

ENGINEERING TOMORROW
프로그래밍 지침서
®
VLT
소프트웨어 버전: 3.30
AQUA Drive FC 202
www.DanfossDrives.com
차례 프로그래밍 지침서
차례
1 소개
1.1 설명서의 용도
1.2 추가 리소스
1.3 소프트웨어 버전
1.4 승인
1.5 기호
1.6 정의
1.6.1 Frequency converter(AC 드라이브) 4
1.6.2 입력 4
1.6.3 모터 4
1.6.4 지령 5
1.6.5 기타 5
1.7 약어, 기호 및 규약
1.8 안전
1.9 전기 배선
2 프로그래밍 방법
2.1 그래픽 및 숫자 방식의 현장 제어 패널
4
4
4
4
4
4
4
7
8
10
13
13
2.2 그래픽 LCP의 프로그래밍 방법
2.2.1 LCP 표시창 14
2.2.2 여러 AC 드라이브 간의 파라미터 설정값 복사 17
2.2.3 표시 모드 17
2.2.4 표시모드 – 읽기 선택 17
2.2.5 파라미터 셋업 18
2.2.6 단축 메뉴 키 기능 18
2.2.7 단축 메뉴, Q3 기능 셋업 19
2.2.8 단축 메뉴, Q4 SmartStart 20
2.2.9 주 메뉴 모드 20
2.2.10 파라미터 선택 21
2.2.11 데이터의 수정 21
2.2.12 텍스트 값의 변경 21
2.2.13 데이터 값의 변경 21
2.2.14 이미 설정되어 있는 값으로 숫자 데이터 값 변경 22
2.2.15 값, 단계적 22
2.2.16 인덱싱된 파라미터 읽기 및 프로그래밍 22
13
2.2.17 숫자 방식의 현장 제어 패널을 이용한 프로그래밍 방법 22
2.2.18 LCP 키 24
3 파라미터 설명
3.1 파라미터 선택
MG20OB39 Danfoss A/S © 05/2018 All rights reserved. 1
26
26
차례
VLT® AQUA Drive FC 202
3.2 파라미터 0-** 운전 및 디스플레이
3.3 파라미터 1-** 부하/모터
3.4 파라미터 2-** 제동
3.5 파라미터 3-** 지령/가감속
3.6 파라미터 4-** 한계/경고
3.7 파라미터 5-** 디지털 입/출력
3.8 파라미터 6-** 아날로그 입/출력
3.9 파라미터 8-** 통신 및 옵션
3.10 파라미터 9-** 프로피버스
3.11 파라미터 10-** 캔 필드버스
3.12 파라미터 13-** 스마트 논리
3.13 파라미터 14-** 특수 기능
3.14 파라미터 15-** 인버터 정보
3.15 파라미터 16-** 정보 읽기
3.16 파라미터 18-** 데이터 읽기 2
3.17 파라미터 20-** FC 폐회로
3.18 파라미터 21-** 확장형 폐회로
27
42
65
69
76
80
97
108
122
122
126
150
160
169
176
179
190
3.19 파라미터 22-** 어플리케이션 기능
3.20 파라미터 23-** 시간 관련 기능
3.21 파라미터 24-** 어플리케이션 기능 2
3.22 파라미터 25-** 캐스케이드 컨트롤러
3.23 파라미터 26-** 아날로그 I/O 옵션 MCB 109
3.24 파라미터 27-** 캐스케이드 CTL 옵션
3.25 파라미터 29-** 수처리 어플리케이션 기능
3.26 파라미터 30-** 특수 기능
3.27 파라미터 31-** 바이패스 옵션
3.28 파라미터 35-** 센서 입력 옵션
4 파라미터 목록
4.1 파라미터 옵션
4.1.1 초기 설정 277
4.1.2 0-** 운전/표시 278
4.1.3 1-** 부하/모터 280
4.1.4 2-** 제동 장치 282
4.1.5 3-** 지령/가감속 283
199
214
226
231
243
250
264
272
273
274
277
277
4.1.6 4-** 한계/경고 284
4.1.7 5-** 디지털 입/출력 285
4.1.8 6-** 아날로그 입/출력 287
4.1.9 8-** 통신 및 옵션 289
4.1.10 9-** 프로피드라이브 290
4.1.11 10-** 캔 필드버스 291
2 Danfoss A/S © 05/2018 All rights reserved. MG20OB39
차례 프로그래밍 지침서
4.1.12 13-** 스마트 논리 292
4.1.13 14-** 특수 기능 293
4.1.14 15-** 인버터 정보 294
4.1.15 16-** 정보 읽기 296
4.1.16 18-** 정보 및 읽기 298
4.1.17 20-** 인버터 폐회로 299
4.1.18 21-** 확장형 폐회로 300
4.1.19 22-** 애플리 기능 302
4.1.20 23-** 시간 관련 기능 304
4.1.21 24-** 애플리 기능 2 305
4.1.22 25-** 캐스케이드 컨트롤러 305
4.1.23 26-** 아날로그 I/O 옵션 306
4.1.24 29-** 수처리 어플리케이션 기능 308
4.1.25 30-** 특수 기능 310
4.1.26 31-** 바이패스 옵션 310
4.1.27 35-** 센서 입력 옵션 310
5 고장수리
5.1 상태 메시지
5.1.1 경고/알람 메시지 312
인덱스
312
312
318
MG20OB39 Danfoss A/S © 05/2018 All rights reserved. 3
소개
VLT® AQUA Drive FC 202
1
1 소개
1.1 설명서의 용도
프로그래밍 지침서는 다양한 어플리케이션에 맞게 AC
드라이브를 프로그래밍하는데 필요한 정보를 제공합니
다.
VLT®는 등록 상표입니다.
1.2 추가 리소스
기타 리소스는 AC 드라이브의 고급 기능 및 프로그래
밍을 이해할 수 있도록 제공됩니다.
VLT® AQUA Drive FC 202 사용 설명서
•
AC 드라이브의 기계적인 설치와 전기적인 설
치에 대해 설명합니다.
VLT® AQUA Drive FC 202
•
터 제어 시스템을 설계할 수 있도록 성능 및
기능에 관한 자세한 정보를 제공합니다.
옵션 장비와 함께 운전하기 위한 지침서.
•
보충 자료 및 설명서는 댄포스에서 구할 수 있습니다.
관련 목록은
technical-documentation/
1.3
소프트웨어 버전 번호는
할 수 있습니다.
drives.danfoss.com/knowledge-center/
참조.
소프트웨어 버전
소프트웨어 버전: 3.30
파라미터 15-43 소프트웨어 버전
설계지침서
1.4 승인
는
는 모
에서 확인
주의
경상 또는 중등도 상해로 이어질 수 있는 잠재적으로
위험한 상황을 나타냅니다. 이는 또한 안전하지 않은 실
제 상황을 알리는 데도 이용될 수 있습니다.
주의 사항
장비 또는 자산의 파손으로 이어질 수 있는 상황 등의
중요 정보를 나타냅니다.
1.6 정의
1.6.1 Frequency converter(AC 드라이
브)
I
VLT,MAX
최대 출력 전류입니다.
I
VLT,N
AC 드라이브에서 공급하는 정격 출력 전류입니다.
U
VLT,MAX
최대 출력 전압입니다.
1.6.2 입력
제어 명령
LCP 및 디지털 입력으로 연결된 모터를 기동 및 정지
합니다.
기능은 두 그룹으로 구분됩니다.
그룹 1의 기능은 그룹 2의 기능에 우선합니다.
그룹 1 리셋, 코스팅(프리런) 정지, 리셋 및 코스팅(프리런)
정지, 순간 정지, 직류 제동, 정지, [OFF] 키.
그룹 2 기동, 펄스 기동, 역회전, 역회전 기동, 조그, 출력 고
정.
표 1.1 기능 그룹
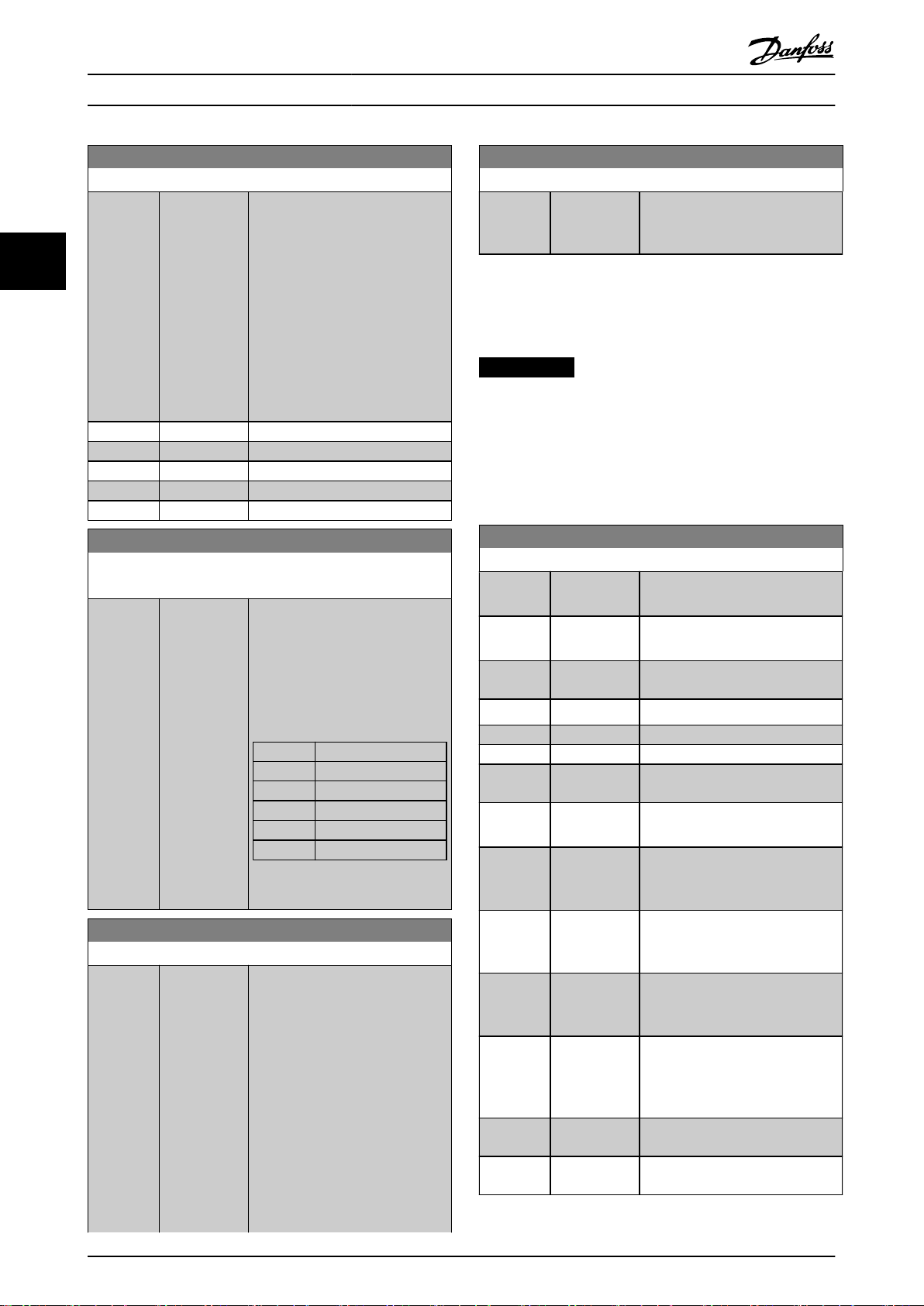
1.6.3 모터
모터 구동 중
1.5 기호
본 지침서에 사용된 기호는 다음과 같습니다.
경고
사망 또는 중상으로 이어질 수 있는 잠재적으로 위험한
상황을 나타냅니다.
4 Danfoss A/S © 05/2018 All rights reserved. MG20OB39
출력축에서 생성된 토오크와 0 RPM에서 최대 속도까지
의 모터 속도입니다.
f
JOG
디지털 단자를 통해 조그 기능이 활성화되었을 때의 모
터 주파수입니다.
f
M
모터 주파수입니다.
f
MAX
최대 모터 주파수입니다.
f
MIN
최소 모터 주파수입니다.
175ZA078.10
Pull-out
RPM
Torque
소개 프로그래밍 지침서
f
M,N
모터 정격 주파수(모터 명판)입니다.
I
M
(실제) 모터 전류입니다.
I
M,N
모터 정격 전류(모터 명판)입니다.
n
M,N
모터 정격 회전수(명판 데이터)입니다.
n
s
동기식 모터 회전수입니다.
2 × par . 1 − 23 × 60s
ns=
n
slip
par . 1 − 39
모터 미끄럼입니다.
P
M,N
모터 정격 출력(모터 명판, kW 또는 HP 단위)입니다.
T
M,N
모터 정격 토오크입니다.
U
M
순간 모터 전압입니다.
U
M,N
모터 정격 전압(명판 데이터)입니다.
브레이크어웨이 토오크
1.6.4 지령
아날로그 지령
아날로그 입력 53 또는 54에 전달되는 신호(전압 또는
전류)입니다.
이진수 지령
직렬 통신 포트에 전달되는 신호입니다.
프리셋 지령
프리셋 지령은 -100%에서 +100% 사이의 지령 범위에
서 설정할 수 있는 지령입니다. 디지털 단자를 통해 8개
의 프리셋 지령을 선택할 수 있습니다.
펄스 지령
디지털 입력(단자 29 또는 33)에 전달된 펄스 주파수
신호입니다.
Ref
MAX
100% 전체 범위 값(일반적으로 10 V, 20 mA)에서의
지령 입력과 결과 지령 간의 관계를 결정합니다. 최대
지령 값은
Ref
MIN
파라미터 3-03 최대 지령
에서 설정됩니다.
0% 값(일반적으로 0 V, 0 mA, 4 mA)에서의 지령 입력
과 결과 지령 간의 관계를 결정합니다. 최소 지령 값은
파라미터 3-02 최소 지령
에서 설정됩니다.
1.6.5 기타
1
1
그림 1.1 브레이크어웨이 토오크
η
VLT
AC 드라이브 효율은 입력 전원 및 출력 전원 간의 비율
로 정의됩니다.
기동 불가 명령
제어 명령 그룹 1에 속하는 정지 명령입니다(
조).
표 1.1
참
정지 명령
제어 명령 그룹 1에 속하는 정지 명령입니다(
표 1.1
참
조).
아날로그 입력
아날로그 입력은 AC 드라이브의 각종 기능을 제어하는
데 사용합니다.
아날로그 입력에는 다음과 같은 두 가지 형태가 있습니
다.
전류 입력, 0-20mA 및 4-20mA
전압 입력, -10 V DC ~ +10 V DC.
아날로그 출력
아날로그 출력은 0-20mA 신호, 4-20mA 신호를 공급
할 수 있습니다.
자동 모터 최적화, AMA
AMA 알고리즘은 정지 상태에서 연결된 모터의 전기적
인 파라미터를 결정합니다.
제동 저항
제동 저항은 재생 제동 시에 발생하는 제동 동력을 흡
수하기 위한 모듈입니다. 재생 제동 동력은 직류단 전압
을 증가시키고, 제동 초퍼는 이 때 발생한 동력을 제동
저항에 전달되도록 합니다.
CT 특성
컨베이어 벨트, 배수 펌프나 크레인 등에는 일정 토오크
특성이 사용됩니다.
디지털 입력
디지털 입력은 AC 드라이브의 각종 기능을 제어하는
데 사용할 수 있습니다.
디지털 출력
AC 드라이브는 24VDC(최대 40 mA) 신호를 공급할 수
있는 두 개의 고정 상태 출력을 가지고 있습니다.
MG20OB39 Danfoss A/S © 05/2018 All rights reserved. 5

소개
VLT® AQUA Drive FC 202
1
DSP
Digital Signal Processor(디지털 신호 처리 장치)의 약
자입니다.
ETR
Electronic Thermal Relay(전자 써멀 릴레이)의 약자
이며 실제 부하 및 시간을 기준으로 한 써멀 부하 계산
입니다. 모터 온도의 측정을 그 목적으로 합니다.
HIPERFACE
HIPERFACE®는 Stegmann의 등록 상표입니다.
초기화
초기화가 실행(
라이브가 초기 설정으로 복원됩니다.
단속적 듀티 사이클
단속적 듀티 정격은 듀티 사이클의 시퀀스를 나타냅니
다. 각각의 사이클은 부하 기간과 부하 이동 기간으로
구성되어 있습니다. 단속 부하로 운전하거나 정상 부하
로 운전할 수 있습니다.
LCP
현장 제어 패널은 AC 드라이브를 제어하고 프로그래밍
하기에 완벽한 인터페이스로 구성되어 있습니다. 제어
패널은 탈부착이 가능하며 설치 키트 옵션으로 AC 드
라이브에서 최대 3미터(10 ft) 거리(즉, 전면 패널)에 설
치할 수 있습니다.
NLCP
AC 드라이브를 제어하고 프로그래밍하기 위한 숫자 방
식의 현장 제어 패널 인터페이스입니다. 표시창은 숫자
로 되어 있으며 패널은 공정 값을 나타내는 데 사용됩
니다. NLCP에는 저장 및 복사 기능이 없습니다.
lsb
Least significant bit(최하위 비트)의 약자입니다.
msb
Most significant bit(최상위 비트)의 약자입니다.
MCM
미국의 케이블 단면적 측정 단위인 Mille Circular Mil
의 약자입니다. 1 MCM=0.5067 mm2.
온라인/오프라인 파라미터
온라인 파라미터에 대한 변경 사항은 데이터 값이 변경
되면 즉시 적용됩니다. [OK]를 눌러 오프라인 파라미터
에 대한 변경 사항을 활성화합니다.
공정 PID
PID 제어는 변화하는 부하에 따라 출력 주파수를 자동
조정하여 원하는 속도, 압력, 온도 등을 유지합니다.
PCD
Process control data(공정 제어 데이터)의 약자입니다.
전원 사이클
표시창(LCP)이 꺼질 때까지 주전원을 차단한 다음 다시
전원을 켭니다.
펄스 입력/인크리멘탈 엔코더
모터 회전수에 대한 정보를 피드백하는 외부 디지털 펄
스 전송 장치입니다. 엔코더는 정밀한 속도 제어가 요구
되는 어플리케이션에 사용됩니다.
®
파라미터 14-22 운전 모드
)되면 AC 드
RCD
Residual current device(잔류 전류 장치)의 약자입니
다.
셋업
4개의 셋업에 파라미터 설정을 저장할 수 있습니다. 4
개의 파라미터 셋업을 서로 변경할 수 있으며 하나의
셋업이 활성화되어 있더라도 다른 셋업을 편집할 수 있
습니다.
SFAVM
Stator Flux-oriented Asynchronous Vector
Modulation(고정자속 지향성 비동기식 벡터 변조)이라
는 스위칭 방식입니다(
미끄럼 보상
AC 드라이브는 모터의 미끄럼 보상을 위해 모터의 회
전수를 거의 일정하도록 하는 모터 부하를 측정하고 그
에 따라 주파수를 보완하여 줍니다.
SLC
SLC(스마트 로직 컨트롤러)는 관련 사용자 정의 이벤트
가 SLC에 의해 TRUE(참)로 연산될 때 실행되는 사용
자 정의 동작 단계입니다. (
스마트 논리
STW
상태 워드입니다.
FC 표준 버스통신
FC 프로토콜이나 MC 프로토콜이 있는 RS485 버스통
신이 여기에 해당합니다.
(를) 참조하십시오.
THD
Total Harmonic Distortion(총 고조파 왜곡)은 고조파
의 총 기여도를 나타냅니다.
써미스터
온도에 따라 작동되는 저항으로, AC 드라이브 또는 모
터에 설치되어 있습니다.
트립
예를 들어, AC 드라이브의 온도가 너무 높거나 AC 드
라이브가 모터, 공정 또는 기계장치의 작동을 방해하는
등 결함이 발생한 상태입니다. 결함의 원인이 사라져야
AC 드라이브가 재기동할 수 있습니다. 트립 상태를 취
소하려면 AC 드라이브를 재기동합니다. 사용자의 안전
을 위해 트립 상태를 사용하지 마십시오.
트립 잠김
AC 드라이브는 결함이 발생한 상황에서 자체 보호를
위해 이 상태로 전환합니다. AC 드라이브는 예를 들어,
출력이 단락된 경우 사용자의 개입이 필요합니다. 주전
원을 차단하고 결함의 원인을 제거한 다음 AC 드라이
브를 다시 연결해야만 트립 잠김을 해제할 수 있습니다.
리셋을 실행하거나 또는 경우에 따라 자동으로 리셋하
도록 프로그래밍하여 트립 상태를 해제해야만 재기동할
수 있습니다. 사용자의 안전을 위해 트립 잠김 상태를
사용하지 마십시오.
VT 특성
펌프와 팬에 사용되는 가변 토오크 특성입니다.
참조).
파라미터 14-00 스위칭 방식
장을 3.12 파라미터 13-**
파라미터 8-30 프로토콜
).
을
6 Danfoss A/S © 05/2018 All rights reserved. MG20OB39
소개 프로그래밍 지침서
+
VVC
전압 벡터 제어(VVC+)는 표준 V/f(전압/주파수) 비율
제어에 비해 가변되는 속도 지령 및 부하 토오크에서
유동성과 안정성을 향상시킵니다.
60° AVM
60° Asynchronous Vector Modulation(60° 비동기식
벡터 변조)(
파라미터 14-00 스위칭 방식
).
역률
역률은 I1과 I
전력률
=
의 관계를 나타냅니다.
RMS
3xUxI1cosϕ
3xUxI
RMS
3상 제어의 역률:
전력률
I1xcosϕ1
=
I
RMS
=
I
1
sincecosϕ1 = 1
I
RMS
역률은 AC 드라이브가 주전원 공급에 가하는 부하의
크기입니다.
역률이 낮을수록 동일한 kW(출력)를 얻기 위해 I
RMS
가
높아집니다.
I
RMS
=
I
+ I
1
5
+ I
2
+ .. + I
7
2
n
2
2
또한 역률이 높으면 다른 고조파 전류는 낮아집니다.
AC 드라이브의 DC 코일은 역률을 높여 주전원 공급에
가해지는 부하를 최소화합니다.
목표 위치
위치 지정 명령에 의한 최종 목표 위치입니다. 프로필
생성기는 이 위치를 사용하여 속도 프로필을 계산합니
다.
명령 위치
프로필 생성기에 의해 계산된 실제 위치 지령입니다.
AC 드라이브는 위치 PI의 설정포인트로 명령 위치를
사용합니다.
실제 위치
엔코더의 실제 위치 또는 개회로에서 모터 제어가 계산
한 값입니다. AC 드라이브는 위치 PI의 피드백으로 실
제 위치를 사용합니다.
위치 오류
위치 오류는 실제 위치와 명령 위치 간의 차이입니다.
위치 오류는 위치 PI 제어기의 입력입니다.
위치 단위
위치 값의 물리적 단위입니다.
약어, 기호 및 규약
1.7
°C
°F
AC Alternating current(교류)
AEO
AWG American wire gauge(미국 전선 규격)
AMA
DC Direct current(직류)
EMC
ETR
f
M,N
FC Frequency Converter(AC 드라이브)
I
INV
I
LIM
I
M,N
I
VLT,MAX
I
VLT,N
IP
LCP Local Control Panel(현장 제어 패널)
MCT
n
s
P
M,N
PELV
PCB Printed Circuit Board(인쇄회로기판)
PM 모터
PWM Pulse width modulation(펄스 폭 변조)
RPM Revolutions Per Minute(분당 회전수)
재생 Regenerative terminals(재생 단자)
T
LIM
U
M,N
Degrees Celsius(섭씨도)
Degrees fahrenheit(화씨도)
Automatic Energy Optimization(자동
에너지 최적화)
Automatic motor adaptation(자동 모터
최적화)
Electro Magnetic Compatibility(전자기
적합성)
Electronic Thermal Relay(전자 써멀 릴
레이)
Nominal motor frequency(모터 정격 주
파수)
Rated Inverter Output Current(인버터
정격 출력 전류)
Current Limit(전류 한계)
Nominal motor current(모터 정격 전류)
Maximum output current(최대 출력 전
류)
Rated output current supplied by the
frequency converter(AC 드라이브에서
공급하는 정격 출력 전류)
Ingress protection(분진 및 수분에 대한
보호)
Motion Control Tool(모션컨트롤 소프트
웨어)
Synchronous motor speed(동기식 모터
회전수)
Nominal motor power(모터 정격 출력)
Protective Extra Low Voltage(방호초
저전압)
Permanent magnet motor(영구 자석 모
터)
Torque Limit(토오크 한계)
Nominal motor voltage(모터 정격 전압)
1
1
MG20OB39 Danfoss A/S © 05/2018 All rights reserved. 7
소개
VLT® AQUA Drive FC 202
1
1.8 안전
경고
최고 전압
교류 주전원 입력, 직류 공급 또는 부하 공유에 연결될
때 AC 드라이브에 고전압이 발생합니다. 설치, 기동 및
유지보수를 공인 기사가 수행하지 않으면 사망 또는 중
상으로 이어질 수 있습니다.
반드시 공인 기사가 설치, 기동 및 유지보수를
•
수행해야 합니다.
서비스 또는 수리 작업을 수행하기 전에 적절
•
한 전압 측정 장치를 사용하여 AC 드라이브에
전압이 남아 있지 않은지 확인합니다.
안전 규정
수리 작업을 수행하는 경우에는 그 전에 AC
•
드라이브에 연결된 주전원 공급을 차단합니다.
모터와 주전원 플러그를 분리하기 전에 주전원
공급이 차단되었는지 또한 충분히 시간이 경과
했는지 확인합니다. 방전 시간에 관한 정보는
표 1.2
을 참조하십시오.
[Off]로는 주전원 공급을 차단할 수 없으므로
•
안전 스위치로 사용해서는 안됩니다.
장비를 올바르게 접지합니다. 공급 전압으로부
•
터 사용자를 보호하고 관련 국내 및 국제 규정
에 따라 과부하로부터 모터를 보호합니다.
접지 누설 전류는 3.5 mA를 초과합니다.
•
모터 과부하 보호 기능은 초기 설정에 포함되
•
어 있지 않습니다. 이 기능이 필요하면
터 1-90 모터 열 보호
트립 1
또는 데이터 값
정합니다.
AC 드라이브에 주전원이 연결되어 있는 동안
•
에는 주전원 플러그 또는 모터 플러그를 절대
로 분리하지 마십시오. 모터와 주전원 플러그
를 분리하기 전에 주전원 공급이 차단되었는지
또한 충분히 시간이 경과했는지 확인합니다.
부하 공유(DC 링크의 연결) 또는 외부 24VDC
•
가 설치되어 있는 경우, AC 드라이브에는 L1,
L2, L3 이상의 전압 소스가 있습니다. 수리 작
업을 수행하기 전에 모든 전압 소스가 차단되
었는지 또한 충분히 시간이 경과했는지 확인합
니다. 방전 시간에 관한 정보는
하십시오.
을 데이터 값
[3] ETR 경고 1
표 1.2
파라미
[4] ETR
로 설
을 참조
경고
의도하지 않은 기동
AC 드라이브가 교류 주전원, 직류 공급 또는 부하 공유
에 연결되어 있는 경우, 모터는 언제든지 기동할 수 있
습니다. 프로그래밍, 서비스 또는 수리 작업 중에 의도
하지 않은 기동이 발생하면 사망, 중상 또는 장비나 자
산의 파손으로 이어질 수 있습니다. 모터는 외부 스위
치, 필드버스 명령이나 LCP의 입력 지령 신호를 통해서
나 결함 조건 해결 후에 기동할 수 있습니다.
의도하지 않은 모터 기동을 방지하려면:
주전원으로부터 AC 드라이브를 연결 해제합니
•
다.
파라미터를 프로그래밍하기 전에 LCP의 [Off/
•
Reset]를 누릅니다.
AC 드라이브를 교류 주전원, 직류 공급장치 또
•
는 부하 공유에 연결하기 전에 AC 드라이브,
모터 및 관련 구동 장비를 완벽히 배선 및 조
립합니다.
경고
방전 시간
AC 드라이브에는 AC 드라이브에 전원이 인가되지 않
더라도 충전이 유지될 수 있는 DC 링크 컨덴서가 포함
되어 있습니다. 경고 LED 표시 램프가 꺼져 있더라도
최고 전압이 남아 있을 수 있습니다. 전원을 분리한 후
서비스 또는 수리를 진행하기 전까지 지정된 시간 동안
기다리지 않으면 사망 또는 중상으로 이어질 수 있습니
다.
모터를 정지합니다.
•
교류 주전원 및 원격 DC 링크 전원 공급(배터
•
리 백업장치, UPS 및 다른 AC 드라이브에 연
결된 DC 링크 연결장치 포함)을 차단합니다.
PM 모터를 차단하거나 구속시킵니다.
•
컨덴서가 완전히 방전될 때까지 기다립니다.
•
최소 대기 시간은
AC 드라이브 상단의 명판에서도 확인할 수 있
습니다.
서비스 또는 수리 작업을 수행하기 전에 적절
•
한 전압 측정 장치를 사용하여 컨덴서가 완전
히 방전되었는지 확인합니다.
표 1.2
에 지정되어 있으며
8 Danfoss A/S © 05/2018 All rights reserved. MG20OB39
소개 프로그래밍 지침서
전압[V]
200–240 0.25–3.7 kW
(0.34–5 hp)
380–480 0.37–7.5 kW
(0.5–10 hp)
525–600 0.75–7.5 kW
(1–10 hp)
525–690 – 1.1–7.5 kW
표 1.2 방전 시간
최소 대기 시간(분)
4 7 15
– 5.5–45 kW
(7.5–60 hp)
– 11–90 kW
(15–121 hp)
– 11–90 kW
(15–121 hp)
11–90 kW
(1.5–10 hp)
(15–121 hp)
주의 사항
Safe Torque Off를 사용할 때는 항상
이브 - Safe Torque Off 사용 설명서
VLT® AC 드라
를 준수합니다.
주의 사항
드물기는 하지만 AC 드라이브에서의 제어 신호 또는
내부의 제어 신호가 잘못 활성화되거나 지연되거나 전
체적으로 결함이 발생할 수 있습니다. 안전이 최우선인
상황에서 사용되는 경우, 이러한 제어 신호에 전적으로
의존해서는 안됩니다.
주의 사항
필요한 예방 수단을 고려할 책임이 있는 기계 제조업체/
설치업체에 의해 위험한 상황이 파악되어야 합니다. 추
가적인 감시 및 보호 장치가 포함될 수 있으며 이러한
장치를 추가할 때는 반드시 유효한 안전 규정(예를 들
어, 기계 공구 관련 법규, 사고 예방 관련 규정)에 따라
장착해야 합니다.
보호 모드
모터 전류나 DC 링크 전압의 하드웨어 한계를 초과하
게 되면 AC 드라이브가 보호 모드로 전환됩니다. 보호
모드는 손실을 최소화하기 위해 PWM 변조 전략의 변
경과 낮은 스위칭 주파수를 의미합니다. 마지막 결함 후
에 10초간 지속되며 모터에 대한 제어 능력을 완전히
복구하는 동안 AC 드라이브의 신뢰성과 견고성이 증가
합니다.
1
1
MG20OB39 Danfoss A/S © 05/2018 All rights reserved. 9
*
91 (L1)
92 (L2)
93 (L3)
PE
88 (-)
89 (+)
50 (+10 V OUT)
53 (A IN)
54 (A IN)
55 (COM A IN)
0/4-20 mA
12 (+24 V OUT)
13 (+24 V OUT)
18 (D IN)
20 (COM D IN)
15 mA 200 mA
(U) 96
(V) 97
(W) 98
(PE) 99
(COM A OUT) 39
(A OUT) 42
0/4-20 mA
03
0-10 V DC
+10 V DC
0-10 V DC
0/4-20 mA
240 V AC, 2 A
24 V DC
02
01
05
04
06
240 V AC, 2 A
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
19 (D IN)
24 V (NPN)
0 V (PNP)
27
24V
0V
(D IN/OUT)
0 V (PNP)
24 V (NPN)
(D IN/OUT)
0V
24V
29
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
33 (D IN)
32 (D IN)
1 2
ON
S201
ON
21
S202
ON=0-20 mA
OFF=0-10 V
95
400 V AC, 2 A
P 5-00
(R+) 82
(R-) 81
37 (D IN)
+ - + -
e30be257.11
(P RS485) 68
(N RS485) 69
(COM RS485) 61
0 V
5V
S801
RS485
RS485
21
ON
S801
3-phase
power
input
DC bus
Switch mode
power supply
Motor
Analog output
Interface
relay1
relay2
ON=Terminated
OFF=Open
Brake
resistor
(NPN) = Sink
(PNP) = Source
소개
VLT® AQUA Drive FC 202
1
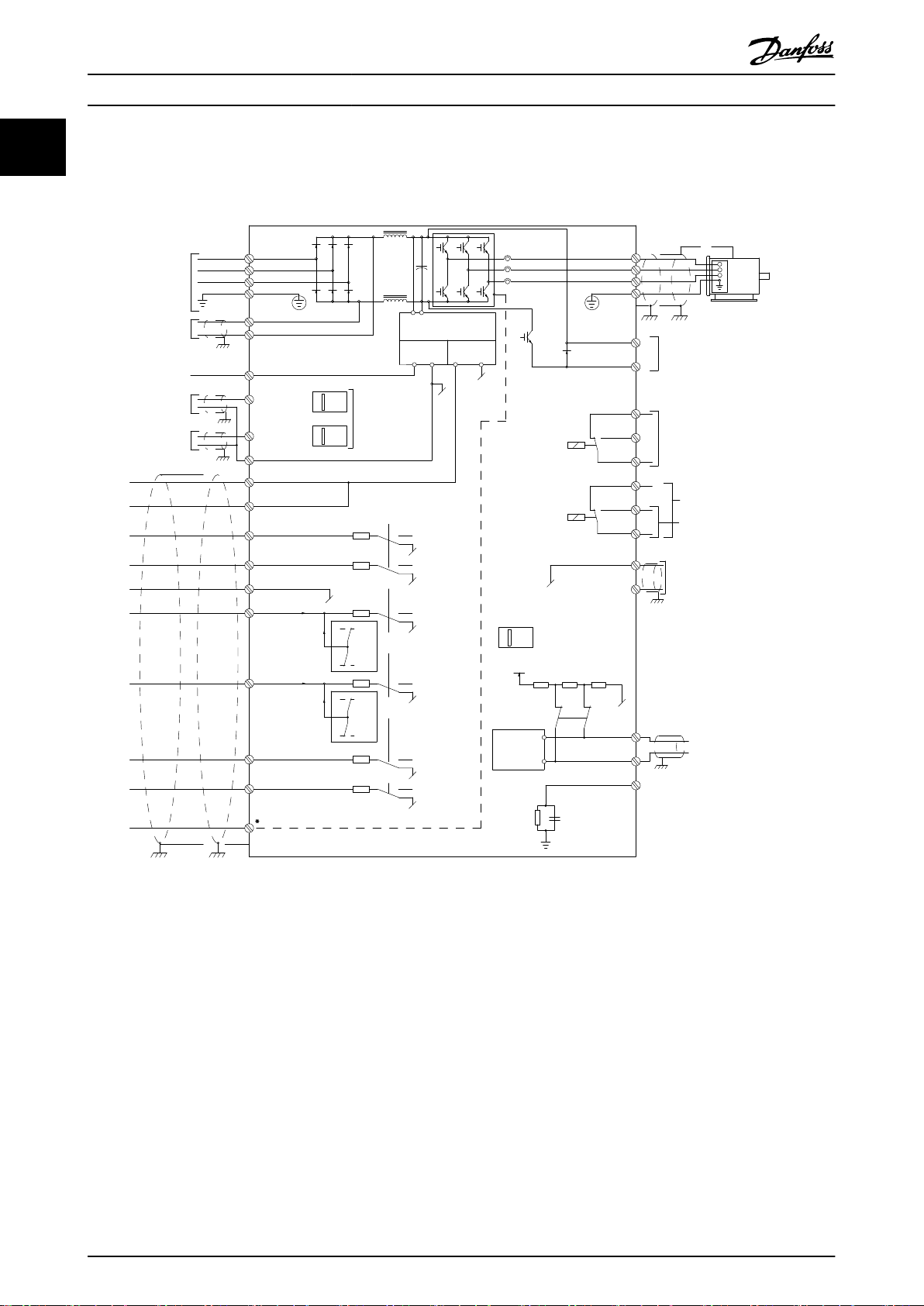
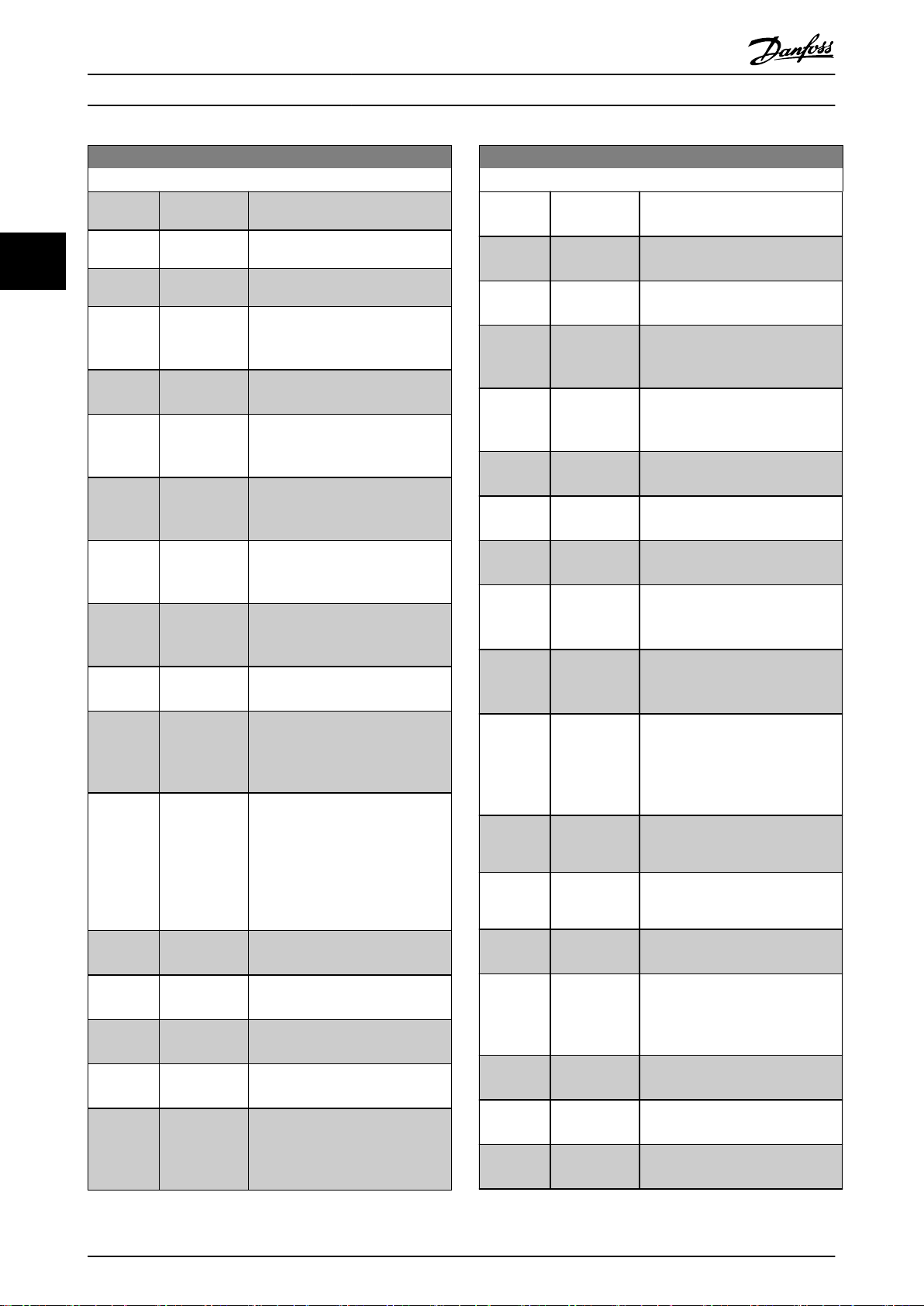
1.9 전기 배선
1.9.1 전기 배선 - 제어 케이블
그림 1.2 기본 배선 약도
A = 아날로그, D = 디지털
단자 37은 Safe Torque Off에 사용합니다. Safe Torque Off 설치 지침은
사용 설명서
* 단자 37은 FC 202에 포함되어 있지 않습니다(외함 사이즈 A1 제외). VLT® AQUA Drive FC 202의 경우, 릴레이
2와 단자 29에 기능이 없습니다.
제어 케이블과 아날로그 신호용 케이블의 길이가 긴 경
우에 설치 방식에 따라 주전원 공급 케이블로부터 전달
를 참조하십시오.
된 노이즈로 인해 50/60Hz 접지 루프가 발생할 수 있
습니다.
이와 같은 경우에는 차폐선을 차단하거나 차폐선과 외
함 사이에 100nF 컨덴서를 설치해야 할 수도 있습니다.
10 Danfoss A/S © 05/2018 All rights reserved. MG20OB39
VLT® AC 드라이브 - Safe Torque Off
디지털 및 아날로그 입출력은 양쪽에 서로 영향을 미칠
수 있는 접지전류를 피하기 위해 AC 드라이브 공통 입
력(단자 20, 55, 39)에 각각 분리해서 연결합니다. 예를
들어, 디지털 입력의 전원 공급/차단은 아날로그 입력
신호에 영향을 미칠 수 있습니다.

