


未来のエンジニアリング
操作ガイド
VLT® Midi Drive FC 280
www.DanfossDrives.com

目次 操作ガイド
目次
1 はじめに
1.1 取扱説明書の目的
1.2 補助的リソース
1.3 ドキュメント/ソフトウェア・バージョン
1.4 製品概要
1.5 承認及び認証
1.6 廃棄
2 安全性
2.1 安全記号
2.2 有資格技術者
2.3 安全予防措置
3 機械的設置
3.1 開梱
3.2 設置環境
3.3 取り付け
4
4
4
4
4
6
6
7
7
7
7
9
9
10
10
4 電気的設置
4.1 安全指示
4.2 EMC 対策設置
4.3 接地
4.4 配線図
4.5 アクセス
4.6 モーター接続
4.7 AC 主電源接続
4.8 コントロール配線
4.8.1 コントロール端子の種類 19
4.8.2 コントロール端子への配線 20
4.8.3 モーター動作を有効化(端子 27) 20
4.8.4 機械的ブレーキ・コントロール 20
4.8.5 USB データ通信 22
4.9 設置チェックリスト
5 設定
5.1 安全指示
13
13
13
13
15
17
17
18
19
23
24
24
5.2 電源の供給
5.3 ローカル・コントロール・パネル動作
5.3.1 数値ローカル・コントロール・パネル (NLCP) 24
5.3.2 NLCP の右キー機能 26
MG07A540 Danfoss A/S © 08/2018 All rights reserved. 1
24
24
目次
VLT® Midi Drive FC 280
5.3.3 NLCP のクイック・メニュー 26
5.3.4 NLCP のメイン・メニュー 28
5.3.5 グラフィック・ローカル・コントロール・パネル (GLCP) 30
5.3.6 パラメーター設定 31
5.3.7 GLCP によるパラメーター設定の変更 31
5.3.8 LCP へ/からデータのアップロード/ダウンロード 31
5.3.9 LCP によるデフォルト設定の回復 32
5.4 基本プログラミング
5.4.1 非同期モーター設定 32
5.4.2 VVC+による PM モーター設定 32
5.4.3 自動モーター適合 (AMA) 34
5.5 モーター回転をチェック中
5.6 エンコーダーの回転確認
5.7 ローカル・コントロール・テスト
5.8 システム・スタートアップ
5.9 メモリモジュール
5.9.1 周波数変換器データを新しいメモリモジュール(ドライブバックアップの
作成)と同期 36
5.9.2 別の周波数変換器にデータをコピー 36
5.9.3 複数の周波数変換器にデータをコピー 36
5.9.4 ファームウェア情報の転送 37
5.9.5 パラメータの変更をメモリモジュールにバックアップ 37
5.9.6 データの消去 37
5.9.7 性能の転送と表示 37
5.9.8 PROFIBUS コンバーターを有効にする 37
32
34
34
35
35
35
6 Safe Torque Off (STO)
6.1 STO の安全予防措置
6.2 Safe Torque Off の設置
6.3 STO 試運転
6.3.1 Safe Torque Off の起動 41
6.3.2 Safe Torque Off の無効化 41
6.3.3 STO 試運転試験 42
6.3.4 手動再スタートモードでの STO アプリケーション用試験 42
6.3.5 自動再スタートモードでの STO アプリケーション用試験 42
6.4 STO のメンテナンスと点検
6.5 STO 技術データ
7 アプリケーション例
7.1 はじめに
7.2 アプリケーション例
2 Danfoss A/S © 08/2018 All rights reserved. MG07A540
39
40
40
41
43
44
45
45
45
目次 操作ガイド
7.2.1 AMA 45
7.2.2 速度 45
7.2.3 スタート/ストップ 47
7.2.4 外部警報リセット 47
7.2.5 モーター・サーミスター 47
7.2.6 SLC 48
8 メンテナンス、診断およびトラブルシューティング
8.1 メンテナンスとサービス
8.2 警告と警報の種類
8.3 警報と警告の表示
8.4 警告と警報のリスト
8.4.1 警告および警報コードリスト 51
8.5 トラブルシューティング
9 仕様
9.1 電気データ
9.2 主電源
9.3 モーター出力とモーター・データ
9.4 周囲条件
9.5 ケーブル仕様
9.6 コントロール入力/出力とコントロールデータ
9.7 接続の締め付けトルク
9.8 ヒューズと遮断器
9.9 エンクロージャー・サイズ、電力規格、寸法
49
49
49
50
51
56
58
58
60
61
61
62
62
65
65
68
10 付属資料
10.1 記号、略語と用例
10.2 パラメーター・メニュー構造
インデックス
MG07A540 Danfoss A/S © 08/2018 All rights reserved. 3
71
71
71
83
はじめに
VLT® Midi Drive FC 280
11
1 はじめに
1.1 取扱説明書の目的
この操作ガイドには、VLT® Midi Drive FC 280 周波数
変換器の設置と設定を安全に行うための情報が記載され
ています。
操作ガイドは、有資格技術者による利用を前提としていま
す。
周波数変換器を安全かつ専門的に使用するため、操作ガイ
ドを良く読み、その内容に従ってください。安全指示と一
般警告については、特に注意して読むようにしてくださ
い。この操作ガイドは、周波数変換器の操作時にいつでも
取り出して読めるよう大切に保管してください。
VLT® は登録商標です。
1.2 補助的リソース
高度な周波数変換器の機能やプログラミング及びメンテ
ナンスを理解するために、様々なリソースがご利用になれ
ます。
VLT® Midi Drive FC 280
•
は、周波数変換器のデザインとアプリケーション
に関する詳細情報が記載されています。
VLT® Midi Drive FC 280
•
イド
では、プログラム方法に関する情報を説明
し、全パラメーターを解説します。
Danfoss は補足的な情報と取扱説明書を提供しています。
をご参照ください。
center/technical-documentation/
drives.danfoss.com/knowledge-
デザイン・ガイド
プログラミング・ガ
をご参照ください。
に
製品概要
1.4
1.4.1 使用目的
周波数変換器は、電動モーターの制御目的で
システムフィードバック、又は外部コントローラ
•
ーからのリモートコマンドに反応して、モーター
速度の制御を行う電子モーターコントローラー
です。パワードライブシステムは、周波数変換
器、モーター、及びモーター駆動の機器から構成
されています。
システム及びモーター状態監視。
•
周波数変換器は、モーター過負荷保護のために使用するこ
ともできます。
設定によっては、周波数変換器を独立的な用途に用いるこ
とができる一方で、より大きな装置や設置物の一部として
用いることも可能です。
周波数変換器は、地域の法規に従って、住居環境、工業環
境、商業環境にて使用することができます。
注記
住居環境では、この製品は無線妨害を生じさせる可能性が
あり、追加的な緩和措置が必要になる場合があります。
予期される誤用
周波数変換器を、指定の動作条件・動作環境に準拠してい
ない用途に使用しないでください。
れている条件を遵守してください。
章 9 仕様
に指定さ
ドキュメント/ソフトウェア・バー
1.3
ジョン
この取扱説明書には、定期的な見直しと更新が行われま
す。改善のご提案を歓迎します。
ト・バージョンと、対応するソフトウェア・バージョンを
示しています。
エディショ
ン
ソフトウェア・アップデートお
MG07A5
表 1.1 ドキュメントおよびソフトウェア・バージョン
4 Danfoss A/S © 08/2018 All rights reserved. MG07A540
よびメモリ モジュールのサポ
ート。
注釈
表 1.1
が、ドキュメン
ソフトウェ
ア・バージョン
1.5
M
7
63
4
5
21
8
10
130BE200.12
M
7
63
4
5
21
8
9
T2/T4
S2
はじめに 操作ガイド
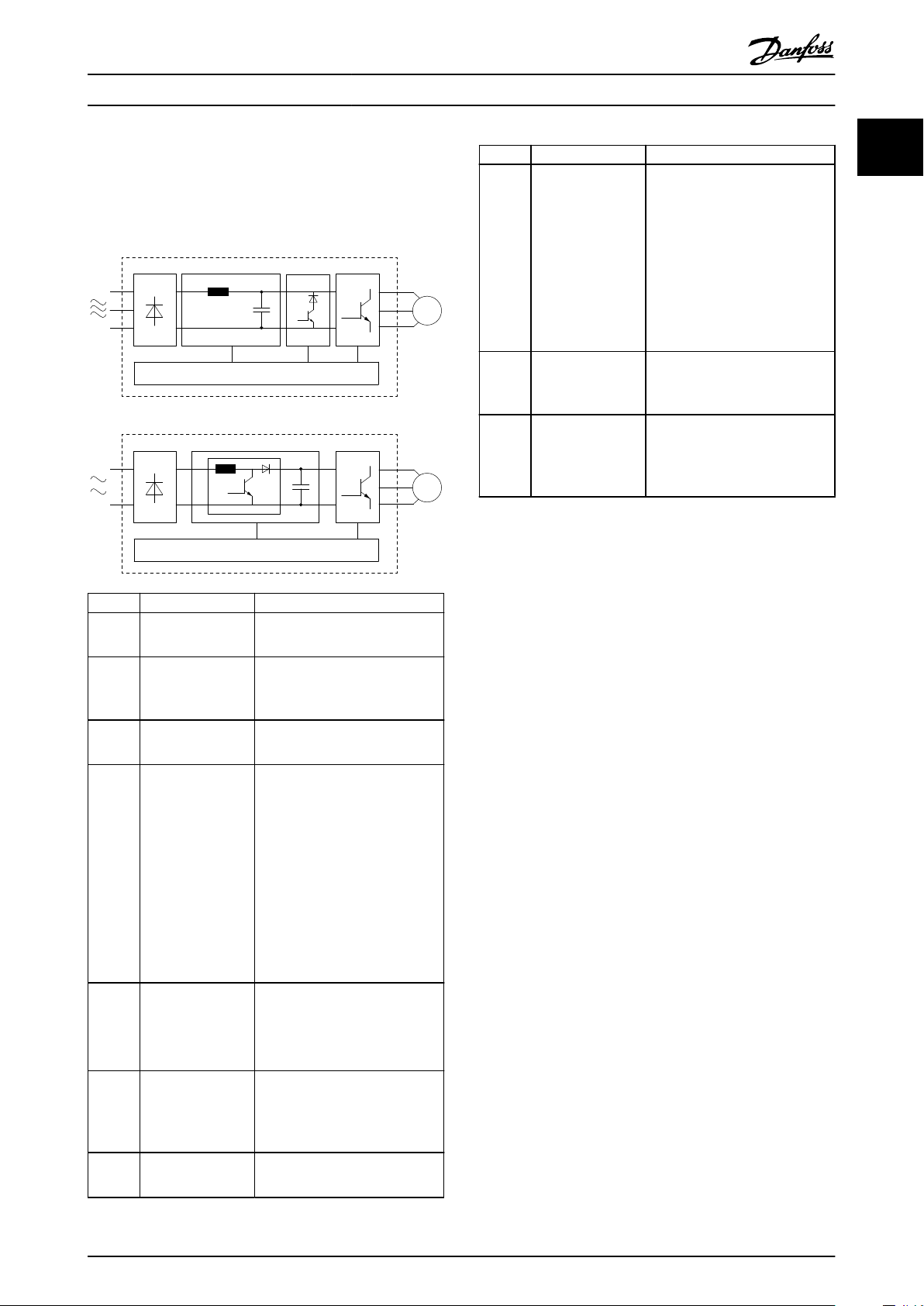
1.4.2 周波数変換器のブロック図
図 1.1
は、周波数変換器の内部部品のブロック図です。
面積 コンポーネント 機能
周波数変換器の AC 主電源
1 主電源入力
2 整流器
3 直流バス
4 直流リアクター
5
6 インバーター
7 モーターへの出力
キャパシター・バン
ク
•
です。
整流器ブリッジがインバータ
•
ーに電力供給するため交流を
直流に変換します。
中間直流バス回路は、 直流電
•
流を操作します。
中間直流回路電流をフィルタ
•
リングします。
主電源トランジエント保護を
•
提供します。
2 乗平均平方根(RMS)電流を
•
減じます。
ラインに反映する力率を上昇
•
させます。
交流入力の高調波を減じま
•
す。
直流電力を保持します。
•
ショート電力損失に対するラ
•
イド・スルー保護を提供しま
す。
制御された可変出力をモータ
•
ーへ供給するために、直流を
制御された PWM 交流波形へ
変換します。
モーターに供給される制御さ
•
れた 3 相出力です。
面積 コンポーネント 機能
効率良い運転と制御のため、
•
入力電源、内部処理、出力、
及びモーター電流は監視され
ます。
ユーザー・インターフェイス
8 コントロール回路
9 PFC
ブレーキ・チョッパ
10
ー
図 1.1 周波数変換器のブロック図の例
•
と外部指令は監視され、実行
されます。
状況の出力と制御が行えま
•
す。
力率修正は、周波数変換器に
•
よって描かれる電流の波形を
変更し、力率を向上します。
ブレーキ・チョッパーは、負
•
荷がエネルギーを戻すときに
直流中間回路で DC 電圧を制
御するために使用されます。
1.4.3 エンクロージャー・サイズと電力規
格
周波数変換器のエンクロージャー・サイズと電力規格につ
いては、
寸法
章 9.9 エンクロージャー・サイズ、電力規格、
を参照してください。
1.4.4 Safe Torque Off (STO)
VLT® Midi Drive FC 280 周波数変換器は Safe Torque
Off (STO)をサポートします。STO の設置、設定、メンテ
ナンス、および技術データについては、
Off (STO)
をご参照ください。
章 6 Safe Torque
1 1
MG07A540 Danfoss A/S © 08/2018 All rights reserved. 5
089
はじめに
VLT® Midi Drive FC 280
11
1.5 承認及び認証
国内水路での危険物の国際輸送に関する欧州協定(ADN)の
遵守に関しては、
イドの「ADN を遵守した設置」の章
周波数変換器は、UL508C 熱記憶保持の要件を遵守してい
ます。詳細については、
ンガイドの「モーター熱保護」
STO の適用基準およびコンプライアンス
端子 37 及び 38 上の STO を使用する場合、関連する
法、規則、ガイドラインを含むすべての安全規則を遵守し
なければいけません。内蔵の STO 機能は以下の基準に
準拠しています:
IEC/EN 61508:2010, SIL2
•
IEC/EN 61800-5-2:2007, SIL2
•
IEC/EN 62061:2015, SIL2 の SILCL
•
EN ISO 13849-1:2015 カテゴリー 3 PL d
•
VLT® Midi Drive FC 280 デザインガ
を参照してください。
VLT® Midi Drive FC 280 デザイ
の章を参照してください。
廃棄
1.6
電装品を組み込んでいる装置を一般廃棄
物とともに処理することは禁止されてい
ます。
地域で現在施行されている法律に従っ
て、分別回収してください。
6 Danfoss A/S © 08/2018 All rights reserved. MG07A540
安全性 操作ガイド
2 安全性
2.1 安全記号
安全予防措置
2.3
2 2
以下は、この文書で使用されている記号です:
警告
死亡事故や深刻な傷害事故を招く可能性のある危険な状
況を示します。
注意
軽微あるいは中小程度の傷害を招く危険性のある状況を
示します。これは安全ではないやり方に対する警告とし
ても使用される場合があります。
注記
重要情報を示します。装置や所有物などの損害を招く可
能性のある状況が含まれます。
2.2 有資格技術者
周波数変換器を無故障かつ安全に動作させるためには、正
確かつ信頼性の高い輸送、保管、設置、操作、メンテナン
スが必要です。機器の設置や操作は、有資格技術者のみが
行うことができます。
有資格技術者とは、訓練を受けたスタッフであって、関連
する法律と規則に従って設備、システム、回路の設置、設
定、メンテナンスを行うことを許された者のことをいいま
す。さらに、有資格技術者は、このガイドに記載されてい
る指示と安全措置を熟知する必要があります。
警告
高電圧
AC 主 電源、DC 電源、あるいは負荷分散に接続されてい
る限り、周波数変換器は高電圧が印加されています。有資
格技術者でない人が、設置、スタートアップ、メンテナン
スを誤って行った場合、死亡事故や重大な傷害事故を招く
ことがあります。
設置、始動、メンテナンスは、有資格技術者のみ
•
が行ってください。
サービスや修理を実施する前に、周波数変換器上
•
に残存電圧がないことを確認するために、適切な
電圧測定機器を使用してください。
警告
予期しない始動
周波数変換器が AC 主電源、直流電源、あるいは負荷分
散に接続されている場合、モーターは思いがけなくスター
トすることがあります。プログラミング、サービス、ある
いは修理中の予期しない始動は、死亡、深刻な傷害、ある
いは物損事故を招く恐れがあります。 モーターは外部
スイッチ、フィールドバスコマンド、LCP からの入力速度
指令信号によって、MCT 10 設定ソフトウェアを用いたリ
モート操作を介して、あるいは不具合状態のクリア後にス
タートします。
予期しないモーターのスタートを防止するには:
周波数変換器を主電源から切り離してください。
•
パラメーターのプログラミング前に、LCP 上の
•
[Off/Reset] を押します。
周波数変換器を AC 主電源、直流電源、あるいは
•
負荷分散に接続する前に、周波数変換器、モータ
ー、運転機器は、配線及び組み立てが完了してい
る必要があります。
MG07A540 Danfoss A/S © 08/2018 All rights reserved. 7
安全性
VLT® Midi Drive FC 280
警告
放電時間
22
周波数変換器の直流リンク・キャパシターは、周波数変換
器の電源が入っていないときでも充電されています。警
告 LED が点灯していない場合でも、高電圧が存在する可
能性があります。サービスや修理の実施前に、電源を切っ
てから一定時間待たないと、死亡事故または重大な傷害事
故を招くことがあります。
モーターを停止します。
•
バッテリーバックアップ、UPS 及び他の周波数変
•
換器に接続されている直流リンク接続も含めて、
AC 電源、リモート直流リンク電源の接続をすべ
て外してください。
PM モーターの接続を外すか、ロックしてくださ
•
い。
キャパシターが完全に放電されるまでお待ちく
•
ださい。最小待ち時間は、
います。
サービスや修理を実施する前に、キャパシターが
•
完全に放電していることを確認するために、適切
な電圧測定機器を使用してください。
表 2.1
に記載されて
警告
機器の危険性
回転するシャフトや電気機器に接触すると、死亡事故また
は重大な傷害事故を招くことがあります。
訓練を受けた有資格技術者のみが、設置、始動、
•
メンテナンスを行うようにしてください。
電気作業は、国内および地域の電気工事規則に準
•
拠する必要があります。
本ガイドの手順に従ってください。
•
注意
内部故障により危険
周波数変換器の内部故障は、周波数変換器を適切に閉じな
いと、深刻な傷害事故を招くことがあります。
電力を供給する前に、すべての安全カバーが適切
•
に配置され、しっかりと固定されていることを確
認します。
電圧 [V]
200–240 0.37–3.7 (0.5–5) 4
380–480
表 2.1 放電時間
出力範囲
[kW (hp)]
0.37–7.5 (0.5–10) 4
11–22 (15–30) 15
最小待機時間
(分)
警告
漏洩電流に関する危険事項
漏洩電流は、3.5 mA (ミリアンペア) を超えます。接地
を正しく行わない場合、死亡又は重大な傷害を招くことが
あります。
機器の接地は、有資格の電気工事者が正しく行う
•
必要があります。
8 Danfoss A/S © 08/2018 All rights reserved. MG07A540
130BE616.14
VLT
MADE IN
DENMARK
T/C: FC-280PK37T4E20H1BXCXXXSXXXXAX
0.37kW 0.5HP
IN: 3x380-480V 50/60Hz, 1.2/1.0A
OUT: 3x0-Vin 0-500Hz, 1.2/1.1A
IP20
P/N: 134U2184 S/N: 000000G000
Midi Drive
www.danfoss.com
CAUTION / ATTENTION:
WARNING / AVERTISSEMENT:
See manual for special condition/mains fuse
Voir manual de conditions speciales/fusibles
Enclosure: See manual
5AF3 E358502 IND.CONT.EQ.
Stored charge, wait 4 min.
Charge r
é
siduelle, attendez 4 min.
21
1
2
4
3
5
11
20
19
18
16
15
14
13
10
8
9
6
17
R
US LISTED
www.tuv.com
ID 0600000000
Danfoss A/S, 6430 Nordborg, Denmark
12
7
機械的設置 操作ガイド
3 機械的設置
3.1 開梱
3.1.1 納入物
納入物は、機器構成によって異なります。
納入物と銘板上の情報が、注文確認書に対応して
•
いることを確認してください。
梱包と周波数変換器を目視検査して、輸送中の不
•
適切な取扱によって損傷が発生していないか確
認します。損害については、運送業者に請求を行
なってください。説明のために、損傷のあった部
品を保管してください。
3 3
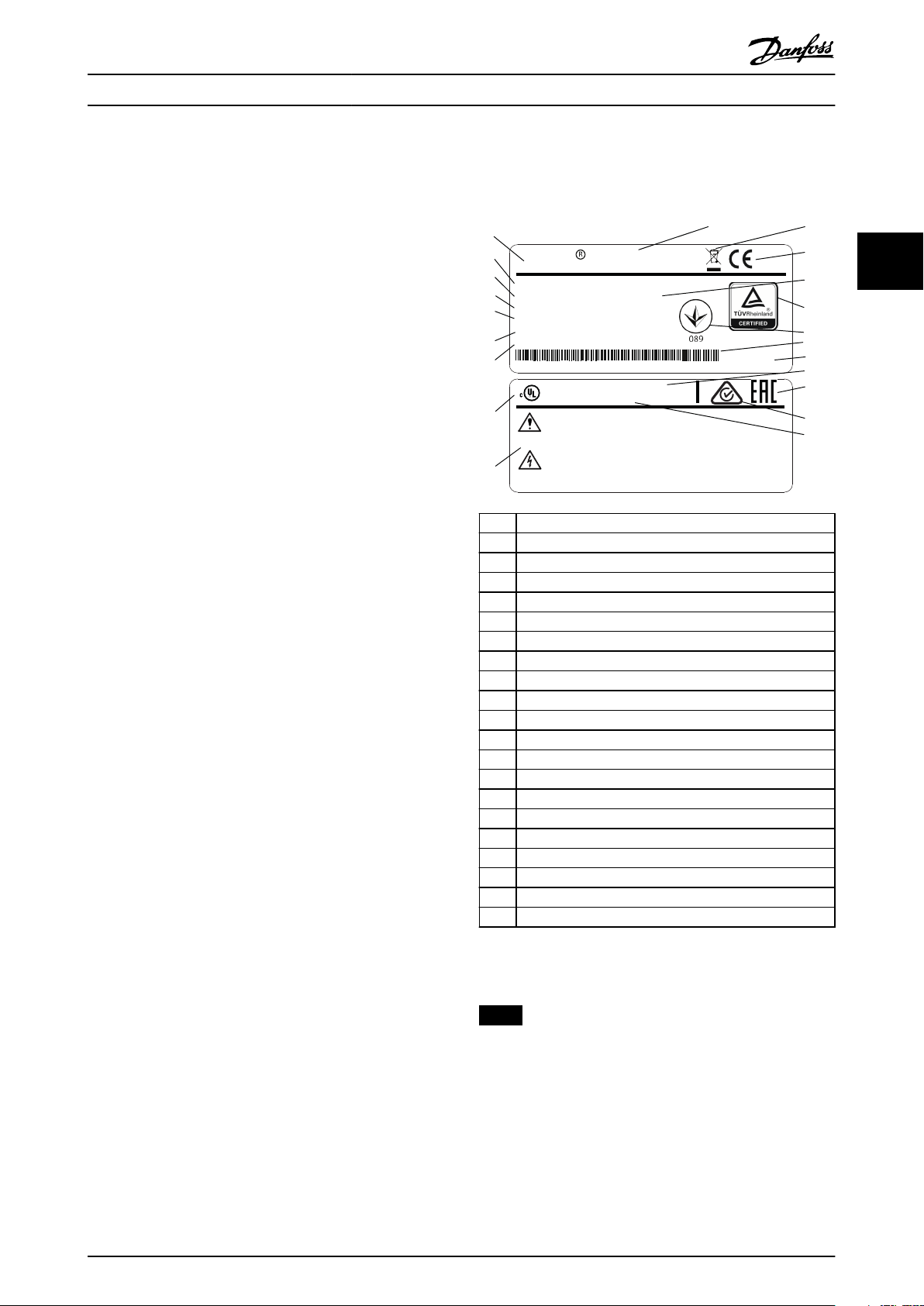
1 製品ロゴ
2 製品名
3 廃棄
4 CE マーク
5 シリアル番号
6 TÜV ロゴ
7 UkrSEPRO ロゴ
8 バーコード
9 生産国
10 エンクロージャーのタイプ参照
11 EAC ロゴ
12 RCM 参照
13 UL 参照
14 警告仕様
15 UL ロゴ
16 IP 定格
17 出力電圧、周波数、電流 (低/高電圧時)
18 入力電圧、周波数、電流(低/高電圧時)
19 電力規格
20 注文番号
21 タイプ・コード
MG07A540 Danfoss A/S © 08/2018 All rights reserved. 9
図 3.1 製品銘板(例)
注記
周波数変換器からネームプレートを取り外さないでくだ
さい(保証対象外になります)。
タイプ・コードの詳細については、
280 デザインガイドの「タイプ・コード」
てください。
3.1.2 保存
保存上の要件が満たされているか確認してください。詳
細については
章 9.4 周囲条件
VLT® Midi Drive FC
の章を参照し
を参照してください。
130BE615.12
130BF642.10
G
機械的設置
VLT® Midi Drive FC 280
3.2 設置環境
注記
空気(中)の水分、粒子、腐食性ガスが存在する環境で
は、機器の IP/定格が設置環境に適合していることを確認
してください。周囲環境の条件を遵守していないと、周波
33
数変換器の寿命が短くなることがあります。空気中の湿
度、温度、高度の条件を遵守してください。
振動とショック
周波数変換器は、ユニットが生産施設内の壁や床に取り付
けられ、パネルがボルトで壁や床に留められている場合の
要件に準拠しています。
周囲環境仕様の詳細については、
照してください。
章 9.4 周囲条件
を参
注記
実装穴の寸法については、
イズ、電力規格、寸法
3.3.1 並列配置
並列配置
VLT® Midi Drive FC 280 ユニットはすべて、垂直また
は水平位置に並列設置できます。ユニットに側面に追加
の換気システムは不要です。
章 9.9 エンクロージャー・サ
を参照してください。
3.3 取り付け
注記
誤った取り付けは、過熱や性能の低下を招く場合がありま
す。
冷却
上部と下部に 100 mm (3.9 in) の冷却用空き
•
スペースを確保してください。
吊り下げ方法
安全な持ち上げ方法を決めるためにユニットの
•
重量を確認してください。
ジャー・サイズ、電力規格、寸法
作業に最適なリフティング機器を確保します。
•
必要ならば、ユニットを移動するために最適な定
•
格を持つ、ホイスト、クレーン、フォークリフト
などを用意してください。
持ち上げる場合、ユニットのホイスト・リング
•
(装備されている場合)を使用します。
取り付け
VLT® Midi Drive FC 280 の実装穴に適合させるには、
地域の Danfoss 代理店にお問い合わせの上、背版をご発
注ください。
周波数変換器と取り付けるには:
1. ユニットの重量を支えるのに十分な強度が取り
付け位置にあることを確認してください。周波
数変換器は並べて設置可能です。
2. ユニットは、モーターのできる限り近くに置いて
ください。モーター・ケーブルはできる限り短く
します。
3. ユニットは垂直に冷却気流を確保するために、堅
固で平らな表面、あるいはオプションの背版に取
り付けます。
4. 壁に取り付ける場合、ユニットのスロット付き実
装穴(装備されている場合)を使用します。
章 9.9 エンクロー
を参照。
図 3.2 並列配置
注記
過熱の危険性
IP21 変換キットを使用する場合、ユニットの並列設置は
過熱とユニットの損傷を引き起こす恐れがあります。
IP21 変換キットのトップカバーの端の間は最
•
低 30 mm (1.2 インチ)必要です。
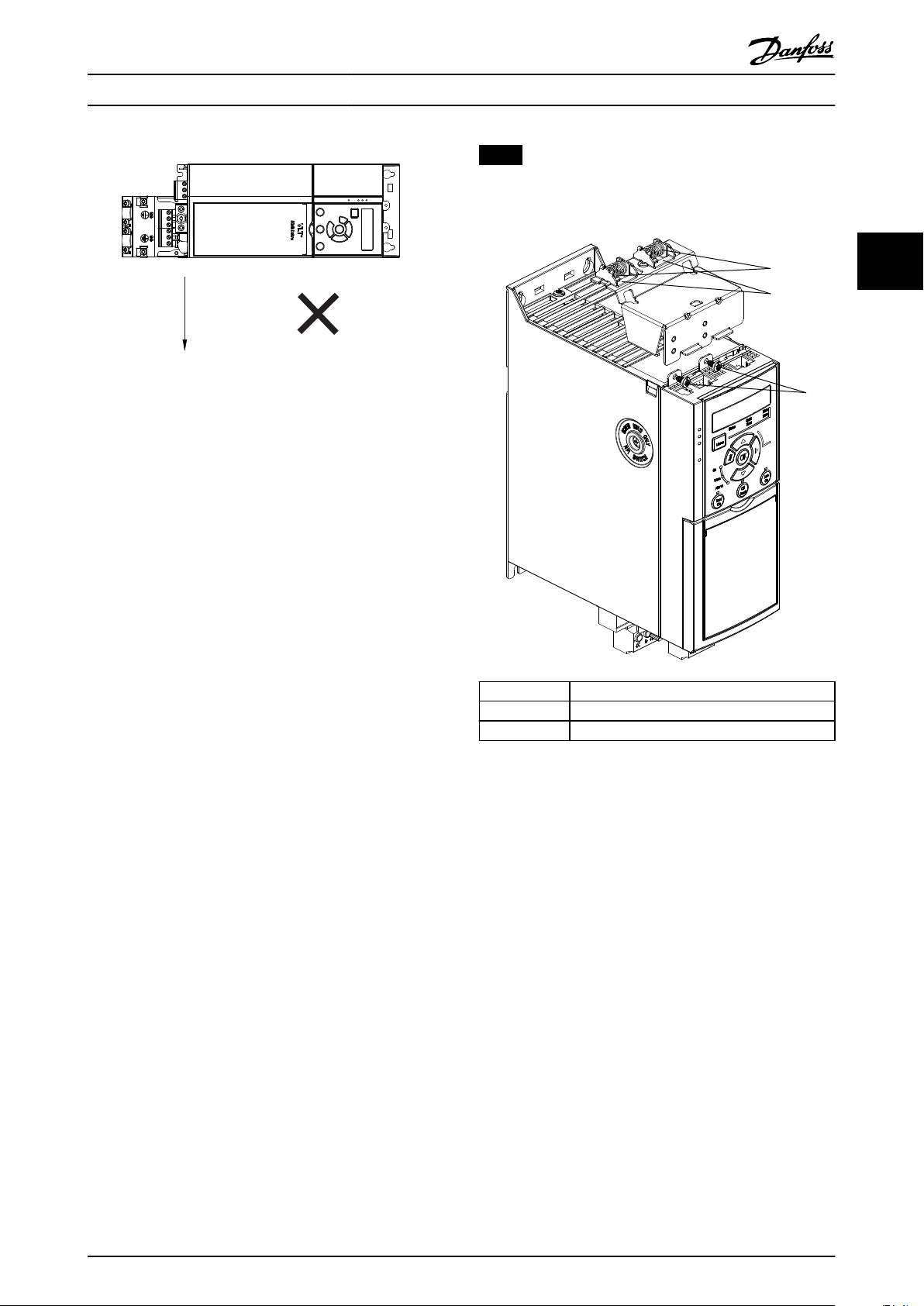
3.3.2 水平設置
図 3.3 水平設置の正しい方法(左側を下げる)
10 Danfoss A/S © 08/2018 All rights reserved. MG07A540
130BF643.10
G
1
2
3
130BE480.10
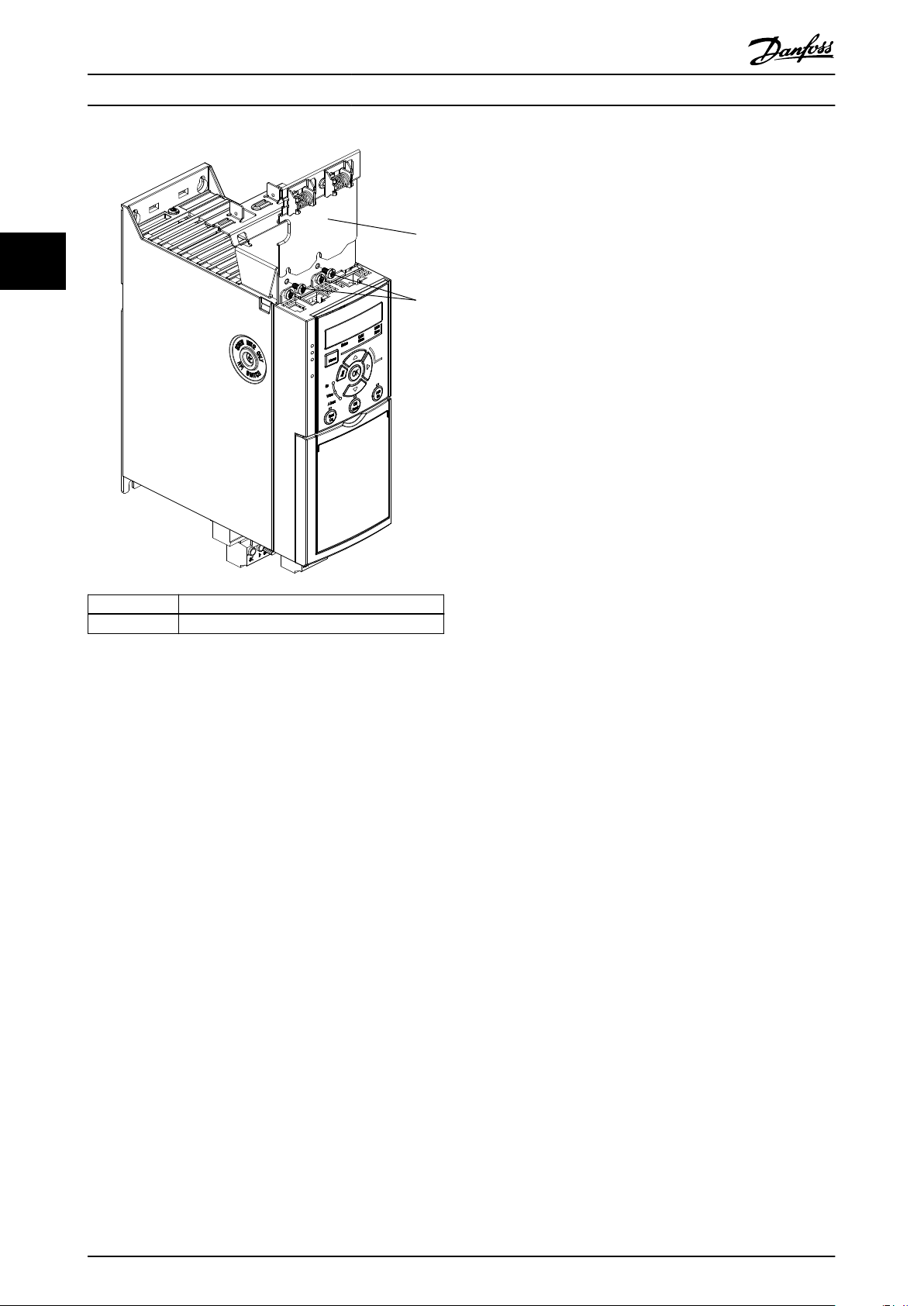
機械的設置 操作ガイド
図 3.4 水平設置の間違った方法(右側を下げる)
3.3.3 バス減結合キット
バス減結合キットにより、次のコントロールカセット改良
型で機械的固定とケーブルの電気的シールドを確保でき
ます。
プロフィバス付きコントロールカセット。
•
プロフィネット付きコントロールカセット。
•
CANopen 付きコントロールカセット。
•
イーサネット付きコントロールカセット。
•
POWERLINK 付きコントロールカセット。
•
各々のバス減結合キットには、水平減結合プレート 1 枚と
垂直減結合プレート 1 枚が含まれています。垂直減結合
プレートの取り付けはオプションです。垂直減結合プレ
ートにより、プロフィネット、イーサネット、POWERLINK
コネクタおよびケーブルの機械的サポートが向上します。
注記
IP21 トップカバーを使用する場合、プレートの高さが
IP21 トップカバーの正しい設置に影響を及ぼすため、垂
直減結合プレートを取り付けないでください。
3 3
1 メカニカルスプリング
2 メタルクランプ
3 ネジ
3.3.4 取り付け
バス減結合キットを取り付けるには:
1. 周波数変換器に設置されているコントロールカ
セットに水平減結合プレートを置いて、
に示すとおり、2 本のネジでプレートを締め付
けます。 締 め 付 けトルクは 0.7 – 1.0 Nm
(6.2–8.9 in-lb) です。
2. オプション: 以下のように垂直減結合プレート
を取り付けます:
2a 2 本のメカニカルスプリングと 2 個の
クランプを水平プレートから取り外し
ます。
2b メカニカルスプリングとメタルクラン
プを垂直プレートに取り付けます。
2c
図 3.6
に示すとおり、2 本のネジでプ
レートを締め付けます。締め付けトル
クは 0.7 – 1.0 Nm (6.2 – 8.9 in-lb)
です。
図 3.5 ネジで水平減結合プレートを締め付ける
図 3.5
MG07A540 Danfoss A/S © 08/2018 All rights reserved. 11
130BE481.10
1
2
機械的設置
VLT® Midi Drive FC 280
33
1 垂直減結合プレート
2 ネジ
図 3.6 ネジで垂直減結合プレートを締め付ける
図 3.5と図 3.6
します(RJ45)。実際のコネクタタイプは、周波数変換器の
選択したフィールドバスの種類により異なります。
3. フィールドバス ケーブル(PROFIBUS/CANopen)
が適切に配線されている、またはケーブルコネク
タ (RJ45 for PROFINET/POWERLINK/
Ethernet/IP)をコントロールカセットのソケッ
トに押し込みます。
4. 4a ケーブルのシールド部とクランプ間の
の両方はプロフィネットソケットを示
機械的固定と電気的接触を確立するた
めに、スプリング付きメタルクランプ間
にプロフィバス/CANopen ケーブルを
設置します。
4b ケーブルとクランプ間の機械的固定を
確立するために、スプリング付きメタル
クランプ間 に PROFINET/POWERLINK/
Ethernet/IP ケーブルを設置します。
12 Danfoss A/S © 08/2018 All rights reserved. MG07A540
電気的設置 操作ガイド
4 電気的設置
4.1 安全指示
安全指示の全般については、
ださい。
章 2 安全性
を参照してく
警告
誘導電圧
共に動作する異なる周波数変換器の出力モーター・ケーブ
ルからの誘導電圧は、共に機器のキャパシターを充電しま
す。これは機器がオフの場合、ロックアウトの場合でも同
様です。出力ケーブルを別にせず動作させた場合、又はシ
ールド・ケーブルを使用しなかった場合、死亡事故又は深
刻な傷害事故を招くことがあります。
出力モーター・ケーブルを別々に配線します。
•
シールド・ケーブルを使用します。
•
周波数変換器をすべて同時にロックアウトしま
•
す。
警告
ショックの危険
この周波数変換器は保護導体に直流電流を引き起こすこ
とがあり、死亡事故又は深刻な傷害事故を招くことがあり
ます。
残留電流で動作する保護デバイス (RCD) が電
•
気ショック保護のために使用されているときは、
供給側でタイプ B の RCD のみが許容されま
す。
推奨事項に従わない場合、RCD が意図された保護を行わな
い可能性があります。
過電流保護
複数のモーターを用いる用途には、周波数変換器
•
とモーター間の短絡保護やモーター熱保護など、
別途保護機器が必要です。
短絡と過電流保護を行うため、入力ヒューズが必
•
要です。工場で装備されない場合、設置作業者が
ヒューズの取り付けを行う必要があります。最
大ヒューズ定格は
参照してください。
ケーブルの種類と定格
すべてのケーブルが、ケーブル断面積と周囲温度
•
の国内及び地域の規制に準拠していなければな
りません。
推奨される電力接続ケーブル: 最低 75 °C
•
(167 °F) 定格の銅線。
章 9.8 ヒューズと遮断器
を
EMC 対策設置
4.2
EMC 対策設置を行う際は、 以下の指示をご参照ください。
章 4.3 接地、 章 4.4 配線図, 章 4.6 モーター接続
および
章 4.8 コントロール配線
。
,
4.3 接地
警告
漏洩電流に関する危険事項
漏洩電流は、3.5 mA (ミリアンペア) を超えます。周波
数変換器の接地を正しく行わない場合、死亡事故又は深刻
な傷害事故を招くことがあります。
機器の接地は、有資格の電気工事者が正しく行う
•
必要があります。
電気的安全のために
適用される基準と指令に従って、周波数変換器を
•
接地してください。
入力電力、モーター電源、およびコントロール配
•
線用に専用アース線が必要です。
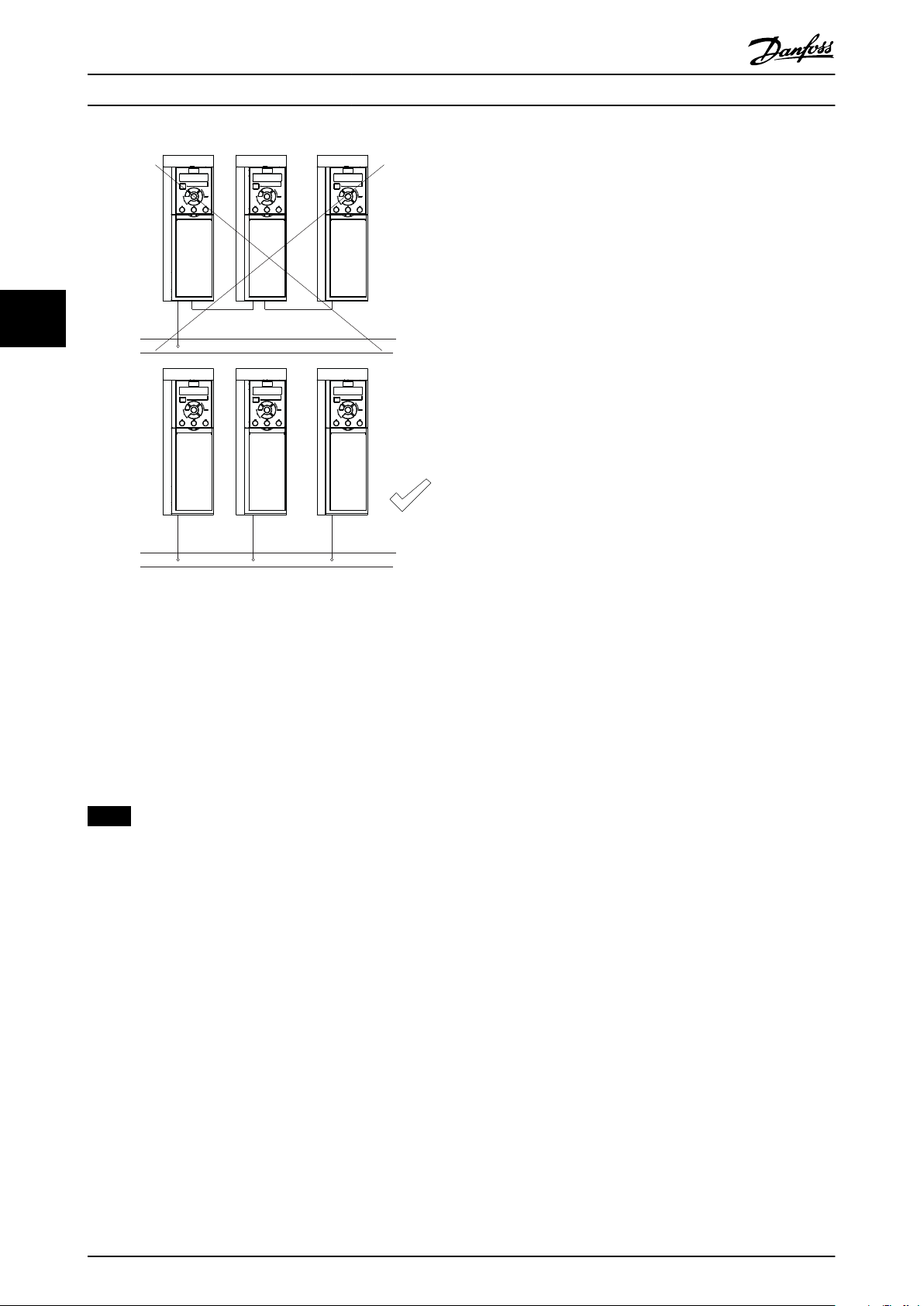
複数の周波数変換器をディジーチェーン接続し
•
て、接地しないでください (
接地ワイヤ接続をできるだけ短くします。
•
モーターのメーカーの配線条件に従ってくださ
•
い。
接地ケーブルの最小ケーブル断面積: 10 mm
•
(7 AWG).
個々の接地線を別々に終端処理、どちらも寸法要
•
件に従う。
図 4.1
を参照)。
2
4 4
推奨ワイヤサイズおよびタイプについては、
ーブル仕様
MG07A540 Danfoss A/S © 08/2018 All rights reserved. 13
を参照してください。
章 9.5 ケ
130BC500.10
FC 1
FC 1
FC 2
FC 2
FC 3
FC 3
PE
PE
電気的設置
VLT® Midi Drive FC 280
44
図 4.1 接地の原則
EMC 対策接地のために
金属ケーブル・グランド、又は機器に付属するク
•
ランプを使用して、ケーブル・シールドと周波数
変換器のエンクロージャーとの間で電気的接触
を確立します (
バースト・トランジエントを低減するために、高
•
品質撚り線を使用します。
ピッグテールを使用しないでください。
•
章 4.6 モーター接続
を参照)。
注記
等電位
周波数変換器とコントロールシステムとの間の接地電位
が異なる場合には、バースト・トランジエントのリスクが
生じます。システム・コンポーネント間に平衡ケーブルを
設置します。推奨されるケーブル断面積: 16 mm2 (6
AWG)。
14 Danfoss A/S © 08/2018 All rights reserved. MG07A540
Power
input
Switch mode
power supply
Motor
Analog output
interface
(PNP) = Source
(NPN) = Sink
ON = Terminated
OFF = Open
Brake
resistor
91 (L1/N)
92 (L2/L)
93 (L3)
PE
50 (+10 V OUT)
53 (A IN)
2)
54 (A IN)
55 (COM digital/analog I/O)
0/4−20 mA
12 (+24 V OUT)
13 (+24 V OUT)
18 (D IN)
10 V DC
15 mA 100 mA
+ - + -
(U) 96
(V) 97
(W) 98
(PE) 99
(A OUT) 42
(P RS485) 68
(N RS485) 69
(COM RS485) 61
0 V
5 V
S801
0/4−20 mA
RS485
RS485
03
+10 V DC
0−10 V DC
24 V DC
02
01
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
19 (D IN)
24 V (NPN)
0 V (PNP)
17 V
0 V
0 V (PNP)
24 V (NPN)
29 (D IN)
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
33 (D IN)
32 (D IN)
38 (STO2)
4)
37 (STO1)
4)
95
P 5-00
21
ON
(+DC/R+) 89
(R-) 81
0−10 V DC
(-DC) 88
RFI
0 V
250 V AC, 3 A
Relay 1
1)
3)
5)
5)
130BE202.19
27 (D IN/OUT)
6)
電気的設置 操作ガイド
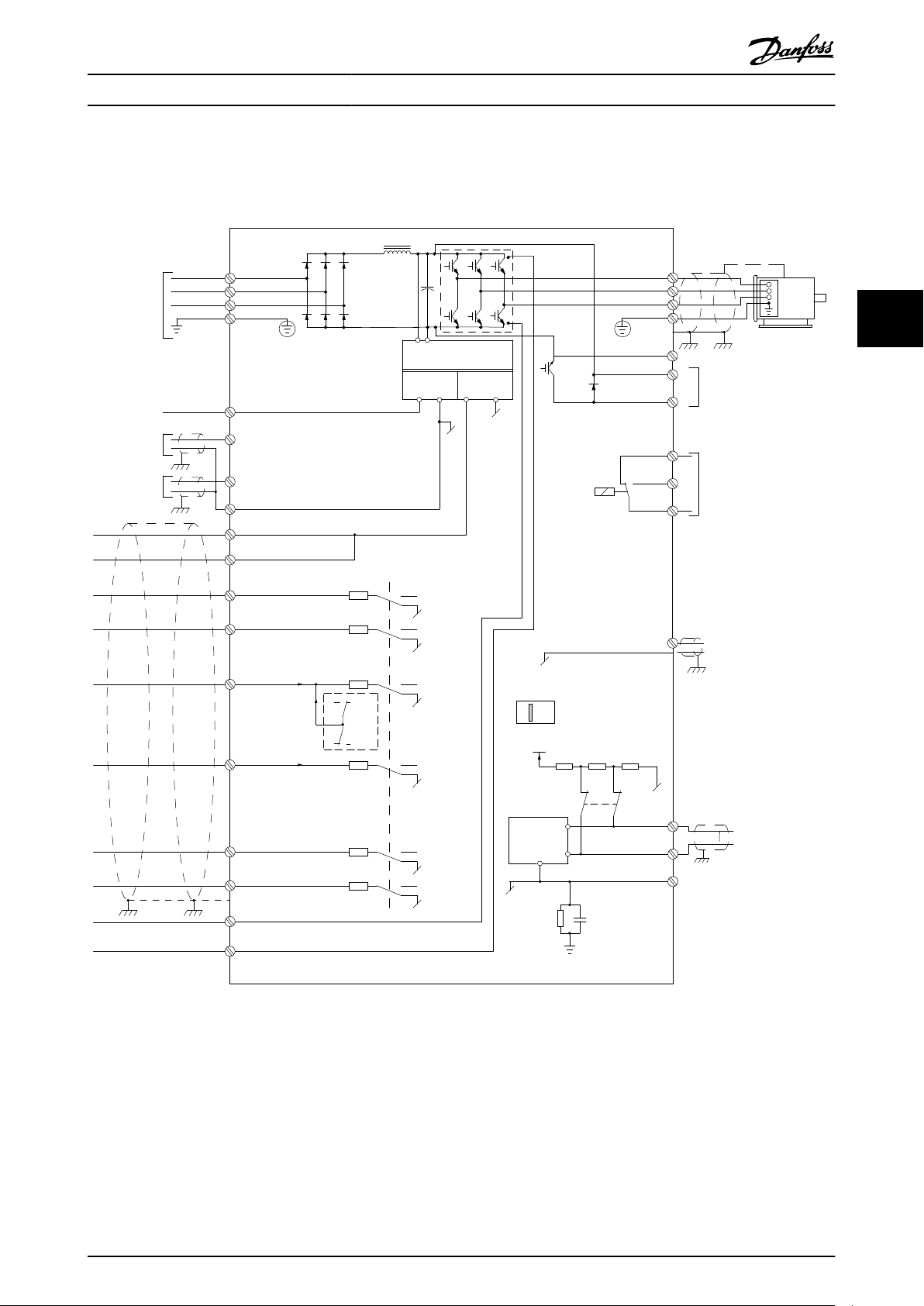
4.4 配線図
本セクションには、周波数変換器の配線に関する説明が記載されています。
4 4
図 4.2 基本的配線図
A = アナログ、D = ディジタル
1) 内蔵ブレーキ・チョッパーは 3 相ユニットにのみ用意されています。
2) 端子 53 はディジタル入力としても使用できます。
3) スイッチ S801 (バス端子) は、RS-485 ポート (端子 68 及び 69) の終端に使用できます。
4) 正しい STO 配線については、章 6 Safe Torque Off (STO)をご参照ください。
5) S2 (単相 200–240 V) 周波数変換器は、負荷分散アプリケーションをサポートしていません。
6) アナログ出力での最大電圧は、端子 27 個に 17V です。
MG07A540 Danfoss A/S © 08/2018 All rights reserved. 15
e30bf228.11
L1
L2
L3
PE
PE
u
v
w
2
1
3
5
16
17
18
14
12
8
7
10
9
4
11
13
4
6
15
90
4
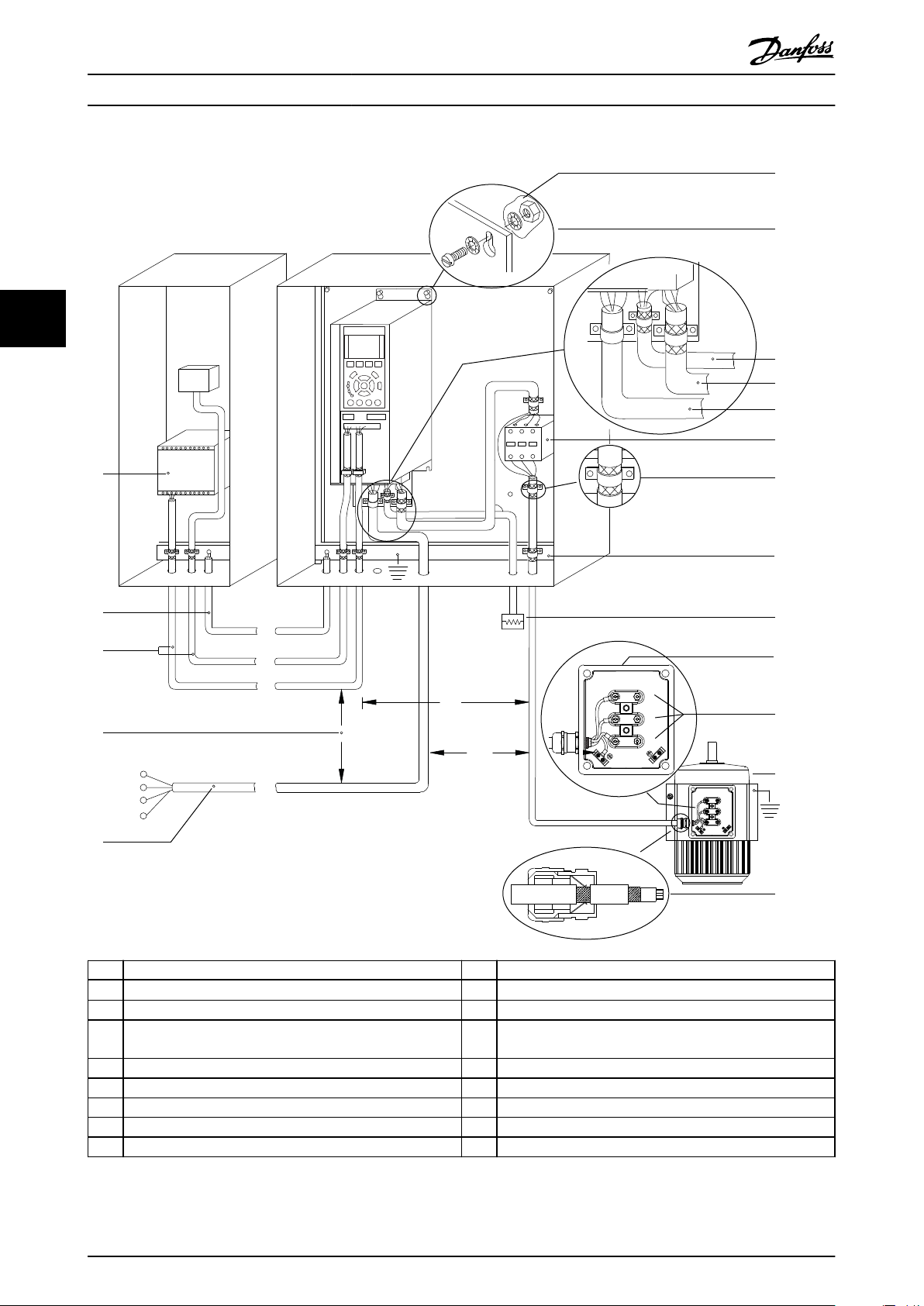
電気的設置
VLT® Midi Drive FC 280
44
1 PLC 10 主電源ケーブル (シールドなし)
2
最小 16 mm2 (6 AWG) 等価ケーブル。
3 コントロール・ケーブル 12 ケーブル 絶縁はく離
4 コントロール・ケーブル、モーター・ケーブル、主電源ケー
ブルの間隔は最低 200 mm (7.87 in)。
5 主電源 14 ブレーキ抵抗器
6 露出 (未塗装) 表面 15 金属ボックス
7 スター・ワッシャー 16 モーターへの接続
8 ブレーキ・ケーブル (シールドあり) 17 モーター
9 モーター・ケーブル (シールドあり) 18 EMC ケーブル・グランド
図 4.3 典型的な電気的接続
11 出力接触器など。
13 標準接地母線。地域及び国のキャビネット接地に関する要
件に従ってください。
16 Danfoss A/S © 08/2018 All rights reserved. MG07A540
130BC504.11
130BD531.10
U
V
W
96
97
98
電気的設置 操作ガイド
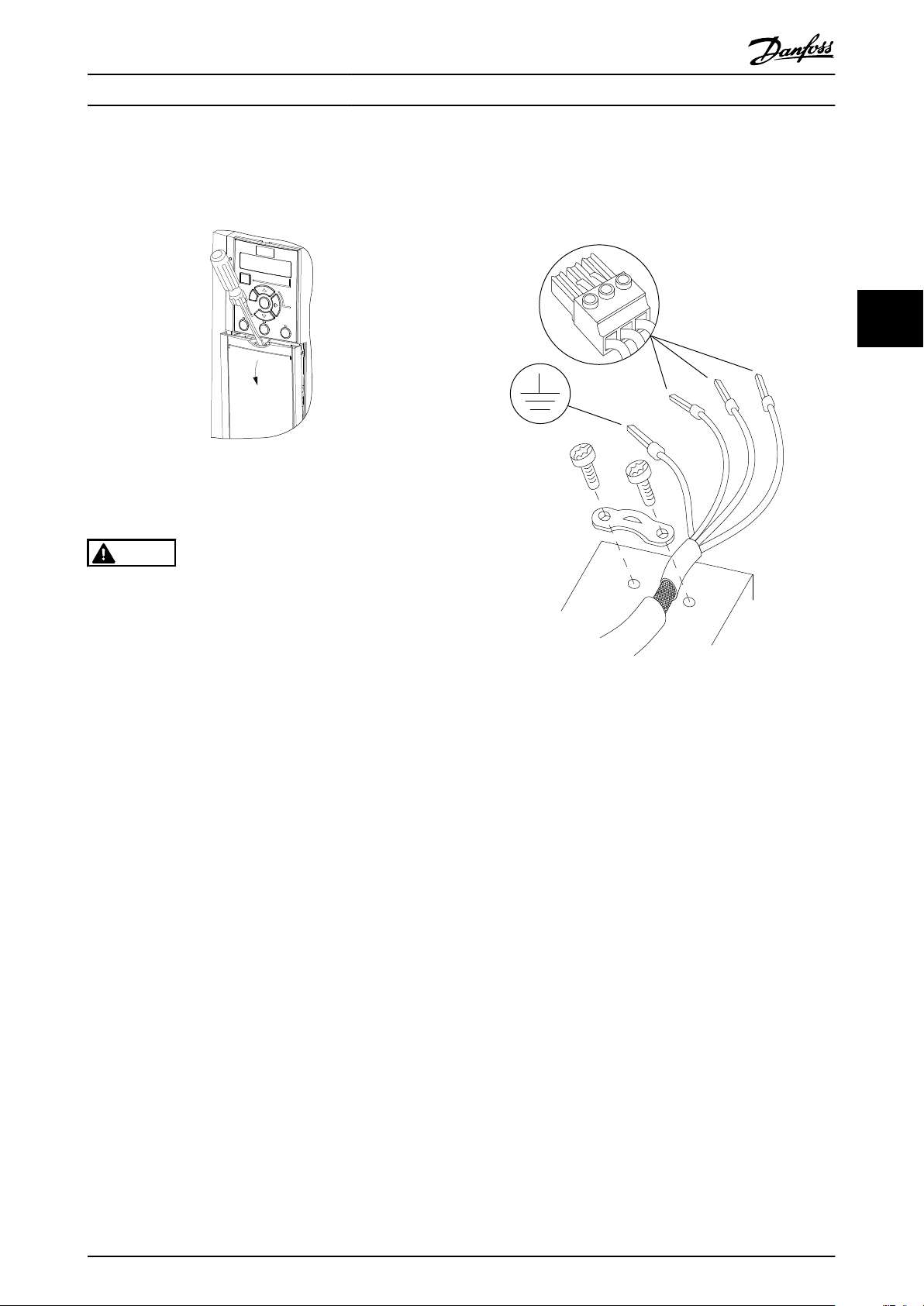
4.5 アクセス
ドライバーでカバー・プレートを取り外します。
•
図 4.4
を参照
図 4.4 コントロール配線アクセス
4.6 モーター接続
警告
誘導電圧
出力モーター・ケーブルからの誘導電圧は、共に機器のキ
ャパシターを充電します。これは機器がオフの場合、ロッ
クアウトの場合でも同様です。出力ケーブルを別にせず
動作させた場合、又はシールド・ケーブルを使用しなかっ
た場合、死亡事故又は深刻な傷害事故を招くことがありま
す。
4. 3 相モーター配線を端子 96(U)、97(V)、98(W)
に接続します。
5.
章 9.7 接続の締め付けトルク
る内容に従って、端子を締めます。
図 4.5 モーター接続
図 4.5
を参照してください。
に記載されてい
4 4
出力モーター・ケーブルを別々に配線します。
•
シールド・ケーブルを使用します。
•
ケーブル・サイズについては、国内及び地域の電
•
気法規を遵守してください。最大ケーブル・サイ
ズについては、
ださい。
モーターのメーカーの配線条件に従ってくださ
•
い。
モーター配線ノックアウト又はアクセスパネル
•
は、21/Type 1 ユニットを基本に提供されます。
周波数変換器とモーターの間に始動器あるいは
•
極数可変機器(例えば、ダランダーモーターやス
リップリング誘導モーター)を接続しないでくだ
さい。
手順
1. 外部ケーブル絶縁の一部分をはく離します。
2. はく離ケーブルをケーブル・クランプの下に設置
して、ケーブル・シールドと接地との間で機械的
固定と電気的接触を確立します。
3.
章 4.3 接地
示に従って、最も近接した接地端子に接地ケーブ
ルを接続します。
章 9.1 電気データ
に記載されている接地に関する指
図 4.5
を参照
を参照してく
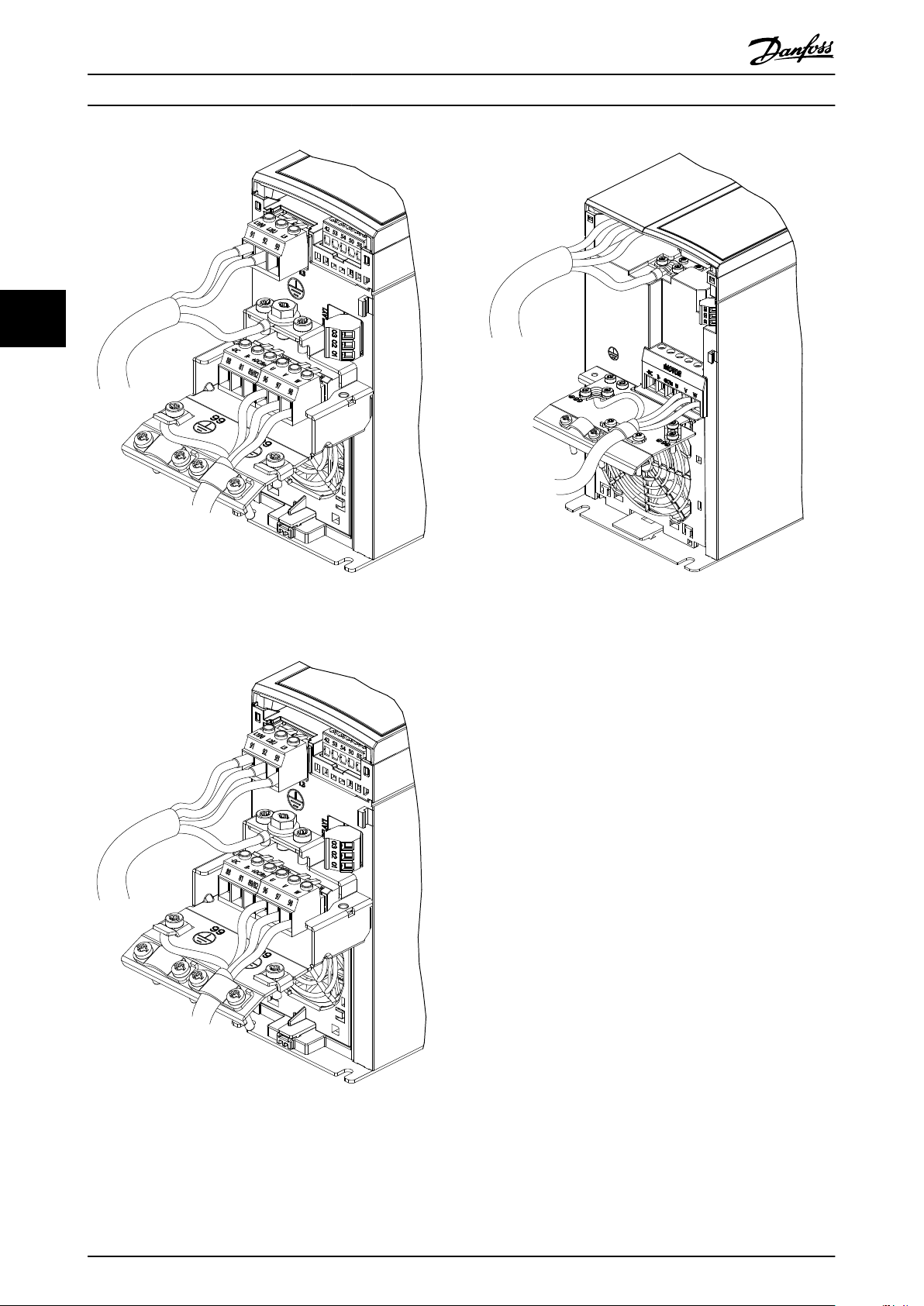
主電源、モーター、ならびに単相および 3 相周波数変換
器の接地接続は、
れぞれ示されています。実際の構成は、ユニットの種類や
オプション機器によって異なります。
図 4.6、図 4.7
、および
図 4.8
にそ
MG07A540 Danfoss A/S © 08/2018 All rights reserved. 17
130BE232.11
130BE231.11
130BE804.10
電気的設置
VLT® Midi Drive FC 280
44
図 4.6 主電源、モーター及び接地接続
(単相ユニット用)
図 4.7 主電源、モーター及び接地接続 (3 相ユニット用)
(K1, K2, K3)
図 4.8 主電源、モーター及び接地接続 (3 相ユニット用)
(K4、K5)
AC 主電源接続
4.7
周波数変換器の入力電流を基にワイヤのサイズ
•
を決めます。最大ワイヤ・サイズは、
気データ
ケーブル・サイズについては、国内及び地域の電
•
気法規を遵守してください。
手順
1. AC 入力電力ケーブルを単相ユニットの端子 N お
よび L に(
トの端子 L1、L2 および L3 に接続します(
を参照)。
2. 機器構成に応じて、入力電力を主電源入力端子あ
るいは入力切断に接続してください。
3.
章 4.3 接地
示に従ってケーブルを接地します。
4. 絶縁された主電源 (IT 主電源やフローティン
グ・デルタ)、又は接地脚を有する TT/TN-S 主
電源 (接地デルタ) から供給するときは、必ず
RFI フィルターネジを外します。RFI ネジを外
して、直流リンクに対する損傷を防ぎ、接地容量
電流を減少させます (IEC 61800-3 準拠)
(
図 9.2
にあります)。
を参照してください。
図 4.6
を参照して、RFI ねじは周波数変換器側
を参照)、あるいは 3 相ユニッ
に記載されている接地に関する指
章 9.1 電
図 4.7
18 Danfoss A/S © 08/2018 All rights reserved. MG07A540
130BE212.10
1 2
3
130BE214.10
37 38 12 13 18 19 27 29 32 33 61
42 53 54 50 55
68 69
1
3
2
電気的設置 操作ガイド
4.8 コントロール配線
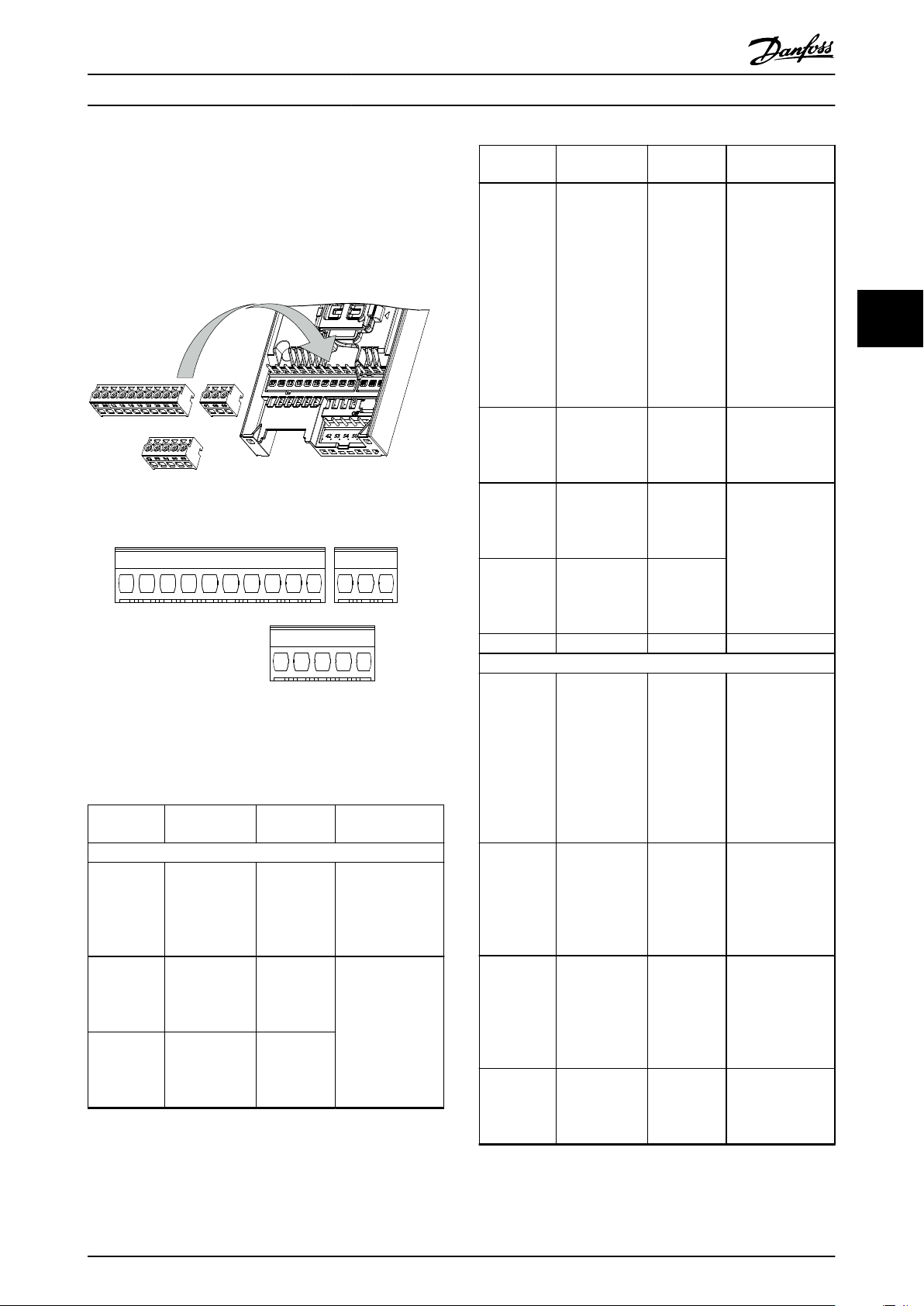
4.8.1 コントロール端子の種類
図 4.9
は取り外し可能な周波数変換器コネクタを示して
います。端子機能およびデフォルト設定は
表 4.2
に要約されています。
図 4.9 コントロール端子位置
図 4.10 端子番号
端子定格の詳細は、
ントロールデータ
端子 パラメーター
ディジタル I/O、パルス I/O、エンコーダー
12, 13 – +24 V 直流
18
19
章 9.6 コントロール入力/出力とコ
を参照してください
デフォルト
設定
24V 直流供給電
圧。すべての 24V
負荷について、最
大出力電流は
100mA です。
パラメータ
ー 5-10 Termi
nal 18
Digital Input
パラメータ
ー 5-11 Termi
nal 19
[8] スター
ト
ディジタル入力
[10] 逆転
Digital Input
表 4.1
説明
と
端子 パラメーター
デフォルト
設定
説明
パラメータ
ー 5-01 Termi
nal 27 Mode
パラメータ
ー 5-12 Termi
27
nal 27
Digital Input
パラメータ
ー 5-30 Termi
nal 27
Digital
Output
パラメータ
29
ー 5-13 Termi
nal 29
DI [2] 逆フ
リーラン
DO [0] 動作
なし
[14] ジョグ
ディジタル入力、
ディジタル出力、
又はパルス出力と
して選択します。
デフォルト設定は
ディジタル入力で
す。
ディジタル入力。
Digital Input
パラメータ
32
ー 5-14 Termi
nal 32
Digital Input
パラメータ
33
ー 5-15 Termi
nal 33
[0] 動作な
し
[0] 動作な
し
ディジタル入力、
24 V エンコーダ
ー。端子 33 はパ
ルス入力として使
用できます。
Digital Input
37, 38 – STO 機能的安全入力。
アナログ入力/出力
プログラマブル・
アナログ出力。ア
パラメータ
42
ー 6-91 Termi
nal 42 Analog
[0] 動作な
し
Output
50 – +10 V 直流
パラメーター・
53
グループ 6-1*
アナログ入力
–
53
パラメーター・
54
グループ 6-2*
アナログ入力
–
ナログ信号は、最
大 500 Ω にて
0~20mA あるいは
4~20mA です。デ
ィジタル出力とし
ても設定できま
す。
10 VDC アナログ
供給電圧。ポテン
ショメーターやサ
ーミスターに通常
使用される最大
15mA。
アナログ入力 電
圧モードのみサポ
ートされます。デ
ィジタル入力とし
ても使用できま
す。
アナログ入力 電
圧または電流モー
ドを選択可能。
54
4 4
MG07A540 Danfoss A/S © 08/2018 All rights reserved. 19

