

Page 1

ENGINEERING TOMORROW
Guida operativa
VLT® Midi Drive FC 280
www.danfoss.it/vlt-drives
Page 2

Page 3
Page 4
Page 5

Sommario Guida operativa
Sommario
1 Introduzione
1.1 Scopo del manuale
1.2 Risorse aggiuntive
1.3 Versione del documento e del software
1.4 Panoramica dei prodotti
1.5 Approvazioni e certicazioni
1.6 Smaltimento
2 Sicurezza
2.1 Simboli di sicurezza
2.2 Personale qualicato
2.3 Precauzioni di sicurezza
3 Installazione meccanica
3.1 Disimballaggio
3.2 Ambiente di installazione
3.3 Montaggio
4
4
4
4
4
6
6
7
7
7
7
9
9
10
10
4 Installazione elettrica
4.1 Istruzioni di sicurezza
4.2 Impianto conforme ai requisiti EMC
4.3 Collegamento a massa
4.4 Schema di cablaggio
4.5 Accesso
4.6 Collegamento al motore
4.7 Collegamento di rete CA
4.8 Cavi di controllo
4.8.1 Tipi di morsetti di controllo 19
4.8.2 Collegamento ai morsetti di controllo 20
4.8.3 Abilitazione del funzionamento motore (morsetto 27) 20
4.8.4 Controllo del freno meccanico 21
4.8.5 Comunicazione dati USB 22
4.9 Lista di controllo per l'installazione
5 Messa in funzione
5.1 Istruzioni di sicurezza
13
13
13
13
15
17
17
18
19
23
25
25
5.2 Applicare la tensione
5.3 Funzionamento del pannello di controllo locale
5.3.1 Pannello di Controllo Locale Numerico (NLCP) 25
5.3.2 Funzione del tasto destro sull'NLCP 27
MG07A506 Danfoss A/S © 08/2018 Tutti i diritti riservati. 1
25
25
Page 6
Sommario
VLT® Midi Drive FC 280
5.3.3 Menu rapido sull'NLCP 27
5.3.4 Menu principale sull'NLCP 29
5.3.5 Pannello di controllo locale graco (GLCP) 31
5.3.6 Impostazioni parametri 32
5.3.7 Modica delle impostazioni parametri con GLCP 32
5.3.8 Caricamento/scaricamento di dati sull'/dall'LCP 33
5.3.9 Ripristino delle impostazioni di fabbrica con l'LCP 33
5.4 Programmazione di base
5.4.1 Setup del motore asincrono 33
5.4.2 Setup motore PM in VVC
5.4.3 Adattamento automatico motore (AMA) 35
+
5.5 Controllo della rotazione del motore
5.6 Controllo della rotazione dell'encoder
5.7 Test di comando locale
5.8 Avviamento del sistema
5.9 Modulo di memoria
5.9.1 Sincronizzazione dei dati del convertitore di frequenza con un nuovo modulo di
memoria (creazione di un backup del convertitore di frequenza) 37
5.9.2 Copia dei dati su un altro convertitore di frequenza 38
5.9.3 Copia dei dati su convertitori di frequenza multipli 38
5.9.4 Trasferimento delle informazioni sul rmware 38
5.9.5 Backup delle modiche dei parametri nel modulo di memoria 39
5.9.6 Cancellazione dati 39
5.9.7 Prestazioni di trasferimento e indicazioni 39
5.9.8 Attivazione del convertitore PROFIBUS 39
33
34
36
36
36
36
37
6 Safe Torque O (STO)
6.1 Precauzioni di sicurezza STO
6.2 Installazione del Safe Torque O
6.3 Messa in funzione STO
6.3.1 Attivazione della funzione Safe Torque O 43
6.3.2 Disattivazione della funzione Safe Torque O 43
6.3.3 Test di messa in servizio STO 44
6.3.4 Test per applicazioni STO in modalità riavvio manuale 44
6.3.5 Test per applicazioni STO in modalità riavvio automatico 44
6.4 Manutenzione e assistenza per STO
6.5 Dati tecnici STO
7 Esempi applicativi
7.1 Introduzione
7.2 Esempi applicativi
2 Danfoss A/S © 08/2018 Tutti i diritti riservati. MG07A506
41
42
42
43
45
46
47
47
47
Page 7
Sommario Guida operativa
7.2.1 AMA 47
7.2.2 Velocità 47
7.2.3 Avviamento/arresto 49
7.2.4 Ripristino allarmi esterni 49
7.2.5 Termistore motore 49
7.2.6 SLC 50
8 Manutenzione, diagnostica e ricerca guasti
8.1 Manutenzione e assistenza
8.2 Tipi di avvisi e allarmi
8.3 Visualizzazioni di avvisi e allarmi
8.4 Elenco degli avvisi e degli allarmi
8.4.1 Elenco dei codici di avviso e allarme 53
8.5 Ricerca e risoluzione dei guasti
9 Speciche
9.1 Dati elettrici
9.2 Alimentazione di rete
9.3 Uscita motore e dati motore
9.4 Condizioni ambientali
9.5 Speciche dei cavi
9.6 Ingresso/uscita di dati e di controllo
9.7 Coppie di serraggio dei collegamenti
9.8 Fusibili e interruttori
9.9 Dimensioni contenitore, potenze nominali e dimensioni
51
51
51
52
53
57
59
59
61
62
62
63
63
66
66
69
10 Appendice
10.1 Simboli, abbreviazioni e convenzioni
10.2 Struttura del menu dei parametri
Indice
MG07A506 Danfoss A/S © 08/2018 Tutti i diritti riservati. 3
72
72
72
84
Page 8
Introduzione
VLT® Midi Drive FC 280
11
1 Introduzione
1.1 Scopo del manuale
Questa guida operativa fornisce informazioni relative all'installazione e alla messa in servizio sicure del convertitore di
frequenza VLT® Midi Drive FC 280.
La guida operativa è concepita per l'uso da parte di
personale qualicato.
Leggere e seguire la guida operativa per utilizzare il
convertitore di frequenza in modo sicuro e professionale.
Prestare particolare attenzione alle istruzioni di sicurezza e
agli avvisi generali. Conservare questa guida operativa
sempre nei pressi del convertitore di frequenza.
VLT® è un marchio registrato.
1.2 Risorse aggiuntive
Ulteriori risorse di supporto alla comprensione del funzionamento, della programmazione e della manutenzione
avanzate del convertitore di frequenza:
Panoramica dei prodotti
1.4
1.4.1 Uso previsto
Il convertitore di frequenza è un controllore elettronico del
motore progettato per:
Regolazione della velocità del motore in risposta
•
ai comandi di retroazione o ai comandi remoti da
controllori esterni. Un sistema di azionamento
elettrico è composto dal convertitore di
frequenza, dal motore e dall'apparecchiatura
azionata dal motore.
Monitoraggio del sistema e dello stato del
•
motore.
Il convertitore di frequenza può anche essere utilizzato per
la protezione da sovraccarico motore.
A seconda della congurazione, il convertitore di frequenza
può essere usato in applicazioni stand-alone o fare parte di
un dispositivo o di un impianto più grande.
La Guida alla Progettazione VLT® Midi Drive FC
•
280 fornisce informazioni dettagliate sulla progettazione e sulle applicazioni del convertitore di
frequenza.
La Guida alla Programmazione VLT® Midi Drive FC
•
280 fornisce informazioni sulla programmazione e
comprende descrizioni complete dei parametri.
Pubblicazioni e manuali supplementari sono disponibili
presso Danfoss. Vedere drives.danfoss.com/knowledge-
center/technical-documentation/ per gli elenchi.
Versione del documento e del software
1.3
Il presente manuale è revisionato e aggiornato
regolarmente. Sono bene accetti tutti i suggerimenti di
eventuali migliorie. La Tabella 1.1 mostra la versione del
documento e la versione software corrispondente.
Edizione Osservazioni
MG07A5
Tabella 1.1 Versione del documento e del software
Aggiornamento software e supporto
del modulo di memoria.
Versione
software
1.5
Il convertitore di frequenza è approvato per l'uso in
ambienti residenziali, industriali e commerciali in
conformità alle normative e agli standard locali.
AVVISO!
In un ambiente residenziale, questo prodotto può
provocare interferenze radio e, in tal caso, potrebbero
essere necessarie misure correttive supplementari.
Uso improprio prevedibile
Non usare il convertitore di frequenza in applicazioni che
non sono conformi alle condizioni di funzionamento e
ambientali specicate. Vericare la conformità alle
condizioni specicate nel capitolo 9 Speciche.
4 Danfoss A/S © 08/2018 Tutti i diritti riservati. MG07A506
Page 9
M
7
63
4
5
21
8
10
130BE200.12
M
7
63
4
5
21
8
9
T2/T4
S2
Introduzione Guida operativa
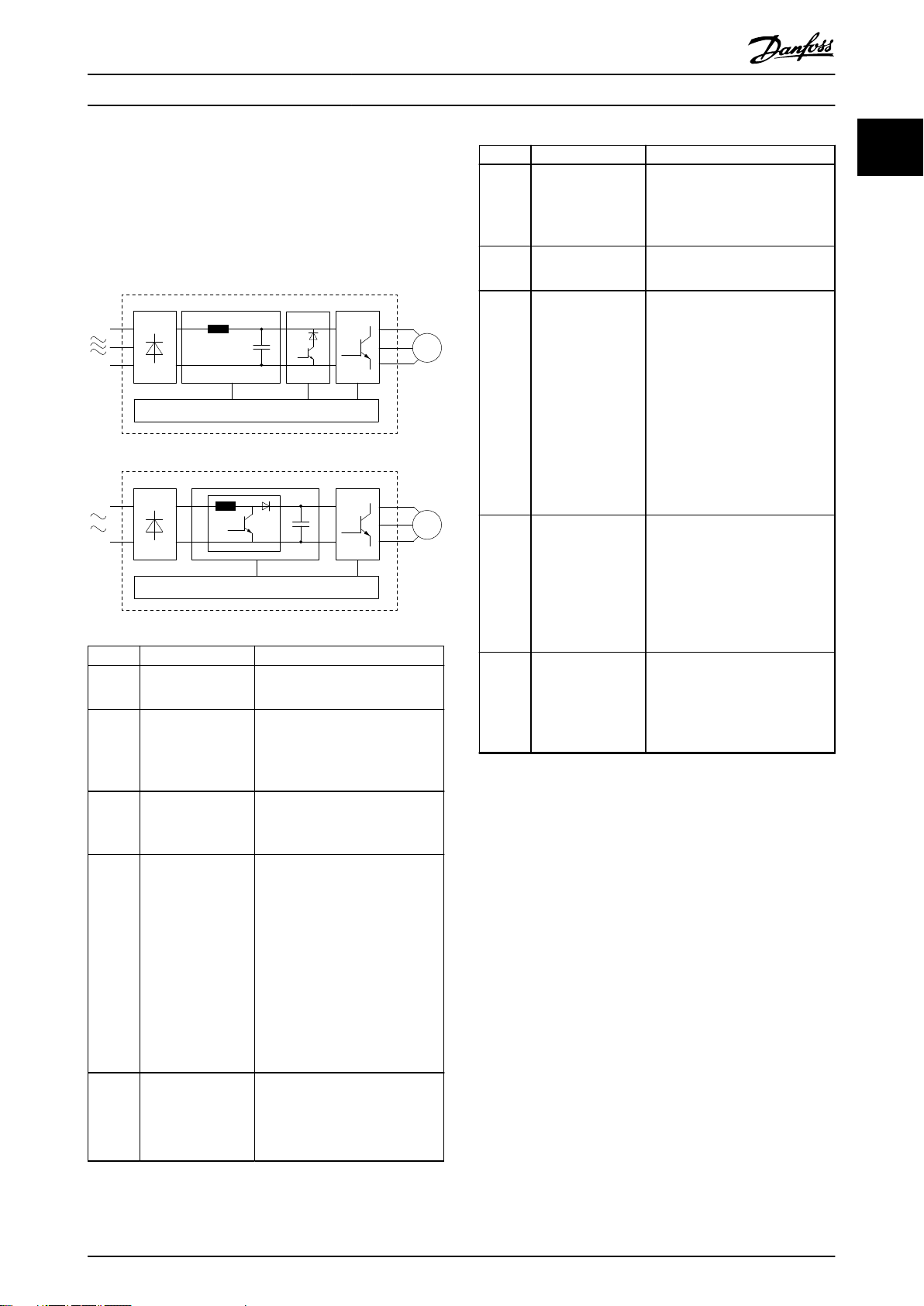
1.4.2 Diagramma a blocchi del convertitore
di frequenza
La Disegno 1.1 è un diagramma a blocchi dei componenti
interni del convertitore di frequenza.
Area Componente applicazione
Alimentazione di rete CA al
1 Ingresso di rete
2 Raddrizzatore
3 Bus CC
4 Reattore CC
5
Banco di condensatori
•
convertitore di frequenza.
Il ponte raddrizzatore
•
converte l'alimentazione di
ingresso CA in una corrente
CC per alimentare l'inverter.
Il circuito del bus CC
•
intermedio controlla la
corrente CC.
Filtra la corrente del circuito
•
CC intermedio.
Assicura la protezione dai
•
transitori di rete.
Riduce la corrente quadratica
•
media (RMS).
Aumenta il fattore di potenza
•
•
•
•
che ritorna in linea.
Riduce le armoniche sull'ingresso CA.
Immagazzina l'energia CC.
Fornisce autonomia per
superare brevi perdite di
potenza.
Area Componente applicazione
Converte il segnale CC in una
•
6 Inverter
7 Uscita al motore
Circuito di
8
comando
9 PFC
Chopper di
10
frenatura
Disegno 1.1 Esempio di un diagramma a blocchi per un
convertitore di frequenza
forma d'onda CA PWM per
ottenere un'uscita variabile
controllata per il motore.
Potenza di uscita trifase
•
regolata al motore.
La potenza in ingresso,
•
l'elaborazione interna, l'uscita
e la corrente motore vengono
monitorate per assicurare un
funzionamento e un controllo
ecienti.
L'interfaccia utente e i
•
comandi esterni vengono
monitorati ed eseguiti.
Sono disponibili anche l'uscita
•
di stato e il controllo.
La correzione del fattore di
•
potenza cambia la forma
d'onda della corrente che
viene convogliata dal convertitore di frequenza per
migliorare il fattore di potenza
stesso.
Il chopper di frenatura viene
•
usato nel circuito intermedio
CC per controllare la tensione
CC quando il carico reimmette
l'energia.
1.4.3 Dimensioni di frame e potenze
nominali
Per le dimensioni del frame e le potenze nominali dei
convertitori di frequenza consultare il
capitolo 9.9 Dimensioni contenitore, potenze nominali e
dimensioni.
1.4.4 Safe Torque O (STO)
Il convertitore di frequenza VLT® Midi Drive FC 280
supporta la funzione Safe Torque O (STO). Vedere il
capitolo 6 Safe Torque O (STO) per i dettagli sull'installazione, la messa in servizio, la manutenzione e i dati
tecnici di STO.
1 1
MG07A506 Danfoss A/S © 08/2018 Tutti i diritti riservati. 5
Page 10
089
Introduzione
VLT® Midi Drive FC 280
11
1.5 Approvazioni e certicazioni
Per la conformità all'Accordo europeo relativo al trasporto
internazionale di merci pericolose per vie navigabili interne
(ADN), fare riferimento al capitolo Impianto conforme ad
ADN nella Guida alla Progettazione VLT® Midi Drive FC 280.
Il convertitore di frequenza soddisfa i requisiti UL 508C di
protezione termica. Per maggiori informazioni, fare
riferimento al capitolo Protezione termica del motore nella
Guida alla Progettazione VLT® Midi Drive FC 280.
Norme applicate e conformità per STO
L'uso di STO sui morsetti 37 e 38 richiede che siano
soddisfatte tutte le norme di sicurezza, incluse le leggi, i
regolamenti e le direttive vigenti. La funzione STO
integrata è conforme alle seguenti norme:
IEC/EN 61508:2010, SIL2
•
IEC/EN 61800-5-2:2007, SIL2
•
IEC/EN 62061:2015, SILCL di SIL2
•
EN ISO 13849-1:2015, categoria 3 PL d
•
Smaltimento
1.6
Non smaltire le apparecchiature che
contengono componenti elettrici insieme
ai riuti domestici.
Raccoglierle separatamente in conformità
alle leggi locali e attualmente vigenti.
6 Danfoss A/S © 08/2018 Tutti i diritti riservati. MG07A506
Page 11
Sicurezza Guida operativa
2 Sicurezza
2.1 Simboli di sicurezza
Precauzioni di sicurezza
2.3
2 2
Nel presente documento vengono utilizzati i seguenti
simboli:
AVVISO
Indica una situazione potenzialmente rischiosa che
potrebbe causare morte o lesioni gravi.
ATTENZIONE
Indica una situazione potenzialmente rischiosa che
potrebbe causare lesioni leggere o moderate. Può anche
essere usato per mettere in guardia da pratiche non
sicure.
AVVISO!
Indica informazioni importanti, incluse situazioni che
possono causare danni alle apparecchiature o alla
proprietà.
2.2 Personale qualicato
Il trasporto, l'immagazzinamento, l'installazione, il funzionamento e la manutenzione eettuati in modo corretto e
adabile sono essenziali per un funzionamento senza
problemi e sicuro del convertitore di frequenza. Solo il
personale qualicato è autorizzato a installare o a far
funzionare questa apparecchiatura.
Per personale
tamente formati, autorizzati a installare, mettere in
funzione ed eettuare la manutenzione su apparecchiature,
sistemi e circuiti in conformità alle leggi e ai regolamenti
pertinenti. Inoltre, il personale deve avere dimestichezza
con tutte le istruzioni e le misure di sicurezza descritte in
questa guida.
qualicato si intendono i dipendenti adegua-
AVVISO
ALTA TENSIONE
I convertitori di frequenza sono soggetti ad alta tensione
quando collegati all'alimentazione di ingresso della rete
CA, all'alimentazione CC o alla condivisione del carico. Se
l'installazione, l'avviamento e la manutenzione non
vengono eseguiti da personale qualicato potrebbero
presentarsi rischi di lesioni gravi o mortali.
L'installazione, l'avviamento e la manutenzione
•
devono essere eettuati esclusivamente da
personale qualicato.
Prima di eettuare qualsiasi lavoro di
•
manutenzione o di riparazione, usare un
appropriato dispositivo di misurazione della
tensione per assicurarsi che non sia presente
tensione residua nel convertitore di frequenza.
AVVISO
AVVIO INVOLONTARIO
Quando il convertitore di frequenza è collegato alla rete
CA, all'alimentazione CC o alla condivisione del carico, il
motore può avviarsi in qualsiasi momento. L'avvio
involontario durante le operazioni di programmazione o i
lavori di manutenzione o riparazione può causare morte,
lesioni gravi o danni alle cose. Il motore può essere
avviato tramite un interruttore esterno, un comando bus
di campo, un segnale di riferimento in ingresso dall'LCP,
da remoto utilizzando Software di congurazione MCT
10, oppure a seguito del ripristino di una condizione di
guasto.
Per prevenire un avviamento involontario del motore,
procedere come segue:
Scollegare il convertitore di frequenza dalla
•
rete.
Premere [O/Reset] sull'LCP prima di
•
programmare i parametri.
Cablare e montare completamente il conver-
•
titore di frequenza, il motore e qualsiasi
apparecchiatura azionata prima di collegare il
convertitore di frequenza alla rete CA, all'alimentazione CC o alla condivisione del carico.
MG07A506 Danfoss A/S © 08/2018 Tutti i diritti riservati. 7
Page 12
Sicurezza
VLT® Midi Drive FC 280
AVVISO
TEMPO DI SCARICA
22
Il convertitore di frequenza contiene condensatori del
collegamento CC che possono rimanere carichi anche
quando il convertitore di frequenza non è alimentato.
Può ancora essere presente alta tensione anche dopo lo
spegnimento dei LED. Il mancato rispetto del tempo di
attesa indicato dopo il disinserimento dell'alimentazione
e prima di eettuare lavori di manutenzione o
riparazione può causare lesioni gravi o mortali.
Arrestare il motore.
•
Scollegare la rete CA e gli alimentatori del
•
collegamento CC remoti, comprese le batterie di
riserva, i gruppi di continuità e i collegamenti
CC ad altri convertitori di frequenza.
Scollegare o bloccare il motore PM.
•
Attendere che i condensatori si scarichino
•
completamente. La durata minima del tempo di
attesa è specicata in Tabella 2.1.
Prima di eettuare qualsiasi intervento di
•
manutenzione o riparazione, usare un
appropriato dispositivo di misurazione della
tensione per assicurarsi che i condensatori siano
completamente scarichi.
AVVISO
PERICOLO APPARECCHIATURE
Il contatto con gli alberi rotanti e le apparecchiature
elettriche può causare morte o lesioni gravi.
Assicurarsi che soltanto personale adegua-
•
tamente formato e qualicato eettui
l'installazione, l'avviamento e la manutenzione.
Assicurarsi che i lavori elettrici siano eseguiti in
•
conformità alle norme elettriche nazionali e
locali.
Seguire le procedure illustrate in questa guida.
•
ATTENZIONE
RISCHIO DI GUASTO INTERNO
Un guasto interno nel convertitore di frequenza può
provocare lesioni gravi quando questo non è chiuso
correttamente.
Prima di applicare la corrente elettrica,
•
assicurarsi che tutte le coperture di sicurezza
siano al loro posto e ssate in modo sicuro.
Tensione [V]
200–240 0,37–3,7 (0,5–5) 4
380–480
Tabella 2.1 Tempo di scarica
Gamma di potenza
[kW (cv)]
0,37–7,5 (0,5–10) 4
11–22 (15–30) 15
Tempo di attesa minimo
(minuti)
AVVISO
RISCHIO DI CORRENTE DI DISPERSIONE
Le correnti di dispersione superano i 3,5 mA. Una messa
a terra non appropriata del convertitore può causare
morte o lesioni gravi.
Assicurare che la messa a terra dell'apparec-
•
chiatura sia correttamente eseguita da un
installatore elettrico certicato.
8 Danfoss A/S © 08/2018 Tutti i diritti riservati. MG07A506
Page 13
130BE616.14
VLT
MADE IN
DENMARK
T/C: FC-280PK37T4E20H1BXCXXXSXXXXAX
0.37kW 0.5HP
IN: 3x380-480V 50/60Hz, 1.2/1.0A
OUT: 3x0-Vin 0-500Hz, 1.2/1.1A
IP20
P/N: 134U2184 S/N: 000000G000
Midi Drive
www.danfoss.com
CAUTION / ATTENTION:
WARNING / AVERTISSEMENT:
See manual for special condition/mains fuse
Voir manual de conditions speciales/fusibles
Enclosure: See manual
5AF3 E358502 IND.CONT.EQ.
Stored charge, wait 4 min.
Charge r
é
siduelle, attendez 4 min.
21
1
2
4
3
5
11
20
19
18
16
15
14
13
10
8
9
6
17
R
US LISTED
www.tuv.com
ID 0600000000
Danfoss A/S, 6430 Nordborg, Denmark
12
7
Installazione meccanica Guida operativa
3 Installazione meccanica
3.1 Disimballaggio
3.1.1 Elementi forniti
Gli elementi forniti possono variare a seconda della
congurazione del prodotto.
Assicurarsi che gli articoli forniti e le informazioni
•
sulla targa corrispondano alla conferma d'ordine.
Controllare visivamente il confezionamento e il
•
convertitore di frequenza per
presenza di eventuali danni causati da una
manipolazione inappropriata durante la
spedizione. Presentare qualsiasi reclamo per danni
al vettore di consegna. Conservare le parti
danneggiate per chiarimenti.
vericare la
1 Logo del prodotto
2 Nome del prodotto
3 Smaltimento
4 Marchio CE
5 Numero seriale
6 Logo TÜV
7 Logo UkrSEPRO
8 Codice a barre
9 Paese di origine
10 Riferimento al tipo di frame.
11 Logo EAC
12 Logo RCM
13 Riferimento UL
14 Speciche avviso
15 Logo UL
16 Grado IP
Tensione, frequenza e corrente di uscita (a basse/alte
17
tensioni)
Tensione, frequenza e corrente di ingresso (a basse/alte
18
tensioni)
19 Potenza nominale
20 Numero d'ordine
21 Codice identicativo
3 3
MG07A506 Danfoss A/S © 08/2018 Tutti i diritti riservati. 9
Disegno 3.1 Targa del prodotto (esempio)
AVVISO!
Non rimuovere la targa dal convertitore di frequenza
(perdita della garanzia).
Per maggiori informazioni, fare riferimento al capitolo
Codice identicativo nella Guida alla Progettazione VLT
Midi Drive FC 280.
®
Page 14
130BE615.12
Installazione meccanica
VLT® Midi Drive FC 280
3.1.2 Immagazzinamento
Assicurarsi che siano soddisfatti i requisiti per l'immagazzinamento. Fare riferimento al capitolo 9.4 Condizioni
ambientali per informazioni più dettagliate.
33
3.2 Ambiente di installazione
AVVISO!
In ambienti con liquidi, particelle o gas corrosivi
trasportati dall'aria, assicurarsi che il grado IP e il tipo di
apparecchiatura corrispondano all'ambiente di installazione. Il mancato rispetto dei requisiti sulle condizioni
ambientali può ridurre la durata di vita del convertitore
di frequenza. Assicurarsi che siano soddisfatti i requisiti
di umidità dell'aria, di temperatura e di altitudine.
Vibrazioni e scosse
Il convertitore di frequenza è conforme ai requisiti esistenti
per unità installate a muro e sul pavimento di stabilimenti
di produzione, nonché su pannelli imbullonati al muro o al
pavimento.
Per le speciche dettagliate sulle condizioni ambientali,
fare riferimento al capitolo 9.4 Condizioni ambientali.
Montaggio
3.3
Montaggio
Per adattare i fori di montaggio di VLT® Midi Drive FC 280,
contattare il fornitore Danfoss locale per ordinare una
piastra posteriore separata.
Per montare il convertitore di frequenza:
1. Assicurarsi che il sito di installazione sia in grado
di sopportare il peso dell'unità. Il convertitore di
frequenza consente l'installazione anco a anco.
2. Collocare l'unità il più vicino possibile al motore.
Fare in modo che i cavi motore siano quanto più
corti possibile.
3. Per consentire la circolazione di aria per il rared-
damento, montare l'unità verticalmente su una
supercie piana robusta o sulla piastra posteriore
opzionale.
4. Se disponibili, utilizzare i fori di montaggio
scanalati sull'unità da montare a muro.
AVVISO!
Per le dimensioni dei fori di montaggio vedere il
capitolo 9.9 Dimensioni contenitore, potenze nominali e
dimensioni.
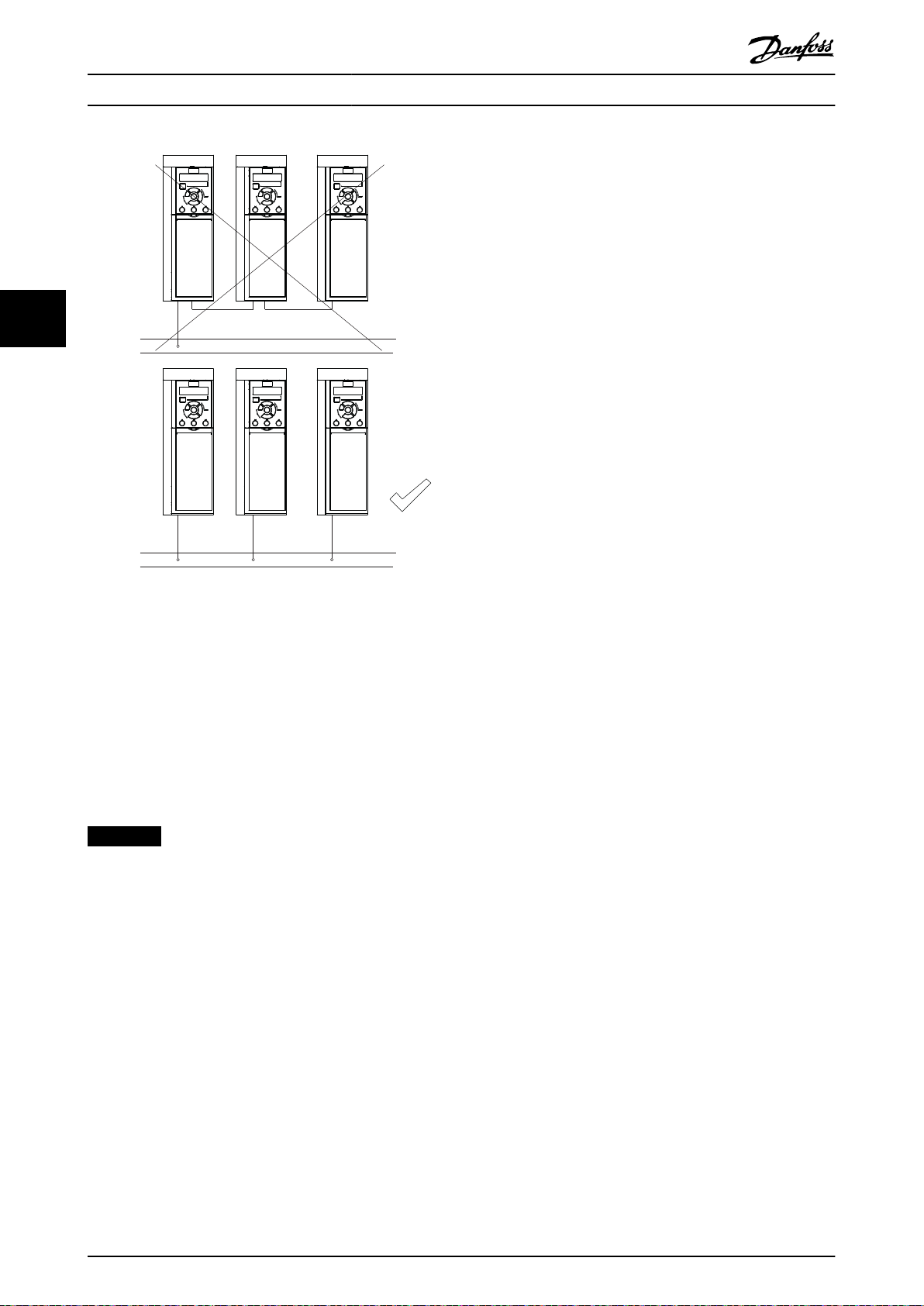
3.3.1 Installazione anco a anco
AVVISO!
Un montaggio errato può causare surriscaldamento e
prestazioni ridotte.
Rareddamento
Assicurarsi che sia presente uno spazio di 100
•
mm (3,9 pollici) sul lato superiore e inferiore per il
rareddamento ad aria.
Sollevamento
Per determinare un metodo di sollevamento
•
sicuro, controllare il peso dell'unità vedere il
capitolo 9.9 Dimensioni contenitore, potenze
nominali e dimensioni.
Assicurarsi che il dispositivo di sollevamento sia
•
idoneo.
Se necessario, per spostare l'unità avvalersi di un
•
paranco, una gru o un muletto di grado
adeguato.
Per il sollevamento, utilizzare i golfari sull'unità, se
•
in dotazione.
Installazione anco a anco
Tutte le unità VLT® Midi Drive FC 280 possono essere
installate anco a anco, in posizione verticale od
orizzontale. Le unità non necessitano di ventilazione
supplementare sul lato.
Disegno 3.2 Installazione anco a anco
10 Danfoss A/S © 08/2018 Tutti i diritti riservati. MG07A506
Page 15
130BF642.10
G
130BF643.10
G
Installazione meccanica Guida operativa
AVVISO!
RISCHIO DI SURRISCALDAMENTO
Se si utilizza il kit di conversione IP21, il montaggio delle
unità anco a anco potrebbe causare il surriscaldamento e danni all'unità.
Sono necessari almeno 30 mm (1,2 pollici) tra i
•
bordi del coperchio superiore del kit di
conversione IP21.
3.3.2 Montaggio orizzontale
Disegno 3.3 Modalità di montaggio orizzontale corretto
(lato sinistro verso il basso)
Disegno 3.4 Modalità di montaggio orizzontale errato
(lato destro verso il basso)
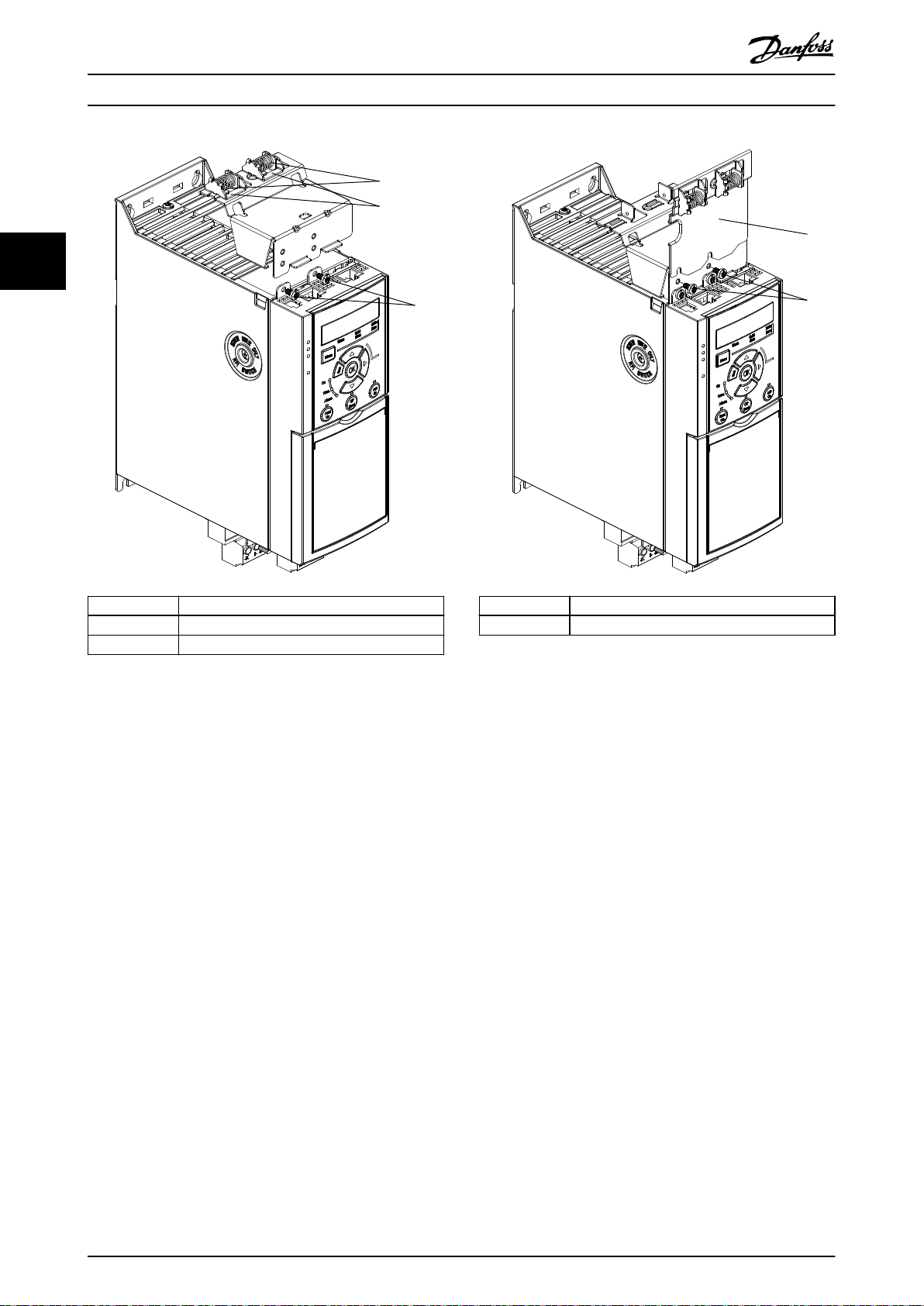
3.3.3 Kit disaccoppiamento del bus
Il kit di disaccoppiamento del bus assicura il ssaggio
meccanico e la schermatura elettrica dei cavi per le
seguenti varianti di cassette di controllo:
Cassetta di controllo con PROFIBUS.
•
Cassetta di controllo con PROFINET.
•
Cassetta di controllo con CANOpen.
•
Cassetta di controllo con Ethernet.
•
Cassetta di controllo con POWERLINK.
•
Ciascun kit di disaccoppiamento del bus contiene una
piastra di disaccoppiamento orizzontale e una verticale. Il
montaggio della piastra di disaccoppiamento verticale è
opzionale. La piastra di disaccoppiamento verticale fornisce
un migliore supporto meccanico per passacavi e cavi
PROFINET, Ethernet e POWERLINK.
3.3.4 Montaggio
Per montare il kit di disaccoppiamento del bus:
1. Posizionare la piastra di disaccoppiamento
orizzontale sulla cassetta di controllo montata sul
convertitore di frequenza, quindi ssare la piastra
con due viti, come mostrato nella Disegno 3.5. La
coppia di serraggio è pari a 0,7–1,0 Nm (6,2–8,9
pollici-lb).
2. Opzionale: montare la piastra di disaccoppiamento verticale nel modo seguente:
2a Rimuovere le due molle meccaniche e i
due morsetti metallici dalla piastra
orizzontale.
2b Montare le molle meccaniche e i
morsetti metallici sulla piastra verticale.
2c Fissare la piastra con due viti come
mostrato nella Disegno 3.6. La coppia di
serraggio è pari a 0,7–1,0 Nm (6,2–8,9
pollici-lb).
AVVISO!
Se si utilizza il coperchio superiore IP21, non montare la
piastra di disaccoppiamento verticale, perché la sua
altezza incide sulla corretta installazione dello stesso.
3 3
MG07A506 Danfoss A/S © 08/2018 Tutti i diritti riservati. 11
Page 16
1
2
3
130BE480.10
130BE481.10
1
2
Installazione meccanica
VLT® Midi Drive FC 280
33
1 Molle meccaniche
2 Morsetti metallici
3 Viti
Disegno 3.5 Fissare la piastra di disaccoppiamento orizzontale
mediante le viti
1 Piastra di disaccoppiamento verticale
2 Viti
Disegno 3.6 Fissare la piastra di disaccoppiamento verticale
mediante le viti
La Disegno 3.5 e la Disegno 3.6 mostrano i passacavi
Ethernet (RJ45). Il tipo eettivo di passacavo dipende dalla
variante del bus di campo selezionato del convertitore di
frequenza.
3. Assicurare il cablaggio corretto dei cavi del bus di
campo (PROFIBUS/CANopen) o spingere i
passacavi (RJ45 per PROFINET/POWERLINK/
Ethernet/IP) nelle prese della cassetta di controllo.
4. 4a Posizionare i cavi PROFIBUS/CANOpen
tra i morsetti metallici a molla per
stabilire il
ssaggio meccanico e il
contatto elettrico tra le sezioni
schermate dei cavi e dei morsetti.
4b Posizionare i cavi PROFINET/POWERLINK/
Ethernet/IP tra i morsetti metallici a
molla per stabilire il ssaggio meccanico
e il contatto elettrico tra i cavi e i
morsetti.
12 Danfoss A/S © 08/2018 Tutti i diritti riservati. MG07A506
Page 17
Installazione elettrica Guida operativa
4 Installazione elettrica
4.1 Istruzioni di sicurezza
Vedere capitolo 2 Sicurezza per le istruzioni generali di
sicurezza.
AVVISO
TENSIONE INDOTTA
La tensione indotta da cavi motore di uscita di convertitori di frequenza diversi posati insieme può caricare i
condensatori dell'apparecchiatura anche quando questa
è spenta e disinserita. Il mancato rispetto della posa
separata dei cavi motore di uscita o il mancato utilizzo di
cavi schermati possono causare morte o lesioni gravi.
Posare separatamente i cavi motore di uscita.
•
Usare cavi schermati.
•
Disinserire tutti i convertitori di frequenza
•
simultaneamente.
AVVISO
PERICOLO DI SCOSSE
Il convertitore di frequenza può provocare una corrente
CC nel conduttore PE e quindi causare morte o lesioni
gravi.
Quando viene usato un dispositivo a corrente
•
residua (RCD) per una protezione contro le
scosse elettriche, è consentito solo un RCD di
tipo B sul lato di alimentazione.
In caso di mancato rispetto delle raccomandazioni, l'RCD
non è in grado di fornire la protezione prevista.
Protezione da sovracorrente
Per applicazioni con motori multipli sono
•
necessari dispositivi di protezione addizionali,
quali una protezione da cortocircuito o la
protezione termica del motore tra il convertitore
di frequenza e il motore.
Sono necessari fusibili di ingresso per fornire una
•
protezione da cortocircuito e da sovracorrente. Se
non sono stati installati in fabbrica, i fusibili
devono comunque essere forniti dall'installatore.
Vedere le prestazioni massime dei fusibili in
capitolo 9.8 Fusibili e interruttori.
Tipi e caratteristiche dei cavi
Tutti i cavi devono essere conformi alle norme
•
locali e nazionali relative ai requisiti in termini di
sezioni trasversali e temperature ambiente.
Raccomandazione sui cavi di alimentazione: cavo
•
di rame predisposto per almeno 75 °C.
Vedere capitolo 9.5 Speciche dei cavi per le dimensioni e i
tipi di cavi raccomandati.
4.2 Impianto conforme ai requisiti EMC
Per ottenere un impianto conforme ai requisiti EMC seguire
le istruzioni fornite nel capitolo 4.3 Collegamento a massa,
capitolo 4.4 Schema di cablaggio, capitolo 4.6 Collegamento
al motore, e capitolo 4.8 Cavi di controllo.
4.3 Collegamento a massa
AVVISO
RISCHIO DI CORRENTE DI DISPERSIONE
Le correnti di dispersione superano i 3,5 mA. Una messa
a terra non corretta del convertitore di frequenza può
causare morte o lesioni gravi.
Assicurare che la messa a terra dell'apparec-
•
chiatura sia correttamente eseguita da un
installatore elettrico certicato.
Per la sicurezza elettrica
Mettere a terra il convertitore di frequenza
•
conformemente alle norme e direttive pertinenti.
Usare un lo di terra dedicato per l'alimentazione
•
di ingresso, la potenza motore e i cavi di
controllo.
Non collegare a terra un convertitore di frequenza
•
con un altro in modo concatenato (vedere
Disegno 4.1).
Tenere i li di terra quanto più corti possibile.
•
Rispettare i requisiti del costruttore del motore
•
relativi al cablaggio.
Sezione trasversale dei cavi minima per li di
•
terra: 10 mm2 (7 AWG).
Terminare separatamente i singoli li di terra,
•
entrambi corrispondenti ai requisiti di dimensionamento.
4 4
MG07A506 Danfoss A/S © 08/2018 Tutti i diritti riservati. 13
Page 18
130BC500.10
FC 1
FC 1
FC 2
FC 2
FC 3
FC 3
PE
PE
Installazione elettrica
VLT® Midi Drive FC 280
44
Disegno 4.1 Principio di messa a terra
Per un impianto conforme ai requisiti EMC
Stabilire un contatto elettrico tra lo schermo del
•
cavo e il frame del convertitore di frequenza
usando passacavi metallici o i morsetti forniti in
dotazione con l'apparecchiatura (vedere il
capitolo 4.6 Collegamento al motore).
Utilizzare un lo cordato per contenere i transitori
•
veloci.
Non usare schermi attorcigliati.
•
AVVISO!
COLLEGAMENTO EQUIPOTENZIALE
Rischio di transitori veloci quando il potenziale di terra
tra il convertitore di frequenza e il sistema di controllo è
diverso. Installare i cavi di equalizzazione tra i
componenti di sistema. Sezione trasversale dei cavi
consigliata: 16 mm2 (6 AWG).
14 Danfoss A/S © 08/2018 Tutti i diritti riservati. MG07A506
Page 19
Power
input
Switch mode
power supply
Motor
Analog output
interface
(PNP) = Source
(NPN) = Sink
ON = Terminated
OFF = Open
Brake
resistor
91 (L1/N)
92 (L2/L)
93 (L3)
PE
50 (+10 V OUT)
53 (A IN)
2)
54 (A IN)
55 (COM digital/analog I/O)
0/4−20 mA
12 (+24 V OUT)
13 (+24 V OUT)
18 (D IN)
10 V DC
15 mA 100 mA
+ - + -
(U) 96
(V) 97
(W) 98
(PE) 99
(A OUT) 42
(P RS485) 68
(N RS485) 69
(COM RS485) 61
0 V
5 V
S801
0/4−20 mA
RS485
RS485
03
+10 V DC
0−10 V DC
24 V DC
02
01
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
19 (D IN)
24 V (NPN)
0 V (PNP)
17 V
0 V
0 V (PNP)
24 V (NPN)
29 (D IN)
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
33 (D IN)
32 (D IN)
38 (STO2)
4)
37 (STO1)
4)
95
P 5-00
21
ON
(+DC/R+) 89
(R-) 81
0−10 V DC
(-DC) 88
RFI
0 V
250 V AC, 3 A
Relay 1
1)
3)
5)
5)
130BE202.19
27 (D IN/OUT)
6)
Installazione elettrica Guida operativa
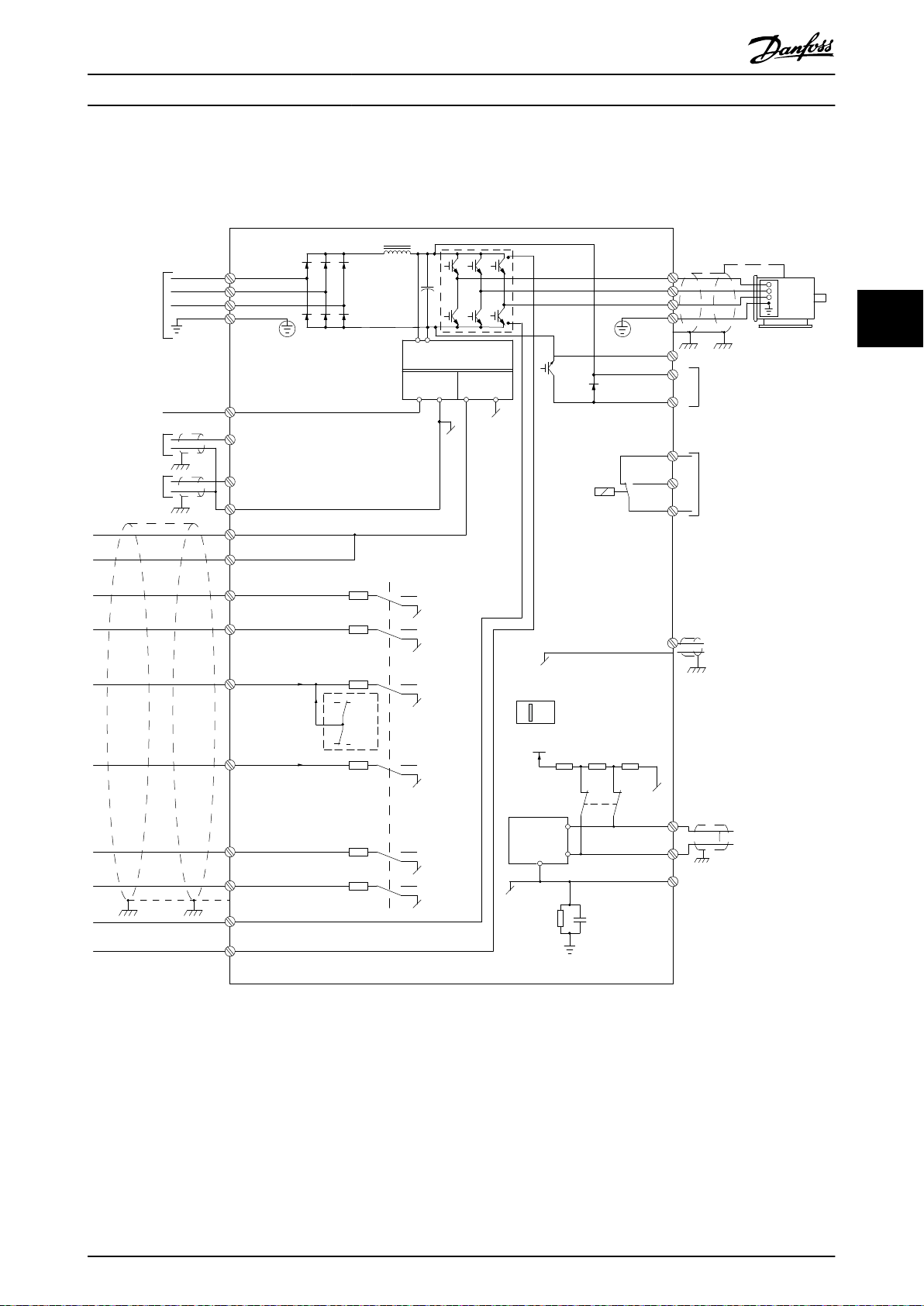
4.4 Schema di cablaggio
Questa sezione descrive come cablare il convertitore di frequenza.
4 4
Disegno 4.2 Schema di cablaggio base
A = analogico, D = digitale
1) Il chopper di frenatura integrato è disponibile solo su unità trifase.
2) È possibile usare il morsetto 53 anche come ingresso digitale.
3) È possibile usare l'interruttore S801 (morsetto del bus) per abilitare la terminazione sulla porta RS485 (morsetti 68 e 69).
4) Consultare capitolo 6 Safe Torque O (STO) per il cablaggio STO corretto.
5) Il convertitore di frequenza S2 (monofase 200-240 V) non supporta l'applicazione a condivisione del carico.
6) La tensione massima è 17 V per il morsetto 27 come uscita analogica.
MG07A506 Danfoss A/S © 08/2018 Tutti i diritti riservati. 15
Page 20
e30bf228.11
L1
L2
L3
PE
PE
u
v
w
2
1
3
5
16
17
18
14
12
8
7
10
9
4
11
13
4
6
15
90
4
Installazione elettrica
VLT® Midi Drive FC 280
44
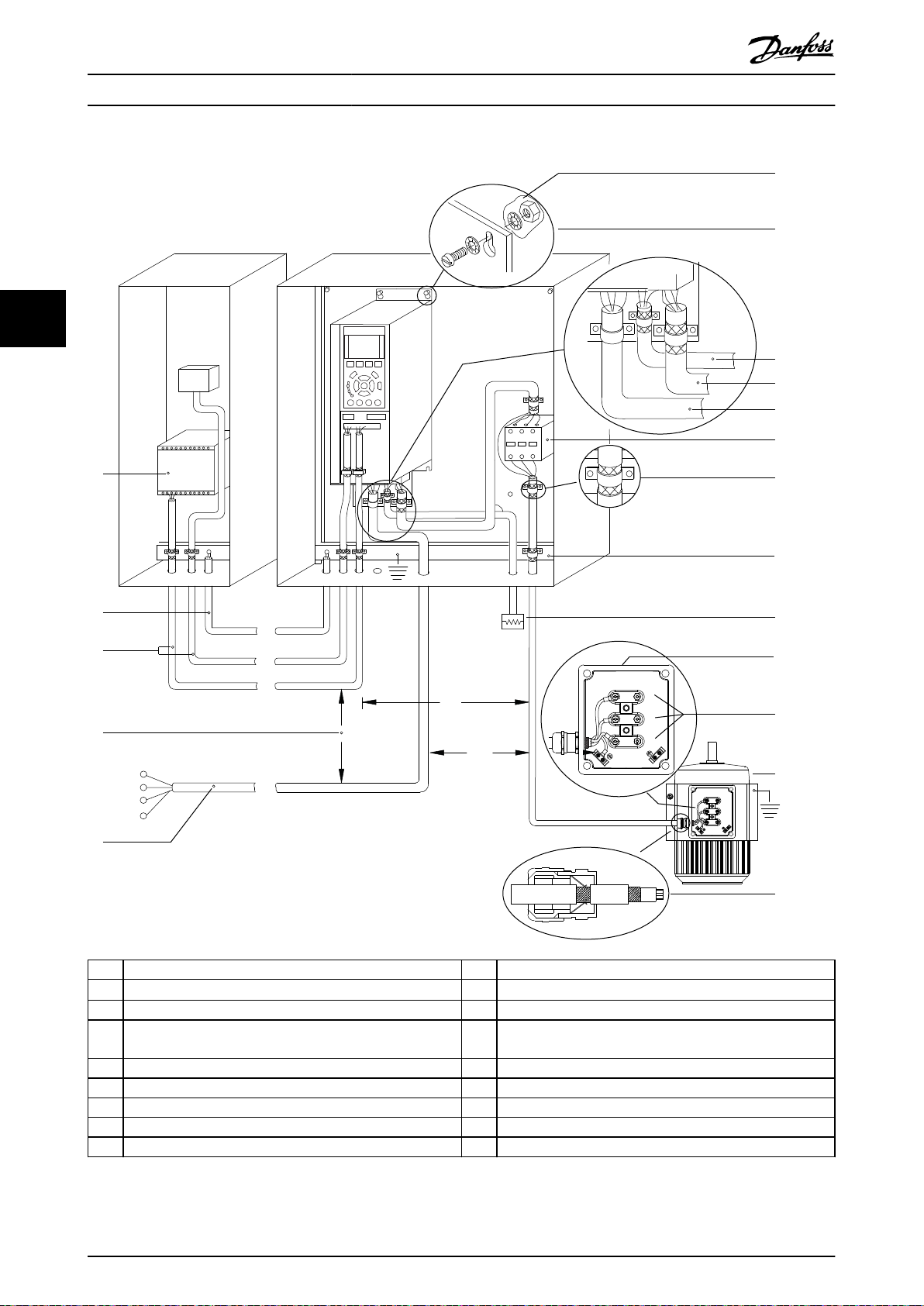
1 PLC 10 Cavo dell’alimentazione di rete (non schermato)
2
Cavo di equalizzazione minimo 16 mm2 (6 AWG)
3 Cavi di comando 12 Isolamento del cavo spelato
4 Almeno 200 mm (7,87 pollici) tra i cavi di comando, cavi
motore e cavi dell'alimentazione di rete.
5 Alimentazione di rete 14 Resistenza freno
6 Supercie nuda (non verniciata) 15 Scatola di metallo
7 Rondelle a stella 16 Collegamento al motore
8 Cavo freno (schermato) 17 Motore
9 Cavo motore (schermato) 18 Passacavo EMC
Disegno 4.3 Collegamento elettrico tipico
11 Contattore di uscita e altro.
13 Barra collettrice comune di terra. Rispettare i requisiti
nazionali e locali per la messa a terra degli armadi.
16 Danfoss A/S © 08/2018 Tutti i diritti riservati. MG07A506
Page 21
130BC504.11
130BD531.10
U
V
W
96
97
98
Installazione elettrica Guida operativa
4.5 Accesso
Rimuovere la piastra di copertura mediante un
•
cacciavite. Vedere la Disegno 4.4.
Disegno 4.4 Accesso ai cavi di controllo
4.6 Collegamento al motore
AVVISO
TENSIONE INDOTTA
La tensione indotta da cavi motore di uscita posati
insieme può caricare i condensatori dell'apparecchiatura
anche quando questa è spenta e disinserita. Il mancato
rispetto della posa separata dei cavi motore di uscita o il
mancato utilizzo di cavi schermati possono causare
morte o lesioni gravi.
Procedura
1. Sguainare una sezione dell'isolamento esterno del
cavo.
2. Posizionare il cavo spelato sotto il pressacavo per
stabilire il ssaggio meccanico e il contatto
elettrico tra lo schermo del cavo e la terra.
3. Collegare il cavo di terra al morsetto di messa a
terra più vicino secondo le istruzioni di messa a
terra fornite nel capitolo 4.3 Collegamento a
massa. Vedere la Disegno 4.5.
4. Collegare il cablaggio trifase del motore ai
morsetti 96 (U), 97 (V) e 98 (W), come mostrato
nella Disegno 4.5.
5. Serrare i morsetti in base alle informazioni fornite
nel capitolo 9.7 Coppie di serraggio dei
collegamenti.
4 4
Posare separatamente i cavi motore di uscita.
•
Usare cavi schermati.
•
Rispettare le normative elettriche nazionali e
•
locali per le dimensioni cavo. Per le dimensioni
cavo massime consultare il capitolo 9.1 Dati
elettrici.
Rispettare i requisiti del costruttore del motore
•
relativi al cablaggio.
Sono forniti passacavi per i cavi del motore o
•
pannelli di accesso alla base delle unità IP21/Tipo
1.
Non cablare un dispositivo di avviamento o un
•
invertitore di poli (per esempio un motore
Dahlander o un motore a induzione ad anelli) tra
il convertitore di frequenza e il motore.
Disegno 4.5 Collegamento del motore
La rete, il motore e il collegamento a massa per i convertitori di frequenza monofase e trifase sono mostrati
rispettivamente nella Disegno 4.6, nella Disegno 4.7 e nella
Disegno 4.8. Le congurazioni eettive variano in base ai
tipi di unità e alle apparecchiature opzionali.
MG07A506 Danfoss A/S © 08/2018 Tutti i diritti riservati. 17
Page 22
130BE232.11
130BE231.11
130BE804.10
Installazione elettrica
VLT® Midi Drive FC 280
44
Disegno 4.6 Collegamento di rete, motore e a massa per
unità monofase
Disegno 4.7 Rete, motore e collegamento a massa per unità
trifase (K1, K2, K3)
Disegno 4.8 Rete, motore e collegamento a massa per unità
trifase (K4, K5)
Collegamento di rete CA
4.7
Calibrare il cablaggio in funzione della corrente di
•
ingresso del convertitore di frequenza. Per le
dimensioni massime del lo, consultare il
capitolo 9.1 Dati elettrici.
Rispettare le normative elettriche nazionali e
•
locali per le dimensioni cavo.
Procedura
1. Collegare i cavi di potenza di ingresso CA ai
morsetti N ed L per le unità monofase (vedere la
Disegno 4.6), o ai morsetti L1, L2 e L3 per le unità
trifase (vedere la Disegno 4.7).
2. In base alla congurazione dell'apparecchiatura,
collegare l'alimentazione di ingresso ai morsetti di
ingresso di rete o al sezionatore di ingresso.
3. Mettere a terra il cavo seguendo le istruzioni per
la messa a terra fornite nel
capitolo 4.3 Collegamento a massa.
4. Quando alimentato da una sorgente di rete
isolata (rete IT o collegamento a triangolo
sospeso) o da una rete TT/TN-S con neutro a terra
(triangolo a terra), assicurarsi che la vite del ltro
RFI sia stata rimossa. La rimozione della vite RFI
impedisce danni al collegamento CC e riduce le
correnti capacitive verso terra in conformità alla
norma IEC 61800-3 (vedere la Disegno 9.2, la vite
18 Danfoss A/S © 08/2018 Tutti i diritti riservati. MG07A506
Page 23
130BE212.10
1 2
3
130BE214.10
37 38 12 13 18 19 27 29 32 33 61
42 53 54 50 55
68 69
1
3
2
Installazione elettrica Guida operativa
RFI è situata sul lato del convertitore di
frequenza).
4.8 Cavi di controllo
4.8.1 Tipi di morsetti di controllo
La Disegno 4.9 mostra i passacavi removibili del convertitore di frequenza. Le funzioni dei morsetti e le relative
impostazioni di fabbrica sono illustrate nella Tabella 4.1 e
nella Tabella 4.2.
Disegno 4.9 Posizioni dei morsetti di controllo
Disegno 4.10 Numeri dei morsetti
Vedere il capitolo 9.6 Ingresso/uscita di dati e di controllo per
dettagli sui gradi dei morsetti.
Morsetto Parametro
I/O digitale, I/O a impulsi, encoder
12, 13 – +24 V CC
Parametro 5-10
18
19
Ingr. digitale
morsetto 18
Parametro 5-11
Ingr. digitale
morsetto 19
Impostazione
di fabbrica
[8] Avvio
[10] Inversione
Descrizione
Tensione di
alimentazione a
24 V CC. La
corrente di
uscita massima è
di 100 mA per
tutti i carichi da
24 V.
Ingressi digitali.
Morsetto Parametro
Parametro 5-01
Modo Morsetto
27
Parametro 5-12
27
29
32
33
37, 38 – STO
42
50 – +10 V CC
53
Ingr. digitale
morsetto 27
Parametro 5-30
Uscita dig.
morsetto 27
Parametro 5-13
Ingr. digitale
morsetto 29
Parametro 5-14
Ingr. digitale
morsetto 32
Parametro 5-15
Ingr. digitale
morsetto 33
Ingressi/uscite analogici
Parametro 6-91
Uscita
analogica
morsetto 42
Gruppo di
parametri 6-1*
Ingr. analog. 53
DI [2] Evol.
libera neg.
DO [0] Nessuna
funzione
[14] Jog ingresso digitale;
[0] Nessuna
funzione
[0] Nessuna
funzione
[0] Nessuna
funzione
Impostazione
di fabbrica
–
Descrizione
Selezionabile
come ingresso
digitale, uscita
digitale o uscita
a impulsi.
L'impostazione
di fabbrica è
ingresso digitale.
Ingresso digitale,
encoder 24 V. È
possibile usare il
morsetto 33
anche come
ingresso a
impulsi.
Ingressi di
sicurezza
funzionale.
Uscita analogica
programmabile.
Il segnale
analogico è
0–20 mA o
4–20 mA a un
massimo di
500 Ω. È anche
possibile
congurarlo
come uscite
digitali.
Tensione di
alimentazione
analogica 10 V
CC. Tipicamente
vengono usati
massimo 15 mA
per un
potenziometro o
un termistore.
Ingresso
analogico. È
supportata solo
la modalità
tensione. È
possibile usarlo
anche come
ingresso digitale.
4 4
MG07A506 Danfoss A/S © 08/2018 Tutti i diritti riservati. 19
Page 24
Installazione elettrica
VLT® Midi Drive FC 280
Morsetto Parametro
Gruppo di
54
parametri 6-2*
Ingr. analog. 54
44
55 – –
Impostazione
di fabbrica
–
Descrizione
Ingresso
analogico. È
possibile
scegliere tra
modalità
tensione o
corrente.
Linea comune
per ingressi
digitali e
analogici.
4.8.2 Collegamento ai morsetti di controllo
I passacavi dei morsetti di controllo possono essere
scollegati dal convertitore di frequenza per facilitare
l'installazione, come mostrato nella Disegno 4.9.
Per maggiori dettagli sul cablaggio STO fare riferimento al
capitolo 6 Safe Torque O (STO).
AVVISO!
Mantenere quanto più corti possibile i cavi di comando e
separarli dai cavi di alta potenza per ridurre al minimo le
interferenze.
Tabella 4.1 Descrizione dei morsetti - Ingressi/uscite digitali,
ingressi/uscite analogici
Morsetto Parametro
Comunicazione seriale
61 – –
Gruppo di
68 (+)
69 (-)
01, 02, 03
Tabella 4.2 Descrizione dei morsetti - Comunicazione seriale
parametri 8-3*
Impostaz. porta
FC
Gruppo di
parametri 8-3*
Impostaz. porta
FC
Parametro 5-40
Funzione relè
Impostazion
e di fabbrica
–
–
Relè
[1] Comando
pronto
Descrizione
Filtro RC integrato
per lo schermo del
cavo. SOLTANTO
per collegare lo
schermo in caso di
problemi EMC.
Interfaccia RS485.
Per la resistenza di
terminazione è
disponibile un
interruttore sulla
scheda di
controllo.
Uscita a relè forma
C. Questi relè si
trovano in varie
posizioni in base
alla congurazione
e alla dimensione
del convertitore di
frequenza. Utilizzabile per tensione
CA o CC e carichi
induttivi o resistivi.
1. Allentare le viti per i morsetti.
2. Inserire i cavi di comando rivestiti negli slot.
3. Fissare le viti per i morsetti
4. Assicurarsi che il contatto sia ben saldo e non
allentato. I cavi di controllo allentati possono
causare guasti all'apparecchiatura o un funzionamento non ottimale.
Vedere il capitolo 9.5 Speciche dei cavi per le dimensioni
cavo dei morsetti di controllo e il capitolo 7 Esempi
applicativi per i collegamenti tipici dei cavi di comando.
4.8.3 Abilitazione del funzionamento
motore (morsetto 27)
Tra il morsetto 12 (o 13) e il morsetto 27 è necessario
eseguire un ponticello per il funzionamento del convertitore di frequenza utilizzando i valori di programmazione
impostati in fabbrica.
Il morsetto di ingresso digitale 27 è progettato
•
per ricevere un comando di interblocco esterno a
24 V CC.
Se non si utilizzano dispositivi di interblocco,
•
eseguire un ponticello tra il morsetto di controllo
12 (consigliato) o 13 e il morsetto 27. Il ponticello
fornisce un segnale interno a 24 V sul
morsetto 27.
Solo per GLCP: quando la riga di stato in fondo
•
all'LCP riporta AUTO REMOTE COAST signica che
l'unità è pronta a funzionare, ma manca un
segnale di ingresso sul morsetto 27.
AVVISO!
AVVIAMENTO INIBITO
Il convertitore di frequenza non può funzionare senza un
segnale sul morsetto 27, a meno che il morsetto 27 non
venga riprogrammato.
20 Danfoss A/S © 08/2018 Tutti i diritti riservati. MG07A506
Page 25
Start Current
2)
Only support in some products.
1)
DC injection current during “Active Brake Delay” after MAV reduced to “0” . Only support in some products.
Off
On
Off
Relay
/
DO Status
Active Brake Delay
Active Brake Delay
MAV
Start Speed
Active Brake Speed
0
t
Start Delay
Off
On
Off
Start Command
Released
Activated
Reaction time of
mech
.
brake
Reaction time of
mech
.
brake
Mech
.
Brake Status
Release Brake Current
Output Current
DC Injection Current
1)
0
t
130BF687.10
Activated
Note:
2)
Installazione elettrica Guida operativa
4.8.4 Controllo del freno meccanico
In applicazioni di sollevamento/abbassamento è necessario per controllare un freno elettromeccanico,
Controllare il freno utilizzando un'uscita a relè o un'uscita digitale qualsiasi (morsetto 27).
•
L'uscita deve rimanere chiusa (priva di tensione) per il periodo di tempo in cui il convertitore di frequenza non è in
•
grado di mantenere fermo il motore, ad esempio in conseguenza di un carico eccessivo.
Selezionare [32] Com. freno mecc. nel gruppo di parametri 5-4* Relè per applicazioni con un freno elettromeccanico.
•
Il freno viene rilasciato se la corrente motore supera il valore preimpostato nel parametro 2-20 Corrente rilascio
•
freno.
Il freno è innestato quando la frequenza di uscita è inferiore alla frequenza impostata nel parametro 2-22 Velocità di
•
attivazione del freno [Hz] e solo nel caso in cui il convertitore di frequenza esegue un comando di arresto.
Se il convertitore di frequenza è in una delle seguenti situazioni, il freno meccanico si chiude immediatamente.
In modalità di allarme.
•
In una situazione di sovratensione.
•
È stata attivata la funzione STO.
•
È impartito il comando di ruota libera.
•
4 4
Disegno 4.11 Freno meccanico
MG07A506 Danfoss A/S © 08/2018 Tutti i diritti riservati. 21
Page 26
130BE201.11
L1(N) L2(L) L3
U V W
02 01
A1
A2
Frequency converter
Output
relay
Command circuit
220 V AC
Mechanical
brake
ShaftMotor
Freewheeling
diode
Brake power circuit
380 V AC
Output
contactor
input
e30bt623.11
61
68
69
+
130BB489.10
RS485
Installazione elettrica
VLT® Midi Drive FC 280
Il convertitore di frequenza non è un dispositivo di
sicurezza. Il progettista del sistema è tenuto a integrare i
dispositivi di sicurezza in base alle norme nazionali
pertinenti relative alle gru/agli ascensori.
AVVISO!
Un bus USB non ha alcuna capacità di impostare un
indirizzo e non ha alcun nome di bus da congurare. Se
si collegano più di un convertitore di frequenza tramite
USB, il nome del bus viene aumentato automaticamente
nell'elenco dei bus di rete Software di congurazione
MCT 10.
Il collegamento di più di un convertitore di frequenza
mediante un cavo USB spesso fa sì che i computer in cui
44
è installato Windows XP lancino un'eccezione e vadano
in crash. Pertanto si consiglia di collegare un solo convertitore di frequenza al PC tramite USB.
4.8.6 Comunicazione seriale RS485
Collegare i cavi della comunicazione seriale RS485 ai
morsetti (+)68 e (-)69.
Si consiglia un cavo schermato per la comuni-
•
cazione seriale.
Vedere il capitolo 4.3 Collegamento a massa per
•
una messa a terra corretta.
Disegno 4.12 Collegamento del freno meccanico al convertitore di frequenza
4.8.5 Comunicazione dati USB
Disegno 4.13 Elenco dei bus di rete
Quando il cavo USB viene scollegato, il convertitore di
frequenza collegato tramite la porta USB viene rimosso
dall'elenco dei bus Rete.
Disegno 4.14 Schema di cablaggio per la comunicazione
seriale
Per il setup della comunicazione seriale di base, selezionare
quanto segue:
1. tipo di protocollo nel parametro 8-30 Protocollo
2. Indirizzo del convertitore di frequenza nel
parametro 8-31 Indirizzo.
3. baud rate nel parametro 8-32 Baud rate.
Due protocolli di comunicazione sono interni al convertitore di frequenza. Rispettare i requisiti del costruttore del
motore relativi al cablaggio.
Danfoss FC.
•
Modbus RTU.
•
Le funzioni sono programmabili da remoto utilizzando il
software di protocollo e la connessione RS485 o nel gruppo
di parametri 8-** Comun. e opzioni.
22 Danfoss A/S © 08/2018 Tutti i diritti riservati. MG07A506
Page 27
Installazione elettrica Guida operativa
La selezione di un protocollo di comunicazione specico modica diverse impostazioni parametri predeniti per adeguarle
alle speciche del protocollo e rende disponibili parametri aggiuntivi specici del protocollo.
4.9 Lista di controllo per l'installazione
Prima di completare l'installazione dell'unità, ispezionare l'intero impianto come spiegato nel dettaglio nella Tabella 4.3.
Spuntare le voci man mano che vengono controllate.
Controllare Descrizione
Apparecchiatura
ausiliaria
Instradamento cavi
Cavi di controllo
Spazio per il rared-
damento
Condizioni
ambientali
Fusibili e interruttori•Controllare il corretto dimensionamento di fusibili e interruttori.
Messa a terra
Fili di alimentazione
di ingresso e uscita
Interno del pannello•Vericare che l'interno dell'unità sia privo di sporcizia, trucioli di metallo, umidità e corrosione.
Interruttori
Vibrazioni
Controllare l'apparecchiatura ausiliaria, gli interruttori, i sezionatori o gli interruttori automatici/fusibili di
•
ingresso eventualmente presenti sul lato di alimentazione di ingresso del convertitore di frequenza e sul
lato di uscita verso il motore. Assicurarsi che siano pronti per il funzionamento a piena velocità.
Controllare il funzionamento e l'installazione di tutti i sensori utilizzati per la retroazione al convertitore di
•
frequenza.
Rimuovere i condensatori per correzione del fattore di potenza sui motori.
•
Regolare tutti i condensatori per correzione del fattore di potenza sul lato della rete e assicurarsi che siano
•
smorzati.
Assicurarsi che i cavi motore e i cavi di controllo siano separati, schermati oppure in tre canaline
•
metalliche separate per l'isolamento dall'interferenza ad alta frequenza.
Controllare che non vi siano eventuali li rotti o danneggiati e collegamenti allentati.
•
Controllare che i cavi di controllo siano isolati dal cablaggio di alimentazione e dai cavi motore per
•
assicurare l'immunità dai disturbi.
Se necessario, controllare la sorgente di tensione dei segnali.
•
Si consiglia l'utilizzo di cavi schermati o doppini intrecciati. Assicurarsi che lo schermo sia terminato correttamente.
Assicurarsi che la distanza superiore e inferiore sia adeguata per garantire un corretto usso d'aria per il
•
rareddamento; vedere il capitolo 3.3 Montaggio.
Controllare che siano soddisfatti i requisiti relativi alle condizioni ambientali.
•
Controllare che tutti i fusibili siano inseriti saldamente e siano in condizioni ottimali di funzionamento e
•
che tutti gli interruttori siano in posizione aperta.
Controllare che i collegamenti a massa siano sucienti, serrati e privi di ossidazione.
•
Non collegare a terra la canalina oppure montare il pannello posteriore su una supercie metallica.
•
Controllare se vi sono collegamenti allentati.
•
Controllare che i cavi motore e dell'alimentazione di rete siano disposti in canaline o in cavi schermati
•
separati.
Controllare che l'unità sia montata su una supercie metallica non verniciata.
•
Assicurarsi che tutti gli interruttori e sezionatori siano impostati nelle posizioni corrette.
•
Assicurarsi che l'unità sia montata saldamente o che vengano usati ammortizzatori di vibrazioni, se
•
necessario.
Controllare se sono presenti vibrazioni eccessive.
•
☑
4 4
Tabella 4.3 Lista di controllo per l'installazione
MG07A506 Danfoss A/S © 08/2018 Tutti i diritti riservati. 23
Page 28

