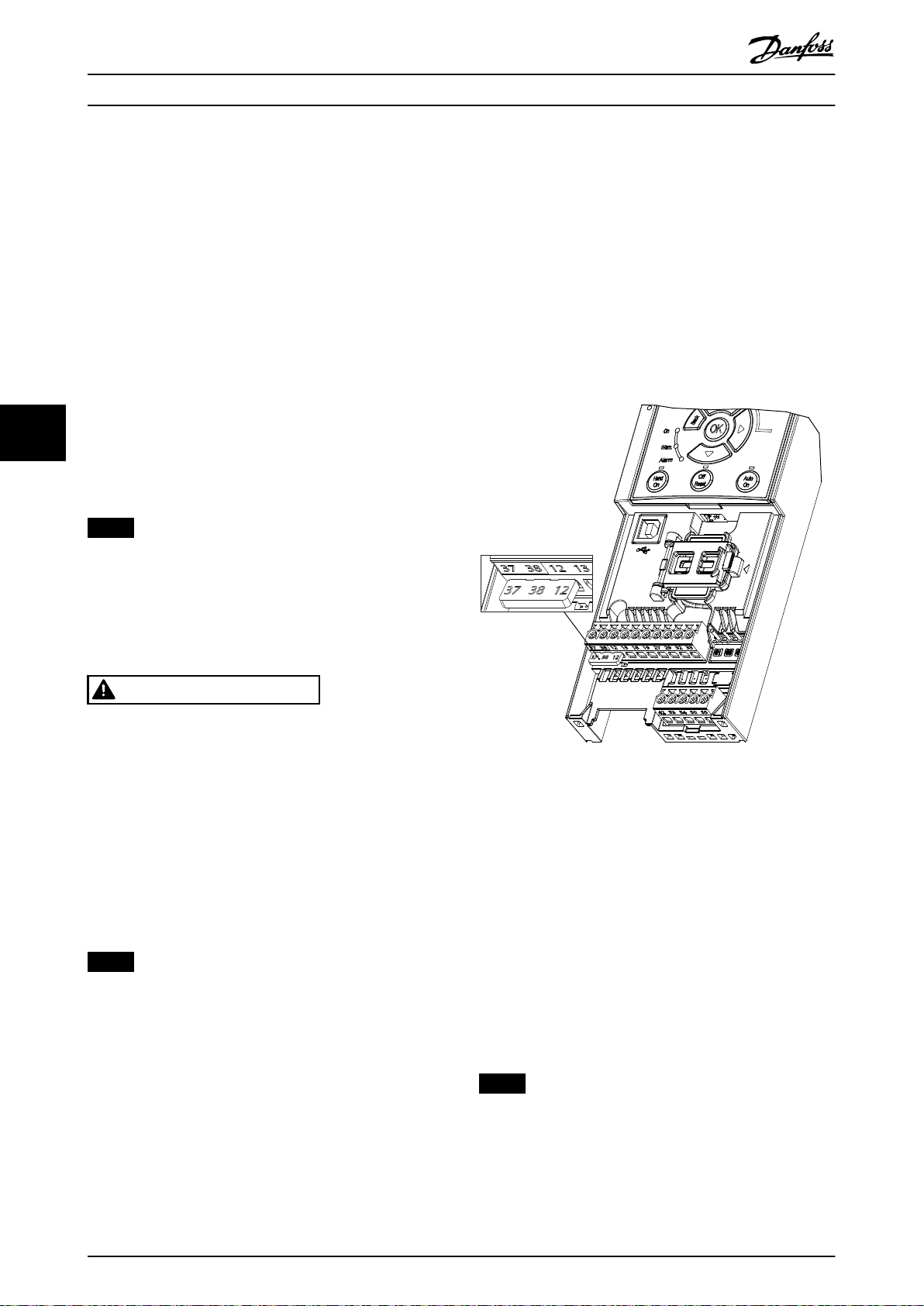
130BE213.10
Safe Torque O (STO)
VLT® Midi Drive FC 280
6
Signaux valides
Pour activer la fonction STO, les 2 signaux doivent être à
un faible niveau pendant au moins 80 ms. Pour arrêter la
fonction STO, les 2 signaux doivent être à un haut niveau
pendant au moins 20 ms. Se reporter au
chapitre 9.6 Entrée/sortie de commande et données de
commande pour les niveaux de tension et le courant
d'entrée des bornes STO.
6.1 Précautions de sécurité pour la STO
Personnel qualié
Seul du personnel qualié est autorisé à installer ou utiliser
cet équipement.
Par dénition, le personnel qualié est un personnel formé,
autorisé à installer, mettre en service et maintenir l’équipement, les systèmes et les circuits conformément aux lois
et aux réglementations en vigueur. En outre, il doit être
familiarisé avec les instructions et les mesures de sécurité
décrites dans ce manuel.
AVIS!
Après l’installation de la fonction STO, procéder à un
essai de mise en service comme indiqué au
chapitre 6.3.3 Essai de mise en service de la fonction STO.
Un essai de mise en service réussi est obligatoire après la
première installation et après chaque modication de
l’installation de sécurité.
6.2 Installation de la fonction Safe Torque
O
Pour le raccordement du moteur, la connexion secteur CA
et le câblage de commande, respecter les instructions
d'installation sûre indiquées dans le chapitre 4 Installation
électrique.
Activer la fonction STO en procédant comme suit :
1. Retirer le cavalier entre les bornes de commande
12 (24 V), 37 et 38. La coupure ou la rupture du
cavalier n’est pas susante pour éviter les courtscircuits. Voir le cavalier sur l'Illustration 6.3.
AVERTISSEMENT
RISQUE DE CHOC ÉLECTRIQUE
La fonction STO n'isole PAS la tension secteur vers le
variateur de fréquence ou les circuits auxiliaires et, par
conséquent, n'assure pas de sécurité électrique. Le nonrespect de cette isolation et du temps d'attente spécié
peut entraîner le décès ou des blessures graves.
N'intervenir sur les parties électriques du
•
variateur de fréquence ou du moteur qu'après
avoir isolé l'alimentation secteur et après avoir
attendu le temps spécié dans le
chapitre 2.3.1 Temps de décharge.
AVIS!
Lors de la conception de l'application de la machine,
tenir compte du temps et de la distance nécessaires à
l'arrêt de la roue libre (STO). Pour plus d’informations sur
les catégories d’arrêt, consulter la norme EN 60204-1.
Illustration 6.3 Cavalier entre les bornes 12 (24 V),
37 et 38
2. Brancher un dispositif de sécurité à double canal
(par exemple un PLC de sécurité, un rideau de
lumière, un relais de sécurité ou un bouton
d'arrêt d'urgence) sur les bornes 37 et 38 pour
former une application de sécurité. Le dispositif
doit respecter le niveau de sécurité requis d'après
l'évaluation des risques. L'Illustration 6.4
représente le schéma de câblage des applications
STO où le variateur de fréquence et le dispositif
de sécurité sont montés dans la même armoire.
L'Illustration 6.5 représente le schéma de câblage
des applications STO où une alimentation externe
est utilisée.
AVIS!
Le signal STO doit être alimenté par PELV.
42 Danfoss A/S © 08/2018 Tous droits réservés. MG07A504
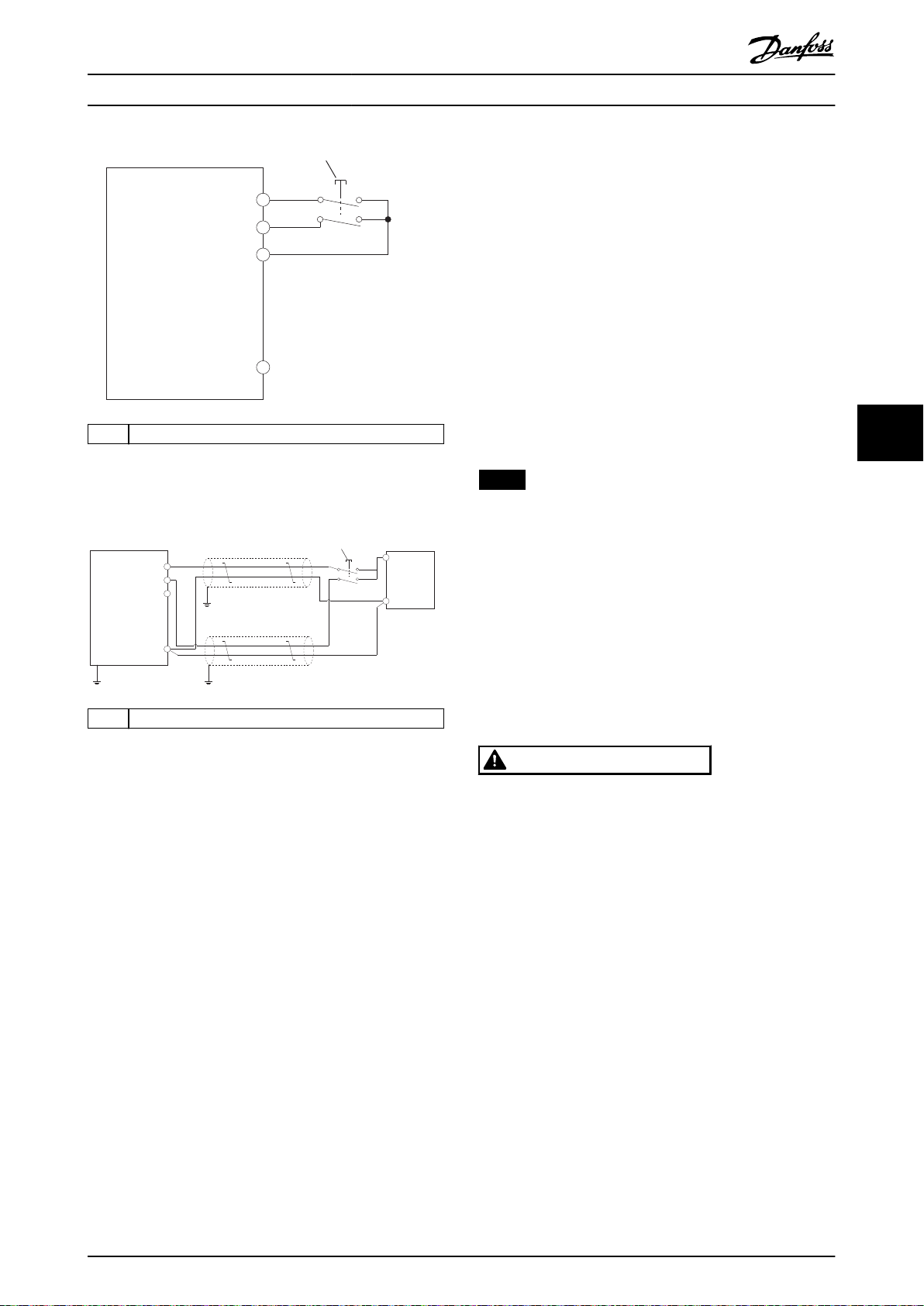
130BE424.11
37
38
12
55
1
130BE425.12
24 V source
37
38
+
-
12
55
1
Safe Torque O (STO) Manuel d'utilisation
1 Dispositif de sécurité
Mise en service de la fonction STO
6.3
6.3.1 Activation de la fonction Safe Torque
O
Pour activer la fonction STO, supprimer la tension au
niveau des bornes 37 et 38 du variateur de fréquence.
Lorsque la fonction STO est activée, le variateur de
fréquence génère l'alarme ou l'avertissement 68, Safe Torque
O, arrête l'unité et fait tourner le moteur en roue libre
jusqu'à l'arrêt. Utiliser la fonction STO pour arrêter le
variateur de fréquence dans les situations d’arrêt
d’urgence. En mode d’exploitation normal lorsque la STO
n’est pas nécessaire, utiliser plutôt la fonction d’arrêt
habituelle.
6
6
Illustration 6.4 Câblage de la fonction STO dans une armoire,
le variateur de fréquence fournit la tension d'alimentation
1 Dispositif de sécurité
Illustration 6.5 Câblage de la fonction STO, alimentation
externe
3. Procéder au câblage en respectant les
instructions fournies dans le chapitre 4 Installation
électrique et :
3a éliminer les risques de court-circuit
3b s'assurer que les câbles STO sont blindés
s'ils font plus de 20 m (65,6 pi) de long
ou sont en dehors de l'armoire
3c connecter le dispositif de sécurité
directement aux bornes 37 et 38.
AVIS!
Si la fonction STO est activée pendant que le variateur
de fréquence émet l'avertissement ou l'alarme 8, DC
Undervoltage, le variateur de fréquence saute l'alarme 68,
Safe Torque O, mais le fonctionnement de la STO n'est
pas aecté.
6.3.2 Désactivation de la fonction Safe
Torque O
Suivre les instructions du Tableau 6.2 pour désactiver la
fonction STO et reprendre le fonctionnement normal selon
le mode de redémarrage de la fonction STO.
AVERTISSEMENT
RISQUE DE BLESSURES OU DE DÉCÈS
Si l'alimentation 24 V CC est réappliquée à la borne 37
ou 38, l'état SIL2 STO est terminé, ce qui peut déclencher
le démarrage du moteur. Un démarrage inattendu du
moteur peut causer des blessures, voire la mort.
Veiller à ce que toutes les mesures de sécurité
•
soient prises avant de réappliquer l'alimentation
24 V CC aux bornes 37 et 38.
MG07A504 Danfoss A/S © 08/2018 Tous droits réservés. 43

Safe Torque O (STO)
VLT® Midi Drive FC 280
6
Mode de
redémarr
age
Redémarr
age
manuel
Redémarr
age
automatiq
ue
Tableau 6.2 Désactivation de la fonction STO
Étapes à suivre pour
désactiver la STO et
reprendre le fonctionnement normal
1. Appliquer à nouveau
la tension 24 V CC aux
bornes 37 et 38.
2. Créer un signal de
reset (via le bus de
terrain, une E/S
digitale ou la touche
[Reset]/[O Reset] du
LCP).
Appliquer à nouveau la
tension 24 V CC aux
bornes 37 et 38.
Conguration du mode
de redémarrage
Réglage par défaut.
Paramétre 5-19 Arrêt de
sécurité borne 37 = [1]
Arrêt sécurité alarme
Paramétre 5-19 Arrêt de
sécurité borne 37= [3]
Arrêt sécu avertiss.
6.3.3 Essai de mise en service de la
fonction STO
Après l'installation et avant le premier fonctionnement,
procéder à un essai de mise en service de l'installation en
faisant usage de la fonction STO.
Procéder à nouveau à l’essai après chaque modication de
l’installation ou de l’application impliquant la STO.
AVIS!
Un essai de mise en service réussi de la fonction STO est
nécessaire après l’installation initiale et après chaque
modication ultérieure de l’installation.
Pour réaliser un essai de mise en service :
Suivre les instructions du chapitre 6.3.4 Test des
•
applications STO en mode de redémarrage manuel
si la fonction STO est réglée sur le mode de
redémarrage manuel.
Suivre les instructions du chapitre 6.3.5 Test des
•
applications STO en mode de redémarrage
automatique si la fonction STO est réglée sur le
mode de redémarrage automatique.
6.3.4 Test des applications STO en mode de
redémarrage manuel
Pour les applications où le paramétre 5-19 Arrêt de sécurité
borne 37 est réglé sur la valeur par défaut [1] Arrêt sécurité
alarme, réaliser le test de mise en service suivant :
1. Régler le paramétre 5-40 Fonction relais sur [190]
STO Function active.
2. Couper l'alimentation 24 V CC des bornes 37 et
38 à l'aide du dispositif de sécurité tandis que le
moteur est entraîné par le variateur de fréquence
(c.-à-d. que l'alimentation secteur n'est pas
interrompue).
3.
Vérier que :
3a le moteur tourne en roue libre. Cela
peut prendre beaucoup de temps avant
que le moteur s'arrête
3b si le LCP est monté, l'alarme 68, Safe
Torque O, s'ache sur le LCP. Si le LCP
n'est pas monté, l'alarme 68, Safe Torque
O, est enregistrée dans le
paramétre 15-30 Journal alarme : code.
4. Appliquer à nouveau la tension 24 V CC aux
bornes 37 et 38.
5. Vérier que le moteur reste en état de roue libre
et que le relais client (s'il est connecté) reste
activé.
6. Envoyer un signal de reset (via le bus de terrain,
une E/S digitale ou la touche [Reset]/[O Reset]
du LCP).
7. S'assurer que le moteur se met à fonctionner, et
ce, dans la plage de vitesse d'origine.
On considère que l'essai de mise en service a réussi
lorsque toutes les étapes ci-dessus ont été respectées.
6.3.5 Test des applications STO en mode de
redémarrage automatique
Pour les applications où le paramétre 5-19 Arrêt de sécurité
borne 37 est réglé sur [3] Arrêt sécu avertiss., réaliser le test
de mise en service suivant.
1. Couper l'alimentation 24 V CC des bornes 37 et
38 à l'aide du dispositif de sécurité tandis que le
moteur est entraîné par le variateur de fréquence
(c.-à-d. que l'alimentation secteur n'est pas
interrompue).
44 Danfoss A/S © 08/2018 Tous droits réservés. MG07A504
Safe Torque O (STO) Manuel d'utilisation
2. Vérier que :
2a le moteur tourne en roue libre. Cela
peut prendre beaucoup de temps avant
que le moteur s'arrête
2b si le LCP est monté, l'avertissement 68,
Safe Torque O, s'ache sur le LCP. Si le
LCP n'est pas monté, l'avertissement 68,
Safe Torque O, est enregistré dans le bit
30 du paramétre 16-92 Mot avertis.
3. Appliquer à nouveau la tension 24 V CC aux
bornes 37 et 38.
4. S'assurer que le moteur se met à fonctionner, et
ce, dans la plage de vitesse d'origine.
On considère que l'essai de mise en service a réussi
lorsque toutes les étapes ci-dessus ont été respectées.
AVIS!
Voir l'avertissement sur le comportement au
redémarrage au chapitre 6.1 Précautions de sécurité pour
la STO.
6.4 Maintenance et service de la fonction
STO
Les mesures de sécurité sont de la responsabilité
•
de l'utilisateur.
Les paramètres du variateur de fréquence
•
peuvent être protégés par un mot de passe.
Le test fonctionnel se compose de deux parties :
test fonctionnel de base
•
test fonctionnel diagnostique.
•
Lorsque toutes les étapes sont réalisées avec succès, le test
fonctionnel est réussi.
7. Reconnecter l'alimentation 24 V CC aux bornes 37
et 38.
8. Vérier que le moteur ne démarre pas automatiquement et redémarre uniquement grâce à un
signal de reset (via le bus de terrain, une E/S
digitale ou la touche [Reset]/[O Reset] sur le
LCP).
Test fonctionnel diagnostique
1. Vérier que l'avertissement 68, Safe Torque O, et
l'alarme 68, Safe Torque O, n'apparaissent pas
lorsque l'alimentation 24 V est raccordée aux
bornes 37 et 38.
2. Retirer l'alimentation 24 V de la borne 37 et
vérier que le LCP ache l'alarme 188, STO
Function Fault, si le LCP est monté. Si le LCP n'est
pas monté, vérier que l'alarme 188 STO Function
Fault est enregistrée dans le
paramétre 15-30 Journal alarme : code.
3. Réappliquer l'alimentation 24 V à la borne 37 et
vérier que la réinitialisation de l'alarme est
réussie.
4. Retirer l'alimentation 24 V de la borne 38 et
vérier que le LCP ache l'alarme 188, STO
Function Fault si le LCP est monté. Si le LCP n'est
pas monté, vérier que l'alarme 188 STO Function
Fault est enregistrée dans le
paramétre 15-30 Journal alarme : code.
5. Réappliquer l'alimentation 24 V à la borne 38 et
vérier que la réinitialisation de l'alarme est
réussie.
6
6
Test fonctionnel de base
Si la fonction STO n'a pas été utilisée depuis 1 an, réaliser
un test fonctionnel de base
ou tout dysfonctionnement de la fonction STO.
1. S'assurer que le paramétre 5-19 Arrêt de sécurité
borne 37 est réglé sur *[1] Arrêt sécurité alarme.
2. Ôter la tension 24 V CC aux bornes 37 et 38.
3. Vérier si le LCP ache l'alarme 68, Safe Torque
O.
4. Vérier que le variateur de fréquence arrête
l’unité.
5. Vérier que le moteur est en roue libre et se met
complètement à l'arrêt.
6. Créer un signal de démarrage (via le bus de
terrain, une E/S digitale ou le LCP) et vérier que
le moteur ne démarre pas.
MG07A504 Danfoss A/S © 08/2018 Tous droits réservés. 45
an de détecter toute panne

Safe Torque O (STO)
VLT® Midi Drive FC 280
6.5 Caractéristiques techniques de la fonction STO
L'analyse des modes de défaillance, de leurs eets et de l'aide au diagnostic est réalisée d'après les suppositions suivantes :
Le VLT® Midi Drive FC 280 prend 10 % du budget de défaillance complète pour une boucle de sécurité SIL2.
•
Les taux de défaillance reposent sur la base de données Siemens SN29500.
•
Les taux de défaillance sont constants. Les mécanismes d'usure ne sont pas inclus.
•
Pour chaque canal, les composants liés à la sécurité sont considérés de type A avec une tolérance aux défaillances
•
du matériel égale à 0.
Les niveaux de contrainte sont moyens pour un environnement industriel et la température de service des
•
composants peut aller jusqu'à 85 °C (185 °F).
Une erreur de sécurité (p. ex. sortie en état de sécurité) est réparée en moins de 8 heures.
•
Une sortie de couple nulle correspond à l'état de sécurité.
•
6
Normes de sécurité
Fonction de sécurité Safe Torque O CEI 61800-5-2
Performance de sécurité
Temps de réaction
1)
Sécurité des machines ISO 13849-1, CEI 62061
Sécurité fonctionnelle CEI 61508
ISO 13849-1
Catégorie Cat. 3
Couverture du diagnostic (DC) 60 % (bas)
Durée moyenne de fonctionnement
avant défaillance (MTTFD)
Niveau de performance PL d
CEI 61508/CEI 61800-5-2/CEI 62061
Niveau d’intégrité de sécurité SIL2
Probabilité de défaillance
dangereuse par heure (PFH) (mode
à forte sollicitation)
Probabilité de défaillance
dangereuse à la sollicitation (PFD
pour PTI = 20 ans) (mode à faible
sollicitation)
Pourcentage de défaillance en
sécurité (SFF)
Tolérance aux défaillances du
matériel (HFT)
Intervalle des essais de validité
(PTI) 20 ans
Défaillance de cause commune
(CCF)
Intervalle des essais diagnostiques
(DTI)
Capacité du système SC 2
Temps de réponse de l’entrée à la
sortie
2 400 ans (haut)
7.54E-9 (1/h)
avg
6.05E-4
Pour les pièces à double canal : > 84 %
Pour les pièces à canal simple : > 99 %
Pour les pièces à double canal : HFT = 1
Pour les pièces à canal simple : HFT = 0
2)
β = 5 % ; βD = 5 %
160 ms
Boîtiers de tailles K1-K3 : 50 ms maximum
Boitiers de tailles K4 et K5 : 30 ms maximum
Tableau 6.3 Caractéristiques techniques de la fonction STO
1) Le temps de réaction est le temps qui s'écoule entre la condition de signal d'entrée qui déclenche la fonction STO et l'arrêt du couple sur le
moteur.
2) Pour la procédure des tests de validité, se reporter au chapitre 6.4 Maintenance et service de la fonction STO.
46 Danfoss A/S © 08/2018 Tous droits réservés. MG07A504

130BF096.10
FC
+24 V
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
12
13
18
19
27
29
32
33
50
53
54
55
42
A OUT
D IN
+24 V
130BE204.11
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
0 ~10 V
+
-
FC
+24 V
130BF097.10
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
4 - 20mA
+
-
FC
+24 V
Exemples d'applications Manuel d'utilisation
7 Exemples d'applications
7.1 Introduction
Les exemples de cette partie servent de référence rapide
pour les applications courantes.
Les réglages des paramètres correspondent aux
•
valeurs régionales par défaut sauf indication
contraire (sélection au paramétre 0-03 Réglages
régionaux).
Les paramètres associés aux bornes et leurs
•
réglages sont indiqués à côté des dessins.
Le réglage des commutateurs des bornes
•
analogiques 53 ou 54 est aussi représenté.
AVIS!
Lorsque la fonction STO n'est pas utilisée, un cavalier est
nécessaire entre les bornes 12, 37 et 38 pour que le
variateur de fréquence fonctionne avec les valeurs de
programmation d'usine par défaut.
7.2 Exemples d'applications
7.2.1 AMA
7.2.2 Vitesse
Paramètres
Fonction Réglage
Paramétre 6-10
Ech.min.U/born.530,07 V*
Paramétre 6-11
Ech.max.U/born.5310 V*
Paramétre 6-14
Val.ret./
0
Réf.bas.born.53
Paramétre 6-15
Val.ret./
50
Réf.haut.born.53
Paramétre 6-19
Terminal 53
[1] Tension
mode
* = valeur par défaut
Remarques/commentaires :
7 7
Paramètres
Tableau 7.2 Référence de vitesse analogique (tension)
Fonction Réglage
Paramétre 1-29 Ada
ptation auto. au
moteur (AMA)
Paramétre 5-12 E.di
git.born.27
[1] AMA
activée
compl.
*[2]
Lâchage
* = valeur par défaut
Remarques/commentaires :
Paramètres
Fonction Réglage
Paramétre 6-22
Ech.min.I/born.544 mA*
Paramétre 6-23
Ech.max.I/born.5420 mA*
régler le groupe de paramètres
1-2* Motor Data en fonction des
spécications du moteur.
AVIS!
Si les bornes 13 et 27 ne
Tableau 7.1 AMA avec borne 27 connectée
sont pas connectées, régler
le paramétre 5-12 Terminal
27 Digital Input sur [0]
Inactif.
Tableau 7.3 Référence de vitesse analogique (courant)
Paramétre 6-24
Val.ret./
0
Réf.bas.born.54
Paramétre 6-25
Val.ret./
50
Réf.haut.born.54
Paramétre 6-29
Mode born.54
[0] Courant
* = valeur par défaut
Remarques/commentaires :
MG07A504 Danfoss A/S © 08/2018 Tous droits réservés. 47

