


ENGINEERING TOMORROW
Guía de funcionamiento
VLT® Midi Drive FC 280
vlt-drives.danfoss.com

Índice Guía de funcionamiento
Índice
1 Introducción
1.1 Objetivo de este manual
1.2 Recursos adicionales
1.3 Versión del documento y del software
1.4 Vista general de producto
1.5 Homologaciones y certicados
1.6 Eliminación
2 Seguridad
2.1 Símbolos de seguridad
2.2 Personal cualicado
2.3 Medidas de seguridad
3 Instalación mecánica
3.1 Desembalaje
3.2 Entorno de instalación
3.3 Montaje
4
4
4
4
4
6
6
7
7
7
7
9
9
10
10
4 Instalación eléctrica
4.1 Instrucciones de seguridad
4.2 Instalación conforme a CEM
4.3 Conexión a tierra
4.4 Esquema de cableado
4.5 Acceso
4.6 Conexión del motor
4.7 Conexión de red de CA
4.8 Cableado de control
4.8.1 Tipos de terminal de control 19
4.8.2 Cableado a los terminales de control 20
4.8.3 Activación del funcionamiento del motor (terminal 27) 20
4.8.4 Control de freno mecánico 21
4.8.5 Comunicación de datos por USB 22
4.9 Lista de vericación de la instalación
5 Puesta en servicio
5.1 Instrucciones de seguridad
13
13
13
13
15
17
17
18
19
23
25
25
5.2 Conexión de potencia
5.3 Funcionamiento del panel de control local
5.3.1 panel numérico de control local (NLCP) 25
5.3.2 Función de la tecla derecha en el NLCP 27
MG07A505 Danfoss A/S © 08/2018 Reservados todos los derechos. 1
25
25
Índice
VLT® Midi Drive FC 280
5.3.3 Menú rápido del NLCP 27
5.3.4 Menú principal del NLCP 29
5.3.5 Panel de control local gráco (GLCP) 31
5.3.6 Ajustes de parámetros 32
5.3.7 Cambio de los ajustes de parámetros con el GLCP 32
5.3.8 Cargar / descargar datos al / del LCP 33
5.3.9 Restablecimiento de los ajustes predeterminados con el LCP 33
5.4 Programación básica
5.4.1 Ajuste del motor asíncrono 33
5.4.2 Ajuste de Motor PM en VVC
5.4.3 Adaptación automática del motor (AMA) 35
+
5.5 Comprobación del giro del motor
5.6 Comprobación del giro del encoder
5.7 Prueba de control local
5.8 Arranque del sistema
5.9 Módulo de memoria
5.9.1 Sincronización de los datos del convertidor de frecuencia con un nuevo módulo
de memoria (creación de una copia de seguridad del convertidor) 37
5.9.2 Copia de datos a otro convertidor de frecuencia 37
5.9.3 Copia de datos a varios convertidores de frecuencia 38
5.9.4 Transferencia de la información del rmware 38
5.9.5 Copia de seguridad de los cambios de parámetros en el módulo de memoria 38
5.9.6 Eliminación de datos 39
5.9.7 Rendimiento de la transferencia e indicaciones 39
5.9.8 Activación del convertidor PROFIBUS 39
33
34
35
36
36
36
36
6 Safe Torque O (STO)
6.1 Medidas de seguridad de la STO
6.2 Instalación de la función Safe Torque O
6.3 Puesta en servicio de STO
6.3.1 Activación de la función Safe Torque O 43
6.3.2 Desactivación de la función Safe Torque O 43
6.3.3 Prueba de puesta en servicio de STO 44
6.3.4 Prueba para aplicaciones de STO en el modo de reinicio manual 44
6.3.5 Prueba para aplicaciones de STO en el modo de rearranque automático 44
6.4 Mantenimiento y servicio de la STO
6.5 Datos técnicos de STO
7 Ejemplos de aplicaciones
7.1 Introducción
7.2 Ejemplos de aplicaciones
2 Danfoss A/S © 08/2018 Reservados todos los derechos. MG07A505
41
42
42
43
45
46
47
47
47
Índice Guía de funcionamiento
7.2.1 AMA 47
7.2.2 Velocidad 47
7.2.3 Arranque/parada 48
7.2.4 Reinicio de alarma externa 49
7.2.5 Termistor del motor 49
7.2.6 SLC 49
8 Mantenimiento, diagnóstico y resolución de problemas
8.1 Mantenimiento y servicio
8.2 Tipos de advertencias y alarmas
8.3 Pantalla de advertencias y alarmas
8.4 Lista de Advertencias y Alarmas
8.4.1 Lista de códigos de alarma y advertencia 53
8.5 Resolución de problemas
9 Especicaciones
9.1 Datos eléctricos
9.2 Fuente de alimentación de red
9.3 Salida del motor y datos del motor
9.4 Condiciones ambientales
9.5 Especicaciones del cable
9.6 Entrada/salida de control y datos de control
9.7 Pares de apriete de conexión
9.8 Fusibles y magnetotérmicos
9.9 Tamaños de las protecciones, potencias de salida y dimensiones
51
51
51
52
53
58
60
60
62
63
63
64
64
67
67
70
10 Anexo
10.1 Símbolos, abreviaturas y convenciones
10.2 Estructura de menú de parámetros
Índice
MG07A505 Danfoss A/S © 08/2018 Reservados todos los derechos. 3
73
73
73
85
Introducción
VLT® Midi Drive FC 280
11
1 Introducción
1.1 Objetivo de este manual
Esta guía de funcionamiento proporciona información para
la instalación y puesta en servicio del convertidor de
frecuencia VLT® Midi Drive FC 280.
La guía de funcionamiento está diseñada para su
utilización por parte de personal cualicado.
Para utilizar el convertidor de frecuencia de forma segura y
profesional, lea y siga la guía de funcionamiento. Preste
especial atención a las instrucciones de seguridad y
advertencias generales. Conserve esta guía de funcionamiento junto con el convertidor de frecuencia en todo
momento.
VLT® es una marca registrada.
1.2 Recursos adicionales
Recursos disponibles para comprender las funciones
avanzadas, la programación y el mantenimiento del
convertidor de frecuencia:
La Guía de Diseño del VLT® Midi Drive FC 280
•
proporciona información detallada acerca del
diseño y las aplicaciones del convertidor de
frecuencia.
Guía de programación del VLT® Midi Drive FC 280,
•
que proporciona información acerca de cómo
programar el equipo e incluye descripciones
completas de los parámetros.
Danfoss proporciona publicaciones y manuales complementarios. Consulte drives.danfoss.com/knowledge-center/
technical-documentation/ para ver un listado.
Versión del documento y del software
1.3
Vista general de producto
1.4
1.4.1 Uso previsto
El convertidor de frecuencia es un controlador electrónico
del motor diseñado para:
Regular la velocidad del motor en respuesta a la
•
realimentación del sistema o a órdenes remotas
de controladores externos. Un sistema Power
Drive consiste en un convertidor de frecuencia, el
motor y el equipo accionado por el motor.
Supervisión del estado del motor y el sistema.
•
El convertidor de frecuencia también puede utilizarse para
la protección de sobrecarga del motor.
En función de la conguración, el convertidor de
frecuencia puede utilizarse en aplicaciones independientes
o formar parte de un equipo o instalación de mayor
tamaño.
El convertidor de frecuencia es apto para su uso en
entornos residenciales, industriales y comerciales, de
acuerdo con la legislación y la normativa locales.
AVISO!
En un entorno residencial, este producto puede producir
radiointerferencias, en cuyo caso puede que se tengan
que tomar las medidas de mitigación pertinentes.
Posible uso indebido
No utilice el convertidor de frecuencia en aplicaciones que
no cumplan con los entornos y condiciones de funcionamiento especicados. Garantice la conformidad con las
condiciones especicadas en el capétulo 9 Especicaciones.
Este manual se revisa y se actualiza de forma periódica. Le
agradecemos cualquier sugerencia de mejoras. La Tabla 1.1
muestra las versiones de documento y software.
Edición Comentarios
MG07A5
4 Danfoss A/S © 08/2018 Reservados todos los derechos. MG07A505
Actualización del software y soporte
del módulo de memoria.
Tabla 1.1 Versión del documento y del software
Versión de
software
1.5
M
7
63
4
5
21
8
10
130BE200.12
M
7
63
4
5
21
8
9
T2/T4
S2
Introducción Guía de funcionamiento
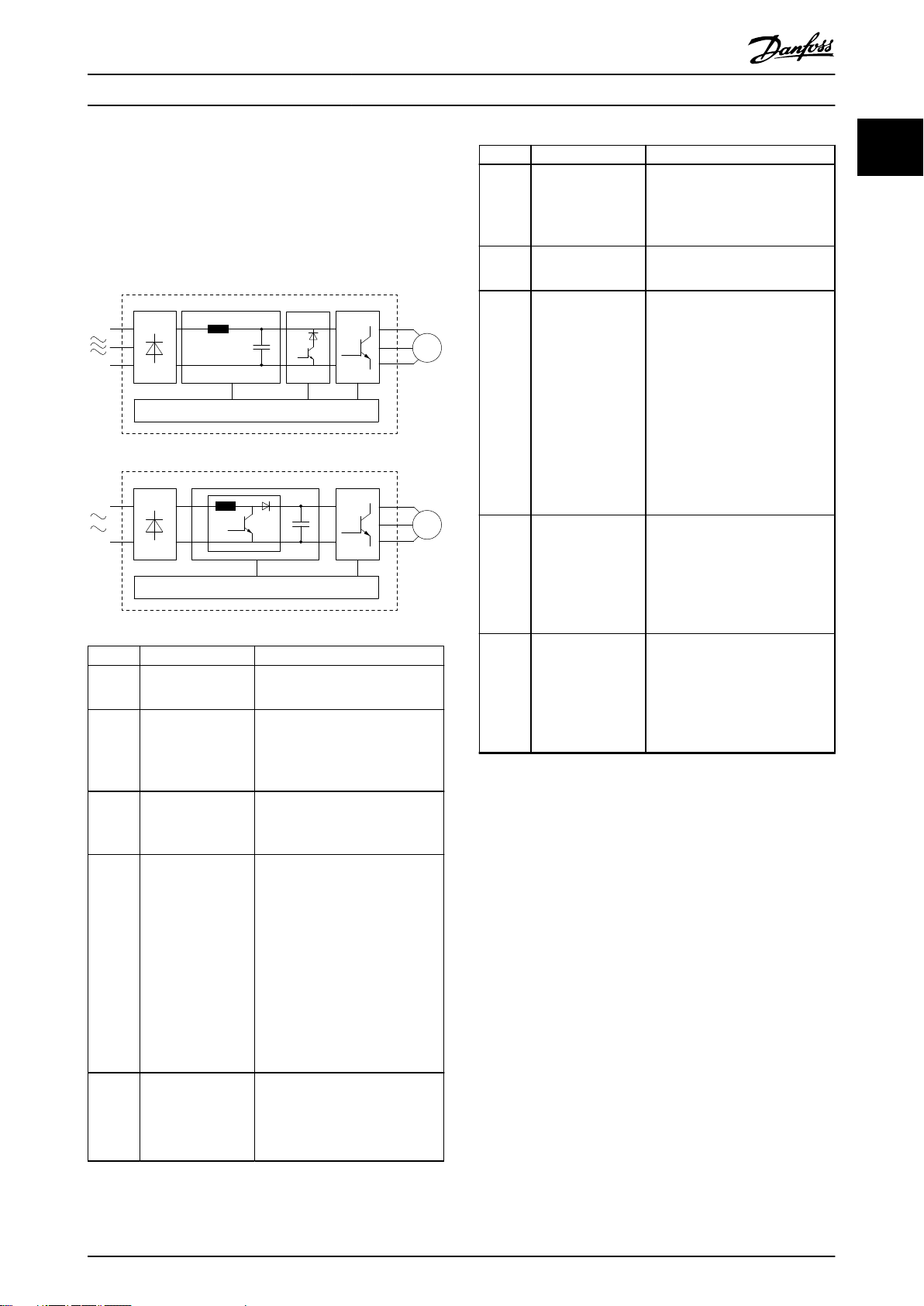
1.4.2 Diagrama de bloques del convertidor
de frecuencia
La Ilustración 1.1 es un diagrama de bloques de los
componentes internos del convertidor de frecuencia.
Área Componente de aplicación
Alimentación de red de CA al
1
2 Recticador
3 Bus de CC
4 Reactor de CC
5
Entrada de alimentación
Banco de condensadores
•
convertidor de frecuencia.
El puente del recticador
•
convierte la entrada de CA en
corriente CC para suministrar
electricidad al inversor.
El circuito de bus de CC
•
intermedio gestiona la
corriente de CC.
Filtra la corriente del circuito
•
de CC intermedio.
Ofrece protección frente a
•
transitorios de red.
Reduce la corriente ecaz
•
(RMS).
Eleva el factor de potencia
•
•
•
•
reejado de vuelta a la línea.
Reduce los armónicos en la
entrada de CA.
Almacena la potencia de CC.
Proporciona protección ininterrumpida para pérdidas de
potencia cortas.
Área Componente de aplicación
Convierte la CC en una forma
•
6 Inversor
7 Salida al motor
8 Circuitos de control
9 PFC
10 Chopper de frenado
Ilustración 1.1 Ejemplo de diagrama de bloques para un
convertidor de frecuencia
de onda de CA PWM
controlada para una salida
variable controlada al motor.
Regula la potencia de salida
•
trifásica al motor.
La alimentación de entrada, el
•
procesamiento interno, la
salida y la intensidad del
motor se monitorizan para
proporcionar un funcionamiento y un control ecaces.
Se monitorizan y ejecutan los
•
comandos externos y la
interfaz de usuario.
Puede suministrarse salida de
•
estado y control.
La corrección del factor de
•
potencia cambia la forma de
onda de la corriente
consumida por el convertidor
de frecuencia a n de mejorar
el factor de potencia.
El chopper de frenado se
•
utiliza en el circuito
intermedio de CC para
controlar la tensión de CC
cuando la carga devuelve
energía.
1.4.3 Tamaños de alojamiento y potencias
de salida
Para conocer los tamaños de las protecciones y las
potencias de salida de los convertidores de frecuencia,
consulte el capétulo 9.9 Tamaños de las protecciones,
potencias de salida y dimensiones.
1.4.4 Safe Torque O (STO)
El convertidor de frecuencia VLT® Midi Drive FC 280 admite
la función Safe Torque O (STO). Consulte el
capétulo 6 Safe Torque O (STO) para obtener detalles sobre
la instalación, la puesta en servicio, el mantenimiento y los
datos técnicos de la STO.
1 1
MG07A505 Danfoss A/S © 08/2018 Reservados todos los derechos. 5
089
Introducción
VLT® Midi Drive FC 280
11
1.5 Homologaciones y certicados
Para comprobar la conformidad con el Acuerdo europeo
relativo al transporte internacional de mercancías
peligrosas por vías de navegación interior (ADN), consulte
el capítulo «Instalación conforme con ADN» de la Guía de
diseño del VLT® Midi Drive FC 280.
El convertidor de frecuencia cumple los requisitos de la
norma UL 508C de retención de memoria térmica. Si desea
obtener más información, consulte el capítulo «Protección
térmica del motor» en la Guía de diseño del VLT® Midi Drive
FC 280.
Normas aplicadas y conformidad para STO
El uso de la STO en los terminales 37 y 38 conlleva el
cumplimiento de todas las disposiciones de seguridad,
incluidas las normas, los reglamentos y las directrices
pertinentes. La función STO integrada cumple las
siguientes normas:
CEI/EN 61508:2010, SIL2
•
CEI/EN 61800-5-2:2007, SIL2
•
CEI/EN 62061:2015, SILCL de SIL2
•
EN ISO 13849-1:2015 Categoría 3 PL d
•
Eliminación
1.6
No deseche equipos que contienen
componentes eléctricos junto con los
desperdicios domésticos.
Deben recogerse de forma selectiva según
la legislación local vigente.
6 Danfoss A/S © 08/2018 Reservados todos los derechos. MG07A505
Seguridad Guía de funcionamiento
2 Seguridad
2.1 Símbolos de seguridad
2.3
2 2
Medidas de seguridad
En este documento se utilizan los siguientes símbolos:
ADVERTENCIA
Indica situaciones potencialmente peligrosas que pueden
producir lesiones graves o incluso la muerte.
PRECAUCIÓN
Indica una situación potencialmente peligrosa que puede
producir lesiones leves o moderadas. También puede
utilizarse para alertar contra prácticas no seguras.
AVISO!
Indica información importante, entre la que se incluyen
situaciones que pueden producir daños en el equipo u
otros bienes.
2.2 Personal cualicado
Se precisan un transporte, un almacenamiento, una
instalación, un funcionamiento y un mantenimiento
correctos y ables para que el convertidor de frecuencia
funcione de un modo seguro y sin ningún tipo de
problemas. Este equipo únicamente puede ser manejado o
instalado por personal cualicado.
El personal cualicado es aquel personal formado que está
autorizado para realizar la instalación, la puesta en marcha
y el mantenimiento de equipos, sistemas y circuitos
conforme a la legislación y la regulación vigentes.
Asimismo, el personal debe estar familiarizado con las
instrucciones y medidas de seguridad descritas en esta
guía.
ADVERTENCIA
TENSIÓN ALTA
Los convertidores de frecuencia contienen tensión alta
cuando están conectados a una entrada de red de CA, a
un suministro de CC o a una carga compartida. Si la
instalación, el arranque y el mantenimiento no son
efectuados por personal cualicado, pueden causarse
lesiones graves o incluso la muerte.
La instalación, el arranque y el mantenimiento
•
deben ser realizados exclusivamente por
personal cualicado.
Antes de realizar cualquier trabajo de
•
reparación o mantenimiento, utilice un
dispositivo de medición de tensión adecuado
para asegurarse de que el convertidor de
frecuencia se haya descargado por completo.
ADVERTENCIA
ARRANQUE ACCIDENTAL
Cuando el convertidor de frecuencia se conecta a una
red de CA, a un suministro de CC o a una carga
compartida, el motor puede arrancar en cualquier
momento. Un arranque accidental durante la programación, el mantenimiento o los trabajos de reparación
puede causar la muerte, lesiones graves o daños
materiales. El motor puede arrancar mediante un
conmutador externo, una orden de eldbus, una señal
de referencia de entrada desde el LCP, por funcionamiento remoto mediante el Software de conguración
MCT 10 o tras la eliminación de una condición de fallo.
Para evitar un arranque accidental del motor:
Desconecte el convertidor de frecuencia de la
•
alimentación.
Pulse [O/Reset] en el LCP antes de programar
•
cualquier parámetro.
Debe cablear y montar completamente el
•
convertidor de frecuencia, el motor y cualquier
equipo accionado antes de conectar el
convertidor de frecuencia a la red de CA, al
suministro de CC o a una carga compartida.
MG07A505 Danfoss A/S © 08/2018 Reservados todos los derechos. 7
Seguridad
VLT® Midi Drive FC 280
ADVERTENCIA
TIEMPO DE DESCARGA
22
El convertidor de frecuencia contiene condensadores de
enlace de CC que pueden seguir cargados incluso si el
convertidor de frecuencia está apagado. Puede haber
tensión alta presente aunque las luces del indicador LED
de advertencia estén apagadas. Si, después de
desconectar la alimentación, no espera el tiempo especicado antes de realizar cualquier trabajo de reparación o
tarea de mantenimiento, pueden producirse lesiones
graves o incluso la muerte.
Pare el motor.
•
Desconecte la red de CA y las fuentes de
•
alimentación de enlace de CC remotas, incluidas
las baterías de emergencia, los SAI y las
conexiones de enlace de CC a otros convertidores de frecuencia.
Desconecte o bloquee el motor PM.
•
Espere a que los condensadores se descarguen
•
por completo. El tiempo mínimo de espera se
especica en la Tabla 2.1.
Antes de realizar cualquier trabajo de
•
reparación o mantenimiento, utilice un
dispositivo de medición de tensión adecuado
para asegurarse de que los condensadores se
han descargado por completo.
ADVERTENCIA
PELIGRO DEL EQUIPO
El contacto con ejes en movimiento y equipos eléctricos
puede provocar lesiones graves o la muerte.
Asegúrese de que la instalación, el arranque y
•
el mantenimiento sean realizados únicamente
por personal formado y cualicado.
Asegúrese de que los trabajos eléctricos
•
respeten las normativas eléctricas locales y
nacionales.
Siga los procedimientos indicados en esta guía.
•
PRECAUCIÓN
PELIGRO DE FALLO INTERNO
Si el convertidor de frecuencia no está correctamente
cerrado, un fallo interno en este puede causar lesiones
graves.
Asegúrese de que todas las cubiertas de
•
seguridad estén colocadas y jadas de forma
segura antes de suministrar electricidad.
Tensión [V]
200–240 0,37-3,7 (0,5-5) 4
380–480
Tabla 2.1 Tiempo de descarga
Gama de potencias
[kW (CV)]
0,37-7,5 (0,5-10) 4
11–22 (15–30) 15
Tiempo de espera
mínimo
(minutos)
ADVERTENCIA
PELIGRO DE CORRIENTE DE FUGA
Las corrientes de fuga superan los 3,5 mA. No realizar la
conexión toma a tierra adecuada del convertidor de
frecuencia puede ser causa de lesiones graves e incluso
de muerte.
La correcta conexión a tierra del equipo debe
•
estar garantizada por un instalador eléctrico
certicado.
8 Danfoss A/S © 08/2018 Reservados todos los derechos. MG07A505
130BE616.14
VLT
MADE IN
DENMARK
T/C: FC-280PK37T4E20H1BXCXXXSXXXXAX
0.37kW 0.5HP
IN: 3x380-480V 50/60Hz, 1.2/1.0A
OUT: 3x0-Vin 0-500Hz, 1.2/1.1A
IP20
P/N: 134U2184 S/N: 000000G000
Midi Drive
www.danfoss.com
CAUTION / ATTENTION:
WARNING / AVERTISSEMENT:
See manual for special condition/mains fuse
Voir manual de conditions speciales/fusibles
Enclosure: See manual
5AF3 E358502 IND.CONT.EQ.
Stored charge, wait 4 min.
Charge r
é
siduelle, attendez 4 min.
21
1
2
4
3
5
11
20
19
18
16
15
14
13
10
8
9
6
17
R
US LISTED
www.tuv.com
ID 0600000000
Danfoss A/S, 6430 Nordborg, Denmark
12
7
Instalación mecánica Guía de funcionamiento
3 Instalación mecánica
3.1 Desembalaje
3.1.1 Elementos suministrados
Los elementos suministrados pueden variar en función de
conguración del producto.
la
Asegúrese de que los elementos suministrados y
•
la información de la placa de características se
correspondan con la
Compruebe visualmente el embalaje y el
•
convertidor de frecuencia en busca de daños
provocados por una manipulación inadecuada
durante el envío. En caso de existir daños,
presente la reclamación al transportista y
conserve las piezas dañadas para poder esclarecer
el conicto.
conrmación del pedido.
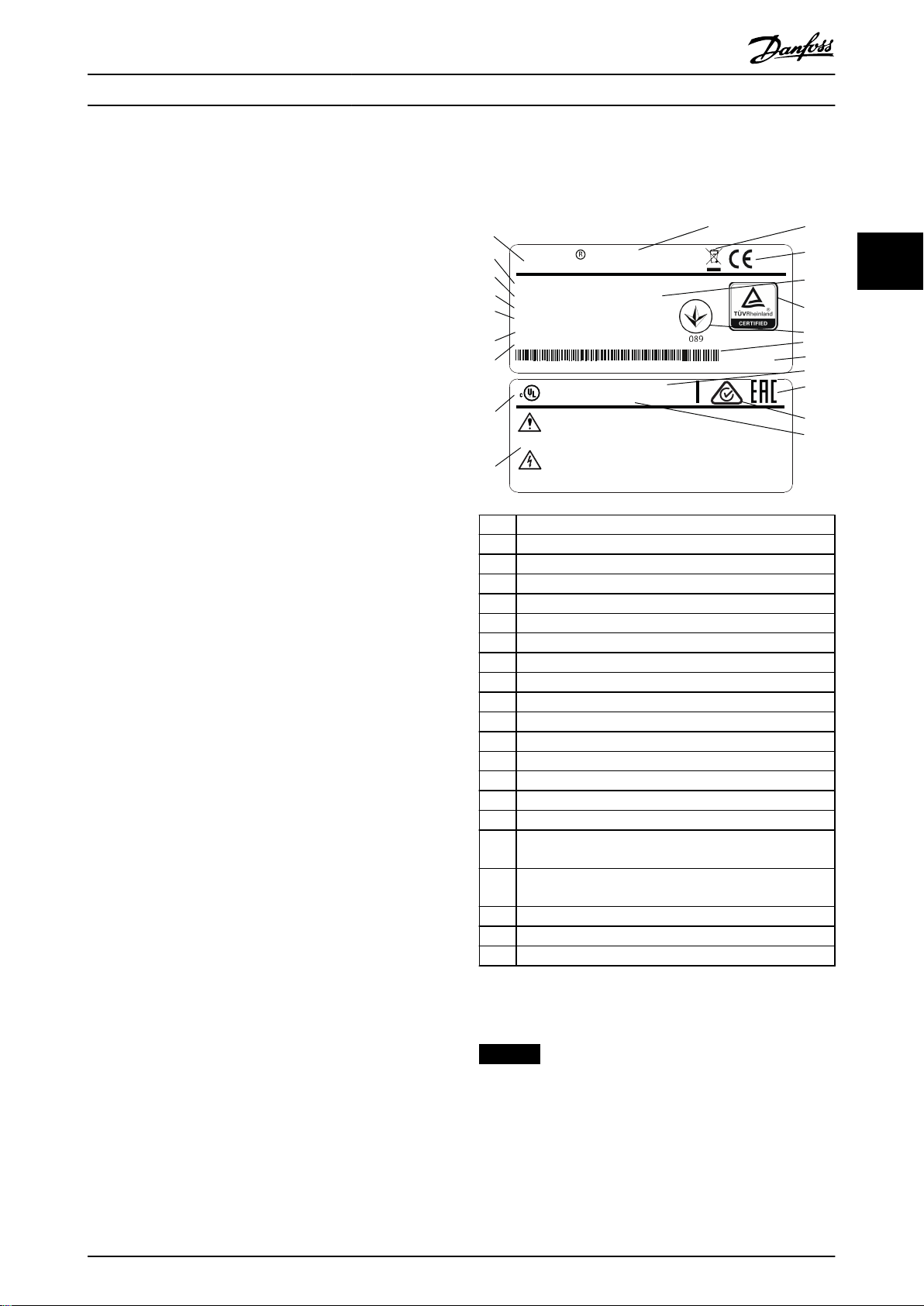
1 Logotipo del producto
2 Nombre del producto
3 Eliminación
4 Marcado CE
5 Número de serie
6 Logotipo de TÜV
7 Logotipo de UkrSEPRO
8 Código de barras
9 País de origen
10 Referencia del tipo de alojamiento
11 Logotipo de EAC
12 Logotipo de RCM
13 Referencia de UL
14 Especicaciones de advertencia
15 Logotipo de UL
16 Clasicación IP
Corriente, frecuencia y tensión de salida (con tensión
17
baja/alta)
Corriente, frecuencia y tensión de entrada (con tensión
18
baja/alta)
19 Potencia de salida
20 Número de pedido
21 Código descriptivo
3 3
MG07A505 Danfoss A/S © 08/2018 Reservados todos los derechos. 9
Ilustración 3.1 Placa de características del producto (ejemplo)
AVISO!
No retire la placa de características del convertidor de
frecuencia (pérdida de la garantía).
Si desea obtener más información sobre el código
descriptivo, consulte el capítulo «Código descriptivo» en
la Guía de diseño del VLT® Midi Drive FC 280.
130BE615.12
Instalación mecánica
VLT® Midi Drive FC 280
3.1.2 Almacenamiento
Asegúrese de que se cumplen los requisitos de almacenamiento. Consulte el capétulo 9.4 Condiciones ambientales
para obtener más información.
33
3.2 Entorno de instalación
AVISO!
En entornos con líquidos, partículas o gases corrosivos
transmitidos por el aire, asegúrese de que la clasicación
IP / de tipo del equipo se corresponde con el entorno de
instalación. No cumplir los requisitos de las condiciones
ambientales puede reducir la vida útil del convertidor de
frecuencia. Asegúrese de que se cumplan todos los
requisitos de humedad atmosférica, temperatura y
altitud.
Vibración y golpes
El convertidor de frecuencia cumple los requisitos relativos
a estas condiciones cuando se monta en las paredes y
suelos de instalaciones de producción o en paneles atornillados a paredes o suelos.
Para obtener información detallada sobre las especica-
ciones de las condiciones ambientales, consulte el
capétulo 9.4 Condiciones ambientales.
Montaje
3.3
Montaje
Para adaptar los agujeros de montaje del VLT® Midi Drive
FC 280, póngase en contacto con el proveedor local de
Danfoss y encargue una placa posterior independiente.
Para montar el convertidor de frecuencia:
1. Asegúrese de que el lugar donde va a realizar el
montaje soportará el peso de la unidad. El
convertidor de frecuencia permite la instalación
lado a lado.
2. Coloque la unidad lo más cerca posible del
motor. Los cables del motor deben ser lo más
cortos que sea posible.
3. Monte la unidad de modo vertical en una
supercie plana sólida o en la placa posterior
opcional para proporcionar un ujo de aire de
refrigeración.
4. Cuando disponga de ellos, utilice los agujeros de
montaje ranurados de la unidad para el montaje
en pared.
AVISO!
Para obtener las dimensiones de los agujeros de
montaje, consulte el capétulo 9.9 Tamaños de las protec-
ciones, potencias de salida y dimensiones.
3.3.1 Montaje lado a lado
AVISO!
Un montaje incorrecto puede provocar un sobrecalentamiento y disminuir el rendimiento.
Refrigeración
Asegúrese de que exista un espacio libre de 100
•
mm (3,9 in) por encima y por debajo para la
refrigeración por aire.
Elevación
Para determinar un método de elevación seguro,
•
compruebe el peso de la unidad. Consulte el
capétulo 9.9 Tamaños de las protecciones, potencias
de salida y dimensiones.
Asegúrese de que el dispositivo de izado es
•
idóneo para la tarea.
Si fuera necesario, busque una grúa o carretilla
•
elevadora adecuada para mover la unidad.
Utilice los cáncamos de elevación para el izado
•
de la unidad, en caso de que los haya.
Instalación lado a lado
Todas las unidades VLT® Midi Drive FC 280 pueden
instalarse una al lado de la otra, en posición vertical u
horizontal. Estas unidades no requieren de un espacio
añadido para ventilación en los laterales.
Ilustración 3.2 Montaje lado a lado
10 Danfoss A/S © 08/2018 Reservados todos los derechos. MG07A505
130BF642.10
G
130BF643.10
G
Instalación mecánica Guía de funcionamiento
AVISO!
RIESGO DE SOBRECALENTAMIENTO
Si se utiliza el kit de conversión IP21, la instalación de las
unidades una al lado de la otra podría generar un
sobrecalentamiento y daños en la unidad.
Se requiere una separación de al menos 30 mm
•
(1,2 in) entre los bordes de la tapa superior del
