

Page 1

ENGINEERING TOMORROW
Οδηγός Προγραμματισμού
Ρυθμιστής στροφών VLT® Midi FC 280
www.DanfossDrives.com
Page 2

Page 3

Περιεχόμενα Οδηγός Προγραμματισμού
Περιεχόμενα
1 Εισαγωγή
1.1 Τρόπος ανάγνωσης του παρόντος Οδηγού προγραμματισμού
1.2 Ορισμοί
1.3 Ηλεκτρική καλωδίωση - Καλώδια σημάτων ελέγχου
2 Ασφάλεια
2.1 Σύμβολα ασφάλειας
2.2 Εξειδικευμένο προσωπικό
2.3 Μέτρα ασφαλείας
3 Προγραμματισμός
3.1 Λειτουργία τοπικού πίνακα ελέγχου
3.1.1 Αριθμητικός τοπικός πίνακας ελέγχου (LCP) 14
3.1.2 Η λειτουργία του δεξιού πλήκτρου στο NLCP 15
3.1.3 Γρήγορο μενού στο NLCP 16
3.1.4 Βασικό μενού στο NLCP 18
3.1.5 Διάταξη GLCP 20
3.1.6 Ρυθμίσεις παραμέτρων 21
3
3
4
8
12
12
12
12
14
14
3.1.7 Αλλαγή ρυθμίσεων παραμέτρων με το GLCP 22
3.1.8 Αποστολή/λήψη δεδομένων προς/από το GLCP 22
3.1.9 Επαναφορά προεπιλεγμένων ρυθμίσεων με το LCP 22
3.2 Βασικός προγραμματισμός
3.2.1 Ρύθμιση ασύγχρονου κινητήρα 23
3.2.2 Ρύθμιση κινητήρα PM σε VVC
3.2.3 Αυτόματη προσαρμογή κινητήρα (AMA) 24
+
4 Περιγραφές παραμέτρων
4.1 Παράμετροι: 0-** Λειτουργία/Οθόνη
4.2 Παράμετροι: 1-** Φορτίο και Κινητήρας
4.3 Παράμετροι: 2-** Φρένα
4.4 Παράμετροι: 3-** Τιμή αναφοράς/Αν.-κάθ.
4.5 Παράμετροι: 4-** Όρια/Προειδοποιήσεις
4.6 Παράμετροι: 5-** Ψηφ.είσοδος/έξοδος
4.7 Παράμετροι: 6-** Αναλ. είσ./έξοδος
4.8 Παράμετροι: 7-** Ελεγκτές
4.9 Παράμετροι: 8-** Επικοινωνίες και Προαιρετικός εξοπλισμός
23
23
26
26
34
45
48
54
58
71
75
80
4.10 Παράμετροι: 9-** PROFIdrive
4.11 Παράμετροι: 10-** Τοπ. δίαυλος CAN
4.12 Παράμετροι: 12-** Ethernet
4.13 Παράμετροι: 13-** Έξυπνος λογικός έλεγχος
MG07C327 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. 1
85
85
85
85
Page 4
Περιεχόμενα
Ρυθμιστής στροφών VLT® Midi FC 280
4.14 Παράμετροι: 14-** Ειδικές λειτουργίες
4.15 Παράμετροι: 15-** Πληρ. ρυθμ. στροφ.
4.16 Παράμετροι: 16-** Ενδείξεις δεδομένων
4.17 Παράμετροι: 18-** Ενδείξεις δεδομένων 2
4.18 Παράμετροι: 21-** Εξωτ. Κλ. βρόχος
4.19 Παράμετροι: 22-** Λειτουργίες εφαρμογής
4.20 Παράμετροι: 30-** Ειδικά χαρακτηριστικά
4.21 Παράμετροι: 32-** Βασικές ρυθμίσεις ελέγχου κίνησης
4.22 Παράμετροι: 33-** Έλεγχος κίνησης προηγμ. Ρυθμίσεις
4.23 Παράμετροι: 34-** Ανάγνωση δεδομένων ελέγχου κίνησης
4.24 Παράμετροι: 37-** Ρυθμίσεις εφαρμογής
5 Λίστες παραμέτρων
5.1 Εισαγωγή
5.2 Λίστες παραμέτρων
6 Αντιμετώπιση προβλημάτων
6.1 Προειδοποιήσεις και συναγερμοί
91
98
100
104
105
107
109
109
110
111
113
115
115
118
135
135
Ευρετήριο
6.1.1 Συναγερμοί 135
6.1.2 Προειδοποιήσεις 135
6.1.3 Μηνύματα προειδοποίησης/συναγερμού 135
6.1.4 Λίστα κωδικών προειδοποίησης και συναγερμού 136
147
2 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. MG07C327
Page 5
Εισαγωγή Οδηγός Προγραμματισμού
1 Εισαγωγή
1.1 Τρόπος ανάγνωσης του παρόντος
Οδηγού προγραμματισμού
1.1.1 Σκοπός του εγχειριδίου
Αυτός ο οδηγός προγραμματισμού περιέχει πληροφορίες
για τον έλεγχο του μετατροπέα συχνότητας, την πρόσβαση
στις παραμέτρους, τον προγραμματισμό και την αντιμετώπιση προβλημάτων.
Ο οδηγός προγραμματισμού προορίζεται για χρήση από
εξειδικευμένο προσωπικό, εξοικειωμένο με το μετατροπέα
συχνότητας Ρυθμιστής στροφών VLT® Midi FC 280.
Διαβάστε τις οδηγίες πριν τον προγραμματισμό και
ακολουθήστε τις διαδικασίες στο παρόν εγχειρίδιο.
Το VLT® είναι σήμα κατατεθέν.
1.1.2 Πρόσθετοι πόροι
Οι πρόσθετοι πόροι περιλαμβάνουν:
Ο Οδηγός λειτουργίας του Ρυθμιστής στροφών VLT
•
Midi FC 280, παρέχει τις απαραίτητες πληροφορίες
για τη ρύθμιση και λειτουργία του μετατροπέα
συχνότητας.
Ο Οδηγός σχεδίασης Ρυθμιστής στροφών VLT® Midi
•
FC 280 παρέχει λεπτομερείς τεχνικές πληροφορίες
για το μετατροπέα συχνότητας, το σχεδιασμό του
πελάτη και τις εφαρμογές.
Επικοινωνήστε με τον τοπικό προμηθευτή της Danfoss ή
επισκεφθείτε τη διεύθυνση drives.danfoss.com/knowledge-
center/technical-documentation/ για να πραγματοποιήσετε
λήψη της τεκμηρίωσης.
1.1.3 Τεκμηρίωση και Έκδοση λογισμικού
Το παρόν εγχειρίδιο αναθεωρείται και ενημερώνεται
τακτικά. Είναι ευπρόσδεκτες όλες οι προτάσεις για
βελτίωση. Το Πίνακας 1.1 υποδεικνύει την έκδοση του
εγγράφου και την αντίστοιχη έκδοση λογισμικού.
Έκδοση Παρατηρήσεις Έκδοση
λογισμικού
MG07C3 Ενημέρωση λόγω της κυκλοφορίας
νέας έκδοσης λογισμικού.
Πίνακας 1.1 Τεκμηρίωση και Έκδοση λογισμικού
1.2
1 1
°C
°F
AC Εναλλασσόμενο ρεύμα
AEO Αυτόματη βελτιστοποίηση ενέργειας
ACP Επεξεργαστής ελέγχου εφαρμογής
AWG Αμερικανική Διατομή Συρμάτων
AMA Αυτόματη προσαρμογή κινητήρα
DC Συνεχές ρεύμα
EEPROM
EMC Ηλεκτρομαγνητική συμβατότητα
EMI Ηλεκτρομαγνητική παρεμβολή
ESD Ηλεκτροστατική εκφόρτιση
ETR Ηλεκτρονικό θερμικό ρελέ
f
M,N
FC Μετατροπέας συχνότητας
IGBT
®
IP Προστασία από διείσδυση
I
LIM
I
INV
I
M,N
I
VLT,MAX
I
VLT,N
L
d
L
q
LCP Τοπικός πίνακας ελέγχου
LED Δίοδος φωτοεκπομπής
MCP Επεξεργαστής ελέγχου κινητήρα
N.A. Μη εφαρμόσιμο
NEMA
P
M,N
PCB Πλακέτα τυπωμένου κυκλώματος
PE Προστατευτική γείωση
PELV
PWM Διαμόρφωση πλάτους παλμού
R
s
Αναδημιουργία Ακροδέκτες αναπαραγωγής
RPM Στροφές ανά λεπτό
RFI Παρεμβολή ραδιοσυχνοτήτων
SCR Ελεγχόμενος ανορθωτής πυριτίας
SMPS Τροφοδοσία λειτουργίας μεταγωγής
T
LIM
U
M,N
Βαθμοί Κελσίου
Φαρενάιτ
Ηλεκτρικά διαγράψιμη, προγραμματίσιμη μνήμη μόνο για ανάγνωση
Ονομαστική συχνότητα κινητήρα
Διπολικό τρανζίστορ μονωμένης
πύλης
Όριο έντασης ρεύματος
Ονομαστικό ρεύμα εξόδου
αναστροφέα
Ονομαστικό ρεύμα κινητήρα
Μέγιστη ένταση ρεύματος εξόδου
Η ονομαστική ένταση ρεύματος που
παρέχεται από το μετατροπέα
συχνότητας
Αυτεπαγωγή άξονα d κινητήρα
Αυτεπαγωγή άξονα q κινητήρα
Εθνική Ομοσπονδία Κατασκευαστών
Ηλεκτρικού Εξοπλισμού
Ονομαστική ισχύς κινητήρα
Προστατευτική εξαιρετικά χαμηλή
τάση
Αντίσταση στάτορα
Όριο ροπής
Ονομαστική τάση κινητήρα
MG07C327 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. 3
Page 6
Εισαγωγή
Ρυθμιστής στροφών VLT® Midi FC 280
11
X
h
Κύρια επαγωγική αντίσταση κινητήρα
U
VLT,MAX
Μέγιστη τάση εξόδου.
Πίνακας 1.2 Συντμήσεις
1.2.2 Είσοδος
Εντολές ελέγχου
Εκκίνηση και σταμάτημα του συνδεδεμένου κινητήρα μέσω
LCP και ψηφιακών εισόδων.
Οι λειτουργίες διαιρούνται σε 2 ομάδες.
Οι λειτουργίες της ομάδας 1 έχουν μεγαλύτερη
προτεραιότητα από τις λειτουργίες της ομάδας 2.
Ομάδα 1 Ακριβές σταμάτημα, σταμάτημα με ελεύθερη
κίνηση, ακριβές σταμάτημα και σταμάτημα με
ελεύθερη κίνηση, γρήγορη διακοπή, πέδηση ΣΡ,
διακοπή και απενεργοποίηση [OFF].
Ομάδα 2 Εκκίνηση, εκκίνηση παλμού, αναστροφή, εκκίνηση
αναστροφής, ελαφριά ώθηση και πάγωμα εξόδου.
Πίνακας 1.3 Ομάδες λειτουργιών
Για τη συμμόρφωση με την Ευρωπαϊκή Συμφωνία για τη
διεθνή μεταφορά επικινδύνων εμπορευμάτων μέσω
εσωτερικών πλωτών οδών (ADN), ανατρέξτε στην ενότητα
Εγκατάσταση με συμμόρφωση ADN στον Οδηγό σχεδίασης
του Ρυθμιστής στροφών VLT
®
Midi FC 280.
Ο μετατροπέας συχνότητας είναι σύμφωνος με τις
απαιτήσεις UL 508C σχετικά με τη διατήρηση θερμικής
μνήμης. Για περισσότερες πληροφορίες, ανατρέξτε στην
ενότητα Θερμική προστασία κινητήρα στον Οδηγό
σχεδίασης εφαρμογών του Ρυθμιστής στροφών VLT® Midi FC
280.
Εφαρμοζόμενα πρότυπα και συμμόρφωση για την STO
Η χρήση STO στους ακροδέκτες 37 και 38 προϋποθέτει
κάλυψη όλων των διατάξεων για την ασφάλεια, συμπεριλαμβανομένων των σχετικών νόμων, κανονισμών και
οδηγιών. Η ενσωματωμένη λειτουργία STO συμμορφώνεται
με τα ακόλουθα πρότυπα:
IEC/EN 61508: 2010 SIL2
•
IEC/EN 61800-5-2: 2007 SIL2
•
IEC/EN 62061: 2012 SILCL of SIL2
•
IEC/EN 61326-3-1: 2008
•
EN ISO 13849-1: 2008 Κατηγορία 3 PL d
•
Ορισμοί
1.2
1.2.1 Μετατροπέας συχνότητας
Ελεύθερη κίνηση
Ο άξονας του κινητήρα βρίσκεται σε ελεύθερο τρόπο
λειτουργίας. Δεν υπάρχει ροπή στον κινητήρα.
I
VLT,MAX
Η μέγιστη ένταση ρεύματος εξόδου.
I
VLT,N
Η ονομαστική ένταση ρεύματος που παρέχεται από τον
μετατροπέα συχνότητας
1.2.3 Κινητήρας
Κινητήρας σε λειτουργία
Ροπή που δημιουργείται στον άξονα εξόδου και ταχύτητα
από 0 RPM μέχρι τη μέγιστη ταχύτητα κινητήρα.
fΕΛΑΦΡΙΑ ΩΘΗΣΗ
Συχνότητα κινητήρα όταν είναι ενεργοποιημένη η
λειτουργία ελεύθερη ώθηση (μέσω ψηφιακών ακροδεκτών).
f
M
Συχνότητα κινητήρα.
f
ΜΕΓ.
Μέγιστη συχνότητα κινητήρα.
f
ΕΛΑΧ.
Ελάχιστη συχνότητα κινητήρα.
f
M,N
Ονομαστική συχνότητα κινητήρα (δεδομένα πινακίδας).
I
M
Ρεύμα κινητήρα (πραγματικό)
I
M,N
Ονομαστική τιμή ρεύματος κινητήρα (δεδομένα στην
πινακίδα στοιχείων).
n
M,N
Ονομαστική ταχύτητα κινητήρα (δεδομένα στην πινακίδα
στοιχείων).
n
s
Στροφές σύγχρονου κινητήρα.
2 × Παράμετρος 1−23 × 60s
ns=
n
ολίσθηση
Ολίσθηση κινητήρα.
P
M,N
Ονομαστική ισχύς κινητήρα (δεδομένα πινακίδας σε kW ή
hp).
Παράμετρος 1−39
4 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. MG07C327
Page 7
175ZA078.10
Pull-out
RPM
Torque
Εισαγωγή Οδηγός Προγραμματισμού
T
M,N
Ονομαστική ροπή κινητήρα
U
M
Στιγμιαία τάση κινητήρα
U
M,N
Ονομαστική τάση λειτουργίας κινητήρα (δεδομένα
πινακίδας)
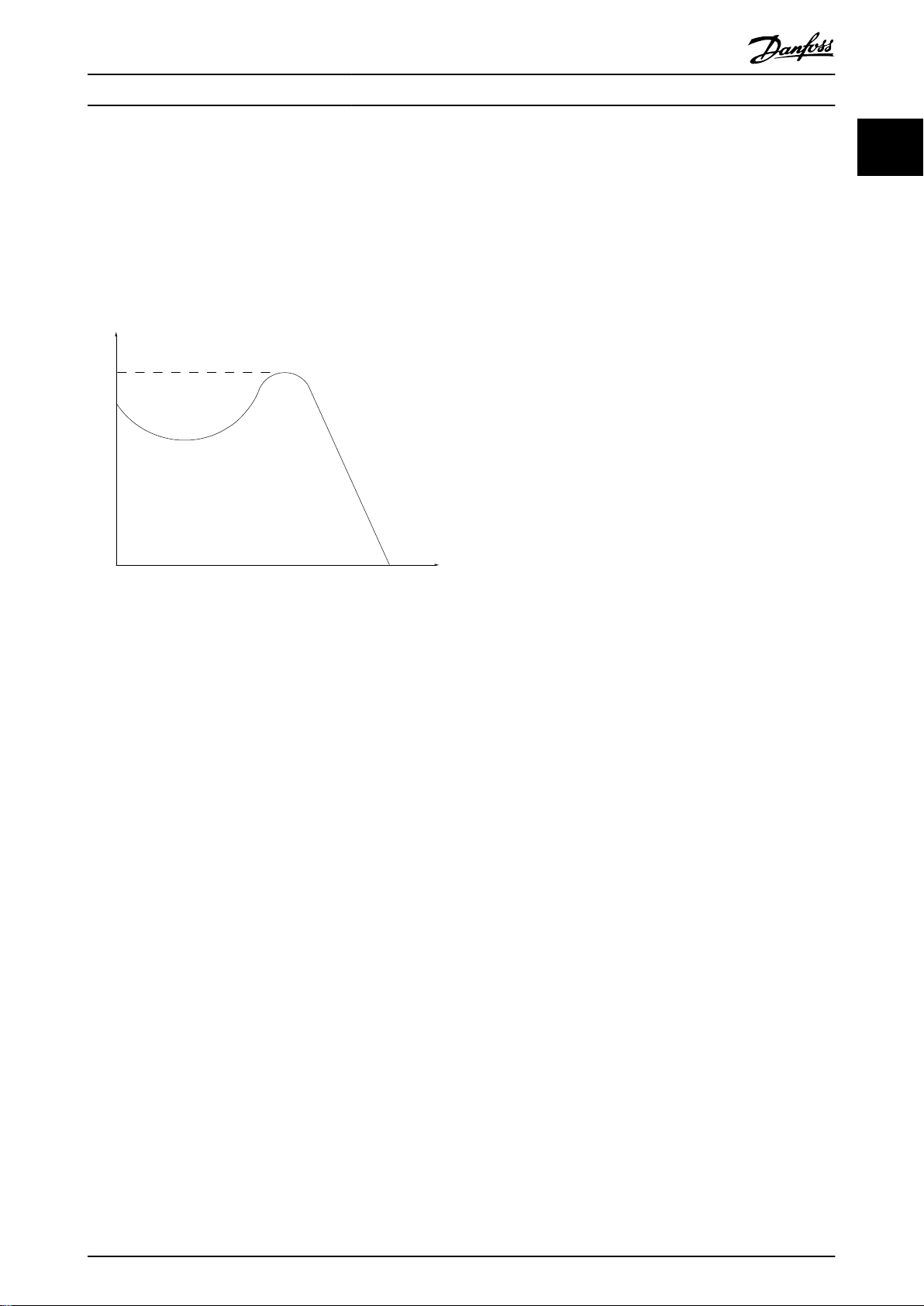
Ροπή απόσχισης
Εικόνα 1.1 Ροπή απόσχισης
η
VLT
Σαν απόδοση του μετατροπέα συχνότητας ορίζεται ο λόγος
μεταξύ της εξόδου και της εισόδου ισχύος.
Εντολή απενεργοποίησης εκκίνησης
Μία εντολή απενεργοποίησης εκκίνησης που ανήκει στην
ομάδα εντολών ελέγχου 1. Ανατρέξτε στο Πίνακας 1.3 για
περισσότερες λεπτομέρειες.
Εντολή διακοπής
Μία εντολή διακοπής που ανήκει στην ομάδα εντολών
ελέγχου 1. Ανατρέξτε στο Πίνακας 1.3 για περισσότερες
λεπτομέρειες.
1.2.4 Τιμές αναφοράς
Αναλογική αναφορά
Ένα σήμα μεταφερόμενο στις αναλογικές εισόδους 53 ή 54
μπορεί να είναι τάση ή ένταση ρεύματος.
Δυαδική τιμή αναφοράς
Ένα σήμα μεταδίδεται στη θύρα σειριακής επικοινωνίας.
Προεπιλεγμένη επιθυμητή τιμή
Να ρυθμιστεί μία καθορισμένη προεπιλεγμένη τιμή
αναφοράς από -100% έως +100% του εύρους τιμών
αναφοράς. Επιλογή 8 προκαθορισμένων τιμών αναφοράς
μέσω ψηφιακών ακροδεκτών.
Επιθυμητή τιμή παλμού
Ένα σήμα παλμικής συχνότητας που μεταδίδετε στις
ψηφιακές εισόδους (ακροδέκτες 29 και 33).
Ref
ΜΕΓ.
Προσδιορίζει τη σχέση μεταξύ της τιμής αναφοράς εισόδου
στην τιμή 100% πλήρους κλίμακας (τυπικά 10 V, 20 mA) και
της τιμής αναφοράς που προκύπτει. Η μέγιστη τιμή
αναφοράς ορίζεται στην παράμετρος 3-03 Μέγιστη
επιθυμητή τιμή.
Ref
ΕΛΑΧ.
Προσδιορίζει τη σχέση μεταξύ της τιμής αναφοράς εισόδου
σε τιμή 0% (τυπικά 0 V, 0 mA, 4 mA) και της τιμής
αναφοράς που προκύπτει. Η ελάχιστη τιμή αναφοράς
ρυθμίζεται στην παράμετρος 3-02 Ελάχιστη επιθ. τιμή.
1.2.5 Διάφορα
Αναλογικές είσοδοι
Οι ψηφιακές είσοδοι χρησιμοποιούνται για τον έλεγχο
διαφόρων λειτουργιών στο μετατροπέα συχνότητας.
Υπάρχουν 2 είδη αναλογικών εισόδων:
Είσοδος ρεύματος, 0–20 mA και 4–20 mA.
•
Είσοδος τάσης, 0 έως +10 V ΣΡ.
•
Αναλογικές έξοδοι
Οι αναλογικές έξοδοι μπορούν να παρέχουν ένα σήμα 0-20
mA ή 4-20 mA.
Αυτόματη προσαρμογή κινητήρα, AMA
Ο αλγόριθμος AMA προσδιορίζει τις ηλεκτρικές
παραμέτρους του συνδεδεμένου κινητήρα σε αδράνεια.
Αντιστάτης πέδησης
Ο αντιστάτης πέδησης είναι μία μονάδα ικανή να
απορροφήσει την ισχύ πέδησης που δημιουργείται στην
πέδηση γεννήτριας. Αυτή η ισχύς πέδησης γεννήτριας
αυξάνει την τάση του ενδιάμεσου κυκλώματος και ένα
τρανζίστορ πέδησης εξασφαλίζει ότι η ισχύς μεταδίδεται
στον αντιστάτη πέδησης.
Χαρακτηριστικά CT
Χαρακτηριστικά σταθερής ροπής που χρησιμοποιούνται για
εφαρμογές όπως ιμάντες μεταφοράς, αντλίες εκτοπίσματος
και γερανούς.
Ψηφιακές είσοδοι
Οι ψηφιακές είσοδοι χρησιμοποιούνται για τον έλεγχο
διαφόρων λειτουργιών στο μετατροπέα συχνότητας.
Ψηφιακές έξοδοι
Ο μετατροπέας συχνότητας διαθέτει 2 εξόδους στερεάς
κατάστασης που μπορούν να παρέχουν ένα σήμα 24 V ΣΡ
(μέγ. 40 mA).
DSP
Επεξεργαστής ψηφιακού σήματος.
ETR
Το ηλεκτρονικό θερμικό ρελέ είναι ένας ένας υπολογισμός
θερμικού φορτίου βασισμένος στο παρόν φορτίο και
χρόνο. Ο σκοπός του είναι να εκτιμήσει τη θερμοκρασία
του κινητήρα.
1 1
MG07C327 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. 5
Page 8

Εισαγωγή
Ρυθμιστής στροφών VLT® Midi FC 280
11
Κανονικός δίαυλος FC
Περιλαμβάνει τον δίαυλο RS485 με το πρωτόκολλο FC ή
πρωτόκολλο MC. Ανατρέξτε στον παράμετρος 8-30 Protocol.
Αρχικοποίηση
Εάν εκτελεστεί αρχικοποίηση (παράμετρος 14-22 Operation
Mode), ο μετατροπέας συχνότητας επιστρέφει στις προεπι-
λεγμένες ρυθμίσεις.
Διαλείπων κύκλος εργασίας
Μία τιμή αναφοράς διαλείποντος κύκλου εργασίας
αναφέρετε σε μία ακολουθία κύκλων εργασίας. Κάθε
κύκλος αποτελείται από μία περίοδο με φορτίο και μία
περίοδο χωρίς φορτίο. Η λειτουργία μπορεί να είναι
περιοδικού ή μη περιοδικού κύκλου εργασίας.
LCP
Ο Τοπικός πίνακας ελέγχου LCP δημιουργεί μία πλήρη
διεπαφή για έλεγχο και προγραμματισμό του μετατροπέα
συχνότητας. Ο πίνακας ελέγχου είναι αποσπώμενος και
μπορεί να τοποθετηθεί μέχρι και 3 μέτρα (9,8 πόδια) από
το μετατροπέα συχνότητας, δηλαδή σε έναν μπροστινό
πίνακα χρησιμοποιώντας την επιλογή του κιτ τοποθέτησης.
NLCP
Η διεπαφή του αριθμητικού τοπικού πίνακα ελέγχου για
τον έλεγχο και τον προγραμματισμό του μετατροπέα
συχνότητας. Η οθόνη είναι αριθμητική και ο πίνακας
χρησιμοποιείται για την εμφάνιση των τιμών διεργασίας. Το
NLCP εκτελεί λειτουργίες αποθήκευσης και αντιγραφής.
lsb
Λιγότερο σημαντικό bit.
msb
Περισσότερο σημαντικό bit.
MCM250
Συντομογραφία για το Mille Circular Mil, μία Αμερικάνικη
μονάδα μέτρησης διατομών καλωδίων, . 1 MCM = 0,5067
mm2.
Παράμετροι On-line/O-line
Οι αλλαγές στις παραμέτρους on-line ενεργοποιούνται
αμέσως μετά την αλλαγή των τιμών των δεδομένων.
Πατήστε [OK] για να ενεργοποιήσετε τις αλλαγές στις
παραμέτρους o-line.
Διεργασία PID
Ο έλεγχος PID διατηρεί την ταχύτητα, πίεση, θερμοκρασία,
ρυθμίζοντας τη συχνότητα εξόδου έτσι ώστε να ταιριάζει
με το μεταβαλλόμενο φορτίο.
PCD
Δεδομένα ελέγχου διεργασίας.
Κύκλος ισχύος
Διακόψτε την παροχή ρεύματος μέχρι η οθόνη (LCP) να
σβήσει και, στη συνέχεια ενεργοποιήστε ξανά.
Συντελεστής ισχύος
Ο συντελεστής ισχύος είναι η σχέση μεταξύ I1 και I
Τροφοδοσίασυντελεστής =
3xUxI1συνϕ1
3xUxI
RMS
RMS
.
cosϕ1 = 1, συνεπώς:
Τροφοδοσίασυντελεστής =
I1xσυνϕ1
I
RMS
=
I
I
RMS
1
Ο συντελεστής ισχύος δείχνει σε ποιο βαθμό ο
μετατροπέας συχνότητας επιβάλει φορτίο στην τροφοδοσία
από το δίκτυο ρεύματος.
Όσο πιο χαμηλός είναι ο συντελεστής ισχύος, τόσο πιο
υψηλό είναι το I
= I
2
+ I
1
I
RMS
για επιδόσεις ίδιων kW.
RMS
2
5
+ I
2
+ .. + I
7
2
n
Εξάλλου, υψηλότερος συντελεστής ισχύος δείχνει ότι τα
διαφορετικά αρμονικά ρεύματα είναι χαμηλά.
Τα ενσωματωμένα πηνία ΣΡ, παράγουν έναν υψηλό
συντελεστή ισχύος, που ελαχιστοποιεί το φορτίο που έχει
επιβληθεί στην τροφοδοσία του ρεύματος.
Είσοδος παλμού/Αυξητική παλμογεννήτρια
Ένας εξωτερικός, μεταδότης ψηφιακού παλμού που
χρησιμοποιείται για να ανατροφοδοτεί πληροφορίες για την
ταχύτητα του κινητήρα. Η παλμογεννήτρια χρησιμοποιείται
σε εφαρμογές που απαιτείται μεγάλη ακρίβεια στον έλεγχο
ταχύτητας.
RCD
Συσκευή παραμένοντος ρεύματος.
Ρυθμίσεις
Αποθηκεύστε τις ρυθμίσεις σε 4 ρυθμίσεις. Εναλλάξτε
ανάμεσα στις 4 ρυθμίσεις παραμέτρων και επεξεργαστείτε
1 ρύθμιση, όσο είναι ανενεργή.
SFAVM
Ακρωνύμιο που περιγράφει το μοτίβο μεταγωγής της
διαμόρφωσης ασύγχρονου διανύσματος που βασίζεται στη
ροή στάτορα.
Αντιστάθμιση ολίσθησης
Ο μετατροπέας συχνότητας αντισταθμίζει την ολίσθηση του
κινητήρα δίνοντας στη συχνότητα ένα συμπλήρωμα που
ακολουθεί το μετρημένο φορτίο του κινητήρα κρατώντας
την ταχύτητα του κινητήρα σχεδόν σταθερή.
Έξυπνος λογικός ελεγκτής (SLC)
Το SLC είναι μία ακολουθία από ενέργειες που προσδιορίζονται από το χρήστη και εκτελούνται όταν τα
συσχετιζόμενα συμβάντα που προσδιορίζονται από το
χρήστη αξιολογούνται ως αληθινά από τον έξυπνο λογικό
ελεγκτή (ομάδα παραμέτρων 13-** Έξυπνος λογικός
ελεγκτής).
STW
Λέξη περιγραφής κατάστασης.
THD
Η συνολική αρμονική παραμόρφωση δηλώνει τη συνολική
συνεισφορά της αρμονικής παραμόρφωσης.
Θερμίστορ
Ένας αντιστάτης εξαρτημένος από τη θερμοκρασία τοποθετημένος εκεί που πρέπει να παρακολουθείται η
θερμοκρασία (μετατροπέας συχνότητας ή κινητήρας).
6 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. MG07C327
Page 9