130BE208.11
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
≈ 5kΩ
FC
+24 V
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
130BF100.10
+24 V
130BB840.12
Speed
Reference
Start (18)
Freeze ref (27)
Speed up (29)
Speed down (32)
130BF098.10
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
19
18
27
29
32
33
50
53
54
55
42
+24 V 13
Exemples d'applications
VLT® Midi Drive FC 280
Paramètres
Fonction Réglage
Paramétre 6-10
Ech.min.U/born.530,07 V*
Paramétre 6-11
Ech.max.U/born.5310 V*
Paramétre 6-14
Val.ret./
0
Illustration 7.1 Accélération/décélération
Réf.bas.born.53
Paramétre 6-15
Val.ret./
Réf.haut.born.53
Paramétre 6-19
Terminal 53
mode
* = valeur par défaut
77
Remarques/commentaires :
50
[1] Tension
7.2.3 Marche/arrêt
Paramètres
Fonction Réglage
Paramétre 5-10 E.di
git.born.18
Paramétre 5-11 E.di
git.born.19
[8]
Démarrage
*[10]
Inversion
Tableau 7.4 Référence de vitesse (à l’aide d’un potentiomètre
manuel)
Paramètres
Fonction Réglage
Paramétre 5-10
E.digit.born.18
Paramétre 5-12
E.digit.born.27
Paramétre 5-13
E.digit.born.29
Paramétre 5-14
E.digit.born.32
*[8] Démarrage
[19] Gel
référence
[21] Accélération
[22] Décélération
* = valeur par défaut
Remarques/commentaires :
Paramétre 5-12 E.di
git.born.27
Paramétre 5-14 E.di
git.born.32
Paramétre 5-15 E.di
git.born.33
Paramétre 3-10 Réf.
prédénie
Réf.prédénie 0
Réf.prédénie 1
Réf.prédénie 2
Réf.prédénie 3
* = valeur par défaut
[0] Inactif
[16] Réf
prédénie
bit 0
[17] Réf
prédénie
bit 1
25%
50%
75%
100%
Remarques/commentaires :
Tableau 7.6 Démarrage/arrêt avec inversion et 4 vitesses
prédénies
Tableau 7.5 Accélération/décélération
48 Danfoss A/S © 08/2018 Tous droits réservés. MG07A504
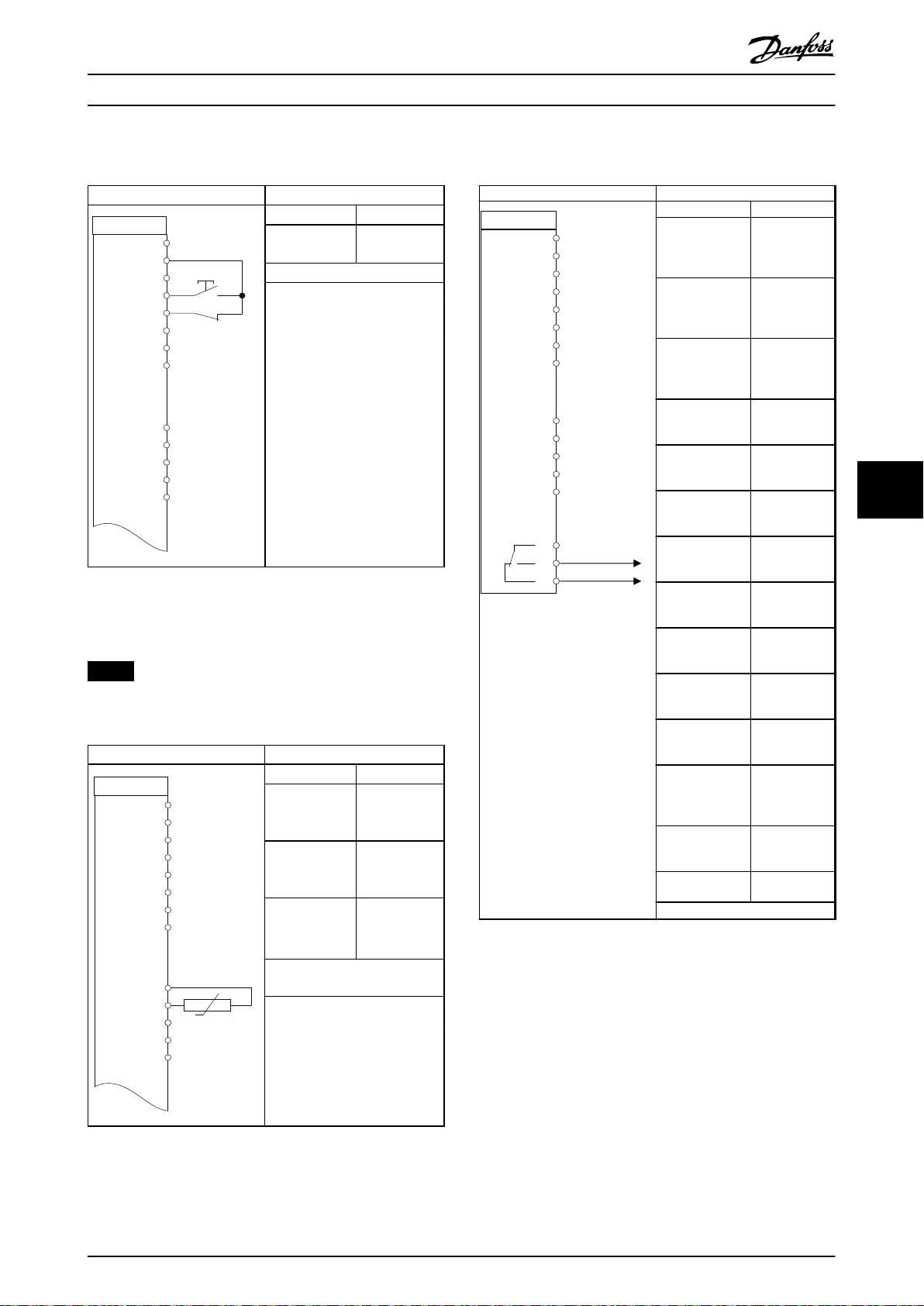
130BF099.10
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
+24 V
130BE210.11
+24 V
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
FC
D IN
+24 V
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
R1
12
13
18
19
27
29
32
33
50
53
54
55
42
01
02
03
130BE211.11
+24 V
Exemples d'applications Manuel d'utilisation
7.2.4 Réinitialisation d’alarme externe
Paramètres
Fonction Réglage
Paramétre 5-11
E.digit.born.19
* = valeur par défaut
Remarques/commentaires :
[1] Réinitialisation alarme
7.2.6 SLC
Paramètres
Fonction Réglage
Paramétre 4-30
Fonction perte
signal de retour
[1] Avertis-
sement
moteur
Paramétre 4-31
Erreur vitesse
signal de retour
50
moteur
Paramétre 4-32
Fonction tempo.
signal de retour
5 s
moteur
Paramétre 7-00
PID vit.source
ret.
[1] Codeur 24
V
Paramétre 5-70
Pts/tr cod.born.
32 33
Paramétre 13-00
Mode contr. log
1024*
7 7
[1] Actif
avancé
Tableau 7.7 Réinitialisation d’alarme externe
7.2.5 Thermistance du moteur
AVIS!
Pour satisfaire aux exigences d'isolation PELV, utiliser des
thermistances à isolation renforcée ou double.
Paramétre 13-01
Événement de
démarrage
Paramétre 13-02
Événement
d'arrêt
Paramétre 13-10
Opérande
comparateur
Paramétre 13-11
Opérateur
comparateur
[19] Avertis-
sement
[44] Touche
Reset
[21] N°
avertiss.
*[1] ≈
Paramétre 13-12
Paramètres
Fonction Réglage
Paramétre 1-90
Protect.
[2] Arrêt
thermistance
thermique mot.
Paramétre 1-93
Source
[1] Entrée
ANA 53
Thermistance
Paramétre 6-19
Tableau 7.8 Thermistance du moteur
MG07A504 Danfoss A/S © 08/2018 Tous droits réservés. 49
Terminal 53
[1] Tension
mode
* = valeur par défaut
Remarques/commentaires :
Si seul un avertissement est
souhaité, régler le
paramétre 1-90 Protect.
thermique mot. sur [1] Avertis.
Thermist.
Valeur
comparateur
Paramétre 13-51
Événement
contr. log
avancé
Paramétre 13-52
Action contr.
logique avancé
Paramétre 5-40
Fonction relais
* = valeur par défaut
61
[22]
Comparateur 0
[32] Déf. sort.
dig. A bas
[80] Sortie
digitale A

Exemples d'applications
Paramètres
Remarques/commentaires :
Si la limite dans la surveillance
du signal de retour est
dépassée, l'avertissement 61,
Feedback monitor (Surveillance
retour) apparaît. Le SLC surveille
l'avertissement 61, Feedback
monitor (Surveillance retour). Si
l'avertissement 61, Feedback
monitor (Surveillance retour),
devient vrai, le relais 1 est
déclenché.
L'équipement externe peut
indiquer qu'il faut procéder à
l'entretien. Si l'erreur de signal
de retour redescend sous la
limite en moins de 5 s, le
variateur de fréquence continue
à fonctionner et l'avertissement
disparaît. Le relais 1 reste
enclenché tant que la touche
[O/Reset] n'est pas actionnée.
VLT® Midi Drive FC 280
77
Tableau 7.9 Utilisation du SLC pour régler un relais
50 Danfoss A/S © 08/2018 Tous droits réservés. MG07A504

Maintenance, diagnostics et... Manuel d'utilisation
8 Maintenance, diagnostics et dépannage
8.1 Maintenance et service
Dans des conditions de fonctionnement normal et avec
des prols de charge normaux, le variateur de fréquence
ne nécessite aucune maintenance tout au long de sa durée
de vie. Pour éviter pannes, dangers et dommages en raison
de connexions trop serrées au niveau de la borne, de
présence de poussière, etc., examiner le variateur de
fréquence à intervalles réguliers en fonction des conditions
d'exploitation. Remplacer les pièces usées ou
endommagées par des pièces de rechange d'origine ou
standard. Pour le service et l'assistance, contacter le
fournisseur local Danfoss.
AVERTISSEMENT
DÉMARRAGE IMPRÉVU
Lorsque le variateur de fréquence est connecté au
secteur CA, à l’alimentation CC ou est en répartition de
la charge, le moteur peut démarrer à tout moment. Un
démarrage imprévu pendant la programmation, une
opération d'entretien ou de réparation peut entraîner la
mort, des blessures graves ou des dégâts matériels. Le
moteur peut être démarré par un commutateur externe,
un ordre du bus série, un signal de référence d'entrée, à
partir du LCP, par commande à distance à l'aide du
Logiciel de programmation MCT 10 ou suite à la
suppression d'une condition de panne.
Pour éviter un démarrage imprévu du moteur :
Déconnecter le variateur de fréquence du
•
secteur.
Activer la touche [O/Reset] sur le LCP avant de
•
programmer les paramètres.
Câbler et assembler entièrement le variateur de
•
fréquence, le moteur et tous les équipements
entraînés avant de connecter le variateur de
fréquence au secteur CA, à l'alimentation CC ou
en répartition de la charge.
Types d'avertissement et d'alarme
8.2
Type d'avertissement et
d'alarme
Avertissement Un avertissement signale une condition de
Alarme Une alarme signale une erreur qui nécessite une
Déclenchement
En cas de déclenchement, le variateur cesse de fonctionner
an d’éviter tout endommagement du variateur et des
autres équipements. Lors d’un déclenchement, le moteur
s’arrête en roue libre. La logique du variateur continue à
fonctionner et à surveiller l’état du variateur. Une fois que
la cause de la panne est supprimée, le variateur peut être
réinitialisé.
Alarme verrouillée
En cas d’ alarme verrouillée, le variateur cesse de
fonctionner an d’éviter tout endommagement du
variateur et des autres équipements. Lors d’une alarme
verrouillée, le moteur s’arrête en roue libre. La logique du
variateur continue à fonctionner et à surveiller l’état du
variateur. Le variateur lance une alarme verrouillée
seulement lorsque des fautes graves susceptibles
d’endommager le variateur ou d’autres équipements se
produisent. Une fois les pannes réparées, lancer un cycle
de puissance avant de réinitialiser le variateur.
Description
fonctionnement anormal qui génère une alarme.
Un avertissement s'arrête lorsque la condition
anormale est supprimée.
attention particulière immédiatement. La panne
déclenche toujours un arrêt ou une alarme
verrouillée. Réinitialiser le variateur après une
alarme.
Réinitialiser le variateur de l’une des 4 manières
suivantes :
appuyer sur [Reset]/[O/Reset]
•
ordre de réinitialisation via une entrée
•
digitale
ordre de réinitialisation via la communication
•
série
reset automatique.
•
8 8
MG07A504 Danfoss A/S © 08/2018 Tous droits réservés. 51

Setup 1
Status
Quick
Menu
Main
Menu
130BD111.10
Setup 1
Status Quick
Menu
Main
Menu
130BD112.10
130BD062.10
D
Hand
On
Reset
Auto
On
OK
On
Warn
Alarm
Maintenance, diagnostics et...
VLT® Midi Drive FC 280
8.3 Achage d'avertissement et d'alarme
Illustration 8.1 Achage d'avertissement
Une alarme ou une alarme verrouillée s'ache sur l'écran
avec le numéro d'alarme.
88
Illustration 8.2 Alarme/alarme verrouillée
Outre le texte et le code d'alarme sur l'écran du variateur
de fréquence, 3 voyants d'état sont présents. Le voyant
d'avertissement est jaune pendant un avertissement. Le
voyant d'alarme est rouge et clignote pendant une alarme.
Illustration 8.3 Voyants d’état
52 Danfoss A/S © 08/2018 Tous droits réservés. MG07A504

Maintenance, diagnostics et... Manuel d'utilisation
8.4 Liste des avertissements et alarmes
8.4.1 Liste des codes d'alarme/avertissement
Un (X) dans le Tableau 8.1 indique que l'avertissement ou l'alarme s'est produit(e).
N° Description
2 Déf.zéro signal X X –
3 Pas de moteur X – –
4
Perte phase secteur
7
DC overvoltage
8
DC undervoltage
9 Inverter overloaded X X – Durée trop longue de charge supérieure à 100 %.
10 Motor ETR overtemperature X X –
Motor thermistor overtempe-
11
rature
12 Torque limit X X –
13 Overcurrent X X X
14 Ground fault – X X Présence fuite à la masse d’une phase de sortie.
16 Short circuit – X X Court-circuit dans le moteur ou aux bornes du moteur.
17 Control word timeout X X –
25 Brake resistor short-circuited – X X
26 Brake overload X X –
Brake IGBT/brake chopper short-
27
circuited
28 Brake check – X –
30 U phase loss – X X Phase U moteur absente. Vérier la phase.
31 V phase loss – X X Phase V moteur absente. Vérier la phase.
32 W phase loss – X X Phase W moteur absente. Vérier la phase.
34 Fieldbus fault X X – Des erreurs de communication PROFIBUS ont eu lieu.
35 Option fault – X – Le bus de terrain détecte des erreurs internes.
1)
1)
1)
Avertis-
sement
X X X
X X –
X X –
X X –
– X X
Alarme Alarme
verrouillée
Cause
Le signal sur la borne 53 ou 54 équivaut à moins de
50 % de la valeur dénie au paramétre 6-10 Ech.min.U/
born.53, au paramétre 6-20 Ech.min.U/born.54 et au
paramétre 6-22 Ech.min.I/born.54.
Aucun moteur n'a été connecté à la sortie du variateur
de fréquence.
Absence de l'une des phases secteur ou uctuations trop
importantes de la tension. Vérier la tension d’alimentation.
La tension du circuit intermédiaire dépasse la limite.
La tension du circuit intermédiaire est inférieure à la
limite d'avertissement basse tension.
Le moteur est trop chaud en raison d'une charge de plus
de 100 % trop longue.
La thermistance ou la liaison de la thermistance sont
interrompues, ou le moteur est trop chaud.
Le couple dépasse la valeur dénie au
paramétre 4-16 Mode moteur limite couple ou au
paramétre 4-17 Mode générateur limite couple.
La limite de courant de pointe de l’onduleur est
dépassée. Si cette alarme survient lors de la mise sous
tension, vérier si les câbles de puissance ne sont pas
connectés par erreur aux bornes du moteur.
Absence de communication avec le variateur de
fréquence.
Résistance de freinage court-circuitée et fonction de
freinage déconnectée.
La puissance transmise à la résistance de freinage lors
des 120 dernières s dépasse la limite. Corrections
possibles : réduire l'énergie de freinage en diminuant la
vitesse ou en allongeant le temps de rampe.
Transistor de freinage court-circuité et fonction de
freinage déconnectée.
La résistance de freinage n'est pas connectée/ne marche
pas.
8 8
MG07A504 Danfoss A/S © 08/2018 Tous droits réservés. 53

Maintenance, diagnostics et...
VLT® Midi Drive FC 280
N° Description
36 Panne secteur X X –
38 Internal fault – X X Contacter le fournisseur Danfoss local.
40 Overload T27 X – –
46 Alim. carte puis. – X X –
47 24 V supply low X X X L’alimentation 24 V CC peut être surchargée.
49 Speed limit – X –
50 AMA calibration failed – X – Une erreur d'étalonnage s'est produite.
51 AMA check U
52 AMA low I
53 AMA big motor – X –
88
54 AMA small motor – X –
55 AMA parameter range – X –
56 AMA interrupt – X – L’AMA est interrompue.
57 AMA timeout – X – –
58 AMA internal – X – Contacter Danfoss.
59 Current limit X X – Variateur de fréquence en surcharge.
60 External interlock – X – Fonction de blocage externe activée.
61 Encoder loss (Perte codeur) X X – –
63 Frein méca. bas – X –
65 Control card temp X X X
67 Option change – X –
68
Safe Torque O
69 Power card temp X X X
80 Drive initialized to default value – X –
nom
nom
and I
2)
nom
Avertis-
sement
– X –
– X – Le courant moteur est trop bas. Vérier les réglages.
X X –
Alarme Alarme
verrouillée
Cause
Cet avertissement/alarme n'est actif que si la tension
d'alimentation du variateur de fréquence est inférieure à
la valeur du paramétre 14-11 Tension secteur si panne
secteur et si le paramétre 14-10 Panne secteur n'est PAS
réglé sur [0] Pas de fonction.
Vérier la charge connectée à la borne 27 ou supprimer
le raccordement en court-circuit.
La vitesse du moteur est inférieure à la limite spéciée au
paramétre 1-87 Arrêt vit. basse [Hz].
Conguration erronée pour tension et/ou courant du
moteur.
La puissance du moteur est trop importante pour que
l'AMA puisse fonctionner.
La puissance du moteur est trop faible pour que l'AMA
puisse fonctionner.
Les valeurs des paramètres du moteur sont hors de la
plage admissible. L'AMA ne fonctionne pas.
Le courant moteur eectif n'a pas dépassé le courant
d'activation du frein au cours de la temporisation du
démarrage.
La température de déclenchement de la carte de
commande a dépassé la limite supérieure.
Une nouvelle option est détectée ou une option installée
est enlevée.
La fonction STO est activée. Si la fonction STO est en
mode de redémarrage manuel (par défaut), pour
reprendre le fonctionnement normal, appliquer 24 V CC
aux bornes 37 et 38, puis créer un signal de reset (via le
bus de terrain, une E/S digitale ou la touche [Reset]/[O/
Reset]). Si la fonction STO est en mode de redémarrage
automatique, l'application de 24 V CC aux bornes 37 et
38 ramène automatiquement le variateur de fréquence
en fonctionnement normal.
La température de déclenchement de la carte de
puissance a dépassé la limite supérieure.
Tous les réglages des paramètres sont initialisés aux
réglages par défaut.
54 Danfoss A/S © 08/2018 Tous droits réservés. MG07A504

Maintenance, diagnostics et... Manuel d'utilisation
N° Description
87 Freinage CC auto X – –
88 Option detection – X X L'option est retirée avec succès.
95 Broken belt X X – –
99 Rotor verrouillé – X –
120 Position control fault – X – –
126 Motor rotating – X – Le moteur PM tourne lors de l'AMA.
127 Back EMF too high X – –
188
STO internal fault
nw
Pas en fonction. – – –
run
Err. Saisie d'un mot de passe erroné – – –
2)
Avertis-
sement
– X –
Alarme Alarme
verrouillée
Cause
Se produit sur le secteur IT lorsque le variateur de
fréquence lâche le moteur et que la tension CC est
supérieure à 830 V sur les unités 400 V ou à 425 V sur les
unités 200 V. Le moteur consomme de l'énergie sur le
circuit intermédiaire. Cette fonction peut être activée ou
désactivée au paramétre 0-07 Freinage CC auto IT.
Le rotor est bloqué.
La FCEM du moteur PM est trop élevée avant le
démarrage.
L'alimentation 24 V CC est connectée à une seule des 2
bornes STO (37 et 38) ou une panne est détectée dans
les canaux STO. S'assurer que les deux bornes sont
alimentées par l'alimentation 24 V CC et que l'écart entre
les signaux aux 2 bornes est inférieur à 12 ms. Si la
panne a toujours lieu, contacter le fournisseur local
Danfoss.
Les paramètres ne peuvent être modiés qu'avec le
moteur à l'arrêt.
Se produit lors de l'utilisation d'un mot de passe erroné
pour modier un paramètre protégé par mot de passe.
8 8
Tableau 8.1 Liste des codes d'avertissements et alarmes
1) Ces pannes peuvent provenir de perturbations du secteur. L'installation d'un ltre de ligne Danfoss peut rectier ce problème.
2) Cette alarme ne peut pas être réinitialisée automatiquement via le paramétre 14-20 Mode reset.
Pour le diagnostic, acher les mots d'alarme, d'avertissement et d'état élargi.
Mot
Bit Hex Déc
000000
0
1
2
3
4
5
01
000000
02
000000
04
000000
08
000000
10
000000
20
1 Brake check Réservé
2 Pwr. card temp Alim. carte puis. MM alarm Pwr. card temp Réservé
4 Earth fault Réservé Réservé Réservé Réservé
8
16
32 Overcurrent Réservé Réservé Overcurrent Réservé
Mot d'alarme
(paramétre 16-
90 Mot
d'alarme)
Temp. carte
ctrl.
Dép.tps.mot
ctrl
Mot
Mot d'alarme 2
(paramétre 16-91
Mot d'alarme 2)
Réservé Réservé Temp. carte ctrl. Réservé Ralentissement
Réservé Réservé Dép.tps.mot ctrl Réservé Rattrapage
d'alarme 3
(paramétre
16-97 Alar
m Word 3)
STO
function
fault
Mot d'avertis-
sement
(paramétre 16-9
2 Mot avertis.)
Réservé Réservé
d'avertissement 2
(paramétre
16-93 Mot
d'avertis-
sement 2)
Mot d'état
élargi
(paramétre 16-
94 Mot état
élargi)
Rampe en
cours
Adaptation
AMA
Démarrage
CW/CCW
Avertis.retour
haut
Mot d'état
élargi 2
(paramétre 16-9
5 Mot état
élargi 2)
O
Manuel/
automatique
Probus OFF1
actif
Probus OFF2
actif
Probus OFF3
actif
Réservé
MG07A504 Danfoss A/S © 08/2018 Tous droits réservés. 55
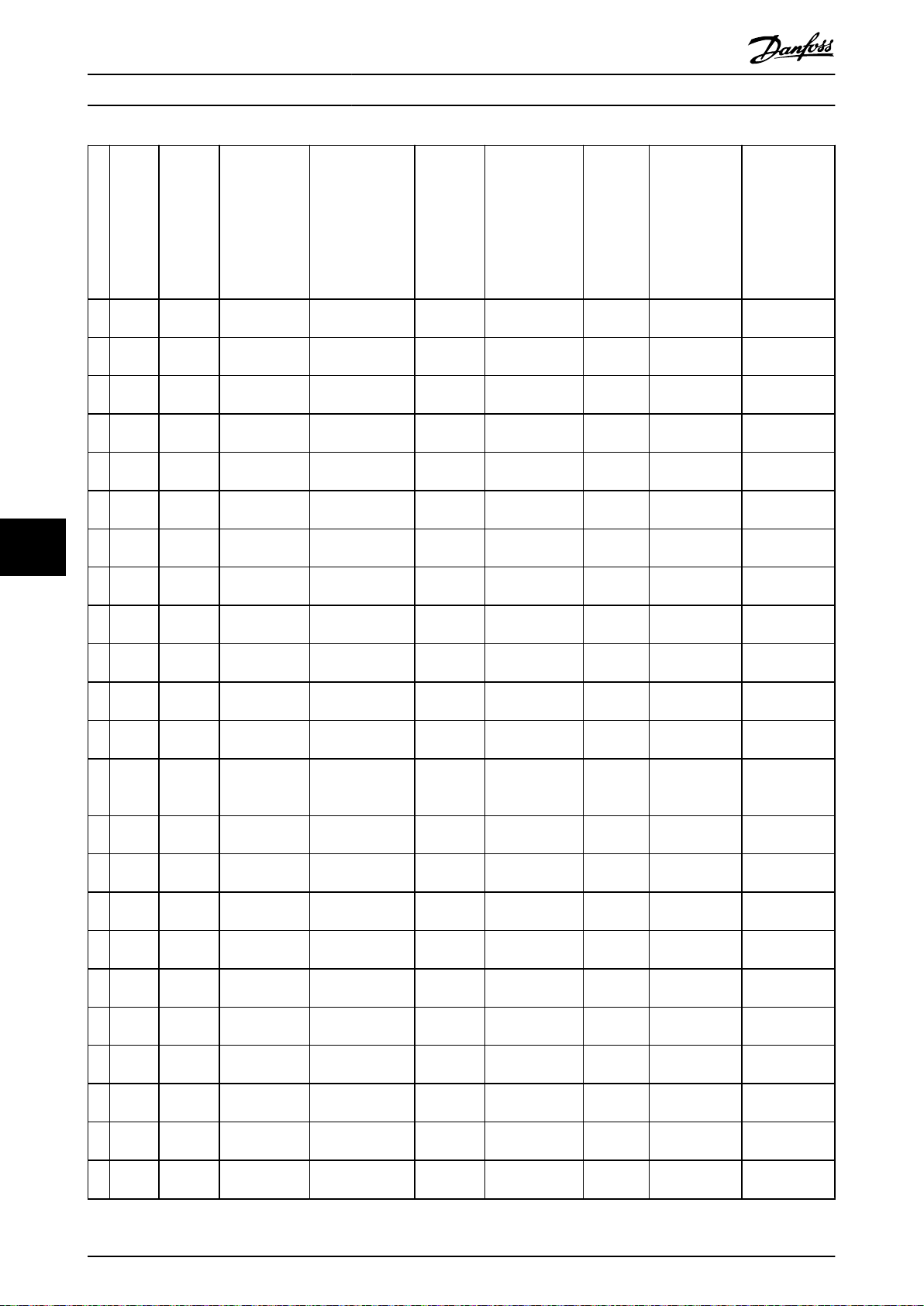
Maintenance, diagnostics et...
Mot d'alarme
Bit Hex Déc
(paramétre 16-
90 Mot
d'alarme)
VLT® Midi Drive FC 280
Mot d'alarme 2
(paramétre 16-91
Mot d'alarme 2)
Mot
d'alarme 3
(paramétre
16-97 Alar
m Word 3)
Mot d'avertis-
sement
(paramétre 16-9
2 Mot avertis.)
Mot
d'avertissement 2
(paramétre
16-93 Mot
d'avertis-
sement 2)
Mot d'état
élargi
(paramétre 16-
94 Mot état
élargi)
Mot d'état
élargi 2
(paramétre 16-9
5 Mot état
élargi 2)
000000
6
40
000000
7
80
000001
8
00
000002
9
00
000004
10
00
000008
11
00
000010
88
12
00
000020
13
00
000040
14
00
000080
15
00
000100
16
00
000200
17
00
000400
18
00
000800
19
00
001000
20
00
002000
21
00
004000
22
00
008000
23
00
010000
24
00
020000
25
00
040000
26
00
0800000013421772
27
1000000026843545
28
64 Torque limit Réservé Réservé Torque limit Réservé
128 Surt.therm.mot. Réservé Réservé Surt.therm.mot. Réservé
256 Motor ETR over Broken belt Réservé Motor ETR over
512 Inverter overld. Réservé Réservé Inverter overld. Réservé
1024
2048 DC overvolt. Speed limit Réservé DC overvolt. Réservé
4096 Short circuit External interlock Réservé Réservé Réservé Freinage max. Réservé
8192 Réservé Réservé Réservé Réservé Réservé Freinage
16384 Perte phase s. Réservé Réservé Perte phase s. Réservé Réservé Gel sortie
32768 AMA pas OK Réservé Réservé Pas de moteur
65536 Déf.zéro signal Réservé Réservé Déf.zéro signal Réservé Frein CA Jogging
131072 Internal fault Réservé Réservé Réservé Réservé Réservé
262144 Brake overload Réservé Réservé
524288 U phase loss Réservé Réservé Réservé Réservé
1048576 V phase loss Option detection Réservé Réservé
2097152 W phase loss Option fault Réservé Réservé Réservé Réservé Veille
4194304 Fieldbus fault Rotor verrouillé Réservé Fieldbus fault
8388608 Alim. 24 V bas Position ctrl. fault Réservé Alim. 24 V bas Réservé Réservé En fonction
16777216 Panne secteur Réservé Réservé Panne secteur Réservé Réservé Bipasse
33554432 Réservé Current limit Réservé Current limit Réservé Réservé Réservé
67108864
Sous-tension
CC
Résistance de
freinage
8
6
Brake IGBT Réservé Réservé Réservé Réservé Réservé Réservé
Option change Réservé Réservé
Start failed Réservé Sous-tension CC Réservé
Réservé Réservé Réservé Réservé Réservé
Limite puissance
résistance
freinage
Encoder loss
(Perte codeur)
Courroie
cassée
Freinage
CC auto
Réservé Réservé Démarrage
Overload
T27
Module de
mémoire
Réservé Réservé
Avertis.retour
bas
Courant de
sortie haut
Courant de
sortie bas
Fréq. sortie
haute
Fréq. sortie
basse
Contrôle
freinage OK
OVC active
Référence
haute
Référence basse Retard démar.
Réservé Augm. veille
Réservé
Comm.prete
Variateur de
fréquence prêt
Arrêt rapide
Frein-CC
Arrêt
Demande gel
sortie
Demande de
jogging
Démarr.
demandé
Réservé
External
interlock
Démarr. volée
actif
56 Danfoss A/S © 08/2018 Tous droits réservés. MG07A504
Maintenance, diagnostics et... Manuel d'utilisation
Mot
d'alarme 3
(paramétre
16-97 Alar
m Word 3)
Bit Hex Déc
Mot d'alarme
(paramétre 16-
90 Mot
d'alarme)
Mot d'alarme 2
(paramétre 16-91
Mot d'alarme 2)
Mot d'avertis-
sement
(paramétre 16-9
2 Mot avertis.)
Mot
d'avertissement 2
(paramétre
16-93 Mot
d'avertis-
sement 2)
Mot d'état
élargi
(paramétre 16-
94 Mot état
élargi)
Mot d'état
élargi 2
(paramétre 16-9
5 Mot état
élargi 2)
2000000053687091
29
4000000010737418
30
8000000021474836
31
Tableau 8.2 Description du mot d'alarme, du mot d'avertissement et du mot d'état élargi
24
48
Variateur de
2
fréquence
initialisé
Safe Torque O Réservé Réservé Safe Torque O Réservé Réservé Réservé
Frein méca. bas Réservé Réservé Réservé Réservé
Encoder loss
(Perte codeur)
Réservé Réservé
Back EMF
too high
Réservé
Base données
occupée
Avertissement
nettoyage
radiateur
Réservé
8 8
MG07A504 Danfoss A/S © 08/2018 Tous droits réservés. 57