Installazione elettrica
VLT® Midi Drive FC 280
ATTENZIONE
POTENZIALE RISCHIO IN CASO DI GUASTO INTERNO
Rischio di lesioni personali se il convertitore di frequenza non è chiuso correttamente.
Prima di applicare la corrente elettrica, assicurarsi che tutte le coperture di sicurezza siano al loro posto e
•
ssate in modo sicuro.
44
24 Danfoss A/S © 08/2018 Tutti i diritti riservati. MG07A506
Page 29
Messa in funzione Guida operativa
5 Messa in funzione
5.1 Istruzioni di sicurezza
Vedere il capitolo 2 Sicurezza per istruzioni generali di
sicurezza.
AVVISO
ALTA TENSIONE
I convertitori di frequenza sono soggetti ad alta tensione
quando collegati all'alimentazione di ingresso della rete
CA. Se l'installazione, l'avvio e la manutenzione non
vengono eseguiti da personale qualicato potrebbero
presentarsi rischi di lesioni gravi o mortali.
L'installazione, l'avviamento e la manutenzione
•
devono essere eseguiti solo da personale
qualicato.
Prima di applicare la tensione:
1. Chiudere correttamente il coperchio.
2. Controllare che tutti i passacavi siano saldamente
serrati.
3. Assicurarsi che l'alimentazione di ingresso all'unità
sia spenta ed esclusa. Non fare adamento sui
sezionatori del convertitore di frequenza per
l'isolamento dell'alimentazione di ingresso.
4. Vericare che non sia presente tensione sui
morsetti di ingresso L1 (91), L2 (92) e L3 (93), tra
fase e fase e tra fase e terra.
5. Vericare che non sia presente tensione sui
morsetti di uscita 96 (U), 97 (V) e 98 (W), tra fase
e fase e tra fase e terra.
6. Confermare la continuità del motore misurando i
valori Ω su U–V (96–97), V–W (97–98) e W–U (98–
96).
7. Controllare che la messa a terra del convertitore
di frequenza e del motore sia idonea.
8. Ispezionare il convertitore di frequenza per
vericare la presenza di eventuali collegamenti
allentati sui morsetti.
9. Controllare che la tensione di alimentazione
corrisponda alla tensione del convertitore di
frequenza e del motore.
Applicare la tensione
5.2
Applicare la tensione al convertitore di frequenza
eseguendo i passaggi riportati di seguito:
1. Confermare che la tensione di ingresso sia
bilanciata entro il 3%. In caso contrario,
correggere lo squilibrio della tensione di ingresso
prima di continuare. Ripetere questa procedura
dopo aver corretto la tensione.
2. Assicurarsi che gli eventuali li elettrici opzionali
siano idonei per l'applicazione dell'impianto.
3. Assicurarsi che tutti i dispositivi di comando siano
in posizione OFF. Gli sportelli del pannello
devono essere chiusi e i coperchi ssati
saldamente.
4. Alimentare l'unità. Non avviare il convertitore di
frequenza ora. Per le unità dotate di sezionatore,
impostare quest'ultimo sulla posizione ON per
alimentare il convertitore di frequenza.
5.3 Funzionamento del pannello di
controllo locale
Il convertitore di frequenza supporta il pannello di
controllo locale numerico (NLCP), il pannello di controllo
locale graco (GLCP) e la copertura cieca. Questa sezione
descrive le operazioni con l'NLCP e il GLCP.
AVVISO!
Il convertitore di frequenza può essere anche
programmato da Software di congurazione MCT 10 sul
PC attraverso la porta di comunicazione RS485 o la porta
USB. Questo software può essere ordinato usando il
numero d'ordine 130B1000 oppure scaricato dal sito web
Danfoss: drives.danfoss.com/downloads/pc-tools/#/.
5.3.1 Pannello di Controllo Locale
Numerico (NLCP)
Il pannello di controllo locale numerico (NLCP) è suddiviso
in quattro gruppi funzionali.
A. Display numerico.
B. Tasto menu.
C. Tasti di navigazione e spie (LED).
D. Tasti funzione e spie luminose (LED).
5 5
MG07A506 Danfoss A/S © 08/2018 Tutti i diritti riservati. 25
Page 30

130BC506.10
Setup 1
A
B
C
D
5
12
13 14 15
10
11
10
9
6
7
8
4
1
2
3
Menu
Status
Quick
Menu
Main
Menu
Hand
On
O
Reset
Auto
On
Back
OK
On
Warn
Alarm
130BD135.10
Setup 12
INDEX
AHP
VkW
srpm
Hz%
n2n1
n3
p5 p4
p3 p2 p1
Messa in funzione
VLT® Midi Drive FC 280
B. Tasto menu
Premere [Menu] per selezionare tra menu di stato, menu
rapido o menu principale.
C. Spie luminose (LED) e tasti di navigazione
Indicatore Luce Funzione
La spia luminosa ON si accende
quando il convertitore di frequenza
6 On Verde
55
7 Warn Giallo
8 All. Rosso
viene alimentato dalla tensione di
rete, da un morsetto del bus CC o
da un'alimentazione esterna a 24 V.
Quando sono soddisfatte le
condizioni per l'avviso, si accende il
LED giallo WARN e sul display
appare il testo che illustra il
problema.
Una condizione di guasto provoca il
lampeggiamento del LED di allarme
rosso e la visualizzazione di un testo
relativo all'allarme.
Tabella 5.2 Legenda per la Disegno 5.1, spie (LED)
Disegno 5.1 Vista dell'NLCP
9 [Back]
A. Display numerico
Il display LCD è retroilluminato con una riga numerica.
Tutti i dati sono visualizzati sull'NLCP.
Il numero del setup mostra il setup attivo e quello di
modica. Se lo stesso setup funge da setup attivo e da
setup di modica, viene visualizzato solo quel numero di
1
setup (impostazione di fabbrica). Se il setup attivo e il
setup di modica sono diversi, sul display vengono
visualizzati entrambi i numeri (ad esempio, setup 12). Il
numero che lampeggia indica il setup di modica.
2 Numero del parametro.
3 Valore del parametro.
La direzione del motore è mostrata in basso nella parte
4
inferiore sinistra del display. Una piccola freccia indica la
direzione.
Il triangolo indica se l'LCP è nel menu di stato, nel menu
5
rapido o nel menu principale.
Tabella 5.1 Legenda per la Disegno 5.1, Sezione A
Disegno 5.2 Informazioni display
10
11 [OK]
12
Tabella 5.3 Legenda per la Disegno 5.1, tasti di navigazione
Tasto Funzione
Per spostarsi alla fase o al livello
precedente nella struttura di navigazione.
Per commutare tra gruppi di parametri,
parametri e all'interno dei parametri o
[▲] [▼]
aumentare/diminuire i valori dei
parametri. Per impostare il riferimento
locale possono essere anche usate le
frecce.
Premere per accedere a gruppi di
parametri o per abilitare una selezione.
Può essere usato anche per spostarsi da
[►]
sinistra a destra all'interno del valore di
un parametro per modicare ogni cifra
singolarmente.
26 Danfoss A/S © 08/2018 Tutti i diritti riservati. MG07A506
Page 31

