

Page 1

ENGINEERING TOMORROW
Guia de Operação
VLT® Midi Drive FC 280
vlt-drives.danfoss.com
Page 2

Page 3
Page 4
Page 5
Índice Guia de Operação
Índice
1 Introdução
1.1 Objetivo do Manual
1.2 Recursos adicionais
1.3 Versão do Software e do Documento
1.4 Visão Geral do Produto
1.5 Aprovações e certicações
1.6 Descarte
2 Segurança
2.1 Símbolos de Segurança
2.2 Pessoal qualicado
2.3 Segurança e Precauções
3 Instalação Mecânica
3.1 Desembalagem
3.2 Ambiente de instalação
3.3 Montagem
4
4
4
4
4
6
6
7
7
7
7
9
9
10
10
4 Instalação Elétrica
4.1 Instruções de Segurança
4.2 Instalação compatível com EMC
4.3 Aterramento
4.4 Esquemático de ação
4.5 Acesso
4.6 Conexão do Motor
4.7 Ligação da Rede Elétrica CA
4.8 Fiação de Controle
4.8.1 Tipos de Terminal de Controle 19
4.8.2 Fiação para os Terminais de Controle 20
4.8.3 Ativando a operação do motor (Terminal 27) 20
4.8.4 Controle do Freio Mecânico 21
4.8.5 Comunicação de dados USB 22
4.9 Lista de Vericação da Instalação
5 Colocação em funcionamento
5.1 Instruções de Segurança
13
13
13
13
15
17
17
18
19
23
24
24
5.2 Aplicando Potência
5.3 Operação do painel de controle local
5.3.1 Painel de Controle Local Numérico (NLCP) 24
5.3.2 Função da tecla direita no NLCP 26
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 1
24
24
Page 6
Índice
VLT® Midi Drive FC 280
5.3.3 Quick Menu no NLCP 26
5.3.4 Menu principal no NLCP 28
5.3.5 Painel de Controle Local Gráco (GLCP) 30
5.3.6 Programações dos Parâmetros 31
5.3.7 Alterando a programação do parâmetro com GLCP 31
5.3.8 Fazer upload/download de dados de/para o LCP 32
5.3.9 Restaurando as congurações padrão com o LCP 32
5.4 Programação Básica
5.4.1 Setup de Motor Assíncrono 33
5.4.2 Setup do motor PM em VVC
5.4.3 Adaptação Automática do Motor (AMA) 34
+
5.5 Vericando a rotação do motor
5.6 Vericando a Rotação do Encoder
5.7 Teste de controle local
5.8 Partida do Sistema
5.9 Módulo de memória
5.9.1 Sincronizando dados do conversor de frequência para um novo módulo de memória (criar backup do conversor) 36
5.9.2 Copiando dados para outro conversor de frequência 37
5.9.3 Copiando dados para vários conversores de frequência 37
5.9.4 Transferência das Informações do Firmware 37
5.9.5 Fazendo backup de alterações de parâmetro no módulo de memória 38
5.9.6 Apagando Dados 38
5.9.7 Desempenho e Indicações de Transferência 38
5.9.8 Ativando o Conversor PROFIBUS 38
33
33
35
35
35
35
36
6 Safe Torque O (STO)
6.1 Precauções de segurança para STO
6.2 Instalação do Safe Torque O
6.3 Colocação em funcionamento do STO
6.3.1 Ativação do Safe Torque O 42
6.3.2 Desativação do Safe Torque O 42
6.3.3 Teste de colocação em funcionamento do STO 43
6.3.4 Teste para aplicações de STO em modo de reinicialização manual 43
6.3.5 Teste para aplicações de STO em modo nova partida automática 43
6.4 Manutenção e serviço de STO
6.5 Dados Técnicos STO
7 Exemplos de Aplicações
7.1 Introdução
7.2 Exemplos de Aplicações
2 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
40
41
41
42
44
45
46
46
46
Page 7
Índice Guia de Operação
7.2.1 AMA 46
7.2.2 Velocidade 46
7.2.3 Partida/Parada 47
7.2.4 Reset do Alarme Externo 48
7.2.5 Termistor do motor 48
7.2.6 SLC 48
8 Manutenção, diagnósticos e resolução de problemas
8.1 Manutenção e serviço
8.2 Tipos de Advertência e Alarme
8.3 Display de advertência e alarme
8.4 Lista das advertências e alarmes
8.4.1 Lista de Códigos de Advertência e Alarme 51
8.5 Resolução de Problemas
9 Especicações
9.1 Dados Elétricos
9.2 Alimentação de Rede Elétrica
9.3 Saída do Motor e dados do motor
9.4 Condições ambiente
9.5 Especicações de Cabo
9.6 Entrada/Saída de controle e dados de controle
9.7 Torques de Aperto de Conexão
9.8 Fusíveis e Disjuntores
9.9 Tamanhos do gabinete metálico, valor nominal da potência e dimensões
49
49
49
50
51
56
58
58
60
61
61
62
62
65
65
68
10 Apêndice
10.1 Símbolos, abreviações e convenções
10.2 Estrutura de Menu dos Parâmetros
Índice
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 3
71
71
71
83
Page 8
Introdução
VLT® Midi Drive FC 280
11
1 Introdução
1.1 Objetivo do Manual
Este guia de operação oferece informações para a
instalação segura e a colocação em funcionamento do
conversor de frequência VLT® Midi Drive FC 280.
O guia de operação destina-se a ser utilizado por pessoal
qualicado.
Para usar o conversor de frequência de maneira prossional e segura, leia e siga o guia de operação. Tenha
particular atenção às instruções de segurança e
advertências gerais. Sempre mantenha este guia de
operação junto ao conversor de frequência.
VLT® é uma marca registrada.
1.2 Recursos adicionais
Há recursos disponíveis para entender a programação, a
manutenção e as funções avançadas do conversor de
frequência:
O Guia de Design VLT® Midi Drive FC 280 fornece
•
informações detalhadas sobre o projeto e as
aplicações do conversor de frequência.
O Guia de Programação do VLT® Midi Drive FC 280
•
fornece informações sobre como programar e
inclui descrições completas dos parâmetros.
Publicações e manuais complementares estão disponíveis
na Danfoss. Consulte drives.danfoss.com/knowledge-center/
technical-documentation/ para listagens.
Versão do Software e do Documento
1.3
Este manual é revisado e atualizado regularmente. Todas as
sugestões para melhorias são bem-vindas. Tabela 1.1
mostra a versão do documento com a respectiva versão de
software.
Visão Geral do Produto
1.4
1.4.1 Uso Pretendido
O conversor de frequência é um controlador eletrônico de
motor destinado para:
regulagem de velocidade do motor em resposta
•
ao sistema de feedback ou a comandos remotos
de controladores externos. Um Power Drive
System consiste em conversor de frequência,
motor e equipamento acionado pelo motor.
Vigilância do status do motor e do sistema.
•
O conversor de frequência também pode ser usado para
proteção de sobrecarga do motor.
Dependendo da conguração, o conversor de frequência
pode ser usado em aplicações independentes ou fazer
parte de uma grande aplicação ou instalação.
O conversor de frequência é permitido para uso em
ambientes residenciais, comerciais e industriais de acordo
com as leis e normas locais.
AVISO!
Em um ambiente residencial este produto pode causar
interferência nas frequências de rádio e, nesse caso,
podem ser necessárias medidas de atenuação complementares.
Má utilização previsível
Não utilize o conversor de frequência em aplicações que
não são compatíveis com ambientes e condições de
operação especicados. Garanta estar em conformidade
com as condições especicadas em capétulo 9 Especi-
cações.
Edição Observações
MG07A5
Tabela 1.1 Documento e versão de software
4 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
Atualização de software e suporte do
módulo de memória.
Versão do
software
1.5
Page 9
M
7
63
4
5
21
8
10
130BE200.12
M
7
63
4
5
21
8
9
T2/T4
S2
Introdução Guia de Operação
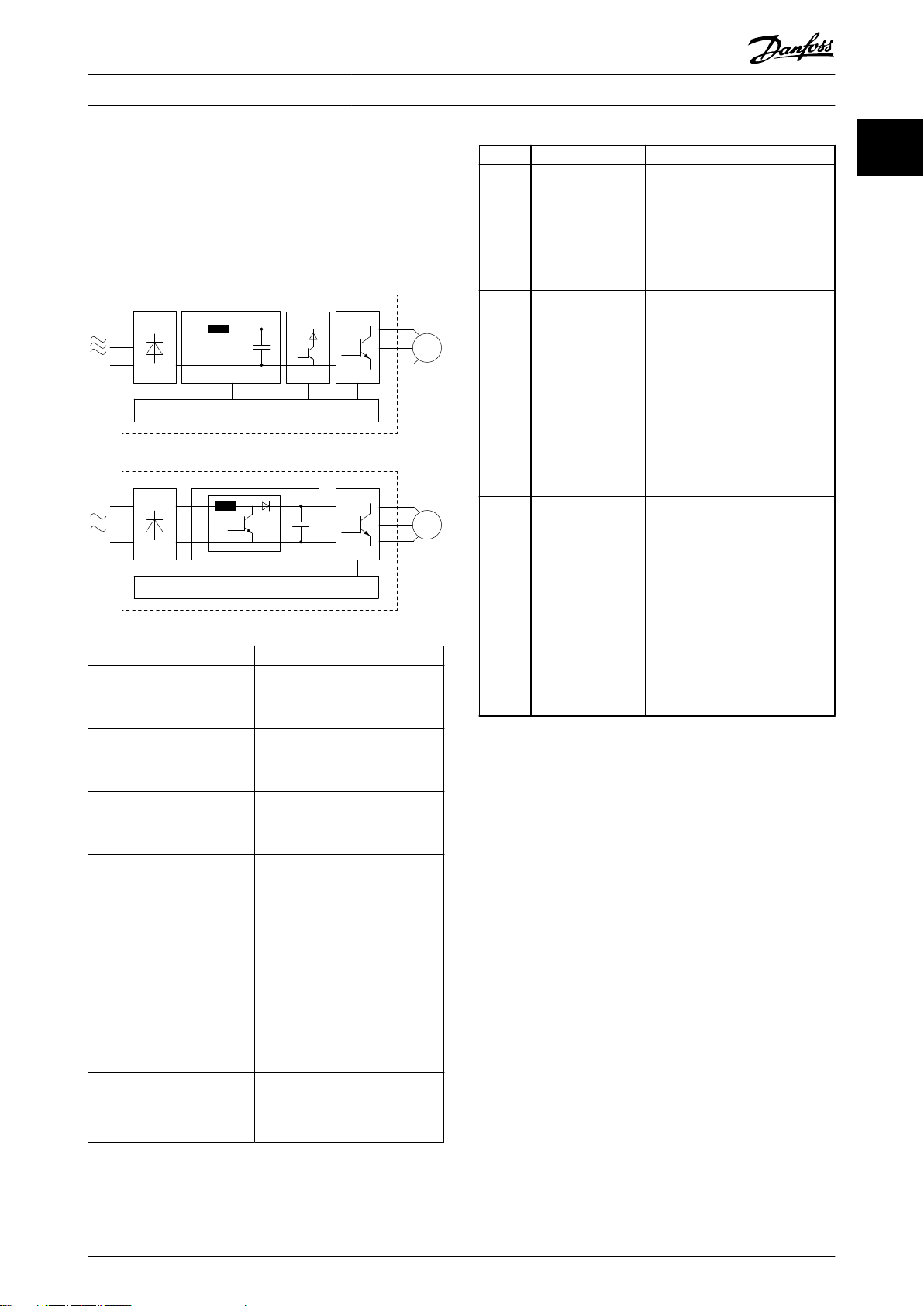
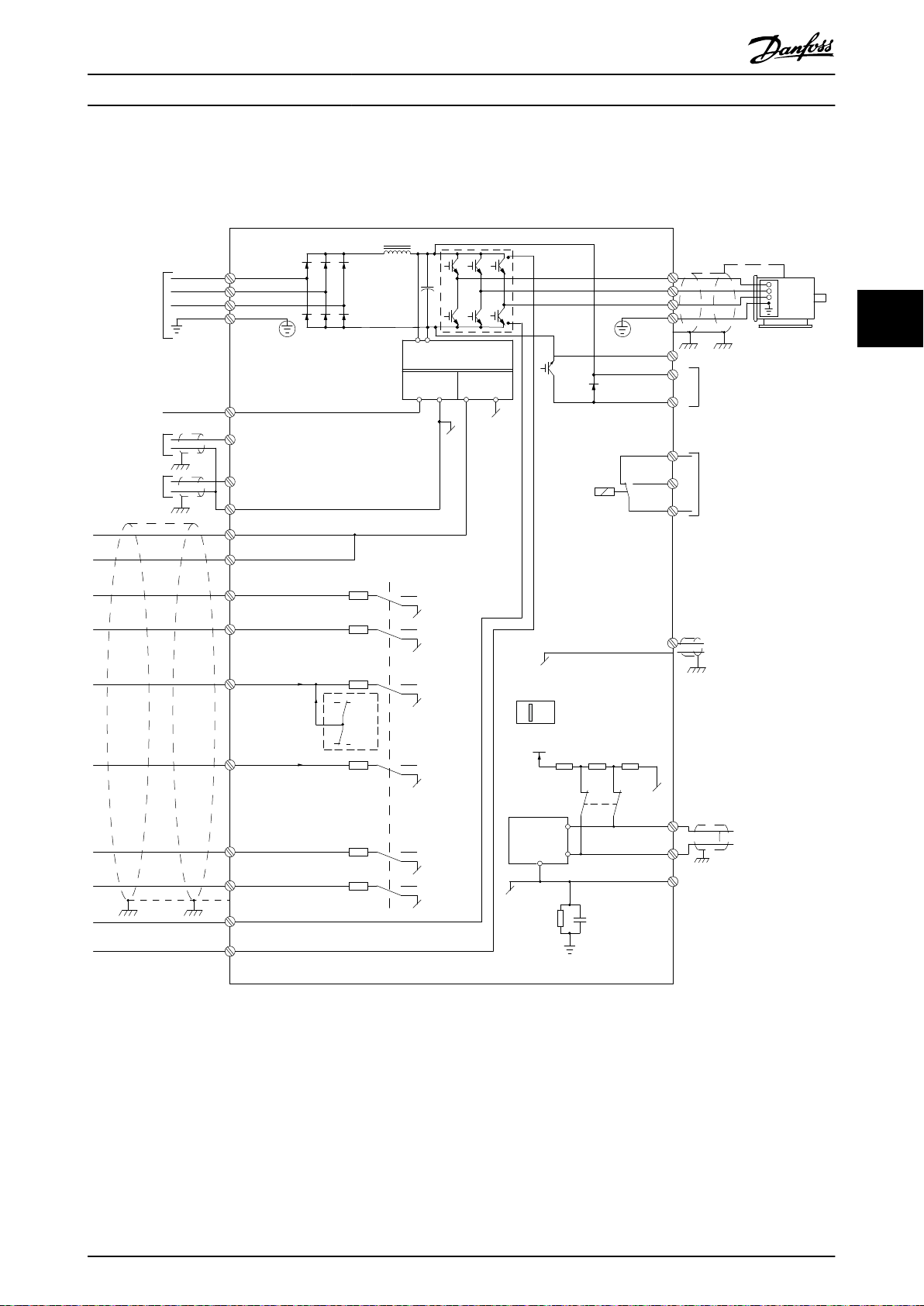
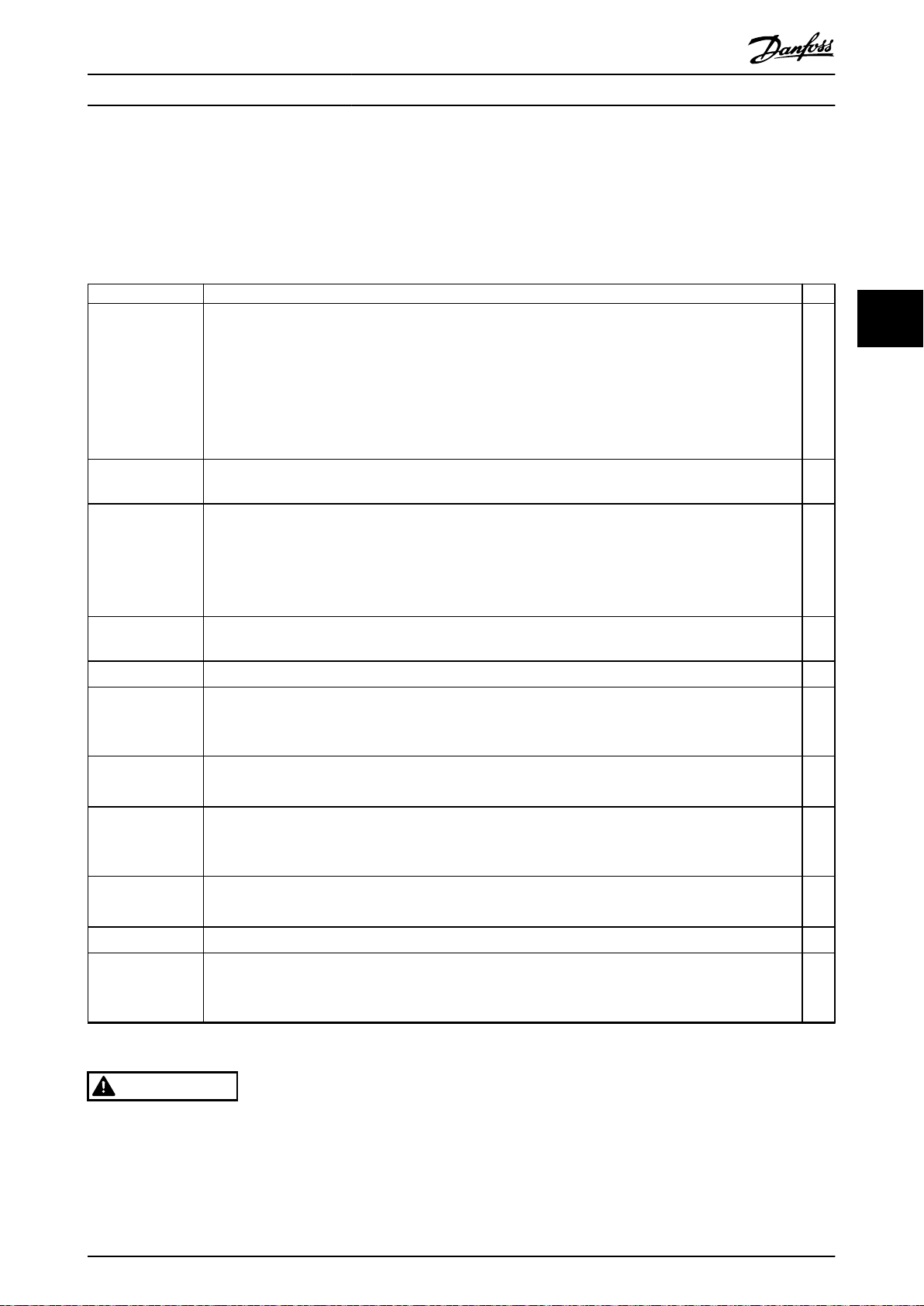
1.4.2 Diagrama de blocos do conversor de
frequência
Ilustração 1.1 é um diagrama de blocos dos componentes
internos do conversor de frequência.
Área Componente Funções
Alimentação de rede elétrica
•
CA para o conversor de
frequência.
A ponte reticadora converte
•
a entrada CA para corrente CC
para alimentação do inversor.
O circuito do barramento CC
•
intermediário processa a
corrente CC.
Filtra a corrente do circuito CC
•
intermediário.
Fornece proteção a transiente
•
de rede elétrica.
Reduz a corrente de raiz
•
quadrada média (RMS).
Aumenta o fator de potência
•
•
•
•
reetido de volta para a linha.
Reduz harmônicas na entrada
CA.
Armazena a alimentação CC.
Fornece proteção ride-through
para perdas de energia curtas.
1
2 Reticador
3 Barramento CC
4 Reator CC
5
Entrada da rede
elétrica
Banco de
capacitores
Área Componente Funções
Converte a CC em uma forma
•
6 Inversor
7 Saída para o motor
8 Circuito de controle
9 PFC
Circuito de
10
frenagem
Ilustração 1.1 Exemplo do diagrama de blocos para um
conversor de frequência
de onda CA PWM para uma
saída variável controlada para
o motor.
Regula a potência de saída
•
trifásica para o motor.
Potência de entrada, proces-
•
samento interno, saída e
corrente do motor são
monitorados para fornecer
operação e controle ecientes.
A interface do usuário e os
•
comandos externos são
monitorados e executados.
A saída e o controle do status
•
podem ser fornecidos.
A correção do fator de
•
potência altera a forma de
onda da corrente que é
extraída pelo conversor de
frequência para melhorar o
fator de potência.
O circuito de frenagem é
•
usado no circuito intermediário CC para controlar a
tensão CC quando a carga
alimenta de volta a energia.
1.4.3 Tamanhos de gabinetes e valores
nominais da potência
Para os tamanhos de gabinete metálico e os valores
nominais da potência dos conversores de frequência,
consulte capétulo 9.9 Tamanhos do gabinete metálico, valor
nominal da potência e dimensões.
1.4.4 Safe Torque O (STO)
O conversor de frequência VLT® Midi Drive FC 280 suporta
Safe Torque O (STO). Consulte capétulo 6 Safe Torque O
(STO) para obter detalhes sobre a instalação, colocação em
funcionamento, manutenção e dados técnicos de STO.
1 1
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 5
Page 10
089
Introdução
VLT® Midi Drive FC 280
11
1.5 Aprovações e certicações
Para conformidade com o Acordo Europeu relativo ao
Transporte Internacional de Mercadorias Perigosas por Vias
Navegáveis Internas (ADN), consulte o capítulo Instalação
em conformidade com o ADN no VLT® Midi Drive FC 280
Guia de Design.
O conversor de frequência atende os requisitos de
retenção de memória térmica UL 508C. Para obter mais
informações, consulte o capítulo Proteção Térmica do Motor
no VLT® Midi Drive FC 280 Guia de Design.
Normas e conformidades aplicadas para STO
O uso do STO nos terminais 37 e 38 exige o atendimento
de todas as determinações de segurança, incluindo as leis,
regulamentações e diretrizes relevantes. A função STO
integrada atende às normas a seguir:
IEC/EN 61508:2010, SIL2
•
IEC/EN 61800-5-2:2007, SIL2
•
IEC/EN 62061:2015, SILCL de SIL2
•
EN ISO 13849-1:2015, Categoria 3 PL d
•
Descarte
1.6
Não descarte equipamentos que
contenham componentes elétricos junto
com o lixo doméstico.
Colete-os separadamente em conformidade com a legislação local e vigente.
6 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
Page 11
Segurança Guia de Operação
2 Segurança
2.1 Símbolos de Segurança
Segurança e Precauções
2.3
2 2
Os seguintes símbolos são usados neste documento:
ADVERTÊNCIA
Indica uma situação potencialmente perigosa que
poderia resultar em morte ou ferimentos graves.
CUIDADO
Indica uma situação potencialmente perigosa que
poderia resultar em ferimentos leves ou moderados.
Também pode ser usado para alertar contra práticas
inseguras.
AVISO!
Indica informações importantes, incluindo situações que
possam resultar em danos ao equipamento ou à
propriedade.
2.2 Pessoal qualicado
São necessários transporte, armazenagem, instalação,
operação e manutenção corretos e conáveis para a
operação sem problemas e segura do conversor de
frequência. Somente pessoal qualicado tem permissão
para instalar ou operar este equipamento.
O pessoal
qual está autorizado a instalar, comissionar e manter
equipamentos, sistemas e circuitos de acordo com as leis e
regulamentos pertinentes. Além disso, o pessoal deve estar
familiarizado com as instruções e medidas de segurança
descritas neste guia.
qualicado é denido como pessoal treinado, o
ADVERTÊNCIA
ALTA TENSÃO
Os conversores de frequência contêm alta tensão quando
estão conectados à entrada da rede elétrica CA,
alimentação CC ou Load Sharing. Negligenciar em
realizar a instalação, partida e manutenção por pessoal
qualicado pode resultar em ferimentos graves ou fatais.
Somente pessoal qualicado deverá realizar a
•
instalação, partida e manutenção.
Antes de realizar qualquer serviço de
•
manutenção ou outro serviço, use um
dispositivo de medição de tensão apropriado
para assegurar que não há tensão restante no
conversor de frequência.
ADVERTÊNCIA
PARTIDA ACIDENTAL
Quando o conversor de frequência estiver conectado à
rede elétrica CA, alimentação CC ou load sharing, o
motor poderá dar partida a qualquer momento. Partida
acidental durante a programação, serviço ou serviço de
manutenção pode resultar em morte, ferimentos graves
ou danos à propriedade. O motor pode dar partida por
meio de interruptor externo, comando do eldbus, sinal
de referência de entrada do LCP, via operação remota
usando o Software de Setup MCT 10 ou após uma
condição de falha resolvida.
Para impedir a partida do motor:
Desconecte o conversor de frequência da rede
•
elétrica.
Pressione [O/Reset] no LCP, antes de
•
programar parâmetros.
Conecte toda a ação e monte completamente
•
o conversor de frequência, o motor e qualquer
equipamento acionado antes de o conversor de
frequência ser conectado à rede elétrica CA,
fonte de alimentação CC ou load sharing.
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 7
Page 12
Segurança
VLT® Midi Drive FC 280
ADVERTÊNCIA
TEMPO DE DESCARGA
22
O conversor de frequência contém capacitores de
barramento CC que podem permanecer carregados
mesmo quando o conversor de frequência não estiver
ligado. Pode haver alta tensão presente mesmo quando
os indicadores luminosos de LED de advertência
estiverem apagados. Se não for aguardado o tempo
especicado após a energia ter sido removida para
executar serviço de manutenção, o resultado poderá ser
ferimentos graves ou morte.
Pare o motor.
•
Desconecte a rede elétrica CA e as alimentações
•
do barramento CC remoto, incluindo bateria de
backup, UPS e conexões do barramento CC para
outros conversores de frequência.
Desconecte ou trave o motor PM.
•
Aguarde a descarga total dos capacitores. O
•
tempo de espera mínimo é especicado em
Tabela 2.1.
Antes de realizar qualquer serviço de
•
manutenção ou reparo, use um dispositivo de
medição da tensão apropriado para garantir
que os capacitores estão completamente
descarregados.
ADVERTÊNCIA
PERIGO PARA O EQUIPAMENTO
Contato com eixos rotativos e equipamentos elétricos
pode resultar em morte ou ferimentos graves.
Garanta que apenas pessoal treinado e
•
qualicado realize a instalação, inicialização e
manutenção.
Garanta que o trabalho elétrico esteja em
•
conformidade com os códigos elétricos
nacionais e locais.
Siga os procedimentos deste guia.
•
CUIDADO
RISCO DE FALHA INTERNA
Uma falha interna no conversor de frequência pode
resultar em lesões graves quando o conversor de
frequência não estiver fechado corretamente.
Assegure que todas as tampas de segurança
•
estão no lugar e bem presas antes de aplicar
energia.
Tensão [V]
200–240 0,37–3,7 (0,5–5) 4
380–480
Tabela 2.1 Tempo de Descarga
Faixa de potência
[kW (hp)]
0,37–7,5 (0,5–10) 4
11–22 (15–30) 15
Tempo de espera
mínimo
(minutos)
ADVERTÊNCIA
RISCO DE CORRENTE DE FUGA
As correntes de fuga excedem 3,5 mA. Falha em aterrar o
conversor corretamente pode resultar em morte ou
ferimentos graves.
Assegure o aterramento correto do
•
equipamento por um eletricista certicado.
8 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
Page 13
130BE616.14
VLT
MADE IN
DENMARK
T/C: FC-280PK37T4E20H1BXCXXXSXXXXAX
0.37kW 0.5HP
IN: 3x380-480V 50/60Hz, 1.2/1.0A
OUT: 3x0-Vin 0-500Hz, 1.2/1.1A
IP20
P/N: 134U2184 S/N: 000000G000
Midi Drive
www.danfoss.com
CAUTION / ATTENTION:
WARNING / AVERTISSEMENT:
See manual for special condition/mains fuse
Voir manual de conditions speciales/fusibles
Enclosure: See manual
5AF3 E358502 IND.CONT.EQ.
Stored charge, wait 4 min.
Charge r
é
siduelle, attendez 4 min.
21
1
2
4
3
5
11
20
19
18
16
15
14
13
10
8
9
6
17
R
US LISTED
www.tuv.com
ID 0600000000
Danfoss A/S, 6430 Nordborg, Denmark
12
7
Instalação Mecânica Guia de Operação
3 Instalação Mecânica
3.1 Desembalagem
3.1.1 Itens fornecidos
Os itens fornecidos podem variar de acordo com a
conguração do produto.
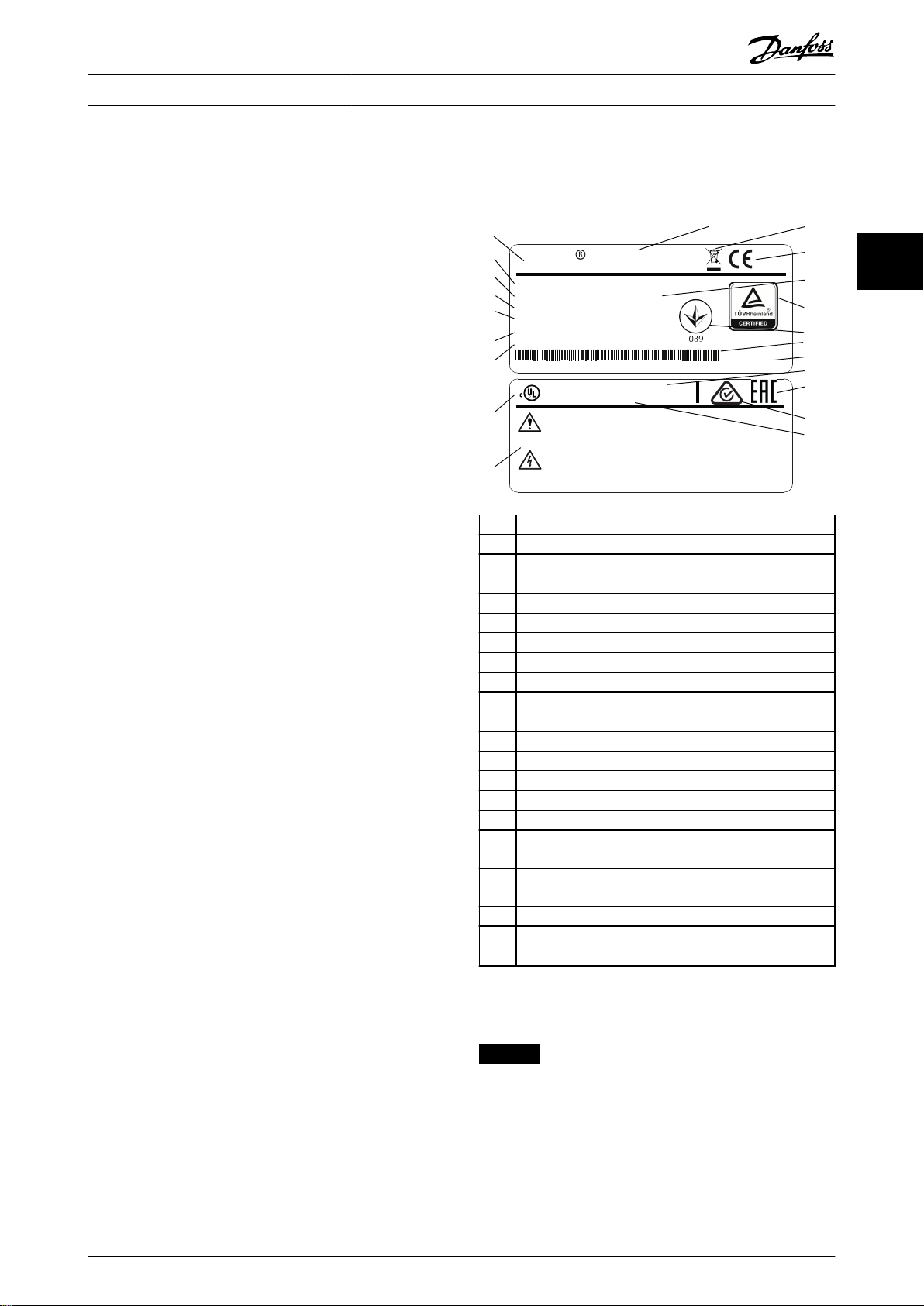
Certique-se de que os itens fornecidos e as
•
informações na plaqueta de identicação correspondem à conrmação do pedido.
Inspecione visualmente a embalagem e o
•
conversor de frequência quanto a danos causados
por manuseio inadequado durante o envio.
Preencha uma reivindicação por danos com a
transportadora. Guarde as peças danicadas para
maior esclarecimento.
1 Logotipo do produto
2 Nome do produto
3 Descarte
4 Marcação CE
5 Número de série
6 Logotipo TÜV
7 Logotipo UkrSEPRO
8 Código de barras
9 País de origem
10 Referência ao tipo de gabinete metálico
11 Logotipo EAC
12 Logotipo RCM
13 Referência UL
14 Especicações de advertência
15 Logotipo UL
16 Características nominais de IP
Tensão de saída, frequência e corrente (em baixa/alta
17
tensão)
Tensão de entrada, frequência e corrente (em baixa/alta
18
tensão)
19 Valor nominal da potência
20 Código de compra
21 Código de tipo
3 3
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 9
Ilustração 3.1 Plaqueta de identicação do produto (Exemplo)
AVISO!
Não remova a plaqueta de identicação do conversor de
frequência (perda de garantia).
Para obter mais informações sobre o código de tipo,
consulte o capítulo Código de Tipo no VLT® Midi Drive FC
280 Guia de Design.
Page 14
130BE615.12
Instalação Mecânica
VLT® Midi Drive FC 280
3.1.2 Armazenagem
Certique-se de que os requisitos para armazenagem
sejam atendidos. Consultar o capétulo 9.4 Condições
ambiente, para detalhes adicionais.
33
3.2 Ambiente de instalação
AVISO!
Em ambientes com gotículas, partículas ou gases
corrosivos em suspensão no ar, garanta que as características nominais de IP/tipo do equipamento é
compatível com a instalação ambiente. Deixar de atender
às exigências em relação às condições ambiente pode
reduzir o tempo de vida do conversor de frequência.
Certique-se de que os requisitos de umidade do ar,
temperatura e altitude são atendidos.
Vibração e choque
O conversor de frequência está em conformidade com os
requisitos para unidades montadas em paredes e pisos de
instalações de produção, bem como em painéis
aparafusados em paredes ou pisos.
Para obter especicações detalhadas das condições
ambiente, consulte capétulo 9.4 Condições ambiente.
Montagem
3.3
Montagem
Para adaptar a furação de montagem do VLT® Midi Drive
FC 280, entre em contato com o fornecedor Danfoss local
para encomendar uma placa traseira separada.
Para montar o conversor de frequência:
1. Certique-se de que o local de montagem é forte
o suciente suportar o peso da unidade. O
conversor de frequência permite instalação lado a
lado.
2. Posicione a unidade o mais perto possível do
motor. Mantenha o cabo de motor o mais curto
possível.
3. Monte a unidade na posição vertical em uma
superfície plana sólida ou na placa traseira
opcional para fornecer uxo de ar de
resfriamento.
4. Use a furação de montagem com slot na unidade
para montagem em parede, quando fornecida.
AVISO!
Para saber as dimensões da furação de montagem,
consulte capétulo 9.9 Tamanhos do gabinete metálico,
valor nominal da potência e dimensões.
3.3.1 Instalação lado a lado
AVISO!
Montagem inadequada pode resultar em superaquecimento e desempenho reduzido.
Refrigeração
Assegurar 100 mm (3,9 pol.) de espaço para
•
ventilação acima e abaixo.
Elevação
Para determinar um método de elevação seguro,
•
verique o peso da unidade, consulte
capétulo 9.9 Tamanhos do gabinete metálico, valor
nominal da potência e dimensões.
Garanta que o dispositivo de elevação é
•
apropriado para a tarefa.
Se necessário, planeje um guincho, guindaste ou
•
empilhadeira com as características nominais
apropriadas para mover a unidade.
Para içamento, use anéis de guincho na unidade,
•
quando fornecidos.
Instalação lado a lado
Todas as unidades VLT® Midi Drive FC 280 podem ser
instaladas lado a lado na posição vertical ou horizontal. As
unidades não exigem ventilação adicional na lateral.
Ilustração 3.2 Instalação lado a lado
10 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
Page 15
130BF642.10
G
130BF643.10
G
Instalação Mecânica Guia de Operação
AVISO!
RISCO DE SUPERAQUECIMENTO
Se for usado o kit de conversão IP21, a montagem das
unidades lado a lado pode resultar em superaquecimento e danos à unidade.
São necessários pelo menos 30 mm (1,2 pol.)
•
entre as bordas da tampa superior do kit de
conversão IP21.
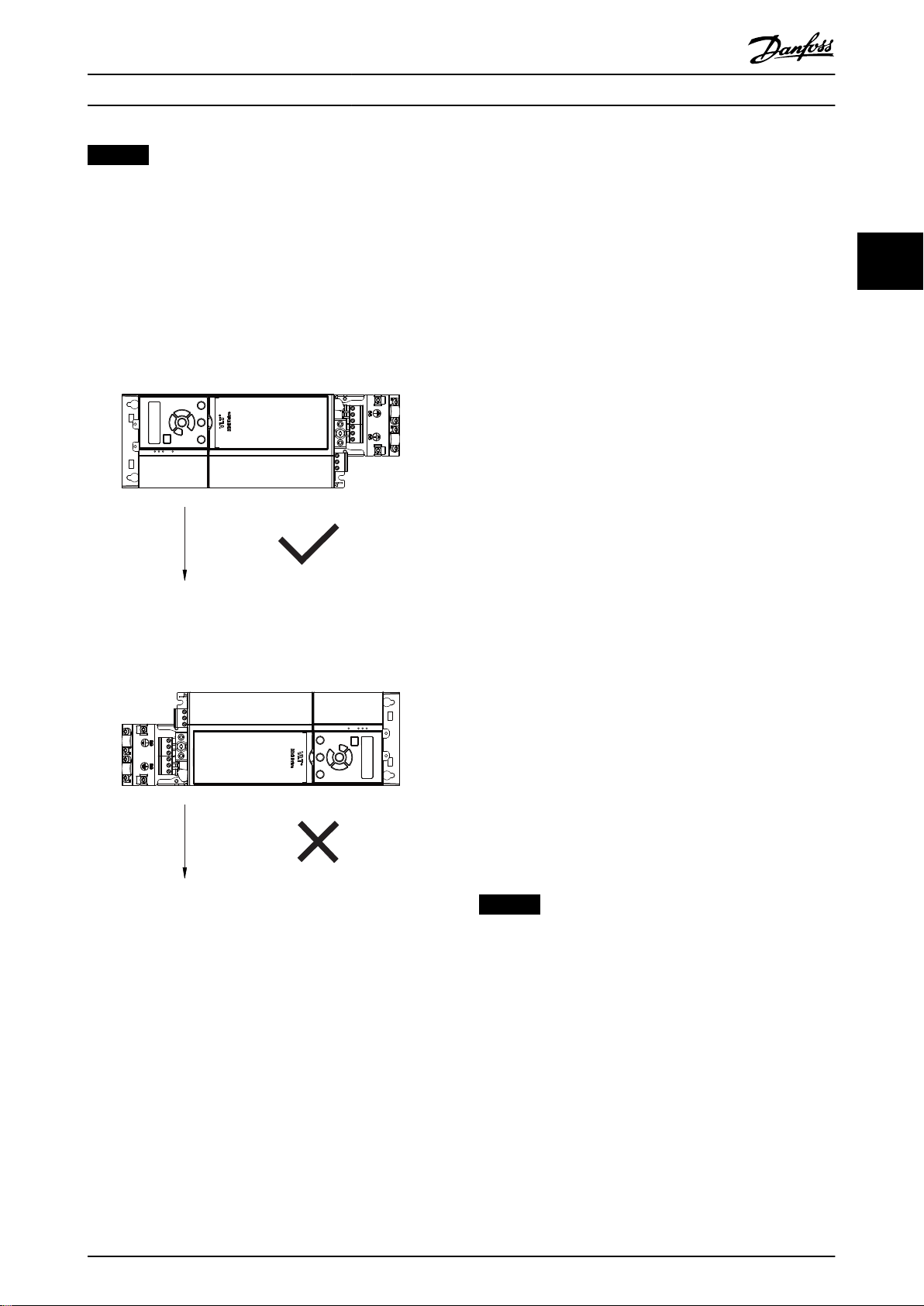
3.3.2 Montagem Horizontal
Ilustração 3.3 Maneira certa da montagem horizontal
(lado esquerdo para baixo)
Ilustração 3.4 Maneira errada da montagem horizontal
(lado direito para baixo)
3.3.3 Kit de desacoplamento do
barramento
O kit de desacoplamento do barramento garante a xação
mecânica e a ltragem elétrica dos cabos para as seguintes
variantes de cassete de controle:
Cassete de controle com PROFIBUS.
•
Cassete de controle com PROFINET.
•
Cassete de controle com CANopen.
•
Cassete de controle com Ethernet.
•
Cassete de controle com POWERLINK
•
Cada kit de desacoplamento do barramento contém 1
placa de desacoplamento horizontal e 1 placa de desacoplamento vertical. A montagem da placa de
desacoplamento vertical é opcional. A placa de desacoplamento vertical fornece melhor suporte mecânico para
conectores e cabos PROFINET, Ethernet e POWERLINK.
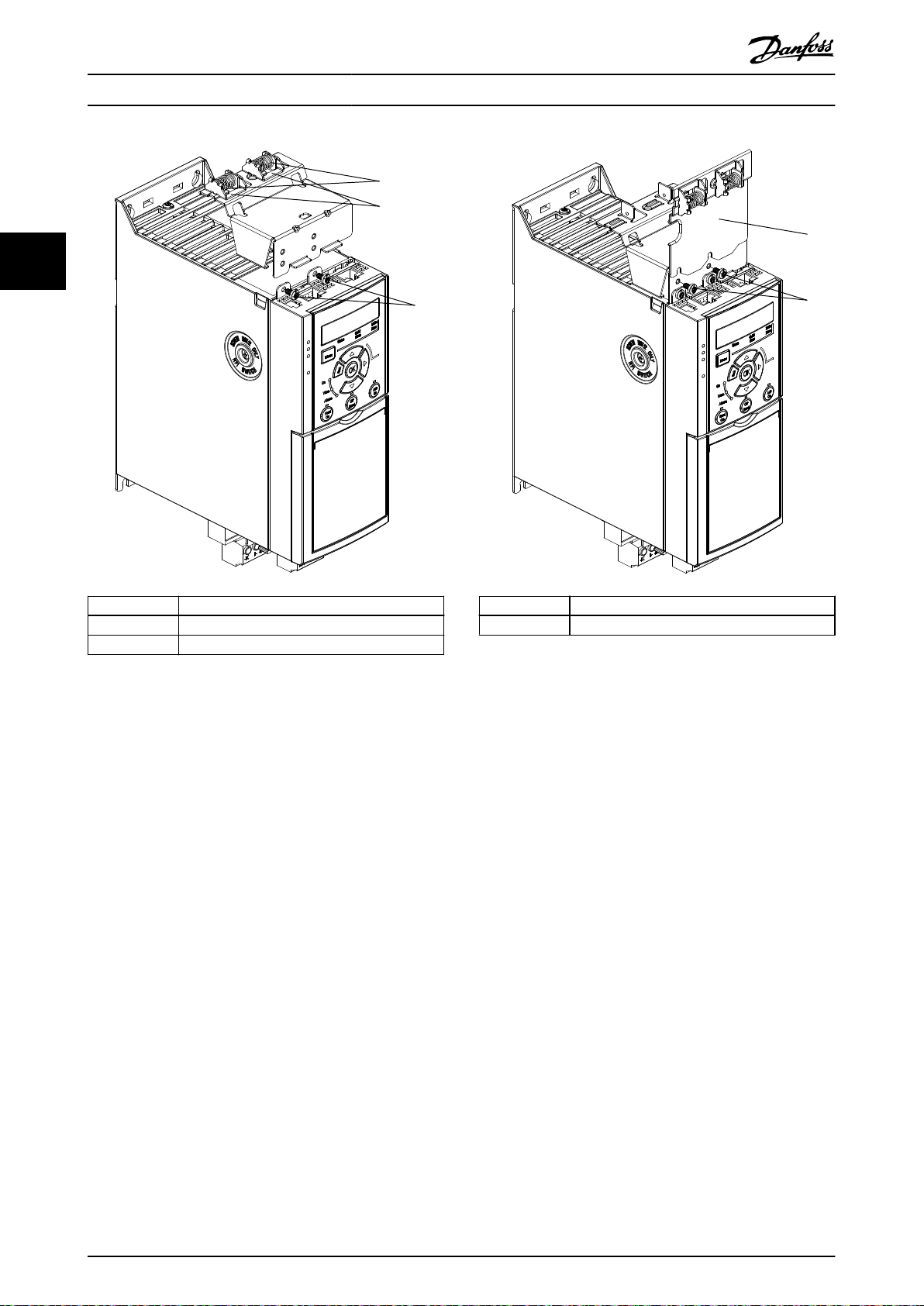
3.3.4 Montagem
Para montar o kit de desacoplamento do barramento:
1. Coloque a placa de desacoplamento horizontal
sobre o cassete de controle que está montado no
conversor de frequência, e xe a placa usando 2
parafusos, como mostrado em Ilustração 3.5. O
torque de aperto é 0,7–1,0 Nm (6,2–8,9 pol-lb).
2. Opcional: Monte a placa de desacoplamento
vertical da seguinte maneira:
2a Remova as duas molas mecânicas e
duas braçadeira de metal da placa
horizontal.
2b Monte as molas mecânicas e braçadeiras
de metal na placa vertical.
2c Fixe a placa com 2 parafusos, como
mostrado em Ilustração 3.6. O torque de
aperto é 0,7–1,0 Nm (6,2–8,9 pol-lb).
AVISO!
Se a tampa superior IP21 for utilizada, não monte a
placa de desacoplamento vertical, porque sua altura
afeta a instalação correta da tampa superior IP21.
3 3
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 11
Page 16
1
2
3
130BE480.10
130BE481.10
1
2
Instalação Mecânica
VLT® Midi Drive FC 280
33
1 Molas mecânicas
2 Braçadeiras metálicas
3 Parafusos
Ilustração 3.5 Fixe a placa de desacoplamento horizontal com
parafusos
1 Placa de desacoplamento vertical
2 Parafusos
Ilustração 3.6 Fixe a placa de desacoplamento vertical com
parafusos
Ilustração 3.5 e Ilustração 3.6 mostram conectores baseados
em Ethernet (RJ45). O tipo de conector real depende da
variante de eldbus selecionada do conversor de
frequência.
3. Garanta a
ação correta dos cabos de eldbus
(PROFIBUS/CANopen) ou empurre os conectores
do cabo (RJ45 para PROFINET/POWERLINK/
Ethernet/IP) nos soquetes no cassete de controle.
4. 4a Coloque os cabos PROFIBUS/CANopen
entre as braçadeiras metálicas acionadas
por mola para estabelecer xação
mecânica e contato elétrico entre as
seções blindadas dos cabos e as
braçadeiras.
4b Posicione os cabos PROFINET/