Εισαγωγή Οδηγός Προγραμματισμού
Σφάλμα
Μία κατάσταση που δημιουργείται σε περιπτώσεις
σφάλματος, για παράδειγμα εάν ο μετατροπέας συχνότητας
έχει υποστεί υπέρταση ή όταν προστατεύει τον κινητήρα,
τη διαδικασία ή το μηχανισμό. Η επανεκκίνηση εμποδίζεται
μέχρι να εξαφανιστεί η αιτία του σφάλματος και να
ακυρωθεί η κατάσταση σφάλματος ενεργοποιώντας την
επαναφορά ή σε μερικές περιπτώσεις, έχοντας προγραμματιστεί να εκτελεί αυτόματη επαναφορά. Μην
χρησιμοποιείτε το σφάλμα για προσωπική ασφάλεια.
Κλείδωμα σφάλματος
Μία κατάσταση που δημιουργείται σε περιπτώσεις
σφάλματος όταν ο μετατροπέας συχνότητας προστατεύει
τον εαυτό του και απαιτεί φυσική παρέμβαση, για
παράδειγμα εάν έχει υποστεί βραχυκύκλωμα στην έξοδο.
Ένα κλείδωμα σφάλματος μπορεί να ακυρωθεί μόνο
διακόπτοντας την τροφοδοσία ρεύματος, απομακρύνοντας
την αιτία του σφάλματος, και επανασυνδέοντας τον
μετατροπέα συχνότητας. Η επανεκκίνηση εμποδίζεται μέχρι
να ακυρωθεί η κατάσταση σφάλματος ενεργοποιώντας την
επαναφορά, ή σε μερικές περιπτώσεις, έχοντας προγραμματιστεί να εκτελεί αυτόματη επαναφορά. Μην
χρησιμοποιείτε το κλείδωμα σφάλματος για προσωπική
ασφάλεια.
Χαρακτηριστικά VT
Μεταβλητά χαρακτηριστικά ροπής που χρησιμοποιούνται
σε αντλίες και ανεμιστήρες.
+
VVC
Σε σύγκριση με τον κανονικό έλεγχο λόγου τάσης/
συχνότητας, ο έλεγχος διανύσματος τάσης (VVC+) βελτιώνει
τη δυναμική και τη σταθερότητα, τόσο όταν η τιμή
αναφοράς ταχύτητας αλλάξει, όσο και σε σχέση με τη ροπή
φορτίου.
60° AVM
Αναφέρεται στο μοτίβο μεταγωγής της διαμόρφωσης
ασύγχρονου διανύσματος 60°.
1 1
MG07C327 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. 7
Page 10
130BE202.17
Power
input
Switch mode
power supply
Motor
Analog output
interface
(PNP) = Source
(NPN) = Sink
ON = Terminated
OFF = Open
Brake
resistor
91 (L1/N)
92 (L2/L)
93 (L3)
PE
50 (+10 V OUT)
53 (A IN)
2)
54 (A IN)
55 (COM digital/analog I/O)
0/4−20 mA
12 (+24 V OUT)
13 (+24 V OUT)
18 (D IN)
10 V DC
15 mA 100 mA
+ - + -
(U) 96
(V) 97
(W) 98
(PE) 99
(A OUT) 42
(P RS485) 68
(N RS485) 69
(COM RS485) 61
0 V
5 V
S801
0/4−20 mA
RS485
RS485
03
+10 V DC
0−10 V DC
24 V DC
02
01
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
19 (D IN)
24 V (NPN)
0 V (PNP)
27 (D IN/OUT)
24 V
0 V
0 V (PNP)
24 V (NPN)
29 (D IN)
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
33 (D IN)
32 (D IN)
38 (STO2)
4)
37 (STO1)
4)
95
P 5-00
21
ON
(+DC/R+) 89
(R-) 81
0−10 V DC
(-DC) 88
RFI
0 V
250 V AC, 3 A
Relay 1
1)
3)
Εισαγωγή
Ρυθμιστής στροφών VLT® Midi FC 280
11
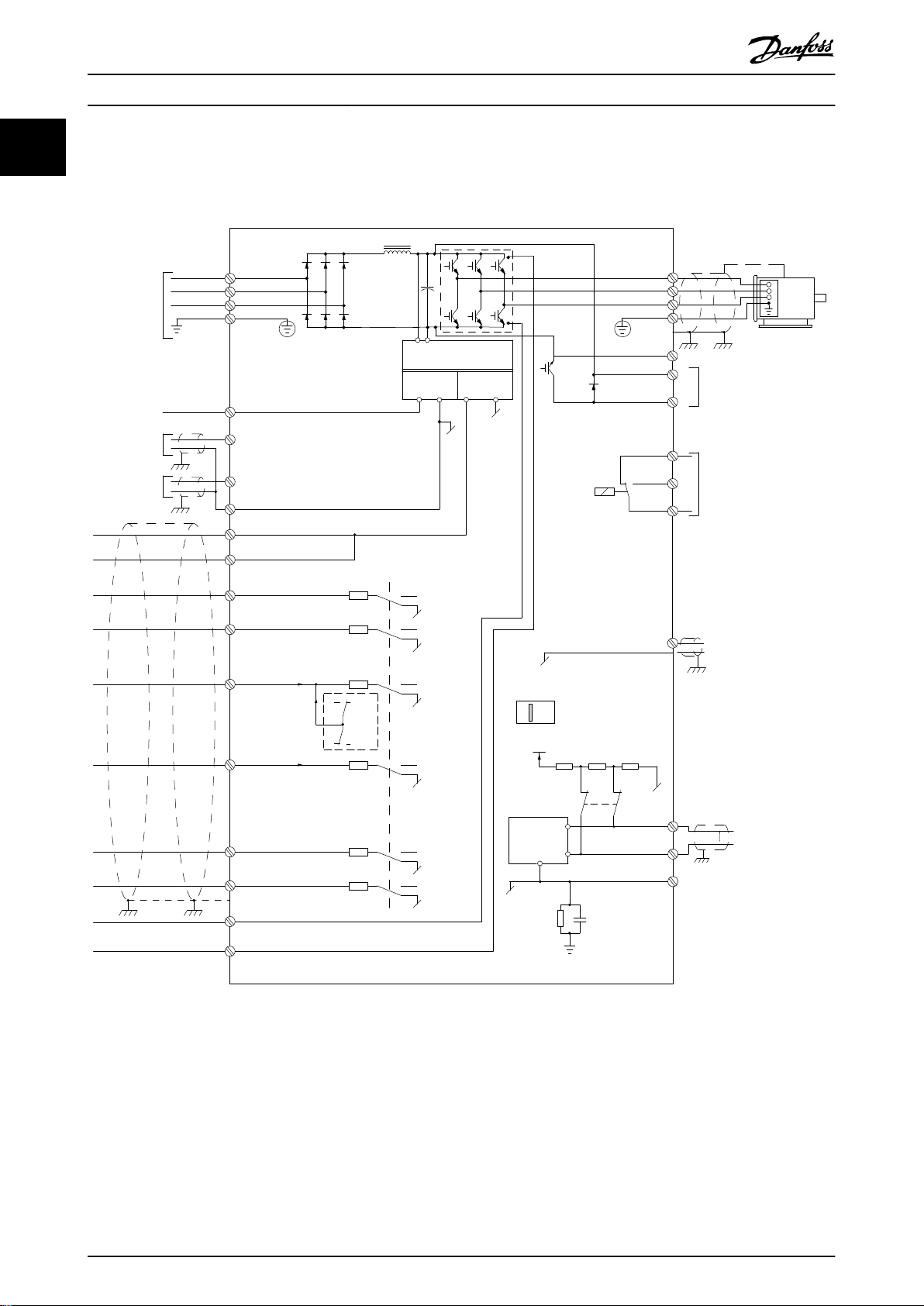
1.3 Ηλεκτρική καλωδίωση - Καλώδια σημάτων ελέγχου
1.3.1 Επισκόπηση
Εικόνα 1.2 Σχηματικό διάγραμμα βασικής συνδεσμολογίας
A = αναλογικό, D = ψηφιακό
1) Το ενσωματωμένο τρανζίστορ πέδης διατίθεται μόνο σε 3-φασικές μονάδες.
2) Ο ακροδέκτης 53 μπορεί να χρησιμοποιηθεί και ως ψηφιακή είσοδος.
3) Ο διακόπτης S801 (ακροδέκτης διαύλου) μπορεί να χρησιμοποιηθεί για την ενεργοποίηση του τερματισμού στη θύρα RS485
(ακροδέκτες 68 και 69).
4) Ανατρέξτε στο κεφάλαιο 6 Safe Torque O (STO) στον οδηγό χειρισμού για την ορθή καλωδίωση STO.
8 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. MG07C327
Page 11
130BE730.10
12 13 18 19 27 29 32 33 55
+24 VDC
0 VDC
PNP (Source)
Digital input wiring
NPN (Sink)
Digital input wiring
12 13 18 19 27 29 32 33 55
+24 VDC
0 VDC
130BE731.10
130BA681.10
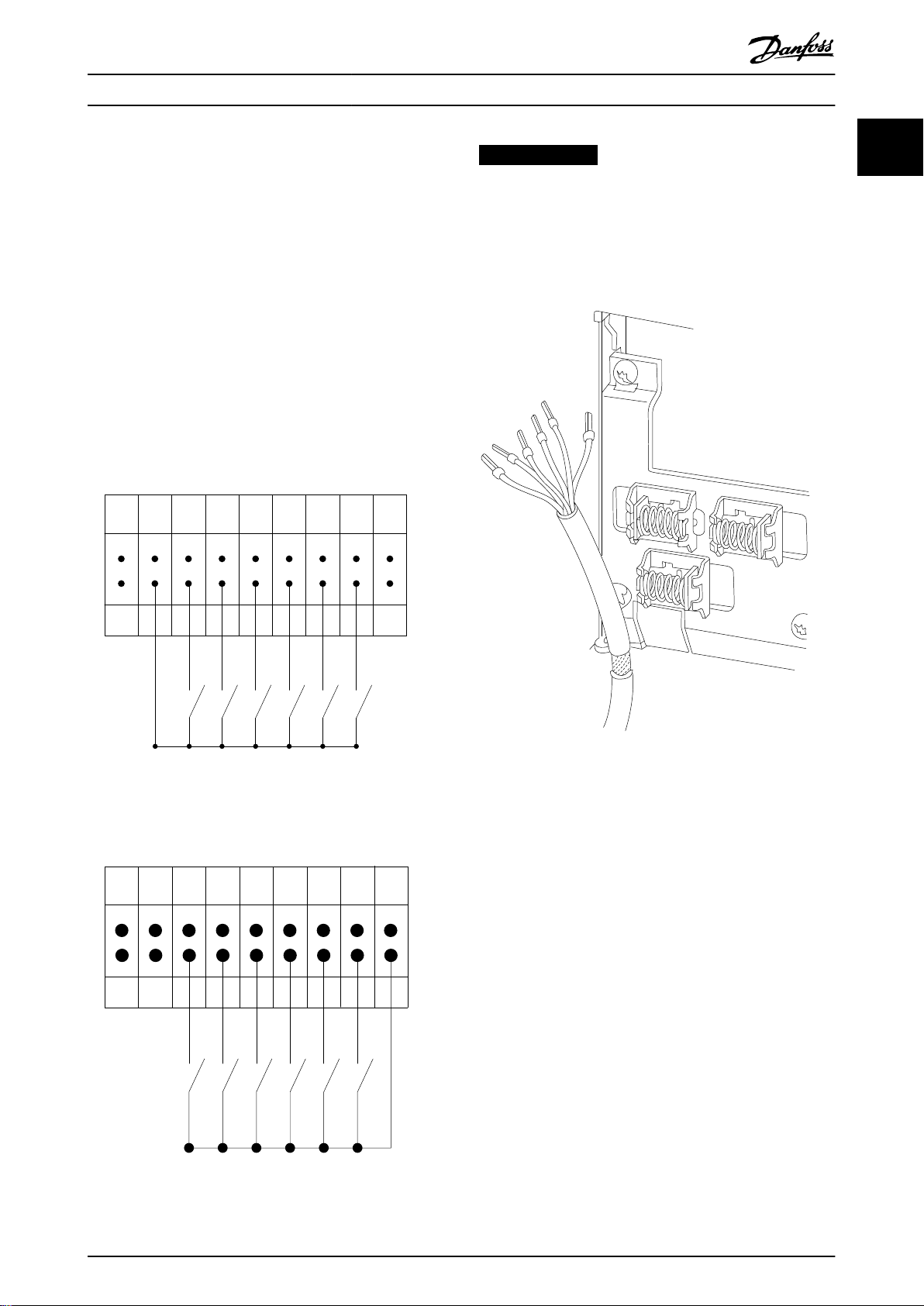
Εισαγωγή Οδηγός Προγραμματισμού
Σε σπάνιες περιπτώσεις, τα καλώδια σημάτων ελέγχου
μεγάλου μήκους και τα αναλογικά σήματα ενδέχεται να
οδηγήσουν σε βρόχους γείωσης 50/60 Hz εξαιτίας θορύβου
από τα καλώδια του δικτύου τροφοδοσίας. Εάν συμβεί
αυτό, σπάστε τη θωράκιση ή τοποθετήστε έναν πυκνωτή
100 nF μεταξύ της θωράκισης και του πλαισίου.
Οι ψηφιακές και αναλογικές είσοδοι και έξοδοι πρέπει να
συνδέονται ξεχωριστά στις κοινές εισόδους (ακροδέκτης
55) του μετατροπέα συχνότητας για την αποφυγή
ρευμάτων γείωσης και από τις δύο ομάδες που επηρεάζουν
άλλες ομάδες. Για παράδειγμα, η εναλλαγή στην ψηφιακή
είσοδο μπορεί να δημιουργήσει διαταραχή στο αναλογικό
σήμα εισόδου.
Πολικότητα εισόδου για ακροδέκτες σημάτων ελέγχου
ΕΙΔΟΠΟΙΗΣΗ
Τα καλώδια σημάτων ελέγχου πρέπει να είναι
θωρακισμένα.
Ανατρέξτε στην ενότητα Χρήση θωρακισμένων καλωδίων
σημάτων ελέγχου στον οδηγό σχεδιασμού για τον ορθό
τερματισμό των καλωδίων σημάτων ελέγχου.
1 1
Εικόνα 1.3 (PNP)-Πηγή
Εικόνα 1.4 (NPN)-Βύθιση
Εικόνα 1.5 Γείωση θωρακισμένων καλωδίων σημάτων ελέγχου
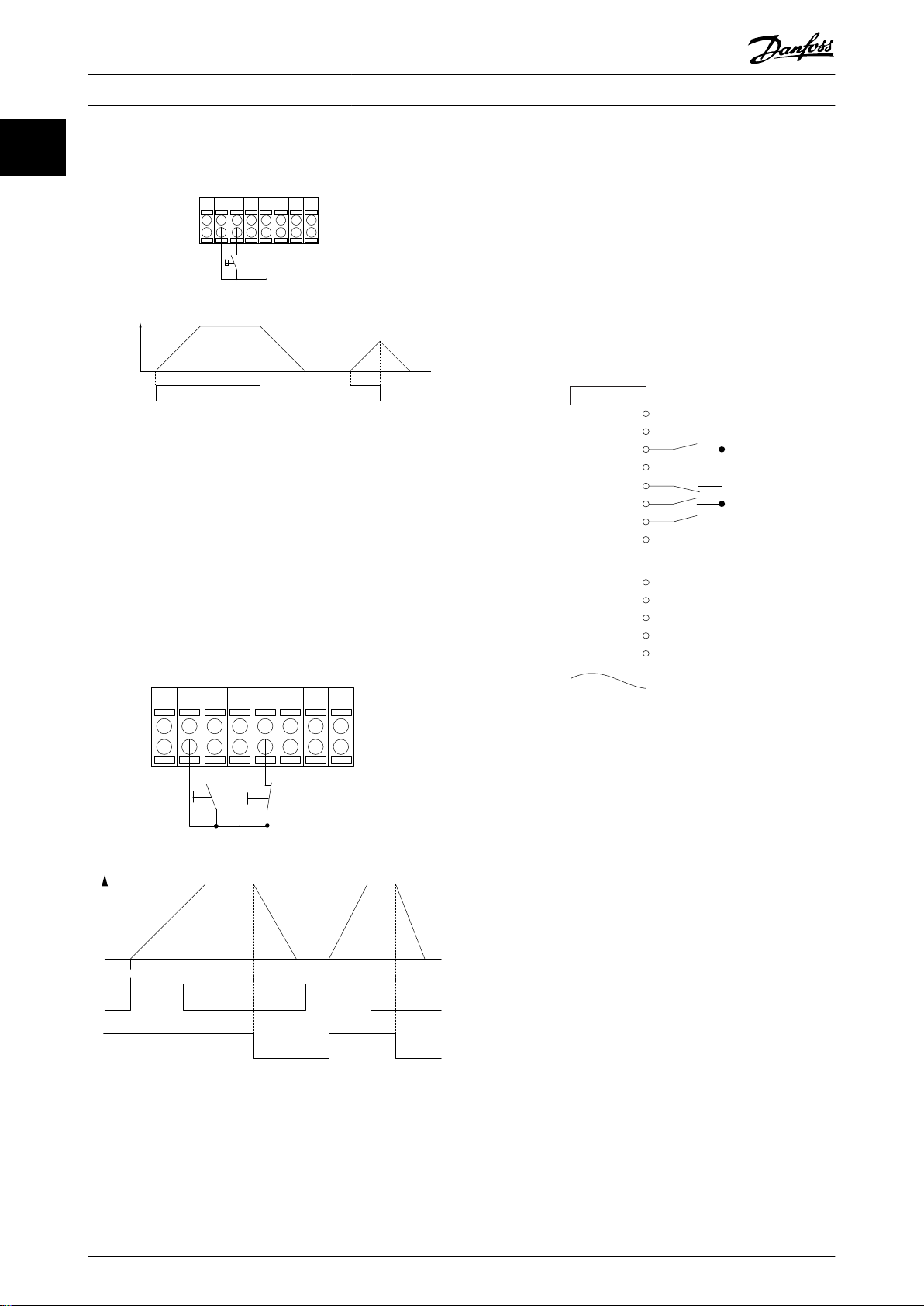
1.3.2 Εκκίνηση/Διακοπή
Ακροδέκτης 18 = Παράμετρος 5-10 Ψηφιακή είσοδος
ακροδέκτη 18 [8] Εκκίνηση.
Ακροδέκτης 27 = Παράμετρος 5-12 Ψηφιακή είσοδος
ακροδέκτη 27 [0] Καμία λειτουργία (Προεπιλογή Αντίστροφη
ελεύθερη κίνηση).
MG07C327 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. 9
Page 12
130BE732.10
12 13 18 322719 29 33
P 5-12 [2]
P 5-10 [8]
Start/Stop
+24V
Speed
Start/Stop
[18]
1312 18 19
130BF101.10
322927 33
P 5 - 12 [6]
P 5 - 10[9]
+24V
Speed
Start Stop inverse
Start (18)
Stop (27)
FC
+24 V
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
130BF095.10
Εισαγωγή
Ρυθμιστής στροφών VLT® Midi FC 280
11
1.3.4 Επιτάχυνση/Επιβράδυνση
Ακροδέκτες 29/32 = Επιτάχυνση/επιβράδυνση
Ακροδέκτης 18 = Παράμετρος 5-10 Ψηφιακή
είσοδος ακροδέκτη 18 [9] Εκκίνηση (προεπιλογή).
Ακροδέκτης 27 = Παράμετρος 5-12 Ψηφιακή
είσοδος ακροδέκτη 27 [19] Πάγωμα αναφοράς.
Ακροδέκτης 29 = Παράμετρος 5-13 Ψηφιακή
είσοδος ακροδέκτη 29 [21] Επιτάχυνση.
Ακροδέκτης 32 = Παράμετρος 5-14 Ψηφιακή
είσοδος ακροδέκτη 32 [22] Επιβράδυνση.
Εικόνα 1.6 Εκκίνηση/Διακοπή
1.3.3 Έναρξη/Διακοπή Παλμού
Ακροδέκτης 18 = Παράμετρος 5-10 Ψηφιακή είσοδος
ακροδέκτη 18 [9] Σήμα εκκίνησης με αυτοσυγκράτηση.
Ακροδέκτης 27 = Παράμετρος 5-12 Ψηφιακή είσοδος
ακροδέκτη 27 [6] Διακοπή αναστροφής.
Εικόνα 1.8 Επιτάχυνση/Επιβράδυνση
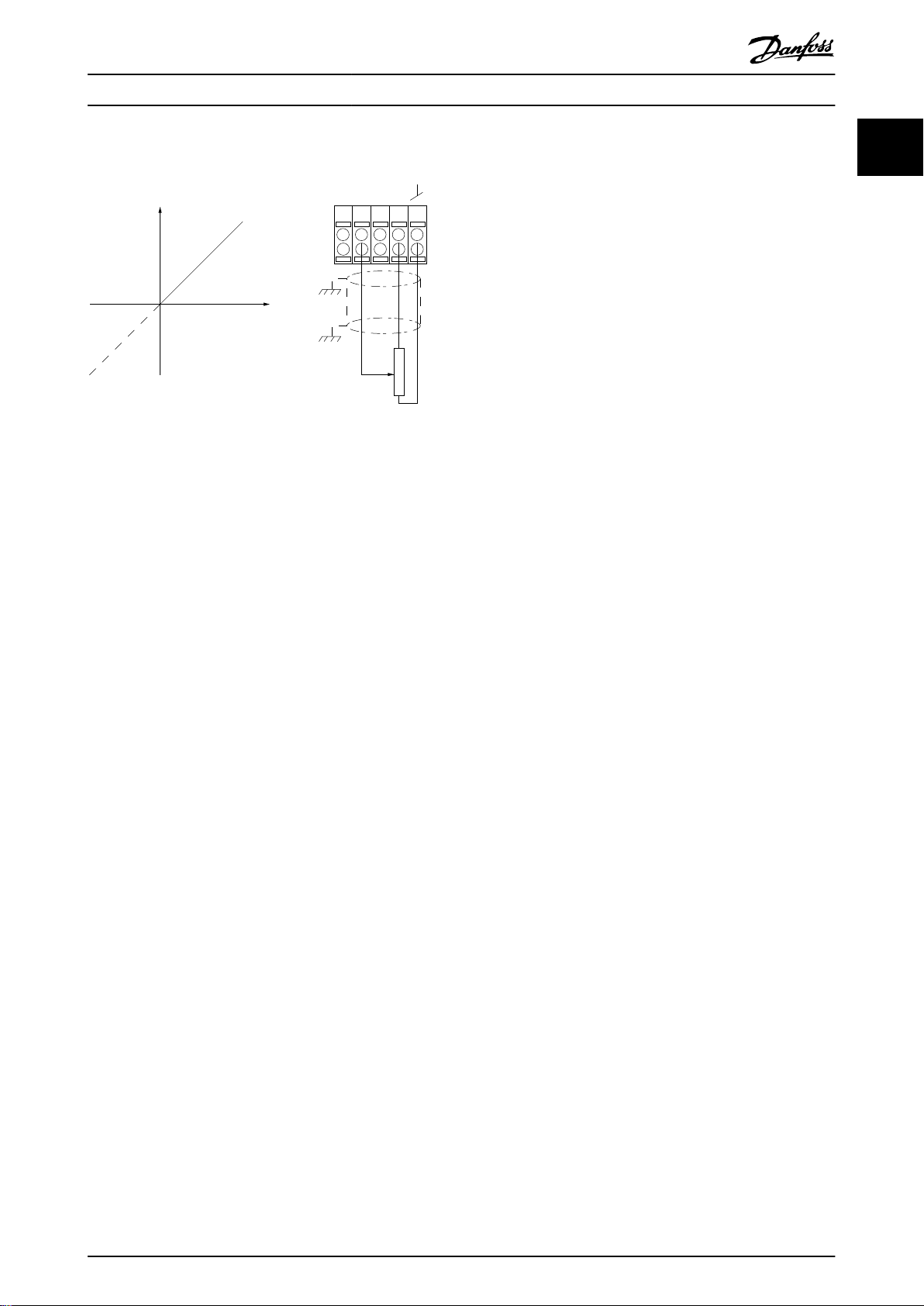
1.3.5 Τιμή αναφοράς ποτενσιόμετρου
Επιθυμητή τιμή τάσης μέσω ποτενσιόμετρου
Πηγή αναφοράς 1 = [1] Αναλογική είσοδος 53
(προεπιλογή).
Ακροδέκτης 53, χαμηλή τάση = 0 V.
Ακροδέκτης 53, υψηλή τάση = 10 V.
Ακροδέκτης 53, χαμηλή τιμή αναφ./ανάδρασης =
0 Hz.
Ακροδέκτης 53, υψηλή τιμή αναφ./ανάδρασης =
50 Hz.
Παράμετρος 6-19 Terminal 53 mode = [1] Τάση.
Εικόνα 1.7 Έναρξη/Διακοπή Παλμού
10 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. MG07C327
Page 13
130BD381.12
555342 54 50
Speed
P 6-15
1 kΩ
+10V/15mA
Ref. voltage
P 6-11 10V
Εισαγωγή Οδηγός Προγραμματισμού
Εικόνα 1.9 Τιμή αναφοράς ποτενσιόμετρου
1 1
MG07C327 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. 11
Page 14
Ασφάλεια
Ρυθμιστής στροφών VLT® Midi FC 280
2 Ασφάλεια
22
2.1 Σύμβολα ασφάλειας
Στο παρόν έγγραφο χρησιμοποιούνται τα ακόλουθα
σύμβολα:
ΠΡΟΕΙΔΟΠΟΙΗΣΗ
Υποδεικνύει πιθανώς επικίνδυνη κατάσταση, η οποία θα
μπορούσε να προκαλέσει θάνατο ή σοβαρό τραυματισμό.
ΠΡΟΣΟΧΗ
Υποδεικνύει πιθανώς επικίνδυνη κατάσταση, η οποία θα
μπορούσε να προκαλέσει μικρό ή ήπιο τραυματισμό.
Μπορεί επίσης να χρησιμοποιηθεί ως ειδοποίηση για
επισφαλείς πρακτικές.
ΕΙΔΟΠΟΙΗΣΗ
Υποδεικνύει σημαντικές πληροφορίες, όπως καταστάσεις
που θα μπορούσαν να προκαλέσουν βλάβη στον
εξοπλισμό ή σε αντικείμενο ιδιοκτησίας.
2.2 Εξειδικευμένο προσωπικό
Για την ασφαλή λειτουργία του μετατροπέα συχνότητας
χωρίς προβλήματα απαιτείται ορθή και αξιόπιστη
μεταφορά, αποθήκευση, εγκατάσταση, λειτουργία και
συντήρηση. Η εγκατάσταση και η λειτουργία αυτού του
εξοπλισμού πρέπει να γίνεται μόνο από εξειδικευμένο
προσωπικό.
ΠΡΟΕΙΔΟΠΟΙΗΣΗ
ΑΚΟΥΣΙΑ ΕΚΚΙΝΗΣΗ
Όταν ο μετατροπέας συχνότητας είναι συνδεδεμένος σε
δίκτυο ΕΡ, τροφοδοσία ρεύματος ΣΡ ή διαμοιρασμό
φορτίου, ο κινητήρας μπορεί να εκκινήσει ανά πάσα
στιγμή. Η ακούσια εκκίνηση κατά τον προγραμματισμό,
τη συντήρηση ή μια επισκευαστική εργασία μπορεί να
προκαλέσει θάνατο, σοβαρό τραυματισμό ή βλάβη
αντικειμένου ιδιοκτησίας. Ο κινητήρας μπορεί να
εκκινήσει μέσω εξωτερικού διακόπτη, εντολής τοπικού
διαύλου επικοινωνίας, σήμα αναφοράς εισόδου από το
LCP, μέσω απομακρυσμένης λειτουργίας με χρήση
Λογισμικό ρύθμισης MCT 10 ή μετά από την εκκαθάριση
μιας συνθήκης σφάλματος.
Προς αποφυγή της ακούσιας εκκίνησης του κινητήρα:
Αποσυνδέστε το μετατροπέα συχνότητας από το
•
δίκτυο ρεύματος.
Πατήστε [O/Reset] στο LCP, προτού προγραμ-
•
ματίσετε παραμέτρους.
Συνδέστε και συναρμολογήστε πλήρως το
•
μετατροπέα συχνότητας, τον κινητήρα και τυχόν
χρησιμοποιούμενο εξοπλισμό, πριν τη σύνδεση
του μετατροπέα συχνότητας στο δίκτυο ΕΡ, την
τροφοδοσία ρεύματος ΣΡ ή το διαμοιρασμό
φορτίου.
Εξειδικευμένο προσωπικό είναι το εκπαιδευμένο
προσωπικό που είναι πιστοποιημένο για την εγκατάσταση,
τη λειτουργία και τη συντήρηση του εξοπλισμού, των
συστημάτων και των κυκλωμάτων σύμφωνα με τους
σχετικούς νόμους και κανονισμούς. Επίσης, το προσωπικό
πρέπει να είναι εξοικειωμένο με τις οδηγίες και τα μέτρα
ασφαλείας που περιγράφονται σε αυτόν τον οδηγό.
Μέτρα ασφαλείας
2.3
ΠΡΟΕΙΔΟΠΟΙΗΣΗ
ΥΨΗΛΗ ΤΑΣΗ
Οι μετατροπείς συχνότητας περιέχουν υψηλή τάση όταν
συνδέονται με είσοδο ρεύματος δικτύου ΕΡ, τροφοδοσία
ρεύματος ΣΡ ή διαμοιρασμό φορτίων. Τυχόν μη εκτέλεση
της τοποθέτησης, της εκκίνησης και της συντήρησης από
εξουσιοδοτημένο προσωπικό μπορεί να προκαλέσει
θάνατο ή σοβαρό τραυματισμό.
Μόνο ειδικευμένο προσωπικό πρέπει να εκτελεί
•
την εγκατάσταση, εκκίνηση και συντήρηση.
12 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. MG07C327
Page 15
Ασφάλεια Οδηγός Προγραμματισμού
ΠΡΟΕΙΔΟΠΟΙΗΣΗ
ΧΡΟΝΟΣ ΕΚΦΟΡΤΙΣΗΣ
Ο μετατροπέας συχνότητας περιέχει πυκνωτές ζεύξης
συνεχούς ρεύματος, οι οποίοι παραμένουν φορτισμένοι,
όταν ο μετατροπέας συχνότητας δεν τροφοδοτείται από
το δίκτυο ρεύματος. Μπορεί να υπάρχει υψηλή τάση
ακόμη και όταν οι λυχνίες προειδοποίησης LED είναι
σβηστές. Η αποτυχία αναμονής κατά τον καθορισμένο
χρόνο μετά την αποσύνδεση ισχύος, πριν από τη
συντήρηση ή τις επισκευαστικές εργασίες, μπορεί να
προκαλέσει θάνατο ή σοβαρό τραυματισμό.
Διακοπή λειτουργίας του κινητήρα.
•
Αποσυνδέστε την παροχή εναλλασσόμενου
•
ρεύματος και κάθε τροφοδοσία απομακρυσμένης σύνδεσης συνεχούς ρεύματος,
συμπεριλαμβανομένων των εφεδρικών
μπαταριών, των μονάδων αδιάλειπτης παροχής
ισχύος (UPS) και των συνδέσεων συνδέσμου
συνεχούς ρεύματος με άλλους μετατροπείς
συχνότητας.
Αποσύνδεση ή κλείδωμα κινητήρα PM.
•
Περιμένετε την πλήρη εκφόρτιση των
•
πυκνωτών. Ο ελάχιστος χρόνος αναμονής
ορίζεται στην ενότητα Πίνακας 2.1.
Πριν την εκτέλεση οποιασδήποτε εργασίας
•
τεχνικής συντήρησης ή επισκευής, χρησιμοποιήστε κατάλληλη διάταξη μέτρησης τάσης για
να διασφαλίσετε την πλήρη εκφόρτιση των
πυκνωτών.
ΠΡΟΕΙΔΟΠΟΙΗΣΗ
ΚΙΝΔΥΝΟΣ ΕΞΟΠΛΙΣΜΟΥ
Η επαφή με τους περιστρεφόμενους άξονες και τον
ηλεκτρικό εξοπλισμό μπορεί να προκαλέσει θάνατο ή
σοβαρό τραυματισμό.
Βεβαιωθείτε ότι μόνο εκπαιδευμένο και εξειδι-
•
κευμένο προσωπικό εκτελεί την εγκατάσταση,
την εκκίνηση και τη συντήρηση.
Βεβαιωθείτε ότι οι ηλεκτρικές εργασίες θα
•
πρέπει να εκτελούνται σε συμμόρφωση προς
τους εθνικούς και τοπικούς κανονισμούς περί
ηλεκτρισμού.
Ακολουθήστε τις διαδικασίες που αναφέρονται
•
στον παρόντα οδηγό.
ΠΡΟΣΟΧΗ
ΚΙΝΔΥΝΟΣ ΕΣΩΤΕΡΙΚΗΣ ΒΛΑΒΗΣ
Μια εσωτερική βλάβη στο μετατροπέα συχνότητας
μπορεί να προκαλέσει σοβαρό τραυματισμό, αν δεν έχει
κλείσει σωστά ο μετατροπέας συχνότητας.
Βεβαιωθείτε ότι όλα τα καλύμματα ασφαλείας
•
βρίσκονται στη θέση τους και έχουν ασφαλιστεί
πλήρως πριν από την παροχή ενέργειας.
2 2
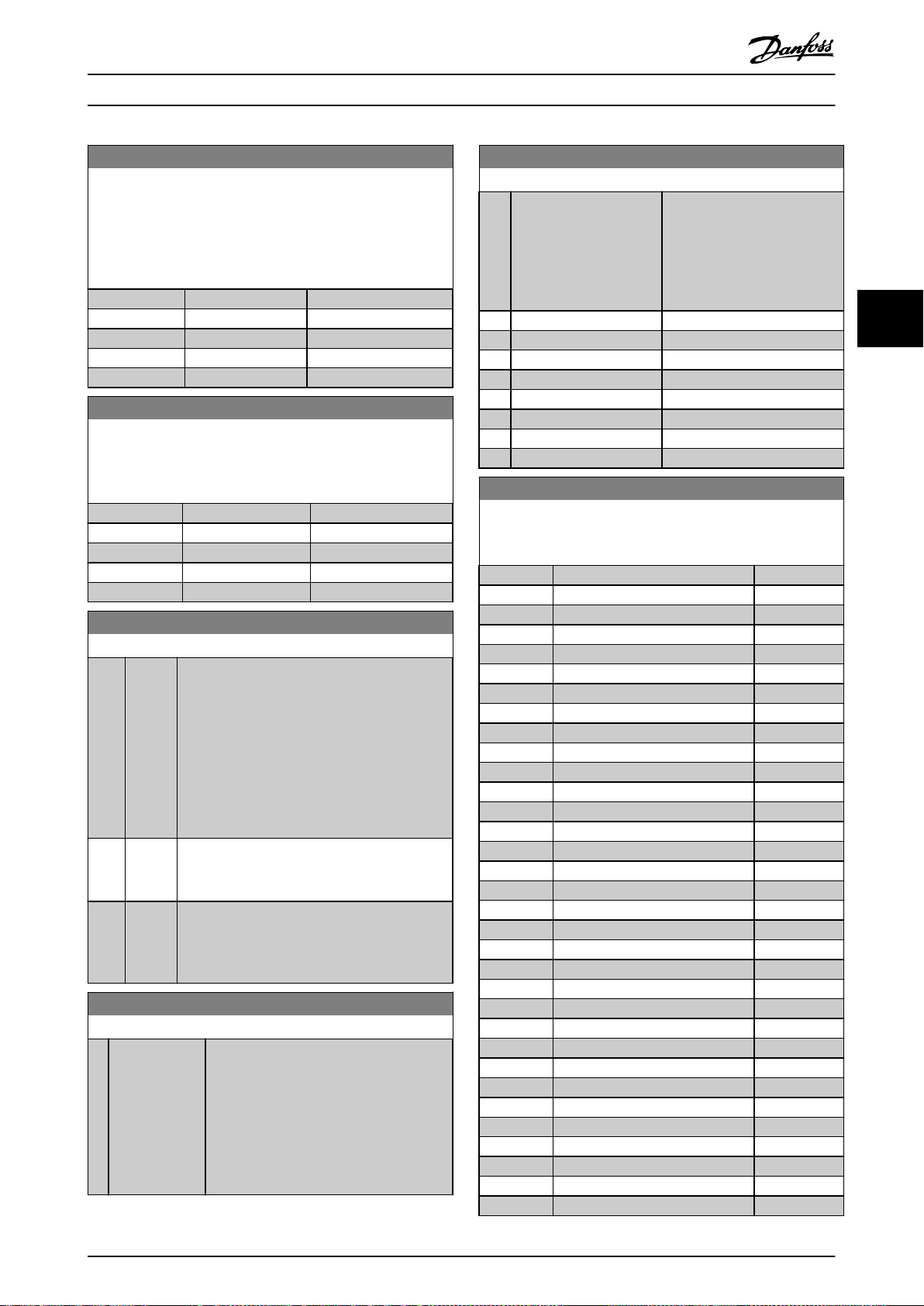
Τάση [V]
200–240 0,37–3,7 (0,5–5) 4
380–480
Πίνακας 2.1 Χρόνος εκφόρτισης
Περιοχή ισχύος
[kW (hp)]
0,37–7,5 (0,5–10) 4
11–22 (15–30) 15
Ελάχιστος χρόνος
αναμονής
(λεπτά)
ΠΡΟΕΙΔΟΠΟΙΗΣΗ
ΚΙΝΔΥΝΟΣ ΑΠΟ ΡΕΥΜΑ ΔΙΑΡΡΟΗΣ
Τα ρεύματα διαρροής υπερβαίνουν τα 3,5 mA. Η
αποτυχία σωστής γείωσης του μετατροπέα συχνότητας
μπορεί να οδηγήσει σε θάνατο ή σοβαρό τραυματισμό.
Διασφαλίστε τη σωστή γείωση του εξοπλισμού
•
από πιστοποιημένο τεχνικό ηλεκτρικής εγκατάστασης.
MG07C327 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. 13
Page 16
130BC506.10
Setup 1
A
B
C
D
5
12
13 14 15
10
11
10
9
6
7
8
4
1
2
3
Menu
Status
Quick
Menu
Main
Menu
Hand
On
O
Reset
Auto
On
Back
OK
On
Warn
Alarm
Προγραμματισμός
Ρυθμιστής στροφών VLT® Midi FC 280
3 Προγραμματισμός
3.1 Λειτουργία τοπικού πίνακα ελέγχου
33
Ο μετατροπέας συχνότητας υποστηρίζει αριθμητικό τοπικό
πίνακα ελέγχου (NLCP), τοπικό πίνακα ελέγχου γραφικών
(GLCP) και τυφλό κάλυμμα. Αυτή η ενότητα περιγράφει τη
λειτουργία με NLCP και GLCP.
ΕΙΔΟΠΟΙΗΣΗ
Μπορείτε επίσης να προγραμματίσετε τον μετατροπέα
συχνότητας από το Λογισμικό ρύθμισης MCT 10 σε Η/Υ
μέσω της θύρας επικοινωνίας RS485 ή τη θύρα USB.
Μπορείτε να αποκτήσετε το λογισμικό είτε παραγγέλνοντας το χρησιμοποιώντας τον κωδικό 130B1000 ή
πραγματοποιώντας λήψη από την ιστοσελίδα της
Danfoss: http://www.danfoss.com/BusinessAreas/
DrivesSolutions/Softwaredownload.
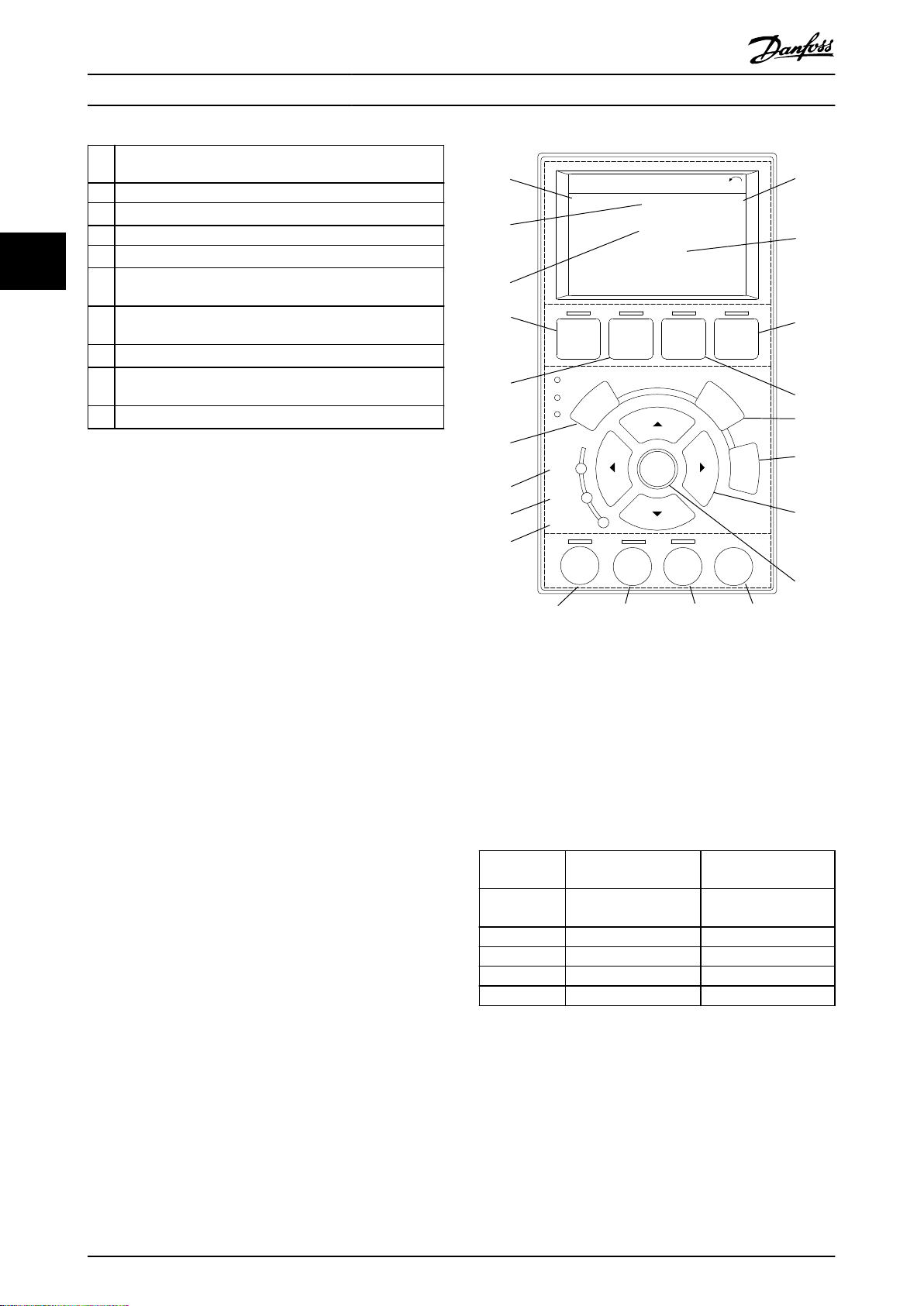
3.1.1 Αριθμητικός τοπικός πίνακας ελέγχου
(LCP)
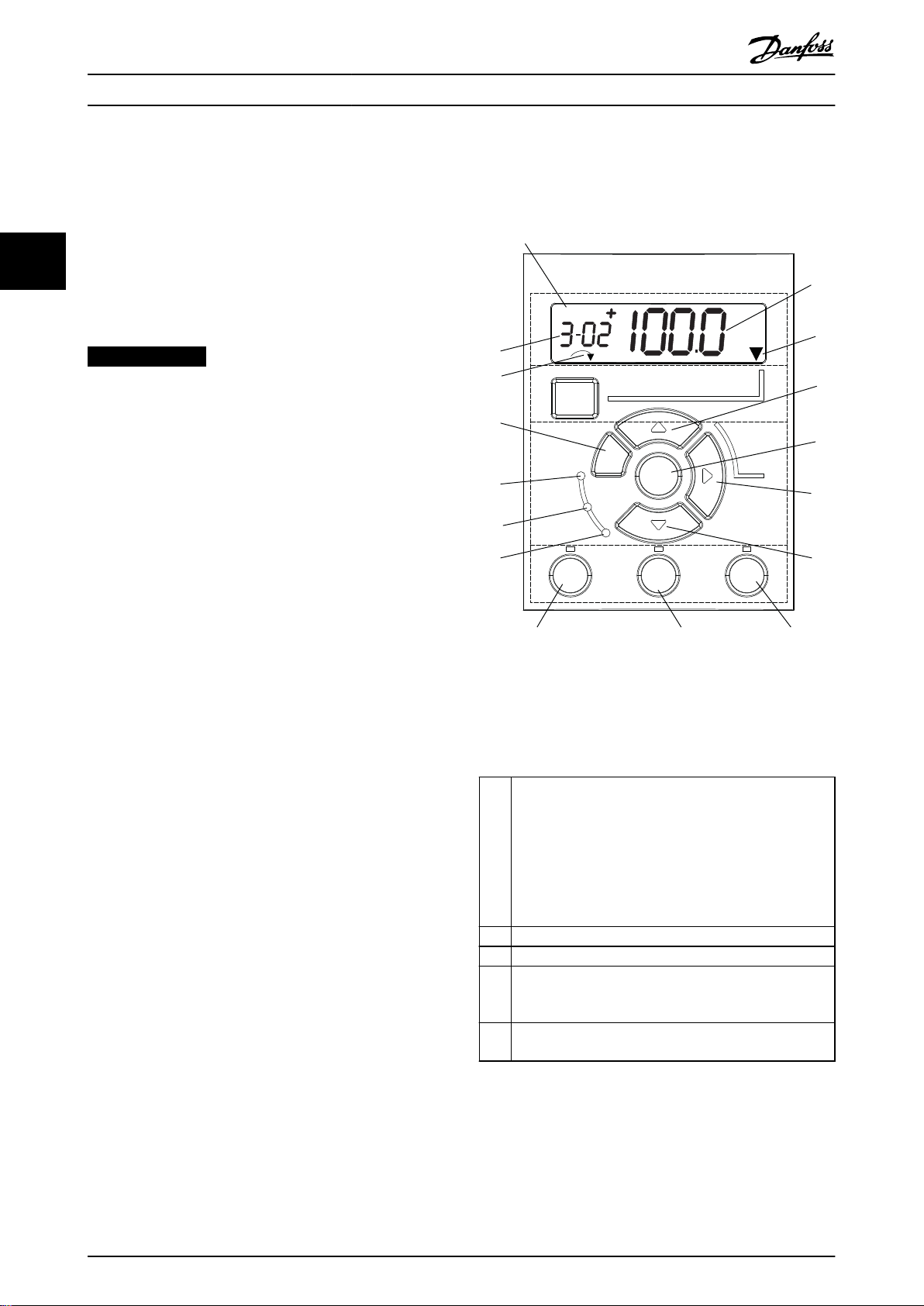
Ο αριθμητικός πίνακας ελέγχου (NLCP) διαιρείται σε 4
λειτουργικές ομάδες.
A. Αριθμητική οθόνη.
B. Πλήκτρο Menu.
C. Πλήκτρα πλοήγησης και ενδεικτικές λυχνίες
(LED).
D. Πλήκτρα χειρισμού και ενδεικτικές λυχνίες
(LEDs).
Εικόνα 3.1 Όψη του NLCP
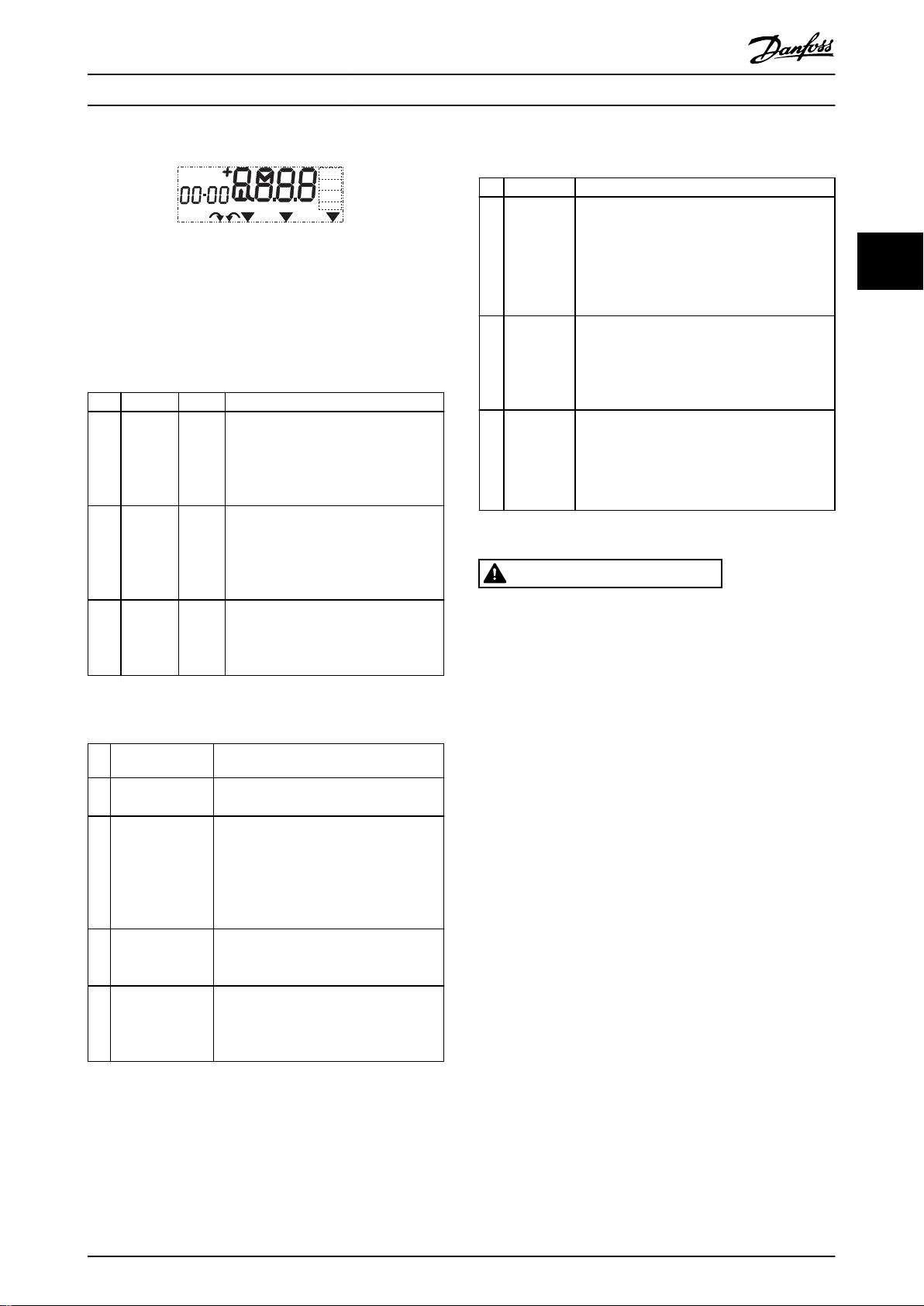
A. Αριθμητική οθόνη
Η οθόνη LCD είναι οπισθοφωτιζόμενη με 1 αριθμητική
γραμμή. Όλα τα δεδομένα εμφανίζονται στο NLCP.
Ο αριθμός ρύθμισης υποδεικνύει την ενεργή ρύθμιση και
τη ρύθμιση επεξεργασίας. Εάν η ίδια ρύθμιση λειτουργεί
ως ενεργή ρύθμιση και ρύθμιση επεξεργασίας, εμφανίζεται
μόνο ο αριθμός ρύθμισης (εργοστασιακή ρύθμιση). Όταν η
1
ενεργή ρύθμιση και η ρύθμιση επεξεργασίας διαφέρουν,
εμφανίζονται και οι δύο αριθμοί στην οθόνη (για
παράδειγμα, ρύθμιση 12). Ο αριθμός που αναβοσβήνει,
υποδεικνύει τη ρύθμιση επεξεργασίας.
2 Αριθμός παραμέτρου.
3 Τιμή παραμέτρου.
Η κατεύθυνση του κινητήρα εμφανίζεται στην κάτω
4
αριστερή πλευρά της οθόνης. Ένα μικρό βέλος υποδεικνύει
την κατεύθυνση.
Το τρίγωνο υποδεικνύει κατά πόσο το LCP είναι σε μενού
5
κατάστασης, γρήγορο μενού ή σε βασικό μενού.
Πίνακας 3.1 Υπόμνημα για την Εικόνα 3.1, Τμήμα A
14 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. MG07C327
Page 17
130BD135.10
Setup 12
INDEX
AHP
VkW
srpm
Hz%
n2n1
n3
p5 p4
p3 p2 p1
Προγραμματισμός Οδηγός Προγραμματισμού
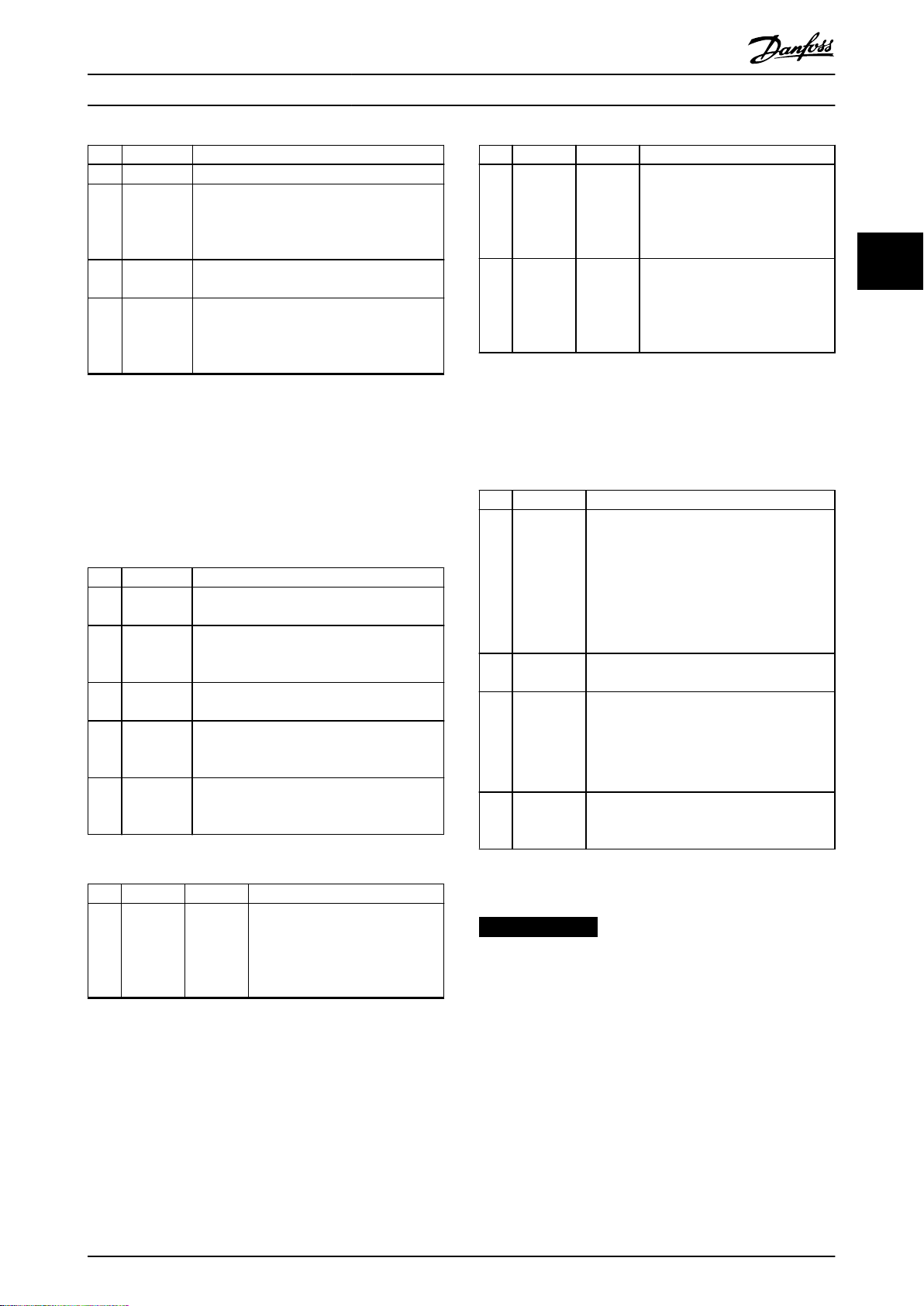
Δ. Πλήκτρα λειτουργίας και ενδεικτικές λυχνίες (LED)
Πλήκτρο Λειτουργία
Εικόνα 3.2 Πληροφορίες οθόνης
13
B. Πλήκτρο μενού
Για να επιλέξετε μεταξύ Κατάστασης, Γρήγορου μενού ή
Βασικού μενού, πατήστε [Μenu].
Γ. Ενδεικτικές λυχνίες (LED) και πλήκτρα πλοήγησης.
Ένδειξη Λυχνία Λειτουργία
Η λυχνία ON ενεργοποιείται όταν ο
μετατροπέας συχνότητας λαμβάνει ισχύ
μός
Πράσιν
από τάση δικτύου ρεύματος ή μέσω
η
ενός ακροδέκτη διαύλου ΣΡ ή από
εξωτερική τροφοδοσία 24 V.
Όταν πληρούνται οι προϋποθέσεις
προειδοποίησης, η κίτρινη λυχνία LED
Κίτρινη
ΠΡΟΕΙΔ ανάβει και στην οθόνη
εμφανίζεται ένα κείμενο που
προσδιορίζει το πρόβλημα.
Όταν υφίστανται οι συνθήκες
Κόκκιν
σφάλματος, η κόκκινη λυχνία
η
αναβοσβήνει και στην οθόνη
εμφανίζεται ένα κείμενο συναγερμού.
6 On
Προειδο-
7
ποίηση
Συναγερ
8
14
15
Πίνακας 3.4 Υπόμνημα για την Εικόνα 3.1, Τμήμα D
ΚΙΝΔΥΝΟΣ ΗΛΕΚΤΡΟΠΛΗΞΙΑΣ
Ακόμη και αφού πατήσετε το πλήκτρο [Απενεργοποίηση/
Επαναφορά], η τάση παραμένει στους ακροδέκτες του
μετατροπέα συχνότητας. Το πάτημα του πλήκτρου
[Απενεργοποίηση/Επαναφορά] δεν αποσυνδέει τον
Πίνακας 3.2 Επεξήγηση στο Εικόνα 3.1, Ενδεικτικές λυχνίες
(LED)
μετατροπέα συχνότητας από το δίκτυο ρεύματος. Η
επαφή με μέρη υπό τάση μπορεί να οδηγήσει σε θάνατο
ή σοβαρό τραυματισμό.
Πλήκτρο Λειτουργία
9 [Back]
10
11 [OK]
12
[▲] [▼]
[►]
Για μετάβαση στο προηγούμενο βήμα ή
επίπεδο στη δομή πλοήγησης.
Για την εναλλαγή μεταξύ ομάδων
παραμέτρων, παραμέτρων και εντός
παραμέτρων ή για την αύξηση/μείωση
των τιμών παραμέτρων. Τα βέλη μπορούν
επίσης να χρησιμοποιηθούν για τη
ρύθμιση τοπικής τιμής αναφοράς.
Πατήστε το για πρόσβαση στις ομάδες
παραμέτρων ή για την ενεργοποίηση μιας
επιλογής.
Πατήστε για να μετακινηθείτε από τα
αριστερά προς τα δεξιά, εντός της τιμής
παραμέτρου, για να αλλάξετε κάθε ψηφίο
μεμονωμένα.
•
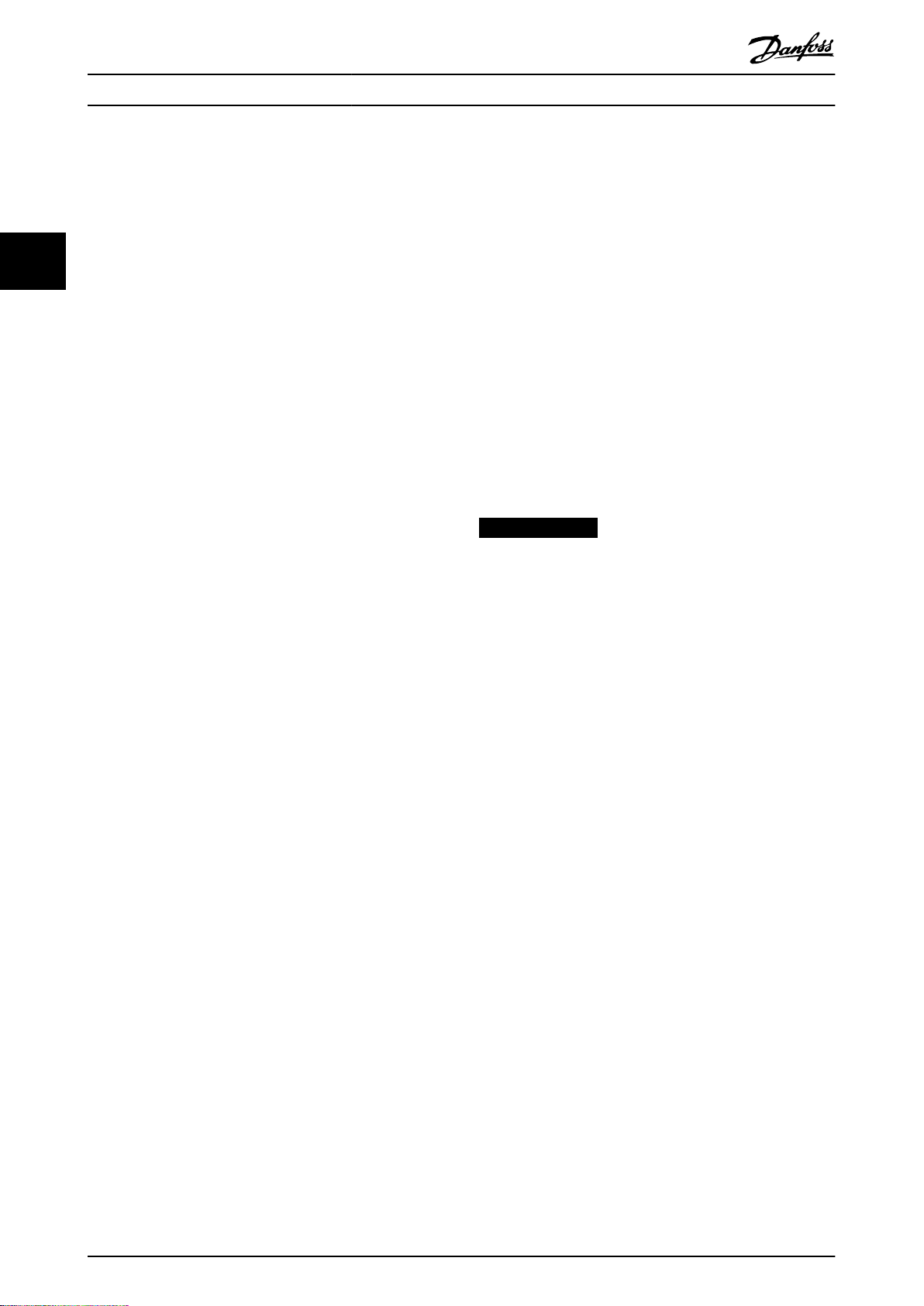
3.1.2 Η λειτουργία του δεξιού πλήκτρου
Πατήστε [►] για να επεξεργαστείτε οποιοδήποτε από τα 4
ψηφία στην οθόνη μεμονωμένα. Εάν πατήσετε [►] μία
φορά, ο δρομέας μετακινείται στο πρώτο ψηφίο και το
ψηφίο ξεκινά να αναβοσβήνει, όπως φαίνεται στο
Εικόνα 3.3. Πατήστε [▲] [▼] για να αλλάξετε την τιμή. Εάν
πατήσετε [►] η τιμή των ψηφίων δεν αλλάζει και δεν
μετακινείται η θέση της υποδιαστολής.
Εκκινεί το μετατροπέα συχνότητας σε
λειτουργία τοπικού ελέγχου.
Ένα εξωτερικό σήμα διακοπής από την
Χειροκίνητο
ενεργό
Απενεργο-
ποίηση/
Επαναφορά
Αυτόματη
λειτουργία
ενεργο-
ποιημένη
•
είσοδο ελέγχου ή τη σειριακή επικοινωνία
υπερισχύει της τοπικής εντολής hand on
(χειροκίνητο ενεργό).
Σταματά τον κινητήρα αλλά δεν διακόπτει την
τροφοδοσία στο μετατροπέα συχνότητας ή
επαναφέρει χειροκίνητα το μετατροπέα
συχνότητας μετά τη διόρθωση ενός
σφάλματος.
Θέτει το σύστημα σε απομακρυσμένη
λειτουργία.
Ανταποκρίνεται σε μια εξωτερική εντολή
•
εκκίνησης από ακροδέκτες ελέγχου ή
σειριακή επικοινωνία.
ΠΡΟΕΙΔΟΠΟΙΗΣΗ
Μην αγγίζετε μέρη υπό τάση.
στο NLCP
3 3
Πίνακας 3.3 Επεξήγηση στις Εικόνα 3.1, Πλήκτρα πλοήγησης
MG07C327 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. 15
Page 18
130BC440.10
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Προγραμματισμός
Ρυθμιστής στροφών VLT® Midi FC 280
5.
Πατήστε [▲] [▼] για να αλλάξετε την τιμή μιας
ρύθμισης παραμέτρου.
6. Πατήστε το [OK] για να αποδεχτείτε την αλλαγή.
7. Για έξοδο, πατήστε δύο φορές το πλήκτρο [Back]
(ή 3 φορές αν βρίσκεστε στα QM2 και QM3) για
33
να μεταβείτε στην Κατάσταση ή πατήστε μία φορά
το πλήκτρο [Μenu] για να μεταβείτε στο Βασικό
μενού.
Εικόνα 3.3 Λειτουργία δεξιού πλήκτρου
Το [►] μπορεί επίσης να χρησιμοποιηθεί για τη μετακίνηση
μεταξύ ομάδων παραμέτρων. Όταν βρίσκεστε στο Βασικό
μενού, πατήστε [►] για να μετακινηθείτε στην πρώτη
παράμετρο της επόμενης ομάδας παραμέτρων (για
παράδειγμα, μετακίνηση από την παράμετρο
παράμετρος 0-03 Regional Settings [0] Διεθνές στην
παράμετρο παράμετρος 1-00 Conguration Mode [0]
Ανοικτός βρόχος).
ΕΙΔΟΠΟΙΗΣΗ
Κατά την εκκίνηση, το ΝLCP εμφανίζει το μήνυμα LCP
ΕΝΕΡΓΟ. Όταν δεν εμφανίζεται πλέον το μήνυμα, ο
μετατροπέας συχνότητας είναι έτοιμος προς λειτουργία.
Η προσθήκη ή η αφαίρεση επιλογών μπορεί να
επεκτείνει τη διάρκεια της εκκίνησης.
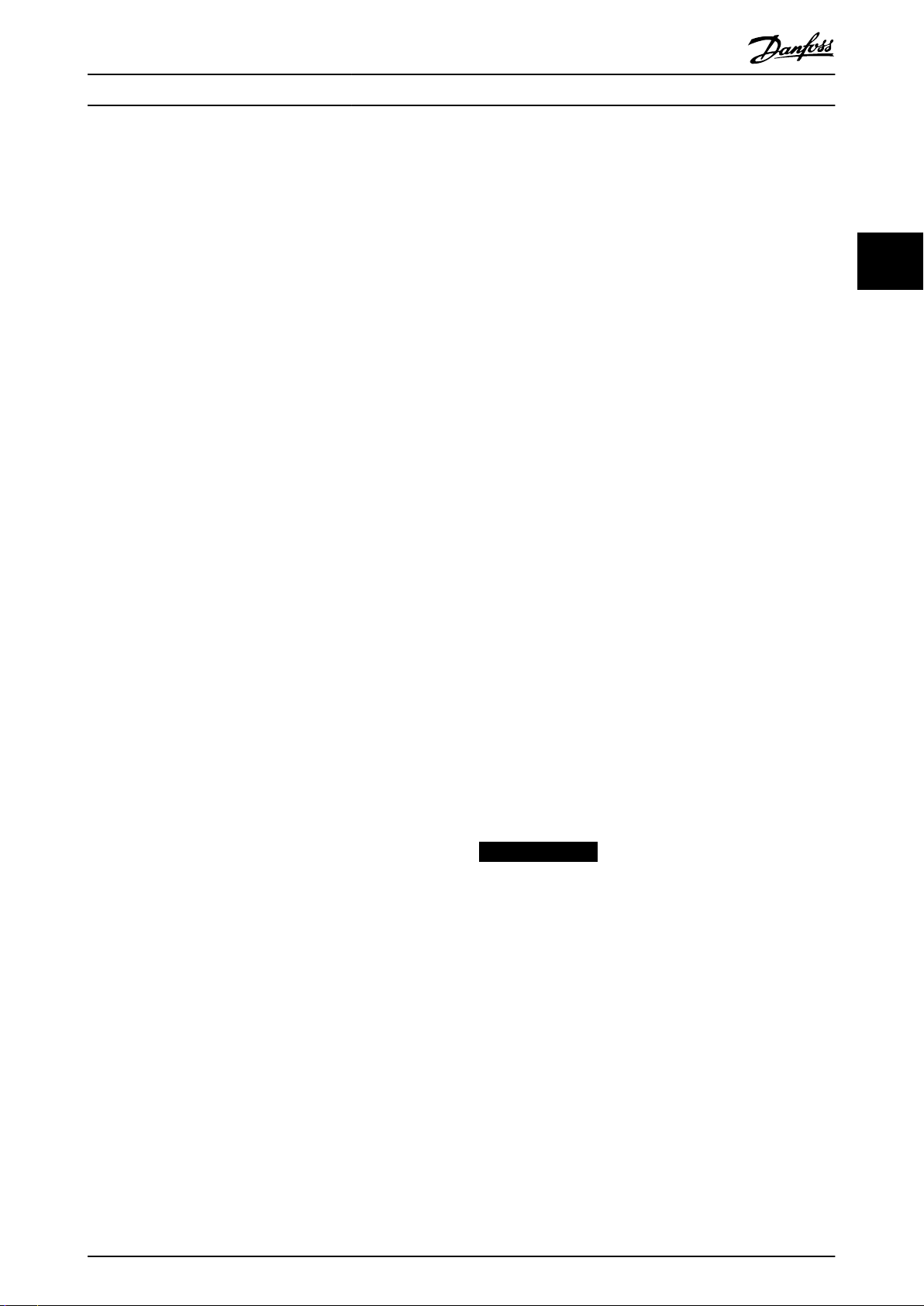
3.1.3 Γρήγορο μενού στο NLCP
Το Γρήγορο μενού επιτρέπει την πρόσβαση στις
παραμέτρους που χρησιμοποιούνται πιο συχνά.
1. Για να μεταβείτε στο Γρήγορο μενού, πατήστε το
πλήκτρο [Μenu] έως ότου ανάψει η ένδειξη στην
οθόνη πάνω από το Γρήγορο μενού.
2.
Πατήστε [▲] [▼] για να επιλέξετε QM1 ή QM2 και,
στη συνέχεια, πατήστε [OK].
3.
Πατήστε [▲] [▼] για να μετακινηθείτε μεταξύ των
παραμέτρων στο Γρήγορο μενού.
4. Πατήστε [OK] για να επιλέξετε μια παράμετρο.
16 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. MG07C327
Page 19
130BC445.12
1-22 XXXX V
Motor
nominal
speed
QM 1
0-01 [0]
1-10 [0]
1-24 XXXX A
Language
Motor Type
1-20 XXXX kW
Motor power
Motor voltage
1-26 XXXX 1-23 XXXX
Stator
Motor frequency
1-25 XXXX
1-30 XXXX
1-39 XXXX
1-40 XXXX
1-37 XXXX
1-25 XXXX
1-24 XXXX
A
3-02 XXXX
3-03 XXXX
3-41 XXXX S
3-42 XXXX S
5-12
[2]
1-29 [1]
AMA
Back EMF at
1000 RPM
d-axis
QM 2
BMS
AMS
ES
5-70 XXXX
5-71 [0]
1-30 XXXX
1-39 XXXX
1-90 [0]
2-10 [0]
4-16 XXXX %
4-17 XXXX %
4-18 XXXX %
1-00 [0]
1-01 [1]
1-10 [0]
1-24 XXXX A 1-20 XXXX kW
1-22 XXXX V
Motor
nominal
speed
Motor power
Motor voltage
1-26 XXXX 1-23 XXXX
Motor frequency
1-25 XXXX
1-30 XXXX
1-40 XXXX
1-37 XXXX
1-25 XXXX
1-24 XXXX
A
Back EMF at
1000 RPM
d-axis
1-39 XXXX
4-19 XXXX
4-14 XXXX
Stator
QM 3
QM 4 QM 5
L10C
SFS
TBD
Motor
nominal
speed
Motor
nominal
speed
Motor current
Motor cont.
rated torque
Resistance (Rs)
Motor poles
inductance (Ld)
Asynchronous motor
Motor current
Minimum reference
Maximum reference
Ramp 1 ramp-up time
Ramp 1 ramp-down time
Terminal 27 digital input
Basic motor set-up
mode
Motor control
principle
Motor type
PM motor
PM motor
Motor
current
Motor cont.
rated torque
Stator
Resistance (Rs)
Motor poles
inductance (Ld)
Motor speed high limit [Hz]
Maximum output frequency
Asynchronous motor
Motor current
RPM
RPM
RPM
Hz
RPM
Hz
Hz
Hz
Hz
Hz
Adv. motor set-up
Resistance (Rs)
Motor poles
Motor thermal
protection
Brake function
Torque limit motor mode
Torque limit generator mode
Current limit
Encoder set-up
Terminal 32/33
pulses per revolution
Terminal 32/33
encoder direction
Changes made
Last 10 changes Since fac tory setting
Alarm log
Προγραμματισμός Οδηγός Προγραμματισμού
3 3
MG07C327 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. 17
Εικόνα 3.4 Δομή γρήγορου μενού
Page 20
130BC446.10
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
1
2
3
4
5
6
7
10
11
12
OK
OK
Back
8
Back
Setup 1
2 x
+
OK
9
OK
Προγραμματισμός
Ρυθμιστής στροφών VLT® Midi FC 280
3.1.4 Βασικό μενού στο NLCP
Το Βασικό μενού επιτρέπει την πρόσβαση σε όλες τις
παραμέτρους.
33
1. Για να μεταβείτε στο Βασικό μενού, πατήστε το
πλήκτρο [Μenu] έως ότου ανάψει η ένδειξη στην
οθόνη πάνω από το Βασικό μενού.
2.
[▲] [▼]: Μετακινηθείτε μεταξύ των ομάδων
παραμέτρων.
3. Πατήστε [OK] για να επιλέξετε μια ομάδα
παραμέτρων.
4.
[▲] [▼]: Μετακινηθείτε μεταξύ των παραμέτρων
μιας συγκεκριμένης ομάδας.
5. Πατήστε [OK] για να επιλέξετε μια παράμετρο.
6.
[►] και [▲] [▼]: Ρυθμίστε/αλλάξτε την τιμή μιας
παραμέτρου.
7. Πατήστε το [OK] για να αποδεχτείτε την τιμή.
8. Για έξοδο, πατήστε δύο φορές το πλήκτρο [Back]
(ή 3 φορές για τις παραμέτρους πίνακα) για να
μεταβείτε στο Βασικό μενού ή πατήστε μία φορά
το πλήκτρο [Μenu] για να μεταβείτε στην
Κατάσταση.
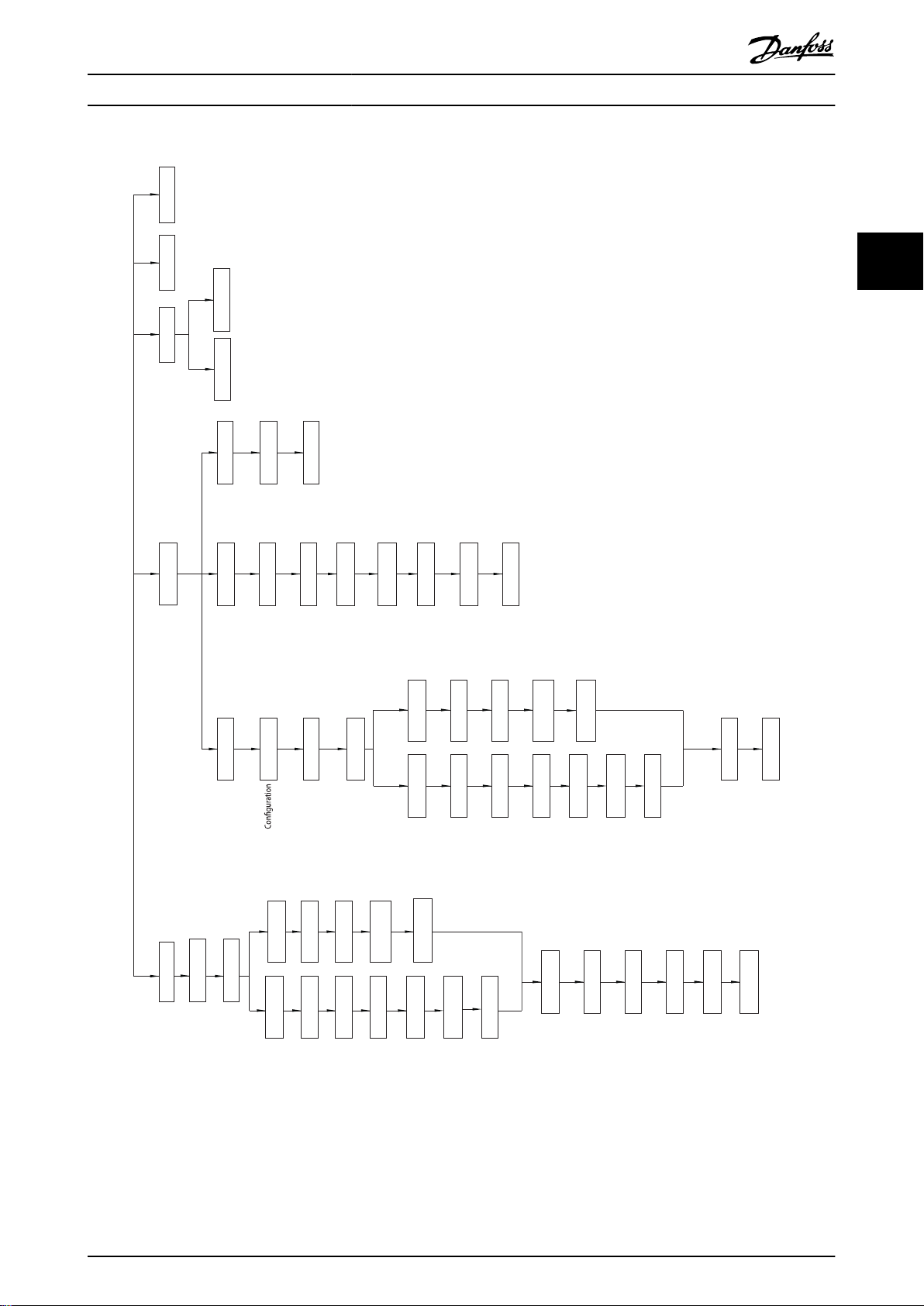
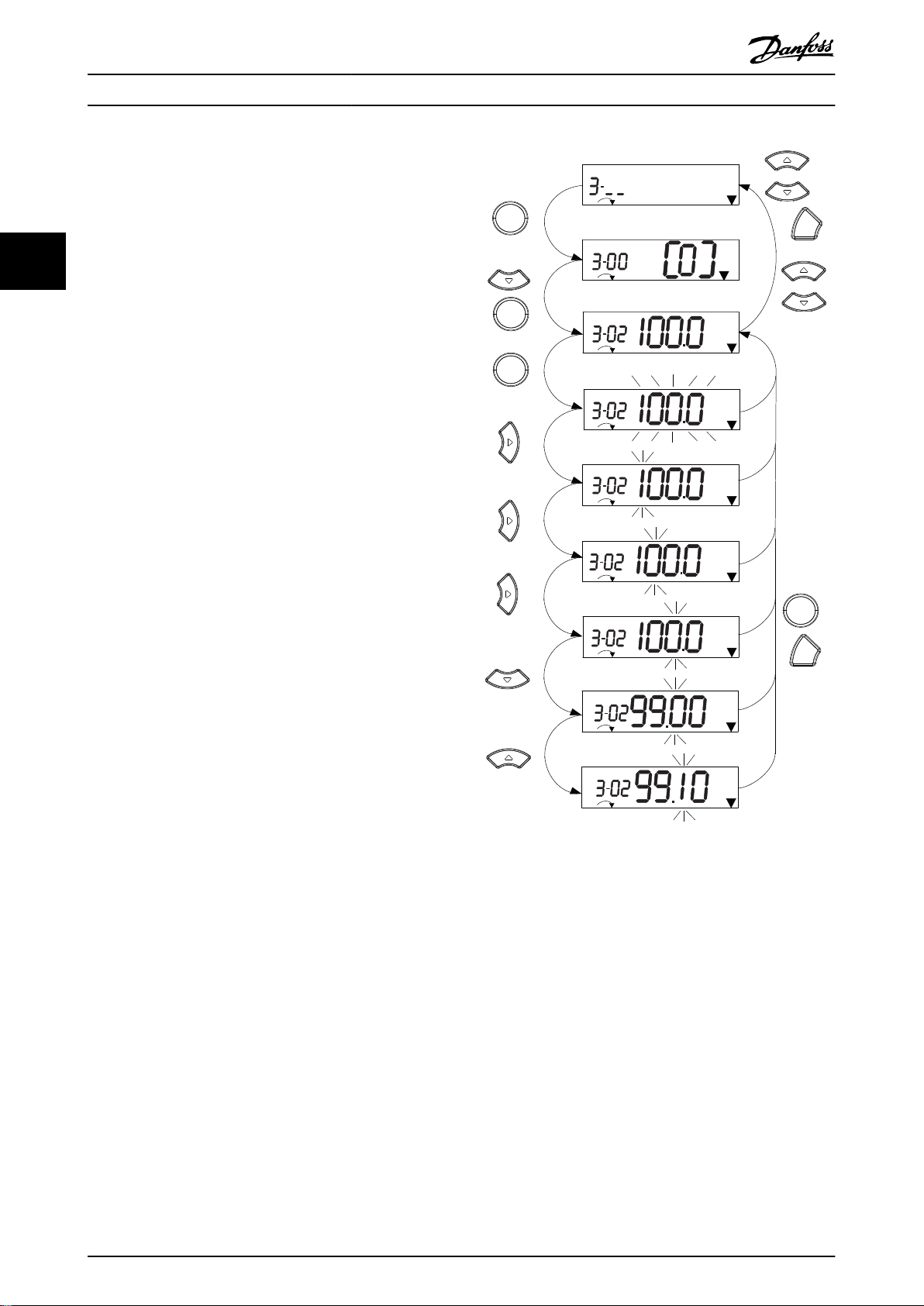
Ανατρέξτε στα Εικόνα 3.5, Εικόνα 3.6 και Εικόνα 3.7 για τις
αρχές αλλαγής της τιμής συνεχών, αριθμημένων
παραμέτρων και παραμέτρων πίνακα, αντίστοιχα. Οι
ενέργειες στις εικόνες περιγράφονται στα Πίνακας 3.5,
Πίνακας 3.6 και Πίνακας 3.7.
Εικόνα 3.5 Αλληλεπιδράσεις Βασικού μενού - Συνεχείς
παράμετροι
18 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. MG07C327
Page 21
130BC447.11
Setup 1
Setup 1
Setup 1
1
2
3
4
5
6
OK
OK
Back
7
OK
Back
130BC448.10
1
2
4
5
6
7
8
9
10
OK
Back
Back
Back
5 x
Setup 1
Setup 1
Setup 1
Setup 1
%
INDEX
%
INDEX
%
INDEX
Setup 1
INDEX
%
OK
OK
OK
Προγραμματισμός Οδηγός Προγραμματισμού
1 [OK]: Εμφανίζεται η πρώτη παράμετρος στην ομάδα.
2
Πατήστε [▼] επαναλαμβανόμενα για να μετακινηθείτε προς
τα κάτω στην παράμετρο.
3 Πατήστε [ΟΚ] για να ξεκινήσετε την επεξεργασία.
4
[►]: Το πρώτο ψηφίο αναβοσβήνει (είναι επεξεργάσιμο).
5
[►]: Το δεύτερο ψηφίο αναβοσβήνει (είναι επεξεργάσιμο).
6
[►]: Το τρίτο ψηφίο αναβοσβήνει (είναι επεξεργάσιμο).
7
[▼]: Μειώστε την τιμή της παραμέτρου, η θέση της υποδια-
στολής αλλάζει αυτόματα.
8
[▲]: Αυξήστε την τιμή της παραμέτρου.
9 [Back]: Ακυρώνει τις αλλαγές, επιστρέφει στο 2.
[OK]: Αποδοχή αλλαγών, επιστροφή στο 2.
10
[▲][▼]: Επιλογή παραμέτρου εντός της ομάδας.
11 [Back]: Αφαίρεση της τιμής και εμφάνιση της ομάδας
παραμέτρων.
12
[▲][▼]: Επιλογή ομάδας.
Πίνακας 3.5 Αλλαγή τιμών συνεχών παραμέτρων
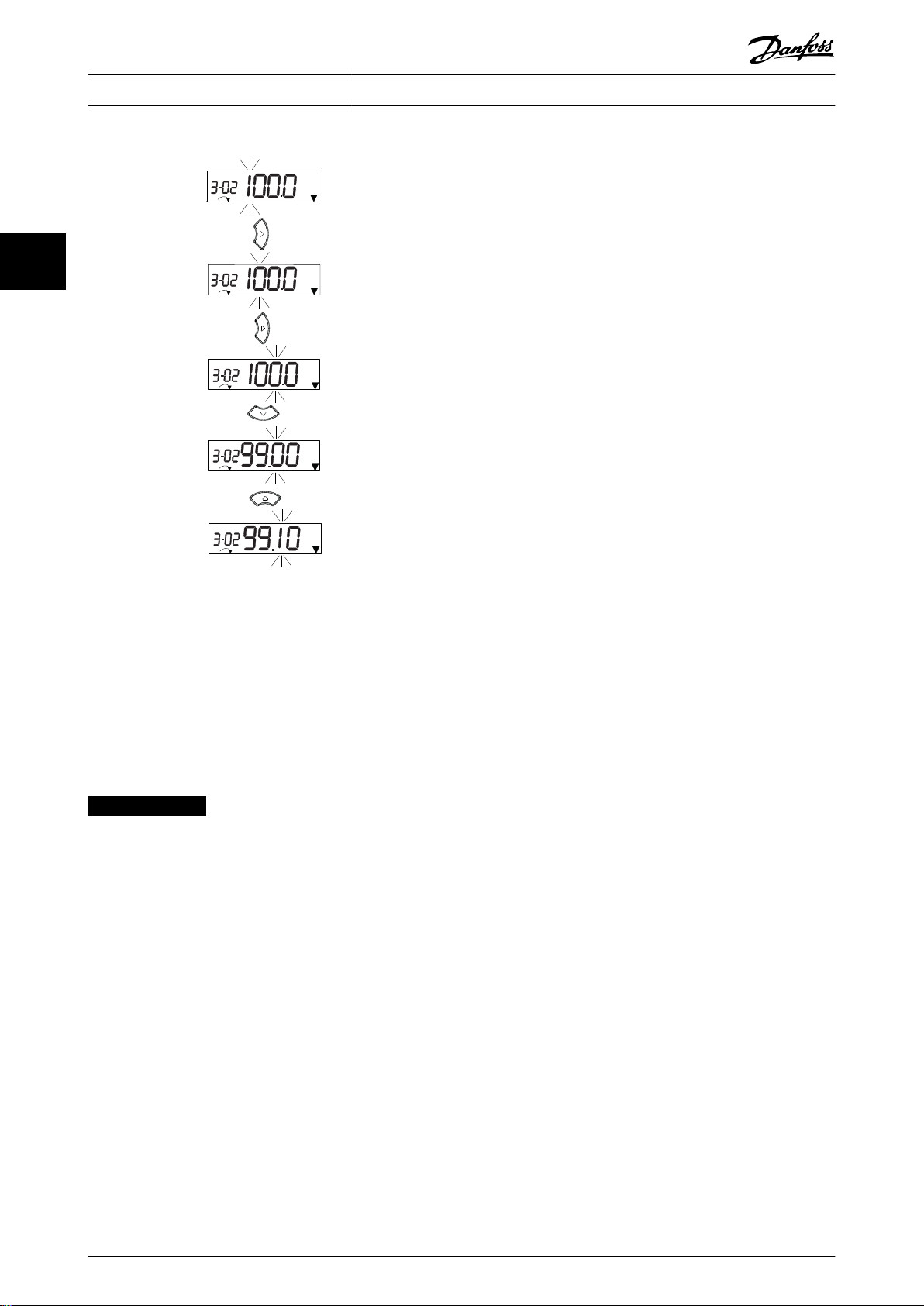
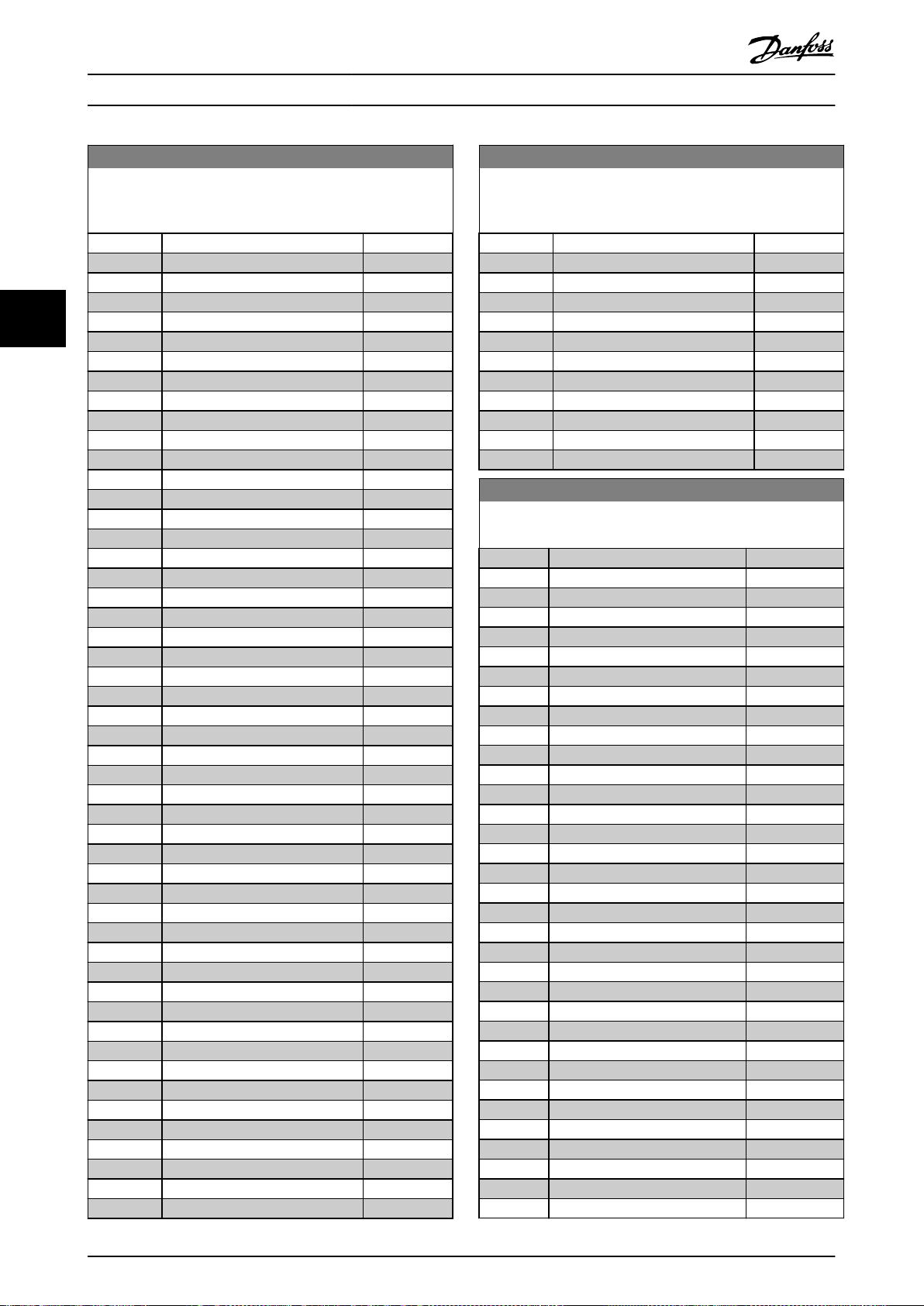
Για τις αριθμημένες παραμέτρους, οι αλληλεπιδράσεις είναι
παρόμοιες, αλλά η τιμή της παραμέτρου εμφανίζεται σε
αγκύλες λόγω του περιορισμού των ψηφίων (4 μεγάλα
ψηφία) στο NLCP και η αρίθμηση μπορεί να είναι
μεγαλύτερη από 99. Όταν η τιμή αρίθμησης είναι
μεγαλύτερη από 99, το LCP μπορεί να εμφανίσει μόνο το
πρώτο μέρος της αγκύλης.
1 [OK]: Εμφανίζεται η πρώτη παράμετρος στην ομάδα.
2 Πατήστε [ΟΚ] για να ξεκινήσετε την επεξεργασία.
3
[▲][▼]: Αλλαγή της τιμής παραμέτρου (αναλαμπή).
4 Πατήστε [Back] για να ακυρώσετε τις αλλαγές ή [OK] για να
αποδεχθείτε τις αλλαγές (επιστροφή στην οθόνη 2).
5
[▲][▼]: Επιλογή μιας παραμέτρου εντός της ομάδας.
6 [Back]: Αφαίρεση της τιμής και εμφάνιση της ομάδας
παραμέτρων.
7
[▲][▼]: Επιλογή ομάδας.
Πίνακας 3.6 Αλλαγή τιμών αριθμημένων παραμέτρων
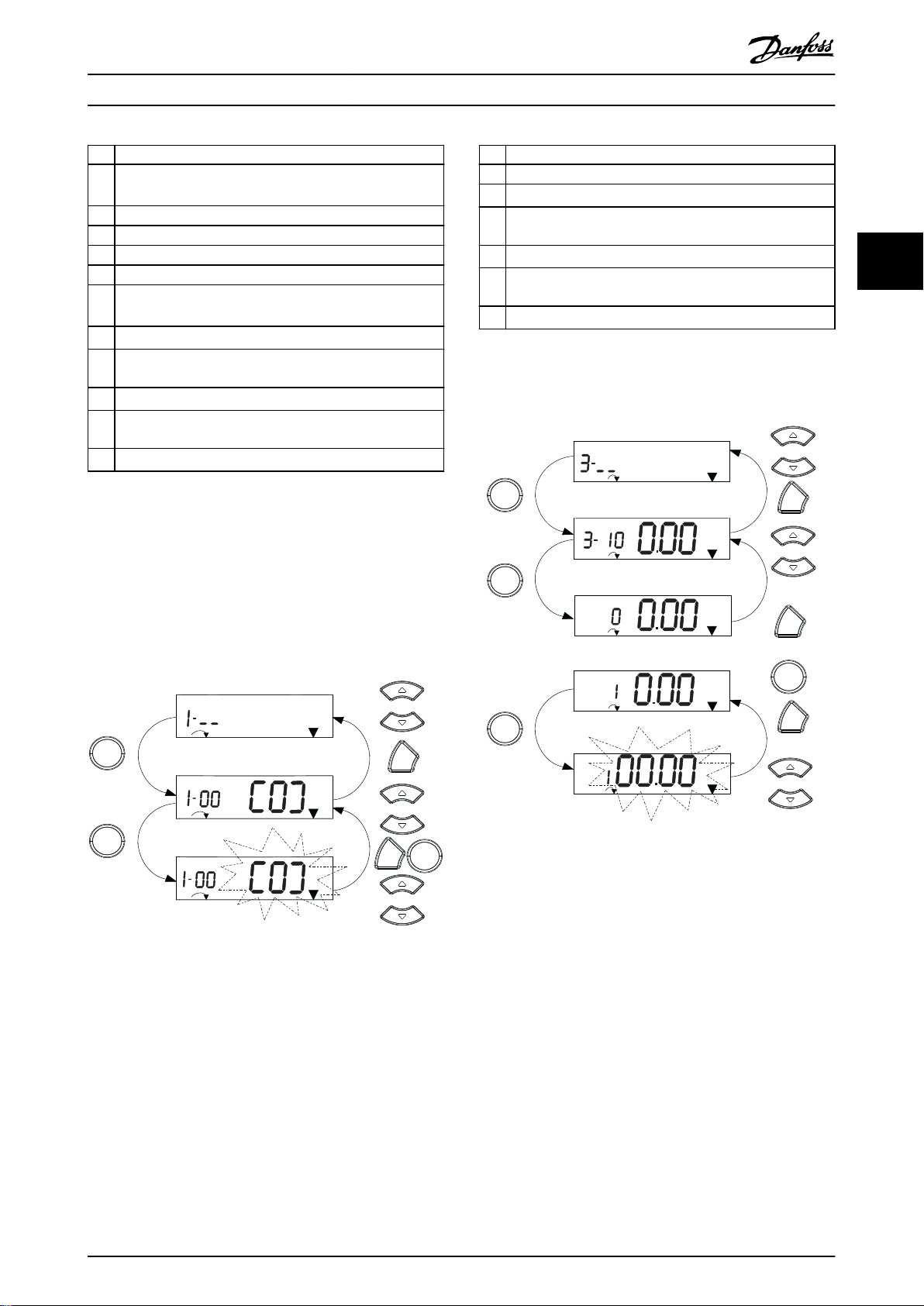
Οι παράμετροι πίνακα λειτουργούν ως εξής:
3 3
Εικόνα 3.7 Αλληλεπιδράσεις Βασικού μενού - Παράμετροι
πίνακα
Εικόνα 3.6 Αλληλεπιδράσεις Βασικού μενού - Αριθμημένες
παράμετροι
MG07C327 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. 19
Page 22
130BD598.10
Auto
on
Reset
Hand
on
Off
Status
Quick
Menu
Main
Menu
Alarm
Log
Back
Cancel
Info
OK
Status
1(1)
36.4 kW
Auto Remote Ramping
0.000
On
Alarm
Warn.
A
7.83 A
799 RPM
B
C
D
53.2 %
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18 19 20 21
Προγραμματισμός
Ρυθμιστής στροφών VLT® Midi FC 280
1 [OK]: Εμφάνιση αριθμών παραμέτρων και της τιμής στον
πρώτο δείκτη.
2 [OK]: Ο δείκτης μπορεί να επιλεχθεί.
3
[▲][▼]: Επιλογή δείκτη.
4 [OK]: Η τιμή είναι επεξεργάσιμη.
5
33
[▲][▼]: Αλλαγή της τιμής παραμέτρου (αναλαμπή).
6 [Back]: Ακύρωση αλλαγών.
[OK]: Αποδοχή αλλαγών.
7 [Back]: Ακύρωση επεξεργασίας δείκτη, επιλογή νέας
παραμέτρου.
8
[▲][▼]: Επιλογή παραμέτρου εντός της ομάδας.
9 [Back]: Αφαίρεση της τιμής δείκτη παραμέτρου και εμφάνιση
της ομάδας παραμέτρων.
10
[▲][▼]: Επιλογή ομάδας.
Πίνακας 3.7 Αλλαγή τιμών παραμέτρων πίνακα
3.1.5 Διάταξη GLCP
Το LCP διαιρείται σε τέσσερις λειτουργικές ομάδες
(ανατρέξτε στο Εικόνα 3.8).
Α. Περιοχή οθόνης
B. Πλήκτρα μενού οθόνης
Γ. Πλήκτρα πλοήγησης και ενδεικτικές λυχνίες
Εικόνα 3.8 Γραφικός τοπικός πίνακας ελέγχου (GLCP)
(LED)
Δ: Πλήκτρα λειτουργίας και επαναφοράς
Α. Περιοχή οθόνης
Η περιοχή οθόνης ενεργοποιείται όταν ο μετατροπέας
συχνότητας λαμβάνει ισχύ από τάση δικτύου ρεύματος ή
μέσω ενός ακροδέκτη διαύλου ΣΡ ή από εξωτερική
τροφοδοσία ΣΡ 24 V.
Οι πληροφορίες που εμφανίζονται στον LCP μπορούν να
προσαρμοστούν για τις εφαρμογές χρήστη. Κάντε επιλογές
στις Ρυθμίσεις οθόνης Q3-13 γρήγορου μενού.
Οθόνη Αριθμός παραμέτρου
1 0-20
2 0-21 [1614] Ρεύμα κινητήρα
3 0-22 [1610] Ισχύς [kW ]
4 0-23 [1613] Συχνότητα
5 0-24 [1502] Μετρητής kWh
Πίνακας 3.8 Υπόμνημα για το Εικόνα 3.8, Περιοχή οθόνης
Προεπιλεγμένη
ρύθμιση
[1602] Τιμή αναφοράς
[%]
20 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. MG07C327
B. Πλήκτρα μενού οθόνης
Τα πλήκτρα μενού χρησιμοποιούνται για τη ρύθμιση των
παραμέτρων σχετικά με την πρόσβαση στο μενού, την
εναλλαγή μεταξύ των τρόπων προβολής κατάστασης κατά
τη διάρκεια της κανονικής λειτουργίας και την προβολή
των δεδομένων αρχείων καταγραφής σφαλμάτων.
Page 23
Προγραμματισμός Οδηγός Προγραμματισμού
Πλήκτρο Λειτουργία
6 Κατάσταση Εμφανίζει πληροφορίες λειτουργίας.
Παρέχει πρόσβαση στις παραμέτρους
Γρήγορο
7
μενού
Βασικό
8
μενού
Ιστορικό
9
σφαλμάτων
Πίνακας 3.9 Επεξήγηση στο Εικόνα 3.8, Πλήκτρα μενού οθόνης
προγραμματισμού για οδηγίες αρχικής
ρύθμισης και πολλές αναλυτικές οδηγίες για
την εφαρμογή.
Επιτρέπει την πρόσβαση σε όλες τις
παραμέτρους προγραμματισμού.
Εμφανίζει μια λίστα πρόσφατων προειδοποιήσεων, τους τελευταίους 10 συναγερμούς
και το αρχείο καταγραφής δεδομένων
συντήρησης.
Γ. Πλήκτρα πλοήγησης και ενδεικτικές λυχνίες (LED)
Τα πλήκτρα πλοήγησης χρησιμοποιούνται για τον προγραμματισμό λειτουργιών και τη μετακίνηση του κέρσορα της
οθόνης. Τα πλήκτρα πλοήγησης επιτρέπουν επίσης τον
έλεγχο της ταχύτητας στη λειτουργία τοπικού ελέγχου. Στην
περιοχή αυτή βρίσκονται επίσης 3 ενδεικτικές λυχνίες
κατάστασης του μετατροπέα συχνότητας.
Πλήκτρο Λειτουργία
10 Πίσω
11 Άκυρο
ΠληροφορίεςΠατήστε για τον ορισμό της λειτουργίας που
12
Πλήκτρα
13
πλοήγησης
14 OK
Πίνακας 3.10 Επεξήγηση στις Εικόνα 3.8, Πλήκτρα πλοήγησης
Ένδειξη Λυχνία Λειτουργία
15 On Πράσινη
Μεταβαίνει στο προηγούμενο βήμα ή στη
λίστα της δομής του μενού.
Ακυρώνει την τελευταία σας αλλαγή ή
εντολή, εφόσον δεν έχει αλλάξει ο τρόπος
λειτουργίας οθόνης.
εμφανίζεται.
Για να κινηθείτε μεταξύ των αντικειμένων στο
μενού, χρησιμοποιήστε τα 4 πλήκτρα
πλοήγησης.
Πατήστε το για πρόσβαση στις ομάδες
παραμέτρων ή για την ενεργοποίηση μιας
επιλογής.
Η λυχνία ON ενεργοποιείται όταν ο
μετατροπέας συχνότητας λαμβάνει
ισχύ από τάση δικτύου ρεύματος ή
μέσω ενός ακροδέκτη διαύλου ΣΡ
ή από εξωτερική τροφοδοσία 24 V.
Ένδειξη Λυχνία Λειτουργία
Όταν πληρούνται οι προϋποθέσεις
Προειδο-
16
ποίηση
Συναγερμ
17
Πίνακας 3.11 Επεξήγηση στο Εικόνα 3.8, Ενδεικτικές λυχνίες
(LED)
ός
Κίτρινη
Κόκκινη
προειδοποίησης, η κίτρινη λυχνία
LED ΠΡΟΕΙΔ ανάβει και στην
οθόνη εμφανίζεται ένα κείμενο
που προσδιορίζει το πρόβλημα.
Όταν υφίστανται οι συνθήκες
σφάλματος, η κόκκινη λυχνία
αναβοσβήνει και στην οθόνη
εμφανίζεται ένα κείμενο
συναγερμού.
Δ: Πλήκτρα λειτουργίας και επαναφοράς
Τα πλήκτρα λειτουργίας βρίσκονται στο κάτω μέρος του
LCP.
Πλήκτρο Λειτουργία
Εκκινεί το μετατροπέα συχνότητας σε
χειροκίνητη λειτουργία.
Ένα εξωτερικό σήμα διακοπής από
Χειροκίνητο
18
ενεργό
Απενεργο-
19
ποίηση
Αυτόματη
λειτουργία
20
ενεργο-
ποιημένη
21 Επαναφορά
Πίνακας 3.12 Επεξήγηση στο Εικόνα 3.8, Πλήκτρα λειτουργίας
και επαναφορά
•
την είσοδο ελέγχου ή τη σειριακή
επικοινωνία υπερισχύει της τοπικής
εντολής hand on (χειροκίνητο
ενεργό).
Διακόπτει τον κινητήρα, αλλά δεν αφαιρεί
την ισχύ από το μετατροπέα συχνότητας.
Θέτει το σύστημα σε απομακρυσμένη
λειτουργία.
Ανταποκρίνεται σε μια εξωτερική εντολή
•
εκκίνησης από ακροδέκτες ελέγχου ή
σειριακή επικοινωνία.
Επαναφέρει χειροκίνητα το μετατροπέα
συχνότητας μετά τη διόρθωση ενός
σφάλματος.
ΕΙΔΟΠΟΙΗΣΗ
Για να ρυθμίσετε την αντίθεση οθόνης, πατήστε [Status]
και τα πλήκτρα [▲]/[▼].
3.1.6 Ρυθμίσεις παραμέτρων
3 3
Η εφαρμογή του σωστού προγραμματισμού για εφαρμογές
απαιτεί συχνά τη ρύθμιση λειτουργιών σε διάφορες
σχετικές παραμέτρους. Λεπτομέρειες για παραμέτρους
παρέχονται στο κεφάλαιο 4 Περιγραφές παραμέτρων.
Τα δεδομένα προγραμματισμού αποθηκεύονται εσωτερικά
στο μετατροπέα συχνότητας.
MG07C327 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. 21
Page 24
Προγραμματισμός
Ρυθμιστής στροφών VLT® Midi FC 280
Για δημιουργία εφεδρικού αντιγράφου, τα
•
δεδομένα μπορούν να αποσταλούν στη μνήμη
LCP.
Για λήψη δεδομένων σε άλλο μετατροπέα
•
συχνότητας, συνδέστε το LCP σε εκείνη τη
33
μονάδα και πραγματοποιήστε λήψη των
αποθηκευμένων ρυθμίσεων.
Η επαναφορά των εργοστασιακών προεπι-
•
λεγμένων ρυθμίσεων δεν αλλάζει τα δεδομένα
που έχουν αποθηκευτεί στη μνήμη του LCP.
3.1.7 Αλλαγή ρυθμίσεων παραμέτρων με το
3.1.8 Αποστολή/λήψη δεδομένων προς/από
το GLCP
1. Πατήστε [O] για να σταματήσετε τον κινητήρα
πριν εκτελέσετε αποστολή ή λήψη δεδομένων.
2. Πατήστε [Main Menu] παράμετρος 0-50 LCP Copy
και μετά [OK].
3. Επιλέξτε [1] All to LCP για αποστολή δεδομένων
στο LCP ή επιλέξτε [2] All from LCP για λήψη
δεδομένων από το LCP.
4. Πατήστε [OK]. Μια μπάρα προόδου παρουσιάζει
την πρόοδο της αποστολής ή της λήψης.
GLCP
5. Πατήστε [Hand On] ή [Auto On] για να
Πρόσβαση στις ρυθμίσεις παραμέτρων και αλλαγή τους
μέσω του Γρήγορου μενού ή του Βασικού μενού. Το Γρήγορο
μενού επιτρέπει την πρόσβαση μόνο σε περιορισμένο
αριθμό παραμέτρων.
1. Πατήστε το πλήκτρο [Quick Menu] ή [Main Menu]
στο LCP.
2.
Πατήστε [▲] [▼] για να μετακινηθείτε στις ομάδες
παραμέτρων και πατήστε το [OK] για να επιλέξετε
μια ομάδα παραμέτρων.
3.
Πατήστε [▲] [▼] για να μετακινηθείτε στις
παραμέτρους και πατήστε [OK] για να επιλέξετε
μια παράμετρο.
4.
Πατήστε [▲] [▼] για να αλλάξετε την τιμή μιας
ρύθμισης παραμέτρου.
5.
Πατήστε [◄] [►] για να μετατοπίσετε γρήγορα ένα
ψηφίο όταν μια δεκαδική παράμετρος βρίσκεται
σε κατάσταση επεξεργασίας.
6. Πατήστε το [OK] για να αποδεχτείτε την αλλαγή.
7. Πατήστε είτε [Back] δύο φορές για να μεταβείτε
στην Κατάσταση ή πατήστε [Main Menu] μία
φορά για να μεταβείτε στο Βασικό μενού.
Προβολή αλλαγών
Το Γρήγορο μενού Q5 - Αλλαγές που έχουν γίνει αναφέρει
όλες τις παραμέτρους που έχουν αλλάξει από τις προεπιλεγμένες ρυθμίσεις.
Η λίστα εμφανίζει μόνο παραμέτρους που
•
άλλαξαν κατά την τρέχουσα ρύθμιση της επεξεργασίας.
Οι παράμετροι που επαναφέρθηκαν στις προεπι-
•
λεγμένες τιμές δεν αναφέρονται.
Το μήνυμα "Empty" υποδεικνύει ότι δεν άλλαξε
•
καμία παράμετρος.
3.1.9 Επαναφορά προεπιλεγμένων
ΕΙΔΟΠΟΙΗΣΗ
Κίνδυνος απώλειας προγραμματισμού, δεδομένων
κινητήρα, τοπικοποίησης και τοποθέτησης αρχείων
προεπιλεγμένων ρυθμίσεων. Για την παροχή εφεδρικού
αντιγράφου, πραγματοποιήστε αποστολή δεδομένων στο
LCP πριν από την επαναφορά των παραμέτρων στις
εργοστασιακές ρυθμίσεις.
Η επαναφορά των παραμέτρων στις προεπιλεγμένες
ρυθμίσεις πραγματοποιείται με την επαναφορά του
μετατροπέα συχνότητας. Η επαναφορά των παραμέτρων
στις εργοστασιακές ρυθμίσεις πραγματοποιείται μέσω του
παράμετρος 14-22 Operation Mode (συνιστάται) ή
χειροκίνητα. Η επαναφορά των παραμέτρων στις εργοστασιακές ρυθμίσεις δεν επαναφέρει τις ρυθμίσεις για το
παράμετρος 1-06 Clockwise Direction.
επιστρέψετε στην κανονική λειτουργία.
ρυθμίσεων με το LCP
Η επαναφορά των παραμέτρων στις εργοστα-
•
σιακές ρυθμίσεις μέσω
παράμετρος 14-22 Operation Mode δεν επαναφέρει
τις ρυθμίσεις του μετατροπέα συχνότητας, όπως
τις ώρες λειτουργίας, τις επιλογές σειριακής
επικοινωνίας, το αρχείο καταγραφής σφαλμάτων
(ή βλαβών), το ιστορικό σφαλμάτων και άλλες
λειτουργίες παρακολούθησης.
Η χειροκίνητη επαναφορά των παραμέτρων στις
•
εργοστασιακές ρυθμίσεις διαγράφει όλα τα
δεδομένα κινητήρα, προγραμματισμού,
εντοπισμού και παρακολούθησης και επαναφέρει
τις προεπιλεγμένες εργοστασιακές ρυθμίσεις.
22 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. MG07C327
Page 25
Προγραμματισμός Οδηγός Προγραμματισμού
Συνιστώμενη διαδικασία επαναφοράς παραμέτρων μέσω
παράμετρος 14-22 Operation Mode
1. Επιλέξτε παράμετρος 14-22 Operation Mode και
πατήστε [OK].
2. Επιλέξτε [2] Επαναφορά των παραμέτρων στις
εργοστασιακές ρυθμίσεις και πατήστε [OK].
3. Διακόψτε την παροχή ρεύματος από τη μονάδα
και περιμένετε να σβήσει η οθόνη.
4. Εφαρμόστε ισχύ στη μονάδα.
Οι προεπιλεγμένες ρυθμίσεις παραμέτρων επαναφέρονται
κατά τη διάρκεια της εκκίνησης. Η διαδικασία αυτή
ενδέχεται να διαρκεί ελαφρώς περισσότερο από το
κανονικό.
5. Εμφανίζεται ο Συναγερμός 80, Επαναφορά
ρυθμιστή στροφών στην προεπιλεγμένη τιμή.
6. Πατήστε [Reset] για να επιστρέψετε στον τρόπο
λειτουργίας.
Διαδικασία χειροκίνητης αρχικής παραμετροποίησης
1. Διακόψτε την παροχή ρεύματος από τη μονάδα
και περιμένετε να σβήσει η οθόνη.
2. Πατήστε και κρατήστε πατημένα τα [Status],
[Main Menu] και [OK] ταυτόχρονα στο GLCP, ή
πατήστε ταυτόχρονα [Μenu] και [OK] στο NLCP
ενώ εφαρμόζετε ισχύ στη μονάδα (σχεδόν 5 δευτ.
ή μέχρι να ακουστεί ένα κλικ και να ξεκινήσει ο
ανεμιστήρας).
Οι προεπιλεγμένες εργοστασιακές ρυθμίσεις παραμέτρων
επαναφέρονται κατά την εκκίνηση. Η διαδικασία αυτή
ενδέχεται να διαρκεί ελαφρώς περισσότερο από το
κανονικό.
Η χειροκίνητη αρχική παραμετροποίηση δεν επαναφέρει τις
παρακάτω πληροφορίες του μετατροπέα συχνότητας:
Παράμετρος 15-00 Operating hours
•
Παράμετρος 15-03 Power Up's
•
Παράμετρος 15-04 Over Temp's
•
Παράμετρος 15-05 Over Volt's
•
Βασικός προγραμματισμός
3.2
3.2.1 Ρύθμιση ασύγχρονου κινητήρα
Εισαγάγετε τα ακόλουθα δεδομένα κινητήρα με την
αναγραφόμενη σειρά. Εντοπίστε τις πληροφορίες στην
πινακίδα στοιχείων κινητήρα.
1. Παράμετρος 1-20 Motor Power.
2. Παράμετρος 1-22 Motor Voltage.
3. Παράμετρος 1-23 Motor Frequency.
4. Παράμετρος 1-24 Motor Current.
5. Παράμετρος 1-25 Motor Nominal Speed.
Για βέλτιστη απόδοση σε λειτουργία VVC
επιπλέον δεδομένα κινητήρα για τη ρύθμιση των
παρακάτω παραμέτρων.
6. Παράμετρος 1-30 Stator Resistance (Rs).
7. Παράμετρος 1-31 Rotor Resistance (Rr).
8. Παράμετρος 1-33 Stator Leakage Reactance (X1).
9. Παράμετρος 1-35 Main Reactance (Xh).
Μπορείτε να βρείτε τα δεδομένα στο φύλλο δεδομένων
κινητήρα (αυτά τα δεδομένα συνήθως δεν διατίθενται στην
πινακίδα στοιχείων κινητήρα). Εκτελέστε πλήρες AMA
χρησιμοποιώντας το παράμετρος 1-29 Automatic Motor
Adaption (AMA) [1] Ενεργοποίηση πλήρους AMA ή
εισαγάγετε χειροκίνητα τις ακόλουθες παραμέτρους:
Ρύθμιση συγκεκριμένα για την εφαρμογή κατά την
εκτέλεση VVC
Το VVC+ είναι η πιο στιβαρή λειτουργία ελέγχου. Στις
περισσότερες περιπτώσεις, προσφέρει βέλτιστη απόδοση
χωρίς επιπλέον προσαρμογές. Εκτελέστε ένα πλήρες AMA
για βέλτιστη απόδοση.
3.2.2
Αρχικά βήματα προγραμματισμού
1. Ρυθμίστε το παράμετρος 1-10 Motor Construction
2. Επιλέξτε [0] Ανοικτός βρόχος στο
+
Ρύθμιση κινητήρα PM σε VVC
στις ακόλουθες επιλογές, για να ενεργοποιήσετε
τη λειτουργία του κινητήρα PM:
1a [1] PM, μη εξέχον SPM
1b [2] PM, εξέχον SPM, μη Κορ
1c [3] PM, εξέχον IPM, Κορ
παράμετρος 1-00 Conguration Mode.
+
, απαιτούνται
+
ΕΙΔΟΠΟΙΗΣΗ
Η ανάδραση κωδικοποιητή δεν υποστηρίζεται για
κινητήρες PM.
Προγραμματισμός δεδομένων κινητήρα
Μετά την επιλογή 1 από τις επιλογές κινητήρα PΜ στο
παράμετρος 1-10 Motor Construction, οι παράμετροι που
σχετίζονται με τον κινητήρα PM στις ομάδες παραμέτρων
1-2* Δεδομένα κινητήρα, 1-3* Εμπλ. Δεδομένα κινητήρα, και
1-4* Εμπλ. Δεδομένα κινητήρα II είναι ενεργές.
Εντοπίστε τις απαιτούμενες πληροφορίες στην πινακίδα
στοιχείων του κινητήρα και στο φύλλο δεδομένων
κινητήρα.
Προγραμματίστε τις ακόλουθες παραμέτρους στην αναγραφόμενη σειρά:
1. Παράμετρος 1-24 Motor Current.
2. Παράμετρος 1-26 Motor Cont. Rated Torque.
3. Παράμετρος 1-25 Motor Nominal Speed.
3 3
MG07C327 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. 23
Page 26