kit de conversión IP21.
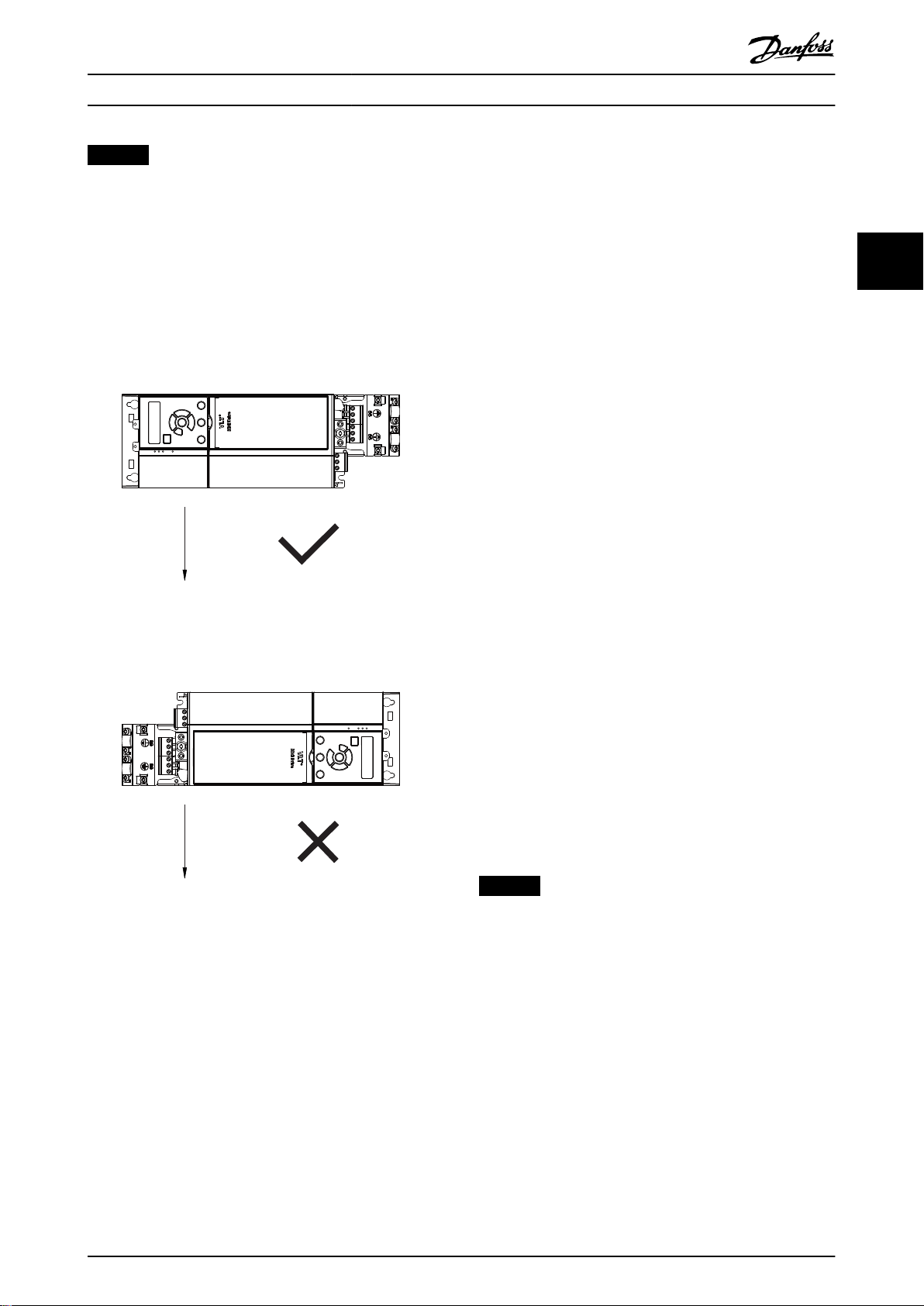
3.3.2 Montaje horizontal
Ilustración 3.3 Colocación correcta del montaje
horizontal (lado izquierdo hacia abajo)
3.3.3 Kit de desacoplamiento de bus
El kit de desacoplamiento de bus garantiza la jación
mecánica y el apantallamiento eléctrico de los cables en
las siguientes variantes de cartucho de control:
Cartucho de control con PROFIBUS.
•
Cartucho de control con PROFINET.
•
Cartucho de control con CANOpen.
•
Cartucho de control con Ethernet.
•
Cartucho de control con POWERLINK.
•
Cada kit de desacoplamiento de bus contiene una placa de
desacoplamiento horizontal y una placa de desacoplamiento vertical. El montaje de la placa de desacoplamiento
vertical es opcional. La placa de desacoplamiento vertical
ofrece un mejor soporte mecánico para los terminales y
cables de las opciones PROFINET, Ethernet y POWERLINK.
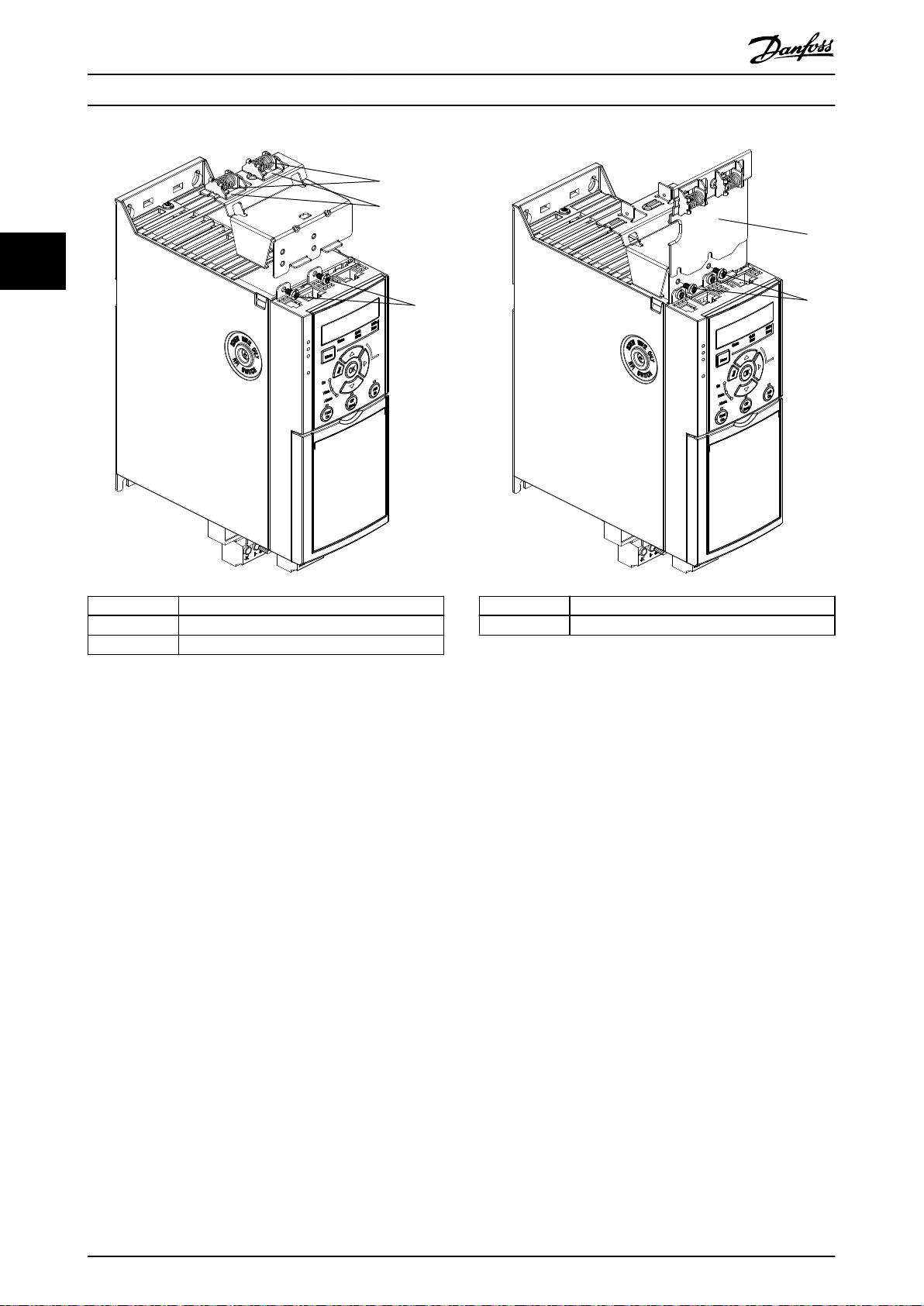
3.3.4 Montaje
Para montar el kit de desacoplamiento de bus:
1. Coloque la placa de desacoplamiento horizontal
sobre el cartucho de control montado en el
convertidor de frecuencia y fíjela con dos
tornillos, como se muestra en la Ilustración 3.5. El
par de apriete es de 0,7-1,0 Nm (6,2-8,9 in-lb).
2. Opcional: monte la placa de desacoplamiento
vertical de la siguiente manera:
2a Retire los dos muelles mecánicos y las
dos bridas metálicas de la placa
horizontal.
2b Monte los muelles mecánicos y las
bridas metálicas en la placa vertical.
2c Fije la placa con dos tornillos, como se
muestra en la Ilustración 3.6. El par de
apriete es de 0,7-1,0 Nm (6,2-8,9 in-lb).
3 3
Ilustración 3.4 Colocación incorrecta del montaje
horizontal (lado derecho hacia abajo)
MG07A505 Danfoss A/S © 08/2018 Reservados todos los derechos. 11
Si se utiliza la tapa superior IP21, no monte la placa de
desacoplamiento vertical, ya que su altura afecta a la
correcta instalación de la tapa superior IP21.
AVISO!
1
2
3
130BE480.10
130BE481.10
1
2
Instalación mecánica
VLT® Midi Drive FC 280
33
1 Muelles mecánicos
2 Bridas metálicas
3 Tornillos
Ilustración 3.5 Fije la placa de desacoplamiento horizontal con
tornillos
1 Placa de desacoplamiento vertical
2 Tornillos
Ilustración 3.6 Fije la placa de desacoplamiento vertical con
tornillos
Tanto la Ilustración 3.5 como la Ilustración 3.6 muestran
terminales (RJ45) basados en Ethernet. El tipo de terminal
concreto dependerá de la variante de eldbus seleccionada
en el convertidor de frecuencia.
3. Asegúrese de realizar un cableado adecuado de
los cables de
eldbus (PROFIBUS/CANOpen) o
introduzca los prensacables (RJ45 para PROFINET/
POWERLINK/Ethernet/IP) en los conectores del
cartucho de control.
4. 4a Coloque los cables de PROFIBUS/
CANOpen entre las bridas metálicas con
muelle para establecer una jación
mecánica y contacto eléctrico entre las
secciones apantalladas de los cables y
las bridas.
4b Coloque los cables de PROFINET/
POWERLINK/Ethernet/IP entre las bridas
metálicas con muelle para establecer
una jación mecánica entre los cables y
las bridas.
12 Danfoss A/S © 08/2018 Reservados todos los derechos. MG07A505
Instalación eléctrica Guía de funcionamiento
4 Instalación eléctrica
4.1 Instrucciones de seguridad
Consulte el capétulo 2 Seguridad para conocer las instrucciones generales de seguridad.
ADVERTENCIA
TENSIÓN INDUCIDA
La tensión inducida desde los cables de motor de salida
de diferentes convertidores de frecuencia que están
juntos puede cargar los condensadores del equipo,
incluso aunque este esté apagado y bloqueado. Si no se
colocan los cables de motor de salida separados o no se
utilizan cables apantallados, pueden producirse lesiones
graves o incluso la muerte.
Coloque los cables de motor de salida por
•
separado.
Utilice cables apantallados.
•
Bloquee todos los convertidores de frecuencia
•
de forma simultánea.
ADVERTENCIA
RIESGO DE DESCARGA
El convertidor de frecuencia puede generar una
intensidad de CC en el conductor de conexión a tierra y
producir lesiones graves o incluso la muerte.
Cuando se utilice un dispositivo de protección
•
de corriente residual (RCD) como protección
antidescargas eléctricas, este solo podrá ser de
tipo B en el lado de la fuente de alimentación.
Si no se respeta la recomendación, el RCD no proporcionará la protección prevista.
Protección de sobreintensidad
En aplicaciones con varios motores, es necesario
•
un equipo de protección adicional entre el
convertidor de frecuencia y el motor, como
protección contra cortocircuitos o protección
térmica del motor.
Es necesario un fusible de entrada para propor-
•
cionar protección contra cortocircuitos y
sobreintensidad. Si no vienen instalados de
fábrica, los fusibles deben ser suministrados por
el instalador. Consulte las clasicaciones máximas
de los fusibles en el capétulo 9.8 Fusibles y
magnetotérmicos.
Tipo de cable y clasicaciones
Todos los cableados deben cumplir las normas
•
nacionales y locales sobre los requisitos de
sección transversal y temperatura ambiente.
Recomendación de conexión de cable de alimen-
•
tación: cable de cobre con una temperatura
nominal mínima de 75 °C (167 °F).
Consulte el capétulo 9.5 Especicaciones del cable para
obtener información sobre los tamaños y tipos de cable
recomendados.
4.2 Instalación conforme a CEM
Para conseguir una instalación conforme a CEM, siga las
instrucciones que se proporcionan en el
capétulo 4.3 Conexión a tierra, capétulo 4.4 Esquema de
cableado, capétulo 4.6 Conexión del motor, y en el
capétulo 4.8 Cableado de control.
4.3 Conexión a tierra
ADVERTENCIA
PELIGRO DE CORRIENTE DE FUGA
Las corrientes de fuga superan los 3,5 mA. No efectuar
una conexión toma a tierra correcta del convertidor de
frecuencia podría ser causa de lesiones graves e incluso
muerte.
La correcta conexión a tierra del equipo debe
•
estar garantizada por un instalador eléctrico
certicado.
Para seguridad eléctrica
Conecte a tierra el convertidor de frecuencia
•
según las normas y directivas vigentes.
Utilice un cable de conexión toma a tierra
•
especíco para el cableado de control, de la
alimentación de entrada y de la potencia del
motor.
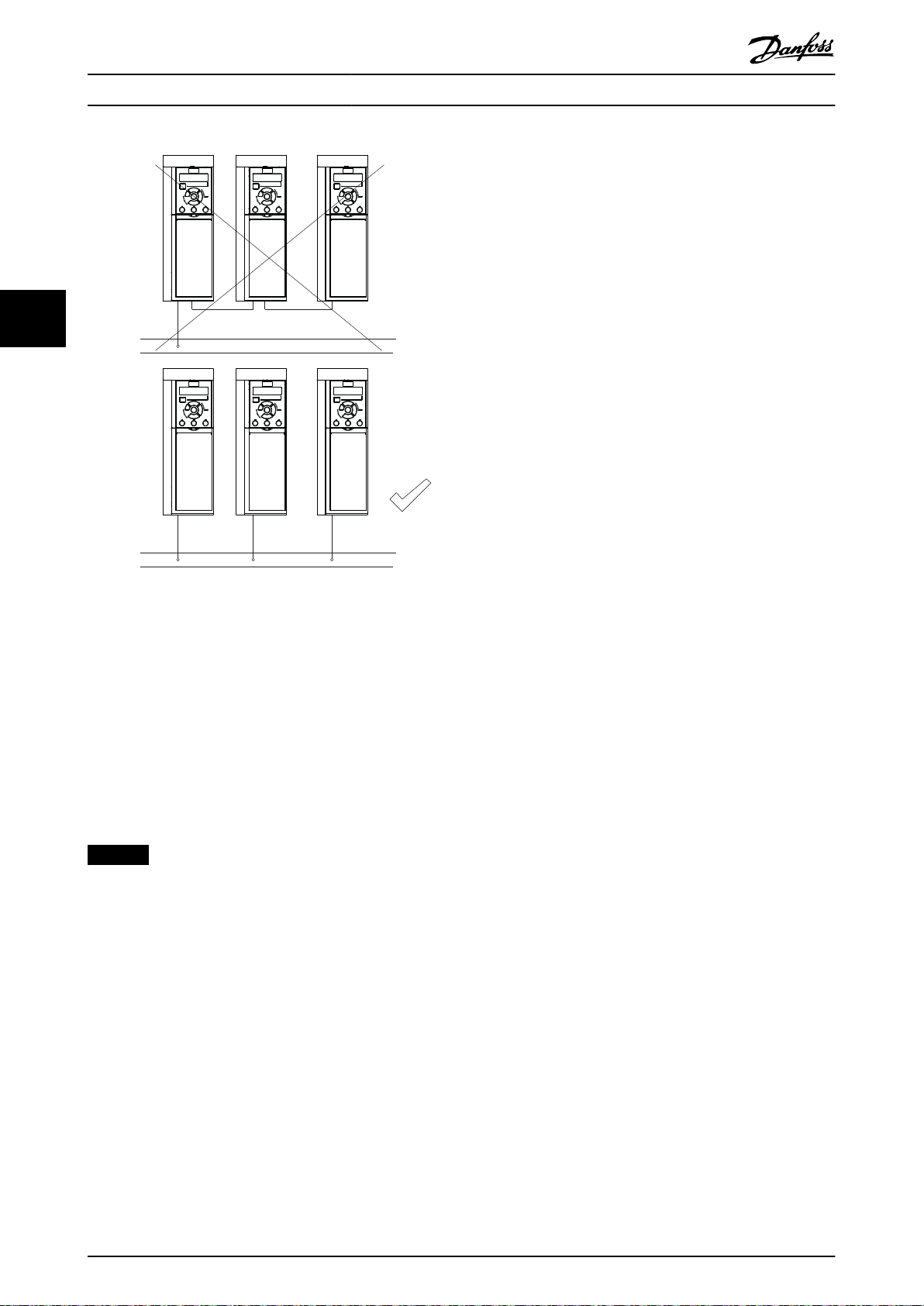
No conecte a tierra un convertidor de frecuencia
•
unido a otro en un sistema de cadena (consulte
la Ilustración 4.1).
Los cables de conexión toma a tierra deben ser lo
•
más cortos posible.
Observe los requisitos de cableado del fabricante
•
del motor.
Sección transversal mínima de los cables de
•
conexión toma a tierra: 10 mm2 (7 AWG).
Termine por separado dos cables de conexión
•
toma a tierra que cumplan con los requisitos de
longitud.
4 4
MG07A505 Danfoss A/S © 08/2018 Reservados todos los derechos. 13
130BC500.10
FC 1
FC 1
FC 2
FC 2
FC 3
FC 3
PE
PE
Instalación eléctrica
VLT® Midi Drive FC 280
44
Ilustración 4.1 Principio de conexión a tierra
Para una instalación conforme a CEM
Establezca contacto eléctrico entre el apantalla-
•
miento de cables y el alojamiento del convertidor
de frecuencia mediante prensacables metálicos o
con las bridas suministradas con el equipo
(consulte el capétulo 4.6 Conexión del motor).
Utilice un cable con muchos lamentos para
•
reducir los transitorios de ráfagas.
No utilice cables de pantalla retorcidos y
•
embornados.
AVISO!
ECUALIZACIÓN POTENCIAL
Existe un riesgo de transitorios de ráfagas cuando el
potencial de conexión toma a tierra entre el convertidor
de frecuencia y el sistema de control es diferente. Instale
cables de ecualización entre los componentes del
sistema. Sección transversal del cable recomendada:
16 mm2 (6 AWG).
14 Danfoss A/S © 08/2018 Reservados todos los derechos. MG07A505
Power
input
Switch mode
power supply
Motor
Analog output
interface
(PNP) = Source
(NPN) = Sink
ON = Terminated
OFF = Open
Brake
resistor
91 (L1/N)
92 (L2/L)
93 (L3)
PE
50 (+10 V OUT)
53 (A IN)
2)
54 (A IN)
55 (COM digital/analog I/O)
0/4−20 mA
12 (+24 V OUT)
13 (+24 V OUT)
18 (D IN)
10 V DC
15 mA 100 mA
+ - + -
(U) 96
(V) 97
(W) 98
(PE) 99
(A OUT) 42
(P RS485) 68
(N RS485) 69
(COM RS485) 61
0 V
5 V
S801
0/4−20 mA
RS485
RS485
03
+10 V DC
0−10 V DC
24 V DC
02
01
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
19 (D IN)
24 V (NPN)
0 V (PNP)
17 V
0 V
0 V (PNP)
24 V (NPN)
29 (D IN)
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
33 (D IN)
32 (D IN)
38 (STO2)
4)
37 (STO1)
4)
95
P 5-00
21
ON
(+DC/R+) 89
(R-) 81
0−10 V DC
(-DC) 88
RFI
0 V
250 V AC, 3 A
Relay 1
1)
3)
5)
5)
130BE202.19
27 (D IN/OUT)
6)
Instalación eléctrica Guía de funcionamiento
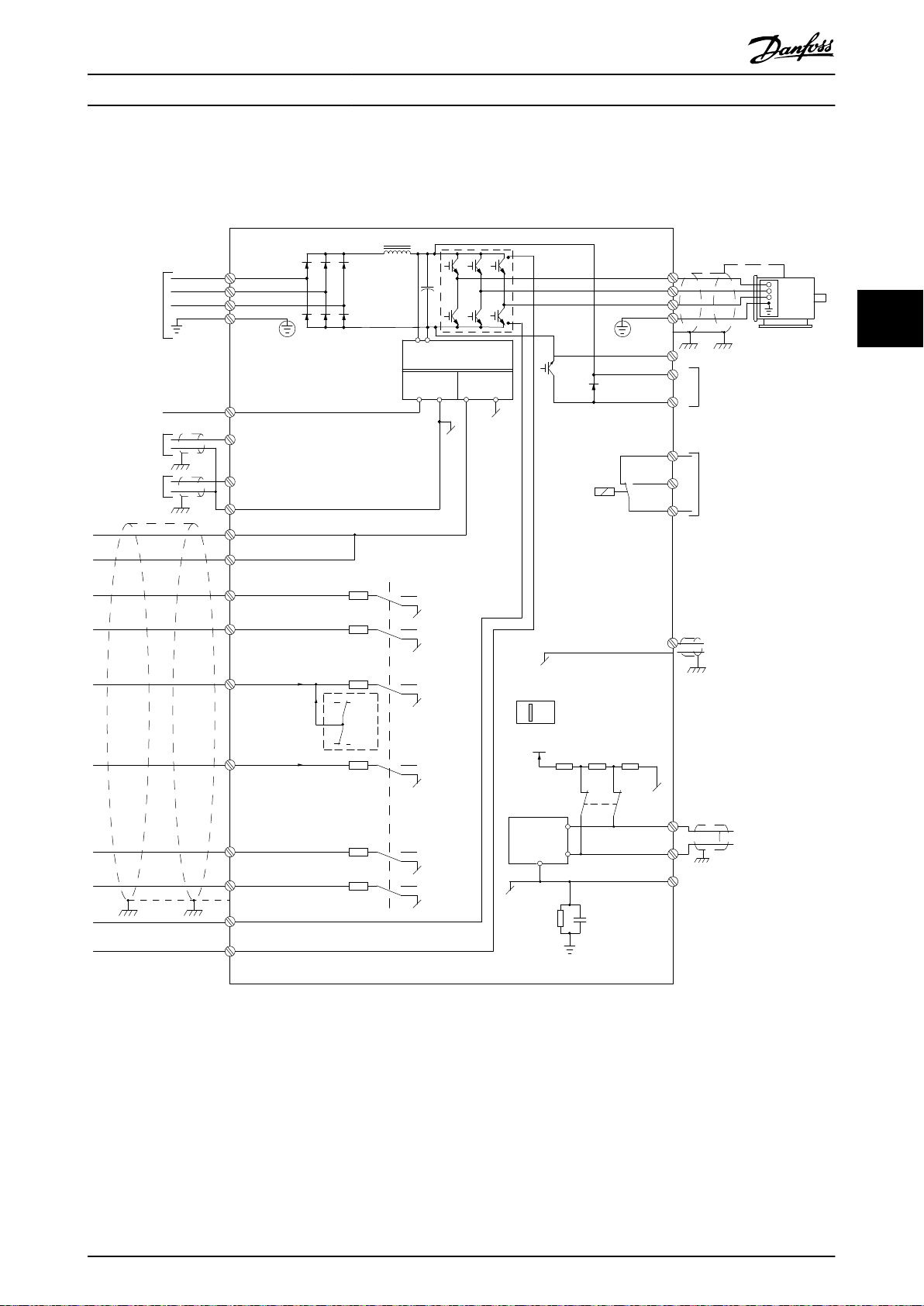
4.4 Esquema de cableado
En esta sección se describe cómo cablear el convertidor de frecuencia.
4 4
Ilustración 4.2 Dibujo esquemático del cableado básico
A = analógico, D = digital
1) El chopper de frenado integrado solo está disponible en las unidades trifásicas.
2) El terminal 53 también puede utilizarse como entrada digital.
3) El conmutador S801 (terminal de bus) se puede utilizar para activar la terminación del puerto RS485 (terminales 68 y 69).
4) Consulte el capétulo 6 Safe Torque O (STO) para comprobar el cableado correcto de la desconexión segura de par.
5) El convertidor de frecuencia S2 (monofásico, 200-240 V) no admite la aplicación de carga compartida.
6) La tensión máxima es 17 V para el terminal 27 como salida analógica.
MG07A505 Danfoss A/S © 08/2018 Reservados todos los derechos. 15
e30bf228.11
L1
L2
L3
PE
PE
u
v
w
2
1
3
5
16
17
18
14
12
8
7
10
9
4
11
13
4
6
15
90
4
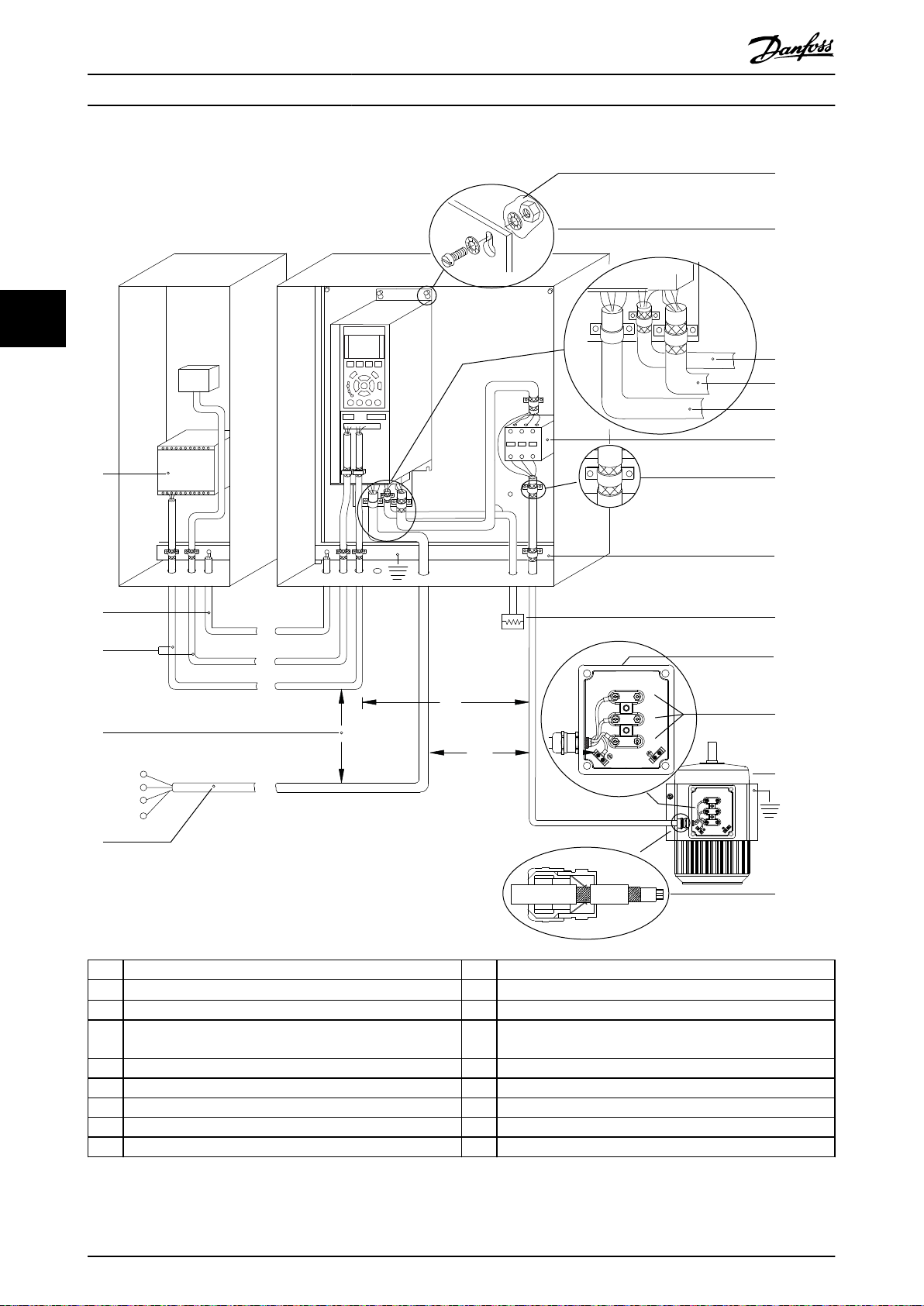
Instalación eléctrica
VLT® Midi Drive FC 280
44
1 PLC 10 Cable de red (no apantallado)
2
Cable de ecualizador de un mínimo de 16 mm2 (6 AWG)
3 Cables de control 12 Aislamiento de cable pelado
4 Espacio mínimo de 200 mm (7,87 in) entre los cables de
control, de motor y de red.
5 Fuente de alimentación de red 14 Resistencia de frenado
6 Supercie no aislada (sin pintar) 15 Caja metálica
7 Arandelas de estrella 16 Conexión al motor
8 Cable de freno (apantallado) 17 Motor
9 Cable de motor (apantallado) 18 Prensacables CEM
Ilustración 4.3 Conexión eléctrica típica
11 Contactor de salida y otros.
13 Barra conductora de tierra a común. Siga las normativas
locales y nacionales para la conexión a tierra de alojamientos.
16 Danfoss A/S © 08/2018 Reservados todos los derechos. MG07A505
130BC504.11
130BD531.10
U
V
W
96
97
98
Instalación eléctrica Guía de funcionamiento
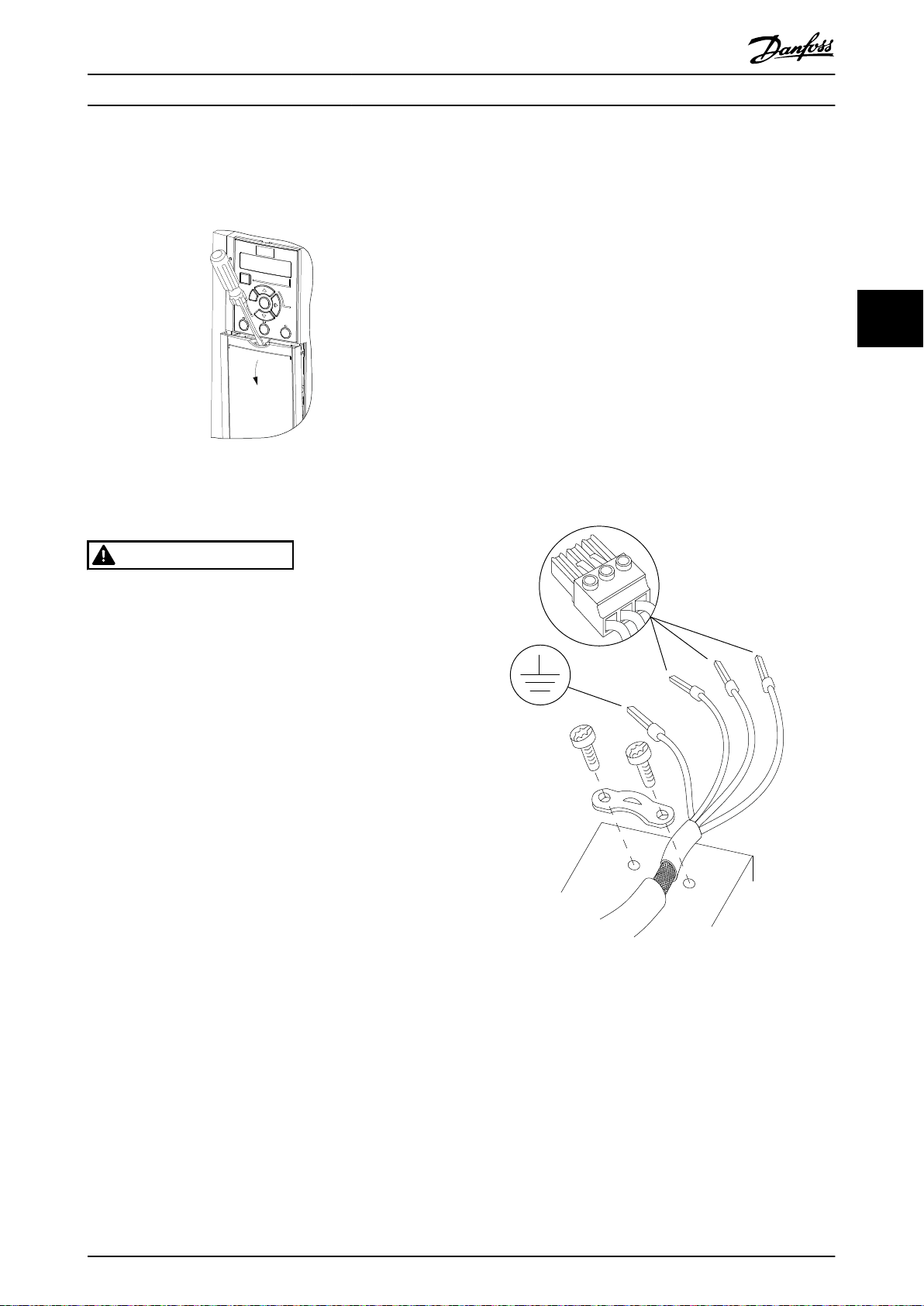
4.5 Acceso
Retire la placa protectora con un destornillador.
•
Consulte el Ilustración 4.4.
Ilustración 4.4 Acceso al cableado de control
4.6 Conexión del motor
ADVERTENCIA
TENSIÓN INDUCIDA
La tensión inducida desde los cables de motor de salida
que están juntos puede cargar los condensadores del
equipo, incluso si este está apagado y bloqueado. No
colocar los cables del motor de salida separados o no
utilizar cables apantallados puede provocar lesiones
graves o incluso la muerte.
Procedimiento
1. Pele una sección del aislamiento del cable
exterior.
2. Coloque el cable pelado bajo la abrazadera de
cables para establecer una jación mecánica y un
contacto eléctrico entre los cables apantallados y
la conexión toma a tierra.
3. Conecte el cable de conexión toma a tierra al
terminal de conexión a tierra más cercano, según
las instrucciones de conexión a tierra que
aparecen en el capétulo 4.3 Conexión a tierra.
Consulte el Ilustración 4.5.
4. Conecte el cableado del motor trifásico a los
terminales 96 (U), 97 (V) y 98 (W), como se
muestra en la Ilustración 4.5.
5. Apriete los terminales conforme a la información
suministrada en el capétulo 9.7 Pares de apriete de
conexión.
4 4
Coloque los cables de motor de salida por
•
separado.
utilice cables apantallados.
•
Cumpla los códigos eléctricos locales y nacionales
•
en las dimensiones de los cables. Consulte las
dimensiones máximas del cable en el
capétulo 9.1 Datos eléctricos.
Observe los requisitos de cableado del fabricante
•
del motor.
En la base de las unidades IP21/Tipo 1, se
•
suministran troqueles o paneles de acceso para el
cableado del motor.
No conecte un dispositivo de arranque o de
•
cambio de polaridad (por ejemplo, un motor
Dahlander o un motor de inducción de anillo
colector) entre el convertidor de frecuencia y el
motor.
Ilustración 4.5 Conexión del motor
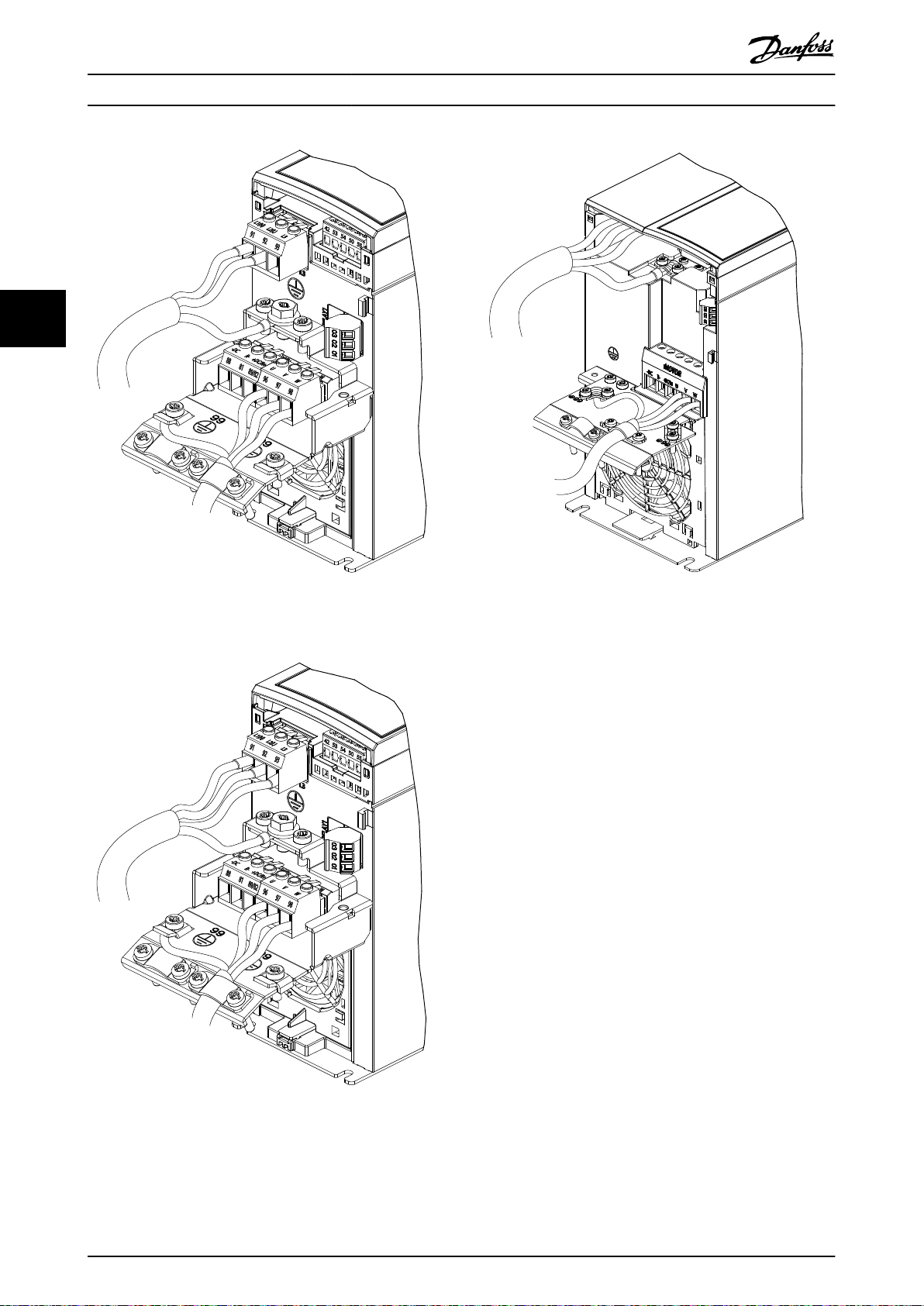
La alimentación, el motor y la conexión a tierra para
convertidores de frecuencia trifásicos y monofásicos se
muestran en la Ilustración 4.6, la Ilustración 4.7 y la
Ilustración 4.8, respectivamente. Las conguraciones reales
pueden variar según los tipos de unidades y el equipo
opcional.
MG07A505 Danfoss A/S © 08/2018 Reservados todos los derechos. 17
130BE232.11
130BE231.11
130BE804.10
Instalación eléctrica
VLT® Midi Drive FC 280
44
Ilustración 4.6 Conexión a tierra, de alimentación y de motor
para unidades monofásicas
Ilustración 4.7 La alimentación, el motor y la conexión a tierra
para unidades trifásicas (K1, K2 y K3)
Ilustración 4.8 La alimentación, el motor y la conexión a tierra
para unidades trifásicas (K4 y K5)
Conexión de red de CA
4.7
Calcule el tamaño del cableado a partir de la
•
intensidad de entrada del convertidor de
frecuencia. Consulte los tamaños máximos de
cable en el capétulo 9.1 Datos eléctricos.
Cumpla los códigos eléctricos locales y nacionales
•
en las dimensiones de los cables.
Procedimiento
1. Conecte los cables de alimentación de entrada de
CA a los terminales N y L en unidades
monofásicas (consulte la Ilustración 4.6) o a los
terminales L1, L2 y L3 en unidades trifásicas
(consulte la Ilustración 4.7).
2. En función de la conguración del equipo,
conecte la alimentación de entrada a los
terminales de entrada de alimentación o al
dispositivo de desconexión de entrada.
3. Conecte a tierra el cable según las instrucciones
de conexión a tierra disponibles en el
capétulo 4.3 Conexión a tierra.
4. Si la alimentación proviene de una fuente de red
aislada (red eléctrica IT o en triángulo) o de redes
TT/TN-S con toma de tierra (triángulo conectado
a tierra), asegúrese de que se haya retirado el
tornillo del ltro RFI. Retirando dicho tornillo, se
evitarán daños en el enlace de CC y se reducirá la
18 Danfoss A/S © 08/2018 Reservados todos los derechos. MG07A505
130BE212.10
1 2
3
130BE214.10
37 38 12 13 18 19 27 29 32 33 61
42 53 54 50 55
68 69
1
3
2
Instalación eléctrica Guía de funcionamiento
corriente capacitiva a tierra según la norma CEI
61800-3 (consulte la Ilustración 9.2; el tornillo de
RFI está ubicado en la pared lateral del
convertidor de frecuencia).
4.8 Cableado de control
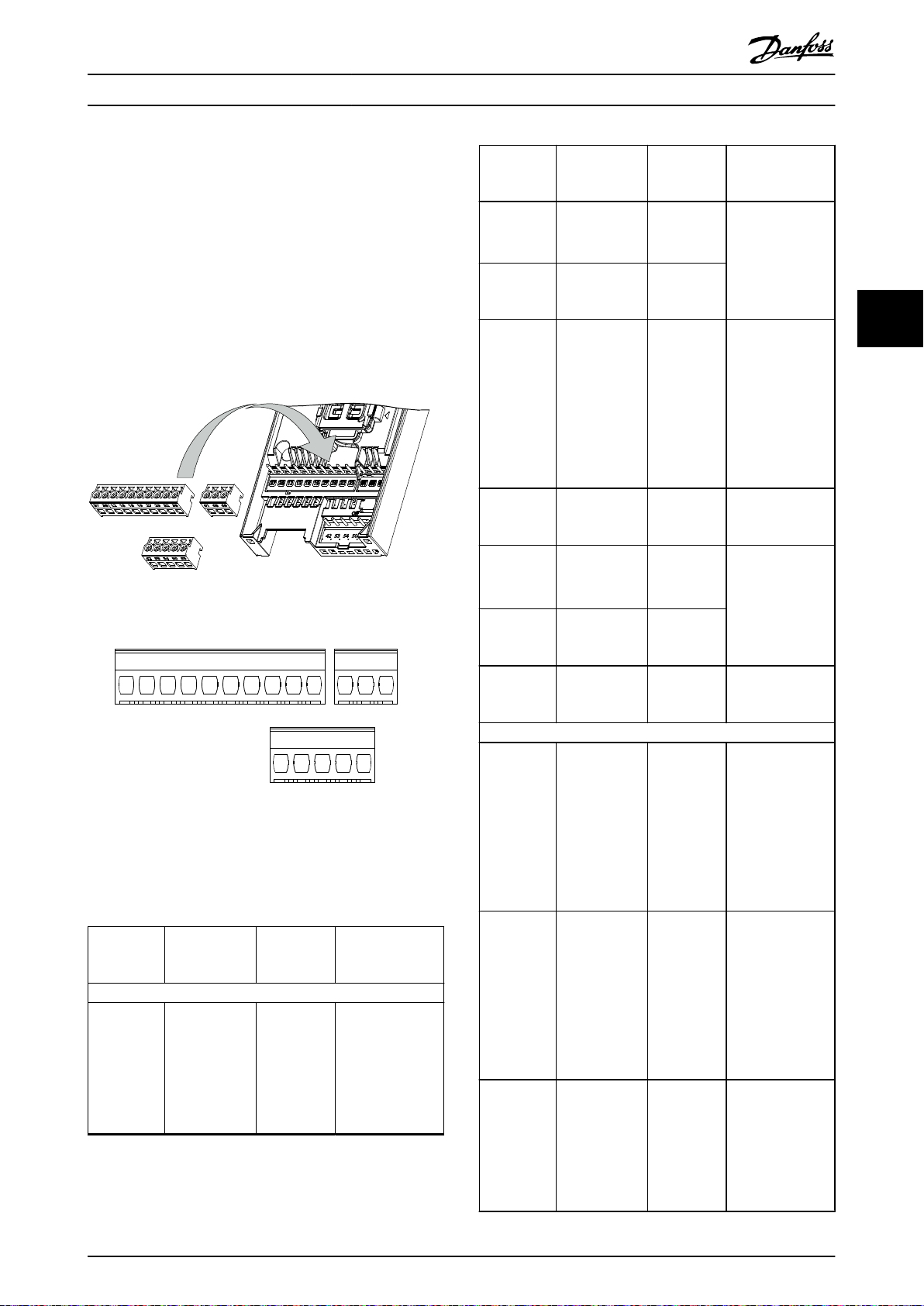
4.8.1 Tipos de terminal de control
La Ilustración 4.9 muestra los terminales extraíbles del
convertidor de frecuencia. Las funciones de los terminales
y los ajustes predeterminados están resumidos en la
Tabla 4.1 y en la Tabla 4.2.
Ilustración 4.9 Ubicaciones de los terminales de control
Ilustración 4.10 Números de los terminales
Consulte el capétulo 9.6 Entrada/salida de control y datos de
control para obtener mas información sobre la clasicación
de los terminales.
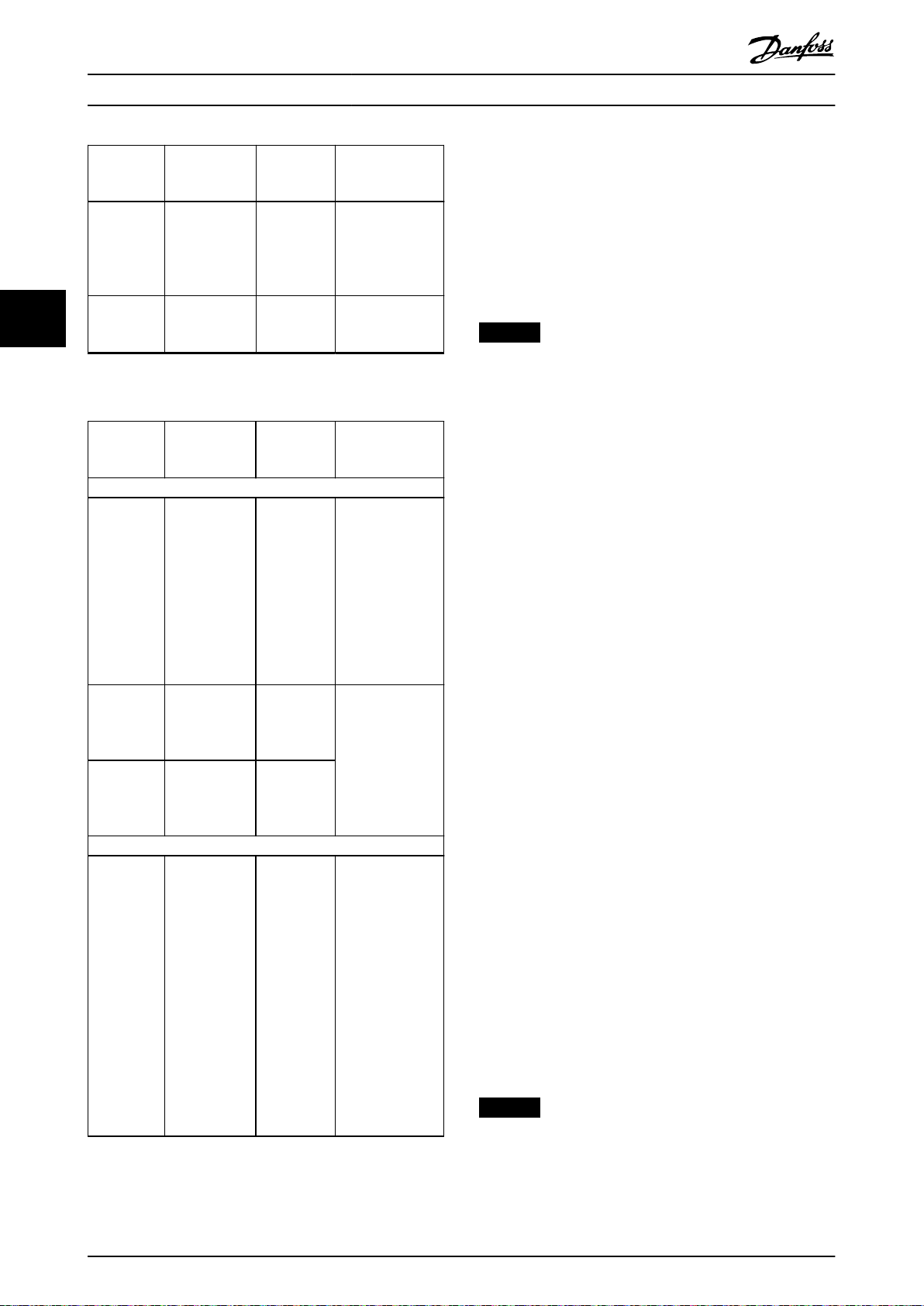
Terminal Parámetro
I/O digitales, I/O de pulsos, encoder
12, 13 – +24 V CC
predeter-
Ajustes
minados
Descripción
Suministro externo
de 24 V CC. La
intensidad de
salida máxima es
de 100 mA para
todas las cargas
de 24 V.
Terminal Parámetro
Parámetro 5-10
18
19
27
29
32
33
37, 38 – STO
42
50 – +10 V CC
53
Terminal 18
Entrada digital
Parámetro 5-11
Terminal 19
entrada digital
Parámetro 5-01
Terminal 27
modo E/S
Parámetro 5-12
Terminal 27
Entrada digital
Parámetro 5-30
Terminal 27
salida digital
Parámetro 5-13
Terminal 29
Entrada digital
Parámetro 5-14
Terminal 32
entrada digital
Parámetro 5-15
Terminal 33
entrada digital
Entradas/salidas analógicas
Parámetro 6-91
Terminal 42
salida analógica
Grupo de
parámetros 6-1*
Entrada
analógica 53
[8] Arranque
[10] Cambio
sentido
Entrada
digital [2]
Inercia
Salida digital
[0] Sin
función
[14]
Velocidad ja
[0] Sin
función
[0] Sin
función
[0] Sin
función
Ajustes
predeter-
minados
–
Descripción
Entradas digitales.
4 4
Se puede
seleccionar como
entrada digital,
salida digital o
salida de impulsos.
El ajuste predeterminado es entrada
digital.
Entrada digital.
Entrada digital,
encoder de 24 V.
El terminal 33
puede usarse
como entrada de
pulsos.
Entradas de
seguridad
funcional.
Salida analógica
programable. La
señal analógica es
de 0-20 mA o
4-20 mA a un
máximo de 500 Ω.
También puede
congurarse como
salida digital.
Tensión de alimentación analógica
de 10 V CC. Se
utiliza
normalmente un
máximo de 15 mA
para un
potenciómetro o
termistor.
Entrada analógica.
Solo el modo
tensión es
compatible.
También puede
utilizarse como
entrada digital.
MG07A505 Danfoss A/S © 08/2018 Reservados todos los derechos. 19
Instalación eléctrica
VLT® Midi Drive FC 280
Ajustes
Terminal Parámetro
Grupo de
54
44
55 – –
parámetros 6-2*
Entrada
analógica 54
predeter-
minados
–
Descripción
Entrada analógica.
Seleccionable
entre el modo
tensión o el modo
intensidad.
Común para
entradas digitales
y analógicas.
4.8.2 Cableado a los terminales de control
Los prensacables del terminal de control pueden
desconectarse del convertidor de frecuencia para facilitar la
instalación, tal y como se muestra en la Ilustración 4.9.
Para obtener detalles sobre el cableado de STO, consulte el
capétulo 6 Safe Torque O (STO).
AVISO!
Mantenga los cables de control tan cortos como sea
Tabla 4.1 Descripciones de los terminales: entradas/salidas
digitales, entradas/salidas analógicas
Ajustes
Terminal Parámetro
Comunicación serie
61 – –
Grupo de
68 (+)
69 (-)
01, 02, 03
Tabla 4.2 Descripciones de terminales: comunicación serie
parámetros 8-3*
Ajuste puerto
FC
Grupo de
parámetros 8-3*
Ajuste puerto
FC
Parámetro 5-40
Relé de función
predeterminados
–
–
Relés
[1] Ctrl prep.
Descripción
Filtro RC integrado
para el apantallamiento de cables.
SOLO para
conectar el
apantallamiento
cuando se
produzcan
problemas de
CEM.
Interfaz RS485. El
conmutador de la
tarjeta de control
se suministra para
la resistencia de
terminación.
Salida de relé en
forma de C. Estos
relés se
encuentran en
diferentes
ubicaciones en
función de la
conguración y el
tamaño del
convertidor de
frecuencia. Se
utiliza para tensión
de CA o CC y
cargas resistivas o
inductivas.
posible y sepárelos de los cables de alimentación de alta
potencia para reducir al mínimo las interferencias.
1. Aoje los tornillos de los terminales.
2. Inserte cables de control encamisados en las
ranuras.
3. Apriete los tornillos de los terminales.
4. Asegúrese de que el contacto esté bien sujeto y
no esté suelto. Un cableado de control suelto
puede ser la causa de fallos en el equipo o de un
funcionamiento deciente.
Consulte el capétulo 9.5 Especicaciones del cable para
conocer las dimensiones de los cables de los terminales de
control y el capétulo 7 Ejemplos de aplicaciones para
conocer las conexiones habituales de los cables de control.
4.8.3 Activación del funcionamiento del
motor (terminal 27)
Se necesita un puente entre el terminal 12 (o 13) y el 27
para que el convertidor de frecuencia funcione cuando
utilice valores de programación ajustados en fábrica.
El terminal de entrada digital 27 está diseñado
•
para recibir una orden de parada externa de
24 V CC.
Cuando no se utiliza un dispositivo de enclava-
•
miento, conecte un puente desde el terminal de
control 12 (recomendado) o el 13 al terminal 27.
Dicho puente genera una señal interna de 24 V
en el terminal 27.
Solo para GLCP: Cuando en la línea de estado de
•
la parte inferior del LCP aparece INERCIA REMOTA
AUTOMÁTICA, esto indica que la unidad está lista
para funcionar pero que falta una señal de
entrada en el terminal 27.
AVISO!
UNABLE TO START («Arranque imposible»)
El convertidor de frecuencia no puede funcionar sin una
señal en el terminal 27, a menos que este se reprograme.
20 Danfoss A/S © 08/2018 Reservados todos los derechos. MG07A505
Start Current
2)
Only support in some products.
1)
DC injection current during “Active Brake Delay” after MAV reduced to “0” . Only support in some products.
Off
On
Off
Relay
/
DO Status
Active Brake Delay
Active Brake Delay
MAV
Start Speed
Active Brake Speed
0
t
Start Delay
Off
On
Off
Start Command
Released
Activated
Reaction time of
mech
.
brake
Reaction time of
mech
.
brake
Mech
.
Brake Status
Release Brake Current
Output Current
DC Injection Current
1)
0
t
130BF687.10
Activated
Note:
2)
Instalación eléctrica Guía de funcionamiento
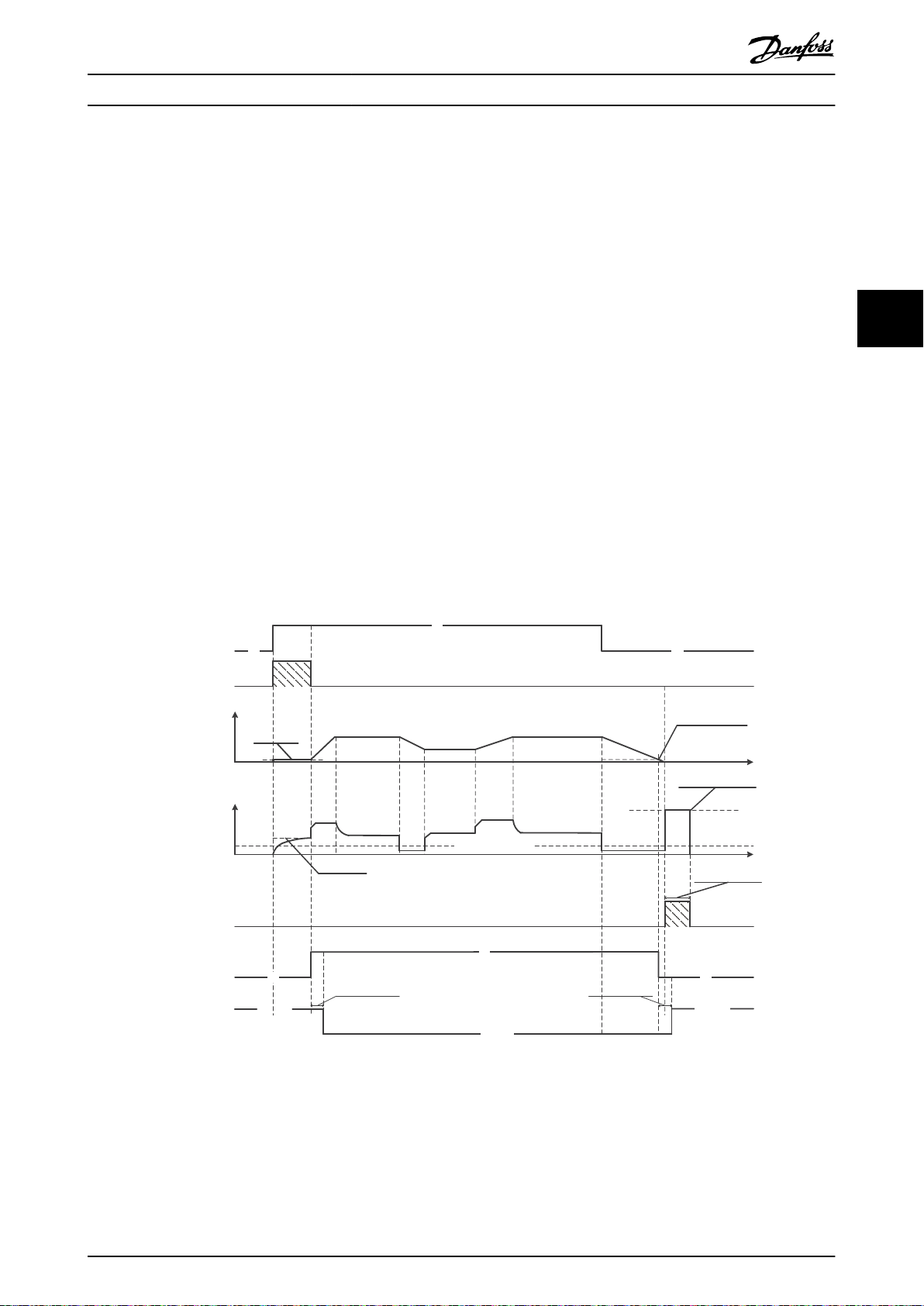
4.8.4 Control de freno mecánico
En las aplicaciones de elevación/descenso, es necesario controlar un freno electromecánico.
Controle el freno utilizando una salida de relé o una salida digital (terminal 27).
•
Mantenga la salida cerrada (sin tensión) mientras el convertidor de frecuencia no pueda mantener el motor parado,
•
por ejemplo debido a una carga demasiado pesada.
Seleccione [32] Ctrl. freno mec. en el grupo de parámetros 5-4* Relés para aplicaciones con freno electromecánico.
•
El freno queda liberado cuando la intensidad del motor supera el valor preseleccionado en el
•
parámetro 2-20 Intensidad freno liber.
El freno se acciona cuando la frecuencia de salida es inferior a la frecuencia ajustada en el parámetro 2-22 Activar
•
velocidad freno [Hz], y solo si el convertidor de frecuencia emite una orden de parada.
Si el convertidor de frecuencia se encuentra en una de las siguientes situaciones, el freno mecánico se cierra inmediatamente.
En modo de alarma.
•
En una situación de sobretensión.
•
La función STO está activada.
•
Se ha dado la orden de inercia.
•
4 4
Ilustración 4.11 Freno mecánico
MG07A505 Danfoss A/S © 08/2018 Reservados todos los derechos. 21