電気的設置
VLT® Midi Drive FC 280
端子 パラメーター
55 – –
表 4.1 端子説明 - ディジタル入力/出力、
アナログ入力/出力
44
端子 パラメーター
61 – –
パラメーター・
68 (+)
69 (-)
01, 02, 03
グループ 8-3*
FC ポート設定
パラメーター・
グループ 8-3*
FC ポート設定
パラメータ
ー 5-40 Funct
ion Relay
デフォルト
設定
デフォルト
設定
シリアル通信
–
–
リレー
[1] コント
準備
説明
ディジタルおよび
アナログ入力用共
通。
説明
ケーブル・シール
ド用の統合 RC
フィルター。EMC
に問題がある場合
のシールド接続専
用。
RS485 インターフ
ェイス。コントロ
ール・カード・ス
イッチが終端抵抗
に提供されていま
す。
Form C リレー出
力。これらのリレ
ーは、周波数変換
器の構成とサイズ
に応じて場所が変
わります。交流、
直流電圧どちらで
も利用でき、抵抗
あるいは誘導負荷
をかけることがで
きます。
3. 端子のネジを締め付けます。
4. 接点がしっかりと固定され、緩んでいないことを
確認します。コントロール配線が緩むと、機器故
障の原因となったり、操作の最適化の妨げとなっ
たりします。
コントロール・ケーブルのケーブル・サイズについては
章 9.5 ケーブル仕様
接続については
ださい。
を、典型的なコントロール配線の
章 7 アプリケーション例
を参照してく
4.8.3 モーター動作を有効化(端子 27)
工場出荷時のプログラミング値を使用する際、周波数変換
器の端子 12(又は 13)と端子 27 の間にジャンパー線を必
要とします。
ディジタル入力端子 27 は、24VDC 外部インター
•
ロック・コマンドを受信できるよう設計されてい
ます。
インターロック・デバイスが使用されてない場
•
合、コントロール端子 12(推奨)又は 13 と端子 27
にジャンパー線を接続します。ジャンパーによ
り、端子 27 に内部 24V 信号が供給されます。
GLCP の場合のみ: LCP の下部にある状態行に、
•
自動遠隔フリーラン
ットが動作可能状態になっていますが、端子 27
には入力信号がありません。
が表示されている場合、ユニ
注記
スタート不可能
端子 27 が再プログラムされた場合を除き、周波数変換器
は、端子 27 上の信号なしでは動作できません。
4.8.4 機械的ブレーキ・コントロール
表 4.2 端子説明 - シリアル通信
4.8.2 コントロール端子への配線
コントロール端子コネクタは、設置を容易にするために、
周波数変換器から取り外すことができます。
参照ください。
STO 配線の詳細については、
(STO)
をご参照ください。
章 6 Safe Torque Off
図 4.9
をご
注記
コントロール・ケーブルを可能な限り短くし、高電力ケー
ブルから離すことにより、干渉を最小限にします。
1. 端子のネジを緩めます。
2. スリーブ付きコントロール・ケーブルをスロット
に挿入します。
20 Danfoss A/S © 08/2018 All rights reserved. MG07A540
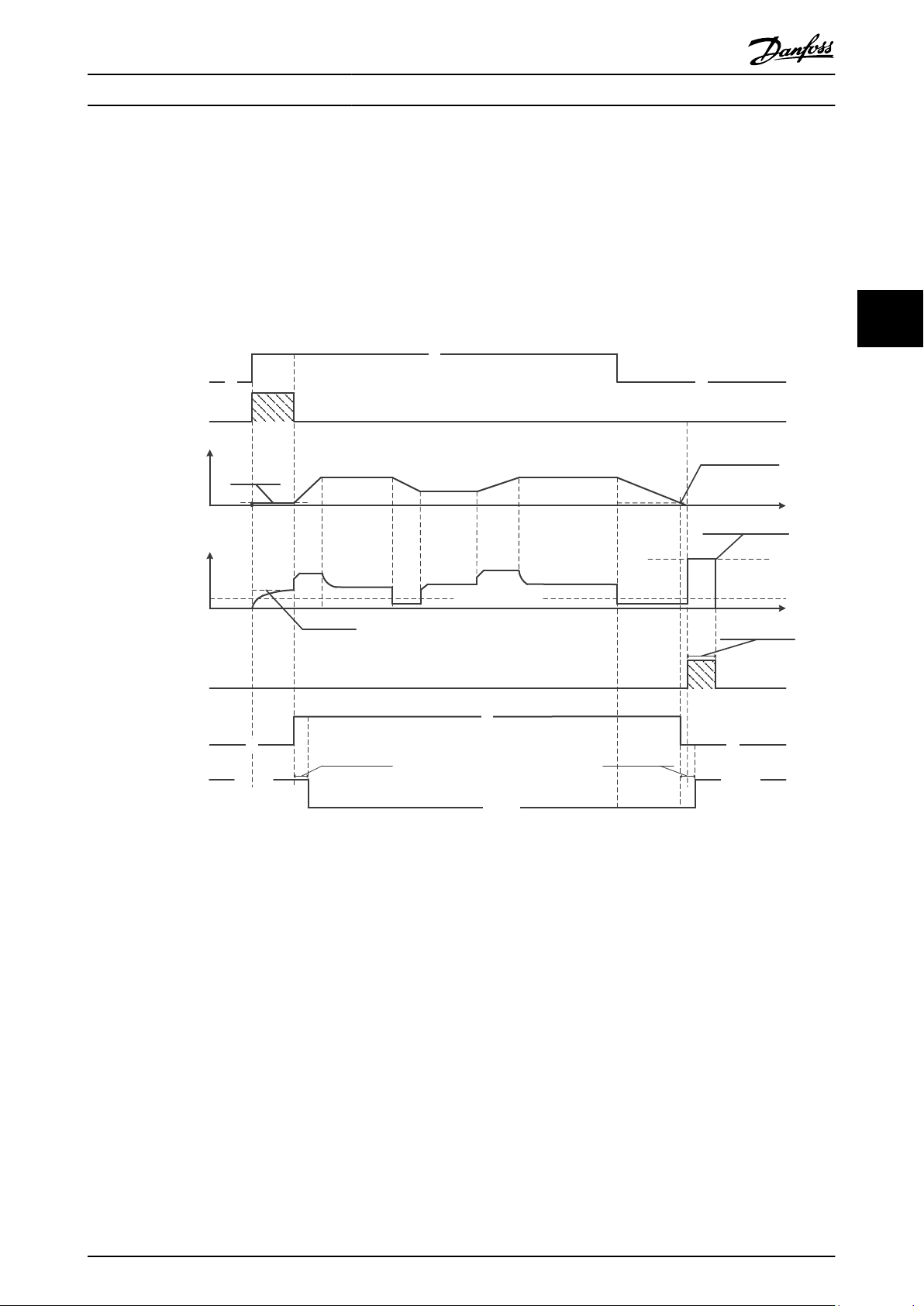
巻き上げ/下げアップリケーションでは、電子機械的ブ
レーキを制御する必要があります。
リレー出力、又はディジタル出力(端子 27)を使
•
用してブレーキをコントロールしてください。
負荷が大き過ぎるなどの理由で、周波数変換器が
•
モーターを停止状態に維持できない間、出力を閉
じておいてください(電圧なし)。
電磁ブレーキを使用するアプリケーションに対
•
して、
パラメーター・グループ 5-4* リレー
[32] 機械的ブレーキ CL・コントロール
してください。
モーター電流が
•
Brake Current
えるとブレーキが解除されます。
周波数変換器がストップ・コマンドを実行してい
•
る場合にのみ、出力周波数が
パラメーター 2-20 Release
にあらかじめ設定された値を超
パラメータ
ー 2-22 Activate Brake Speed [Hz]
れた周波数よりも低くなるとブレーキがかかり
ます。
の
を選択
に設定さ
Start Current
2)
Only support in some products.
1)
DC injection current during “Active Brake Delay” after MAV reduced to “0” . Only support in some products.
Off
On
Off
Relay
/
DO Status
Active Brake Delay
Active Brake Delay
MAV
Start Speed
Active Brake Speed
0
t
Start Delay
Off
On
Off
Start Command
Released
Activated
Reaction time of
mech
.
brake
Reaction time of
mech
.
brake
Mech
.
Brake Status
Release Brake Current
Output Current
DC Injection Current
1)
0
t
130BF687.10
Activated
Note:
2)
電気的設置 操作ガイド
周波数変換器が次のいずれかの状態にある場合、機械的ブレーキが直ちに作動します。
警報モード。
•
過電圧の状態。
•
STO が有効。
•
Coast コマンドが付与される。
•
4 4
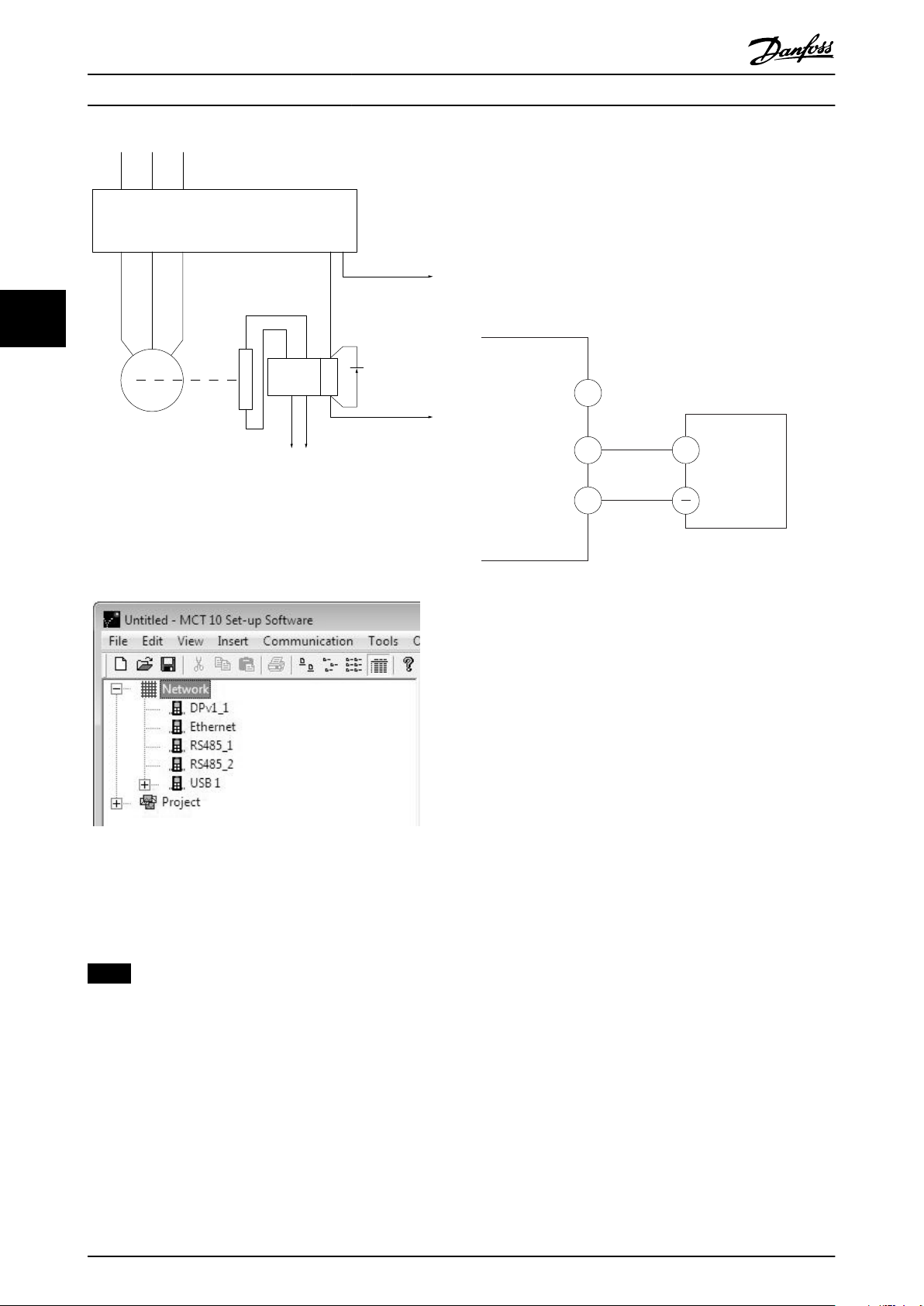
図 4.11 機械的ブレーキ
周波数変換器は安全デバイスではありません。システム設計者は、クレーン/リフトに関する国の規則に従って、安全デ
バイスを組み込む責任を負います。
MG07A540 Danfoss A/S © 08/2018 All rights reserved. 21
130BE201.11
L1(N) L2(L) L3
U V W
02 01
A1
A2
Frequency converter
Output
relay
Command circuit
220 V AC
Mechanical
brake
ShaftMotor
Freewheeling
diode
Brake power circuit
380 V AC
Output
contactor
input
e30bt623.11
61
68
69
+
130BB489.10
RS485
電気的設置
VLT® Midi Drive FC 280
4.8.6 RS485 シリアル通信
RS485 シリアル通信の配線を端子(+)68 と (-)69 に接
続します。
シールドされたシリアル通信ケーブルを推奨し
•
ます。
正しい接地については
•
44
図 4.12 機械的ブレーキを周波数変換器へ接続
ください。
章 4.3 接地
を参照して
4.8.5 USB データ通信
図 4.13 ネットワーク・バス・リスト
USB ケーブルが切断されている場合、USB ポートを介し
て接続されている周波数変換器が
ネットワーク・
バス・リ
ストから除外されます。
注記
USB バスにはアドレス設定機能も設定するバス名もあり
ません。USB を通して 2 つ以上の周波数変換器を接続
する場合は、MCT 10 設定ソフトウェア ネットワーク・
バス・リストでバス名の数字が自動で増加していきます。
USB ケーブルを通して 2 つ以上の周波数変換器を接続
すると、Windows XP 搭載のコンピューターは例外処理を
実行して故障することがあります。そのため、USB を介
して PC に周波数変換器を 1 台だけ接続するこをとお
勧めします。
図 4.14 シリアル通信 配線図
基本的なシリアル通信については、以下を選択します。
1.
パラメーター 8-30 プロトコール
のプロトコル
形式。
2.
パラメーター 8-31 アドレス
の周波数変換器ア
ドレス。
3.
パラメーター 8-32 ボーレート
のボーレート。
周波数変換器は、二つの通信プロトコルをサポートしてい
ます。モーターのメーカーの配線条件に従ってください。
Danfoss FC。
•
Modbus RTU。
•
諸機能は、プロトコルソフトウエアと RS485 接続、ある
いは、
パラメーター・グループ 8-** 通信・オプ
を使用
してプログラムできます。
特定の通信プロトコルを選択することにより、様々なデフ
ォルト・パラメーターを変更して、付加的なプロトコル別
のパラメーターを設定すると共に、そのプロトコルの仕様
に合わせることができます。
22 Danfoss A/S © 08/2018 All rights reserved. MG07A540
電気的設置 操作ガイド
4.9 設置チェックリスト
ユニットの設置を完了する前に、
の項目をチェックしてください。
検査項目 説明
補助機器
ケーブルルーティ
ング(配線)
コントロール配線
冷却用空きスペー
ス
周囲条件
ヒューズと遮断器
接地
入力及び出力電力
配線
パネル内部
スイッチ類
振動
周波数変換器の入力電力やモーターの出力側に接続されている可能性のある、補助機器、スイッチ、切
•
断装置、入力ヒューズ/遮断器などを探します。フルスピード動作の用意ができていることを確認してく
ださい。
使用されているセンサーの機能と設置状態をチェックし、周波数変換器へフィードバックします。
•
モーターの力率改善コンデンサーをはずします。
•
主電源側の力率改善コンデンサーを調整して、それらを減衰させます。
•
高周波干渉から隔離するために、モーター配線及びコントロール配線が分離、シールドされていること、
•
あるいは 3 つの金属導管に各々が通っていることを確認します。
破損や損傷のあるワイヤや不適切な接続をチェックします。
•
コントロール配線が電力とモーター配線から絶縁され、ノイズの干渉を受けていないか確認します。
•
必要に応じて、信号の電圧源をチェックします。
•
シールド・ケーブルやツイストペア・ケーブルの使用を推奨します。シールドが正しく終端されていること
を確認します。
上部と下部の空きスペースを十分に確保し、適切な冷却空気の流れを維持します。
•
参照してください。
周囲条件を満たしているか確認してください。
•
適切なヒューズと遮断器であることをチェックします。
•
全ヒューズはしっかりと挿入されて動作状態にあり、全遮断器がオープン位置にあることをチェックし
•
ます。
接地の接続が、しっかりと固定されて、酸化されてないことをチェックします。
•
導管を接地したり、金属面にバックパネルを取り付けたりしないでください。
•
接続が緩んでないかチェックします。
•
モーターならびに主電源ケーブルが別々の導管にあるか、あるいは分離したシールド・ケーブルである
•
ことを確認します。
ユニット内部に、汚れ、金属片、湿気、及び腐食がないか検査します。
•
ユニットが、未塗装の金属表面に取り付けられていることを確認してください。
•
スイッチや切断設定が全て、正常な位置にあることを確保します。
•
ユニットがしっかりと取り付けられていることを確認し、必要に応じて緩衝台を使用します。
•
異常な量の振動がないか検査してください。
•
表 4.3
に記載されているとおり、設置全体を検査します。完了したときには、これら
☑
章 3.3 取り付け
を
4 4
表 4.3 設置チェックリスト
注意
内部故障が発生したときの潜在的危険
周波数変換器が適切に閉じられていないと、人身事故の危険が生じます。
電力を供給する前に、すべての安全カバーが適切に配置され、しっかりと固定されていることを確認します。
•
MG07A540 Danfoss A/S © 08/2018 All rights reserved. 23
設定
5 設定
VLT® Midi Drive FC 280
5.1 安全指示
安全指示の全般については、
さい。
章 2 安全性
を参照してくだ
警告
高電圧
55
AC 主電源に接続されている限り、周波数変換器は高電圧
が印加されています。有資格技術者による設置、スタート
アップ、メンテナンスを怠った場合、死亡事故や重大な傷
害事故を招くことがあります。
設置、スタートアップ、メンテナンスは、有資格
•
技術者のみが実施するようにしてください。
電力供給前に:
1. カバーを適切に閉じてください。
2. すべてのケーブル・グランドが固く締められてい
るか確認します。
3. ユニットへの入力電力はオフにして、ロックアウ
トしてください。周波数変換器で入力電力を遮
断するためのスイッチがオフにされていても安
心しないでください。
4. 入力端子 L1 (91)、 L2 (92)、 及び L3 (93)に
て、相間、あるいは相と接地間に電圧が印加され
ていないことを検証します。
5. 出力端子 96 (U)、 97 (V)、 及び 98 (W)にて、
相間、あるいは相と接地間に電圧が印加されてい
ないことを検証します。
6. U-V (96-97)、V-W (97-98)、 W-U (98-96)の Ω
値を測定して、モーターの継続性を確認します。
7. 周波数変換器とモーターの接地が正しく行われ
ているかチェックします。
8. 周波数変換器の端子の接続が緩んでないか検査
します。
9. 供給電圧が周波数変換器とモーターの電圧に一
致するかを確認します。
電源の供給
5.2
以下の手順で周波数変換器に電力を供給します:
1. コントロール・カードへフィードバックするタコ
メータを装備しています 入力電圧、balanced
実際のモーター電流が 3%. そうでない場合、入
力電圧の不均衡を補正してから作業を進めてく
ださい。電圧補正以降の手順を繰り返します。
2. オプション機器 の配線が設置アプリケーショ
ンに合っていることを確認します。
3. 動作機器全てが、OFF 位置であることを確保しま
す。パネルのドアを閉め、カバーをしっかりと取
り付けるようにしてください。
4. ユニットの電源を投入します。この時、周波数変
換器をスタートしないでください。ユニットの
スイッチがオフになっている場合、ON 位置にし
て周波数変換器に電力を供給します。
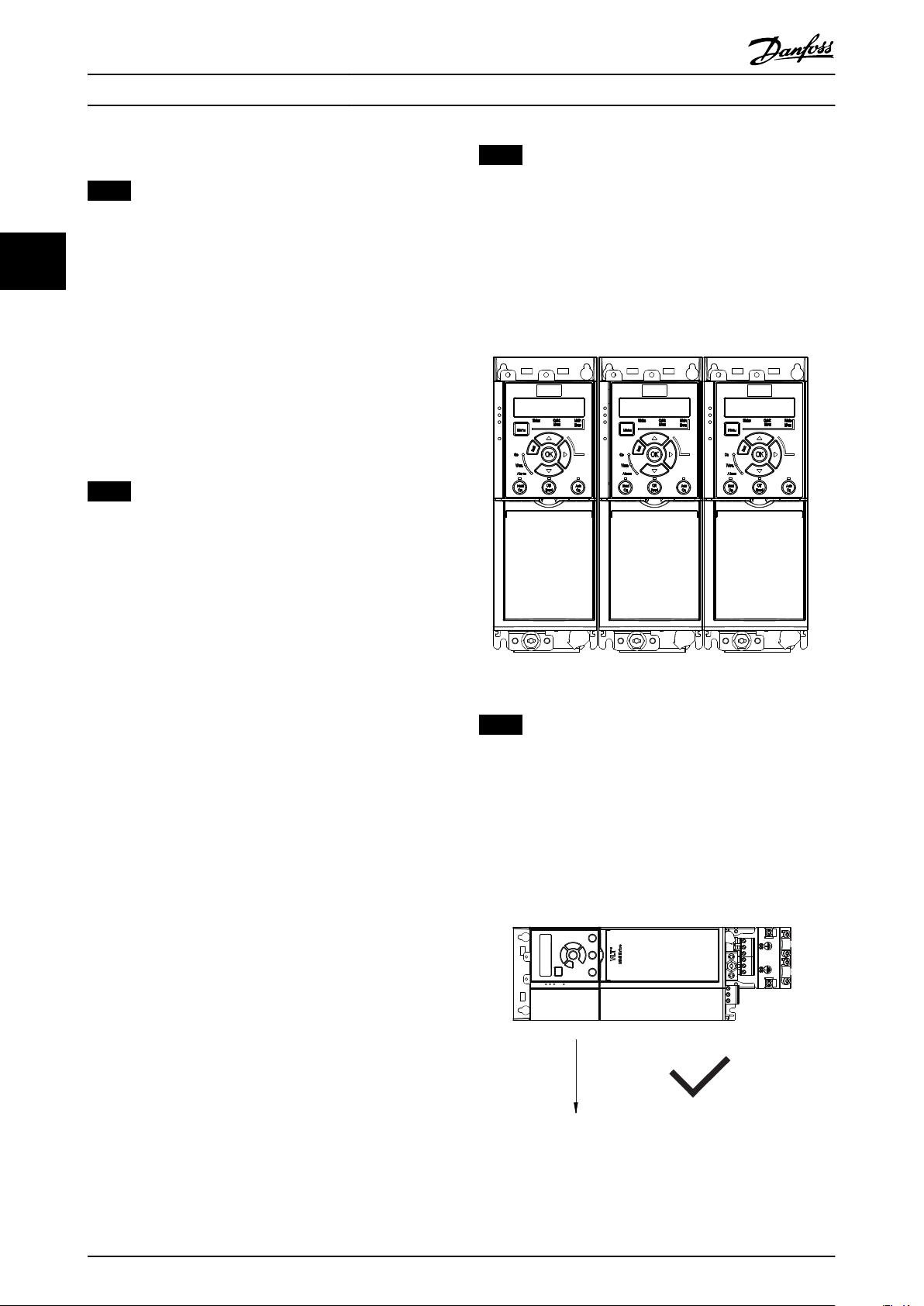
5.3 ローカル・コントロール・パネル動作
周波数変換器は、数値ローカル・コントロール・パネル
(NLCP)、グラフィック・ローカル・コントロール・パネル
(GLCP)およびブラインドカバーをサポートします。この
セクションには、NLCP 及び GLCP の操作について記載さ
れています。
注記
周波数変換器は、RS485 通信ポートまたは USB ポートを
介して、PC 上の MCT 10 設定ソフトウェア からプログ
ラミングすることも可能です。このソフトウェアは、注文
番号 130B1000 を用いて注文したり、Danfoss ウェブサ
イトからダウンロードすることができます:
drives.danfoss.com/downloads/pc-tools/#/
5.3.1 数値ローカル・コントロール・パネ
ル (NLCP)
数値ローカル・コントロール・パネル(NLCP)は機能上 4
つのセクションに分かれます。
A. 数値表示
B. メニュー・キー
C. ナビゲーション・キー及び表示ランプ
(LED)。
D. 操作キーと表示ランプ (LED)。
.
24 Danfoss A/S © 08/2018 All rights reserved. MG07A540