12 13 18 19 27 29 32 33 20 37
+24 VDC
0 VDC
130BT106.10
PNP (Source)
Digital input wiring
NPN (Sink)
Digital input wiring
12 13 18 19 27 29 32 33 20 37
+24 VDC
0 VDC
130BT107.11
130BA681.10
12 13 18 37
130BA155.12
322719 29 33 20
P 5-12 [0]
P 5-10 [8]
Start/Stop
+24V
Speed
Safe Stop
Start/Stop
[18]
소개 프로그래밍 지침서
제어 단자의 입력 극성
그림 1.3 PNP (소스)
1
1
그림 1.4 NPN (싱크)
주의 사항
제어 케이블은 반드시 차폐/보호되어야 합니다.
제어 케이블의 올바른 종단을 위해
형 제어 케이블 접지 섹션
을 참조하십시오.
설계 지침서의 차폐
그림 1.5 차폐/보호된 제어 케이블의 접지
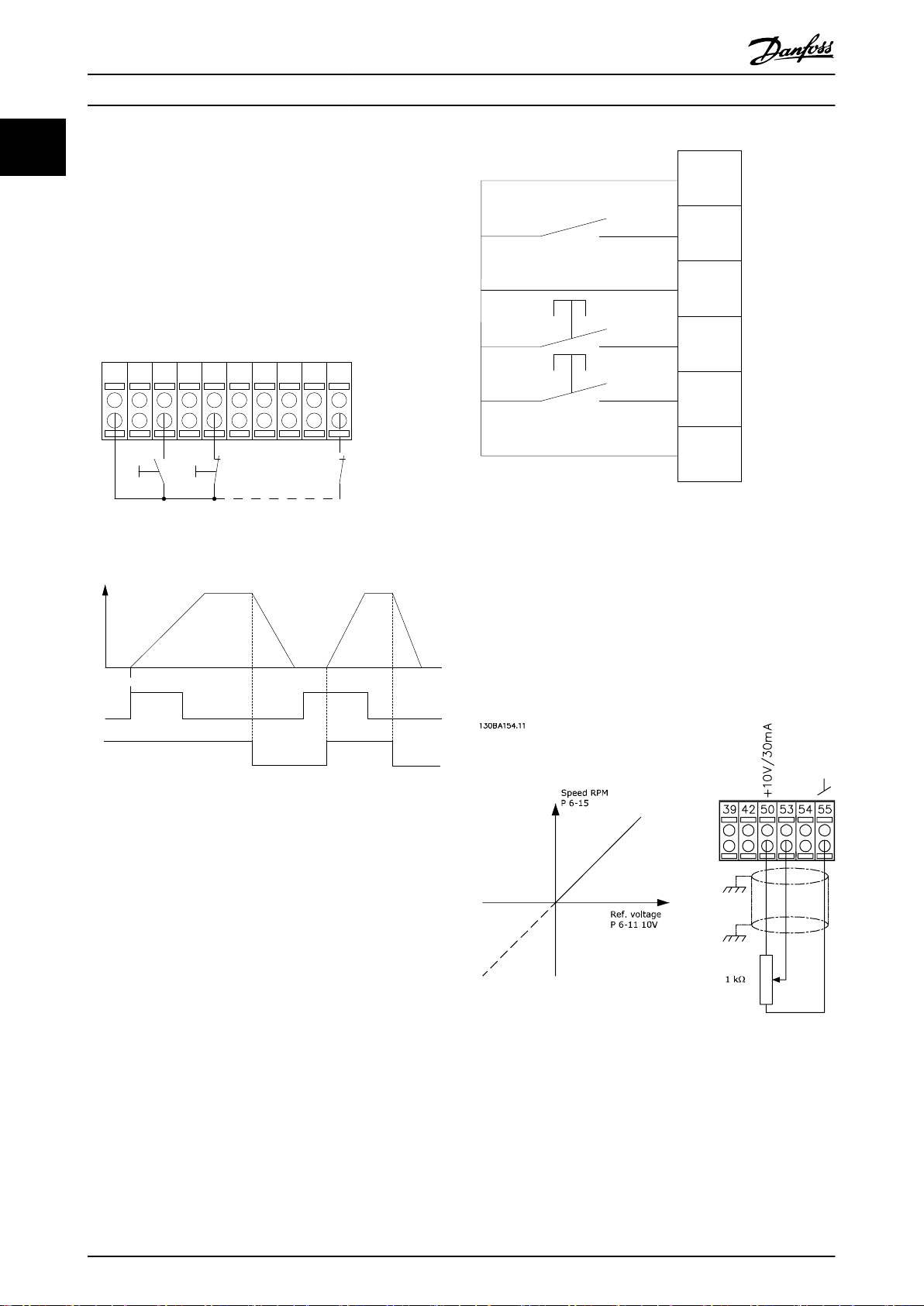
1.9.2 기동/정지
단자 18 =
동.
단자 27 =
전하지 않음
단자 37 = Safe Torque Off(가능한 경우에 한함).
그림 1.6 기동/정지
파라미터 5-10 단자 18 디지털 입력 [8] 기
파라미터 5-12 단자 27 디지털 입력 [0] 운
(초기 설정값
[2] 코스팅 인버스
).
MG20OB39 Danfoss A/S © 05/2018 All rights reserved. 11
12 13 18 37
130BA156.12
322719 29 33 20
P 5 - 12 [6]
P 5 - 10[9]
+24V
Speed
Start Stop inverse Safe Stop
Start (18)
Start (27)
12
18
27
29
32
37
+24V
Par. 5-10
Par. 5-12
Par. 5-13
Par. 5-14
130BA021.12
소개
VLT® AQUA Drive FC 202
1
1.9.3 펄스 기동/정지
단자 18 =
스 기동.
단자 27 =
지 인버스.
단자 37 = Safe Torque Off(가능한 경우에 한함).
파라미터 5-10 단자 18 디지털 입력 [9] 펄
파라미터 5-12 단자 27 디지털 입력 [6] 정
그림 1.8 가속/감속
1.9.5 가변 저항 지령
가변 저항을 통한 전압 지령
지령 소스 1 =
단자 53, 최저 전압 = 0 V.
단자 53, 최고 전압 = 10 V.
단자 53, 최저 지령/피드백 = 0 RPM.
단자 53, 최고 지령/피드백 = 1500 RPM.
S201 스위치 = 꺼짐(U).
[1] 아날로그 입력 53
(초기 설정값).
그림 1.7 펄스 기동/정지
1.9.4 가속/감속
단자 29/32 = 가속/감속
단자 18 =
동
(초기 설정값).
단자 27 =
지령 고정.
단자 29 =
가속.
단자 32 =
감속.
파라미터 5-10 단자 18 디지털 입력 [9] 기
파라미터 5-12 단자 27 디지털 입력 [19]
파라미터 5-13 단자 29 디지털 입력 [21]
파라미터 5-14 단자 32 디지털 입력 [22]
그림 1.9 가변 저항 지령
12 Danfoss A/S © 05/2018 All rights reserved. MG20OB39
Auto
On
Reset
Hand
On
Off
Status
Quick
Menu
Main
Menu
Alarm
Log
Back
Cancel
Info
OK
Status
1(0)
1234rpm 10,4A 43,5Hz
Run OK
43,5Hz
On
Alarm
Warn.
e30ba018.14
1
2
3
4
b
a
c
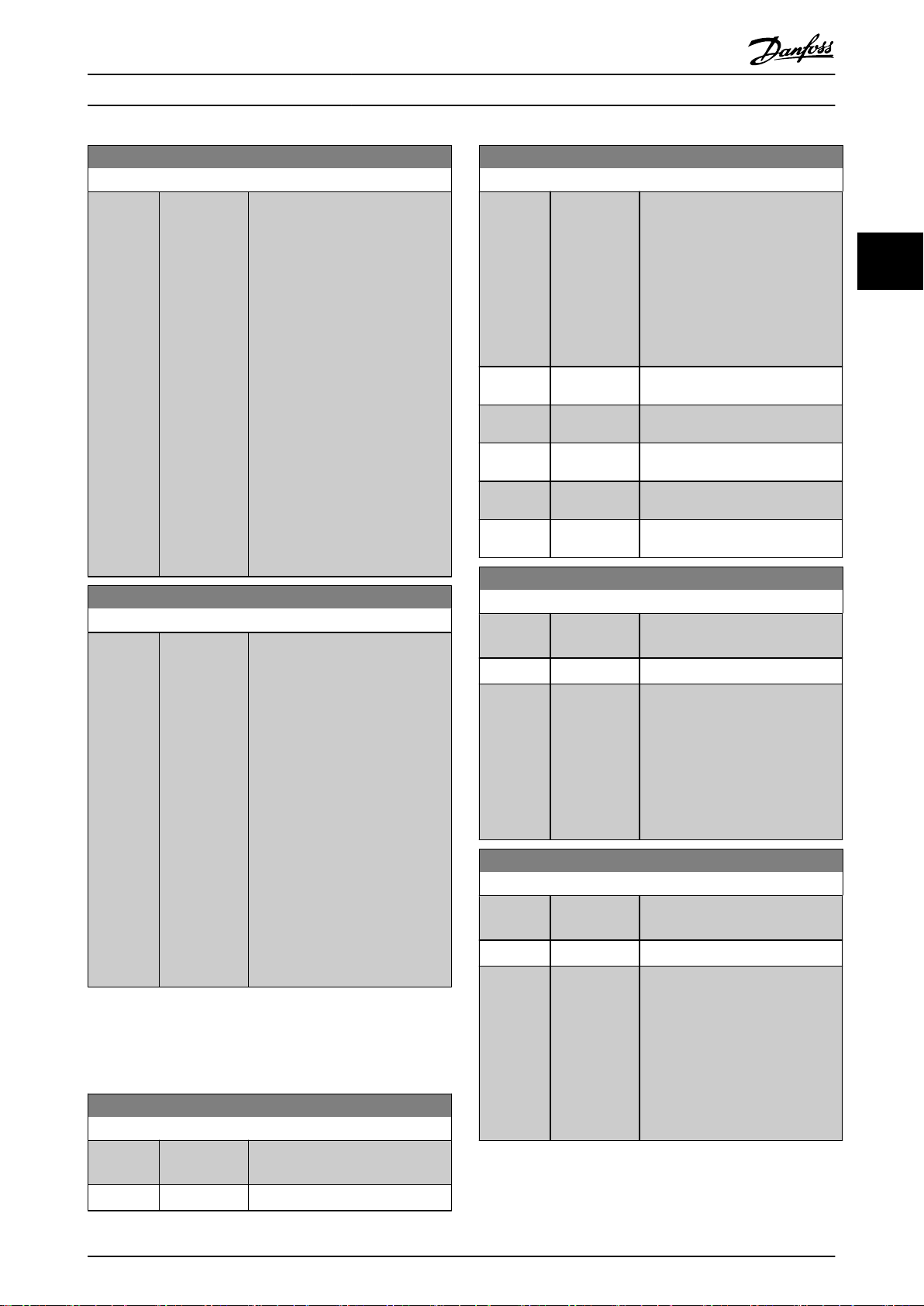
프로그래밍 방법 프로그래밍 지침서
2 프로그래밍 방법
2.1 그래픽 및 숫자 방식의 현장 제어 패
널
그래픽 방식의 LCP(LCP 102)를 활용하면 AC 드라이
브의 프로그래밍이 용이합니다. 숫자 방식의 현장 제어
패널(LCP 101) 사용에 관한 정보는
방식의 현장 제어 패널을 이용한 프로그래밍 방법
조하십시오.
2.2 그래픽 LCP의 프로그래밍 방법
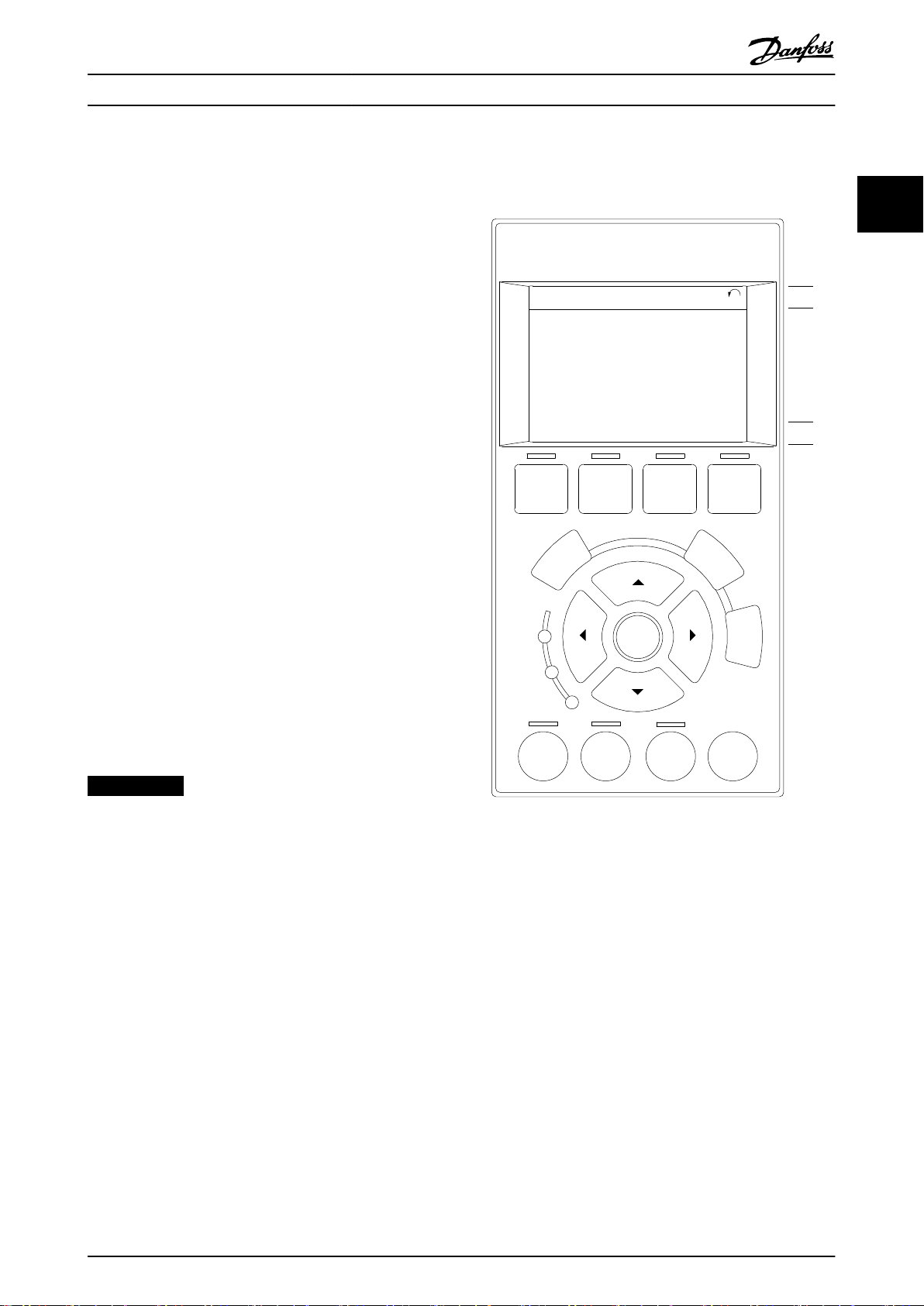
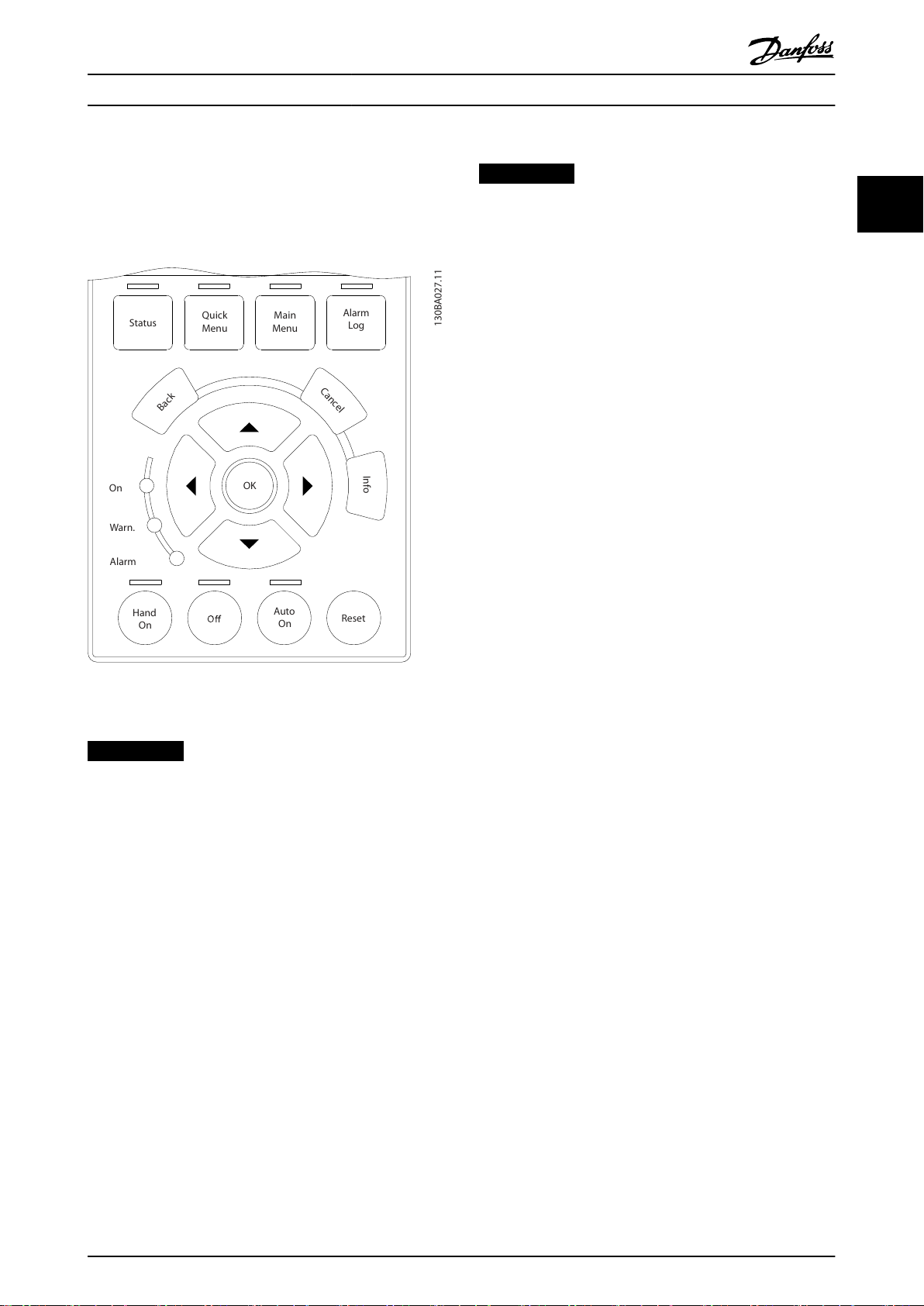
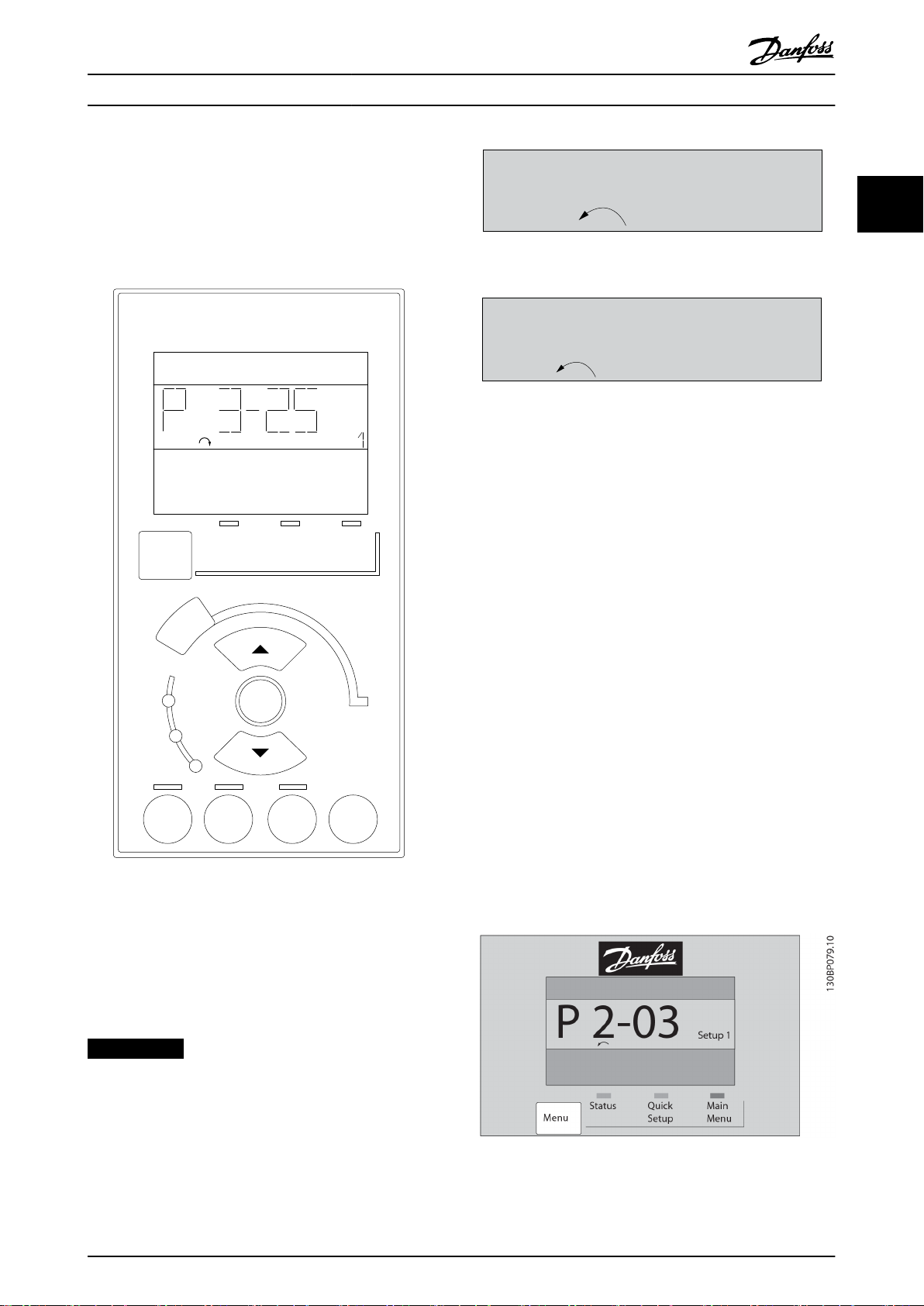
LCP는 기능별로 아래와 같이 4가지로 나뉘어집니다.
1. 상태 표시줄이 포함된 그래픽 표시창
2. 메뉴 키 및 표시 램프 – 파라미터 변경 및 표시
기능 전환.
3. 검색 키 및 표시등.
4. 운전 키 및 표시등.
LCP 표시창에서는 상태와 함께 최대 5개의 운전 데이
터를 표시할 수 있습니다.
장을 2.2.17 숫자
를 참
2 2
표시줄:
a. 상태 표시줄: 상태 메시지가 아이콘 및 그래픽
으로 표시됩니다.
b. 첫 번째/두 번째 표시줄: 정의되거나 선택된 사
용자 데이터가 표시됩니다. [Status]를 눌러 최
대 한 줄을 추가할 수 있습니다.
c. 상태 표시줄: 상태 메시지가 텍스트로 표시됩
니다.
주의 사항
기동이 지연되면 기동이 끝날 때까지 초기화 중이라는
메시지가 LCP에 표시됩니다. 옵션을 추가하거나 제거
그림 2.1 LCP
하면 기동이 지연될 수 있습니다.
MG20OB39 Danfoss A/S © 05/2018 All rights reserved. 13
On
Warn.
Alarm
130BP044.10
130BP045.10
Status
Quick
Menu
Main
Menu
Alarm
Log
프로그래밍 방법
VLT® AQUA Drive FC 202
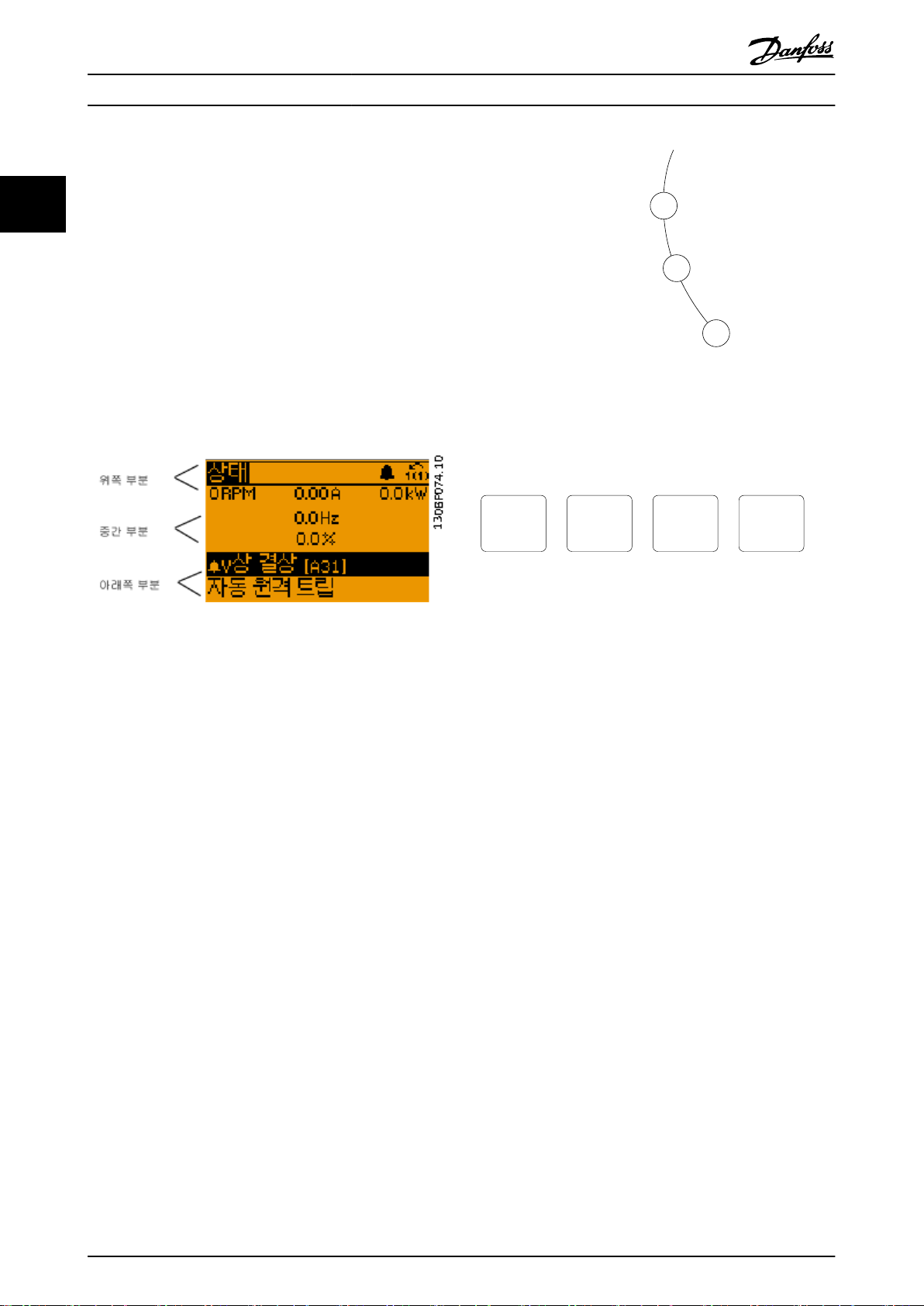
2.2.1 LCP 표시창
LCD 표시창에는 백라이트가 적용되었으며 총 6줄의 문
22
자 숫자 조합을 표시할 수 있습니다. 표시줄에는 회전
방향(화살표), 선택한 셋업, 프로그래밍 셋업 등이 표시
됩니다. 표시창은 크게 세 부분으로 나뉘어져 있습니다.
맨 위 부분
일반 운전 상태에서 최대 2개의 측정값이 표시됩니다.
중간 부분
맨 위 줄에는 상태와 관계 없이 최대 5개의 측정값이
표시됩니다(알람/경고가 있는 경우 제외).
아래쪽 부분
항상 상태 모드에서의 AC 드라이브의 상태가 표시됩니
다.
그림 2.3 표시 램프
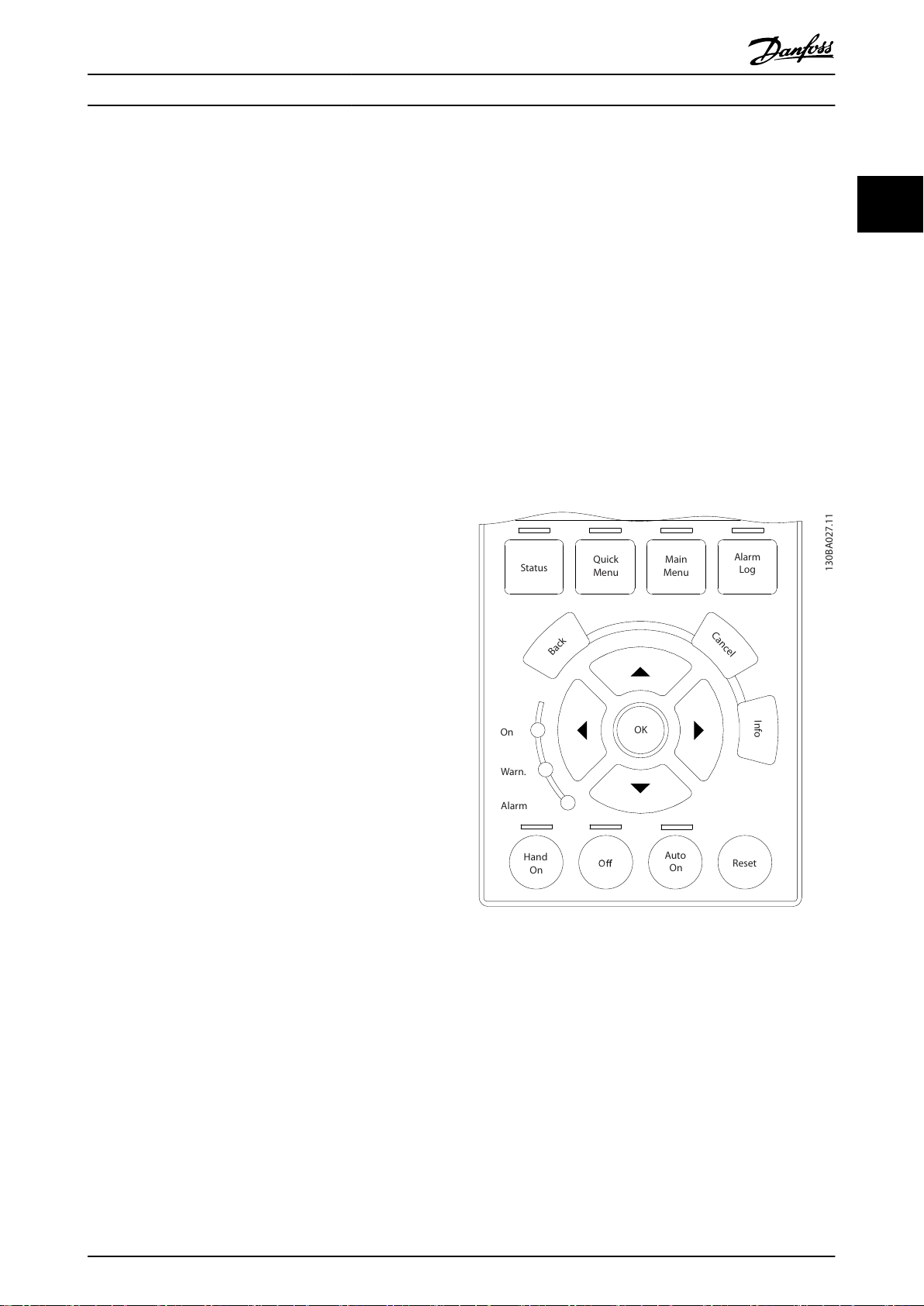
LCP 키
제어 키는 기능별로 분리되어 있습니다. 표시창과 표시
램프 아래에 있는 키는 정상 운전 도중의 표시창 모드
전환 옵션 등 파라미터 셋업에 사용됩니다.
그림 2.2 아래쪽 부분
(
파라미터 0-10 셋업 활성화
한) 활성 셋업이 표시됩니다. 활성 셋업 이외의 다른 셋
업을 프로그래밍하는 경우에는 프로그래밍된 셋업의 번
호가 오른쪽에 나타납니다.
표시창 명암 조절
표시창을 어둡게 하려면 [Status]와 [▲]를 누릅니다.
표시창을 밝게 하려면 [Status]와 [▼]를 누릅니다.
파라미터 0-60 주 메뉴 비밀번호
터 0-65 개인 메뉴 비밀번호
하지 않는 한 LCP를 통해 대부분의 파라미터 셋업을
즉시 변경할 수 있습니다.
표시 램프
특정 임계값을 초과하게 되면 알람 및/또는 경고 표시등
이 켜집니다. 상태 및 알람 메시지가 LCP에 나타납니
다.
ON 표시 램프는 AC 드라이브에 주전원 전압, 직류 버
스통신 단자를 통한 전압 또는 외부 24V 전압이 공급되
는 경우에 켜집니다. 또한 동시에 백라이트도 켜집니다.
녹색 LED/On: 제어부가 동작하고 있음을 의미
•
합니다.
황색 LED/경고: 경고 메시지를 의미합니다.
•
적색 LED/Alarm 점멸: 알람을 의미합니다.
•
에서 활성 셋업으로 선택
또는
파라미
를 통해 비밀번호를 생성
그림 2.4 LCP 키
[Status]
AC 드라이브 및/또는 모터의 상태를 나타냅니다.
[Status]를 눌러 다음 세 가지 표기 방법 중 하나를 선
택합니다. 다섯줄 표기, 네줄 표기 또는 스마트 로직 컨
트롤러.
[Status]를 눌러 표시창의 모드를 선택하거나
뉴
모드,
주 메뉴
전환합니다. 또한 [Status]를 사용하여 한줄 또는 두줄
읽기 모드로 전환합니다.
[Quick Menu]
가장 흔히 사용하는 AC 드라이브 기능에 신속히 접근
할 수 있게 합니다.
[Quick Menu]는 다음으로 구성됩니다:
Q1: 개인 메뉴.
•
Q2: 단축 설정.
•
Q3: 기능 셋업.
•
Q4: SmartStart.
•
Q5: 변경 완료.
•
Q6: 로깅.
•
Q7: 수처리 및 펌프.
•
기능 셋업은 다음을 포함하여 대부분의 수처리 및 폐수
처리 어플리케이션에 필요한 모든 파라미터에 신속히
접근할 수 있게 합니다.
가변 토오크.
•
일정 토오크.
•
펌프.
•
도징 펌프.
•
모드 또는 알람 모드에서 표시모드로
단축 메
14 Danfoss A/S © 05/2018 All rights reserved. MG20OB39
Au t o
On R eset
Hand
On
S
ta
tus
Q
uick
M
enu
M
ain
M
enu
A
lar
m
Lo
g
Back
C
anc
el
I
n
fo
OK
On A lar m W
ar
n.
130BA027.11
프로그래밍 방법 프로그래밍 지침서
우물용 펌프.
•
가압펌프.
•
믹서 펌프.
•
폭기용 송풍기.
•
기타 펌프.
•
팬 어플리케이션.
•
다른 특징 중에서도 다음을 선택하기 위한 파라미터가
포함되어 있습니다.
LCP에 표시할 변수.
•
디지털 프리셋 속도.
•
아날로그 지령의 범위 설정.
•
폐회로 단일 영역 및 다중 영역 어플리케이션.
•
수처리와 관련된 특수 기능.
•
폐수처리 어플리케이션.
•
단축 메뉴
및 펌프 전용 기능에 직접 접근할 수 있게 합니다.
•
•
•
•
•
•
•
•
•
다음의 파라미터 중 하나를 통해 비밀번호를 생성하지
않는 한
있습니다.
•
•
•
•
단축 메뉴
니다.
[Main Menu]
이 섹션은 모든 파라미터를 프로그래밍하는데 사용합니
다.
다음의 파라미터 중 하나를 통해 비밀번호를 생성하지
않는 한
습니다.
•
•
Q7: 수처리 및 펌프
Q7-1: 특수 가감속(초기 가감속, 최종 가감속,
체크밸브 맞춤형 가감속).
Q7-2: 슬립 모드.
Q7-3: 디래깅.
Q7-4: 드라이 구동.
Q7-5: 유량 과다 감지.
Q7-6: 유량 보상.
Q7-7: 배관 급수(수평 배관, 수직 배관, 혼합
배관 시스템).
Q7-8: 제어 성능.
Q7-9: 최소 속도 감시.
단축 메뉴
파라미터 0-60 주 메뉴 비밀번호
파라미터 0-61 비밀번호 없이 주 메뉴 접근
파라미터 0-65 개인 메뉴 비밀번호
파라미터 0-66 비밀번호 없이 개인 메뉴 액세
스
.
모드와
주 메뉴
파라미터 0-60 주 메뉴 비밀번호
파라미터 0-61 비밀번호 없이 주 메뉴 접근
파라미터에 즉각적으로 접근할 수
주 메뉴
파라미터에 즉각적으로 접근할 수 있
는 가장 중요한 수처리
.
.
.
모드 간 직접 전환이 가능합
.
.
파라미터 0-65 개인 메뉴 비밀번호
•
파라미터 0-66 비밀번호 없이 개인 메뉴 액세
•
스
.
대부분의 수처리 및 폐수처리 어플리케이션의 경우,
메뉴
파라미터에 접근할 필요가 없습니다.
단축 셋업 및 기능 셋업은 대표적으로 필요한 파라미터
에 가장 간단하면서도 신속하게 접근할 수 있게 합니다.
주 메뉴
니다.
파라미터 바로가기를 생성하려면 [Main Menu]를 3초
간 누릅니다. 파라미터 바로가기를 이용하면 모든 파라
미터에 직접 접근할 수 있습니다.
[Alarm Log]
마지막으로 발생한 알람을 5개(A1~A5)까지 표시합니
다. 검색 키를 눌러 알람 번호를 검색하고 [OK] 키를
누르면 해당 알람에 관한 세부 정보를 확인할 수 있습
니다. 알람 모드를 시작하기 직전에 AC 드라이브의 상
태에 관한 정보가 제공됩니다.
[Back]
검색 내용의 이전 단계 또는 이전 수준으로 돌아갑니다.
[Cancel]
표시 내용이 변경되지 않는 한 마지막 변경 내용 또는
명령이 취소됩니다.
[Info]
표시창에 명령, 파라미터 또는 기능에 관한 정보가 제공
됩니다. [INFO] 키는 도움말이 필요할 때마다 자세한
정보를 제공합니다.
[Info], [Back] 또는 [Cancel]을 누르면 정보 모드가
종료됩니다.
모드와
그림 2.5 LCP
단축 메뉴
모드 간 직접 전환이 가능합
.
단축 메뉴
주
,
2 2
MG20OB39 Danfoss A/S © 05/2018 All rights reserved. 15
B
a
c
k
C
a
n
c
e
l
I
n
f
o
e30bp046.12
Hand
On
Off
Auto
On
Reset
프로그래밍 방법
22
그림 2.6 Back (뒤로)
그림 2.7 Cancel (취소)
VLT® AQUA Drive FC 202
•
•
•
•
•
•
•
•
[Hand On] - [Off] - [Auto On].
리셋.
코스팅(프리런) 정지 인버스.
역회전
셋업 선택 비트 0 - 셋업 선택 비트 1.
직렬 통신을 통한 정지 명령.
순간 정지.
직류 제동.
[Off]
연결된 모터를 정지합니다.
짐] 키
를 통해 키를
[1] 사용함
파라미터 0-41 LCP의 [꺼
또는
[0] 사용안함
으로
선택할 수 있습니다. 외부 정지 기능을 선택하지 않고
그림 2.8 Info (정보)
[Off] 키도 활성화되지 않았다면 전압을 차단하여 모터
를 정지합니다.
[Auto On]
검색 키
4개의 검색 키는
단축 메뉴, 주 메뉴
및
알람 기록
의 각
기 다른 옵션을 선택하는데 사용합니다. 검색 키를 눌러
커서를 움직입니다.
[OK]
커서로 표시된 파라미터를 선택하거나 파라미터 변경을
적용하는데 사용합니다.
현장 제어 키
현장 제어 키는 LCP 맨 아래에 있습니다.
제어 단자 및/또는 직렬 통신을 통해 AC 드라이브를 제
어하는데 사용합니다. 제어 단자 및/또는 직렬 통신에서
기동 신호를 주면 AC 드라이브가 기동을 시작합니다.
파라미터 0-42 LCP의 [자동 운전] 키
[1] 사용함
또는
[0] 사용안함
으로 선택할 수 있습니
를 통해 키를
다.
주의 사항
디지털 입력을 통해 활성화된 수동-꺼짐-자동 신호는
제어 키 [Hand on] 및 [Auto on]보다 우선순위가 높
습니다.
그림 2.9 현장 제어 키
[Hand On]
LCP를 통해 AC 드라이브를 제어하는데 사용합니다.
[Hand on]을 눌러 모터를 기동할 수 있으며 이제는 검
색 키를 이용하여 모터 회전수 데이터를 입력할 수도
있습니다.
해 키를
파라미터 0-40 LCP의 [수동 운전] 키
[1] 사용함
또는
[0] 사용안함
으로 선택할 수
를 통
있습니다.
제어 신호 또는 필드버스를 통해 외부 정지 신호가 활
성화된 경우, LCP를 통해 기동 명령을 실행해도 기동되
지 않습니다.
[Hand on]이 활성화되어 있어도 다음과 같은 제어 신
호는 계속 사용할 수 있습니다.
[Reset]
알람(트립) 후 AC 드라이브를 리셋하는데 사용합니다.
파라미터 0-43 LCP의 [리셋] 키
또는
[0] 사용안함
으로 선택할 수 있습니다.
를 통해
[1] 사용함
[Main Menu]를 3초간 눌러 파라미터 바로가기를 생성
할 수 있습니다. 파라미터 바로가기를 이용하면 모든 파
라미터에 직접 접근할 수 있습니다.
16 Danfoss A/S © 05/2018 All rights reserved. MG20OB39
Au t o
On R eset
Hand
On
S
ta
tus
Q
uick
M
enu
M
ain
M
enu
A
lar
m
Lo
g
Back
C
anc
el
I
n
fo
OK
On A lar m W
ar
n.
130BA027.11
프로그래밍 방법 프로그래밍 지침서
2.2.2 여러 AC 드라이브 간의 파라미터
설정값 복사
AC 드라이브의 셋업이 완료되면 MCT 10 셋업 소프트
웨어를 통해 LCP 또는 PC에 데이터를 저장합니다.
그림 2.10 LCP
LCP의 데이터 저장
주의 사항
이 작업을 수행하기 전에 모터를 정지합니다.
LCP에 데이터를 저장하려면:
1.
파라미터 0-50 LCP 복사
2. [OK] 키를 누릅니다.
3.
[1] 모두 업로드
를 선택합니다.
4. [OK] 키를 누릅니다.
모든 파라미터 설정값이 진행 표시줄에 표시된 LCP에
저장됩니다. 진행 표시줄에 100%라고 표시되면 [OK]
를 누릅니다.
LCP를 다른 AC 드라이브에 연결하여 파라미터 설정값
을 복사합니다.
(으)로 이동합니다.
LCP에서 AC 드라이브로 데이터 전송
주의 사항
이 작업을 수행하기 전에 모터를 정지합니다.
LCP에서 AC 드라이브로 데이터를 전송하려면:
1.
파라미터 0-50 LCP 복사
2. [OK] 키를 누릅니다.
3.
[2] 모두 다운로드
4. [OK] 키를 누릅니다.
LCP에 저장된 파라미터 설정값이 진행 표시줄에 표시
된 해당 AC 드라이브로 전송됩니다. 진행 표시줄에
100%라고 표시되면 [OK]를 누릅니다.
2.2.3 표시 모드
일반 운전 상태에서 최대 다섯 가지의 각각 다른 운전
정보를 LCP의 중간 부분인 1.1, 1.2, 1.3, 2, 3에 표시
할 수 있습니다.
2.2.4 표시모드 – 읽기 선택
[Status]를 눌러 3개의 상태 읽기 화면 간 전환을 수행
합니다.
각기 다른 형식의 운전 정보가 각각의 표시 모드 화면
에 표시됩니다. 자세한 정보는 이 장의 예시를 참조하십
시오.
표시된 각각의 운전 변수에는 일부 값이나 측정치가 연
결될 수 있습니다. 표시할 값 또는 측정치는 다음의 파
라미터를 통해 정의할 수 있습니다.
파라미터 0-20 소형 표시 1.1
•
파라미터 0-21 소형 표시 1.2
•
파라미터 0-22 소형 표시 1.3
•
파라미터 0-23 둘째 줄 표시
•
파라미터 0-24 셋째 줄 표시
•
[Quick Menu],
Q3-13 표시창 설정
파라미터 0-20 소형 표시 1.1
줄 표시
에서 선택되어 표시창에 나타난 각각의 파라미
터 값에는 소수점 뒤에 고유 범위와 자릿수가 있습니다.
파라미터 값이 클수록 소수점 뒤에 표시되는 자릿수가
적습니다.
예: 전류 표기값 5.25A; 15.2 A; 105 A.
Q3 기능 셋업, Q3-1 일반 설정
을 통한 파라미터 접근.
(으)로 이동합니다.
를 선택합니다.
.
.
.
.
.
~
파라미터 0-24 셋째
,
2 2
자세한 내용은
파라미터 그룹 0-2* LCP 표시창
을 참조
하십시오.
MG20OB39 Danfoss A/S © 05/2018 All rights reserved. 17
130BC916.10
Q1 My Personal Menu
Q2 Quick Setup
Q4 Smart Setup
Q5 Changes Made
0RPM 0.00A 1(1)
Quick Menus
프로그래밍 방법
VLT® AQUA Drive FC 202
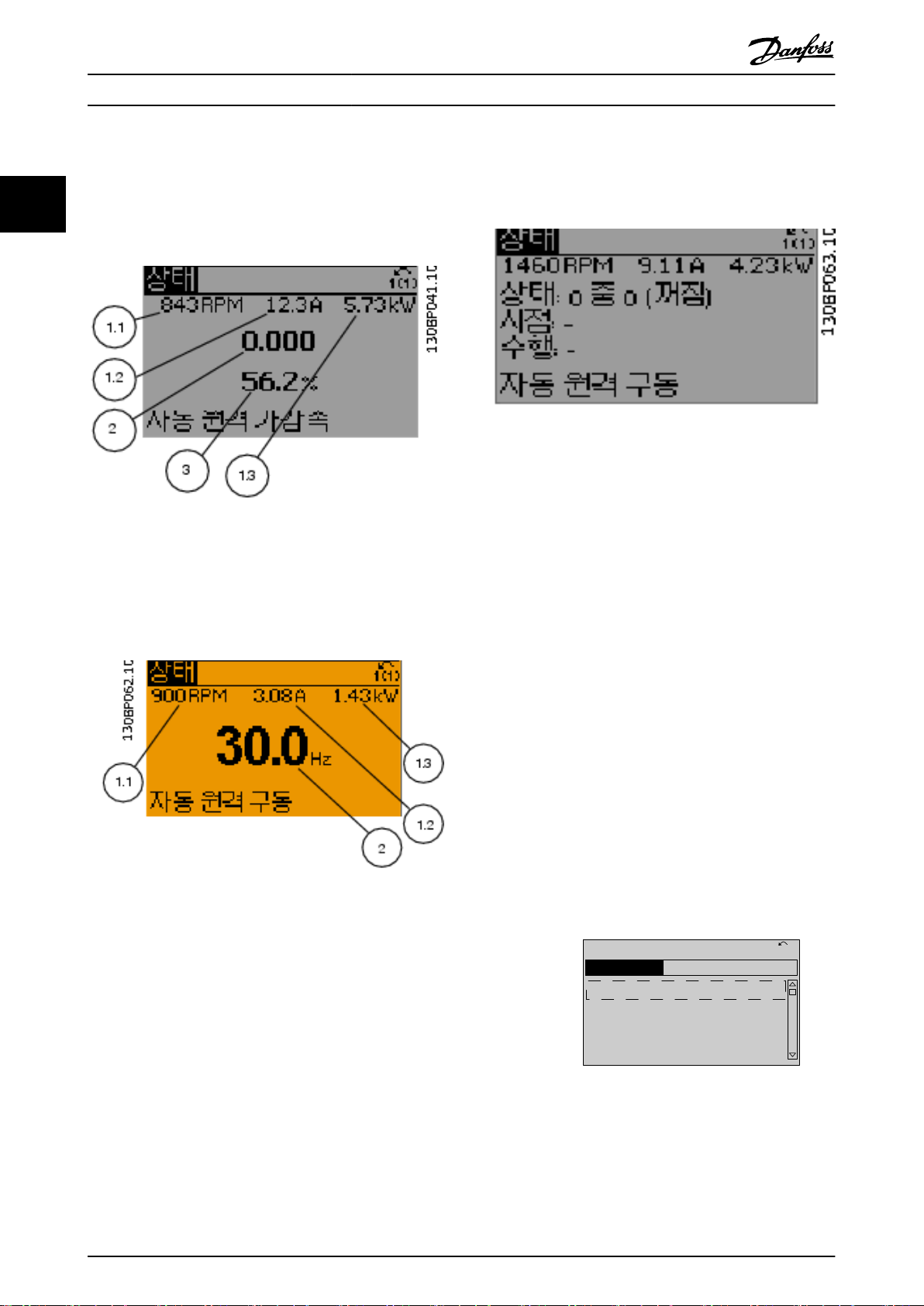
상태 화면 I
이 표기 상태는 기동 또는 초기화 후 기본적으로 나타
나는 상태입니다.
22
[Info]를 눌러 1.1, 1.2, 1.3, 2, 3에 표시된 운전 변수
에 연결된 측정치에 관한 정보를 확인합니다.
그림 2.11
그림 2.11 상태 화면 I
상태 화면 II
그림 2.12
하십시오.
예시에서는 속도, 모터 전류, 모터 출력 및 주파수가 처
음 두 줄에 표시되어 있습니다.
에 표시된 운전 변수를 참조하십시오.
에 표시된 운전 변수(1.1, 1.2, 1.3, 2)를 참조
상태 화면 III
이 상태는 스마트 로직 컨트롤러의 이벤트와 동작을 보
여줍니다. 자세한 정보는
로직
을 참조하십시오.
그림 2.13 상태 화면 III
파라미터 그룹 13-** 스마트
2.2.5 파라미터 셋업
AC 드라이브는 실제로 모든 작업을 수행하는데 사용할
수 있으며 다음과 같은 2가지 프로그래밍 모드 옵션을
제공합니다.
주 메뉴 모드.
•
단축 메뉴 모드.
•
주 메뉴에서는 모든 파라미터에 접근할 수 있습니다. 단
축 메뉴 모드에서는 사용자가 일부 파라미터에 접근하
여 AC 드라이브 운전을 시작할 수 있습니다.
파라미터를 주 메뉴 모드 또는 단축 메뉴 모드에서 변
경합니다.
2.2.6 단축 메뉴 키 기능
[Quick Menu]를 눌러
영역 목록으로 이동합니다.
Q1 개인 메뉴
다. 이 파라미터는
그림 2.12 상태 화면 II
됩니다. 이 메뉴에 최대 50개의 각기 다른 파라미터를
추가할 수 있습니다.
그림 2.14 단축 메뉴
Q2 단축 셋업
일부 파라미터만 설정할 수 있습니다. 그 이외의 파라미
18 Danfoss A/S © 05/2018 All rights reserved. MG20OB39
터는 제어 기능과 신호 입력/출력(제어 단자)의 구성에
따라 초기 설정됩니다.
를 선택하여 선택한 개인 메뉴를 표시합니
을 선택하면 모터 구동을 최적화하기 위해
단축 메뉴
에 포함된 각기 다른
파라미터 0-25 개인 메뉴
에서 선택
프로그래밍 방법 프로그래밍 지침서
검색 키로 파라미터를 선택할 수 있습니다.
표 2.1
의 파
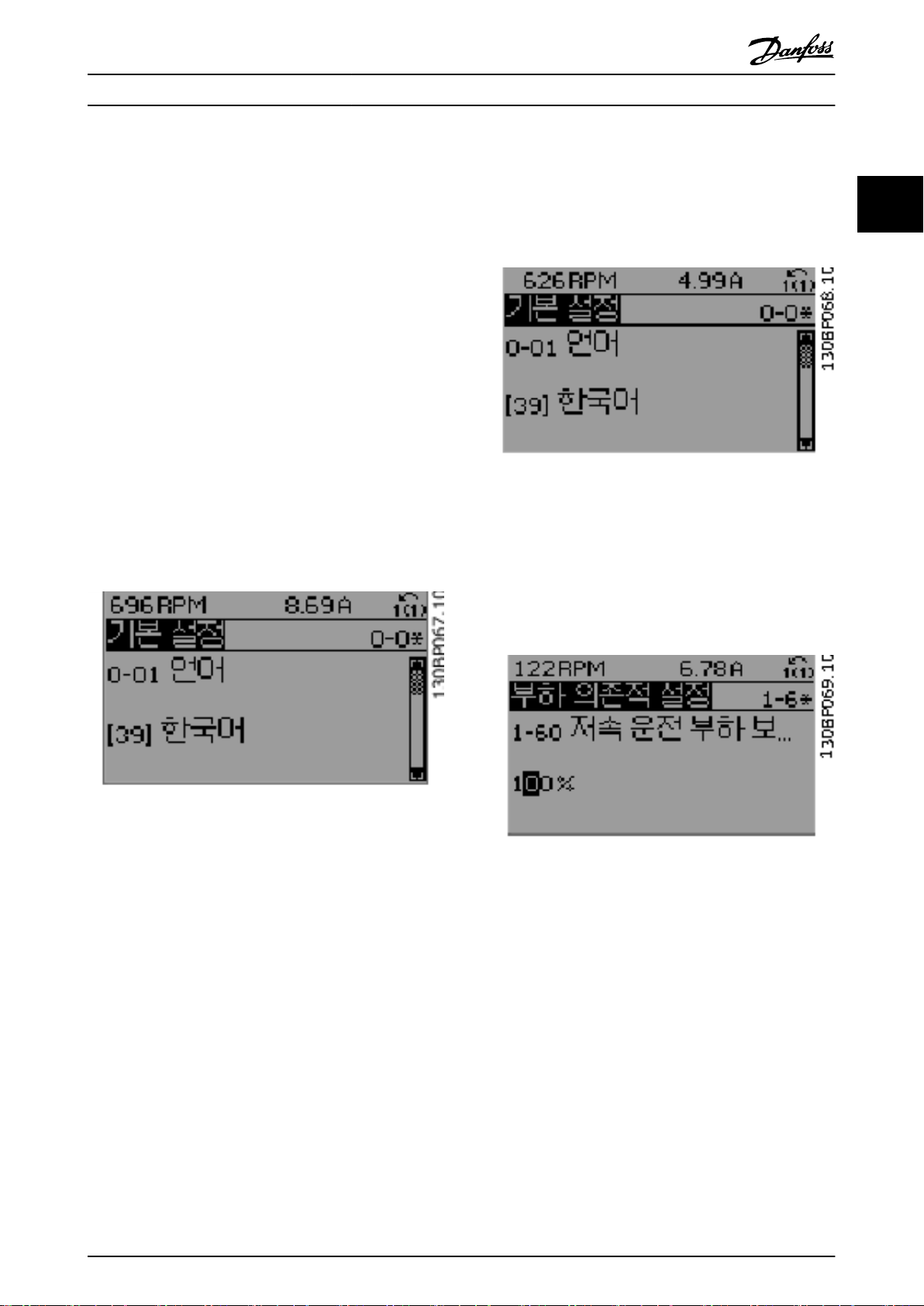
라미터에 접근할 수 있습니다.
파라미터 설정
파라미터 0-01 언어
파라미터 1-20 모터 출력[kW]
파라미터 1-22 모터 전압
파라미터 1-23 모터 주파수
파라미터 1-24 모터 전류
파라미터 1-25 모터 정격 회전수
파라미터 5-12 단자 27 디지털 입력
파라미터 1-29 자동 모터 최적화 (AMA)
파라미터 3-02 최소 지령
파라미터 3-03 최대 지령
파라미터 3-41 1 가속 시간
파라미터 3-42 1 감속 시간
파라미터 3-13 지령 위치
표 2.1 파라미터 선택
1) 단자 27이 [0] 기능 없음으로 설정된 경우, 단자 27에
+24 V를 연결할 필요가 없습니다.
변경 완료
에서는 다음 정보를 확인할 수 있습니다.
마지막 변경 10건. [▲] [▼] 검색 키를 사용하
•
[kW]
[V]
[Hz]
[A]
[RPM]
[0] 기능 없음
[1] 완전 AMA 사용함
[RPM]
[RPM]
[s]
[s]
1)
여 마지막으로 변경된 10개의 파라미터를 스크
롤합니다.
기본 설정 이후 변경 사항.
•
로깅
을 선택하면 표시된 정보를 자세히 확인할 수 있습
니다. 정보는 그래프로 나타납니다.
파라미터 0-20 소형 표시 1.1과 파라미터 0-24 셋째
줄 표시
에서 선택한 파라미터만 볼 수 있습니다. 다음
기능 셋업 파라미터는 다음과 같은 방식으로 분류됩니다.
지령을 위해 샘플을 최대 120개까지 저장할 수 있습니
다.
2.2.7 단축 메뉴, Q3 기능 셋업
기능 셋업은 다음을 포함하여 대부분의 수처리 및 폐수
처리 어플리케이션에 필요한 모든 파라미터에 신속히
접근할 수 있게 합니다.
가변 토오크.
•
일정 토오크.
•
펌프.
•
도징 펌프.
•
우물용 펌프.
•
가압펌프.
•
믹서 펌프.
•
폭기용 송풍기.
•
기타 펌프.
•
팬 어플리케이션.
•
다른 특징 중에서도 기능 셋업 메뉴에는 다음을 선택하
기 위한 파라미터가 포함되어 있습니다.
LCP에 표시할 변수.
•
디지털 프리셋 속도.
•
아날로그 지령의 범위 설정.
•
폐회로 단일 영역 및 다중 영역 어플리케이션.
•
수처리와 관련된 특수 기능.
•
폐수처리 어플리케이션.
•
2 2
Q3-1 일반 설정
Q3-10 시간 설정 Q3-11 표시창 설정 Q3-12 아날로그 출력 Q3-13 릴레이
파라미터 0-70 날짜 및 시간 파라미터 0-20 소형 표시 1.1 파라미터 6-50 단자 42 출력
파라미터 0-71 날짜 형식 파라미터 0-21 소형 표시 1.2 파라미터 6-51 단자 42 최소 출력 범
위
파라미터 0-72 시간 형식 파라미터 0-22 소형 표시 1.3 파라미터 6-52 단자 42 최대 출력 범
위
파라미터 0-74 DST/서머타임 파라미터 0-23 둘째 줄 표시
파라미터 0-76 DST/서머타임 시작 파라미터 0-24 셋째 줄 표시
파라미터 0-77 DST/서머타임 종료 파라미터 0-37 표시 문자 1
–
–
표 2.2 Q3-1 일반 설정
파라미터 0-38 표시 문자 2
파라미터 0-39 표시 문자 3
– 옵션 릴레이 8⇒
– 옵션 릴레이 9⇒
– –
– –
– –
릴레이 1⇒
이 기능
릴레이 2⇒
이 기능
옵션 릴레이 7⇒
터 5-40 릴레이 기능
터 5-40 릴레이 기능
터 5-40 릴레이 기능
파라미터 5-40 릴레
파라미터 5-40 릴레
파라미
파라미
파라미
MG20OB39 Danfoss A/S © 05/2018 All rights reserved. 19
프로그래밍 방법
Q3-20 디지털 지령 Q3-21 아날로그 지령
파라미터 3-02 최소 지령 파라미터 3-02 최소 지령
22
파라미터 3-03 최대 지령 파라미터 3-03 최대 지령
파라미터 3-10 프리셋 지령 파라미터 6-10 단자 53 최저 전압
파라미터 5-13 단자 29 디지털 입력 파라미터 6-11 단자 53 최고 전압
파라미터 5-14 단자 32 디지털 입력 파라미터 6-14 단자 53 최저 지령/피드백 값
파라미터 5-15 단자 33 디지털 입력 파라미터 6-15 단자 53 최고 지령/피드백 값
표 2.3 Q3-2 개회로 설정
Q3-30 피드백 설정 Q3-31 PID 설정
파라미터 1-00 구성 모드 파라미터 20-81 PID 정/역 제어
파라미터 20-12 지령/피드백 단위 파라미터 20-82 PID 기동 속도 [RPM]
파라미터 3-02 최소 지령 파라미터 20-21 설정포인트 1
파라미터 3-03 최대 지령 파라미터 20-93 PID 비례 이득
파라미터 6-20 단자 54 최저 전압 파라미터 20-94 PID 적분 시간
파라미터 6-21 단자 54 최고 전압
파라미터 6-24 단자 54 최저 지령/피드백 값
파라미터 6-25 단자 54 최고 지령/피드백 값
파라미터 6-00 외부 지령 보호 시간
파라미터 6-01 외부 지령 보호 기능
VLT® AQUA Drive FC 202
Q3-2 개회로 설정
Q3-3 폐회로 설정
표 2.4 Q3-3 폐회로 설정
2.2.8 단축 메뉴, Q4 SmartStart
SmartStart는 AC 드라이브 최초 전원 인가 시 또는 공
장 설정값으로 리셋 후 자동으로 구동합니다.
SmartStart는 적절하고 가장 효율적인 모터 제어를 위
해 단계별로 사용자를 안내합니다. SmartStart는 또한
단축 메뉴
SmartStart를 통해 다음과 같은 설정을 이용할 수 있습
니다.
를 통해서도 직접 시작할 수 있습니다.
단일 펌프/모터: 개회로 또는 폐회로.
•
모터 절체: 2개의 모터가 1대의 AC 드라이브
•
를 공유하는 경우.
기본형 캐스케이드 제어: 다중 펌프 시스템 내
•
단일 펌프의 속도 제어.
예를 들어, 이는 부스터 세트에 비용 효율적인
솔루션일 수 있습니다.
마스터/슬레이브: 최대 8대의 AC 드라이브 및
•
펌프를 제어하여 전체 펌프 시스템을 부드럽게
운전할 수 있습니다.
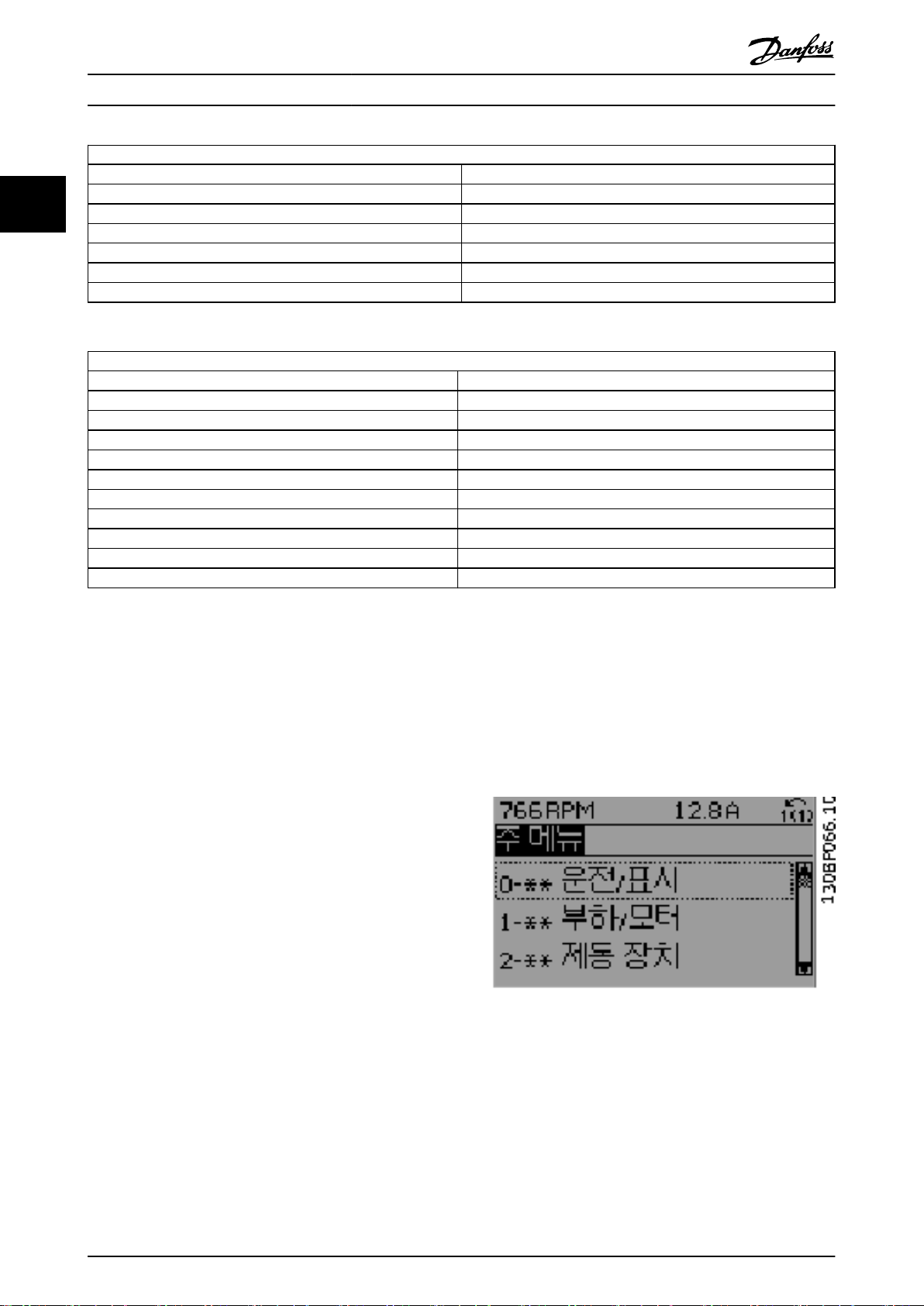
2.2.9 주 메뉴 모드
[Main Menu]를 눌러 주 메뉴 모드로 이동합니다.
림 2.15
표시창의 중간 부분과 아래쪽 부분에는 [▲] 및 [▼] 키
를 사용하여 선택할 수 있는 파라미터 그룹의 목록이
표시됩니다.
의 읽기는 표시창에 나타납니다.
그림 2.15 주 메뉴 모드
그
20 Danfoss A/S © 05/2018 All rights reserved. MG20OB39
프로그래밍 방법 프로그래밍 지침서
각 파라미터의 이름과 숫자는 프로그래밍 모드와 관계
없이 동일합니다. 주 메뉴 모드에서 파라미터는 그룹별
로 분리되어 있습니다. 파라미터 번호의 첫 번째 숫자
(맨 왼쪽에 있는 숫자)는 파라미터 그룹 번호를 나타냅
니다.
주 메뉴에서는 모든 파라미터를 변경할 수 있습니다. 하
지만 구성(
미터를 숨길 수 있습니다. 예를 들어, 개회로를 선택하
면 모든 PID 파라미터를 숨길 수 있고 활성화된 다른
옵션을 선택하면 다른 파라미터 그룹을 추가로 표시하
게 할 수 있습니다.
파라미터 1-00 구성 모드
)에 따라 일부 파라
2.2.10 파라미터 선택
주 메뉴 모드에서 파라미터는 그룹별로 분리되어 있습
니다. 검색 키로 파라미터 그룹을 선택할 수 있습니다.
파라미터 그룹을 선택한 다음 검색 키로 파라미터를 선
택합니다.
표시창의 중간 부분에 파라미터 번호와 이름 그리고 선
택된 파라미터 값이 표시됩니다.
2.2.12 텍스트 값의 변경
선택한 파라미터가 텍스트 값인 경우에는 [▲] [▼] 키로
텍스트 값을 변경합니다.
저장할 값 위에 커서를 놓고 [OK]를 누릅니다.
그림 2.17 텍스트 값의 변경
2.2.13 데이터 값의 변경
선택한 파라미터가 숫자 데이터 값인 경우에는 [◀] [▶]
검색 키와 [▲] [▼] 검색 키로 선택한 데이터 값을 변경
합니다. [◀] [▶] 키를 눌러 커서를 좌우로 이동합니다.
2 2
그림 2.16 파라미터 선택
2.2.11 데이터의 수정
데이터를 변경하는 방법은 단축 메뉴 모드와 주 메뉴
모드 둘 다 동일합니다. [OK] 키를 눌러 선택된 파라미
터를 수정할 수 있습니다.
선택된 파라미터가 숫자 데이터 값인지 또는 텍스트 값
인지에 따라 데이터 변경 절차가 약간 다를 수 있습니
다.
그림 2.18 데이터 값의 변경
데이터 값을 변경하려면 [▲] [▼] 키를 누릅니다. [▲]를
누르면 데이터 값이 커지고 [▼]를 누르면 데이터 값이
작아집니다. 저장할 값 위에 커서를 놓고 [OK]를 누릅
니다.
MG20OB39 Danfoss A/S © 05/2018 All rights reserved. 21
130BP072.10
957RPM
1-71 High starting torque time
0. s
11.58A 1 (1)
1-7*Start Adjustments
4
프로그래밍 방법
VLT® AQUA Drive FC 202
이 파라미터는 단계적으로 값을 변경할 수도 있고 이미
설정되어 있는 값으로 변경할 수도 있습니다.
22
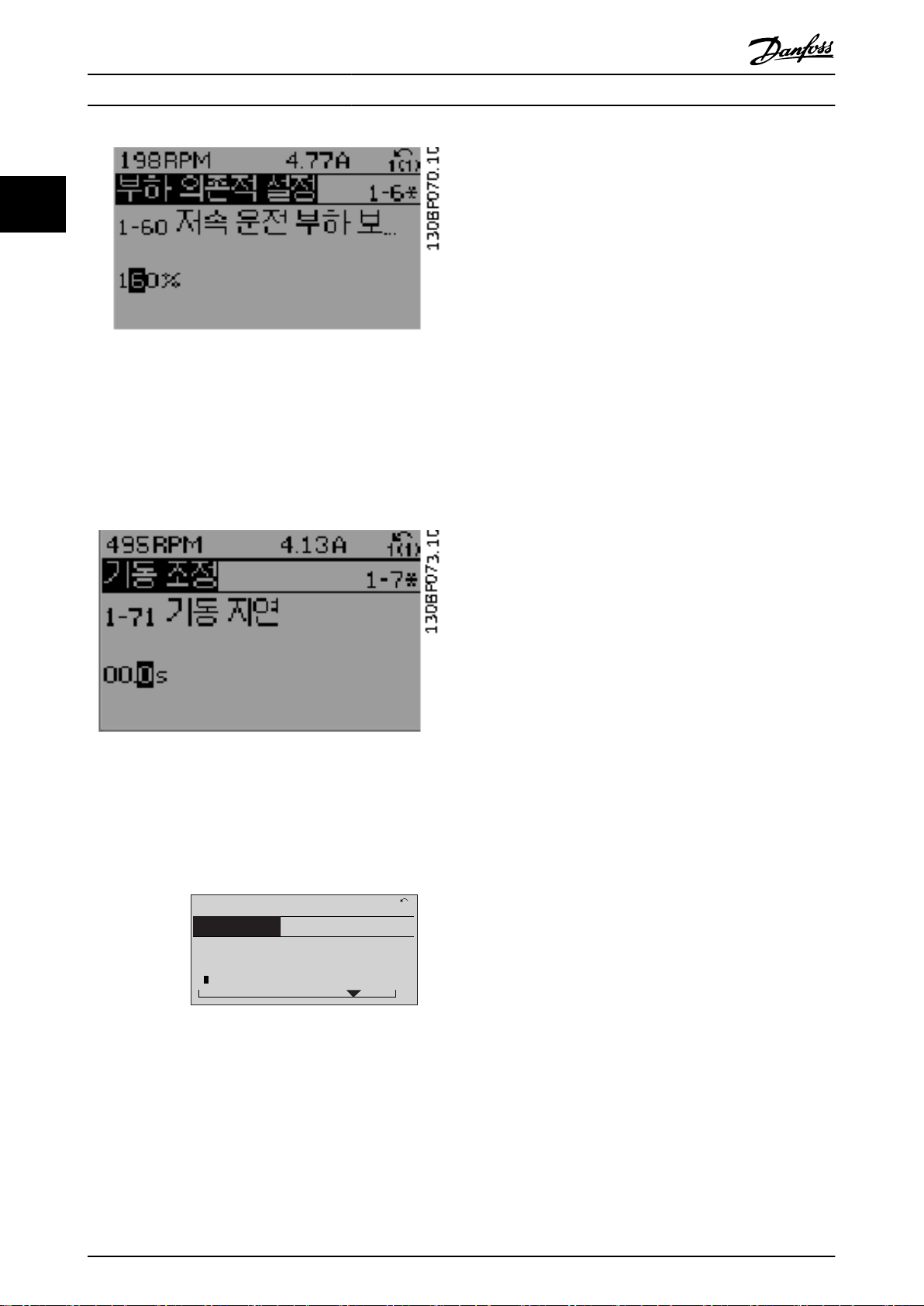
2.2.16 인덱싱된 파라미터 읽기 및 프로
그래밍
여러 개의 데이터를 가진 파라미터에는 각각의 데이터
에 인덱스가 붙어 있습니다.
그림 2.19 데이터 값의 저장
2.2.14 이미 설정되어 있는 값으로 숫자
데이터 값 변경
선택한 파라미터가 숫자 데이터 값인 경우에는 [◀] [▶]
로 자릿수를 선택합니다.
파라미터 15-30 알람 기록: 오류 코드
터 15-32 알람 기록: 시간
있어 확인할 수 있습니다. 파라미터를 선택하고 [OK]를
누른 다음 [▲] [▼] 키를 눌러 값 기록을 스크롤합니다.
예를 들어,
변경됩니다.
1. 파라미터를 선택하고 [OK]를 누른 다음 [▲]
2. 파라미터 값을 변경하려면 인덱싱된 값을 선택
3. [▲] [▼]를 눌러 값을 변경합니다.
4. [OK] 키를 눌러 변경된 설정을 저장합니다.
5. [Cancel] 키를 눌러 취소할 수 있습니다.
파라미터 3-10 프리셋 지령
[▼]를 눌러 인덱싱된 값을 스크롤합니다.
하고 [OK] 키를 누릅니다.
[Back] 키를 누르면 다른 파라미터로 이동할
수 있습니다.
에는 결함 기록이 포함되어
에서
파라미
은 다음과 같이
2.2.17 숫자 방식의 현장 제어 패널을 이
용한 프로그래밍 방법
그림 2.20 자릿수 선택
[▲] [▼]로 선택한 자릿수를 이미 설정되어 있는 값으로
즉시 변경할 수 있습니다.
커서는 선택한 자릿수를 가리킵니다. 저장할 자릿수 위
에 커서를 놓고 [OK]를 누릅니다.
그림 2.21 저장
다음 지침은 숫자 방식의 LCP(LCP 101)가 있는 경우
에 해당하는 내용입니다.
제어 패널은 기능별로 아래와 같이 4가지로 나뉘어집니
다.
숫자 표시창.
•
메뉴 키 및 표시 램프 – 파라미터 변경 및 표시
•
기능 전환.
검색 키 및 표시등.
•
운전 키 및 표시등.
•
화면 표시줄
상태 메시지가 아이콘과 숫자로 표시됩니다.
표시 램프
녹색 LED/On: 제어부가 켜져 있음을 의미합니
•
다.
황색 LED/Wrn: 경고 메시지를 의미합니다.
•
적색 LED/Alarm 점멸: 알람을 의미합니다.
•
2.2.15 값, 단계적
일부 파라미터는 단계적으로 값을 변경할 수 있습니다.
이는 다음에 적용됩니다.
파라미터 1-20 모터 출력[kW]
•
파라미터 1-22 모터 전압
•
파라미터 1-23 모터 주파수
•
22 Danfoss A/S © 05/2018 All rights reserved. MG20OB39
.
.
.
e30ba191.11
1
Auto
On
Reset
Hand
On
Off
Menu
Status
Quick
Setup
Main
Menu
Back
2
3
4
OK
On
Alarm
Warn.
Setup
130BP077.10
22.8
rpm
Setup 1
Setup 1
130BP078.10
A 17
프로그래밍 방법 프로그래밍 지침서
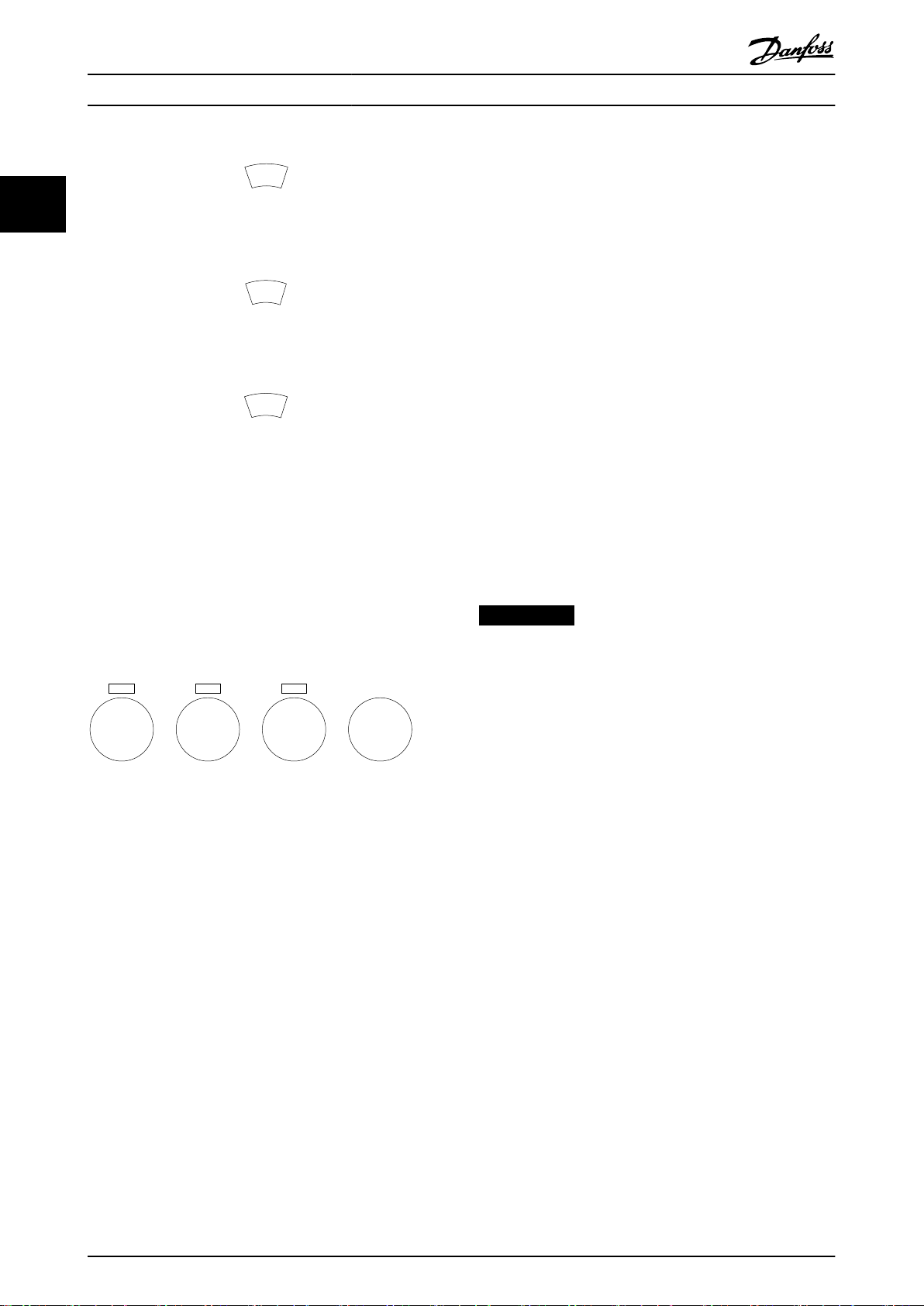
LCP 키
[Menu]
다음 모드 중 하나를 선택합니다.
상태.
•
단축 설정.
•
주 메뉴.
•
그림 2.22 LCP 키
상태 모드
상태 모드는 AC 드라이브 또는 모터의 상태를 나타냅
니다.
알람이 발생하면, NLCP는 모드를 상태 모드로 자동 전
환합니다.
일부 알람이 표시될 수 있습니다.
그림 2.23 상태 모드
그림 2.24 알람
주 메뉴/단축 셋업
모든 파라미터를 프로그래밍하거나 단축 메뉴의 파라미
터만 프로그래밍하는데 사용합니다(
숫자 방식의 현장 제어 패널
조).
값이 점멸할 때 [▲] 또는 [▼]를 눌러 파라미터 값을 변
경합니다.
1. [Main Menu]를 눌러 주 메뉴를 선택합니다.
2. 파라미터 그룹 [xx-__]를 선택하고 [OK]를
누릅니다.
3. 파라미터 [__-xx]을 선택하고 [OK]를 누릅니
다.
4. 파라미터가 배열 파라미터라면 배열 번호를 선
택한 다음 [OK]를 누릅니다.
5. 필요한 데이터 값을 선택하고 [OK]를 누릅니
다.
기능 옵션이 있는 파라미터는 [1], [2] 등과 같은 값을
나타냅니다. 각기 다른 옵션에 대한 설명은
미터 설명
[Back]
이전 단계로 이동하는데 사용합니다.
[▲] [▼]는 다른 명령으로 이동하거나 파라미터의 각종
항목을 확인하는데 사용합니다.
의 개별 파라미터 설명을 참조하십시오.
의 LCP 102 설명 또한 참
장을 2.1 그래픽 및
장을 3 파라
2 2
주의 사항
LCP 101 숫자 방식의 현장 제어 패널에서는 파라미터
복사 기능을 사용할 수 없습니다.
MG20OB39 Danfoss A/S © 05/2018 All rights reserved. 23
그림 2.25 주 메뉴/단축 셋업
e30bp046.12
Hand
On
Off
Auto
On
Reset
프로그래밍 방법
VLT® AQUA Drive FC 202
2.2.18 LCP 키
현장 제어 키는 LCP 맨 아래에 있습니다.
22
그림 2.26 LCP 키
[Hand On]
LCP를 통해 AC 드라이브를 제어하는데 사용합니다.
[Hand on]을 눌러 모터를 기동할 수 있으며 이제는 검
색 키를 이용하여 모터 회전수 데이터를 입력할 수도
있습니다.
해 키를
있습니다.
제어 신호 또는 필드버스를 통해 외부 정지 신호가 활
성화된 경우, LCP를 통해 기동 명령을 실행해도 기동되
지 않습니다.
[Hand on]이 활성화되어 있어도 다음과 같은 제어 신
호는 계속 사용할 수 있습니다.
[Off]
연결된 모터를 정지합니다.
짐] 키
선택할 수 있습니다.
외부 정지 기능을 선택하지 않고 [Off] 키도 활성화되
지 않았다면 전압을 차단하여 모터를 정지합니다.
[Auto On]
제어 단자 및/또는 직렬 통신을 통해 AC 드라이브를 제
어하는데 사용합니다. 제어 단자 또는 직렬 통신에서 기
동 신호를 주면 AC 드라이브가 기동을 시작합니다.
라미터 0-42 LCP의 [자동 운전] 키
사용함
주의 사항
디지털 입력을 통해 활성화된 수동-꺼짐-자동 신호는
제어 키 [Hand on] 및 [Auto on]보다 우선순위가 높
습니다.
[Reset]
알람(트립) 후 AC 드라이브를 리셋하는데 사용합니다.
파라미터 0-43 LCP의 [리셋] 키
또는
파라미터 0-40 LCP의 [수동 운전] 키
[1] 사용함
[Hand On] - [Off] - [Auto On].
•
리셋.
•
코스팅(프리런) 정지 인버스.
•
역회전
•
셋업 선택 lsb – 셋업 선택 msb.
•
직렬 통신을 통한 정지 명령.
•
순간 정지.
•
직류 제동.
•
를 통해 키를
또는
[0] 사용안함
또는
[0] 사용안함
파라미터 0-41 LCP의 [꺼
[1] 사용함
[0] 사용안함
으로 선택할 수 있습니다.
으로 선택할 수 있습니다.
또는
으로 선택할 수
[0] 사용안함
를 통해 키를
를 통해
[1] 사용함
를 통
으로
파
[1]
2.3.1 초기 설정으로 초기화
2가지 방법으로 AC 드라이브를 초기 설정으로 초기화
합니다.
권장 초기화(
1.
2. [OK]를 누릅니다.
3.
4. [OK]를 누릅니다.
5. 주전원 공급을 차단하고 표시창이 꺼질 때까지
6. 주전원 공급을 다시 연결합니다. 이제 AC 드라
파라미터 14-22 운전 모드
기화합니다.
•
•
•
•
•
•
•
•
•
•
수동 초기화
1. 주전원을 차단하고 표시창이 꺼질 때까지 기다
2. 2a LCP 102, 그래픽 표시창에 전원이 인
3. 5초 후에 키를 놓습니다.
4. AC 드라이브가 초기 설정으로 복원되었습니
이 절차는 다음을 제외하고 초기화합니다.
•
•
•
•
파라미터 14-22 운전 모드
파라미터 14-22 운전 모드
[2] 초기화
기다립니다.
이브가 리셋되었습니다.
파라미터 14-50 RFI 필터
파라미터 8-30 프로토콜
파라미터 8-31 주소
파라미터 8-32 통신 속도
파라미터 8-35 최소 응답 지연
파라미터 8-36 최대 응답 지연
파라미터 8-37 최대 특성간 지연
파라미터 15-00 운전 시간
터 15-05 과전압
파라미터 15-20 이력 기록: 이벤트
터 15-22 이력 기록: 시간
파라미터 15-30 알람 기록: 오류 코드
미터 15-32 알람 기록: 시간
립니다.
2b LCP 101, 숫자 방식의 표시창에 전원
다.
파라미터 15-00 운전 시간
파라미터 15-03 전원 인가
파라미터 15-04 온도 초과
파라미터 15-05 과전압
를 선택합니다.
는 다음을 제외하고 모두 초
.
.
가되는 동안 [Status] - [Main
Menu] - [OK]를 동시에 누릅니다.
이 인가되는 동안 [Menu] - [OK]를
누릅니다.
.
을 통한 방법)
를 선택합니다.
.
.
.
.
.
.
~
파라미
.
.
.
.
.
~
파라미
~
파라
24 Danfoss A/S © 05/2018 All rights reserved. MG20OB39