130BE201.11
L1(N) L2(L) L3
U V W
02 01
A1
A2
Frequency converter
Output
relay
Command circuit
220 V AC
Mechanical
brake
ShaftMotor
Freewheeling
diode
Brake power circuit
380 V AC
Output
contactor
input
e30bt623.11
61
68
69
+
130BB489.10
RS485
Instalación eléctrica
VLT® Midi Drive FC 280
El convertidor de frecuencia no es un dispositivo de
seguridad. El diseñador del sistema es el responsable de
integrar los dispositivos de seguridad según las regulaciones nacionales pertinentes sobre grúas / elevadores.
AVISO!
Un bus USB no tiene capacidad para ajustar direcciones
ni un nombre de bus que congurar. Si se conecta más
de un convertidor de frecuencia a través de USB, el
nombre del bus se añade automáticamente a la lista de
buses de red de Software de conguración MCT 10.
Conectar más de un convertidor de frecuencia mediante
un cable USB suele hacer que los ordenadores que
funcionen con Windows XP emitan una excepción y se
44
cuelguen. Por lo tanto, se recomienda conectar al PC un
solo convertidor de frecuencia mediante USB.
4.8.6 Comunicación serie RS485
Conecte el cableado de comunicación serie RS485 a los
terminales (+)68 y (–)69.
Se recomienda usar un cable de comunicación
•
serie apantallado.
Consulte el capétulo 4.3 Conexión a tierra para
•
realizar correctamente la conexión a tierra.
Ilustración 4.12 Conexión del freno mecánico al convertidor de
frecuencia
4.8.5 Comunicación de datos por USB
Ilustración 4.13 Lista de buses de red
Cuando se desconecta el cable USB, el convertidor de
frecuencia conectado a través del puerto USB se elimina
de la lista de buses de la red.
Ilustración 4.14 Diagrama de cableado de comunicación serie
Seleccione lo siguiente para congurar la comunicación
serie básica:
1. Tipo de protocolo en el parámetro 8-30 Protocolo.
2. Dirección del convertidor de frecuencia en el
parámetro 8-31 Dirección.
3. Velocidad en baudios en el
parámetro 8-32 Velocidad en baudios.
Hay dos protocolos de comunicación internos en el
convertidor de frecuencia. Observe los requisitos de
cableado del fabricante del motor.
Danfoss FC.
•
Modbus RTU.
•
Las funciones pueden programarse remotamente utilizando
el software de protocolo y la conexión RS485 o en el grupo
de parámetros 8-** Comunic. y opciones.
22 Danfoss A/S © 08/2018 Reservados todos los derechos. MG07A505
Instalación eléctrica Guía de funcionamiento
Al seleccionar un protocolo de comunicación especíco, se modican diferentes ajustes de parámetros por defecto para
adaptarse a las especicaciones del protocolo y se hacen accesibles los parámetros especícos adicionales del protocolo.
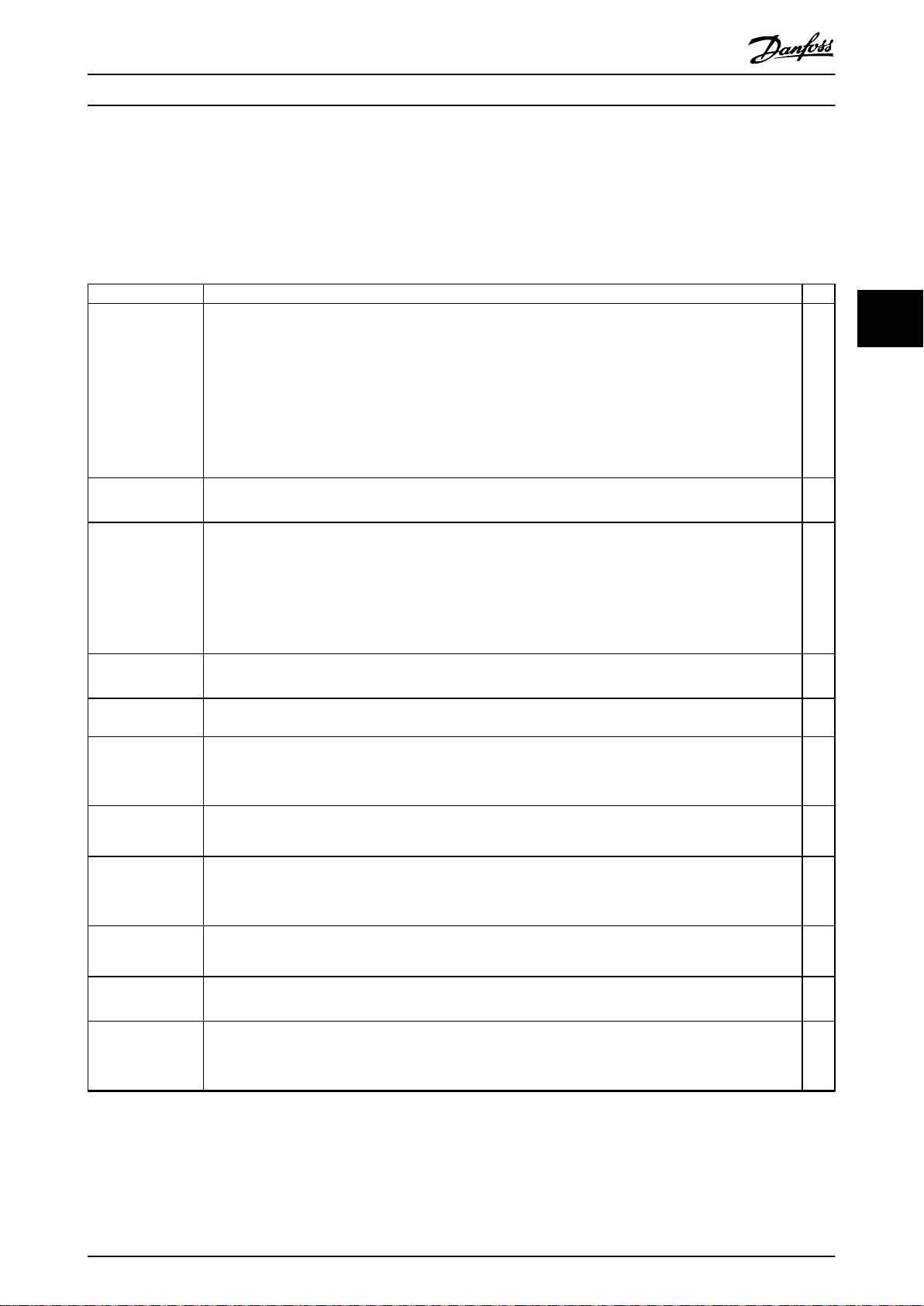
4.9 Lista de vericación de la instalación
Antes de completar la instalación de la unidad, inspeccione toda la instalación tal y como se indica en la Tabla 4.3.
Compruebe y marque los elementos una vez completados.
Inspección Descripción
Equipo auxiliar
Recorrido de los
cables
Cableado de control•Compruebe que no existan cables rotos o dañados ni conexiones ojas.
Espacio libre para la
refrigeración
Condiciones
ambientales
Fusibles y magnetotérmicos
Conexión a tierra
Cableado de
entrada y salida de
alimentación
Panel interior
Conmutadores
Vibración
Busque los equipos auxiliares, conmutadores, desconectores, fusibles de entrada o magnetotérmicos que
•
pueda haber en el lado de la alimentación de entrada del convertidor de frecuencia o en el de salida al
motor. Asegúrese de que están listos para un funcionamiento a máxima velocidad.
Compruebe el funcionamiento y la instalación de los sensores utilizados para la realimentación del
•
convertidor de frecuencia.
Retire los condensadores de corrección del factor de potencia del motor o motores.
•
Ajuste los condensadores de corrección del factor de potencia del lado de la alimentación y asegúrese de
•
que estén amortiguados.
Asegúrese de que el cableado del motor y el cableado de control estén separados, apantallados o vayan
•
por tres conductos metálicos independientes para el aislamiento de interferencias de alta frecuencia.
Compruebe que el cableado de control está aislado del cableado del motor y de potencia para protegerlo
•
del ruido.
Compruebe la fuente de tensión de las señales, si fuera necesario.
•
Se recomienda el uso de un cable apantallado o de par trenzado. Asegúrese de que la pantalla está correctamente terminada.
Compruebe que la zona despejada por encima y por debajo sea la adecuada para garantizar un ujo
•
correcto de aire de refrigeración; consulte el capétulo 3.3 Montaje.
Compruebe que se cumplen los requisitos sobre las condiciones ambientales.
•
Compruebe si los fusibles o magnetotérmicos son los adecuados.
•
Compruebe que todos los fusibles estén bien insertados y en buen estado de funcionamiento y que todos
•
los magnetotérmicos estén en la posición abierta.
Compruebe que las conexiones a tierra sean sucientes y estén bien apretadas y sin óxido.
•
No realice la conexión toma a tierra a un conducto ni monte el panel posterior en una supercie metálica.
•
Revise posibles conexiones sueltas.
•
Compruebe que los cables de red y del motor estén en conductos separados o en cables apantallados
•
separados.
Compruebe que el interior de la unidad está libre de suciedad, virutas metálicas, humedad y corrosión.
•
Compruebe que la unidad esté montada en una supercie metálica sin pintar.
•
Asegúrese de que todos los ajustes de conmutación y desconexión se encuentren en las posiciones
•
correctas.
Compruebe que la unidad esté montada de manera sólida o bien sobre soportes amortiguadores, si fuese
•
necesario.
Compruebe que no exista ninguna vibración excesiva.
•
☑
4 4
Tabla 4.3 Lista de vericación de la instalación
MG07A505 Danfoss A/S © 08/2018 Reservados todos los derechos. 23
Instalación eléctrica
VLT® Midi Drive FC 280
PRECAUCIÓN
POSIBLE PELIGRO EN CASO DE FALLO INTERNO
Existe el riesgo de sufrir lesiones si el convertidor de frecuencia no está correctamente cerrado.
Antes de suministrar electricidad, asegúrese de que todas las cubiertas de seguridad estén colocadas y jadas
•
de forma segura.
44
24 Danfoss A/S © 08/2018 Reservados todos los derechos. MG07A505

Puesta en servicio Guía de funcionamiento
5 Puesta en servicio
5.1 Instrucciones de seguridad
Consulte el capétulo 2 Seguridad para conocer las instrucciones de seguridad generales.
ADVERTENCIA
TENSIÓN ALTA
Los convertidores de frecuencia contienen tensión alta
cuando están conectados a una alimentación de entrada
de red de CA. En caso de que la instalación, el arranque
y el mantenimiento no fueran efectuados por personal
cualicado, podrían causarse lesiones graves o incluso la
muerte.
La instalación, puesta en marcha y manteni-
•
miento solo deben realizarlos personal
cualicado.
Antes de conectar la potencia:
1. Cierre correctamente la cubierta.
2. Compruebe que todos los prensacables estén
bien apretados.
3. Asegúrese de que la alimentación de entrada de
la unidad esté desactivada y bloqueada. No
confíe en los interruptores de desconexión del
convertidor de frecuencia para aislar la alimentación de entrada.
4. Compruebe que no haya tensión en los
terminales de entrada L1 (91), L2 (92) y L3 (93), ni
entre fases, ni de fase a conexión toma a tierra.
5. Compruebe que no haya tensión en los
terminales de salida 96 (U), 97(V) y 98 (W), ni
entre fases, ni de fase a conexión toma a tierra.
6. Conrme la continuidad del motor midiendo los
valores en Ω en los pares U-V (96-97), V-W (97-98)
y W-U (98-96).
7. Compruebe que la conexión a tierra del
convertidor de frecuencia y el motor sea correcta.
8. Revise el convertidor de frecuencia en busca de
conexiones sueltas en los terminales.
9. Conrme que la tensión de alimentación es
compatible con la del convertidor de frecuencia y
la del motor.
Conexión de potencia
5.2
Conecte la alimentación al convertidor de frecuencia
realizando los siguientes pasos:
1. Conrme que la tensión de entrada está
equilibrada en un margen del 3 %. De no ser así,
corrija el desequilibrio de tensión de entrada
antes de continuar. Repita el procedimiento
después de corregir la tensión.
2. Asegúrese de que el cableado del equipo
opcional sea compatible con la aplicación de la
instalación.
3. Asegúrese de que todos los dispositivos del
operador están en la posición OFF. Las puertas
del panel deben estar cerradas y las cubiertas,
jadas de manera segura.
4. Encienda la alimentación de la unidad. No
arranque el convertidor de frecuencia en este
momento. Para las unidades con un interruptor
de desconexión, seleccione la posición ON para
aplicar potencia al convertidor de frecuencia.
5.3 Funcionamiento del panel de control
local
El convertidor de frecuencia admite panel de control local
numérico (NLCP), panel de control local gráco (GLCP) y
tapa ciega. En este apartado se describe el funcionamiento
con NLCP y GLCP.
AVISO!
El convertidor de frecuencia también puede programarse
desde un PC con el Software de conguración MCT 10, a
través del puerto de comunicación RS485 o mediante un
puerto USB. Este software puede solicitarse usando el
número de pedido 130B1000 o descargarse desde el sitio
web de Danfoss: drives.danfoss.com/downloads/pc-
-tools/#/.
5.3.1 panel numérico de control local
(NLCP)
El panel de control local numérico (NLCP) se divide en
cuatro grupos funcionales.
A. Pantalla numérica.
B. Tecla de menú.
C. Teclas de navegación y luces indicadoras (LED).
D. Teclas de funcionamiento y luces indicadoras
(LED).
5 5
MG07A505 Danfoss A/S © 08/2018 Reservados todos los derechos. 25

130BC506.10
Setup 1
A
B
C
D
5
12
13 14 15
10
11
10
9
6
7
8
4
1
2
3
Menu
Status
Quick
Menu
Main
Menu
Hand
On
O
Reset
Auto
On
Back
OK
On
Warn
Alarm
130BD135.10
Setup 12
INDEX
AHP
VkW
srpm
Hz%
n2n1
n3
p5 p4
p3 p2 p1
Puesta en servicio
VLT® Midi Drive FC 280
B. Tecla de menú
Para alternar entre Status, Quick Menu, o Main Menu, pulse
[Menu].
C. Luces indicadoras (LED) y teclas de navegación
Indicació
6 On Verde
55
7 Warn
8 Alarma Roja
Luz Función
n
La luz de encendido se activa cuando
el convertidor de frecuencia recibe
potencia de la tensión de red, a través
de un terminal de bus de CC o de un
suministro externo de 24 V.
Cuando se cumplen las condiciones de
advertencia, se enciende el LED de
Amarill
advertencia amarillo y aparece un texto
a
en la pantalla que identica el
problema.
Un fallo hace que el LED de alarma
rojo parpadee y que aparezca un texto
de alarma.
Tabla 5.2 Leyenda de la Ilustración 5.1, luces indicadoras (LED)
Ilustración 5.1 Vista del NLCP
9 [Back]
A. Pantalla numérica
La pantalla LCD está retroiluminada y cuenta con una línea
numérica. Todos los datos se muestran en el NLCP.
El número de ajuste muestra el ajuste activo y el ajuste
editado. Si el mismo ajuste actúa como ajuste activo y
editado, solo se mostrará ese número de ajuste (ajustes de
1
fábrica). Cuando el ajuste activo y el editado dieren,
ambos números se muestran en la pantalla (por ejemplo,
ajuste 12). El número intermitente indica el ajuste editado.
2 Número de parámetro.
3 Valor del parámetro.
La dirección del motor se muestra en la parte inferior
4
izquierda de la pantalla. Una pequeña echa indica el
sentido.
El triángulo indica si el LCP está en Status, Quick Menu, o
5
Main Menu.
Tabla 5.1 Leyenda de la Ilustración 5.1, sección A
Ilustración 5.2 Información de la pantalla
10
11 [OK]
12
Tabla 5.3 Leyenda de la Ilustración 5.1, teclas de navegación
Tecla Función
para ir al paso o nivel anterior en la
estructura de navegación.
Para navegar entre grupos de
parámetros, parámetros y dentro de
[▲] [▼]
estos, así como para aumentar/reducir los
valores de los parámetros. Las echas
también puede usarse para ajustar la
referencia local.
Pulse para acceder a grupos de
parámetros o para activar una selección.
Pulse para desplazarse de izquierda a
[►]
derecha dentro del valor de parámetro a
n de cambiar cada valor de modo
individual.
26 Danfoss A/S © 08/2018 Reservados todos los derechos. MG07A505

130BC440.10
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Puesta en servicio Guía de funcionamiento
D. Teclas de funcionamiento y luces indicadoras (LED)
Tecla Función
Arranca el convertidor de frecuencia en control
local.
Una señal de parada externa emitida por la
13 Hand On
14 O/Reset
15 Auto On
Tabla 5.4 Leyenda de la Ilustración 5.1, sección D
•
entrada de control o por comunicación
serie invalida la tecla [Hand on] local.
Detiene el motor pero no desconecta la
alimentación del convertidor de frecuencia, o
reinicia el convertidor de frecuencia
manualmente una vez que se ha eliminado un
fallo. En el modo de alarma, esta se reinicia al
eliminarse la situación de alarma.
Pone el sistema en modo de funcionamiento
remoto.
Responde a una orden de arranque externa
•
emitida por los terminales de control o por
comunicación serie.
5 5
ADVERTENCIA
PELIGRO ELÉCTRICO
Incluso después de pulsar la tecla [O/Reset], habrá
tensión en los terminales del convertidor de frecuencia.
Al pulsar la tecla [O/Reset], no se desconecta el
convertidor de frecuencia de la alimentación. Tocar las
partes con corriente puede causar lesiones graves e
incluso la muerte.
No toque ninguna pieza con corriente.
•
5.3.2 Función de la tecla derecha en el
NLCP
Pulse [►] para editar cualquiera de los cuatro dígitos de la
pantalla de forma individual. Al pulsar [►] una vez, el
cursor se mueve al primer dígito y el dígito empieza a
parpadear como se muestra en la Ilustración 5.3. Pulse [▲] y
[▼] para cambiar el valor. Al pulsar [►], no se altera el valor
de los dígitos ni se mueve la coma decimal.
Ilustración 5.3 Función de la tecla derecha
[►] también puede usarse para navegar entre grupos de
parámetros. En el Menú principal, pulse [►] para moverse al
primer parámetro del siguiente grupo de parámetros (por
ejemplo, para moverse del parámetro 0-03 Ajustes
regionales [0] Internacional al parámetro 1-00 Modo Conguración [0] Veloc. lazo abierto).
AVISO!
Durante el arranque, el LCP muestra el mensaje INITIALISING (Inicialización). Cuando deje de mostrarse dicho
mensaje, el convertidor de frecuencia estará listo para
funcionar. La adición o supresión de opciones puede
alargar la duración del arranque.
5.3.3 Menú rápido del NLCP
El Menú rápido proporciona un fácil acceso a los
parámetros más utilizados.
1. Para entrar en el Menú rápido, pulse la tecla
[Menu] hasta que el indicador de la pantalla se
coloque encima de Menú rápido.
2.
Use [▲] [▼] para seleccionar QM1 o QM2 y luego
pulse [OK].
3.
Pulse [▲] [▼] para desplazarse por los parámetros
del Menú rápido.
4. Pulse [OK] para seleccionar un parámetro.
5.
Pulse [▲] [▼] para cambiar el valor de ajuste de
un parámetro.
MG07A505 Danfoss A/S © 08/2018 Reservados todos los derechos. 27

130BC445.13
1-22 XXXX V
Motor
nominal
speed
QM 1
0-01 [0]
1-10 [0]
1-24 XXXX A
Language
Motor Type
1-20 XXXX kW
Motor power
Motor voltage
1-26 XXXX 1-23 XXXX
Stator
Motor frequency
1-25 XXXX
1-30 XXXX
1-39 XXXX
1-40 XXXX
1-37 XXXX
1-25 XXXX
1-24 XXXX
A
3-02 XXXX
3-03 XXXX
3-41 XXXX S
3-42 XXXX S
5-12
[2]
1-29 [1]
AMA
Back EMF at
1000 RPM
d-axis
QM 2
BMS
AMS
ES
5-70 XXXX
5-71 [0]
1-30 XXXX
1-39 XXXX
1-90 [0]
2-10 [0]
4-16 XXXX %
4-17 XXXX %
4-18 XXXX %
1-00 [0]
1-01 [1]
1-10 [0]
1-24 XXXX A 1-20 XXXX kW
1-22 XXXX V
Motor
nominal
speed
Motor power
Motor voltage
1-26 XXXX 1-23 XXXX
Motor frequency
1-25 XXXX
1-30 XXXX
1-40 XXXX
1-37 XXXX
1-25 XXXX
1-24 XXXX
A
Back EMF at
1000 RPM
d-axis
1-39 XXXX
4-14 XXXX
4-19 XXXX
Stator
QM 3
QM 4 QM 5
L10C
SFS
TBD
Motor
nominal
speed
Motor
nominal
speed
Motor current
Motor cont.
rated torque
Resistance (Rs)
Motor poles
inductance (Ld)
Asynchronous motor
Motor current
Minimum reference
Maximum reference
Ramp 1 ramp-up time
Ramp 1 ramp-down time
Terminal 27 digital input
Basic motor set-up
mode
Motor control
principle
Motor type
PM motor
PM motor
Motor
current
Motor cont.
rated torque
Stator
Resistance (Rs)
Motor poles
inductance (Ld)
Motor speed high limit [Hz]
Maximum output frequency
Asynchronous motor
Motor current
RPM
RPM
RPM
Hz
RPM
Hz
Hz
Hz
Hz
Hz
Adv. motor set-up
Resistance (Rs)
Motor poles
Motor thermal
protection
Brake function
Torque limit motor mode
Torque limit generator mode
Current limit
Encoder set-up
Terminal 32/33
pulses per revolution
Terminal 32/33
encoder direction
Changes made
Last 10 changes Since factory setting
Alarm log
Puesta en servicio
VLT® Midi Drive FC 280
6. Pulse [OK] para aceptar el cambio.
7. Para salir, pulse [Back] dos veces (o tres veces en QM2 y QM3) para entrar en Status, o bien pulse [Menu] una vez
para entrar en Menú principal.
55
28 Danfoss A/S © 08/2018 Reservados todos los derechos. MG07A505
Ilustración 5.4 Estructura de menú rápido

130BC446.10
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
1
2
3
4
5
6
7
10
11
12
OK
OK
Back
8
Back
Setup 1
2 x
+
OK
9
OK
Puesta en servicio Guía de funcionamiento
5.3.4 Menú principal del NLCP
El Menú principal proporciona acceso a todos los
parámetros.
1. Para entrar en el Menú principal, pulse [Menu]
hasta que el indicador de la pantalla se coloque
sobre Menú principal.
2.
[▲] [▼]: desplazarse por los grupos de parámetros.
3. Pulse [OK] para seleccionar un grupo de
parámetros.
4.
[▲] [▼]: desplazarse por los parámetros de ese
grupo en concreto.
5. Pulse [OK] para seleccionar el parámetro.
6.
[►] y [▲]/ [▼]: ajustar/cambiar el valor del
parámetro.
7. Pulse [OK] para aceptar el valor.
8. Para salir, pulse [Back] dos veces (o tres veces
para parámetros de matrices) para entrar en
Menú principal, o bien pulse [Menu] una vez para
entrar en Status.
Consulte la Ilustración 5.5, la Ilustración 5.6 y la
Ilustración 5.7 para conocer los principios de cambio de
valor de los parámetros continuos, enumerados y de
matrices, respectivamente. Las acciones de las ilustraciones
se describen en la Tabla 5.5, la Tabla 5.6 y la Tabla 5.7.
5 5
Ilustración 5.5 Interacciones del menú principal: parámetros
continuos
MG07A505 Danfoss A/S © 08/2018 Reservados todos los derechos. 29

130BC447.11
Setup 1
Setup 1
Setup 1
1
2
3
4
5
6
OK
OK
Back
7
OK
Back
130BC448.10
1
2
4
5
6
7
8
9
10
OK
Back
Back
Back
5 x
Setup 1
Setup 1
Setup 1
Setup 1
%
INDEX
%
INDEX
%
INDEX
Setup 1
INDEX
%
OK
OK
OK
Puesta en servicio
VLT® Midi Drive FC 280
1 [OK]: se muestra el primer parámetro del grupo.
2
Pulse [▼] repetidamente para bajar hasta el parámetro.
Los parámetros de matrices funcionan de la siguiente
manera:
3 Pulse [OK] para iniciar la edición.
4
[►]: parpadea el primer dígito (puede editarse).
5
[►]: parpadea el segundo dígito (puede editarse).
6
[►]: parpadea el tercer dígito (puede editarse).
7
[▼]: se disminuye el valor del parámetro; la coma decimal
cambia automáticamente.
8
[▲]: se aumenta el valor del parámetro.
9 [Back]: cancelar los cambios, volver al 2.
[OK]: aceptar los cambios, volver al 2
10
55
[▲][▼]: selección de un parámetro dentro del grupo.
11 [Back]: elimina el valor y muestra el grupo de parámetros.
12
[▲][▼]: selección del grupo.
Tabla 5.5 Cambio de valores de los parámetros continuos
Con los parámetros enumerados, la interacción es similar,
pero el valor del parámetro se muestra entre corchetes por
causa de la limitación de dígitos (cuatro dígitos grandes)
del NLCP, y la enumeración puede ser mayor de 99.
Cuando el valor de enumeración es superior a 99, el LCP
solo muestra el primero de los corchetes.
Ilustración 5.7 Interacciones del menú principal: parámetros de
matrices
1 [OK]: se muestran los números de parámetros y el valor del
primer índice.
2 [OK]: puede seleccionarse el índice.
3
[▲][▼]: selección del índice.
4 [OK]: puede editarse el valor.
5
[▲][▼]: cambiar el valor del parámetro (que parpadea).
6 [Back]: cancelar los cambios.
[OK]: aceptar los cambios.
7 [Back]: cancelar la edición del índice; seleccionar un nuevo
Ilustración 5.6 Interacciones del menú principal: parámetros
enumerados
parámetro
8
[▲][▼]: selección de un parámetro dentro del grupo.
9 [Back]: eliminar el valor del índice del parámetro y mostrar
el grupo de parámetros.
10
[▲][▼]: selección del grupo.
Tabla 5.7 Cambio de valores de los parámetros de matrices
1 [OK]: se muestra el primer parámetro del grupo.
2 Pulse [OK] para iniciar la edición.
3
[▲][▼]: cambiar el valor del parámetro (que parpadea).
4 Pulse [Back] para cancelar los cambios u [OK] para
aceptarlos (y volver a la pantalla 2).
5
[▲][▼]: selección de un parámetro dentro del grupo.
6 [Back]: elimina el valor y muestra el grupo de parámetros.
7
[▲][▼]: selección de un grupo.
Tabla 5.6 Cambio de valores de los parámetros enumerados
30 Danfoss A/S © 08/2018 Reservados todos los derechos. MG07A505

130BD598.10
Auto
On
Reset
Hand
On
O
Status
Quick
Menu
Main
Menu
Alarm
Log
Back
Cancel
Info
OK
Status
1(1)
36.4 kW
Auto Remote Ramping
0.000
On
Alarm
Warn.
A
7.83 A
799 RPM
B
C
D
53.2 %
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18 19 20 21
Puesta en servicio Guía de funcionamiento
5.3.5 Panel de control local gráco (GLCP)
El GLCP se divide en cuatro grupos funcionales (consulte la
Ilustración 5.8).
A. Área de la pantalla.
B. Teclas de menú de la pantalla.
C. Teclas de navegación y luces indicadoras (LED).
D. Teclas de funcionamiento y reinicio.
B. Teclas de menú de la pantalla
Las teclas del menú se utilizan para acceder al menú de
ajuste de parámetros, alternar los modos display durante el
funcionamiento normal y visualizar los datos del registro
de fallos.
Tecla Función
6 Estado Muestra la información de funcionamiento.
Permite acceder a parámetros de progra-
Menú
7
rápido
mación para obtener instrucciones de ajuste
inicial, así como muchas otras instrucciones
detalladas sobre la aplicación.
Menú
8
principal
Permite el acceso a todos los parámetros de
programación.
Muestra una lista de advertencias actuales,
9 Alarm Log
las últimas diez alarmas y el registro de
mantenimiento.
Tabla 5.9 Leyenda de la Ilustración 5.8, teclas de menú de la
pantalla
C. Teclas de navegación y luces indicadoras (LED)
Las teclas de navegación se utilizan para programar
funciones y desplazar el cursor de la pantalla. Las teclas de
navegación también permiten el control de velocidad en
funcionamiento local. También hay tres luces indicadoras
del estado del convertidor de frecuencia en esta área.
5 5
Tecla Función
10 Back
Vuelve al paso o lista anterior en la
estructura del menú.
Cancela el último cambio o la última orden,
11 Cancel
siempre y cuando el modo display no haya
cambiado.
12 Info
Teclas de
Ilustración 5.8 Panel de control local gráco (GLCP)
A. Área de la pantalla
El área de la pantalla se activa cuando el convertidor de
frecuencia recibe potencia de la tensión de red, a través de
un terminal de bus de CC o de un suministro externo de
24 V CC.
La información visualizada en el LCP puede personalizarse
para las aplicaciones del usuario. Seleccione las opciones
en el Menú rápido Q3-13 Ajs display.
MG07A505 Danfoss A/S © 08/2018 Reservados todos los derechos. 31
Pantalla Número de parámetro
1 0-20 [1602] Referencia %
2 0-21 [1614] Intensidad motor
3 0-22 [1610] Potencia [kW]
4 0-23 [1613] Frecuencia
5 0-24 [1502] Contador kWh
Tabla 5.8 Leyenda de la Ilustración 5.8, área de la pantalla
Ajustes predeter-
minados
13
navegación
14 OK
Tabla 5.10 Leyenda de la Ilustración 5.8, teclas de navegación
Pulsar para obtener una denición de la
función que se está visualizando.
Para desplazarse entre los elementos del
menú, utilice las cuatro teclas de navegación.
Pulse para acceder a grupos de parámetros o
para activar una selección.

Puesta en servicio
VLT® Midi Drive FC 280
Indicación Luz Función
La luz de encendido se activa
cuando el convertidor de
15 On Verde
16 Warn Amarilla
55
17 Alarma Roja
Tabla 5.11 Leyenda de la Ilustración 5.8, luces indicadoras (LED)
D. Teclas de funcionamiento y reinicio
Las teclas de funcionamiento están en la parte inferior del
LCP.
Tecla Función
Arranca el convertidor de frecuencia en
modo manual.
18 Hand On
19 O
20 Auto On
21 Reinicio
Tabla 5.12 Leyenda de la Ilustración 5.8, teclas de
funcionamiento y reinicio
Detiene el motor pero no desconecta la
potencia del convertidor de frecuencia.
Pone el sistema en modo de funcionamiento
remoto.
•
Reinicia el convertidor de frecuencia
manualmente una vez se ha eliminado un
alarma.
frecuencia recibe potencia de la
tensión de red, a través de un
terminal de bus de CC o de un
suministro externo de 24 V.
Cuando se cumplen las
condiciones de advertencia, se
enciende el LED de advertencia
amarillo y aparece un texto en la
pantalla que identica el
problema.
Un fallo hace que el LED de
alarma rojo parpadee y que
aparezca un texto de alarma.
Una señal de parada externa
•
emitida por la entrada de control o
por comunicación serie invalida la
tecla [Hand on] local.
Responde a una orden de arranque
externa emitida por los terminales de
control o por comunicación serie.
AVISO!
Para ajustar el contraste de la pantalla, pulse las teclas
[Status] y [▲]/[▼].
5.3.6 Ajustes de parámetros
El establecimiento de la programación adecuada para
aplicaciones requiere a menudo el ajuste de las funciones
en diferentes parámetros relacionados. Encontrará los
detalles de los parámetros en el capétulo 10.2 Estructura de
menú de parámetros.
Los datos de programación se almacenan internamente en
el convertidor de frecuencia.
Para hacer una copia de seguridad, cargue los
•
datos en la memoria del LCP.
Para descargar los datos a otro convertidor de
•
frecuencia, conecte el LCP a esa unidad y
descargue los ajustes guardados.
El restablecimiento de los ajustes predeter-
•
minados de fábrica no cambia los datos
almacenados en la memoria del LCP.
5.3.7 Cambio de los ajustes de parámetros
con el GLCP
Acceso a los ajustes de parámetros y modicación de los
mismos desde el Menú rápido o desde el Menú principal. El
Menú rápido solo permite acceder a un número limitado de
parámetros.
1. Pulse [Quick Menu] o [Main Menu] en el LCP.
2.
Pulse [▲] [▼] para desplazarse por los grupos de
parámetros; pulse [OK] para seleccionar un grupo
de parámetros.
3.
Pulse [▲] [▼] para desplazarse por los parámetros;
pulse [OK] para seleccionar un parámetro.
4.
Pulse [▲] [▼] para cambiar el valor de ajuste de
un parámetro.
5.
Pulse [◄] [►] para saltarse un dígito cuando se
está editando un parámetro decimal.
6. Pulse [OK] para aceptar el cambio.
7. Pulse [Back] dos veces para entrar en Estado, o
bien pulse [Main Menu] una vez para entrar en el
Menú principal.
Visualización de los cambios
En el Menú rápido Q5, Changes Made, se muestra una lista
de todos los parámetros modicados desde los ajustes
predeterminados.
La lista muestra únicamente los parámetros que
•
se han cambiado en el ajuste de edición actual.
No se indican los parámetros que se han
•
restablecido a los valores predeterminados.
32 Danfoss A/S © 08/2018 Reservados todos los derechos. MG07A505

Puesta en servicio Guía de funcionamiento
El mensaje Vacío indica que no se ha cambiado
•
ningún parámetro.
5.3.8 Cargar / descargar datos al / del LCP
1. Pulse [O] para detener el motor antes de cargar
o descargar datos.
2. Pulse [Main Menu] parámetro 0-50 Copia con LCP
y después pulse [OK].
3. Seleccione [1] Trans. LCP tod. par. para cargar los
datos al LCP o seleccione [2] Tr d LCP tod. par.
para descargar datos del LCP.
4. Pulse [OK]. Una barra de progreso muestra el
proceso de carga o de descarga.
5. Pulse [Hand On] o [Auto On] para volver al
funcionamiento normal.
5.3.9 Restablecimiento de los ajustes
predeterminados con el LCP
AVISO!
Existe el riesgo de perder los registros de monitorización,
ubicación, datos del motor y programación al restablecer
los ajustes predeterminados. Para obtener una copia de
seguridad, cargue los datos al LCP antes de la inicialización.
El restablecimiento de los ajustes predeterminados de los
parámetros se lleva a cabo a través de la inicialización del
convertidor de frecuencia. La inicialización puede
efectuarse a través del parámetro 14-22 Modo funciona-
miento (recomendado) o manualmente. La inicialización no
reinicia los ajustes del parámetro 1-06 En sentido horario y
el parámetro 0-03 Ajustes regionales.
La inicialización mediante el
•
parámetro 14-22 Modo funcionamiento no
restablece los ajustes del convertidor de
frecuencia, como las horas de funcionamiento, las
selecciones de comunicación serie, el registro de
fallos, el registro de alarmas y otras funciones de
monitorización.
La inicialización manual elimina todos los datos
•
del motor, programación, ubicación y monitorización y restaura los ajustes predeterminados de
fábrica.
Procedimiento de inicialización recomendado, a través
del parámetro 14-22 Modo funcionamiento
1. Seleccione el parámetro 14-22 Modo funcionamiento y pulse [OK].
2. Seleccione [2] Inicialización y pulse [OK].
3. Desconecte la alimentación de la unidad y espere
a que se apague la pantalla.
4. Encienda la alimentación de la unidad.
Los ajustes predeterminados de los parámetros se
restauran durante el arranque. Esto puede llevar algo más
de tiempo de lo normal.
5. Se visualiza Alarma 80. Drive initialised to default
value.
6. Pulse [Reset] para volver al modo de funcionamiento.
Procedimiento de inicialización manual
1. Desconecte la alimentación de la unidad y espere
a que se apague la pantalla.
2. Mantenga pulsados [Status], [Main Menu] y [OK]
simultáneamente en el GLCP o pulse [Menu] y
[OK] al mismo tiempo en el NLCP mientras
suministra potencia a la unidad (durante aproximadamente 5 s o hasta que se oiga un clic y el
ventilador arranque).
Los ajustes de parámetros predeterminados de fábrica se
restablecen durante el arranque. Esto puede llevar algo
más de tiempo de lo normal.
La inicialización manual no reinicia la siguiente información
del convertidor de frecuencia:
Parámetro 15-00 Horas de funcionamiento.
•
Parámetro 15-03 Arranques.
•
Parámetro 15-04 Sobretemperat.
•
Parámetro 15-05 Sobretensión.
•
Programación básica
5.4
5.4.1 Ajuste del motor asíncrono
Introduzca los siguientes datos del motor en el orden
indicado. Encontrará la información en la placa de características del motor.
1. Parámetro 1-20 Potencia motor [kW].
2. Parámetro 1-22 Tensión motor.
3. Parámetro 1-23 Frecuencia motor.
4. Parámetro 1-24 Intensidad motor.
5. Parámetro 1-25 Veloc. nominal motor.
Para conseguir un rendimiento óptimo en modo VVC+, se
necesitarán datos adicionales del motor a n de ajustar los
siguientes parámetros.
6. Parámetro 1-30 Resistencia estator (Rs).
7. Parámetro 1-31 Resistencia rotor (Rr).
8. Parámetro 1-33 Reactancia fuga estátor (X1).
9. Parámetro 1-35 Reactancia princ. (Xh).
5 5
MG07A505 Danfoss A/S © 08/2018 Reservados todos los derechos. 33

Puesta en servicio
VLT® Midi Drive FC 280
Dichos datos se encuentran en la hoja de datos del motor
(normalmente este tipo de datos no consta en la placa de
características del motor). Ejecute un AMA completo
mediante el parámetro 1-29 Adaptación automática del
motor (AMA) [1] Act. AMA completo o introduzca
manualmente los parámetros.
Ajuste especíco de la aplicación al funcionar en modo
+
VVC
VVC+ es el modo de control más able. En la mayor parte
de las situaciones, proporciona un rendimiento óptimo sin
55
ajustes adicionales. Ejecute un AMA completo para obtener
unos mejores resultados.
5.4.2
Ajuste de Motor PM en VVC
Pasos para la programación inicial
1. Para activar el funcionamiento del motor PM,
ajuste el parámetro 1-10 Construcción del motor
con las siguientes opciones:
1a [1] PM, no saliente SPM
1b [3] PM, salient IPM, Sat
2. Seleccione [0] Veloc. lazo abierto en el
parámetro 1-00 Modo
Conguración.
+
AVISO!
La realimentación de encoder no es compatible con
motores PM.
Programación de los datos del motor
Después de seleccionar una de las opciones de motor PM
en el parámetro 1-10 Construcción del motor, se activarán
los parámetros relacionados con el motor PM en los
grupos de parámetros 1-2* Datos de motor, 1-3* Datos
motor av. I y 1-4* Datos motor av. II .
Encontrará la información en la placa de características del
motor y en la hoja de datos del motor.
Programe los siguientes parámetros en el orden indicado:
1. Parámetro 1-24 Intensidad motor.
2. Parámetro 1-26 Par nominal continuo.
3. Parámetro 1-25 Veloc. nominal motor.
4. Parámetro 1-39 Polos motor.
5. Parámetro 1-30 Resistencia estator (Rs).
Introduzca resistencia de bobinado del estátor
(Rs) de línea a común. Si solo dispone de datos
línea a línea, divida el valor línea a línea entre dos
para lograr el valor de línea a común (punto de
inicio).
Asimismo, existe la posibilidad de medir el valor
con un ohmímetro, que también tiene en cuenta
la resistencia del cable. Divida el valor medido
entre dos e introduzca el resultado.
6. Parámetro 1-37 Inductancia eje d (Ld).
Introduzca la inductancia directa al eje del motor
PM de línea a común.
Si solo dispone de datos línea a línea, divida el
valor línea a línea entre dos para lograr el valor
de línea a común (punto de inicio).
Asimismo, es posible medir el valor con un
medidor de inductancia, que también tiene en
cuenta la inductancia del cable. Divida el valor
medido entre dos e introduzca el resultado.
7. Parámetro 1-40 fcem a 1000 RPM.
Introduzca la fuerza contraelectromotriz línea a
línea del motor PM a una velocidad mecánica de
1000 r/min (valor RMS). La fuerza contraelectromotriz es la tensión que genera un motor PM
cuando no se le conecta un convertidor de
frecuencia y el eje se gira desde el exterior. La
fuerza contraelectromotriz normalmente se
especica para la velocidad nominal del motor o
con la medición de 1000 r/min entre dos líneas.
Si no dispone del valor para una velocidad del
motor de 1000 r/min, calcule el valor correcto del
siguiente modo: Por ejemplo, si la fuerza contraelectromotriz a 1800 r/min es de 320 V, la fuerza
contraelectromotriz a 1000 r/min será:
fuerza contraelectromotriz = (tensión/RPM) ×
1000 = (320/1800) × 1000 = 178.
Programe este valor para el parámetro 1-40 fcem a
1000 RPM.
Funcionamiento del motor de prueba
1. Arranque el motor a velocidad baja (de 100 a 200
r/min). Si el motor no gira, compruebe la
instalación, la programación general y los datos
del motor.
Parking
Se recomienda elegir esta función en aquellas aplicaciones
en las que el motor gire a velocidad baja (por ejemplo,
autorrotación en aplicaciones de ventiladores). Pueden
ajustarse el Parámetro 2-06 Intensidad estacionamiento y el
parámetro 2-07 Tiempo estacionamiento. Aumente los
ajustes de fábrica de los parámetros para las aplicaciones
con una inercia alta.
Arranque el motor a velocidad nominal. Si la aplicación no
funciona bien, compruebe los ajustes PM de VVC+. La
Tabla 5.13 muestra recomendaciones en diferentes aplicaciones.
34 Danfoss A/S © 08/2018 Reservados todos los derechos. MG07A505

Puesta en servicio Guía de funcionamiento
Aplicación Ajustes
Aplicaciones de inercia
baja
I
carga/Imotor
Aplicaciones de inercia
media
50>I
Aplicaciones con alta
inercia
I
Carga/IMotor
Carga elevada a velocidad
baja
<30 % (velocidad nominal)
<5
carga/Imotor
>50
>5
Aumente el valor del
•
parámetro 1-17 Const. de tiempo
del ltro de tensión en un factor
de 5 a 10.
Reduzca el valor del
•
parámetro 1-14 Factor de
ganancia de amortiguación.
Reduzca el valor (<100 %) del
•
parámetro 1-66 Intens. mín. a baja
veloc.
Conserve los valores calculados.
Aumente los valores del
parámetro 1-14 Factor de ganancia de
amortiguación, del
parámetro 1-15 Const. tiempo ltro a
baja velocidad y del
parámetro 1-16 Const. tiempo ltro a
alta velocidad
Aumente el valor del
parámetro 1-17 Const. de tiempo del
ltro de tensión
Aumente el valor del
parámetro 1-66 Intens. mín. a baja
veloc. (>100 % durante un tiempo
prolongado puede sobrecalentar el
motor).
Si se producen advertencias o alarmas, consulte
•
capétulo 8.4 Lista de Advertencias y Alarmas.
Para obtener los mejores resultados posibles,
•
ejecute este procedimiento con el motor en frío.
Ejecutar un AMA con el LCP
1. Con los ajustes de parámetros predeterminados,
conecte los terminales 13 y 27 antes de ejecutar
el AMA.
2. Entre en el Menú principal.
3. Vaya al grupo de parámetros 1-** Carga y motor.
4. Pulse [OK].
5. Ajuste los parámetros del motor usando los datos
de la placa de características para el grupo de
parámetros 1-2* Datos motor.
6. Ajuste la longitud del cable de motor en el
parámetro 1-42 Longitud del cable del motor.
7. Vaya al parámetro 1-29 Adaptación automática del
motor (AMA).
8. Pulse [OK].
9. Seleccione [1] Act. AMA completo.
10. Pulse [OK].
11. La prueba empieza automáticamente e indica
cuándo ha nalizado.
En función de la potencia, la AMA tarda de 3 a 10 minutos
en completarse.
5 5
Tabla 5.13 Recomendaciones en diferentes aplicaciones
Si el motor arranca con una oscilación a una velocidad
concreta, aumente el parámetro 1-14 Factor de ganancia de
amortiguación. Aumente el valor en intervalos pequeños.
El par de arranque puede ajustarse en el
parámetro 1-66 Intens. mín. a baja veloc. 100 % proporciona
un par nominal como par de arranque.
5.4.3 Adaptación automática del motor
(AMA)
Para optimizar la compatibilidad entre el convertidor de
frecuencia y el motor en modo VVC+, ejecute la AMA.
El convertidor de frecuencia construye un modelo
•
matemático del motor para regular la intensidad
de salida de este, de forma que mejora su
rendimiento.
Algunos motores pueden no ser capaces de
•
ejecutar la versión completa de la prueba. En ese
caso, seleccione [2] Act. AMA reducido en el
parámetro 1-29 Adaptación automática del motor
(AMA).
AVISO!
La función de AMA no hace funcionar el motor ni lo
daña.
5.5 Comprobación del giro del motor
Antes de poner en funcionamiento el convertidor de
frecuencia, compruebe el giro del motor.
1. Pulse [Hand On].
2.
Pulse [►] para ajustar la referencia de velocidad
positiva.
3. Compruebe que la velocidad mostrada es
positiva.
4. Compruebe que el cableado entre el convertidor
de frecuencia y el motor sea el correcto.
5. Compruebe que el sentido de funcionamiento del
motor coincida con el ajuste del
parámetro 1-06 En sentido horario.
5a Cuando el parámetro 1-06 En sentido
horario está ajustado en [0] Normal (en
MG07A505 Danfoss A/S © 08/2018 Reservados todos los derechos. 35