130BC506.10
Setup 1
A
B
C
D
5
12
13 14 15
10
11
10
9
6
7
8
4
1
2
3
Menu
Status
Quick
Menu
Main
Menu
Hand
On
O
Reset
Auto
On
Back
OK
On
Warn
Alarm
130BD135.10
Setup 12
INDEX
AHP
VkW
srpm
Hz%
n2n1
n3
p5 p4
p3 p2 p1
設定 操作ガイド
B. メニュー・キー
ステータス、クイック・メニュー、メイン・メニューの中
から選択するには、[Menu]を押してください。
C. 表示ランプ (LED) 及びナビゲーション・キー
表示 ランプ 機能
ON は、周波数変換器に主電源電圧、直
6 オン 緑色
WARN(警
7
告)
8 警報 赤色
流バス端子、又は 24 V 外部電源から
電力が供給されると点灯します。
警告の条件が満足されると、黄色の警
黄色
告 LED が点灯し、表示エリアにテキ
ストが表示されて問題を識別します。
故障が発生すると、赤色の警告 LED
が点滅し、警告テキストが表示されま
す。
5 5
表 5.2
図 5.1
に対する説明、表示ランプ(LED)
キー 機能
ナビゲーション構成の 1 つ前のステッ
9 [Back]
プまたはレイヤーに戻すときに使用し
ます。
図 5.1 NLCP の外観
[▲] [▼]
10
A. 数値表示
LCD ディスプレイはバック・ライト付きで、英数字の行
が 1 行あります。すべてのデータは NLCP に表示されま
す。
設定番号はアクティブな設定と編集設定を示します。ア
クティブ設定と編集設定に同じ設定を使用する場合、設定
番号のみが表示されます (工場出荷時設定)。アクティ
1
ブ設定と編集設定が異なる場合、両方の番号がディスプレ
イに表示されます(例えば、設定 12)。番号の点滅は編集
設定を示します。
2 パラメーター番号
3 パラメーター値。
モーター方向はディスプレイの左下に表示されます。小
4
さい矢印は方向を示します。
三角は、LCP がステータス、クイック・メニュー、または
5
メイン・メニュー状態にあるかどうかを示します。
表 5.1
図 5.1
に対する説明、セクション A
図 5.2 ディスプレイ情報
11 [OK]
12
表 5.3
[►]
図 5.1
D. 操作キーと表示ランプ (LED)
キー 機能
Hand On(手
13
動オン)
オフ/リセ
14
ット
Auto On(自
15
動オン)
表 5.4
図 5.1
パラメーター・グループ間やパラメータ
ー間の切り替えおよびパラメーター内
の移動あるいはパラメーター値の増加/
減少に使用します。矢印キー はローカ
ル指令の設定にも使用できます。
押して、パラメーター・グループへアク
セスしたり、選択をアクティブにしたり
できます。
押して、パラメーター値内で左右に移動
したり、数値を個々に変更したりできま
す。
に対する説明、ナビゲーション・キー
ローカル・コントロールで周波数変換器をス
タートします。
コントロール入力やシリアル通信による
•
外部停止信号は、ローカルの手動オンを重
ね書きします。
モーターを停止し、周波数変換器への電源は
遮断しないでください。あるいは不具合がリ
セットされた後に、周波数変換器を手動でリ
セットしてください。警告モードの場合は、
警告状態が解除されるとアラームがリセット
されます。
システムをリモート操作モードにします。
コントロール端子やシリアル通信による
•
外部スタート・コマンドに対応します。
に対する説明、セクション D
MG07A540 Danfoss A/S © 08/2018 All rights reserved. 25

130BC440.10
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
設定
VLT® Midi Drive FC 280
警告
電気的危険事項
[Off/Reset] (オフ/リセット)キーを押した後でも、周波
数変換器の端子には電圧が印加されています。[Off/
Reset]キーを押すことで、周波数変換器が主電源から切断
されることはありません。帯電部に触れると、死亡又は重
大な傷害を招くことがあります。
帯電部には絶対に触れないでください。
•
5.3.2 NLCP の右キー機能
55
[►] 押して、ディスプレイ上の 4 桁のいずれかを個別に
修正できます。[►] を 1 回押すと、カーソルは最初の桁
に移動し、
ます。[▲] [▼] を押して、値を変更できます。[►] を押
しても桁の値は変化しませんし、小数点も移動しません。
図 5.3
に示すとおり、その桁は点滅を開始し
注記
スタートアップの間、LCP には
示されます。このメッセージが表示されなくなったら、周
波数変換器は動作準備が完了しています。オプションの
追加又は除去はスタートアップの時間を延ばすことがあ
ります。
5.3.3 NLCP のクイック・メニュー
クイック・メニュー
を簡単に表示できます。
1.
クイック・メニュー
レイのインジケーターが
にくるまで [Menu] を押します。
2. [▲] [▼] を押して、QM1 または QM2 を選択し、
次に[OK]を押します。
3. [▲] [▼] を押して、
メーターを参照します。
4. [OK] を押してパラメーターを選択します。
5. パラメーター設定の値を変更するには、[▲] [▼]
を押します。
6. [OK] を押して変更を受け入れます。
7. 終了するには、[Back] を 2 回押して(QM2 と
QM3 にいる場合は 3 回)
か、[Menu] を 1 回押して
移行します。
では頻繁に使用しているパラメーター
初期化中
に切り替えるには、ディスプ
クイック・メニュー
のメッセージが表
クイック・メニュー
のパラ
ステータス
に移行する
メイン・メニュー
の上
に
図 5.3 右キー機能
[►] はパラメーター・グループ間の移動にも使用できま
す。メイン・メニューにいるとき、[►]を押して、次のパ
ラメーター・グループの最初のパラメーターに移動できま
す(例えば、
パラメーター 0-03 Regional Settings [0]
国際からパラメーター 1-00 Configuration Mode [0]
開ループ速度
26 Danfoss A/S © 08/2018 All rights reserved. MG07A540
)。

130BC445.13
1-22 XXXX V
Motor
nominal
speed
QM 1
0-01 [0]
1-10 [0]
1-24 XXXX A
Language
Motor Type
1-20 XXXX kW
Motor power
Motor voltage
1-26 XXXX 1-23 XXXX
Stator
Motor frequency
1-25 XXXX
1-30 XXXX
1-39 XXXX
1-40 XXXX
1-37 XXXX
1-25 XXXX
1-24 XXXX
A
3-02 XXXX
3-03 XXXX
3-41 XXXX S
3-42 XXXX S
5-12
[2]
1-29 [1]
AMA
Back EMF at
1000 RPM
d-axis
QM 2
BMS
AMS
ES
5-70 XXXX
5-71 [0]
1-30 XXXX
1-39 XXXX
1-90 [0]
2-10 [0]
4-16 XXXX %
4-17 XXXX %
4-18 XXXX %
1-00 [0]
1-01 [1]
1-10 [0]
1-24 XXXX A 1-20 XXXX kW
1-22 XXXX V
Motor
nominal
speed
Motor power
Motor voltage
1-26 XXXX 1-23 XXXX
Motor frequency
1-25 XXXX
1-30 XXXX
1-40 XXXX
1-37 XXXX
1-25 XXXX
1-24 XXXX
A
Back EMF at
1000 RPM
d-axis
1-39 XXXX
4-14 XXXX
4-19 XXXX
Stator
QM 3
QM 4 QM 5
L10C
SFS
TBD
Motor
nominal
speed
Motor
nominal
speed
Motor current
Motor cont.
rated torque
Resistance (Rs)
Motor poles
inductance (Ld)
Asynchronous motor
Motor current
Minimum reference
Maximum reference
Ramp 1 ramp-up time
Ramp 1 ramp-down time
Terminal 27 digital input
Basic motor set-up
mode
Motor control
principle
Motor type
PM motor
PM motor
Motor
current
Motor cont.
rated torque
Stator
Resistance (Rs)
Motor poles
inductance (Ld)
Motor speed high limit [Hz]
Maximum output frequency
Asynchronous motor
Motor current
RPM
RPM
RPM
Hz
RPM
Hz
Hz
Hz
Hz
Hz
Adv. motor set-up
Resistance (Rs)
Motor poles
Motor thermal
protection
Brake function
Torque limit motor mode
Torque limit generator mode
Current limit
Encoder set-up
Terminal 32/33
pulses per revolution
Terminal 32/33
encoder direction
Changes made
Last 10 changes Since factory setting
Alarm log
設定 操作ガイド
5 5
MG07A540 Danfoss A/S © 08/2018 All rights reserved. 27
図 5.4 クイック・メニュー構造

130BC446.10
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
1
2
3
4
5
6
7
10
11
12
OK
OK
Back
8
Back
Setup 1
2 x
+
OK
9
OK
設定
5.3.4 NLCP のメイン・メニュー
VLT® Midi Drive FC 280
メイン・メニュー
では、全てのパラメーターにアクセスで
きます。
1.
メイン・メニュー
イの小さな矢印が
に切り替えるには、ディスプレ
メイン・メニュー
の上にくるま
で [Menu] キーを押します。
2. [▲] [▼]: パラメーター・グループを参照しま
す。
3. [OK] を押してパラメーター・グループを選択し
55
ます。
4. [▲] [▼]: 特定のグループのパラメーターを参
照します。
5. [OK] を押してパラメーターを選択します。
6. [►] および [▲]/ [▼]: パラメーター値を設
定 / 変更します。
7. [OK] を押して値を受け入れます。
8. 終了するには、[Back] を 2 回押して(アレイ・
パラメーターの場合は 3 回)メイン・メニューに
移行するか、[Menu] を 1 回押して
ステータス
に移行します。
連続パラメーター、列挙型パラメーター、およびアレイ・
パラメーターの値を個別に変更する原則については、
図 5.5、図 5.6
トを用いた動作説明については、
表 5.7
をご参照ください。
および
図 5.7
をご参照ください。イラス
表 5.5、表 5.6
および
図 5.5 メイン・メニューインタラクション - 連続パラ
メーター
28 Danfoss A/S © 08/2018 All rights reserved. MG07A540

130BC447.11
Setup 1
Setup 1
Setup 1
1
2
3
4
5
6
OK
OK
Back
7
OK
Back
130BC448.10
1
2
4
5
6
7
8
9
10
OK
Back
Back
Back
5 x
Setup 1
Setup 1
Setup 1
Setup 1
%
INDEX
%
INDEX
%
INDEX
Setup 1
INDEX
%
OK
OK
OK
設定 操作ガイド
1 [OK]: グループの最初のパラメーターが表示されます。
2
[▼]を繰り返し押して、パラメーターに移動します。
3 [OK] を押して、編集を開始します。
4 [►]: 最初の桁が点滅(編集可能)。
5 [►]: 2 番目の桁が点滅(編集可能)。
6 [►]: 3 番目の桁が点滅(編集可能)。
7
[▼]: パラメーター値を減少させます。小数点は自動的に
変化します。
8
[▲]: パラメーター値を増加させます。
9 [Back]: 変更を取り消して、2 に戻ります。
[OK]: 変更を受け付けて、2 に戻ります。
10
[▲][▼]: グループ内のパラメーターを選択します。
11 [Back]: 値を除去して、パラメーター・グループを表示し
ます。
12
[▲][▼]: グループを選択します。
表 5.5 連続パラメーターでの値の変更
列挙型パラメーターの場合、インタラクションに類似性が
ありますが、NLCP の桁制限 (大きい 4 桁) のためパラメ
ーター値はカッコに表示されます。また計数は 99 より
大きい値をとることができます。enum 値は 99 より大き
くなると、LCP はカッコの最初の部分のみ表示できます。
アレイ・パラメーター機能は以下のとおり:
5 5
図 5.7 メイン・メニューインタラクション - アレイ・パラ
メーター
1 [OK]: 最初のインデックスのパラメーター番号と値を表
示します。
2 [OK]: インデックスを選択できます。
3
[▲][▼]: インデックスを選択します。
4 [OK]: 値を編集できます。
5
[▲][▼]: パラメーター値 (点滅)を変更します。
6 [Back]: 変更を取り消します。
[OK]: 変更を承認します。
7 [Back]: インデックスの編集をキャンセルして、新しいパ
ラメーターを選択します。
8
図 5.6 メイン・メニューインタラクション - 列挙型パラメ
ーター
1 [OK]: グループの最初のパラメーターが表示されます。
2 [OK] を押して、編集を開始します。
3
[▲][▼]: パラメーター値 (点滅)を変更します。
4 [Back] を押して変更を取り消すか、 [OK] を押して変更
を受け付けます (画面 2 に戻る)。
5
[▲][▼]: グループ内のパラメーターを選択します。
6 [Back]: 値を除去して、パラメーター・グループを表示し
ます。
7
[▲][▼]: グループ を選択します。
表 5.6 列挙型パラメーターでの値の変更
MG07A540 Danfoss A/S © 08/2018 All rights reserved. 29
[▲][▼]: グループ内のパラメーターを選択します。
9 [Back]: パラメーター・インデックス値を除去して、パラ
メーター・グループを表示します。
10
[▲][▼]: グループを選択します。
表 5.7 アレイ・パラメーターでの値の変更

130BD598.10
Auto
On
Reset
Hand
On
O
Status
Quick
Menu
Main
Menu
Alarm
Log
Back
Cancel
Info
OK
Status
1(1)
36.4 kW
Auto Remote Ramping
0.000
On
Alarm
Warn.
A
7.83 A
799 RPM
B
C
D
53.2 %
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18 19 20 21
設定
VLT® Midi Drive FC 280
5.3.5 グラフィック・ローカル・コントロ
ール・パネル (GLCP)
GLCP は、機能上、4 つのグループに分かれています
(
図 5.8
を参照)。
A. ディスプレイ・エリア
B. ディスプレイメニュー・キー
C. ナビゲーション・キー及び表示ランプ
ディスプレイ パラメーター番号 デフォルト設定
1 0-20
2 0-21
3 0-22
4 0-23
5 0-24
表 5.8
図 5.8
に対する説明、ディスプレイ・エリア
[1602] 速度指令信号
[%]
[1614] モーター電流
[1610] 電力 [KW]
[1613] 周波数
[1502] KWh カウンタ
ー
(LED)。
55
D. 操作キー及びリセット
B. ディスプレイメニュー・キー
メニュー・キーは、メニュー・アクセス・パラメーターの
設定、通常操作時の状況ディスプレイ・モードの変更、あ
るいは不具合ログ・データの表示などに使用します。
キー 機能
6 状態 操作に関する情報を表示します。
7
ック・メニ
8
ン・メニュ
9
Log(警報ロ
Quick
Menu(クイ
ュー)
Main
Menu(メイ
ー)
Alarm
グ)
初期設定指示と多くの詳細なアプリケーシ
ョン指示について、プログラムするためのパ
ラメーターにアクセスできます。
すべてのプログラミング・パラメーターにア
クセスできます。
現在の警告のリスト、最後の 10 個の警報、
及びメンテナンス・ログを表示します。
表 5.9
図 5.8
に対する説明、ディスプレイメニュー・キー
C. ナビゲーション・キー及び表示ランプ (LED)
ナビゲーション・キーは、機能のプログラミングやディス
プレイ・カーソルの移動に使用します。ナビゲーション・
キーは、ローカル(手動)操作での速度コントロールにも使
用できます。3 つの周波数変換器状態表示ランプも、この
エリアにあります。
図 5.8 グラフィック・ローカル・コントロール・パネル (GLCP)
A. ディスプレイ・エリア
ディスプレイ・エリアは、周波数変換器に主電源電圧、直
流バス端子、あるいは 24V DC 外部電源が供給されると有
効になります。
LCP に表示される情報は、ユーザーの用途に応じてカスト
マイズ可能です。オプションは、
Q3-13 表示設定
30 Danfoss A/S © 08/2018 All rights reserved. MG07A540
で選択します。
クイック・メニュー
キー 機能
10 Back(戻る)
Cancel(キ
11
ャンセル)
12 Info(情報)
ナビゲーシ
13
ョン・キー
14 OK(確定)
表 5.10
図 5.8
メニュー構成の 1 つ前のステップ又はリ
ストに戻ります。
表示モードが変更されない限り、最後に実行
した変更やコマンドが取り消されます。
押すと、表示されている機能の意味を表示し
ます。
メニュー内の項目間を移動するには、4 つの
ナビゲーション・キーを使用します。
押して、パラメーター・グループへアクセス
したり、選択をアクティブにしたりできま
す。
に対する説明、ナビゲーション・キー

設定 操作ガイド
表示 ランプ 機能
ON は、周波数変換器に主電源電
15 オン 緑色
WARN(警
16
告)
17 警報 赤色
表 5.11
D. 操作キー及びリセット
操作キーは、LCP の下部にあります。
キー 機能
18
19 オフ
20
21 リセット
表 5.12
図 5.8
Hand On(手
動オン)
Auto On(自
動オン)
図 5.8
黄色
に対する説明、表示ランプ(LED)
手動オンモードで周波数変換器を起動させ
ます。
モーターを停止しますが、周波数変換器へ
の電力は供給します。
システムをリモート操作モードにします。
•
不具合がリセットされた後に、周波数変換
器を手動でリセットします。
に対する説明、操作キー 及びリセット
圧、直流バス端子、又は 24 V 外
部電源から電力が供給されると点
灯します。
警告の条件が満足されると、黄色
の警告 LED が点灯し、表示エリ
アにテキストが表示されて問題を
識別します。
故障が発生すると、赤色の警告
LED が点滅し、警告テキストが表
示されます。
コントロール入力やシリアル通信
•
による外部停止信号は、ローカル
の手動オンを重ね書きします。
コントロール端子やシリアル通信によ
る外部スタート・コマンドに対応しま
す。
注記
ディスプレイのコントラストを調整するには、[Status]
および [▲]/[▼] キーを押します。
5.3.6 パラメーター設定
アプリケーションに対する正しいプログラミングを実現
するには、いくつかの関連パラメーターの機能設定が必要
となります。パラメーターの詳細は、
ター・メニュー構造
プログラミング・データは、周波数変換器の内部に保持さ
れます。
バックアップには、LCP メモリにデータをアップ
•
ロードします。
他の周波数変換器にデータをダウンロードする
•
には、LCP をそのユニットに接続して、保存した
設定をダウンロードします。
デフォルト設定に初期化しても、LCP メモリに保
•
存したデータは変更されません。
に記載しています。
章 10.2 パラメー
5.3.7 GLCP によるパラメーター設定の変
更
クイック・メニュー
ター設定にアクセスおよびパラメーター設定を変更しま
す。
クイック・メニュー
対してのみアクセス可能です。
1. LCP 上の [Quick Menu] 又 は [Main Menu] を
押します。
2. [▲] [▼]を押してパラメーター・グループを参照
します。[OK] を押してパラメーター・グループ
を選択します。
3. [▲] [▼]を押してパラメーターを参照します。
[OK] を押してパラメーターを選択します。
4. パラメーター設定の値を変更するには、[▲] [▼]
を押します。
5. 小数パラメーターが編集状態にある場合、[◄]
[►]を押して、数字を変更します。
6. [OK] を押して変更を受け入れます。
7. [Back] を 2 回押してステータスに移行するか、
[Main Menu] を 1 回押してメイン・メニューに
移行します。
変更を見る
クイック・メニュー Q5
ターがデフォルト設定から変更されました。
このリストは、現在の編集設定で変更されたパラ
•
メーターのみを表示します。
初期値にリセットされたパラメーターは、表示さ
•
れません。
メッセージ
•
が存在しないことを示します。
または
メイン・メニュー
では、限定されたパラメーターに
- 変更履歴リスト 全パラメー
Empty
は、変更されたパラメーター
からパラメー
5.3.8 LCP へ/からデータのアップロー
ド/ダウンロード
1. データのアップロードやダウンロードを行う前
に、 [Off](オフ) を押してモーターを停止して
ください。
2. [Main Menu] を 押 してから、
ー 0-50 LCP Copy
3. LCP にデータをアップロードするには、
を LCP からへ
ダウンロードするには、
します。
4. [OK] を押します。プログレス・バーは、アップ
ロード又はダウンロードの進捗状況を示します。
5. [Hand On](手動オン) 又は [Auto On](自動オ
ン) を押して、通常動作に戻します。
[OK]を押します。
を選択します。LCP からデータを
[2] LCP から全て
パラメータ
[1] 全て
を選択
5 5
MG07A540 Danfoss A/S © 08/2018 All rights reserved. 31

設定
VLT® Midi Drive FC 280
5.3.9 LCP によるデフォルト設定の回復
注記
デフォルト設定の回復によって、プログラム、モーター・
データ、ローカリゼーション、監視記録が失われるリスク
があります。バックアップを取るには、初期化前に LCP へ
データをアップロードします。
パラメーター 15-00 Operating hours
•
パラメーター 15-03 Power Up's
•
パラメーター 15-04 Over Temp's
•
パラメーター 15-05 Over Volt's
•
5.4 基本プログラミング
.
.
.
.
5.4.1 非同期モーター設定
パラメーター設定を回復するには、周波数変換器を初期化
します。初期化は、
(推奨します)又は手動で実施します。初期化では
55
メーター 1-06 Clockwise Directionとパラメータ
ー 0-03 Regional Settings
ん。
パラメーター 14-22 Operation Mode
•
た初期化により、動作時間、シリアル通信選択、
不具合ログ、警報ログ、その他の監視機能など、
周波数変換器に関する設定がリセットされるこ
とはありません。
手動初期化は、モーターに関する、プログラミン
•
グ、ローカリゼーション、監視データを消去し、
デフォルト設定に戻します。
推奨される初期化手順(
Mode
を介して)
1.
パラメーター 14-22 Operation Mode
て、 [OK](確定)を押します。
2.
[2] 初期化
す。
3. ユニットの電源を切って、表示が消えるまで待ち
ます。
4. ユニットの電源を投入します。
スタートアップの間に、パラメーターがデフォルト設定に
戻ります。この方法は、通常よりも少し時間がかかりま
す。
5.
警報 80、Dr 初期化
6. [Reset](リセット)を押して動作モードに戻りま
す。
手動初期化手順
1. ユニットの電源を切って、表示が消えるまで待ち
ます。
2. ユニットに電力を供給している間 、 GLCP で
[Status]、[Main Menu]、[OK]を同時に押し続け
ます、あるいは NLCP で [Menu]、[OK]を同時に
押し続けます (約 5 秒、またはクリック音が聞
こえて、ファンが始動するまで)。
スタートアップ時、パラメーターはデフォルト設定に戻り
ます。この方法は、通常よりも少し時間がかかります。
パラメーター 14-22 Operation Mode
パラ
のリセットは行われませ
を使用し
パラメーター 14-22 Operation
を選択し
を選択して、 [OK](確定)を押しま
が表示されます。
以下のモーター・データをリストの記載順に入力します。
モーター銘板の情報を確認します。
1.
パラメーター 1-20 Motor Power
2.
パラメーター 1-22 Motor Voltage
3.
パラメーター 1-23 Motor Frequency
4.
パラメーター 1-24 Motor Current
5.
パラメーター 1-25 Motor Nominal Speed
VVC+ モードで最適なパフォーマンスを得る目的で、以下
のパラメーターを設定するための特殊モーター・データが
必要になります。
6.
パラメーター 1-30 Stator Resistance (Rs)
7.
パラメーター 1-31 Rotor Resistance (Rr)
8.
パラメーター 1-33 Stator Leakage Reactance
(X1)
.
9.
パラメーター 1-35 Main Reactance (Xh)
データは、モーター・データシートに表記されています
(このデータは通常モーター銘板には表記されていませ
ん)。
パラメーター 1-29 Automatic Motor Adaption
(AMA)
を用いて
手動で入力します。
VVC+実行時のアプリケーション別調整
VVC+ は最も堅牢なコントロールモードです。ほとんどの
状況で、詳細な調整なしに最適化されたパフォーマンスを
得ることができます。ベストパフォーマンスを得るため
に完全 AMA を実行します。
5.4.2
初期プログラミングステップ
1. PM モーター動作を有効にするには、
2.
[1] 完全 AMA を有効化
VVC+による PM モーター設定
ー 1-10 Motor Construction
ョンに設定します:
1a
[1] PM、非突極 SPM
1b
[3] PM, salient IPM (PM、突極 IPM)
パラメーター 1-00 Configuration Modeで[0]
開ループ
を選択します。
.
.
.
.
.
.
.
、パラメーターを
パラメータ
を以下のオプシ
.
手動初期化は、以下の周波数変換器情報をリセットしませ
ん。
32 Danfoss A/S © 08/2018 All rights reserved. MG07A540