Προγραμματισμός
Ρυθμιστής στροφών VLT® Midi FC 280
4. Παράμετρος 1-39 Motor Poles.
5. Παράμετρος 1-30 Stator Resistance (Rs).
Εισαγάγετε τη γραμμή στην αντίσταση περιέλιξης
του κοινού στάτορα (Rs). Εάν διατίθενται μόνο
δεδομένα γραμμής προς γραμμή, διαιρέστε την
33
τιμή γραμμής προς γραμμή δια 2 για να επιτύχετε
την τιμή της γραμμής προς κοινό (σημείο
αστέρα).
Μπορείτε επίσης να μετρήσετε την τιμή με
ωμόμετρο, το οποίο θα λαμβάνει επίσης υπόψη
την αντίσταση του καλωδίου. Διαιρέστε τη
μετρημένη τιμή με 2 και εισαγάγετε το
αποτέλεσμα.
6. Παράμετρος 1-37 d-axis Inductance (Ld).
Εισαγάγετε την άμεση αυτεπαγωγή άξονα
γραμμής προς κοινό για τον κινητήρα PM.
Εάν διατίθενται μόνο δεδομένα γραμμής προς
γραμμή, διαιρέστε την τιμή γραμμής προς γραμμή
δια 2 για να επιτύχετε την τιμή της γραμμής προς
κοινό (σημείο αστέρα).
Μπορείτε επίσης να μετρήσετε την τιμή με
μετρητή αυτεπαγωγής που θα λαμβάνει επίσης
υπόψη την αυτεπαγωγή του καλωδίου. Διαιρέστε
τη μετρημένη τιμή με 2 και εισαγάγετε το
αποτέλεσμα.
7. Παράμετρος 1-40 Back EMF at 1000 RPM.
Εισαγάγετε την ανάδρομη EMF γραμμής προς
γραμμή του κινητήρα PM σε μηχανική ταχύτητα
1.000 σ.α.λ. (τιμή RMS). Η ανάδρομη EMF είναι η
τάση που δημιουργείται από έναν κινητήρα PM,
όταν δεν έχει συνδεθεί μετατροπέας συχνότητας
και ο άξονας περιστρέφεται εξωτερικά. Η
ανάδρομη EMF κανονικά προσδιορίζεται για την
ονομαστική ταχύτητα κινητήρα ή για 1.000 σ.α.λ.,
μετρημένη μεταξύ δύο γραμμών. Εάν η τιμή δεν
είναι διαθέσιμη για ταχύτητα κινητήρα 1000 RPM,
υπολογίστε τη σωστή τιμή ως εξής: Για
παράδειγμα, εάν η ανάδρομη EMF είναι π.χ. 320 V
στις 1800 RPM, μπορεί να υπολογιστεί στις 1000
RPM ως εξής:
Ανάδρομη EMF=(Τάση/
Αυξήστε την εργοστασιακή ρύθμιση αυτών των
παραμέτρων για εφαρμογές με μεγάλη αδράνεια.
Εκκινήστε τον κινητήρα σε ονομαστική ταχύτητα. Σε
περίπτωση που η εφαρμογή δεν εκτελείται σωστά, ελέγξτε
τις ρυθμίσεις VVC+ PM. Το Πίνακας 3.13 εμφανίζει συστάσεις
για διάφορες εφαρμογές.
Εφαρμογή MCO
Εφαρμογές χαμηλής
αδράνειας
I
Φορτίο/Iκινητήρα
Εφαρμογές μέτριας
αδράνειας
50>I
Φορτίο/Iκινητήρα
Εφαρμογές υψηλής
αδράνειας
I
Φορτίο/IΚινητήρα
Υψηλό φορτίο σε χαμηλή
ταχύτητα
<30% (ονομαστική
ταχύτητα)
Πίνακας 3.13 Συστάσεις για διάφορες εφαρμογές
<5
>5
>50
Αύξηση της τιμής του
•
παράμετρος 1-17 Voltage lter
time const. με συντελεστή 5–10.
Μειώστε την τιμή για το
•
παράμετρος 1-14 Damping Gain.
Μειώστε την τιμή (<100%) για το
•
παράμετρος 1-66 Min. Current at
Low Speed.
Διατήρηση υπολογισμένων τιμών.
Αυξήστε τις τιμές για
παράμετρος 1-14 Damping Gain,
παράμετρος 1-15 Low Speed Filter
Time Const. και
παράμετρος 1-16 High Speed Filter
Time Const.
Αυξήστε την τιμή για
παράμετρος 1-17 Voltage lter time
const.
Αυξήστε την τιμή για
παράμετρος 1-66 Min. Current at Low
Speed (>100% για μεγαλύτερο χρόνο
μπορεί να υπερθερμάνει τον
κινητήρα).
Εάν ο κινητήρας ξεκινήσει να ταλαντώνεται σε
συγκεκριμένη ταχύτητα, αυξήστε το
παράμετρος 1-14 Damping Gain. Αυξήστε την τιμή με μικρά
βήματα.
RPM)x1000=(320/1800)x1000=178.
Προγραμματίστε αυτή την τιμή στο
παράμετρος 1-40 Back EMF at 1000 RPM.
Η ροπή εκκίνησης μπορεί να ρυθμιστεί στο
παράμετρος 1-66 Min. Current at Low Speed. 100% παρέχει
ονομαστική ροπή ως ροπή εκκίνησης.
Δοκιμή λειτουργίας κινητήρα
1. Εκκινήστε τον κινητήρα σε χαμηλή ταχύτητα (100
έως 200 RPM). Εάν ο κινητήρας δεν
περιστρέφεται, ελέγξτε την εγκατάσταση, το
γενικό προγραμματισμό και τα δεδομένα
κινητήρα.
Στάθμευση
Αυτή η λειτουργία είναι η συνιστώμενη επιλογή για
εφαρμογές όπου ο κινητήρας περιστρέφεται σε χαμηλή
ταχύτητα, π.χ. ελεύθερη περιστροφή σε εφαρμογές
ανεμιστήρα. Τα Παράμετρος 2-06 Parking Current και
3.2.3 Αυτόματη προσαρμογή κινητήρα
(AMA)
Για τη βελτιστοποίηση της συμβατότητας μεταξύ του
μετατροπέα συχνότητας και του κινητήρα σε τρόπο
λειτουργίας VVC+, εκτελέστε AMA.
Ο μετατροπέας συχνότητας δημιουργεί ένα
•
μαθηματικό μοντέλο του κινητήρα για τη ρύθμιση
παράμετρος 2-07 Parking Time μπορούν να ρυθμιστούν.
24 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. MG07C327
Page 27
Προγραμματισμός Οδηγός Προγραμματισμού
του ρεύματος εξόδου του κινητήρα, ενισχύοντας
έτσι την απόδοση του κινητήρα.
Ορισμένοι κινητήρες ενδέχεται να μην έχουν τη
•
δυνατότητα εφαρμογής της πλήρους έκδοσης του
ελέγχου. Στην περίπτωση αυτή, επιλέξτε [2]
Ενεργοποίηση μειωμένου AMA στο
παράμετρος 1-29 Automatic Motor Adaption (AMA).
Αν εμφανιστούν συναγερμοί ή προειδοποιήσεις,
•
ανατρέξτε στο Κεφάλαιο κεφάλαιο 6.1 Προειδοποιήσεις και συναγερμοί.
Για βέλτιστα αποτελέσματα εκτελέστε αυτή τη
•
διαδικασία σε κρύο κινητήρα.
Για την εκτέλεση της διαδικασίας AMA με το LCP
1. Ρύθμιση παραμέτρων στις προεπιλεγμένες τιμές,
συνδέστε τους ακροδέκτες 13 και 27 πριν την
εκτέλεση της AMA.
2. Αποκτήστε πρόσβαση στο Βασικό μενού.
3. Μεταβείτε στην ομάδα παραμέτρων 1-** Φορτίο
και κινητήρας.
4. Πατήστε [OK].
5. Ρυθμίσετε τις παραμέτρους κινητήρα χρησιμοποιώντας τα δεδομένα στην πινακίδα στοιχείων
για την ομάδα παραμέτρων 1-2* Δεδομένα
κινητήρα.
6. Ρυθμίστε το μήκος καλωδίου κινητήρα στο
παράμετρος 1-42 Motor Cable Length.
7. Μεταβείτε στην παράμετρος 1-29 Automatic Motor
Adaption (AMA).
8. Πατήστε [OK].
9. Επιλέξτε [1] Ενεργ. πλήρους AMA.
10. Πατήστε [OK].
11. Η δοκιμή εκτελείται αυτόματα και υποδεικνύει την
ολοκλήρωσή της.
Ανάλογα με την κλάση ισχύος, η AMA διαρκεί 3–10 λεπτά
μέχρι να ολοκληρωθεί.
3 3
ΕΙΔΟΠΟΙΗΣΗ
Η λειτουργία AMA δεν θέτει τον κινητήρα σε λειτουργία,
ούτε προκαλεί βλάβη στον κινητήρα
MG07C327 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. 25
Page 28
Περιγραφές παραμέτρων
Ρυθμιστής στροφών VLT® Midi FC 280
4 Περιγραφές παραμέτρων
4.1 Παράμετροι: 0-** Λειτουργία/Οθόνη
0-01 Language
Επιλογή της γλώσσας που θα χρησιμοποιείται στην οθόνη
προβολής.
44
Επιλογή: Λειτουργία:
[0] * English
[1] Deutsch
[2] Francais
[3] Dansk
[4] Spanish
[5] Italiano
[28] Bras.port
0-03 Τοπικές ρυθμίσεις
Επιλογή: Λειτουργία:
ΕΙΔΟΠΟΙΗΣΗ
Η παράμετρος αυτή δεν μπορεί να
τροποποιηθεί ενώ λειτουργεί ο κινητήρας.
[0] * Διεθνείς Ενεργοποιήστε την παράμετρο
παράμετρος 1-20 Ισχύς κινητήρα [kW] για τη
ρύθμιση της ισχύος του κινητήρα σε kW και
ρυθμίστε την προκαθορισμένη τιμή της
παράμετρος 1-23 Συχνότητα κινητήρα στα 50 Hz.
[1] Η.Π.Α. Ενεργοποιήστε την παράμετρο
παράμετρος 1-20 Ισχύς κινητήρα [kW] για τη
ρύθμιση της ισχύος του κινητήρα σε kW και
ρυθμίστε την προκαθορισμένη τιμή της
παράμετρος 1-23 Συχνότητα κινητήρα στα 60 Hz.
0-04 Κατ. λειτ. κατά την εκκίνηση (χειρ.)
Επιλογή: Λειτουργία:
[2] Εξαν.διακ.,
ref=0
Επαναφέρει την τοπική τιμή αναφοράς στο 0
με την επανεκκίνηση του μετατροπέα
συχνότητας.
0-06 Τύπος δικτύου τροφοδοσίας
Επιλέξτε την τάση τροφοδοσίας ρεύματος, τη συχνότητα και τον
τύπο.
Επιλογή: Λειτουργία:
[0] 200-240V/50Hz/Δίκτυο IT
[1] 200-240V/50Hz/Delta
[2] 200-240V/50Hz
[10] 380-440V/50Hz/Δίκτυο IT
[11] 380-440V/50Hz/Delta
[12] 380-440V/50Hz
[20] 440-480V/50Hz/Δίκτυο IT
[21] 440-480V/50Hz/Delta
[22] 440-480V/50Hz
[100] 200-240V/60Hz/Δίκτυο IT
[101] 200-240V/60Hz/Delta
[102] 200-240V/60Hz
[110] 380-440V/60Hz/Δίκτυο IT
[111] 380-440V/60Hz/Delta
[112] 380-440V/60Hz
[120] 440-480V/60Hz/Δίκτυο IT
[121] 440-480V/60Hz/Delta
[122] 440-480V/60Hz
0-04 Κατ. λειτ. κατά την εκκίνηση (χειρ.)
Επιλογή: Λειτουργία:
Επιλέξτε τον τρόπο λειτουργίας με την
επανασύνδεση του μετατροπέα συχνότητας
στην τάση δικτύου τροφοδοσίας, μετά από
διακοπή λειτουργίας ενώ βρισκόταν σε
χειροκίνητο τρόπο λειτουργίας.
[0] Συνέχιση Επανεκκινήστε το μετατροπέα συχνότητας
διατηρώντας τις ρυθμίσεις έναρξης/διακοπής
(που εφαρμόζεται μέσω της εντολής [Hand
On/O]), οι οποίες επιλέχθηκαν πριν την
απενεργοποίηση του μετατροπέα
συχνότητας.
[1] * Εξαν.διακ.,
ref=old
26 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. MG07C327
Επανεκκινήστε το μετατροπέα συχνότητας με
μια αποθηκευμένη τοπική τιμή αναφοράς
μετά την αποκατάσταση της τάσης του
δικτύου ρεύματος και αφού πατήσετε το
[Hand On].
0-07 Auto DC Braking
Επιλογή: Λειτουργία:
Λειτουργία προστασίας από υπέρταση στην ελεύθερη
κίνηση σε περιβάλλον δικτύου IT. Αυτή η παράμετρος
είναι ενεργή μόνο όταν έχει επιλεχθεί σε αυτή την
παράμετρο το [1] Ενεργό και έχουν επιλεχθεί οι
επιλογές δικτύου IT στην παράμετρο
παράμετρος 0-06 GridType.
[0] O Αυτή η λειτουργία δεν είναι ενεργή.
[1] * On Αυτή η λειτουργία είναι ενεργή.
Page 29
Περιγραφές παραμέτρων Οδηγός Προγραμματισμού
0-10 Active Set-up
Επιλέξτε τη ρύθμιση για τον έλεγχο των λειτουργιών του
μετατροπέα συχνότητας. Προγραμματίστε τις παραμέτρους στις
ρυθμίσεις 1–4. Χρησιμοποιήστε την εργοστασιακή ρύθμιση για να
επιστρέψετε στην αρχική κατάσταση. Χρησιμοποιήστε πολλαπλές
ρυθμίσεις για τον απομακρυσμένο έλεγχο.
Επιλογή: Λειτουργία:
[1] * Set-up 1
[2] Set-up 2
[3] Set-up 3
[4] Set-up 4
[9] Multi Set-up
0-11 Programming Set-up
Επιλέξτε τη ρύθμιση που θα προγραμματιστεί κατά τη λειτουργία
είτε τις ενεργές ρυθμίσεις, είτε τις μη ενεργές ρυθμίσεις. Ο
αριθμός της ρύθμισης σε επεξεργασία αναβοσβήνει στο LCP.
Επιλογή: Λειτουργία:
[1] Set-up 1
[2] Set-up 2
[3] Set-up 3
[4] Set-up 4
[9] * Active Set-up
0-12 Link Setups
Επιλογή: Λειτουργία:
Η σύνδεση θα εξασφαλίσει το συγχρονισμό των
τιμών παραμέτρων που Δεν αλλάζουν κατά τη
λειτουργία, επιτρέποντας τη μετακίνηση από 1
ρύθμιση σε μια άλλη κατά τη λειτουργία.
Εάν οι ρυθμίσεις δεν είναι συνδεδεμένες, η
αλλαγή μεταξύ τους δεν είναι δυνατή ενώ ο
κινητήρας βρίσκεται σε λειτουργία. Συνεπώς, η
αλλαγή ρύθμισης δεν προκύπτει μέχρι την
ελεύθερη κίνηση του κινητήρα.
[0] Not
linked
[20]*Linked Αντιγράφει τις παραμέτρους που Δεν αλλάζουν
Αφήνει τις παραμέτρους αμετάβλητες και στις
δύο ρυθμίσεις και δεν μπορεί να αλλάξει ενώ ο
κινητήρας λειτουργεί.
κατά τη λειτουργία από τη 1 ρύθμιση στην άλλη,
ώστε να είναι πανομοιότυπες και στις δύο
ρυθμίσεις.
0-14 Readout: Edit Set-ups / Channel
Περιοχή: Λειτουργία:
0* [-2147483647 -
2147483647 ]
Προβολή της ρύθμισης της παραμέτρου
παράμετρος 0-11 Programming Set-up.
Επεξεργαστείτε τη ρύθμιση για κάθε κανάλι
επικοινωνίας. A σημαίνει ενεργός ρύθμιση, F
σημαίνει εργοστασιακό, οι αριθμοί υποδεικνύουν των κωδικό ρύθμισης. Τα κανάλια
επικοινωνίας από τα δεξιά προς τα αριστερά
είναι LCP, δίαυλος FC, USB και HPFB1-5.
0-16 Application Selection
Επιλογή: Λειτουργία:
Επιλέξτε τις λειτουργίες της
ενσωματωμένης εφαρμογής.
Μόλις επιλεχθεί μια εφαρμογή,
ένα σύνολο σχετικών
παραμέτρων ρυθμίζεται
αυτόματα.
[0] * None
[1] Simple Process Close Loop
[2] Local/Remote
[3] Speed Open Loop
[4] Simple Speed Close Loop
[5] Multi Speed
[6] OGD LA10
[7] OGD V210
0-20 Display Line 1.1 Small
Επιλέξτε μια μεταβλητή για εμφάνιση στη γραμμή 1, αριστερή
θέση.
Επιλογή: Λειτουργία:
[0] None
[37] Display Text 1
[38] Display Text 2
[39] Display Text 3
[748] PCD Feed Forward
[953] Probus Warning Word
[1005] Readout Transmit Error Counter
[1006] Readout Receive Error Counter
[1230] Warning Parameter
[1501] Running Hours
[1502] kWh Counter
[1600] Control Word
[1601] Reference [Unit]
[1602] * Reference [%]
[1603] Status Word
[1605] Main Actual Value [%]
[1609] Custom Readout
[1610] Power [kW]
[1611] Power [hp]
[1612] Motor Voltage
[1613] Frequency
[1614] Motor current
[1615] Frequency [%]
[1616] Torque [Nm]
[1617] Speed [RPM]
[1618] Motor Thermal
[1620] Motor Angle
[1622] Torque [%]
[1630] DC Link Voltage
[1633] Brake Energy /2 min
[1634] Heatsink Temp.
[1635] Inverter Thermal
[1636] Inv. Nom. Current
4 4
MG07C327 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. 27
Page 30
Περιγραφές παραμέτρων
Ρυθμιστής στροφών VLT® Midi FC 280
0-20 Display Line 1.1 Small
Επιλέξτε μια μεταβλητή για εμφάνιση στη γραμμή 1, αριστερή
θέση.
Επιλογή: Λειτουργία:
[1637] Inv. Max. Current
[1638] SL Controller State
[1639] Control Card Temp.
[1650] External Reference
44
[1652] Feedback[Unit]
[1653] Digi Pot Reference
[1657] Feedback [RPM]
[1660] Digital Input
[1661] Terminal 53 Setting
[1662] Analog input 53
[1663] Terminal 54 Setting
[1664] Analog input 54
[1665] Analog output 42 [mA]
[1666] Digital Output
[1667] Pulse input 29[Hz]
[1668] Pulse Input 33 [Hz]
[1669] Pulse Output 27 [Hz]
[1671] Relay output
[1672] Counter A
[1673] Counter B
[1674] Prec. Stop Counter
[1680] Fieldbus CTW 1
[1682] Fieldbus REF 1
[1684] Comm. Option STW
[1685] FC Port CTW 1
[1686] FC Port REF 1
[1690] Alarm Word
[1691] Alarm Word 2
[1692] Warning Word
[1693] Warning Word 2
[1694] Ext. Status Word
[1695] Ext. Status Word 2
[1697] Alarm Word 3
[1890] Process PID Error
[1891] Process PID Output
[1892] Process PID Clamped Output
[1893] Process PID Gain Scaled Output
[2117] Ext. 1 Reference [Unit]
[2118] Ext. 1 Feedback [Unit]
[2119] Ext. 1 Output [%]
[3401] PCD 1 Write For Application
[3402] PCD 2 Write For Application
[3403] PCD 3 Write For Application
[3404] PCD 4 Write For Application
[3405] PCD 5 Write For Application
[3406] PCD 6 Write For Application
[3407] PCD 7 Write For Application
[3408] PCD 8 Write For Application
[3409] PCD 9 Write For Application
[3410] PCD 10 Write For Application
0-20 Display Line 1.1 Small
Επιλέξτε μια μεταβλητή για εμφάνιση στη γραμμή 1, αριστερή
θέση.
Επιλογή: Λειτουργία:
[3421] PCD 1 Read For Application
[3422] PCD 2 Read For Application
[3423] PCD 3 Read For Application
[3424] PCD 4 Read For Application
[3425] PCD 5 Read For Application
[3426] PCD 6 Read For Application
[3427] PCD 7 Read For Application
[3428] PCD 8 Read For Application
[3429] PCD 9 Read For Application
[3430] PCD 10 Read For Application
[3450] Actual Position
[3456] Track Error
0-21 Display Line 1.2 Small
Επιλέξτε μια μεταβλητή για εμφάνιση στη γραμμή 1, μεσαία θέση.
Επιλογή: Λειτουργία:
[0] None
[37] Display Text 1
[38] Display Text 2
[39] Display Text 3
[748] PCD Feed Forward
[953] Probus Warning Word
[1005] Readout Transmit Error Counter
[1006] Readout Receive Error Counter
[1230] Warning Parameter
[1501] Running Hours
[1502] kWh Counter
[1600] Control Word
[1601] Reference [Unit]
[1602] Reference [%]
[1603] Status Word
[1605] Main Actual Value [%]
[1609] Custom Readout
[1610] Power [kW]
[1611] Power [hp]
[1612] Motor Voltage
[1613] Frequency
[1614] * Motor current
[1615] Frequency [%]
[1616] Torque [Nm]
[1617] Speed [RPM]
[1618] Motor Thermal
[1620] Motor Angle
[1622] Torque [%]
[1630] DC Link Voltage
[1633] Brake Energy /2 min
[1634] Heatsink Temp.
[1635] Inverter Thermal
[1636] Inv. Nom. Current
[1637] Inv. Max. Current
28 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. MG07C327
Page 31

Περιγραφές παραμέτρων Οδηγός Προγραμματισμού
0-21 Display Line 1.2 Small
Επιλέξτε μια μεταβλητή για εμφάνιση στη γραμμή 1, μεσαία θέση.
Επιλογή: Λειτουργία:
[1638] SL Controller State
[1639] Control Card Temp.
[1650] External Reference
[1652] Feedback[Unit]
[1653] Digi Pot Reference
[1657] Feedback [RPM]
[1660] Digital Input
[1661] Terminal 53 Setting
[1662] Analog input 53
[1663] Terminal 54 Setting
[1664] Analog input 54
[1665] Analog output 42 [mA]
[1666] Digital Output
[1667] Pulse input 29[Hz]
[1668] Pulse Input 33 [Hz]
[1669] Pulse Output 27 [Hz]
[1671] Relay output
[1672] Counter A
[1673] Counter B
[1674] Prec. Stop Counter
[1680] Fieldbus CTW 1
[1682] Fieldbus REF 1
[1684] Comm. Option STW
[1685] FC Port CTW 1
[1686] FC Port REF 1
[1690] Alarm Word
[1691] Alarm Word 2
[1692] Warning Word
[1693] Warning Word 2
[1694] Ext. Status Word
[1695] Ext. Status Word 2
[1697] Alarm Word 3
[1890] Process PID Error
[1891] Process PID Output
[1892] Process PID Clamped Output
[1893] Process PID Gain Scaled Output
[2117] Ext. 1 Reference [Unit]
[2118] Ext. 1 Feedback [Unit]
[2119] Ext. 1 Output [%]
[3401] PCD 1 Write For Application
[3402] PCD 2 Write For Application
[3403] PCD 3 Write For Application
[3404] PCD 4 Write For Application
[3405] PCD 5 Write For Application
[3406] PCD 6 Write For Application
[3407] PCD 7 Write For Application
[3408] PCD 8 Write For Application
[3409] PCD 9 Write For Application
[3410] PCD 10 Write For Application
[3421] PCD 1 Read For Application
[3422] PCD 2 Read For Application
0-21 Display Line 1.2 Small
Επιλέξτε μια μεταβλητή για εμφάνιση στη γραμμή 1, μεσαία θέση.
Επιλογή: Λειτουργία:
[3423] PCD 3 Read For Application
[3424] PCD 4 Read For Application
[3425] PCD 5 Read For Application
[3426] PCD 6 Read For Application
[3427] PCD 7 Read For Application
[3428] PCD 8 Read For Application
[3429] PCD 9 Read For Application
[3430] PCD 10 Read For Application
[3450] Actual Position
[3456] Track Error
0-22 Display Line 1.3 Small
Επιλέξτε μια μεταβλητή για εμφάνιση στη γραμμή 1, δεξιά θέση.
Επιλογή: Λειτουργία:
[0] None
[37] Display Text 1
[38] Display Text 2
[39] Display Text 3
[748] PCD Feed Forward
[953] Probus Warning Word
[1005] Readout Transmit Error Counter
[1006] Readout Receive Error Counter
[1230] Warning Parameter
[1501] Running Hours
[1502] kWh Counter
[1600] Control Word
[1601] Reference [Unit]
[1602] Reference [%]
[1603] Status Word
[1605] Main Actual Value [%]
[1609] Custom Readout
[1610] * Power [kW]
[1611] Power [hp]
[1612] Motor Voltage
[1613] Frequency
[1614] Motor current
[1615] Frequency [%]
[1616] Torque [Nm]
[1617] Speed [RPM]
[1618] Motor Thermal
[1620] Motor Angle
[1622] Torque [%]
[1630] DC Link Voltage
[1633] Brake Energy /2 min
[1634] Heatsink Temp.
[1635] Inverter Thermal
[1636] Inv. Nom. Current
[1637] Inv. Max. Current
[1638] SL Controller State
[1639] Control Card Temp.
[1650] External Reference
4 4
MG07C327 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. 29
Page 32

Περιγραφές παραμέτρων
Ρυθμιστής στροφών VLT® Midi FC 280
0-22 Display Line 1.3 Small
Επιλέξτε μια μεταβλητή για εμφάνιση στη γραμμή 1, δεξιά θέση.
Επιλογή: Λειτουργία:
[1652] Feedback[Unit]
[1653] Digi Pot Reference
[1657] Feedback [RPM]
[1660] Digital Input
[1661] Terminal 53 Setting
44
[1662] Analog input 53
[1663] Terminal 54 Setting
[1664] Analog input 54
[1665] Analog output 42 [mA]
[1666] Digital Output
[1667] Pulse input 29[Hz]
[1668] Pulse Input 33 [Hz]
[1669] Pulse Output 27 [Hz]
[1671] Relay output
[1672] Counter A
[1673] Counter B
[1674] Prec. Stop Counter
[1680] Fieldbus CTW 1
[1682] Fieldbus REF 1
[1684] Comm. Option STW
[1685] FC Port CTW 1
[1686] FC Port REF 1
[1690] Alarm Word
[1691] Alarm Word 2
[1692] Warning Word
[1693] Warning Word 2
[1694] Ext. Status Word
[1695] Ext. Status Word 2
[1697] Alarm Word 3
[1890] Process PID Error
[1891] Process PID Output
[1892] Process PID Clamped Output
[1893] Process PID Gain Scaled Output
[2117] Ext. 1 Reference [Unit]
[2118] Ext. 1 Feedback [Unit]
[2119] Ext. 1 Output [%]
[3401] PCD 1 Write For Application
[3402] PCD 2 Write For Application
[3403] PCD 3 Write For Application
[3404] PCD 4 Write For Application
[3405] PCD 5 Write For Application
[3406] PCD 6 Write For Application
[3407] PCD 7 Write For Application
[3408] PCD 8 Write For Application
[3409] PCD 9 Write For Application
[3410] PCD 10 Write For Application
[3421] PCD 1 Read For Application
[3422] PCD 2 Read For Application
[3423] PCD 3 Read For Application
[3424] PCD 4 Read For Application
[3425] PCD 5 Read For Application
0-22 Display Line 1.3 Small
Επιλέξτε μια μεταβλητή για εμφάνιση στη γραμμή 1, δεξιά θέση.
Επιλογή: Λειτουργία:
[3426] PCD 6 Read For Application
[3427] PCD 7 Read For Application
[3428] PCD 8 Read For Application
[3429] PCD 9 Read For Application
[3430] PCD 10 Read For Application
[3450] Actual Position
[3456] Track Error
0-23 Display Line 2 Large
Επιλέξτε μια μεταβλητή για εμφάνιση στη γραμμή 2.
Επιλογή: Λειτουργία:
[0] None
[37] Display Text 1
[38] Display Text 2
[39] Display Text 3
[748] PCD Feed Forward
[953] Probus Warning Word
[1005] Readout Transmit Error Counter
[1006] Readout Receive Error Counter
[1230] Warning Parameter
[1501] Running Hours
[1502] kWh Counter
[1600] Control Word
[1601] Reference [Unit]
[1602] Reference [%]
[1603] Status Word
[1605] Main Actual Value [%]
[1609] Custom Readout
[1610] Power [kW]
[1611] Power [hp]
[1612] Motor Voltage
[1613] * Frequency
[1614] Motor current
[1615] Frequency [%]
[1616] Torque [Nm]
[1617] Speed [RPM]
[1618] Motor Thermal
[1620] Motor Angle
[1622] Torque [%]
[1630] DC Link Voltage
[1633] Brake Energy /2 min
[1634] Heatsink Temp.
[1635] Inverter Thermal
[1636] Inv. Nom. Current
[1637] Inv. Max. Current
[1638] SL Controller State
[1639] Control Card Temp.
[1650] External Reference
[1652] Feedback[Unit]
[1653] Digi Pot Reference
[1657] Feedback [RPM]
30 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. MG07C327
Page 33

Περιγραφές παραμέτρων Οδηγός Προγραμματισμού
0-23 Display Line 2 Large
Επιλέξτε μια μεταβλητή για εμφάνιση στη γραμμή 2.
Επιλογή: Λειτουργία:
[1660] Digital Input
[1661] Terminal 53 Setting
[1662] Analog input 53
[1663] Terminal 54 Setting
[1664] Analog input 54
[1665] Analog output 42 [mA]
[1666] Digital Output
[1667] Pulse input 29[Hz]
[1668] Pulse Input 33 [Hz]
[1669] Pulse Output 27 [Hz]
[1671] Relay output
[1672] Counter A
[1673] Counter B
[1674] Prec. Stop Counter
[1680] Fieldbus CTW 1
[1682] Fieldbus REF 1
[1684] Comm. Option STW
[1685] FC Port CTW 1
[1686] FC Port REF 1
[1690] Alarm Word
[1691] Alarm Word 2
[1692] Warning Word
[1693] Warning Word 2
[1694] Ext. Status Word
[1695] Ext. Status Word 2
[1697] Alarm Word 3
[1890] Process PID Error
[1891] Process PID Output
[1892] Process PID Clamped Output
[1893] Process PID Gain Scaled Output
[2117] Ext. 1 Reference [Unit]
[2118] Ext. 1 Feedback [Unit]
[2119] Ext. 1 Output [%]
[3401] PCD 1 Write For Application
[3402] PCD 2 Write For Application
[3403] PCD 3 Write For Application
[3404] PCD 4 Write For Application
[3405] PCD 5 Write For Application
[3406] PCD 6 Write For Application
[3407] PCD 7 Write For Application
[3408] PCD 8 Write For Application
[3409] PCD 9 Write For Application
[3410] PCD 10 Write For Application
[3421] PCD 1 Read For Application
[3422] PCD 2 Read For Application
[3423] PCD 3 Read For Application
[3424] PCD 4 Read For Application
[3425] PCD 5 Read For Application
[3426] PCD 6 Read For Application
[3427] PCD 7 Read For Application
[3428] PCD 8 Read For Application
0-23 Display Line 2 Large
Επιλέξτε μια μεταβλητή για εμφάνιση στη γραμμή 2.
Επιλογή: Λειτουργία:
[3429] PCD 9 Read For Application
[3430] PCD 10 Read For Application
[3450] Actual Position
[3456] Track Error
0-24 Display Line 3 Large
Επιλέξτε μια μεταβλητή για εμφάνιση στη γραμμή 3.
Επιλογή: Λειτουργία:
[0] None
[37] Display Text 1
[38] Display Text 2
[39] Display Text 3
[748] PCD Feed Forward
[953] Probus Warning Word
[1005] Readout Transmit Error Counter
[1006] Readout Receive Error Counter
[1230] Warning Parameter
[1501] Running Hours
[1502] * kWh Counter
[1600] Control Word
[1601] Reference [Unit]
[1602] Reference [%]
[1603] Status Word
[1605] Main Actual Value [%]
[1609] Custom Readout
[1610] Power [kW]
[1611] Power [hp]
[1612] Motor Voltage
[1613] Frequency
[1614] Motor current
[1615] Frequency [%]
[1616] Torque [Nm]
[1617] Speed [RPM]
[1618] Motor Thermal
[1620] Motor Angle
[1622] Torque [%]
[1630] DC Link Voltage
[1633] Brake Energy /2 min
[1634] Heatsink Temp.
[1635] Inverter Thermal
[1636] Inv. Nom. Current
[1637] Inv. Max. Current
[1638] SL Controller State
[1639] Control Card Temp.
[1650] External Reference
[1652] Feedback[Unit]
[1653] Digi Pot Reference
[1657] Feedback [RPM]
[1660] Digital Input
[1661] Terminal 53 Setting
[1662] Analog input 53
4 4
MG07C327 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. 31
Page 34

Περιγραφές παραμέτρων
Ρυθμιστής στροφών VLT® Midi FC 280
0-24 Display Line 3 Large
Επιλέξτε μια μεταβλητή για εμφάνιση στη γραμμή 3.
Επιλογή: Λειτουργία:
[1663] Terminal 54 Setting
[1664] Analog input 54
[1665] Analog output 42 [mA]
[1666] Digital Output
[1667] Pulse input 29[Hz]
44
[1668] Pulse Input 33 [Hz]
[1669] Pulse Output 27 [Hz]
[1671] Relay output
[1672] Counter A
[1673] Counter B
[1674] Prec. Stop Counter
[1680] Fieldbus CTW 1
[1682] Fieldbus REF 1
[1684] Comm. Option STW
[1685] FC Port CTW 1
[1686] FC Port REF 1
[1690] Alarm Word
[1691] Alarm Word 2
[1692] Warning Word
[1693] Warning Word 2
[1694] Ext. Status Word
[1695] Ext. Status Word 2
[1697] Alarm Word 3
[1890] Process PID Error
[1891] Process PID Output
[1892] Process PID Clamped Output
[1893] Process PID Gain Scaled Output
[2117] Ext. 1 Reference [Unit]
[2118] Ext. 1 Feedback [Unit]
[2119] Ext. 1 Output [%]
[3401] PCD 1 Write For Application
[3402] PCD 2 Write For Application
[3403] PCD 3 Write For Application
[3404] PCD 4 Write For Application
[3405] PCD 5 Write For Application
[3406] PCD 6 Write For Application
[3407] PCD 7 Write For Application
[3408] PCD 8 Write For Application
[3409] PCD 9 Write For Application
[3410] PCD 10 Write For Application
[3421] PCD 1 Read For Application
[3422] PCD 2 Read For Application
[3423] PCD 3 Read For Application
[3424] PCD 4 Read For Application
[3425] PCD 5 Read For Application
[3426] PCD 6 Read For Application
[3427] PCD 7 Read For Application
[3428] PCD 8 Read For Application
[3429] PCD 9 Read For Application
[3430] PCD 10 Read For Application
[3450] Actual Position
0-24 Display Line 3 Large
Επιλέξτε μια μεταβλητή για εμφάνιση στη γραμμή 3.
Επιλογή: Λειτουργία:
[3456] Track Error
0-30 Custom Readout Unit
Ρυθμίστε μια τιμή να εμφανίζεται στο LCP. Η τιμή έχει μια
γραμμική, δευτεροβάθμια ή τριτοβάθμια σχέση με την ταχύτητα.
Αυτή η σχέση εξαρτάται από την επιλεγμένη μονάδα.
Επιλογή: Λειτουργία:
[0] None
[1] * %
[5] PPM
[10] 1/min
[11] RPM
[12] Pulse/s
[20] l/s
[21] l/min
[22] l/h
[23] m³/s
[24] m³/min
[25] m³/h
[30] kg/s
[31] kg/min
[32] kg/h
[33] t/min
[34] t/h
[40] m/s
[41] m/min
[45] m
[60] °C
[70] mbar
[71] bar
[72] Pa
[73] kPa
[74] m WG
[80] kW
[120] GPM
[121] gal/s
[122] gal/min
[123] gal/h
[124] CFM
[127] ft³/h
[140] ft/s
[141] ft/min
[160] °F
[170] psi
[171] lb/in2
[172] in WG
[173] ft WG
[180] HP
32 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. MG07C327
Page 35

Περιγραφές παραμέτρων Οδηγός Προγραμματισμού
0-31 Custom Readout Min Value
Περιοχή: Λειτουργία:
0
CustomReadoutUnit*
[ 0 - 999999.99
CustomReadoutUnit]
Αυτή η παράμετρος
ρυθμίζει την ελάχιστη
τιμής της κοινής
ένδειξης (προκύπτει σε
ταχύτητα 0). Είναι
δυνατό να επιλεγεί
μόνο μια τιμή
διαφορετική του 0 κατά
την επιλογή γραμμικής
μονάδας στο
παράμετρος 0-30 Custom
Readout Unit. Για
δευτεροβάθμιες και
τριτοβάθμιες μονάδες, η
ελάχιστη τιμή είναι 0.
0-32 Custom Readout Max Value
Περιοχή: Λειτουργία:
100
CustomReadoutUnit*
[ 0.0 - 999999.99
CustomReadoutUnit]
Αυτή η παράμετρος
καθορίζει τη μέγιστη
τιμή που θα
εμφανίζεται όταν η
ταχύτητα του
κινητήρα φτάσει την
ρυθμισμένη τιμή για
την
παράμετρος 4-14 Motor
Speed High Limit [Hz].
0-37 Display Text 1
Περιοχή: Λειτουργία:
[0 - 0 ] Ελεύθερο κείμενο που χρησιμοποιείται, για
παράδειγμα, για την ετικέτα της συσκευής της
εφαρμογής τοπικού διαύλου επικοινωνίας.
0-38 Display Text 2
Περιοχή: Λειτουργία:
[0 - 0 ] Ελεύθερο κείμενο που χρησιμοποιείται, για
παράδειγμα, για την ετικέτα θέσης της εφαρμογής
τοπικού διαύλου επικοινωνίας.
0-39 Display Text 3
Περιοχή: Λειτουργία:
[0 - 0 ] Ελεύθερο κείμενο που χρησιμοποιείται, για
παράδειγμα, για την ετικέτα βοήθειας της
εφαρμογής τοπικού διαύλου επικοινωνίας.
0-42 [Auto on] Key on LCP
Επιλογή: Λειτουργία:
[0] Disabled Αποτρέπει την ακούσια εκκίνηση του μετατροπέα
συχνότητας από το LCP.
[1] * Enabled Το [Auto on] είναι ενεργοποιημένο.
0-44 [O/Reset] Key on LCP
Επιλογή: Λειτουργία:
[0] Disabled
[1] * Enabled
[7] Enable Reset Only
0-50 LCP Copy
Επιλογή: Λειτουργία:
[0] * No copy Καμία λειτουργία.
[1] All to LCP Αντιγράφει όλες τις παραμέτρους σε όλες τις
ρυθμίσεις από τη μνήμη του μετατροπέα
συχνότητας στο LCP. Λόγω του ότι χρειάζονται
στο σέρβις, συνιστάται να αντιγράφετε όλες τις
παραμέτρους στο LCP μετά τον τελικό έλεγχο
πριν την παράδοση.
[2] All from
LCP
[3] Size
indep.
from LCP
Αντιγράφει όλες τις παραμέτρους σε όλες τις
ρυθμίσεις από τη μνήμη LCP στη μνήμη του
μετατροπέα συχνότητας.
Αντιγραφή μόνο των παραμέτρων που είναι
ανεξάρτητοι από το μέγεθος του κινητήρα.
Αυτή η επιλογή μπορεί να χρησιμοποιηθεί για
τον προγραμματισμό πολλών μετατροπέων
συχνότητας με την ίδια λειτουργία, χωρίς να
επηρεάζονται τα δεδομένα κινητήρα που έχουν
ήδη ρυθμιστεί.
0-51 Set-up Copy
Χρησιμοποιήστε αυτή την παράμετρο για να αντιγράψετε
παραμέτρους μεταξύ ρυθμίσεων.
Επιλογή: Λειτουργία:
[0] * No copy
[1] Copy from setup 1
[2] Copy from setup 2
[3] Copy from setup 3
[4] Copy from setup 4
[9] Copy from Factory setup
4 4
0-40 [Hand on] Key on LCP
Επιλογή: Λειτουργία:
[0] Disabled Αποτρέπει την ακούσια εκκίνηση του μετατροπέα
συχνότητας στη χειροκίνητη λειτουργία.
[1] * Enabled Η λειτουργία [Hand On] είναι ενεργοποιημένη.
MG07C327 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. 33
Page 36