Puesta en servicio
VLT® Midi Drive FC 280
sentido horario de forma predeterminada):
a. Compruebe que el motor gira
en sentido horario.
b. Compruebe que la echa de
dirección del LCP se mueve en
sentido horario.
5b Cuando el parámetro 1-06 En sentido
horario está ajustado como [1] Inversa
(en sentido antihorario):
55
a. Compruebe que el motor gire
en sentido antihorario.
b. Compruebe que la echa de
dirección del LCP gire en
sentido antihorario.
5.6 Comprobación del giro del encoder
Compruebe la rotación del encoder solo si se utiliza la
realimentación de encoder.
1. Seleccione [0] Veloc. lazo abierto en el
parámetro 1-00 Modo Conguración.
2. Seleccione [1] Encoder 24 V en el
parámetro 7-00 Fuente de realim. PID de veloc.
3. Pulse [Hand On].
4.
Pulse [►] para ajustar la referencia de velocidad
positiva (parámetro 1-06 En sentido horario) a [0]
Normal).
5. Compruebe en el parámetro 16-57 Realim. [RPM]
que la realimentación sea positiva.
AVISO!
REALIMENTACIÓN NEGATIVA
Si la realimentación es negativa, la conexión del encoder
es incorrecta. Utilice el parámetro 5-71 Term. 32/33 direc.
encoder para invertir la dirección o invierta los cables del
encoder.
5.7 Prueba de control local
1. Pulse [Hand On] para proporcionar una orden de
arranque local para el convertidor de frecuencia.
2.
Acelere el convertidor de frecuencia pulsando [▲]
hasta la velocidad máxima. Si se mueve el cursor
a la izquierda de la coma decimal, se consiguen
efectuar los cambios de entrada más
rápidamente.
3. Observe cualquier problema de aceleración.
4. Pulse [O]. Observe cualquier problema de
desaceleración.
En caso de problemas de aceleración o desaceleración,
consulte el capétulo 8.5 Resolución de problemas. Consulte
capétulo 8.2 Tipos de advertencias y alarmas para reiniciar el
convertidor de frecuencia tras una desconexión.
5.8 Arranque del sistema
El procedimiento de esta sección requiere que se haya
completado el cableado por parte del usuario y la programación de la aplicación. Se recomienda el siguiente
procedimiento una vez que se ha nalizado la congu-
ración de la aplicación.
1. Pulse [Auto On].
2. Aplique un comando de ejecución externo.
3. Ajuste la velocidad de referencia en todo el
intervalo de velocidad.
4. Elimine el comando de ejecución externo.
5. Compruebe los niveles de ruido y vibración del
motor para garantizar que el sistema funcione
según lo previsto.
Si se producen advertencias o alarmas, consulte el
capétulo 8.2 Tipos de advertencias y alarmas para reiniciar el
convertidor de frecuencia tras una desconexión.
Módulo de memoria
5.9
El módulo de memoria VLT® Memory Module MCM es un
pequeño dispositivo de memoria que contiene datos
como:
El rmware del convertidor de frecuencia (no se
•
incluye el rmware de comunicación de la tarjeta
de control).
Archivo PUD.
•
Archivo SIVP.
•
Archivo de parámetros.
•
El módulo de memoria VLT® Memory Module MCM es un
accesorio. El convertidor de frecuencia se facilita sin el
módulo de memoria instalado de fábrica. Se puede
encargar un nuevo módulo de memoria con los siguientes
números de pedido.
Descripción Número de
pedido
VLT® Memory Module MCM 102
Módulo de memoria VLT® Memory Module
MCM 103
Tabla 5.14 Número de pedido
Cada módulo de memoria tiene a un número de serie
único que no se puede modicar.
132B0359
132B0466
36 Danfoss A/S © 08/2018 Reservados todos los derechos. MG07A505

Puesta en servicio Guía de funcionamiento
AVISO!
El módulo de memoria VLT® Memory Module MCM
puede utilizarse en el convertidor de frecuencia a partir
de la versión 1.5 del rmware.
Seleccione las opciones correctas para el
parámetro 31-40 Memory Module Function antes de realizar
la conguración con el módulo de memoria.
Parámetro 31-40 Memory
Module Function
[0] Disabled La función de carga o descarga de
*[1] Only Allow Download Permitir únicamente la descarga de
[2] Only Allow Upload Permitir únicamente la carga de
[3] Allow Both Download
and Upload
Tabla 5.15 Descripción del
Parámetro 31-40 Memory Module Function
Descripción
datos está desactivada.
datos del módulo de memoria al
convertidor de frecuencia. Este es el
ajuste predeterminado del
parámetro 31-40 Memory Module
Function.
datos del convertidor de frecuencia
al módulo de memoria.
Si se selecciona esta opción, el
convertidor de frecuencia descarga
primero los datos del módulo de
memoria y luego carga los datos
del convertidor de frecuencia al
módulo de memoria.
AVISO!
EVITAR LA SOBRESCRITURA NO INTENCIONADA
El ajuste predeterminado del parámetro 31-40 Memory
Module Function es [1] Only Allow Download. Si se
produce cualquier actualización, como la actualización
del rmware por el MCT 10 mediante un archivo OSS, la
actualización de un parámetro por LCP o bus, el reinicio
de parámetros a través del parámetro 14-22 Modo funcio-
namiento o el reinicio con tres dedos del convertidor de
frecuencia, los datos actualizados se perderán en el
siguiente apagado y encendido de la unidad, ya que el
convertidor de frecuencia volverá a descargar los datos
del módulo de memoria.
Tras la descarga de los datos del módulo de
•
memoria al convertidor de frecuencia,
seleccione [0] Disabled o [2] Only Allow Upload
en el parámetro 31-40 Memory Module Function
antes del nuevo ciclo de apagado y encendido.
5.9.1 Sincronización de los datos del
convertidor de frecuencia con un
nuevo módulo de memoria (creación
de una copia de seguridad del
convertidor)
1. Conecte un nuevo módulo de memoria vacío en
el convertidor de frecuencia.
2. Seleccione [2] Only Allow Upload o [3] Allow Both
Download and Upload en el
parámetro 31-40 Memory Module Function.
3. Encienda el convertidor de frecuencia.
4. Espere a que se complete la sincronización.
Consulte el capétulo 5.9.7 Rendimiento de la
transferencia e indicaciones para comprobar las
indicaciones de transferencia del convertidor de
frecuencia.
AVISO!
Para evitar la sobrescritura no intencionada de los datos
del módulo de memoria, piense en ajustar la congu-
ración del parámetro 31-40 Memory Module Function
antes del siguiente ciclo de apagado y encendido,
conforme a las distintas nalidades operativas.
5.9.2 Copia de datos a otro convertidor de
frecuencia
1. Asegúrese de los datos necesarios se carguen en
el módulo de memoria. Consulte el
capétulo 5.9.1 Sincronización de los datos del
convertidor de frecuencia con un nuevo módulo de
memoria (creación de una copia de seguridad del
convertidor).
2. Desconecte el módulo de memoria y conéctelo a
otro convertidor de frecuencia.
3. Asegúrese de que se haya seleccionado [1] Only
Allow Download o [3] Allow Both Download and
Upload en el parámetro 31-40 Memory Module
Function del nuevo convertidor de frecuencia.
4. Encienda el nuevo convertidor de frecuencia.
5. Espere a que se complete la descarga y se
transeran los datos. Consulte el
capétulo 5.9.7 Rendimiento de la transferencia e
indicaciones para comprobar las indicaciones de
transferencia del convertidor de frecuencia.
AVISO!
Para evitar la sobrescritura no intencionada de los datos
del módulo de memoria, piense en ajustar la congu-
ración del parámetro 31-40 Memory Module Function
antes del siguiente ciclo de apagado y encendido,
conforme a las distintas nalidades operativas.
5 5
MG07A505 Danfoss A/S © 08/2018 Reservados todos los derechos. 37

Puesta en servicio
VLT® Midi Drive FC 280
5.9.3 Copia de datos a varios convertidores
de frecuencia
Si varios convertidores de frecuencia tienen la misma
tensión/potencia, la información de uno de los convertidores puede transferirse a los demás mediante un
módulo de memoria.
1. Siga los pasos descritos en el
capétulo 5.9.1 Sincronización de los datos del
convertidor de frecuencia con un nuevo módulo de
55
memoria (creación de una copia de seguridad del
convertidor) para cargar los datos de un
convertidor de frecuencia a un módulo de
memoria.
2. Para evitar la carga no intencionada de datos al
módulo de memoria maestro, asegúrese de
seleccionar [1] Only Allow Download en el
parámetro 31-40 Memory Module Function en los
demás convertidores de frecuencia.
3. Desconecte el módulo de memoria y conéctelo a
otro convertidor de frecuencia.
4. Encienda el nuevo convertidor de frecuencia.
5. Espere a que se complete la descarga y se
transeran los datos. Consulte el
capétulo 5.9.7 Rendimiento de la transferencia e
indicaciones para comprobar las indicaciones de
transferencia del convertidor de frecuencia.
6. Repita los pasos 3-5 para el siguiente convertidor
de frecuencia.
AVISO!
Los datos también se pueden descargar al módulo de
memoria desde un PC con el programador del módulo
de memoria VLT® Memory Module Programmer.
AVISO!
En cualquiera de los convertidores de frecuencia, si se
conecta un módulo de memoria vacío para hacer una
copia de seguridad de los datos, ajuste la conguración
del parámetro 31-40 Memory Module Function a [2] Only
Allow Upload o [3] Allow Both Download and Upload
antes del siguiente ciclo de apagado y encendido.
5.9.4 Transferencia de la información del
rmware
Si dos convertidores de frecuencia tienen la misma tensión
y la misma magnitud de potencia, la información del
rmware puede transferirse de un convertidor a otro.
1. Siga los pasos descritos en el
capétulo 5.9.1 Sincronización de los datos del
convertidor de frecuencia con un nuevo módulo de
memoria (creación de una copia de seguridad del
convertidor) para cargar los datos del
un convertidor de frecuencia a un módulo de
memoria.
2. Siga los datos del capétulo 5.9.2 Copia de datos a
otro convertidor de frecuencia para transferir la
información del rmware a otro convertidor de
frecuencia que tenga la misma tensión y
magnitud de potencia.
rmware de
AVISO!
Los datos del rmware también se pueden descargar al
módulo de memoria desde un PC con el programador
del módulo de memoria VLT® Memory Module
Programmer.
5.9.5 Copia de seguridad de los cambios
de parámetros en el módulo de
memoria
1. Conecte un módulo de memoria nuevo o
formateado en el convertidor de frecuencia.
2. Seleccione [2] Only Allow Upload o [3] Allow Both
Download and Upload en el
parámetro 31-40 Memory Module Function.
3. Encienda el convertidor de frecuencia.
4. Espere a que se complete la sincronización.
Consulte el capétulo 5.9.7 Rendimiento de la
transferencia e indicaciones para comprobar las
indicaciones de transferencia del convertidor de
frecuencia.
5. Cualquier cambio de los ajustes de parámetros se
sincroniza automáticamente en el módulo de
memoria.
38 Danfoss A/S © 08/2018 Reservados todos los derechos. MG07A505

Puesta en servicio Guía de funcionamiento
5.9.6 Eliminación de datos
El módulo de memoria puede borrarse mediante el ajuste
del parámetro 31-43 Erase_MM sin necesidad de un nuevo
ciclo de apagado y encendido.
1. Compruebe que el módulo de memoria esté
montado en el convertidor de frecuencia.
2. Seleccione [1] Erase MM en el
parámetro 31-43 Erase_MM.
3. Se borrarán todos los archivos del módulo de
memoria.
4. El ajuste del Parámetro 31-43 Erase_MM regresa a
[0] No function.
5.9.7 Rendimiento de la transferencia e
indicaciones
El tiempo necesario para transferir diferentes datos entre el
convertidor de frecuencia y el módulo de memoria es
variable. Consulte el Tabla 5.16.
Archivo de datos Tiempo
La carga de datos del convertidor de
•
frecuencia al módulo de memoria dura
unos 2 minutos.
Archivo del rmware
Archivo SIVP Alrededor de 10 s.
Archivo de
parámetros
Tabla 5.16 Rendimiento de la transferencia
1) Si se
cargar el parámetro actualizado, espere al menos 5 s antes de la
desconexión.
1)
modica un parámetro en el convertidor de frecuencia, para
La carga de datos del módulo de
•
memoria al convertidor de frecuencia
dura unos 6 minutos.
Alrededor de 5 s.
capétulo 5.3.5 Panel de control local gráco (GLCP) para conocer la
posición y las funciones del LED de encendido.
5.9.8 Activación del convertidor PROFIBUS
El módulo de memoria VLT® Memory Module MCM 103
funciona como una combinación de un módulo de
memoria y un módulo de activación para activar la función
de convertidor PROFIBUS en el rmware. El módulo de
memoria VLT® Memory Module MCM 103 contiene un
archivo PBconver.MME que se combina con el número de
serie del módulo de memoria particular. El archivo
PBconver.MME es la clave para la función de convertidor
PROFIBUS.
Para activar el convertidor PROFIBUS, seleccione la versión
en el parámetro 14-70 Compatibility Selections.
Parámetro 14-70 Compatibility
Selections
*[0] No Function La selección de la función de
[12] VLT2800 3M Seleccione el modo de
[13] VLT2800 3M incl. MAV Seleccione el modo de
[14] VLT2800 12M Seleccione el modo de
[15] VLT2800 12M incl. MAV Seleccione el modo de
Descripción
compatibilidad está
desactivada.
compatibilidad VLT 2800 3M
para el convertidor de
frecuencia.
compatibilidad VLT 2800 3M
con MAV para el convertidor de
frecuencia.
compatibilidad VLT 2800 12M
para el convertidor de
frecuencia.
compatibilidad VLT 2800 12M
con MAV para el convertidor de
frecuencia.
5 5
Archivo de
datos
Archivo
de rmware
Archivo
SIVP
Archivo
de
parámetros
Tabla 5.17 Indicaciones de transferencia
1) El LED de encendido está en el LCP. Consulte el
capétulo 5.3.1 panel numérico de control local (NLCP) y el
MG07A505 Danfoss A/S © 08/2018 Reservados todos los derechos. 39
GLCP NLCP
Durante la transferencia se indica
«Synchronizing with
Memory Module»
(Sincronización con
el módulo de
memoria)
No se muestra
ningún texto.
Indicaciones
No se
muestra
ningún
texto.
LED de
encendido
El LED parpadea
lentamente
durante la
transferencia.
El LED no
parpadea.
1)
Tabla 5.18 Descripción del
parámetro 14-70 Compatibility Selections
Activar el convertidor Probus mediante el módulo de
memoria VLT® Memory Module MCM 103
1. Conecte el módulo de memoria al convertidor de
frecuencia.
2. Seleccione [12] VLT 2800 3M o [14] VLT 2800 12M
en el parámetro 14-70 Compatibility Selections.
3. Realice un ciclo de apagado y encendido para
arrancar el convertidor de frecuencia con el
número de identicación y el módulo VLT® 2800
Probus.

Puesta en servicio
VLT® Midi Drive FC 280
AVISO!
Para que el módulo de memoria VLT® Memory Module
MCM 103 funcione como convertidor Probus, no debe
ajustarse el parámetro 31-40 Memory Module Function
como [0] Disabled.
Es posible activar el convertidor Probus sin el módulo de
memoria VLT® Memory Module MCM 103 durante un
tiempo limitado. Antes de que transcurra dicho periodo,
conecte un módulo de memoria VLT® Memory Module
MCM 103 para mantener la función de convertidor
55
Probus.
Active el convertidor Probus mediante ajustes de
parámetros
1. Seleccione [1] Enabled en parámetro 31-47 Time
Limit Function.
2. Seleccione [12] VLT 2800 3M o [14] VLT 2800 12M
en el parámetro 14-70 Compatibility Selections.
3. Realice un ciclo de apagado y encendido para
arrancar el convertidor de frecuencia con el
número de
Probus.
4. El Parámetro 31-48 Time Limit Remaining Time
iniciará una cuenta atrás después del ciclo de
apagado y encendido, y mostrará el tiempo de
uso restante.
Tras 720 horas de funcionamiento, el convertidor de
frecuencia emite una advertencia. El convertidor Probus
sigue funcionando. Cuando el contador de tiempo del
parámetro 31-48 Time Limit Remaining Time llegue a 0, el
convertidor de frecuencia emitirá una alarma de bloqueo
por alarma con la siguiente orden de arranque.
identicación y el módulo VLT® 2800
40 Danfoss A/S © 08/2018 Reservados todos los derechos. MG07A505
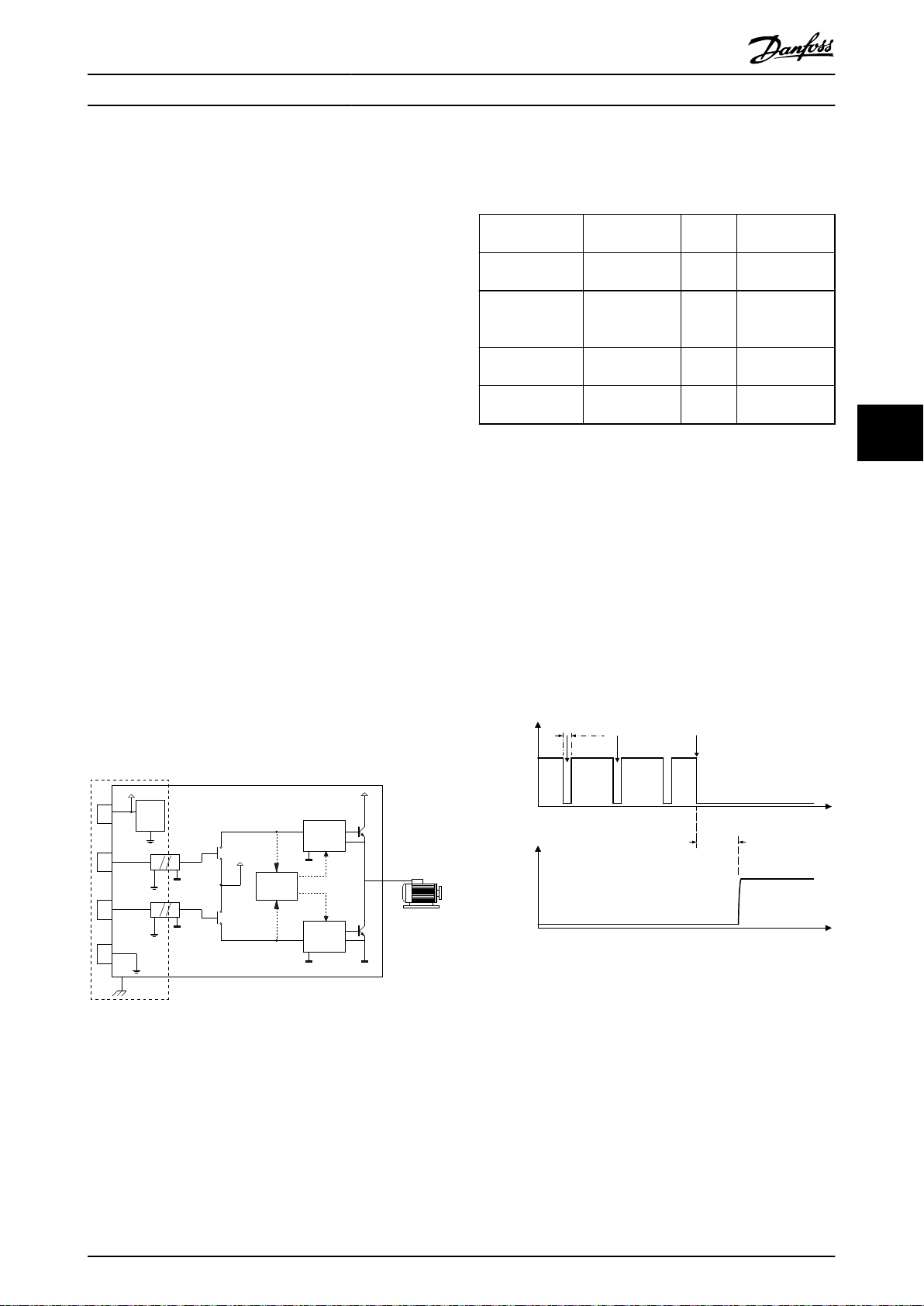
24 V
17 V
IGBT
+UDC
X3
IGBT
PELV
X3
X3
24 V
voltage
source
high-side
gate driving
circuit
diagnostic
circuit
low-side
gate driving
circuit
12
38
37
55
130BE463.12
Time
5 ms max.
Debounce time
Time
STO valid
STO invalid
Voltage
T37/38
Test pulse STO demanded
STO request
state
130BE587.12
Safe Torque O (STO) Guía de funcionamiento
6 Safe Torque O (STO)
La función Safe Torque O (STO) es uno de los
componentes de un sistema de control de seguridad. La
STO evita que la unidad genere la energía necesaria para
girar el motor, garantizando así la seguridad en situaciones
de emergencia.
La función STO está diseñada y homologada conforme a
estos requisitos:
CEI/EN 61508: 2010 SIL2
•
CEI/EN 61800-5-2: 2007 SIL2
•
CEI/EN 62061: 2012 SILCL de SIL2
•
EN ISO 13849-1: 2008 categoría 3 PL d
•
Para conseguir el nivel deseado de seguridad operativa,
seleccione y aplique de forma adecuada los componentes
del sistema de control de seguridad. Antes de utilizar la
STO, realice un análisis completo de los riesgos de dicha
instalación para determinar si la función STO y los niveles
de seguridad son apropiados y sucientes.
La función STO del convertidor de frecuencia se controla
mediante los terminales de control 37 y 38. Cuando está
activada la STO, se desconecta la fuente de alimentación
del lado alto y bajo de los circuitos de accionamiento de
puerta del IGBT. En la Ilustración 6.1 se muestra la
arquitectura de la STO. En la Tabla 6.1 se muestran los
estados de la STO en función del estado de alimentación
de los terminales 37 y 38.
Terminal 37 Terminal 38 Par Advertencia o
alarma
Alimentado
1)
Alimentado
2)
Sí
Sin advertencias
ni alarmas.
3)
Sin alimentación
Sin alimentación No Advertencia/
alarma 68: Safe
Torque O.
Sin alimentación Alimentado No Alarma 188: Fallo
funcion. STO
Alimentado Sin alimentación No Alarma 188: Fallo
funcion. STO
Tabla 6.1 Estado de la STO
1) El rango de tensión es de 24 V ±5 V, siendo el terminal 55 el
terminal de referencia.
2) Solo habrá par cuando el convertidor de frecuencia esté en funcionamiento.
±
3) Circuito abierto, o tensión en el intervalo de 0 V
1,5 V, siendo el
terminal 55 el terminal de referencia.
Filtrado del pulso de prueba
En el caso de dispositivos de seguridad que generen
pulsos de prueba en las líneas de control de la STO: si las
señales de pulsos permanecen en un nivel bajo (≤1,8 V)
durante un máximo de 5 ms, se ignorarán, como se
muestra en la Ilustración 6.2.
6
6
Ilustración 6.2 Filtrado del pulso de prueba
Ilustración 6.1 Arquitectura de la STO
Tolerancia de entrada asíncrona
Las señales de entrada de los dos terminales no siempre
están sincronizadas. Si la discrepancia entre ambas señales
es mayor de 12 ms, se emite una alarma de fallo de STO
(alarma 188 Fallo funcion. STO).
MG07A505 Danfoss A/S © 08/2018 Reservados todos los derechos. 41

130BE213.10
Safe Torque O (STO)
VLT® Midi Drive FC 280
6
Señales válidas
Para activar la STO, las dos señales deben estar a nivel bajo
durante al menos 80 ms. Para desactivar la STO, ambas
señales deben estar a nivel alto durante al menos 20 ms.
Consulte el capétulo 9.6 Entrada/salida de control y datos de
control para conocer los niveles de tensión y la intensidad
de entrada de los terminales de STO.
6.1 Medidas de seguridad de la STO
Personal
Este equipo únicamente puede ser manejado o instalado
por personal cualicado.
El personal cualicado es aquel personal formado que está
autorizado para realizar la instalación, la puesta en marcha
y el mantenimiento de equipos, sistemas y circuitos
conforme a la legislación y la regulación vigentes.
Asimismo, el personal debe estar familiarizado con las
instrucciones y medidas de seguridad descritas en este
manual.
cualicado
AVISO!
Después de instalar la STO, realice una prueba de puesta
en servicio tal y como se especica en el
capétulo 6.3.3 Prueba de puesta en servicio de STO. Es
obligatorio pasar una prueba de puesta en servicio tras
la primera instalación y después de cada cambio en la
instalación de seguridad.
6.2 Instalación de la función Safe Torque O
Para la conexión del motor, la conexión de red de CA y el
cableado de control, siga las instrucciones de instalación
segura del capétulo 4 Instalación eléctrica.
Active la STO integrada del siguiente modo:
1. Retire el puente situado entre los terminales de
control 12 (24 V), 37 y 38. No basta con cortar o
romper el puente para evitar los cortocircuitos
Consulte el puente en la Ilustración 6.3.
ADVERTENCIA
RIESGO DE DESCARGA ELÉCTRICA
La función STO NO aísla la tensión de red al convertidor
de frecuencia o los circuitos auxiliares y, por lo tanto, no
ofrece seguridad eléctrica. Si no aísla el suministro de
tensión de red de la unidad y no espera el tiempo
especicado, pueden producirse lesiones graves o
incluso la muerte.
Realice las tareas pertinentes en las partes
•
eléctricas del convertidor de frecuencia o el
motor únicamente después de aislar el
suministro de tensión de red y de esperar el
tiempo especicado en el capétulo 2.3.1 Tiempo
de descarga.
AVISO!
A la hora de diseñar la aplicación de la máquina, tenga
en cuenta la sincronización y la distancia para una
parada por inercia (STO). Para obtener más información
sobre las categorías de parada, consulte la norma EN
60204-1.
Ilustración 6.3 Puente entre el terminal 12 (24 V), el 37 y el 38
2. Conecte un dispositivo de seguridad de doble
canal (por ejemplo, un PLC de seguridad, una
cortina de luz, un relé de seguridad o un botón
de parada de emergencia) a los terminales 37 y
38, para crear una aplicación de seguridad. El
dispositivo debe cumplir el nivel de seguridad
requerido conforme a la evaluación de riesgos. En
la Ilustración 6.4 se muestra el esquema de
cableado de las aplicaciones STO cuando el
convertidor de frecuencia y el dispositivo de
seguridad están en el mismo alojamiento. En la
Ilustración 6.5 se muestra el esquema de cableado
de las aplicaciones STO cuando se utiliza alimentación externa.
AVISO!
La señal de STO debe suministrarse mediante PELV.
42 Danfoss A/S © 08/2018 Reservados todos los derechos. MG07A505
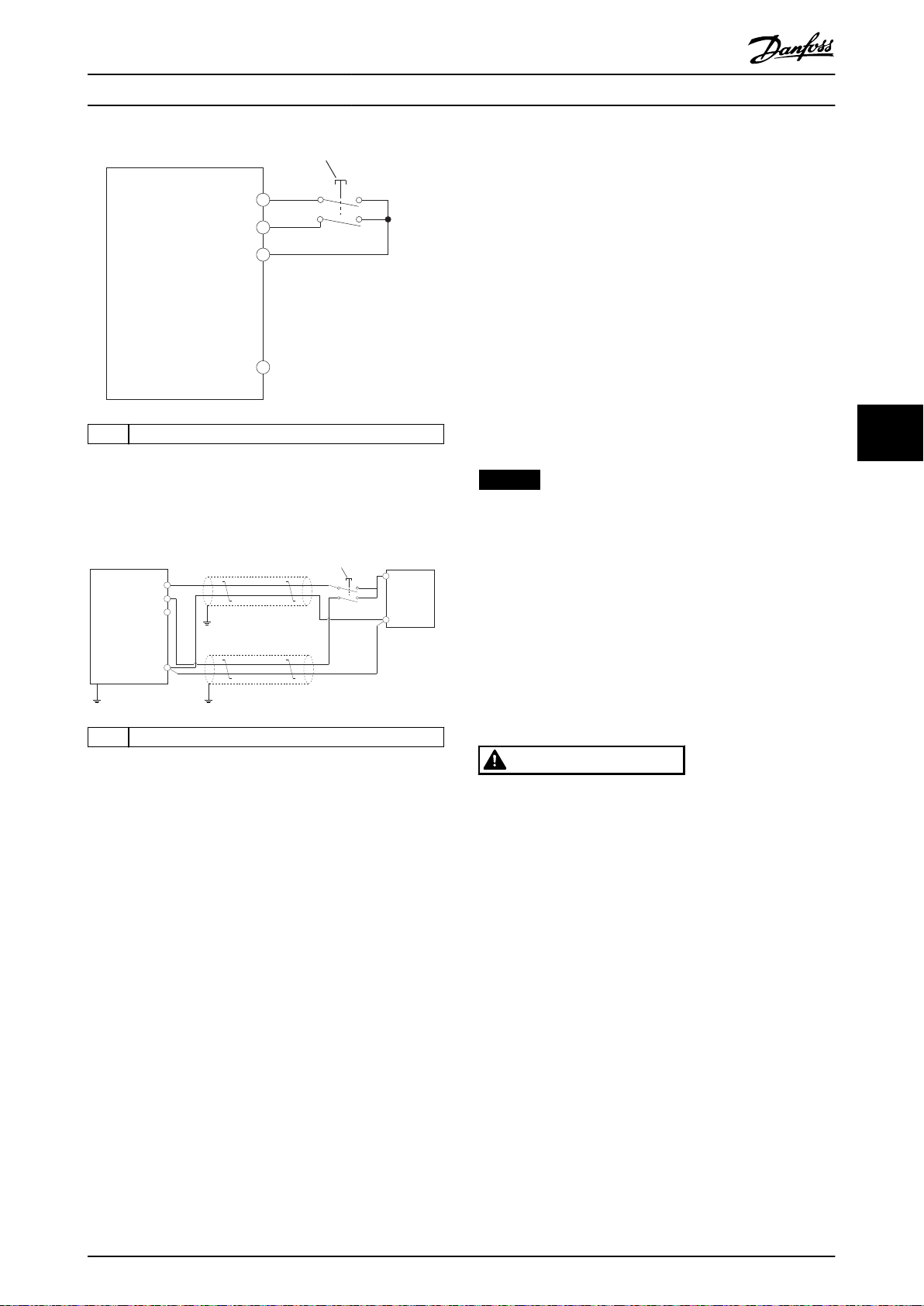
130BE424.11
37
38
12
55
1
130BE425.12
24 V source
37
38
+
-
12
55
1
Safe Torque O (STO) Guía de funcionamiento
6.3
6.3.1 Activación de la función Safe Torque
Para activar la función de STO, retire la tensión en los
terminales 37 y 38 del convertidor de frecuencia.
Cuando se activa la STO, el convertidor de frecuencia emite
la alarma 68, Safe Torque
Torque O, desconecta la unidad y hace que el motor entre
en modo de inercia hasta que se detiene. Utilice la función
STO para detener el convertidor de frecuencia en
situaciones de parada de emergencia. En el modo de
1 Dispositivo de seguridad
funcionamiento normal, cuando no se necesite la STO,
utilice la función de parada normal.
Puesta en servicio de STO
O
O o la advertencia 68, Safe
6
6
Ilustración 6.4 Cableado de STO en un alojamiento; el
convertidor de frecuencia suministra la tensión de alimentación
1 Dispositivo de seguridad
Ilustración 6.5 Cableado de STO; alimentación externa
3. Efectúe el cableado según las instrucciones del
capétulo 4 Instalación eléctrica y:
3a Elimine los riesgos de cortocircuito.
3b Asegúrese de que los cables de STO
estén apantallados si tienen más de 20
m (65,6 ft) o están fuera del alojamiento.
3c Conecte el dispositivo de seguridad
directamente a los terminales 37 y 38.
AVISO!
Si se activa la STO mientras el convertidor de frecuencia
emite una advertencia 8, Tensión baja CC o una alarma 8,
Tensión baja CC, el convertidor de frecuencia omite la
alarma 68, Safe Torque O, pero el funcionamiento de la
STO no se ve afectado.
6.3.2 Desactivación de la función Safe
Torque O
Siga las instrucciones de la Tabla 6.2 para desactivar la
función STO y reanudar el funcionamiento normal
conforme al modo de reinicio de la función STO.
ADVERTENCIA
RIESGO DE MUERTE O LESIONES
Si se vuelve a aplicar un suministro externo de 24 V CC
al terminal 37 o al 38, se pone n al estado SIL2 STO, lo
cual puede arrancar el motor. Un arranque inesperado
del motor puede causar lesiones personales o la muerte.
Asegúrese de tomar todas las medidas de
•
seguridad necesarias antes de volver a aplicar
un suministro externo de 24 V CC a los
terminales 37 y 38.
MG07A505 Danfoss A/S © 08/2018 Reservados todos los derechos. 43

Safe Torque O (STO)
VLT® Midi Drive FC 280
6
Modo de
reinicio
Reinicio
manual
Rearranque
automático
Tabla 6.2 Desactivación de la STO
Pasos para desactivar la
STO y reanudar el
funcionamiento normal
1. Vuelva a aplicar un
suministro externo de
24 V CC a los
terminales 37 y 38.
2. Inicie una señal de
reinicio (mediante
eldbus, I/O digital o
la tecla [Reset]/[O
Reset] del LCP).
Vuelva a aplicar un
suministro externo de 24
V CC a los terminales 37
y 38.
Conguración del
modo de reinicio
Ajustes predeterminados.
Parámetro 5-19 Terminal
37/38 Safe Torque O=[1]
Alarma de Safe Torque
O
Parámetro 5-19 Terminal
37/38 Safe Torque O=
[3] Advertencia de Safe
Torque O
6.3.3 Prueba de puesta en servicio de STO
Después de la instalación y antes de la puesta en funcionamiento por primera vez, realice una prueba de puesta en
servicio de la instalación utilizando la STO.
Vuelva a realizar la prueba después de cada modicación
de la instalación o aplicación de la STO.
AVISO!
Se requiere una prueba de puesta en servicio correcta de
la función STO tras la instalación inicial y después de
cada cambio que se efectúe posteriormente en la
instalación.
Para llevar a cabo una prueba de puesta en servicio:
Siga las instrucciones del capétulo 6.3.4 Prueba
•
para aplicaciones de STO en el modo de reinicio
manual si la STO está ajustada en el modo de
reinicio manual.
Siga las instrucciones del capétulo 6.3.5 Prueba
•
para aplicaciones de STO en el modo de rearranque
automático si la STO está ajustada en el modo de
rearranque automático.
6.3.4 Prueba para aplicaciones de STO en el
modo de reinicio manual
En aplicaciones en las que el parámetro 5-19 Terminal 37/38
Safe Torque O esté ajustado al valor predeterminado [1]
Alarma de Safe Torque O, efectúe la prueba de puesta en
servicio de la siguiente manera:
1. Ajuste el parámetro 5-40 Relé de función a [190]
Función STO activa.
2. Retire la fuente de alimentación de tensión de 24
V CC a los terminales 37 y 38 usando el
dispositivo de seguridad mientras el convertidor
de frecuencia acciona el motor (es decir, sin
interrumpir la alimentación de red).
3. Compruebe que:
3a El motor funciona por inercia. El motor
puede tardar mucho tiempo en pararse.
3b Si el LCP está montado, se visualiza en
este la alarma 68, Safe Torque
LCP no está montado, la alarma 68, Safe
Torque O, se registra en el
parámetro 15-30 Reg. alarma: código de
fallo.
4. Vuelva a aplicar 24 V CC a los terminales 37 y 38.
5. Asegúrese de que el motor permanezca en
estado de inercia y de que el relé del cliente (si
está conectado) permanezca activado.
6. Envíe una señal de reinicio (mediante eldbus, I/O
digital o la tecla [Reset]/[O Reset] del LCP).
7. Asegúrese de que el motor esté operativo y
funcione en el rango de velocidad original.
La prueba de puesta en servicio se ha nalizado con éxito
cuando se han completado todos los pasos anteriores.
O. Si el
6.3.5 Prueba para aplicaciones de STO en el
modo de rearranque automático
En aplicaciones en las que el parámetro 5-19 Terminal 37/38
Safe Torque O esté ajustado como [3] Advertencia de Safe
Torque O, efectúe la prueba de puesta en servicio de la
siguiente manera:
1. Retire la fuente de alimentación de tensión de
24 V CC a los terminales 37 y 38 mediante el
dispositivo de seguridad mientras el convertidor
de frecuencia acciona el motor (es decir, sin
interrumpir la alimentación de red).
44 Danfoss A/S © 08/2018 Reservados todos los derechos. MG07A505

Safe Torque O (STO) Guía de funcionamiento
2. Compruebe que:
2a El motor funciona por inercia. El motor
puede tardar mucho tiempo en pararse.
2b Si el LCP está montado, se visualiza en
este la advertencia 68, Safe Torque O. Si
el LCP no está montado, la advertencia
68, Safe Torque O, se registra en el bit
30 del parámetro 16-92 Código de
advertencia.
3. Vuelva a aplicar 24 V CC a los terminales 37 y 38.
4. Asegúrese de que el motor esté operativo y
funcione en el rango de velocidad original.
La prueba de puesta en servicio se ha nalizado con éxito
cuando se han completado todos los pasos anteriores.
AVISO!
Consulte la advertencia sobre el comportamiento de
reinicio en el capétulo 6.1 Medidas de seguridad de la STO.
6.4 Mantenimiento y servicio de la STO
El usuario será responsable de tomar las medidas
•
de seguridad adecuadas.
Los parámetros del convertidor de frecuencia se
•
pueden proteger mediante contraseña.
La prueba de funcionamiento tiene dos partes:
Prueba básica de funcionamiento.
•
Prueba diagnóstica de funcionamiento.
•
Si todos los pasos se completan adecuadamente, se
considera superada la prueba de funcionamiento.
8. Compruebe que el motor no arranque de forma
automática y que solo se rearranque enviando
una señal de reinicio (mediante eldbus, I/O
digital o la tecla [Reset]/[O Reset] del LCP).
Prueba diagnóstica de funcionamiento
1. Compruebe que la advertencia 68, Safe Torque O
y la alarma 68, Safe Torque O no se emiten
cuando la fuente de alimentación de 24 V está
conectada a los terminales 37 y 38.
2. Retire la fuente de alimentación de 24 V al
terminal 37 y compruebe que el LCP muestra la
alarma 188, Fallo funcion. STO si el LCP está
montado. Si el LCP no está montado, compruebe
que la alarma 188, Fallo funcion. STO esté
registrada en el parámetro 15-30 Reg. alarma:
código de fallo.
3. Vuelva a aplicar una fuente de alimentación de
24 V al terminal 37 y compruebe que la alarma se
haya reiniciado adecuadamente.
4. Retire la fuente de alimentación de 24 V al
terminal 38 y compruebe que el LCP muestra la
alarma 188, Fallo funcion. STO si el LCP está
montado. Si el LCP no está montado, compruebe
que la alarma 188, Fallo funcion. STO esté
registrada en el parámetro 15-30 Reg. alarma:
código de fallo.
5. Vuelva a aplicar una fuente de alimentación de
24 V al terminal 38 y compruebe que la alarma se
haya reiniciado adecuadamente.
6
6
Prueba básica de funcionamiento
Si la función de STO no se ha usado durante un año,
realice una prueba funcional básica para detectar cualquier
fallo o funcionamiento defectuoso de la STO.
1. Asegúrese de que el parámetro 5-19 Terminal
37/38 Safe Torque O esté ajustado en *[1] Alarma
de Safe Torque O.
2. Retire la fuente de alimentación de tensión de 24
V CC a los terminales 37 y 38.
3. Compruebe si el LCP muestra la alarma 68, Safe
Torque O.
4. Compruebe que el convertidor de frecuencia
desconecte la unidad.
5. Compruebe que el motor esté en funcionamiento
por inercia y que se pare por completo.
6. Inicie una señal de arranque (mediante eldbus,
I/O digital o el LCP) y compruebe que el motor
no arranca.
7. Vuelva a conectar la fuente de alimentación de
tensión de 24 V CC a los terminales 37 y 38.
MG07A505 Danfoss A/S © 08/2018 Reservados todos los derechos. 45

Safe Torque O (STO)
VLT® Midi Drive FC 280
6.5 Datos técnicos de STO
El análisis de diagnósticos, efectos y modos de fallo (FMEDA) se realiza con base en los siguientes supuestos:
El VLT® Midi Drive FC 280 dedica el 10 % del presupuesto total para fallos a un lazo de seguridad SIL2.
•
Las tasas de fallos se basan en la base de datos SN29500 de Siemens.
•
Las tasas de fallos son constantes, sin que se incluyan los mecanismos de desgaste.
•
Para cada canal, los componentes relacionados con la seguridad se consideran de tipo A, con una tolerancia a
•
fallos del hardware de 0.
Los niveles de tensión están en la media de un entorno industrial y la temperatura de funcionamiento de los
•
componentes es de hasta 85 °C (185 °F).
Un error de seguridad (por ejemplo, la salida en estado seguro) se repara en un plazo de ocho horas.
•
El estado de seguridad es sin par de salida.
•
6
Estándares de seguridad
Función de seguridad Safe Torque O CEI 61800-5-2
Rendimiento de seguridad
Tiempo de reacción
1)
Seguridad de la maquinaria ISO 13849-1, CEI 62061
Seguridad funcional CEI 61508
ISO 13849-1
Categoría Cat. 3
Cobertura del diagnóstico (CC) 60 % (baja)
Tiempo medio entre fallos
peligrosos (MTTFd)
Nivel de rendimiento PL d
CEI 61508 / CEI 61800-5-2 / CEI 62061
Nivel de integridad de seguridad SIL2
Probabilidad de fallo peligroso por
hora (PFH) (modo de alta demanda)
Probabilidad de fallo peligroso
según demanda (PFD
20 años) (modo de baja demanda)
Fracción de fallos seguros (SFF)
Tolerancia a fallos del hardware
(HFT)
Intervalo de prueba de evidencia2)20 años
Fallo de causa frecuente (CCF) β = 5 %; βD = 5 %
Intervalo de prueba diagnóstica
(DTI)
Capacidad sistemática SC 2
Tiempo de respuesta de entrada a
salida
para PTI =
med
2400 años (alto)
7,54E-9 (1/h)
6.05E-4
En piezas de doble canal: >84 %
En piezas de canal simple: >99 %
En piezas de doble canal: HFT = 1
En piezas de canal simple: HFT = 0
160 ms
Alojamientos de tamaño K1-K3: Máximo de 50 ms
Alojamientos de tamaño K4 y K5: máximo de 30 ms
Tabla 6.3 Datos técnicos de la STO
1) El tiempo de reacción es el tiempo que pasa desde que se produce una condición de señal de entrada que activa la función de STO hasta que
se desconecta el par del motor.
2) Para conocer el procedimiento de prueba de evidencia, consulte el capétulo 6.4 Mantenimiento y servicio de la STO.
46 Danfoss A/S © 08/2018 Reservados todos los derechos. MG07A505
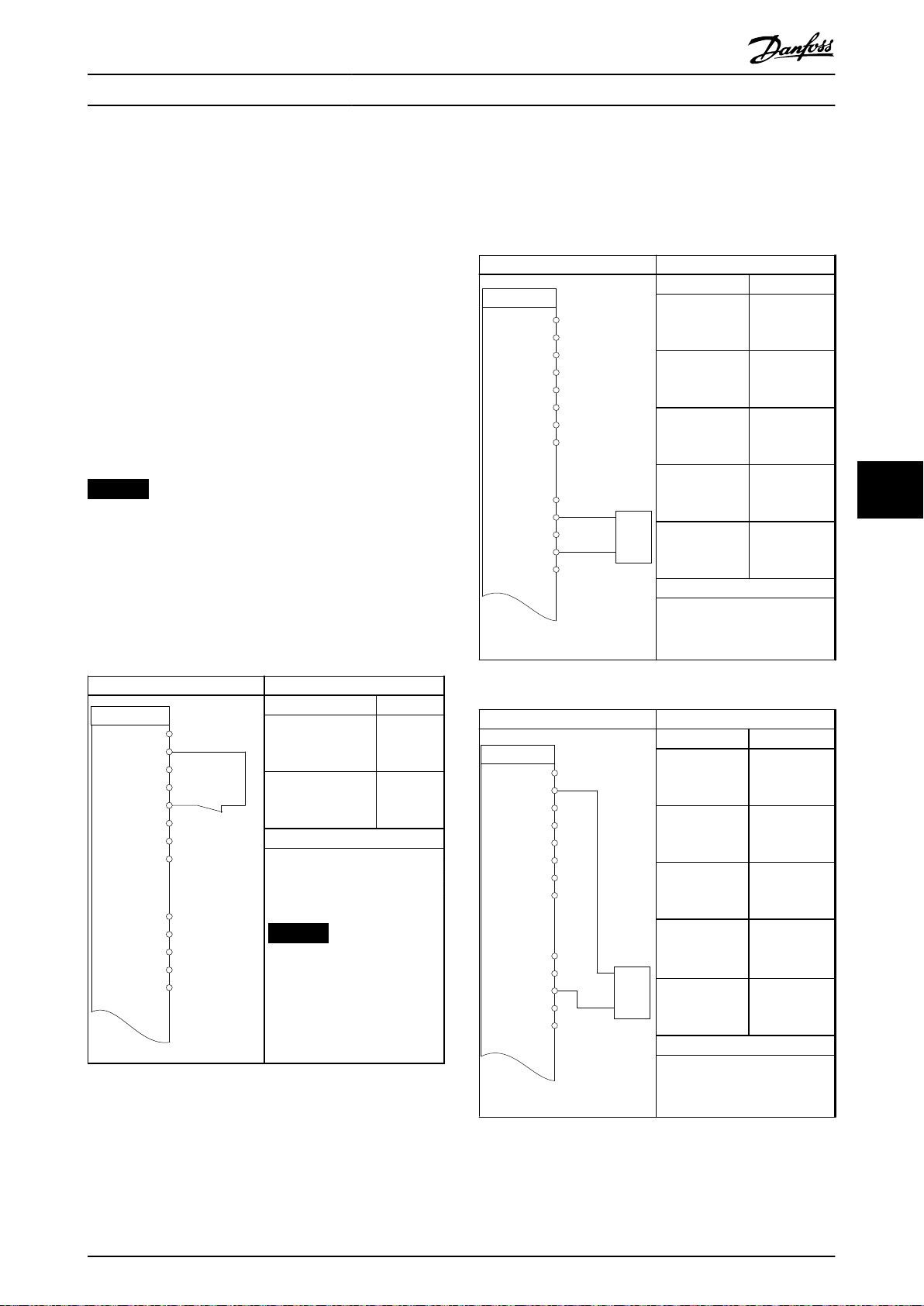
130BF096.10
FC
+24 V
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
12
13
18
19
27
29
32
33
50
53
54
55
42
A OUT
D IN
+24 V
130BE204.11
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
0 ~10 V
+
-
FC
+24 V
130BF097.10
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
4 - 20mA
+
-
FC
+24 V
Ejemplos de aplicaciones Guía de funcionamiento
7 Ejemplos de aplicaciones
7.1 Introducción
Los ejemplos de esta sección pretenden ser una referencia
rápida para aplicaciones comunes.
Los ajustes de parámetros son los valores
•
regionales predeterminados, salvo que se indique
lo contrario (seleccionado en
parámetro 0-03 Ajustes regionales).
Los parámetros asociados con los terminales y sus
•
ajustes se muestran al lado de los dibujos.
También se muestran los ajustes de conmutador
•
necesarios para los terminales analógicos 53 o 54.
AVISO!
Si no se usa la función de STO, será necesario un puente
entre los terminales 12, 37 y 38 para que el convertidor
de frecuencia funcione con los valores de programación
ajustados en fábrica.
7.2 Ejemplos de aplicaciones
7.2.1 AMA
7.2.2 Velocidad
Parámetros
Función Ajuste
Parámetro 6-10
Terminal 53
0,07 V*
escala baja V
Parámetro 6-11
Terminal 53
10 V*
escala alta V
Parámetro 6-14
Term. 53 valor
0
bajo ref./realim
Parámetro 6-15
Term. 53 valor
50
alto ref./realim
Parámetro 6-19
Modo terminal
53
[1] Modo
tensión
* = Valor por defecto
Notas / comentarios:
7 7
Parámetros
Tabla 7.2 Velocidad de referencia analógica (tensión)
Función Ajuste
Parámetro 1-29 Ada
ptación automática
del motor (AMA)
[1] Act.
AMA
completo
Parámetro 5-12 Ter
minal 27 Entrada
*[2] Inercia
digital
* = Valor por defecto
Notas / comentarios: ajuste el
grupo de parámetros 1-2* Datos
de motor conforme a las especi-
caciones del motor.
AVISO!
Tabla 7.1 AMA con T27 conectado
Si los terminales 13 y 27 no
están conectados, ajuste el
parámetro 5-12 Terminal 27
Digital Input como [0] Sin
función.
Parámetros
Función Ajuste
Parámetro 6-22
Terminal 54
4 mA*
escala baja mA
Parámetro 6-23
Terminal 54
20 mA*
escala alta mA
Parámetro 6-24
Term. 54 valor
0
bajo ref./realim
Parámetro 6-25
Term. 54 valor
50
alto ref./realim
Parámetro 6-29
Modo terminal
54
[0] Modo de
intensidad
* = Valor por defecto
Notas / comentarios:
Tabla 7.3 Referencia analógica de velocidad (corriente)
MG07A505 Danfoss A/S © 08/2018 Reservados todos los derechos. 47