設定 操作ガイド
注記
エンコーダー・フィードバックは PM モーターでサポート
されていません。
モーター・データのプログラミング
パラメーター 1-10 Motor Construction
ーオプションの 1 を選択した後、
プ 1-2* Mo データ、1-3* 調整 Mo データ
1-4* 高度 モーター・データ II
ーターは有効になります。
この情報は、モーター銘板とモーター・データシートに表
記されています。
以下のパラメーターをリストの記載順にプログラムしま
す。
1.
パラメーター 1-24 Motor Current
2.
パラメーター 1-26 Motor Cont. Rated
Torque
.
3.
パラメーター 1-25 Motor Nominal Speed
4.
パラメーター 1-39 Motor Poles
5.
パラメーター 1-30 Stator Resistance (Rs)
ライン対共通固定子抵抗(Rs)を入力します。ラ
イン間データのみ利用できる場合、ライン間の値
を 2 で割り、ライン対共通(スターポイント)値
を導きます。
オーム計によって値を測定することも可能です
が、これはケーブルの抵抗値を考慮することにも
なります。測定値を 2 で割り、その値を入力しま
す。
6.
パラメーター 1-37 d-axis Inductance (Ld)
PM モーターのライン対共通直軸インダクタンス
を入力します。
ライン間データのみ利用できる場合、ライン間の
値を 2 で割り、ライン対共通 (スターポイン
ト) 値を導きます。
インダクタンス計によって値を測定することも
可能ですが、これはケーブルのインダクタンスを
考慮することにもなります。測定値を 2 で割り、
その値を入力します。
7.
パラメーター 1-40 Back EMF at 1000 RPM
1000 RPM の機械的速度(RMS 値) において PM モ
ーターのライン対ラインのバック EMF を入力し
ます。バック EMF は、周波数変換器が接続されて
おらず、シャフトが外部から回転されている場合
に PM モーターによって発生される電圧です。バ
ック EMF は、通常、公称モーター速度又は 2 線間
で測定される 1000RPM に対する電圧として定義
されています。1000 RPM のモーター速度で値が
利用できない場合、次ぎのように正しい値を計算
します。例えば、バック EMF が 1800 RPM で 320V
の場合、1000 RPM でのバック EMF は次ぎのよう
算出できます:
バック EMF=( 電圧/
RPM)x1000=(320/1800)x1000=178
で PM モータ
パラメーター・グルー
・データ及び
のモーター関連パラメ
.
.
.
.
.
.
パラメーター 1-40 Back EMF at 1000 RPM
に
対してこの値をプログラムします.
テストモーター動作
1. 低速(100~200 RPM)でモーターを起動します。
モーターが回転しない場合、設置、プログラム全
般及びモーターのデータをチェックしてくださ
い。
パーキング
この機能は、モーターが低速回転するアプリケーションの
オプションに推奨されます(例えば、ファンアプリケーシ
ョンの空転)。
よび
パラメーター 2-07 Parking Time
パラメーター 2-06 Parking Current
は調整可能で
お
す。高慣性のアプリケーションに対しては、これらのパラ
メーターの工場出荷時設定を増加します。
公称速度でモーターを起動します。アプリケーションが
正常に動作しない場合、VVC+ PM 設定をチェックします。
表 5.13
はさまざまなアプリケーションでの推奨項目を
示します。
アプリケーション 設定
低慣性アプリケーション
I負荷/I
中慣性アプリケーション
50>I負荷/I
高慣性アプリケーション
I負荷/I
低速での高負荷
<30% (定格速度)
表 5.13 さまざまなアプリケーションでの推奨項目
モーター
モーター
モーター
<5
>5
>50
ある速度でモーターが振動を開始した場合、
ー 1-14 Damping Gain
パラメーター 1-17 Voltage
•
filter time const.
数 5~10 で増加します。
パラメーター 1-14 Damping
•
Gain
の値を減少します。
パラメーター 1-66 Min.
•
Current at Low Speed
減少します (<100%)。
計算値を維持します。
パラメーター 1-14 Damping Gain
パラメーター 1-15 Low Speed
Filter Time Const.
メーター 1-16 High Speed
Filter Time Const.
ます。
パラメーター 1-17 Voltage
filter time const.
ます。
パラメーター 1-66 Min. Current
at Low Speed
(長時間の>100% はモーターを過熱
させます)。
の値を増加します
の値を係
の値を
、および
の値を増加し
の値を増加し
パラ
パラメータ
を増加します。小さいステップ
、
で値を増加します。
始動トルクは
Speed
パラメーター 1-66 Min. Current at Low
で調整できます。100%で、始動トルクとして公称ト
ルクが与えられます。
5 5
MG07A540 Danfoss A/S © 08/2018 All rights reserved. 33

設定
VLT® Midi Drive FC 280
5.4.3 自動モーター適合 (AMA)
VVC+ モードで周波数変換器とモーターとの間の適合性の
最適化を図るには、AMA を動作させます。
周波数変換器は、出力モーター電流を安定させる
•
ために、モーターの数学的モデルを構築し、モー
ターの性能が向上します。
モーターによっては、テストを完全なバージョン
•
で実施できない場合があります。この場合、
ラメーター 1-29 Automatic Motor Adaption
55
LCP を用いて AMA を実行するには
電力サイズに依存して、AMA は完了するのに 3~10 分か
かります。
(AMA)で[2] 簡略 AMA を有効化
警告や警報が発生した場合、
•
のリスト
最良の結果を得るため、この手順は冷えているモ
•
ーターで実施します。
1. デフォルト・パラメーター設定で、AMA を実行
する前に端子 13 と 27 を接続します。
2.
メイン・メニュー
3.
パラメーター・グループ 1-** 負荷及びモータ
ー
4. [OK] を押します。
5.
パラメーター・グループ 1-2* Mo データ
データを用いて、モーター・パラメーターを設定
します。
6.
パラメーター 1-42 Motor Cable Length
ーター・ケーブル長を設定します。
7.
パラメーター 1-29 Automatic Motor Adaption
(AMA)
8. [OK] を押します。
9.
[1] 完全 AMA を有効化
10. [OK] を押します。
11. テストが自動的に実施され、終了するとその指示
があります。
をご覧ください。
に進みます。
に進みます。
へ進みます。
を選択します。
を選択します。
章 8.4 警告と警報
パ
の銘板
でモ
注記
AMA 機能によりモーターが作動したり、モーターに悪影響
を及ぼしたりすることはありません。
5.5 モーター回転をチェック中
周波数変換器を作動する前に、 モーターの回転をチェッ
クしてください。
1. [Hand On](手動オン)を押します。
2. 正の速度指令信号の設定には、[▲]を押してくだ
さい。
3. 表示された速度がプラスになっていることを確
認します。
4. 周波数変換器とモーター間の配線が正しいこと
を確認してください。
5. モーターの回転方向が
計回り方向
ください。
5a
5b
エンコーダーの回転確認
5.6
エンコーダー・フィードバックを使用している場合、エン
コーダー回転を確認します。
1.
パラメーター 1-00 Configuration Modeで[0]
開ループ
2.
パラメーター 7-00 Speed PID Feedback
Sourceで [1] 24 V エンコーダー
す。
3. [Hand On](手動オン)を押します。
4. 正の速度指令信号の設定には、[▲]を押してくだ
さい(
Direction
5. フィードバックがプラスになっていることを
ラメーター 16-57 Feedback [RPM]
す。
の設定に一致することを確認して
パラメーター 1-06 時計回り方向
[0]* 正常
設定されている場合:
a. モーター・シャフトを時計回り
b. LCP の方向矢印が時計回りに
パラメーター 1-06 時計回り方向
[1]
反転(左回り)に設定している場合:
a. モーター・シャフトの回転が反
b. LCP の方向矢印が左回りにな
を選択します。
[0] 正常パラメーター 1-06 Clockwise
)。
パラメーター 1-06 時
が
(デフォルトは時計回り) に
に回転していることを確認し
ます。
なっていることを確認します。
を
時計回りとなっていることを
確認します。
っていることを確認します。
を選択しま
パ
で確認しま
34 Danfoss A/S © 08/2018 All rights reserved. MG07A540

設定 操作ガイド
注記
ネガティブフィードバック
フィードバックがマイナスの場合は、エンコーダー接続が
間違っています。
Encoder Direction
エンコーダーケーブルを逆にします。
5.7 ローカル・コントロール・テスト
1. [Hand On]を押すと、周波数変換器にローカル・
スタートコマンドが提供されます。
2. [▲]を押すことにより、周波数変換器をフルスピ
ードに加速できます。カーソルを小数点の左へ
移動することで、入力変更をより迅速に行えま
す。
3. 加速の問題は、どんなものでも記録してくださ
い。
4. [Off](オフ)を押します。減速の問題は、どんな
ものでも記録してください。
加速や減速の問題が発生するときは、
ューティング
出た後の周波数変換器のリセットについては
告と警報の種類
システム・スタートアップ
5.8
パラメーター 5-71 Term 32/33
を使用して、方向を反転するか、又は
章 8.5 トラブルシ
を参照してください。警報 (トリップ) が
章 8.2 警
を参照してください。
メモリモジュール
5.9
VLT® Memory Module MCM は、次のデータが含まれている
小さいメモリデバイスです。
周波数変換器のファームウェア(コントロール・
•
カードでの通信用のファームウェアは含まれて
いません)。
PUD ファイル。
•
SIVP ファイル。
•
パラメータファイル。
•
VLT® Memory Module MCM は付属品です。周波数変換器
には、出荷時にメモリモジュールは取り付けられていませ
ん。新しいメモリモジュールは、次の注文番号を使用して
注文できます。
説明 注文番号
VLT® Memory Module MCM 102
VLT® Memory Module MCM 103
表 5.14 注文番号
それぞれのメモリモジュールには、一意のシリアル番号が
あり変更できません。
132B0359
132B0466
5 5
このセクションの手順書では、ユーザー配線やアプリケー
ションプログラムについて学びます。アプリケーショ
ン・セットアップが完了したら、以下の手順を推奨しま
す。
1. [Auto On](自動オン)を押します。
2. 外部運転指令を適用します。
3. 速度範囲全体にわたって、速度指令値を調整しま
す。
4. 外部運転指令を除きます。
5. モーターの音や振動レベルをチェックして、シス
テムが意図したとおりに動作しているか確認し
ます。
警告や警報が発生した場合、トリップ後の周波数変換器の
リセットについては、
てください。
章 8.2 警告と警報の種類
を参照し
注記
VLT®Memory Module MCM は、ファームウェア 1.5 以前を搭
載した周波数変換器で使用できます。
メモリモジュールで設定する前に、
ー 31-40 Memory Module Function
を選択します。
パラメータ
ー 31-40 Memory
Module Function
[0] Disabled (無効) データ機能のダウンロードまたはア
*[1] Only Allow
Download (ダウンロード
だけ可能)
[2] Only Allow Upload
(アップロードだけ可能)
[3] Allow Both
Download and Upload
(ダウンロードとアップ
ロードの両方が可能)
説明
ップロードが無効です。
メモリモジュールから周波数変換器
にデータをダウンロードすることだ
けが可能です。これが
ー 31-40 Memory Module Function
のデフォルトの設定です。
周波数変換器からメモリモジュール
にデータをアップロードすることだ
けが可能です。
このオプションを選択した場合、周
波数変換器はまずメモリモジュール
からデータをダウンロードし、その
後周波数変換器からメモリモジュー
ルにデータをアップロードします。
パラメータ
の正しいオプション
パラメータ
表 5.15
の詳細
MG07A540 Danfoss A/S © 08/2018 All rights reserved. 35
パラメーター 31-40 Memory Module Function

設定
VLT® Midi Drive FC 280
注記
予期しない上書きの回避
パラメーター 31-40 Memory Module Function
ルトの設定は
だけが可能です)
るファームウエアのアップデート、LCP またはバスにより
更新されたパラメータ、
Mode
を介してリセットされたパラメータ、周波数変換器
の 3-finger-reset of などのアップデートがある場合、
更新されたデータは、周波数変換器がメモリモジュールか
ら再度データをダウンロードするので新しい電源サイク
ルのあとに失われます。
55
•
[1] Only Allow Download (ダウンロード
。OSS ファイルを使用した MCT 10 によ
パラメーター 14-22 Operation
データをメモリモジュールから周波数変換器に
ダウンロードした後、新しい電源サイクルの前に
パラメーター 31-40 Memory Module Function
で
[0] Disabled (無効または) [2] Only
Allow Upload (アップロードだけが可能)
択します。
5.9.1 周波数変換器データを新しいメモ
のデフォ
注記
メモリモジュールで予期しないデータの上書きを回避す
るには、異なる操作目的にしたがって、次の電源サイクル
の前に
設定を調整します。
5.9.3 複数の周波数変換器にデータをコ
を選
複数の周波数変換器が同じ電圧/電源にある場合、1 つの
周波数変換器の情報は、1 つのメモリモジュールを介して
別のものに転送されます。
リモジュール(ドライブバックアッ
プの作成)と同期
1. 新しい空のメモリモジュールを周波数変換器に
挿入します。
2.
パラメーター 31-40 Memory Module Function
で
[2] Only Allow Upload (アップロードだけ
が可能) または[3] Allow Both Download and
Upload (ダウンロードとアップロードの両方が
可能)
を選択します。
3. 周波数変換器の電源を入れます。
4. 同期が完了するまで待ちます。
の転送と表示
状況を確認します。
を参照して周波数変換器で転送の
章 5.9.7 性能
注記
メモリモジュールで予期しないデータの上書きを回避す
るには、異なる操作目的にしたがって、次の電源サイクル
の前に
パラメーター 31-40 Memory Module Function
設定を調整します。
の
たは[3] Allow Both Download and Upload
(ダウンロードとアップロードの両方が可能)
が選択されていることを確認します。
4. 新しい周波数変換器の電源を入れます。
5. ダウンロードが完了し、データが転送されるまで
待ちます。
して周波数変換器で転送の状況を確認します。
パラメーター 31-40 Memory Module Function
章 5.9.7 性能の転送と表示
を参照
の
ピー
章 5.9.1 周波数変換器データを新しいメモリ
1.
モジュール(ドライブバックアップの作成)と同
期
のステップにしたがって、データを 1 つの周波
数変換器からメモリモジュールにアップロード
します。
2. マスターメモリモジュールに予期しないデータ
のアップロードを回避するには、周波数変換器の
パラメーター 31-40 Memory Module Function
で
[1] Only Allow Download (ダウンロードだ
けが可能)
3. メモリモジュールを取り外し新しい周波数変換
器に挿入します。
4. 新しい周波数変換器の電源を入れます。
5. ダウンロードが完了し、データが転送されるまで
待ちます。
して周波数変換器で転送の状況を確認します。
6. 次の周波数変換器でステップ 3-5 を繰り返しま
す。
を必ず選択してください。
章 5.9.7 性能の転送と表示
を参照
注記
5.9.2 別の周波数変換器にデータをコピ
ー
データは、VLT®Memory Module Programmer を介して PC
から面利モジュールにダウンロードすることもできます。
1. 必要なデータがメモリモジュールにアップロー
ドされていることを確認します(
数変換器データを新しいメモリモジュール(ドラ
イブバックアップの作成)と同期
2. メモリモジュールを取り外し新しい周波数変換
器に挿入します。
3. 新 しい周波数変換器の
ー 31-40 Memory Module Functionで[1] Only
Allow Download (ダウンロードだけが可能) ま
36 Danfoss A/S © 08/2018 All rights reserved. MG07A540
章 5.9.1 周波
参照)。
パラメータ
注記
いずれの周波数変換器でも、データのバックアップ用に空
のメモリモジュールを挿入すると、次の電源サイクルが始
まる前に、
の設定を
可能) または[3] Allow Both Download and Upload
(ダウンロードとアップロードの両方が可能)
ます。
パラメーター 31-40 Memory Module Function
[2] Only Allow Upload (アップロードだけが
に調整し

設定 操作ガイド
5.9.4 ファームウェア情報の転送
2 つの周波数変換器が同じ電圧/電源にある場合、1 つの周
波数変換器から別のものにファームウェア情報が転送さ
れます。
1.
章 5.9.1 周波数変換器データを新しいメモリ
モジュール(ドライブバックアップの作成)と同
期
のステップにしたがって、ファームウェア情報
を 1 つの周波数変換器からメモリモジュールに
アップロードします。
2.
章 5.9.2 別の周波数変換器にデータをコピー
のステップにしたがって、同じ電圧/電源の別の
周波数変換器にファームウェア情報を転送しま
す。
注記
ファームウェア情報は、VLT®Memory Module Programmer
を介して PC から面利モジュールにダウンロードすること
もできます。
5.9.5 パラメータの変更をメモリモジュ
ールにバックアップ
1. 周波数変換器に新しいまたはメモリを消去した
メモリモジュールを挿入します。
2.
パラメーター 31-40 Memory Module Function
で
[2] Only Allow Upload (アップロードだけ
が可能) または[3] Allow Both Download and
Upload (ダウンロードとアップロードの両方が
可能)
を選択します。
3. 周波数変換器の電源を入れます。
4. 同期が完了するまで待ちます。
の転送と表示
状況を確認します。
5. パラメータの設定の変更は自動的にメモリモジ
ュールと同期されます。
を参照して周波数変換器で転送の
5.9.6 データの消去
メモリモジュールは新しい電源サイクルなしで、
ター 31-43 Erase_MM
1. メモリモジュールが周波数変換器に取り付けら
れていることを確認します。
2.
パラメーター 31-43 Erase_MM
MM (MM を消去)
3. メモリモジュールのすべてのファイルは消去さ
れます。
4.
パラメーター 31-43 Erase_MM
能なし
の設定で消去できます。
を選択します。
に戻ります。
章 5.9.7 性能
パラメー
で
[1] Erase
の設定は
[0] 機
5.9.7 性能の転送と表示
周波数変換器とメモリモジュール間で異なるデータの転
送にかかる時間は異なります(
データファイル 時間
周波数変換器からメモリモジュールへ
•
のデータのアップロードには約 2 分か
ファームウェアファ
イル
SIVP ファイル。 約 10 秒。
パラメータファイル
1)
表 5.16 性能の転送
1) 周波数変換器のパラメータを変更すると、更新したパラメー
タにアップロードするには、電源を切る前に約 5 秒待ちます。
データフ
ァイル
ファーム
ウェア
ファイル
SIVP ファ
イル。
パラメー
タ
ファイル
表 5.17 転送の表示
1) LED 上は LCP にあります。LED 上での位置と機能については、
章 5.3.1 数値ローカル・コントロール・パネル (NLCP)と
章 5.3.5 グラフィック・ローカル・コントロール・パネル
(GLCP)を参照してください。
転送中は“メモリモ
ジュールと同期中”
が表示されます。
文字は表示されま
せん。
かります。
メモリモジュールから周波数変換器へ
•
のデータのアップロードには約 6 分か
かります。
GLCP NLCP
表 5.16
約 5 秒。
表示
文字
は表示され
ません。
を参照)。
LED 上
転送中 LED がゆ
っくり点滅しま
す。
LED は点滅しませ
ん。
1)
5.9.8 PROFIBUS コンバーターを有効にす
る
VLT® Memory Module MCM 103 は、メモリモジュールとア
クティベーション モジュールの両方を組み合わせたよ
うに機能し、ファームウェアの PROFIBUS コンバーター機
能を有効にします。VLT® Memory Module MCM 103 には、
PBconver.MME ファイルが含まれており、これは個々のメ
モリモジュールのシリアル番号を組み合わせたものです。
PBconver.MME は PROFIBUS コンバーター機能のキーとな
ります。
PROFIBUS コンバーターを有効にするには、
ー 14-70 Compatibility Selections
択します。
パラメータ
でバージョンを選
5 5
MG07A540 Danfoss A/S © 08/2018 All rights reserved. 37

設定
VLT® Midi Drive FC 280
パラメータ
ー 14-70 Compatibility
Selections
*[0] No Function (機能なし) 互換性の機能の選択が無効
[12] VLT2800 3M 周波数変換器の VLT2800 3M
[13] VLT2800 3M incl. MAV 周波数変換器の VLT2800 3M
[14] VLT2800 12M 周波数変換器の VLT2800
55
[15] VLT2800 12M incl. MAV 周波数変換器の VLT2800
表 5.18
の詳細
VLT® Memory Module MCM 103 から PROFIBUS コンバータ
ーを有効にします。
パラメーター 14-70 Compatibility Selections
1. 周波数変換器にメモリモジュールを挿入します。
2.
パラメーター 14-70 Compatibility
説明
です。
互換性モードを選択します。
incl. MAV 互換性モードを
選択します。
12M 互換性モードを選択し
ます。
12M incl. MAV 互換性モー
ドを選択します。
稼動時間 720 時間後に、周波数変換器が警告を報告しま
す。PROFIBUS コンバーターはまだ機能します。
ター 31-48 Time Limit Remaining Time
ンタが 0 に達すると、周波数変換器は、次のスタートアッ
プコマンドでトリップ・ロックアラームを報告します。
パラメー
のタイムカウ
Selectionsの[12] VLT 2800 3M または[14]
VLT 2800 12M
3.
電源サイクルを作成し、VLT® 2800 PROFIBUS 認
証番号とモードとして周波数変換器を開始しま
す。
を選択します。
注記
VLT® Memory Module MCM 103 が PROFIBUS コンバータ
ーとして機能するには
Module Functionを[0] Disabled (無効)
でください。
一定の時間 VLT® Memory Module MCM 103 なしで
PROFIBUS コンバーターを有効にすることができます。こ
の時間が経過する前に、VLT® Memory Module MCM 103 を
挿入し PROFIBUS コンバーター機能を維持します。
パラメータ設定から PROFIBUS コンバーターを有効にしま
す。
パラメーター 31-47 Time Limit Function
1.
[1] Enabled (有効)
2.
パラメーター 14-70 Compatibility
Selectionsの[12] VLT 2800 3M または[14]
VLT 2800 12M
3.
電源サイクルを作成し、VLT® 2800 PROFIBUS 認
証番号とモードとして周波数変換器を開始しま
す。
4. 電源サイクルの後
Limit Remaining Time
用可能な残り時間を表示します。
パラメーター 31-40 Memory
に設定しない
で
を選択します。
を選択します。
パラメーター 31-48 Time
がカウントを開始し、使
38 Danfoss A/S © 08/2018 All rights reserved. MG07A540

24 V
17 V
IGBT
+UDC
X3
IGBT
PELV
X3
X3
24 V
voltage
source
high-side
gate driving
circuit
diagnostic
circuit
low-side
gate driving
circuit
12
38
37
55
130BE463.12
Time
5 ms max.
Debounce time
Time
STO valid
STO invalid
Voltage
T37/38
Test pulse STO demanded
STO request
state
130BE587.12
Safe Torque Off (STO) 操作ガイド
6 Safe Torque Off (STO)
Safe Torque Off (STO)機能は、安全制御システムのコン
ポーネントです。STO は、ユニットがモーター回転に必要
なエネルギーを生成するのを阻止し、緊急時の安全を確保
します。
STO 機能は、以下の要件に適合するように設計され、承認
されています。
IEC/EN 61508: 2010 SIL2
•
IEC/EN 61800-5-2: 2007 SIL2
•
IEC/EN 62061: SIL2 の 2012 SILCL
•
EN ISO 13849-1: 2008 カテゴリー 3 PL d
•
動作上の安全性において必要なレベルを達成するために、
安全制御システムのコンポーネントを適切に選択および
適用してください。STO を使用する前に、STO 機能と安全
レベルが適切かつ十分であるかどうかを判断するため、そ
の設備について徹底したリスク分析を行ってください。
周波数変換器の STO 機能は、コントロール端子 37 及び
38 で制御されます。STO をアクティブにすると、回路を
駆動している IGBT ゲートの高い側と低い側への電力供
給が遮断されます。
します。
表 6.1
図 6.1
は STO アーキテクチャを示
は端子 37 と 38 に電力供給されてい
るかどうかに基づく STO ステータスを示します。
端子 37 端子 38 トルク 警告または警報
電力供給有り
電力供給無し
1)
電力供給有り
3)
電力供給無し いいえ
はい
2)
警告及び警報な
し。
警告/アラーム
68: Safe
Torque Off
電力供給無し 電力供給有り いいえ
警報 188: STO
機能障害。
電力供給有り 電力供給無し いいえ
警報 188: STO
機能障害。
表 6.1 STO ステータス
1) 電圧範囲は 24 V ±5 V で、端子 55 は速度指令信号端子にな
ります。
2) 周波数変換器が動作しているときにのみトルクは存在しま
す。
3) 開回路、または電圧範囲 0 V±1.5 V、端子 55 は速度指令信
号端子になります。
試験パルスフィルタリング
STO コントロールラインに試験パルスを生成する安全デ
バイスについて: パルス信号が低レベル (≤1.8 V) を
5 ms 以上維持しない場合、
図 6.2
に示すとおり、信号
は無視されます。
6
6
図 6.2 試験パルスフィルタリング
図 6.1 STO アーキテクチャ
非同期入力誤差
2 つの端子の入力信号は常に同期していません。2 つの端
子間のディスクレパンシー時間が 12 ms 以上である場
合、STO 障害警報(警報 188、
STO 機能障害
す。
MG07A540 Danfoss A/S © 08/2018 All rights reserved. 39
)が発生しま

130BE213.10
Safe Torque Off (STO)
VLT® Midi Drive FC 280
6
有効な信号
STO をアクティブにするには、2 つの信号は最低でも 80
ms の間低レベルを維持する必要があります。STO を終
了するには、2 つの信号は最低でも 20 ms の間高レベル
を維持する必要があります。STO 端子の電圧レベルと入
力電流については、
ントロールデータ
章 9.6 コントロール入力/出力とコ
をご参照ください。
6.1 STO の安全予防措置
有資格技術者
機器の設置や操作は、有資格技術者のみが行うことができ
ます。
有資格技術者とは、訓練を受けたスタッフであって、関連
する法律と規則に従って設備、システム、回路の設置、設
定、メンテナンスを行うことを許された者のことをいいま
す。また、有資格技術者は、この取扱説明書に記載する指
示と安全措置を熟知する必要があります。
注記
STO の設置後、
いるとおり、試運転試験を行ってください。最初の設置の
後および安全設置への変更後に、試運転試験に合格するこ
とが必須です。
章 6.3.3 STO 試運転試験
で指定されて
6.2 Safe Torque Off の設置
モーター接続、AC 主電源接続及びコントロール配線につ
いて、
章 4 電気的設置
示事項に従ってください。
内蔵 STO を以下のように有効にします:
1. コントロール端子 12 (24 V)、37 および 38 の間
のジャンパー線を除去します。短絡を回避する
ためには、ジャンパー線を切断/断線するのでは
不十分です。
ください。
に定める安全な設置のための指
図 6.3
のジャンパー線を参照して
警告
感電の危険
STO 機能は主電源電圧を周波数変換器または付属回路か
ら絶縁しないため、STO 機能が安全性を提供することはあ
りません。ユニットから主電源供給を絶縁せず、指定され
た時間だけ待機をしなかった場合、死亡または重大な傷害
につながることがあります。
周波数変換器またはモーターの電子部品につい
•
て作業をする場合は、主電源電圧を絶縁し、
章 2.3.1 放電時間
た時間だけ待機をしてください。
注記
機器のアプリケーションを設計する際は、フリーラン停止
のタイミングと距離を考慮する必要があります(STO)。停
止カテゴリーの詳細は、EN 60204-1 を参照してくださ
い。
の安全性の項目で指定され
図 6.3 端子 12(24 V)、37 および 38 間のジャンパー線
2. デュアルチャネル安全デバイス(例えば、安全
PLC、ライトカーテン、安全リレー、緊急停止ボ
タン)を端子 37 及び 38 に接続して、安全アプ
リケーションを構築します。デバイスはハザー
ドアセスメントに基づいて必要な安全レベルに
準拠する必要があります。
換器と安全デバイスが同一キャビネットに収納
される STO アプリケーションの配線図を示し
ます。
図 6.5
アプリケーションの配線図を示します。
は、 外部電源が使用される STO
図 6.4
は、周波数変
注記
STO 信号は、PELV 供給である必要があります。
40 Danfoss A/S © 08/2018 All rights reserved. MG07A540

130BE424.11
37
38
12
55
1
130BE425.12
24 V source
37
38
+
-
12
55
1
Safe Torque Off (STO) 操作ガイド
STO 試運転
6.3
6.3.1 Safe Torque Off の起動
STO 機能をアクティブにするには、周波数変換器の端子
37 と 38 の電圧を除去します。
1 安全デバイス
図 6.4 キャビネット 1 個での STO 配線、周波数変換器が電
源電圧を供給
1 安全デバイス
図 6.5 STO 配線、外部電源
3.
章 4 電気的設置
の指示に従って配線を完了さ
せて:
3a 短絡の危険性を排除してください。
3b STO ケーブルが長さ 20 m (65.6 ft)
以上である、又はキャビネットの外側に
ある場合、STO ケーブルをシールドし
てください。
3c 安全デバイスを端子 37 及び 38 に直
接、接続してください。
STO がアクティブになると、周波数変換器は
全停止
または
警告 68、安全停止
を発し、ユニットをト
警報 68、安
リップさせて、モーターを停止させるためフリーランしま
す。STO 機能は、緊急停止の状況で周波数変換器の停止
に使用します。通常の動作モードで STO が必要ない場
合、通常停止機能を代わりに使用します。
注記
周波数変換器が
電圧低下
周波数変換器は
STO 動作は影響を受けません。
6.3.2 Safe Torque Off の無効化
表 6.2
の指示に従って、STO 機能を無効化して、STO 機能
の再スタートモードに基づいて通常動作を再開します。
警告 8、DC 電圧低下
または
警報 8、DC
を発している間、STO がアクティブになると、
警報 68、安全停止
をスキップしますが、
警告
怪我や死亡のリスク
24 V 直流を端子 37 または 38 に再供給すると、SIL2
STO 状態が終了して、モーターが起動する可能性がありま
す。モーターの予期せぬ起動は、怪我や死亡事故を引き起
こす恐れがあります。
24 V 直流を端子 37 及び 38 に再供給する前
•
に、安全措置をすべて講じるようにしてくださ
い。
再スター
トモード
手動再ス
タート
自動再ス
タート
表 6.2 STO 無効化
STO を無効化して、通常動
作を再開するための手順
1. 24 V 直流を端子 37
及び 38 に再供給しま
す。
2. リセット信号を生成
します(フィールドバ
ス、 ディジタル I/O 、
または LCP の
[Reset]/[Off Reset]
キーを介して)。
24 V 直流を端子 37 及び
38 に再供給します。
再スタート構成
デフォルト設定。
パラメータ
ー 5-19 Terminal
37/38 Safe Torque
Off=[1] 安全停止警報
パラメータ
ー 5-19 Terminal
37/38 Safe Torque
Off= [3] 安全停止警
告。
6
6
MG07A540 Danfoss A/S © 08/2018 All rights reserved. 41

Safe Torque Off (STO)
VLT® Midi Drive FC 280
6
6.3.3 STO 試運転試験
設置後、最初の動作前に、STO を使用する設置の試運転試
験を行ってください。
STO が含まれる設置やアプリケーションを変更するたび
に、この試験を実行してください。
注記
最初の設置後、および設置に対する各変更後に、STO 機
能の試運転試験に合格する必要があります。
試運転試験を実施するには:
STO を手動再スタートモードに設定する場合、
•
章 6.3.4 手動再スタートモードでの STO アプ
リケーション用試験
STO を自動再スタートモードに設定する場合、
•
章 6.3.5 自動再スタートモードでの STO アプ
リケーション用試験
6.3.4 手動再スタートモードでの STO ア
プリケーション用試験
パラメーター 5-19 Terminal 37/38 Safe Torque Off
がデフォルト値
プリケーションの場合、以下のように試運転試験を実施し
てください。
1.
パラメーター 5-40 Function Relayを [190]
安全機能有効
2. 周波数変換器がモーターを駆動している時(主電
源は妨害されていない場合)に、安全デバイスを
使用して 端子 37 及び 38 への 24 V 直流電源
を除去します。
3. 以下を検証してください:
4. 24 V 直流を端子 37 及び 38 に再供給します。
5. モーターがフリーラン状態のままであり、(接続
されていれば)カスタマリレーが起動したままで
あるようにします。
[1] 安全停止警報
3a モーターはフリーランします。モータ
ーを停止 させるのに長い時間を要する
場合があります。
3b LCP が取り付けられている場合、
68、安全停止
LCP が取り付けられていない場合、
報 68 、 安全停止
ー 15-30 Alarm Log: Error Code
記録されます。
の指示に従ってください。
の指示に従ってください。
に設定されているア
に設定します。
が LCP に表示されます。
が
警報
警
パラメータ
に
6. リセット信号を送信します(フィールドバス、デ
ィジタル I/O 、 または LCP の [Reset]/[Off
Reset]キーを介して)。
7. モーターが動作可能状態になっていて、元々の速
度範囲で動作することを確認してください。
上記ステップすべてに合格すれば、試運転試験は合格とな
ります。
6.3.5 自動再スタートモードでの STO ア
プリケーション用試験
パラメーター 5-19 Terminal 37/38 Safe Torque Off
が
[3] 安全停止警告
ンの場合、以下のように試運転試験を実施してください:
1. 周波数変換器がモーターを駆動している時(主電
源は妨害されていない場合)に、安全デバイスを
使用して 端子 37 及び 38 への 24 V 直流電源
を除去します。
2. 以下を検証してください:
2a モーターはフリーランします。モータ
2b LCP が取り付けられている場合、
3. 24 V 直流を端子 37 及び 38 に再供給します。
4. モーターが動作可能状態になっていて、元々の速
度範囲で動作することを確認してください。
上記ステップすべてに合格すれば、試運転試験は合格とな
ります。
に設定されているアプリケーショ
ーを停止 させるのに長い時間を要する
場合があります。
警告
68、安全停止 W68
ます。LCP が取り付けられていない場
合、
警告 68、安全停止 W68 が パラメ
ーター 16-92 Warning Word
30 に記録されます。
が LCP に表示され
のビット
注記
章 6.1 STO の安全予防措置
ト動作上での警告を参照してください。
に記載されている再スター
42 Danfoss A/S © 08/2018 All rights reserved. MG07A540

Safe Torque Off (STO) 操作ガイド
6.4 STO のメンテナンスと点検
セキュリティ措置はユーザーの責任です。
•
周波数変換器のパラメーターは、パスワードで保
•
護できます。
機能試験は 2 つ部分で構成されます:
基本的な機能試験。
•
診断による機能試験。
•
上記ステップすべてに合格すれば、機能試験は合格となり
ます。
基本的な機能試験
STO 機能を 1 年間使用していない場合、STO の不具合や故
障を検出するため基本的な機能試験を実施してください。
1.
パラメーター 5-19 Terminal 37/38 Safe
Torque Off を*[1] 安全停止警報
ください。
2. 端子 37 及び 38 から 24 V 直流電源を除去しま
す。
3. LCP が
4. 周波数変換器がユニットをトリップさせること
5. モーターがフリーランした後、完全に停止するこ
6. スタート信号を生成して(フィールドバス、ディ
7. 24 V 直流電源を端子 37 及び 38 に再接続しま
8. モーターが自動的に始動せず、リセット信号を供
診断による機能試験
1. 24 V 電源を端子 37 及び 38 に 接続しても、
2. 24 V 電源を端子 37 から除去して、LCP が取
3. 24 V 電源を端子 37 に再供給して、警報のリセ
警報 68、安全停止
か確認します。
を確認します。
とを確認します。
ジタル I/O、または LCP を介して)、モーターが
起動しないことを確認してください。
す。
給することでのみ再スタートすることを確認し
ます(フィールドバス、ディジタル I/O、または
LCP の[Reset]/[Off Reset]キーを介して )。
警告 68、安全停止
が発生しないことを確認してください。
り付けられている場合、LCP に
機能障害
LCP が取り付けられていない場合、
機能障害がパラメーター 15-30 Alarm Log:
Error Code
い。
ットが正常に実施されることを確認してくださ
い。
が表示されることを確認してください。
に記録されることを確認してくださ
および
に設定して
を示しているかどう
警報 68、安全停止
警報 188、STO
警報 188、STO
4. 24 V 電源を端子 38 から除去して、LCP が取
り付けられている場合、LCP に
機能障害
LCP が取り付けられていない場合、
機能障害がパラメーター 15-30 Alarm Log:
Error Code
い。
5. 24 V 電源を端子 38 に再供給して、警報のリセ
ットが正常に実施されることを確認してくださ
い。
が表示されることを確認してください。
に記録されることを確認してくださ
警報 188、STO
警報 188、STO
6
6
MG07A540 Danfoss A/S © 08/2018 All rights reserved. 43

Safe Torque Off (STO)
VLT® Midi Drive FC 280
6.5 STO 技術データ
故障モード、効果、および診断解析(FMEDA)は、以下の仮定に基づいて実施されます:
VLT® Midi Drive FC 280 は、SIL2 安全ループにおいて 10% の合計故障バジェットを取っています。
•
故障率は Siemens SN29500 データベースに基づきます。
•
故障率はコンスタントであり、 摩耗機構は含まれていません。
•
各チャネルにおいて、安全関連コンポーネントは、0 のハードウェア不具合許容値を持つタイプ A と見なされま
•
す。
ストレスレベルは産業環境の平均で、コンポーネントの動作温度は最高 85 °C (185 °F) です。
•
安全エラー(例えば、安全状態での出力)は 8 時間以内に修理されます。
•
トルク出力なしは安全な状態です。
•
6
安全性基準
安全機能 Safe Torque Off IEC 61800-5-2
安全性能
応答時間
1)
機械の安全性 ISO 13849-1、IEC 62061
機能的安全性 IEC 61508
ISO 13849-1
カテゴリー カテゴリー 3
診断対象 (DC) 60% (低)
危険な故障までの平均時間
(MTTFd)
性能レベル PL d
IEC 61508/IEC 61800-5-2/IEC 62061
安全統合レベル SIL2
1 時間ごとの危険な故障の発生率
(PFH)(高要求モード)
作動要求当たりの危険な故障の発
生率 (PTI = 20 年での PFD
(低要求モード)
安全故障割合 (SFF)
ハードウェア不具合許容値 (HFT)
実証テスト間隔
共通原因故障 (CCF) β = 5%; βD = 5%
診断テスト間隔 (DTI) 160 ms
系統的耐性 SC 2
入力から出力までの応答時間 エンクロージャー・サイズ K1–K3: 最大 50 ms
2)
2400 年 (高)
7.54E-9 (1/h)
)
6.05E-4
avg
デュアルチャネル・パーツ用: >84%
シングルチャネル・パーツ用: >99%
デュアルチャネル・パーツ用: HFT = 1
シングルチャネル・パーツ用: HFT = 0
20 年
エンクロージャー・サイズ K4 および K5: 最大 30 ms
表 6.3 STO の技術データ
1) 応答時間は、STO を作動させる入力信号状態からモーターのトルクがオフになるまでの時間です。
2) 実証テストの手順については、章 6.4 STO のメンテナンスと点検 を参照してください。
44 Danfoss A/S © 08/2018 All rights reserved. MG07A540

130BF096.10
FC
+24 V
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
12
13
18
19
27
29
32
33
50
53
54
55
42
A OUT
D IN
+24 V
130BE204.11
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
0 ~10 V
+
-
FC
+24 V
アプリケーション例 操作ガイド
7 アプリケーション例
7.1 はじめに
このセクションに記載されている事例は、一般的なアプリ
ケーションのためのクイック・リファレンスとして利用す
ることを目的としています。
パラメーター設定については、特に指定しなけれ
•
ば (
パラメーター 0-03 Regional Settings
で
選択)地域のデフォルト設定になります。
端子に関連付けられたパラメーターとその設定
•
は、図の次に示されています。
アナログ端子 53 又は 54 に必要なスイッチ設定
•
も示されています。
注記
STO 機能が使用されている場合、工場出荷時のプログラミ
ング値で周波数変換器を動作させるには、端子 12、37 お
よび 38 の間にジャンパー線が必要になります。
7.2.2 速度
パラメーター
機能 設定
パラメータ
ー 6-10 Termin
al 53 Low
0.07 V*
Voltage
パラメータ
ー 6-11 Termin
al 53 High
10 V*
Voltage
パラメータ
ー 6-14 Termin
al 53 Low
0
Ref./Feedb.
Value
パラメータ
7 7
ー 6-15 Termin
7.2 アプリケーション例
7.2.1 AMA
al 53 High
Ref./Feedb.
Value
50
パラメータ
パラメーター
機能 設定
パラメータ
ー 1-29 自動モー
ター適合(AMA)
パラメータ
ー 5-12 端末 27
ディジタル入力
* = デフォルト値
注意/コメント: モーター仕様
に従って、
パラメーター・グル
ープ 1-2* Mo データ
てください。
[1] 完全
AMA を有
効化
*[2] 逆フ
リーラン
を設定し
ー 6-19 Termin
al 53 mode
* = デフォルト値
注意/コメント:
表 7.2 アナログ速度指令信号(電圧)
[1] 電圧
注記
端子 13 および 27 が接
表 7.1 T27 を接続した AMA
ーター 5-12 Terminal 27
Digital Inputを[0] 動作
なし
に設定します。
続されている場合、
パラメ
MG07A540 Danfoss A/S © 08/2018 All rights reserved. 45

130BF097.10
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
4 - 20mA
+
-
FC
+24 V
130BE208.11
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
≈ 5kΩ
FC
+24 V
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
130BF100.10
+24 V
130BB840.12
Speed
Reference
Start (18)
Freeze ref (27)
Speed up (29)
Speed down (32)
アプリケーション例
VLT® Midi Drive FC 280
パラメーター
機能 設定
パラメータ
ー 6-22 Termin
al 54 Low
4mA*
Current
パラメータ
ー 6-23 Termin
al 54 High
20mA*
Current
パラメータ
ー 6-24 Termin
al 54 Low
0
Ref./Feedb.
Value
パラメータ
ー 6-25 Termin
al 54 High
77
Ref./Feedb.
50
Value
パラメーター
機能 設定
パラメータ
ー 5-10 端末
18 ディジタル
*[8] スター
ト
入力
パラメータ
ー 5-12 端末
[19] 速度指
令信号凍結
27 ディジタル
入力
パラメータ
[21] 加速
ー 5-13 端末
29 ディジタル
入力
パラメータ
[22] 減速
ー 5-14 端末
32 ディジタル
入力
* = デフォルト値
注意/コメント:
パラメータ
ー 6-29 Termin
[0] 電流
al 54 mode
* = デフォルト値
表 7.5 加速/減速
注意/コメント:
表 7.3 アナログ速度指令信号(電流)
パラメーター
機能 設定
パラメータ
ー 6-10 端末
53 低電圧
0.07 V*
図 7.1 加速/減速
パラメータ
ー 6-11 端末
10 V*
53 高電圧
パラメータ
ー 6-14 端末
53 低速信/FB
0
値
パラメータ
ー 6-15 端末
53 高速信/FB
値
パラメータ
ー 6-19 Termin
al 53 mode
* = デフォルト値
注意/コメント:
50
[1] Voltage
(電圧)
表 7.4 速度指令信号(手動ポテンショメーターを使用)
46 Danfoss A/S © 08/2018 All rights reserved. MG07A540