130BC440.10
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Messa in funzione Guida operativa
D. Tasti funzione e spie luminose (LED)
Tasto Funzione
Avvia il convertitore di frequenza nella
modalità di comando locale.
Un segnale di arresto esterno dall'ingresso
13 Hand on
14 O/Reset
15 Auto On
•
di comando o dalla comunicazione seriale
esclude il comando Hand on locale.
Arresta il motore ma non disinserisce l'alimentazione al convertitore di frequenza oppure
ripristina manualmente il convertitore di
frequenza dopo aver eliminato un guasto. Se è
in modalità di allarme, l'allarme viene
ripristinato se la condizione di allarme è
rimossa.
Pone il sistema in modalità di funzionamento
remoto.
Risponde a un comando di avvio esterno
•
dai morsetti di controllo o dalla comunicazione seriale.
5 5
Tabella 5.4 Legenda per la Disegno 5.1, Sezione D
AVVISO
RISCHIO ELETTRICO
Anche dopo aver premuto il tasto [O/Reset], i morsetti
del convertitore di frequenza restano ancora sotto
tensione. Premendo il tasto [O/Reset], non si scollega il
convertitore di frequenza dall'alimentazione di rete. Il
contatto con parti sotto tensione può causare morte o
lesioni gravi.
Non toccare le parti sotto tensione.
•
5.3.2 Funzione del tasto destro sull'NLCP
Premere [►] per modicare una delle quattro cifre sul
display singolarmente. Premendo una volta [►], il cursore si
sposta sulla prima cifra, che inizia a lampeggiare, come
mostrato nella Disegno 5.3. Premere [▲] o [▼] per
modicare il valore. Premendo [►] non è possibile
modicare il valore delle cifre oppure spostare la virgola.
Disegno 5.3 Funzione tasto destro
[►] può anche essere usato per spostarsi tra gruppi di
parametri. Nel Menu principale, premere [►] per spostarsi al
primo parametro nel gruppo di parametri successivo (ad
esempio, spostarsi da parametro 0-03 Impostazioni locali [0]
Internaz. a parametro 1-00 Modo congurazione [0] An.
aperto).
AVVISO!
Durante l'avviamento, l'LCP visualizza il messaggio
INIZIALIZZAZIONE IN CORSO. Quando questo messaggio
non viene più visualizzato, il convertitore di frequenza è
pronto per funzionare. L'aggiunta o la rimozione di
opzioni può prolungare la durata dell'avviamento.
5.3.3 Menu rapido sull'NLCP
Il Menu rapido consente di accedere rapidamente ai
parametri più utilizzati.
1. Per accedere al Menu rapido, premere il tasto
no a quando l'indicatore nel display non
[Menu]
si trova posizionato su Menu rapido.
2.
Premere [▲] o [▼] per selezionare QM1 o QM2,
quindi premere [OK].
3.
Premere [▲] o [▼] per scorrere tra i parametri nel
Menu rapido.
4. Premere [OK] per selezionare un parametro.
5.
Premere [▲] o [▼] per
impostazione parametri.
modicare il valore di
MG07A506 Danfoss A/S © 08/2018 Tutti i diritti riservati. 27
Page 32

130BC445.13
1-22 XXXX V
Motor
nominal
speed
QM 1
0-01 [0]
1-10 [0]
1-24 XXXX A
Language
Motor Type
1-20 XXXX kW
Motor power
Motor voltage
1-26 XXXX 1-23 XXXX
Stator
Motor frequency
1-25 XXXX
1-30 XXXX
1-39 XXXX
1-40 XXXX
1-37 XXXX
1-25 XXXX
1-24 XXXX
A
3-02 XXXX
3-03 XXXX
3-41 XXXX S
3-42 XXXX S
5-12
[2]
1-29 [1]
AMA
Back EMF at
1000 RPM
d-axis
QM 2
BMS
AMS
ES
5-70 XXXX
5-71 [0]
1-30 XXXX
1-39 XXXX
1-90 [0]
2-10 [0]
4-16 XXXX %
4-17 XXXX %
4-18 XXXX %
1-00 [0]
1-01 [1]
1-10 [0]
1-24 XXXX A 1-20 XXXX kW
1-22 XXXX V
Motor
nominal
speed
Motor power
Motor voltage
1-26 XXXX 1-23 XXXX
Motor frequency
1-25 XXXX
1-30 XXXX
1-40 XXXX
1-37 XXXX
1-25 XXXX
1-24 XXXX
A
Back EMF at
1000 RPM
d-axis
1-39 XXXX
4-14 XXXX
4-19 XXXX
Stator
QM 3
QM 4 QM 5
L10C
SFS
TBD
Motor
nominal
speed
Motor
nominal
speed
Motor current
Motor cont.
rated torque
Resistance (Rs)
Motor poles
inductance (Ld)
Asynchronous motor
Motor current
Minimum reference
Maximum reference
Ramp 1 ramp-up time
Ramp 1 ramp-down time
Terminal 27 digital input
Basic motor set-up
mode
Motor control
principle
Motor type
PM motor
PM motor
Motor
current
Motor cont.
rated torque
Stator
Resistance (Rs)
Motor poles
inductance (Ld)
Motor speed high limit [Hz]
Maximum output frequency
Asynchronous motor
Motor current
RPM
RPM
RPM
Hz
RPM
Hz
Hz
Hz
Hz
Hz
Adv. motor set-up
Resistance (Rs)
Motor poles
Motor thermal
protection
Brake function
Torque limit motor mode
Torque limit generator mode
Current limit
Encoder set-up
Terminal 32/33
pulses per revolution
Terminal 32/33
encoder direction
Changes made
Last 10 changes Since factory setting
Alarm log
Messa in funzione
VLT® Midi Drive FC 280
6. Premere [OK] per accettare la modica.
7. Per uscire, premere due volte [Back] (o tre volte se in QM2 e QM3) per spostarsi alla voce Stato o premere [Menu]
una volta per spostarsi al Menu principale.
55
28 Danfoss A/S © 08/2018 Tutti i diritti riservati. MG07A506
Disegno 5.4 Struttura menu rapido
Page 33

130BC446.10
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
1
2
3
4
5
6
7
10
11
12
OK
OK
Back
8
Back
Setup 1
2 x
+
OK
9
OK
Messa in funzione Guida operativa
5.3.4 Menu principale sull'NLCP
Il Menu principale consente di accedere a tutti i parametri.
1. Per accedere al Menu principale, premere il tasto
[Menu] no a quando l'indicatore nel display non
si trova posizionato su Menu principale.
2.
[▲] [▼]: per spostarsi tra i gruppi di parametri.
3. Premere [OK] per selezionare un gruppo di
parametri.
4.
[▲] [▼]: per spostarsi tra i parametri di un gruppo
specico.
5. Premere [OK] per selezionare il parametro.
6.
[►] e [▲]/ [▼]: per
del parametro.
7. Premere [OK] per accettare il valore.
8. Per uscire, premere due volte [Back] (o tre volte
per i parametri array) per spostarsi al Menu
Principale o premere [Menu] una volta per
spostarsi alla voce Stato.
Vedere la Disegno 5.5, la Disegno 5.6 e la Disegno 5.7 per i
principi di
parametri continui, numerati e array. Le azioni delle
illustrazioni sono descritte nella Tabella 5.5, nella Tabella 5.6
modica del valore, rispettivamente, dei
e nella Tabella 5.7.
impostare/modicare il valore
5 5
Disegno 5.5 Interazioni Menu principale - Parametri continui
MG07A506 Danfoss A/S © 08/2018 Tutti i diritti riservati. 29
Page 34

130BC447.11
Setup 1
Setup 1
Setup 1
1
2
3
4
5
6
OK
OK
Back
7
OK
Back
130BC448.10
1
2
4
5
6
7
8
9
10
OK
Back
Back
Back
5 x
Setup 1
Setup 1
Setup 1
Setup 1
%
INDEX
%
INDEX
%
INDEX
Setup 1
INDEX
%
OK
OK
OK
Messa in funzione
VLT® Midi Drive FC 280
1 [OK]: consente di visualizzare il primo parametro del
I parametri array funzionano nel modo seguente:
gruppo.
2
Premere ripetutamente [▼] per spostarsi sul parametro.
3 Premere [OK] per avviare la modica.
4
[►]: la prima cifra lampeggia (può essere modicata).
5
[►]: la seconda cifra lampeggia (può essere modicata).
6
[►]: la terza cifra lampeggia (può essere modicata).
7
[▼]: riduce il valore del parametro, la virgola decimale si
sposta automaticamente.
8
[▲]: aumenta il valore del parametro.
9 [Back]: annulla le modiche, torna a 2.
55
[OK]: accetta le modiche, torna a 2.
10
[▲][▼]: seleziona un parametro all'interno del gruppo.
11 [Back]: rimuove il valore e mostra il gruppo di parametri.
12
[▲][▼]: seleziona un gruppo.
Tabella 5.5 Modica dei valori nei parametri
continui
Per i parametri numerati l'interazione è simile, ma il valore
del parametro è mostrato tra parentesi a causa del limite
di visualizzazione delle cifre (quattro cifre grandi) sull'NLCP,
mentre il parametro numerato può essere maggiore di 99.
Quando il valore numerato è maggiore di 99, l'LCP è in
Disegno 5.7 Interazioni Menu principale - Parametri array
grado di mostrare solo la prima parte della parentesi.
1 [OK]: mostra i numeri dei parametri e il valore nel primo
indice.
2 [OK]: è possibile selezionare l'indice.
3
[▲][▼]: seleziona l'indice.
4 [OK]: il valore può essere modicato.
5
[▲][▼]: modica il valore del parametro (lampeggiante).
6 [Back]: annulla le modiche.
[OK]: accetta le modiche.
7 [Back]: annulla l'indice delle modiche, seleziona un nuovo
parametro.
8
[▲][▼]: seleziona un parametro all'interno del gruppo.
9 [Back]: rimuove il valore dell'indice del parametro e mostra
il gruppo di parametri.
Disegno 5.6 Interazioni Menu principale - Parametri numerati
1 [OK]: consente di visualizzare il primo parametro del
gruppo.
2 Premere [OK] per avviare la modica.
3
[▲][▼]: modica il valore del parametro (lampeggiante).
4 Premere [Back] per annullare le modiche o [OK] per
accettarle (e tornare alla schermata 2).
5
[▲][▼]: seleziona un parametro all'interno del gruppo.
6 [Back]: rimuove il valore e mostra il gruppo di parametri.
7
[▲][▼]: seleziona un gruppo.
Tabella 5.6 Modica dei valori nei parametri numerati
30 Danfoss A/S © 08/2018 Tutti i diritti riservati. MG07A506
10
[▲][▼]: seleziona un gruppo.
Tabella 5.7 Modica dei valori nei parametri array
Page 35

130BD598.10
Auto
On
Reset
Hand
On
O
Status
Quick
Menu
Main
Menu
Alarm
Log
Back
Cancel
Info
OK
Status
1(1)
36.4 kW
Auto Remote Ramping
0.000
On
Alarm
Warn.
A
7.83 A
799 RPM
B
C
D
53.2 %
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18 19 20 21
Messa in funzione Guida operativa
5.3.5 Pannello di controllo locale graco
(GLCP)
Il GLCP è suddiviso in quattro gruppi funzionali (vedere la
Disegno 5.8).
A. Area di visualizzazione.
B. Tasti del menu Display.
C. Tasti di navigazione e spie (LED).
D. Tasti di funzionamento e ripristino.
B. Tasti del menu Display
I tasti menu sono utilizzati per l'accesso ai menu, per la
programmazione parametri, per commutare tra le varie
modalità visualizzazione dello stato durante il funzionamento normale e per la visualizzazione dei dati del log
guasti.
Tasto Funzione
6 Stato Mostra le informazioni sul funzionamento.
Consente l'accesso ai parametri di program-
Menu
7
rapido
mazione per le istruzioni sul setup iniziale e
a molte istruzioni dettagliate relative all'applicazione.
8
9
Menu
principale
Registro
allarmi
Permette di accedere a tutti i parametri di
programmazione.
Mostra un elenco degli avvisi correnti, gli
ultimi dieci allarmi e il log di manutenzione.
Tabella 5.9 Legenda per la Disegno 5.8, tasti del menu Display
C. Tasti di navigazione e spie luminose (LED)
I tasti di navigazione sono utilizzati per le funzioni di
programmazione e per spostare il cursore del display. I
tasti di navigazione inoltre permettono il controllo di
velocità nel funzionamento locale. In quest'area sono
presenti anche tre indicatori di stato del convertitore di
frequenza.
5 5
Tasto Funzione
10 Back
Consente di tornare al passaggio o all'elenco
precedente nella struttura del menu.
Annulla l'ultima modica o l'ultimo comando,
11 Cancel
sempre che la modalità visualizzazione non
sia stata cambiata.
12 Info
Tasti di
13
Disegno 5.8 Pannello di controllo locale graco (GLCP)
A. Area di visualizzazione
Il display è attivo quando il convertitore di frequenza è
alimentato dalla tensione di rete, da un morsetto del bus
CC o da un'alimentazione esterna a 24 V CC.
Le informazioni visualizzate sull'LCP sono personalizzabili
per le applicazioni dell'utente. Selezionare le opzioni nel
Menu rapido Q3-13 Imp. dis.
MG07A506 Danfoss A/S © 08/2018 Tutti i diritti riservati. 31
Display Numero di parametro
1 0-20 [1602] Riferimento [%]
2 0-21 [1614] Corrente motore
3 0-22 [1610] Potenza [kW]
4 0-23 [1613] Frequenza
5 0-24 [1502] Contatore kWh
Tabella 5.8 Legenda per la Disegno 5.8, area di visualizzazione
Impostazione di
fabbrica
navigazione
14 OK
Tabella 5.10 Legenda per la Disegno 5.8, tasti di navigazione
Premere per una denizione della funzione
visualizzata.
Per spostarsi tra le voci nel menu usare i
quattro tasti di navigazione.
Premere per accedere a gruppi di parametri
o per abilitare una selezione.
Page 36

Messa in funzione
VLT® Midi Drive FC 280
Indicatore Luce Funzione
La spia luminosa ON si accende
quando il convertitore di
15 On Verde
16 Warn Giallo
55
17 All. Rosso
Tabella 5.11 Legenda per la Disegno 5.8, spie (LED)
D. Tasti di funzionamento e ripristino
I tasti di funzionamento si trovano nella parte bassa
dell'LCP.
Tasto Funzione
Avvia il convertitore di frequenza in modalità
hand on.
18 Hand on
19 O
20 Auto On
21 Ripristino
Tabella 5.12 Legenda per la Disegno 5.8, tasti di
funzionamento e ripristino
Arresta il motore ma non rimuove l'alimentazione al convertitore di frequenza.
Pone il sistema in modalità di funzionamento
remoto.
•
Ripristina manualmente il convertitore di
frequenza dopo la cancellazione di un
guasto.
frequenza viene alimentato dalla
tensione di rete, da un morsetto
del bus CC o da un'alimentazione
esterna a 24 V.
Quando sono soddisfatte le
condizioni per l'avviso, si accende
il LED giallo WARN e sul display
appare il testo che illustra il
problema.
Una condizione di guasto provoca
il lampeggiamento del LED di
allarme rosso e la visualizzazione
di un testo relativo all'allarme.
Un segnale di arresto esterno
•
dall'ingresso di comando o dalla
comunicazione seriale esclude il
comando Hand on locale.
Risponde a un comando di avvio esterno
dai morsetti di controllo o dalla comunicazione seriale.
AVVISO!
Per regolare il contrasto del display, premere il tasto
[Status] e i tasti [▲]/[▼].
5.3.6 Impostazioni parametri
Una corretta programmazione delle applicazioni spesso
richiede l'impostazione di funzioni in diversi parametri
correlati. Le informazioni dettagliate sui parametri vengono
fornite nel capitolo 10.2 Struttura del menu dei parametri.
I dati di programmazione sono memorizzati internamente
al convertitore di frequenza.
Per il backup, caricare i dati nella memoria
•
dell'LCP.
Per scaricare i dati su un altro convertitore di
•
frequenza, collegare l'LCP a quell'unità e scaricare
le impostazioni memorizzate.
Il ripristino delle impostazioni di fabbrica non
•
modica i dati salvati nella memoria dell'LCP.
5.3.7 Modica delle impostazioni parametri
con GLCP
Accedere alle impostazioni parametri e modicarle dal
Menu rapido o dal Menu principale. Il Menu rapido consente
di accedere solo a un numero limitato di parametri.
1. Premere [Quick Menu] o [Main Menu] sull'LCP.
2.
Premere [▲] o [▼] per sfogliare i gruppi di
parametri, premere [OK] per selezionare un
gruppo di parametri.
3.
Premere [▲] o [▼] per sfogliare i parametri,
premere [OK] per selezionare un parametro.
4.
Premere [▲] o [▼] per modicare il valore di
impostazione parametri.
5.
Premere [◄] o [►] per cambiare cifra quando un
parametro decimale si trova nello stato di
modica.
6. Premere [OK] per accettare la modica.
7. Premere due volte [Back] per accedere allo Stato
o premere [Main Menu] per accedere al Menu
principale.
Visualizza modiche
Menu rapido Q5 - modiche eettuate elenca tutti i
parametri modicati rispetto alle impostazioni di fabbrica.
Questo elenco mostra solo i parametri che sono
•
stati cambiati nell'attuale setup di modica.
I parametri che sono stati ripristinati ai valori
•
predeniti non sono elencati.
Il messaggio Vuoto indica che non è stato
•
modicato alcun parametro.
32 Danfoss A/S © 08/2018 Tutti i diritti riservati. MG07A506
Page 37

Messa in funzione Guida operativa
5.3.8 Caricamento/scaricamento di dati
sull'/dall'LCP
1. Premere [O] per arrestare il motore prima di
caricare o scaricare dati.
2. Premere [Main Menu] parametro 0-50 Copia LCP e
premere [OK].
3. Selezionare [1] Tutti a LCP per caricare dati
sull'LCP o selezionare [2] Tutti da LCP per scaricare
dati dall'LCP.
4. Premere [OK]. Una barra di avanzamento mostra
l'avanzamento del processo di caricamento o di
scaricamento.
5. Premere [Hand On] o [Auto On] per ritornare al
funzionamento normale.
5.3.9 Ripristino delle impostazioni di
fabbrica con l'LCP
AVVISO!
Ripristinando le impostazioni di fabbrica è possibile che
vengano persi i dati di programmazione, quelli relativi al
motore, quelli di localizzazione e quelli sul monitoraggio.
Per eseguire un backup, caricare i dati sull'LCP prima
dell'inizializzazione.
Durante l'avvio vengono ripristinate le impostazioni
parametri di fabbrica. Questo può richiedere un tempo
leggermente più lungo del normale.
5. Viene visualizzato l'Allarme 80, Conv. iniz.
6. Premere [Reset] per ritornare al funzionamento
normale.
Procedura di inizializzazione manuale
1. Togliere l'alimentazione all'unità e attendere che il
display si spenga.
2. Tenere premuti contemporaneamente [Stato],
[Menu principale] e [OK] sul GLCP o premere
contemporaneamente [Menu] e [OK] sull'NLCP
mentre si alimenta l'unità (circa 5 s o nché non
si avverte un clic e la ventola inizia a funzionare).
Le impostazioni di fabbrica dei parametri vengono
ripristinate durante l'avviamento. Questo può richiedere un
tempo leggermente più lungo del normale.
L'inizializzazione manuale non ripristina le seguenti
informazioni sul convertitore di frequenza:
Parametro 15-00 Ore di funzionamento.
•
Parametro 15-03 Accensioni.
•
Parametro 15-04 Sovratemp.
•
Parametro 15-05 Sovratensioni.
•
5 5
Il ripristino delle impostazioni di fabbrica dei parametri
avviene mediante l'inizializzazione del convertitore di
frequenza. L'inizializzazione può essere eettuata attraverso
il parametro 14-22 Modo di funzionamento (consigliato) o
manualmente. L'inizializzazione non ripristina le
impostazioni per il parametro 1-06 Senso orario e il
parametro 0-03 Impostazioni locali.
L'inizializzazione mediante il
•
parametro 14-22 Modo di funzionamento non
ripristina le impostazioni del convertitore di
frequenza quali ore di funzionamento, selezioni
della comunicazione seriale, log guasti, registro
allarmi e altre funzioni di monitoraggio.
L'inizializzazione manuale cancella tutti i dati di
•
motore, programmazione, localizzazione e
monitoraggio e ripristina le impostazioni di
fabbrica.
Procedura di inizializzazione consigliata tramite il
parametro 14-22 Modo di funzionamento
1. Selezionare il parametro 14-22 Modo di funzionamento e premere [OK].
2. Selezionare [2] Inizializzazione e premere [OK].
3. Togliere l'alimentazione all'unità e attendere che il
display si spenga.
4. Alimentare l'unità.
Programmazione di base
5.4
5.4.1 Setup del motore asincrono
Inserire i seguenti dati motore nell'ordine elencato. Le
informazioni sono riportate sulla targa del motore.
1. Parametro 1-20 Potenza motore.
2. Parametro 1-22 Tensione motore.
3. Parametro 1-23 Frequen. motore.
4. Parametro 1-24 Corrente motore.
5. Parametro 1-25 Vel. nominale motore.
Per ottenere prestazioni ottimali in modalità VVC+sono
necessari ulteriori dati motore per impostare i seguenti
parametri.
6. Parametro 1-30 Resist. statore (RS).
7. Parametro 1-31 Resistenza rotore (Rr).
8. Parametro 1-33 Reatt. dispers. statore (X1).
9. Parametro 1-35 Reattanza principale (Xh).
MG07A506 Danfoss A/S © 08/2018 Tutti i diritti riservati. 33
Page 38

Messa in funzione
VLT® Midi Drive FC 280
I dati sono riportati nella scheda tecnica del motore (di
norma non sono disponibili sulla targa del motore).
Eettuare un AMA completo usando
parametro 1-29 Adattamento Automatico Motore (AMA) [1]
Abilit.AMA compl. o impostare i seguenti parametri
manualmente:
Regolazione specica dell'applicazione nel funzionamento VVC
VVC+ è la modalità di controllo più robusta. Nella maggior
parte delle situazioni, fornisce prestazioni ottimali senza
55
necessità di altre regolazioni. Eseguire un AMA completo
per ottenere prestazioni migliori.
5.4.2
Fasi di programmazione iniziale
1. Impostare il parametro 1-10 Struttura motore sulle
2. Selezionare [0] An. aperto nel
+
Setup motore PM in VVC
seguenti opzioni per attivare il funzionamento
motore PM:
1a [1] PM, SPM n. saliente
1b [3] PM, IPM sal., sat
parametro 1-00 Modo
congurazione.
+
AVVISO!
La retroazione encoder non è supportata per motori PM.
Programmazione dei dati del motore
Dopo aver selezionato una delle opzioni motore PM nel
parametro 1-10 Struttura motore, sono attivi i parametri
relativi al motore PM nei gruppi di parametri 1-2* Dati mot.,
1-3* Dati motore avanz. I e 1-4* Contr. mot. avanz. II.
Le informazioni possono essere trovate sulla targa del
motore e nella scheda tecnica del motore.
Programmare i seguenti parametri nell'ordine elencato:
1. Parametro 1-24 Corrente motore.
2. Parametro 1-26 Coppia motore nominale cont.
3. Parametro 1-25 Vel. nominale motore.
4. Parametro 1-39 Poli motore.
5. Parametro 1-30 Resist. statore (RS).
Immettere la resistenza dell'avvolgimento dello
statore da linea a lo comune (Rs). Se sono
disponibili soltanto dati linea-linea, dividere il
valore linea-linea per due per ottenere il valore
da linea a lo comune (centro stella).
È anche possibile misurare il valore con un
ohmmetro, che terrà conto della resistenza del
cavo. Dividere il valore misurato per due e
immettere il risultato.
6. Parametro 1-37 Induttanza asse d (Ld).
Immettere l'induttanza assiale diretta del motore
PM da linea a lo comune.
Se sono disponibili soltanto dati da linea a linea,
dividere il valore linea-linea per due per ottenere
il valore da linea a lo comune (centro stella).
È anche possibile misurare il valore con un
misuratore di induttanza, che terrà conto dell'induttanza del cavo. Dividere il valore misurato per
due e immettere il risultato.
7. Parametro 1-40 Forza c.e.m. a 1000 giri/minuto.
Immettere la forza c.e.m. da linea a linea del
motore PM con una velocità meccanica di 1000
giri/min. (valore RMS). La forza c.e.m. è la
tensione generata da un motore PM quando non
è collegato alcun convertitore di frequenza e
l'albero è girato verso l'esterno. Normalmente la
forza c.e.m. è specicata per la velocità nominale
del motore oppure per 1000 Giri/min. tra due fasi.
Se il valore non è disponibile per una velocità del
motore di 1000 Giri/min., calcolare il valore
corretto come segue: Ad esempio, se la forza
c.e.m. a 1800 Giri/min. è pari a 320 V, la forza
c.e.m. a 1000 Giri/min. sarà:
Forza c.e.m. = (tensione/Giri/min.) x 1000 =
(320/1800) x 1000 = 178.
Programmare questo valore per il
parametro 1-40 Forza c.e.m. a 1000 giri/minuto
Test del funzionamento del motore
1. Avviare il motore a bassa velocità (da 100 a 200
Giri/min.). Se il motore non gira, controllare installazione, programmazione generale e dati motore.
Parcheggio
Questa funzione è l'opzione raccomandata per applicazioni
in cui il motore ruota a velocità lenta (ad esempio per
eetto di autorotazione in applicazioni con ventola). Il
Parametro 2-06 Corrente di parcheggio e il
parametro 2-07 Tempo di parcheggio possono essere
regolati. Aumentare le impostazioni di fabbrica di questi
parametri per applicazioni con inerzia elevata.
Avviare il motore a velocità nominale. Se l'applicazione non
funziona correttamente, controllare le impostazioni PM VVC
+
. Tabella 5.13 mostra le raccomandazioni per le diverse
applicazioni.
34 Danfoss A/S © 08/2018 Tutti i diritti riservati. MG07A506
Page 39

Messa in funzione Guida operativa
Applicazione Impostazioni
Applicazioni a bassa
inerzia
I
Load/IMotor
Applicazioni a inerzia
media
50>I
Applicazioni a inerzia
elevata
I
Load/IMotor
Carico elevato a bassa
velocità
< 30% (velocità nominale)
<5
Load/IMotor
Tabella 5.13 Raccomandazioni per diverse applicazioni
>5
>50
Aumentare il valore per il
•
parametro 1-17 Cost. di tempo
ltro tensione da 5 a 10.
Ridurre il valore per il
•
parametro 1-14 Fatt. di guad.
attenuaz.
Ridurre il valore (<100%) per il
•
parametro 1-66 Corrente min. a
velocità bassa.
Mantenere i valori calcolati.
Aumentare i valori per il
parametro 1-14 Fatt. di guad.
attenuaz., il parametro 1-15 Cost.
tempo ltro a bassa velocità e il
parametro 1-16 Cost. tempo ltro ad
alta velocità
Aumentare il valore per
parametro 1-17 Cost. di tempo ltro
tensione
Aumentare il valore per il
parametro 1-66 Corrente min. a
velocità bassa (>100% per un tempo
prolungato può surriscaldare il
motore).
Se il motore inizia a oscillare a una certa velocità
aumentare il parametro 1-14 Fatt. di guad. attenuaz.
Aumentare il valore in piccoli passi.
La coppia di avviamento può essere regolata nel
parametro 1-66 Corrente min. a velocità bassa. Se impostato
su 100%, la coppia nominale viene usata come coppia di
avviamento.
5.4.3 Adattamento automatico motore
(AMA)
Per ottimizzare la compatibilità tra il convertitore di
frequenza e il motore nella modalità VVC+, eseguire l'AMA.
Il convertitore di frequenza costruisce un modello
•
matematico del motore per la regolazione della
corrente motore in uscita, aumentando in questo
modo le prestazioni del motore.
Alcuni motori potrebbero non essere in grado di
•
eseguire la versione completa del test. In questo
caso selezionare [2] Abilitare AMA ridotto nel
parametro 1-29 Adattamento Automatico Motore
(AMA).
In presenza di avvisi o allarmi vedere il
•
capitolo 8.4 Elenco degli avvisi e degli allarmi.
Per ottenere risultati ottimali eseguire questa
•
procedura a motore freddo.
Eseguire l'AMA mediante l'LCP
1. Impostando i parametri
morsetti 13 e 27 prima di eseguire l'AMA.
2. Accedere al Menu principale.
3. Andare al gruppo di parametri 1-** Carico e
motore.
4. Premere [OK].
5. Impostare i parametri motore usando i dati di
targa per il gruppo di parametri 1-2* Dati mot.
6. Impostare la lunghezza del cavo motore nel
parametro 1-42 Lungh. cavo motore.
7. Andare al parametro 1-29 Adattamento Automatico
Motore (AMA).
8. Premere [OK].
9. Selezionare [1] Abilit.AMA compl.
10. Premere [OK].
11. Il test viene eseguito automaticamente
segnalando il completamento.
Il completamento dell'AMA richiede da 3 a 10 minuti, a
seconda della taglia di potenza.
predeniti, collegare i
5 5
AVVISO!
La funzione AMA non provoca il funzionamento del
motore e non lo danneggia.
MG07A506 Danfoss A/S © 08/2018 Tutti i diritti riservati. 35
Page 40

Messa in funzione
VLT® Midi Drive FC 280
5.5 Controllo della rotazione del motore
Prima di azionare il convertitore di frequenza, controllare la
rotazione del motore.
1. Premere [Hand On].
2.
Premere [▲] per un riferimento di velocità
positivo.
3. Controllare che la velocità visualizzata sia positiva.
Vericare che il cablaggio tra il convertitore di
4.
55
5.6
Se si utilizza la retroazione encoder controllare soltanto la
rotazione dell'encoder.
frequenza e il motore sia corretto.
5. Vericare che il senso di rotazione del motore
corrisponda all'impostazione in
parametro 1-06 Senso orario.
5a Quando il parametro 1-06 Senso orario è
impostato su [0] Norm. (in senso orario,
impostazione predenita):
a. Vericare che il motore giri in
senso orario.
b.
Vericare che la freccia di
direzione dell'LCP indichi il
senso orario.
5b Quando il parametro 1-06 Senso orario è
impostato su [1] Inverso (senso
antiorario):
a. Vericare che il motore giri in
senso antiorario.
b. Vericare che la freccia di
direzione dell'LCP indichi il
senso antiorario.
Controllo della rotazione dell'encoder
1. Selezionare [0] An. aperto nel
parametro 1-00 Modo congurazione.
2. Selezionare [1] Encoder 24 V nel
parametro 7-00 Fonte retroazione PID di velocità.
3. Premere [Hand On].
4.
Premere [▲] per un riferimento di velocità
positivo (parametro 1-06 Senso orario su [0]
Norm.).
5. Vericare nel parametro 16-57 Retroaz. [RPM] che
la retroazione sia positiva.
AVVISO!
RETROAZIONE NEGATIVA
Se la retroazione è negativa, il collegamento dell'encoder
è errato. Usare il parametro 5-71 Direz. encoder mors.
32/33 per invertire il senso, oppure invertire i cavi
dell'encoder.
5.7 Test di comando locale
1. Premere [Hand On] per fornire un comando di
avviamento locale al convertitore di frequenza.
2. Accelerare il convertitore di frequenza alla piena
velocità premendo [▲]. Lo spostamento del
cursore a sinistra della virgola decimale consente
di apportare modiche più rapide ai dati inseriti.
3. Prestare attenzione a eventuali problemi di
accelerazione.
4. Premere [O]. Prestare attenzione a eventuali
problemi di decelerazione.
In caso di problemi di accelerazione o di decelerazione
vedere il capitolo 8.5 Ricerca e risoluzione dei guasti. Vedere
il capitolo 8.2 Tipi di avvisi e allarmi per ripristinare il
convertitore di frequenza dopo uno scatto.
Avviamento del sistema
5.8
La procedura descritta in questa sezione richiede il
completamento del cablaggio da parte dell'utente e della
programmazione dell'applicazione. Una volta completato il
setup dell'applicazione, si consiglia di seguire la procedura
illustrata qui sotto.
1. Premere [Auto On].
2. Applicare un comando di esecuzione esterno.
3. Regolare il riferimento di velocità nell'intervallo di
velocità.
4. Interrompere il comando di esecuzione esterno.
5. Controllare i livelli di vibrazione e rumore del
motore per assicurarsi che il sistema funzioni
come previsto.
Se si vericano avvisi o allarmi vedere il capitolo 8.2 Tipi di
avvisi e allarmi per ripristinare il convertitore di frequenza
dopo uno scatto.
36 Danfoss A/S © 08/2018 Tutti i diritti riservati. MG07A506
Page 41

Messa in funzione Guida operativa
5.9 Modulo di memoria
Il VLT® Memory Module MCM è un piccolo dispositivo di
memoria contenente dati quali:
Firmware per il convertitore di frequenza (tra cui
•
il rmware per la comunicazione sulla scheda di
controllo).
File PUD.
•
File SIVP.
•
File parametro.
•
Il VLT® Memory Module MCM è un accessorio. Il convertitore di frequenza viene fornito senza modulo di memoria
installato in fabbrica. È possibile ordinare un nuovo
modulo di memoria usando i seguenti I numeri d'ordine.
Descrizione Numero d'ordine
VLT® Memory Module MCM 102
VLT® Memory Module MCM 103
Tabella 5.14 Numero d'ordine
Ciascun modulo di memoria dispone di un unico numero
seriale che non può essere modicato.
132B0359
132B0466
AVVISO!
Il VLT® Memory Module MCM può essere usato sul
convertitore di frequenza insieme al rmware 1.5 e
superiore.
Selezionare le opzioni corrette per il
parametro 31-40 Memory Module Function prima della
congurazione con il modulo di memoria.
Parametro 31-40 Memory
Module Function
[0] Disabled La funzione scaricamento o
*[1] Only Allow Download Consentire lo scaricamento dei dati
[2] Only Allow Upload Consentire il caricamento dei dati
Descrizione
caricamento dati è disabilitata.
solamente dal modulo di memoria
al convertitore di frequenza. Questa
è l'impostazione di fabbrica del
parametro 31-40 Memory Module
Function.
solamente dal convertitore di
frequenza al modulo di memoria.
Parametro 31-40 Memory
Module Function
[3] Allow Both Download and
Upload
Tabella 5.15 Descrizione del
Parametro 31-40 Memory Module Function
Descrizione
Se questa opzione è selezionata,
il convertitore di frequenza
scarica prima i dati dal modulo
di memoria e poi quelli dal
convertitore di frequenza al
modulo di memoria.
AVVISO!
EVITARE SOVRASCRITTURE INVOLONTARIE
L'impostazione di fabbrica del parametro 31-40 Memory
Module Function è [1] Only Allow Download. In presenza
di un aggiornamento, come ad esempio un rmware
aggiornato da MCT 10 con un le OSS, un parametro
aggiornato da LCP o bus, parametri ripristinati tramite il
parametro 14-22 Modo di funzionamento o un ripristino
con tre dita del convertitore di frequenza, i dati
aggiornati andranno persi dopo un nuovo riavvio, perché
il convertitore di frequenza scarica nuovamente i dati dal
modulo di memoria.
Dopo aver scaricato i dati dal modulo di
•
memoria al convertitore di frequenza,
selezionare [0] Disabled o [2] Only Allow Upload
nel parametro 31-40 Memory Module Function
prima del nuovo riavvio.
5.9.1 Sincronizzazione dei dati del
convertitore di frequenza con un
nuovo modulo di memoria (creazione
di un backup del convertitore di
frequenza)
1. Inserire un nuovo modulo di memoria vuoto nel
convertitore di frequenza.
2. Selezionare [2] Only Allow Upload o [3] Allow Both
Download and Upload nel
parametro 31-40 Memory Module Function.
3. Accendere il convertitore di frequenza.
4. Attendere il completamento della sincronizzazione, fare riferimento al
capitolo 5.9.7 Prestazioni di trasferimento e
indicazioni per controllare le indicazioni di trasfe-
rimento sul convertitore di frequenza.
AVVISO!
Evitare sovrascritture involontarie dei dati nel modulo di
memoria, modicare le impostazioni del
parametro 31-40 Memory Module Function prima del
successivo riavvio a seconda delle diverse nalità
operative.
5 5
MG07A506 Danfoss A/S © 08/2018 Tutti i diritti riservati. 37
Page 42

Messa in funzione
VLT® Midi Drive FC 280
5.9.2 Copia dei dati su un altro convertitore
di frequenza
1. Assicurarsi che i dati richiesti siano caricati nel
modulo di memoria, fare riferimento al
capitolo 5.9.1 Sincronizzazione dei dati del convertitore di frequenza con un nuovo modulo di
memoria (creazione di un backup del convertitore di
frequenza).
2. Disinserire il modulo di memoria e inserirlo in
nuovo convertitore di frequenza.
55
3. Assicurarsi che [1] Only Allow Download o [3]
Allow Both Download and Upload siano selezionati
nel parametro 31-40 Memory Module Function
nuovo convertitore di frequenza.
4. Accendere il nuovo convertitore di frequenza.
5. Attendere il completamento dello scaricamento e
del trasferimento dei dati, fare riferimento al
capitolo 5.9.7 Prestazioni di trasferimento e
indicazioni per controllare le indicazioni di trasfe-
rimento sul convertitore di frequenza.
AVVISO!
Evitare sovrascritture involontarie dei dati nel modulo di
memoria, modicare le impostazioni del
parametro 31-40 Memory Module Function prima del
successivo riavvio a seconda delle diverse nalità
operative.
5.9.3 Copia dei dati su convertitori di
frequenza multipli
Se i convertitori di frequenza multipli presentano la stessa
tensione/potenza, le informazioni di un convertitore di
frequenza possono essere trasferite agli altri tramite un
modulo di memoria.
1. Seguire i passaggi nel capitolo 5.9.1 Sincroniz-
zazione dei dati del convertitore di frequenza con
un nuovo modulo di memoria (creazione di un
backup del convertitore di frequenza) per caricare i
dati da un convertitore di frequenza al modulo di
memoria.
2. Per evitare caricamenti involontari dei dati nel
modulo di memoria master, assicurarsi che [1]
Only Allow Download sia selezionato nel
parametro 31-40 Memory Module Function negli
altri convertitori di frequenza.
3. Disinserire il modulo di memoria e inserirlo in
nuovo convertitore di frequenza.
4. Accendere il nuovo convertitore di frequenza.
5. Attendere il completamento dello scaricamento e
del trasferimento dei dati, consultare il
capitolo 5.9.7 Prestazioni di trasferimento e
indicazioni per controllare le indicazioni di trasfe-
rimento sul convertitore di frequenza.
6. Ripetere i passaggi 3-5 per il convertitore di
frequenza successivo.
AVVISO!
È possibile scaricare i dati anche nel modulo di memoria
di un PC tramite il VLT® Memory Module Programmer.
AVVISO!
Se in uno dei convertitori di frequenza è inserito un
modulo di memoria vuoto per il backup dei dati,
modicare le impostazioni del parametro 31-40 Memory
Module Function in [2] Only Allow Upload o [3] Allow Both
Download and Upload prima del successivo riavvio.
5.9.4 Trasferimento delle informazioni sul
rmware
Se due convertitori di frequenza presentano tensione e
taglia di potenza identiche, le informazioni sul rmware
possono essere trasferite da un convertitore di frequenza
all'altro.
1. Seguire i passaggi nel capitolo 5.9.1 Sincroniz-
zazione dei dati del convertitore di frequenza con
un nuovo modulo di memoria (creazione di un
backup del convertitore di frequenza) per caricare
le informazioni sul
frequenza a un modulo di memoria.
2. Seguire i passaggi nel capitolo 5.9.2 Copia dei dati
su un altro convertitore di frequenza per trasferire
le informazioni sul rmware a un altro convertitore di frequenza con la stessa tensione e taglia
di potenza.
rmware da un convertitore di
AVVISO!
È possibile scaricare le informazioni sul rmware anche
nel modulo di memoria da un PC tramite il VLT® Memory
Module Programmer.
38 Danfoss A/S © 08/2018 Tutti i diritti riservati. MG07A506
Page 43