Maintenance, diagnostics et...
VLT® Midi Drive FC 280
8.5 Dépannage
Symptôme Cause possible Test Solution
Arrêt LCP
Signal de démarrage absent (veille)
Signal de roue libre du moteur actif
Moteur ne
fonctionnant pas
(roue libre)
Source du signal de référence
erronée
88
Limite de rotation du moteur
Le moteur tourne
dans le mauvais
sens
Moteur n’atteignant
pas la vitesse
maximale
La vitesse du
moteur est instable
Le moteur tourne
de façon irrégulière
Le moteur ne freine
pas
Signal d'inversion actif
Connexion des phases moteur
incorrecte
Les limites de fréquence sont mal
réglées
Signal d'entrée de référence
incorrectement mis à l'échelle
Réglages des paramètres éventuellement incorrects
Surmagnétisation possible
Éventuels réglages incorrects au
niveau des paramètres de freinage.
Rampes de décélération peut-être
trop courtes.
Vérier si la touche [O] a été
enfoncée.
Vérier que le
paramétre 5-10 E.digit.born.18 est bien
réglé pour la borne 18 (utiliser le
réglage par défaut).
Vérier que le paramétre 5-12 Terminal
27 Digital Input est bien réglé pour la
borne 27 (utiliser le réglage par
défaut).
Vérier les points suivants :
Le signal de référence est local,
•
distant ou une référence bus ?
Référence prédénie active ?
•
Connexion des bornes correcte ?
•
Mise à l'échelle des bornes
•
correcte ?
Signal de référence disponible ?
•
Vérier que le paramétre 4-10 Sens de
rotation du moteur est correctement
programmé.
Vérier si un ordre d’inversion est
programmé pour la borne au groupe
de paramètres 5-1* Entrées digitales.
Changer le paramétre 1-06 Clockwise
Direction.
Vérier les limites de sortie au
paramétre 4-14 Vitesse moteur limite
haute [Hz] et au
paramétre 4-19 Frq.sort.lim.hte.
Vérier la mise à l'échelle du signal
d'entrée de référence dans le groupe
de paramètres 6-0* Mode E/S ana. et le
groupe de paramètres 3-1* Consignes.
Vérier les réglages de tous les
paramètres du moteur, y compris tous
les réglages de compensation du
moteur. Pour le fonctionnement en
boucle fermée, contrôler les réglages
du PID.
Rechercher les réglages incorrects du
moteur dans tous les paramètres du
moteur.
Vérier les paramètres de freinage.
Vérier les réglages du temps de
rampe.
Appuyer sur [Auto On] ou [Hand On]
(selon le mode d'exploitation) pour
faire fonctionner le moteur.
Appliquer un signal de démarrage
valide pour démarrer le moteur.
Appliquer 24 V à la borne 27 ou
programmer cette borne sur [0]
Inactif.
Programmer les réglages corrects.
Régler la référence prédénie active
dans le groupe de paramètres 3-1*
Consignes. Vérier que le câblage est
correct. Vérier la mise à l’échelle des
bornes. Vérier le signal de référence.
Programmer les réglages corrects.
Désactiver le signal d’inversion.
Programmer des limites correctes.
Programmer les réglages corrects.
Vérier les réglages du groupe de
paramètres 6-0* Mode E/S ana.
Vérier les réglages du moteur dans
les groupes de paramètres 1-2* Motor
Data, 1-3* Données mot. av. I et 1-5*
Load indep. setting.
Vérier les groupes de paramètres 2-0*
Frein-CC et 3-0* Limites de réf.
58 Danfoss A/S © 08/2018 Tous droits réservés. MG07A504

Maintenance, diagnostics et... Manuel d'utilisation
Symptôme Cause possible Test Solution
Court-circuit entre phases du moteur
ou du panneau. Rechercher de
possibles courts-circuits sur les phases
du moteur et du panneau.
Le moteur est en surcharge pour
l’application.
Procéder à une vérication avant le
démarrage pour rechercher les
éventuelles connexions desserrées.
Décaler les ls de l'alimentation
d'entrée d'une position sur le variateur
de fréquence : A vers B, B vers C, C
vers A.
Décaler les ls de l'alimentation
d'entrée d'une position sur le variateur
de fréquence : A vers B, B vers C, C
vers A.
Décaler les ls du moteur de sortie
d'une position : U vers V, V vers W, W
vers U.
Décaler les ls du moteur de sortie
d'une position : U vers V, V vers W, W
vers U.
Fréquences critiques de bipasse à
l'aide des paramètres du groupe de
paramètres 4-6* Bipasse vit.
Désactiver la surmodulation au
paramétre 14-03 Overmodulation.
Augmenter l'atténuation des
résonances au
paramétre 1-64 Resonance Dampening.
Éliminer les courts-circuits détectés.
Eectuer le test de démarrage et
vérier que le courant du moteur
gure dans les spécications. Si le
courant du moteur dépasse le
courant de pleine charge de la
plaque signalétique, le moteur ne
peut fonctionner qu'avec une charge
réduite. Examiner les spécications
pour l’application.
Serrer les connexions desserrées.
Si le déséquilibre de la colonne suit
le l, il s'agit d'un problème de
puissance. Contrôler l'alimentation
secteur.
Si le déséquilibre de colonne reste
sur la même borne d'entrée, il s'agit
d'un problème dans l'unité. Contacter
le fournisseur.
Si le déséquilibre de la colonne suit
le l, le problème se trouve dans le
moteur ou le câblage du moteur.
Vérier le moteur et le câblage du
moteur.
Si le déséquilibre de la colonne reste
sur la même borne de sortie, il existe
un problème dans l’unité. Contacter
le fournisseur.
Vérier si le bruit et/ou la vibration
ont été réduits à une limite
acceptable.
Fusibles d'alimentation ouverts ou
déclenchement du
disjoncteur
Déséquilibre du
courant secteur
supérieur à 3 %
Déséquilibre du
courant du moteur
supérieur à 3 %
Bruit acoustique ou
vibration (p. ex. une
lame de ventilateur
fait du bruit ou
transmet des
vibrations à
certaines
fréquences)
Court-circuit entre phases
Surcharge moteur
Connexions desserrées
Problème lié à l'alimentation secteur
(voir la description de l'alarme 4,
Perte phase s.).
Problème lié au variateur de
fréquence
Problème avec le moteur ou le l du
moteur
Problème lié au variateur de
fréquence
Résonances, p. ex. dans le moteur/
système de ventilateur
8 8
Tableau 8.3 Dépannage
MG07A504 Danfoss A/S © 08/2018 Tous droits réservés. 59

Spécications
9 Spécications
9.1 Données électriques
VLT® Midi Drive FC 280
Sortie d'arbre typique [kW (HP)]
du variateur de fréquence
Protection nominale IP20 (IP21/Type 1 en
option)
Courant de sortie
Sortie d'arbre [kW] 0,37 0,55 0,75 1,1 1,5 2,2 3
Continu (3 x 380-440 V) [A] 1,2 1,7 2,2 3 3,7 5,3 7,2
Continu (3 x 441-480 V) [A] 1,1 1,6 2,1 2,8 3,4 4,8 6,3
Intermittent (surcharge 60 s) [A] 1,9 2,7 3,5 4,8 5,9 8,5 11,5
kVA continu (400 V CA) [kVA] 0,9 1,2 1,5 2,1 2,6 3,7 5,0
kVA continu (480 V CA) [kVA] 0,9 1,3 1,7 2,5 2,8 4,0 5,2
Courant d’entrée maximal
Continu (3 x 380-440 V) [A] 1,2 1,6 2,1 2,6 3,5 4,7 6,3
Continu (3 x 441-480 V) [A] 1,0 1,2 1,8 2,0 2,9 3,9 4,3
Intermittent (surcharge 60 s) [A] 1,9 2,6 3,4 4,2 5,6 7,5 10,1
Autres spécications
Section max. de câble (secteur, moteur, frein et
99
répartition de la charge) [mm² (AWG)]
Perte de puissance estimée à charge nominale
max. [W]
Poids, protection nominale IP20 [kg (lb)] 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,5 (5,5) 3,6 (7,9)
Poids, protection nominale IP21 [kg (lb)] 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 5,5 (12,1)
Rendement [%]
1)
2)
PK37
0,37
(0,5)
K1 K1 K1 K1 K1 K1 K2
20,9 25,2 30 40 52,9 74 94,8
96,0 96,6 96,8 97,2 97,0 97,5 98,0
PK55
0,55
(0,75)
PK75
0,75
(1,0)
P1K1
1,1
(1,5)
4 (12)
P1K5
1,5
(2,0)
P2K2
2,2
(3,0)
P3K0
3,0
(4,0)
Tableau 9.1 Alimentation secteur 3 x 380-480 V CA
60 Danfoss A/S © 08/2018 Tous droits réservés. MG07A504

Spécications Manuel d'utilisation
Sortie d'arbre typique [kW (HP)]
du variateur de fréquence
Protection nominale IP20 (IP21/Type 1 en
option)
Courant de sortie
Sortie d'arbre 4 5,5 7,5 11 15 18,5 22
Continu (3 x 380-440 V) [A] 9 12 15,5 23 31 37 42,5
Continu (3 x 441-480 V) [A] 8,2 11 14 21 27 34 40
Intermittent (surcharge 60 s) [A] 14,4 19,2 24,8 34,5 46,5 55,5 63,8
kVA continu (400 V CA) [kVA] 6,2 8,3 10,7 15,9 21,5 25,6 29,5
kVA continu (480 V CA) [kVA] 6,8 9,1 11,6 17,5 22,4 28,3 33,3
Courant d’entrée maximal
Continu (3 x 380-440 V) [A] 8,3 11,2 15,1 22,1 29,9 35,2 41,5
Continu (3 x 441-480 V) [A] 6,8 9,4 12,6 18,4 24,7 29,3 34,6
Intermittent (surcharge 60 s) [A] 13,3 17,9 24,2 33,2 44,9 52,8 62,3
Autres spécications
Section max. de câble (secteur, moteur, frein et
répartition de la charge) [mm² (AWG)]
Perte de puissance estimée à charge nominale
max. [W]
Poids, protection nominale IP20 [kg] (lb) 3,6 (7,9) 3,6 (7,9) 4,1 (9,0) 9,4 (20,7) 9,5 (20,9) 12,3 (27,1) 12,5 (27,6)
Poids, protection nominale IP21 [kg (lb)] 5,5 (12,1) 5,5 (12,1) 6,5 (14,3) 10,5 (23,1) 10,5 (23,1) 14,0 (30,9) 14,0 (30,9)
Rendement [%]
1)
2)
P4K0
4
(5,5)
K2 K2 K3 K4 K4 K5 K5
115,5 157,5 192,8 289,5 393,4 402,8 467,5
98,0 97,8 97,7 98,0 98,1 98,0 98,0
P5K5
5,5
(7,5)
4 (12) 16 (6)
P7K5
7,5
(10)
P11K
11
(15)
P15K
15
(20)
P18K
18,5
(25)
P22K
22
(30)
9 9
Tableau 9.2 Alimentation secteur 3 x 380-480 V CA
Sortie d'arbre typique [kW (HP)]
du variateur de fréquence
Protection nominale IP20 (IP21/Type 1 en
option)
Courant de sortie
Continu (3 x 200-240 V) [A] 2,2 3,2 4,2 6 6,8 9,6 15,2
Intermittent (surcharge 60 s) [A] 3,5 5,1 6,7 9,6 10,9 15,4 24,3
kVA continu (230 V CA) [kVA] 0,9 1,3 1,7 2,4 2,7 3,8 6,1
Courant d’entrée maximal
Continu (3 x 200-240 V) [A] 1,8 2,7 3,4 4,7 6,3 8,8 14,3
Intermittent (surcharge 60 s) [A] 2,9 4,3 5,4 7,5 10,1 14,1 22,9
Autres spécications
Section max. de câble (secteur, moteur, frein et
répartition de la charge) [mm² (AWG)]
Perte de puissance estimée à charge nominale
max. [W]
Poids, protection nominale IP20 [kg] (lb) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,5 (5,5) 3,6 (7,9)
Poids, protection nominale IP21 [kg (lb)] 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 5,5 (12,1) 6,5 (14,3)
Rendement [%]
1)
2)
Tableau 9.3 Alimentation secteur 3 x 200-240 V CA
PK37
0,37
(0,5)
K1 K1 K1 K1 K1 K2 K3
29,4 38,5 51,1 60,7 76,1 96,1 147,5
96,4 96,6 96,3 96,6 96,5 96,7 96,7
PK55
0,55
(0,75)
PK75
0,75
(1,0)
P1K1
1,1
(1,5)
4 (12)
P1K5
1,5
(2,0)
P2K2
2,2
(3,0)
P3K7
3,7
(5,0)
MG07A504 Danfoss A/S © 08/2018 Tous droits réservés. 61

Spécications
VLT® Midi Drive FC 280
Sortie d'arbre typique [kW (HP)]
du variateur de fréquence
Protection nominale IP20 (IP21/Type 1 en option) K1 K1 K1 K1 K1 K2
Courant de sortie
Continu (3 x 200-240 V) [A] 2,2 3,2 4,2 6 6,8 9,6
Intermittent (surcharge 60 s) [A] 3,5 5,1 6,7 9,6 10,9 15,4
kVA continu (230 V CA) [kVA] 0,9 1,3 1,7 2,4 2,7 3,8
Courant d’entrée maximal
Continu (1 x 200-240 V) [A] 2,9 4,4 5,5 7,7 10,4 14,4
Intermittent (surcharge 60 s) [A] 4,6 7,0 8,8 12,3 16,6 23,0
Autres spécications
Section max. du câble (secteur et moteur) [mm²
(AWG)]
Perte de puissance estimée à charge nominale max.
1)
[W]
Poids, protection nominale IP20 [kg] (lb) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,5 (5,5)
Poids, protection nominale IP21 [kg (lb)] 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 5,5 (12,1)
Rendement [%]
Tableau 9.4 Alimentation secteur 1 x 200-240 V CA
1) La perte de puissance typique, mesurée dans des conditions de charge nominales, est de ± 15 % (la tolérance est liée à la variété des
conditions de tension et de câblage).
99
Les valeurs s'appuient sur le rendement typique d'un moteur (limite IE2/IE3). Les moteurs de moindre rendement renforcent la perte de puissance
du variateur de fréquence, tandis que les moteurs à rendement élevé la réduisent.
S'applique au dimensionnement du refroidissement de variateur de fréquence. Si la fréquence de commutation est supérieure au réglage par
défaut, les pertes de puissance peuvent augmenter. Les puissances consommées par le LCP et la carte de commande sont incluses. D'autres
options et la charge client peuvent accroître les pertes de 30 W max. (bien que l'on ne compte généralement que 4 W supplémentaires pour une
carte de commande ou un bus de terrain à pleine charge).
Pour les données des pertes de puissance selon la norme EN 50598-2, consulter www.danfoss.com/vltenergyeciency.
2) Mesuré avec des câbles de moteur blindés de 50 m (164 pi) à la charge et à la fréquence nominales. Pour la classe d'ecacité énergétique, voir
le chapitre 9.4 Conditions ambiantes. Pour connaître les pertes de charge partielles, voir www.danfoss.com/vltenergyeciency.
2)
PK37
0,37
(0,5)
37,7 46,2 56,2 76,8 97,5 121,6
94,4 95,1 95,1 95,3 95,0 95,4
PK55
0,55
(0,75)
PK75
0,75
(1,0)
4 (12)
P1K1
1,1
(1,5)
P1K5
1,5
(2,0)
P2K2
2,2
(3,0)
Alimentation secteur
9.2
Alimentation secteur (L1/N, L2/L, L3)
Bornes d'alimentation (L1/N, L2/L, L3)
Tension d’alimentation 380-480 V : -15 % (-25 %)1) à +10 %
Tension d’alimentation 200-240 V : -15 % (-25 %)1) à +10 %
1) Le variateur de fréquence peut fonctionner à -25 % de la tension d'entrée en performance réduite. La puissance de sortie
maximale du variateur de fréquence est de 75 % à -25 % de la tension d'entrée et de 85 % à -15 % de la tension d'entrée.
Un couple complet n'est pas envisageable à une tension secteur plus de 10 % en dessous de la tension nominale d'alimentation
secteur du variateur de fréquence.
Fréquence d’alimentation 50/60 Hz ± 5 %
Écart temporaire maximum entre phases secteur 3,0 % de la tension nominale d’alimentation
Facteur de puissance réelle (λ) ≥ 0,9 à charge nominale
Facteur de puissance de déphasage (cos ϕ) Proche de 1 (> 0,98)
Commutation sur l'entrée d'alimentation L1, L2, L3 (mises sous tension) ≤ 7,5 kW (10 HP) Maximum 2 fois/minute
Commutation sur l'entrée d'alimentation (L1/N, L2/L, L3) (mises sous tension) 11-22 kW (15-30 HP) Maximum 1 fois/minute
62 Danfoss A/S © 08/2018 Tous droits réservés. MG07A504

Spécications Manuel d'utilisation
9.3 Puissance et données du moteur
Puissance du moteur (U, V, W)
Tension de sortie 0-100 % de la tension d’alimentation
Fréquence sortie 0-500 Hz
Fréquence de sortie en mode VVC
Commutation sur la sortie Illimitée
Temps de rampe 0,01-3 600 s
Caractéristiques de couple
Couple de démarrage (couple constant) Maximum 160 % pendant 60 s
Surcouple (couple constant) Maximum 160 % pendant 60 s
Courant de démarrage Maximum 200 % pendant 1 s
Temps de montée du couple en mode VVC+ (indépendant de fsw) 50 ms maximum
1) Le pourcentage se réfère au couple nominal. Pour les variateurs de fréquence 11-22 kW (15-30 HP), il est de 150 %.
+
0-200 Hz
9.4 Conditions ambiantes
Conditions ambiantes
Protection nominale, variateur de fréquence IP20 (IP21/Type 1 en option)
Protection nominale, kit de conversion IP21/Type 1
Essai de vibration, toutes les tailles de boîtier 1,14 g
Humidité relative 5-95 % (CEI 721-3-3 ; classe 3K3 (sans condensation) pendant le fonctionnement)
Température ambiante (en mode de commutation DPWM)
- avec déclassement Maximum 55 °C (131 °F)
- à courant de sortie constant max. Maximum 45 °C (113 °F)
Température ambiante min. en pleine exploitation 0 °C (32 °F)
Température ambiante min. en exploitation réduite -10 °C (14 °F)
Température durant le stockage/transport -25 à +65/70 °C (-13 à +149/158 °F)
Altitude max. au-dessus du niveau de la mer sans déclassement 1 000 m (3 280 pi)
Altitude max. au-dessus du niveau de la mer avec déclassement 3 000 m (9 243 pi)
EN 61800-3, EN 61000-3-2, EN 61000-3-3, EN 61000-3-11,
Normes CEM, Émission
Normes CEM, Immunité
Classe d'ecacité énergétique
1) Se reporter au chapitre Conditions spéciales du manuel de conguration pour :
Déclassement pour température ambiante élevée
•
Déclassement à haute altitude
•
2) Pour éviter toute
Midi Drive FC 280, éviter une pleine charge E/S digitale/analogique à une température ambiante supérieure à 45 °C (113 °F).
3) La température ambiante pour K1S2 sans déclassement est au maximum de 50 °C (122 °F).
4) La température ambiante pour K1S2 à plein courant de sortie constant est au maximum de 40 °C (104 °F).
5) Déterminée d'après la norme EN 50598-2 à :
Charge nominale
•
90 % de la fréquence nominale
•
Fréquence de commutation au réglage d'usine
•
Type de modulation au réglage d'usine
•
Type ouvert : température de l'air environnant 45 °C (113 °F).
•
Type 1 (kit NEMA) : température ambiante 45 °C (113 °F).
•
surchaue de la carte de puissance sur les variantes PROFIBUS, PROFINET, EtherNet/IP et POWERLINK du VLT
5)
EN 61000-3-12, EN 61000-6-3/4, EN 55011, CEI 61800-3
EN 61800-3, EN 61000-6-1/2, EN 61000-4-2, EN 61000-4-3
EN 61000-4-4, EN 61000-4-5, EN 61000-4-6, EN 61326-3-1
1)2)3)
IE2
®
1)
1)
9 9
4)
MG07A504 Danfoss A/S © 08/2018 Tous droits réservés. 63