Περιγραφές παραμέτρων
Ρυθμιστής στροφών VLT® Midi FC 280
4.2 Παράμετροι: 1-** Φορτίο και Κινητήρας
1-00 Conguration Mode
Επιλογή: Λειτουργία:
Επιλέξτε την αρχή ελέγχου εφαρμογής που θα
χρησιμοποιείται όταν μια απομακρυσμένη τιμή
αναφοράς (δηλαδή αναλογική είσοδος ή
τοπικός δίαυλος επικοινωνίας) είναι ενεργή.
44
[0]*Open Loop Ενεργοποιήστε τον έλεγχο ταχύτητας (χωρίς
σήμα ανάδρασης από τον κινητήρα) με
αυτόματη αντιστάθμιση ολίσθησης για σχεδόν
σταθερή ταχύτητα σε μεταβλητό φορτίο. Οι
αντισταθμίσεις είναι ενεργές αλλά μπορούν να
απενεργοποιηθούν στην ομάδα παραμέτρων
1-0* Φορτίο και κινητήρας.
[1] Speed
closed loop
[2] Torque
closed loop
[3] Process
Closed
Loop
[4] Torque
open loop
[7] Extended
PID Speed
OL
Ενεργοποιήστε τον έλεγχο ταχύτητας κλειστού
βρόχου με ανάδραση. Για αυξημένη ακρίβεια
ταχύτητας, διαθέστε σήμα ανάδρασης και
ρυθμίστε τον έλεγχο PID ταχύτητας. Οι
παράμετροι ελέγχου ταχύτητας ρυθμίζονται
στην ομάδα παραμέτρων 7-0* Έλεγχος PID
ταχύτητας.
Ενεργοποιήστε τον έλεγχο ροπής κλειστού
βρόχου με ανάδραση. Είναι δυνατό μόνο όταν
η επιλογή [1] VVC+ έχει επιλεχθεί στην
παράμετρος 1-01 Motor Control Principle.
Ενεργοποιήστε τη χρήση ελέγχου διεργασίας
στο μετατροπέα συχνότητας. Οι παράμετροι
ελέγχου διεργασίας ρυθμίζονται στις ομάδες
παραμέτρων 7-2* Έλε γχος διεργασίας. Ανάδραση
και 7-3* Έλεγχος PID διεργασίας.
1-01 Motor Control Principle
Επιλογή: Λειτουργία:
[0] U/f
ΕΙΔΟΠΟΙΗΣΗ
Κατά την εκτέλεση U/f, ο έλεγχος ολίσθησης
και οι αντισταθμίσεις φορτίου δεν περιλαμβάνονται.
1-01 Motor Control Principle
Επιλογή: Λειτουργία:
[1] * VVC+
ΕΙΔΟΠΟΙΗΣΗ
Όταν η παράμετρος 1-10 Κατασκευή κινητήρα
έχει ρυθμιστεί σε λειτουργίες με
ενεργοποιημένη PM, μόνο η επιλογή VVC
+
είναι διαθέσιμη.
Κανονικός τρόπος λειτουργίας, συμπεριλαμβανομένης
της αντιστάθμισης ολίσθησης και φορτίου.
1-03 Torque Characteristics
Επιλογή: Λειτουργία:
Επιλέξτε το χαρακτηριστικό ροπής
που απαιτείται. Οι VT και AEO είναι
και οι δύο λειτουργίες εξοικονόμησης
ενέργειας.
[0] * Constant torque
[1] Variable Torque
[2] Auto Energy Optim.
CT
1-06 Clockwise Direction
Επιλογή: Λειτουργία:
ΕΙΔΟΠΟΙΗΣΗ
Η παράμετρος αυτή δεν μπορεί να
τροποποιηθεί ενώ λειτουργεί ο κινητήρας.
Αυτή η παράμετρος καθορίζει τον όρο δεξιόστροφα
ανάλογα με το βέλος διεύθυνσης του LCP. Χρησιμοποιείται για εύκολη αλλαγή κατεύθυνσης της
περιστροφής του άξονα χωρίς την αντιστροφή των
καλωδίων του κινητήρα.
[0]*Normal Ο άξονας κινητήρα θα περιστραφεί δεξιόστροφα
όταν ο μετατροπέας συχνότητας είναι
συνδεδεμένος U⇒U, V⇒V, και W⇒W με τον
κινητήρα.
[1] Inverse Ο άξονας κινητήρα θα περιστραφεί αριστερό-
στροφα όταν ο μετατροπέας συχνότητας είναι
συνδεδεμένος U⇒U, V⇒V, και W⇒W με τον
κινητήρα.
Χρησιμοποιείται για παράλληλα συνδεδεμένους
κινητήρες ή/και ειδικές εφαρμογές κινητήρων.
Ρυθμίστε τις ρυθμίσεις U/f στην παράμετρος 1-55 U/f
Characteristic - U και την παράμετρος 1-56 U/f
Characteristic - F.
34 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. MG07C327
1-08 Εύρος ζώνης ελέγχου κινητήρα
Επιλογή: Λειτουργία:
[0] Υψηλή Κατάλληλο για υψηλά δυναμική απόκριση.
[1] Μεσαία Κατάλληλο για ομαλή λειτουργία σταθερής
κατάστασης.
[2] * Χαμηλή Κατάλληλο για ομαλή λειτουργία σταθερής
κατάστασης με τη χαμηλότερη δυναμική
απόκριση.
Page 37

Περιγραφές παραμέτρων Οδηγός Προγραμματισμού
1-08 Εύρος ζώνης ελέγχου κινητήρα
Επιλογή: Λειτουργία:
[3] Προσαρμο-
ζόμενο 1
[4] Προσαρμο-
ζόμενο 2
Βελτιστοποιημένο για ομαλή λειτουργία
σταθερής κατάστασης, με επιπλέον ενεργή
απόσβεση.
Εστίαση στους κινητήρες PM χαμηλής
αυτεπαγωγής. Αυτή η επιλογή είναι
εναλλακτική του [3] Προσαρμοζόμενο 1.
1-10 Κατασκευή κινητήρα
Επιλογή: Λειτουργία:
[0]*Ασύγχρον. Για ασύγχρονους κινητήρες
[1] PM, μη εξέχον
SPM
[2] PM, εξέχον
SPM, μη
Κορεσμένο
[3] PM, εξέχον
IPM,
Κορεσμένο
Για κινητήρες μόνιμου μαγνήτη (PM) με
επιφανειακά τοποθετημένους (μη εξέχοντες)
μαγνήτες. Ανατρέξτε στην παράμετρο
παράμετρος 1-14 Damping Gain έως
παράμετρος 1-17 Voltage lter time const.
για λεπτομέρειες σχετικά με τη βελτιστοποίηση της λειτουργίας του κινητήρα.
Για κινητήρες μόνιμου μαγνήτη (PM) με
εσωτερικούς (εξέχοντες) μαγνήτες, χωρίς
έλεγχο κορεσμού αυτεπαγωγής.
Για κινητήρες μόνιμου μαγνήτη (PM) με
εσωτερικούς (εξέχοντες) μαγνήτες, με
έλεγχο κορεσμού αυτεπαγωγής.
1-14 Damping Gain
Περιοχή: Λειτουργία:
120%* [ 0 -
250 %]
Η απολαβή εξασθένισης σταθεροποιεί το
μηχάνημα PM. Η τιμή της απολαβής
εξασθένισης ελέγχει τη δυναμική απόδοση του
μηχανήματος PM. Υψηλή απολαβή εξασθένισης
παρέχει υψηλή δυναμική απόδοση και χαμηλή
απολαβή εξασθένισης παρέχει χαμηλή δυναμική
απόδοση. Η δυναμική απόδοση σχετίζεται με τα
δεδομένα του μηχανήματος και τον τύπο
φορτίου. Εάν η απολαβή εξασθένισης είναι πολύ
υψηλή ή χαμηλή, ο έλεγχος γίνεται ασταθής.
1-15 Low Speed Filter Time Const.
Περιοχή: Λειτουργία:
Size
related*
[ 0.01 - 20s]Αυτή η σταθερά χρόνου χρησιμο-
ποιείται κάτω από το 10% της
ονομαστικής ταχύτητας. Η βραχεία
σταθερά χρόνου εξασθένισης
επιτυγχάνει γρήγορο έλεγχο. Ωστόσο,
εάν αυτή η τιμή είναι πολύ χαμηλή, ο
έλεγχος γίνεται ασταθής.
1-16 High Speed Filter Time Const.
Περιοχή: Λειτουργία:
Size
related*
[ 0.01 - 20s]Αυτή η σταθερά χρόνου χρησιμο-
ποιείται πάνω από το 10% της
ονομαστικής ταχύτητας. Η βραχεία
σταθερά χρόνου εξασθένισης
επιτυγχάνει γρήγορο έλεγχο. Ωστόσο,
εάν αυτή η τιμή είναι πολύ χαμηλή, ο
έλεγχος γίνεται ασταθής.
1-17 Voltage lter time const.
Περιοχή: Λειτουργία:
Size
related*
[ 0.001 - 1s]Μειώνει την επίδραση της κύμανσης
υψηλής συχνότητας και του
συντονισμού του συστήματος στον
υπολογισμό της τάσης τροφοδοσίας
ρεύματος. Χωρίς αυτό το φίλτρο, οι
διακυμάνσεις των ρευμάτων μπορούν
να παραμορφώσουν την υπολογισμένη
τάση και να επηρεάσουν τη
σταθερότητα του συστήματος.
1-20 Motor Power
Επιλογή: Λειτουργία:
[2] 0.12 kW - 0.16 hp
[3] 0.18 kW - 0.25 hp
[4] 0.25 kW - 0.33 hp
[5] 0.37 kW - 0.5 hp
[6] 0.55 kW - 0.75 hp
[7] 0.75 kW - 1 hp
[8] 1.1 kW - 1.5 hp
[9] 1.5 kW - 2 hp
[10] 2.2 kW - 3 hp
[11] 3 kW - 4 hp
[12] 3.7 kW - 5 hp
[13] 4 kW - 5.4 hp
[14] 5.5 kW - 7.5 hp
[15] 7.5 kW - 10 hp
[16] 11 kW - 15 hp
[17] 15 kW - 20 hp
[18] 18.5 kW - 25 hp
[19] 22 kW - 30 hp
[20] 30 kW - 40 hp
1-22 Motor Voltage
Περιοχή: Λειτουργία:
Size
related*
[50 - 1000V]Εισαγάγετε την ονομαστική τάση
κινητήρα σύμφωνα με τα δεδομένα
στην πινακίδα στοιχείων του κινητήρα.
Η προεπιλεγμένη τιμή αντιστοιχεί στην
ονομαστική έξοδο της μονάδας.
4 4
MG07C327 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. 35
Page 38

Περιγραφές παραμέτρων
Ρυθμιστής στροφών VLT® Midi FC 280
1-23 Motor Frequency
Περιοχή: Λειτουργία:
ΕΙΔΟΠΟΙΗΣΗ
Η παράμετρος αυτή δεν μπορεί να
τροποποιηθεί ενώ λειτουργεί ο
1-29 Automatic Motor Adaption (AMA)
Επιλογή: Λειτουργία:
ΕΙΔΟΠΟΙΗΣΗ
Η παράμετρος αυτή δεν μπορεί να
τροποποιηθεί ενώ λειτουργεί ο κινητήρας.
κινητήρας.
ΕΙΔΟΠΟΙΗΣΗ
Size
44
related*
1-24 Motor Current
Περιοχή: Λειτουργία:
Size
related*
1-25 Motor Nominal Speed
Περιοχή: Λειτουργία:
Size
related*
1-26 Motor Cont. Rated Torque
Περιοχή: Λειτουργία:
Size
related*
[ 20
Επιλέξτε την τιμή της συχνότητας κινητήρα από
- 500
την πινακίδα στοιχείων του κινητήρα. Για
Hz]
λειτουργία 87 Hz με κινητήρες 230/440 V,
ρυθμίστε την τιμή σύμφωνα με τα δεδομένα
στην πινακίδα στοιχείων για 230 V/50 Hz.
Προσαρμόστε τις παράμετρος 4-14 Motor Speed
High Limit [Hz] και παράμετρος 3-03 Maximum
Reference στη λειτουργία 87 Hz.
[ 0.01 -
10000.00 A]
[50 - 60000
RPM]
[ 0.1 10000
Nm]
Εισαγάγετε την ονομαστική τιμή
ρεύματος κινητήρα σύμφωνα με τα
δεδομένα στην πινακίδα στοιχείων του
κινητήρα. Τα δεδομένα χρησιμοποιούνται για τον υπολογισμό της
ροπής του κινητήρα, της θερμικής
προστασίας κινητήρα και ούτως καθ'
εξής.
Εισαγάγετε την ονομαστική ταχύτητα
κινητήρα σύμφωνα με τα δεδομένα
στην πινακίδα στοιχείων του
κινητήρα. Τα δεδομένα αυτά χρησιμοποιούνται για τον υπολογισμό των
αυτόματων αντισταθμίσεων κινητήρα.
Εισαγάγετε την τιμή από τα δεδομένα στην
πινακίδα στοιχείων του κινητήρα. Η προεπιλεγμένη τιμή αντιστοιχεί στην ονομαστική
έξοδο. Αυτή η παράμετρος είναι διαθέσιμη
όταν η παράμετρος 1-10 Κατασκευή κινητήρα
έχει ρυθμιστεί σε [1] PM, μη εξέχον SPM, μη
Κορ., [2] PM, εξέχον IPM, μη Κορ. ή [3] PM,
εξέχον IPM, Κορ., δηλαδή, η παράμετρος
ισχύει για κινητήρες PM, μη εξέχον SPM, και
εξέχον IPM μόνο.
Η ψηφιακή είσοδος του ακροδέκτη
27(παράμετρος 5-12 Terminal 27 Digital
Input) έχει ως προεπιλεγμένη ρύθμιση την
αντίστροφη ελεύθερη κίνηση. Αυτή η
ρύθμιση σημαίνει ότι η AMA δεν μπορεί
να εκτελεστεί εάν ο ακροδέκτης 27 είναι
απενεργοποιημένος.
Η λειτουργία AMA βελτιώνει τη δυναμική
απόδοση του κινητήρα ρυθμίζοντας αυτόματα τις
προηγμένες παραμέτρους κινητήρα
(παράμετρος 1-30 Stator Resistance (Rs) έως
παράμετρος 1-35 Main Reactance (Xh)) με
σταματημένο τον κινητήρα.
[0]*O Καμία λειτουργία.
[1] Enable
Complete
AMA
Ανάλογα με την επιλογή στην
παράμετρος 1-10 Motor Construction, η AMA
εκτελείται σε διαφορετικές παραμέτρους.
Εάν έχει επιλεχθεί [0] Ασύγχρονο, η AMA
•
εκτελείται στα εξής:
- Παράμετρος 1-30 Stator
- Παράμετρος 1-31 Rotor
- Παράμετρος 1-33 Stator
- Παράμετρος 1-35 Main
Εάν έχει επιλεχθεί [1] PM, μη εξέχον SPM,
•
μη Κορ., η AMA εκτελείται στα εξής:
- Παράμετρος 1-30 Stator
- Παράμετρος 1-37 d-axis
Εάν έχει επιλεχθεί [2] PM, εξέχον IPM, μη
•
Κορ., η AMA εκτελείται στα εξής:
- Παράμετρος 1-30 Stator
- Παράμετρος 1-37 d-axis
- Παράμετρος 1-38 q-axis
Resistance (Rs).
Resistance (Rr).
Leakage Reactance (X1).
Reactance (Xh).
Resistance (Rs).
Inductance (Ld).
Resistance (Rs).
Inductance (Ld).
Inductance (Lq).
36 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. MG07C327
Page 39

Περιγραφές παραμέτρων Οδηγός Προγραμματισμού
1-29 Automatic Motor Adaption (AMA)
Επιλογή: Λειτουργία:
Εάν έχει επιλεχθεί [3] PM, εξέχον IPM,
•
Κορ., η AMA εκτελείται στα εξής:
- Παράμετρος 1-30 Stator
Resistance (Rs).
- Παράμετρος 1-37 d-axis
Inductance (Ld).
- Παράμετρος 1-38 q-axis
Inductance (Lq).
- Παράμετρος 1-44 d-axis
Inductance Sat. (LdSat).
- Παράμετρος 1-45 q-axis
Inductance Sat. (LqSat).
[2] Enable
Reduced
AMA
Εκτελεί μειωμένη AMA της αντίστασης στάτορα
Rs (παράμετρος 1-30 Stator Resistance (Rs)) στο
σύστημα μόνο. Επιλέξτε αυτή την επιλογή, εάν
χρησιμοποιείται φίλτρο LC μεταξύ του
μετατροπέα συχνότητας και του κινητήρα.
Όταν η παράμετρος παράμετρος 1-10 Κατασκευή κινητήρα
ρυθμιστεί σε επιλογές που ενεργοποιούν μόνιμη λειτουργία
κινητήρα, η μόνο διαθέσιμη επιλογή είναι [1] Ενεργοποίηση
πλήρους AMA.
Ενεργοποιήστε τη λειτουργία AMA πατώντας το πλήκτρο
[Hand on] αφού επιλέξετε [1] Ενεργοποίηση πλήρους AMA ή
[2] Ενεργοποίηση μειωμένης AMA. Μετά από μια κανονική
ακολουθία, στην οθόνη θα εμφανιστεί η ένδειξη: Πατήστε
[OK] για την ολοκλήρωση της AMA. Αφού πατήσετε το [ΟΚ],
ο μετατροπέας συχνότητας θα είναι πλέον έτοιμος για
λειτουργία.
ΕΙΔΟΠΟΙΗΣΗ
Για τη βέλτιστη προσαρμογή του μετατροπέα
•
συχνότητας, εκτελέστε το AMA με κρύο
κινητήρα.
Το AMA δεν μπορεί να εκτελεστεί ενώ ο
•
κινητήρας βρίσκεται σε λειτουργία.
ΕΙΔΟΠΟΙΗΣΗ
Αποφύγετε τη δημιουργία εξωτερικής ροπής κατά τη
διάρκεια του AMA.
ΕΙΔΟΠΟΙΗΣΗ
Αν τροποποιηθεί 1 από τις ρυθμίσεις στις ομάδα
παραμέτρων 1-2* Δεδομένα κινητήρα, οι προηγμένες
παράμετροι κινητήρα, παράμετρος 1-30 Stator Resistance
(Rs) έως παράμετρος 1-39 Motor Poles, θα επιστρέψουν
στην προεπιλεγμένη ρύθμιση.
Εάν χρησιμοποιείται φίλτρο LC, ρυθμίστε το μετατροπέα
συχνότητας σε λειτουργία ελέγχου U/f (συνιστώμενη) ή
εκτελέστε μειωμένη AMA σε λειτουργία in VVC+. Εάν δεν
χρησιμοποιείται φίλτρο LC, εκτελέστε πλήρη AMA.
1-30 Stator Resistance (Rs)
Περιοχή: Λειτουργία:
Size
related*
[ 0.0 -
9999.000
Ohm]
ΕΙΔΟΠΟΙΗΣΗ
Η παράμετρος αυτή δεν μπορεί
να τροποποιηθεί ενώ λειτουργεί
ο κινητήρας.
Ορίστε την τιμή αντίστασης στάτορα.
Εισάγετε την τιμή από έναν πίνακα
δεδομένων κινητήρα ή εκτελέστε AMA
σε κρύο κινητήρα.
1-31 Rotor Resistance (Rr)
Περιοχή: Λειτουργία:
Size
related*
[ 0 -
9999.000
Ohm]
Εισαγάγετε την τιμή αντίστασης
στάτορα. Βρείτε την τιμή σε έναν
πίνακα δεδομένων κινητήρα ή
εκτελώντας AMA σε κρύο κινητήρα. Η
προεπιλεγμένη ρύθμιση υπολογίζεται
από το μετατροπέα συχνότητας
χρησιμοποιώντας τα δεδομένα στην
πινακίδα στοιχείων του κινητήρα.
1-33 Stator Leakage Reactance (X1)
Περιοχή: Λειτουργία:
Size
related*
[ 0.0 -
9999.000
Ohm]
Ορίστε την τιμή άεργου αντίστασης
διαρροής στάτορα. Βρείτε την τιμή
σε έναν πίνακα δεδομένων κινητήρα
ή εκτελώντας AMA σε κρύο κινητήρα.
Η προεπιλεγμένη ρύθμιση
υπολογίζεται από το μετατροπέα
συχνότητας χρησιμοποιώντας τα
δεδομένα στην πινακίδα στοιχείων
του κινητήρα.
1-35 Main Reactance (Xh)
Περιοχή: Λειτουργία:
Size
related*
[ 0.0 -
9999.00
Ohm]
Ρυθμίστε την κύρια άεργο αντίσταση του
κινητήρα χρησιμοποιώντας 1 από αυτές τις
μεθόδους:
Εκτέλεση μιας AMA σε κρύο
•
κινητήρα. Ο μετατροπέας
συχνότητας μετά την τιμή από
τον κινητήρα.
Εισάγετε την τιμή Xh χειροκίνητα.
•
Επιλέξτε την τιμή που αναφέρεται
στην πινακίδα στοιχείων του
κινητήρα.
4 4
MG07C327 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. 37
Page 40

Περιγραφές παραμέτρων
Ρυθμιστής στροφών VLT® Midi FC 280
1-35 Main Reactance (Xh)
Περιοχή: Λειτουργία:
Χρησιμοποιήστε την προεπι-
•
λεγμένη τιμή Xh. Ο μετατροπέας
συχνότητας επιτυγχάνει τη
ρύθμιση με βάση τα δεδομένα
στην πινακίδα στοιχείων
κινητήρα.
44
1-37 d-axis Inductance (Ld)
Περιοχή: Λειτουργία:
Size related* [ 0 - 1000
mH]
Εισάγετε την τιμή αυτεπαγωγής του
άξονα d. Επιλέξτε την τιμή από το
φύλλο δεδομένων του κινητήρα
μόνιμου μαγνήτη.
1-38 q-axis Inductance (Lq)
1-40 Ανάδρομη EMF στις 1000 σ.α.λ.
Περιοχή: Λειτουργία:
παράδειγμα 320 V στις 1800 RPM, μπορεί να
υπολογιστεί στις 1000 RPM ως εξής:
Παράδειγμα
Ανάδρομη EMF 320 V στις 1800 RPM.
Ανάδρομη EMF = (Τάση/RPM)*1.000 =
(320/1.800)*1.000 = 178.
Αυτή η παράμετρος είναι διαθέσιμη όταν το
παράμετρος 1-10 Motor Construction
ρυθμιστεί σε επιλογές που ενεργοποιούν
κινητήρες ΡΜ (μόνιμου μαγνήτη).
ΕΙΔΟΠΟΙΗΣΗ
Κατά τη χρήση κινητήρων PM,
συστήνεται η χρήση αντιστάσεων
πέδησης.
Περιοχή: Λειτουργία:
Size
related*
[ 0.000 1000 mH]
ΕΙΔΟΠΟΙΗΣΗ
Η παράμετρος αυτή δεν μπορεί
να τροποποιηθεί ενώ λειτουργεί
ο κινητήρας.
1-42 Motor Cable Length
Περιοχή: Λειτουργία:
50 m* [0 - 100 m] Ρυθμίστε το μήκος καλωδίου κινητήρα σε
μέτρα.
Ρυθμίστε την τιμή αυτεπαγωγής του
άξονα q. Βρείτε την τιμή στο φύλλο
δεδομένων κινητήρα.
1-39 Motor Poles
Περιοχή: Λειτουργία:
Size
related*
[2 100 ]
ΕΙΔΟΠΟΙΗΣΗ
Η παράμετρος αυτή δεν μπορεί να
τροποποιηθεί ενώ λειτουργεί ο
κινητήρας.
Εισαγάγετε τον αριθμό πόλων του κινητήρα.
Η τιμή των πόλων του κινητήρα είναι πάντα
ζυγός αριθμός, γιατί αναφέρεται στο σύνολο
των αριθμών πόλων, όχι σε ζευγάρια πόλων.
1-40 Ανάδρομη EMF στις 1000 σ.α.λ.
Περιοχή: Λειτουργία:
Size
related*
[0 9000 V]
Ρυθμίστε την ονομαστική ανάδρομη EMF για
τον κινητήρα κατά τη λειτουργία στις 1000
RPM.
Η ανάδρομη EMF είναι η τάση που δημιουργείται από έναν κινητήρα PM, όταν δεν έχει
συνδεθεί μετατροπέας συχνότητας και ο
άξονας περιστρέφεται εξωτερικά. Η
ανάδρομη EMF κανονικά προσδιορίζεται για
την ονομαστική ταχύτητα κινητήρα ή για
1.000 RPM μετρημένη μεταξύ 2 γραμμών.
Εάν η τιμή δεν είναι διαθέσιμη για ταχύτητα
κινητήρα 1000 RPM, υπολογίστε τη σωστή
τιμή ως εξής: Εάν η ανάδρομη EMF είναι για
1-43 Motor Cable Length Feet
Περιοχή: Λειτουργία:
164 ft* [0 - 328 ft] Ρυθμίστε το μήκος καλωδίου κινητήρα. Η
μονάδα μήκους είναι τα πόδια.
1-44 d-axis Inductance Sat. (LdSat)
Περιοχή: Λειτουργία:
Size
related
[ 0 1000
mH]
Αυτή η παράμετρος είναι ενεργή μόνο όταν το
παράμετρος 1-10 Motor Construction έχει
ρυθμιστεί σε [3] PM, εξέχον IPM, Κορ.
Αυτή η παράμετρος αντιστοιχεί στον κορεσμό
αυτεπαγωγής του άξονα d. Η προεπιλεγμένη
τιμή είναι η τιμή που έχει οριστεί στο
παράμετρος 1-37 d-axis Inductance (Ld). Στις
περισσότερες περιπτώσεις, μην αλλάξετε την
προεπιλεγμένη τιμή. Εάν ο προμηθευτής του
κινητήρα παρέχει την καμπύλη κορεσμού,
καταχωρίστε την τιμή αυτεπαγωγής άξονα d,
η οποία είναι το 100% του ονομαστικού
ρεύματος.
1-45 q-axis Inductance Sat. (LqSat)
Περιοχή: Λειτουργία:
Size
related*
[ 0 1000
mH]
Αυτή η παράμετρος είναι ενεργή μόνο όταν
το παράμετρος 1-10 Motor Construction έχει
ρυθμιστεί σε [3] PM, εξέχον IPM, Κορ.
Αυτή η παράμετρος αντιστοιχεί στον κορεσμό
αυτεπαγωγής του άξονα q. Η προεπιλεγμένη
τιμή είναι η τιμή που έχει οριστεί στο
παράμετρος 1-38 q-axis Inductance (Lq). Στις
περισσότερες περιπτώσεις, μην αλλάξετε την
38 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. MG07C327
Page 41

Magn. current
130BB780.10
Hz
Par.1-50
90%
Par.1-52
Motor Voltage
Par 1-55 [x]
Output Frequency
Par 1-56 [x]
1-55[5]
1-55[4]
1-55[3]
1-55[2]
1-55[1]
1-55[0]
1-56
[0]
1-56
[1]
1-56
[2]
1-56
[3]
1-56
[4]
1-56
[5]
130BA166.10
Περιγραφές παραμέτρων Οδηγός Προγραμματισμού
1-45 q-axis Inductance Sat. (LqSat)
Περιοχή: Λειτουργία:
προεπιλεγμένη τιμή. Εάν ο προμηθευτής του
κινητήρα παρέχει την καμπύλη κορεσμού,
καταχωρίστε την τιμή αυτεπαγωγής άξονα q,
η οποία είναι το 100% του ονομαστικού
ρεύματος.
1-46 Position Detection Gain
Περιοχή: Λειτουργία:
100 %* [ 20 -
200 %]
Ρυθμίζει το πλάτος του παλμού δοκιμής
κατά την ανίχνευση θέσης στην εκκίνηση.
Ρυθμίστε αυτή την παράμετρο για να
βελτιώσετε τη μέτρηση θέσης.
1-48 Current at Min Inductance for d-axis
Περιοχή: Λειτουργία:
100 % [ 20 - 200 %] Χρησιμοποιήστε αυτή την παράμετρο για
να ρυθμίσετε το σημείο κορεσμού
αυτεπαγωγής.
1-49 Current at Min Inductance for q-axis
Περιοχή: Λειτουργία:
100 % [ 20 -
200 %]
Αυτή η παράμετρος καθορίζει την καμπύλη
κορεσμού των τιμών αυτεπαγωγής q. Από το
20% έως το 100% αυτής της παραμέτρου, οι
αυτεπαγωγές προσεγγίζονται γραμμικά λόγω
των παραμέτρων παράμετρος 1-38 q-axis
Inductance (Lq) και παράμετρος 1-45 q-axis
Inductance Sat. (LqSat). Αυτές οι παράμετροι
σχετίζονται με τις αντισταθμίσεις φορτίου της
πινακίδας στοιχείων του κινητήρα, τον τύπο του
φορτίου εφαρμογής και την ηλεκτρονική
λειτουργία πέδησης για το γρήγορο
σταμάτημα/κράτηση του κινητήρα.
1-50 Motor Magnetisation at Zero Speed
Περιοχή: Λειτουργία:
100%* [0 -
Χρησιμοποιήστε την παράμετρο μαζί με την
300 %
παράμετρος 1-52 Min Speed Normal Magnetising
]
[Hz] για να πάρετε διαφορετικό θερμικό φορτίο
στον κινητήρα όταν αυτός λειτουργεί σε χαμηλή
ταχύτητα.
Εισάγετε μία τιμή που είναι ποσοστό του
ονομαστικού ρεύματος μαγνήτισης. Αν η ρύθμιση
είναι πολύ χαμηλή, η ροπή στον άξονα του
κινητήρα μπορεί να μειωθεί.
1-52 Min Speed Normal Magnetising [Hz]
Περιοχή: Λειτουργία:
1 Hz* [ 0.1 - 10.0
Hz]
Ρυθμίστε την απαιτούμενη ισχύ για κανονικό
ρεύμα μαγνήτισης. Χρησιμοποιήστε αυτήν
την παράμετρο μαζί με την
παράμετρος 1-50 Motor Magnetisation at Zero
Speed, επίσης δείτε το Εικόνα 4.1.
1-55 U/f Characteristic - U
Περιοχή: Λειτουργία:
Size
related*
[0 - 1000V]Καταχωρίστε τάση σε κάθε σημείο
συχνότητας για να σχηματίσετε
χειροκίνητα έναν κινητήρα με
αντίστοιχο χαρακτηριστικό U/f. Τα
σημεία συχνότητας ορίζονται στην
παράμετρος 1-56 U/f Characteristic - F.
1-56 U/f Characteristic - F
Περιοχή: Λειτουργία:
Size
related*
[ 0 -
500.0
Hz]
Καταχωρίστε σημεία συχνότητας για να
σχηματίσετε έναν κινητήρα με αντίστοιχο
χαρακτηριστικό U/f. Η τάση σε κάθε σημείο
ορίζεται στο παράμετρος 1-55 U/f
Characteristic - U.
Δημιουργήστε ένα χαρακτηριστικό U/f βάσει
6 ρυθμιζόμενων τάσεων και συχνοτήτων, βλ.
Εικόνα 4.2.
Εικόνα 4.2 Παράδειγμα χαρακτηριστικού
U/f
1-60 Low Speed Load Compensation
Περιοχή: Λειτουργία:
100 %* [0 -
300 %]
Καταχωρίστε την τιμή αντιστάθμισης τάσης
χαμηλής ταχύτητας ως ποσοστό. Αυτή
παράμετρος χρησιμοποιείται για τη βελτιστοποίηση της απόδοσης φορτίου χαμηλής
ταχύτητας. Αυτή η παράμετρος είναι μόνο
ενεργή εάν παράμετρος 1-10 Κατασκευή
κινητήρα = [0] Ασύγχρονο.
4 4
Εικόνα 4.1 Μαγνήτιση κινητήρα
MG07C327 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. 39
Page 42

Περιγραφές παραμέτρων
Ρυθμιστής στροφών VLT® Midi FC 280
1-61 High Speed Load Compensation
Περιοχή: Λειτουργία:
100 %* [0 -
300 %]
44
Καταχωρίστε την τιμή αντιστάθμισης τάσης
υψηλής ταχύτητας ως ποσοστό. Αυτή
παράμετρος χρησιμοποιείται για τη βελτιστοποίηση της απόδοσης φορτίου υψηλής
ταχύτητας. Αυτή η παράμετρος είναι μόνο
ενεργή εάν παράμετρος 1-10 Κατασκευή
κινητήρα = [0] Ασύγχρονο.
1-62 Slip Compensation
Περιοχή: Λειτουργία:
Size
related*
[ -400 -
399.0 %]
Εισάγετε μία % τιμή για την
αντιστάθμιση ολίσθησης, για να
αντισταθμίσετε την ανοχή στην τιμή του
n
Η αντιστάθμιση ολίσθησης
M,N
υπολογίζεται αυτόματα, δηλαδή με
βάση την ονομαστική ταχύτητα
κινητήρα n
M,N
1-63 Slip Compensation Time Constant
Περιοχή: Λειτουργία:
0.1 s* [0.05 - 5 s] Εισάγετε την ταχύτητα αντίδρασης
αντιστάθμισης ολίσθησης. Μία υψηλή τιμή
έχει σαν αποτέλεσμα αργή αντίδραση και μία
χαμηλή τιμή έχει σαν αποτέλεσμα γρήγορη
αντίδραση. Αν δημιουργηθούν προβλήματα
συντονισμού χαμηλής ταχύτητας, χρησιμοποιήστε μεγαλύτερη ρύθμιση χρόνου.
1-64 Resonance Dampening
Περιοχή: Λειτουργία:
100%* [0 -
500 %]
Εισάγετε την τιμή της εξασθένισης συντονισμού
Ρυθμίστε την παράμετρος 1-64 Resonance
Dampening και παράμετρος 1-65 Resonance
Dampening Time Constant για να βοηθήσετε να
μειωθούν προβλήματα υψηλής συχνότητας. Για
να μειώσετε την ταλάντωση συντονισμού,
αυξήστε την τιμή της παράμετρος 1-64 Resonance
Dampening.
1-66 Min. Current at Low Speed
Περιοχή: Λειτουργία:
50 %* [ 0 -
120 %]
Εισαγάγετε το ελάχιστο ρεύμα κινητήρα σε
χαμηλή ταχύτητα. Η αύξηση του ρεύματος
βελτιώνει τη ροπή κινητήρα σε χαμηλή
ταχύτητα. Η
Παράμετρος 1-66 Min. Current at Low Speed
είναι ενεργοποιημένη μόνο για τον κινητήρα
PM.
1-70 PM Start Mode
Επιλέξτε τον τρόπο εκκίνησης κινητήρα PM. Για να εκτελέσετε
αρχικοποίηση του πυρήνα ελέγχου VVC+ για κινητήρα PM που
εκτελούσε προηγουμένως ελεύθερη λειτουργία. Ενεργό για
κινητήρες PM σε VVC+ μόνο εάν ο κινητήρας είναι σταματημένος
(ή λειτουργεί σε πάρα πολύ χαμηλή ταχύτητα).
Επιλογή: Λειτουργία:
[0] * Rotor Detection Εκτιμά την ηλεκτρική γωνία του ρότορα
και χρησιμοποιεί αυτή τη γωνία ως σημείο
εκκίνησης. Αυτή η επιλογή είναι η τυπική
επιλογή για τις βιομηχανικές εφαρμογές.
Εάν η άμεση εκκίνηση ανιχνεύσει ότι ο
κινητήρας λειτουργεί σε χαμηλή ταχύτητα
ή έχει σταματήσει, ο μετατροπέας
συχνότητας ανιχνεύει τη θέση του ρότορα
(τη γωνία) και εκκινεί τον κινητήρα από
αυτή τη θέση.
[1] Parking Η λειτουργία στάθμευσης εφαρμόζει ΣΡ
κατά μήκος των περιελίξεων του στάτορα
και περιστρέφει το ρότορα στη θέση
ηλεκτρικού 0. Αυτή η επιλογή είναι τυπική
για εφαρμογές αντλίας και ανεμιστήρα.
Εάν η άμεση εκκίνηση ανιχνεύσει ότι ο
κινητήρας λειτουργεί σε χαμηλή ταχύτητα
ή έχει σταματήσει, ο μετατροπέας
συχνότητας εκπέμπει ρεύμα ΣΡ για να
αναγκάσει τον κινητήρα να σταθμεύσει σε
γωνία και, στη συνέχεια, εκκινεί τον
κινητήρα από αυτή τη θέση.
1-71 Start Delay
1-65 Resonance Dampening Time Constant
Περιοχή: Λειτουργία:
0.005 s* [ 0.001 -
0.05 s]
Ρυθμίστε την παράμετρος 1-64 Resonance
Dampening και παράμετρος 1-65 Resonance
Dampening Time Constant για να
βοηθήσετε να μειωθούν προβλήματα
υψηλής συχνότητας. Εισαγάγετε τη σταθερά
χρόνου που δίνει την καλύτερη απόσβεση.
Περιοχή: Λειτουργία:
0 s* [0 - 10s]Αυτή η παράμετρος ενεργοποιεί μια
καθυστέρηση του χρόνου εκκίνησης. Ο
μετατροπέας συχνότητας ξεκινά με τη λειτουργία
εκκίνησης που επιλέγεται στην
παράμετρος 1-72 Start Function. Ορίστε το χρόνο
καθυστέρησης μέχρι την έναρξη της
επιτάχυνσης.
40 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. MG07C327
Page 43

Περιγραφές παραμέτρων Οδηγός Προγραμματισμού
1-72 Start Function
Επιλογή: Λειτουργία:
Επιλέξτε τη λειτουργία εκκίνησης κατά τη
διάρκεια της καθυστέρησης εκκίνησης. Αυτή η
παράμετρος είναι συνδεδεμένη με τη
παράμετρος 1-71 Start Delay.
[0] DC Hold/
delay time
[1] DC-Brake/
delay time
[2]*Coast/delay
time
[3] Start speed
cw
[4] Horizontal
operation
[5] VVC+
clockwise
Ενεργοποιήστε τον κινητήρα με ΣΡ διατήρησης
(παράμετρος 2-00 DC Hold/Motor Preheat
Current) κατά τη διάρκεια του χρόνου
καθυστέρησης εκκίνησης.
Ενεργοποιήστε τον κινητήρα με ΣΡ διατήρησης
(παράμετρος 2-01 DC Brake Current) κατά τη
διάρκεια του χρόνου καθυστέρησης εκκίνησης.
Ελεύθερη κίνηση του κινητήρα κατά τη
διάρκεια του χρόνου καθυστέρησης εκκίνησης
(αναστροφέας απενεργοποιημένος).
Δυνατό μόνο με VVC+. Ανεξάρτητα από την
τιμή που εφαρμόζεται από το σήμα αναφοράς,
η ταχύτητα εξόδου εφαρμόζει τη ρύθμιση της
ταχύτητας εκκίνησης στην
παράμετρος 1-75 Start Speed [Hz] και το ρεύμα
εξόδου αντιστοιχεί στη ρύθμιση του ρεύματος
εκκίνησης στην παράμετρος 1-76 Start Current.
Αυτή η λειτουργία χρησιμοποιείται συνήθως σε
εφαρμογές ανύψωσης χωρίς αντίβαρο και
ιδιαίτερα σε εφαρμογές με κωνικό κινητήρα,
όπου η εκκίνηση είναι δεξιόστροφη, ακολουθούμενη από περιστροφή στην κατεύθυνση
αναφοράς.
Δυνατό μόνο με VVC+.
Για την επίτευξη της λειτουργίας που
περιγράφεται στην παράμετρος 1-75 Start Speed
[Hz] και την παράμετρος 1-76 Star t Current κατά
τη διάρκεια του χρόνου καθυστέρησης
εκκίνησης. Ο κινητήρας περιστρέφεται προς
την κατεύθυνση αναφοράς. Εάν το σήμα
αναφοράς ισούται με 0,η παράμετρος 1-75 Start
Speed [Hz] δεν λαμβάνεται υπόψη και η
ταχύτητα εξόδου ισούται με 0. Το ρεύμα
εξόδου αντιστοιχεί στη ρύθμιση του ρεύματος
εκκίνησης στην παράμετρος 1-76 Start Current.
Το ρεύμα εκκίνησης υπολογίζεται αυτόματα.
Αυτή η λειτουργία χρησιμοποιεί την ταχύτητα
εκκίνησης μόνο κατά το χρόνο καθυστέρησης
εκκίνησης.
1-73 Flying Start
Επιλογή: Λειτουργία:
ΕΙΔΟΠΟΙΗΣΗ
Για την επίτευξη βέλτιστης απόδοσης
έναρξης υπό κίνηση, τα προηγμένα
δεδομένα κινητήρα,
παράμετρος 1-30 Stator Resistance (Rs)
έως παράμετρος 1-35 Main Reactance (Xh)
πρέπει να είναι σωστά.
Σταμάτημα κινητήρα που περιστρέφεται
ελεύθερα λόγω πτώσης τάσης δικτύου
ρεύματος.
[0]*Disabled Καμία λειτουργία.
[1] Enabled Ενεργοποιήστε το μετατροπέα συχνότητας για
να σταματήσετε και να ελέγξετε έναν κινητήρα
που περιστρέφεται. Όταν η
παράμετρος 1-73 Flying Start είναι ενεργοποιημένη, η παράμετρος 1-71 Start Delay και η
παράμετρος 1-72 Start Function δεν έχουν
λειτουργία.
[2] Enabled
Always
[3] Enabled
Ref. Dir.
[4] Enab.
Always
Ref. Dir.
1-75 Start Speed [Hz]
Περιοχή: Λειτουργία:
Size
related*
Επιτρέπει την έναρξη υπό κίνηση σε κάθε
εντολή εκκίνησης.
Ενεργοποιήστε το μετατροπέα συχνότητας για
να σταματήσετε και να ελέγξετε έναν κινητήρα
που περιστρέφεται. Η αναζήτηση εκτελείται
μόνο στην κατεύθυνση αναφοράς.
Επιτρέπει την έναρξη υπό κίνηση σε κάθε
εντολή εκκίνησης. Η αναζήτηση εκτελείται μόνο
στην κατεύθυνση αναφοράς.
[ 0 -
500.0
Hz]
Αυτή η παράμετρος μπορεί να χρησιμοποιηθεί για εφαρμογές ανύψωσης (κωνικός
ρότορας). Ρυθμίστε μια ταχύτητα εκκίνησης
κινητήρα. Μετά το σήμα εκκίνησης, η
ταχύτητα εξόδου μεταπηδά στη ρυθμισμένη
τιμή. Ρυθμίστε τη λειτουργία εκκίνησης στην
παράμετρος 1-72 Start Function σε [3]
Ταχύτητα εκκίνησης δεξιόστροφα, [4]
Οριζόντια λειτουργία ή [5] VVC+ δεξιόσ τροφα,
και ρυθμίστε ένα χρόνο καθυστέρησης
εκκίνησης στην παράμετρος 1-71 Start Delay.
4 4
1-73 Flying Start
Επιλογή: Λειτουργία:
ΕΙΔΟΠΟΙΗΣΗ
Η παράμετρος αυτή δεν μπορεί να
αλλάξει ενώ λειτουργεί ο κινητήρας.
MG07C327 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. 41
1-76 Start Current
Περιοχή: Λειτουργία:
Size
related*
[ 0 10000
A]
Μερικοί κινητήρες, για παράδειγμα οι
κινητήρες κωνικού ρότορα, απαιτούν
επιπλέον ρεύμα/ταχύτητα εκκίνησης για να
απελευθερώσουν το ρότορα. Για να
επιτύχετε αυτή την ενίσχυση, ρυθμίστε το
απαιτούμενο ρεύμα σε αυτή την παράμετρο.
Page 44

Περιγραφές παραμέτρων
Ρυθμιστής στροφών VLT® Midi FC 280
1-76 Start Current
Περιοχή: Λειτουργία:
Ρυθμίστε την παράμετρος 1-72 Start Function
σε [3] Ταχύτητα εκκίνησης δεξιόστροφα ή [4]
Οριζόντια λειτουργία και ρυθμίστε ένα χρόνο
καθυστέρησης εκκίνησης στην
παράμετρος 1-71 Start Delay.
44
1-78 Compressor Start Max Speed [Hz]
Περιοχή: Λειτουργία:
0 Hz* [ 0 -
500 Hz]
Αυτή η παράμετρος επιτρέπει την υψηλή ροπή
εκκίνησης. Ο χρόνος από την αποστολή του
σήματος εκκίνησης μέχρι η ταχύτητα να υπερβεί
την ταχύτητα που ορίζεται σε αυτή την
παράμετρο, καθίσταται ζώνη εκκίνησης. Στη
ζώνη εκκίνησης, το όριο έντασης ρεύματος και
το όριο ροπής κινητήρα ρυθμίζονται στη μέγιστη
δυνατή τιμή για το συνδυασμό μετατροπέα
συχνότητας/κινητήρα. Ο χρόνος χωρίς προστασία
από το όριο έντασης ρεύματος και το όριο
ροπής δεν πρέπει να υπερβαίνει την τιμή που
έχει οριστεί στην παράμετρος 1-79 Compressor
Start Max Time to Trip. Διαφορετικά, ο
μετατροπέας συχνότητας σημειώνει σφάλμα με
το συναγερμό 18, Αποτυχία εκκίνησης.
1-79 Compressor Start Max Time to Trip
Περιοχή: Λειτουργία:
5 s* [0 -
10 s]
Ο χρόνος από την αποστολή του σήματος
εκκίνησης μέχρι η ταχύτητα να υπερβεί την
ταχύτητα που ορίζεται στην
παράμετρος 1-78 Compressor Start Max Speed [Hz]
δεν πρέπει να υπερβαίνει το χρόνο που ορίζεται σε
αυτή την παράμετρο. Διαφορετικά, ο μετατροπέας
συχνότητας σημειώνει σφάλμα με το συναγερμό 18,
Αποτυχία εκκίνησης. Κάθε χρόνος που ρυθμίζεται
στην παράμετρος 1-71 Star t Delay για χρήση μιας
λειτουργίας εκκίνησης πρέπει να εκτελείται εντός
του χρονικού ορίου.
1-80 Function at Stop
Επιλογή: Λειτουργία:
Επιλέξτε τη λειτουργία μετατροπέα στροφών
μετά από μια εντολή διακοπής ή μετά τη
γραμμική μείωση της ταχύτητας στις ρυθμίσεις
στην παρ παράμετρος 1-82 Min Speed for
Function at Stop [Hz].
Οι διαθέσιμες επιλογές εξαρτώνται από τη
ρύθμιση στην παράμετρος 1-10 Motor
Construction.
[0] Ασύγχρον.
•
- [0] Ελεύθερη κίνηση.
- [1] Διατήρηση ΣΡ.
1-80 Function at Stop
Επιλογή: Λειτουργία:
- [3] Προ-μαγνητισμός.
[1] PM, εξέχον SPM, μη Κορ.
•
[2] PM, εξέχον SPM, μη Κορ.
•
[3] PM, εξέχον IPM, Κορ.
•
- [0] Ελεύθερη κίνηση.
- [1] Διατήρηση ΣΡ.
[0]*Coast Αφήνει τον κινητήρα σε ελεύθερο τρόπο
λειτουργίας.
[1] DC hold /
Motor
Preheat
[3] Pre-
magnetizing
Ενεργοποιεί τον κινητήρα με ΣΡ διατήρησης
(ανατρέξτε στο παράμετρος 2-00 DC Hold/
Motor Preheat Current.
Δημιουργεί ένα μαγνητικό πεδίο, ενώ ο
κινητήρας είναι σταματημένος. Αυτό επιτρέπει
στον κινητήρα να παράγει γρήγορα ροπή
κατόπιν εντολών (ασύγχρονοι κινητήρες μόνο).
Αυτή η λειτουργία προμαγνήτισης δεν βοηθά
την πρώτη εντολή εκκίνησης. Διατίθενται δύο
διαφορετικές λύσεις για την προ-μαγνήτιση
του μηχανήματος για την πρώτη εντολή
εκκίνησης:
1. Εκκίνηση του μετατροπέα
συχνότητας με αναφορά 0 RPM και
αναμονή κατά 2–4 σταθερές χρόνου
ρότορα (δείτε την παρακάτω
εξίσωση) πριν την αύξηση της τιμής
αναφοράς ταχύτητας.
2. 2a Ρύθμιση
παράμετρος 1-71 Start Delay
στο χρόνο προ-μαγνήτισης
(2–4 σταθερές χρόνου
ρότορα).
2b Ρύθμιση της
παράμετρος 1-72 Start
Function σε [0] Διατήρηση
ΣΡ.
2c Ρυθμίστε το μέγεθος του
ΣΡ διατήρησης
(παράμετρος 2-00 DC Hold/
Motor Preheat Current ώστε
να είναι ίσο με I
= U
ονομ.
Δείγματα σταθερών χρόνου ρότορα=
(Xh+X2)/(6.3*Freq_nom*Rr)
1 kW=0,2 s
10 kW=0,5 s
100 kW=1,7 s
προ-μαγνήτιση
/(1.73 x Xh).
42 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. MG07C327
Page 45

Περιγραφές παραμέτρων Οδηγός Προγραμματισμού
1-82 Min Speed for Function at Stop [Hz]
Περιοχή: Λειτουργία:
0 Hz* [0 - 20 Hz] Ρυθμίστε τη συχνότητα εξόδου στην οποία
θα ενεργοποιείται το
παράμετρος 1-80 Function at Stop.
1-83 Precise Stop Function
Επιλογή: Λειτουργία:
[0]*Precise ramp
stop
[1] Counter stop
with reset
[2] Counter stop
without reset
[3] Speed
compensated
stop
Βέλτιστο μόνο όταν η ταχύτητα λειτουργίας
(για παράδειγμα η ταχύτητα λειτουργίας μιας
μεταφορικής ταινίας) είναι σταθερή. Αυτός
είναι ένας έλεγχος ανοικτού βρόχου.
Επιτυγχάνει υψηλή επαναλαμβανόμενη
ακρίβεια στο σημείο διακοπής.
Μετρά τον αριθμό παλμών, συνήθως από
μια παλμογεννήτρια και δημιουργεί ένα
σήμα διακοπής μετά από έναν προπρογραμματισμένο αριθμό παλμών που
ορίζεται στην παράμετρος 1-84 Precise Stop
Counter Value, ο οποίος λαμβάνεται στον
ακροδέκτη 29 ή τον ακροδέκτη 33. Αυτή
είναι μια άμεση ανάδραση με μονόδρομο
έλεγχο κλειστού βρόχου. Η λειτουργία του
μετρητή (ξεκινά το χρονισμό) στο άκρο του
σήματος εκκίνησης (όταν αλλάζει από
διακοπή σε εκκίνηση). Μετά από κάθε
ακριβή διακοπή, ο αριθμός παλμών που
μετρήθηκαν κατά το χρόνο γραμμικής
μεταβολής μείωσης προς τις 0 RPM
μηδενίζεται.
Το ίδιο με το [1] Μετρητής σταματήματος με
επαναφορά, αλλά ο αριθμός παλμών που
μετρώνται κατά τη γραμμική μεταβολή
μείωσης στις 0 RPM αφαιρείται από την τιμή
του μετρητή που έχει καταχωρηθεί στην
παράμετρος 1-84 Precise Stop Counter Value.
Αυτή η λειτουργία επαναφοράς μπορεί να
χρησιμοποιηθεί για την αντιστάθμιση της
πρόσθετης απόστασης που καλύφθηκε κατά
τη διάρκεια γραμμικής μεταβολής μείωσης
και για τη μείωση των επιπτώσεων της
σταδιακής φθοράς των μηχανικών μερών.
Σταμάτημα στο ίδιο ακριβώς σημείο,
ανεξάρτητα από την τρέχουσα ταχύτητα. Το
σήμα σταματήματος καθυστερείται
εσωτερικά, όταν η τρέχουσα ταχύτητα είναι
χαμηλότερη από τη μέγιστη ταχύτητα
(ορίζεται στην παράμετρος 4-19 Max Output
Frequency). Η καθυστέρηση υπολογίζεται
βάσει τις ταχύτητας αναφοράς στο
μετατροπέα συχνότητας και όχι βάσει τις
πραγματικής ταχύτητας. Διασφαλίστε ότι ο
μετατροπέας συχνότητας έχει εκτελέσει
γραμμική αύξηση πριν την ενεργοποίηση
της διακοπής με αντιστάθμιση ταχύτητας.
1-83 Precise Stop Function
Επιλογή: Λειτουργία:
[4] Speed
compensated
counter stop
with reset
[5] Speed
compensated
counter stop
without reset
Το ίδιο με το [3] Διακοπή με αντιστάθμιση
ταχύτητας, αλλά μετά από κάθε ακριβή
διακοπή, ο αριθμός παλμών που μετρήθηκαν
κατά το χρόνο γραμμικής μεταβολής
μείωσης στις 0 RPM μηδενίζεται.
Το ίδιο με το [3] Διακοπή με αντιστάθμιση
ταχύτητας, αλλά ο αριθμός παλμών που
μετρώνται κατά τη γραμμική μεταβολή
μείωσης στις 0 RPM αφαιρείται από την τιμή
του μετρητή που έχει καταχωρηθεί στην
παράμετρος 1-84 Precise Stop Counter Value.
Αυτή η λειτουργία επαναφοράς μπορεί να
χρησιμοποιηθεί για την αντιστάθμιση της
πρόσθετης απόστασης που καλύφθηκε κατά
τη διάρκεια γραμμικής μεταβολής μείωσης
και για τη μείωση των επιπτώσεων της
σταδιακής φθοράς των μηχανικών μερών.
1-84 Precise Stop Counter Value
Περιοχή: Λειτουργία:
100000* [0 -
999999999 ]
Καταχωρίστε την τιμή μετρητή που θα
χρησιμοποιηθεί στην ενσωματωμένη
λειτουργία ακριβούς ακινητοποίησης
στην παράμετρος 1-83 Precise Stop
Function. Η μέγιστη επιτρεπόμενη
συχνότητα στον ακροδέκτη 29 ή 33
είναι 32 kHz.
1-85 Precise Stop Speed Compensation Delay
Περιοχή: Λειτουργία:
10 ms* [0 - 100
ms]
Καταχωρίστε το χρόνο καθυστέρησης για τους
αισθητήρες, τα PLCs, κ.λπ. για χρήση στην
παράμετρος 1-83 Precise Stop Function. Στη
λειτουργία σταματήματος με αντιστάθμιση
ταχύτητας, ο χρόνος καθυστέρησης στις
διάφορες συχνότητες έχει μεγάλη επίπτωση
στη λειτουργία ακινητοποίησης.
1-88 AC Brake Gain
Περιοχή: Λειτουργία:
1.4* [1.0 -
2.0 ]
Αυτή η παράμετρος χρησιμοποιείται για τη
ρύθμιση της ικανότητας ισχύος ΕΡ (ρυθμίστε το
χρόνο γραμμικής μείωσης όταν η αδράνεια είναι
σταθερή). Στην περίπτωση όπου η τάση της
σύνδεσης ΣΡ δεν είναι υψηλότερη από την τιμή
σφάλματος τάσης σύνδεσης ΣΡ, η ροπή της
γεννήτριας μπορεί να ρυθμιστεί με αυτή την
παράμετρο. Όσο υψηλότερη η απολαβή πέδησης
ΕΡ, τόσο ισχυρότερη η ικανότητα πέδησης. Εάν
ισούται με 1,0 σημαίνει ότι δεν υπάρχει ικανότητα
πέδησης ΕΡ.
4 4
MG07C327 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. 43
Page 46

Περιγραφές παραμέτρων
Ρυθμιστής στροφών VLT® Midi FC 280
1-88 AC Brake Gain
Περιοχή: Λειτουργία:
ΕΙΔΟΠΟΙΗΣΗ
Εάν υπάρχει συνεχής ροπή γεννήτριας, η
υψηλότερη ροπή γεννήτριας προκαλεί
1-93 Thermistor Source
Επιλογή: Λειτουργία:
ΕΙΔΟΠΟΙΗΣΗ
Η παράμετρος αυτή δεν μπορεί να
αλλάξει ενώ λειτουργεί ο κινητήρας.
υψηλότερο ρεύμα κινητήρα και ο κινητήρας
θερμαίνεται. Σε αυτή την κατάσταση, η
παράμετρος 2-16 AC Brake, Max current
44
μπορεί να χρησιμοποιηθεί για την
προστασία του κινητήρα από
υπερθέρμανση.
1-90 Motor Thermal Protection
Επιλογή: Λειτουργία:
[0] * No protection συνεχώς υπερφορτωμένος κινητήρας, όταν
δεν απαιτείται ενεργοποίηση προειδοποίησης ή σφάλματος στο μετατροπέα
συχνότητας.
[1] Thermistor
warning
[2] Thermistor
trip
[3] ETR warning 1 Υπολογίζει το φορτίο και ενεργοποιεί μία
[4] ETR trip 1 Υπολογίζει το φορτίο και σταματάει
[22] ETR Trip -
Extended
Detection
Ενεργοποιεί μια προειδοποίηση όταν το
συνδεδεμένο θερμίστορ στον κινητήρα
αντιδράσει σε περίπτωση υπερθέρμανσης
του κινητήρα.
Διακόπτει (παρουσιάζει σφάλμα) το
μετατροπέα συχνότητας όταν το θερμίστορ
συνδεδεμένο στον κινητήρα αντιδράσει σε
περίπτωση υπερθέρμανσης του κινητήρα.
Η τιμή απενεργοποίησης του θερμίστορ
πρέπει να είναι >3 kΩ.
Ενσωματώστε ένα θερμίστορ (αισθητήρας
PTC) στον κινητήρα για προστασία
περιέλιξης.
προειδοποίηση στην οθόνη όταν ο
κινητήρας υπερφορτωθεί. Προγραμματίζει
ένα σήμα προειδοποίησης μέσω 1 από τις
ψηφιακές εξόδους.
(σημειώνει σφάλμα) το μετατροπέα
συχνότητας όταν ο κινητήρας
υπερφορτωθεί. Προγραμματίζει ένα σήμα
προειδοποίησης μέσω 1 από τις ψηφιακές
εξόδους. Το σήμα εμφανίζεται σε
περίπτωση προειδοποίησης και αν ο
μετατροπέας συχνότητας παρουσιάσει
σφάλμα (προειδοποίηση θερμοκρασίας).
[0] * None
[1] Analog
Input 53
[2] Analog
Input 54
[3] Digital input
18
[4] Digital input
19
[5] Digital input
32
[6] Digital input
33
ΕΙΔΟΠΟΙΗΣΗ
Η ψηφιακή είσοδος πρέπει να ορίζεται
σε [0] PNP - Ενεργό στα 24 V στην
παράμετρος 5-00 Digital I/O Mode.
Επιλέξτε την είσοδο στην οποία πρέπει να
συνδεθεί το θερμίστορ (αισθητήρας PTC). Δεν
μπορεί να επιλεγεί προαιρετικός εξοπλισμός
αναλογικής εισόδου [1] Αναλογική είσοδος 53
ή [2] Αναλογική είσοδος 54 αν η αναλογική
είσοδος χρησιμοποιείται ήδη ως πηγή
αναφοράς (επιλεγμένη στην
παράμετρος 3-15 Reference 1 Source,
παράμετρος 3-16 Reference 2 Source ή την
παράμετρος 3-17 Reference 3 Source.
44 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. MG07C327
Page 47

Περιγραφές παραμέτρων Οδηγός Προγραμματισμού
4.3 Παράμετροι: 2-** Φρένα
2-00 DC Hold/Motor Preheat Current
Περιοχή: Λειτουργία:
50 %* [0 -
160 %]
Εισαγάγετε την τιμή για το ρεύμα συγκράτησης
ως ποσοστό του ονομαστικού ρεύματος
κινητήρα I
Αυτή η παράμετρος διατηρεί τη λειτουργία
κινητήρα (ροπή διατήρησης) ή προθερμαίνει τον
κινητήρα. Αυτή η παράμετρος είναι ενεργή αν
επιλεγεί το [0] Διατήρηση ΣΡ στην
παράμετρος 1-72 Start Function ή το [1]
Διατήρηση ΣΡ/Προθέρμανση στην
παράμετρος 1-80 Function at Stop.
παράμετρος 1-24 Motor Current.
M,N
ΕΙΔΟΠΟΙΗΣΗ
Η μέγιστη τιμή εξαρτάται από το
ονομαστικό ρεύμα κινητήρα. Αποφύγετε
το ρεύμα 100% για μεγάλη διάρκεια.
Μπορεί να καταστρέψει τον κινητήρα.
2-01 DC Brake Current
Περιοχή: Λειτουργία:
50 %* [0 -
150 %]
2-02 DC Braking Time
Περιοχή: Λειτουργία:
10 s* [0 - 60 s] Ορίστε τη διάρκεια του πέδησης ΣΡ που
2-04 DC Brake Cut In Speed
Περιοχή: Λειτουργία:
0 Hz* [ 0 - 500
ΕΙΔΟΠΟΙΗΣΗ
ΥΠΕΡΘΕΡΜΑΝΣΗ ΚΙΝΗΤΗΡΑ
Η μέγιστη τιμή εξαρτάται από το
ονομαστικό ρεύμα κινητήρα.
Για να αποφύγετε βλάβη του κινητήρα από
υπερθέρμανση, μην εκτελείτε λειτουργία
στο 100% για πολύ μεγάλο διάστημα.
Ρυθμίστε το ρεύμα ως % του ονομαστικού
ρεύματος κινητήρα, παράμετρος 1-24 Motor
Current. Όταν η ταχύτητα είναι κάτω από το όριο
που έχει οριστεί στην παράμετρος 2-04 DC Brake
Cut In Speed ή όταν η λειτουργία αντίστροφης
πέδης ΣΡ είναι ενεργή (η ομάδα παραμέτρων 5-1*
Ψηφιακές είσοδοι ρυθμισμένη σε [5] Αντίστροφη
πέδη ΣΡ ή μέσω της σειριακής θύρας), ένα ρεύμα
πέδης ΣΡ εφαρμόζεται με την εντολή διακοπής.
Ανατρέξτε στην παράμετρος 2-02 DC Braking Time
για τη διάρκεια.
ρυθμίστηκε στην παράμετρος 2-01 DC Brake
Current, όταν ενεργοποιηθεί.
Αυτή η παράμετρος είναι για τη ρύθμιση της
Hz]
ταχύτητας ενεργοποίησης πέδης ΣΡ, στην
οποία το ρεύμα πέδησης ΣΡ
παράμετρος 2-01 DC Brake Current πρέπει να
2-04 DC Brake Cut In Speed
Περιοχή: Λειτουργία:
είναι ενεργό, σε συνδυασμό με μια εντολή
διακοπής.
2-06 Parking Current
Περιοχή: Λειτουργία:
100 %* [0 - 150 %] Ρυθμίστε το ρεύμα ως ποσοστό της
ονομαστικής τιμής ρεύματος κινητήρα,
παράμετρος 1-24 Motor Current.
2-07 Χρόνος στάθμευσης
Περιοχή: Λειτουργία:
3 s* [0.1 - 60 s] Ορίστε τη διάρκεια του ρεύματος στάθμευσης
που ρυθμίστηκε στην παράμετρος 2-06 Ρεύμα
στάθμευσης, όταν ενεργοποιηθεί.
2-10 Brake Function
Επιλογή: Λειτουργία:
[0]*O Δεν υπάρχει εγκατεστημένος αντιστάτης πέδης.
[1] Resistor
brake
[2] AC
brake
Υπάρχει εγκατεστημένος στο σύστημα ένας
αντιστάτης πέδης, για την απορρόφηση της
περίσσειας ενέργειας πέδης ως θερμότητα. Η
σύνδεση ενός αντιστάτη πέδης επιτρέπει
υψηλότερη τάση ζεύξης ΣΡ κατά την πέδηση
(λειτουργία γεννήτριας). Η λειτουργία αντίστασης
πέδησης είναι ενεργή μόνο σε μετατροπείς
συχνότητας με εσωτερική δυναμική πέδη.
Βελτιώνει την πέδηση χωρίς τη χρήση αντίστασης
πέδησης. Αυτή η παράμετρος ελέγχει τον υπερμαγνητισμό του κινητήρα κατά την εκτέλεση με
φορτίο που παράγει ενέργεια. Αυτή η λειτουργία
μπορεί να βελτιώσει τη λειτουργία OVC.
Αυξάνοντας τις ηλεκτρικές απώλειες στον
κινητήρα, η λειτουργία OVC μπορεί να αυξήσει τη
ροπή πέδησης χωρίς την υπέρβαση του ορίου
υπέρτασης.
ΕΙΔΟΠΟΙΗΣΗ
Η πέδηση ΕΡ δεν είναι τόσο αποτελεσματική όσο η δυναμική πέδηση με
αντίσταση.
Η πέδη AC προορίζεται για τη λειτουργία
VVC+ σε ανοιχτό και κλειστό βρόχο.
2-11 Brake Resistor (ohm)
Περιοχή: Λειτουργία:
Size
related*
[ 0 65535
Ohm]
Ορίστε την τιμή αντιστάτη πέδησης σε Ω.
Αυτή η τιμή χρησιμοποιείται για την
παρακολούθηση της ισχύος στην
αντίσταση πέδησης. Η
4 4
MG07C327 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. 45
Page 48

