

Page 1

ENGINEERING TOMORROW
Handbok
VLT® Midi Drive FC 280
www.danfoss.se/vlt
Page 2

Page 3
Page 4
Page 5
Innehåll Handbok
Innehåll
1 Inledning
1.1 Syftet med handboken
1.2 Ytterligare dokumentation
1.3 Dokument- och programversion
1.4 Produktöversikt
1.5 Godkännanden och certikat
1.6 Kassering
2 Säkerhet
2.1 Säkerhetssymboler
2.2 Behörig personal
2.3 Säkerhetsåtgärder
3 Mekanisk installation
3.1 Uppackning
3.2 Installationsmiljö
3.3 Montering
4
4
4
4
4
6
6
7
7
7
7
9
9
10
10
4 Elektrisk installation
4.1 Säkerhetsinstruktioner
4.2 EMC-korrekt installation
4.3 Jordning
4.4 Kopplingsschema
4.5 Åtkomst
4.6 Motoranslutning
4.7 Anslutning till växelströmsnät
4.8 Styrkablar
4.8.1 Styrplintstyper 19
4.8.2 Kabeldragning till styrplintarna 20
4.8.3 Aktivera motordrift (plint 27) 20
4.8.4 Styrning av mekanisk broms 20
4.8.5 USB datakommunikation 22
4.9 Checklista för installation
5 Idrifttagning
5.1 Säkerhetsinstruktioner
13
13
13
13
15
17
17
18
19
23
24
24
5.2 Koppla på strömmen
5.3 Drift med lokal manöverpanel
5.3.1 Numerisk lokal manöverpanel (NLCP) 24
5.3.2 Högerknappsfunktionen på NLCP 26
MG07A507 Danfoss A/S © 08/2018 Med ensamrätt. 1
24
24
Page 6
Innehåll
VLT® Midi Drive FC 280
5.3.3 Snabbmeny på NLCP 26
5.3.4 Huvudmeny på NLCP 28
5.3.5 Grask lokal manöverpanel (GLCP) 30
5.3.6 Parameterinställningar 31
5.3.7 Ändra parameterinställningar med GLCP 31
5.3.8 Överföra/hämta data till/från LCP:n 31
5.3.9 Återställa fabriksinställningarna med LCP 31
5.4 Grundläggande programmering
5.4.1 Inställningar för asynkronmotor 32
5.4.2 PM-motorkonguration i VVC
5.4.3 Automatisk motoranpassning (AMA) 33
+
5.5 Kontrollera motorns rotation
5.6 Kontrollera pulsgivarens rotation
5.7 Test av lokal styrning
5.8 Systemkonguration
5.9 Minnesmodul
5.9.1 Synkronisera frekvensomriktardata till en ny minnesmodul (skapa säkerhetskopia) 36
5.9.2 Kopiera data till en annan frekvensomriktare 36
5.9.3 Kopiera data till era frekvensomriktare 36
5.9.4 Överföring av Firmware-information 37
5.9.5 Säkerhetskopiera parameterändringar till minnesmodulen 37
5.9.6 Radera data 37
5.9.7 Överföringsprestanda och indikatorer 37
5.9.8 Aktivera PROFIBUS-omvandlaren 37
32
32
34
34
34
35
35
6 Safe Torque O (STO)
6.1 Säkerhetsåtgärder för STO
6.2 Installation av Safe Torque O
6.3 STO-idrifttagning
6.3.1 Aktivering av Safe Torque O 41
6.3.2 Inaktivering av Safe Torque O 41
6.3.3 STO-idrifttagningstest 42
6.3.4 Test för STO-tillämpningar i läget manuell omstart 42
6.3.5 Test för STO-tillämpningar i läget automatisk omstart 42
6.4 Underhåll och service för STO
6.5 STO-tekniska data
7 Tillämpningsexempel
7.1 Inledning
7.2 Tillämpningsexempel
2 Danfoss A/S © 08/2018 Med ensamrätt. MG07A507
39
40
40
41
42
44
45
45
45
Page 7
Innehåll Handbok
7.2.1 AMA 45
7.2.2 Varvtal 45
7.2.3 Start/stopp 47
7.2.4 Extern larmåterställning 47
7.2.5 Motortermistor 47
7.2.6 SLC 48
8 Underhåll, diagnostik och felsökning
8.1 Underhåll och service
8.2 Varnings- och larmtyper
8.3 Varnings- och larmdisplay
8.4 Lista över varningar och larm
8.4.1 Varning och larm – kodlista 51
8.5 Felsökning
9 Specikationer
9.1 Elektriska data
9.2 Nätförsörjning
9.3 Motoreekt och motordata
9.4 Omgivande miljöförhållanden
9.5 Kabelspecikationer
9.6 Styringång/-utgång och styrdata
9.7 Åtdragningsmoment för anslutningar
9.8 Säkringar och maximalbrytare
9.9 Kapslingsstorlekar, märkeekter och mått
49
49
49
49
51
55
57
57
59
60
60
61
61
64
64
67
10 Bilaga
10.1 Symboler, förkortningar och praxis
10.2 Menystruktur för parametrar
Index
MG07A507 Danfoss A/S © 08/2018 Med ensamrätt. 3
70
70
70
81
Page 8
Inledning
VLT® Midi Drive FC 280
11
1 Inledning
1.1 Syftet med handboken
Drifthandboken innehåller information för säker installation
och idrifttagning av VLT® Midi DriveFC 280 frekvensom-
riktaren.
Handboken är endast avsedd att användas av behörig
personal.
Läs och följ instruktionerna i handboken för att kunna
använda frekvensomriktaren på ett säkert och professionellt sätt. Lägg särskild vikt vid säkerhetsinstruktionerna
och de allmänna varningarna. Handboken ska alltid
tillgänglig i anslutning till frekvensomriktaren.
VLT® är ett registrerat varumärke.
1.2 Ytterligare dokumentation
Tillgänglig dokumentation som hjälper dig att förstå
frekvensomriktarens avancerade funktioner och programmering:
Design Guide för VLT® Midi Drive FC 280 innehåller
•
information om frekvensomriktarens design och
tillämpningar.
Programmeringshandboken för VLT® Midi DriveFC
•
280 innehåller information om programmering och
fullständiga parameterbeskrivningar.
Ytterligare dokumentation och handböcker nns
tillgängliga hos Danfoss. I drives.danfoss.com/knowledge-
center/technical-documentation/ nns en förteckning över
handböcker/dokumentation.
Dokument- och programversion
1.3
nns
Produktöversikt
1.4
1.4.1 Avsett användningsområde
Frekvensomriktaren är en elektronisk motorregulator
avsedd för:
Reglering av motorvarvtal som svar på systemå-
•
terkoppling eller ärrkommandon från externa
regulatorer. Ett frekvensomriktarsystem består av
frekvensomriktaren, motorn och utrustningen
som drivs av motorn.
Övervakning av system- och motorstatus.
•
Frekvensomriktaren kan också användas som överbelastningsskydd för motor.
Beroende på kongurationen kan frekvensomriktaren
användas i fristående tillämpningar eller utgöra en del av
en större apparat eller anläggning.
Frekvensomriktaren får användas i bostads-, industri- och
företagsmiljöer i enlighet med lokala lagar och normer.
OBS!
I bostadsmiljöer kan produkten orsaka radiostörningar,
och lämpliga åtgärder för att minska störningarna kan
behöva vidtas.
Förutsebar felaktig användning
Använd inte frekvensomriktaren inom användningsområden som inte motsvarar angivna driftförhållanden och
miljöer. Kontrollera att villkoren i kapitel 9 Specikationer är
uppfyllda.
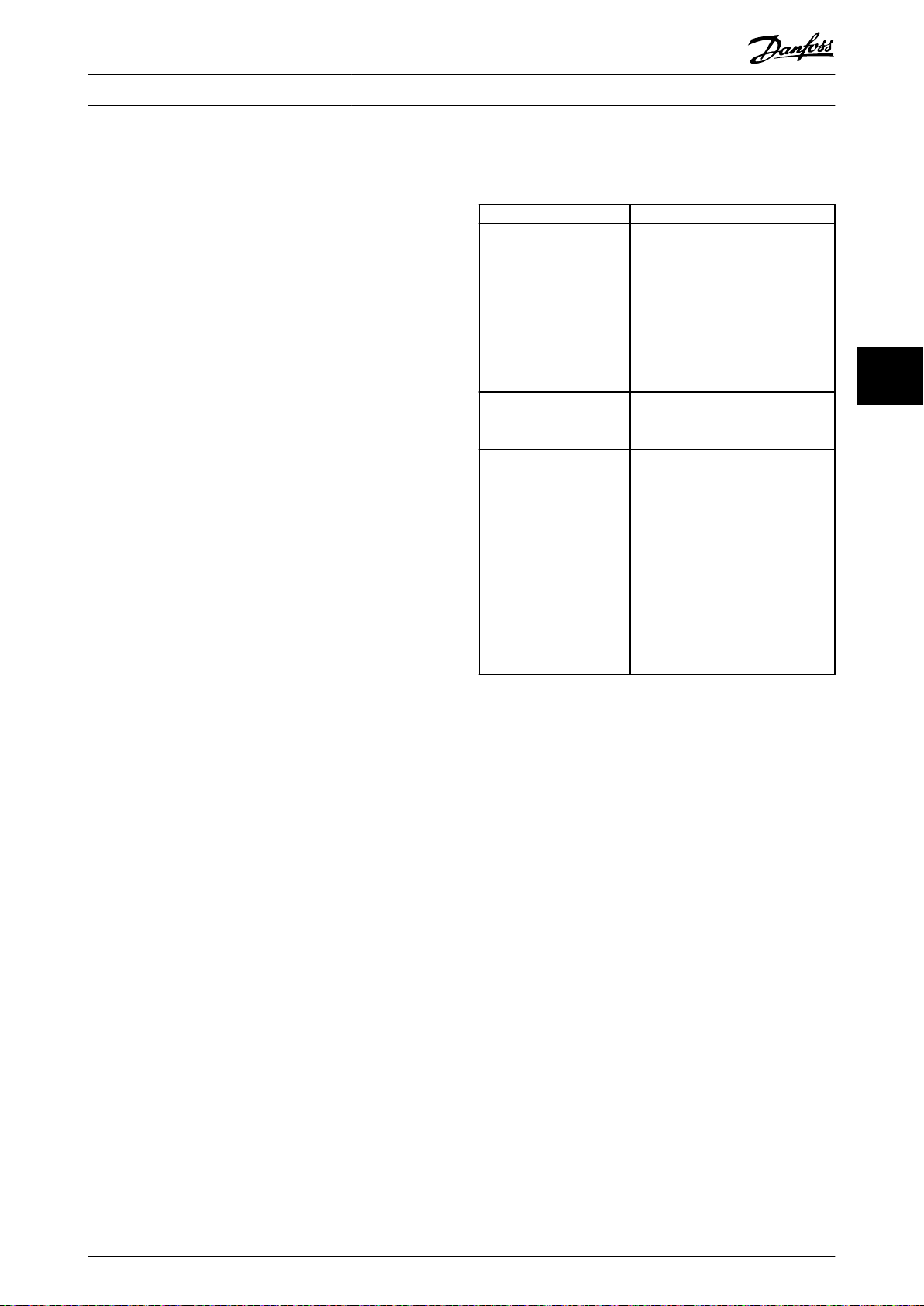
Den här handboken granskas och uppdateras regelbundet.
Förslag på förbättringar tas gärna emot. Tabell 1.1 visar
dokumentversionen och motsvarande programversion.
Utgåva Anmärkningar
MG07A5
4 Danfoss A/S © 08/2018 Med ensamrätt. MG07A507
Uppdatering av programvara och
minnesmodulsupport.
Tabell 1.1 Dokument- och programversion
Program-
version
1,5
Page 9
M
7
63
4
5
21
8
10
130BE200.12
M
7
63
4
5
21
8
9
T2/T4
S2
Inledning Handbok
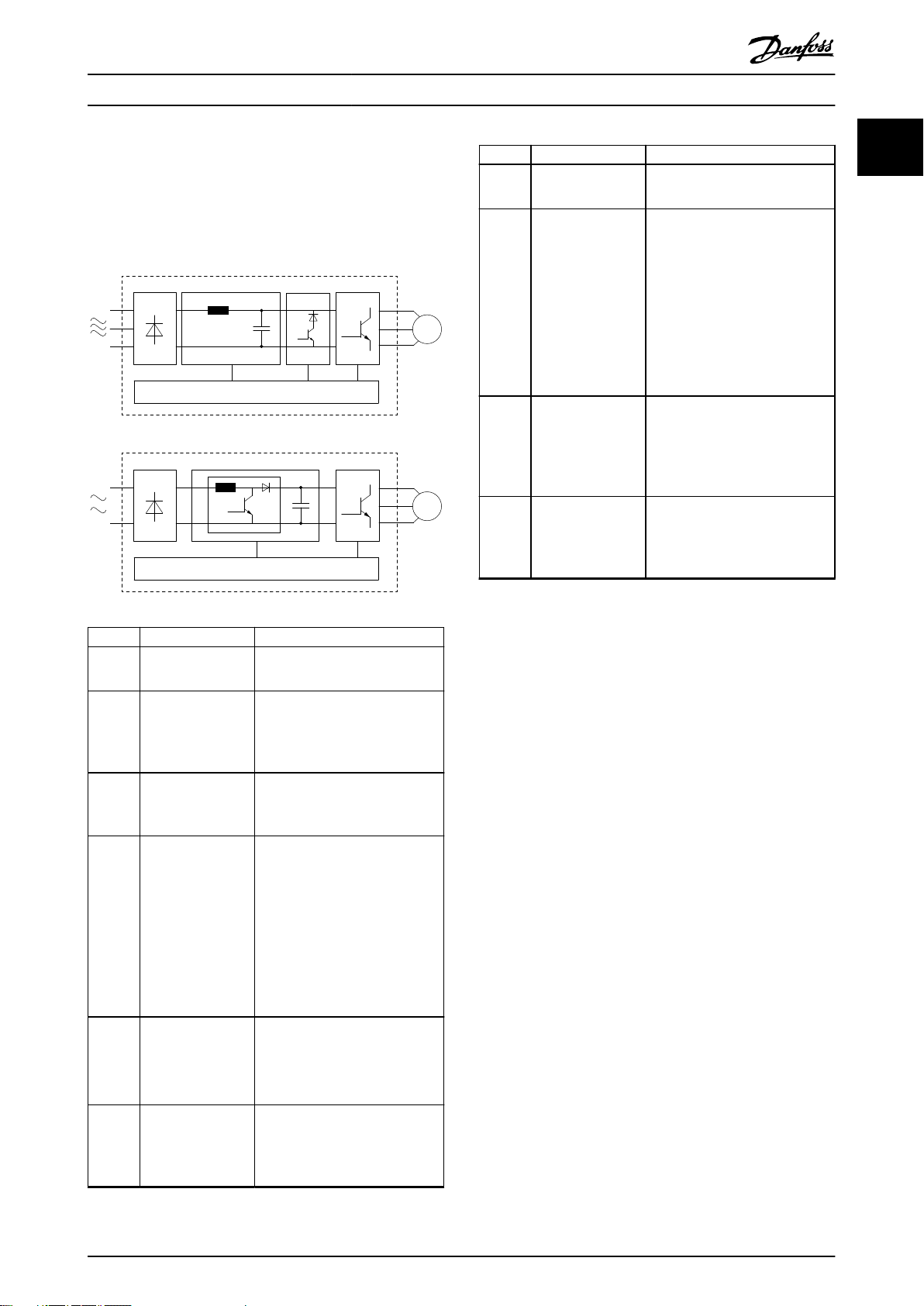
1.4.2 Blockschema över frekvensomriktaren
Bild 1.1 är ett blockschema över frekvensomriktarens
interna komponenter.
Område Komponent Funktioner
Reglerad utgående 3-fasström
7 Utström till motorn
8 Styrströmkrets
9 PFC
10 Bromschopper
•
till motorn.
Ineekt, intern bearbetning,
•
uteekt och motorström
övervakas för att driften och
styrningen ska bli eektiv.
Användargränssnitt och
•
externa kommandon
övervakas och utförs.
Statusutgång och status-
•
styrning kan tillhandahållas.
Korrigering av eektfaktorn
•
ändrar vågformen på
strömmen som dras av
frekvensomriktaren för att
förbättra eektfaktorn.
Bromschoppern används för
•
att styra spänningen i mellankretsen när lasten matar
energi tillbaka.
1 1
Område Komponent Funktioner
Växelströmförsörjning till
1 Nätingång
2 Likriktare
3 DC-buss
4 Likströmsreaktor
5 Kondensatorbank
6 Växelriktare
•
frekvensomriktaren.
Likriktarbryggan konverterar
•
den ingående växelströmmen
till likström, vilket
växelriktaren matas med.
En mellanliggande
•
likströmskrets hanterar
likströmmen.
Filtrerar mellankretsspän-
•
ningen (likström).
Skyddar mot nättransienter.
•
Reducerar RMS-ström.
•
Höjer den eektfaktor som
•
skickas tillbaka till nätet.
Reducerar övertoner på
•
växelströmsingången.
Lagrar likströmmen.
•
Tillhandahåller genomström-
•
ningsskydd vid kortvariga
eektförluster.
Konverterar likströmmen till
•
en reglerad PWM-växelströmsvågform för en reglerad,
variabel utgång till motorn.
Bild 1.1 Exempel på blockschema för en frekvensomriktare
1.4.3 Kapslingsstorlekar och märkeekter
Kapslingsstorlekar och märkeekter för frekvensomriktarna
nns i kapitel 9.9 Kapslingsstorlekar, märkeekter och mått.
1.4.4 Safe Torque O (STO)
Frekvensomriktaren VLT® Midi Drive FC 280 stöder Safe
Torque O (STO). Mer information om installation, idrifttagning, underhåll och tekniska data för STO nns i
kapitel 6 Safe Torque O (STO).
MG07A507 Danfoss A/S © 08/2018 Med ensamrätt. 5
Page 10
089
Inledning
VLT® Midi Drive FC 280
11
1.5 Godkännanden och certikat
Mer information om den Europeiska överenskommelsen
om internationell transport av farligt gods på inre
vattenvägar (ADN) nns i avsnittet Installation i enlighet
med ADN i Design Guide för VLT® Midi DriveFC 280.
Frekvensomriktaren uppfyller kraven i UL 508C. Mer
information nns i avsnittet Termiskt motorskydd i Design
Guide för VLT® Midi DriveFC 280.
Tillämpade standarder och uppfyllda krav för STO
Användning av STO på plint 37 och 38 kräver att alla
säkerhetsvillkor, inklusive relevanta lagar, bestämmelser och
riktlinjer uppfylls. Den integrerade STO-funktionen uppfyller
följande standarder:
IEC/SS-EN 61508:2010, SIL2
•
IEC/SS-EN 61800-5-2:2007, SIL2
•
IEC/SS-EN 62061:2015, SILCL av SIL2
•
SS-EN ISO 13849-1:2015 kategori 3 PL d
•
Kassering
1.6
Utrustning som innehåller elektriska
komponenter får inte hanteras på samma
sätt som hushållsavfall.
Sortera utrustningen separat i enlighet
med gällande lokal lagstiftning.
6 Danfoss A/S © 08/2018 Med ensamrätt. MG07A507
Page 11
Säkerhet Handbok
2 Säkerhet
2.1 Säkerhetssymboler
Säkerhetsåtgärder
2.3
2 2
Följande symboler används i det här dokumentet:
VARNING
Indikerar en potentiellt farlig situation som kan leda till
dödsfall eller allvarliga personskador.
FÖRSIKTIGT
Indikerar en potentiellt farlig situation som kan leda till
lindriga eller måttliga personskador. Symbolen kan även
användas för att uppmärksamma farligt handhavande.
OBS!
Indikerar viktig information, inklusive situationer som
kan leda till skador på utrustning eller egendom.
2.2 Behörig personal
Korrekt och säker transport, lagring, installation, drift och
underhåll krävs för problemfri och säker drift av frekvensomriktaren. Endast behörig personal får installera och
använda denna utrustning.
Behörig personal
med behörighet att installera, driftsätta och underhålla
utrustning, system och kretsar i enlighet med gällande
lagar och bestämmelser. Personalen måste dessutom vara
införstådd med de instruktioner och säkerhetsåtgärder som
beskrivs i den här handboken.
denieras som utbildade medarbetare
VARNING
HÖG SPÄNNING
Frekvensomriktare innehåller hög spänning när de är
anslutna till växelströmsnätet, likströmsförsörjning eller
lastdelning. Om installation, driftsättning och underhåll
inte utförs av behörig personal kan det leda till dödsfall
eller allvarliga personskador.
Endast behörig personal får utföra installation,
•
driftsättning och underhåll.
Innan underhålls- eller reparationsarbete utförs
•
ska ett lämpligt verktyg för att mäta spänning
användas för att säkerställa att ingen spänning
föreligger i frekvensomriktaren.
VARNING
OAVSIKTLIG START
När frekvensomriktaren är ansluten till växelströmsnät,
DC-försörjning eller lastdelning kan motorn starta när
som helst. Oavsiktlig start vid programmering, underhåll
eller reparationsarbete kan leda till dödsfall, allvarliga
personskador eller materiella skador. Motorn kan starta
med hjälp av en extern brytare, ett fältbusskommando,
en ingångsreferenssignal från LCP, via ärrstyrning med
MCT 10 Set-up Software eller efter ett uppklarat
feltillstånd.
Så här förhindrar du oavsiktlig motorstart:
Koppla bort frekvensomriktaren från nätet.
•
Tryck på [O/Reset] på LCP:n innan du
•
programmerar parametrar.
Frekvensomriktaren, motorn och all annan
•
elektrisk utrustning måste vara driftklara när
frekvensomriktaren ansluts till växelströmsnät,
DC-försörjning eller lastdelning.
MG07A507 Danfoss A/S © 08/2018 Med ensamrätt. 7
Page 12
Säkerhet
VLT® Midi Drive FC 280
VARNING
URLADDNINGSTID
22
Frekvensomriktaren har DC-busskondensatorer som kan
behålla sin spänning även när nätspänningen kopplats
från. Hög spänning kan nnas kvar även om varningslysdioderna är släckta. Om du inte väntar den angivna
tiden efter att strömmen bryts innan underhålls- eller
reparationsarbete utförs, kan det leda till dödsfall eller
allvarliga personskador.
Stanna motorn.
•
Koppla från växelströmsnät och externa DC-
•
bussförsörjningar, inklusive reservbatterier, UPS
och DC-bussanslutningar till andra frekvensomriktare.
Koppla från eller lås PM-motorn.
•
Vänta tills kondensatorerna laddats ur. Minsta
•
väntetid anges i Tabell 2.1.
Innan underhålls- eller reparationsarbete utförs
•
ska ett lämpligt verktyg för att mäta spänning
användas för att säkerställa att kondensatorerna
är helt urladdade.
VARNING
FARLIG UTRUSTNING
Kontakt med roterande axlar och elektrisk utrustning kan
leda till dödsfall eller allvarliga personskador.
Säkerställ att endast utbildad och behörig
•
personal utför installation, driftsättning och
underhåll.
Kontrollera att elektriskt arbete följer gällande
•
nationella och lokala elsäkerhetsföreskrifter.
Följ procedurerna i denna handbok.
•
FÖRSIKTIGT
RISK FÖR INTERNT FEL
Om frekvensomriktaren inte stängs av på rätt sätt kan
ett internt fel leda till dödsfall eller allvarliga
personskador.
Innan du kopplar på strömmen ska du
•
säkerställa att alla skyddskåpor sitter på plats
och är säkrade.
Spänning [V]
200–240 0,37–3,7 (0,5–5) 4
380–480
Tabell 2.1 Urladdningstid
Eektområde
[kW (hk)]
0,37–7,5 (0,5–10) 4
11–22 (15–30) 15
Minsta väntetid
(minuter)
VARNING
VARNING FÖR LÄCKSTRÖM
Läckström överstiger 3,5 mA. Om jordningen av frekvensomriktaren inte genomförs korrekt kan det leda till
dödsfall eller allvarliga personskador.
En behörig elinstallatör måste säkerställa att
•
utrustningen är korrekt jordad.
8 Danfoss A/S © 08/2018 Med ensamrätt. MG07A507
Page 13
130BE616.14
VLT
MADE IN
DENMARK
T/C: FC-280PK37T4E20H1BXCXXXSXXXXAX
0.37kW 0.5HP
IN: 3x380-480V 50/60Hz, 1.2/1.0A
OUT: 3x0-Vin 0-500Hz, 1.2/1.1A
IP20
P/N: 134U2184 S/N: 000000G000
Midi Drive
www.danfoss.com
CAUTION / ATTENTION:
WARNING / AVERTISSEMENT:
See manual for special condition/mains fuse
Voir manual de conditions speciales/fusibles
Enclosure: See manual
5AF3 E358502 IND.CONT.EQ.
Stored charge, wait 4 min.
Charge r
é
siduelle, attendez 4 min.
21
1
2
4
3
5
11
20
19
18
16
15
14
13
10
8
9
6
17
R
US LISTED
www.tuv.com
ID 0600000000
Danfoss A/S, 6430 Nordborg, Denmark
12
7
Mekanisk installation Handbok
3 Mekanisk installation
3.1 Uppackning
3.1.1 Levererade artiklar
Vilka artiklar som levereras varierar beroende på
produktens
•
•
konguration.
Kontrollera att de levererade artiklarna och
informationen på märkskylten överensstämmer
med orderbekräftelsen.
Kontrollera om förpackningen och frekvensomriktaren ser ut att ha skador orsakade av olämplig
hantering under transporten. Lämna eventuellt
skadeståndskrav till transportören. Spara de
skadade delarna för framtida klargörande.
3 3
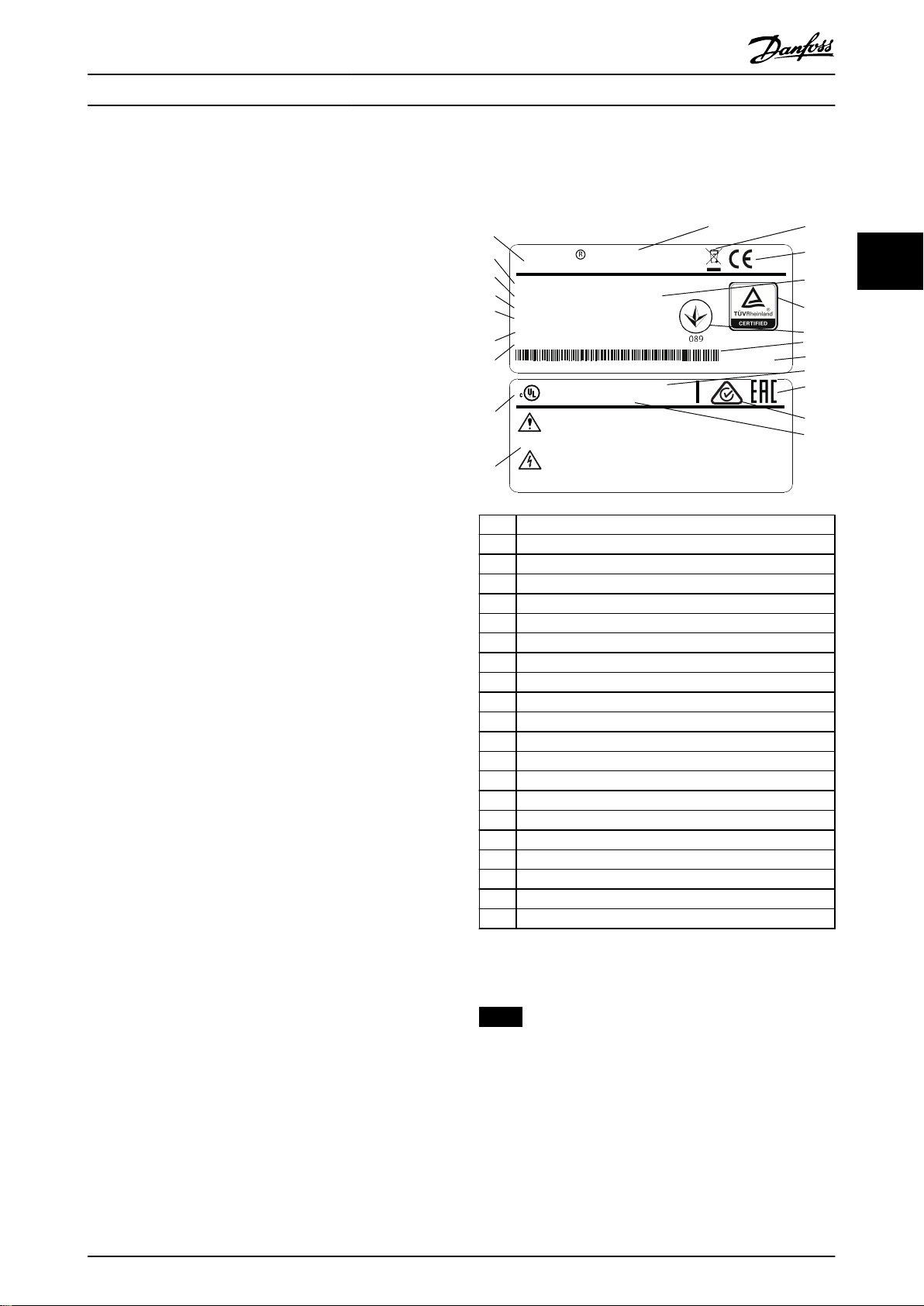
1 Produkt-logotyp
2 Produktnamn
3 Kassering
4 CE-märkning
5 Serienummer
6 TÜV-logotyp
7 UkrSEPRO-logotyp
8 Streckkod
9 Tillverkningsland
10 Referens till kapslingstyp
11 EAC-logotyp
12 RCM-logotyp
13 UL-referens
14 Varningsspecikationer
15 UL-logotyp
16 IP-klassicering
17 Utspänning, frekvens och ström (vid låg/hög spänning)
18 Inspänning, frekvens och ström (vid låg/hög spänning)
19 Märkeekt
20 Beställningsnummer
21 Typkod
MG07A507 Danfoss A/S © 08/2018 Med ensamrätt. 9
Bild 3.1 Produktmärkskylt (exempel)
OBS!
Ta inte bort märkskylten från frekvensomriktaren
(garantiförlust).
Mer information om typkod nns i avsnittet Typkod i
Design Guide för VLT® Midi DriveFC 280.
Page 14
Mekanisk installation
VLT® Midi Drive FC 280
3.1.2 Lagring
Kontrollera att kraven för lagring är uppfyllda. Ytterligare
information nns i kapitel 9.4 Omgivande miljöförhållanden.
3.2 Installationsmiljö
33
OBS!
I miljöer med fukt, luftburna partiklar eller korrosiva
gaser måste du kontrollera att utrustningens IP-klass/
märkdata överensstämmer med installationsmiljön. Om
kraven på omgivande miljö inte uppfylls kan frekvensomriktarens livslängd förkortas. Kontrollera att kraven
för luftfuktighet, temperatur och höjd är uppfyllda.
Vibrationer och stötar
Frekvensomriktaren uppfyller de krav som gäller för
enheter monterade i produktionslokaler på vägg eller golv,
och i panel fast monterad på vägg eller golv.
Detaljerade specikationer för omgivande miljöförhållanden nns i kapitel 9.4 Omgivande miljöförhållanden.
3.3 Montering
OBS!
Felaktig montering kan orsaka överhettning och
reducerade prestanda.
Kylning
Se till att kylningsavståndet är 100 mm både över
•
och under enheten.
Lyft
Kontrollera vad enheten väger för att avgöra en
•
säker lyftmetod. Se kapitel 9.9 Kapslingsstorlekar,
märkeekter och mått.
Säkerställ att lyftenheten är lämplig för uppgiften.
•
Planera vid behov för att ytta enheten med
•
hjälp av en lyft, en kran eller en gaeltruck med
lämplig klassicering.
Använd lyftöglorna på enheten om sådana nns.
•
Montering
Om du vill justera monteringshålen på VLT® Midi DriveFC
280 kontaktar du den lokala Danfoss-leverantören och
beställer en separat bakre plåt.
Så här monterar du frekvensomriktaren:
1. Kontrollera att monteringsplatsen klarar av att
bära enhetens vikt. Frekvensomriktaren möjliggör
installation sida vid sida.
2. Placera enheten så nära motorn som möjligt. Håll
motorkablarna så korta som möjligt.
3. Montera enheten lodrätt på en massiv, jämn yta
eller på den bakre plåten (tillval) för att
möjliggöra luftkylning.
4. Använd enhetens monteringshål vid väggmontering, om sådana
nns.
OBS!
Information om monteringshålens mått nns i
kapitel 9.9 Kapslingsstorlekar, märkeekter och mått.
3.3.1 Installation sida vid sida
Installation sida vid sida
Alla VLT® Midi DriveFC 280-enheter kan installeras sida vid
sida i lodrätt eller vågrätt läge. Enheterna kräver ingen
extra kylning från sidan.
10 Danfoss A/S © 08/2018 Med ensamrätt. MG07A507
Page 15
130BE615.12
130BF642.10
G
130BF643.10
G
Mekanisk installation Handbok
Bild 3.2 Installation sida vid sida
OBS!
RISK FÖR ÖVERHETTNING
Om ett IP21-konverteringssats används, kan montering
sida vid sida leda till överhettning eller skador på
enheten.
Det krävs minst 30 mm avstånd mellan de övre
•
kanterna på IP21 konverteringssats.
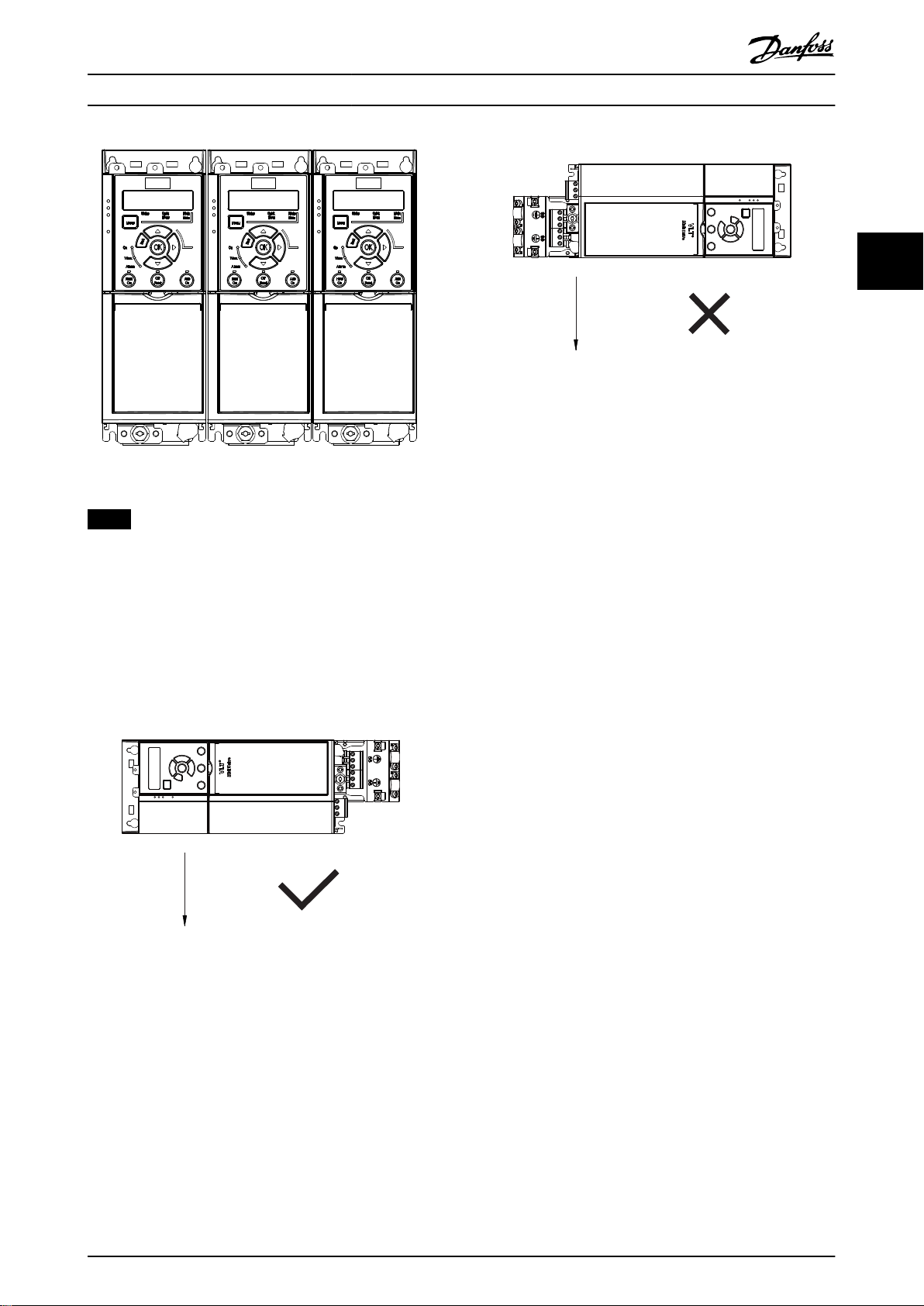
3.3.2 Horisontell montering
Bild 3.4 Fel håll vid horisontell montering (höger sida nedåt)
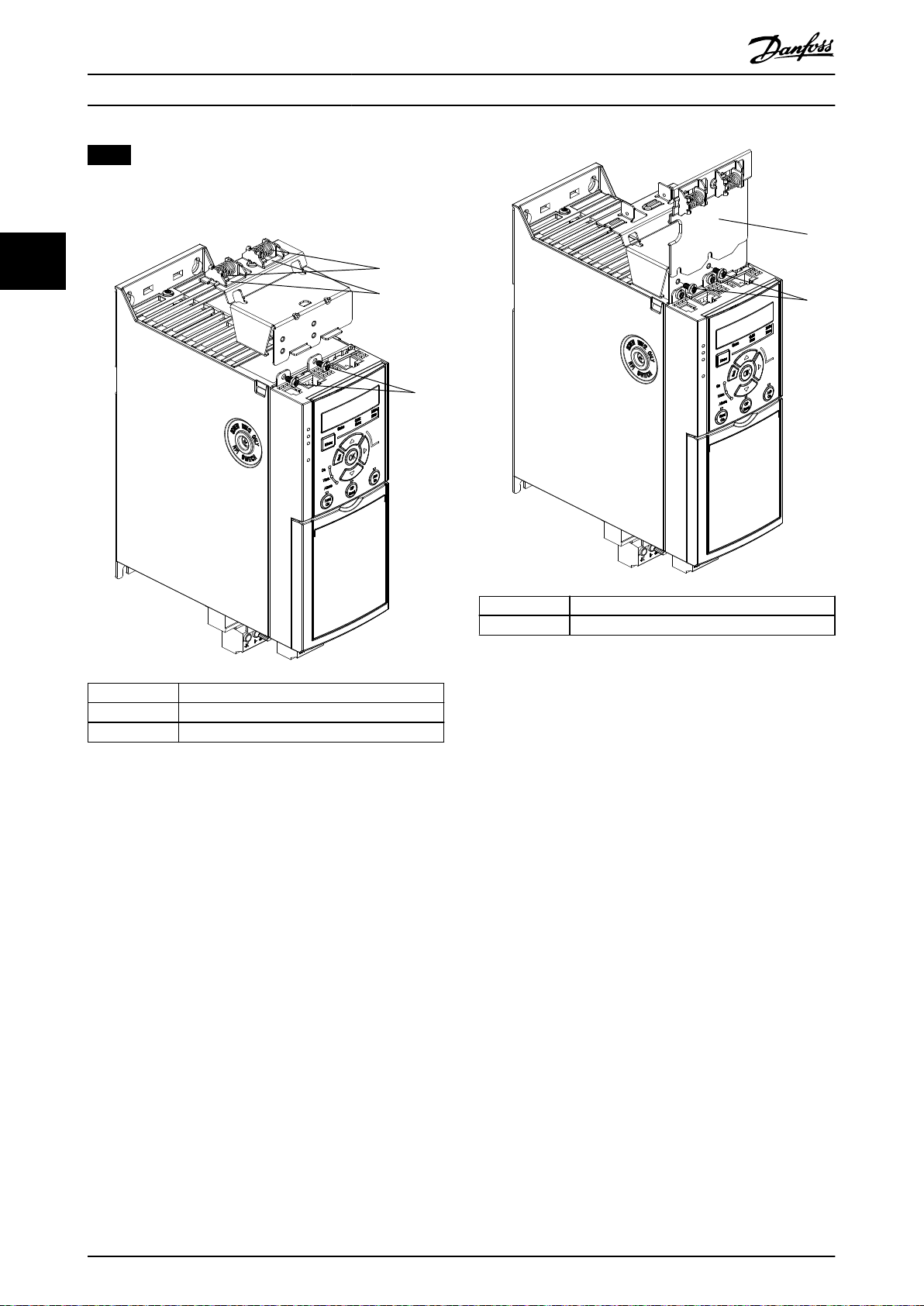
3.3.3 Bussjordningssats
Bussjordningssatsen säkerställer mekanisk fastsättning och
elektrisk skärmning av kablar för följande styrkassetter:
Styrkassett med PROFIBUS.
•
Styrkassett med PROFINET.
•
Styrkassett med CANopen.
•
Styrkassett med Ethernet.
•
Styrkassett med POWERLINK.
•
Varje bussjordningssats innehåller en horisontell
jordningsplåt och en vertikal jordningsplåt. Det är valfritt
att montera den vertikala jordningsplåten. Den vertikala
jordningsplåten ger bättre mekaniskt stöd för kabelförskruvningar och kablar för PROFINET, Ethernet och
POWERLINK.
3 3
Bild 3.3 Rätt håll vid horisontell montering (vänster sida
nedåt)
3.3.4 Montering
Så här monterar du bussjordningssatsen:
1. Placera den horisontella jordningsplåten på
styrkassetten som är monterad på frekvensomriktaren. Fäst plåten med två skruvar, så som visas
i Bild 3.5. Åtdragningsmoment 0,7–1,0 Nm (6.2–
8.9 in-lb).
2. Alternativt: Montera den vertikala jordningsplåten
på följande sätt:
2a Ta bort de två mekaniska ädrarna och
de två metallklämmorna från den
horisontella plåten.
2b Montera de mekaniska ädrarna och
metallklämmorna på den vertikala
plåten.
2c Fäst plåten med två skruvar, så som
visas i Bild 3.6. Åtdragningsmoment 0,7–
1,0 Nm (6.2–8.9 in-lb).
MG07A507 Danfoss A/S © 08/2018 Med ensamrätt. 11
Page 16
1
2
3
130BE480.10
130BE481.10
1
2
Mekanisk installation
VLT® Midi Drive FC 280
OBS!
Om IP21-toppkåpan används ska den vertikala jordningsplåten inte monteras. Detta eftersom dess höjd påverkar
den korrekta installationen av IP21-toppkåpan.
33
1 Mekaniska ädrar
2 Metallklämmor
3 Skruvar
Bild 3.5 Fästa den horisontella jordningsplåten med skruvar
1 Vertikal jordningsplåt
2 Skruvar
Bild 3.6 Fäst den vertikala jordningsplåten med skruvar
Både Bild 3.5 och Bild 3.6 visar Ethernet-baserade
kabelförskruvningar (RJ45). Kabelförskruvningstypen beror
på vilken fältbussvariant som har valts till frekvensomriktaren.
3. Säkerställ korrekt dragning av fältbussens kablar
(PROFIBUS/CANopen) eller tryck in kabelförskruvningarna (RJ45 för PROFINET/POWERLINK/
Ethernet/IP) i styrkassettens hylsor.
4. 4a Placera PROFIBUS-/CANopen-kablarna
mellan de
äderspända metallklämmorna för mekanisk xering och
elektrisk kontakt mellan de skärmade
delarna av kablarna och klämmorna.
4b Placera PROFINET/POWERLINK/
Ethernet/IP-kablarna mellan de
äderspända metallklämmorna för
mekanisk xering och elektrisk kontakt
mellan kablarna och klämmorna.
12 Danfoss A/S © 08/2018 Med ensamrätt. MG07A507
Page 17
Elektrisk installation Handbok
4 Elektrisk installation
4.1 Säkerhetsinstruktioner
Se kapitel 2 Säkerhet för allmänna säkerhetsinstruktioner.
VARNING
INDUCERAD SPÄNNING
Inducerad spänning från olika frekvensomriktares
utgående motorkablar som är dragna tillsammans kan
ladda upp utrustningens kondensatorer, även om utrustningen är avstängd eller låst. Om du inte använder
skärmade motorkablar eller drar motorkablarna separat,
kan det leda till dödsfall eller allvarliga personskador.
Dra utgående motorkablar separat.
•
Använd skärmade kablar.
•
Lås alla frekvensomriktare samtidigt.
•
VARNING
RISK FÖR STÖT
Frekvensomriktaren kan ge upphov till likström i PEledaren och därmed orsaka dödsfall eller allvarliga
personskador.
Om en jordfelsbrytare (RCD) används för skydd
•
mot elstötar måste den vara av typ B på försörjningssidan.
Underlåtenhet att följa rekommendationen innebär att
jordfelsbrytaren inte ger avsett skydd.
Överströmsskydd
Ytterligare skyddsutrustning som kortslut-
•
ningsskydd eller termiskt motorskydd mellan
frekvensomriktaren och motorn krävs för tillämpningar med era motorer.
Ingångssäkringar krävs för skydd mot kortslutning
•
och överström. Om säkringarna inte fabriksmonteras måste de tillhandahållas av
installatören. Information om maximala
säkringsklassiceringar nns i kapitel 9.8 Säkringar
och maximalbrytare.
Ledningstyper och klassiceringar
Alla kablar måste uppfylla nationella och lokala
•
krav på ledarareor och omgivningstemperaturer.
Rekommenderad ledning för nätanslutning: Minst
•
75 °C-märkt kopparledning (167 °F).
Rekommendationer för ledningsstorlekar och typer nns i
kapitel 9.5 Kabelspecikationer.
EMC-korrekt installation
4.2
Om en EMC-korrekt installation ska göras, måste instruktionerna i kapitel 4.3 Jordning, kapitel 4.4 Kopplingsschema,
kapitel 4.6 Motoranslutning, och kapitel 4.8 Styrkablar.
4.3 Jordning
VARNING
VARNING FÖR LÄCKSTRÖM
Läckström överstiger 3,5 mA. Om frekvensomriktaren
inte jordas korrekt kan det leda till dödsfall eller
allvarliga personskador.
En behörig elinstallatör måste säkerställa att
•
utrustningen är korrekt jordad.
För elektrisk säkerhet
Jorda frekvensomriktaren i enlighet med gällande
•
standarder och direktiv.
En dedikerad jordningsledning krävs för inström,
•
motoreekt och styrkablar.
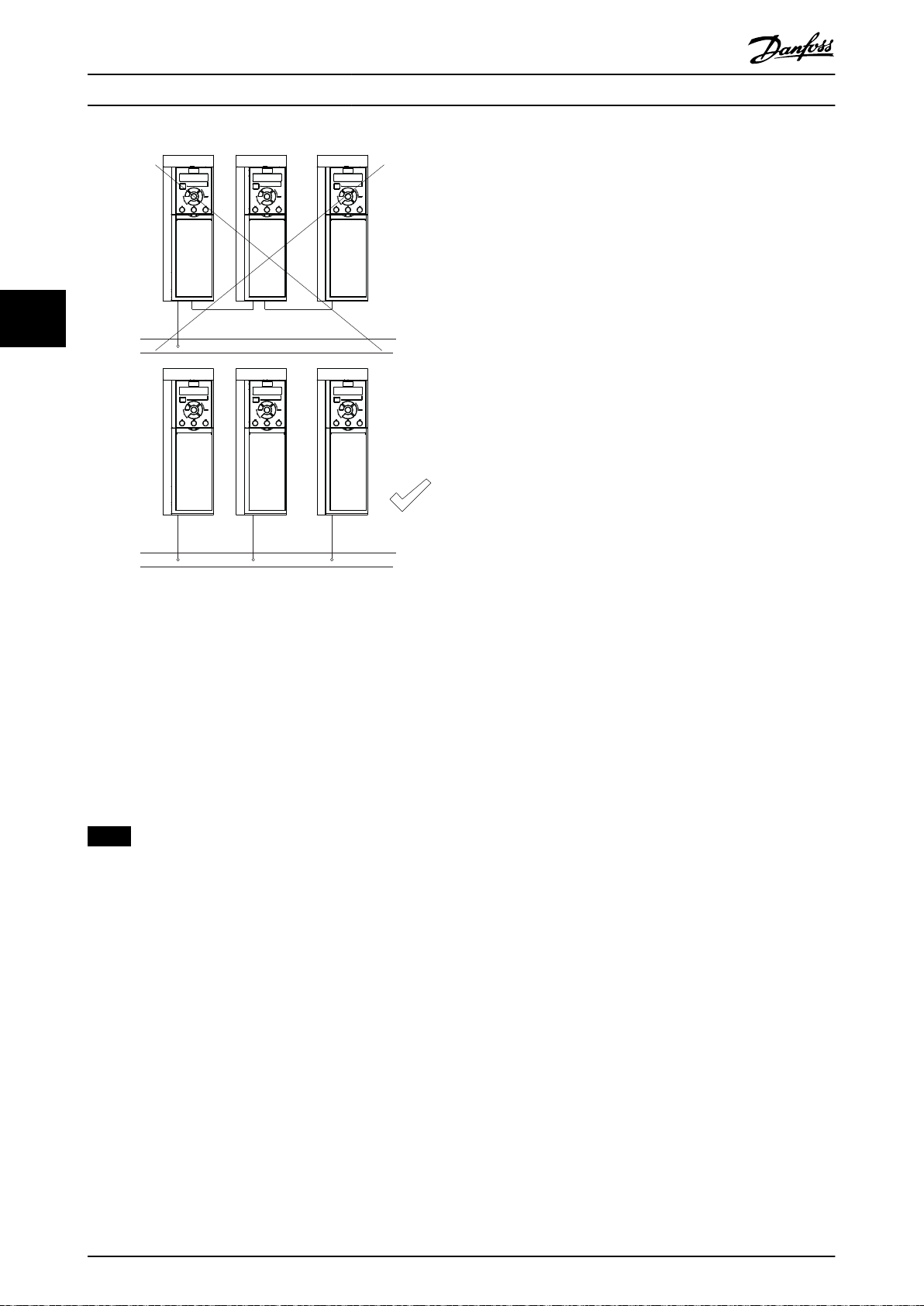
Kedjejorda inte era frekvensomriktare till
•
varandra (se Bild 4.1).
Håll ledningsanslutningarna till jord så korta som
•
möjligt.
Se till att motortillverkarens ledningskrav uppfylls.
•
Minsta ledararea för jordade kablar: 10 mm2 (7
•
AWG).
Separat avslutade jordledningar som uppfyller
•
dimensionskraven.
4 4
MG07A507 Danfoss A/S © 08/2018 Med ensamrätt. 13
Page 18
130BC500.10
FC 1
FC 1
FC 2
FC 2
FC 3
FC 3
PE
PE
Elektrisk installation
VLT® Midi Drive FC 280
44
Bild 4.1 Jordningsprincip
För EMC-korrekt installation
Skapa elektrisk kontakt mellan kabelskärmen och
•
frekvensomriktarens kapsling med hjälp av
kabelförskruvningar av metall eller genom att
använda klämmorna på utrustningen (se
kapitel 4.6 Motoranslutning).
Använd en kabel med mångtrådiga ledare för att
•
minska snabba transienter.
Använd inte tvinnade skärmändar.
•
OBS!
POTENTIALUTJÄMNING
Risk för snabba transienter när jordpotentialen mellan
frekvensomriktaren och styrsystemet är olika. Installera
utjämningskablar mellan systemkomponenterna.
Rekommenderad ledararea: 16 mm2 (6 AWG).
14 Danfoss A/S © 08/2018 Med ensamrätt. MG07A507
Page 19
Power
input
Switch mode
power supply
Motor
Analog output
interface
(PNP) = Source
(NPN) = Sink
ON = Terminated
OFF = Open
Brake
resistor
91 (L1/N)
92 (L2/L)
93 (L3)
PE
50 (+10 V OUT)
53 (A IN)
2)
54 (A IN)
55 (COM digital/analog I/O)
0/4−20 mA
12 (+24 V OUT)
13 (+24 V OUT)
18 (D IN)
10 V DC
15 mA 100 mA
+ - + -
(U) 96
(V) 97
(W) 98
(PE) 99
(A OUT) 42
(P RS485) 68
(N RS485) 69
(COM RS485) 61
0 V
5 V
S801
0/4−20 mA
RS485
RS485
03
+10 V DC
0−10 V DC
24 V DC
02
01
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
19 (D IN)
24 V (NPN)
0 V (PNP)
17 V
0 V
0 V (PNP)
24 V (NPN)
29 (D IN)
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
33 (D IN)
32 (D IN)
38 (STO2)
4)
37 (STO1)
4)
95
P 5-00
21
ON
(+DC/R+) 89
(R-) 81
0−10 V DC
(-DC) 88
RFI
0 V
250 V AC, 3 A
Relay 1
1)
3)
5)
5)
130BE202.19
27 (D IN/OUT)
6)
Elektrisk installation Handbok
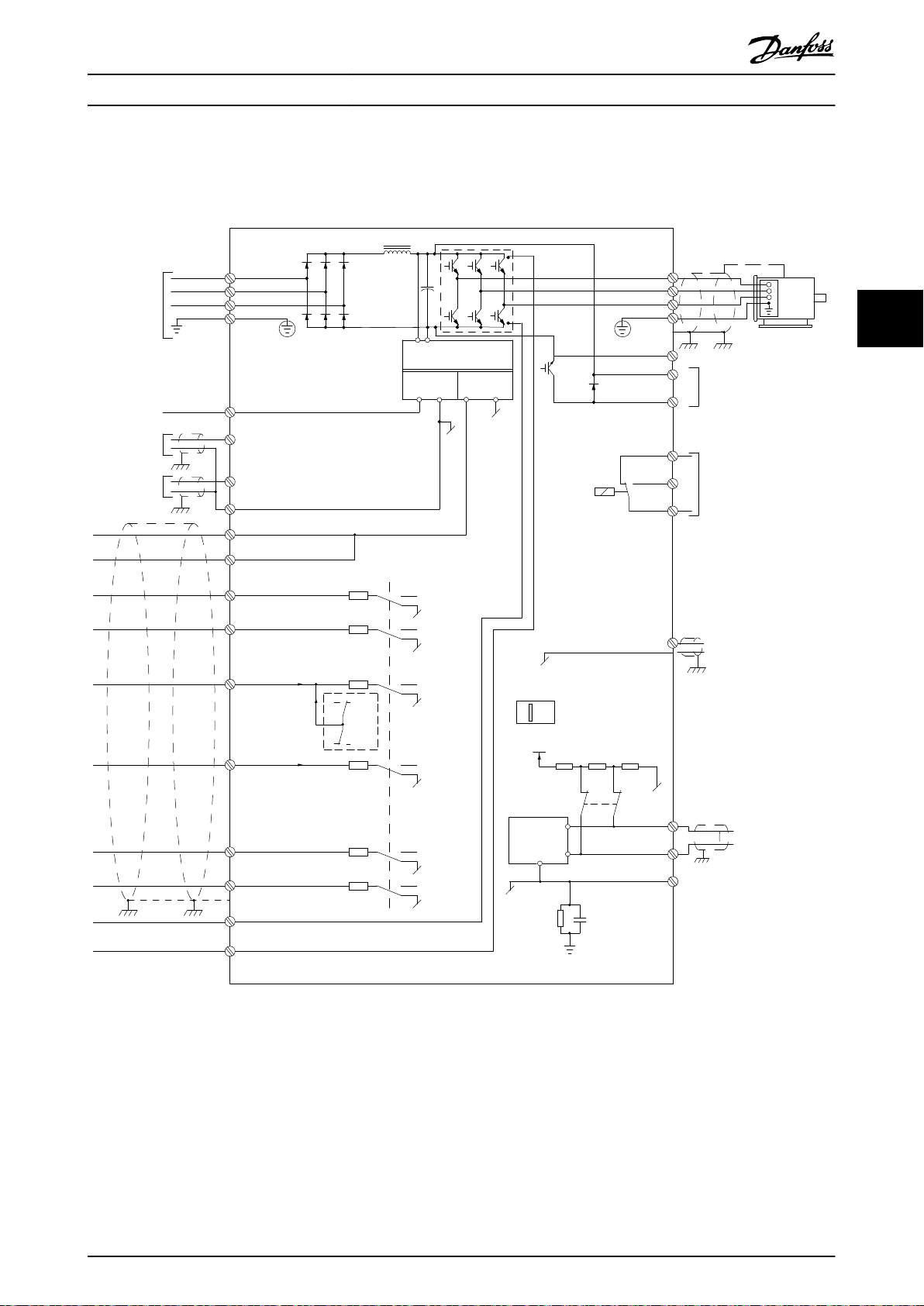
4.4 Kopplingsschema
Det här avsnittet beskriver hur frekvensomriktarens ledningar ska dras.
4 4
Bild 4.2 Kopplingsschema för grundläggande ledningsdragning
A = analog, D = digital
1) Inbyggd bromschopper nns endast för enheter med 3-fas.
2) Plint 53 kan även användas som en digital ingång.
3) Brytare S801 (bussanslutning) kan användas för att aktivera avslutningen på RS485-porten (plint 68 och 69).
4) Se kapitel 6 Safe Torque O (STO) för korrekt STO-ledningsdragning.
5) S2 (enkelfas 200–240 V) frekvensomriktaren stöder inte lastdelningsfunktionen.
6) Maximal spänning är 17 V för plint 27 som analog utgång.
MG07A507 Danfoss A/S © 08/2018 Med ensamrätt. 15
Page 20
e30bf228.11
L1
L2
L3
PE
PE
u
v
w
2
1
3
5
16
17
18
14
12
8
7
10
9
4
11
13
4
6
15
90
4
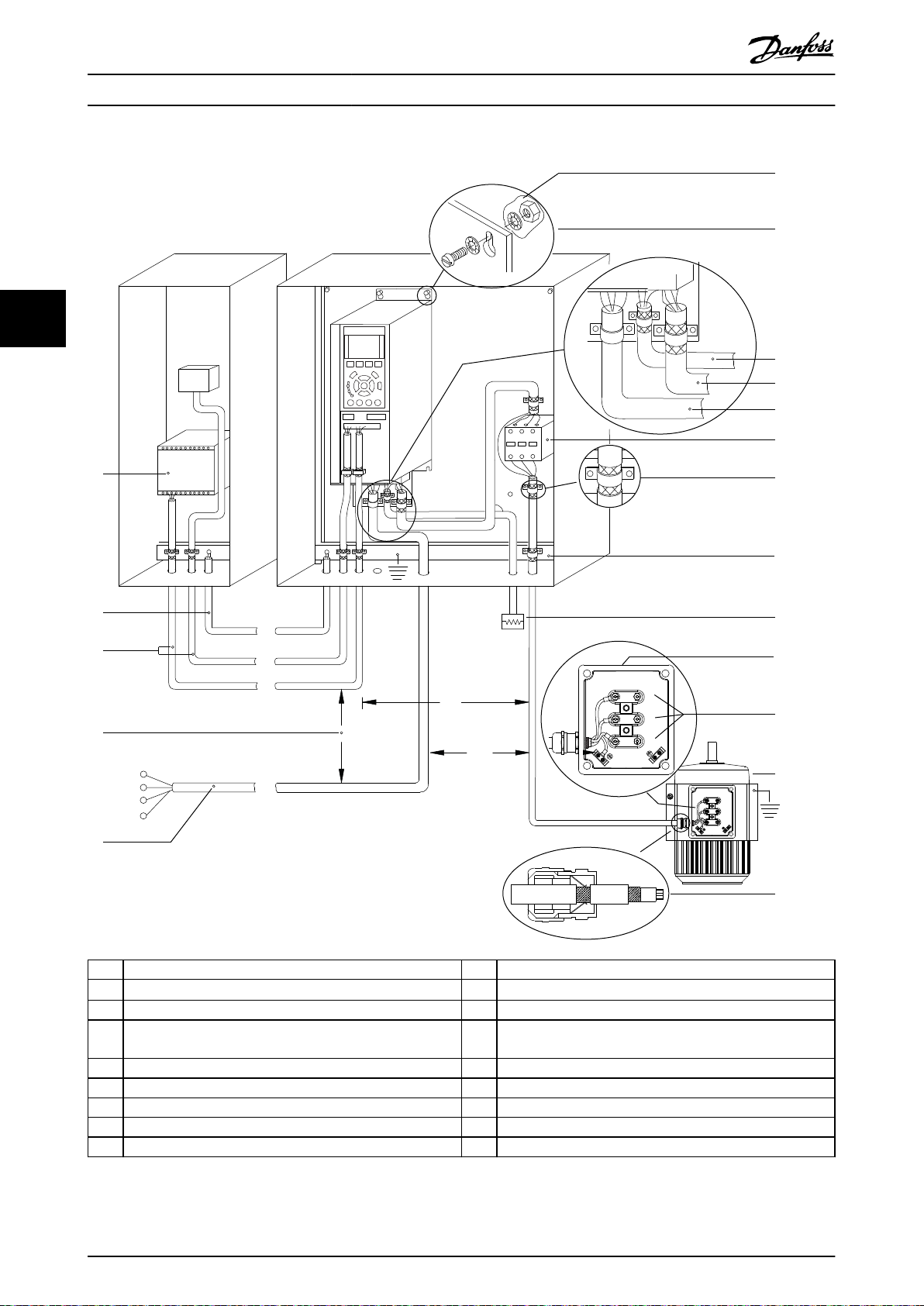
Elektrisk installation
VLT® Midi Drive FC 280
44
1 PLC 10 Nätkabel (oskärmad)
2
Minst 16 mm2 (6 AWG) utjämningskabel
3 Styrkablar 12 Skalad kabelisolering
4 Minst 200 mm (7,87 in) mellan styrkablar, motorkablar och
nätkablar.
5 Nätförsörjning 14 bromsmotstånd
6 Bar (omålad) yta 15 Metallåda
7 Stjärnbrickor 16 Anslutning till motor
8 Bromskabel (skärmad) 17 Motor
9 Motorkabel (skärmad) 18 EMC-kabelförskruvning
Bild 4.3 Standardmässig elektrisk anslutning
11 Utgångskontakt osv.
13 Gemensam jordsamlingsskena. Följ lokala och nationella krav
för apparatskåpets jordning.
16 Danfoss A/S © 08/2018 Med ensamrätt. MG07A507
Page 21
130BC504.11
130BD531.10
U
V
W
96
97
98
Elektrisk installation Handbok
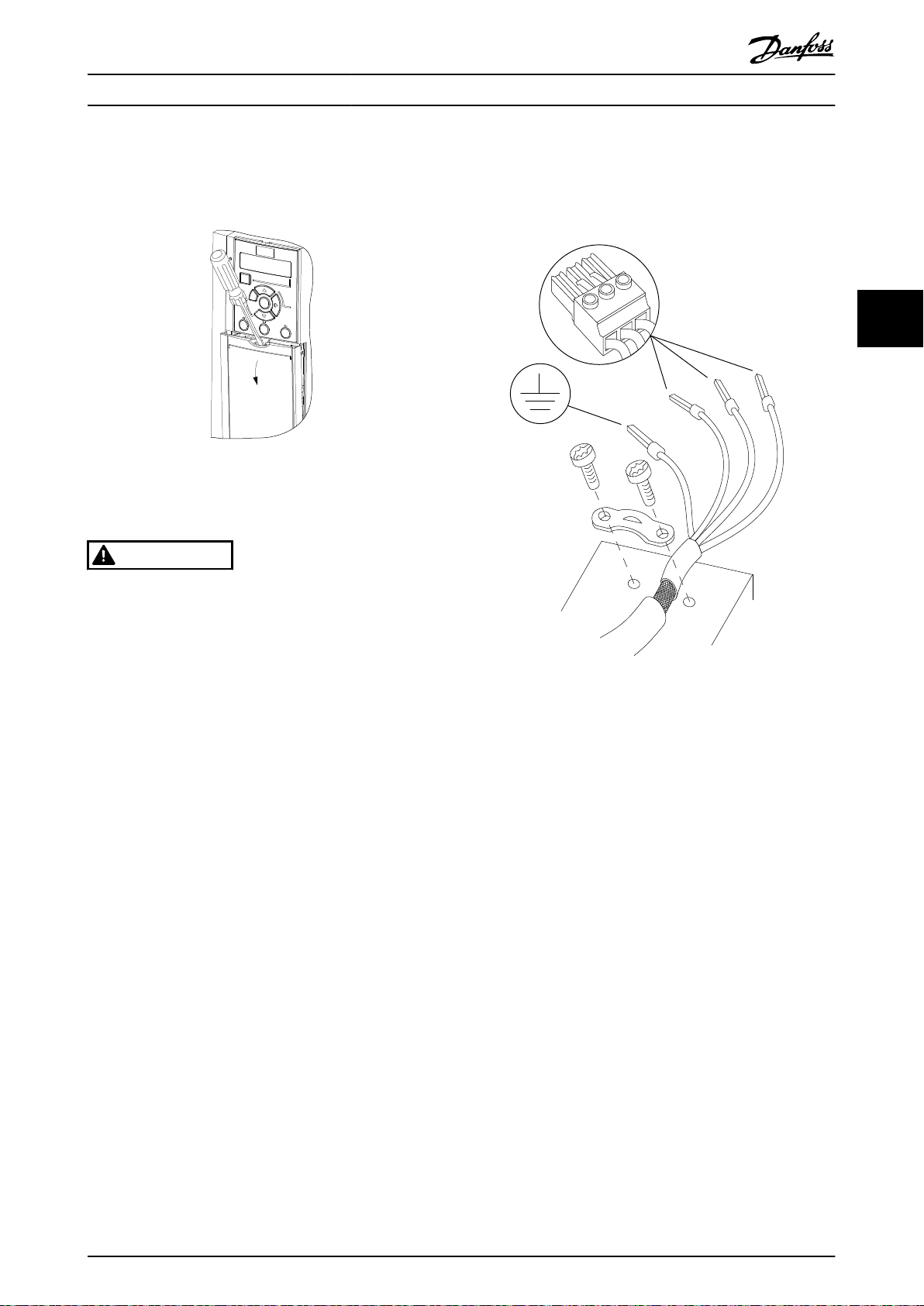
4.5 Åtkomst
Ta bort skyddsplåten med en skruvmejsel. Se
•
Bild 4.4.
Bild 4.4 Styrkabelåtkomst
4.6 Motoranslutning
VARNING
INDUCERAD SPÄNNING
Inducerad spänning från utgående motorkablar som är
dragna tillsammans kan ladda upp utrustningens
kondensatorer, även om utrustningen är avstängd och
låst. Om du inte använder skärmade kablar eller drar
motorkablarna separat, kan det leda till dödsfall eller
allvarliga personskador.
4. Anslut 3-fasmotorkablarna till plint 96 (U), 97 (V)
och 98 (W), så som visas i Bild 4.5.
5. Dra åt plintarna i enlighet med informationen i
kapitel 9.7 Åtdragningsmoment för anslutningar.
4 4
Bild 4.5 Motoranslutning
Dra utgående motorkablar separat.
•
Använd skärmade kablar.
•
Följ gällande lokala och nationella elsäkerhetsfö-
•
reskrifter om kabeldimensioner. Information om
maximala kabeldimensioner nns i
kapitel 9.1 Elektriska data.
Se till att motortillverkarens ledningskrav uppfylls.
•
Kabelhål eller luckor för motorledningar nns
•
längst ned på IP21/typ 1-enheter.
Koppla inte en start- eller polvändningsenhet
•
(t.ex. en Dahlandermotor eller induktionsmotor
med eftersläpningsring) mellan frekvensomriktaren och motorn.
Procedur
1. Skala av en bit av den yttre kabelisoleringen.
2. Placera den skalade kabeln under kabelklämman
för mekanisk xering och elektrisk kontakt mellan
kabelskärm och jord.
3. Anslut jordkabeln till närmsta jordningsplint i
enlighet med jordningsinstruktionerna i
kapitel 4.3 Jordning. Se Bild 4.5.
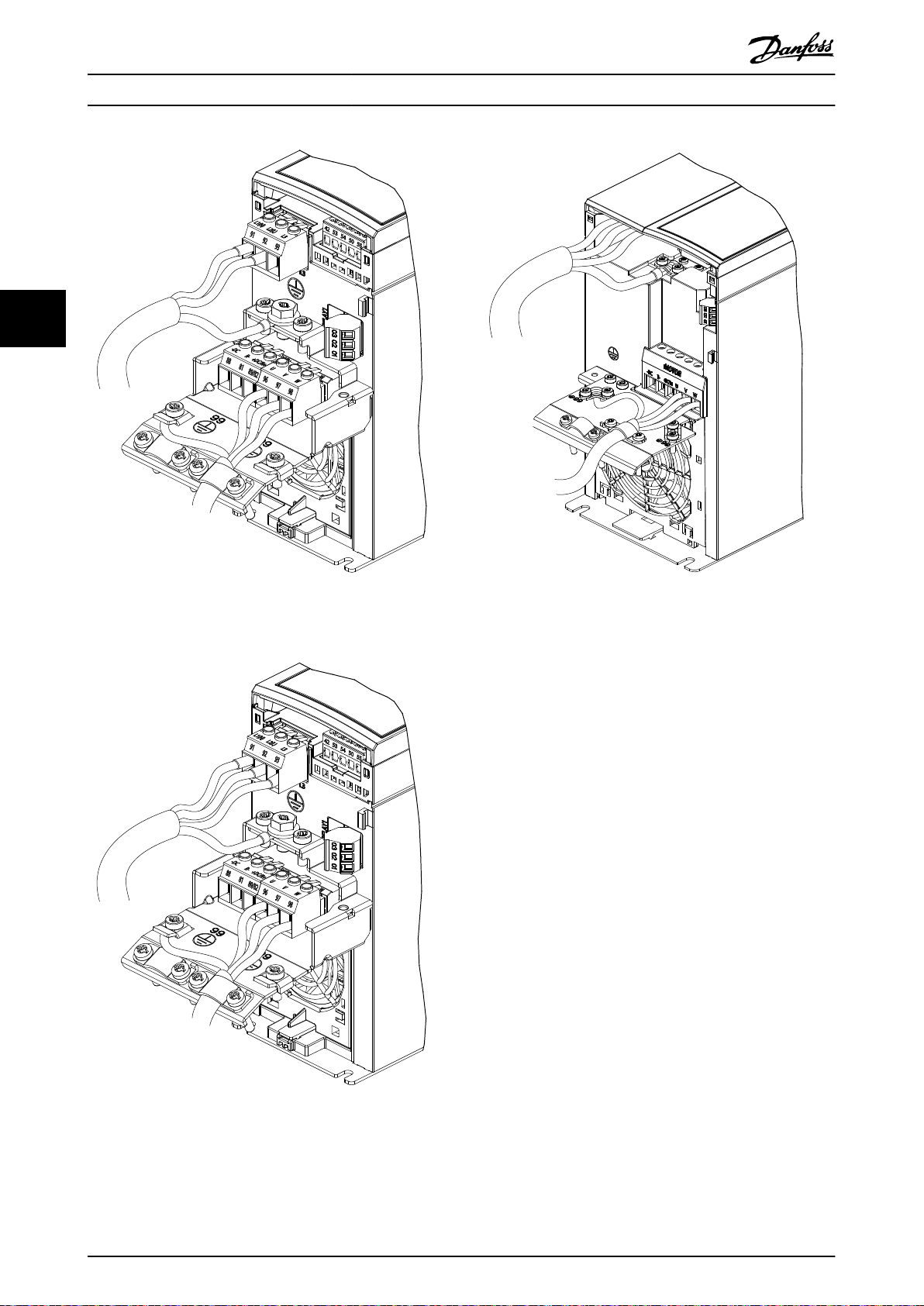
Nät-, motor- och jordanslutningen för frekvensomriktare
med 1-fas och 3-fas visas i Bild 4.6, Bild 4.7 respektive
Bild 4.8. Den verkliga kongurationen kan variera beroende
på enhetstyp och tillvalsutrustning.
MG07A507 Danfoss A/S © 08/2018 Med ensamrätt. 17
Page 22
130BE232.11
130BE231.11
130BE804.10
Elektrisk installation
VLT® Midi Drive FC 280
44
Bild 4.6 Nät-, motor- och jordanslutning för
Enheter med 1-fas
Bild 4.7 Nät-, motor- och jordanslutning för enheter med
3-fas (K1, K2, K3)
Bild 4.8 Nät-, motor- och jordanslutning för enheter med
3-fas (K4, K5)
Anslutning till växelströmsnät
4.7
Anpassa ledningarnas storlek efter inströmmen till
•
frekvensomriktaren. Information om maximal
ledningsstorlek nns i kapitel 9.1 Elektriska data.
Följ gällande lokala och nationella elsäkerhetsfö-
•
reskrifter om kabeldimensioner.
Procedur
1. Anslut växelströmsledningar till plint N och L för
enheter med 1-fas (se Bild 4.6), eller till plint L1,
L2 och L3 för enheter med 3-fas (se Bild 4.7).
2. Beroende på utrustningens konguration ansluter
du inströmmen till nätets ingångsplintar eller till
ingångsströmbrytaren.
3. Jorda kabeln i enlighet med jordningsanvisningarna i kapitel 4.3 Jordning.
4. Om frekvensomriktaren försörjs från ett isolerat
nät (IT-nät eller ytande delta) eller från ett
TT/TN-S-nät med en jordad gren (jordat delta) ska
du säkerställa att RFI-lterskruven är borttagen.
Detta för att undvika skador på mellankretsen
och reducera jordströmmar i enlighet med IEC
61800-3 (se Bild 9.2, RFI-skruven sitte på sidan av
frekvensomriktaren).
18 Danfoss A/S © 08/2018 Med ensamrätt. MG07A507
Page 23
130BE212.10
1 2
3
130BE214.10
37 38 12 13 18 19 27 29 32 33 61
42 53 54 50 55
68 69
1
3
2
Elektrisk installation Handbok
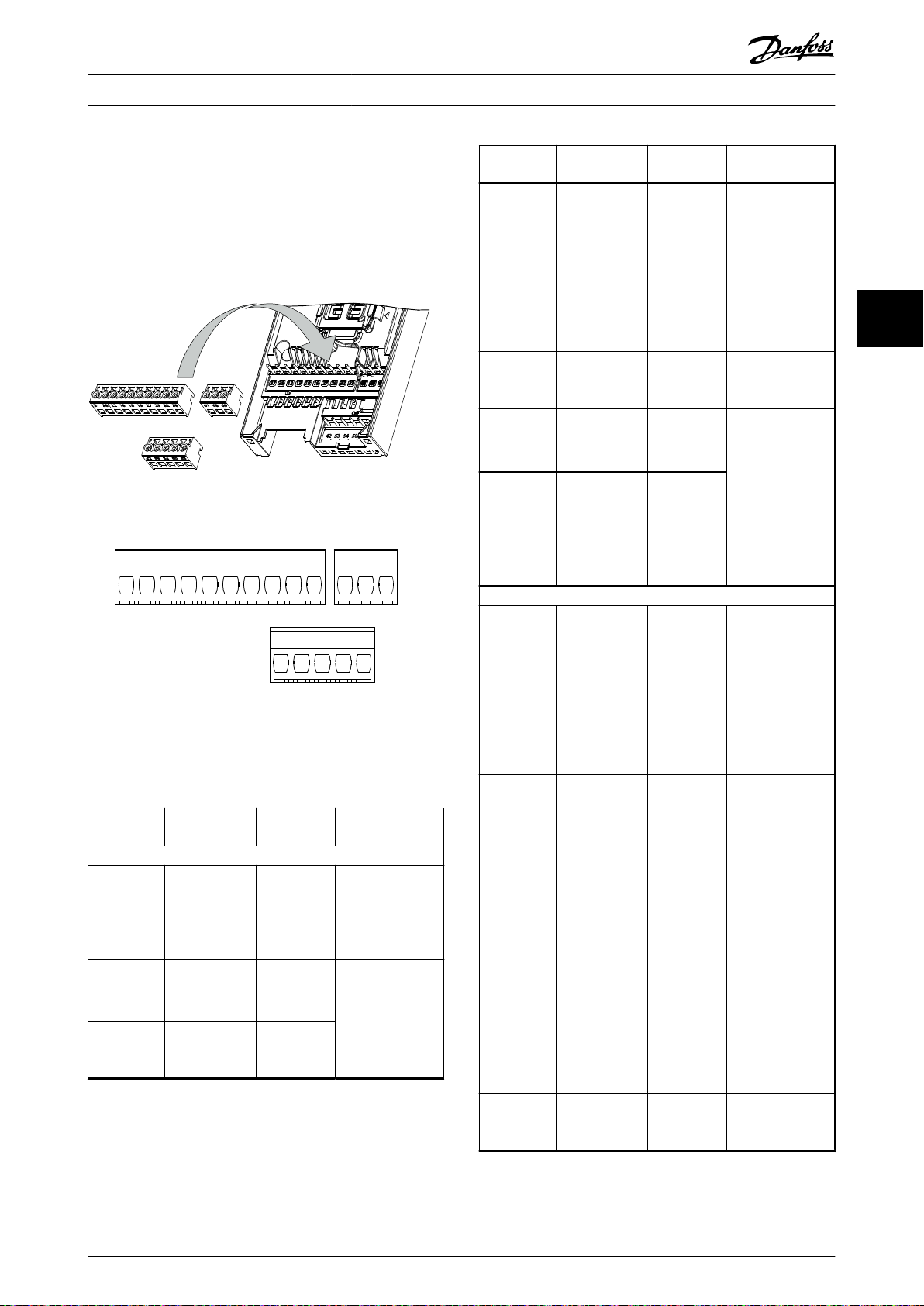
4.8 Styrkablar
4.8.1 Styrplintstyper
Bild 4.9 visar frekvensomriktarens borttagningsbara
kabelförskruvningar. Plintfunktionerna och fabriksinställningarna sammanfattas i Tabell 4.1 och Tabell 4.2.
Bild 4.9 Placering av styrplint
Bild 4.10 Plintnummer
I kapitel 9.6 Styringång/-utgång och styrdata nns mer
information om plintarnas klassiceringar.
Plint Parameter
Digital I/O, puls I/O, pulsgivare
12, 13 – +24 V DC
Parameter 5-10
18
19
Terminal 18
Digital Input
Parameter 5-11
Terminal 19
Digital Input
Fabriksin-
ställning
[8] Start
[10]
Reversering
Beskrivning
24 V DC-försörjningsspänning.
Maximal utström
är 100 mA för alla
24 V-belastningar.
Digitala ingångar.
Plint Parameter
Parameter 5-01
Terminal 27
Mode
Parameter 5-12
27
29
32
33
37, 38 – STO
42
50 – +10 V DC
53
54
55 – –
Tabell 4.1 Plintbeskrivningar – digitala ingångar/utgångar,
analoga ingångar/utgångar
Terminal 27
Digital Input
Parameter 5-30
Terminal 27
Digital Output
Parameter 5-13
Terminal 29
Digital Input
Parameter 5-14
Terminal 32
Digital Input
Parameter 5-15
Terminal 33
Digital Input
Analoga ingångar/utgångar
Parameter 6-91
Terminal 42
Analog Output
Parametergrupp
6-1*, Analog
ingång 53
Parametergrupp
6-2*, Analog
ingång 54
Fabriksin-
ställning
DI [2]
Inverterad
utrullning
DO [0] Ingen
drift
[14] Jogg Digital ingång.
[0] Ingen
funktion
[0] Ingen
funktion
[0] Ingen
funktion
–
–
Beskrivning
Kan användas som
digital ingång,
digital utgång eller
pulsutgång. Fabriksinställningen är
digital ingång.
Digital ingång, 24
V-pulsgivare. Plint
33 kan användas
som pulsingång.
Ingångar för
funktionell
säkerhet.
Programmerbar
analog utgång.
Den analoga
signalen är 0–20
mA eller 4–20 mA
vid max. 500 Ω.
Kan även
kongureras som
digitala utgångar
10 V DC analog
nätspänning. Max.
15 mA används
vanligen för
potentiometer
eller termistor.
Analog ingång.
Endast
spänningsläge
stöds. Den kan
även användas
som digital
ingång.
Analog ingång.
Spännings- eller
strömläge kan
väljas.
Gemensam för
digitala och
analoga ingångar.
4 4
MG07A507 Danfoss A/S © 08/2018 Med ensamrätt. 19
Page 24
Elektrisk installation
VLT® Midi Drive FC 280
Plint Parameter
Seriell kommunikation
61 – –
Parametergrupp
44
68 (+)
69 (-)
01, 02, 03
Tabell 4.2 Plintbeskrivning – seriell kommunikation
8-3*, FC-portin-
ställningar
Parametergrupp
8-3*, FC-portin-
ställningar
Parameter 5-40
Function Relay
Fabriksinställning
Reläer
[1] Styrning
klar
Beskrivning
Integrerat RC-lter
för kabelskärm.
ENDAST för att
ansluta skärmen
vid EMC-problem.
–
–
RS485-gränssnitt.
En styrkortsbrytare
nns för termineringsmotstånd.
Reläutgång typ C.
Dessa reläer sitter
på olika platser
beroende frekvensomriktarens
konguration och
storlek. Kan
användas för
växel- eller
likspänning samt
resistiva eller
induktiva
belastningar.
4.8.2 Kabeldragning till styrplintarna
Det går att koppla bort styrplintsanslutningarna från
frekvensomriktaren för att underlätta installationen (se
Bild 4.9).
Information om STO-kablar nns i kapitel 6 Safe Torque O
(STO).
OBS!
Håll styrkablarna så korta som möjligt och åtskilda från
högspänningskablar för att minimera störningar.
1. Lossa plintarnas skruvar.
2. Sätt i styrkablar med hylsa i öppningarna.
3. Skruva åt plintarnas skruvar.
4. Se till att kabeln sitter ordentligt i kontakten. Löst
sittande styrkablar kan orsaka utrustningsfel och
göra att enheten inte fungerar optimalt.
I kapitel 9.5 Kabelspecikationer nns information om
kabeldimensioner för styrplintar, och i kapitel 7 Tillämp-
ningsexempel nns information om vanliga
styrkabelanslutningar.
4.8.3 Aktivera motordrift (plint 27)
Det krävs en bygelledning mellan plint 12 (eller 13) och
plint 27 för att frekvensomriktaren ska fungera när fabriksinställda programmeringsvärden används.
Den digitala ingångsplinten 27 är avsedd för att
•
ta emot ett 24 V DC externt förreglingskommando.
Om ingen förreglingsenhet används, ska en bygel
•
kopplas mellan styrplint 12 (rekommenderas) eller
13 och plint 27, Bygeln ger en intern 24 V-signal
på plint 27,
Endast för GLCP: Om statusraden längst ned på
•
LCP:n visar AUTO REMOTE COAST betyder det att
enheten är klar för drift, men att den saknar en
ingångssignal på plint 27,
OBS!
KAN INTE STARTA
Frekvensomriktaren fungerar inte utan en signal på plint
27, såvida inte plint 27 är omprogrammerad.
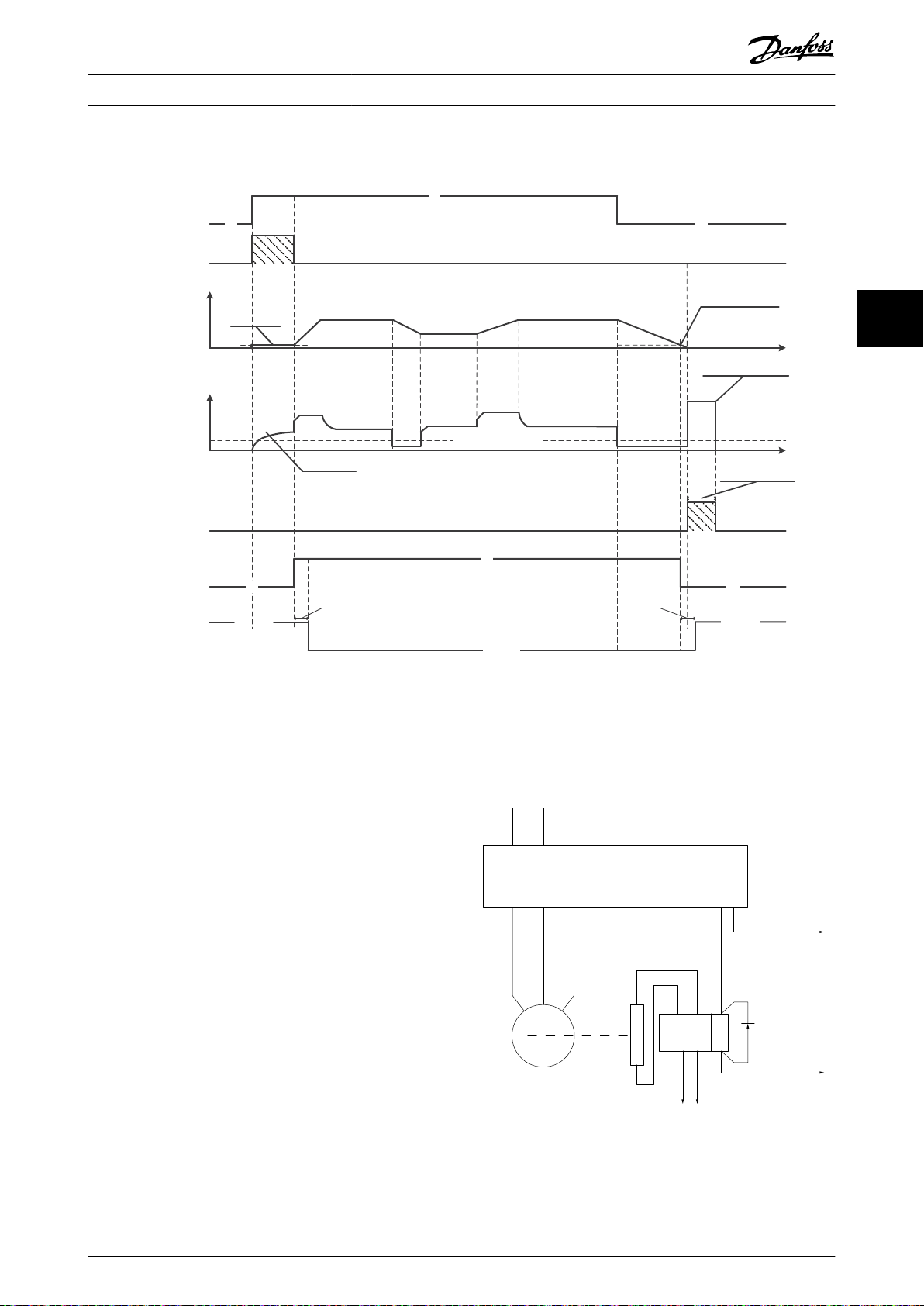
4.8.4 Styrning av mekanisk broms
I krantillämpningar måste det gå att styra en elektromekanisk broms.
Styr bromsen med hjälp av en valfri reläutgång
•
eller digital utgång (plint 27).
Utgången ska vara spänningslös så länge frekven-
•
somriktaren inte kan hålla motorn stillastående,
exempelvis på grund av för stor belastning.
Välj [32] Styrning av mekanisk broms i parame-
•
tergrupp 5–4* Reläer för tillämpningar med en
elektromekanisk broms.
Bromsen kopplas ur om motorströmmen
•
överstiger det förinställda värdet i
parameter 2-20 Release Brake Current.
Bromsen kopplas in när utfrekvensen är mindre
•
än den frekvens som anges i
parameter 2-22 Activate Brake Speed [Hz], och bara
om frekvensomriktaren utför ett stoppkommando.
Om frekvensomriktaren är något av följande lägen, kopplas
den mekaniska bromsen omedelbart in.
Larmläge.
•
Överspänningsläge.
•
STO är aktiverat.
•
Ett startkommando ges.
•
20 Danfoss A/S © 08/2018 Med ensamrätt. MG07A507
Page 25
Start Current
2)
Only support in some products.
1)
DC injection current during “Active Brake Delay” after MAV reduced to “0” . Only support in some products.
Off
On
Off
Relay
/
DO Status
Active Brake Delay
Active Brake Delay
MAV
Start Speed
Active Brake Speed
0
t
Start Delay
Off
On
Off
Start Command
Released
Activated
Reaction time of
mech
.
brake
Reaction time of
mech
.
brake
Mech
.
Brake Status
Release Brake Current
Output Current
DC Injection Current
1)
0
t
130BF687.10
Activated
Note:
2)
130BE201.11
L1(N) L2(L) L3
U V W
02 01
A1
A2
Frequency converter
Output
relay
Command circuit
220 V AC
Mechanical
brake
ShaftMotor
Freewheeling
diode
Brake power circuit
380 V AC
Output
contactor
input
Elektrisk installation Handbok
4 4
Bild 4.11 Mekanisk broms
Frekvensomriktaren är ingen säkerhetsanordning. Det
åligger den som designar systemet att integrera säkerhetsanordningar enligt gällande nationella kran-/
lyftbestämmelser.
Bild 4.12 Ansluta den mekaniska bromsen till frekvensomriktaren
MG07A507 Danfoss A/S © 08/2018 Med ensamrätt. 21
Page 26
e30bt623.11
61
68
69
+
130BB489.10
RS485
Elektrisk installation
VLT® Midi Drive FC 280
4.8.5 USB datakommunikation
Välj följande vid inställning av grundläggande seriell
kommunikation:
1. Protokolltyp i parameter 8-30 Protokoll.
2. Frekvensomriktarens adress i
parameter 8-31 Adress.
3. Baudhastighet i parameter 8-32 Baudhastighet.
Två kommunikationsprotokoll nns internt i frekvensomriktaren. Se till att motortillverkarens ledningskrav uppfylls.
44
Danfoss FC.
•
Modbus RTU.
•
Funktioner kan ärrprogrammeras med hjälp av protokollprogramvaran och RS485-anslutning eller i parametergrupp
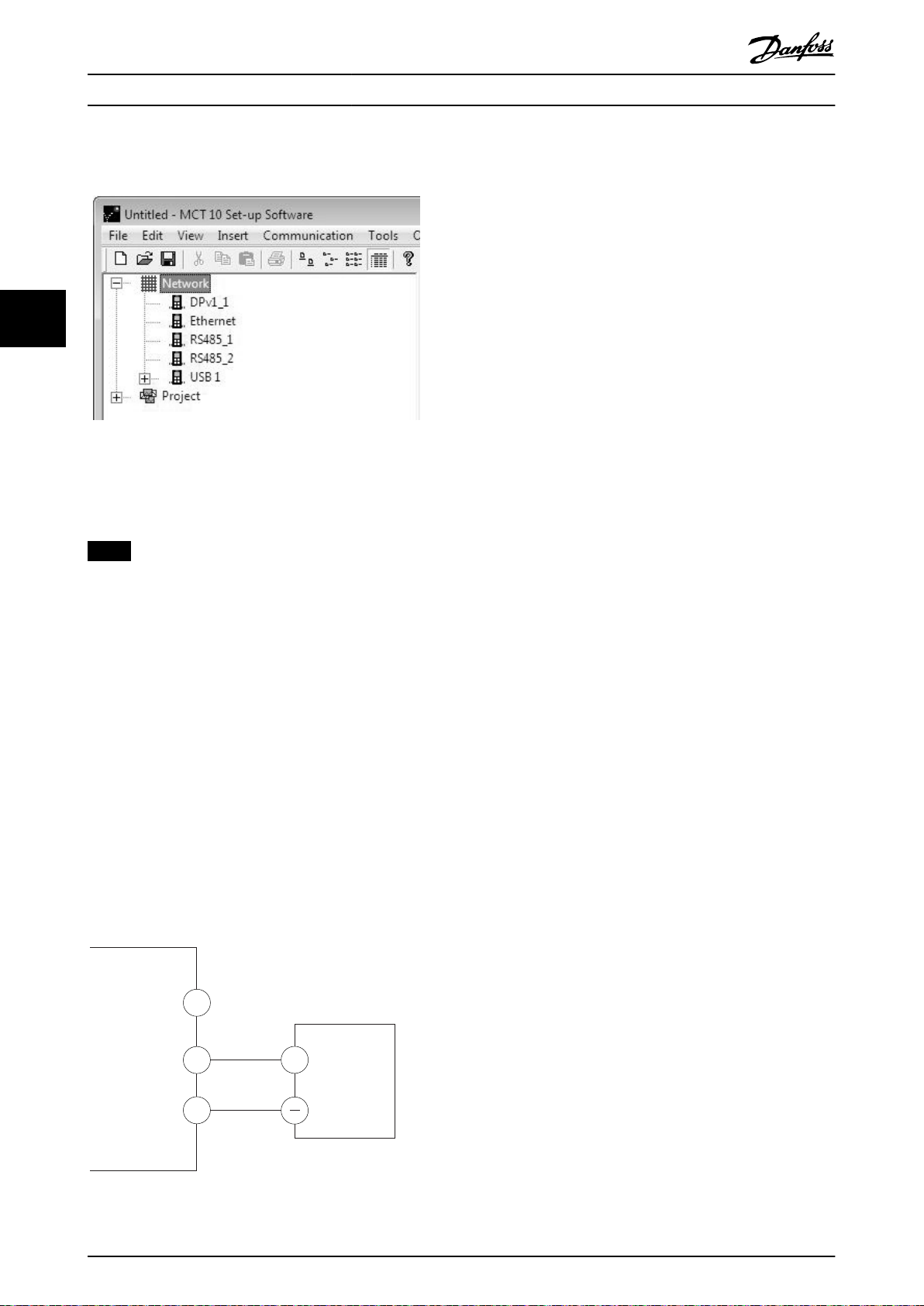
Bild 4.13 Bussnätverkslista
När USB-kabeln är frånkopplad tas frekvensomriktaren som
är ansluten via USB-porten, bort från nätverksbusslistan.
OBS!
Det går inte att ställa in en adress på en USB-buss och
det nns inget bussnamn att kongurera. Om er än en
frekvensomriktare ansluts via USB, läggs bussnamnet
automatiskt till i MCT 10 Set-up Software nätverksbusslistan.
Att ansluta er än en frekvensomriktare via en USB-kabel
kan orsaka att datorer med Windows XP kraschar. Därför
rekommenderar vi att endast ansluta en frekvensomriktare via USB till datorn.
8-**Komm. och tillval.
Genom att välja ett
ändras era parameterinställningars standardvärden så att
de stämmer överens med protokollets specikationer.
Dessutom bli ytterligare protokollspecika parametrar
tillgängliga.
specikt kommunikationsprotokoll
4.8.6 Seriell kommunikation med RS485
Anslut kablar för seriell kommunikation med RS485 till
plintarna (+)68 och (-)69,
Skärmad kabel för seriell kommunikation
•
rekommenderas.
Information om korrekt jordning
•
kapitel 4.3 Jordning.
Bild 4.14 Kopplingsschema för seriell kommunikation
nns i
22 Danfoss A/S © 08/2018 Med ensamrätt. MG07A507
Page 27
Elektrisk installation Handbok
4.9 Checklista för installation
Innan installationen av enheten slutförs ska den inspekteras enligt beskrivningen i Tabell 4.3. Bocka av uppgifterna efterhand
som de slutförs.
Inspektera Beskrivning
Extrautrustning
Kabeldragning
Styrkablar
Kylningsavstånd
Omgivande
miljöförhållanden
Säkringar och
maximalbrytare
Jordning
Kablar för in- och
utström
Apparatskåpets inre•Kontrollera att enhetens inre är fritt från smuts, metallspån, fukt och korrosion.
Brytare
Vibrationer
Inspektera extrautrustning, switchar, strömbrytare eller ingångssäkringar/maximalbrytare som kan nnas på
•
frekvensomriktarens ingångssida eller på utgångssidan till motorn. Kontrollera att de är redo för drift med
fullt varvtal.
Kontrollera att alla givare som används för återkoppling till frekvensomriktaren fungerar och att de är
•
korrekt installerade.
Ta bort eventuella kondensatorer för korrigering av eektfaktor från motorn/motorerna.
•
Justera eventuella kondensatorer för korrigering av eektfaktor på nätsidan och kontrollera att de är
•
dämpade.
Kontrollera att motorkablarna och styrkablarna är separerade, skärmade, eller leds i tre separata skyddsrör
•
av metall för isolering av högfrekventa störningar.
Kontrollera att det inte nns några skador eller brott på ledningarna, och att inga anslutningar är lösa.
•
Kontrollera att styrkablarna är isolerade från ström- och motorkablarna mot buller.
•
Kontrollera vid behov signalernas spänningskälla.
•
Vi rekommenderar att skärmade kablar eller tvinnade parkablar används. Kontrollera att skärmen är korrekt
avslutad.
Kontrollera att avståndet är tillräckligt stort över och under enheten för korrekt luftöde, se
•
kapitel 3.3 Montering.
Kontrollera att kraven för omgivande miljöförhållanden är uppfyllda.
•
Kontrollera att korrekta säkringar och maximalbrytare används.
•
Kontrollera att alla säkringar sitter ordentligt och är i funktionsdugligt skick, liksom att alla maximalbrytare
•
är öppna.
Kontrollera att jordanslutningarna är korrekta och åtdragna samt att de inte har oxiderat.
•
Jorda inte till skyddsrör och fäst inte den bakre panelen på en metallyta.
•
Kontrollera att anslutningarna sitter ordentligt.
•
Kontrollera att motor- och nätkablarna är dragna i separata skyddsrör eller i separata skärmade kablar.
•
Kontrollera att enheten är monterad på en omålad yta av metall.
•
Kontrollera att alla brytare och strömbrytare är inställda i rätt läge.
•
Kontrollera att enheten är ordentligt monterad eller att vibrationsdämpande stöd används.
•
Kontrollera att det inte förekommer onormalt mycket vibrationer.
•
☑
4 4
Tabell 4.3 Checklista för installation
FÖRSIKTIGT
RISK FÖR FARA I HÄNDELSE AV INTERNT FEL
Om frekvensomriktaren inte stängs på rätt sätt kan det leda till personskador.
Innan du kopplar på strömmen ska du säkerställa att alla skyddskåpor sitter på plats och är säkrade.
•
MG07A507 Danfoss A/S © 08/2018 Med ensamrätt. 23
Page 28