프로그래밍 방법 프로그래밍 지침서
주의 사항
수동 초기화는 또한 직렬 통신, RFI 필터 설정(
터 14-50 RFI 필터
) 및 결함 기록 설정도 리셋합니다.
파라미
2 2
MG20OB39 Danfoss A/S © 05/2018 All rights reserved. 25
파라미터 설명
3 파라미터 설명
3.1 파라미터 선택
VLT® AQUA Drive FC 202
33
파라미터는 AC 드라이브의 최적 운전을 위해 다양한 파라미터 그룹 중에서 올바르게 선택합니다.
파라미터 그룹 개요
그룹 기능
0-** 운전 및 디스플레이 AC 드라이브의 기본 기능, LCP 키의 기능 및 LCP 표시창의 구성 관련 파라미터입니다.
1-** 부하/모터 모터 설정과 관련된 파라미터입니다.
2-** 제동 장치 AC 드라이브의 제동 기능과 관련된 파라미터입니다.
3-** 지령/가감속 지령 처리, 한계 설정 및 AC 드라이브의 반응 구성 변경에 관한 파라미터입니다.
4-** 한계/경고 한계 및 경고를 구성하는 파라미터입니다.
5-** 디지털 입/출력 디지털 입력 및 출력을 구성하는 파라미터입니다.
6-** 아날로그 입/출력 아날로그 입력 및 출력을 구성하는 파라미터입니다.
8-** 통신 및 옵션 통신 및 옵션을 구성하는 파라미터 그룹입니다.
9-** 프로피버스
10-** 캔 필드버스
13-** 스마트 논리 스마트 로직 컨트롤러를 위한 파라미터 그룹입니다.
14-** 특수 기능 특수 AC 드라이브 기능을 구성하는 파라미터 그룹입니다.
15-** AC 드라이브 정보 운전 데이터, 하드웨어 구성 및 소프트웨어 버전 등과 같은 AC 드라이브의 정보가 들어 있는 파라미터 그룹
16-** 정보 읽기 실제 지령, 전압, 제어 워드, 알람 워드, 경고 워드 및 상태 워드와 같은 데이터 읽기에 관한 파라미터 그룹
18-** 정보 읽기 2 이 파라미터 그룹에는 예방적 유지보수 기록 중 마지막 10건이 포함되어 있습니다.
20-** FC 폐회로 이 파라미터 그룹은 폐회로 PID 제어기를 구성하는데 사용되며 장치의 출력 주파수를 제어합니다.
21-** 확장형 폐회로 3개의 확장형 폐회로 PID 제어기를 구성하는 파라미터입니다.
22-** 어플리케이션 기능 수처리 어플리케이션을 위한 파라미터입니다.
23-** 시간 관련 기능 매일 또는 매주 수행할 동작을 위한 파라미터입니다.
24-** 어플리케이션 기능 2 AC 드라이브 바이패스를 위한 파라미터입니다.
25-** 캐스케이드 컨트롤러 여러 펌프의 순차 제어를 위한 기본형 캐스케이드 컨트롤러를 구성하는 파라미터입니다.
26-** 아날로그 I/O 옵션 MCB 109
29-** 수처리 어플리케이션 기능 수처리 고유 기능을 설정하는 파라미터입니다.
30-** 특수 기능 특수 기능을 구성하는 파라미터입니다.
31-** 바이패스 옵션 바이패스 기능을 구성하는 파라미터입니다.
35-** 센서 입력 옵션 센서 입력 기능을 구성하는 파라미터입니다.
프로피버스 고유 파라미터로 구성된 파라미터 그룹입니다(VLT® PROFIBUS DP MCA 101 필요).
DeviceNet 고유 파라미터로 구성된 파라미터 그룹입니다(VLT® DeviceNet MCA 104 필요).
입니다.
입니다.
VLT® 아날로그 I/O 옵션 MCB 109을 구성하는 파라미터입니다.
표 3.1 파라미터 그룹
파라미터 설명 및 선택항목은 그래픽 방식의 LCP 또는 숫자 방식의 LCP에 표시됩니다. 자세한 내용은
그래밍 방법
는 운전 기동에 필요한 파라미터를 제공함으로써 주로 기동 시 제품의 작동에 사용됩니다.
을 참조하십시오. LCP의
[Quick Menu]
또는
[Main Menu]
를 눌러 파라미터에 접근합니다.
주 메뉴
장을 2 프로
단축 메뉴
는 세부적인 어플
리케이션 프로그래밍을 위해 모든 파라미터에 대한 접근을 가능하게 합니다.
모든 디지털 입력/출력 및 아날로그 입력/출력 단자는 다기능 단자입니다. 모든 단자에는 대부분의 수처리 어플리케
이션에 적합한 공장 초기 설정 기능이 있습니다. 다른 특수 기능이 필요한 경우에는 파라미터 그룹
출력
또는
6-** 아날로그 입/출력
26 Danfoss A/S © 05/2018 All rights reserved. MG20OB39
에서 프로그래밍해야 합니다.
5-** 디지털 입/
0-01 언어
옵션: 기능:
표시창에 표시될 언어를 지정합니
다.
AC 드라이브는 2가지 언어 패키
지로 배송됩니다. 기본적으로 영
어와 독어는 두 패키지에 모두 포
함되어 있습니다. 영어는 삭제할
수도 중복 포함시킬 수도 없습니
다.
[0] * English 언어 패키지 1–2에 포함.
[1] Deutsch 언어 패키지 1–2에 포함.
[2] Francais 언어 패키지 1에 포함.
[3] Dansk 언어 패키지 1에 포함.
[4] Spanish 언어 패키지 1에 포함.
[5] Italiano 언어 패키지 1에 포함.
[6] Svenska 언어 패키지 1에 포함.
[7] Nederlands 언어 패키지 1에 포함.
[10] Chinese 언어 패키지 2에 포함.
[20] Suomi 언어 패키지 1에 포함.
[22] English US 언어 패키지 1에 포함.
[27] Greek 언어 패키지 1에 포함.
[28] Bras.port 언어 패키지 1에 포함.
[36] Slovenian 언어 패키지 1에 포함.
[39] Korean 언어 패키지 2에 포함.
[40] Japanese 언어 패키지 2에 포함.
[41] Turkish 언어 패키지 1에 포함.
[42] Trad.Chinese언어 패키지 2에 포함.
[43] Bulgarian 언어 패키지 1에 포함.
[44] Srpski 언어 패키지 1에 포함.
[45] Romanian 언어 패키지 1에 포함.
[46] Magyar 언어 패키지 1에 포함.
[47] Czech 언어 패키지 1에 포함.
[48] Polski 언어 패키지 1에 포함.
[49] Russian 언어 패키지 1에 포함.
[50] Thai 언어 패키지 2에 포함.
[51] Bahasa
Indonesia
언어 패키지 2에 포함.
0-01 언어
옵션: 기능:
[52] Hrvatski 언어 패키지 2에 포함.
0-02 모터 속도 단위
옵션: 기능:
주의 사항
모터가 운전하는 동안에는 이
파라미터를 설정할 수 없습니
다.
표시창에 나타나는 정보는
파라미
터 0-02 모터 속도 단위와 파라
미터 0-03 지역 설정
의 설정에
따라 달라집니다.
파라미
터 0-02 모터 속도 단위
및
파라
미터 0-03 지역 설정
의 초기 설
정은 AC 드라이브가 배송되는 지
역에 따라 다릅니다.
주의 사항
모터 속도 단위를 변경하면 특
정 파라미터가 초기 값으로 리
셋됩니다. 다른 파라미터를 수
정하기 전에 모터 속도 단위를
선택합니다.
[0] * RPM 모터 회전수(RPM)를 사용하여 모
터 속도 변수 및 파라미터를 표시
할 때 선택합니다.
[1] Hz 출력 주파수(Hz)를 사용하여 모터
속도 변수 및 파라미터를 표시할
때 선택합니다.
0-03 지역 설정
옵션: 기능:
주의 사항
모터가 운전하는 동안에는 이
파라미터를 설정할 수 없습니
다.
표시창에 나타나는 내용은
파라미
터 0-02 모터 속도 단위와 파라
미터 0-03 지역 설정
의 설정에
따라 달라집니다.
파라미
터 0-02 모터 속도 단위
및
파라
미터 0-03 지역 설정
의 초기 설
정은 AC 드라이브가 배송되는 지
역에 따라 다릅니다. 필요한 경우,
설정을 다시 프로그래밍합니다.
사용하지 않는 설정은 보이지 않
습니다.
[0] 국제 표준
파라미터 1-20 모터 출력[kW]
단위를 [kW]로 설정하고
파라미
파라미터 설명 프로그래밍 지침서
3.2 파라미터 0-** 운전 및 디스플레이
AC 드라이브의 기본 기능, LCP 키의 기능 및 LCP 표
시창의 구성 관련 파라미터입니다.
3.2.1 0-0* 기본 설정
MG20OB39 Danfoss A/S © 05/2018 All rights reserved. 27
3 3
0-03 지역 설정
옵션: 기능:
터 1-23 모터 주파수
의 초기 설
정값을 50 Hz로 설정합니다.
[1] 북미
파라미터 1-21 모터 동력 [HP]
단위를 [hp]로 설정하고
파라미
터 1-23 모터 주파수
의 초기 설
정값을 60 Hz로 설정합니다.
0-04 전원 인가 시 운전 상태
옵션: 기능:
수동 (현장) 운전 모드에서 전원을
차단한 다음 AC 드라이브를 주전
원 전압에 다시 연결한 후 운전
모드를 선택합니다.
[0] * 재개 동일한 현장 지령과 동일한 기동/
정지 조건을 유지하면서 AC 드라
이브의운전을 재개합니다. 기동/정
지 조건은 AC 드라이브의 전원이
차단되기 전에 LCP의 [Hand
On]/[Off] 또는 디지털 입력을 통
한 현장 기동에 의해 적용됩니다.
[1] 강제정지,지령
=이전
AC 드라이브를 정지함과 동시에
전원이 차단되기 전에 현장 속도
지령이 메모리에 저장됩니다. 주
전원 전압이 다시 연결되고 기동
명령([Hand On]을 누르거나 디지
털 입력을 통한 현장 기동 명령)
을 받은 후에 AC 드라이브가 재
기동하고 저장된 속도 지령에 따
라 운전합니다.
0-05 현장 모드 단위
옵션: 기능:
현장 지령 단위를 모터축 속도
(RPM/Hz 단위)로 표시할지 아니
면 백분율로 표시할지 여부를 정
의합니다.
[0] * 모터 속도 단
위
[1] %
0-10 셋업 활성화
옵션: 기능:
AC 드라이브가 운전할 셋업을 선
택합니다.
파라미터 0-51 셋업 복사
를 사용
하여 하나의 셋업을 하나 이상의
다른 셋업에 복사합니다. 2개의
각기 다른 셋업에 동일한 파라미
터가 설정되지 않게 하려면
파라
미터 0-12 다음에 링크된 설정
을
통해 셋업을 링크합니다.
운전 중
변경 불가
로 표시된 파라미터에
각기 다른 값이 있는 셋업 간의
전환을 수행하기 전에 AC 드라이
브를 정지합니다.
운전 중 변경 불가
로 표시된 파라
미터는
장을 4 파라미터 목록
에
FALSE(거짓)로 표시됩니다.
[0] 기본 설정 변경할 수 없습니다. 여기에는 댄
포스 데이터 세트가 포함되어 있
으며 다른 셋업을 기존 상태로 복
구하고 싶을 때 이 데이터를 데이
터 소스로 사용할 수 있습니다.
[1] * 셋업 1
[1] 셋업 1
에서
[4] 셋업 4
까지
는 4개의 파라미터 셋업이며, 셋
업 내의 모든 파라미터를 프로그
래밍할 수 있습니다.
[2] 셋업2
파라미터 설명
VLT® AQUA Drive FC 202
하도록 프로그래밍할 수도 있습니다. 또는 공기 처리 장
치나 OEM 장치의 경우, 동일 범위 내의 각기 다른 장
비에 알맞게 모든 AC 드라이브를 프로그래밍하여 동일
한 파라미터를 갖게 할 수 있습니다. 생산/작동 도중에
AC 드라이브 모델에 따라 특정 셋업을 선택할 수 있습
니다.
33
활성 셋업(AC 드라이브가 현재 운전 중인 셋업)은
미터 0-10 셋업 활성화
에서 선택할 수 있습니다. 그리
파라
고 나면 LCP에 활성 셋업이 표시됩니다. 다중 셋업을
사용하면 AC 드라이브가 운전 중이거나 정지된 상태에
서 디지털 입력 또는 직렬 통신 명령(예컨대, 야간 운
전)을 통해 셋업 간 전환이 가능합니다. 운전 중에 셋업
을 변경할 필요가 있는 경우에는
에 링크된 설정
를 원하는 대로 프로그래밍하면 됩니다.
파라미터 0-12 다음
대부분의 수처리 및 폐수처리 어플리케이션의 경우, 운
전하는 동안 셋업 변경이 필요하더라도
터 0-12 다음에 링크된 설정
를 프로그래밍할 필요가
파라미
없습니다. 하지만 다중 셋업을 최대한 유연성 있게 사용
하는 복잡한 어플리케이션의 경우에는 프로그래밍이 필
요할 수 있습니다.
파라미터 0-11 변경 셋업 선택
을 사
용하면 AC 드라이브가 활성 셋업으로 계속 운전하는
동안에도 모든 셋업 내의 파라미터를 수정할 수 있습니
다. 활성 셋업이 수정 중인 셋업과 다른 셋업일 수 있습
니다.
파라미터 0-51 셋업 복사
을 사용하면 각기 다른
셋업에 유사한 파라미터 설정이 필요할 때, 신속히 작동
할 수 있도록 셋업 간 파라미터 설정을 복사할 수 있습
니다.
3.2.2 0-1* 셋업 처리
각각의 파라미터 셋업을 정의하고 제어하는 파라미터입
니다.
AC 드라이브에는 개별적으로 프로그래밍할 수 있는 4
개의 파라미터 셋업이 있습니다. 이는 AC 드라이브를
다양하게 활용할 수 있게 해주며 다양한 수처리 시스템
제어 방식의 요구사항을 충족시켜 줄 뿐만 아니라 외부
제어 장비에 드는 비용을 절감시켜 주기도 합니다. 예를
들어, 하나의 셋업과 하나의 제어 방식에 따라 운전(예
컨대, 주간 운전)하도록 프로그래밍할 수도 있고 또 하
나의 셋업과 제어 방식에 따라 운전(예컨대, 야간 운전)
28 Danfoss A/S © 05/2018 All rights reserved. MG20OB39
0-10 셋업 활성화
옵션: 기능:
[3] 셋업 3
[4] 셋업 4
[9] 다중 설정 디지털 입력과 직렬 통신 포트를
통해 원격 셋업을 선택하는데 사
용합니다. 이 셋업은
파라미
터 0-12 다음에 링크된 설정
의
설정을 사용합니다.
0-11 변경 셋업 선택
옵션: 기능:
운전하는 동안 편집(즉, 프로그래
밍)할 셋업을 활성 셋업 또는 비
활성 셋업 중에서 하나 선택합니
다. 편집 중인 셋업 번호가 LCP에
서 괄호 안에 표시됩니다.
[0] 공장 설정 셋업편집할 수는 없지만 다른 셋업을
기존 상태로 복구하고 싶을 때 데
이터 소스로 사용할 수는 있습니
다.
[1] 셋업 1
[1] 셋업 1
에서
[4] 셋업 4
까지
는 운전하는 동안 활성 셋업과 관
계 없이 원하는 대로 편집할 수
있습니다.
[2] 셋업 2
[3] 셋업 3
[4] 셋업 4
[9] * 활성 셋업 AC 드라이브가 운전 중인 셋업을
운전하는 동안 편집할 수 있습니
다. 일반적으로 LCP를 통해 선택
한 셋업의 파라미터를 편집하지만
직렬 통신 포트를 통해서도 편집
할 수 있습니다.
0-12 다음에 링크된 설정
옵션: 기능:
모터가 구동 중일 때 셋업 변경이
필요한 경우에만 이 파라미터를
사용합니다. 이 파라미터를 사용
하면 운전 중 변경 불가로 표시된
파라미터가 모든 관련 셋업에서
동일하게 설정됩니다.
AC 드라이브가 운전하는 동안 하
나의 셋업에서 다른 셋업으로 변
경 시 충돌이 생기지 않도록 하려
면 운전 중에 변경할 수 없는 파
라미터가 포함된 셋업을 링크합니
다. 운전하는 동안 하나의 셋업에
서 다른 셋업으로 이동할 때 링크
가
운전 중 변경 불가
파라미터
값의 동기화를 확인합니다. AC 드
라이브가 구동 중일 때는 (
장
을 4 파라미터 목록
의) 파라미터
0-12 다음에 링크된 설정
옵션: 기능:
목록에서 FALSE(거짓)로 표시된
파라미터는 변경할 수 없습니다.
파라미터 0-12 다음에 링크된 설
정
기능은
파라미터 0-10 셋업
활성화
에서
[9] 다중 셋업
이 선택
되었을 때 사용됩니다.
[9] 다중
셋업
을 사용하여 모터가 구동 중
일 때 하나의 셋업에서 다른 셋업
으로 이동합니다.
예를 들어:
[9] 다중 셋업
을 사용하여 모터가
구동 중일 때 셋업 1에서 셋업 2
로 이동합니다. 셋업 1의 파라미
터를 먼저 프로그래밍한 다음 셋
업 1과 셋업 2가 동기화(또는 링
크)되어 있는지 확인합니다.
다음과 같은 2가지 방법으로 동기
화할 수 있습니다.
•
설정 셋업을
파라미
터 0-11 변경 셋업 선택
의
[2] 셋업 2
로 변경하
고
파라미터 0-12 다음
에 링크된 설정를 [1] 셋
업 1
로 설정합니다. 이렇
게 하면 링크(동기화) 공
정이 시작됩니다.
130BP075.10
그림 3.1 설정 처리
•
셋업 1에서
파라미
터 0-50 LCP 복사
을 사
용하여 셋업 1을 셋업 2
로 복사합니다. 그리고
나서
파라미터 0-12 다
음에 링크된 설정을 [2]
셋업 2
로 설정합니다. 이
렇게 하면 링크 공정이
시작됩니다.
130BP076.10
그림 3.2 설정 처리
파라미터 설명 프로그래밍 지침서
3 3
MG20OB39 Danfoss A/S © 05/2018 All rights reserved. 29
0-12 다음에 링크된 설정
옵션: 기능:
링크가 완료되고 나면 모든
운전
중 변경 불가
파라미터가 이제 셋
업 1과 셋업 2에서 동일하다는 의
미로
파라미터 0-13 읽기: 링크된
설정
가 셋업 1 및 2로 표기됩니
다. 셋업 2의
운전 중 변경 불가
파라미터(예를 들어,
파라미
터 1-30 고정자 저항 (Rs)
)에 변
경 사항이 있으면 셋업 1에서도
자동으로 변경됩니다. 이제 운전
하는 동안 셋업 1과 셋업 2 간의
전환이 가능합니다.
[0] * 링크 안됨
[1] 셋업 1
[2] 셋업 2
[3] 셋업 3
[4] 셋업 4
0-13 읽기: 링크된 설정
배열 [5]
범위: 기능:
0* [0 - 255 ]
파라미터 0-12 다음에 링크된 설
정
을 통해 링크된 셋업을 모두 보
여줍니다. 파라미터는 각각의 파
라미터 셋업에 대해 하나의 인덱
스를 가지고 있습니다. 각 인덱스
의 값은 해당 파라미터 셋업에 링
크된 셋업을 나타냅니다.
인덱스 LCP 값
0 {0}
1 {1,2}
2 {1,2}
3 {3}
4 {4}
표 3.2 셋업 링크 예시
0-14 읽기: 프로그래밍 셋업 / 채널
범위: 기능:
0*
[-21474836
48 2147483647
]
각기 다른 4개의 통신 채널에 대
한
파라미터 0-11 변경 셋업 선
택
의 설정을 보여줍니다. LCP에
서와 같이 번호가 6단위 숫자로
표기되면 각각의 번호가 하나의
채널을 의미합니다.
숫자 1~4는 셋업 번호를 의미하
고 F는 초기 설정, A는 활성 셋업
을 의미합니다. 채널은 (오른쪽에
서 왼쪽으로) LCP, 필드버스,
USB, HPFB1.5 순입니다.
예: 값 AAAAAA21h는 필드버스
채널이
파라미터 0-11 변경 셋업
선택
의 셋업 2를 사용하고, LCP
0-14 읽기: 프로그래밍 셋업 / 채널
범위: 기능:
가 셋업 1을 사용하며, 다른 모든
채널이 활성 셋업을 사용하고 있
음으로 의미합니다.
0-20 소형 표시 1.1
옵션: 기능:
왼쪽에 표시할 소형 표시 1 변수
를 선택합니다.
[0] 없음 선택된 표시 값이 없음을 의미합
니다.
[15] Readout:
actual setup
[37] 표시 문자 1 현재 제어 워드
[38] 표시 문자 2
[39] 표시 문자 3
[89] 날짜 및 시간
읽기
[953] 프로피버스
경고 워드
프로피버스 통신 경고를 나타냅니
다.
[1005] 전송오류 카
운터 읽기
마지막으로 전원 인가된 이후에
CAN 제어기의 전송 오류 횟수를
나타냅니다.
[1006] 수신오류 카
운터 읽기
마지막으로 전원 인가된 이후에
CAN 제어기의 수신 오류 횟수를
나타냅니다.
[1007] 통신 종류 카
운터 읽기
마지막으로 전원 인가된 이후의
통신 종료 이벤트 횟수를 나타냅
니다.
[1013] 경고 파라미터DeviceNet 고유 경고 워드를 나
타냅니다. 각각의 경고에 별도의
비트가 하나씩 할당되어 있습니
다.
[1230] 경고 파라미
터
[1397] Alert Alarm
Word
파라미터 설명
VLT® AQUA Drive FC 202
33
3.2.3 0-2* LCP 디스플레이
LCP에 표시된 변수를 정의합니다.
주의 사항
표시 문자를 쓰는 방법에 관한 정보는 다음을 참조하십
시오.
파라미터 0-37 표시 문자 1
•
파라미터 0-38 표시 문자 2
•
파라미터 0-39 표시 문자 3
•
.
.
.
30 Danfoss A/S © 05/2018 All rights reserved. MG20OB39