130BF098.10
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
19
18
27
29
32
33
50
53
54
55
42
+24 V 13
130BF099.10
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
+24 V
130BE210.11
+24 V
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
FC
D IN
+24 V
アプリケーション例 操作ガイド
7.2.3 スタート/ストップ
パラメーター
パラメータ
ー 5-10 端末 18
ディジタル入力
パラメータ
ー 5-11 端末 19
ディジタル入力
パラメータ
ー 5-12 端末 27
ディジタル入力
パラメータ
ー 5-14 端末 32
ディジタル入力
パラメータ
ー 5-15 端末 33
ディジタル入力
パラメータ
ー 3-10 プリセ
ット速度指令信号
プリ速信ビット 0
プリ速信ビット 1
プリ速信ビット 2
プリ速信ビット 3
* = デフォルト値
注意/コメント:
機能 設定
[8] スタ
ート
*[10] 逆
転
[0] 動作
なし
[16] プリ
速信ビット
0
[17] プリ
速信ビット
1
25%
50%
75%
100%
7.2.4 外部警報リセット
パラメーター
機能 設定
パラメータ
ー 5-11 端末
19 ディジタル
[1] リセッ
ト
入力
* = デフォルト値
注意/コメント:
表 7.7 外部警報リセット
7.2.5 モーター・サーミスター
注記
PELV 絶縁条件を満足させるために、強化あるいは二重絶
縁をサーミスターに使用する必要があります。
7 7
表 7.6 逆転および 4 プリセット速度付きスタート/停止
パラメーター
機能 設定
パラメータ
ー 1-90 モータ
ー熱保護
パラメータ
ー 1-93 サーミ
[2] サーミ
スター・トリ
ップ
[1] アナロ
グ入力 53
スター・ソース
パラメータ
ー 6-19 Termin
[1] 電圧
al 53 mode
* = デフォルト値
注意/コメント:
警告のみが必要な場合は、
ラメーター 1-90 モーター熱
保護を [1] サーミスタトリッ
プ
に設定してください。
表 7.8 モーター・サーミスター
MG07A540 Danfoss A/S © 08/2018 All rights reserved. 47
パ

FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
R1
12
13
18
19
27
29
32
33
50
53
54
55
42
01
02
03
130BE211.11
+24 V
アプリケーション例
VLT® Midi Drive FC 280
7.2.6 SLC
パラメーター
機能 設定
パラメータ
ー 4-30 モータ
ー・フィードバ
[1] 警告
ック損失機能
パラメータ
ー 4-31 モータ
50
FB 速度エラー
パラメータ
ー 4-32 モータ
FB 損失タイムア
5 秒
ウト
パラメータ
ー 7-00 速度
PID フィードバ
[1] 24V エ
ンコーダー
ック・ソース
注意/コメント:
表 7.9 SLC を使用してリレー設定
パラメーター
フィードバックモーターの制
限値を超えた場合、
警告 61、フ
ィードバックモニター
されます。SLC は
警告 61、フィ
ードバックモニター
警告 61、フィードバッ
ます。
クモニター
ー 1 が作動します。
外部装置の修理が必要となる
ことを表示します。フィード
バックエラーが 5 秒以内に再
び制限値以下になった場合、周
波数変換器の運転は継続し、警
告は消えます。[Off/Reset]
を押すまで、リレー 1 は作動
します。
が真になると、リレ
が発行
を監視し
パラメータ
ー 5-70 Term
32/33 Pulses
77
Per Revolution
1024*
パラメータ
ー 13-00 SL
コントローラ
[1] オン
ー・モード
パラメータ
ー 13-01 イベ
[19] 警告
ントをスタート
パラメータ
ー 13-02 イベ
ントを停止
[44] リセッ
ト・キー
パラメータ
ー 13-10 コン
パレーター・オ
[21] 警告番
号
ペランド
パラメータ
ー 13-11 コン
パレーター演算
*[1] ≈
子
パラメータ
ー 13-12 コン
61
パレーター値
パラメータ
ー 13-51 SL
コントローラ
[22] コンパ
レーター 0
ー・イベント
パラメータ
ー 13-52 SL
コントローラ
ー・アクション
パラメータ
ー 5-40 機能リ
レー
* = デフォルト値
[32] デジ出
A 低設定
[80] SL ディ
ジ出力 A
48 Danfoss A/S © 08/2018 All rights reserved. MG07A540

メンテナンス、診断およびトラブルシュー
ティング
操作ガイド
8 メンテナンス、診断およびトラブルシューティング
8.1 メンテナンスとサービス
通常の動作条件と負荷プロファイルの下では、周波数変換
器の寿命として指定された期間中、メンテナンスの必要は
ありません。故障、危険及び損傷を防ぐために、動作条件
に従い、端子接続の耐久性、粉塵の侵入など、周波数変換
器を定期的に検査してください。損耗や損傷した部品は、
純正スペア部品又は標準部品と交換してください。サー
ビスとサポートについては、最寄りの Danfoss 代理店まで
ご連絡ください。
警告
予期しない始動
周波数変換器が AC 主電源、直流電源、あるいは負荷分
散に接続されている場合、モーターは思いがけなくスター
トすることがあります。プログラミング、サービス、ある
いは修理中の予期しない始動は、死亡、深刻な傷害、ある
いは物損事故を招く恐れがあります。 モーターは外部
スイッチ、フィールドバスコマンド、LCP からの入力速度
指令信号によって、MCT 10 設定ソフトウェアを用いたリ
モート操作を介して、あるいは不具合状態のクリア後にス
タートします。
予期しないモーターのスタートを防止するには:
周波数変換器を主電源から切り離してください。
•
パラメーターのプログラミング前に、LCP 上の
•
[Off/Reset] を押します。
周波数変換器を AC 主電源、直流電源、あるいは
•
負荷分散に接続する前に、周波数変換器、モータ
ー、運転機器は、配線及び組み立てが完了してい
る必要があります。
8.2 警告と警報の種類
警告/警報タイプ説明
警告 警告は、警報を引き起こす異常な動作状態を示し
ます。異常な状態が除去されると警告は停止し
ます。
警報 警報は、迅速な注意喚起を必要とする障害を示し
ます。障害は常にトリップやトリップ・ロックを
作動させます。警報の後にドライブをリセット
してください。
以下の 4 つの方法のいずれかでドライブをリセ
ットします:
[Reset]/[Off/Reset]を押します。
•
ディジタル・リセット入力コマンド。
•
シリアル通信リセット入力コマンド。
•
自動リセット。
•
トリップ
トリップ時、ドライブや他の装置が損傷するのを防ぐため
に、ドライブは動作を停止します。トリップが発生する
と、モーターはフリーランして停止します。ドライブのロ
ジックは動作を続け、ドライブの状態を監視します。不具
合状態が解消されるとドライブはリセットできる状態に
なります。
トリップ・ロック
トリップ・ロック時、ドライブや他の装置が損傷するのを
防ぐために、ドライブは動作を停止します。トリップ・ロ
ックが発生すると、モーターはフリーランして停止しま
す。ドライブのロジックは動作を続け、ドライブの状態を
監視します。ドライブは、ドライブやその他の装置を損傷
させる恐れのある深刻な障害が発生したときにのみトリ
ップ・ロックを開始します。不具合が解消された後、ドラ
イブをリセットする前に、入力電源を再投入してくださ
い。
8 8
MG07A540 Danfoss A/S © 08/2018 All rights reserved. 49

Setup 1
Status
Quick
Menu
Main
Menu
130BD111.10
Setup 1
Status Quick
Menu
Main
Menu
130BD112.10
130BD062.10
D
Hand
On
Reset
Auto
On
OK
On
Warn
Alarm
メンテナンス、診断およびトラブルシュー
ティング
VLT® Midi Drive FC 280
8.3 警報と警告の表示
図 8.1 警告ディスプレイ
警報又はトリップ・ロック警報は、警報番号と共にディス
プレイに表示されます。
88
図 8.2 警報/トリップ・ロック警報
周波数変換器ディスプレイ上のテキストと警報コードに
加えて、3 つの状態表示ランプがあります。警告の間、警
告インジケータランプが黄色に点灯します。警報の間、警
報インジケータランプは赤色に点滅します。
図 8.3 状態表示ランプ
50 Danfoss A/S © 08/2018 All rights reserved. MG07A540

メンテナンス、診断およびトラブルシュー
ティング
操作ガイド
8.4 警告と警報のリスト
8.4.1 警告および警報コードリスト
表 8.1
の(X)マークは、警告や警報が発生したことを示します。
No. 説明
警告 警報 トリップ・ロ
ック
端子 53 又は 54 の信号は、
原因
パラメータ
ー 6-10 Terminal 53 Low Voltage、パラメータ
2 ライブ・ゼロ・エラー X X –
3 モーターなし X – – 周波数変換器の出力にモーターが接続されていません。
4
主電源相損失
7
直流過電圧
8
直流電圧不足
9 インバーター過負荷 X X – 負荷が 100% を超える状態が長すぎます。
10 モーター ETR 過温度 X X –
11 モーター・サーミスター過温度 X X –
12 トルク制限 X X –
13 過電流 X X X
14 地絡 – X X 出力相からグランドへの放電。
16 短絡 – X X モーター内またはモーター端子上での短絡。
コントロール・メッセージ文タ
17
イムアウト
25 ブレーキ抵抗器短絡 – X X
26 ブレーキ過負荷 X X –
ブレーキ IGBT/ブレーキ・チョ
27
ッパー短絡
28 ブレーキ確認 – X –
30 U 相損失 – X X
31 V 相損失 – X X
32 W 相損失 – X X
34 フィールドバス不具合 X X – プロフィバス通信障害が発生しました。
35 オプション不具合 – X – フィールドバスが内部不具合を検出しています。
1)
1)
1)
X X X
X X –
X X –
X X –
– X X
ー 6-20 Terminal 54 Low Voltage
ー 6-22 Terminal 54 Low Current
50% 未満です。
電源側で相が損失しているか、電圧アンバランスが高す
ぎます。電源電圧を確認してください。
直流リンク電圧が制限を超えています。
直流リンク電圧が電圧警告低限度より低くなっていま
す。
100% を超える負荷で長く運転したためモーターが過熱
しています。
サーミスターまたはサーミスター接続が切断されてい
るか、モーターが過熱しています。
トルクが
Mode
Generator Mode
インバーター・ピーク電流制限を超えています。電源投
入時、この警報が発生した場合、電力ケーブルがモータ
ー端子に誤って接続されていないか確認してください。
周波数変換器への通信がありません。
ブレーキ抵抗器が短絡しているため、ブレーキ機能が切
断されています。
ブレーキ抵抗器に伝達された電力が直近の 120 秒間に
制限値を超えています。可能な修正: 低い速度または
長い立ち上がり/立ち下り時間でブレーキエネルギーを
減少させます。
ブレーキ抵抗器が短絡しているため、ブレーキ機能が切
断されています。
ブレーキ抵抗器が接続されていないか、動作していませ
ん。
モーター相 U が損失しています。この相を確認してく
ださい。
モーター相 V が損失しています。この相を確認してく
ださい。
モーター相 W が損失しています。この相を確認してく
ださい。
パラメーター 4-16 Torque Limit Motor
または
パラメーター 4-17 Torque Limit
で設定した値を超えています。
、及び
パラメータ
で設定した値の
8 8
MG07A540 Danfoss A/S © 08/2018 All rights reserved. 51

メンテナンス、診断およびトラブルシュー
ティング
VLT® Midi Drive FC 280
No. 説明
警告 警報 トリップ・ロ
ック
この警告/警報は、周波数変換器への供給電圧が
ーター 14-11 Mains Fault Voltage Level
36 主電源異常 X X –
38 内部不具合 – X X
40 過負荷 T27 X – –
46 ゲートドライブ電圧不具合 – X X –
47 24 V 電源低 X X X 24 V 直流 が過負荷の可能性があります。
49 速度制限 – X –
50 AMA 較正失敗 – X – 較正エラーが発生しました。
AMA チェック U
51
I
nom
AMA 低 I
52
53 AMA 大モーター – X –
nom
および
nom
– X –
– X –
88
54 AMA 小モーター – X –
55 AMA パラメーター範囲 – X –
56 AMA 中断 – X – AMA が中断されます。
57 AMA タイムアウト – X – –
58 AMA 内部 – X – Danfoss にお問い合わせください。
59 電流制限 X X – 周波数変換器過負荷。
60 外部インターロック – X – 外部インターロックが作動しました。
61 エンコーダー損失 X X – –
63 機械的ブレーキ低 – X –
65 コントロール・カード温度 X X X
67 オプション変更 – X –
68
Safe Torque Off
69 電力カード温度 X X X 電力カードの切断温度が上限を超えています。
ドライブがデフォルト値に初期
80
化
87 自動直流ブレーキ X – –
88 オプション検出 – X X オプションは正常に除去されました。
95 破損ベルト X X – –
2)
X X –
– X –
値よりも低く、
[0] 機能無し
ブになります。
最寄の Danfoss 製品取り扱い代理店までご連絡くださ
い。
端子 27 に接続されている負荷を確認するか、短絡接続
を取り除いてください。
モーター速度がこの制限
速度ロー [Hz]
モーター電圧およびモーター電流の設定が間違ってい
ます。
モーター電流が低すぎます。設定を確認してください。
AMA を動作させるには、モーターの電力サイズが大きす
ぎます。
AMA を動作させるには、モーターの電力サイズが小さす
ぎます。
モーターのパラメーター値は、許容範囲の外にありま
す。AMA 自動調整は動作しません。
実際のモーター電流がスタート遅延時間中にブレーキ
解除電流値を超えませんでした。
コントロール・カードの切断温度が上限を超えていま
す。
新しいオプションが検出されたか、取り付けられている
オプションが除去されました。
STO が有効。STO が手動再スタートモード (デフォル
ト)にある場合、通常動作を再開するには、24 V 直流を
端子 37 及び 38 に供給して、リセット信号を送信しま
す (フィールドバス、ディジタル I/O、[Reset]/[Off
Reset]キーを介して)。STO が自動再スタートモードに
ある場合、24 V 直流を端子 37 及び 38 に供給すると、
周波数変換器は通常動作を再開します。
全てのパラメーター設定がデフォルト設定に初期化さ
れています。
周波数変換器がフリーランして、400 V ユニットで直流
電圧が 830 V より高い (200 V ユニットの場合は
425 V より高い) 場合に、IT 主電源で発生します。直
流リンクのエネルギーはモーターによって消費されま
す。この機能は
で有効/無効にできます。
パラメーター 14-10 Mains Failure
に設定されていない場合にのみアクティ
を下回ります。
パラメーター 0-07 Auto DC Braking
原因
パラメ
で設定した
が
パラメーター 1-87 トリップ
52 Danfoss A/S © 08/2018 All rights reserved. MG07A540

メンテナンス、診断およびトラブルシュー
ティング
操作ガイド
No. 説明
99 ロックされた回転子 – X –
120 位置コントロールの不具合 – X – –
126 モーター回転 – X – AMA を実行中は PM モーターが回転しています。
127 逆起電力が高すぎる X – –
188
STO 内部不具合
稼働
中以外稼動中でない – – –
エラー誤ったパスワードが入力されま
した
表 8.1 警告および警報コードリスト
2)
警告 警報 トリップ・ロ
ック
– X –
– – –
ローターがブロックされました。
開始する前の PM モーターのバック EMF が高すぎま
す。
24 V 直流電源が 2 個の STO 端子 (37 及び 38)のいず
れかにのみ接続されているか、STO チャネルの不具合が
検出されました。両方の端子が 24 V 直流電源に接続
されていて、2 つの端子間のディスクレパンシー時間が
12 ms 未満であることを確認してください。障害が直ら
ない場合、最寄りの Danfoss 代理店にご連絡ください。
パラメーターはモーターが停止していないと変更でき
ません。
パスワードで保護されたパラメーターを変更する際に
誤ったパスワードを使用すると発生します。
原因
1) この不具合は主電源の歪みによって生じる場合があります。Danfoss ラインフィルターを取り付けるとこの問題を解決できる場合
があります。
2) この警告は、 パラメーター 14-20 Reset Mode を介して自動的にリセットできません。
8 8
診断のため、警報メッセージ文、警告メッセージ文、及び拡張状態メッセージ文を読みだしてください。
ビ
ッ
ト
0
1
2
3
4
5
6
7
8
16 進
数
000000
01
000000
02
000000
04
000000
08
000000
10
000000
20
000000
40
000000
80
000001
00
警報メッセ
警報メッセ
ージ文
詳細
(
パラメータ
ー 16-90 A
larm Word
ブレーキ確
1
2
4 地絡 予約済み 予約済み 予約済み 予約済み
8
16
32 過電流 予約済み 予約済み 過電流 予約済み
64 トルク制限 予約済み 予約済み トルク制限 予約済み
128
256
認
電力カード
温度
Ctrl.カード
温度
コントロー
ル・メッセージ文予約済み 予約済み
モーター過
熱
モーター
ETR 過
ージ文 2
(
パラメー
タ
ー 16-91 A
)
larm Word
2
)
予約済み
ゲートドラ
イブ電圧不具合MM 警報
予約済み 予約済み
予約済み 予約済み モーター過熱 予約済み 出力電流高 コント準備
破損ベルト 予約済み
警報メッセ
ージ文 3
(
パラメータ
ー 16-97 A
larm Word
3
)
STO 機能障
害
警告メッセー
ジ文
(
パラメータ
ー 16-92 War
ning Word
予約済み 予約済み ランピング オフ
電力カード温
度
Ctrl.カード 温
度
コントロー
ル・メッセージ文予約済み 加速
モーター ETR
過
警告メッセー
ジ文 2
(
パラメータ
ー 16-93 War
)
ning Word 2
予約済み AMA 調整 手動/自動
予約済み
破損ベルト 出力電流低
拡張
状態メッセー
ジ文
(
パラメータ
状態メッセージ文
ー 16-94 Ext
)
. Status
Word
)
CW/CCW をスタートプロフィバス OFF1
シャットダウンプロフィバス OFF2
フィードバッ
ク高
フィードバッ
ク低
Status Word 2
プロフィバス OFF3
周波数変換器準備完
拡張
2
(
パラメータ
ー 16-95 Ext.
アクティブ
アクティブ
アクティブ
予約済み
予約済み
了
)
MG07A540 Danfoss A/S © 08/2018 All rights reserved. 53

メンテナンス、診断およびトラブルシュー
ティング
VLT® Midi Drive FC 280
警報メッセ
警報メッセ
ビ
16 進
ッ
数
ト
詳細
ージ文
(
パラメータ
ー 16-90 A
larm Word
000002
9
00
000004
10
00
000008
11
00
000010
12
00
000020
13
00
000040
14
00
000080
88
15
16
17
18
19
20
21
22
23
00
000100
00
000200
00
000400
00
000800
00
001000
00
002000
00
004000
00
008000
00
512
1024 直流低電圧 始動に失敗 予約済み 直流低電圧 予約済み 出力周波数低 直流ブレーキ
2048 直流低電圧 速度制限 予約済み 直流低電圧 予約済み
4096 短絡
8192 予約済み 予約済み 予約済み 予約済み 予約済み ブレーキ 出力凍結要求
16384
32768
65536
131072 内部不具合 予約済み 予約済み 予約済み 予約済み 予約済み スタート要求
262144
524288 U 相損失 予約済み 予約済み 予約済み 予約済み
1048576 V 相損失
2097152 W 相損失
4194304
8388608
インバータ過負
荷
主電源相損
失
AMA OK で
ない
ライブ・ゼ
ロ・エラー
ブレーキ過
負荷
フィールド
バス不具合
24 V 電源
低
ージ文 2
(
パラメー
タ
ー 16-91 A
)
larm Word
2
)
予約済み 予約済み インバータ過負荷 予約済み 出力周波数高 クイック停止
外部インタ
ーロック
予約済み 予約済み 主電源相損失 予約済み 予約済み 出力凍結
予約済み 予約済み モーターなし
予約済み 予約済み
予約済み 予約済み
オプション
検出
オプション
不具合
ロックされ
た回転子
位置コント
ロールの不具合予約済み 24 V 電源低 予約済み 予約済み 運転中
警報メッセ
ージ文 3
(
パラメータ
ー 16-97 A
larm Word
3
予約済み 予約済み 予約済み 最高ブレーキ 予約済み
予約済み 予約済み 過負荷 T27
予約済み 予約済み 予約済み 予約済み スリープ
予約済み
)
警告メッセー
ジ文
(
パラメータ
ー 16-92 War
ning Word
ライブ・ゼロ・
ブレーキ抵抗
器電力制限
フィールドバ
ス不具合
)
エラー
警告メッセー
ジ文 2
(
パラメータ
ー 16-93 War
ning Word 2
自動直流ブレーキOVC アクティ
予約済み 交流ブレーキ ジョグ
予約済み 予約済み スタート
メモリモジュ
ール
拡張
状態メッセー
ジ文
(
パラメータ
ー 16-94 Ext
)
. Status
Word
ブレーキ確認
OK です。
ブ
速度指令信号
高
速度指令信号
低
予約済み スリープ促進
)
状態メッセージ文
(
ー 16-95 Ext.
Status Word 2
スタート遅延
拡張
2
パラメータ
)
停止
ジョグ要求
予約済み
010000
24
020000
25
040000
26
08000000134217728ブレーキ
27
10000000268435456オプション
28
20000000536870912周波数変換
29
400000001073741824Safe Torque
30
54 Danfoss A/S © 08/2018 All rights reserved. MG07A540
16777216 主電源異常 予約済み 予約済み 主電源異常 予約済み 予約済み バイパス
00
33554432 予約済み 電流制限 予約済み 電流制限 予約済み 予約済み 予約済み
00
67108864 ブレーキ抵抗器 予約済み 予約済み 予約済み 予約済み 予約済み 外部インターロック
00
IGBT
変更
器初期化
Off
予約済み 予約済み 予約済み 予約済み 予約済み 予約済み
予約済み 予約済み
エンコーダ
ー損失
予約済み 予約済み
予約済み 予約済み
エンコーダー
損失
Safe Torque
Off
予約済み 予約済み
逆起電力が高
すぎる
予約済み 予約済み 予約済み
予約済み
FlyStart アクティ
ヒートシンク・クリ
ブ
ーン警告

メンテナンス、診断およびトラブルシュー
ティング
操作ガイド
警報メッセ
警報メッセ
ビ
16 進
ッ
数
ト
詳細
ージ文
(
パラメータ
ー 16-90 A
larm Word
8000000021474836
31
表 8.2 警報メッセージ文、警告メッセージ文、及び拡張状態メッセージ文の説明
機械ブレーキ低 予約済み 予約済み 予約済み 予約済み
48
ージ文 2
(
パラメー
ー 16-91 A
)
larm Word
タ
2
)
警報メッセ
ージ文 3
(
パラメータ
ー 16-97 A
larm Word
3
)
警告メッセー
ジ文
(
パラメータ
ー 16-92 War
ning Word
)
警告メッセー
ジ文 2
(
パラメータ
ー 16-93 War
ning Word 2
拡張
状態メッセー
ジ文
(
パラメータ
ー 16-94 Ext
)
. Status
Word
データベース
がビジー
)
拡張
状態メッセージ文
2
(
パラメータ
ー 16-95 Ext.
Status Word 2
予約済み
)
8 8
MG07A540 Danfoss A/S © 08/2018 All rights reserved. 55

メンテナンス、診断およびトラブルシュー
ティング
VLT® Midi Drive FC 280
8.5 トラブルシューティング
症状 考えられる原因 テスト 解決方法
LCP 停止
スタート信号(スタンバイ)の欠落
モーター・フリーラン信号アクティ
ブ(フリーラン)
モーターが動作し
ない
間違った速度指令信号ソース
88
[Off](オフ)が押されているか確認し
ます。
端子 18 が正しく設定されているか
パラメーター 5-10 端末 18 ディジ
タル入力
ト設定を使用)。
端子 27 が正しく設定されているか
を確認します (デフォル
パラメーター 5-12 Terminal 27
Digital Input
ォルト設定を使用)。
以下をチェックしてください:
速度指令信号はローカル、リモー
•
ト、又はバス速度指令信号?
プリセット速度指令信号がアクテ
•
ィブですか?
端子接続は正しく行われています
•
か?
端子のスケーリングは正しく行わ
•
れていますか?
速度指令信号はアクティブです
•
か?
を確認します (デフ
パラメーター 4-10 モーター速度方
モーターが間違っ
た方向に回転して
いる
モーター回転制限
アクティブな逆転信号
間違ったモーター相接続
向
が正しくプログラムされているこ
とを確認してください。
逆転コマンドが
プ 5-1* ディジタル入力
子にプログラムされているか確認し
ます。
パラメーター・グルー
において端
パラメーター 1-06 Clockwise
Direction
を変更します。
パラメーター 4-14 モーター速度上
モーターが最大速
度に達しない
モーター速度が不
安定
モーター動作が滑
らかでない
モーターのブレー
キがきかない
周波数制限の設定が間違っていま
す。
速度指令入力信号が正しくスケー
リングされていない
不正なパラメーター設定の可能性
過剰な磁化の可能性があります。
ブレーキ・パラメーターの設定が間
違っている可能性があります。立
ち下り時間が短すぎる可能性があ
ります。
限[Hz]
及び
パラメーター 4-19 最
高出力周波数
します。
で出力制限をチェック
パラメーター・グループ 6-** AnaI/
O モード及びパラメーター・グループ
3-1* 速度指令信号
入力信号スケーリングを確認します。
すべてのモーター補償設定を含め、全
モーターパラメーターの設定を確認
します。閉ループ動作については、
PID 設定を確認します。
すべてのモーターパラメーターにお
いて間違ったモーター設定がないか
確認します。
ブレーキ・パラメーターを確認しま
す。立ち上がり/立ち下り時間設定を
確認します。
において速度指令
[Auto On](自動オン) 又は [Hand
On](手動オン) (動作モードによる)
を押して、モーターを動作させます。
モーターをスタートさせるためアク
ティブなスタート信号を適用しま
す。
端子 27 に 24 V を供給するか、こ
の端子を
ムします。
正しい設定をプログラムします。プ
リセット速度指令信号を
ー・グループ 3-1* 速度指令信号
アクティブに設定します。配線が正
しく行われているか確認します。端
子のスケーリングを確認します。速
度指令信号を確認します。
正しい設定をプログラムします。
逆転信号を無効にします。
正しい制限をプログラムします。
正しい設定をプログラムします。
[0] 動作無し
にプログラ
パラメータ
で
パラメーター・グループ 6-** AnaI/
O モード
の設定を確認します。
パラメーター・グループ 1-2* Mo デ
ータ、1-3* 調整 Mo データ、1-5* 負
荷独立設定における設定
す。
を確認しま
パラメーター・グループ 2-0* 直流ブ
レーキ及び 3-0* 速信制限
ます。
を確認し
56 Danfoss A/S © 08/2018 All rights reserved. MG07A540

メンテナンス、診断およびトラブルシュー
ティング
症状 考えられる原因 テスト 解決方法
相間が短絡
電力ヒューズが切
れるか遮断器がト
リップする
主電源電流アンバ
ランスが 3%以上
モーター電流アン
バランスが 3%以上
モーター過負荷
接続が緩んでいる
主電源の問題 (
失
の説明を参照)
周波数変換器ユニットの問題
モーター又はモーター配線の問題
周波数変換器ユニットの問題
警報 4、主電源相損
操作ガイド
モーター又はパネルの相間が短絡し
ます。モーターとパネルの相間が短
絡していないか確認します。
アプリケーションに対してモーター
が過負荷状態になっています。
事前スタートアップ・チェックを実施
し、接続の緩みをチェックします。
入力電力リード線を周波数変換器の
別の位置へ移動: A から B、B から C、
C から A。
入力電力リード線を周波数変換器の
別の位置へ移動: A から B、B から C、
C から A。
出力モーターリード線の位置を移
動: U から V、V から W、W から U。
出力モーターリード線の位置を移
動: U から V、V から W、W から U。
検出された短絡を全て解消します。
スタートアップ検査を実施して、モ
ーター電流が仕様の範囲に入ってい
るかを確認します。モーター電流が
銘板の全負荷電流を超えている場
合、モーターは負荷を減少させない
限り動作しない場合があります。ア
プリケーションの仕様を確認してく
ださい。
緩んでいる接続を締めなおします。
アンバランスなレグがワイヤによる
場合、電力に問題があります。主電
源を確認します。
アンバランス・レグが同じ入力端子
に発生する場合、ユニットに問題が
あります。代理店に お問い合わせ
ください。
アンバランスなレグがワイヤによる
場合、モーター又はモーター配線に
問題があります。モーター及びモー
ター配線を確認します。
アンバランス・レグが同じ出力端子
に発生する場合、ユニットに問題が
あります。代理店に お問い合わせ
ください。
パラメーター・グループ 4-6* 速度
騒音又は振動 (例
えば、ファンブレー
ド等が騒音又は振
動を一定の周波数
において発生)
共振、例えば、モーター / ファン
システムにおいて。
バイパス
重要な周波数をバイパスします。
パラメータ
ー 14-03 Overmodulation
をオフにします。
パラメーター 1-64 Resonance
Dampening
のパラメーターを使用して
で過変調
で共振制動を強化します。
ノイズや振動が許容限界まで低減さ
れているかどうかチェックします。
8 8
表 8.3 トラブルシューティング
MG07A540 Danfoss A/S © 08/2018 All rights reserved. 57

仕様
9 仕様
9.1 電気データ
VLT® Midi Drive FC 280
周波数変換器
シャフト出力 [kW(hp)](代表値)
エンクロージャー保護等級 IP20 (オプショ
ンとして IP21/Type 1)
出力電流
シャフト出力[kW] 0.37 0.55 0.75 1.1 1.5 2.2 3
連続 (3x380–440 V) [A] 1.2 1.7 2.2 3 3.7 5.3 7.2
連続 (3x441–480 V) [A] 1.1 1.6 2.1 2.8 3.4 4.8 6.3
断続 (60 秒過負荷) [A] 1.9 2.7 3.5 4.8 5.9 8.5 11.5
定常 kVA(400 V AC) [kVA] 0.9 1.2 1.5 2.1 2.6 3.7 5.0
定常 kVA(480 V AC) [kVA] 0.9 1.3 1.7 2.5 2.8 4.0 5.2
最大入力電流
連続 (3x380–440 V) [A] 1.2 1.6 2.1 2.6 3.5 4.7 6.3
連続 (3x441–480 V) [A] 1.0 1.2 1.8 2.0 2.9 3.9 4.3
断続 (60 秒過負荷) [A] 1.9 2.6 3.4 4.2 5.6 7.5 10.1
詳細仕様
最大ケーブル断面積(主電源、モーター、ブレ
99
ーキ、負荷分散) [mm2 (AWG)]
定格最大負荷における推定電力損失[W]
重量、エンクロージャー保護等級 IP20 [kg
(lb)]
重量、エンクロージャー保護等級 IP21 [kg
(lb)]
効率 [%]
2)
1)
PK37
0.37
(0.5)
K1 K1 K1 K1 K1 K1 K2
20.9 25.2 30 40 52.9 74 94.8
2.3 (5.1) 2.3 (5.1)
4.0 (8.8) 4.0 (8.8)
96.0 96.6 96.8 97.2 97.0 97.5 98.0
PK55
0.55
(0.75)
PK75
0.75
(1.0)
2.3
(5.1)
4.0
(8.8)
P1K1
1.1
(1.5)
4 (12)
2.3 (5.1) 2.3 (5.1) 2.5 (5.5) 3.6 (7.9)
4.0 (8.8) 4.0 (8.8) 4.0 (8.8) 5.5 (12.1)
P1K5
1.5
(2.0)
P2K2
2.2
(3.0)
P3K0
3.0
(4.0)
表 9.1 主電源 3x380~480 V AC
58 Danfoss A/S © 08/2018 All rights reserved. MG07A540

仕様 操作ガイド
周波数変換器
シャフト出力 [kW(hp)](代表値)
エンクロージャー保護等級 IP20 (オプショ
ンとして IP21/Type 1)
出力電流
シャフト出力 4 5.5 7.5 11 15 18.5 22
連続 (3x380–440 V) [A] 9 12 15.5 23 31 37 42.5
連続 (3x441–480 V) [A] 8.2 11 14 21 27 34 40
断続 (60 秒過負荷) [A] 14.4 19.2 24.8 34.5 46.5 55.5 63.8
定常 kVA(400 V AC) [kVA] 6.2 8.3 10.7 15.9 21.5 25.6 29.5
定常 kVA(480 V AC) [kVA] 6.8 9.1 11.6 17.5 22.4 28.3 33.3
最大入力電流
連続 (3x380–440 V) [A] 8.3 11.2 15.1 22.1 29.9 35.2 41.5
連続 (3x441–480 V) [A] 6.8 9.4 12.6 18.4 24.7 29.3 34.6
断続 (60 秒過負荷) [A] 13.3 17.9 24.2 33.2 44.9 52.8 62.3
詳細仕様
最大ケーブル断面積(主電源、モーター、ブレ
ーキ、負荷分散) [mm2 (AWG)]
定格最大負荷における推定電力損失[W]
重量、エンクロージャー保護等級 IP20 [kg
(lb)]
重量、エンクロージャー保護等級 IP21 [kg
(lb)]
効率 [%]
2)
1)
P4K0
4
(5.5)
K2 K2 K3 K4 K4 K5 K5
115.5 157.5 192.8 289.5 393.4 402.8 467.5
3.6 (7.9) 3.6 (7.9)
5.5
(12.1)
98.0 97.8 97.7 98.0 98.1 98.0 98.0
P5K5
5.5
(7.5)
4 (12) 16 (6)
5.5 (12.1)
P7K5
7.5
(10)
4.1
(9.0)
6.5
(14.3)
P11K
11
(15)
9.4
(20.7)
10.5
(23.1)
P15K
15
(20)
9.5
(20.9)
10.5
(23.1)
P18K
18.5
(25)
12.3
(27.1)
14.0
(30.9)
P22K
22
(30)
12.5
(27.6)
14.0
(30.9)
9 9
表 9.2 主電源 3x380~480 V AC
周波数変換器
シャフト出力 [kW(hp)](代表値)
エンクロージャー保護等級 IP20 (オプショ
ンとして IP21/Type 1)
出力電流
定常(3x200~240 V) [A] 2.2 3.2 4.2 6 6.8 9.6 15.2
断続 (60 秒過負荷) [A] 3.5 5.1 6.7 9.6 10.9 15.4 24.3
定常 kVA (230 V AC) [kVA] 0.9 1.3 1.7 2.4 2.7 3.8 6.1
最大入力電流
定常(3x200~240 V) [A] 1.8 2.7 3.4 4.7 6.3 8.8 14.3
断続 (60 秒過負荷) [A] 2.9 4.3 5.4 7.5 10.1 14.1 22.9
詳細仕様
最大ケーブル断面積(主電源、モーター、ブレ
ーキ、負荷分散) [mm2 (AWG)]
定格最大負荷における推定電力損失[W]
重量、エンクロージャー保護等級 IP20 [kg
(lb)]
重量、エンクロージャー保護等級 IP21 [kg
(lb)]
効率 [%]
2)
1)
PK37
0.37
(0.5)
K1 K1 K1 K1 K1 K2 K3
29.4 38.5 51.1 60.7 76.1 96.1 147.5
2.3 (5.1) 2.3 (5.1)
4.0 (8.8) 4.0 (8.8)
96.4 96.6 96.3 96.6 96.5 96.7 96.7
PK55
0.55
(0.75)
PK75
0.75
(1.0)
2.3
(5.1)
4.0
(8.8)
P1K1
1.1
(1.5)
4 (12)
2.3 (5.1) 2.3 (5.1) 2.5 (5.5) 3.6 (7.9)
4.0 (8.8) 4.0 (8.8) 5.5 (12.1) 6.5 (14.3)
P1K5
1.5
(2.0)
P2K2
2.2
(3.0)
P3K7
3.7
(5.0)
表 9.3 主電源 3x200~240V AC
MG07A540 Danfoss A/S © 08/2018 All rights reserved. 59

仕様
VLT® Midi Drive FC 280
周波数変換器
シャフト出力 [kW(hp)](代表値)
エンクロージャー保護等級 IP20 (オプションとし
て IP21/Type 1)
出力電流
定常(3x200~240 V) [A] 2.2 3.2 4.2 6 6.8 9.6
断続 (60 秒過負荷) [A] 3.5 5.1 6.7 9.6 10.9 15.4
定常 kVA (230 V AC) [kVA] 0.9 1.3 1.7 2.4 2.7 3.8
最大入力電流
定常(1x200~240 V) [A] 2.9 4.4 5.5 7.7 10.4 14.4
断続 (60 秒過負荷) [A] 4.6 7.0 8.8 12.3 16.6 23.0
詳細仕様
最大ケーブル断面積(主電源とモーター) [mm
(AWG)]
定格最大負荷における推定電力損失[W]
重量、エンクロージャー保護等級 IP20 [kg (lb)] 2.3 (5.1) 2.3 (5.1) 2.3 (5.1) 2.3 (5.1) 2.3 (5.1) 2.5 (5.5)
重量、エンクロージャー保護等級 IP21 [kg (lb)] 4.0 (8.8) 4.0 (8.8) 4.0 (8.8) 4.0 (8.8) 4.0 (8.8) 5.5 (12.1)
効率 [%]
1) 電力損失の代表値は公称負荷条件のものであり、±15% 以内と予想されます (電圧とケーブル条件の変化に関係する公差)。
99
値はモーター効率(IE2/IE3 境界線)の代表値に基づきます。モーターが低効率であれば周波数変換器の電力損失は増大し、高効率であ
れば電力損失は減少します。
周波数変換器冷却の寸法設定に適用。スイッチ周波数がデフォルト設定よりも高い場合は、電力損失が増加することがあります。LCP
及び代表的なコントロール・カードの電力消費が含まれます。追加オプションとカスタマ負荷で損失が最大 30 W 増加することがあり
ます (但し、フルロードのコントロール・カードまたはフィールドバスの場合、通常 4 W の増加のみです)。
EN 50598-2 に従った電力損失データについては、以下を参照してください: www.danfoss.com/vltenergyefficiency.
2) 定格負荷及び定格周波数にて、50 m (164 ft) のシールドされたモーター・ケーブルを用いて測定。エネルギー効率クラスについ
ては、章 9.4 周囲条件 を参照してください. 部分負荷損失については、以下を参照してください: www.danfoss.com/
vltenergyefficiency.
2)
表 9.4 主電源 1x200-240 V AC
2
1)
PK37
0.37
(0.5)
K1 K1 K1 K1 K1 K2
37.7 46.2 56.2 76.8 97.5 121.6
94.4 95.1 95.1 95.3 95.0 95.4
PK55
0.55
(0.75)
PK75
0.75
(1.0)
4 (12)
P1K1
1.1
(1.5)
P1K5
1.5
(2.0)
P2K2
2.2
(3.0)
主電源
9.2
主電源 (L1/N、L2/L、L3)
供給端子 (L1/N、L2/L、L3)
供給電圧 380–480 V: -15% (-25%)1) ~ +10%
供給電圧 200–240 V: -15% (-25%)1) ~ +10%
1) 周波数変換器は -25%の入力電圧でも運転できますが、性能が低下します。周波数変換器の最大出力電力は、-25%
の入力電圧の場合が 75% で、-15% の入力電圧の場合が 85% です。
周波数変換器の最低定格供給電圧を 10%以上下回る主電源電圧において、最大トルクは期待できません。
供給周波数
50/60 Hz ±5%
主電源相間の一時的最大アンバランス 定格供給電圧の 3.0%
真の力率 (λ) ≥0.9 定格負荷での公称値
変位力率 (cos ϕ) 1 に近い (>0.98)
入力点スイッチング電源(L1/N, L2/L, L3) (電源投入)≤7.5 kW(10 hp)
最大 2 回/分
入力点スイッチング電源(L1/N、L2/L、L3) (電源投入) 11.22 kW (15–30 hp) 最大 1 回/分
60 Danfoss A/S © 08/2018 All rights reserved. MG07A540

仕様 操作ガイド
9.3 モーター出力とモーター・データ
モーター出力 (U、V、W):
出力電圧 供給電圧の 0–100%
出力周波数 0–500 Hz
VVC+ モードでの出力周波数 0–200 Hz
出力側スイッチング 無制限
立ち上がり/立ち下り時間 0.01–3600 s
トルク特性
始動トルク (一定トルク) 60 秒で最大 160%
過負荷トルク (一定トルク) 60 秒で最大 160%
起動電流 1 秒で最大 200%
VVC+ モードでのトルク立ち上がり時間 (f
1) パーセントは公称トルクに関連します。11–22 kW (15–30 hp) 周波数変換器には 150% です。
とは別)
sw
最大 50 ms
9.4 周囲条件
周囲条件
エンクロージャー保護等級、周波数変換器 IP20 (オプションとして IP21/Type 1)
エンクロージャー保護等級、変換キット IP21/タイプ 1
振動テスト、すべてのエンクロージャー・サイズ 1.14 g
相対湿度 5–95% (IEC 721-3-3; クラス 3K3 (非結露)、運転中)
周囲温度(DPWM スイッチ・モードにて)
- 定格低減付きの場合
- フルの一定出力電流にて
フルスケール動作時の最低周囲温度
性能低下時の最低周囲温度
保管/輸送時の温度
最大海抜高度 (定格低減なし) 1000 m (3280 ft)
最大海抜高度 (定格低減あり) 3000 m (9243 ft)
EN 61800-3, EN 61000-3-2, EN 61000-3-3, EN 61000-3-11,
EMC 規格、放射
EMC 規格、耐性
周波数変換器
1) 以下については、デザイン・ガイドの特殊条件を参照してください:
•
•
2) VLT® Midi Drive FC 280 のプロフィバス、プロフィネット、イーサネット、および POWERLINK 改良型での、コント
ロール・カードの過熱を防ぐために、45 °C (113 °F)より高い周囲温度でのフルディジタル/アナログ I/O 負荷を避け
てください。
3) 定格低減付きの K1S2 の周囲温度は最大 50 °C (122 °F)です。
4) フルの一定出力電流での K1S2 の周囲温度は最大 40 °C (104 °F) です。
5) 以下では EN 50598-2 に従って決定されます:
•
•
•
•
•
•
5)
周囲温度が高い場合の定格低減。
高度が高い場合の定格低減。
定格負荷。
90% 定格周波数。
スイッチ周波数工場出荷時設定。
スイッチ・パターン工場出荷時設定。
オープン・タイプ: 周囲の気温 45 °C (113 °F)。
タイプ 1 (NEMA キット): 周囲温度 45 °C (113 °F)。
EN 61000-3-12, EN 61000-6-3/4, EN 55011, IEC 61800-3
EN 61800-3, EN 61000-6-1/2, EN 61000-4-2, EN 61000-4-3
EN 61000-4-4, EN 61000-4-5, EN 61000-4-6, EN 61326-3-1
-25 ~ +65/70 °C (-13 ~ +149/158 °F)
最高 55 °C (131 °F)
最高 45 °C (113 °F)
0 °C (32 °F)
-10 °C (14 °F)
1)2)3)
IE2
1)
1)
9 9
4)
MG07A540 Danfoss A/S © 08/2018 All rights reserved. 61