Spécications
9.5 Spécications du câble
VLT® Midi Drive FC 280
Longueurs et sections de câble
Longueur max. du câble du moteur, blindé 50 m (164 pi)
Longueur max. du câble du moteur, non blindé 75 m (246 pi)
Section max. des bornes de commande, l souple/rigide 2,5 mm²/14 AWG
Section minimale des bornes de commande 0,55 mm²/30 AWG
Longueur max. du câble d'entrée STO, non blindé 20 m (66 pi)
1) Pour les sections de câbles de puissance, voir le Tableau 9.1, le Tableau 9.2, le Tableau 9.3 et le Tableau 9.4.
Pour respecter les normes EN 55011 1A et EN 55011 1B, il convient dans certains cas de réduire le câble du moteur. Consulter le
chapitre 2.6.2 Émission CEM dans le manuel de conguration du VLT® Midi Drive FC 280 pour obtenir de plus amples
informations.
1)
9.6 Entrée/sortie de commande et données de commande
Entrées digitales
N° de borne
Logique PNP ou NPN
Niveau de tension 0-24 V CC
Niveau de tension, 0 logique PNP < 5 V CC
Niveau de tension, 1 logique PNP > 10 V CC
Niveau de tension, 0 logique NPN > 19 V CC
Niveau de tension, 1 logique NPN < 14 V CC
99
Tension maximale sur l’entrée 28 V CC
Plage de fréquence d'impulsion 4-32 kHz
(Cycle d'utilisation) durée de l'impulsion min. 4,5 ms
Résistance d’entrée, R
1) La borne 27 peut aussi être programmée comme sortie.
i
18, 19, 271), 29, 32, 33
Environ 4 kΩ
Entrées STO
N° de borne 37, 38
Niveau de tension 0-30 V CC
Niveau de tension, bas < 1,8 V CC
Niveau de tension, haut > 20 V CC
Tension maximale sur l’entrée 30 V CC
Courant d'entrée minimum (chaque broche) 6 mA
1) Se reporter au chapitre 6 Safe Torque O (STO) pour plus de détails sur les entrées STO.
Entrées analogiques
Nombre d’entrées analogiques 2
N° de borne 531), 54
Modes Tension ou courant
Sélection du mode Logiciel
Niveau de tension 0-10 V
Résistance d’entrée, R
Tension maximale -15 V à +20 V
Niveau de courant 0/4 à 20 mA (échelonnable)
Résistance d’entrée, R
Courant maximal 30 mA
Résolution des entrées analogiques 11 bits
Précision des entrées analogiques Erreur max. 0,5 % de l’échelle totale
Largeur de bande 100 Hz
Les entrées analogiques sont isolées galvaniquement de la tension d’alimentation (PELV) et d’autres bornes haute tension.
1) La borne 53 prend en charge uniquement le mode tension et peut également servir d'entrée digitale.
1)
i
i
Environ 10 kΩ
Environ 200 Ω
64 Danfoss A/S © 08/2018 Tous droits réservés. MG07A504

Mains
Functional
isolation
PELV isolation
Motor
DC bus
High
voltage
Control
37
RS485
38
33
130BE837.10
Spécications Manuel d'utilisation
Illustration 9.1 Isolation galvanique
AVIS!
HAUTE ALTITUDE
Pour une installation à des altitudes supérieures à 2 000 m (6 562 pi), contacter Danfoss pour la norme PELV.
Entrées impulsions
Entrées impulsions programmables 2
Nombre de bornes impulsion 29, 33
Fréquence maximale aux bornes 29, 33 32 kHz (activation push-pull)
Fréquence maximale aux bornes 29, 33 5 kHz (collecteur ouvert)
Fréquence minimale aux bornes 29, 33 4 Hz
Niveau de tension Voir la section sur les entrées numériques
Tension maximale sur l’entrée 28 V CC
Résistance d’entrée, R
i
Précision d'entrée impulsions Erreur maximale : 0,1 % de l’échelle totale
Environ 4 kΩ
9 9
Sorties digitales
Sorties digitales/impulsionnelles programmables 2
N° de borne 27
Niveau de tension à la sortie digitale/en fréquence 0-24 V
Courant de sortie max. (récepteur ou source) 40 mA
Charge max. à la sortie en fréquence 1 kΩ
Charge capacitive max. à la sortie en fréquence 10 nF
Fréquence de sortie min. à la sortie en fréquence 4 Hz
Fréquence de sortie max. à la sortie en fréquence 32 kHz
Précision de la sortie en fréquence Erreur maximale : 0,1 % de l’échelle totale
Résolution de la sortie en fréquence 10 bits
Numéro de borne (voir données dans les sorties analogiques) 42
Niveau de tension à la sortie digitale 0-17 V
1) La borne 27 peut également être programmée comme entrée.
2) La borne 42 peut aussi être programmée comme sortie analogique.
La sortie digitale est isolée galvaniquement de la tension d'alimentation (PELV) et d'autres bornes haute tension.
Sorties analogiques
Nombre de sorties analogiques programmables 1
N° de borne 42
Plage de courant de la sortie analogique 0/4-20 mA
Résistance max. à la masse de la sortie analogique 500 Ω
Tension maximale à la sortie analogique 17 V
Précision de la sortie analogique Erreur maximale : 0,8 % de l’échelle totale
Résolution de la sortie analogique 10 bits
1) La borne 42 peut aussi être programmée comme sortie digitale.
La sortie analogique est isolée galvaniquement de la tension d’alimentation (PELV) et d’autres bornes haute tension.
MG07A504 Danfoss A/S © 08/2018 Tous droits réservés. 65
1)
2)
1)

Spécications
Carte de commande, sortie 24 V CC
N° de borne 12, 13
Charge maximale 100 mA
L'alimentation 24 V CC est isolée galvaniquement de la tension d'alimentation (PELV). L'alimentation a toutefois le même
potentiel que les entrées et sorties analogiques et numériques.
Carte de commande, sortie 10 V CC
N° de borne 50
Tension de sortie 10,5 V ± 0,5 V
Charge maximale 15 mA
L'alimentation 10 V CC est isolée galvaniquement de la tension d'alimentation (PELV) et d'autres bornes haute tension.
Carte de commande, communication série RS485
N° de borne 68 (P,TX+, RX+), 69 (N,TX-, RX-)
Borne n° 61 Commun des bornes 68 et 69
Le circuit de communication série RS485 est isolé galvaniquement de la tension d'alimentation (PELV).
Carte de commande, communication série USB
Norme USB 1.1 (pleine vitesse)
Fiche USB Fiche USB de type B
La connexion au PC est réalisée via un câble USB standard hôte/dispositif.
La connexion USB est isolée galvaniquement de la tension d’alimentation (PELV) et d’autres bornes haute tension.
La mise à la terre USB n'est pas galvaniquement isolée de la protection par mise à la terre. Utiliser uniquement un ordinateur
portable isolé en tant que connexion PC au connecteur USB sur le variateur de fréquence.
VLT® Midi Drive FC 280
99
Sorties relais
Sorties relais programmables 1
Relais 01 01-03 (NF), 01-02 (NO)
Charge maximale sur les bornes (CA-1)1) sur 01-02 (NO) (charge résistive) 250 V CA, 3 A
Charge maximale sur les bornes (CA-15)1) sur 01-02 (NO) (charge inductive à cosφ 0,4) 250 V CA, 0,2 A
Charge maximale sur les bornes (CC-1)1) sur 01-02 (NO) (charge résistive) 30 V CC, 2 A
Charge maximale sur les bornes (CC-13)1) sur 01-02 (NO) (charge inductive) 24 V CC, 0,1 A
Charge maximale sur les bornes (CA-1)1) sur 01-03 (NF) (charge résistive) 250 V CA, 3 A
Charge maximale sur les bornes (CA-15)1) sur 01-03 (NF) (charge inductive à cosφ 0,4) 250 V CA, 0,2 A
Charge maximale sur les bornes (CC-1)1) sur 01-03 (NF) (charge résistive) 30 V CC, 2 A
Charge minimale sur les bornes sur 01-03 (NF), 01-02 (NO) 24 V CC 10 mA, 24 V CA 20 mA
1) CEI 60947 parties 4 et 5.
Les contacts de relais sont isolés galvaniquement du reste du circuit par une isolation renforcée.
Performance de la carte de commande
Intervalle de balayage 1 ms
Caractéristiques de contrôle
Résolution de fréquence de sortie à 0-500 Hz ± 0,003 Hz
Temps de réponse système (bornes 18, 19, 27, 29, 32 et 33) ≤ 2 ms
Plage de commande de vitesse (boucle ouverte) 1:100 de la vitesse synchrone
Précision de vitesse (boucle ouverte) ± 0,5 % de la vitesse nominale
Vitesse, précision (boucle fermée) ± 0,1 % de la vitesse nominale
Toutes les caractéristiques de contrôle sont basées sur un moteur asynchrone 4 pôles.
66 Danfoss A/S © 08/2018 Tous droits réservés. MG07A504

Spécications Manuel d'utilisation
9.7 Couples de serrage des raccords
Lors du serrage de tous les raccordements électriques, il est important de serrer avec le bon couple. Des couples trop faibles
ou trop élevés peuvent provoquer des problèmes de raccordement électrique. Utiliser une clé dynamométrique pour
garantir un couple correct. Il est recommandé d'utiliser un tournevis plat de type SZS 0,6 x 3,5 mm.
Couple [Nm (po-lb)]
Type de
boîtier
K1
K2
K3 7,5 (10) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
K4
K5
Tableau 9.5 Couples de serrage
Puissance
[kW (HP)]
0,37-2,2
(0,5-3,0)
3,0-5,5
(4,0-7,5)
11–15
(15–20)
18,5-22
(25-30)
Secteur Moteur
0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
1,2 (10,6) 1,2 (10,6) 1,2 (10,6) 1,2 (10,6) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
1,2 (10,6) 1,2 (10,6) 1,2 (10,6) 1,2 (10,6) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
Raccor-
dement CC
Frein Terre Contrôle Relais
9.8 Fusibles et disjoncteurs
Utiliser des fusibles et/ou des disjoncteurs du côté de l'alimentation comme protection du personnel d'entretien et de l'équipement en cas de panne d'un composant interne au variateur de fréquence (première panne).
Protection du circuit de dérivation
Protéger tous les circuits de dérivation d'une installation (notamment appareillage de connexion et machines) contre les
courts-circuits et les surcourants, conformément aux règlements nationaux et internationaux.
AVIS!
La protection intégrale contre les courts-circuits par semi-conducteurs n'assure pas la protection du circuit de
dérivation. Prévoir une protection du circuit de dérivation conformément aux réglementations nationales et locales.
Le Tableau 9.6 présente les fusibles recommandés et les disjoncteurs qui ont été testés.
ATTENTION
RISQUE DE BLESSURES ET DE DOMMAGES À L'ÉQUIPEMENT
Le non-respect de ces recommandations peut entraîner des risques pour le personnel et endommager le variateur de
fréquence et d'autres équipements en cas de dysfonctionnement.
Choisir les fusibles en fonction des recommandations. Les dommages éventuels peuvent être limités à
•
l'intérieur du variateur de fréquence.
AVIS!
DOMMAGES MATÉRIELS
L'utilisation de fusibles et/ou de disjoncteurs est obligatoire an d'assurer la conformité à la norme CEI 60364 pour CE.
Le non-respect des recommandations relatives à la protection peut endommager le variateur de fréquence.
9 9
Danfoss recommande d'utiliser les fusibles et les disjoncteurs mentionnés dans le Tableau 9.6 et le Tableau 9.7 pour garantir
la conformité à UL 508C ou à la norme CEI 61800-5-1. Pour les applications non conformes à UL, prévoir des disjoncteurs
conçus pour protéger un circuit capable de fournir un maximum de 50 000 A
fusibles de classe T, le courant nominal de court-circuit du variateur de fréquence (SCCR) convient à un circuit capable de
fournir un maximum de 100 000 A
MG07A504 Danfoss A/S © 08/2018 Tous droits réservés. 67
, 240 V/480 V.
rms
(symétriques), 240 V/400 V. Avec des
rms
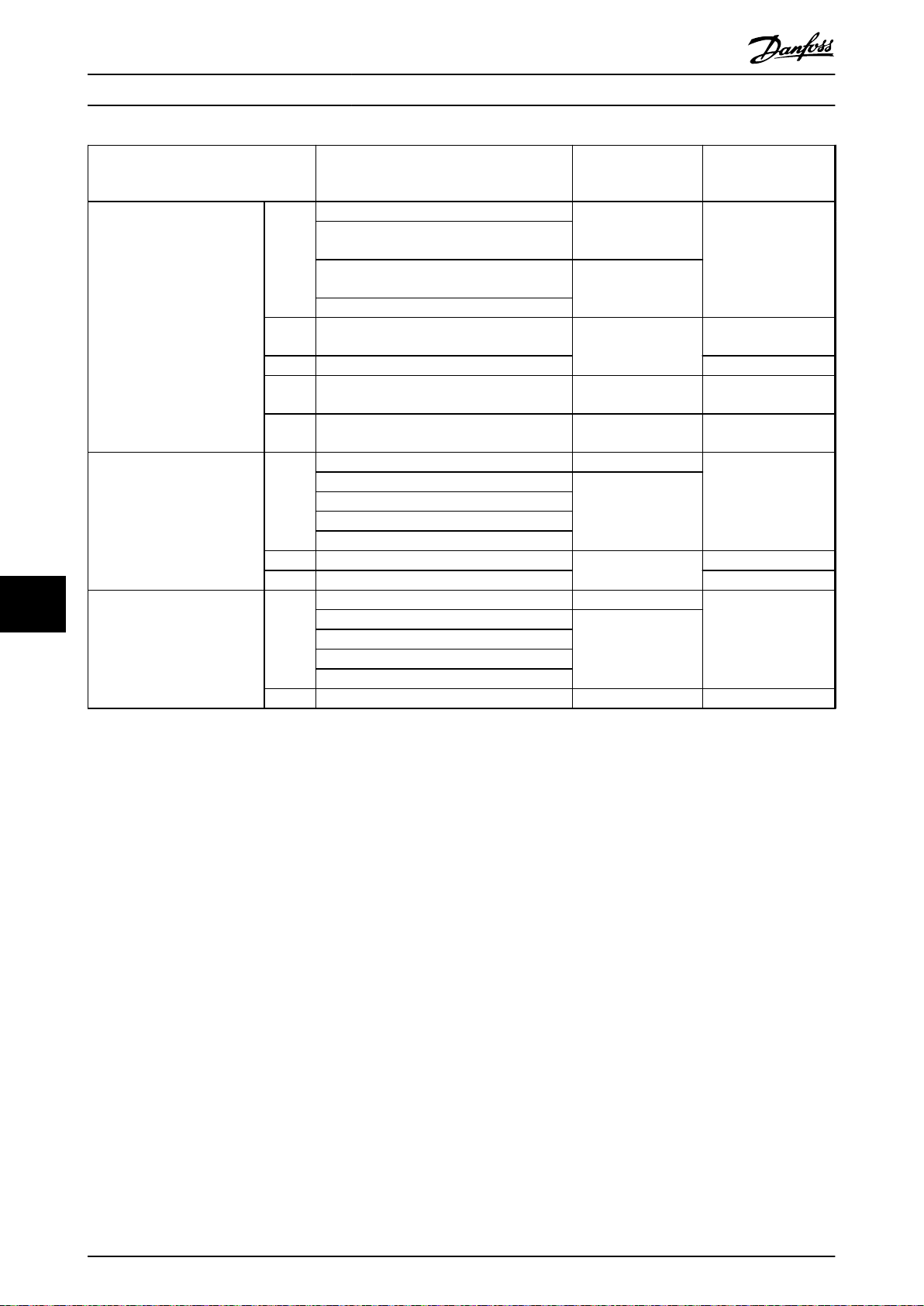
Spécications
VLT® Midi Drive FC 280
Taille de boîtier Puissance [kW (HP)]
0,37 (0,5)
0,55-0,75
K1
Triphasé 380-480 V
Triphasé 200-240 V
K2
K3 7,5 (10) PKZM0-25
K4
K5
K1
K2 2,2 (3,0)
K3 3,7 (5,0) PKZM0-25
99
Monophasé 200-240 V
K1
K2 2,2 (3,0) gG-25 PKZM0-20
(0,75-1,0)
1,1-1,5
(1,5-2,0)
2,2 (3,0)
3,0-5,5
(4,0-7,5)
11–15
(15–20)
18,5-22
(25-30)
0,37 (0,5) gG-10
0,55 (0,75)
0,75 (1,0)
1,1 (1,5)
1,5 (2,0)
0,37 (0,5) gG-10
0,55 (0,75)
0,75 (1,0)
1,1 (1,5)
1,5 (2,0)
Fusible non conforme
à UL
gG-10
gG-20
gG-25
gG-50 –
gG-80 –
gG-20
gG-25
gG-20
Disjoncteur non
conforme à UL
(Eaton)
PKZM0-16
PKZM0-20
PKZM0-16
PKZM0-20
PKZM0-16
Tableau 9.6 Fusible et disjoncteur non conformes à UL
68 Danfoss A/S © 08/2018 Tous droits réservés. MG07A504

Spécications Manuel d'utilisation
Taille de boîtier
Triphasé
380-480 V
Triphasé
200-240 V
Monophasé
200-240 V
Puissance
[kW (HP)]
0,37-0,75
(0,5-1,0)
K1
K2-K3
K4
K5
K1
K2-K3
K1
K2 2,2 (3,0)
1,1-1,5
(1,5-2,0)
2,2 (3,0) KTS-R-15 JKS-15 JJS-15 FNQ-R-15 KTK-R-15 LP-CC-15 KLSR-15 ATM-R15 A6K-15R
3,0-7,5
(4,0-10)
11–15
(15–20)
18,5-22
(25-30)
0,37 (0,5) KTN-R-6 JKS-6 JJN-6 FNQ-R-6 KTK-R-6 LP-CC-6 KLNR-6 ATM-R6 A2K-6R
0,55 (0,75)
0,75 (1,0)
1,1-1,5
(1,5-2,0)
2,2-3,7
(3,0-5,0)
0,37 (0,5) KTN-R-6 JKS-6 JJN-6 FNQ-R-6 KTK-R-6 LP-CC-6 KLNR-6 ATM-R6 A2K-6R
0,55 (0,75)
0,75 (1,0)
1,1-1,5
(1,5-2,0)
Bussmann E4273
Classe
KTS-R-6 JKS-6 JJS-6 FNQ-R-6 KTK-R-6 LP-CC-6 KLSR-6 ATM-R6 A6K-6R
KTS-R-10 JKS-10 JJS-10 FNQ-R-10 KTK-R-10 LP-CC-10 KLSR-10 ATM-R10 A6K-10R
KTS-R-25 JKS-25 JJS-25 FNQ-R-25 KTK-R-25 LP-CC-25 KLSR-25 ATM-R25 A6K-25R
KTS-R-50 JKS-50 JJS-50 – – – KLSR-50 – A6K-50R
KTNR-10
KTNR-15
KTNR-20
KTNR-25
KTNR-10
KTNR-15
KTNR-20
KTNR-25
Classe J Classe T
RK1
– JKS-80 JJS-80 – – – – – –
JKS-10 JJN-10 FNQ-R-10 KTK-R-10 LP-CC-10 KLNR-10 ATM-R10 A2K-10R
JKS-15 JJN-15 FNQ-R-15 KTK-R-15 LP-CC-15 KLNR-15 ATM-R15 A2K-15R
JKS-20 JJN-20 FNQ-R-20 KTK-R-20 LP-CC-20 KLNR-20 ATM-R20 A2K-20R
JKS-25 JJN-25 – – – KLNR-25 ATM-R25 A2K-25R
JKS-10 JJN-10 FNQ-R-10 KTK-R-10 LP-CC-10 KLNR-10 ATM-R10 A2K-10R
JKS-15 JJN-15 FNQ-R-15 KTK-R-15 LP-CC-15 KLNR-15 ATM-R15 A2K-15R
JKS-20 JJN-20 FNQ-R-20 KTK-R-20 LP-CC-20 KLNR-20 ATM-R20 A2K-20R
JKS-25 JJN-25 – – – KLNR-25 ATM-R25 A2K-25R
Classe
CC
Classe CC
ClasseCCClasse
Littelfuse
E81895
RK1
MERSEN
E163267/
E2137
Classe CC Classe RK1
MERSEN
E163267/
E2138
9 9
Tableau 9.7 Fusible UL
MG07A504 Danfoss A/S © 08/2018 Tous droits réservés. 69

Spécications
VLT® Midi Drive FC 280
9.9 Tailles de protection, dimensionnements puissance et dimensions
Puissance [kW
(HP)]
Dimensions
[mm (po)]
99
Poids
[kg (lb)]
Trous de
xation [mm
(po)]
Taille de
boîtier
Monophasé
200-240 V
Triphasé
200-240 V
Triphasé
380-480 V
Hauteur A1 210 (8,3) 272,5 (10,7)
Hauteur A2 278 (10,9) 340 (13,4)
Largeur B 75 (3,0) 90 (3,5) 115 (4,5) 133 (5,2) 150 (5,9)
Profondeur C 168 (6,6) 168 (6,6) 168 (6,6) 245 (9,6) 245 (9,6)
Hauteur A 338,5 (13,3) 395 (15,6)
Largeur B 100 (3,9) 115 (4,5) 130 (5,1) 153 (6,0) 170 (6,7)
Profondeur C 183 (7,2) 183 (7,2) 183 (7,2) 260 (10,2) 260 (10,2)
Hauteur A 294 (11,6) 356 (14)
Largeur B 75 (3,0) 90 (3,5) 115 (4,5) 133 (5,2) 150 (5,9)
Profondeur C 168 (6,6) 168 (6,6) 168 (6,6) 245 (9,6) 245 (9,6)
IP20 2,5 (5,5) 3,6 (7,9)
IP21 4,0 (8,8) 5,5 (12,1)
a 198 (7,8) 260 (10,2)
b 60 (2,4) 70 (2,8) 90 (3,5) 105 (4,1) 120 (4,7)
c 5 (0,2) 6,4 (0,25)
d 9 (0,35) 11 (0,43) 11 (0,43) 12,4 (0,49) 12,6 (0,5)
e 4,5 (0,18) 5,5 (0,22)
f 7,3 (0,29) 8,1 (0,32)
0,37
(0,5)
0,37
(0,5)
0,37
(0,5)
0,55
(0,75)
0,55
(0,75)
0,55
(0,75)
FC 280 avec couvercle d'entrée de câble inférieur (sans couvercle supérieur)
K1 K2 K3 K4 K5
0,75
(1,0)
0,75
(1,0)
0,75
(1,0)
1,1
(1,5)
1,1
(1,5)
1,1
(1,5)
FC 280 avec kit IP21/UL/Type 1
1,5
(2,0)
1,5
(2,0)
1,5
(2,0)
FC 280 IP20
2,2
(3,0)
3
(4,0
2,2
(3,0)
2,2
(3,0)
4
5,5
(5,5)
)
(7,5)
– – –
3,7
(5,0)
7,5
(10)11(15)15(20)
272,5
(10,7)
341,5
(13,4)
395
(15,6)
357
(14,1)
4,6
(10,1)
6,5
(14,3)
260
(10,2)
6,5
(0,26)
5,5
(0,22)
9,2
(0,36)
– –
317,5
(12,5)
379,5
(14,9)
425 (16,7) 520 (20,5)
391 (15,4) 486 (19,1)
8,2 (18,1) 11,5 (25,4)
10,5 (23,1) 14,0 (30,9)
297,5
(11,7)
8 (0,32) 7,8 (0,31)
6,8 (0,27) 7 (0,28)
11 (0,43) 11,2 (0,44)
18,5
(25)22(30)
410 (16,1)
474 (18,7)
390 (15,4)
Tableau 9.8 Tailles de boîtier, dimensionnements puissance et dimensions
70 Danfoss A/S © 08/2018 Tous droits réservés. MG07A504

130BE844.11
B
C
A1
A2
130BE846.10
B
A
C
Spécications Manuel d'utilisation
Illustration 9.2 Standard avec plaque de connexion à la terre
9 9
Illustration 9.3 Standard avec couvercle d'entrée de câble inférieur (sans couvercle supérieur)
MG07A504 Danfoss A/S © 08/2018 Tous droits réservés. 71
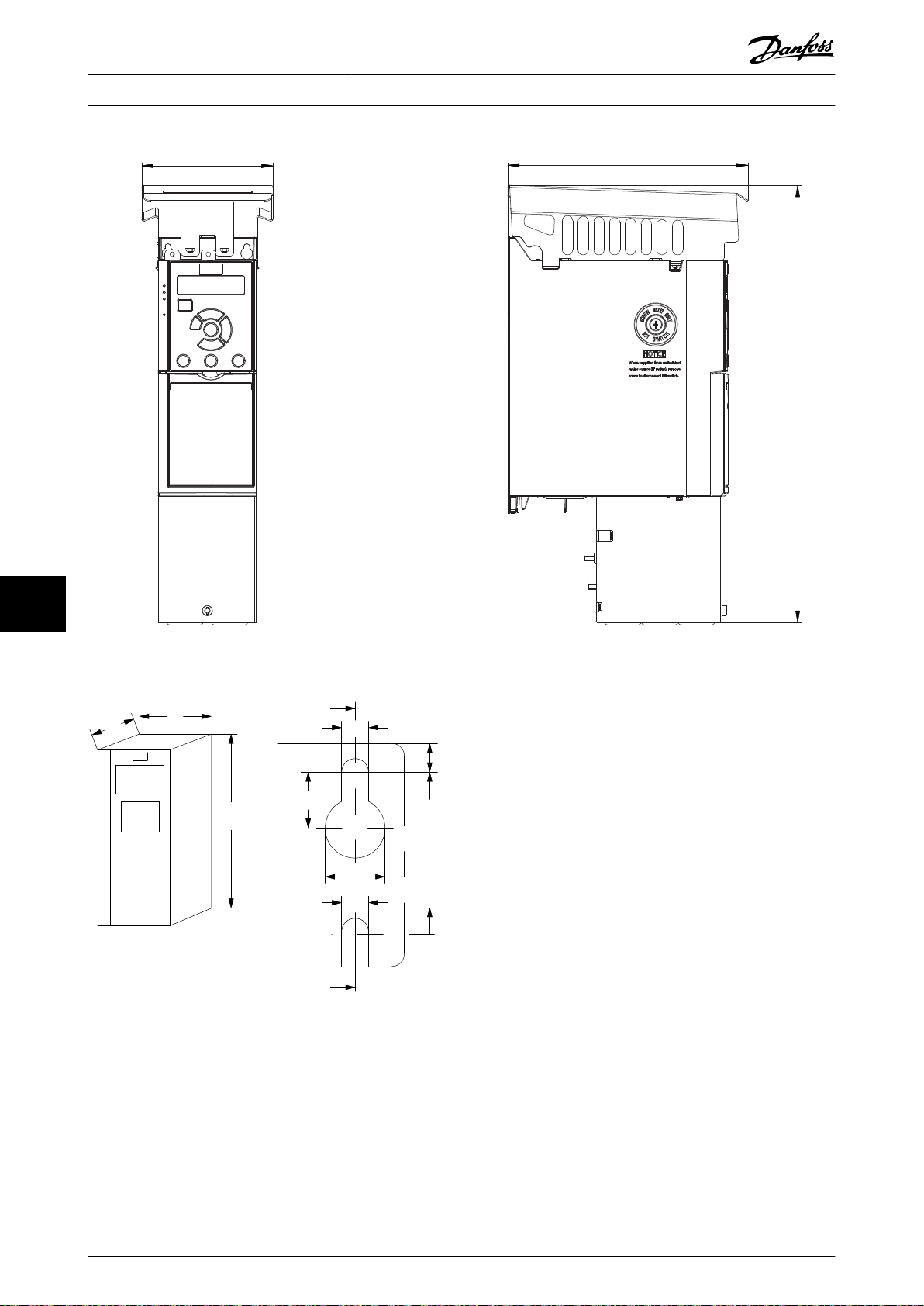
B
C
A
130BE845.10
C
a
b
130BA648.12
f
e
B
A
a
d
e
b
c
Spécications
VLT® Midi Drive FC 280
99
Illustration 9.4 Standard avec kit IP21/UL/Type 1
Illustration 9.5 Trous de xation supérieurs et inférieurs
72 Danfoss A/S © 08/2018 Tous droits réservés. MG07A504