Messa in funzione Guida operativa
5.9.5 Backup delle modiche dei parametri
nel modulo di memoria
1. Inserire un modulo di memoria nuovo o
cancellato nel convertitore di frequenza.
2. Selezionare [2] Only Allow Upload o [3] Allow Both
Download and Upload nel
parametro 31-40 Memory Module Function.
3. Accendere il convertitore di frequenza.
4. Attendere il completamento della sincronizzazione, fare riferimento al
capitolo 5.9.7 Prestazioni di trasferimento e
indicazioni per controllare le indicazioni di trasfe-
rimento sul convertitore di frequenza.
5. Qualsiasi modica delle impostazioni parametri
viene sincronizzata automaticamente con il
modulo di memoria.
5.9.6 Cancellazione dati
Il modulo di memoria può essere cancellato impostando il
parametro 31-43 Erase_MM senza un nuovo riavvio.
1. Assicurarsi che il modulo di memoria sia montato
nel convertitore di frequenza.
2. Selezionare [1] Erase MM nel
parametro 31-43 Erase_MM.
3. Tutti i le nel modulo di memoria vengono
cancellati.
4. L'impostazione del Parametro 31-43 Erase_MM
torna a [0] No function.
5.9.7 Prestazioni di trasferimento e
indicazioni
Il tempo per il trasferimento di diversi dati tra il convertitore di frequenza e il modulo di memoria è dierente,
fare riferimento alla Tabella 5.16.
File dati Tempo
Occorrono circa due minuti per il
•
caricamento dei dati dal convertitore di
frequenza al modulo di memoria.
File rmware
File SIVP Circa 10 s.
File parametri
Tabella 5.16 Prestazioni di trasferimento
1) Se un parametro viene modicato nel convertitore di frequenza,
per caricare il parametro aggiornato attendere almeno 5 s prima
dello spegnimento.
File dati
File
rmware
File SIVP
File
parametro
Tabella 5.17 Indicazioni di trasferimento
1) Il LED On è sull'LCP. Fare riferimento al capitolo 5.3.1 Pannello di
Controllo Locale Numerico (NLCP) e al capitolo 5.3.5 Pannello di
controllo locale graco (GLCP) per la posizione e le funzioni del LED
On.
1)
Durante il trasferimento viene
mostrato "Sincronizzazione con modulo
di memoria".
Nessuna indicazione
di testo.
Occorrono circa sei minuti per lo
•
scaricamento dei dati dal modulo di
memoria al convertitore di frequenza.
Circa 5 s.
Indicazioni
GLCP NLCP
Il LED lampeggia
Nessuna
indicazione
di
testo
lentamente
durante il trasfe-
rimento.
Il LED non
lampeggia.
LED On
1)
5 5
5.9.8 Attivazione del convertitore PROFIBUS
Il VLT® Memory Module MCM 103 fonde in sé un modulo
di memoria e un modulo di attivazione per abilitare la
funzione del convertitore PROFIBUS nel rmware. Il VLT
Memory Module MCM 103 contiene un le PBconver.MME
combinato al numero seriale del singolo modulo di
memoria. PBconver.MME è il codice per il funzionamento
del convertitore PROFIBUS.
Per attivare il convertitore PROFIBUS scegliere la versione
nel parametro 14-70 Compatibility Selections.
MG07A506 Danfoss A/S © 08/2018 Tutti i diritti riservati. 39
®
Page 44

Messa in funzione
VLT® Midi Drive FC 280
Parametro 14-70 Compatibility
Selections
*[0] No Function Selezione della funzione di
[12] VLT2800 3M Selezionare la modalità di
[13] VLT2800 3M incl. MAV Selezionare la modalità di
[14] VLT2800 12M Selezionare la modalità di
55
[15] VLT2800 12M incl. MAV Selezionare la modalità di
Descrizione
compatibilità disabilitata.
compatibilità VLT2800 3M per
il convertitore di frequenza.
compatibilità VLT2800 3M incl.
MAV per il convertitore di
frequenza.
compatibilità VLT2800 12M per
il convertitore di frequenza.
compatibilità VLT2800 12M
incl. MAV per il convertitore di
frequenza.
Attivare il convertitore PROFIBUS tramite le impostazioni
parametri
1. Selezionare [1] Enabled nel parametro 31-47 Time
Limit Function.
2. Selezionare [12] VLT 2800 3M o [14] VLT 2800 12M
nel parametro 14-70 Compatibility Selections.
3. Eseguire un riavvio per avviare il convertitore di
frequenza come numero di identicazione e
modo VLT® 2800 PROFIBUS.
4. Il Parametro 31-48 Time Limit Remaining Time
inizia il contro alla rovescia dopo il riavvio e
mostra il tempo rimanente di utilizzo.
Dopo 720 ore di funzionamento il convertitore di
frequenza genera un avviso. Il convertitore PROFIBUS
funziona ancora. Quando il conto alla rovescia nel
parametro 31-48 Time Limit Remaining Time raggiunge 0, il
convertitore di frequenza genera un allarme di scatto
Tabella 5.18 Descrizione del
parametro 14-70 Compatibility Selections
bloccato al successivo comando di avviamento.
Attivare il convertitore PROFIBUS tramite VLT® Memory
Module MCM 103
1. Inserire il modulo di memoria nel convertitore di
frequenza.
2. Selezionare [12] VLT 2800 3M o [14] VLT 2800 12M
nel parametro 14-70 Compatibility Selections.
3. Eseguire un riavvio per avviare il convertitore di
frequenza come numero di
identicazione e
modo VLT® 2800 PROFIBUS.
AVVISO!
Per far funzionare il VLT® Memory Module MCM 103
come convertitore PROFIBUS, il parametro 31-40 Memory
Module Function non deve essere impostato su [0]
Disabled.
È possibile attivare il convertitore PROFIBUS senza il VLT
Memory Module MCM 103 per un tempo limitato. Prima di
questo intervallo di tempo, inserire un VLT® Memory
Module MCM 103 per mantenere la funzione del convertitore PROFIBUS.
®
40 Danfoss A/S © 08/2018 Tutti i diritti riservati. MG07A506
Page 45

24 V
17 V
IGBT
+UDC
X3
IGBT
PELV
X3
X3
24 V
voltage
source
high-side
gate driving
circuit
diagnostic
circuit
low-side
gate driving
circuit
12
38
37
55
130BE463.12
Time
5 ms max.
Debounce time
Time
STO valid
STO invalid
Voltage
T37/38
Test pulse STO demanded
STO request
state
130BE587.12
Safe Torque O (STO) Guida operativa
6 Safe Torque O (STO)
La funzione Safe Torque O (STO) è un componente in un
sistema di controllo di sicurezza che impedisce all'unità di
generare l'energia necessaria a far ruotare il motore,
garantendo pertanto sicurezza in situazioni di emergenza.
Il convertitore di frequenza con funzionalità STO è
progettato e ritenuto conforme in base ai requisiti previsti
dalle seguenti normative:
IEC/EN 61508: 2010 SIL2
•
IEC/EN 61800-5-2: 2007 SIL2
•
IEC/EN 62061: 2012 SILCL di SIL2
•
EN ISO 13849-1: 2008 - Categoria 3 PL d.
•
Per ottenere il livello desiderato di sicurezza operativa,
selezionare e applicare adeguatamente i componenti nel
sistema di controllo di sicurezza. Prima di usare la funzione
STO, eettuare un'analisi approfondita dei rischi sull'impianto, al ne di determinare se la funzione STO e i livelli
di sicurezza sono adeguati e sucienti.
La funzione STO nei convertitori di frequenza è controllata
mediante i morsetti di controllo 37 e 38. Quando STO è
attivata, l'alimentazione sul lato superiore e su quello
inferiore dei circuiti di pilotaggio del gate IGBT è
disinserita. La Disegno 6.1 mostra la congurazione STO. La
Tabella 6.1 mostra gli stati STO, a seconda del fatto che i
morsetti 37 e 38 siano eccitati o meno.
Morsetto 37 Morsetto 38 Coppia Avviso o
allarme
Eccitato
1)
Eccitato
2)
Sì
Nessun avviso o
allarme.
Diseccitato
3)
Diseccitato No Avviso/allarme
68: Safe Torque
O.
Diseccitato Eccitato No Allarme 188:
Guasto funz. STO.
Eccitato Diseccitato No Allarme 188:
Guasto funz. STO.
Tabella 6.1 Stato STO
1) L'intervallo di tensione è 24 V ±5 V, con il morsetto 55 come
morsetto di riferimento.
2) La coppia è presente solo quando il convertitore di frequenza è in
funzione.
±
3) Circuito aperto, oppure tensione entro l'intervallo di 0 V
1,5 V,
con il morsetto 55 come morsetto di riferimento.
Filtraggio impulso di prova
Per dispositivi di sicurezza che generano impulsi di prova
sulle linee di controllo STO: se i segnali d'impulso
rimangono a un livello basso (≤1,8 V) per oltre 5 ms,
vengono ignorati come mostrato nella Disegno 6.2.
6
6
Disegno 6.2 Modello di impulsi di prova
Disegno 6.1 Congurazione STO
Tolleranza ingresso asincrono
I segnali d'ingresso nei due morsetti non sono sempre
sincroni. Se la discrepanza tra i due segnali è più lunga di
12 ms, si attiva l'allarme di guasto STO (allarme 188, Guasto
funz. STO).
Segnali validi
Per attivare la funzione STO i due segnali devono essere
entrambi a un livello basso per almeno 80 ms. Per
terminare STO i due segnali devono essere entrambi a un
MG07A506 Danfoss A/S © 08/2018 Tutti i diritti riservati. 41
livello elevato per almeno 20 ms. Consultare il
capitolo 9.6 Ingresso/uscita di dati e di controllo per i livelli
di tensione e la corrente di ingresso dei morsetti STO.
Page 46

130BE213.10
Safe Torque O (STO)
VLT® Midi Drive FC 280
6
6.1 Precauzioni di sicurezza STO
Personale qualicato
Solo il personale qualicato è autorizzato a installare o a
far funzionare questa apparecchiatura.
Per personale qualicato si intendono i dipendenti adeguatamente formati, autorizzati a installare, mettere in
funzione ed eettuare la manutenzione su apparecchiature,
sistemi e circuiti in conformità alle leggi e ai regolamenti
pertinenti. Inoltre, il personale deve avere dimestichezza
con le istruzioni e le misure di sicurezza descritte in questo
manuale.
AVVISO!
Dopo l'installazione dell'STO, eseguire un test di messa in
servizio come specicato nel capitolo 6.3.3 Test di messa
in servizio STO. Dopo la prima installazione è necessario
superare un test di messa in servizio, che va ripetuto
dopo ogni modica all'impianto di sicurezza.
AVVISO
RISCHIO DI SCOSSA ELETTRICA
La funzione STO NON isola la tensione di rete dal convertitore di frequenza o dai circuiti ausiliari e, pertanto, non
ore sicurezza elettrica. Il mancato isolamento della
tensione di rete dall'unità e la mancata attesa del tempo
specicato potrebbero provocare lesioni serie o anche
mortali.
Eseguire interventi sui componenti del conver-
•
titore di frequenza o del motore soltanto dopo
avere scollegato la tensione di rete e avere
aspettato il tempo necessario specicato nel
capitolo 2.3.1 Tempo di scarica.
AVVISO!
In fase di progettazione dell'applicazione della macchina,
valutare tempo e distanza necessari per l'arresto a ruota
libera (STO). Per maggiori informazioni sulle categorie di
arresto, fare riferimento a EN 60204-1.
6.2 Installazione del Safe Torque O
Per il collegamento del motore, della rete CA e dei cavi di
controllo, seguire le istruzioni per l'installazione sicura
descritte nel capitolo 4 Installazione elettrica.
Abilitare l'STO integrato come segue:
1. Rimuovere il ponticello fra i morsetti di controllo
12 (24 V), 37 e 38. Non è
rompere il ponticello per evitare il cortocircuito.
Vedere il ponticello nella Disegno 6.3.
Disegno 6.3 Rimuovere il ponticello fra i morsetti 12 (24 V),
37 e 38
2. Collegare un dispositivo di sicurezza a doppio
canale (ad esempio, PLC di sicurezza, barriera di
sicurezza, relè di sicurezza oppure pulsante di
arresto di emergenza) ai morsetti 37 e 38 per
formare un'applicazione di sicurezza. Il dispositivo
deve soddisfare il livello di sicurezza richiesto
sulla base della valutazione dei rischi. La
Disegno 6.4 illustra lo schema di cablaggio delle
applicazioni STO in cui il convertitore di
frequenza e il dispositivo di sicurezza sono
collocati nello stesso armadio. La Disegno 6.5
mostra lo schema di cablaggio delle applicazioni
STO in cui viene utilizzata un'alimentazione
esterna.
suciente tagliare o
AVVISO!
Il segnale STO deve essere alimentato da PELV.
42 Danfoss A/S © 08/2018 Tutti i diritti riservati. MG07A506
Page 47

130BE424.11
37
38
12
55
1
130BE425.12
24 V source
37
38
+
-
12
55
1
Safe Torque O (STO) Guida operativa
1 Dispositivo di sicurezza
Messa in funzione STO
6.3
6.3.1 Attivazione della funzione Safe
Torque O
Per attivare la funzione STO, rimuovere la tensione ai
morsetti 37 e 38 del convertitore di frequenza.
Quando la funzione STO è attivata, il convertitore di
frequenza emette l'allarme 68, Safe Torque
Safe Torque O, fa scattare l'unità e arresta il motore a
ruota libera. Usare la funzione STO per arrestare il convertitore di frequenza in situazioni di arresto di emergenza.
Nel modo di funzionamento normale, se l'STO non è
necessario, usare la funzione di arresto standard.
O o l'avviso 68,
6
6
Disegno 6.4 Cablaggio STO in armadio 1, il convertitore di
frequenza fornisce la tensione di alimentazione
1 Dispositivo di sicurezza
Disegno 6.5 Cablaggio STO, alimentazione esterna
3. Completare il cablaggio seguendo le istruzioni
descritte nel capitolo 4 Installazione elettrica e:
3a Eliminare i rischi di cortocircuito.
3b Assicurarsi che i cavi STO siano
schermati se sono più lunghi di 20 m
(65,6 piedi) o al di fuori dell'armadio.
3c Collegare il dispositivo di sicurezza
direttamente ai morsetti 37 e 38.
AVVISO!
Se si attiva l'STO mentre il convertitore di frequenza
emette l'avviso 8, Sottotens. CC o l'allarme 8 Sottotens. CC,
il convertitore di frequenza ignora l'allarme 68, Safe
Torque O senza intaccare il funzionamento dell'STO.
6.3.2 Disattivazione della funzione Safe
Torque O
Seguire le istruzioni descritte nella Tabella 6.2 per
disattivare la funzione STO e riavviare il funzionamento
normale sulla base della modalità riavvio della funzione
STO.
AVVISO
RISCHIO DI LESIONI O MORTE
Riapplicando l'alimentazione a 24 V CC ai morsetti 37 o
38, si provoca l'arresto dello stato STO SIL2, rischiando di
riavviare il motore. L'avviamento imprevisto del motore
potrebbe provocare lesioni personali gravi o mortali.
Assicurarsi che siano state prese tutte le misure
•
di sicurezza necessarie prima di riapplicare
l'alimentazione a 24 V CC ai morsetti 37 e 38.
MG07A506 Danfoss A/S © 08/2018 Tutti i diritti riservati. 43
Page 48

Safe Torque O (STO)
VLT® Midi Drive FC 280
6
Modalità
riavvio
Riavvio
manuale
Riavvio
automatico
Tabella 6.2 Disattivazione STO
Passaggi per disattivare
l'STO e riattivare il
funzionamento normale
1. Riapplicare l'alimentazione a 24 V CC ai
morsetti 37 e 38.
2. Avviare un segnale di
ripristino (tramite bus
di campo, I/O digitale
o il tasto [Reset]/[O
Reset] sull'LCP).
Riapplicare l'alimentazione a 24 V CC ai
morsetti 37 e 38.
Riavviare la congurazione della modalità
Impostazione di
fabbrica.
Parametro 5-19 Arresto
sicurezza mors. 37/38=[1]
All. Safe Torque O.
Parametro 5-19 Arresto
sicurezza mors. 37/38=
[3] Avviso Safe Torque
O.
6.3.3 Test di messa in servizio STO
Dopo l'installazione e prima della prima messa in servizio,
eseguire un test di messa in servizio dell'impianto
utilizzando la funzione STO.
Rieseguire il test dopo ogni modica dell'impianto o
dell'applicazione che coinvolge l'STO.
3. Vericare che:
3a Il motore giri a ruota libera. Potrebbe
essere necessario molto tempo perché il
motore si arresti.
3b Se è montato l'LCP, sull'LCP viene
visualizzato l'allarme 68, Safe Torque O.
Se l'LCP non è montato, l'allarme 68,
Safe Torque O viene registrato nel
parametro 15-30 Log allarme: Codice
guasto.
4. Riapplicare l'alimentazione a 24 V CC ai morsetti
37 e 38.
5. Assicurarsi che il motore rimanga nello stato di
ruota libera e il freno meccanico rimanga attivato
(se collegato).
6. Inviare un segnale di ripristino (tramite bus di
campo, I/O digitale o il tasto [Reset]/[O Reset]
sull'LCP).
7. Assicurarsi che il motore torni operativo e
funzioni entro l'intervallo originale di velocità.
Il test di messa in servizio è completato con successo
quando sono stati superati tutti i passi menzionati
precedentemente.
AVVISO!
È necessario un test di messa in servizio riuscito della
funzione STO dopo l'installazione iniziale e dopo ogni
modica successiva dell'impianto.
Per eseguire un test di messa in servizio:
Seguire le istruzioni nel capitolo 6.3.4 Test per
•
applicazioni STO in modalità riavvio manuale se
STO è impostato su modalità riavvio manuale.
Seguire le istruzioni nel capitolo 6.3.5 Test per
•
applicazioni STO in modalità riavvio automatico se
STO è impostato su modalità riavvio automatico.
6.3.4 Test per applicazioni STO in modalità
riavvio manuale
Per le applicazioni in cui il parametro 5-19 Arresto sicurezza
mors. 37/38 è impostato sul valore predenito [1] All. Safe
Torque O eseguire il test di messa in servizio come segue:
1. Impostare il parametro 5-40 Funzione relè su [190]
Funz. STO attiva.
2. Rimuovere la tensione di alimentazione 24 V CC
ai morsetti 37 e 38, usando il dispositivo di
sicurezza mentre il motore è azionato dal convertitore di frequenza (vale a dire quando
l'alimentazione di rete non è interrotta).
6.3.5 Test per applicazioni STO in modalità
riavvio automatico
Per le applicazioni in cui il parametro 5-19 Arresto sicurezza
mors. 37/38 è impostato su [3] Avviso Safe Torque O
eseguire il test di messa in servizio come segue:
1. Rimuovere la tensione di alimentazione 24 V CC
al morsetto 37 e 38 mediante il dispositivo di
sicurezza mentre il motore è azionato dal convertitore di frequenza (vale a dire quando
l'alimentazione di rete non è interrotta).
2. Vericare che:
2a Il motore giri a ruota libera. Potrebbe
essere necessario molto tempo perché il
motore si arresti.
2b Se è montato l'LCP, sull'LCP viene
visualizzato l'avviso 68, Safe Torque O.
Se l'LCP non è montato, l'avviso 68, Safe
Torque O viene registrato nel bit 30 del
parametro 16-92 Parola di avv.
3. Riapplicare l'alimentazione a 24 V CC ai morsetti
37 e 38.
4. Assicurarsi che il motore torni operativo e
funzioni entro l'intervallo originale di velocità.
Il test di messa in servizio è completato con successo
quando sono stati superati tutti i passi menzionati
precedentemente.
44 Danfoss A/S © 08/2018 Tutti i diritti riservati. MG07A506
Page 49

Safe Torque O (STO) Guida operativa
AVVISO!
Vedere l'avviso relativo al comportamento di riavvio nel
capitolo 6.1 Precauzioni di sicurezza STO.
6.4 Manutenzione e assistenza per STO
L'utente è responsabile delle misure di sicurezza.
•
I parametri del convertitore di frequenza possono
•
essere protetti con una password.
Il test di funzionamento consiste in due parti:
Test di funzionamento base.
•
Test di funzionamento diagnostico
•
Il test può considerarsi concluso con successo quando
vengono completate tutte le fasi.
Test di funzionamento base
Se la funzione STO non è stata utilizzata per un anno,
eseguire un test di funzionamento base per rilevare
qualsiasi guasto o malfunzionamento dell'STO.
1. Assicurarsi che il parametro 5-19 Arresto sicurezza
mors. 37/38 sia impostato su *[1] All. Safe Torque
O.
2. Rimuovere l'alimentazione di tensione a 24 V CC
dai morsetti 37 e 38.
3. Controllare se l'LCP visualizza l'allarme 68, Safe
Torque O.
4. Vericare che il convertitore di frequenza faccia
scattare l'unità.
5. Vericare che il motore stia girando a rotazione
libera e si arresti completamente.
6. Iniziare un segnale di avvio (tramite bus di
campo, I/O digitale o LCP) e vericare che il
motore non si avvii.
7. Ricollegare l'alimentazione di tensione a 24 V CC
ai morsetti 37 e 38.
8. Vericare che il motore non venga avviato
automaticamente e che riparta solo dando un
segnale di ripristino (tramite bus di campo, I/O
digitale oppure tasto [Reset]/[O Reset] sull'LCP).
Test di funzionamento diagnostico
1. Accertarsi che l'avviso 68, Safe Torque O e
l'allarme 68, Safe Torque O non si attivino
quando l'alimentazione a 24 V è collegata ai
morsetti 37 e 38.
2. Rimuovere l'alimentazione a 24 V dal morsetto 37
e vericare che sull'LCP sia visualizzato l'allarme
188, Guasto funz. STO, se l'LCP è montato. Se l'LCP
non è montato, vericare che l'allarme 188,
Guasto funz. STO sia registrato nel
parametro 15-30 Log allarme: Codice guasto.
3. Riapplicare l'alimentazione a 24 V al morsetto 37
e vericare che il ripristino dell'allarme avvenga
correttamente.
4. Rimuovere l'alimentazione a 24 V dal morsetto 38
e vericare che sull'LCP sia visualizzato l'allarme
188, Guasto funz. STO se l'LCP è montato. Se l'LCP
non è montato, vericare che l'allarme 188,
Guasto funz. STO sia registrato nel
parametro 15-30 Log allarme: Codice guasto.
5. Riapplicare l'alimentazione a 24 V al morsetto 38
e vericare che il ripristino dell'allarme avvenga
correttamente.
6
6
MG07A506 Danfoss A/S © 08/2018 Tutti i diritti riservati. 45
Page 50

Safe Torque O (STO)
VLT® Midi Drive FC 280
6.5 Dati tecnici STO
L'FMEDA (Analisi modalità guasti, eetti e diagnostica) viene eseguita sulla base delle seguenti premesse:
VLT® Midi Drive FC 280 richiede il 10% del totale complessivo dei guasti per un anello di sicurezza SIL2.
•
I tassi di guasto si basano sul database Siemens SN29500.
•
I tasso di guasto sono costanti e non comprendono i meccanismi di usura.
•
Per ciascun canale, i componenti relativi alla sicurezza sono considerati di tipo A, con una tolleranza ai guasti
•
hardware pari a 0.
Sono previsti livelli di stress medi per gli ambienti industriali e una temperatura di funzionamento massima dei
•
componenti di 85 °C (185 °F).
Un errore di sicurezza (ad esempio uscita in stato sicuro) viene riparato in 8 ore.
•
L'assenza di coppia in uscita è lo stato sicuro.
•
6
Norme di sicurezza
Funzione di sicurezza Safe Torque O IEC 61800-5-2
Prestazioni di sicurezza
Tempo di reazione
1)
Sicurezza delle macchine ISO 13849-1, IEC 62061
Sicurezza funzionale IEC 61508
ISO 13849-1
Categoria Cat. 3
Copertura diagnostica (DC) 60% (bassa)
Tempo medio per guasto pericoloso
(MTTFD)
Livello di prestazioni PL d
IEC 61508/IEC 61800-5-2/IEC 62061
Livello di integrità sicurezza SIL2
Probabilità di guasto pericoloso per
ora (PFH) (modalità a richiesta
elevata)
Probabilità di guasto pericoloso alla
richiesta (PFD
(modalità a richiesta bassa)
Frazione di guasti sicuri (SFF)
Tolleranza ai guasti hardware (HFT)
Intervallo del test di verica
Guasto causa comune (CCF) β = 5%; βD = 5%
Intervallo test di diagnostica (DTI) 160 ms
Capacità sistema SC 2
Tempo di risposta da ingresso a
uscita
per PTI = 20 anni)
avg
2)
2400 anni (alta)
7.54E-9 (1/h)
6.05E-4
Per parti a doppio canale: >84%
Per parti a singolo canale: >99%
Per parti a doppio canale: HFT = 1
Per parti a singolo canale: HFT = 0
20 anni
Dimensioni del frame K1–K3: Massimo 50 ms
Dimensioni del frame K4 e K5: Massimo 30 ms
Tabella 6.3 Dati tecnici per STO
1) Il tempo di reazione corrisponde al tempo che intercorre da una condizione del segnale di ingresso che attiva l'STO no a quando la coppia
non viene disinserita sul motore.
2) Per la procedura del test di verica, fare riferimento al capitolo 6.4 Manutenzione e assistenza per STO.
46 Danfoss A/S © 08/2018 Tutti i diritti riservati. MG07A506
Page 51

130BF096.10
FC
+24 V
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
12
13
18
19
27
29
32
33
50
53
54
55
42
A OUT
D IN
+24 V
130BE204.11
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
0 ~10 V
+
-
FC
+24 V
Esempi applicativi Guida operativa
7 Esempi applicativi
7.1 Introduzione
Gli esempi di questa sezione fungono da riferimento
rapido per le applicazioni standard.
Le impostazioni parametri corrispondono ai valori
•
locali predeniti (selezionati nel
parametro 0-03 Impostazioni locali) se non
diversamente specicato.
Accanto ai disegni sono mostrati i parametri
•
associati ai morsetti e alle relative impostazioni.
Sono visualizzate anche le impostazioni dell'inter-
•
ruttore per i morsetti analogici 53 o 54.
AVVISO!
Quando viene usata la funzionalità opzionale STO,
potrebbe essere necessario montare un ponticello tra i
morsetti 12, 37 e 38 per assicurare il funzionamento del
convertitore di frequenza con i valori di programmazione
impostati di fabbrica.
7.2 Esempi applicativi
7.2.1 AMA
7.2.2 Velocità
Parametri
Funzione Impostazione
Parametro 6-10
Tens. bassa
morsetto 53
Parametro 6-11
Tensione alta
morsetto 53
Parametro 6-14
Rif.basso/
val.retroaz.mors
etto 53
Parametro 6-15
Rif. alto/valore
retroaz.
morsetto 53
Parametro 6-19
Mod. morsetto
53
* = Valore predenito
Note/commenti:
0,07 V*
10 V*
0
50
[1] Mod.
tensione
7 7
Parametri
Imposta–
Funzione
Parametro 1-29 Ada
ttamento
automatico motore
(AMA)
Parametro 5-12 Ingr.
digitale morsetto 27
* = Valore predenito
Note/commenti: Impostare il
gruppo di parametri 1-2* Dati
mot. in base alle speciche del
motore.
Tabella 7.1 AMA con T27 collegato
AVVISO!
Se i morsetti 13 e 27 non
sono connessi, impostare il
parametro 5-12 Terminal 27
Digital Input su [0] Nessuna
funzione.
zione
[1]
Abilit.AMA
compl.
*[2] Evol.
libera neg.
Tabella 7.2 Riferimento di velocità analogico (tensione)
MG07A506 Danfoss A/S © 08/2018 Tutti i diritti riservati. 47
Page 52

130BF097.10
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
4 - 20mA
+
-
FC
+24 V
130BE208.11
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
≈ 5kΩ
FC
+24 V
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
130BF100.10
+24 V
130BB840.12
Speed
Reference
Start (18)
Freeze ref (27)
Speed up (29)
Speed down (32)
Esempi applicativi
VLT® Midi Drive FC 280
Parametri
Funzione Impostazione
Parametro 6-22
Corr. bassa
4 mA*
morsetto 54
Parametro 6-23
Corrente alta
20 mA*
morsetto 54
Parametro 6-24
Rif.basso/
val.retroaz.mors
0
etto 54
Parametro 6-25
Rif. alto/valore
retroaz.
50
morsetto 54
Parametro 6-29
Modo morsetto
77
54
[0] Mod.
corrente
Parametri
Funzione Impostazione
Parametro 5-10
Ingr. digitale
*[8] Avvio
morsetto 18
Parametro 5-12
Ingr. digitale
[19] Blocco
riferimento
morsetto 27
Parametro 5-13
Ingr. digitale
[21] Accele-
razione
morsetto 29
Parametro 5-14
Ingr. digitale
[22] Decele-
razione
morsetto 32
* = Valore predenito
Note/commenti:
* = Valore predenito
Note/commenti:
Tabella 7.5 Accelerazione/decelerazione
Tabella 7.3 Riferimento di velocità analogico (corrente)
Parametri
Funzione Impostazione
Parametro 6-10
Tens. bassa
0,07 V*
morsetto 53
Parametro 6-11
Tensione alta
10 V*
Disegno 7.1 Accelerazione/decelerazione
morsetto 53
Parametro 6-14
Rif.basso/
val.retroaz.mors
0
etto 53
Parametro 6-15
Rif. alto/valore
retroaz.
50
morsetto 53
Parametro 6-19
Terminal 53
[1] Tensione
mode
* = Valore predenito
Note/commenti:
Tabella 7.4 Riferimento di velocità (utilizzando un
potenziometro manuale)
48 Danfoss A/S © 08/2018 Tutti i diritti riservati. MG07A506
Page 53

130BF098.10
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
19
18
27
29
32
33
50
53
54
55
42
+24 V 13
130BF099.10
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
+24 V
130BE210.11
+24 V
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
FC
D IN
+24 V
Esempi applicativi Guida operativa
7.2.3 Avviamento/arresto
Parametri
Parametro 5-10 Ing
r. digitale morsetto18[8] Avvio
Parametro 5-11 Ing
r. digitale morsetto
19
Parametro 5-12 Ing
r. digitale morsetto
27
Parametro 5-14 Ing
r. digitale morsetto
32
Parametro 5-15 Ing
r. digitale morsetto
33
Parametro 3-10 Rif
erim preimp.
Rif. preimp. 0
Rif. preimp. 1
Rif. preimp. 2
Rif. preimp. 3
* = Valore predenito
Note/commenti:
Funzione
Imposta–
zione
*[10]
Inversione
[0] Nessuna
funzione
[16] Rif.
preimp. bit
0
[17] Rif.
preimp. bit
1
25%
50%
75%
100%
7.2.4 Ripristino allarmi esterni
Parametri
Funzione Impostazione
Parametro 5-11
Ingr. digitale
[1] Ripristino
morsetto 19
* = Valore predenito
Note/commenti:
Tabella 7.7 Ripristino allarmi esterni
7.2.5 Termistore motore
AVVISO!
Per soddisfare i requisiti di isolamento PELV, utilizzare un
isolamento doppio o rinforzato sui termistori.
7 7
Tabella 7.6 Avviamento/arresto con inversione e quattro
velocità preimpostate
Parametri
Funzione Impostazione
Parametro 1-90
Protezione
[2] Termistore,
scatto
termica motore
Parametro 1-93
Fonte termistore
Parametro 6-19
Terminal 53
mode
[1] Ingr.
analog. 53
[1] Mod.
tensione
* = Valore predenito
Note/commenti:
Se si desidera soltanto un
avviso, impostare il
parametro 1-90 Protezione
termica motore su [1] Termistore,
avviso.
Tabella 7.8 Termistore motore
MG07A506 Danfoss A/S © 08/2018 Tutti i diritti riservati. 49
Page 54

FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
R1
12
13
18
19
27
29
32
33
50
53
54
55
42
01
02
03
130BE211.11
+24 V
Esempi applicativi
VLT® Midi Drive FC 280
7.2.6 SLC
Parametri
Funzione Impostazione
Parametro 4-30
Funzione di
perdita
retroazione
motore
Parametro 4-31
Errore di velocità
retroazione
motore
Parametro 4-32
Timeout perdita
retroazione
motore
Parametro 7-00
Fonte
retroazione PID
di velocità
77
Parametro 5-70
Term 32/33
Impulsi per giro
Parametro 13-00
Modo regol. SL
Parametro 13-01
Evento
avviamento
Parametro 13-02
Evento arresto
Parametro 13-10
Comparatore di
operandi
Parametro 13-11
Comparatore di
operandi
Parametro 13-12
Valore
comparatore
Parametro 13-51
Evento regol. SL
Parametro 13-52
Azione regol. SL
Parametro 5-40
Funzione relè
* = Valore predenito
Note/commenti:
se il limite nel monitor di
retroazione viene superato,
viene generato l'avviso 61,
Perdita encoder. L'SLC monitora
l'avviso 61, Perdita encoder. Se
l'avviso 61, Perdita encoder
diventa vero, si attiva il relè 1.
L'attrezzatura esterna può
indicare che è necessaria una
manutenzione. Se l'errore di
retroazione torna a scendere al
di sotto del limite entro 5 s, il
convertitore di frequenza
continua a funzionare e l'avviso
scompare. Il relè 1 continua
Tabella 7.9 Utilizzo dell'SLC per impostare un relè
nché non viene premuto [O/
Reset].
[1] Avviso
50
5 s
[1] Encoder 24
V
1024*
[1] On
[19] Avviso
[44] Tasto
Reset
[21] Numero di
avviso
*[1] ≈
61
[22]
Comparatore 0
[32] Imp. usc.
dig. A bassa
[80] Uscita
digitale SL A
50 Danfoss A/S © 08/2018 Tutti i diritti riservati. MG07A506
Page 55

Manutenzione, diagnostica e... Guida operativa
8 Manutenzione, diagnostica e ricerca guasti
8.1 Manutenzione e assistenza
In condizioni di funzionamento e proli di carico normali, il
convertitore di frequenza è esente da manutenzione per
tutta la sua durata. Al ne di evitare guasti, pericoli e
danni, esaminare il convertitore di frequenza per
controllare a intervalli regolari il serraggio dei collegamenti
dei morsetti, l'ingresso di polvere e così via in funzione
delle condizioni di funzionamento. Sostituire le parti
usurate o danneggiate con ricambi originali o parti
standard. Per assistenza e supporto, contattare il fornitore
Danfoss locale.
AVVISO
AVVIO INVOLONTARIO
Quando il convertitore di frequenza è collegato alla rete
CA, all'alimentazione CC o alla condivisione del carico, il
motore può avviarsi in qualsiasi momento. L'avvio
involontario durante le operazioni di programmazione o i
lavori di manutenzione o riparazione può causare morte,
lesioni gravi o danni alle cose. Il motore può essere
avviato tramite un interruttore esterno, un comando bus
di campo, un segnale di riferimento in ingresso dall'LCP,
da remoto utilizzando Software di congurazione MCT
10, oppure a seguito del ripristino di una condizione di
guasto.
Per prevenire un avviamento involontario del motore,
procedere come segue:
Scollegare il convertitore di frequenza dalla
•
rete.
Premere [O/Reset] sull'LCP prima di
•
programmare i parametri.
Cablare e montare completamente il conver-
•
titore di frequenza, il motore e qualsiasi
apparecchiatura azionata prima di collegare il
convertitore di frequenza alla rete CA, all'alimentazione CC o alla condivisione del carico.
Tipi di avvisi e allarmi
8.2
Tipi di avvisi
e allarmi
Avviso Un avviso indica una condizione di funzio-
All. Un allarme indica un guasto che richiede
Scatto
Quando si verica uno scatto, il convertitore di frequenza
smette di funzionare, anché vengano evitati danni al
convertitore stesso e ad altre apparecchiature. Quando si
verica uno scatto il motore procede a ruota libera no
all'arresto. La logica del convertitore di frequenza continua
a funzionare e a monitorare lo stato del convertitore
stesso. Dopo aver eliminato la condizione di guasto è
possibile ripristinare il convertitore di frequenza.
Scatto bloccato
Quando si verica uno scatto bloccato, il convertitore di
frequenza smette di funzionare, anché vengano evitati
danni al convertitore stesso e ad altre apparecchiature.
Quando si verica un scatto bloccato, il motore procede a
ruota libera no all'arresto. La logica del convertitore di
frequenza continua a funzionare e a monitorare lo stato
del convertitore stesso. Il convertitore di frequenza avvia
uno scatto bloccato solo se si vericano guasti gravi che
possono danneggiare il convertitore stesso o altri
dispositivi. Dopo aver risolto i guasti, scollegare e
ricollegare l'alimentazione di ingresso prima di ripristinare
il convertitore di frequenza.
Descrizione
namento anomala che provoca un allarme.
L'avviso scompare quando viene rimossa la
condizione anomala.
attenzione immediata. Il guasto attiva sempre
uno scatto oppure uno scatto bloccato. Dopo un
allarme ripristinare il convertitore di frequenza.
Ripristinare il convertitore di frequenza in uno
qualsiasi di questi quattro modi.
Premere [Reset]/[O/Reset].
•
Comando di ingresso ripristino digitale.
•
Comando di ingresso ripristino comunicazione
•
seriale.
Ripristino automatico.
•
8 8
MG07A506 Danfoss A/S © 08/2018 Tutti i diritti riservati. 51
Page 56

Setup 1
Status
Quick
Menu
Main
Menu
130BD111.10
Setup 1
Status Quick
Menu
Main
Menu
130BD112.10
130BD062.10
D
Hand
On
Reset
Auto
On
OK
On
Warn
Alarm
Manutenzione, diagnostica e...
VLT® Midi Drive FC 280
8.3 Visualizzazioni di avvisi e allarmi
Disegno 8.1 Visualizzazione avviso
Un allarme o un allarme di scatto bloccato viene
visualizzato sul display con il numero di allarme.
88
Disegno 8.2 Allarme/Allarme scatto bloccato
Oltre al testo e al codice di allarme sul tastierino del
convertitore di frequenza, sono presenti tre spie di
indicazione dello stato. In caso di avviso, la spia relativa si
accende di giallo. In caso di allarme, la spia relativa
lampeggia in rosso.
Disegno 8.3 Spie dell'indicatore di stato
52 Danfoss A/S © 08/2018 Tutti i diritti riservati. MG07A506
Page 57

Manutenzione, diagnostica e... Guida operativa
8.4 Elenco degli avvisi e degli allarmi
8.4.1 Elenco dei codici di avviso e allarme
Una (X) presente nella Tabella 8.1 indica che l'allarme o l'avviso cui fa riferimento si è vericato.
N. Descrizione
2 Gu. tens.zero X X –
3 N. mot. X – –
4
Gua. fase rete
7
Sovratens. CC
8
Sottotens. CC
9 Sovracc. invert. X X – Carico oltre il 100% troppo a lungo.
10 Sovr. ETR mot. X X –
11 Sovrtp.ter.mot. X X –
12 Lim. coppia X X –
13 Sovracorr. X X X
14 Guasto di terra – X X Scarica dalle fasi in uscita verso terra.
16 Cortocircuito – X X Cortocircuito nel motore o sui morsetti del motore.
17 TO par.contr. X X – Nessuna comunicazione con il convertitore di frequenza.
25 Corto resist. freno – X X
26 Sovracc. freno X X –
27 Cort. IGBT fr./chopper fren. – X X
28 Contr. freno – X – La resistenza freno non è collegata/in funzione.
30 Guasto fase U – X X Fase U del motore mancante. Vericare la fase.
31 Guasto fase V – X X Fase V del motore mancante. Vericare la fase.
32 Guasto fase W – X X Fase W del motore mancante. Vericare la fase.
34 Guasto bus di c. X X – Si sono vericati problemi di comunicazione PROFIBUS.
35 Gu. opzione – X – Il bus di campo rileva guasti interni.
36 Guasto di rete X X –
38 Guasto interno – X X Contattare il rivenditore Danfoss locale.
1)
1)
1)
Avviso Allarme Scatto
bloccato
X X X
X X –
X X –
Il segnale sul morsetto 53 o 54 è inferiore al 50% del
valore impostato nel parametro 6-10 Tens. bassa morsetto
53, nel parametro 6-20 Tens. bassa morsetto 54 e nel
parametro 6-22 Corr. bassa morsetto 54.
non è stato collegato alcun motore all’uscita del convertitore di frequenza.
Mancanza di una fase sul lato alimentazione o sbilanciamento troppo alto della tensione. Controllare la
tensione di alimentazione.
Tensione collegamento CC superiore al limite.
La tensione del bus CC scende sotto il limite di avviso di
tensione bassa.
Il motore è surriscaldato a causa di un carico superiore al
100% per un periodo troppo lungo.
Il termistore o il relativo collegamento è scollegato,
oppure il motore è surriscaldato.
La coppia supera il valore impostato nel
parametro 4-16 Lim. di coppia in modo motore o nel
parametro 4-17 Lim. di coppia in modo generatore.
Il limite di corrente di picco dell'inverter è stato superato.
Se questo allarme si verica all'accensione, controllare
che i cavi di potenza non siano stati erroneamente
collegati ai morsetti del motore.
La resistenza freno è cortocircuitata e quindi la funzione
freno è disattivata.
La potenza trasmessa alla resistenza freno negli ultimi
120 s supera il limite. Possibili correzioni: diminuire
l'energia di freno impostando una velocità minore o un
tempo di rampa maggiore.
Il transistor di frenatura è cortocircuitato o la funzione
freno è disattivata.
Questo avviso/allarme è attivo solo se la tensione di
alimentazione al convertitore di frequenza è inferiore al
valore impostato nel parametro 14-11 Tens.di rete in caso
di guasto rete, e il parametro 14-10 Guasto di rete NON è
impostato su [0] Nessuna funzione.
Causa
8 8
MG07A506 Danfoss A/S © 08/2018 Tutti i diritti riservati. 53
Page 58