POWERLINK/Ethernet/IP entre as
braçadeiras metálicas acionadas por
mola para estabelecer xação mecânica
entre os cabos e as braçadeiras.
12 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
Page 17
Instalação Elétrica Guia de Operação
4 Instalação Elétrica
4.1 Instruções de Segurança
Ver capétulo 2 Segurança para instruções de segurança
gerais.
ADVERTÊNCIA
TENSÃO INDUZIDA
A tensão induzida dos cabos de motor de saída de
conversores de frequência diferentes em operação
conjunta pode carregar capacitores do equipamento
mesmo com o equipamento desligado e travado. Se os
cabos de motor de saída não forem estendidos separadamente ou não forem utilizados cabos blindados, o
resultado poderá ser morte ou lesões graves.
Estenda os cabos de motor de saída separa-
•
damente.
Use cabos blindados.
•
Trave todos os conversores de frequência
•
simultaneamente.
ADVERTÊNCIA
PERIGO DE CHOQUE
O conversor de frequência pode causar uma corrente CC
no condutor PE e resultar em morte ou lesão grave.
Quando um dispositivo de proteção operado
•
por corrente residual (RCD) for usado para
proteção contra choque elétrico, somente um
RCD do Tipo B é permitido no lado da
alimentação.
A falha em seguir as recomendações signica que o RCD
pode não fornecer a proteção pretendida.
Proteção de sobrecorrente
Equipamento de proteção adicional como
•
proteção contra curto-circuito ou proteção
térmica do motor entre o motor e o conversor de
frequência é necessário para aplicações com
vários motores.
É necessário um fusível de entrada para fornecer
•
proteção contra curto-circuito e sobrecorrente. Se
os fusíveis não forem fornecidos de fábrica,
devem ser fornecidos pelo instalador. Consulte as
características nominais máximas dos fusíveis em
capétulo 9.8 Fusíveis e Disjuntores.
Tipos e características nominais dos os
Toda a ação deverá estar em conformidade com
•
as regulamentações locais e nacionais com
relação à seção transversal e aos requisitos de
temperatura ambiente.
Recomendação de o de conexão de energia: Fio
•
de cobre com classicação mínima de 75 °C
(167 °F).
Consulte capétulo 9.5 Especicações de Cabo para obter
tamanhos e tipos de o recomendados.
4.2 Instalação compatível com EMC
Para obter uma instalação compatível com EMC, siga as
instruções fornecidas em capétulo 4.3 Aterramento,
capétulo 4.4 Esquemático de ação, capétulo 4.6 Conexão do
Motor, e capétulo 4.8 Fiação de Controle.
4.3 Aterramento
ADVERTÊNCIA
RISCO DE CORRENTE DE FUGA
As correntes de fuga excedem 3,5 mA. Não aterrar o
conversor de frequência corretamente poderá resultar
em morte ou lesões graves.
Assegure o aterramento correto do
•
equipamento por um eletricista certicado.
Para segurança elétrica
Aterre o conversor de frequência de acordo com
•
os padrões e diretivas aplicáveis.
Use um o terra dedicado para potência de
•
entrada, potência do motor e ação de controle.
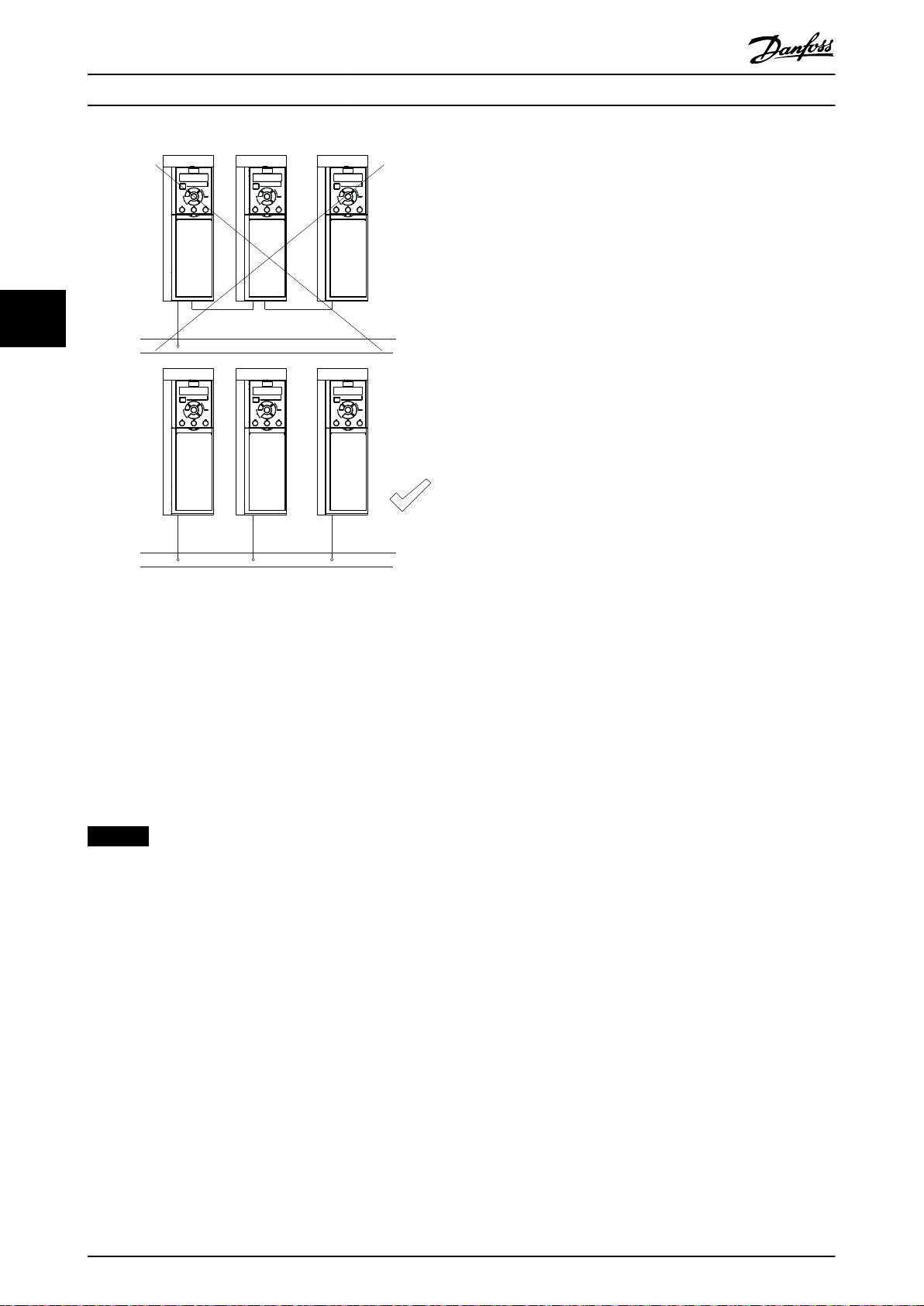
Não aterre um conversor de frequência ao outro
•
em modo encadeado (consulte Ilustração 4.1).
Mantenha as conexões do o terra tão curtas
•
quanto possível.
Atenda aos requisitos de ação do fabricante do
•
motor.
Seção transversal mínima do cabo de os terra:
•
10 mm2 (7 AWG).
Termine os os terra individuais separadamente,
•
seguindo em ambos os requisitos de dimensão
de cabo.
4 4
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 13
Page 18
130BC500.10
FC 1
FC 1
FC 2
FC 2
FC 3
FC 3
PE
PE
Instalação Elétrica
VLT® Midi Drive FC 280
44
Ilustração 4.1 Princípio de aterramento
Para instalação compatível com EMC
Estabeleça um contato elétrico entre a blindagem
•
do cabo e o gabinete do conversor de frequência
usando buchas de cabo metálicas ou as
braçadeiras fornecidas com o equipamento
(consulte capétulo 4.6 Conexão do Motor).
Use o de cabo resistente para reduzir transiente
•
de ruptura.
Não use rabichos.
•
AVISO!
EQUALIZAÇÃO DO POTENCIAL
Risco de transiente de ruptura quando o potencial do
ponto de aterramento entre o conversor de frequência e
o sistema de controle for diferente. Instale cabos de
equalização entre os componentes do sistema.
Recomenda-se a seção transversal do cabo: 16 mm
(6 AWG).
2
14 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
Page 19
Power
input
Switch mode
power supply
Motor
Analog output
interface
(PNP) = Source
(NPN) = Sink
ON = Terminated
OFF = Open
Brake
resistor
91 (L1/N)
92 (L2/L)
93 (L3)
PE
50 (+10 V OUT)
53 (A IN)
2)
54 (A IN)
55 (COM digital/analog I/O)
0/4−20 mA
12 (+24 V OUT)
13 (+24 V OUT)
18 (D IN)
10 V DC
15 mA 100 mA
+ - + -
(U) 96
(V) 97
(W) 98
(PE) 99
(A OUT) 42
(P RS485) 68
(N RS485) 69
(COM RS485) 61
0 V
5 V
S801
0/4−20 mA
RS485
RS485
03
+10 V DC
0−10 V DC
24 V DC
02
01
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
19 (D IN)
24 V (NPN)
0 V (PNP)
17 V
0 V
0 V (PNP)
24 V (NPN)
29 (D IN)
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
33 (D IN)
32 (D IN)
38 (STO2)
4)
37 (STO1)
4)
95
P 5-00
21
ON
(+DC/R+) 89
(R-) 81
0−10 V DC
(-DC) 88
RFI
0 V
250 V AC, 3 A
Relay 1
1)
3)
5)
5)
130BE202.19
27 (D IN/OUT)
6)
Instalação Elétrica Guia de Operação
4.4 Esquemático de ação
Esta seção descreve como instalar a ação do conversor de frequência.
4 4
Ilustração 4.2 Desenho Esquemático de Fiação Básica
A = analógica, D = digital
1) O circuito de frenagem está disponível apenas em unidades trifásicas.
2) O Terminal 53 também pode ser usado como entrada digital.
3) O interruptor S801 (terminais de comunicação serial) pode ser usado para ativar a terminação na porta RS485 (terminais 68 e
69).
4) Consulte capétulo 6 Safe Torque O (STO) para obter a ação correta de STO.
5) O conversor de frequência S2 (monofásico de 200 a 240 V) não suporta a aplicação de load sharing.
6) A tensão máxima é de 17 V para o terminal 27 como saída analógica.
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 15
Page 20
e30bf228.11
L1
L2
L3
PE
PE
u
v
w
2
1
3
5
16
17
18
14
12
8
7
10
9
4
11
13
4
6
15
90
4
Instalação Elétrica
VLT® Midi Drive FC 280
44
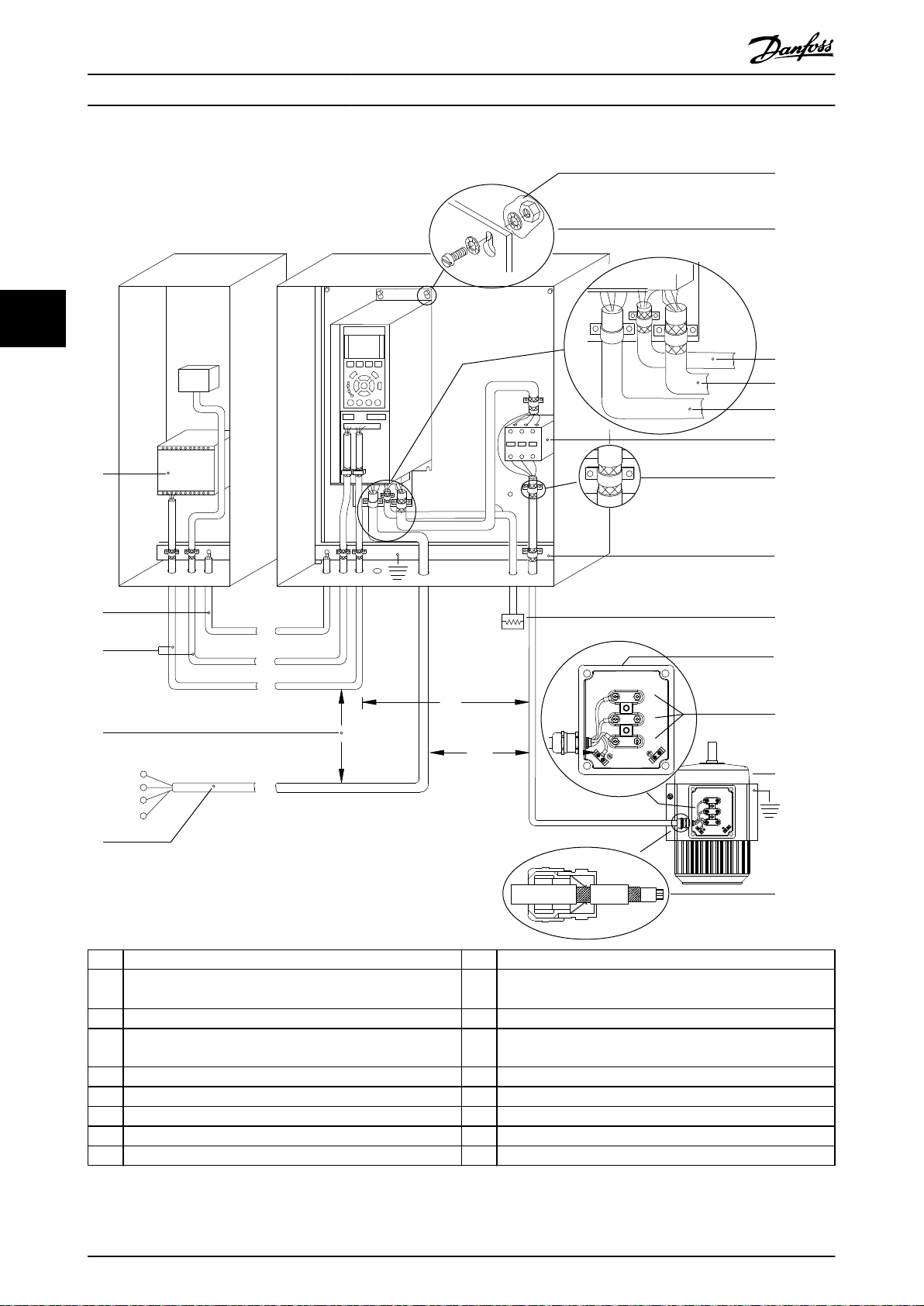
1 PLC 10 Cabo de rede elétrica (não blindado)
2
Cabo de equalização com diâmetro mínimo de 16 mm
(6 AWG).
3 Cabos de controle 12 Isolamento do cabo descascado
4 Mínimo de 200 mm (7,87 pol.) entre os cabos de controle, os
cabos de motor e os cabos de rede elétrica.
5 Alimentação de rede elétrica 14 Resistor do freio
6 Superfície exposta (não pintada) 15 Caixa metálica
7 Arruelas tipo estrela 16 Conexão para o motor
8 Cabo do freio (blindado) 17 Motor
9 Cabo de motor (blindado) 18 Bucha de cabo de EMC
Ilustração 4.3 Conexão Elétrica Típica
2
11 Contator de saída e mais.
13 Barramento do ponto de aterramento comum Siga as
exigências locais e nacionais para o aterramento do gabinete.
16 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
Page 21
130BC504.11
130BD531.10
U
V
W
96
97
98
Instalação Elétrica Guia de Operação
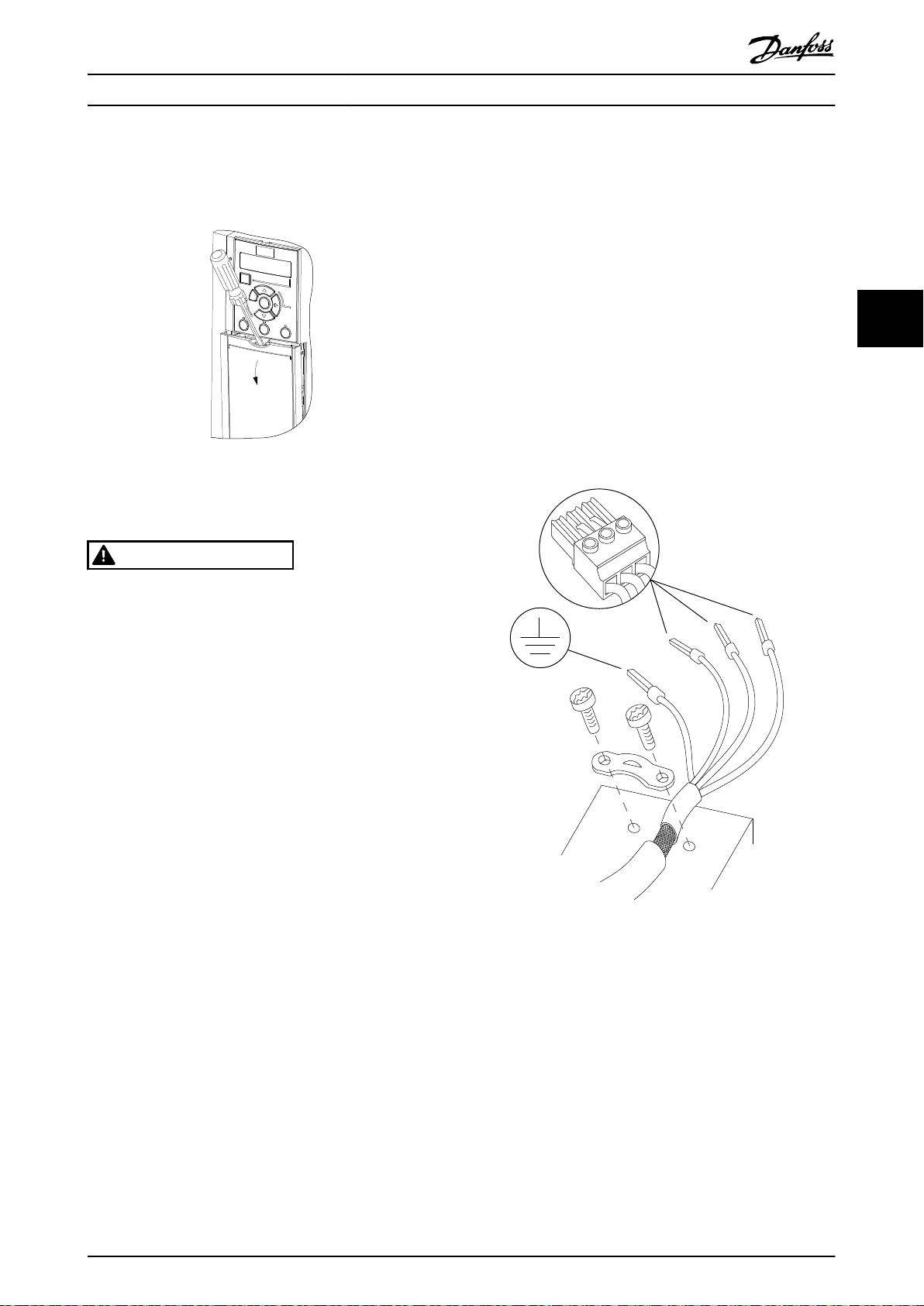
4.5 Acesso
Remova a placa de cobertura com uma chave de
•
fenda. Consulte Ilustração 4.4.
Ilustração 4.4 Acesso à Fiação de Controle
4.6 Conexão do Motor
ADVERTÊNCIA
TENSÃO INDUZIDA
A tensão induzida dos cabos de motor de saída
estendidos juntos pode carregar capacitores do
equipamento, mesmo com o equipamento desligado e
travado. Se os cabos de motor de saída não forem
estendidos separadamente ou não forem utilizados
cabos blindados, o resultado poderá ser morte ou lesões
graves.
Procedimento
1. Descasque um pedaço do isolamento do cabo
externo.
2. Posicione o cabo descascado sob a braçadeira de
cabo para estabelecer xação mecânica e contato
elétrico entre a blindagem do cabo e o terra.
3. Conecte o o terra ao terminal de aterramento
mais próximo de acordo com as instruções de
aterramento fornecidas em
capétulo 4.3 Aterramento. Consulte Ilustração 4.5.
4. Conecte a ação do motor trifásico nos terminais
96 (U), 97 (V) e 98 (W), conforme mostrado em
Ilustração 4.5.
5. Aperte os terminais de acordo com as
informações fornecidas em capétulo 9.7 Torques de
Aperto de Conexão.
4 4
Estenda os cabos de motor de saída separa-
•
damente.
Use cabos blindados.
•
Atenda os códigos elétricos locais e nacionais
•
para tamanhos do cabo. Para obter os tamanhos
máximos dos cabos, consulte capétulo 9.1 Dados
Elétricos.
Atenda aos requisitos de ação do fabricante do
•
motor.
Extratores da ação do motor ou painéis de
•
acesso são fornecidos na base das unidades IP21/
Tipo 1.
Não conecte um dispositivo de partida ou de
•
troca de polo (por exemplo, motor Dahlander ou
motor de indução de anel de deslizamento) entre
o conversor de frequência e o motor.
Ilustração 4.5 Conexão do Motor
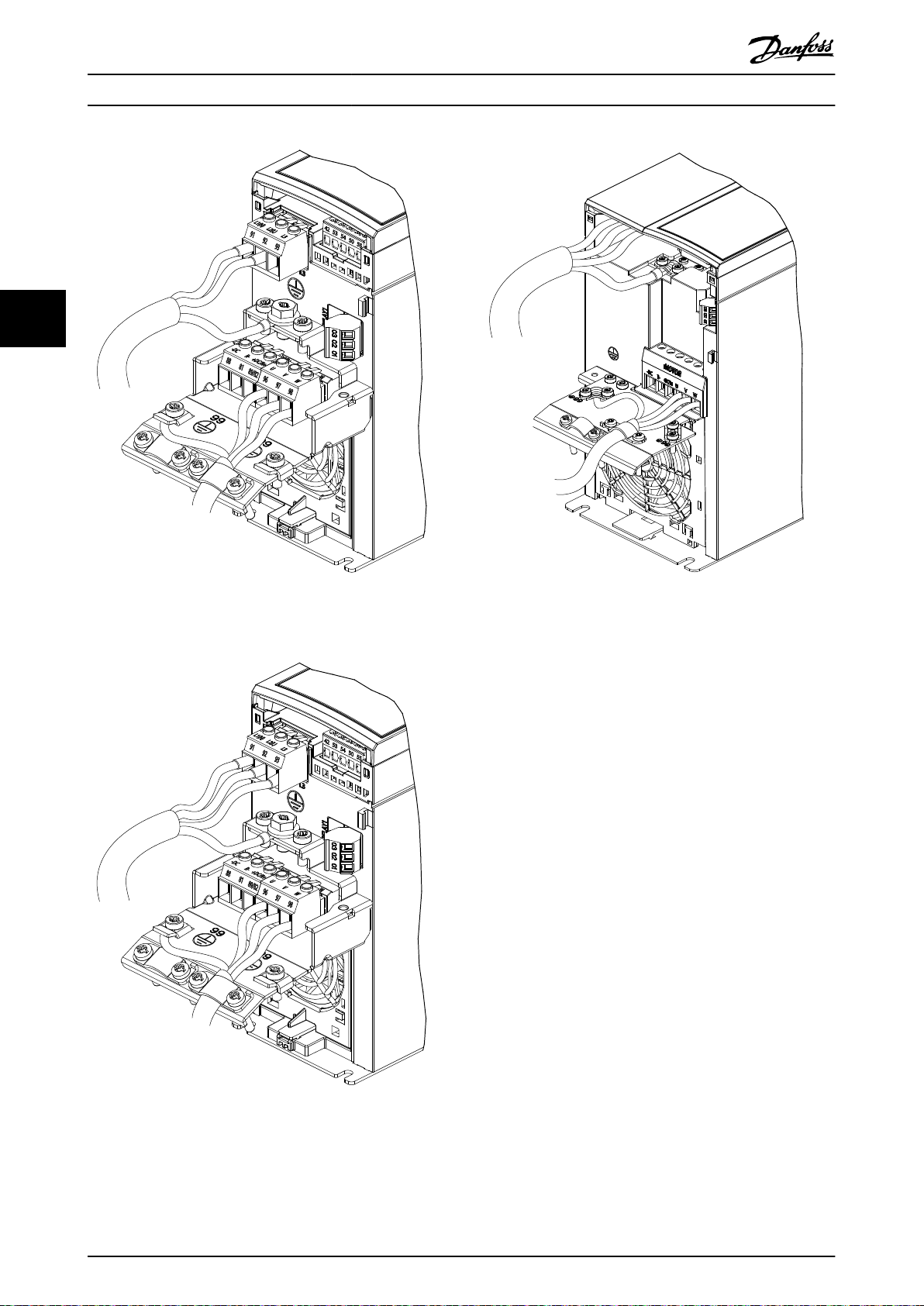
As conexões do terra, da rede elétrica e do motor para
conversores de frequência monofásicos e trifásicos são
mostradas em Ilustração 4.6, Ilustração 4.7 e Ilustração 4.8,
respectivamente. As congurações reais variam com os
tipos de unidade e equipamentos opcionais.
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 17
Page 22
130BE232.11
130BE231.11
130BE804.10
Instalação Elétrica
VLT® Midi Drive FC 280
44
Ilustração 4.6 Conexões do terra, da rede elétrica e do
motor para Unidades monofásicas
Ilustração 4.7 Rede elétrica, motor e conexão do terra
para unidades trifásicas (K1, K2, K3)
Ilustração 4.8 Rede elétrica, motor e conexões do terra
para unidades trifásicas (K4, K5)
Ligação da Rede Elétrica CA
4.7
Dimensione a ação com base na corrente de
•
entrada do conversor de frequência. Para obter os
tamanhos máximos dos cabos, consulte
capétulo 9.1 Dados Elétricos.
Atenda os códigos elétricos locais e nacionais
•
para tamanhos do cabo.
Procedimento
1. Conecte os cabos de energia CA de entrada aos
terminais N e L para unidades monofásicas
(consulte Ilustração 4.6) ou aos terminais L1, L2 e
L3 para unidades trifásicas (consulte
Ilustração 4.7).
2. Dependendo da conguração do equipamento,
conecte a potência de entrada nos terminais de
entrada da rede elétrica ou na desconexão de
entrada.
3. Aterre o cabo de acordo com as instruções de
aterramento em capétulo 4.3 Aterramento.
4. Quando alimentado por uma fonte de rede
elétrica isolada (rede elétrica IT ou delta
utuante) ou rede elétrica TT/TN-S com uma
perna aterrada (delta aterrado), certique-se de
que o parafuso do ltro de RFI foi removido. A
remoção do parafuso RFI evita danos no
barramento CC e reduz as correntes de
18 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
Page 23
130BE212.10
1 2
3
130BE214.10
37 38 12 13 18 19 27 29 32 33 61
42 53 54 50 55
68 69
1
3
2
Instalação Elétrica Guia de Operação
capacidade do terra de acordo com a IEC 61800-3
(consulte Ilustração 9.2, o parafuso RFI está na
lateral do conversor de frequência).
4.8 Fiação de Controle
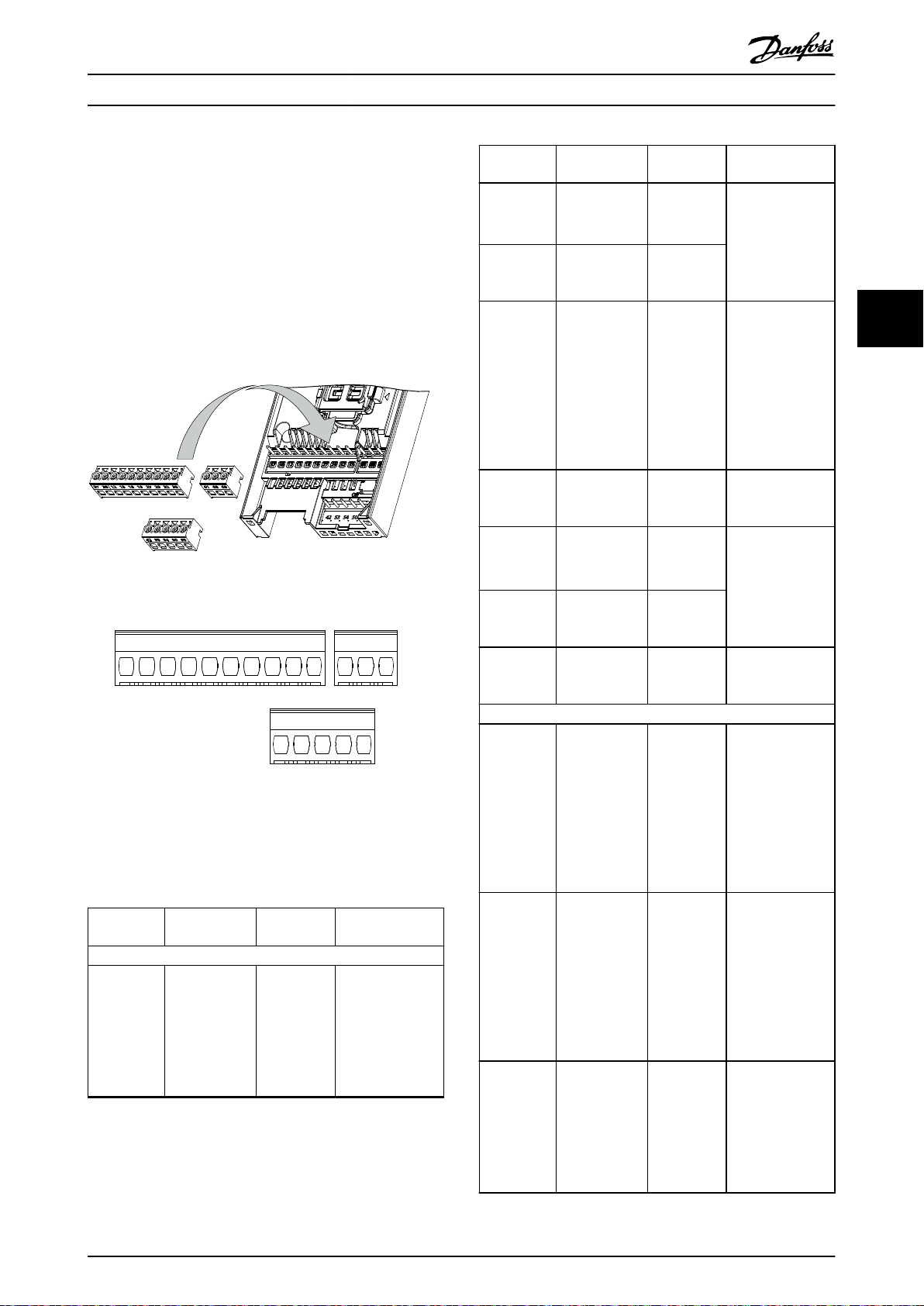
4.8.1 Tipos de Terminal de Controle
Ilustração 4.9 mostra os conectores do conversor de
frequência removíveis. As funções de terminal e a
conguração padrão estão resumidas em Tabela 4.1 e
Tabela 4.2.
Ilustração 4.9 Locais do Terminal de Controle
Ilustração 4.10 Números dos Terminais
Consulte capétulo 9.6 Entrada/Saída de controle e dados de
controle para saber detalhes das características nominais
dos terminais.
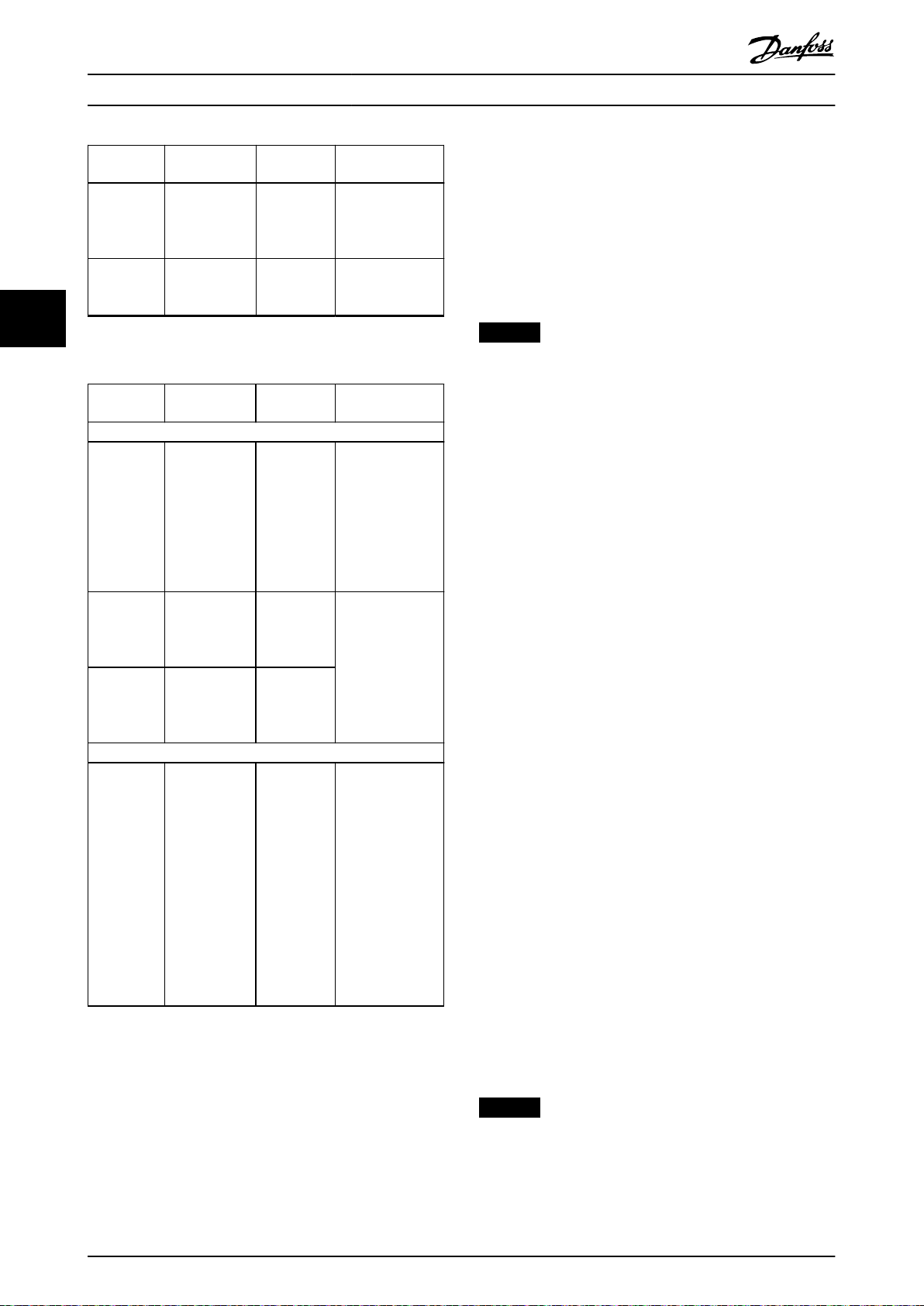
Terminal
número
12, 13 – +24 V CC
Parâmetro
E/S digital, E/S pulso, encoder
Conguraçã
o padrão
Descrição
Tensão de
alimentação de 24
V CC. A corrente
de saída máxima é
de 100 mA para
todas as cargas de
24 V.
Terminal
número
18
19
27
29
32
33
37, 38 – STO
42
50 – +10 V CC
53
Parâmetro
Parâmetro 5-10
Terminal 18
Entrada Digital
Parâmetro 5-11
Terminal 19,
Entrada Digital
Parâmetro 5-01
Modo do
Terminal 27
Parâmetro 5-12
Terminal 27,
Entrada Digital
Parâmetro 5-30
Terminal 27
Saída Digital
Parâmetro 5-13
Terminal 29,
Entrada Digital
Parâmetro 5-14
Terminal 32,
Entrada Digital
Parâmetro 5-15
Terminal 33
Entrada Digital
Entradas/saídas analógicas
Parâmetro 6-91
Terminal 42
Saída Analógica
Grupo do
parâmetro 6-1*
Entrada
Analógica 53
Conguraçã
[8] Partida
[10] Reversão
DI [2] Paradp/
inérc,reverso
DO [0] Sem
operação
[14] Jog Entrada digital.
[0] Sem
operação
[0] Sem
operação
[0] Fora de
funcionament
o padrão
–
Descrição
Entradas digitais.
Selecionável para
entrada digital,
saída digital ou
saída de pulso. A
conguração
padrão é entrada
digital.
Entrada digital,
encoder de 24 V.
O terminal 33
pode ser usado
para entrada de
pulso.
Entradas de
segurança
funcional
Saída analógica
programável. O
sinal analógico é
de 0-20 mA ou
4-20 mA a um
máximo de 500 Ω.
Também pode ser
congurado como
saídas digitais.
Tensão de
alimentação
analógica de 10 V
CC. Máximo de
15 mA
comumente usado
para
potenciômetro ou
termistor.
Entrada analógica.
Somente modo de
tensão é
suportado.
Também pode ser
usado como
entrada digital.
4 4
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 19
Page 24
Instalação Elétrica
VLT® Midi Drive FC 280
Terminal
número
54
55 – –
Parâmetro
Grupo do
parâmetro 6-2*
Entrada
analógica 54
Conguraçã
o padrão
–
Descrição
Entrada analógica.
Selecionável entre
modo de tensão
ou de corrente.
Comum para
entradas digital e
analógica.
4.8.2 Fiação para os Terminais de Controle
Os conectores do terminal de controle podem ser
desconectados do conversor de frequência para facilitar a
instalação, como mostrado em Ilustração 4.9.
Para obter detalhes sobre ação de STO, consulte
capétulo 6 Safe Torque O (STO).
44
Tabela 4.1 Descrições do terminal - Entradas/saídas digitais,
Entradas/Saídas Analógicas
Terminal
número
61 – –
68 (+)
69 (-)
01, 02, 03
Tabela 4.2 Descrições dos terminais - Comunicação Serial
Parâmetro
Comunicação serial
Grupo do
parâmetro 8-3*
Denições da
porta do FC
Grupo do
parâmetro 8-3*
Denições da
porta do FC
Parâmetro 5-40
Função do Relé
Conguraçã
o padrão
–
–
Relés
[1] Placa d
Cntrl Pronta
Descrição
Filtro de RC
integrado para
blindagem do
cabo. SOMENTE
para conectar a
blindagem quando
houver problemas
de EMC.
Interface RS485.
Um interruptor do
cartão de controle
é fornecido para
resistência de
terminação.
Saída do relé de
forma C. Esses
relés estão em
diferentes locais,
dependendo do
tamanho e da
conguração do
conversor de
frequência.
Utilizável para
tensão CC ou CA e
carga indutiva ou
resistiva.
AVISO!
Mantenha os cabos de controle o mais curto possível e
separe-os dos cabos de alta energia para minimizar a
interferência.
1. Solte os parafusos dos terminais.
2. Insira cabos de controle com luva nos slots.
3. Aperte os parafusos dos terminais.
4. Certique-se de que o contato está estabelecido
bem rme e não está frouxo. Fiação de controle
frouxa pode ser a fonte de falhas do
equipamento ou de operação não ideal.
Consulte capétulo 9.5 Especicações de Cabo para obter
tamanhos do cabo do terminal de controle e
capétulo 7 Exemplos de Aplicações para obter conexões de
cabos de controle típicas.
4.8.3 Ativando a operação do motor
(Terminal 27)
Um o de jumper pode ser necessário entre o terminal 12
(ou 13) e o terminal 27 para o conversor de frequência
operar quando usar valores de programação padrão de
fábrica.
O terminal de entrada digital 27 é projetado para
•
receber comando de bloqueio externo de 24 V
CC.
Quando não for usado um dispositivo de
•
bloqueio, instale um jumper entre o terminal de
controle 12 (recomendado) ou 13 e o terminal 27.
O jumper fornece um sinal interno de 24 V CC no
terminal 27.
Somente para GLCP: Quando a linha de status na
•
parte inferior do LCP indicar PARADA POR INÉRCIA
REMOTA AUTOMÁTICA, indica que a unidade está
pronta para operar, mas há um sinal de entrada
ausente no terminal 27.
AVISO!
IMPOSSÍVEL INICIAR
O conversor de frequência não pode operar sem um
sinal no terminal 27, a menos que o terminal 27 seja
reprogramado.
20 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
Page 25
Start Current
2)
Only support in some products.
1)
DC injection current during “Active Brake Delay” after MAV reduced to “0” . Only support in some products.
Off
On
Off
Relay
/
DO Status
Active Brake Delay
Active Brake Delay
MAV
Start Speed
Active Brake Speed
0
t
Start Delay
Off
On
Off
Start Command
Released
Activated
Reaction time of
mech
.
brake
Reaction time of
mech
.
brake
Mech
.
Brake Status
Release Brake Current
Output Current
DC Injection Current
1)
0
t
130BF687.10
Activated
Note:
2)
Instalação Elétrica Guia de Operação
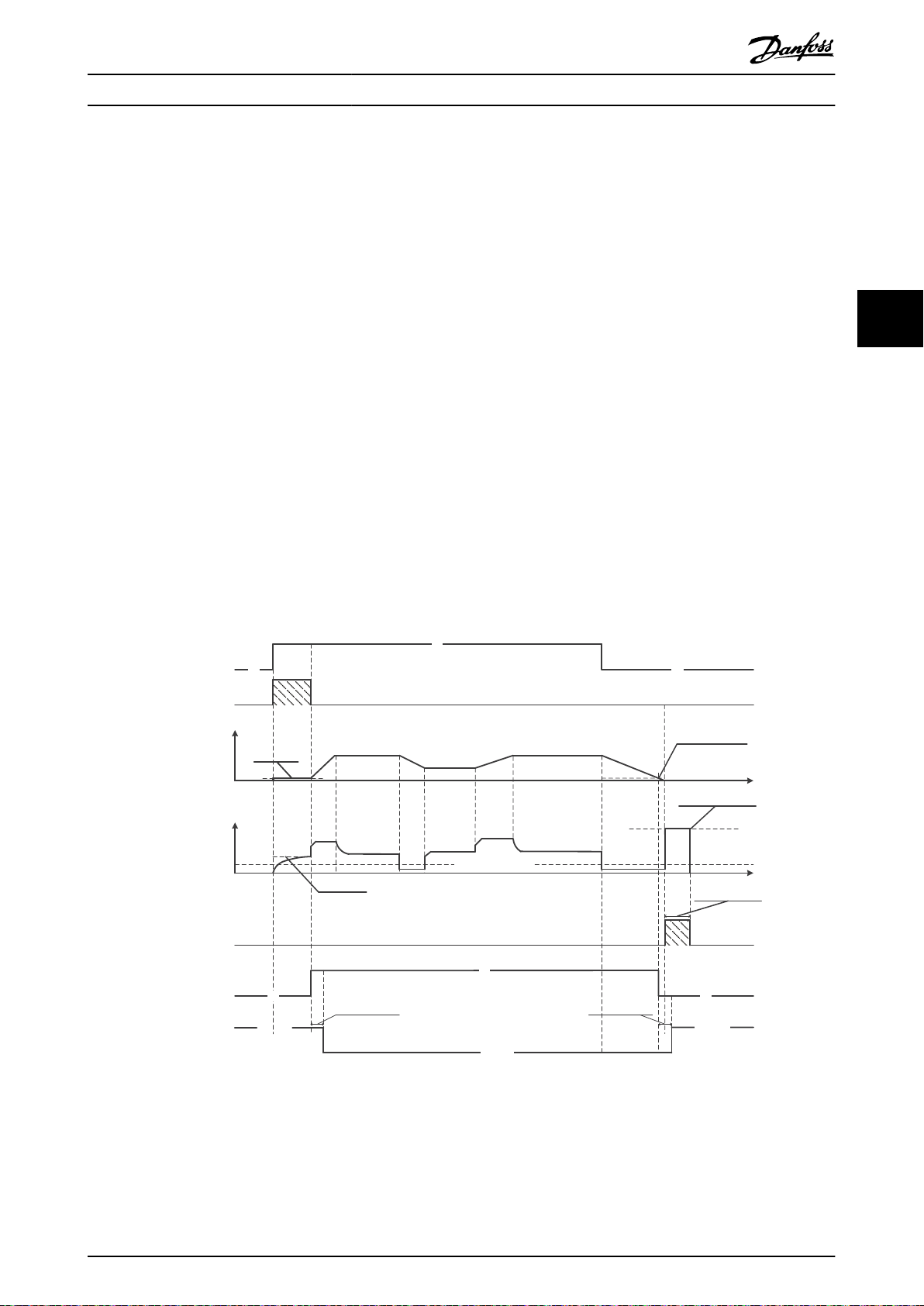
4.8.4 Controle do Freio Mecânico
Nas aplicações de elevação/abaixamento é necessário controlar um freio eletromecânico.
Controle o freio usando qualquer saída do relé ou saída digital (terminal 27).
•
A saída deve ser mantida fechada (sem tensão) durante o período em que o conversor de frequência não puder
•
manter o motor parado, por exemplo, ao fato de a carga ser excessivamente pesada.
Selecione [32] Controle do freio mecânico no grupo do parâmetro 5-4* Relés para aplicações com freio eletrome-
•
cânico.
O freio é liberado quando a corrente do motor exceder o valor predenido no parâmetro 2-20 Corrente de Liberação
•
do Freio.
O freio é acionado quando a frequência de saída for menor que a frequência programada no
•
parâmetro 2-22 Velocidade de Ativação do Freio [Hz] e somente se o conversor de frequência estiver executando um
comando de parada.
Se o conversor de frequência estiver em 1 das seguintes situações, o freio mecânico é fechado imediatamente.
Em modo alarme.
•
Em uma situação de sobretensão.
•
O STO é ativado.
•
O comando de parada por inércia é dado.
•
4 4
Ilustração 4.11 Freio Mecânico
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 21
Page 26
130BE201.11
L1(N) L2(L) L3
U V W
02 01
A1
A2
Frequency converter
Output
relay
Command circuit
220 V AC
Mechanical
brake
ShaftMotor
Freewheeling
diode
Brake power circuit
380 V AC
Output
contactor
input
e30bt623.11
61
68
69
+
130BB489.10
RS485
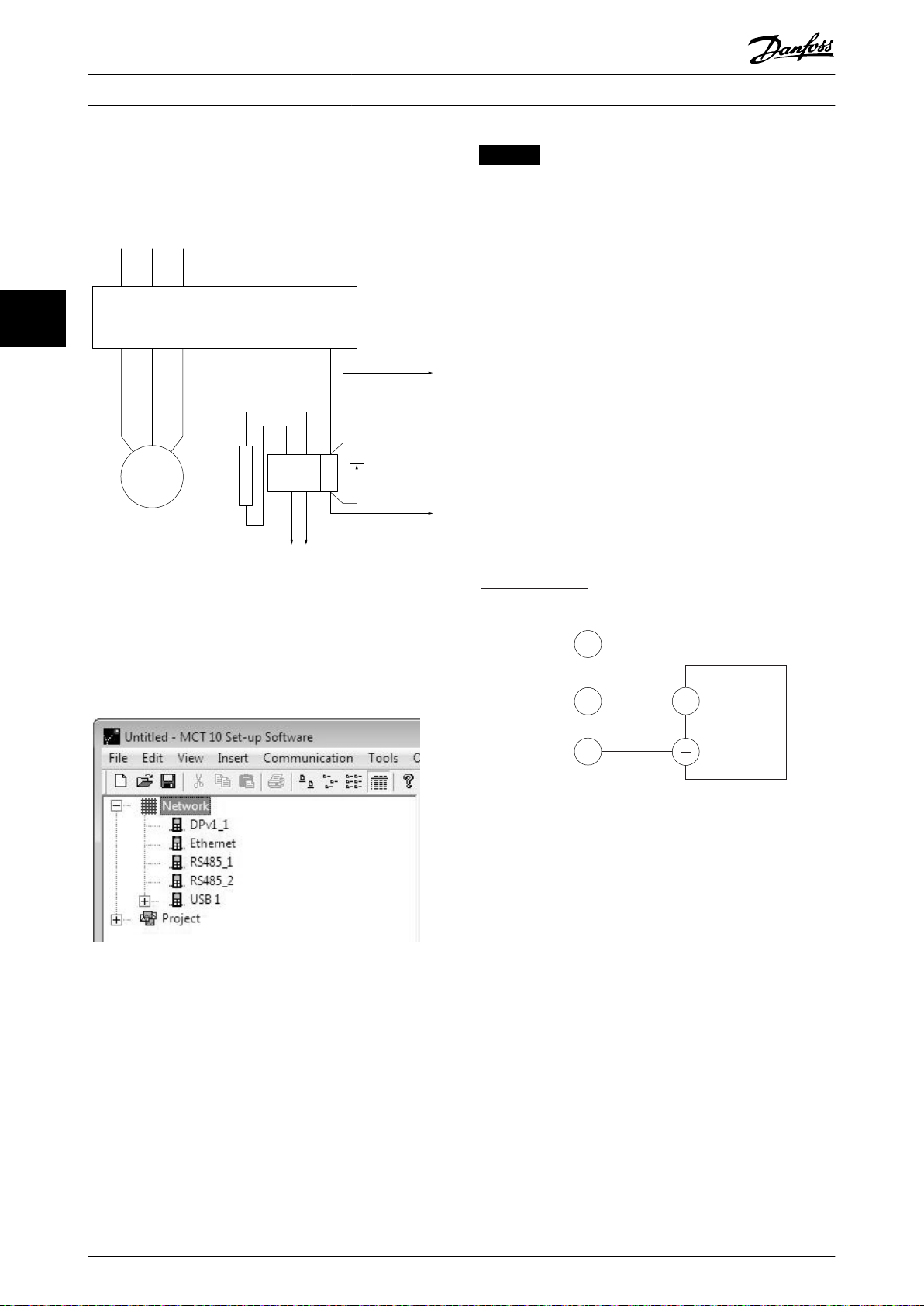
Instalação Elétrica
VLT® Midi Drive FC 280
O conversor de frequência não é um dispositivo de
segurança. É responsabilidade de quem projetou o sistema
integrar dispositivos de segurança de acordo com as
normas nacionais de elevação pertinentes.
AVISO!
Um barramento USB não tem capacidade de
conguração de endereço e nenhum nome de
barramento para congurar. Se conectar mais de um
conversor de frequência por meio do USB, o nome do
barramento é incrementado automaticamente na Lista
de barramentos de rede Software de Setup MCT 10.
Conectar mais de um conversor de frequência por meio
de um cabo USB geralmente faz com que computadores
44
instalado com Windows XP lancem uma exceção e
travem. Por isso é aconselhável conectar apenas um
conversor de frequência ao PC por meio do USB.
4.8.6 Comunicação serial RS485
Conecte a ação de comunicação serial RS485 aos
terminais (+)68 e (-)69.
É recomendável cabo de comunicação serial
•
blindado.
Consulte capétulo 4.3 Aterramento para saber o
•
aterramento correto.
Ilustração 4.12 Conectando o Freio Mecânico ao Conversor de
Frequência
4.8.5 Comunicação de dados USB
Ilustração 4.13 Lista de barramentos de rede
Quando o cabo USB é desconectado, o conversor de
frequência conectada por meio da porta USB é removido
da Lista de barramentos de rede.
Ilustração 4.14 Diagrama da Fiação de Comunicação Serial
Para setup de comunicação serial básica, selecione o
seguinte
1. Tipo de protocolo em parâmetro 8-30 Protocolo.
2. Endereço do conversor de frequência em
parâmetro 8-31 Endereço.
3. Baud rate em parâmetro 8-32 Baud Rate da Porta
do FC.
Dois protocolos de comunicação são internos ao conversor
de frequência. Atenda aos requisitos de ação do
fabricante do motor.
Danfoss FC.
•
Modbus RTU.
•
As funções podem ser programadas remotamente usando
o software do protocolo e a conexão RS485 ou no grupo
do parâmetro 8-** Comunicações e opcionais.
22 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
Page 27
Instalação Elétrica Guia de Operação
A seleção de um protocolo de comunicação especíco altera várias programações dos parâmetros padrão para corresponder
às especicações do protocolo e disponibiliza parâmetros adicionais especícos do protocolo.
4.9 Lista de Vericação da Instalação
Antes de concluir a instalação da unidade, inspecione a instalação por completo, como está detalhado na Tabela 4.3.
Verique e marque esses itens quando concluídos.
Inspecionar Descrição
Equipamento
auxiliar
Disposição dos
cabos
Fiação de controle
Espaço para
ventilação
Condições ambiente•Verique se os requisitos para as condições ambiente foram atendidos.
Fusíveis e
disjuntores
Aterramento
Fiação da energia
de entrada e de
saída
Interior do painel
Chaves
Vibração
Procure equipamento auxiliar, interruptores, desconectores ou fusíveis/disjuntores de entrada que possam
•
residir no lado da potência de entrada do conversor de frequência ou no lado de saída para o motor.
Certique-se de que estão prontos para operação em velocidade total.
Verique a função e a instalação dos sensores usados para feedback para o conversor de frequência.
•
Remova qualquer capacitor de correção do fator de potência do(s) motor(es).
•
Ajuste qualquer capacitor de correção do fator de potência no lado da rede elétrica e certique-se de que
•
estão amortecidos.
Assegure que a ação do motor e a ação de controle estão separadas ou blindadas ou em três conduítes
•
metálicos separados para isolamento de interferência de alta frequência.
Verique se há os partidos ou danicados e conexões soltas.
•
Verique se a ação de controle está isolada da ação do motor e de potência para imunidade de ruído.
•
Verique a fonte de tensão dos sinais, caso necessário.
•
Recomenda-se o uso de cabo blindado ou de par trançado. Garanta que a blindagem esteja com terminação
correta.
Certique-se de que o espaço livre superior e inferior é adequado para garantir o uxo de ar necessário
•
para resfriamento, consulte capétulo 3.3 Montagem.
Verique se os fusíveis e os disjuntores estão corretos.
•
Verique se todos os fusíveis estão rmemente encaixados e em condição operacional e se todos os
•
disjuntores estão na posição aberto.
Verique se as conexões do terra são sucientes e se estão rmes e sem oxidação.
•
Não aterre no condutor nem monte o painel traseiro em uma superfície metálica.
•
Verique se há conexões soltas.
•
Verique se o motor e os cabos de rede elétrica estão em conduítes separados ou em cabos blindados
•
separados.
Inspecione se o interior da unidade está isento de sujeira, lascas metálicas, umidade e corrosão.
•
Verique se a unidade está montada em uma superfície metálica não pintada.
•
Garanta que todas as chaves e congurações de desconexão estão nas posições corretas.
•
Verique se a unidade está montada de maneira sólida e se estão sendo usadas montagens de choque, se
•
necessário.
Verique se há volume incomum de vibração.
•
☑
4 4
Tabela 4.3 Lista de Vericação de Instalação
CUIDADO
RISCO POTENCIAL NO CASO DE FALHA INTERNA
Risco de ferimentos pessoais se o conversor de frequência não estiver corretamente fechado.
Antes de aplicar potência, assegure que todas as tampas de segurança estão no lugar e bem presas.
•
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 23
Page 28