Περιγραφές παραμέτρων
Ρυθμιστής στροφών VLT® Midi FC 280
2-11 Brake Resistor (ohm)
Περιοχή: Λειτουργία:
Παράμετρος 2-11 Brake Resistor (ohm) είναι
ενεργή μόνο σε μετατροπείς συχνότητας με
εσωτερική δυναμική πέδη. Χρησιμοποιήστε
αυτήν την παράμετρο για τιμές χωρίς
δεκαδικά.
44
2-12 Brake Power Limit (kW)
Περιοχή: Λειτουργία:
Size
related*
[0.001
- 2000
kW]
Η Παράμετρος 2-12 Όριο ισχύος πέδησης (kW)
είναι η αναμενόμενη μέση ισχύς που
εκλύεται στον αντίσταση πέδησης εντός
περιόδου 120 s. Χρησιμοποιείται ως το όριο
καταγραφής για την
παράμετρος 16-33 Ενέργεια πέδης /2 min και
καθορίζει το πότε παρέχεται προειδοποίηση/
συναγερμός.
Για τον υπολογισμό της
παράμετρος 2-12 Όριο ισχύος πέδησης (kW)
μπορεί να χρησιμοποιηθεί ο ακόλουθος
τύπος.
P
W =
br, μέση
P
είναι η μέση ισχύς που εκλύεται στον
br,μέση
αντιστάτη πέδησης. Rbr είναι η αντίσταση
του αντιστάτη πέδησης. tbr είναι ο ενεργός
χρόνος πέδησης εντός της περιόδου των 120
s, Tbr.
Ubr είναι η τάση ΣΡ όπου ο αντίσταση
πέδησης είναι ενεργός. Για τις μονάδες T4, η
τάση ΣΡ είναι 770 V, η οποία μπορεί να
μειωθεί από την παράμετρος 2-14 Μείωσης
τάσης πέδης.
2
U
V × tbrs
br
RbrΩ × Tbrs
ΕΙΔΟΠΟΙΗΣΗ
Αν το Rbr δεν είναι γνωστό ή αν το T
είναι διάφορο των 120 s, η πρακτική
br
2-16 AC Brake, Max current
Περιοχή: Λειτουργία:
100 %* [0 -
160 %]
Εισαγάγετε το μέγιστο επιτρεπόμενο ρεύμα
κατά τη χρήση της πέδης εναλλασσόμενου
ρεύματος για την αποφυγή της υπερθέρ-
μανσης των περιελίξεων κινητήρα.
ΕΙΔΟΠΟΙΗΣΗ
Η Παράμετρος 2-16 AC Brake, Max
current δεν είναι διαθέσιμη για όλους
τους κινητήρες PM, για παράδειγμα,
όλες οι επιλογές PM στην
παράμετρος 1-10 Motor Construction.
2-17 Over-voltage Control
Επιλογή: Λειτουργία:
Ο έλεγχος υπέρτασης (OVC) μειώνει τον
κίνδυνο παρουσίασης σφάλματος του
μετατροπέα συχνότητας λόγω υπέρτασης στη
ζεύξη DC που προκαλείται λόγω της αναγεννητικής ισχύος που παράγεται από το φορτίο.
[0] * Disabled Δεν απαιτείται το OVC.
[1] Enabled
(not at
stop)
[2] Enabled Ενεργοποιεί το OVC.
Ενεργοποιήστε τον OVC εκτός και εάν χρησιμοποιείτε σήμα διακοπής για το σταμάτημα του
μετατροπέα συχνότητας.
ΠΡΟΕΙΔΟΠΟΙΗΣΗ
ΠΡΟΣΩΠΙΚΟΣ ΤΡΑΥΜΑΤΙΣΜΟΣ ΚΑΙ
ΒΛΑΒΗ ΤΟΥ ΕΞΟΠΛΙΣΜΟΥ
Η ενεργοποίηση του OVC σε εφαρμογές
ανύψωσης μπορεί να οδηγήσει σε
προσωπικό τραυματισμό και βλάβη του
εξοπλισμού. Μην ενεργοποιείτε το OVC
σε τέτοιοες εφαρμογές.
προσέγγιση είναι η εκτέλεση της
εφαρμογής πέδησης, λήψη της ένδειξη
της παράμετρος 16-33 Ενέργεια
πέδης /2 min, και έπειτα η εισαγωγή
+ 20% στην παράμετρος 2-12 Όριο
ισχύος πέδησης (kW).
2-19 Over-voltage Gain
Περιοχή: Λειτουργία:
100 %* [0 - 200 %] Επιλέξτε την απολαβή υπέρτασης.
2-20 Release Brake Current
Περιοχή: Λειτουργία:
2-14 Μείωσης τάσης πέδης
Περιοχή: Λειτουργία:
0 V* [ 0 - 70 V] Η ρύθμιση αυτής της παραμέτρου μπορεί να
αλλάξει την αντίσταση πέδησης
(παράμετρος 2-11 Brake Resistor (ohm)).
0 A* [0 - 100A]Ορίστε το ρεύμα κινητήρα για την απελευ-
θέρωση της μηχανικής πέδης, όταν υπάρχει
συνθήκη εκκίνησης. Το ανώτερο όριο
καθορίζεται στην παράμετρος 16-37 Μέγ. ρεύμα
αναστρ..
46 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. MG07C327
Page 49

Περιγραφές παραμέτρων Οδηγός Προγραμματισμού
2-20 Release Brake Current
Περιοχή: Λειτουργία:
ΕΙΔΟΠΟΙΗΣΗ
Όταν επιλέγετε την έξοδο ελέγχου
μηχανικής πέδης, αλλά δεν υπάρχει
συνδεδεμένη μηχανική πέδη, η
λειτουργία δεν ενεργοποιείται με την
προεπιλεγμένη ρύθμιση, εξαιτίας του
πολύ χαμηλού ρεύματος κινητήρα.
2-22 Activate Brake Speed [Hz]
Περιοχή: Λειτουργία:
0 Hz* [0 - 400 Hz] Ρυθμίστε τη συχνότητα κινητήρα για την
ενεργοποίηση της μηχανικής πέδης, όταν
υπάρχει συνθήκη ακινητοποίησης.
2-23 Activate Brake Delay
Περιοχή: Λειτουργία:
0 s* [0 - 5 s] Εισάγετε το χρόνος καθυστέρησης πέδης της
ελεύθερης κίνησης μετά το χρόνο γραμμικής
μείωσης. Ο άξονας διατηρείται σε ταχύτητα 0 με
πλήρη ροπή διακοπής. Βεβαιωθείτε ότι η
μηχανική πέδη έχει ασφαλίσει το φορτίο πριν την
είσοδο του κινητήρα σε λειτουργία ελεύθερης
κίνησης.
4 4
MG07C327 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. 47
Page 50

Περιγραφές παραμέτρων
Ρυθμιστής στροφών VLT® Midi FC 280
4.4 Παράμετροι: 3-** Τιμή αναφοράς/Αν.-κάθ.
3-00 Reference Range
Επιλογή: Λειτουργία:
[0] * Min - Max Επιλέξτε το εύρος του σήματος αναφοράς και
του σήματος ανάδρασης. Οι τιμές σημάτων
μπορεί να είναι μόνο θετικές ή θετικές και
αρνητικές.
44
[1] -Max -
+Max
Για τιμές και θετικές και αρνητικές (και προς τις
δύο κατευθύνσεις) σε σχέση με την
παράμετρος 4-10 Motor Speed Direction.
3-01 Reference/Feedback Unit
Επιλογή: Λειτουργία:
Επιλέγει τη μονάδα για τις τιμές αναφοράς
ελέγχου διεργασίας PID και την ανάδραση.
[0] None
[1] %
[2] RPM
[3] Hz
[4] Nm
[5] PPM
[10] 1/min
[12] Pulse/s
[20] l/s
[21] l/min
[22] l/h
[23] m³/s
[24] m³/min
[25] m³/h
[30] kg/s
[31] kg/min
[32] kg/h
[33] t/min
[34] t/h
[40] m/s
[41] m/min
[45] m
[60] °C
[70] mbar
[71] bar
[72] Pa
[73] kPa
[74] m WG
[80] kW
[120] GPM
[121] gal/s
[122] gal/min
[123] gal/h
[124] CFM
[125] ft³/s
[126] ft³/min
[127] ft³/h
[130] lb/s
3-01 Reference/Feedback Unit
Επιλογή: Λειτουργία:
[131] lb/min
[132] lb/h
[140] ft/s
[141] ft/min
[145] ft
[150] lb ft
[160] °F
[170] psi
[171] lb/in2
[172] in WG
[173] ft WG
[180] HP
3-02 Minimum Reference
Περιοχή: Λειτουργία:
0
Reference
Feedback
Unit*
[ 0 4999
Reference
Feedback
Unit]
Εισάγετε την ελάχιστη τιμή αναφοράς. Η
ελάχιστη τιμή αναφοράς είναι η
χαμηλότερη τιμή που μπορεί να ληφθεί
από την άθροιση όλων των αναφορών.
Η Ελάχιστη τιμή αναφοράς είναι ενεργή
μόνο αν στην παράμετρος 3-00 Reference
Range είναι επιλεγμένο το [0] Ελάχ.–Μέγ.
Η μονάδα ελάχιστης τιμής αναφοράς
συμφωνεί:
Την επιλογή στην
•
παράμετρος 1-00 Conguration
Mode.
Η επιλεγμένη μονάδα στην
•
παράμετρος 3-01 Reference/
Feedback Unit.
3-03 Maximum Reference
Περιοχή: Λειτουργία:
Size
related*
[-4999.0
- 4999
Reference
Feedback
Unit]
Εισάγετε τη μέγιστη τιμή αναφοράς. Η
μέγιστη τιμή αναφοράς είναι η υψηλότερη
τιμή που μπορεί να ληφθεί από την
άθροιση όλων των τιμών αναφοράς.
Η μονάδα μέγιστης τιμής αναφοράς
συμφωνεί:
Την επιλογή στην
•
παράμετρος 1-00 Conguration
Mode.
Η επιλεγμένη μονάδα στην
•
παράμετρος 3-00 Reference Range.
48 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. MG07C327
Page 51

Relative
Z=X+X*Y/100
Resulting
actual
reference
Y
X
130BA059.12
Z
X
100
%
0-100
Z
Y
X+X*Y/100
P 3-14
130BA278.10
Περιγραφές παραμέτρων Οδηγός Προγραμματισμού
3-04 Reference Function
Επιλογή: Λειτουργία:
[0] * Sum Αθροίζει τόσο τις εξωτερικές, όσο και τις
προκαθορισμένες τιμές αναφοράς.
[1] External/
Preset
Χρησιμοποιεί είτε την προκαθορισμένη είτε
την εξωτερική τιμή αναφοράς Εναλλαγή
μεταξύ εξωτερικού σήματος τιμής αναφοράς
και προκαθορισμένης τιμής αναφοράς σε
ψηφιακή είσοδο.
3-10 Preset Reference
Περιοχή: Λειτουργία:
0 %* [-100 -
100 %]
Εισάγετε έως και οκτώ διαφορετικές προεπιλεγμένες επιθυμητές τιμές (0-7) σε αυτήν την
παράμετρο, χρησιμοποιώντας τον προγραμματισμό συστοιχίας. Για την επιλογή ειδικών
τιμών αναφοράς, επιλέξτε προκαθορισμένη τιμή
αναφοράς bit 0/1/2 [16], [17] ή [18] για τις
αντίστοιχες ψηφιακές εισόδους στην ομάδα
παραμέτρων 5.1* Ψηφιακές είσοδοι.
3-11 Jog Speed [Hz]
Περιοχή: Λειτουργία:
5 Hz* [ 0 - 500.0
Hz]
Η ταχύτητα ελαφριάς ώθησης είναι μια
σταθερή ταχύτητα εξόδου στην οποία
λειτουργεί ο μετατροπέας συχνότητας όταν
ενεργοποιείται η λειτουργία ελαφριάς
ώθησης. Βλέπε επίσης την
παράμετρος 3-80 Jog Ramp Time.
3-12 Catch up/slow Down Value
Περιοχή: Λειτουργία:
0 %* [0 -
100 %]
Καταχωρίστε μια τιμή ποσοστού που είτε θα
προστεθεί, είτε θα αφαιρεθεί από την πραγματική
τιμή αναφοράς για το σταμάτημα ή την
επιβράδυνση αντίστοιχα. Εάν επιλεχθεί [28]
Σταμάτημα μέσω 1 από τις ψηφιακές εισόδους
(παράμετρος 5-10 Ψηφιακή είσοδος ακροδέκτη 18
έως παράμετρος 5-15 Ψηφιακή είσοδος ακροδέκτη
33), η τιμή του ποσοστού προστίθεται στη
συνολική τιμή αναφοράς. Εάν επιλεχθεί [29]
Επιβράδυνση μέσω 1 από τις ψηφιακές εισόδους
(παράμετρος 5-10 Ψηφιακή είσοδος ακροδέκτη 18
έως παράμετρος 5-15 Ψηφιακή είσοδος ακροδέκτη
33), η τιμή του ποσοστού αφαιρείται από τη
συνολική τιμή αναφοράς.
3-14 Preset Relative Reference
Περιοχή: Λειτουργία:
0 %* [-100 -
100 %]
Εικόνα 4.3 Προεπιλεγμένη σχετική τιμή αναφοράς
Εικόνα 4.4 Πραγματική τιμή αναφοράς
Η πραγματική τιμή αναφοράς, Χ, αυξάνεται ή
μειώνεται κατά το ποσοστό Υ, που ορίζεται στην
παράμετρος 3-14 Προεπιλεγμένη σχετική επιθυμητή
τιμή. Αυτό έχει σαν αποτελέσματα την
πραγματική τιμή αναφοράς Ζ. Πραγματική τιμή
αναφοράς (Χ) είναι το άθροισμα των εισόδων
που έχουν επιλεγεί στις παράμετρος 3-15 Πηγή
αναφοράς 1, παράμετρος 3-16 Πηγή αναφοράς 2,
παράμετρος 3-17 Πηγή αναφοράς 3, και
παράμετρος 8-02 Πηγή ελέγχου.
3-15 Reference 1 Source
Επιλογή: Λειτουργία:
Επιλέξτε την είσοδο αναφοράς που θα
χρησιμοποιηθεί για το πρώτο σήμα
αναφοράς. Οι Παράμετρος 3-15 Reference
1 Source, παράμετρος 3-16 Reference 2
Source, και παράμετρος 3-17 Reference 3
Source ορίζουν έως και τρία διαφορετικά
σήματα αναφοράς. Το άθροισμα αυτών
των σημάτων αναφοράς ορίζει την
πραγματική αναφορά.
[0] No function
[1] * Analog Input 53
[2] Analog Input 54
[7] Frequency input
29
[8] Frequency input
33
[11] Local bus
reference
[20] Digital pot.meter
[32] Bus PCD
4 4
MG07C327 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. 49
Page 52

Relative
Z=X+X*Y/100
Resulting
actual
reference
Y
X
130BA059.12
Z
Περιγραφές παραμέτρων
Ρυθμιστής στροφών VLT® Midi FC 280
3-16 Reference 2 Source
Επιλογή: Λειτουργία:
Επιλέξτε την είσοδο αναφοράς που θα
χρησιμοποιηθεί για το πρώτο σήμα
αναφοράς. Οι Παράμετρος 3-15 Reference
1 Source, παράμετρος 3-16 Reference 2
Source, και παράμετρος 3-17 Reference 3
Source ορίζουν έως και τρία διαφορετικά
44
[0] No function
[1] Analog Input 53
[2] * Analog Input 54
[7] Frequency input
29
[8] Frequency input
33
[11] Local bus
reference
[20] Digital pot.meter
[32] Bus PCD
σήματα αναφοράς. Το άθροισμα αυτών
των σημάτων αναφοράς ορίζει την
πραγματική αναφορά.
3-17 Reference 3 Source
Επιλογή: Λειτουργία:
Επιλέξτε την είσοδο αναφοράς που θα
χρησιμοποιηθεί για το πρώτο σήμα
αναφοράς. Οι Παράμετρος 3-15 Reference
1 Source, παράμετρος 3-16 Reference 2
Source, και παράμετρος 3-17 Reference 3
Source ορίζουν έως και τρία διαφορετικά
σήματα αναφοράς. Το άθροισμα αυτών
των σημάτων αναφοράς ορίζει την
πραγματική αναφορά.
[0] No function
[1] Analog Input 53
[2] Analog Input 54
[7] Frequency input
29
[8] Frequency input
33
[11] * Local bus
reference
[20] Digital pot.meter
[32] Bus PCD
3-18 Relative Scaling Reference Resource
Επιλογή: Λειτουργία:
ΕΙΔΟΠΟΙΗΣΗ
Η παράμετρος αυτή δεν μπορεί να
τροποποιηθεί ενώ λειτουργεί ο
κινητήρας.
Επιλέξτε μια μεταβλητή τιμή που θα
προστεθεί στη σταθερή τιμή (ορίζεται
3-18 Relative Scaling Reference Resource
Επιλογή: Λειτουργία:
στην παράμετρος 3-14 Preset Relative
Reference). Το άθροισμα της σταθερής και
μεταβλητής τιμής (με την ένδειξη Y στην
Εικόνα 4.5) πολλαπλασιάζεται με την
πραγματική τιμή αναφοράς (με την ένδειξη
X στην Εικόνα 4.5). Αυτό το γινόμενο
προστίθεται στη συνέχεια στην πραγματική
τιμή αναφοράς (X+X*Y/100) για να εξαχθεί
η προκύπτουσα πραγματική τιμή
αναφοράς.
Εικόνα 4.5 Προκύπτουσα πραγματική
τιμή αναφοράς
[0] * No function
[1] Analog Input
53
[2] Analog Input
54
[7] Frequency
input 29
[8] Frequency
input 33
[11] Local bus
reference
3-40 Ramp 1 Type
Επιλογή: Λειτουργία:
Επιλέξτε τον τύπο ανόδου/καθόδου, ανάλογα με
τις απαιτήσεις για επιτάχυνση και επιβράδυνση.
Μια γραμμική μεταβολή παρέχει σταθερή
επιτάχυνση κατά την άνοδο/κάθοδο. Μια
ημιτονοειδής άνοδος/κάθοδος 2 παρέχει μη
γραμμική επιτάχυνση.
[0] * Linear
[1] Sine
Ramp
[2] Sine 2
Ramp
Η μεταβολή S βασίζεται στις τιμές που
ορίστηκαν στην παράμετρος 3-41 Ramp 1 Ramp
Up Time και παράμετρος 3-42 Ramp 1 Ramp
Down Time.
3-41 Ramp 1 Ramp Up Time
Περιοχή: Λειτουργία:
Size
related*
[0.01 3600 s]
Εισαγάγετε το χρόνο ανόδου, δηλαδή το
χρόνο επιτάχυνσης από 0 σ.α.λ. στην
ταχύτητα σύγχρονου κινητήρα nS. Επιλέξτε
χρόνο γραμμικής αύξησης τέτοιο, ώστε η
ένταση ρεύματος εξόδου να μην υπερβαίνει
50 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. MG07C327
Page 53

Περιγραφές παραμέτρων Οδηγός Προγραμματισμού
3-41 Ramp 1 Ramp Up Time
Περιοχή: Λειτουργία:
το όριο ρεύματος που ορίζεται στην
παράμετρος 4-18 Current Limit κατά τη
διάρκεια της γραμμικής μεταβολής. Η τιμή
0,00 αντιστοιχεί σε 0,01 s σε τρόπο
λειτουργίας ταχύτητας. Δείτε το χρόνο
γραμμικής μείωσης στην
παράμετρος 3-42 Ramp 1 Ramp Down Time.
Παρ. .3 − 41 =
t
3-42 Ramp 1 Ramp Down Time
Περιοχή: Λειτουργία:
Size
related*
[0.01
- 3600
s]
Εισαγάγετε το χρόνο καθόδου, δηλαδή το
χρόνο επιβράδυνσης από την ταχύτητα
σύγχρονου κινητήρα ns έως τις 0 σ.α.λ.
Επιλέξτε ένα χρόνο γραμμικής μείωσης ώστε
να προκύπτει υπέρταση στον αναστροφέα
εξαιτίας της λειτουργίας αναπαραγωγής του
κινητήρα, και ώστε το παραγόμενο ρεύμα να
μην υπερβαίνει το τρέχον όριο που ορίζεται
στην παράμετρος 4-18 Current Limit. Η τιμή
0,00 αντιστοιχεί σε 0,01 s σε τρόπο
λειτουργίας ταχύτητας. Δείτε το χρόνο
γραμμικής αύξησης στην
παράμετρος 3-41 Ramp 1 Ramp Up Time.
Παρ. .3 − 42 =
t
3-50 Ramp 2 Type
Επιλογή: Λειτουργία:
Επιλέξτε τον τύπο ανόδου/καθόδου, ανάλογα με
τις απαιτήσεις για επιτάχυνση και επιβράδυνση.
Μια γραμμική μεταβολή παρέχει σταθερή
επιτάχυνση κατά την άνοδο/κάθοδο. Μια
ημιτονοειδής άνοδος/κάθοδος 2 παρέχει μη
γραμμική επιτάχυνση.
[0] * Linear
[1] Sine
Ramp
[2] Sine 2
Ramp
Η μεταβολή S βασίζεται στις τιμές που
ορίστηκαν στην παράμετρος 3-51 Ramp 2 Ramp
Up Time και παράμετρος 3-52 Ramp 2 Ramp
Down Time.
3-51 Ramp 2 Ramp Up Time
Περιοχή: Λειτουργία:
Size
related*
[0.01 3600 s]
Εισαγάγετε το χρόνο ανόδου, δηλαδή το
χρόνο επιτάχυνσης από 0 σ.α.λ. μέχρι την
ονομαστική ταχύτητα κινητήρα ns. Επιλέξτε
χρόνο γραμμικής αύξησης τέτοιο, ώστε η
ένταση ρεύματος εξόδου να μην υπερβαίνει
το όριο ρεύματος που ορίζεται στην
παράμετρος 4-18 Current Limit κατά τη
διάρκεια της γραμμικής μεταβολής. Η τιμή
s xns RPM
επιτ.
αναφ. RPM
s xns RPM
επιβ.
αναφ. RPM
3-51 Ramp 2 Ramp Up Time
Περιοχή: Λειτουργία:
0,00 αντιστοιχεί σε 0,01 s σε τρόπο
λειτουργίας ταχύτητας. Δείτε το χρόνο
γραμμικής μείωσης στην
παράμετρος 3-52 Ramp 2 Ramp Down Time.
Παρ. .3 − 51 =
t
3-52 Ramp 2 Ramp Down Time
Περιοχή: Λειτουργία:
Size
related*
[0.01 3600 s]
Εισαγάγετε το χρόνο καθόδου, δηλαδή το
χρόνο επιβράδυνσης από την ονομαστική
ταχύτητα κινητήρα ns έως τις 0 σ.α.λ.
Επιλέξτε ένα χρόνο γραμμικής μείωσης ώστε
να προκύπτει υπέρταση στο μετατροπέα
συχνότητας εξαιτίας της λειτουργίας
αναπαραγωγής του κινητήρα, και ώστε το
παραγόμενο ρεύμα να μην υπερβαίνει το
τρέχον όριο που ορίζεται στην
παράμετρος 4-18 Όριο ρεύματος. Η τιμή 0,00
αντιστοιχεί σε 0,01 s σε τρόπο λειτουργίας
ταχύτητας. Δείτε το χρόνο γραμμικής
αύξησης στην παράμετρος 3-51 Άνοδος/
Κάθοδος 2 Χρόνος ανόδου.
Παρ. .3 − 52 =
t
3-60 Ramp 3 Type
Επιλογή: Λειτουργία:
Επιλέξτε τον τύπο ανόδου/καθόδου, ανάλογα με
τις απαιτήσεις για επιτάχυνση και επιβράδυνση.
Μια γραμμική μεταβολή παρέχει σταθερή
επιτάχυνση κατά την άνοδο/κάθοδο. Μια
άνοδος/κάθοδος S παρέχει μη γραμμική
επιτάχυνση.
[0] * Linear
[1] Sine
Ramp
[2] Sine 2
Ramp
Η μεταβολή S βασίζεται στις τιμές που
ορίστηκαν στην παράμετρος 3-61 Άνοδος/
Κάθοδος 3 Χρόνος ανόδου και
παράμετρος 3-62 Άνοδος/Κάθοδος 3 Χρόνος
καθόδου.
3-61 Ramp 3 Ramp up Time
Περιοχή: Λειτουργία:
Size
related*
[0.01 3600 s]
Εισαγάγετε το χρόνο ανόδου, δηλαδή το
χρόνο επιτάχυνσης από 0 σ.α.λ. μέχρι την
ονομαστική ταχύτητα κινητήρα ns. Επιλέξτε
χρόνο γραμμικής αύξησης τέτοιο, ώστε η
ένταση ρεύματος εξόδου να μην υπερβαίνει
το όριο ρεύματος που ορίζεται στην
παράμετρος 4-18 Όριο ρεύματος κατά τη
διάρκεια της γραμμικής μεταβολής. Η τιμή
0,00 αντιστοιχεί σε 0,01 s σε τρόπο
s xns RPM
επιτ.
αναφ. RPM
s xns RPM
επιβ.
αναφ. RPM
4 4
MG07C327 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. 51
Page 54

Περιγραφές παραμέτρων
Ρυθμιστής στροφών VLT® Midi FC 280
3-61 Ramp 3 Ramp up Time
Περιοχή: Λειτουργία:
λειτουργίας ταχύτητας. Δείτε το χρόνο
γραμμικής μείωσης στην
παράμετρος 3-62 Άνοδος/Κάθοδος 3 Χρόνος
καθόδου.
3-62 Ramp 3 Ramp down Time
44
Περιοχή: Λειτουργία:
Size
related*
[0.01 3600 s]
Εισαγάγετε το χρόνο καθόδου, δηλαδή το
χρόνο επιβράδυνσης από την ονομαστική
ταχύτητα κινητήρα ns έως τις 0 σ.α.λ.
Επιλέξτε ένα χρόνο γραμμικής μείωσης ώστε
να προκύπτει υπέρταση στον αναστροφέα
εξαιτίας της λειτουργίας αναπαραγωγής του
κινητήρα, και ώστε το παραγόμενο ρεύμα να
μην υπερβαίνει το τρέχον όριο που ορίζεται
στην παράμετρος 4-18 Όριο ρεύματος. Η τιμή
0,00 αντιστοιχεί σε 0,01 s σε τρόπο
λειτουργίας ταχύτητας. Δείτε το χρόνο
γραμμικής αύξησης στην
παράμετρος 3-61 Άνοδος/Κάθοδος 3 Χρόνος
ανόδου.
Παρ. .3 − 62 =
t
s xns RPM
επιβ.
αναφ. RPM
3-70 Ramp 4 Type
Επιλογή: Λειτουργία:
Επιλέξτε τον τύπο ανόδου/καθόδου, ανάλογα με
τις απαιτήσεις για επιτάχυνση και επιβράδυνση.
Μια γραμμική μεταβολή παρέχει σταθερή
επιτάχυνση κατά την άνοδο/κάθοδο. Μια
άνοδος/κάθοδος S παρέχει μη γραμμική
επιτάχυνση.
[0] * Linear
[1] Sine
Ramp
[2] Sine 2
Ramp
Η μεταβολή S βασίζεται στις τιμές που
ορίστηκαν στην παράμετρος 3-71 Άνοδος/
Κάθοδος 4 Χρόνος ανόδου και
παράμετρος 3-72 Άνοδος/Κάθοδος 4 Χρόνος
καθόδου.
3-71 Ramp 4 Ramp up Time
Περιοχή: Λειτουργία:
παράμετρος 3-72 Άνοδος/Κάθοδος 4 Χρόνος
καθόδου.
Παρ. .3 − 71 =
3-72 Ramp 4 Ramp Down Time
Περιοχή: Λειτουργία:
Size
related*
[0.01 3600 s]
Εισαγάγετε το χρόνο καθόδου, δηλαδή το
χρόνο επιβράδυνσης από την ονομαστική
ταχύτητα κινητήρα ns έως τις 0 σ.α.λ.
Επιλέξτε ένα χρόνο γραμμικής μείωσης ώστε
να προκύπτει υπέρταση στον αναστροφέα
εξαιτίας της λειτουργίας αναπαραγωγής του
κινητήρα, και ώστε το παραγόμενο ρεύμα να
μην υπερβαίνει το τρέχον όριο που ορίζεται
στην παράμετρος 4-18 Όριο ρεύματος. Η τιμή
0,00 αντιστοιχεί σε 0,01 s σε τρόπο
λειτουργίας ταχύτητας. Δείτε το χρόνο
γραμμικής αύξησης στην
παράμετρος 3-71 Άνοδος/Κάθοδος 4 Χρόνος
ανόδου.
Παρ. .3 − 72 =
t
3-80 Jog Ramp Time
Περιοχή: Λειτουργία:
Size
related*
[0.01
Εισάγετε το χρόνο ανόδου/καθόδου ελαφράς
- 3600
ώθησης, ο οποίος είναι ο χρόνος επιτάχυνσης/
s]
επιβράδυνσης μεταξύ 0 RPM και της
ονομαστικής συχνότητας κινητήρα ns.
Βεβαιωθείτε ότι το προκύπτον ρεύμα εξόδου
που απαιτείται για το δεδομένο χρόνο ανόδου/
καθ. ελαφράς ώθησης δεν υπερβαίνει το όριο
ρεύματος στην παράμετρος 4-18 Current Limit.
Ο χρόνος γραμμικής μεταβολής ελαφράς
ώθησης ξεκινά με την ενεργοποίηση ενός
σήματος ελαφράς ώθησης μέσω του LCP, μιας
επιλεγμένης ψηφιακής εισόδου ή της σειριακής
θύρας επικοινωνίας. Όταν η κατάσταση
ελαφράς ώθησης είναι απενεργοποιημένη, οι
κανονικοί χρόνοι γραμμικής μεταβολής είναι
t
s xns RPM
επιτ.
αναφ. RPM
s xns RPM
επιβ.
αναφ. RPM
έγκυροι.
3-71 Ramp 4 Ramp up Time
Περιοχή: Λειτουργία:
Size
related*
[0.01 3600 s]
Εισαγάγετε το χρόνο ανόδου, δηλαδή το
χρόνο επιτάχυνσης από 0 σ.α.λ. μέχρι την
ονομαστική ταχύτητα κινητήρα ns. Επιλέξτε
χρόνο γραμμικής αύξησης τέτοιο, ώστε η
ένταση ρεύματος εξόδου να μην υπερβαίνει
το όριο ρεύματος που ορίζεται στην
παράμετρος 4-18 Όριο ρεύματος κατά τη
διάρκεια της γραμμικής μεταβολής. Η τιμή
0,00 αντιστοιχεί σε 0,01 s σε τρόπο
λειτουργίας ταχύτητας. Δείτε το χρόνο
γραμμικής μείωσης στην
52 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. MG07C327
Page 55

130BD375.10
Time
P 3-80
Hz
P 4-14 Hz
high limit
P 1-25
Motor speed
Jog speed
P 3-19
P 3-80
Ramp up
(acc)
Ramp down
(dec)
t jog t jog
P 4-12 Hz
low limit
130BD376.10
Time
Hz
P 4-14 Hz
high limit
Reference
P 1-25
Motor speed
low limit
P 4-12 Hz
P 3-81
Qramp
Qstop
Περιγραφές παραμέτρων Οδηγός Προγραμματισμού
3-90 Step Size
Περιοχή: Λειτουργία:
0.10 %* [0.01 -
3-92 Power Restore
Επιλογή: Λειτουργία:
Εικόνα 4.6 χρόνος γραμμικής μεταβολής ελαφράς ώθησης
Παρ. .3 − 80 =
t
Ελαφρά ώθηση
ΔΕλαφρά ώθησηταχύτητα παρ. . 3 − 19 RPM
s xns RPM
3-81 Quick Stop Ramp Time
Περιοχή: Λειτουργία:
Size
related*
[0.01 3600 s]
Εισαγάγετε το χρόνο γρήγορης ακινητοποίησης, ο οποίος είναι ο χρόνος
επιβράδυνσης από την ταχύτητα σύγχρονου
κινητήρα έως τις 0 RPM. Βεβαιωθείτε ότι
δεν προκύπτει υπέρταση στον αναστροφέα
εξαιτίας της λειτουργίας αναπαραγωγής του
κινητήρα που απαιτείται για να επιτευχθεί ο
δεδομένος χρόνος καθόδου. Βεβαιωθείτε
επίσης ότι το παραγόμενο ρεύμα που
απαιτείται για να επιτευχθεί ο δεδομένος
χρόνος καθόδου δεν υπερβαίνει το όριο
ρεύματος (που ορίζεται στην
παράμετρος 4-18 Όριο ρεύματος). Ενεργοποιήστε τη γρήγορη διακοπή με ένα σήμα
σε μια επιλεγμένη ψηφιακή είσοδο ή μέσω
της θύρας σειριακής επικοινωνίας.
[0] * O Επαναφέρει την τιμή αναφοράς του ψηφιακού
[1] On Επαναφέρει την πιο πρόσφατη τιμή αναφοράς του
3-93 Maximum Limit
Περιοχή: Λειτουργία:
100 %* [-200 -
3-94 Minimum Limit
Περιοχή: Λειτουργία:
-100 % [-200 -
3-95 Ramp Delay
Περιοχή: Λειτουργία:
1000
ms*
Εισάγετε το μέγεθος της προσαύξησης που
200 %]
απαιτείται για ΑΥΞΗΣΗ/ΜΕΙΩΣΗ, σαν ποσοστό
της ταχύτητας του σύγχρονου κινητήρα, ns.
Αν η αύξηση/μείωση είναι ενεργοποιημένη η
τιμή αναφοράς που προκύπτει θα αυξάνεται/
μειώνεται κατά το ποσό που ορίζεται σε αυτή
την παράμετρο.
ποτενσιομέτρου στο 0% μετά την εκκίνηση.
ψηφιακού ποτενσιομέτρου κατά την εκκίνηση.
Εισαγάγετε τη μέγιστη αποδεκτή τιμή για
200 %]
την αναφορά που προκύπτει. Αυτό
συστήνεται αν το ψηφιακό ποτενσιόμετρο
χρησιμοποιηθεί για τη λεπτομερή ρύθμιση
της προκύπτουσας τιμής αναφοράς.
Εισαγάγετε την ελάχιστη αποδεκτή τιμή για
200 %]
την αναφορά που προκύπτει. Αυτό
συστήνεται αν το ψηφιακό ποτενσιόμετρο
χρησιμοποιηθεί για τη λεπτομερή ρύθμιση
της προκύπτουσας τιμής αναφοράς.
[0 3600000 ms]
Εισάγετε την καθυστέρηση που απαιτείται
για τη ενεργοποίηση της λειτουργίας
ψηφιακού ποτενσιόμετρου μέχρι ο
μετατροπέας συχνότητας να αρχίσει την
άν./κάθ. της τιμής αναφοράς. Με
καθυστέρηση 0 ms, η τιμή αναφοράς
αρχίζει την αν./κάθ. μόλις ενεργοποιηθεί η
αύξηση/μείωση.
4 4
3-96 Maximum Limit Switch Reference
Εικόνα 4.7 Χρόνος γραμμικής μεταβολής γρήγορης διακοπής
MG07C327 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. 53
Περιοχή: Λειτουργία:
25 %* [0 -
200 %]
Εισαγάγετε τη μέγιστη τιμή αναφοράς
διακόπτη ορίου. Εάν ο γερανός φθάσει ένα
διακόπτη ορίου (OFF) και εάν η ταχύτητα
υπερβαίνει την τιμή σε αυτή την παράμετρο,
τότε η ταχύτητα μειώνεται αυτόματα στην τιμή
αυτής της παραμέτρου. Εάν ο διακόπτης ορίου
είναι ανενεργός, η ταχύτητα δεν μπορεί να
υπερβεί την τιμή σε αυτή την παράμετρο.
Page 56

Περιγραφές παραμέτρων
Ρυθμιστής στροφών VLT® Midi FC 280
4.5 Παράμετροι: 4-** Όρια/Προειδοποιήσεις
4-10 Motor Speed Direction
Επιλογή: Λειτουργία:
[0] * Clockwise
ΕΙΔΟΠΟΙΗΣΗ
Η ρύθμιση στην
παράμετρος 4-10 Motor Speed Direction
έχει επίπτωση στην
44
[2] Both
directions
παράμετρος 1-73 Flying Start.
Επιτρέπεται μόνο η λειτουργία προς τη
δεξιόστροφη κατεύθυνση.
Επιτρέπεται η λειτουργία τόσο δεξιόστροφα
όσο και αριστερόστροφα.
4-12 Χαμηλό όριο ταχύτητας κινητήρα [Hz]
Περιοχή: Λειτουργία:
0 Hz* [ 0 -
500,0 Hz]
Εισαγάγετε το ελάχιστο όριο ταχύτητας
κινητήρα. Το Χαμηλό όριο ταχύτητας κινητήρα
μπορεί να ρυθμιστεί έτσι ώστε να αντιστοιχεί
στην ελάχιστη συχνότητα εξόδου του άξονα
κινητήρα. Το Χαμηλό όριο ταχύτητας κινητήρα
δεν πρέπει να υπερβαίνει τη ρύθμιση στην
παράμετρος 4-14 Motor Speed High Limit [Hz].
4-18 Current Limit
Περιοχή: Λειτουργία:
Size
related*
[ 0 1000 %]
Αυτή είναι μια λειτουργία περιορισμού του
πραγματικού ορίου έντασης ρεύματος, η
οποία συνεχίζει στην περιοχή υπερσυγχρονισμού. Ωστόσο, λόγω της
εξασθένισης πεδίου, η ροπή κινητήρα στο
όριο έντασης ρεύματος μειώνεται
αντίστοιχα, όταν η αύξηση τάσης σταματά
επάνω από την ταχύτητα του συγχρονισμένου κινητήρα.
4-19 Max Output Frequency
Περιοχή: Λειτουργία:
Size
related*
[ 0 -
ΕΙΔΟΠΟΙΗΣΗ
500
Η παράμετρος αυτή δεν μπορεί να
Hz]
τροποποιηθεί ενώ λειτουργεί ο
κινητήρας.
ΕΙΔΟΠΟΙΗΣΗ
Η μέγιστη συχνότητα εξόδου δεν μπορεί
να υπερβαίνει το 10% της συχνότητας
εναλλαγής αναστροφέα
4-14 Motor Speed High Limit [Hz]
Περιοχή: Λειτουργία:
65
Hz*
[ 0.1 -
500
Hz]
ΕΙΔΟΠΟΙΗΣΗ
Η μέγιστη συχνότητα εξόδου δεν μπορεί
να υπερβαίνει το 10% της συχνότητας
εναλλαγής αναστροφέα
(παράμετρος 14-01 Συχνότητα μεταγωγής).
Εισάγετε το μέγιστο όριο ταχύτητας κινητήρα. Το
Υψηλό όριο ταχύτητας κινητήρα μπορεί να
ρυθμιστεί έτσι ώστε να αντιστοιχεί στη μέγιστη
συνιστώμενη τιμή του άξονα κινητήρα σύμφωνα
με τον κατασκευαστή. Το Υψηλό όριο ταχύτητας
κινητήρα πρέπει να υπερβαίνει τη ρύθμιση στην
παράμετρος 4-12 Χαμηλό όριο ταχύτητας κινητήρα
[Hz].
4-16 Torque Limit Motor Mode
Περιοχή: Λειτουργία:
Size related* [ 0 - 1000 %] Αυτή η λειτουργία περιορίζει τη
ροπή στον άξονα για την
προστασία της μηχανικής εγκατάστασης.
4-17 Torque Limit Generator Mode
Περιοχή: Λειτουργία:
100 %* [ 0 - 1000 %] Αυτή η λειτουργία περιορίζει τη ροπή
στον άξονα για την προστασία της
μηχανικής εγκατάστασης.
4-20 Torque Limit Factor Source
Επιλέξτε μια αναλογική είσοδο για την κλιμάκωση της ρύθμισης
στις παράμετρος 4-16 Torque Limit Motor Mode και
παράμετρος 4-17 Torque Limit Generator Mode 0–100% (ή
αντίστροφα). Τα επίπεδα σήματος που αντιστοιχούν στα 0% και
100% ορίζονται στην κλιμάκωση της αναλογικής εισόδου, για
παράδειγμα ομάδα παραμέτρων 6-1* Αναλογική είσοδος 1. Αυτή η
παράμετρος είναι ενεργή μόνο όταν η
παράμετρος 1-00 Conguration Mode έχει οριστεί σε [0] Ανοικτός
βρόχος ή [1] Κλειστός βρόχος ταχύτητας.
Επιλογή: Λειτουργία:
[0] * No function
[2] Analog in 53
[4] Analog in 53 inv
[6] Analog in 54
[8] Analog in 54 inv
(παράμετρος 14-01 Συχνότητα
μεταγωγής).
Διαθέστε ένα απόλυτο όριο στη συχνότητα
εξόδου για βελτιωμένη ασφάλεια σε εφαρμογές
με κίνδυνο υπέρβασης ταχύτητας. Αυτό το όριο
είναι απόλυτο για όλες τις διαμορφώσεις
(ανεξάρτητα από τη ρύθμιση στην
παράμετρος 1-00 Conguration Mode).
54 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. MG07C327
Page 57

Περιγραφές παραμέτρων Οδηγός Προγραμματισμού
4-21 Speed Limit Factor Source
Επιλέξτε μια αναλογική είσοδο για την κλιμάκωση της ρύθμισης
στην παράμετρος 4-19 Max Output Frequency 0–100% (ή
αντίστροφα). Τα επίπεδα σήματος που αντιστοιχούν στα 0% και
100% ορίζονται στην κλιμάκωση της αναλογικής εισόδου, για
παράδειγμα ομάδα παραμέτρων 6-1* Αναλογική είσοδος 1. Αυτή η
παράμετρος είναι ενεργή μόνο όταν η
παράμετρος 1-00 Conguration Mode βρίσκεται σε λειτουργία
ροπής.
Επιλογή: Λειτουργία:
[0] * No function
[2] Analog in 53
[4] Analog in 53 inv
[6] Analog in 54
[8] Analog in 54 inv
4-22 Break Away Boost
Επιλογή: Λειτουργία:
[0] * O
[1] On Ο μετατροπέας συχνότητας παρέχει υψηλότερο ρεύμα
από τα κανονικά επίπεδα ρεύματος για να ενισχύσει
την ικανότητα ροπής απόσχισης.
Εικόνα 4.8 Σφάλμα ταχύτητας ανάδρασης κινητήρα
4-32 Motor Feedback Loss Timeout
Περιοχή: Λειτουργία:
4-30 Motor Feedback Loss Function
0.05 s* [0 - 60s]Ρυθμίστε την τιμή τέλους χρόνου που
Επιλογή: Λειτουργία:
Αυτή η λειτουργία χρησιμοποιείται για την
παρακολούθηση της συνοχής στο σήμα
ανάδρασης, δηλαδή, κατά πόσο το σήμα
ανάδρασης είναι διαθέσιμο. Επιλέξτε την
ενέργεια του μετατροπέα συχνότητας σε
περίπτωση ανίχνευσης σφάλματος
ανάδρασης. Η επιλεγμένη ενέργεια εκτελείται
όταν το σήμα ανάδρασης διαφέρει από την
ταχύτητα εξόδου κατά την τιμή που έχει
οριστεί στην παράμετρος 4-31 Motor Feedback
Speed Error για διάστημα μεγαλύτερο από την
τιμή που έχει οριστεί στην
παράμετρος 4-32 Motor Feedback Loss Timeout.
[0] * Disabled
[1] Warning
[2] Trip
[3] Jog
[4] Freeze
Output
[5] Max Speed
[6] Switch to
Open Loop
4-31 Motor Feedback Speed Error
4-40 Warning Freq. Low
Περιοχή: Λειτουργία:
Size
related*
4-41 Warning Freq. High
Περιοχή: Λειτουργία:
Size
related*
Περιοχή: Λειτουργία:
20 Hz* [0 - 50 Hz] Επιλέξτε το μέγιστο επιτρεπόμενο σφάλμα
ταχύτητας (ταχύτητα εξόδου έναντι
ανάδρασης).
επιτρέπει την υπέρβαση του σφάλματος
ταχύτητας που έχει οριστεί στην
παράμετρος 4-31 Motor Feedback Speed Error
πριν την ενεργοποίηση της λειτουργίας που
έχει επιλεχθεί στην παράμετρος 4-30 Motor
Feedback Loss Function.
[ 0 -
Χρησιμοποιήστε αυτή την παράμετρο για να
500
ορίσετε ένα κατώτερο όριο για το εύρος
Hz]
συχνότητας. Όταν η ταχύτητα κινητήρα πέσει
κάτω από αυτό το όριο, στην οθόνη
εμφανίζεται η ένδειξη Χαμηλή ταχύτητα. Το bit
προειδοποίησης 10 ορίζεται στην
παράμετρος 16-94 Ext. Status Word. Το ρελε
εξόδου μπορεί να ρυθμιστεί να υποδεικνύει
αυτή την προειδοποίηση. Η φωτεινή ένδειξη
προειδοποίησης του LCP δεν φωτίζεται όταν
επιτυγχάνεται το όριο που έχει οριστεί.
[ 0 -
Χρησιμοποιήστε αυτή την παράμετρο για να
500
ορίσετε ένα ανώτερο όριο για το εύρος
Hz]
συχνότητας. Όταν η ταχύτητα κινητήρα
υπερβαίνει αυτό το όριο, στην οθόνη
εμφανίζεται η ένδειξη Υψηλή ταχύτητα. Το bit
προειδοποίησης 9 ορίζεται στην
παράμετρος 16-94 Ext. Status Word. Το ρελέ
4 4
MG07C327 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. 55
Page 58

Περιγραφές παραμέτρων
Ρυθμιστής στροφών VLT® Midi FC 280
4-41 Warning Freq. High
Περιοχή: Λειτουργία:
εξόδου μπορεί να ρυθμιστεί να υποδεικνύει
αυτή την προειδοποίηση. Η φωτεινή ένδειξη
προειδοποίησης του LCP δεν φωτίζεται όταν
επιτυγχάνεται το όριο που έχει οριστεί.
4-55 Warning Reference High
Περιοχή: Λειτουργία:
ποίηση. Η φωτεινή ένδειξη προειδοποίησης του
LCP δεν ενεργοποιείται όταν επιτυγχάνεται το
όριο που έχει οριστεί σε αυτή την παράμετρο.
4-56 Warning Feedback Low
4-42 Adjustable Temperature Warning
44
Περιοχή: Λειτουργία:
0* [ 0 - 255 ] Χρησιμοποιήστε αυτή την παράμετρο για να
ορίσετε το όριο θερμοκρασίας κινητήρα.
4-50 Warning Current Low
Περιοχή: Λειτουργία:
0 A* [ 0 - 194.0A]Εισαγάγετε την τιμή I
κινητήρα πέσει κάτω από αυτό το όριο,
ορίζεται ένα bit στη λέξη περιγραφής
κατάστασης. Αυτή η τιμή μπορεί επίσης να
προγραμματιστεί για να παράξει ένα σήμα
στην ψηφιακή έξοδο ή την έξοδο ρελέ.
Όταν το ρεύμα
LOW
4-51 Warning Current High
Περιοχή: Λειτουργία:
Size
related*
[ 0.0 -
194.0 A]
Εισαγάγετε την τιμή I
ρεύμα κινητήρα υπερβεί αυτό το όριο,
ορίζεται ένα bit στη λέξη περιγραφής
κατάστασης. Αυτή η τιμή μπορεί επίσης
να προγραμματιστεί για να παράξει ένα
σήμα στην ψηφιακή έξοδο ή την έξοδο
ρελέ.
ΥΨΗΛΟ
Όταν το
4-54 Warning Reference Low
Περιοχή: Λειτουργία:
-4999* [-4999 -
4999 ]
Εισαγάγετε το χαμηλό όριο τιμής αναφοράς.
Όταν η πραγματική τιμή αναφοράς πέσει κάτω
από αυτό το όριο, στην οθόνη εμφανίζεται
Ref
. Το bit 20 ορίζεται στην
LOW
παράμετρος 16-94 Ext. Status Word. Το ρελέ
εξόδου ή η ψηφιακή έξοδος μπορούν να
ρυθμιστούν να υποδεικνύουν αυτή την
προειδοποίηση. Η φωτεινή ένδειξη προειδοποίησης του LCP δεν ενεργοποιείται όταν
επιτυγχάνεται το όριο που έχει οριστεί σε αυτή
την παράμετρο.
4-55 Warning Reference High
Περιοχή: Λειτουργία:
4999* [-4999
- 4999 ]
Χρησιμοποιήστε αυτή την παράμετρο για να
ορίσετε ένα υψηλό όριο για το εύρος τιμών
αναφοράς. Όταν η πραγματική τιμή αναφοράς
υπερβεί αυτό το όριο, η οθόνη εμφανίζει το
μήνυμα Ref
παράμετρος 16-94 Ext. Status Word. Το ρελέ
εξόδου ή η ψηφιακή έξοδος μπορούν να
ρυθμιστούν να υποδεικνύουν αυτή την προειδο-
. Το bit 19 ορίζεται στην
HIGH
Περιοχή: Λειτουργία:
-4999
ProcessCtrlUnit*
[-4999 - 4999
ProcessCtrlUnit]
Χρησιμοποιήστε αυτή την
παράμετρο για να ορίσετε ένα
χαμηλό όριο για το εύρος
τιμών ανάδρασης. Όταν η
ανάδραση πέσει κάτω από
αυτό το όριο, η οθόνη
εμφανίζει το μήνυμα Χαμ.
ανάδραση. Το bit 6 ορίζεται
στην παράμετρος 16-94 Ext.
Status Word. Το ρελέ εξόδου ή
η ψηφιακή έξοδος μπορούν
να ρυθμιστούν να υποδεικνύουν αυτή την
προειδοποίηση. Η φωτεινή
ένδειξη προειδοποίησης του
LCP δεν ενεργοποιείται όταν
επιτυγχάνεται το όριο που
έχει οριστεί σε αυτή την
παράμετρο.
4-57 Warning Feedback High
Περιοχή: Λειτουργία:
4999
ProcessCtrlUnit*
[-4999 - 4999
ProcessCtrlUnit]
Χρησιμοποιήστε αυτή την
παράμετρο για να ορίσετε ένα
υψηλό όριο για το εύρος
τιμών ανάδρασης. Όταν η
ανάδραση υπερβεί αυτό το
όριο, η οθόνη εμφανίζει το
μήνυμα Υψ. ανάδραση. Το bit
5 ορίζεται στην
παράμετρος 16-94 Ext. Status
Word. Το ρελέ εξόδου ή η
ψηφιακή έξοδος μπορούν να
ρυθμιστούν να υποδεικνύουν
αυτή την προειδοποίηση. Η
φωτεινή ένδειξη προειδοποίησης του LCP δεν
ενεργοποιείται όταν επιτυγχάνεται το όριο που έχει
οριστεί σε αυτή την
παράμετρο.
56 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. MG07C327
Page 59

Περιγραφές παραμέτρων Οδηγός Προγραμματισμού
4-58 Missing Motor Phase Function
Επιλογή: Λειτουργία:
[0] O Δεν εμφανίζεται συναγερμός σε περίπτωση απουσίας
φάσης κινητήρα.
[1] * On Εμφανίζεται ένας συναγερμός σε περίπτωση απουσίας
φάσης κινητήρα.
4-61 Bypass Speed From [Hz]
Περιοχή: Λειτουργία:
0 Hz* [ 0 - 500
Hz]
Σε μερικά συστήματα πρέπει να αποφεύγονται ορισμένες ταχύτητες εξόδου λόγω
προβλημάτων συντονισμού στο σύστημα.
Εισάγετε τα κατώτερα όρια των ταχυτήτων
που πρέπει να αποφεύγονται.
4-63 Bypass Speed To [Hz]
Περιοχή: Λειτουργία:
0 Hz* [ 0 - 500
Hz]
Σε μερικά συστήματα πρέπει να αποφεύγονται ορισμένες ταχύτητες εξόδου λόγω
προβλημάτων συντονισμού στο σύστημα.
Εισάγετε τα ανώτερα όρια των ταχυτήτων
που πρέπει να αποφεύγονται.
4 4
4-64 Semi-Auto Bypass Set-up
Επιλογή: Λειτουργία:
[0] * O
[1] Enable
MG07C327 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. 57
Page 60

Περιγραφές παραμέτρων
Ρυθμιστής στροφών VLT® Midi FC 280
4.6 Παράμετροι: 5-** Ψηφ.είσοδος/έξοδος
5-00 Digital Input Mode
Επιλογή: Λειτουργία:
Ρυθμίστε τη λειτουργία NPN ή PNP για τις ψηφιακές
εισόδους 18, 19, 27, 29, 32, και 33. Λειτουργία
ψηφιακής εισόδου.
[0] * PNP Ενέργεια σε θετικά κατευθυνόμενους παλμούς (0). Τα
44
[1] NPN Η ενέργεια σε αρνητικά κατευθυνόμενους παλμούς
συστήματα PNP ωθούνται κάτω στη γείωση (GND).
(1). Τα συστήματα NPN ωθούνται προς τα επάνω έως
και + 24 V, εσωτερικά στο μετατροπέα συχνότητας.
[6] Διακοπή
ανάστροφης
ενεργοποιώντας τον με συνεχές ρεύμα για
συγκεκριμένο χρονικό διάστημα. Βλέπε
παράμετρος 2-01 Ρεύμα πέδης DC έως
παράμετρος 2-04 Ταχύτητα ενεργοπ. πέδης DC
[Hz]. Η λειτουργία είναι ενεργή μόνο όταν η
τιμή στην παράμετρος 2-02 Χρόνος πέδησης
DC είναι διαφορετική από 0. Λογικό
0⇒Πέδηση ΣΡ.
ΕΙΔΟΠΟΙΗΣΗ
Όταν ο μετατροπέας συχνότητας
βρίσκεται στο όριο ροπής και έχει
λάβει μια εντολή διακοπής
5-01 Terminal 27 Mode
Επιλογή: Λειτουργία:
ΕΙΔΟΠΟΙΗΣΗ
Η παράμετρος αυτή δεν μπορεί να
τροποποιηθεί ενώ λειτουργεί ο κινητήρας.
λειτουργίας, δεν θα σταματήσει από
μόνος του. Για να διασφαλιστεί η
διακοπή της λειτουργίας του
μετατροπέα συχνότητας, θα πρέπει να
ρυθμίσετε μια ψηφιακή έξοδο στο [27]
Όριο ροπής & διακοπή και να
συνδέσετε αυτή την ψηφιακή έξοδο
[0] * Input Ορίζει τον ακροδέκτη 27 ως ψηφιακή είσοδο.
[1] Output Ορίζει τον ακροδέκτη 27 ως ψηφιακή έξοδο.
4.6.1 5-1* Ψηφιακές είσοδοι
Οι ψηφιακές είσοδοι χρησιμοποιούνται για την επιλογή
διαφόρων λειτουργιών στο μετατροπέα συχνότητας.
5-10 έως 5-15 Ψηφιακές είσοδοι
[0] Χωρίς
λειτουργία
[1] Επαναφορά Επαναφορά του μετρητή συχνότητας μετά
[2] Αντίστρ. ελ.
κίνηση
[3] Αντίστρ.
ελ.κίν./επαν.
[4] Γρήγορη
διακοπή
αναστροφής
[5] Αντίστρ. πέδηΣΡΕίσοδος με αναστροφή για πέδηση DC (NC).
Καμία αντίδραση σε σήματα που μεταδίδονται στον ακροδέκτη.
από σφάλμα/συναγερμό. Δεν είναι δυνατή η
επαναφορά όλων των συναγερμών.
(Προεπιλεγμένη ψηφιακή είσοδος 27):
Διακοπή με ελεύθερη κίνηση, είσοδος με
αναστροφή (NC). Ο μετατροπέας συχνότητας
αφήνει τον κινητήρα σε τρόπο ελεύθερης
λειτουργίας Λογικό 0⇒διακοπή με ελεύθερη
κίνηση.
Επαναφορά και διακοπή με ελεύθερη
κίνηση, είσοδος με αναστροφή (NC). Αφήνει
τον κινητήρα σε ελεύθερο τρόπο λειτουργίας
και επαναφέρει το μετατροπέα συχνότητας.
Λογικό 0⇒διακοπή με ελεύθερη κίνηση και
επαναφορά.
Είσοδος με αναστροφή (NC). Παράγει μια
διακοπή σύμφωνα με το χρόνος γραμμικής
μεταβολής γρήγορης διακοπής που ορίζεται
στην παράμετρος 3-81 Χρόνος αν./καθ.
γρήγορης διακοπής. Όταν ο κινητήρας
σταματάει, ο άξονας είναι σε ελεύθερο
τρόπο λειτουργίας. Λογικό 0⇒Γρήγορη
διακοπή.
Διακόπτει τη λειτουργία του κινητήρα,
[8] Εκκίνηση Προεπιλεγμένη ψηφιακή είσοδος 18.
[9] Σήμα
εκκίνησης με
αυτοσυγκράτηση
[10] Αναστροφή Προεπιλεγμένη ψηφιακή είσοδος 19. Αλλάζει
[11] Έναρξη
αναστροφής
σε μια ψηφιακή είσοδο που έχει
ρυθμιστεί ως ελεύθερη κίνηση.
Διακοπή λειτουργίας αναστροφής.
Δημιουργεί μια λειτουργία διακοπής, όταν ο
επιλεγμένος ακροδέκτης μεταβαίνει από τη
λογική 1 στη λογική 0. Η διακοπή πραγματοποιείται σύμφωνα με τον επιλεγμένο χρόνο
γραμμικής μεταβολής
(παράμετρος 3-42 Άνοδος/Κάθοδος 1 Χρόνος
καθόδου, παράμετρος 3-52 Άνοδος/Κάθοδος 2
Χρόνος καθόδου, παράμετρος 3-62 Ramp 3
Ramp down Time, παράμετρος 3-72 Ramp 4
Ramp Down Time).
Επιλέξτε εκκίνηση, στην εντολή εκκίνησης/
διακοπής. Λογικό 1 = εκκίνηση, λογικό 0 =
διακοπή.
Ο κινητήρας ξεκινά, εάν εφαρμοστεί παλμός
για 2 ms τουλάχιστον. Ο κινητήρας σταματά
όταν ενεργοποιηθεί η [6] Διακοπή
αναστροφής ή δοθεί εντολή επαναφοράς
(μέσω DI).
την κατεύθυνση περιστροφή του άξονα του
κινητήρα. Επιλέξτε λογικό ‘1’ για αναστροφή.
Το σήμα αναστροφής αλλάζει μόνο την
κατεύθυνση περιστροφής. Δεν ενεργοποιεί
τη λειτουργία εκκίνησης. Επιλέξτε και τις δύο
κατευθύνσεις στην
παράμετρος 4-10 Κατεύθυνση ταχύτητας
κινητήρα. Η λειτουργία δεν είναι ενεργή στον
κλειστό βρόχο λειτουργίας.
Χρησιμοποιείται για την εκκίνηση/διακοπή
λειτουργίας και για την αντιστροφή στο ίδιο
σύρμα. Τα σήματα κατά την εκκίνηση δεν
επιτρέπονται ταυτόχρονα.
58 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. MG07C327
Page 61

Περιγραφές παραμέτρων Οδηγός Προγραμματισμού
[12] Ενεργοποίηση
έναρξης
κίνησης προς
τα εμπρός
[13] Ενεργοποίηση
έναρξης
κίνησης
αναστροφής
[14] Ελαφρά
ώθηση
[15] Προκ. τιμή
αναφ. ON
[16] Προκαθο-
ρισμένη τιμή
αναφοράς bit
0
[17] Προκαθο-
ρισμένη τιμή
αναφοράς bit
1
[18] Προκαθο-
ρισμένη τιμή
αναφ. bit 2
Προκαθ. επιθυμ. bit 2 1 0
Προκαθορισμένη τιμή
αναφοράς 0
Προκαθορισμένη τιμή
αναφοράς 1
Προκαθορισμένη τιμή
αναφοράς 2
Προκαθορισμένη τιμή
αναφοράς 3
Προκαθ. τιμή αναφ. 4 1 0 0
Προκαθ. τιμή αναφ. 5 1 0 1
Προκαθ. τιμή αναφ. 6 1 1 0
Προκαθ. τιμή αναφ. 7 1 1 1
Πίνακας 4.1 Προκαθ. τιμή αναφ. Bit
[19] Πάγωμα
τιμής
αναφοράς
Αποδεσμεύει την αριστερόστροφη κίνηση
και επιτρέπει τη δεξιόστροφη κατεύθυνση.
Αποδεσμεύει τη δεξιόστροφη κίνηση και
επιτρέπει την αριστερόστροφη κατεύθυνση.
Προεπιλεγμένη ψηφιακή είσοδος 29.
Χρησιμοποιείται για την ενεργοποίηση της
ταχύτητας ελαφράς ώθησης. Ανατρέξτε στον
παράμετρος 3-11 Ταχύτητα ελαφράς ώθησης
[Hz].
Μετατοπίσεις μεταξύ εξωτερικού σήματος
τιμής αναφοράς και προκαθορισμένης τιμής
αναφοράς. Θεωρείται ότι έχει επιλεγεί η
ρύθμιση [1] Εξωτερικό/Προεπιλ. στην
παράμετρος 3-04 Λειτουργία αναφοράς.
Λογικό '0' = ενεργή εξωτερική τιμή
αναφοράς, Λογικό '1' = 1 από τις 8 προκαθορισμένες τιμές αναφοράς είναι ενεργή.
Τα προκαθορισμένα bit 0,1, και 2 τιμής
αναφοράς ενεργοποιούν 1 επιλογή μεταξύ
των 8 προκαθορισμένων τιμών αναφοράς,
σύμφωνα με το Πίνακας 4.1.
Ίδιο με την [16] Προκαθ. τιμή αναφ. bit 0.
Ίδιο με την [16] Προκαθ. τιμή αναφ. bit 0.
0 0 0
0 0 1
0 1 0
0 1 1
Παγώνει την τιμή αναφοράς, που είναι τώρα το
σημείο ενεργοποίησης για την [21] Αύξηση
ταχύτητας και την [22] Μείωση ταχύτητας που
θα χρησιμοποιηθεί. Εάν χρησιμοποιείται η [21]
Επιτάχυνση ή [22] Επιβράδυνση, η μεταβολή της
ταχύτητας θα ακολουθεί πάντα τη γραμμική
μεταβολή 2 (παράμετρος 3-51 Άνοδος/Κάθοδος
2 Χρόνος ανόδου και παράμετρος 3-52 Άνοδος/
Κάθοδος 2 Χρόνος καθόδου) στην περιοχή
τιμών 0–παράμετρος 3-03 Μέγιστη επιθυμητή
τιμή.
[20] Πάγωμα
εξόδου
ΕΙΔΟΠΟΙΗΣΗ
Όταν έχει ενεργοποιηθεί το [20] Πάγωμα
εξόδου, η λειτουργία του μετατροπέα
συχνότητας δεν μπορεί να διακοπεί με
ρύθμιση του σήματος στο [8] Εκκίνηση
σε χαμηλό. Διακόψτε τη λειτουργία του
μετατροπέα συχνότητας μέσω ενός
ακροδέκτη προγραμματισμένου σε [2]
Αντίστρ. ελ. κίνηση ή [3] Αντίστρ. ελ.κίν./
επαν.
Παγώνει την πραγματική συχνότητα κινητήρα
(Hz), που είναι τώρα το σημείο ενεργοποίησης
για την [21] Επιτάχυνση και την [22]
Επιβράδυνση που θα χρησιμοποιηθεί. Εάν
χρησιμοποιείται η [21] Επιτάχυνση ή [22]
Επιβράδυνση, η μεταβολή της ταχύτητας θα
ακολουθεί πάντα τη γραμμική μεταβολή 2
(παράμετρος 3-51 Άνοδος/Κάθοδος 2 Χρόνος
ανόδου και παράμετρος 3-52 Άνοδος/Κάθοδος 2
Χρόνος καθόδου) στην περιοχή τιμών 0–
παράμετρος 1-23 Συχνότητα κινητήρα.
[21] Επιτάχυνση Επιλέξτε [21] Επιτάχυνση και [22] Επιβράδυνση
εάν απαιτείται ψηφιακός έλεγχος της ταχύτητας
επιτάχυνσης/επιβράδυνσης (ποτενσιόμετρο
κινητήρα). Ενεργοποιήστε αυτήν τη λειτουργία,
επιλέγοντας [19] Πάγωμα τιμής αναφοράς ή [20]
Πάγωμα εξόδου. Όταν η επιτάχυνση/
επιβράδυνση ενεργοποιείται για λιγότερο από
400 msec, η τιμή αναφοράς που προκύπτει θα
αυξάνεται/ μειώνεται κατά 0,1%. Αν ενεργοποιηθεί η επιτάχυνση/ επιβράδυνση για πάνω
από 400 msec. η προκύπτουσα τιμή αναφοράς
θα συμφωνεί με τη ρύθμιση της παραμέτρου
γραμμικής αύξησης/ μείωσης 3-x1/ 3-x2.
Απενεργο-
ποίηση
Ταχύτητα που δεν έχει αλλάξει 0 0
Μειωμένη κατά την τιμή % 1 0
Αυξημένη κατά την τιμή % 0 1
Μειωμένη κατά την τιμή % 1 1
Πίνακας 4.2 Απενεργοποίηση/Ποσοστιαία αύξηση ταχύτητας
[22] Επιβράδυνση Ίδια με την [21] Επιτάχυνση.
[23] Επιλ.
ρύθμισης bit
0
[24] Επιλ.
ρύθμισης bit
1
Επιλέξτε [23] Ρύθμιση, επιλέξτε bit 0 ή
επιλέξτε [1] Ρύθμιση, επιλέξτε bit 1, για να
επιλέξετε 1 από τις 2 ρυθμίσεις. Ρυθμίστε το
παράμετρος 0-10 Ενεργός ρύθμιση σε [9]
Πολλαπλή ρύθμιση.
Προεπιλεγμένη ψηφιακή είσοδος 32. Ίδια με
την [23] Επιλ. ρύθμισης bit 0.
Αύξηση ταχ.
4 4
MG07C327 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. 59
Page 62