Idrifttagning
5 Idrifttagning
VLT® Midi Drive FC 280
5.1 Säkerhetsinstruktioner
Allmänna säkerhetsinstruktioner nns i kapitel 2 Säkerhet.
VARNING
HÖG SPÄNNING
Frekvensomriktare innehåller hög spänning när de är
55
anslutna till växelströmsnätet. Om installation, driftsättning och underhåll inte utförs av behörig personal
kan det leda till dödsfall eller allvarliga personskador.
Installation, driftsättning och underhåll får
•
endast utföras av behörig personal.
Innan strömmen ansluts ska du göra följande:
1. Stäng skyddet ordentligt.
2. Kontrollera att alla kabelförskruvningar är hårt
åtdragna.
3. Kontrollera att strömförsörjningen till enheten är
frånkopplad och låst. Lita inte på att frekvensomriktarens strömbrytare isolerar inströmmen.
4. Kontrollera att ingångsplintarna L1 (91), L2 (92)
och L3 (93), fas-till-fas och fas-till-jord är
spänningslösa.
5. Kontrollera att utgångsplintarna 96 (U), 97 (V) och
98 (W), fas-till-fas och fas-till-jord är
spänningslösa.
6. Kontrollera motorns anslutning genom att mäta
Ω-värdena på U–V (96–97), V–W (97–98) och W–U
(98–96).
7. Kontrollera att såväl frekvensomriktaren som
motorn är korrekt jordad.
8. Kontrollera att frekvensomriktaren inte har lösa
anslutningar på plintarna.
9. Kontrollera att nätspänningen stämmer överens
med frekvensomriktarens och motorns spänning.
Koppla på strömmen
5.2
Koppla på strömmen till frekvensomriktaren på följande
sätt:
1. Kontrollera att inspänningen är balanserad inom
3 %. Korrigera annars obalansen i inspänningen
innan du fortsätter. Upprepa proceduren efter
spänningskorrigeringen.
2. Kontrollera att eventuella ledningar till tillvalsutrustning stämmer överens med
installationstillämpningen.
3. Kontrollera att alla operatörsenheter är inställda
på OFF (AV). Dörrar till apparatskåp ska vara
stängda och skydden säkert fastsatta.
4. Slå på strömmen till enheten. Starta inte frekvensomriktaren i det här läget. Om
frekvensomriktaren är försedd med en strömbrytare vrider du den till läget PÅ för att koppla på
strömmen till enheten.
5.3 Drift med lokal manöverpanel
Frekvensomriktaren stöder numerisk lokal manöverpanel
(NLCP), grask lokal manöverpanel (GLCP) och blindlock.
Det här avsnittet beskriver drift med NLCP och GLCP.
OBS!
Frekvensomriktaren kan även programmeras från MCT 10
Set-up Software på en dator via kommunikationsporten
RS485 eller USB-porten. Denna programvara kan
beställas med beställningsnummer 130B1000 eller laddas
ned från Danfoss webbplats: drives.danfoss.com/
downloads/pc-tools/#/.
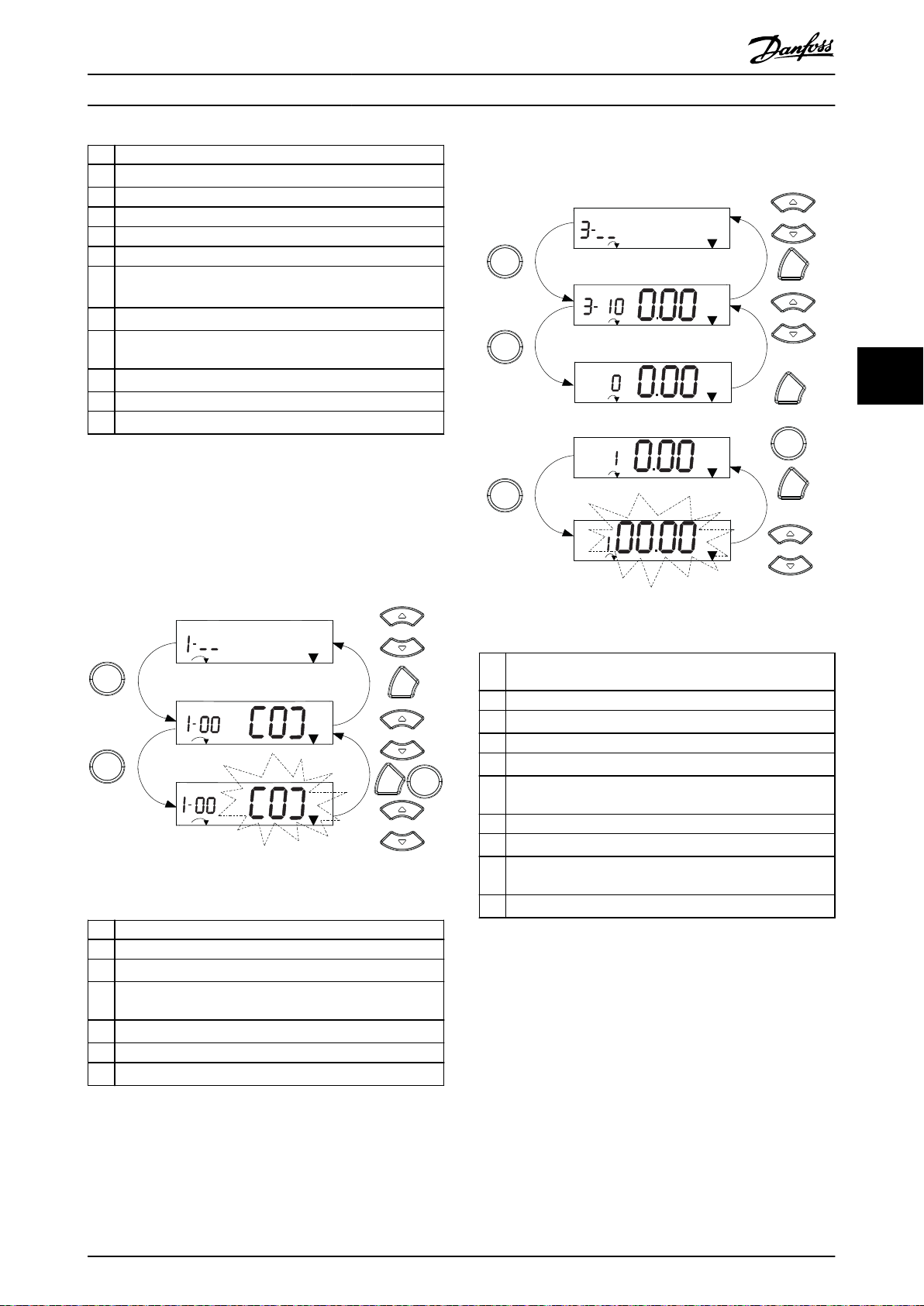
5.3.1 Numerisk lokal manöverpanel (NLCP)
Den numeriska lokala manöverpanelen (NLCP) är indelad i
fyra funktionsgrupper.
A. Numerisk display.
B. Menyknapp.
C. Navigeringsknappar och indikeringslampor
(lysdioder).
D. Manöverknappar och indikeringslampor
(lysdioder).
24 Danfoss A/S © 08/2018 Med ensamrätt. MG07A507
Page 29