Annexe Manuel d'utilisation
10 Annexe
10.1 Symboles, abréviations et conventions
°C
°F
CA Courant alternatif
AEO Optimisation automatique de l’énergie
AWG American Wire Gauge (calibre américain des ls)
AMA Adaptation automatique au moteur
CC Courant continu
CEM Compatibilité électromagnétique
ETR Relais thermique électronique
f
M,N
FC Variateur de fréquence
I
INV
I
LIM
I
M,N
I
VLT,MAX
I
VLT,N
IP Protection contre les inltrations
LCP Panneau de commande local
MCT Outil de contrôle du mouvement
MM Module de mémoire
MMP Programmateur du module de mémoire
n
s
P
M,N
PELV Protective extra low voltage (très basse tension de protection)
PCB Carte à circuits imprimés
Moteur PM Moteur à aimant permanent
PUD Données de l'unité d'alimentation
PWM Modulation par largeur d’impulsion
Tr/min Tours par minute
SIVP Valeurs d'initialisation et protection spéciques
STO Safe Torque O
T
LIM
U
M,N
Degrés Celsius
Degrés Fahrenheit
Fréquence nominale du moteur
Courant de sortie nominal onduleur
Limite courant
Courant nominal du moteur
Courant de sortie maximal
Courant nominal de sortie fourni par le variateur de fréquence
Vitesse moteur synchrone
Puissance nominale du moteur
Limite couple
Tension nominale du moteur
10 10
Tableau 10.1 Symboles et abréviations
Conventions
Sur les illustrations, toutes les dimensions sont en
•
[mm (po)].
L’astérisque (*) indique le réglage par défaut d’un
•
paramètre.
Les listes numérotées correspondent à des
•
10.2 Structure du menu des paramètres
- Références croisées
- Liens
- Nom du paramètre
procédures.
Les listes à puces fournissent d'autres
•
informations.
Les textes en italique indiquent :
•
MG07A504 Danfoss A/S © 08/2018 Tous droits réservés. 73

Annexe
VLT® Midi Drive FC 280
0 - 999 *0
0.01 - 20 s *Dépend de la taille
0.01 - 20 s *Dépend de la taille
0 - 250 % *120 %
[0] Désactivé
0-30 Unité lect. déf. par utilisateur
*[1] Activé
[0] None
1-06 Sens horaire
*[0] Normal
[1] Inverse
1-08 Motor Control Bandwidth
[0] High
[1] Medium
[2] Low
[3] Adaptive 1
0 - 999999.99 CustomReadoutUnit *0
CustomReadoutUnit
0-32 Val.max. déf. par utilis.
[4] Adaptive 2
1-1* Sélection moteur
1-10 Construction moteur
*[0] Asynchron
*100 CustomReadoutUnit
0.0 - 999999.99 CustomReadoutUnit
0 - 0 *
0-37 Ach. texte 1
1-15 Const. temps de ltre faible vitesse
1-14 Amort. facteur gain
[1] PM, non salient SPM
[3] PM, salient IPM
0 - 0 *
0 - 0 *
0-38 Ach. texte 2
0-39 Ach. texte 3
0-4* Clavier LCP
[1] Couple variable
0-44 Touche [O/Reset] sur LCP
[0] Désactivé
*[1] Activé
[7] Enable Reset Only
0-5* Copie/Sauvegarde
0-50 Copie LCP
*[0] Pas de copie
[1] Lect.PAR.LCP
[2] Ecrit.PAR. LCP
[3] Ecrit.LCP sans puis.
0-51 Copie process
*[0] Pas de copie
[1] Copie dans process 1
[11] Tr/min
[12] IMPULSION/s
[20] l/s
[21] l/min
[22] l/h
[23] m³/s
[24] m³/min
[25] m³/h
[30] kg/s
*[1] %
[5] PPM
[10] 1/min
[31] kg/min
[2] Copie dans process 2
[32] kg/h
[3] Copy from setup 3
[33] t/min
[4] Copy from setup 4
[34] t/h
[9] Copie vers tous
[40] m/s
0-6* Mot de passe
0-60 Mt de passe menu princ.
[41] m/min
[45] m
1-00 Mode Cong.
*[0] Boucle ouverte vitesse
[72] Pa
[73] kPa
[1] Boucle fermée vit.
[74] m WG
[2] Couple
[80] kW
1-** Load and Motor
1-0* Réglages généraux
[60] °C
[70] mbar
[71] bar
[3] Boucle fermée
[120] GPM
[7] Boucl.ouv. vit. PID ét.
[4] Boucl.ouverte couple
[121] gal/s
[122] gal/min
1-01 Principe Contrôle Moteur
[123] gal/h
[0] U/f
[124] CFM
*[1] VVC+
[127] ft³/h
1-03 Caract.couple
*[0] Compresseur CT
[140] ft/s
[141] ft/min
[2] Optim.AUTO énergie CT
[160] °F
[170] psi
[171] lb/in2
[172] in wg
[173] ft WG
[180] HP
0-31 Val.min.lecture déf.par utilis.
1-17 Const. temps de ltre tension
1-16 Const. temps de ltre vitesse élevée
*[1] Activé
0-42 Touche [Auto On] sur LCP
[0] Désactivé
0-40 Touche [Hand On] sur LCP
1010
Mêmes choix que pour 0-20
Mêmes choix que pour 0-20
Mêmes choix que pour 0-20
Mêmes choix que pour 0-20
[3450] Position eective
[3430] Lecture MCO par PCD 10
[3429] Lecture MCO par PCD 9
[3428] Lecture MCO par PCD 8
[3427] Lecture MCO par PCD 7
[3426] Lecture MCO par PCD 6
[3425] Lecture MCO par PCD 5
[3424] Lecture MCO par PCD 4
[3423] Lecture MCO par PCD 3
[1666] Sortie digitale [bin]
[3401] Ecriture PCD 1 sur MCO
[3402] Ecriture PCD 2 sur MCO
[3403] Ecriture PCD 3 sur MCO
[3404] Ecriture PCD 4 sur MCO
[3405] Ecriture PCD 5 sur MCO
[3406] Ecriture PCD 6 sur MCO
[3407] Ecriture PCD 7 sur MCO
[1891] PID proc./Sortie
[1890] PID proc./Erreur
[1684] Impulsion démarrage
[1690] Mot d’alarme
[1685] Mot ctrl.1 port FC
[1680] Mot ctrl.1 bus
[1682] Réf.1 port bus
[1673] Compteur B
[1674] Compteur stop précis
[1671] Sortie relais [bin]
[1672] Compteur A
[1669] Sortie impulsions 27 [Hz]
[1667] Fréqu. entrée #29 [Hz]
[1668] Fréqu. entrée #33 [Hz]
[1695] Mot état élargi 2
[1697] Alarm Word 3
[1694] Mot état élargi
[1692] Mot avertis.
[1693] Mot d’avertissement 2
[1691] Mot d’alarme 2
[1686] Réf.1 port FC
[1892] PID proc./Sortie lim. verr.
[1698] Warning Word 3
[1893] PID proc./Sortie à l’éch. gain
[2119] Sortie ext. 1 [%]
[2117] Réf. ext. 1 [unité]
[2118] Retour ext. 1 [unité]
[3408] Ecriture PCD 8 sur MCO
[3422] Lecture MCO par PCD 2
[3409] Ecriture PCD 9 sur MCO
[3410] Ecriture PCD 10 sur MCO
[3421] Lecture MCO par PCD 1
[3456] Erreur de traînée
0-21 Ach. ligne 1.2 petit
0-22 Ach. ligne 1.3 petit
0-23 Ach. ligne 2 grand
0-24 Ach. ligne 3 grand
0-3* Lecture LCP
-2147483647 - 2147483647 *0
[1657] Feedback [RPM]
[1660] Entrée dig.
[1661] Régl.commut.born.53
[1662] Entrée ANA 53
[1663] Régl.commut.born.54
[1664] Entrée ANA 54
0-16 Application Selection
0-** Operation / Display
0-0* Basic Settings
*[0] None
[1] Simple Process Close Loop
0-01 Langue
*[0] English
[2] Local/Remote
[3] Speed Open Loop
[1] Deutsch
[2] Français
[5] Multi Speed
[4] Simple Speed Close Loop
[3] Dansk
[4] Espanol
[6] OGD LA10
[7] OGD V210
[5] Italiano
[28] Portugais
[8] Hoist
0-02 Unité vit. mot.
0-2* Ecran LCP
0-20 Ach. ligne 1.1 petit
[0] Tr/min
*[1] Hz
[0] Aucun
[37] Ach. texte 1
0-03 Réglages régionaux
[0] International
[38] Ach. texte 2
[1] Amérique Nord
[39] Ach. texte 3
[748] PCD Feed Forward
[0] Redém auto
0-04 État exploi. à mise ss tension
[953] Mot d’avertissement probus.
[1005] Cptr lecture erreurs transmis.
[1006] Cptr lecture erreurs reçues
0-06 Type réseau
*[1] Arr.forcé, réf.mémor
[2] Arrêt forcé, réf. = 0
[1230] Avertis.par.
[0] 200-240 V/50 Hz/grille IT
[1501] Heures fonction.
[1502] Compteur kWh
[2] 200-240 V/50 Hz
[1] 200-240 V/50 Hz/triangle
[1600] Mot contrôle
[10] 380-440 V/50 Hz/grille IT
[1601] Réf. [unité]
*[1602]Réf. [%]
[12] 380-440 V/50 Hz
[11] 380-440 V/50 Hz/triangle
[1603] Mot état [binaire]
[20] 440-480 V/50 Hz/grille IT
[1605] Valeur réelle princ. [%]
[1609] Lect.paramétr.
[22] 440-480 V/50 Hz
[21] 440-480 V/50 Hz/triangle
[1610] Puissance moteur [kW]
[100] 200-240 V/60 Hz/grille IT
[1611] Puissance moteur[CV]
[1612] Tension moteur
[102] 200-240 V/60 Hz
[101] 200-240 V/60 Hz/triangle
[1613] Fréquence moteur
[110] 380-440 V/60 Hz/grille IT
[1614] Courant moteur
[1615] Fréquence [%]
[112] 380-440 V/60 Hz
[111] 380-440 V/60 Hz/triangle
[1616] Couple [Nm]
[120] 440-480 V/60 Hz/grille IT
[1618] Thermique moteur
[1617] Vitesse moteur [tr/min]
[122] 440-480 V/60 Hz
[121] 440-480 V/60 Hz/triangle
[1620] Angle moteur
0-07 Freinage CC auto IT
[1622] Couple [%]
[0] Inactif
[1630] Tension DC Bus
*[1] Actif
[1633] Puis.Frein. /2 min
0-1* Gestion process
[1634] Temp. radiateur
[1635] Thermique onduleur
0-10 Process actuel
*[1] Proc.1
[1653] Référence pot. dig.
[1639] Temp. carte ctrl.
[1650] Réf.externe
[1637] I max VLT
[1636] I nom VLT
[2] Proc.2
[3] Proc.3
[1652] Signal de retour [Unité]
[1638] Etat ctrl log avancé
[1] Proc.1
[2] Proc.2
0-11 Programmer process
[3] Proc.3
[4] Proc.4
*[9] Process actuel
[4] Proc.4
[9] Multi process
[1665] Sortie ANA 42 [mA]
[0] Non lié
*[20] Lié
0-14 Lecture: prog. process/canal
0-12 Ce réglage lié à
74 Danfoss A/S © 08/2018 Tous droits réservés. MG07A504
Annexe Manuel d'utilisation
-4999.0 - 4999 ReferenceFeedbackUnit
*0 ReferenceFeedbackUnit
-4999.0 - 4999 ReferenceFeedbackUnit
*Dépend de la taille
[73] kPa
[74] m WG
[80] kW
[120] GPM
[121] gal/s
[122] gal/min
[123] gal/h
[124] CFM
[125] ft³/s
[126] ft³/min
[127] ft³/h
[130] lb/s
[131] lb/min
[132] lb/h
[140] ft/s
[141] ft/min
[145] ft
[150] lb ft
[160] °F
[170] psi
[171] lb/in2
[172] in wg
[173] ft WG
[180] HP
3-02 Référence minimale
3-03 Réf. max.
*[0] Somme
[1] Externe/prédénie
3-04 Fonction référence
3-1* Consignes
0 - 500.0 Hz *5 Hz
-100 - 100 % *0 %
3-12 Rattrap/ralentiss
3-11 Fréq.Jog. [Hz]
3-10 Réf.prédénie
Mêmes choix que pour 3-15
[20] Potentiomètre digital
[32] Bus PCD
Mêmes choix que pour 3-15
3-18 Echelle réf.relative
*[0] Pas de fonction
[1] Entrée ANA 53
3-17 Source référence 3
3-16 Source référence 2
[2] Entrée ANA 54
0 - 100 % *0 %
-100 - 100 % *0 %
[8] Entrée Fréquence 33
[0] Pas de fonction
*[1] Entrée ANA 53
3-15 Source référence 1
3-14 Réf.prédéf.relative
[11] Référence bus locale
[2] Entrée ANA 54
[7] Entrée Fréquence 29
0 - 6200 Ohm *Dépend de la taille
0 - 500 Hz *0 Hz
0 - 328 ft *164 ft
0 - 160 % *100 %
0 - 500 V *0 V
0.001 - 2000 kW *Dépend de la taille
*[0] Désactivé
2-17 Contrôle Surtension
2-16 Courant max. frein CA
2-14 Réduc tens frein
2-12 P. kW Frein Res.
0 - 200 % *100 %
0 - 100 A *0 A
[2] Activé
2-19 Gain surtension
[1] Activé (pas à l’arrêt)
2-2* Mechanical Brake
2-20 Activation courant frein.
0 - 5 s *0 s
0 - 400 Hz *0 Hz
2-23 Activation retard frein
2-22 Activation vit. Frein[Hz]
méca. avec ch.dir)
2-3* Adv. Mech Brake
2-39 Mech. Brake w/ dir. Change (Frein
démar.)
[1] ON (actif)
[2] ON with start delay (Actif avec retard
*[0] OFF (Inactif)
3-** Reference / Ramps
3-0* Limites de réf.
*[0] Min - Max
[1] =-Max - +Max
3-01 Réf/Unité retour
3-00 Plage de réf.
[0] None
[1] %
[3] Hz
[2] tr/min
[4] Nm
[5] PPM
[10] 1/min
[12] IMPULSION/s
[20] l/s
[21] l/min
[22] l/h
[23] m³/s
[24] m³/min
[25] m³/h
[30] kg/s
[31] kg/min
[32] kg/h
[34] t/h
[33] t/min
[40] m/s
[41] m/min
[45] m
[60] °C
[70] mbar
[71] bar
[72] Pa
10 10
0 - 10 s *5 s
1-79 Tps max. démar. comp. avant arrêt
0 - 65535 mH *Dépend de la taille
*[0] Roue libre
1-8* Stop Adjustments
1-80 Fonction à l’arrêt
0 - 65535 mH *Dépend de la taille
[1] Maintien/préchauf.mot. CC
[3] Prémagnétisation
20 - 200 % *100 %
0 - 20 Hz *0 Hz
[3] Stopcomp. en vit.
[1] Stopcpteur(reset)
[2] Stopcpteur ss reset
1-83 Fonction de stop précis
*[0] Stop précis rampe
1-82 Vit. min. pour fonct. à l’arrêt [Hz]
20 - 200 % *100 %
20 - 200 % *100 %
0 - 300 % *100 %
[4] Stopcomp.(reset)
0.1 - 10.0 Hz *1 Hz
[5] Stopcomp. ss reset
0 - 999999999 *100000
1-84 Valeur compteur stop précis
0 - 1000 V *Dépend de la taille
1-85 Tempo. arrêt compensé en vitesse
0 - 500.0 Hz *Dépend de la taille
0 - 100 ms *10 ms
1-88 AC Brake Gain
1.0 - 2.0 *1.4
0 - 300 % *100 %
1-9* T° moteur
0.1 - 60 s *3 s
0 - 150 % *100 %
0 - 500 Hz *0 Hz
0 - 60 s *10 s
0 - 150 % *50 %
0 - 160 % *50 %
[6] Entrée digitale 33
[3] Entrée digitale 18
[4] Entrée digitale 19
[22] ETR Trip - Extended Detection
1-93 Source Thermistance
*[0] Aucun
[1] Avertis. Thermist.
-400 - 400.0 % *Dépend de la taille
[4] ETR Alarme
[2] Arrêt thermistance
[3] ETR Avertis. 1
0.05 - 5 s *0.1 s
1-90 Protect. thermique mot.
*[0] Absence protection
0 - 300 % *100 %
[1] Entrée ANA 53
0.001 - 0.05 s *0.005 s
0 - 500 % *100 %
[5] Entrée digitale 32
[2] Entrée ANA 54
0 - 120 % *50 %
2-** Brakes
2-0* Frein-CC
2-00 I maintien/préchauf.CC
0 - 10 s *0 s
2-02 Temps frein CC
2-01 Courant frein CC
2-06 Courant de parking
2-04 Vitesse frein CC [Hz]
2-07 Temps de parking
2-1* Brake Energy Funct.
2-10 Fonction Frein et Surtension
*[0] Inactif
0 - 500.0 Hz *Dépend de la taille
[1] Freinage résistance
[2] Frein CA
2-11 Frein Res (ohm)
0 - 1000 A *Dépend de la taille
0.001 - 1 s *Dépend de la taille
1-44 d-axis Inductance Sat. (LdSat)
1-2* Motor Data
1-49 Courant à inductance min.
1-48 Current at Min Inductance for d-axis
1-46 Gain détection position
1-45 q-axis Inductance Sat. (LqSat)
[8] 1.10 kW - 1.50 hp
[9] 1.50 kW - 2.00 hp
[6] 0.55 kW - 0.75 hp
[7] 0.75 kW - 1.00 hp
[4] 0.25 kW - 0.33 Hp
[5] 0.37 kW - 0.50 hp
[3] 0.18 kW - 0.25 hp
[2] 0.12 kW - 0.16 hp
1-20 Puissance moteur [kW]
1-5* Load Indep. Setting
1-50 Magnétisation moteur à vitesse nulle
[11] 3.00 kW - 4.00 hp
[10] 2.20 kW - 3.00 hp
1-52 Magnétis. normale vitesse min [Hz]
[13] 4.00 kW - 5.40 hp
[12] 3.70 kW - 5.00 hp
1-56 Caract. V/f - f
1-55 Caract. V/f - U
[17] 15.00kW - 20 hp
[18] 18.5kW - 25 hp
[15] 7.50 kW - 10.0 hp
[16] 11.00 kW - 15.00 hp
[14] 5.50 kW - 7.50 hp
1-6* Load Depen. Setting
1-60 Comp.charge à vit.basse
[19] 22kW - 30 hp
[20] 30kW - 40 hp
1-61 Compens. de charge à vitesse élevée
50 - 1000 V *Dépend de la taille
1-22 Tension moteur
1-23 Fréq. moteur
1-62 Comp. gliss.
20 - 500 Hz *Dépend de la taille
1-24 Courant moteur
1-63 Cste tps comp.gliss.
0.01 - 1000.00 A *Dépend de la taille
1-64 Amort. résonance
50 - 60000 RPM *Dépend de la taille
1-25 Vit.nom.moteur
1-26 Couple nominal cont. moteur
1-65 Tps amort.resonance
0.1 - 10000.0 Nm *Dépend de la taille
1-66 Courant min. à faible vitesse
[1] AMA activée compl.
1-29 Adaptation auto. au moteur (AMA)
*[0] Inactif
[1] Parking
1-7* Start Adjustments
[2] AMA activée réduite
1-71 Retard démar.
1-70 Mode de démarrage PM
*[0] Détection position rotor
0.0 - 9999.000 Ohm *Dépend de la
taille
1-30 Résistance stator (Rs)
1-31 Résistance rotor (Rr)
1-3* Données mot. av. I
1-72 Fonction au démar.
0 - 9999.000 Ohm *Dépend de la taille
[0] Tempo.maintien CC
1-33 Réactance fuite stator (X1)
*[2] Roue libre temporisé
[1] Tempo.frein CC
taille
0.0 - 9999.000 Ohm *Dépend de la
[3] Dém.hor.vit/courant
1-35 Réactance principale (Xh)
[4] Fonction horizontale
0.0 - 9999.00 Ohm *Dépend de la taille
1-73 Démarr. volée
*[0] Désactivé
[1] Activé
[5] VVC+/Flux sens hor.
0.000 - 65535 mH *Dépend de la taille
0 - 65535 mH *Dépend de la taille
1-38 Induction axe q (Lq)
1-37 Inductance axe d (Ld)
[2] Toujours activé
1-39 Pôles moteur
[3] Enabled Ref. Dir.
2 - 100 *Dépend de la taille
[4] Enab. Always Ref. Dir.
1-4* Données mot. av. II
1-75 Vit.de dém.[Hz]
1-40 FCEM à 1000 tr/min.
1 - 9000 V *Dépend de la taille
1-76 Courant Démar.
1-42 Longueur câble moteur
1-78 Vit. max. démar. compress. [Hz]
0 - 100 m *50 m
1-43 Longueur câble moteur (pieds)
MG07A504 Danfoss A/S © 08/2018 Tous droits réservés. 75
Annexe
[65] Reset compteur B
[72] Inversion erreur PID
[73] Reset facteur I PID
[74] Activ. PID
[150] Go To Home
[151] Home Ref. Switch
VLT® Midi Drive FC 280
Mêmes choix que pour 5-12
[32] Entrée impulsions
[83] Encoder input Z
5-14 E.digit.born.32
Mêmes choix que pour 5-10
Mêmes choix que pour 5-12
*[1] Arrêt sécurité alarme
[30] Entrée compteur
[32] Entrée impulsions
5-15 E.digit.born.33
[82] Encoder input B
[3] Arrêt sécu avertiss.
[81] Encoder input A
5-19 Arrêt de sécurité borne 37
5-3* Sorties digitales
5-30 S.digit.born.27
*[0] Inactif
[4] Prêt, pas d'avertis.
[5] Fonctionne
[3] Var.prêt en ctrl.dist.
[1] Comm.prete
[2] Variateur prêt
[9] Alarme
[10] Alarme ou avertis.
[8] F.sur réf/pas avert.
[7] F.dans gam/pas avert
[6] Fonction./pas d’avert.
[12] Hors gamme courant
[11] À la limite du couple
[13] Courant inf. bas
[14] Courant sup. haut
[15] Hors plage de vitesse
[17] Vitesse sup. haute
[16] Vitesse inf. basse
[18] Hors gamme retour
[19] Inf.retour bas
[20] Sup.retour haut
[21] Avertis.thermiq.
[22] Ready, no thermal warning
[25] Inverse
[23] Dist.Prêt,Pas Therm.
[24] Prt, tension OK
Mêmes choix que pour 5-12
[30] Entrée compteur
[164] Pos. Idx Bit2
[171] Limit switch cw inverse
[172] Limit switch ccw inverse
5-13 E.digit.born.29
[162] Pos. Idx Bit0
[163] Pos. Idx Bit1
[160] Go To Target Pos.
[156] HW Limit Negative Inv
[157] Pos. Quick Stop Inv
[155] HW Limit Positive Inv
[57] Eacer pot. dig.
[56] Diminuer pot. dig.
[55] Augmenter pot. dig.
[45] Latched start reverse
[63] Compteur B (augm.)
[65] Reset compteur B
[64] Compteur B (dimin.)
[72] Inversion erreur PID
[73] Reset facteur I PID
[74] Activ. PID
[150] Go To Home
[151] Home Ref. Switch
[28] Rattrapage
[19] Gel référence
[20] Gel sortie
[21] Accélération
[2] Lâchage
[3] Roue libre NF
[4] Arrêt rapide NF
[5] Frein NF-CC
5-12 E.digit.born.27
[0] Inactif
[164] Pos. Idx Bit2
[171] Limit switch cw inverse
[172] Limit switch ccw inverse
5-11 E.digit.born.19
[162] Pos. Idx Bit0
[163] Pos. Idx Bit1
[160] Go To Target Pos.
[156] HW Limit Negative Inv
[157] Pos. Quick Stop Inv
[155] HW Limit Positive Inv
[1] Réinitialisation alarme
[6] Arrêt NF
[8] Démarrage
[9] Impulsion démarrage
[11] Démarrage avec inv.
[10] Inversion
[18] Réf prédénie bit 2
[16] Réf prédénie bit 0
[17] Réf prédénie bit 1
[14] Jogging
[15] Réf. prédénie active
[12] Marche sens hor.
[13] Marche sens antihor.
[22] Décélération
[29] Ralentis.
[23] Sélect.proc.bit 0
[24] Sélect.proc.bit 1
[51] Verrouillage ext.
[34] Bit rampe 0
[35] Bit rampe 1
[58] Pot.dig. levage
[60] Compteur A (augm.)
[62] Reset compteur A
[61] Compteur A (dimin.)
[63] Compteur B (augm.)
[64] Compteur B (dimin.)
1010
0 - 500 Hz *0 Hz
0 - 500 Hz *0 Hz
[57] Eacer pot. dig.
[56] Diminuer pot. dig.
[55] Augmenter pot. dig.
[51] Verrouillage ext.
[41] Arrêt précis NF imp.
4-58 Surv. phase mot.
0 - 1000 % *Dépend de la taille
[0] Désactivé
*[1] Alarme 100 ms
0 - 1000 % *100 %
4-17 Mode générateur limite couple
[28] Rattrapage
[29] Ralentis.
[22] Décélération
0 - 500 Hz *Dépend de la taille
[23] Sélect.proc.bit 0
4-41 Warning Freq. High
[24] Sélect.proc.bit 1
0 - 500 Hz *Dépend de la taille
[26] Arrêt précis NF
4-42 Adjustable Temperature Warning
[19] Gel référence
[20] Gel sortie
[18] Réf prédénie bit 2
moteur
[21] Accélération
0 - 60 s *0.05 s
4-4* Adj. Warnings 2
4-40 Warning Freq. Low
4-63 Bipasse vitesse à [Hz]
4-6* Bipasse vit.
4-61 Bipasse vitesse de [Hz]
0 - 1000 % *Dépend de la taille
4-18 Limite courant
5-** Digital In/Out
5-0* Mode E/S digitales
5-00 Mode E/S digital
*[0] PNP
[1] NPN
5-01 Mode born.27
*[0] Entrée
[1] Sortie
5-1* Entrées digitales
5-10 E.digit.born.18
[0] Inactif
[1] Réinitialisation alarme
0 - 500 Hz *Dépend de la taille
4-19 Frq.sort.lim.hte
4-2* Limit Factors
4-20 Source facteur limite de couple
*[0] Pas de fonction
[2] Entrée ANA 53
4-21 Source facteur vitesse limite
[6] Entrée ANA 54
[8] Entrée ANA 54 inv
[4] Entrée ANA 53 inv
*[0] Pas de fonction
[6] Entrée ANA 54
[8] Entrée ANA 54 inv
[2] Entrée ANA 53
[4] Entrée ANA 53 inv
[2] Lâchage
[3] Roue libre NF
[4] Arrêt rapide NF
*[0] O
4-22 Break Away Boost
[1] On
[5] Frein NF-CC
[6] Arrêt NF
*[8] Démarrage
[0] Désactivé
4-3* Surv. retour mot.
4-30 Fonction perte signal de retour moteur
[9] Impulsion démarrage
[1] Avertissement
[10] Inversion
[11] Démarrage avec inv.
*[2] Alarme
[3] Jogging
[12] Marche sens hor.
0 - 50 Hz *20 Hz
4-32 Fonction tempo. signal de retour
4-31 Erreur vitesse signal de retour moteur
[4] Gel sortie
[5] Vitesse max.
[6] Aller à boucl.ouvert
[17] Réf prédénie bit 1
[16] Réf prédénie bit 0
[14] Jogging
[15] Réf. prédénie active
[13] Marche sens antihor.
[34] Bit rampe 0
[27] Démar./Stop préc.
0 - 200 *0
0 - 500 A *0 A
4-5* Rég. Avertis.
4-50 Avertis. courant bas
[35] Bit rampe 1
4-51 Avertis. courant haut
[40] Dém. précis impuls.
0 - 500.00 A *Dépend de la taille
[45] Latched start reverse
-4999 - 4999 *-4999
4-54 Avertis. référence basse
4-55 Avertis. référence haute
-4999 - 4999 *4999
4-56 Avertis.retour bas
[58] Pot.dig. levage
-4999 - 4999 ProcessCtrlUnit *-4999
ProcessCtrlUnit
[60] Compteur A (augm.)
4-57 Avertis.retour haut
[62] Reset compteur A
[61] Compteur A (dimin.)
-4999 - 4999 ProcessCtrlUnit *4999
ProcessCtrlUnit
0.1 - 500 Hz *65 Hz
0.01 - 3600 s *Dépend de la taille
0.01 - 3600 s *Dépend de la taille
[9] Quick Stop Ramp Time
[3] Ramp 3 Ramp Down Time
[1] Ramp 1 Ramp Down Time
[2] Ramp 2 Ramp Down Time
[4] Ramp 4 Ramp Down Time
3-4* Rampe 1
3-40 Type rampe 1
3-41 Temps d’accél. rampe 1
*[0] Linéaire
[1] Rampe S
[2] Tps rampe S
*[0] O
[11] Référence bus locale
[7] Entrée Fréquence 29
[8] Entrée Fréquence 33
3-3* Gen Ramp Settings
3-31 Ramp Down w/ dir. Change
Idem 3-4*
Idem 3-4*
Idem 3-4*
3-42 Temps décél. rampe 1
3-5* Rampe 2
3-6* Ramp 3
3-7* Ramp 4
3-8* Autres rampes
0.01 - 3600 s *Dépend de la taille
0.01 - 3600 s *Dépend de la taille
3-81 Temps rampe arrêt rapide
3-80 Tps rampe Jog.
0.01 - 200 % *0.10 %
3-92 Restauration de puissance
*[0] Inactif
3-9* Digital Pot.Meter
3-90 Dimension de pas
[1] Actif
-200 - 200 % *100 %
3-94 Limite minimale
3-93 Limite maximale
-200 - 200 % *-100 %
0 - 3600000 ms *1000 ms
3-95 Retard de rampe
0 - 200 % *25 %
3-96 Maximum Limit Switch Reference
4-** Limits / Warnings
4-1* Limites moteur
4-10 Direction vit. moteur
0 - 1500 RPM *Dépend de la taille
*[0] Sens horaire
[2] Les deux directions
4-11 Vit. mot., limite infér. [tr/min]
0 - 60000 RPM *Dépend de la taille
0 - 400.0 Hz *0 Hz
4-16 Mode moteur limite couple
4-14 Vitesse moteur limite haute [Hz]
4-13 Vit.mot., limite supér. [tr/min]
4-12 Vitesse moteur limite basse [Hz]
76 Danfoss A/S © 08/2018 Tous droits réservés. MG07A504