130BE208.11
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
≈ 5kΩ
FC
+24 V
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
130BF100.10
+24 V
130BB840.12
Speed
Reference
Start (18)
Freeze ref (27)
Speed up (29)
Speed down (32)
130BF098.10
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
19
18
27
29
32
33
50
53
54
55
42
+24 V 13
Ejemplos de aplicaciones
VLT® Midi Drive FC 280
Parámetros
Función Ajuste
Parámetro 6-10
Terminal 53
0,07 V*
escala baja V
Parámetro 6-11
Terminal 53
10 V*
escala alta V
Parámetro 6-14
Term. 53 valor
0
Ilustración 7.1 Aceleración/desaceleración
bajo ref./realim
Parámetro 6-15
Term. 53 valor
alto ref./realim
Parámetro 6-19
Terminal 53
mode
* = Valor por defecto
77
Notas / comentarios:
Tabla 7.4 Velocidad de referencia (con un
potenciómetro manual)
Parámetros
Función Ajuste
Parámetro 5-10
Terminal 18
Entrada digital
Parámetro 5-12
Terminal 27
Entrada digital
Parámetro 5-13
Terminal 29
Entrada digital
Parámetro 5-14
Terminal 32
entrada digital
* = Valor por defecto
50
[1] Modo
tensión
*[8] Arranque
[19] Mantener
referencia
[21]
Aceleración
[22] Deceleración
7.2.3 Arranque/parada
Parámetros
Función Ajuste
Parámetro 5-10 Ter
minal 18 Entrada
digital
Parámetro 5-11 Ter
minal 19 entrada
digital
Parámetro 5-12 Ter
minal 27 Entrada
digital
Parámetro 5-14 Ter
minal 32 entrada
digital
Parámetro 5-15 Ter
minal 33 entrada
digital
Parámetro 3-10 Ref
erencia interna
Ref. interna 0
Ref. interna 1
Ref. interna 2
Ref. interna 3
* = Valor por defecto
Notas / comentarios:
[8]
Arranque
*[10]
Cambio de
sentido
[0] Sin
función
[16] Ref.
interna bit 0
[17] Ref.
interna bit 1
25%
50%
75%
100%
Notas / comentarios:
Tabla 7.6 Arranque/parada con cambio de sentido y cuatro
velocidades predeterminadas
Tabla 7.5 Aceleración/desaceleración
48 Danfoss A/S © 08/2018 Reservados todos los derechos. MG07A505

130BF099.10
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
+24 V
130BE210.11
+24 V
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
FC
D IN
+24 V
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
R1
12
13
18
19
27
29
32
33
50
53
54
55
42
01
02
03
130BE211.11
+24 V
Ejemplos de aplicaciones Guía de funcionamiento
7.2.4 Reinicio de alarma externa
Parámetros
Función Ajuste
Parámetro 5-11
Terminal 19
entrada digital
* = Valor por defecto
Notas / comentarios:
[1] Reinicio
7.2.6 SLC
Parámetros
Función Ajuste
Parámetro 4-30
Función de
pérdida de
[1] Advertencia
realim. del
motor
Parámetro 4-31
Error de
velocidad en
50
realim. del
motor
Parámetro 4-32
Tiempo lím.
pérdida realim.
5 s
del motor
Parámetro 7-00
Fuente de
realim. PID de
[1] Encoder 24
V
veloc.
Parámetro 5-70
Term. 32/33
resolución
1024*
7 7
encoder
Parámetro 13-00
Modo
Tabla 7.7 Reinicio de alarma externa
Controlador SL
Parámetro 13-01
Evento
7.2.5 Termistor del motor
arranque
Parámetro 13-02
AVISO!
Para cumplir los requisitos de aislamiento PELV, utilice
aislamiento reforzado o doble en los termistores.
Evento parada
Parámetro 13-10
Operando
comparador
Parámetro 13-11
Operador
Parámetros
Función Ajuste
Parámetro 1-90
Protección
[2] Descon.
termistor
térmica motor
Parámetro 1-93
Fuente de
[1] Entrada
analógica 53
termistor
Parámetro 6-19
Tabla 7.8 Termistor del motor
MG07A505 Danfoss A/S © 08/2018 Reservados todos los derechos. 49
Terminal 53
mode
* = Valor por defecto
Notas / comentarios:
si solo se necesita una
advertencia, ajuste el
parámetro 1-90 Protección
térmica motor en [1] Advert.
termistor.
[1] Modo
tensión
comparador
Parámetro 13-12
Valor
comparador
Parámetro 13-51
Evento
Controlador SL
Parámetro 13-52
Acción
Controlador SL
Parámetro 5-40
Relé de función
* = Valor por defecto
[1] act
[19]
Advertencia
[44] Botón
Reset
[21] Número
advert.
*[1] ≈
61
[22]
Comparador 0
[32] Aj. sal. dig.
A baja
[80] Salida
digital SL A

Ejemplos de aplicaciones
VLT® Midi Drive FC 280
Notas / comentarios:
Tabla 7.9 Uso de SLC para congurar un relé
si se supera el límite del
monitor de realimentación, se
emite la advertencia 61,
feedback monitor. El SLC
supervisa la advertencia 61,
feedback monitor. Si la
advertencia 61, feedback
monitor, se evalúa como
verdadera, se activa el relé 1.
A continuación, los equipos
externos pueden indicar que es
necesario realizar una
reparación. Si el valor del error
de realimentación vuelve a ser
inferior al límite en un intervalo
de 5 s, el convertidor de
frecuencia continúa
funcionando y la advertencia
desaparece. El relé 1 persiste
hasta que se pulsa
[O/Reset].
77
50 Danfoss A/S © 08/2018 Reservados todos los derechos. MG07A505

Mantenimiento, diagnóstico ... Guía de funcionamiento
8 Mantenimiento, diagnóstico y resolución de problemas
8.1 Mantenimiento y servicio
En condiciones de funcionamiento y con perles de carga
normales, el convertidor de frecuencia no necesita
mantenimiento durante su vida útil. Para evitar averías,
riesgos o daños, compruebe entre otros factores que las
conexiones de los terminales estén bien apretadas y no
haya entrada de polvo en el convertidor de frecuencia, a
intervalos periódicos en función de las condiciones de
funcionamiento. Sustituya las piezas desgastadas o
dañadas por piezas de repuesto originales o piezas
estándar. Para necesidades de mantenimiento y asistencia,
póngase en contacto con el proveedor local de Danfoss.
ADVERTENCIA
ARRANQUE ACCIDENTAL
Cuando el convertidor de frecuencia se conecta a una
red de CA, a un suministro de CC o a una carga
compartida, el motor puede arrancar en cualquier
momento. Un arranque accidental durante la programación, el mantenimiento o los trabajos de reparación
puede causar la muerte, lesiones graves o daños
materiales. El motor puede arrancar mediante un
conmutador externo, una orden de eldbus, una señal
de referencia de entrada desde el LCP, por funcionamiento remoto mediante el Software de conguración
MCT 10 o tras la eliminación de una condición de fallo.
Para evitar un arranque accidental del motor:
Desconecte el convertidor de frecuencia de la
•
alimentación.
Pulse [O/Reset] en el LCP antes de programar
•
cualquier parámetro.
Debe cablear y montar completamente el
•
convertidor de frecuencia, el motor y cualquier
equipo accionado antes de conectar el
convertidor de frecuencia a la red de CA, al
suministro de CC o a una carga compartida.
Tipos de advertencias y alarmas
8.2
Tipo de
advertencia/
alarma
Advertencia Una advertencia indica unas condiciones de
Alarma Una alarma indica un fallo que requiere de
Desconexión
Al producirse la desconexión, el convertidor de frecuencia
suspende su funcionamiento para evitar daños en el
propio convertidor y en otros equipos. Cuando se produce
una desconexión, el motor frena por inercia hasta
detenerse. La lógica del convertidor de frecuencia continúa
funcionando y monitorizando el estado del convertidor de
frecuencia. Una vez solucionada la causa del fallo, podrá
reiniciarse el convertidor de frecuencia.
Bloqueo por alarma
Al producirse el bloqueo por alarma, el convertidor de
frecuencia suspende su funcionamiento para evitar daños
en el propio convertidor y en otros equipos. Cuando se
produce un bloqueo por alarma, el motor frena por inercia
hasta detenerse. La lógica del convertidor de frecuencia
continúa funcionando y monitorizando el estado del
convertidor de frecuencia. El convertidor de frecuencia
iniciará un bloqueo por alarma cuando se produzcan fallos
graves que puedan dañar el propio convertidor u otros
equipos. Una vez que se hayan reparado los fallos,
desconecte y vuelva a conectar la potencia de entrada
antes de reiniciar el convertidor de frecuencia.
Descripción
funcionamiento anómalas que dan lugar a una
alarma. La advertencia se detiene una vez que
desaparece dicho funcionamiento anómalo.
atención inmediata. Dicho fallo siempre genera
una desconexión o un bloqueo por alarma.
Reinicie el convertidor tras una alarma.
Reinicie el convertidor de frecuencia de
cualquiera de estas cuatro maneras:
Pulse [Reset]/[O/Reset].
•
Con una orden de entrada digital de reinicio.
•
Con una orden de entrada de reinicio de
•
comunicación serie.
Con un reinicio automático.
•
8 8
MG07A505 Danfoss A/S © 08/2018 Reservados todos los derechos. 51

Setup 1
Status
Quick
Menu
Main
Menu
130BD111.10
Setup 1
Status Quick
Menu
Main
Menu
130BD112.10
130BD062.10
D
Hand
On
Reset
Auto
On
OK
On
Warn
Alarm
Mantenimiento, diagnóstico ...
VLT® Midi Drive FC 280
8.3 Pantalla de advertencias y alarmas
Ilustración 8.1 Pantalla de advertencia
Una alarma o una alarma de bloqueo de desconexión se
muestran en la pantalla junto con el número de alarma.
88
Ilustración 8.2 Alarma / bloqueo por alarma
Además del texto y el código de alarma en la pantalla del
convertidor de frecuencia, existen tres luces indicadoras de
estado. La luz indicadora será de color amarillo durante
una advertencia. La luz indicadora será de color rojo y
parpadeará durante una alarma.
Ilustración 8.3 Luces indicadoras del estado
52 Danfoss A/S © 08/2018 Reservados todos los derechos. MG07A505

Mantenimiento, diagnóstico ... Guía de funcionamiento
8.4 Lista de Advertencias y Alarmas
8.4.1 Lista de códigos de alarma y advertencia
Una (X) marcada en la Tabla 8.1 indica que se ha producido la advertencia o alarma.
N.º Descripción
2 Error cero activo X X –
3 Sin motor X – –
4
Pérd. fase alim.
7
Sobretens. CC
8
Subtensión CC
9 Convert. sobrecargado X X – Carga superior al 100 % durante demasiado tiempo.
10 Sobrt ETR mot X X –
11 Sobretemp. termistor motor X X –
12 Límite de par X X –
13 Sobrecorriente X X X
14 Ground fault – X X
16 Cortocircuito – X X Cortocircuito en el motor o en sus terminales.
17 Cód. ctrl TO X X – No hay comunicación con el convertidor de frecuencia.
25 Resist. freno cortocircuitada – X X
26 Sobrecar. freno X X –
27 Cortocirc IGBT fren/chopper fren – X X
28 Comprob. freno – X –
30 Pérdida fase U – X X Falta la fase U del motor. Compruebe la fase.
31 Pérdida fase V – X X Falta la fase V del motor. Compruebe la fase.
32 Pérdida fase W – X X Falta la fase W del motor. Compruebe la fase.
34 Fallo Fieldbus X X –
35 Fallo de opción – X – El eldbus detecta fallos internos.
1)
1)
1)
Advertencia Alarma Bloqueo
por alarma
X X X
X X –
X X –
La señal del terminal 53 o 54 es inferior al 50 % del
valor ajustado en el parámetro 6-10 Terminal 53 escala
baja V, el parámetro 6-20 Terminal 54 escala baja V y el
parámetro 6-22 Terminal 54 escala baja mA.
No se ha conectado ningún motor a la salida del
convertidor de frecuencia.
Falta una fase en el lado de fuente de alimentación o
el desequilibrio de tensión es demasiado alto.
Compruebe la tensión de alimentación.
La tensión del enlace de CC supera el límite.
La tensión del enlace de CC cae por debajo del límite
bajo de advertencia de tensión.
El motor se ha sobrecalentado debido a una carga de
más del 100 % durante demasiado tiempo.
El termistor o la conexión del termistor están
desconectados, o el motor está demasiado caliente.
El par supera el valor ajustado en el
parámetro 4-16 Modo motor límite de par o en el
parámetro 4-17 Modo generador límite de par.
Se ha sobrepasado el límite de intensidad pico del
inversor. Si se produce esta alarma durante el
encendido, compruebe si los cables de alimentación
están conectados por error a los terminales del motor.
Descarga desde las fases de salida a conexión toma a
tierra.
La resistencia de frenado se ha cortocircuitado y, en
consecuencia, la función de freno está desconectada.
La potencia transmitida a la resistencia de frenado
durante los últimos 120 s supera el límite. Posibles
soluciones: disminuir la energía de freno mediante una
velocidad más baja o un mayor tiempo de rampa.
El transistor de freno se ha cortocircuitado y, en
consecuencia, la función de freno está desconectada.
La resistencia de frenado no está conectada o no
funciona.
Se han producido problemas de comunicación de
Probus.
Motivo
8 8
MG07A505 Danfoss A/S © 08/2018 Reservados todos los derechos. 53

Mantenimiento, diagnóstico ...
VLT® Midi Drive FC 280
N.º Descripción
36 Fallo aliment. X X –
38 Fa. corr. carga – X X
40 Sobrecarga T27 X – –
46 Fallo tensión acc puerta – X X –
47 Alim. baja 24 V X X X 24 V CC puede estar sobrecargada.
49 Límite de veloc. – X –
50 Fallo de calibración del AMA – X – Se ha producido un fallo de calibración.
51 Comprob. U
52 Fa. AMA In baja – X –
88
53 AMA motor gr. – X –
54 AMA mot. peque. – X –
55 AMA fuera ran. – X –
56 Interrup. AMA – X – Se interrumpe el AMA.
57 T. lím. AMA – X – –
58 AMA interno – X – Póngase en contacto con Danfoss.
59 Límite intensidad X X – Sobrecarga del convertidor de frecuencia.
60 Parada externa – X – Se ha activado la parada externa.
61 Pérdida del encoder X X – –
63 Fr. mecán. bajo – X –
65 Temp. tarj. ctrl X X X
67 Cambio opción – X –
68
Safe Torque O
69 Temp. tarj. pot. X X X
80 Drive initialized to default value – X –
nom
e I
en AMA – X – Ajustes de tensión y/o intensidad del motor erróneos.
nom
2)
Advertencia Alarma Bloqueo
por alarma
X X –
Esta advertencia/alarma solo se activa si la tensión de
alimentación al convertidor de frecuencia es inferior al
valor ajustado en el parámetro 14-11 Tensión de red en
fallo de red y el parámetro 14-10 Fallo aliment. NO está
ajustado a [0] Sin función.
Póngase en contacto con el distribuidor local de
Danfoss.
Compruebe la carga conectada al terminal 27 o
elimine la conexión cortocircuitada.
La velocidad del motor es inferior al límite especi-
cado en el parámetro 1-87 Velocidad baja desconexión
[Hz].
Intensidad del motor demasiado baja. Compruebe los
ajustes.
La potencia del motor es demasiado grande para que
funcione el AMA.
La potencia del motor es demasiado pequeña para
que funcione el AMA.
Los valores de parámetros del motor están fuera del
intervalo aceptable. El AMA no funciona.
La intensidad del motor no ha sobrepasado el valor de
intensidad de liberación del freno dentro de la ventana
de tiempo de retardo de arranque.
La temperatura de desconexión de la tarjeta de control
ha superado el límite máximo.
Se ha detectado una nueva opción o se ha eliminado
una opción instalada.
La función STO está activada. Si la función STO está en
modo de reinicio manual (predeterminado), para
reanudar el funcionamiento normal, aplique 24 V CC a
los terminales 37 y 38 e inicie una señal de reinicio
(mediante eldbus, I/O digital o la tecla [Reset]/[O
Reset]). Si la función STO está en modo de rearranque
automático, al aplicar 24 V CC a los terminales 37 y 38
el convertidor de frecuencia reanuda automáticamente
su funcionamiento normal.
La temperatura de desconexión de la tarjeta de
potencia ha superado el límite máximo.
Todos los ajustes de parámetros vuelven a sus ajustes
predeterminados.
Motivo
54 Danfoss A/S © 08/2018 Reservados todos los derechos. MG07A505

Mantenimiento, diagnóstico ... Guía de funcionamiento
N.º Descripción
87 Frenado CC aut. X – –
88 Detecc. opción – X X La opción se elimina correctamente.
95 Correa rota X X – –
99 Rotor bloqueado – X –
120 Fallo ctrl. posición – X – –
126 Motor en giro – X – El motor PM está en giro al ejecutar el AMA.
127 Fcem demas. alta X – –
188
STO internal fault
nw
Not while running – – –
run
Err. A wrong password was entered – – –
2)
Advertencia Alarma Bloqueo
por alarma
– X –
Se produce en redes IT, cuando el convertidor de
frecuencia entra en inercia y la tensión de CC es
superior a 830 V en unidades de 400 V y a 425 V en
unidades de 200 V. El motor consume energía en el
enlace de CC. Esta función puede activarse/
desactivarse en el parámetro 0-07 Frenado de CC aut. IT.
El rotor está bloqueado.
La fuerza contraelectromotriz del motor PM es
demasiado elevada antes del arranque.
El suministro externo de 24 V CC está conectado a
uno solo de los dos terminales STO (37 y 38), o se ha
detectado un fallo en los canales de STO. Asegúrese
de que ambos terminales estén alimentados mediante
un suministro externo de 24 V CC y de que la discrepancia entre las señales de los dos terminales sea
inferior a 12 ms. Si el fallo sigue produciéndose,
póngase en contacto con su proveedor local de
Danfoss.
Los parámetros sólo se pueden cambiar cuando el
motor está parado.
Esta situación se da al introducir una contraseña
incorrecta para modicar un parámetro protegido
mediante contraseña.
Motivo
8 8
Tabla 8.1 Lista de códigos de advertencias y alarmas
1) Estos fallos pueden estar causados por alteraciones de la alimentación. Este problema se podría corregir instalando un ltro de línea de
Danfoss.
2) Esta alarma no se puede reiniciar automáticamente a través del parámetro 14-20 Modo Reset.
MG07A505 Danfoss A/S © 08/2018 Reservados todos los derechos. 55

Mantenimiento, diagnóstico ...
VLT® Midi Drive FC 280
Para su diagnóstico, lea los códigos de alarma, los códigos de advertencia y los códigos de estado ampliados.
Código de
alarma
Bit Hex Dec
000000
0
01
000000
1
02
000000
2
04
000000
3
08
000000
4
10
11
12
13
14
15
16
17
18
19
20
5
6
7
8
9
10
000000
20
000000
40
000000
80
000001
00
000002
00
000004
00
000008
00
000010
00
000020
00
000040
00
000080
00
000100
00
000200
00
000400
00
000800
00
001000
00
1024
2048
4096
8192 Reservado Reservado Reservado Reservado Reservado Frenado
16384
32768
65536
131072
262144
524288
1048576
88
(parámetro
16-90 Códi
go de
alarma)
Comprob.
1
2
4 Fallo Tierra Reservado Reservado Reservado Reservado Start CW/CCW
8
16
32
64
128
256
512
freno
Temp. tarj.
pot.
Temp. tarj.
ctrl
Cód. ctrl.
TO
Sobreco-
rriente
Límite de
par
Sobrt termi
mot
Sobrt ETR
mot
Sobrecar.
conv.
Tensión
baja CC
Sobretens.CCLímite de
CortocircuitoParada
Pérd. fase
alim.
AMA not
OK
Error cero
activo
Fa. corr.
carga
Sobrecar.
freno
Pérdida
fase U
Pérdida
fase V
Código de
alarma 2
(parámetro 16
-91 Código de
alarma 2)
Reservado
Fallo tensión
acc puerta
Reservado Reservado Temp. tarj. ctrl Reservado Enganc. abajo
Reservado Reservado Cód. ctrl. TO Reservado Engan. arriba
Reservado Reservado Sobrecorriente Reservado Realim. alta Reservado
Reservado Reservado Límite de par Reservado Realim. baja Reservado
Reservado Reservado
Correa rota Reservado Sobrt ETR mot Correa rota
Reservado Reservado Sobrecar. conv. Reservado Output freq. high Parada rápida
Arranque
fallido
veloc.
externa
Reservado Reservado Pérd. fase alim. Reservado Reservado Mantener salida
Reservado Reservado Sin motor Frenado CC aut. OVC active
Reservado Reservado
Reservado Reservado Reservado Reservado Reservado Start request
Reservado Reservado
Reservado Reservado Reservado Reservado Reference high Reservado
Detecc.
opción
Código de
alarma 3
(parámetro
16-97 Alar
m Word 3)
Fallo
funcion.
STO
Alarma
MM
Reservado
Reservado Sobretens. CC Reservado Brake check OK Parada
Reservado Reservado Reservado Frenado máx. Reservado
Reservado Reservado Sobrecarga T27 Reference low Retardo arr.
Código de
advertencia
(parámetro 16-
92 Código de
advertencia)
Reservado Reservado En rampa O
Temp. tarj. pot. Reservado AMA tuning Hand/Auto
Sobrt termi
mot
Tensión baja
CC
Error cero
activo
Lím. potenc.
resist. freno
Código de
advertencia 2
(parámetro 16-9
3 Código de
advertencia 2)
Reservado
Reservado Output freq. low Freno de CC
Reservado Freno de CA Velocidad ja
Reservado Reservado Arranque
Código
de estado
ampliado
(parámetro 16-94
Cód. estado amp)
Output current
high
Output current
low
Código
de estado
ampliado 2
(parámetro 16-95
Código de
estado ampl. 2)
Probus OFF1
active
Probus OFF2
active
Probus OFF3
active
Ctrl prep.
Convertidor de
frecuencia
preparado
Solicitud de
mantener salida
Solicitud de
velocidad ja
56 Danfoss A/S © 08/2018 Reservados todos los derechos. MG07A505

Mantenimiento, diagnóstico ... Guía de funcionamiento
Bit Hex Dec
002000
21
004000
22
008000
23
010000
24
020000
25
040000
26
0800000013421772
27
10000000268435456Cambio
28
2000000053687091
29
400000001073741824Safe
30
800000002147483648Fr. mecán.
31
2097152
00
4194304
00
8388608
00
16777216
00
33554432 Reservado
00
67108864
00
8
2
Código de
alarma
(parámetro
16-90 Códi
go de
alarma)
Pérdida
fase W
Fallo
Fieldbus
Alim. baja
24 V
Fallo
aliment.
Resistencia
de frenado
Freno IGBT Reservado Reservado Reservado Reservado Reservado Reservado
opción
Frequency
converter
initialized
Torque O
bajo
Código de
alarma 2
(parámetro 16
-91 Código de
alarma 2)
Fallo de
opción
Rotor
bloqueado
Fallo ctrl.
posición
Reservado Reservado Fallo aliment. Reservado Reservado Bypass
Límite
intensidad
Reservado Reservado Reservado Reservado Reservado Parada externa
Reservado Reservado
Pérdida del
encoder
Reservado Reservado
Reservado Reservado Reservado Reservado Base dat ocup Reservado
Código de
alarma 3
(parámetro
16-97 Alar
m Word 3)
Reservado Reservado Reservado Reservado Reposo
Reservado Fallo Fieldbus
Reservado Alim. baja 24 V Reservado Reservado
Reservado
Reservado Reservado
Código de
advertencia
(parámetro 16-
92 Código de
advertencia)
Límite
intensidad
Pérdida del
encoder
Safe Torque
O
Código de
advertencia 2
(parámetro 16-9
3 Código de
advertencia 2)
Módulo de
memoria
Reservado Reservado Reservado
Reservado Reservado FlyStart active
Fcem demas.
alta
Reservado Reservado Reservado
Código
de estado
ampliado
(parámetro 16-94
Cód. estado amp)
Reservado Ref. dormir
Reservado
Código
de estado
ampliado 2
(parámetro 16-95
Código de
estado ampl. 2)
En funciona-
miento
Heat sink clean
warning
8 8
Tabla 8.2 Descripción de Código de alarma, Código de advertencia y Código de estado ampliado
MG07A505 Danfoss A/S © 08/2018 Reservados todos los derechos. 57

Mantenimiento, diagnóstico ...
VLT® Midi Drive FC 280
8.5 Resolución de problemas
Síntoma Causa posible Prueba Solución
Parada del LCP
Falta la señal de arranque (en
espera)
Señal de funcionamiento por inercia
del motor activa (inercia)
Motor parado
88
El motor está
funcionando en el
sentido incorrecto
El motor no llega a
la velocidad máxima
La velocidad del
motor es inestable
El motor funciona
con brusquedad
Fuente de señal de referencia
incorrecta.
Límite de giro del motor
Señal de cambio de sentido activa
Conexión de fase del motor
incorrecta.
Los límites de frecuencia están mal
congurados
La señal de entrada de referencia no
se ha escalado correctamente
Posibles ajustes de parámetros
incorrectos.
Posible sobremagnetización
Compruebe si se ha pulsado la tecla
[O].
Compruebe el ajuste correcto del
terminal 18 en el
parámetro 5-10 Terminal 18 Entrada
digital (utilice los ajustes predeter-
minados).
Compruebe el ajuste correcto del
terminal 27 en el
parámetro 5-12 Terminal 27 Digital
Input (utilice los ajustes predeter-
minados).
Compruebe lo siguiente:
¿La señal de referencia es local,
•
remota o de referencia de bus?
¿La referencia interna está activa?
•
¿La conexión de los terminales es
•
correcta?
¿El escalado de los terminales es
•
correcto?
¿La señal de referencia está
•
disponible?
Compruebe que el
parámetro 4-10 Dirección veloc. motor
está programado correctamente.
Compruebe si se ha programado una
orden de cambio de sentido para el
terminal en el grupo de parámetros
5-1* Entradas digitales.
Cambie el parámetro 1-06 Clockwise
Direction.
Compruebe los límites de salida en el
parámetro 4-14 Límite alto veloc. motor
[Hz] y el parámetro 4-19 Frecuencia
salida máx.
Compruebe el escalado de la señal de
entrada de referencia en el grupo de
parámetros 6-** Modo E/S analógico y
el grupo de parámetros 3-1*
Referencias.
Compruebe los ajustes de todos los
parámetros del motor, incluidos los
ajustes de compensación del motor.
En el caso de funcionamiento en lazo
cerrado, compruebe los ajustes de PID.
Compruebe si hay algún ajuste del
motor incorrecto en los parámetros
del motor.
Pulse [Auto On] o [Hand On] (según
el modo de funcionamiento) para
accionar el motor.
Aplique una señal de arranque válida
para arrancar el motor.
Aplique 24 V al terminal 27 o
programe este terminal como [0] Sin
función.
Programe los ajustes correctos.
Congure la referencia interna activa
en el grupo de parámetros 3-1*
Referencias. Compruebe si el cableado
es correcto. Compruebe el escalado
de los terminales. Compruebe la señal
de referencia.
Programe los ajustes correctos.
Desactive la señal de cambio de
sentido.
Programe los límites correctos.
Programe los ajustes correctos.
Compruebe los ajustes del grupo de
parámetros 6-** Modo E/S analógico.
Compruebe los ajustes del motor en
los grupos de parámetros 1-2* Datos
de motor, 1-3* Datos motor av. I y
1-5* Aj. indep. carga
58 Danfoss A/S © 08/2018 Reservados todos los derechos. MG07A505
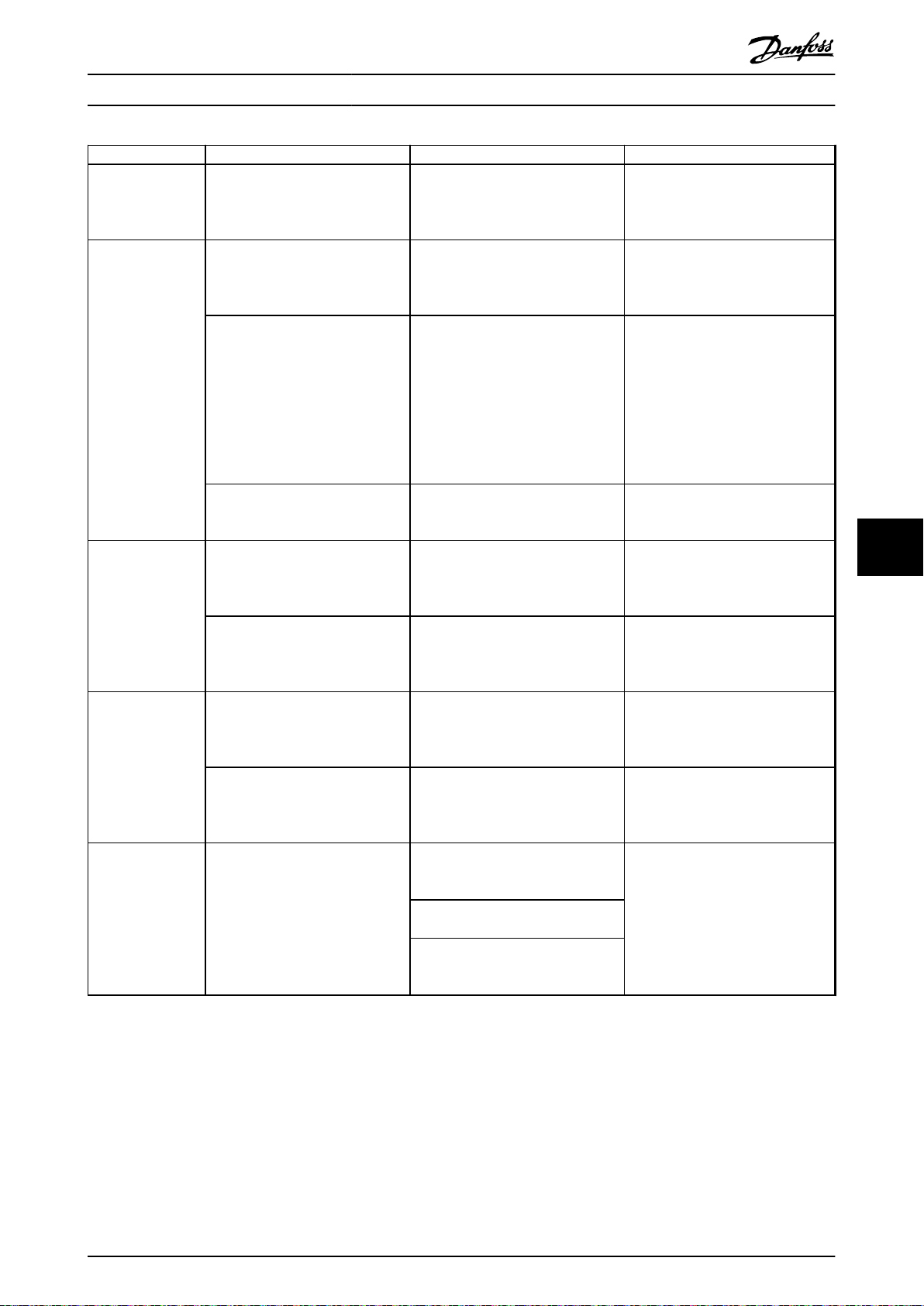
Mantenimiento, diagnóstico ... Guía de funcionamiento
Síntoma Causa posible Prueba Solución
El motor no frena
Fusibles de potencia
abiertos o magnetotérmico
desconectado
Desequilibrio de
corriente de alimentación superior al
3 %
El desequilibrio de
intensidad del
motor es superior al
3 %.
Ruido acústico o
vibraciones (por
ejemplo, un aspa de
ventilador hace
ruido o produce
vibraciones a
determinadas
frecuencias)
Posibles ajustes incorrectos en los
parámetros de freno. Puede que los
tiempos de deceleración sean
demasiado cortos.
Cortocircuito entre fases
Sobrecarga mot
Conexiones ojas
Problema con la alimentación del
sistema (consulte la descripción de
la Alarma 4, Pérd. fase alim.).
Problema con la unidad del
convertidor de frecuencia.
Problema en el motor o en su
cableado
Problema con la unidad del
convertidor de frecuencia.
Resonancias, por ejemplo, en el
sistema del ventilador o del motor.
Compruebe los parámetros del freno.
Compruebe los ajustes del tiempo de
rampa.
El motor o el panel tienen un
cortocircuito entre fases. Compruebe
si hay algún cortocircuito entre fases
en el motor y el panel.
El motor está sobrecargado para la
aplicación.
Lleve a cabo una comprobación previa
al arranque por si hubiera conexiones
ojas.
Gire una posición los conectores de la
alimentación de entrada al convertidor
de frecuencia: de A a B, de B a C y de
C a A.
Gire una posición los conectores de la
alimentación de entrada al convertidor
de frecuencia: de A a B, de B a C y de
C a A.
Gire los conectores del motor de
salida una posición: de U a V, de V a
W y de W a U.
Gire los conectores del motor de
salida una posición: de U a V, de V a
W y de W a U.
Evite las frecuencias críticas usando
los parámetros del grupo de
parámetros 4-6* Bypass veloc.
Desactive la sobremodulación en el
parámetro 14-03 Overmodulation.
Aumente la amortiguación de
resonancia en el
parámetro 1-64 Resonance Dampening.
Compruebe los grupos de parámetros
2-0* Freno CC y 3-0* Límites referencia.
Elimine cualquier cortocircuito
detectado.
Lleve a cabo una prueba de arranque
y verique que la intensidad del
motor esté dentro de los valores
especicados. Si la intensidad del
motor supera la corriente a plena
carga indicada en la placa de características, el motor solo debe funcionar
con carga reducida. Revise las especicaciones de la aplicación.
Apriete las conexiones ojas.
Si continúa el desequilibrio en el
cable, hay un problema de alimentación. Compruebe la alimentación de
red.
Si continúa el desequilibrio en el
mismo terminal de entrada, hay un
problema en la unidad. Póngase en
contacto con el proveedor.
Si el desequilibrio persiste en el
cable, el problema se encuentra en el
motor o en su cableado. Compruebe
el motor y su cableado.
Si el desequilibrio persiste en el
mismo terminal de salida, hay un
problema en la unidad. Póngase en
contacto con el proveedor.
Compruebe si el ruido o las
vibraciones se han reducido a un
límite aceptable.
8 8
Tabla 8.3 Resolución de problemas
MG07A505 Danfoss A/S © 08/2018 Reservados todos los derechos. 59

Especicaciones
9 Especicaciones
9.1 Datos eléctricos
VLT® Midi Drive FC 280
Eje de salida típico [kW (CV)]
del convertidor de frecuencia
Clasicación de protección del alojamiento IP20
(IP21/Tipo 1 opcional)
Intensidad de salida
Salida de eje [kW] 0,37 0,55 0,75 1,1 1,5 2,2 3
Continua (3 × 380-440 V) [A] 1,2 1,7 2,2 3 3,7 5,3 7,2
Continua (3 × 441-480 V) [A] 1,1 1,6 2,1 2,8 3,4 4,8 6,3
Intermitente (60 s de sobrecarga) [A] 1,9 2,7 3,5 4,8 5,9 8,5 11,5
Continua kVA (400 V CA) [kVA] 0,9 1,2 1,5 2,1 2,6 3,7 5,0
Continua kVa (480 V CA) [kVA] 0,9 1,3 1,7 2,5 2,8 4,0 5,2
Intensidad de entrada máxima
Continua (3 × 380-440 V) [A] 1,2 1,6 2,1 2,6 3,5 4,7 6,3
Continua (3 × 441-480 V) [A] 1,0 1,2 1,8 2,0 2,9 3,9 4,3
Intermitente (60 s de sobrecarga) [A] 1,9 2,6 3,4 4,2 5,6 7,5 10,1
Más especicaciones
Sección transversal máxima del cable (alimen-
99
tación, motor, freno y carga compartida) [mm
(AWG)]
Pérdida de potencia estimada a carga nominal
máxima [W]
Peso, clasicación de protección de alojamiento
IP20 [kg (lb)]
Peso, clasicación de protección del
alojamiento IP21 [kg (lb)]
Rendimiento [%]
1)
2)
PK37
0,37
(0,5)
K1 K1 K1 K1 K1 K1 K2
2
20,9 25,2 30 40 52,9 74 94,8
2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,5 (5,5) 3,6 (7,9)
4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 5,5 (12,1)
96,0 96,6 96,8 97,2 97,0 97,5 98,0
PK55
0,55
(0,75)
PK75
0,75
(1,0)
P1K1
1,1
(1,5)
4 (12)
P1K5
1,5
(2,0)
P2K2
2,2
(3,0)
P3K0
3,0
(4,0)
Tabla 9.1 Fuente de alimentación de red 3 × 380-480 V CA
60 Danfoss A/S © 08/2018 Reservados todos los derechos. MG07A505

Especicaciones Guía de funcionamiento
Eje de salida típico [kW (CV)]
del convertidor de frecuencia
Clasicación de protección del alojamiento IP20
(IP21/Tipo 1 opcional)
P4K0
4
(5,5)
K2 K2 K3 K4 K4 K5 K5
P5K5
5,5
(7,5)
P7K5
7,5
(10)
P11K
11
(15)
P15K
15
(20)
P18K
18,5
(25)
P22K
22
(30)
Intensidad de salida
Salida de eje 4 5,5 7,5 11 15 18,5 22
Continua (3 × 380-440 V) [A] 9 12 15,5 23 31 37 42,5
Continua (3 × 441-480 V) [A] 8,2 11 14 21 27 34 40
Intermitente (60 s de sobrecarga) [A] 14,4 19,2 24,8 34,5 46,5 55,5 63,8
Continua kVA (400 V CA) [kVA] 6,2 8,3 10,7 15,9 21,5 25,6 29,5
Continua kVa (480 V CA) [kVA] 6,8 9,1 11,6 17,5 22,4 28,3 33,3
Intensidad de entrada máxima
Continua (3 × 380-440 V) [A] 8,3 11,2 15,1 22,1 29,9 35,2 41,5
Continua (3 × 441-480 V) [A] 6,8 9,4 12,6 18,4 24,7 29,3 34,6
Intermitente (60 s de sobrecarga) [A] 13,3 17,9 24,2 33,2 44,9 52,8 62,3
Más especicaciones
Sección transversal máxima del cable (alimentación, motor, freno y carga compartida) [mm
2
4 (12) 16 (6)
(AWG)]
Pérdida de potencia estimada a carga nominal
máxima [W]
1)
Peso, clasicación de protección de alojamiento
IP20 [kg (lb)]
Peso, clasicación de protección del alojamiento
IP21 [kg (lb)]
Rendimiento [%]
2)
115,5 157,5 192,8 289,5 393,4 402,8 467,5
3,6 (7,9) 3,6 (7,9) 4,1 (9,0) 9,4 (20,7) 9,5 (20,9) 12,3 (27,1) 12,5 (27,6)
5,5 (12,1) 5,5 (12,1) 6,5 (14,3) 10,5 (23,1) 10,5 (23,1) 14,0 (30,9) 14,0 (30,9)
98,0 97,8 97,7 98,0 98,1 98,0 98,0
9 9
Tabla 9.2 Fuente de alimentación de red 3 × 380-480 V CA
Eje de salida típico [kW (CV)]
del convertidor de frecuencia
Clasicación de protección del alojamiento IP20
(IP21/Tipo 1 opcional)
PK37
0,37
(0,5)
K1 K1 K1 K1 K1 K2 K3
PK55
0,55
(0,75)
PK75
0,75
(1,0)
P1K1
1,1
(1,5)
P1K5
1,5
(2,0)
P2K2
2,2
(3,0)
P3K7
3,7
(5,0)
Intensidad de salida
Continua (3 × 200-240 V) [A] 2,2 3,2 4,2 6 6,8 9,6 15,2
Intermitente (60 s de sobrecarga) [A] 3,5 5,1 6,7 9,6 10,9 15,4 24,3
Continua kVA (230 V CA) [kVA] 0,9 1,3 1,7 2,4 2,7 3,8 6,1
Intensidad de entrada máxima
Continua (3 × 200-240 V) [A] 1,8 2,7 3,4 4,7 6,3 8,8 14,3
Intermitente (60 s de sobrecarga) [A] 2,9 4,3 5,4 7,5 10,1 14,1 22,9
Más especicaciones
Sección transversal máxima del cable (alimentación, motor, freno y carga compartida) [mm
2
4 (12)
(AWG)]
Pérdida de potencia estimada a carga nominal
máxima [W]
1)
Peso, clasicación de protección de alojamiento
IP20 [kg (lb)]
Peso, clasicación de protección del
alojamiento IP21 [kg (lb)]
Rendimiento [%]
2)
29,4 38,5 51,1 60,7 76,1 96,1 147,5
2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,5 (5,5) 3,6 (7,9)
4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 5,5 (12,1) 6,5 (14,3)
96,4 96,6 96,3 96,6 96,5 96,7 96,7
Tabla 9.3 Fuente de alimentación de red 3 × 200-240 V CA
MG07A505 Danfoss A/S © 08/2018 Reservados todos los derechos. 61