Manutenzione, diagnostica e...
VLT® Midi Drive FC 280
N. Descrizione
40 Sovracc. T27 X – –
46 Err. tens. pilot. gate – X X –
47 Alim. 24V bassa X X X L'alimentazione 24 V CC può essere sovraccaricata.
49 Lim. veloc. – X –
50 Calibraz. AMA – X – Si è vericato un errore di taratura.
51 AMA, U
52 AMA, I
53 AMA mot. gr. – X –
54 AMA mot picc. – X –
55 F. c. par. AMA – X –
56 AMA interr. – X – L'AMA è interrotto.
88
57 Temp. AMA – X – –
58 AMA internal – X – Contattare Danfoss.
59 Limite corr. X X – Sovraccarico convertitore di frequenza.
60 Interbl. esterno – X – L'interblocco esterno è stato attivato.
61 Perdita encoder X X – –
63 Fr. mecc. basso – X –
65 Temp sch. c. X X X
67 Cambio di opz. – X –
68
69 Temp. sch. pot X X X
80 Conv. iniz. – X –
87 Frenata CC autom. X – –
88 Rilevam. opz. – X X L'opzione è stata rimossa correttamente.
95 Cinghia rotta X X – –
99 Rotore bloccato – X –
nom,Inom
b. – X –
nom
Safe Torque O
2)
Avviso Allarme Scatto
bloccato
– X –
X X –
Vericare il carico collegato al morsetto 27 o rimuovere il
collegamento in cortocircuito.
La velocità del motore è inferiore al limite specicato nel
parametro 1-87 Velocità scatto bassa [Hz].
Errata impostazione della tensione motore e/o della
corrente motore.
La corrente motore è troppo bassa. Controllare le
impostazioni.
La taglia di potenza del motore è troppo grande per
eseguire l'AMA.
La taglia di potenza del motore è troppo piccola per
eseguire l'AMA.
I valori dei parametri del motore sono al di fuori del
campo accettabile. AMA non eseguito.
La corrente motore eettiva non ha superato la corrente
rilascio freno entro la nestra di tempo di ritardo
avviamento.
La temperatura di disinserimento della scheda di
controllo ha superato il limite superiore.
È stata rilevata una nuova opzione oppure un'opzione
installata è stata rimossa.
È stata attivata la funzione STO. Se l'STO è in modalità
riavvio manuale (predenito), per riprendere il funzionamento normale applicare 24 V CC ai morsetti 37 e 38 e
iniziare un segnale di ripristino (tramite bus di campo, I/O
digitale o tasto [Reset]/[O Reset]). Se l'STO è in modalità
di riavvio automatico, applicando 24 V CC ai morsetti 37
e 38, il convertitore di frequenza riprende automaticamente il funzionamento normale.
La temperatura di disinserimento della scheda di potenza
ha superato il limite superiore.
Tutte le impostazioni parametri vengono riportate alle
impostazioni di fabbrica.
Avviene nella rete IT quando il convertitore di frequenza
gira a ruota libera e la tensione CC è superiore a 830 V
per unità da 400 V e a 425 V per unità da 200 V. Il
motore consuma l'energia sul collegamento CC. Questa
funzione può essere abilitata/disabilitata nel
parametro 0-07 Frenata CC autom. IT.
Il rotore è bloccato.
Causa
120 Err. contr. pos. – X – –
54 Danfoss A/S © 08/2018 Tutti i diritti riservati. MG07A506
Page 59

Manutenzione, diagnostica e... Guida operativa
N. Descrizione
126 Motore in rot. – X – Il motore PM è in rotazione quando viene eseguito l'AMA.
127 Forza c.e.m eccess. X – –
188
Guasto funz. STO
nw
Not while running (Non quando
run
in funzione)
È stata inserita una password
Err.
errata
Tabella 8.1 Elenco dei codici di avvisi e allarmi
1) Questi guasti possono essere causati da disturbi nell'alimentazione di rete. L'installazione di un ltro di linea Danfoss potrebbe risolverli.
2) Questo allarme non può essere ripristinato automaticamente tramite il parametro 14-20 Modo ripristino.
2)
Avviso Allarme Scatto
bloccato
– X –
– – –
– – –
La forza c.e.m. del motore PM è troppo alta prima dell'avviamento.
L'alimentazione a 24 V CC è connessa soltanto a uno dei
due morsetti STO (37 e 38), oppure è stato rilevato un
guasto nei canali STO. Assicurarsi che entrambi i morsetti
siano collegati a un'alimentazione a 24 V CC e che la
discrepanza tra i segnali ai due morsetti sia inferiore a 12
ms. Se il guasto si ripete, contattare il fornitore locale
Danfoss.
I parametri possono essere modicati solo quando il
motore si è arrestato.
Si verica se si usa una password errata per la modica
di un parametro protetto da password.
Causa
Per la diagnosi, leggere le parole di allarme, di avviso e di stato estese.
8 8
Bit Hex Dec
000000
10
11
0
1
2
3
4
5
6
7
8
9
01
000000
02
000000
04
000000
08
000000
10
000000
20
000000
40
000000
80
000001
00
000002
00
000004
00
000008
00
1 Contr. freno Riservato
2
4
8 Temp. sch. c. Riservato Riservato Temp. sch. c. Riservato Slowdown Probus OFF2 attivo
16
32 Sovracorr. Riservato Riservato Sovracorr. Riservato Retroaz. alta Riservato
64 Lim. coppia Riservato Riservato Lim. coppia Riservato Retroaz.ba. Riservato
128
256
512
1024
2048 Sovrat. CC Lim. veloc. Riservato Sovrat. CC Riservato
Parola di
allarme
(parametro 1
6-90 Parola
di all.)
Temp. sch.
pot
Guasto di
terra
TO par.
contr.
Sovrtp.ter.mo
t
Sovr. ETR
mot.
Sovracc.
invert.
Sottotens.CCAvviamento
Parola di
allarme 2
(parametro
16-91 Parola
di allarme 2)
Err. tens.
pilot. gate
Riservato Riservato Riservato Riservato
Riservato Riservato TO par. contr. Riservato Catchup Probus OFF3 attivo
Riservato Riservato Sovrtp.ter.mot Riservato
Cinghia
rotta
Riservato Riservato Sovracc. invert. Riservato
fallito
Parola di
allarme 3
(parametro 1
6-97 Par. all.
3)
Guasto funz.
STO
Allarme MM Temp. sch. pot Riservato Taratura AMA Manuale/Automatico
Riservato Sovr. ETR mot. Cinghia rotta
Riservato Sottotens. CC Riservato
Parola di
avviso
(parametro 16-
92 Parola di
avv.)
Riservato Riservato Funz. rampa O
Parola di
avviso 2
(parametro 16
-93 Parola di
avv. 2)
Parola di
stato estesa
(parametro 16-
94 Parola di
stato est.)
Avviamento s.
orario/
antiorario
Corrente di
uscita alta
Corrente di
uscita bassa
Frequenza di
uscita alta
Frequenza di
uscita bassa
Controllo freno
OK
di stato estesa 2
(parametro 16-95 Pa
rola di stato est. 2)
Probus OFF1 attivo
Comando pronto
Convertitore di
frequenza pronto
Arresto rapido
Parola
Freno CC
Arresto
MG07A506 Danfoss A/S © 08/2018 Tutti i diritti riservati. 55
Page 60

Manutenzione, diagnostica e...
VLT® Midi Drive FC 280
Parola di
allarme
Bit Hex Dec
000010
12
00
000020
13
00
000040
14
00
000080
15
00
000100
16
00
000200
17
00
88
000400
18
00
000800
19
00
001000
20
00
002000
21
00
004000
22
00
008000
23
00
010000
24
00
020000
25
00
040000
26
00
0800000013421772
27
10000000268435456Cambio di
28
2000000053687091
29
400000001073741824Safe Torque
30
800000002147483648Fr. mecc.
31
4096 Cortocircuito
8192 Riservato Riservato Riservato Riservato Riservato Frenata
16384
32768 AMA non ok Riservato Riservato N. mot.
65536 Gu. tens.zero Riservato Riservato Gu. tens.zero Riservato Freno CA Jog
131072
262144
524288
1048576
2097152
4194304
8388608
16777216
33554432 Riservato Limite corr. Riservato Limite corr. Riservato Riservato Riservato
67108864
(parametro 1
6-90 Parola
di all.)
Gua. fase
rete
Guasto
interno
Sovracc.
freno
Guasto fase
U
Guasto faseVRilevam.
Guasto fase
W
Guasto bus
di c.
Alim. 24V
bassa
Guasto di
rete
Resistenza
freno
IGBT freno Riservato Riservato Riservato Riservato Riservato Riservato
8
opz.
Convertitore
di frequenza
2
inizial.
O
basso
Parola di
allarme 2
(parametro
16-91 Parola
di allarme 2)
Interbl.
esterno
Riservato Riservato Gua. fase rete Riservato Riservato Blocco uscita
Riservato Riservato Riservato Riservato Riservato Richiesta avviamento
Riservato Riservato
Riservato Riservato Riservato Riservato
opz.
Gu. opzione Riservato Riservato Riservato Riservato Pausa
Rotore
bloccato
Errore di
controllo
posizione
Riservato Riservato Guasto di rete Riservato Riservato Bypass
Riservato Riservato Riservato Riservato Riservato Interbl. esterno
Riservato Riservato
Perdita
encoder
Riservato Riservato
Riservato Riservato Riservato Riservato
Parola di
allarme 3
(parametro 1
6-97 Par. all.
3)
Riservato Riservato Riservato Frenata max. Riservato
Riservato Riservato Sovracc. T27
Riservato
Riservato
Riservato Riservato
Parola di
avviso
(parametro 16-
92 Parola di
avv.)
Limite di
potenza
resistenza
freno
Guasto bus dic.Modulo di
Alim. 24V
bassa
Perdita
encoder
Safe Torque
O
Parola di
avviso 2
(parametro 16
-93 Parola di
avv. 2)
Frenata CC
autom.
Riservato Riservato Avvio
memoria
Riservato Riservato In funzione
Riservato Riservato Riagg. al volo attivo
Forza c.e.m
eccess.
Riservato Riservato Riservato
Parola di
stato estesa
(parametro 16-
94 Parola di
stato est.)
OVC attivo Richiesta marcia jog
Riferimento
alto
Riferimento
basso
Riservato Modo pre-pausa
Riservato
Database
occupato
Parola
di stato estesa 2
(parametro 16-95 Pa
rola di stato est. 2)
Richiesta uscita
congelata
Riservato
Ritardo avv.
Avviso pulizia
dissipatore
Riservato
Tabella 8.2 Descrizione di parola di allarme, parola di avviso e parola di stato estesa
56 Danfoss A/S © 08/2018 Tutti i diritti riservati. MG07A506
Page 61

Manutenzione, diagnostica e... Guida operativa
8.5 Ricerca e risoluzione dei guasti
Sintomo Possibile causa Test Soluzione
Premere [Auto On] o [Hand on] (a
Motore non in
funzione
Il motore gira nel
senso sbagliato
Il motore non
raggiunge la
velocità massima
Velocità del motore
instabile
Il motore funziona
in modo irregolare
Il motore non frena
Arresto LCP Vericare se è stato premuto [O].
Controllare l'impostazione corretta del
Segnale di avvio mancante (standby)
Segnale di ruota libera motore
(rotazione libera)
Sorgente di segnale di riferimento
errato
Limite di rotazione del motore
Segnale di inversione attivo
Collegamento errato della fase del
motore
I limiti di frequenza sono impostati
in modo errato.
Segnale di ingresso di riferimento
non scalato correttamente
Possibili impostazioni parametri
errate
Possibile sovramagnetizzazione
Possibili impostazioni errate dei
parametri dei freni. Possibili tempi
rampa di decelerazione troppo brevi.
parametro 5-10 Ingr. digitale morsetto
18 per il morsetto 18 (usare l'impo-
stazione di fabbrica).
Controllare l'impostazione corretta del
parametro 5-12 Terminal 27 Digital
Input per il morsetto 27 (usare l'impo-
stazione di fabbrica).
Controllare quanto segue:
Il segnale di riferimento è locale,
•
remoto o del bus?
Il riferimento preimpostato è
•
attivo?
Il collegamento del morsetto è
•
corretto?
La conversione in scala dei
•
morsetti è corretta?
Il segnale di riferimento è
•
disponibile?
Controllare che il
parametro 4-10 Direzione velocità
motore sia programmato corret-
tamente.
Vericare se è stato programmato un
comando di inversione per il morsetto
nel gruppo di parametri 5-1* Ingressi
digitali.
Cambiare il parametro 1-06 Clockwise
Direction.
Vericare i limiti di uscita nel
parametro 4-14 Limite alto velocità
motore [Hz] e nel parametro 4-19 Freq.
di uscita max.
Vericare la scala del segnale di
ingresso di riferimento nel gruppo di
parametri 6-** I/O analogici e nel
gruppo di parametri 3-1* Riferimenti.
Vericare le impostazioni di tutti i
parametri motore, incluse quelle di
compensazione del motore. Per un
funzionamento ad anello chiuso,
vericare le impostazioni PID.
Controllare eventuali impostazioni del
motore errate in tutti i parametri
motore.
Controllare i parametri del freno.
Controllare le impostazioni del tempo
di rampa.
seconda del modo di funzionamento)
per avviare il motore.
Applicare un segnale di avviamento
valido per avviare il motore.
Applicare 24 V sul morsetto 27 o
programmare questo morsetto su [0]
Nessuna funzione.
Programmare le impostazioni corrette.
Impostare il riferimento preimpostato
su attivo nel gruppo di parametri 3-1*
Riferimenti. Vericare il cablaggio
corretto. Controllare la scala dei
morsetti. Controllare il segnale di
riferimento.
Programmare le impostazioni corrette.
Disattivare il segnale di inversione.
Programmare i limiti corretti.
Programmare le impostazioni corrette.
Vericare le impostazioni nel gruppo
di parametri 6** I/O analogici.
Controllare le impostazioni motore
nei gruppi di parametri 1-2* Dati mot.,
1-3* Dati motore avanz. I, e 1-5* Imp.
indip. dal car.
Controllare i gruppi di parametri 2-0*
Freno CC e 3-0* Limiti riferimento.
8 8
MG07A506 Danfoss A/S © 08/2018 Tutti i diritti riservati. 57
Page 62

Manutenzione, diagnostica e...
Sintomo Possibile causa Test Soluzione
Corto tra due fasi
Fusibili aperti o
scatto interruttore
automatico alimentazione
Sbilanciamento
corrente di rete
88
superiore al 3%
Sbilanciamento della
corrente motore
superiore al 3%.
Disturbo acustico o
vibrazioni (ad
esempio la pala di
una ventola genera
disturbi o vibrazioni
a certe frequenze)
Sovraccarico motore
Collegamenti allentati
Problemi con l'alimentazione di rete
(vedere la descrizione allarme 4, Gua.
fase rete).
Problema con il convertitore di
frequenza
Problema con il motore o con il
cablaggio del motore
Problema con il convertitore di
frequenza
Risonanze, ad esempio nel sistema
motore/ventola.
VLT® Midi Drive FC 280
Il motore o il pannello presentano un
cortocircuito tra due fasi. Controllare
eventuali corti tra le fasi di motore e
pannello.
Il motore è sovraccaricato per l'applicazione.
Eseguire il controllo di pre-avviamento
per vericare la presenza di
collegamenti allentati.
Ruotare i cavi dell'alimentazione di
ingresso nel convertitore di frequenza
di una posizione: da A a B, da B a C,
da C ad A.
Ruotare i cavi dell'alimentazione di
ingresso nel convertitore di frequenza
di una posizione: da A a B, da B a C,
da C ad A.
Ruotare i cavi di uscita del motore di
una posizione: da U a V, da V a W, da
W a U.
Ruotare i cavi di uscita del motore di
una posizione: da U a V, da V a W, da
W a U.
Evitare frequenze critiche usando i
parametri nel gruppo di parametri 4-6*
Bypass di velocità.
Spegnere la sovramodulazione nel
parametro 14-03 Overmodulation.
Aumentare lo smorzamento risonanza
nel parametro 1-64 Resonance
Dampening.
Eliminare ogni cortocircuito rilevato.
Eseguire il test all'avviamento e
vericare che la corrente motore
rientri nelle speciche. Se la corrente
motore supera la corrente a pieno
carico indicata sulla targhetta, il
motore potrebbe funzionare soltanto
a carico ridotto. Riesaminare le
speciche per l'applicazione.
Serrare i collegamenti allentati.
Se lo squilibrio segue il lo elettrico,
si tratta di un problema di alimentazione. Vericare l'alimentazione di
rete.
Se lo squilibrio permane sullo stesso
morsetto di ingresso, si tratta di un
problema dell'unità. Contattare il
fornitore.
Se lo sbilanciamento segue il lo
elettrico il problema è del motore o
del cablaggio del motore. Controllare
il motore e il cablaggio del motore.
Se lo sbilanciamento permane sullo
stesso morsetto di uscita si tratta di
un problema legato all'unità.
Contattare il fornitore.
Controllare se il disturbo e/o le
vibrazioni sono stati ridotti a un
limite accettabile.
Tabella 8.3 Ricerca e risoluzione dei guasti
58 Danfoss A/S © 08/2018 Tutti i diritti riservati. MG07A506
Page 63

Speciche Guida operativa
9 Speciche
9.1 Dati elettrici
Potenza all'albero standard
del convertitore di frequenza [kW (cv)]
Grado di protezione frame IP20 (IP21/tipo 1 in
opzione)
Corrente di uscita
Potenza all'albero [kW ] 0,37 0,55 0,75 1,1 1,5 2,2 3
Continua (3 x 380–440 V) [A] 1,2 1,7 2,2 3 3,7 5,3 7,2
Continua (3 x 441–480 V) [A] 1,1 1,6 2,1 2,8 3,4 4,8 6,3
Intermittente (sovraccarico 60 s) [A] 1,9 2,7 3,5 4,8 5,9 8,5 11,5
kVa continui (400 V CA) [kVa] 0,9 1,2 1,5 2,1 2,6 3,7 5,0
kVa continui (480 V CA) [kVa] 0,9 1,3 1,7 2,5 2,8 4,0 5,2
Corrente di ingresso massima
Continua (3x380–440 V) [A] 1,2 1,6 2,1 2,6 3,5 4,7 6,3
Continua (3x441–480 V) [A] 1,0 1,2 1,8 2,0 2,9 3,9 4,3
Intermittente (sovraccarico 60 s) [A] 1,9 2,6 3,4 4,2 5,6 7,5 10,1
Altre speciche
Sezione trasversale dei cavi massima (rete,
motore, freno e condivisione del carico) [mm
(AWG)]
Perdita di potenza stimata al carico nominale
massimo [W]
Peso, grado di protezione frame IP20 [kg
(libbre)]
Peso, grado di protezione frame IP21 [kg
(libbre)]
Ecienza [%]
1)
2)
PK37
0,37
(0,5)
K1 K1 K1 K1 K1 K1 K2
2
20,9 25,2 30 40 52,9 74 94,8
2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,5 (5,5) 3,6 (7,9)
4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 5,5 (12,1)
96,0 96,6 96,8 97,2 97,0 97,5 98,0
PK55
0,55
(0,75)
PK75
0,75
(1,0)
P1K1
1,1
(1,5)
4 (12)
P1K5
1,5
(2,0)
P2K2
2,2
(3,0)
P3K0
3,0
(4,0)
9 9
Tabella 9.1 Alimentazione di rete 3x380–480 V CA
MG07A506 Danfoss A/S © 08/2018 Tutti i diritti riservati. 59
Page 64

Speciche
VLT® Midi Drive FC 280
Potenza all'albero standard
del convertitore di frequenza [kW (cv)]
Grado di protezione frame IP20 (IP21/tipo 1 in
opzione)
P4K0
4
(5,5)
K2 K2 K3 K4 K4 K5 K5
P5K5
5,5
(7,5)
P7K5
7,5
(10)
P11K
11
(15)
P15K
15
(20)
P18K
18,5
(25)
P22K
22
(30)
Corrente di uscita
Potenza all'albero 4 5,5 7,5 11 15 18,5 22
Continua (3x380–440 V) [A] 9 12 15,5 23 31 37 42,5
Continua (3x441–480 V) [A] 8,2 11 14 21 27 34 40
Intermittente (sovraccarico 60 s) [A] 14,4 19,2 24,8 34,5 46,5 55,5 63,8
kVa continui (400 V CA) [kVa] 6,2 8,3 10,7 15,9 21,5 25,6 29,5
kVa continui (480 V CA) [kVa] 6,8 9,1 11,6 17,5 22,4 28,3 33,3
Corrente di ingresso massima
Continua (3x380–440 V) [A] 8,3 11,2 15,1 22,1 29,9 35,2 41,5
Continua (3x441–480 V) [A] 6,8 9,4 12,6 18,4 24,7 29,3 34,6
Intermittente (sovraccarico 60 s) [A] 13,3 17,9 24,2 33,2 44,9 52,8 62,3
Altre speciche
Sezione trasversale dei cavi massima (rete,
motore, freno e condivisione del carico) [mm
2
4 (12) 16 (6)
(AWG)]
Perdita di potenza stimata al carico nominale
massimo [W]
1)
Peso, grado di protezione frame IP20 [kg
99
(libbre)]
115,5 157,5 192,8 289,5 393,4 402,8 467,5
3,6 (7,9) 3,6 (7,9) 4,1 (9,0) 9,4 (20,7) 9,5 (20,9) 12,3 (27,1) 12,5 (27,6)
Grado di protezione frame IP21 [kg (libbre)] 5,5 (12,1) 5,5 (12,1) 6,5 (14,3) 10,5 (23,1) 10,5 (23,1) 14,0 (30,9) 14,0 (30,9)
Ecienza [%]
2)
98,0 97,8 97,7 98,0 98,1 98,0 98,0
Tabella 9.2 Alimentazione di rete 3x380–480 V CA
Potenza all'albero standard
del convertitore di frequenza [kW (cv)]
Grado di protezione frame IP20 (IP21/tipo 1 in
opzione)
PK37
0,37
(0,5)
K1 K1 K1 K1 K1 K2 K3
PK55
0,55
(0,75)
PK75
0,75
(1,0)
P1K1
1,1
(1,5)
P1K5
1,5
(2,0)
P2K2
2,2
(3,0)
P3K7
3,7
(5,0)
Corrente di uscita
Continua (3x200–240 V) [A] 2,2 3,2 4,2 6 6,8 9,6 15,2
Intermittente (sovraccarico 60 s) [A] 3,5 5,1 6,7 9,6 10,9 15,4 24,3
kVa continui (230 V CA) [kVA] 0,9 1,3 1,7 2,4 2,7 3,8 6,1
Corrente di ingresso massima
Continua (3x200–240 V) [A] 1,8 2,7 3,4 4,7 6,3 8,8 14,3
Intermittente (sovraccarico 60 s) [A] 2,9 4,3 5,4 7,5 10,1 14,1 22,9
Altre speciche
Sezione trasversale dei cavi massima (rete,
motore, freno e condivisione del carico) [mm
2
4 (12)
(AWG)]
Perdita di potenza stimata al carico nominale
massimo [W]
1)
Peso, grado di protezione frame IP20 [kg
(libbre)]
29,4 38,5 51,1 60,7 76,1 96,1 147,5
2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,5 (5,5) 3,6 (7,9)
Grado di protezione frame IP21 [kg (libbre)] 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 5,5 (12,1) 6,5 (14,3)
Ecienza [%]
2)
96,4 96,6 96,3 96,6 96,5 96,7 96,7
Tabella 9.3 Alimentazione di rete 3x200–240 V CA
60 Danfoss A/S © 08/2018 Tutti i diritti riservati. MG07A506
Page 65

Speciche Guida operativa
Potenza all'albero standard
del convertitore di frequenza [kW (cv)]
Grado di protezione frame IP20 (IP21/tipo 1 in
opzione)
Corrente di uscita
Continua (3x200–240 V) [A] 2,2 3,2 4,2 6 6,8 9,6
Intermittente (sovraccarico 60 s) [A] 3,5 5,1 6,7 9,6 10,9 15,4
kVa continui (230 V CA) [kVA] 0,9 1,3 1,7 2,4 2,7 3,8
Corrente di ingresso massima
Continua (1x200-240 V) [A] 2,9 4,4 5,5 7,7 10,4 14,4
Intermittente (sovraccarico 60 s) [A] 4,6 7,0 8,8 12,3 16,6 23,0
Altre speciche
Sezione trasversale dei cavi massima per rete e
motore [mm2 (AWG)]
Perdita di potenza stimata al carico nominale
massimo [W]
Peso, grado di protezione frame IP20 [kg (libbre)] 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,5 (5,5)
Grado di protezione frame IP21 [kg (libbre)] 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 5,5 (12,1)
Ecienza [%]
Tabella 9.4 Alimentazione di rete 1x200-240 V CA
1) La perdita di potenza standard è a condizioni di carico nominale ed è prevista essere entro il ±15% (la tolleranza si riferisce alle diverse tensioni
e ai tipi di cavo).
I valori si basano sul rendimento di un motore standard (limite IE2/IE3). I motori a scarso rendimento contribuiscono anch'essi alla perdita di
potenza nel convertitore di frequenza, mentre i motori con un rendimento elevato la riducono.
Ciò vale per il dimensionamento del rareddamento del convertitore di frequenza. Se la frequenza di commutazione è superiore all'impostazione
di fabbrica, le perdite di potenza a volte aumentano. Si tiene conto anche del consumo di potenza tipico dell'LCP e della scheda di controllo. Altre
opzioni e il carico del cliente possono aggiungere no a 30 W alle perdite, nonostante tipicamente si tratti soltanto di 4 W supplementari per una
scheda di controllo o un bus di campo completamente carichi.
Per dati sulla perdita di potenza secondo EN 50598-2, consultare www.danfoss.com/vltenergyeciency.
2) Misurato utilizzando cavi motore schermati di 50 m (164 piedi) a carico e frequenza nominali. Per la classe di ecienza energetica vedere il
capitolo 9.4 Condizioni ambientali. Per perdite di carico della parte, vedere www.danfoss.com/vltenergyeciency.
1)
2)
PK37
0,37
(0,5)
K1 K1 K1 K1 K1 K2
37,7 46,2 56,2 76,8 97,5 121,6
94,4 95,1 95,1 95,3 95,0 95,4
PK55
0,55
(0,75)
PK75
0,75
(1,0)
4 (12)
P1K1
1,1
(1,5)
P1K5
1,5
(2,0)
P2K2
2,2
(3,0)
9 9
Alimentazione di rete
9.2
Alimentazione di rete (L1/N, L2/L, L3)
Morsetti di alimentazione (L1/N, L2/L, L3)
Tensione di alimentazione 380–480 V: da -15% (-25%)1) a +10%
Tensione di alimentazione 200–240 V: da -15% (-25%)1) a +10%
1) Il convertitore di frequenza può funzionare a una tensione di ingresso del -25% con prestazioni ridotte. La potenza di uscita
massima del convertitore di frequenza è pari al 75% se la tensione di ingresso è -25% e pari all'85% se la tensione di ingresso è
-15%.
Il funzionamento alla coppia massima non è possibile se la tensione di rete è oltre il 10% al di sotto della tensione di alimentazione nominale minima del convertitore di frequenza.
Frequenza di alimentazione 50/60 Hz ±5%
Sbilanciamento temporaneo massimo tra le fasi di rete 3,0% della tensione di alimentazione nominale
Fattore di potenza reale (λ) ≥0,9 nominale al carico nominale
Fattore di dislocazione di potenza (cos ϕ) Prossimo all'unità (>0,98)
Commutazione sull'alimentazione di ingresso (L1/N, L2/L, L3) (accensioni) ≤7,5 kW (10 cv) Massimo 2 volte/minuto
Commutazione sull'alimentazione di ingresso (L1/N, L2/L, L3) (accensioni) 11–22 kW (15–30 cv) Al massimo 1 volta/minuto
MG07A506 Danfoss A/S © 08/2018 Tutti i diritti riservati. 61
Page 66

Speciche
VLT® Midi Drive FC 280
9.3 Uscita motore e dati motore
Uscita motore (U, V, W)
Tensione di uscita 0–100% della tensione di alimentazione
Frequenza di uscita 0–500 Hz
Frequenza di uscita in modalità VVC
Commutazione sull'uscita Illimitata
Tempo di rampa 0,01–3600 s
Caratteristiche della coppia
Coppia di avviamento (coppia costante) Al massimo 160% per 60 s
Coppia di sovraccarico (coppia costante) Al massimo 160% per 60 s
Corrente di avviamento Al massimo 200% per 1 s
Tempo di salita di coppia in modalità VVC+ (indipendente da fsw) Massimo 50 ms
1) La percentuale si riferisce alla coppia nominale. È pari al 150% per convertitori di frequenza 11–22 kW (15–30 cv).
+
0–200 Hz
1)
1)
9.4 Condizioni ambientali
Condizioni ambientali
Grado di protezione frame, convertitore di frequenza IP20 (IP21/Tipo 1 in opzione)
Grado di protezione frame, kit di conversione IP21/Tipo 1
Test di vibrazione, frame di tutte le dimensioni 1,14 g
Umidità relativa 5–95% (IEC 721–3–3; classe 3K3 (senza condensa) durante il funzionamento)
99
Temperatura ambiente (modalità di commutazione DPWM)
- con declassamento Al massimo 55 °C (131 °F)
- a piena corrente di uscita costante Al massimo 45 °C (113 °F)
Temperatura ambiente minima durante il funzionamento a pieno regime 0 °C (32 °F)
Temperatura ambiente minima con prestazioni ridotte -10 °C (14 °F)
Temperatura durante l'immagazzinamento/il trasporto Da -25 a +65/70 °C (da -13 a +149/158 °F)
Altitudine massima sopra il livello del mare senza declassamento 1000 m (3280 piedi)
Altezza massima sopra il livello del mare con declassamento 3000 m (9243 piedi)
EN 61800-3, EN 61000-3-2, EN 61000-3-3, EN 61000-3-11,
Norme EMC, emissione
Norme EMC, immunità
Classe di ecienza energetica
1) Fare riferimento alle condizioni speciali nella Guida alla Progettazione per:
Declassamento in caso di temperatura ambiente elevata.
•
Declassamento per altitudini elevate.
•
ne di impedire la sovratemperatura della scheda di controllo sulle varianti PROFIBUS, PROFINET, EtherNet/IP e POWERLINK
2) Al
di VLT® Midi Drive FC 280, evitare il pieno carico I/O digitali/analogici a una temperatura ambiente superiore a 45 °C (113 °F).
3) La temperatura ambiente per K1S2 con declassamento è al massimo pari a 50 °C (122 °F).
4) La temperatura ambiente per K1S2 a piena corrente di uscita costante è al massimo pari a 40 °C (104 °F).
5) Determinato secondo la EN50598-2 al:
Carico nominale.
•
90% della frequenza nominale.
•
Impostazione di fabbrica della frequenza di commutazione.
•
Impostazione di fabbrica del modello di commutazione.
•
Tipo aperto: temperatura dell'aria circostante 45 °C (113 °F).
•
Tipo 1 (kit NEMA): temperatura ambiente 45 °C (113 °F).
•
5)
EN 61000-3-12, EN 61000-6-3/4, EN 55011, IEC 61800-3
EN 61800-3, EN 61000-6-1/2, EN 61000-4-2, EN 61000-4-3
EN 61000-4-4, EN 61000-4-5, EN 61000-4-6, EN 61326-3-1
1)2)3)
IE2
4)
62 Danfoss A/S © 08/2018 Tutti i diritti riservati. MG07A506
Page 67

Speciche Guida operativa
9.5 Speciche dei cavi
Lunghezze e sezioni trasversali dei cavi
Lunghezza massima del cavo motore, schermato 50 m (164 piedi)
Lunghezza massima del cavo motore, non schermato 75 m (246 piedi)
Sezione trasversale massima dei morsetti di controllo, lo essibile/rigido 2,5 mm2/14 AWG
Sezione trasversale minima dei morsetti di controllo 0,55 mm2/30 AWG
Lunghezza massima del cavo d'ingresso dell'STO, non schermato 20 m (66 piedi)
1) Per le sezioni trasversali dei cavi di potenza, vedere la Tabella 9.1, la Tabella 9.2, la Tabella 9.3 e la Tabella 9.4.
Per la conformità alle norme EN 55011 1A ed EN 55011 1B, in alcuni casi è necessario ridurre la lunghezza dei cavi motore. Per
maggiori dettagli consultare il capitolo 2.6.2 Emissioni EMC nella Guida alla Progettazione VLT
1)
®
Midi Drive FC 280.
9.6 Ingresso/uscita di dati e di controllo
Ingressi digitali
Numero morsetto 18, 19, 271), 29, 32, 33
Logica PNP o NPN
Livello di tensione 0–24 V CC
Livello di tensione, logica 0 PNP <5 V CC
Livello di tensione, logica 1 PNP >10 V CC
Livello di tensione, logica 0 NPN >19 V CC
Livello di tensione, logica 1 NPN <14 V CC
Tensione massima in ingresso 28 V CC
Campo di frequenza impulsi 4–32 kHz
Modulazione di larghezza minima (duty cycle) 4,5 ms
Resistenza di ingresso, R
1) Il morsetto 27 può anche essere programmato come uscita.
i
Circa 4 kΩ
9 9
Ingressi STO
Numero morsetto 37, 38
Livello di tensione 0–30 V CC
Livello di tensione, basso <1,8 V CC
Livello di tensione, alto >20 V CC
Tensione massima in ingresso 30 V CC
Corrente di ingresso minima (ogni pin) 6 mA
1) Consultare il capitolo 6 Safe Torque O (STO) per maggiori dettagli sugli ingressi STO.
Ingressi analogici
Numero di ingressi analogici 2
Numero morsetto 531), 54
Modalità Tensione o corrente
Selezione modalità Software
Livello di tensione 0–10 V
Resistenza di ingresso, R
Tensione massima Da -15 V a +20 V
Livello di corrente Da 0/4 a 20 mA (convertibile in scala)
Resistenza di ingresso, R
Corrente massima 30 mA
Risoluzione per gli ingressi analogici 11 bit
Precisione degli ingressi analogici Errore massimo 0,5% del fondo scala
Larghezza di banda 100 Hz
Gli ingressi analogici sono isolati galvanicamente dalla tensione di alimentazione (PELV) e dagli altri morsetti ad alta tensione.
1) Il morsetto 53 supporta soltanto la modalità tensione e può anche essere usato come ingresso digitale.
1)
i
i
Circa 10 kΩ
Circa 200 Ω
MG07A506 Danfoss A/S © 08/2018 Tutti i diritti riservati. 63
Page 68

Mains
Functional
isolation
PELV isolation
Motor
DC bus
High
voltage
Control
37
RS485
38
33
130BE837.10
Speciche
Disegno 9.1 Isolamento galvanico
VLT® Midi Drive FC 280
AVVISO!
ALTITUDINI ELEVATE
Per un'installazione ad altitudini superiori ai 2000 m (6562 piedi), contattare Danfoss per informazioni relative a PELV.
Ingressi a impulsi
Ingressi a impulsi programmabili 2
Numero morsetto a impulsi 29, 33
Frequenza massima in corrispondenza dei morsetti 29 e 33 32 kHz (comando push-pull)
Frequenza massima in corrispondenza dei morsetti 29 e 33 5 kHz (collettore aperto)
Frequenza minima in corrispondenza dei morsetti 29 e 33 4 Hz
99
Livello di tensione Vedere la sezione sull'ingresso digitale
Tensione massima in ingresso 28 V CC
Resistenza di ingresso, R
i
Circa 4 kΩ
Precisione dell'ingresso a impulsi Errore massimo: 0,1% del fondo scala
Uscite digitali
Uscite digitali/a impulsi programmabili 2
Numero morsetto 27
Livello di tensione sull'uscita digitale/frequenza di uscita 0–24 V
Corrente di uscita massima (sink o source) 40 mA
Carico massimo alla frequenza di uscita 1 kΩ
Carico capacitivo massimo alla frequenza di uscita 10 nF
Frequenza di uscita minima in corrispondenza della frequenza di uscita 4 Hz
Frequenza di uscita massima in corrispondenza della frequenza di uscita 32 kHz
Precisione della frequenza di uscita Errore massimo: 0,1% del fondo scala
Risoluzione della frequenza di uscita 10 bit
Numero morsetto (vedere dati nelle uscite analogiche) 42
Livello di tensione sull'uscita digitale 0–17 V
1) Il morsetto 27 può essere programmato come ingresso.
2) Il morsetto 42 può anche essere programmato come uscita analogica.
L'uscita digitale è isolata galvanicamente dalla tensione di alimentazione (PELV) e dagli altri morsetti ad alta tensione.
Uscite analogiche
Numero delle uscite analogiche programmabili 1
Numero morsetto 42
Intervallo di corrente in corrispondenza dell'uscita analogica 0/4–20 mA
Carico massimo della resistenza verso massa sull'uscita analogica 500 Ω
Massima tensione sull'uscita analogica 17 V
Precisione sull'uscita analogica Errore massimo: 0,8% del fondo scala
Risoluzione sull'uscita analogica 10 bit
1) Il morsetto 42 può anche essere programmato come uscita digitale.
L'uscita analogica è isolata galvanicamente dalla tensione di alimentazione (PELV) e dagli altri morsetti ad alta tensione.
64 Danfoss A/S © 08/2018 Tutti i diritti riservati. MG07A506
1)
2)
1)
Page 69
Speciche Guida operativa
Scheda di controllo, tensione di uscita a 24 V CC
Numero morsetto 12, 13
Carico massimo 100 mA
L’alimentazione a 24 V CC è isolata galvanicamente dalla tensione di alimentazione (PELV). Tuttavia, l'alimentazione ha lo stesso
potenziale degli ingressi e delle uscite analogici e digitali.
Scheda di controllo, tensione di uscita a +10 V CC
Numero morsetto 50
Tensione di uscita 10,5 V ±0,5 V
Carico massimo 15 mA
L’alimentazione 10 V CC è isolata galvanicamente dalla tensione di alimentazione (PELV) nonché da altri morsetti ad alta
tensione.
Scheda di controllo, comunicazione seriale RS485
Numero morsetto 68 (P,TX+, RX+), 69 (N,TX-, RX-)
Numero morsetto 61 Comune per i morsetti 68 e 69
Il circuito di comunicazione seriale RS485 è isolato galvanicamente dalla tensione di alimentazione (PELV).
Scheda di controllo, comunicazione seriale USB
USB standard 1.1 (piena velocità)
Spina USB Spina USB tipo B
Il collegamento al PC viene eettuato mediante un cavo USB dispositivo/host standard.
Il collegamento USB è isolato galvanicamente dalla tensione di alimentazione (PELV) nonché dagli altri morsetti ad alta tensione.
Il collegamento a massa USB non è isolato galvanicamente dalla messa a terra di protezione. Usare solo un computer portatile
isolato come collegamento PC al connettore USB sul convertitore di frequenza.
9 9
Uscite a relè
Uscite a relè programmabili 1
Relè 01 01–03 (NC), 01–02 (NO)
Carico massimo sui morsetti (CA-1)1) su 01-02 (NO) (carico resistivo) 250 V CA, 3 A
Carico massimo sui morsetti (CA-15)1) su 01-02 (NO) (carico induttivo con cosφ 0,4) 250 V CA, 0,2 A
Carico massimo sui morsetti (CC-1)1) su 01–02 (NO) (carico resistivo) 30 V CC, 2 A
Carico massimo sui morsetti (CC-13)1) su 01–02 (NO) (carico induttivo) 24 V CC, 0,1 A
Carico massimo sui morsetti (CA-1)1) su 01–03 (NC) (carico resistivo) 250 V CA, 3 A
Carico massimo sui morsetti (CA-15)
Carico massimo sui morsetti (CC-1)
Carico minimo sui morsetti su 01–03 (NC), 01–02 (NO) 24 V CC 10 mA, 24 V CA 20 mA
1) IEC 60947 parti 4 e 5.
I contatti del relè sono isolati galvanicamente dal resto del circuito mediante un isolamento rinforzato.
Prestazioni scheda di controllo
Intervallo di scansione 1 ms
Caratteristiche di comando
Risoluzione della frequenza di uscita a 0–500 Hz ±0,003 Hz
Tempo di risposta del sistema (morsetti 18, 19, 27, 29, 32 e 33) ≤2 ms
Intervallo controllo di velocità (anello aperto) 1:100 della velocità sincrona
Precisione della velocità (anello aperto) ±0,5% della velocità nominale
Precisione della velocità (anello chiuso) ±0,1% della velocità nominale
Tutte le caratteristiche di comando si basano su un motore asincrono a quattro poli.
1)
su 01–03 (NC) (carico induttivo con cosφ 0,4) 250 V CA, 0,2 A
1)
su 01–03 (NC) (carico resistivo) 30 V CC, 2 A
MG07A506 Danfoss A/S © 08/2018 Tutti i diritti riservati. 65
Page 70