Colocação em funcionamento
VLT® Midi Drive FC 280
5 Colocação em funcionamento
5.1 Instruções de Segurança
Consulte capétulo 2 Segurança para instruções de
segurança gerais.
ADVERTÊNCIA
ALTA TENSÃO
55
Os conversores de frequência contêm alta tensão quando
conectados à entrada de energia da rede elétrica CA.
Instalação, partida e manutenção realizadas por pessoal
não qualicado poderá resultar em morte ou lesões
graves.
A instalação, partida e manutenção deverão ser
•
executadas somente por pessoal qualicado.
Antes de aplicar potência:
1. Feche a tampa corretamente.
2. Verique se todas as buchas de cabo estão
apertadas rmemente.
3. Assegure que a potência de entrada da unidade
esteja desligada e bloqueada. Não cone na
chave de desconexão do conversor de frequência
para isolamento da potência de entrada.
4. Verique se não há tensão nos terminais de
entrada L1 (91), L2 (92) e L3 (93), de fase para
fase ou de fase para o terra.
5. Verique se não há tensão nos terminais de saída
96 (U), 97 (V) e 98 (W), de fase para fase e de
fase para o terra.
6. Conrme a continuidade do motor medindo os
valores de Ω em U–V (96–97), V–W (97–98) e W–
U (98–96).
7. Verique o aterramento correto do conversor de
frequência e do motor.
8. Inspecione se há conexões frouxas nos terminais
do conversor de frequência.
9. Conrme se a tensão de alimentação corresponde
à tensão do conversor de frequência e do motor.
Aplicando Potência
5.2
Alimente o conversor de frequência usando as etapas a
seguir:
1. Verique se a tensão de entrada está balanceada
dentro dos 3%. Se não estiver, corrija o desbalanceamento da tensão de entrada antes de
prosseguir. Repita este procedimento após a
correção da tensão.
2. Certique-se de que toda ação de equipamentos
opcionais corresponda à aplicação de instalação.
3. Certique-se de que todos os dispositivos do
operador estejam desligados. As portas de painel
devem ser fechadas e as tampas bem presas.
4. Aplique energia à unidade. Não ligue o conversor
de frequência agora. Nas unidades com uma
chave de desconexão, coloque-a na posição ON
(Ligar) para alimentar o conversor de frequência.
5.3 Operação do painel de controle local
O conversor de frequência suporta o painel de controle
local (NLCP) numérico, o painel de controle local gráco
(GLCP) e a tampa cega. Esta seção descreve as operações
com NLCP e GLCP.
AVISO!
O conversor de frequência também pode ser
programado no Software de Setup MCT 10 no PC via
porta de comunicação RS485 ou porta USB. Este
software pode ser encomendado usando o número de
pedido 130B1000 ou baixado do site Danfoss:
drives.danfoss.com/downloads/pc-tools/#/.
5.3.1 Painel de Controle Local Numérico
(NLCP)
O painel de controle local numérico (NLCP) é dividido em
4 seções funcionais.
A. Display numérico.
B. Chave do menu.
C. Teclas de navegação e luzes indicadoras(LEDs).
D. Teclas de operação e luzes indicadoras (LEDs).
24 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
Page 29

130BC506.10
Setup 1
A
B
C
D
5
12
13 14 15
10
11
10
9
6
7
8
4
1
2
3
Menu
Status
Quick
Menu
Main
Menu
Hand
On
O
Reset
Auto
On
Back
OK
On
Warn
Alarm
130BD135.10
Setup 12
INDEX
AHP
VkW
srpm
Hz%
n2n1
n3
p5 p4
p3 p2 p1
Colocação em funcionamento Guia de Operação
B. Tecla do menu
Para selecionar entre Status, Quick Menu ou Menu
Principal. pressione [Menu].
C. Luzes indicadoras (LEDs) e teclas de navegação
Indicador Luz Função
A luz indicadora ON é ativada
quando o conversor de frequência
6 On Verde
AdvertênciaAmarel
7
8 Alarme
Tabela 5.2 Legenda para Ilustração 5.1, Luzes indicadoras
(LEDs)
receber energia da tensão de rede,
dos terminais de comunicação serial
CC ou de uma fonte de alimentação
de 24 V externa.
Quando as condições de advertência
são atendidas, o LED WARN amarelo
o
acende e o texto aparece na área de
exibição identicando o problema.
Uma condição de falha faz com que
Vermel
o alarme LED vermelho pisque e um
ho
texto de alarme seja mostrado.
5 5
Ilustração 5.1 Vista do NLCP
9 [Back]
A. Display Numérico
A tela de LCD é iluminada por trás com uma linha
numérica. Todos os dados são mostrados no NLCP.
O número do setup exibe a conguração ativa e o setup
de edição. Caso o mesmo setup atue tanto como setup
ativo e como setup de edição, somente esse setup é
1
mostrado (conguração de fábrica). Quando as congu-
rações ativa e de edição forem diferentes, os dois números
são exibidos no display (por ex., setup 12). O número
piscando indica o setup de edição.
2 Número do parâmetro.
3 Valor do parâmetro.
O sentido do motor é mostrado no canto inferior esquerdo
4
do display. Uma pequena seta indica o sentido de rotação.
O triângulo indica se o LCP está no menu de Status, no
5
Quick Menu ou no Menu Principal.
Tabela 5.1 Legenda de Ilustração 5.1, seção A
Ilustração 5.2 Informações da tela
10
11 [OK]
12
Tabela 5.3 Legenda para Ilustração 5.1, Teclas de navegação
Tecla Função
Para retornar à etapa ou camada anterior,
na estrutura de navegação.
Para alternar entre os grupos do
parâmetro, nos parâmetros e dentro dos
[▲] [▼]
parâmetros ou aumentar/diminuir valores
dos parâmetros. Setas também podem
ser usadas para programar a referência
local.
Pressione para acessar grupos do
parâmetro ou para ativar uma seleção.
Pressione para se mover da esquerda
[►]
para a direita dentro do valor do
parâmetro para alterar cada dígito individualmente.
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 25
Page 30

130BC440.10
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Colocação em funcionamento
VLT® Midi Drive FC 280
D. Teclas de operação e luzes indicadoras (LEDs)
Tecla Função
Inicia o conversor de frequência no controle
Hand On
13
(Manual
Ligado)
14 O/Reset
55
Auto On
15
(Automátic
o Ligado)
Tabela 5.4 Legenda de Ilustração 5.1, seção D
local.
Um sinal de parada externo por entrada de
•
controle ou comunicação serial substitui o
manual ligado local.
Faz parar o motor, mas não remove a energia
para o conversor de frequência ou reinicializa
o conversor de frequência manualmente após
uma falha ser eliminada. Se estiver no modo
de alarme, o alarme é reinicializado se a
condição de alarme for removida.
Coloca o sistema em modo operacional
remoto.
Responde a um comando de partida
•
externo por terminais de controle ou
comunicação serial.
ADVERTÊNCIA
RISCO ELÉTRICO
Mesmo após pressionar a tecla [O/Reset], existe tensão
presente nos terminais do conversor de frequência.
Pressionar a chave [O/Reset] não desconecta o
conversor de frequência da rede elétrica. Tocar em peças
energizadas poderá resultar em morte ou ferimentos
graves.
Não toque em qualquer peça energizada.
•
5.3.2 Função da tecla direita no NLCP
Pressione [►] para editar individualmente qualquer dos 4
dígitos na tela. Ao pressionar [►] uma vez, o cursor move
para o primeiro dígito e o dígito começa a piscar,
conforme mostrado em Ilustração 5.3. Pressione [▲] [▼]
para alterar o valor. Pressionar [►] não altera o valor dos
dígitos e não move a casa decimal.
Ilustração 5.3 Função da tecla direita
[►] também pode ser usado para se mover entre os grupos
do parâmetro. No Menu Principal, pressione [►] para ir para
o primeiro parâmetro no próximo grupo do parâmetro (por
exemplo, para ir de parâmetro 0-03 Denições Regionais [0]
Internacional para parâmetro 1-00 Modo Conguração [0]
Malha aberta).
AVISO!
Durante a inicialização, o LCP mostra a mensagem INICIALIZANDO. Quando esta mensagem não aparecer mais, o
conversor de frequência está pronto para operação.
Adicionar ou remover opcionais pode prolongar a
duração da inicialização.
5.3.3 Quick Menu no NLCP
O Quick Menu dá acesso fácil aos parâmetros utilizados
com mais frequência.
1. Para entrar no Quick Menu, pressione [Menu] até
o indicador no display
Quick Menu.
2.
Pressione [▲] [▼] para selecionar QM1 ou QM2, e
em seguida pressione [OK].
3.
Pressione [▲] [▼] para navegar pelos parâmetros
no Quick Menu.
4. Pressione [OK] para selecionar um parâmetro.
5.
Pressione [▲] [▼] para alterar o valor de uma
programação do parâmetro.
car posicionado sobre
26 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
Page 31

130BC445.13
1-22 XXXX V
Motor
nominal
speed
QM 1
0-01 [0]
1-10 [0]
1-24 XXXX A
Language
Motor Type
1-20 XXXX kW
Motor power
Motor voltage
1-26 XXXX 1-23 XXXX
Stator
Motor frequency
1-25 XXXX
1-30 XXXX
1-39 XXXX
1-40 XXXX
1-37 XXXX
1-25 XXXX
1-24 XXXX
A
3-02 XXXX
3-03 XXXX
3-41 XXXX S
3-42 XXXX S
5-12
[2]
1-29 [1]
AMA
Back EMF at
1000 RPM
d-axis
QM 2
BMS
AMS
ES
5-70 XXXX
5-71 [0]
1-30 XXXX
1-39 XXXX
1-90 [0]
2-10 [0]
4-16 XXXX %
4-17 XXXX %
4-18 XXXX %
1-00 [0]
1-01 [1]
1-10 [0]
1-24 XXXX A 1-20 XXXX kW
1-22 XXXX V
Motor
nominal
speed
Motor power
Motor voltage
1-26 XXXX 1-23 XXXX
Motor frequency
1-25 XXXX
1-30 XXXX
1-40 XXXX
1-37 XXXX
1-25 XXXX
1-24 XXXX
A
Back EMF at
1000 RPM
d-axis
1-39 XXXX
4-14 XXXX
4-19 XXXX
Stator
QM 3
QM 4 QM 5
L10C
SFS
TBD
Motor
nominal
speed
Motor
nominal
speed
Motor current
Motor cont.
rated torque
Resistance (Rs)
Motor poles
inductance (Ld)
Asynchronous motor
Motor current
Minimum reference
Maximum reference
Ramp 1 ramp-up time
Ramp 1 ramp-down time
Terminal 27 digital input
Basic motor set-up
mode
Motor control
principle
Motor type
PM motor
PM motor
Motor
current
Motor cont.
rated torque
Stator
Resistance (Rs)
Motor poles
inductance (Ld)
Motor speed high limit [Hz]
Maximum output frequency
Asynchronous motor
Motor current
RPM
RPM
RPM
Hz
RPM
Hz
Hz
Hz
Hz
Hz
Adv. motor set-up
Resistance (Rs)
Motor poles
Motor thermal
protection
Brake function
Torque limit motor mode
Torque limit generator mode
Current limit
Encoder set-up
Terminal 32/33
pulses per revolution
Terminal 32/33
encoder direction
Changes made
Last 10 changes Since factory setting
Alarm log
Colocação em funcionamento Guia de Operação
6. Pressione [OK] para aceitar a modicação.
7. Para sair, pressione [Back] duas vezes (ou 3 vezes se estiver em QM2 e QM3) para entrar em Status ou pressione
[Menu] uma vez para entrar no Menu Principal.
5 5
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 27
Ilustração 5.4 Estrutura do Quick Menu
Page 32

130BC446.10
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
1
2
3
4
5
6
7
10
11
12
OK
OK
Back
8
Back
Setup 1
2 x
+
OK
9
OK
Colocação em funcionamento
VLT® Midi Drive FC 280
5.3.4 Menu principal no NLCP
O Menu Principal dá acesso a todos os parâmetros.
1. Para entrar no Menu Principal, pressione a tecla
[Menu] até o indicador na tela car posicionado
sobre Menu Principal.
2.
[▲] [▼]: Navegando pelos grupos do parâmetro.
3. Pressione [OK] para selecionar um grupo do
parâmetro.
4.
55
Consulte Ilustração 5.5, Ilustração 5.6 e Ilustração 5.7 para
obter informações sobre os princípios de alterar o valor de
parâmetros contínuos, parâmetros enumerados e
parâmetro de matriz, respectivamente. As ações nas
ilustrações estão descritas em Tabela 5.5, Tabela 5.6 e
Tabela 5.7.
[▲] [▼]: Navegando pelos parâmetros do grupo
especíco.
5. Pressione [OK] para selecionar o parâmetro.
6.
[►] e [▲]/ [▼]:
Denir/alterar o valor do parâmetro.
7. Pressione [OK] para aceitar o valor.
8. Para sair, pressione [Back] duas vezes (ou 3 vezes
para parâmetros de matriz) para entrar no Menu
Principal ou pressione [Menu] uma vez para entrar
em Status.
Ilustração 5.5 Interações do menu principal - Parâmetros
contínuos
28 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
Page 33

130BC447.11
Setup 1
Setup 1
Setup 1
1
2
3
4
5
6
OK
OK
Back
7
OK
Back
130BC448.10
1
2
4
5
6
7
8
9
10
OK
Back
Back
Back
5 x
Setup 1
Setup 1
Setup 1
Setup 1
%
INDEX
%
INDEX
%
INDEX
Setup 1
INDEX
%
OK
OK
OK
Colocação em funcionamento Guia de Operação
1 [OK]: O primeiro parâmetro do grupo é mostrado.
2
Pressione [▼] repetidamente para ir até o parâmetro.
3 Pressione [OK] para iniciar a edição.
4
[►]: Primeiro dígito piscando (pode ser editado).
5
[►]: Segundo dígito piscando (pode ser editado).
6
[►]: Terceiro dígito piscando (pode ser editado).
7
[▼]: Diminui o valor do parâmetro, a casa decimal muda
automaticamente.
8
[▲]: Aumenta o valor do parâmetro.
9 [Back] Cancelar alterações, voltar a 2.
[OK]: Aceitar alterações, voltar a 2.
10
[▲][▼]: Selecione o parâmetro dentro do grupo.
11 [Back] Remove o valor e mostra o grupo do parâmetro.
12
[▲][▼]: Selecionar grupo.
Tabela 5.5 Alterando valores de parâmetros contínuos
Para parâmetros enumerados, a interação é semelhante,
mas o valor do parâmetro é mostrado entre parênteses
devido à limitação de dígitos do NLCP (4 dígitos grandes) e
o enum pode ser maior que 99. Quando o valor enum for
maior que 99, o LCP pode mostrar somente a primeira
parte do colchete.
Os parâmetros de matriz funcionam da seguinte maneira:
5 5
Ilustração 5.7 Interações do menu principal - Parâmetros de
matriz
1 [OK]: Mostra os números do parâmetro e o valor do
primeiro índice.
2 [OK]: O índice pode ser selecionado.
3
[▲][▼]: Selecione o índice.
4 [OK]: O valor pode ser editado.
5
[▲][▼]: Alterar valor do parâmetro (piscando).
6 [Back] Cancelar alterações.
[OK]: Aceitar alterações.
7 [Back] Cancelar a edição do índice, selecionar um novo
parâmetro.
8
Ilustração 5.6 Interações do menu principal - Parâmetros
enumerados
1 [OK]: O primeiro parâmetro do grupo é mostrado.
2 Pressione [OK] para iniciar a edição.
3
[▲][▼]: Alterar valor do parâmetro (piscando).
4 Pressione [Back] para cancelar as alterações ou [OK] para
aceitar as alterações (retornar à tela 2).
5
[▲][▼]: Selecione um parâmetro dentro do grupo.
6 [Back] Remove o valor e mostra o grupo do parâmetro.
7
[▲][▼]: Selecione um grupo.
Tabela 5.6 Alterando valores de parâmetros enumerados
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 29
[▲][▼]: Selecione o parâmetro dentro do grupo.
9 [Back] Remove o valor do índice do parâmetro e mostra o
grupo do parâmetro.
10
[▲][▼]: Selecionar grupo.
Tabela 5.7 Alterando valores dos parâmetros de matriz
Page 34

130BD598.10
Auto
On
Reset
Hand
On
O
Status
Quick
Menu
Main
Menu
Alarm
Log
Back
Cancel
Info
OK
Status
1(1)
36.4 kW
Auto Remote Ramping
0.000
On
Alarm
Warn.
A
7.83 A
799 RPM
B
C
D
53.2 %
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18 19 20 21
Colocação em funcionamento
VLT® Midi Drive FC 280
5.3.5 Painel de Controle Local Gráco
(GLCP)
O GLCP é dividido em quatro grupos funcionais (ver
Ilustração 5.8).
Display. Número do parâmetro Conguração padrão
1 0-20 [1602] Referência [%]
2 0-21
[1614] Corrente do
Motor
3 0-22 [1610] Potência [kW]
4 0-23 [1613] Freqüência
A. Área do display
B. Teclas do menu do display.
5 0-24 [1502] Medidor de kWh
Tabela 5.8 Legenda para Ilustração 5.8, Área do display
C. Teclas de navegação e luzes indicadoras(LEDs).
D. Teclas de operação e reinicializar.
55
B. Teclas do menu do display
As teclas de menu são usadas para acesso ao menu para
conguração de parâmetros, articulação entre modos
display de status durante a operação normal e visualização
de dados do registro de falhas.
Tecla Função
6 Status Mostra informações operacionais.
Permite acesso aos parâmetros de
7
8
9
Quick
Menu
Main Menu
(Menu
Principal)
Registro de
Alarmes
programação para obter instruções de setup
iniciais e muitas instruções detalhadas da
aplicação.
Permite acesso a todos os parâmetros de
programação.
Mostra uma lista das advertências atuais, os
últimos 10 alarmes e o log de manutenção.
Tabela 5.9 Legenda para Ilustração 5.8, Teclas do menu do
display
C. Teclas de navegação e luzes indicadoras (LEDs)
As teclas de navegação são usadas para programar funções
e mover o cursor no display. As teclas de navegação
também fornecem controle da velocidade na operação
local. Há também três luzes indicadoras de status do
conversor de frequência nessa área.
Ilustração 5.8 Painel de Controle Local Gráco (GLCP)
A. Área do display
A área do display é ativada quando o conversor de
frequência recebe energia da tensão de rede, de terminais
de comunicação serial CC ou de alimentação de 24 V CC
externa.
As informações mostradas no LCP podem ser customizadas
para as aplicações do usuário. Selecione as opções no
Quick Menu Q3-13 Conguração do Display.
30 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
Tecla Função
10
11
Back
(Anterior)
Cancel
(Cancelar)
Info
12
(Informaçõe
Teclas de
13
navegação
14 OK
Retorna à etapa ou lista anterior na estrutura
de menu.
Cancela a última alteração ou comando
enquanto o modo display não for alterado.
Pressione para obter uma denição da
função exibida.
s)
Para mover entre os itens do menu, use as 4
teclas de navegação.
Pressione para acessar grupos do parâmetro
ou para ativar uma seleção.
Tabela 5.10 Legenda para Ilustração 5.8, Teclas de navegação
Page 35

Colocação em funcionamento Guia de Operação
Indicador Luz Função
A luz indicadora ON é ativada
quando o conversor de frequência
15 On Verde
Advertênc
16
17 Alarme Vermelho
Tabela 5.11 Legenda para Ilustração 5.8, Luzes indicadoras
(LEDs)
D. Teclas de operação e reinicializar
As teclas de operação estão na parte inferior do LCP.
Tecla Função
Hand On
18
(Manual
Ligado)
19
(Desligado)
Auto On
20
(Automático
Ligado)
Reset
21
(Reinicializar
Tabela 5.12 Legenda para Ilustração 5.8, Teclas de operação
e reinicializar
ia
O
Amarelo
Inicia o conversor de frequência no modo
Manual ligado.
Para o motor, mas não remove a energia
para o conversor de frequência.
Coloca o sistema em modo operacional
remoto.
•
Reinicializa o conversor de frequência
manualmente após uma falha ser eliminada.
)
receber energia da tensão de rede,
dos terminais de comunicação
serial CC ou de uma fonte de
alimentação de 24 V externa.
Quando as condições de
advertência são atendidas, o LED
WARN amarelo acende e o texto
aparece na área de exibição identicando o problema.
Uma condição de falha faz com
que o alarme LED vermelho pisque
e um texto de alarme seja
mostrado.
Um sinal de parada externo por
•
entrada de controle ou
comunicação serial substitui o
manual ligado local.
Responde a um comando de partida
externo por terminais de controle ou
comunicação serial.
AVISO!
Para ajustar o contraste do display, pressione [Status] e
as teclas [▲]/[▼].
5.3.6 Programações dos Parâmetros
Para estabelecer a programação correta da aplicação
geralmente é necessário programar funções em vários
parâmetros relacionados. Os detalhes dos parâmetros são
fornecidos em capétulo 10.2 Estrutura de Menu dos
Parâmetros.
Os dados de programação são armazenados internamente
no conversor de frequência.
Para backup,
•
memória do LCP.
Para fazer download de dados em outro
•
conversor de frequência, conecte o LCP a essa
unidade e faça o download das congurações
armazenadas.
Restaurar a conguração padrão de fábrica não
•
altera os dados armazenados na memória do LCP.
transra dados por upload para a
5.3.7 Alterando a programação do
parâmetro com GLCP
Acesse e altere a programação do parâmetro no Quick
Menu (Menu Rápido) ou no Main Menu (Menu Principal). O
Quick Menu dá acesso somente a um número limitado de
parâmetros.
1. Pressione [Quick Menu] ou [Main Menu] no LCP.
2.
Pressione [▲] [▼] para navegar pelos grupos do
parâmetro, pressione [OK] para selecionar grupo
de parâmetros.
3.
Pressione [▲] [▼] para navegar pelos parâmetros,
pressione [OK] para selecionar um parâmetro.
4.
Pressione [▲] [▼] para alterar o valor de uma
programação do parâmetro.
5.
Press [◄] [►] para alterar o dígito quando um
parâmetro decimal estiver no estado de edição.
6. Pressione [OK] para aceitar a modicação.
7. Pressione [Back] duas vezes para entrar em Status
ou pressione [Main Menu] uma vez para entrar no
Main Menu (Menu Principal).
Visualizar alterações
Quick Menu Q5 - Alterações Efetuadas indica todos os
parâmetros alterados em relação à conguração padrão.
A lista mostra somente os parâmetros que foram
•
alterados no setup de edição atual.
Os parâmetros que foram reinicializados para
•
valores padrão não são indicados.
A mensagem Empty (vazio) indica que nenhum
•
parâmetro foi alterado.
5 5
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 31
Page 36

Colocação em funcionamento
VLT® Midi Drive FC 280
5.3.8 Fazer upload/download de dados de/
para o LCP
1. Pressione [O] para parar o motor antes de
transferir dados por upload ou download.
2. Pressione [Main Menu] parâmetro 0-50 Cópia do
LCP e pressione [OK].
3. Selecione [1] Todos para o LCP para transferir
dados por upload para o LCP ou selecione [2]
Todos a partir d LCP para fazer download de
dados do LCP.
55
4. Pressione [OK]. Uma barra de progresso mostra o
andamento do download ou do upload.
5. Pressione [Hand On] ou [Auto On] para retornar à
operação normal.
5.3.9 Restaurando as congurações padrão
com o LCP
AVISO!
Risco de perder programação, dados do motor,
localização e registros de monitoramento ao realizar a
restauração da conguração padrão. Para fornecer um
backup, transra os dados por upload para o LCP antes
da inicialização.
A restauração da programação do parâmetro padrão é
realizada pela inicialização do conversor de frequência.
Inicialização é executada por meio do
parâmetro 14-22 Modo Operação (recomendado) ou
manualmente. A inicialização não reinicializa as congu-
rações para parâmetro 1-06 Sentido Horário e
parâmetro 0-03 Denições Regionais.
A inicialização usando parâmetro 14-22 Modo
•
Operação não reinicializa congurações do
conversor de frequência como as horas de funcionamento, seleções da comunicação serial, registro
de falhas, registro de alarme e outras funções de
monitoramento.
A inicialização manual apaga todos os dados do
•
motor, de programação, de localização e de
monitoramento e restaura as conguração padrão
de fábrica.
Procedimento de inicialização recomendado, via
parâmetro 14-22 Modo Operação
1. Selecione parâmetro 14-22 Modo Operação e
pressione [OK].
2. Selecione [2] Inicialização e pressione [OK].
3. Remova a energia da unidade e aguarde até que
o display seja desligado.
4. Aplique energia à unidade.
As programações do parâmetro padrão são restauradas
durante a partida. Isso poderá demorar ligeiramente mais
que o normal.
5. Alarme 80, Drive inicializado no valor padrão é
mostrado.
6. Pressione [Reset] para retornar ao modo de
operação.
Procedimento de inicialização manual
1. Remova a energia da unidade e aguarde até que
o display seja desligado.
2. Pressione e mantenha pressionado [Status], [Main
Menu] e [OK] ao mesmo tempo no GLCP, ou
pressione [Menu] e [OK] ao mesmo tempo no
NLCP enquanto estiver energizando a unidade
(aproximadamente 5 segundos ou até que um
clique seja ouvido e o ventilador inicie).
As programações do parâmetro padrão de fábrica são
restauradas durante a partida. Isso poderá demorar
ligeiramente mais que o normal.
A inicialização manual não reinicializa as seguintes
informações do conversor de frequência:
Parâmetro 15-00 Horas de funcionamento.
•
Parâmetro 15-03 Energizações.
•
Parâmetro 15-04 Superaquecimentos.
•
Parâmetro 15-05 Sobretensões.
•
32 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
Page 37

Colocação em funcionamento Guia de Operação
5.4 Programação Básica
5.4.1 Setup de Motor Assíncrono
Insira os dados do motor a seguir na ordem indicada. Essas
informações são encontradas na plaqueta de
do motor.
1. Parâmetro 1-20 Potência do Motor.
2. Parâmetro 1-22 Tensão do Motor.
3. Parâmetro 1-23 Freqüência do Motor.
4. Parâmetro 1-24 Corrente do Motor.
5. Parâmetro 1-25 Velocidade nominal do motor.
Para desempenho ideal no modo VVC+, dados adicionais
do motor são necessários para congurar os parâmetros a
seguir.
6. Parâmetro 1-30 Resistência do Estator (Rs).
7. Parâmetro 1-31 Resistência do Rotor (Rr).
8. Parâmetro 1-33 Reatância Parasita do Estator (X1).
9. Parâmetro 1-35 Reatância Principal (Xh).
Os dados podem ser encontrados na folha de dados do
motor (esses dados tipicamente não estão disponíveis na
plaqueta de
completa usando parâmetro 1-29 Adaptação Automática do
Motor (AMA) [1] Ativar AMA completa ou insira os
parâmetros manualmente.
Ajuste especíco da aplicação ao executar VVC
VVC+ é o modo de controle mais robusto. Na maioria das
situações ele fornece desempenho ideal sem ajustes
posteriores. Execute uma AMA completa para obter o
melhor desempenho.
5.4.2
Etapas iniciais de programação
1. Ajuste parâmetro 1-10 Construção do Motor com
2. Selecione [0] Malha aberta em
identicação do motor). Execute a AMA
Setup do motor PM em VVC
as opções a seguir para ativar a operação do
motor PM:
1a [1] PM, SPM não saliente
1b [3] PM, IPM saliente, Sat
parâmetro 1-00 Modo Conguração.
identicação
+
+
AVISO!
O feedback do encoder não é suportado para motores
PM.
Programando os dados do motor
Após selecionar uma das opções do motor PM em
parâmetro 1-10 Construção do Motor, os parâmetros
relacionados ao motor PM nos grupos do parâmetro 1-2*
Dados do Motor, 1-3* Dados Avanç. do Motor I e 1-4* Dados
Avanç. do Motor estão ativos.
Obtenha a informação na plaqueta de identicação do
motor e na folha de dados do motor.
Programe os parâmetros a seguir na ordem indicada:
1. Parâmetro 1-24 Corrente do Motor.
2. Parâmetro 1-26 Torque nominal do Motor.
3. Parâmetro 1-25 Velocidade nominal do motor.
4. Parâmetro 1-39 Pólos do Motor.
5. Parâmetro 1-30 Resistência do Estator (Rs).
Insira linha para resistência de enrolamento do
estator comum (Rs). Se houver apenas dados
linha-linha disponíveis, divida o valor de linha-
-linha por 2 para obter o valor linha-a-comum
(starpoint) da linha.
Também é possível medir o valor com um
ohmímetro, que leva em conta a resistência do
cabo. Divida o valor medido por 2 e insira o
resultado.
6. Parâmetro 1-37 Indutância do eixo-d (Ld).
Insira a linha à indutância direta do eixo comum
do motor PM.
Se houver somente dados de linha para linha
disponíveis, divida o valor de linha para linha por
2 para obter o valor comum da linha (starpoint).
Também é possível medir o valor com um
medidor de indutância, que leva em conta a
indutância do cabo. Divida o valor medido por 2
e insira o resultado.
7. Parâmetro 1-40 Força Contra Eletromotriz em
1000RPM.
Insira a Força Contra Eletromotriz linha-linha do
motor PM a uma velocidade mecânica de 1.000
rpm (valor RMS). Força Contra Eletro Motriz é a
tensão gerada por um motor PM quando não
houver um conversor de frequência conectado e
o eixo for girado externamente. A Força Contra
Eletro Motriz é normalmente especicada pela
velocidade nominal do motor ou a 1,000 RPM
medida entre duas linhas. Se o valor não estiver
disponível para uma velocidade do motor de
1000 RPM, calcule o valor correto da seguinte
maneira: Por exemplo, se a Força Contra Eletro
Motriz a 1800 RPM for de 320 V, a Força Contra
Eletro Motriz a 1000 RPM será:
Força Contra Eletro Motriz = (Tensão/RPM) x 1000
= (320/1800) x 1000 = 178.
Programe esse valor para parâmetro 1-40 Força
Contra Eletromotriz em 1000RPM.
5 5
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 33
Page 38

Colocação em funcionamento
VLT® Midi Drive FC 280
Operação do motor de teste
1. Dê partida no motor em baixa velocidade (100 a
200 RPM). Se o motor não funcionar, verique a
O torque de partida pode ser ajustado em
parâmetro 1-66 Corrente Mín. em Baixa Velocidade. 100%
fornece torque nominal como torque de partida.
instalação, programação geral e os dados do
motor.
Estacionamento
5.4.3 Adaptação Automática do Motor
(AMA)
Esta função é a opção recomendada para aplicações em
que o motor gira a baixa velocidade (por exemplo,
moagem a vento em aplicações de ventiladores).
Para otimizar a compatibilidade entre o conversor de
frequência e o motor em modo VVC+, execute a AMA.
Parâmetro 2-06 Corrente de Estacionamento e
parâmetro 2-07 Tempo de Estacionamento são ajustáveis.
Aumentar a conguração de fábrica desses parâmetros
55
para aplicações com alta inércia.
Dar partida na velocidade nominal. Caso a aplicação não
funcione bem, verique as congurações de VVC+ PM.
Tabela 5.13 mostra recomendações em diferentes
aplicações.
O conversor de frequência constrói um modelo
•
matemático do motor para regular a corrente do
motor de saída, melhorando assim seu
desempenho.
Alguns motores poderão não conseguir executar
•
a versão completa do teste. Nesse caso, selecione
[2] Ativar AMA reduzida em
parâmetro 1-29 Adaptação Automática do Motor
Aplicação Congurações
Aplicações de baixa inércia
I
Carga/IMotor
Aplicações de média
inércia
50>I
Aplicações de alta inércia
I
Carga/IMotor
Alta carga em baixa
velocidade
<30% (velocidade
nominal)
<5
Carga/IMotor
>50
>5
Aumente o valor de
•
parâmetro 1-17 Const. de tempo
do ltro de tensão por um fator
de 5 a 10.
Reduza o valor de
•
parâmetro 1-14 Fator de Ganho de
Amortecimento.
Reduza o valor (<100%) de
•
parâmetro 1-66 Corrente Mín. em
Baixa Velocidade.
Mantenha valores calculados.
Aumente os valores de
parâmetro 1-14 Fator de Ganho de
Amortecimento,
parâmetro 1-15 Const. de Tempo do
Filtro de Baixa Veloc e
parâmetro 1-16 Const. de Tempo do
Filtro de Alta Veloc.
Aumente o valor de
parâmetro 1-17 Const. de tempo do
ltro de tensão
Aumente o valor de
parâmetro 1-66 Corrente Mín. em
Baixa Velocidade (>100% durante
mais tempo pode superaquecer o
motor).
Para executar AMA usando o LCP
Dependendo da potência, a AMA leva de 3–10 minutos
para concluir.
(AMA).
Se ocorrerem advertências ou alarmes, consulte
•
capétulo 8.4 Lista das advertências e alarmes.
Para melhor resultados execute esse
•
procedimento em um motor frio.
1. Por programação do parâmetro padrão, conecte
os terminais 13 e 27 antes de executar a AMA.
2. Acesse o Menu Principal.
3. Acesse o grupo do parâmetro 1-** Carga e Motor.
4. Pressione [OK].
5. Programe os parâmetros do motor usando os
dados da plaqueta de
identicação do grupo do
parâmetro 1-2* Dados do Motor.
6. Dena o comprimento de cabo de motor em
parâmetro 1-42 Comprimento do Cabo do Motor.
7. Ir para parâmetro 1-29 Adaptação Automática do
Motor (AMA).
8. Pressione [OK].
9. Selecione [1] Ativar AMA completa.
10. Pressione [OK].
11. O teste executará automaticamente e indicará
quando estiver concluído.
Tabela 5.13 Recomendações em diferentes aplicações
Se o motor começar a oscilar a uma certa velocidade,
aumente parâmetro 1-14 Fator de Ganho de Amortecimento.
AVISO!
A função AMA em não faz o motor funcionar e não
prejudica o motor.
Aumente o valor em pequenas etapas.
34 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
Page 39