Especicaciones
VLT® Midi Drive FC 280
Eje de salida típico [kW (CV)]
del convertidor de frecuencia
Clasicación de protección del alojamiento IP20
(IP21/Tipo 1 opcional)
Intensidad de salida
Continua (3 × 200-240 V) [A] 2,2 3,2 4,2 6 6,8 9,6
Intermitente (60 s de sobrecarga) [A] 3,5 5,1 6,7 9,6 10,9 15,4
Continua kVA (230 V CA) [kVA] 0,9 1,3 1,7 2,4 2,7 3,8
Intensidad de entrada máxima
Continua (1 × 200-240 V) [A] 2,9 4,4 5,5 7,7 10,4 14,4
Intermitente (60 s de sobrecarga) [A] 4,6 7,0 8,8 12,3 16,6 23,0
Más especicaciones
Sección transversal máxima del cable (alimentación y
motor) (mm2 [AWG])
Pérdida de potencia estimada a carga nominal
máxima [W]
Peso, clasicación de protección de alojamiento IP20
[kg (lb)]
Peso, clasicación de protección del alojamiento IP21
[kg (lb)]
Rendimiento [%]
99
Tabla 9.4 Fuente de alimentación de red 1 × 200-240 V CA
1) La pérdida de potencia típica es en condiciones de carga nominal y se espera que esté dentro del ±15 % (la tolerancia está relacionada con la
variedad en las condiciones de cable y tensión).
Los valores están basados en el rendimiento típico de un motor (en el límite de IE2 / IE3). Los motores que tienen un rendimiento inferior
contribuyen a la pérdida de potencia del convertidor de frecuencia y los motores con mayor rendimiento reducen dicha pérdida de frecuencia.
Se aplica para dimensionar la refrigeración del convertidor de frecuencia. Si la frecuencia de conmutación es superior a los ajustes predeterminados, en ocasiones las pérdidas de potencia aumentan. Se incluyen los consumos de energía habituales del LCP y de la tarjeta de control.
Otras opciones y la carga del cliente pueden sumar hasta 30 W a las pérdidas (aunque normalmente solo serán 4 W adicionales por un eldbus o
una tarjeta de control a plena carga).
Para conocer los datos de pérdida de potencia conforme a la norma EN 50598-2, consulte www.danfoss.com/vltenergyeciency.
2) Se mide utilizando cables de motor apantallados de 50 m (164 ft) y en condiciones de carga y frecuencia nominales. Para conocer la clase de
rendimiento energético, consulte el capétulo 9.4 Condiciones ambientales. Para conocer las pérdidas a carga parcial, consulte www.danfoss.com/
vltenergyeciency.
1)
2)
PK37
0,37
(0,5)
K1 K1 K1 K1 K1 K2
37,7 46,2 56,2 76,8 97,5 121,6
2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,5 (5,5)
4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 5,5 (12,1)
94,4 95,1 95,1 95,3 95,0 95,4
PK55
0,55
(0,75)
PK75
0,75
(1,0)
4 (12)
P1K1
1,1
(1,5)
P1K5
1,5
(2,0)
P2K2
2,2
(3,0)
Fuente de alimentación de red
9.2
Alimentación de red (L1/N, L2/L y L3)
Terminales de la fuente de alimentación (L1/N, L2/L y L3)
Tensión de alimentación 380-480 V: –15 % (–25 %)1) al 10 %
Tensión de alimentación 200-240 V: –15 % (–25 %)1) al 10 %
1) El convertidor de frecuencia puede funcionar con una tensión de entrada de –25 %, con rendimiento reducido. La potencia de
salida máxima del convertidor de frecuencia es del 75 % en caso de tensión de entrada de –25 % y del 85 % en caso de tensión
de entrada de –15 %.
No se puede esperar un par completo con una tensión de red inferior al 10 % por debajo de la tensión de alimentación nominal
más baja del convertidor de frecuencia.
Frecuencia de alimentación 50/60 Hz ±5 %
Máximo desequilibrio transitorio entre fases de red 3,0 % de la tensión de alimentación nominal
Factor de potencia real (λ) ≥0,9 nominal con carga nominal
Factor de potencia de desplazamiento (cos ϕ) Prácticamente uno (>0,98)
Conmutación en la entrada de la fuente de alimentación (L1/N, L2/L y L3) (arranques) ≤7,5
kW (10 CV)
62 Danfoss A/S © 08/2018 Reservados todos los derechos. MG07A505
Dos veces por minuto, como
máximo

Especicaciones Guía de funcionamiento
Conmutación en la entrada de la fuente de alimentación (L1/N, L2/L y L3) (arranques)
11-22 kW (15-30 CV)
Una vez por minuto, como
máximo
9.3 Salida del motor y datos del motor
Salida del motor (U, V y W)
Tensión de salida 0-100 % de la tensión de alimentación
Frecuencia de salida 0-500 Hz
Frecuencia de salida en modo VVC
Conmutación en la salida Ilimitada
Tiempo de rampa 0,01-3600 s
Características de par
Par de arranque (par constante) Máximo del 160 % durante 60 s
Par de sobrecarga (par constante) Máximo del 160 % durante 60 s
Corriente de arranque Máximo del 200 % durante 1 s
Tiempo de subida de par en modo VVC+ (independiente de fsw) Máximo de 50 ms
1) Porcentaje relativo al par nominal. Es el 150 % en convertidores de frecuencia de 11-22 kW (15-30 CV).
+
0-200 Hz
9.4 Condiciones ambientales
Condiciones ambientales
Clasicación de protección del alojamiento, convertidor de frecuencia IP20 (IP21/Tipo 1 opcional)
Clasicación de protección del alojamiento, kit de conversión IP21 / Tipo 1
Prueba de vibración para todos los tipos de protección 1,14 g
Humedad relativa 5-95 % (CEI 721-3-3; clase 3K3 [sin condensación] durante el funcionamiento)
Temperatura ambiente (en el modo de conmutación DPWM)
- con reducción de potencia Máximo 55 °C (131 °F)
- a plena intensidad de salida constante Máximo 45 °C (113 °F)
Temperatura ambiente mínima durante el funcionamiento a escala completa 0 °C (32 °F)
Temperatura ambiente mínima con rendimiento reducido –10 °C (14 °F)
Temperatura durante el almacenamiento/transporte De –25 a +65/70 °C (de –13 a +149/158 °F)
Altitud máxima sobre el nivel del mar sin reducción de potencia 1000 m (3280 ft)
Altitud máxima sobre el nivel del mar con reducción de potencia 3000 m (9243 ft)
EN 61800-3, EN 61000-3-2, EN 61000-3-3, EN 61000-3-11,
Normas CEM, emisión
Normas CEM, inmunidad
Clase de rendimiento energético
1) Consulte en la Guía de diseño las condiciones especiales para:
Reducción de potencia por temperatura ambiente alta.
•
Reducción de potencia por altitud elevada.
•
2) Para evitar el sobrecalentamiento de la tarjeta de control, en las versiones
Midi Drive FC 280, evite la carga total de I/O digital/analógica a una temperatura ambiente superior a 45 °C (113 °F).
3) La temperatura ambiente máxima del K1S2 con reducción de potencia es de 50 °C (122 °F).
4) La temperatura ambiente máxima del K1S2 a plena intensidad de salida constante es de 40 °C (104 °F).
5) Determinada conforme a la norma EN 50598-2 en:
Carga nominal.
•
90 % de la frecuencia nominal.
•
Ajustes de fábrica de la frecuencia de conmutación.
•
Ajustes de fábrica del patrón de conmutación.
•
5)
EN 61000-3-12, EN 61000-6-3/4, EN 55011 y CEI 61800-3
EN 61800-3, EN 61000-6-1/2, EN 61000-4-2, EN 61000-4-3
EN 61000-4-4, EN 61000-4-5, EN 61000-4-6 y EN 61326-3-1
Probus, Pronet, Ethernet/IP y Powerlink del VLT
1)2)3)
IE2
®
1)
1)
9 9
4)
MG07A505 Danfoss A/S © 08/2018 Reservados todos los derechos. 63

Especicaciones
Tipo abierto: temperatura del aire circundante de 45 °C (113 °F).
•
Tipo 1 (kit NEMA): temperatura ambiente de 45 °C (113 °F).
•
9.5 Especicaciones del cable
VLT® Midi Drive FC 280
Longitudes y secciones transversales del cable
Longitud máxima del cable de motor, apantallado 50 m (164 ft)
Longitud máxima del cable de motor, sin apantallar 75 m (246 ft)
Sección transversal máxima de los terminales de control, cable rígido/exible 2,5 mm2/14 AWG
Sección transversal mínima de los terminales de control 0,55 mm2 / 30 AWG
Máxima longitud del cable de entrada de STO, cable no apantallado 20 m (66 ft)
1) Para obtener las secciones transversales de los cables de alimentación, consulte la Tabla 9.1, la Tabla 9.2, la Tabla 9.3 y la
Tabla 9.4.
Para cumplir las normas EN 55011 1A y EN 55011 1B, deberá acortarse el cable de motor en determinadas circunstancias. Para
obtener más información, consulte el capítulo 2.6.2 Emisión CEM de la Guía de diseño del VLT
1)
®
Midi Drive FC 280.
9.6 Entrada/salida de control y datos de control
Entradas digitales
Número de terminal
Lógica PNP o NPN
Nivel de tensión 0-24 V CC
99
Nivel de tensión, 0 lógico PNP <5 V CC
Nivel de tensión, 1 lógico PNP >10 V CC
Nivel de tensión, 0 lógico NPN >19 V CC
Nivel de tensión, 1 lógico NPN <14 V CC
Tensión máxima de entrada 28 V CC
Rango de frecuencia de pulsos 4–32 kHz
(Ciclo de trabajo) anchura de impulsos mínima 4,5 ms
Resistencia de entrada, R
1) El terminal 27 también puede programarse como salida.
i
18, 19, 271), 29, 32, 33
Aproximadamente 4 kΩ
Entradas de STO
Número de terminal 37, 38
Nivel de tensión 0-30 V CC
Nivel de tensión, bajo <1,8 V CC
Nivel de tensión, alto >20 V CC
Tensión máxima de entrada 30 V CC
Intensidad de entrada mínima (cada patilla) 6 mA
1) Consulte el capétulo 6 Safe Torque O (STO) para obtener más detalles sobre las entradas de STO.
Entradas analógicas
N.º de entradas analógicas 2
Número de terminal 531), 54
Modos Tensión o intensidad
Selección de modo Software
Nivel de tensión 0-10 V
Resistencia de entrada, R
Tensión máxima De –15 a 20 V
Nivel de intensidad De 0/4 a 20 mA (escalable)
Resistencia de entrada, R
Corriente máxima 30 mA
Resolución de entradas analógicas 11 bits
Precisión de las entradas analógicas Error máximo del 0,5 % de la escala completa
1)
i
i
Aproximadamente 10 kΩ
Aproximadamente 200 Ω
64 Danfoss A/S © 08/2018 Reservados todos los derechos. MG07A505

Mains
Functional
isolation
PELV isolation
Motor
DC bus
High
voltage
Control
37
RS485
38
33
130BE837.10
Especicaciones Guía de funcionamiento
Ancho de banda 100 Hz
Las entradas analógicas están galvánicamente aisladas de la tensión de alimentación (PELV) y de los demás terminales de
tensión alta.
1) El terminal 53 solo acepta el modo de tensión y también puede usarse como entrada digital.
Ilustración 9.1 Aislamiento galvánico
AVISO!
ALTITUD ELEVADA
Para la instalación en altitudes superiores a 2000 m (6562 ft), póngase en contacto con el servicio de atención telefónica
de Danfoss en relación con los requisitos de PELV.
Entradas de pulsos
Entradas de pulsos programables 2
Número de terminal de pulso 29, 33
Frecuencia máxima en los terminales 29 y 33 32 kHz (en contrafase)
Frecuencia máxima en los terminales 29 y 33 5 kHz (colector abierto)
Frecuencia mínima en los terminales 29 y 33 4 Hz
Nivel de tensión Consulte el apartado sobre entradas digitales
Tensión máxima de entrada 28 V CC
Resistencia de entrada, R
i
Aproximadamente 4 kΩ
Precisión de la entrada de pulsos Error máximo: un 0,1 % de la escala completa
Salidas digitales
Salidas digitales / de pulsos programables 2
Número de terminal 27
Nivel de tensión en la salida digital / salida de frecuencia 0–24 V
Intensidad de salida máxima (disipador o fuente) 40 mA
Carga máxima en salida de frecuencia 1 kΩ
Carga capacitiva máxima en salida de frecuencia 10 nF
Frecuencia de salida mín. en salida de frecuencia 4 Hz
Frecuencia de salida máxima en salida de frecuencia 32 kHz
Precisión de salida de frecuencia Error máximo: un 0,1 % de la escala completa
Resolución en la salida de frecuencia 10 bits
Número de terminal (consulte los datos de las salidas analógicas) 42
Nivel de tensión en salida digital 0-17 V
1) El terminal 27 también puede programarse como una entrada.
2) El terminal 42 también puede programarse como salida analógica.
La salida digital está galvánicamente aislada de la tensión de alimentación (PELV) y de los demás terminales de tensión alta.
9 9
1)
2)
MG07A505 Danfoss A/S © 08/2018 Reservados todos los derechos. 65

Especicaciones
Salidas analógicas
Número de salidas analógicas programables 1
Número de terminal 42
Rango de intensidad en la salida analógica 0/4-20 mA
Carga de resistencia máxima a común en la salida analógica 500 Ω
Máxima tensión en salidas analógicas 17 V
Precisión en la salida analógica Error máximo: un 0,8 % de la escala completa
Resolución en la salida analógica 10 bits
1) El terminal 42 también puede programarse como salida digital.
La salida analógica está galvánicamente aislada de la tensión de alimentación (PELV) y de los demás terminales de tensión alta.
Tarjeta de control, salida de 24 V CC
Número de terminal 12, 13
Carga máxima 100 mA
El suministro externo de 24 V CC está galvánicamente aislado de la tensión de alimentación (PELV). Sin embargo, tiene el mismo
potencial que las entradas y salidas analógicas y digitales.
Tarjeta de control, salida de 10 V CC
Número de terminal 50
Tensión de salida 10,5 V ±0,5 V
Carga máxima 15 mA
El suministro de 10 V CC está galvánicamente aislado de la tensión de alimentación (PELV) y de los demás terminales de tensión
alta.
VLT® Midi Drive FC 280
1)
99
Tarjeta de control, comunicación serie RS485
Número de terminal 68 (P,TX+, RX+) y 69 (N,TX-, RX-)
N.º de terminal 61 Común para los terminales 68 y 69
El circuito de comunicación serie RS485 está galvánicamente aislado de la tensión de alimentación (PELV).
Tarjeta de control, comunicación serie USB
USB estándar 1.1 (velocidad máxima)
Conector USB Conector USB tipo B
La conexión al PC se realiza por medio de un cable USB de dispositivo o host estándar.
La conexión USB se encuentra galvánicamente aislada de la tensión de alimentación (PELV) y del resto de los terminales de
tensión alta.
La conexión a tierra USB no se encuentra galvánicamente aislada de la conexión a tierra de protección. Utilice únicamente un
ordenador portátil aislado como conexión entre el PC y el terminal USB del convertidor de frecuencia.
Salidas de relé
Salidas de relé programables 1
Relé 01 01-03 (NC), 01-02 (NO)
Máxima carga del terminal (CA-1)1) en 01-02 (NO) (carga resistiva) 250 V CA, 3 A
Máxima carga del terminal (CA-15 )1) en 01-02 (NO) (carga inductiva a cosφ 0,4) 250 V CA, 0,2 A
Máxima carga del terminal (CC-1)1) en 01-02 (NO) (carga resistiva) 30 V CC, 2 A
Máxima carga del terminal (CC-13 )1) en 01-02 (NO) (carga inductiva) 24 V CC, 0,1 A
Máxima carga del terminal (CA-1)1) en 01-03 (NC) (carga resistiva) 250 V CA, 3 A
Máxima carga del terminal (CA-15)1) en 01-03 (NC) (carga inductiva a cosφ 0,4) 250 V CA, 0,2 A
Máxima carga del terminal (CC-1)1) en 01-03 (NC) (carga resistiva) 30 V CC, 2 A
Carga mínima del terminal en 01-03 (NC), 01-02 (NO) 24 V CC 10 mA, 24 V CA 20 mA
1) CEI 60947 partes 4 y 5.
Los contactos del relé están galvánicamente aislados con respecto al resto del circuito con un aislamiento reforzado.
Rendimiento de la tarjeta de control
Intervalo de exploración 1 ms
66 Danfoss A/S © 08/2018 Reservados todos los derechos. MG07A505

Especicaciones Guía de funcionamiento
Características de control
Resolución de la frecuencia de salida a 0-500 Hz ±0,003 Hz
Tiempo de respuesta del sistema (terminales 18, 19, 27, 29, 32 y 33) ≤2 ms
Rango de control de velocidad (lazo abierto) 1:100 de velocidad síncrona
Precisión de velocidad (lazo abierto) ±0,5 % de la velocidad nominal
Precisión de velocidad (lazo cerrado) ±0,1 % de la velocidad nominal
Todas las características de control se basan en un motor asíncrono de 4 polos.
9.7 Pares de apriete de conexión
Asegúrese de utilizar los pares correctos para apretar las conexiones eléctricas. Un par demasiado alto o demasiado bajo
puede causar problemas de conexión eléctrica. Para asegurar la aplicación del par de apriete correcto, utilice una llave
dinamométrica. El tipo de destornillador de ranura recomendado es SZS 0,6 × 3,5 mm.
Par [Nm (in-lb)]
Tipo de
alojamiento
K1
K2
K3 7,5 (10) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
K4
K5
Potencia
(kW [CV])
0,37-2,2
(0,5-3,0)
3,0-5,5
(4,0-7,5)
11–15
(15–20)
18,5-22
(25-30)
Alimentación Motor
0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
1,2 (10,6) 1,2 (10,6) 1,2 (10,6) 1,2 (10,6) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
1,2 (10,6) 1,2 (10,6) 1,2 (10,6) 1,2 (10,6) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
Conexión de
CC
Freno Tierra Control Relé
9 9
Tabla 9.5 Pares de apriete
9.8 Fusibles y magnetotérmicos
Utilice fusibles y/o magnetotérmicos en el lado de la fuente de alimentación para proteger de lesiones al personal de
mantenimiento y evitar daños en los equipos en caso de avería de los componentes internos del convertidor de frecuencia
(primer fallo).
Protección de circuito derivado
Proteja todos los circuitos derivados de las instalaciones (incluidos los aparatos de conmutación y las máquinas) frente a
cortocircuitos y sobreintensidades conforme a las normativas nacionales e internacionales.
AVISO!
La protección integral de estado sólido contra cortocircuitos no proporciona protección de circuito derivado. Suministre
la debida protección de circuito derivado conforme a las normativas y reglamentos locales y nacionales.
En la Tabla 9.6 se enumeran los fusibles y magnetotérmicos recomendados que han sido probados.
PRECAUCIÓN
RIESGO DE LESIONES PERSONALES Y DE DAÑOS EN EL EQUIPO
Un mal funcionamiento o el incumplimiento de estas recomendaciones podrían dar lugar a riesgos personales y a daños
en el convertidor de frecuencia u otros equipos.
Seleccione los fusibles conforme a las recomendaciones. Los daños potenciales pueden limitarse al interior del
•
convertidor de frecuencia.
MG07A505 Danfoss A/S © 08/2018 Reservados todos los derechos. 67

Especicaciones
VLT® Midi Drive FC 280
AVISO!
DAÑOS MATERIALES
El uso de fusibles y/o magnetotérmicos es obligatorio para garantizar la conformidad con la norma CEI 60364 para CE.
El incumplimiento de las recomendaciones de protección podría causar daños en el convertidor de frecuencia.
Danfoss recomienda el uso de fusibles y magnetotérmicos en el Tabla 9.6 y el Tabla 9.7 para garantizar la conformidad con
las normas UL 508C o CEI 61800-5-1. En aplicaciones que no sean UL, deben utilizarse magnetotérmicos diseñados para
proteger circuitos capaz de suministrar un máximo de 50 000 A
nominal de cortocircuito (SCCR) del convertidor de frecuencia es adecuada para su uso en circuitos capaces de suministrar
un máximo de 100 000 A
, a un máximo de 240 V / 480 V, con protección mediante fusibles de clase T.
rms
(simétricos), a 240 V / 400 V como máximo. La intensidad
rms
Tamaño del alojamiento Potencia (kW [CV])
0,37 (0,5)
0,55-0,75
K1
Trifásico 380-480 V
99
Trifásico 200-240 V
Monofásico 200-240 V
K2
K3 7,5 (10) PKZM0-25
K4
K5
K1
K2 2,2 (3,0)
K3 3,7 (5,0) PKZM0-25
K1
K2 2,2 (3,0) gG-25 PKZM0-20
(0,75-1,0)
1,1-1,5
(1,5-2,0)
2,2 (3,0)
3,0-5,5
(4,0-7,5)
11–15
(15–20)
18,5-22
(25-30)
0,37 (0,5) gG-10
0,55 (0,75)
0,75 (1,0)
1,1 (1,5)
1,5 (2,0)
0,37 (0,5) gG-10
0,55 (0,75)
0,75 (1,0)
1,1 (1,5)
1,5 (2,0)
Fusible no conforme
con UL
gG-10
gG-20
gG-25
gG-50 –
gG-80 –
gG-20
gG-25
gG-20
Magnetotérmico no
conforme con UL
(Eaton)
PKZM0-16
PKZM0-20
PKZM0-16
PKZM0-20
PKZM0-16
Tabla 9.6 Fusible y magnetotérmico no conformes con UL
68 Danfoss A/S © 08/2018 Reservados todos los derechos. MG07A505

Especicaciones Guía de funcionamiento
Tamaño del
alojamiento
Trifásico
380-480 V
Trifásico
200-240 V
Monofásico
200-240 V
Potencia
(kW [CV])
0,37-0,75
(0,5-1,0)
K1
K2-K3
K4
K5
K1
K2-K3
K1
K2 2,2 (3,0)
1,1-1,5
(1,5-2,0)
2,2 (3,0) KTS-R-15 JKS-15 JJS-15 FNQ-R-15 KTK-R-15 LP-CC-15 KLSR-15 ATM-R15 A6K-15R
3,0-7,5
(4,0-10)
11–15
(15–20)
18,5-22
(25-30)
0,37 (0,5) KTN-R-6 JKS-6 JJN-6 FNQ-R-6 KTK-R-6 LP-CC-6 KLNR-6 ATM-R6 A2K-6R
0,55 (0,75)
0,75 (1,0)
1,1-1,5
(1,5-2,0)
2,2-3,7
(3,0-5,0)
0,37 (0,5) KTN-R-6 JKS-6 JJN-6 FNQ-R-6 KTK-R-6 LP-CC-6 KLNR-6 ATM-R6 A2K-6R
0,55 (0,75)
0,75 (1,0)
1,1-1,5
(1,5-2,0)
Bussmann E4273
Clase
RK1
KTS-R-6 JKS-6 JJS-6 FNQ-R-6 KTK-R-6 LP-CC-6 KLSR-6 ATM-R6 A6K-6R
KTS-R-10 JKS-10 JJS-10 FNQ-R-10 KTK-R-10 LP-CC-10 KLSR-10 ATM-R10 A6K-10R
KTS-R-25 JKS-25 JJS-25 FNQ-R-25 KTK-R-25 LP-CC-25 KLSR-25 ATM-R25 A6K-25R
KTS-R-50 JKS-50 JJS-50 – – – KLSR-50 – A6K-50R
KTN-
-R-10
KTN-
-R-15
KTN-
-R-20
KTN-
-R-25
KTN-
-R-10
KTN-
-R-15
KTN-
-R-20
KTN-
-R-25
Clase J Clase T Clase CC Clase CC Clase CC Clase RK1 Clase CC Clase RK1
– JKS-80 JJS-80 – – – – – –
JKS-10 JJN-10 FNQ-R-10 KTK-R-10 LP-CC-10 KLNR-10 ATM-R10 A2K-10R
JKS-15 JJN-15 FNQ-R-15 KTK-R-15 LP-CC-15 KLNR-15 ATM-R15 A2K-15R
JKS-20 JJN-20 FNQ-R-20 KTK-R-20 LP-CC-20 KLNR-20 ATM-R20 A2K-20R
JKS-25 JJN-25 – – – KLNR-25 ATM-R25 A2K-25R
JKS-10 JJN-10 FNQ-R-10 KTK-R-10 LP-CC-10 KLNR-10 ATM-R10 A2K-10R
JKS-15 JJN-15 FNQ-R-15 KTK-R-15 LP-CC-15 KLNR-15 ATM-R15 A2K-15R
JKS-20 JJN-20 FNQ-R-20 KTK-R-20 LP-CC-20 KLNR-20 ATM-R20 A2K-20R
JKS-25 JJN-25 – – – KLNR-25 ATM-R25 A2K-25R
Littelfuse
E81895
MERSEN
E163267/
E2137
MERSEN
E163267/
E2138
9 9
Tabla 9.7 Fusible conforme con UL
MG07A505 Danfoss A/S © 08/2018 Reservados todos los derechos. 69

Especicaciones
VLT® Midi Drive FC 280
9.9 Tamaños de las protecciones, potencias de salida y dimensiones
Potencia [kW
(CV)]
Dimensiones
[mm (in)]
99
Peso
[kg (lb)]
Agujeros de
montaje [mm
(in)]
Tamaño del
alojamiento
Monofásico
200-240 V
Trifásico
200-240 V
Trifásico
380-480 V
Altura A1 210 (8,3) 272,5 (10,7)
Altura A2 278 (10,9) 340 (13,4)
Anchura B 75 (3,0) 90 (3,5) 115 (4,5) 133 (5,2) 150 (5,9)
Profundidad C 168 (6,6) 168 (6,6) 168 (6,6) 245 (9,6) 245 (9,6)
Altura A 338,5 (13,3) 395 (15,6)
Anchura B 100 (3,9) 115 (4,5) 130 (5,1) 153 (6,0) 170 (6,7)
Profundidad C 183 (7,2) 183 (7,2) 183 (7,2) 260 (10,2) 260 (10,2)
Altura A 294 (11,6) 356 (14)
Anchura B 75 (3,0) 90 (3,5) 115 (4,5) 133 (5,2) 150 (5,9)
Profundidad C 168 (6,6) 168 (6,6) 168 (6,6) 245 (9,6) 245 (9,6)
IP20 2,5 (5,5) 3,6 (7,9)
IP21 4,0 (8,8) 5,5 (12,1)
a 198 (7,8) 260 (10,2)
b 60 (2,4) 70 (2,8) 90 (3,5) 105 (4,1) 120 (4,7)
c 5 (0,2) 6,4 (0,25)
d 9 (0,35) 11 (0,43) 11 (0,43) 12,4 (0,49) 12,6 (0,5)
e 4,5 (0,18) 5,5 (0,22)
f 7,3 (0,29) 8,1 (0,32)
0,37
(0,5)
0,37
(0,5)
0,37
(0,5)
0,55
(0,75)
0,55
(0,75)
0,55
(0,75)
FC 280 con tapa inferior de entrada de cable (sin tapa superior)
K1 K2 K3 K4 K5
0,75
(1,0)
0,75
(1,0)
0,75
(1,0)
1,1
(1,5)
1,1
(1,5)
1,1
(1,5)
FC 280 con kit IP21/UL/Tipo 1
1,5
(2,0)
1,5
(2,0)
1,5
(2,0)
FC 280 IP20
2,2
(3,0)
3
(4,0
2,2
(3,0)
2,2
(3,0)
4
5,5
(5,5)
)
(7,5)
– – –
3,7
(5,0)
7,5
(10)11(15)15(20)
272,5
(10,7)
341,5
(13,4)
395
(15,6)
357
(14,1)
4,6
(10,1)
6,5
(14,3)
260
(10,2)
6,5
(0,26)
5,5
(0,22)
9,2
(0,36)
– –
317,5
(12,5)
379,5
(14,9)
425 (16,7) 520 (20,5)
391 (15,4) 486 (19,1)
8,2 (18,1) 11,5 (25,4)
10,5 (23,1) 14,0 (30,9)
297,5
(11,7)
8 (0,32) 7,8 (0,31)
6,8 (0,27) 7 (0,28)
11 (0,43) 11,2 (0,44)
18,5
(25)22(30)
410 (16,1)
474 (18,7)
390 (15,4)
Tabla 9.8 Tamaños de los alojamientos, potencias de salida y dimensiones
70 Danfoss A/S © 08/2018 Reservados todos los derechos. MG07A505

130BE844.11
B
C
A1
A2
130BE846.10
B
A
C
Especicaciones Guía de funcionamiento
Ilustración 9.2 Estándar con placa de desacoplamiento
9 9
Ilustración 9.3 Estándar con tapa inferior de entrada de cable (sin tapa superior)
MG07A505 Danfoss A/S © 08/2018 Reservados todos los derechos. 71

B
C
A
130BE845.10
C
a
b
130BA648.12
f
e
B
A
a
d
e
b
c
Especicaciones
VLT® Midi Drive FC 280
99
Ilustración 9.4 Estándar con kit IP21/UL/Tipo 1
Ilustración 9.5 Agujeros de montaje superiores e inferiores
72 Danfoss A/S © 08/2018 Reservados todos los derechos. MG07A505

Anexo Guía de funcionamiento
10 Anexo
10.1 Símbolos, abreviaturas y convenciones
°C
°F
CA Corriente alterna
AEO Optimización automática de la energía
AWG Calibre de cables estadounidense
AMA Adaptación automática del motor
CC Corriente continua
CEM Compatibilidad electromagnética
ETR Relé termoelectrónico
f
M,N
FC Convertidor de frecuencia
I
INV
I
LÍM.
I
M,N
I
VLT, MÁX.
I
VLT, N
IP Protección Ingress
LCP Panel de control local
MCT Herramienta de control de movimientos
MM Módulo de memoria
MMP Programador del módulo de memoria
n
s
P
M,N
PELV Tensión de protección muy baja
PCB Placa de circuito impreso
Motor PM Motor de magnetización permanente
PUD Datos de la unidad de potencia
PWM Modulación de la anchura de impulsos
r/min Revoluciones por minuto
SIVP Protección y valores de inicialización especícos
STO Safe Torque O
T
LÍM.
U
M,N
Grados Celsius
Grados Fahrenheit
Frecuencia nominal del motor
Intensidad nominal de salida del convertidor
Límite de intensidad
Corriente nominal del motor
Intensidad de salida máxima
Corriente nominal de salida suministrada por el convertidor de frecuencia
Velocidad del motor síncrono
Potencia nominal del motor
Límite de par
Tensión nominal del motor
10 10
Tabla 10.1 Símbolos y abreviaturas
Convenciones
En las ilustraciones, todas las dimensiones están
•
10.2 Estructura de menú de parámetros
en mm (in).
Un asterisco (*) indica los ajustes predeter-
•
minados de un parámetro.
Las listas numeradas indican procedimientos.
•
Las listas de viñetas indican otra información.
•
El texto en cursiva indica:
•
- Referencia cruzada.
- Vínculo.
- Nombre del parámetro.
MG07A505 Danfoss A/S © 08/2018 Reservados todos los derechos. 73

Anexo
VLT® Midi Drive FC 280
0 - 999 *0
0,01-20 s *Dependiente del tamaño
0,01-20 s *Dependiente del tamaño
0 - 250 % *120 %
0-40 Botón (Hand on) en LCP
1-17 Const. de tiempo del ltro de tensión
1-16 Const. tiempo ltro a alta velocidad
[0] Desactivado
*[1] Activado
0-42 [Auto activ.] llave en LCP
[0] Desactivado
*[1] Activado
[0] Ning.
*[1] Activado
0-44 Tecla [O/Reset] en LCP
*[1] %
[5] PPM
[10] 1/min
[0] Desactivado
0-30 Unidad de lectura personalizada
[7] Act reinicio solo
0-5* Copiar/Guardar
[11] r/min
[12] PULSO/s
1-08 Motor Control Bandwidth
[0] Alto
[1] Medio
[2] Bajo
[3] Adaptat. 1
0-999999,99 CustomReadoutUnit *0
CustomReadoutUnit
0-32 Valor máximo de lectura personalizada
[4] Adaptat. 2
*[0] Asynchron
1-1* Selección de motor
1-10 Construcción del motor
0 - 0 *
*100 CustomReadoutUnit
0,0-999999,99 CustomReadoutUnit
0-37 Texto display 1
[1] PM, no saliente SPM
0-38 Texto display 2
1-14 Factor de ganancia de amortiguación
[3] PM, salient IPM, Sat
0 - 0 *
0-39 Texto display 3
1-15 Const. tiempo ltro a baja velocidad
0 - 0 *
0-4* Teclado LCP
[1] Copiar al ajuste 1
[2] Copiar al ajuste 2
[32] kg/h
[31] kg/min
[4] Copiar de aj. 4
[33] t/min
[34] t/h
[40] m/s
0-6* Contraseña
0-60 Contraseña menú principal
[41] m/min
[45] m
1-** Carga y motor
[60] °C
[70] mbar
1-0* Ajustes generales
1-00 Modo Conguración
*[0] Veloc. lazo abierto
[1] Veloc. Lazo Cerrado
[71] bar
[72] Pa
[73] kPa
[74] m WG
[2] Par Lazo Cerrado
[80] kW
[3] Lazo cerrado
[120] GPM
[4] Lazo abierto de par
[121] gal/s
1-01 Principio control motor
[7] Vel. lazo a. PID ampl.
[122] gal/min
[123] gal/h
[0] U/f
[124] CFM
*[1] VVC+
[127] ft³/h
1-03 Características de par
[140] pies/s
0-51 Copia de ajuste
*[0] No copiar
[3] Tr d LCP par ind tam
[2] Tr d LCP tod. par.
*[0] No copiar
[1] Trans. LCP tod. par.
0-50 Copia con LCP
[20] l/s
[21] l/min
[22] l/h
[23] m³/s
[24] m³/min
[25] m³/h
[30] kg/s
[9] Copiar a todos
[3] Copiar de aj. 3
*[0] Par constante
[141] ft/m
[1] Par variable
[160] °F
[2] Optim. auto. energía CT
[170] psi
1-06 En sentido horario
*[0] Normal
[1] Inversa
[171] libras/pulg.²
[172] in wg
[173] pies WG
[180] CV
0-31 Valor mínimo de lectura personalizada
1010
Mismas opciones que el 0-20
Mismas opciones que el 0-20
Mismas opciones que el 0-20
Mismas opciones que el 0-20
0-24 Línea de pantalla grande 3
0-23 Línea de pantalla grande 2
[1666] Salida digital
[3429] PCD 9 lectura desde MCO
[3430] PCD 10 lectura desde MCO
[1690] Código de alarma
[1691] Código de alarma 2
[1685] Puerto FC CTW 1
[1684] Opción comun. STW
[1682] Bus campo REF 1
[1671] Salida de relé
[1669] Salida pulsos #27 [Hz]
[1668] Entrada de frecuencia #33 [Hz]
[1667] Entrada de frecuencia #29 [Hz]
[1680] Bus campo CTW 1
[1672] Contador A
[1673] Contador B
[1674] Contador de parada precisa
[1692] Código de advertencia
[1686] Puerto FC REF 1
[1693] Código de advertencia 2
[1694] Código estado amp
[1890] Error PID proceso
[1695] Código de estado ampl. 2
[3427] PCD 7 lectura desde MCO
[3425] PCD 5 lectura desde MCO
[3426] PCD 6 lectura desde MCO
[3424] PCD 4 lectura desde MCO
[3422] PCD 2 lectura desde MCO
[3423] PCD 3 lectura desde MCO
[3410] PCD 10 escritura en MCO
[3421] PCD 1 lectura desde MCO
[3408] PCD 8 escritura en MCO
[3409] PCD 9 escritura en MCO
[3406] PCD 6 escritura en MCO
[3407] PCD 7 escritura en MCO
[3405] PCD 5 escritura en MCO
[3403] PCD 3 escritura en MCO
[3404] PCD 4 escritura en MCO
[3402] PCD 2 escritura en MCO
[3401] PCD 1 escritura en MCO
[2119] Salida 1 Ext. [%]
[2118] Realim. 1 Ext. [Unidad]
[2117] Referencia 1 Ext. [Unidad]
[1893] Salida con ganancia escal. PID de proc.
[1892] Salida grapada PID de proc.
[1891] Salida PID de proceso
[1697] Alarm Word 3
[1698] Warning Word 3
[3450] Posición real
[3428] PCD 8 lectura desde MCO
[3456] Error de pista
0-21 Línea de pantalla pequeña 1.2
0-22 Línea de pantalla pequeña 1.3
0-3* Lectura LCP
-2147483647 - 2147483647 *0
[1664] Entrada analógica 54
[1665] Salida analógica 42 [mA]
[1663] Terminal 54 ajuste conex.
[1662] Entrada analógica 53
[1657] Realim. [RPM]
[1660] Entrada digital
[1661] Terminal 53 ajuste conex.
[1653] Referencia Digi pot
[1639] Temp. tarjeta control
[1650] Referencia externa
0-16 Selección aplicación
0-** Func./Display
0-0* Ajustes básicos
*[0] Ning.
[1] Lazo cerrado proc. simple
0-01 Idioma
*[0] Inglés
[3] Veloc. lazo abierto
[2] Local/Remoto
[1] Alemán
[2] Francés
[5] Vel. múltip
[4] Lazo cerrado vel simple
[3] Danés
[4] Español
[6] OGD LA10
[7] OGD V210
[5] Italiano
[28] Portugués
[8] Hoist
0-02 Unidad de velocidad de motor
0-2* Display LCP
0-20 Línea de pantalla pequeña 1.1
[0] r/min
*[1] Hz
[0] Ninguno
[37] Texto display 1
0-03 Ajustes regionales
[0] Internacional
[38] Texto display 2
[1] Norteamérica
[748] PCD Feed Forward
[39] Texto display 3
[0] Auto-arranque
0-04 Estado operación en arranque
[953] Cód. de advert. Probus
[1005] Lectura contador errores transm.
*[1] Par. forz., ref. guard.
[2] Par. forz., ref. = 0
[1230] Parámetro de advertencia
[1006] Lectura contador errores recepción
0-06 Tipo red
[0] 200-240 V / 50 Hz / red IT
[1501] Horas funcionam.
[1601] Referencia [Unidad]
[1502] Contador kWh
[1600] Código de control
[11] 380-440 V / 50 Hz / triángulo
[10] 380-440 V / 50 Hz / red IT
[2] 200-240 V / 50 Hz
[1] 200-240 V / 50 Hz / triáng.
*[1602]Referencia %
[12] 380-440 V / 50 Hz
[1603] Código estado
[20] 440-480 V / 50 Hz / red IT
[1609] Lectura personalizada
[1610] Potencia [kW]
[1611] Potencia [HP]
[1605] Valor real princ. [%]
[101] 200-240 V / 60 Hz / triángulo
[100] 200-240 V / 60 Hz / red IT
[22] 440-480 V / 50 Hz
[21] 440-480 V / 50 Hz / triángulo
[1612] Tensión motor
[1613] Frecuencia
[110] 380-440 V / 60 Hz / red IT
[102] 200-240 V / 60 Hz
[1615] Frecuencia [%]
[1614] Intensidad motor
[112] 380-440 V / 60 Hz
[111] 380-440 V / 60 Hz / triángulo
[1616] Par [Nm]
[120] 440-480 V / 60 Hz / red IT
[1617] Velocidad [RPM]
[1618] Térmico motor
[122] 440-480 V / 60 Hz
[121] 440-480 V / 60 Hz / triángulo
[1637] Máx. Int. Inv.
[1635] Térmico inversor
[1636] Int. Nom. Inv.
[1634] Temp. disipador
[1633] Energía freno / 2 min
[1620] Ángulo motor
[1622] Par [%]
[1630] Tensión Bus CC
[0] O
0-07 Frenado de CC aut. IT
*[1] act
0-1* Operac. de ajuste
0-10 Ajuste activo
*[1] Ajuste activo 1
[2] Ajuste activo 2
[3] Editar ajuste 3
[1638] Estado ctrlador SL
[4] Editar ajuste 4
[9] Ajuste múltiple
[1652] Realimentación [Unit]
[2] Ajuste activo 2
0-11 Ajuste de programación
[1] Ajuste activo 1
*[9] Ajuste activo
[4] Editar ajuste 4
0-12 Ajuste enlaces
[0] Sin relacionar
*[20] Enlazado
[3] Editar ajuste 3
0-14 Lectura: Editar ajustes / canal
74 Danfoss A/S © 08/2018 Reservados todos los derechos. MG07A505