仕様
9.5 ケーブル仕様
VLT® Midi Drive FC 280
ケーブル長と断面積
モーター・ケーブルの最大長さ (シールドされている) 50 m (164 ft)
モーター・ケーブルの最大長さ (シールドされていない) 75 m (246 ft)
コントロール端子の最大断面積 (フレキシブル/剛性ワイヤ) 2.5 mm2/14 AWG
コントロール端子の最小断面積 0.55 mm2/30 AWG
STO 入力ケーブルの最大長さ (シールドされていない) 20 m (66 ft)
1)
1) ケーブル断面積については、表 9.1、表 9.2、表 9.3、および表 9.4 を参照してください。
EN 55011 1A および EN 55011 1B に準拠している場合、モーターケーブルは一定量削除する必要があります。詳細につ
いては、VLT® Midi Drive FC 280 デザインガイドの 2.6.2 章の EMC 放射を参照してください。
9.6 コントロール入力/出力とコントロールデータ
ディジタル入力
端子番号 18, 19, 271), 29, 32, 33
論理 PNP または NPN
電圧レベル 0–24 V 直流
電圧レベル、論理 0 PNP <5 V DC
電圧レベル、論理 1 PNP >10 V DC
電圧レベル、論理 0 NPN >19 V DC
電圧レベル、論理 1 NPN <14 V DC
入力の最大電圧 28 V 直流
99
パルス周波数範囲 4–32 kHz
(デューティー・サイクル) 最小パルス幅 4.5 ms
入力抵抗、R
i
約 4 kΩ
1) 端末 27 は出力としてもプログラムできます。
STO 入力
端子番号 37, 38
電圧レベル 0–30 V 直流
電圧レベル、低 <1.8 V 直流
電圧レベル、高 > 20 V 直流
入力の最大電圧 30 V 直流
最低入力電流 (各々のピン) 6 mA
1)
1) STO 入力の詳細については、章 6 Safe Torque Off (STO) を参照してください。
アナログ入力
アナログ入力の数 2
端子番号 531), 54
モード 電圧又は電流
モード選択 ソフトウェア
電圧レベル 0–10 V
入力抵抗、R
最大電圧 -15 V ~ +20 V
電流レベル 0/4~20 mA (スケーラブル)
入力抵抗、R
最大電流 30 mA
アナログ入力の分解能 11 ビット
アナログ入力の精度 最大エラー、全スケールの 0.5%
帯域幅 100 Hz
i
i
約 10 kΩ
約 200 Ω
アナログ入力は、供給電圧 (PELV) などの高電圧端子から電気絶縁されています。
1) 端子 53 は電圧モードのみをサポートし、ディジタル入力としても使用できます。
62 Danfoss A/S © 08/2018 All rights reserved. MG07A540

Mains
Functional
isolation
PELV isolation
Motor
DC bus
High
voltage
Control
37
RS485
38
33
130BE837.10
仕様 操作ガイド
図 9.1 電気絶縁
注記
高い高度
2000 m (6562 ft) を超える高度での設置については、PELV に関して Danfoss ホットラインに連絡してください。
パルス入力
プログラマブル・パルス入力 2
端子番号パルス 29, 33
端子 29、33 での最大周波数 32 kHz (プッシュプル駆動)
端子 29、33 での最大周波数 5 kHz (オープン・コレクター)
端子 29、33 での最小周波数 4 Hz
電圧レベル ディジタル入力のセクションを参照
入力の最大電圧 28 V 直流
入力抵抗、R
i
パルス入力精度 最大エラー: 全スケールの 0.1%
約 4 kΩ
9 9
ディジタル出力
プログラマブル・ディジタル/パルス出力 2
端子番号 27
ディジタル/周波数出力の電圧レベル 0–24 V
最大出力電流 (シンク又はソース) 40 mA
周波数出力時の最大負荷
周波数出力時の最大容量負荷 10 nF
周波数出力時の最低出力周波数 4 Hz
周波数出力時の最大出力周波数 32 kHz
周波数出力の精度 最大エラー: 全スケールの 0.1%
周波数出力の分解能 10 bit
端子数(アナログ出力のデータを参照) 42
ディジタル出力での電圧レベル 0–17 V
1) 端子 27 は入力としてもプログラム設定できます。
2) 端末 42 はアナログ出力としてもプログラムできます。
ディジタル出力は、供給電圧 (PELV) とその他の高電圧端子から電気絶縁されています。
アナログ出力
プログラマブル・アナログ出力の数 1
端子番号 42
アナログ出力の電流範囲 0/4–20 mA
アナログ出力から共通側への最大負荷
アナログ出力での最大電圧 17 V
アナログ出力の精度 最大エラー: 全スケールの 0.8%
アナログ出力の分解能 10 bit
1) 端末 42 はデジタル出力としてもプログラムできます。
アナログ出力は供給電圧 (PELV)などの高電圧端子から電気絶縁されています。
MG07A540 Danfoss A/S © 08/2018 All rights reserved. 63
1)
1 kΩ
2)
1)
500 Ω

仕様
コントロール・カード、24 V 直流出力
端子番号 12, 13
最大負荷 100 mA
VLT® Midi Drive FC 280
24 V 直流電源は供給電圧 (PELV) から電気絶縁されています。但し、電源にはアナログ及びディジタル入出力と同じ
電位があります。
コントロール・カード、+10 V 直流出力
端子番号 50
出力電圧
最大負荷 15 mA
10.5 V ±0.5 V
10 V 直流電源は供給電圧 (PELV) などの高電圧端子から電気絶縁されています。
コントロール・カード、RS-485 シリアル通信
端子番号 68 (P、TX+、RX+) 、69 (N、TX-、RX-)
端子番号 61 端子 68 と 69 に共通
RS485 シリアル通信回路は供給電圧 (PELV) から電気絶縁されています。
コントロール・カード、USB シリアル通信
USB 標準 1.1 (全速)
USB プラグ USB タイプ B プラグ
PC への接続は、標準ホスト/デバイス USB ケーブルを介して行われます。
USB 接続は、供給電圧 (PELV) などの高電圧端子から電気的に絶縁されています。
USB 接地接続は、保護接地からは電気絶縁されていません。一つの絶縁されたラップトップだけを周波数変換器の USB
コネクターへの PC 接続として使用してください。
99
リレー出力
プログラマブル・リレー出力 1
リレー 01 01–03 (NC), 01–02 (NO)
01–02 (NO) の最大端子負荷 (AC-1)1) (抵抗負荷) 250 V 交流、3 A
01–02 (NO) の最大端子負荷 (AC-15)1) (誘導負荷 @ cosφ 0.4)
01–02 (NO) の最大端子負荷 (DC-1)1)(抵抗負荷) 30 V 直流、2 A
01–02 (NO) の最大端子負荷 (DC-13)1) (誘導負荷) 24 V 直流、0.1 A
01–03 (NC) の最大端子負荷 (AC-1)1) (抵抗負荷) 250 V 交流、3 A
01–03 (NC) の最大端子負荷 (AC-15)1) (誘導負荷 @ cosφ0.4)
01–03 (NC) の最大端子負荷 (DC-1)1) (抵抗負荷) 30 V 直流、2 A
01–03 (NC)、01–02 (NO) の最大端子負荷 24 V 直流 10 mA、24 V 交流 20 mA
1) IEC 60947 パート 4 および 5。
リレー接点は、補強絶縁により他の回路から電気絶縁されています。
250 V 交流、0.2 A
250 V 交流、0.2 A
コントロール・カード性能
スキャン間隔 1 ms
コントロール特性
出力周波数 0~500 Hz での分解能
システム応答時間 (端子 18、19、27、29、32、33)
速度コントロール範囲 (開ループ) 同期速度の 1:100
速度精度 (開ループ)
速度精度(閉ループ)
±0.003 Hz
≤2 ms
通常速度の±0.5%
通常速度の±0.1%
すべてのコントロール特性は、4 極非同期モーターに基づいています。
64 Danfoss A/S © 08/2018 All rights reserved. MG07A540

仕様 操作ガイド
9.7 接続の締め付けトルク
電気的接続を締め付ける際は、正しいトルクを使用するようにしてください。トルクが低すぎたり、高すぎたりすると、
電気的接続の問題を引き起こすことがあります。正しいトルクを確保するには、トルクレンチを使用してください。推奨
されるマイナスドライバーのタイプは SZS 0.6x3.5 mm です。
トルク [Nm (in-lb)]
エンクロー
ジャー
タイプ
K1
K2
K3 7.5 (10) 0.8 (7.1) 0.8 (7.1) 0.8 (7.1) 0.8 (7.1) 1.6 (14.2) 0.4 (3.5) 0.5 (4.4)
K4
K5
表 9.5 締め付けトルク
出力
[kW (hp)]
0.37–2.2
(0.5–3.0)
3.0–5.5
(4.0–7.5)
11–15
(15–20)
18.5–22
(25–30)
主電源 モーター 直流接続 ブレーキ 接地 制御 リレー
0.8 (7.1) 0.8 (7.1) 0.8 (7.1) 0.8 (7.1) 1.6 (14.2) 0.4 (3.5) 0.5 (4.4)
0.8 (7.1) 0.8 (7.1) 0.8 (7.1) 0.8 (7.1) 1.6 (14.2) 0.4 (3.5) 0.5 (4.4)
1.2 (10.6) 1.2 (10.6) 1.2 (10.6) 1.2 (10.6) 1.6 (14.2) 0.4 (3.5) 0.5 (4.4)
1.2 (10.6) 1.2 (10.6) 1.2 (10.6) 1.2 (10.6) 1.6 (14.2) 0.4 (3.5) 0.5 (4.4)
9.8 ヒューズと遮断器
供給側では、周波数変換器(初回故障)内でコンポーネントが破損した場合にサービス担当者や機器を怪我や損傷から保護
するため、ヒューズ及び/又は遮断器を使用してください。
分岐回路の保護
設置(スイッチ装置、機械などを含む)に関するすべての分岐回路を国内/国際規則に則って短絡及び過電流から保護し
ます。
注記
内蔵ソリッドステート短絡保護には分岐回路保護はありません。国内及び地域の規則や規制に従った分岐回路保護を用
意してください。
表 9.6
には、試験済みの推奨ヒューズと遮断器が記載されています。
注意
人身事故や設備損害の危険
誤動作が発生した場合や推奨事項に従っていない場合、怪我および周波数変換器やその他の装置への損傷を引き起こす恐
れがあります。
推奨事項に従ってヒューズを選択してください。周波数変換器内部の損傷を最小限に抑えることができます。
•
注記
機器の損傷
IEC 60364 (CE)に準拠させるために、ヒューズ及び遮断器、もしくはそのいずれかを必ず使用してください。保護の推
奨事項に従っていないと、周波数変換器が損傷することがあります。
9 9
UL 508C または IEC 61800-5-1 に準拠するために、Danfoss は
ことを推奨しています。非 UL アプリケーションの場合、遮断器は最高 50000 A
給可能な回路での保護に適するように設計します。周波数変換器の短絡電流定格 (SCCR) は、クラス T のヒューズで保
護される場合に 100000 A
MG07A540 Danfoss A/S © 08/2018 All rights reserved. 65
以下、最高 240V/480 V を供給できる回路での使用に適しています。
rms
表 9.6
および
表 9.7
のヒューズ及び遮断器を使用する
(対称)、最高 240 V/400 V を供
rms

仕様
VLT® Midi Drive FC 280
エンクロージャー・サイズ 出力 [kW (hp)] 非 UL ヒューズ
0.37 (0.5)
0.55–0.75
K1
3 相 380–480 V
3 相 200–240 V
99
単相 200–240 V
K2
K3 7.5 (10) PKZM0-25
K4
K5
K1
K2 2.2 (3.0)
K3 3.7 (5.0) PKZM0-25
K1
K2 2.2 (3.0) gG-25 PKZM0-20
(0.75–1.0)
1.1–1.5
(1.5–2.0)
2.2 (3.0)
3.0–5.5
(4.0–7.5)
11–15
(15–20)
18.5–22
(25–30)
0.37 (0.5) gG-10
0.55 (0.75)
0.75 (1.0)
1.1 (1.5)
1.5 (2.0)
0.37 (0.5) gG-10
0.55 (0.75)
0.75 (1.0)
1.1 (1.5)
1.5 (2.0)
gG-10
gG-20
gG-25
gG-50 –
gG-80 –
gG-20
gG-25
gG-20
非 UL 遮断器
(Eaton)
PKZM0-16
PKZM0-20
PKZM0-16
PKZM0-20
PKZM0-16
表 9.6 非 UL ヒューズおよび遮断器
66 Danfoss A/S © 08/2018 All rights reserved. MG07A540

仕様 操作ガイド
エンクロージャー・
サイズ
K1
3 相
380–480 V
3 相
200–240 V
単相 200–
240 V
K2–K33.0–7.5
K4
K5
K1
K2–K32.2–3.7
K1
K2 2.2 (3.0)
Littel–
出力
[kW (hp)]
0.37–0.75
(0.5–1.0)
1.1–1.5
(1.5–2.0)
2.2 (3.0)
(4.0–10)
11–15
(15–20)
18.5–22
(25–30)
0.37 (0.5) KTN-R-6 JKS-6 JJN-6 FNQ-R-6 KTK-R-6 LP-CC-6 KLNR-6 ATM-R6 A2K-6R
0.55 (0.75)
0.75 (1.0)
1.1–1.5
(1.5–2.0)
(3.0–5.0)
0.37 (0.5) KTN-R-6 JKS-6 JJN-6 FNQ-R-6 KTK-R-6 LP-CC-6 KLNR-6 ATM-R6 A2K-6R
0.55 (0.75)
0.75 (1.0)
1.1–1.5
(1.5–2.0)
クラス
KTS-R-6 JKS-6 JJS-6 FNQ-R-6 KTK-R-6 LP-CC-6 KLSR-6 ATM-R6 A6K-6R
KTSR-10
KTSR-15
KTSR-25
KTSR-50
KTNR-10
KTNR-15
KTNR-20
KTNR-25
KTNR-10
KTNR-15
KTNR-20
KTNR-25
クラスJクラスTクラスCCクラスCCクラスCCクラス
RK1
JKS-10 JJS-10 FNQ-R-10 KTK-R-10 LP-CC-10 KLSR-10 ATM-R10 A6K-10R
JKS-15 JJS-15 FNQ-R-15 KTK-R-15 LP-CC-15 KLSR-15 ATM-R15 A6K-15R
JKS-25 JJS-25 FNQ-R-25 KTK-R-25 LP-CC-25 KLSR-25 ATM-R25 A6K-25R
JKS-50 JJS-50 – – – KLSR-50 – A6K-50R
– JKS-80 JJS-80 – – – – – –
JKS-10 JJN-10 FNQ-R-10 KTK-R-10 LP-CC-10 KLNR-10 ATM-R10 A2K-10R
JKS-15 JJN-15 FNQ-R-15 KTK-R-15 LP-CC-15 KLNR-15 ATM-R15 A2K-15R
JKS-20 JJN-20 FNQ-R-20 KTK-R-20 LP-CC-20 KLNR-20 ATM-R20 A2K-20R
JKS-25 JJN-25 – – – KLNR-25 ATM-R25 A2K-25R
JKS-10 JJN-10 FNQ-R-10 KTK-R-10 LP-CC-10 KLNR-10 ATM-R10 A2K-10R
JKS-15 JJN-15 FNQ-R-15 KTK-R-15 LP-CC-15 KLNR-15 ATM-R15 A2K-15R
JKS-20 JJN-20 FNQ-R-20 KTK-R-20 LP-CC-20 KLNR-20 ATM-R20 A2K-20R
JKS-25 JJN-25 – – – KLNR-25 ATM-R25 A2K-25R
Bussmann E4273
fuse
E81895
RK1
MERSEN
E163267/
E2137
クラス CC クラス RK1
MERSEN
E163267/
E2138
9 9
表 9.7 UL ヒューズ
MG07A540 Danfoss A/S © 08/2018 All rights reserved. 67

仕様
VLT® Midi Drive FC 280
9.9 エンクロージャー・サイズ、電力規格、寸法
出力サイズ
[kW (hp)]
99
寸法 [mm
(in)]
重量
[kg (lb)]
実装穴 [mm
(in)]
エンクロージ
ャー・サイズ
単相
200–240 V
3 相
200–240 V
3 相
380–480 V
高さ A1 210 (8.3) 272.5 (10.7)
高さ A2 278 (10.9) 340 (13.4)
幅 B 75 (3.0) 90 (3.5)
奥行き C 168 (6.6) 168 (6.6)
高さ A 338.5 (13.3) 395 (15.6)
幅 B 100 (3.9) 115 (4.5)
奥行き C 183 (7.2) 183 (7.2)
高さ A 294 (11.6) 356 (14)
幅 B 75 (3.0) 90 (3.5)
奥行き C 168 (6.6) 168 (6.6)
IP20 2.5 (5.5) 3.6 (7.9)
IP21 4.0 (8.8) 5.5 (12.1)
a 198 (7.8) 260 (10.2)
b 60 (2.4) 70 (2.8)
c 5 (0.2) 6.4 (0.25)
d 9 (0.35) 11 (0.43)
e 4.5 (0.18) 5.5 (0.22)
f 7.3 (0.29) 8.1 (0.32)
0.37
(0.5)
0.37
(0.5)
0.37
(0.5)
0.55
(0.75)
0.55
(0.75)
0.55
(0.75)
FC 280(底部のケーブル挿入カバー(w/o トップカバー)付き)
K1 K2 K3 K4 K5
1.1
0.75
(1.5
(1.0)
0.75
(1.0)
0.75
(1.0)
)
1.1
(1.5
)
1.1
(1.5
)
FC 280(IP21/UL/Type 1 キット付き)
1.5
(2.0)
1.5
(2.0)
1.5
(2.0)
FC 280 IP20
2.2
(3.0)
3
(4.
0)
2.2
(3.0)
2.2
(3.0)
4
(5.5
)
5.5
(7.5)
– – –
3.7
(5.0)
7.5
(10)
272.5
(10.7)
341.5
(13.4)
115
(4.5)
168
(6.6)
395
(15.6)
130
(5.1)
183
(7.2)
357
(14.1)
115
(4.5)
168
(6.6)
4.6
(10.1)
6.5
(14.3)
260
(10.2)
90
(3.5)
6.5
(0.26)
11
(0.43)
5.5
(0.22)
9.2
(0.36)11(0.43)
– –
11
15
(15
(20)
)
317.5
(12.5)
379.5
(14.9)
133
(5.2)
245
(9.6)
425
(16.7)
153
(6.0)
260
(10.2)
391
(15.4)
133
(5.2)
245
(9.6)
8.2
(18.1)
10.5
(23.1)
297.5
(11.7)
105
(4.1)
8 (0.32) 7.8 (0.31)
12.4
(0.49)
6.8
(0.27)
410 (16.1)
474 (18.7)
520 (20.5)
260 (10.2)
486 (19.1)
11.5 (25.4)
14.0 (30.9)
390 (15.4)
12.6 (0.5)
11.2 (0.44)
18.5
(25)22(30)
150 (5.9)
245 (9.6)
170 (6.7)
150 (5.9)
245 (9.6)
120 (4.7)
7 (0.28)
表 9.8 エンクロージャー・サイズ、電力規格、寸法
68 Danfoss A/S © 08/2018 All rights reserved. MG07A540

130BE844.11
B
C
A1
A2
130BE846.10
B
A
C
仕様 操作ガイド
図 9.2 標準、減結合プレート使用
9 9
図 9.3 標準(底部のケーブル挿入カバー(w/o トップカバー)付き)
MG07A540 Danfoss A/S © 08/2018 All rights reserved. 69

B
C
A
130BE845.10
C
a
b
130BA648.12
f
e
B
A
a
d
e
b
c
仕様
VLT® Midi Drive FC 280
99
図 9.4 標準(IP21/UL/Type 1 キット付き)
図 9.5 上部及び下部の実装穴
70 Danfoss A/S © 08/2018 All rights reserved. MG07A540

付属資料 操作ガイド
10 付属資料
10.1 記号、略語と用例
°C
°F
AC 交流
AEO 自動エネルギー最適化
AWG アメリカ式ワイヤ規格
AMA 自動モーター適合
DC 直流
EMC 電磁環境適合性
ETR 電子サーマル・リレー
f
M,N
FC 周波数変換器
I
INV
I
LIM
I
M,N
I
VLT,MAX
I
VLT,N
IP IP 保護
LCP ローカル・コントロール・パネル
MCT 動作コントロール・ツール
MM メモリモジュール
MMP メモリモジュールプログラマ
n
s
P
M,N
PELV 超低電圧保護
PCB プリント回路基板
PM モーター 永久磁石モーター
PUD 電源ユニットデータ
PWM パルス幅変調
RPM 毎分回転数
SIVP 固有初期化値と保護
STO Safe Torque Off
T
LIM
U
M,N
摂氏温度
華氏
公称モーター周波数
定格インバーター出力電流
電流制限
公称モーター電流
最大出力電流
周波数変換器から供給される定格出力電流
同期モーター速度
公称モーター電力
トルク制限
公称モーター電圧
10 10
表 10.1 記号と略語
用例
•
イラストでは、寸法の単位は全て [mm (in)] で
10.2 パラメーター・メニュー構造
す。
アスタリスク (*) はパラメーターのデフォル
•
ト設定を示します。
番号付けされたリストは手順を示します。
•
箇条書きリストはその他の情報を示しています。
•
イタリック体の文字は以下を示します:
•
- 相互参照。
- リンク
- パラメーター名
MG07A540 Danfoss A/S © 08/2018 All rights reserved. 71

付属資料
VLT® Midi Drive FC 280
[1] PM、非突極 SPM
0 - 0 *
0 - 250 % *120 %
1-15 低速フィルター時間定数
1-14 減衰利得
[3] PM, salient IPM (PM、突極 IPM)
0 - 0 *
0-4* LCP キーパッド
0-40 LCP の [Hand On] (手動オン) キー
0-39 表示テキスト 3
ト) キー
*[1] 有効
0-44 LCP の [Off/Reset] (オフ/リセッ
[0] Disabled (無効)
[0] Disabled (無効)
*[1] 有効
0-42 LCP の[Auto On] (自動オン) キー
0-3* LCP カスタム読み出し
0-30 カスタム読み出し単位
[0] なし
*[1] %
[5] PPM
[10] 1/min
[11] RPM
0-5* コピー/保存
0-50 LCP コピー
*[1] 有効
[0] Disabled (無効)
[12] Pulse/s
[20] l/s
*[0] コピーなし
[7] リセットのみ有効化
[21] l/min
[22] l/h
[23] m³/s
[24] m³/min
[1] 全てを LCP へ
[25] m³/h
[2] 全てを LCP から
[30] kg/s
[3] サイズを独自に LCP から
[31] kg/min
*[0] コピーなし
[1] 設定 1 からコピー
[2] 設定 2 からコピー
0-51 設定コピー
[32] kg/h
[33] t/min
[34] t/h
[40] m/s
[3] 設定 3 からコピー
[4] 設定 4 からコピー
[9] 工場設定からコピー
0-6* パスワード
0-60 メイン・メニュー・パスワード
[41] m/min
[45] m
[60] °C
[70] mbar
[71] bar
0 - 999 *0
1-** 負荷及びモーター
1-0* 一般設定
1-00 構成モード
*[0] 開ループ
[72] Pa
[73] kPa
[74] m WG
[80] kW
[120] GPM
[1] 閉ループ速度
[2] トルク閉ループ
[3] プロセス閉ループ
[4] トルク開ループ
[7] 拡張 PID 速度 OL
[121] gal/s
[122] gal/min
[123] gal/h
[124] CFM
[127] ft³/h
1-01 モーター・コントロールの原則
[0] U/f
*[1] VVC+
1-03 トルク特性
*[0] 一定トルク
[1] 可変トルク
[2] 自エネルギー最適化 CT
[170] psi
[171] lb/in2
[172] in WG
[173] ft WG
[140] ft/s
[160] °F
[141] ft/min
1-06 時計回り方向
*[0] 通常
[1] 反転
1-08 モーター・コントロール帯域幅
[0] 高
[1] 中
[2] 低
[3] アダプティブ 1
0 - 999999.99 カスタム読み出しユ
[180] HP
0-31 カスタム読み出し最小値
0.0 - 999999.99 カスタム読み出 し
ト
ニット *0 カスタム読み出しユニッ
ユニット *100 カスタム読み出しユ
0-32 カスタム読み出し最大値
[4] アダプティブ 2
1-1* モーター選択
1-10 モーター構造
*[0] 非同期
0 - 0 *
ニット
0-38 表示テキスト 2
0-37 表示テキスト 1
1010
0-20 と同じ選択
0-20 と同じ選択
0-20 と同じ選択
0-20 と同じ選択
[1671]デフォルト設定
[1672]カウンター A
[1668]パルス入力 33 [Hz]
[1669]パルス出力 27 [Hz]
[1667]パルス入力 29 [Hz]
[1666]ディジタル出力
[1665]アナログ出力 42 [mA]
-2147483647 - 2147483647 *0
[3] 開ループ速度
[4] シンプル 速度閉ループ
[1] シンプル プロセス閉ループ
[2] ローカル / リモート
0-16 アプリケーション選択
*[0] なし
0-** 操作/表示
0-0* 基本設定
0-01 言語
*[0] English
[1] Deutsch
[2] Francais
[3] Dansk
[1674]正確な 停止カウンター
[1680]フィールドバス CTW 1
[1682]フィールドバス REF 1
[1673]カウンター B
[5] マルチ速度
[4] Spanish
[1684]通信 オプション STW
[6] OGD LA10
[7] OGD V210
[8] 巻き上げ
0-2* LCP 表示
[5] Italiano
[28] Bras.port
0-02 モーター速度単位
[0] RPM
[1690]警報メッセージ文
[1691]警報メッセージ文 2
[1686]FC ポート REF 1
[1685]FC ポート CTW 1
[38] 表示テキスト 2
0-20 表示行 1.1 小
[0] なし
[37] 表示テキスト 1
*[1] Hz
0-03 地域設定
[0] 国際
[1] 米国
[1892]プロセス PID クランプ出力
[1694]拡張 状態メッセージ文
[1695]拡張 状態メッセージ文 2
[1697]警報メッセージ文 3
[1692]警告メッセージ文
[1693]警告メッセージ文 2
[39] 表示テキスト 3
[748] 速度フィード・フォワード
0-04 電源投入時の動作状況
[0] 再開
[1698]警告メッセージ文 3
[953] プロフィバス警告メッセージ文
[1005]読み出し伝送エラー・カウンター
[1006]読み出し受信エラー・カウンター
[1230]警告パラメーター
*[1] 強制停止、速信=旧
[2] 強制停止、速度指令信号=0
0-06 GridType
[0] 200-240V/50Hz/IT-grid
[1893]プロセス PID ゲインスケール出力
[1890]プロセス PID エラー
[1891]プロセス PID 出力
[1601]速度指令信号 [単位]
[1501]運転時間
[1502]KWh カウンター
[1600]コントロール・メッセージ文
[1] 200-240V/50Hz/Delta
[2] 200-240V/50Hz
[10] 380-440V/50Hz/IT-grid
[11] 380-440V/50Hz/Delta
[3401]PCD 1 アプリケーション用書き込み
[3402]PCD 2 アプリケーション用書き込み
[3403]PCD 3 アプリケーション用書き込み
[3404]PCD 4 アプリケーション用書き込み
[2117]拡張 1 速度指令信号 [単位]
[2118]拡張 1 フィードバック [単位]
[2119]拡張 1 出力 [%]
速度指令信号 [%]
[1603]状態メッセージ文
[1605]主電源実効値 [%]
*[1602
]
[12] 380-440V/50Hz
[20] 440-480V/50Hz/IT-grid
[21] 440-480V/50Hz/Delta
[22] 440-480V/50Hz
[3405]PCD 5 アプリケーション用書き込み
[1609]カスタム読み出し
[1610]電力 [KW]
[1611]出力 [hp]
[1612]モーター電圧
[100] 200-240V/60Hz/IT-grid
[101] 200-240V/60Hz/Delta
[102] 200-240V/60Hz
[110] 380-440V/60Hz/IT-grid
[3421]PCD 1 アプリケーション用読み出し
[3422]PCD 2 アプリケーション用読み出し
[3423]PCD 3 アプリケーション用読み出し
[3424]PCD 4 アプリケーション用読み出し
[3425]PCD 5 アプリケーション用読み出し
[3406]PCD 6 アプリケーション用書き込み
[3407]PCD 7 アプリケーション用書き込み
[3408]PCD 8 アプリケーション用書き込み
[3409]PCD 9 アプリケーション用書き込み
[3410]PCD 10 アプリケーション用書き込み
[1613]周波数
[1614]モーター電流
[1615]周波数 [%]
[1616]トルク [Nm]
[1617]速度 [RPM]
[1618]モーター熱
[1620]モーター角
[111] 380-440V/60Hz/Delta
[112] 380-440V/60Hz
[120] 440-480V/60Hz/IT-grid
[121] 440-480V/60Hz/Delta
[122] 440-480V/60Hz
0-07 自動直流ブレーキング
[0] オフ
[3426]PCD 6 アプリケーション用読み出し
[1622]トルク [%]
[1630]直流リンク電圧
[1633]ブレーキ・エネルギー/2 分
[1634]ヒートシンク温度
*[1] オン
0-1* 設定動作
0-10 アクティブ設定
*[1] 設定 1
0-22 表示行 1.3 小
[3427]PCD 7 アプリケーション用読み出し
[3428]PCD 8 アプリケーション用読み出し
[3429]PCD 9 アプリケーション用読み出し
[3430]PCD 10 アプリケーション用読み出し
[3450]実際の位置
[3456]トラック・エラー
0-21 表示行 1.2 小
[1635]インバーター熱
[1636]インバーター 定格 電流
[1637]インバーター 最大電流
[1638]SL コントローラー状態
[1639]コントロール・カード温度
[1650]外部速度指令信号
[1652]フィードバック [単位]
[2] 設定 2
[3] 設定 3
[4] 設定 4
[9] マルチ設定
0-11 プログラム設定
[1] 設定 1
[2] 設定 2
0-23 表示行 2 大
[1653]ディジポテンショ速信
[1657]フィードバック [RPM]
[1660]ディジタル入力
[1661]端子 53 設定
[3] 設定 3
[4] 設定 4
*[9] アクティブ設定
0-12 リンク設定
0-24 表示行 3 大
[1664]アナログ入力 54
[1662]アナログ入力 53
[1663]端子 54 設定
[0] リンクなし
*[20] リンクあり
0-14 読み出し: 設定/チャネルの編集
72 Danfoss A/S © 08/2018 All rights reserved. MG07A540

付属資料 操作ガイド
[70] mbar
[71] bar
[72] Pa
[73] kPa
[74] m WG
2-10 ブレーキ機能
*[0] オフ
[1] 抵抗器ブレーキ
[2] 交流ブレーキ
2-11 ブレーキ抵抗器(オーム)
0 - 1000 A *サイズによる
時間
0 - 500 Hz *0 Hz
[80] kW
[120] GPM
[121] gal/s
[122] gal/min
[123] gal/h
0 - 500 V *0 V
0.001 - 2000 kW *サイズによる
0 - 6200 Ohm *サイズによる
2-14 ブレーキ電圧抑制
2-12 ブレーキ電力制限 (kW)
0 - 10 秒 *5 秒
[132] lb/h
[140] ft/s
[124] CFM
[125] ft³/s
[126] ft³/min
[127] ft³/h
[130] lb/s
0 - 160 % *100 %
[1] 有効 (非停止時)
2-17 過電圧コントロール
*[0] Disabled (無効)
2-16 交流ブレーキ、最大電流
0 - 20 Hz *0 Hz
[141] ft/min
[131] lb/min
0 - 200 % *100 %
[2] 有効
2-19 過電圧ゲイン
2-2* 機械的ブレーキ
[160] °F
[170] psi
[171] lb/in2
[172] in WG
[145] ft
[150] lb ft
0 - 100 A *0 A
2-22 ブレーキ作動速度[Hz]
2-20 ブレーキ解除電流
ウンター停止
ター停止
[173] ft WG
0 - 5 秒 *0 秒
0 - 400 Hz *0 Hz
2-23 ブレーキ遅延の有効化
2-3* 高度 機械的ブレーキ
0 - 100 ms *10 ms
0 - 999999999 *100000
ク・ユニット *0 基準フィードバッ
-4999.0 - 4999 基準フィードバッ
ク・ユニット
[180] HP
3-02 最小速度指令信号
2-39 Mech. 直交のブレーキ 変更
*[0] Off(オフ)
1.0 - 2.0 *1.4
3-03 最大速度指令信号
[1] ON(オフ)
[2] ON(スタート遅延)
3-** 速度指令信号/ランプ
3-0* 速度指信号制限
ク・ユニット *サイズによる
-4999.0 - 4999 基準フィードバッ
*[0] 合計
[1] 外部/プリセット
3-04 速度指令信号機能
3-1* 速度指令信号
3-00 速度指令信号範囲
*[0] 最低 - 最高
[1] -最高 - +最高
3-01 速度指令信号/フィードバック単位
[0] なし
[1] %
0 - 500.0 Hz *5 Hz
-100 - 100 % *0 %
3-11 ジョグ速度 [Hz]
3-10 プリセット速度指令信号
[2] RPM
[3] Hz
[4] Nm
[5] PPM
-100 - 100 % *0 %
0 - 100 % *0 %
[7] 周波数入力 29
[0] 機能なし
*[1] アナログ入力 53
[2] アナログ入力 54
3-15 速度指令信号 1 ソース
3-14 プリセット相対速度指令信号
3-12 増加/スローダウン値
[10] 1/min
[12] Pulse/s
[20] l/s
[21] l/min
[22] l/h
[23] m³/s
[24] m³/min
[25] m³/h
[30] kg/s
0 - 150 % *50 %
0 - 160 % *50 %
[32] バス PCD
3-16 速度指令信号 2 ソース
[11] ローカル・バス速度指令信号
[20] Dg P メータ
[8] 周波数入力 33
[31] kg/min
[32] kg/h
[33] t/min
[34] t/h
[40] m/s
0 - 500 Hz *0 Hz
0 - 60 秒 *10 秒
0 - 150 % *100 %
3-15 と同じ選択
3-15 と同じ選択
3-17 速度指令信号 3 ソース
[41] m/min
[45] m
[60] °C
0.1 - 60 秒 *3 秒
10 10
1-79 トリップまでのコンプレッサ開始最大
1-78 コンプレッサ開始最大速度[Hz]
0 - 328 ft *164 ft
0 - 100 m *50 m
1-43 モーター・ケーブル長 (フィート)
0.01 - 20 秒*サイズによる
0.01 - 20 秒*サイズによる
1-16 高速フィルター時間定数
1-8* 停止調整
1-80 停止時の機能
*[0] フリーラン
[1] 直流保留/モーター予熱
[3] 事前磁化
0 - 65535 mH *サイズによる
0 - 65535 mH *サイズによる
1-45 q 軸インダクタンス 飽和 (LqSat)
1-44 d 軸インダクタンス 飽和 (LdSat)
0.001 - 1 秒*サイズによる
1-17 電圧フィルター時間定数
1-2* モーター・データ
1-20 モーター電力
20 - 200 % *100 %
20 - 200 % *100 %
1-48 d 軸の最小インダクタンスでの電流
1-46 位置検知利得
[5] 0.37 kW - 0.5 hp
[4] 0.25 kW - 0.33 hp
[2] 0.12 kW - 0.16 hp
[3] 0.18 kW - 0.25 hp
1-84 正確な停止カウンター値
[2] リセットを伴わないカウンター停止
*[0] 正確なランプ停止
[1] リセットを伴うカウンター停止
1-83 正確な停止機能
1-82 停止時機能の最低速度 [Hz]
20 - 200 % *100 %
0 - 300 % *100 %
1-49 q 軸の最小インダクタンスでの電流
[7] 0.75 kW - 1 hp
[6] 0.55 kW - 0.75 hp
1-52 最低速度通常磁化 [Hz]
1-5* 負荷独立 設定
1-50 速度ゼロでのモーター磁化
[11] 3 kW - 4 hp
[10] 2.2 kW - 3 hp
[8] 1.1 kW - 1.5 hp
[9] 1.5 kW - 2 hp
[5] リセットを伴わない速度補償されたカ
[3] 速度補償された停止
[4] リセットを伴う速度補償されたカウン
0 - 500.0 Hz *サイズによる
0 - 1000 V *サイズによる
0.1 - 10.0 Hz *1 Hz
1-56 U/f 特性 - F (周波数)
[12] 3.7 kW - 5 hp
1-55 U/f 特性 - U (電圧)
[13] 4 kW - 5.4 hp
1-6* 負荷依存 設定
1-60 低速負荷補償
[18] 18.5 kW - 25 hp
[16] 11 kW - 15 hp
[17] 15 kW - 20 hp
[15] 7.5 kW - 10 hp
[14] 5.5 kW - 7.5 hp
1-88 交流ブレーキ・ゲイン
1-85 正確な停止速度補償遅延
0 - 300 % *100 %
[19] 22 kW - 30 hp
1-9* モーター温度
1-90 モーター熱保護
-400 - 400.0 % *サイズによる
0 - 300 % *100 %
1-63 スリップ補償時間定数
1-62 スリップ補償
1-61 高速負荷補償
20 - 500 Hz *サイズによる
50 - 1000 V *サイズによる
1-23 モーター周波数
1-22 モーター電圧
[20] 30 kW - 40 hp
*[0] 保護なし
[1] サーミスター警告
[2] サーミスター・トリップ
0 - 500 % *100 %
0.05 - 5 秒 *0.1 秒
1-64 共振制動
0.01 - 1000.00 A *サイズによる
1-25 モーター公称速度
1-24 モーター電流
*[0] なし
[1] アナログ入力 53
1-93 サーミスター・ソース
[3] ETR 警告 1
[4] ETR トリップ 1
[22] ETR トリップ - 拡張検出
0 - 120 % *50 %
0.001 - 0.05 秒 *0.005 秒
1-66 低速時の最低電流
1-65 共振制動時間定数
50 - 60000 RPM *サイズによる
1-7* スタート調整
0.1 - 10000.0 Nm *サイズによる
1-29 自動モーター適合 (AMA)
*[0] オフ
1-26 モーター制御 定格トルク
1-70 スタートモード
[1] 完全 AMA を有効化
[5] ディジタル入力 32
[4] ディジタル入力 19
[2] アナログ入力 54
[3] ディジタル入力 18
0 - 10 秒 *0 秒
*[0] 回転子検知
[1] パーキング
1-71 スタート遅延
0.0 - 9999.000 Ohm *サイズによる
[2] 簡略 AMA を有効化
1-3* 高度 モーター・データ I
1-30 固定子抵抗 (Rs)
[6] ディジタル入力 33
2-** ブレーキ
[0] 直流保留/遅延時間
1-72 スタート機能
0 - 9999.000 Ohm *サイズによる
1-31 回転抵抗(Rr)
2-01 直流ブレーキ電流
2-0* 直流ブレーキ
2-00 直流保留/モーター予熱電流
[3] 始動速度 cw
[4] 水平動作
[5] VVC+ 磁束時計回り
*[2] フリーラン/遅延時間
[1] 直流ブレーキ/遅延時間
0.0 - 9999.00 Ohm *サイズによる
0.0 - 9999.000 Ohm *サイズによる
1-37 d 軸インダクタンス (Ld)
1-35 主電源リアクタンス (Xh)
1-33 固定子漏洩リアクタンス (X1)
2-07 パーキング時間
2-06 パーキング電流
2-04 直流ブレーキ作動速度
2-02 直流ブレーキ時間
[2] 常に有効
[3] 速信方向 有効
[4] 速信方向 常に 有効
1-73 フライング・スタート
*[0] Disabled (無効)
[1] 有効
0 - 65535 mH *サイズによる
0.000 - 65535 mH *サイズによる
1-38 q 軸インダクタンス (Lq)
1-75 スタート速度[Hz]
2 - 100 *サイズによる
1-39 モーター極数
1-4* 高度 モーター・データ II
1-40 1000 RPM での逆起電力
2-1* ブレーキ・エネルギー機能
0 - 500.0 Hz *サイズによる
1-76 スタート電流
1 - 9000 V *サイズによる
1-42 モーター・ケーブル長
MG07A540 Danfoss A/S © 08/2018 All rights reserved. 73