0-20 소형 표시 1.1
옵션: 기능:
[1398] Alert
Warning
Word
[1399] Alert Status
Word
[1500] 운전 시간 AC 드라이브가 구동한 시간을 표
시합니다.
[1501] 구동 시간 모터가 구동한 시간을 표시합니
다.
[1502] kWh 카운터 주전원 소비 전력을 kWh로 나타
냅니다.
[1580] 구동 시간
[1600] 제어 워드 직렬 통신을 통해 AC 드라이브로
부터 전달된 제어 워드를 hex 코
드로 나타냅니다.
[1601] * 지령 [단위] 총 지령(디지털, 아날로그, 프리
셋, 버스통신, 지령 고정, 캐치업
및 슬로우다운의 합)을 선택한 단
위로 나타냅니다.
[1602] 지령 % 총 지령(디지털, 아날로그, 프리
셋, 버스통신, 지령 고정, 캐치업
및 슬로우다운의 합)을 백분율로
나타냅니다.
[1603] 상태 워드 현재 상태 워드를 나타냅니다.
[1605] 필드버스 속
도 실제 값
[%]
하나 이상의 경고를 hex 코드로
나타냅니다.
[1609] 사용자 정의읽기다음에서 정의한 대로 사용자 정
의 읽기를 표시합니다.
•
파라미터 0-30 사용자
정의 읽기 단위
.
•
파라미터 0-31 사용자
정의 읽기 최소값
.
•
파라미터 0-32 사용자
정의 읽기 최대값
.
[1610] 출력[kW] 모터가 소비하는 실제 출력을 kW
로 나타냅니다.
[1611] 출력[HP] 모터가 소비하는 실제 출력을 hp
로 나타냅니다.
[1612] 모터 전압 모터에 전달된 전압입니다.
[1613] 주파수 모터 주파수, 즉 AC 드라이브의
출력 주파수를 Hz로 나타냅니다.
[1614] 모터 전류 실효값으로 측정된 모터의 위상
전류를 나타냅니다.
[1615] 주파수 [%] 모터 주파수, 즉 AC 드라이브의
출력 주파수를 백분율로 나타냅니
다.
0-20 소형 표시 1.1
옵션: 기능:
[1616] 토오크 [Nm] 현재 모터 부하를 모터 정격 토오
크의 백분율로 나타냅니다.
[1617] 속도 [RPM] 속도를 RPM(분당 회전수), 즉, 입
력된 AC 드라이브의 모터 명판
데이터, 출력 주파수 및 부하를 기
준으로 한 폐회로에서의 모터축
속도로 나타냅니다.
[1618] 모터 과열 ETR 기능에 의해 계산된 모터의
써멀 부하를 나타냅니다.
파라미
터 그룹 1-9* 모터 온도
또한 참
조하십시오.
[1619] KTY 센서 온
도
[1622] 토오크 [%] 실제 토오크를 백분율로 표시합니
다.
[1623] Motor Shaft
Power [kW]
모터축에 적용된 기계적 동력을
나타냅니다.
[1624] Calibrated
Stator
Resistance
[1626] 필터링된 출
력[kW]
[1627] 필터링된 출
력[HP]
[1630] DC 링크 전압 AC 드라이브의 DC 링크 전압입
니다.
[1631] System
Temp.
[1632] 제동 에너지/초외부 제동 저항으로 전달된 현재
의 제동 동력을 나타냅니다.
순간값을 나타냅니다.
[1633] 제동 에너
지/2 분
외부 제동 저항으로 전달된 제동
동력을 나타냅니다. 평균 동력은
마지막 120초 동안 지속적으로
계산됩니다.
[1634] 방열판 온도 AC 드라이브의 현재 방열판 온도
를 나타냅니다. 정지 한계는 95
±5 °C입니다. 재기동 온도는 70
±5 °C입니다.
[1635] 인버터 과열 인버터의 부하 %를 나타냅니다.
[1636] 인버터 정격전류AC 드라이브의 정격 전류입니다.
[1637] 인버터 최대전류AC 드라이브의 최대 전류입니다.
[1638] SL 제어기 상태제어기에 의해 실행된 이벤트의
상태를 나타냅니다.
[1639] 제어카드 온도제어카드의 온도를 나타냅니다.
[1642] Service Log
Counter
파라미터 설명 프로그래밍 지침서
MG20OB39 Danfoss A/S © 05/2018 All rights reserved. 31
3 3
0-20 소형 표시 1.1
옵션: 기능:
[1645] Motor Phase
U Current
[1646] Motor Phase
V Current
[1647] Motor Phase
W Current
[1650] 외부 지령 외부 지령의 합(아날로그, 펄스,
버스통신의 합)을 백분율로 나타
냅니다.
[1652] 피드백 [단위]신호 값을 프로그래밍된 디지털
입력 단위로 나타냅니다.
[1653] 디지털 전위
차계 지령
실제 지령 피드백에 대한 디지털
가변 저항의 기여도를 표시합니
다.
[1654] 피드백 1 [단위]피드백 1의 값을 표시합니다.
파
라미터 그룹 20-0* 피드백
또한
참조하십시오.
[1655] 피드백 2 [단위]피드백 2의 값을 표시합니다.
파
라미터 그룹 20-0* 피드백
또한
참조하십시오.
[1656] 피드백 3 [단위]피드백 3의 값을 표시합니다.
파
라미터 그룹 20-0* 피드백
또한
참조하십시오.
[1658] PID 출력
[%]
폐회로 PID 제어기 출력 값을 백
분율로 표시합니다.
[1659] Adjusted
Setpoint
유량 보상에 의해 조정된 이후의
실제 운전 설정포인트를 표시합니
다.
파라미터 그룹 22-8* 유량 보
상
을 참조하십시오.
[1660] 디지털 입력 디지털 입력의 상태를 표시합니
다. 0은 입력 신호가 없음을 의미
하고 1은 입력 신호가 있음을 의
미합니다.
순서는
파라미터 16-60 디지털
입력
(을)를 참조하십시오. 비트 0
이 맨 오른쪽입니다.
[1661] 단자 53 스위
치 설정
입력 단자 53의 설정 (전류 = 0,
전압 = 1)을 나타냅니다.
[1662] 아날로그 입
력 53
입력 53의 실제 값을 지령 또는
보호 값으로 나타냅니다.
[1663] 단자 54 스위
치 설정
입력 단자 54의 설정 (전류 = 0,
전압 = 1)을 나타냅니다.
[1664] 아날로그 입
력 54
입력 54의 실제 값을 지령 또는
보호 값으로 나타냅니다.
[1665] 아날로그 출
력 42 [mA]
출력 42의 실제 값을 mA로 표시
합니다.
파라미터 6-50 단자 42
출력
을 사용하여 출력 42에서 표
시할 변수를 선택합니다.
0-20 소형 표시 1.1
옵션: 기능:
[1666] 디지털 출력
[이진수]
모든 디지털 출력의 이진값을 나
타냅니다.
[1667] 펄스 입력
#29 [Hz]
펄스 입력으로 단자 29에 적용된
주파수의 실제 값을 나타냅니다.
[1668] 펄스 입력
#33 [Hz]
펄스 입력으로 단자 33에 적용된
주파수의 실제 값을 나타냅니다.
[1669] 펄스 출력
#27 [Hz]
디지털 출력 모드에서 단자 27에
적용된 실제 펄스 값을 나타냅니
다.
[1670] 펄스 출력
#29 [Hz]
디지털 출력 모드에서 단자 29에
적용된 실제 펄스 값을 나타냅니
다.
[1671] 릴레이 출력
[이진수]
모든 릴레이의 설정을 표시합니
다.
[1672] 카운터 A 카운터 A의 현재 값을 표시합니
다.
[1673] 카운터 B 카운터 B의 현재 값을 표시합니
다.
[1675] 아날.입력
X30/11
입력 X30/11(VLT® General
Purpose I/O MCB 101, 옵션)의
실제 신호 값을 표시합니다.
[1676] 아날.입력
X30/12
입력 X30/12(VLT® General
Purpose I/O MCB 101, 옵션)의
실제 신호 값을 표시합니다.
[1677] 아날로그 출
력 X30/8
[mA]
출력 X30/8(VLT® General
Purpose I/O MCB 101, 옵션)의
실제 값을 표시합니다.
파라미
터 6-60 단자 X30/8 출력
을 사용
하여 표시할 변수를 선택합니다.
[1678] 아날로그 출
력 X45/1
[mA]
[1679] 아날로그 출
력 X45/3
[mA]
[1680] 필드버스 제
어워드 1
필드버스에서 수신된 제어 워드
(CTW)를 나타냅니다.
[1682] 필드버스 지
령 1
직렬 통신 네트워크(예컨대, BMS,
PLC 또는 기타 컨트롤러)를 통해
제어 워드와 함께 전송된 실제 지
령값입니다.
[1684] 통신 옵션
STW
확장된 필드버스 통신 옵션 상태
워드입니다.
[1685] FC 단자 제어
워드 1
필드버스에서 수신된 제어 워드
(CTW)입니다.
[1686] FC 단자 지령1필드버스에 전송된 상태 워드
(STW)입니다.
파라미터 설명
33
32 Danfoss A/S © 05/2018 All rights reserved. MG20OB39
VLT® AQUA Drive FC 202

0-20 소형 표시 1.1
옵션: 기능:
[1687] Bus Readout
Alarm/
Warning
[1689] Configurable
Alarm/
Warning
Word
파라미터 8-17 Configurable
Alarm and Warningword
에서 구
성되는 알람/경고 워드를 나타냅
니다.
[1690] 알람 워드 하나 이상의 알람을 hex 코드로
나타냅니다(직렬 통신에 사용됨).
[1691] 알람 워드 2 하나 이상의 알람을 hex 코드로
나타냅니다(직렬 통신에 사용됨).
[1692] 경고 워드 하나 이상의 경고를 hex 코드로
나타냅니다(직렬 통신에 사용됨).
[1693] 경고 워드 2 하나 이상의 경고를 hex 코드로
나타냅니다(직렬 통신에 사용됨).
[1694] 확장 상태 워드하나 이상의 상태 조건을 hex 코
드로 나타냅니다(직렬 통신에 사
용됨).
[1695] 확장형 상태
워드 2
하나 이상의 상태 조건을 hex 코
드로 나타냅니다(직렬 통신에 사
용됨).
[1696] 유지보수 워드비트는
파라미터 그룹 23-1* 유
지보수
에서 프로그래밍된 예방적
유지보수 이벤트의 상태를 나타냅
니다.
[1697] Alarm Word
3
[1698] Warning
Word 3
[1830] 아날로그 입
력 X42/1
아날로그 입출력 카드의 단자
X42/1에 적용된 신호의 값을 표
시합니다.
[1831] 아날로그 입
력 X42/3
아날로그 입출력 카드의 단자
X42/3에 적용된 신호의 값을 표
시합니다.
[1832] 아날로그 입
력 X42/5
아날로그 입출력 카드의 단자
X42/5에 적용된 신호의 값을 표
시합니다.
[1833] 아날로그 출
력 X42/7
[V]
아날로그 입출력 카드의 단자
X42/7에 적용된 신호의 값을 표
시합니다.
[1834] 아날로그 출
력 X42/9
[V]
아날로그 입출력 카드의 단자
X42/9에 적용된 신호의 값을 표
시합니다.
[1835] 아날로그 출
력 X42/11
[V]
아날로그 입출력 카드의 단자
X42/11에 적용된 신호의 값을 표
시합니다.
0-20 소형 표시 1.1
옵션: 기능:
[1836] 아날로그 입
력 X48/2
[mA]
[1837] 온도 입력
X48/4
[1838] 온도 입력
X48/7
[1839] 온도 입력
X48/10
[1850] 센서리스 읽
기[단위]
[1860] Digital Input
2
[1870] Mains
Voltage
[1871] Mains
Frequency
[1872] Mains
Imbalance
[1875] Rectifier DC
Volt.
[2117] 확장PID 1:
지령 [단위]
확장형 폐회로 제어기 1의 지령
값을 나타냅니다.
[2118] 확장PID 1:
피드백 [단
위]
확장형 폐회로 제어기 1의 피드백
신호 값을 나타냅니다.
[2119] 확장PID 1:
출력 [%]
확장형 폐회로 제어기 1의 출력
값을 나타냅니다.
[2137] 확장PID 2:
지령 [단위]
확장형 폐회로 제어기 2의 지령
값을 나타냅니다.
[2138] 확장PID 2:
피드백 [단
위]
확장형 폐회로 제어기 2의 피드백
신호 값을 나타냅니다.
[2139] 확장PID 2:
출력 [%]
확장형 폐회로 제어기 2의 출력
값을 나타냅니다.
[2157] 확장PID 3:
지령 [단위]
확장형 폐회로 제어기 3의 지령
값을 나타냅니다.
[2158] 확장PID 3:
피드백 [단
위]
확장형 폐회로 제어기 3의 피드백
신호 값을 나타냅니다.
[2159] 확장PID 3:
출력 [%]
확장형 폐회로 제어기 3의 출력
값을 나타냅니다.
[2230] 유량없음 감
지 기준
power
실제 운전 속도를 위해 계산된 비
유량 출력입니다.
[2316] 유지보수 문
자
[2580] 캐스케이드상태캐스케이드 컨트롤러의 작동 상태
입니다.
파라미터 설명 프로그래밍 지침서
MG20OB39 Danfoss A/S © 05/2018 All rights reserved. 33
3 3

0-20 소형 표시 1.1
옵션: 기능:
[2581] 펌프 상태 캐스케이드 컨트롤러에 의해 제어
되는 각 개별 펌프의 동작 상태입
니다.
[2791] Cascade
Reference
슬레이브 AC 드라이브와 함께 사
용하기 위한 지령 출력입니다.
[2792] % Of Total
Capacity
총 시스템 용량 중 시스템 운전
용량을 백분율로 나타내는 읽기
파라미터입니다.
[2793] Cascade
Option
Status
캐스케이드 시스템의 상태를 나타
내는 읽기 파라미터입니다.
[2794] 캐스케이드
시스템 상태
[2795] Advanced
Cascade
Relay Output
[bin]
[2796] Extended
Cascade
Relay Output
[bin]
[2920] Derag
Power[kW]
[2921] Derag
Power[HP]
[2965] Totalized
Volume
[2966] Actual
Volume
[2969] Flow
[3110] 바이패스 상
태 워드
[3111] 바이패스 구
동 시간
[3401] PCD 1 MCO
쓰기
[3402] PCD 2 MCO
쓰기
[3403] PCD 3 MCO
쓰기
[3404] PCD 4 MCO
쓰기
[3405] PCD 5 MCO
쓰기
[3406] PCD 6 MCO
쓰기
[3407] PCD 7 MCO
쓰기
[3408] PCD 8 MCO
쓰기
[3409] PCD 9 MCO
쓰기
0-20 소형 표시 1.1
옵션: 기능:
[3410] PCD 10
MCO 쓰기
[3421] PCD 1 MCO
읽기
[3422] PCD 2 MCO
읽기
[3423] PCD 3 MCO
읽기
[3424] PCD 4 MCO
읽기
[3425] PCD 5 MCO
읽기
[3426] PCD 6 MCO
읽기
[3427] PCD 7 MCO
읽기
[3428] PCD 8 MCO
읽기
[3429] PCD 9 MCO
읽기
[3430] PCD 10
MCO 읽기
[9920] Fan Ctrl
deltaT
[9921] Fan Ctrl
Tmean
[9922] Fan Ctrl
NTC Cmd
[9923] Fan Ctrl i-
term
[9924] Rectifier
Current
[9952] PC Debug 0
[9953] PC Debug 1
[9954] PC Debug 2
[9961] FPC Debug
0
[9962] FPC Debug
1
[9963] FPC Debug
2
[9964] FPC Debug
3
[9965] FPC Debug
4
파라미터 설명
33
34 Danfoss A/S © 05/2018 All rights reserved. MG20OB39
VLT® AQUA Drive FC 202
0-21 소형 표시 1.2
옵션은
합니다. 중앙에 표시할 소형 표시 1 변수를 선택합니다.
0-22 소형 표시 1.3
옵션은
합니다. 오른쪽에 표시할 소형 표시 1 변수를 선택합니다.
파라미터 0-20 소형 표시 1.1
파라미터 0-20 소형 표시 1.1
에 수록된 옵션과 동일
에 수록된 옵션과 동일

0-25 개인 메뉴
배열 [50]
범위: 기능:
Size
related*
[0 -
9999 ]
LCP의 [Quick Menu] 키를 이용
하여 접근할 수 있는
Q1 개인 메
뉴
의 파라미터를 최대 20개까지
정의합니다.
Q1 개인 메뉴
의 파라
미터는 이 배열 파라미터에 프로
그래밍된 순서대로 표시됩니다.
값을 0000으로 설정하여 파라미
터를 삭제할 수 있습니다.
예를 들어, 정기적으로 변경이 필
요한 1개에서 최대 50개의 파라
미터에 신속하면서도 간단히 접근
하는데 사용할 수 있습니다.
Custom Readout (Value)
P 16-09
Custom Readout
Unit P 0-30
Max value
P 0-32
Min value
P 0-31
Linear
units only
Quadratic Unit (Pressure)
Cubic Unit (Power)
Motor Speed
Motor Speed
High limit
P 4-13 (RPM)
P 4-14 (Hz)
0
130BT105.12
Linear Unit (e.g. speed and ow)
0-30 사용자 정의 읽기 단위
옵션: 기능:
LCP 표시창에 나타낼 값을 프로
그래밍합니다. 값은 속도에 대해
선형, 2차 또는 3차 관계를 가지
고 있습니다. 이 관계는 선택한 단
위에 따라 달라집니다(
표 3.3
참
조). 실제 계산된 값은
파라미
터 16-09 사용자 정의 읽기
에서
읽을 수 있고/있거나
파라미
터 0-20 소형 표시 1.1
~
파라미
터 0-24 셋째 줄 표시
에서
[1609] 사용자 정의 읽기를 선택
하여 표시창에 표시할 수 있습니
다.
[0]
[1] * %
[5] PPM
[10] 1/min
[11] RPM
[12] PULSE/s
[20] l/s
파라미터 설명 프로그래밍 지침서
0-23 둘째 줄 표시
옵션은
파라미터 0-20 소형 표시 1.1
합니다. 둘째 줄에 표시할 변수를 선택합니다.
에 수록된 옵션과 동일
0-24 셋째 줄 표시
옵션은
파라미터 0-20 소형 표시 1.1
합니다. 둘째 줄에 표시할 변수를 선택합니다.
에 수록된 옵션과 동일
3 3
그림 3.3 사용자 정의 읽기
3.2.4 0-3* LCP사용자읽기
다양한 목적으로 표시창 요소를 사용자에 맞게 구성할
수 있습니다:
사용자 정의 읽기. (
•
의 읽기 단위
차 또는 3차) 속도에 비례하는 값.
표시 문자. 파라미터에 저장된 문자열.
•
사용자 정의 읽기
표시할 계산 값은 다음의 설정을 기준으로 합니다.
파라미터 0-30 사용자 정의 읽기 단위
•
파라미터 0-31 사용자 정의 읽기 최소값
•
MG20OB39 Danfoss A/S © 05/2018 All rights reserved. 35
만 해당).
파라미터 0-32 사용자 정의 읽기 최대값
•
파라미터 4-13 모터의 고속 한계 [RPM]
•
•
•
파라미터 4-14 모터 속도 상한 [Hz]
실제 속도.
파라미터 0-30 사용자 정
에서 선택한 단위에 따른 선형, 2
.
(선형
.
.
.
관계는
파라미터 0-30 사용자 정의 읽기 단위
택한 단위의 유형에 따라 달라집니다:
단위 유형 속도 관계
점형
속도
유량, 부피
유량, 체적
유속
길이
온도
압력 2차
전력 3차
표 3.3 각기 다른 단위 유형의 속도 관계
선형
에서 선

0-30 사용자 정의 읽기 단위
옵션: 기능:
[21] l/min
[22] l/h
[23] m³/s
[24] m³/min
[25] m³/h
[30] kg/s
[31] kg/min
[32] kg/h
[33] t/min
[34] t/h
[40] m/s
[41] m/min
[45] m
[60] °C
[70] mbar
[71] bar
[72] Pa
[73] kPa
[74] m WG
[75] mm Hg
[80] kW
[120] GPM
[121] gal/s
[122] gal/min
[123] gal/h
[124] CFM
[125] ft3/s
[126] ft3/min
[127] ft³/h
[130] lb/s
[131] lb/min
[132] lb/h
[140] ft/s
[141] ft/min
[145] ft
[160] °F
[170] psi
[171] lb/in²
[172] in wg
[173] ft WG
[174] in Hg
[180] HP
0-31 사용자 정의 읽기 최소값
범위: 기능:
Size
related* [ -999999.9
9 - 100.00
CustomRead
outUnit]
이 파라미터를 통해 (속도가 0일
때 발생하는) 사용자 정의 읽기
최소값을 선택할 수 있습니다.
파
라미터 0-30 사용자 정의 읽기
단위
에서 선형 단위를 선택할 때
0과 다른 값을 선택하는 경우에만
0-31 사용자 정의 읽기 최소값
범위: 기능:
가능합니다. 2차 및 3차 단위의
경우 최소값은 0입니다.
0-32 사용자 정의 읽기 최대값
범위: 기능:
100
CustomRe
adoutUnit
*
[ par.
0-31 -
999999.99
CustomRead
outUnit]
이 파라미터는 모터 속도가 (
파라
미터 0-02 모터 속도 단위
의 설
정에 따라)
파라미터 4-13 모터
의 고속 한계 [RPM]
또는
파라미
터 4-14 모터 속도 상한 [Hz]
의
설정 값에 도달했을 때 표시되는
최대값을 설정합니다.
0-37 표시 문자 1
범위: 기능:
0* [0 - 25 ] LCP에 표시하거나 직렬 통신을
통해 읽기 위한 개별 문자열을 이
파라미터에서 쓰기할 수 있습니
다.
문자를 영구적으로 표시하려면 다
음 파라미터 중 하나에서
[37] 표
시 문자 1
을 선택합니다.
•
파라미터 0-20 소형 표
시 1.1
.
•
파라미터 0-21 소형 표
시 1.2
.
•
파라미터 0-22 소형 표
시 1.3
.
•
파라미터 0-23 둘째 줄
표시
.
•
파라미터 0-24 셋째 줄
표시
.
•
파라미터 0-37 표시 문
자 1
.
파라미터 12-08 호스트 이름
을
변경하면
파라미터 0-37 표시 문
자 1
가 변경됩니다. 하지만 그 반
대는 안됩니다.
0-38 표시 문자 2
범위: 기능:
0* [0 - 25 ] LCP에 표시하거나 직렬 통신을
통해 읽기 위한 개별 문자열을 이
파라미터에서 쓰기할 수 있습니
다.
문자를 영구적으로 표시하려면 다
음에서
[38] 표시 문자 2
를 선택
합니다.
파라미터 설명
33
36 Danfoss A/S © 05/2018 All rights reserved. MG20OB39
VLT® AQUA Drive FC 202
0-38 표시 문자 2
범위: 기능:
•
파라미터 0-20 소형 표
시 1.1
.
•
파라미터 0-21 소형 표
시 1.2
.
•
파라미터 0-22 소형 표
시 1.3
.
•
파라미터 0-23 둘째 줄
표시
.
•
파라미터 0-24 셋째 줄
표시
.
[▲] 또는 [▼]를 눌러 문자를 변
경합니다. [◀] 및 [▶]를 눌러 커
서를 움직입니다. 커서에 의해 문
자가 강조 표시되면 강조 표시된
문자를 변경할 수 있습니다. 두 문
자 사이에 커서를 놓고 [▲] 또는
[▼]를 누르면 문자를 삽입할 수
있습니다.
0-39 표시 문자 3
범위: 기능:
0* [0 - 25 ] LCP에 표시하거나 직렬 통신을
통해 읽기 위한 개별 문자열을 이
파라미터에서 쓰기할 수 있습니
다. 문자를 영구적으로 표시하려
면
파라미터 0-20 소형 표시 1.1
,
파라미터 0-21 소형 표시 1.2, 파
라미터 0-22 소형 표시 1.3, 파라
미터 0-23 둘째 줄 표시
또는
파
라미터 0-24 셋째 줄 표시
애서
표시 문자 3을 선택합니다. [▲]
또는 [▼]를 눌러 문자를 변경합니
다. [◀] 및 [▶]를 눌러 커서를 움
직입니다. 커서에 의해 문자가 강
조 표시되면 강조 표시된 문자를
변경할 수 있습니다. 두 문자 사이
에 커서를 놓고 [▲] 또는 [▼]를
누르면 문자를 삽입할 수 있습니
다.
0-40 LCP의 [수동 운전] 키
옵션: 기능:
[0] 사용안함 키를 사용하지 않으려면 선택합니
다.
[1] * 사용함 [Hand On] 키가 활성화됩니다.
0-40 LCP의 [수동 운전] 키
옵션: 기능:
[2] 비밀번호 수동 운전 모드에서 권한 없이 기
동하지 않도록 합니다.
개인 메뉴
에
파라미터 0-40 LCP의 [수동
운전] 키
가 포함되어 있으면
파라
미터 0-65 개인 메뉴 비밀번호
에
서 비밀번호를 정의합니다. 그외
의 경우에는
파라미터 0-60 주
메뉴 비밀번호
에서 비밀번호를 정
의합니다.
[3] 꺼짐 없이 사
용함
[4] 꺼짐 없이 비
밀번호
[5] 꺼짐 포함 사
용함
[6] 꺼짐 포함 비
밀번호
[9] Enabled, ref
= 0
0-41 LCP의 [꺼짐] 키
옵션: 기능:
[0] 사용안함 키를 사용하지 않으려면 선택합니
다.
[1] * 사용함 [Off] 키가 활성화됩니다.
[2] 비밀번호 권한 없이 정지되지 않도록 합니
다.
개인 메뉴에 파라미
터 0-41 LCP의 [꺼짐] 키
가 포
함되어 있으면
파라미터 0-65 개
인 메뉴 비밀번호
에서 비밀번호를
정의합니다. 그외의 경우에는
파
라미터 0-60 주 메뉴 비밀번호
에
서 비밀번호를 정의합니다.
0-42 LCP의 [자동 운전] 키
옵션: 기능:
[0] 사용안함 키를 사용하지 않으려면 선택합니
다.
[1] * 사용함 [Auto On] 키가 활성화됩니다.
[2] 비밀번호 자동 운전 모드에서 권한 없이 기
동하지 않도록 합니다.
개인 메뉴
에
파라미터 0-42 LCP의 [자동
운전] 키
가 포함되어 있으면
파라
미터 0-65 개인 메뉴 비밀번호
에
서 비밀번호를 정의합니다. 그외
의 경우에는
파라미터 0-60 주
메뉴 비밀번호
에서 비밀번호를 정
의합니다.
파라미터 설명 프로그래밍 지침서
3 3
3.2.5 0-4* LCP 키패드
LCP에 있는 각각의 키를 사용함/사용안함으로 설정하
거나 비밀번호로 보호할 수 있습니다.
MG20OB39 Danfoss A/S © 05/2018 All rights reserved. 37

0-43 LCP의 [리셋] 키
옵션: 기능:
[0] 사용안함 키를 사용하지 않으려면 선택합니
다.
[1] * 사용함 [Reset] 키가 활성화됩니다.
[2] 비밀번호 권한 없이 리셋되지 않도록 합니
다.
파라미터 0-25 개인 메뉴
에
파라미터 0-43 LCP의 [리셋] 키
가 포함되어 있으면
파라미
터 0-65 개인 메뉴 비밀번호
에서
비밀번호를 정의합니다. 그외의
경우에는
파라미터 0-60 주 메뉴
비밀번호
에서 비밀번호를 정의합
니다.
[3] 꺼짐 없이 사
용함
[4] 꺼짐 없이 비
밀번호
[5] 꺼짐 포함 사용함키를 누르면 AC 드라이브가 리셋
됩니다. 하지만 기동하지는 않습
니다.
[6] 꺼짐 포함 비
밀번호
권한 없는 리셋을 방지합니다. 권
한 있는 리셋을 하더라도 AC 드
라이브가 기동하지는 않습니다.
비밀번호 설정 방법에 관한 정보
는 옵션
[2] 비밀번호
를 참조하십
시오.
0-44 LCP의 [Off/Reset] 키
[Off/Reset] 키를 활성화하거나 비활성화합니다.
옵션: 기능:
[0] 사용안함
[1] * 사용함
[2] 비밀번호
0-45 LCP의 [Drive Bypass] 키
의도하지 않은 AC 드라이브 정지를 피하려면 [Off]를 누른
다음
[0] 사용안함
을 선택합니다. 의도하지 않은 AC 드라이
브 바이패스를 피하려면 [Off]를 누른 다음
[2] 비밀번호
를
선택합니다.
단축 메뉴에 파라미터 0-45 LCP의 [Drive
Bypass] 키
가 포함되어 있으면
파라미터 0-65 개인 메뉴 비
밀번호
에서 비밀번호를 정의합니다.
옵션: 기능:
[0] 사용안함 키를 사용하지 않으려면 선택합니
다.
[1] * 사용함
[2] 비밀번호
0-50 LCP 복사
옵션: 기능:
주의 사항
모터가 운전하는 동안에는 이
파라미터를 설정할 수 없습니
다.
[0] * 복사하지 않
음
[1] 모두 업로드 모든 셋업의 파라미터 전체를 AC
드라이브 메모리에서 LCP 메모리
로 복사합니다. 서비스를 실행하
기 위한 목적으로 작동 후에는 모
든 파라미터를 LCP로 복사합니
다.
[2] 모두 다운로드모든 셋업의 파라미터 전체를
LCP 메모리에서 AC 드라이브 메
모리로 복사합니다.
[3] 용량 제외 다
운로드
모터 용량과 관계 없는 파라미터
만 복사합니다. 마지막 선택항목
을 사용하여 이미 설정된 모터 데
이터에 영향을 주지 않고 동일한
기능으로 일부 AC 드라이브를 프
로그래밍할 수 있습니다.
[10] Delete LCP
copy data
0-51 셋업 복사
옵션: 기능:
[0] * 복사하지 않음기능 없음.
[1] 셋업 1에 복사(
파라미터 0-11 변경 셋업 선택
에서 정의된) 현재 프로그래밍 셋
업의 모든 파라미터를 셋업 1에
복사합니다.
[2] 셋업 2에 복사(
파라미터 0-11 변경 셋업 선택
에서 정의된) 현재 프로그래밍 셋
업의 모든 파라미터를 셋업 2에
복사합니다.
[3] 셋업 3에 복사(
파라미터 0-11 변경 셋업 선택
에서 정의된) 현재 프로그래밍 셋
업의 모든 파라미터를 셋업 3에
복사합니다.
[4] 셋업 4에 복사(
파라미터 0-11 변경 셋업 선택
에서 정의된) 현재 프로그래밍 셋
업의 모든 파라미터를 셋업 4에
복사합니다.
파라미터 설명
VLT® AQUA Drive FC 202
3.2.6 0-5* 복사/저장
LCP에서 또는 LCP로 파라미터를 복사합니다. 하나의
AC 드라이브에서 다른 AC 드라이브로 셋업을 저장 및
복사할 때 이 파라미터를 사용합니다.
33
38 Danfoss A/S © 05/2018 All rights reserved. MG20OB39

0-51 셋업 복사
옵션: 기능:
[9] 모두 복사 현재 셋업의 파라미터를 셋업 1
~ 4에 각각 복사합니다.
0-60 주 메뉴 비밀번호
범위: 기능:
100* [-9999 -
9999 ]
[Main Menu] 키를 통해 주 메뉴
에 접근할 때 사용되는 비밀번호
를 정의합니다.
파라미터 0-61 비
밀번호 없이 주 메뉴 접근이 [0]
완전 접근
으로 설정되어 있으면
이 파라미터가 무시됩니다.
0-61 비밀번호 없이 주 메뉴 접근
옵션: 기능:
[0] * 완전 접근
파라미터 0-60 주 메뉴 비밀번호
에서 정의된 비밀번호를 사용하지
않습니다. 이 옵션이 선택되면
파
라미터 0-60 주 메뉴 비밀번호
,
파라미터 0-65 개인 메뉴 비밀번
호
및
파라미터 0-66 비밀번호
없이 개인 메뉴 액세스
이 무시됩
니다.
[1] LCP: 읽기 전용권한 없이
주 메뉴
파라미터를 편
집하지 못하게 합니다.
[2] LCP: 접근 권
한 없음
권한 없이
주 메뉴
파라미터를 보
고 편집하지 못하게 합니다.
[3] 버스통신: 읽
기 전용
필드버스를 통한 읽기 전용 접근
이 가능합니다.
[4] 버스통신: 접
근 권한 없음
필드버스를 통해 파라미터에 접근
할 수 없습니다.
[5] Alt: 읽기 전용권한 없이
주 메뉴
파라미터를 편
집하지 못하게 하며 필드버스를
통한 읽기 전용 접근이 가능합니
다.
[6] Alt: 접근 권
한 없음
권한 없이
주 메뉴
파라미터를 보
고 편집하지 못하게 하며 필드버
스를 통해 접근할 수 없습니다.
0-65 개인 메뉴 비밀번호
범위: 기능:
200* [-9999 -
9999 ]
[Quick Menu] 키를 통해
개인
메뉴
에 접근하는데 사용되는 비밀
번호를 정의합니다.
파라미
터 0-66 비밀번호 없이 개인 메
뉴 액세스이 [0] 완전 접근
으로
설정되어 있으면 이 파라미터가
무시됩니다.
0-66 비밀번호 없이 개인 메뉴 액세스
파라미터 0-61 비밀번호 없이 주 메뉴 접근이 [0] 완전 접근
으로 설정되어 있으면 이 파라미터가 무시됩니다.
옵션: 기능:
[0] * 완전 접근
파라미터 0-65 개인 메뉴 비밀번
호
에서 정의된 비밀번호를 사용하
지 않습니다.
[1] LCP: 읽기 전용권한 없이
개인 메뉴
파라미터를
편집하지 못하게 합니다.
[3] 버스통신: 읽
기 전용
[5] Alt: 읽기 전
용
0-67 버스통신 비밀번호 액세스
범위: 기능:
0* [0 -
9999 ]
이 파라미터에 쓰기를 실행하면
버스통신/MCT 10 셋업 소프트웨
어에서 AC 드라이브를 잠금 해제
할 수 있습니다.
파라미터 설명 프로그래밍 지침서
3.2.7 0-6* 비밀번호
MG20OB39 Danfoss A/S © 05/2018 All rights reserved. 39
3 3
3.2.8 0-7* 클럭 설정
내부 클럭의 시간과 날짜를 설정합니다. 예를 들어, 내
부 클럭은 다음 용도로 사용할 수 있습니다.
시간 제한 동작.
•
적산 전력 기록.
•
추세 분석.
•
알람 관련 날짜/시간 스탬프.
•
기록 데이터.
•
예방적 유지보수.
•
20가지 예외(휴일 등)를 포함하여 일광절약시간제/서머
타임제, 주별 작업일/비작업일을 클럭에 프로그래밍할
수 있습니다. 클럭은 LCP를 통해 설정할 수 있으며
MCT 10 셋업 소프트웨어 도구를 사용하여 시간 예약
동작과 예방적 유지보수 기능도 함께 설정할 수 있습니
다.
주의 사항
AC 드라이브에는 클럭 백업 기능이 없으므로 백업 기
능이 있는 실시간 클럭 모듈이 설치되지 않는 한 전원
이 차단된 후에 설정 날짜/시간이 초기 설정값
(01.01.2007 00:00 Mon)으로 리셋됩니다. 백업 기능이
있는 모듈이 설치되지 않은 경우에는 직렬 통신을 사용
하고 제어 장비 클럭 시간의 시스템 유지보수 동기화
기능이 있는 외부 시스템에 AC 드라이브가 내장되었을
때만 클럭 기능을 사용합니다.
함
에서 클럭이 올바르게 설정되지 않은 경우(예컨대, 전
원 차단 후) 경고가 발생하도록 프로그래밍할 수 있습니
다.
파라미터 0-79 클럭 결