Colocação em funcionamento Guia de Operação
5.5 Vericando a rotação do motor
Antes de funcionar o conversor de frequência, verique a
rotação do motor.
1. Pressione [Hand On].
2.
Pressione [▲] para obter referência de velocidade
positiva.
Verique se a velocidade mostrada é positiva.
3.
4. Verique se a ação entre o conversor de
frequência e o motor está correta.
5. Verique se o sentido de funcionamento do
motor corresponde à conguração em
parâmetro 1-06 Sentido Horário.
5a Quando parâmetro 1-06 Sentido Horário
estiver programado para [0] Normal
(sentido horário padrão):
a. Verique se o motor gira no
sentido horário.
b.
Verique se a seta de direção
do LCP está no sentido horário
5b Quando parâmetro 1-06 Sentido Horário
estiver programado para [1] Inversão
(sentido anti-horário):
a. Verique se o motor gira no
sentido anti-horário.
b. Verique se a seta de direção
do LCP está no sentido anti-
-horário.
Vericando a Rotação do Encoder
5.6
Somente verique a rotação do encoder se o feedback do
encoder for utilizado.
1. Selecione [0] Malha aberta em
parâmetro 1-00 Modo Conguração.
2. Selecione [1] Encoder de 24V em
parâmetro 7-00 Fonte do Feedback do PID de
Velocidade.
3. Pressione [Hand On].
4.
Pressione [►] para referência de velocidade
positiva (parâmetro 1-06 Sentido Horário em [0]
Normal).
5. Verique em parâmetro 16-57 Feedback [rpm] se o
feedback é positivo.
AVISO!
FEEDBACK NEGATIVO
Se o feedback for negativo, a conexão do encoder está
errada. Use parâmetro 5-71 Term 32/33 Sentido do
Encoder para inversão do sentido ou inverta os cabos do
encoder.
5.7 Teste de controle local
1. Pressione [Hand On] (Manual) para fornecer um
comando de partida local para o conversor de
frequência.
2. Acelere o conversor de frequência pressionando
[▲] para obter a velocidade total. Mover o cursor
para a esquerda do ponto decimal agiliza as
mudanças de entrada.
3. Observe se há qualquer problema de aceleração.
4. Pressione [O] (Desligado). Observe se há
qualquer problema de desaceleração.
Se ocorrerem problemas de aceleração ou desaceleração,
consulte capétulo 8.5 Resolução de Problemas. Consulte
capétulo 8.2 Tipos de Advertência e Alarme para reinicializar
o conversor de frequência após um desarme.
Partida do Sistema
5.8
O procedimento nesta seção exige que a ação do usuário
e a programação da aplicação estejam concluídos. O
procedimento a seguir é recomendado após o setup da
aplicação estar concluído.
1. Pressione [Auto On] (Automático ligado).
2. Aplique um comando de execução externo.
3. Ajuste a referência de velocidade em todo o
intervalo de velocidade.
4. Remova o comando de execução externo.
5. Verique os níveis de som e vibração do motor
para assegurar que o sistema está funcionando
como previsto.
Se ocorrerem advertências ou alarmes, consulte
capétulo 8.2 Tipos de Advertência e Alarme para reinicialização do conversor de frequência após um desarme.
5 5
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 35
Page 40

Colocação em funcionamento
VLT® Midi Drive FC 280
5.9 Módulo de memória
O VLT® Memory Module MCM é um pequeno dispositivo
de memória que contém dados como:
Firmware para o conversor de frequência (não
•
incluindo o rmware para comunicação no cartão
de controle).
Arquivo PUD.
•
Arquivo SIVP.
•
Arquivo parâmetro.
55
•
O VLT® Memory Module MCM é um acessório. O conversor
de frequência vem sem o módulo de memória instalado de
fábrica. Um novo módulo de memória pode ser
encomendado usando os seguintes números de pedido.
Descrição Código de compra
VLT® Memory Module MCM 102
VLT® Memory Module MCM 103
Tabela 5.14 Código de Compra
Cada módulo de memória possui um número de série
exclusivo que não pode ser modicado.
132B0359
132B0466
AVISO!
O VLT® Memory Module MCM pode ser usado no
conversor de frequência junto com o rmware 1.5 e
superior.
Parâmetro 31-40 Memory
Module Function
[3] Allow Both Download
and Upload
Tabela 5.15 Descrição de
Parâmetro 31-40 Memory Module Function
AVISO!
EVITAR SUBSTITUIÇÃO NÃO INTENCIONAL
A conguração padrão do parâmetro 31-40 Memory
Module Function é [1] Only Allow Download (Permitir
Somente Download). Se houver alguma atualização, como
rmware atualizado pelo MCT 10 usando o arquivo OSS,
parâmetro atualizado pelo LCP ou barramento,
parâmetros redenidos via parâmetro 14-22 Modo
Operação ou reinicialização com 3 dedos do conversor de
frequência, os dados atualizados serão perdidos após um
novo ciclo de energia, porque o conversor de frequência
baixa os dados do módulo de memória novamente.
Após o download dos dados do módulo de
•
memória para o conversor de frequência,
selecione [0] Disabled (Desativado) ou [2] Only
Allow Upload (Permitir Somente Upload) em
parâmetro 31-40 Memory Module Function antes
do novo ciclo de energia.
Descrição
Se esta opção for selecionada, o
conversor de frequência faz o
download dos dados do módulo de
memória primeiro e depois faz o
upload dos dados do conversor de
frequência para o módulo de
memória.
Selecione as opções corretas para parâmetro 31-40 Memory
Module Function antes de congurar com o módulo de
memória.
Parâmetro 31-40 Memory
Module Function
[0] Disabled A função de download ou upload
*[1] Only Allow Download Permita somente download de
[2] Only Allow Upload Permita somente upload de dados
Descrição
de dados está desativada.
dados do módulo de memória para
o conversor de frequência. Esta é a
conguração padrão de
parâmetro 31-40 Memory Module
Function.
do conversor de frequência para o
módulo de memória.
5.9.1 Sincronizando dados do conversor de
frequência para um novo módulo de
memória (criar backup do conversor)
1. Conecte um novo módulo de memória vazio no
conversor de frequência.
2. Selecione [2] Only Allow Upload (Permitir Somente
Upload) ou [3] Allow Both Download and Upload
(Permitir Download e Upload) em
parâmetro 31-40 Memory Module Function.
3. Ligue o conversor de frequência.
4. Aguarde até que a sincronização esteja concluída,
consulte capétulo 5.9.7 Desempenho e Indicações
de Transferência para vericar as indicações de
transferência no conversor de frequência.
AVISO!
Para evitar a substituição inadvertida dos dados no
módulo de memória, considere ajustar as congurações
parâmetro 31-40 Memory Module Function antes do
próximo ciclo de energia, de acordo com o propósito de
operação diferente.
36 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
Page 41

Colocação em funcionamento Guia de Operação
5.9.2 Copiando dados para outro conversor
de frequência
1. Certique-se de que os dados necessários sejam
enviados para o módulo de memória, consulte
capétulo 5.9.1 Sincronizando dados do conversor de
frequência para um novo módulo de memória (criar
backup do conversor).
2. Desconecte o módulo de memória e conecte-o a
um novo conversor de frequência.
3. Certique-se de que [1] Only Allow Download
(Permitir Somente Download) ou [3] Allow Both
Download and Upload (Permitir Download e
Upload) esteja selecionado
parâmetro 31-40 Memory Module Function no novo
conversor de frequência.
4. Ligue o novo conversor de frequência.
5. Aguarde até que o download esteja concluído e
os dados estejam transferidos, consulte
capétulo 5.9.7 Desempenho e Indicações de Transferência para
no conversor de frequência.
vericar as indicações de transferência
AVISO!
Para evitar a substituição inadvertida dos dados no
módulo de memória, considere ajustar as congurações
parâmetro 31-40 Memory Module Function antes do
próximo ciclo de energia, de acordo com o propósito de
operação diferente.
5.9.3 Copiando dados para vários
conversores de frequência
Se vários conversores de frequência tiverem a mesma
tensão/potência, as informações de 1 conversor de
frequência podem ser transferidas para os outros através
de 1 módulo de memória.
1. Siga as etapas em capétulo 5.9.1 Sincronizando
dados do conversor de frequência para um novo
módulo de memória (criar backup do conversor)
para fazer o upload dos dados de 1 conversor de
frequência para um módulo de memória.
2. Para evitar o upload não intencional de dados
para o módulo de memória mestre, certique-se
de que [1] Only Allow Download (Permitir Somente
Download) esteja selecionado em
parâmetro 31-40 Memory Module Function nos
outros conversores de frequência.
3. Desconecte o módulo de memória e conecte-o a
um novo conversor de frequência.
4. Ligue o novo conversor de frequência.
5. Aguarde até que o download esteja concluído e
os dados estejam transferidos, consulte
capétulo 5.9.7 Desempenho e Indicações de Transferência para vericar as indicações de transferência
no conversor de frequência.
6. Repita as etapas 3 a 5 para o próximo conversor
de frequência.
AVISO!
Os dados também podem ser baixados para o módulo
de memória de um PC via VLT® Memory Module
Programmer.
AVISO!
Em qualquer um dos conversores de frequência, se um
módulo de memória vazio estiver conectado para fazer o
backup de dados, ajuste as congurações para
parâmetro 31-40 Memory Module Function para [2] Only
Allow Upload (Permitir Somente Upload) ou [3] Allow Both
Download and Upload (Permitir Download e Upload) antes
do próximo ciclo de energia.
5.9.4 Transferência das Informações do
Firmware
Se 2 conversores de frequência tiverem a mesma tensão e
potência, as informações do rmware podem ser
transferidas de 1 conversor de frequência para outro.
1. Siga as etapas em capétulo 5.9.1 Sincronizando
dados do conversor de frequência para um novo
módulo de memória (criar backup do conversor)
para fazer o upload das informações do
de 1 conversor de frequência para um módulo de
memória.
2. Siga as etapas em capétulo 5.9.2 Copiando dados
para outro conversor de frequência para transferir
as informações do rmware para outro conversor
de frequência com a mesma voltagem e potência.
rmware
AVISO!
As informações do rmware também podem ser
baixadas para o módulo de memória de um PC através
do VLT® Memory Module Programmer.
5 5
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 37
Page 42

Colocação em funcionamento
VLT® Midi Drive FC 280
5.9.5 Fazendo backup de alterações de
parâmetro no módulo de memória
1. Conecte um módulo de memória novo ou
apagado no conversor de frequência.
2. Selecione [2] Only Allow Upload (Permitir Somente
5.9.7 Desempenho e Indicações de
Transferência
O tempo para transferir dados diferentes entre o conversor
de frequência e o módulo de memória é diferente,
consulte Tabela 5.16.
Upload) ou [3] Allow Both Download and Upload
(Permitir Download e Upload) em
parâmetro 31-40 Memory Module Function.
3. Ligue o conversor de frequência.
4. Aguarde até que a sincronização esteja concluída,
55
consulte capétulo 5.9.7 Desempenho e Indicações
de Transferência para vericar as indicações de
transferência no conversor de frequência.
5. Qualquer alteração nas programações dos
parâmetros é automaticamente sincronizada com
o módulo de memória.
5.9.6 Apagando Dados
O módulo de memória pode ser apagado através da
Arquivo de dados Hora
Leva cerca de 2 minutos para fazer o
•
upload dos dados do conversor de
frequência para o módulo de memória.
Arquivo de rmware
Arquivo SIVP Cerca de 10 segundos.
Arquivo de
parâmetro
Tabela 5.16 Desempenho de Transferência
1) Se um parâmetro for alterado no conversor de frequência, para
realizar o upload do parâmetro atualizado, aguarde pelo menos 5
segundos antes de desligar.
1)
Leva cerca de 6 minutos para transferir
•
dados do módulo de memória para o
conversor de frequência.
Cerca de 5 segundos.
conguração parâmetro 31-43 Erase_MM sem um novo
ciclo de energia.
1. Certique-se de que o módulo de memória esteja
montado no conversor de frequência.
2. Selecione [1] Erase MM em
parâmetro 31-43 Erase_MM.
3. Todos os arquivos no módulo de memória são
apagados.
4. A conguração Parâmetro 31-43 Erase_MM retorna
Arquivo
de dados
Arquivo
de
rmware
Arquivo
SIVP
Arquivo
de
parâmetro
GLCP NLCP
A “Sincronização
com Módulo de
Memória” é
mostrada durante a
transferência.
Sem indicação de
texto.
Indicações
Sem
indicação
de texto.
1)
No LED
O LED pisca
lentamente
durante a transferência.
O LED não pisca.
para [0] No function.
Tabela 5.17 Indicações de Transferência
1) O On LED está no LCP. Consulte capétulo 5.3.1 Painel de Controle
Local Numérico (NLCP) e capétulo 5.3.5 Painel de Controle Local
Gráco (GLCP) para a posição e as funções do On LED.
5.9.8 Ativando o Conversor PROFIBUS
VLT® Memory Module MCM 103 atua como uma
combinação do módulo de memória e do módulo de
ativação para ativar a função do conversor PROFIBUS no
rmware. VLT® Memory Module MCM 103 contém um
arquivo PBconver.MME, que é combinado com o número
de série do módulo de memória individual. O
PBconver.MME é a chave para a função do conversor
PROFIBUS.
38 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
Page 43

Colocação em funcionamento Guia de Operação
Para ativar o conversor PROFIBUS, escolha a versão em
parâmetro 14-70 Compatibility Selections.
Parâmetro 14-70 Compatibility
Selections
*[0] No Function A seleção da função de
[12] VLT2800 3M Selecione o modo de compati-
[13] VLT2800 3M incl. MAV Selecione o modo de compati-
[14] VLT2800 12M Selecione o modo de compati-
[15] VLT2800 12M incl. MAV Selecione o modo de compati-
Tabela 5.18 Descrição de
parâmetro 14-70 Compatibility Selections
Descrição
compatibilidade está
desativada.
bilidade do VLT2800 3M para o
conversor de frequência.
bilidade do VLT2800 3M incl.
MAV para o conversor de
frequência.
bilidade do VLT2800 12M para
o conversor de frequência.
bilidade do VLT2800 12M incl.
MAV para o conversor de
frequência.
Ative o conversor PROFIBUS por meio da programação
do parâmetro
1. Selecione [1] Enabled em parâmetro 31-47 Time
Limit Function.
2. Selecione [12] VLT 2800 3M ou [14] VLT 2800 12M
em parâmetro 14-70 Compatibility Selections.
3. Faça um ciclo de energia para iniciar o conversor
de frequência como o número de identicação e
modo do VLT® 2800 PROFIBUS.
4. Parâmetro 31-48 Time Limit Remaining Time
começa a contagem regressiva após o ciclo de
energia e mostra o tempo restante para uso.
Após 720 horas de funcionamento, o conversor de
frequência relata uma advertência. O conversor PROFIBUS
ainda funciona. Quando o contador de tempo no
parâmetro 31-48 Time Limit Remaining Time alcançar 0, o
conversor de frequência reporta um alarme de bloqueio
por desarme no próximo comando de partida.
5 5
Ative o conversor PROFIBUS via VLT® Memory Module
MCM 103
1. Conecte o módulo de memória no conversor de
frequência.
2. Selecione [12] VLT 2800 3M ou [14] VLT 2800 12M
em parâmetro 14-70 Compatibility Selections.
3. Faça um ciclo de energia para iniciar o conversor
de frequência como o número de
identicação e
modo do VLT® 2800 PROFIBUS.
AVISO!
Para o VLT® Memory Module MCM 103 funcionar como
conversor PROFIBUS, o parâmetro 31-40 Memory Module
Function não deve ser programado para [0] Disabled.
É possível ativar o conversor PROFIBUS sem o VLT
Memory Module MCM 103 por um tempo limitado. Antes
deste tempo, conecte um VLT® Memory Module MCM 103
para manter a função do conversor PROFIBUS.
®
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 39
Page 44

24 V
17 V
IGBT
+UDC
X3
IGBT
PELV
X3
X3
24 V
voltage
source
high-side
gate driving
circuit
diagnostic
circuit
low-side
gate driving
circuit
12
38
37
55
130BE463.12
Time
5 ms max.
Debounce time
Time
STO valid
STO invalid
Voltage
T37/38
Test pulse STO demanded
STO request
state
130BE587.12
Safe Torque O (STO)
6 Safe Torque O (STO)
VLT® Midi Drive FC 280
6
A função Safe Torque O (STO) é um componente em um
sistema de controle de segurança. O STO impede a
geração da tensão necessária pela unidade para girar o
motor, garantindo segurança em situações de emergência.
A função STO é projetada e aprovada como adequada para
os requisitos de:
IEC/EN 61508: 2010 SIL2
•
IEC/EN 61800-5-2: 2007 SIL2
•
IEC/EN 62061: 2012 SILCL de SIL2
•
EN ISO 13849-1: 2008 Categoria 3 PL d
•
Para obter o nível desejado de segurança operacional,
selecione e aplique corretamente os componentes no
sistema de controle de segurança. Antes de usar o STO,
execute uma análise de risco completa na instalação para
determinar se a função STO e os níveis de segurança são
apropriados e sucientes.
A função STO no conversor de frequência é controlada por
meio dos terminais de controle 37 e 38. Quando o STO é
ativado, a fonte de alimentação nos lados alto e baixo dos
circuitos de acionamento do gate do IGBT é cortada.
Ilustração 6.1 mostra a arquitetura do STO. Tabela 6.1
mostra status do STO dependendo se os terminais 37 e 38
estão energizados.
Terminal 37 Terminal 38 Torque Advertência ou
alarme
Energizado
1)
Energizado
Sim
2)
Sem
advertências ou
alarmes.
3)
Desenergizado
Desenergizado Não Advertência/
alarme 68: Safe
Torque O.
Desenergizado Energizado Não Alarme 188:
Falha da função
STO.
Energizado Desenergizado Não Alarme 188:
Falha da função
STO.
Tabela 6.1 Status do STO
1) A faixa de tensão é 24 V ±5 V, com o terminal 55 como terminal
de referência.
2) O torque estará presente somente quando o conversor de
frequência estiver operando.
±
3) Circuito aberto ou a tensão dentro da faixa de 0 V
1,5 V, com o
terminal 55 como terminal de referência.
Filtragem de pulso de teste
Para dispositivos de segurança que geram pulsos de teste
nas linhas de controle do STO: Se o sinal de pulso
permanecer em nível baixo (≤1,8 V) durante não mais que
5 ms, ele é ignorado, como mostrado em Ilustração 6.2.
Ilustração 6.1 Arquitetura do STO
Ilustração 6.2 Filtragem de pulso de teste
Tolerância de entrada assíncrona
Os sinais de entrada nos 2 terminais não são sempre
síncronos. Se a discrepância entre os 2 sinais for maior do
que 12 ms, ocorre o alarme de falha do STO (alarme 188
Falha da função STO).
40 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
Page 45

130BE213.10
Safe Torque O (STO) Guia de Operação
Sinais válidos
Para ativar o STO, os 2 sinais devem estar em nível baixo
durante pelo menos 80 ms. Para nalizar o STO, os 2 sinais
devem estar em nível alto durante no mínimo 20 ms.
Consulte capétulo 9.6 Entrada/Saída de controle e dados de
controle para obter os níveis de tensão e corrente de
entrada de terminais de STO.
6.1 Precauções de segurança para STO
Pessoal
Somente pessoal qualicado tem permissão de instalar ou
operar este equipamento.
Pessoal qualicado é denido como pessoal treinado,
autorizado a instalar, colocar em funcionamento e manter
o equipamento, os sistemas e circuitos em conformidade
com as leis e normas pertinentes. Adicionalmente, o
pessoal deve estar familiarizado com as instruções e as
medidas de segurança descritas neste manual.
qualicado
AVISO!
Após a instalação do STO, realize um teste de colocação
em funcionamento conforme especicado em
capétulo 6.3.3 Teste de colocação em funcionamento do
STO. Um teste de colocação em funcionamento bem
sucedido é obrigatório após a primeira instalação e a
após cada mudança na instalação de segurança.
6.2 Instalação do Safe Torque O
Para a conexão do motor, conexão de rede elétrica CA e
ação de controle, siga as instruções para instalação segura
em capétulo 4 Instalação Elétrica.
Ative o STO integrado da seguinte maneira:
1. Remova o jumper entre os terminais de controle
12 (24 V) 37 e 38. Cortar ou interromper o
jumper não é
Veja o jumper em Ilustração 6.3.
suciente para evitar curto circuito.
6
6
ADVERTÊNCIA
RISCO DE CHOQUE ELÉTRICO
A função STO NÃO isola a tensão de rede para o
conversor de frequência ou circuitos auxiliares e,
portanto, não fornece segurança elétrica. Se a
alimentação de tensão de rede da unidade não for
isolada e o tempo de espera especicado não for
respeitado, o resultado poderá ser de morte ou
ferimentos graves.
Execute trabalho em peças elétricas do
•
conversor de frequência ou do motor somente
após isolar a alimentação de tensão de rede e
aguardar o intervalo de tempo especicado em
capétulo 2.3.1 Tempo de Descarga.
AVISO!
Ao projetar a aplicação da máquina, a sincronização e a
distância devem ser consideradas para uma parada por
inércia (STO). Para obter mais informações sobre as
categorias de parada, consulte EN 60204-1.
Ilustração 6.3 Jumper entre Terminal 12 (24 V), 37 e 38
2. Conecte um dispositivo de segurança de canal
duplo (por exemplo, PLC de segurança, cortina de
luz, relé de segurança ou botão de parada de
emergência) nos terminais 37 e 38 para formar
uma aplicação de segurança. O dispositivo deve
atender o nível de segurança desejado com base
na avaliação de risco. Ilustração 6.4 mostra o
esquema da ação de aplicações de STO em que
o conversor de frequência e o dispositivo de
segurança estão no mesmo gabinete.
Ilustração 6.5 mostra o esquema da ação de
aplicações de STO em que é usada alimentação
externa.
AVISO!
O sinal do STO deve ser fornecido pelo PELV.
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 41
Page 46

130BE424.11
37
38
12
55
1
130BE425.12
24 V source
37
38
+
-
12
55
1
Safe Torque O (STO)
VLT® Midi Drive FC 280
Colocação em funcionamento do STO
6.3
6.3.1 Ativação do Safe Torque O
Para ativar a função STO, remova a tensão nos terminais 37
e 38 do conversor de frequência.
Quando STO é ativado, o conversor de frequência emite o
alarme 68, Safe Torque O ou advertência 68, Safe Torque
O, desarma a unidade e faz parada por inércia do motor.
Use a função STO para parar o conversor de frequência em
situações de parada de emergência. No modo de operação
normal, quando o STO não é necessário, use a função de
parada padrão.
6
1 Dispositivo de segurança
Ilustração 6.4 Fiação de STO em 1 gabinete, o conversor de
frequência fornece a tensão de alimentação
1 Dispositivo de segurança
Ilustração 6.5 Fiação de STO, alimentação externa
3. Conclua a ação de acordo com as instruções em
capétulo 4 Instalação Elétrica e:
3a Elimine riscos de curto-circuito.
3b Certique-se de que os cabos de STO
são blindados se forem maiores que
20 m (65,6 pés) ou estiverem fora do
gabinete.
3c Conecte o dispositivo de segurança
diretamente aos terminais 37 e 38.
AVISO!
Se o STO for ativado enquanto o conversor de frequência
emitir a advertência 8, Subtensão CC ou alarme 8,
Subtensão CC, o conversor de frequência ignora o alarme
68, Safe Torque O, mas a operação do STO não é
afetada.
6.3.2 Desativação do Safe Torque O
Siga as instruções em Tabela 6.2 para desativar a função de
STO e retomar a operação normal com base no modo de
reinicialização da função STO.
ADVERTÊNCIA
RISCO FERIMENTOS OU MORTE
Reaplicação de alimentação de 24 V CC para o terminal
37 ou 38 encerra o estado SIL2 STO, potencialmente
dando partida no motor. Uma partida do motor
inesperada pode causar ferimentos pessoais ou morte.
Certique-se de que todas as medidas de
•
segurança são tomadas antes de reaplicar
alimentação de 24 V CC aos terminais 37 e 38.
42 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
Page 47

Safe Torque O (STO) Guia de Operação
Modo de
reinicialização
Reinicialização
manual
Nova
partida
automática
Tabela 6.2 Desativação do STO
Etapas para desativar o
STO e retomar a
operação normal
1. Reaplique
alimentação de 24 V
CC nos terminais 37 e
38.
2. Inicie um sinal de
reset (via eldbus, E/S
digital ou tecla
[Reset]/[O Reset] no
LCP).
Reaplique alimentação de
24 V CC nos terminais 37
e 38.
Conguração do modo
de reinicialização
Conguração padrão.
Parâmetro 5-19 Terminal
37/38 Safe Torque O=[1]
Alarme de Safe Torque
O
Parâmetro 5-19 Terminal
37/38 Safe Torque O=
[3] Advertência de Safe
Torque O.
6.3.3 Teste de colocação em
funcionamento do STO
Após a instalação e antes da primeira operação, realize um
teste de colocação em funcionamento da instalação
usando STO.
Execute o teste novamente após cada modicação da
instalação ou aplicação que envolva o STO.
AVISO!
É necessário um teste de colocação em funcionamento
bem sucedido após a instalação inicial e após cada
modicação subsequente da instalação.
Para realizar um teste de colocação em funcionamento:
Siga as instruções em capétulo 6.3.4 Teste para
•
aplicações de STO em modo de reinicialização
manual se o STO estiver programado no modo de
reinicialização manual.
Siga as instruções em capétulo 6.3.5 Teste para
•
aplicações de STO em modo nova partida
automática se o STO estiver programado no
modo de nova partida automática.
6.3.4 Teste para aplicações de STO em
modo de reinicialização manual
Para aplicações em que o parâmetro 5-19 Terminal 37/38
Safe Torque O estiver programado para o valor padrão [1]
Alarme do Safe Torque O, conduza o teste de colocação
em funcionamento da seguinte forma:
1. Programe parâmetro 5-40 Função do Relé para
[190] Função STO ativa.
2. Remova a alimentação de tensão de 24 V CC dos
terminais 37 e 38 por meio do dispositivo de
segurança enquanto o motor é acionado pelo
conversor de frequência (isto é, a alimentação de
rede elétrica não é interrompida).
3.
Verique se:
3a O motor faz parada por inércia. Pode
levar um longo tempo até o motor
parar.
3b Se o LCP estiver montado, alarme 68,
Safe Torque O é mostrado no LCP. Se o
LCP não estiver montado, alarme 68,
Safe Torque O é acessado em
parâmetro 15-30 Log Alarme: Cód Falha.
4. Reaplique alimentação de 24 V CC nos terminais
37 e 38.
5. Certique-se de que o motor permanece no
estado de parada por inércia e o relé do cliente
(se conectado) permanece ativado.
6. Enviar sinal de reset (via eldbus, E/S digital ou
tecla [Reset]/[O Reset] no LCP).
7. Certique-se de que o motor que operacional e
funcione dentro da faixa de velocidade original.
O teste de colocação em funcionamento é completado
com sucesso quando todas as etapas acima são aprovadas.
6.3.5 Teste para aplicações de STO em
modo nova partida automática
Para aplicações em que parâmetro 5-19 Terminal 37/38 Safe
Torque O é programado para [3] Advertência de Safe
Torque O, execute o teste de colocação em funcio-
namento da seguinte maneira:
1. Remova a alimentação de tensão de 24 V CC dos
terminais 37 e 38 por meio do dispositivo de
segurança enquanto o motor é acionado pelo
conversor de frequência (isto é, a alimentação de
rede elétrica não é interrompida).
2. Verique se:
6
6
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 43
Page 48
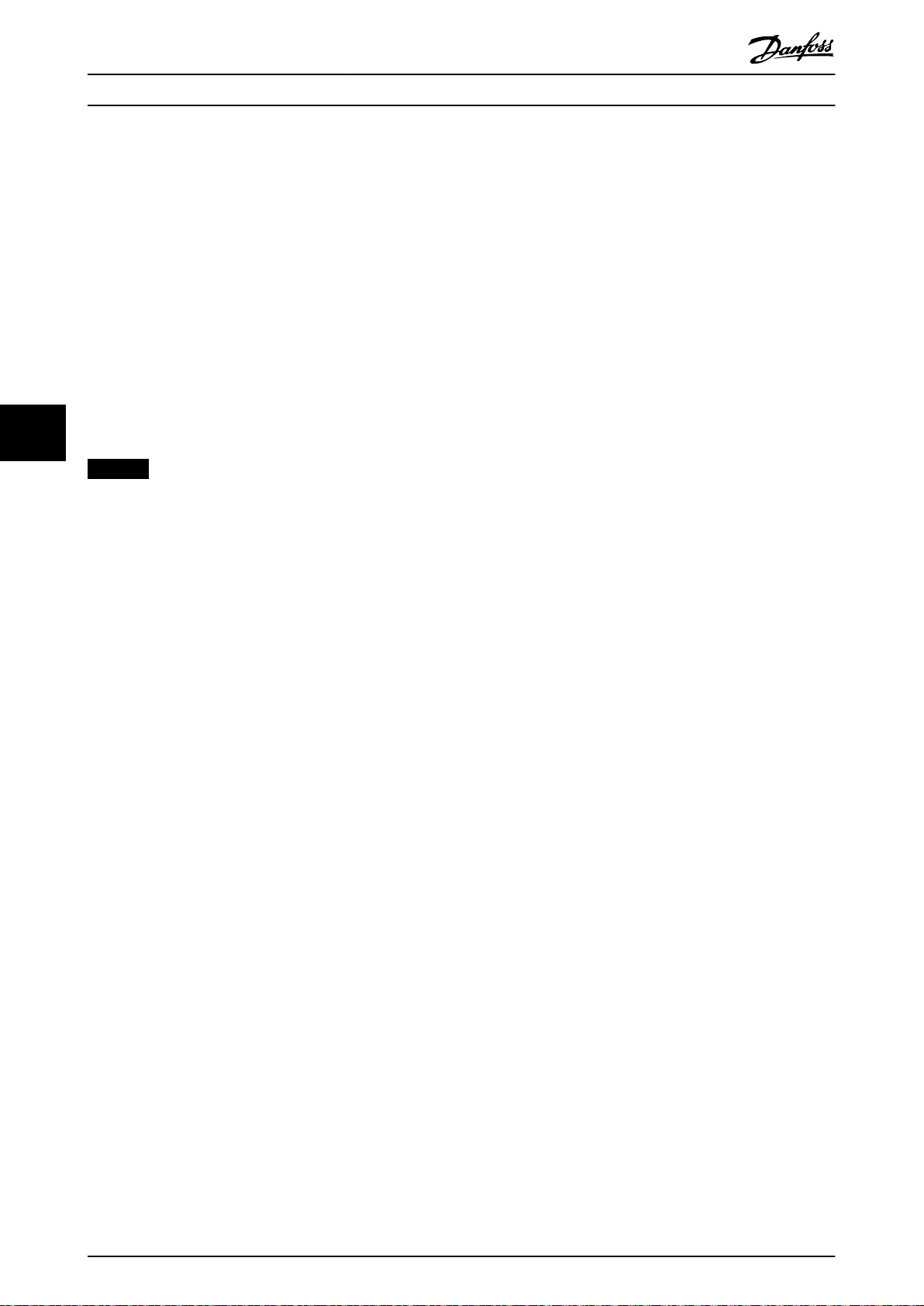
Safe Torque O (STO)
VLT® Midi Drive FC 280
6
2a O motor faz parada por inércia. Pode
levar um longo tempo até o motor
parar.
2b Se o LCP estiver montado, Advertência
68, Safe Torque O W68 é mostrado no
LCP. Se o LCP não estiver montado,
Advertência 68, Safe Torque O W68 é
acessado no bit 30 de
parâmetro 16-92 Warning Word.
3. Reaplique alimentação de 24 V CC nos terminais
37 e 38.
4. Certique-se de que o motor que operacional e
funcione dentro da faixa de velocidade original.
O teste de colocação em funcionamento é completado
com sucesso quando todas as etapas acima são aprovadas.
AVISO!
Consulte a advertência sobre o comportamento da nova
partida em capétulo 6.1 Precauções de segurança para
STO.
6.4 Manutenção e serviço de STO
O usuário é responsável por medidas de
•
segurança.
Os parâmetros do conversor de frequência
•
podem ser protegidos por senha.
O teste funcional consiste em 2 partes:
Teste funcional básico.
•
Teste funcional de diagnóstico.
•
Quando todas as etapas forem concluídas com êxito, o
teste funcional será bem sucedido.
8. Verique se o motor não dá partida automaticamente e se reinicia apenas ao dar um sinal de
reinicialização (via eldbus, E/S digital ou tecla
[Reset]/[O] no LCP).
Teste funcional de diagnóstico
1. Verique se advertência 68, Safe Torque O e
alarme 68, Safe Torque O não ocorrem quando a
alimentação de 24 V estiver conectada aos
terminais 37 e 38.
2. Remova a alimentação de 24 V do terminal 37 e
verique se o LCP mostra alarme 188, Falha da
função STO se o LCP estiver montado. Se o LCP
não estiver montado, verique se alarme 188,
Falha da função STO é registrada em
parâmetro 15-30 Log Alarme: Cód Falha.
3. Reaplique a alimentação de 24 V no terminal 37 e
verique se a reinicialização do alarme é bem
sucedida.
4. Remova a alimentação de 24 V do terminal 38 e
verique se o LCP mostra alarme 188, Falha da
função STO se o LCP estiver montado. Se o LCP
não estiver montado, verique se alarme 188,
Falha da função STO é registrada em
parâmetro 15-30 Log Alarme: Cód Falha.
5. Reaplique a alimentação de 24 V no terminal 38 e
verique se a reinicialização do alarme é bem
sucedida.
Teste funcional básico
Se a função STO não for usada durante 1 ano, conduza um
teste funcional básico para detectar qualquer falha ou mau
funcionamento do STO.
1. Certique-se de que parâmetro 5-19 Terminal
37/38 Safe Torque O está programado para *[1]
Alarme de Safe Torque O.
2. Remova a fonte de tensão de 24 V CC dos
terminais 37 e 38.
3. Verique se o LCP mostra o alarme 68, Safe
Torque O.
4. Verique se o conversor de frequência desarma a
unidade.
5. Verique se o motor faz parada por inércia e para
completamente.
6. Inicie um sinal de partida (via eldbus, E/S digital
ou LCP) e verique se o motor não dá partida.
7. Reconecte a alimentação de tensão de 24 V CC
nos terminais 37 e 38.
44 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
Page 49

Safe Torque O (STO) Guia de Operação
6.5 Dados Técnicos STO
Os modos de falha, Efeitos, e Análise de diagnóstico (FMEDA) são executados com base nas seguintes suposições:
VLT® Midi Drive FC 280 leva 10% do orçamento total de falha para uma malha de segurança SIL2.
•
Taxas de falha são baseadas no banco de dados Siemens SN29500.
•
Taxas de falha são constantes; mecanismos de desgaste não estão incluídos.
•
Para cada canal, os componentes relacionados a segurança são considerados de tipo A com uma tolerância de
•
falha de hardware de 0.
Os níveis de tensão são médios para um ambiente industrial e a temperatura operacional dos componentes é de
•
até 85 °C (185 °F).
Um erro seguro (por exemplo, saída em estado seguro) é reparado dentro de 8 horas.
•
Sem saída de torque é o estado seguro.
•
Normas de segurança
Função de segurança Safe Torque O IEC 61800-5-2
Desempenho de segurança
Segurança da maquinaria ISO 13849-1, IEC 62061
Segurança funcional IEC 61508
ISO 13849-1
Categoria Cat. 3
Cobertura do diagnóstico (CD) 60% (Baixo)
Tempo médio para falha perigosa
(MTTFd)
Nível de desempenho PL d
IEC 61508/IEC 61800-5-2/IEC 62061
Nível da Integridade de Segurança SIL2
Probabilidade de falha perigosa por
hora (PFH) (modo de alta demanda)
Probabilidade de falha perigosa sob
demanda (PFD
anos) (modo de baixa demanda)
Fração de falha segura (SFF)
Tolerância da falha de hardware
(HFT)
para PTI = 20
avg
2400 anos (Alta)
7,54E-9 (1/h)
6.05E-4
Para peças de canal duplo: >84%
Para peças de canal único: >99%
Para peças de canal duplo: HFT = 1
Para peças de canal único: HFT = 0
6
6
Intervalo de teste de prova
Falha de causa comum (CCF) β = 5%; βD = 5%
Intervalo de teste de diagnóstico
(DTI)
Capacidade sistemática SC 2
Tempo de reação
Tabela 6.3 Dados técnicos do STO
1) O tempo de reação é o tempo de uma condição de sinal de entrada que aciona o STO até o torque ser desligado no motor.
2) Para saber o procedimento de teste de prova, consulte capétulo 6.4 Manutenção e serviço de STO.
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 45
1)
Tempo de resposta da entrada à
saída
2)
20 anos
160 ms
Gabinete metálico tamanhos K1–K3: Máximo 50 ms
Gabinete metálico tamanhos K4–K5: Máximo 30 ms
Page 50

130BF096.10
FC
+24 V
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
12
13
18
19
27
29
32
33
50
53
54
55
42
A OUT
D IN
+24 V
130BE204.11
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
0 ~10 V
+
-
FC
+24 V
130BF097.10
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
4 - 20mA
+
-
FC
+24 V
Exemplos de Aplicações
7 Exemplos de Aplicações
VLT® Midi Drive FC 280
7.1 Introdução
Os exemplos nesta seção têm a nalidade de referência
rápida para aplicações comuns.
7.2.2 Velocidade
Parâmetros
Função Conguração
Parâmetro 6-10
A programação do parâmetro são os valores
•
padrão regionais, a menos que indicado de outro
modo (selecionados em parâmetro 0-03 Denições
Regionais).
Os parâmetros associados aos terminais e suas
•
congurações estão mostrados ao lado dos
desenhos
As congurações de chaveamento necessárias
•
para os terminais analógicos 53 ou 54 também
77
são mostrados.
AVISO!
Quando o recurso STO não for usado, um o de jumper
é necessário entre os terminais 12, 37 e 38 para o
conversor de frequência operar com valores de
programação padrão de fábrica.
Terminal 53
Tensão Baixa
Parâmetro 6-11
Terminal 53
Tensão Alta
Parâmetro 6-14
Terminal 53 Ref./
Feedb. Valor
Baixo
Parâmetro 6-15
Terminal 53 Ref./
Feedb. Valor
Alto
Parâmetro 6-19
Modo do
terminal 53
0,07 V*
10 V*
0
50
[1] Modo de
tensão
* = Valor padrão
7.2 Exemplos de Aplicações
Notas/comentários:
7.2.1 AMA
Parâmetros
Congur–
Função
Parâmetro 1-29 Ada
ptação Automática
do Motor (AMA)
Parâmetro 5-12 Ter
minal 27, Entrada
Digital
ação
[1] Ativar
AMA
completa
*[2]
Paradp/
inérc,revers
o
* = Valor padrão
Notas/comentários: Programe o
grupo do parâmetro 1-2* Dados
do motor de acordo com as
especicações do motor.
AVISO!
Se os terminais 13 e 27 não
estiverem conectados,
programe o
parâmetro 5-12 Terminal 27,
Entrada Digital para [0] Sem
operação.
Tabela 7.2 Referência de Velocidade Analógica (Tensão)
Parâmetros
Função Conguração
Parâmetro 6-22
Terminal 54
4 mA*
Corrente Baixa
Parâmetro 6-23
Terminal 54
20 mA*
Corrente Alta
Parâmetro 6-24
Terminal 54 Ref./
Feedb. Valor
0
Baixo
Parâmetro 6-25
Terminal 54 Ref./
50
Feedb. Valor Alto
Parâmetro 6-29
Modo do
terminal 54
[0] Modo de
corrente
* = Valor padrão
Notas/comentários:
Tabela 7.1 AMA com T27 conectado
46 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
Tabela 7.3 Referência de Velocidade Analógica (Corrente)
Page 51

130BE208.11
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
≈ 5kΩ
FC
+24 V
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
130BF100.10
+24 V
130BB840.12
Speed
Reference
Start (18)
Freeze ref (27)
Speed up (29)
Speed down (32)
130BF098.10
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
19
18
27
29
32
33
50
53
54
55
42
+24 V 13
Exemplos de Aplicações Guia de Operação
Parâmetros
Função Conguração
Parâmetro 6-10
Terminal 53
Tensão Baixa
Parâmetro 6-11
Terminal 53
Tensão Alta
Parâmetro 6-14
Terminal 53
Ref./Feedb. Valor
Baixo
Parâmetro 6-15
Terminal 53
Ref./Feedb. Valor
Alto
Parâmetro 6-19
Terminal 53
mode
* = Valor padrão
Notas/comentários:
Tabela 7.4 Referência de Velocidade (utilizando um
Potenciômetro Manual)
Parâmetros
Função Conguração
Parâmetro 5-10
Terminal 18
Entrada Digital
Parâmetro 5-12
Terminal 27,
Entrada Digital
Parâmetro 5-13
Terminal 29,
Entrada Digital
Parâmetro 5-14
Terminal 32,
Entrada Digital
* = Valor padrão
Notas/comentários:
Tabela 7.5 Aceleração/desaceleração
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 47
0,07 V*
10 V*
0
50
[1] Modo de
tensão
*[8] Partida
[19] Congelar
referência
[21] Acelerar
[22]
Desacelerar
Ilustração 7.1 Aceleração/desaceleração
7.2.3 Partida/Parada
Parâmetros
Função
Parâmetro 5-10 Ter
minal 18 Entrada
Digital
Parâmetro 5-11 Ter
minal 19, Entrada
Digital
Parâmetro 5-12 Ter
minal 27, Entrada
Digital
Parâmetro 5-14 Ter
minal 32, Entrada
Digital
Parâmetro 5-15 Ter
minal 33 Entrada
Digital
Parâmetro 3-10 Ref
erência Predenida
Ref. predenida 0
Ref. predenida 1
Ref. predenida 2
Ref. predenida 3
* = Valor padrão
Notas/comentários:
Tabela 7.6 Partida/parada com reversão e 4 velocidades
pré-programadas
Congur–
ação
[8] Partida
*[10]
Reversão
[0] Sem
operação
[16] Ref
predenida
bit 0
[17] Ref.
predenida
bit 1
25%
50%
75%
100%
7 7
Page 52