Annexe Manuel d'utilisation
-4999 - 4999 *0
0 - 20 mA *20 mA
[58] Pot.dig. levage
0 - 0xFFFFFFFF *0
[72] Inversion erreur PID
[73] Reset facteur I PID
0 - 100 % *0 %
[74] Activ. PID
[151] Home Ref. Switch
[150] Go To Home
0 - 100 % *0 %
0 - 10 V *0.07 V
*[1] Tension
[6] Digital input
6-19 Terminal 53 mode
[163] Pos. Idx Bit1
[164] Pos. Idx Bit2
[171] Limit switch cw inverse
[172] Limit switch ccw inverse
6-2* Entrée ANA 54
6-20 Ech.min.U/born.54
0 - 10 V *0.07 V
0 - 10 V *10 V
[162] Pos. Idx Bit0
[157] Pos. Quick Stop Inv
[160] Go To Target Pos.
[156] HW Limit Negative Inv
[155] HW Limit Positive Inv
1 - 99 s *10 s
6-21 Ech.max.U/born.54
0 - 20 mA *4 mA
0 - 10 V *10 V
6-24 Val.ret./Réf.bas.born. 54
6-23 Ech.max.I/born.54
6-22 Ech.min.I/born.54
-4999 - 4999 *0
-4999 - 4999 *Dépend de la taille
6-25 Val.ret./Réf.haut.born. 54
0.01 - 10 s *0.01 s
-4999 - 4999 *Dépend de la taille
0.01 - 10 s *0.01 s
6-26 Const.tps.l.born.54
6-29 Mode borne 54
[0] Courant
*[1] Tension
*[0] Inactif
[100] Fréquence de sortie
[101] Référence
[102] Retour
[103] Courant moteur
[104] Couple rel./limit
[105] Couple rel./Evaluer
[106] Puissance
[107] Vitesse
*[0] 0-20 mA
[1] 4-20 mA
[2] Sortie digitale
6-9* Sortie analog./dig. 42
6-90 Terminal 42 Mode
6-91 Sortie ANA borne 42
[111] Speed Feedback
[113] Sortie verr. PID
[139] Ctrl bus 0-20 mA
[254] DC Link Voltage
[1] Comm.prete
*[0] Inactif
6-92 Terminal 42 Digital Output
[143] Ext. CL 1
[57] Eacer pot. dig.
[56] Diminuer pot. dig.
[28] Rattrapage
[19] Gel référence
[20] Gel sortie
[21] Accélération
5-94 Tempo. prédénie sortie impulsions 27
5-93 Ctrl par bus sortie impulsions 27
6-** Analog In/Out
6-0* Mode E/S ana.
6-00 Temporisation/60
6-01 Fonction/Tempo60
*[0] Inactif
[1] Gel sortie
[2] Arrêt
[3] Jogging
[4] Vitesse max.
[5] Arrêt et alarme
6-1* Entrée ANA 53
6-10 Ech.min.U/born.53
6-11 Ech.max.U/born.53
6-14 Val.ret./Réf.bas.born. 53
6-16 Const.tps.l.born.53
6-15 Val.ret./Réf.haut.born. 53
6-18 Terminal 53 Digital Input
*[0] Inactif
[2] Lâchage
[1] Réinitialisation alarme
[3] Roue libre NF
[4] Arrêt rapide NF
[5] Frein NF-CC
[6] Arrêt NF
[8] Démarrage
[10] Inversion
[11] Démarrage avec inv.
[13] Marche sens antihor.
[17] Réf prédénie bit 1
[18] Réf prédénie bit 2
[16] Réf prédénie bit 0
[14] Jogging
[15] Réf. prédénie active
[12] Marche sens hor.
[22] Décélération
[29] Ralentis.
[23] Sélect.proc.bit 0
[24] Sélect.proc.bit 1
[55] Augmenter pot. dig.
[34] Bit rampe 0
[35] Bit rampe 1
[51] Verrouillage ext.
10 10
0 - 600 s *0.01 s
0 - 600 s *0.01 s
0 - 31999 Hz *4 Hz
[239] STO function fault
[13] Courant inf. bas
5-41 Relais, retard ON
[14] Courant sup. haut
[15] Hors plage de vitesse
5-42 Relais, retard OFF
[17] Vitesse sup. haute
[16] Vitesse inf. basse
5-5* Entrée impulsions
5-50 F.bas born.29
[19] Inf.retour bas
[20] Sup.retour haut
[18] Hors gamme retour
[170] Homing Completed
[6] Fonction./pas d’avert.
[171] Target Position Reached
[8] F.sur réf/pas avert.
[7] F.dans gam/pas avert
[173] Position Mech Brake
[9] Alarme
[10] Alarme ou avertis.
[12] Hors gamme courant
[11] À la limite du couple
[169] Mode automatique
[168] Var.en mode manu.
[165] Référence locale act.
[166] Réf.dist.active
[167] Ordre dém. actif
[5] Fonctionne
[4] Prêt, pas d'avertis.
*[1] Comm.prete
[2] Variateur prêt
[3] Var.prêt en ctrl.dist.
[193] Mode veille
[194] Courroie cassée
[190] STO function active
[172] Position Control Fault
5-51 F.haute born.29
[21] Avertis.thermiq.
1 - 32000 Hz *32000 Hz
[22] Ready, no thermal warning
-4999 - 4999 *0
5-52 Val.ret./Réf.bas.born. 29
[23] Dist.Prêt,Pas Therm.
[24] Prt, tension OK
5-53 Val.ret./Réf.haut.born. 29
[25] Inverse
-4999 - 4999 *Dépend de la taille
[26] Bus OK
5-55 F.bas born.33
[27] Limite couple & arrêt
0 - 31999 Hz *4 Hz
[28] Frein ss avertis.
5-56 F.haute born.33
[29] Frein prêt sans déf.
1 - 32000 Hz *32000 Hz
5-57 Val.ret./Réf.bas.born. 33
[31] Relais 123
[30] Défaut frein. (IGBT)
-4999 - 4999 *0
-4999 - 4999 *Dépend de la taille
5-58 Val.ret./Réf.haut.born. 33
5-6* Sortie impulsions
[40] Hors plage réf.
[37] Mot contrôle bit 12
[32] Ctrl frein mécanique
[36] Mot contrôle bit 11
5-60 Fréq.puls./S.born.27
[41] Inf. réf., bas
*[0] Inactif
[42] Sup. réf., haut
[45] Ctrl bus
[45] Ctrl bus
4 - 32000 Hz *5000 Hz
1 - 4096 *1024
[100] Fréquence de sortie
[101] Référence
[102] Retour
[103] Courant moteur
[104] Couple rel./limit
[105] Couple rel./Evaluer
[48] Ctrl bus, tempo.
[56] Heat sink cleaning warning, high
[60] Comparateur 0
[47] Ctrl bus, 0 si tempo.
[46] Ctrl bus, 1 si tempo.
[106] Puissance
[64] Comparateur 4
[61] Comparateur 1
[62] Comparateur 2
[63] Comparateur 3
[107] Vitesse
[65] Comparateur 5
[109] Fréq. sortie max.
[70] Règle logique 0
[113] Sortie verr. PID
[71] Règle logique 1
5-62 Fréq. max. sortie impulsions 27
5-70 Pts/tr cod.born.32 33
5-71 Sens cod.born.32 33
*[0] Sens horaire
[1] Sens anti-horaire
5-7* Entrée cod. 24V
[75] Règle logique 5
[80] Sortie digitale A
[72] Règle logique 2
[73] Règle logique 3
[81] Sortie digitale B
[74] Règle logique 4
5-90 Ctrl bus sortie dig.&relais
5-9* Contrôle par bus
[161] Fonct. inversé
[82] Sortie digitale C
[83] Sortie digitale D
[160] Pas d’alarme
retard ON)
0 - 600 s *0.01 s
retard OFF)
0 - 600 s *0.01 s
5-35 O Delay, Digital Output (S.digit.,
5-34 On Delay, Digital Output (S.digit.,
[194] Courroie cassée
[26] Bus OK
[172] Position Control Fault
[173] Position Mech Brake
[170] Homing Completed
[169] Mode automatique
[166] Réf.dist.active
[161] Fonct. inversé
[167] Ordre dém. actif
[165] Référence locale act.
[65] Comparateur 5
[62] Comparateur 2
[63] Comparateur 3
[42] Sup. réf., haut
[43] Limite PID étendu
[46] Ctrl bus, 1 si tempo.
[31] Relais 123
[32] Ctrl frein mécanique
[36] Mot contrôle bit 11
[37] Mot contrôle bit 12
[30] Défaut frein. (IGBT)
[29] Frein prêt sans déf.
[28] Frein ss avertis.
[27] Limite couple & arrêt
[41] Inf. réf., bas
[40] Hors plage réf.
[56] Heat sink cleaning warning, high
[55] Sortie impulsions
[60] Comparateur 0
[47] Ctrl bus, 0 si tempo.
[45] Ctrl bus
[64] Comparateur 4
[61] Comparateur 1
[73] Règle logique 3
[70] Règle logique 0
[71] Règle logique 1
[91] Encoder emulate output A
[160] Pas d’alarme
[82] Sortie digitale C
[83] Sortie digitale D
[80] Sortie digitale A
[81] Sortie digitale B
[74] Règle logique 4
[75] Règle logique 5
[72] Règle logique 2
[171] Target Position Reached
[168] Var.en mode manu.
[239] STO function fault
[190] STO function active
[193] Mode veille
5-4* Relais
5-40 Fonction relais
[0] Inactif
MG07A504 Danfoss A/S © 08/2018 Tous droits réservés. 77

Annexe
[64] Comparateur 4
[65] Comparateur 5
0.001 - 1 s *0.001 s
VLT® Midi Drive FC 280
0.1 - 10.0 s *Dépend de la taille
0 - 2147483647 *Dépend de la taille
8-14 Mot contrôle congurable
[83] Sortie digitale D
[93] Alarm68 or Alarm188
[81] Sortie digitale B
[74] Règle logique 4
[72] Règle logique 2
[73] Règle logique 3
[71] Règle logique 1
[70] Règle logique 0
0.001 - 1 s *0.001 s
[82] Sortie digitale C
[75] Règle logique 5
[80] Sortie digitale A
[0] Aucun
*[1] Prol par défaut
[2] CT W OK actif état bas
[4] PID error inverse
[5] PID reset I part
[6] PID enable
8-19 Product Code
8-3* FC Port Settings
8-30 Protocole
0.5 - 6000 s *1 s
0.0 - 247 *1
[7] 115200 bauds
8-33 Parité/bits arrêt
[1] Parité impaire, 1 bit d’arrêt
[0] Parité paire, 1 bit d’arrêt
*[0] FC
[2] Modbus RTU
8-31 Adresse
8-32 Vit. transmission
[0] 2400 bauds
[1] 4800 bauds
[2] 9600 Bauds
[4] 38400 bauds
[5] 57600 Bauds
[6] 76800 Bauds
[3] 19200 bauds
0.0010 - 0.5 s *0.01 s
8-36 Retard réponse max
8-35 Retard réponse min.
[3] Pas de parité, 2 bits d’arrêt
[2] Pas de parité, 1 bit d’arrêt
8-4* FC MC protocol set
8-42 Cong. écriture PCD
[0] None
[1] [302] Minimum Reference
[2] [303] Maximum Reference
[3] [341] Ramp 1 Ramp up time
[4] [342] Ramp 1 Ramp down time
[5] [351] Ramp 2 Ramp up time
[6] [352] Ramp 2 Ramp down time
[7] [380] Jog Ramp Time
[8] [381] Quick Stop Time
[10] [414] Motor Speed High Limit [Hz]
[9] [412] Motor Speed Low Limit [Hz]
7-57 Process PID Fb. Filter Time
7-56 Process PID Ref. Filter Time
7-6* Conv. sign. retour
[1] Racine carrée
*[0] Linéaire
*[0] Linéaire
[1] Racine carrée
7-62 Conversion retour 2
7-60 Conversion retour 1
8-** Comm. and Options
8-0* General Settings
8-01 Type contrôle
[1] Seulement digital
[2] Mot Contr. seulement
*[0] Digital. et mot ctrl.
8-02 Source mot de contrôle
[0] Aucun
[2] FC USB
[1] FC RS485
8-04 Mot de ctrl.Fonct.dépas.tps
[3] Option A
8-03 Ctrl.Action dépas.tps
*[0] Inactif
[1] Gel sortie
[2] Arrêt
[3] Jogging
[4] Vitesse max.
[5] Arrêt et alarme
8-07 Activation diagnostic
*[0] Inactif
[1] Décl./Alarm.
[2] Déclen.avert.&alarm
8-1* Ctrl. Word Settings
8-10 Prol de ctrl
[11] État IN19
[12] État IN27
[13] État IN29
[14] État IN32
[15] État IN33
[21] Avertis.thermiq.
[3] Déclen. sf alarme 68
*[0] Prol FC
[1] Prol PROFIdrive
[5] ODVA
[7] CANopen DSP 402
8-13 Mot état congurable
[0] Pas de fonction
*[1] Prol par défaut
[2] Alarme 68 seule
[10] État IN18
[30] Défaut frein. (IGBT)
[62] Comparateur 2
[63] Comparateur 3
[60] Comparateur 0
[61] Comparateur 1
[40] Hors plage réf.
1010
*[0] Normal
0 - 500 % *100 %
[1] Inverse
7-48 PCD Feed Forward
0.002 - 2 s *0.020 s
7-13 Tps intégr. PI couple
0 - 65535 *0
7-2* PIDproc/ctrl retour
7-49 Process PID Output Normal/ Inv. Ctrl.
7-20 PI proc./1 retour
*[0] Normal
*[0] Pas de fonction
[1] Inverse
[1] Entrée ANA 53
0.01 - 100 s *0.01 s
0.01 - 100 s *0.01 s
0 - 100 *1
7-53 Process PID Feed Fwd Ramp down
7-52 Process PID Feed Fwd Ramp up
*[1] Activé
7-51 Process PID Feed Fwd Gain
7-50 PID proc./PID étendu
[0] Désactivé
7-5* Process PID av. II
[3] Entrée Fréquence 29
*[0] Pas de fonction
[3] Entrée Fréquence 29
[4] Entrée Fréquence 33
7-22 PID proc./2 retours
[2] Entrée ANA 54
[4] Entrée Fréquence 33
[1] Entrée ANA 53
[2] Entrée ANA 54
7-3* PID proc./Régul.
[32] Bus PCD
[11] Référence bus locale
0 - 500 % *0 %
7-08 Speed PID Feed Forward Factor
Ctrl.
7-46 Process PID Feed Fwd Normal/ Inv.
7-12 PI couple/Gain P
7-1* Torque PID Ctrl.
-100 - 100 % *100 %
7-42 Process PID Output Pos. Clamp
0 - 1 *0.015
7-02 PID vit.gain P
0 - 100 % *100 %
[7] Entrée Fréquence 29
[1] Entrée ANA 53
7-06 PID vit.tps ltre
[2] Entrée ANA 54
1 - 6000 ms *10 ms
[8] Entrée Fréquence 33
0.0001 - 32 *1
7-07 Speed PID Feedback Gear Ratio
*[0] Pas de fonction
7-45 Process PID Feed Fwd Resource
7-44 Process PID Gain Scale at Max. Ref.
7-43 Process PID Gain Scale at Min. Ref.
2 - 20000 ms *8 ms
7-03 PID vit.tps intég.
7-04 PID vit.tps di.
0 - 200 ms *30 ms
1 - 20 *5
7-05 PID vit.limit gain D
7-38 Facteur d’anticipation PID process
0 - 16384 *0
0 - 200 % *0 %
7-39 Largeur de bande sur réf.
7-** Controllers
7-0* Speed PID Ctrl.
0 - 200 % *5 %
7-40 Process PID I-part Reset
7-4* Process PID av. I
[1] Codeur 24 V
[6] Entrée ANA 53
7-00 PID vit.source ret.
0 - 10 *0.01
7-33 PID proc./Gain P
[193] Mode veille
7-34 PID proc./Tps intégral.
[198] Bipasse mode actif
[194] Courroie cassée
0.10 - 9999 s *9999 s
6-93 Echelle min s.born.42
7-35 PID proc./Tps di.
0 - 200 % *0 %
0 - 20 s *0 s
6-94 Echelle max s.born.42
1 - 50 *5
7-36 PID proc./Limit. gain D
0 - 200 % *100 %
6-96 Ctrl bus sortie born. 42
0 - 6000 RPM *0 RPM
7-30 PID proc./Norm.Inv.
*[0] Normal
[1] Inverse
7-31 Anti-satur. PID
[0] Inactif
*[1] Actif
7-32 PID proc./Fréq.dém.
[172] Position Control Fault
[170] Homing Completed
[171] Target Position Reached
[173] Position Mech Brake
[169] Mode automatique
[168] Var.en mode manu.
[166] Réf.dist.active
[167] Ordre dém. actif
*[0] Non
[7] Entrée ANA 54
[1] Oui
[8] Entrée impulsions 29
-100 - 100 % *-100 %
7-41 Process PID Output Neg. Clamp
*[20] None
[9] Entrée Fréquence 33
0 - 100 % *100 %
[161] Fonct. inversé
[82] Sortie digitale C
[75] Règle logique 5
[80] Sortie digitale A
[72] Règle logique 2
[73] Règle logique 3
[71] Règle logique 1
[64] Comparateur 4
[65] Comparateur 5
[22] Ready, no thermal warning
[25] Inverse
[23] Dist.Prêt,Pas Therm.
[24] Prt, tension OK
[19] Inf.retour bas
[20] Sup.retour haut
[18] Hors gamme retour
[21] Avertis.thermiq.
[10] Alarme ou avertis.
[11] À la limite du couple
[13] Courant inf. bas
[9] Alarme
[8] F.sur réf/pas avert.
[7] F.dans gam/pas avert
[5] Fonctionne
[6] Fonction./pas d’avert.
[4] Prêt, pas d'avertis.
[2] Variateur prêt
[3] Var.prêt en ctrl.dist.
[17] Vitesse sup. haute
[16] Vitesse inf. basse
[14] Courant sup. haut
[15] Hors plage de vitesse
[12] Hors gamme courant
[61] Comparateur 1
[62] Comparateur 2
[56] Heat sink cleaning warning, high
[60] Comparateur 0
[47] Ctrl bus, 0 si tempo.
[45] Ctrl bus
[46] Ctrl bus, 1 si tempo.
[41] Inf. réf., bas
[42] Sup. réf., haut
[40] Hors plage réf.
[37] Mot contrôle bit 12
[31] Relais 123
[32] Ctrl frein mécanique
[36] Mot contrôle bit 11
[30] Défaut frein. (IGBT)
[28] Frein ss avertis.
[29] Frein prêt sans déf.
[26] Bus OK
[27] Limite couple & arrêt
[70] Règle logique 0
[63] Comparateur 3
[81] Sortie digitale B
[74] Règle logique 4
[165] Référence locale act.
[83] Sortie digitale D
[160] Pas d’alarme
78 Danfoss A/S © 08/2018 Tous droits réservés. MG07A504