130BC506.10
Setup 1
A
B
C
D
5
12
13 14 15
10
11
10
9
6
7
8
4
1
2
3
Menu
Status
Quick
Menu
Main
Menu
Hand
On
O
Reset
Auto
On
Back
OK
On
Warn
Alarm
130BD135.10
Setup 12
INDEX
AHP
VkW
srpm
Hz%
n2n1
n3
p5 p4
p3 p2 p1
Idrifttagning Handbok
B. Menyknapp
Tryck på [Menu] för att växla mellan statusmeny,
snabbmeny och huvudmeny.
C. Indikatorlampor (lysdioder) och navigeringsknappar
Indikator Färg Funktion
Lampan tänds när frekvensomriktaren
6 På Grön
7 Varn. Gul
8 Larm Röd
Tabell 5.2 Förklaring till Bild 5.1, indikatorlampor (lysdioder)
är ansluten till nätspänningen, en DCbussanslutning eller en extern 24 Vförsörjningskälla.
När varningsvillkoren uppfylls tänds
den gula VARNINGSLAMPAN och en
text som identierar problemet visas
på displayen.
Om det uppstår ett fel blinkar den
röda indikeringslampan och en
larmtext visas.
5 5
9 [Back]
Bild 5.1 Översikt av NLCP
Knapp Funktion
Används för att återgå till föregående
steg eller nivå i navigationsstrukturen.
Används för att navigera mellan parametergrupper, parametrar och inom
A. Numerisk display
10
[▲] [▼]
LCD-displayen är bakgrundsbelyst med en numerisk rad.
Alla data visas på NLCP:n.
Menynumret visar den aktiva menyn och den redigerade
menyn. Om den aktiva och den redigerade menyn är
densamma, visas endast det menynumret (fabriksin-
1
ställning). När den aktiva och den redigerade menyn är
olika visas båda numren i displayen (till exempel meny 12).
Det blinkande numret anger den redigerade menyn.
2 Parameternummer.
3 Parametervärde.
Motorriktning visas längst ned till vänster på displayen. En
4
liten pil visar riktningen.
Triangeln visar om LCP:n är i statusmenyn, snabbmenyn
5
eller huvudmenyn.
Tabell 5.1 Förklaring till Bild 5.1, avsnitt A
Bild 5.2 Displayinformation
11 [OK]
12
[►]
Tabell 5.3 Förklaring till Bild 5.1, navigeringsknappar
D. Manöverknappar och indikeringslampor (lysdioder)
Knapp Funktion
13 Hand On
14 O/Reset
15 Auto On
Tabell 5.4 Förklaring till Bild 5.1, avsnitt D
parametrar eller för att öka/minska
parametervärden. Pilarna kan även
användas för att ställa in lokal referens.
Tryck för att komma åt parametergrupper
eller för att aktivera ett val.
Tryck för att gå från vänster till höger i
parametervärdet och ändra varje sira
individuellt.
Startar frekvensomriktaren med lokal styrning.
En extern stoppsignal via styringången eller
•
via seriell kommunikation åsidosätter den
lokala styrningen.
Stannar motorn men kopplar inte bort
strömmen från frekvensomriktaren. Alternativt
återställs frekvensomriktaren manuellt efter att
ett fel har åtgärdats. Om den är i larmläge,
återställs larmet om larmstatus tas bort.
Försätter systemet i ärrdriftläge.
Svarar på ett externt startkommando via
•
styrplintarna eller via seriell kommunikation.
MG07A507 Danfoss A/S © 08/2018 Med ensamrätt. 25
Page 30

130BC440.10
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Idrifttagning
VLT® Midi Drive FC 280
VARNING
ELEKTRISK FARA
Även efter att du har tryck på knappen [O/Reset] nns
det spänning vid frekvensomriktarens plintar. Frekvensomriktaren kopplas inte bort från nätspänningen bara
för att du trycker på [O/Reset]. Kontakt med
strömförande delar kan leda till dödsfall eller allvarliga
personskador.
Rör inte några strömförande delar.
•
55
5.3.2 Högerknappsfunktionen på NLCP
Tryck på [►] för att redigera någon av de fyra sirorna på
displayen individuellt. När du trycker på [►] en gång yttar
markören till den första siran, som då börjar blinka, så
som visas i Bild 5.3. Tryck på [▲] [▼] för att ändra värdet.
Sirornas värde ändras inte om du trycker på [►] och
decimaltecknet yttas inte.
OBS!
Vid start visas meddelandet INITIALISING på LCP:n. När
meddelandet inte längre visas är frekvensomriktaren klar
för drift. Att lägga till eller ta bort tillval kan förlänga
starttiden.
5.3.3 Snabbmeny på NLCP
Snabbmenyn används för att komma åt de parametrar som
används oftast.
1. Du går in i snabbmenyn genom att trycka på
[Menu] tills indikatorn i displayen placeras
ovanför Snabbmenyn.
2.
Tryck på ▲] [▼] för att välja antingen QM1 eller
QM2, och tryck sedan på [OK].
3.
Tryck på [▲] [▼] för att bläddra genom
parametrarna i Snabbmenyn.
4. Tryck på [OK] om du vill välja en parameter.
5.
Tryck på [▲] [▼] om du vill ändra värdet på en
parameterinställning.
6. Tryck på [OK] för att godkänna ändringen.
7. Avsluta genom att antingen trycka på [Back] två
gånger (eller tre gånger om du är i QM2 eller
QM3) för att gå till Status eller tryck på [Menu] en
gång för att gå till huvudmenyn.
Bild 5.3 Högerknappsfunktion
[►] kan även användas för att växla mellan parametergrupper. Tryck på [►] i huvudmenyn för att gå till den första
parametern i nästa parametergrupp (till exempel, gå från
parameter 0-03 Regional Settings [0] Internationellt till
parameter 1-00 Conguration Mode [0] Utan återkoppling).
26 Danfoss A/S © 08/2018 Med ensamrätt. MG07A507
Page 31

130BC445.13
1-22 XXXX V
Motor
nominal
speed
QM 1
0-01 [0]
1-10 [0]
1-24 XXXX A
Language
Motor Type
1-20 XXXX kW
Motor power
Motor voltage
1-26 XXXX 1-23 XXXX
Stator
Motor frequency
1-25 XXXX
1-30 XXXX
1-39 XXXX
1-40 XXXX
1-37 XXXX
1-25 XXXX
1-24 XXXX
A
3-02 XXXX
3-03 XXXX
3-41 XXXX S
3-42 XXXX S
5-12
[2]
1-29 [1]
AMA
Back EMF at
1000 RPM
d-axis
QM 2
BMS
AMS
ES
5-70 XXXX
5-71 [0]
1-30 XXXX
1-39 XXXX
1-90 [0]
2-10 [0]
4-16 XXXX %
4-17 XXXX %
4-18 XXXX %
1-00 [0]
1-01 [1]
1-10 [0]
1-24 XXXX A 1-20 XXXX kW
1-22 XXXX V
Motor
nominal
speed
Motor power
Motor voltage
1-26 XXXX 1-23 XXXX
Motor frequency
1-25 XXXX
1-30 XXXX
1-40 XXXX
1-37 XXXX
1-25 XXXX
1-24 XXXX
A
Back EMF at
1000 RPM
d-axis
1-39 XXXX
4-14 XXXX
4-19 XXXX
Stator
QM 3
QM 4 QM 5
L10C
SFS
TBD
Motor
nominal
speed
Motor
nominal
speed
Motor current
Motor cont.
rated torque
Resistance (Rs)
Motor poles
inductance (Ld)
Asynchronous motor
Motor current
Minimum reference
Maximum reference
Ramp 1 ramp-up time
Ramp 1 ramp-down time
Terminal 27 digital input
Basic motor set-up
mode
Motor control
principle
Motor type
PM motor
PM motor
Motor
current
Motor cont.
rated torque
Stator
Resistance (Rs)
Motor poles
inductance (Ld)
Motor speed high limit [Hz]
Maximum output frequency
Asynchronous motor
Motor current
RPM
RPM
RPM
Hz
RPM
Hz
Hz
Hz
Hz
Hz
Adv. motor set-up
Resistance (Rs)
Motor poles
Motor thermal
protection
Brake function
Torque limit motor mode
Torque limit generator mode
Current limit
Encoder set-up
Terminal 32/33
pulses per revolution
Terminal 32/33
encoder direction
Changes made
Last 10 changes Since factory setting
Alarm log
Idrifttagning Handbok
5 5
MG07A507 Danfoss A/S © 08/2018 Med ensamrätt. 27
Bild 5.4 Struktur för snabbmeny
Page 32
130BC446.10
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
1
2
3
4
5
6
7
10
11
12
OK
OK
Back
8
Back
Setup 1
2 x
+
OK
9
OK
Idrifttagning
VLT® Midi Drive FC 280
5.3.4 Huvudmeny på NLCP
Huvudmenyn används för att komma åt samtliga
parametrar.
1. Du går in i huvudmenyn genom att trycka på
[Menu] tills indikatorn i displayen placeras
ovanför Huvudmeny.
2.
[▲] [▼]: Bläddra genom parametergrupperna.
3. Tryck på [OK] om du vill välja en parametergrupp.
4.
55
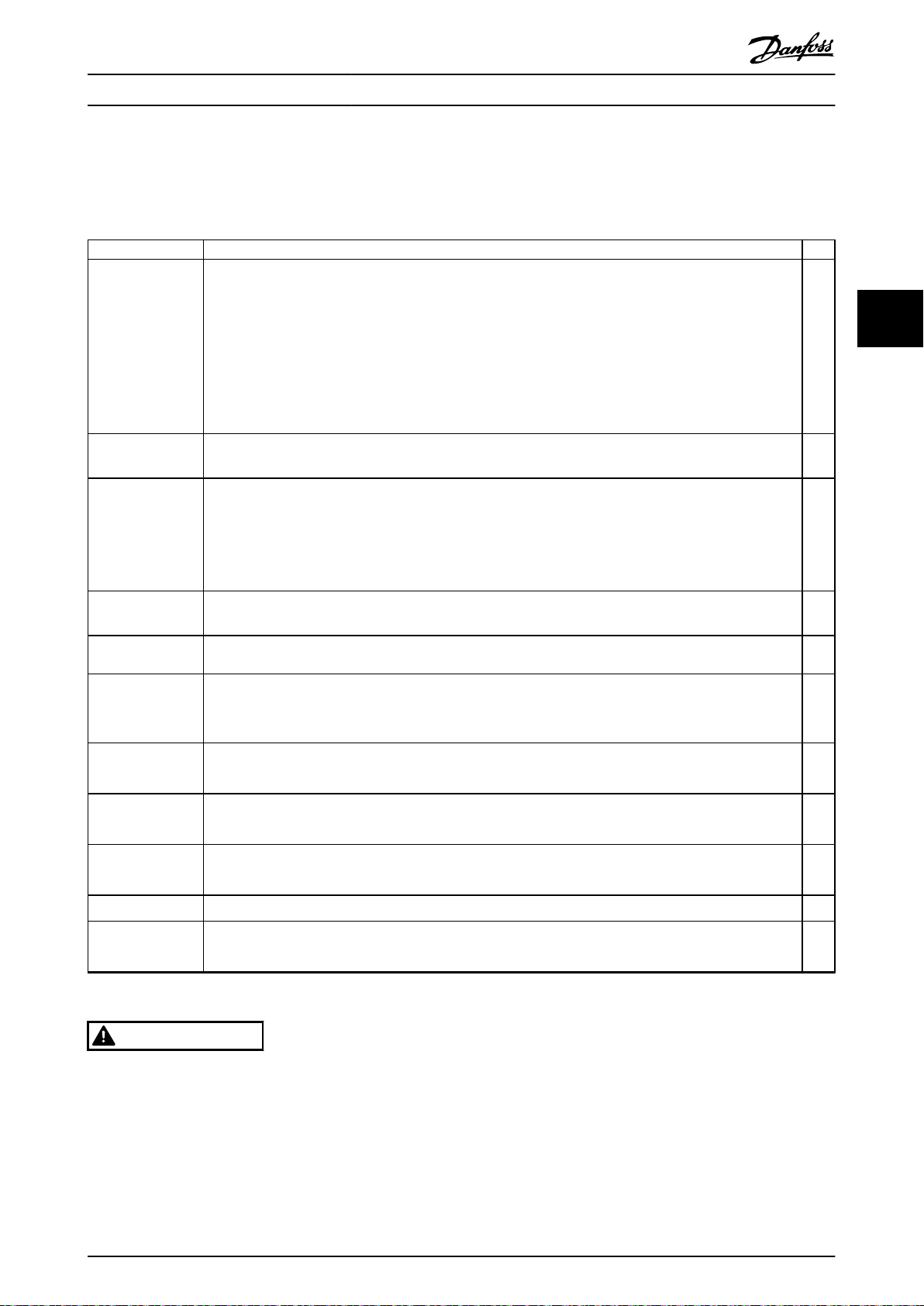
I Bild 5.5, Bild 5.6 och Bild 5.7 nns principerna för att ändra
värdet för kontinuerliga och uppräknade parametrar
respektive matrisparametrar. Åtgärderna i bilderna beskrivs
i Tabell 5.5, Tabell 5.6 och Tabell 5.7.
[▲] [▼]: Bläddra genom parametrarna i den
specika gruppen.
5. Tryck på [OK] om du vill välja en parameter.
6.
[►] och [▲]/ [▼]: Ange/ändra parametervärdet.
7. Tryck på [OK] för att godkänna värdet.
8. Avsluta genom att antingen trycka på [Back] två
gånger (eller tre gånger för matrisparametrar) för
att gå till huvudmenyn eller tryck på [Menu] en
gång för att gå till Status.
Bild 5.5 Interaktioner i huvudmenyn – kontinuerliga
parametrar
28 Danfoss A/S © 08/2018 Med ensamrätt. MG07A507
Page 33
130BC447.11
Setup 1
Setup 1
Setup 1
1
2
3
4
5
6
OK
OK
Back
7
OK
Back
130BC448.10
1
2
4
5
6
7
8
9
10
OK
Back
Back
Back
5 x
Setup 1
Setup 1
Setup 1
Setup 1
%
INDEX
%
INDEX
%
INDEX
Setup 1
INDEX
%
OK
OK
OK
Idrifttagning Handbok
1 [OK]: Den första parametern i gruppen visas.
2
Tryck på [▼] era gånger för att gå nedåt till parametern.
3 Tryck på [OK] för att börja redigera.
4
[►]: Första siran blinkar (kan redigeras).
5
[►]: Andra siran blinkar (kan redigeras).
6
[►]: Tredje siran blinkar (kan redigeras).
7
[▼]: Minskar parametervärdet, decimaltecknet yttas
automatiskt.
8
[▲]: Ökar parametervärdet.
9 [Back]: Avbryt ändringarna, återgå till 2,
[OK]: Godkänn ändringarna, återgå till 2,
10
[▲][▼]: Välj parameter inom gruppen.
11 [Back]: Tar bort värdet och visar parametergruppen.
12
[▲][▼]: Välj grupp.
Tabell 5.5 Ändra värden i kontinuerliga parametrar
För uppräknade parametrar är interaktionen liknande, men
parametervärdet visas inom parentes på grund av
sierbe-
gränsningar (4 stora siror) på NLCP och uppräkningen kan
vara större än 99, När det uppräknade värdet är större än
99 kan LCP endast visa den första delen av parentesen.
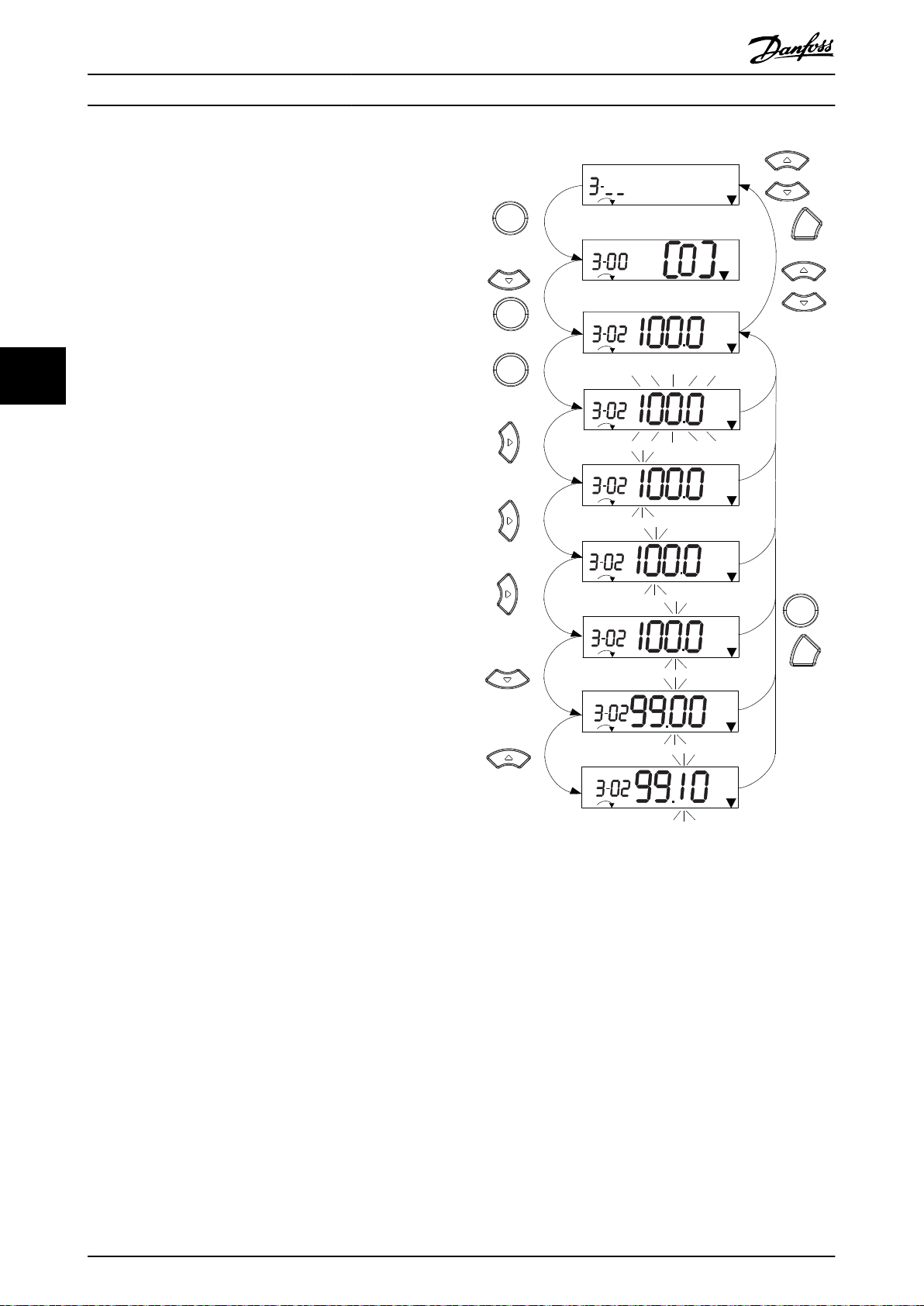
Matrisparametrar fungerar så här:
5 5
Bild 5.7 Interaktioner i huvudmenyn – matrisparametrar
1 [OK]: Visar parameternummer och värdet i det första
indexet.
2 [OK]: Index kan väljas.
3
[▲][▼]: Välj index.
4 [OK]: Värdet kan redigeras.
5
[▲][▼]: Ändra parametervärdet (blinkar).
6 [Back]: Avbryter ändringar.
[OK]: Godkänner ändringar.
7 [Back]: Avbryt redigeringsindex, välj en ny parameter.
8
[▲][▼]: Välj parameter inom gruppen.
Bild 5.6 Interaktioner i huvudmenyn – uppräknade parametrar
9 [Back]: Tar bort parameterindexets värde och visar parame-
tergruppen.
10
[▲][▼]: Välj grupp.
1 [OK]: Den första parametern i gruppen visas.
2 Tryck på [OK] för att börja redigera.
3
[▲][▼]: Ändra parametervärdet (blinkar).
4 Tryck på [Back] för att avbryta ändringarna eller [OK] för att
godkänna dem (återgå till skärm 2).
5
[▲][▼]: Välj en parameter inom gruppen.
6 [Back]: Tar bort värdet och visar parametergruppen.
7
[▲][▼]: Välj en grupp.
Tabell 5.6 Ändra värden i uppräknade parametrar
MG07A507 Danfoss A/S © 08/2018 Med ensamrätt. 29
Tabell 5.7 Ändra värden i matrisparametrar
Page 34
130BD598.10
Auto
On
Reset
Hand
On
O
Status
Quick
Menu
Main
Menu
Alarm
Log
Back
Cancel
Info
OK
Status
1(1)
36.4 kW
Auto Remote Ramping
0.000
On
Alarm
Warn.
A
7.83 A
799 RPM
B
C
D
53.2 %
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18 19 20 21
Idrifttagning
VLT® Midi Drive FC 280
5.3.5 Grask lokal manöverpanel (GLCP)
B. Menyknappar för displayen
Menyknapparna används för åtkomst till parameterinställ-
GLCP är indelad i fyra funktionsgrupper (se Bild 5.8).
ningar, för att växla mellan visningslägen vid normal drift
och för att visa felloggsdata.
A. Displayområde
B. Menyknappar för displayen.
C. Navigeringsknappar och indikeringslampor
(lysdioder).
D. Manöverknappar och återställning.
55
Knapp Funktion
6 Status Visar driftinformation.
Quick
7
Menu
8 Main Menu
9 Alarm Log
Ger åtkomst till programmeringsparametrarna
för de första inställningsinstruktionerna och
många detaljerade tillämpningsinstruktioner.
Ger åtkomst till alla programmeringsparametrar.
Visar en lista över aktuella varningar, de 10
senaste larmen och underhållsloggen.
Tabell 5.9 Förklaring till Bild 5.8, menyknappar för displayen
C. Navigeringsknappar och indikatorlampor (lysdioder)
Navigeringsknapparna används för att ställa in olika
funktioner och för att ytta displaymarkören. Via navigeringsknapparna går det också att sköta varvtalsregleringen
vid lokal styrning. I det här området sitter också frekvensomriktarens tre statusindikatorer.
Knapp Funktion
Back
10
(Tillbaka)
Cancel
11
(Avbryt)
12 Info Ger en denition av den funktion som visas.
Navigering-
13
sknappar
14 OK
Återgår till det föregående steget eller den
föregående listan i menystrukturen.
Upphäver den senaste ändringen eller det
senaste kommandot, såvida displayläget inte
har ändrats.
Använd de fyra navigeringsknapparna för att
gå mellan olika objekt i menyn.
Tryck för att komma åt parametergrupper
eller för att aktivera ett val.
Tabell 5.10 Förklaring till Bild 5.8, navigeringsknappar
Bild 5.8 Grask lokal manöverpanel (GLCP)
A. Displayområde
Displayområdet aktiveras när frekvensomriktaren matas
med ström via nätspänningen, en DC-bussanslutning eller
en extern 24 V DC-försörjning.
Informationen som visas på LCP kan anpassas till
användarens tillämpning. Välj alternativ i Snabbmenyn
Q3-13 Displayinställningar.
Display Parameternummer Fabriksinställning
1 0-20 [1602] Referens [%]
2 0-21 [1614] Motorström
3 0-22 [1610] Eekt [kW]
4 0-23 [1613] Frekvens
5 0-24 [1502] kWh-räkneverk
Tabell 5.8 Förklaring till Bild 5.8, displayområde
30 Danfoss A/S © 08/2018 Med ensamrätt. MG07A507
Indikator Färg Funktion
Lampan tänds när frekvensomriktaren är ansluten till
15 På Grön
nätspänningen, en DC-bussanslutning eller en extern 24 Vförsörjningskälla.
När varningsvillkoren uppfylls
16 Varn. Gul
tänds den gula VARNINGSLAMPAN
och en text som identierar
problemet visas på displayen.
Om det uppstår ett fel blinkar den
17 Larm Röd
röda lysdioden och en larmtext
visas.
Tabell 5.11 Förklaring till Bild 5.8, indikatorlampor (lysdioder)
Page 35
Idrifttagning Handbok
D. Manöverknappar och återställning
Manöverknapparna sitter längst ned på LCP:n.
Knapp Funktion
Startar frekvensomriktaren i Hand-on-läge.
En extern stoppsignal via
•
18 Hand On
19 Av
20 Auto On
21 Återställning
Tabell 5.12 Förklaring till
Bild 5.8, manöverknappar och återställning
Stannar motorn men kopplar inte bort
strömmen från frekvensomriktaren.
Försätter systemet i ärrdriftläge.
•
Återställer frekvensomriktaren manuellt efter
att ett fel har kvitterats.
styringången eller via seriell
kommunikation åsidosätter den
lokala styrningen.
Svarar på ett externt startkommando via
styrplintarna eller via seriell kommunikation.
OBS!
Ändra displayens kontrast genom att trycka på [Status]
och knapparna [▲]/[▼].
3.
Bläddra genom parametrarna med [▲] [▼] och
tryck på [OK] om du vill välja en parameter.
4.
Tryck på [▲] [▼] om du vill ändra värdet på en
parameterinställning.
5.
Tryck på [◄] [►] för att ändra siran när en
decimalparameter är i redigeringsläge.
6. Tryck på [OK] för att godkänna ändringen.
7. Tryck på [Back] två gånger om du vill gå till
Status, eller tryck på [Main Menu] en gång om du
vill gå till Huvudmenyn.
Visa ändringar
I Snabbmeny Q5 – Gjorda ändringar nns alla parametrar
som ändrats från fabriksinställningarna.
Listan visar endast parametrar som har ändrats i
•
aktuell redigeringsmeny.
Parametrar som har återställts till fabriksvärdena
•
är inte angivna.
Meddelandet Empty indikerar att inga parametrar
•
har ändrats.
5.3.8 Överföra/hämta data till/från LCP:n
5 5
5.3.6 Parameterinställningar
Funktioner behöver ofta ställas in i era relaterade
parametrar för att rätt programmering ska uppnås för
tillämpningen. Information om parametrar nns i
kapitel 10.2 Menystruktur för parametrar.
Programmeringsdata lagras internt i frekvensomriktaren.
Överför data till LCP-minnet som säkerhetsko-
•
piering.
Om du vill hämta data till en annan frekvensom-
•
riktare ansluter du LCP:n till den aktuella enheten
och hämtar de lagrade inställningarna.
Återställning till fabriksinställningarna ändrar inte
•
de data som lagrats i LCP-minnet.
5.3.7 Ändra parameterinställningar med
GLCP
Du kommer åt och kan ändra parameterinställningarna från
Snabbmenyn eller Huvudmenyn. Snabbmenyn ger endast
åtkomst till ett begränsat antal parametrar.
1. Tryck på [Quick Menu] eller [Main Menu] på
LCP:n.
2.
Bläddra genom parametergrupperna med [▲] [▼]
och tryck på [OK] om du vill välja en parametergrupp.
1. Tryck på [O] för att stanna motorn innan du
hämtar eller överför data.
2. Tryck på [Main Menu] parameter 0-50 LCP Copy
och sedan på [OK].
3. Välj [1] Alla till LCP om du vill överföra data till
LCP, eller [2] Alla från LCP om du vill hämta data
från LCP.
4. Tryck på [OK]. En indikator visar överföringens
eller hämtningens förlopp.
5. Tryck på [Hand On] eller [Auto On] för att återgå
till normal drift.
5.3.9 Återställa fabriksinställningarna med
LCP
OBS!
Det nns risk för att programmering, motordata, lokalisering och övervakningsposter går förlorade om
fabriksinställningarna återställs. Om du vill skapa en
säkerhetskopia överför du alla data till LCP:n innan
initiering.
Återställ parametrarnas fabriksinställningar genom att
starta frekvensomriktaren. Initiering utförs manuellt eller
via parameter 14-22 Operation Mode (rekommenderas).
Initiering återställer inte inställningarna för
parameter 1-06 Clockwise Direction och
parameter 0-03 Regional Settings.
MG07A507 Danfoss A/S © 08/2018 Med ensamrätt. 31
Page 36
Idrifttagning
Initiering med parameter 14-22 Operation Mode
•
ändrar inte frekvensomriktarens inställningar, som
drifttimmar, val för seriell kommunikation, fellogg,
larmlogg och andra övervakningsfunktioner.
Återgång till fabriksprogrammering raderar alla
•
data om motorn, programmering, lokalisering och
övervakning och återställer fabriksinställningar.
Rekommenderad initieringsprocedur, via
parameter 14-22 Operation Mode
1. Välj parameter 14-22 Operation Mode och tryck på
[OK].
55
2. Välj [2] Initiering och tryck på [OK].
3. Slå från strömmen till enheten och vänta tills
displayen har stängts av.
4. Slå på strömmen till enheten.
Fabriksinställda parameterinställningar återställs under
startsekvensen. Detta kan ta något längre tid än normalt.
5. Larm 80, Drive initialised to default value (Frekven-
somriktaren initierad med standardvärden) visas.
6. Tryck på [Reset] för att återgå till driftläge.
Procedur för återgång till fabriksprogrammering
1. Slå från strömmen till enheten och vänta tills
displayen har stängts av.
2. Håll ned [Status], [Main Menu] och [OK] samtidigt
på GLCP, eller [Menu] och [OK] samtidigt på NLCP
medan du kopplar på strömmen till enheten (i
ungefär 5 sekunder eller tills du hör ett klick och
äkten startar).
Parameterinställningarna återställs till fabriksvärden under
startsekvensen. Detta kan ta något längre tid än normalt.
VLT® Midi Drive FC 280
Grundläggande programmering
5.4
5.4.1 Inställningar för asynkronmotor
Ange följande motordata nämnd ordning. Informationen
hittar du på motorns märkskylt.
1. Parameter 1-20 Motor Power.
2. Parameter 1-22 Motor Voltage.
3. Parameter 1-23 Motor Frequency.
4. Parameter 1-24 Motor Current.
5. Parameter 1-25 Motor Nominal Speed.
För optimala prestanda i läget VVC+ krävs extra motordata
för att ställa in följande parametrar.
6. Parameter 1-30 Stator Resistance (Rs).
7. Parameter 1-31 Rotor Resistance (Rr).
8. Parameter 1-33 Stator Leakage Reactance (X1).
9. Parameter 1-35 Main Reactance (Xh).
Dessa data nns i motorns datablad (de nns vanligen inte
på motorns märkskylt). Kör fullständig AMA med
parameter 1-29 Automatic Motor Adaption (AMA) [1] Aktivera
fullständig AMA, eller ange parametrarna manuellt.
Tillämpningsspecik justering vid drift i läget VVC
VVC+ är det tåligaste styrningsläget. Det ger optimala
prestanda i de esta situationer utan ytterligare justeringar.
Kör fullständig AMA för bästa prestanda.
5.4.2
PM-motorkonguration i VVC
+
+
Återgång till fabriksprogrammering återställer inte följande
frekvensomriktarinformation:
Parameter 15-00 Operating hours.
•
Parameter 15-03 Power Up's.
•
Parameter 15-04 Over Temp's.
•
Parameter 15-05 Over Volt's.
•
Inledande programmeringssteg
1. Ange parameter 1-10 Motor Construction till
följande alternativ för att aktivera PM-motordrift:
1a [1] PM, ej utpräg. SPM
1b [3] PM, salient IPM (PM, utpräg. IPM)
2. Välj [0] Utan återkoppling i parameter 1-00 Congu-
ration Mode.
OBS!
Pulsgivaråterkoppling stöds inte av PM-motorer.
Programmera motordata
När en av PM-motorerna har valts i parameter 1-10 Motor
Construction är de PM-motorrelaterade parametrarna i
parametergrupperna 1-2* Motordata, 1-3* Av. motordata och
1-4* Av. motordata II aktiva.
Informationen nns på motorns märkskylt och i motorns
datablad.
32 Danfoss A/S © 08/2018 Med ensamrätt. MG07A507
Page 37
Idrifttagning Handbok
Programmera följande parametrar i angiven turordning:
1. Parameter 1-24 Motor Current.
2. Parameter 1-26 Motor Cont. Rated Torque.
3. Parameter 1-25 Motor Nominal Speed.
4. Parameter 1-39 Motor Poles.
5. Parameter 1-30 Stator Resistance (Rs).
Ange statormotståndet (Rs) för fas-mittpunkt. Om
endast data för fas-till-fas nns tillgängligt,
dividerar du värdet med två för att få fram värdet
fas-till-mittpunkt (stjärnpunkt).
Det är även möjligt att mäta värdet med en
ohmmeter, som också tar med kabelmotståndet i
beräkningen. Dividera det uppmätta värdet med
två och ange resultatet.
6. Parameter 1-37 d-axis Inductance (Ld).
Ange fas-till-mittpunktsinduktans för PM-motorn.
Om endast data för fas-till-fas nns tillgängligt,
dividerar du värdet med två för att få fram värdet
fas-till-mittpunkt (stjärnpunkt).
Det är även möjligt att mäta värdet med en
induktansmätare, som tar med kabelns induktans
i beräkningen. Dividera det uppmätta värdet med
två och ange resultatet.
7. Parameter 1-40 Back EMF at 1000 RPM.
Ange PM-motorns fas-till-fas mot-Emk vid 1 000
varv/minut mekaniskt varvtal (RMS-värde). MotEmk är den spänning som genereras av en PMmotor när ingen frekvensomriktare är ansluten
och axeln roteras externt. Mot-Emk är normalt
specicerad för nominellt motorvarvtal eller till
ett varvtal på 1 000 varv/minut som uppmätts
mellan två faser. Om värdet inte är angivet för
motorvarvtalet 1 000 varv/minut räknar du ut ett
korrekt värde enligt följande: Om till exempel
mot-Emk vid 1 800 varv/minut är 320 V, är motEmk vid 1 000 varv/minut:
Mot-Emk = (spänning/varv per minut) x 1 000 =
(320/1 800) x 1 000 = 178,
Programmera det här värdet för
parameter 1-40 Back EMF at 1000 RPM.
Test av motordrift
1. Starta motorn på ett lågt varvtal (100–200 varv/
minut). Om motorn inte kör igång kontrollerar du
installationen, programmeringen och motordata.
Parkering
Den här funktionen rekommenderas för tillämpningar där
motorn roterar vid låga varvtal (till exempel självrotation i
äkttillämpningar). Parameter 2-06 Parking Current och
parameter 2-07 Parking Time kan justeras. Öka fabriksinställ-
ningsvärdena för de här parametrarna för tillämpningar
med hög tröghet.
Starta motorn vid nominellt varvtal. Om tillämpningen inte
fungerar ska PM-inställningarna för VVC+ kontrolleras.
Rekommendationer för olika applikationer nns i
Tabell 5.13.
Tillämpning Inställningar
Tillämpningar med låg
tröghet
I
Tillämpning med
medelhög tröghet
50>I
Tillämpningar med hög
tröghet
I
Hög belastning vid lågt
varvtal
<30 % (nominellt varvtal)
<5
Last/IMotor
>5
Last/IMotor
>50
Last/IMotor
Tabell 5.13 Rekommendationer för olika applikationer
Öka värdet för
•
parameter 1-17 Voltage lter time
const. med faktor 5–10,
Minska värdet för
•
parameter 1-14 Damping Gain.
Minska värdet (<100 %) för
•
parameter 1-66 Min. Current at
Low Speed.
Behåll beräknade värden.
Öka värdena för
parameter 1-14 Damping Gain,
parameter 1-15 Low Speed Filter Time
Const. och parameter 1-16 High
Speed Filter Time Const.
Öka värdet för
parameter 1-17 Voltage lter time
const.
Öka värdet för parameter 1-66 Min.
Current at Low Speed (>100 % under
en längre tid kan leda till
överhettning i motorn).
Om motorn börjar pendla vid ett visst varvtal, ökar du
parameter 1-14 Damping Gain. Öka värdet i små steg.
Startmomentet kan justeras i parameter 1-66 Min. Current at
Low Speed. 100 % ger nominellt moment som
startmoment.
5.4.3 Automatisk motoranpassning (AMA)
Optimera kompatibiliteten mellan frekvensomriktaren och
motorn i läget VVC+ genom att köra AMA.
Frekvensomriktaren skapar en matematisk modell
•
av motorn för att reglera den utgående
motorströmmen och förbättra motorns prestanda.
Det är möjligt att vissa motorer inte kan utföra
•
den fullständiga versionen av testet. Välj i sådana
fall [2] Aktivera reducerad AMA i
parameter 1-29 Automatic Motor Adaption (AMA).
Se kapitel 8.4 Lista över varningar och larm om du
•
möts av varningar eller larm.
Kör den här processen med kall motor för bästa
•
resultat.
5 5
MG07A507 Danfoss A/S © 08/2018 Med ensamrätt. 33
Page 38
Idrifttagning
VLT® Midi Drive FC 280
Köra AMA med LCP
1. Med fabriksparameterinställning ska plint 13 och
27 anslutas innan AMA körs.
2. Gå till huvudmenyn.
3. Gå till parametergrupp 1-** Last/motor.
4. Tryck på [OK].
5. Ställ in motorparametrarna baserat på
märkskyltsdata för parametergrupp 1-2*
Motordata.
6. Ange motorkabelns längd i parameter 1-42 Motor
55
Det tar 3–10 minuter att slutföra AMA beroende på eektstorlek.
Cable Length.
7. Gå till parameter 1-29 Automatic Motor Adaption
(AMA).
8. Tryck på [OK].
9. Välj [1] Aktivera fullst. AMA.
10. Tryck på [OK].
11. Testet utförs automatiskt och när det är klart visas
ett meddelande.
OBS!
AMA-funktionen startar inte motorn och skadar inte
motorn.
5.6 Kontrollera pulsgivarens rotation
Kontrollera endast pulsgivarens rotation om pulsgivaråterkoppling används.
1. Välj [0] Utan återkoppling i parameter 1-00
ration Mode.
2. Välj [1] 24 V-pulsgivare i parameter 7-00 Speed PID
Feedback Source.
3. Tryck på [Hand on].
4.
Tryck på [▲] för positiv varvtalsreferens
(parameter 1-06 Clockwise Direction vid [0]
Normal).
5. Kontrollera i parameter 16-57 Feedback [RPM] att
återkopplingen är positiv.
OBS!
NEGATIV ÅTERKOPPLING
Om återkopplingen är negativ är pulsgivarens anslutning
felaktig. Använd parameter 5-71 Term 32/33 Encoder
Direction för att invertera riktningen, eller vänd pulsgivarens kablar.
a. Kontrollera att motorn roterar
moturs.
b. Kontrollera att LCP-
riktningspilen är moturs.
Congu-
5.5 Kontrollera motorns rotation
Kontrollera motorns rotation innan du kör frekvensomriktaren.
1. Tryck på [Hand on].
2.
Tryck på [▲] för positiv referenshastighet.
3. Kontrollera att hastigheten som visas är positiv.
4. Kontrollera att kabeldragningen mellan frekvensomriktaren och motorn är korrekt.
5. Kontrollera att motorns riktning stämmer överens
med inställningen i parameter 1-06 Medurs.
5a Om parameter 1-06 Medurs har inställ-
ningen [0]* Normal (standard medurs):
a. Kontrollera att motorn roterar
medurs.
b. Kontrollera att LCP-
riktningspilen är medurs.
5b Om parameter 1-06 Medurs har inställ-
ningen [1] Inverterad (moturs):
5.7 Test av lokal styrning
1. Tryck på [Hand On] för att ge ett lokalt
startkommando till frekvensomriktaren.
2. Få frekvensomriktaren att accelerera genom att
trycka på [▲] tills du når fullt varvtal. Om du
yttar markören till vänster om decimaltecknet
går ändringarna snabbare.
3. Notera eventuella accelerationsproblem.
4. Tryck på [O]. Notera eventuella decelerationsproblem.
Om det nns några problem med acceleration eller deceleration,se kapitel 8.5 Felsökning. Se kapitel 8.2 Varnings- och
larmtyper för återställning av frekvensomformaren efter en
tripp.
34 Danfoss A/S © 08/2018 Med ensamrätt. MG07A507
Page 39
Idrifttagning Handbok
5.8 Systemkonguration
För att slutföra proceduren i det här avsnittet måste du
som användare dra ledningar och programmera olika
tillämpningar. Vi rekommenderar följande förfarande när
du är färdig med tillämpningskongurationen.
1. Tryck på [Auto On].
2. Kör ett externt körkommando.
3. Justera varvtalsreferensen genom hela varvtalsintervallet.
4. Ta bort det externa körkommandot.
5. Kontrollera motorns nivåer för ljud och vibration
för att säkerställa att systemet fungerar som
avsett.
Om varningar eller larm visas nns information om
återställning av frekvensomriktaren efter en tripp i
kapitel 8.2 Varnings- och larmtyper.
5.9 Minnesmodul
VLT® Memory Module MCM är en liten anordning som
innehåller data som till exempel:
Firmware för frekvensomriktaren (ej Firmware för
•
kommunikation till styrkortet).
PUD-l.
•
SIVP-l.
•
Parameterl.
•
VLT® Memory Module MCM är ett tillbehör. Frekvensomriktaren levereras utan att minnesmodulen har installeras
på fabriken. En minnesmodul kan beställas med följande
artikelnummer.
Beskrivning Artikelnummer
VLT® Memory Module MCM 102
VLT® Memory Module MCM 103
Tabell 5.14 Artikelnummer
Varje minnesmodul har ett unik serienummer som inte går
att ändra.
132B0359
132B0466
Välj rätt alternativ för parameter 31-40 Memory Module
Function innan den kongureras med minnesmodulen.
Parameter 31-40 Memory
Module Function
[0] Inaktiverad Funktionen att ladda ned eller
*[1] Tillåt endast
nedladdning
[2] Tillåt endast överföring Tillåt endast överföring från
[3] Tillåt både nedladdning
och överföring
Tabell 5.15 Beskrivning av
Parameter 31-40 Memory Module Function
Beskrivning
överföra data är inaktiverad.
Tillåt endast nedladdning av data
från minnesmodulen till frekvensomriktaren. Det är
standardinställningen för
parameter 31-40 Memory Module
Function.
frekvensomriktaren till minnesmodulen.
Om det här alternativet väljs,
laddar frekvensomriktaren med
data från minnesmodulen först
och överför sedan data från
frekvensomriktaren till minnesmodulen.
OBS!
UNDVIK ATT SKRIVA ÖVER
Standardinställning för parameter 31-40 Memory Module
Function är [1] Tillåt endast nedladdning. Om det nns
sådana uppdateringar, som Firmware uppdaterad av MCT
10 med OSS-l, parameteruppdateringar från LCP eller
buss, parameteråterställning via
parameter 14-22 Operation Mode, eller 3-ngers
återställning av frekvensomriktaren, kan uppdaterad
data försvinna efter ny eektcykel eftersom frekvensomriktaren laddar ned data från minnesmodulen igen.
När data har laddats ned från minnesmodulen
•
till frekvensomriktaren, välj [0] Inaktiverad eller
[2] Tillåt endast uppladdning i
parameter 31-40 Memory Module Function innan
den nya eektcykeln.
5 5
OBS!
VLT® Memory Module MCM kan användas på frekvensomriktaren tillsammans med den inbyggda
programvaran 1,5 och senare.
MG07A507 Danfoss A/S © 08/2018 Med ensamrätt. 35
Page 40
Idrifttagning
VLT® Midi Drive FC 280
5.9.1 Synkronisera frekvensomriktardata till
en ny minnesmodul (skapa
5.9.3 Kopiera data till era
frekvensomriktare
säkerhetskopia)
Om era frekvensomriktare har samma spänning/eekt kan
1. Anslut en ny, tom minnesmodul till frekvensomriktaren.
2. Välj [2] Only Allow Upload ( Tillåt endast
uppladdning) eller [3] Allow Both Download and
Upload (Tillåt både nedladdning och uppladdning) i
parameter 31-40 Memory Module Function.
3. Starta frekvensomriktaren.
55
4. Vänta tills synkroniseringen är slutförd,
information om överföringsindikatorerna på
frekvensomriktaren nns i kapitel 5.9.7 Överfö-
ringsprestanda och indikatorer
OBS!
Undvik oavsiktlig överskrivning av data i minnesmodulen
och överväg att justera inställningarna för
parameter 31-40 Memory Module Function innan nästa
eektcykel i enlighet med olika driftsyften.
5.9.2 Kopiera data till en annan
frekvensomriktare
1. Se till att den data du vill överföra är uppladdad
till minnesmodulen, se kapitel 5.9.1 Synkronisera
frekvensomriktardata till en ny minnesmodul (skapa
säkerhetskopia).
2. Koppla loss minnesmodulen och koppla in den i
den nya frekvensomriktaren.
3. Se till att [1] Only Allow Download (Tillåt endast
nedladdning) eller [3] Allow Both Download and
Upload (Tillåt både nedladdning och uppladdning)
har valts i parameter 31-40 Memory Module
Function på den nya frekvensomriktaren.
4. Starta frekvensomriktaren.
5. Vänta tills nedladdningen är slutförd och all data
är överförd, mer information om överföringsindikatorer på frekvensomritkaren nns i
kapitel 5.9.7 Överföringsprestanda och indikatorer.
informationen i en frekvensomriktare överföras till andra
frekvensomriktare via en minnesmodul.
1. Följ stegen i kapitel 5.9.1 Synkronisera frekvensom-
riktardata till en ny minnesmodul (skapa
säkerhetskopia) för att ladda upp data från
frekvensomriktaren till minnesmodulen.
2. För att undvika oavsiktlig uppaddning av data till
huvudminnesmodulen, måste [1] Only Allow
Download (Tillåt endast nedladdning) väljas i
parameter 31-40 Memory Module Function på de
andra frekvensomriktarna.
3. Koppla loss minnesmodulen och koppla in den i
den nya frekvensomriktaren.
4. Starta frekvensomriktaren.
5. Vänta tills nedladdningen är slutförd och all data
är överförd, mer information om överföringsindikatorer på frekvensomritkaren
kapitel 5.9.7 Överföringsprestanda och indikatorer.
6. Upprepa steg 3–5 för nästa frekvensomriktare.
nns i
OBS!
Data kan även laddas ned till minnesmodulen från en PC
via VLT® Memory Module Programmer.
OBS!
Om någon av frekvensomriktarna har en tom
minnesmodul ansluten för säkerhetskopiering, ska inställningarna för parameter 31-40 Memory Module Function
justeras till [2] Only Allow Upload (OTillåt endast
uppladdning) eller [3] Allow Both Download and Upload
(Tillåt både nedladdning och uppladdning) innan nästa
eektcykel.
OBS!
Undvik oavsiktlig överskrivning av data i minnesmodulen
och överväg att justera inställningarna för
parameter 31-40 Memory Module Function innan nästa
eektcykel i enlighet med olika driftsyften.
36 Danfoss A/S © 08/2018 Med ensamrätt. MG07A507
Page 41