130BF099.10
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
+24 V
130BE210.11
+24 V
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
FC
D IN
+24 V
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
R1
12
13
18
19
27
29
32
33
50
53
54
55
42
01
02
03
130BE211.11
+24 V
Exemplos de Aplicações
VLT® Midi Drive FC 280
7.2.4 Reset do Alarme Externo
Parâmetros
Função Conguração
Parâmetro 5-11
Terminal 19,
Entrada Digital
* = Valor padrão
Notas/comentários:
[1] Rep.alarmes
7.2.6 SLC
Parâmetros
Função Conguração
Parâmetro 4-30
Função Perda
[1] Advertência
Fdbk do Motor
Parâmetro 4-31
Erro Feedb
50
Veloc. Motor
Parâmetro 4-32
Timeout Perda
5 s
Feedb Motor
Parâmetro 7-00
Fonte do Feedb.
do PID de Veloc.
[1] Encoder de
24 V
Parâmetro 5-70
Term 32/33
Pulsos Por
1024*
Revolução
Parâmetro 13-0
77
0 Modo do SLC
Parâmetro 13-0
1 Iniciar Evento
Parâmetro 13-0
2 Parar Evento
Parâmetro 13-1
0 Operando do
Tabela 7.7 Reset do Alarme Externo
Comparador
[1] Ligado
[19]
Advertência
[44] Tecla Reset
[21] Núm
Advertênc.
Parâmetro 13-1
7.2.5 Termistor do motor
1 Operador do
Comparador
*[1] ≈
Parâmetro 13-1
AVISO!
Para atender os requisitos de isolamento PELV, use
isolamento reforçado ou duplo nos termistores.
2 Valor do
Comparador
Parâmetro 13-5
1 Evento do SLC
Parâmetro 13-5
Parâmetros
Função Conguração
Parâmetro 1-90
Proteção
[2] Desrm por
Termistor
Térmica do
Motor
Parâmetro 1-93
Fonte do
[1] Entrada
analógica 53
Termistor
Tabela 7.8 Termistor do motor
48 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
Parâmetro 6-19
Terminal 53
mode
[1] Modo de
tensão
* = Valor padrão
Notas/comentários:
Se somente uma advertência
for necessária, programe
parâmetro 1-90 Proteção Térmica
do Motor para [1] Advrtnc d
Termistor.
Tabela 7.9 Usando SLC para programar um relé
2 Ação do SLC
Parâmetro 5-40
Função do Relé
* = Valor padrão
Notas/comentários:
Se o limite no monitor de
feedback for excedido, a
advertência 61, Perda d Encodr é
emitida. O SLC monitora a
advertência 61, Perda d Encodr.
Se advertência 61, Perda d
Encodr tornar-se verdadeira, o
relé 1 é acionado.
O equipamento externo pode
indicar que é necessária
manutenção. Se o erro de
feedback
novamente dentro de 5 s, o
conversor de frequência
continua e a advertência
desaparece. O relé 1 persiste
[O/Reset] ser pressionado.
até
61
[22]
Comparador 0
[32] Den saíd
dig.A baix
[80] Saída
digitl A do SLC
car abaixo do limite
Page 53

Manutenção, diagnósticos e ... Guia de Operação
8 Manutenção, diagnósticos e resolução de problemas
8.1 Manutenção e serviço
Em condições de operação e pers de carga normais, o
conversor de frequência é isento de manutenção durante
toda a vida útil projetada. Para evitar panes, perigos e
danos, examine o conversor de frequência quanto ao
aperto das conexões dos terminais, à entrada de poeira e
assim por diante, regularmente, dependendo das
condições de operação. Substitua as peças desgastadas ou
danicadas por peças de reposição originais ou peças
padrão. Para serviço e suporte, entre em contato com o
fornecedor Danfoss local.
ADVERTÊNCIA
PARTIDA ACIDENTAL
Quando o conversor de frequência estiver conectado à
rede elétrica CA, alimentação CC ou load sharing, o
motor poderá dar partida a qualquer momento. Partida
acidental durante a programação, serviço ou serviço de
manutenção pode resultar em morte, ferimentos graves
ou danos à propriedade. O motor pode dar partida por
meio de interruptor externo, comando do eldbus, sinal
de referência de entrada do LCP, via operação remota
usando o Software de Setup MCT 10 ou após uma
condição de falha resolvida.
Para impedir a partida do motor:
Desconecte o conversor de frequência da rede
•
elétrica.
Pressione [O/Reset] no LCP, antes de
•
programar parâmetros.
Conecte toda a ação e monte completamente
•
o conversor de frequência, o motor e qualquer
equipamento acionado antes de o conversor de
frequência ser conectado à rede elétrica CA,
fonte de alimentação CC ou load sharing.
8.2 Tipos de Advertência e Alarme
Tipo de
advertência/
alarme
Advertência Uma advertência indica uma condição de
Alarme O alarme indica uma falha que exige atenção
Desarme
Ao disparar, o conversor suspende a operação para evitar
danos ao conversor e a outros equipamentos. Quando
ocorre um desarme, ocorre parada por inércia do motor. A
lógica do conversor continua a operar e monitorar seu
status. Após a condição de falha ser corrigida, o conversor
está pronto para uma reinicialização.
Bloqueio por desarme
Ao ocorrer um bloqueio por desarme, o conversor
suspende a operação para evitar danos ao conversor e a
outros equipamentos. Quando ocorre um bloqueio por
desarme, ocorre parada por inércia do motor. A lógica do
conversor continua a operar e monitorar seu status. O
conversor inicia um bloqueio por desarme somente
quando ocorrem falhas graves que podem danicar o
conversor ou outro equipamento. Após as falhas serem
corrigidas, desligue e ligue a energia de entrada antes de
reinicializar o conversor.
Descrição
operação anormal que leva a um alarme. A
advertência para quando a condição anormal é
removida.
imediata. A falha sempre dispara um desarme ou
bloqueio por desarme. Reinicialize o conversor
após um alarme.
Reinicialize o conversor em qualquer dessas 4
maneiras:
Pressione [Reset]/[O/Reset].
•
Comando de entrada de reinicialização digital.
•
Comando de entrada de reinicialização de
•
comunicação serial.
Reinicialização automática.
•
8 8
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 49
Page 54

Setup 1
Status
Quick
Menu
Main
Menu
130BD111.10
Setup 1
Status Quick
Menu
Main
Menu
130BD112.10
130BD062.10
D
Hand
On
Reset
Auto
On
OK
On
Warn
Alarm
Manutenção, diagnósticos e ...
VLT® Midi Drive FC 280
8.3 Display de advertência e alarme
Ilustração 8.1 Display da Advertência
Um alarme ou alarme de bloqueio por desarme é exibido
no display junto com o número do alarme.
88
Ilustração 8.2 Alarme/Alarme de Bloqueio por Desarme
Além do texto e código de alarme no display do conversor
de frequência, existem 3 luzes indicadoras de status. A luz
indicadora de advertência ca amarela durante uma
advertência. A luz indicadora de alarme ca vermelha e
pisca durante um alarme.
Ilustração 8.3 Luzes indicadoras de status
50 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
Page 55

Manutenção, diagnósticos e ... Guia de Operação
8.4 Lista das advertências e alarmes
8.4.1 Lista de Códigos de Advertência e Alarme
Um (X) marcado em Tabela 8.1 indica que ocorreu advertência ou alarme.
Advertência Alarme Bloqueio
Nº Descrição
2 Erro de live zero X X –
3 Sem Motor X – –
4
Perda de fases de rede elétrica
7
Sobretensão CC
8
Subtensão CC
9 Inversor sobrecarregado X X –
Superaquecimento do ETR do
10
motor
Superaquecimento do termistor
11
do motor
12 Limite de torque X X –
13 Sobrecarga de corrente X X X
14 Falha de aterramento – X X Descarga das fases de saída para terra.
16 Curto circuito – X X Curto-circuito no motor ou nos terminais do motor.
17 Timeout da control word X X – Sem comunicação com o conversor de frequência.
Resistor do freio em curto-
25
-circuito
26 Sobrecarga do freio X X –
IGBT do freio/circuito de
27
frenagem em curto-circuito
28 Vericação do freio – X – Resistor do freio não conectado/funcionando.
30 Perda de fase U – X X Perda de fase U do motor. Verique a fase.
31 Perda de fase V – X X Perda de fase V do motor Verique a fase.
32 Perda de fase W – X X Perda de fase W do motor. Verique a fase.
34 Falha de eldbus X X – Ocorreu um problema de comunicação do PROFIBUS.
35 Falha do opcional – X – O Fieldbus detecta defeitos internos.
1)
1)
1)
X X X
X X –
X X –
X X –
X X –
– X X
– X X
por
desarme
O sinal no terminal 53 ou 54 é menos que 50% do
valor programado em parâmetro 6-10 Terminal 53
Tensão Baixa, parâmetro 6-20 Terminal 54 Tensão Baixa
e parâmetro 6-22 Terminal 54 Corrente Baixa.
Não há nenhum motor conectado na saída do
conversor de frequência.
Fase ausente no lado da alimentação ou desbalanceamento muito grande da alta tensão. Verique a
tensão de alimentação.
A tensão do barramento CC excede o limite.
A tensão do barramento CC cai abaixo do limite
inferior de advertência de tensão.
Mais de 100% de carga durante tempo demasiadamente longo.
O motor está muito quente devido a mais de 100% de
carga durante tempo demasiadamente longo.
O termistor ou a conexão do termistor foi
desconectada ou o motor está muito quente.
O torque excede o valor programado em
parâmetro 4-16 Limite de Torque do Modo Motor ou
parâmetro 4-17 Limite de Torque do Modo Gerador.
Limite de corrente de pico do inversor foi excedido. Se
este alarme ocorre na energização, verique se os
cabos de energia estão conectados incorretamente nos
terminais do motor.
O resistor do freio está em curto-circuito, por isso a
função de frenagem está desconectada.
A energia transmitida ao resistor do freio nos últimos
120 s excede o limite. Correções possíveis: Diminuir a
energia de frenagem reduzindo a velocidade ou
aumentando o tempo de rampa.
O transistor do freio está em curto-circuito, por isso a
função de frenagem está desconectada.
Causa
8 8
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 51
Page 56

Manutenção, diagnósticos e ...
VLT® Midi Drive FC 280
Advertência Alarme Bloqueio
Nº Descrição
36 Falha de rede elétrica X X –
38 Defeito interno – X X Entre em contato com seu fornecedor Danfoss local.
40 Sobrecarga T27 X – –
Falha na tensão do drive da
46
porta
47 Alimentação 24 V baixa X X X A fonte de 24 V CC pode estar sobrecarregada.
49 Limite de velocidade – X –
50 Calibração AMA – X – Ocorreu um erro de calibração.
51 Vericação AMA U
nom
e I
nom
– X X
– X –
88
52 AMA I
53 Motor grande para AMA – X –
54 AMA motor pequeno – X –
55 Faixa de parâmetros AMA – X –
56 Interrupção da AMA – X – A AMA é interrompida.
57 Timeout da AMA – X – –
58 AMA interna – X – Contato Danfoss.
59 Limite de Corrente X X – Sobrecarga do conversor de frequência.
60 Bloqueio externo – X – O bloqueio externo foi ativado.
61 Perda do Encoder X X – –
63 Freio mecânico baixo – X –
Temperatura do cartão de
65
controle
67 Mudança de opcional – X –
68
Safe Torque O
Temperatura do Cartão de
69
Potência
Drive inicializado no valor
80
padrão
baixa – X –
nom
X X X
2)
X X –
X X X
– X –
por
desarme
Essa advertência/alarme estará ativa somente se a
tensão de alimentação do conversor de frequência for
menor que o valor programado em
parâmetro 14-11 Tensã Red na FalhaRed.Elétr., e se
parâmetro 14-10 Falh red elétr NÃO estiver programado
para [0] Sem função.
Verique a carga conectada ao terminal 27 ou remova
a conexão de curto-circuito.
–
A velocidade do motor está abaixo do limite especi-
cado em parâmetro 1-87 Velocidade de Desarme Baixa
[Hz].
Conguração incorreta da tensão do motor e/ou da
corrente do motor.
Corrente do motor está muito baixa. Verique as
congurações.
A potência do motor é muito grande para a AMA
operar.
A potência do motor é muito pequena para a AMA
operar.
Os valores de parâmetro do motor estão fora da faixa
aceitável. AMA não funciona.
A corrente do motor real não excedeu a corrente de
liberação do freio dentro da janela do tempo de
retardo de partida.
A temperatura de desativação do cartão de controle
excedeu o limite superior.
Um novo opcional foi detectado ou um opcional
montado foi removido.
O STO é ativado. Se o STO estiver no modo de reinicialização manual, para retomar a operação normal,
aplique 24 V CC aos terminais 37 e 38 e inicie um sinal
de reset (via eldbus, E/S digital ou tecla [Reset]/[O
Reset]. Se o STO estiver no modo nova partida
automática, aplicar 24 V CC aos terminais 37 e 38
automaticamente retoma o conversor de frequência
para operação normal.
A temperatura de desativação do cartão de potência
excedeu o limite superior.
Todas as programações dos parâmetros serão inicializadas com a conguração padrão.
Causa
52 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
Page 57

Manutenção, diagnósticos e ... Guia de Operação
Advertência Alarme Bloqueio
Nº Descrição
87 Frenagem CC automática X – –
88 Detecção de opcionais – X X Opcional removido com êxito.
95 Correia Partida X X – –
99 Rotor bloqueado – X –
120 Falha no controle de posição – X – –
126 Motor em rotação – X – O motor PM está girando quando a AMA é executada.
Força Contra Eletro Motriz muito
127
alta
188
Defeito interno do STO
nw
Não durante o funcionamento – – –
run
Uma senha incorreta foi
Err.
fornecida
2)
X – –
– X –
– – –
por
desarme
Ocorre em rede elétrica IT quando o conversor de
frequência zer parada por inércia e a tensão CC for
maior que 830 V para unidades de 400 V e maior do
que 425 V para unidades de 200 V. O motor consome
a energia no barramento CC. Esta função pode ser
ativada/desativada no parâmetro 0-07 TI de Frenagem
CC Automática.
O rotor está bloqueado.
A Força Contra Eletro Motriz do motor PM está muito
alta antes da partida.
A alimentação de 24 V CC é conectada somente a 1
dos 2 terminais de STO (37 e 38) ou uma falha nos
canais de STO foi detectada. Certique-se de que
ambos os terminais sejam alimentados por uma
alimentação de 24 V CC e que a discrepância entre os
sinais nos 2 terminais seja menor que 12 ms. Se a
falha ainda ocorrer, entre em contato com o
fornecedor local Danfoss.
Os parâmetros só podem ser alterados quando o
motor está parado.
Ocorre quando é usada uma senha incorreta ao
modicar um parâmetro protegido por senha.
Causa
8 8
Tabela 8.1 Lista de Códigos de Advertências e Alarmes
1) Distorções na rede elétrica podem causar essas falhas. A instalação de um ltro de linha Danfoss pode corrigir esse problema.
2) Este alarme não pode ser reprogramado automaticamente por meio de parâmetro 14-20 Modo Reset.
Para diagnóstico, leia as alarm words, warning words e status words estendidas.
Status
word
estendida
(parâmetro 16-
94 Status Word
Estendida)
Partida
CW/CCW
word 2 estendida
(parâmetro 16-95 Est
OFF1 do Probus
OFF2 do Probus
Bit Hex Dec
000000
0
1
2
3
01
000000
02
000000
04
000000
08
1
2
4
8
Alarm word
(parâmetro 1
6-90 Alarm
Word)
Vericação
do freio
Temperatura
do cartão de
potência
Defeito do
terra
Temperatura
do cartão de
controle
Alarm word
2
(parâmetro
16-91 Alarm
Word 2)
Reservado
Falha na
tensão do
drive da
porta
Reservado Reservado Reservado Reservado
Reservado Reservado
Alarm word
3
(parâmetro 1
6-97 Alarm
Word 3)
Falha da
função STO
Alarme MM
Warning word
(parâmetro 16-
92 Warning
Word)
Reservado Reservado Rampa Desligado
Temperatura
do cartão de
potência
Temperatura
do cartão de
controle
Warning word
2
(parâmetro 16
-93 Warning
Word 2)
Reservado Ajuste de AMA Manual / Automático
Reservado Slowdown
Status
. Status Word 2)
ativo
ativo
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 53
Page 58

Manutenção, diagnósticos e ...
VLT® Midi Drive FC 280
Alarm word
16
32
64
128
256
512
(parâmetro 1
6-90 Alarm
Word)
Ctrl. word
T.O.
Sobrecarga
de corrente
Limite de
torque
Sup. t. do
motor
ETR do
motor
nalizado
Sobrecarg
do inversor.
Subtensão
CC.
Sobretensão
CC.
Curto
circuito
Perda de
fase da rede
elétrica
Erro de live
zero
Defeito
interno
Sobrecarga
do freio
Perda de
fase U
Perda de
fase V
Perda de
fase W
Falha de
eldbus
Alimentação
24 V baixa
Bit Hex Dec
000000
4
10
000000
5
20
000000
6
40
000000
7
80
000001
8
00
000002
9
88
10
11
12
13
14
15
16
17
18
19
20
21
22
23
00
000004
00
000008
00
000010
00
000020
00
000040
00
000080
00
000100
00
000200
00
000400
00
000800
00
001000
00
002000
00
004000
00
008000
00
1024
2048
4096
8192 Reservado Reservado Reservado Reservado Reservado Frenagem
16384
32768 AMA não OK Reservado Reservado Sem Motor
65536
131072
262144
524288
1048576
2097152
4194304
8388608
Alarm word
2
(parâmetro
16-91 Alarm
Word 2)
Reservado Reservado Ctrl. word T.O. Reservado Catchup
Reservado Reservado
Reservado Reservado
Reservado Reservado
Correia
Partida
Reservado Reservado
Partida
falhou
Limite de
velocidade
Bloqueio
externo
Reservado Reservado
Reservado Reservado
Reservado Reservado Reservado Reservado Reservado Pedido de partida
Reservado Reservado
Reservado Reservado Reservado Reservado Referência alta Reservado
Detecção de
opcionais
Falha do
opcional
Rotor
bloqueado
Falha no
controle de
posição
Alarm word
3
(parâmetro 1
6-97 Alarm
Word 3)
Reservado
Reservado Subtensão CC. Reservado
Reservado
Reservado Reservado Reservado Frenagem Máx Reservado
Reservado Reservado
Reservado Reservado Reservado Reservado Sleep
Reservado
Reservado
Warning word
(parâmetro 16-
92 Warning
Word)
Sobrecarga de
corrente
Limite de
torque
Sup. t. do
motor
ETR do motor
nalizado
Sobrecarg do
inversor.
Sobretensão
CC.
Perda de fase
da rede
elétrica
Erro de live
zero
Limite de
carga do
resistor do
freio
Falha de
eldbus
Alimentação
24 V baixa
Warning word
2
(parâmetro 16
-93 Warning
Word 2)
Reservado Feedback alto Reservado
Reservado Feedback baixo Reservado
Reservado
Correia Partida
Reservado
Reservado
Reservado Reservado
Frenagem CC
automática
Reservado Freio CA Jog
Reservado Reservado Partida
Sobrecarga
T27
Módulo de
memória
Reservado Reservado Em funcionamento
Status
word
estendida
(parâmetro 16-
94 Status Word
Estendida)
Corrente de
saída alta
Corrente de
saída baixa
Freq. de saída
alta.
Freq. de saída
baixa
A vericação
do freio está
OK
OVC ativa Solicitação de Jog
Referência
baixa
Reservado Boost do sleep
Status
word 2 estendida
(parâmetro 16-95 Est
. Status Word 2)
OFF3 do Probus
ativo
Controle pronto
O conversor de
frequência está
pronto
Parada rápida
Freio CC
Parada
Solicitação de
Congelar frequência
de saída
Congelar frequência
de saída
Retardo de partida
54 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
Page 59
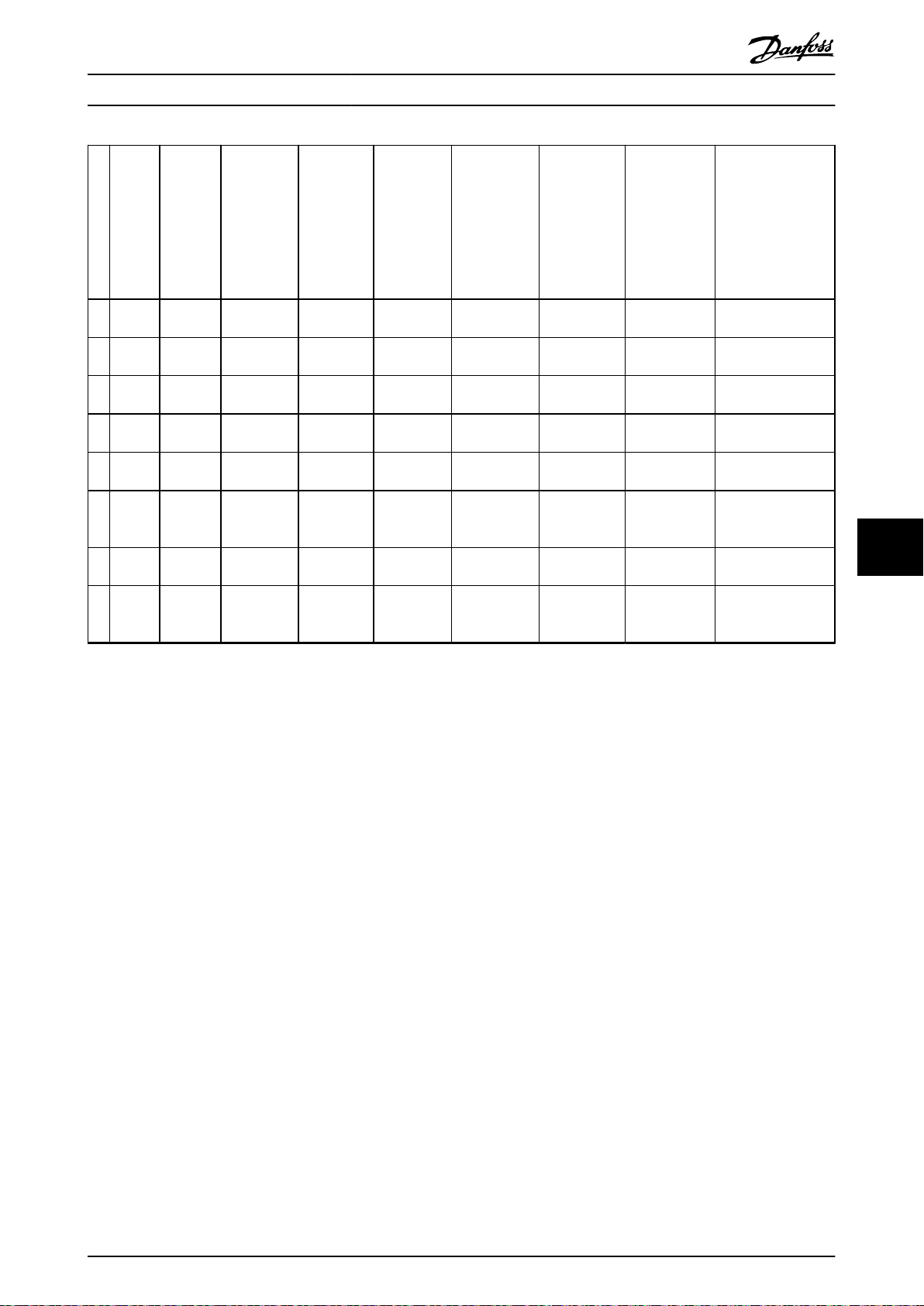
Manutenção, diagnósticos e ... Guia de Operação
Alarm word
Bit Hex Dec
010000
24
020000
25
040000
26
0800000013421772
27
10000000268435456Mudança de
28
2000000053687091
29
400000001073741824Safe Torque
30
8000000021474836
31
16777216
00
33554432 Reservado
00
67108864
00
(parâmetro 1
rede elétrica
IGBT do freio Reservado Reservado Reservado Reservado Reservado Reservado
8
Conversor de
2
48
6-90 Alarm
Word)
Falha de
Resistor do
freio
opcional
frequência
inicializado
O
Freio
mecânico
baixo
Alarm word
2
(parâmetro
16-91 Alarm
Word 2)
Reservado Reservado
Limite de
Corrente
Reservado Reservado Reservado Reservado Reservado Bloqueio externo
Reservado Reservado
Perda do
Encoder
Reservado Reservado
Reservado Reservado Reservado Reservado
Alarm word
3
(parâmetro 1
6-97 Alarm
Word 3)
Reservado
Reservado Reservado
Warning word
(parâmetro 16-
92 Warning
Word)
Falha de rede
elétrica
Limite de
Corrente
Perda do
Encoder
Safe Torque
O
Warning word
2
(parâmetro 16
-93 Warning
Word 2)
Reservado Reservado Bypass
Reservado Reservado Reservado
Reservado Reservado FlyStart ativo
Força Contra
Eletro Motriz
muito alta
Reservado Reservado Reservado
Status
word
estendida
(parâmetro 16-
94 Status Word
Estendida)
Reservado
Banco de
dados ocupado
Status
word 2 estendida
(parâmetro 16-95 Est
. Status Word 2)
Advertência de
limpeza do
dissipador de calor
Reservado
8 8
Tabela 8.2 Descrição da Alarm Word, Warning Word e Status Word Estendida
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 55
Page 60

Manutenção, diagnósticos e ...
VLT® Midi Drive FC 280
8.5 Resolução de Problemas
Sintoma Causas prováveis Teste Solução
Parada do LCP
Sinal de partida ausente (prontidão)
Sinal ativo de parada por inércia do
Motor não
funcionando
motor (parada por inércia)
Origem do sinal de referência errada
88
Limite de rotação do motor
Motor girando no
sentido errado
O motor não está
alcançando a
velocidade máxima.
Velocidade do
motor instável
Motor funciona
irregularmente
Motor não freia
Sinal de reversão ativo
Conexão errada das fases do motor Alterar parâmetro 1-06 Sentido Horário.
Limites de frequência congurados
incorretamente
Sinal de entrada de referência não
escalonado corretamente
Possíveis programações do
parâmetro incorretas:
Possível sobremangnetização
Possíveis congurações incorretas
dos parâmetros do freio. Tempos de
desaceleração possivelmente muito
curtos.
Verique se a tecla [O] foi
pressionada.
Verique parâmetro 5-10 Terminal 18
Entrada Digital para corrigir a
conguração do terminal 18 (use a
conguração padrão).
Verique parâmetro 5-12 Terminal 27,
Entrada Digital para corrigir a
conguração do terminal 27 (use a
conguração padrão).
Verique o seguinte:
O sinal de referência é da
•
referência local, remota ou do
barramento?
Referência predenida ativa?
•
Conexão do terminal correta?
•
Escala dos terminais correta?
•
Sinal de referência disponível?
•
Verique se parâmetro 4-10 Sentido de
Rotação do Motor está programado
corretamente.
Verique se há um comando de
reversão programado para o terminal
no grupo do parâmetro 5-1* Entradas
Digitais.
Verique os limites de saída em
parâmetro 4-14 Lim. Superior da Veloc
do Motor [Hz] e
parâmetro 4-19 Freqüência Máx. de
Saída.
Verique a escala do sinal de entrada
de referência no grupo do parâmetro
6-** Modo E/S analógica e no grupo do
parâmetro 3-1* Referências.
Verique as congurações de todos os
parâmetros do motor, inclusive todas
as congurações de compensação do
motor. Para operação em malha
fechada, verique as congurações do
PID.
Verique se há congurações
incorretas do motor em todos os
parâmetros do motor.
Verique os parâmetros do freio.
Verique as congurações do tempo
de rampa.
Pressione [Auto On] ou [Hand On]
(dependendo do modo de operação)
para funcionar o motor.
Aplique um sinal de partida válido
para dar partida no motor.
Aplique 24 V no terminal 27 ou
programe esse terminal para [0] Sem
operação.
Programe as congurações corretas.
Congure a referência predenida
ativa no grupo do parâmetro 3-1*
Referências. Verique a ação correta.
Verique a escala dos terminais.
Verique o sinal de referência.
Programe as congurações corretas.
Desative o sinal de reversão.
Programe os limites corretos.
Programe as congurações corretas.
Verique as congurações no grupo
do parâmetro 6-** Modo E/S analógica.
Verique as congurações do motor
no grupo do parâmetro 1-2* Dados do
Motor, 1-3* Dados Avanç d Motr e 1-5*
Carregar conguração indep.
Verique os grupos do parâmetro
2-0* Freio CC e 3-0* Limits de Referênc.
56 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
Page 61
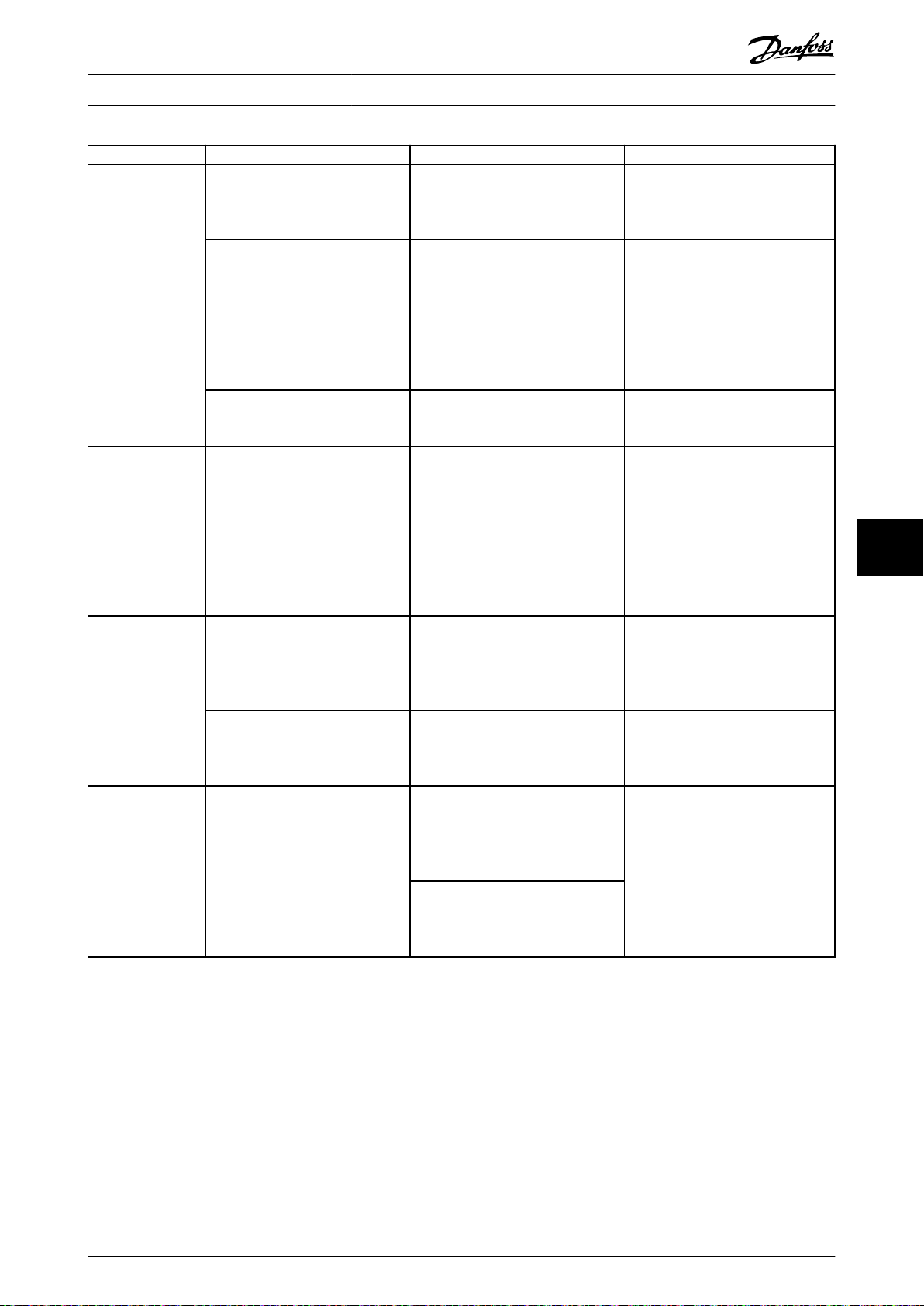
Manutenção, diagnósticos e ... Guia de Operação
Sintoma Causas prováveis Teste Solução
O motor ou o painel ter curto-circuito
Fusíveis de energia
em aberto ou
desarme do
disjuntor
Desbalanceamento
da corrente de rede
elétrica maior que
3%
Desbalanceamento
da corrente do
motor maior que
3%
Ruído acústico ou
vibração (por
exemplo, uma
lâmina do ventilador
está fazendo ruído
ou vibrações em
determinadas
frequências)
Curto entre fases
Sobrecarga do motor
Conexões soltas
Problema com energia da rede
elétrica (consulte a descrição alarme
4 Perda de fases de rede elétrica).
Problema com a unidade do
conversor de frequência
Problema com o motor ou com a
ação do motor.
Problema com a unidade do
conversor de frequência
Ressonâncias, por exemplo, no
sistema motor/ventilador
entre fases. Verique se há curto-
-circuito nas fases do motor e do
painel.
O motor está sobrecarregado para
esta aplicação.
Faça uma vericação de pré-
-energização e procure conexões
soltas.
Gire os cabos de energia de entrada
no conversor de frequência uma
posição: A para B, B para C, C para A.
Gire os cabos de energia de entrada
no conversor de frequência uma
posição: A para B, B para C, C para A.
Gire os cabos de saída do motor uma
posição: U para V, V para W, W para U.
Gire os cabos de saída do motor uma
posição: U para V, V para W, W para U.
Ignore frequências críticas usando
parâmetros do grupo do parâmetro
4-6* Bypass de velocidade.
Desligue a sobre modulação em
parâmetro 14-03 Sobremodulação.
Aumente o amortecimento de
ressonância em
parâmetro 1-64 Amortecimento da
Ressonância.
Elimine qualquer curto-circuito
detectado.
Execute o teste de partida e verique
se a corrente do motor está dentro
das especicações. Se a corrente do
motor exceder a corrente de carga
total indicada na plaqueta de identicação, o motor pode funcionar
apenas com carga reduzida. Revise as
especicações da aplicação.
Aperte as conexões soltas.
Se a perna desbalanceada seguir o
o, é um problema de energia.
Verique a alimentação de rede
elétrica.
Se a perna desbalanceada
permanecer no mesmo terminal de
entrada, trata-se de um problema
com a unidade. Entre em contato
com o fornecedor.
Se a perna desbalanceada
acompanhar o o, o problema está
no motor ou na ação do motor.
Verique o motor e a ação do
motor.
Se a perna desbalanceada
permanecer no mesmo terminal de
saída, o problema está na unidade.
Entre em contato com o fornecedor.
Verique se o ruído e/ou a vibração
foram reduzidos até um limite
aceitável.
8 8
Tabela 8.3 Resolução de Problemas
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 57
Page 62

Especicações
9 Especicações
9.1 Dados Elétricos
VLT® Midi Drive FC 280
Potência no eixo típica do
conversor de frequência [kW (hp)]
Características nominais de proteção do
gabinete IP20 (IP21/Tipo 1 como opção)
Corrente de saída
Potência no eixo [kW] 0,37 0,55 0,75 1,1 1,5 2,2 3
Contínua (3x380–440 V) [A] 1,2 1,7 2,2 3 3,7 5,3 7,2
Contínua (3 x 441-480 V) [A] 1,1 1,6 2,1 2,8 3,4 4,8 6,3
Intermitente (sobrecarga 60 s) [A] 1,9 2,7 3,5 4,8 5,9 8,5 11,5
Contínua kVA (400 V CA) [kVA] 0,9 1,2 1,5 2,1 2,6 3,7 5,0
Contínua kVA (480 V CA) [kVA] 0,9 1,3 1,7 2,5 2,8 4,0 5,2
Corrente de entrada máxima
Contínua (3x380–440 V) [A] 1,2 1,6 2,1 2,6 3,5 4,7 6,3
Contínua (3 x 441-480 V) [A] 1,0 1,2 1,8 2,0 2,9 3,9 4,3
Intermitente (sobrecarga 60 s) [A] 1,9 2,6 3,4 4,2 5,6 7,5 10,1
Mais especicações
Máxima seção transversal do cabo (rede
99
elétrica, motor, freio e load sharing) [mm
(AWG)]
Perda de energia estimada em carga nominal
máxima [W]
Peso, características nominais de proteção do
gabinete metálico IP20 [kg (lb)]
Peso, características nominais de proteção do
gabinete IP21 [kg (lb)]
Eciência [%]
1)
2)
2
PK37
0,37
(0,5)
K1 K1 K1 K1 K1 K1 K2
20,9 25,2 30 40 52,9 74 94,8
2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,5 (5,5) 3,6 (7,9)
4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 5,5 (12,1)
96,0 96,6 96,8 97,2 97,0 97,5 98,0
PK55
0,55
(0,75)
PK75
0,75
(1,0)
P1K1
1,1
(1,5)
4 (12)
P1K5
1,5
(2,0)
P2K2
2,2
(3,0)
P3K0
3,0
(4,0)
Tabela 9.1 Alimentação de rede elétrica 3x380-480 V CA
58 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
Page 63

Especicações Guia de Operação
Potência no eixo típica do
conversor de frequência [kW (hp)]
Características nominais de proteção do
gabinete IP20 (IP21/Tipo 1 como opção)
P4K0
4
(5,5)
K2 K2 K3 K4 K4 K5 K5
P5K5
5,5
(7,5)
P7K5
7,5
(10)
P11K
11
(15)
P15K
15
(20)
P18K
18,5
(25)
P22K
22
(30)
Corrente de saída
Potência no eixo 4 5,5 7,5 11 15 18,5 22
Contínua (3x380–440 V) [A] 9 12 15,5 23 31 37 42,5
Contínua (3 x 441-480 V) [A] 8,2 11 14 21 27 34 40
Intermitente (sobrecarga 60 s) [A] 14,4 19,2 24,8 34,5 46,5 55,5 63,8
Contínua kVA (400 V CA) [kVA] 6,2 8,3 10,7 15,9 21,5 25,6 29,5
Contínua kVA (480 V CA) [kVA] 6,8 9,1 11,6 17,5 22,4 28,3 33,3
Corrente de entrada máxima
Contínua (3x380–440 V) [A] 8,3 11,2 15,1 22,1 29,9 35,2 41,5
Contínua (3 x 441-480 V) [A] 6,8 9,4 12,6 18,4 24,7 29,3 34,6
Intermitente (sobrecarga 60 s) [A] 13,3 17,9 24,2 33,2 44,9 52,8 62,3
Mais especicações
Máxima seção transversal do cabo (rede
elétrica, motor, freio e load sharing) [mm
2
4 (12) 16 (6)
(AWG)]
Perda de energia estimada em carga nominal
máxima [W]
1)
Peso, características nominais de proteção do
gabinete metálico IP20 [kg (lb)]
Características nominais do peso de proteção
do gabinete IP21 [kg (lb)]
Eciência [%]
2)
115,5 157,5 192,8 289,5 393,4 402,8 467,5
3,6 (7,9) 3,6 (7,9) 4,1 (9,0) 9,4 (20,7) 9,5 (20,9) 12,3 (27,1) 12,5 (27,6)
5,5 (12,1) 5,5 (12,1) 6,5 (14,3) 10,5 (23,1) 10,5 (23,1) 14,0 (30,9) 14,0 (30,9)
98,0 97,8 97,7 98,0 98,1 98,0 98,0
9 9
Tabela 9.2 Alimentação de rede elétrica 3x380-480 V CA
Potência no eixo típica do
conversor de frequência [kW (hp)]
Características nominais de proteção do
gabinete IP20 (IP21/Tipo 1 como opção)
PK37
0,37
(0,5)
K1 K1 K1 K1 K1 K2 K3
PK55
0,55
(0,75)
PK75
0,75
(1,0)
P1K1
1,1
(1,5)
P1K5
1,5
(2,0)
P2K2
2,2
(3,0)
P3K7
3,7
(5,0)
Corrente de saída
Contínua (3x200–240 V) [A] 2,2 3,2 4,2 6 6,8 9,6 15,2
Intermitente (sobrecarga 60 s) [A] 3,5 5,1 6,7 9,6 10,9 15,4 24,3
Contínua kVA (230 V CA) [kVA] 0,9 1,3 1,7 2,4 2,7 3,8 6,1
Corrente de entrada máxima
Contínua (3x200–240 V) [A] 1,8 2,7 3,4 4,7 6,3 8,8 14,3
Intermitente (sobrecarga 60 s) [A] 2,9 4,3 5,4 7,5 10,1 14,1 22,9
Mais especicações
Máxima seção transversal do cabo (rede
elétrica, motor, freio e load sharing) [mm
2
4 (12)
(AWG)]
Perda de energia estimada em carga nominal
máxima [W]
1)
Peso, características nominais de proteção do
gabinete metálico IP20 [kg (lb)]
Características nominais do peso de proteção
do gabinete IP21 [kg (lb)]
Eciência [%]
2)
29,4 38,5 51,1 60,7 76,1 96,1 147,5
2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,5 (5,5) 3,6 (7,9)
4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 5,5 (12,1) 6,5 (14,3)
96,4 96,6 96,3 96,6 96,5 96,7 96,7
Tabela 9.3 Alimentação de rede elétrica 3x200-240 V CA
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 59
Page 64

Especicações
VLT® Midi Drive FC 280
Potência no eixo típica do
conversor de frequência [kW (hp)]
Características nominais de proteção do gabinete
IP20 (IP21/Tipo 1 como opção)
Corrente de saída
Contínua (3x200–240 V) [A] 2,2 3,2 4,2 6 6,8 9,6
Intermitente (sobrecarga 60 s) [A] 3,5 5,1 6,7 9,6 10,9 15,4
Contínua kVA (230 V CA) [kVA] 0,9 1,3 1,7 2,4 2,7 3,8
Corrente de entrada máxima
Contínua (1x200–240 V CA) [A] 2,9 4,4 5,5 7,7 10,4 14,4
Intermitente (sobrecarga 60 s) [A] 4,6 7,0 8,8 12,3 16,6 23,0
Mais especicações
Máxima seção transversal do cabo (rede elétrica e
motor) [mm2 (AWG)]
Perda de energia estimada em carga nominal
máxima [W]
Peso, características nominais de proteção do
gabinete metálico IP20 [kg (lb)]
Características nominais do peso de proteção do
gabinete IP21 [kg (lb)]
Eciência [%]
99
Tabela 9.4 Alimentação de rede elétrica 1x200-240 V CA
1) A perda de energia típica é em condições de carga nominais e espera-se que esteja dentro de ±15% (a tolerância está relacionada à variedade
de condições de tensão e cabo).
Os valores são baseados em uma eciência de motor típica (linha divisória de IE2/IE3). Os motores com eciência mais baixa aumentam a perda
de energia no conversor de frequência, e motores com eciência mais alta reduzem a perda.
Aplica-se ao dimensionamento do resfriamento do conversor de frequência. Se a frequência de chaveamento for mais alta que a conguração
padrão, as perdas de energia algumas vezes aumentam. O consumo de energia típico do LCP e do cartão de controle estão incluídos. Outros
opcionais e carga do cliente podem acrescentar até 30 W às perdas (embora normalmente apenas 4 W extras para cartão de controle totalmente
carregado ou eldbus).
Para sabe os dados de perda de energia de acordo com EN 50598-2, consulte www.danfoss.com/vltenergyeciency.
2) Medido usando 50 m (164 pés) de cabos de motor blindados com carga nominal e frequência nominal. Para saber a classe de eciência
energética, consulte capétulo 9.4 Condições ambiente. Para saber as perdas de carga parcial, consulte www.danfoss.com/vltenergyeciency.
1)
2)
PK37
0,37
(0,5)
K1 K1 K1 K1 K1 K2
37,7 46,2 56,2 76,8 97,5 121,6
2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,5 (5,5)
4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 5,5 (12,1)
94,4 95,1 95,1 95,3 95,0 95,4
PK55
0,55
(0,75)
PK75
0,75
(1,0)
4 (12)
P1K1
1,1
(1,5)
P1K5
1,5
(2,0)
P2K2
2,2
(3,0)
Alimentação de Rede Elétrica
9.2
Alimentação de rede elétrica (L1/N, L2/L, L3)
Terminais de alimentação (L1/N, L2/L, L3)
Tensão de alimentação 380–480 V: -15% (-25%)1) a +10%
Tensão de alimentação 200–240 V: -15% (-25%)1) a +10%
1) O conversor de frequência pode funcionar a -25% da tensão de entrada com desempenho reduzido. A potência máxima de
saída do conversor de frequência é de 75% se a tensão de entrada for -25% e 85% se a tensão de entrada for -15%.
O torque total não pode ser esperado em tensão de rede menor que 10% abaixo da tensão de alimentação nominal mais baixa
do conversor de frequência.
Frequência de alimentação 50/60 Hz ±5%
Desbalanceamento máximo temporário entre fases de rede elétrica 3,0% da tensão de alimentação nominal
Fator de potência real (λ) ≥0,9 nominal com carga nominal
Fator de potência de deslocamento (cos ϕ) Unidade próxima (>0,98)
Chaveamento na alimentação de entrada (L1/N, L2/L, L3) (energizações) ≤7.5 kW (10 hp) Máximo 2 vezes/minuto
Chaveamento na alimentação de entrada (L1/N, L2/L, L3) (energizações) 11-22 kW (15-30 hp) Máximo de 1 vez/minuto
60 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
Page 65