Annexe Manuel d'utilisation
0 - 65535 *0
Mêmes choix que pour 9-15 et 9-16
9-27 Edition param.
[0] Désactivé
9-23 Signaux pour PAR
[108] PPO 8
[200] Télégr. perso 1
*[1] Maître cycl.activé
*[1] Activé
9-28 CTRL process
[0] Inactif
0 - 0 *0
9-45 Code déf.
9-44 Compt. message déf.
0 - 1000 *0
0 - 0 *0
9-47 N° déf.
9-52 Compt. situation déf.
0 - 65535 *0
9-53 Mot d’avertissement probus.
9-63 Vit. Trans. réelle
[0] 9,6 kbit/s
[1] 19,2 kbit/s
[2] 93,75 kbit/s
[3] 187,5 kbit/s
[4] 500 kbit/s
[6] 1500 kbit/s
[7] 3000 kbit/s
[8] 6000 kbit/s
[9] 12000 kbit/s
[10] 31,25 kbit/s
[11] 45,45 kbit/s
9-64 Identic. dispositif
*[255] Pas vit. trans. trouv.
9-75 Identication DO
0 - 9999 *0
0 - 65535 *0
9-80 Paramètres dénis (1)
0 - 0 *0
0 - 0 *0
0 - 65535 *0
0 - 65535 *0
9-65 N° prol
9-67 Mot de contrôle 1
9-68 Mot d’Etat 1
9-70 Edit Set-up
[1] Proc.1
[2] Proc.2
[3] Proc.3
[4] Proc.4
*[9] Process actuel
1 - 126 *126
9-71 Sauv.Données Probus
*[0] Inactif
[1] Stock.tous les proc.
0 - 65535 *1037
9-72 Reset Var.Probus
*[0] Aucune action
[1] Res.rem.ss tens
[2] Prép.res.rem.ss tens
[3] Reset option comm.
[1634] Temp. radiateur
[1633] Puis.Frein. /2 min
[0] Aucun
[302] Référence minimale
[0] Entrée dig.
[1] Bus
[1639] Temp. carte ctrl.
[1635] Thermique onduleur
[1638] Etat ctrl log avancé
[312] Rattrap/ralentiss
[341] Temps d’accél. rampe 1
[303] Réf. max.
[2] Digital et bus
*[3] Digital ou bus
8-54 Sélect.Invers.
[1657] Feedback [RPM]
[1660] Entrée dig.
[1661] Régl.commut.born.53
[1653] Référence pot. dig.
[1650] Réf.externe
[1652] Signal de retour [Unité]
[1662] Entrée ANA 53
[1663] Régl.commut.born.54
[1666] Sortie digitale [bin]
[1664] Entrée ANA 54
[1665] Sortie ANA 42 [ma]
[3456] Erreur de traînée
9-18 Adresse station
9-19 Drive Unit System Number
9-22 Sélection Télégramme
[1] Télégr. standard 1
*[100] Aucun
[101] PPO1
[104] PPO 4
[105] PPO 5
[106] PPO 6
[102] PPO 2
[103] PPO 3
[107] PPO 7
[3450] Position eective
[3430] Lecture MCO par PCD 10
[3429] Lecture MCO par PCD 9
[3428] Lecture MCO par PCD 8
[3427] Lecture MCO par PCD 7
[3426] Lecture MCO par PCD 6
[3425] Lecture MCO par PCD 5
[3424] Lecture MCO par PCD 4
[3423] Lecture MCO par PCD 3
[3422] Lecture MCO par PCD 2
[3421] Lecture MCO par PCD 1
[1695] Mot état élargi 2
[1697] Alarm Word 3
[1698] Warning Word 3
[1694] Mot état élargi
[1692] Mot avertis.
[1693] Mot d’avertissement 2
[1691] Mot d’alarme 2
[1690] Mot d’alarme
[1684] Impulsion démarrage
[1685] Mot ctrl.1 port FC
[1673] Compteur B
[1674] Compteur stop précis
[1671] Sortie relais [bin]
[1672] Compteur A
[1669] Sortie impulsions 27 [Hz]
[1667] Fréqu. entrée #29 [Hz]
[1668] Fréqu. entrée #33 [Hz]
10 10
[3410] Ecriture PCD 10 sur MCO
9-16 Cong. lecture PCD
[3408] Ecriture PCD 8 sur MCO
[3409] Ecriture PCD 9 sur MCO
[3406] Ecriture PCD 6 sur MCO
[3407] Ecriture PCD 7 sur MCO
[3405] Ecriture PCD 5 sur MCO
[3403] Ecriture PCD 3 sur MCO
[3404] Ecriture PCD 4 sur MCO
[3402] Ecriture PCD 2 sur MCO
[1680] Mot ctrl.1 bus
[1682] Réf.1 port bus
[3401] Ecriture PCD 1 sur MCO
[891] Vitesse Bus Jog 2
[748] PCD Feed Forward
[625] Val.ret./Réf.haut.born. 54
[696] Ctrl bus sortie born. 42
8-57 Sélect OFF2 Prodrive
[0] Entrée dig.
[1] Bus
[890] Vitesse Bus Jog 1
[2] Digital et bus
*[3] Digital ou bus
[1618] Thermique moteur
[1620] Angle moteur
[1622] Couple [%]
[1612] Tension moteur
8-90 Vitesse Bus Jog 1
[1613] Fréquence moteur
0 - 1500 RPM *100 RPM
[1615] Fréquence [%]
0 - 1500 RPM *200 RPM
8-91 Vitesse Bus Jog 2
9-** PROFIdrive
9-00 Pt de cons.
[1611] Puissance moteur[CV]
[1600] Mot contrôle
[1601] Réf. [unité]
[1501] Heures fonction.
[0] Aucun
[1500] Heures mises ss tension
0 - 4294967295 *0
0 - 4294967295 *0
0 - 4294967295 *0
0 - 655 *Dépend de la taille
8-58 Prodrive OFF3 Select
[0] Entrée dig.
[1] Bus
[2] Digital et bus
*[3] Digital ou bus
8-7* Protocol SW Version
8-79 Protocol Firmware version
8-80 Compt.message bus
8-8* Diagnostics port FC
8-81 Compt.erreur bus
8-83 Compt.erreur esclave
8-82 Compt.message esclave
[1602] Réf. [%]
[1502] Compteur kWh
0 - 4294967295 *0
0 - 4294967295 *0
8-85 Erreurs tempo esclave
8-84 Mess. esclaves envoyés
[1610] Puissance moteur [kW]
[1603] Mot état [binaire]
[1605] Valeur réelle princ. [%]
[1609] Lect.paramétr.
0 - 4294967295 *0
*[0] Pas de reset
8-88 Reset diagnostics port FC
[1] Reset compteur
8-9* Retour bus
[1616] Couple [Nm]
[1617] Vitesse moteur [tr/min]
[1614] Courant moteur
[1630] Tension DC Bus
0 - 65535 *0
0 - 65535 *0
9-07 Valeur réelle
9-15 Cong. écriture PCD
[553] Val.ret./Réf.haut.born. 29
[417] Mode générateur limite couple
[416] Mode moteur limite couple
[414] Vitesse moteur limite haute [Hz]
[412] Vitesse moteur limite basse [Hz]
[381] Temps rampe arrêt rapide
[380] Tps rampe Jog.
[352] Temps décél. rampe 2
[351] Temps d’accél. rampe 2
[342] Temps décél. rampe 1
[0] Entrée dig.
[1] Bus
[2] Digital et bus
*[3] Digital ou bus
8-55 Sélect.proc.
[0] Entrée dig.
[1] Bus
[2] Digital et bus
*[3] Digital ou bus
8-56 Sélect. réf. par défaut
[615] Val.ret./Réf.haut.born. 53
[558] Val.ret./Réf.haut.born. 33
[590] Ctrl bus sortie dig.&relais
[593] Ctrl par bus sortie impulsions 27
[0] Entrée dig.
[1] Bus
[2] Digital et bus
*[3] Digital ou bus
[22] [1650] External Reference
[23] [1652] Feedback [Unit]
[25] [1661] Terminal 53 Switch Setting
[24] [1660] Digital Input 18,19,27,33
[17] [1618] Motor Thermal
[20] [1635] Inverter Thermal
[15] FC Port CTW
[16] FC Port REF
8-43 Cong. lecture PCD
[13] [696] Terminal 42 Output Bus Control
[11] [590] Digital & Relay Bus Control
[12] [676] Terminal 45 Output Bus Control
[0] None
[2] [1501] Running Hours
[1] [1500] Operation Hours
[4] [1600] Control Word
[5] [1601] Reference [Unit]
[3] [1502] Compteur kWh
[9] [1609] Custom Readout
[7] [1603] Status Word
[8] [1605] Main Actual Value [%]
[6] [1602] Reference %
[15] [1615] Frequency [%]
[16] [1616] Torque [Nm]
[13] [1613] Fréquence moteur
[14] [1614] Courant moteur
[11] [1611] Power [hp]
[12] [1612] Motor Voltage
[10] [1610] Puissance moteur [kW]
[21] [1638] SL Controller State
[18] [1630] DC Link Voltage
[19] [1634] Heatsink Temp.
[29] [1665] Sortie ANA 42 [mA]
[26] [1662] Entrée ANA 53
8-5* Digital/Bus
8-50 Sélect.roue libre
[0] Entrée dig.
[1] Bus
[2] Digital et bus
*[3] Digital ou bus
8-51 Sélect. arrêt rapide
[0] Entrée dig.
[1] Bus
[2] Digital et bus
*[3] Digital ou bus
[0] Entrée dig.
[1] Bus
[2] Digital et bus
*[3] Digital ou bus
8-52 Sélect.frein CC
8-53 Sélect.dém.
[35] [1694] Ext. Status Word
[34] [1692] Warning Word
[32] [1673] Compteur kWh
[33] [1690] Alarm Word
[31] [1672] Compteur kWh
[30] [1671] Relay output
[27] [1663] Terminal 54 Switch Setting
[28] [1664] Entrée ANA 54
MG07A504 Danfoss A/S © 08/2018 Tous droits réservés. 79
Annexe
VLT® Midi Drive FC 280
0 - 2000000.000 ms *5000.000 ms
[1673] Compteur B
0 - 2000000000 *15
12-66 Threshold
[1684] Impulsion démarrage
[1674] Compteur stop précis
12-67 Threshold Counters
[1685] Mot ctrl.1 port FC
0 - 4294967295 *0
[1690] Mot d’alarme
12-68 Cumulative Counters
[1691] Mot d’alarme 2
0 - 4294967295 *0
0 - 2147483647 *0
12-69 Ethernet PowerLink Status
[1692] Mot avertis.
[1693] Mot d’avertissement 2
[1694] Mot état élargi
12-8* +services Ethernet
12-80 Serveur FTP
[1695] Mot état élargi 2
[1697] Alarm Word 3
*[0] Désactivé
[1698] Warning Word 3
[1] Activé
12-82 Service SMTP
[1] Activé
12-83 SNMP Agent
[0] Désactivé
*[1] Activé
[1] Activé
12-81 Serveur HTTP
*[0] Désactivé
*[0] Désactivé
[3427] Lecture MCO par PCD 7
[3426] Lecture MCO par PCD 6
[3425] Lecture MCO par PCD 5
[3424] Lecture MCO par PCD 4
[3423] Lecture MCO par PCD 3
[3422] Lecture MCO par PCD 2
[3421] Lecture MCO par PCD 1
12-84 Address Conict Detection
[3450] Position eective
[3430] Lecture MCO par PCD 10
[3429] Lecture MCO par PCD 9
[3428] Lecture MCO par PCD 8
*[1] Activé
[0] Désactivé
[3456] Erreur de traînée
12-23 Process Data Cong Write Size
12-89 Port canal che transparente
8 - 32 *16
0 - 65535 *4000
12-9* Ethernet avancé
8 - 32 *16
12-24 Process Data Cong Read Size
12-90 Diagnostic câble
*[0] Désactivé
[1] Activé
12-28 Stock.val.données
*[0] Inactif
[2] Stock.tous les proc.
[0] Désactivé
12-91 Croisement auto
12-29 Toujours stocker
*[0] Inactif
*[1] Activé
12-92 Surveillance IGMP
[1] Actif
12-3* EtherNet/IP
0 - 65535 *0
-1 - 20 % *-1 %
0 - 3600 *120
*[1] Activé
12-93 Longueur erreur câble
[0] Désactivé
12-30 Avertis.par.
12-94 Protection tempête de diusion
12-95 Filtre tempête de diusion
12-96 Cong. port
0 - 2147483647 *0
[1] Actif
12-31 Réf.NET
[1] Actif
*[0] Inactif
12-33 Révision CIP
12-32 Ctrl.NET
*[0] Inactif
[0] Inactif
0 - 65535 *Dépend de la taille
[1] Dupliquer port 1 > 2
12-34 Code produit CIP
[10] Port 1 disabled
[2] Dupliquer port 2 > 1
0 - 65535 *Dépend de la taille
12-35 Paramètre EDS
[11] Port 2 disabled
0 - 0 *0
[254] Dupliquer port int. > 1
12-37 Retard inhibition COS
0 - 63 *Dépend de la taille
12-97 QoS Priority
[255] Dupliquer port int. > 2
0 - 65535 *0
0 - 65535 *0
12-38 Filtre COS
0 - 4294967295 *4000
12-98 Compteurs interface
12-6* Ethernet PowerLink
12-60 Node ID
0 - 4294967295 *0
12-99 Compteurs médias
1 - 239 *1
12-62 SDO Timeout
0 - 2000000000 ms *30000 ms
12-63 Basic Ethernet Timeout
1010
[748] PCD Feed Forward
[890] Vitesse Bus Jog 1
0 - 4294967295 *0
12-03 Passerelle par défaut
0 - 9999 *0
9-81 Paramètres dénis (2)
[1680] Mot ctrl.1 bus
[891] Vitesse Bus Jog 2
0 - 2147483647 *0
12-04 Serveur DHCP
0 - 9999 *0
9-82 Paramètres dénis (3)
[1682] Réf.1 port bus
12-05 Bail expire
9-83 Paramètres dénis (4)
[3401] Ecriture PCD 1 sur MCO
0 - 4294967295 *0
1 - 48 *0
12-07 Nom de domaine
12-08 Nom d’hôte
0 - 9999 *0
9-85 Dened Parameters (6)
9-90 Paramètres modiés (1)
1 - 48 *0
12-09 Adresse physique
0 - 9999 *0
9-91 Paramètres modiés (2)
0 - 4294967295 *0
12-06 Serveurs nom
0 - 9999 *0
0 - 9999 *0
9-84 Paramètres dénis (5)
0 - 17 *0
0 - 9999 *0
12-10 État lien
12-1* Paramètres lien Ethernet
0 - 9999 *0
9-92 Paramètres modiés (3)
[0] Aucun
*[0] Pas de lien
9-93 Paramètres modiés (4)
[1500] Heures mises ss tension
[1] Lien
0 - 9999 *0
[1501] Heures fonction.
12-11 Durée lien
9-94 Paramètres modiés (5)
[1502] Compteur kWh
0 - 0 *Dépend de la taille
0 - 9999 *0
[1601] Réf. [unité]
[1600] Mot contrôle
12-12 Négociation auto
[0] Inactif
0 - 65535 *0
9-99 Compteur révision Probus
[1602] Réf. [%]
*[1] Actif
10-** CAN Fieldbus
[1605] Valeur réelle princ. [%]
[1609] Lect.paramétr.
[1603] Mot état [binaire]
12-13 Vitesse lien
*[0] Aucun
[1] 10 Mbps
[16] 10 Kbps
10-0* Common Settings
10-01 Sélection de la vitesse de transmission
[1610] Puissance moteur [kW]
[2] 100 Mbps
[17] 20 Kbps
[1611] Puissance moteur[CV]
12-14 Lien duplex
[18] 50 Kbps
[1612] Tension moteur
[0] Semi-duplex
*[20] 125 Kbps
[1613] Fréquence moteur
*[1] Duplex intégral
[21] 250 Kbps
[1614] Courant moteur
12-18 Supervisor MAC
[22] 500 Kbps
[1615] Fréquence [%]
0 - 2147483647 *0
[23] 800 Kbps
[1616] Couple [Nm]
12-19 Supervisor IP Addr.
[24] 1000 Kbps
[1618] Thermique moteur
[1617] Vitesse moteur [tr/min]
0 - 2147483647 *0
12-2* Process Data
1 - 127 *127
10-02 Node ID
[1633] Puis.Frein. /2 min
[1620] Angle moteur
[1622] Couple [%]
[1630] Tension DC Bus
0 - 255 *Dépend de la taille
12-21 Proc./Ecrit.cong.données
12-20 Instance de ctrl
[0] Aucun
0 - 255 *0
0 - 255 *0
10-05 Cptr lecture erreurs transmis.
10-06 Cptr lecture erreurs reçues
[1634] Temp. radiateur
[1635] Thermique onduleur
[1638] Etat ctrl log avancé
[302] Référence minimale
[303] Réf. max.
[312] Rattrap/ralentiss
10-31 Store Data Values
*[0] O
10-3* Parameter Access
[1639] Temp. carte ctrl.
[341] Temps d’accél. rampe 1
[2] Store all setups
[1650] Réf.externe
[1652] Signal de retour [Unité]
[351] Temps d’accél. rampe 2
[342] Temps décél. rampe 1
[3] Store edit setup
10-33 Toujours stocker
[1657] Feedback [RPM]
[1660] Entrée dig.
[1661] Régl.commut.born.53
[380] Tps rampe Jog.
[1] Actif
[412] Vitesse moteur limite basse [Hz]
[381] Temps rampe arrêt rapide
12-** Ethernet
12-0* Réglages IP
[1662] Entrée ANA 53
[414] Vitesse moteur limite haute [Hz]
12-00 Attribution adresse IP
[1653] Référence pot. dig.
[352] Temps décél. rampe 2
*[0] Inactif
[1663] Régl.commut.born.54
[1664] Entrée ANA 54
[417] Mode générateur limite couple
[416] Mode moteur limite couple
[0] MANUEL
[1] DHCP
[1665] Sortie ANA 42 [ma]
[553] Val.ret./Réf.haut.born. 29
[2] BOOTP
[1666] Sortie digitale [bin]
[558] Val.ret./Réf.haut.born. 33
*[10] DCP
[1667] Fréqu. entrée #29 [Hz]
[590] Ctrl bus sortie dig.&relais
[20] From node ID
[1671] Sortie relais [bin]
[1672] Compteur A
[1669] Sortie impulsions 27 [Hz]
[1668] Fréqu. entrée #33 [Hz]
[615] Val.ret./Réf.haut.born. 53
[625] Val.ret./Réf.haut.born. 54
[696] Ctrl bus sortie born. 42
[593] Ctrl par bus sortie impulsions 27
0 - 4294967295 *0
0 - 4294967295 *0
12-02 Masque sous-réseau
12-01 Adresse IP
[3410] Ecriture PCD 10 sur MCO
12-22 Proc./Lect.cong.données
[3408] Ecriture PCD 8 sur MCO
[3409] Ecriture PCD 9 sur MCO
[3406] Ecriture PCD 6 sur MCO
[3407] Ecriture PCD 7 sur MCO
[3405] Ecriture PCD 5 sur MCO
[3403] Ecriture PCD 3 sur MCO
[3404] Ecriture PCD 4 sur MCO
[3402] Ecriture PCD 2 sur MCO
80 Danfoss A/S © 08/2018 Tous droits réservés. MG07A504

Annexe Manuel d'utilisation
0 - 100 % *Dépend de la taille
0 - 100 % *Dépend de la taille
0 - 100 *Dépend de la taille
[71] Dém. Tempo.4
[72] Dém. Tempo.5
[73] Dém. Tempo.6
[28] Gel sortie
[29] Tempo début 0
[8] I inf. basse
[9] I sup. haute
[31] Tempo début 2
[17] Tens.sect.horsplage
[16] Avertis.thermiq.
[18] Inversion
[19] Avertissement
[27] Règle logique 1
[28] Règle logique 2
[25] Comparateur 3
[26] Règle logique 0
[24] Comparateur 2
[22] Comparateur 0
[23] Comparateur 1
[20] Alarme(Déf.)
[21] Alarme(Verrou déf.)
[26] Arrêt CC
[27] Roue libre
[4] Sur réf.
[7] Hors gamme courant
[60] Reset compteur A
[61] Reset compteur B
[70] Dém. Tempo.3
[41] Déf. sort. dig. D haut
[40] Déf. sort. dig. C haut
[39] Déf. sort. dig. B haut
[38] Déf. sort. dig. A haut
[35] Déf. sort. dig. D bas
[33] Déf. sort. dig. B bas
[34] Déf. sort. dig. C bas
[32] Déf. sort. dig. A bas
[30] Tempo début 1
[74] Dém. Tempo.7
14-** Special Functions
14-0* Commut.onduleur
14-01 Fréq. commut.
[0] Ran3
[1] Ran5
[2] 2,0 kHz
[3] 3,0 kHz
[4] 4,0 kHz
[5] 5,0 kHz
[6] 6,0 kHz
[7] 8,0 kHz
[8] 10,0 kHz
[70] Temporisation 3
[51] Comparateur 5
[60] Règle logique 4
[30] Temporisation 0
[31] Temporisation 1
[32] Temporisation 2
[29] Règle logique 3
[33] Entrée dig. DI18
[34] Entrée dig. DI19
[35] Entrée dig. DI27
[39] Ordre de démarrage
[40] Variateur arrêté
[42] Arrêt reset auto
[36] Entrée dig. DI29
[61] Règle logique 5
[50] Comparateur 4
[9] 12,0kHz
[10] 16,0kHz
[72] Temporisation 5
[71] Temporisation 4
[0] Inactif
*[1] Actif
14-07 Dead Time Compensation Level
14-03 Surmodulation
[83] Courroie cassée
13-52 Action contr. logique avancé
[73] Temporisation 6
[74] Temporisation 7
14-09 Dead Time Bias Current Level
14-08 Amort. facteur gain
*[0] Désactivé
[1] Aucune action
14-1* Secteur On/o
[2] Sélect.proc.1
[3] Sélect.proc.2
[4] Sélect.proc.3
[5] Sélect.proc.4
14-10 Panne secteur
[10] Réf. prédéf. 0
*[0] Pas de fonction
[11] Réf. prédéf. 1
[1] Décélération ctrlée
[12] Réf. prédéf. 2
[2] Décél. ctrlée&alarme
[13] Réf. prédéf. 3
[3] Roue libre
[4] Sauvegarde cinétique
[15] Réf. prédéf. 5
[14] Réf. prédéf. 4
[5] Sauv. cinétiq&alarm
[16] Réf. prédéf. 6
[6] Alarme
[17] Réf. prédéf. 7
100 - 800 V *Dépend de la taille
14-12 Fonct.sur désiqui.réseau
*[0] Alarme
[22] Fonctionne
[23] Fonction sens antihor
[24] Arrêt
[1] Avertissement
[25] Arrêt rapide
14-11 Tension secteur si panne secteur
[7] Kin. back-up, trip w recovery
[18] Sélect. Rampe 1
[19] Sélect. Rampe 2
10 10
Mêmes choix que pour 13-42
Mêmes choix que pour 13-41
Mêmes choix que pour 13-40
[7] Hors gamme courant
[26] Règle logique 0
13-** Smart Logic
[8] I inf. basse
[9] I sup. haute
[28] Règle logique 2
[27] Règle logique 1
13-0* Réglages SLC
13-00 Mode contr. log avancé
[17] Tens.sect.horsplage
[16] Avertis.thermiq.
[29] Règle logique 3
[30] Temporisation 0
*[0] Inactif
[1] Actif
[18] Inversion
[19] Avertissement
[32] Temporisation 2
[31] Temporisation 1
[0] Faux
13-01 Événement de démarrage
[20] Alarme(Déf.)
[33] Entrée dig. DI18
[1] Vrai
[21] Alarme(Verrou déf.)
[34] Entrée dig. DI19
[2] En fonction
[22] Comparateur 0
[23] Comparateur 1
[35] Entrée dig. DI27
[36] Entrée dig. DI29
[3] Dans gamme
[4] Sur réf.
[24] Comparateur 2
[39] Ordre de démarrage
[7] Hors gamme courant
[25] Comparateur 3
[26] Règle logique 0
[42] Arrêt reset auto
*[40] Variateur arrêté
[8] I inf. basse
[9] I sup. haute
[27] Règle logique 1
[28] Règle logique 2
[51] Comparateur 5
[50] Comparateur 4
[16] Avertis.thermiq.
[17] Tens.sect.horsplage
[30] Temporisation 0
[29] Règle logique 3
[60] Règle logique 4
[61] Règle logique 5
[18] Inversion
[19] Avertissement
[1] ET
[2] Ou
[3] ET PAS
[4] OU PAS
[5] NON ET
[6] NON OU
[73] Temporisation 6
[6] Puiss. moteur
[42] Arrêt reset auto
[74] Temporisation 7
[7] Tension moteur
[50] Comparateur 4
[12] Entrée ANA AI53
[51] Comparateur 5
13-41 Opérateur de Règle Logique 1
[13] Entrée ANA AI54
[60] Règle logique 4
[18] Entrée impuls FI29
[61] Règle logique 5
[19] Entrée impuls FI33
[20] Numéro alarme
[83] Courroie cassée
13-02 Événement d’arrêt
[30] Compteur A
[0] Faux
[60] Règle logique 4
*[0] Désactivé
[34] Entrée dig. DI19
[61] Règle logique 5
[1] Référence %
[35] Entrée dig. DI27
[2] Retour %
[36] Entrée dig. DI29
[71] Temporisation 4
[3] Vit. moteur
*[39] Ordre de démarrage
[4] Courant moteur
[40] Variateur arrêté
[33] Entrée dig. DI18
[72] Temporisation 5
[22] Comparateur 0
[34] Entrée dig. DI19
[73] Temporisation 6
[23] Comparateur 1
[35] Entrée dig. DI27
[74] Temporisation 7
[24] Comparateur 2
[36] Entrée dig. DI29
[83] Courroie cassée
[25] Comparateur 3
[31] Temporisation 1
[32] Temporisation 2
[70] Temporisation 3
[71] Temporisation 4
[20] Alarme(Déf.)
[21] Alarme(Verrou déf.)
[39] Ordre de démarrage
13-03 Reset SLC
[26] Règle logique 0
[50] Comparateur 4
[1] Reset SLC
*[0] Pas de reset SLC
13-1* Comparateurs
13-10 Opérande comparateur
[33] Entrée dig. DI18
[27] Règle logique 1
[28] Règle logique 2
[29] Règle logique 3
[51] Comparateur 5
[40] Variateur arrêté
[42] Arrêt reset auto
[72] Temporisation 5
[70] Temporisation 3
*[0] Désactivé
[83] Courroie cassée
[7] PAS ET PAS
[31] Compteur B
13-11 Opérateur comparateur
[0] Less Than (<)
*[1] ≈ (égal)
[4] Sur réf.
[1] Vrai
[2] En fonction
[3] Dans gamme
[8] PAS OU PAS
[2] Greater Than (>)
[7] Hors gamme courant
13-42 Règle de Logique Booléenne 2
13-12 Valeur comparateur
[8] I inf. basse
13-43 Opérateur de Règle Logique 2
-9999 - 9999 *0
0 - 3600 s *0 s
13-2* Temporisations
13-20 Tempo.contrôleur de logique avancé
[9] I sup. haute
[16] Avertis.thermiq.
[17] Tens.sect.horsplage
[18] Inversion
13-4* Règles de Logique
[19] Avertissement
13-5* États
13-40 Règle de Logique Booléenne 1
[20] Alarme(Déf.)
13-51 Événement contr. log avancé
*[0] Faux
[21] Alarme(Verrou déf.)
*[0] Faux
[1] Vrai
[22] Comparateur 0
[1] Vrai
[2] En fonction
[23] Comparateur 1
[2] En fonction
[3] Dans gamme
[4] Sur réf.
[3] Dans gamme
[25] Comparateur 3
[24] Comparateur 2
13-44 Règle de Logique Booléenne 3
MG07A504 Danfoss A/S © 08/2018 Tous droits réservés. 81