0-70 날짜 및 시간
범위: 기능:
Size
related*
[ 0 - 0 ] 내부 클럭의 날짜와 시간을 설정
합니다. 사용할 형식은
파라미
터 0-71 날짜 형식과 파라미
터 0-72 시간 형식
에서 설정됩니
다.
VLT® Real-time Clock MCB
117
을 사용하는 경우, 시간은 매
일 15:00에 동기화됩니다.
0-71 날짜 형식
옵션: 기능:
[0] YYYY-MM-DDLCP에서 사용할 날짜 형식을 설
정합니다.
[1] DD-MM-
YYYY
LCP에서 사용할 날짜 형식을 설
정합니다.
[2] MM/DD/
YYYY
LCP에서 사용할 날짜 형식을 설
정합니다.
0-72 시간 형식
옵션: 기능:
LCP에서 사용할 시간 형식을 설
정합니다.
[0] 24시간
[1] 12시간
0-73 시간 영역 오프셋
범위: 기능:
0 min* [-780 -
780 min]
UTC에 비례한 시간 영역 오프셋
을 입력합니다. 이 파라미터는 일
광절약시간제 자동 조정에 필요합
니다.
0-74 DST/서머타임
옵션: 기능:
일광절약시간제/서머타임제 처리
방법을 선택합니다. DST/서머타
임제를 수동으로 설정하려면
파라
미터 0-76 DST/서머타임 시작
및
파라미터 0-77 DST/서머타임
종료
에 시작 날짜와 종료 날짜를
입력합니다.
[0] * 꺼짐
[2] 수동
0-76 DST/서머타임 시작
범위: 기능:
Size
related*
[ 0 - 0 ] DST/서머타임제를 시작할 날짜와
시간을 설정합니다. 날짜는
파라
미터 0-71 날짜 형식
에서 선택한
형식으로 프로그래밍됩니다.
0-77 DST/서머타임 종료
범위: 기능:
Size
related*
[ 0 - 0 ] DST/서머타임제를 종료할 날짜와
시간을 설정합니다. 날짜는
파라
미터 0-71 날짜 형식
에서 선택한
형식으로 프로그래밍됩니다.
0-79 클럭 결함
옵션: 기능:
클럭이 설정되지 않은 경우 또는
전원이 차단되었거나 설치된 백업
이 없어서 리셋된 경우, 클럭 경고
를 사용하거나 사용하지 않습니
다. VLT® Analog I/O Option
MCB 109이 설치되어 있으면
[1]
사용함
이 기본값입니다.
[0] 사용안함
[1] 사용함
0-81 작업일
배열 [7]
표시창에서 파라미터 번호 아래에 7개 요소 [0]–[6]이 표시
되면서 배열됩니다. [OK]를 누르고 [▲] 및 [▼]로 요소 간
이동을 수행합니다.
옵션: 기능:
주중 평일이 작업일인지 아니면
비작업일인지 설정합니다. 배열의
첫번째 요소는 월요일입니다. 작
업입은 시간 예약 동작에 사용됩
니다.
[0] 아니오
[1] 예
0-82 작업일 추가
배열 [5]
표시창에서 파라미터 번호 아래에 5개 요소 [0]–[4]가 표시
되면서 배열됩니다. [OK]를 누르고 [▲] 및 [▼]로 요소 간
이동을 수행합니다.
범위: 기능:
Size
related*
[ 0 - 0 ]
파라미터 0-81 작업일
에 따라 통
상적으로 설정된 비작업일을 작업
일로 추가 변경하고자 하는 날짜
를 정의합니다.
파라미터 설명
VLT® AQUA Drive FC 202
주의 사항
VLT® Analog I/O Option MCB 109 또는 VLT
Real-time Clock MCB 117이 설치된 경우에는 날짜
및 시간의 배터리 백업 기능이 포함됩니다.
®
33
40 Danfoss A/S © 05/2018 All rights reserved. MG20OB39
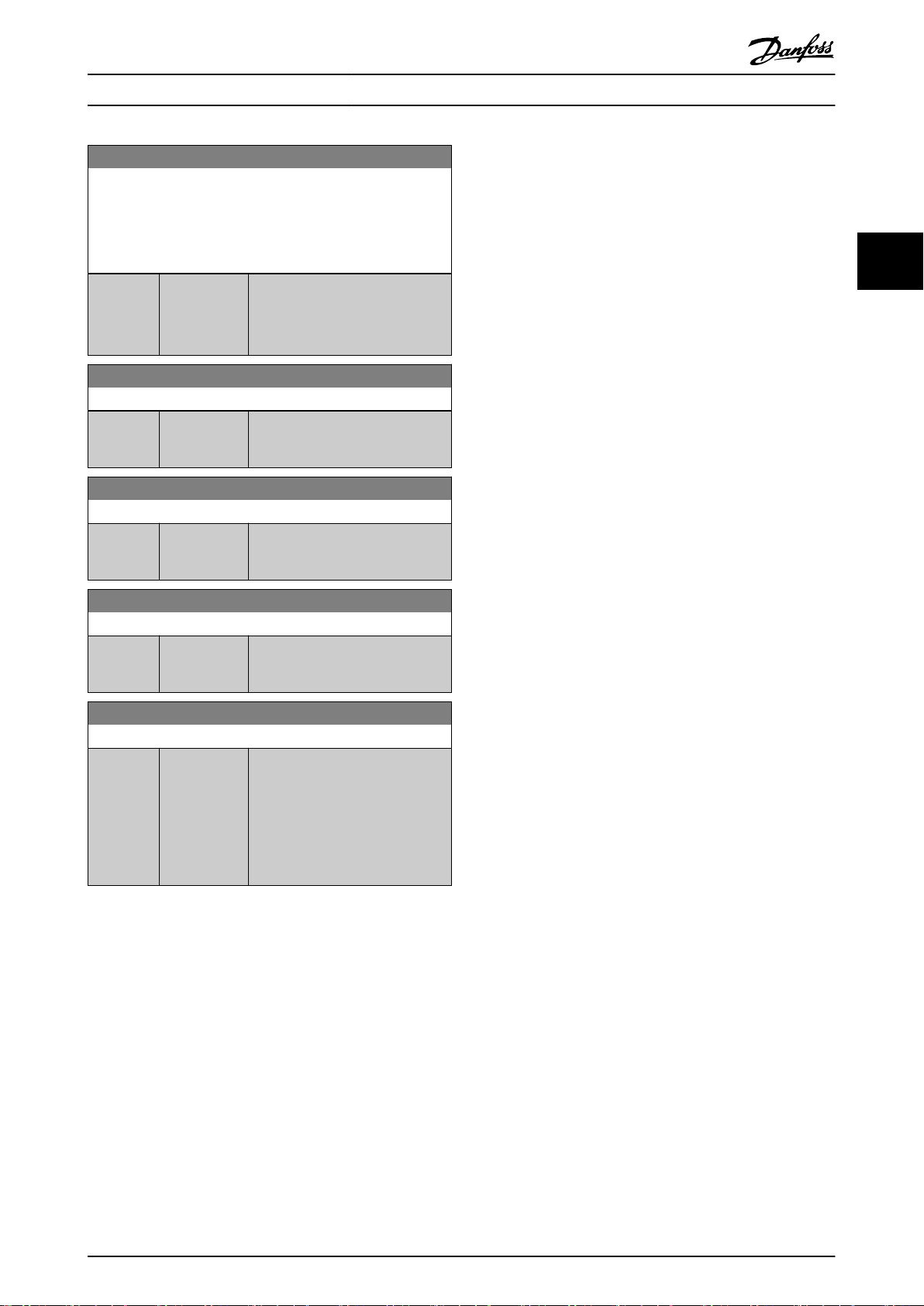
0-83 비작업일 추가
배열 [15]
표시창에서 파라미터 번호 아래에 15개 요소 [0]–[14]가 표
시되면서 배열됩니다. [OK]를 누르고 [▲] 및 [▼]로 요소 간
이동을 수행합니다.
범위: 기능:
Size
related*
[ 0 - 0 ]
파라미터 0-81 작업일
에 따라 통
상적으로 설정된 비작업일을 작업
일로 추가 변경하고자 하는 날짜
를 정의합니다.
0-84 Time for Fieldbus
범위: 기능:
0* [0 -
4294967295
]
필드버스를 위한 시간을 표시합니
다.
0-85 Summer Time Start for Fieldbus
범위: 기능:
0* [0 -
4294967295
]
필드버스를 위한 서머타임제 시작
을 표시합니다.
0-86 Summer Time End for Fieldbus
범위: 기능:
0* [0 -
4294967295
]
필드버스를 위한 서머타임제 종료
를 표시합니다.
0-89 날짜 및 시간 읽기
범위: 기능:
0* [0 - 25 ] 현재 날짜와 시간을 표시합니다.
날짜와 시간은 지속적으로 업데이
트됩니다.
파라미터 0-70 날짜 및 시간
에서
초기 설정과 다른 설정이 이루어
질 때까지는 클럭이 작동하지 않
습니다.
파라미터 설명 프로그래밍 지침서
3 3
MG20OB39 Danfoss A/S © 05/2018 All rights reserved. 41

1-00 구성 모드
옵션: 기능:
주의 사항
모터가 운전하는 동안에는 이
파라미터를 설정할 수 없습니
다.
주의 사항
[3] 폐회로
로 설정되어 있으
면 역회전 및 역회전 기동 명
령을 주더라도 모터의 회전 방
향이 변경되지 않습니다.
[0] 개회로 수동 운전 모드에서 속도 지령을
적용하거나 속도를 설정하여 모터
속도가 결정됩니다.
개회로는 또한 AC 드라이브가 출
력으로 속도 지령 신호를 보내는
외부 PID 제어기를 기본으로 하는
폐회로 제어 시스템의 일부일 때
도 사용됩니다.
[3] 폐회로 폐회로 제어 프로세스(예컨대, 일
정 압력 또는 유속)의 일환으로
모터 속도를 변화시키는 내장형
PID 제어기로부터의 지령에 의해
모터 속도가 결정됩니다.
파라미
터 그룹 20-** 피드백
에서
또는
[Quick Menu]를 눌러서 접근한
기능 셋업
을 통해 PID 제어기를
구성합니다.
1-01 모터 제어 방식
옵션: 기능:
주의 사항
모터가 운전하는 동안에는 이
파라미터를 설정할 수 없습니
다.
사용할 모터 제어 방식을 선택합
니다.
[0] U/f 특수 모터를 병렬로 연결하여 사
용하는 경우의 특수 모터 모드입
니다. U/f를 선택한 경우,
파라미
터 1-55 V/f 특성 - V
및
파라미
터 1-56 V/f 특성 - f
에서 제어
방식의 특성을 편집합니다.
1-01 모터 제어 방식
옵션: 기능:
[1] * VVC+ 대부분의 어플리케이션에 적합한
전압 벡터 제어 방식입니다. VVC
+
운전의 주요 이점은 강력한 모
터 모델을 사용한다는 점입니다.
1-03 토오크 특성
옵션: 기능:
[0] 압축기 토오크다음과 같은 일정 토오크 어플리
케이션의 속도 제어용.
•
축류 펌프.
•
용적식 펌프.
•
송풍기.
전체 속도 범위에 걸쳐 모터의 일
정한 토오크 부하 특성에 대하여
최적화된 전압을 제공합니다.
[1] 가변 토오크 원심 펌프 및 팬의 속도 제어용.
동일한 AC 드라이브에서 하나 이
상의 모터를 제어할 때(예컨대, 여
러 콘덴서 팬 또는 냉각 타워 팬)
도 사용합니다. 모터의 제곱 토오
크 부하 특성에 대해 최적화된 전
압을 제공합니다.
[2] 자동 에너지
최적화 CT
에너지 효율 최적의 스크류 및 스
크롤 압축기 속도 제어용. 15 Hz
까지의 전체 범위에 걸쳐 모터의
일정한 토오크 부하 특성에 대하
여 최적화된 전압을 제공합니다.
더 나아가서 AEO 기능은 전압을
전류 부하 상황에 맞게 조정하고,
에너지 소모와 모터의 가청 소음
을 줄입니다. 최적 성능을 얻으려
면 모터 역률 코사인 파이를 올바
르게 설정합니다. 이 값은
파라미
터 14-43 모터 코사인 파이
에서
설정됩니다. 파라미터는 모터 데
이터가 프로그래밍될 때 자동으로
조정되는 초기 설정값으로 되어
있습니다. 이러한 설정은 일반적
으로 최적 모터 전압을 보장하지
만 모터 역률 코사인 파이에 조정
이 필요하면
파라미터 1-29 자동
모터 최적화 (AMA)
를 이용하여
AMA 기능을 수행할 수 있습니다.
[3] * 자동 에너지
최적화 VT
에너지 효율 최적의 원심 펌프 및
팬 속도 제어용. 모터의 제곱 토오
크 부하 특성에 대해 최적화된 전
압을 제공합니다. 더 나아가서
AEO 기능은 전압을 전류 부하 상
황에 맞게 조정하고, 에너지 소모
와 모터의 가청 소음을 줄입니다.
최적 성능을 얻으려면 모터 동력
을 올바르게 설정합니다. 이 값은
파라미터 설명
3.3 파라미터 1-** 부하/모터
3.3.1 1-0* 일반 설정
AC 드라이브가 개회로에서 운전하는지 아니면 폐회로
에서 운전하는지 여부를 정의합니다.
33
42 Danfoss A/S © 05/2018 All rights reserved. MG20OB39
VLT® AQUA Drive FC 202

1-03 토오크 특성
옵션: 기능:
파라미터 14-43 모터 코사인 파
이
에서 설정됩니다. 파라미터는
모터 데이터가 프로그래밍될 때
자동으로 조정되는 초기 설정값으
로 되어 있습니다. 이러한 설정은
일반적으로 최적 모터 전압을 보
장하지만 모터 역률 코사인 파이
에 조정이 필요하면
파라미
터 1-29 자동 모터 최적화
(AMA)
를 이용하여 AMA 기능을
수행할 수 있습니다. 모터 역률을
수동으로 조정할 필요는 거의 없
습니다.
1-04 과부하 모드
과부하 모드에서 토오크 수준을 선택합니다.
옵션: 기능:
[0] 높은 토오크 저용량 모터의 경우, 최대 160%
의 초과 토오크를 허용합니다.
[1] * 정상 토오크 최대 110%의 초과 토오크를 허용
합니다.
1-06 시계 방향
옵션: 기능:
주의 사항
모터가 운전하는 동안에는 이
파라미터를 설정할 수 없습니
다.
이 파라미터는 LCP 방향 화살표
에 해당하는 시계방향을 정의합니
다. 모터 와이어를 교체하지 않고
축 회전 방향을 쉽게 변경하는 데
사용합니다.
[0] * 정 AC 드라이브가 U⇒U, V⇒V 및 W
⇒W와 같이 모터에 연결되었을 때
모터축이 시계방향으로 회전합니
다.
[1] 역 AC 드라이브가 U⇒U, V⇒V 및 W
⇒W와 같이 모터에 연결되었을 때
모터축이 반시계방향으로 회전합
니다.
파라미터 설명 프로그래밍 지침서
3.3.2 1-1* 모터 선택
주의 사항
모터가 운전하는 동안에는 이 파라미터 그룹을 설정할
수 없습니다.
주의 사항
파라미터 1-10 모터 구조
경우,
파라미터 1-03 토오크 특성
니다.
=
[1] PM, 비돌극 SPM
에 영향을 주지 않습
MG20OB39 Danfoss A/S © 05/2018 All rights reserved. 43
인
파라미터 1-10 모터 구조
의 설정에 따라 다음과 같은
파라미터를 계속 사용할 수 있습니다.
파라미터 1-10 모터
구조
파라미터 1-00 구성 모
드
파라미터 1-03 토오크
특성
파라미터 1-06 시계 방
향
파라미터 1-14 댐핑 게
인
파라미터 1-15 저속 필
터 시상수
파라미터 1-16 고속 필
터 시상수
파라미터 1-17 전압 필
터 시상수
파라미터 1-20 모터 출
력[kW]
파라미터 1-21 모터 동
력 [HP]
파라미터 1-22 모터 전
압
파라미터 1-23 모터 주
파수
파라미터 1-24 모터 전
류
파라미터 1-25 모터 정
격 회전수
파라미터 1-26 모터 일
정 정격 토오크
파라미터 1-28 모터 회
전 점검
파라미터 1-29 자동 모
터 최적화 (AMA)
파라미터 1-30 고정자
저항 (Rs)
파라미터 1-31 회전자
저항 (Rr)
파라미터 1-35 주 리액
턴스 (Xh)
파라미터 1-37 d축 인
덕턴스 (Ld)
파라미터 1-39 모터 극
수
[0] 비동
[1] PM
기
모터
식
비돌극
x x x x
x – - -
x x x x
– x x x
– x x x
– x x x
– x x x
x – – –
x – – –
x – – –
x – – –
x x x x
x x x x
– x x x
x x x x
x x x x
x x x x
x – – –
x – – –
– x x x
x x x x
[2] PM
모터 돌
극 IPM
3 3
[3]
SynRM
모터

파라미터 설명
VLT® AQUA Drive FC 202
파라미터 1-10 모터
[0] 비동
구조
파라미터 1-40 1000
RPM에서의 역회전
EMF
33
파라미터 1-44 d-axis
Inductance Sat.
(LdSat)
파라미터 1-45 q-axis
Inductance Sat.
(LqSat)
파라미터 1-46 위치 감
지 게인
파라미터 1-47 저속 토
오크 보정
파라미
터 1-48 Inductance
Sat. Point
파라미터 1-49 최소 인
덕턴스 기준 전류
파라미터 1-50 0 속도
에서의 모터 자화
파라미터 1-51 최소 속
도의 일반 자화 [RPM]
파라미터 1-52 최소 속
도의 일반 자화 [Hz]
파라미터 1-58 플라잉
기동 시험 펄스 전류
파라미터 1-59 플라잉
기동 시험 펄스 주파수
파라미터 1-60 저속 운
전 부하 보상
파라미터 1-61 고속 운
전 부하 보상
파라미터 1-62 슬립 보
상
파라미터 1-63 슬립 보
상 시상수
파라미터 1-64 공진 제
거
파라미터 1-65 공진 제
거 시상수
파라미터 1-66 최저 속
도의 최소 전류
파라미터 1-70 기동 모
드
파라미터 1-71 기동 지
연
파라미터 1-72 기동 기
능
파라미터 1-73 플라잉
기동
파라미터 1-80 정지 시
기능
[1] PM
기
모터
식
비돌극
– x x –
– – – x
– – x –
– x x x
– x x x
– – – x
– – x –
x – – –
x – – –
x – – –
x x x –
x x x –
x – – –
x – – –
x – – –
x – – –
x – – –
x – – –
– x x x
– x x x
x x x x
x x x x
x x x x
x x x x
[2] PM
모터 돌
극 IPM
[3]
SynRM
모터
파라미터 1-10 모터
구조
파라미터 1-81 정지 시
기능을 위한 최소 속도
[RPM]
파라미터 1-82 정지 시
기능을 위한 최소 속도
[Hz]
파라미터 1-86 트립 속
도 하한 [RPM]
파라미터 1-87 트립 속
도 하한 [Hz]
파라미터 1-90 모터 열
보호
파라미터 1-91 모터 외
부 팬
파라미터 1-93 써미스
터 소스
파라미터 2-00 직류 유
지/예열 전류
파라미터 2-01 직류 제
동 전류
파라미터 2-02 직류 제
동 시간
파라미터 2-03 직류 제
동 동작 속도 [RPM]
파라미터 2-04 직류 제
동 동작 속도 [Hz]
파라미터 2-06 파킹 전
류
파라미터 2-07 파킹 시
간
파라미터 2-10 제동 기
능
파라미터 2-11 제동 저
항 (ohm)
파라미터 2-12 제동 동
력 한계(kW)
파라미터 2-13 제동 동
력 감시
파라미터 2-15 제동 검
사
파라미터 2-16 교류 제
동 최대 전류
파라미터 2-17 과전압
제어
파라미터 4-10 모터 속
도 방향
파라미터 4-11 모터의
저속 한계 [RPM]
파라미터 4-12 모터 속
도 하한 [Hz]
파라미터 4-13 모터의
고속 한계 [RPM]
[0] 비동
[1] PM
기
모터
식
비돌극
x x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x – x x
x x x x
x – x x
x – x x
x – x x
– x x x
– x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x – – –
x x x x
x x x x
x x x x
x x x x
x x x x
[2] PM
모터 돌
극 IPM
[3]
SynRM
모터
44 Danfoss A/S © 05/2018 All rights reserved. MG20OB39

1-10 모터 구조
모터 구조 유형을 선택합니다.
옵션: 기능:
[0] * 비동기화 비동기형 모터에 해당합니다.
[1] 자석비철각
SPM
영구자석형(PM) 모터용. PM 모터
는 외부 장착식 자석형 모터(비돌
극) 또는 내부 장착식 모터(돌극)
와 같이 두 그룹으로 나뉩니다.
[2] 자석철각IPM
[5] SynRM
파라미터 설명 프로그래밍 지침서
파라미터 1-10 모터
구조
파라미터 4-14 모터 속
도 상한 [Hz]
파라미터 4-16 모터 운
전의 토오크 한계
파라미터 4-17 재생 운
전의 토오크 한계
파라미터 4-18 전류 한
계
파라미터 4-19 최대 출
력 주파수
파라미터 4-58 모터 결
상 시 기능
파라미터 14-40 가변
토오크 수준
파라미터 14-41 자동
에너지 최적화 최소 자
화
파라미터 14-42 자동
에너지 최적화 최소 주
파수
파라미터 14-43 모터
코사인 파이
[0] 비동
[1] PM
기
모터
식
비돌극
x x x x
x x x x
x x x x
x x x x
x x x x
x – x x
x – – –
x – – –
x – – –
x – – –
3.3.3 비동기식 모터 셋업
다음의 모터 데이터를 입력합니다. 모터 명판에 있는 정
보를 확인합니다.
1.
파라미터 1-20 모터 출력[kW]
터 1-21 모터 동력 [HP]
2.
파라미터 1-22 모터 전압
3.
파라미터 1-23 모터 주파수
4.
VVC+ 모드에서 최적 성능을 위해서는 다음의 파라미터
를 셋업하는 데 모터 데이터가 추가로 필요합니다. 모터
데이터시트에서 해당 데이터를 확인합니다(이 데이터는
일반적으로 모터 명판에 없습니다).
MG20OB39 Danfoss A/S © 05/2018 All rights reserved. 45
파라미터 1-24 모터 전류
5.
파라미터 1-25 모터 정격 회전수
.
.
.
[2] PM
모터 돌
극 IPM
또는
[3]
SynRM
모터
파라미
.
.
파라미터 1-29 자
동 모터 최적화 (AMA) [1] 완전 AMA 사용함
을 통해
완전 자동 모터 최적화(AMA)를 실행하거나 수동으로
파라미터를 입력합니다.
(Rfe)
는 항상 수동으로 입력합니다.
1.
파라미터 1-30 고정자 저항 (Rs)
2.
파라미터 1-31 회전자 저항 (Rr)
3.
파라미터 1-33 고정자 누설 리액턴스 (X1)
4.
파라미터 1-34 회전자 누설 리액턴스 (X2)
5.
파라미터 1-35 주 리액턴스 (Xh)
6.
파라미터 1-36 철 손실 저항 (Rfe)
파라미터 1-36 철 손실 저항
.
.
.
.
.
.
VVC+ 실행 시 어플리케이션별 조정
VVC+는 가장 견고한 제어 모드입니다. 이 모드는 대부
분의 경우에서 추가 조정 없이 최적 성능을 제공합니다.
최고의 성능을 위해서는 완전 AMA를 실행합니다.
3.3.4 PM 모터 셋업
이 섹션에서는 PM 모터 셋업 방법을 설명합니다.
초기 프로그래밍 단계
PM 모터 운전을 활성화하려면
조
에서
[1] PM, 비돌극 SPM
파라미터 1-10 모터 구
또는
[2] PM, 돌극 IPM
을 선택합니다.
모터 데이터 프로그래밍
PM 모터를 선택하고 나면
이터, 1-3* 고급 모터 데이터
터 II
의 PM 모터 관련 파라미터가 활성화됩니다.
파라미터 그룹 1-2* 모터 데
및
1-4* 고급 모터 데이
필요한 데이터는 모터 명판과 모터 데이터시트에서 확
인할 수 있습니다.
나열된 순서에 따라 다음 파라미터를 프로그래밍합니
다.
1.
파라미터 1-24 모터 전류
2.
파라미터 1-25 모터 정격 회전수
3.
파라미터 1-26 모터 일정 정격 토오크
4.
파라미터 1-39 모터 극수
.
.
.
.
파라미터 1-29 자동 모터 최적화 (AMA) [1] 완전
AMA 사용함
을 통해 완전 AMA를 실행합니다.
주의 사항
AMA를 사용하는 경우, 정상 속도를 사용하여
터 1-40 1000 RPM에서의 역회전 EMF
는지 확인합니다.
완전 AMA가 수행되지 않으면 다음의 파라미터를 수동
으로 구성합니다.
1.
파라미터 1-30 고정자 저항 (Rs)
라인-공통 고정자 권선 저항(Rs)을 입력합니다.
선간 데이터만 사용할 수 있는 경우에는 선간
값을 2로 나누어 라인-공통 값을 얻습니다.
2.
파라미터 1-37 d축 인덕턴스 (Ld)
파라미
의 값이 계산되
3 3
파라미터 설명
VLT® AQUA Drive FC 202
PM 모터의 라인-공통 d축 인덕턴스를 입력합
니다.
선간 데이터만 사용할 수 있는 경우에는 선간
값을 2로 나누어 라인-공통 값을 얻습니다.
3.
파라미터 1-40 1000 RPM에서의 역회전
EMF
33
.
1000 RPM(RMS 값)을 기준으로 한 PM 모터
의 선간 역기전력을 입력합니다. 역기전력은
+
VVC
실행 시 어플리케이션별 조정
VVC+는 가장 견고한 제어 모드입니다. 이 모드는 대부
분의 경우에서 추가 조정 없이 최적 성능을 제공합니다.
최고의 성능을 위해서는 완전 AMA를 실행합니다.
모터를 정격 회전수에서 기동합니다. 어플리케이션이
제대로 구동하지 않는 경우 VVC+ PM 설정을 점검합니
다.
표 3.4
에는 각종 어플리케이션의 권장 사항이 포함
되어 있습니다.
AC 드라이브가 연결되어 있지 않고 축이 외부
의 힘에 의해서 회전하는 경우 PM 모터에서
생성되는 전압입니다. 이는 일반적으로 모터
정격 회전수 또는 두 라인 사이에서 측정된
1000 RPM에 맞게 지정됩니다. 1000 RPM의
모터 회전수에 대한 값이 없는 경우에는 다음
과 같이 올바른 값을 계산합니다.
예를 들어 1800 RPM에서 역기전력이 320 V
라면 1000 RPM에서의 값을 다음과 같이 계산
할 수 있습니다.
역기전력 = (전압/RPM)x1000 =
(320/1800)x1000 = 178.
4. IPM 모터의 경우: 다음 파라미터에서 인덕턴스
값을 구성합니다.
파라미터 1-38 q축 인덕턴스 (Lq)
•
파라미터 1-44 d-axis Inductance
•
Sat. (LdSat)
파라미터 1-45 q-axis Inductance
•
Sat. (LqSat)
파라미터 1-49 최소 인덕턴스 기준
•
전류
.
.
.
.
주의 사항
IPM 모터의 경우, 명판 또는 데이터시트에 일부 인덕턴
스 값이 누락되어 있을 수 있습니다. AMA를 수행하여
유효한 값을 얻습니다.
어플리케이션 설정
관성이 낮은 어플리케이션
I
Load/IMotor
관성이 낮은 어플리케이션
50>I
관성이 높은 어플리케이션
I
Load/IMotor
저속에서 부하가 큰 경우
<30% (정격 회전수)
<5
>5
Load/IMotor
>50
표 3.4 각종 어플리케이션의 권장 사항
모터가 특정 회전수에서 진동하기 시작하면
터 1-14 댐핑 게인
인수 5~10 단위로
압 필터 시상수
파라미터 1-14 댐핑 게인
다.
파라미터 1-66 최저 속도의 최소 전류
을(를) 줄입니다(<100%).
초기 설정값을 유지합니다.
파라미터 1-14 댐핑 게인, 파라미
터 1-15 저속 필터 시상수
터 1-16 고속 필터 시상수
니다.
파라미터 1-17 전압 필터 시상수
늘립니다.
파라미터 1-66 최저 속도의 최소 전류
를 늘려 기동 토오크를 조정합니다.
100% 전류는 정격 토오크를 기동 토오
크로 제공합니다. 장시간 100%를 초과
하는 전류 수준에서 작동하면 모터가
과열될 수 있습니다.
파라미터 1-17 전
을(를) 늘립니다.
을(를) 줄입니
및
을(를) 늘립
파라미
을(를)
파라미
를 증가시킵니다. 작은 단계로 값을
증가시킵니다. 모터에 따라 이 파라미터는 초기값보다
높은 10-100%로 설정할 수 있습니다.
모터 운전 시험
1. 모터를 저속(100-200 RPM)으로 기동합니다.
모터가 회전하지 않는 경우 설치, 일반 프로그
래밍 및 모터 데이터를 점검합니다.
2.
파라미터 1-70 기동 모드
의 기동 기능이 어플
3.3.5 SynRM 모터 셋업
이 섹션에서는 동기식 인덕턴스 모터 셋업 방법을 설명
합니다.
리케이션 요구사항에 적합한지 확인합니다.
회전자 감지
이 기능은 모터가 정지 상태에서 기동하는 어플리케이
션(예를 들어, 펌프 또는 컨베이어)에 적합한 권장 사항
입니다. 일부 모터에서는 AC 드라이브가 회전자 감지를
수행할 때 소리가 날 수 있습니다. 이 작업을 하더라도
모터에는 악영향을 주지 않습니다.
파킹
이 기능은 예를 들어 팬 어플리케이션의 풍차 회전과
같이 모터가 저속으로 회전하는 어플리케이션에 권장되
는 기능입니다.
터 2-07 파킹 시간
파라미터 2-06 파킹 전류
및
파라미
는 조정할 수 있습니다. 관성이 높은
어플리케이션의 경우에는 이러한 파라미터의 공장 설정
초기 프로그래밍 단계
SynRM 모터 운전을 활성화하려면
구조
에서 옵션
[5] SynRM
을 선택합니다.
파라미터 1-10 모터
모터 데이터 프로그래밍
옵션 [5]
파라미터(
모터 데이터
SynRM을 선택하고 나면,
SynRM 모터 관련
파라미터 그룹 1-2* 모터 데이터, 1-3* 고급
및
1-4* 고급 모터 데이터 II
)가 활성화됩
니다.
필요한 데이터는 모터 명판과 모터 데이터시트에서 확
인할 수 있습니다.
나열된 순서에 따라 다음 파라미터를 프로그래밍합니
다.
값을 증가시킵니다.
46 Danfoss A/S © 05/2018 All rights reserved. MG20OB39

파라미터 설명 프로그래밍 지침서
1.
파라미터 1-24 모터 전류
2.
파라미터 1-25 모터 정격 회전수
3.
파라미터 1-26 모터 일정 정격 토오크
4.
파라미터 1-39 모터 극수
.
.
.
.
파라미터 1-29 자동 모터 최적화 (AMA) [1] 완전
AMA 사용함
을 통해 완전 AMA를 실행합니다.
완전 AMA가 수행되지 않으면 다음의 파라미터를 수동
으로 구성합니다.
1.
파라미터 1-30 고정자 저항 (Rs)
라인-공통 고정자 권선 저항(Rs)을 입력합니다.
선간 데이터만 사용할 수 있는 경우에는 선간
값을 2로 나누어 라인-공통 값을 얻습니다.
2.
파라미터 1-37 d축 인덕턴스 (Ld)
모터의 라인-공통 d축 인덕턴스를 입력합니다.
선간 데이터만 사용할 수 있는 경우에는 선간
값을 2로 나누어 라인-공통 값을 얻습니다.
3.
파라미터 1-38 q축 인덕턴스 (Lq)
.
모터의 라인-공통 q축 인덕턴스를 입력합니다.
선간 데이터만 사용할 수 있는 경우에는 선간
값을 2로 나누어 라인-공통 값을 얻습니다.
4.
파라미터 1-44 d-axis Inductance Sat.
(LdSat)
.
d축 인덕턴스의 라인-공통 포화값을 입력합니
다. 이는 인덕턴스가 완전 포화 상태인 정격 전
류보다 높은 전류를 기준으로 한 값입니다.
5.
파라미터 1-48 Inductance Sat. Point
.
d축 인덕턴스가 절반 포화 상태인 정격 전류의
백분율, 즉, 비포화값과 포화값의 평균값을 입
력합니다.
주의 사항
모터의 경우, 명판 또는 데이터시트에 일부 인덕턴스 값
이 누락되어 있을 수 있습니다. AMA를 수행하여 유효
한 값을 얻습니다.
모터 운전 시험
1. 모터를 저속(100-200 RPM)으로 기동합니다.
모터가 회전하지 않는 경우 설치, 일반 프로그
래밍 및 모터 데이터를 점검합니다.
2.
파라미터 1-70 기동 모드
리케이션 요구사항에 적합한지 확인합니다.
회전자 감지
이 기능은 모터가 정지 상태에서 기동하는 어플리케이
션(예를 들어, 펌프 또는 컨베이어)에 적합한 권장 사항
입니다. 일부 모터에서는 AC 드라이브가 회전자 감지를
수행할 때 소리가 날 수 있습니다. 이 작업을 하더라도
모터에는 악영향을 주지 않습니다.
파킹
이 기능은 예를 들어 팬 어플리케이션의 풍차 회전과
같이 모터가 저속으로 회전하는 어플리케이션에 권장되
는 기능입니다.
터 2-07 파킹 시간
파라미터 2-06 파킹 전류
는 조정할 수 있습니다. 관성이 높은
의 기동 기능이 어플
및
파라미
어플리케이션의 경우에는 이러한 파라미터의 공장 설정
값을 증가시킵니다.
VVC+ 실행 시 어플리케이션별 조정
VVC+는 가장 견고한 제어 모드입니다. 이 모드는 대부
분의 경우에서 추가 조정 없이 최적 성능을 제공합니다.
최고의 성능을 위해서는 완전 AMA를 실행합니다.
모터를 정격 회전수에서 기동합니다. 어플리케이션이
제대로 구동하지 않는 경우, VVC+ SynRM 설정을 점
검합니다.
표 3.5
에는 각종 어플리케이션의 권장 사항이
포함되어 있습니다.
어플리케이션 설정
관성이 낮은 어플리케이션
I
Load/IMotor
관성이 낮은 어플리케이션
50>I
관성이 높은 어플리케이션
I
Load/IMotor
저속에서 부하가 큰 경우
<30% (정격 회전수)
<5
>5
Load/IMotor
>50
표 3.5 각종 어플리케이션의 권장 사항
모터가 특정 회전수에서 진동하기 시작하면
터 1-14 댐핑 게인
인수 5~10 단위로
압 필터 시상수
파라미터 1-14 댐핑 게인
다.
파라미터 1-66 최저 속도의 최소 전류
을(를) 줄입니다(<100%).
초기 설정값을 유지합니다.
파라미터 1-14 댐핑 게인, 파라미
터 1-15 저속 필터 시상수
터 1-16 고속 필터 시상수
니다.
파라미터 1-17 전압 필터 시상수
늘립니다.
파라미터 1-66 최저 속도의 최소 전류
를 늘려 기동 토오크를 조정합니다.
100% 전류는 정격 토오크를 기동 토오
크로 제공합니다. 장시간 100%를 초과
하는 전류 수준에서 작동하면 모터가
과열될 수 있습니다.
파라미터 1-17 전
을(를) 늘립니다.
을(를) 줄입니
및
을(를) 늘립
파라미
을(를)
파라미
를 증가시킵니다. 작은 단계로 값을
증가시킵니다. 모터에 따라 이 파라미터는 초기값보다
높은 10-100%로 설정할 수 있습니다.
3.3.6
1-1* VVC+ PM/SynRM
VVC+ PMSM 제어 코어의 제어 파라미터 초기 설정값
은 50>Jl/Jm>5 범위의 어플리케이션 및 관성 부하에 최
적화되어 있습니다. Jl는 어플리케이션의 부하 관성이고
Jm은 장비 관성입니다.
관성이 낮은 어플리케이션(Jl/Jm<5)의 경우, 5-10의 계
수로
파라미터 1-17 전압 필터 시상수
성능 및 안정성 향상을 위해 가끔
게인
을 증가시킵니다.
를 증가시키고
파라미터 1-14 댐핑
관성이 높은 어플리케이션(Jl/Jm>50)의 경우, 성능 및
안정성 향상을 위해
파라미터 1-16 고속 필터 시상수
핑 게인
을 증가시킵니다.
파라미터 1-15 저속 필터 시상수
및
파라미터 1-14 댐
,
저속(정격 속도 30% 미만) 시 부하가 높은 경우, 저속
시 인버터의 비선형성 때문에
터 시상수
를 증가시킵니다.
파라미터 1-17 전압 필
3 3
MG20OB39 Danfoss A/S © 05/2018 All rights reserved. 47

1-14 댐핑 게인
범위: 기능:
Size
related*
[0 250 %]
이 파라미터가 PM 모터를 안정화
하므로 부드러우면서도 안정적인
구동이 가능합니다. 감쇄 이득 값
은 PM 모터의 다이나믹 성능을
제어합니다. 감쇄 이득이 낮으면
높은 다이나믹 성능을 제공하고
감쇄 이득이 높으면 낮은 다이나
믹 성능을 제공합니다. 감쇄 이득
이 너무 높거나 너무 낮으면 제어
가 불안정해집니다. 다아나믹 성
능은 장비 데이터 및 부하 유형과
관련이 있습니다.
1-15 저속 필터 시상수
범위: 기능:
Size
related*
[0.01 - 20s]고속 필터 댐핑 시상수는 부하 단
계에 대한 반응 시간을 결정합니
다. 짧은 감쇄 시정수를 통해 순간
제어를 확보합니다. 하지만 이 값
이 지나치게 작으면 제어가 불안
정해집니다. 이 시정수는 정격 속
도 10% 미만에서 사용됩니다.
1-16 고속 필터 시상수
범위: 기능:
Size
related*
[0.01 - 20s]고속 필터 댐핑 시상수는 부하 단
계에 대한 반응 시간을 결정합니
다. 짧은 감쇄 시정수를 통해 순간
제어를 확보합니다. 하지만 이 값
이 지나치게 작으면 제어가 불안
정해집니다. 이 시정수는 정격 속
도 10% 초과에서 사용됩니다.
1-17 전압 필터 시상수
범위: 기능:
Size
related*
[0.001 - 2s]공급 전압 필터 시상수는 장비 공
급 전압 계산 시 고주파수 리플과
시스템 공진을 줄이는데 사용됩니
다. 이 필터가 없으면 전류 내 리
플이 계산된 전압을 왜곡하고 시
스템의 안정성에 영향을 미칩니
다.
1-20 모터 출력[kW]
범위: 기능:
Size
related*
[ 0.09 -
2000.00 kW]
주의 사항
모터가 운전하는 동안에는 이
파라미터를 설정할 수 없습니
다.
모터 명판 데이터에 따라 모터 정
격 출력을 kW로 입력합니다. 초
기 설정값은 장치의 정격 출력에
해당합니다.
파라미터 0-03 지역 설정
의 설정
에 따라
파라미터 1-20 모터 출
력[kW]
또는
파라미터 1-21 모
터 동력 [HP]
이 보이지 않을 수
있습니다.
파라미터 설명
VLT® AQUA Drive FC 202
1-11 모터 모델
옵션: 기능:
선택한 모터에 알맞은 공장 값을 자동 설정
합니다. 초기 설정값
하는 경우, 선택항목
조
33
[1] 표준 비
동기형
[2] 표준
PM, 비
돌극
[10] 댄포스
OGD
LA10
[11] 댄포스
OGD
V210
에 따라 설정을 수동으로 결정합니다.
파라미터 1-10 모터 구조
을 선택한 경우의 기본 모터 모델.
파라미터 1-10 모터 구조
돌극SPM
파라미터 1-10 모터 구조
돌극SPM
1.5–3 kW의 T4, T5에만 해당합니다. 이 특
정 모터에 대한 설정이 자동으로 로드됩니
다.
파라미터 1-10 모터 구조
돌극SPM
0.75–3 kW의 T4, T5에만 해당합니다. 이
특정 모터에 대한 설정이 자동으로 로드됩니
다.
을 선택한 경우, 선택 가능합니다.
을 선택한 경우, 선택 가능합니다.
을 선택한 경우, 선택 가능합니다.
표준 비동기형
파라미터 1-10 모터 구
에서
에서
에서
에서
을 사용
[0] 비동기식
[1] PM, 비
[1] PM, 비
[1] PM, 비
3.3.7 1-2* 모터 데이터
이 파라미터 그룹에는 연결된 모터 명판의 입력 데이터
가 포함되어 있습니다.
주의 사항
이 파라미터의 값을 변경하면 다른 파라미터의 설정에
영향을 줍니다.
주의 사항
파라미터 1-10 모터 구조이 [1] PM, 비돌극 SPM, [2]
PM, 돌극 IPM, [5] 동기식 릴럭턴스
로 설정되어 있는
경우, 다음의 파라미터에 영향을 주지 않습니다.
파라미터 1-20 모터 출력[kW]
•
파라미터 1-21 모터 동력 [HP]
•
파라미터 1-22 모터 전압
•
파라미터 1-23 모터 주파수
•
.
.
.
.
48 Danfoss A/S © 05/2018 All rights reserved. MG20OB39

1-21 모터 동력 [HP]
범위: 기능:
Size
related*
[ 0.09 -
500.00 hp]
주의 사항
모터가 운전하는 동안에는 이
파라미터를 설정할 수 없습니
다.
모터 명판 데이터에 따라 모터 정
격 출력을 hp로 입력합니다. 초기
설정값은 장치의 정격 출력에 해
당합니다.
파라미터 0-03 지역 설정
의 설정
에 따라
파라미터 1-20 모터 출
력[kW]
또는
파라미터 1-21 모
터 동력 [HP]
이 보이지 않을 수
있습니다.
1-22 모터 전압
범위: 기능:
Size
related*
[ 10 1000 V]
주의 사항
모터가 운전하는 동안에는 이
파라미터를 설정할 수 없습니
다.
모터 명판 데이터에 따라 모터 정
격 전압을 입력합니다. 초기 설정
값은 장치의 정격 출력에 해당합
니다.
1-23 모터 주파수
범위: 기능:
Size
related*
[20 1000 Hz]
주의 사항
모터가 운전하는 동안에는 이
파라미터를 설정할 수 없습니
다.
모터 명판 데이터에서 모터 주파
수 값을 선택합니다. 230/400V
모터를 사용하여 87Hz의 운전을
하는 경우, 230V/50Hz에 해당하
는 명판 데이터를 설정합니다.
파
라미터 4-13 모터의 고속 한계
[RPM]
및
파라미터 3-03 최대
지령
을(를) 87Hz로 운전하는 모터
에 적용합니다.
1-24 모터 전류
범위: 기능:
Size
related*
[ 0.10 -
10000.00 A]
주의 사항
모터가 운전하는 동안에는 이
파라미터를 설정할 수 없습니
다.
모터 명판 데이터에 따라 모터 정
격 전류 값을 입력합니다. 데이터
는 모터 토오크 계산, 모터 써멀
보호 등에 사용됩니다.
1-25 모터 정격 회전수
범위: 기능:
Size
related*
[100 60000 RPM]
주의 사항
모터가 운전하는 동안에는 이
파라미터를 설정할 수 없습니
다.
모터 명판 데이터에 따라 모터 정
격 회전수 값을 입력합니다. 데이
터는 자동 모터 보상을 계산하는
데 사용됩니다.
1-26 모터 일정 정격 토오크
범위: 기능:
Size
related*
[1 -
10000.0
Nm]
모터 명판 데이터에 따라 값을 입
력합니다. 초기 설정값은 정격 출
력에 해당합니다. 이 파라미터는
파라미터 1-10 모터 구조을 [1]
PM, 비돌극 SPM
으로 설정한 경
우에 사용할 수 있습니다. 다시 말
해, 이 파라미터는 영구자석형 모
터와 비돌극 SPM 모터에서만 사
용할 수 있습니다.
파라미터 설명 프로그래밍 지침서
3 3
MG20OB39 Danfoss A/S © 05/2018 All rights reserved. 49