Especicações Guia de Operação
9.3 Saída do Motor e dados do motor
Saída do Motor (U, V, W)
Tensão de saída 0–100% da tensão de alimentação
Frequência de saída 0–500 Hz
Frequência de saída no modo VVC
Chaveamento na saída Ilimitado
Tempo de rampa 0,01–3600 s
Características do torque
Torque de partida (torque constante) Máximo 160% durante 60 s
Torque de sobrecarga (torque constante) Máximo 160% durante 60 s
Corrente de partida Máximo 200% durante 1 s
Tempo de subida do torque em VVC+ (independente de fsw) Máximo 50 ms
1) A porcentagem está relacionada ao torque nominal. São 150% para conversores de frequência de 11–22 kW (15–30 hp).
+
0–200 Hz
9.4 Condições ambiente
Condições ambiente
Características nominais de proteção do gabinete metálico, conversor de frequência IP20 (IP21/Tipo 1 como opção)
Características nominais de proteção do gabinete metálico, kit de conversão IP21/Tipo 1
Teste de vibração, todos os tamanhos de gabinete 1,14 g
Umidade relativa 5–95% (IEC 721-3-3; Classe 3K3 (não condensante) durante operação)
Temperatura ambiente (no modo de chaveamento DPWM)
- com derating Máximo de 55 °C (131 °F)
- na corrente de saída constante total Máximo de 45 °C (113 °F)
Temperatura ambiente mínima, durante operação plena 0 °C (32 °F)
Temperatura ambiente mínima em desempenho reduzido -10 °C (14 °F)
Temperatura durante a armazenagem/transporte -25 para +65/70 °C (-13 para +149/158 °F)
Altitude máxima acima do nível do mar, sem derating 1000 m (3280 pés)
Altitude máxima acima do nível do mar, sem derating 3000 m (9243 pés)
EN 61800-3, EN 61000-3-2, EN 61000-3-3, EN 61000-3-11,
Normas de EMC, emissão
Normas de EMC, imunidade
Classe de eciência energética
1) Consulte as Condições Especiais no Guia de design para:
Derating para temperatura ambiente elevada.
•
Derating para alta altitude.
•
2) Para evitar a sobretemperatura do cartão de controle em variantes de PROFIBUS, PROFINET, EtherNet/IP e POWERLINK do VLT
Midi Drive FC 280, evite carga completa de E/S digital/analógica em temperatura ambiente superior a 45 °C (113 °F).
3) A temperatura ambiente para K1S2 com derating é no máximo 50 °C (122 °F).
4) A temperatura ambiente para K1S2 em plena corrente de saída constante é no máximo 40 °C (104 °F).
5) Determinada de acordo com EN50598-2 em:
Carga nominal.
•
90% frequência nominal.
•
Conguração de fábrica da frequência de chaveamento.
•
Conguração de fábrica do padrão de chaveamento.
•
Tipo aberto: Temperatura do ar adjacente 45 °C (113 °F).
•
Tipo 1 (kit NEMA): Temperatura ambiente 45 °C (113 °F).
•
5)
EN 61000-3-12, EN 61000-6-3/4, EN 55011, IEC 61800-3
EN 61800-3, EN 61000-6-1/2, EN 61000-4-2, EN 61000-4-3
EN 61000-4-4, EN 61000-4-5, EN 61000-4-6, EN 61326-3-1
1)2)3)
IE2
®
1)
1)
9 9
4)
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 61
Page 66

Especicações
9.5 Especicações de Cabo
VLT® Midi Drive FC 280
Comprimentos de cabo e seções transversais
Comprimento de cabo de motor máximo, blindado 50 m (164 pés)
Comprimento de cabo de motor máximo, não blindado 75 m (246 pés)
Seção transversal máxima de terminais de controle, o exível/rígido 2,5 mm2/14 AWG
Seção transversal mínima de terminais de controle 0,55 mm2/30 AWG
Comprimento de cabo máximo da entrada de STO, não blindado 20 m (66 pés)
1) Para as seções transversais dos cabos de energia, consulte Tabela 9.1, Tabela 9.2, Tabela 9.3 e Tabela 9.4.
Ao cumprir as normas EN 55011 1A e EN 55011 1B, o cabo do motor deve ser reduzido, em alguns casos. Veja o capítulo 2.6.2
Emissão EMC no Guia de Design VLT
®
1)
Midi Drive FC 280 para obter mais detalhes.
9.6 Entrada/Saída de controle e dados de controle
Entradas digitais
Número do terminal
Lógica PNP ou NPN
Nível de tensão 0–24 V CC
Nível de tensão, lógica 0 PNP <5 V CC
Nível de tensão, lógica 1 PNP >10 V CC
Nível de tensão, lógica 0 NPN >19 V CC
Nível de tensão, lógica 1 NPN <14 V CC
Tensão máxima na entrada 28 V CC
99
Faixa de frequência de pulso 4–32 kHz
Largura de pulso mínima (ciclo útil) 4,5 ms
Resistência de entrada, R
1) O terminal 27 também pode ser programado como saída.
i
18, 19, 271), 29, 32, 33
Aproximadamente 4 kΩ
Entradas de STO
Número do terminal 37, 38
Nível de tensão 0–30 V CC
Nível de tensão, baixo <1.8 V CC
Nível de tensão, alto >20 V CC
Tensão máxima na entrada 30 V CC
Corrente de entrada mínima (cada pino) 6 mA
1) Consulte capétulo 6 Safe Torque O (STO) para obter mais detalhes sobre as entradas de STO.
Entradas Analógicas
Número de entradas analógicas 2
Número do terminal 531), 54
Modos Tensão ou corrente
Seleção do modo Software
Nível de tensão 0–10 V
Resistência de entrada, R
Tensão máxima -15 V a +20 V
Nível de corrente 0/4 a 20 mA (escalonável)
Resistência de entrada, R
Corrente máxima 30 mA
Resolução das entradas analógicas 11 bit
Precisão das entradas analógicas Erro máx. 0,5% do fundo de escala
Largura de banda 100 Hz
As entradas analógicas são isoladas galvanicamente da tensão de alimentação (PELV) e de outros terminais de alta tensão.
1) O terminal 53 suporta somente o modo de tensão e também pode ser usado como entrada digital.
1)
i
i
Aproximadamente 10 kΩ
Aproximadamente 200 Ω
62 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
Page 67

Mains
Functional
isolation
PELV isolation
Motor
DC bus
High
voltage
Control
37
RS485
38
33
130BE837.10
Especicações Guia de Operação
Ilustração 9.1 Isolação Galvânica
AVISO!
ALTITUDES ELEVADAS
Para instalação em altitudes acima de 2.000 m (6562 pés), entre em contato com a linha direta da Danfoss com relação
à PELV.
Entradas de pulso
Entradas de pulso programáveis 2
Número do terminal do pulso 29, 33
Frequência máxima no terminais 29, 33 32 kHz (acionado por push-pull)
Frequência máxima no terminais 29, 33 5 kHz (coletor aberto)
Frequência mínima nos terminais 29, 33 4 Hz
Nível de tensão Consulte a seção sobre entrada digital
Tensão máxima na entrada 28 V CC
Resistência de entrada, R
i
Precisão da entrada de pulso Erro máximo: 0,1% do fundo de escala
Aproximadamente 4 kΩ
9 9
Saídas digitais
Saída digital/pulso programável 2
Número do terminal 27
Nível de tensão na saída de frequência/digital 0–24 V
Corrente de saída máxima (dissipador ou fonte) 40 mA
Carga máxima na saída de frequência 1 kΩ
Carga capacitiva máxima na saída de frequência 10 nF
Frequência de saída mínima na saída de frequência 4 Hz
Frequência de saída máxima na saída de frequência 32 kHz
Precisão da saída de frequência Erro máximo: 0,1% do fundo de escala
Resolução da saída de frequência 10 bits
Número do terminal (consulte os dados em saídas analógicas) 42
Nível de tensão na saída digital 0–17 V
1) O terminal 27 também pode ser programado como entrada.
2) O terminal 42 também pode ser programado como saída analógica.
A saída digital está isolada galvanicamente da tensão de alimentação (PELV) e de outros terminais de alta tensão.
Saídas analógicas
Número de saídas analógicas programáveis 1
Número do terminal 42
Faixa atual na saída analógica 0/4–20 mA
Carga máxima do resistor em relação ao comum na saída analógica 500 Ω
Tensão máxima na saída analógica 17 V
Precisão na saída analógica Erro máximo: 0,8% do fundo de escala
Resolução na saída analógica 10 bits
1) O terminal 42 também pode ser programado como saída digital.
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 63
1)
2)
1)
Page 68

Especicações
A saída analógica está isolada galvanicamente da tensão de alimentação (PELV) e de outros terminais de alta tensão.
Cartão de controle, saída 24 V CC
Número do terminal 12, 13
Carga máxima 100 mA
A alimentação de 24 V CC está isolada galvanicamente da tensão de alimentação (PELV). No entanto, a alimentação tem o
mesmo potencial que as entradas e saídas analógicas e digitais.
Cartão de controle, saída +10 V CC
Número do terminal 50
Tensão de saída 10,5 V ±0,5 V
Carga máxima 15 mA
A alimentação de 10 V CC está isolada galvanicamente da tensão de alimentação (PELV) e de outros terminais de alta tensão.
Cartão de controle, comunicação serial RS485
Número do terminal 68 (P,TX+, RX+), 69 (N,TX-, RX-)
Terminal número 61 Ponto comum dos terminais 68 e 69
O circuito de comunicação serial RS485 é isolado galvanicamente da tensão de alimentação (PELV).
Cartão de controle, comunicação serial USB
Padrão USB 1,1 (velocidade total)
Plugue USB Plugue USB tipo B
A conexão ao PC é realizada por meio de um cabo de USB host/dispositivo.
A conexão USB está isolada galvanicamente da tensão de alimentação (PELV) e de outros terminais de alta tensão.
99
A conexão do terra do USB não está isolada galvanicamente do ponto de aterramento de proteção. Utilize somente laptop
isolado para ligar-se ao conector USB do conversor de frequência.
VLT® Midi Drive FC 280
Saídas do relé
Saídas do relé programáveis 1
Relé 01 01–03 (NC), 01–02 (NO)
Carga do terminal máxima (CA-1)1) em 01–02 (NO) (carga resistiva) 250 V CA, 3 A
Carga do terminal máxima (CA-15)1) em 01-02 (NO) (carga indutiva @ cosφ 0,4) 250 V CA,0,2 A
Carga do terminal máxima (CC-1)1) em 01-02 (NO) (carga resistiva) 30 V CC, 2 A
Carga do terminal máxima (CC-13)1) em 01-02 (NA) (carga indutiva) 24 V CC, 0,1 A
Carga do terminal máxima (CA-1)1) em 01-03 (NC) (carga resistiva) 250 V CA, 3 A
Carga do terminal máxima (CA-15)1) em 01-03 (NC) (carga indutiva @ cosφ 0,4) 250 V CA,0,2 A
Carga do terminal máxima (CC-1)1) em 01-03 (NC) (carga resistiva) 30 V CC, 2 A
Carga do terminal mínima em 01-03 (NC), 01-02 (NO) 24 V CC 10 mA, 24 V CA 20 mA
1) Partes 4 e 5 do IEC 60947.
Os contatos do relé são isolados galvanicamente do resto do circuito por isolação reforçada.
Desempenho do cartão de controle
Intervalo de varredura 1 ms
Características de controle
Resolução da frequência de saída a 0-500 Hz ±0,003 Hz
Tempo de resposta do sistema (terminais 18, 19, 27, 29, 32 e 33) ≤2 ms
Faixa de controle da velocidade (malha aberta) 1:100 da velocidade síncrona
Precisão da velocidade (malha aberta) ±0,5% da velocidade nominal
Precisão da velocidade (malha fechada) ±0,1% da velocidade nominal
Todas as características de controle são baseadas em um motor assíncrono de 4 polos.
64 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
Page 69

Especicações Guia de Operação
9.7 Torques de Aperto de Conexão
Certique-se de usar os torques certos ao apertar todas as conexões elétricas. Torque de aperto muito baixo ou muito alto
às vezes causa problemas de conexão elétrica. Para garantir que os torques corretos sejam aplicados, use um torquímetro. O
tipo de chave de fenda recomendável é SZS 0,6x3,5 mm.
Torque [Nm (pol-lb)]
Tipo de
gabinete
K1
K2
K3 7,5 (10) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
K4
K5
Tabela 9.5 Torques de Aperto
Potência
[kW (hp)]
0,37–2,2
(0,5–3,0)
3,0–5,5
(4,0–7,5)
11–15
(15–20)
18,5–22
(25–30)
Rede elétrica Motor Conexão CC Freio Terra Controle Relé
0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
1,2 (10,6) 1,2 (10,6) 1,2 (10,6) 1,2 (10,6) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
1,2 (10,6) 1,2 (10,6) 1,2 (10,6) 1,2 (10,6) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
9.8 Fusíveis e Disjuntores
Use fusíveis e/ou disjuntores no lado da alimentação para proteger a equipe de manutenção de ferimentos e o
equipamento de danos, caso haja falha do componente dentro do conversor de frequência (primeira falha).
Proteção do circuito de derivação
Proteja todos os circuitos de derivação em uma instalação (incluindo engrenagem de chaveamento e máquinas) contra
curto-circuito e sobrecorrente de acordo com as regulamentações nacionais/internacionais.
AVISO!
A proteção contra curto-circuito de estado sólido integrado não fornece proteção do circuito de derivação. Forneça
proteção do circuito de derivação de acordo com as normas e regulamentações nacionais e locais aplicáveis.
Tabela 9.6 indica os fusíveis e disjuntores recomendados que foram testados.
CUIDADO
RISCO DE FERIMENTOS PESSOAIS E DANOS AO EQUIPAMENTO
Mau funcionamento ou falha em seguir as recomendações pode resultar em risco pessoal e danos ao conversor de
frequência e a outros equipamentos.
Selecione os fusíveis de acordo com as recomendações. Possíveis danos podem ser limitados a estar dentro do
•
conversor de frequência.
AVISO!
DANOS NO EQUIPAMENTO
O uso de fusíveis e/ou disjuntores é obrigatório para garantir estar em conformidade com a IEC 60364 da CE. A falha
em seguir as recomendações de proteção pode resultar em danos no conversor de frequência.
9 9
Danfoss recomenda usar os fusíveis e disjuntores em Tabela 9.6 e Tabela 9.7 para garantir a conformidade com a UL 508C ou
a IEC 61800-5-1. Para aplicações que não sejam UL, projete disjuntores para proteção em um circuito capaz de fornecer um
máximo de 50.000 A
conversor de frequência (SCCR) são adequadas para uso em um circuito capaz de fornecer não mais do que 100.000 A
máximo 240 V/480 V quando protegido por fusíveis Classe T.
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 65
(simétrico), máximo de 240 V/400 V. As características nominais da corrente em curto-circuito do
rms
rms
, no
Page 70

Especicações
VLT® Midi Drive FC 280
Tamanho do gabinete metálico Potência [kW (hp)] Fusível não UL
0,37 (0,5)
0,55–0,75
K1
Trifásico de 380-480 V
Trifásico de 200-240 V
99
Monofásico de 200-240 V
K2
K3 7,5 (10) PKZM0-25
K4
K5
K1
K2 2,2 (3,0)
K3 3,7 (5,0) PKZM0-25
K1
K2 2,2 (3,0) gG-25 PKZM0-20
(0,75–1,0)
1,1–1,5
(1,5–2,0)
2,2 (3,0)
3,0–5,5
(4,0–7,5)
11–15
(15–20)
18,5–22
(25–30)
0,37 (0,5) gG-10
0,55 (0,75)
0,75 (1,0)
1,1 (1,5)
1,5 (2,0)
0,37 (0,5) gG-10
0,55 (0,75)
0,75 (1,0)
1,1 (1,5)
1,5 (2,0)
gG-10
gG-20
gG-25
gG-50 –
gG-80 –
gG-20
gG-25
gG-20
Disjuntor não UL
(Eaton)
PKZM0-16
PKZM0-20
PKZM0-16
PKZM0-20
PKZM0-16
Tabela 9.6 Disjuntor e fusível não UL
66 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
Page 71

Especicações Guia de Operação
Tamanho do
gabinete metálico
K1
Trifásico
380–480 V
Trifásico
200–240 V
Monofásico
de 200-240
K2–K3
K4
K5
K1
K2–K3
K1
V
K2 2,2 (3,0)
Potência
[kW (hp)]
0,37–0,75
(0,5–1,0)
1,1–1,5
(1,5–2,0)
2,2 (3,0) KTS-R-15 JKS-15 JJS-15 FNQ-R-15 KTK-R-15 LP-CC-15 KLSR-15 ATM-R15 A6K-15R
3,0–7,5
(4,0–10)
11–15
(15–20)
18,5–22
(25–30)
0,37 (0,5) KTN-R-6 JKS-6 JJN-6 FNQ-R-6 KTK-R-6 LP-CC-6 KLNR-6 ATM-R6 A2K-6R
0,55 (0,75)
0,75 (1,0)
1,1–1,5
(1,5–2,0)
2,2–3,7
(3,0–5,0)
0,37 (0,5) KTN-R-6 JKS-6 JJN-6 FNQ-R-6 KTK-R-6 LP-CC-6 KLNR-6 ATM-R6 A2K-6R
0,55 (0,75)
0,75 (1,0)
1,1–1,5
(1,5–2,0)
Classe
KTS-R-6 JKS-6 JJS-6 FNQ-R-6 KTK-R-6 LP-CC-6 KLSR-6 ATM-R6 A6K-6R
KTS-R-10 JKS-10 JJS-10 FNQ-R-10 KTK-R-10 LP-CC-10 KLSR-10 ATM-R10 A6K-10R
KTS-R-25 JKS-25 JJS-25 FNQ-R-25 KTK-R-25 LP-CC-25 KLSR-25 ATM-R25 A6K-25R
KTS-R-50 JKS-50 JJS-50 – – – KLSR-50 – A6K-50R
KTN-
-R-10
KTN-
-R-15
KTN-
-R-20
KTN-
-R-25
KTN-
-R-10
KTN-
-R-15
KTN-
-R-20
KTN-
-R-25
Classe J Classe T
RK1
– JKS-80 JJS-80 – – – – – –
JKS-10 JJN-10 FNQ-R-10 KTK-R-10 LP-CC-10 KLNR-10 ATM-R10 A2K-10R
JKS-15 JJN-15 FNQ-R-15 KTK-R-15 LP-CC-15 KLNR-15 ATM-R15 A2K-15R
JKS-20 JJN-20 FNQ-R-20 KTK-R-20 LP-CC-20 KLNR-20 ATM-R20 A2K-20R
JKS-25 JJN-25 – – – KLNR-25 ATM-R25 A2K-25R
JKS-10 JJN-10 FNQ-R-10 KTK-R-10 LP-CC-10 KLNR-10 ATM-R10 A2K-10R
JKS-15 JJN-15 FNQ-R-15 KTK-R-15 LP-CC-15 KLNR-15 ATM-R15 A2K-15R
JKS-20 JJN-20 FNQ-R-20 KTK-R-20 LP-CC-20 KLNR-20 ATM-R20 A2K-20R
JKS-25 JJN-25 – – – KLNR-25 ATM-R25 A2K-25R
Bussmann E4273
Classe
CC
Classe CC
ClasseCCClasse
Littelfuse
E81895
RK1
MERSEN
E163267/
E2137
Classe CC Classe RK1
MERSEN
E163267/
E2138
9 9
Tabela 9.7 Fusível UL
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 67
Page 72

Especicações
VLT® Midi Drive FC 280
9.9 Tamanhos do gabinete metálico, valor nominal da potência e dimensões
Tamanho do
Tamanho da
potência [kW
(hp)]
Dimensões
[mm (pol)]
99
Peso
[kg (lb)]
Furação de
montagem
[mm (pol)]
gabinete
metálico
Monofásico
200–240 V
Trifásico
200–240 V
Trifásico
380–480 V
Altura A1 210 (8,3) 272,5 (10,7)
Altura A2 278 (10,9) 340 (13,4)
Largura B 75 (3,0) 90 (3,5) 115 (4,5) 133 (5,2) 150 (5,9)
Profundidade C 168 (6,6) 168 (6,6) 168 (6,6) 245 (9,6) 245 (9,6)
Altura A 338,5 (13,3) 395 (15,6)
Largura B 100 (3,9) 115 (4,5) 130 (5,1) 153 (6,0) 170 (6,7)
Profundidade C 183 (7,2) 183 (7,2) 183 (7,2) 260 (10,2) 260 (10,2)
Altura A 294 (11,6) 356 (14)
Largura B 75 (3,0) 90 (3,5) 115 (4,5) 133 (5,2) 150 (5,9)
Profundidade C 168 (6,6) 168 (6,6) 168 (6,6) 245 (9,6) 245 (9,6)
IP20 2,5 (5,5) 3,6 (7,9)
IP21 4,0 (8,8) 5,5 (12,1)
a 198 (7,8) 260 (10,2)
b 60 (2,4) 70 (2,8) 90 (3,5) 105 (4,1) 120 (4,7)
c 5 (0,2) 6,4 (0,25)
d 9 (0,35) 11 (0,43) 11 (0,43) 12,4 (0,49) 12,6 (0,5)
e 4,5 (0,18) 5,5 (0,22)
f 7,3 (0,29) 8,1 (0,32)
0,37
(0,5)
0,37
(0,5)
0,37
(0,5)
0,55
(0,75)
0,55
(0,75)
0,55
(0,75)
FC 280 com tampa de entrada do cabo inferior (sem tampa superior)
K1 K2 K3 K4 K5
0,75
(1,0)
0,75
(1,0)
0,75
(1,0)
1,1
(1,5)
1,1
(1,5)
1,1
(1,5)
FC 280 com kit IP21/UL/Tipo 1
1,5
(2,0)
1,5
(2,0)
1,5
(2,0)
FC 280 IP20
2,2
(3,0)
3
(4,0
)
2,2
(3,0)
2,2
(3,0)
4
(5,5)
5,5
(7,5)
– – –
3,7
(5,0)
7,5
(10)11(15)15(20)
272,5
(10,7)
341,5
(13,4)
395
(15,6)
357
(14,1)
4,6
(10,1)
6,5
(14,3)
260
(10,2)
6,5
(0,26)
5,5
(0,22)
9,2
(0,36)
– –
317,5
(12,5)
379,5
(14,9)
425 (16,7) 520 (20,5)
391 (15,4) 486 (19,1)
8,2 (18,1) 11,5 (25,4)
10,5 (23,1) 14,0 (30,9)
297,5
(11,7)
8 (0,32) 7,8 (0,31)
6,8 (0,27) 7 (0,28)
11 (0,43) 11,2 (0,44)
18,5
(25)22(30)
410 (16,1)
474 (18,7)
390 (15,4)
Tabela 9.8 Tamanhos do gabinete metálico, valor nominal da potência e dimensões
68 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
Page 73

130BE844.11
B
C
A1
A2
130BE846.10
B
A
C
Especicações Guia de Operação
Ilustração 9.2 Padrão com placa de desacoplamento
9 9
Ilustração 9.3 Padrão com tampa de entrada do cabo inferior (sem tampa superior)
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 69
Page 74

B
C
A
130BE845.10
C
a
b
130BA648.12
f
e
B
A
a
d
e
b
c
Especicações
VLT® Midi Drive FC 280
99
Ilustração 9.4 Padrão com kit IP21/UL/Tipo 1
Ilustração 9.5 Furação de montagem na parte superior e
inferior.
70 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
Page 75

Apêndice Guia de Operação
10 Apêndice
10.1 Símbolos, abreviações e convenções
°C
°F
CA Corrente alternada
AEO Otimização Automática de Energia
AWG American wire gauge
AMA Adaptação automática do motor
CC Corrente contínua
EMC Compatibilidade eletromagnética
ETR Relé térmico eletrônico
f
M,N
FC Conversor de frequência
I
INV
I
LIM
I
M,N
I
VLT,MAX
I
VLT,N
IP Proteção de entrada
LCP Painel de controle local
MCT Motion Control Tool
MM Módulo de memória
MMP Programador do módulo de memória
n
s
P
M,N
PELV Tensão extra baixa protetiva
PCB Placa de circuito Impresso
Motor PM Motor de ímã permanente
PUD Dados da unidade de potência
PWM Modulação por largura de pulso
RPM Rotações por minuto
SIVP Valores de inicialização e proteção especícos
STO Safe Torque O
T
LIM
U
M,N
Graus centígrados
Graus fahrenheit
Frequência do motor nominal
Corrente nominal de saída do inversor
Limite de Corrente
Corrente nominal do motor
Corrente de saída máxima
Corrente de saída nominal fornecida pelo conversor de frequência
Velocidade do motor síncrono
Potência do motor nominal
Limite de torque
Tensão do motor nominal
10 10
Tabela 10.1 Símbolos e abreviações
Convenções
Para ilustrações, todas as dimensões são em [mm
•
10.2 Estrutura de Menu dos Parâmetros
(pol)].
Um asterisco (*) indica a conguração padrão de
•
um parâmetro.
Listas numeradas indicam os procedimentos.
•
As listas de itens indicam outras informações.
•
O texto em itálico indica:
•
- Referência cruzada.
- Link.
- Nome do parâmetro.
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 71
Page 76

Apêndice
VLT® Midi Drive FC 280
motor
[1] Inverso
1-08 Largura de banda do controle do
*[0] Normal
0 - 999999.99 CustomReadoutUnit *0
CustomReadoutUnit
0-32 Valor Máx. Leitura Personalizada
0-31 Valor Mín. Leitura Personalizada
[0] Alto
[1] Médio
[2] Baixo
[3] Adaptativo 1
0 - 0 *
*100 CustomReadoutUnit
0.0 - 999999.99 CustomReadoutUnit
0-37 Texto do Display 1
[4] Adaptativo 2
1-1* Seleção do motor
0 - 0 *
0-38 Texto do Display 2
[3] PM, IPM saliente, Sat
*[0] Assíncrono
[1] PM, SPM não saliente
1-10 Construção do Motor
0 - 0 *
0-39 Texto do Display 3
0-4* Teclado do LCP
0-40 Tecla [Hand on] (Manual ligado) do
0-24 Linha de Display 3 Grande
LCP
[0] Disabled (Desativado)
Mesmas escolhas com 0-20
0-3* Leitura Personalizada LCP
LCP
[0] Disabled (Desativado)
*[1] Ativado
0-42 Tecla [Auto on] (Automático Ligado) do
0-30 Unidade de Leitura Personalizada
[0] Nenhum
*[1] %
[5] PPM
*[1] Ativado
0-44 Tecla [O/Reset] do LCP
[10] 1/min
[11] RPM
[0] Disabled (Desativado)
*[1] Ativado
[20] l/s
[12] Pulsos/s
[7] Ativar somente Reset
[21] l/min
0 - 999 *0
[4] Copiar de setup 4
[9] Copiar do Setup de fábrica
*[0] Sem cópia
[25] m³/h
[30] kg/s
[31] kg/min
[32] kg/h
[33] t/min
[34] t/h
[22] l/h
[23] m³/s
[24] m³/min
[40] m/s
[41] m/min
[45] m
0-6* Senha
0-60 Senha do Menu Principal
1-** Carga e Motor
1-0* Congurações Gerais
1-00 Modo Conguração
*[0] Malha Aberta
[1] Velocidade da malha fechada
[2] Malha fechada de torque
[3] Malha Fechada de Processo
[60] °C
[70] mbar
[71] bar
[72] Pa
[73] kPa
[74] m WG
[80] kW
[120] GPM
[122] galão/min
[121] galão/s
[123] galão/h
[3] Copiar de setup 3
[1] Copiar de setup 1
[2] Copiar de setup 2
0-51 Cópia do Setup
*[0] Sem cópia
[2] Todos do LCP
[3] Independente de tamanho de LCP
[1] Todos para o LCP
0-5* Copiar/Salvar
0-50 Cópia via LCP
[0] U/f
*[1] VVC+
1-03 Características do Torque
*[0] Torque constante
[1] Torque variável
[2] Otim. Autom. Energia TC
[171] lb/pol2
[172] pol WG
[173] pés WG
1-06 Sentido Horário
[180] HP
1-01 Princípio de Controle do Motor
[7] Velocidade do PID estendido OL
[4] Torque, malha aberta
[124] CFM
[127] pé cúbico/h
[160] °F
[170] psi
[140] pés/s
[141] pés/min
1010
Mesmas escolhas com 0-20
Mesmas escolhas com 0-20
Processo
Mesmas escolhas com 0-20
[1665] Saída analógica 42 [mA]
[1664] Entrada analógica 54
-2147483647 - 2147483647 *0
0-16 Seleção da Aplicação
0-** Operação/Display
0-0* Congurações Básicas
[1668] Entrada de pulso 33 [Hz]
[1666] Saída Digital
[1667] Entrada de pulso 29 [Hz]
[2] Local/Remoto
*[0] Nenhum
[1] Malha fechada de processo simples
0-01 Idioma
*[0] Inglês
[1] Alemão
[1669] Saída de pulso 27 [Hz]
[3] Malha Aberta Veloc.
[2] Francês
[1671] Saída do relé
[1672] Contador A
[5] Várias velocidades
[4] Malha fechada de velocidade simples
[3] Dinamarquês
[4] Espanhol
[1673] Contador B
[1674] Prec. Parar Contador
[6] OGD LA10
[7] OGD V210
[5] Italiano
[28] Português brasileiro
[1684] Comunicação Opcional STW
[1680] CTW 1 do Fieldbus
[1682] REF 1 do Fieldbus
[8] Guincho
0-2* Display do LCP
0-20 Linha de Display 1,1 Pequeno
[0] RPM
*[1] Hz
0-02 Unidade de velocidade do motor
[1685] CTW 1 da Porta do FC
[1686] REF 1 da Porta do FC
[1690] Alarm Word
[38] Texto do Display 2
[0] Nenhum
[37] Texto do Display 1
0-03 Congurações Regionais
[1] América do Norte
[0] Internacional
[1692] Warning Word
[1691] Alarm Word 2
[39] Texto do Display 3
[748] Feed Forward do PCD
[0] Retomar
0-04 Estado Operacional na Energização
[1693] Warning Word 2
[1694] Ext. Status Word
[953] Warning Word do Probus
[1005] Leitura do Contador de Erros de
*[1] Parad forçd,ref=ant.
[2] Parada forçada, ref=0
[1697] Alarm Word 3
[1698] Warning Word 3
[1695] Ext. Status Word 2
Recepção
Transmissão
[1006] Leitura do Contador de Erros de
[1] 200-240 V/50 Hz/Delta
0-06 Tipo de Grade
[0] 200-240 V/50 Hz/grade de TI
[1890] Erro do PID de Processo
[1230] Parâmetro de Advertência
[2] 200-240 V/50 Hz
[1891] Saída do PID de Processo
[1501] Horas de Funcionamento
[10] 380-440 V/50 Hz/grade de TI
[1892] Saída Presa do PID de Processo
[1502] Medidor de kWh
[11] 380-440 V/50 Hz/Delta
[1893] Ganho escalonado de Saída do PID de
[1600] Control Word
[1601] Referência [Unidade]
[12] 380-440 V/50 Hz
[20] 440-480 V/50 Hz/grade de TI
[3401] PCD 1 gravar para aplicação
[2118] Feedback Ext. 1 [Unidade]
[2119] Saída Ext. 1 [%]
[2117] Referência Ext. 1[Unidade]
[1609] Leitura Personalizada
[1603] Status Word
[1605] Valor Real Principal [%]
*[1602]Referência [%]
[101] 200-240 V/60 Hz/Delta
[21] 440-480 V/50 Hz/Delta
[22] 440-480 V/50 Hz
[100] 200-240 V/60 Hz/grade de TI
[3403] PCD 3 gravar para aplicação
[3404] PCD 4 gravar para aplicação
[3402] PCD 2 gravar para aplicação
[1612] Tensão do Motor
[1610] Potência [kW]
[1611] Potência [hp]
[111] 380-440 V/60 Hz/Delta
[110] 380-440 V/60 Hz/grade de TI
[102] 200-240 V/60 Hz
[3406] PCD 6 gravar para aplicação
[3407] PCD 7 gravar para aplicação
[3405] PCD 5 gravar para aplicação
[1615] Frequência [%]
[1613] Freqüência
[1614] Corrente do Motor
[121] 440-480 V/60 Hz/Delta
[120] 440-480 V/60 Hz/grade de TI
[112] 380-440 V/60 Hz
[3408] PCD 8 gravar para aplicação
[3409] PCD 9 gravar para aplicação
[3410] PCD 10 gravar para aplicação
[1618] Térmico Calculado do Motor
[1616] Torque [Nm]
[1617] Velocidade [RPM]
0-07 Frenagem CC automática
[0] O (Desligado)
[122] 440-480 V/60 Hz
[3423] PCD 3 ler para aplicação
[3422] PCD 2 ler para aplicação
[3421] PCD 1 ler para aplicação
[1620] Ângulo do Motor
[1622] Torque [%]
[1630] Tensão do Barramento CC
0-10 Conguração Ativa
*[1] On
0-1* Operações de Setup
[3424] PCD 4 ler para aplicação
[3425] PCD 5 ler para aplicação
[3426] PCD 6 ler para aplicação
[1635] Térmico do Inversor
[1634] Temperatura do Dissipador de Calor
[1633] Energia do Freio /2 min
*[1] Setup 1
[2] Setup 2
[3] Setup 3
[3427] PCD 7 ler para aplicação
[3428] PCD 8 ler para aplicação
[3429] PCD 9 ler para aplicação
[1638] Estado do Controlador do SL
[1637] Inv. Corrente máx.
[1636] Inv. Nom. Corrente
[4] Setup 4
[9] Setup Múltiplo
0-11 Setup de Programação
[3430] PCD 10 ler para aplicação
[3450] Posição Real
[3456] Erro de Track
0-21 Linha de Display 1,2 Pequeno
[1652] Feedback[Unidade]
[1653] Referência do DigiPot
[1650] Referência Externa
[1639] Temperatura do Cartão de Controle
[1] Setup 1
[2] Setup 2
[3] Setup 3
[4] Setup 4
[1657] Feedback [rpm]
*[9] Conguração Ativa
0-22 Linha de Display 1,3 Pequeno
[1660] Entrada digital
[1661] Programação do Terminal 53
[0] Não conectado
0-12 Setups de conexão
0-23 Linha de Display 2 Grande
[1662] Entrada analógica 53
*[20] Conectado
[1663] Programação do Terminal 54
0-14 Leitura: Editar Setups / Canal
72 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
Page 77

Apêndice Guia de Operação
Ponto de Inexão
[12] Pulsos/s
[20] l/s
[21] l/min
[22] l/h
[23] m³/s
[24] m³/min
[25] m³/h
[30] kg/s
[31] kg/min
[32] kg/h
2-39 Feedback mecânico Freio com dir.
*[0] OFF (Desligada)
[1] ON
[2] LIGADO com retardo de partida
3-** Referência/Rampas
3-0* Limites de Ref.
3-00 Faixa de Referência
*[0] Mín - Máx
[1] -Máx até +Máx
3-01 Unidade da Referência/Feedback
[0] Nenhum
[1] %
[2] RPM
[3] Hz
[4] Nm
[5] PPM
[10] 1/min
[33] t/min
[34] t/h
[40] m/s
[41] m/min
[45] m
[60] °C
[70] mbar
[71] bar
[72] Pa
[73] kPa
[74] m WG
[80] kW
[120] GPM
[121] galão/s
[122] galão/min
[123] galão/h
[124] CFM
[125] pé cúbico/s
[126] pé cúbico/min
[127] pé cúbico/h
[130] lb/s
[131] lb/min
[132] lb/h
[140] pés/s
[141] pés/min
[145] pé
[171] lb/pol2
[150] lb pé
[172] pol WG
[160] °F
[170] psi
*[0] Sem proteção
[1] Advertência do termistor
0,001 - 0,05 s *0,005 s
1-66 Corrente Mínima em Baixa Velocidade
0,0 - 9999,00 Ohm *Relacionado ao
[4] Desarme do ETR 1
[2] Desrm por Termistor
[3] Advertência do ETR 1
0 - 120 % *50 %
1-70 Modo de Partida
1-7* Ajustes da Partida
tamanho
0 - 65535 mH *Relacionado ao
1-93 Fonte do Termistor
*[0] Nenhum
[22] Desarme do ETR - Detecção estendida
[1] Estacionamento
1-71 Retardo de Partida
*[0] Detecção de Rotor
0,000 - 65535 mH *Relacionado ao
tamanho
[3] Entrada digital 18
[2] Entrada analógica 54
[1] Entrada analógica 53
0 - 10 s *0 s
1-72 Função Partida
[0] Retenção CC/tempo de atraso
tamanho
2 - 100 *Relacionado ao tamanho
[4] Entrada digital 19
[1] Freio CC/tempo de atraso
[5] Entrada digital 32
[6] Entrada digital 33
[3] Vel partid horár
*[2] Parada por inércia/tempo de atraso
1 - 9000 V *Relacionado ao tamanho
2-** Freios
[4] Funcion.na horizntl
2-0* Freio CC
[5] Sentido horário VVC+
0 - 100 m *50 m
0 - 500 V *0 V
2-16 Freio CA, Corrente máxima
2-14 Redução da tensão de frenagem
0 - 160 % *100 %
2-17 Controle de Sobretensão
*[0] Disabled (Desativado)
0,1 - 60 s *3 s
0 - 150 % *50 %
0 - 160 % *50 %
-aquecimento do Motor
2-00 Retenção CC/Corrente de Pré-
0 - 60 s *10 s
2-02 Tempo de Frenagem CC
2-01 Corrente de Freio CC
0 - 150 % *100 %
0 - 500 Hz *0 Hz
2-04 Velocidade de ativação do freio CC
2-07 Tempo de Estacionamento
2-06 Corrente de Estacionamento
2-1* Funções do Freio
2-10 Função de Frenagem
*[0] O (Desligado)
[1] Resistor de frenagem
[2] Freio CA
2-11 Resistor do Freio (ohm)
0 - 6200 Ohm *Relacionado ao
0,001 - 2000 kW *Relacionado ao
tamanho
2-12 Limite da Potência de Frenagem (kW)
tamanho
0 - 200 % *100 %
0 - 100 A *0 A
[2] Ativado
2-19 Ganho de Sobretensão
[1] Ativado (não em stop)
2-2* Freio Mecânico
2-20 Corrente de Liberação do Freio
0 - 5 s *0 s
0 - 400 Hz *0 Hz
2-22 Velocidade de Ativação do Freio [Hz]
2-23 Atraso de Ativação do Freio
mecânica avançada)
2-3* Avançado Mech Brake (Frenagem
10 10
0 - 10 s *5 s
Compressor para Desarme
compressor [Hz]
0 - 500,0 Hz *Relacionado ao tamanho
1-79 Tempo Máximo de Partida do
1-78 Velocidade máxima de partida do
1-76 Corrente de Partida
[2] Sempre Ativo
[4] Ativar sempre ref. Dir.
[3] Ref.ativada Dir.
tamanho
0 - 65535 mH *Relacionado ao
1-75 Frequências de Partida [Hz]
tamanho
0 - 65535 mH *Relacionado ao
[1] Retenção CC/Pré-aquecimento do
1-80 Função na Parada
*[0] Parada por inércia
1-8* Ajustes de Parada
20 - 200 % *100 %
20 - 200 % *100 %
20 - 200 % *100 %
Zero
0 - 300 % *100 %
1-73 Flying Start
*[0] Disabled (Desativado)
[1] Ativado
pés
0 - 328 pés *164 pés
motor
[3] Pré-magnetização
Normal [Hz]
0,1 - 10,0 Hz *1 Hz
Parada [rpm]
1-82 Velocidade Mínima para Função na
0 - 1000 V *Relacionado ao tamanho
0 - 20 Hz *0 Hz
1-83 Função de Parada Precisa
0 - 500,0 Hz *Relacionado ao tamanho
*[0] Parada precisa de rampa
[1] Contador de paradas com reset
[2] Contador de paradas sem reset
[3] Parada compensada por velocidade
[4] Contador de paradas compensadas por
Velocidade
0 - 300 % *100 %
velocidade com reset
Velocidade
0 - 500 Hz *0 Hz
0 - 1000 A *Relacionado ao tamanho
[5] Contador de paradas compensadas por
0 - 300 % *100 %
velocidade sem reset
0 - 999999999 *100000
1-84 Valor do Contador de Parada Precisa
-400 - 400,0 % *Relacionado ao
tamanho
1-85 Atraso de Compensação de Velocidade
Parada Precisa
de Escorregamento
0 - 100 ms *10 ms
0,05 - 5 s *0,1 s
1,0 - 2,0 *1,4
1-88 Ganho do freio CA
1-9* Temper. do Motor
1-90 Proteção Térmica do Motor
0 - 500 % *100 %
cimento da Ressonância
1-35 Reatância Principal (Xh)
1-14 Ganho de Amortecimento
0 - 250 % *120 %
1-37 Indutância do eixo-d (Ld)
Velocidade
1-15 Constante de Tempo do Filtro de Baixa
1-38 Indutância do eixo-q (Lq)
Velocidade
0,01 - 20 s *Relacionado ao tamanho
1-16 Constante de Tempo do Filtro de Alta
1-39 Polos do Motor
tensão
0,01 - 20 s *Relacionado ao tamanho
1-17 Constante de tempo do ltro de
1-4* Avançado Dados do Motor II
1-40 Força Contra Eletro Motriz a 1000 rpm
0,001 - 1 s *Relacionado ao tamanho
1-2* Dados do Motor
1-20 Potência do Motor
1-44 Sat. da Indutância do eixo-d (LdSat)
1-43 Comprimento de cabo de motor em
1-42 Comprimento de cabo de motor
[7] 0,75 kW - 1 hp
[8] 1,1 kW - 1,5 hp
[9] 1,5 kW - 2 hp
[5] 0,37 kW - 0,5 hp
[6] 0,55 kW - 0,75 hp
[4] 0,25 kW - 0,33 hp
[2] 0,12 kW - 0,16 hp
[3] 0,18 kW - 0,25 hp
[10] 2,2 kW - 3 hp
1-46 Ganho de Detecção de Posição
1-45 Sat. da Indutância do eixo-q (LqSat)
[14] 5,5 kW - 7,5 hp
[15] 7,5 kW - 10 hp
[11] 3 kW - 4 hp
[12] 3,7 kW - 5 hp
[16] 11 kW - 15 hp
[13] 4 kW - 5,4 hp
1-5* Conguração de carga independente
[19] 22 kW - 30 hp
[20] 30 kW - 40 hp
[17] 15 kW - 20 hp
[18] 18,5 kW - 25 hp
1-50 Magnetização do Motor à Velocidade
50 - 1000 V *Relacionado ao tamanho
1-23 Frequência do Motor
1-22 Tensão do Motor
1-52 Velocidade Mínima de Magnetização
20 - 500 Hz *Relacionado ao tamanho
1-24 Corrente do Motor
1-55 Característica U/f - U
tamanho
0,01 - 1000,00 A *Relacionado ao
1-56 Característica U/f - F
50 - 60000 RPM *Relacionado ao
1-25 Velocidade Nominal do Motor
1-6* Depend. da Carga Conguração
1-60 Compensação de Carga de Baixa
tamanho
0,1 - 10000,0 Nm *Relacionado ao
tamanho
1-26 Motor Cont. Torque Nominal
1-62 Compensação de Escorregamento
1-61 Compensação de Carga de Alta
0,0 - 9999.000 Ohm *Relacionado ao
*[0] O (Desligado)
1-29 Adaptação Automática do Motor (AMA)
[1] Ativar AMA completa
[2] Ativar AMA reduzida
1-3* Avançado Dados do Motor I
1-30 Resistência do Estator (Rs)
1-64 Amortecimento da Ressonância
1-63 Constante de Tempo de Compensação
tamanho
0 - 9999.000 Ohm *Relacionado ao
tamanho
1-31 Resistência do Rotor (Rr)
1-33 Reatância Parasita do Estator (X1)
1-65 Constante de Tempo de Amorte -
tamanho
0,0 - 9999.000 Ohm *Relacionado ao
1-49 Corrente na indutância mín. do eixo q
1-48 Corrente na indutância mín. do eixo d
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 73
Page 78