Idrifttagning Handbok
5.9.4 Överföring av Firmware-information
Om två frekvensomriktare har samma spänning och eekt-
storlek, kan Firmware-information överföras från en
frekvensomriktare till en annan.
1. Följ stegen i kapitel 5.9.1 Synkronisera frekvensom-
riktardata till en ny minnesmodul (skapa
säkerhetskopia) för att ladda upp Firmware-
informationen från frekvensomriktaren till
minnesmodulen.
2. Följ stegen i kapitel 5.9.2 Kopiera data till en annan
frekvensomriktare för att överföra Firmwareinformationen till en annan frekvensomriktare
med samma spänning och eektstorlek.
OBS!
Firmware-informationen kan även laddas ned till minnesmodulen från en PC via VLT® Memory Module
Programmer.
5.9.5 Säkerhetskopiera parameterändringar
till minnesmodulen
1. Anslut en ny eller rensad minnesmodul till
frekvensomriktaren.
2. Välj [2] Only Allow Upload ( Tillåt endast
uppladdning) eller [3] Allow Both Download and
Upload (Tillåt både nedladdning och uppladdning) i
parameter 31-40 Memory Module Function.
3. Starta frekvensomriktaren.
4. Vänta tills synkroniseringen är slutförd,
information om överföringsindikatorerna på
frekvensomriktaren nns i kapitel 5.9.7 Överfö-
ringsprestanda och indikatorer
5. Ändringar av parameterinställningarna synkronieras automatiskt med minnesmodulen.
5.9.6 Radera data
Minnesmodulen kan raderas via inställningarna i
parameter 31-43 Erase_MM utan en ny eektcykel.
1. Se till att minnesmodulen är monterad i frekvensomriktaren.
2. Välj [1] Erase MM (Radera MM) i
parameter 31-43 Erase_MM.
3. Alla ler i minnesmodulen är raderade.
4. Parameter 31-43 Erase_MM-inställningarna
återställs till [0] Ingen funktion
5.9.7 Överföringsprestanda och indikatorer
Tiden det tar att överföra olika data mellan frekvensomriktaren och minnesmodulen skiljer sig åt, mer information
nns i Tabell 5.16.
Datal Tid
Det tar cirka 2 minuter att ladda upp
•
data från frekvensomriktaren till
minnesmodulen.
Firmware-l
SIVP-l Cirka 10 sek.
Parameterl
Tabell 5.16 Överföringsprestanda
1) Om en parameter ändras i frekvensomriktaren ska du vänta minst
5 sek innan du stänger för att den ska hinna laddas upp.
Datal
Firmware
-l
SIVP-l
Parameter
-l
Tabell 5.17 Överföringsindikatorer
1) Lysdioden På tänds på LCP. Information om lysdiodernas position
och funktion nns i kapitel 5.3.1 Numerisk lokal manöverpanel (NLCP)
och kapitel 5.3.5 Grask lokal manöverpanel (GLCP).
1)
”Synkroniserar med
minnesmodul.” visas
vid överföring.
Ingen textindikation.
Det tar cirka 6 minter att ladda ned
•
data från minnesmodulen till frekvensomriktaren.
Cirka 5 sek.
Indikatorer
GLCP NLCP
Lysdioden blinkar
Ingen text
-indikation.
långsamt vid
överföring.
Lysdioden blinkar
inte.
På LED
1)
5.9.8 Aktivera PROFIBUS-omvandlaren
VLT® Memory Module MCM 103 fungerar som en
kombination av både minnesmodul och aktiveringsmodul
för att möjliggöra PROFIBUS-omvandlarfunktionen i den
inbyggda programvaran. VLT® Memory Module MCM 103
innehåller en
individuella minnesmodulens serienummer. PBconver.MME
är nyckeln för PROFIBUS-omvandlarfunktionen.
Om du vill aktivera PROFIBUS-omvandlare ska du välja
version i parameter 14-70 Compatibility Selections.
PBconver.MME-l som kombineras med den
5 5
MG07A507 Danfoss A/S © 08/2018 Med ensamrätt. 37
Page 42

Idrifttagning
VLT® Midi Drive FC 280
Parameter 14-70 Compatibility
Selections
*[0] Ingen funktion Valet av kompabilitetsfunk-
[12] VLT2800 3M Välj VLT2800 3M kompabili-
[13] VLT2800 3M incl. MAV Välj VLT2800 3M inkl. MAV
[14] VLT2800 12M Välj VLT2800 12M kompabili-
55
[15] VLT2800 12M inkl. MAV Välj VLT2800 12M inkl. MAV
Beskrivning
tionen är inaktiverad.
tetsläge för
frekvensomriktaren.
kompabilitetsläge för
frekvensomriktaren.
tetsläge för
frekvensomriktaren.
kompabilitetsläge för
frekvensomriktaren.
Aktivera PROFIBUS-omvandlaren via parameterinställningarna
1. Välj [1] Aktiverad i parameter 31-47 Time Limit
Function.
2. Välj [12] VLT 2800 3M eller [14] VLT 2800 12M i
parameter 14-70 Compatibility Selections.
3. Låt en eektcykel starta frekvensomriktaren som
VLT® 2800 PROFIBUS identieringsnummer och
läge.
4. Parameter 31-48 Time Limit Remaining Time börjar
att räkna ned efter eektcykeln och visar
kvarstående tid.
Efter 720 timmars drifttid ger frekvensomriktaren en
varning. PROFIBUS-omvandlaren fungerar fortfarande. När
tidräknaren i parameter 31-48 Time Limit Remaining Time
Tabell 5.18 Beskrivning av
parameter 14-70 Compatibility Selections
når 0 visar frekvensomformaren ett tripplåslarm vid nästa
startkommando.
Aktivera PROFIBUS-omvandlaren via VLT® Memory
Module MCM 103
1. Anslut minnesmodulen till frekvensomriktaren.
2. Välj [12] VLT 2800 3M eller [14] VLT 2800 12M i
parameter 14-70 Compatibility Selections.
3. Låt en
eektcykel starta frekvensomriktaren som
VLT® 2800 PROFIBUS identieringsnummer och
läge.
OBS!
Om VLT® Memory Module MCM 103 ska kunna fungera
som PROFIBUS-omvandlare, måste
parameter 31-40 Memory Module Function ställas in till [0]
Inaktiverad.
Det går att aktivera PROFIBUS-omvandlaren utan VLT
Memory Module MCM 103 i en begränsad tidsperiod.
Innan tidsgränsen går ut ansluter du en VLT® Memory
Module MCM 103 för att behålla PROFIBUS-omvandlarens
funktion.
®
38 Danfoss A/S © 08/2018 Med ensamrätt. MG07A507
Page 43

24 V
17 V
IGBT
+UDC
X3
IGBT
PELV
X3
X3
24 V
voltage
source
high-side
gate driving
circuit
diagnostic
circuit
low-side
gate driving
circuit
12
38
37
55
130BE463.12
Time
5 ms max.
Debounce time
Time
STO valid
STO invalid
Voltage
T37/38
Test pulse STO demanded
STO request
state
130BE587.12
Safe Torque O (STO) Handbok
6 Safe Torque O (STO)
Funktionen Safe Torque O (STO) är en del av ett
säkerhetsstyrsystem. STO förhindrar att enheten genererar
den spänning som krävs för att motorn ska rotera, vilket
garanterar säkerheten i nödsituationer.
STO-funktionen är konstruerad och godkänd enligt kraven
i:
IEC/SS-EN 61508: 2010 SIL2
•
IEC/SS-EN 61800-5-2: 2007 SIL2
•
IEC/SS-EN 62061: 2012 SILCL av SIL2
•
SS-EN ISO 13849-1: 2008 kategori 3 PL d
•
Uppnå den nivå av driftsäkerhet som krävs genom att välja
och tillämpa komponenterna i säkerhetsstyrsystemet på
lämpligt sätt. Innan STO används ska en noggrann
riskanalys av installationen genomföras för att avgöra om
STO-funktionen och säkerhetsnivåerna är lämpliga och
tillräckliga.
STO-funktionen i frekvensomriktaren styrs via styrplint 37
och 38, När STO aktiveras bryts strömförsörjningen på den
höga och låga sidan av IGBT-växelriktarkretsen. I Bild 6.1
visas STO-arkitekturen. I Tabell 6.1 visas STO-statusar
baserat på huruvida plint 37 och 38 är strömsatta eller ej.
Plint 37 Plint 38 Moment Varning eller
larm
Strömsatt1) Strömsatt Ja2) Inga varningar
eller larm.
Frånslagen3) Frånslagen Nej Varning/larm 68:
Safe Torque O.
Frånslagen Strömsatt Nej Larm 188: STO-
funktionsfel.
Strömsatt Frånslagen Nej Larm 188: STO-
funktionsfel.
Tabell 6.1 STO-status
1) Spänningsområdet är 24 V ±5 V med plint 55 som referensplint.
2) Momentet nns endast när frekvensomriktaren körs.
±
3) Öppen krets, eller spänning inom området 0 V
1,5 V, med
terminal 55 som referensplint.
Testpulsltrering
För säkerhetsenheter som genererar testpulser på STOstyrrader: Om pulsen förblir på låg nivå (≤1,8 V) i max. 5
ms ignoreras de, enligt Bild 6.2.
6
6
Bild 6.2 Testpulsltrering
Asynkron ingångstolerans
Bild 6.1 STO-arkitektur
Ingångssignalen på de två plintarna är inte alltid synkrona.
Om avvikelserna mellan de två signalerna är längre än 12
ms uppstår STO-fellarmet (larm 188 STO-funktionsfel).
Giltiga signaler
Båda signalerna måste vara på låg nivå i minst 80 ms för
att STO ska aktiveras. För att STO ska avslutas måste båda
signalerna vara på hög nivå i minst 20 ms. I
MG07A507 Danfoss A/S © 08/2018 Med ensamrätt. 39
kapitel 9.6 Styringång/-utgång och styrdata anges STOplintarnas spänningsnivåer och inström.
Page 44

130BE213.10
Safe Torque O (STO)
VLT® Midi Drive FC 280
6
6.1 Säkerhetsåtgärder för STO
Behörig personal
Endast behörig personal får installera och använda denna
utrustning.
Behörig personal denieras som utbildade medarbetare
med behörighet att installera, driftsätta och underhålla
utrustning, system och kretsar i enlighet med gällande
lagar och bestämmelser. Personalen måste dessutom vara
införstådd med de instruktioner och säkerhetsåtgärder som
beskrivs i den här handboken.
OBS!
Efter installation av STO ska du utföra ett idrifttagningstest som beskrivs i kapitel 6.3.3 STO-
idrifttagningstest. Ett godkänt idrifttagningstest är
obligatoriskt efter första installationen och efter varje
ändring av säkerhetsinstallationen.
VARNING
RISK FÖR ELEKTRISKA STÖTAR
STO-funktionen bryter INTE nätspänningen till frekvensomriktaren eller anslutna kretsar och ger därför inte
elektrisk säkerhet. Om du inte kopplar från nätspänningen från enheten och inte väntar angiven tid kan det
leda till dödsfall eller allvarliga personskador.
Arbete får endast utföras på frekvensomrik-
•
tarens eller motorns elektriska delar när
nätspänningen är frånkopplad och du har
väntat den tid som anges i kapitel 2.3.1 Urladd-
ningstid.
6.2 Installation av Safe Torque O
Följ instruktionerna i kapitel 4 Elektrisk installation för säker
installation av motoranslutning, växelströmsnätanslutning
och styrkablar.
Aktivera inbyggd STO på följande sätt:
1. Ta bort bygeln mellan styrplintarna 12 (24 V), 37
och 38, Det räcker inte att klippa eller bryta
bygeln för att undvika kortslutning. Se bygeln i
Bild 6.3.
Bild 6.3 Bygel mellan plint 12 (24 V), 37 och 38
OBS!
När maskintillämpningen konstrueras ska tid och avstånd
beaktas för utrullningsstopp (STO). Mer information om
stoppkategorier nns i SS-EN 60204-1,
2. Anslut en säkerhetsenhet med två kanaler (till
exempel säkert-PLC, ljusridå, säkerhetsrelä eller
nödstoppsknapp) på plint 37 och 38 för att
utforma en säkerhetstillämpning. Enheten måste
uppfylla önskad säkerhetsnivå baserat på
riskutvärderingen. I Bild 6.4 visas kopplingsschemat för STO-tillämpningar där
frekvensomriktaren och säkerhetsenheten är i
samma apparatskåp. I Bild 6.5 visas kopplingsschemat för STO-tillämpningar där extern
försörjning används.
OBS!
STO-signalen måste vara PELV-försörjd.
40 Danfoss A/S © 08/2018 Med ensamrätt. MG07A507
Page 45

130BE424.11
37
38
12
55
1
130BE425.12
24 V source
37
38
+
-
12
55
1
Safe Torque O (STO) Handbok
STO-idrifttagning
6.3
6.3.1 Aktivering av Safe Torque O
Aktivera STO-funktionen genom att ta bort spänningen på
plint 37 och 38 på frekvensomriktaren.
När STO är aktiverat utfärdar frekvensomriktaren larm 68,
Safe Torque O eller varning 68, Safe Torque O, trippar
enheten och utrullar motorn till stopp. STO-funktionen kan
användas för att stoppa frekvensomriktaren i nödstoppssituationer. I normalt driftläge, när STO inte är nödvändigt,
ska den vanliga stoppfunktionen användas i stället.
1 Säkerhetsenhet
Bild 6.4 STO-kabeldragning i ett apparatskåp, frekvensomriktaren ger nätspänningen
1 Säkerhetsenhet
Bild 6.5 STO-kabeldragning, extern försörjning
3. Slutför kabeldragning enligt instruktionerna i
kapitel 4 Elektrisk installation och:
3a Eliminera risker för kortslutning.
3b Säkerställ att STO-kablarna är skärmade
om de är längre än 20 meter eller
utanför apparatskåpet.
3c Anslut säkerhetsenheten direkt till plint
37 och 38,
OBS!
Om STO aktiveras när frekvensomriktaren utfärdar
varning 8, likströmsunderspänning eller larm 8, likströmsunderspänning hoppar frekvensomriktaren över larm 68,
Safe Torque O, men STO-driften påverkas inte.
6.3.2 Inaktivering av Safe Torque O
Följ instruktionerna i Tabell 6.2 för att inaktivera STOfunktionen och återuppta normal drift baserad på
omstartsläge av STO-funktionen.
VARNING
RISK FÖR SKADOR ELLER DÖDSFALL
Om du på nytt ansluter 24 V DC-försörjningen till plint
37 och 38 avslutas SIL2 STO-tillståndet och motorn
startas eventuellt. Oavsiktlig motorstart kan leda till
personskador eller dödsfall.
Kontrollera att alla säkerhetsåtgärder har
•
vidtagits innan 24 V DC-försörjningen på nytt
ansluts till plint 37 och 38,
Omstartsl
äge
Manuell
omstart
Automatis
k omstart
Tabell 6.2 STO-inaktivering
Steg för att inaktivera
STO och återuppta
normal drift
1. Anslut 24 V DC-försörjningen till plint 37 och
38 på nytt.
2. Initiera en återställningssignal (via
fältbuss, digital I/O
eller knappen [Reset]/
[O Reset] på LCP).
Anslut 24 V DC-försörjningen till plint 37 och 38
på nytt.
Konguration av
omstartsläge
Fabriksinställning.
Parameter 5-19 Terminal
37/38 Safe Torque O=[1]
Larm Safe Torque O
Parameter 5-19 Terminal
37/38 Safe Torque O= [3]
Varning Safe Torque O.
6
6
MG07A507 Danfoss A/S © 08/2018 Med ensamrätt. 41
Page 46

Safe Torque O (STO)
VLT® Midi Drive FC 280
6
6.3.3 STO-idrifttagningstest
Efter installationen, men före det första drifttillfället, ska ett
idrifttagningstest av installationen med STO utföras.
Utför testet efter varje ändring av installationen eller
tillämpningen som har STO.
OBS!
Ett godkänt idrifttagningstest av STO-funktionen behövs
efter den första installationen och efter varje
efterföljande ändring av installationen.
Så här utför du ett idrifttagningstest:
Följ instruktionerna i kapitel 6.3.4 Test för STO-
•
tillämpningar i läget manuell omstart om STO är
inställd på läget manuell omstart.
Följ instruktionerna i kapitel 6.3.5 Test för STO-
•
tillämpningar i läget automatisk omstart om STO
är inställd på läget automatisk omstart.
6.3.4 Test för STO-tillämpningar i läget
manuell omstart
För tillämpningar där parameter 5-19 Terminal 37/38 Safe
Torque O är inställt på standardvärdet [1] Larm Safe Torque
O ska idrifttagningstestet utföras på följande sätt:
1. Ange parameter 5-40 Function Relay till [190] Safe
Function active.
2. Ta bort 24 V DC-spänningen från plint 37 och 38
med hjälp av säkerhetsenheten medan motorn
drivs av frekvensomriktaren (nätförsörjningen
bryts alltså inte).
3. Kontrollera att:
3a Motorn utrullar. Det kan ta lång tid för
motorn att stanna.
3b Om LCP är monterad visas larm 68, Safe
O på LCP. Om LCP inte är
Torque
monterad loggas larm 68, Safe Torque O
i parameter 15-30 Alarm Log: Error Code.
4. Anslut 24 V DC-försörjning till plint 37 och 38 på
nytt.
5. Kontrollera att motorn förblir i utrullningsläget
och att kundreläet (om sådant nns) förblir
aktiverat.
6. Skicka en återställningssignal (via fältbuss, digital
I/O eller knappen [Reset]/[O Reset] på LCP).
7. Kontrollera att motorn blir funktionsduglig och
att den körs inom det ursprungliga varvtalsområdet.
Idrifttagningstestet är slutfört när alla ovan nämnda steg är
godkända.
6.3.5 Test för STO-tillämpningar i läget
automatisk omstart
För tillämpningar där parameter 5-19 Terminal 37/38 Safe
Torque O är inställt på [3] Varning, Safe Torque O ska
idrifttagningstestet utföras på följande sätt:
1. Ta bort 24 V DC-spänningen från plint 37 och 38
med hjälp av säkerhetsenheten medan motorn
drivs av frekvensomriktaren (nätförsörjningen
bryts alltså inte).
2. Kontrollera att:
2a Motorn utrullar. Det kan ta lång tid för
motorn att stanna.
2b Om LCP är monterad visas varning 68,
Safe Torque O W68 på LCP. Om LCP inte
är monterad loggas varning 68, Safe
Torque O i bit 30 i
parameter 16-92 Warning Word.
3. Anslut 24 V DC-försörjning till plint 37 och 38 på
nytt.
4. Kontrollera att motorn blir funktionsduglig och
att den körs inom det ursprungliga varvtalsområdet.
Idrifttagningstestet är slutfört när alla ovan nämnda steg är
godkända.
OBS!
Se varningen angående omstart i kapitel 6.1 Säkerhetsåtgärder för STO.
6.4 Underhåll och service för STO
Användaren ansvarar för att vidta säkerhetsåt-
•
gärderna.
Frekvensomriktarens parametrar kan lösenord-
•
skyddas.
Funktionstestet består av två delar:
Grundläggande funktionstest.
•
Diagnostiskt funktionstest.
•
När alla steg har slutförts utan problem är funktionstestet
godkänt.
Grundläggande funktionstest
Om STO-funktionen inte har använts på ett år, ska ett
grundläggande funktionstest utföras för att upptäcka
eventuella fel i STO.
1. Kontrollera att parameter 5-19 Terminal 37/38 Safe
Torque O är inställt på *[1] Larm Safe Torque O.
2. Ta bort 24 V DC-försörjningen till plint 37 och 38,
3. Kontrollera om larm 68, Safe Torque O visas på
LCP:n.
42 Danfoss A/S © 08/2018 Med ensamrätt. MG07A507
Page 47

Safe Torque O (STO) Handbok
4. Kontrollera att frekvensomriktaren trippar
enheten.
5. Kontrollera att motorn utrullar och stannar helt.
6. Initiera en startsignal (via fältbuss, digital I/O eller
LCP) och kontrollera att motorn inte startar.
7. Anslut 24 V DC-försörjningen till plint 37 och 38
på nytt.
8. Kontrollera att motorn inte startar automatiskt
och att den endast kan startas om med en
återställningssignal (via fältbuss, digital I/O eller
knappen [Reset]/[O Reset] på LCP).
Diagnostiskt funktionstest
1. Kontrollera att varning 68, Safe Torque O och
larm 68, Safe Torque O inte utlöses när 24 V-
försörjning är ansluten till plint 37 och 38,
2. Ta bort 24 V-försörjningen från plint 37 och
kontrollera att LCP visar larm 188, STO-funktionsfel
om LCP är monterad. Kontrollera att larm 188,
STO-funktionsfel loggas i parameter 15-30 Alarm
Log: Error Code om LCP inte är monterad.
3. Anslut 24 V-försörjning till plint 37 på nytt och
kontrollera att larmet återställs.
4. Ta bort 24 V-försörjningen från plint 38 och
kontrollera att LCP visar larm 188, STO-funktionsfel
om LCP är monterad. Kontrollera att larm 188,
STO-funktionsfel loggas i parameter 15-30 Alarm
Log: Error Code om LCP inte är monterad.
5. Anslut 24 V-försörjning till plint 38 på nytt och
kontrollera att larmet återställs.
6
6
MG07A507 Danfoss A/S © 08/2018 Med ensamrätt. 43
Page 48
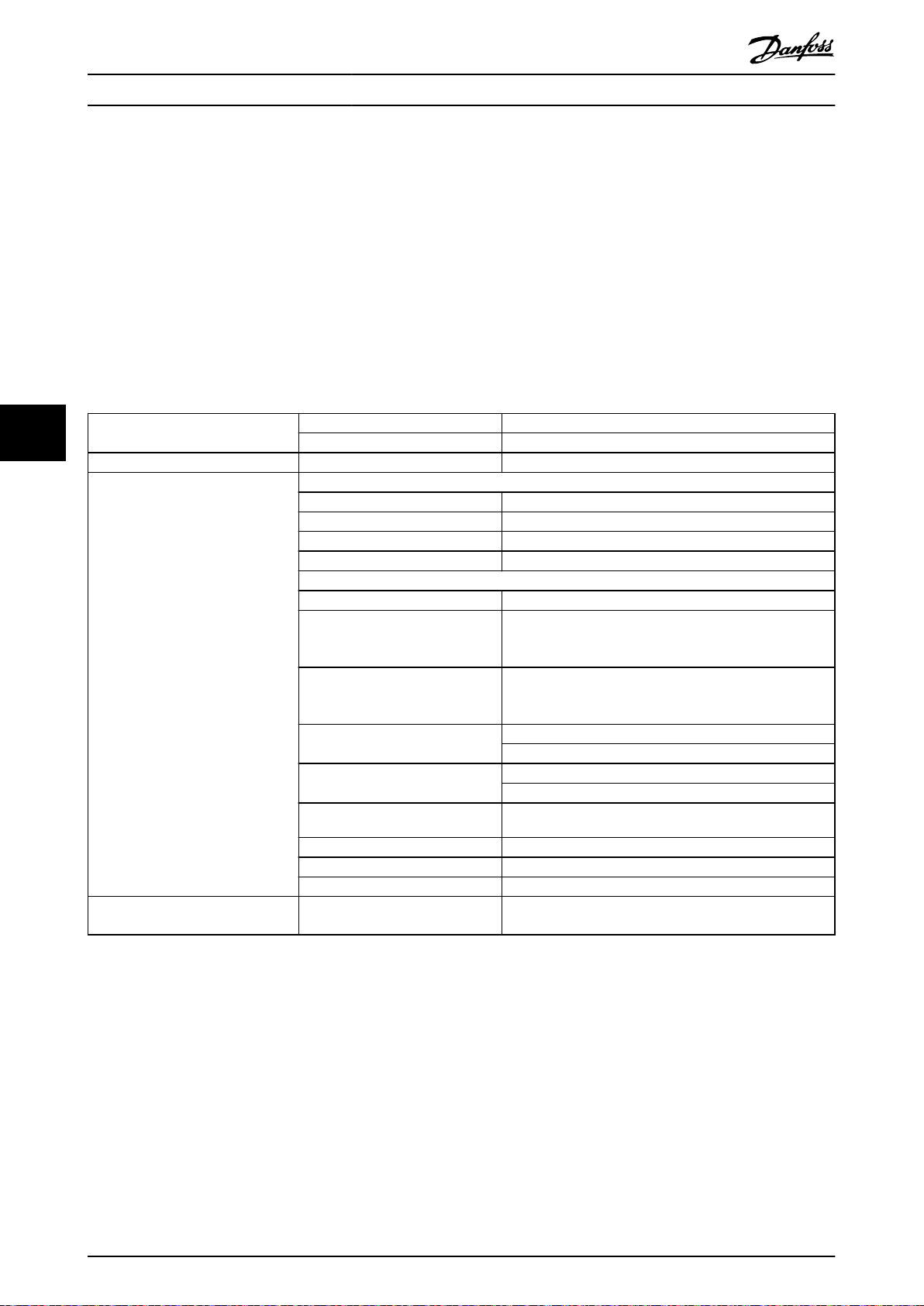
Safe Torque O (STO)
VLT® Midi Drive FC 280
6.5 STO-tekniska data
FMEDA (fellägen, eekter och diagnostisk analys) utförs baserat på följande antaganden:
VLT® Midi Drive FC 280 tar 10 % av den totala felbudgeten för en SIL2-säkerhetsslinga.
•
Felfrekvenser baseras på Siemens SN29500-databasen.
•
Felfrekvenser är konstanta. Mekanismer för slitage ingår ej.
•
För varje kanal antas de säkerhetsrelaterade komponenterna vara av typ A med en feltolerans för maskinvara på 0,
•
Stressnivåerna är genomsnittliga för en industrimiljö och komponenternas arbetstemperatur är upp till 85 °C
•
(185 °F).
Ett säkerhetsfel (till exempel utgång i säkert läge) repareras inom 8 timmar.
•
Inget utgångsmoment är säkert läge.
•
6
Säkerhetsstandarder
Säkerhetsfunktion Safe Torque O IEC 61800-5-2
Säkerhetsprestanda
Reaktionstid1) Svarstid ingång till utgång Kapslingsstorlekar K1–K3: Maximalt 50 ms
Säkerhet för maskinenheterna ISO 13849-1, IEC 62061
Funktionell säkerhet IEC 61508
ISO 13849-1
Kategori Kat. 3
Diagnostisk täckning (DC) 60 % (Låg)
Medeltid till farligt fel (MTTFd) 2 400 år (Hög)
Prestandanivå PL d
IEC 61508/IEC 61800-5-2/IEC 62061
Safety Integrity Level SIL2
Sannolikhet för att ett farligt fel ska
inträa per timme (PFH) (läge med
högt behov)
Sannolikhet för farligt fel vid behov
(PFDavg för PTI = 20 år) (läge med
lågt behov)
Säkerhetsfelfaktor (SFF)
Feltolerans med maskinvara (HFT)
Intervall för säkerhetstest2) 20 år
Fel av vanlig orsak (CCF) β = 5 %; βD = 5 %
Intervall för diagnostiskt test (DTI) 160 ms
Systemkapacitet SC 2
7,54E-9 (1/h)
6.05E-4
För delar till dubbla kanaler: >84 %
För delar till enkla kanaler: >99 %
För delar till dubbla kanaler: HFT = 1
För delar till enkla kanaler: HFT = 0
Kapslingsstorlekar K4–K5: Maximalt 30 ms
Tabell 6.3 Tekniska data för STO
1) Reaktionstiden är tiden som förlöper från ett tillstånd på ingångsignalen som aktiverar STO tills momentet är av på motorn.
2) Information om hur säkerhetstest utförs nns i kapitel 6.4 Underhåll och service för STO.
44 Danfoss A/S © 08/2018 Med ensamrätt. MG07A507
Page 49
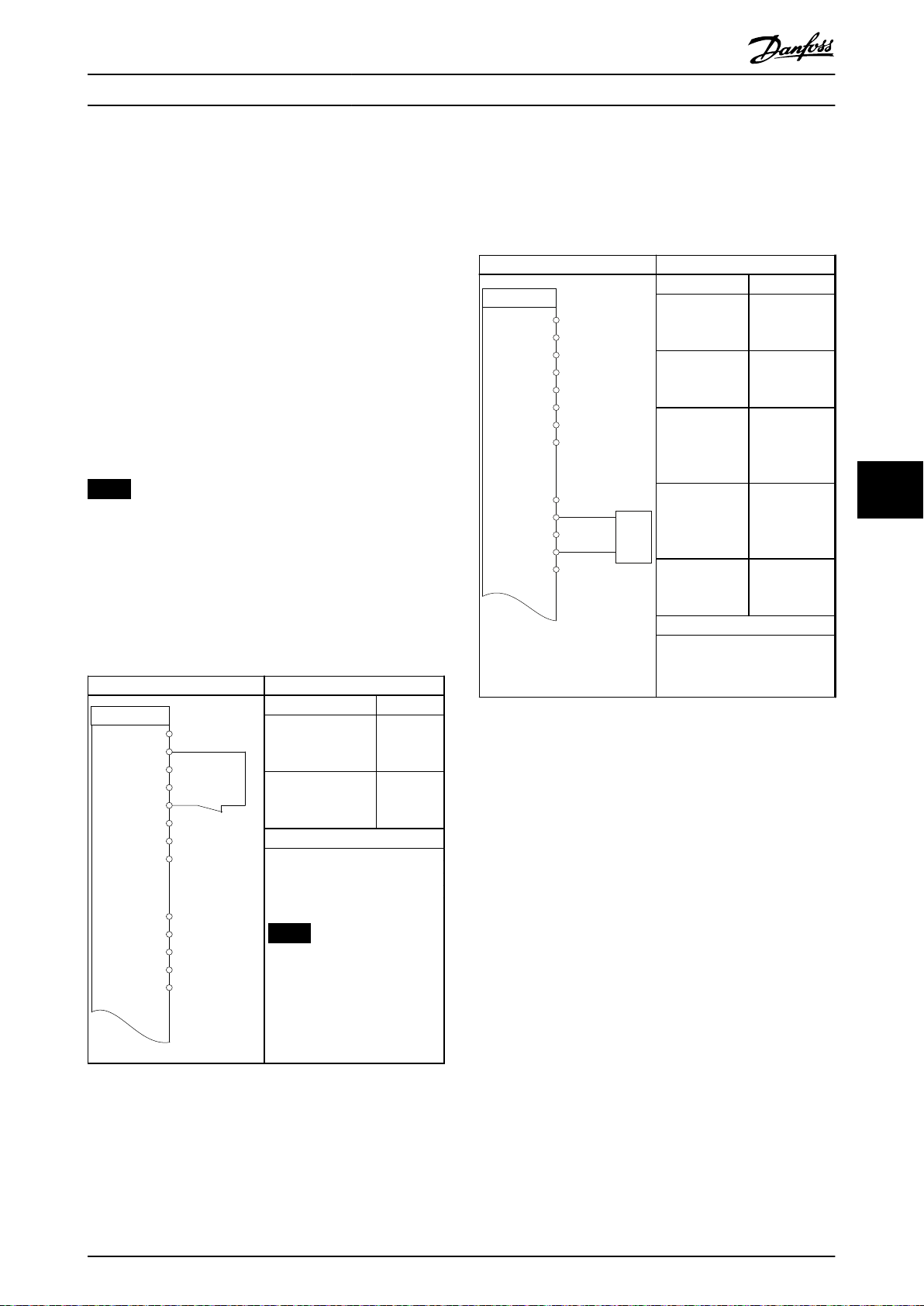
130BF096.10
FC
+24 V
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
12
13
18
19
27
29
32
33
50
53
54
55
42
A OUT
D IN
+24 V
130BE204.11
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
0 ~10 V
+
-
FC
+24 V
Tillämpningsexempel Handbok
7 Tillämpningsexempel
7.1 Inledning
Exemplen i detta avsnitt är tänkta som en snabb referens
för vanliga tillämpningar.
Parameterinställningarna motsvarar de regionala
•
standardvärdena, som du väljer i
parameter 0-03 Regional Settings, om inte något
annat anges.
Parametrar som är kopplade till plintarna och
•
deras inställningar visas bredvid ritningarna.
Även de switchinställningar som krävs för de
•
analoga plintarna 53 och 54 visas.
OBS!
Om STO-funktionen inte används behövs en
bygelledning mellan plint 12, 37 och 38 för att frekvensomriktaren ska fungera med fabriksinställda
programmeringsvärden.
7.2 Tillämpningsexempel
7.2.1 AMA
7.2.2 Varvtal
Parametrar
Funktion Inställning
Parameter 6-10
Terminal 53 Low
Voltage
Parameter 6-11
Terminal 53
High Voltage
Parameter 6-14
Terminal 53 Low
Ref./Feedb.
Value
Parameter 6-15
Terminal 53
High Ref./Feedb.
Value
Parameter 6-19
Terminal 53
mode
* = Standardvärde
Anteckningar/kommentarer:
0,07 V*
10 V*
0
50
[1] Spänning
7 7
Parametrar
Funktion Inställning
Parameter 1-29 Aut
omatisk motoranpassning (AMA)
Parameter 5-12 Plint
27, digital ingång
* = Standardvärde
Anteckningar/kommentarer:
Ställ in parametergrupp 1-2*
Motordata enligt motorns
specikationer.
[1] Aktivera
fullst. AMA
*[2]
Utrullning,
invert.
Tabell 7.2 Analog varvtalsreferens (spänning)
OBS!
Tabell 7.1 AMA med T27 anslutet
Om plint 13 och 27 inte är
anslutna ska
parameter 5-12 Terminal 27
Digital Input ställas in på
[0] Ingen funktion.
MG07A507 Danfoss A/S © 08/2018 Med ensamrätt. 45
Page 50
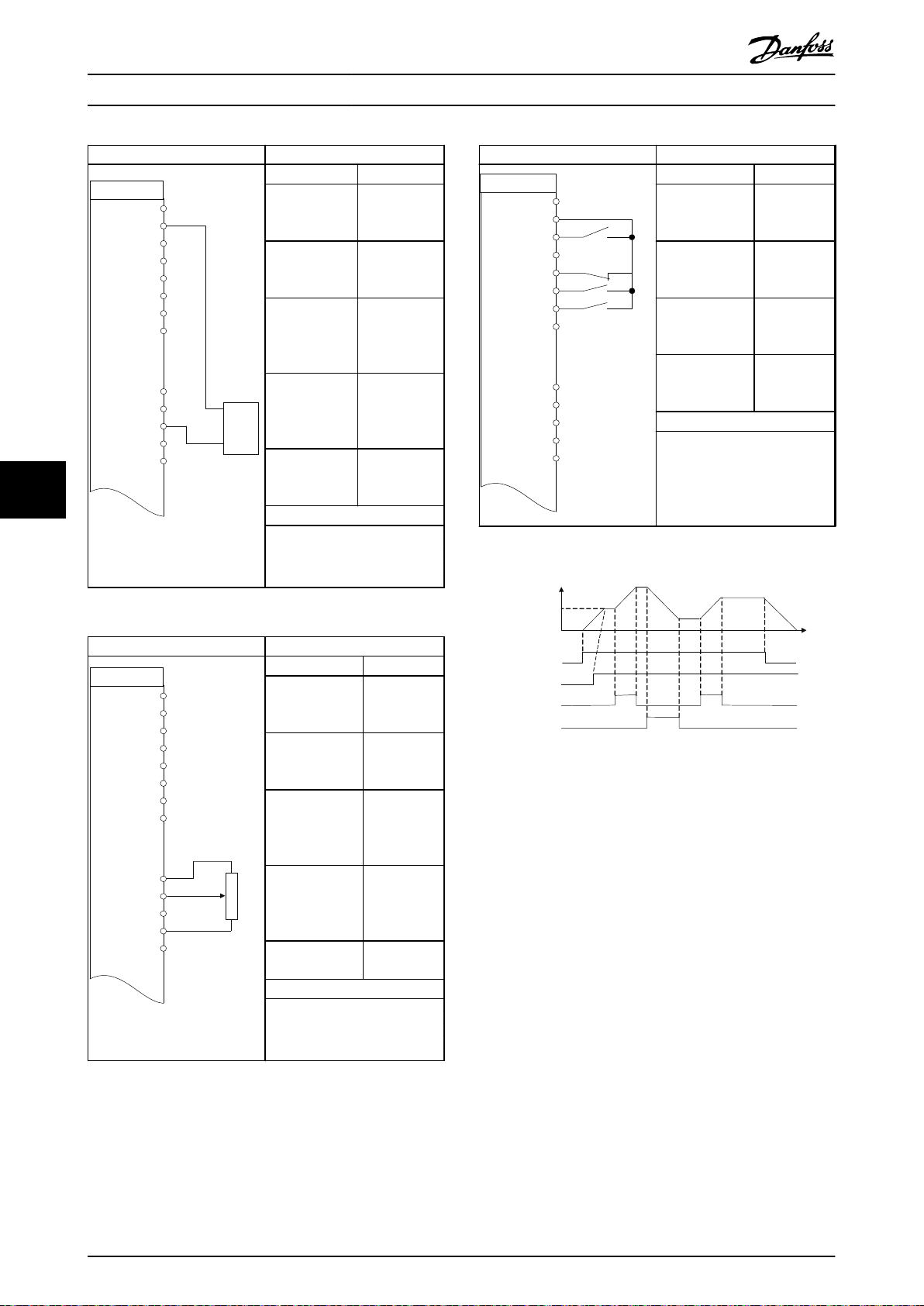
130BF097.10
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
4 - 20mA
+
-
FC
+24 V
130BE208.11
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
≈ 5kΩ
FC
+24 V
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
130BF100.10
+24 V
130BB840.12
Speed
Reference
Start (18)
Freeze ref (27)
Speed up (29)
Speed down (32)
Tillämpningsexempel
VLT® Midi Drive FC 280
Parametrar
Funktion Inställning
Parameter 6-22
Terminal 54 Low
4 mA*
Current
Parameter 6-23
Terminal 54
20 mA*
High Current
Parameter 6-24
Terminal 54 Low
Ref./Feedb.
0
Value
Parameter 6-25
Terminal 54
High Ref./Feedb.
50
Value
Parametrar
Funktion Inställning
Parameter 5-10 Pl
int 18, digital
*[8] Start
ingång
Parameter 5-12 Pl
int 27, digital
[19] Frys
referens
ingång
Parameter 5-13 Pl
int 29, digital
[21] Öka
varvtal
ingång
Parameter 5-14 Pl
int 32, digital
[22] Minska
varvtal
ingång
* = Standardvärde
Anteckningar/kommentarer:
Parameter 6-29
Terminal 54
77
mode
[0] Ström
* = Standardvärde
Anteckningar/kommentarer:
Tabell 7.5 Öka/minska varvtal
Tabell 7.3 Analog varvtalsreferens (ström)
Parametrar
Funktion Inställning
Parameter 6-10 Pl
int 53, låg
0,07 V*
spänning
Parameter 6-11 Pl
int 53, hög
10 V*
Bild 7.1 Öka/minska varvtal
spänning
Parameter 6-14 Pl
int 53, lågt ref./
återkopp-
0
lingsvärde
Parameter 6-15 Pl
int 53, högt ref./
återkopp-
50
lingsvärde
Parameter 6-19 T
Tabell 7.4 Varvtalsreferens (med hjälp av manuell
potentiometer)
erminal 53 mode
* = Standardvärde
Anteckningar/kommentarer:
[1] Spänning
46 Danfoss A/S © 08/2018 Med ensamrätt. MG07A507
Page 51
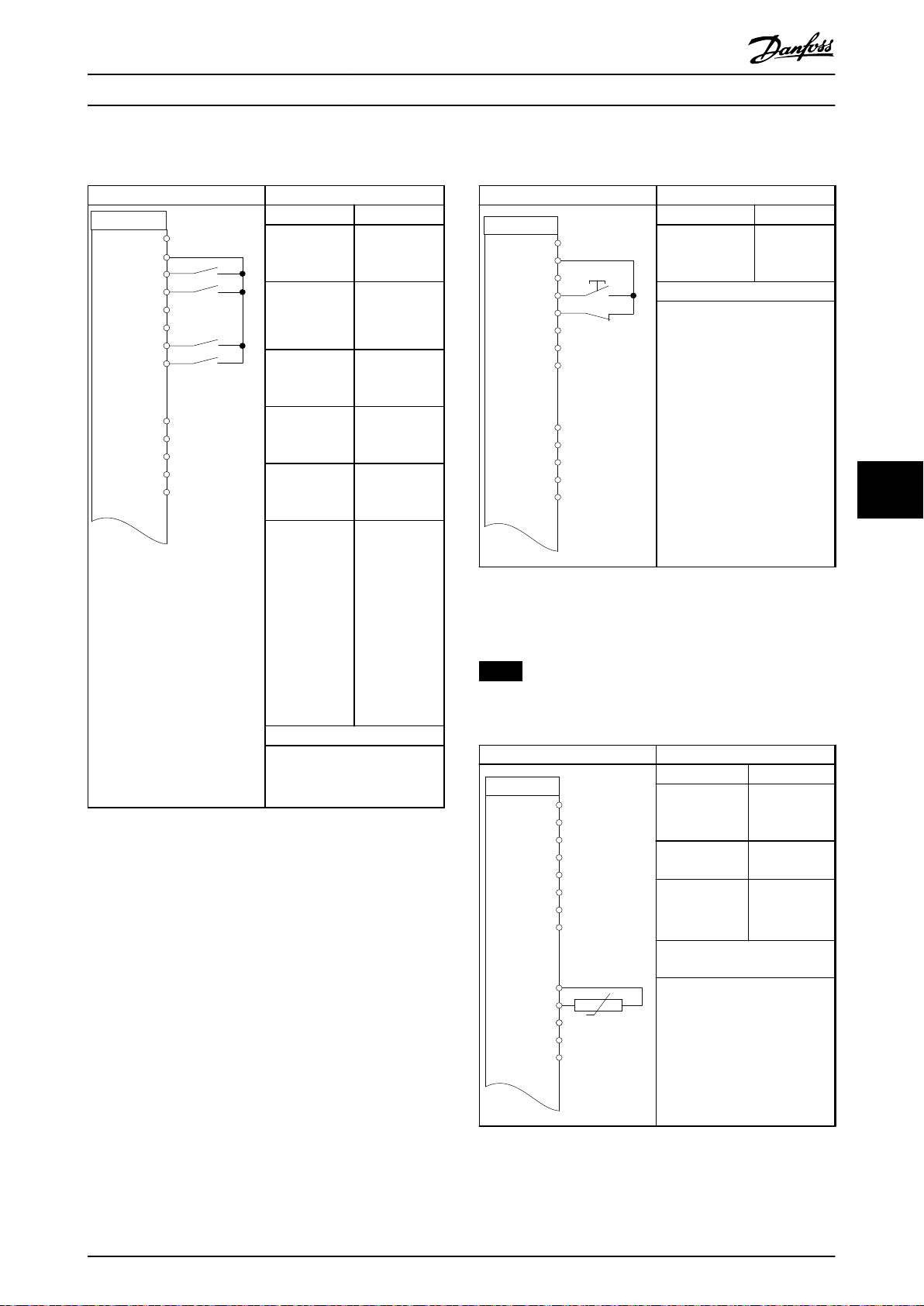
130BF098.10
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
19
18
27
29
32
33
50
53
54
55
42
+24 V 13
130BF099.10
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
+24 V
130BE210.11
+24 V
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
FC
D IN
+24 V
Tillämpningsexempel Handbok
7.2.3 Start/stopp
Parametrar
Funktion Inställning
Parameter 5-10
Plint 18, digital
[8] Start
ingång
Parameter 5-11
Plint 19, digital
ingång
Parameter 5-12
Plint 27, digital
*[10]
Reversering
[0] Ingen
funktion
7.2.4 Extern larmåterställning
Parametrar
Funktion Inställning
Parameter 5-11 Pl
int 19, digital
ingång
* = Standardvärde
Anteckningar/kommentarer:
[1]
Återställning
ingång
Parameter 5-14
Plint 32, digital
[16] Förinst ref
bit 0
ingång
Parameter 5-15
Plint 33, digital
[17] Förinst ref
bit 1
ingång
Parameter 3-10
Förinställd
referens
Förinställd ref.
0
Förinställd ref.
1
25%
50%
75%
100%
Tabell 7.7 Extern larmåterställning
7.2.5 Motortermistor
Förinställd ref.
2
Förinställd ref.
3
OBS!
Förstärkt eller dubbel isolering ska användas på
termistorn för att uppfylla PELV-isoleringskraven.
* = Standardvärde
Anteckningar/kommentarer:
Parametrar
Funktion Inställning
Tabell 7.6 Start/stopp med reversering och fyra förinställda
varvtal
Parameter 1-90
Termiskt
motorskydd
Parameter 1-93
Termistorkälla
[2] Termistortripp
[1] Analog
ingång 53
Parameter 6-19
Terminal 53
[1] Spänning
mode
* = Standardvärde
Anteckningar/kommentarer:
Om bara en varning önskas ska
parameter 1-90 Termiskt
motorskydd ställas in på [1]
Termistorvarning.
Tabell 7.8 Motortermistor
MG07A507 Danfoss A/S © 08/2018 Med ensamrätt. 47
7 7
Page 52
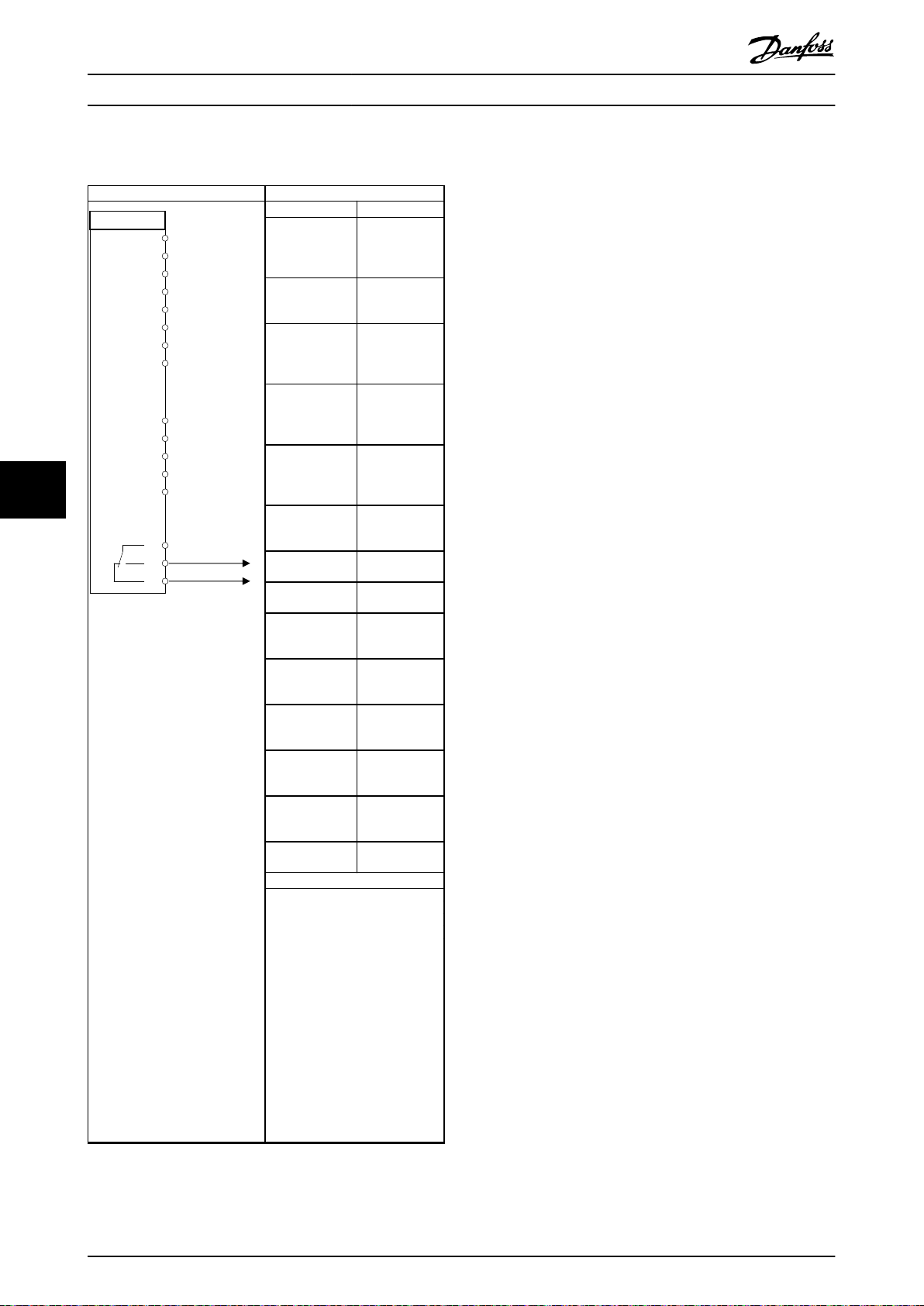
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
R1
12
13
18
19
27
29
32
33
50
53
54
55
42
01
02
03
130BE211.11
+24 V
Tillämpningsexempel
VLT® Midi Drive FC 280
7.2.6 SLC
Parametrar
Funktion Inställning
Parameter 4-30
Funktion för
motoråterk.bortf
all
Parameter 4-31
Motoråterk.varvt
al, fel
Parameter 4-32
Timeout för
motoråterk.bortf
all
Parameter 7-00
Varvtal PIDåterkopplingskäl
la
Parameter 5-70
Term 32/33
77
Pulses Per
Revolution
Parameter 13-00
SL Controllerläge
Parameter 13-01
Starthändelse
Parameter 13-02
Stopphändelse
Parameter 13-10
Komparatoroperand
Parameter 13-11
Komparatoroperator
Parameter 13-12
Komparatorvärde
Parameter 13-51
SL Controllervillkor
Parameter 13-52
SL Controllerfunktioner
Parameter 5-40
Funktionsrelä
* = Standardvärde
Anteckningar/kommentarer:
Om gränsvärdet i återkopplingsövervakningen överskrids
utfärdas varning 61, Återkopp-
lingsövervakning. SLC övervakar
varning 61, Återkopplingsövervakning. Om varning 61,
Återkopplingsövervakning
aktiveras, utlöses relä 1,
Extern utrustning kan indikera
att systemet behöver service.
Om återkopplingsfelet går
under gränsvärdet igen inom 5
sekunder fortsätter frekvensomriktaren och varningen
Tabell 7.9 Ställa in ett relä med SLC
försvinner. Relä 1 ändras först
[O/Reset] trycks in.
då
[1] Varning
50
5 s
[1] 24 Vpulsgivare
1024*
[1] På
[19] Varning
[44] Resetknapp
[21] Varningsnummer
*[1] ≈
61
[22]
Komparator 0
[32] Ange dig.
ut. A låg
[80] SL Digital
utgång A
48 Danfoss A/S © 08/2018 Med ensamrätt. MG07A507
Page 53
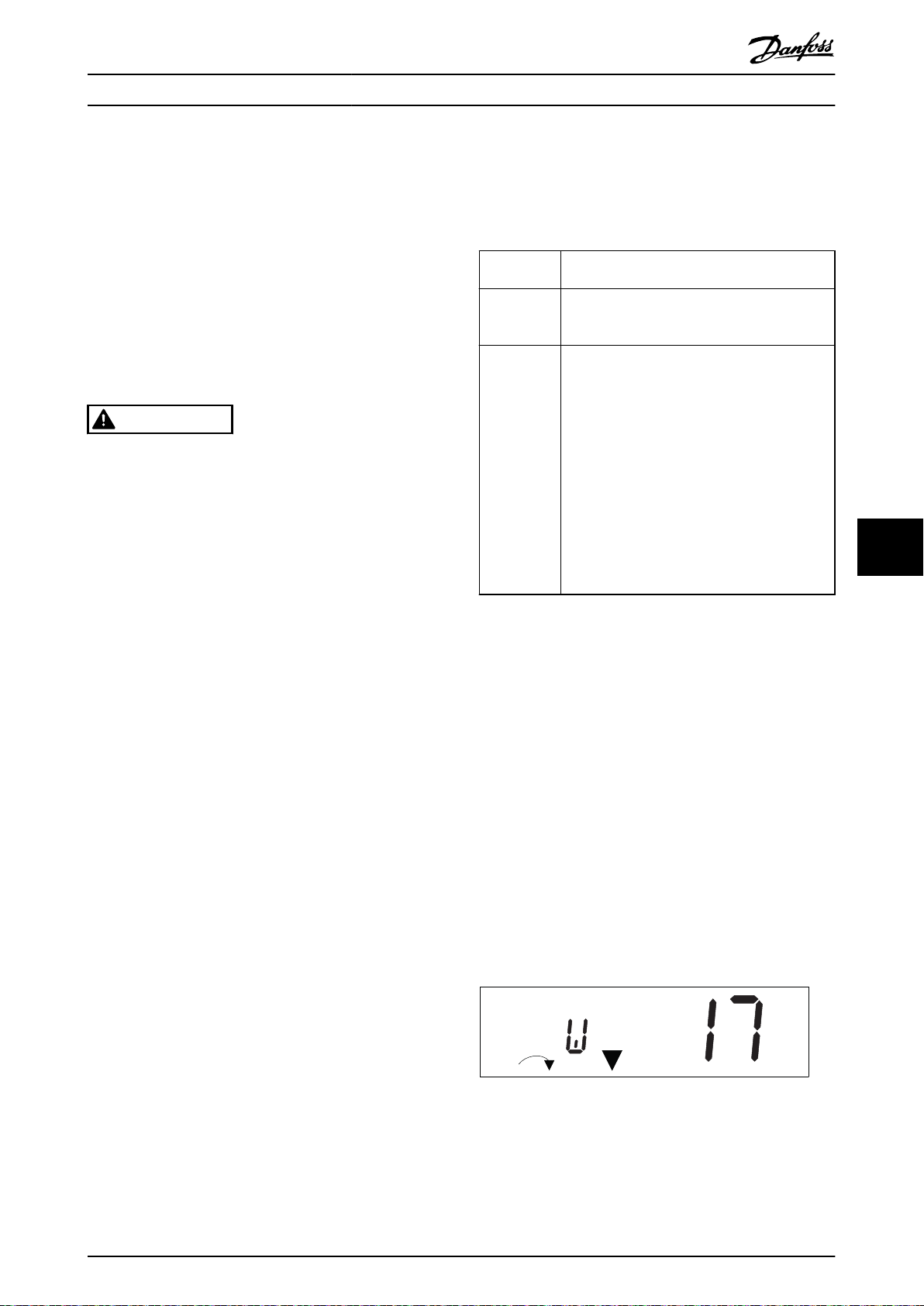
Setup 1
Status
Quick
Menu
Main
Menu
130BD111.10
Underhåll, diagnostik och f... Handbok
8 Underhåll, diagnostik och felsökning
8.1 Underhåll och service
Vid normala driftförhållanden och belastningsproler är
frekvensomriktaren underhållsfri under sin beräknade
livslängd. Undersök frekvensomriktaren så att plintanslutningarna är täta, att inte damm trängt in och så vidare
regelbundet beroende på driftförhållandena för att undvika
att den går sönder. Byt ut slitna eller skadade delar mot
originalreservdelar eller standarddelar. Kontakta din lokala
Danfoss-leverantör vid behov av service och support.
VARNING
OAVSIKTLIG START
När frekvensomriktaren är ansluten till växelströmsnät,
DC-försörjning eller lastdelning kan motorn starta när
som helst. Oavsiktlig start vid programmering, underhåll
eller reparationsarbete kan leda till dödsfall, allvarliga
personskador eller materiella skador. Motorn kan starta
med hjälp av en extern brytare, ett fältbusskommando,
en ingångsreferenssignal från LCP, via ärrstyrning med
MCT 10 Set-up Software eller efter ett uppklarat
feltillstånd.
Så här förhindrar du oavsiktlig motorstart:
Koppla bort frekvensomriktaren från nätet.
•
Tryck på [O/Reset] på LCP:n innan du
•
programmerar parametrar.
Frekvensomriktaren, motorn och all annan
•
elektrisk utrustning måste vara driftklara när
frekvensomriktaren ansluts till växelströmsnät,
DC-försörjning eller lastdelning.
8.2 Varnings- och larmtyper
Varnings-/
larmtyper
Varning En varning utfärdas när onormala driftvillkor
Larm Ett larm indikerar ett fel som måste åtgärdas
Tripp
När frekvensomriktaren trippar avbryts driften för att
förhindra skador på frekvensomriktaren och annan
utrustning. Vid en tripp utrullar motorn till ett stopp.
Frekvensomriktarlogiken fortsätter att fungera och
övervakar frekvensomriktarens status. Efter att felet har
åtgärdats kan frekvensomriktaren återställas.
Tripplås
Vid tripplås avbryter frekvensomriktaren driften för att
förhindra skador på frekvensomriktaren och annan
utrustning. Vid ett tripplås utrullar motorn till ett stopp.
Frekvensomriktarlogiken fortsätter att fungera och
övervakar frekvensomriktarens status. Frekvensomriktaren
startar endast ett tripplås vid allvarliga fel som kan skada
frekvensomriktaren eller annan utrustning. När felen har
åtgärdats ska du slå av och på ingångsströmmen innan
frekvensomriktaren återställs.
Beskrivning
föreligger. En varning försvinner när det onormala
tillståndet upphör.
omedelbart. Felet utlöser alltid en tripp eller ett
tripplås. Återställ frekvensomriktaren efter ett
larm.
Återställ frekvensomriktaren på ett av följande
fyra sätt:
Tryck på [Reset]/[O/Reset].
•
Med ett återställningskommando via en
•
digital ingång.
Med ett återställningskommando via seriell
•
kommunikation.
Med automatisk återställning.
•
8 8
Varnings- och larmdisplay
8.3
Bild 8.1 Varningsdisplay
Ett larm eller ett tripplåslarm visas på displayen
tillsammans med larmnumret.
MG07A507 Danfoss A/S © 08/2018 Med ensamrätt. 49
Page 54
Setup 1
Status Quick
Menu
Main
Menu
130BD112.10
130BD062.10
D
Hand
On
Reset
Auto
On
OK
On
Warn
Alarm
Underhåll, diagnostik och f...
Bild 8.2 Larm/tripplåslarm
VLT® Midi Drive FC 280
Förutom texten och larmkoden som visas på frekvensomriktarens display, nns det tre statuslampor.
Varningslampan lyser gult vid en varning. Larmlampan
blinkar rött vid ett larm.
88
Bild 8.3 Statuslampor
50 Danfoss A/S © 08/2018 Med ensamrätt. MG07A507
Page 55