Speciche
VLT® Midi Drive FC 280
9.7 Coppie di serraggio dei collegamenti
Assicurarsi di utilizzare la coppia corretta quando si serrano i collegamenti elettrici. Una coppia troppo bassa o troppo alta a
volte provoca problemi di collegamento elettrico. Per assicurare che vengano applicate coppie corrette, usare una chiave
dinamometrica. Il tipo di cacciavite a testa piatta consigliato è SZS 0,6 x 3,5 mm.
Coppia [Nm (pollici-libbre)]
Tipo di
frame
K1
K2
K3 7,5 (10) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
K4
K5
Tabella 9.5 Coppie di serraggio
Potenza
[kW (cv)]
0,37–2,2
(0,5–3,0)
3,0–5,5
(4,0–7,5)
11–15
(15–20)
18,5–22
(25–30)
Rete Motore
0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
1,2 (10,6) 1,2 (10,6) 1,2 (10,6) 1,2 (10,6) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
1,2 (10,6) 1,2 (10,6) 1,2 (10,6) 1,2 (10,6) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
Collegamento in
CC
Freno Terra Controllo Relè
9.8 Fusibili e interruttori
Usare i fusibili e/o gli interruttori sul lato di alimentazione per proteggere il personale preposto alla manutenzione e l'appa-
99
recchiatura da lesioni e danni in caso di guasto di un componente all'interno del convertitore di frequenza (primo guasto).
Protezione del circuito di derivazione
Proteggere tutti i circuiti di derivazione in un impianto (compresi i commutatori e le macchine) da cortocircuiti e
sovracorrenti, conformemente a quanto previsto dalle norme nazionali/internazionali.
AVVISO!
La protezione da cortocircuito allo stato solido integrata non fornisce una protezione del circuito di derivazione.
Assicurare una protezione del circuito di derivazione in conformità alle regole e normative nazionali e locali.
La Tabella 9.6 elenca i fusibili raccomandati e gli interruttori che sono stati testati.
ATTENZIONE
RISCHIO DI LESIONI PERSONALI E DANNI AD APPARECCHIATURE
Il malfunzionamento o la mancata osservanza delle raccomandazioni potrebbe provocare rischi al personale e danni al
convertitore di frequenza o ad altre apparecchiature.
Selezionare i fusibili sulla base delle raccomandazioni. I possibili danni possono essere limitati all'interno del
•
convertitore di frequenza.
AVVISO!
DANNI ALL'APPARECCHIATURA
L'uso di fusibili e/o di interruttori è obbligatorio per assicurare la conformità alla norma IEC 60364 della CE. La mancata
osservanza delle raccomandazioni di protezione può provocare danni al convertitore di frequenza.
Danfoss raccomanda l'uso di fusibili e interruttori nella Tabella 9.6 e nella Tabella 9.7 al ne di assicurare la conformità a UL
508C o IEC 61800-5-1. Per applicazioni non UL, dimensionare gli interruttori per la protezione in un circuito in grado di
fornire un massimo di 50000 A
convertitore di frequenza è adatta per l'uso su un circuito capace di fornire non più di 100000 A
quando è protetto da fusibili di classe T.
66 Danfoss A/S © 08/2018 Tutti i diritti riservati. MG07A506
(simmetrici), 240 V/400 V massimo. La corrente nominale di cortocircuito (SCCR) del
rms
, 240 V/480 V massimo
rms
Page 71

Speciche Guida operativa
Dimensione del frame Potenza [kW (cv)] Fusibile non UL
0,37 (0,5)
gG-10
gG-20
gG-25
gG-50 –
gG-80 –
gG-20
gG-25
gG-20
Trifase 380-480 V
Trifase 200–240 V
Monofase 200–240 V
0,55–0,75
K1
K2
K3 7,5 (10) PKZM0-25
K4
K5
K1
K2 2,2 (3,0)
K3 3,7 (5,0) PKZM0-25
K1
K2 2,2 (3,0) gG-25 PKZM0-20
(0,75–1,0)
1,1–1,5
(1,5–2,0)
2,2 (3,0)
3,0–5,5
(4,0–7,5)
11–15
(15–20)
18,5–22
(25–30)
0,37 (0,5) gG-10
0,55 (0,75)
0,75 (1,0)
1,1 (1,5)
1,5 (2,0)
0,37 (0,5) gG-10
0,55 (0,75)
0,75 (1,0)
1,1 (1,5)
1,5 (2,0)
Interruttore non UL
(Eaton)
PKZM0-16
PKZM0-20
PKZM0-16
PKZM0-20
PKZM0-16
9 9
Tabella 9.6 Fusibile e interruttore non UL
MG07A506 Danfoss A/S © 08/2018 Tutti i diritti riservati. 67
Page 72

Speciche
VLT® Midi Drive FC 280
Dimensione
del frame
Trifase:
380–480 V
Trifase:
200–240 V
99
Monofase
200–240 V
K2–K3
K2–K3
Potenza
[kW (cv)]
0,37–0,75
(0,5–1,0)
K1
K4
K5
K1
K1
K2 2,2 (3,0)
1,1–1,5
(1,5–2,0)
2,2 (3,0) KTS-R-15 JKS-15 JJS-15 FNQ-R-15 KTK-R-15 LP-CC-15 KLSR-15 ATM-R15 A6K-15R
3,0–7,5
(4,0–10)
11–15
(15–20)
18,5–22
(25–30)
0,37 (0,5) KTN-R-6 JKS-6 JJN-6 FNQ-R-6 KTK-R-6 LP-CC-6 KLNR-6 ATM-R6 A2K-6R
0,55 (0,75)
0,75 (1,0)
1,1–1,5
(1,5–2,0)
2,2–3,7
(3,0–5,0)
0,37 (0,5) KTN-R-6 JKS-6 JJN-6 FNQ-R-6 KTK-R-6 LP-CC-6 KLNR-6 ATM-R6 A2K-6R
0,55 (0,75)
0,75 (1,0)
1,1–1,5
(1,5–2,0)
Classe
KTS-R-6 JKS-6 JJS-6 FNQ-R-6 KTK-R-6 LP-CC-6 KLSR-6 ATM-R6 A6K-6R
KTS-R-10 JKS-10 JJS-10 FNQ-R-10 KTK-R-10 LP-CC-10 KLSR-10 ATM-R10 A6K-10R
KTS-R-25 JKS-25 JJS-25 FNQ-R-25 KTK-R-25 LP-CC-25 KLSR-25 ATM-R25 A6K-25R
KTS-R-50 JKS-50 JJS-50 – – – KLSR-50 – A6K-50R
KTNR-10
KTNR-15
KTNR-20
KTNR-25
KTNR-10
KTNR-15
KTNR-20
KTNR-25
Classe J Classe T
RK1
– JKS-80 JJS-80 – – – – – –
JKS-10 JJN-10 FNQ-R-10 KTK-R-10 LP-CC-10 KLNR-10 ATM-R10 A2K-10R
JKS-15 JJN-15 FNQ-R-15 KTK-R-15 LP-CC-15 KLNR-15 ATM-R15 A2K-15R
JKS-20 JJN-20 FNQ-R-20 KTK-R-20 LP-CC-20 KLNR-20 ATM-R20 A2K-20R
JKS-25 JJN-25 – – – KLNR-25 ATM-R25 A2K-25R
JKS-10 JJN-10 FNQ-R-10 KTK-R-10 LP-CC-10 KLNR-10 ATM-R10 A2K-10R
JKS-15 JJN-15 FNQ-R-15 KTK-R-15 LP-CC-15 KLNR-15 ATM-R15 A2K-15R
JKS-20 JJN-20 FNQ-R-20 KTK-R-20 LP-CC-20 KLNR-20 ATM-R20 A2K-20R
JKS-25 JJN-25 – – – KLNR-25 ATM-R25 A2K-25R
Bussmann E4273
Classe
CC
Classe CC
ClasseCCClasse
Littelfuse
E81895
RK1
MERSEN
E163267/
E2137
Classe CC Classe RK1
MERSEN
E163267/
E2138
Tabella 9.7 Fusibile UL
68 Danfoss A/S © 08/2018 Tutti i diritti riservati. MG07A506
Page 73

Speciche Guida operativa
9.9 Dimensioni contenitore, potenze nominali e dimensioni
Taglia di
potenza [kW
(cv)]
Dimensioni
[mm (pollici)]
Peso
[kg (libbre)]
Fori di
montaggio
[mm (pollici)]
Dimensione
del frame
Monofase
200–240 V
Trifase:
200–240 V
Trifase:
380–480 V
Altezza A1 210 (8,3) 272,5 (10,7)
Altezza A2 278 (10,9) 340 (13,4)
Larghezza B 75 (3,0) 90 (3,5) 115 (4,5) 133 (5,2) 150 (5,9)
Profondità C 168 (6,6) 168 (6,6) 168 (6,6) 245 (9,6) 245 (9,6)
Altezza A 338,5 (13,3) 395 (15,6)
Larghezza B 100 (3,9) 115 (4,5) 130 (5,1) 153 (6,0) 170 (6,7)
Profondità C 183 (7,2) 183 (7,2) 183 (7,2) 260 (10,2) 260 (10,2)
Altezza A 294 (11,6) 356 (14)
Larghezza B 75 (3,0) 90 (3,5) 115 (4,5) 133 (5,2) 150 (5,9)
Profondità C 168 (6,6) 168 (6,6) 168 (6,6) 245 (9,6) 245 (9,6)
IP20 2,5 (5,5) 3,6 (7,9)
IP21 4,0 (8,8) 5,5 (12,1)
a 198 (7,8) 260 (10,2)
b 60 (2,4) 70 (2,8) 90 (3,5) 105 (4,1) 120 (4,7)
c 5 (0,2) 6,4 (0,25)
d 9 (0,35) 11 (0,43) 11 (0,43) 12,4 (0,49) 12,6 (0,5)
e 4,5 (0,18) 5,5 (0,22)
f 7,3 (0,29) 8,1 (0,32)
0,37
0,55
(0,5)
(0,75)
0,37
0,55
(0,5)
(0,75)
0,37
0,55
(0,5)
(0,75)
FC 280 con coperchio ingresso cavi inferiore (senza coperchio superiore)
K1 K2 K3 K4 K5
0,75
(1,0)
0,75
(1,0)
0,75
(1,0)
1,1
(1,5)
1,1
(1,5)
1,1
(1,5)
FC 280 con IP21/UL/tipo 1 kit
1,5
(2,0)
1,5
(2,0)
1,5
(2,0)
FC 280 IP20
2,2
(3,0)
3
(4,0
2,2
(3,0)
2,2
(3,0)
4
5,5
(5,5)
)
(7,5)
– – –
3,7
(5,0)
7,5
(10)11(15)15(20)
272,5
(10,7)
341,5
(13,4)
395
(15,6)
357
(14,1)
4,6
(10,1)
6,5
(14,3)
260
(10,2)
6,5
(0,26)
5,5
(0,22)
9,2
(0,36)
– –
317,5
(12,5)
379,5
(14,9)
425 (16,7) 520 (20,5)
391 (15,4) 486 (19,1)
8,2 (18,1) 11,5 (25,4)
10,5 (23,1) 14,0 (30,9)
297,5
(11,7)
8 (0,32) 7,8 (0,31)
6,8 (0,27) 7 (0,28)
11 (0,43) 11,2 (0,44)
18,5
(25)22(30)
410 (16,1)
474 (18,7)
390 (15,4)
9 9
Tabella 9.8 Dimensioni frame, potenze nominali e dimensioni
MG07A506 Danfoss A/S © 08/2018 Tutti i diritti riservati. 69
Page 74

130BE844.11
B
C
A1
A2
130BE846.10
B
A
C
Speciche
VLT® Midi Drive FC 280
99
Disegno 9.2 Standard con piastra di disaccoppiamento
Disegno 9.3 Standard con coperchio ingresso cavi inferiore (senza coperchio superiore)
70 Danfoss A/S © 08/2018 Tutti i diritti riservati. MG07A506
Page 75
B
C
A
130BE845.10
C
a
b
130BA648.12
f
e
B
A
a
d
e
b
c
Speciche Guida operativa
9 9
Disegno 9.4 Standard con IP21/UL/tipo 1 kit
Disegno 9.5 Fori di montaggio superiori e inferiori
MG07A506 Danfoss A/S © 08/2018 Tutti i diritti riservati. 71
Page 76

Appendice
VLT® Midi Drive FC 280
10 Appendice
10.1 Simboli, abbreviazioni e convenzioni
°C
°F
CA Corrente alternata
AEO Ottimizzazione automatica dell'energia
AWG American Wire Gauge
AMA Adattamento automatico motore
CC Corrente continua
EMC Compatibilità elettromagnetica
ETR Relè termico elettronico
f
M,N
FC Convertitore di frequenza
I
INV
I
LIM
I
M,N
I
VLT,MAX
I
VLT,N
IP Classe di protezione IP
LCP Pannello di controllo locale
MCT Motion Control Tool
MM Modulo di memoria
1010
MMP Programmatore del modulo di memoria
n
s
P
M,N
PELV Tensione di protezione bassissima
PCB Scheda di circuito stampato
Motore PM Motore a magneti permanenti
PUD Dati unità di potenza
PWM Modulazione di larghezza degli impulsi
Giri/min. Giri al minuto
SIVP Valori di inizializzazione specici e protezione
STO Safe Torque O
T
LIM
U
M,N
Gradi Celsius
Gradi Fahrenheit
Frequenza motore nominale
Corrente nominale di uscita dell'inverter
Limite di corrente
Corrente nominale del motore
Corrente di uscita massima
Corrente di uscita nominale fornita dal convertitore di frequenza
Velocità del motore sincrono
Potenza motore nominale
Limite di coppia
Tensione motore nominale
Tabella 10.1 Simboli e abbreviazioni
Convenzioni
Nelle illustrazioni tutte le dimensioni sono in [mm
•
10.2 Struttura del menu dei parametri
(pollici)].
Un asterisco (*) indica l'impostazione di fabbrica
•
del parametro.
Gli elenchi numerati indicano le procedure.
•
Gli elenchi puntati indicano altre informazioni.
•
Il testo in corsivo indica:
•
- Riferimenti incrociati.
- Collegamento.
- Nomi di parametri.
72 Danfoss A/S © 08/2018 Tutti i diritti riservati. MG07A506
Page 77
Appendice Guida operativa
0 - 999 *0
[4] Copia da setup 4
0-44 Tasto [O / Reset] Key sull'LCP
[0] Disattivato
*[1] Abilitato
[0] Disattivato
*[1] Abilitato
*[1] Abilitato
0-42 Tasto [Auto on] sull'LCP
[7] Abil. solo riprist.
0-5* Copia/Salva
0-50 Copia LCP
*[0] Nessuna copia
0-51 Copia setup
*[0] Nessuna copia
[1] Tutti a LCP
[2] Tutti da LCP
[1] Copia da setup 1
[3] Dim. indip. da LCP
[9] Copia da setup di f.
[2] Copia da setup 2
[3] Copia da setup 3
0-6* Password
0-60 Passw. menu princ.
1-** Carico e motore
1-0* Impost.generali
1-00 Modo congurazione
*[0] An. aperto
[1] Anello chiuso vel.
[3] Anello chiuso
[2] Coppia an. chiuso
0,01 - 20 s *In funzione della
dimensione
0 - 250 % *120 %
[1] Inverso
1-08 Motor Control Bandwidth
[2] Low
[7] PID veloc. OL esteso
1-01 Principio controllo motore
[4] Coppia, anello aperto
[0] U/f
*[1] VVC+
*[0] Coppia cost.
1-03 Caratteristiche di coppia
[1] Coppia variabile
[2] Ottim. en. autom. CT
1-06 Senso orario
*[0] Norm.
[0] High
[1] Medium
[3] Adatt. 1
[4] Adatt. 2
1-1* Selezione motore
1-10 Struttura motore
*[0] Asincrono
[1] PM, SPM n. saliente
[3] PM, IPM sal., sat
1-14 Fatt. di guad. attenuaz.
1-15 Cost. tempo ltro a bassa velocità
[0] Ness
0-30 Unità visual. person.
[1666] Uscita digitale
[1667] Ingr. freq. #29 [Hz]
-2147483647 - 2147483647 *0
0 - 0 *
zazione personalizzata
0,0 - 999999,99 Unità di visualizzazione
personalizzata *100 Unità di visualiz-
zazione personalizzata
personalizzata *0 Unità di visualiz-
0 - 999999,99 Unità di visualizzazione
[32] kg/h
[33] t/min
[34] t/h
[40] m/s
[41] m/min
[45] m
[60] °C
[70] mbar
[71] bar
[72] Pa
[73] kPa
[74] m WG
[80] kW
[120] GPM
[121] gal/s
[122] gal/min
[123] gal/h
[124] CFM
[127] ft³/h
[140] ft/s
[141] ft/min
[160] °F
[170] psi
[171] lb/in2
[172] in wg
[173] ft WG
[180] CV
[11] Giri/min.
[12] IMPULSI/s
[20] l/s
[21] l/min
[22] l/h
[23] m³/s
[24] m³/min
[25] m³/h
[30] kg/s
*[1] %
[5] PPM
[10] 1/min
[31] kg/min
0-31 Valore min. visual. person.
0-32 Valore max. visual. person.
0-37 Testo display 1
0 - 0 *
0 - 0 *
0-39 Testo 3 del display
0-38 Testo display 2
0-4* Tastierino LCP
0-40 Tasto [Hand On] sull'LCP
[0] Disattivato
10 10
Stesse scelte con 0-20
Stesse scelte con 0-20
Stesse scelte con 0-20
Stesse scelte con 0-20
[3450] Posizione eettiva
[3430] PCD 10 lettura per applic.
[3429] PCD 9 lettura per applic.
[3427] PCD 7 lettura per applic.
[3428] PCD 8 lettura per applic.
[3426] PCD 6 lettura per applic.
[3425] PCD 5 lettura per applic.
[3424] PCD 4 lettura per applic.
[3422] PCD 2 lettura per applic.
[3423] PCD 3 lettura per applic.
[3421] PCD 1 lettura per applic.
[3410] Scrittura PCD 10 per applic.
[3408] Scrittura PCD 8 per applic.
[3409] Scrittura PCD 9 per applic.
[3407] Scrittura PCD 7 per applic.
[3406] Scrittura PCD 6 per applic.
[3405] Scrittura PCD 5 per applic.
[3404] Scrittura PCD 4 per applic.
[3403] Scrittura PCD 3 per applic.
[3402] Scrittura PCD 2 per applic.
[3401] Scrittura PCD 1 per applic.
[2119] Uscita est. 1 [%]
[2118] Retroazione est. 1 [unità]
[2117] Riferimento est. 1 [unità]
[1893] Uscita scalata guad. PID proc.
[1892] Uscita bloccata PID di proc.
[1891] Usc. PID di proc.
[1890] Errore PID di proc.
[1697] Par. all. 3
[1698] Warning Word 3
[1695] Parola di stato est. 2
[1693] Parola di avviso 2
[1694] Parola di stato est.
[1691] Parola di allarme 2
[1692] Parola di avv.
[1686] RIF 1 porta FC
[1690] Parola di all.
[1685] Par. com. 1 p. FC
[1682] RIF 1 Fieldbus
[1684] Opz. com. par. stato
[1674] Contat. arresti precisi
[1671] Uscita a relè
[1669] Usc. imp. 27 [Hz]
[1668] Ingr. freq. #33 [Hz]
[1680] Par. com. 1 F.bus
[1672] Contatore A
[1673] Contatore B
0-22 Visualiz.ridotta del display- riga 1,3
[3456] Errore di inseguimento
0-21 Visualiz.ridotta del display- riga 1,2
0-24 Visual.completa del display-riga 3
0-23 Visual.completa del display-riga 2
0-3* Visual. person. LCP
[1664] Ingr. anal. 54
0-16 Selezione applicazione
*[0] Ness
0-** Funzion./Vis.
0-0* Impost. base
0-01 Lingua
[2] Locale/Rem.
[1] Proc. sempl. an. chiuso
*[0] English
[1] Deutsch
[4] Vel. sempl. an. chiuso
[3] An. aperto vel.
[2] Francais
[3] Dansk
[5] Multi Speed
[6] OGD LA10
[4] Español
[5] Italiano
[7] OGD V210
[8] Hoist
[28] Português
0-02 Unità velocità motore
0-2* Display LCP
0-20 Visualiz.ridotta del display- riga 1,1
[0] Giri/min.
*[1] Hz
[38] Testo display 2
[0] Nessuno
[37] Testo display 1
[0] Internaz.
[1] Nord America
0-03 Impostazioni locali
[748] PCD Feed Forward
[39] Testo 3 del display
0-04 Stato di funz. all'accens.
[0] Prosegui
[953] Parola di avviso Probus
[1005] Visualizz. cont. errori trasm.
[2] Arresto forz., rif=0
*[1] Arr. forz., rif=vecc.
[1609] Visual. personaliz.
[1610] Potenza [kW]
[1611] Power [hp]
*[1602]Riferimento [%]
[1603] Parola di stato
[1601] Riferimento [unità]
[11] 380-440V/50Hz/Delta
[12] 380-440V/50Hz
[1605] Val. reale princ. [%]
[21] 440-480V/50Hz/Delta
[20] 440-480V/50Hz/rete IT
[1502] Contatore kWh
[1600] Par. di contr.
[1230] Parametro di avviso
[1501] Ore esercizio
[1006] Visual. contatore errori ricez.
[1] 200-240V/50Hz/Delta
[2] 200-240V/50Hz
0-06 Tipo di rete
[10] 380-440V/50Hz/rete IT
[0] 200-240V/50Hz/rete IT
[1612] Tensione motore
[101] 200-240V/60Hz/Delta
[102] 200-240V/60Hz
[22] 440-480V/50Hz
[100] 200-240V/60Hz/rete IT
[1615] Frequenza [%]
[1613] Frequenza
[1614] Corrente motore
[110] 380-440V/60Hz/rete IT
[111] 380-440V/60Hz/Delta
[112] 380-440V/60Hz
[1616] Coppia [Nm]
[120] 440-480V/60Hz/rete IT
[1617] Velocità [giri/m]
[121] 440-480V/60Hz/Delta
[1622] Coppia [%]
[1618] Term. motore
[1620] Angolo motore
[122] 440-480V/60Hz
0-07 Frenata CC autom. IT
[0] O
[1630] Tensione bus CC
*[1] On
[1633] Energia freno/2 min
0-10 Setup attivo
0-1* Operazioni di setup
[1635] Termico inverter
*[1] Setup 1
[2] Setup 2
[3] Setup 3
[4] Setup 4
[9] Multi setup
0-11 Setup di programmazione
[1] Setup 1
[2] Setup 2
[3] Setup 3
[4] Setup 4
*[9] Setup attivo
[1660] Ingresso digitale
[1661] Impost. mors. 53
[1657] Retroazione [RPM]
[1652] Retroazione [unità]
[1653] Riferim. pot. digit.
[1639] Temp. scheda di controllo
[1650] Riferimento esterno
[1638] Condiz. regol. SL
[1636] Corrente nom inv.
[1637] Corrente max inv.
[1634] Temp. dissip.
[1662] Ingr. anal. 53
[1663] Imp. interr. mors. 54
[0] Non collegato
0-12 Collega setup
[1665] Uscita anal. 42 [mA]
*[20] Collegato
0-14 Visualizz.: Prog. setup/canale
MG07A506 Danfoss A/S © 08/2018 Tutti i diritti riservati. 73
Page 78

Appendice
[1] %
[2] Giri/min.
[3] Hz
[4] Nm
[5] PPM
[10] 1/min
[12] IMPULSI/s
VLT® Midi Drive FC 280
dimensione
-4999,0–4999 Unità di riferimento/
retroazione
3-03 Riferimento max.
retroazione *In funzione della
3-04 Funzione di riferimento
*[0] Somma
retroazione *0 Unità di riferimento/
-4999,0 - 4999 Unità di riferimento/
[122] gal/min
[123] gal/h
[124] CFM
[125] ft³/s
[126] ft³/min
[127] ft³/h
[130] lb/s
[131] lb/min
[132] lb/h
[140] ft/s
[141] ft/min
[145] ft
[150] lb ft
[160] °F
[170] psi
[171] lb/in2
[172] in wg
[173] ft WG
[180] CV
[25] m³/h
[30] kg/s
[31] kg/min
[32] kg/h
[33] t/min
[34] t/h
[40] m/s
[41] m/min
[45] m
[60] °C
[70] mbar
[71] bar
[72] Pa
[73] kPa
[74] m WG
[80] kW
[120] GPM
[20] l/s
[21] l/min
[22] l/h
[23] m³/s
[24] m³/min
[121] gal/s
3-02 Riferimento minimo
0 - 200 % *100 %
0 - 100 A *0 A
[2] Abilitato
2-19 Guadagno sovratensione
[1] Abilitato (non in stop)
2-2* Freno mecc.
2-20 Corrente rilascio freno
0 - 5 s *0 s
0 - 400 Hz *0 Hz
2-23 Ritardo attivaz. freno
2-22 Velocità di attivazione del freno [Hz]
*[0] OFF
[1] ON
2-3* Freno Mecc. avanzato
[2] ON con ritardo all'avviamento
2-39 Cambiare freno mecc. con dir.
3-** Rif./Rampe
3-0* Limiti riferimento
3-00 Intervallo di rif.
*[0] Min - Max
[1] -Max - +Max
3-01 Unità riferimento/Retroazione
[0] Ness
2-14 Riduzione tens. freno
0 - 160 % *100 %
0 - 500 V *0 V
*[0] Disabilitato
2-17 Controllo sovratensione
2-16 Freno CA, corr. max
dimensione
0 - 500 Hz *0 Hz
0 - 150 % *100 %
0 - 160 % *50 %
[5] Ingresso digitale 32
[6] Ingresso digitale 33
[4] Ingresso digitale 19
[2] Ingr. analog. 54
[3] Ingresso digitale 18
2-** Freni
2-0* Freno CC
2-00 Corr. mant. CC/prerisc. motore
0 - 60 s *10 s
0 - 150 % *50 %
2-01 Corrente di frenatura CC
2-04 Vel. freno inserito CC
2-02 Tempo di frenata CC
0,1 - 60 s *3 s
2-06 Corrente di parcheggio
2-07 Tempo di parcheggio
2-1* Funz. energia freno
2-10 Funzione freno
*[0] O
[1] Freno resistenza
[2] Freno CA
2-11 Resistenza freno (ohm)
dimensione
0 - 6200 Ohm *In funzione della
2-12 Limite di potenza freno (kW)
0,001 - 2000 kW *In funzione della
1010
0 - 10 s *5 s
*[0] Rilevamento del rotore
[1] Parcheggio
1-71 Ritardo avv.
dimensione
0,0 - 9999,00 Ohm *In funzione della
0 - 10 s *0 s
[0] Corr. CC/t. ritardo
1-72 Funz. di avv.
0 - 65535 mH *In funzione della
dimensione
[3] Vel. di avv. s. orario
*[2] Ev. libera/t. ritardo
[1] Fren. CC/t. ritardo
dimensione
0,000 - 65535 mH *In funzione della
*[0] Disattivato
[4] Funz. orizzontale
[5] VVC+ in s. ora
1-73 Riaggancio al volo
2 - 100 *In funzione della dimensione
1 - 9000 V *In funzione della
[2] Abilitato sempre
[3] Dir. rif. abilit.
[4] Dir. rif. sempre abil.
[1] Abilitato
0 - 100 m *50 m
dimensione
0 - 500,0 Hz *In funzione della
1-75 Velocità di avviamento [Hz]
0 - 328 piedi *164 piedi
0 - 1000 A *In funzione della
dimensione
dimensione
1-76 Corrente di avviam.
0 - 65535 mH *In funzione della
dimensione
0 - 65535 mH *In funzione della
0 - 500 Hz *0 Hz
1-79 T. max scatto avviam. compr.
1-78 Vel. max. di avviam. comp. [Hz]
20 - 200 % *100 %
dimensione
0 - 999999999 *100000
[3] Stop con vel. comp
[4] Contatore stop comp. da vel. con ripr.
0 - 500,0 Hz *In funzione della
ripr.
1-84 Valore del contatore arresti precisi
[5] Contatore stop comp. da vel. senza
dimensione
0 - 300 % *100 %
0 - 20 Hz *0 Hz
[2] Cont. stop senza reset
[1] Cont. stop con reset
1-83 Funzione arresto preciso
1-8* Regolaz. arr.
1-80 Funzione all'arresto
*[0] Evol. libera
[1] Mant. CC/prerisc. mot.
[3] Premagnetizz.
20 - 200 % *100 %
20 - 200 % *100 %
*[0] Arr. prec. in rampa
1-82 V. min. funz. all'arr. [Hz]
dimensione
0 - 1000 V *In funzione della
0,1 - 10,0 Hz *1 Hz
0 - 300 % *100 %
1,0 - 2,0 *1,4
0 - 100 ms *10 ms
1-88 Guad. freno CA
1-85 Rit. arr. prec. tr. comp. vel.
0 - 300 % *100 %
1-9* Temp. motore
-400 - 400,0 % *In funzione della
dimensione
1-90 Protezione termica motore
*[0] Nessuna protezione
[1] Termistore, avviso
0,05 - 5 s *0,1 s
[2] Termistore, scatto
[3] ETR avviso 1
[4] ETR sc. 1
0,001 - 0,05 s *0,005 s
0 - 500 % *100 %
[22] ETR scatto - rilevamento esteso
1-93 Fonte termistore
*[0] Nessuno
0 - 120 % *50 %
[1] Ingr. analog. 53
1-49 Corrente a indutt. min. per asse q
1-48 Corr. a indutt. min. per asse d
dimensione
50 - 1000 V *In funzione della
1-22 Tensione motore
[19] 22kW - 30 hp
[20] 30kW - 40 hp
1-50 Magnetizz. motore a vel. nulla.
1-5* Imp. indip. dal car.
20 - 500 Hz *In funzione della
1-23 Frequen. motore
1-52 Min velocità magnetizz. normale [Hz]
dimensione
0,01 - 1000,00 A *In funzione della
1-24 Corrente motore
1-56 Caratteristica u/f - F
1-55 Caratteristica u/f - U
dimensione
dimensione
50 - 60000 Giri/min. *In funzione della
1-25 Vel. nominale motore
0,1 - 10000.0 Nm *In funzione della
1-26 Coppia motore nominale cont.
1-61 Compensaz. del carico ad alta vel.
1-6* Imp. dipend. dal car.
1-60 Compensaz. del carico a bassa vel.
(AMA)
dimensione
*[0] O
1-29 Adattamento Automatico Motore
1-64 Smorzamento risonanza
1-63 Costante di tempo compens. scorrim.
1-62 Compens. scorrim.
0,0 - 9999,000 Ohm *In funzione della
dimensione
[2] Abilitare AMA ridotto
[1] Abilit.AMA compl.
1-3* Dati motore avanz. I
1-30 Resist. statore (RS)
1-31 Resistenza rotore (Rr)
1-65 Smorzamento ris. tempo costante
dimensione
0 - 9999,000 Ohm *In funzione della
1-33 Reatt. dispers. statore (X1)
1-66 Corrente min. a velocità bassa
1-7* Regolaz. avvio
0,0 - 9999,000 Ohm *In funzione della
dimensione
1-35 Reattanza principale (Xh)
1-70 Modalità avvio
0,01 - 20 s *In funzione della
1-16 Cost. tempo ltro ad alta velocità
1-38 Induttanza asse q (Lq)
1-37 Induttanza asse d (Ld)
dimensione
0,001 - 1 s *In funzione della
dimensione
1-17 Cost. di tempo ltro tensione
1-39 Poli motore
1-4* Contr. mot. avanz. II
[4] 0,25 kW - 0,33 Hp
[3] 0,18 kW - 0,25 cv
1-2* Dati mot.
1-20 Potenza motore
[2] 0,12 kW - 0,16 cv
1-42 Lungh. cavo motore
1-40 Forza c.e.m. a 1000 giri/minuto
[7] 0,75 kW - 1,00 hp
[8] 1,10 kW - 1,5 hp
[6] 0,55 kW - 0,75 cv
[5] 0,37 kW - 0,50 hp
1-44 Sat. induttanza asse d (LdSat)
1-43 Lungh. cavi motore piedi
[14] 5,50 kW - 7,50 hp
[13] 4,00 kW - 5,40 hp
[11] 3,00 kW - 4,00 hp
[12] 3,70 kW - 5,00 hp
[10] 2,20 kW - 3,00 hp
[9] 1,50 kW - 2,00 hp
1-46 Guadagno rilevamento posizione
1-45 Sat. induttanza asse q (LqSat)
[18] 18,5kW - 25 hp
[17] 15,00kW - 20 hp
[15] 7,50 kW - 10,0 hp
[16] 11,00 kW - 15,00 hp
74 Danfoss A/S © 08/2018 Tutti i diritti riservati. MG07A506
Page 79

Appendice Guida operativa
[28] Catch-up
[29] Slow down
[34] Rampa bit 0
5-12 Ingr. digitale morsetto 27
[0] Nessuna funzione
[1] Ripristino
[2] Evol. libera neg.
[5] Freno CC neg.
[4] Arr. rapido (negato)
[6] Stop (negato)
[8] Avvio
[9] Avv. a impulsi
[10] Inversione
[11] Avv. inversione
[3] Ruota lib. e ripr. inv.
[12] Abilitaz.+avviam.
[13] Abilitaz.+inversione
[14] Jog
[16] Rif. preimp. bit 0
[19] Blocco riferimento
[20] Blocco uscita
[18] Rif. preimp. bit 2
[17] Rif. preimp. bit 1
[15] Rif. preimp. abil.
[21] Accelerazione
[22] Decelerazione
[24] Selez. setup bit 1
[23] Selez. setup bit 0
Stesse scelte con 5-12
[30] Ingresso contatore
[162] Pos. Idx Bit0
[163] Pos. Idx Bit1
[171] Int. lim. s. or. inverso
[58] DigiPot paranco
[60] Cont. A (increm.)
[61] Cont. A (decrem.)
[57] Azzeram. pot. digit.
[56] Riduzione pot. digit.
[51] Interblocco esterno
[55] Aumento pot. digit.
[35] Rampa bit 1
[45] Latched star t reverse
[65] Ripristino cont. B
[62] Ripristino cont. A
[160] Vai pos. destinaz.
[157] Pos. arr. rap. inv
[156] Lim. HW inv. neg.
[150] Vai pos. home
[151] Int. rif. home
[155] Lim. HW inv. pos.
[74] Abilitaz. PID
[73] Ripr. PID parte I
[72] Errore PID inver.
[63] Cont. B (increm.)
[64] Cont. B (decrem.)
[172] Int. lim. s. antior. inverso
[164] Pos. Idx Bit2
[32] Ingr. impulsi
5-13 Ingr. digitale morsetto 29
Stesse scelte con 5-10
[1] Ripristino
[2] Evol. libera neg.
4-30 Funzione di perdita retroazione motore
4-3* Monit. retr. mot.
0,01 - 3600 s *In funzione della
3-81 Tempo rampa arr. rapido
[4] Arr. rapido (negato)
[5] Freno CC neg.
[6] Stop (negato)
[3] Ruota lib. e ripr. inv.
[0] Disabilitato
[1] Avviso
*[2] Scatto
[3] Jog
dimensione
0,01 - 200 % *0,10 %
3-9* Pot.metro dig.
3-90 Dimensione Passo
[9] Avv. a impulsi
*[8] Avvio
[4] Blocco uscita
[5] Vel. max.
*[0] O
3-92 Ripristino della potenza
[10] Inversione
[11] Avv. inversione
4-31 Errore di velocità retroazione motore
[6] Comm. ad an. ap.
[1] On
3-93 Limite massimo
[12] Abilitaz.+avviam.
0 - 50 Hz *20 Hz
-200 - 200 % *100 %
[13] Abilitaz.+inversione
[14] Jog
0 - 60 s *0,05 s
4-32 Timeout perdita retroazione motore
-200 - 200 % *-100 %
3-94 Limite minimo
[16] Rif. preimp. bit 0
[15] Rif. preimp. abil.
4-4* Ad. avvisi 2
4-40 Avviso freq. bassa
0 - 3600000 ms *1000 ms
3-95 Ritardo rampa
[19] Blocco riferimento
[18] Rif. preimp. bit 2
[17] Rif. preimp. bit 1
0 - 500 Hz *In funzione della
dimensione
4-41 Avviso freq. alta
0 - 200 % *25 %
3-96 Rif. max necorsa
4-** Limiti/Avvisi
[20] Blocco uscita
[21] Accelerazione
[22] Decelerazione
0 - 500 Hz *In funzione della
dimensione
4-42 Avviso di temperatura regolabile
4-1* Limiti motore
4-10 Direz. velocità motore
*[0] Senso orario
[24] Selez. setup bit 1
[23] Selez. setup bit 0
0 - 200 *0
4-5* Adattam. avvisi
[2] Entrambe le direzioni
4-11 Lim. basso vel. motore [giri/min]
[28] Catch-up
[26] Stop prec. (negato)
[27] Start e Stop prec.
0 - 500 A *0 A
4-51 Avviso corrente alta
4-50 Avviso corrente bassa
dimensione
0 - 1500 Giri/min. *In funzione della
4-12 Limite basso velocità motore [Hz]
[29] Slow-down
[34] Rampa bit 0
[35] Rampa bit 1
dimensione
0 - 500,00 A *In funzione della
4-54 Avviso rif. basso
0 - 60000 Giri/min. *In funzione della
0 - 400,0 Hz *0 Hz
4-13 Lim. alto vel. motore [giri/min]
[51] Interblocco esterno
[45] Latched star t reverse
[41] Stop pr. su imp. neg.
[40] Avv. prec. su imp.
-4999 - 4999 *4999
-4999 - 4999 *-4999
4-56 Avviso retroazione bassa
4-55 Avviso riferimento alto
0,1 - 500 Hz *65 Hz
dimensione
4-16 Lim. di coppia in modo motore
4-14 Limite alto velocità motore [Hz]
[57] Azzeram. pot. digit.
[56] Riduzione pot. digit.
[55] Aumento pot. digit.
processo
processo *-4999 Unità di controllo del
-4999 - 4999 Unità di controllo del
dimensione
0 - 1000% *In funzione della
4-17 Lim. di coppia in modo generatore
[58] DigiPot paranco
4-57 Avviso retroazione alta
0 - 1000 % *100 %
[60] Cont. A (increm.)
-4999 - 4999 Unità di controllo del
4-18 Limite di corrente
[61] Cont. A (decrem.)
processo *-4999 Unità di controllo del
0 - 1000% *In funzione della
[63] Cont. B (increm.)
[64] Cont. B (decrem.)
[65] Ripristino cont. B
[62] Ripristino cont. A
processo
4-58 Funzione fase motore mancante
[0] O
*[1] On
0 - 500 Hz *In funzione della
dimensione
dimensione
4-19 Freq. di uscita max.
[73] Ripr. PID parte I
[72] Errore PID inver.
4-6* Bypass di velocità
4-61 Bypass velocità da [Hz]
4-2* Coe. limite
4-20 Fonte coe. limite di coppia
[74] Abilitaz. PID
[150] Vai pos. home
[151] Int. rif. home
0 - 500 Hz *0 Hz
0 - 500 Hz *0 Hz
4-63 Bypass velocità a [Hz]
[4] Ingr. analog. 53 inv
*[0] Nessuna funzione
[2] Ingr. analog. 53
[155] Lim. HW inv. pos.
5-** I/O digitali
[6] Ingr. analog. 54
[156] Lim. HW inv. neg.
5-0* Modalità I/O digitali
[8] Ingr. analog. 54 inv
[157] Pos. arr. rap. inv
[160] Vai pos. destinaz.
*[0] PNP
5-00 Modo ingr. dig.
*[0] Nessuna funzione
4-21 Fonte fattore limite velocità
[162] Pos. Idx Bit0
[1] NPN
[2] Ingr. analog. 53
[163] Pos. Idx Bit1
5-01 Modo Morsetto 27
[4] Ingr. analog. 53 inv
[164] Pos. Idx Bit2
*[0] Ingresso
[6] Ingr. analog. 54
[171] Int. lim. s. or. inverso
[1] Uscita
[8] Ingr. analog. 54 inv
[172] Int. lim. s. antior. inverso
5-1* Ingressi digitali
4-22 Coppia agg. avv.
5-11 Ingr. digitale morsetto 19
5-10 Ingr. digitale morsetto 18
[0] Nessuna funzione
*[0] O
[1] On
10 10
Stesse scelte con 3-15
0 - 100 % *0 %
3-12 Valore di catch-up/slow down
-100 - 100 % *0 %
[11] Rif. bus locale
[8] Ingr. frequenza 33
[2] Ingr. analog. 54
[7] Ingr. frequenza 29
[0] Nessuna funz.
*[1] Ingr. analog. 53
3-15 Risorsa di rif. 1
3-14 Rif. relativo preimpostato
0 - 500,0 Hz *5 Hz
-100 - 100 % *0 %
[1] Esterno/Preimpost.
3-11 Velocità di jog [Hz]
3-1* Riferimenti
3-10 Riferim preimp.
Stesse scelte con 3-15
[20] Potenziom. digitale
[32] Bus PCDFC302Only
3-16 Risorsa di riferimento 2
0,01 - 3600 s *In funzione della
[11] Rif. bus locale
[7] Ingr. frequenza 29
*[0] Nessuna funz.
3-18 Risorsa rif. in scala relativa
3-17 Risorsa di riferimento 3
[8] Ingr. frequenza 33
[1] Ingr. analog. 53
[2] Ingr. analog. 54
3-3* Gen Ramp Settings
3-31 Ramp Down w/ dir. Change
*[0] O
[1] Ramp 1 Ramp Down Time
[2] Ramp 2 Ramp Down Time
[3] Ramp 3 Ramp Down Time
[4] Ramp 4 Ramp Down Time
[9] Quick Stop Ramp Time
3-41 Rampa 1 tempo di accel.
3-4* Rampa 1
[2] Rampa sin. 2
3-40 Rampa tipo 1
*[0] Lineare
[1] Rampa-S
dimensione
dimensione
0,01 - 3600 s *In funzione della
3-42 Rampa 1 tempo di decel.
3-8* Altre rampe
3-80 Tempo rampa Jog
dimensione
0,01 - 3600 s *In funzione della
Stessi contenuti con 3-4*
Stessi contenuti con 3-4*
Stessi contenuti con 3-4*
3-5* Rampa 2
3-6* Rampa 3
3-7* Rampa 4
MG07A506 Danfoss A/S © 08/2018 Tutti i diritti riservati. 75
Page 80