Apêndice
VLT® Midi Drive FC 280
[163] Pos. Idx Bit1
5-01 Modo do Terminal 27
[164] Pos. Idx Bit2
*[0] Entrada
[171] Limite do interruptor sentido horário
[1] Saída
inverso
5-1* Entradas Digitais
[172] Limite do interruptor sentido anti-
5-10 Terminal 18 Entrada Digital
-horário inverso
5-11 Terminal 19 Entrada Digital
[1] Reinicializar
[0] Sem operação
Mesmas escolhas com 5-10
[2] Paradp/inérc,reverso
5-12 Terminal 27 Entrada Digital
[3] Parada por inércia e reinicio, inverso
[0] Sem operação
[1] Reinicializar
[5] Freio CC, inversão
[4] Parada rápida por inércia inversa
[2] Paradp/inérc,reverso
[6] Parada por inércia inversa
[3] Parada por inércia e reinicio, inverso
*[8] Partida
[4] Parada rápida por inércia inversa
[9] Partida por pulso
[5] Freio CC, inversão
[6] Parada por inércia inversa
[10] Reversão
[11] Partida em reversão
[8] Partida
[12] Ativar partida direta
[9] Partida por pulso
[13] Ativar partida reversa
[10] Reversão
[11] Partida em reversão
[14] Jog
[15] Referência predenida on (ligada)
[12] Ativar partida direta
[16] Ref predenida bit 0
[13] Ativar partida reversa
[17] Ref. predenida bit 1
[14] Jog
[18] Referência predenida bit 2
[15] Referência predenida on (ligada)
[16] Ref predenida bit 0
[19] Congelar referência
[20] Congelar frequência de saída
[17] Ref. predenida bit 1
[21] Aceleração
[18] Referência predenida bit 2
[22] Desaceleração
[19] Congelar referência
[23] Seleção do setup bit 0
[20] Congelar frequência de saída
[24] Seleção do setup bit 1
[21] Aceleração
[26] Parada por inércia inversa precisa
[22] Desaceleração
[27] Partida precisa, parada
[24] Seleção do setup bit 1
[23] Seleção do setup bit 0
[28] Catch-up
[29] Redução de velocidade
[28] Catch-up
[29] Redução de velocidade
[35] Bit 1 da rampa
[34] Bit 0 da rampa
[34] Bit 0 da rampa
[35] Bit 1 da rampa
[41] Parad inv prec puls
[40] Partida precisa travada
[45] Partida reversa por pulso
[45] Partida reversa por pulso
[63] Contador B (cresc)
[63] Contador B (cresc)
[64] Contador B (decresc)
[64] Contador B (decresc)
[72] Erro do PID inv.
[65] Reinicializar o contador B
[72] Erro do PID inv.
[65] Reinicializar o contador B
[56] Diminuição do Digipot
[56] Diminuição do Digipot
[57] Limpar digipot
[60] Contador A (cresc)
[62] Reset Contador A
[61] Contador A (decresc)
[58] Içam. DigiPot
[60] Contador A (cresc)
[55] Aumento do DigiPot
[51] Bloqueio externo
[51] Bloqueio externo
[55] Aumento do DigiPot
[62] Reset Contador A
[61] Contador A (decresc)
[57] Limpar digipot
[58] Içam. DigiPot
[151] Ref. do início Interruptor
[73] Reinicialização do PID parte-I
[162] Pos. Idx Bit0
[156] Limite Negativo HW Inverso
[157] Pos. Parada Rápida Inversa
[155] Limite Positivo HW Inverso
[160] Vá para Posição de Destino
[151] Ref. do início Interruptor
[73] Reinicialização do PID parte-I
[74] Ativo PID
[150] Vá para o início
[162] Pos. Idx Bit0
[160] Vá para Posição de Destino
[157] Pos. Parada Rápida Inversa
[156] Limite Negativo HW Inverso
[155] Limite Positivo HW Inverso
[74] Ativo PID
[150] Vá para o início
1010
0 - 60 s *0,05 s
0 - 50 Hz *20 Hz
Motor
0 - 500 Hz *Relacionado ao tamanho
0 - 200 *0
0 - 500 Hz *Relacionado ao tamanho
0 - 500 A *0 A
0 - 500,00 A *Relacionado ao tamanho
-4999 - 4999 *-4999
-4999 - 4999 *4999
-4999 - 4999 UnidContrProces *-4999
UnidContrProces
-4999 - 4999 UnidContrProces *4999
UnidContrProces
0 - 500 Hz *0 Hz
0 - 500 Hz *0 Hz
4-21 Fonte Fator do Limite de Velocidade
[8] Ent.analg.54 inv
Mesmas escolhas com 3-4*
3-5* Rampa 2
[173] pés WG
[180] HP
*[0] Sem função
[2] Ent.analóg53
[4] Ent.analg.53 inv
Mesmas escolhas com 3-4*
3-6* Rampa 3
3-7* Rampa 4
-4999,0 - 4999 ReferenceFeedbackUnit
*0 ReferenceFeedbackUnit
3-02 Referência Mínima
[6] Ent.analóg54
[8] Ent.analg.54 inv
4-22 Impulso de arranque
Mesmas escolhas com 3-4*
3-8* Outras Rampas
3-80 Tempo de Rampa do Jog
-4999,0 - 4999 ReferenceFeedbackUnit
*Tamanho relacionado
3-03 Referência Máxima
*[0] O (Desligado)
0,01 - 3600 s *Relacionado ao tamanho
3-04 Função de Referência
[0] Disabled (Desativado)
4-30 Função Perda de Feedback de Motor
[1] On
4-3* Monitor de Fb do Motor
0,01 - 3600 s *Relacionado ao tamanho
3-81 Tempo de Rampa da Parada Rápida
3-9* Potenciômetro Digital
3-90 Tamanho do Passo
*[0] Soma
[1] Externa/Predenida
3-1* Referências
3-10 Referência Predenida
[1] Advertência
0,01 - 200 % *0,10 %
-100 - 100 % *0 %
*[2] Desarme
3-92 Restauração da Energia
3-11 Velocidade de Jog [Hz]
[3] Jog
*[0] O (Desligado)
0 - 500,0 Hz *5 Hz
[4] Congelar frequência de saída
[1] On
3-12 Valor de catch-up/slow down
[5] Velocidade Máx
3-93 Limite Máximo
0 - 100 % *0 %
[6] Alternar para Malha Aberta
4-31 Erro de Velocidade de Feedback de
-200 - 200 % *-100 %
-200 - 200 % *100 %
3-95 Atraso de Rampa
3-94 Limite Mínimo
-100 - 100 % *0 %
3-14 Referência Relativa Predenida
[0] Sem função
3-15 Fonte da Referência 1
4-32 Timeout Perda de Feedback de Motor
0 - 3600000 ms *1.000 ms
*[1] Entrada analógica 53
4-42 Aviso de temperatura ajustável
4-41 Advertência de Freq. Alto
4-4* Aj. Advertências 2
4-40 Advertência de Freq. Baixo
curso
0 - 200 % *25 %
3-96 Referência máxima da chave de m de
[8] Entrada de frequência 33
[2] Entrada analógica 54
[7] Entrada de frequência 29
4-** Limites/Advertências
4-1* Limites do Motor
[20] Potenciômetro digital
[11] Referência do barramento local
4-10 Sentido da Rotação do Motor
[32] Barramento PCD
*[0] Sentido horário
[2] Nos dois sentidos
Mesmas escolhas com 3-15
3-16 Fonte da Referência 2
4-5* Aj. Advertências
4-50 Advertência de Corrente Baixa
[RPM]
4-11 Limite inferior da velocidade do motor
Mesmas escolhas com 3-15
3-17 Fonte da Referência 3
4-51 Advertência de Corrente Alta
tamanho
0 - 1500 RPM *Relacionado ao
Relativa
3-18 Recurso de Referência de Escala
4-54 Advertência de Referência Baixa
[Hz]
4-12 Limite Inferior da Velocidade do Motor
*[0] Sem função
[1] Entrada analógica 53
4-55 Advertência de Referência Alta
0,1 - 500 Hz *65 Hz
tamanho
0 - 60000 RPM *Relacionado ao
[11] Referência do barramento local
4-14 Limite Superior da Velocidade do
3-3* Congurações Gerais de Rampa
3-31 Desaceleração com dir. Ponto de
Motor [Hz]
Inexão
*[0] O (Desligado)
motor [RPM]
0 - 400,0 Hz *0 Hz
4-13 Limite superior da velocidade do
[7] Entrada de frequência 29
[8] Entrada de frequência 33
[2] Entrada analógica 54
0 - 1000 % *Relacionado ao tamanho
4-16 Limite de Torque do Modo Motor
[1] Tempo de Desaceleração da Rampa 1
[2] Tempo de Desaceleração da Rampa 2
4-17 Limite de Torque do Modo Gerador
[3] Tempo de Desaceleração da Rampa 3
*[1] On
0 - 1000 % *100 %
[4] Tempo de Desaceleração da Rampa 4
4-6* Bypass de Velocidade
4-61 Bypass de Velocidade De [Hz]
0 - 1000 % *Relacionado ao tamanho
4-19 Frequência de Saída Máx.
4-18 Limite de Corrente
[9] Tempo de Rampa da Parada Rápida
3-4* Rampa 1
3-40 Tipo de Rampa 1
4-63 Bypass de Velocidade Até [Hz]
5-** Entrada/Saída Digital
0 - 500 Hz *Relacionado ao tamanho
4-2* Fatores de Limite
4-20 Fonte Fator do Limite de Torque
*[0] Linear
[1] Rampa sinoidal
[2] Rampa sinoidal 2
5-0* Modo E/S Digital
5-00 Modo Entrada Digital
*[0] Sem função
[2] Ent.analóg53
0,01 - 3600 s *Relacionado ao tamanho
3-41 Tempo de Aceleração da Rampa 1
*[0] PNP
[1] NPN
[4] Ent.analg.53 inv
[6] Ent.analóg54
0,01 - 3600 s *Relacionado ao tamanho
3-42 Tempo de Desaceleração da Rampa 1
[0] O (Desligado)
4-58 Função Fase Ausente de Motor
4-57 Advertência de Feedback Alto
4-56 Advertência de Feedback Baixo
74 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
Page 79

Apêndice Guia de Operação
nº 27
0 - 100 % *0 %
0 - 100 % *0 %
5-94 Timeout Predenido da Saída de Pulso
5-93 Controle do Bus da Saída de Pulso 27
[170] Homing concluído
[169] Conversor em modo automático
[168] Conversor em modo manual
[167] Comando de partida ativo
[166] Referência remota ativa
6-** Entrada/Saída Analógica
[171] Posição do destino atingida
6-0* Modo E/S Analógica
6-00 Timeout do Live Zero
[173] Posicione o freio mecânico
[172] Falha do controle de posição
1 - 99 s *10 s
*[0] O (Desligado)
6-01 Função Timeout do Live Zero
[1] Congelar frequência de saída
[239] Falha da função STO
[193] Sleep Mode
[194] Função Correia Partida
[190] Função do STO ativa
[2] Parada
5-41 Atraso de Ativação do Relé
[3] Jogging
0 - 600 s *0,01 s
[5] Parada e desarme
[4] Velocidade máxima
0 - 600 s *0,01 s
5-42 Atraso de desligamento, relé
6-1* Entrada analógica 53
5-5* Entrada de Pulso
0 - 10 V *0,07 V
6-11 Terminal 53 Alta Tensão
6-10 Terminal 53 Baixa Tensão
0 - 31999 Hz *4 Hz
5-51 Term. 29 Alta Frequência
5-50 Term. 29 Baixa Frequência
0 - 10 V *10 V
-4999 - 4999 *0
6-14 Terminal 53 Ref./Feedback Baixo Valor
6-15 Terminal 53 Ref./Feedback Alto Valor
-4999 - 4999 *0
1 - 32000 Hz *32000 Hz
5-52 Term. 29 Ref./Feedback Baixo Valor
5-53 Term. 29 Ref./Feedback Alto Valor
Filtro
-4999 - 4999 *Relacionado ao tamanho
6-16 Terminal 53 Constante de Tempo do
0 - 31999 Hz *4 Hz
-4999 - 4999 *Relacionado ao tamanho
5-55 Term. 33 Baixa Frequência
0,01 - 10 s *0,01 s
*[0] Sem operação
6-18 Terminal 53 Entrada Digital
1 - 32000 Hz *32000 Hz
5-56 Term. 33 Alta Frequência
5-57 Term. 33 Ref./Feedback Baixo Valor
[1] Reinicializar
[2] Paradp/inérc,reverso
[3] Parada por inércia e reinicio, inverso
-4999 - 4999 *0
-4999 - 4999 *Relacionado ao tamanho
5-58 Term. 33 Ref./Feedback Alto Valor
[4] Parada rápida por inércia inversa
5-6* Saída de Pulso
[5] Freio CC, inversão
5-60 Terminal 27 Variável da Saída de Pulso
[6] Parada por inércia inversa
*[0] Sem operação
[8] Partida
[10] Reversão
[48] Controle do barramento, timeout
[45] Controle do barramento
[11] Partida em reversão
[100] Frequência de saída
[12] Ativar partida direta
[101] Referência
[13] Ativar partida reversa
[102] Feedback do processo
[14] Jog
[103] Corrente do Motor
[16] Ref predenida bit 0
[15] Referência predenida on (ligada)
[104] Torque relativo ao limite
[105] Torque relativo ao nominal
[18] Referência predenida bit 2
[17] Ref. predenida bit 1
[106] Potência
[107] Velocidade
[19] Congelar referência
[109] Frequência máxima de saída
[20] Congelar frequência de saída
[113] Saída da braçadeira do PID
[21] Aceleração
5-62 Freq Máx da Saída de Pulso nº 27
[22] Desaceleração
4 - 32000 Hz *5000 Hz
[23] Seleção do setup bit 0
5-7* Entrada do Encoder 24 V
[28] Catch-up
[24] Seleção do setup bit 1
1 - 4096 *1024
5-70 Term 32/33 Pulsos Por Revolução
[29] Redução de velocidade
[34] Bit 0 da rampa
[35] Bit 1 da rampa
*[0] Sentido horário
[1] Sentido anti-horário
5-71 Term 32/33 Sentido do Encoder
[51] Bloqueio externo
5-9* Controlado por Bus
[55] Aumento do DigiPot
5-90 Controle do bus digital e do relé
[56] Diminuição do Digipot
0 - 0xFFFFFFFF *0
10 10
de calor, alto
advertência
advertência
térmica
(Desligado)
[8] Funcionamento na referência/sem
[7] Funcionamento na faixa/sem
[37] Control word bit 12
[36] Control word bit 11
[32] Controle do freio mecânico
[163] Pos. Idx Bit1
[164] Pos. Idx Bit2
[171] Limite do interruptor sentido horário
[40] Fora da faixa de referência
inverso
[9] Alarme
[41] Abaixo da referência, baixa
[172] Limite do interruptor sentido anti-
[10] Alarme ou advertência
[42] Acima da referência, alta
-horário inverso
[11] No limite de torque
[43] Limite Estendido do PID
5-13 Terminal 29 Entrada Digital
[12] Fora da faixa de corrente
[45] Controle do barramento
Mesmas escolhas com 5-12
[13] Abaixo da corrente, baixa
[46] Controle do bus, timeout: On
[30] Entrada do contador
[15] Fora da faixa de frequência
[14] Acima da corrente, alta
(Desligado)
[47] Controle do bus, timeout: O
[32] Entrada de pulso
[83] Entrada do encoder Z
[16] Abaixo da frequência, baixo
[17] Acima da frequência, alto
[55] Saída de pulso
[56] Advertência de limpeza do dissipador
Mesmas escolhas com 5-12
5-14 Terminal 32 Entrada Digital
[19] Abaixo do feedback, baixo
[20] Acima do feedback, alto
[18] Fora da faixa de feedback
de calor, alto
[60] Comparador 0
[61] Comparador 1
Mesmas escolhas com 5-12
[82] Entrada do encoder B
5-15 Terminal 33 Entrada Digital
[21] Advertência térmica
[22] Pronto, sem advertência térmica
[63] Comparador 3
[62] Comparador 2
[30] Entrada do contador
[32] Entrada de pulso
[23] Remoto, pronto, sem advertência
[64] Comparador 4
[81] Entrada do encoder A
[65] Comparador 5
5-19 Terminal 37/38 Safe Torque O
[24] Pronto, s/ sobre/subtensão
[25] Reversão
[71] Regra lógica 1
[70] Regra lógica 0
*[1] Alarme de Safe Torque O
[3] Advertência de Safe Torque O
[26] Barramento OK
[72] Regra lógica 2
5-3* Saídas Digitais
[27] Limite de torque e parada
[73] Regra lógica 3
5-30 Terminal 27 Saída Digital
[28] Freio, sem advertência de freio
[74] Regra lógica 4
*[0] Sem operação
[30] Falha de freio (IGBT)
[29] Freio pronto, sem falhas
[80] Saída digitl A do SLC
[75] Regra lógica 5
[1] Placa d Cntrl Pronta
[2] Drive pronto
[31] Relé 123
[81] Saída digital do SL B
[3] Conversor pronto/controle rem.
[32] Controle do freio mecânico
[82] Saída digital do SL C
[4] Em espera / sem advertência
[36] Control word bit 11
[83] Saída digital do SL D
[5] Em funcionamento
[40] Fora da faixa de referência
[37] Control word bit 12
[91] Encoder simula saída A
[160] Sem alarme
[7] Funcionamento na faixa/sem
[6] Em funcionamento/ sem advertência
[42] Acima da referência, alta
[41] Abaixo da referência, baixa
[165] Referência local ativa
[161] Rodando em reversão
advertência
[8] Funcionamento na referência/sem
[45] Controle do barramento
[166] Referência remota ativa
advertência
[46] Controle do bus, timeout: On
[167] Comando de partida ativo
[9] Alarme
[47] Controle do bus, timeout: O
[169] Conversor em modo automático
[168] Conversor em modo manual
[11] No limite de torque
[10] Alarme ou advertência
[60] Comparador 0
[56] Advertência de limpeza do dissipador
[172] Falha do controle de posição
[170] Homing concluído
[171] Posição do destino atingida
[14] Acima da corrente, alta
[13] Abaixo da corrente, baixa
[12] Fora da faixa de corrente
[63] Comparador 3
[61] Comparador 1
[62] Comparador 2
[193] Sleep Mode
[190] Função do STO ativa
[173] Posicione o freio mecânico
[16] Abaixo da frequência, baixo
[17] Acima da frequência, alto
[15] Fora da faixa de frequência
[65] Comparador 5
[70] Regra lógica 0
[64] Comparador 4
5-34 On Delay, Saída Digital
[239] Falha da função STO
[194] Função Correia Partida
[19] Abaixo do feedback, baixo
[20] Acima do feedback, alto
[18] Fora da faixa de feedback
[71] Regra lógica 1
0 - 600 s *0,01 s
[21] Advertência térmica
[72] Regra lógica 2
5-35 O Delay, Saída Digital
[22] Pronto, sem advertência térmica
[73] Regra lógica 3
0 - 600 s *0,01 s
[23] Remoto, pronto, sem advertência
[74] Regra lógica 4
5-4* Relés
térmica
[80] Saída digitl A do SLC
[75] Regra lógica 5
5-40 Relé de Função
[0] Sem operação
[24] Pronto, s/ sobre/subtensão
[25] Reversão
[81] Saída digital do SL B
*[1] Placa d Cntrl Pronta
[26] Barramento OK
[82] Saída digital do SL C
[2] Drive pronto
[27] Limite de torque e parada
[83] Saída digital do SL D
[3] Conversor pronto/controle rem.
[28] Freio, sem advertência de freio
[160] Sem alarme
[161] Rodando em reversão
[5] Em funcionamento
[4] Em espera / sem advertência
[30] Falha de freio (IGBT)
[29] Freio pronto, sem falhas
[165] Referência local ativa
[6] Em funcionamento/ sem advertência
[31] Relé 123
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 75
Page 80

Apêndice
0 - 100 % *100 %
*[0] Sem função
7-45 Process PID Feed Fwd Resource
Torque
0,002 - 2 s *0,020 s
VLT® Midi Drive FC 280
Ctrl.
*[0] Normal
[1] Inverso
Processo 2
7-48 Feed Forward do PCD
0 - 65535 *0
*[0] Normal
[1] Inverso
7-49 Saída Normal/Inv. do PID de Processo
7-5* Avançado PID de processo II
7-50 PID estendido do PID de processo
Processo
0 - 100 *1
*[1] Ativado
7-51 Process PID Feed Fwd Gain
7-52 Aceleração do Process PID Feed Fwd
[0] Disabled (Desativado)
0,01 - 100 s *0,01 s
Fwd
0,01 - 100 s *0,01 s
7-56 Ref. do PID de Processo Tempo do
7-53 Desaceleração do Process PID Feed
0 - 10 *0,01
0 - 6000 RPM *0 RPM
Processo
Filtro
Filtro
0,001 - 1 s *0,001 s
Processo
0,001 - 1 s *0,001 s
7-57 Fb. do PID de Processo Tempo do
7-6* Conversão de Feedback
7-60 Conversão de Feedback 1
Processo
0 - 20 s *0 s
0,10 - 9999 s *9999 s
*[0] Linear
[1] Raiz quadrada
1 - 50 *5
Ganho
7-62 Conversão de Feedback 2
*[0] Linear
[1] Raiz quadrada
0 - 200 % *0 %
Processo
8-** Com. e Opcionais
8-0* Congurações Gerais
8-01 Tipo de Controle
0 - 200 % *5 %
*[0] Digital e control wrd
[1] Somente digital
[2] Somente control word
8-02 Origem do Controle
[0] Nenhum
[1] Porta FC
processo
-100 - 100 % *-100 %
0,5 - 6000 s *1 s
[2] USB do FC
8-04 Função Timeout de Controle
[3] Opcional A
8-03 Tempo de Timeout de Controle
*[0] O (Desligado)
[1] Congelar frequência de saída
0 - 100 % *100 %
em Ref. Máx.
em Ref. Mínima
-100 - 100 % *100 %
Ctrl.
[32] Barramento PCD
7-46 Process PID Feed Fwd Normal/ Inv.
[8] Entrada de frequência 33
[11] Referência do barramento local
[7] Entrada de frequência 29
[1] Entrada analógica 53
[2] Entrada analógica 54
Processo 1
[3] Entrada de frequência 29
[4] Entrada de frequência 33
7-22 Recurso de Feedback do CL de
7-13 Tempo de Integração do PID de
7-2* Process Ctrl. Feedb
*[0] Sem função
7-20 Recurso de Feedback do CL de
[4] Entrada de frequência 33
[2] Entrada analógica 54
[3] Entrada de frequência 29
[1] Entrada analógica 53
7-3* Controle PID de processo
7-30 Controle Normal/Inversão do PID de
*[0] Normal
[1] Inverso
7-31 Anti Windup do PID do Processo
[0] O (Desligado)
*[1] On
7-32 Velocidade Inicial do PID do Processo
7-34 Tempo de Integração do PID de
7-33 Ganho Proporcional do PID de
7-36 Dif. do PID de Processo Limite de
7-35 Tempo do Diferencial do PID de
[2] Entrada analógica 54
*[0] Sem função
[1] Entrada analógica 53
7-39 Largura de banda na referência
7-38 Fator de Feed Forward do PID de
*[0] Não
7-4* Avançado PID de processo I
7-40 Reinicializar a parte I do PID de
[1] Sim
7-42 PID de processo Saída Pos. Braçadeira
7-41 PID de Processo Saída Neg. Braçadeira
7-43 Escala de Ganho do PID de Processo
7-44 Escala de Ganho do PID de Processo
1010
0 - 16384 *0
0 - 200 % *100 %
0 - 200 % *0 %
6-96 Terminal 42 Controle de Saída do Bus
6-94 Terminal 42 Escala Máxima de Saída
6-93 Terminal 42 Escala Mínima de Saída
[193] Sleep Mode
[194] Função Correia Partida
[198] Bypass do Drive
[173] Posicione o freio mecânico
[170] Homing concluído
[171] Posição do destino atingida
[172] Falha do controle de posição
[169] Conversor em modo automático
[167] Comando de partida ativo
[168] Conversor em modo manual
[165] Referência local ativa
[166] Referência remota ativa
[160] Sem alarme
[161] Rodando em reversão
[83] Saída digital do SL D
[82] Saída digital do SL C
[81] Saída digital do SL B
[74] Regra lógica 4
[75] Regra lógica 5
[80] Saída digitl A do SLC
advertência
advertência
[21] Advertência térmica
[19] Abaixo do feedback, baixo
[20] Acima do feedback, alto
[18] Fora da faixa de feedback
[16] Abaixo da frequência, baixo
[17] Acima da frequência, alto
[15] Fora da faixa de frequência
[14] Acima da corrente, alta
[13] Abaixo da corrente, baixa
[12] Fora da faixa de corrente
[9] Alarme
[10] Alarme ou advertência
[3] Conversor pronto/controle rem.
[4] Em espera / sem advertência
[6] Em funcionamento/ sem advertência
[2] Drive pronto
*[0] Sem operação
[1] Placa d Cntrl Pronta
[254] Tensão do Barramento CC
6-92 Terminal 42 Saída Digital
[8] Funcionamento na referência/sem
[7] Funcionamento na faixa/sem
[5] Em funcionamento
[11] No limite de torque
7-** Controladores
7-0* Ctrl. do PID de Velocidade
[22] Pronto, sem advertência térmica
[23] Remoto, pronto, sem advertência
Velocidade
7-00 Fonte do Feedback do PID de
térmica
[24] Pronto, s/ sobre/subtensão
[1] Encoder de 24 V
[25] Reversão
[6] Entrada analógica 53
[26] Barramento OK
[7] Entrada analógica 54
[27] Limite de torque e parada
[8] Entrada de frequência 29
[28] Freio, sem advertência de freio
[9] Entrada de frequência 33
*[20] Nenhum
[30] Falha de freio (IGBT)
[29] Freio pronto, sem falhas
7-02 Ganho Proporcional no PID de
[31] Relé 123
0 - 1 *0,015
Velocidade
7-03 Tempo Integrado do PID de Velocidade
[37] Control word bit 12
[32] Controle do freio mecânico
[36] Control word bit 11
2 - 20000 ms *8 ms
[40] Fora da faixa de referência
7-04 Tempo de Diferenciação do PID de
[41] Abaixo da referência, baixa
0 - 200 ms *30 ms
Velocidade
7-05 Diferenciação do PID de velocidade
[46] Controle do bus, timeout: On
[45] Controle do barramento
[42] Acima da referência, alta
Limite de Ganho
[47] Controle do bus, timeout: O
1 - 20 *5
7-06 Período do Filtro Passa Baixa do PID
(Desligado)
[56] Advertência de limpeza do dissipador
de Velocidade
1 - 6000 ms *10 ms
7-07 Relação de Engrenagem do Feedback
de calor, alto
[60] Comparador 0
[61] Comparador 1
do PID de Velocidade
[62] Comparador 2
0,0001 - 32 *1
[63] Comparador 3
velocidade
7-08 Fator de feed forward do PID de
[64] Comparador 4
[65] Comparador 5
0 - 500 % *0 %
0 - 500 % *100 %
7-12 Ganho Proporcional do PID de Torque
7-1* Ctrl. do PID de Torque
[72] Regra lógica 2
[73] Regra lógica 3
[70] Regra lógica 0
[71] Regra lógica 1
[57] Limpar digipot
-horário inverso
inverso
*[1] Modo de tensão
[6] Entrada digital
6-19 Modo do terminal 53
[164] Pos. Idx Bit2
[172] Limite do interruptor sentido anti-
[171] Limite do interruptor sentido horário
6-2* Entrada analógica 54
[162] Pos. Idx Bit0
[163] Pos. Idx Bit1
[157] Pos. Parada Rápida Inversa
[160] Vá para Posição de Destino
[156] Limite Negativo HW Inverso
[155] Limite Positivo HW Inverso
[74] Ativo PID
[150] Vá para o início
[151] Ref. do início Interruptor
[73] Reinicialização do PID parte-I
[58] Içam. DigiPot
[72] Erro do PID inv.
0 - 10 V *0,07 V
6-20 Terminal 54 Baixa Tensão
0 - 10 V *10 V
6-21 Terminal 54 Alta Tensão
0 - 20 mA *4 mA
6-22 Terminal 54 Corrente Baixa
-4999 - 4999 *0
0 - 20 mA *20 mA
6-24 Terminal 54 Ref./Feedback Baixo Valor
6-23 Terminal 54 Corrente Alta
6-25 Terminal 54 Ref./Feedback Alto Valor
Filtro
-4999 - 4999 *Relacionado ao tamanho
6-26 Terminal 54 Constante de Tempo do
0,01 - 10 s *0,01 s
[0] Modo de corrente
*[1] Modo de tensão
6-29 Modo do terminal 54
6-9* Saída Analógica/Digital 42
6-90 Modo do Terminal 42
*[0] 0-20 mA
[1] 4-20 mA
[2] Saída Digital
6-91 Terminal 42 Saída Analógica
*[0] Sem operação
[100] Frequência de saída
[101] Referência
[102] Feedback do Processo
[104] Torque relativo ao limite
[105] Torque relativo ao nominal
[106] Potência
[103] Corrente do Motor
[107] Velocidade
[113] Saída da braçadeira do PID
[139] Ctrl. bus
[111] Feedback de Velocidade
[143] Ext. CL 1
76 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
Page 81

Apêndice Guia de Operação
[3405] PCD 5 gravar para aplicação
[3406] PCD 6 gravar para aplicação
[3407] PCD 7 gravar para aplicação
[3408] PCD 8 gravar para aplicação
[3409] PCD 9 gravar para aplicação
[3410] PCD 10 gravar para aplicação
[553] Term. 29 Ref./Feedback Alto Valor
[417] Limite de Torque do Modo Gerador
[558] Term. 33 Ref./Feedback Alto Valor
[416] Limite de Torque do Modo Motor
[590] Controle do bus digital e do relé
[696] Terminal 42 Controle de Saída do Bus
[593] Controle do Bus da Saída de Pulso 27
0 - 655 *Relacionado ao tamanho
0 - 4294967295 *0
[3404] PCD 4 gravar para aplicação
[3402] PCD 2 gravar para aplicação
[3403] PCD 3 gravar para aplicação
[3401] PCD 1 gravar para aplicação
[1680] CTW 1 do Fieldbus
[1682] REF 1 do Fieldbus
[891] Velocidade do Jog do Bus 2
[890] Velocidade do Jog do Bus 1
[748] Feed Forward do PCD
[615] Terminal 53 Ref./Feedback Alto Valor
[625] Terminal 54 Ref./Feedback Alto Valor
9-16 Conguração de Leitura do PCD
[0] Nenhum
[1500] Horas de funcionamento
[1501] Horas de Funcionamento
[1502] Medidor de kWh
0 - 4294967295 *0
0 - 4294967295 *0
0 - 4294967295 *0
0 - 4294967295 *0
[1600] Control Word
[1601] Referência [Unidade]
0 - 4294967295 *0
[1602] Referência [%]
[1603] Status Word
[1605] Valor Real Principal [%]
[1612] Tensão do Motor
[1609] Leitura Personalizada
[1610] Potência [kW]
[1611] Potência [hp]
0 - 1500 RPM *100 RPM
[1615] Frequência [%]
[1613] Freqüência
[1614] Corrente do Motor
0 - 1500 RPM *200 RPM
[1634] Temperatura do Dissipador de Calor
[1639] Temperatura do Cartão de Controle
Motor [Hz]
[Hz]
[1630] Tensão do Barramento CC
[1633] Energia do Freio /2 min
[1620] Ângulo do Motor
[1622] Torque [%]
[1618] Térmico Calculado do Motor
[1616] Torque [Nm]
[1617] Velocidade [RPM]
0 - 65535 *0
0 - 65535 *0
[1662] Entrada analógica 53
[1660] Entrada digital
[1661] Programação do Terminal 53
[1657] Feedback [rpm]
[1652] Feedback[Unidade]
[1653] Referência do DigiPot
[1650] Referência Externa
[1635] Térmico do Inversor
[1638] Estado do Controlador do SL
[0] Entrada digital
[1] Barramento
[12] [1612] Tensão do Motor
[13] [1613] Freqüência
0,0 - 247 *1
8-31 Endereço
8-88 Reinicializar Diagnóstico da Porta doFC*[0] Não reinicializar
8-85 Erros de Timeout do Escravo
*[3] Lógica OR (OU)
[0] Entrada digital
[1] Barramento
[2] Lógica AND (E)
[0] Entrada digital
[2] Lógica AND (E)
*[3] Lógica OR (OU)
8-57 Selecionar Prodrive OFF2
8-58 Selecionar Prodrive OFF3
[1] Barramento
*[3] Lógica OR (OU)
[2] Lógica AND (E)
8-7* Versão do SW de Protocolo
8-79 Versão do rmware do protocolo
8-80 Contador de Mensagens do Bus
8-8* Diagnóstico da Porta do FC
8-81 Contador de Erros do Bus
8-82 Mensagens do Escravo Recebidas
8-84 Mensagens Enviadas ao Escravo
8-83 Contador de Erros do Escravo
[1] Reset contador
8-91 Velocidade do Jog do Bus 2
8-9* Feedback do Barramento
8-90 Velocidade do Jog do Bus 1
9-** PROFIdrive
9-00 Setpoint
9-07 Valor Real
[0] Nenhum
9-15 Conguração de Gravação do PCD
[303] Referência Máxima
[302] Referência Mínima
[312] Valor de catch-up/slow down
[341] Tempo de Aceleração da Rampa 1
[380] Tempo de Rampa do Jog
[352] Tempo de Desaceleração da Rampa 2
[351] Tempo de Aceleração da Rampa 2
[342] Tempo de Desaceleração da Rampa 1
[381] Tempo de Rampa da Parada Rápida
[412] Limite Inferior da Velocidade do Motor
[414] Limite Superior da Velocidade do
10 10
do Terminal 54
[23] [1652] Feedback [Unit]
[24] [1660] Entrada Digital 18,19, 27,33
[1] Paridade Ímpar, 1 Bit de Parada
[0] Paridade Par, 1 Bit de Parada
[25] [1661] Conguração do Chaveamento
[2] Sem Paridade, 1 Bit de Parada
do Terminal 53
[3] Sem Paridade, 2 Bits de Parada
[26] [1662] Entrada analógica 53
[27] [1663] Conguração do Chaveamento
0,0010 - 0,5 s *0,01 s
8-35 Atraso de Resposta Mínimo
[28] [1664] Entrada analógica 54
0,1 - 10,0 s *Relacionado ao tamanho
8-36 Atraso de Resposta Mínimo
[29] [1665] Saída analógica 42 [mA]
8-4* Denição de protocolo FC MC
[31] [1672] Contador A
[30] [1671] Saída do relé
[0] Nenhum
8-42 Conguração de Gravação do PCD
[32] [1673] Contador B
[33] [1690] Alarm Word
[2] [303] Referência Máxima
[1] [302] Referência Mínima
[35] [1694] Ext. Status Word
[34] [1692] Warning Word
1
[3] [341] Tempo de aceleração da Rampa
8-5* Digital/Bus
8-50 Selecionar parada por inércia
Rampa 1
[4] [342] Tempo de desaceleração da
[0] Entrada digital
[1] Barramento
2
[5] [351] Tempo de aceleração da Rampa
[0] Entrada digital
*[3] Lógica OR (OU)
[1] Barramento
[2] Lógica AND (E)
[10] [1610] Potência [kW]
[9] [1609] Leitura Personalizada
[8] [1605] Valor Real Principal [%]
8-56 Selecionar Referência Predenida
[11] [1611] Potência [hp]
*[3] Lógica OR (OU)
[1] Barramento
[3] [1502] Medidor de kWh
[2] Lógica AND (E)
[4] [1600] Control Word
[5] [1601] Referência [Unidade]
8-55 Selecionar Setup
[6] [1602] Referência %
[7] [1603] Status Word
[1] Barramento
[16] REF da Porta do FC
[2] Lógica AND (E)
8-43 Conguração de Leitura do PCD
[0] Nenhum
8-54 Selecionar Reversão
[2] [1501] Horas de Funcionamento
[1] [1500] Horas de operação
*[3] Lógica OR (OU)
8-53 Selecionar Partida
[2] Lógica AND (E)
barramento de saída
[0] Entrada digital
Bus
[15] CT W da Porta do FC
[13] [696] Terminal 42 Controle de Saída do
[0] Entrada digital
[1] Barramento
[0] Entrada digital
*[3] Lógica OR (OU)
8-51 Selecionar Parada Rápida
[2] Lógica AND (E)
Rampa 2
[8] [381] Tempo de Parada Rápida
[7] [380] Tempo de Rampa do Jog
[6] [352] Tempo de desaceleração da
8-52 Selecionar Freio CC
[1] Barramento
*[3] Lógica OR (OU)
[2] Lógica AND (E)
Motor [Hz]
Motor [Hz]
[12] [676] Terminal 45 Controle do
[10] [414] Limite Superior da Velocidade do
[9] [412] Limite Inferior da Velocidade do
[11] [590] Controle do bus digital e do relé
[0] Entrada digital
*[3] Lógica OR (OU)
Calor
[22] [1650] Referência Externa
[21] [1638] Estado do Controlador do SL
[20] [1635] Térmico do Inversor
[19] [1634] Temperatura do Dissipador de
[18] [1630] Tensão do Barramento CC
[16] [1616] Torque [Nm]
[17] [1618] Térmico Calculado do Motor
[15] [1615] Frequência [%]
[14] [1614] Corrente do Motor
8-32 Baud Rate
[0] 2400 Baud
[1] 4800 Baud
[2] 9600 Baud
[3] 19200 Baud
[4] 38400 Baud
[5] 57600 Baud
[6] 76800 Baud
[7] 115200 Baud
8-33 Bits de Parada / Paridade
tamanho
0 - 2147483647 *Relacionado ao
[0] Nenhum
*[1] Padrão do perl
[93] Alarme68 ou Alarme188
8-14 CTW Congurável da Control Word
[83] Saída digital D do SL
[82] Saída digital C do SL
[81] Saída digital B do SL
[80] Saída digital A do SL
[73] Regra lógica 3
[74] Regra lógica 4
[2] Parada
[3] Jogging
[4] Velocidade máxima
[5] Parada e desarme
[70] Regra lógica 0
[71] Regra lógica 1
[64] Comparador 4
[2] Disparar alarme/advertência
*[0] Inativo
[1] Disparar em alarmes
8-07 Acionador de Diagnóstico
8-1* Ctrl. Congurações da Word
8-10 Perl da Control Word
*[0] Perl do FC
[1] Perl do PROFIdrive
[5] ODVA
[7] CANopen DSP 402
8-13 Status word STW congurável
[0] Sem função
*[1] Padrão do perl
[2] Somente Alarme 68
[3] Desarme excl. Alarme 68
[10] T18 Status da DI
[14] T32 Status da DI
[13] T29 Status da DI
[11] T19 Status da DI
[12] T27 Status da DI
[61] Comparador 1
[40] Fora da faixa de referência
[60] Comparador 0
[30] Falha de freio (IGBT)
[21] Advertência térmica
[15] T33 Status da DI
[65] Comparador 5
[62] Comparador 2
[63] Comparador 3
[75] Regra lógica 5
[72] Regra lógica 2
[4] Erro do PID inv.
[2] CT W válida, ativa baixa
[6] Ativo PID
8-19 Código do Produto
[5] Reinicialização do PID parte-I
8-30 Protocolo
*[0] FC
[2] Modbus RTU
8-3* Congurações da Porta do FC
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 77
Page 82