Speed [rpm] Speed [rpm]
Time[sec] Time[sec]a b
130BB462.10
Read Timer:
20 timer tides
Read Timer:
20 timer tides
Time Start
Time counter
Sample time
Timer
Pulse
130BB464.10
Περιγραφές παραμέτρων
Ρυθμιστής στροφών VLT® Midi FC 280
[26] Σταμάτημα
ακριβείας μετ.
Η λειτουργία αναστροφής ακριβούς ακινητοποίησης είναι διαθέσιμη για τους
ακροδέκτες 18 ή 19.
[27] Εκκίνηση,
σταμάτημα
ακριβείας
[28] Αύξηση ταχ. Μειώνει την τιμή αναφορά σύμφωνα με το
ποσοστό (σχετικό) που ορίζεται στην
παράμετρος 3-12 Τιμή αύξησης/μείωσης ταχ..
44
[29] Μείωση ταχ. Μειώνει την τιμή αναφορά σύμφωνα με το
[41] Σήμα
στ.ακρ.αυτ.αν.
ποσοστό (σχετικό) που ορίζεται στην
παράμετρος 3-12 Τιμή αύξησης/μείωσης ταχ..
[32] Παλμός βάσει
χρόνου
Μετρά τη διάρκεια μεταξύ των πλευρών
παλμού. Αυτή η παράμετρος παρέχει
υψηλότερη ανάλυση σε χαμηλότερες
συχνότητες, αλλά δεν είναι τόσο ακριβής
στις υψηλότερες συχνότητες. Αυτή η αρχή
έχει συχνότητα αποκοπής που την καθιστά
[51] Εξωτερική
μανδάλωση
ασφαλείας
ακατάλληλη για παλμογεννήτριες με πολύ
χαμηλές αναλύσεις (για παράδειγμα 30 PPR)
σε χαμηλές ταχύτητες.
[58] Μηχ.ανύψ.
αναφοράς, ο μετατροπέας συχνότητας θα
ενεργοποιήσει εσωτερικά το σήμα
ακριβούς σταματήματος. Ο μετατροπέας
συχνότητας χρειάζεται ένα σήμα ακριβούς
σταματήματος πριν να φτάσει την τιμή
που αναγράφεται στην
παράμετρος 1-84 Precise Stop Counter
Value.
Στέλνει ένα σήμα ακινητοποίησης με
ασφάλιση, όταν η λειτουργία ακριβούς
ακινητοποίησης είναι ενεργή στο
παράμετρος 1-83 Precise Stop Function. Η
λειτουργία αναστροφής ακινητοποίησης
ακριβείας με ασφάλιση είναι διαθέσιμη για
τους ακροδέκτες 18 ή 19.
Αυτή η λειτουργία επιτρέπει την παροχή
εξωτερικού σφάλματος στο μετατροπέα
συχνότητας. Αυτό το σφάλμα αντιμετωπίζεται σαν ένας εσωτερικά
δημιουργούμενος συναγερμός.
DigiPot
[60] Μετρητής A (Ακροδέκτης 29 ή 33 μόνο) Είσοδος για
μέτρηση προσαυξήσεων στο μετρητή SLC.
[61] Μετρητής A (Ακροδέκτης 29 ή 33 μόνο) Είσοδος για
α: Χαμηλή ανάλυση
παλμογεννήτριας
β: Τυπική ανάλυση
παλμογεννήτριας
[62] Μηδεν.
μετρητή Α
μέτρηση ελαττώσεων στο μετρητή SLC.
Είσοδος για μηδενισμό του μετρητή Α.
[63] Μετρητής B (Ακροδέκτης 29 ή 33 μόνο) Είσοδος για
μέτρηση προσαυξήσεων στο μετρητή SLC.
[64] Μετρητής B (Ακροδέκτης 29 ή 33 μόνο) Είσοδος για
μέτρηση ελαττώσεων στο μετρητή SLC.
Εικόνα 4.9 Διάρκεια μεταξύ των πλευρών
παλμού.
[34] Βit 0 ανόδου/
καθόδου
Ενεργοποιεί μια επιλογή μεταξύ των 4
διαθέσιμων ανόδων/καθόδων, σύμφωνα με
το Πίνακας 4.3.
[35] Bit ανόδου/
Όπως και στο bit ανόδου/καθ. 0.
καθ. 1
Προκαθ. bit ανόδου/καθ. 1 0
Άν./Κάθ. 1 0 0
Άν./Κάθ. 2 0 1
Άν./Κάθ. 3 1 0
Άν./Κάθ. 4 1 1
Πίνακας 4.3 Προκαθορισμένα bit ανόδου/καθ.
[65] Μηδεν.
μετρητή Β
[72] PID
αντιστροφή
σφ.
[73] PID επαναφ. I
μέρος
[74] PID ενεργο-
ποίηση
Είσοδος για μηδενισμό του μετρητή Β.
Αναστρέφει το σφάλμα που προκύπτει
από τη διαδικασία ελεγκτή PID. Διαθέσιμο
μόνο εάν η παράμετρος 1-00 Τρόπος
λειτουργίας οριστεί σε [6] Περιέλιξη
επιφάνειας, ή [7] Εκτεταμένη Υπερφόρτ.
Ταχύτητας PID.
Επαναφέρει το I μέρος του ελεγκτή
διεργασίας PID. Ισοδυναμεί με
παράμετρος 7-40 Διεργασία PID I-μέρος
Επαναφορά. Διαθέσιμο μόνο εάν η
παράμετρος 1-00 Τρόπος λειτουργίας
οριστεί σε [6] Περιέλιξη επιφάνειας, ή [7]
Εκτεταμένη Υπερφόρτ. Ταχύτητας PID.
Αυτή η επιλογή, ενεργοποιεί τον ελεγκτή
εκτεταμένης διεργασίας PID. Ισοδυναμεί
με παράμετρος 7-50 Προηγμένη διεργασία
[40] Ακριβής
εκκίνηση
ασφάλισης
Μια κλειδωμένη ακριβής εκκίνηση απαιτεί
μόνο έναν παλμό των 3 ms στους
ακροδέκτες 18 ή 19 κατά τη χρήση της
παράμετρος 1-83 Precise Stop Function [1]
Μετρητής σταματήματος με επαναφορά ή
[2] Μετρητής σταματήματος χωρίς
επαναφορά. Όταν φτάσει την τιμή
[150] Μετάβαση
στην αρχική
θέση
PID. Διαθέσιμο μόνο εάν η
παράμετρος 1-00 Τρόπος λειτουργίας
οριστεί σε [7] Εκτεταμένη Υπερφόρτ.
Ταχύτητας PID.
Ο μετατροπέας συχνότητας μεταβαίνει
στην αρχική θέση.
60 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. MG07C327
Page 63

Περιγραφές παραμέτρων Οδηγός Προγραμματισμού
[151] Τιμή αναφοράς
αρχικής θέσης
Διακόπτης
[155] Θετικό όριο
υλικού
[156] Αρνητικό όριο
υλικού
[157] Θέση Γρήγορη
διακοπή
αναστρ.
[160] Μετάβαση στη
θέση στόχο
[162] Θέση Idx Bit0 Βit δείκτη θέσης 0. Αυτή η επιλογή είναι
[163] Θέση Idx Bit1 Βit δείκτη θέσης 1 Αυτή η επιλογή είναι
[164] Θέση Idx Bit2 Βit δείκτη θέσης 2. Αυτή η επιλογή είναι
[171] Διακόπτης
ορίου
δεξιόστροφα
αντίστροφος
[172] Διακόπτης
ορίου αριστερόστροφα
αντίστροφος
Υποδεικνύει την κατάσταση του διακόπτη
με τιμή αναφοράς αρχικής θέσης. Ενεργό
σημαίνει προσέγγιση της αρχικής θέσης,
ανενεργό σημαίνει μη επίτευξη της
αρχικής θέσης.
Υπέρβαση του θετικού ορίου θέσης
υλικού. Αυτή η επιλογή είναι ενεργή στο
άκρο πτώσης.
Υπέρβαση του αρνητικού ορίου θέσης
υλικού. Αυτή η επιλογή είναι ενεργή στο
άκρο πτώσης.
Σταματά το μετατροπέα συχνότητας κατά
την επίτευξη θέσης με το χρόνο
γραμμικής μεταβολής που έχει οριστεί
στην παράμετρος 32-81 Motion Ctrl Quick
Stop Ramp. Αυτή η επιλογή είναι ενεργή
μόνο όταν η παράμετρος 37-00 Application
Mode έχει οριστεί σε [2] Έλεγχος θέσης.
Ο μετατροπέας συχνότητας μεταβαίνει
στη θέση στόχο. Αυτή η επιλογή είναι
ενεργή μόνο όταν η
παράμετρος 37-00 Application Mode έχει
οριστεί σε [2] Έλεγχος θέσης.
ενεργή μόνο όταν η
παράμετρος 37-00 Application Mode έχει
οριστεί σε [2] Έλεγχος θέσης.
ενεργή μόνο όταν η
παράμετρος 37-00 Application Mode έχει
οριστεί σε [2] Έλεγχος θέσης.
ενεργή μόνο όταν η
παράμετρος 37-00 Application Mode έχει
οριστεί σε [2] Έλεγχος θέσης.
5-10 Ψηφιακή είσοδος ακροδέκτη 18
Επιλογή: Λειτουργία:
[8] * Εκκίνηση Οι λειτουργίες περιγράφονται στην ομάδα
παραμέτρων 5-1* Ψηφιακές είσοδοι.
5-11 Ψηφιακή είσοδος ακροδέκτη 19
Επιλογή: Λειτουργία:
[10] * Αναστροφή Οι λειτουργίες περιγράφονται στην ομάδα
παραμέτρων 5-1* Ψηφιακές είσοδοι.
5-12 Ψηφιακή είσοδος ακροδέκτη 27
Επιλογή: Λειτουργία:
[2] * Αντίστρ. ελ. κίνηση Οι λειτουργίες περιγράφονται στην
ομάδα παραμέτρων 5-1* Ψηφιακές
είσοδοι.
5-13 Ψηφιακή είσοδος ακροδέκτη 29
Επιλογή: Λειτουργία:
[14] * Ελαφρά ώθηση Οι λειτουργίες περιγράφονται στην
ομάδα παραμέτρων 5-1* Ψηφιακές
είσοδοι.
[32] Παλμός βάσει χρόνου
5-14 Ψηφιακή είσοδος ακροδέκτη 32
Επιλογή: Λειτουργία:
[0] * Χωρίς λειτουργία Οι λειτουργίες περιγράφονται στην
ομάδα παραμέτρων 5-1* Ψηφιακές
είσοδοι.
[82] Είσ. παλμογεννήτριας Β
5-15 Ψηφιακή είσοδος ακροδέκτη 33
Επιλογή: Λειτουργία:
[0] * Χωρίς λειτουργία Οι λειτουργίες περιγράφονται
στην ομάδα παραμέτρων 5-1*
Ψηφιακές είσοδοι.
[32] Παλμός βάσει χρόνου
[81] Είσοδος παλμογεννήτριας
Α
5-19 Terminal 37/38 Safe Torque O
Χρησιμοποιήστε αυτή την παράμετρο για να ρυθμίσετε τη
λειτουργία STO. Η προειδοποίηση αναγκάζει το μετατροπέα
συχνότητας να εκτελέσει ελεύθερη κίνηση και ενεργοποιεί την
αυτόματη επανεκκίνηση. Ο συναγερμός αναγκάζει το μετατροπέα
συχνότητας να εκτελέσει ελεύθερη κίνηση και απαιτεί χειροκίνητη
επανεκκίνηση.
Επιλογή: Λειτουργία:
[1] * Safe Torque O
Alarm
[3] Safe Torque O
Warning
Εκτελεί ελεύθερη κίνηση του μετατροπέα
συχνότητας όταν ενεργοποιείται το Safe
Torque O. Χειροκίνητη επανεκκίνηση
από το LCP, την ψηφιακή είσοδο, ή τον
τοπικό δίαυλο επικοινωνίας. Αυτός ο
συναγερμός δεν μπορεί να μηδενιστεί από
τη λειτουργία αυτόματης επαναφοράς της
παράμετρος 14-20 Reset Mode στην
έκδοση λογισμικού 1.2 και τις
επακόλουθες εκδόσεις.
Εκτελεί ελεύθερη κίνηση του μετατροπέα
συχνότητας όταν ενεργοποιείται το Safe
Torque O (ακροδέκτης 37 και
ακροδέκτης 38 ανενεργοί). Όταν αποκαθίσταται το κύκλωμα Safe Torque O, ο
μετατροπέας συχνότητας συνεχίζει χωρίς
χειροκίνητη επαναφορά.
4 4
MG07C327 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. 61
Page 64

Περιγραφές παραμέτρων
Ρυθμιστής στροφών VLT® Midi FC 280
4.6.2 5-3* Ψηφιακές έξοδοι
[12] Εκτός πεδίου
έντασης
Οι 2 ψηφιακές έξοδοι σταθερής κατάστασης είναι κοινές
για τον ακροδέκτη 27. Ρυθμίστε τη λειτουργία εισόδου/
εξόδου του ακροδέκτη 27 στην παράμετρος 5-01 Τρόπος
[13] Κάτω από ενταση,
χαμηλό
λειτουργίας ακροδέκτη 27.
Ο ακροδέκτης 42 μπορεί να διαμορφωθεί και ως ψηφιακή
έξοδος.
[14] Επάνω από την
ένταση, υψηλό
44
ΕΙΔΟΠΟΙΗΣΗ
Αυτοί οι παράμετροι δεν μπορούν να τροποποιηθούν,
ενώ λειτουργεί ο κινητήρας.
5-30 Ψηφιακές έξοδοι
[0] * Χωρίς λειτουργία Προεπιλογή για όλες τις ψηφιακές
εξόδους.
[1] Έλεγχος έτοιμος Η κάρτα ελέγχου είναι έτοιμη.
[2] Ρυθμιστής
στροφών έτοιμος
[3] Ρυθμ. στροφών
έτοιμος / τηλεχειρισμός
[4] Αναμονή/χωρίς
προειδ.
[5] Λειτουργία Ο κινητήρας λειτουργεί και υπάρχει
[6] Λειτ./χωρίς
προειδ.
[7] Λειτ.στο εύρος/
χ.πρ.
[8] Εκτέλεση με
αναφορά / χωρίς
προειδοποίηση
[9] Συναγερμός Ένας συναγερμός ενεργοποιεί την
[10] Συναγερμός ή
προειδοποίηση
[11] Στο όριο ροπής Υπέρβαση του ορίου ροπής που
Ο μετατροπέας συχνότητας είναι
έτοιμος για λειτουργία και εφαρμόζει
ένα σήμα τροφοδοσίας στην πλακέτα
ελέγχου.
Ο μετατροπέας συχνότητας είναι
έτοιμος για λειτουργία και βρίσκεται
στη λειτουργία αυτόματης ενεργο-
ποίησης.
Έτοιμο για λειτουργία. Δεν έχει δοθεί
εντολή εκκίνησης ή διακοπής
(εκκίνηση/απενεργοποίηση). Δεν
υπάρχουν ενεργές προειδοποιήσεις.
ροπή άξονα.
Η ταχύτητα εξόδου είναι υψηλότερη
από την ταχύτητα που ορίζεται στην
παράμετρος 1-81 Ελάχ.ταχ. για λειτ. κατά
τη διακ.[RPM]. Ο κινητήρας λειτουργεί
και δεν υπάρχουν προειδοποιήσεις.
Ο κινητήρας λειτουργεί εντός των
προγραμματισμένων ορίων ρεύματος
και ταχύτητας που έχουν οριστεί στην
παράμετρος 4-50 Προειδοποίηση
χαμηλού ρεύματος έως
παράμετρος 4-51 Warning Current High.
Δεν υπάρχουν προειδοποιήσεις.
Ο κινητήρας λειτουργεί σε ταχύτητα
αναφοράς. Καμία προειδοποίηση.
έξοδο. Δεν υπάρχουν προειδοποιήσεις.
Ένας συναγερμός ή μια προειδοποίηση
ενεργοποιεί την έξοδο.
ορίζεται στην παράμετρος 4-16 Τρόπος
λειτουργίας κινητήρα ορίου ροπής ή
στην παράμετρος 4-17 Τρόπος λειτ.
γεννήτριας ορίου ροπής.
[15] Eκτός εύρους
συχνότητας
[16] Χαμ. συχνότητα,
υπό ορίου
[17] Above frequency,
high
[18] Εκτός εύρους
ανάδρασης
[19] Χαμ. αν. υπό
ορίου
[20] Υψ. ανάδρ. υπέρβ. Η ανάδραση έχει υπερβεί το όριο που
[21] Θερμική προειδο-
ποίηση
[22] Έτοιμο, χωρίς
θερμική προειδοποίηση
[23] Απομακρυσμένο,
έτοιμο, χωρίς
θερμική προειδοποίηση
[24] Έτοιμο, χωρίς
υπέρταση/
υπόταση
[25] Αναστροφή Ο κινητήρας λειτουργεί (ή είναι έτοιμος
Το ρεύμα του κινητήρα είναι εκτός του
πεδίου που ορίζεται στην
παράμετρος 4-18 Όριο ρεύματος.
Το ρεύμα του κινητήρα είναι
χαμηλότερο από αυτό που ορίζεται
στην παράμετρος 4-50 Προειδοποίηση
χαμηλού ρεύματος.
Το ρεύμα κινητήρα είναι υψηλότερο
από αυτό που ορίζεται στην
παράμετρος 4-51 Προειδοποίηση υψηλού
ρεύματος.
Η συχνότητα εξόδου είναι εκτός του
εύρους συχνότητας.
Η ταχύτητα εξόδου είναι χαμηλότερη
από τη ρύθμιση στην
παράμετρος 4-40 Warning Freq. Low.
Η ταχύτητα εξόδου είναι υψηλότερη
από τη ρύθμιση στην
παράμετρος 4-41 Warning Freq. High.
Η ανάδραση είναι εκτός του εύρους
που ορίζεται στην
παράμετρος 4-56 Προειδοποίηση Χαμηλή ανάδραση και
παράμετρος 4-57 Προειδοποίηση Υψηλή ανάδραση.
Η ανάδραση είναι κάτω από το όριο
που ορίζεται στην
παράμετρος 4-56 Προειδοποίηση Χαμηλή ανάδραση.
ορίζεται στην
παράμετρος 4-57 Προειδοποίηση Υψηλή ανάδραση.
Η θερμική προειδοποίηση ενεργοποιείται όταν η θερμοκρασία υπερβεί
το όριο στον κινητήρα, το μετατροπέα
συχνότητας, τον αντιστάτης πέδης ή το
θερμίστορ.
Ο μετατροπέας συχνότητας είναι
έτοιμος για λειτουργία και δεν υπάρχει
προειδοποίηση υπερθέρμανσης.
Ο μετατροπέας συχνότητας είναι
έτοιμος για λειτουργία και βρίσκεται
στη λειτουργία αυτόματης ενεργοποίησης. Δεν υπάρχει προειδοποίηση
υπερθέρμανσης.
Ο μετατροπέας συχνότητας είναι
έτοιμος για λειτουργία και η τάση του
δικτύου ρεύματος βρίσκεται εντός του
καθορισμένου εύρους τάσης (βλέπε
ενότητα Γενικές προδιαγραφές στον
οδηγό σχεδίασης).
να λειτουργήσει) δεξιόστροφα όταν
λογική=0 και αριστερόστροφα όταν
λογική=1. Η έξοδος αλλάζει με την
εφαρμογή του σήματος αναστροφής.
62 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. MG07C327
Page 65

Περιγραφές παραμέτρων Οδηγός Προγραμματισμού
[26] Δίαυλος ΟΚ Ενεργή επικοινωνία (χωρίς τέλος
χρόνου) μέσω της σειριακής θύρας
επικοινωνίας.
[27] Όριο ροπής και
διακοπή
[28] Πέδη, χωρίς
προειδοποίηση
πέδης
[29] Πέδη έτοιμη, χ.
σφ.
[30] Σφάλμα πέδης
(IGBT)
[31] Ρελέ 123 Το ρελέ ενεργοποιείται όταν η [0] Λέξη
[32] Έλεγχος
μηχανικής πέδης
[36] Βit 11 λέξης
ελέγχου
[37] Λέξη ελέγχου bit
12
[40] Τιμή αναφοράς
εκτός εύρους
[41] Χαμ.τιμή αναφ.
υπό
[42] Υψ.τιμή αναφοράς
υπέρβ.
[43] Εκτετ. όριο PID
[45] Έλεγχος διαύλου Έλεγχος εξόδου μέσω τοπικού διαύλου
Να χρησιμοποιείται κατά την εκτέλεση
ακινητοποίησης με ελεύθερη κίνηση
και στη συνθήκη ορίου ροπής. Αν ο
μετατροπέας συχνότητας λάβει σήμα
ακινητοποίησης και βρίσκεται στο όριο
ροπής, το σήμα είναι λογικό 0.
Η πέδη είναι ενεργή και δεν υπάρχουν
προειδοποιήσεις.
Η πέδη είναι έτοιμη για λειτουργία και
δεν υπάρχουν σφάλματα.
Η έξοδος είναι λογικό 1 όταν η πέδη
IGBT είναι βραχυκυκλωμένη. Χρησιμο-
ποιήστε αυτή τη λειτουργία για την
προστασία του μετατροπέα συχνότητας
αν υπάρχει σφάλμα στις μονάδες
πέδης. Χρησιμοποιείτε την έξοδο/ρελέ
για τη διακοπή της τάσης δικτύου από
τον μετατροπέα συχνότητας.
περιγραφής ελέγχου επιλεγεί στην
ομάδα παραμέτρων 8-** Επικοινωνία και
επιλογές.
Ενεργοποιεί τον έλεγχο μιας εξωτερικής
μηχανικής πέδης. Ανατρέξτε στην
ομάδα παραμέτρων 2-2* Μηχανική πέδη
για περισσότερες λεπτομέρειες.
Αυτή η επιλογή είναι ενεργή όταν η
πραγματική ταχύτητα είναι εκτός των
ρυθμίσεων στην
παράμετρος 4-52 Προειδοποίηση
χαμηλής ταχύτητας έως την
παράμετρος 4-55 Προειδοποίηση -
Υψηλή επιθυμ. τιμή.
Αυτή η επιλογή είναι ενεργή όταν η
πραγματική ταχύτητα είναι κάτω από
τη ρύθμιση της τιμής αναφοράς
ταχύτητας.
Αυτή η επιλογή είναι ενεργή όταν η
πραγματική ταχύτητα είναι επάνω από
τη ρύθμιση της τιμής αναφοράς
ταχύτητας.
επικοινωνίας. Η κατάσταση της εξόδου
ορίζεται στην παράμετρος 5-90 Έλεγχος
διαύλου ψηφιακός & ρελέ. Η κατάσταση
της εξόδου διατηρείται αν υπάρξει
τέλος χρόνου τοπικού διαύλου επικοι-
νωνίας.
[46] Έλεγχος διαύλου,
τέλος χρόνου:
Ενεργό
[47] Έλεγχος διαύλου,
τέλος χρόνου:
Απενεργοποίηση
[55] Έξοδος παλμού
[56] Προειδοποίηση
καθαρισμού
ψύκτρας, υψηλό
[60] Συγκριτής 0 Ανατρέξτε στην ομάδα παραμέτρων
[61] Συγκριτής 1 Ανατρέξτε στην ομάδα παραμέτρων
[62] Συγκριτής 2 Ανατρέξτε στην ομάδα παραμέτρων
[63] Συγκριτής 3 Ανατρέξτε στην ομάδα παραμέτρων
[64] Συγκριτής 4 Ανατρέξτε στην ομάδα παραμέτρων
[65] Συγκριτής 5 Ανατρέξτε στην ομάδα παραμέτρων
[70] Λογικός κανόνας0Ανατρέξτε στην ομάδα παραμέτρων
[71] Λογικός κανόνας1Ανατρέξτε στην ομάδα παραμέτρων
[72] Λογικός κανόνας2Ανατρέξτε στην ομάδα παραμέτρων
Έλεγχος εξόδου μέσω τοπικού διαύλου
επικοινωνίας. Η κατάσταση της εξόδου
ορίζεται στην παράμετρος 5-90 Έλεγχος
διαύλου ψηφιακός & ρελέ. Στην
περίπτωση τέλους χρόνου διαύλου, η
κατάσταση εξόδου ορίζεται ως υψηλή
(Ενεργό).
13-1* Συγκριτές. Αν το κύκλωμα
σύγκρισης 0 αξιολογείται ως αληθές, η
έξοδος θα είναι υψηλή. Διαφορετικά,
θα είναι χαμηλή.
13-1* Συγκριτές. Αν το κύκλωμα
σύγκρισης 1 αξιολογείται ως αληθές, η
έξοδος θα είναι υψηλή. Διαφορετικά,
θα είναι χαμηλή.
13-1* Συγκριτές. Αν το κύκλωμα
σύγκρισης 2 αξιολογείται ως αληθές, η
έξοδος θα είναι υψηλή. Διαφορετικά,
θα είναι χαμηλή.
13-1* Συγκριτές. Αν το κύκλωμα
σύγκρισης 3 αξιολογείται ως αληθές, η
έξοδος θα είναι υψηλή. Διαφορετικά,
θα είναι χαμηλή.
13-1* Συγκριτές. Αν το κύκλωμα
σύγκρισης 4 αξιολογείται ως αληθές, η
έξοδος θα είναι υψηλή. Διαφορετικά,
θα είναι χαμηλή.
13-1* Συγκριτές. Αν το κύκλωμα
σύγκρισης 5 αξιολογείται ως αληθές, η
έξοδος θα είναι υψηλή. Διαφορετικά,
θα είναι χαμηλή.
13-4* Λογικοί Κανόνες. Αν ο λογικός
κανόνας 0 αξιολογείται ως αληθής, η
έξοδος θα είναι υψηλή. Διαφορετικά,
θα είναι χαμηλή.
13-4* Λογικοί Κανόνες. Αν ο λογικός
κανόνας 1 αξιολογείται ως αληθής, η
έξοδος θα είναι υψηλή. Διαφορετικά,
θα είναι χαμηλή.
13-4* Λογικοί Κανόνες. Αν ο λογικός
κανόνας 2 αξιολογείται ως αληθής, η
4 4
MG07C327 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. 63
Page 66

Περιγραφές παραμέτρων
Ρυθμιστής στροφών VLT® Midi FC 280
έξοδος θα είναι υψηλή. Διαφορετικά,
θα είναι χαμηλή.
[73] Λογικός κανόνας3Ανατρέξτε στην ομάδα παραμέτρων
13-4* Λογικοί Κανόνες. Αν ο λογικός
κανόνας 3 αξιολογείται ως αληθής, η
έξοδος θα είναι υψηλή. Διαφορετικά,
θα είναι χαμηλή.
[74] Λογικός κανόνας4Ανατρέξτε στην ομάδα παραμέτρων
13-4* Λογικοί Κανόνες. Αν ο λογικός
44
[75] Λογικός κανόνας5Ανατρέξτε στην ομάδα παραμέτρων
[80] Ψηφιακή έξοδος
SL A
[81] Ψηφιακή έξοδος
SL Β
[82] Ψηφιακή έξοδος
SL Γ
[83] Ψηφιακή έξοδος
SL Δ
[91] Η παλμογεννήτρια
εξομοιώνει την
έξοδο Α
[160] Χωρίς συναγερμό Η έξοδος είναι υψηλή όταν δεν
[161] Αντίστροφη
λειτουργία
κανόνας 4 αξιολογείται ως αληθής, η
έξοδος θα είναι υψηλή. Διαφορετικά,
θα είναι χαμηλή.
13-4* Λογικοί Κανόνες. Αν ο λογικός
κανόνας 5 αξιολογείται ως αληθής, η
έξοδος θα είναι υψηλή. Διαφορετικά,
θα είναι χαμηλή.
Ανατρέξτε στον
παράμετρος 13-52 Ενέργεια ελεγκτή SL.
Η έξοδος θα είναι υψηλή σε κάθε
ενέργεια smart logic [38] Ρύθμιση ψηφ.
εξ. Εκτελείται Α υψηλή. Η έξοδος θα
είναι χαμηλή σε κάθε ενέργεια smart
logic [32] Ρύθμιση ψηφ. εξ. Εκτελείται A
χαμηλή.
Ανατρέξτε στον
παράμετρος 13-52 Ενέργεια ελεγκτή SL.
Η είσοδος θα είναι υψηλή σε κάθε
ενέργεια smart logic [39] Ρύθμισης ψηφ.
εξ. Εκτελείται Β υψηλή. Η είσοδος θα
είναι χαμηλή σε κάθε ενέργεια smart
logic [33] Ρύθμιση ψηφ. εξ. Η B low
εκτελείται.
Ανατρέξτε στον
παράμετρος 13-52 Ενέργεια ελεγκτή SL.
Η είσοδος θα είναι υψηλή σε κάθε
ενέργεια smart logic [40] Ρύθμισης ψηφ.
εξ. Η C high εκτελείται. Η είσοδος θα
είναι χαμηλή σε κάθε ενέργεια smart
logic [34] Ρύθμιση ψηφ. εξ. Η C low
εκτελείται.
Ανατρέξτε στον
παράμετρος 13-52 Ενέργεια ελεγκτή SL.
Η είσοδος θα είναι υψηλή σε κάθε
ενέργεια smart logic [41] Ρύθμισης ψηφ.
εξ. Η D high εκτελείται. Η είσοδος θα
είναι χαμηλή σε κάθε ενέργεια smart
logic [35] Ρύθμιση ψηφ. εξ. Η D low
εκτελείται.
υπάρχει συναγερμός.
Η έξοδος είναι υψηλή όταν ο
μετατροπέας συχνότητας εκτελείται
αριστερόστροφα (το λογικό προϊόν των
[165] Τοπική τιμή
αναφοράς ενεργή
[166] Απομ.επιθ.τιμή
ενεργή
[167] Εντολή εκκ.
ενεργή
[168] Ρυθμιστής
στροφών σε
χειροκίνητη
λειτουργία
[169] Ρυθ.στ.σε αυτ.λειτ. Η έξοδος είναι υψηλή όταν ο
[170] Λειτουργία
επιστροφής στην
αρχική θέση,
ολοκληρώθηκε
[171] Επίτευξη θέσης-
στόχου
[172] Σφάλμα ελέγχου
θέσης
[173] Θέση μηχανικής
πέδησης
[190] Λειτουργία STO
ενεργή
[193] Τρόπος
λειτουργίας
προσωρινής
απενεργοποίησης
[194] Σπασμένος
ιμάντας
[239] Σφάλμα
λειτουργίας STO
5-34 On Delay, Digital Output
Περιοχή: Λειτουργία:
0.01 s* [0 - 600 s]
bit κατάστασης ‘Λειτουργία’ ΚΑΙ
‘Αντίστροφη’).
Η έξοδος είναι υψηλή όταν υπάρχει μια
εντολή ενεργούς εκκίνησης και δεν
είναι ενεργή κάποια εντολή διακοπής.
Η έξοδος είναι υψηλή όταν ο
μετατροπέας συχνότητας βρίσκεται στη
λειτουργία hand on.
μετατροπέας συχνότητας βρίσκεται στη
λειτουργία αυτόματης ενεργοποίησης.
Η λειτουργία επιστροφής στην αρχική
θέση ολοκληρώθηκε. Αυτή η επιλογή
είναι ενεργή μόνο όταν η
παράμετρος 37-00 Application Mode έχει
οριστεί σε [2] Έλεγχος θέσης.
Η θέση-στόχος επιτεύχθηκε. Αυτή η
επιλογή είναι ενεργή μόνο όταν η
παράμετρος 37-00 Application Mode έχει
οριστεί σε [2] Έλεγχος θέσης.
Προέκυψε σφάλμα κατά τη διαδικασία
τοποθέτησης. Ανατρέξτε στο
παράμετρος 37-18 Pos. Ctrl Fault Reason
για λεπτομέρειες σχετικά με το
σφάλμα. Αυτή η επιλογή είναι ενεργή
μόνο όταν η
παράμετρος 37-00 Application Mode έχει
οριστεί σε [2] Έλεγχος θέσης.
Επιλέξτε μηχανικός έλεγχος για την
τοποθέτηση. Αυτή η επιλογή είναι
ενεργή μόνο όταν η
παράμετρος 37-00 Application Mode έχει
οριστεί σε [2] Έλεγχος θέσης.
Ο μετατροπέας συχνότητας/το
σύστημα περνά σε λειτουργία
προσωρινής αδρανοποίησης. Δείτε την
ομάδα παραμέτρων 22-4* Λειτουργία
προσωρινής αδρανοποίησης.
Ανιχνεύθηκε συνθήκη σπασμένου
ιμάντα. Δείτε την ομάδα παραμέτρων
22-4* Λειτουργία προσωρινής αδρανοποίησης.
64 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. MG07C327
Page 67

Περιγραφές παραμέτρων Οδηγός Προγραμματισμού
5-35 O Delay, Digital Output
Περιοχή: Λειτουργία:
0.01 s* [0 - 600 s]
4.6.3 5-4* Ρελέ
Παράμετροι για διαμόρφωση τους συγχρονισμού και των
λειτουργιών εξόδου για το ρελέ.
Η παράμετρος εμφανίζει 1 ρελέ.
5-40 Λειτουργία ρελέ
Επιλογή: Λειτουργία:
[0] Χωρίς λειτουργία Προεπιλογή για όλες τις ψηφιακές
εξόδους.
[1] * Έλ.έτοιμος Η κάρτα ελέγχου είναι έτοιμη.
[2] Ρυθμιστής
στροφών έτοιμος
[3] Ρυθμ.στρ. έτ./
απ.ελ.
[4] Αναμονή/χωρίς
προειδ.
[5] Λειτουργία Ο κινητήρας λειτουργεί και υπάρχει
[6] Λειτ./χωρίς
προειδ.
[7] Λειτ.στο εύρος/
χ.πρ.
[8] Λειτ.με επιθ.τιμ./
χ.πρ
[9] Συναγερμός Ένας συναγερμός ενεργοποιεί την
[10] Συναγερμός ή
προειδοποίηση
[11] Στο όριο ροπής Υπέρβαση του ορίου ροπής που
[12] Εκτός πεδίου
έντασης
[13] Κάτω από
ενταση, χαμηλό
Ο μετατροπέας συχνότητας είναι
έτοιμος για λειτουργία. Οι τροφοδοσίες
δικτύου ρεύματος και ελέγχου είναι
εντάξει.
Ο μετατροπέας συχνότητας είναι
έτοιμος για λειτουργία και βρίσκεται στη
λειτουργία αυτόματης ενεργοποίησης.
Έτοιμο για λειτουργία. Δεν έχουν δοθεί
εντολές εκκίνησης ή διακοπής. Δεν
υπάρχουν ενεργές προειδοποιήσεις.
ροπή άξονα.
Η ταχύτητα εξόδου είναι υψηλότερη
από την ταχύτητα που ορίζεται στην
παράμετρος 1-82 Min Speed for Function
at Stop [Hz]. Ο κινητήρας λειτουργεί και
δεν υπάρχουν προειδοποιήσεις.
Ο κινητήρας λειτουργεί εντός των
προγραμματισμένων ορίων ρεύματος
και ταχύτητας που έχουν οριστεί στην
παράμετρος 4-50 Warning Current Low.
Ο κινητήρας λειτουργεί σε ταχύτητα
αναφοράς. Καμία προειδοποίηση.
έξοδο. Καμία προειδοποίηση.
Ένας συναγερμός ή μια προειδοποίηση
ενεργοποιεί την έξοδο.
ορίζεται στην παράμετρος 4-16 Torque
Limit Motor Mode ή στην
παράμετρος 4-17 Torque Limit Generator
Mode.
Το ρεύμα του κινητήρα είναι εκτός του
πεδίου που ορίζεται στην
παράμετρος 4-18 Current Limit.
Το ρεύμα του κινητήρα είναι
χαμηλότερο από αυτό που ορίζεται
στην παράμετρος 4-50 Warning Current
Low.
5-40 Λειτουργία ρελέ
Επιλογή: Λειτουργία:
[14] Επάνω από την
ένταση, υψηλό
[15] Eκτός εύρους
συχνότητας
[16] Χαμ. συχνότητα,
υπό ορίου
[17] Πάνω από
συχνότητα,
υψηλό
[18] Εκτός εύρ. αν. Η ανάδραση είναι εκτός του εύρους που
[19] Κάτω από
ανάδραση,
χαμηλό
[20] Επάνω από
ανάδραση,
υψηλό
[21] Θερμική
προειδοποίηση
[22] Έτοιμο, χωρίς
θερμική προειδοποίηση
[23] Απ.,έτ.χωρίς
πρ.θερμ.
[24] Έτοιμο, χωρίς
υπερ-/υπόταση
[25] Αναστροφή Ο κινητήρας λειτουργεί (ή είναι έτοιμος
[26] Δίαυλος ΟΚ Ενεργή επικοινωνία (χωρίς τέλος
[27] Όριο & διακοπή
ροπής
Το ρεύμα κινητήρα είναι υψηλότερο
από αυτό που ορίζεται στην
παράμετρος 4-51 Warning Current High.
Η ταχύτητα/συχνότητα εξόδου
υπερβαίνει το όριο που έχει οριστεί
στην παράμετρος 4-40 Warning Freq. Low
και την παράμετρος 4-41 Warning Freq.
High.
Η ταχύτητα εξόδου είναι χαμηλότερη
από τη ρύθμιση στην
παράμετρος 4-40 Warning Freq. Low.
Η συχνότητα είναι υψηλότερη από τη
ρύθμιση στην παράμετρος 4-41 Warning
Freq. High.
ορίζεται στην παράμετρος 4-56 Warning
Feedback Low και
παράμετρος 4-57 Warning Feedback High.
Η ανάδραση είναι κάτω από το όριο
που ορίζεται στην
παράμετρος 4-56 Warning Feedback Low.
Η ανάδραση έχει υπερβεί το όριο που
ορίζεται στην παράμετρος 4-57 Warning
Feedback High.
Η θερμική προειδοποίηση ενεργοποιείται όταν η θερμοκρασία υπερβεί το
όριο στον κινητήρα, το μετατροπέα
συχνότητας, τον αντιστάτης πέδης ή το
συνδεδεμένο θερμίστορ.
Ο μετατροπέας συχνότητας είναι
έτοιμος για λειτουργία και δεν υπάρχει
προειδοποίηση υπερθέρμανσης.
Ο μετατροπέας συχνότητας είναι
έτοιμος για λειτουργία και βρίσκεται στη
λειτουργία αυτόματης ενεργοποίησης.
Δεν υπάρχει προειδοποίηση υπερθέρμανσης.
Ο μετατροπέας συχνότητας είναι
έτοιμος για λειτουργία και η τάση του
δικτύου ρεύματος βρίσκεται εντός του
καθορισμένου εύρους τάσης.
να λειτουργήσει) δεξιόστροφα όταν
λογική=0 και αριστερόστροφα όταν
λογική=1. Η έξοδος αλλάζει με την
εφαρμογή του σήματος αναστροφής.
χρόνου) μέσω της σειριακής θύρας
επικοινωνίας.
Να χρησιμοποιείται κατά την εκτέλεση
ακινητοποίησης με ελεύθερη κίνηση και
με μετατροπέα συχνότητας σε συνθήκη
ορίου ροπής. Αν ο μετατροπέας
συχνότητας λάβει σήμα ακινητοποίησης
4 4
MG07C327 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. 65
Page 68

Περιγραφές παραμέτρων
Ρυθμιστής στροφών VLT® Midi FC 280
5-40 Λειτουργία ρελέ
Επιλογή: Λειτουργία:
και βρίσκεται στο όριο ροπής, το σήμα
είναι λογικό=0.
[28] Πέδη, χωρίς
προειδοποίηση
πέδης
[29] Πέδη έτοιμη, χ.
44
σφ.
[30] Σφάλμα πέδης
(IGBT)
[31] Ρελέ 123 Η ψηφιακή έξοδος/ρελέ ενεργοποιείται
[32] Έλεγχος μηχ.
πέδης
[36] Βit 11 λέξης
ελέγχου
[37] Λέξη ελέγχου bit12Ενεργοποίηση ρελέ 2 με εντολή ελέγχου
[40] Τιμή αναφοράς
εκτός εύρους
[41] Κάτω από τιμή
αναφοράς,
χαμηλό
Η πέδη είναι ενεργή και δεν υπάρχουν
προειδοποιήσεις.
Η πέδη είναι έτοιμη για λειτουργία και
δεν υπάρχουν σφάλματα.
Η έξοδος είναι λογικό=1 όταν η πέδη
IGBT είναι βραχυκυκλωμένη. Χρησιμο-
ποιήστε αυτή τη λειτουργία για την
προστασία του μετατροπέα συχνότητας
αν υπάρχει σφάλμα στη μονάδα πέδης.
Χρησιμοποιείτε την ψηφιακή έξοδο/ρελέ
για τη διακοπή της κύριας τάσης από
τον μετατροπέα συχνότητας.
όταν η [0] Λέξη περιγραφής ελέγχου
επιλεγεί στην ομάδα παραμέτρων 8-**.
Επικοινωνία και επιλογές.
Επιλογή ελέγχου μηχανικής πέδης. Όταν
οι επιλεγμένες παράμετροι στην ομάδα
παραμέτρων 2-2* Μηχανική πέδη είναι
ενεργές, ενισχύστε την έξοδο για τη
μεταφορά του ρεύματος για το πηνίο
στην πέδη. Αυτό το ζήτημα επιλύεται
συνδέοντας ένα εξωτερικό ρελέ στην
επιλεγμένη ψηφιακή έξοδο.
Ενεργοποίηση ρελέ 1 με εντολή ελέγχου
από τον τοπικό δίαυλο επικοινωνίας.
Δεν υπάρχει άλλη λειτουργική επίδραση
στο μετατροπέα συχνότητας. Τυπική
εφαρμογή: Έλεγχος βοηθητικής
συσκευής από τοπικό δίαυλο επικοι-
νωνίας. Η λειτουργία είναι έγκυρη όταν
επιλεγεί [0] Προφίλ FC στην
παράμετρος 8-10 Control Word Prole.
από τον τοπικό δίαυλο επικοινωνίας.
Δεν υπάρχει άλλη λειτουργική επίδραση
στο μετατροπέα συχνότητας. Τυπική
εφαρμογή: Έλεγχος βοηθητικής
συσκευής από τοπικό δίαυλο επικοι-
νωνίας. Η λειτουργία είναι έγκυρη όταν
επιλεγεί [0] Προφίλ FC στην
παράμετρος 8-10 Control Word Prole.
Ενεργή όταν η πραγματική ταχύτητα
είναι εκτός των ρυθμίσεων στην
παράμετρος 4-55 Warning Reference High
και την παράμετρος 4-56 Warning
Feedback Low.
Ενεργή όταν η πραγματική ταχύτητα
είναι κάτω από τη ρύθμιση της τιμής
αναφοράς ταχύτητας.
5-40 Λειτουργία ρελέ
Επιλογή: Λειτουργία:
[42] Υψ.αναφ.,υπέρβ. Ενεργή όταν η πραγματική ταχύτητα
είναι πάνω από τη ρύθμιση της τιμής
αναφοράς ταχύτητας.
[45] Έλεγχος διαύλου Ελέγχει την ψηφιακή έξοδο/ρελέ μέσω
διαύλου. Η κατάσταση της εξόδου
ορίζεται στην παράμετρος 5-90 Digital &
Relay Bus Control. Η κατάσταση της
εξόδου διατηρείται αν υπάρξει τέλος
χρόνου διαύλου.
[46] Έλεγχος διαύλου,
τέλος χρόνου:
Ενεργό
[47] Έλεγχος διαύλου,
τέλος χρόνου:
Απενεργοποίηση
[56] Προειδοποίηση
καθαρισμού
ψύκτρας, υψηλό
[60] Συγκριτής 0 Βλέπε ομάδα παραμέτρων 13-1* Smart
[61] Συγκριτής 1 Βλέπε ομάδα παραμέτρων 13-1* Smart
[62] Συγκριτής 2 Βλέπε ομάδα παραμέτρων 13-1* Smart
[63] Συγκριτής 3 Βλέπε ομάδα παραμέτρων 13-1* Smart
[64] Συγκριτής 4 Βλέπε ομάδα παραμέτρων 13-1* Smart
[65] Συγκριτής 5 Βλέπε ομάδα παραμέτρων 13-1* Smart
[70] Λογικός κανόνας0Ανατρέξτε στην ομάδα παραμέτρων
Ελέγχει την έξοδο μέσω διαύλου. Η
κατάσταση της εξόδου ορίζεται στην
παράμετρος 5-90 Digital & Relay Bus
Control. Στην περίπτωση τέλους χρόνου
διαύλου, η κατάσταση εξόδου ορίζεται
ως υψηλή (ενεργό).
Ελέγχει την έξοδο μέσω διαύλου. Η
κατάσταση της εξόδου ορίζεται στην
παράμετρος 5-90 Digital & Relay Bus
Control. Στην περίπτωση τέλους χρόνου
διαύλου, η κατάσταση εξόδου ορίζεται
ως χαμηλή (ανενεργό).
Logic Control. Αν ο συγκριτής 0 στο SLC
είναι αληθής, η έξοδος θα είναι υψηλή.
Διαφορετικά, θα είναι χαμηλή.
Logic Control. Αν ο Συγκριτής 1 στο SLC
είναι αληθής, η έξοδος θα είναι υψηλή.
Διαφορετικά, θα είναι χαμηλή.
Logic Control. Αν ο Συγκριτής 2 στο SLC
είναι αληθής, η έξοδος θα είναι υψηλή.
Διαφορετικά, θα είναι χαμηλή.
Logic Control. Αν ο Συγκριτής 3 στο SLC
είναι αληθής, η έξοδος θα είναι υψηλή.
Διαφορετικά, θα είναι χαμηλή.
Logic Control. Αν ο Συγκριτής 4 στο SLC
είναι αληθής, η έξοδος θα είναι υψηλή.
Διαφορετικά, θα είναι χαμηλή.
Logic Control. Αν ο Συγκριτής 5 στο SLC
είναι αληθής, η έξοδος θα είναι υψηλή.
Διαφορετικά, θα είναι χαμηλή.
13-4* Λογικοί Κανόνες. Αν ο λογικός
κανόνας 0 στο SLC είναι αληθής, η
έξοδος θα είναι υψηλή. Διαφορετικά, θα
είναι χαμηλή.
66 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. MG07C327
Page 69

Περιγραφές παραμέτρων Οδηγός Προγραμματισμού
5-40 Λειτουργία ρελέ
Επιλογή: Λειτουργία:
[71] Λογικός κανόνας1Ανατρέξτε στην ομάδα παραμέτρων
13-4* Λογικοί Κανόνες. Αν ο λογικός
κανόνας 1 στο SLC είναι αληθής, η
έξοδος θα είναι υψηλή. Διαφορετικά, θα
είναι χαμηλή.
[72] Λογικός κανόνας2Ανατρέξτε στην ομάδα παραμέτρων
13-4* Λογικοί Κανόνες. Αν ο λογικός
κανόνας 2 στο SLC είναι αληθής, η
έξοδος θα είναι υψηλή. Διαφορετικά, θα
είναι χαμηλή.
[73] Λογικός κανόνας3Ανατρέξτε στην ομάδα παραμέτρων
13-4* Λογικοί Κανόνες. Αν ο λογικός
κανόνας 3 στο SLC είναι αληθής, η
έξοδος θα είναι υψηλή. Διαφορετικά, θα
είναι χαμηλή.
[74] Λογικός κανόνας4Ανατρέξτε στην ομάδα παραμέτρων
13-4* Λογικοί Κανόνες. Αν ο λογικός
κανόνας 4 στο SLC είναι αληθής, η
έξοδος θα είναι υψηλή. Διαφορετικά, θα
είναι χαμηλή.
[75] Λογικός κανόνας5Ανατρέξτε στην ομάδα παραμέτρων
13-4* Λογικοί Κανόνες. Αν ο λογικός
κανόνας 5 στο SLC είναι αληθής, η
έξοδος θα είναι υψηλή. Διαφορετικά, θα
είναι χαμηλή.
[80] Ψηφιακή έξοδος
SL A
[81] Ψηφιακή έξοδος
SL Β
[82] Ψηφιακή έξοδος
SL C
[83] Ψηφιακή έξοδος
SL D
[160] Χωρίς συναγερμό Η έξοδος είναι υψηλή όταν δεν υπάρχει
[161] Αντίστροφη
λειτουργία
[165] Τοπ.επιθ.τιμή
ενεργή
Ανατρέξτε στον παράμετρος 13-52 SL
Controller Action. Η έξοδος A είναι
χαμηλή στην [32] Ενέργεια Smart Logic.
Η έξοδος A είναι υψηλή στην [38]
Ενέργεια Smart Logic.
Ανατρέξτε στον παράμετρος 13-52 SL
Controller Action. Η έξοδος Β είναι
χαμηλή στην [32] Ενέργεια Smart Logic.
Η έξοδος Β είναι υψηλή στην [38]
Ενέργεια Smart Logic.
Ανατρέξτε στον παράμετρος 13-52 SL
Controller Action. Η έξοδος C είναι
χαμηλή στην [32] Ενέργεια Smart Logic.
Η έξοδος C είναι υψηλή στην [38]
Ενέργεια Smart Logic.
Ανατρέξτε στον παράμετρος 13-52 SL
Controller Action. Η έξοδος D είναι
χαμηλή στην [32] Ενέργεια Smart Logic.
Η έξοδος D είναι υψηλή στην [38]
Ενέργεια Smart Logic.
συναγερμός.
Η έξοδος είναι υψηλή όταν ο
μετατροπέας συχνότητας εκτελείται
αριστερόστροφα (το λογικό προϊόν των
bit κατάστασης ‘Λειτουργία’ ΚΑΙ
‘Αντίστροφη’).
5-40 Λειτουργία ρελέ
Επιλογή: Λειτουργία:
[166] Απομ.επιθ.τιμή
ενεργή
[167] Εντολή εκκ.
ενεργή
[168] Ρυθμιστής
στροφών σε
χειροκίνητη
λειτουργία
[169] Ρυθ.στ.σε
αυτ.λειτ.
[170] Λειτουργία
επιστροφής στην
αρχική θέση,
ολοκληρώθηκε
[171] Επίτευξη θέσης-
στόχου
[172] Σφάλμα ελέγχου
θέσης
[173] Θέση μηχανικής
πέδησης
[190] Λειτουργία STO
ενεργή
[193] Τρόπος
λειτουργίας
προσωρινής
απενεργοποίησης
[194] Λειτουργία
σπασμένου
ιμάντα
[239] Σφάλμα
λειτουργίας STO
Η έξοδος είναι υψηλή όταν υπάρχει μια
εντολή ενεργούς εκκίνησης και δεν είναι
ενεργή κάποια εντολή διακοπής.
Η έξοδος είναι υψηλή όταν ο
μετατροπέας συχνότητας βρίσκεται στη
λειτουργία hand on.
Η έξοδος είναι υψηλή όταν ο
μετατροπέας συχνότητας βρίσκεται στη
λειτουργία αυτόματης ενεργοποίησης.
Η λειτουργία επιστροφής στην αρχική
θέση ολοκληρώθηκε. Αυτή η επιλογή
είναι ενεργή μόνο όταν η
παράμετρος 37-00 Application Mode έχει
οριστεί σε [2] Έλεγχος θέσης.
Η θέση-στόχος επιτεύχθηκε. Αυτή η
επιλογή είναι ενεργή μόνο όταν η
παράμετρος 37-00 Application Mode έχει
οριστεί σε [2] Έλεγχος θέσης.
Προέκυψε σφάλμα κατά τη διαδικασία
τοποθέτησης. Ανατρέξτε στο
παράμετρος 37-18 Pos. Ctrl Fault Reason
για λεπτομέρειες σχετικά με το σφάλμα.
Αυτή η επιλογή είναι ενεργή μόνο όταν
η παράμετρος 37-00 Application Mode
έχει οριστεί σε [2] Έλεγχος θέσης.
Επιλέξτε μηχανικός έλεγχος για την
τοποθέτηση. Αυτή η επιλογή είναι
ενεργή μόνο όταν η
παράμετρος 37-00 Application Mode έχει
οριστεί σε [2] Έλεγχος θέσης.
Ο μετατροπέας συχνότητας/το σύστημα
περνά σε λειτουργία προσωρινής
αδρανοποίησης. Δείτε την ομάδα
παραμέτρων 22-4* Λειτουργία
προσωρινής αδρανοποίησης.
Ανιχνεύθηκε συνθήκη σπασμένου
ιμάντα. Δείτε την ομάδα παραμέτρων
22-4* Λειτουργία προσωρινής αδρανοποίησης.
5-41 Καθυστέρηση ενεργοποίησης, Ρελέ
Περιοχή: Λειτουργία:
0.01 s* [0.01 600 s]
Εισάγετε την καθυστέρηση χρόνου διακοπής
ρελέ. Το ρελέ παρεμβαίνει μόνο εάν η
συνθήκη στην παράμετρος 5-40 Λειτουργία
ρελέ δεν διακοπεί κατά τον καθορισμένο
χρόνο.
4 4
MG07C327 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. 67
Page 70

Selected
Event
Relay
output
Selected
Event
Relay
output
On Delay
P 5-41
On Delay
P 5-41
O Delay
P 5-42
130BA171.10
Selected
Event
Relay
output
On Delay
P 5-41
O Delay
P 5-42
130BA172.10
130BD377.10
Ref.
Low freq.
P 5-50/
P 5-55
Input
(Hz)
High
ref.
value
P 5-53/
p 5-58
High freq.
P 5-51/
P 5-56
Low
ref.
value
P 5-52/
p 5-57
Περιγραφές παραμέτρων
Ρυθμιστής στροφών VLT® Midi FC 280
44
Εικόνα 4.12 Είσοδος παλμού
Εικόνα 4.10 Καθυστέρηση ενεργοποίησης, Ρελέ
5-42 Καθυστέρησης απενεργοποίησης, Ρελέ
Περιοχή: Λειτουργία:
0.01 s* [0.01 - 600 s] Εισαγάγετε την καθυστέρηση χρόνου
διακοπής του ρελέ.
Εικόνα 4.11 Καθυστέρησης απενεργοποίησης, Ρελέ
Αν η επιλεγμένη συνθήκη συμβάντος αλλάξει πριν λήξει το
χρονόμετρο καθυστέρησης ενεργοποίησης ή απενεργοποίησης, η έξοδος του ρελέ δεν επηρεάζεται.
4.6.4 5-5* Είσοδος παλμού
Οι παράμετροι εισόδου παλμού χρησιμοποιούνται για τον
καθορισμό ενός κατάλληλου παραθύρου για την περιοχή
αναφοράς διέγερσης, διαμορφώνοντας τις ρυθμίσεις
κλιμάκωσης και φίλτρου για τις εισόδους παλμού. Οι
ακροδέκτες εισόδου 29 και 33 ενεργούν ως είσοδοι
αναφοράς συχνότητας. Ρυθμίστε τον ακροδέκτη 29
(παράμετρος 5-13 Ψηφιακή είσοδος ακροδέκτη 29) ή τον
ακροδέκτη 33 (παράμετρος 5-15 Ψηφιακή είσοδος
ακροδέκτη 33) σε [32] Είσοδο παλμού. Αν ο ακροδέκτης 29
χρησιμοποιείται ως είσοδος, τότε θέστε το
παράμετρος 5-01 Τρόπος λειτουργίας ακροδέκτη 27 σε [0]
Είσοδος.
5-50 Term. 29 Low Frequency
Περιοχή: Λειτουργία:
4 Hz* [4 - 31999
Hz]
Εισαγάγετε το όριο χαμηλής συχνότητας που
αντιστοιχεί στη χαμηλή ταχύτητα του άξονα
κινητήρα (δηλαδή χαμηλή τιμή αναφοράς)
στην παράμετρος 5-52 Term. 29 Low Ref./
Feedb. Value. Ανατρέξτε στο Εικόνα 4.12.
5-51 Term. 29 High Frequency
Περιοχή: Λειτουργία:
32000
Hz*
[5 - 32000
Hz]
Εισαγάγετε το όριο υψηλής συχνότητας
που αντιστοιχεί στην υψηλή ταχύτητα
του άξονα κινητήρα (δηλαδή υψηλή τιμή
αναφοράς) στην παράμετρος 5-53 Term.
29 High Ref./Feedb. Value.
5-52 Term. 29 Low Ref./Feedb. Value
Περιοχή: Λειτουργία:
0* [-4999 -
4999 ]
Εισαγάγετε τη όριο χαμηλής τιμής αναφοράς για
την ταχύτητα του άξονα κινητήρα [Hz]. Αυτή είναι
επίσης η χαμηλότερη τιμή ανάδρασης, δείτε
επίσης την παράμετρος 5-57 Term. 33 Low Ref./
Feedb. Value. Ρυθμίστε τον ακροδέκτη 29 στην
ψηφιακή είσοδο (παράμετρος 5-02 Terminal 29
Mode=[0] Είσοδος και παράμετρος 5-13 Ψηφιακή
είσοδος ακροδέκτη 29=εφαρμοστέα τιμή.
5-53 Term. 29 High Ref./Feedb. Value
Περιοχή: Λειτουργία:
Size
related*
[-4999 4999 ]
Εισαγάγετε την υψηλή τιμή αναφοράς [Hz]
για την ταχύτητα του άξονα κινητήρα και
την υψηλή τιμή ανάδρασης. Βλέπε επίσης
την παράμετρος 5-58 Term. 33 High Ref./
Feedb. Value. Ρυθμίστε τον ακροδέκτη 29
στην ψηφιακή είσοδο
(παράμετρος 5-02 Τρόπος λειτουργίας
ακροδέκτη 29=[0] Είσοδος (προεπιλογή) και
παράμετρος 5-13 Ψηφιακή είσοδος
ακροδέκτη 29=εφαρμοστέα τιμή).
68 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. MG07C327
Page 71

Περιγραφές παραμέτρων Οδηγός Προγραμματισμού
5-55 Term. 33 Low Frequency
Περιοχή: Λειτουργία:
4 Hz* [4 - 31999
Hz]
Εισαγάγετε τη χαμηλή συχνότητα που
αντιστοιχεί στη χαμηλή ταχύτητα του άξονα
κινητήρα (δηλαδή χαμηλή τιμή αναφοράς)
στην παράμετρος 5-57 Term. 33 Low Ref./
Feedb. Value.
5-56 Term. 33 High Frequency
Περιοχή: Λειτουργία:
32000
Hz*
[5 - 32000
Hz]
Εισαγάγετε την υψηλή συχνότητα που
αντιστοιχεί στην υψηλή ταχύτητα του
άξονα κινητήρα (δηλαδή υψηλή τιμή
αναφοράς) στην παράμετρος 5-58 Term.
33 High Ref./Feedb. Value.
5-57 Term. 33 Low Ref./Feedb. Value
Περιοχή: Λειτουργία:
0* [-4999 -
4999 ]
Εισάγετε την χαμηλή τιμής αναφοράς [Hz] για
την ταχύτητα του άξονα κινητήρα. Αυτή είναι
επίσης η χαμηλή τιμή ανάδρασης, δείτε επίσης
την παράμετρος 5-52 Term. 29 Low Ref./Feedb.
Value.
5-58 Term. 33 High Ref./Feedb. Value
Περιοχή: Λειτουργία:
Size
related*
[-4999 4999 ]
Εισαγάγετε την υψηλή τιμή αναφοράς
[Hz] για την ταχύτητα του άξονα
κινητήρα. Βλέπε επίσης την
παράμετρος 5-53 Term. 29 High Ref./
Feedb. Value.
5-60 Terminal 27 Pulse Output Variable
Επιλογή: Λειτουργία:
[0] * No operation
[45] Bus ctrl.
[48] Bus ctrl., timeout
[100] Output frequency
[101] Reference
[102] Process Feedback
[103] Motor Current
[104] Torque rel to limit
[105] Torq relate to rated
[106] Power
[107] Speed
[109] Max Out Freq
[113] Ext. Closed Loop 1
5-62 Pulse Output Max Freq 27
Περιοχή: Λειτουργία:
5000
Hz*
[4 - 32000
Hz]
Ρυθμίστε τη μέγιστη συχνότητα για τον
ακροδέκτη 27, ανάλογα με τη μεταβλητή
εξόδου που έχει επιλεγεί στο
5-62 Pulse Output Max Freq 27
Περιοχή: Λειτουργία:
παράμετρος 5-60 Terminal 27 Pulse Output
Variable.
5-70 Term 32/33 Pulses Per Revolution
Περιοχή: Λειτουργία:
1024* [1 - 4096 ] Ρυθμίστε τους παλμούς της παλμογεννήτριας
ανά περιστροφή στον άξονα του κινητήρα. Η
πραγματική τιμή μπορεί να αναγνωστεί στην
παλμογεννήτρια.
5-71 Term 32/33 Encoder Direction
Επιλογή: Λειτουργία:
ΕΙΔΟΠΟΙΗΣΗ
Η παράμετρος αυτή δεν μπορεί να
τροποποιηθεί ενώ λειτουργεί ο
κινητήρας.
Αλλάξτε την φορά περιστροφής της παλμογεννήτριας που ανιχνεύθηκε, χωρίς να αλλάξετε
την καλωδίωση προς την παλμογεννήτρια.
[0] * Clockwise
[1] Counter
clockwise
5-90 Digital & Relay Bus Control
Περιοχή: Λειτουργία:
0* [0 - 0xFFFFFFFF ] Αυτή η παράμετρος κρατά την κατάσταση
Bit 0–3 Δεσμευμένο
Bit 4 Ακροδέκτης εξόδου ρελέ 1
Bit 6–23 Δεσμευμένο
Bit 24 Ψηφιακή έξοδος ακροδέκτη 42
Bit 26–31 Δεσμευμένο
Πίνακας 4.4 Λειτουργίες Bit
5-93 Pulse Out 27 Bus Control
Περιοχή: Λειτουργία:
0 %* [0 -
100 %]
Ρυθμίστε το κανάλι A 90° (ηλεκτρικές μοίρες)
πίσω από το κανάλι B μετά την δεξιόστροφη
περιστροφή του άξονα παλμογεννήτριας.
Ρυθμίστε το κανάλι A 90° (ηλεκτρικές μοίρες)
μπροστά από το κανάλι B μετά την
δεξιόστροφη περιστροφή του άξονα
παλμογεννήτριας.
των ψηφιακών εξόδων και των ρελέ.
Ένα λογικό 1 δείχνει ότι η έξοδος είναι
υψηλή ή ενεργή.
Ένα λογικό 0 δείχνει ότι η έξοδος είναι
χαμηλή ή ανενεργή.
Ρυθμίστε τη συχνότητα εξόδου που
μεταφέρεται στον ακροδέκτη εξόδου 27, όταν
ο ακροδέκτης έχει διαμορφωθεί ως [45] Με
έλεγχο διαύλου στην παράμετρος 5-60 Terminal
27 Pulse Output Variable.
4 4
MG07C327 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. 69
Page 72