付属資料
[64] カウンター B (ダウン)
[62] カウンター A リセット
[63] カウンター B (アップ)
[72] PID エラー反転
[73] PID リセット I パート
[65] カウンター B リセット
[74] PID 有効
[150] ホームに移動
[151] ホーム信号 スイッチ
[155] HW 正の制限 Inv
[162] 位置 Idx Bit0
[156] HW 負の制限 Inv
[163] 位置 Idx Bit1
[157] 位置 クイック停止 Inv
[160] 目的の位置に移動
[171] cw 逆制限スイッチ
[172] ccw 逆制限スイッチ
5-13 端子 29 ディジタル入力
[164] 位置 Idx Bit2
VLT® Midi Drive FC 280
5-12 と同じ選択
5-12 と同じ選択
[30] カウンター入力
5-12 と同じ選択
5-14 端子 32 ディジタル入力
[32] パルス入力
[83] エンコーダー入力 Z
5-10 と同じ選択
[30] カウンター入力
5-15 端子 33 ディジタル入力
[82] エンコーダー入力 B
*[1] Safe Torque Off 警報
5-19 端子 37/38 Safe Torque Off
[32] パルス入力
[81] エンコーダー入力 A
[3] Safe Torque Off 警告
5-3* ディジタル出力
5-30 端子 27 ディジタル出力
*[0] 動作なし
[1] コント準備
[2] ドライブ準備完了
[3] ドライブ 準備完了/リモートコントロール
[4] スタンバイ/警告なし
[5] 運転中
[6] 運転中/警告なし
[7] 範囲内運転/警無
[8] 信号運転/警告無
[9] 警報
[10] 警報または警告
[11] トルク制限値
[12] 電流範囲外
[13] 電流低下、低
[14] 電流超過、高
[15] 周波数範囲外
[16] 周波数低下、低
[17] 周波数超過、高
[18] FB 範囲外
[19] フィードバック低下、低
[20] フィードバック超過、高
[21] 熱警告
[22] 準備完了、熱警告なし
[61] カウンター A (ダウン)
[62] カウンター A リセット
[60] カウンター A (アップ)
[65] カウンター B リセット
[64] カウンター B (ダウン)
[63] カウンター B (アップ)
[72] PID エラー反転
[73] PID リセット I パート
[74] PID 有効
[150] ホームに移動
[156] HW 負の制限 Inv
[151] ホーム信号 スイッチ
[155] HW 正の制限 Inv
[171] cw 逆制限スイッチ
[162] 位置 Idx Bit0
[163] 位置 Idx Bit1
[157] 位置 クイック停止 Inv
[164] 位置 Idx Bit2
[160] 目的の位置に移動
[172] ccw 逆制限スイッチ
5-11 端子 19 ディジタル入力
[1] リセット
5-12 端子 27 ディジタル入力
[0] 動作なし
[8] スタート
[9] ラッチ・スタート
[10] 逆転
[11] 逆転スタート
[12] 正転スタート有効
[2] 逆フリーラン
[3] フリーランおよびリセット反転
[4] クイック逆停止
[5] 直流ブレーキ反転
[6] 逆停止
[13] 逆転スタート有効
[14] ジョグ
[15] プリ速指信号オン
[16] プリ速信ビット 0
[17] プリ速信ビット 1
[18] プリセット速度指令信号ビット 2
[19] 速度指令信号凍結
[20] 出力凍結
[21] 加速
[22] 減速
[45] ラッチ・スタート逆転
[51] 外部インターロック
[55] DigiPot 増加
[29] スローダウン
[34] ランプ・ビット 0
[28] 増加
[35] ランプ・ビット 1
[24] 設定選択ビット 1
[23] 設定選択ビット 0
[56] DigiPot 減少
[57] DigiPot クリア
[58] DigiPot ????
[60] カウンター A (アップ)
[61] カウンター A (ダウン)
1010
0 - 500 Hz *0 Hz
-4999 - 4999 プロセス制御単位
*4999 プロセス制御単位
4-57 警告フィードバック高
4-58 損失したモーター相機能
[0] オフ
0.1 - 500 Hz *65 Hz
4-14 モーター速度上限 [Hz]
0 - 1000 % *サイズによる
4-16 トルク制限モーター・モード
0 - 60000 RPM *サイズによる
0 - 500 Hz *0 Hz
4-6* 速度バイパス
4-61 バイパス最低速度 [Hz]
*[1] オン
0 - 1000 % *サイズによる
0 - 1000 % *100 %
4-18 電流制限
4-17 トルク制限ジェネレーター・モード
4-63 バイパス最高速度 [Hz]
5-** ディジタル入/出力
5-0* ディジタル I/O モード
5-00 ディジタル入力モード
*[0] PNP
0 - 500 Hz *サイズによる
4-19 最大出力周波数
4-2* 制限係数
4-20 トルク制限係数ソース
*[0] 機能なし
[2] アナログ・イン 53
[1] NPN
5-01 端子 27 モード
*[0] 入力
[1] 出力
[8] アナログ・イン 54 反
4-21 速度制限係数ソース
[4] アナログ・イン 53 反
[6] アナログ・イン 54
5-1* ディジタル入力
5-10 端子 18 ディジタル入力
[0] 動作なし
[1] リセット
[2] 逆フリーラン
[3] フリーランおよびリセット反転
4-22 切断ブースト
[8] アナログ・イン 54 反
[4] アナログ・イン 53 反
[6] アナログ・イン 54
*[0] 機能なし
[2] アナログ・イン 53
[4] クイック逆停止
[5] 直流ブレーキ反転
[6] 逆停止
*[8] スタート
[9] ラッチ・スタート
[10] 逆転
*[0] オフ
[1] オン
4-3* モーター・フィードバック・モニター
4-30 モーター・フィードバック損失機能
[0] Disabled (無効)
[1] 警告
[11] 逆転スタート
[12] 正転スタート有効
[13] 逆転スタート有効
[14] ジョグ
[15] プリ速指信号オン
*[2] トリップ
[3] ジョグ
[4] 出力凍結
[5] 最高速度
[6] 開ループに切替
[16] プリ速信ビット 0
[17] プリ速信ビット 1
[18] プリセット速度指令信号ビット 2
[19] 速度指令信号凍結
0 - 60 秒 *0.05 秒
0 - 50 Hz *20 Hz
4-32 モーターフィードバック損失タイムアウト
4-31 モーターフィードバック速度エラー
[20] 出力凍結
[21] 加速
[22] 減速
0 - 500 Hz *サイズによる
4-4* 調整 警告 2
4-40 警告周波数 低
[28] 増加
[26] 正確な逆停止
[27] 正確スタート、停止
[23] 設定選択ビット 0
[24] 設定選択ビット 1
0 - 200 *0
0 - 500 Hz *サイズによる
4-42 調整可能な温度警告
4-41 警告周波数 高
4-5* 調整 警告
[35] ランプ・ビット 1
[40] 正確なラッチ始動
[29] スローダウン
[34] ランプ・ビット 0
0 - 500.00 A *サイズによる
0 - 500 A *0 A
4-51 警告電流高
4-50 警告電流低
[51] 外部インターロック
[41] ラッチ正確逆停止
[45] ラッチ・スタート逆転
-4999 - 4999 *-4999
4-54 警告速度指令信号低
4-55 警告速度指令信号高
[58] DigiPot ????
[55] DigiPot 増加
[56] DigiPot 減少
[57] DigiPot クリア
-4999 - 4999 プロセス制御単位
-4999 - 4999 *4999
*-4999 プロセス制御単位
4-56 警告フィードバック低
0 - 200 % *25 %
0 - 3600000 ms *1000 ms
3-96 最大リミット・スイッチ速度指令信号
3-95 ランプ遅延
4-** 制限 / 警告
4-1* モーター制限
0 - 1500 RPM *サイズによる
[2] 両方向
4-11 モーター速度下限 [RPM]
4-12 モーター速度下限 [Hz]
4-10 モーター速度方向
*[0] 時計回り
0 - 400.0 Hz *0 Hz
4-13 モーター速度上限 [RPM]
3-18 相対スケーリング 速度指令信号リソース
*[0] 機能なし
0.01 - 3600 秒 *サイズによる
0.01 - 3600 秒 *サイズによる
[8] 周波数入力 33
[11] ローカル・バス速度指令信号
[7] 周波数入力 29
[1] アナログ入力 53
[2] アナログ入力 54
3-3* 一般 ランプ設定
3-31 直交の立ち下がり 変更
*[0] オフ
[1] ランプ 1 立ち下がり時間
[2] ランプ 2 立ち下がり時間
[3] ランプ 3 立ち下がり時間
[4] ランプ 4 立ち下がり時間
[9] クイック停止ランプ時間
3-4* ランプ 1
3-40 ランプ 1 タイプ
*[0] 直線
[1] 正弦 ランプ
[2] 正弦 2 ランプ
3-41 ランプ 1 立ち上がり時間
3-4*と同じ内容
3-4*と同じ内容
3-42 ランプ 1 立ち下がり時間
3-5* ランプ 2
3-6* ランプ 3
3-4*と同じ内容
3-7* ランプ 4
3-8* その他のランプ
0.01 - 3600 秒 *サイズによる
0.01 - 3600 秒 *サイズによる
3-81 クイック停止ランプ時間
3-80 ジョグ・ランプ時間
0.01 - 200 % *0.10 %
3-9* ディジタル電位メーター
3-90 ステップ・サイズ
3-92 電力回復
*[0] オフ
[1] オン
3-93 上限
-200 - 200 % *-100 %
-200 - 200 % *100 %
3-94 下限
74 Danfoss A/S © 08/2018 All rights reserved. MG07A540

付属資料 操作ガイド
[156] HW 負の制限 Inv
[15] プリ速指信号オン
[16] プリ速信ビット 0
[17] プリ速信ビット 1
[18] プリセット速度指令信号ビット 2
[19] 速度指令信号凍結
[20] 出力凍結
4 - 32000 Hz *5000 Hz
[21] 加速
[22] 減速
[23] 設定選択ビット 0
[24] 設定選択ビット 1
1 - 4096 *1024
[28] 増加
[55] DigiPot 増加
[35] ランプ・ビット 1
[51] 外部インターロック
[29] スローダウン
[34] ランプ・ビット 0
0 - 0xFFFFFFFF *0
トロール
[56] DigiPot 減少
[57] DigiPot クリア
0 - 100 % *0 %
[58] DigiPot ????
[72] PID エラー反転
[73] PID リセット I パート
ット
0 - 100 % *0 %
[155] HW 正の制限 Inv
[74] PID 有効
[150] ホームに移動
[151] ホーム信号 スイッチ
1 - 99 秒 *10 秒
[171] cw 逆制限スイッチ
[163] 位置 Idx Bit1
[157] 位置 クイック停止 Inv
[164] 位置 Idx Bit2
[160] 目的の位置に移動
[162] 位置 Idx Bit0
6-2* アナログ入力 54
[172] ccw 逆制限スイッチ
6-19 端子 53 モード
6-20 端子 54 低電圧
*[1] 電圧モード
[6] ディジタル入力
0 - 10 V *10 V
0 - 10 V *0.07 V
0 - 10 V *0.07 V
ック 値
0 - 10 V *10 V
6-21 端子 54 高電圧
-4999 - 4999 *0
0 - 20 mA *20 mA
0 - 20 mA *4 mA
6-23 端子 54 高電流
6-22 端子 54 低電流
0.01 - 10 秒 *0.01 秒
ック 値
-4999 - 4999 *サイズによる
ック 値
-4999 - 4999 *0
6-25 端子 54 高速度指令信号/フィードバ
6-24 端子 54 低速度指令信号/フィードバ
ック 値
0.01 - 10 秒 *0.01 秒
-4999 - 4999 *サイズによる
6-29 端子 54 モード
6-26 端子 54 フィルター時間定数
6-9* アナログ/ディジタル出力 42
6-90 端子 42 モード
*[1] 電圧モード
[0] 電流モード
*[0] 0-20 mA
[106] 電力
[107] 速度
[109] 最高出力周波数
[113] PID クランプ出力
5-62 パルス出力最大周波数 27
5-7* 24V エンコーダー入力
5-70 端子 32/33 1 回転当たりのパルス
[72] 論理規則 2
[73] 論理規則 3
[74] 論理規則 4
[75] 論理規則 5
[80] SL ディジ出力 A
[81] SL ディジタル出力 B
[82] SL ディジタル出力 C
[83] SL ディジタル出力 D
[160] 警報なし
0 - 600 秒 *0.01 秒
0 - 600 秒 *0.01 秒
5-35 オフ遅延、ディジタル出力
5-4* リレー
5-40 機能リレー
[0] 動作なし
*[1] コント準備
[2] ドライブ準備完了
[3] ドライブ 準備完了/リモートコントロール
*[0] 時計回り
[1] 反時計回り
5-71 端子 32/33 エンコーダー方向
5-9* バス・コントロール完了
[161] 逆転運転中
[165] ローカル基準アクティブ
[166] 遠速信アクティブ
[167] スタート・コマンド・アクティブ
[4] スタンバイ/警告なし
[5] 運転中
[6] 運転中/警告なし
[7] 範囲内運転/警無
5-93 パルス出力 27 バス・コントロール
5-90 ディジタルおよびリレー・バス・コン
[168] 手動モードのドライブ
[169] 自動モードのドライブ
[170] ホーミング完了
[171] 目標位置に到達
[8] 信号運転/警告無
[9] 警報
[10] 警報または警告
[11] トルク制限値
5-94 パルス出力 27 タイムアウト・プリセ
6-** アナログ入/出力
6-0* アナログ I/O モード
[172] 位置コントロールの不具合
[173] 機械的ブレーキを配置
[190] STO 機能が有効
[193] スリープ・モード
[194] 破損ベルト機能
[239] STO 機能障害
[12] 電流範囲外
[13] 電流低下、低
[14] 電流超過、高
[15] 周波数範囲外
[16] 周波数低下、低
[17] 周波数超過、高
*[0] オフ
6-01 ライブ・ゼロ・タイムアウト機能
6-00 ライブ・ゼロ・タイムアウト時間
0 - 600 秒 *0.01 秒
0 - 600 秒 *0.01 秒
5-41 オン遅延、リレー
5-42 オフ遅延、リレー
[18] FB 範囲外
[19] フィードバック低下、低
[20] フィードバック超過、高
[21] 熱警告
[1] 出力凍結
5-5* パルス入力
[22] 準備完了、熱警告なし
[5] 停止およびトリップ
[2] 停止
[3] ジョグ
[4] 最高速度
1 - 32000 Hz *32000 Hz
0 - 31999 Hz *4 Hz
5-51 端子 29 高周波数
5-50 端子 29 低周波数
[23] 遠隔,完了,熱警告無
[24] 準備完了、過電圧/電圧低下なし
[25] 逆転
[26] バス OK
6-11 端子 53 高電圧
6-1* アナログ入力 53
6-10 端子 53 低電圧
ック 値
-4999 - 4999 *0
ック 値
5-53 端子 29 高速度指令信号/フィードバ
5-52 端子 29 低速度指令信号/フィードバ
[27] トルク制限 & 停止
[28] ブレーキ、ブレーキ警無
[29] ブレーキ準完不具合無
[30] ブレーキ不具合(IGBT)
[31] リレー 123
6-15 端子 53 高速度指令信号/フィードバ
6-14 端子 53 低速度指令信号/フィードバ
0 - 31999 Hz *4 Hz
-4999 - 4999 *サイズによる
5-55 端子 33 低周波数
11
[32] 機械的ブレコント
[36] コントロール・メッセージ文ビット
6-16 端子 53 フィルター時間定数
ック 値
1 - 32000 Hz *32000 Hz
5-56 端子 33 高周波数
5-57 端子 33 低速度指令信号/フィードバ
12
[40] 速指信号範囲外
[41] 速度指令信号低下、低
[37] コントロール・メッセージ文ビット
[3] フリーランおよびリセット反転
[4] クイック逆停止
6-18 端子 53 ディジタル入力
*[0] 動作なし
[1] リセット
-4999 - 4999 *0
ック 値
-4999 - 4999 *サイズによる
5-58 端子 33 高速度指令信号/フィードバ
オン
[42] 速度指令信号超過、高
[45] バス・コントロール
[46] バス ・コントロール、タイムアウト:
[5] 直流ブレーキ反転
[2] 逆フリーラン
5-6* パルス出力
5-60 端子 27 パルス出力変数
*[0] 動作なし
[45] バス・コントロール
オフ
[47] バス ・コントロール、タイムアウト:
[56] ヒートシンク・クリーン警告、高
[60] コンパレーター 0
[6] 逆停止
[8] スタート
[10] 逆転
[48] BC、TO
[100] 出力周波数
[101] 速度指令信号
[63] コンパレーター 3
[61] コンパレーター 1
[62] コンパレーター 2
[11] 逆転スタート
[12] 正転スタート有効
[13] 逆転スタート有効
[14] ジョグ
[102] プロセス フィードバック
[103] モーター電流
[104] 制限関係トルク
[105] 制限関係トルク
[71] 論理規則 1
[64] コンパレーター 4
[65] コンパレーター 5
[70] 論理規則 0
10 10
[82] SL ディジタル出力 C
[83] SL ディジタル出力 D
[91] エンコーダーは出力 A をエミュレー
ト
[160] 警報なし
[161] 逆転運転中
[165] ローカル基準アクティブ
[166] 遠速信アクティブ
[167] スタート・コマンド・アクティブ
[168] 手動モードのドライブ
[169] 自動モードのドライブ
[170] ホーミング完了
[171] 目標位置に到達
[172] 位置コントロールの不具合
[173] 機械的ブレーキを配置
[190] STO 機能が有効
[193] スリープ・モード
[194] 破損ベルト機能
[239] STO 機能障害
5-34 オン遅延、ディジタル出力
11
[23] 遠隔,完了,熱警告無
[24] 準備完了、過電圧/電圧低下なし
[25] 逆転
[26] バス OK
[27] トルク制限 & 停止
[28] ブレーキ、ブレーキ警無
[29] ブレーキ準完不具合無
[30] ブレーキ不具合(IGBT)
[31] リレー 123
[32] 機械的ブレコント
[36] コントロール・メッセージ文ビット
12
[40] 速指信号範囲外
[41] 速度指令信号低下、低
[37] コントロール・メッセージ文ビット
[42] 速度指令信号超過、高
オン
[43] 拡張 PID 制限
[45] バス・コントロール
[46] バス ・コントロール、タイムアウト:
オフ
[47] バス ・コントロール、タイムアウト:
[55] パルス出力
[64] コンパレーター 4
[63] コンパレーター 3
[61] コンパレーター 1
[62] コンパレーター 2
[56] ヒートシンク・クリーン警告、高
[60] コンパレーター 0
[71] 論理規則 1
[72] 論理規則 2
[73] 論理規則 3
[74] 論理規則 4
[75] 論理規則 5
[80] SL ディジ出力 A
[65] コンパレーター 5
[70] 論理規則 0
[81] SL ディジタル出力 B
MG07A540 Danfoss A/S © 08/2018 All rights reserved. 75

付属資料
VLT® Midi Drive FC 280
*[0] 無効
[1] 警報にてトリガー
[2] トリガー警報/警告
8-1* コントロール メッセ設定
8-10 コントロール・メッセージ文プロファイル*[0] FC プロファイル
[7] 周波数入力 29
[8] 周波数入力 33
[2] アナログ入力 54
*[0] 機能なし
[1] アナログ入力 53
[1] PROFIdrive プロファイル
[5] ODVA
[7] CANopen DSP 402
8-13 構成可能な状態メッセージ文 STW
*[0] 通常
[1] 反転
[11] ローカル・バス速度指令信号
[32] バス PCD
7-48 速度フィード・フォワード
7-46 プロセス PID FF 正/反 コントロール
[0] 機能なし
*[1] プロファイル・デフォルト
[2] アラーム 68 のみ
0 - 65535 *0
ル
7-49 プロセス PID 出力正/反 コントロー
[3] 警報 68 を除くトリップ
[10] T18 DI 状態
[11] T19 DI 状態
[12] T27 DI 状態
[13] T29 DI 状態
[14] T32 DI 状態
*[0] 通常
[1] 反転
7-5* 高度 プロセス PID II
7-50 プロセス PID 拡張 PID
[0] Disabled (無効)
*[1] 有効
[61] コンパレーター 1
[15] T33 DI 状態
7-51 プロ PIDFF ゲイン
[60] コンパレーター 0
[21] 熱警告
[30] ブレーキ不具合(IGBT)
[40] 速指信号範囲外
0 - 100 *1
0.01 - 100 秒 *0.01 秒
0.01 - 100 秒 *0.01 秒
7-52 プロ PIDFF ランプ up
7-53 プロ PIDFF ランプダウン
[70] 論理規則 0
[63] コンパレーター 3
[62] コンパレーター 2
0.001 - 1 秒 *0.001 秒
7-56 プロセス PID Ref. フィルター時間
[71] 論理規則 1
[64] コンパレーター 4
[65] コンパレーター 5
0.001 - 1 秒 *0.001 秒
7-57 プロセス PID Fb. フィルター時間
7-6* フィードバック変換
7-60 フィードバック 1 変換
[72] 論理規則 2
*[0] 直線
[73] 論理規則 3
[74] 論理規則 4
[1] 平方根
7-62 フィードバック 2 変換
[82] SL ディジタル出 C
[75] 論理規則 5
[80] SL ディジタル出 A
[81] SL ディジタル出 B
*[0] 直線
[1] 平方根
8-** 通信とオプション
8-0* 一般設定
[83] SL ディジタル出 D
[93] 警報 68 または警報 188
8-01 コントロール・サイト
*[0] ディジタルおよびコントロール・メッ
8-14 コンフィ・コントロメッセ文 CTW
セージ文
[0] なし
*[1] プロファ・デフォ
[2] CTW 有効 active low
[4] PID エラー反転
[5] PID リセット I パート
[6] PID 有効
[0] なし
[1] FC ポート
8-02 コントロール・ソース
[2] FC USB
[2] コントロール・メッセージ文のみ
[1] ディジタルのみ
0 - 2147483647 *サイズによる
8-19 製品コード
8-3* FC ポート設定
8-30 プロトコル
0.5 - 6000 秒 *1 秒
8-04 コントロール・タイムアウト機能
8-03 コントロール・タイムアウト時間
[3] オプション A
*[0] FC
[2] Modbus RTU
*[0] オフ
[1] 出力凍結
0.0 - 247 *1
8-31 アドレス
8-32 ボーレート
[0] 2400 ボー
[2] 停止
[3] ジョグ
[4] 最高速度
[5] 停止およびトリップ
[1] 4800 ボー
8-07 診断トリガー
1010
0 - 500 % *0 %
0.0001 - 32 *1
1 - 6000 ms *10 ms
0.002 - 2 秒 *0.020 秒
0 - 500 % *100 %
0 - 6000 RPM *0 RPM
0 - 10 *0.01
0.10 - 9999 秒 *9999 秒
1 - 50 *5
0 - 20 秒 *0 秒
0 - 200 % *5 %
0 - 200 % *0 %
-100 - 100 % *-100 %
Ref.
-100 - 100 % *100 %
0 - 100 % *100 %
Ref.
0 - 100 % *100 %
7-08 速度 PID フィードフォーワード 係数
7-07 速度 PID フィードバック・ギア比
オン
オフ
[46] バス ・コントロール、タイムアウト:
[47] バス ・コントロール、タイムアウト:
[56] ヒートシンク・クリーン警告、高
[1] 4-20 mA
[2] ディジタル出力
6-91 端子 42 アナログ出力
*[0] 動作なし
[100] 出力周波数
7-13 トルク PID 積分時間
7-1* トルク PID コントロール
7-12 トルク PID 比例ゲイン
[64] コンパレーター 4
[63] コンパレーター 3
[61] コンパレーター 1
[62] コンパレーター 2
[60] コンパレーター 0
[101] 速度指令信号
[102] プロセス フィードバック
[103] モーター電流
[104] 制限関係トルク
[105] 制限関係トルク
[3] 周波数入力 29
7-2* プロ CL フィードバック
[65] コンパレーター 5
[106] 電力
[2] アナログ入力 54
7-20 プロ CL FB 1 リソース
*[0] 機能なし
[1] アナログ入力 53
[71] 論理規則 1
[72] 論理規則 2
[73] 論理規則 3
[70] 論理規則 0
[107] 速度
[74] 論理規則 4
[111] 速度フィードバック
[113] PID クランプ出力
[139] バス・コントロール
[143] 拡張 CL 1
[3] 周波数入力 29
[1] アナログ入力 53
[4] 周波数入力 33
[75] 論理規則 5
[254] 直流リンク電圧
[2] アナログ入力 54
7-22 プロ CL FB 2 リソース
*[0] 機能なし
[80] SL ディジ出力 A
[81] SL ディジタル出力 B
[82] SL ディジタル出力 C
[83] SL ディジタル出力 D
[160] 警報なし
6-92 端子 42 ディジタル出力
*[0] 動作なし
[1] コント準備
[2] ドライブ準備完了
[3] ドライブ 準備完了/リモートコントロール
[4] 周波数入力 33
*[0] 通常
[1] 反転
7-31 プロセス PID 反ねじ巻き
[0] オフ
7-3* プロ PID CL
7-30 プロセス PID 順転/反転コントロール
[161] 逆転運転中
[165] ローカル基準アクティブ
[166] 遠速信アクティブ
[167] スタート・コマンド・アクティブ
[4] スタンバイ/警告なし
[5] 運転中
[6] 運転中/警告なし
[7] 範囲内運転/警無
*[1] オン
[168] 手動モードのドライブ
[169] 自動モードのドライブ
[170] ホーミング完了
[171] 目標位置に到達
[8] 信号運転/警告無
[9] 警報
[10] 警報または警告
[11] トルク制限値
7-36 プロセス PID 微分 ゲイン制限
7-33 プロセス PID 比例ゲイン
7-32 プロ PID スタート速度
[172] 位置コントロールの不具合
[173] 機械的ブレーキを配置
[193] スリープ・モード
[12] 電流範囲外
[13] 電流低下、低
[14] 電流超過、高
7-35 プロセス PID 微分時間
7-34 プロセス PID 積分時間
0 - 200 % *100 %
0 - 200 % *0 %
[194] 破損ベルト機能
[198] ドライブ・バイパス
6-93 端子 42 出力最小スケール
6-94 端子 42 出力最大スケール
[15] 周波数範囲外
[16] 周波数低下、低
[17] 周波数超過、高
[18] FB 範囲外
[19] フィードバック低下、低
[20] フィードバック超過、高
6-96 端子 42 出力バス・コントロール
[21] 熱警告
7-39 オン速度指令信号帯域幅
7-38 プロPIDフィードフォワード 係数
0 - 16384 *0
[22] 準備完了、熱警告なし
7-4* 高度 プロセス PID I
7-40 プロセス PID I-パートリセット
*[0] いいえ
[1] はい
7-41 プロセス PID 出力 Neg. クランプ
7-42 プロセス PID 出力 Pos. クランプ
[9] 周波数入力 33
*[20] なし
7-02 速度 PID 比例ゲイン
7-** コントローラー
7-0* 速度 PID コントローラー
7-00 速度 PID フィードバック・ソース
[23] 遠隔,完了,熱警告無
[24] 準備完了、過電圧/電圧低下なし
[25] 逆転
[8] 周波数入力 29
[1] 24V エンコーダー
[6] アナログ入力 53
[7] アナログ入力 54
[26] バス OK
[27] トルク制限 & 停止
[28] ブレーキ、ブレーキ警無
[29] ブレーキ準完不具合無
[30] ブレーキ不具合(IGBT)
[31] リレー 123
[32] 機械的ブレコント
7-44 プロセス PID ゲインスケール最大
7-43 プロセス PID ゲインスケール最小
1 - 20 *5
0 - 200 ms *30 ms
2 - 20000 ms *8 ms
0 - 1 *0.015
7-04 速度 PID 微分時間
7-03 速度 PID 積分時間
11
[36] コントロール・メッセージ文ビット
7-05 速度 PID 微分 ゲイン制限
12
[40] 速指信号範囲外
[41] 速度指令信号低下、低
[37] コントロール・メッセージ文ビット
[42] 速度指令信号超過、高
7-45 プロ PIDFF リソース
7-06 速度 PID 低域フィルター時間
[45] バス・コントロール
76 Danfoss A/S © 08/2018 All rights reserved. MG07A540

付属資料 操作ガイド
1 - 126 *126
[1698]警告メッセージ文 3
[3421]PCD 1 アプリケーション用読み出し
[3422]PCD 2 アプリケーション用読み出し
[3423]PCD 3 アプリケーション用読み出し
[3424]PCD 4 アプリケーション用読み出し
[3425]PCD 5 アプリケーション用読み出し
[3426]PCD 6 アプリケーション用読み出し
[3427]PCD 7 アプリケーション用読み出し
[3428]PCD 8 アプリケーション用読み出し
[3429]PCD 9 アプリケーション用読み出し
[3430]PCD 10 アプリケーション用読み出し
[3450]実際の位置
[3456]トラック・エラー
[1673]カウンター B
[1690]警報メッセージ文
[1674]正確な 停止カウンター
[1684]通信 オプション STW
[1685]FC ポート CTW 1
[1695]拡張 状態メッセージ文 2
[1694]拡張 状態メッセージ文
[1693]警告メッセージ文 2
[1691]警報メッセージ文 2
[1692]警告メッセージ文
[1697]警報メッセージ文 3
9-18 ノード・アドレス
0 - 65535 *1037
9-22 テレグラム選択
[1] 標準テレグラム 1
*[100]なし
[101] PPO 1
[102] PPO 2
[103] PPO 3
[104] PPO 4
[105] PPO 5
[106] PPO 6
[107] PPO 7
9-19 ドライブユニットシステム番号は
[108] PPO 8
9-15 & 9-16 と同じ選択
[200] カスタムテレグラム1
9-23 信号用パラメーター
*[1] 有効
9-27 パラメーター編集
[0] Disabled (無効)
0 - 65535 *0
9-44 不具合メッセージ・カウンター
9-28 プロセス制御
[0] 無効
*[1] 循環マスター 有効化
0 - 0 *0
0 - 0 *0
9-45 不具合コード
9-47 不具合番号
9-52 不具合状況カウンター
0 - 1000 *0
0 - 65535 *0
9-63 実際ボーレート
9-53 プロフィバス警告メッセージ文
[3401]PCD 1 アプリケーション用書き込み
[1682]フィールドバス REF 1
[891] バス・ジョグ 2 速度
[1680]フィールドバス CTW 1
[748] 速度フィード・フォワード
[890] バス・ジョグ 1 速度
0 - 655 *サイズによる
ョン
[2] 論理 AND
*[3] 論理 OR
8-7* プロトコル SW バージョン
8-79 プロトコル・ファームウェア・バージ
33
[23] [1652] フィードバック [単位]
[24] [1660] ディジタル入力 18、19、27、
[22] [1650] 外部速度指令信号
[26] [1662] アナログ入力 53
[25] [1661] 端子 53 スイッチ設定
9-16 PCD 読み出し構成
[3402]PCD 2 アプリケーション用書き込み
[3403]PCD 3 アプリケーション用書き込み
[3404]PCD 4 アプリケーション用書き込み
[3405]PCD 5 アプリケーション用書き込み
[3406]PCD 6 アプリケーション用書き込み
[3407]PCD 7 アプリケーション用書き込み
[3408]PCD 8 アプリケーション用書き込み
0 - 4294967295 *0
8-8* FC ポート診断
8-80 バス・メッセージ・カウント
[29] [1665] アナログ出力 42 [mA]
[27] [1663] 端子 54 スイッチ設定
[28] [1664] アナログ入力 54
0 - 4294967295 *0
0 - 4294967295 *0
8-82 スレーブ・メッセージ回復
8-81 バス・エラー・カウント
[30] [1671] デフォルト設定
[31] [1672] カウンター A
[32] [1673] カウンター B
[33] [1690] 警報メッセージ文
[0] なし
[3409]PCD 9 アプリケーション用書き込み
[3410]PCD 10 アプリケーション用書き込み
0 - 4294967295 *0
0 - 4294967295 *0
8-84 スレーブ・メッセージ送信
8-83 スレーブ・エラー・カウント
8-5* ディジタル/バス
8-50 フリーラン選択
[34] [1692] 警告メッセージ文
[35] [1694] 拡張 状態メッセージ文
[1501]運転時間
[1500]動作時間
0 - 4294967295 *0
8-85 スレーブ・タイムアウト・エラー
[0] ディジタル入力
[1] バス
[1602]速度指令信号 [%]
[1502]KWh カウンター
[1600]コントロール・メッセージ文
[1601]速度指令信号 [単位]
8-88 FC ポート診断のリセット
*[0] リセットしない
[1] カウンターのリセット
8-9* バス・フィードバック
[2] 論理 AND
*[3] 論理 OR
8-51 クイック停止選択
[0] ディジタル入力
[1612]モーター電圧
[1610]電力 [KW]
[1603]状態メッセージ文
8-90 バス・ジョグ 1 速度
[1] バス
[1611]出力 [hp]
[1605]主電源実効値 [%]
[1609]カスタム読み出し
0 - 1500 RPM *200 RPM
0 - 1500 RPM *100 RPM
8-91 バス・ジョグ 2 速度
9-** プロフィドライブ
9-00 設定値
[2] 論理 AND
*[3] 論理 OR
8-52 直流ブレーキ選択
[0] ディジタル入力
[1] バス
[1613]周波数
[1614]モーター電流
[1615]周波数 [%]
[1616]トルク [Nm]
0 - 65535 *0
0 - 65535 *0
9-15 PCD 書き込み構成
9-07 実際値
[2] 論理 AND
*[3] 論理 OR
8-53 スタート選択
[0] ディジタル入力
[1617]速度 [RPM]
[1618]モーター熱
[1620]モーター角
[1622]トルク [%]
[1630]直流リンク電圧
[1633]ブレーキ・エネルギー/2 分
[342] ランプ 1 立ち下がり時間
[303] 最大速度指令信号
[312] 増加/スローダウン値
[0] なし
[1] バス
[341] ランプ 1 立ち上がり時間
[302] 最小速度指令信号
[2] 論理 AND
*[3] 論理 OR
8-54 逆転選択
[0] ディジタル入力
[1] バス
[1634]ヒートシンク温度
[1635]インバーター熱
[1638]SL コントローラー状態
[1639]コントロール・カード温度
[1650]外部速度指令信号
[1652]フィードバック [単位]
[352] ランプ 2 立ち下がり時間
[380] ジョグ・ランプ時間
[381] クイック停止ランプ時間
[412] モーター速度下限 [Hz]
[351] ランプ 2 立ち上がり時間
[2] 論理 AND
*[3] 論理 OR
[414] モーター速度上限 [Hz]
8-55 設定選択
[0] ディジタル入力
[1] バス
[2] 論理 AND
[1666]ディジタル出力
[1653]ディジポテンショ速信
[1657]フィードバック [RPM]
[416] トルク制限モーター・モード
[417] トルク制限ジェネレーター・モード
*[3] 論理 OR
8-56 プリセット速度指令信号選択
[1663]端子 54 設定
[1660]ディジタル入力
[1661]端子 53 設定
[1662]アナログ入力 53
ック 値
ック 値
[558] 端子 33 高速度指令信号/フィードバ
[553] 端子 29 高速度指令信号/フィードバ
[0] ディジタル入力
[1] バス
[2] 論理 AND
*[3] 論理 OR
[1667]パルス入力 29 [Hz]
[1664]アナログ入力 54
[1665]アナログ出力 42 [mA]
トロール
[593] パルス出力 27 バス・コントロール
[615] 端子 53 高速度指令信号/フィードバ
[590] ディジタルおよびリレー・バス・コン
8-57 プロフィドライブ OFF2 選択
[0] ディジタル入力
[1] バス
[2] 論理 AND
[1671]デフォルト設定
[1669]パルス出力 27 [Hz]
[1668]パルス入力 33 [Hz]
ック 値
ック 値
[625] 端子 54 高速度指令信号/フィードバ
*[3] 論理 OR
8-58 プロフィドライブ OFF3 選択
[0] ディジタル入力
[1672]カウンター A
10 10
[696] 端子 42 出力バス・コントロール
[1] バス
ル
ル
[2] 9600 ボー
[3] 19200 ボー
[4] 38400 ボー
[5] 57600 ボー
[6] 76800 ボー
[7] 115200 ボー
8-33 パリティ/ストップ・ビット
[0] 偶数パリティ、1 ストップ・ビット
[1] 奇数パリティ、1 ストップ・ビット
[2] パリティなし、1 ストップ・ビット
0.0010 - 0.5 秒 *0.01 秒
8-36 最大応答遅延
[3] パリティなし、2 ストップ・ビット
8-35 最低応答遅延
0.1 - 10.0 秒 *サイズによる
8-4* FC MC プロトコル設定
8-42 PCD 書き込み構成
[0] なし
[1] [302] 最小速度指令信号
[7] [380] ジョグ・ランプ時間
[8] [381] クイック停止時間
[6] [352] ランプ 2 立ち下がり時間
[5] [351] ランプ 2 立ち上がり時間
[2] [303] 最大速度指令信号
[3] [341] ランプ 1 立ち上がり時間
[4] [342] ランプ 1 立ち下がり時間
[9] [412] モーター速度下限 [Hz]
[10] [414] モーター速度上限 [Hz]
ス・コントロール
[12] [676] 端子 45 出力バス・コントロー
[11] [590] ディジタルおよびリレー・バ
[15] FC ポート CTW
[16] FC ポート REF
[13] [696] 端子 42 出力バス・コントロー
[2] [1501] 運転時間
[0] なし
[1] [1500] 動作時間
[3] [1502] KWh カウンター
8-43 PCD 読み出し構成
[7] [1603] 状態メッセージ文
[8] [1605] 主電源実効値 [%]
[6] [1602] 速度指令信号 %
[4] [1600] コントロール・メッセージ文
[5] [1601] 速度指令信号 [単位]
[12] [1612] モーター電圧
[13] [1613] 周波数
[11] [1611] 出力 [hp]
[14] [1614] モーター電流
[9] [1609] カスタム読み出し
[10] [1610] 電力 [KW]
[15] [1615] 周波数 [%]
[16] [1616] トルク [Nm]
[17] [1618] モーター熱
[18] [1630] 直流リンク電圧
[19] [1634] ヒートシンク温度
[20] [1635] インバーター熱
[21] [1638] SL コントローラー状態
MG07A540 Danfoss A/S © 08/2018 All rights reserved. 77