Apêndice
[3402] PCD 2 gravar para aplicação
[3403] PCD 3 gravar para aplicação
[3404] PCD 4 gravar para aplicação
1 - 48 *0
1 - 48 *0
[3405] PCD 5 gravar para aplicação
[3406] PCD 6 gravar para aplicação
[3407] PCD 7 gravar para aplicação
0 - 17 *0
[3408] PCD 8 gravar para aplicação
[3409] PCD 9 gravar para aplicação
[3410] PCD 10 gravar para aplicação
Processo
12-22 Leitura da Cong dos Dados de
0 - 0 *Relacionado ao tamanho
[0] Nenhum
[1500] Horas de funcionamento
[1501] Horas de Funcionamento
[1502] Medidor de kWh
[1600] Control Word
[1601] Referência [Unidade]
VLT® Midi Drive FC 280
[1609] Leitura Personalizada
[1610] Potência [kW]
[1603] Status Word
[1605] Valor Real Principal [%]
[1611] Potência [hp]
[1602] Referência [%]
[1612] Tensão do Motor
0 - 2147483647 *0
[1614] Corrente do Motor
[1615] Frequência [%]
[1613] Freqüência
0 - 2147483647 *0
[1618] Térmico Calculado do Motor
[1616] Torque [Nm]
[1617] Velocidade [RPM]
Processo
0 - 255 *Relacionado ao tamanho
[1684] Comunicação Opcional STW
[1685] CTW 1 da Porta do FC
[1674] Prec. Parar Contador
[1690] Alarm Word
[1671] Saída do relé
[1672] Contador A
[1673] Contador B
[1669] Saída de pulso 27 [Hz]
[1668] Entrada de pulso 33 [Hz]
[1665] Saída analógica 42 [mA]
[1666] Saída Digital
[1664] Entrada analógica 54
[1622] Torque [%]
[1634] Temperatura do Dissipador de Calor
[1630] Tensão do Barramento CC
[1633] Energia do Freio /2 min
Motor [Hz]
[Hz]
[1620] Ângulo do Motor
[1663] Programação do Terminal 54
[1662] Entrada analógica 53
[1657] Feedback [rpm]
[1660] Entrada digital
[1661] Programação do Terminal 53
[1653] Referência do DigiPot
[1650] Referência Externa
[1652] Feedback[Unidade]
[1638] Estado do Controlador do SL
[1639] Temperatura do Cartão de Controle
[1635] Térmico do Inversor
[1667] Entrada de pulso 29 [Hz]
12-08 Nome do Host
12-09 Endereço Físico
12-10 Status do Link
*[0] Sem link
12-1* Parâmetros de Link de Ethernet
[1] Link
12-11 Duração do Link
12-12 Negociação Automática
[0] O (Desligado)
*[1] On
12-13 Velocidade do Link
*[0] Nenhum
[1] 10 Mbps
[2] 100 Mbps
[0] Half Duplex
12-14 Link Duplex
12-19 Supervisor End. IP
*[1] Full Duplex
12-18 Supervisor MAC
12-2* Dados do Processo
12-20 Instância de Controle
12-21 Gravação da Cong dos Dados de
[0] Nenhum
[302] Referência Mínima
[303] Referência Máxima
[312] Valor de catch-up/slow down
[351] Tempo de Aceleração da Rampa 2
[342] Tempo de Desaceleração da Rampa 1
[341] Tempo de Aceleração da Rampa 1
[417] Limite de Torque do Modo Gerador
[416] Limite de Torque do Modo Motor
[414] Limite Superior da Velocidade do
[381] Tempo de Rampa da Parada Rápida
[412] Limite Inferior da Velocidade do Motor
[380] Tempo de Rampa do Jog
[352] Tempo de Desaceleração da Rampa 2
[553] Term. 29 Ref./Feedback Alto Valor
[558] Term. 33 Ref./Feedback Alto Valor
[590] Controle do bus digital e do relé
[593] Controle do Bus da Saída de Pulso 27
[3401] PCD 1 gravar para aplicação
[1680] CTW 1 do Fieldbus
[1682] REF 1 do Fieldbus
[891] Velocidade do Jog do Bus 2
[890] Velocidade do Jog do Bus 1
[748] Feed Forward do PCD
[615] Terminal 53 Ref./Feedback Alto Valor
[625] Terminal 54 Ref./Feedback Alto Valor
[696] Terminal 42 Controle de Saída do Bus
1010
0 - 9999 *0
0 - 9999 *0
0 - 9999 *0
9-93 Parâmetros Alterados (4)
9-92 Parâmetros Alterados (3)
9-91 Parâmetros Alterados (2)
0 - 0 *0
0 - 65535 *0
9-45 Código de Falha
0 - 1000 *0
0 - 0 *0
9-47 № do Defeito
9-52 Contador da Situação do defeito
9-99 Contador de Revisões do Probus
9-94 Parâmetros Alterados (5)
0 - 65535 *0
9-53 Warning Word do Probus
9-63 Baud Rate Real
0 - 65535 *0
[0] 9,6 kbit/s
10-** Fieldbus CAN
[1] 19,2 kbit/s
10-0* Congurações comuns
10-01 Seleção de Baud Rate
[2] 93,75 kbit/s
[3] 187,5 kbit/s
[16] 10 Kbps
[4] 500 kbit/s
[17] 20 Kbps
[6] 1500 kbit/s
[18] 50 Kbps
[7] 3000 kbit/s
*[20] 125 Kbps
[8] 6000 kbit/s
[21] 250 Kbps
[9] 12000 kbit/s
[22] 500 Kbps
[10] 31,25 kbit/s
[23] 800 Kbps
[11] 45,45 kbit/s
[24] 1000 Kbps
*[255] BaudRate ñ encontrad
10-02 ID do Nó
9-64 Identicação do Dispositivo
1 - 127 *127
10-05 Leitura do Contador de Erros de
0 - 0 *0
9-65 Número do Perl
0 - 9999 *0
0 - 9999 *0
Transmissão
0 - 255 *0
10-06 Leitura do Contador de Erros de
0 - 0 *0
0 - 65535 *0
9-67 Control Word 1
Recepção
0 - 255 *0
0 - 65535 *0
9-68 Status Word 1
10-3* Acesso ao Parâmetro
9-70 Editar Setup
*[0] O (Desligado)
10-31 Armazenar Valores dos Dados
[1] Setup 1
[2] Setup 2
[2] Gravar todos setups
[3] Gravar setup edição
[3] Setup 3
[4] Setup 4
10-33 Gravar Sempre
*[0] O (Desligado)
*[9] Conguração Ativa
9-71 Valor dos Dados Salvos Probus
[1] On
12-** Ethernet
12-0* Congurações IP
12-00 Alocação do Endereço IP
*[0] O (Desligado)
[1] Gravar todos setups
9-72 ProbusDriveReset
*[0] Nenhuma ação
[0] MANUAL
[1] DHCP
[1] Reset na energização
[2] Prep d reset d energ.
[2] BOOTP
*[10] DCP
9-75 Identicação do DO
[3] Reset doOpc d Comun
0 - 2147483647 *0
12-04 Servidor DHCP
0 - 9999 *0
9-83 Parâmetros Denidos (4)
0 - 4294967295 *0
12-07 Nome do Domínio
12-06 Servidores de Nome
12-05 Contrato de Aluguel Expira
0 - 9999 *0
0 - 9999 *0
9-84 Parâmetros Denidos (5)
9-85 Parâmetros Denidos (6)
9-90 Parâmetros Alterados (1)
0 - 4294967295 *0
0 - 4294967295 *0
0 - 4294967295 *0
12-01 Endereço IP
[20] Do ID do nó
0 - 65535 *0
9-80 Parâmetros Denidos (1)
12-03 Gateway Padrão
12-02 Máscara de Sub-rede
0 - 9999 *0
0 - 9999 *0
0 - 9999 *0
9-82 Parâmetros Denidos (3)
9-81 Parâmetros Denidos (2)
0 - 4294967295 *0
drive
0 - 65535 *1037
1 - 126 *126
*[100] Nenhum
[101] PPO 1
[102] PPO 2
[103] PPO 3
[104] PPO 4
[105] PPO 5
[106] PPO 6
9-22 Seleção de Telegrama
[3423] PCD 3 ler para aplicação
[3424] PCD 4 ler para aplicação
[3425] PCD 5 ler para aplicação
[3426] PCD 6 ler para aplicação
[1684] Comunicação Opcional STW
[1671] Saída do relé
[1672] Contador A
[1669] Saída de pulso 27 [Hz]
[1668] Entrada de pulso 33 [Hz]
[1666] Saída Digital
[1665] Saída analógica 42 [mA]
[1667] Entrada de pulso 29 [Hz]
[1664] Entrada analógica 54
[1663] Programação do Terminal 54
[1685] CTW 1 da Porta do FC
[1673] Contador B
[1674] Prec. Parar Contador
[1693] Warning Word 2
[1690] Alarm Word
[1691] Alarm Word 2
[1692] Warning Word
[3421] PCD 1 ler para aplicação
[3422] PCD 2 ler para aplicação
[1697] Alarm Word 3
[1698] Warning Word 3
[1695] Ext. Status Word 2
[1694] Ext. Status Word
[3427] PCD 7 ler para aplicação
[3428] PCD 8 ler para aplicação
[3429] PCD 9 ler para aplicação
[3430] PCD 10 ler para aplicação
[3450] Posição Real
[3456] Erro de Track
9-18 Endereço do Nó
9-19 Número do sistema da unidade de
[1] Telegrama padrão 1
[107] PPO 7
Mesmas escolhas com 9-15 e 9-16
[0] Inativo
*[1] Ativar mestre cíclico
9-28 Controle de Processo
9-44 Contador de Mensagem de Falha
9-27 Edição do Parâmetro
[0] Disabled (Desativado)
[108] PPO 8
[200] Telegrama personalizado 1
9-23 Parâmetros para Sinais
*[1] Ativado
78 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
Page 83
Apêndice Guia de Operação
[71] Timeout 4 do SL
[70] Timeout 3 do SL
[51] Comparador 5
[60] Regra lógica 4
[61] Regra lógica 5
[50] Comparador 4
[42] Desarme de Auto Reset
[39] Comando de partida
[40] Conversor parado
[36] Entrada digital DI29
[34] Entrada digital DI19
[35] Entrada digital DI27
[33] Entrada digital DI18
[31] Timeout 1 do SL
[32] Timeout 2 do SL
[30] Timeout 0 do SL
[28] Regra lógica 2
[17] Rede elétrica fora da faixa
[18] Reversão
[19] Advertência
[20] Alarme (desarme)
[21] Alarme (bloqueio por desarme)
[25] Comparador 3
[23] Comparador 1
[24] Comparador 2
[22] Comparador 0
[29] Regra lógica 3
[26] Regra lógica 0
[27] Regra lógica 1
Mesmas escolhas com 13-42
Mesmas escolhas com 13-41
Mesmas escolhas com 13-40
13-44 Regra Lógica Booleana 3
13-43 Operador de Regra Lógica 2
*[0] Disabled (Desativado)
[1] E
[2] OU
[3] E NÃO
[4] OU NÃO
[83] Correia Partida
13-41 Operador de Regra Lógica 1
[73] Timeout 6 do SL
[74] Timeout 7 do SL
[72] Timeout 5 do SL
[5] NÃO E
[6] NÃO OU
13-42 Regra Lógica Booleana 2
[7] NÃO E NÃO
[8] NÃO OU NÃO
-9999 - 9999 *0
13-5* Estados
13-51 Evento do Controlador do SL
*[0] False (Falso)
[1] True (Verdadeiro)
[2] Em funcionamento
[3] Na faixa
0 - 3600 s *0 s
[4] Na referência
[9] Acima da alta I
[8] Abaixo da baixa I
[7] Fora da faixa de corrente
[30] Timeout 0 do SL
[1] On
12-67 Contadores de limite
[31] Timeout 1 do SL
13-1* Comparadores
13-10 Operando do Comparador
*[0] Disabled (Desativado)
[4] Corrente do Motor
[2] Feedback %
[3] Velocidade do motor
[1] Referência %
[13] Entrada analógica AI54
[12] Entrada analógica 53
[6] Potência do motor
[7] Tensão do motor
[18] Entrada de pulso FI29
[19] Entrada de pulso FI33
[20] Número do alarme
[30] Contador A
[31] Contador B
13-11 Operador do Comparador
[0] Menor que (<)
*[1] Aproximadamente igual (~)
[2] Maior que (>)
13-12 Valor do Comparador
[3] Na faixa
[4] Na referência
[8] Abaixo da baixa I
[7] Fora da faixa de corrente
*[0] False (Falso)
[1] True (Verdadeiro)
13-2* Temporizadores
13-20 Temporizador do Controlador do SL
13-4* Regras Lógicas
[2] Em funcionamento
13-40 Regra Lógica Booleana 1
[16] Advertência térmica
[9] Acima da alta I
[1] Reinicializar o SLC
*[0] Não reinicializar o SLC
[83] Correia Partida
13-03 Reinicializar o SLC
[73] Timeout 6 do SL
[74] Timeout 7 do SL
[72] Timeout 5 do SL
[71] Timeout 4 do SL
[70] Timeout 3 do SL
[51] Comparador 5
[60] Regra lógica 4
[61] Regra lógica 5
[50] Comparador 4
[42] Desarme de Auto Reset
[39] Comando de partida
*[40] Conversor parado
[36] Entrada digital DI29
[34] Entrada digital DI19
[35] Entrada digital DI27
[32] Timeout 2 do SL
[33] Entrada digital DI18
10 10
[27] Regra lógica 1
[28] Regra lógica 2
[20] Alarme (desarme)
[21] Alarme (bloqueio por desarme)
0 - 63 *Relacionado ao tamanho
12-97 Prioridade de QoS
12-98 Contadores de Interface
[23] Comparador 1
0 - 4294967295 *4000
12-99 Contadores de Mídia
0 - 4294967295 *0
[83] Correia Partida
13-02 Parar Evento
[0] False (Falso)
12-93 Comprimento Errado de Cabo
0 - 65535 *0
12-94 Proteção contra Broadcast Storm
[1] True (Verdadeiro)
[2] Em funcionamento
-1 - 20 % *-1 %
12-95 Timeout de inatividade
[18] Reversão
[19] Advertência
[21] Alarme (bloqueio por desarme)
[22] Comparador 0
[23] Comparador 1
[17] Rede elétrica fora da faixa
*[0] Disabled (Desativado)
[1] Ativado
[20] Alarme (desarme)
12-82 Serviço SMTP
[0] Disabled (Desativado)
*[0] Disabled (Desativado)
[1] Ativado
12-83 Agente SNMP
13-01 Iniciar Evento
[0] False (Falso)
[1] True (Verdadeiro)
[2] Em funcionamento
0 - 4294967295 *0
0 - 2147483647 *0
12-68 Contadores cumulativos
12-69 Status do PowerLink de Ethernet
[3] Na faixa
0 - 4294967295 *0
[7] Fora da faixa de corrente
[4] Na referência
12-8* Outros Serviços Ethernet
12-80 Servidor de FTP
[8] Abaixo da baixa I
*[0] Disabled (Desativado)
[1] Ativado
12-81 Servidor HTTP
[16] Advertência térmica
[9] Acima da alta I
[24] Comparador 2
*[1] Ativado
[27] Regra lógica 1
Transparente
0 - 65535 *4000
*[1] Ativado
12-92 Espionagem IGMP
*[1] Ativado
12-89 Porta do Canal de Soquete
[0] Disabled (Desativado)
12-84 Detecção de conito de endereços
*[0] Disabled (Desativado)
12-9* Serviços Ethernet Avançados
12-90 Diagnóstico de Cabo
[1] Ativado
12-91 Cross-Over Automático
[0] Disabled (Desativado)
[0] Disabled (Desativado)
*[1] Ativado
[60] Regra lógica 4
[61] Regra lógica 5
[50] Comparador 4
[51] Comparador 5
[40] Conversor parado
[42] Desarme de Auto Reset
*[39] Comando de partida
[35] Entrada digital DI27
[36] Entrada digital DI29
[34] Entrada digital DI19
[29] Regra lógica 3
[33] Entrada digital DI18
[28] Regra lógica 2
[25] Comparador 3
[26] Regra lógica 0
[3] Na faixa
0 - 3600 *120
[4] Na referência
12-96 Cong. da Porta
[7] Fora da faixa de corrente
[0] Normal
[8] Abaixo da baixa I
[255] Espelho Int. Porta para 2
[10] Porta 1 desativada
[11] Porta 2 desativada
[254] Espelho Int. Porta para 1
[2] Porta espelho 2 para 1
[1] Porta espelho 1 para 2
[18] Reversão
[19] Advertência
[17] Rede elétrica fora da faixa
[9] Acima da alta I
[16] Advertência térmica
[24] Comparador 2
[25] Comparador 3
[22] Comparador 0
[29] Regra lógica 3
[26] Regra lógica 0
13-00 Modo Controlador do SL
13-** Smart Logic
13-0* Denições do SLC
*[0] O (Desligado)
dados de processo
8 - 32 *16
dados de processo
8 - 32 *16
[3425] PCD 5 ler para aplicação
[3426] PCD 6 ler para aplicação
[3427] PCD 7 ler para aplicação
[3424] PCD 4 ler para aplicação
[3423] PCD 3 ler para aplicação
[3421] PCD 1 ler para aplicação
[3422] PCD 2 ler para aplicação
[1697] Alarm Word 3
[1698] Warning Word 3
[1695] Ext. Status Word 2
[1694] Ext. Status Word
[1691] Alarm Word 2
[1692] Warning Word
[1693] Warning Word 2
[3428] PCD 8 ler para aplicação
[3429] PCD 9 ler para aplicação
[3430] PCD 10 ler para aplicação
[3450] Posição Real
[3456] Erro de Track
12-23 Tamanho da gravação da cong dos
12-24 Tamanho da leitura da cong dos
*[0] O (Desligado)
12-28 Armazenar Valores dos Dados
[2] Gravar todos setups
12-29 Gravar Sempre
*[0] O (Desligado)
[1] On
12-3* EtherNet/IP
12-30 Parâmetro de Advertência
0 - 2147483647 *0
*[0] O (Desligado)
12-31 Referência da Rede
[1] On
12-32 Controle da Rede
0 - 65535 *Relacionado ao tamanho
*[0] O (Desligado)
[1] On
12-33 Revisão do CIP
0 - 65535 *Relacionado ao tamanho
12-34 Código CIP do Produto
0 - 0 *0
12-35 Parâmetro do EDS
12-37 Temporizador de Inibição do COS
0 - 65535 *0
0 - 65535 *0
12-38 Filtro COS
12-6* PowerLink da Ethernet
12-60 ID do Nó
0 - 2000000000 ms *30000 ms
1 - 239 *1
12-62 Timeout de SDO
0 - 2000000,000 ms *5000,000 ms
12-63 Timeout de Ethernet básica
0 - 2000000000 *15
12-66 Limites
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 79
Page 84

Apêndice
VLT® Midi Drive FC 280
0 - 16 *0
0 - 255 *0
15-57 Versão do arquivo
15-59 Nome do arquivo
14-90 Nível de Defeito
*[3] Bloqueio por desarme
[4] Desarm c/reset atrasad
[5] Flystart
15-6* Ident. do Opcional
15-60 Opcional Montado
15-** Informação do Drive
15-0* Dados Operacionais
0 - 30 *Relacionado ao tamanho
15-00 Horas de funcionamento
0 - 20 *Relacionado ao tamanho
15-70 Opcional no Slot A
15-61 Versão do SW do Opcional
0 - 0x7f. h *0 h
0 - 0x7f. h *0 h
15-01 Horas de Funcionamento
0 - 30 *0
15-71 Versão do SW do Opcional - Slot A
0 - 2147483647 kWh *0 kWh
15-02 Medidor de kWh
15-03 Energizações
14-51 Compensação da Tensão do
0 - 0 *0
15-52 Informações de OEM
15-51 Número de Série do Drive
0 - 65535 *0
14-8* Opcionais
14-88 Armazenagem de dados do opcional
0 - 0 *0
15-53 Número de Série do Cartão de
*[0] Conguração de opcional de proteção
14-89 Detecção de Opcionais
[1] Ativar alteração de opcionais
14-9* Congurações de Defeito
*[0] Não reinicializar
[1] Reset contador
15-07 Reinicializar Contador de Horas de
[7] Modo lig qd inversor não estiver deslig
*[8] Modo de velocidade variável
14-55 Filtro de Saída
Funcionamento
*[0] Não reinicializar
*[0] Sem ltro
[1] Filtro de onda senoidal
[1] Reset contador
15-3* Registro de Alarmes
14-6* Derate Automático
14-61 Função na Sobrecarga do Inversor
15-30 Registro de Alarme: Código de Erro
*[0] Desarme
0 - 255 *0
[1] Derate
-32767 - 32767 *0
15-31 Motivo da Falha Interna
*[2] 2,0 kHz
14-63 Frequência de Chaveamento Mínimo
15-49 ID do SW da Placa de Controle
[12] VLT2800 3M
0 - 0 *0
0 - 0 *0
15-50 ID do SW da Placa de Potência
[14] VLT2800 12M
[15] VLT2800 12M incl. MAV
[13] VLT2800 3M incl. MAV
0 - 0 *0
0 - 20 *0
0 - 20 *0
15-42 Tensão
[8] 10,0 kHz
[9] 12,0 kHz
0 - 0 *0
15-43 Versão do Software
[10] 16,0 kHz
14-64 Nível de Corrente Zero para
0 - 0 *0
15-4* Identicação do drive
15-40 Tipo do FC
15-41 Seção de Potência
[6] 6,0 kHz
[3] 3,0 kHz
[7] 8,0 kHz
[4] 4,0 kHz
[5] 5,0 kHz
0 - 41 *0
15-44 Código do tipo solicitado
15-45 String do Código do Tipo Real
Compensação de Tempo Ocioso
*[0] Disabled (Desativado)
[1] Ativado
0 - 40 *0
15-46 Número de catálogo do conversor de
Derate de Velocidade
14-65 Compensação de Tempo Ocioso de
0 - 0 *0
frequência
15-48 Nº do Id do LCP
20 - 1000 Hz *Relacionado ao tamanho
*[0] No Function
14-7* Compatibilidade
14-70 Seleções de compatibilidade
0 - 2147483647 *0
0 - 65535 *0
0 - 65535 *0
15-04 Superaquecimentos
15-05 Sobretensões
15-06 Reinicializar Contador de kWh
Barramento CC
[0] O (Desligado)
*[1] On
14-52 Controle do Ventilador
[5] Modo constantemente ligado
[6] Modo constantemente desligado
Potência
0 - 0 *0
1010
0 - 60000,000 ReferenceFeedbackUnit
*Relacionado ao tamanho
Automática
0 - 600 s *10 s
Torque
Corrente
0 - 60 s *60 s
0 - 60 s *60 s
0 - 0xFFFFFFFF *0
0 - 500 % *100 %
Integração
1 - 100 ms *5 ms
0,002 - 2 s *0,020 s
40 - 90 % *66 %
0 - 200 % *100 %
40 - 75 % *66 %
[2] Disabled (Desativado)
[30] Iniciar temporizador 1
[16] Advertência térmica
14-15 Cin. Backup, desarme com recuperação
[31] Iniciar temporizador 2
[17] Rede elétrica fora da faixa
[32] Den saíd dig.A baix
[33] Denir saída digital B baixa
[18] Reversão
[19] Advertência
14-2* Funções Reset
14-20 Modo Reinicializar
[34] Denir saída digital C baixa
[35] Denir saída digital D baixa
[20] Alarme (desarme)
[21] Alarme (bloqueio por desarme)
*[0] Reset manual
[1] Reset automático x1
[38] Denir saída digital A alta
[39] Denir saída digital B alta
[22] Comparador 0
[23] Comparador 1
[2] Reset automático x2
[40] Denir saída digital C alta
[24] Comparador 2
[3] Reset automático x3
[41] Denir saída digital D alta
[25] Comparador 3
*[0] Nenhuma ação
[1] Reset de serviço
[3] Reset do Software
0 - 100 % *Relacionado ao tamanho
14-08 Fator de Ganho de Amortecimento
[3] Selecionar setup 2
[2] Selecionar setup 1
14-09 Nível de Corrente de Polarização de
[4] Selecionar setup 3
14-29 Código de Serviço
Tempo Ocioso
0 - 100 % *Relacionado ao tamanho
[10] Selecionar referência predenida 0
[5] Selecionar setup 4
14-30 Ctrl Lim Corrente, Ganho Proporcional
14-3* Ctrl. Limite de Corrente
14-10 Falha de rede elétrica
14-1* Liga/Desliga Rede Elétrica
[12] Selecionar referência predenida 2
[11] Selecionar referência predenida 1
14-31 Ctrl Lim Corrente, Tempo de
*[0] Sem função
[1] Desaceleração controlada
[14] Selecionar referência predenida 4
[13] Selecionar referência predenida 3
[2] Desaceleração controlada, desarme
[15] Selecionar referência predenida 5
[3] Parada por inércia
[16] Selecionar referência predenida 6
14-32 Ctrl Lim Corrente, Tempo do Filtro
14-4* Otimização de Energia
14-40 Nível do VT
[7] Backup cinético, desarme com
[4] Backup cinético
[5] Backup cinético, desarme
[6] Alarme
[22] Funcionar
[19] Selecionar rampa 2
[18] Selecionar rampa 1
[17] Selecionar referência predenida 7
recuperação
[23] Funcionar reverso
14-41 Magnetização Mínima do AEO
14-11 Nível de tensão de falha da rede
[24] Parada
14-44 Otimização corrente do eixo d p/IPM
100 - 800 V *Relacionado ao tamanho
elétrica
[25] Qstop
[26] Freio CC
14-12 Resposta a desbalanceamento de rede
[27] Parada por inércia
14-5* Ambiente
*[0] Desarme
[28] Congelar frequência de saída
[1] Advertência
[29] Iniciar temporizador 0
14-22 Modo Operação
*[0] Operação normal
[3] 3,0 kHz
[42] Desarme de Auto Reset
[4] 4,0 kHz
[5] 5,0 kHz
[50] Comparador 4
[51] Comparador 5
[2] Inicialização
[6] 6,0 kHz
[60] Regra lógica 4
[4] Reset automático x4
[5] Reset automático x5
[6] Reset automático x6
[7] Reset automático x7
[8] Reset automático x8
[9] Reset automático x9
[10] Reset automático x10
[11] Reset automático x15
[12] Reset automático x20
[13] Reset automático innito
[14] Reset na energização
14-21 Tempo de uma Nova Partida
[70] Iniciar temporizador 3
[71] Iniciar temporizador 4
[72] Iniciar temporizador 5
[73] Iniciar temporizador 6
[60] Reset Contador A
[61] Reinicializar o contador B
[28] Regra lógica 2
[26] Regra lógica 0
[27] Regra lógica 1
[74] Iniciar temporizador 7
[32] Timeout 2 do SL
[31] Timeout 1 do SL
[29] Regra lógica 3
[30] Timeout 0 do SL
14-** Funções Especiais
14-0* Chaveamento do Inversor
[34] Entrada digital DI19
[33] Entrada digital DI18
14-01 Frequência de Chaveamento
[35] Entrada digital DI27
[0] Ran3
[36] Entrada digital DI29
[1] Ran5
[39] Comando de partida
[2] 2,0 kHz
[40] Conversor parado
14-25 Atraso do Desarme no Limite de
14-24 Atraso do Desarme no Limite de
Ocioso
0 - 100 *Relacionado ao tamanho
[10] 16,0 kHz
14-03 Sobremodulação
[7] 8,0 kHz
[8] 10,0 kHz
[70] Timeout 3 do SL
[61] Regra lógica 5
[0] O (Desligado)
[9] 12,0 kHz
[71] Timeout 4 do SL
*[1] On
14-07 Nível de Compensação de Tempo
*[0] Disabled (Desativado)
[1] Nenhuma ação
[83] Correia Partida
13-52 Ação do Controlador do SL
[74] Timeout 7 do SL
[73] Timeout 6 do SL
[72] Timeout 5 do SL
[0] Desarme
*[1] Advertência
14-28 Programações de Produção
14-27 Ação na Falha do Inversor
80 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
Page 85

Apêndice Guia de Operação
0 - 200,0 % *Relacionado ao tamanho
0 - 60 s *Relacionado ao tamanho
30-21 Corrente de Torque de Partida Alta [%]
*0 ExtPID1Unit
-999999.999 - 999999.999 ExtPID1Unit
21-17 Referência Ext. 1[Unidade]
0 - 0xFFFFFFFFUL *0
*[0] O (Desligado)
30-22 Proteção de Rotor Bloqueado
[1] On
-999999.999 - 999999.999 ExtPID1Unit
*0 ExtPID1Unit
21-18 Feedback Ext. 1 [Unidade]
0 - 0xFFFFFFFFUL *0
Bloqueado [s]
0,05 - 1 s *0,10 s
30-23 Tempo de Detecção do Rotor
-999999.999 - 999999.999 ExtPID1Unit
*0 ExtPID1Unit
21-19 Saída Ext. 1 [%]
0 - 0xFFFFFFFFUL *0
0 - 0xFFFFFFFFUL *0
31-** Opcional especial
31-4* Módulo de memória
0 - 100 % *0 %
21-2* Ext. CL 1 PID
0 - 0xFFFFFFFFUL *0
0 - 2 *0
Memória
31-42 Congure o Acesso ao Módulo de
31-41 Informações de MM
[3] Permita Download e Upload
*[1] Only Allow Download
[2] Only Allow Upload
[0] Disabled (Desativado)
31-40 Função do Módulo de Memória
0,01 - 10000 s *10000 s
0 - 10 *0,01
[1] Inverso
21-21 Ganho Proporcional Ext. 1
*[0] Normal
21-20 Controle Normal/Inverso Ext. 1
21-23 Tempo de Diferenciação Ext. 1
21-22 Tempo Integrado Ext. 1
[2] Programe MM para leitura e gravação
31-43 Erase_MM
*[0] Sem função
[1] Apagar MM
22-0* Diversos
Mode
22-02 Modo de controle do CL do Sleep
31-47 Função Limite de Tempo
*[0] Normal
*[0] Nenhuma ação
[1] Programe MM para somente leitura
1 - 50 *5
0 - 10 s *0 s
21-24 Ext. 1 Dif. Limite de Ganho
22-** Aplicação Funções
0 - 720 h *720 h
*[0] Disabled (Desativado)
[1] Ativado
31-48 Tempo restante do Limite de Tempo
0 - 600 s *10 s
[1] Simplicado
22-4* Sleep Mode
22-40 Tempo de Funcionamento Mínimo
movimento
32-** Congurações básicas do controle de
0 - 600 s *10 s
22-41 Sleep Time Mínimo
32-1* Unidade do Usuário
32-11 Denominador da Unidade do Usuário
0 - 400,0 *10
22-43 Velocidade de Ativação [Hz]
1 - 65535 *1
1 - 65535 *1
32-12 Numerador da Unidade do Usuário
0 - 100 % *10 %
22-44 Referência de Ativação/Diferença de FB
1 - 2147483648 *2000000
32-6* PID
32-67 Erro Máximo de Posição Tolerado
32-8* Velocidade e Aceleração
0 - 600 s *60 s
-100 - 100 % *0 %
22-46 Tempo Máximo de Impulso
22-47 Velocidade de Sleep [Hz]
22-45 Boost de Setpoint
1 - 30000 RPM *1500 RPM
32-80 Velocidade máxima permitida
0 - 400,0 *0
22-48 Tempo de Atraso do Sleep
32-81 Rampa de parada rápida do controle
0 - 3600 s *0 s
de movimento
22-49 Tempo de Atraso de Ativação
50 - 3600000 ms *1000 ms
0 - 3600 s *0 s
Congurações
33-00 Modo Homing
33-** Controle de movimento avançado
33-0* Movimento de Início
*[0] O (Desligado)
22-6* Detecção de Correia Partida
22-60 Função Correia Partida
[1] Advertência
*[0] Não forçado
[2] Desarme
[1] Homing manual forçado
22-61 Torque de Correia Partida
[2] Homing automatizado forçado
5 - 100 % *10 %
-1073741824 - 1073741824 *0
33-01 Compensar Home
0 - 600 s *10 s
22-62 Atraso de Correia Partida
1 - 1000 ms *10 ms
33-02 Tempo de Rampa de Home
30-** Recursos Especiais
30-2* Avançado Ajuste de Partida
33-03 Início velocidade
30-20 Tempo do Torque de Partida Alto [s]
10 10
-200 - 200 % *0 %
0 - 0xFFFFFFFFUL *0
0 - 0 *0
0 - 0xFFFFFFFFUL *0
Memória
-200 - 200 % *0 %
-200 - 200 % *0 %
0 - 4294967295 *0
0 - 0xFFFFFFFFUL *0
Processo
-200 - 200 % *0 %
-999999.999 - 999999.999 ExtPID1Unit
*0 ExtPID1Unit
-999999.999 - 999999.999 ExtPID1Unit
*100 ExtPID1Unit
16-9* Leituras de Diagnóstico
0 - 655,35 A *0 A
0 - 20 *0
16-90 Alarm Word
0 - 655,35 A *0 A
16-37 Inv. Corrente máx.
15-9* Informações do Parâmetro
15-92 Parâmetros Denidos
16-91 Alarm Word 2
16-38 Estado do Controlador do SL
0 - 2000 *0
16-92 Warning Word
0 - 20 *0
16-39 Temperatura do Cartão de Controle
0 - 0xFFFFFFFF *0
15-97 Tipo de Aplicação
16-93 Warning Word 2
0 - 65535 °C *0 °C
16-5* Ref. e Feedback
0 - 56 *0
15-98 Identicação do drive
16-95 Ext. Status Word 2
16-94 Ext. Status Word
-4999 - 4999 UnidContrProces *0
-200 - 200 % *0 %
16-52 Feedback[Unidade]
16-50 Referência Externa
0 - 9999 *0
15-99 Metadados de Parâmetro
16-** Exibição dos Dados
16-0* Status Geral
UnidContrProces
16-00 Control Word
16-97 Alarm Word 3
-200 - 200 *0
16-53 Referência do DigiPot
0 - 65535 *0
16-01 Referência [Unidade]
16-98 Warning Word 3
18-** Leituras de Dados 2
-30000 - 30000 RPM *0 RPM
16-57 Feedback [rpm]
16-6* Entradas e Saídas
ReferenceFeedbackUnit
-4999 - 4999 ReferenceFeedbackUnit *0
16-02 Referência [%]
18-51 Motivo da Advertência do Módulo de
18-5* Leitura do Módulo de Memória
0 - 4095 *0
16-60 Entrada digital
-200 - 200 % *0 %
16-03 Status Word
16-61 Programação do Terminal 53
0 - 65535 *0
18-52 ID do Módulo de Memória
[1] Modo de tensão
[6] Entrada digital
-200 - 200 % *0 %
16-05 Valor Real Principal [%]
18-90 Erro do PID de Processo
18-9* Leituras do PID
0 - 20 *1
[0] Modo de corrente
16-63 Programação do Terminal 54
16-62 Entrada analógica 53
0 - 9999 CustomReadoutUnit *0
CustomReadoutUnit
16-09 Leitura Personalizada
16-1* Status do Motor
18-91 Saída do PID de Processo
[1] Modo de tensão
16-64 Entrada analógica 54
0 - 1000 kW *0 kW
16-10 Potência [kW]
18-92 Saída Presa do PID de Processo
0 - 20 *1
16-11 Potência [hp]
18-93 Ganho escalonado de Saída do PID de
21-** Ext. Malha Fechada
21-0* Ext. Sintonização Automática do PID
21-09 Ativar PID estendido
*[0] Disabled (Desativado)
[1] PID 1 CL Ext. Ativado
21-1* Ext. CL 1 Ref./Fb.
0 - 40000 *0
0 - 130000 *0
0 - 63 *0
16-66 Saída Digital
0 - 65535 V *0 V
16-13 Freqüência
0 - 130000 *0
16-69 Saída de pulso 27 [Hz]
16-68 Entrada de pulso 33 [Hz]
16-67 Entrada de pulso 29 [Hz]
0 - 6553,5 % *0 %
0 - 655,35 A *0 A
0 - 6553,5 Hz *0 Hz
16-16 Torque [Nm]
16-15 Frequência [%]
16-14 Corrente do Motor
0 - 20 mA *0 mA
16-65 Saída analógica 42 [mA]
0 - 1000 hp *0 hp
16-12 Tensão do Motor
21-11 Referência Mínima Ext. 1
16-71 Saída do relé
-30000 - 30000 Nm *0 Nm
21-12 Referência Máxima Ext. 1
0 - 31 *0
-32768 - 32767 *0
-32768 - 32767 *0
16-72 Contador A
16-73 Contador B
0 - 100 % *0 %
-30000 - 30000 RPM *0 RPM
16-18 Térmico Calculado do Motor
16-17 Velocidade [RPM]
16-20 Ângulo do Motor
21-13 Fonte da Referência Ext. 1
16-74 Prec. Parar Contador
0 - 65535 *0
*[0] Sem função
[1] Entrada analógica 53
0 - 2147483647 *0
16-8* Porta do FC e Fieldbus
-200 - 200 % *0 %
16-22 Torque [%]
[2] Entrada analógica 54
16-80 CT W 1 do Fieldbus
16-3* Status do conversor
[7] Entrada de frequência 29
0 - 65535 *0
16-30 Tensão do Barramento CC
[8] Entrada de frequência 33
21-14 Fonte do Feedback Ext. 1
-32768 - 32767 *0
16-82 REF 1 do Fieldbus
0 - 65535 V *0 V
16-33 Energia do Freio /2 min
*[0] Sem função
[1] Entrada analógica 53
0 - 65535 *0
16-84 Comunicação Opcional STW
0 - 10000 kW *0 kW
16-34 Temperatura do Dissipador de Calor
[2] Entrada analógica 54
16-85 CT W 1 da Porta do FC
-128 - 127 °C *0 °C
[3] Entrada de frequência 29
[4] Entrada de frequência 33
0 - 65535 *1084
16-86 REF 1 da Porta do FC
0 - 255 % *0 %
16-35 Térmico do Inversor
21-15 Setpoint Ext. 1
-32768 - 32767 *0
16-36 Inv. Nom. Corrente
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 81
Page 86

Apêndice
VLT® Midi Drive FC 280
1010
0 - 255 *0
inicial
37-19 Pos. Novo índice
[20] Não é possível localizar a posição
[13] Operação Para frente
[12] Operação Reversa
[7] Limite de desgaste do freio
[8] Parada Rápida
[9] Erro do PID muito grande
[5] Limite Negativo do SW
[1] Bloquear Reversão
Controle
[4] Limite Positivo do SW
[1] Homing Necessário
*[0] Sem falha
[2] Limite Positivo do HW
[3] Limite Negativo do HW
[1] Frear Diretamente
37-18 Pos. Motivo da Falha de Controle
*[0] Desaceleração e Freio
37-17 Pos. Comportamento da Falha de
[2] Bloquear para frente
0 - 65535 *0
34-30 PCD 10 ler para aplicação
34-5* Dados do Processo
34-50 Posição Real
50 - 100000 ms *5000 ms
50 - 100000 ms *5000 ms
*[0] Absoluto
[1] Relativo
37-04 Pos. Velocidade
1 - 30000 RPM *100 RPM
37-05 Pos. Tempo de Aceleração da Rampa
37-06 Pos. Tempo de desaceleração
37-07 Pos. Controle de freio automático
37-02 Pos. Destino
*[0] Encoder de 24 V
37-01 Pos. Fonte do Feedback
-1073741824 - 1073741824 *0
37-03 Pos. Tipo
-2147483647 - 2147483647 *0
-1073741824 - 1073741824 *0
34-56 Erro de Track
37-** Congurações da Aplicação
37-0* Modo de aplicação
37-00 Modo de aplicação
*[0] Modo Drive
[2] Controle da Posição
37-1* Controle da Posição
0 - 10000 ms *0 ms
37-12 Pos. Anti Windup do PID
37-11 Pos. Limite de desgaste do freio
37-10 Pos. Atraso de freio
*[1] Ativado
37-08 Pos. Atraso de retenção
37-09 Pos. Atraso de parada por inércia
[0] Inativo
0 - 1073741824 *0
0 - 1000 ms *200 ms
0 - 1000 ms *200 ms
1 - 10000 *1000
*[0] Sem Bloqueio
*[0] DI
[1] FieldBus
37-15 Pos. Bloqueio de sentido
37-14 Pos. Ctrl. Fonte
37-13 Braçadeira da saída do PID de posição
[0] Inativo
*[1] Ativado
-1500 - 1500 RPM *100 RPM
33-04 Comportamento Homing
-1073741824 - 1073741824 *500000
-1073741824 - 1073741824 *-500000
*[0] Inativo
[1] Referência
33-44 Limite Positivo de Software Ativo
33-43 Limite Negativo de Software Ativo
[3] Para frente sem índice
*[1] Reversão sem índice
33-42 Limite Positivo de Software
33-4* Manuseio do Limite
33-41 Limite Negativo de Software
1 - 10000 *512
Movimento
0 - 65535 *0
0 - 65535 *0
0 - 65535 *0
0 - 65535 *0
0 - 65535 *0
0 - 65535 *0
0 - 65535 *0
0 - 65535 *0
*[0] Inativo
[1] Referência
33-47 Posição da Janela de Destino
34-** Leituras de Dados do Controle de
34-0* Par. Gravação PCD
34-01 PCD 1 gravar para aplicação
34-02 PCD 2 gravar para aplicação
34-03 PCD 3 gravar para aplicação
34-04 PCD 4 gravar para aplicação
34-05 PCD 5 gravar para aplicação
34-06 PCD 6 gravar para aplicação
34-07 PCD 7 gravar para aplicação
34-08 PCD 8 gravar para aplicação
0 - 65535 *0
34-09 PCD 9 gravar para aplicação
34-10 PCD 10 gravar para aplicação
0 - 65535 *0
34-2* Par Ler PCD
34-21 PCD 1 ler para aplicação
0 - 65535 *0
34-22 PCD 2 ler para aplicação
0 - 65535 *0
34-23 PCD 3 ler para aplicação
0 - 65535 *0
34-24 PCD 4 ler para aplicação
0 - 65535 *0
34-25 PCD 5 ler para aplicação
0 - 65535 *0
34-26 PCD 6 ler para aplicação
0 - 65535 *0
34-27 PCD 7 ler para aplicação
0 - 65535 *0
34-28 PCD 8 ler para aplicação
0 - 65535 *0
34-29 PCD 9 ler para aplicação
0 - 65535 *0
82 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
Page 87

Índice Guia de Operação
Índice
A
Abreviações............................................................................................ 71
Alta tensão.......................................................................................... 7, 24
AMA com T27 conectado.................................................................. 46
Ambiente de instalação..................................................................... 10
Aprovação e certicação...................................................................... 6
Armazenagem....................................................................................... 10
Aterramento...................................................................... 17, 18, 23, 24
Auto on (Automático ligado)..................................................... 31, 35
C
Cabo blindado....................................................................................... 23
Cartão de controle
Comunicação serial RS485............................................................ 64
Comunicação serial USB................................................................ 64
Desempenho..................................................................................... 64
Saída +10 V CC.................................................................................. 64
Saída 24 V CC..................................................................................... 64
Chave de desconexão......................................................................... 24
Choque..................................................................................................... 10
Classe de eciência energética........................................................ 61
Comando Executar............................................................................... 35
Comando externo................................................................................... 5
Comando remoto.................................................................................... 4
Comprimento de cabo....................................................................... 62
Comprimento do o............................................................................ 13
Comunicação serial
Comunicação serial.................................................... 22, 31, 49, 64
Comunicação serial USB................................................................ 64
Condição ambiente............................................................................. 61
Conduzir................................................................................................... 23
Conexão de energia............................................................................. 13
Conguração padrão.......................................................................... 32
Controlador externo.............................................................................. 4
Controle
Característica..................................................................................... 64
Fiação..................................................................................... 13, 20, 23
Terminal de controle................................................................ 31, 53
Controle do freio mecânico.............................................................. 21
Controle local......................................................................................... 31
Convenção.............................................................................................. 71
Corrente CC............................................................................................... 5
Corrente de fuga.............................................................................. 8, 13
Corrente de saída.................................................................................. 63
D
Delta aterrado........................................................................................ 19
Delta utuante....................................................................................... 19
Derating................................................................................................... 61
Disjuntor.................................................................................................. 23
Display numérico.................................................................................. 25
Disposição dos cabos.......................................................................... 23
E
Eciência energética............................................................. 58, 59, 60
Elevação................................................................................................... 10
EMC............................................................................................................ 61
Entrada
Corrente............................................................................................... 18
Energia de entrada.......................................................................... 13
Fiação da energia de entrada...................................................... 23
Potência............................................................................ 5, 18, 23, 24
Tensão de entrada........................................................................... 24
Terminal número....................................................................... 18, 24
Entrada CA.......................................................................................... 5, 18
Entrada digital....................................................................................... 20
Entradas
Entrada analógica............................................................................ 62
Entrada de pulso.............................................................................. 63
Entrada digital................................................................................... 62
Equalização do potencial................................................................... 14
Equipamento auxiliar.......................................................................... 23
Equipamento opcional....................................................................... 24
Espaço para ventilação....................................................................... 23
Especicação.......................................................................................... 23
Estrutura do menu............................................................................... 30
F
Falha
Registro de falhas............................................................................. 30
Fator de potência............................................................................. 5, 23
Feedback................................................................................................. 23
Feedback do sistema............................................................................. 4
Fiação de energia de saída................................................................ 23
Filtro de RFI............................................................................................. 19
Forma de onda CA.................................................................................. 5
Fusível......................................................................................... 13, 23, 65
H
Hand On (Manual Ligado)................................................................. 31
I
IEC 61800-3...................................................................................... 19, 61
Inicialização
Procedimento.................................................................................... 32
Procedimento manual.................................................................... 32
Instalação................................................................................................ 23
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 83
Page 88

Índice
Instalação compatível com EMC..................................................... 13
Instalação lado a lado......................................................................... 10
Instruções para descarte...................................................................... 6
Isolação de interferência.................................................................... 23
VLT® Midi Drive FC 280
J
Jumper...................................................................................................... 20
L
Lista de advertência e alarme.......................................................... 53
Load Sharing............................................................................................. 7
M
Malha aberta.......................................................................................... 64
Manutenção........................................................................................... 49
Menu principal............................................................................... 28, 30
Montagem....................................................................................... 10, 23
Montagem horizontal......................................................................... 11
Motor
Cabo de motor........................................................................... 13, 17
Corrente.......................................................................................... 5, 34
Corrente do Motor........................................................................... 30
Dados................................................................................................... 34
Dados do motor............................................................................... 33
Potência do motor.................................................................... 13, 30
Proteção................................................................................................. 4
Proteção térmica do motor............................................................. 6
Rotação................................................................................................ 35
Saída do motor................................................................................. 61
Status...................................................................................................... 4
N
Nível de tensão...................................................................................... 62
Norma e conformidade para STO...................................................... 6
P
Partida acidental.............................................................................. 7, 49
PELV.................................................................................................... 48, 64
Pessoal qualicado................................................................................. 7
Placa traseira.......................................................................................... 10
Plaqueta de identicação.................................................................... 9
Programação............................................................................ 20, 30, 31
Proteção de sobrecorrente................................................................ 13
Proteção de transiente.......................................................................... 5
Proteção do circuito de derivação.................................................. 65
Proteção térmica..................................................................................... 6
Q
Quick menu..................................................................................... 26, 30
R
Reciclagem................................................................................................ 6
Recurso adicional.................................................................................... 4
Rede elétrica
Alimentação (L1/N, L2/L, L3)........................................................ 60
Dados de alimentação................................................................... 58
Tensão.................................................................................................. 30
Rede elétrica CA............................................................................... 5, 18
Rede elétrica isolada............................................................................ 19
Referência................................................................................................ 30
Referência de velocidade............................................................ 35, 46
Refrigeração........................................................................................... 10
Registro de Alarme............................................................................... 30
Reinicializar........................................................................ 30, 31, 32, 49
Relé do cliente....................................................................................... 43
Requisito de espaçamento................................................................ 10
Rotação do encoder............................................................................ 35
S
Saída do relé........................................................................................... 64
Saídas
Saída analógica................................................................................. 63
Saída digital........................................................................................ 63
Seção transversal.................................................................................. 62
Segurança.................................................................................................. 8
Serviço...................................................................................................... 49
Setup......................................................................................................... 35
SIL2............................................................................................................... 6
SILCL de SIL2............................................................................................. 6
Símbolo.................................................................................................... 71
Start-up.................................................................................................... 32
STO
Ativação............................................................................................... 42
Dados técnicos.................................................................................. 45
Desativação........................................................................................ 42
Manutenção....................................................................................... 44
Nova partida automática....................................................... 42, 43
Reinicialização manual............................................................ 42, 43
Teste de colocação em funcionamento................................... 43
T
Tamanho do cabo................................................................................. 17
Tecla.................................................................................................... 25, 30
Tecla de navegação....................................................................... 25, 30
Tecla de operação.......................................................................... 25, 30
Tempo de descarga................................................................................ 8
Tensão de alimentação................................................................ 24, 64
84 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
Page 89

Índice Guia de Operação
Terminais
Terminal de controle................................................................ 31, 53
Terminal de saída............................................................................. 24
Termistor.................................................................................................. 48
Terra
Conexão do terra.............................................................................. 23
Fio terra................................................................................................ 13
Torque
Característica do torque................................................................ 61
Torque de aperto dos terminais...................................................... 65
Transiente de ruptura.......................................................................... 14
U
Uso pretendido........................................................................................ 4
V
Vibração................................................................................................... 10
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 85
Page 90

A Danfoss não aceita qualquer responsabilidade por possíveis erros constantes de catálogos, brochuras ou outros materiais impressos. A Danfoss reserva-se o direito de alterar os seus produtos sem
aviso prévio. Esta determinação aplica-se também a produtos já encomendados, desde que tais modicações não impliquem em mudanças nas especicações acordadas. Todas as marcas
registradas constantes deste material são propriedade das respectivas empresas. Danfoss e o logotipo Danfoss são marcas registradas da Danfoss A/S. Todos os direitos reservados.
Danfoss A/S
Ulsnaes 1
DK-6300 Graasten
vlt-drives.danfoss.com
132R0153 MG07A528 08/2018
*MG07A528*
 Loading...
Loading...