Annexe
VLT® Midi Drive FC 280
-200 - 200 % *0 %
16-52 Signal de retour [Unité]
0 - 9999 *0
16-** Data Readouts
0 - 31 *0
16-71 Sortie relais [bin]
-30000 - 30000 Nm *0 Nm
16-72 Compteur A
-30000 - 30000 RPM *0 RPM
16-17 Vitesse moteur [tr/min]
-32768 - 32767 *0
16-18 Thermique moteur
0 - 40000 *0
-200 - 200 *0
16-53 Référence pot. dig.
0 - 65535 *0
16-57 Feedback [RPM]
-4999 - 4999 ReferenceFeedbackUnit *0
16-01 Réf. [unité]
-30000 - 30000 RPM *0 RPM
0 - 4095 *0
16-6* Inputs & Outputs
16-60 Entrée dig.
-200 - 200 % *0 %
ReferenceFeedbackUnit
16-03 Mot état [binaire]
16-02 Réf. [%]
16-61 Régl.commut.born.53
0 - 65535 *0
[1] Tension
[6] Digital input
-200 - 200 % *0 %
16-05 Valeur réelle princ. [%]
0 - 20 *1
16-62 Entrée ANA 53
0 - 9999 CustomReadoutUnit *0
16-09 Lect.paramétr.
16-63 Régl.commut.born.54
[0] Courant
[1] Tension
16-64 Entrée ANA 54
CustomReadoutUnit
0 - 1000 kW *0 kW
16-1* Motor Status
16-10 Puissance moteur [kW]
0 - 20 *1
16-11 Puissance moteur[CV]
-4999 - 4999 ProcessCtrlUnit *0
ProcessCtrlUnit
16-0* État général
16-00 Mot contrôle
16-65 Sortie ANA 42 [ma]
0 - 1000 hp *0 hp
0 - 20 mA *0 mA
16-12 Tension moteur
0 - 63 *0
16-66 Sortie digitale [bin]
0 - 65535 V *0 V
16-13 Fréquence moteur
0 - 130000 *0
0 - 130000 *0
16-69 Sortie impulsions 27 [Hz]
16-68 Fréqu. entrée #33 [Hz]
16-67 Fréqu. entrée #29 [Hz]
16-14 Courant moteur
0 - 6553.5 % *0 %
0 - 655.35 A *0 A
16-16 Couple [Nm]
16-15 Fréquence [%]
0 - 6553.5 Hz *0 Hz
0 - 2147483647 *0
-32768 - 32767 *0
16-73 Compteur B
16-74 Compteur stop précis
0 - 100 % *0 %
0 - 65535 *0
16-20 Angle moteur
16-22 Couple [%]
0 - 65535 *0
16-80 Mot ctrl.1 bus
16-8* Fieldbus & FC Port
-200 - 200 % *0 %
16-3* Drive Status
16-30 Tension DC Bus
16-82 Réf.1 port bus
0 - 65535 V *0 V
-32768 - 32767 *0
16-33 Puis.Frein. /2 min
0 - 65535 *0
16-84 Impulsion démarrage
0 - 10000 kW *0 kW
16-34 Temp. radiateur
0 - 65535 *1084
16-85 Mot ctrl.1 port FC
-128 - 127 °C *0 °C
16-35 Thermique onduleur
-32768 - 32767 *0
16-86 Réf.1 port FC
16-9* Ach. diagnostics
0 - 655.35 A *0 A
0 - 255 % *0 %
16-36 I nom VLT
16-90 Mot d’alarme
16-37 I max VLT
0 - 0xFFFFFFFFUL *0
0 - 0xFFFFFFFFUL *0
16-91 Mot d’alarme 2
0 - 20 *0
0 - 655.35 A *0 A
16-38 Etat ctrl log avancé
0 - 0xFFFFFFFFUL *0
0 - 0xFFFFFFFFUL *0
16-92 Mot avertis.
16-93 Mot d’avertissement 2
0 - 65535 °C *0 °C
16-39 Temp. carte ctrl.
16-5* Ref. & Feedb.
16-50 Réf.externe
1010
0 - 0 *0
-32767 - 32767 *0
0 - 255 *0
0 - 0 *0
0 - 20 *0
0 - 20 *0
0 - 41 *0
0 - 40 *0
0 - 0 *0
0 - 0 *0
0 - 0 *0
0 - 0 *0
0 - 0 *0
0 - 0 *0
0 - 0 *0
0 - 255 *0
0 - 30 *Dépend de la taille
0 - 16 *0
0 - 20 *Dépend de la taille
0 - 30 *0
0 - 20 *0
0 - 2000 *0
0 - 0xFFFFFFFF *0
0 - 56 *0
15-06 Reset comp. kWh
*[0] Pas de reset
[6] Constant-o mode
[7] On-when-Inverter-is-on-else-o Mode
[2] Désactivé
14-15 Kin. Back-up Trip Recovery Level
[1] Reset compteur
15-07 Reset compt. heures de fonction.
*[0] Pas de reset
[1] Reset compteur
*[8] Variable-speed mode
14-55 Filtre de sortie
*[0] Pas de ltre
[1] Filtre de sortie Sinus
0 - 60000.000 ReferenceFeedbackUnit
*Dépend de la taille
14-2* Reset Functions
14-20 Mode reset
15-3* Journal alarme
15-30 Journal alarme : code
14-6* Déclasst auto
14-61 Fonct. en surcharge onduleur
*[0] Reset manuel
[1] Reset auto. x 1
*[0] Arrêt
[2] Reset auto. x 2
15-31 Journal alarme : valeur
15-4* Drive Identication
14-63 Fréq. commutat° min.
[1] Déclasser
*[2] 2,0 kHz
[5] Reset auto. x 5
[4] Reset auto. x 4
[3] Reset auto. x 3
15-51 N° série variateur
15-45 Code composé var
15-46 Code variateur
15-40 Type. FC
15-41 Partie puiss.
15-42 Tension
15-43 Version logiciel
15-44 Compo.code cde
Level
[3] 3,0 kHz
[4] 4,0 kHz
[5] 5,0 kHz
[6] 6,0 kHz
[7] 8,0 kHz
[8] 10,0 kHz
[9] 12,0kHz
[11] Reset auto. x 15
[12] Reset auto. x 20
[10] Reset auto. x 10
[9] Reset auto. x 9
[8] Reset auto. x 8
[7] Reset auto. x 7
[6] Reset auto. x 6
[10] 16,0kHz
[13] Reset auto. inni
14-64 Dead Time Compensation Zero Current
[14] RESETà mise ss tens°
*[0] Désactivé
0 - 600 s *10 s
14-21 Temps reset auto.
15-48 Version LCP
20 - 1000 Hz *Dépend de la taille
sation
[1] Activé
14-65 Speed Derate Dead Time Compen-
14-24 Délais Al./Limit.C
14-22 Mod. exploitation
*[0] Fonction. normal
[2] Restaura° régl.usine
15-50 N°logic.carte puis
15-49 N°logic.carte ctrl.
[14] VLT2800 12M
[12] VLT2800 3M
[13] VLT2800 3M incl. MAV
*[0] No Function
14-7* Compatibility
14-70 Compatibility Selections
0 - 60 s *60 s
0 - 60 s *60 s
*[1] Avertissement
14-27 Action en U limit.
[0] Alarme
14-25 Délais Al./C.limit ?
[15] VLT2800 12M incl. MAV
14-28 Réglages production
15-52 Informations OEM
14-8* Options
14-88 Option Data Storage
*[0] Aucune action
[1] Reset service
15-53 N° série carte puissance
0 - 65535 *0
[3] Reset logiciel
14-89 Option Detection
14-29 Code service
15-57 Version chier
*[0] Protect Option Cong.
[1] Enable Option Change
0 - 0xFFFFFFFF *0
14-3* Ctrl I lim. courant
15-59 Nom du chier
14-9* Fault Settings
14-90 Niveau panne
0 - 500 % *100 %
14-30 Ctrl.I limite, Gain P
15-6* Identif.Option
*[3] Alarme verr.
14-31 Ctrl.I limite, tps Intég.
15-60 Option montée
[4] Arrêt & reset retardé
0.002 - 2 s *0.020 s
15-61 Version logicielle option
[5] Flystart
15-** Drive Information
1 - 100 ms *5 ms
14-32 Ctrl.I limite, tps ltre
15-70 Option A
0 - 0x7f. h *0 h
15-0* Données exploit.
15-00 Heures mises ss tension
40 - 90 % *66 %
14-4* Energy Optimising
14-40 Niveau VT
15-71 Vers.logic.option A
15-9* Parameter Info
0 - 0x7f. h *0 h
15-01 Heures fonction.
15-02 Compteur kWh
40 - 75 % *66 %
14-44 d-axis current optimization for IPM
14-41 Magnétisation AEO minimale
15-92 Paramètres dénis
0 - 2147483647 kWh *0 kWh
15-03 Mise sous tension
0 - 200 % *100 %
14-5* Environnement
15-97 Type application
15-98 Type.VAR.
0 - 65535 *0
0 - 2147483647 *0
15-05 Surtension
15-04 Surtemp.
*[1] Actif
14-52 Contrôle ventil
[0] Inactif
14-51 Compensation bus CC
15-99 Métadonnées param.?
0 - 65535 *0
[5] Constant-on mode
82 Danfoss A/S © 08/2018 Tous droits réservés. MG07A504

Annexe Manuel d'utilisation
-1073741824 - 1073741824 *0
33-47 Taille fenêtre cible
37-03 Pos. Type
*[0] Absolute
1 - 10000 *512
34-** Motion Control Data Readouts
[1] Relative
34-0* Par. écriture PCD
[0] Disable
*[1] Enable
0 - 65535 *0
34-10 Ecriture PCD 10 sur MCO
1 - 10000 *1000
37-13 Pos. PID Output Clamp
34-2* Par. lecture PCD
34-21 Lecture MCO par PCD 1
[8] Quick Stop
[9] PID Error Too Big
[7] Brake Wear Limit
34-30 Lecture MCO par PCD 10
0 - 65535 *0
[12] Rev. Operation
34-5* Données de process
34-50 Position eective
[4] Pos. SW Limit
[2] Pos. HW Limit
34-28 Lecture MCO par PCD 8
[3] Neg. HW Limit
0 - 65535 *0
[5] Neg. SW Limit
0 - 65535 *0
34-29 Lecture MCO par PCD 9
*[0] No Fault
*[0] No Blocking
[1] Block Reverse
[2] Block Forward
34-24 Lecture MCO par PCD 4
37-17 Pos. Ctrl Fault Behaviour
0 - 65535 *0
34-25 Lecture MCO par PCD 5
*[0] Ramp Down&Brake
0 - 65535 *0
*[0] DI
[1] FieldBus
37-15 Pos. Direction Block
37-14 Pos. Ctrl. Source
0 - 65535 *0
0 - 65535 *0
0 - 65535 *0
34-23 Lecture MCO par PCD 3
34-22 Lecture MCO par PCD 2
[1] Brake Directly
34-26 Lecture MCO par PCD 6
37-18 Pos. Ctrl Fault Reason
0 - 65535 *0
34-27 Lecture MCO par PCD 7
[1] Homing Needed
0 - 65535 *0
0 - 1073741824 *0
0 - 1000 ms *200 ms
0 - 1000 ms *200 ms
[0] Disable
*[1] Enable
0 - 65535 *0
34-05 Ecriture PCD 5 sur MCO
37-08 Pos. Hold Delay
0 - 65535 *0
0 - 10000 ms *0 ms
34-06 Ecriture PCD 6 sur MCO
37-09 Pos. Coast Delay
0 - 65535 *0
37-12 Pos. PID Anti Windup
37-11 Pos. Brake Wear Limit
37-10 Pos. Brake Delay
0 - 65535 *0
0 - 65535 *0
0 - 65535 *0
34-07 Ecriture PCD 7 sur MCO
34-08 Ecriture PCD 8 sur MCO
34-09 Ecriture PCD 9 sur MCO
50 - 100000 ms *5000 ms
50 - 100000 ms *5000 ms
1 - 30000 RPM *100 RPM
37-07 Pos. Auto Brake Ctrl
37-06 Pos. Ramp Down Time
37-05 Pos. Ramp Up Time
37-04 Pos. Velocity
0 - 65535 *0
0 - 65535 *0
0 - 65535 *0
34-04 Ecriture PCD 4 sur MCO
34-01 Ecriture PCD 1 sur MCO
34-03 Ecriture PCD 3 sur MCO
34-02 Ecriture PCD 2 sur MCO
[13] Fwd. Operation
-1073741824 - 1073741824 *0
0 - 255 *0
37-19 Pos. New Index
[20] Can not nd home position
-2147483647 - 2147483647 *0
34-56 Erreur de traînée
37-** Application Settings
37-0* ApplicationMode
37-00 Application Mode
*[0] Drive mode
[2] Position Control
*[0] Codeur 24 V
37-02 Pos. Target
37-01 Pos. Feedback Source
37-1* Position Control
10 10
0 - 2 *0
0 - 720 h *720 h
1 - 65535 *1
1 - 65535 *1
1 - 2147483648 *2000000
50 - 3600000 ms *1000 ms
1 - 30000 RPM *1500 RPM
origine
-1073741824 - 1073741824 *0
1 - 1000 ms *10 ms
-1500 - 1500 RPM *100 RPM
-1073741824 - 1073741824 *500000
-1073741824 - 1073741824 *-500000
[0] Disabled
*[1] Only Allow Download
[2] Only Allow Upload
21-2* Ext. CL 1 PID
21-20 Contrôle normal/inverse ext 1
*[0] Normal
0 - 0xFFFFFFFFUL *0
16-94 Mot état élargi
16-95 Mot état élargi 2
[3] Allow Both Download And Upload
31-41 MM Information
21-21 Gain proportionnel ext 1
[1] Inverse
0 - 0xFFFFFFFFUL *0
16-97 Alarm Word 3
0 - 10 *0.01
0 - 0xFFFFFFFFUL *0
31-42 Congure Memory Module Access
21-22 Tps intégral ext. 1
16-98 Warning Word 3
*[0] No action
0.01 - 10000 s *10000 s
0 - 4294967295 *0
[1] Set MM to read only
21-23 Temps de dérivée ext. 1
18-** Data Readouts 2
31-43 Erase_MM
[2] Set MM to read write
0 - 10 s *0 s
21-24 Limit.gain.D ext. 1
18-5* Memory Module Readout
18-51 Motif d'avertissement Module de
*[0] No function
1 - 50 *5
mémoire
[1] Erase MM
22-** Appl. Functions
0 - 0xFFFFFFFFUL *0
*[0] Disabled
31-47 Time Limit Function
22-0* Divers
22-02 Sleepmode CL Control Mode
0 - 0 *0
18-52 ID Module de mémoire
[1] Enabled
31-48 Time Limit Remaining Time
*[0] Normal
[1] Simplied
22-4* Mode veille
-200 - 200 % *0 %
18-9* PID Readouts
18-90 PID proc./Erreur
32-** Motion Control Basic Settings
32-1* User Unit
0 - 600 s *10 s
22-40 Tps de fct min.
-200 - 200 % *0 %
18-91 PID proc./Sortie
32-11 Dénominateur unité utilisateur
22-41 Tps de veille min.
18-92 PID proc./Sortie lim. verr.
33-03 Vitesse pour mvt origine
32-12 Numérateur unité utilisateur
32-6* PID
32-67 Erreur de position maximale tolérée
0 - 400.0 *10
0 - 600 s *10 s
-200 - 200 % *0 %
22-43 Vit. réveil [Hz]
18-93 PID proc./Sortie à l’éch. gain
-200 - 200 % *0 %
0 - 100 % *10 %
22-44 Diérence réf/ret. réveil
21-** Ext. Closed Loop
21-0* Ext. CL Autotuning
22-45 Consign.surpres.
21-09 Régl. auto PID
32-8* Velocity&Acceleration
-100 - 100 % *0 %
*[0] Désactivé
32-80 Vitesse maximum (codeur)
0 - 600 s *60 s
22-46 Tps surpression max.
[1] PID étendu 1 activé
21-1* Ext. CL 1 Ref./Fb.
32-81 Rampe la + courte
0 - 400.0 *0
22-47 Vitesse veille [Hz]
-999999.999 - 999999.999 ExtPID1Unit
21-11 Référence min. ext. 1
33-** Motion Control Adv. Settings
33-0* Home Motion
33-00 Origine forcée
0 - 3600 s *0 s
22-49 Wake-Up Delay Time
22-48 Sleep Delay Time
-999999.999 - 999999.999 ExtPID1Unit
*0 ExtPID1Unit
21-12 Référence max. ext. 1
*[0] Not forced
[1] Forced manual homing
[2] Forced automated homing
0 - 3600 s *0 s
22-6* Détec.courroi.cassée
22-60 Fonct.courroi.cassée
*100 ExtPID1Unit
*[0] Pas de fonction
21-13 Source référence ext. 1
33-01 Décalage point zéro depuis pos.
0 - 600 s *10 s
5 - 100 % *10 %
22-62 Retar.courroi.cassée
[2] Arrêt
22-61 Coupl.courroi.cassée
*[0] Inactif
[1] Avertissement
*[0] Pas de fonction
[1] Entrée ANA 53
[8] Entrée Fréquence 33
[1] Entrée ANA 53
21-14 Source retour ext. 1
[2] Entrée ANA 54
[7] Entrée Fréquence 29
33-4* Limit Handling
33-41 Lim. n course logic. positive active
0 - 60 s *Dépend de la taille
30-21 High Starting Torque Current [%]
30-20 High Starting Torque Time [s]
30-** Special Features
30-2* Adv. Start Adjust
-999999.999 - 999999.999 ExtPID1Unit
[4] Entrée Fréquence 33
21-15 Consigne ext. 1
[2] Entrée ANA 54
[3] Entrée Fréquence 29
33-02 Rampe pour mvt origine
33-42 Limite n de course logicielle positive
0 - 200.0 % *Dépend de la taille
*[0] Inactif
30-22 Protec. rotor verr.
*0 ExtPID1Unit
-999999.999 - 999999.999 ExtPID1Unit
21-17 Réf. ext. 1 [unité]
33-43 Lim. n course logic. négative active
[1] Actif
*0 ExtPID1Unit
*[0] Inactif
[1] Actif
0.05 - 1 s *0.10 s
30-23 Tps détect° rotor bloqué [s]
-999999.999 - 999999.999 ExtPID1Unit
21-18 Retour ext. 1 [unité]
*[0] Inactif
[1] Actif
33-44 Lim. n course logic. positive active
31-** Special Option
31-4* Memory Module
31-40 Memory Module Function
0 - 100 % *0 %
*0 ExtPID1Unit
21-19 Sortie ext. 1 [%]
[3] Avant sans index
33-04 Comportement pendant mvt origine
*[1] Arrière sans index
MG07A504 Danfoss A/S © 08/2018 Tous droits réservés. 83

Indice
VLT® Midi Drive FC 280
Indice
A
Abréviation............................................................................................. 73
Acheur numérique........................................................................... 26
AMA avec borne 27 connectée....................................................... 47
Auto On............................................................................................. 32, 36
D
Déclassement......................................................................................... 63
Dégagement pour le refroidissement.......................................... 24
Démarrage.............................................................................................. 33
Démarrage imprévu........................................................................ 7, 51
Disjoncteur.............................................................................................. 24
B
Bornes
Borne de commande............................................................... 32, 55
Borne de sortie.................................................................................. 25
Boucle ouverte...................................................................................... 66
C
Câble blindé........................................................................................... 24
Câble de puissance de sortie............................................................ 24
Carte de commande
Communication série RS485........................................................ 66
Communication série USB............................................................ 66
Performance...................................................................................... 66
Sortie 10 V CC.................................................................................... 66
Sortie 24 V CC.................................................................................... 66
Cavalier..................................................................................................... 20
CEI 61800-3...................................................................................... 18, 63
CEM............................................................................................................ 63
Chocs......................................................................................................... 10
Classe d'ecacité énergétique........................................................ 63
Commande locale................................................................................ 32
Communication série
Communication série................................................ 23, 32, 51, 66
Communication série USB............................................................ 66
Condition ambiante............................................................................. 63
Conduit..................................................................................................... 24
Conguration......................................................................................... 36
Connexion de l'alimentation............................................................ 13
Contrôle
Borne de commande............................................................... 32, 55
Câblage.................................................................................. 13, 20, 24
Caractéristique.................................................................................. 66
Contrôleur externe................................................................................. 4
Convention............................................................................................. 73
Couple
Caractéristique de couple............................................................. 63
Couple de serrage des bornes......................................................... 67
Courant CC................................................................................................. 5
Courant de fuite................................................................................ 8, 13
Courant de sortie.................................................................................. 65
Ctrl frein mécanique............................................................................ 21
E
Ecacité énergétique........................................................... 60, 61, 62
É
Égalisation de potentiel..................................................................... 14
E
Entrée
Alimentation................................................................... 5, 18, 24, 25
Borne............................................................................................. 18, 25
Câble de puissance d'entrée........................................................ 24
Courant................................................................................................ 18
Puissance d'entrée........................................................................... 13
Tension d'entrée............................................................................... 25
Entrée CA............................................................................................ 5, 18
Entrée digitale........................................................................................ 20
Entrées
Entrée analogique........................................................................... 64
Entrée digitale................................................................................... 64
Entrée impulsions............................................................................ 65
Environnement d'installation........................................................... 10
É
Équipement auxiliaire......................................................................... 24
Équipement facultatif......................................................................... 25
E
Exigence relative au dégagement :................................................ 10
F
Facteur de puissance...................................................................... 5, 24
Filtre RFI.................................................................................................... 18
Forme d'onde CA.................................................................................... 5
Fusible......................................................................................... 13, 24, 67
H
Hand On................................................................................................... 32
Haute tension.................................................................................... 7, 25
Homologation et certication............................................................ 6
84 Danfoss A/S © 08/2018 Tous droits réservés. MG07A504

Indice Manuel d'utilisation
I
Initialisation
Procédure............................................................................................ 33
Procédure manuelle........................................................................ 33
Installation.............................................................................................. 24
Installation selon critères CEM......................................................... 13
Instruction de mise au rebut............................................................... 6
Isolation des interférences................................................................ 24
J
Journal alarme....................................................................................... 31
L
Levage...................................................................................................... 10
Liste des avertissements et alarmes.............................................. 55
Longueur de câble............................................................................... 64
M
Maintenance.......................................................................................... 51
Menu principal............................................................................... 29, 31
Menu rapide.................................................................................... 27, 31
Mise à la terre.................................................................... 17, 18, 24, 25
Montage............................................................................................ 10, 24
Montage côte à côte............................................................................ 10
Montage horizontal............................................................................. 11
Moteur
Câble du moteur.............................................................................. 17
Câble moteur..................................................................................... 13
Courant........................................................................................... 5, 35
Courant moteur................................................................................ 31
Données.............................................................................................. 35
Données du moteur........................................................................ 34
État........................................................................................................... 4
Protection.............................................................................................. 4
Protection thermique du moteur................................................. 6
Puissance du moteur...................................................................... 63
Puissance moteur...................................................................... 13, 31
Rotation............................................................................................... 36
N
Niveau de tension................................................................................ 64
Norme et conformité de la fonction STO....................................... 6
O
Ordre de marche................................................................................... 36
Ordre distant............................................................................................. 4
Ordre externe........................................................................................... 5
P
Panne
Mémoire des défauts...................................................................... 31
Passage des câbles............................................................................... 24
PELV.................................................................................................... 49, 66
Personnel qualié................................................................................... 7
Plaque arrière......................................................................................... 10
Plaque signalétique................................................................................ 9
Programmation....................................................................... 20, 31, 32
Protection contre les surcourants................................................... 13
Protection contre les transitoires...................................................... 5
Protection du circuit de dérivation................................................ 67
Protection thermique............................................................................ 6
R
Rafales/transitoires.............................................................................. 14
Recyclage................................................................................................... 6
Référence................................................................................................. 31
Référence de vitesse..................................................................... 36, 47
Refroidissement.................................................................................... 10
Réglage par défaut............................................................................... 33
Relais client............................................................................................. 44
Répartition de la charge....................................................................... 7
Reset..................................................................................... 31, 32, 33, 51
Ressource supplémentaire.................................................................. 4
Retour....................................................................................................... 24
Rotation du codeur.............................................................................. 36
S
Secteur
Alimentation (L1/N, L2/L, L3)....................................................... 62
Données d'alimentation................................................................ 60
Tension................................................................................................. 31
Secteur CA.......................................................................................... 5, 18
Secteur isolé........................................................................................... 18
Section...................................................................................................... 64
Section de câble.................................................................................... 17
Sectionneur............................................................................................ 25
Sécurité....................................................................................................... 8
Service...................................................................................................... 51
Signal de retour du système............................................................... 4
SIL2............................................................................................................... 6
SILCL de SIL2............................................................................................. 6
Sortie relais............................................................................................. 66
Sorties
Sortie analogique............................................................................. 65
Sortie digitale.................................................................................... 65
MG07A504 Danfoss A/S © 08/2018 Tous droits réservés. 85

Indice
Spécications......................................................................................... 23
STO
Activation............................................................................................ 43
Caractéristiques techniques......................................................... 46
Désactivation..................................................................................... 43
Essai de mise en service................................................................. 44
Maintenance...................................................................................... 45
Redémarrage automatique................................................... 43, 44
Redémarrage manuel.............................................................. 43, 44
Stockage.................................................................................................. 10
Structure du menu............................................................................... 31
Symbole................................................................................................... 73
VLT® Midi Drive FC 280
T
Taille des ls............................................................................................ 13
Temps de décharge................................................................................ 8
Tension d’alimentation................................................................ 25, 65
Terre
Fil de terre........................................................................................... 13
Mise à la terre.................................................................................... 24
Thermistance......................................................................................... 49
Touche d’exploitation.................................................................. 26, 31
Touche de navigation.................................................................. 26, 31
Touche Menu.................................................................................. 26, 31
Triangle isolé de la terre..................................................................... 18
Triangle mis à la terre.......................................................................... 18
U
Utilisation prévue.................................................................................... 4
V
Vibration.................................................................................................. 10
86 Danfoss A/S © 08/2018 Tous droits réservés. MG07A504

Indice Manuel d'utilisation
MG07A504 Danfoss A/S © 08/2018 Tous droits réservés. 87
Danfoss VLT Drives
1 bis Av. Jean d’Alembert,
78990 Elancourt
France
Tél.: +33 (0) 1 30 62 50 00
Fax.: +33 (0) 1 30 62 50 26
e-mail: Variateurs.vlt@danfoss.fr
www.drives.danfoss.fr
Danfoss VLT Drives
A. Gossetlaan 28,
1702 Groot-Bijgaarden
Belgique
Tél.: +32 (0) 2 525 0711
Fax.: +32 (0) 2 525 07 57
e-mail: drives@danfoss.be
www.danfoss.be/drives/fr
Danfoss AG, VLT® Antriebstechnik
Parkstrasse 6
CH-4402 Frenkendorf
Tél.: +41 61 906 11 11
Telefax: +41 61 906 11 21
www.danfoss.ch
Danfoss décline toute responsabilité quant aux erreurs qui se seraient glissées dans les catalogues, brochures ou autres documentations écrites. Dans un souci constant d'amélioration, Danfoss se
réserve le droit d'apporter sans préavis toutes modications à ses produits, y compris ceux se trouvant déjà en commande, sous réserve, toutefois, que ces modications n'aectent pas les
caractéristiques déjà arrêtées en accord avec le client. Toutes les marques de fabrique de cette documentation sont la propriété des sociétés correspondantes. Danfoss et le logotype Danfoss sont
des marques de fabrique de Danfoss A/S. Tous droits réservés.
Danfoss A/S
Ulsnaes 1
DK-6300 Graasten
vlt-drives.danfoss.com
132R0153 MG07A504 08/2018
*MG07A504*
 Loading...
Loading...