Underhåll, diagnostik och f... Handbok
8.4 Lista över varningar och larm
8.4.1 Varning och larm – kodlista
Ett (X) i Tabell 8.1 innebär att varningen eller larmet har inträat.
Nr Beskrivning Varning Larm Tripplås Orsak
Signalen på plint 53 eller 54 är mindre än 50 % av det
2 Signalavbrott X X –
3 Ingen motoransl. X – – Ingen motor har anslutits till frekvensomriktarens utgång.
4
Nätfasbortfall
7
Hög DC-spän.
8
Låg DC-spänning
9 Växelriktaren överbelastad X X – Mer än 100 % belastning under för lång tid.
10 Motor-ETR, öv. X X –
11 Motort., över X X –
12 Momentgräns X X –
13 Överström X X X
14 Jordfel – X X Det har skett en urladdning från utgångsfaserna till jord.
16 Kortslutning – X X Motorn eller motorplintarna har kortslutits.
17 Styrord TILL X X – Ingen kommunikation med frekvensomriktaren.
25 Bromsmotstånd – X X
26 Bromsöverbel. X X –
27 Broms IGBT – X X
28 Bromskontroll – X –
30 U-fasbortfall – X X Motorfasen U saknas. Kontrollera fasen.
31 V-fasbortfall – X X Motorfasen V saknas. Kontrollera fasen.
32 W-fasbortfall – X X Motorfasen W saknas. Kontrollera fasen.
34 Fältbussfel X X – Det har inträat fel i PROFIBUS-kommunikationen.
35 Tillvalsfel – X – Fältbuss registrerar interna fel.
36 Nätfel X X –
38 Internt fel – X X Kontakta din lokala Danfoss-leverantör.
40 Överlast T27 X – –
46 Nätkortsför. – X X –
1)
1)
1)
X X X
X X –
X X –
angivna värdet i parameter 6-10 Terminal 53 Low Voltage,
parameter 6-20 Terminal 54 Low Voltage och
parameter 6-22 Terminal 54 Low Current.
Nätfasbortfall på försörjningssidan eller för hög
spänningsobalans. Kontrollera nätspänningen.
DC-busspänningen överskrider gränsen.
DC-busspänningen sjunker under varningsgränsen för låg
spänning.
Motorn är för het på grund av att belastningen har varit
mer än 100 % under för lång tid.
Termistorn eller termistoranslutningen är bortkopplad
eller så är motorn för varm.
Vridmomentet överskrider det värde som är inställt i
parameter 4-16 Torque Limit Motor Mode eller
parameter 4-17 Torque Limit Generator Mode.
Växelriktarens toppströmbegränsning har överskridits. Om
det här larmet inträar vid start ska du kontrollera om
kraftkablarna av misstag har anslutits till motorplintarna.
Bromsmotståndet är kortslutet och bromsfunktionen är
därför inaktiverad.
Eekten överförd till bromsmotståndet under de senaste
120 sekunderna överskrider gränsen. Möjliga åtgärder:
Minska bromsenergin med lägre varvtal eller längre
ramptid.
Bromstransistorn är kortsluten och bromsfunktionen är
därför inaktiverad.
Bromsmotståndet är inte anslutet eller också fungerar det
inte.
Varningen/larmet aktiveras endast om nätspänningen till
frekvensomriktaren är lägre än värdet inställt i
parameter 14-11 Mains Fault Voltage Level och om
parameter 14-10 Mains Failure INTE är inställd på [0] Ingen
funktion.
Kontrollera belastningen på plint 27 eller åtgärda
kortslutningen.
8 8
MG07A507 Danfoss A/S © 08/2018 Med ensamrätt. 51
Page 56
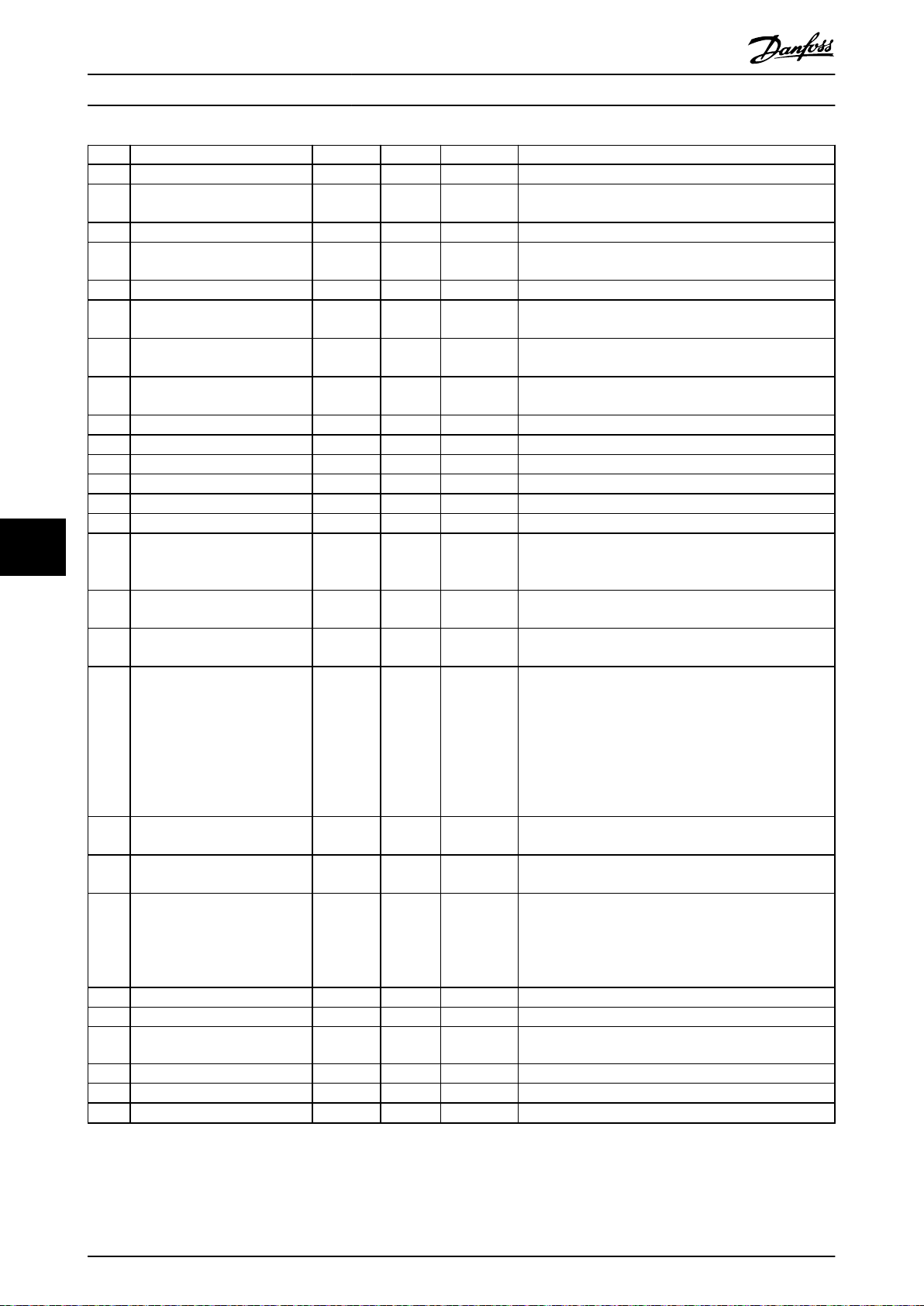
Underhåll, diagnostik och f...
Nr Beskrivning Varning Larm Tripplås Orsak
47 24 V-spän. Låg X X X 24 V DC-försörjningen kan vara överbelastad.
49 Varvtalsgräns – X –
50 AMA, kalibr. – X – Ett kalibreringsfel har uppstått.
51 AMA U
52 AMA låg Inom – X – Motorströmmen är för låg. Kontrollera inställningarna.
53 AMA, st. motor – X –
54 AMA, lit. motor – X –
55 AMA, par.omr. – X –
56 AMA, avbryt – X – AMA har avbrutits.
57 AMA, tidsgräns – X – –
58 AMA, internt – X – Kontakta Danfoss.
59 Strömbegränsning X X – Frekvensomriktaren överbelastad.
60 Externt stopp – X – Externt stopp har aktiverats.
61 Pulsgivarbortf. X X – –
88
63 Mek. broms låg – X –
65 Styrkortstemp. X X X
67 Tillvalsändring – X –
68
69 Nätkortstemp. X X X
80
87 Automatisk likströmsbroms X – –
88 Option detection – X X Tillvalet har tagits bort.
95 Rembrott X X – –
99 Låst rotor – X –
nom,Inom
Safe Torque O
Frekvensomformaren initierad till
standardvärdet
2)
VLT® Midi Drive FC 280
– X –
X X –
– X –
Motorvarvtalet understiger den angivna gränsen i
parameter 1-87 Tripp lågt varvtal [RPM].
Inställningen för motorspänningen och/eller
motorströmmen är felaktig.
AMA kan inte köras eftersom motorns eektstorlek är för
stor.
AMA kan inte köras eftersom motorns eektstorlek är för
liten.
Parametervärdena för motorn ligger utanför det tillåtna
gränsvärdena. AMA körs inte.
Den faktiska motorströmmen har inte överstigit
strömmen för att frikoppla bromsström inom startfördröjningstiden.
Frånslagningstemperaturen för styrkortet har överskridit
den övre gränsen.
Ett nytt tillval har upptäckts eller ett monterat tillval har
tagits bort.
STO är aktiverat. Om STO är i läget manuell omstart
(standard) och du vill återgå till normal drift, ansluter du
24 V DC till plint 37 och 38 på nytt och skickar en
återställningssignal (via fältbuss, digital I/O eller genom
att trycka på [Reset]/[O/Reset]). Om STO är i läget
automatisk omstart, återupptar frekvensomriktaren
automatiskt normal drift om du ansluter 24 V DC till plint
37 och 38 på nytt.
Frånslagningstemperaturen för eektkortet har överskridit
den övre gränsen.
Alla parametrar återställs till sina fabriksinställda värden.
Uppstår i IT-nät när frekvensomriktaren utrullar och
likspänningen är högre än 830 V för enheter på 400 V
och 425 V för enheter på 200 V. Motorn förbrukar energi
på DC-bussen. Den här funktionen kan aktiveras/
inaktiveras i parameter 0-07 Auto DC Braking.
Rotorn är blockerad.
120 Lägesstyrningsfel – X – –
126 Motorns rotation – X – PM-motor roterar när AMA körs.
127 Mot-Emk-spänning hög X – – PM-motorns mot-Emk är för högt före start.
52 Danfoss A/S © 08/2018 Med ensamrätt. MG07A507
Page 57
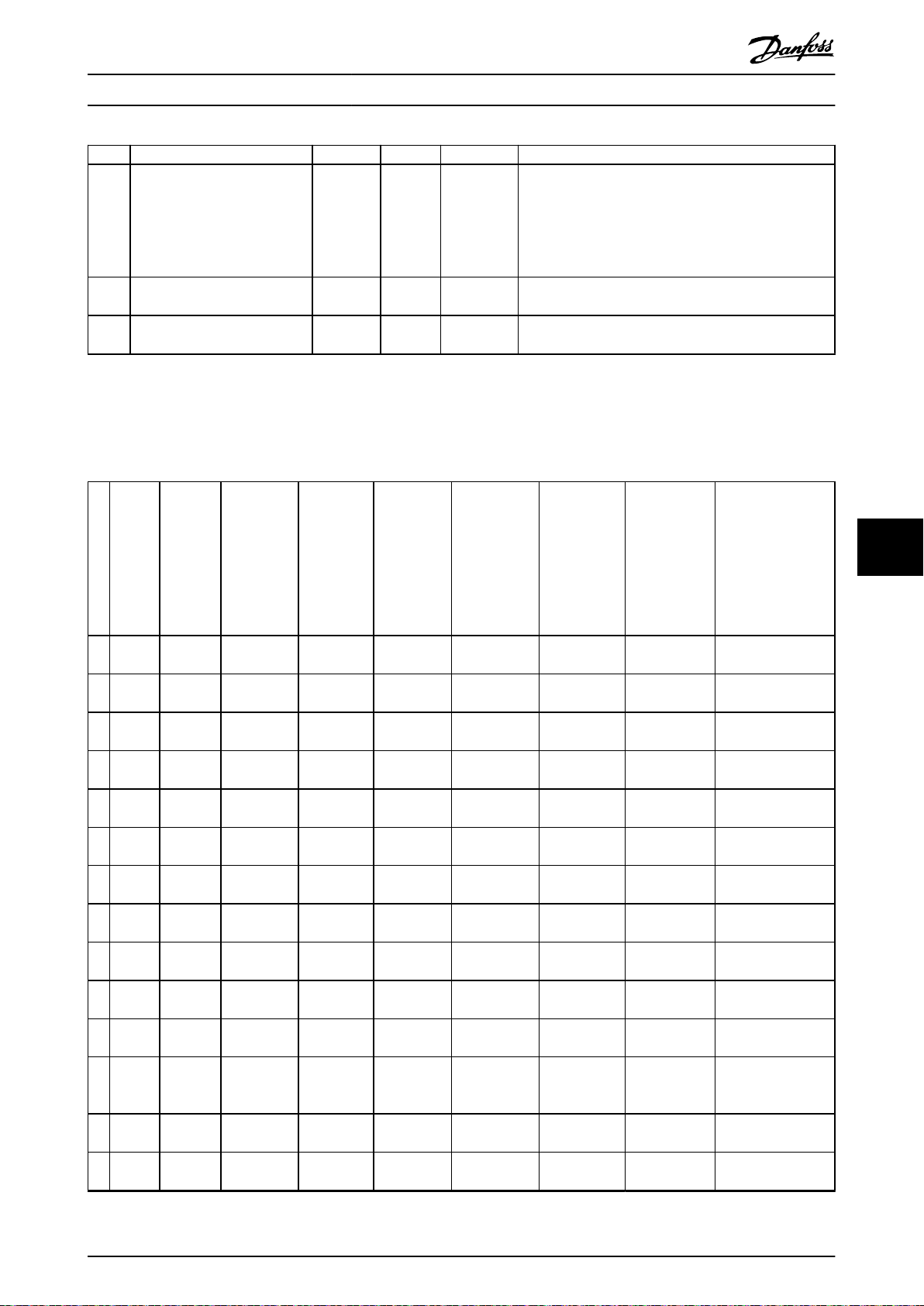
Underhåll, diagnostik och f... Handbok
Nr Beskrivning Varning Larm Tripplås Orsak
24 V DC-försörjning är endast ansluten till en av de två
STO-plintarna (37 och 38), eller så nns det ett fel i STO-
188
STO, internt fel
nw
Inte vid körning – – –
run
Err. Fel lösenord angavs – – –
Tabell 8.1 Varningar och larm – kodlista
1) Dessa fel kan orsakas av nätstörningar. Installation av Danfoss-ledningslter kan rätta till problemet.
2) Larmet kan inte återställas automatiskt via parameter 14-20 Reset Mode.
2)
– X –
kanalerna. Kontrollera att både plintarna är anslutna till
24 V DC-försörjning och att avvikelsen mellan signalerna
på de två plintarna är mindre än 12 ms. Kontakta din
lokala Danfoss-återförsäljare om felet kvarstår.
Parametrar kan endast ändras när motorn är stoppad.
Inträar när ett felaktigt lösenord anges vid ändring av
en lösenordsskyddad parameter.
För diagnostisering ska du läsa larm- och varningsorden samt de utökade statusorden.
Bit Hex Dec
000000
10
11
12
13
0
1
2
3
4
5
6
7
8
9
01
000000
02
000000
04
000000
08
000000
10
000000
20
000000
40
000000
80
000001
00
000002
00
000004
00
000008
00
000010
00
000020
00
1
2
4 Jordfel Reserverad Reserverad Reserverad Reserverad
8
16 Styrord TILL Reserverad Reserverad Styrord TILL Reserverad Öka Probus OFF3 aktiv
32 Överström Reserverad Reserverad Överström Reserverad
64
128 Motort., över Reserverad Reserverad Motort., över Reserverad Utström hög Styrning klar
256
512
1024
2048
4096 Kortslutning
8192 Reserverad Reserverad Reserverad Reserverad Reserverad Bromsning
Larmord
(parameter 1
6-90 Alarm
Word)
Bromskontrol
l
Nätkortstem
p.
Styrkortstem
p.
Momentgrän
s
Motor-ETR,
öv.
Växelri.
överb.
Likströmsun-
derspänning
Likströms-
överspännin
g
Larmord 2
(parameter
16-91 Alarm
Word 2)
Reserverad
Nätkortsför. MM-larm Nätkortstemp. Reserverad
Reserverad Reserverad Styrkortstemp. Reserverad Nedsaktning Probus OFF2 aktiv
Reserverad Reserverad Momentgräns Reserverad
Rembrott Reserverad Motor-ETR, öv. Rembrott Utström låg
Reserverad Reserverad Växelri. överb. Reserverad Utfrekvens hög Snabb stopp
Start missl. Reserverad
Varvtalsgrän
s
Externt
stopp
Larmord 3
(parameter 1
6-97 Alarm
Word 3)
STO-
funktionsfel
Reserverad
Reserverad Reserverad Reserverad Maximal broms Reserverad
Varningsord
(parameter 16-
92 Warning
Word)
Reserverad Reserverad Rampning Av
Likströmsunderspänning
Likströmsöver-
spänning
Varningsord 2
(parameter 16
-93 Warning
Word 2)
Reserverad Utfrekvens låg DC-broms
Reserverad Bromstest OK Stopp
Utökat
statusord
(parameter 16-
94 Ext. Status
Word)
AMA-
anpassning
Start med-/
moturs
Hög
återkoppling
Återkoppling
låg
Utökat
statusord 2
(parameter 16-95 Ext
. Status Word 2)
Hand/Auto
Probus OFF1 aktiv
Reserverad
Reserverad
Frekvensomriktaren
är driftklar
Begäran om frys
utgång
8 8
MG07A507 Danfoss A/S © 08/2018 Med ensamrätt. 53
Page 58

Underhåll, diagnostik och f...
VLT® Midi Drive FC 280
Larmord
Bit Hex Dec
000040
14
000080
15
000100
16
000200
17
000400
18
000800
19
88
001000
20
002000
21
004000
22
008000
23
010000
24
020000
25
040000
26
0800000013421772
27
10000000268435456Tillval-
28
2000000053687091
29
400000001073741824Safe Torque
30
800000002147483648Mek. broms
31
16384
00
32768 AMA ej OK Reserverad Reserverad
00
65536 Signalavbrott Reserverad Reserverad Signalavbrott Reserverad AC-broms Jogg
00
131072 Internt fel Reserverad Reserverad Reserverad Reserverad Reserverad Startbegäran
00
262144
00
524288 U-fasbortfall Reserverad Reserverad Reserverad Reserverad Referens hög Reserverad
00
1048576 V-fasbortfall
00
2097152 W-fasbortfall Tillvalsfel Reserverad Reserverad Reserverad Reserverad Energisparläge
00
4194304 Fältbussfel Låst rotor Reserverad Fältbussfel Minnesmodul Reserverad
00
8388608
00
16777216 Nätfel Reserverad Reserverad Nätfel Reserverad Reserverad Förbikoppling
00
33554432 Reserverad
00
67108864
00
(parameter 1
6-90 Alarm
Word)
Nätfas-
bortfall
Bromsö-
verbel.
24 V-spän.
Låg
bromsmotstå
nd
Broms IGBT Reserverad Reserverad Reserverad Reserverad Reserverad Reserverad
8
sändring
Frekvensom-
2
riktare
initierad
O
låg
Larmord 2
(parameter
16-91 Alarm
Word 2)
Reserverad Reserverad Nätfasbortfall Reserverad Reserverad Frys utgång
Reserverad Reserverad Bromsöverbel. Reserverad Reserverad Start
Option
detection
Lägesstyr-
ningsfel
Strömbe-
gränsning
Reserverad Reserverad Reserverad Reserverad Reserverad Externt stopp
Reserverad Reserverad Pulsgivarbortf. Reserverad Reserverad Flygande start aktiv
Pulsgi-
varbortf.
Reserverad Reserverad
Reserverad Reserverad Reserverad Reserverad
Larmord 3
(parameter 1
6-97 Alarm
Word 3)
Reserverad Reserverad Överlast T27 Referens låg Startfördröjning
Reserverad 24 V-spän. Låg Reserverad Reserverad Kör
Reserverad
Reserverad Reserverad
Varningsord
(parameter 16-
92 Warning
Word)
Ingen
motoransl.
Strömbe-
gränsning
Safe Torque
O
Varningsord 2
(parameter 16
-93 Warning
Word 2)
Automatisk
likströmsbromsOVC aktiv Joggbegäran
Reserverad Reserverad Reserverad
Mot-Emk-
spänning hög
Reserverad Reserverad Reserverad
Utökat
statusord
(parameter 16-
94 Ext. Status
Word)
Reserverad
Databas
upptagen
Utökat
statusord 2
(parameter 16-95 Ext
. Status Word 2)
Förbättrat energi-
sparläge
Kylplatta rengörings-
varning
Reserverad
Tabell 8.2 Beskrivning av larmord, varningsord och utökat statusord
54 Danfoss A/S © 08/2018 Med ensamrätt. MG07A507
Page 59

Underhåll, diagnostik och f... Handbok
8.5 Felsökning
Symptom Möjlig orsak Test Lösning
Tryck på [Auto On] eller [Hand On]
Motorn startar inte
Motorn kör i fel
riktning
Motorn når inte
maximalt varvtal
Instabilt
motorvarvtal
Motorn går
ansträngt
Motorn kan inte
bromsas
LCP-stopp Kontrollera om [O] har tryckts ned.
Kontrollera parameter 5-10 Plint 18,
Startsignal saknas (standby)
Motorutrullning är aktiv (utrullning)
Fel referenssignalkälla
Gräns för motorns rotation
Aktiv reverseringssignal
Felaktig motorfasanslutning
Frekvensgränserna är felaktigt
inställda
Referensingångssignalen är inte
korrekt skalad
Parameterinställningarna kan vara
felaktiga
Möjlig övermagnetisering
Inställningarna i bromsparametrarna
kan vara felaktiga. Nedramptiderna
kan vara för korta.
digital ingång för korrekt inställning på
plint 18 (använd fabriksinställning).
Kontrollera parameter 5-12 Terminal 27
Digital Input för korrekt inställning på
plint 27 (använd fabriksinställning).
Kontrollera följande:
Är referenssignalen en lokal-, ärr-
•
eller bussreferens?
Är den förinställda referensen
•
aktiv?
Är plintanslutningen korrekt?
•
Är plintarnas skalning korrekt?
•
Är referenssignalen tillgänglig?
•
Kontrollera att parameter 4-10 Motorns
varvtalsriktning är korrekt
programmerad.
Kontrollera om ett reverseringskommando har programmerats för
plinten i parametergrupp 5–1* Digitala
ingångar.
Ändra parameter 1-06 Clockwise
Direction.
Kontrollera utgångsgränserna i
parameter 4-14 Motorvarvtal, övre
gräns [Hz] och parameter 4-19 Max.
utfrekvens.
Kontrollera referensingångssignalens
skalning i parametergrupp 6–* Analogt
I/O-läge och parametergrupp 3–1*
Referenser.
Kontrollera inställningen för alla
motorparametrar, inklusive alla inställningar för motorkompensation.
Kontrollera PID-inställningarna vid drift
med återkoppling.
Kontrollera att motorinställningarna är
korrekta i alla motorparametrar.
Kontrollera bromsparametrarna.
Kontrollera ramptidsinställningarna.
(beroende på driftläge) för att köra
motorn.
Skicka en startsignal för att starta
motorn.
Anslut 24 V till plint 27 eller
programmera plinten för [0] Ingen
funktion.
Programmera rätt inställningar.
Aktivera den förinställda referensen i
parametergrupp 3-1* Referenser.
Kontrollera att kablarna är rätt
inkopplade. Kontrollera plintarnas
skalning. Kontrollera referenssignalen.
Programmera rätt inställningar.
Inaktivera reverseringssignal.
Programmera in de korrekta
gränserna.
Programmera rätt inställningar.
Kontrollera inställningarna i parame-
tergrupp 6-** Analogt I/O-läge.
Kontrollera motorinställningarna i
parametergrupperna 1-2* Motordata,
1-3* Av motordata och 1-5* Lastoberoende inställ.
Kontrollera parametergrupperna 2-0*
DC-broms och 3-0* Referensgränser.
8 8
MG07A507 Danfoss A/S © 08/2018 Med ensamrätt. 55
Page 60

Underhåll, diagnostik och f...
Symptom Möjlig orsak Test Lösning
Kortslutning mellan faser
Utlösta nätsäkringar
eller maximalbrytartripp
Nätobalansen är
större än 3 %
Motorn överbelastad
Lösa anslutningar
Problem med nätströmmen (Se
beskrivningen i larm 4 Nätfasbortfall)
Problem med frekvensomriktarenheten
88
Problem med motor eller
Motorströmobalansen är större än
3 %
Ljudnivå eller
vibration (till
exempel ett
äktblad som låter
eller vibrerar vid
vissa frekvenser)
motorkablage
Problem med frekvensomriktarenheten
Resonanser i exempelvis motorn/
äktsystemet
VLT® Midi Drive FC 280
Motor eller apparatskåp har en
kortslutning mellan faser. Kontrollera
om det nns kortslutningar i motor
och apparatskåp.
Motorn är överbelastad för tillämpningen.
Utför en startkontroll och sök efter
lösa anslutningar.
Skifta frekvensomriktarens ingående
ledningar ett snäpp: A till B, B till C, C
till A.
Skifta frekvensomriktarens ingående
ledningar ett snäpp: A till B, B till C, C
till A.
Skifta frekvensomriktarens utgående
ledningar ett snäpp: U till V, V till W,
W till U.
Skifta frekvensomriktarens utgående
ledningar ett snäpp: U till V, V till W,
W till U.
Förbikoppla de kritiska frekvenserna
med hjälp av parametrarna i parame-
tergrupp 4-6* Varvtal, förbik.
Stäng av övermodulering i
parameter 14-03 Overmodulation.
Öka resonansdämpningen i
parameter 1-64 Resonance Dampening.
Åtgärda eventuella kortslutningar.
Starta motorn och kontrollera att
motorströmmen är inom specika-
tionerna. Om motorströmmen
överskrider belastningsströmmen som
anges på märkskylten kan motorn
enbart köras med reducerad
belastning. Kontrollera specika-
tionerna för tillämpningen.
Dra åt lösa anslutningar.
Om obalansen följer med ledningen
är det ett nätproblem. Kontrollera
nätförsörjningen.
Om obalansen är kvar på samma
ingångsplint är det fel i enheten.
Kontakta återförsäljaren.
Om obalansen följer ledningen är det
fel i motorn eller motorkablaget.
Kontrollera motorn och
motorkablaget.
Om obalansen är kvar på samma
utgångsplint är det fel på enheten.
Kontakta återförsäljaren.
Kontrollera om ljudet och/eller
vibrationerna har minskat till en
acceptabel nivå.
Tabell 8.3 Felsökning
56 Danfoss A/S © 08/2018 Med ensamrätt. MG07A507
Page 61

Specikationer Handbok
9 Specikationer
9.1 Elektriska data
Frekvensomriktare
typisk axeleekt [kW (hk)]
Kapsling med skyddsklassicering IP20 IP21/Typ
1 som alternativ)
Utström
Axeleekt [kW] 0,37 0,55 0,75 1,1 1,5 2,2 3
Kontinuerlig (3 x 380–440 V ) [A] 1,2 1,7 2,2 3 3,7 5,3 7,2
Kontinuerlig (3 x 441–480 V ) [A] 1,1 1,6 2,1 2,8 3,4 4,8 6,3
Intermittent (60 s överbelastning) [A] 1,9 2,7 3,5 4,8 5,9 8,5 11,5
Kontinuerlig kVa (400 V AC) [kVa] 0,9 1,2 1,5 2,1 2,6 3,7 5,0
Kontinuerlig kVa (480 V AC) [kVa] 0,9 1,3 1,7 2,5 2,8 4,0 5,2
Maximal inström
Kontinuerlig (3 x 380–440 V ) [A] 1,2 1,6 2,1 2,6 3,5 4,7 6,3
Kontinuerlig (3 x 441–480 V ) [A] 1,0 1,2 1,8 2,0 2,9 3,9 4,3
Intermittent (60 s överbelastning) [A] 1,9 2,6 3,4 4,2 5,6 7,5 10,1
Fler specikationer
Maximal ledararea (nät, motor, broms och
lastdelning) [mm2 (AWG])
Uppskattad eektförlust vid nominell maximal
belastning [W]
Vikt, kapsling med skyddsklassicering IP20 [kg
(lb)]
Vikt, kapsling med skyddsklassicering IP21 [kg
(lb)]
Verkningsgrad [%]
1)
2)
PK37
0,37
(0,5)
K1 K1 K1 K1 K1 K1 K2
20,9 25,2 30 40 52,9 74 94,8
2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,5 (5,5) 3,6 (7,9)
4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 5,5 (12,1)
96,0 96,6 96,8 97,2 97,0 97,5 98,0
PK55
0,55
(0,75)
PK75
0,75
(1,0)
P1K1
1,1
(1,5)
4 (12)
P1K5
1,5
(2,0)
P2K2
2,2
(3,0)
P3K0
3,0
(4,0)
9 9
Tabell 9.1 Nätförsörjning 3 x 380–480 V AC
MG07A507 Danfoss A/S © 08/2018 Med ensamrätt. 57
Page 62

Specikationer
VLT® Midi Drive FC 280
Frekvensomriktare
typisk axeleekt [kW (hk)]
Kapsling med skyddsklassicering IP20 IP21/Typ
1 som alternativ)
Utström
Axeleekt 4 5,5 7,5 11 15 18,5 22
Kontinuerlig (3 x 380–440 V ) [A] 9 12 15,5 23 31 37 42,5
Kontinuerlig (3 x 441–480 V ) [A] 8,2 11 14 21 27 34 40
Intermittent (60 s överbelastning) [A] 14,4 19,2 24,8 34,5 46,5 55,5 63,8
Kontinuerlig kVa (400 V AC) [kVa] 6,2 8,3 10,7 15,9 21,5 25,6 29,5
Kontinuerlig kVa (480 V AC) [kVa] 6,8 9,1 11,6 17,5 22,4 28,3 33,3
Maximal inström
Kontinuerlig (3 x 380–440 V ) [A] 8,3 11,2 15,1 22,1 29,9 35,2 41,5
Kontinuerlig (3 x 441–480 V ) [A] 6,8 9,4 12,6 18,4 24,7 29,3 34,6
Intermittent (60 s överbelastning) [A] 13,3 17,9 24,2 33,2 44,9 52,8 62,3
Fler specikationer
Maximal ledararea (nät, motor, broms och
lastdelning) [mm2 (AWG])
Uppskattad eektförlust vid nominell maximal
belastning [W]
Vikt, kapsling med skyddsklassicering IP20 [kg
(lb)]
99
Vikt, kapsling med skyddsklassicering IP21 [kg
(lb)]
Verkningsgrad [%]
1)
2)
P4K0
4
(5,5)
K2 K2 K3 K4 K4 K5 K5
115,5 157,5 192,8 289,5 393,4 402,8 467,5
3,6 (7,9) 3,6 (7,9) 4,1 (9,0) 9,4 (20,7) 9,5 (20,9) 12,3 (27,1) 12,5 (27,6)
5,5 (12,1) 5,5 (12,1) 6,5 (14,3) 10,5 (23,1) 10,5 (23,1) 14,0 (30,9) 14,0 (30,9)
98,0 97,8 97,7 98,0 98,1 98,0 98,0
P5K5
5,5
(7,5)
4 (12) 16 (6)
P7K5
7,5
(10)
P11K
11
(15)
P15K
15
(20)
P18K
18,5
(25)
P22K
22
(30)
Tabell 9.2 Nätförsörjning 3 x 380–480 V AC
Frekvensomriktare
typisk axeleekt [kW (hk)]
Kapsling med skyddsklassicering IP20 IP21/Typ
1 som alternativ)
Utström
Kontinuerlig (3 x 200–240 V ) [A] 2,2 3,2 4,2 6 6,8 9,6 15,2
Intermittent (60 s överbelastning) [A] 3,5 5,1 6,7 9,6 10,9 15,4 24,3
Kontinuerlig kVA (230 V AC) [kVA] 0,9 1,3 1,7 2,4 2,7 3,8 6,1
Maximal inström
Kontinuerlig (3 x 200–240 V ) [A] 1,8 2,7 3,4 4,7 6,3 8,8 14,3
Intermittent (60 s överbelastning) [A] 2,9 4,3 5,4 7,5 10,1 14,1 22,9
Fler specikationer
Maximal ledararea (nät, motor, broms och
lastdelning) [mm2 (AWG])
Uppskattad eektförlust vid nominell maximal
belastning [W]
Vikt, kapsling med skyddsklassicering IP20 [kg
(lb)]
Vikt, kapsling med skyddsklassicering IP21 [kg
(lb)]
Verkningsgrad [%]
1)
2)
PK37
0,37
(0,5)
K1 K1 K1 K1 K1 K2 K3
29,4 38,5 51,1 60,7 76,1 96,1 147,5
2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,5 (5,5) 3,6 (7,9)
4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 5,5 (12,1) 6,5 (14,3)
96,4 96,6 96,3 96,6 96,5 96,7 96,7
PK55
0,55
(0,75)
PK75
0,75
(1,0)
P1K1
1,1
(1,5)
4 (12)
P1K5
1,5
(2,0)
P2K2
2,2
(3,0)
P3K7
3,7
(5,0)
Tabell 9.3 Nätförsörjning 3 x 200–240 V AC
58 Danfoss A/S © 08/2018 Med ensamrätt. MG07A507
Page 63