1-28 모터 회전 점검
옵션: 기능:
경고
최고 전압
교류 주전원 입력, 직류 공급
또는 부하 공유에 연결될 때
AC 드라이브에 고전압이 발생
합니다.
•
모터 위상 케이블을
차단하기 전에 주전
원을 분리합니다.
주의 사항
모터 회전 점검이 활성화되면
표시창에 다음 내용이 나타납
니다.
참고! 모터가 잘못된 방
향으로 구동할 수 있습니다
.
[OK], [Back] 또는 [Cancel]
을 누르면 메시지가 없어지고
다음과 같이 새로운 메시지가
나타납니다.
[Hand On]을 눌
러 모터를 기동합니다.
[Cancel] 키를 눌러 취소합니
다
. [Hand On]을 눌러 5 Hz
에서 정방향으로 모터를 기동
하면 표시창에 다음 메시지가
나타납니다.
모터가 구동 중입
니다
. 모터 회전 방향이 올바
른지 확인합니다. [Off]를 눌
러 모터를 정지합니다. [Off]
를 눌러 모터를 정지하고
파라
미터 1-28 모터 회전 점검
를
리셋합니다. 모터 회전 방향이
올바르지 않은 경우, 모터 위
상 케이블 2개를 서로 맞바꿉
니다.
모터를 설치 및 연결한 다음, 이
기능을 사용하여 모터 회전 방향
이 올바른지 점검할 수 있습니다.
이 기능을 사용하면 버스통신 명
령이나 디지털 입력(외부 인터록
과 Safe Torque Off(STO)(포함
된 경우)는 제외)이 무시됩니다.
[0] * 꺼짐 모터 회전 점검이 활성화되지 않
습니다.
[1] 사용함 모터 회전 점검이 활성화됩니다.
1-29 자동 모터 최적화 (AMA)
옵션: 기능:
AMA 기능은 모터가 정지되어 있
는 동안 고급 모터 파라미터(
파라
미터 1-30 고정자 저항 (Rs)
~
파라미터 1-35 주 리액턴스
(Xh)
)를 최적화하여 다이나믹 모
터 성능을 최적화합니다.
[0] * 꺼짐 기능 없음.
[1] 완전 AMA 사용함고정자 저항 RS, 회전자 저항 Rr,
고정자 누설 리액턴스 X1, 회전자
누설 리액턴스 X2 및 주 리액턴스
Xh에 대한 AMA를 실행합니다.
[2] 축소 AMA 사용함시스템에서 고정자 저항 Rs에 대
해서만 축소 AMA를 실행합니다.
AC 드라이브와 모터 간에 LC 필
터가 사용되는 경우 이 옵션을 선
택합니다.
[3] Enable
Complete
AMA II
고정자 저항 RS, 회전자 저항 Rr,
고정자 누설 리액턴스 X1, 회전자
누설 리액턴스 X2 및 주 리액턴스
Xh에 대한 고급 기능 AMA II를
실행합니다. 개선된 결과를 얻으
려면
파라미터 14-43 모터 코사
인 파이
을 업데이트합니다.
[4] Enable
Reduced
AMA II
시스템에서 고정자 저항 Rs에 대
해서만 축소 AMA II를 실행합니
다. AC 드라이브와 모터 간에 LC
필터가 사용되는 경우 이 옵션을
선택합니다.
파라미터 설명
33
VLT® AQUA Drive FC 202
50 Danfoss A/S © 05/2018 All rights reserved. MG20OB39
주의 사항
파라미터 1-29 자동 모터 최적화 (AMA)
비돌극 SPM
인 경우,
파라미터 1-10 모터 구조
을 주지 않습니다.
[1] 완전 AMA 사용함
또는
[2] 축소 AMA 사용함
선택한 다음 [Hand On]을 눌러 AMA 기능을 실행합니
다.
설계 지침서의 자동 모터 최적화
시오. 정상적으로 완료되면 표시창에 다음과 같이 표시
됩니다:
[OK]를 눌러 AMA를 종료합니다
른 후에 AC 드라이브를 운전할 수 있습니다.
=
[1] PM,
에 영향
을
장 또한 참조하십
. [OK]를 누
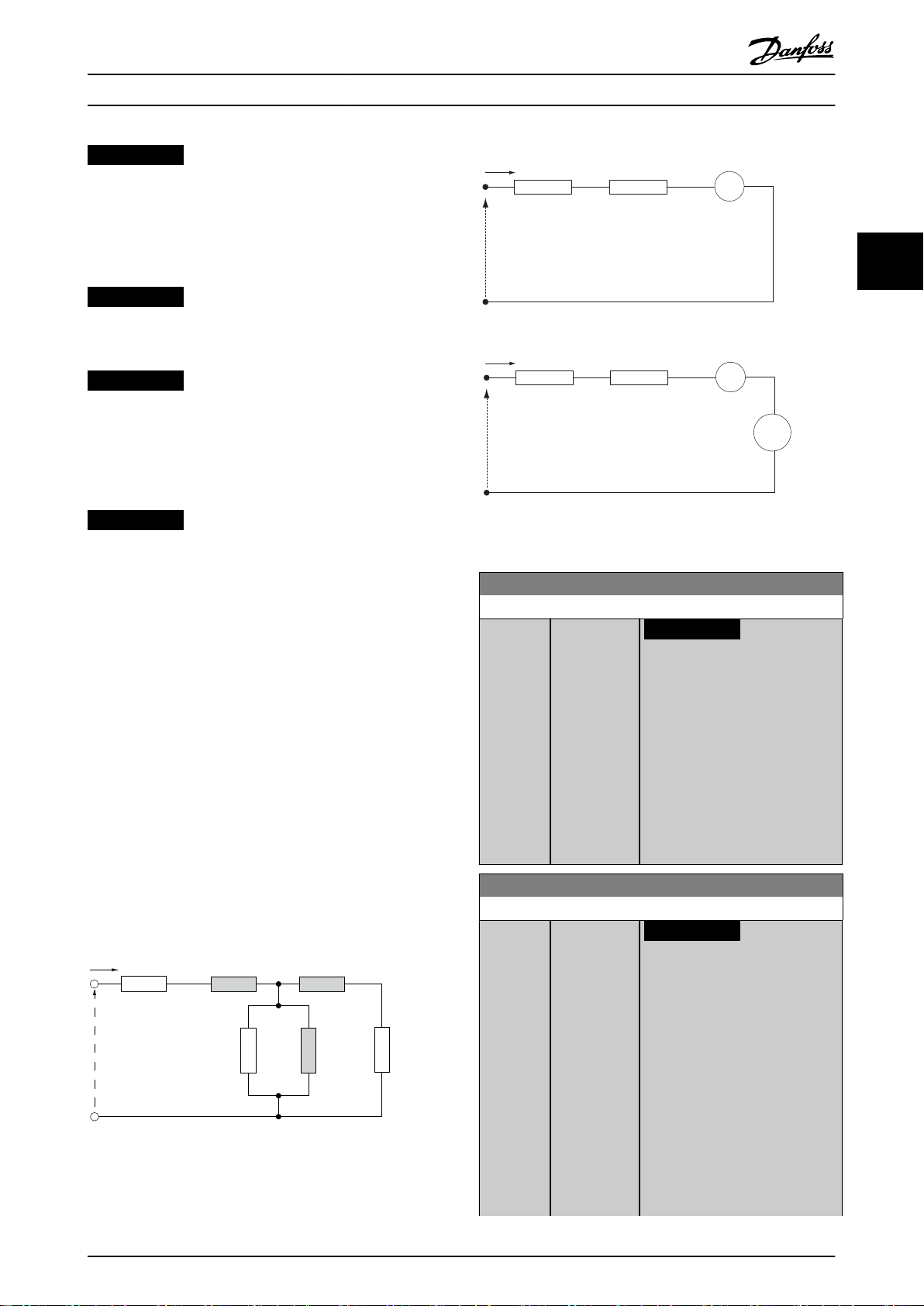
130BA375.11
R
S
P 1-30
R
1s
X
h
P1-35
R
1
X
2
X
1
U
1
I
1
I
R
s
Par. 1-30
L
d
Par. 1-37
ω
sLqIq
U
d
I
R
s
Par. 1-30
L
q=Ld
Par. 1-37
ω
sLdId
+
-
+ -
+ -
Par. 1-40
ω
sλPM
U
q
q
q
d-axis equivalent circuit
q-axis equivalent circuit
130BC056.11
1-30 고정자 저항 (Rs)
범위: 기능:
Size
related*
[ 0.0140 -
140.0000
Ohm]
주의 사항
모터가 운전하는 동안에는 이
파라미터를 설정할 수 없습니
다.
PM 모터의 경우,
파라미
터 1-37 d축 인덕턴스 (Ld)
의 설
명을 참조하십시오.
고정자 저항 값을 설정합니다. 모
터 데이터시트의 값을 입력하거나
모터가 차가운 상태에서 AMA를
실행합니다.
1-31 회전자 저항 (Rr)
범위: 기능:
Size
related*
[ 0.0100 -
100.0000
Ohm]
주의 사항
다음과 같은 경우,
파라미
터 1-31 회전자 저항 (Rr)
에
영향을 주지 않습니다.
파라미
터 1-10 모터 구조이 [1]
PM, 비돌극 SPM, [5] 동기식
릴럭턴스
로 설정되어 있는 경
우.
다음 방법 중 하나로 회전자 저항
값 Rr을 설정하여 축 성능을 개선
합니다.
•
차가운 상태의 모터에서
AMA를 실행합니다. AC
드라이브가 모터에서 값
파라미터 설명 프로그래밍 지침서
주의 사항
AMA 기능을 사용하여 최상의 AC 드라이브 효
•
과를 얻기 위해서는 모터가 차가운 상태에서
AMA를 실행해야 합니다.
모터 구동 중에는 AMA를 실행할 수 없습니다.
•
주의 사항
AMA 실행 중에 외부 토오크가 발생하지 않도록 합니
다.
주의 사항
파라미터 그룹 1-2* 모터 데이터
변경하면
터 1-39 모터 극수
파라미터 1-30 고정자 저항 (Rs)
는 초기 설정값으로 복원됩니다.
모터가 운전하는 동안에는 이 파라미터를 설정할 수 없
습니다.
의 설정값 중 하나를
~
파라미
3 3
주의 사항
완전 AMA 기능은 필터 없이 실행해야 하지만 축소
AMA 기능은 필터와 함께 사용해야 합니다.
VLT® AQUA Drive FC 202 설계 지침서의 자동 모터
장을 참조하십시오.
최적화
3.3.8 1-3* 고급 모터 데이터
고급 모터 데이터에 대한 파라미터입니다. 모터를 최적
으로 구동하려면
파라미터 1-39 모터 극수
모터에 적합해야 합니다. 초기 설정은 일반 표준형 모터
의 공통 모터 파라미터를 기초로 하여 구성됩니다. 모터
파라미터가 올바르게 설정되지 않으면 AC 드라이브 시
스템이 오작동될 수 있습니다. 알려지지 않은 고급 모터
데이터의 경우에는 AMA를 실행하는 것이 좋습니다.
VLT® AQUA Drive FC 202 설계 지침서의 자동 모터
최적화
장을 참조하십시오. AMA는 회전자의 관성 모멘
트와 철 손실 저항(
을 제외한 모든 모터 파라미터를 수정합니다.
MG20OB39 Danfoss A/S © 05/2018 All rights reserved. 51
그림 3.4 비동기식 모터의 모터 대응 다이어그램
파라미터 1-30 고정자 저항 (Rs)
까지의 모터 데이터가 해당
파라미터 1-36 철 손실 저항 (Rfe)
그림 3.5 PM 비돌극 모터의 모터 대응 회로 다이어그램
에서
)

1-31 회전자 저항 (Rr)
범위: 기능:
을 측정합니다. 모든 보
상이 100%로 리셋됩니
다.
•
Rr 값을 직접 입력합니
다. 해당 값은 모터 공급
업체에서 제공합니다.
•
Rr의 초기 설정값을 사용
합니다. AC 드라이브는
모터 명판 데이터를 기준
으로 설정값을 선택합니
다.
1-33 고정자 누설 리액턴스 (X1)
범위: 기능:
Size
related*
[ 0.0400 -
400.0000
Ohm]
주의 사항
이 파라미터는 비동기식 모터
와만 관련이 있습니다.
다음 방법 중 하나를 사용하여 모
터의 고정자 누설 리액턴스를 설
정합니다.
•
차가운 상태의 모터에서
AMA를 실행합니다. AC
드라이브가 모터에서 값
을 측정합니다.
•
X1 값을 직접 입력합니
다. 해당 값은 모터 공급
업체에서 제공합니다.
•
X1의 초기 설정값을 사용
합니다. AC 드라이브는
모터 명판 데이터를 기준
으로 설정값을 선택합니
다.
그림 3.4
참조.
주의 사항
파라미터 1-47 저속 토오크
보정
에서 옵션
[3] 첫 번째 기
동 시 저장
또는 옵션
[4] 기
동 시 항상 저장
을 선택한 경
우 토오크 보정 후 항상 파라
미터 값이 업데이트됩니다.
1-34 회전자 누설 리액턴스 (X2)
범위: 기능:
Size
related*
[ 0.0400 -
400.0000
Ohm]
주의 사항
이 파라미터는 비동기식 모터
와만 관련이 있습니다.
다음 방법 중 하나를 사용하여 모
터의 회전자 누설 리액턴스를 설
정합니다.
•
차가운 상태의 모터에서
AMA를 실행합니다. AC
드라이브가 모터에서 값
을 측정합니다.
•
X2 값을 직접 입력합니
다. 해당 값은 모터 공급
업체에서 제공합니다.
•
X2의 초기 설정값을 사용
합니다. AC 드라이브는
모터 명판 데이터를 기준
으로 설정값을 선택합니
다.
그림 3.4
참조.
주의 사항
파라미터 1-47 저속 토오크
보정
에서 옵션
[3] 첫 번째 기
동 시 저장
또는 옵션
[4] 기
동 시 항상 저장
을 선택한 경
우 토오크 보정 후 항상 파라
미터 값이 업데이트됩니다.
1-35 주 리액턴스 (Xh)
범위: 기능:
Size
related*
[ 1.0000 -
10000.0000
Ohm]
주의 사항
파라미터 1-10 모터 구조
=[1] PM, 비돌극 SPM
인 경
우,
파라미터 1-35 주 리액턴
스 (Xh)
에 영향을 주지 않습니
다.
주의 사항
모터가 운전하는 동안에는 이
파라미터를 설정할 수 없습니
다.
다음 방법 중 하나를 사용하여 모
터의 주 리액턴스를 설정합니다.
•
차가운 상태의 모터에서
AMA를 실행합니다. AC
파라미터 설명
VLT® AQUA Drive FC 202
33
52 Danfoss A/S © 05/2018 All rights reserved. MG20OB39
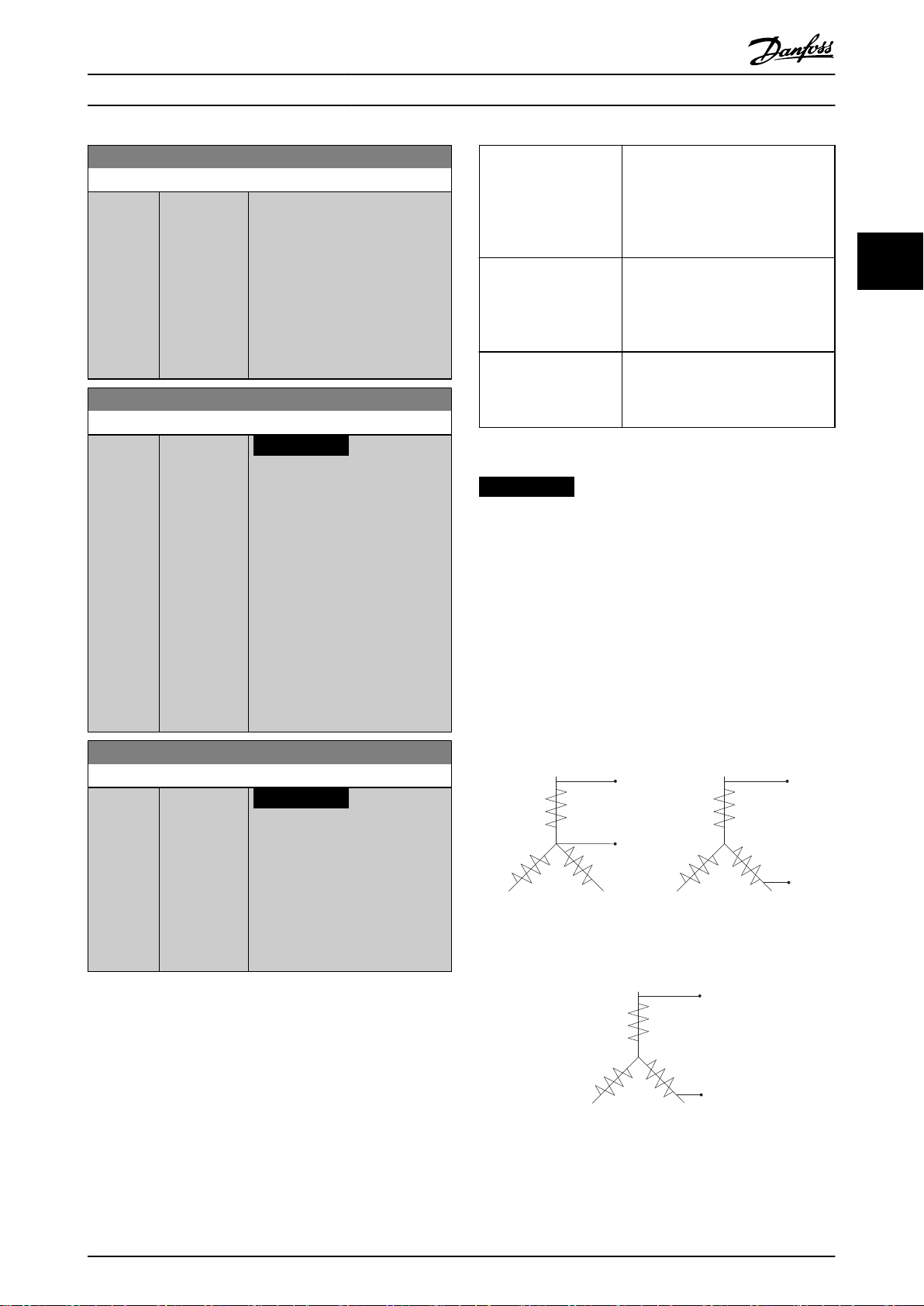
1-35 주 리액턴스 (Xh)
범위: 기능:
드라이브가 모터에서 값
을 측정합니다.
•
Xh 값을 직접 입력합니
다. 해당 값은 모터 공급
업체에서 제공합니다.
•
Xh의 초기 설정값을 사용
합니다. AC 드라이브는
모터 명판 데이터에서 설
정값을 선택합니다.
1-36 철 손실 저항 (Rfe)
범위: 기능:
Size
related*
[ 0 -
10000.000
Ohm]
주의 사항
모터가 운전하는 동안에는 이
파라미터를 설정할 수 없습니
다.
모터의 철 손실을 보상할 수 있을
정도의 철 손실 저항(RFe)을 입력
합니다.
RFe 값은 AMA를 실행하여 찾을
수 없습니다.
RFe 값은 토오크 제어 어플리케이
션에 특히 중요합니다. RFe를 모
르는 경우에는
파라미터 1-36 철
손실 저항 (Rfe)
을 초기 설정 상
태로 둡니다.
1-37 d축 인덕턴스 (Ld)
범위: 기능:
Size
related*
[0.000 -
1000.000
mH]
주의 사항
이 파라미터는
파라미
터 1-10 모터 구조를 [1]
PM, 비돌극 SPM
으로 설정한
경우에만 사용할 수 있습니다.
d축 인덕턴스 값을 설정합니다.
PM 모터 데이터시트에서 값을 확
인합니다.
Line to common (starpoint)
Line-to-line values
Rs and Ld
Rs and Ld
e30bc008.12
Permanent magnet motors
e30bc009.11
Line-to-line back
EMF in RMS value
at 1000 RPM
speed (mech)
파라미터 설명 프로그래밍 지침서
파라미터 1-30 고정자 저
항 (Rs)
(라인-공통).
파라미터 1-37 d축 인덕턴
스 (Ld)
(라인-공통).
파라미터 1-40 1000 RPM
에서의 역회전 EMF
RMS(선간 값)
표 3.6 PM 모터와 관련된 파라미터
이 파라미터는 비동기식 모터 고정자 저
항과 유사한 고정자 권선 저항(Rs)을 제
공합니다. 고정자 저항은 라인-공통 측정
을 위해 정의됩니다. 두 라인 간 고정자
저항이 측정되는 선간 데이터의 경우, 2
로 나눕니다.
이 파라미터는 PM 모터의 d축 인덕턴스
를 제공합니다. d축 인덕턴스는 상-공통
측정을 위해 정의됩니다. 두 라인 간 고
정자 저항이 측정되는 선간 데이터의 경
우, 2로 나눕니다.
이 파라미터는 특별히 1000 RPM의 기
계적 속도에서 PM 모터의 고정자 단자에
대한 역기전력을 제공합니다. 이는 선간
에서 정의되며 RMS 값으로 표시됩니다.
주의 사항
모터 제조업체는 라인-공통(시작포인트) 또는 선간으로
기술 사양에 고정자 저항(
(Rs)
) 및 d축 인덕턴스(
(Ld)
)의 값을 제공합니다. 일반적인 표준은 없습니다.
고정자 권선 저항 및 인덕턴스의 각기 다른 셋업은
림 3.6
에서 보는 바와 같습니다. 댄포스 AC 드라이브는
항상 라인-공통 값을 필요로 합니다. PM 모터의 역기
전력은 프리런 모터의 고정자 권선 중 임의의 2상에 걸
쳐 발생한 유도 EMF로 정의됩니다. 댄포스 AC 드라이
브는 기계적인 회전 속도 1000 RPM에서 측정된 선간
RMS 값을 항상 필요로 합니다. 이는
는 바와 같습니다.
파라미터 1-30 고정자 저항
파라미터 1-37 d축 인덕턴스
그림 3.7
에서 보
그
3 3
비동기식 모터의 경우, 고정자 저항 및 d축 인덕턴스 값
은 대체로 라인-공통(시작포인트)으로 기술 사양에 설
명되어 있습니다. PM 모터의 경우, 대체로 선간으로 기
술 사양에 설명되어 있습니다. PM 모터는 일반적으로
스타 연결형입니다.
MG20OB39 Danfoss A/S © 05/2018 All rights reserved. 53
그림 3.6 고정자 권선 셋업
그림 3.7 PM 모터 역기전력의 장비 파라비터 설명

1-38 q축 인덕턴스 (Lq)
범위: 기능:
Size
related*
[0.000 1000 mH]
주의 사항
모터가 운전하는 동안에는 이
파라미터를 설정할 수 없습니
다.
q축 인덕턴스 값을 설정합니다.
모터 데이터시트를 참조하십시오.
1-39 모터 극수
범위: 기능:
Size
related*
[2 - 132 ]
주의 사항
모터가 운전하는 동안에는 이
파라미터를 설정할 수 없습니
다.
모터 극 수를 입력합니다.
극수 ~nn@ 50Hz ~nn@ 60
Hz
2 2700–2880 3250–3460
4 1350–1450 1625–1730
6 700–960 840–1153
표 3.7 극수 및 관련 주파수
표 3.7
는 모터 종류별 정상 속도
범위 내의 극수를 나타냅니다. 다
른 주파수를 사용하도록 설계된
모터는 별도로 정의합니다. 여기
서 언급된 값은 (양극 수가 아닌)
모터의 총 극 수에 따라 계산된
값이므로 반드시 짝수여야 합니
다. AC 드라이브는
파라미
터 1-23 모터 주파수와 파라미
터 1-25 모터 정격 회전수
를 기
준으로
파라미터 1-39 모터 극수
의 초기 설정값을 생성합니다.
1-40 1000 RPM에서의 역회전 EMF
범위: 기능:
Size
related*
[ 10 9000 V]
1000 RPM으로 운전 시 모터의
공칭 역기전력을 설정합니다. 이
파라미터는
파라미터 1-10 모터
구조를 [1] PM, 비돌극 SPM
으로
설정한 경우에만 사용할 수 있습
니다.
1-44 d-axis Inductance Sat. (LdSat)
범위: 기능:
Size
related*
[0 - 1000
mH]
Ld의 인덕턴스 포화를 입력합니
다. 이 파라미터의 값이
파라미
터 1-37 d축 인덕턴스 (Ld)
와 동
일한 것이 이상적입니다. 모터 공
급업체가 유도 곡선을 제공하는
경우, 정격 전류 200%에서의 유
도 값을 입력합니다.
1-45 q-axis Inductance Sat. (LqSat)
범위: 기능:
Size
related*
[0 - 1000
mH]
이 파라미터는 Lq의 인덕턴스 포
화와 일치합니다. 이 파라미터의
값이
파라미터 1-38 q축 인덕턴
스 (Lq)
와 동일한 것이 이상적입
니다. 모터 공급업체가 유도 곡선
을 제공하는 경우, 정격 전류
200%에서의 유도 값을 입력합니
다.
1-47 저속 토오크 보정
옵션: 기능:
이 파라미터를 사용하여 최대 속
도 범위의 토오크 추정치를 최적
화합니다. 토오크 추정치는 축 동
력, P
shaft
= Pm - Rs x I2를 기준
으로 합니다. Rs 값이 올바른지 확
인합니다. 이 식에서의 Rs 값은 모
터, 케이블 및 AC 드라이브의 전
력 손실과 동일합니다. 이 파라미
터가 활성화된 경우, AC 드라이브
는 전원 인가하는 동안 Rs 값을
계산하며 최적 토오크 추정치 및
최적 성능이 가능하게 합니다. AC
드라이브의
파라미터 1-30 고정
자 저항 (Rs)
를 조정하여 케이블
길이, AC 드라이브 손실 및 모터
의 온도 편차를 보상할 수 없는
경우에 이 기능을 사용합니다.
[0] * 꺼짐
[1] 전원인가 후
첫 기동
전원 인가 후 첫 번째 기동 시 보
정하고 전원 리셋할 때까지 이 값
을 유지합니다.
[2] 매 기동 시 기동할 때마다 보정하고 마지막
기동 이후의 모터 온도 변화를 보
상합니다. 해당 값은 전원 리셋 후
리셋됩니다.
[3] 1st start
with store
AC 드라이브는 전원 인가 후 첫
기동 시 토오크를 보정합니다. 이
옵션은 다음과 같은 모터 파라미
터를 업데이트하는데 사용합니다.
파라미터 설명
VLT® AQUA Drive FC 202
33
54 Danfoss A/S © 05/2018 All rights reserved. MG20OB39

1-47 저속 토오크 보정
옵션: 기능:
•
파라미터 1-30 고정자
저항 (Rs)
.
•
파라미터 1-33 고정자
누설 리액턴스 (X1)
.
•
파라미터 1-34 회전자
누설 리액턴스 (X2)
.
•
파라미터 1-37 d축 인덕
턴스 (Ld)
.
[4] Every start
with store
AC 드라이브는 기동할 때마다 토
오크를 보정하고 마지막 기동 이
후의 모터 온도 변화를 보상합니
다. 이 옵션은 다음과 같은 모터
파라미터를 업데이트하는데 사용
합니다.
•
파라미터 1-30 고정자
저항 (Rs)
.
•
파라미터 1-33 고정자
누설 리액턴스 (X1)
.
•
파라미터 1-34 회전자
누설 리액턴스 (X2)
.
•
파라미터 1-37 d축 인덕
턴스 (Ld)
.
1-48 Inductance Sat. Point
범위: 기능:
Size
related*
[1 500 %]
유도 포화 지점을 입력합니다.
1-49 최소 인덕턴스 기준 전류
범위: 기능:
Size
related*
[ 0 200 %]
주의 사항
AMA를 실행하여 이 파라미터
의 값을 설정합니다. AMA에
의해 결정된 값이 아닌 다른
값이 어플리케이션에 필요한
경우에만 값을 직접 입력합니
다.
q축 인덕턴스 포화 지점을 입력합
니다. AC 드라이브는 이 값을 사
용하여 IPM 모터의 성능을 최적
화합니다.
인덕턴스가
파라미터 1-38 q축
인덕턴스 (Lq)
및
파라미
터 1-45 q-axis Inductance Sat.
(LqSat)
의 평균값과 동일한 지점
에 해당하는 값을 정격 전류의 백
분율로 선택합니다.
1-50 0 속도에서의 모터 자화
범위: 기능:
100 %* [0 -
300 %]
주의 사항
파라미터 1-50 0 속도에서의
모터 자화
=
[1] PM, 비돌극
SPM
인 경우,
파라미
터 1-10 모터 구조
에 영향을
주지 않습니다.
이 파라미터를
파라미터 1-51 최
소 속도의 일반 자화 [RPM]
와 함
께 사용하여 저속으로 운전 중인
모터에서 각기 다른 써멀 부하를
얻습니다.
정격 자화 전류의 백분율 값을 입
력합니다. 너무 낮게 설정하면 모
터축의 토오크가 감소할 수 있습
니다.
Magn. current
130BA045.11
Hz
Par.1-50
Par.1-51
100%
Par.1-52 RPM
그림 3.8 자화 전류
1-51 최소 속도의 일반 자화 [RPM]
범위: 기능:
Size
related*
[10 - 300
RPM]
주의 사항
파라미터 1-51 최소 속도의
일반 자화 [RPM]
=
[1] PM,
비돌극 SPM
인 경우,
파라미
터 1-10 모터 구조
에 영향을
주지 않습니다.
정상 자화 전류에 필요한 속도를
설정합니다. 속도가 모터 미끄럼
속도보다 낮게 설정된 경우에는
파라미터 1-50 0 속도에서의 모
터 자화와 파라미터 1-51 최소
속도의 일반 자화 [RPM]
이 중요
하지 않습니다.
이 파라미터를
파라미터 1-50 0
속도에서의 모터 자화
과 함께 사
용합니다.
표 3.7
을(를) 참조하십
시오.
파라미터 설명 프로그래밍 지침서
3.3.9 1-5* 부하 독립적 설정
3 3
MG20OB39 Danfoss A/S © 05/2018 All rights reserved. 55
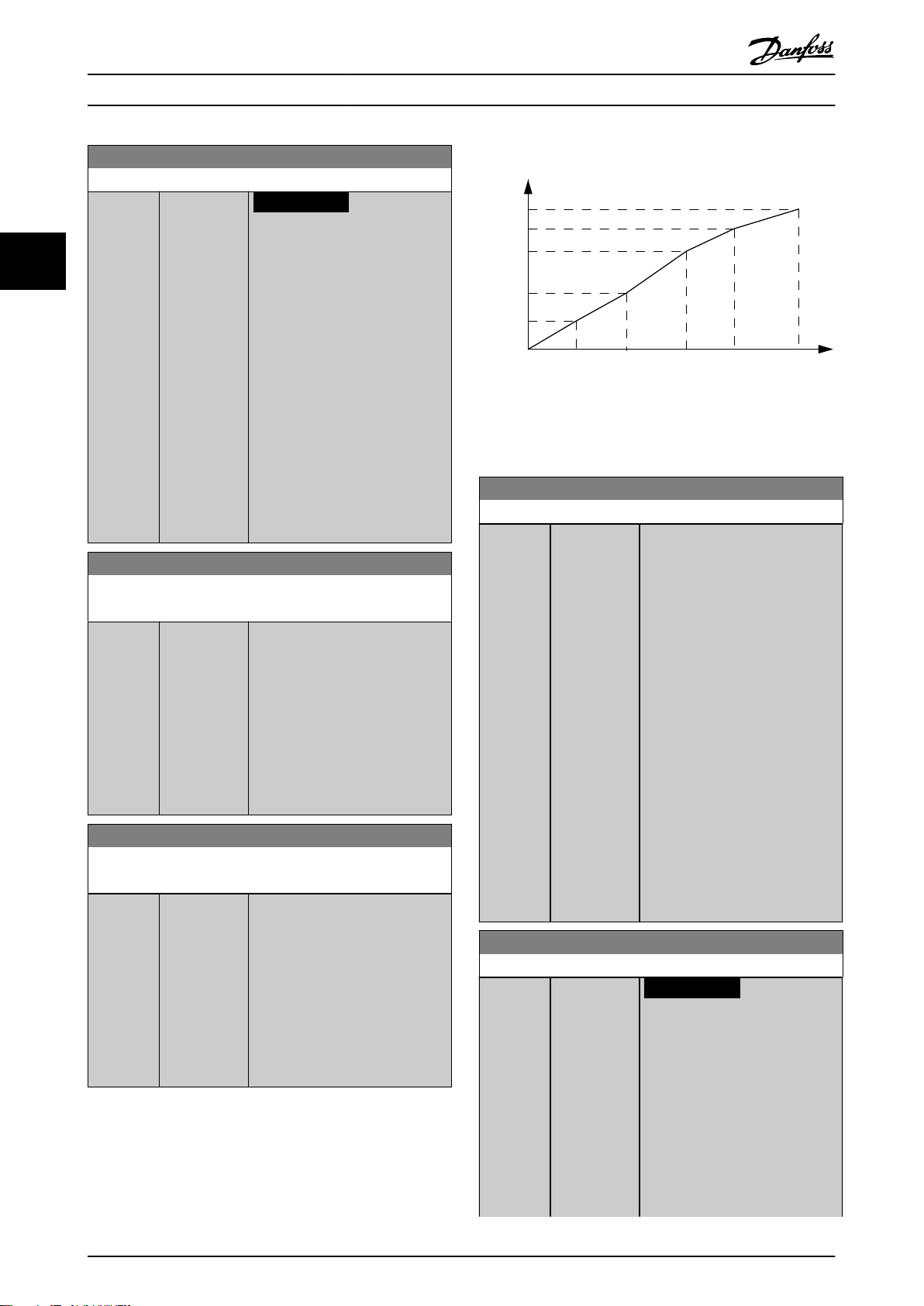
1-52 최소 속도의 일반 자화 [Hz]
범위: 기능:
Size
related*
[ 0.3 -
10.0 Hz]
주의 사항
파라미터 1-52 최소 속도의
일반 자화 [Hz]
=
[1] PM,
비돌극 SPM
인 경우,
파라미
터 1-10 모터 구조
에 영향을
주지 않습니다.
일반 자화 전류에 필요한 주파수
를 설정합니다. 주파수가 모터 미
끄럼 주파수보다 낮게 설정된 경
우에는
파라미터 1-50 0 속도에
서의 모터 자화과 파라미
터 1-51 최소 속도의 일반 자화
[RPM]
이 비활성화됩니다.
이 파라미터를
파라미터 1-50 0
속도에서의 모터 자화
과 함께 사
용합니다.
표 3.7
을(를) 참조하십
시오.
1-55 V/f 특성 - V
배열 [6]
범위: 기능:
Size
related*
[0 - 1000V]각각의 주파수 포인트에서의 전압
을 입력하여 U/f 특성이 직접 모
터와 일치하게 합니다.
주파수 포인트는
파라미
터 1-56 V/f 특성 - f
에서 정의
됩니다.
이 파라미터는 배열 파라미터
[0-5]이며
파라미터 1-01 모터
제어 방식이 [0] U/f
로 설정된 경
우에만 접근할 수 있습니다.
1-56 V/f 특성 - f
배열 [6]
범위: 기능:
Size
related*
[ 0 -
1000.0 Hz]
주파수 포인트를 입력하여 U/f 특
성이 직접 모터와 일치하게 합니
다.
각 주파수 포인트에서의 전압은
파라미터 1-55 V/f 특성 - V
에서
정의됩니다.
이 파라미터는 배열 파라미터
[0-5]이며
파라미터 1-01 모터
제어 방식이 [0] U/f
로 설정된 경
우에만 접근할 수 있습니다.
Motor Voltage
Par 1-55 [x]
Output Frequency
Par 1-56 [x]
1-55[5]
1-55[4]
1-55[3]
1-55[2]
1-55[1]
1-55[0]
1-56
[0]
1-56
[1]
1-56
[2]
1-56
[3]
1-56
[4]
1-56
[5]
130BA166.10
1-58 플라잉 기동 시험 펄스 전류
범위: 기능:
Size
related*
[ 0 200 %]
모터 방향을 감지하는데 사용되는
펄스에 대한 자화 전류의 크기를
설정합니다. 값의 범위와 기능은
다음에 따라 다릅니다.
파라미
터 1-10 모터 구조
:
[0] 비동기형: [0–200%]
이 값을 줄이면 생성된 토오크가
줄어듭니다. 100%는 최대 모터
정격 전류를 의미합니다. 이 경우,
초기 값은 30%입니다.
[1] PM 비돌극: [0–40%]
PM 모터의 경우, 20%의 일반 설
정이 권장됩니다. 값이 클수록 성
능이 증가합니다. 하지만 정격 속
도에서 300 VLL (rms)을 초과하
는 역기전력과 높은 권선 인덕턴
스(10 mH 초과)를 가진 모터의
경우, 잘못된 속도 예측을 피하기
위해 낮은 값이 권장됩니다.
파라
미터 1-73 플라잉 기동
가 활성화
되면 파라미터가 활성화됩니다
1-59 플라잉 기동 시험 펄스 주파수
범위: 기능:
Size
related*
[ 0 500 %]
주의 사항
PM 플라잉 기동 파라미터 간
관계에 대한 개요는
파라미
터 1-70 기동 모드
의 설명을
참조하십시오.
값의 범위와 기능은 다음에 따라
다릅니다.
파라미터 1-10 모터 구
조
:
[0] 비동기형: [0–500%]
모터 방향을 감지하는 데 사용되
는 펄스에 대한 주파수의 백분율
파라미터 설명
VLT® AQUA Drive FC 202
33
그림 3.9 U/f 특성
56 Danfoss A/S © 05/2018 All rights reserved. MG20OB39
1-59 플라잉 기동 시험 펄스 주파수
범위: 기능:
을 제어합니다. 이 값을 늘리면 생
성된 토오크가 줄어듭니다. 이 모
드에서 100%는 미끄럼 주파수의
2배를 의미합니다.
[1] PM 비돌극: [0–10%]
이 파라미터는 파킹 기능(
파라미
터 2-06 파킹 전류
및
파라미
터 2-07 파킹 시간
참조)이 활성
화되는 모터 회전수 상한 임계값
(모터 정격 회전수의 %로 표시)을
정의합니다. 이 파라미터는
파라
미터 1-70 기동 모드이 [1] 파킹
으로 설정되어 있고 모터를 기동
한 후에만 활성화됩니다.
1-60 저속 운전 부하 보상
범위: 기능:
100 %* [0 -
300 %]
주의 사항
파라미터 1-60 저속 운전 부
하 보상
=
[1] PM, 비돌극
SPM
인 경우,
파라미
터 1-10 모터 구조
에 영향을
주지 않습니다.
모터가 저속으로 운전하는 동안
부하와 관련하여 전압을 보상하기
위한 % 값을 입력하고 최적 U/f
특성을 얻습니다. 이 파라미터가
활성화되는 주파수 범위는 모터
용량에 따라 결정됩니다.
모터 용량
[kW]
전환 주파수
[Hz]
0.25–7.5 <10
11–45 <5
55–550 <3–4
표 3.8 전환 주파수
130BA046.11
60%
0%
100%
U
m
Changeover
f
out
Par.1-60 Par.1-61
1-61 고속 운전 부하 보상
범위: 기능:
100 %* [0 -
300 %]
주의 사항
파라미터 1-61 고속 운전 부
하 보상
=
[1] PM, 비돌극
SPM
인 경우,
파라미
터 1-10 모터 구조
에 영향을
주지 않습니다.
모터가 고속으로 운전하는 동안
부하와 관련하여 전압을 보상하기
위한 % 값을 입력하고 최적 U/f
특성을 얻습니다. 이 파라미터가
활성화되는 주파수 범위는 모터
용량에 따라 결정됩니다.
모터 용량
[kW]
전환 주파수
[Hz]
0.25–7.5 >10
11–45 <5
55–550 <3–4
표 3.9 전환 주파수
1-62 슬립 보상
범위: 기능:
0 %* [-500 -
500 %]
주의 사항
파라미터 1-62 슬립 보상
=
[1] PM, 비돌극 SPM
인 경우,
파라미터 1-10 모터 구조
에
영향을 주지 않습니다.
n
M,N
의 값으로 허용 한계를 보상
하려면 미끄럼 보상에 대한 % 값
을 입력합니다. 미끄럼 보상은 모
터 정격 회전수(n
M,N
)를 기준으로
자동 계산됩니다.
파라미터 설명 프로그래밍 지침서
3.3.10 1-6* 부하 의존적 설정
3 3
그림 3.10 저속 부하 보상
MG20OB39 Danfoss A/S © 05/2018 All rights reserved. 57

1-63 슬립 보상 시상수
범위: 기능:
Size
related*
[0.05 - 5
s]
주의 사항
파라미터 1-63 슬립 보상 시
상수
=
[1] PM, 비돌극 SPM
인 경우,
파라미터 1-10 모터
구조
에 영향을 주지 않습니다.
미끄럼 보상 반응 속도를 입력합
니다. 값이 높을수록 반응 속도가
느려지고 값이 낮을수록 반응 속
도가 빨라집니다. 저주파수 공진
문제가 발생하면 시간을 더 길게
설정합니다.
1-64 공진 제거
범위: 기능:
Size
related*
[0 500 %]
주의 사항
파라미터 1-64 공진 제거
=
[1] PM, 비돌극 SPM
인 경우,
파라미터 1-10 모터 구조
에
영향을 주지 않습니다.
공진 감쇄 값을 입력합니다.
파라
미터 1-64 공진 제거와 파라미
터 1-65 공진 제거 시상수
를 설
정하여 고주파수 공진 문제를 제
거합니다. 공진을 감소시키려면
파라미터 1-64 공진 제거
의 값을
높여야 합니다.
1-65 공진 제거 시상수
범위: 기능:
5 ms* [5 - 50
ms]
주의 사항
파라미터 1-65 공진 제거 시
상수
=
[1] PM, 비돌극 SPM
인 경우,
파라미터 1-10 모터
구조
에 영향을 주지 않습니다.
파라미터 1-64 공진 제거와 파라
미터 1-65 공진 제거 시상수
를
설정하여 고주파수 공진 문제를
제거합니다. 최상의 감쇄 결과를
제공하는 시정수를 입력합니다.
1-66 최저 속도의 최소 전류
범위: 기능:
Size
related*
[ 1 200 %]
주의 사항
파라미터 1-10 모터 구조
=
[0] 비동기식
인 경우,
파라미
터 1-66 최저 속도의 최소 전
류
에 영향을 주지 않습니다.
1-66 최저 속도의 최소 전류
범위: 기능:
저속에서의 최소 모터 전류를 입
력합니다.
이 전류 값을 높이면 저속에서의
모터 토오크가 개선됩니다. 여기
서 저속은 VVC+ PM 제어 방식
을 기준으로 모터 정격 회전수(
파
라미터 1-25 모터 정격 회전수
)
의 6% 미만의 속도로 정의됩니다.
1-70 기동 모드
옵션: 기능:
[0] 회전자 감지 모터가 완전 정지 상태에서 기동
하는 것으로 알려진 모든 어플리
케이션(예를 들어, 컨베이어, 펌프
및 풍차형 이외의 팬)에 적합합니
다.
[1] 파킹 시간 예를 들어, 풍차형 팬으로 인해 모
터가 저속(정격 회전수의 2-5%
미만)으로 회전하는 경우,
[1] 파
킹
을 선택하고 상황에 맞게
파라
미터 2-06 파킹 전류
및
파라미
터 2-07 파킹 시간
을 조정합니다.
[2] Rotor Det.
w/ Parking
1-71 기동 지연
범위: 기능:
00 s* [0 - 300s]기동 명령과 AC 드라이브가 모터
에 전력을 공급하는 시점 사이의
시간 지연을 입력합니다.
이 파라미터는
파라미터 1-72 기
동 기능
에서 선택한 기동 기능과
관련이 있습니다.
1-72 기동 기능
옵션: 기능:
기동 지연 중에 기동 기능을 선택
합니다. 이 파라미터는
파라미
터 1-71 기동 지연
과 연결되어
있습니다.
[0] DC 유지/지연시간기동 지연 시간 중에 직류 유지
전류(
파라미터 2-00 직류 유지/예
열 전류
)로 모터에 에너지를 공급
합니다.
[2] 코스팅/지연시간기동 지연 시간(인버터 꺼짐) 도중
에 모터가 코스팅(프리런)되었습
니다.
파라미터 설명
VLT® AQUA Drive FC 202
33
3.3.11 1-7* 기동 조정
58 Danfoss A/S © 05/2018 All rights reserved. MG20OB39

1-72 기동 기능
옵션: 기능:
파라미터 1-10 모터 구조
에 따라
사용할 수 있는 선택항목:
[0] 비
동기
:
•
[2] 코스팅
.
•
[0] 직류 유지
.
[1] PM 비돌극
:
•
[2] 코스팅
.
1-73 플라잉 기동
옵션: 기능:
이 기능을 선택하면 주전원 저전
압으로 인해 프리런 상태인 모터
를 정지시킬 수 있습니다.
파라미터 1-73 플라잉 기동
이 사
용함으로 설정되어 있으면
파라미
터 1-71 기동 지연
에는 기능이
없습니다.
플라잉 기동의 검색 방향은
파라
미터 4-10 모터 속도 방향
에서의
설정과 관련이 있습니다.
[0] 시계방향
: 플라잉 기동 검색
이 시계방향으로 이루어집니다.
검색이 실패하면 DC 제동장치가
실행됩니다.
[2] 양방향
: 플라잉 기동은 먼저
최종 지령(방향)에 의해 결정된 방
향으로 검색합니다. 속도를 찾지
못하면 반대 방향으로 검색합니
다. 검색이 실패하면 직류 제동은
파라미터 2-02 직류 제동 시간
에
설정된 시간에 활성화됩니다. 그
러면 0 Hz에서부터 기동합니다.
[0] 사용안함 이 기능이 필요하지 않으면
[0]
Disable(사용안함)
을 선택합니다.
[1] 사용함 AC 드라이브가 회전하는 모터를
정지시키고 제어하게 하려면
[1]
사용함
을 선택합니다.
파라미터 1-10 모터 구조 = [1]
PM 비돌극
인 경우에는 파라미터
가 항상
[1] 사용함
으로 설정됩니
다.
중요한 관련 파라미터:
•
파라미터 1-58 플라잉
기동 시험 펄스 전류
.
•
파라미터 1-59 플라잉
기동 시험 펄스 주파수
.
•
파라미터 1-70 기동 모
드
.
•
파라미터 2-03 직류 제
동 동작 속도 [RPM]
.
1-73 플라잉 기동
옵션: 기능:
•
파라미터 2-04 직류 제
동 동작 속도 [Hz]
.
•
파라미터 2-06 파킹 전
류
.
•
파라미터 2-07 파킹 시
간
.
파라미터 설명 프로그래밍 지침서
3 3
MG20OB39 Danfoss A/S © 05/2018 All rights reserved. 59
파라미터 1-73 플라잉 기동
으면
파라미터 1-71 기동 지연
PM 모터에 사용된 플라잉 기동은 초기 속도 예측을 기
초로 합니다. 속도는 항상 활성 기동 신호가 주어진 직
후에 예측됩니다.
기초로 하여 다음과 같은 상황이 발생합니다.
파라미터 1-70 기동 모드
파라미터 1-70 기동 모드
속도 예측이 0 Hz보다 크게 나타나면 AC 드라이브가
해당 속도에서 모터를 정지시키고 정상 운전을 재개합
니다. 그렇지 않으면 AC 드라이브가 회전자 위치를 예
측하고 예측된 위치에서 정상 운전을 시작합니다.
파라미터 1-70 기동 모드=[1] 파킹
속도 예측이
파수
의 설정보다 낮게 나타나면 파킹 기능이 실행됩니
다(
파라미터 2-06 파킹 전류
시간
참조). 그렇지 않으면 AC 드라이브가 그 속도에서
모터를 정지시키고 정상 운전을 재개합니다. 권장 설정
은
파라미터 1-70 기동 모드
PM 모터에 사용된 플라잉기동 원리의 전류 한계:
•
•
•
•
•
•
파라미터 1-59 플라잉 기동 시험 펄스 주
속도 범위는 최대 100% 정격 속도 또는 약계
자 속도 중 가장 낮은 속도입니다.
높은 역기전력(>300 VLL(rms))과 높은 권선
인덕턴스(>10 mH)가 있는 PMSM은 단락 전류
를 영(0)으로 줄이는데 시간이 더 필요하며 예
측에 오류가 있는 것으로 의심될 수 있습니다.
현재 테스트는 최대 300 Hz의 속도 범위로 제
한되었습니다. 특정 제품의 경우, 한계는 250
Hz입니다. 모든 200–240 V 제품의 한계는 최
대 2.2 kW(3 hp)이고, 모든 380–480 V 제품
의 한계는 최대 4kW(5.4 hp)입니다.
현재 테스트는 최대 22kW(30 hp)의 설비 출력
크기로 제한되었습니다.
돌극 설비(IPMSM)에 맞게 준비되었지만 이러
한 유형의 설비에 대한 검증은 아직 이루어지
지 않았습니다.
관성이 높은 어플리케이션의 경우(예를 들어,
부하 관성이 모터 관성보다 30배 이상 큰 경
우), 플라잉기동 기능이 고속으로 실행되는 동
안 과전압을 피하기 위해 제동 저항이 권장됩
니다.
이 사용함으로 설정되어 있
에는 기능이 없습니다.
의 설정을
=
[0] 회전자 감지
:
및
파라미터 2-07 파킹
의 설명을 참조하십시오.
:
1-79 압축기 기동 후 트립 시까지 최대시간
범위: 기능:
0 s* [ 0 -
3600.0 s]
이 파라미터에서 지정된 시간 내
에 모터가
파라미터 1-86 트립
속도 하한 [RPM]
에서 지정된 속
도에 도달하지 못하면 AC 드라이
브는 트립됩니다. 이 파라미터의
시간에는
파라미터 1-71 기동 지
연
에서 지정된 시간이 포함되어
있습니다. 예를 들어,
파라미
터 1-71 기동 지연
의 값이
파라
미터 1-79 압축기 기동 후 트립
시까지 최대시간
의 값 이상이면
AC 드라이브가 절대 기동하지 않
습니다.
1-80 정지 시 기능
옵션: 기능:
정지 명령 후 또는
파라미
터 1-81 정지 시 기능을 위한 최
소 속도 [RPM]
의 설정값으로 감
속된 후에 실행할 AC 드라이브
기능을 선택합니다.
파라미터 1-10 모터 구조
에 따라
사용할 수 있는 선택항목:
[0] 비동기
:
•
[0] 코스팅
.
•
[1] 직류 유지
.
[1] PM 비돌극
:
•
[0] 코스팅
.
[0] * 코스팅 모터가 코스팅(프리런)되도록 합
니다.
[1] DC 유지/모터예열직류 유지 전류(
파라미
터 2-00 직류 유지/예열 전류
참
조)로 모터에 에너지를 공급합니
다.
[2] 모터 점검
[6] 모터 점검, 알
람
1-81 정지 시 기능을 위한 최소 속도 [RPM]
범위: 기능:
Size
related*
[0 - 600
RPM]
파라미터 1-80 정지 시 기능
을
활성화하는 속도를 설정합니다.
1-82 정지 시 기능을 위한 최소 속도 [Hz]
범위: 기능:
Size
related*
[ 0 - 20.0
Hz]
파라미터 1-80 정지 시 기능
을
활성화하는 출력 주파수를 설정합
니다.
N
RPM
T
N
1-86
T
1-79
T
1-71
0
1
1-86 트립 속도 하한 [RPM]
범위: 기능:
Size
related*
[ 0 - par.
4-13 RPM]
주의 사항
이 파라미터는
파라미
터 0-02 모터 속도 단위
가
[11] RPM
으로 설정되어 있는
경우에만 보입니다.
AC 드라이브가 트립하는 모터 회
전수의 하한을 입력합니다. 값이
0인 경우, 해당 기능이 활성화되
지 않습니다. 기동 후 (또는 정지
파라미터 설명
VLT® AQUA Drive FC 202
3.3.13 수중 펌프를 위한 고급형 최소 속
도 감시
일부 펌프는 저속에서 작동하기에 민감합니다. 저속에
서는 냉각 또는 윤활이 충분하지 않은 것이 대표적인
이유입니다.
33
3.3.12 1-8* 정지 조정
과부하 조건에서 AC 드라이브는 통합 보호 기능을 사
용하여 자체를 보호하며 여기에는 감속이 포함됩니다.
예를 들어, 전류 한계 컨트롤러는 속도를 낮출 수 있습
니다. 경우에 따라 속도가
한계 [RPM]
및
파라미터 4-12 모터 속도 하한 [Hz]
파라미터 4-11 모터의 저속
서 지정된 속도보다 낮아질 수 있습니다.
속도가 특정 값 아래로 떨어지면 고급형 최소 속도 감
시 기능이 AC 드라이브를 트립합니다. 펌프 모터가
라미터 1-79 압축기 기동 후 트립 시까지 최대시간
서 지정된 시간 내에
[RPM]
에서 지정된 속도에 도달하지 못하면(가속이 너
파라미터 1-86 트립 속도 하한
무 오래 걸리면) AC 드라이브가 트립됩니다.
터 1-71 기동 지연
트립 시까지 최대시간
될 때 동시에 시작합니다. 예를 들어, 이는
터 1-71 기동 지연
후 트립 시까지 최대시간
및
파라미터 1-79 압축기 기동 후
의 타이머는 기동 명령이 활성화
파라미
의 값이
파라미터 1-79 압축기 기동
의 값 이상이면 AC 드라이브
파
에
파라미
가 절대 기동하지 않음을 의미합니다.
에
60 Danfoss A/S © 05/2018 All rights reserved. MG20OB39
T
1-71
T
1-79
N
1-86
1 정상 운전.
그림 3.11 고급형 최소 속도 감시
파라미터 1-71 기동 지연
파라미터 1-79 압축기 기동 후 트립 시까지 최대시간
시간에는 T
파라미터 1-86 트립 속도 하한 [RPM]
속도가 이 값 미만으로 떨어지면 AC 드라이브가 트립됩니
다.
의 시간이 포함됩니다.
1-71
.
. 이
. 정상 운전 도중에