Appendice
0 - 10 V *10 V
0 - 10 V *0,07 V
6-11 Tensione alta morsetto 53
6-10 Tens. bassa morsetto 53
1 - 32000 Hz *32000 Hz
0 - 31999 Hz *4 Hz
6-14 Rif.basso/val.retroaz. morsetto 53
-4999 - 4999 *0
-4999 - 4999 *0
6-15 Rif. alto/valore retroaz. morsetto 53
-4999 - 4999 *In funzione della
0,01 - 10 s *0,01 s
-4999 - 4999 *In funzione della
dimensione
6-16 Tempo cost. ltro morsetto 53
dimensione
0 - 31999 Hz *4 Hz
6-18 Ingr. dig. morsetto 53
*[0] Nessuna funzione
1 - 32000 Hz *32000 Hz
[1] Ripristino
[2] Evol. libera neg.
-4999 - 4999 *0
[4] Arr. rapido (negato)
[5] Freno CC neg.
[3] Ruota lib. e ripr. inv.
dimensione
-4999 - 4999 *In funzione della
VLT® Midi Drive FC 280
[14] Jog
[12] Abilitaz.+avviam.
[13] Abilitaz.+inversione
[15] Rif. preimp. abil.
[11] Avv. inversione
[6] Stop (negato)
[8] Avvio
[10] Inversione
[171] Int. lim. s. or. inverso
[172] Int. lim. s. antior. inverso
[164] Pos. Idx Bit2
6-19 Mod. morsetto 53
[150] Vai pos. home
[151] Int. rif. home
[156] Lim. HW inv. neg.
[155] Lim. HW inv. pos.
1 - 99 s *10 s
[21] Accelerazione
[22] Decelerazione
[24] Selez. setup bit 1
[23] Selez. setup bit 0
4 - 32000 Hz *5000 Hz
1 - 4096 *1024
[19] Blocco riferimento
[20] Blocco uscita
[18] Rif. preimp. bit 2
[17] Rif. preimp. bit 1
[16] Rif. preimp. bit 0
[28] Catch-up
[29] Slow down
[55] Aumento pot. digit.
[34] Rampa bit 0
[35] Rampa bit 1
[51] Interblocco esterno
0 - 100 % *0 %
0 - 100 % *0 %
0 - 0xFFFFFFFF *0
[74] Abilitaz. PID
[73] Ripr. PID parte I
[58] DigiPot paranco
[72] Errore PID inver.
[56] Riduzione pot. digit.
[57] Azzeram. pot. digit.
[162] Pos. Idx Bit0
[163] Pos. Idx Bit1
[157] Pos. arr. rap. inv
[160] Vai pos. destinaz.
5-53 Rif. alto/val. retroaz. morsetto 29
5-52 Rif. basso/val. retroaz. morsetto 29
5-51 Frequenza alta mors. 29
5-6* Uscita impulsi
5-60 Uscita impulsi variabile morsetto 27
[45] Com. bus
[48] Com. bus, timeout
*[0] Nessuna funzione
[100] Freq. di uscita
[101] Riferimento
[102] Retroaz. processo
[106] Potenza
[107] Vel.
[109] Freq. usc. max.
[113] Uscita bloccata PID
[105] Coppia rel. a nom.
[103] Corrente motore
[104] Coppia rel. al lim.
5-62 Freq. max. uscita imp. #27
5-7* Ingr. encoder 24V
*[0] S. orario
[1] Senso antiorario
5-71 Direz. encoder mors. 32/33
5-70 Term 32/33 Impulsi per giro
5-9* Controllato da bus
5-90 Controllo bus digitale e a relè
5-93 Controllo bus uscita impulsi #27
5-94 Preimp. timeout uscita impulsi #27
6-** I/O analogici
6-0* Mod. I/O analogici
*[0] O
6-00 Tempo timeout tensione zero
6-01 Funz. temporizz. tensione zero
[1] Blocco uscita
[2] Arresto
[3] Mar.Jog
[4] Vel. max.
[5] Stop e scatto
6-1* Ingr. analog. 53
5-58 Rif. alto/val. retroaz. morsetto 33
5-57 Rif. basso/val. retroaz morsetto 33
5-56 Frequenza alta mors. 33
5-55 Frequenza bassa morsetto 33
1010
0 - 600 s *0,01 s
0 - 600 s *0,01 s
[20] Sopra retroaz. alta
[61] Comparatore 1
[21] Termica Avviso
[62] Comparatore 2
[41] Sotto rif., basso
[40] Fuori campo rif.
[37] Bit 12 par. di contr.
[31] Relè 123
[32] Com. freno mecc.
[36] Bit 11 par. di contr.
[30] Guasto freno (IGBT)
[29] Fr.pronto, no gu.
[26] Bus OK
[27] Coppia lim.&arresto
[28] Freno, ness. avv.
[25] Inversione
[24] Pronto, no sovra / sotto tensione
[23] Rem., pronto, n. ter.
[22] Pronto, n. avv. term.
[160] Nessun allarme
[91] Encoder emula uscita A
[83] Uscita digitale SL D
[82] Uscita digitale SL C
[80] Uscita digitale SL A
[70] Regola logica 0
[71] Regola logica 1
[72] Regola logica 2
[64] Comparatore 4
[65] Comparatore 5
[63] Comparatore 3
[73] Regola logica 3
[81] Uscita digitale SL B
[74] Reg. log. 4
[75] Reg. log. 5
[47] Contr. bus, tempor.: O
[42] Sopra rif., alto
[45] Com. bus
[46] Contr. bus, tempor.: On
[161] Inversione attiva
[165] Rif. locale attivo
[166] Rif. remoto attivo
[167] Comando di avviamento attivo
[56] Avviso pulizia dissip., alto
[168] Conv.freq.mod.man.
[61] Comparatore 1
[62] Comparatore 2
[60] Comparatore 0
[169] Conv. in mod.auto
[170] Homing compl.
[171] Pos. destinaz. raggiunta
[70] Regola logica 0
[71] Regola logica 1
[65] Comparatore 5
[190] Funz. STO attiva
[193] Modo pausa
[194] Funz. cinghia rotta
[72] Regola logica 2
[239] Guasto funz. STO
[64] Comparatore 4
[63] Comparatore 3
[172] Err. contr. pos.
[173] Pos. freno mecc.
[80] Uscita digitale SL A
[73] Regola logica 3
[74] Reg. log. 4
[75] Reg. log. 5
0 - 600 s *0,01 s
uscita digitale)
5-35 O Delay, Digital Output (Ritardo
5-34 On Delay, Digital Output (Ritardo attiv.,
[160] Nessun allarme
[161] Inversione attiva
[83] Uscita digitale SL D
[82] Uscita digitale SL C
[81] Uscita digitale SL B
0 - 600 s *0,01 s
disatt., usc. dig.)
5-4* Relè
5-40 Funzione relè
[0] Nessuna funzione
[168] Conv.freq.mod.man.
[169] Conv. in mod.auto
[167] Comando di avviamento attivo
[3] Conv. freq. pr. / rem.
[4] Stand-by/n.avviso
[5] In funzione
[170] Homing compl.
[6] In marcia/no avviso
[165] Rif. locale attivo
[166] Rif. remoto attivo
*[1] Comando pronto
[2] Conv. freq. pronto
[190] Funz. STO attiva
[193] Modo pausa
[171] Pos. destinaz. raggiunta
[172] Err. contr. pos.
[8] Mar./rif. rag./n. avv.
[7] Mar. in range/n. avv.
[194] Funz. cinghia rotta
[173] Pos. freno mecc.
[9] All.
[10] Allarme o avviso
[11] Al lim. coppia
[12] Fuori interv.di corr.
[239] Guasto funz. STO
[13] Sotto corrente, bassa
5-41 Ritardo attiv., relè
[14] Sopra corrente, alta
5-42 Ritardo disatt., relè
5-5* Ingr. impulsi
5-50 Frequenza bassa morsetto 29
[18] Fuori campo retroaz.
[19] Sotto retroaz. bassa
[16] Sotto freq., bassa
[17] Sopra freq., alta
[15] Fuori campo di freq.
Stesse scelte con 5-12
Stesse scelte con 5-12
[43] Limite PID esteso
[45] Com. bus
[46] Contr. bus, tempor.: On
[47] Contr. bus, tempor.: O
[55] Uscita a impulsi
[56] Avviso pulizia dissip., alto
[60] Comparatore 0
[19] Sotto retroaz. bassa
[20] Sopra retroaz. alta
[22] Pronto, n. avv. term.
[10] Allarme o avviso
[11] Al lim. coppia
[12] Fuori interv.di corr.
[13] Sotto corrente, bassa
[5] In funzione
[6] In marcia/no avviso
[7] Mar. in range/n. avv.
[8] Mar./rif. rag./n. avv.
[83] Ingr. encoder Z
5-14 Ingr. digitale morsetto 32
[82] Ingr. encoder B
5-15 Ingr. digitale morsetto 33
[30] Ingresso contatore
[32] Ingr. impulsi
[81] Ingr. encoder A
5-19 Arresto sicurezza mors. 37/38
*[1] All. Safe Torque O
[3] Avviso Safe Torque O
5-3* Uscite digitali
5-30 Uscita dig. morsetto 27
*[0] Nessuna funzione
[1] Comando pronto
[2] Conv. freq. pronto
[3] Conv. freq. pr. / rem.
[4] Stand-by/n.avviso
[9] All.
[18] Fuori campo retroaz.
[16] Sotto freq., bassa
[17] Sopra freq., alta
[14] Sopra corrente, alta
[15] Fuori campo di freq.
[41] Sotto rif., basso
[42] Sopra rif., alto
[40] Fuori campo rif.
[37] Bit 12 par. di contr.
[31] Relè 123
[32] Com. freno mecc.
[36] Bit 11 par. di contr.
[30] Guasto freno (IGBT)
[29] Fr.pronto, no gu.
[26] Bus OK
[27] Coppia lim.&arresto
[28] Freno, ness. avv.
[25] Inversione
[24] Pronto, no sovra / sotto tensione
[23] Rem., pronto, n. ter.
[21] Termica Avviso
76 Danfoss A/S © 08/2018 Tutti i diritti riservati. MG07A506
Page 81

Appendice Guida operativa
0,5 - 6000 s *1 s
8-04 Funzione temp. controllo
*[0] Par. dig. e di com.
[1] Solo digitale
[2] Solo parola di com.
8-02 Fonte di contr.
[0] Nessuno
[1] Porta FC
[2] USB FC
[3] Opz. A
*[0] O
8-03 Tempo temporizz. di contr.
[1] Blocco uscita
[2] Arresto
[3] Mar.Jog
[4] Vel. max.
[5] Stop e scatto
8-07 Diagnosi Trigger
[2] All./avviso a scatto
*[0] Disabilitato
8-10 Prolo p. di contr.
[1] Attivazione allarmi
8-1* Imp. par. di contr.
*[0] Prolo FC
[1] Prolo PROFIdrive
[5] ODVA
[7] CANopen DSP 402
8-13 Parola di stato congurabile (STW)
*[1] Prolo default
[0] Nessuna funzione
[2] Solo allarme 68
[71] Regola logica 1
[72] Regola logica 2
[73] Regola logica 3
[70] Regola logica 0
[63] Comparatore 3
[64] Comparatore 4
[60] Comparatore 0
[21] Avviso termico
[13] Stato T29 DI
[14] Stato T32 DI
[11] Stato T19 DI
[10] Stato T18 DI
[3] Scatto escl. all. 68
[15] Stato T33 DI
[12] Stato T27 DI
[61] Comparatore 1
[30] Guasto freno (IGBT)
[40] Fuori campo rif.
[65] Comparatore 5
[62] Comparatore 2
[81] Uscita digitale SL B
[74] Regola logica 4
[75] Regola logica 5
[80] Uscita digitale SL A
8-14 Parola di controllo congurabile CT W
[93] Alarm68 or Alarm188
[83] Uscita digitale SL D
[82] Uscita digitale SL C
7-36 PID di processo, limite guad. deriv.
6-96 Morsetto 42, uscita controllata via bus
1 - 50 *5
7-39 Ampiezza di banda riferimento a
7-38 Fattore feed forward PID di processo
*[0] No
[1] Sì
7-4* PID proc. avanz. I
7-40 Ripr. PID proc. parte I
-100 - 100 % *100 %
-100 - 100 % *-100 %
7-42 Blocco uscita PID di proc. pos.
7-41 Blocco uscita PID di proc. neg.
7-43 Scala guad. PID di proc. a rif. min.
0 - 100 % *100 %
0 - 100 % *100 %
[11] Rif. bus locale
[32] Bus PCDFC302Only
7-44 Scala guad. PID di proc. a rif. max.
7-45 Risorsa Feed Fwd PID di processo
*[0] Nessuna funz.
[7] Ingr. frequenza 29
[2] Ingr. analog. 54
[1] Ingr. analog. 53
7-46 Feed Fwd PID di processo/contr. inv.
[8] Ingr. frequenza 33
0 - 200 % *5 %
0 - 200 % *0 %
0 - 65535 *0
*[0] Norm.
[1] Inverso
7-48 PCD Feed Forward
7-49 om. usc. PID di processo norm./ inv.
*[0] Norm.
[1] Inverso
7-5* PID proc. avanz. II
7-50 PID di processo PID esteso
0 - 100 *1
7-52 Controlla la din. del seg. di feed
7-51 Guad. Feed Fwd PID di proc.
[0] Disabilitato
*[1] Abilitato
0,01 - 100 s *0,01 s
0,01 - 100 s *0,01 s
forward dur. l'accel.
7-53 Rampa decel. Feed Fwd PID di proc.
0,001 - 1 s *0,001 s
0,001 - 1 s *0,001 s
7-57 Tempo retroaz. ltro PID pr.
7-56 Tempo di rif. ltro PID di pr.
7-60 Conversione retroazione 1
7-6* Conversione della retroazione
*[0] Lineare
[1] Radice quadrata
[1] Radice quadrata
7-62 Conversione retroazione 2
8-** Comun. e opzioni
8-0* Impost.generali
8-01 Sito di comando
*[0] Lineare
10 10
0 - 16384 *0
[8] Ingr. frequenza 29
7-00 Fonte retroazione PID di velocità
[1] Encoder 24 V
[7] Ingr. analog. 54
[6] Ingr. analog. 53
7-** Regolatori
7-0* Contr. vel. PID
0 - 1 *0,015
*[20] Ness
7-02 Guadagno prop. PID di vel.
[9] Ingr. frequenza 33
0 - 200 ms *30 ms
2 - 20000 ms *8 ms
7-03 Tempo di integr. PID vel.
7-04 Tempo dier. PID di velocità
1 - 20 *5
7-05 PID di vel. lim. guad. di
1 - 6000 ms *10 ms
7-06 Tempo ltro p-b PID di velocità
7-07 Retroaz. vel. PID rapp. trasm.
0,0001 - 32 *1
0 - 500 % *0 %
7-08 Fattore feed forward PID vel.
7-1* Contr. coppia PID
0 - 500 % *100 %
7-12 Guadagno prop. PID di coppia
0,002 - 2 s *0,020 s
7-13 Tempo di integ. PID di coppia
7-2* Retroaz. reg. proc.
*[0] Nessuna funzione
7-20 Risorsa retroazione 1 CL processo
0 - 10 *0,01
processo
0 - 6000 RPM *0 Giri/min.
[2] Ingresso analogico 54
[3] Ingr. frequenza 29
[4] Ingr. frequenza 33
[1] Ingresso analogico 53
*[0] Nessuna funzione
[4] Ingr. frequenza 33
7-22 Risorsa retroazione 2 CL processo
[3] Ingr. frequenza 29
[1] Ingr. analog. 53
[2] Ingr. analog. 54
7-3* Reg. PID di proc.
7-30 PID proc., contr. n./inv.
*[0] Norm.
[1] Inverso
7-31 Anti sat. PID di processo
[0] O
*[1] On
7-33 Guadagno proporzionale PID di
7-32 Veloc. avviam. PID di pr.
7-34 Tempo d’integrazione PID di processo
0 - 20 s *0 s
0,10 - 9999 s *9999 s
7-35 Tempo di derivazione PID di processo
0 - 200 % *100 %
0 - 200 % *0 %
[18] Fuori campo retroaz.
[17] Sopra freq., alta
*[1] Mod. tensione
[6] Ingr. dig.
[20] Sopra retroaz. alta
[19] Sotto retroaz. bassa
6-20 Tens. bassa morsetto 54
6-2* Ingr. analog. 54
[21] Termica Avviso
0 - 10 V *0,07 V
[27] Coppia lim.&arresto
0 - 20 mA *20 mA
[30] Guasto freno (IGBT)
[28] Freno, ness. avv.
0,01 - 10 s *0,01 s
dimensione
-4999 - 4999 *In funzione della
-4999 - 4999 *0
6-29 Modo morsetto 54
[0] Mod. corrente
6-26 Tempo Cost. ltro morsetto 54
6-25 Rif. alto/valore retroaz. morsetto 54
6-24 Rif.basso/val.retroaz. morsetto 54
[25] Inversione
[26] Bus OK
[24] Pronto, no sovra / sotto tensione
[23] Rem., pronto, n. ter.
[22] Pronto, n. avv. term.
0 - 20 mA *4 mA
0 - 10 V *10 V
6-23 Corrente alta morsetto 54
6-22 Corr. bassa morsetto 54
6-21 Tensione alta morsetto 54
[41] Sotto rif., basso
[40] Fuori campo rif.
[37] Bit 12 par. di contr.
[36] Bit 11 par. di contr.
[31] Relè 123
[32] Com. freno mecc.
[29] Fr.pronto, no gu.
[42] Sopra rif., alto
[45] Com. bus
*[1] Mod. tensione
6-9* Uscita anal./digit. 42
[46] Contr. bus, tempor.: On
6-90 Terminal 42 Mode
[47] Contr. bus, tempor.: O
*[0] 0-20 mA
[56] Avviso pulizia dissip., alto
[1] 4-20 mA
[60] Comparatore 0
[2] Uscita digitale
[61] Comparatore 1
[62] Comparatore 2
*[0] Nessuna funzione
6-91 Uscita analogica morsetto 42
[64] Comparatore 4
[63] Comparatore 3
[100] Freq. di uscita
[101] Riferimento
[65] Comparatore 5
[102] Retroaz. processo
[193] Modo pausa
[168] Conv.freq.mod.man.
[169] Conv. in mod.auto
[170] Homing compl.
[5] In funzione
[4] Stand-by/n.avviso
[6] In marcia/no avviso
[171] Pos. destinaz. raggiunta
[7] Mar. in range/n. avv.
[165] Rif. locale attivo
[161] Inversione attiva
[166] Rif. remoto attivo
*[0] Nessuna funzione
[1] Comando pronto
[2] Conv. freq. pronto
[167] Comando di avviamento attivo
[3] Conv. freq. pr. / rem.
[160] Nessun allarme
[83] Uscita digitale SL D
[82] Uscita digitale SL C
[80] Uscita digitale SL A
[70] Regola logica 0
[71] Regola logica 1
[72] Regola logica 2
[73] Regola logica 3
[106] Potenza
[105] Coppia rel. a nom.
[104] Coppia rel. al lim.
[103] Corrente motore
[81] Uscita digitale SL B
[74] Reg. log. 4
[75] Reg. log. 5
[107] Vel.
[111] Retroaz. vel.
[113] Uscita bloccata PID
[139] Contr. bus
[143] CL 1 est.
[254] Tens. bus CC
6-92 Terminal 42 Digital Output
[194] Funz. cinghia rotta
[172] Err. contr. pos.
[173] Pos. freno mecc.
[9] All.
[10] Allarme o avviso
[11] Al lim. coppia
[8] Mar./rif. rag./n. avv.
6-94 Mors. 42, usc. scala max.
[198] Modo bypass attivo
6-93 Mors. 42, usc. scala min.
[16] Sotto freq., bassa
[13] Sotto corrente, bassa
[14] Sopra corrente, alta
[15] Fuori campo di freq.
[12] Fuori interv.di corr.
MG07A506 Danfoss A/S © 08/2018 Tutti i diritti riservati. 77
Page 82

Appendice
VLT® Midi Drive FC 280
0 - 65535 *0
[0] Disabilitato
*[1] Attivaz.mast.cicl.
9-44 Contatore messaggi di guasto
[1662] Ingr. analog. 53
[1657] Retroaz. [RPM]
[1660] Ingresso digitale
[1661] Impost. mors. 53
[108] PPO 8
[1633] Energia freno/2 min
Stesse scelte con 9-15 e 9-16
9-27 Param. edit
[0] Disattivato
*[1] Abilitato
[1639] Temp. scheda di controllo
[1650] Riferimento esterno
9-28 Controllo di processo
[1653] Riferim. pot. digit.
[1652] Retroazione [unità]
9-23 Parametri per segnali
[200] Telegr. person. 1
[1634] Temp. dissip.
[1635] Termico inverter
[1638] Condiz. regol. SL
0 - 65535 *1037
1 - 126 *126
[1672] Contatore A
[696] Morsetto 42, uscita controllata via bus
[1673] Contatore B
[748] PCD Feed Forward
[1684] Opz. com. par. stato
[890] Bus Jog 1 velocità
[891] Bus Jog 2 velocità
[1680] Par. com. 1 F.bus
[1682] RIF 1 Fieldbus
[3401] Scrittura PCD 1 per applic.
[3402] Scrittura PCD 2 per applic.
[0] Nessuno
[1500] Ore di funzionamento
[1501] Ore esercizio
9-16 Cong. lettura PCD
[3410] Scrittura PCD 10 per applic.
[3409] Scrittura PCD 9 per applic.
[3408] Scrittura PCD 8 per applic.
[3407] Scrittura PCD 7 per applic.
[3406] Scrittura PCD 6 per applic.
[3405] Scrittura PCD 5 per applic.
[3404] Scrittura PCD 4 per applic.
[3403] Scrittura PCD 3 per applic.
[1671] Uscita a relè
[1669] Usc. imp. 27 [Hz]
[1668] Ingr. freq. #33 [Hz]
[1666] Uscita digitale
[1667] Ingr. freq. #29 [Hz]
[1664] Ingr. anal. 54
[1665] Uscita anal. 42 [mA]
[1663] Imp. interr. mors. 54
[625] Rif. alto/valore retroaz. morsetto 54
[615] Rif. alto/valore retroaz. morsetto 53
[593] Controllo bus uscita impulsi #27
[558] Rif. alto/val. retroaz. morsetto 33
[590] Controllo bus digitale e a relè
[417] Lim. di coppia in modo generatore
[553] Rif. alto/val. retroaz. morsetto 29
[416] Lim. di coppia in modo motore
[3425] PCD 5 lettura per applic.
[3426] PCD 6 lettura per applic.
[3427] PCD 7 lettura per applic.
[3424] PCD 4 lettura per applic.
[3422] PCD 2 lettura per applic.
[3423] PCD 3 lettura per applic.
[3421] PCD 1 lettura per applic.
[1695] Parola di stato est. 2
[1697] Par. all. 3
[1698] Warning Word 3
[1694] Parola di stato est.
[1692] Parola di avv.
[1693] Parola di avv. 2
[1690] Parola di all.
[1691] Parola di allarme 2
[1685] Par. com. 1 p. FC
[1674] Contat. arresti precisi
[3450] Posizione eettiva
[3428] PCD 8 lettura per applic.
[3429] PCD 9 lettura per applic.
[3430] PCD 10 lettura per applic.
[3456] Errore di inseguimento
9-18 Indirizzo nodo
[1603] Parola di stato
[1605] Val. reale princ. [%]
[1601] Riferimento [unità]
[1602] Riferimento [%]
[1502] Contatore kWh
[1600] Par. di contr.
9-19 N. sist. unità conv. di freq.
[1610] Potenza [kW]
[1609] Visual. personaliz.
[1611] Power [hp]
9-22 Selezione telegramma
[1] Telegr. std.1
[1612] Tensione motore
[1613] Frequenza
*[100] Ness
[1614] Corrente motore
[101] PPO 1
[1615] Frequenza [%]
[102] PPO 2
[103] PPO 3
[104] PPO 4
[105] PPO 5
[106] PPO 6
[107] PPO 7
[1617] Velocità [giri/m]
[1622] Coppia [%]
[1618] Term. motore
[1620] Angolo motore
[1630] Tensione bus CC
[1616] Coppia [Nm]
1010
0 - 4294967295 *0
0 - 4294967295 *0
0 - 4294967295 *0
0 - 4294967295 *0
0 - 4294967295 *0
0 - 4294967295 *0
0 - 655 *In funzione della dimensione
0 - 1500 Giri/min. *100 Giri/min.
0 - 1500 Giri/min. *200 Giri/min.
0 - 65535 *0
0 - 65535 *0
[2] Logica E
*[3] Logica O
8-56 Selezione rif. preimpostato
[6] [1602] Riferim. %
[7] [1603] P. di stato
[8] [1605] Valore e. princ. [%]
[0] Nessuno
*[1] Prolo default
[2] CT W Valido, attivo basso
[0] Ingr. digitale
[1] Bus
[10] [1610] Pot. [kW ]
[9] [1609] Visual. person.
[5] Ripr. PID parte I
[4] Errore PID inver.
[2] Logica E
[11] [1611] Pot. [hp]
[6] Abil. PID
*[3] Logica O
8-57 Selezione Prodrive OFF2
[13] [1613] Frequenza
[12] [1612] Tens. mot.
0 - 2147483647 *In funzione della
8-19 Cod. prod.
[2] Logica E
[0] Ingr. digitale
[1] Bus
*[3] Logica O
[16] [1616] Coppia [Nm]
[17] [1618] Term. motore
[15] [1615] Frequenza [%]
[14] [1614] Corr. motore
dimensione
8-3* Impostaz. porta FC
8-30 Protocollo
*[0] FC
8-58 Prodrive OFF3 Select
[18] [1630] Tens. bus CC
[2] Modbus RTU
[0] Ingr. digitale
[19] [1634] Temp. dissip.
8-31 Indirizzo
[1] Bus
[20] [1635] Term. inverter
0,0 - 247 *1
[2] Logica E
*[3] Logica O
8-7* Prot. vers. SW
8-79 Vers. Firmware prot.
[25] [1661] Imp. interr. mors. 53
[23] [1652] Retroaz. [Unità]
[24] [1660] Ingr. dig. 18, 19, 27, 33
[22] [1650] Riferim. esterno
[21] [1638] Stato Controllo SL
8-32 Baud rate
[0] 2400 Baud
[1] 4800 Baud
[2] 9600 Baud
[3] 19200 Baud
8-8* Diagnostica porta FC
[26] [1662] Ingr. anal. 53(V )
[4] 38400 Baud
8-80 Conteggio messaggi bus
[27] [1663] Imp. interr. mors. 54
[5] 57600 Baud
[28] [1664] Ingr. anal. 54
[6] 76800 Baud
8-81 Conteggio errori bus
[29] [1665] Uscita anal. 42 [mA]
[7] 115200 Baud
[30] [1671] Uscita a relè [bin]
8-33 Parità / bit di stop
8-9* Retroazione bus
8-90 Bus Jog 1 velocità
8-91 Bus Jog 2 velocità
9-** PROFIdrive
9-00 Riferimento
9-07 Valore reale
9-15 Cong. scrittura PCD
[35] [1694] Parola di stato est.
[34] [1692] Parola di avv.
[33] [1690] Parola di all.
[31] [1672] Contat. A
[32] [1673] Contat. B
[1] Parità dispari, 1 bit di stop
[0] Parità pari, 1 bit di stop
8-5* Digit./Bus
8-50 Selezione ruota libera
[0] Ingr. digitale
[1] Bus
[2] Logica E
*[3] Logica O
8-51 Selez. arresto rapido
[0] Ingr. digitale
[1] Bus
[2] Logica E
*[3] Logica O
8-52 Selez. freno CC
[0] Ingr. digitale
dimensione
0,1 - 10,0 s *In funzione della
0,0010 - 0,5 s *0,01 s
8-36 Ritardo max. risposta
8-35 Ritardo minimo risposta
[3] Ness. parità, 2 bit di stop
[2] Ness. parità, 1 bit di stop
8-4* Imp. prot. FC MC
8-42 Cong. scrittura PCD
[0] Ness
[1] [302] Riferimento min.
[2] [303] Riferimento max.
[6] [352] Rampa 2 tempo decel.
[5] [351] Rampa 2 tempo accel.
[4] [342] Rampa 1 tempo decel.
[3] [341] Rampa 1 tempo accel.
[1] Bus
[7] [380] T. rampa Jog
[2] Logica E
*[3] Logica O
[9] [412] Lim. basso vel. mot. [Hz]
[8] [381] T. arr. rapido
8-53 Selez. avvio
[10] [414] Lim. alto vel. mot. [Hz]
[303] Riferimento max.
[0] Nessuno
[302] Riferimento minimo
[0] Ingr. digitale
[1] Bus
[2] Logica E
[13] [696] Mors. 42, bus controllo uscita
[12] [676] Mors. 45, bus controllo uscita
[11] [590] Controllo bus dig. e a relè
[312] Valore di catch-up/slow down
*[3] Logica O
[15] Por. FC CTW
[341] Rampa 1 tempo di accel.
[342] Rampa 1 tempo di decel.
[0] Ingr. digitale
8-54 Selez. inversione
[16] Por. FC RIF
8-43 Cong. lettura PCD
[351] Rampa 2 tempo di accel.
[1] Bus
[0] Ness
[352] Rampa 2 tempo di decel.
[2] Logica E
[1] [1500] Ore di funz.
8-84 Messaggi slave inviati
8-83 Conteggio errori slave
8-82 Conteggio messaggi slave
[380] Tempo rampa Jog
*[3] Logica O
[2] [1501] Ore esercizio
[412] Limite basso velocità motore [Hz]
[381] Tempo rampa arr. rapido
8-55 Selez. setup
[0] Ingr. digitale
[4] [1600] Par. di contr.
[3] [1502] Contat. kWh
[414] Limite alto velocità motore [Hz]
[1] Bus
[5] [1601] Riferim. [unità]
*[0] Non riprist.
[1] Riprist. cont.
8-88 Ripr. diagnost. porta FC
8-85 Errore timeout slave
78 Danfoss A/S © 08/2018 Tutti i diritti riservati. MG07A506
Page 83

Appendice Guida operativa
8 - 32 *16
8 - 32 *16
0 - 2147483647 *0
0 - 65535 *In funzione della
dimensione
0 - 65535 *In funzione della
dimensione
0 - 0 *0
0 - 65535 *0
0 - 65535 *0
1 - 239 *1
0 - 2000000000 ms *30000 ms
0 - 2000000,000 ms *5000,000 ms
0 - 4294967295 *0
0 - 2147483647 *0
0 - 4294967295 *0
0 - 2000000000 *15
[3421] PCD 1 lettura per applic.
[3408] Scrittura PCD 8 per applic.
12-09 Indirizzo sico
[3422] PCD 2 lettura per applic.
[3409] Scrittura PCD 9 per applic.
0 - 17 *0
[3424] PCD 4 lettura per applic.
[3423] PCD 3 lettura per applic.
12-22 Dati processo lettura cong.
[3410] Scrittura PCD 10 per applic.
12-1* Parametri collegamento Ethernet
12-10 Stato del collegamento
[3427] PCD 7 lettura per applic.
[3426] PCD 6 lettura per applic.
[3425] PCD 5 lettura per applic.
[0] Nessuno
[1500] Ore di funzionamento
[1501] Ore esercizio
*[0] Nessun collegamento
[1] Coll.
12-11 Durata del collegamento
[3450] Posizione eettiva
[3428] PCD 8 lettura per applic.
[3429] PCD 9 lettura per applic.
[3430] PCD 10 lettura per applic.
[1602] Riferimento [%]
[1502] Contatore kWh
[1600] Par. di contr.
[1601] Riferimento [unità]
0 - 0 *In funzione della dimensione
12-12 Negoziazione automatica
[0] O
*[1] On
[3456] Errore di inseguimento
12-23 Process Data Cong Write Size
[1603] Parola di stato
[1605] Val. reale princ. [%]
*[0] Nessuno
12-13 Velocità di collegamento
12-24 Process Data Cong Read Size
[1609] Visual. personaliz.
[1610] Potenza [kW]
[1611] Power [hp]
[1] 10 Mbps
[2] 100 Mbps
12-14 Link duplex
*[0] O
12-28 Memorizzare i valori di dati
[1613] Frequenza
[1612] Tensione motore
[0] Half-duplex
*[1] Full-duplex
12-29 Memorizzare sempre
[2] Salva tutti i setup
[1614] Corrente motore
[1615] Frequenza [%]
0 - 2147483647 *0
12-18 Superv. MAC
*[0] O
[1616] Coppia [Nm]
12-19 Ind. IP superv.
[1] On
[1617] Velocità [giri/m]
0 - 2147483647 *0
12-31 Riferimento rete
12-3* EtherNet/IP
12-30 Parametro di avviso
[1618] Term. motore
[1620] Angolo motore
[1622] Coppia [%]
[1630] Tensione bus CC
0 - 255 *In funzione della dimensione
12-21 Dati processo scrittura cong.
12-2* Dati proc.
12-20 Istanza di controllo
*[0] O
[1] On
12-32 Controllo rete
[1634] Temp. dissip.
[1635] Termico inverter
[1633] Energia freno/2 min
[0] Nessuno
[302] Riferimento minimo
[303] Riferimento max.
*[0] O
[1638] Condiz. regol. SL
[312] Valore di catch-up/slow down
[1] On
[1639] Temp. scheda di controllo
[341] Rampa 1 tempo di accel.
12-33 Revis. CIP
[1650] Riferimento esterno
[342] Rampa 1 tempo di decel.
[1652] Retroazione [unità]
[1653] Riferim. pot. digit.
[351] Rampa 2 tempo di accel.
[352] Rampa 2 tempo di decel.
12-34 Codice prodotto CIP
[1657] Retroazione [RPM]
[380] Tempo rampa Jog
[1660] Ingresso digitale
[1661] Impost. mors. 53
[412] Limite basso velocità motore [Hz]
[381] Tempo rampa arr. rapido
12-35 Parametro EDS
[1662] Ingr. analog. 53
[414] Limite alto velocità motore [Hz]
12-69 Ethernet PowerLink Status
12-68 Cumulative Counters
12-67 Threshold Counters
[1673] Contatore B
12-63 Basic Ethernet Timeout
[1684] Opz. com. par. stato
[1674] Contat. arresti precisi
12-66 Threshold
[1690] Parola di all.
[1685] Par. com. 1 p. FC
[1697] Par. all. 3
[1698] Warning Word 3
[1694] Parola di stato est.
[1695] Parola di stato est. 2
[1693] Parola di avv. 2
[1692] Parola di avv.
[1691] Parola di allarme 2
12-37 Timer con inibizione COS
12-38 Filtro COS
12-6* Ethernet PowerLink
12-60 Node ID
12-62 SDO Timeout
[1669] Usc. imp. 27 [Hz]
[1671] Uscita a relè
[1672] Contatore A
[1668] Ingr. freq. #33 [Hz]
[1666] Uscita digitale
[1667] Ingr. freq. #29 [Hz]
[1664] Ingr. anal. 54
[1665] Uscita anal. 42 [mA]
[1663] Imp. interr. mors. 54
10 10
[3407] Scrittura PCD 7 per applic.
[3406] Scrittura PCD 6 per applic.
[3405] Scrittura PCD 5 per applic.
[3404] Scrittura PCD 4 per applic.
[3403] Scrittura PCD 3 per applic.
[1680] Par. com. 1 F.bus
[1682] RIF 1 Fieldbus
[3401] Scrittura PCD 1 per applic.
[3402] Scrittura PCD 2 per applic.
[748] PCD Feed Forward
[890] Bus Jog 1 velocità
[696] Morsetto 42, uscita controllata via bus
[891] Bus Jog 2 velocità
[625] Rif. alto/valore retroaz. morsetto 54
[615] Rif. alto/valore retroaz. morsetto 53
[593] Controllo bus uscita impulsi #27
[558] Rif. alto/val. retroaz. morsetto 33
[590] Controllo bus digitale e a relè
[417] Lim. di coppia in modo generatore
[553] Rif. alto/val. retroaz. morsetto 29
[416] Lim. di coppia in modo motore
0 - 9999 *0
0 - 9999 *0
0 - 9999 *0
0 - 9999 *0
0 - 65535 *0
9-91 Parametri cambiati (2)
9-92 Parametri cambiati (3)
9-93 Parametri cambiati (4)
9-94 Parametri cambiati (5)
9-99 Contatore di revisione Probus
10-** B. di c. CAN
0 - 0 *0
0 - 0 *0
0 - 1000 *0
0 - 65535 *0
9-45 Codice di guasto
9-47 Numero guasto
9-52 Contatore situazione guasto
9-53 Parola di avviso Probus
9-63 Baud rate attuale
[0] 9,6 kbit/s
[1] 19,2 kbit/s
10-0* Impostaz. di base
[2] 93,75 kbit/s
10-01 Selez. baud rate
[3] 187,5 kbit/s
[16] 10 Kbps
[4] 500 kbit/s
[17] 20 Kbps
[6] 1500 kbit/s
[18] 50 Kbps
[7] 3000 kbit/s
*[20] 125 Kbps
[8] 6000 kbit/s
[21] 250 Kbps
[9] 12000 kbit/s
[22] 500 Kbps
[10] 31,25 kbit/s
[23] 800 Kbps
[11] 45,45 kbit/s
[24] 1000 Kbps
*[255] No vel.in baud pr.
1 - 127 *127
10-02 ID nodo
0 - 0 *0
9-64 Identif. apparecchio
0 - 255 *0
10-05 Visualizz. cont. errori trasm.
0 - 0 *0
9-65 Numero di prolo
0 - 255 *0
10-06 Visual. contatore errori ricez.
9-67 Parola contr. 1
*[0] O
10-3* Accesso param.
10-31 Memorizza i valori dei dati
0 - 65535 *0
0 - 65535 *0
9-68 Parola di stato 1
9-70 Prog. setup
[3] Salva setup pr.
[2] Salva tutti i setup
[1] Setup 1
[2] Setup 2
*[0] O
10-33 Memorizzare sempre
[1] On
[3] Setup 3
[4] Setup 4
*[9] Setup attivo
12-** Ethernet
12-0* Impostazioni IP
12-00 Assegnazione indirizzo IP
9-71 Salva valori di dati Probus
*[0] O
[1] Salva tutti i setup
[0] MANUALE
[1] DHCP
[2] BOOTP
9-72 Ripr. conv.freq. Probus
*[0] Nessun'azione
[1] Riprist. accens.
*[10] DCP
[2] Prep. riprist. accens.
[20] Da ID nodo
[3] Ripris.opz.di com.
12-01 Indirizzo IP
9-75 Identicazione Uscita Digitale
0 - 4294967295 *0
0 - 4294967295 *0
12-02 Maschera di sottorete
0 - 65535 *0
0 - 9999 *0
9-80 Parametri deniti (1)
0 - 4294967295 *0
12-03 Gateway default
0 - 9999 *0
9-81 Parametri deniti (2)
0 - 2147483647 *0
12-04 Server DHCP
0 - 9999 *0
9-82 Parametri deniti (3)
0 - 4294967295 *0
12-05 Rilascio scade
0 - 9999 *0
9-83 Parametri deniti (4)
12-06 Name-servers
9-84 Parametri deniti (5)
0 - 4294967295 *0
12-07 Nome di dominio
0 - 9999 *0
9-85 Parametri deniti (6)
1 - 48 *0
1 - 48 *0
12-08 Nome di host
0 - 9999 *0
0 - 9999 *0
9-90 Parametri cambiati (1)
MG07A506 Danfoss A/S © 08/2018 Tutti i diritti riservati. 79
Page 84