Anexo Guía de funcionamiento
[127] ft³/h
[130] lb/s
[131] lb/min
[132] lb/h
[140] pies/s
[141] ft/m
[145] pies
[150] lb ft
[160] °F
[170] psi
[171] libras/pulg.²
[32] kg/h
[33] t/min
[34] t/h
[40] m/s
[41] m/min
[45] m
[60] °C
[70] mbar
[71] bar
[72] Pa
[73] kPa
[74] m WG
[80] kW
[120] GPM
[121] gal/s
[122] gal/min
[123] gal/h
[124] CFM
[125] ft³/s
[126] ft³/min
[172] in wg
[173] pies WG
[180] CV
3-02 Referencia mínima
–4999,0-4999 ReferenceFeedbackUnit
*0 ReferenceFeedbackUnit
–4999,0-4999 ReferenceFeedbackUnit
3-03 Referencia máxima
*Dependiente del tamaño
3-04 Función de referencia
*[0] Suma
[1] Externa sí/no
3-1* Referencias
3-10 Referencia interna
0 - 100 % *0 %
3-12 Valor de enganche/arriba-abajo
3-14 Referencia interna relativa
-100 - 100 % *0 %
[7] Entr. frec. 29
[8] Entr. frec. 33
[11] Referencia bus local
[2] Entrada analógica 54
[0] Sin función
*[1] Entrada analógica 53
3-15 Fuente 1 de referencia
0-500.0 Hz *5 Hz
-100 - 100 % *0 %
3-11 Velocidad ja [Hz]
0-500 Hz *0 Hz
2-06 Intensidad estacionamiento
[1] Activado
[2] Activado siempre
2-100 *Dependiente del tamaño
0 - 150 % *100 %
2-07 Tiempo estacionamiento
[3] Dir. ref activada
[4] Dir. ref activ siempre
1-9000 V *Dependiente del tamaño
0,1-60 s *3 s
1-75 Velocidad arranque [Hz]
2-1* Func. energ. freno
2-10 Función de freno
0-500,0 Hz *Dependiente del tamaño
1-76 Intensidad arranque
0-100 m *50 m
*[0] O
[1] Freno con resistencia
0-1000 A *Dependiente del tamaño
1-78 Velocidad máx. arranque compresor
0-328 ft *164 ft
2-11 Resistencia freno (ohmios)
[2] Frenado de CA
0-500 Hz *0 Hz
[Hz]
0-65535 mH *Dependiente del tamaño
0-6200 Ohm *Dependiente del tamaño
2-12 Límite potencia de freno (kW)
0-10 s *5 s
1-79 Tiempo máx. descon. arr. compresor
0-65535 mH *Dependiente del tamaño
0,001-2000 kW *Dependiente del
1-8* Ajustes de parada
20 - 200 % *100 %
tamaño
2-14 Reduc. tensión freno
*[0] Inercia
1-80 Función de parada
20 - 200 % *100 %
0-500 V *0 V
2-16 Intensidad máx. de frenado de CA
[3] Premagnetización
[1] CC mant./precal. motor
20 - 200 % *100 %
0 - 160 % *100 %
1-82 Vel. mín. para func. parada [Hz]
*[0] Desactivado
2-17 Control de sobretensión
0-20 Hz *0 Hz
1-83 Función de parada precisa
0 - 300 % *100 %
[2] Activado
[1] Activado (no parada)
[1] Par. cont. c/reinicio
*[0] Det. precisa rampa
0,1-10,0 Hz *1 Hz
0 - 200 % *100 %
2-19 Ganancia sobretensión
[2] Par. cont. s/reinicio
[3] Parada vel. comp.
0-1000 V *Dependiente del tamaño
2-2* Freno mecánico
[4] Par. cnt. cm. c/rein.
0-100 A *0 A
2-20 Intensidad freno liber.
1-84 Valor de contador para parada precisa
[5] Par. cnt. cm. s/rein.
0-500,0 Hz *Dependiente del tamaño
0-400 Hz *0 Hz
2-23 Activar retardo de freno
2-22 Activar velocidad freno [Hz]
0-100 ms *10 ms
0 - 999999999 *100000
1-85 Demora comp. veloc. det. precisa
0 - 300 % *100 %
0-5 s *0 s
*[0] OFF
[1] ON
2-3* Adv. Mech Brake
2-39 Mech. Brake w/ dir. Change
[2] ON with start delay
3-** Ref./Rampas
3-0* Límites referencia
3-00 Rango de referencia
*[0] Mín - Máx
[1] =-Máx - +Máx
3-01 Referencia/Unidad Realimentación
[0] Ning.
[1] %
[2] r/min
[3] Hz
[4] Nm
[5] PPM
[10] 1/min
[12] PULSO/s
[20] l/s
[21] l/min
[24] m³/min
[25] m³/h
[30] kg/s
[22] l/h
[23] m³/s
[31] kg/min
10 10
1,0-2,0 *1,4
1-88 Ganancia del freno de CA
0 - 300 % *100 %
1-9* Temperatura motor
–400-400,0 % *Dependiente del
*[0] Sin protección
1-90 Protección térmica motor
tamaño
[1] Advert. termistor
[2] Descon. termistor
[4] Descon. ETR 1
[22] Desconex. ETR: detecc. ampl.
[3] Advert. ETR 1
resonancia
0 - 500 % *100 %
0,05-5 s *0,1 s
1-93 Fuente de termistor
0,001-0,05 s *0,005 s
*[0] Ninguno
[1] Entrada analógica 53
0 - 120 % *50 %
[2] Entrada analógica 54
[3] Entrada digital 18
[4] Entrada digital 19
[5] Entrada digital 32
[6] Entrada digital 33
2-** Frenos
0-10 s *0 s
0 - 160 % *50 %
2-0* Freno CC
2-00 Intensidad CC mantenida/precalent.
0-60 s *10 s
0 - 150 % *50 %
2-01 Intens. freno CC
[Hz]
2-04 Velocidad de conexión del freno CC
2-02 Tiempo de frenado CC
1-4* Datos motor av. II
0,001-1 s *Dependiente del tamaño
1-2* Datos de motor
1-44 Saturac. inductanc. eje d (LdSat)
1-43 Long. cable motor (ft)
1-42 Longitud del cable del motor
1-40 fcem a 1000 RPM
[15] 7,50 kW - 10,00 CV
[16] 11,00 kW - 15,00 CV
[13] 4,00 kW - 5,40 CV
1-20 Potencia motor [kW ]
[2] 0,12 kW - 0,16 CV
[6] 0,55 kW - 0,75 CV
[3] 0,18 kW - 0,25 CV
[4] 0,25 kW - 0,33 CV
[10] 2,20 kW - 3,00 CV
[8] 1,10 kW - 1,50 CV
[9] 1,50 kW - 2,00 CV
[7] 0,75 kW - 1,00 CV
[5] 0,37 kW - 0,50 CV
[14] 5,50 kW - 7,50 CV
[11] 3,00 kW - 4,00 CV
[12] 3,70 kW - 5,00 CV
1-52 Magnetización normal veloc. mín. [Hz]
1-5* Aj. indep. carga
1-50 Magnet. motor a veloc. cero
[20] 30 kW - 40 CV
[18] 18,5 kW - 25 CV
[19] 22 kW - 30 CV
[17] 15,00 kW - 20 CV
1-22 Tensión motor
1-55 Característica U/f - U
50-1000 V *Dependiente del tamaño
1-23 Frecuencia motor
1-56 Característica U/f - F
20-500 Hz *Dependiente del tamaño
1-24 Intensidad motor
1-6* Aj. depend. carga
0,01-1000,00 A *Dependiente del
1-60 Compensación carga baja veloc.
tamaño
1-25 Veloc. nominal motor
1-62 Compensación deslizam.
1-61 Compensación carga alta velocidad
tamaño
50-60000 r/min *Dependiente del
1-26 Par nominal continuo
0,1-10000,0 Nm *Dependiente del
1-63 Tiempo compens. deslizam. constante
tamaño
1-29 Adaptación automática del motor
1-64 Amortiguación de resonancia
(AMA)
*[0] O
[1] Act. AMA completo
1-46 Ganancia de detecc. de posición
1-45 Sat. inductanc. eje q (LqSat)
1-65 Const. tiempo amortigua. de
[2] Act. AMA reducido
1-3* Datos motor av. I
1-30 Resistencia estator (Rs)
1-66 Intens. mín. a baja veloc.
0,0-9999,000 Ohm *Dependiente del
1-7* Ajustes arranque
tamaño
1-31 Resistencia rotor (Rr)
1-70 Modo de inicio
*[0] Detección de rotor
tamaño
0-9999,000 Ohm *Dependiente del
[1] Parking
1-33 Reactancia fuga estátor (X1)
1-71 Retardo arr.
0,0-9999,000 Ohm *Dependiente del
1-72 Función de arranque
tamaño
1-35 Reactancia princ. (Xh)
[0] CC mant./tiempo ret.
0,0-9999,00 Ohm *Dependiente del
*[2] Tiempo inerc./retardo
[1] Fr CC/tiempo retar.
tamaño
1-37 Inductancia eje d (Ld)
[4] Func. horizontal
[3] Int./Vel. arranque CW
0-65535 mH *Dependiente del tamaño
1-38 Inductancia eje q (Lq)
[5] VVC+/Flux s. horario
0,000-65535 mH *Dependiente del
1-73 Motor en giro
*[0] Desactivado
tamaño
1-39 Polos motor
1-49 Corriente en inductancia mín.
1-48 Intensidad Min Inductance para d-axis
MG07A505 Danfoss A/S © 08/2018 Reservados todos los derechos. 75
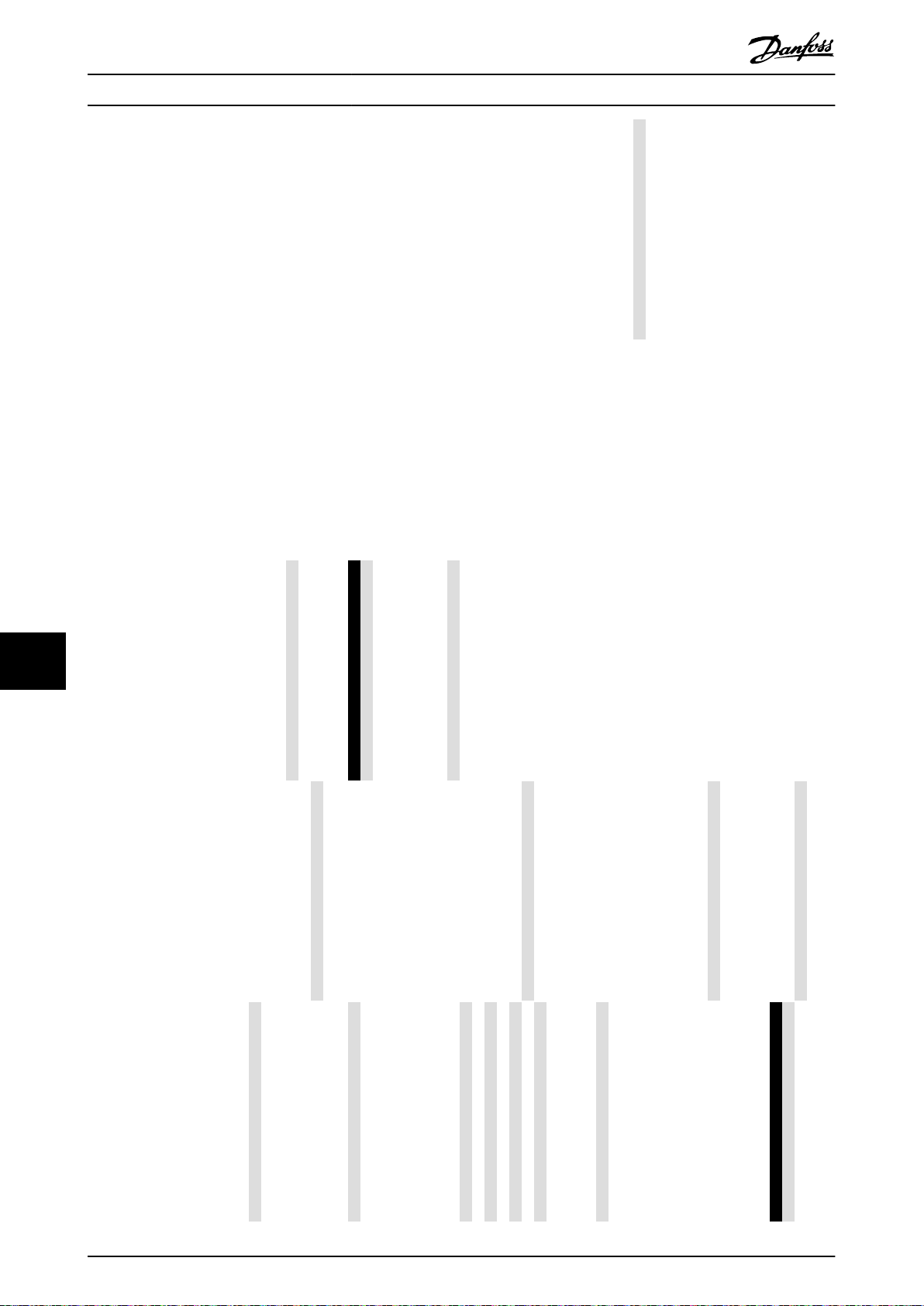
Anexo
[34] Bit rampa 0
[35] Bit rampa 1
[45] Latched start reverse
VLT® Midi Drive FC 280
Mismas opciones que el 5-12
[83] Entr. encoder Z
[32] Entrada de pulsos
Mismas opciones que el 5-10
5-14 Terminal 32 entrada digital
Mismas opciones que el 5-12
5-15 Terminal 33 entrada digital
*[1] Alarma de Safe Torque O
[3] Advertencia de Safe Torque O
5-3* Salidas digitales
5-30 Terminal 27 salida digital
[1] Ctrl prep.
*[0] Sin función
[2] Unidad lista
[5] Funcionamiento
[3] Unid. lista/remoto
[4] Activar / sin advert.
[9] Alarma
[10] Alarma o advertencia
[11] En límite par
[7] Func. en ran./sin adv.
[8] Func. en ref./sin adv.
[6] Func./sin advert.
[12] Fuera ran. intensidad
5-19 Terminal 37/38 Safe Torque O
[81] Encoder input A
[32] Entrada de pulsos
[30] Entrada del contador
[82] Encoder input B
Mismas opciones que el 5-12
[30] Entrada del contador
5-13 Terminal 29 Entrada digital
[172] Conm. lím inv dcha a izq
[171] Conm lím inv izq a dcha
[163] Pos. Idx bit 1
[160] Ir a pos. destino
[162] Pos. Idx bit 0
[164] Pos. Idx bit 2
[150] Ir inicio
[151] Conmut. ref inic
[156] Límite HW negat. inv.
[155] Límite HW posit. inv.
[51] Parada externa
[55] Increm. DigiPot
[56] Dismin. DigiPot
[57] Borrar DigiPot
[58] Elevador DigiPot
[60] Contador A (ascend)
[61] Contador A (descend)
[63] Contador B (ascend)
[62] Reset del contador A
[73] Rein. PID part I
[74] Activar PID
[72] Error de PID inverso
[64] Contador B (descend)
[65] Reset del contador B
[157] Pos. parada ráp inv
5-12 Terminal 27 Entrada digital
[0] Sin función
[1] Reinicio
[2] Inercia
[3] Inercia y reinicio
[4] Parada rápida
[5] Freno CC
5-11 Terminal 19 entrada digital
[172] Conm. lím inv dcha a izq
[163] Pos Idx bit 1
[164] Pos Idx bit 2
[74] Activar PID
[150] Ir inicio
[151] Conmut. ref inic
[155] Límite HW posit. inv.
[56] Dismin. DigiPot
[57] Borrar DigiPot
[51] Parada externa
[55] Increm. DigiPot
[41] Det. precisa pulsos
[45] Latched start reverse
[35] Bit rampa 1
[40] Inic. preciso pulsos
[34] Bit rampa 0
[62] Reset del contador A
[58] Elevador DigiPot
[60] Contador A (ascend)
[73] Rein. PID part I
[65] Reset del contador B
[72] Error de PID inverso
[64] Contador B (descend)
[63] Contador B (ascend)
[61] Contador A (descend)
[160] Ir a pos. destino
[157] Pos. parada ráp inv
[156] Límite HW negat. inv.
[171] Conm lím inv izq a dcha
[162] Pos Idx bit 0
[6] Parada
[8] Arranque
[9] Arranque por pulsos
[10] Cambio de sentido
[11] Arranque e inversión
[21] Aceleración
[22] Deceleración
[24] Selec. ajuste MSB
[19] Mantener referencia
[20] Mantener salida
[18] Ref. interna bit 2
[17] Ref. interna bit 1
[15] Ref. interna, sí
[16] Ref. interna bit 0
[28] Enganche arriba
[29] Enganche abajo
[23] Selec.ajuste LSB
[14] Velocidad ja
[12] Act. arranque adelante
[13] Act. arranque inverso
1010
–4999-4999 ProcessCtrlUnit *4999
0-500 A *0 A
[2] Ambos sentidos
4-51 Advert. Intens. alta
4-11 Límite bajo veloc. motor [RPM]
0-500,00 A *Dependiente del tamaño
4-54 Advertencia referencia baja
0-1500 r/min *Dependiente del tamaño
4-12 Límite bajo veloc. motor [Hz]
-4999 - 4999 *-4999
4-55 Advertencia referencia alta
0-400,0 Hz *0 Hz
4-13 Límite alto veloc. motor [RPM]
-4999 - 4999 *4999
4-56 Advertencia realimentación baja
tamaño
0-60000 r/min *Dependiente del
–4999-4999 ProcessCtrlUnit *–4999
4-14 Límite alto veloc. motor [Hz]
ProcessCtrlUnit
0,1-500 Hz *65 Hz
4-57 Advertencia realimentación alta
4-16 Modo motor límite de par
ProcessCtrlUnit
0-1000 % *Dependiente del tamaño
4-17 Modo generador límite de par
4-58 Función Fallo Fase Motor
0 - 1000 % *100 %
[0] O
*[1] Act
0-1000 % *Dependiente del tamaño
4-18 Límite intensidad
4-6* Bypass veloc.
4-19 Frecuencia salida máx.
0-500 Hz *0 Hz
4-61 Velocidad bypass desde [Hz]
0-500 Hz *Dependiente del tamaño
4-2* Fact. limitadores
4-63 Veloc. bypass hasta [Hz]
4-20 Fuente del factor de límite de par
0-500 Hz *0 Hz
5-** E/S digital
*[0] Sin función
[2] Ent. analóg. 53
5-0* Modo E/S digital
[4] Ent. analóg. 53 inv.
5-00 Modo E/S digital
[6] Ent. analóg. 54
*[0] PNP
[8] Ent. analóg. 54 inv.
[1] NPN
4-21 Fuente del factor de límite de
5-01 Terminal 27 modo E/S
*[0] Entrada
[1] Salida
velocidad
*[0] Sin función
[2] Ent. analóg. 53
5-1* Entradas digitales
5-10 Terminal 18 Entrada digital
[6] Ent. analóg. 54
[4] Ent. analóg. 53 inv.
[1] Reinicio
[0] Sin función
4-22 Break Away Boost
[8] Ent. analóg. 54 inv.
[2] Inercia
*[0] O
[3] Inercia y reinicio
[4] Parada rápida
[1] act
4-3* Ctrl. realim. motor
[5] Freno CC
4-30 Función de pérdida de realim. del
[6] Parada
motor
*[8] Arranque
[9] Arranque por pulsos
[0] Desactivado
[1] Advertencia
[10] Cambio de sentido
*[2] Desconexión
[11] Arranque e inversión
[12] Act. arranque adelante
[3] Velocidad ja
[4] Mantener salida
[13] Act. arranque inverso
[5] Velocidad máx.
[14] Velocidad ja
[6] Cambiar a lazo ab.
[15] Ref. interna, sí
4-31 Error de velocidad en realim. del
[20] Mantener salida
[21] Aceleración
4-4* Aj. advert. 2
4-40 Advert. frec. baja
[23] Selec.ajuste LSB
[22] Deceleración
0-500 Hz *Dependiente del tamaño
4-41 Advert. frec. alta
[19] Mantener referencia
[18] Ref. interna bit 2
[17] Ref. interna bit 1
[16] Ref. interna bit 0
0-60 s *0,05 s
0-50 Hz *20 Hz
motor
4-32 Tiempo lím. pérdida realim. del motor
[24] Selec. ajuste MSB
0-500 Hz *Dependiente del tamaño
4-42 Advert. temperatura ajustable
[28] Enganche arriba
0 - 200 *0
4-5* Ajuste Advert.
4-50 Advert. Intens. baja
[29] Enganche abajo
[26] Parada precisa
[27] Arranq./parada prec.
0-3600000 ms *1000 ms
3-95 Retardo de rampa
0 - 200 % *25 %
3-96 Ref. máxima conmutador límite
*[0] Izqda. a dcha.
4-** Lím./Advert.
4-1* Límites motor
4-10 Dirección veloc. motor
[20] Potencióm. digital
[32] Bus PCD
Mismas opciones que el 3-15
3-16 Fuente 2 de referencia
3-17 Fuente 3 de referencia
Mismas opciones que el 3-15
3-18 Recurso refer. escalado relativo
*[0] Sin función
[1] Entrada analógica 53
0,01-3600 s *Dependiente del tamaño
0,01-3600 s *Dependiente del tamaño
[7] Entr. frec. 29
[8] Entr. frec. 33
[11] Referencia bus local
[2] Entrada analógica 54
3-3* Gen Ramp Settings
3-31 Ramp Down w/ dir. Change
*[0] O
[1] Ramp 1 Ramp Down Time
[2] Ramp 2 Ramp Down Time
[3] Ramp 3 Ramp Down Time
[4] Ramp 4 Ramp Down Time
[9] Quick Stop Ramp Time
*[0] Lineal
[1] Rampa-S
[2] Rampa-S T. cte.
3-41 Rampa 1 tiempo acel. rampa
3-4* Rampa 1
3-40 Rampa 1 tipo
3-42 Rampa 1 tiempo desacel. rampa
Mismo contenido que el 3-4*
Mismo contenido que el 3-4*
Mismo contenido que el 3-4*
3-5* Rampa 2
3-6* Rampa 3
3-7* Rampa 4
3-8* Otras rampas
3-80 Tiempo rampa veloc. ja
0,01-3600 s *Dependiente del tamaño
3-81 Tiempo rampa parada rápida
0,01-3600 s *Dependiente del tamaño
3-9* Potencióm. digital
3-90 Tamaño de paso
0,01-200 % *0,10 %
*[0] O
3-92 Restitución de Energía
[1] act
-200 - 200 % *100 %
3-93 Límite máximo
-200 - 200 % *-100 %
3-94 Límite mínimo
76 Danfoss A/S © 08/2018 Reservados todos los derechos. MG07A505

Anexo Guía de funcionamiento
0-10 V *0,07 V
*[1] Modo tensión
[6] Entrada digital
6-19 Modo terminal 53
[22] Deceleración
[23] Selec.ajuste LSB
[24] Selec. ajuste MSB
[28] Enganche arriba
[29] Enganche abajo
[34] Bit rampa 0
[35] Bit rampa 1
[57] Borrar DigiPot
[51] Parada externa
[55] Increm. DigiPot
[56] Dismin. DigiPot
[58] Elevador DigiPot
[72] Error de PID inverso
[151] Conmut. ref inic
[73] Rein. PID part I
[160] Ir a pos. destino
[162] Pos Idx bit 0
[157] Pos. parada ráp inv
[156] Límite HW negat. inv.
[155] Límite HW posit. inv.
[74] Activar PID
[150] Ir inicio
[172] Conm. lím inv dcha a izq
[163] Pos Idx bit 1
[164] Pos Idx bit 2
[171] Conm lím inv izq a dcha
6-2* Entrada analógica 54
6-20 Terminal 54 escala baja V
0,01-10 s *0,01 s
–4999-4999 *Dependiente del tamaño
-4999 - 4999 *0
0-20 mA *20 mA
0-20 mA *4 mA
0-10 V *10 V
*[1] Modo tensión
6-29 Modo terminal 54
[0] Modo de intensidad
6-26 Terminal 54 tiempo ltro constante
6-25 Term. 54 valor alto ref./realim
6-22 Terminal 54 escala baja mA
6-21 Terminal 54 escala alta V
*[0] 0-20 mA
6-90 Terminal 42 Mode
6-9* Salida anal. / digit. 42
[1] 4-20 mA
[2] Salida digital
6-91 Terminal 42 salida analógica
*[0] Sin función
6-24 Term. 54 valor bajo ref./realim
6-23 Terminal 54 escala alta mA
[101] Referencia
[100] Frecuencia de salida
[103] Intensidad motor
[102] Realimentación +-200%
[104] Par. rel. al límite
[113] Salida grapada PID
[71] Regla lógica 1
5-62 Frec. máx. salida de pulsos #27
[72] Regla lógica 2
5-93 Control de bus salida de pulsos #27
0 - 100 % *0 %
0 - 100 % *0 %
5-94 Tiempo lím. predet. salida pulsos #27
6-** E/S analógica
1-99 s *10 s
6-01 Función Cero Activo
6-0* Modo E/S analógico
*[0] O
6-00 Tiempo Límite Cero Activo
[1] Mantener salida
[2] Parada
[3] Velocidad ja
[4] Velocidad max.
[5] Parada y desconexión
0-10 V *0,07 V
6-1* Entrada analógica 53
6-10 Terminal 53 escala baja V
-4999 - 4999 *0
0-10 V *10 V
6-14 Term. 53 valor bajo ref./realim
6-11 Terminal 53 escala alta V
4-32000 Hz *5000 Hz
1 - 4096 *1024
*[0] Izqda. a dcha.
5-71 Term. 32/33 direc. encoder
5-70 Term. 32/33 resolución encoder
5-7* Entr. encoder 24V
[1] Dcha. a izqda.
5-9* Controlado por bus
0-0xFFFFFFFF *0
5-90 Control de bus digital y de relé
6-15 Term. 53 valor alto ref./realim
–4999-4999 *Dependiente del tamaño
6-16 Terminal 53 tiempo ltro constante
0,01-10 s *0,01 s
[13] Act. arranque inverso
6-18 Terminal 53 entrada dig.
*[0] Sin función
[1] Reinicio
[2] Inercia
[3] Inercia y reinicio
[4] Parada rápida
[5] Freno CC
[6] Parada
[8] Arranque
[10] Cambio sentido
[11] Arranque e inversión
[12] Act. arranque adelante
[14] Velocidad ja
[19] Mantener referencia
[20] Mantener salida
[21] Aceleración
[18] Ref. interna bit 2
[17] Ref. interna bit 1
[15] Ref. interna, sí
[16] Ref. interna bit 0
10 10
0-600 s *0,01 s
0-600 s *0,01 s
5-41 Retardo conex, relé
[193] Modo reposo
[172] Fallo ctrl. posición
[173] Posición freno mec.
[190] Función STO activa
[171] Alcanzada pos. destino
[169] Dispos. en modo auto.
[170] Regres inic comp
[160] Sin alarma
[161] Func. inverso
[83] Salida digital SL D
[82] Salida digital SL C
[73] Regla lógica 3
[81] Salida digital SL B
[74] Regla lógica 4
[75] Regla lógica 5
[80] Salida digital SL A
0-600 s *0,01 s
0-600 s *0,01 s
[168] Conv. modo manual
[165] Ref. local activa
[166] Ref. remota activa
[167] Coman. arranque activo
[194] Func. correa rota
5-42 Retardo desconex, relé
[239] Fallo funcion. STO
5-5* Entrada de pulsos
0-31999 Hz *4 Hz
5-51 Term. 29 alta frecuencia
5-50 Term. 29 baja frecuencia
1-32000 Hz *32000 Hz
-4999 - 4999 *0
5-52 Term. 29 valor bajo ref./realim
–4999-4999 *Dependiente del tamaño
5-53 Term. 29 valor alto ref./realim
0-31999 Hz *4 Hz
5-56 Term. 33 alta frecuencia
5-55 Term. 33 baja frecuencia
1-32000 Hz *32000 Hz
-4999 - 4999 *0
5-57 Term. 33 valor bajo ref./realim
5-58 Term. 33 valor alto ref./realim
–4999-4999 *Dependiente del tamaño
5-6* Salida de pulsos
5-60 Terminal 27 salida pulsos variable
*[0] Sin función
[45] Contr. bus
[48] Contr. bus, t. lím.
[101] Referencia
[100] Frecuencia de salida
[102] Realimentación +-200%
[103] Intensidad motor
[104] Par. rel. al límite
[105] Par rel. a nominal
[106] Potencia
[107] Velocidad
[109] Frec. máx. de salida
[190] Función STO activa
[13] Corriente posterior, baja
[193] Modo reposo
[194] Func. correa rota
[15] Fuera de rango de frecuencia
[14] Corriente anterior, alta
[239] Fallo funcion. STO
[16] Velocidad posterior, baja
5-34 On Delay, Digital Output
[17] Velocidad anterior, alta
5-35 O Delay, Digital Output
[19] < que realim. alta
[18] Fuera rango realim.
[20] > que realim. baja
5-4* Relés
[21] Advertencia térmica
5-40 Relé de función
[0] Sin función
[23] Rem list sin adv tér
[22] Listo, sin adv. térm.
*[1] Ctrl prep.
[24] Listo, tensión OK
[2] Unidad lista
[25] Cambio sentido
[3] Unid. lista/remoto
[26] Bus OK
[4] Activar / sin advert.
[27] Límite par y parada
[41] Bajo ref., alta
[37] Bit código control 12
[26] Bus OK
[65] Comparador 5
[27] Límite par y parada
[70] Regla lógica 0
[29] Fren. prep. sin fallos
[28] Freno, sin advert.
[73] Regla lógica 3
[74] Regla lógica 4
[71] Regla lógica 1
[72] Regla lógica 2
[11] En límite par
[37] Bit código control 12
[12] Fuera ran. intensidad
[13] Corriente posterior, baja
[41] Bajo ref., alta
[40] Fuera rango de ref.
[14] Corriente anterior, alta
[42] Sobre ref., alta
[43] Límite PID ampliado
[45] Contr. bus
[47] Contr. bus, t. lím.: O
[46] Contr. bus, t. lím.: act
[55] Salida de pulsos
[56] Advert. limpieza disipador, alta
[63] Comparador 3
[64] Comparador 4
[62] Comparador 2
[60] Comparador 0
[61] Comparador 1
[9] Alarma
[6] Func./sin advert.
[5] Funcionamiento
[28] Freno, sin advert.
[29] Fren. prep. sin fallos
[10] Alarma o advertencia
[7] Func. en ran./sin adv.
[8] Func. en ref./sin adv.
[32] Ctrl. freno mec.
[36] Bit código control 11
[30] Fallo freno (IGBT )
[31] Relé 123
[25] Cambio sentido
[24] Listo, tensión OK
[23] Rem list sin adv tér
[22] Listo, sin adv. térm.
[20] > que realim. baja
[21] Advertencia térmica
[18] Fuera rango realim.
[19] < que realim. alta
[17] Velocidad anterior, alta
[16] Velocidad posterior, baja
[15] Fuera de rango de frecuencia
[30] Fallo freno (IGBT )
[31] Relé 123
[40] Fuera rango de ref.
[32] Ctrl. freno mec.
[36] Bit código control 11
[83] Salida digital SL D
[82] Salida digital SL C
[81] Salida digital SL B
[75] Regla lógica 5
[80] Salida digital SL A
[42] Sobre ref., alta
[91] Emulac. encoder salida A
[45] Contr. bus
[160] Sin alarma
[46] Contr. bus, t. lím.: act
[161] Func. inverso
[47] Contr. bus, t. lím.: O
[165] Ref. local activa
[56] Advert. limpieza disipador, alta
[166] Ref. remota activa
[60] Comparador 0
[167] Coman. arranque activo
[62] Comparador 2
[61] Comparador 1
[169] Dispos. en modo auto.
[168] Conv. modo manual
[63] Comparador 3
[170] Regres inic comp
[64] Comparador 4
[65] Comparador 5
[172] Fallo ctrl. posición
[171] Alcanzada pos. destino
[70] Regla lógica 0
[173] Posición freno mec.
MG07A505 Danfoss A/S © 08/2018 Reservados todos los derechos. 77

Anexo
VLT® Midi Drive FC 280
[10] Estado ED T18
*[0] Normal
[11] Estado ED T19
[1] Inversa
[12] Estado ED T27
[13] Estado ED T29
7-5* PID proc. av. II
7-50 PID de proceso PID ampliado
[14] Estado ED T32
[0] Desactivado
[15] Estado ED T33
*[1] Activado
[21] Advertencia térmica
7-51 Ganancia FF de PID de proc.
[30] Fallo freno (IGBT )
0 - 100 *1
[60] Comparador 0
[40] Fuera rango de ref.
durante la rampa de acel.
7-52 Contr. la dinám. de la señal de proalim.
tamaño
0-2147483647 *Dependiente del
[93] Alarm68 or Alarm188
8-14 Código de control congurable CTW
[0] Ninguno
8-0* Ajustes generales
*[1] Perl por defecto
[1] Sólo digital
8-01 Puesto de control
*[0] Digital y cód. ctrl
[2] CT W válido act. bajo
[2] Sólo cód. de control
[4] Error PID inverso
8-02 Fuente de control
[6] Activ. PID
[5] Rein. PID part I
[0] Ninguno
[1] FC RS485
8-19 Cód producto
8-3* Ajuste puerto FC
8-30 Protocolo
0,5-6000 s *1 s
[2] USB FC
8-04 Función tiempo límite ctrl.
[3] Opción A
8-03 Valor de tiempo límite ctrl.
[75] Regla lógica 5
[1] Raíz cuadrada
[80] Salida digital SL A
7-62 Conversión realim. 2
[82] Salida digital SL C
[1] Raíz cuadrada
*[0] Lineal
8-** Comunic. y opciones
[73] Regla lógica 3
[74] Regla lógica 4
[71] Regla lógica 1
[64] Comparador 4
[62] Comparador 2
[63] Comparador 3
[61] Comparador 1
0,01-100 s *0,01 s
0,01-100 s *0,01 s
7-56 Tiempo ltro ref. PID de proc.
7-53 Desaceleración FF de PID de proceso
[72] Regla lógica 2
[65] Comparador 5
[70] Regla lógica 0
0,001-1 s *0,001 s
0,001-1 s *0,001 s
7-57 Tiempo ltro realim. PID de proceso
7-6* Conversión realim.
7-60 Conversión realim. 1
*[0] Lineal
[83] Salida digital SL D
[81] Salida digital SL B
*[0] CF
*[0] O
[2] Modbus RTU
8-31 Dirección
[1] Mantener salida
[2] Parada
0,0-247 *1
8-32 Velocidad en baudios
[3] Velocidad ja
[4] Velocidad max.
[0] 2.400 baudios
[1] 4.800 baudios
[5] Parada y desconexión
8-07 Accionador diagnóstico
[2] 9.600 baudios
[3] 19.200 baudios
*[0] Desactivar
[1] Activar alarmas
[4] 38.400 baudios
[5] 57.600 baudios
[2] Provoc alarm/adver
8-1* Aj. cód. ctrl.
[6] 76.800 baudios
[7] 115.200 baudios
8-10 Trama Cód. Control
*[0] Protocolo FC
8-33 Paridad / Bits de parada
[1] Perl PROFIdrive
[0] Paridad par, 1 bit de parada
[5] ODVA
[1] Paridad impar, 1 bit de parada
[7] CANopen DSP 402
[2] Sin paridad, 1 bit de parada
8-13 Código de estado congurable STW
8-35 Retardo respuesta mín.
[3] Sin paridad, 2 bits de parada
*[1] Perl por defecto
[0] Sin función
0,0010-0,5 s *0,01 s
8-36 Retardo respuesta máx.
[3] Desc. excl. alarma 68
[2] Sólo alarma 68
1010
0-6000 r/min *0 r/min
0-10 *0,01
1 - 50 *5
0 - 200 % *0 %
0-20 s *0 s
0,10-9999 s *9999 s
0 - 200 % *5 %
-100 - 100 % *100 %
-100 - 100 % *-100 %
0 - 100 % *100 %
0 - 100 % *100 %
proc
0 - 65535 *0
[1] Entrada analógica 53
*[0] Sin función
[73] Regla lógica 3
[72] Regla lógica 2
[105] Par rel. a nominal
[106] Potencia
[4] Entr. frec. 33
[2] Entrada analógica 54
[3] Entrada pulsos 29
[74] Regla lógica 4
[75] Regla lógica 5
[80] Salida digital SL A
[107] Velocidad
[111] Realim. veloc.
[113] Salida grapada PID
7-22 Fuente 2 realim. lazo cerrado proceso
[81] Salida digital SL B
[139] Contr. bus
*[0] Sin función
[1] Entrada analógica 53
[83] Salida digital SL D
[82] Salida digital SL C
[143] CL 1 amp.
[254] Tensión Bus CC
[2] Entrada analógica 54
[160] Sin alarma
6-92 Terminal 42 Digital Output
[3] Entrada pulsos 29
[4] Entr. frec. 33
[161] Func. inverso
[165] Ref. local activa
*[0] Sin función
[1] Ctrl prep.
7-3* Ctrl. PID proceso
[166] Ref. remota activa
[2] Unidad lista
7-30 Ctrl. normal/inverso de PID de proceso.
[167] Coman. arranque activo
[3] Unid. lista/remoto
*[0] Normal
[1] Inversa
[169] Dispos. en modo auto.
[168] Conv. modo manual
[4] Activar / sin advert.
[5] Funcionamiento
7-31 Saturación de PID de proceso
[170] Regres inic comp
[6] Func./sin advert.
[0] O
*[1] act
[172] Fallo ctrl. posición
[171] Alcanzada pos. destino
[7] Func. en ran./sin adv.
[8] Func. en ref./sin adv.
7-32 Valor arran. para ctrldor. PID proceso.
[173] Posición freno mec.
[9] Alarma
7-33 Ganancia proporc. PID de proc.
[193] Modo reposo
[194] Func. correa rota
[10] Alarma o advertencia
[11] En límite par
7-34 Tiempo integral PID proc.
[198] Modo bypass activo
6-93 Esc. mín. salida terminal 42
[13] Corriente posterior, baja
[12] Fuera ran. intensidad
7-35 Tiempo diferencial PID proc.
0 - 200 % *0 %
6-94 Esc. máx. salida terminal 42
[15] Fuera de rango de frecuencia
[14] Corriente anterior, alta
0 - 200 % *100 %
[16] Velocidad posterior, baja
7-36 Límite ganancia diferencial PID proceso
6-96 Control bus salida terminal 42
[17] Velocidad anterior, alta
7-38 Factor directo aliment. PID de proc.
0 - 16384 *0
7-** Controladores
[19] < que realim. alta
[18] Fuera rango realim.
7-0* Ctrlador PID vel.
[20] > que realim. baja
7-39 Ancho banda En Referencia
7-00 Fuente de realim. PID de veloc.
[21] Advertencia térmica
7-48 PCD Feed Forward
*[0] Normal
[1] Inversa
7-13 Tiempo integral PI de par
[64] Comparador 4
7-49 Ctrl. salida PID de proc. normal/ inv.
0,002-2 s *0,020 s
7-2* Ctrl. realim. proc.
7-20 Fuente 1 realim. lazo cerrado proceso
[70] Regla lógica 0
[71] Regla lógica 1
[65] Comparador 5
[32] Bus PCD
[8] Entr. frec. 33
0,0001-32 *1
[47] Contr. bus, t. lím.: O
[11] Referencia bus local
7-08 Factor directo de alim. PID de veloc.
[56] Advert. limpieza disipador, alta
7-46 Control normal/inv de FF de PID de
0 - 500 % *0 %
0 - 500 % *100 %
7-1* Ctrl. PID par
7-12 Ganancia proporcional PI de par
[63] Comparador 3
[62] Comparador 2
[60] Comparador 0
[61] Comparador 1
[1] Sí
[9] Entr. de frec. 33
[26] Bus OK
7-41 Grapa salida PID de proc. neg.
*[20] Ning.
[27] Límite par y parada
7-02 Ganancia proporc. PID veloc.
[28] Freno, sin advert.
7-42 Grapa salida PID de proc. pos.
0-1 *0,015
7-03 Tiempo integral PID veloc.
[30] Fallo freno (IGBT )
[29] Fren. prep. sin fallos
2-20000 ms *8 ms
[31] Relé 123
velocidad
1-6000 ms *10 ms
1 - 20 *5
0-200 ms *30 ms
7-05 Límite ganancia dif. PID veloc.
7-04 Tiempo diferencial PID veloc.
[36] Bit código control 11
[37] Bit código control 12
[32] Ctrl. freno mec.
7-07 Relación engranaje realim. PID
7-06 Tiempo ltro paso bajo PID veloc.
[42] Sobre ref., alta
[46] Contr. bus, t. lím.: act
[41] Bajo ref., alta
[45] Contr. bus
[40] Fuera rango de ref.
*[0] No
7-4* PID proc. av. I
7-40 Reinicio parte I de PID proc.
[7] Entrada analógica 54
[8] Entrada pulsos 29
[6] Entrada analógica 53
[1] Encoder 24 V
[25] Cambio sentido
[24] Listo, tensión OK
[23] Rem list sin adv tér
[22] Listo, sin adv. térm.
[7] Entr. frec. 29
[2] Entrada analógica 54
*[0] Sin función
[1] Entrada analógica 53
7-45 Recurso FF de PID de proceso
7-44 Esc. ganancia PID proc. con ref. máx.
7-43 Esc. ganancia PID proc. con ref. mín.
78 Danfoss A/S © 08/2018 Reservados todos los derechos. MG07A505

Anexo Guía de funcionamiento
0 - 65535 *0
0 - 0 *0
0 - 0 *0
9-18 Dirección de nodo
1 - 126 *126
9-19 Núm. sistema unid. conv.
0 - 65535 *1037
9-22 Selección de telegrama
Mismas opciones que el 9-15 y el 9-16
9-45 Código de fallo
*[1] Act. master cíclico
9-44 Contador mensajes de fallo
[0] Desactivado
*[1] Activado
9-28 Control de proceso
[0] Desactivar
9-23 Parám. para señales
*[100] Ning.
[101] PPO 1
[102] PPO 2
[103] PPO 3
[104] PPO 4
[105] PPO 5
[106] PPO 6
[107] PPO 7
[1] Telegram. estándar 1
[108] PPO 8
9-27 Editar parámetros
[200] Telegrama person. 1
9-47 Número de fallo
0 - 1000 *0
9-52 Contador situación fallo
0 - 65535 *0
9-53 Cód. de advert. Probus
9-63 Veloc. Transmisión
[0] 9,6 kbit/s
[1] 19,2 kbit/s
[2] 93,75 kbit/s
[3] 187,5 kbit/s
[4] 500 kbit/s
[6] 1.500 kbit/s
[7] 3.000 kbit/s
[8] 6.000 kbit/s
[9] 12.000 kbit/s
[10] 31,25 kbit/s
[11] 45,45 kbit/s
*[255] Sin vel. transmisión
9-64 Identicación dispositivo
0 - 0 *0
9-65 Número perl Probus
0 - 0 *0
0 - 65535 *0
0 - 65535 *0
9-67 Cód. control 1
9-68 Cód. estado 1
9-70 Editar Set-up
[3] Editar ajuste 3
[1] Ajuste activo 1
[2] Ajuste activo 2
[1609] Lectura personalizada
[1610] Potencia [kW]
[1611] Potencia [HP]
[1605] Valor real princ. [%]
8-88 Reset Diagn. puerto FC
*[0] No reiniciar
[1] Reiniciar contador
8-9* Realim. de bus
[1] Bus
[2] Lógico Y
*[3] Lógico O
8-51 Selección parada rápida
[1613] Frecuencia
[1612] Tensión motor
0-1500 r/min *100 r/min
8-90 Veloc Bus Jog 1
[0] Entrada digital
[1] Bus
[1614] Intensidad motor
8-91 Veloc Bus Jog 2
[2] Lógico Y
[1615] Frecuencia [%]
[1616] Par [Nm]
0-1500 r/min *200 r/min
9-** PROFIdrive
8-52 Selección freno CC
*[3] Lógico O
[1617] Velocidad [RPM]
9-00 Valor de consigna
[0] Entrada digital
[1618] Térmico motor
0 - 65535 *0
[1] Bus
[1620] Ángulo motor
9-07 Valor
[2] Lógico Y
[1622] Par [%]
0 - 65535 *0
*[3] Lógico O
[1633] Energía freno / 2 min
[1630] Tensión Bus CC
9-15 Cong. escritura PCD
[0] Ninguno
8-53 Selec. arranque
[0] Entrada digital
[1634] Temp. disipador
[1635] Térmico inversor
[1638] Estado ctrlador SL
[312] Valor de enganche/arriba-abajo
[303] Referencia máxima
[302] Referencia mínima
[1] Bus
[2] Lógico Y
*[3] Lógico O
[1650] Referencia externa
[1639] Temp. tarjeta control
[341] Rampa 1 tiempo acel. rampa
[342] Rampa 1 tiempo desacel. rampa
[0] Entrada digital
8-54 Selec. sentido inverso
[1652] Realimentación [Unit]
[1653] Referencia Digi pot
[351] Rampa 2 tiempo acel. rampa
[352] Rampa 2 tiempo desacel. rampa
[1] Bus
[2] Lógico Y
[1657] Realim. [RPM]
[380] Tiempo rampa veloc. ja
*[3] Lógico O
[1660] Entrada digital
[1661] Terminal 53 ajuste conex.
[381] Tiempo rampa parada rápida
[412] Límite bajo veloc. motor [Hz]
8-55 Selec. ajuste
[0] Entrada digital
[1662] Entrada analógica 53
[414] Límite alto veloc. motor [Hz]
[1] Bus
[1663] Terminal 54 ajuste conex.
[416] Modo motor límite de par
[2] Lógico Y
[1664] Entrada analógica 54
[417] Modo generador límite de par
*[3] Lógico O
[1665] Salida analógica 42 [mA]
[1666] Salida digital
[558] Term. 33 valor alto ref./realim
[553] Term. 29 valor alto ref./realim
8-56 Selec. referencia interna
[0] Entrada digital
[1667] Entrada de frecuencia #29 [Hz]
[590] Control de bus digital y de relé
[1] Bus
[1668] Entrada de frecuencia #33 [Hz]
[593] Control de bus salida de pulsos #27
[2] Lógico Y
[1671] Salida de relé
[1669] Salida pulsos #27 [Hz]
[625] Term. 54 valor alto ref./realim
[615] Term. 53 valor alto ref./realim
*[3] Lógico O
8-57 Selecc Prodrive OFF2
[1672] Contador A
[696] Control bus salida terminal 42
[0] Entrada digital
[1673] Contador B
[748] PCD Feed Forward
[1] Bus
[1674] Contador de parada precisa
[890] Veloc Bus Jog 1
[2] Lógico Y
[3429] PCD 9 lectura desde MCO
[3430] PCD 10 lectura desde MCO
[3450] Posición real
[1685] Puerto FC CTW 1
[1690] Código de alarma
[1691] Código de alarma 2
[1692] Código de advertencia
[1693] Código de advertencia 2
[1684] Opción comun. STW
[1694] Cód. estado amp
[3421] PCD 1 lectura desde MCO
[1695] Código de estado ampl. 2
[3427] PCD 7 lectura desde MCO
[3428] PCD 8 lectura desde MCO
[3426] PCD 6 lectura desde MCO
[3424] PCD 4 lectura desde MCO
[3425] PCD 5 lectura desde MCO
[3423] PCD 3 lectura desde MCO
[3422] PCD 2 lectura desde MCO
[1697] Alarm Word 3
[1698] Warning Word 3
[3456] Error de pista
10 10
[3410] PCD 10 escritura en MCO
9-16 Cong. lectura PCD
[3409] PCD 9 escritura en MCO
[3407] PCD 7 escritura en MCO
[3408] PCD 8 escritura en MCO
[3406] PCD 6 escritura en MCO
[3405] PCD 5 escritura en MCO
[3404] PCD 4 escritura en MCO
[3402] PCD 2 escritura en MCO
[3403] PCD 3 escritura en MCO
[3401] PCD 1 escritura en MCO
[1682] Bus campo REF 1
[891] Veloc Bus Jog 2
[1680] Bus campo CTW 1
0-655 *Dependiente del tamaño
[0] Entrada digital
[1] Bus
[2] Lógico Y
*[3] Lógico O
8-58 Selecc Prodrive OFF3
*[3] Lógico O
8-7* Vers. SW protocolo
8-79 Protocol Firmware version
8-8* Diagnóstico puerto FC
8-80 Contador mensajes de bus
[0] Ninguno
[1500] Horas de funcionamiento
[1501] Horas funcionam.
[1502] Contador kWh
0 - 4294967295 *0
0 - 4294967295 *0
0 - 4294967295 *0
0 - 4294967295 *0
8-83 Contador errores de esclavo
8-82 Mensaje de esclavo recibido
8-81 Contador errores de bus
[1601] Referencia [Unidad]
[1600] Código de control
0 - 4294967295 *0
8-84 Mensajes de esclavo enviados
[1602] Referencia %
8-85 Errores de tiempo lím. esclavo
[1603] Código estado
0 - 4294967295 *0
0,1-10,0 s *Dependiente del tamaño
[32] [1673] Contador B
[33] [1690] Código de alarma
[34] [1692] Código de advertencia
8-4* Conf. protoc. FC MC
8-42 Conguración de escritura PCD
[0] Ning.
[2] [303] Referencia máxima
[1] [302] Referencia mínima
[15] FC Port CTW
[16] FC Port REF
[7] [380] Tiempo rampa veloc. ja
[6] [352] Tiempo decel. rampa 2
[5] [351] Tiempo acel rampa 2
[4] [342] Tiempo decel. rampa 1
[3] [341] Tiempo acel rampa 1
[8] [381] Tiempo par. ráp
[12] [676] Term. 45 control bus salida
[11] [590] Control de bus digital y de relé
[10] [414] Límite alto veloc. motor [Hz]
[9] [412] Límite bajo veloc. motor [Hz]
8-43 Cong. lectura PCD
[13] [696] Control bus salida terminal 42
[0] Ning.
[1] [1500] Operation Hours
[5] [1601] Referencia [Unidad]
[4] [1600] Código de control
[2] [1501] Horas funcionam.
[3] [1502] Contador kWh
[7] [1603] estado amp
[6] [1602] Referencia %
[9] [1609] Lectura personalizada
[10] [1610] Potencia [kW]
[11] [1611] Potencia [HP]
[8] [1605] Valor real princ. [%]
[12] [1612] Tensión motor
[13] [1613] Frecuencia
[15] [1615] Frecuencia [%]
[14] [1614] Intensidad motor
[19] [1634] Temp. disipador
[17] [1618] Térmico motor
[18] [1630] Tensión Bus CC
[16] [1616] Par [Nm]
[31] [1672] Contador A
[29] [1665] Salida analógica 42 [mA]
[30] [1671] Salida Relé [bin]
[28] [1664] Entrada analógica 54
[27] [1663] Terminal 54 ajuste conex.
[26] [1662] Entr analóg 53 (V)
[25] [1661] Terminal 53 ajuste conex.
[23] [1652] Realim. [Unid.]
[24] [1660] Digital Input 18,19,27,33
[22] [1650] Referencia externa
[20] [1635] Térmico inversor
[21] [1638] Estado ctrlador SL
[35] [1694] Cód. est. ampl.
8-5* Digital/Bus
8-50 Selección inercia
[0] Entrada digital
MG07A505 Danfoss A/S © 08/2018 Reservados todos los derechos. 79