Specikationer Handbok
Frekvensomriktare
typisk axeleekt [kW (hk)]
Kapsling med skyddsklassicering IP20 IP21/Typ 1
som alternativ)
Utström
Kontinuerlig (3 x 200–240 V ) [A] 2,2 3,2 4,2 6 6,8 9,6
Intermittent (60 s överbelastning) [A] 3,5 5,1 6,7 9,6 10,9 15,4
Kontinuerlig kVA (230 V AC) [kVA] 0,9 1,3 1,7 2,4 2,7 3,8
Maximal inström
Kontinuerlig (1 x 200–240 V ) [A] 2,9 4,4 5,5 7,7 10,4 14,4
Intermittent (60 s överbelastning) [A] 4,6 7,0 8,8 12,3 16,6 23,0
Fler specikationer
Maximal ledararea (nät och motor) [mm2 (AWG)] 4 (12)
Uppskattad eektförlust vid nominell maximal
belastning [W]
Vikt, kapsling med skyddsklassicering IP20 [kg (lb)] 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,5 (5,5)
Vikt, kapsling med skyddsklassicering IP21 [kg (lb)] 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 5,5 (12,1)
Verkningsgrad [%]
Tabell 9.4 Nätförsörjning 1 x 200–240 V AC
1) Den normala eektförlusten gäller vid nominella belastningsförhållanden och förväntas inte avvika mer än ±15 % (toleransen beror på hur
spänning och kabelförhållanden varierar).
Värdena är baserade på en normal motorverkningsgrad (på gränsen mellan IE2/IE3). Motorer med lägre verkningsgrad bidrar till ökad eektförlust
i frekvensomriktaren, och motorer med hög verkningsgrad minskar eektförlusten.
Gäller dimensionering av frekvensomriktarens kylning. Om switchfrekvensen är högre än fabriksinställningen kan eektförlusterna ibland stiga.
Normal eektförbrukning för LCP och styrkort är inkluderad. Ytterligare tillval och extern belastning kan ibland öka förlusterna med upp till 30 W
(vanligen endast 4 W extra vardera för ett fullt belastat styrkort eller en fullt belastad fältbuss).
Information om eektförlust enligt SS-EN 50598-2 nns på www.danfoss.com/vltenergyeciency.
2) Mätt med 50 m skärmade motorkablar vid nominell belastning och nominell frekvens. Information om energieektivitetsklass nns i
kapitel 9.4 Omgivande miljöförhållanden. Information om delbelastningsförluster nns på www.danfoss.com/vltenergyeciency.
1)
2)
PK37
0,37
(0,5)
K1 K1 K1 K1 K1 K2
37,7 46,2 56,2 76,8 97,5 121,6
94,4 95,1 95,1 95,3 95,0 95,4
PK55
0,55
(0,75)
PK75
0,75
(1,0)
P1K1
1,1
(1,5)
P1K5
1,5
(2,0)
P2K2
2,2
(3,0)
9 9
Nätförsörjning
9.2
Nätförsörjning (L1/N, L2/L, L3)
Försörjningsplintar (L1/N, L2/L, L3)
Nätspänning 380–480 V: -15 % (-25 %)1) till +10 %
Nätspänning 200–240 V: -15 % (-25 %)1) till +10 %
1) Frekvensomriktaren kan köras vid –25 % inspänning med reducerad prestanda. Maximal utgångsspänning på frekvensomriktaren är 75 % vid –25 % inspänning, och 85 % vid –15 % inspänning.
Fullt moment kan inte förväntas vid nätspänning som är mer än 10 % under frekvensomriktarens lägsta nominella nätspänning.
Nätfrekvens 50/60 Hz ±5 %
Maximal obalans tillfälligt mellan nätfaser 3,0 % av den nominella nätspänningen
Aktiv eektfaktor (λ) ≥ 0,9 vid nominell belastning
Förskjuten eektfaktor (cos ϕ) Nära ett (> 0,98)
Växling på nätspänningsingång (L1/N, L2/L, L3) (nättillslag) ≤ 7,5 kW (10 hk) Maximalt 2 gånger/minut
Växling på nätspänningsingång (L1/N, L2/L, L3) (nättillslag) 11–22 kW (15–30 hk) Maximalt 1 gång/minut
MG07A507 Danfoss A/S © 08/2018 Med ensamrätt. 59
Page 64
Specikationer
VLT® Midi Drive FC 280
9.3 Motoreekt och motordata
Motoreekt (U, V, W)
Utspänning 0–100 % av nätspänningen
Utfrekvens 0–500 Hz
Motorfrekvens i läget VVC
Växling på utgång Obegränsat
Ramptid 0,01–3 600 s
Momentegenskaper
Startmoment (konstant moment) Maximalt 160 % i 60 s
Överbelastningsmoment (konstant moment) Maximalt 160 % i 60 s
Startström Maximalt 200 % i 1 s
Momentstigtid i VVC+ (oberoende av fsw) Maximalt 50 ms
1) Procentangivelsen är grundad på det nominella momentet. Det är 150 % för 11–22 kW (15–30 hk) frekvensomriktare.
+
0–200 Hz
1)
1)
9.4 Omgivande miljöförhållanden
Omgivande miljöförhållanden
Kapsling med skyddsklassicering, frekvensomriktare IP20 (IP21/Typ 1 som alternativ)
Kapsling med skyddsklassicering, konverteringssats IP21/typ 1
Vibrationstest, alla kapslingsstorlekar 1,14 g
Relativ luftfuktighet 5–95 % (IEC 721-3-3; Klass 3K3 (icke kondenserande) under drift)
99
Omgivande temperatur (vid DPWM-växlingsläge)
- med nedstämpling Maximalt 55 °C
- vid fullständig konstant utström Maximalt 45 °C
Lägsta omgivningstemperatur vid fullskalig drift 0 °C (32 °F)
Lägsta omgivningstemperatur vid reducerade prestanda –10 °C (14 °F)
Temperatur vid lagring/transport –25 till +65/70 °C
Maximal höjd över havet utan nedstämpling 1000 m (3280 ft)
Maximal höjd över havet med nedstämpling 3000 m (9243 ft)
SS-EN 61800-3, SS-EN 61000-3-2, SS-EN 61000-3-3, SS-EN 61000-3-11,
EMC-standarder, emission
EMC-standarder, immunitet
Energieektivitetsklass
1) Se avsnittet Speciella förhållanden i Design Guide för:
Nedstämpling för hög omgivningstemperatur.
•
Nedstämpling för höga höjder.
•
2) Förhindra överhettning av styrkort på PROFIBUS-, PROFINET-, Ethernet/IP- och POWERLINK-varianter av VLT
genom att undvika fullständig digital/analog I/O-last vid omgivningstemperaturer högre än 45 °C (113 °F).
3) Omgivningstemperatur för K1S2 med nedstämpling är maximalt 50 °C.
4) Omgivningstemperatur för K1S2 vid fullständig konstant utström är maximalt 40 °C.
5) Bestäms enligt SS-EN 50598-2 vid:
nominell belastning
•
90 % av nominell frekvens
•
switchfrekvensens fabriksinställning
•
switchmönstrets fabriksinställning
•
Öppen typ: Omgivande lufttemperatur 45 °C.
•
Typ 1 (NEMA-kit): Omgivningstemperatur 45 °C.
•
5)
SS-EN 61000-3-12, SS-EN 61000-6-3/4, SS-EN 55011, IEC 61800-3
SS-EN 61800-3, SS-EN 61000-6-1/2, SS-EN 61000-4-2, SS-EN 61000-4-3
SS-EN 61000-4-4, SS-EN 61000-4-5, SS-EN 61000-4-6, SS-EN 61326-3-1
®
Midi DriveFC 280,
1)2)3)
IE2
4)
60 Danfoss A/S © 08/2018 Med ensamrätt. MG07A507
Page 65
Specikationer Handbok
9.5 Kabelspecikationer
Kabellängder och ledarareor
Maximal motorkabellängd, skärmad 50 m (164 ft)
Maximal motorkabellängd, oskärmad 75 m (246 ft)
Maximal ledararea för styrplintar, mjuk/styv ledning 2,5 mm2/14 AWG
Minsta ledararea för styrplintar 0,55 mm2/30 AWG
Maximal kabellängd för STO-ingång, oskärmad 20 m (66 ft)
1) Information om kablar och ledararea nns i Tabell 9.1, Tabell 9.2, Tabell 9.3 och Tabell 9.4.
Om SS-EN 55011 1A och SS-EN 55011 1B ska uppfyllas, måste i vissa fall motorkabelarean minskas. Mer information nns i
avsnitt 2,6,2 EMC-emission i Design Guide för VLT
1)
®
Midi Drive FC 280.
9.6 Styringång/-utgång och styrdata
Digitala ingångar
Plintnummer 18, 19, 271), 29, 32, 33
Logik PNP eller NPN
Spänningsnivå 0–24 V DC
Spänningsnivå, logisk 0 PNP < 5 V DC
Spänningsnivå, logisk 1 PNP > 10 V DC
Spänningsnivå, logisk 0 NPN > 19 V DC
Spänningsnivå, logisk 1 NPN < 14 V DC
Maximal spänning på ingång 28 V DC
Pulsfrekvensområde 4–32 kHz
(Driftcykel) minsta pulsbredd 4,5 ms
Ingångsresistans, R
1) Plint 27 kan även användas som en digital utgång.
i
Ungefär 4 kΩ
9 9
STO-ingångar
Plintnummer 37, 38
Spänningsnivå 0–30 V DC
Spänningsnivå, låg <1,8 V DC
Spänningsnivå, hög >20 V DC
Maximal spänning på ingång 30 V DC
Minsta inström (per stift) 6 mA
1) Mer information om STO-ingångar nns i kapitel 6 Safe Torque O (STO).
Analoga ingångar
Antal analoga ingångar 2
Plintnummer 531), 54
Lägen Spänning eller ström
Lägesväljare Programvara
Spänningsnivå 0–10 V
Ingångsresistans, R
Maximal spänning -15 V till +20 V
Strömnivå 0/4 till 20 mA (skalbar)
Ingångsresistans, R
Maximal ström 30 mA
Upplösning för analoga ingångar 11 bitar
Noggrannhet hos analoga ingångar Maximalt fel 0,5 % av full skala
Bandbredd 100 Hz
De analoga ingångarna är galvaniskt isolerade från nätspänningen (PELV) och övriga högspänningsplintar.
1) Plint 53 stöder endast spänningsläge och kan även användas som digital ingång.
1)
i
i
Cirka 10 kΩ
Cirka 200 Ω
MG07A507 Danfoss A/S © 08/2018 Med ensamrätt. 61
Page 66
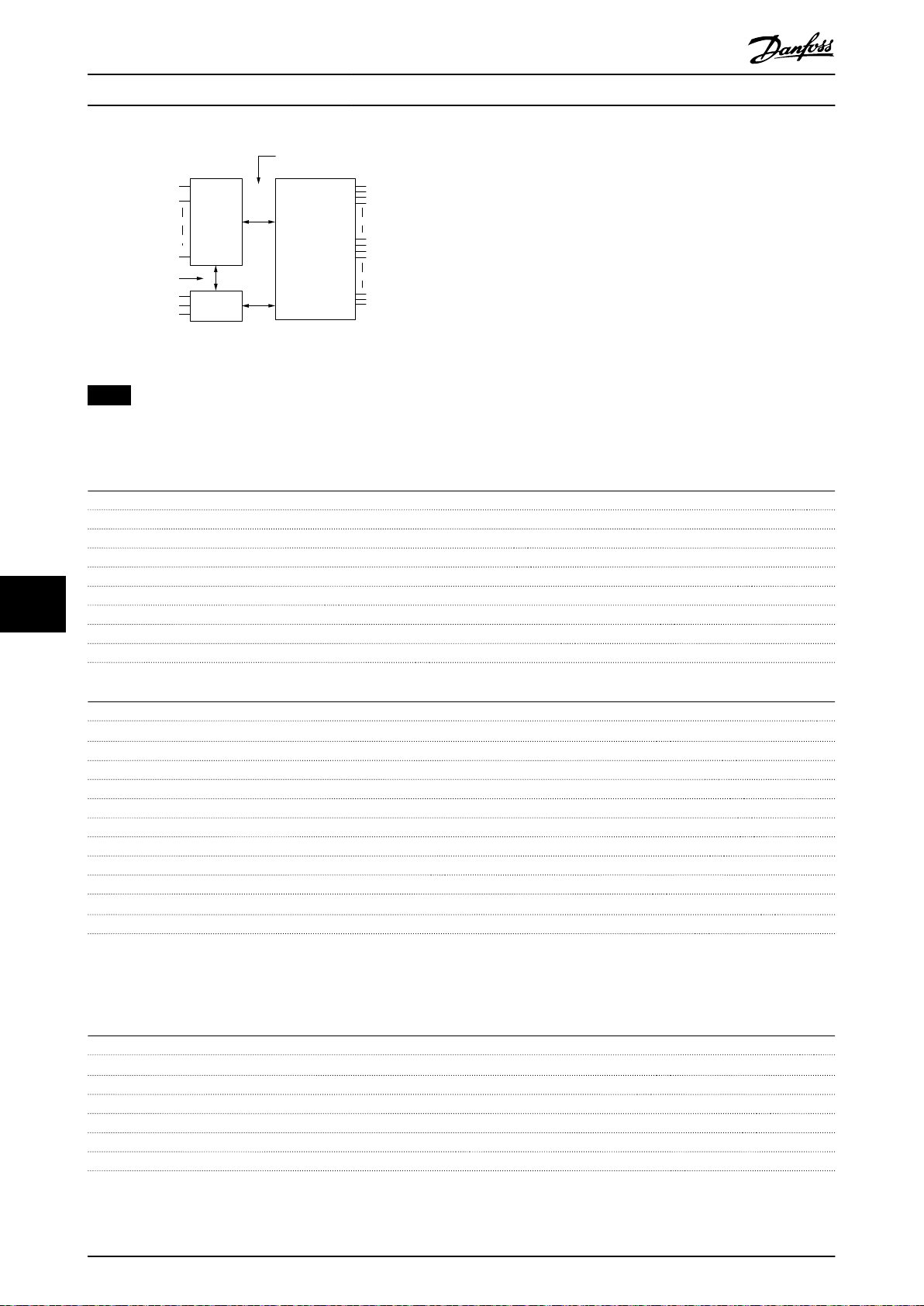
Mains
Functional
isolation
PELV isolation
Motor
DC bus
High
voltage
Control
37
RS485
38
33
130BE837.10
Specikationer
Bild 9.1 Galvanisk isolation
VLT® Midi Drive FC 280
OBS!
HÖG HÖJD
Vid installationer på höjder över 2 km ska du kontakta Danfoss angående PELV.
Pulsingångar
Programmerbara pulsingångar 2
Plintnummer puls 29, 33
Maximal frekvens vid plint 29, 33 32 kHz (mottaktsdriven)
Maximal frekvens vid plint 29, 33 5 kHz (öppen kollektor)
Minsta frekvens vid plint 29 och 33 4 Hz
99
Spänningsnivå Se avsnittet om digital ingång
Maximal spänning på ingång 28 V DC
Ingångsresistans, R
i
Cirka 4 kΩ
Noggrannhet, pulsingång Maximalt fel: 0,1 % av full skala
Digitala utgångar
Programmerbara digitala utgångar/pulsutgångar 2
Plintnummer 27
Spänningsnivå vid digital utgång/utfrekvens 0–24 V
Maximal utström (platta eller källa) 40 mA
Maximal belastning vid utfrekvens 1 kΩ
Maximal kapacitiv belastning vid utfrekvens 10 nF
Minsta motorfrekvens vid utfrekvens 4 Hz
Maximal motorfrekvens vid utfrekvens 32 kHz
Utfrekvensens noggrannhet Maximalt fel: 0,1 % av full skala
Utfrekvensens upplösning 10 bitar
Plintnummer (se data i analoga utgångar) 42
Spänningsnivå vid digital utgång 0–17 V
1) Plint 27 kan även programmeras som ingång.
2) Plint 42 kan även programeras som en digital utgång.
Den digitala utgången är galvaniskt isolerad från nätspänningen (PELV) och övriga högspänningsplintar.
Analoga utgångar
Antal programmerbara analoga utgångar 1
Plintnummer 42
Strömområde vid analog utgång 0/4–20 mA
Maximal motståndsbelastning till gemensam vid analog utgång 500 Ω
Maximal spänning vid analog utgång 17 V
Noggrannhet på analog utgång Maximalt fel: 0,8 % av full skala
Upplösning på analog utgång 10 bitar
1) Plint 42 kan även programeras som en digital utgång.
Den analoga utgången är galvaniskt isolerad från nätspänningen (PELV) och andra högspänningsplintar.
62 Danfoss A/S © 08/2018 Med ensamrätt. MG07A507
1)
2)
1)
Page 67
Specikationer Handbok
Styrkort, 24 V DC-utgång
Plintnummer 12, 13
Maximal belastning 100 mA
24 V DC-försörjningen är galvaniskt isolerad från nätspänningen (PELV). Försörjningen har samma potential som de analoga och
digitala in- och utgångarna.
Styrkort, +10 V DC-utgång
Plintnummer 50
Utspänning 10,5 V ±0,5 V
Maximal belastning 15 mA
10 V DC-försörjningen är galvaniskt isolerad från nätspänningen (PELV) och övriga högspänningsplintar.
Styrkort, RS485-seriell kommunikation
Plintnummer 68 (P, TX+, RX+), 69 (N, TX-, RX-)
Plintnummer 61 Gemensam för plint 68 och 69
RS485-kretsen för seriell kommunikation är galvaniskt isolerade från nätspänningen (PELV).
Styrkort, USB-seriell kommunikation
USB-standard 1,1 (full speed)
USB-kontakt USB-kontakt, typ B
Datoranslutningen sker via en USB-standardkabel.
USB-anslutningen är galvaniskt isolerad från nätspänningen (PELV) och andra plintar med hög spänning.
USB-jordanslutningen är inte galvaniskt isolerad från skyddsjorden. Använd endast en isolerad bärbar dator som datoranslutning
till USB-kontakten på frekvensomriktaren.
Reläutgångar
Programmerbara reläutgångar 1
Relä 01 01–03 (NC), 01–02 (NO)
Maximal plintbelastning (AC-1)1) på 01–02 (NO) (resistiv belastning) 250 V AC, 3 A
Maximal plintbelastning (AC-15 )1) på 01–02 (NO) (induktiv belastning vid cosφ 0,4) 250 V AC, 0,2 A
Maximal plintbelastning (DC-1)1) på 01–02 (NO) (resistiv belastning) 30 V DC, 2 A
Maximal plintbelastning (DC-13)1) på 01–02 (NO) (induktiv belastning) 24 V DC, 0,1 A
Maximal plintbelastning (AC-1)1) på 01–03 (NC) (resistiv belastning) 250 V AC, 3 A
Maximal plintbelastning (AC-15 )1) på 01–03 (NO) (induktiv belastning vid cosφ 0,4) 250 V AC, 0,2 A
Maximal plintbelastning (DC-1)1) på 01–03 (NC) (resistiv belastning) 30 V DC, 2 A
Minimal plintbelastning på 01–03 (NC), 01–02 (NO) 24 V DC 10 mA, 24 V AC 20 mA
1) IEC 60947 del 4 och 5,
Reläkontakterna är galvaniskt isolerade från resten av kretsen genom förstärkt isolering.
9 9
Styrkortsprestanda
Scan intervall 1 ms
Styregenskaper
Utfrekvensens upplösning vid 0–500 Hz ± 0,003 Hz
Systemets svarstid (plint 18, 19, 27, 29, 32 och 33) ≤2 ms
Varvtalsreglering (utan återkoppling) 1:100 av synkront varvtal
Varvtalsnoggrannhet (utan återkoppling) ±0,5 % av nominellt varvtal
Varvtalsnoggrannhet (med återkoppling) ±0,1 % av nominellt varvtal
Alla styregenskaper är baserade på en 4-polig asynkronmotor.
MG07A507 Danfoss A/S © 08/2018 Med ensamrätt. 63
Page 68
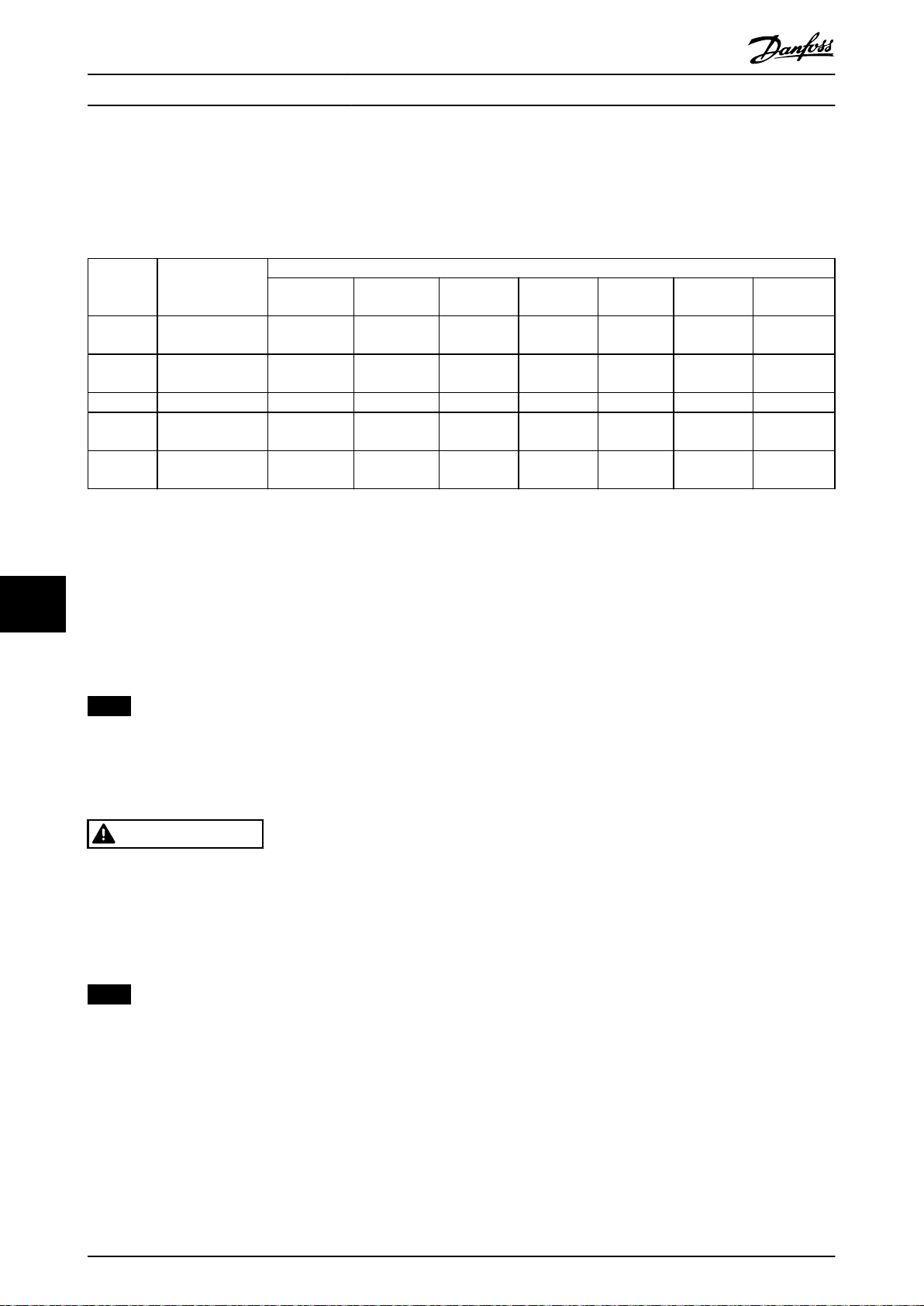
Specikationer
VLT® Midi Drive FC 280
9.7 Åtdragningsmoment för anslutningar
Se till att dra åt alla elektriska anslutningar med korrekt åtdragningsmoment. För lågt eller för högt moment kan ge upphov
till problem med de elektriska anslutningarna. Använd en momentnyckel för att säkerställa att rätt moment används.
Rekommenderad skruvmejsel är SZS 0,6 x 3,5 mm.
Moment [Nm (in-lb)]
Kapslings-
typ
K1
K2
K3 7,5 (10) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
K4
K5
Tabell 9.5 Åtdragningsmoment
Eekt
[kW (hk)]
0,37–2,2
(0,5–3,0)
3,0–5,5
(4,0–7,5)
11–15
(15–20)
18,5–22
(25–30)
Nät Motor
0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
1,2 (10,6) 1,2 (10,6) 1,2 (10,6) 1,2 (10,6) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
1,2 (10,6) 1,2 (10,6) 1,2 (10,6) 1,2 (10,6) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
Likströmsanslutning
Broms Jord Styrning Relä
9.8 Säkringar och maximalbrytare
Använd säkringar och/eller maximalbrytare på försörjningssidan för att skydda operatören och utrustningen från skador vid
99
eventuella komponentfel inne i frekvensomriktaren (första felställe).
Skydd för förgreningsenhet
Skydda alla strömförgreningsenheter i en installation (inklusive ställverk och maskiner) mot kortslutning och överström i
enlighet med nationella/internationella bestämmelser.
OBS!
Integrerat kortslutningsskydd ger inte skydd för förgreningsenhet. Använd det skydd för förgreningsenhet som krävs
enligt nationella bestämmelser.
I Tabell 9.6 anges rekommenderade säkringar och maximalbrytare som har testats.
FÖRSIKTIGT
RISK FÖR PERSONSKADOR OCH MATERIELLA SKADOR
Eventuella fel och underlåtenhet att följa rekommendationerna kan innebära risk för personskador eller skador på
frekvensomriktaren och annan utrustning.
Välj säkringar i enlighet med rekommendationerna. Eventuella skador kan begränsas till frekvensomriktarens
•
insida.
OBS!
SKADOR PÅ UTRUSTNING
Det är obligatoriskt att använda säkringar och/eller maximalbrytare för att uppfylla kraven i IEC 60364 för CE. Om du
inte följer rekommendationerna kan det resultera i skador på frekvensomriktaren.
Danfossrekommenderar att säkringarna och maximalbrytarna i Tabell 9.6 och Tabell 9.7 används för att säkerställa att kraven i
UL 508C eller IEC 61800-5-1 uppfylls. För icke UL-tillämpningar ska maximalbrytarna vara konstruerade för skydd av kretsar
som kan leverera högst 50 000 Arms (symmetrisk) och maximalt 240 V/400 V. Frekvensomriktarens kortslutningsvärde (SCCR)
är lämplig för kretsar som inte levererar mer än 100 000 Arms och maximalt 240 V/480 V när säkringar av T-klass används.
64 Danfoss A/S © 08/2018 Med ensamrätt. MG07A507
Page 69
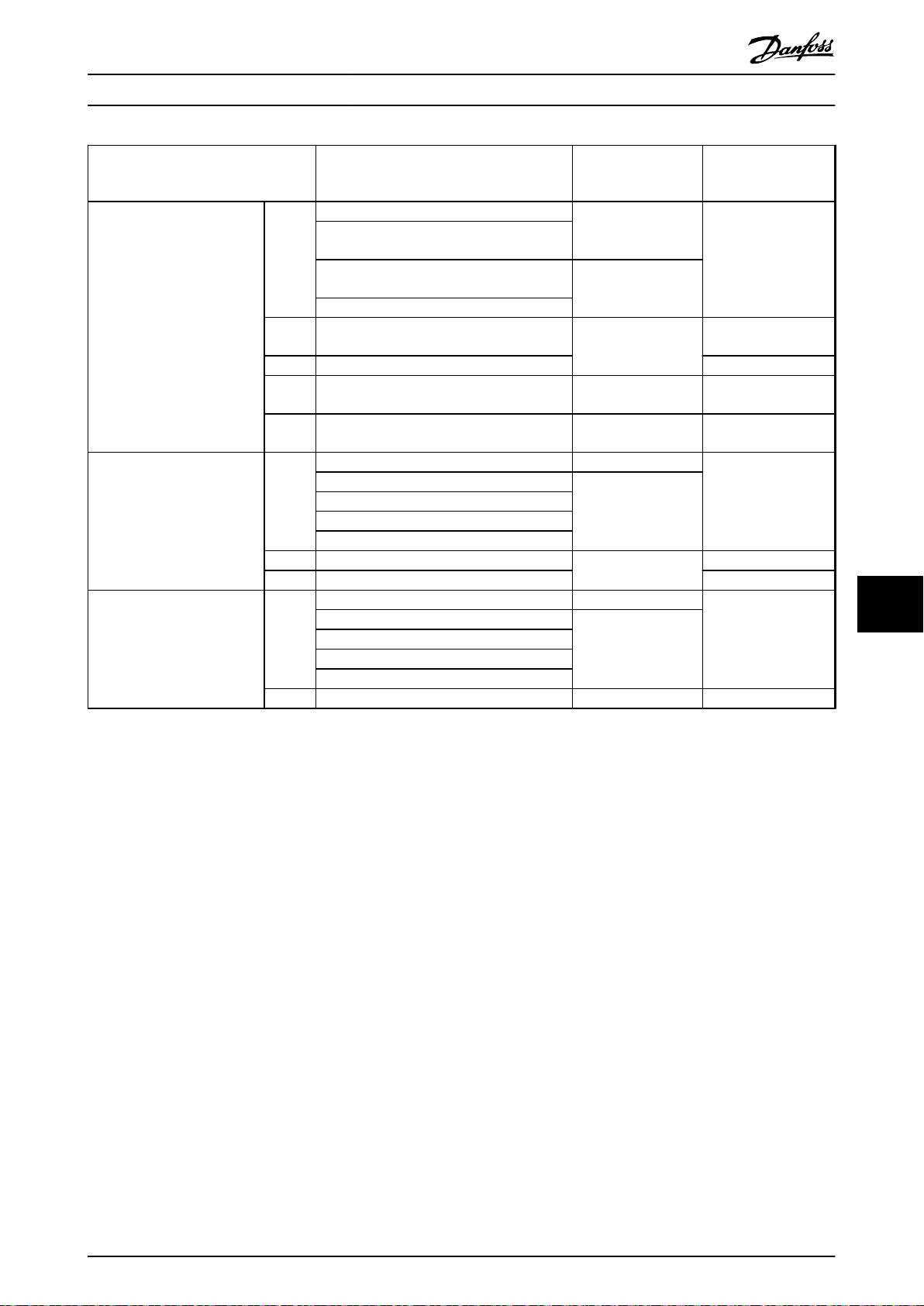
Specikationer Handbok
Kapslingsstorlek Eekt [kW (hk)] Icke UL-säkring
K1
3-fas 380–480 V
3-fas 200–240 V
1-fas 200–240 V
K2
K3 7,5 (10) PKZM0-25
K4
K5
K1
K2 2,2 (3,0)
K3 3,7 (5,0) PKZM0-25
K1
K2 2,2 (3,0) gG-25 PKZM0-20
0,37 (0,5)
0,55–0,75
(0,75–1,0)
1,1–1,5
(1,5–2,0)
2,2 (3,0)
3,0–5,5
(4,0–7,5)
11–15
(15–20)
18,5–22
(25–30)
0,37 (0,5) gG-10
0,55 (0,75)
0,75 (1,0)
1,1 (1,5)
1,5 (2,0)
0,37 (0,5) gG-10
0,55 (0,75)
0,75 (1,0)
1,1 (1,5)
1,5 (2,0)
gG-10
gG-20
gG-25
gG-50 –
gG-80 –
gG-20
gG-25
gG-20
Icke UL-maximal-
brytare
(Eaton)
PKZM0-16
PKZM0-20
PKZM0-16
PKZM0-20
9 9
PKZM0-16
Tabell 9.6 Icke UL-säkring och maximalbrytare
MG07A507 Danfoss A/S © 08/2018 Med ensamrätt. 65
Page 70
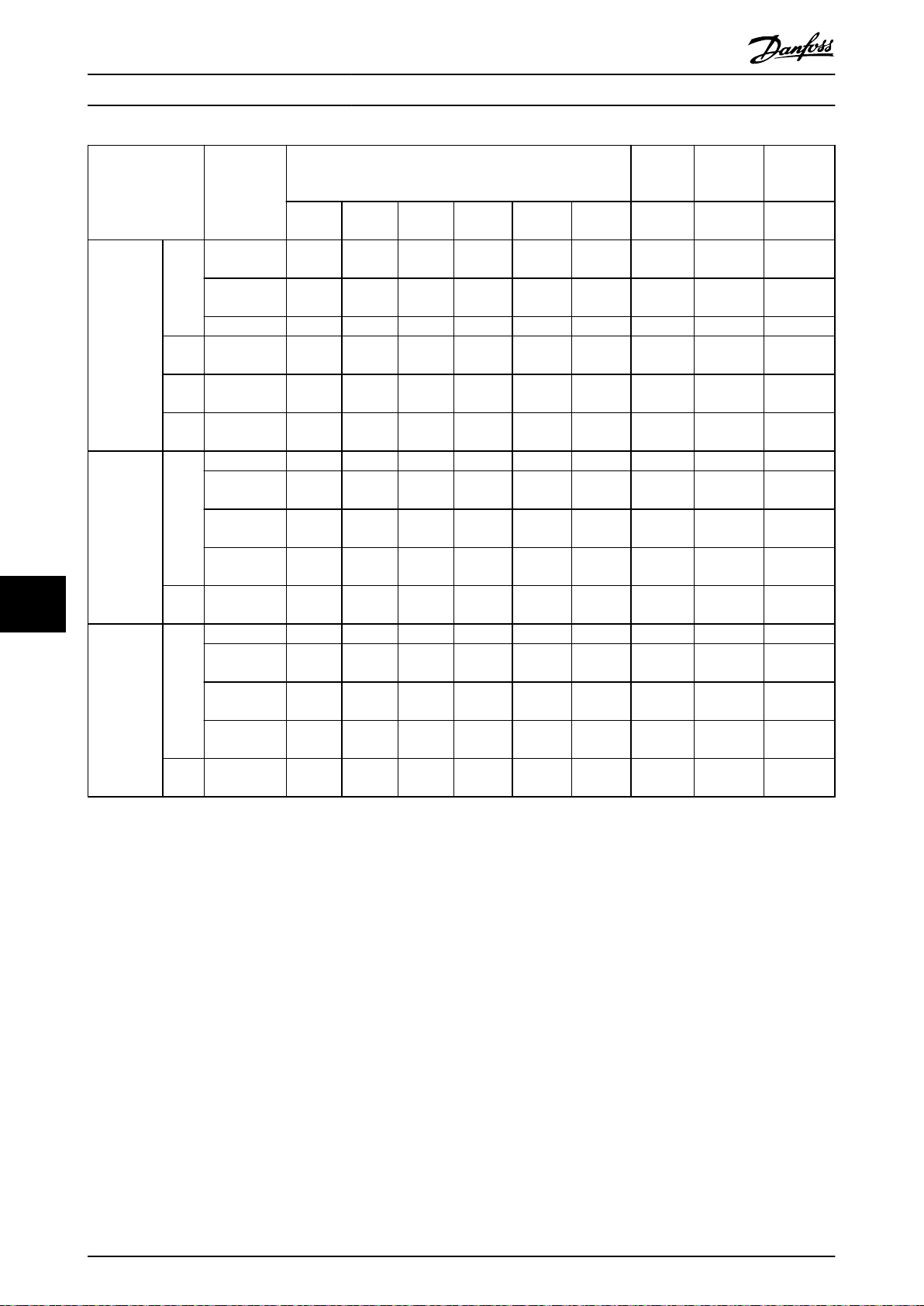
Specikationer
VLT® Midi Drive FC 280
Kapslingsstorlek
K1
3-fas
380–480 V
3-fas
200–240 V
99
1-fas 200–
240 V
K2–K3
K4
K5
K1
K2–K3
K1
K2 2,2 (3,0)
Eekt
[kW (hk)]
0,37–0,75
(0,5–1,0)
1,1–1,5
(1,5–2,0)
2,2 (3,0) KTS-R-15 JKS-15 JJS-15 FNQ-R-15 KTK-R-15 LP-CC-15 KLSR-15 ATM-R15 A6K-15R
3,0–7,5
(4,0–10)
11–15
(15–20)
18,5–22
(25–30)
0,37 (0,5) KTN-R-6 JKS-6 JJN-6 FNQ-R-6 KTK-R-6 LP-CC-6 KLNR-6 ATM-R6 A2K-6R
0,55 (0,75)
0,75 (1,0)
1,1–1,5
(1,5–2,0)
2,2–3,7
(3,0–5,0)
0,37 (0,5) KTN-R-6 JKS-6 JJN-6 FNQ-R-6 KTK-R-6 LP-CC-6 KLNR-6 ATM-R6 A2K-6R
0,55 (0,75)
0,75 (1,0)
1,1–1,5
(1,5–2,0)
Class
RK1
KTS-R-6 JKS-6 JJS-6 FNQ-R-6 KTK-R-6 LP-CC-6 KLSR-6 ATM-R6 A6K-6R
KTS-R-10 JKS-10 JJS-10 FNQ-R-10 KTK-R-10 LP-CC-10 KLSR-10 ATM-R10 A6K-10R
KTS-R-25 JKS-25 JJS-25 FNQ-R-25 KTK-R-25 LP-CC-25 KLSR-25 ATM-R25 A6K-25R
KTS-R-50 JKS-50 JJS-50 – – – KLSR-50 – A6K-50R
KTN-
R-10
KTN-
R-15
KTN-
R-20
KTN-
R-25
KTN-
R-10
KTN-
R-15
KTN-
R-20
KTN-
R-25
Class J Class T Class CC Class CC Class CC Class RK1 Class CC Class RK1
– JKS-80 JJS-80 – – – – – –
JKS-10 JJN-10 FNQ-R-10 KTK-R-10 LP-CC-10 KLNR-10 ATM-R10 A2K-10R
JKS-15 JJN-15 FNQ-R-15 KTK-R-15 LP-CC-15 KLNR-15 ATM-R15 A2K-15R
JKS-20 JJN-20 FNQ-R-20 KTK-R-20 LP-CC-20 KLNR-20 ATM-R20 A2K-20R
JKS-25 JJN-25 – – – KLNR-25 ATM-R25 A2K-25R
JKS-10 JJN-10 FNQ-R-10 KTK-R-10 LP-CC-10 KLNR-10 ATM-R10 A2K-10R
JKS-15 JJN-15 FNQ-R-15 KTK-R-15 LP-CC-15 KLNR-15 ATM-R15 A2K-15R
JKS-20 JJN-20 FNQ-R-20 KTK-R-20 LP-CC-20 KLNR-20 ATM-R20 A2K-20R
JKS-25 JJN-25 – – – KLNR-25 ATM-R25 A2K-25R
Bussmann E4273
Littelfuse
E81895
MERSEN
E163267/
E2137
MERSEN
E163267/
E2138
Tabell 9.7 UL-säkring
66 Danfoss A/S © 08/2018 Med ensamrätt. MG07A507
Page 71
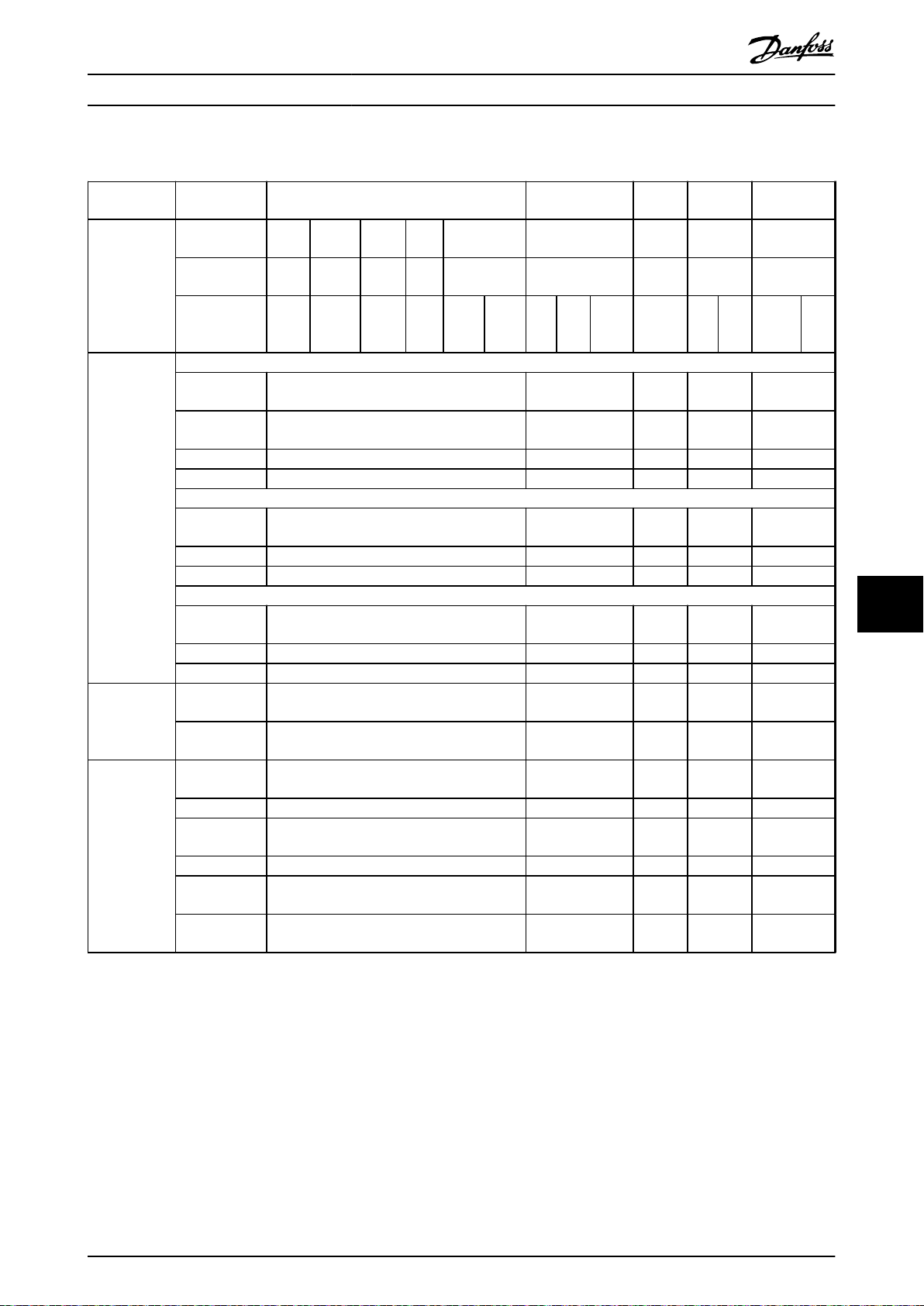
Specikationer Handbok
9.9 Kapslingsstorlekar, märkeekter och mått
Eektstorlek
[kW (hk)]
Mått [mm]
Vikt
[kg (lb)]
Monteringshål
[mm (in)]
Kapslings-
storlek
1-fas
200–240 V
3-fas
200–240 V
3-fas
380–480 V
Höjd A1 210 (8,3) 272,5 (10,7)
Höjd A2 278 (10,9) 340 (13,4)
Bredd B 75 (3,0) 90 (3,5) 115 (4,5) 133 (5,2) 150 (5,9)
Djup C 168 (6,6) 168 (6,6) 168 (6,6) 245 (9,6) 245 (9,6)
Höjd A 338,5 (13,3) 395 (15,6)
Bredd B 100 (3,9) 115 (4,5) 130 (5,1) 153 (6,0) 170 (6,7)
Djup C 183 (7,2) 183 (7,2) 183 (7,2) 260 (10,2) 260 (10,2)
Höjd A 294 (11,6) 356 (14)
Bredd B 75 (3,0) 90 (3,5) 115 (4,5) 133 (5,2) 150 (5,9)
Djup C 168 (6,6) 168 (6,6) 168 (6,6) 245 (9,6) 245 (9,6)
IP20 2,5 (5,5) 3,6 (7,9)
IP21 4,0 (8,8) 5,5 (12,1)
a 198 (7,8) 260 (10,2)
b 60 (2,4) 70 (2,8) 90 (3,5) 105 (4,1) 120 (4,7)
c 5 (0,2) 6,4 (0,25)
d 9 (0,35) 11 (0,43) 11 (0,43) 12,4 (0,49) 12,6 (0,5)
e 4,5 (0,18) 5,5 (0,22)
f 7,3 (0,29) 8,1 (0,32)
0,37
(0,5)
0,37
(0,5)
0,37
(0,5)
0,55
(0,75)
0,55
(0,75)
0,55
(0,75)
FC 280 med nedre skydd för kabelgenomföring (utan övre skydd)
K1 K2 K3 K4 K5
0,75
(1,0)
0,75
(1,0)
0,75
(1,0)
1,1
(1,5)
1,1
(1,5)
1,1
(1,5)
FC 280 med IP21/UL/Typ 1-sats
1,5
(2,0)
1,5
(2,0)
1,5
(2,0)
FC 280 IP20
2,2
(3,0)
3
(4,0
2,2
(3,0)
2,2
(3,0)
4
5,5
(5,5)
)
(7,5)
– – –
3,7
(5,0)
7,5
(10)11(15)15(20)
272,5
(10,7)
341,5
(13,4)
395
(15,6)
357
(14,1)
4,6
(10,1)
6,5
(14,3)
260
(10,2)
6,5
(0,26)
5,5
(0,22)
9,2
(0,36)
– –
317,5
(12,5)
379,5
(14,9)
425 (16,7) 520 (20,5)
391 (15,4) 486 (19,1)
8,2 (18,1) 11,5 (25,4)
10,5 (23,1) 14,0 (30,9)
297,5
(11,7)
8 (0,32) 7,8 (0,31)
6,8 (0,27) 7 (0,28)
11 (0,43) 11,2 (0,44)
18,5
(25)22(30)
410 (16,1)
474 (18,7)
390 (15,4)
9 9
Tabell 9.8 Kapslingsstorlekar, märkeekter och mått
MG07A507 Danfoss A/S © 08/2018 Med ensamrätt. 67
Page 72
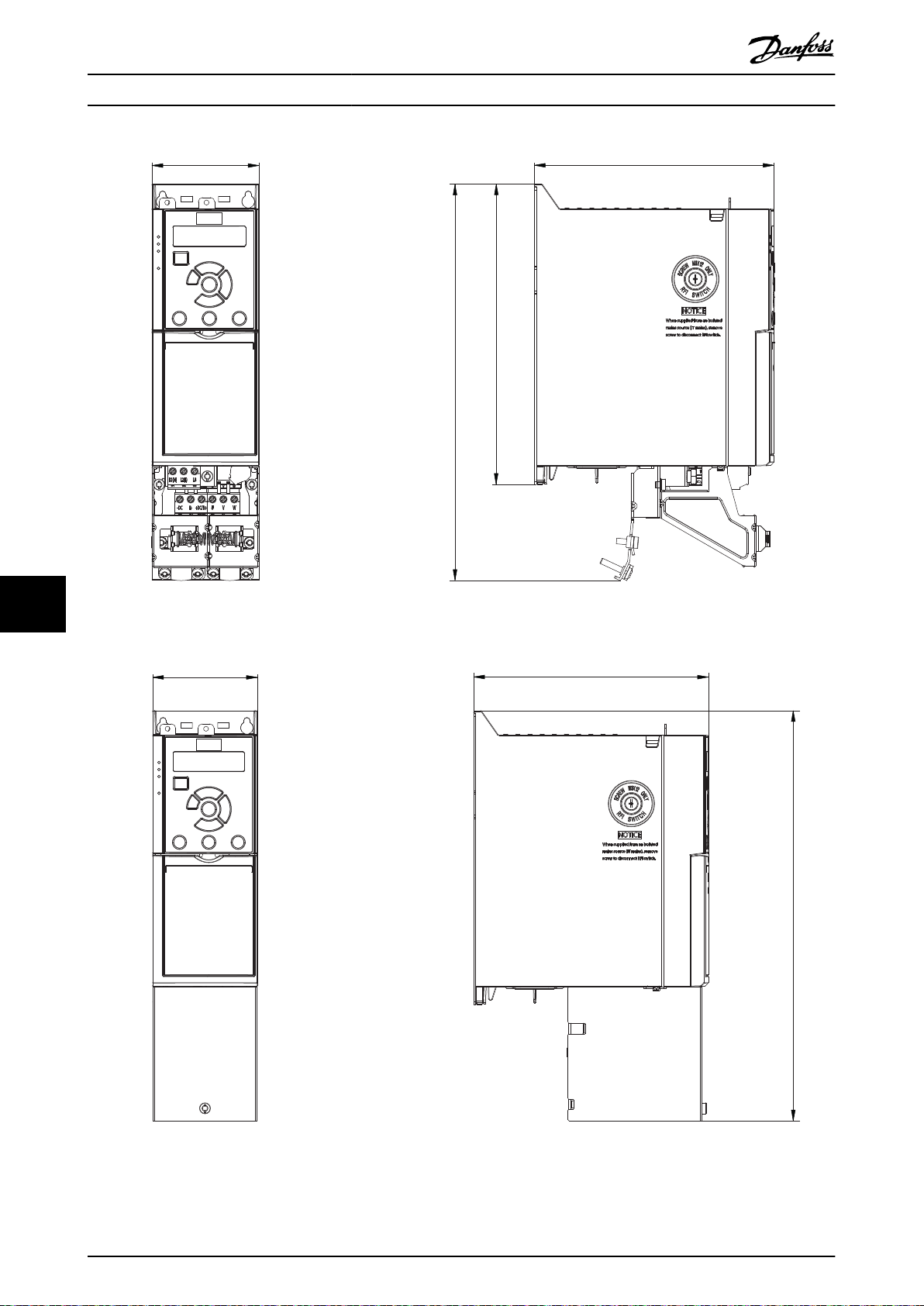
130BE844.11
B
C
A1
A2
130BE846.10
B
A
C
Specikationer
VLT® Midi Drive FC 280
99
Bild 9.2 Standard med jordningsplåt
Bild 9.3 Standard med nedre skydd för kabelgenomföring (utan övre skydd)
68 Danfoss A/S © 08/2018 Med ensamrätt. MG07A507
Page 73
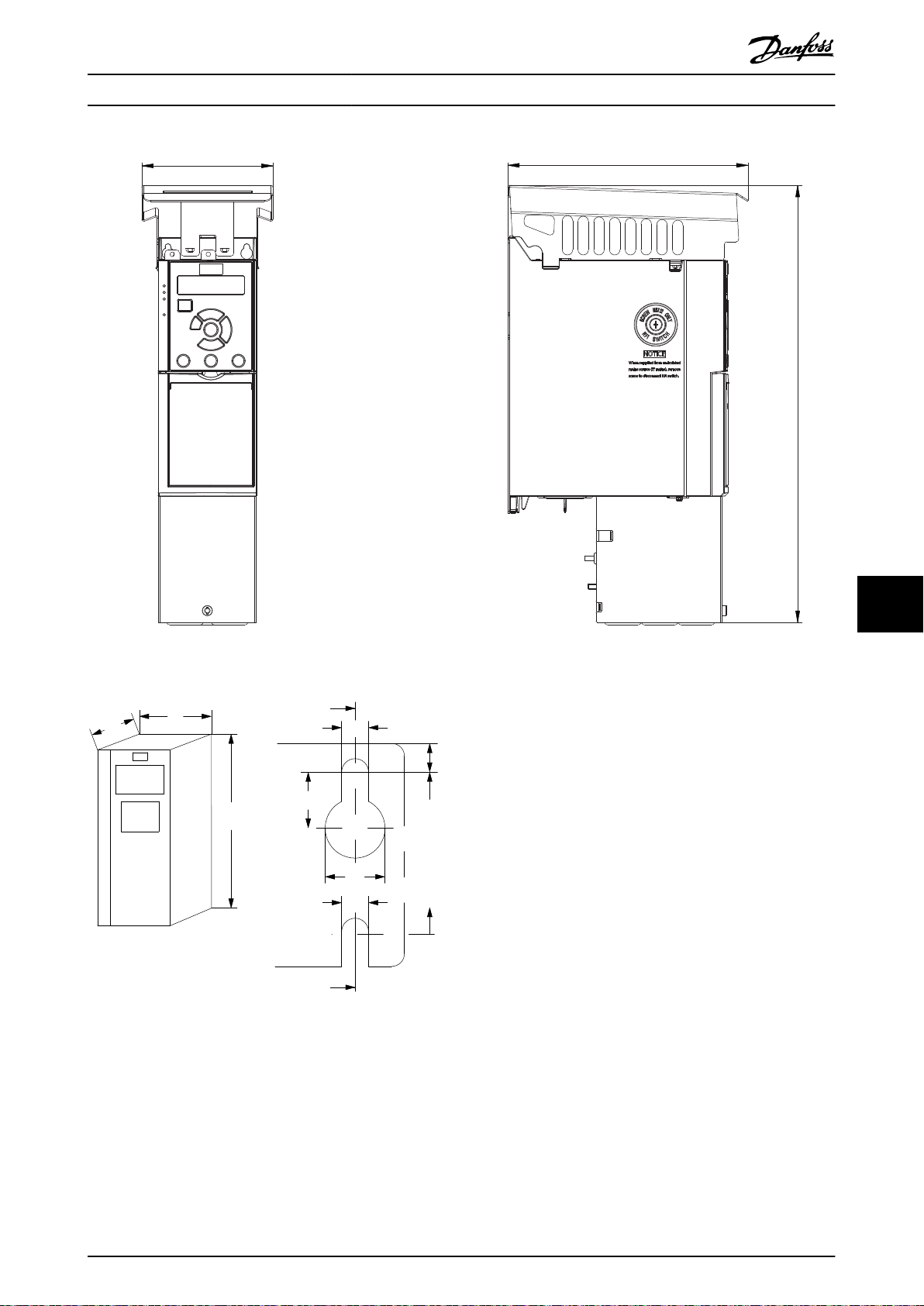
B
C
A
130BE845.10
C
a
b
130BA648.12
f
e
B
A
a
d
e
b
c
Specikationer Handbok
9 9
Bild 9.4 Standard med IP21/UL/Typ 1-sats
Bild 9.5 Övre och nedre monteringshål.
MG07A507 Danfoss A/S © 08/2018 Med ensamrätt. 69
Page 74

Bilaga
VLT® Midi Drive FC 280
10 Bilaga
10.1 Symboler, förkortningar och praxis
°C
°F
AC Växelström
AEO Automatisk energioptimering
AWG American Wire Gauge
AMA Automatisk motoranpassning
DC Likström
EMC Elektromagnetisk kompatibilitet
ETR Elektronisk-termiskt relä
f
M,N
FC Frekvensomriktare
I
INV
I
LIM
I
M,N
I
VLT,MAX
I
VLT,N
IP Kapslingsklassicering
LCP Lokal manöverpanel
MCT Rörelsekontrollverktyg
MM Minnesmodul
1010
MMP Minnesmodulprogrammerare
n
s
P
M,N
PELV Protective Extra Low Voltage
PCB Ytbehandlat kretskort
PM-motor Permanentmagnetmotor
PUD Power unit data
PWM Pulsbreddsmodulering
varv/minut Varv per minut
SIVP Specic initialization values and protection
STO Safe Torque O
T
LIM
U
M,N
Grader Celsius
Grader Fahrenheit
Nominell motorfrekvens
Nominell växelriktarutström
Strömbegränsning
Nominell motorström
Maximal utström
Den nominella utströmmen från frekvensomriktaren
Synkront motorvarvtal
Nominell motoreekt
Momentgräns
Nominell motorspänning
Tabell 10.1 Symboler och förkortningar
Praxis
•
•
Alla mått anges i [mm (tum)].
En asterisk (*) indikerar fabriksinställningen för en
10.2 Menystruktur för parametrar
parameter.
Numrerade listor används för procedurer.
•
Punktlistor används för annan information.
•
Kursiv text används för:
•
- hänvisningar
- länkar
- parameternamn
70 Danfoss A/S © 08/2018 Med ensamrätt. MG07A507
Page 75