1-86 트립 속도 하한 [RPM]
범위: 기능:
도중) 특정 시점의 속도가 파라미
터의 값보다 낮아지면 AC 드라이
브가 트립하고
알람 49, 속도 한
계
가 발생합니다.
1-87 트립 속도 하한 [Hz]
범위: 기능:
Size
related*
[ 0 - par.
4-14 Hz]
주의 사항
이 파라미터는
파라미
터 0-02 모터 속도 단위
가
[1] Hz
로 설정되어 있는 경우
에만 보입니다.
AC 드라이브가 트립하는 모터 회
전수의 하한을 입력합니다. 값이
0인 경우, 해당 기능이 활성화되
지 않습니다. 기동 후 (또는 정지
도중) 특정 시점의 속도가 파라미
터의 값보다 낮아지면 AC 드라이
브가 트립하고
알람 49, 속도 한
계
가 발생합니다.
파라미터 설명 프로그래밍 지침서
3.3.14 1-9* 모터 온도
1-90 모터 써멀 보호
옵션: 기능:
[0] 보호하지않음AC 드라이브에 경고 발생이나 트립이 필요
[1] 써미스터경고모터에 연결된 써미스터 또는 KTY 센서가
MG20OB39 Danfoss A/S © 05/2018 All rights reserved. 61
다음과 같이 다양한 방식으로 모터 써멀 보
호를 구현할 수 있습니다.
아날로그 입력 또는 디지털 입력(
•
라미터 1-93 써미스터 소스
나에 연결된 모터 권선의 PTC 센서
를 통해 구현.
미스터 연결
실제 부하 및 시간을 기준으로 써멀
•
부하 계산 (ETR = 전자 써멀 릴레
이). 측정된 써멀 부하를 모터 정격
전류(I
M,N
(f
)와 비교하면
M,N
및
장을 3.3.17 ATEX ETR
하십시오.
기계식 써멀 스위치(Klixon 유형)를
•
통해 측정.
(를) 참조하십시오.
북미 시장에서는 ETR 기능이 NEC에 따라
클래스 20 모터 과부하 보호 기능을 제공합
니다.
없을 때, 모터에 지속적으로 과부하가 발생합
니다.
모터 과열에 반응할 때 경고하도록 합니다.
장을 3.3.15 PTC 써
을(를) 참조하십시오.
) 및 모터 정격 주파수
장을 3.3.16 ETR
장을 3.3.18 Klixon
파
) 중 하
를 참조
을
1-90 모터 써멀 보호
옵션: 기능:
[2] 써미스터트립모터에 연결된 써미스터 또는 KTY 센서가
모터 과열에 반응할 때 AC 드라이브가 정지
(트립)하도록 합니다.
써미스터 정지 값은 >3 kΩ이어야 합니다.
와인드업 방지를 위해 써미스터(PTC 센서)를
모터에 설치합니다.
[3] ETR 경
고 1
[4] ETR 트
립 1
[5] ETR 경
고 2
[6] ETR 트
립 2
[7] ETR 경
고 3
[8] ETR 트
립 3
[9] ETR 경
고 4
[10] ETR 트
립 4
[20] ATEX
ETR
셋업 1이 활성 상태일 때 부하를 계산하고
모터에 과부하가 발생하면 경고가 표시되도
록 합니다. 디지털 출력 중 하나를 통해 경고
신호를 프로그래밍합니다.
셋업 1이 활성 상태일 때 부하를 계산하고
모터에 과부하가 발생할 때 AC 드라이브를
정지(트립)합니다. 디지털 출력 중 하나를 통
해 경고 신호를 프로그래밍합니다. 경고가 발
생하고 AC 드라이브가 트립하는 경우 (써멀
경고) 신호가 표시됩니다.
ATEX에 적합하도록 Ex-e 모터에 대한 써멀
모니터링 기능을 활성화합니다.
터 1-94 ATEX ETR cur.lim. speed
reduction, 파라미터 1-98 ATEX ETR
interpol. points freq.
터 1-99 ATEX ETR interpol points
current
을(를) 활성화합니다.
및
파라미
파라미
주의 사항
[20] ATEX ETR
련 장에 수록된 지침과 모터 제조업체에서 제공한 지침
을 준수합니다.
을 선택하는 경우,
설계 지침서
의 관
주의 사항
[20] ATEX ETR
계
를 150%로 설정합니다.
이 선택되면
파라미터 4-18 전류 한
3 3
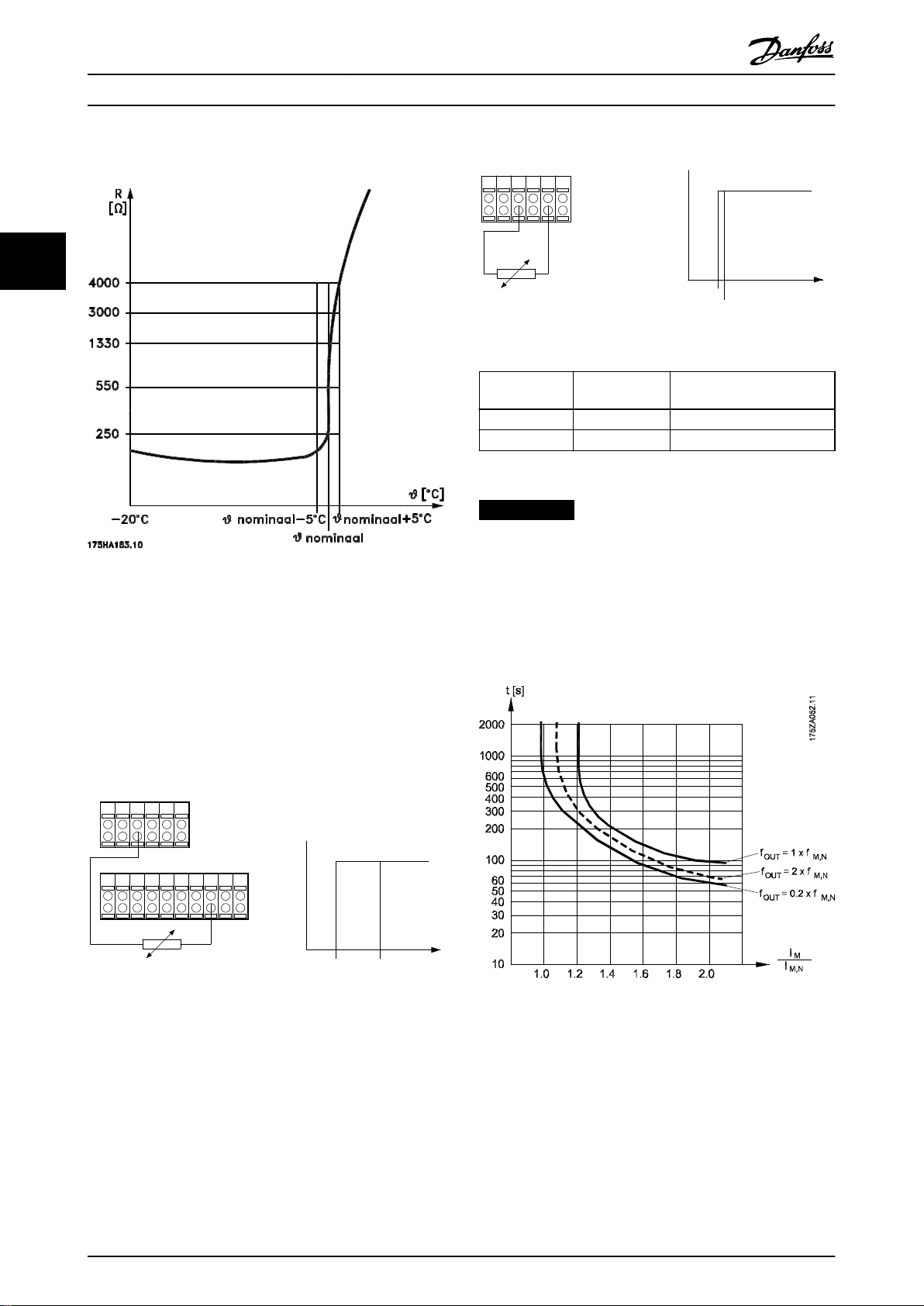
PTC / Thermistor
R
OFF
ON
<800 Ω
+10V
130BA152.10
>2.7 kΩ
12 13 18 37322719 29 33 20
5550
39 42 53 54
555039 42 53 54
R
<3.0 k Ω
>3.0 k Ω
+10V
130BA153.11
PTC / Thermistor
OFF
ON
파라미터 설명
VLT® AQUA Drive FC 202
3.3.15 PTC 써미스터 연결
33
그림 3.14 PTC 써미스터 연결 - 아날로그 입력
그림 3.12 PTC 프로필
디지털 입력과 10V를 공급으로 사용하는 경우:
예: 모터 온도가 지나치게 상승하면 AC 드라이브가 트
립됩니다.
파라미터 셋업:
파라미터 1-90 모터 열 보호을 [2] 써미스터
•
트립
으로 설정합니다.
파라미터 1-93 써미스터 소스을 [6] 디지털
•
입력
으로 설정합니다.
디지털/
아날로그입력
디지털 10V <800 Ω⇒2.7 kΩ
아날로그 10V <3.0 kΩ⇒3.0 kΩ
표 3.10 임계 정지 값
공급 전압 임계
정지 값
주의 사항
선택한 공급 전압이 사용된 써미스터의 사양과 일치하
는지 확인합니다.
3.3.16 ETR
모터에 설치된 팬의 냉각 성능 감소로 인해 속도가 줄
어들 때 부하를 줄여야 할지를 짐작할 수 있습니다.
그림 3.13 PTC 써미스터 연결 - 디지털 입력
아날로그 입력과 10V를 공급으로 사용하는 경우:
예: 모터 온도가 지나치게 상승하면 AC 드라이브가 트
립됩니다.
파라미터 셋업:
•
•
62 Danfoss A/S © 05/2018 All rights reserved. MG20OB39
파라미터 1-90 모터 열 보호을 [2] 써미스터
트립
으로 설정합니다.
파라미터 1-93 써미스터 소스을 [2] 아날로그
입력 54
로 설정합니다.
그림 3.15 ETR 프로필

PTC / Thermistor
OFF
ON
+24V
12 13 18 3732
A
2719 29 33B20
GND
R<6.6 k Ω >10.8 k Ω
130BA151.11
1-91 모터 외부 팬
옵션: 기능:
[0] * 아니오 외부 팬이 필요 없습니다. 다시 말
해, 모터가 저속 운전에 따라 용량
이 감소됩니다.
[1] 예 외부 모터 팬(외부 공조)를 사용합
니다. 다시 말해, 저속 운전에 따
른 용량 감소가 필요 없습니다. 모
터 전류가 모터 정격 전류(
파라미
터 1-24 모터 전류
참조)보다 낮
으면
그림 3.15
의 위쪽 곡선과 같
은 결과(f
out
= 1 x f
M,N
)가 나타납
니다. 모터 전류가 정격 전류를 초
과하는 경우에는 팬이 설치되지
않았을 때와 동일하게 운전 시간
이 감소합니다.
파라미터 설명 프로그래밍 지침서
3.3.17 ATEX ETR
VLT® PTC Thermistor Card MCB 112은 ATEX 인증
모터 온도 감시 기능을 제공합니다. 혹은 ATEX 인증을
받은 외부 PTC 보호 장치를 사용할 수도 있습니다.
주의 사항
이 기능에는 ATEX Ex-e 인증 모터만 사용합니다. 모
터 명판, 인증서, 데이터시트를 참조하거나 모터 공급업
체에 문의하십시오.
개선된 안전성으로 Ex-e 모터를 제어할 때는 특정 제
한사항을 준수하는 것이 중요합니다. 반드시 프로그래
밍해야 할 파라미터는
기능 설정
파라미터 1-90 모터 열 보호
파라미터 1-94 ATEX ETR
cur.lim. speed reduction
파라미터 1-98 ATEX ETR
interpol. points freq.
파라미터 1-99 ATEX ETR
interpol points current
파라미터 1-23 모터 주파수 파라미터 4-19 최대 출력 주파수
파라미터 4-19 최대 출력 주파
수
파라미터 4-18 전류 한계
파라미터 5-15 단자 33 디지털입력[80] PTC 카드 1
표 3.11
에 제시되어 있습니다.
[20] ATEX ETR
20%
모터 명판.
에서와 동일한 값을 입력합니다.
모터 명판(길이가 긴 모터 케이블,
사인파 필터 또는 축소된 공급 전
압에 맞게 축소).
1-90 [20]으로 150%까지 강제 변
경
3.3.18 Klixon
Klixon 유형 써멀 회로 차단기는 KLIXON® 금속 접시
형을 사용합니다. 미리 결정된 과부하에서 디스크를 통
해 전류에 의해 발생한 열은 트립으로 이어집니다.
디지털 입력과 24 V를 공급으로 사용하는 경우:
예: 모터 온도가 지나치게 상승하면 AC 드라이브가 트
립됩니다.
파라미터 셋업:
파라미터 1-90 모터 열 보호을 [2] 써미스터
•
트립
으로 설정합니다.
파라미터 1-93 써미스터 소스을 [6] 디지털
•
입력
으로 설정합니다.
그림 3.16 써미스터 연결
3 3
파라미터 5-19 단자 37 안전 정지[4] PTC 1 알람
파라미터 14-01 스위칭 주파수
파라미터 14-26 인버터 결함 시
트립 지연
표 3.11 파라미터
주의 사항
모터 제조업체에서 제시한 최소 스위칭 주파수 요구사
항을
파라미터 14-01 스위칭 주파수
AC 드라이브의 최소 스위칭 주파수와 비교합니다. AC
드라이브가 이러한 요구사항을 충족하지 않으면 사인파
필터를 사용합니다.
ATEX ETR 써멀 감시에 관한 자세한 정보는
ATEX ETR 써멀 감시 기능 관련 어플리케이션 지침서
에서 확인할 수 있습니다.
MG20OB39 Danfoss A/S © 05/2018 All rights reserved. 63
초기 설정 값이 모터 명판의 요구
사항을 충족하는지 확인합니다. 충
족하지 않는 경우, 사인파 필터를
사용합니다.
0
의 초기 설정 값인
FC 300
1-93 써미스터 소스
옵션: 기능:
주의 사항
모터가 운전하는 동안에는 이
파라미터를 설정할 수 없습니
다.
주의 사항
파라미터 5-00 디지털 I/O 모
드
에서 디지털 입력을
[0]
PNP - 24V에서 활성화
로 설
정합니다.
써미스터(PTC 센서)가 연결될 입
력을 선택합니다. 아날로그 입력
을 이미 (
파라미터 3-15 지령 1
소스, 파라미터 3-16 지령 2 소스
또는
파라미터 3-17 지령 3 소스
에서 선택한) 지령 리소스로 사용
하고 있는 경우에는 아날로그 입
력 옵션
[1] 아날로그 입력 53
또
는
[2] 아날로그 입력 54
를 선택
할 수 없습니다.
VLT® PTC Thermistor Card
MCB 112를 사용할 때는 항상
[0] 없음
을 선택합니다.
[0] * 없음
[1] 아날로그 입
력 53
[2] 아날로그 입
력 54
[3] 디지털 입력
18
[4] 디지털 입력
19
[5] 디지털 입력
32
[6] 디지털 입력
33
1-95 KTY 센서 유형
옵션: 기능:
써미스터 센서의 유형을 선택합니
다.
[0] * KTY 센서 1 1 kΩ (100 °C (212 °F) 기준).
[1] KTY 센서 2 1 kΩ (25 °C (77 °F) 기준).
[2] KTY 센서 3 2 kΩ (25 °C (77 °F) 기준).
[3] Pt1000
1-96 KTY 써미스터 리소스
옵션: 기능:
아날로그 입력 단자 54를 써미스
터 센서 입력으로 선택합니다. 단
자 54가 지령으로 사용된 경우에
는 써미스터 소스로 선택할 수 없
습니다(
파라미터 3-15 지령 1 소
스
~
파라미터 3-17 지령 3 소스
참조).
주의 사항
단자 54와 55 간의 써미스터
센서 연결(접지).
장
을 3.3.15 PTC 써미스터 연결
을(를) 참조하십시오.
[0] * 없음
[2] 아날로그 입
력 54
1-97 KTY 임계값
범위: 기능:
80 °C* [ -40 -
220 °C]
모터 써멀 보호에 필요한 써미스
터 센서 임계값 수준을 선택합니
다.
파라미터 설명
VLT® AQUA Drive FC 202
33
64 Danfoss A/S © 05/2018 All rights reserved. MG20OB39
2-00 직류 유지/예열 전류
범위: 기능:
50 %* [ 0 -
160 %]
주의 사항
파라미터 1-10 모터 구조 =
[1] PM, 비돌극 SPM
인 경우,
파라미터 2-00 직류 유지/예
열 전류
에 영향을 주지 않습니
다.
주의 사항
최대값은 모터 정격 전류에 따
라 다릅니다.
100% 전류를 너무 오랫동안
공급하지 마십시오. 모터가 손
상될 수 있습니다.
유지 전류에 대한 값을
파라미
터 1-24 모터 전류
에서 설정한
모터 정격 전류(I
M,N
)의 % 값으로
입력합니다. 100% 직류 유지 전
류는 I
M,N
과 동일합니다.
이 파라미터는 모터(유지 토오크)
를 유지하거나 모터를 예열합니
다.
파라미터 1-80 정지 시 기능
에서
[1] 직류 유지/예열
을 선택한 경
우에 이 파라미터가 활성화됩니
다.
2-01 직류 제동 전류
범위: 기능:
50 %* [ 0 -
1000 %]
주의 사항
최대값은 모터 정격 전류에 따
라 다릅니다. 100% 전류를 너
무 오랫동안 공급하지 마십시
오. 모터가 손상될 수 있습니
다.
전류에 대한 값을 모터 정격 전류
(I
M,N
)의 백분율로 입력합니다(
파
라미터 1-24 모터 전류
참조).
100% 직류 제동 전류는 I
M,N
과
동일합니다.
다음에서 설정한 한계보다 속도가
낮을 때, 정지 명령에 직류 제동
전류가 적용됩니다.
2-01 직류 제동 전류
범위: 기능:
•
파라미터 2-03 직류 제
동 동작 속도 [RPM]
.
•
파라미터 2-04 직류 제
동 동작 속도 [Hz]
(직류
제동 인버스가 활성화된
경우 또는 직렬 통신 포
트를 통한 경우).
파라미터 2-02 직류 제동 시간
에
서 설정한 시간 동안 제동 전류가
활성화됩니다.
2-02 직류 제동 시간
범위: 기능:
10 s* [0 - 60 s] 활성화되면
파라미터 2-01 직류
제동 전류
에서 설정한 직류 제동
전류의 제동 시간을 설정합니다.
2-03 직류 제동 동작 속도 [RPM]
범위: 기능:
Size
related*
[ 0 - 0
RPM]
주의 사항
파라미터 2-03 직류 제동 동
작 속도 [RPM] = [1] PM,
비돌극 SPM
인 경우,
파라미
터 1-10 모터 구조
에 영향을
주지 않습니다.
정지 명령 후에
파라미
터 2-01 직류 제동 전류
에서 설
정한 직류 제동 전류의 활성화를
위해 제동 동작 속도를 설정합니
다.
파라미터 1-10 모터 구조이 [1]
PM 비돌극 SPM
으로 설정되면 이
값은 0 RPM (꺼짐)으로 제한됩니
다.
2-04 직류 제동 동작 속도 [Hz]
범위: 기능:
Size
related*
[ 0 - 0.0
Hz]
주의 사항
파라미터 2-04 직류 제동 동
작 속도 [Hz] = [1] PM, 비
돌극 SPM
인 경우,
파라미
터 1-10 모터 구조
에 영향을
주지 않습니다.
정지 명령 후에
파라미
터 2-01 직류 제동 전류
에서 설
정한 직류 제동 전류의 활성화를
위한 제동 동작 속도를 설정합니
다.
파라미터 설명 프로그래밍 지침서
3.4 파라미터 2-** 제동
3.4.1 2-0* 직류 제동
직류 제동과 직류 유지 기능을 구성하는 파라미터입니
다.
3 3
MG20OB39 Danfoss A/S © 05/2018 All rights reserved. 65

2-06 파킹 전류
범위: 기능:
50 %* [ 0 -
1000 %]
주의 사항
파라미터 2-06 파킹 전류
및
파라미터 2-07 파킹 시간: 파
라미터 1-10 모터 구조
에서
[1] PM, 비돌극SPM
을 선택
한 경우에만 활성화됩니다.
전류를 모터 정격 전류의 백분율
로 설정합니다(
파라미터 1-24 모
터 전류
).
파라미터 1-73 플라잉
기동
와 함께 활성화합니다.
파라
미터 2-07 파킹 시간
에서 설정한
시간 동안 파킹 전류가 활성화됩
니다.
2-07 파킹 시간
범위: 기능:
3 s* [0.1 - 60
s]
파라미터 2-06 파킹 전류
에서 설
정한 파킹 전류 시간을 설정합니
다.
파라미터 1-73 플라잉 기동
와
함께 활성화합니다.
주의 사항
파라미터 1-10 모터 구조
에서
[1] PM, 비돌극SPM
을 선택
한 경우에만
파라미
터 2-07 파킹 시간
가 활성화
됩니다.
2-10 제동 기능
옵션: 기능:
파라미터 1-10 모터 구조
에 따라
사용할 수 있는 선택항목:
[0] 비동기식
:
•
[0] 꺼짐
.
•
[1] 저항 제동
.
•
[2] 교류 제동
.
[1] PM 비돌극
:
•
[0] 꺼짐
.
•
[1] 저항 제동
.
[0] 꺼짐 설치된 제동 저항이 없습니다.
[1] 저항 제동 잉여 제동 에너지를 열로 소실시
키기 위해 시스템에 제동 저항이
설치되어 있습니다. 제동 저항을
연결하면 제동(발전 운전) 중에
2-10 제동 기능
옵션: 기능:
DC 링크 전압이 상승합니다. 저항
제동 기능은 다이나믹 제동 기능
이 있는 AC 드라이브에서만 활성
화됩니다.
[2] 교류 제동 교류 제동은
파라미터 1-03 토오
크 특성
의 압축기 토오크 모드에
서만 동작합니다.
2-11 제동 저항 (ohm)
범위: 기능:
Size
related*
[ 5 65535 Ohm]
제동 저항 값은 Ω 단위로 설정합
니다. 이 값은
파라미터 2-13 제
동 동력 감시
에서 제동 저항의 동
력을 감시하는데 사용됩니다. 이
파라미터는 다이나믹 제동 기능이
있는 AC 드라이브에서만 활성화
됩니다.
소수점이 없는 값에 이 파라미터
를 사용합니다. 소수점이 2자리인
선택 항목은
파라미터 30-81 제
동 저항 (ohm)
을 사용합니다.
2-12 제동 동력 한계(kW)
범위: 기능:
Size
related*
[ 0.001 -
2000.000
kW]
주의 사항
이 파라미터는 다이나믹 제동
기능이 있는 AC 드라이브에서
만 활성화됩니다.
저항에 전달된 제동 동력의 감시
한계를 설정합니다.
감시 한계는 최대 듀티 사이클
(120초)과 해당 듀티 사이클에서
의 제동 저항의 최대 동력으로 계
산됩니다. 아래 식을 참조하십시
오.
200–240 V 장치:
P
resistor
=
3902 × dutytime
R × 120
380–480 V 장치:
P
resistor
=
7782 × dutytime
R × 120
525–600 V 장치:
P
resistor
=
9432 × dutytime
R × 120
파라미터 설명
VLT® AQUA Drive FC 202
33
3.4.2 2-1* 제동 에너지 기능
다이나믹 제동 파라미터를 선택하기 위한 파라미터 그
룹입니다. 제동 초퍼가 포함된 AC 드라이브의 경우에만
해당합니다.
66 Danfoss A/S © 05/2018 All rights reserved. MG20OB39

2-13 제동 동력 감시
옵션: 기능:
주의 사항
이 파라미터는 다이나믹 제동
기능이 있는 AC 드라이브에서
만 활성화됩니다.
이 파라미터는 제동 저항의 동력
을 감시할 수 있습니다. 동력은 저
항(
파라미터 2-11 제동 저항
(ohm)
), DC 링크 전압 및 저항의
듀티 사이클을 기준으로 계산됩니
다.
[0] * 꺼짐 제동 동력 감시 기능이 필요 없습
니다.
동력 감시를
[0] 꺼짐
또는
[1]
경고
로 설정하면 감시 한계를 초
과하더라도 제동 기능은 계속 작
동합니다. 이런 경우 저항에 써멀
과부하가 발생할 수 있습니다. 또
한 릴레이/디지털 출력을 통해 경
고가 발생할 수 있습니다. 동력 감
시의 측정 정밀도는 저항의 저항
정밀도에 따라 다릅니다(±20% 이
상).
[1] 경고 120초 이상 전달된 동력이 감시
한계(
파라미터 2-12 제동 동력
한계(kW)
) 100%를 초과할 때 경
고를 활성화합니다.
전달된 동력이 감시 한계 80% 이
하로 떨어지면 경고가 사라집니
다.
[2] 트립 계산된 동력이 감시 한계 100%를
초과할 때 AC 드라이브를 트립하
고 알람을 표시합니다.
[3] 경고 및 트립 위와 같은 경우에 AC 드라이브를
트립하고 경고 및 알람을 표시합
니다.
[4] Warning 30s
[5] Trip 30s
[6] Warning &
trip 30s
[7] Warning 60s
[8] Trip 60s
[9] Warning &
trip 60s
[10] Warning
300s
[11] Trip 300s
[12] Warning &
trip 300s
[13] Warning
600s
[14] Trip 600s
2-13 제동 동력 감시
옵션: 기능:
[15] Warning &
trip 600s
2-15 제동 검사
옵션: 기능:
주의 사항
주전원을 반복 공급하여
[0]
꺼짐
또는
[1] 경고
와 함께 발
령되는 경고를 제거합니다. 우
선 결함을 해결합니다.
[0] 꺼
짐
또는
[1] 경고
의 경우에는
결함이 발견되더라도 AC 드라
이브가 운전합니다.
제동 저항에 대한 연결을 검사하
거나 제동 저항이 존재하는지 여
부를 확인하고 결함 발생 시 경고
또는 알람을 표시할 시험 및 감시
기능 종류를 선택합니다. 전원인
가 중에 제동 저항 차단 기능을
시험합니다. 하지만 제동 IGBT
시험은 제동하지 않을 때 실시됩
니다. 경고 또는 트립이 발생하면
제동 기능이 차단됩니다.
시험 과정은 다음과 같습니다.
1. 직류단 리플 진폭을 300
밀리초 동안 제동하지 않
는 상태에서 측정합니다.
2. 직류단 리플 진폭을 300
밀리초 동안 제동 상태에
서 측정합니다.
3. 제동 상태에서의 직류단
리플 진폭이 제동 전의
직류단 리플 진폭 +1%
보다 낮으면 제동 검사가
실패합니다. 제동 검사가
실패하면 경고 또는 알람
이 발생합니다.
4. 제동 상태에서의 직류단
리플 진폭이 제동 전의
직류단 리플 진폭 +1%
보다 높으면 제동 검사
결과가 양호합니다.
[0] * 꺼짐 운전 중에 제동 저항 및 제동
IGBT의 단락을 감시합니다. 만일
단락이 발생하면 경고가 표시됩니
다.
[1] 경고 제동 저항 및 제동 IGBT의 단락
을 감시하고 전원 인가 중에 제동
저항 차단 시험을 실시합니다.
[2] 트립 제동 저항의 단락 또는 차단을 감
시하거나 제동 IGBT의 단락을 감
파라미터 설명 프로그래밍 지침서
MG20OB39 Danfoss A/S © 05/2018 All rights reserved. 67
3 3

2-15 제동 검사
옵션: 기능:
시합니다. 결함이 발생하면 알람
(트립 잠김)이 표시되는 동안 AC
드라이브가 정지합니다.
[3] 정지 및 트립 제동 저항의 단락 또는 차단을 감
시하거나 제동 IGBT의 단락을 감
시합니다. 결함이 발생하면 AC 드
라이브가 감속하다가 코스팅(프리
런) 상태가 된 다음 트립됩니다.
트립 잠김 알람이 표시됩니다.
[4] 교류 제동 제동 저항의 단락 또는 차단을 감
시하거나 제동 IGBT의 단락을 감
시합니다. 결함이 발생하면 AC 드
라이브가 제어 감속을 실시합니
다.
2-16 교류 제동 최대 전류
범위: 기능:
100 %* [ 0 -
1000.0 %]
주의 사항
파라미터 2-16 교류 제동 최
대 전류 = [1] PM, 비돌극
SPM
인 경우,
파라미
터 1-10 모터 구조
에 영향을
주지 않습니다.
모터 권선의 과열 방지를 위해 교
류 제동을 사용하는 경우의 최대
허용 전류를 입력합니다.
2-17 과전압 제어
옵션: 기능:
[0] 사용안함 과전압 제어가 필요 없습니다.
[2] * 사용함 과전압 제어를 활성화합니다.
2-19 Over-voltage Gain
범위: 기능:
100 %* [10 -
200 %]
과전압 이득을 선택합니다.
파라미터 설명
VLT® AQUA Drive FC 202
33
68 Danfoss A/S © 05/2018 All rights reserved. MG20OB39

3-02 최소 지령
범위: 기능:
Size
related* [ -999999.9
99 - par.
3-03
ReferenceFe
edbackUnit]
원격 지령의 최소 값을 입력합니
다. 최소 지령 값 및 단위는
파라
미터 1-00 구성 모드
및
파라미
터 20-12 지령/피드백 단위
에서
선택한 구성값과 일치합니다.
3-03 최대 지령
범위: 기능:
Size
related*
[ par.
3-02 -
999999.999
ReferenceFe
edbackUnit]
원격 지령에 대한 최대 허용 값을
입력합니다. 최대 지령 값과 단위
는
파라미터 1-00 구성 모드
및
파라미터 20-12 지령/피드백 단
위
에서 선택한 구성값과 일치합니
다.
3-04 지령 기능
옵션: 기능:
[0] * 합계 외부 지령 소스와 프리셋 지령 소
스를 모두 합산합니다.
[1] 외부/프리셋 프리셋 지령 소스 또는 외부 지령
소스만 사용합니다.
명령 또는 디지털 입력을 통해 외
부와 프리셋 간 전환을 합니다.
3-10 프리셋 지령
배열 [8]
범위: 기능:
0 %* [-100 -
100 %]
배열 프로그래밍을 통해 이 파라
미터에 최대 8개의 프리셋 지령
(0-7)을 입력합니다. 프리셋 지령
은 Ref
MAX
값(
파라미터 3-03 최
대 지령
)의 백분율로 나타냅니다.
프리셋 지령을 사용할 때는
파라
미터 그룹 5-1* 디지털 입력
에서
해당 디지털 입력에 맞는
프리셋
지령 비트 0/1/2 [16], [17]
또는
[18]
을 선택합니다.
P3-03
P3-02
0 50 100%
P3-10
130BB036.10
[P 5-13=Preset ref. bit 0]
Preset
[P 5-14=Preset ref. bit 1]
[P 5-15=Preset ref. bit 2]
10101010
76543210
29
12
(+24V)
11001100
32
11110000
33
130BA149.10
3-11 조그 속도 [Hz]
범위: 기능:
Size
related*
[ 0 - par.
4-14 Hz]
조그 속도는 조그 기능이 활성화
될 때 AC 드라이브가 운전하는
고정 출력 속도입니다.
파라미터 3-19 조그 속도 [RPM]
및
파라미터 3-80 조그 가감속
시간
또한 참조하십시오.
3-13 지령 위치
옵션: 기능:
활성화할 지령 위치를 선택합니
다.
[0] * 수동/자동에링크수동 운전 모드에서 현장 지령을
사용하거나 자동 운전 모드에서
원격 지령을 사용합니다.
[1] 원격 수동 운전 모드와 자동 운전 모드
에서 모두 원격 지령을 사용합니
다.
파라미터 설명 프로그래밍 지침서
3.5 파라미터 3-** 지령/가감속
3.5.1 3-0* 지령 한계
3 3
그림 3.17 프리셋 지령
3.5.2 3-1* 지령
프리셋 지령을 선택합니다.
입력
에서 해당 디지털 입력에 맞는
0/1/2 [16], [17]
또는
MG20OB39 Danfoss A/S © 05/2018 All rights reserved. 69
파라미터 그룹 5-1* 디지털
프리셋 지령 비트
[18]
을 선택합니다.
그림 3.18 프리셋 지령 도식

3-13 지령 위치
옵션: 기능:
[2] 현장 수동 운전 모드와 자동 운전 모드
에서 모두 현장 지령을 사용합니
다.
주의 사항
[2] 현장
으로 설정되어 있으
면 AC 드라이브가 전원 차단
후에 이 설정으로 다시 기동합
니다.
[3] Linked to
H/A MCO
이 옵션을 선택하여 FFACC 계수
를 활성화합니다. FFACC를 활성
화하면 지터가 감소하고 모션 컨
트롤러에서 AC 드라이브의 제어
카드로의 전송 속도가 빨라집니
다. 이로 인해 다이나믹 어플리케
이션 및 위치 제어의 응답 시간이
빨라집니다. FFACC에 관한 자세
한 정보는
VLT® Motion Control
MCO 305 사용 설명서
를 참조하
십시오.
3-14 프리셋 상대 지령
범위: 기능:
0 %* [-100 -
100 %]
실제 지령 X는
파라미터 3-14 프
리셋 상대 지령
에서 설정한 백분
율 Y에 따라 증가 또는 감소합니
다.
그 결과는 실제 지령 Z입니다. 실
제 지령(X)은 다음에서 선택한 입
력의 합입니다.
•
파라미터 3-15 지령 1
소스
.
•
파라미터 3-16 지령 2
소스
.
•
파라미터 3-17 지령 3
소스
.
•
파라미터 8-02 제어 소
스
.
Relative
Z=X+X*Y/100
Resulting
actual
reference
Y
X
130BA059.12
Z
X
100
%
0-100
Z
Y
X+X*Y/100
P 3-14
130BA278.10
3-15 지령 1 소스
옵션: 기능:
주의 사항
모터가 운전하는 동안에는 이
파라미터를 설정할 수 없습니
다.
다음에서 첫 번째 지령 신호에 사
용할 지령 입력을 선택합니다.
•
파라미터 3-15 지령 1
소스
.
•
파라미터 3-16 지령 2
소스
.
•
파라미터 3-17 지령 3
소스
.
최대 3개의 각기 다른 지령 신호
를 정의합니다. 이와 같은 지령 신
호의 합은 실제 지령을 나타냅니
다.
[0] 기능 없음
[1] * 아날로그 입
력 53
[2] 아날로그 입
력 54
[7] 펄스 입력 29
[8] 펄스 입력 33
[20] 디지털 가변
저항기
[21] 아날로그 입
력 X30/11
[22] 아날로그 입
력 X30/12
[23] 아날로그 입
력 X42/1
[24] 아날로그 입
력 X42/3
[25] 아날로그 입
력 X42/5
[29] 아날로그 입
력 X48/2
파라미터 설명
33
VLT® AQUA Drive FC 202
그림 3.20 실제 지령
그림 3.19 프리셋 상대 지령
70 Danfoss A/S © 05/2018 All rights reserved. MG20OB39

3-15 지령 1 소스
옵션: 기능:
[30] 확장형 폐회
로 1
[31] 확장형 폐회
로 2
[32] 확장형 폐회
로 3
[35] Digital input
select
AC 드라이브는 디지털 입력 중
하나로 옵션
[42] 지령 소스 비트
0
에서 정의한 입력 신호를 기준으
로 한 지령 소스로 AI53 또는
AI54를 선택합니다. 자세한 정보
는
파라미터 그룹 5-1* 디지털
입력
, 옵션
[42] 지령 소스 비트
0
을 참조하십시오.
3-16 지령 2 소스
옵션: 기능:
주의 사항
모터가 운전하는 동안에는 이
파라미터를 설정할 수 없습니
다.
다음에서 두 번째 지령 신호에 사
용할 지령 입력을 선택합니다.
•
파라미터 3-15 지령 1
소스
.
•
파라미터 3-16 지령 2
소스
.
•
파라미터 3-17 지령 3
소스
.
최대 3개의 각기 다른 지령 신호
를 정의합니다. 이와 같은 지령 신
호의 합은 실제 지령을 나타냅니
다.
[0] * 기능 없음
[1] 아날로그 입
력 53
[2] 아날로그 입
력 54
[7] 펄스 입력 29
[8] 펄스 입력 33
[20] 디지털 가변
저항기
[21] 아날로그 입
력 X30/11
[22] 아날로그 입
력 X30/12
[23] 아날로그 입
력 X42/1
[24] 아날로그 입
력 X42/3
3-16 지령 2 소스
옵션: 기능:
[25] 아날로그 입
력 X42/5
[29] 아날로그 입
력 X48/2
[30] 확장형 폐회
로 1
[31] 확장형 폐회
로 2
[32] 확장형 폐회
로 3
[35] Digital input
select
AC 드라이브는 디지털 입력 중
하나로 옵션
[42] 지령 소스 비트
0
에서 정의한 입력 신호를 기준으
로 한 지령 소스로 AI53 또는
AI54를 선택합니다. 자세한 정보
는
파라미터 그룹 5-1* 디지털
입력
, 옵션
[42] 지령 소스 비트
0
을 참조하십시오.
3-17 지령 3 소스
옵션: 기능:
주의 사항
모터가 운전하는 동안에는 이
파라미터를 설정할 수 없습니
다.
다음에서 세 번째 지령 신호에 사
용할 지령 입력을 선택합니다.
•
파라미터 3-15 지령 1
소스
.
•
파라미터 3-16 지령 2
소스
.
•
파라미터 3-17 지령 3
소스
.
최대 3개의 각기 다른 지령 신호
를 정의합니다. 이와 같은 지령 신
호의 합은 실제 지령을 나타냅니
다.
[0] * 기능 없음
[1] 아날로그 입
력 53
[2] 아날로그 입
력 54
[7] 펄스 입력 29
[8] 펄스 입력 33
[20] 디지털 가변
저항기
[21] 아날로그 입
력 X30/11
[22] 아날로그 입
력 X30/12
파라미터 설명 프로그래밍 지침서
3 3
MG20OB39 Danfoss A/S © 05/2018 All rights reserved. 71
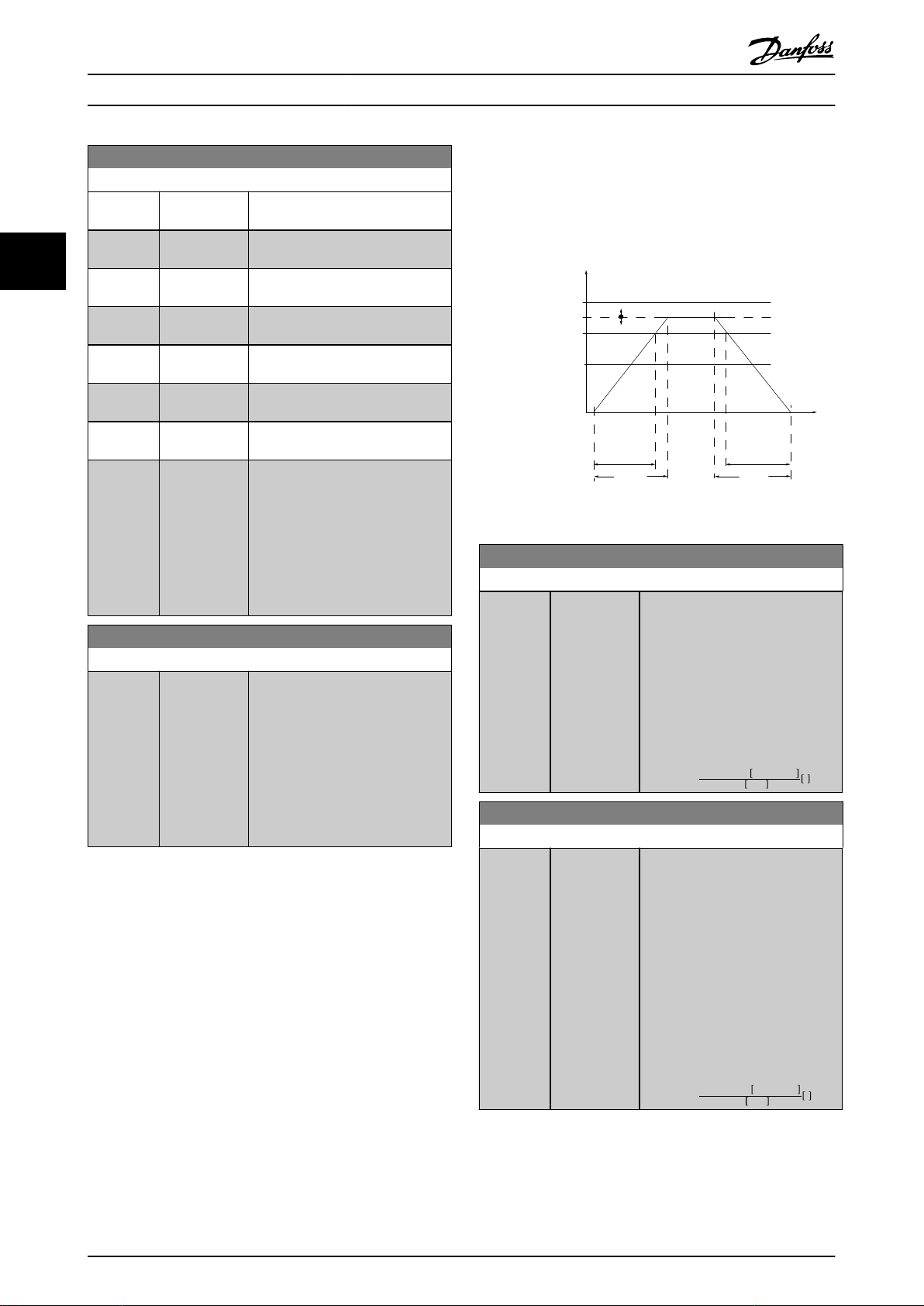
3-17 지령 3 소스
옵션: 기능:
[23] 아날로그 입
력 X42/1
[24] 아날로그 입
력 X42/3
[25] 아날로그 입
력 X42/5
[29] 아날로그 입
력 X48/2
[30] 확장형 폐회
로 1
[31] 확장형 폐회
로 2
[32] 확장형 폐회
로 3
[35] Digital input
select
AC 드라이브는 디지털 입력 중
하나로 옵션
[42] 지령 소스 비트
0
에서 정의한 입력 신호를 기준으
로 한 지령 소스로 AI53 또는
AI54를 선택합니다. 자세한 정보
는
파라미터 그룹 5-1* 디지털
입력
, 옵션
[42] 지령 소스 비트
0
을 참조하십시오.
3-19 조그 속도 [RPM]
범위: 기능:
Size
related*
[ 0 - par.
4-13 RPM]
조그 속도(n
JOG
), 즉 고정 출력 속
도에 대한 값을 입력합니다. 조그
기능이 활성화되면 AC 드라이브
는 조그 속도로 운전합니다. 최대
한계는
파라미터 4-13 모터의 고
속 한계 [RPM]
에서 정의됩니다.
파라미터 3-11 조그 속도 [Hz]
및
파라미터 3-80 조그 가감속
시간
또한 참조하십시오.
t
acc
t
dec
130BA169.11
P 3-*2
Ramp (X)
Down
Time (Dec)
P 4-13
High-limit
RPM
Reference
P 1-25
Motor
speed
P 4-11
Low limit
Time
P 3-*1
Ramp (X)Up
Time (Acc)
3-41 1 가속 시간
범위: 기능:
Size
related*
[ 0.10 3600 s]
가속 시간, 즉 0 RPM에서
파라미
터 1-25 모터 정격 회전수
까지
가속하는데 걸리는 시간을 입력합
니다. 가감속 중에 출력 전류가
파
라미터 4-18 전류 한계
의 전류
한계를 초과하지 않는 가속 시간
을 선택합니다.
파라미터 3-42 1
감속 시간
의 감속 시간을 참조하
십시오.
par . 3 − 41 =
tacc × nnom par . 1 − 25
ref RPM
s
3-42 1 감속 시간
범위: 기능:
Size
related*
[ 0.10 3600 s]
감속 시간, 즉
파라미터 1-25 모
터 정격 회전수
에서 0 RPM까지
감속하는데 걸리는 시간을 입력합
니다. 모터의 재생 운전으로 인해
인버터에 과전압이 발생하지 않는
감속 시간을 선택합니다. 또한 생
성된 전류가
파라미터 4-18 전류
한계
에서 설정한 전류 한계를 초
과하지 않을 만큼 감속 시간이 충
분히 길어야 합니다.
파라미
터 3-41 1 가속 시간
의 가속 시
간을 참조하십시오.
par . 3 − 42 =
tdec × nnom par . 1 − 25
ref RPM
s
파라미터 설명
VLT® AQUA Drive FC 202
3.5.3 3-4* 가감속 1
2가지 가감속(
터 그룹 3-5* 가감속 2
파라미터 그룹 3-4* 가감속 1과 파라미
)에 각기 해당하는 가감속 시간
을 구성합니다.
33
그림 3.21 가감속 1
72 Danfoss A/S © 05/2018 All rights reserved. MG20OB39
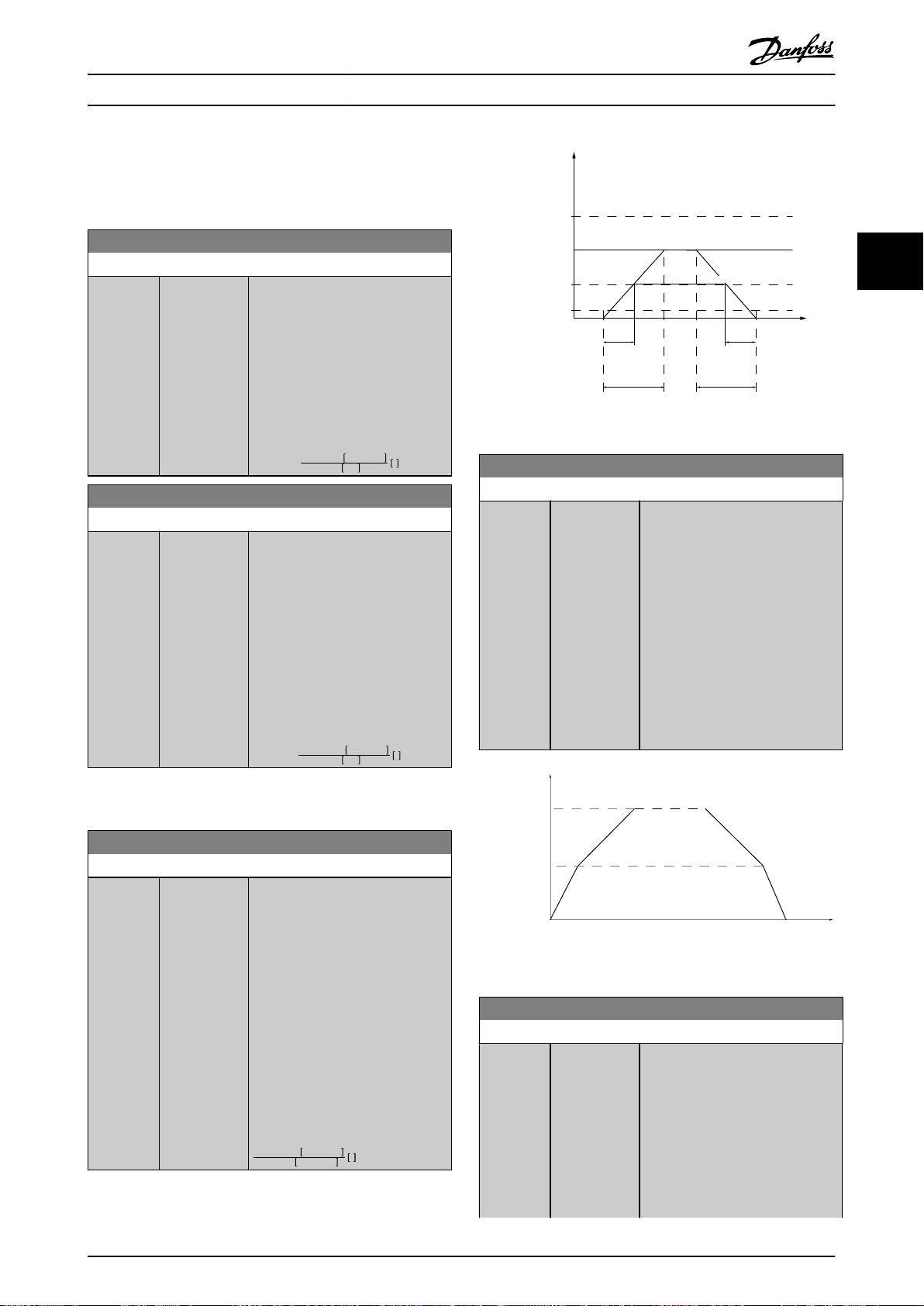
3-51 2 가속 시간
범위: 기능:
Size
related*
[ 0.10 3600 s]
가속 시간, 즉 0 RPM에서
파라미
터 1-25 모터 정격 회전수
까지
가속하는데 걸리는 시간을 입력합
니다. 가감속 중에 출력 전류가
파
라미터 4-18 전류 한계
의 전류
한계를 초과하지 않는 가속 시간
을 선택합니다.
파라미터 3-52 2
감속 시간
의 감속 시간을 참조하
십시오.
par . 3 − 51 =
tacc × nnom par . 1 − 25
ref rpm
s
3-52 2 감속 시간
범위: 기능:
Size
related*
[ 0.10 3600 s]
감속 시간, 즉
파라미터 1-25 모
터 정격 회전수
에서 0 RPM까지
감속하는데 걸리는 시간을 입력합
니다. 모터의 재생 운전으로 인해
인버터에 과전압이 발생하지 않거
나 발전 전류가
파라미
터 4-18 전류 한계
에서 설정한
전류 한계를 초과하지 않는 감속
시간을 선택합니다.
파라미
터 3-51 2 가속 시간
의 가속 시
간을 참조하십시오.
par . 3 − 52 =
tdec × nnom par . 1 − 25
ref rpm
s
3-80 조그 가감속 시간
범위: 기능:
Size
related*
[0.1 3600 s]
조그 가감속 시간, 즉 0 RPM에서
모터 정격 회전수(n
M,N
)(
파라미
터 1-25 모터 정격 회전수
에서
설정)까지 가속/감속하는데 걸리
는 시간을 입력합니다. 지정된 조
그 가감속 시간에 필요한 결과 출
력 전류는
파라미터 4-18 전류
한계
의 전류 한계를 초과하지 않
아야 합니다. 조그 가감속 시간은
제어 패널, 선택한 디지털 입력 또
는 직렬 통신 포트를 통해 조그
신호를 활성화한 후에 시작됩니
다.
par . 3 − 80 =
t jog × nnom par . 1 − 25
jog speed par . 3 − 19
s
130BA070.10
Time
P 3-80
RPM
P 4-13 RPM
high limit
P 1-25
Motor speed
Jog speed
P 3-19
P 3-80
Ramp up
(acc)
Ramp down
(dec)
t jog t jog
P 4-11 RPM
low limit
3-84 Initial Ramp Time
범위: 기능:
0 s* [0 - 60 s] 영(0) 속도에서 모터의 저속 한계
(
파라미터 4-11 모터의 저속 한
계 [RPM]
또는
파라미
터 4-12 모터 속도 하한 [Hz]
)까
지의 초기 가속 시간을 입력합니
다. 최저 속도 이하로 구동하면 수
중 심정 펌프가 손상될 수 있습니
다. 최저 펌프 속도 이하의 빠른
가감속 시간이 권장됩니다. 이 파
라미터는 영(0) 속도에서 모터의
저속 한계까지의 빠른 가감속율로
적용될 수 있습니다.
그림 3.23
을
(를) 참조하십시오.
130BA962.10
Motor Speed
Motor Speed
High
Low
Normal
Ramps
Initial
Ramp
Final
Ramp
Time
Speed
3-85 Check Valve Ramp Time
범위: 기능:
0 s* [0 - 650s]정지 상황에서 볼 체크 밸브를 보
호하기 위해서는
파라미
터 4-11 모터의 저속 한계
[RPM]
또는
파라미터 4-12 모터
속도 하한 [Hz]
에서 체크 밸브 가
감속 종료 속도(
파라미
터 3-86 Check Valve Ramp
End Speed [RPM]
또는
파라미
터 3-87 Check Valve Ramp
파라미터 설명
3.5.4 3-5* 가감속 2
프로그래밍 지침서
가감속 파라미터를 선택하려면
감속 1
을 참조하십시오.
파라미터 그룹 3-4* 가
3 3
그림 3.22 조그 가/감속 시간
3.5.5 3-8* 기타 가감속
MG20OB39 Danfoss A/S © 05/2018 All rights reserved. 73
그림 3.23 초기 및 최종 가감속 시간