付属資料
VLT® Midi Drive FC 280
8 - 32 *16
[3425]PCD 5 アプリケーション用読み出し
[3426]PCD 6 アプリケーション用読み出し
[3427]PCD 7 アプリケーション用読み出し
[3428]PCD 8 アプリケーション用読み出し
[3429]PCD 9 アプリケーション用読み出し
[3430]PCD 10 アプリケーション用読み出し
[3450]実際の位置
[3456]トラック・エラー
12-23 プロセス・データ構成書き込みサイズ
12-24 プロセス・データ構成読み出しサイズ
[1610]電力 [KW]
[1603]状態メッセージ文
[1605]主電源実効値 [%]
[1609]カスタム読み出し
[0] なし
[1500]動作時間
[1501]運転時間
[1602]速度指令信号 [%]
[1502]KWh カウンター
[1600]コントロール・メッセージ文
[1601]速度指令信号 [単位]
8 - 32 *16
12-28 データ値の保存
*[0] オフ
[2] 全ての設定を保存
12-29 常に保存
[1612]モーター電圧
[1613]周波数
[1614]モーター電流
[1611]出力 [hp]
[1615]周波数 [%]
12-3* イーサネット/IP
12-30 警告パラメーター
*[0] オフ
[1] オン
[1617]速度 [RPM]
[1618]モーター熱
[1620]モーター角
[1616]トルク [Nm]
0 - 2147483647 *0
12-31 ネット速度指令信号
*[0] オフ
[1] オン
12-32 ネット・コントロール
*[0] オフ
[1622]トルク [%]
[1630]直流リンク電圧
[1633]ブレーキ・エネルギー/2 分
[1634]ヒートシンク温度
[1635]インバーター熱
[1638]SL コントローラー状態
0 - 65535 *サイズによる
0 - 65535 *サイズによる
12-35 EDS パラメーター
12-34 CIP 製品コード
[1] オン
12-33 CIP レビジョン
[1653]ディジポテンショ速信
[1657]フィードバック [RPM]
[1652]フィードバック [単位]
[1660]ディジタル入力
[1639]コントロール・カード温度
[1650]外部速度指令信号
0 - 65535 *0
0 - 0 *0
12-38 COS フィルター
12-37 COS 抑止タイマー
[1663]端子 54 設定
[1664]アナログ入力 54
[1661]端子 53 設定
[1662]アナログ入力 53
0 - 65535 *0
1 - 239 *1
12-6* イーサネット PowerLink
12-60 ノード ID
12-62 SDO タイムアウト
[1669]パルス出力 27 [Hz]
[1666]ディジタル出力
[1667]パルス入力 29 [Hz]
[1668]パルス入力 33 [Hz]
[1665]アナログ出力 42 [mA]
0 - 2000000.000 ms *5000.000 ms
0 - 2000000000 ms *30000 ms
[1671]デフォルト設定
0 - 2000000000 *15
12-66 閾値
12-63 基本的なイーサネット・タイムアウト
[1672]カウンター A
12-67 スレッショルドレベル・カウンター
[1673]カウンター B
[1674]正確な 停止カウンター
[1684]通信 オプション STW
[1685]FC ポート CTW 1
0 - 4294967295 *0
[1690]警報メッセージ文
0 - 4294967295 *0
0 - 2147483647 *0
12-69 イーサネット PowerLink ステータス
12-68 累積カウンター
[1691]警報メッセージ文 2
12-8* 他のイーサネットサービス
12-80 FTP サーバー
[1695]拡張 状態メッセージ文 2
[1697]警報メッセージ文 3
[1694]拡張 状態メッセージ文
[1693]警告メッセージ文 2
[1692]警告メッセージ文
*[0] Disabled (無効)
[1] 有効
12-81 HTTP サーバー
*[0] Disabled (無効)
[1] 有効
[1698]警告メッセージ文 3
[3421]PCD 1 アプリケーション用読み出し
[3422]PCD 2 アプリケーション用読み出し
[3423]PCD 3 アプリケーション用読み出し
[3424]PCD 4 アプリケーション用読み出し
1010
0 - 2147483647 *0
0 - 2147483647 *0
0 - 255 *サイズによる
ック 値
ック 値
トロール
ック 値
ック 値
[0] オフ
*[1] オン
12-13 リンク速度
*[0] なし
[1] 10 Mbps
0 - 65535 *0
10-** CAN フィールドバス
10-0* 共通設定
10-01 ボーレート選択
[16] 10 Kbps
[0] 9,6 kbit/s
[1] 19,2 kbit/s
[2] 93,75 kbit/s
[3] 187,5 kbit/s
[4] 500 kbit/s
[2] 100 Mbps
12-14 リンク・デュープレックス
[0] ハーフデュープレ
*[1] フルデュープレ
12-18 管理者 MAC
[17] 20 Kbps
[18] 50 Kbps
*[20] 125 Kbps
[21] 250 Kbps
[22] 500 Kbps
[6] 1500 kbit/s
[7] 3000 kbit/s
[8] 6000 kbit/s
[9] 12000 kbit/s
[10] 31,25 kbit/s
12-19 管理者 IP アドレス
[23] 800 Kbps
[24] 1000 Kbps
10-02 ノード ID
[11] 45,45 kbit/s
*[255]ボーレート発見不可能
9-64 デバイス識別
[0] なし
12-2* プロセス・データ
12-20 コントロール・インスタンス
1 - 127 *127
10-05 読み出し伝送エラー・カウンター
0 - 0 *0
9-65 プロファイル番号
[302] 最小速度指令信号
12-21 プロセス・データ構成書き込み
0 - 255 *0
0 - 255 *0
10-06 読み出し受信エラー・カウンター
10-3* パラメーター・アクセス
0 - 0 *0
0 - 65535 *0
9-67 コントロール・メッセージ文 1
9-68 状態メッセージ文 1
[352] ランプ 2 立ち下がり時間
[380] ジョグ・ランプ時間
[351] ランプ 2 立ち上がり時間
[342] ランプ 1 立ち下がり時間
[303] 最大速度指令信号
[312] 増加/スローダウン値
[341] ランプ 1 立ち上がり時間
10-31 データ値の保存
*[0] オフ
[2] 全ての設定を保存
[3] 編集設定を保存
10-33 常に保存
*[0] オフ
[1] オン
0 - 65535 *0
9-70 設定の編集
[1] 設定 1
[2] 設定 2
[3] 設定 3
[4] 設定 4
*[9] アクティブ設定
[381] クイック停止ランプ時間
[412] モーター速度下限 [Hz]
[414] モーター速度上限 [Hz]
[416] トルク制限モーター・モード
12-** イーサネット
12-0* IP 設定
12-00 IP アドレス割当
[0] マニュアル
9-71 プロフィバス・データ値保存
*[0] オフ
[1] 全ての設定を保存
9-72 ProfibusDriveReset
[558] 端子 33 高速度指令信号/フィードバ
[417] トルク制限ジェネレーター・モード
[553] 端子 29 高速度指令信号/フィードバ
[1] DHCP
[2] BOOTP
*[10] DCP
[20] ノード ID から
12-01 IP アドレス
*[0] アクションなし
[1] 電源投入リセット
[2] 電源投入リセット準備
[3] 通信オプションリセット
9-75 DO 識別
[590] ディジタルおよびリレー・バス・コン
0 - 4294967295 *0
0 - 4294967295 *0
12-03 デフォルト・ゲートウェイ
12-02 サブネット・マスク
0 - 9999 *0
0 - 65535 *0
9-80 定義済みパラメーター(1)
9-81 定義済みパラメーター(2)
[696] 端子 42 出力バス・コントロール
0 - 2147483647 *0
0 - 4294967295 *0
12-05 リース終了
12-04 DHCP サーバー
0 - 9999 *0
0 - 9999 *0
9-83 定義済みパラメーター(4)
9-82 定義済みパラメーター(3)
[625] 端子 54 高速度指令信号/フィードバ
[593] パルス出力 27 バス・コントロール
[615] 端子 53 高速度指令信号/フィードバ
[3401]PCD 1 アプリケーション用書き込み
[3402]PCD 2 アプリケーション用書き込み
[3403]PCD 3 アプリケーション用書き込み
[1682]フィールドバス REF 1
[891] バス・ジョグ 2 速度
[1680]フィールドバス CTW 1
[748] 速度フィード・フォワード
[890] バス・ジョグ 1 速度
1 - 48 *0
0 - 4294967295 *0
0 - 4294967295 *0
12-06 ネームサーバー
0 - 9999 *0
0 - 9999 *0
9-84 定義済みパラメーター(5)
1 - 48 *0
12-07 ドメイン名称
12-08 ホスト名称
12-09 物理アドレス
0 - 9999 *0
0 - 9999 *0
9-85 定義済みパラメーター (6)
9-90 変更済みパラメーター(1)
9-91 変更済みパラメーター(2)
[3404]PCD 4 アプリケーション用書き込み
[3405]PCD 5 アプリケーション用書き込み
[3406]PCD 6 アプリケーション用書き込み
[3407]PCD 7 アプリケーション用書き込み
0 - 17 *0
12-1* イーサネットリンクパラメーター
12-10 リンク状態
*[0] リンクなし
0 - 9999 *0
0 - 9999 *0
9-92 変更済みパラメーター(3)
9-93 変更済みパラメーター(4)
12-22 プロセス・データ構成読み出し
[3408]PCD 8 アプリケーション用書き込み
[3409]PCD 9 アプリケーション用書き込み
[3410]PCD 10 アプリケーション用書き込み
0 - 0 *サイズによる
[1] リンク
12-11 リンク継続時間
12-12 自動ネゴシエーション
0 - 9999 *0
0 - 9999 *0
9-94 変更済みパラメーター(5)
9-99 プロフィバスレビジョンカウンター
78 Danfoss A/S © 08/2018 All rights reserved. MG07A540

付属資料 操作ガイド
[2] 設定 1 を選択
[3] 設定 2 を選択
[35] ディジタル入力 DI27
[36] ディジタル入力 DI29
[40] ドライブ停止
[39] スタート・コマンド
[33] ディジタル入力 DI18
[34] ディジタル入力 DI19
[32] SL タイムアウト 2
[30] SL タイムアウト 0
[31] SL タイムアウト 1
[42] 自動リセット・トリップ
[50] コンパレーター 4
[51] コンパレーター 5
[60] 論理規則 4
[72] SL タイムアウト 5
[61] 論理規則 5
[70] SL タイムアウト 3
*[0] Disabled (無効)
[74] SL タイムアウト 7
[83] 破損ベルト
13-52 SL コントローラー・アクション
[73] SL タイムアウト 6
[71] SL タイムアウト 4
[4] 設定 3 を選択
[1] アクションなし
[5] 設定 4 を選択
[10] プリセット速度指令信号 0 を選択
[11] プリセット速度指令信号 1 を選択
[12] プリセット速度指令信号 2 を選択
[13] プリセット速度指令信号 3 を選択
[14] プリセット速度指令信号 4 を選択
[15] プリセット速度指令信号 5 を選択
[16] プリセット速度指令信号 6 を選択
[17] プリセット速度指令信号 7 を選択
[18] ランプ 1 を選択
[22] 運転
[19] ランプ 2 を選択
[23] 逆転運転
[24] 停止
[25] クイック停止
[28] 出力凍結
[29] タイマー 0 スタート
[26] 直流ブレーキ
[30] タイマー 1 スタート
[27] フリーラン
[33] ディジタル出 B 低設定
[31] タイマー 2 スタート
[32] デジ出 A 低設定
[35] ディジタル出 D 低設定
[34] ディジタル出 C 低設定
[38] ディジタル出 A 高設定
[39] ディジタル出 B 高設定
[41] ディジタル出 D 高設定
[40] ディジタル出 C 高設定
[70] タイマー 3 スタート
[60] カウンター A リセット
[61] カウンター B リセット
[71] タイマー 4 スタート
13-41 と同じ選択
13-43 論理規則演算子 2
13-44 論理規則ブール 3
13-42 と同じ選択
13-5* 状態
13-51 SL コントローラー・イベント
*[0] 偽
[1] 真
[2] 運転中
[3] 範囲内
[4] オン速度指令信号
[7] 電流範囲外
[8] 低下 I 低
[9] 超過 I 高
[16] 熱警告
[17] 主電源範囲外
[18] 逆転
[19] 警告
[20] 警報 (トリップ)
[21] 警報 (トリップ・ロック)
[22] コンパレーター 0
[23] コンパレーター 1
[27] 論理規則 1
[28] 論理規則 2
[25] コンパレーター 3
[24] コンパレーター 2
[29] 論理規則 3
[26] 論理規則 0
13-40 と同じ選択
[1] AND
[2] OR
[3] AND NOT
[4] OR NOT
[5] NOT AND
[6] NOT OR
[7] NOT AND NOT
[8] NOT OR NOT
[32] SL タイムアウト 2
[33] ディジタル入力 DI18
[34] ディジタル入力 DI19
[31] SL タイムアウト 1
[35] ディジタル入力 DI27
[36] ディジタル入力 DI29
[39] スタート・コマンド
[42] 自動リセット・トリップ
[50] コンパレーター 4
[51] コンパレーター 5
[40] ドライブ停止
[71] SL タイムアウト 4
[60] 論理規則 4
[61] 論理規則 5
[70] SL タイムアウト 3
[83] 破損ベルト
13-41 論理規則演算子 1
*[0] Disabled (無効)
[74] SL タイムアウト 7
[72] SL タイムアウト 5
[73] SL タイムアウト 6
13-42 論理規則ブール 2
10 10
-9999 - 9999 *0
0 - 3600 秒 *0 秒
[74] SL タイムアウト 7
[73] SL タイムアウト 6
[71] SL タイムアウト 4
[72] SL タイムアウト 5
[70] SL タイムアウト 3
[1] SLC のリセット
[83] 破損ベルト
13-03 SLC のリセット
*[0] SLC をリセットしない
13-1* コンパレーター
13-10 コンパレーター・オペランド
*[0] Disabled (無効)
[1] 速度指令信号 %
[2] フィードバック%
[3] モーター速度
[7] モーター電圧
[12] アナログ入力 AI53
[4] モーター電流
[13] アナログ入力 AI54
[6] モーター電力
[18] パルス入力 FI29
[20] 警報番号
[19] パルス入力 FI33
[2] より大きい (>)
13-11 コンパレーター演算子
[0] より小さい (<)
[30] カウンター A
*[1] ほぼ等しい (~)
[31] カウンター B
13-12 コンパレーター値
13-2* タイマー
13-20 SL コントローラー・タイマー
13-4* 論理規則
13-40 論理規則ブール 1
[29] 論理規則 3
[21] 警報 (トリップ・ロック)
[24] コンパレーター 2
[18] 逆転
[19] 警告
[7] 電流範囲外
[8] 低下 I 低
[9] 超過 I 高
*[0] 偽
[1] 真
[2] 運転中
[3] 範囲内
[4] オン速度指令信号
[16] 熱警告
[20] 警報 (トリップ)
[17] 主電源範囲外
[26] 論理規則 0
[25] コンパレーター 3
[22] コンパレーター 0
[23] コンパレーター 1
[30] SL タイムアウト 0
[27] 論理規則 1
[28] 論理規則 2
[51] コンパレーター 5
[60] 論理規則 4
[20] 警報 (トリップ)
[21] 警報 (トリップ・ロック)
[22] コンパレーター 0
[23] コンパレーター 1
12-82 SMTP サービス
*[0] Disabled (無効)
[1] 有効
12-83 SNMP エージェント
[27] 論理規則 1
[28] 論理規則 2
[29] 論理規則 3
[33] ディジタル入力 DI18
[25] コンパレーター 3
[26] 論理規則 0
[24] コンパレーター 2
[0] Disabled (無効)
*[1] 有効
12-84 アドレスコンフリクト検出
[0] Disabled (無効)
[34] ディジタル入力 DI19
0 - 65535 *4000
*[1] 有効
12-89 透過ソケットチャンネル・ポート
12-9* 高度なイーサネットサービス
[40] ドライブ停止
[42] 自動リセット・トリップ
[36] ディジタル入力 DI29
*[39] スタート・コマンド
[35] ディジタル入力 DI27
12-90 ケーブル診断
*[0] Disabled (無効)
[1] 有効
12-91 オート・クロスオーバー
[0] Disabled (無効)
[60] 論理規則 4
[61] 論理規則 5
[50] コンパレーター 4
[51] コンパレーター 5
*[1] 有効
12-92 IGMP スヌーピング
[0] Disabled (無効)
*[1] 有効
[83] 破損ベルト
13-02 イベント停止
[0] 偽
[1] 真
[2] 運転中
[3] 範囲内
0 - 65535 *0
12-93 ケーブルエラー長
0 - 3600 *120
-1 - 20 % *-1 %
12-95 アイドル時間タイムアウト
12-94 同報ストーム保護
[7] 電流範囲外
[8] 低下 I 低
[9] 超過 I 高
[16] 熱警告
[1] ミラー・ポート1~2
[2] ミラー・ポート2~1
[17] 主電源範囲外
[11] ポート 2 無効
[10] ポート 1 無効
[4] オン速度指令信号
12-96 ポート設定
[0] 通常
[18] 逆転
[254] ミラー内部 ポートから 1
[19] 警告
[255] ミラー内部 ポートから 2
[21] 警報 (トリップ・ロック)
[22] コンパレーター 0
[23] コンパレーター 1
[20] 警報 (トリップ)
0 - 4294967295 *4000
0 - 63 *サイズによる
12-97 QoS 優先度
12-98 インターフェース・カウンター
[24] コンパレーター 2
[25] コンパレーター 3
[26] 論理規則 0
[27] 論理規則 1
[28] 論理規則 2
[29] 論理規則 3
[30] SL タイムアウト 0
0 - 4294967295 *0
12-99 メディアカウンター
13-** スマート論理
13-0* SLC 設定
13-00 SL コントローラー・モード
*[0] オフ
[1] オン
[32] SL タイムアウト 2
[33] ディジタル入力 DI18
[34] ディジタル入力 DI19
[31] SL タイムアウト 1
13-01 イベント開始
[35] ディジタル入力 DI27
[0] 偽
[1] 真
[2] 運転中
[3] 範囲内
[36] ディジタル入力 DI29
[39] スタート・コマンド
*[40] ドライブ停止
[42] 自動リセット・トリップ
[4] オン速度指令信号
[7] 電流範囲外
[8] 低下 I 低
[9] 超過 I 高
[61] 論理規則 5
[50] コンパレーター 4
[16] 熱警告
[17] 主電源範囲外
[18] 逆転
[19] 警告
MG07A540 Danfoss A/S © 08/2018 All rights reserved. 79

付属資料
VLT® Midi Drive FC 280
*0 カスタム読み出しユニット
0 - 9999 カスタム読み出しユニット
16-1* モーター状態
16-10 電力 [KW]
0 - 20 *0
0 - 0 *0
15-42 電圧
15-43 ソフトウェア・バージョン
0 - 1000 kW *0 kW
15-44 注文済みタイプ・コード
0 - 65535 V *0 V
0 - 1000 hp *0 hp
16-12 モーター電圧
16-11 出力 [hp]
0 - 41 *0
0 - 40 *0
15-45 実際タイプ・コード文字列
15-46 ドライブの注文番号
0 - 6553.5 Hz *0 Hz
16-14 モーター電流
16-13 周波数
0 - 0 *0
0 - 0 *0
15-48 LCP ID 番号
0 - 655.35 A *0 A
16-15 周波数 [%]
0 - 0 *0
15-49 SW ID コントロール・カード
0 - 6553.5 % *0 %
-30000 - 30000 Nm *0 Nm
16-17 速度 [RPM]
16-16 トルク [Nm]
0 - 0 *0
0 - 0 *0
15-50 SW ID 電力カード
15-51 ドライブ・シリアル番号
0 - 100 % *0 %
-30000 - 30000 RPM *0 RPM
16-18 モーター熱
0 - 0 *0
15-52 OEM 情報
15-53 電力カード・シリアル番号
0 - 65535 *0
-200 - 200 % *0 %
16-20 モーター角
16-22 トルク [%]
0 - 0 *0
0 - 255 *0
15-57 ファイル・バージョン
15-59 ファイル名
0 - 10000 kW *0 kW
0 - 65535 V *0 V
16-33 ブレーキ・エネルギー/2 分
16-3* ドライブ状態
16-30 直流リンク電圧
0 - 16 *0
0 - 30 *サイズによる
15-6* オプション識別
15-60 オプション実装済み
15-61 オプション SW バージョン
0 - 655.35 A *0 A
0 - 255 % *0 %
-128 - 127 °C *0 °C
16-36 インバーター 定格 電流
16-35 インバーター熱
16-34 ヒートシンク温度
0 - 20 *サイズによる
0 - 20 *0
0 - 30 *0
15-70 スロット A のオプション
15-71 スロット A オプション SW バージョン
15-9* パラメーター情報
0 - 65535 °C *0 °C
0 - 20 *0
0 - 655.35 A *0 A
16-39 コントロール・カード温度
16-38 SL コントローラー状態
16-37 インバーター 最大電流
0 - 2000 *0
15-92 定義済みパラメーター
15-97 アプリケーション・タイプ
16-5* 指令信号とフィードバック
16-50 外部速度指令信号
0 - 56 *0
0 - 0xFFFFFFFF *0
0 - 9999 *0
15-99 パラメーター・メタデータ
15-98 ドライブ識別
プロセス制御単位
-4999 - 4999 プロセス制御単位 *0
-200 - 200 % *0 %
16-52 フィードバック [単位]
0 - 65535 *0
16-** データ読み出し
16-0* 一般状態
16-00 コントロール・メッセージ文
-30000 - 30000 RPM *0 RPM
-200 - 200 *0
16-53 ディジポテンショ速信
16-57 フィードバック [RPM]
ユニット *0 基準フィードバック・ユ
-4999 - 4999 基準フィードバック・
16-01 速度指令信号 [単位]
16-6* 入力&出力
16-60 ディジタル入力
-200 - 200 % *0 %
ニット
16-02 速度指令信号 [%]
0 - 4095 *0
16-61 端子 53 設定
0 - 65535 *0
16-03 状態メッセージ文
[6] ディジタル入力
16-62 アナログ入力 53
[1] 電圧モード
-200 - 200 % *0 %
16-09 カスタム読み出し
16-05 主電源実効値 [%]
1010
0 - 65535 *0
20 - 1000 Hz *サイズによる
0 - 2147483647 *0
0 - 65535 *0
0 - 0x7fffffff. h *0 h
0 - 2147483647 kWh *0 kWh
0 - 0x7fffffff. h *0 h
0 - 65535 *0
0 - 255 *0
-32767 - 32767 *0
0 - 0 *0
0 - 20 *0
[5] 5.0 kHz
[6] 6.0 kHz
[7] 8.0 kHz
[11] 自動リセット x 15
[12] 自動リセット × 20
[10] 自動リセット x 10
[72] タイマー 5 スタート
[73] タイマー 6 スタート
[74] タイマー 7 スタート
[8] 10.0 kHz
[9] 12.0 kHz
[10] 16.0 kHz
14-64 無駄時間補償ゼロ電流レベル
*[0] Disabled (無効)
[1] 有効
14-65 速度定格低減、無駄時間補償
0 - 600 秒 *10 秒
[13] 無限自動リセット
[14] 上昇時にリセット
14-21 自動再スタート時間
14-** 特殊関数
14-0* インバーター・スイッチ
14-01 スイッチ周波数
[0] Ran3
14-24 電流制限時のトリップ遅延
14-22 動作モード
*[0] 通常動作
[2] 初期化
[1] Ran5
[2] 2.0 kHz
[3] 3.0 kHz
[4] 4.0 kHz
14-7* 互換性
14-70 互換性の選択
*[0] No Function (機能なし)
[12] VLT2800 3M
[13] VLT2800 3M incl. MAV
[14] VLT2800 12M
[15] VLT2800 12M incl. MAV
14-8* オプション
14-88 オプションデータ保存
14-89 オプション検出
0 - 60 秒 *60 秒
0 - 60 秒 *60 秒
14-28 生産設定
*[0] アクションなし
[1] サービス・リセット
[3] ソフトウェア・リセット
14-25 トルク制限時のトリップ遅延
14-27 インバーター不具合時のアクション
[0] トリップ
*[1] 警告
[5] 5.0 kHz
[6] 6.0 kHz
[7] 8.0 kHz
[8] 10.0 kHz
[9] 12.0 kHz
[10] 16.0 kHz
14-03 過変調
14-29 サービス・コード
0 - 100 *サイズによる
[0] オフ
*[1] オン
14-07 無駄時間補償レベル
*[0] オプション構成の保護
[1] オプション変更の有効化
14-9* デフォルト設定
14-90 不具合レベル
*[3] トリップ・ロック
[4] 遅延リセットによるトリップ
[5] フライスタート
15-** ドライブ情報
15-0* 動作データ
15-00 動作時間
15-01 運転時間
0 - 0xFFFFFFFF *0
0 - 500 % *100 %
14-3* 電流制限コントローラー
14-30 電流制限コントローラー、比例ゲイン
0 - 100 % *サイズによる
0 - 100 % *サイズによる
14-09 無駄時間バイアス電流レベル
14-08 減衰利得係数
時間
1 - 100 ms *5 ms
0.002 - 2 秒 *0.020 秒
14-32 電流制限コントローラー、フィルター
14-31 電流制限コントローラー、積分時間
14-1* 主電源オン/オフ
14-10 主電源異常
*[0] 機能なし
[1] Ctrl. 立ち下がり
40 - 90 % *66 %
14-4* エネルギー最適化
14-40 VT レベル
[4] 速度バックアップ
[5] 速度バックアップ、トリップ
[3] フリーラン
[2] コントロール 立ち下がり、トリップ
15-03 電源投入回数
15-02 KWh カウンター
40 - 75 % *66 %
14-41 AEO 最小磁化
[6] 警報
[7] 速度バックアップ、トリップ(リカバ
15-04 過熱回数
0 - 200 % *100 %
14-44 IPM 用の d 軸電流最適化
14-5* 環境
14-51 直流リンク電圧補償
100 - 800 V *サイズによる
リー付き)
14-12 主不均衡に応答
14-11 主電源不具合電圧レベル
15-06 kWh カウンターのリセット
*[0] リセットしない
15-05 過電圧回数
[0] オフ
*[1] オン
14-52 ファン・コントロール
[5] Constant-on モード
[6] Constant-off モード
バリー・レベル
[1] 警告
[2] Disabled (無効)
14-15 動的 バックアップ・トリップ・リカ
*[0] トリップ
*[0] リセットしない
[1] カウンターのリセット
[1] カウンターのリセット
15-07 稼動時間カウンターのリセット
15-3* Alarm Log(警報ログ)
15-30 警報ログ: エラー・コード
15-31 InternalFaultReason
15-4* ドライブ識別
15-40 FC タイプ
15-41 電力セクション
モード
[7] On-when-Inverter-is-on-else-off
*[8] 可変速度モード
14-55 出力フィルター
*[0] フィルターなし
[1] 正弦波フィルター
14-6* 温度自動低減
14-61 インバーター過負荷時の機能
*[0] トリップ
[1] 定格低減
14-63 最小スイッチ周波数
*[2] 2.0 kHz
[3] 3.0 kHz
0 - 60000.000 基準フィードバッ
ク・ユニット *サイズによる
[7] 自動リセット × 7
[8] 自動リセット × 8
[6] 自動リセット × 6
[5] 自動リセット × 5
[4] 自動リセット × 4
14-2* リセット機能
14-20 リセット・モード
[3] 自動リセット × 3
*[0] 手動リセット
[1] 自動リセット x 1
[2] 自動リセット × 2
[4] 4.0 kHz
[9] 自動リセット × 9
80 Danfoss A/S © 08/2018 All rights reserved. MG07A540

付属資料 操作ガイド
0 - 65535 *0
0 - 65535 *0
0 - 65535 *0
0 - 65535 *0
0 - 65535 *0
34-05 PCD 5 アプリケーション用書き込み
34-04 PCD 4 アプリケーション用書き込み
34-03 PCD 3 アプリケーション用書き込み
[1] MM を消去
31-47 時間制限機能
*[0] 機能なし
*[0] Disabled (無効)
[2] 読み取り書き込みに MM を設定
31-43 Erase_MM
34-07 PCD 7 アプリケーション用書き込み
34-06 PCD 6 アプリケーション用書き込み
0 - 720 h *720 h
32-** 動作コントロール基本設定
[1] 有効
31-48 残り時間の時間制限
0 - 600 秒 *10 秒
0 - 600 秒 *10 秒
0 - 65535 *0
34-10 PCD 10 アプリケーション用書き込み
34-09 PCD 9 アプリケーション用書き込み
34-08 PCD 8 アプリケーション用書き込み
1 - 65535 *1
1 - 65535 *1
32-1* ユーザーユニット
32-11 ユーザユニットデノミネータ
32-12 ユーザユニットニューメレータ
32-6* PID
0 - 400.0 *10
-100 - 100 % *0 %
0 - 100 % *10 %
ドバック偏差
0 - 65535 *0
34-2* PCD 読み出しパラメーター
34-21 PCD 1 アプリケーション用読み出し
1 - 2147483648 *2000000
32-67 最大許容位置エラー
32-8* 速度 & 加速
32-80 最大許容速度
0 - 400.0 *0
0 - 600 秒 *60 秒
0 - 65535 *0
0 - 65535 *0
0 - 65535 *0
0 - 65535 *0
0 - 65535 *0
0 - 65535 *0
0 - 65535 *0
0 - 65535 *0
34-25 PCD 5 アプリケーション用読み出し
34-24 PCD 4 アプリケーション用読み出し
34-23 PCD 3 アプリケーション用読み出し
34-22 PCD 2 アプリケーション用読み出し
プ
50 - 3600000 ms *1000 ms
1 - 30000 RPM *1500 RPM
32-81 動作コントロール・クイック停止ラン
33-** 動作コントロール詳細 設定
33-0* ホーム・モーション
33-00 ホーミング・モード
0 - 3600 秒 *0 秒
0 - 3600 秒 *0 秒
34-27 PCD 7 アプリケーション用読み出し
34-26 PCD 6 アプリケーション用読み出し
*[0] フォースなし
[1] 強制手動ホーミング
[2] 強制自動ホーミング
33-01 ホーム・オフセット
5 - 100 % *10 %
0 - 65535 *0
34-30 PCD 10 アプリケーション用読み出し
34-29 PCD 9 アプリケーション用読み出し
34-28 PCD 8 アプリケーション用読み出し
-1073741824 - 1073741824 *0
-1500 - 1500 RPM *100 RPM
1 - 1000 ms *10 ms
33-03 ホーミング速度
33-02 ホーム・ランプ時間
0 - 600 秒 *10 秒
33-04 ホーミング動作
0 - 60 秒 *サイズによる
-1073741824 - 1073741824 *0
34-5* プロセス・データ
34-50 実際の位置
*[1] インデックス番号を逆転
[3] インデックス番号を正転
33-4* 制限取扱い
33-41 負ソフトウェア・リミット
0 - 200.0 % *サイズによる
0 - 65535 *0
0 - 65535 *0
0 - 65535 *0
-2147483647 - 2147483647 *0
34-56 トラック・エラー
37-** アプリケーション設定
37-0* アプリケーション・モード
37-00 アプリケーション・モード
*[0] ドライブモード
-1073741824 - 1073741824 *500000
-1073741824 - 1073741824 *-500000
33-43 負ソフトウェア・リミット・アクティブ*[0] 非アクティブ
33-42 正ソフトウェア・リミット
0.05 - 1 秒 *0.10 秒
-1073741824 - 1073741824 *0
[2] 位置コントロール
37-1* 位置コントロール
37-01 位置 フィードバック・ソース
*[0] 24V エンコーダー
37-02 位置 目標
[1] アクティブ
33-44 正ソフトウェア・リミット・アクティブ*[0] 非アクティブ
[1] アクティブ
33-47 目標位置ウィンドウ
だけ可能)
け可能)
1 - 30000 RPM *100 RPM
*[0] 絶対
37-03 位置 タイプ
1 - 10000 *512
34-** 動作コントロール・データ読み出し
可能
37-05 位置 立ち上がり時間
[1] 相対
37-04 位置 速度
0 - 65535 *0
34-0* PCD 書き込みパラメーター
34-01 PCD 1 アプリケーション用書き込み
34-02 PCD 2 アプリケーション用書き込み
0 - 2 *0
10 10
22-02 スリープモード CL コントロール・モード*[0] 通常
-200 - 200 % *0 %
18-91 プロセス PID 出力
18-90 プロセス PID エラー
0 - 20 *1
16-63 端子 54 設定
[0] 電流モード
[1] 簡易
22-4* スリープ・モード
22-40 最小稼働時間
-200 - 200 % *0 %
-200 - 200 % *0 %
18-93 プロセス PID ゲインスケール出力
18-92 プロセス PID クランプ出力
0 - 20 *1
16-65 アナログ出力 42 [mA]
[1] 電圧モード
16-64 アナログ入力 54
22-43 ウェイクアップ速度 [Hz]
22-41 最小スリープ時間
-200 - 200 % *0 %
0 - 20 mA *0 mA
22-44 ウェイクアップ速度指令信号/フィー
21-** 拡張 閉ループ
21-0* 拡張 CL 自動調整
21-09 拡張 PID 有効
*[0] Disabled (無効)
[1] 拡張 CL1 PID 有効
21-1* 拡張 CL 1 速度指令信号/フィードバ
0 - 130000 *0
0 - 130000 *0
0 - 63 *0
16-67 パルス入力 29 [Hz]
16-68 パルス入力 33 [Hz]
16-66 ディジタル出力
22-47 スリープ速度 [Hz]
22-46 最大ブースト時間
22-45 設定値ブースト
-999999.999 - 999999.999 ExtPID1
-999999.999 - 999999.999 ExtPID1
ユニット*0 ExtPID1 ユニット
ック
21-12 拡張 1 最大速度指令信号
21-11 拡張 1 最小速度指令信号
-32768 - 32767 *0
0 - 31 *0
0 - 40000 *0
16-72 カウンター A
16-71 デフォルト設定
16-69 パルス出力 27 [Hz]
22-6* 破損ベルト検出
22-60 破損ベルト機能
[1] アナログ入力 53
0 - 2147483647 *0
[2] アナログ入力 54
[7] 周波数入力 29
16-8* フィールドバス & FC ポート
16-80 フィールドバス CTW 1
*[0] オフ
[8] 周波数入力 33
0 - 65535 *0
22-49 ウェイクアップ遅延時間
22-48 スリープ遅延時間
ユニット *100 ExtPID1 ユニット
21-13 拡張 1 速度指令信号ソース
*[0] 機能なし
-32768 - 32767 *0
16-74 正確な 停止カウンター
16-73 カウンター B
[1] 警告
[2] トリップ
*[0] 機能なし
21-14 拡張 1 フィードバック・ソース
-32768 - 32767 *0
16-82 フィールドバス REF 1
22-62 破損ベルト遅延
22-61 破損ベルト・トルク
[4] 周波数入力 33
[2] アナログ入力 54
[3] 周波数入力 29
[1] アナログ入力 53
0 - 65535 *1084
0 - 65535 *0
16-85 FC ポート CTW 1
16-84 通信 オプション STW
30-** 特別機能
30-2* 高度 調整開始
30-20 高始動トルク時間 [s]
-999999.999 - 999999.999 ExtPID1
ユニット*0 ExtPID1 ユニット
21-15 拡張 1 設定値
-32768 - 32767 *0
16-86 FC ポート REF 1
16-9* 診断読み出し
30-22 回転子拘束保護
*[0] オフ
[1] オン
30-21 高始動トルク電流 [%]
ユニット*0 ExtPID1 ユニット
-999999.999 - 999999.999 ExtPID1
21-17 拡張 1 速度指令信号 [単位]
0 - 0xFFFFFFFFUL *0
16-90 警報メッセージ文
16-91 警報メッセージ文 2
30-23 回転子拘束検知時間 [s]
ユニット*0 ExtPID1 ユニット
-999999.999 - 999999.999 ExtPID1
21-19 拡張 1 出力 [%]
21-18 拡張 1 フィードバック [単位]
0 - 0xFFFFFFFFUL *0
0 - 0xFFFFFFFFUL *0
16-92 警告メッセージ文
16-93 警告メッセージ文 2
31-** 特殊オプション
31-4* メモリモジュール
31-40 メモリモジュール機能
[0] Disabled (無効)
*[1] Only Allow Download (ダウンロード
*[0] 通常
16-95 拡張 状態メッセージ文 2
[1] 反転
0 - 0xFFFFFFFFUL *0
0 - 10 *0.01
21-21 拡張 1 比例ゲイン
0 - 0xFFFFFFFFUL *0
16-97 警報メッセージ文 3
0 - 100 % *0 %
21-2* 拡張 CL 1 PID
21-20 拡張 1 順転/反転コントロール
0 - 0xFFFFFFFFUL *0
0 - 0xFFFFFFFFUL *0
16-94 拡張 状態メッセージ文
[2] Only Allow Upload (アップロードだ
21-22 拡張 1 積分時間
16-98 警告メッセージ文 3
31-41 MM 情報
[3] ダウンロードとアップロードの両方が
0.01 - 10000 秒 *10000 秒
21-23 拡張 1 微分時間
0 - 4294967295 *0
18-** データ読出 2
31-42 メモリモジュールアクセスの設定
1 - 50 *5
0 - 10 秒 *0 秒
21-24 拡張 1 微分 ゲイン制限
22-** アプリケーション 機能
0 - 0xFFFFFFFFUL *0
18-5* メモリモジュール読み出し
18-51 メモリモジュール警告理由
18-52 メモリモジュール ID
*[0] アクションなし
[1] 読み取り専用に MM を設定
22-0* その他
0 - 0 *0
18-9* PID 読み出し
MG07A540 Danfoss A/S © 08/2018 All rights reserved. 81

付属資料
VLT® Midi Drive FC 280
1010
50 - 100000 ms *5000 ms
50 - 100000 ms *5000 ms
37-07 位置 自動ブレーキ・コントロール
37-06 位置 立ち下り時間
[0] 無効
*[1] 有効化
37-08 位置 保留遅延
0 - 10000 ms *0 ms
0 - 1000 ms *200 ms
0 - 1000 ms *200 ms
37-09 位置 フリーラン遅延
0 - 1073741824 *0
37-10 位置 ブレーキ遅延
37-11 位置 ブレーキ摩耗限界
37-12 位置 PID 反ねじ巻き
[0] 無効
*[1] 有効化
37-13 位置 PID 出力クランプ
1 - 10000 *1000
37-14 位置 コントロール ソース
*[0] DI
*[0] ブロックなし
[1] 逆転をブロック
[1] フィールドバス
[2] 正転をブロック
37-15 位置 方向ブロック
*[0] Fault なし
[1] ホーミング必要
[2] 正 HW 制限
[3] 負 HW 制限
[1] 直接ブレーキ
37-18 位置 コントロール不具合理由
37-17 位置 コントロール不具合動作
*[0] 立ち下がり&ブレーキ
[4] 正 SW 制限
[9] PID エラー大きすぎ
[5] 負 SW 制限
[12] 改訂操作
[7] ブレーキ摩耗限界
[8] クイック停止
0 - 255 *0
[13] 正転 運転
[20] ホームの位置を見つけれません
37-19 位置 新インデックス
82 Danfoss A/S © 08/2018 All rights reserved. MG07A540

インデックス 操作ガイド
インデックス
A
AC 主電源.................................... 5, 18
AC 入力...................................... 5, 18
[
[Auto on]................................... 31, 35
E
EMC............................................. 61
EMC 対策設置.................................... 13
F
Fault
不具合ログ.................................... 30
[
[Hand on]....................................... 31
I
IEC 61800-3................................. 18, 61
P
PELV........................................ 47, 64
オ
オプション装置.................................. 24
カ
カスタマリレー.................................. 42
ク
クイック・メニュー.......................... 26, 30
ケ
ケーブル・サイズ................................ 17
ケーブルルーティング(配線)...................... 23
ケーブル長...................................... 62
コ
コントロール・カード
+10 V 直流出力................................ 64
RS485 シリアル通信............................ 64
USB シリアル通信.............................. 64
性能.......................................... 64
サ
サービス........................................ 49
サーマル保護..................................... 6
サーミスター.................................... 47
R
RFI フィルター.................................. 18
S
SIL2............................................. 6
SIL2 の SILCL..................................... 6
STO
メンテナンス.................................. 43
手動再スタート............................ 41, 42
技術データ.................................... 44
無効化........................................ 41
自動再スタート............................ 41, 42
試運転試験.................................... 42
起動.......................................... 41
STO の基準およびコンプライアンス................. 6
T
T27 を接続した AMA.............................. 45
エ
エネルギー効率.......................... 58, 59, 60
エネルギー効率クラス............................ 61
エンコーダーの回転.............................. 34
シ
シールド ケーブル............................... 23
システムフィードバック........................... 4
ジ
ジャンパー...................................... 20
シ
シリアル通信
USB シリアル通信.............................. 64
シリアル通信...................... 22, 31, 49, 64
ス
スタートアップ.................................. 32
デ
ディジタル入力.................................. 20
デフォルト設定.............................. 32, 64
ト
トランジエント保護............................... 5
MG07A540 Danfoss A/S © 08/2018 All rights reserved. 83

インデックス
トルク
トルク特性.................................... 61
VLT® Midi Drive FC 280
ナ
ナビゲーション・キー........................ 25, 30
ネ
ネームプレート................................... 9
バ
バースト・トランジエント........................ 14
ワ
ワイヤサイズ.................................... 13
並
並列配置........................................ 10
主
主電源
(L1/N、L2/L、L3).............................. 60
電圧.......................................... 30
電源データ.................................... 58
ヒ
ヒューズ................................ 13, 23, 65
フ
フィードバック.................................. 23
フローティング・デルタ.......................... 18
プ
プログラミング.......................... 20, 30, 31
メ
メイン・メニュー............................ 28, 30
メニュー・キー.............................. 25, 30
メニュー構造.................................... 30
メンテナンス.................................... 49
モ
モーター
データ........................................ 34
モーター・ケーブル........................ 13, 17
モーター・データ.............................. 32
モーター出力.................................. 61
モーター熱保護................................. 6
モーター電力.............................. 13, 30
モーター電流.................................. 30
保護........................................... 4
回転.......................................... 34
状態........................................... 4
電流....................................... 5, 34
リ
リセット............................ 30, 31, 32, 49
リモートコマンド................................. 4
予
予期しない始動............................... 7, 49
交
交流波形......................................... 5
仕
仕様............................................ 22
伝
伝導............................................ 23
使
使用目的......................................... 4
供
供給電圧.................................... 24, 63
保
保存............................................. 9
入
入力
アナログ入力.................................. 62
ディジタル入力................................ 62
パルス入力.................................... 63
入力電力...................................... 13
入力電力配線.................................. 23
入力電圧...................................... 24
端子...................................... 18, 24
電力............................... 5, 18, 23, 24
電流.......................................... 18
ロ
ローカル・コントロール.......................... 31
再
再利用........................................... 6
冷
冷却............................................ 10
84 Danfoss A/S © 08/2018 All rights reserved. MG07A540

インデックス 操作ガイド
冷却用空きスペース.............................. 23
出
出力
アナログ出力.................................. 63
ディジタル出力................................ 63
出力電力配線.................................... 23
出力電流........................................ 63
分
分岐回路の保護.................................. 65
初
初期化
手動手順...................................... 32
手順.......................................... 32
廃
廃棄指示......................................... 6
承
承認と認証....................................... 6
振
振動............................................ 10
接
接地
接地接続...................................... 23
接地線........................................ 13
接地................................ 17, 18, 23, 24
接地デルタ...................................... 18
制
制御
コントロール端子.......................... 31, 53
特性.......................................... 64
配線.................................. 13, 20, 23
力
力率......................................... 5, 23
取
取り付け.................................... 10, 23
吊
吊り下げ方法.................................... 10
周
周囲条件........................................ 61
外
外部コマンド..................................... 5
外部コントローラー............................... 4
安
安全性........................................... 8
定
定格低減........................................ 61
干
干渉隔離........................................ 23
操
操作キー.................................... 25, 30
放
放電時間......................................... 8
数
数値表示........................................ 25
断
断路器.......................................... 24
断面積.......................................... 62
有
有資格技術者..................................... 7
機
機械的ブレーキ CL............................... 20
水
水平設置........................................ 10
漏
漏洩電流..................................... 8, 13
用
用例............................................ 71
略
略語............................................ 71
MG07A540 Danfoss A/S © 08/2018 All rights reserved. 85

インデックス
VLT® Midi Drive FC 280
直
直流電流......................................... 5
空
空きスペース要件................................ 10
端
端子
コントロール端子.......................... 31, 53
出力端子...................................... 24
端子締め付けトルク.............................. 65
等
等電位.......................................... 14
絶
絶縁された主電源................................ 18
背
背版............................................ 10
運
運転コマンド.................................... 35
過
過電流保護...................................... 13
遮
遮断器.......................................... 23
開
開ループ........................................ 64
電
電力接続........................................ 13
電圧レベル...................................... 62
高
高電圧....................................... 7, 24
衝
衝撃............................................ 10
補
補助機器........................................ 23
補助的リソース................................... 4
記
記号............................................ 71
設
設定............................................ 35
設置............................................ 23
設置環境........................................ 10
警
警告および警報リスト............................ 53
警報ログ........................................ 30
負
負荷分散......................................... 7
速
速度指令信号............................ 30, 35, 45
86 Danfoss A/S © 08/2018 All rights reserved. MG07A540

インデックス 操作ガイド
MG07A540 Danfoss A/S © 08/2018 All rights reserved. 87

カタログ、プローシャー、その他の印刷物に万が一間違いが含まれていたとしても、ダンプオス杜はいっさい責任を負いかねますので、ご了承ください。なおダンプオス杜は予告なし
に製品に変更を加える権利を保有しています。既にご注文をいただいている製品に関しでも、注文品の詳細に影響を及ぼさない範囲内で、変更がなされることがあります。 印刷物に
記載されている商標は各社の所有物件です。名称 Danfoss およびダンプオスのロゴタイプはダンプオス杜の商標で、それに関係するすべての権利はダンプオス杜に帰属します。
Danfoss A/S
Ulsnaes 1
DK-6300 Graasten
vlt-drives.danfoss.com
132R0153 MG07A540 08/2018
*MG07A540*
 Loading...
Loading...