Περιγραφές παραμέτρων
5-94 Pulse Out 27 Timeout Preset
Περιοχή: Λειτουργία:
0 %* [0 -
100 %]
Ρυθμίστε τη συχνότητα εξόδου που
μεταφέρεται στον ακροδέκτη εξόδου 27, όταν
ο ακροδέκτης έχει διαμορφωθεί ως [48] Λήξη
χρόνου ελέγχου διαύλου στην
παράμετρος 5-60 Terminal 27 Pulse Output
Variable και ανιχνεύτηκε λήξη χρόνου.
Ρυθμιστής στροφών VLT® Midi FC 280
44
70 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. MG07C327
Page 73

Ref./Feedback
Analog input
High Ref./
Feedb. Value'
Low Ref./
Feedb. Value'
'Low Voltage'or
'Low Current'
'High Voltage'or
'High Current'
130BD378.10
1 V 5 V 10 V
300
600
900
1200
1500
[V]
150
Par 6-xx
Par 6-xx
Par 6-xx
Par 6-xx
Περιγραφές παραμέτρων Οδηγός Προγραμματισμού
4.7 Παράμετροι: 6-** Αναλ. είσ./έξοδος
6-00 Live Zero Timeout Time
Περιοχή: Λειτουργία:
10 s* [1 - 99 s] Εισαγάγετε τη λήξη χρόνου.
6-01 Live Zero Timeout Function
Επιλογή: Λειτουργία:
Επιλέξτε τη λειτουργία λήξης χρόνου. Η
λειτουργία που ρυθμίζεται στην
παράμετρος 6-01 Live Zero Timeout Function θα
ενεργοποιηθεί αν το σήμα εισόδου στον
ακροδέκτη 53 ή 54 είναι κάτω από 50% της
τιμής στην παράμετρος 6-10 Terminal 53 Low
Voltage, παράμετρος 6-20 Terminal 54 Low
Voltage, ή παράμετρος 6-22 Terminal 54 Low
Current για χρονικό διάστημα που ορίζεται
στην παράμετρος 6-00 Live Zero Timeout Time.
[0] * O
[1] Freeze
output
[2] Stop
[3] Jogging
[4] Max. speed
[5] Stop and
trip
6-11 Terminal 53 High Voltage
Περιοχή: Λειτουργία:
10 V* [0 - 10 V] Εισαγάγετε την τάση (V) που αντιστοιχεί στην
υψηλή τιμή αναφοράς (ορίζεται στην
παράμετρος 6-15 Υψηλή τιμή αναφ./ανάδρ.
ακροδέκτη 53).
6-14 Terminal 53 Low Ref./Feedb. Value
Περιοχή: Λειτουργία:
0* [-4999 -
4999 ]
Εισαγάγετε την τιμή αναφοράς ή ανάδρασης
που αντιστοιχεί στην τάση ή το ρεύμα που
ορίζεται στην παράμετρος 6-10 Terminal 53
Low Voltage.
6-15 Terminal 53 High Ref./Feedb. Value
Περιοχή: Λειτουργία:
Size
related*
[-4999 4999 ]
Εισαγάγετε την τιμή αναφοράς ή
ανάδρασης που αντιστοιχεί στην τάση
ή το ρεύμα που ορίζεται στην
παράμετρος 6-11 Terminal 53 High
Voltage.
6-16 Terminal 53 Filter Time Constant
Περιοχή: Λειτουργία:
0.01 s* [0.01 - 10s]Εισαγάγετε τη σταθερά χρόνου. Αυτή είναι
μια σταθερά χρόνου ψηφιακού χαμηλοπερατού φίλτρου πρώτης σειράς για την
καταστολή του ηλεκτρικού θορύβου στον
ακροδέκτη 53. Μια υψηλή τιμή σταθεράς
χρόνου βελτιώνει την απόσβεση, αλλά
αυξάνει το χρόνο καθυστέρησης μέσω του
φίλτρου.
4 4
6-18 Terminal 53 Digital Input
Επιλογή: Λειτουργία:
[0] * No operation
[1] Reset
[2] Coast inverse
[3] Coast and reset inverse
[4] Quick stop inverse
[5] DC-brake inverse
Εικόνα 4.13 Λειτουργία λήξης χρόνου
6-10 Terminal 53 Low Voltage
Περιοχή: Λειτουργία:
0.07 V* [0 - 10V]Εισαγάγετε την τάση (V) που αντιστοιχεί στην
MG07C327 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. 71
παράμετρος 6-14 Terminal 53 Low Ref./Feedb.
Value. Για να ενεργοποιήσετε την
παράμετρος 6-01 Live Zero Timeout Function,
ρυθμίστε την τιμή σε >1 V.
[6] Stop inverse
[8] Start
[10] Reversing
[11] Start reversing
[12] Enable start forward
[13] Enable start reverse
[14] Jog
[15] Preset reference on
[16] Preset ref bit 0
[17] Preset ref bit 1
[18] Preset ref bit 2
[19] Freeze reference
Page 74

Περιγραφές παραμέτρων
Ρυθμιστής στροφών VLT® Midi FC 280
6-18 Terminal 53 Digital Input
Επιλογή: Λειτουργία:
[20] Freeze output
[21] Speed up
[22] Speed down
[23] Set-up select bit 0
[24] Set-up select bit 1
[28] Catch up
44
[29] Slow down
[34] Ramp bit 0
[35] Ramp bit 1
[51] External Interlock
[55] DigiPot increase
[56] DigiPot decrease
[57] DigiPot clear
[58] DigiPot Hoist
[72] PID error inverse
[73] PID reset I part
[74] PID enable
[150] Go To Home
[151] Home Ref. Switch
[155] HW Limit Positive Inv
[156] HW Limit Negative Inv
[157] Pos. Quick Stop Inv
[160] Go To Target Pos.
[162] Pos. Idx Bit0
[163] Pos. Idx Bit1
[164] Pos. Idx Bit2
[171] Limit switch cw inverse
[172] Limit switch ccw inverse
6-19 Τρόπος λειτουργίας ακροδέκτη 53
Επιλέξτε τη λειτουργία εισόδου του ακροδέκτη 53.
Επιλογή: Λειτουργία:
[1] * Τρόπος λειτουργίας τάσης
[6] Ψηφιακή είσοδος
6-20 Terminal 54 Low Voltage
Περιοχή: Λειτουργία:
0.07 V* [0 - 10V]Εισαγάγετε την τάση (V) που αντιστοιχεί στη
χαμηλή τιμή αναφοράς (ορίζεται στην
παράμετρος 6-24 Terminal 54 Low Ref./Feedb.
Value). Για να ενεργοποιήσετε την
παράμετρος 6-01 Live Zero Timeout Function,
ρυθμίστε την τιμή σε >1 V.
6-22 Terminal 54 Low Current
Περιοχή: Λειτουργία:
4 mA* [0 - 20
mA]
Εισαγάγετε την τιμή χαμηλού ρεύματος. Αυτό το
σήμα αναφοράς πρέπει να αντιστοιχεί στη
χαμηλή τιμή αναφοράς/ανάδρασης που ορίζεται
στην παράμετρος 6-24 Terminal 54 Low Ref./
Feedb. Value. Για να ενεργοποιήσετε τη
λειτουργία λήξης χρόνου ζωντανού μηδέν στην
παράμετρος 6-01 Live Zero Timeout Function,
ρυθμίστε την τιμή σε >2 mA.
6-23 Terminal 54 High Current
Περιοχή: Λειτουργία:
20 mA* [0 - 20
mA]
Εισαγάγετε την υψηλή τιμή ρεύματος που
αντιστοιχεί στο υψηλό σύνολο αναφοράς/
ανάδρασης που ορίζεται στην
παράμετρος 6-25 Terminal 54 High Ref./Feedb.
Value.
6-24 Terminal 54 Low Ref./Feedb. Value
Περιοχή: Λειτουργία:
0* [-4999 -
4999 ]
Εισαγάγετε την τιμή αναφοράς ή ανάδρασης
που αντιστοιχεί στην τάση ή το ρεύμα που
ορίζεται στην παράμετρος 6-21 Terminal 54
High Voltage/παράμετρος 6-22 Terminal 54 Low
Current.
6-25 Terminal 54 High Ref./Feedb. Value
Περιοχή: Λειτουργία:
Size
related*
[-4999 4999 ]
Εισαγάγετε την τιμή αναφοράς ή
ανάδρασης που αντιστοιχεί στην τάση ή
το ρεύμα που ορίζεται στην
παράμετρος 6-21 Terminal 54 High
Voltage/παράμετρος 6-23 Terminal 54
High Current.
6-26 Terminal 54 Filter Time Constant
Περιοχή: Λειτουργία:
0.01 s* [0.01 - 10s]Εισαγάγετε τη σταθερά χρόνου, η οποία
είναι μια σταθερά χρόνου ψηφιακού χαμηλοπερατού φίλτρου πρώτης σειράς για την
καταστολή του ηλεκτρικού θορύβου στον
ακροδέκτη 54. Μια υψηλή τιμή σταθεράς
χρόνου βελτιώνει την απόσβεση, αλλά
αυξάνει το χρόνο καθυστέρησης μέσω του
φίλτρου.
6-21 Terminal 54 High Voltage
Περιοχή: Λειτουργία:
10 V* [0 - 10 V] Εισαγάγετε την τάση (V) που αντιστοιχεί στην
υψηλή τιμή αναφοράς (ορίζεται στην
παράμετρος 6-25 Terminal 54 High Ref./Feedb.
Value).
72 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. MG07C327
6-29 Terminal 54 mode
Επιλογή: Λειτουργία:
Επιλέξτε αν ο ακροδέκτης 54 θα χρησιμοποιείται για είσοδο ρεύματος ή τάσης.
[0] Current mode
[1] * Voltage mode
Page 75

Περιγραφές παραμέτρων Οδηγός Προγραμματισμού
6-90 Terminal 42 Mode
Επιλογή: Λειτουργία:
Ρυθμίστε τον ακροδέκτη 42 να λειτουργεί ως
αναλογική έξοδος ή ως ψηφιακή έξοδος.
Όταν ρυθμιστεί ψηφιακή έξοδος, ο
ακροδέκτης 42 εξάγει 0 mA ως OFF ή 20 mA
ως ON. Πρέπει να συνδεθεί εξωτερική
αντίσταση (≥1 kΩ) μεταξύ των ακροδεκτών
42 και 55.
[0] * 0-20 mA
[1] 4-20 mA
[2] Digital
Output
6-91 Terminal 42 Analog Output
Επιλογή: Λειτουργία:
[0] * No operation
[100] Output frequency
[101] Reference
[102] Process Feedback
[103] Motor Current
[104] Torque rel to limit
[105] Torq relate to rated
[106] Power
[107] Speed
[111] Speed Feedback
[113] Ext. Closed Loop 1
[139] Bus Control
[143] Ext. CL 1
[254] DC Link Voltage
6-92 Terminal 42 Digital Output
Επιλογή: Λειτουργία:
[0] * No operation
[1] Control Ready
[2] Drive ready
[3] Drive rdy/rem ctrl
[4] Stand-by / no warning
[5] Running
[6] Running / no warning
[7] Run in range/no warn
[8] Run on ref/no warn
[9] Alarm
[10] Alarm or warning
[11] At torque limit
[12] Out of current range
[13] Below current, low
[14] Above current, high
[15] Out of frequency range
[16] Below frequency, low
[17] Above frequency, high
[18] Out of feedb. range
[19] Below feedback, low
[20] Above feedback, high
6-92 Terminal 42 Digital Output
Επιλογή: Λειτουργία:
[21] Thermal warning
[22] Ready, no thermal
warning
[23] Remote,ready,no TW
[24] Ready, no over-/ under
voltage
[25] Reverse
[26] Bus OK
[27] Torque limit & stop
[28] Brake, no brake
warning
[29] Brake ready, no fault
[30] Brake fault (IGBT)
[31] Relay 123
[32] Mech brake ctrl
[36] Control word bit 11
[37] Control word bit 12
[40] Out of ref range
[41] Below reference, low
[42] Above ref, high
[45] Bus ctrl.
[46] Bus control, timeout:
On
[47] Bus control, timeout:
O
[56] Heat sink cleaning
warning, high
[60] Comparator 0
[61] Comparator 1
[62] Comparator 2
[63] Comparator 3
[64] Comparator 4
[65] Comparator 5
[70] Logic rule 0
[71] Logic rule 1
[72] Logic rule 2
[73] Logic rule 3
[74] Logic rule 4
[75] Logic rule 5
[80] SL digital output A
[81] SL digital output B
[82] SL digital output C
[83] SL digital output D
[160] No alarm
[161] Running reverse
[165] Local ref active
[166] Remote ref active
[167] Start command activ
[168] Drive in hand mode
[169] Drive in auto mode
[170] Homing Completed Η λειτουργία επιστροφής στην
αρχική θέση ολοκληρώθηκε. Αυτή
4 4
MG07C327 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. 73
Page 76

(mA)
0%
20
0/4
100%
Current
Analog
output
Min Scale
par. 6-93
Variable
for
output
example:
Power
Analog
Output
Max Scale
par. 6-94
130BB772.10
Περιγραφές παραμέτρων
Ρυθμιστής στροφών VLT® Midi FC 280
6-92 Terminal 42 Digital Output
Επιλογή: Λειτουργία:
6-94 Terminal 42 Output Max Scale
Περιοχή: Λειτουργία:
η επιλογή είναι ενεργή μόνο όταν
η παράμετρος 37-00 Application
Mode έχει οριστεί σε [2] Έλεγχος
θέσης.
[171] Target Position Reached Η θέση-στόχος επιτεύχθηκε. Αυτή
η επιλογή είναι ενεργή μόνο όταν
44
η παράμετρος 37-00 Application
Mode έχει οριστεί σε [2] Έλεγχος
θέσης.
[172] Position Control Fault Προέκυψε σφάλμα κατά τη
διαδικασία τοποθέτησης.
Εικόνα 4.14 Κλίμακα εξόδου έναντι έντασης
Ανατρέξτε στο
παράμετρος 37-18 Pos. Ctrl Fault
Reason για λεπτομέρειες σχετικά
με το σφάλμα. Αυτή η επιλογή
είναι ενεργή μόνο όταν η
παράμετρος 37-00 Application
Mode έχει οριστεί σε [2] Έλεγχος
6-96 Terminal 42 Output Bus Control
Περιοχή: Λειτουργία:
0* [0 - 16384 ] Συγκρατεί την αναλογική έξοδο του ακροδέκτη
42, αν ελέγχεται από δίαυλο.
θέσης.
[173] Position Mech Brake Επιλέξτε μηχανικός έλεγχος για
την τοποθέτηση. Αυτή η επιλογή
είναι ενεργή μόνο όταν η
6-98 Drive Type
Περιοχή: Λειτουργία:
0* [0 - 0 ]
παράμετρος 37-00 Application
Mode έχει οριστεί σε [2] Έλεγχος
θέσης.
[193] Sleep Mode Ο μετατροπέας συχνότητας/το
σύστημα περνά σε λειτουργία
προσωρινής αδρανοποίησης.
Δείτε την ομάδα παραμέτρων
22-4* Λειτουργία προσωρινής
αδρανοποίησης.
[194] Broken Belt Function Ανιχνεύθηκε συνθήκη σπασμένου
ιμάντα. Δείτε την ομάδα
παραμέτρων 22-4* Λειτουργία
προσωρινής αδρανοποίησης.
[198] Drive Bypass
6-93 Terminal 42 Output Min Scale
Περιοχή: Λειτουργία:
0 %* [0 -
200 %]
Διαβαθμίστε την ελάχιστη έξοδο (0 ή 4 mA)
του αναλογικού σήματος στον ακροδέκτη 42.
Ρυθμίστε την τιμή ως το ποσοστό του πλήρους
εύρους της μεταβλητής που έχει επιλεγεί στην
παράμετρος 6-91 Terminal 42 Analog Output.
6-94 Terminal 42 Output Max Scale
Περιοχή: Λειτουργία:
100 %* [0 -
200 %]
74 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. MG07C327
Διαβαθμίστε τη μέγιστη έξοδο (20 mA) της
κλιμάκωσης στον ακροδέκτη 42. Ρυθμίστε την
τιμή ως το ποσοστό του πλήρους εύρους της
μεταβλητής που έχει επιλεγεί στην
παράμετρος 6-91 Terminal 42 Analog Output.
Page 77

Περιγραφές παραμέτρων Οδηγός Προγραμματισμού
4.8 Παράμετροι: 7-** Ελεγκτές
7-00 Speed PID Feedback Source
Επιλογή: Λειτουργία:
ΕΙΔΟΠΟΙΗΣΗ
Η παράμετρος αυτή δεν μπορεί
να αλλάξει ενώ λειτουργεί ο
κινητήρας.
Επιλέγει πηγή ανάδρασης για τον
έλεγχο ταχύτητας CL.
[1] 24V encoder
[6] Analog Input 53
[7] Analog Input 54
[8] Frequency input 29
[9] Frequency input 33
[20] * None
7-02 Speed PID Proportional Gain
Περιοχή: Λειτουργία:
0.015* [0 -
7-03 Speed PID Integral Time
Περιοχή: Λειτουργία:
8
ms*
Εισάγετε την αναλογική απολαβή του ελεγκτή
1 ]
ταχύτητας. Η αναλογική απολαβή ενισχύει το
σφάλμα (δηλαδή την απόκλιση μεταξύ του
σήματος ανάδρασης και του σημείου ρύθμισης).
Αυτή η παράμετρος χρησιμοποιείται με την
παράμετρος 1-00 Τρόπος λειτουργίας [1] Έλεγχος
κλειστού βρόχου ταχύτητας. Γρήγορος έλεγχος
επιτυγχάνεται σε υψηλή ενίσχυση. Ωστόσο αν η
ενίσχυση είναι πολύ μεγάλη, η διεργασία μπορεί
να γίνει ασταθής.
[2 20000
ms]
Εισαγάγετε τον ολοκληρωτικό χρόνο του ελεγκτή
ταχύτητας, ο οποίος προσδιορίζει το χρόνο που
απαιτεί ο εσωτερικός έλεγχος PID για να
διορθώσει τα σφάλματα. Όσο μεγαλύτερο το
σφάλμα, τόσο ταχύτερα αυξάνει η απολαβή. Ο
ολοκληρωτικός χρόνος προκαλεί μια
καθυστέρηση του σήματος και συνεπώς
επίδραση εξασθένισης και μπορεί να χρησιμοποιηθεί για την απαλοιφή του σφάλματος
ταχύτητας σταθερής κατάστασης. Αποκτήστε
γρήγορο έλεγχο μέσω του σύντομου ολοκληρωτικού χρόνου, αν και, εάν ο ολοκληρωτικός
χρόνος είναι πολύ σύντομος, η διεργασία
καθίσταται ασταθής. Ένας υπερβολικά μεγάλος
ολοκληρωτικός χρόνος απενεργοποιεί την
ενέργεια ολοκλήρωσης οδηγώντας σε μεγάλες
αποκλίσεις από την απαιτούμενη τιμή αναφοράς,
καθώς ο ρυθμιστής διεργασίας χρειάζεται πολύ
χρόνο για να ρυθμίσει τα σφάλματα. Αυτή η
παράμετρος χρησιμοποιείται με την [1] Έλεγχος
κλειστού βρόχου ταχύτητας που ορίζεται στην
παράμετρος 1-00 Τρόπος λειτουργίας.
7-04 Speed PID Dierentiation Time
Περιοχή: Λειτουργία:
30 ms* [0 -
200 ms]
Εισαγάγετε τον χρόνο διαφόρισης του ελεγκτή
ταχύτητας. Ο διαφοριστής δεν αντιδρά σε
σταθερό σφάλμα. Παρέχει απολαβή ανάλογη
του ρυθμού μεταβολής της ανάδρασης
ταχύτητας. Όσο πιο γρήγορα αλλάζει το
σφάλμα, τόσο πιο δυνατή η απολαβή από τον
διαφοριστή. Η απολαβή είναι ανάλογη της
ταχύτητας μεταβολής των σφαλμάτων. Η
ρύθμιση αυτής της παραμέτρου σε 0 απενεργοποιεί το διαφοριστή. Αυτή η παράμετρος
χρησιμοποιείται με την
παράμετρος 1-00 Conguration Mode [1] Έλεγχος
κλειστού βρόχου ταχύτητας.
7-05 Speed PID Di. Gain Limit
Περιοχή: Λειτουργία:
5* [1 -
20 ]
Ορίζει ένα όριο για την απολαβή που παρέχει ο
διαφοριστής. Καθώς η διαφορική απολαβή
αυξάνεται στις υψηλότερες συχνότητες, ο
περιορισμός της απολαβής μπορεί να είναι
χρήσιμος. Για παράδειγμα, ορίστε μια αμιγή ζεύξη
D στις χαμηλές συχνότητες και μια σταθερή ζεύξη
D στις υψηλότερες συχνότητες. Αυτή η παράμετρος
χρησιμοποιείται με την
παράμετρος 1-00 Conguration Mode [1] Έλεγχος
κλειστού βρόχου ταχύτητας.
7-06 Speed PID Lowpass Filter Time
Περιοχή: Λειτουργία:
10
[1 -
ms*
ΕΙΔΟΠΟΙΗΣΗ
6000
Το έντονο φιλτράρισμα μπορεί να είναι
ms]
επιζήμιο για τη δυναμική απόδοση.
Αυτή η παράμετρος χρησιμοποιείται με την
παράμετρος 1-00 Τρόπος λειτουργίας [1]
Έλεγχος κλειστού βρόχου ταχύτητας.
Καθορίζει μια σταθερά χρόνου για το χαμηλοδιαβατο φίλτρο ελέγχου ταχύτητας. Το
χαμηλοδιαβατό φίλτρο βελτιώνει την απόδοση
σταθερής κατάστασης και αμβλύνει τις
ταλαντώσεις του σήματος ανάδρασης. Αυτή η
παράμετρος είναι χρήσιμη εάν υπάρχει πολύς
θόρυβος στο σύστημα, ανατρέξτε στο Εικόνα 4.15.
Για παράδειγμα, εάν προγραμματιστεί μια σταθερά
χρόνου (τ) 100 ms, η συχνότητα αποκοπής του
χαμηλοδιαβατού φίλτρου είναι 1/0,1=10 RAD/s.,
που αντιστοιχεί σε (10/2 x π)=1,6 Hz. Ο ρυθμιστής
PID ρυθμίζει μόνο ένα σήμα ανάδρασης που
διαφέρει κατά μία συχνότητα μικρότερη από 1,6
Hz. Εάν το σήμα ανάδρασης διαφέρει κατά
συχνότητα υψηλότερη από 1,6 Hz, ο ρυθμιστής
PID δεν αντιδρά.
4 4
MG07C327 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. 75
Page 78

0.6
0.6
f
g
= 10 Hz
175ZA293.11
Feedback
Disturbed feedback signal
t (Sec.)
t (Sec.)
Filtered feedback signal
Lowpass lter
Feedback
Par 7-07=1.00 Par 7-07=n1/n2
130BA871.10
Motor
n1 n2
Περιγραφές παραμέτρων
Ρυθμιστής στροφών VLT® Midi FC 280
7-06 Speed PID Lowpass Filter Time
Περιοχή: Λειτουργία:
Πρακτικές ρυθμίσεις της παράμετρος 7-06 Speed
PID Lowpass Filter Time που λήφθηκαν από τον
αριθμό παλμών ανά περιστροφή της παλμογεννήτριας:
Παλμογεννήτρια PPR Παράμετρος 7-06 Χρόνο
ς κατωδ. φίλτρου PID
44
512 10 ms
1024 5 ms
2048 2 ms
4096 1 ms
για έλ. ταχ.
7-08 Speed PID Feed Forward Factor
Περιοχή: Λειτουργία:
0 %* [0 - 500 %] Το σήμα ανάδρασης παρακάμπτει τον
ελεγκτή ταχύτητας κατά την τιμή που
ορίζεται. Αυτή η λειτουργία αυξάνει τη
δυναμική απόδοση του βρόχου ελέγχου
ταχύτητας.
7-12 Torque PID Proportional Gain
Περιοχή: Λειτουργία:
100 %* [0 -
500 %]
Εισάγετε την τιμή αναλογικής απολαβής για
τον ελεγκτή ροπής. Επιλογή υψηλότερης
τιμής κάνει τον ελεγκτή να αντιδρά
γρηγορότερα. Υπερβολικά υψηλή ρύθμιση
έχει σαν αποτέλεσμα αστάθεια του ελεγκτή.
7-13 Torque PID Integration Time
Περιοχή: Λειτουργία:
0.020 s* [0.002 - 2 s] Εισαγάγετε τον χρόνο ολοκλήρωσης του
ελεγκτή ροπής. Όσο χαμηλότερος ο
χρόνος ολοκλήρωσης, τόσο ταχύτερα
αντιδρά ο ελεγκτής. Ωστόσο, μια
υπερβολικά χαμηλή ρύθμιση έχει σαν
αποτέλεσμα αστάθεια του ελεγκτή.
Εικόνα 4.15 Σήμα ανάδρασης
7-07 Speed PID Feedback Gear Ratio
Περιοχή: Λειτουργία:
1* [0.0001 -
32 ]
Εικόνα 4.16 Σχέση μετάδοσης ανάδρασης
ταχύτητας PID
Ο μετατροπέας συχνότητας πολλαπλασιάζει την
ανάδραση ταχύτητας με αυτό το λόγο.
7-20 Process CL Feedback 1 Resource
Επιλογή: Λειτουργία:
Το ενεργό σήμα ανάδρασης αποτελείται
από το άθροισμα μέχρι 2 διαφορετικών
σημάτων εισόδου. Επιλέγει ποια είσοδος
θα χρησιμοποιηθεί ως πηγή του πρώτου
από αυτά τα σήματα. Το 2ο σήμα
εισόδου ορίζεται στην
παράμετρος 7-22 Process CL Feedback 2
Resource.
[0] * No function
[1] Analog Input 53
[2] Analog Input 54
[3] Frequency input
29
[4] Frequency input
33
7-22 Process CL Feedback 2 Resource
Επιλογή: Λειτουργία:
Το ενεργό σήμα ανάδρασης αποτελείται
από το άθροισμα μέχρι 2 διαφορετικών
σημάτων εισόδου. Επιλέγει ποια είσοδος
θα χρησιμοποιηθεί ως πηγή του 2ου από
αυτά τα σήματα. Το 1ο σήμα εισόδου
ορίζεται στην παράμετρος 7-20 Process CL
Feedback 1 Resource.
[0] * No function
[1] Analog Input 53
76 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. MG07C327
Page 79

Περιγραφές παραμέτρων Οδηγός Προγραμματισμού
7-22 Process CL Feedback 2 Resource
Επιλογή: Λειτουργία:
[2] Analog Input 54
[3] Frequency input
29
[4] Frequency input
33
7-30 Καν./ανάστρ. έλεγχος PID διεργ.
Επιλογή: Λειτουργία:
Ο κανονικός και αντίστροφος έλεγχος εφαρμόζονται με την εισαγωγή μιας διαφοράς μεταξύ
του σήματος αναφοράς και του σήματος
ανάδρασης.
[0] * Κανονικό Ρυθμίζει τον έλεγχο διεργασίας να αυξήσει τη
συχνότητα εξόδου.
[1] Ανάστροφο Ρυθμίζει τον έλεγχο διεργασίας να μειώσει τη
συχνότητα εξόδου.
7-31 Διεργασία PID Σύστημα επαναφοράς
Επιλογή: Λειτουργία:
[0] Ανενεργό Συνεχίζει τη ρύθμιση ενός σφάλματος ακόμη και
όταν η συχνότητα εξόδου δεν μπορεί να αυξηθεί
ή μειωθεί.
[1] * Ενεργό Σταματά τη ρύθμιση ενός σφάλματος όταν η
συχνότητα εξόδου δεν μπορεί πλέον να
ρυθμιστεί.
7-32 Ταχύτητας έναρξης PID διεργασίας
Περιοχή: Λειτουργία:
0 RPM* [0 -
6000
RPM]
Εισάγετε την ταχύτητα του κινητήρα να
λαμβάνεται σαν σήμα εκκίνησης για την
έναρξη του ελέγχου PID. Κατά την ενεργοποίηση, ο μετατροπέας συχνότητας ξεκινά τη
γραμμική μεταβολή και στη συνέχει
λειτουργεί σε έλεγχο ταχύτητας ανοικτού
βρόχου. Όταν επιτευχθεί η ταχύτητας
εκκίνησης PID, ο μετατροπέας συχνότητας
αλλάζει σε έλεγχο διεργασίας PID.
7-34 Process PID Integral Time
Περιοχή: Λειτουργία:
χρόνος που απαιτείται από τον ολοκληρωτή
για να επιτύχει την ίδια απολαβή με την
αναλογική απολαβή.
7-35 Process PID Dierentiation Time
Περιοχή: Λειτουργία:
0 s* [0 - 20 s] Εισαγάγετε το χρόνο διαφόρισης PID. Ο
διαφοριστής δεν αντιδρά σε σταθερό σφάλμα,
αλλά παρέχει απολαβή μόνο όταν το σφάλμα
μεταβάλλεται. Όσο συντομότερος ο χρόνος
διαφόρισης PID, τόσο ισχυρότερη η απολαβή
από το διαφοριστή.
7-36 Όριο απολ. παραγ. PID διεργ.
Περιοχή: Λειτουργία:
5* [1 - 50 ] Ορίστε ένα όριο για το κέρδος διαφοριστή. Εάν
δεν υπάρχει όριο, το κέρδος διαφοριστή
αυξάνεται όταν συμβαίνουν γρήγορες αλλαγές.
Για να πετύχετε καθαρό κέρδος διαφοριστή σε
αργές αλλαγές και ένα σταθερό κέρδος
διαφοριστή όταν συμβαίνουν γρήγορες αλλαγές.
7-38 Process PID Feed Forward Factor
Περιοχή: Λειτουργία:
0 %* [0 -
200 %]
Εισαγάγετε το συντελεστή προώθησης
τροφοδοσίας PID. Ο συντελεστής FF στέλνει ένα
σταθερό κλάσμα του σήματος αναφοράς για την
παράκαμψη του ελέγχου PID, ώστε ο έλεγχος
PID να επηρεάζει μόνο το υπολειπόμενο κλάσμα
του σήματος ελέγχου. Κάθε μεταβολή σε αυτή
την παράμετρο επηρεάζει την ταχύτητα του
κινητήρα. Όταν ο συντελεστής FF ενεργοποιείται, παρέχει μικρότερη υπερύψωση και
υψηλή δυναμική κατά την αλλαγή του σημείου
ρύθμισης. Η Παράμετρος 7-38 Process PID Feed
Forward Factor είναι ενεργή όταν η
παράμετρος 1-00 Conguration Mode έχει
ρυθμιστεί σε [3] Διεργασία.
4 4
7-33 Process PID Proportional Gain
Περιοχή: Λειτουργία:
0.01* [0 - 10 ] Εισαγάγετε την αναλογική απολαβή PID Η
αναλογική απολαβή πολλαπλασιάζει το σφάλμα
ανάμεσα στο σημείο ρύθμισης και το σήμα
ανάδρασης.
7-34 Process PID Integral Time
7-39 Εύρος ζώνης στην επιθ. τιμή
Περιοχή: Λειτουργία:
5 %* [0 - 200 %] Εισαγάγετε το εύρος ζώνης αναφοράς
ενεργοποίησης. Όταν το σφάλμα ελέγχου PID
(η διαφορά μεταξύ της αναφοράς και της
ανάδρασης) είναι μικρότερη από την τιμή
αυτής της παραμέτρου, το bit κατάστασης
αναφοράς ενεργοποίησης είναι 1.
Περιοχή: Λειτουργία:
9999 s* [0.10 -
9999 s]
MG07C327 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. 77
Καταχωρίστε τον ολοκληρωτικό χρόνο PID.
Ο ολοκληρωτής παρέχει αυξανόμενη
απολαβή σε σταθερό σφάλμα μεταξύ του
σημείου ρύθμισης και του σήματος
ανάδρασης. Ο ολοκληρωτικός χρόνος είναι ο
7-40 Διεργασία PID I-μέρος Επαναφορά
Επιλογή: Λειτουργία:
[0] * Όχι
[1] Ναι Επιλέξτε [1] Ναι για να επαναφέρετε το μέρος I του
ελεγκτή διεργασίας PID. Η επιλογή επιστρέφει
Page 80

Περιγραφές παραμέτρων
Ρυθμιστής στροφών VLT® Midi FC 280
7-40 Διεργασία PID I-μέρος Επαναφορά
Επιλογή: Λειτουργία:
αυτόματα στο [0] Όχι. Η επαναφορά του μέρους I
επιτρέπει την έναρξη από ένα σαφώς καθορισμένο
σημείο μετά την αλλαγή ενός στοιχείου στη
διεργασία, για παράδειγμα την αλλαγή ενός ρολού
υφάσματος.
7-45 Process PID Feed Fwd Resource
Επιλογή: Λειτουργία:
[8] Frequency input 33
[11] Local bus reference
[32] Bus PCD
7-46 Διερ.PID πρ.τροφ.Καν./ αναστ. Λέξη
Επιλογή: Λειτουργία:
44
7-41 Process PID Output Neg. Clamp
Περιοχή: Λειτουργία:
-100 %* [ -100 - 100 %] Εισαγάγετε ένα αρνητικό όριο για την
έξοδο του ελεγκτή PID διεργασίας.
7-42 Process PID Output Pos. Clamp
[0] * Κανονικό Επιλέξτε [0] Κανονικό για να ορίσετε το
συντελεστή προώθησης τροφοδοσίας ώστε να
αντιμετωπίζει τον πόρο FF ως θετική τιμή.
[1] Ανάστροφο Επιλέξτε [1] Αντίστροφο για να αντιμετωπίσετε
το συντελεστή προώθησης τροφοδοσίας ως
αρνητική τιμή.
Περιοχή: Λειτουργία:
100 %* [ -100 - 100 %] Εισαγάγετε ένα θετικό όριο για την
έξοδο του ελεγκτή PID διεργασίας.
7-43 Διερ.PID Κλίμ.απ. στο ελ.Αν. Αναφ.
Περιοχή: Λειτουργία:
100 %* [0 -
100 %]
Εισαγάγεε ένα ποσοστό κλιμάκωσης προς
εφαρμογή στην έξοδο PID διεργασίας κατά τη
λειτουργία στην ελάχιστη τιμή αναφοράς. Το
ποσοστό κλιμάκωσης ρυθμίζεται γραμμικά
μεταξύ της κλίμακας στην ελάχιστη τιμή
αναφοράς (παράμετρος 7-43 Διερ.PID Κλίμ.απ.
στο ελ.Αν. Αναφ.) και την κλίμακα στη μέγιστη
τιμή αναφοράς (παράμετρος 7-44 Διερ.PID
Κλίμ.απ.στο μέγ. Αν. Αναφ.).
7-44 Διερ.PID Κλίμ.απ.στο μέγ. Αν. Αναφ.
Περιοχή: Λειτουργία:
100 %* [0 -
100 %]
Εισαγάγετε ένα ποσοστό κλιμάκωσης προς
εφαρμογή στην έξοδο PID διεργασίας κατά τη
λειτουργία στη μέγιστη τιμή αναφοράς. Το
ποσοστό κλιμάκωσης ρυθμίζεται γραμμικά
μεταξύ της κλίμακας στην ελάχιστη τιμή
αναφοράς (παράμετρος 7-43 Διερ.PID Κλίμ.απ.
στο ελ.Αν. Αναφ.) και την κλίμακα στη μέγιστη
τιμή αναφοράς (παράμετρος 7-44 Διερ.PID
Κλίμ.απ.στο μέγ. Αν. Αναφ.).
7-48 PCD Feed Forward
Περιοχή: Λειτουργία:
0* [0 - 65535 ] Ένδειξη παραμέτρου όπου είναι δυνατή η
ανάγνωση του διαύλου παράμετρος 7-45 Process
PID Feed Fwd Resource [32].
7-49 Διερ.PID Έξοδος καν./ αν Λέξη
Επιλογή: Λειτουργία:
[0] * Κανονικό Επιλέξτε [0] Κανονικό για να χρησιμοποιήσετε
την έξοδο που προκύπτει από τον ελεγκτή PID
διεργασίας ως έχει.
[1] Ανάστροφο Επιλέξτε [1] Αντίστροφο για να αντιστρέψετε
την έξοδο που προκύπτει από τον ελεγκτή PID
διεργασίας. Αυτή η ενέργεια εκτελείται μετά
την εφαρμογή του συντελεστή προώθησης
τροφοδοσίας.
7-50 Προηγμένη διεργασία PID
Επιλογή: Λειτουργία:
[0] Απενεργοποιημένο Απενεργοποιεί τα εκτεταμένα μέρη του
ελεγκτή διεργασίας PID.
[1] * Ενεργοποιημένο Ενεργοποιεί τα εκτεταμένα μέρη του
ελεγκτή διεργασίας PID.
7-51 Process PID Feed Fwd Gain
Περιοχή: Λειτουργία:
7-45 Process PID Feed Fwd Resource
Επιλογή: Λειτουργία:
Επιλέξτε ποια είσοδος μετατροπέα
συχνότητας θα χρησιμοποιηθεί ως
συντελεστής προώθησης τροφοδοσίας.
Ο συντελεστής FF προστίθεται
απευθείας στην έξοδο του ελεγκτή PID.
Αυτή η παράμετρος μπορεί να αυξήσει
τη δυναμική απόδοση.
[0] * No function
[1] Analog Input 53
[2] Analog Input 54
[7] Frequency input 29
1* [0 -
100 ]
Η προώθηση τροφοδοσίας χρησιμοποιείται για την
επίτευξη της απολαβής βάσει ενός γνωστού
διαθέσιμου σήματος. Ο ελεγκτής PID αναλαμβάνει
μόνο το μικρότερο μέρος του ελέγχου, που είναι
απαραίτητο λόγω άγνωστων χαρακτήρων. Ο
τυπικός συντελεστής προώθησης τροφοδοσίας
στην παράμετρος 7-38 Process PID Feed Forward
Factor σχετίζεται πάντα με την τιμη αναφοράς ενώ
η παράμετρος 7-51 Process PID Feed Fwd Gain έχει
περισσότερες επιλογές. Στις εφαρμογές περιέλιξης,
ο συντελεστής προώθησης τροφοδοσίας είναι
συνήθως η ταχύτητα γραμμής του συστήματος.
78 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. MG07C327
Page 81

Περιγραφές παραμέτρων Οδηγός Προγραμματισμού
7-52 Process PID Feed Fwd Ramp up
Περιοχή: Λειτουργία:
0.01 s* [0.01 - 100 s] Ελέγχει τη δυναμική του σήματος
προώθησης τροφοδοσίας κατά τη
γραμμική μεταβολή αύξησης.
7-53 Process PID Feed Fwd Ramp down
Περιοχή: Λειτουργία:
0.01 s* [0.01 - 100 s] Ελέγχει τη δυναμική του σήματος
προώθησης τροφοδοσίας κατά τη
γραμμική μεταβολή μείωσης.
7-56 Διεργασία PID Αναφ. Χρόνος φίλτρου
Περιοχή: Λειτουργία:
0.001 s* [0.001 - 1s]Ρυθμίζει μια σταθερά χρόνου για το
χαμηλοδιαβατό φίλτρο πρώτης σειράς
αναφοράς. Το χαμηλοδιαβατό φίλτρο
βελτιώνει την απόδοση σταθερής
κατάστασης και αμβλύνει τις ταλαντώσεις
των σημάτων αναφοράς/ανάδρασης.
Ωστόσο, το έντονο φιλτράρισμα μπορεί να
είναι επιζήμιο για τη δυναμική απόδοση.
4 4
7-57 Ανάδραση διεργασίας PID Χρόνος φίλτρου
Περιοχή: Λειτουργία:
0.001 s* [0.001 - 1s]Ρυθμίζει μια σταθερά χρόνου για το
χαμηλοδιαβατό φίλτρο πρώτης σειράς
ανάδρασης. Το χαμηλοδιαβατό φίλτρο
βελτιώνει την απόδοση σταθερής
κατάστασης και αμβλύνει τις ταλαντώσεις
των σημάτων αναφοράς/ανάδρασης.
Ωστόσο, το έντονο φιλτράρισμα μπορεί να
είναι επιζήμιο για τη δυναμική απόδοση.
7-60 Feedback 1 Conversion
Επιλέξτε μια μετατροπή για το σήμα ανάδρασης 1. Επιλέξτε [0]
Γραμμικό για να αφήσετε το σήμα ανάδρασης αμετάβλητο.
Επιλογή: Λειτουργία:
[0] * Linear
[1] Square root
7-62 Feedback 2 Conversion
Επιλέξτε μια μετατροπή για το σήμα ανάδρασης 2. Επιλέξτε [0]
Γραμμικό για να αφήσετε το σήμα ανάδρασης αμετάβλητο.
Επιλογή: Λειτουργία:
[0] * Linear
[1] Square root
MG07C327 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. 79
Page 82

Περιγραφές παραμέτρων
Ρυθμιστής στροφών VLT® Midi FC 280
4.9 Παράμετροι: 8-** Επικοινωνίες και Προαιρετικός εξοπλισμός
8-01 Control Site
Επιλογή: Λειτουργία:
Η ρύθμιση σε αυτή την παράμετρο
υπερισχύει των ρυθμίσεων στις
παράμετρος 8-50 Επιλογή ελεύθερης κίνησης
έως παράμετρος 8-58 Prodrive OFF3 Select.
44
[0] * Digital and
ctrl.word
[1] Digital only Έλεγχος με τη χρήση μόνο ψηφιακών
[2] Controlword
only
Έλεγχος με τη χρήση ψηφιακής εισόδου
και ψηφιακής λέξης.
εισόδων.
Έλεγχος με τη χρήση μόνο λέξης ελέγχου.
8-02 Control Source
Επιλογή: Λειτουργία:
Επιλέξτε την πηγή της λέξης ελέγχου.
8-07 Diagnosis Trigger
Επιλογή: Λειτουργία:
[0] * Disable Δεν μεταδίδονται δεδομένα εκτεταμένης
διάγνωσης (EDD).
[1] Trigger on
alarms
[2] Trigger
alarm/warn.
Αποστολή EDD με την ανάκυψη συναγερμών.
Αποστολή EDD με την ανάκυψη συναγερμών η
προειδοποιήσεων στην
παράμετρος 16-90 Alarm Word,
παράμετρος 9-53 Probus Warning Word ή την
παράμετρος 16-92 Warning Word.
8-10 Control Word Prole
Επιλέξτε την ερμηνεία της λέξης περιγραφής ελέγχου και
κατάστασης που αντιστοιχεί στον εγκατεστημένο τοπικό δίαυλο
επικοινωνίας.
Επιλογή: Λειτουργία:
ΕΙΔΟΠΟΙΗΣΗ
Η παράμετρος αυτή δεν μπορεί να
τροποποιηθεί ενώ λειτουργεί ο κινητήρας.
[0] None
[1] FC Port
[2] FC USB
[3] Option A
8-03 Control Timeout Time
Περιοχή: Λειτουργία:
1 s* [0.1 -
6000 s]
8-04 Control Timeout Function
Επιλογή: Λειτουργία:
[0] * O Επιλέξτε τη λειτουργία λήξης χρόνου. Η
[1] Freeze output
[2] Stop
[3] Jogging
[4] Max. speed
[5] Stop and trip
Εισάγετε το μέγιστο χρόνο που αναμένεται να
περάσει ανάμεσα στη λήψη 2 συνεχόμενων
μηνυμάτων. Αν αυτός ο χρόνος ξεπεραστεί, αυτό
δείχνει ότι έχει σταματήσει η σειριακή
επικοινωνία. Στη συνέχεια εκτελείται η λειτουργία
που επιλέχθηκε στην παράμετρος 8-04 Control
Timeout Function.
λειτουργία λήξης χρόνου ενεργοποιείται
όταν μία λέξη ελέγχου δεν πετυχαίνει να
ενημερωθεί μέσα στη χρονική περίοδο που
ορίζεται στην παράμετρος 8-03 Control
Timeout Time.
[0] * FC prole
[1] PROFIdrive prole
[5] ODVA
[7] CANopen DSP 402
8-14 Congurable Control Word CTW
Η λέξη περιγραφής ελέγχου έχει 16 bit (0–15). Τα Bit 10 και 12–
15 είναι ρυθμίσιμα.
Επιλογή: Λειτουργία:
[0] None
[1] * Prole default
[2] CTW Valid, active low
[4] PID error inverse
[5] PID reset I part
[6] PID enable
8-19 Product Code
Περιοχή: Λειτουργία:
Size
related*
[0 2147483647 ]
Επιλέξτε 0 για να διαβάσετε τον
ακριβή κωδικό προϊόντος τοπικού
διαύλου επικοινωνίας ανάλογα με
την τοποθετημένη επιλογή τοπικού
διαύλου επικοινωνίας. Επιλέξτε 1
για να δείτε το πραγματικό ID του
προμηθευτή.
8-30 Protocol
Επιλογή: Λειτουργία:
Επιλέξτε το πρωτόκολλο για την ενσωματωμένη θύρα RS485.
[0] * FC Επικοινωνία σύμφωνα με το πρωτόκολλο FC.
[2] Modbus RTU Επικοινωνία σύμφωνα με το πρωτόκολλο
Modbus RTU.
80 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. MG07C327
Page 83

Περιγραφές παραμέτρων Οδηγός Προγραμματισμού
8-31 Διεύθυνση
Περιοχή: Λειτουργία:
1* [ 0 - 247 ] Εισάγετε τη διεύθυνση για τη θύρα RS485.
Έγκυρη περιοχή: 1–126 για το δίαυλο FC ή 1–
247 για Modbus.
8-32 Ρυθμός Baud
Επιλογή: Λειτουργία:
Επιλέξτε το ρυθμό baud για τη θύρα RS485.
[0] 2400 Baud
[1] 4800 Baud
[2] * 9600 Baud
[3] 19200 Baud
[4] 38400 Baud
[5] 57600 Baud
[6] 76800 Baud
[7] 115200 Baud
8-33 Parity / Stop Bits
Ισοτιμία και bit διακοπής για το πρωτόκολλο που χρησιμοποιεί τη
θύρα του FC. Για κάποια από τα πρωτόκολλα, δεν είναι
διαθέσιμες όλες οι επιλογές.
Επιλογή: Λειτουργία:
[0] Even Parity, 1 Stop Bit
[1] Odd Parity, 1 Stop Bit
[2] No Parity, 1 Stop Bit
[3] No Parity, 2 Stop Bits
8-35 Minimum Response Delay
Περιοχή: Λειτουργία:
0.01 s* [ 0.0010 - 0.5s]Ορίστε την ελάχιστη καθυστέρηση
μεταξύ της παραλαβής μίας ζήτησης και
της μετάδοσης μίας απάντησης. Αυτό
χρησιμοποιείται για την υπέρβαση των
καθυστερήσεων μεταστροφής μόντεμ.
8-36 Maximum Response Delay
Περιοχή: Λειτουργία:
Size
related*
[ 0.1 -
10.0 s]
Ορίστε τη μέγιστη επιτρεπόμενη
καθυστέρηση μεταξύ της παραλαβής
μίας ζήτησης και της μετάδοσης μίας
απάντησης. Σε περίπτωση υπέρβασης
αυτού του χρόνου, δεν επιστρέφεται
απόκριση.
8-37 Maximum Inter-char delay
Περιοχή: Λειτουργία:
0.025 s* [0.025 -
0.025 s]
Ορίστε τη μέγιστη καθυστέρηση μεταξύ
2 χαρακτήρων σε ένα μήνυμα. Η
υπέρβαση αυτού του χρόνου
καθυστέρησης θα έχει σαν αποτέλεσμα
την απόρριψη του μηνύματος.
8-42 PCD Write Conguration
Επιλέξτε τις παραμέτρους που θα διατεθούν στα μηνύματα του
PCD. Ο αριθμός των διαθέσιμων PCD εξαρτάται από τον τύπο του
μηνύματος. Οι τιμές στα PCD θα καταγραφούν έπειτα στις
επιλεγμένες παραμέτρους ως τιμές δεδομένων.
Επιλογή: Λειτουργία:
[0] None
[1] [302] Minimum Reference
[2] [303] Maximum Reference
[3] [341] Ramp 1 Ramp up time
[4] [342] Ramp 1 Ramp down
time
[5] [351] Ramp 2 Ramp up time
[6] [352] Ramp 2 Ramp down
time
[7] [380] Jog Ramp Time
[8] [381] Quick Stop Time
[9] [412] Motor Speed Low Limit
[Hz]
[10] [414] Motor Speed High Limit
[Hz]
[11] [590] Digital & Relay Bus
Control
[12] [676] Terminal45 Output Bus
Control
[13] [696] Terminal 42 Output Bus
Control
[14] [894] Bus Feedback 1
[15] FC Port CTW
[16] FC Port REF
8-43 Διαμόρφωση ανάγνωσης PCD
Επιλέξτε τις παραμέτρους που θα διατεθούν στα PCD των
μηνυμάτων. Ο αριθμός των διαθέσιμων PCD εξαρτάται από τον
τύπο του μηνύματος. Τα PCD περιλαμβάνουν τις πραγματικές
τιμές δεδομένων των επιλεγμένων παραμέτρων.
Επιλογή: Λειτουργία:
[0] * Κανένα
[1] [1500] Ώρες λειτουργίας
[2] [1501] Ώρες λειτουργίας
[3] [1502] Μετρητής kWh
[4] [1600] Λέξη ελέγχου
[5] [1601] Τιμή αναφοράς [Μονάδα]
[6] [1602] Τιμή αναφοράς %
[7] [1603] Λέξη περιγραφής
κατάστασης
[8] [1605] Πραγματική τιμή δικτύου
[%]
[9] [1609] Κοινή ένδειξη
[10] [1610] Ισχύς [kW]
[11] [1611] Ισχύς [hp]
[12] [1612] Τάση κινητήρα
[13] [1613] Συχνότητα
[14] [1614] Ρεύμα κινητήρα
[15] [1615] Συχνότητα [%]
4 4
MG07C327 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. 81
Page 84

Περιγραφές παραμέτρων
Ρυθμιστής στροφών VLT® Midi FC 280
8-43 Διαμόρφωση ανάγνωσης PCD
Επιλέξτε τις παραμέτρους που θα διατεθούν στα PCD των
μηνυμάτων. Ο αριθμός των διαθέσιμων PCD εξαρτάται από τον
τύπο του μηνύματος. Τα PCD περιλαμβάνουν τις πραγματικές
τιμές δεδομένων των επιλεγμένων παραμέτρων.
Επιλογή: Λειτουργία:
[16] [1616] Ροπή [Nm]
[17] [1618] Θερμική προστασία
44
[18] [1630] Τάση ζεύξης συνεχούς
[19] [1634] Θερμοκρασία ψύκτρας
[20] [1635] Θερμική προστασία
[21] [1638] Κατάσταση ελεγκτή SL
[22] [1650] Εξωτερική τιμή αναφοράς
[23] [1652] Ανάδραση [Μονάδα]
[24] [1660] Ψηφιακή είσοδος 18, 19,
[25] [1661] Ρύθμιση διακόπτη
[26] [1662] Αναλογική είσοδος 53(V)
[27] [1663] Ρύθμιση διακόπτη
[28] [1664] Αναλογική είσοδος 54
[29] [1665] Αναλογική έξοδος 42 [mA]
[30] [1671] Έξοδος ρελέ [bin]
[31] [1672] Μετρητής A
[32] [1673] Μετρητής B
[33] [1690] Λέξη περιγραφής
[34] [1692] Λέξη περιγραφής προειδο-
[35] [1694] Εξωτ. λέξη περιγραφής
κινητήρα
ρεύματος
αντιστροφέα
27, 29, 32, 33
ακροδέκτη 53
ακροδέκτη 54
συναγερμού
ποίησης
κατάστασης
8-50 Επιλογή ελεύθερης κίνησης
Επιλογή: Λειτουργία:
Επιλέξτε έλεγχο της λειτουργίας ελεύθερης
κίνηση μέσω των ακροδεκτών (Ψηφιακή
είσοδος) και/ή μέσω του διαύλου.
[0] Ψηφιακή
είσοδος
[1] Δίαυλος Ενεργοποιεί την εντολή ελεύθερης κίνησης
[2] Λογική
διάταξη AND
[3] * Λογική
διάταξη OR
Ενεργοποιεί την εντολή ελεύθερης κίνησης
μέσω μίας ψηφιακής εισόδου.
μέσω της θύρας σειριακής επικοινωνίας ή της
επιλογής τοπικού διαύλου επικοινωνίας.
Ενεργοποιεί την εντολή ελεύθερης κίνησης
μέσω της θύρας τοπικού διαύλου/σειριακής
επικοινωνίας και 1 επιπλέον ψηφιακής
εισόδου.
Ενεργοποιεί την εντολή ελεύθερης κίνησης
μέσω της θύρας τοπικού διαύλου/σειριακής
επικοινωνίας ή 1 από τις ψηφιακές εισόδους.
8-51 Επιλογή γρήγορης διακοπής
Επιλέγει την ενεργοποίηση για τη λειτουργία γρήγορης διακοπής.
Επιλογή: Λειτουργία:
[0] Ψηφιακή είσοδος
[1] Δίαυλος
[2] Λογική διάταξη AND
[3] * Λογική διάταξη OR
8-52 DC Brake Select
Επιλογή: Λειτουργία:
Επιλέξτε έλεγχο της πέδησης DC μέσω των
ακροδεκτών (ψηφιακή είσοδος) και/ή μέσω του
τοπικού διαύλου επικοινωνίας.
ΕΙΔΟΠΟΙΗΣΗ
Όταν η παράμετρος 1-10 Κατασκευή
κινητήρα ρυθμιστεί σε [1] PM μη εξέχον
SPM, μόνο η επιλογή [0] Ψηφιακή είσοδος
είναι διαθέσιμη.
[0] Digital
input
[1] Bus Ενεργοποιεί την εντολή Πέδηση ΣΡ μέσω της
[2] Logic
AND
[3]*LogicORΕνεργοποιεί την εντολή Πέδηση ΣΡ μέσω της
8-53 Επιλογή εκκίνησης
Επιλογή: Λειτουργία:
[0] Ψηφιακή
είσοδος
[1] Δίαυλος Μια θύρα σειριακής επικοινωνίας ή ο
[2] Λογική
διάταξη AND
[3] * Λογική
διάταξη OR
8-54 Reversing Select
Επιλογή: Λειτουργία:
Ενεργοποιεί την εντολή Πέδηση ΣΡ μέσω μιας
ψηφιακής εισόδου.
θύρας σειριακής επικοινωνίας ή της επιλογής
τοπικού διαύλου.
Ενεργοποιεί την εντολή Πέδηση ΣΡ μέσω της
θύρας τοπικού διαύλου/σειριακής επικοινωνίας και
επιπλέον μέσω 1 από τις ψηφιακές εισόδους.
θύρας τοπικού διαύλου/σειριακής επικοινωνίας ή
μέσω 1 από τις ψηφιακές εισόδους.
Επιλέγει την ενεργοποίηση για τη λειτουργία
εκκίνησης.
Μια ψηφιακή είσοδος ενεργοποιεί τη
λειτουργία εκκίνησης.
τοπικός δίαυλος επικοινωνίας ενεργοποιεί τη
λειτουργία εκκίνησης.
Η θύρα του τοπικού διαύλου/σειριακής
επικοινωνίας και μια ψηφιακή είσοδος
ενεργοποιούν τη λειτουργία εκκίνησης.
Η θύρα του τοπικού διαύλου/σειριακής
επικοινωνίας και μια ψηφιακή είσοδος
ενεργοποιούν τη λειτουργία εκκίνησης.
Επιλέγει την ενεργοποίηση για τη λειτουργία
αναστροφής.
82 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. MG07C327
Page 85

Περιγραφές παραμέτρων Οδηγός Προγραμματισμού
8-54 Reversing Select
Επιλογή: Λειτουργία:
[0] Digital
input
[1] Bus Μια θύρα σειριακής επικοινωνίας ή ο τοπικός
[2] Logic AND Η θύρα του τοπικού διαύλου/σειριακής επικοι-
[3] * Logic OR Η θύρα του τοπικού διαύλου/σειριακής επικοι-
Μια ψηφιακή είσοδος ενεργοποιεί τη λειτουργία
αναστροφής.
δίαυλος επικοινωνίας ενεργοποιεί τη λειτουργία
αναστροφής.
νωνίας και μια ψηφιακή είσοδος ενεργοποιούν
τη λειτουργία αναστροφής.
νωνίας ή μια ψηφιακή είσοδος ενεργοποιούν τη
λειτουργία αναστροφής.
8-55 Επιλογή ρύθμισης
Επιλογή: Λειτουργία:
Επιλέγει την ενεργοποίηση για την επιλογή
ρύθμισης.
[0] Ψηφιακή
είσοδος
[1] Δίαυλος Μια θύρα σειριακής επικοινωνίας ή ο
[2] Λογική
διάταξη AND
[3] * Λογική
διάταξη OR
Μια ψηφιακή είσοδος ενεργοποιεί τη
λειτουργία ρύθμισης.
τοπικός δίαυλος επικοινωνίας ενεργοποιεί
την επιλογή ρύθμισης.
Η θύρα του τοπικού διαύλου/σειριακής
επικοινωνίας και μια ψηφιακή είσοδος
ενεργοποιούν την επιλογή ρύθμισης.
Η θύρα του τοπικού διαύλου/σειριακής
επικοινωνίας ή μια ψηφιακή είσοδος ενεργοποιούν την επιλογή ρύθμισης.
8-56 Επιλογή προεπιλ. επιθυμητής τιμής
Επιλογή: Λειτουργία:
Επιλέγει την ενεργοποίηση για την επιλογή
προκαθορισμένης τιμής αναφοράς.
[0] Ψηφιακή
είσοδος
[1] Δίαυλος Μια θύρα σειριακής επικοινωνίας ή ο
[2] Λογική
διάταξη AND
[3] * Λογική
διάταξη OR
Μια ψηφιακή είσοδος ενεργοποιεί τη
λειτουργία επιλογής προκαθορισμένης τιμής
αναφοράς.
τοπικός δίαυλος επικοινωνίας ενεργοποιεί
την επιλογή προκαθορισμένης τιμής
αναφοράς.
Η θύρα του τοπικού διαύλου/σειριακής
επικοινωνίας και μια ψηφιακή είσοδος
ενεργοποιούν την επιλογή προκαθορισμένης
τιμής αναφοράς.
Η θύρα του τοπικού διαύλου/σειριακής
επικοινωνίας ή μια ψηφιακή είσοδος ενεργοποιούν την επιλογή προκαθορισμένης τιμής
αναφοράς.
8-57 Prodrive OFF2 Select
Επιλέξτε τον έλεγχο της λειτουργίας OFF2 του μετατροπέα
συχνότητας μέσω των ακροδεκτών (ψηφιακή είσοδος) και/ή μέσω
του τοπικού διαύλου επικοινωνίας. Αυτή η παράμετρος ενεργοποιείται μόνο όταν η παράμετρος 8-01 Τοποθεσία ελέγχου
ρυθμιστεί σε [0] Ψηφιακή λέξη και λέξη ελέγχου και η
παράμετρος 8-10 Προφίλ λέξης ελέγχου ρυθμιστεί σε [1] Προφίλ
Prodrive.
Επιλογή: Λειτουργία:
[0] Ψηφιακή είσοδος
[1] Δίαυλος
[2] Λογική διάταξη AND
[3] * Λογική διάταξη OR
8-58 Prodrive OFF3 Select
Επιλέξτε τον έλεγχο της λειτουργίας OFF3 του μετατροπέα
συχνότητας μέσω των ακροδεκτών (ψηφιακή είσοδος) και/ή μέσω
του τοπικού διαύλου επικοινωνίας. Αυτή η παράμετρος ενεργοποιείται μόνο όταν η παράμετρος 8-01 Τοποθεσία ελέγχου
ρυθμιστεί σε [0] Ψηφιακή λέξη και λέξη ελέγχου και η
παράμετρος 8-10 Προφίλ λέξης ελέγχου ρυθμιστεί σε [1] Προφίλ
Prodrive.
Επιλογή: Λειτουργία:
[0] Ψηφιακή είσοδος
[1] Δίαυλος
[2] Λογική διάταξη AND
[3] * Λογική διάταξη OR
8-79 Protocol Firmware version
Περιοχή: Λειτουργία:
Size related* [0 - 65535 ] Αναθεώρηση λογισμικού συσκευής:
Το FC είναι στο δείκτη 0, Το Modbus
είναι στο δείκτη 1, οι δείκτες 2–4
είναι δεσμευμένοι.
8-80 Bus Message Count
Περιοχή: Λειτουργία:
0* [0 - 4294967295 ] Αυτή η παράμετρος εμφανίζει τον αριθμό
των έγκυρων μηνυμάτων που
ανιχνεύονται στο δίαυλο.
8-81 Bus Error Count
Περιοχή: Λειτουργία:
0* [0 - 4294967295 ] Αυτή η παράμετρος εμφανίζει τον αριθμό
των έγκυρων μηνυμάτων με σφάλμα (για
παράδειγμα σφάλμα CRC), που
ανιχνεύονται στο δίαυλο.
8-82 Slave Messages Rcvd
Περιοχή: Λειτουργία:
0* [0 - 4294967295 ] Αυτή η παράμετρος εμφανίζει τον αριθμό
των έγκυρων μηνυμάτων που στέλνονται
από το μετατροπέα συχνότητας και
απευθύνονται στην εξαρτημένη μονάδα.
4 4
MG07C327 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. 83
Page 86

Περιγραφές παραμέτρων
Ρυθμιστής στροφών VLT® Midi FC 280
8-83 Slave Error Count
Περιοχή: Λειτουργία:
0* [0 - 4294967295 ] Αυτή η παράμετρος εμφανίζει τον αριθμό
μηνυμάτων σφάλματος, που δεν
μπόρεσαν να εκτελεστούν από το
μετατροπέα συχνότητας.
8-84 Slave Messages Sent
44
Περιοχή: Λειτουργία:
0* [0 - 4294967295 ] Αυτή η παράμετρος εμφανίζει τον αριθμό
των έγκυρων μηνυμάτων που στέλνονται
από την εξαρτημένη μονάδα.
8-85 Slave Timeout Errors
Περιοχή: Λειτουργία:
0* [0 - 4294967295 ] Αυτή η παράμετρος εμφανίζει τον αριθμό
των σφαλμάτων λήξης χρόνου της
εξαρτημένης μονάδας.
8-88 Reset FC port Diagnostics
Επαναφορά όλων των μετρητών διάγνωσης θύρας FC
Επιλογή: Λειτουργία:
[0] * Do not reset
[1] Reset counter
8-90 Bus Jog 1 Speed
Περιοχή: Λειτουργία:
100 RPM* [ 0 - 1500
RPM]
Εισάγετε την ταχύτητας ελαφράς
ώθησης. Αυτή είναι μία σταθερή
ταχύτητα ελαφράς ώθησης που ενεργοποιείται μέσω της σειριακής θύρας ή
της δυνατής επιλογή τοπικού διαύλου
επικοινωνίας.
8-91 Bus Jog 2 Speed
Περιοχή: Λειτουργία:
200 RPM* [ 0 - 1500
RPM]
Εισάγετε την ταχύτητας ελαφράς
ώθησης. Αυτή είναι μία σταθερή
ταχύτητα ελαφράς ώθησης που ενεργοποιείται μέσω της σειριακής θύρας ή
της δυνατής επιλογή τοπικού διαύλου
επικοινωνίας.
84 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. MG07C327
Page 87