Appendice
[26] Reg. log. 0
[23] Comparatore 1
[24] Comparatore 2
[25] Comparatore 3
VLT® Midi Drive FC 280
[38] Imp. usc. dig. A alta
[35] Imp. usc. dig. D bassa
[34] Imp. usc. dig. C bassa
[33] Imp. usc. dig. B bassa
[30] Avvio timer 1
[31] Avvio timer 2
[25] Arresto rapido
[26] Freno CC
[27] Evoluzione libera
[28] Blocco uscita
[23] Mar.in se.antior.
[10] Selez. rif. preimp.0
[5] Selez. setup 4
[11] Selez. rif. preimp.1
[12] Selez. rif. preimp.2
[13] Selez. rif. preimp.3
[14] Selez. rif. preimp.4
[15] Selez. rif. preimp.5
[16] Selez. rif. preimp.6
[17] Selez. rif. preimp.7
Stesse scelte con 13-41
[18] Selez. rampa 1
Stesse scelte con 13-42
[3] Selez. setup 2
[1] Nessun'azione
[2] Selez. setup 1
[4] Selez. setup 3
Stesse scelte con 13-40
[83] Cinghia rotta
[72] Timeout SL 5
[36] Ingr. digitale DI29
[42] Ripr. autom. scatto
[39] Comando avviamento
[40] Conv. di freq. arr.
[33] Ingr. digitale DI18
[34] Ingr. digitale DI19
[35] Ingr. digitale DI27
[27] Reg. log. 1
[28] Reg. log. 2
[32] Timeout SL 2
[29] Reg. log. 3
[30] Timeout SL 0
[31] Timeout SL 1
[61] Reg. log. 5
[50] Comparatore 4
[51] Comparatore 5
[60] Reg. log. 4
[73] Timeout SL 6
[70] Timeout SL 3
[71] Timeout SL 4
*[0] DISATTIVATO
[74] Timeout SL 7
13-52 Azione regol. SL
[24] Arresto
[19] Selez. rampa 2
[22] Funzionamento
[32] Imp. usc. dig. A bassa
[29] Avvio timer 0
13-44 Regola logica Booleana 3
[2] OR
[3] AND NOT
[4] OR NOT
[5] NOT AND
[6] NOT OR
[83] Cinghia rotta
*[0] Disabil.
[72] Timeout SL 5
[73] Timeout SL 6
[61] Reg. log. 5
[70] Timeout SL 3
[51] Comparatore 5
[60] Reg. log. 4
[42] Ripr. autom. scatto
[36] Ingr. digitale DI29
[33] Ingr. digitale DI18
[34] Ingr. digitale DI19
[28] Reg. log. 2
[29] Reg. log. 3
[30] Timeout SL 0
[25] Comparatore 3
[26] Reg. log. 0
[27] Reg. log. 1
[24] Comparatore 2
[31] Timeout SL 1
[35] Ingr. digitale DI27
[32] Timeout SL 2
[50] Comparatore 4
[39] Comando avviamento
[40] Conv. di freq. arr.
[74] Timeout SL 7
[71] Timeout SL 4
[1] AND
13-41 Operatore regola logica 1
[7] NOT AND NOT
13-43 Operatore regola logica 2
[8] NOT OR NOT
13-42 Regola logica Booleana 2
13-5* Stati
*[0] Falso
[1] Vero
[2] In funzione
13-51 Evento regol. SL
[4] Riferimento on
[3] Nel campo
[8] Sotto I, bassa
[9] Sopra I, alta
[7] Fuori dall'interv. di corrente
[16] Termica Avviso
[17] Tens.rete f. campo
[18] Inversione
[19] Avviso
[20] Allarme (sc.)
[21] All. (scatto blocc.)
[22] Comparatore 0
1010
-9999 - 9999 *0
0 - 3600 s *0 s
[1] Ripristinare SLC
[39] Comando avviamento
[7] Fuori dall'interv. di corrente
[42] Ripr. autom. scatto
*[40] Conv. di freq. arr.
[8] Sotto I, bassa
[9] Sopra I, alta
[50] Comparatore 4
[16] Termica Avviso
[60] Reg. log. 4
[51] Comparatore 5
[17] Tens.rete f. campo
[18] Inversione
[61] Reg. log. 5
[19] Avviso
[73] Timeout SL 6
[71] Timeout SL 4
[72] Timeout SL 5
[70] Timeout SL 3
[22] Comparatore 0
[23] Comparatore 1
[20] Allarme (sc.)
[21] All. (scatto blocc.)
*[0] Non ripristinare SLC
[74] Timeout SL 7
[83] Cinghia rotta
13-03 Ripristinare SLC
13-1* Comparatori
13-10 Comparatore di operandi
[26] Reg. log. 0
[27] Reg. log. 1
[28] Reg. log. 2
[29] Reg. log. 3
[24] Comparatore 2
[25] Comparatore 3
[33] Ingr. digitale DI18
*[0] Disabil.
[34] Ingr. digitale DI19
[1] Riferimento
[35] Ingr. digitale DI27
[2] Retroazione %
[36] Ingr. digitale DI29
[3] Vel. motore
[4] Corrente motore
*[39] Comando avviamento
[40] Conv. di freq. arr.
[13] Ingr. anal. AI54
[6] Potenza motore
[7] Tensione motore
[12] Ingr. analog. 53
[51] Comparatore 5
[60] Reg. log. 4
[42] Ripr. autom. scatto
[50] Comparatore 4
[18] Ingr. impulsi FI29
[61] Reg. log. 5
[19] Ingr. impulsi FI33
[83] Cinghia rotta
[30] Contatore A
[31] Contatore B
13-11 Comparatore di operandi
[20] Numero allarme.
13-02 Evento arresto
[0] Falso
[1] Vero
[2] In funzione
[0] Inferiore a (<)
*[1] Quasi uguale (~)
[3] Nel campo
[4] Riferimento on
[2] Superiore a (>)
[7] Fuori dall'interv. di corrente
13-12 Valore comparatore
[8] Sotto I, bassa
[9] Sopra I, alta
13-2* Timer
[16] Termica Avviso
13-20 Timer regolatore SL
[17] Tens.rete f. campo
[18] Inversione
13-4* Regole logiche
[19] Avviso
[8] Sotto I, bassa
[9] Sopra I, alta
[16] Termica Avviso
[4] Riferimento on
[2] In funzione
[3] Nel campo
[25] Comparatore 3
[23] Comparatore 1
[24] Comparatore 2
[7] Fuori dall'interv. di corrente
[26] Reg. log. 0
*[0] Falso
[1] Vero
13-40 Regola logica Booleana 1
[22] Comparatore 0
[20] Allarme (sc.)
[21] All. (scatto blocc.)
[17] Tens.rete f. campo
[27] Reg. log. 1
[28] Reg. log. 2
[29] Reg. log. 3
[30] Timeout SL 0
[18] Inversione
[19] Avviso
[32] Timeout SL 2
[31] Timeout SL 1
[33] Ingr. digitale DI18
[21] All. (scatto blocc.)
[34] Ingr. digitale DI19
[35] Ingr. digitale DI27
[36] Ingr. digitale DI29
[23] Comparatore 1
[22] Comparatore 0
[20] Allarme (sc.)
0 - 63 *In funzione della dimensione
12-98 Contatori di interfaccia
12-97 QoS Priority
0 - 4294967295 *4000
12-99 Contatori di media
*[0] O
13-** Smart Logic
13-0* Impostazioni SLC
13-00 Modo regol. SL
[1] On
13-01 Evento avviamento
[0] Falso
[1] Vero
[2] In funzione
[3] Nel campo
[4] Riferimento on
12-80 Server FTP
12-8* Altri servizi Ethernet
0 - 65535 *4000
12-89 Porta canale a presa trasparente
[0] Disabilitato
*[0] Disabilitato
[1] Abilitato
12-83 SNMP Agent
*[0] Disabilitato
[1] Abilitato
12-81 Server HTTP
*[0] Disabilitato
[1] Abilitato
12-82 Servizio SMTP
[0] Disabilitato
*[1] Abilitato
*[1] Abilitato
12-84 Rilev. con. indirizzo
12-9* Servizi Ethernet avanzati
12-90 Diagnosi cavo
*[0] Disabilitato
[1] Abilitato
12-91 Crossover aut.
[0] Disabilitato
*[1] Abilitato
12-92 Snooping IGMP
0 - 65535 *0
[0] Disabilitato
*[1] Abilitato
12-93 Lunghezza errore cavo
0 - 3600 *120
-1 - 20 % *-1 %
12-94 Protezione Broadcast Storm
12-95 Filtro di protezione Broadcast Storm
12-96 Cong. porta
[0] Norm.
[1] Mirror da porta 1 a 2
[2] Mirror da porta 2 a 1
[255] Mirror porta int. a 2
[11] Porta 2 disab.
[254] Mirror porta int. a 1
[10] Porta 1 disab.
0 - 4294967295 *0
80 Danfoss A/S © 08/2018 Tutti i diritti riservati. MG07A506
Page 85

Appendice Guida operativa
-4999 - 4999 Unità di riferimento/
0 - 255 *0
retroazione
retroazione *0 Unità di riferimento/
-32767 - 32767 *0
15-31 InternalFaultReason
16-02 Riferimento [%]
15-4* Identif. inverter
personalizzata *0 Unità di visualiz-
-200 - 200 % *0 %
15-40 Tipo FC
-200 - 200 % *0 %
0 - 65535 *0
15-41 Sezione potenza
16-05 Val. reale princ. [%]
0 - 20 *0
16-09 Visual. personaliz.
0 - 20 *0
15-42 Tensione
0 - 0 *0
15-43 Versione software
16-03 Parola di stato
0 - 0 *0
15-44 Stringa cod. tipo ordin.
0 - 1000 kW *0 kW
16-1* Stato motore
16-10 Potenza [kW]
0 - 41 *0
0 - 40 *0
15-45 Stringa codice tipo e.
0 - 1000 cv *0 cv
16-11 Power [hp]
16-12 Tensione motore
0 - 0 *0
15-48 N. ld LCP
15-46 N. d'ordine convertitore di frequenza
0 - 65535 V *0 V
16-13 Frequenza
0 - 0 *0
15-49 Scheda di contr. SW id
0 - 6553,5 Hz *0 Hz
0 - 0 *0
0 - 6553,5 % *0 %
0 - 655,35 A *0 A
16-15 Frequenza [%]
16-14 Corrente motore
0 - 0 *0
0 - 0 *0
15-51 Numero seriale conv. di freq.
15-50 Scheda di pot. SW id
16-16 Coppia [Nm]
15-52 Informazioni OEM
-30000 - 30000 Giri/min. *0 Giri/min.
-30000 - 30000 Nm *0 Nm
16-17 Velocità [giri/m]
0 - 0 *0
0 - 0 *0
15-53 N. di serie scheda di potenza
zazione personalizzata
0 - 9999 Unità di visualizzazione
16-18 Term. motore
15-57 Versione le
0 - 65535 *0
16-20 Angolo motore
15-59 Nome le
0 - 16 *0
-200 - 200 % *0 %
16-22 Coppia [%]
15-6* Ident. opz.
15-60 Opzione installata
0 - 65535 V *0 V
16-33 Energia freno/2 min
16-3* Stato inv.
16-30 Tensione bus CC
0 - 20 *In funzione della dimensione
0 - 30 *In funzione della dimensione
15-70 Opzione in slot A
15-61 Versione SW opzione
0 - 10000 kW *0 kW
0 - 30 *0
0 - 255 % *0 %
-128 - 127 °C *0 °C
16-35 Termico inverter
16-34 Temp. dissip.
0 - 20 *0
15-71 Versione SW opzione slot A
15-9* Inform. par.
15-92 Parametri deniti
0 - 655,35 A *0 A
0 - 655,35 A *0 A
16-37 Corrente max inv.
16-36 Corrente nom inv.
0 - 2000 *0
0 - 0xFFFFFFFF *0
15-98 Identif. conv. freq.
15-97 Tipo di applic.
0 - 100 % *0 %
0 - 255 *0
0 - 65535 °C *0 °C
0 - 20 *0
16-39 Temp. scheda di controllo
16-38 Condiz. regol. SL
0 - 56 *0
0 - 9999 *0
15-99 Metadati parametri
16-** Vis. dati
16-5* Rif. e retroaz.
16-0* Stato generale
-200 - 200 % *0 %
16-52 Retroazione [unità]
16-50 Riferimento esterno
0 - 65535 *0
16-01 Riferimento [unità]
16-00 Par. di contr.
10 10
20 - 1000 Hz *In funzione della
dimensione
0 - 2147483647 kWh *0 kWh
0 - 65535 *0
0 - 0x7f. h *0 h
0 - 0x7f. h *0 h
0 - 65535 *0
0 - 2147483647 *0
0 - 65535 *0
14-61 Funzione sovraccarico inverter
[1] Riprist. autom. x 1
[39] Imp. usc. dig. B alta
*[0] Scatto
[2] Riprist. autom. x 2
[40] Imp. usc. dig. C alta
[1] Riduz.
[3] Riprist. autom. x 3
[41] Imp. usc. dig. D alta
14-63 Freq. di commut. min.
[4] Riprist. autom. x 4
[60] Ripristino cont. A
*[0] Nessun reset
[1] Contat. riprist.
15-04 Sovratemp.
14-5* Ambiente
14-51 Compensazione tens. coll. CC
[0] O
dimensione
100 - 800 V *In funzione della
14-12 Funz. durante sbilanciamento di rete
15-05 Sovratensioni
*[1] On
14-52 Comando ventola
*[0] Scatto
[1] Avviso
*[0] Disabilitato
[1] Abilitato
*[2] 2,0 kHz
[3] 3,0 kHz
[4] 4,0 kHz
[5] 5,0 kHz
[6] 6,0 kHz
[7] 8,0 kHz
[10] Riprist. autom. x 10
[9] Riprist. autom. x 9
[8] Riprist. autom. x 8
[7] Riprist. autom. x 7
[5] Riprist. autom. x 5
[6] Riprist. autom. x 6
[74] Avvio timer 7
[72] Avvio timer 5
[73] Avvio timer 6
[70] Avvio timer 3
[71] Avvio timer 4
[61] Ripristino cont. B
[8] 10,0 kHz
[9] 12,0 kHz
[12] Riprist. autom. x 20
[11] Riprist. autom. x 15
14-** Funzioni speciali
14-0* Commut.inverter
14-64 Livello di corr. zero comp. tempi morti
[10] 16,0 kHz
[13] Ripr. autom. inn.
[14] Ripristino all'accens.
14-21 Tempo di riavv. autom.
14-01 Freq. di commutaz.
[0] Ran3
[1] Ran5
0 - 600 s *10 s
14-22 Modo di funzionamento
[2] 2,0 kHz
[3] 3,0 kHz
14-7* Compatibility
14-70 Compatibility Selections
0 - 60 s *60 s
*[0] Funzion.norm.
[2] Inizializzazione
14-24 Ritardo scatto al limite di corrente
[4] 4,0 kHz
[5] 5,0 kHz
[6] 6,0 kHz
[7] 8,0 kHz
14-65 Decl. vel. comp. tempi morti
[12] VLT2800 3M
*[0] No Function
0 - 60 s *60 s
14-25 Ritardo scatto al limite di coppia
[8] 10,0 kHz
[9] 12,0 kHz
[14] VLT2800 12M
[15] VLT2800 12M incl. MAV
[13] VLT2800 3M incl. MAV
14-8* Opzioni
14-27 Azione al guasto inverter
[0] Scatto
*[1] Avviso
14-28 Impostaz. produz.
14-03 Sovramodulazione
[0] O
[10] 16,0 kHz
*[1] On
14-89 Rilevam. opz.
14-88 Option Data Storage
*[0] N. azione
[1] Riprist. serv.
[3] Ripristino software
0 - 100 *In funzione della dimensione
14-08 Fatt. di guad. attenuaz.
14-07 Livello di comp. tempi morti
[1] Abilita cambio di opz.
*[0] Proteggi cong. opz.
14-9* Impostaz. guasti
0 - 0xFFFFFFFF *0
14-29 Cod. di serv.
14-3* Reg. lim. di corr.
0 - 100% *In funzione della
dimensione
14-09 Liv. corr. orient. tempi morti
14-90 Livello di guasto
*[3] Sc. bloc.
[4] Scatto con reset ritardato
0 - 500 % *100 %
14-31 Reg. lim. corr., t. di integrazione
14-30 Reg. lim. corr., guadagno proporz.
0 - 100% *In funzione della
dimensione
14-1* Rete On/O
[5] Riagg. v.
15-** Inform. inverter
0,002 - 2 s *0,020 s
14-32 Reg. lim. corr. , tempo ltro
14-10 Guasto di rete
*[0] Nessuna funzione
15-0* Dati di funzion.
15-00 Ore di funzionamento
1 - 100 ms *5 ms
14-4* Ottimizz. energia
14-40 Livello VT
[3] Ruota libera
[2] Rampa dec. c., sc.
[1] Rampa decel. contr.
15-01 Ore esercizio
40 - 90 % *66 %
[4] Back up cinetico
14-41 Magnetizzazione minima AEO
[5] Funz. rigen., scatto
15-02 Contatore kWh
15-03 Accensioni
0 - 200 % *100 %
40 - 75 % *66 %
14-44 Ottim. corr. asse d per IPM
14-11 Tens.di rete in caso di guasto rete
[6] All.
[7] Backup cin., scatto c. recup.
15-07 Ripristino contatore ore di esercizio
*[0] Nessun reset
[1] Contat. riprist.
15-06 Riprist. contat. kWh
[5] Modo on cost.
[6] Modo o cost.
[7] On se inverter in modo o
0 - 60000.000 Unità di riferimento/
[2] Disabilitato
14-15 Liv. recup. scatto backup en. cin.
14-55 Filtro di uscita
*[0] Senza ltro
*[8] Modo a vel. variabile
dimensione
retroazione *In funzione della
14-2* Funz. ripristino
15-3* Log allarme
15-30 Log allarme: Codice guasto
[1] Filtro sinusoidale
14-6* Declassamento automatico
14-20 Modo ripristino
*[0] Ripristino manuale
MG07A506 Danfoss A/S © 08/2018 Tutti i diritti riservati. 81
Page 86

Appendice
0 - 65535 *0
34-01 Scrittura PCD 1 per applic.
34-** Vis. dati Motion Control
34-0* Par. scrittura PCD
VLT® Midi Drive FC 280
0 - 65535 *0
0 - 65535 *0
0 - 65535 *0
0 - 65535 *0
0 - 65535 *0
0 - 65535 *0
0 - 65535 *0
34-03 Scrittura PCD 3 per applic.
34-02 Scrittura PCD 2 per applic.
0 - 65535 *0
0 - 65535 *0
34-10 Scrittura PCD 10 per applic.
34-09 Scrittura PCD 9 per applic.
34-08 Scrittura PCD 8 per applic.
34-07 Scrittura PCD 7 per applic.
34-04 Scrittura PCD 4 per applic.
34-06 Scrittura PCD 6 per applic.
34-05 Scrittura PCD 5 per applic.
34-2* Par. lettura PCD
0 - 65535 *0
34-21 PCD 1 lettura per applic.
0 - 65535 *0
0 - 65535 *0
0 - 65535 *0
0 - 65535 *0
0 - 65535 *0
0 - 65535 *0
0 - 65535 *0
0 - 65535 *0
34-24 PCD 4 lettura per applic.
34-25 PCD 5 lettura per applic.
34-26 PCD 6 lettura per applic.
34-27 PCD 7 lettura per applic.
34-23 PCD 3 lettura per applic.
34-22 PCD 2 lettura per applic.
34-28 PCD 8 lettura per applic.
0 - 65535 *0
-1073741824 - 1073741824 *0
-2147483647 - 2147483647 *0
34-29 PCD 9 lettura per applic.
34-30 PCD 10 lettura per applic.
34-5* Dati di processo
34-50 Posizione eettiva
34-56 Errore di inseguimento
37-** Impostaz. applicaz.
37-0* Modo applic.
37-00 Modo applic.
*[0] Modo conv.
[2] Contr. pos.
37-1* Contr. pos.
37-01 Pos. fonte retroazione
*[0] Encoder 24V
37-02 Pos. target
-1073741824 - 1073741824 *0
37-03 Tipo pos.
*[1] Only Allow Download
[2] Only Allow Upload
[3] Allow Both Download And Upload
31-41 MM Information
*[0] Disabled
[1] Enabled
31-48 Time Limit Remaining Time
0 - 720 h *720 h
1 - 65535 *1
32-** Imp. base Motion Control
32-12 Numeratore unità utente
32-1* Unità ut.
32-11 Denominatore unità utente
1 - 2147483648 *2000000
1 - 65535 *1
32-6* PID
32-67 Max. errore di posizione consentito
32-8* Velocità e acceleraz.
0 - 2 *0
31-42 Congure Memory Module Access
*[0] No action
[1] Set MM to read only
[2] Set MM to read write
31-43 Erase_MM
*[0] No function
[1] Erase MM
31-47 Time Limit Function
32-80 Velocità massima consentita
1 - 30000 Giri/min. *1500 Giri/min.
32-81 Contr. mov. rampa arr. rap.
50 - 3600000 ms *1000 ms
33-** Imp. avanz. Motion Control
33-0* Sp. a HOME
33-00 Mod. Homing
-1500 - 1500 Giri/min. *100 Giri/min.
1 - 1000 ms *10 ms
-1073741824 - 1073741824 *0
*[1] Inverso s. indice
[3] Diretto senza indice
33-01 Oset home
*[0] N. forzato
[1] Homing man. forz.
[2] Homing aut. forzato
33-02 T. di rampa Home
33-03 Veloc. homing
33-04 Comp. dur. homing
33-4* Gestione limiti
-1073741824 - 1073741824 *-500000
33-41 Limite software negativo
33-42 Limite software positivo
-1073741824 - 1073741824 *500000
*[0] Non attivo
33-43 Limite software negativo attivo
[1] Attivo
33-44 Limite software positivo attivo
1 - 10000 *512
*[0] Non attivo
[1] Attivo
33-47 Pos. della n. target
1010
0 - 3600 s *0 s
0 - 3600 s *0 s
1 - 50 *5
0 - 10 *0,01
21-23 Tempo dierenziale est. 1
[1] Inverso
21-22 Tempo d'integraz. est. 1
21-21 Guadagno proporzionale est. 1
0 - 0xFFFFFFFFUL *0
0 - 0xFFFFFFFFUL *0
*[0] Norm.
0 - 0xFFFFFFFFUL *0
21-24 Limite guad. deriv. est. 1
0 - 4294967295 *0
*[0] Norm.
22-** Funzioni appl.
22-0* Varie
22-02 Modo contr. CL modo pausa
0 - 0 *0
0 - 0xFFFFFFFFUL *0
[1] Semplif.
22-4* Modo pausa
22-40 Tempo ciclo minimo
-200 - 200 % *0 %
0 - 600 s *10 s
-200 - 200 % *0 %
0 - 10 s *0 s
0,01 - 10000 s *10000 s
0 - 600 s *10 s
22-41 Tempo di pausa minimo
-200 - 200 % *0 %
0 - 400,0 *10
22-43 Vel. ne pausa [Hz]
-200 - 200 % *0 %
0 - 100 % *10 %
22-44 Di. rif./retr. f. pausa
-100 - 100 % *0 %
22-45 Riferimento pre pausa
0 - 600 s *60 s
22-46 Tempo massimo pre pausa
0 - 400,0 *0
22-49 Ritardo ne pausa
22-48 Ritardo pausa
22-47 Vel. a riposo [Hz]
est. *0 Unità PID1 est.
-999999,999 - 999999,999 Unità PID1
-999999,999 - 999999,999 Unità PID1
22-60 Funzione cinghia rotta
*[0] O
22-6* Rilevam. cinghia rotta
[1] Avviso
[2] Scatto
est. *100 Unità PID1 est.
22-61 Coppia cinghia rotta
0 - 600 s *10 s
5 - 100 % *10 %
22-62 Ritardo cinghia rotta
30-** Caratt. speciali
30-2* Ad. avvio avanz.
30-20 Tempo alta coppia di avv. [s]
dimensione
0 - 60 s *In funzione della dimensione
0 - 200,0% *In funzione della
30-21 Corr. alta coppia di avv. [%]
est. *0 Unità PID1 est.
-999999,999 - 999999,999 Unità PID1
30-22 Protezione rotore bloccato
-999999,999 - 999999,999 Unità PID1
*[0] O
est. *0 Unità PID1 est.
[1] On
30-23 Tempo di rilev. rot. bloccato [s]
-999999,999 - 999999,999 Unità PID1
0,05 - 1 s *0,10 s
[0] Disabled
31-** Special Option
31-4* Memory Module
31-40 Memory Module Function
0 - 100 % *0 %
est. *0 Unità PID1 est.
21-15 Riferimento est. 1
0 - 65535 *1084
16-86 RIF 1 porta FC
-32768 - 32767 *0
21-17 Riferimento est. 1 [unità]
16-9* Visualizz. diagn.
16-90 Parola di all.
21-2* PID CL 1 est.
21-20 Controllo Normale/Inverso est. 1
0 - 0xFFFFFFFFUL *0
0 - 0xFFFFFFFFUL *0
0 - 0xFFFFFFFFUL *0
0 - 0xFFFFFFFFUL *0
16-94 Parola di stato est.
16-93 Parola di avv. 2
16-92 Parola di avv.
16-91 Parola di allarme 2
-4999 - 4999 Unità di controllo del
16-95 Parola di stato est. 2
processo *0 Unità di controllo del
processo
16-98 Warning Word 3
16-97 Par. all. 3
16-53 Riferim. pot. digit.
18-** Visual. dati 2
-30000 - 30000 Giri/min. *0 Giri/min.
-200 - 200 *0
16-57 Retroaz. [RPM]
16-6* Ingressi e uscite
18-5* Memory Module Readout
18-51 Motivo di avviso modulo di memoria
0 - 4095 *0
16-60 Ingresso digitale
16-61 Impost. mors. 53
18-52 ID modulo di memoria
[6] Ingr. dig.
[1] Mod. tensione
18-9* Visual. PID
16-62 Ingr. anal. 53
18-91 Usc. PID di proc.
18-90 Errore PID di proc.
0 - 20 *1
[0] Mod. corrente
16-63 Imp. interr. mors. 54
18-92 Uscita bloccata PID di proc.
[1] Mod. tensione
16-64 Ingr. anal. 54
18-93 Uscita scalata guad. PID proc.
0 - 20 *1
0 - 20 mA *0 mA
16-65 Uscita anal. 42 [mA]
21-** An. chiuso est.
16-66 Uscita digitale
*[0] Disattivato
[1] PID est. 1 abilitato
21-09 Abilitare PID esteso
21-0* Autotuning CL est.
0 - 63 *0
16-67 Ingr. freq. #29 [Hz]
21-11 Riferimento minimo est. 1
21-1* Rif./retr. CL 1 est.
0 - 130000 *0
0 - 130000 *0
0 - 40000 *0
16-69 Usc. imp. 27 [Hz]
16-68 Ingr. freq. #33 [Hz]
16-71 Uscita a relè
21-13 Fonte riferimento est. 1
21-12 Riferimento max. est. 1
0 - 31 *0
-32768 - 32767 *0
16-72 Contatore A
16-73 Contatore B
*[0] Nessuna funz.
-32768 - 32767 *0
[1] Ingr. analog. 53
16-74 Contat. arresti precisi
[7] Ingr. frequenza 29
[2] Ingr. analog. 54
0 - 2147483647 *0
16-8* Bus di c. e porta FC
[8] Ingr. frequenza 33
16-80 Par. com. 1 F.bus
21-14 Fonte retroazione est. 1
0 - 65535 *0
[1] Ingresso analogico 53
-32768 - 32767 *0
16-82 RIF 1 Fieldbus
0 - 65535 *0
16-85 Par. com. 1 p. FC
16-84 Opz. com. par. stato
[4] Ingr. frequenza 33
[2] Ingresso analogico 54
[3] Ingr. frequenza 29
*[0] Nessuna funzione
21-19 Uscita est. 1 [%]
21-18 Retroazione est. 1 [unità]
82 Danfoss A/S © 08/2018 Tutti i diritti riservati. MG07A506
Page 87

Appendice Guida operativa
10 10
[13] Funz. avanti
[20] Non trova pos. home
37-19 Nuovo indice pos.
0 - 255 *0
50 - 100000 ms *5000 ms
50 - 100000 ms *5000 ms
1 - 30000 Giri/min. *100 Giri/min.
37-07 Contr. fr. aut. pos.
37-06 Tempo decel. pos.
*[0] Assoluto
37-05 Tempo accel. pos.
[1] Relativo
37-04 Velocità pos.
0 - 10000 ms *0 ms
37-12 Antiavv. pos. PID
37-11 Pos. lim. usura freno
37-10 Rit. freno pos.
37-09 Ritardo r. lib. pos.
*[1] Abilit.
[0] Disab.
37-08 Ritardo mant. pos.
0 - 1073741824 *0
0 - 1000 ms *200 ms
0 - 1000 ms *200 ms
1 - 10000 *1000
[8] Arr. rapido
[9] Err. PID tr. gr.
*[0] DI
[1] FieldBus
37-15 Blocco direz. pos.
*[0] N. blocco
[1] Blocco inv.
[2] Blocco avanti
37-17 Comp. err. contr. pos.
*[0] Decel. e freno
[1] Freno diretto
37-18 Motivo err. contr. pos.
*[0] N. guasto
[1] Homing richiesto
[2] Pos. lim. HW
[3] Lim. HW neg.
[4] Lim. HW pos.
37-14 Fonte contr. pos.
*[1] Abilit.
37-13 Blocco usc. PID pos.
[0] Disab.
[5] Lim. SW neg.
[7] Lim. usura freno
[12] Funz. indietro
MG07A506 Danfoss A/S © 08/2018 Tutti i diritti riservati. 83
Page 88

Indice
VLT® Midi Drive FC 280
Indice
A
Abbreviazione........................................................................................ 72
Alta tensione...................................................................................... 7, 25
AMA con T27 collegato...................................................................... 47
Ambiente di installazione.................................................................. 10
Anello aperto......................................................................................... 65
Apparecchiatura ausiliaria................................................................. 23
Apparecchiature opzionali................................................................ 25
Assistenza tecnica................................................................................ 51
Auto on.............................................................................................. 32, 36
Avviamento............................................................................................ 33
Avvio involontario........................................................................... 7, 51
C
Cavo schermato.................................................................................... 23
Classe di ecienza energetica......................................................... 62
Collegamento a triangolo a terra.................................................... 19
Collegamento a triangolo sospeso................................................ 19
Collegamento alimentazione........................................................... 13
Collegamento equipotenziale......................................................... 14
Comando di esecuzione..................................................................... 36
Comando esterno................................................................................... 5
Comando locale.................................................................................... 32
Comando remoto.................................................................................... 4
Comunicazione seriale
Comunicazione seriale.............................................. 22, 32, 51, 65
Comunicazione seriale USB.......................................................... 65
Condivisione del carico......................................................................... 7
Condizione ambientale...................................................................... 62
Condotto................................................................................................. 23
Conformità e certicazione................................................................. 6
Controllo
Cablaggio.............................................................................. 13, 20, 23
Caratteristica...................................................................................... 65
Morsetto di controllo............................................................... 32, 55
Controllo del freno meccanico........................................................ 21
Controllore esterno................................................................................ 4
Convenzione.......................................................................................... 72
Coppia
Caratteristica della coppia............................................................ 62
Coppie di serraggio dei morsetti.................................................... 66
Corrente CC............................................................................................... 5
Corrente di dispersione................................................................. 8, 13
Corrente di uscita................................................................................. 64
D
Declassamento...................................................................................... 62
Dimensione cavo.................................................................................. 17
Dimensioni dei cavi.............................................................................. 13
Display numerico.................................................................................. 26
E
Ecienza energetica............................................................. 59, 60, 61
Elenco di avvisi e allarmi.................................................................... 55
EMC............................................................................................................ 62
F
Fattore di potenza............................................................................ 5, 23
Fili di alimentazione di uscita........................................................... 23
Filtro RFI................................................................................................... 19
Forma d'onda CA..................................................................................... 5
Fusibile....................................................................................... 13, 23, 66
G
Guasto
Log guasti........................................................................................... 31
H
Hand on.................................................................................................... 32
I
IEC 61800-3...................................................................................... 19, 62
Immagazzinamento............................................................................. 10
Impostazione di fabbrica................................................................... 33
Ingressi
Ingresso a impulsi............................................................................ 64
Ingresso analogico.......................................................................... 63
Ingresso digitale............................................................................... 63
Ingresso
Alimentazione di ingresso............................................................ 13
Corrente............................................................................................... 18
Fili di alimentazione di ingresso................................................. 23
Morsetto....................................................................................... 18, 25
Potenza.............................................................................. 5, 18, 23, 25
Tensione di ingresso....................................................................... 25
Ingresso CA........................................................................................ 5, 18
Ingresso digitale.................................................................................... 20
Inizializzazione
Procedura............................................................................................ 33
Procedura manuale......................................................................... 33
Installazione........................................................................................... 23
Installazione conforme ai requisiti EMC....................................... 13
Installazione anco a anco............................................................. 10
Instradamento cavi.............................................................................. 23
84 Danfoss A/S © 08/2018 Tutti i diritti riservati. MG07A506
Page 89

Indice Guida operativa
Interruttore............................................................................................. 23
Isolamento delle interferenze.......................................................... 23
Istruzioni per lo smaltimento.............................................................. 6
L
Livello di tensione................................................................................ 63
Lunghezza del cavo............................................................................. 63
M
Manutenzione........................................................................................ 51
Menu principale............................................................................. 29, 31
Menu rapido.................................................................................... 27, 31
Messa a terra..................................................................... 17, 18, 23, 25
Montaggio....................................................................................... 10, 23
Montaggio orizzontale....................................................................... 11
Morsetti
Morsetto di controllo............................................................... 32, 55
Morsetto di uscita............................................................................ 25
Motore
Cavo motore............................................................................... 13, 17
Corrente.......................................................................................... 5, 35
Corrente motore............................................................................... 31
Dati........................................................................................................ 35
Dati motore........................................................................................ 33
Potenza motore......................................................................... 13, 31
Protezione............................................................................................. 4
Protezione termica del motore...................................................... 6
Rotazione............................................................................................ 36
Stato........................................................................................................ 4
Uscita motore.................................................................................... 62
N
Norme e conformità per STO.............................................................. 6
P
PELV.................................................................................................... 49, 65
Personale qualicato............................................................................. 7
Piastra posteriore.................................................................................. 10
Ponticello................................................................................................. 20
Programmazione.................................................................... 20, 31, 32
Protezione da sovracorrente............................................................ 13
Protezione dai transitori....................................................................... 5
Protezione del circuito di derivazione.......................................... 66
Protezione termica................................................................................. 6
R
Rareddamento.................................................................................... 10
Registro allarmi...................................................................................... 31
Relè cliente.............................................................................................. 44
Rete
Alimentazione (L1/N, L2/L, L3).................................................... 61
Dati dell'alimentazione.................................................................. 59
Tensione.............................................................................................. 31
Rete CA................................................................................................ 5, 18
Rete isolata.............................................................................................. 19
Retroazione............................................................................................. 23
Retroazione del sistema........................................................................ 4
Riciclo.......................................................................................................... 6
Riferimento............................................................................................. 31
Riferimento di velocità................................................................. 36, 47
Ripristino............................................................................. 31, 32, 33, 51
Risorse supplementari........................................................................... 4
Rotazione dell'encoder....................................................................... 36
S
Scheda di controllo
Comunicazione seriale RS485..................................................... 65
Comunicazione seriale USB.......................................................... 65
Prestazioni.......................................................................................... 65
Tensione di uscita a +10 V CC...................................................... 65
Tensione di uscita a 24 V CC......................................................... 65
Scosse....................................................................................................... 10
Setup......................................................................................................... 36
Sezionatore............................................................................................. 25
Sezione trasversale.............................................................................. 63
Sicurezza.................................................................................................... 8
SIL2............................................................................................................... 6
SILCL di SIL2.............................................................................................. 6
Simbolo.................................................................................................... 72
Sollevamento......................................................................................... 10
Spazio libero richiesto......................................................................... 10
Spazio per il rareddamento........................................................... 23
Specica................................................................................................... 23
STO
Attivazione......................................................................................... 43
Dati tecnici.......................................................................................... 46
Disattivazione.................................................................................... 43
Manutenzione................................................................................... 45
Riavvio automatico................................................................... 43, 44
Riavvio manuale........................................................................ 43, 44
Test di messa in servizio................................................................. 44
Struttura del menu............................................................................... 31
T
Targa............................................................................................................ 9
Tasto di funzionamento.............................................................. 26, 31
Tasto di navigazione..................................................................... 26, 31
Tasto menu...................................................................................... 26, 31
Tempo di scarica...................................................................................... 8
MG07A506 Danfoss A/S © 08/2018 Tutti i diritti riservati. 85
Page 90

Indice
Tensione di alimentazione......................................................... 25, 64
Termistore............................................................................................... 49
Terra
Collegamento a massa................................................................... 23
Filo di terra.......................................................................................... 13
Transitori veloci..................................................................................... 14
VLT® Midi Drive FC 280
U
Uscita relè................................................................................................ 65
Uscite
Uscita analogica................................................................................ 64
Uscita digitale.................................................................................... 64
Uso previsto.............................................................................................. 4
V
Vibrazioni................................................................................................. 10
86 Danfoss A/S © 08/2018 Tutti i diritti riservati. MG07A506
Page 91

Indice Guida operativa
MG07A506 Danfoss A/S © 08/2018 Tutti i diritti riservati. 87
Page 92

La Danfoss non si assume alcuna responsabilità circa eventuali errori nei cataloghi, pubblicazioni o altri documenti scritti. La Danfoss si riserva il diritto di modicare i suoi prodotti senza previo
avviso, anche per i prodotti già in ordine, sempre che tali modiche si possano fare senza la necessità di cambiamenti nelle speciche che sono già state concordate. Tutti i marchi di fabbrica citati
sono di proprietà delle rispettive società. Il nome Danfoss e il logotipo Danfoss sono marchi depositati della Danfoss A/S. Tutti i diritti riservati.
Danfoss A/S
Ulsnaes 1
DK-6300 Graasten
vlt-drives.danfoss.com
132R0153 MG07A506 08/2018
*MG07A506*
 Loading...
Loading...