Bilaga Handbok
[0] Inaktiverad
*[1] Aktiverad
0-30 Enhet, anv.def. visning
[0] Ingen
0 - 999 *0
[1] Invert.
1-08 Motor Control Bandwidth
[0] High
[1] Medium
[2] Low
[3] Adaptiv 1
CustomReadoutUnit
0 - 999999,99 CustomReadoutUnit *0
0-32 Maxvärde för anv.def. visning
[4] Adaptiv 2
1-1* Motorval
1-10 Motorkonstruktion
*[0] Asynkront
0 - 0 *
*100 CustomReadoutUnit
0,0 - 999999,99 CustomReadoutUnit
0-37 Displaytext 1
[2] Autoenergioptim. CT
1-06 Medurs
[4] Mom u återkoppl.
[7] Utökad PID-vrvtl OL
[0] U/f
*[1] VVC+
1-03 Momentegenskaper
*[0] Ingen kopiering
[1] Kopiera från konguration 1
[2] Kopiera från konguration 2
[3] Kopiera från konguration 3
[4] Kopiera från konguration 4
[32] kg/h
[33] t/min
[34] t/h
[9] Kopiera från fabriksinställning
0-6* Lösenord
0-60 Huvudmenylösenord
[40] m/s
[41] m/min
[45] m
[60] °C
1-** Last/motor
1-0* Allmänna inställni.
1-00 Kongurationsläge
*[0] Utan återkoppling
[1] Varvtal med återk.
[70] mbar
[71] bar
[72] Pa
[73] kPa
[74] m VP
[2] Moment med återkoppling
[80] kW
0-44 [O/Reset]-knapp på LCP
[0] Inaktiverad
*[1] Aktiverad
[7] Aktivera endast återställning
0-5* Kopiera/spara
0-50 LCP-kopiering
*[0] Ingen kopiering
*[1] %
[5] PPM
[10] 1/min
[11] varv/minut
[12] Pulser
[20] l/s
[21] l/min
0-51 Menykopiering
[1] Alla till LCP
[2] Alla från LCP
[3] Storleksob. från LCP
[22] l/h
[23] m³/s
[24] m³/min
[25] m³/h
[30] kg/s
[31] kg/min
[3] Process med återkoppling
[120] GPM
[121] gal/s
[122] gal/min
1-01 Motorstyrningsprincip
[123] gal/h
*[0] Konstant moment
[124] CFM
[127] ft³/h
[140] ft/s
[141] ft/min
*[0] Normal
[1] Variabelt moment
[160] °F
[170] psi
[171] lb/in2
[172] in WG
[173] ft WG
[180] hk
0-31 Minvärde för anv.def. visning
0 - 250 % *120 %
0,01 - 20 s *Storleksrelaterad
0,01 - 20 s *Storleksrelaterad
1-15 Lågt varvtal ltertidkonst.
[3] PM, salient IPM (PM, utpräg. IPM)
1-14 Dämpningsförstärkning
[1] PM, ej utpräg. SPM
0 - 0 *
0-39 Displaytext 3
0-38 Displaytext 2
0 - 0 *
0-4* LCP-knappsats
1-16 Högt varvtal ltertidkonst.
0-40 [Hand on]-knapp på LCP
[0] Inaktiverad
*[1] Aktiverad
1-17 Spänning ltertidkonst.
0-42 [Auto on]-knapp på LCP
10 10
Samma val med 0-20
Samma val med 0-20
Samma val med 0-20
Samma val med 0-20
[1671] Reläutgång
[1668] Pulsingång 33 [Hz]
[1669] Pulsutgång 27 [Hz]
[1667] Pulsingång 29 [Hz]
[1666] Digital utgång
-2147483647 - 2147483647 *0
[2] Lokal/ärr
0-16 Application Selection
*[0] Ingen
[1] Enkel process med återkoppling
0-** Drift/display
0-0* Grundinställningar
0-01 Språk
*[0] Engelska
[1] Tyska
[1672] Räknare A
[1673] Räknare B
[1674] Prec.stopp, räknare
[5] Fler hastigheter
[4] Enkel hastighet med återkoppling
[3] Varvtal utan återkoppling
[2] Franska
[3] Danska
[4] Spanska
[1680] Fältbuss, CTW 1
[6] OGD LA10
[5] Italienska
[1684] Komm. tillval, STW
[1682] Fältbuss, REF 1
[8] Lyft
[7] OGD V210
[28] Bras. portugisiska
0-02 Motorvarvtalsenhet
[1685] FC-port, CTW 1
[1686] FC-port, REF 1
0-2* LCP-display
0-20 Displayrad 1,1, liten
[0] varv/minut
*[1] Hz
[1690] Larmord
[1691] Larmord 2
[1692] Varningsord
[1693] Varningsord 2
[39] Displaytext 3
[38] Displaytext 2
[0] Ingen
[37] Displaytext 1
0-04 Drifttillstånd vid start
0-03 Regionala inställningar
[0] Internationell
[1] Nordamerika
[1697] Larmord 3
[1698] Varningsord 3
[1890] Process PID-fel
[1005] Avläsning Sändfel, räknare
[2] Tvingat stopp, ref=0
[1006] Avläsning Mottag.fel, räknare
0-06 GridType
[1230] Varningsparameter
[0] 200–240 V/50 Hz/IT-nät
[1891] Process-PID-utgång
[1501] Drifttid
[1] 200-240 V/50 Hz/Delta
[1694] Utök. Statusord
[1695] Utök. statusord 2
[748] PCD Feed Forward
[953] Probus-varningsord
[0] Återuppta
*[1] Tvingat stopp, ref=gam
[1892] Process-PID, byglad utgång
[1502] kWh-räkneverk
[2] 200-240 V/50 Hz
[2117] Utök. 1, referens [enhet]
[1893] Först. skalad utfrekvens för process-PID
[1600] Styrord
[1601] Referens [enhet]
[10] 380-440 V/50 Hz/IT-nät
[11] 380-440 V/50 Hz/Delta
[2118] Utök. 1, återk. [enhet]
[2119] Utök. 1, uteekt [%]
[1603] Statusord
*[1602]Referens [%]
[12] 380-440 V/50 Hz
[20] 440-480 V/50 Hz/IT-nät
[3403] PCD 3 Write For Application
[3401] PCD 1 Write For Application
[3402] PCD 2 Write For Application
[1610] Eekt [kW]
[1609] Anpassad avläsning
[1605] Faktiskt huvudvärde [%]
[21] 440-480 V/50 Hz/Delta
[22] 440-480 V/50 Hz
[100] 200–240 V/60 Hz/IT-nät
[3406] PCD 6 Write For Application
[3404] PCD 4 Write For Application
[3405] PCD 5 Write For Application
[1611] Eekt [hk]
[1612] Motorspänning
[1613] Frekvens
[110] 380-440 V/60 Hz/IT-nät
[101] 200-240 V/60 Hz/Delta
[102] 200-240 V/60 Hz
[3408] PCD 8 Write For Application
[3409] PCD 9 Write For Application
[3407] PCD 7 Write For Application
[1614] Motorström
[1615] Frekvens [%]
[1616] Moment [Nm]
[112] 380-440 V/60 Hz
[120] 440-480 V/60 Hz/IT-nät
[111] 380-440 V/60 Hz/Delta
[3422] PCD 2 Read For Application
[3421] PCD 1 Read For Application
[3410] PCD 10 Write For Application
[1617] Varvtal [v/m]
[1618] Motor, termisk
[1620] Motorvinkel
0-07 Auto DC Braking
[121] 440-480 V/60 Hz/Delta
[122] 440-480 V/60 Hz
[3427] PCD 7 Read For Application
[3426] PCD 6 Read For Application
[3425] PCD 5 Read For Application
[3424] PCD 4 Read For Application
[3423] PCD 3 Read For Application
[1635] Växelriktare, termisk
[1634] Kylplattans temp.
[1622] Moment [%]
[1630] DC-busspänning
[1633] Brake Energy /2 min
[0] Av
*[1] På
0-1* Menyhantering
0-10 Aktiv meny
*[1] Meny 1
[3430] PCD 10 Read For Application
[3429] PCD 9 Read For Application
[3428] PCD 8 Read For Application
[1638] SL Controller, status
[1636] Nominell ström, Ström
[1637] Nominell ström, växelriktare
[2] Meny 2
[3] Meny 3
[4] Meny 4
[3456] Spårningsfel
0-21 Displayrad 1,2, liten
[3450] Faktisk position
[1650] Extern referens
[1652] Återkoppling [enhet]
[1639] Styrkortstemperatur
[1] Meny 1
0-11 Programming Set-up
[9] Ext. menyval
[1653] DigiPot-referens
[2] Meny 2
0-22 Displayrad 1,3, liten
[1657] Feedback [RPM]
[3] Meny 3
0-23 Displayrad 2, stor
[1660] Digital ingång
[1661] Terminal 53 inställning
[1662] Analog ingång 53
[4] Meny 4
*[9] Aktiv meny
0-12 Link Setups
0-24 Displayrad 3, stor
0-3* Anp. LCP-avläsn.
[1665] Analog utgång 42 [mA]
[1663] Terminal 54 inställning
[1664] Analog ingång 54
0-14 Avläsning: Redigera menyer/kanal
[0] Inte länkad
*[20] Länkad
MG07A507 Danfoss A/S © 08/2018 Med ensamrätt. 71
Page 76

Bilaga
[72] Pa
[73] kPa
VLT® Midi Drive FC 280
Samma val med 3-15
-4999,0 - 4999 ReferenceFeedbackUnit
[127] ft³/h
[130] lb/s
[131] lb/min
[132] lb/h
[140] ft/s
[141] ft/min
[145] ft
[150] lb ft
[160] °F
[170] psi
[171] lb/in2
[172] in WG
[173] ft WG
[180] hk
[74] m VP
[80] kW
[120] GPM
[121] gal/s
[122] gal/min
[123] gal/h
[124] CFM
[125] ft³/s
[126] ft³/min
0 - 6200 Ohm *Storleksrelaterad
0,001 - 2000 kW *Storleksrelaterad
0 - 500 V *0 V
0 - 160 % *100 %
0 - 200 % *100 %
0 - 400 Hz *0 Hz
0 - 100 A *0 A
3-02 Minimireferens
0 - 5 s *0 s
*Size related
*0 ReferenceFeedbackUnit
-4999,0 - 4999 ReferenceFeedbackUnit
3-03 Maximireferens
[1] Extern/förinställd
3-04 Referensfunktion
*[0] Summa
3-1* Referenser
3-10 Förinställd referens
-100 - 100 % *0 %
0 - 100 % *0 %
0 - 500,0 Hz *5 Hz
-100 - 100 % *0 %
[8] Frekvensingång 33
[11] Lokal bussreferens
[7] Frekvensingång 29
[0] Ingen funktion
*[1] Analog ingång 53
[2] Analog ingång 54
3-14 Förinställd relativ referens
3-15 Referens 1, källa
3-12 Öka/minska-värde
3-11 Joggvarvtal [Hz]
Samma val med 3-15
*[0] Ingen funktion
[1] Analog ingång 53
3-18 Relativ skalningsreferensresurs
[32] Buss PCD
3-16 Referens 2, källa
3-17 Referens 3, källa
[20] Digital pot.meter
2-12 Bromseektgräns (kW)
[2] AC-broms
2-11 Bromsmotstånd (ohm)
[1] Bromsmotstånd
2-14 Bromsspänning minskning
2-16 AC-broms, max ström
2-17 Överspänningsstyrning
2-19 Over-voltage Gain
[2] Aktiverad
*[0] Inaktiverad
[1] Aktiverad (ej vid stopp)
2-2* Mekanisk broms
2-20 Frikoppla broms, ström
2-23 Aktivera bromsfördröjning
2-22 Aktivera bromsvarvtal [Hz]
2-3* Avanc. Mek broms
*[0] AV
[1] PÅ
[2] PÅ med startfördröjning
2-39 Mek. Broms m/dir. Ändra
3-** Referens/ramper
3-0* Referensgränser
3-00 Referensområde
*[0] Min - Max
[1] -Max - +Max
3-01 Enhet för ref./återk.
[0] Ingen
[1] %
[2] varv/minut
[3] Hz
[4] Nm
[5] PPM
[10] 1/min
[12] Pulser
[20] l/s
[21] l/min
[24] m³/min
[25] m³/h
[23] m³/s
[30] kg/s
[22] l/h
[31] kg/min
[32] kg/h
[33] t/min
[34] t/h
[40] m/s
[41] m/min
[45] m
[60] °C
[70] mbar
[71] bar
1010
0 - 10 s *5 s
1-79 Compressor Start Max Time to Trip
1-8* Stoppjusteringar
1-80 Funktion vid stopp
*[0] Utrullning
0 - 65535 mH *Storleksrelaterad
0 - 65535 mH *Storleksrelaterad
1-44 d-axis Inductance Sat. (LdSat)
1-46 Läge detekteringsförstärk.
1-45 q-axis Inductance Sat. (LqSat)
[3] Förmagnetisering
[1] DC-håll/motorförvärmning
20 - 200 % *100 %
1-48 Current at Min Inductance for d-axis
1-82 Minsta varvtal för funktion v. stopp
20 - 200 % *100 %
[Hz]
0 - 20 Hz *0 Hz
20 - 200 % *100 %
1-49 Current at Min Inductance for q-axis
1-83 Funktion för precisionsstopp
1-5* Belastn.ober. inst.
*[0] Precisionsrampstopp
[1] Pulsräknarstopp med återställning
0 - 300 % *100 %
1-50 Motormagnetisering vid nollvarvtal
[3] Varvtalskompenserat stopp
[4] Varvtalskompenserat pulsräknarstopp
[2] Pulsräknarstopp utan återställning
0,1 - 10,0 Hz *1 Hz
1-55 U/f-förhållande-U
1-52 Min. varvtal normal magnetiser. [Hz]
med återställning
0 - 1000 V *Storleksrelaterad
utan återställning
[5] Varvtalskompenserat pulsräknarstopp
0 - 500,0 Hz *Storleksrelaterad
1-56 U/f-förhållande-F
0 - 999999999 *100000
1-84 Precisionsstopp, räknarvärde
1-60 Belastningskomp. vid lågt varvtal
1-6* Belastn.ber. Inställning
1,0 - 2,0 *1,4
0 - 100 ms *10 ms
1-85 Precisionsstopp, varvtalskomp.fördr.
1-88 AC Brake Gain
1-9* Motortemperatur
1-90 Termiskt motorskydd
*[0] Inget skydd
[1] Termistorvarning
[2] Termistortripp
[3] ETR-varning 1
[4] ETR-tripp 1
[22] ETR-tripp - utökad detektering
1-93 Termistorkälla
*[0] Ingen
[1] Analog ingång 53
-400 - 400,0 % *Storleksrelaterad
0,05 - 5 s *0,1 s
1-63 Eftersläpningskomp., tidskonstant
0 - 500 % *100 %
1-64 Resonance Dampening
0 - 300 % *100 %
0 - 300 % *100 %
1-61 Belastningskomp. vid högt varvtal
1-62 Eftersläpningskomp.
0 - 120 % *50 %
0,001 - 0,05 s *0,005 s
1-66 Min. ström vid lågt varvtal
1-65 Resonance Dampening Time Constant
1-7* Startjusteringar
1-70 Startläge
[2] Analog ingång 54
*[0] Rotordetektering
[3] Digital ingång 18
[1] Parkering
[4] Digital ingång 19
1-71 Startfördr.
[5] Digital ingång 32
[6] Digital ingång 33
0 - 10 s *0 s
1-72 Startfunktion
2-** Bromsar
[0] DC-håll/fördr.tid
2-0* DC-broms
[1] DC-broms/fördr.tid
2-00 DC-håll/ström för förvärmning av
*[2] Utrullning/fördr.tid
0 - 160 % *50 %
motor
[3] Startvarvtal medurs
[4] Horisontal drift
0 - 150 % *50 %
2-01 DC-bromsström
[5] VVC+ medurs
1-73 Flygande start
0 - 60 s *10 s
2-02 DC-bromstid
2-04 DC-broms inkopplingstid
*[0] Inaktiverad
[1] Aktiverad
[2] Alltid aktiverad
0 - 500 Hz *0 Hz
[3] Aktiverad ref. dir.
2-06 Parkeringsström
[4] Akt. alltid ref. dir.
0 - 150 % *100 %
1-75 Startvarvtal [Hz]
0,1 - 60 s *3 s
2-07 Parkeringstid
0 - 500,0 Hz *Storleksrelaterad
1-76 Startström
2-1* Bromsenergifunkt.
2-10 Bromsfunktion
*[0] Av
0 - 500 Hz *0 Hz
0 - 1000 A *Storleksrelaterad
1-78 Kompr., max. startvarvtal [Hz]
0,1 - 10000,0 Nm *Storleksrelaterad
20 - 500 Hz *Storleksrelaterad
[20] 30 kW - 40 hk
[19] 22 kW - 30 hk
50 - 1000 V *Storleksrelaterad
1-23 Motorfrekvens
1-22 Motorspänning
1-24 Motorström
0,001 - 1 s *Storleksrelaterad
1-2* Motordata
[9] 1,5 kW - 2 hk
[7] 0,75 kW - 1 hk
[8] 1,1 kW - 1,5 hk
[10] 2,2 kW - 3 hk
[11] 3 kW - 4 hk
[12] 3,7 kW - 5 hk
[13] 4 kW - 5,4 hk
1-20 Motor Power
[2] 0,12 kW - 0,16 hk
[3] 0,18 kW - 0,25 hk
[4] 0,25 kW - 0,33 hk
[5] 0,37 kW - 0,5 hk
[6] 0,55 kW - 0,75 hk
[14] 5,5 kW - 7,5 hk
[18] 18,5 kW - 25 hk
[15] 7,5 kW - 10 hk
[16] 11 kW - 15 hk
[17] 15 kW - 20 hk
laterad
0,01 - 1000,00 A *Storleksrelaterad
1-25 Nominellt motorvarvtal
50 - 60000 varv/minut *Storleksre-
1-29 Automatic Motor Adaption (AMA)
*[0] Av
1-26 Märkmoment motor
[1] Aktivera fullständig AMA
0,0 - 9999,000 Ohm *Storleksrelaterad
[2] Aktivera reducerad AMA
1-3* Avanc. Motor Data I
1-30 Statorresistans (Rs)
0,0 - 9999,000 Ohm *Storleksrelaterad
1-33 Stator Läck Reaktans (X1)
0,0 - 9999,00 Ohm *Storleksrelaterad
1-35 Huvudreaktans (Xh)
0 - 9999,000 Ohm *Storleksrelaterad
1-31 Rotorresistans (Rr)
0,000 - 65535 mH *Storleksrelaterad
0 - 65535 mH *Storleksrelaterad
1-37 Induktans för d-axel (Ld)
2 - 100 *Storleksrelaterad
1 - 9000 V *Storleksrelaterad
1-38 q-axis Inductance (Lq)
1-39 Motorpoler
1-4* Avanc. Motor Data II
1-40 Mot-Emk vid 1 000 RPM
0 - 100 m *50 m
1-42 Motor Cable Length
0 - 328 ft *164 ft
1-43 Motor Cable Length Feet
72 Danfoss A/S © 08/2018 Med ensamrätt. MG07A507
Page 77

Bilaga Handbok
Samma val med 5-12
[32] Pulsingång
[83] Pulsgivaringång Z
5-14 Plint 32, digital ingång
Samma val med 5-10
Samma val med 5-12
[82] Pulsgivaringång B
5-15 Plint 33, digital ingång
Samma val med 5-12
[30] Räknaringång
5-13 Plint 29, digital ingång
[156] HW-gräns negativ inv.
[160] Gå till målposition
[162] Pos. Idx Bit0
[74] Aktivera PID
[65] Återställ räknare B
[150] Gå till hem
[72] PID-fel, inverterad
[73] PID-återställning I del
[157] Pos. Snabbstopp inv.
[151] Hem-ref. Brytare
[155] HW-gräns positiv inv.
[163] Pos. Idx Bit1
[164] Pos. Idx Bit2
[172] Brytargräns ccw inv.
[171] Brytargräns cw inv.
[30] Räknaringång
[32] Pulsingång
[81] Pulsgivaringång A
5-19 Terminal 37/38 Safe Torque O
*[1] Safe Torque O-larm
[3] Safe Torque O-varning
5-3* Digitala utgångar
5-30 Plint 27, digital utgång
*[0] Ingen funktion
[1] Styrning klar
[3] Enhet klar/ärr
[2] Frekvensomriktare klar
[4] Aktivera/ingen varning
[5] Kör
[6] Kör/ingen varning
[21] Termisk varning
[24] Klar, spänning OK
[16] Under frekvens, låg
[17] Above frequency, high
[19] Under återk., låg
[7] Kör in intervall/ingen varn
[9] Larm
[10] Larm eller varning
[8] Kör på ref./ej varn.
[11] På momentgräns
[14] Över ström, hög
[15] Utanför frekvensområden
[12] Utanför strömomr.
[13] Under ström, låg
[20] Över återk., hög
[18] Utanför återk.omr.
[25] Reversering
[22] Klar, ej term.varn.
[23] Fjärr, klar, ing. TV.
[63] Räknare B (upp)
4-58 Motorfasfunktion saknas
4-16 Momentgräns, motordrift
[64] Räknare B (ned)
[0] Av
0 - 1000 % *Storleksrelaterad
[65] Återställ räknare B
*[1] På
4-17 Momentgräns, generatordrift
[72] PID-fel, inverterad
4-6* Varvtal, förbik.
0 - 1000 % *100 %
[73] PID-återställning I del
[74] Aktivera PID
0 - 500 Hz *0 Hz
4-61 Förbikoppla varvtal från [Hz]
0 - 1000 % *Storleksrelaterad
4-18 Strömbegränsning
[150] Gå till hem
4-63 Förbikoppla varvtal till [Hz]
4-19 Max. utfrekvens
[56] DigiPot, minska
[57] DigiPot, rensa
[58] DigiPot, lyft
[60] Räknare A (upp)
[61] Räknare A (ned)
[62] Återställ räknare A
[63] Räknare B (upp)
[51] Externt stopp
[21] Öka varvtal
[22] Minska varvtal
[24] Menyval, bit 1
[23] Menyval, bit 0
[6] Stopp, inverterat
[8] Start
[9] Pulsstart
[10] Reversering
5-12 Plint 27, digital ingång
[0] Ingen funktion
[2] Utrullning, invert.
[1] Återställning
[162] Pos. Idx Bit0
[171] Brytargräns cw inv.
[160] Gå till målposition
[156] HW-gräns negativ inv.
[157] Pos. Snabbstopp inv.
[151] Hem-ref. Brytare
[155] HW-gräns positiv inv.
5-11 Plint 19, digital ingång
[172] Brytargräns ccw inv.
[163] Pos. Idx Bit1
[164] Pos. Idx Bit2
[4] Snabbstopp, inv
[5] DC-broms, invert.
[3] Utr. och återst., inv.
[11] Starta reverserat
[15] Förinställd ref. till
[12] Aktivera start med.
[19] Frys referens
[20] Frys utgång
[18] Förinst ref bit 2
[17] Förinst ref bit 1
[16] Förinst ref bit 0
[13] Aktivera reverserad start
[14] Jogg
[28] Öka
[29] Minska
[34] Ramp, bit 0
[55] DigiPot, öka
[35] Ramp, bit 1
[45] Reverserad pulsstart
[64] Räknare B (ned)
10 10
0 - 500 Hz *0 Hz
[55] DigiPot, öka
[56] DigiPot, minska
[57] DigiPot, rensa
[58] DigiPot, lyft
[60] Räknare A (upp)
[61] Räknare A (ned)
ProcessCtrlUnit
4-57 Varning hög återkoppling
[62] Återställ räknare A
-4999 - 4999 ProcessCtrlUnit *4999
ProcessCtrlUnit
[45] Reverserad pulsstart
[27] Prec.start/-stopp
[28] Öka
[29] Minska
[34] Ramp, bit 0
0 - 500 A *0 A
4-5* Reg. Varningar
4-50 Varning, svag ström
[35] Ramp, bit 1
4-51 Varning, stark ström
[22] Minska varvtal
0 - 500 Hz *Storleksrelaterad
[23] Menyval, bit 0
4-41 Varning frekv. Hög
[26] Precisionsstopp, inv.
[24] Menyval, bit 1
0 - 500 Hz *Storleksrelaterad
0 - 200 *0
4-42 Adjustable Temperature Warning
[6] Stopp, inverterat
*[8] Start
[9] Pulsstart
[10] Reversering
4-30 Funktion för motoråterk.bortfall
[11] Starta reverserat
[0] Inaktiverad
[1] Varning
*[2] Tripp
[5] DC-broms, invert.
[4] Snabbstopp, inv
*[0] Ingång
5-** Digital I/O
5-0* Digitalt I/O-läge
5-00 Digital Input Mode
*[0] PNP
0 - 500 Hz *Storleksrelaterad
*[0] Ingen funktion
[2] Analog in 53
4-2* Gränsfaktorer
4-20 Gränsfaktorkälla, moment
[1] NPN
5-01 Plint 27, funktion
[4] Analog in 53 inv
[6] Analog in 54
[8] Analog in 54 inv
[1] Eekt
5-1* Digitala ingångar
*[0] Ingen funktion
4-21 Gränsfaktorkälla, varvtal
5-10 Plint 18, digital ingång
[2] Analog in 53
[2] Utrullning, invert.
[0] Ingen funktion
[1] Återställning
[6] Analog in 54
[8] Analog in 54 inv
[4] Analog in 53 inv
[3] Utr. och återst., inv.
4-22 Break Away Boost
*[0] Av
[1] På
4-3* Motor Fb Monitor
[12] Aktivera start med.
[3] Jogg
[4] Frys utfrekvens
[5] Max. varvtal
[15] Förinställd ref. till
[6] Växla t u återkoppl
4-31 Motoråterk.varvtal, fel
0 - 50 Hz *20 Hz
0 - 60 s *0,05 s
4-32 Timeout för motoråterk.bortfall
4-4* Reg. Varningar 2
4-40 Varning frekv. Låg
[19] Frys referens
[20] Frys utgång
[21] Öka varvtal
[18] Förinst ref bit 2
[17] Förinst ref bit 1
[16] Förinst ref bit 0
[13] Aktivera reverserad start
[14] Jogg
[51] Externt stopp
[40] Pulsprecisionsstart
[41] Pulsprec.stopp, inv.
-4999 - 4999 ProcessCtrlUnit *-4999
-4999 - 4999 *4999
-4999 - 4999 *-4999
0 - 500,00 A *Storleksrelaterad
4-56 Varning låg återkoppling
4-55 Varning hög referens
4-54 Varning låg referens
0 - 200 % *25 %
0 - 3600000 ms *1000 ms
3-93 Maximigräns
-200 - 200 % *-100 %
-200 - 200 % *100 %
3-96 Maximum Limit Switch Reference
3-95 Rampfördröjning
3-94 Minimigräns
4-** Gränser/varningar
4-1* Motorgränser
4-10 Motorvarvtal, riktning
*[0] Medurs
[2] Båda riktningarna
0,01 - 3600 s *Storleksrelaterad
0,01 - 3600 s *Storleksrelaterad
Samma innehåll med 3-4*
Samma innehåll med 3-4*
Samma innehåll med 3-4*
0,01 - 3600 s *Storleksrelaterad
0,01 - 3600 s *Storleksrelaterad
0,01 - 200 % *0,10 %
[11] Lokal bussreferens
[8] Frekvensingång 33
[2] Analog ingång 54
[7] Frekvensingång 29
*[0] Av
[1] Ramp 1, nedramptid
3-3* Allm. rampinställn.
3-31 Nedrampning m/dir. Ändra
[2] Ramp 2, nedramptid
[3] Ramp 3, nedramptid
[4] Ramp 4, nedramptid
[9] Snabbstopp, ramptid
3-4* Ramp 1
3-40 Ramp 1, typ
*[0] Linjär
[1] Sine-ramp
[2] Sine 2-ramp
3-41 Ramp 1, uppramptid
3-42 Ramp 1, nedramptid
3-5* Ramp 2
3-6* Ramp 3
3-7* Ramp 4
3-8* Andra ramper
3-80 Jogg, ramptid
3-81 Snabbstopp, ramptid
3-9* Digital pot.meter
3-90 Stegstorlek
3-92 Eektåterställning
*[0] Av
[1] På
4-11 Motorvarvtal, nedre gräns [rpm]
0 - 400,0 Hz *0 Hz
0 - 1500 varv/minut *Storleksrelaterad
4-12 Motorvarvtal, nedre gräns [Hz]
0,1 - 500 Hz *65 Hz
0 - 60000 varv/minut *Storleksrelaterad
4-13 Motorvarvtal, övre gräns [rmp]
4-14 Motorvarvtal, övre gräns [Hz]
MG07A507 Danfoss A/S © 08/2018 Med ensamrätt. 73
Page 78

Bilaga
[74] Aktivera PID
[73] PID-återställning I del
0 - 100 % *0 %
[150] Gå till hem
0 - 100 % *0 %
VLT® Midi Drive FC 280
-4999 - 4999 *0
-4999 - 4999 *Storleksrelaterad
0,01 - 10 s *0,01 s
6-25 Plint 54, högt ref.-/återkopplings värde
6-24 Plint 54, lågt ref.-/återkopplings värde
6-26 Plint 54, tidskonstant för lter
*[1] Spänningsläge
6-29 Plint 54-läge
[0] Strömläge
6-9* Analog/Digital Output 42
6-90 Plint 42-läge
*[0] 0–20 mA
[1] 4-20 mA
[2] Digital utgång
*[0] Ingen funktion
6-91 Terminal 42 Analog Output
[100] Utfrekvens
[101] Referens
[102] Processåterkoppling
[103] Motorström
[104] Mom. i förh t gräns
[105] Moment i förh. t nom.
[106] Eekt
[107] Varvtal
[139] Busstyrning
[111] Varvtalsåterkoppling
[113] PID-byglad utgång
6-92 Plint 42, digital utgång
*[0] Ingen funktion
[143] Utök. CL 1
[1] Styrning klar
[254] DC-busspänning
[3] Enhet klar/ärr
[2] Frekvensomriktare klar
6-22 Plint 54, svag ström
0 - 20 mA *4 mA
-4999 - 4999 *Storleksrelaterad
0 - 20 mA *20 mA
6-23 Plint 54, stark ström
0,01 - 10 s *0,01 s
0 - 10 V *10 V
0 - 10 V *0,07 V
*[1] Spänningsläge
[6] Digital ingång
6-19 Plint 53-läge
[172] Brytargräns ccw inv.
[164] Pos. Idx Bit2
[162] Pos. Idx Bit0
[163] Pos. Idx Bit1
[171] Brytargräns cw inv.
6-2* Analog ingång 54
6-20 Plint 54, låg spänning
0 - 10 V *0,07 V
6-21 Plint 54, hög spänning
0 - 10 V *10 V
-4999 - 4999 *0
[160] Gå till målposition
[156] HW-gräns negativ inv.
[157] Pos. Snabbstopp inv.
[151] Hem-ref. Brytare
[155] HW-gräns positiv inv.
1 - 99 s *10 s
[57] DigiPot, rensa
[58] DigiPot, lyft
5-94 Puls ut 27 förinställd timeout
6-** Analog I/O
6-0* Analogt I/O-läge
6-00 Tidgräns för signalavbrott
6-01 Tidgräns för signalavbrott, funktion
*[0] Av
[1] Frys utgång
[2] Stopp
[3] Jogg
[4] Max.varvtal
[5] Stopp och tripp
6-1* Analog ingång 53
6-10 Plint 53, låg spänning
6-14 Plint 53, lågt ref.-/återkopplings värde
6-11 Plint 53, hög spänning
[28] Öka
[29] Minska
[34] Ramp, bit 0
[35] Ramp, bit 1
[51] Externt stopp
[22] Minska varvtal
[23] Menyval, bit 0
[21] Öka varvtal
[24] Menyval, bit 1
[10] Reversering
[11] Starta reversering
[12] Aktivera start framåt
[13] Aktivera reverserad start
[6] Stopp, inverterat
[8] Start
[5] DC-broms, invert.
6-15 Plint 53, högt ref.-/återkopplings värde
6-16 Plint 53, tidskonstant för lter
6-18 Terminal 53 Digital ingång
*[0] Ingen funktion
[3] Utr. och återst., inv.
[2] Utrullning, invert.
[1] Återställning
[4] Snabbstopp, inv
[18] Förinst ref bit 2
[19] Frys referens
[20] Frys utgång
[17] Förinst ref bit 1
[16] Förinst ref bit 0
[14] Jogg
[15] Förinställd ref. till
[55] DigiPot, öka
[72] PID-fel, inverterad
[56] DigiPot, minska
1010
0 - 600 s *0,01 s
[167] Startkmd. aktivt
[168] Enhet i Hand-läge
[169] Enhet i läget Auto
[3] Enhet klar/ärr
[5] Kör
[4] Aktivera/ingen varning
[170] Homing slutförd
[171] Målposition uppnådd
[6] Kör/ingen varning
[7] Kör in intervall/ingen varn
0 - 600 s *0,01 s
[239] STO-funktionsfel
[13] Under ström, låg
5-41 Till-fördr., relä
[14] Över ström, hög
[15] Utanför frekvensområden
5-42 Från-fördr., relä
[16] Under frekvens, låg
5-5* Pulsingång
[18] Utanför återk.omr.
[17] Above frequency, high
[193] Energisparläge
[173] Position mek. broms
[9] Larm
[190] Säkerhetsfunktion aktiv
[10] Larm eller varning
[194] Rembrott, funktion
[12] Utanför strömomr.
[11] På momentgräns
[172] Lägesstyrningsfel
[8] Kör på ref./ej varn.
5-50 Plint 29, låg frekvens
[19] Under återk., låg
0 - 31999 Hz *4 Hz
[20] Över återk., hög
5-51 Plint 29, hög frekvens
[21] Termisk varning
1 - 32000 Hz *32000 Hz
[22] Klar, ej term.varn.
-4999 - 4999 *Storleksrelaterad
-4999 - 4999 *0
5-53 Plint 29, högt ref.-/återkopplings värde
5-52 Plint 29, lågt ref.-/återkopplings värde
[24] Klar, spänning OK
[25] Reversering
[26] Buss OK
[23] Fjärr, klar, ing. TV.
5-55 Plint 33, låg frekvens
[27] Momentgräns och stopp
0 - 31999 Hz *4 Hz
[28] Broms, ingen varning
5-56 Plint 33, hög frekvens
[29] Broms klar, inga fel
1 - 32000 Hz *32000 Hz
[30] Bromsfel (IGBT)
5-57 Plint 33, lågt ref.-/återkopplings värde
[31] Relä 123
-4999 - 4999 *Storleksrelaterad
-4999 - 4999 *0
5-58 Plint 33, högt ref./återkopplings värde
5-6* Pulsutgång
5-60 Plint 27, pulsutgångsvariabel
*[0] Ingen funktion
[45] Busstyrn.
[48] Busstyrn., timeout
[100] Utfrekvens
[101] Referens
[102] Processåterkoppling
[56] Kylplatta rengöringsvarning, hög
[45] Busstyrn.
[46] Busstyrn., timeout: På
[47] Busstyrn., timeout: Av
[40] Utanför ref.omr.
[41] Under ref.omr.
[36] Styrord, bit 11
[32] Mek. bromstyr.
[42] Över ref., hög
[37] Styrord, bit 12
[60] Komparator 0
[103] Motorström
[61] Komparator 1
[104] Mom. i förh t gräns
[62] Komparator 2
[105] Moment i förh. t nom.
[63] Komparator 3
[106] Eekt
[107] Varvtal
[65] Komparator 5
[64] Komparator 4
4 - 32000 Hz *5000 Hz
1 - 4096 *1024
5-71 Plint 32/33, pulsgivarriktning
[109] Max. utfrek
[113] PID-byglad utgång
5-62 Pulsutgång max frekv 27
5-7* 24 V-pulsgivaring.
[71] Logisk regel 1
[72] Logisk regel 2
[73] Logisk regel 3
[70] Logisk regel 0
[74] Logisk regel 4
*[0] Medurs
5-70 Plint 32/33 pulser per varv
[75] Logisk regel 5
[80] SL Digital utgång A
[81] SL Digital utgång B
[82] SL Digital utgång C
[1] Moturs
[83] SL Digital utgång D
5-9* Busstyrning
5-90 Busstyrning, digital och relä
[160] Inget larm
[161] Kör reverserat
0 - 0xFFFFFFFF *0
[165] Lokal ref. aktiv
5-93 Puls ut 27 busstyrning
[166] Extern ref. aktiv
0 - 600 s *0,01 s
0 - 600 s *0,01 s
5-35 Fördröjning av, digital utgång
5-34 Fördröjning på, digital utgång
[193] Energisparläge
[194] Rembrott, funktion
[26] Buss OK
[27] Momentgräns och stopp
[28] Broms, ingen varning
[83] SL Digital utgång D
[91] Pulsgivarutgång A
[160] Inget larm
[161] Kör reverserat
[165] Lokal ref. aktiv
[166] Extern ref. aktiv
[167] Startkmd. aktivt
[168] Enhet i Hand-läge
[169] Enhet i läget Auto
[170] Homing slutförd
[171] Målposition uppnådd
[172] Lägesstyrningsfel
[70] Logisk regel 0
[71] Logisk regel 1
[72] Logisk regel 2
[73] Logisk regel 3
[74] Logisk regel 4
[75] Logisk regel 5
[80] SL Digital utgång A
[81] SL Digital utgång B
[64] Komparator 4
[65] Komparator 5
[55] Pulsutgång
[43] Utökad PID-gräns
[31] Relä 123
[37] Styrord, bit 12
[32] Mek. bromstyr.
[30] Bromsfel (IGBT)
[29] Broms klar, inga fel
[40] Utanför ref.omr.
[36] Styrord, bit 11
[45] Busstyrn.
[41] Under ref.omr.
[42] Över ref., hög
[56] Kylplatta rengöringsvarning, hög
[46] Busstyrn., timeout: På
[47] Busstyrn., timeout: Av
[63] Komparator 3
[61] Komparator 1
[62] Komparator 2
[60] Komparator 0
[82] SL Digital utgång C
[173] Position mek. broms
[190] Säkerhetsfunktion aktiv
[239] STO-funktionsfel
5-4* Reläer
5-40 Funktionsrelä
[0] Ingen funktion
*[1] Styrning klar
[2] Frekvensomriktare klar
74 Danfoss A/S © 08/2018 Med ensamrätt. MG07A507
Page 79

Bilaga Handbok
0 - 2147483647 *Storleksrelaterad
8-14 Kongurerbart styrord CTW
[93] Larm 68 eller larm 88
[82] SL, digital utgång C
[83] SL, digital utgång D
[70] Logisk regel 0
[71] Logisk regel 1
[72] Logisk regel 2
[65] Komparator 5
0,001 - 1 s *0,001 s
[73] Logisk regel 3
0,001 - 1 s *0,001 s
[81] SL, digital utgång B
[74] Logisk regel 4
[75] Logisk regel 5
[80] SL, digital utgång A
[0] Ingen
*[1] Prolstandard
[2] CT W-giltig, aktiv låg
[6] Aktivera PID
8-19 Produktkod
[4] PID-fel, inverterad
[5] PID-återställning I del
8-3* FC-portinställningar
8-30 Protokoll
*[0] FC
[2] Modbus RTU
0,5 - 6000 s *1 s
0,0 - 247 *1
8-31 Adress
8-32 Baudhastighet
[0] 2400 Baud
[1] 4800 Baud
[2] 9600 Baud
[3] 19200 Baud
[4] 38400 Baud
[5] 57600 Baud
[6] 76800 Baud
[7] 115200 Baud
8-33 Paritet/stoppbitar
[1] Udda par., 1 stoppbit
[0] Jämn par., 1 stoppbit
[3] Ingen par, 2 stoppbit
[2] Ingen par., 1 stoppbit
0,0010 - 0,5 s *0,01 s
8-35 Min. svarsfördröjning
0,1 - 10,0 s *Storleksrelaterad
8-36 Maximal svarsfördröjning
8-4* FC MC-prot.inst.
[1] [302] Minimireferens
[2] [303] Maximireferens
[4] [342] Ramp 1, nedramptid
[3] [341] Ramp 1, uppramptid
8-42 PCD, skrivkonguration
[0] Ingen
[6] [352] Ramp 2, nedramptid
[5] [351] Ramp 2, uppramptid
[8] [381] Snabbstopp, tid
[7] [380] Jogg, ramptid
[11] [590] Busstyrning, digital och relä
[9] [412] Motorvarvtal, nedre gräns [Hz]
[10] [414] Motorvarvtal, övre gräns [Hz]
7-57 Process PID Fb. Filtertid
[1] Invert.
7-31 Anti-windup för process-PID
[0] Av
[170] Homing slutförd
[168] Enhet i Hand-läge
[169] Enhet i läget Auto
*[0] Linjär
7-60 Återk. 1, konvertering
7-6* Återkopplingskonvertering
0 - 6000 varv/minut *0 varv/minut
*[1] På
7-32 Regulatorstartvärde för process-PID
[172] Lägesstyrningsfel
[173] Position mek. broms
[171] Målposition uppnådd
[1] Kvadratrot
7-62 Återk. 2, konvertering
0 - 10 *0,01
7-33 Prop. först. för process-PID
[194] Rembrott, funktion
[193] Energisparläge
*[0] Linjär
[1] Kvadratrot
8-** Komm. och tillval
0,10 - 9999 s *9999 s
7-35 D-tid för process-PID
7-34 I-tid för process-PID
0 - 200 % *0 %
[198] Förbikoppling
6-93 Plint 42, utgång min-skala
8-0* Allmänna inställni.
8-01 Styrplats
*[0] Digital och styrord
1 - 50 *5
0 - 20 s *0 s
7-36 Process-PID först.gräns förstärkn.gräns
0 - 200 % *100 %
6-96 Plint 42, busstyrning för utgång
6-94 Plint 42, utgång max-skala
[1] Endast digital
[2] Endast styrord
0 - 200 % *0 %
7-38 Feed forward-faktor för process-PID
0 - 16384 *0
7-** Regulatorer
8-02 Källa för styrord
7-39 Inom referens bandbredd
7-0* Varvtal, PID-reg.
[0] Ingen
0 - 200 % *5 %
7-00 Varvtal PID-återkopplingskälla
[1] FC-port
[2] FC USB
7-40 Process PID I-part, återställning
7-4* Avanc. Process PID I
[6] Analog ingång 53
[1] 24 V-pulsgivare
[3] Tillval A
*[0] Nej
[7] Analog ingång 54
[1] Frys utgång
*[0] Av
[2] Stopp
[3] Jogg
[4] Max.varvtal
8-04 Tidsg.funktion för styrord
8-03 Tidsgräns för styrord
[5] Stopp och tripp
8-07 Diagnos-trigger
*[0] Inaktivera
[2] Utlös larm/varning
[1] Utlösare av larm
8-1* Kontrollerad inställn.
8-10 Prol för styrord
*[0] FC-prol
[1] PROFIdrive-prol
[5] ODVA
[7] CANopen DSP 402
8-13 Kongurerbart statusord, STW
[0] Ingen funktion
*[1] Prolstandard
[2] Endast larm 68
[10] T18 DI-status
[3] Tripp exkl. larm 68
[11] T19 DI-status
[12] T27 DI-status
[13] T29 DI-status
[14] T32 DI-status
[15] T33 DI-status
[21] Termisk varning
[30] Bromsfel (IGBT)
[40] Utanför ref.omr.
[63] Komparator 3
[64] Komparator 4
[62] Komparator 2
[60] Komparator 0
[61] Komparator 1
10 10
[11] Lokal bussreferens
7-08 Varvtal, PID-frammatningsfaktor
[32] Buss PCD
0 - 500 % *0 %
7-46 Process PID Feed Fwd normal/
7-1* Moment PID kontrol.
inverterad Kontrollerad
7-12 Moment PID proportionell förstärkning
0 - 100 % *100 %
0 - 100 % *100 %
-100 - 100 % *100 %
-100 - 100 % *-100 %
[8] Frekvensingång 33
[2] Analog ingång 54
[7] Frekvensingång 29
*[0] Ingen funktion
[1] Analog ingång 53
7-45 Process PID Feed Fwd
7-44 Process-PID, skalförstärk. vid max. ref.
7-43 Process-PID, skalförstärk. vid min. ref.
7-42 Process PID, utgång pos. bygling
[1] Ja
7-41 Process PID, utgång neg. bygling
0 - 1 *0,015
2 - 20000 ms *8 ms
[9] Frekvensingång 33
*[20] Ingen
7-02 Varvtal, prop. PID-förstärkning
[8] Frekvensingång 29
7-03 Varvtal, PID-integraltid
0 - 200 ms *30 ms
7-04 Varvtal, PID-derivatatid
1 - 20 *5
1 - 6000 ms *10 ms
7-05 Varvtal PID-di. förstärkn.gräns
7-06 Varvtal PID-lågpassltertid
7-07 Varvtalsåterkoppling utväxling
0,0001 - 32 *1
*[0] Normal
0 - 500 % *100 %
[1] Invert.
7-13 Moment PID-integraltid
0 - 65535 *0
Kontrollerad
*[0] Normal
7-49 Process PID, utgång normal/inv
*[0] Ingen funktion
7-20 Processregl. m. 1 återk.signal
[1] Invert.
7-5* Avanc. Process-PID II
7-50 Process-PID, utökad PID
[2] Analog ingång 54
[3] Frekvensingång 29
[4] Frekvensingång 33
[1] Analog ingång 53
7-48 PCD Feed Forward
0,002 - 2 s *0,020 s
7-2* Processregl, återk.
[0] Inaktiverad
*[1] Aktiverad
*[0] Ingen funktion
7-22 Processregl. m. 2 återk.signaler
0 - 100 *1
7-51 Prop. först. för process-PID Feed Fwd
[1] Analog ingång 53
[2] Analog ingång 54
7-52 Feed forward uppr. f proc-PID
[3] Frekvensingång 29
0,01 - 100 s *0,01 s
0,01 - 100 s *0,01 s
7-56 Process PID Ref. Filtertid
7-53 Feed forward nedr. f proc-PID
[4] Frekvensingång 33
*[0] Normal
7-30 Norm./inv. regl. av process-PID
7-3* Process-PID regl.
[83] SL Digital utgång D
[160] Inget larm
[161] Kör reverserat
[165] Lokal ref. aktiv
[4] Aktivera/ingen varning
[5] Kör
[6] Kör/ingen varning
[71] Logisk regel 1
[72] Logisk regel 2
[73] Logisk regel 3
[74] Logisk regel 4
[75] Logisk regel 5
[80] SL Digital utgång A
[81] SL Digital utgång B
[65] Komparator 5
[56] Kylplatta rengöringsvarning, hög
[45] Busstyrn.
[46] Busstyrn., timeout: På
[47] Busstyrn., timeout: Av
[60] Komparator 0
[61] Komparator 1
[40] Utanför ref.omr.
[41] Under ref.omr.
[36] Styrord, bit 11
[30] Bromsfel (IGBT)
[31] Relä 123
[21] Termisk varning
[16] Under frekvens, låg
[17] Above frequency, high
[19] Under återk., låg
[7] Kör in intervall/ingen varn
[9] Larm
[10] Larm eller varning
[8] Kör på ref./ej varn.
[11] På momentgräns
[14] Över ström, hög
[15] Utanför frekvensområden
[12] Utanför strömomr.
[13] Under ström, låg
[20] Över återk., hög
[18] Utanför återk.omr.
[24] Klar, spänning OK
[22] Klar, ej term.varn.
[23] Fjärr, klar, ing. TV.
[25] Reversering
[26] Buss OK
[27] Momentgräns och stopp
[28] Broms, ingen varning
[32] Mek. bromstyr.
[29] Broms klar, inga fel
[42] Över ref., hög
[37] Styrord, bit 12
[62] Komparator 2
[70] Logisk regel 0
[63] Komparator 3
[64] Komparator 4
[82] SL Digital utgång C
[166] Extern ref. aktiv
[167] Startkmd. aktivt
MG07A507 Danfoss A/S © 08/2018 Med ensamrätt. 75
Page 80