Περιγραφές παραμέτρων Οδηγός Προγραμματισμού
4.10 Παράμετροι: 9-** PROFIdrive
Για την περιγραφή των παραμέτρων PROFIBUS δείτε τον
Οδηγό προγραμματισμού PROFIBUS DP Ρυθμιστής στροφών
VLT® Midi FC 280.
4.11 Παράμετροι: 10-** Τοπ. δίαυλος CAN
Για τις περιγραφές των παραμέτρων του τοπικού διαύλου
CAN, ανατρέξτε στον Οδηγό προγραμματισμού CANopen
Ρυθμιστής στροφών VLT® Midi FC 280.
4.12 Παράμετροι: 12-** Ethernet
Για τις περιγραφές των παραμέτρων Ethernet, δείτε τον
Οδηγό προγραμματισμού EtherNet/IP Ρυθμιστής στροφών
VLT® Midi FC 280 και τον Οδηγό προγραμματισμού PROFINET
Ρυθμιστής στροφών VLT® Midi FC 280.
4.13 Παράμετροι: 13-** Έξυπνος λογικός
έλεγχος
13-00 SL Controller Mode
Επιλογή: Λειτουργία:
[0] * O Απενεργοποιεί τον ελεγκτή Smart Logic.
[1] On Ενεργοποιεί τον ελεγκτή Smart Logic.
13-01 Start Event
Επιλέξτε τη συνθήκη (αληθές ή ψευδές) που ενεργοποιεί τον
ελεγκτή smart logic.
Επιλογή: Λειτουργία:
[0] False
[1] True
[2] Running
[3] In range
[4] On reference
[7] Out of current range
[8] Below I low
[9] Above I high
[16] Thermal warning
[17] Mains out of range
[18] Reversing
[19] Warning
[20] Alarm (trip)
[21] Alarm (trip lock)
[22] Comparator 0
[23] Comparator 1
[24] Comparator 2
[25] Comparator 3
[26] Logic rule 0
[27] Logic rule 1
[28] Logic rule 2
[29] Logic rule 3
[33] Digital input DI18
[34] Digital input DI19
[35] Digital input DI27
13-01 Start Event
Επιλέξτε τη συνθήκη (αληθές ή ψευδές) που ενεργοποιεί τον
ελεγκτή smart logic.
Επιλογή: Λειτουργία:
[36] Digital input DI29
[39] * Start command
[40] Drive stopped
[42] Auto Reset Trip
[50] Comparator 4
[51] Comparator 5
[60] Logic rule 4
[61] Logic rule 5
[83] Broken Belt
13-02 Stop Event
Επιλέξτε τη συνθήκη (αληθές ή ψευδές) που απενεργοποιεί τον
ελεγκτή smart logic.
Επιλογή: Λειτουργία:
[0] False
[1] True
[2] Running
[3] In range
[4] On reference
[7] Out of current range
[8] Below I low
[9] Above I high
[16] Thermal warning
[17] Mains out of range
[18] Reversing
[19] Warning
[20] Alarm (trip)
[21] Alarm (trip lock)
[22] Comparator 0
[23] Comparator 1
[24] Comparator 2
[25] Comparator 3
[26] Logic rule 0
[27] Logic rule 1
[28] Logic rule 2
[29] Logic rule 3
[30] SL Time-out 0
[31] SL Time-out 1
[32] SL Time-out 2
[33] Digital input DI18
[34] Digital input DI19
[35] Digital input DI27
[36] Digital input DI29
[39] Start command
[40] * Drive stopped
[42] Auto Reset Trip
[50] Comparator 4
[51] Comparator 5
[60] Logic rule 4
[61] Logic rule 5
4 4
MG07C327 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. 85
Page 88

Περιγραφές παραμέτρων
Ρυθμιστής στροφών VLT® Midi FC 280
13-02 Stop Event
Επιλέξτε τη συνθήκη (αληθές ή ψευδές) που απενεργοποιεί τον
ελεγκτή smart logic.
Επιλογή: Λειτουργία:
[70] SL Time-out 3
[71] SL Time-out 4
[72] SL Time-out 5
[73] SL Time-out 6
44
[74] SL Time-out 7
[83] Broken Belt
13-03 Επαναφορά του SLC
Επιλογή: Λειτουργία:
[0] * Όχι επαναφ.του
SLC
[1] Επαναφορά του
SLC
Διατηρεί τις προγραμματισμένες
ρυθμίσεις στην ομάδα παραμέτρων 13-
** Smart Logic.
Επαναφέρει όλες τις παραμέτρους της
ομάδας παραμέτρων 13-** Smart Logic
στις προεπιλεγμένες ρυθμίσεις.
13-10 Comparator Operand
Επιλέξετε τη μεταβλητή που θα παρακολουθείται από το
συγκριτή. Αυτή είναι μία παράμετρος συστοιχίας που περιέχει
τους συγκριτές από 0 έως 5.
Επιλογή: Λειτουργία:
[0] * Disabled
[1] Reference %
[2] Feedback %
[3] Motor speed
[4] Motor Current
[6] Motor power
[7] Motor voltage
[12] Analog input AI53
[13] Analog input AI54
[18] Pulse input FI29
[19] Pulse input FI33
[20] Alarm number
[30] Counter A
[31] Counter B
13-11 Comparator Operator
Επιλογή: Λειτουργία:
Επιλέξτε τον τελεστή που θα χρησιμοποιηθεί
στη σύγκριση. Αυτή είναι μία παράμετρος
συστοιχίας που περιέχει τους τελεστές
συγκριτή 0 έως 5.
[0] Less Than (<) Το αποτέλεσμα της αξιολόγησης είναι
αληθές, όταν η μεταβλητή που επιλέχθηκε
στην παράμετρος 13-10 Comparator Operand
είναι μικρότερη από τη σταθερή τιμή στο
παράμετρος 13-12 Comparator Value. Το
αποτέλεσμα είναι ψευδές, εάν η μεταβλητή
που επιλέχτηκε στην
παράμετρος 13-10 Comparator Operand είναι
13-11 Comparator Operator
Επιλογή: Λειτουργία:
μεγαλύτερη από τη σταθερή τιμή στην
παράμετρος 13-12 Comparator Value.
[1]*Approx.Equal
(~)
[2] Greater Than
(>)
Το αποτέλεσμα της αξιολόγησης είναι
αληθές, όταν η μεταβλητή ταχύτητα που
επιλέχθηκε στην
παράμετρος 13-10 Comparator Operand είναι
περίπου ίση με τη σταθερή τιμή στο
παράμετρος 13-12 Comparator Value.
Αντίστροφη λογική της [0] Λιγότερο από (<).
13-12 Comparator Value
Περιοχή: Λειτουργία:
0* [-9999 -
9999 ]
Εισάγετε το επίπεδο ενεργοποίησης για τη
μεταβλητή που παρακολουθείται από αυτόν
τον συγκριτή. Αυτή είναι μία παράμετρος
συστοιχίας που περιέχει τιμές συγκριτή 0-5.
13-20 SL Controller Timer
Περιοχή: Λειτουργία:
0 s* [0 - 3600s]Εισάγετε την τιμή που προσδιορίζει τη
διάρκεια της εξόδου ψευδές από το προγραμματισμένο χρονόμετρο. Ένα χρονόμετρο είναι
μόνο ψευδές αν έχει ενεργοποιηθεί από μία
ενέργεια (για παράδειγμα [29] Εκκίνηση
χρονομέτρου 1) και μέχρι η δεδομένη τιμή
χρονομέτρου να παρέλθει.
13-40 Logic Rule Boolean 1
Επιλογή: Λειτουργία:
Επιλέξτε την 1η δυαδική είσοδο
(αληθές ή ψευδές) για τον επιλεγμένο
λογικό κανόνα. Δείτε
παράμετρος 13-01 Start Event ([0]–[61])
και παράμετρος 13-02 Stop Event
([70]–[74]) για περαιτέρω περιγραφή.
[0] * False
[1] True
[2] Running
[3] In range
[4] On reference
[7] Out of current range
[8] Below I low
[9] Above I high
[16] Thermal warning
[17] Mains out of range
[18] Reversing
[19] Warning
[20] Alarm (trip)
[21] Alarm (trip lock)
[22] Comparator 0
[23] Comparator 1
86 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. MG07C327
Page 89

Περιγραφές παραμέτρων Οδηγός Προγραμματισμού
13-40 Logic Rule Boolean 1
Επιλογή: Λειτουργία:
[24] Comparator 2
[25] Comparator 3
[26] Logic rule 0
[27] Logic rule 1
[28] Logic rule 2
[29] Logic rule 3
[30] SL Time-out 0
[31] SL Time-out 1
[32] SL Time-out 2
[33] Digital input DI18
[34] Digital input DI19
[35] Digital input DI27
[36] Digital input DI29
[39] Start command
[40] Drive stopped
[42] Auto Reset Trip
[50] Comparator 4
[51] Comparator 5
[60] Logic rule 4
[61] Logic rule 5
[70] SL Time-out 3
[71] SL Time-out 4
[72] SL Time-out 5
[73] SL Time-out 6
[74] SL Time-out 7
[83] Broken Belt
13-41 Logic Rule Operator 1
Επιλογή: Λειτουργία:
Επιλέξτε τον 1ο λογικό τελεστή για χρήση στις
δυαδικές εισόδους από την
παράμετρος 13-40 Logic Rule Boolean 1 και την
παράμετρος 13-42 Logic Rule Boolean 2.
[0] * Disabled Παράλειψη της παράμετρος 13-42 Logic Rule
Boolean 2, παράμετρος 13-43 Logic Rule
Operator 2, και της παράμετρος 13-44 Logic
Rule Boolean 3.
[1] AND Αξιολόγηση του ορίσματος [13-40] AND
[13-42].
[2] OR Αξιολόγηση του ορίσματος [13-40] OR [13-42].
[3] AND NOT Αξιολόγηση του ορίσματος [13-40] AND NOT
[13-42].
[4] OR NOT Αξιολόγηση του ορίσματος [13-40] OR NOT
[13-42].
[5] NOT AND Αξιολόγηση του ορίσματος NOT [13-40] AND
[13-42].
[6] NOT OR Αξιολόγηση του ορίσματος NOT [13-40] OR
[13-42].
[7] NOT AND
NOT
Αξιολόγηση του ορίσματος NOT [13-40] AND
NOT [13-42].
13-41 Logic Rule Operator 1
Επιλογή: Λειτουργία:
[8] NOT OR
NOT
Αξιολόγηση του ορίσματος NOT [13-40] OR
NOT [13-42].
13-42 Logic Rule Boolean 2
Επιλογή: Λειτουργία:
Επιλέξτε την 2η δυαδική είσοδο
(αληθές ή ψευδές) για τον επιλεγμένο
λογικό κανόνα. Δείτε
παράμετρος 13-01 Start Event ([0]–
[61]), και παράμετρος 13-02 Stop Event
([70]–[74]) για περαιτέρω περιγραφή.
[0] * False
[1] True
[2] Running
[3] In range
[4] On reference
[7] Out of current range
[8] Below I low
[9] Above I high
[16] Thermal warning
[17] Mains out of range
[18] Reversing
[19] Warning
[20] Alarm (trip)
[21] Alarm (trip lock)
[22] Comparator 0
[23] Comparator 1
[24] Comparator 2
[25] Comparator 3
[26] Logic rule 0
[27] Logic rule 1
[28] Logic rule 2
[29] Logic rule 3
[30] SL Time-out 0
[31] SL Time-out 1
[32] SL Time-out 2
[33] Digital input DI18
[34] Digital input DI19
[35] Digital input DI27
[36] Digital input DI29
[39] Start command
[40] Drive stopped
[42] Auto Reset Trip
[50] Comparator 4
[51] Comparator 5
[60] Logic rule 4
[61] Logic rule 5
[70] SL Time-out 3
[71] SL Time-out 4
[72] SL Time-out 5
[73] SL Time-out 6
[74] SL Time-out 7
4 4
MG07C327 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. 87
Page 90

Περιγραφές παραμέτρων
Ρυθμιστής στροφών VLT® Midi FC 280
13-42 Logic Rule Boolean 2
Επιλογή: Λειτουργία:
[83] Broken Belt
13-43 Logic Rule Operator 2
Επιλογή: Λειτουργία:
Επιλέξτε το 2ο λογικό τελεστή να χρησιμοποιηθεί στη δυαδική είσοδο που
44
[0] * Disabled Παράλειψη της παράμετρος 13-44 Logic Rule
[1] AND
[2] OR
[3] AND NOT
[4] OR NOT
[5] NOT AND
[6] NOT OR
[7] NOT AND
NOT
[8] NOT OR NOT
υπολογίστηκε στην παράμετρος 13-40 Logic
Rule Boolean 1, παράμετρος 13-41 Logic Rule
Operator 1, και παράμετρος 13-42 Logic Rule
Boolean 2, και τη δυαδική είσοδο που
έρχεται από την παράμετρος 13-42 Logic Rule
Boolean 2. Η Παράμετρος 13-42 Logic Rule
Boolean 2 υποδεικνύει τη δυαδική είσοδο
της παράμετρος 13-44 Logic Rule Boolean 3.
Παράμετρος 13-40 Logic Rule Boolean 1, και η
παράμετρος 13-42 Logic Rule Boolean 2
σημαίνει τη δυαδική είσοδο που
υπολογίστηκε στην παράμετρος 13-40 Logic
Rule Boolean 1, παράμετρος 13-41 Logic Rule
Operator 1, και την παράμετρος 13-42 Logic
Rule Boolean 2.
Boolean 3.
13-44 Logic Rule Boolean 3
Επιλογή: Λειτουργία:
Επιλέξτε την 3η δυαδική είσοδο
(αληθές ή ψευδές) για τον επιλεγμένο
λογικό κανόνα. Δείτε
παράμετρος 13-40 Logic Rule Boolean
1, παράμετρος 13-41 Logic Rule
Operator 1 και παράμετρος 13-42 Logic
Rule Boolean 2, και τη δυαδική
είσοδο. Δείτε παράμετρος 13-01 Star t
Event ([0]–[61]), και
παράμετρος 13-02 Stop Event ([70]–
[74]) για περαιτέρω περιγραφή.
[0] * False
[1] True
[2] Running
[3] In range
[4] On reference
[7] Out of current range
[8] Below I low
13-44 Logic Rule Boolean 3
Επιλογή: Λειτουργία:
[9] Above I high
[16] Thermal warning
[17] Mains out of range
[18] Reversing
[19] Warning
[20] Alarm (trip)
[21] Alarm (trip lock)
[22] Comparator 0
[23] Comparator 1
[24] Comparator 2
[25] Comparator 3
[26] Logic rule 0
[27] Logic rule 1
[28] Logic rule 2
[29] Logic rule 3
[30] SL Time-out 0
[31] SL Time-out 1
[32] SL Time-out 2
[33] Digital input DI18
[34] Digital input DI19
[35] Digital input DI27
[36] Digital input DI29
[39] Start command
[40] Drive stopped
[42] Auto Reset Trip
[50] Comparator 4
[51] Comparator 5
[60] Logic rule 4
[61] Logic rule 5
[70] SL Time-out 3
[71] SL Time-out 4
[72] SL Time-out 5
[73] SL Time-out 6
[74] SL Time-out 7
[83] Broken Belt
13-51 SL Controller Event
Επιλογή: Λειτουργία:
Επιλέξτε την 3η δυαδική είσοδο
(αληθές ή ψευδές) για τον επιλεγμένο
λογικό κανόνα. Δείτε
παράμετρος 13-40 Logic Rule Boolean
1, παράμετρος 13-41 Logic Rule
Operator 1, παράμετρος 13-42 Logic
Rule Boolean 2, και τη δυαδική
είσοδο. Δείτε παράμετρος 13-01 Star t
Event ([0]–[61]) και
παράμετρος 13-02 Stop Event ([70]–
[74]) για περαιτέρω περιγραφή.
[0] * False
[1] True
[2] Running
88 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. MG07C327
Page 91

Περιγραφές παραμέτρων Οδηγός Προγραμματισμού
13-51 SL Controller Event
Επιλογή: Λειτουργία:
[3] In range
[4] On reference
[7] Out of current range
[8] Below I low
[9] Above I high
[16] Thermal warning
[17] Mains out of range
[18] Reversing
[19] Warning
[20] Alarm (trip)
[21] Alarm (trip lock)
[22] Comparator 0
[23] Comparator 1
[24] Comparator 2
[25] Comparator 3
[26] Logic rule 0
[27] Logic rule 1
[28] Logic rule 2
[29] Logic rule 3
[30] SL Time-out 0
[31] SL Time-out 1
[32] SL Time-out 2
[33] Digital input DI18
[34] Digital input DI19
[35] Digital input DI27
[36] Digital input DI29
[39] Start command
[40] Drive stopped
[42] Auto Reset Trip
[50] Comparator 4
[51] Comparator 5
[60] Logic rule 4
[61] Logic rule 5
[70] SL Time-out 3
[71] SL Time-out 4
[72] SL Time-out 5
[73] SL Time-out 6
[74] SL Time-out 7
[83] Broken Belt
13-52 SL Controller Action
Επιλογή: Λειτουργία:
[0] * Disabled Επιλέξτε την ενέργεια που αντιστοιχεί στο
συμβάν SLC. Οι ενέργειες εκτελούνται όταν
το αντίστοιχο συμβάν (που ορίζεται
στηνπαράμετρος 13-51 SL Controller Event)
αξιολογείται σαν αληθές.
[1] No action
[2] Select set-up1Αλλάζει την ενεργή ρύθμιση
(παράμετρος 0-10 Active Set-up) σε 1. Αν
αλλάξει η ρύθμιση, θα συγχωνευτεί με άλλες
13-52 SL Controller Action
Επιλογή: Λειτουργία:
εντολές ρύθμισης που έρχονται είτε από τις
ψηφιακές εισόδους ή μέσω τοπικού διαύλου.
[3] Select set-up2Αλλάζει την ενεργή ρύθμιση
(παράμετρος 0-10 Active Set-up) σε 2. Αν
αλλάξει η ρύθμιση, θα συγχωνευτεί με άλλες
εντολές ρύθμισης που έρχονται είτε από τις
ψηφιακές εισόδους ή μέσω τοπικού διαύλου.
[4] Select set-up3Αλλάζει την ενεργή ρύθμιση
(παράμετρος 0-10 Active Set-up) σε 3. Αν
αλλάξει η ρύθμιση, θα συγχωνευτεί με άλλες
εντολές ρύθμισης που έρχονται είτε από τις
ψηφιακές εισόδους ή μέσω τοπικού διαύλου.
[5] Select set-up4Αλλάζει την ενεργή ρύθμιση
(παράμετρος 0-10 Active Set-up) σε 4. Αν
αλλάξει η ρύθμιση, θα συγχωνευτεί με άλλες
εντολές ρύθμισης που έρχονται είτε από τις
ψηφιακές εισόδους ή μέσω τοπικού διαύλου.
[10] Select preset
ref 0
[11] Select preset
ref 1
[12] Select preset
ref 2
[13] Select preset
ref 3
[14] Select preset
ref 4
[15] Select preset
ref 5
Επιλέξτε την προκαθορισμένη τιμή αναφοράς
0. Αν αλλάξει η ενεργή προκαθορισμένη τιμή
αναφοράς, θα συγχωνευτεί με άλλες
προκαθορισμένες εντολές αναφοράς που
έρχονται είτε από ψηφιακές εισόδους ή μέσω
τοπικού διαύλου επικοινωνίας.
Επιλέξτε την προκαθορισμένη τιμή αναφοράς
1. Αν αλλάξει η ενεργή προκαθορισμένη τιμή
αναφοράς, θα συγχωνευτεί με άλλες
προκαθορισμένες εντολές αναφοράς που
έρχονται είτε από ψηφιακές εισόδους ή μέσω
τοπικού διαύλου επικοινωνίας.
Επιλέξτε την προκαθορισμένη τιμή αναφοράς
2. Αν αλλάξει η ενεργή προκαθορισμένη τιμή
αναφοράς, θα συγχωνευτεί με άλλες
προκαθορισμένες εντολές αναφοράς που
έρχονται είτε από ψηφιακές εισόδους ή μέσω
τοπικού διαύλου επικοινωνίας.
Επιλέξτε την προκαθορισμένη τιμή αναφοράς
3. Αν αλλάξει η ενεργή προκαθορισμένη τιμή
αναφοράς, θα συγχωνευτεί με άλλες
προκαθορισμένες εντολές αναφοράς που
έρχονται είτε από ψηφιακές εισόδους ή μέσω
τοπικού διαύλου επικοινωνίας.
Επιλέξτε την προκαθορισμένη τιμή αναφοράς
4. Αν αλλάξει η ενεργή προκαθορισμένη τιμή
αναφοράς, θα συγχωνευτεί με άλλες
προκαθορισμένες εντολές αναφοράς που
έρχονται είτε από ψηφιακές εισόδους ή μέσω
τοπικού διαύλου επικοινωνίας.
Επιλέξτε την προκαθορισμένη τιμή αναφοράς
5. Αν αλλάξει η ενεργή προκαθορισμένη τιμή
αναφοράς, θα συγχωνευτεί με άλλες
προκαθορισμένες εντολές αναφοράς που
4 4
MG07C327 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. 89
Page 92

Περιγραφές παραμέτρων
Ρυθμιστής στροφών VLT® Midi FC 280
13-52 SL Controller Action
Επιλογή: Λειτουργία:
έρχονται είτε από ψηφιακές εισόδους ή μέσω
τοπικού διαύλου επικοινωνίας.
[16] Select preset
ref 6
44
[17] Select preset
ref 7
[18] Select ramp1Επιλογή ανόδου/καθ. 1.
[19] Select ramp2Επιλογή ανόδου/καθ. 2.
[22] Run Δίνει εντολή εκκίνησης στο μετατροπέα
[23] Run reverse Δίνει εντολή ανάστροφης εκκίνησης στο
[24] Stop Δίνει εντολή διακοπής λειτουργίας στο
[25] Qstop Δίνει εντολή γρήγορης διακοπής λειτουργίας
[26] DC Brake Δίνει εντολή πέδησης ΣΡ στο μετατροπέα
[27] Coast Ο μετατροπέας συχνότητας εκτελεί ελεύθερη
[28] Freeze
output
[29] Start timer 0 Δείτε παράμετρος 13-20 SL Controller Timer
[30] Start timer 1 Δείτε παράμετρος 13-20 SL Controller Timer
[31] Start timer 2 Δείτε παράμετρος 13-20 SL Controller Timer
[32] Set digital
out A low
[33] Set digital
out B low
[34] Set digital
out C low
[35] Set digital
out D low
Επιλέξτε την προκαθορισμένη τιμή αναφοράς
6. Αν αλλάξει η ενεργή προκαθορισμένη τιμή
αναφοράς, θα συγχωνευτεί με άλλες
προκαθορισμένες εντολές αναφοράς που
έρχονται είτε από ψηφιακές εισόδους ή μέσω
τοπικού διαύλου επικοινωνίας.
Επιλέξτε την προκαθορισμένη τιμή αναφοράς
7. Αν αλλάξει η ενεργή προκαθορισμένη τιμή
αναφοράς, θα συγχωνευτεί με άλλες
προκαθορισμένες εντολές αναφοράς που
έρχονται είτε από ψηφιακές εισόδους ή μέσω
τοπικού διαύλου επικοινωνίας.
συχνότητας.
μετατροπέα συχνότητας.
μετατροπέα συχνότητας.
στο μετατροπέα συχνότητας.
συχνότητας.
κίνηση αμέσως. Όλες οι εντολές διακοπής
συμπεριλαμβανομένης και της εντολής
ελεύθερης κίνησης, σταματούν τη λειτουργία
του SLC.
Παγώνει την έξοδο του μετατροπέα
συχνότητας.
για περαιτέρω περιγραφή.
για περαιτέρω περιγραφή.
για περαιτέρω περιγραφή.
Κάθε έξοδος με έξοδο SL A είναι χαμηλή.
Κάθε έξοδος με έξοδο SL Β είναι χαμηλή.
Κάθε έξοδος με έξοδο SL C είναι χαμηλή.
Κάθε έξοδος με έξοδο SL D είναι χαμηλή.
13-52 SL Controller Action
Επιλογή: Λειτουργία:
[38] Set digital
out A high
[39] Set digital
out B high
[40] Set digital
out C high
[41] Set digital
out D high
[60] Reset
Counter A
[61] Reset
Counter B
[70] Start Timer 3 Δείτε παράμετρος 13-20 SL Controller Timer
[71] Start Timer 4 Δείτε παράμετρος 13-20 SL Controller Timer
[72] Start Timer 5 Δείτε παράμετρος 13-20 SL Controller Timer
[73] Start Timer 6 Δείτε παράμετρος 13-20 SL Controller Timer
[74] Start Timer 7 Δείτε παράμετρος 13-20 SL Controller Timer
Κάθε έξοδος με έξοδο SL A είναι υψηλή.
Κάθε έξοδος με έξοδο SL Β είναι υψηλή.
Κάθε έξοδος με έξοδο SL C είναι υψηλή.
Κάθε έξοδος με έξοδο SL D είναι υψηλή.
Επαναφορά του μετρητή A στο 0.
Επαναφορά του μετρητή Β στο 0.
για περαιτέρω περιγραφή.
για περαιτέρω περιγραφή.
για περαιτέρω περιγραφή.
για περαιτέρω περιγραφή.
για περαιτέρω περιγραφή.
90 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. MG07C327
Page 93

Περιγραφές παραμέτρων Οδηγός Προγραμματισμού
4.14 Παράμετροι: 14-** Ειδικές λειτουργίες
14-01 Συχνότητα μεταγωγής
Επιλογή: Λειτουργία:
Επιλέξτε τη συχνότητα μεταγωγής του
αναστροφέα. Η αλλαγή της συχνότητας μεταγωγής
βοηθά στη μείωση του ακουστικού θορύβου από
τον κινητήρα.
[2] 2,0 kHz
[3] 3,0 kHz
[4] 4,0 kHz
[5] 5,0 kHz
[6] 6,0 kHz
[7] 8,0 kHz
[8] 10,0 kHz
[9] 12.0 kHz
[10] 16.0 kHz
14-03 Overmodulation
Επιλογή: Λειτουργία:
[0] O Για την αποφυγή της κυμάτωσης ροπής στον άξονα
κινητήρα, επιλέξτε [0] Ανενεργό για τη μη υπερδιαμόρφωση της τάσης εξόδου. Αυτή η λειτουργία
μπορεί να είναι χρήσιμη για εφαρμογές όπως τα
τριβεία.
[1] * On Επιλέξτε [1] Ενεργό για να ενεργοποιήσετε τη
λειτουργία υπερδιαμόρφωσης για την τάση εξόδου.
Επιλέξτε αυτή τη ρύθμιση όταν απαιτείται η τάση
εξόδου να είναι >95% της τάσης εισόδου (συνήθως
κατά τη λειτουργία σε υπερσυγχρονισμό). Η τάση
εξόδου αυξάνει ανάλογα με το βαθμό υπερδιαμόρφωσης.
ΕΙΔΟΠΟΙΗΣΗ
Η υπερδιαμόρφωση οδηγεί σε αυξημένη
κυμάτωση ροπής καθώς αυξάνονται οι
αρμονικές.
14-07 Dead Time Compensation Level
Περιοχή: Λειτουργία:
Size
related*
14-08 Damping Gain Factor
Περιοχή: Λειτουργία:
Size related* [0 - 100 %] Συντελεστής απόσβεσης για την
[0 100 ]
Επίπεδο εφαρμοζόμενης αντιστάθμισης
νεκρού χρόνου σε ποσοστό. Ένα υψηλό
επίπεδο (>90%) βελτιστοποιεί τη δυναμική
απόκριση κινητήρα, ένα επίπεδο 50–90%
είναι κατάλληλο και για την ελαχιστοποίηση της κυμάτωσης ροπής κινητήρα
και για τη δυναμική κινητήρα. Το επίπεδο
0 απενεργοποιεί την αντιστάθμιση νεκρού
χρόνου.
αντιστάθμιση τάσης της ζεύξης ΣΡ.
14-09 Dead Time Bias Current Level
Περιοχή: Λειτουργία:
Size related* [0 - 100 %] Ρυθμίζει ένα σήμα πόλωσης (σε [%])
για να προστεθεί στο σήμα
ανίχνευσης ρεύματος για την
αντιστάθμιση νεκρού χρόνου μερικών
κινητήρων.
14-10 Mains Failure
Επιλογή: Λειτουργία:
ΕΙΔΟΠΟΙΗΣΗ
Η Παράμετρος 14-10 Mains Failure δεν
μπορεί να αλλάξει ενώ ο κινητήρας
βρίσκεται σε λειτουργία.
Η Παράμετρος 14-10 Mains Failure χρησιμοποιείται
συνήθως όπου εμφανίζονται πολύ σύντομες
διακοπές του δικτύου ρεύματος (βυθίσεις τάσης).
Σε φορτίο 100% και σε σύντομη διακοπή τάσης, η
τάση ΣΡ στους κύριους πυκνωτές πέφτει γρήγορα.
Για μεγαλύτερους μετατροπείς συχνότητας,
χρειάζονται μόλις λίγα millisecond προτού η
στάθμη ΣΡ πέσει σε 373 V ΣΡ περίπου και το IGBT
αποκοπεί και χάσει τον έλεγχο του κινητήρα.
Μόλις αποκατασταθεί το δίκτυο ρεύματος και τα
IGBT εκκινήσουν ξανά, η συχνότητα εξόδου και το
διάνυσμα τάσης δεν αντιστοιχούν στην ταχύτητα/
συχνότητα του κινητήρα και αυτό έχει ως
αποτέλεσμα συνήθως υπέρταση ή υπερένταση
που οδηγεί σε κλείδωμα σφάλματος. Η
Παράμετρος 14-10 Mains Failure μπορεί να
προγραμματιστεί για την αποφυγή αυτής της
κατάστασης.
Επιλέξτε τη λειτουργία στην οποία ο μετατροπέας
συχνότητας πρέπει να ενεργήσει, όταν προσεγγιστεί το κατώφλι που έχει οριστεί στη
παράμετρος 14-11 Τάση τροφ.σε σφάλμα δικτ.ρεύμ..
[0]*No
function
[1] Ctrl.
rampdown
Ο μετατροπέας συχνότητας δεν αντισταθμίζει τη
διακοπή του δικτύου ρεύματος. Η τάση στη ζεύξη
ΣΡ πέφτει γρήγορα και ο έλεγχος κινητήρα χάνεται
εντός διαστήματος millisecond έως δευτερολέπτων. Το αποτέλεσμα είναι το κλείδωμα
σφάλματος.
Ο μετατροπέας συχνότητας διατηρεί τον έλεγχο
του κινητήρα, χρησιμοποιώντας ελεγχόμενη
γραμμική μείωση από το επίπεδο της
παράμετρος 14-11 Mains Voltage at Mains Fault.
Εάν η παράμετρος 2-10 Brake Function είναι [0]
Ανενεργό ή [2] Πέδηση ΕΡ, η γραμμική μεταβολή
ακολουθεί τη γραμμική μεταβολή υπέρτασης. Εάν
η παράμετρος 2-10 Brake Function είναι [1] Πέδηση
αντίστασης, η γραμμική μεταβολή ακολουθεί τη
4 4
MG07C327 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. 91
Page 94

130BC918.10
U
14-11*1.35
Ref
n [RPM]
t [S]
A B CDE A
DC
U
DC
[V]
t [S]
Περιγραφές παραμέτρων
Ρυθμιστής στροφών VLT® Midi FC 280
44
14-10 Mains Failure
Επιλογή: Λειτουργία:
ρύθμιση στην παράμετρος 3-81 Quick Stop Ramp
Time. Αυτή η επιλογή είναι ιδιαίτερα χρήσιμη στις
εφαρμογές αντλίας, όπου η αδράνεια είναι χαμηλή
και η τριβή υψηλή. Μόλις αποκατασταθεί το
δίκτυο τροφοδοσίας, η συχνότητα εξόδου εκτελεί
γραμμική μεταβολή του κινητήρα μέχρι την
ταχύτητα αναφοράς (εάν η διακοπή του δικτύου
τροφοδοσίας είναι παρατεταμένη, η ελεγχόμενη
μεταβολή μείωσης μπορεί να μειώσει τη
συχνότητα εξόδου μέχρι τις 0 RPM, και μόλις το
δίκτυο τροφοδοσίας αποκατασταθεί η εφαρμογή
εκτελεί γραμμική μεταβολή ανόδου από τις 0 RPM
ως την προηγούμενη ταχύτητα αναφοράς, μέσω
της τυπικής γραμμικής μεταβολής ανόδου). Εάν η
ενέργεια στη ζεύξη ΣΡ χαθεί πριν τη γραμμική
μεταβολή του κινητήρα στο 0, ο κινητήρας εκτελεί
ελεύθερη κίνηση.
[2] Ctrl.
rampdown,
trip
[3] Coasting Οι φυγόκεντροι μπορούν να λειτουργήσουν για
[4] Kinetic
back-up
92 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. MG07C327
Αυτή η επιλογή είναι παρόμοια με την επιλογή [1]
Ελεγχ. γραμμ. μεταβολή μείωσης με την εξαίρεση
ότι στην [2] Ελεγχ. γραμμ. μεταβολή μείωσης,
σφάλμα απαιτείται επαναφορά ή εκκίνηση μετά
την ενεργοποίηση.
μία ώρα χωρίς παροχή ρεύματος. Σε αυτές τις
περιπτώσεις, είναι δυνατή η επιλογή της
λειτουργίας ελεύθερης κίνησης με τη διακοπή του
δικτύου ρεύματος, σε συνδυασμό με μια έναρξη
υπό κίνηση, η οποία προκύπτει με την
αποκατάσταση του δικτύου ρεύματος.
Η κινητική εφεδρεία διασφαλίζει ότι ο
μετατροπέας συχνότητας συνεχίζει να λειτουργεί
όσο υπάρχει ενέργεια στο σύστημα λόγω της
αδράνειας από τον κινητήρα και το φορτίο. Αυτό
επιτυγχάνεται με τη μετατροπή της μηχανικής
ενέργειας στη ζεύξη ΣΡ και διατηρώντας έτσι τον
έλεγχο του μετατροπέα συχνότητας και του
κινητήρα. Αυτό μπορεί να επεκτείνει την
ελεγχόμενη λειτουργία, ανάλογα με την αδράνεια
στο σύστημα. Για τους ανεμιστήρες, συνήθως είναι
αρκετά δευτερόλεπτα, για τις αντλίες μέχρι 2 s και
για τους συμπιεστές μόλις για ένα κλάσμα του
δευτερολέπτου. Πολλές βιομηχανικές εφαρμογές
μπορούν να επεκτείνουν την ελεγχόμενη
λειτουργία για πολλά δευτερόλεπτα, χρόνος που
συνήθως επαρκεί για την επαναφορά του δικτύου
ρεύματος.
14-10 Mains Failure
Επιλογή: Λειτουργία:
A Κανονική λειτουργία
B Διακοπή ρεύματος
C Κινητική εφεδρεία
D Επαναφορά δικτύου ρεύματος
E Κανονική λειτουργία: Γραμμική μεταβολή
Εικόνα 4.17 Κινητική εφεδρεία
Το επίπεδο ΣΡ κατά τη διάρκεια της [4] Κινητικής
εφεδρείας είναι παράμετρος 14-11 Mains Voltage at
Mains Fault x 1.35.
Εάν το δίκτυο ρεύματος δεν επανέλθει, η U
διατηρείται όσο το δυνατό περισσότερο με τη
γραμμική κάθοδο της ταχύτητας προς τις 0 RPM.
Τέλος, ο μετατροπέας συχνότητας εκτελεί
ελεύθερη κίνηση.
Εάν το δίκτυο ρεύματος επανέλθει κατά τη
διάρκεια της κινητικής εφεδρείας, η UDC αυξάνεται
πάνω από παράμετρος 14-11 Mains Voltage at
Mains Fault x 1.35. Αυτό ανιχνεύεται με 1 από τους
εξής τρόπους:
Εάν UDC >παράμετρος 14-11 Mains
•
Voltage at Mains Fault x 1,35 x 1,05
Εάν η ταχύτητα είναι επάνω από την τιμή
•
αναφοράς. Αυτό είναι σχετικό, εάν το
δίκτυο ρεύματος επανέλθει σε επίπεδο
χαμηλότερο από προηγουμένως, για
παράδειγμα, παράμετρος 14-11 Mains
Voltage at Mains Fault x 1,35 x 1,02. Αυτό
δεν καλύπτει το παραπάνω κριτήριο και
ο μετατροπέας συχνότητας προσπαθεί να
μειώσει την UDC σε
παράμετρος 14-11 Mains Voltage at Mains
Fault x 1,35 αυξάνοντας την ταχύτητα.
Αυτό δεν επιτυγχάνει καθώς το δίκτυο
ρεύματος δεν μπορεί να χαμηλώσει.
Σε περίπτωση λειτουργίας κινητήρα. Ο
•
ίδιος μηχανισμός με το προηγούμενο
σημείο αλλά η αδράνεια αποτρέπει την
ταχύτητα από το να υπερβεί την
ταχύτητα αναφοράς. Αυτό οδηγεί στη
μηχανική κίνηση του κινητήρα, μέχρι η
ταχύτητα να υπερβαίνει την ταχύτητα
αναφοράς και να προκύψει η παραπάνω
DC
Page 95

14-11*1.35
Ref
790 V
0
A B C D
130BC920.10
U
n [RPM]
t [S]
DC
U
DC
[V]
t [S]
Περιγραφές παραμέτρων Οδηγός Προγραμματισμού
14-10 Mains Failure
Επιλογή: Λειτουργία:
συνθήκη. Αντί της αναμονής για αυτό,
εισαγάγετε το παρόν κριτήριο.
[5] Kinetic
back-up,
trip
Η διαφορά μεταξύ της κινητικής εφεδρείας με και
χωρίς σφάλμα είναι ότι η τελευταία σημειώνει
πάντα γραμμική μείωση στις 0 RPM και σημειώνει
σφάλμα, ανεξάρτητα από την επαναφορά ή όχι
του δικτύου ρεύματος.
Η λειτουργία εκτελείται ώστε να μην ανιχνεύεται
καν η επαναφορά του δικτύου ρεύματος και αυτός
είναι ο λόγος του σχετικά υψηλού επιπέδου στη
ζεύξη ΣΡ κατά τη γραμμική μείωση.
A Κανονική λειτουργία
B Διακοπή ρεύματος
C Κινητική εφεδρεία
D Σφάλμα
14-12 Λειτουργία σε ασυμμετρία φάσεων
Επιλογή: Λειτουργία:
[0] * Σφάλμα Σημειώνει σφάλμα στο μετατροπέα
συχνότητας.
[1] Προειδοποίηση Εκδίδει μια προειδοποίηση.
[2] Απενεργο-
Δεν εκτελείται ενέργεια.
ποιημένο
14-15 Kin. Backup Trip Recovery Level
Περιοχή: Λειτουργία:
Size
related*
[0 - 500.000
ReferenceFeedbackUnit]
Αυτή η παράμετρος
προσδιορίζει το
επίπεδο ανάκτησης
σφάλματος κινητικής
εφεδρείας.
4 4
Εικόνα 4.18 Κινητ.εφεδ.σε σφάλμα
[6] Alarm
[7] Kin.
back-up,
trip w
recovery
14-11 Mains Voltage at Mains Fault
Περιοχή: Λειτουργία:
342 V* [100 -
800 V]
Αυτή η παράμετρος καθορίζει το κατώφλι
τάσης στο οποίο η επιλεγμένη στην
παράμετρος 14-10 Mains Failure λειτουργία θα
πρέπει να ενεργοποιηθεί. Το επίπεδο
ανίχνευσης είναι σε παράγοντα sqrt2 της τιμής
αυτής της παραμέτρου.
14-12 Λειτουργία σε ασυμμετρία φάσεων
Επιλογή: Λειτουργία:
Η λειτουργία σε συνθήκες έντονης
ασυμμετρίας δικτύου ρεύματος μειώνει τη
ζωή του κινητήρα. Οι συνθήκες
θεωρούνται έντονες αν ο κινητήρας
λειτουργεί συνεχόμενα κοντά στο
ονομαστικό φορτίο (για παράδειγμα μία
αντλία ή ένας ανεμιστήρας που
λειτουργούν κοντά στη μέγιστη ταχύτητα).
MG07C327 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. 93
Page 96

Περιγραφές παραμέτρων
Ρυθμιστής στροφών VLT® Midi FC 280
14-20 Reset Mode
Επιλογή: Λειτουργία:
ΕΙΔΟΠΟΙΗΣΗ
ΑΚΟΥΣΙΑ ΕΚΚΙΝΗΣΗ
Όταν ο μετατροπέας συχνότητας
είναι συνδεδεμένος σε δίκτυο ΕΡ,
τροφοδοσία ρεύματος ΣΡ ή
διαμοιρασμό φορτίου, ο κινητήρας
44
μπορεί να εκκινήσει ανά πάσα
στιγμή. Η ακούσια εκκίνηση κατά
τον προγραμματισμό, τη
συντήρηση ή μια επισκευαστική
εργασία μπορεί να προκαλέσει
θάνατο, σοβαρό τραυματισμό ή
βλάβη αντικειμένου ιδιοκτησίας. Ο
κινητήρας μπορεί να εκκινήσει
μέσω εξωτερικού διακόπτη,
εντολής τοπικού διαύλου επικοι-
14-20 Reset Mode
Επιλογή: Λειτουργία:
ΕΙΔΟΠΟΙΗΣΗ
Αν ο καθορισμένος αριθμός
αυτόματων επαναφορών προσεγγιστεί εντός 10 λεπτών, ο
μετατροπέας συχνότητας μπαίνει σε
λειτουργία [0] Χειροκίνητη
επαναφορά. Αφού εκτελεστεί η
χειροκίνητη επαναφορά, η ρύθμιση
της παράμετρος 14-20 Reset Mode
επαναφέρει την αρχική επιλογή. Αν
ο αριθμός αυτόματων επαναφορών
δεν προσεγγιστεί εντός 10 λεπτών
ή όταν εκτελεστεί μια χειροκίνητη
επαναφορά, ο εσωτερικός μετρητής
αυτόματης επαναφοράς επιστρέφει
στο 0.
νωνίας, σήματος αναφοράς εισόδου
από το LCP ή μετά από την
εκκαθάριση μιας συνθήκης
σφάλματος.
Προς αποφυγή της ακούσιας
εκκίνησης του κινητήρα:
Αποσυνδέστε το
•
μετατροπέα συχνότητας
από το δίκτυο ρεύματος.
Πατήστε [O/Reset] στο
•
LCP, προτού προγραμματίσετε παραμέτρους.
Συνδέστε και συναρμο-
•
λογήστε πλήρως το
μετατροπέα συχνότητας,
τον κινητήρα και τυχόν
χρησιμοποιούμενο
εξοπλισμό, πριν τη
σύνδεση του μετατροπέα
συχνότητας στο δίκτυο ΕΡ,
την τροφοδοσία ρεύματος
ΣΡ ή το διαμοιρασμό
φορτίου.
[0] * Manual reset Επιλέξτε [0] Χειροκίνητη επαναφορά, για
[1] Automatic reset
x 1
[2] Automatic reset
x 2
[3] Automatic reset
x 3
[4] Automatic reset
x 4
[5] Automatic reset
x 5
[6] Automatic reset
x 6
[7] Automatic reset
x 7
[8] Automatic reset
x 8
[9] Automatic reset
x 9
[10] Automatic reset
x 10
[11] Automatic reset
x 15
Επιλέξτε τη λειτουργία επαναφοράς μετά
την πρόκληση σφαλμάτων. Μετά την
επαναφορά, ο μετατροπέας συχνότητας
μπορεί να επανεκκινηθεί. Η λειτουργία
αυτόματης επαναφοράς δεν επηρεάζει το
συναγερμό 68, Safe Torque O και το
συναγερμό 188, Εσωτερικό σφάλμα STO
στην έκδοση λογισμικού v1.2 και τις
επόμενες εκδόσεις.
να εκτελέσετε επαναφορά μέσω [Reset] ή
μέσω των ψηφιακών εξόδων.
Επιλέξτε [1]-[12] Αυτόματη επαναφορά x
1…x 20 για να εκτελέσετε μεταξύ 1 και
20 αυτόματων επαναφορών μετά την
πρόκληση σφαλμάτων.
94 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. MG07C327
Page 97

Περιγραφές παραμέτρων Οδηγός Προγραμματισμού
14-20 Reset Mode
Επιλογή: Λειτουργία:
[12] Automatic reset
x 20
[13] Innite auto
reset
[14] Reset at power-
up
Επιλέξτε [13] Επ'άπειρο αυτόματη
επαναφορά για συνεχή επαναφορά μετά
την πρόκληση σφαλμάτων.
14-21 Automatic Restart Time
Περιοχή: Λειτουργία:
10 s* [0 - 600s]Εισάγετε το χρονικό διάστημα από το σφάλμα
μέχρι την εκκίνηση της λειτουργίας αυτόματης
επαναφοράς. Αυτή η παράμετρος είναι ενεργή
όταν η παράμετρος 14-20 Reset Mode ρυθμιστεί
σε [1]–[13] Αυτόματη επαναφορά.
14-22 Operation Mode
Επιλογή: Λειτουργία:
Καθορίζει την κανονική λειτουργία, εκτελεί
δοκιμές ή αρχικοποιεί όλες τις παραμέτρους
εκτός από τις παράμετρος 15-03 Ε νεργο-
ποιήσεις, παράμετρος 15-04 Υπερθερμάνσεις,
και παράμετρος 15-05 Υπερτάσεις. Αυτή η
λειτουργία είναι ενεργή μόνο όταν η ισχύς
έχει κύκλωμα προς το μετατροπέα
συχνότητας.
[0]*Normal
operation
[2] Initialisation Επαναφέρει όλες τις τιμες παραμέτρων στις
Κανονική λειτουργία με επιλεγμένο κινητήρα.
προεπιλεγμένες ρυθμίσεις, εκτός από τις
παράμετρος 15-03 Ενεργοποιήσεις,
παράμετρος 15-04 Υπερθερμάνσεις, και
παράμετρος 15-05 Υπερτάσεις. Ο μετατροπέας
συχνότητας εκτελεί επαναφορά κατά την
επόμενη εκκίνηση.
14-24 Trip Delay at Current Limit
Περιοχή: Λειτουργία:
60 s* [0 -
60 s]
Εισάγετε την καθυστέρηση ενεργοποίησης
σφάλματος στο όριο ρεύματος σε δευτερόλεπτα.
Όταν το ρεύμα εξόδου φθάσει το όριο ρεύματος
(παράμετρος 4-18 Current Limit), ενεργοποιείται μια
προειδοποίηση. Όταν η προειδοποίηση ορίου
ρεύματος εμφανίζεται συνεχώς για την περίοδο
που ορίζεται σε αυτή την παράμετρο, ο
μετατροπέας συχνότητας παρουσιάζει σφάλμα. Για
τη συνεχή λειτουργία σε όριο ρεύματος χωρίς
σφάλμα ρυθμίστε την παράμετρο σε 60
s=Ανενεργό. Η θερμική παρακολούθηση του
μετατροπέα συχνότητας παραμένει ενεργή.
14-25 Trip Delay at Torque Limit
Περιοχή: Λειτουργία:
60 s* [0 -
60 s]
Εισάγετε την καθυστέρηση ενεργοποίησης
σφάλματος στο όριο ροπής σε δευτερόλεπτα.
Όταν η ροπή εξόδου φτάσει τα όρια ροπής
(παράμετρος 4-16 Torque Limit Motor Mode και
παράμετρος 4-17 Torque Limit Generator Mode),
ενεργοποιείται μία προειδοποίηση. Όταν η
προειδοποίηση ορίου ροπής εμφανίζεται συνεχώς
για την περίοδο που ορίζεται σε αυτή την
παράμετρο, ο μετατροπέας συχνότητας
παρουσιάζει σφάλμα. Απενεργοποιείστε την
καθυστέρηση σφάλματος ρυθμίζοντας την
παράμετρο σε 60 s = Ανενεργό. Η θερμική
παρακολούθηση του μετατροπέα συχνότητας
παραμένει ενεργή.
14-27 Action At Inverter Fault
Επιλογή: Λειτουργία:
Επιλέξτε τον τρόπο αντίδρασης του μετατροπέα
συχνότητας όταν προκύπτει υπέρταση ή σφάλμα
γείωσης.
[0] Trip Απενεργοποιεί τα φίλτρα προστασίας και
σημειώνει σφάλμα με το πρώτο σφάλμα.
[1] * Warning Εκτελεί τα φίλτρα προστασίας κανονικά.
14-28 Production Settings
Επιλογή: Λειτουργία:
[0] * No action
[1] Service reset
[3] Software Reset
14-29 Service Code
Περιοχή: Λειτουργία:
0* [0 - 0x7FFFFFFF ] Για εσωτερική χρήση μόνο.
14-30 Ελεγκτής ορίου ρεύματος, Αναλ. απολαβή
Περιοχή: Λειτουργία:
100 %* [0 -
500 %]
Εισάγετε την τιμή αναλογικής απολαβής για
τον ελεγκτή ορίου έντασης ρεύματος.
Επιλογή υψηλότερης τιμής κάνει τον
ελεγκτή να αντιδρά γρηγορότερα.
Υπερβολικά υψηλή ρύθμιση έχει σαν
αποτέλεσμα αστάθεια του ελεγκτή.
14-31 Current Lim Ctrl, Integration Time
Περιοχή: Λειτουργία:
0.020 s* [0.002 - 2 s] Ελέγχει τον χρόνο ολοκλήρωσης ορίου
έντασης ρεύματος. Η ρύθμιση του σε
χαμηλότερη τιμή έχει σαν αποτέλεσμα να
αντιδρά γρηγορότερα. Υπερβολικά
χαμηλή ρύθμιση έχει σαν αποτέλεσμα
αστάθεια ελέγχου.
4 4
MG07C327 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. 95
Page 98

Περιγραφές παραμέτρων
Ρυθμιστής στροφών VLT® Midi FC 280
14-32 Current Lim Ctrl, Filter Time
Περιοχή: Λειτουργία:
5 ms* [1 - 100 ms] Καθορίζει μια σταθερά χρόνου για το
χαμηλοδιαβατο φίλτρο ελέγχου ρεύματος.
14-40 VT Level
Περιοχή: Λειτουργία:
66 %* [40 -
44
90 %]
ΕΙΔΟΠΟΙΗΣΗ
Η παράμετρος αυτή δεν μπορεί να
τροποποιηθεί ενώ λειτουργεί ο κινητήρας.
14-52 Έλεγχος ανεμιστήρα
Επιλογή: Λειτουργία:
[5] Λειτουργία συνεχούς ενεργοποιημένης
κατάστασης
[6] Λειτουργία συνεχούς απενεργοποιημένης
κατάστασης
[7] Λειτουργία Ενεργό-όταν-ο αναστροφέας-είναι-
ενεργός-διαφορετικά-ανενεργό
[8] * Λειτουργία μεταβλητής ταχύτητας
14-55 Output Filter
Επιλογή: Λειτουργία:
ΕΙΔΟΠΟΙΗΣΗ
Αυτή η παράμετρος δεν είναι ενεργή όταν
η παράμετρος 1-10 Κατασκευή κινητήρα
ΕΙΔΟΠΟΙΗΣΗ
Η παράμετρος αυτή δεν μπορεί να
αλλάξει ενώ λειτουργεί ο κινητήρας.
ρυθμιστεί σε επιλογές που επιτρέπουν τη
λειτουργία κινητήρα ΡΜ.
Εισάγετε το επίπεδο μαγνήτισης κινητήρα σε
χαμηλή ταχύτητα κινητήρα. Η επιλογή χαμηλής
τιμής μειώνει την απώλεια ενέργειας του
κινητήρα, αλλά επίσης μειώνει και τη δυνατότητα
φορτίου.
14-41 AEO Minimum Magnetisation
Περιοχή: Λειτουργία:
66 %* [40 -
75 %]
Εισάγετε την ελάχιστη επιτρεπόμενη
μαγνήτιση για AEO. Η επιλογή χαμηλής
τιμής μειώνει την απώλεια ενέργειας στον
κινητήρα, αλλά επίσης μειώνει την
αντίσταση σε ξαφνικές αλλαγές φορτίου.
14-44 d-axis current optimization for IPM
Περιοχή: Λειτουργία:
100%* [0 -
Αυτή η παράμετρος είναι διαθέσιμη μόνο όταν η
200 %
παράμετρος 1-10 Motor Construction έχει οριστεί
]
σε [2] PM, εξέχον ΙPM, μη Κορ.
Κανονικά, ο έλεγχος VVC+ PM βελτιστοποιεί
αυτόματα το ρεύμα απομαγνήτισης άξονα d
βάσει των ρυθμίσεων του άξονα d και του άξονα
q. Όταν η παράμετρος 1-10 Motor Construction
ρυθμιστεί σε [2] PM, εξέχον IPM, μη Κορ., χρησιμοποιήστε αυτή την παράμετρο για να
αντισταθμίσετε την επίδραση κορεσμού σε υψηλό
φορτίο. Συνήθως, η μείωση αυτής της τιμής
βελτιώνει την αποτελεσματικότητα. Ωστόσο, 0%
σημαίνει καθόλου βελτιστοποίηση και το ρεύμα
του άξονα d είναι 0 (δεν συστήνεται).
14-51 DC-Link Voltage Compensation
Επιλογή: Λειτουργία:
[0] O Απενεργοποίηση αντιστάθμισης ζεύξης ΣΡ.
[1] * On Ενεργοποίηση αντιστάθμισης ζεύξης ΣΡ.
[0] * No Filter
[1] Sine-Wave
Filter
14-61 Function at Inverter Overload
Όταν ο μετατροπέας συχνότητας εκδίδει μια προειδοποίηση
υπερφόρτωσης μετατροπέα συχνότητας, επιλέξτε εάν ο
μετατροπέας συχνότητας θα συνεχίσει και θα σημειώσει σφάλμα
ή εάν θα υποβιβαστεί το ρεύμα εξόδου.
Επιλογή: Λειτουργία:
[0] * Trip
[1] Derate
14-63 Min Switch Frequency
Επιλογή: Λειτουργία:
[2] * 2.0 kHz
[3] 3.0 kHz
[4] 4.0 kHz
[5] 5.0 kHz
[6] 6.0 kHz
[7] 8.0 kHz
[8] 10.0 kHz
[9] 12.0 kHz
[10] 16.0 kHz
14-64 Dead Time Compensation Zero Current Level
Επιλογή: Λειτουργία:
[0] * Disabled
[1] Enabled Εάν χρησιμοποιείτε μακρύ καλώδιο κινητήρα,
Επιλέξτε τον τύπο του συνδεδεμένου
φίλτρου εξόδου.
Ρυθμίζει την ελάχιστη συχνότητα μεταγωγής που
επιτρέπεται από το φίλτρο εξόδου.
επιλέξτε αυτή την επιλογή για να ελαχιστοποιήσετε την κυμάτωση ροπής κινητήρα.
96 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. MG07C327
Page 99

Περιγραφές παραμέτρων Οδηγός Προγραμματισμού
14-65 Speed Derate Dead Time Compensation
Περιοχή: Λειτουργία:
Size
related*
[ 20 1000 Hz]
Το επίπεδο αντιστάθμισης νεκρού χρόνου
μειώνεται γραμμικά έναντι της συχνότητας
εξόδου από το μέγιστο επίπεδο που έχει
οριστεί στην παράμετρος 14-07 Dead Time
Compensation Level σε ένα ελάχιστο
επίπεδο που ορίζεται σε αυτή την
παράμετρο.
14-89 Option Detection
Επιλέξτε τη συμπεριφορά όταν ανιχνεύεται μια αλλαγή του
προαιρετικού εξοπλισμού. Αυτή η παράμετρος επιστρέφει στο [0]
Προστασία διαμόρφωσης προαιρετικού εξοπλισμού μετά από μια
αλλαγή του προαιρετικού εξοπλισμού.
Επιλογή: Λειτουργία:
[0] * Protect Option
Cong.
[1] Enable Option
Change
Παγώνει τις τρέχουσες
ρυθμίσεις και αποτρέπει
ακούσιες αλλαγές, όταν
ανιχνεύεται υπολειπόμενος ή
ελαττωματικός προαιρετικός
εξοπλισμός.
Οι ρυθμίσεις μπορούν να
αλλάξουν κατά την
τροποποίηση της ρύθμισης
παραμέτρων του συστήματος.
Δείκτης Συναγερμός Κλείδωμα
σφάλματος
0 Δεσμευμένο – – –
1 Δεσμευμένο – – –
2 Δεσμευμένο – – –
3 Δεσμευμένο – – –
4 Δεσμευμένο – – –
5 Δεσμευμένο – – –
6 Δεσμευμένο – – –
7 Υπερένταση D x x
Πίνακας 4.5 Πίνακας για την επιλογή ενέργειας όταν
εμφανίζεται ο επιλεγμένος συναγερμός
(Παράμετρος 14-90 Fault Level)
D = Προεπιλεγμένη ρύθμιση
x = Πιθανή επιλογή
Σφάλμ με
καθυστέρη
ση
Έναρξη
κίνηση
υπό
4 4
14-90 Fault Level
Χρησιμοποιήστε αυτή την παράμετρο για να προσαρμόσετε τα
επίπεδα σφάλματος. Χρησιμοποιήστε το 8ο στοιχείο για τον
έλεγχο του επιπέδου σφάλματος του συναγερμού 13, Υπερένταση.
Επιλογή: Λειτουργία:
[3] * Trip Lock Ο συναγερμός ορίζεται σε κλείδωμα
σφάλματος.
[4] Trip w.
delayed reset
[5] Flystart Κατά την εκκίνηση, ο μετατροπέας
Ο συναγερμός ρυθμίζεται σε συναγερμό
σφάλματος, και μπορεί να επανέλθει μετά
από ένα χρόνο καθυστέρησης. Για
παράδειγμα, εάν ο συναγερμός 13,
Υπερένταση έχει ρυθμιστεί σε αυτή την
επιλογή, μπορεί να επανέλθει 3 λεπτά μετά
το συναγερμό.
συχνότητας προσπαθεί να συγχρονιστεί με
έναν κινητήρα που περιστρέφεται. Εάν
επιλεχθεί αυτή η επιλογή, η
παράμετρος 1-73 Flying Start εξαναγκάζεται
σε ρύθμιση [1] Ενεργοποιημένο.
MG07C327 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. 97
Page 100

Περιγραφές παραμέτρων
Ρυθμιστής στροφών VLT® Midi FC 280
4.15 Παράμετροι: 15-** Πληρ. ρυθμ. στροφ.
15-00 Operating hours
Περιοχή: Λειτουργία:
0 h* [0 - 0x7f. h] Προβολή των ωρών λειτουργίας του
μετατροπέα συχνότητας. Η τιμή
αποθηκεύεται όταν ο μετατροπέας
συχνότητας απενεργοποιηθεί.
44
15-01 Running Hours
Περιοχή: Λειτουργία:
0 h* [0 - 0x7f.h]Προβολή των ωρών λειτουργίας του
μετατροπέα συχνότητας. Επαναφορά
μετρητή σε παράμετρος 15-07 Reset Running
Hours Counter. Η τιμή αποθηκεύεται όταν ο
μετατροπέας συχνότητας απενεργοποιηθεί.
15-30 Alarm Log: Error Code
Περιοχή: Λειτουργία:
0* [0 - 255 ] Εμφανίστε τον κωδικό σφάλματος και δείτε την
ερμηνεία του στο κεφάλαιο 6 Αντιμετώπιση
προβλημάτων.
15-31 InternalFaultReason
Περιοχή: Λειτουργία:
0* [-32767 -
32767 ]
Προβολή μίας επιπλέον περιγραφής του
σφάλματος. Αυτή η παράμετρος χρησιμοποιείται κυρίως σε συνδυασμό με το
συναγερμό 38 Εσωτερικό σφάλμα.
15-40 FC Type
Περιοχή: Λειτουργία:
15-02 Μετρητής kWh
Περιοχή: Λειτουργία:
0
kWh*
[0 2147483647
kWh]
Καταχωρεί την κατανάλωση ισχύος του
κινητήρα ως μέση τιμή σε διάρκεια 1
ώρας. Επαναφορά μετρητή σε
παράμετρος 15-06 Επαναφορά μετρητή
kWh.
15-03 Ενεργοποιήσεις
0* [0 - 0 ] Εμφανίζει τον τύπο του μετατροπέα συχνότητας.
Αυτή η ένδειξη είναι ίδια με το πεδίο ισχύος του
ορισμού τύπου κωδικού, χαρακτήρες 1-6.
15-41 Power Section
Περιοχή: Λειτουργία:
0* [0 - 20 ] Προβάλετε τον τύπο FC. Αυτή η ένδειξη είναι ίδια
με το πεδίο ισχύος του ορισμού τύπου κωδικού,
χαρακτήρες 7-10.
Περιοχή: Λειτουργία:
0* [0 - 2147483647 ] Προβολή των ωρών λειτουργίας του
μετατροπέα συχνότητας.
15-04 Υπερθερμάνσεις
Περιοχή: Λειτουργία:
0* [0 - 65535 ] Προβολή του αριθμού των σφαλμάτων
θερμοκρασίας του μετατροπέα συχνότητας.
15-42 Voltage
Περιοχή: Λειτουργία:
0* [0 - 20 ] Προβάλετε τον τύπο FC. Αυτή η ένδειξη είναι ίδια
με το πεδίο ισχύος του ορισμού τύπου κωδικού,
χαρακτήρες 11-12.
15-43 Έκδοση λογισμικού
Περιοχή: Λειτουργία:
15-05 Υπερτάσεις
Περιοχή: Λειτουργία:
0* [0 - 65535 ] Προβολή του αριθμού των υπερτάσεων που
έχουν συμβεί στο μετατροπέα συχνότητας.
0* [0 - 5 ] Προβολή της συνδυασμένης έκδοσης λογισμικού
(ή έκδοση πακέτου) που αποτελείται από
λογισμικό ισχύος και λογισμικό ελέγχου.
15-44 Επιθυμητή συμβολοσειρά κωδικού τύπου
15-06 Επαναφορά μετρητή kWh
Επιλογή: Λειτουργία:
[0] * Όχι επαναφορά Δεν απαιτείται επαναφορά του μετρητή
kWh.
[1] Επαναφορά
μετρητή
Πατήστε [OK] για να επαναφέρετε τον
μετρητή kWh στο 0 (δείτε
παράμετρος 15-02 Μετρητής kWh).
Περιοχή: Λειτουργία:
0* [0 - 40 ] Προβολή της συμβολοσειράς κωδικού τύπου που
χρησιμοποιείται για την αναδιάταξη του
μετατροπέα συχνότητας στην αρχική του
διαμόρφωση.
15-45 Actual Typecode String
Περιοχή: Λειτουργία:
15-07 Reset Running Hours Counter
0* [0 - 40 ] Εμφανίζει τον πραγματικό κωδικό τύπου.
Επιλογή: Λειτουργία:
[0] * Do not reset
[1] Reset counter Πατήστε [OK] για να επαναφέρετε τον
μετρητή ωρών λειτουργίας στο 0 (δείτε
παράμετρος 15-01 Running Hours).
98 Danfoss A/S © 07/2016 Με την επιφύλαξη κάθε δικαιώματος. MG07C327
 Loading...
Loading...