Anexo
0-65535 *Dependiente del tamaño
VLT® Midi Drive FC 280
0 - 4294967295 *0
0 - 2147483647 *0
0 - 65535 *0
0 - 0 *0
0 - 65535 *0
1 - 239 *1
0-2000000000 ms *30000 ms
0-2000000,000 ms *5000,000 ms
0 - 2000000000 *15
0 - 4294967295 *0
0 - 65535 *4000
0 - 65535 *0
0 - 3600 *120
-1 - 20 % *-1 %
[1690] Código de alarma
12-68 Cumulative Counters
[1691] Código de alarma 2
12-69 Ethernet PowerLink Status
[1692] Código de advertencia
[1693] Código de advertencia 2
[1694] Cód. estado amp
12-8* Otros servicios Ethernet
12-80 Servidor FTP
[1697] Alarm Word 3
[1695] Código de estado ampl. 2
*[0] Desactivado
[1698] Warning Word 3
[1] Activado
[3421] PCD 1 lectura desde MCO
*[0] Desactivado
[1] Activado
12-81 Servidor HTTP
*[0] Desactivado
[1] Activado
12-82 Servicio SMTP
*[0] Desactivado
[1] Activado
12-83 Agent SNMP
[0] Desactivado
*[1] Activado
12-84 Detecc. conicto direcc.
[0] Desactivado
*[1] Activado
12-89 Puerto de canal de zócalo transparente
12-9* Servicios Ethernet avanzados
8 - 32 *16
8 - 32 *16
[3456] Error de pista
12-24 Process Data Cong Read Size
12-23 Process Data Cong Write Size
[3429] PCD 9 lectura desde MCO
[3430] PCD 10 lectura desde MCO
[3427] PCD 7 lectura desde MCO
[3425] PCD 5 lectura desde MCO
[3426] PCD 6 lectura desde MCO
[3424] PCD 4 lectura desde MCO
[3422] PCD 2 lectura desde MCO
[3423] PCD 3 lectura desde MCO
[3450] Posición real
[3428] PCD 8 lectura desde MCO
12-90 Diagnóstico de cableado
*[0] O
12-28 Grabar valores de datos
[2] Grabar todos los ajustes
12-91 Cruce automático
12-29 Almacenar siempre
[0] Desactivado
*[0] O
*[1] Activado
12-92 Vigilante IGMP
[1] act
12-3* EtherNet/IP
[0] Desactivado
12-30 Parámetro de advertencia
*[1] Activado
0 - 2147483647 *0
12-93 Long. de cable errónea
12-31 Referencia de red
12-94 Protección transmisión múltiple
*[0] O
[1] act
12-95 Filtro transmisión múltiple
*[0] O
12-32 Control de red
[0] Normal
0-65535 *Dependiente del tamaño
[1] act
12-33 Revisión CIP
12-96 Cong. puerto
12-34 Código de producto CIP
[1653] Referencia Digi pot
[1673] Contador B
12-66 Threshold
[1684] Opción comun. STW
[1674] Contador de parada precisa
12-67 Threshold Counters
[1685] Puerto FC CTW 1
12-35 Parámetro EDS
[1660] Entrada digital
[1657] Realim. [RPM]
12-38 Filtro COS
12-37 Temporizador de inhibición COS
[1662] Entrada analógica 53
[1661] Terminal 53 ajuste conex.
12-6* Ethernet PowerLink
12-60 Node ID
[1666] Salida digital [bin]
[1667] Entrada de frecuencia #29 [Hz]
[1664] Entrada analógica 54
[1665] Salida analógica 42 [mA]
[1663] Terminal 54 ajuste conex.
[1668] Entrada de frecuencia #33 [Hz]
12-62 SDO Timeout
[1669] Salida pulsos #27 [Hz]
[1671] Salida de relé
12-63 Basic Ethernet Timeout
[1672] Contador A
1010
[1650] Referencia externa
[352] Rampa 2 tiempo desacel. rampa
[380] Tiempo rampa veloc. ja
[381] Tiempo rampa parada rápida
[412] Límite bajo veloc. motor [Hz]
[1635] Térmico inversor
[1634] Temp. disipador
[1633] Energía freno / 2 min
[1620] Ángulo motor
[1622] Par [%]
[1615] Frecuencia [%]
[1616] Par [Nm]
[1609] Lectura personalizada
[1610] Potencia [kW]
[1611] Potencia [HP]
[1612] Tensión motor
[0] Ninguno
[1500] Horas de funcionamiento
[1501] Horas funcionam.
[1502] Contador kWh
[1600] Código de control
[1601] Referencia [Unidad]
[1602] Referencia %
[1603] Código estado
[748] PCD Feed Forward
[625] Term. 54 valor alto ref./realim
[696] Control bus salida terminal 42
[615] Term. 53 valor alto ref./realim
[593] Control de bus salida de pulsos #27
[590] Control de bus digital y de relé
[558] Term. 33 valor alto ref./realim
[417] Modo generador límite de par
[553] Term. 29 valor alto ref./realim
[416] Modo motor límite de par
[414] Límite alto veloc. motor [Hz]
[1682] Bus campo REF 1
[890] Veloc Bus Jog 1
[891] Veloc Bus Jog 2
[1680] Bus campo CTW 1
[3410] PCD 10 escritura en MCO
12-22 Lectura cong. datos proceso
[3409] PCD 9 escritura en MCO
[3407] PCD 7 escritura en MCO
[3408] PCD 8 escritura en MCO
[3406] PCD 6 escritura en MCO
[3405] PCD 5 escritura en MCO
[3404] PCD 4 escritura en MCO
[3402] PCD 2 escritura en MCO
[3403] PCD 3 escritura en MCO
[3401] PCD 1 escritura en MCO
[1605] Valor real princ. [%]
[1613] Frecuencia
[1617] Velocidad [RPM]
[1614] Intensidad motor
[1630] Tensión Bus CC
[1618] Térmico motor
[1652] Realimentación [Unit]
[1638] Estado ctrlador SL
[1639] Temp. tarjeta control
1 - 48 *0
*[0] O
[4] Editar ajuste 4
[1] act
*[9] Ajuste activo
12-** Ethernet
12-0* Ajustes de IP
*[0] O
9-71 Grabar valores de datos
12-00 Asignación de dirección IP
[1] Grabar todos los ajustes
[0] MANUAL
[1] DHCP
9-72 Reiniciar unidad
*[0] Sin acción
[2] BOOTP
*[10] DCP
[1] Reinicio arranque
[2] Reinicio arranque
[20] Desde ID nod
12-01 Dirección IP
[3] Reinic. opción comun.
9-75 Identicación DO
0 - 4294967295 *0
12-06 Servidores de nombres
9-84 Parámetros denidos (5)
0 - 9999 *0
1 - 48 *0
12-07 Nombre de dominio
0 - 9999 *0
9-85 Parámetros denidos (6)
0 - 2147483647 *0
12-04 Servidor DHCP
0 - 9999 *0
9-82 Parámetros denidos (3)
0 - 4294967295 *0
12-05 Caducidad arriendo
0 - 9999 *0
9-83 Parámetros denidos (4)
0 - 4294967295 *0
0 - 4294967295 *0
0 - 4294967295 *0
12-03 Puerta de enlace predeterminada
12-02 Máscara de subred
0 - 65535 *0
0 - 9999 *0
0 - 9999 *0
9-80 Parámetros denidos (1)
9-81 Parámetros denidos (2)
12-08 Nombre de host
9-90 Parámetros cambiados (1)
0 - 17 *0
12-09 Dirección física
12-1* Parámetros enlace Ethernet
12-10 Estado de la conexión
0 - 9999 *0
0 - 9999 *0
0 - 9999 *0
9-92 Parámetros cambiados (3)
9-91 Parámetros cambiados (2)
*[0] Sin vínculo
[1] Vínculo
0 - 9999 *0
9-93 Parámetros cambiados (4)
12-11 Duración de la conexión
9-94 Parámetros cambiados (5)
0-0 *Dependiente del tamaño
12-12 Negociación automática
0 - 9999 *0
9-99 Contador revisión de Probus
[0] O
0 - 65535 *0
*[1] act
10-** Fieldbus CAN
[1] 10 Mbps
*[0] Ninguna
12-13 Velocidad de la conexión
10-0* Ajustes comunes
10-01 Selec. vel. baud
[16] 10 Kbps
[2] 100 Mbps
12-14 Vínculo Dúplex
[17] 20 Kbps
[18] 50 Kbps
[0] Semidúplex
*[20] 125 Kbps
*[1] Dúplex completo
[21] 250 Kbps
12-18 Supervisor MAC
[22] 500 Kbps
0 - 2147483647 *0
[23] 800 Kbps
12-19 Dir. IP supervisor
[24] 1000 Kbps
0 - 2147483647 *0
0-255 *Dependiente del tamaño
[0] Ninguno
[302] Referencia mínima
[303] Referencia máxima
[312] Valor de enganche/arriba-abajo
[341] Rampa 1 tiempo acel. rampa
[342] Rampa 1 tiempo desacel. rampa
*[0] O
[351] Rampa 2 tiempo acel. rampa
[2] Grabar todos los ajustes
[3] Grabar todos los ajustes
10-33 Almacenar siempre
12-21 Escritura cong. datos proceso
12-2* Datos de proceso
12-20 Instancia de control
0 - 255 *0
0 - 255 *0
1 - 127 *127
10-05 Lectura contador errores transm.
10-02 ID MAC
10-06 Lectura contador errores recepción
10-3* Acceso parám.
10-31 Grabar valores de datos
80 Danfoss A/S © 08/2018 Reservados todos los derechos. MG07A505

Anexo Guía de funcionamiento
[71] Tempor. inicio 4
[72] Tempor. inicio 5
[12] Selec. ref. presel. 2
[14] Selec. ref. presel. 4
[13] Selec. ref. presel. 3
Mismas opciones que el 13-40
[15] Selec. ref. presel. 5
[16] Selec. ref. presel. 6
Mismas opciones que el 13-41
[17] Selec. ref. presel. 7
[18] Seleccionar rampa 1
Mismas opciones que el 13-42
[24] Parada
[25] Parada rápida
[26] Freno de CC
[27] Inercia
[28] Mant. salida
[22] En funcionamiento
[23] Func. sentido inverso
[19] Seleccionar rampa 2
[29] Tempor. inicio 0
[33] Aj. sal. dig. B baja
[30] Tempor. inicio 1
[31] Tempor. inicio 2
[32] Aj. sal. dig. A baja
[61] Reset del contador B
[60] Reset del contador A
[41] Aj. sal. dig. D alta
[40] Aj. sal. dig. C alta
[38] Aj. sal. dig. A alta
[39] Aj. sal. dig. B alta
[35] Aj. sal. dig. D baja
[34] Aj. sal. dig. C baja
[73] Tempor. inicio 6
[70] Tempor. inicio 3
[74] Tempor. inicio 7
14-** Func. especiales
14-0* Conmut. inversor
14-01 Frecuencia conmutación
[0] Ran3
[1] Ran5
0-100 % *Dependiente del tamaño
0-100 % *Dependiente del tamaño
0-100 *Dependiente del tamaño
14-03 Sobremodulación
[5] 5,0 kHz
[6] 6,0 kHz
[7] 8,0 kHz
[2] 2,0 kHz
[3] 3,0 kHz
[4] 4,0 kHz
[8] 10,0 kHz
[0] O
[9] 12,0 kHz
[10] 16,0 kHz
14-08 Factor de ganancia de amortiguación
*[1] act
14-07 Nivel comp. tiempo muerto
14-09 Dead Time Bias Current Level
14-1* Alim. on/o
14-10 Fallo aliment.
*[0] Sin función
13-42 Regla lógica booleana 2
13-12 Valor comparador
[8] I posterior bajo
13-44 Regla lógica booleana 3
13-43 Operador regla lógica 2
13-5* Estados
13-51 Evento Controlador SL
*[0] Falso
[1] Verdadero
[2] En funcionamiento
[3] En rango
[4] En referencia
[7] Fuera rango intensidad
[8] I posterior bajo
[18] Cambio sentido
[16] Advertencia térmica
[17] Tens. alim. fuera ran.
[19] Advertencia
[9] I anterior alto
[20] Alarma (descon.)
[21] Alar. (bloq. descon.)
[23] Comparador 1
[22] Comparador 0
[27] Regla lógica 1
[25] Comparador 3
[26] Regla lógica 0
[24] Comparador 2
[31] Tiempo límite SL 1
[30] Tiempo límite SL 0
[28] Regla lógica 2
[29] Regla lógica 3
[35] Entrada digital DI27
[36] Entrada digital DI29
[33] Entrada digital DI18
[34] Entrada digital DI19
[32] Tiempo límite SL 2
[40] Convert. frec. parado
[39] Comando de arranque
[42] Desc. reinic. autom.
[50] Comparador 4
[51] Comparador 5
[71] Tiempo límite SL 4
[60] Regla lógica 4
[61] Regla lógica 5
[70] Tiempo límite SL 3
[83] Correa rota
13-52 Acción Controlador SL
[74] Tiempo límite SL 7
[73] Tiempo límite SL 6
[72] Tiempo límite SL 5
*[0] Desactivado
[1] Sin acción
[3] Selección de ajuste 2
[2] Selección de ajuste 1
[11] Selec. ref. presel. 1
[10] Selec. ref. presel. 0
[5] Selección de ajuste 4
[4] Selección de ajuste 3
10 10
-9999 - 9999 *0
0-3600 s *0 s
*[0] Desactivado
[1] Y
[2] O
[3] Y NO
[4] O NO
[5] NO Y
[6] NO O
[7] NO Y NO
13-11 Operador comparador
[0] Menor que (<)
[8] NO O NO
*[1] ≈ (igual)
[2] Mayor que (>)
[51] Comparador 5
13-10 Operando comparador
[60] Regla lógica 4
*[0] Desactivado
[1] Referencia
[70] Tiempo límite SL 3
[2] Realimentación
[3] Veloc. motor
[20] Número de alarma
[30] Contador A
[19] Entrada pulsos FI33
[31] Contador B
[18] Entrada pulsos FI29
[13] Entr. analóg. AI54
[12] Entr. analóg. AI53
[7] Tensión motor
[4] Intensidad motor
[6] Potencia del motor
[26] Regla lógica 0
[42] Desc. reinic. autom.
[29] Regla lógica 3
[27] Regla lógica 1
[1] Reiniciar SLC
[83] Correa rota
13-03 Reiniciar SLC
*[0] No reiniciar SLC
[74] Tiempo límite SL 7
[73] Tiempo límite SL 6
[72] Tiempo límite SL 5
[71] Tiempo límite SL 4
[61] Regla lógica 5
[50] Comparador 4
[70] Tiempo límite SL 3
[51] Comparador 5
[60] Regla lógica 4
13-1* Comparadores
[21] Alar. (bloq. descon.)
[34] Entrada digital DI19
[35] Entrada digital DI27
[36] Entrada digital DI29
[24] Comparador 2
[39] Comando de arranque
*[40] Convert. frec. parado
*[0] Falso
[1] Verdadero
[2] En funcionamiento
[3] En rango
[4] En referencia
13-2* Temporizadores
13-20 Temporizador Smart Logic Controller
13-4* Reglas lógicas
13-40 Regla lógica booleana 1
[19] Advertencia
[21] Alar. (bloq. descon.)
[20] Alarma (descon.)
[22] Comparador 0
[18] Cambio de sentido
[9] I anterior alto
[16] Advertencia térmica
[17] Tens. alim. fuera ran.
[7] Fuera rango intensidad
[26] Regla lógica 0
[24] Comparador 2
[25] Comparador 3
[23] Comparador 1
[8] I posterior bajo
[27] Regla lógica 1
[17] Tens. alim. fuera ran.
[33] Entrada digital DI18
[32] Tiempo límite SL 2
[31] Tiempo límite SL 1
[29] Regla lógica 3
[30] Tiempo límite SL 0
[28] Regla lógica 2
[19] Advertencia
[20] Alarma (descon.)
[18] Cambio de sentido
[9] I anterior alto
[16] Advertencia térmica
[25] Comparador 3
[22] Comparador 0
[23] Comparador 1
[50] Comparador 4
[42] Desc. reinic. autom.
[39] Comando de arranque
[40] Convert. frec. parado
[36] Entrada digital DI29
[34] Entrada digital DI19
[35] Entrada digital DI27
[33] Entrada digital DI18
[32] Tiempo límite SL 2
[31] Tiempo límite SL 1
[30] Tiempo límite SL 0
[28] Regla lógica 2
[83] Correa rota
13-41 Operador regla lógica 1
[74] Tiempo límite SL 7
[73] Tiempo límite SL 6
[72] Tiempo límite SL 5
[71] Tiempo límite SL 4
[61] Regla lógica 5
0 - 4294967295 *0
0 - 4294967295 *4000
0-63 *Dependiente del tamaño
[83] Correa rota
[0] Falso
[1] Verdadero
[2] En funcionamiento
[3] En rango
[4] En referencia
[51] Comparador 5
[60] Regla lógica 4
[61] Regla lógica 5
12-97 QoS Priority
[255] Puerto espejo int. a 2
[10] Vía 1 desactiv.
[11] Vía 2 desactiv.
[1] Puerto espejo 1 a 2
[254] Puerto espejo int. a 1
[2] Puerto espejo 2 a 1
13-** Lógica inteligente
13-0* Ajustes SLC
13-00 Modo Controlador SL
*[0] O
[1] act
13-01 Evento arranque
[0] Falso
[1] Verdadero
[2] En funcionamiento
[3] En rango
[4] En referencia
[7] Fuera rango intensidad
[8] I posterior bajo
[9] I anterior alto
[16] Advertencia térmica
[17] Tens. alim. fuera ran.
[18] Cambio de sentido
[19] Advertencia
[20] Alarma (descon.)
[21] Alar. (bloq. descon.)
12-99 Contadores de medios
12-98 Contadores de interfaz
[25] Comparador 3
[26] Regla lógica 0
[22] Comparador 0
[23] Comparador 1
[27] Regla lógica 1
[24] Comparador 2
[34] Entrada digital DI19
[28] Regla lógica 2
[29] Regla lógica 3
[42] Desc. reinic. autom.
[50] Comparador 4
[40] Convert. frec. parado
[36] Entrada digital DI29
*[39] Comando de arranque
[35] Entrada digital DI27
[33] Entrada digital DI18
13-02 Evento parada
[7] Fuera rango intensidad
MG07A505 Danfoss A/S © 08/2018 Reservados todos los derechos. 81

Anexo
VLT® Midi Drive FC 280
0 - 2147483647 *0
-32768 - 32767 *0
16-73 Contador B
16-74 Contador de parada precisa
16-8* Fieldb. y puerto FC
0 - 100 % *0 %
0 - 65535 *0
-200 - 200 % *0 %
16-20 Ángulo motor
16-22 Par [%]
-32768 - 32767 *0
0 - 65535 *0
16-80 Bus campo CTW 1
16-3* Estado conv.
16-30 Tensión Bus CC
0 - 65535 *0
16-84 Opción comun. STW
16-33 Energía freno / 2 min
0-10000 kW *0 kW
16-34 Temp. disipador
16-85 Puerto FC CTW 1
–128-127 °C *0 °C
16-82 Bus campo REF 1
0-65535 V *0 V
16-35 Térmico inversor
15-70 Opción en ranura A
0 - 31 *0
16-71 Salida de relé
–30000-30000 Nm *0 Nm
-32768 - 32767 *0
16-72 Contador A
–30000-30000 r/min *0 r/min
16-18 Térmico motor
16-17 Velocidad [RPM]
0 - 40000 *0
0 - 255 % *0 %
0 - 30 *0
0-655,35 A *0 A
0-655,35 A *0 A
16-38 Estado ctrlador SL
0 - 2000 *0
15-92 Parámetros denidos
15-97 Tipo de aplicación
16-39 Temp. tarjeta control
16-5* Ref. & realim.
16-50 Referencia externa
0 - 56 *0
0-0xFFFFFFFF *0
15-99 Metadatos parám.
15-98 Id. dispositivo
16-37 Máx. Int. Inv.
16-36 Int. Nom. Inv.
0 - 20 *0
15-71 Versión SW de opción en ranura A
15-9* Inform. parámetro
-200 - 200 % *0 %
0 - 9999 *0
–4999-4999 ProcessCtrlUnit *0
16-52 Realimentación [Unit]
16-** Lecturas de datos
16-0* Estado general
ProcessCtrlUnit
16-00 Código de control
-200 - 200 *0
16-53 Referencia Digi pot
0 - 65535 *0
16-01 Referencia [Unidad]
–30000-30000 r/min *0 r/min
16-57 Realim. [RPM]
16-6* Entradas y salidas
ReferenceFeedbackUnit
–4999-4999 ReferenceFeedbackUnit *0
16-02 Referencia %
16-60 Entrada digital
-200 - 200 % *0 %
0 - 4095 *0
16-61 Terminal 53 ajuste conex.
0 - 65535 *0
16-03 Código estado
[1] Modo tensión
[6] Entrada digital
-200 - 200 % *0 %
16-05 Valor real princ. [%]
0 - 20 *1
16-63 Terminal 54 ajuste conex.
[0] Modo de intensidad
0-9999 CustomReadoutUnit *0 Custom-
ReadoutUnit
16-1* Estado motor
[1] Modo tensión
16-10 Potencia [kW]
16-62 Entrada analógica 53
16-09 Lectura personalizada
16-64 Entrada analógica 54
0-1000 kW *0 kW
0 - 20 *1
16-11 Potencia [HP]
0-20 mA *0 mA
0 - 63 *0
16-66 Salida digital [bin]
16-65 Salida analógica 42 [mA]
0-65535 V *0 V
0-1000 CV *0 CV
16-13 Frecuencia
16-12 Tensión motor
0-65535 °C *0 °C
0 - 20 *0
0 - 130000 *0
0 - 130000 *0
16-69 Salida pulsos #27 [Hz]
16-68 Entrada de frecuencia #33 [Hz]
16-67 Entrada de frecuencia #29 [Hz]
0-6553,5 % *0 %
0-655,35 A *0 A
0-6553,5 Hz *0 Hz
16-16 Par [Nm]
16-15 Frecuencia [%]
16-14 Intensidad motor
1010
0 - 0 *0
0 - 255 *0
0 - 255 *0
0 - 2147483647 *0
0 - 65535 *0
0-0x7f. h *0 h
0-0x7f. h *0 h
0-2147483647 kWh *0 kWh
0 - 65535 *0
-32767 - 32767 *0
0 - 0 *0
0 - 20 *0
0 - 20 *0
0 - 41 *0
0 - 0 *0
0 - 0 *0
0 - 40 *0
0 - 0 *0
0 - 0 *0
0 - 0 *0
0 - 0 *0
0 - 0 *0
0 - 16 *0
0-30 *Dependiente del tamaño
0-20 *Dependiente del tamaño
15-00 Horas de funcionamiento
40 - 90 % *66 %
14-40 Nivel VT
[1] Deceler. controlada
[2] Decel. contr., desc.
15-01 Horas funcionam.
15-02 Contador kWh
0 - 200 % *100 %
40 - 75 % *66 %
14-44 Intens. optimización d-axis para IPM
14-41 Mínima magnetización AEO
[3] Inercia
[4] Energía regenerativa
[5] Energía regen., desc.
[6] Alarma
15-03 Arranques
14-5* Ambiente
14-51 Comp. del enlace de CC
[7] Energ. regen., desc. con rec.
14-11 Tensión de red en fallo de red
15-04 Sobretemperat.
[0] O
*[1] act
100-800 V *Dependiente del tamaño
14-12 Función desequil. alimentación
15-05 Sobretensión
14-52 Control del ventilador
[5] Modo const. ON
*[0] Desconexión
[1] Advertencia
15-06 Reiniciar contador KWh
[6] Modo const. OFF
[2] Desactivado
*[0] No reiniciar
[7] Modo ON si-inv ON; de lo contr, OFF
14-15 Nivel recup. desc. energ. regen.
[1] Reiniciar contador
15-07 Reinicio contador de horas funcionam.
*[0] No reiniciar
[1] Reiniciar contador
*[0] Sin ltro
*[8] Modo vel. variable
14-55 Filtro de salida
[1] Filtro senoidal
0-60000,000 ReferenceFeedbackUnit
*Dependiente del tamaño
14-20 Modo Reset
14-2* Funciones de reset
15-3* Reg. alarma
15-30 Reg. alarma: código de fallo
14-6* Auto Reducción
14-61 Funcionamiento con inversor
[1] Reset autom. x 1
*[0] Reset manual
15-57 Vers. archivo
14-89 Detecc. opción
*[0] Proteger cong. opc.
0-0xFFFFFFFF *0
14-29 Código de servicio
15-59 Nombre de archivo
[1] Permitir cambio opc.
14-90 Nivel de fallos
14-9* Ajustes de fallo
0 - 500 % *100 %
14-3* Ctrl. lím. intens.
14-30 Ctrl. lím. intens., Ganancia proporc.
15-6* Identic. de opción
15-60 Opción instalada
*[3] Bloqueo por alarma
[4] Desconex. reinic. retard.
0,002-2 s *0,020 s
14-31 Control lím. intens., Tiempo integrac.
[5] Mot en giro
14-32 Control lím. intens., tiempo ltro
15-61 Versión SW opción
15-** Información conv.
1-100 ms *5 ms
15-0* Datos funcionam.
14-4* Optimización energ
15-50 Tarjeta potencia id SW
15-49 Tarjeta control id SW
0 - 65535 *0
[14] VLT2800 12M
[15] VLT2800 12M incl. MAV
[12] VLT2800 3M
[13] VLT2800 3M incl. MAV
*[0] No Function
14-7* Compatibility
14-70 Compatibility Selections
0-60 s *60 s
0-60 s *60 s
14-27 Acción en fallo del inversor
14-25 Retardo descon. con lím. de par
[0] Desconexión
*[1] Advertencia
14-8* Opciones
14-28 Aj. producción
*[0] Sin acción
14-88 Option Data Storage
[1] Reinicio
[3] Reinicio softw
*[0] Desactivado
14-22 Modo funcionamiento
15-46 Nº pedido conv. frec.
[1] Activado
*[0] Funcion. normal
15-48 No id LCP
20-1000 Hz *Dependiente del tamaño
14-65 Comp. tiempo muerto reduc. potencia
14-24 Retardo descon. con lím. de int.
[2] Inicialización
15-31 RazónFalloInterno
15-4* Id. dispositivo
15-40 Tipo FC
15-41 Sección de potencia
sobrecarg.
[3] 3,0 kHz
[4] 4,0 kHz
*[2] 2,0 kHz
*[0] Desconexión
[1] Reducción
14-63 Frec. conmutación mín.
[8] Reset autom. x 8
[6] Reset autom. x 6
[7] Reset autom. x 7
[5] Reset autom. x 5
[4] Reset autom. x 4
[3] Reset autom. x 3
[2] Reset autom. x 2
[5] 5,0 kHz
[9] Reset autom. x 9
15-42 Tensión
[6] 6,0 kHz
[7] 8,0 kHz
[11] Reset autom. x 15
[10] Reset autom. x 10
15-43 Versión de software
[8] 10,0 kHz
[12] Reset autom. x 20
15-44 Tipo cód. cadena solicitado
[9] 12,0 kHz
[10] 16,0 kHz
[13] Reinic. auto. innito
[14] Reset en encendido
15-45 Cadena de código
Lev
14-64 Dead Time Compensation Zero Current
0-600 s *10 s
14-21 Tiempo de reinicio automático
15-53 Número serie tarjeta potencia
15-52 Información OEM
15-51 Nº serie convert. frecuencia
82 Danfoss A/S © 08/2018 Reservados todos los derechos. MG07A505

Anexo Guía de funcionamiento
-2147483647 - 2147483647 *0
37-** Ajustes aplicacs.
-1073741824 - 1073741824 *-500000
33-41 Límite nal negativo de software
0-60 s *Dependiente del tamaño
37-0* Modo aplicac.
37-00 Modo aplicac.
-1073741824 - 1073741824 *500000
33-42 Límite nal positivo de software
0-200,0 % *Dependiente del tamaño
*[0] Modo conv.
33-43 Lím. nal neg.software activado
37-01 Pos. fuente realiment.
[2] Control de posición
37-1* Control de posición
*[0] Inactivo
[1] Activo
33-44 Lím. nal pos.software activado
0,05-1 s *0,10 s
*[0] Encoder 24 V
*[0] Inactivo
-1073741824 - 1073741824 *0
37-02 Pos destino
[1] Activo
33-47 Tamaño de la ventana de destino
37-03 Tipo pos.
1 - 10000 *512
0-1000 ms *200 ms
50-100000 ms *5000 ms
50-100000 ms *5000 ms
1-30000 r/min *100 r/min
37-07 Ctrl freno autom pos
[1] Referencia
37-04 Veloc. pos.
*[0] Absoluto
34-** Lecturas datos control mov.
34-0* Par. escr. PCD
34-01 PCD 1 escritura en MCO
37-06 Tiempo decel. pos.
37-05 Tiempo acel. pos.
0 - 65535 *0
0 - 65535 *0
0 - 65535 *0
34-04 PCD 4 escritura en MCO
34-03 PCD 3 escritura en MCO
34-02 PCD 2 escritura en MCO
0-10000 ms *0 ms
[0] Desactivar
0 - 65535 *0
37-09 Ret. inercia pos
*[1] Activar
37-08 Ret. retenc pos
0 - 65535 *0
0 - 65535 *0
34-05 PCD 5 escritura en MCO
34-06 PCD 6 escritura en MCO
34-07 PCD 7 escritura en MCO
0 - 1073741824 *0
0-1000 ms *200 ms
37-12 Saturación PID pos.
37-11 Pos. Lím. desgast freno
37-10 Ret. freno pos.
0 - 65535 *0
0 - 65535 *0
0 - 65535 *0
34-08 PCD 8 escritura en MCO
34-09 PCD 9 escritura en MCO
1 - 10000 *1000
[20] No se encuentra pos. inic.
[12] Funcionam. inv
*[0] Sin bloqueo
0 - 65535 *0
0 - 65535 *0
34-24 PCD 4 lectura desde MCO
37-17 Comport. fallo ctrl. pos.
0 - 65535 *0
0 - 65535 *0
0 - 65535 *0
34-25 PCD 5 lectura desde MCO
34-26 PCD 6 lectura desde MCO
34-27 PCD 7 lectura desde MCO
34-28 PCD 8 lectura desde MCO
*[0] DI
[1] FieldBus
37-15 Bloq. dirección pos.
[0] Desactivar
34-10 PCD 10 escritura en MCO
37-14 Fuente ctrl. pos.
*[1] Activar
37-13 Brida salida PID pos.
0 - 65535 *0
34-2* Par. lectura PCD
0 - 65535 *0
0 - 65535 *0
34-23 PCD 3 lectura desde MCO
34-22 PCD 2 lectura desde MCO
34-21 PCD 1 lectura desde MCO
*[0] Sin fallo
[1] Nec volv inic
[2] Pos. lím. HW
37-18 Causa error ctrl. pos.
[1] Frenar direct.
*[0] Rampa des y fren
[1] Bloq camb sent
[2] Bloq. avance
[7] Lím. desg. freno
[3] Lím HW neg.
[4] Pos. lím. SW
[5] Lím. SW neg.
0 - 65535 *0
0 - 65535 *0
34-29 PCD 9 lectura desde MCO
34-30 PCD 10 lectura desde MCO
[13] Func hacia del
[8] Quick Stop
[9] Err PID dem grande
0 - 65535 *0
-1073741824 - 1073741824 *0
34-56 Error de pista
34-5* Datos de proceso
34-50 Posición real
10 10
–1500-1500 r/min *100 r/min
0 - 2 *0
0-720 h *720 h
1 - 65535 *1
1 - 65535 *1
1 - 2147483648 *2000000
1-30000 r/min *1500 r/min
50-3600000 ms *1000 ms
1-1000 ms *10 ms
-1073741824 - 1073741824 *0
30-21 Intens. par arranque alto [%]
–999999,999-999999,999 ExtPID1Unit
21-15 Consigna 1 Ext.
0 - 65535 *1084
16-86 Puerto FC REF 1
30-22 Protecc. rotor bloqueado
*[0] O
–999999,999-999999,999 ExtPID1Unit
*0 ExtPID1Unit
21-17 Referencia 1 Ext. [Unidad]
-32768 - 32767 *0
16-9* Lect. diagnóstico
16-90 Código de alarma
[1] act
30-23 Tiempo detecc. rotor bloqueado [s]
*0 ExtPID1Unit
–999999,999-999999,999 ExtPID1Unit
21-18 Realim. 1 Ext. [Unidad]
0-0xFFFFFFFFUL *0
0-0xFFFFFFFFUL *0
16-91 Código de alarma 2
31-** Special Option
31-4* Memory Module
31-40 Memory Module Function
*0 ExtPID1Unit
0 - 100 % *0 %
21-19 Salida 1 Ext. [%]
0-0xFFFFFFFFUL *0
16-92 Código de advertencia
16-93 Código de advertencia 2
[0] Disabled
*[1] Only Allow Download
[2] Only Allow Upload
21-2* PID CL 1 ext.
21-20 Control normal/inverso 1 Ext.
*[0] Normal
0-0xFFFFFFFFUL *0
0-0xFFFFFFFFUL *0
16-94 Cód. estado amp
[3] Allow Both Download And Upload
31-41 MM Information
21-21 Ganancia proporcional 1 Ext.
[1] Inversa
0-0xFFFFFFFFUL *0
16-95 Código de estado ampl. 2
0-10 *0,01
16-97 Alarm Word 3
31-42 Congure Memory Module Access
21-22 Tiempo integral 1 Ext.
0-0xFFFFFFFFUL *0
*[0] No action
0,01-10000 s *10000 s
16-98 Warning Word 3
[1] Set MM to read only
21-23 Tiempo diferencial 1 Ext.
0 - 4294967295 *0
31-43 Erase_MM
[2] Set MM to read write
0-10 s *0 s
21-24 Límite ganancia dif. 1 ext.
18-** Lecturas de datos 2
18-5* Memory Module Readout
*[0] No function
[1] Erase MM
1 - 50 *5
22-** Funciones de aplicación
0-0xFFFFFFFFUL *0
18-51 Motivo advert. módulo de memoria
*[0] Disabled
31-47 Time Limit Function
22-0* Varios
22-02 Modo control reposo CL
0 - 0 *0
18-52 Cód. módulo de memoria
[1] Activado
31-48 Time Limit Remaining Time
*[0] Normal
[1] Simplic.
18-9* Lecturas PID
18-90 Error PID proceso
32-** Ajustes básicos control mov.
22-4* Modo reposo
22-40 Tiempo ejecución mín.
-200 - 200 % *0 %
18-91 Salida PID de proceso
32-12 Numerador de unidades del usuario
32-1* Unid. us.
32-11 Denominador de la unidad de usuario
0-600 s *10 s
22-41 Tiempo reposo mín.
-200 - 200 % *0 %
18-92 Salida grapada PID de proc.
32-6* PID
32-67 Máx. Error de posición tolerado
0 - 100 % *10 %
0-400,0 *10
0-600 s *10 s
22-45 Refuerzo de consigna
22-44 Refer. despertar/Dif. realim.
22-43 Veloc. reinicio [Hz]
-200 - 200 % *0 %
-200 - 200 % *0 %
18-93 Salida con ganancia escal. PID de proc.
21-** Lazo cerrado amp
21-09 Ajuste autom. PID
21-0* Conguración auto. PID ext.
32-8* Veloc. y aceleración
32-80 Velocidad máxima (encoder)
-100 - 100 % *0 %
22-46 Tiempo refuerzo máx.
*[0] Desactivado
[1] PID 1 Ext. activado
0-600 s *60 s
21-1* Ref./Realim. CL 1 ext.
32-81 Rampa más corta
0-400,0 *0
22-47 Velocidad de reposo [Hz]
–999999,999-999999,999 ExtPID1Unit
21-11 Referencia mínima 1 Ext.
33-00 Forzar HOME
33-** Ajustes avanzados cntrl mov.
33-0* Movimiento inicial
0-3600 s *0 s
22-49 Tiempo ret. reinic
22-48 Tiempo ret. rep.
*0 ExtPID1Unit
–999999,999-999999,999 ExtPID1Unit
21-12 Referencia máxima 1 Ext.
*[0] No forzado
[1] Regr man a inic forz
0-3600 s *0 s
22-6* Detección correa rota
*100 ExtPID1Unit
21-13 Fuente referencia 1 Ext.
33-01 Desplaz. del punto cero desde HOME
[2] Regr. aut a inicio forz
*[0] O
22-60 Func. correa rota
*[0] Sin función
[1] Entrada analógica 53
[1] Advertencia
[2] Entrada analógica 54
33-02 Tiemp ramp ret in
[2] Desconexión
[7] Entr. frec. 29
22-61 Par correa rota
[8] Entr. frec. 33
5 - 100 % *10 %
21-14 Fuente realim. 1 Ext.
0-600 s *10 s
22-62 Retardo correa rota
[1] Entrada analógica 53
*[0] Sin función
33-4* Gestión de límites
30-20 Tiempo par arranque alto
30-** Características especiales
30-2* Aj. arranq. av.
[3] Entr. frec. 29
[2] Entrada analógica 54
[4] Entr. frec. 33
[3] Avanzar sin índice
33-04 Comport ret inic
*[1] Inverso sin índice
33-03 Vel. ret. inic.
MG07A505 Danfoss A/S © 08/2018 Reservados todos los derechos. 83

Anexo
VLT® Midi Drive FC 280
1010
0 - 255 *0
37-19 Nuevo índ pos.
84 Danfoss A/S © 08/2018 Reservados todos los derechos. MG07A505

Índice Guía de funcionamiento
Índice
A
Abreviatura............................................................................................. 73
Aislamiento de interferencias.......................................................... 23
Ajuste........................................................................................................ 36
Ajustes predeterminados.................................................................. 33
Alimentación
Datos de la fuente de alimentación.......................................... 60
Fuente de alimentación (L1/N, L2/L y L3)................................ 62
Tensión................................................................................................. 31
Almacenamiento.................................................................................. 10
AMA con T27 conectado.................................................................... 47
Arranque.................................................................................................. 33
Arranque accidental........................................................................ 7, 51
Auto on.............................................................................................. 32, 36
C
Cable apantallado................................................................................ 23
Cableado de potencia de salida...................................................... 23
Carga compartida................................................................................... 7
CEI 61800-3...................................................................................... 19, 63
CEM............................................................................................................ 63
Clase de rendimiento energético................................................... 63
Comunicación serie
Comunicación serie.................................................... 22, 32, 51, 66
Comunicación serie USB................................................................ 66
Condiciones ambientales.................................................................. 63
Conexión a tierra.............................................................. 17, 18, 23, 25
Conexión eléctrica................................................................................ 13
Control
Cableado............................................................................... 13, 20, 23
Característica..................................................................................... 67
Terminal de control.................................................................. 32, 56
Control de freno mecánico............................................................... 21
Control local........................................................................................... 32
Controlador externo.............................................................................. 4
Convención............................................................................................. 73
Corriente de CC........................................................................................ 5
Corriente de fuga............................................................................. 8, 13
D
Dimensión del cable............................................................................ 17
E
Ecualización potencial........................................................................ 14
Eciencia energética............................................................. 60, 61, 62
Ejecutar orden....................................................................................... 36
Elevación.................................................................................................. 10
Entorno de instalación........................................................................ 10
Entrada
Alimentación de entrada............................................................... 13
Cableado de alimentación de entrada..................................... 23
Corriente............................................................................................. 18
Potencia............................................................................ 5, 18, 23, 25
Tensión de entrada.......................................................................... 25
Terminal........................................................................................ 18, 25
Entrada de CA.................................................................................... 5, 18
Entrada digital....................................................................................... 20
Entradas
Entrada analógica............................................................................ 64
Entrada de pulsos............................................................................ 65
Entrada digital................................................................................... 64
Equipo auxiliar....................................................................................... 23
Equipo opcional.................................................................................... 25
Espacio libre para la refrigeración.................................................. 23
Espacio libre requerido....................................................................... 10
Especicación........................................................................................ 23
Estructura de menú............................................................................. 31
F
Factor de potencia........................................................................... 5, 23
Fallo
Fault log............................................................................................... 31
Filtro RFI................................................................................................... 19
Forma de onda de CA............................................................................ 5
Fusible......................................................................................... 13, 23, 67
G
Giro del encoder................................................................................... 36
Golpe......................................................................................................... 10
H
Hand on.................................................................................................... 32
Homologación y certicación............................................................ 6
I
Inicialización
Procedimiento................................................................................... 33
Procedimiento manual.................................................................. 33
Instalación............................................................................................... 23
Instalación conforme a CEM............................................................. 13
Instalación lado a lado........................................................................ 10
Instrucciones de eliminación.............................................................. 6
Intensidad de salida............................................................................. 65
Interruptor de desconexión.............................................................. 25
MG07A505 Danfoss A/S © 08/2018 Reservados todos los derechos. 85

Índice
VLT® Midi Drive FC 280
L
Lista de advertencias y alarmas....................................................... 55
Longitud del cable............................................................................... 64
M
Magnetotérmico................................................................................... 23
Mantenimiento...................................................................................... 51
Menú principal............................................................................... 29, 31
Menú rápido.................................................................................... 27, 31
Montaje............................................................................................. 10, 23
Montaje horizontal............................................................................... 11
Motor
Cable de motor.......................................................................... 13, 17
Corriente......................................................................................... 5, 35
Datos..................................................................................................... 35
Datos de motor................................................................................. 33
Estado..................................................................................................... 4
Intensidad motor............................................................................. 31
Potencia del motor................................................................... 13, 31
Protección............................................................................................. 4
Protección térmica del motor........................................................ 6
Rotación.............................................................................................. 35
Salida del motor............................................................................... 63
N
Nivel de tensión.................................................................................... 64
Normas y conformidad para STO...................................................... 6
O
Orden externa.......................................................................................... 5
Orden remota........................................................................................... 4
P
Pantalla numérica................................................................................. 26
Par
Características de par..................................................................... 63
Par de apriete del terminal................................................................ 67
PELV.................................................................................................... 49, 66
Personal cualicado............................................................................... 7
Placa de características......................................................................... 9
Placa posterior....................................................................................... 10
Programación........................................................................... 20, 31, 32
Protección de circuito derivado...................................................... 67
Protección de sobreintensidad........................................................ 13
Protección frente a transitorios.......................................................... 5
Protección térmica.................................................................................. 6
Puente....................................................................................................... 20
R
Realimentación..................................................................................... 23
Realimentación del sistema................................................................ 4
Realizar..................................................................................................... 23
Reciclaje...................................................................................................... 6
Recorrido de los cables....................................................................... 23
Recursos adicionales.............................................................................. 4
Red aislada.............................................................................................. 19
Red de CA............................................................................................ 5, 18
Reducción de potencia....................................................................... 63
Referencia mín-máx............................................................................. 31
Refrigeración.......................................................................................... 10
Registro de alarmas............................................................................. 31
Reinicio................................................................................ 31, 32, 33, 51
Relé del cliente...................................................................................... 44
S
Salida de relé.......................................................................................... 66
Salidas
Salida analógica................................................................................ 66
Salida digital...................................................................................... 65
Sección transversal.............................................................................. 64
Seguridad................................................................................................... 8
Servicio..................................................................................................... 51
SIL2............................................................................................................... 6
SILCL de SIL2............................................................................................. 6
Símbolo.................................................................................................... 73
STO
Activación........................................................................................... 43
Datos técnicos................................................................................... 46
Desactivación.................................................................................... 43
Mantenimiento................................................................................. 45
Prueba de puesta en servicio....................................................... 44
Rearranque automático.......................................................... 43, 44
Reinicio manual......................................................................... 43, 44
T
Tamaño de cable................................................................................... 13
Tarjeta de control
Comunicación serie RS485........................................................... 66
Comunicación serie USB................................................................ 66
Rendimiento...................................................................................... 66
Salida de 10 V CC.............................................................................. 66
Salida de 24 V CC.............................................................................. 66
Tecla de funcionamiento............................................................ 26, 31
Tecla de navegación..................................................................... 26, 31
Tecla Menú....................................................................................... 26, 31
Tensión alta........................................................................................ 7, 25
Tensión de alimentación............................................................. 25, 66
86 Danfoss A/S © 08/2018 Reservados todos los derechos. MG07A505

Índice Guía de funcionamiento
Terminales
Terminal de control.................................................................. 32, 56
Terminal de salida............................................................................ 25
Termistor.................................................................................................. 49
Tiempo de descarga............................................................................... 8
Tierra
Cable de conexión toma a tierra................................................ 13
Conexión a tierra.............................................................................. 23
Transitorio de ráfagas.......................................................................... 14
Triángulo conectado a tierra............................................................ 19
Triángulo otante................................................................................. 19
U
Uso previsto.............................................................................................. 4
V
Veloc. lazo abierto................................................................................ 67
Velocidad de referencia............................................................... 36, 47
Vibración.................................................................................................. 10
MG07A505 Danfoss A/S © 08/2018 Reservados todos los derechos. 87

Danfoss no acepta ninguna responsabilidad por posibles errores que pudieran aparecer en sus catálogos, folletos o cualquier otro material impreso y se reserva el derecho de alterar sus productos
sin previo aviso, incluidos los que estén bajo pedido, si estas modicaciones no afectan las características convenidas con el cliente. Todas las marcas comerciales de este material son propiedad de
las respectivas compañías. Danfoss y el logotipo Danfoss son marcas comerciales de Danfoss A/S. Reservados todos los derechos.
Danfoss A/S
Ulsnaes 1
DK-6300 Graasten
vlt-drives.danfoss.com
132R0153 MG07A505 08/2018
*MG07A505*
 Loading...
Loading...