Bilaga
Samma val med 9-15 & 9-16
VLT® Midi Drive FC 280
0 - 65535 *0
0 - 0 *0
0 - 0 *0
0 - 1000 *0
0 - 65535 *0
0 - 0 *0
0 - 0 *0
0 - 65535 *0
0 - 65535 *0
0 - 65535 *0
0 - 9999 *0
[0] Inaktiverad
*[1] Aktiverad
9-28 Processreglering
[1650] Extern referens
[1653] DigiPot-referens
[1652] Återkoppling [enhet]
[0] Inaktivera
[1657] Feedback [RPM]
9-27 Parameterredigering
9-23 Parametrar för signaler
[200] Kundvalstelegram 1
[1639] Styrkortstemperatur
[1638] SL Controller, status
[1635] Växelriktare, termisk
[1634] Kylplattans temp.
9-45 Felkod
*[1] Aktivera cykl. Mast.
9-44 Räknare för felmeddelanden
[1663] Terminal 54 inställning
[1660] Digital ingång
[1661] Terminal 53 inställning
[1662] Analog ingång 53
9-47 Felnummer
[1665] Analog utgång 42 [mA]
[1664] Analog ingång 54
9-52 Räknare för felsituationer
9-53 Probus-varningsord
[1668] Pulsingång 33 [Hz]
[1669] Pulsutgång 27 [Hz]
[1667] Pulsingång 29 [Hz]
[1666] Digital utgång
[1671] Reläutgång
9-63 Faktisk baudhast.
[0] 9,6 kbit/s
[1] 19,2 kbit/s
[2] 93,75 kbit/s
[3] 187,5 kbit/s
[4] 500 kbit/s
[6] 1 500 kbit/s
[7] 3 000 kbit/s
[8] 6 000 kbit/s
[9] 12 000 kbit/s
[10] 31,25 kbit/s
[11] 45,45 kbit/s
[1685] FC-port, CTW 1
[1690] Larmord
[1691] Larmord 2
[1692] Varningsord
[1693] Varningsord 2
[1694] Utök. Statusord
[1695] Utök. statusord 2
[1684] Komm. tillval, STW
[1672] Räknare A
[1673] Räknare B
[1674] Prec.stopp, räknare
[1697] Larmord 3
9-64 Identiering av enhet
*[255] Baudhastighet saknas
[1698] Varningsord 3
[3421] PCD 1 Read For Application
9-65 Prolnummer
9-67 Styrord 1
[3425] PCD 5 Read For Application
[3424] PCD 4 Read For Application
[3423] PCD 3 Read For Application
[3422] PCD 2 Read For Application
9-68 Statusord 1
[3428] PCD 8 Read For Application
[3427] PCD 7 Read For Application
[3426] PCD 6 Read For Application
9-70 Redigera meny
[1] Meny 1
[2] Meny 2
[3450] Faktisk position
[3430] PCD 10 Read For Application
[3429] PCD 9 Read For Application
[3] Meny 3
[4] Meny 4
*[9] Aktiv meny
9-71 Spara datavärden
*[0] Av
[1] Lagra alla menyer
9-72 Återställ enhet
0 - 65535 *1037
1 - 126 *126
9-22 Telegramval
9-19 Drive Unit System Number
[1] Standardtelegram 1
[3456] Spårningsfel
9-18 Nodadress
*[0] Ingen åtgärd
*[100] Ingen
[1] Start, återställn.
[2] Förb. återst. v. start
[101] PPO 1
[102] PPO 2
[3] Komm.tillval återst.
9-80 Denierade parametrar (1)
9-81 Denierade parametrar (2)
[103] PPO 3
[104] PPO 4
[105] PPO 5
[106] PPO 6
[107] PPO 7
[108] PPO 8
9-75 DO-identiering
1010
9-16 PCD, läskonguration
[3409] PCD 9 Write For Application
[3410] PCD 10 Write For Application
[3408] PCD 8 Write For Application
[3406] PCD 6 Write For Application
[3407] PCD 7 Write For Application
[3405] PCD 5 Write For Application
[3404] PCD 4 Write For Application
[3402] PCD 2 Write For Application
[302] Minimireferens
[303] Maximireferens
[312] Öka/minska-värde
[341] Ramp 1, uppramptid
[342] Ramp 1, nedramptid
[351] Ramp 2, uppramptid
[352] Ramp 2, nedramptid
[380] Jogg, ramptid
[381] Snabbstopp, ramptid
[590] Busstyrning, digital och relä
[625] Plint 54, högt ref.-/återkopplings värde
[553] Plint 29, högt ref.-/återkopplings värde
[558] Plint 33, högt ref./återkopplings värde
[417] Momentgräns, generatordrift
[416] Momentgräns, motordrift
[414] Motorvarvtal, övre gräns [Hz]
[412] Motorvarvtal, nedre gräns [Hz]
[696] Plint 42, busstyrning för utgång
[593] Puls ut 27 busstyrning
[615] Plint 53, högt ref.-/återkopplings värde
[1680] Fältbuss, CTW 1
[748] PCD Feed Forward
[890] Bussjogg 1, varvtal
[891] Bussjogg 2, varvtal
[1682] Fältbuss, REF 1
[3401] PCD 1 Write For Application
[3403] PCD 3 Write For Application
[0] Ingen
[1500] Drifttimmar
[1501] Drifttid
[1601] Referens [enhet]
[1605] Faktiskt huvudvärde [%]
[1611] Eekt [hk]
[1612] Motorspänning
[1613] Frekvens
[1614] Motorström
[1615] Frekvens [%]
[1616] Moment [Nm]
[1617] Varvtal [v/m]
[1618] Motor, termisk
[1620] Motorvinkel
[1622] Moment [%]
[1630] DC-busspänning
[1633] Brake Energy /2 min
[1502] kWh-räkneverk
[1600] Styrord
[1610] Eekt [kW]
[1609] Anpassad avläsning
[1602] Referens [%]
[1603] Statusord
0 - 4294967295 *0
[1] Buss
[12] [676] Plint 45, busstyrning för utgång
[2] Logiskt OCH
[13] [696] Plint 42, busstyrning för utgång
*[3] Logiskt ELLER
8-54 Välj reversering
[15] FC-port, CTW
[16] FC-port, REF
[0] Digital ingång
[1] Buss
[2] Logiskt OCH
*[3] Logiskt ELLER
8-55 Menyval
8-43 PCD, läskonguration
[0] Ingen
[1] [1500] Drifttimmar
[2] [1501] Drifttid
[3] [1502] kWh-räkneverk
[0] Digital ingång
[1] Buss
[4] [1600] Styrord
[5] [1601] Referens [enhet]
[2] Logiskt OCH
[6] [1602] Referens %
*[3] Logiskt ELLER
8-56 Välj förinställd referens
[7] [1603] Statusord
[8] [1605] Faktiskt huvudvärde [%]
[0] Digital ingång
[1] Buss
[2] Logiskt OCH
[11] [1611] Eekt [hk]
[10] [1610] Eekt [kW]
[9] [1609] Anpassad avläsning
*[3] Logiskt ELLER
8-57 Prodrive OFF2 Select
[0] Digital ingång
[1] Buss
[12] [1612] Motorspänning
[13] [1613] Frekvens
[14] [1614] Motorström
[15] [1615] Frekvens [%]
[2] Logiskt OCH
*[3] Logiskt ELLER
8-58 Prodrive OFF3 Select
[0] Digital ingång
[18] [1630] DC-busspänning
[19] [1634] Kylplattans temp.
[17] [1618] Motor, termisk
[16] [1616] Moment [Nm]
[1] Buss
[20] [1635] Växelriktare, termisk
[2] Logiskt OCH
*[3] Logiskt ELLER
[21] [1638] SL Controller, status
[22] [1650] Extern referens
8-7* Protocol SW Version
[23] [1652] Återkoppling [enhet]
0 - 655 *Storleksrelaterad
0 - 4294967295 *0
8-79 Protocol Firmware version
8-8* FC-portdiagnostik
8-80 Bussmedd.antal
8-81 Bussfelsantal
[28] [1664] Analog ingång 54
[29] [1665] Analog utgång 42 [mA]
[26] [1662] Analog ingång 53
[27] [1663] Plint 54, switchinställning
[24] [1660] Digital ingång18,19,27,33
[25] [1661] Plint 53, switchinställning
0 - 4294967295 *0
[30] [1671] Reläutgång
0 - 4294967295 *0
8-82 Slavmeddelanden mottagna
[31] [1672] Räknare A
[32] [1673] Räknare B
0 - 4294967295 *0
0 - 4294967295 *0
8-88 Reset FC port Diagnostics
*[0] Återställ inte
[34] [1692] Varningsord
8-84 Slave Messages Sent
[35] [1694] Utök. Statusord
8-5* Digital/buss
8-85 Slave Timeout Errors
8-50 Välj utrullning
8-83 Slavfelsantal
[33] [1690] Larmord
[0] Digital ingång
[1] Buss
[2] Logiskt OCH
[1] Återställ räknare
8-9* Bus Feedback
*[3] Logiskt ELLER
8-51 Välj snabbstopp
0 - 1500 varv/minut *100 varv/minut
8-90 Bussjogg 1, varvtal
[0] Digital ingång
[1] Buss
0 - 1500 varv/minut *200 varv/minut
8-91 Bussjogg 2, varvtal
[2] Logiskt OCH
*[3] Logiskt ELLER
9-** PROFIdrive
8-52 Välj DC-broms
0 - 65535 *0
9-00 börvärde
[0] Digital ingång
[1] Buss
0 - 65535 *0
9-07 Faktiskt värde
9-15 PCD, skrivkonguration
[0] Ingen
[2] Logiskt OCH
*[3] Logiskt ELLER
8-53 Välj start
[0] Digital ingång
76 Danfoss A/S © 08/2018 Med ensamrätt. MG07A507
Page 81
Bilaga Handbok
0 - 4294967295 *0
0 - 2147483647 *0
0 - 4294967295 *0
0 - 2000000000 *15
12-69 Ethernet PowerLink Status
12-68 Cumulative Counters
12-67 Threshold Counters
12-66 Threshold
*[0] Inaktiverad
[1] Aktiverad
12-8* Övr. Ethernet-tjänster
12-80 FTP-server
*[0] Inaktiverad
[1] Aktiverad
12-81 HTTP-server
*[0] Inaktiverad
[1] Aktiverad
12-82 SMTP-tjänst
12-83 SNMP-agent
[0] Inaktiverad
[0] Inaktiverad
*[1] Aktiverad
12-84 Address Conict Detection
12-89 Transparent Socket Channel Port
8 - 32 *16
*[1] Aktiverad
0 - 65535 *4000
12-9* Avancerade Ethernet-tjänster
8 - 32 *16
12-90 Kabeldiagnostik
*[0] Inaktiverad
-1 - 20 % *-1 %
0 - 65535 *0
[0] Inaktiverad
[1] Aktiverad
12-91 Auto Cross Over
*[1] Aktiverad
12-92 IGMP-snooping
[0] Inaktiverad
*[1] Aktiverad
12-93 Kabellängdfel
0 - 2147483647 *0
12-94 Broadcast Storm-skydd
0 - 3600 *120
12-95 Broadcast Storm-lter
12-96 Portkong.
[0] Normal
0 - 65535 *Storleksrelaterad
[10] Port 1 inaktiverad
[11] Port 2 inaktiverad
[2] Speglad port 2 till 1
[1] Speglad port 1 till 2
0 - 65535 *Storleksrelaterad
0 - 0 *0
0 - 63 *Storleksrelaterad
12-97 QoS Priority
[255] Speglad int. Port till 2
[254] Speglad int. Port till 1
0 - 65535 *0
0 - 65535 *0
12-98 Gränssnittsräknare
0 - 4294967295 *4000
12-99 Mediaräknare
1 - 239 *1
0 - 4294967295 *0
13-** SL (Smart Logic)
13-0* SLC-inställningar
0 - 2000000000 ms *30000 ms
13-00 SL Controller-läge
0 - 2000000,000 ms *5000,000 ms
[1674] Prec.stopp, räknare
[890] Bussjogg 1, varvtal
0 - 4294967295 *0
[1684] Komm. tillval, STW
[891] Bussjogg 2, varvtal
12-04 DHCP-server
[1685] FC-port, CTW 1
[1680] Fältbuss, CTW 1
0 - 2147483647 *0
[1690] Larmord
[1691] Larmord 2
[3401] PCD 1 Write For Application
[1682] Fältbuss, REF 1
0 - 4294967295 *0
12-05 Lease förfaller
[1692] Varningsord
[1693] Varningsord 2
[1694] Utök. Statusord
[3404] PCD 4 Write For Application
[3402] PCD 2 Write For Application
[3403] PCD 3 Write For Application
0 - 4294967295 *0
12-06 Namnservrar
12-07 Domännamn
[1698] Varningsord 3
[1695] Utök. statusord 2
[1697] Larmord 3
[3407] PCD 7 Write For Application
[3405] PCD 5 Write For Application
[3406] PCD 6 Write For Application
1 - 48 *0
1 - 48 *0
12-08 Värdnamn
[3425] PCD 5 Read For Application
[3424] PCD 4 Read For Application
[3423] PCD 3 Read For Application
[3422] PCD 2 Read For Application
[3421] PCD 1 Read For Application
12-22 Processdatakong.Läs
[3410] PCD 10 Write For Application
[3409] PCD 9 Write For Application
[3408] PCD 8 Write For Application
12-09 Fysisk adress
0 - 17 *0
12-1* Ethernet-länkparametrar
[0] Ingen
12-10 Länkstatus
*[0] Ingen länk
[3428] PCD 8 Read For Application
[3427] PCD 7 Read For Application
[3426] PCD 6 Read For Application
[1500] Drifttimmar
[1501] Drifttid
[1502] kWh-räkneverk
0 - 0 *Storleksrelaterad
[1] Länkar
12-11 Länkvaraktighet
[3450] Faktisk position
[3430] PCD 10 Read For Application
[3429] PCD 9 Read For Application
[1602] Referens [%]
[1600] Styrord
[1601] Referens [enhet]
12-12 Automatisk förhandling
[0] Av
*[1] På
[3456] Spårningsfel
12-23 Process Data Cong Write Size
[1609] Anpassad avläsning
[1603] Statusord
[1605] Faktiskt huvudvärde [%]
12-13 Länkhastighet
*[0] Ingen
[1] 10 Mbps
12-24 Process Data Cong Read Size
[1610] Eekt [kW]
[1611] Eekt [hk]
[2] 100 Mbps
12-14 Länk Duplex
[2] Lagra alla menyer
12-28 Lagra datavärden
*[0] Av
12-29 Lagra alltid
[1612] Motorspänning
[1613] Frekvens
[1614] Motorström
[1615] Frekvens [%]
0 - 2147483647 *0
[0] Halv Duplex
*[1] Full Duplex
12-18 Supervisor MAC
*[0] Av
[1616] Moment [Nm]
12-19 Supervisor IP Addr.
[1] På
12-3* EtherNet/IP
[1617] Varvtal [v/m]
[1618] Motor, termisk
0 - 2147483647 *0
12-2* Processdata
12-31 Nätreferens
*[0] Av
12-30 Varningsparameter
[1620] Motorvinkel
[1622] Moment [%]
[1630] DC-busspänning
[1633] Brake Energy /2 min
0 - 255 *Storleksrelaterad
12-20 Kontrollinstans
12-21 Processdatakong. Skriv
[0] Ingen
[1] På
[1634] Kylplattans temp.
[302] Minimireferens
12-32 Nätstyrning
[1635] Växelriktare, termisk
[303] Maximireferens
*[0] Av
[1] På
[1639] Styrkortstemperatur
[1638] SL Controller, status
[312] Öka/minska-värde
[341] Ramp 1, uppramptid
12-33 CIP-revision
[1650] Extern referens
[1652] Återkoppling [enhet]
[342] Ramp 1, nedramptid
[351] Ramp 2, uppramptid
12-34 CIP-produktkod
12-35 EDS-parameter
[1657] Feedback [RPM]
[1660] Digital ingång
[1653] DigiPot-referens
[352] Ramp 2, nedramptid
[380] Jogg, ramptid
[381] Snabbstopp, ramptid
12-37 COS Inhibit Timer
[1663] Terminal 54 inställning
[1661] Terminal 53 inställning
[1662] Analog ingång 53
[416] Momentgräns, motordrift
[414] Motorvarvtal, övre gräns [Hz]
[412] Motorvarvtal, nedre gräns [Hz]
12-38 COS-lter
12-6* Ethernet PowerLink
[1665] Analog utgång 42 [mA]
[1666] Digital utgång
[1664] Analog ingång 54
[558] Plint 33, högt ref./återkopplings värde
[553] Plint 29, högt ref.-/återkopplings värde
[417] Momentgräns, generatordrift
12-60 Node ID
[1667] Pulsingång 29 [Hz]
[590] Busstyrning, digital och relä
[1668] Pulsingång 33 [Hz]
[593] Puls ut 27 busstyrning
12-62 SDO Timeout
[1671] Reläutgång
[1669] Pulsutgång 27 [Hz]
[625] Plint 54, högt ref.-/återkopplings värde
[615] Plint 53, högt ref.-/återkopplings värde
12-63 Basic Ethernet Timeout
[1672] Räknare A
[1673] Räknare B
[748] PCD Feed Forward
[696] Plint 42, busstyrning för utgång
10 10
0 - 9999 *0
0 - 9999 *0
0 - 9999 *0
0 - 9999 *0
9-82 Denierade parametrar (3)
9-83 Denierade parametrar (4)
9-84 Denierade parametrar (5)
0 - 9999 *0
0 - 9999 *0
9-93 Ändrade parametrar (4)
9-92 Ändrade parametrar (3)
9-85 Dened Parameters (6)
9-91 Ändrade parametrar (2)
9-90 Ändrade parametrar (1)
0 - 65535 *0
9-99 Probus, revisionsräknare
9-94 Ändrade parametrar (5)
[16] 10 kbit/s
10-01 Välj baudhastighet
10-** CAN-fältbuss
10-0* Gemensamma inst.
[17] 20 kbit/s
[18] 50 kbit/s
*[20] 125 kbit/s
[21] 250 kbit/s
[22] 500 kbit/s
0 - 9999 *0
0 - 9999 *0
[23] 800 kbit/s
[24] 1 000 kbit/s
1 - 127 *127
10-02 Node ID
0 - 9999 *0
0 - 9999 *0
0 - 255 *0
0 - 255 *0
10-06 Avläsning Mottag.fel, räknare
10-05 Avläsning Sändfel, räknare
10-3* Parameteråtkomst
10-31 Lagra datavärden
[3] Lagra red. meny
10-33 Lagra alltid
*[0] Av
*[0] Av
[2] Lagra alla menyer
[1] På
12-** Ethernet
[1] DHCP
12-0* IP-inställningar
[2] BOOTP
12-00 IP-adresstilldelning
[0] HANDBOK
*[10] DCP
[20] Från nod-ID
12-01 IP-adress
0 - 4294967295 *0
0 - 4294967295 *0
12-02 Subnätmask
12-03 Standard-gateway
MG07A507 Danfoss A/S © 08/2018 Med ensamrätt. 77
Page 82
Bilaga
VLT® Midi Drive FC 280
[29] Starta timer 0
[9] Över I, hög
[30] Starta timer 1
[16] Termisk varning
0 - 100 *Storleksrelaterad
[72] Starta timer 5
[73] Starta timer 6
[61] Återställ räknare B
[70] Starta timer 3
[60] Återställ räknare A
[41] Ange dig. ut. D hög
[40] Ange dig. ut. C hög
[39] Ange dig. ut. B hög
[38] Ange dig. ut. A hög
[35] Ange dig. ut. D låg
[34] Ange dig. ut. C låg
[33] Ange dig. ut. B låg
[31] Starta timer 2
[32] Ange dig. ut. A låg
[25] Komparator 3
[26] Logisk regel 0
[27] Logisk regel 1
[22] Komparator 0
[21] Larm (tripplåst)
[24] Komparator 2
[23] Komparator 1
[20] Larm (tripp)
[18] Reversering
[19] Varning
[17] Nät utanför intervall
[28] Logisk regel 2
[74] Starta timer 7
[71] Starta timer 4
[29] Logisk regel 3
[31] SL-tidsgräns 1
[32] SL-tidsgräns 2
[30] SL-tidsgräns 0
14-** Specialfunktioner
14-0* Växelriktarswitch.
14-01 Switchfrekvens
[0] Ran3
[1] Ran5
[2] 2,0 kHz
[36] Digital ingång DI29
[39] Startkommando
[40] Frekv.omr. stoppad
[35] Digital ingång DI27
[34] Digital ingång DI19
[33] Digital ingång DI18
[3] 3,0 kHz
[42] Autoåterst. tripp
[4] 4,0 kHz
[5] 5,0 kHz
[6] 6,0 kHz
[7] 8,0 kHz
[51] Komparator 5
[60] Logisk regel 4
[61] Logisk regel 5
[50] Komparator 4
14-03 Övermodulering
[0] Av
*[1] På
[73] SL-tidsgräns 6
[74] SL-tidsgräns 7
[83] Rembrott
14-07 Dead Time Compensation Level
13-52 SL Controller-funktioner
*[0] Inaktiverad
[8] 10,0 kHz
[9] 12,0 kHz
[10] 16,0 kHz
[71] SL-tidsgräns 4
[72] SL-tidsgräns 5
[70] SL-tidsgräns 3
0 - 100 % *Storleksrelaterad
0 - 100 % *Storleksrelaterad
[5] Kinetisk back-up, tripp
[3] Utrullning
14-08 Damping Gain Factor
14-09 Dead Time Bias Current Level
14-1* Nät på/av
14-10 Nätfel
*[0] Ingen funktion
[11] Välj förinställd ref. 1
[5] Välj meny 4
[1] Ingen åtgärd
[2] Välj meny 1
[10] Välj förinställd ref. 0
[3] Välj meny 2
[4] Välj meny 3
[1] Kontrollerad nedrampning
[2] Kontrollerad nedrampning och tripp
[14] Välj förinställd ref. 4
[13] Välj förinställd ref. 3
[12] Välj förinställd ref. 2
[4] Kinetisk back-up
[15] Välj förinställd ref. 5
[16] Välj förinställd ref. 6
[6] Larm
[7] Kin. back-up, trip m återställning
[18] Välj ramp 1
[17] Välj förinställd ref. 7
100 - 800 V *Storleksrelaterad
[1] Varning
[2] Inaktiverad
*[0] Tripp
[24] Stopp
[25] Qstop
14-15 Kin. Back-up Trip Recovery Level
[26] DC-broms
[27] Utrullning
[28] Frys utgång
14-12 Funktion vid nätfel
14-11 Nätspänning vid nätfel
[22] Kör
[23] Kör bakåt
[19] Välj ramp 2
1010
Samma val med 13-42
Samma val med 13-41
Samma val med 13-40
[16] Termisk varning
[29] Logisk regel 3
*[0] Av
[18] Reversering
[17] Nät utanför intervall
[31] SL-tidsgräns 1
[30] SL-tidsgräns 0
[1] På
13-01 Starthändelse
[19] Varning
[32] SL-tidsgräns 2
[0] Falskt
[20] Larm (tripp)
[33] Digital ingång DI18
[1] Sant
[22] Komparator 0
[21] Larm (tripplåst)
[35] Digital ingång DI27
[34] Digital ingång DI19
[2] Kör
[3] Inom intervall
[25] Komparator 3
[24] Komparator 2
[23] Komparator 1
[39] Startkommando
*[40] Frekv.omr. stoppad
[36] Digital ingång DI29
[7] Utanför strömomr.
[8] Under I, låg
[4] Enligt referens
[26] Logisk regel 0
[42] Autoåterst. tripp
[9] Över I, hög
[27] Logisk regel 1
[50] Komparator 4
[16] Termisk varning
-9999 - 9999 *0
[9] Över I, hög
13-43 Logisk regel, operator 2
13-2* Timers
13-20 SL Controller-timer
[16] Termisk varning
[17] Nät utanför intervall
13-44 Logisk regel, boolesk 3
0 - 3600 s *0 s
[18] Reversering
13-4* Logiska regler
[19] Varning
13-5* Status
13-40 Logisk regel, boolesk 1
[20] Larm (tripp)
13-51 SL Controller-villkor
*[0] Falskt
*[0] Falskt
[1] Sant
[21] Larm (tripplåst)
[22] Komparator 0
[1] Sant
[2] Kör
[23] Komparator 1
[2] Kör
[3] Inom intervall
[24] Komparator 2
[3] Inom intervall
[4] Enligt referens
[25] Komparator 3
[4] Enligt referens
[7] Utanför strömomr.
[26] Logisk regel 0
[7] Utanför strömomr.
[8] Under I, låg
[27] Logisk regel 1
[8] Under I, låg
[9] Över I, hög
[28] Logisk regel 2
*[0] Inaktiverad
[1] OCH
[2] ELLER
[3] OCH INTE
[4] ELLER INTE
[5] INTE OCH
[6] INTE ELLER
[7] INTE OCH INTE
[8] INTE ELLER INTE
[0] Mindre än (<)
[3] Inom intervall
*[1] Cirka lika med (~)
[4] Enligt referens
[2] Större än (>)
[7] Utanför strömomr.
13-42 Logisk regel, boolesk 2
13-12 Komparatorvärde
[8] Under I, låg
[61] Logisk regel 5
[1] Referens %
[35] Digital ingång DI27
[70] SL-tidsgräns 3
[2] Återkoppling %
[36] Digital ingång DI29
[72] SL-tidsgräns 5
[3] Motorvarvtal
[4] Motorström
[6] Motoreekt
[7] Motorspänning
*[39] Startkommando
[40] Frekv.omr. stoppad
[42] Autoåterst. tripp
[50] Komparator 4
[12] Analog ingång AI53
[51] Komparator 5
[13] Analog ingång AI54
[60] Logisk regel 4
[18] Pulsingång FI29
[61] Logisk regel 5
[19] Pulsingång FI33
[83] Rembrott
[20] Larmnummer
[30] Räknare A
[31] Räknare B
13-11 Komparatoroperator
13-02 Stopphändelse
[0] Falskt
[1] Sant
[2] Kör
[51] Komparator 5
[60] Logisk regel 4
[42] Autoåterst. tripp
[29] Logisk regel 3
[60] Logisk regel 4
[18] Reversering
[30] SL-tidsgräns 0
[61] Logisk regel 5
[19] Varning
[70] SL-tidsgräns 3
[20] Larm (tripp)
[32] SL-tidsgräns 2
[72] SL-tidsgräns 5
[71] SL-tidsgräns 4
[22] Komparator 0
[21] Larm (tripplåst)
[74] SL-tidsgräns 7
[83] Rembrott
[73] SL-tidsgräns 6
[25] Komparator 3
[24] Komparator 2
[23] Komparator 1
[28] Logisk regel 2
[51] Komparator 5
[17] Nät utanför intervall
[36] Digital ingång DI29
[35] Digital ingång DI27
[34] Digital ingång DI19
[33] Digital ingång DI18
[31] SL-tidsgräns 1
[50] Komparator 4
[39] Startkommando
[40] Frekv.omr. stoppad
*[0] Återställ ej SLC
[1] Återställ SLC
13-03 Återställ SLC
13-1* Komparatorer
[26] Logisk regel 0
[27] Logisk regel 1
[28] Logisk regel 2
[29] Logisk regel 3
13-10 Komparatoroperand
[33] Digital ingång DI18
*[0] Inaktiverad
[34] Digital ingång DI19
13-41 Logisk regel, operator 1
[74] SL-tidsgräns 7
[83] Rembrott
[73] SL-tidsgräns 6
[71] SL-tidsgräns 4
78 Danfoss A/S © 08/2018 Med ensamrätt. MG07A507
Page 83
Bilaga Handbok
-4999 - 4999 ProcessCtrlUnit *0
16-52 Återkoppling [enhet]
16-0* Allmän status
16-00 Styrord
ProcessCtrlUnit
0 - 65535 *0
-200 - 200 *0
16-53 DigiPot-referens
-4999 - 4999 ReferenceFeedbackUnit *0
16-01 Referens [enhet]
minut
-30000 - 30000 varv/minut *0 varv/
16-57 Feedback [RPM]
16-6* Ingångar & utgångar
ReferenceFeedbackUnit
-200 - 200 % *0 %
16-03 Statusord
16-02 Referens [%]
0 - 255 *0
-32767 - 32767 *0
0 - 4095 *0
16-60 Digital ingång
0 - 65535 *0
16-05 Faktiskt huvudvärde [%]
16-62 Analog ingång 53
[1] Spänningsläge
[6] Digital ingång
16-61 Terminal 53 inställning
CustomReadoutUnit
0 - 9999 CustomReadoutUnit *0
-200 - 200 % *0 %
16-09 Anpassad avläsning
0 - 0 *0
0 - 20 *0
0 - 20 *1
[0] Strömläge
16-63 Terminal 54 inställning
0 - 1000 kW *0 kW
16-1* Motorstatus
16-10 Eekt [kW]
0 - 20 *0
0 - 0 *0
0 - 20 mA *0 mA
0 - 20 *1
[1] Spänningsläge
16-64 Analog ingång 54
16-65 Analog utgång 42 [mA]
0 - 65535 V *0 V
0 - 1000 hp *0 hk
16-11 Eekt [hk]
16-12 Motorspänning
16-13 Frekvens
0 - 41 *0
0 - 40 *0
16-66 Digital utgång
0 - 6553,5 Hz *0 Hz
0 - 0 *0
0 - 63 *0
16-14 Motorström
0 - 40000 *0
0 - 31 *0
16-71 Reläutgång
-30000 - 30000 varv/minut *0 varv/
16-72 Räknare A
minut
16-18 Motor, termisk
-32768 - 32767 *0
0 - 100 % *0 %
0 - 130000 *0
0 - 130000 *0
16-68 Pulsingång 33 [Hz]
16-15 Frekvens [%]
16-69 Pulsutgång 27 [Hz]
-30000 - 30000 Nm *0 Nm
0 - 6553,5 % *0 %
16-17 Varvtal [v/m]
16-16 Moment [Nm]
16-67 Pulsingång 29 [Hz]
0 - 655,35 A *0 A
-32768 - 32767 *0
16-73 Räknare B
0 - 65535 *0
16-20 Motorvinkel
0 - 2147483647 *0
16-74 Prec.stopp, räknare
-200 - 200 % *0 %
16-22 Moment [%]
-32768 - 32767 *0
0 - 65535 *0
16-80 Fältbuss, CTW 1
16-82 Fältbuss, REF 1
16-8* Fältbuss & FC-por t
0 - 10000 kW *0 kW
0 - 65535 V *0 V
16-33 Brake Energy /2 min
16-3* Drive status
16-30 DC-busspänning
16-85 FC-port, CTW 1
16-35 Växelriktare, termisk
0 - 65535 *1084
16-86 FC-port, REF 1
0 - 255 % *0 %
16-36 Nominell ström, Ström
-32768 - 32767 *0
0 - 655,35 A *0 A
16-9* Avläsn. diagnostik
16-90 Larmord
0 - 655,35 A *0 A
16-37 Nominell ström, växelriktare
0 - 0xFFFFFFFFUL *0
16-91 Larmord 2
0 - 20 *0
16-38 SL Controller, status
0 - 0xFFFFFFFFUL *0
16-39 Styrkortstemperatur
0 - 0xFFFFFFFFUL *0
0 - 0xFFFFFFFFUL *0
16-93 Varningsord 2
16-92 Varningsord
0 - 65535 °C *0 °C
-200 - 200 % *0 %
16-5* Ref. & återk.
16-50 Extern referens
0 - 65535 *0
16-84 Komm. tillval, STW
-128 - 127 °C *0 °C
16-34 Kylplattans temp.
10 10
0 - 0 *0
0 - 0 *0
0 - 0 *0
0 - 0 *0
0 - 0 *0
0 - 0 *0
0 - 255 *0
0 - 30 *Storleksrelaterad
0 - 16 *0
0 - 20 *Storleksrelaterad
0 - 20 *0
0 - 30 *0
0 - 2000 *0
0 - 0xFFFFFFFF *0
0 - 56 *0
0 - 9999 *0
*[0] Återställ inte
[1] Återställ räknare
15-07 Återställ drifttidsräknare
[1] Återställ räknare
*[8] Variable-speed mode
14-55 Utgångslter
*[0] Inget lter
[1] Sinuslter
0 - 60000,000 ReferenceFeedbackUnit
*Storleksrelaterad
14-2* Återst.funktioner
14-20 Återställningsläge
15-3* Alarm Log
15-30 Larmlogg: Felkod
14-6* Auto.nedst.
14-61 Funktion vid växelriktaröverb.
*[0] Manuell återst.
[1] Autoåterställning x 1
15-31 InternalFaultReason
15-4* Drive identiering
*[2] 2,0 kHz
*[0] Tripp
[1] Nedstämpling
14-63 Min Switch Frequency
[5] Autoåterställning x 5
[4] Autoåterställning x 4
[3] Autoåterställning x 3
[2] Autoåterställning x 2
15-40 FC-typ
[3] 3,0 kHz
[6] Autoåterställning x 6
15-41 Eektdel
[4] 4,0 kHz
[5] 5,0 kHz
[8] Autoåterställning x 8
[7] Autoåterställning x 7
15-42 Spänning
[6] 6,0 kHz
[7] 8,0 kHz
[10] Autoåterställn. x 10
[9] Autoåterställning x 9
[8] 10,0 kHz
[11] Autoåterställn. x 15
15-43 Programversion
[10] 16,0 kHz
[9] 12,0 kHz
[12] Autoåterställn. x 20
[13] Obegr. autoåterst.
15-44 Ordered TypeCode
15-45 Faktisk typkodsträng
Level
*[0] Inaktiverad
[1] Aktiverad
14-64 Dead Time Compensation Zero Current
0 - 600 s *10 s
14-22 Driftläge
14-21 Automatisk återstarttid
[14] Återställn. vid nätanslutn.
15-46 Drive Ordering No
sation
14-65 Speed Derate Dead Time Compen-
*[0] Normal drift
[2] Initiering
15-48 LCP-idnr
20 - 1000 Hz *Storleksrelaterad
14-24 Trippfördr. vid strömgräns
14-7* Kompatibilitet
0 - 60 s *60 s
15-49 Program-ID, styrkort
14-70 Kompatibilitetsval
*[0] Ingen funktion
0 - 60 s *60 s
14-25 Trippfördr. vid mom.gräns
15-50 Program-ID, nätkort
[12] VLT2800 3M
14-27 Action At Inverter Fault
[13] VLT2800 3M incl. MAV
[0] Tripp
15-51 Drive Serial Number
15-52 OEM Information
[14] VLT2800 12M
[15] VLT2800 12M inkl. MAV
14-8* Tillval
*[1] Varning
14-28 Produktionsinst.
*[0] Ingen åtgärd
14-88 Option Data Storage
[1] Serviceåterst.
15-57 File Version
14-89 Option Detection
14-29 Servicekod
*[0] Konguration för tillvalsskydd
0 - 0xFFFFFFFF *0
15-59 CSIV-lnamn
15-6* Tillvals-id
[1] Tillåt tillvalsändring
14-9* Felinställningar
14-90 Felnivå
*[3] Tripplås
0 - 500 % *100 %
14-31 Strömgränsreg., integrationstid
14-3* Strömgränsreg.
14-30 Strömgränsreg., prop. förstärkning
15-60 Tillval monterat
[4] Tripp m. fördr. återst.
0,002 - 2 s *0,020 s
15-61 Programversion för tillval
[5] Flygande start
15-** Driveinformation
1 - 100 ms *5 ms
14-32 Strömgränsreg., ltertid
15-70 Tillval för fack A
15-71 Fack A Tillval SW version
0 - 0x7f. h *0 h
15-01 Drifttid
15-0* Driftdata
15-00 Drifttimmar
40 - 90 % *66 %
14-41 Minimal AEO-magnetisering
14-4* Energioptimering
14-40 Var. moment, nivå
15-9* Parameterinfo
15-92 Denierade parametrar
15-97 Application Type
15-98 Drive identiering
15-99 Parametermetadata
16-** Dataavläsningar
0 - 2147483647 *0
0 - 65535 *0
15-04 Överhettningar
15-05 Överspänningar
[0] Av
*[1] På
14-52 Fläktstyrning
0 - 65535 *0
15-06 Återställ kWh-räknare
[6] Constant-o mode
[5] Constant-on mode
*[0] Återställ inte
[7] On-when-Inverter-is-on-else-o Mode
0 - 2147483647 kWh *0 kWh
0 - 0x7f. h *0 h
15-02 kWh-räkneverk
15-03 Nättillslag
0 - 200 % *100 %
40 - 75 % *66 %
14-44 d-axis current optimization for IPM
14-5* Miljö
14-51 Kompensation likspänning
15-53 Serienummer för nätkort
0 - 65535 *0
[3] Återställning av programvara
MG07A507 Danfoss A/S © 08/2018 Med ensamrätt. 79
Page 84
Bilaga
VLT® Midi Drive FC 280
37-03 Pos. Typ
1 - 10000 *512
*[0] Absolute
34-** Dataavläsning rörelsekontroll
[1] Relativ
37-04 Pos. Velocity
34-0* PCD, skrivpar.
34-01 PCD 1 Write For Application
1 - 30000 varv/minut *100 varv/minut
37-05 Pos. Ramp Up Time
0 - 65535 *0
34-02 PCD 2 Write For Application
50 - 100000 ms *5000 ms
37-06 Pos. Ramp Down Time
0 - 65535 *0
34-03 PCD 3 Write For Application
50 - 100000 ms *5000 ms
37-07 Pos. Auto Brake Ctrl
0 - 65535 *0
34-04 PCD 4 Write For Application
[0] Inaktivera
*[1] Aktivera
0 - 65535 *0
34-05 PCD 5 Write For Application
0 - 10000 ms *0 ms
37-08 Pos. Hold Delay
0 - 65535 *0
34-06 PCD 6 Write For Application
0 - 1000 ms *200 ms
37-09 Pos. Coast Delay
0 - 65535 *0
34-07 PCD 7 Write For Application
0 - 1000 ms *200 ms
37-10 Pos. Brake Delay (Bromsfördröjning)
0 - 65535 *0
34-08 PCD 8 Write For Application
0 - 1073741824 *0
37-11 Pos. Brake Wear Limit
0 - 65535 *0
34-09 PCD 9 Write For Application
37-12 Pos. PID Anti Windup
[0] Inaktivera
0 - 65535 *0
34-10 PCD 10 Write For Application
*[1] Aktivera
0 - 65535 *0
1 - 10000 *1000
37-13 Pos. PID Output Clamp
34-2* PCD, läspar.
34-21 PCD 1 Read For Application
*[0] DI
37-14 Pos. Kontrollerad Source
0 - 65535 *0
34-22 PCD 2 Read For Application
[1] FieldBus
37-15 Pos. Direction Block
0 - 65535 *0
34-23 PCD 3 Read For Application
*[0] No Blocking
[1] Block Reverse
0 - 65535 *0
34-24 PCD 4 Read For Application
[2] Block Forward
37-17 Pos. Ctrl Fault Behaviour
0 - 65535 *0
34-25 PCD 5 Read For Application
[1] Bromsa direkt
*[0] Nedrampning och broms
0 - 65535 *0
34-26 PCD 6 Read For Application
*[0] Inget fel
37-18 Pos. Ctrl Fault Reason
0 - 65535 *0
34-27 PCD 7 Read For Application
[1] Homing Needed
[2] Pos. HW Limit
0 - 65535 *0
34-28 PCD 8 Read For Application
[3] Neg. HW Limit
[4] Pos. SW Limit
0 - 65535 *0
34-29 PCD 9 Read For Application
[5] Neg. SW Limit
[7] Brake Wear Limit
0 - 65535 *0
34-30 PCD 10 Read For Application
[8] Quick Stop
0 - 65535 *0
[12] Rev. Drift
[9] PID Error Too Big
34-5* Processdata
34-50 Faktisk position
[13] Fwd. Drift
[20] Det går inte att hitta hem-läget
-1073741824 - 1073741824 *0
34-56 Spårningsfel
37-19 Pos. nytt index
-2147483647 - 2147483647 *0
0 - 255 *0
37-** Application Settings
37-0* ApplicationMode
37-00 Application Mode
*[0] Frekvensom.läge
[2] Position Control
-1073741824 - 1073741824 *0
37-02 Pos. Target
*[0] 24 V-pulsgivare
37-01 Pos. Återkopplingskälla
37-1* Position Control
1010
0 - 2 *0
0 - 720 h *720 h
1 - 65535 *1
1 - 65535 *1
1 - 2147483648 *2000000
1 - 30000 varv/minut *1500 varv/minut
50 - 3600000 ms *1000 ms
-1073741824 - 1073741824 *0
1 - 1000 ms *10 ms
-1500 - 1500 varv/minut *100 varv/
minut
-1073741824 - 1073741824 *500000
-1073741824 - 1073741824 *-500000
[3] Tillåt både nedladdning och överföring
[2] Tillåt endast överföring
31-41 MM - Information
*[1] Tillåt endast nedladdning
21-20 Utök. 1, norm./inv. reglering
*[0] Normal
[1] Invert.
21-21 Utök. 1, prop. förstärkning
0 - 0xFFFFFFFFUL *0
0 - 0xFFFFFFFFUL *0
16-94 Utök. Statusord
16-95 Utök. statusord 2
31-42 Kongurera minnesmodulåtkomst
0 - 10 *0,01
21-22 Utök. 1, integraltid
0 - 0xFFFFFFFFUL *0
16-97 Larmord 3
31-43 Radera_MM
*[0] Ingen åtgärd
[1] Ställ in MM till endast avläsning
[2] Ställ in MM till läs/skriv
0,01 - 10000 s *10000 s
0 - 10 s *0 s
21-23 Utök. 1, dierentieringstid
21-24 Utök. 1, di. förstärkn.gräns
0 - 4294967295 *0
16-98 Varningsord 3
18-** Dataavläsningar 2
18-5* Minnesmodulavläsning
*[0] Ingen funktion
[1] Radera MM
31-47 Tidsbegränsad funktion
1 - 50 *5
22-** Appl. Funktioner
22-0* Övrigt
0 - 0xFFFFFFFFUL *0
18-51 Minnesmodulvarning, orsak
18-52 Minnesmodul-ID
*[0] Inaktiverad
[1] Aktiverad
31-48 Tidsgräns, kvarstående tid
[1] Förenklad
*[0] Normal
22-02 Energisparläge CL-styrläge
0 - 0 *0
18-9* PID-avläsningar
18-90 Process PID-fel
32-** Inställningar rörelsekontrolltillval
32-1* Användarenhet
0 - 600 s *10 s
22-4* Energisparläge
22-40 Minsta körtid
-200 - 200 % *0 %
-200 - 200 % *0 %
18-91 Process-PID-utgång
32-11 Nämnare, anv. enhet
0 - 600 s *10 s
22-41 Minsta vilotid
-200 - 200 % *0 %
18-92 Process-PID, byglad utgång
32-12 Täljare, anv.enhet
0 - 400,0 *10
22-43 Återstartsvarvtal [Hz]
-200 - 200 % *0 %
18-93 Först. skalad utfrekvens för process-PID
32-6* PID
32-67 Max. tolerans för positionsfel
0 - 100 % *10 %
22-44 Återstart, ref./ÅK-skilln.
22-45 Börvärdesökning
21-** Utök. återkoppling
21-0* Utök. PID-autoopt.
21-09 Extended PID Enable
32-8* Hastighet och acceleration
32-80 Max. tillåten hastighet
-100 - 100 % *0 %
22-46 Max. ökningstid
*[0] Inaktiverad
[1] Aktiv. utök. CL1 PID
0 - 600 s *60 s
21-1* Utök. ÅK 1 ref./ÅK
32-81 Rörelsekontroll snabbstopp ramp
0 - 400,0 *0
22-47 Energisparhastighet [Hz]
-999999,999 - 999999,999 ExtPID1Unit
21-11 Utök. 1, minimireferens
*[0] Inte tvingad
33-** Av. rörelsekontroll Inställningar
33-0* HOME-rörelse
33-00 Homing-läge
0 - 3600 s *0 s
0 - 3600 s *0 s
22-49 Fördröjningstid återstart
22-48 Fördröjningstid
-999999,999 - 999999,999 ExtPID1Unit
*100 ExtPID1Unit
*0 ExtPID1Unit
21-12 Utök. 1, maximireferens
[1] Tvingad manuell homing
[2] Tvingad automatisk homing
22-6* Rembrottsdetektering
22-60 Rembrott, funktion
21-13 Utök. 1, referenskälla
*[0] Ingen funktion
33-02 Home-ramptid
33-01 Home-förskjutning
*[0] Av
[1] Varning
[2] Tripp
22-61 Rembrott, moment
[7] Frekvensingång 29
[8] Frekvensingång 33
[1] Analog ingång 53
[2] Analog ingång 54
[3] Framåt inget index
33-04 Homing-funktion
33-03 Homing-hastighet
5 - 100 % *10 %
21-14 Utök. 1, återk.källa
*[1] Bakåt inget index
0 - 600 s *10 s
22-62 Rembrott, fördröjning
30-** Specialfunktioner
30-2* Avanc. startjust.
[3] Frekvensingång 29
*[0] Ingen funktion
[1] Analog ingång 53
[2] Analog ingång 54
30-20 High Starting Torque Time [s]
[4] Frekvensingång 33
33-4* Gränshantering
33-41 Negativ programgräns
0 - 60 s *Storleksrelaterad
30-21 High Starting Torque Current [%]
-999999,999 - 999999,999 ExtPID1Unit
21-15 Utök. 1, börvärde
33-42 Positiv programgräns
0 - 200,0 % *Storleksrelaterad
30-22 Låst rotor-funktion
*[0] Av
-999999,999 - 999999,999 ExtPID1Unit
*0 ExtPID1Unit
21-17 Utök. 1, referens [enhet]
33-43 Negativt programläge aktivt
*[0] Inaktiv
[1] Aktiv
0,05 - 1 s *0,10 s
[1] På
30-23 Locked Rotor Detection Time [s]
-999999,999 - 999999,999 ExtPID1Unit
*0 ExtPID1Unit
21-18 Utök. 1, återk. [enhet]
*[0] Inaktiv
[1] Aktiv
33-47 Läge i målfönster
33-44 Positiv programgräns aktiv
31-** Specialalternativ
31-4* Minnesmodul
31-40 Minnesmodulfunktion
[0] Inaktiverad
*0 ExtPID1Unit
0 - 100 % *0 %
21-19 Utök. 1, uteekt [%]
21-2* Ext. ÅK 1 PID
80 Danfoss A/S © 08/2018 Med ensamrätt. MG07A507
Page 85

Index Handbok
Index
A
AMA med T27 anslutet....................................................................... 45
Å
Åtdragningsmoment för plint.......................................................... 64
Återkoppling.......................................................................................... 23
Återställning...................................................................... 30, 31, 32, 49
Återvinning............................................................................................... 6
A
Auto on.............................................................................................. 31, 35
Avsett användningsområde................................................................ 4
Avståndskrav.......................................................................................... 10
B
Bakre plåt................................................................................................. 10
Behörig personal..................................................................................... 7
Bygel.......................................................................................................... 20
D
Digital ingång........................................................................................ 20
Hög spänning.................................................................................... 7, 24
Horisontell montering........................................................................ 11
Huvudmeny..................................................................................... 28, 30
I
IEC 61800-3...................................................................................... 18, 60
Ingång
Eekt.................................................................................. 5, 18, 23, 24
Inspänning......................................................................................... 24
Inström................................................................................................. 13
Kabeldragning för inström........................................................... 23
Plint................................................................................................ 18, 24
Ström.................................................................................................... 18
Ingångar
Analog ingång................................................................................... 61
Digital ingång.................................................................................... 61
Pulsingång.......................................................................................... 62
Initiering
Manuell procedur............................................................................ 32
Procedur.............................................................................................. 32
Installation.............................................................................................. 23
Installation sida vid sida..................................................................... 10
Installationsmiljö.................................................................................. 10
Instruktion för kassering....................................................................... 6
Isolerat nät.............................................................................................. 18
Isolering mot störning........................................................................ 23
E
Eektfaktor......................................................................................... 5, 23
EMC............................................................................................................ 60
EMC-korrekt installation..................................................................... 13
Energieektivitet.................................................................... 57, 58, 59
Energieektivitetsklass....................................................................... 60
Extern regulator....................................................................................... 4
Externt kommando................................................................................ 5
Extrautrustning..................................................................................... 23
F
Fabriksinställning.................................................................................. 31
Fel
Fellogg................................................................................................. 30
Fjärrkommando....................................................................................... 4
Flytande delta........................................................................................ 18
Förkortning............................................................................................. 70
G
Godkännande och certikat............................................................... 6
H
Hand on.................................................................................................... 31
J
Jord
Jordanslutning.................................................................................. 23
Jordledning........................................................................................ 13
Jordat delta............................................................................................. 18
Jordning.............................................................................. 17, 18, 23, 24
K
Kabel längd............................................................................................. 61
Kabeldimension.................................................................................... 17
Kabeldragning....................................................................................... 23
Kabeldragning för utström............................................................... 23
Körkommando....................................................................................... 35
Kundrelä................................................................................................... 42
Kylning...................................................................................................... 10
Kylningsavstånd.................................................................................... 23
L
Läckström........................................................................................... 8, 13
Lagring..................................................................................................... 10
Larmlogg................................................................................................. 30
Lastdelning................................................................................................ 7
Ledararea................................................................................................. 61
MG07A507 Danfoss A/S © 08/2018 Med ensamrätt. 81
Page 86

Index
VLT® Midi Drive FC 280
Ledning.................................................................................................... 23
Ledningsstorlek..................................................................................... 13
Likström...................................................................................................... 5
Lokal styrning........................................................................................ 31
Lyft............................................................................................................. 10
M
Manöverknapp............................................................................... 25, 30
Märkskylt.................................................................................................... 9
Maximalbrytare..................................................................................... 23
Meny.......................................................................................................... 35
Menyknapp...................................................................................... 25, 30
Menystruktur.......................................................................................... 30
Moment
Momentegenskap........................................................................... 60
Montering........................................................................................ 10, 23
Motor
Data....................................................................................................... 34
Motordata........................................................................................... 32
Motoreekt.......................................................................... 13, 30, 60
Motorkabel.................................................................................. 13, 17
Motorström........................................................................................ 30
Rotation............................................................................................... 34
Skydd...................................................................................................... 4
Status...................................................................................................... 4
Ström................................................................................................ 5, 33
Termiskt motorskydd........................................................................ 6
N
Nät
Försörjning (L1/N, L2/L, L3).......................................................... 59
Försörjningsdata.............................................................................. 57
Spänning............................................................................................. 30
Nätanslutning........................................................................................ 13
Nätspänning.................................................................................... 24, 62
Navigeringsknapp......................................................................... 25, 30
Nedstämpling........................................................................................ 60
Numerisk display.................................................................................. 25
O
Oavsiktlig start.................................................................................. 7, 49
Omgivande förhållande..................................................................... 60
Ö
Överströmsskydd.................................................................................. 13
P
PELV.................................................................................................... 47, 63
Plintar
Styrplint........................................................................................ 31, 53
Utgångsplint...................................................................................... 24
Potentialutjämning.............................................................................. 14
Praxis......................................................................................................... 70
Programmering....................................................................... 20, 30, 31
Pulsgivarrotation.................................................................................. 34
R
Referens................................................................................................... 30
Reläutgång.............................................................................................. 63
RFI-lter.................................................................................................... 18
S
Säkerhet...................................................................................................... 8
Säkring........................................................................................ 13, 23, 64
Seriell kommunikation
Seriell kommunikation.............................................. 22, 31, 49, 63
USB-seriell kommunikation.......................................................... 63
Service...................................................................................................... 49
SIL2............................................................................................................... 6
SILCL av SIL2.............................................................................................. 6
Skärmad kabel....................................................................................... 23
Skydd för förgreningsenhet.............................................................. 64
Snabb transient..................................................................................... 14
Snabbmeny...................................................................................... 26, 30
Spänningsnivå....................................................................................... 61
Specikation........................................................................................... 22
Standard och krav för STO................................................................... 6
Start........................................................................................................... 32
STO
Aktivering........................................................................................... 41
Automatisk omstart................................................................. 41, 42
Idrifttagningstest............................................................................. 42
Inaktivering........................................................................................ 41
Manuell omstart........................................................................ 41, 42
Tekniska data..................................................................................... 44
Underhåll............................................................................................ 42
Stötar......................................................................................................... 10
Strömbrytare.......................................................................................... 24
Styrkort
+10 V DC-utgång............................................................................. 63
Prestanda............................................................................................ 63
Seriell kommunikation med RS485........................................... 63
USB-seriell kommunikation.......................................................... 63
Styrning
Egenskap............................................................................................. 63
Kabeldragning.................................................................... 13, 20, 23
Styrplint........................................................................................ 31, 53
Styrning av mekanisk broms............................................................ 20
Symbol...................................................................................................... 70
Systemåterkoppling............................................................................... 4
82 Danfoss A/S © 08/2018 Med ensamrätt. MG07A507
Page 87
Index Handbok
T
Termiskt skydd......................................................................................... 6
Termistor.................................................................................................. 47
Tillvalsutrustning.................................................................................. 24
Transientskydd......................................................................................... 5
U
Underhåll................................................................................................. 49
Urladdningstid......................................................................................... 8
Utan återkoppling................................................................................ 63
Utgångar
Analog utgång.................................................................................. 62
Digital utgång................................................................................... 62
Utström.................................................................................................... 62
V
Varnings- och larmlista....................................................................... 53
Varvtalsreferens.............................................................................. 35, 45
Växelströmsingång.......................................................................... 5, 18
Växelströmsnät................................................................................. 5, 18
Växelströmsvågform.............................................................................. 5
Vibrationer.............................................................................................. 10
Y
Ytterligare resurser................................................................................. 4
MG07A507 Danfoss A/S © 08/2018 Med ensamrätt. 83
Page 88
Danfoss tar inte på sig något ansvar för eventuella fel i kataloger, broschyrer eller annat tryckt material. Danfoss förbehåller sig rätten till konstruktionsändringar av sina produkter utan föregående
meddelande. Detsamma gäller produkter upptagna på innestående order under förutsättning att redan avtalade specikationer inte ändras. Alla varumärken i det här materialet tillhör respektive
företag. Danfoss och Danfoss logotyp är varumärken som tillhör Danfoss A/S. Med ensamrätt.
Danfoss A/S
Ulsnaes 1
DK-6300 Graasten
vlt-drives.danfoss.com
132R0153 MG07A507 08/2018
*MG07A507*
 Loading...
Loading...