3-85 Check Valve Ramp Time
범위: 기능:
End Speed [HZ]
에서 설정)까지
의 느린 가감속율로 체크 밸브 가
감속이 활용될 수 있습니다.
파라
미터 3-85 Check Valve Ramp
Time
가 0초 이외의 값으로 설정
되면 체크 밸브 가감속 시간이 적
용되며 모터의 저속 한계에서
파
라미터 3-86 Check Valve Ramp
End Speed [RPM]
또는
파라미
터 3-87 Check Valve Ramp
End Speed [HZ]
에서 설정된 체
크 밸브 종료 속도까지 속도를 감
속하는데 사용됩니다.
그림 3.24
을(를) 참조하십시오.
130BA961.10
Speed
Motor Speed
Normal
Check valve
Motor Speed
High
Low
Time
Ramp
End Speed
3-86 Check Valve Ramp End Speed [RPM]
범위: 기능:
Size
related*
[ 0 - par.
4-11 RPM]
체크 밸브가 닫힐 것으로 예상되
는 모터의 저속 한계 미만으로 속
도([RPM] 단위)를 설정합니다.
밸브가 더 이상 활성화되어 있지
않은지 확인합니다.
그림 3.24
을
(를) 참조하십시오.
3-87 Check Valve Ramp End Speed [HZ]
범위: 기능:
Size
related*
[ 0 - par.
4-12 Hz]
체크 밸브 가감속 시간이 더 이상
활성화되지 않는 모터의 저속 한
계 미만으로 속도([Hz] 단위)를
설정합니다.
그림 3.24
을(를) 참조
하십시오.
3-88 Final Ramp Time
범위: 기능:
0 s* [0 - 60 s]
파라미터 4-11 모터의 저속 한계
[RPM]
또는
파라미터 4-12 모터
속도 하한 [Hz]
에서 영(0) 속도까
지 감속할 때 사용할 최종 가감속
시간을 입력합니다.
최저 속도 이하로 구동하면 수중
심정 펌프가 손상될 수 있습니다.
3-88 Final Ramp Time
범위: 기능:
최저 펌프 속도 이하의 빠른 가감
속 시간이 권장됩니다. 이 파라미
터는
파라미터 4-11 모터의 저속
한계 [RPM]
또는
파라미
터 4-12 모터 속도 하한 [Hz]
에
서 영(0) 속도까지의 빠른 가감속
율로 적용될 수 있습니다.
그
림 3.23
을(를) 참조하십시오.
3-90 단계별 크기
범위: 기능:
0.10 %* [0.01 200 %]
증가/감소에 필요한 증분 크기를
동기식 모터 회전수 ns의 백분율
로 입력합니다. 증가/감소가 활성
화된 경우에는 결과 지령이 이 파
라미터에서 설정한 값에 의해 증
가 또는 감소됩니다.
3-91 가감속 시간
범위: 기능:
1 s [0 - 3600s]가감속 시간 즉, 지정된 디지털 가
변 저항 기능(증가, 감소 또는 제
거)의 0–100%에 해당하는 지령의
조정 시간을 입력합니다.
파라미터 3-95 가감속 지연
에서
지정된 가감속 지연 시간보다 긴
시간 동안 증가/감소가 활성화된
경우에는 실제 지령이 가감속 시
간에 따라 가속/감속됩니다.
파라
미터 3-90 단계별 크기
에서 지정
된 단계별 크기에 의해 지령을 조
정하는데 소요되는 시간을 가감속
시간으로 정의합니다.
3-92 전력 복구
옵션: 기능:
[0] * 꺼짐 디지털 가변 저항 지령을 전원 인
가 후에 0%로 리셋합니다.
[1] 켜짐 가장 최근의 디지털 가변 저항 지
령을 전원 인가 시 복구합니다.
파라미터 설명
VLT® AQUA Drive FC 202
33
3.5.6 3-9* 디지털 전위차계
디지털 가변 저항 기능을 사용하면 증가, 감소 또는 제
거 기능으로 디지털 입력의 셋업을 조정하여 실제 지령
을 증가 또는 감소할 수 있습니다. 기능을 활성화하려면
적어도 하나의 디지털 입력을 증가 또는 감소로 설정해
야 합니다.
그림 3.24 체크 밸브 가감속
74 Danfoss A/S © 05/2018 All rights reserved. MG20OB39

3-93 최대 한계
범위: 기능:
100 %* [-200 -
200 %]
결과 지령에 대한 최대 허용 값을
설정합니다. 이는 디지털 가변 저
항기를 결과 지령의 미세조정용으
로 사용하는 경우에 권장됩니다.
3-94 최소 한계
범위: 기능:
0 %* [-200 -
200 %]
결과 지령에 대한 최소 허용 값을
설정합니다. 이는 디지털 가변 저
항기를 결과 지령의 미세조정용으
로 사용하는 경우에 권장됩니다.
3-95 가감속 지연
범위: 기능:
Size
related*
[ 0 - 0 ] AC 드라이브가 지령의 가감속을
시작하기 전에 디지털 가변 저항
기 기능의 활성화에 필요한 지연
을 입력합니다. 가감속 지연을 0
ms로 설정하면 증가/감소가 활성
화될 때 지령이 가감속하기 시작
합니다.
파라미터 3-91 가감속 시
간
또한 참조하십시오.
Speed
Time (s)
Inc
130BA158.11
P 3-95
Speed
Time (s)
Dec
Inc
130BA159.11
P 3-95
파라미터 설명 프로그래밍 지침서
3 3
그림 3.25 가감속 지연 사례 1
그림 3.26 가감속 지연 사례 2
MG20OB39 Danfoss A/S © 05/2018 All rights reserved. 75

4-10 모터 속도 방향
옵션: 기능:
원하는 모터 회전 방향을 선택합
니다.
파라미터 1-00 구성 모드
가
[3] 폐회로
로 설정되어 있으면 파
라미터 초기 설정값이
[0] 시계방
향
으로 변경됩니다. 두 방향을 모
두 선택한 경우, LCP에서 반시계
방향 구동을 선택할 수 없습니다.
[0] * 시계 방향
[2] 양방향
4-11 모터의 저속 한계 [RPM]
범위: 기능:
Size
related*
[ 0 - par.
4-13 RPM]
모터 회전수의 최소 한계를 RPM
단위로 입력합니다. 모터의 저속
한계는 제조업체가 권장하는 최소
모터 회전수에 따라 설정할 수 있
습니다. 모터의 저속 한계가
파라
미터 4-13 모터의 고속 한계
[RPM]
의 설정값을 초과해서는
안됩니다.
4-12 모터 속도 하한 [Hz]
범위: 기능:
Size
related*
[ 0 - par.
4-14 Hz]
모터 회전수의 최소 한계를 Hz 단
위로 입력합니다. 모터의 저속 한
계는 모터축의 최소 출력 주파수
에 해당하는 값으로 설정할 수 있
습니다. 저속 한계가
파라미
터 4-14 모터 속도 상한 [Hz]
의
설정값을 초과해서는 안됩니다.
4-13 모터의 고속 한계 [RPM]
범위: 기능:
Size
related*
[ 0 60000 RPM]
주의 사항
파라미터 4-13 모터의 고속
한계 [RPM]
이 변경되면
파라
미터 4-53 고속 경고
의 값을
파라미터 4-13 모터의 고속
한계 [RPM]
에서 설정된 값으
로 리셋합니다.
4-13 모터의 고속 한계 [RPM]
범위: 기능:
주의 사항
최대 출력 주파수는 인버터 스
위칭 주파수(
파라미
터 14-01 스위칭 주파수
)의
10%를 초과할 수 없습니다.
모터 회전수의 최대 한계를 RPM
단위로 입력합니다. 모터의 고속
한계는 제조업체의 최대 정격 모
터에 따라 설정할 수 있습니다. 모
터의 고속 한계가
파라미
터 4-11 모터의 저속 한계
[RPM]
의 설정값을 초과해서는
안됩니다.
파라미터 이름은 다음에 따라
파
라미터 4-11 모터의 저속 한계
[RPM]
또는
파라미터 4-12 모터
속도 하한 [Hz]
로 나타납니다.
•
주 메뉴
내 다른 파라미
터의 설정.
•
지리적 위치를 기반으로
한 초기 설정.
4-14 모터 속도 상한 [Hz]
범위: 기능:
Size
related*
[ .1 - par.
4-19 Hz]
모터 회전수의 최대 한계를 Hz 단
위로 입력합니다.
파라미
터 4-14 모터 속도 상한 [Hz]
은
제조업체 권장 최대 모터 회전수
에 해당하는 값으로 설정할 수 있
습니다. 모터의 고속 한계가
파라
미터 4-12 모터 속도 하한 [Hz]
의 설정값을 초과해서는 안됩니
다. 출력 주파수는 스위칭 주파수
(
파라미터 14-01 스위칭 주파수
)
의 10%를 초과해서는 안됩니다.
4-16 모터 운전의 토오크 한계
범위: 기능:
Size
related*
[ 0 -
1000.0 %]
모터 운전의 토오크 한계를 입력
합니다. 토오크 한계는
파라미
터 1-25 모터 정격 회전수
에서
설정한 모터 정격 회전수까지의
회전수 범위 내에서 활성화됩니
다. 모터가 정동 토오크를 초과하
지 않도록 보호하기 위해 1.1 x
모터 정격 토오크(계산 값)로 초기
설정되어 있습니다. 자세한 내용
은
파라미터 14-25 토오크 한계
시 트립 지연
또한 참조하십시오.
파라미터 1-00 구성 모드
에서
파
라미터 1-28 모터 회전 점검
의
설정을 변경하면
파라미
파라미터 설명
3.6 파라미터 4-** 한계/경고
3.6.1 4-1* 모터 한계
VLT® AQUA Drive FC 202
33
초과한 경우 AC 드라이브의 반응을 설정합니다.
한계가 표시창에 메시지로 표시될 수 있습니다. 경고는
항상 표시창이나 필드버스에 메시지로 표시됩니다. AC
드라이브가 정지하고 알람 메시지가 발생한 후에 감시
기능이 경고 또는 트립을 발생/동작할 수 있습니다.
모터의 토오크, 전류 및 속도 한계 뿐만 아니라 한계를
76 Danfoss A/S © 05/2018 All rights reserved. MG20OB39

4-16 모터 운전의 토오크 한계
범위: 기능:
터 4-16 모터 운전의 토오크 한
계
는 초기 설정으로 자동 리셋됩
니다.
4-17 재생 운전의 토오크 한계
범위: 기능:
100 %* [ 0 -
1000.0 %]
발전 모드 운전의 토오크 한계를
입력합니다. 토오크 한계는 모터
정격 회전수(
파라미터 1-25 모터
정격 회전수
)까지의 회전수 범위
내에서 활성화됩니다. 자세한 내
용은
파라미터 14-25 토오크 한
계 시 트립 지연
을 참조하십시오.
파라미터 1-00 구성 모드
에서
파
라미터 1-28 모터 회전 점검
의
설정을 변경하면
파라미
터 4-17 재생 운전의 토오크 한
계
이 초기 설정으로 자동 리셋됩
니다.
4-18 전류 한계
범위: 기능:
Size
related*
[ 1.0 -
1000.0 %]
모터 운전 및 발전 운전의 전류
한계를 설정합니다. 모터가 정동
토오크를 초과하지 않도록 보호하
기 위해 1.1 x 모터 정격 토오크
(계산 값)로 초기 설정되어 있습니
다.
파라미터 1-00 구성 모드
에서
파라미터 1-26 모터 일정 정격
토오크
의 설정을 변경하면
파라미
터 4-18 전류 한계
는 초기 설정
으로 자동 리셋됩니다.
4-19 최대 출력 주파수
범위: 기능:
Size
related*
[ 1 - 590
Hz]
주의 사항
모터가 운전하는 동안에는 이
파라미터를 설정할 수 없습니
다.
주의 사항
파라미터 1-10 모터 구조
이
[1] PM, 비돌극 SPM
으로 설
정되면 최대값은 300 Hz로 제
한됩니다.
최대 출력 주파수 값을 입력합니
다.
파라미터 4-19 최대 출력 주
파수
은 의도하지 않은 과속을 방
지해야 하는 어플리케이션에서 안
전성이 향상된 AC 드라이브 출력
주파수의 절대 한계를 지정합니
다. 이 절대 한계는 모든 구성에
4-19 최대 출력 주파수
범위: 기능:
적용되며
파라미터 1-00 구성 모
드
의 설정과는 관계 없이 설정됩
니다.
4-50 저전류 경고
범위: 기능:
0 A* [ 0 - par.
4-51 A]
표시창, 프로그래밍된 출력 또는
필드버스에 경고가 표시됩니다.
130BA064.10
(P 4-18)
(P 4-51)
(P 4-50)
(P 4-11) (P 4-53)(P 4-52) (P 4-13)
I
HIGH
I
LOW
n
LOW
n
HIGH
n
motor
I
motor
REF
ON REF
IN RANGE
I
LIM
n
MAX
n
MIN
[RPM]
그림 3.27 저전류 한계
I
LOW
값을 입력합니다. 모터 전류
가 저전류 한계(I
LOW
)보다 낮으면
표시창에
저전류
가 표시됩니다.
단자 27 또는 29뿐만 아니라 릴
레이 출력 01 또는 02에서 상태
신호가 발생하도록 신호 출력을
프로그래밍할 수 있습니다.
그
림 3.27
를 참조하십시오.
4-51 고전류 경고
범위: 기능:
Size
related*
[ par.
4-50 - par.
16-37 A]
I
HIGH
값을 입력합니다. 모터 전류
가 고전류 한계(I
HIGH
)보다 높으면
표시창에
고전류
가 표시됩니다.
단자 27 또는 29뿐만 아니라 릴
레이 출력 01 또는 02에서 상태
신호가 발생하도록 신호 출력을
프로그래밍할 수 있습니다.
그
림 3.27
를 참조하십시오.
파라미터 설명 프로그래밍 지침서
3 3
3.6.2 4-5* 경고 경고
전류, 속도, 지령 및 피드백에 대해 조정할 수 있는 경
고 한계를 정의합니다.
주의 사항
MCT 10 셋업 소프트웨어에서만 보이고 표시창에서는
보이지 않습니다.
MG20OB39 Danfoss A/S © 05/2018 All rights reserved. 77

4-52 저속 경고
범위: 기능:
0 RPM* [ 0 - par.
4-53 RPM]
n
LOW
값을 입력합니다. 모터 회전
수가 이 한계(n
LOW
)보다 낮으면
표시창에
저속
이 표시됩니다. 단
자 27 또는 29뿐만 아니라 릴레
이 출력 01 또는 02에서 상태 신
호가 발생하도록 신호 출력을 프
로그래밍할 수 있습니다. AC 드라
이브의 정상 운전 범위 내에서 모
터 회전수의 최저 한계(n
LOW
)를
프로그래밍합니다.
그림 3.27
를
참조하십시오.
4-53 고속 경고
범위: 기능:
Size
related*
[ par.
4-52 - par.
4-13 RPM]
주의 사항
파라미터 4-13 모터의 고속
한계 [RPM]
이 변경되면
파라
미터 4-53 고속 경고
의 값을
파라미터 4-13 모터의 고속
한계 [RPM]
에서 설정된 값으
로 리셋합니다.
파라미터 4-53 고속 경고
에서
다른 값이 필요한 경우,
파라
미터 4-13 모터의 고속 한계
[RPM]
프로그래밍 후에 이를
반드시 설정해야 합니다.
n
HIGH
값을 입력합니다. 모터 회전
수가 고속 한계(n
HIGH
)보다 높으면
표시창에
고속
이 표시됩니다. 단
자 27 또는 29뿐만 아니라 릴레
이 출력 01 또는 02에서 상태 신
호가 발생하도록 신호 출력을 프
로그래밍할 수 있습니다. AC 드라
이브의 정상 운전 범위 내에서 모
터 회전수의 최고 한계(n
HIGH
)를
프로그래밍합니다.
그림 3.27
를
참조하십시오.
4-54 지령 낮음 경고
범위: 기능:
-999999.
999*
[ -999999.9
99 - par.
4-55 ]
최저 지령 한계를 입력합니다. 실
제 지령이 이 한계보다 낮아지면
표시창에 Ref
Low
가 표시됩니다.
단자 27 또는 29뿐만 아니라 릴
레이 출력 01 또는 02에서 상태
신호가 발생하도록 신호 출력을
프로그래밍할 수 있습니다.
4-55 지령 높음 경고
범위: 기능:
999999.9
99*
[ par.
4-54 -
999999.999
]
최고 지령 한계를 입력합니다. 실
제 지령이 최고 지령 한계를 초과
하면 표시창에
Ref
High
가 나타납니
다. 단자 27 또는 29뿐만 아니라
릴레이 출력 01 또는 02에서 상
태 신호가 발생하도록 신호 출력
을 프로그래밍할 수 있습니다.
4-56 피드백 낮음 경고
범위: 기능:
-999999.
999
Reference
Feedback
Unit*
[ -999999.9
99 - par.
4-57
ReferenceFe
edbackUnit]
최저 피드백 한계를 입력합니다.
피드백이 이 한계보다 낮아지면
표시창에
Feedb
Low
가 표시됩니다.
단자 27 또는 29뿐만 아니라 릴
레이 출력 01 또는 02에서 상태
신호가 발생하도록 신호 출력을
프로그래밍할 수 있습니다.
4-57 피드백 높음 경고
범위: 기능:
999999.9
99
Reference
Feedback
Unit*
[ par.
4-56 -
999999.999
ReferenceFe
edbackUnit]
최고 피드백 한계를 입력합니다.
피드백이 이 한계를 초과하면 표
시창에
Feedb
High
가 표시됩니다.
단자 27 또는 29뿐만 아니라 릴
레이 출력 01 또는 02에서 상태
신호가 발생하도록 신호 출력을
프로그래밍할 수 있습니다.
4-58 모터 결상 시 기능
옵션: 기능:
주의 사항
모터가 운전하는 동안에는 이
파라미터를 설정할 수 없습니
다.
모터 결상 시에 알람을 표시합니
다.
[0] 사용안함 모터 결상 시에 알람을 표시하지
않습니다.
[1] 트립 100 ms 모터 결상 시에 알람을 표시합니
다.
[2] * 트립 1000
ms
[5] Motor Check
파라미터 설명
VLT® AQUA Drive FC 202
33
78 Danfoss A/S © 05/2018 All rights reserved. MG20OB39

4-60 바이패스 시작 속도[RPM]
배열 [4]
범위: 기능:
Size
related*
[ 0 - par.
4-13 RPM]
일부 시스템은 시스템 공진 문제
로 인해 특정 출력 주파수 또는
속도를 필요로 합니다. 피하고자
하는 속도의 최저 한계를 입력합
니다.
4-61 바이패스 시작 속도 [Hz]
배열 [4]
범위: 기능:
Size
related*
[ 0 - par.
4-14 Hz]
일부 시스템은 시스템 공진 문제
로 인해 특정 출력 주파수 또는
속도를 필요로 합니다. 피하고자
하는 속도의 최저 한계를 입력합
니다.
4-62 바이패스 종결 속도[RPM]
배열 [4]
범위: 기능:
Size
related*
[ 0 - par.
4-13 RPM]
일부 시스템은 시스템 공진 문제
로 인해 특정 출력 주파수 또는
속도를 필요로 합니다. 피하고자
하는 속도의 최고 한계를 입력합
니다.
4-63 바이패스 종결 속도 [Hz]
배열 [4]
범위: 기능:
Size
related*
[ 0 - par.
4-14 Hz]
일부 시스템은 시스템 공진 문제
로 인해 특정 출력 주파수 또는
속도를 필요로 합니다. 피하고자
하는 속도의 최고 한계를 입력합
니다.
4-64 반자동 바이패스 셋업
옵션: 기능:
[0] * 꺼짐 기능 없음.
[1] 사용함 반자동 바이패스 셋업을 시작하고
장을 3.6.4 반자동 바이패스 속도
셋업
에 설명된 절차를 계속합니
다.
파라미터 설명 프로그래밍 지침서
3.6.3 4-6* 속도 바이패스
일부 시스템은 시스템 공진 문제로 인해 특정 출력 주
파수 또는 속도를 필요로 합니다. 최대 4개의 주파수 또
는 속도 범위까지 피할 수 있습니다.
3.6.4 반자동 바이패스 속도 셋업
반자동 바이패스 속도 셋업을 사용하여 시스템 공진으
로 인해 무시될 주파수를 쉽게 프로그래밍할 수 있습니
다.
다음 공정을 수행합니다.
1. 모터를 정지합니다.
파라미터 4-64 반자동 바이패스 셋업
2.
사용함
을 선택합니다.
3. LCP의 [Hand On]을 눌러 공진을 유발하는 주
파수 대역의 검색을 시작합니다. 가감속 세트
에 따라 모터가 가속합니다.
4. 공진 대역을 제거한 다음 LCP의 [OK]를 눌러
대역을 빠져나갑니다. 실제 주파수는
터 4-62 바이패스 종결 속도[RPM]
미터 4-63 바이패스 종결 속도 [Hz]
첫 번째 요소로 저장됩니다. 가속 시 파악된 공
진 대역별로 이 단계를 반복합니다(최대 4개
대역까지 조정할 수 있습니다).
5. 최대 속도에 도달했을 때 모터는 자동으로 감
속하기 시작합니다. 감속 중에 공진 대역을 무
시하고 지나가면 위의 절차를 반복합니다.
[OK]를 누를 때 등록된 실제 주파수는
터 4-60 바이패스 시작 속도[RPM]
미터 4-61 바이패스 시작 속도 [Hz]
니다.
6. 모터가 정지하기 위해 감속할 때 [OK]를 누릅
니다.
파라미터 4-64 반자동 바이패스 셋업
꺼짐으로 자동 리셋됩니다. LCP의 [Off] 또는
[Auto On]을 누를 때까지 AC 드라이브는 수
동 운전 모드 상태로 유지됩니다.
특정 공진 대역의 주파수가 올바른 순서로 등록되지 않
으면 모든 등록이 취소되고 다음과 같은 메시지가 나타
납니다.
다. [Cancel] 키를 눌러 취소합니다
록되었다는 것은
[RPM]
시작 속도[RPM]
작
수집된 속도 영역이 겹치거나 완전하지 않습니
. 잘못된 순서로 등
파라미터 4-62 바이패스 종결 속도
에 저장된 주파수 값이
파라미터 4-60 바이패스
의 값보다 높은 경우 또는
및
바이패스 종료
에 등록된 개수가 동일하지 않은
경우를 의미합니다.
에서
[1]
파라미
또는
파라
(배열)에
파라미
또는
파라
에 저장됩
가
바이패스 시
3 3
MG20OB39 Danfoss A/S © 05/2018 All rights reserved. 79

5-00 디지털 I/O 모드
옵션: 기능:
주의 사항
모터가 운전하는 동안에는 이
파라미터를 설정할 수 없습니
다.
PNP 또는 NPN 시스템에서 운전
하도록 디지털 입력과 프로그래밍
가능한 디지털 출력을 사전에 프
로그래밍할 수 있습니다.
[0] * PNP - 24V
에서 활성화
동작은 양의 방향 펄스입니다(0).
PNP 방식은 접지에 연결됩니다.
[1] NPN - 0V에
서 활성화
동작은 음의 방향 펄스입니다(1).
NPN 방식은 최대 +24V(AC 드
라이브 내부)에 연결됩니다.
5-01 단자 27 모드
옵션: 기능:
주의 사항
모터가 운전하는 동안에는 이
파라미터를 설정할 수 없습니
다.
[0] * 입력 단자 27을 디지털 입력으로 정의
합니다.
[1] 출력 단자 27을 디지털 출력으로 정의
합니다.
5-02 단자 29 모드
옵션: 기능:
주의 사항
모터가 운전하는 동안에는 이
파라미터를 설정할 수 없습니
다.
[0] * 입력 단자 29를 디지털 입력으로 정의
합니다.
[1] 출력 단자 29를 디지털 출력으로 정의
합니다.
파라미터 설명
VLT® AQUA Drive FC 202
3.7 파라미터 5-** 디지털 입/출력
디지털 입력 및 출력을 구성하는 파라미터 그룹입니다.
3.7.1 5-0* 디지털 I/O 모드
33
NPN과 PNP를 사용하여 입력 및 출력을 구성하는 파라
미터입니다.
80 Danfoss A/S © 05/2018 All rights reserved. MG20OB39
3.7.2 5-1* 디지털 입력
입력 단자의 입력 기능을 구성하는 파라미터입니다.
디지털 입력은 AC 드라이브의 각종 기능을 선택하는데
사용합니다. 모든 디지털 입력은 다음과 같은 기능으로
설정할 수 있습니다.
옵션 [120]–[138]은 캐스케이드 컨트롤러 기능과 관련
이 있습니다. 자세한 정보는
케이드 컨트롤러
디지털 입력 기능 옵션 단자
운전하지 않음 [0] 19, 29, 32, 33
리셋 [1] 모두
코스팅 인버스 [2] 27
코스팅리셋인버스 [3] 모두
직류제동 인버스 [5] 모두
정지 인버스 [6] 모두
외부 인터록 [7] 모두
기동 [8] 모두
펄스 기동 [9] 모두
역회전 [10] 모두
역회전 기동 [11] 모두
조그 [14] 모두
프리셋 지령 개시 [15] 모두
프리셋 지령 비트 0 [16] 모두
프리셋 지령 비트 1 [17] 모두
프리셋 지령 비트 2 [18] 모두
지령 고정 [19] 모두
출력 고정 [20] 모두
가속 [21] 모두
감속 [22] 모두
셋업 선택 비트 0 [23] 모두
셋업 선택 비트 1 [24] 모두
펄스 입력 [32] 29, 33
가감속 비트 0 [34] 모두
주전원 차단 인버스 [36] 모두
지령 소스 비트 0 [42] 모두
수동/자동 기동 [51] 모두
운전 허용 [52] 모두
수동 기동 [53] 모두
자동 기동 [54] 모두
디지털Pot증가 [55] 모두
디지털Pot감소 [56] 모두
DP 기억값 소거 [57] 모두
카운터 A (증가) [60] 29, 33
카운터 A (감소) [61] 29, 33
카운터 A 리셋 [62] 모두
카운터 B (증가) [63] 29, 33
카운터 B (감소) [64] 29, 33
카운터 B 리셋 [65] 모두
슬립 모드 [66] 모두
유지보수 워드 리셋 [78] 모두
PTC 카드 1 [80] 모두
를 참조하십시오.
파라미터 그룹 25-** 캐스

파라미터 설명 프로그래밍 지침서
디지털 입력 기능 옵션 단자
펄스 펌프 디래깅 [85] 모두
리드 펌프 기동 [120] 모두
리드 펌프 절체 [121] 모두
펌프 1 인터록 [130] 모두
펌프 2 인터록 [131] 모두
펌프 3 인터록 [132] 모두
표 3.12 디지털 입력의 기능
모두
는 단자 18, 19, 27, 29, 32, X30/2, X30/3 및
X30/4를 의미합니다.
X30/X는 VLT® General Purpose I/O MCB 101의 단
자입니다.
특정 디지털 출력에만 해당하는 기능은 관련 파라미터
를 참조하십시오.
모든 디지털 입력은 다음과 같은 기능으로 프로그래밍
할 수 있습니다.
[0] 운전하
지 않음
[1] 리셋 트립/알람이 발생한 후에 AC 드라이브를 리
[2] 코스팅
인버스
[3] 코스팅
리셋인
버스
[5] 직류제
동 인버
스
단자로 전달된 신호에 반응하지 않습니다.
셋합니다. 하지만 리셋할 수 없는 알람도 있습
니다.
모터가 코스팅(프리런) 정지되도록 합니다. 논
리 0=코스팅(프리런) 정지.
(초기 설정 - 디지털 입력 27) 코스팅(프리런)
정지, 인버스 입력(NC).
리셋 및 코스팅(프리런) 정지 인버스 입력
(NC).
모터가 코스팅(프리런) 정지되도록 하고 AC
드라이브를 리셋합니다. 논리 0=코스팅(프리
런) 정지 및 리셋.
직류 제동의 인버스 입력(NC).
특정 시간 동안 모터에 직류 전류를 공급하여
모터를 정지시킵니다.
동 전류
에서
파라미터 2-03 직류 제동 동작
속도 [RPM]
를 참조하십시오.
터 2-02 직류 제동 시간
우에만 기능이 동작합니다. 논리 0=직류 제동.
파라미터 2-01 직류 제
파라미
의 값이 0이 아닌 경
파라미터 1-10 모터 구조가 [1] PM, 비돌극
SPM
으로 설정되어 있는 경우에는 이 항목을
선택할 수 없습니다.
[6] 정지 인버스정지 인버스 기능. 선택된 단자의 논리가 1에
서 0으로 변경되면 정지 기능이 발생합니다.
정지 기능은 선택된 가감속 시간(
터 3-42 1 감속 시간
감속 시간
)에 따라 동작합니다.
및
파라미
파라미터 3-52 2
주의 사항
AC 드라이브가 토오크 한계에 도달하고
정지 명령을 수신한 경우에는 스스로 정
지할 수 없습니다. AC 드라이브를 정지
하려면 디지털 출력을
및 정지
로 구성하고 이 디지털 출력을 코
스팅(프리런)으로 구성된 디지털 입력에
연결합니다.
[7] 외부 인터록외부 인터록은 코스팅(프리런) 정지 인버스와
기능이 동일하지만 코스팅 인버스에 맞게 프
로그래밍된 단자가 논리 0이면 알람 메시지
외부 결함
하도록 프로그래밍된 경우, 디지털 출력 및 릴
레이 출력을 통해서도 알람 메시지가 활성화
됩니다. 외부 인터록의 원인이 제거된 경우에
는 디지털 입력이나 [Reset] 키로 알람을 리
셋할 수 있습니다.
록 지연
다. 입력에 신호를 보낸 후
을 생성합니다. 외부 인터록을 사용
에서 지연을 프로그래밍할 수 있습니
터 22-00 외부 인터록 지연
에 따라 반응이 지연됩니다.
[8] 기동 기동/정지 명령의 기동 값을 선택합니다. 1=
기동, 0=정지.
(초기 설정 - 디지털 입력 18).
[9] 펄스 기동최소 2밀리초 동안 펄스가 유지되면 모터가
기동하고 정지 인버스가 활성화되면 모터가
정지합니다.
[10] 역회전 모터축 회전 방향을 변경합니다. 논리 1을 선
택하면 역회전합니다. 역회전 신호는 회전 방
향만 변경하고 기동 기능을 활성화하지는 않
습니다.
양방향을 선택합니다.
(초기 설정 - 디지털 입력 19):
[11] 역회전기동기동/정지 시 또는 동일한 와이어의 역회전에
사용합니다. 기동 신호는 동시에 사용할 수 없
습니다.
[14] 조그 조그 속도를 활성화하는 데 사용합니다.
파라미터 4-10 모터 속도 방향
미터 3-11 조그 속도 [Hz]
오.
(초기 설정 - 디지털 입력 29).
[15] 프리셋
지령 개
시
[16] 프리셋
지령 비
트 0
[17] 프리셋
지령 비
트 1
[18] 프리셋
지령 비
트 2
외부 지령과 프리셋 지령 간의 전환에 사용합
니다.
파라미터 3-04 지령 기능
부/프리셋
0 = 외부 지령 활성화; 논리 1 = 8개의 프리
셋 지령 중 하나가 활성화.
표 3.13
선택할 수 있습니다.
표 3.13
선택할 수 있습니다.
표 3.13
선택할 수 있습니다.
을 선택한 것으로 간주합니다. 논리
에 따라 8개의 프리셋 지령 중 하나를
에 따라 8개의 프리셋 지령 중 하나를
에 따라 8개의 프리셋 지령 중 하나를
[27] 토오크 한계
파라미터 22-00 외부 인터
파라미
에서 설정된 시간
에서
파라
을(를) 참조하십시
에서
[1] 외
3 3
MG20OB39 Danfoss A/S © 05/2018 All rights reserved. 81

파라미터 설명
VLT® AQUA Drive FC 202
프리셋 지령 비트 2 1 0
프리셋 지령 0 0 0 0
프리셋 지령 1 0 0 1
프리셋 지령 2 0 1 0
프리셋 지령 3 0 1 1
프리셋 지령 4 1 0 0
33
[19] 지령 고정실제 지령을 고정합니다. 고정된 지령은 사용
[20] 출력 고정실제 모터 주파수(Hz)를 고정시킵니다. 고정
프리셋 지령 5 1 0 1
프리셋 지령 6 1 1 0
프리셋 지령 7 1 1 1
표 3.13 프리셋 지령 비트
할 가속 및 감속의 활성화 지점/조건이 됩니
다. 가속/감속이 사용되면 항상 0–
터 3-03 최대 지령
터 3-51 2 가속 시간
감속 시간
된 모터 주파수는 사용할 가속 및 감속의 활
성화 지점/조건이 됩니다. 가속/감속이 사용되
면 항상 0–
감속 2(
)에 따라 속도가 변합니다.
파라미터 3-52 2 감속 시간
미터 1-23 모터 주파수
니다.
의 가감속 2(
및
파라미터 3-52 2
파라미터 3-51 2 가속 시간
)에 따라 속도가 변합
파라미
파라미
및
의 가
파라
주의 사항
[20] 출력 고정
기동 신호
수 없습니다.
[3] 코스팅리셋인버스
단자를 통해 AC 드라이브를 정지합니다.
[21] 가속 가속/감속을 디지털 제어할 때 사용합니다(모
터 가변 저항).
력 고정
을 선택하여 이 기능을 활성화합니다.
400 ms 이하에서
우, 결과 지령이 0.1%씩 증가합니다. 400 ms
이상에서
지령은
파라미터 3-41 1 가속 시간
1에 따라 가감속합니다.
[22] 감속
[23] 셋업 선
택 비트
0
[24] 셋업 선
택 비트
1
[32] 펄스 입력펄스 시퀀스를 지령 또는 피드백으로 사용하
[34] 가감속
비트 0
[36] 주전원
차단 인
버스
[21] 가속
4개의 셋업 중 하나를 선택합니다.
터 0-10 셋업 활성화
정합니다.
[23] 셋업 선택 비트 0
(초기 설정 - 디지털 입력 32).
는 경우에는
범위는
파라미터 그룹 5-5* 펄스 입력
정됩니다.
사용할 가감속을 선택합니다. 논리 0은 가감
속 1을 선택하고 논리 1은 가감속 2를 선택합
니다.
파라미터 14-10 주전원 결함
다. 주전원 결함 인버스는 논리 0에서 활성화
됩니다.
이 활성화되면 낮은
[8]
를 통해 AC 드라이브를 정지할
[2] 코스팅 인버스
또는
로 프로그래밍된
[19] 지령 고정
[21] 가속
[21] 가속
과 동일합니다.
이 활성화된 경우, 결과
또는
[20] 출
이 활성화된 경
의 가감속
파라미
을(를) 다중 설정으로 설
과 동일합니다.
[32] 펄스 입력
을 선택합니다.
에서 설
를 활성화합니
[42] 지령 소
스 비트
0
[51] 수동/자
동 기동
[52] 운전 허
용
[53] 수동 기동신호가 전달되면 마치 [Hand On]을 누른 것
[54] 자동 기동신호가 전달되면 마치 [Auto On]을 누른 것
[55] 디지털
pot증가
[56] 디지털
pot감소
[57] 디지털
pot제거
[60] 카운터
A (증
가)
[61] 카운터
A (감
소)
비트 0의 활성 입력은 지령 소스로 AI54를 선
택합니다(
[35] 디지털 입력 선택
AI53을 선택합니다.
수동 또는 자동 기동을 선택합니다. 높은 신호
는 자동 운전만 선택하고 낮은 신호는 수동
운전만 선택합니다.
[52] 인가 시 운전
단자는 기동 명령이 인가되기 전에 논리 1이
어야 합니다. 운전 허용은 해당 단자와 관련된
논리 AND 기능이 있으며
그
니다. 모터 구동을 시작하려면 두 조건 모두
충족해야 합니다.
단자에 프로그래밍되면 기능을 수행할 단자
중 하나만 논리 1이면 됩니다.
5-3* 디지털 출력
릴레이
[14] 조그
신호는
습니다.
처럼 AC 드라이브가 수동 운전 모드로 전환
되며 정상적인 정지 명령이 무시됩니다. 신호
가 차단되면 모터가 멈춥니다. 기타 다른 기동
명령을 활성화하려면 다른 디지털 입력을
[54] 자동 기동
에 신호를 전달합니다. [Hand On] 및 [Auto
On]에는 영향을 주지 않습니다. [Off]는 현장
기동 및 자동 기동을 무시합니다. 현장 기동
및 자동 기동을 다시 활성화하려면 [Hand
On] 또는 [Auto On]을 누릅니다.
기동
전달된 정상 기동 명령과 상관 없이 모터가
멈춥니다. 신호가
동 기동
기능을 합니다. [Off]를 누르면
동과 [54] 자동 기동
터가 멈춥니다.
처럼 AC 드라이브가 자동 운전 모드로 전환
됩니다.
입력을
에 있는 디지털 가변 저항 기능의 증가 신호
로 사용합니다.
입력을
에 있는 디지털 가변 저항 기능의 감소 신호
로 사용합니다.
입력을 사용하여
전위차계
거합니다.
(단자 29 또는 33에만 해당) SLC 카운터의
증가분 계수 입력(인크리멘탈 입력)입니다.
(단자 29 또는 33에만 해당) SLC 카운터의
감소분 계수 입력(디크리멘탈 입력)입니다.
파라미터 그룹 3-1* 지령
참조). 비활성 입력은
기능이 프로그래밍된 입력
[8] 기동, [14] 조
또는
[20] 출력 고정
에 맞게 프로그래밍됩
[52] 인가 시 운전
파라미터 그룹
또는
파라미터 그룹 5-4*
에서 프로그래밍된 구동 요청(
또는
[20] 출력 고정
[52] 인가 시 운전
에 할당하고 해당 디지털 입력
또는
[54] 자동 기동
) 디지털 출력
의 영향을 받지 않
에 신호가 없으면
[53] 수동 기동과 [54] 자
에 모두 전달된 경우, 자동 기동만 그
[53] 수동 기
의 신호와 상관 없이 모
[53] 수동 기동
또한 참조하십시오.
파라미터 그룹 3-9* 디지털 전위차계
파라미터 그룹 3-9* 디지털 전위차계
파라미터 그룹 3-9* 디지털
에 있는 디지털 가변 저항 지령을 제
, 옵션
이 여러
[8] 기동,
[53] 수동
82 Danfoss A/S © 05/2018 All rights reserved. MG20OB39

파라미터 설명 프로그래밍 지침서
[62] 카운터
A 리셋
[63] 카운터
B (증
가)
[64] 카운터
B (감
소)
[65] 카운터
B 리셋
[66] 슬립 모드AC 드라이브를 슬립 모드로 강제 전환합니다
[78] 예방적
유지보
수 워드
리셋
[80] PTC 카드1모든 디지털 입력을
[85] 펄스 펌
프 디래
깅
카운터 A를 리셋하기 위한 입력입니다.
(단자 29와 33에만 해당) SLC 카운터의 증가
분 계수 입력(인크리멘탈 입력)입니다.
(단자 29와 33에만 해당) SLC 카운터의 감소
분 계수 입력(디크리멘탈 입력)입니다.
카운터 B를 리셋하기 위한 입력입니다.
(
파라미터 그룹 22-4* 슬립 모드
된 신호의 최고점에서 반응합니다.
파라미터 16-96 유지보수 워드
터를 0으로 리셋합니다.
[80] PTC 카드 1
정할 수 있습니다. 하지만 디지털 입력 중 하
나는 반드시 이 옵션으로 설정해야 합니다.
디래깅을 시작합니다.
참조). 전달
의 모든 데이
로 설
옵션 [120]–[138]은 캐스케이드 컨트롤러 기능과 관련
이 있습니다. 자세한 정보는
케이드 컨트롤러
[120] 리드
펌프
기동
[121] 리드
펌프
절체
[130
138]
펌프
1 인
터록
– 펌
프9
인터
록
를 참조하십시오.
(AC 드라이브에 의해 제어된) 리드 펌프를 기
동/정지합니다. 기동하려면 예를 들어,
동
으로 설정된 디지털 입력 중 하나에 시스템
기동 신호를 전달해야 합니다.
캐스케이드 컨트롤러에서 리드 펌프를 강제로
절체합니다.
을
[2] 명령 시
시
로 설정합니다.
트
는 4가지 옵션 중에서 설정할 수 있습니다.
해당 기능은
정에 따라 다릅니다.
있으면 펌프1은 릴레이1 등에 의해 제어되는
펌프를 의미하며
프1은 (내장 릴레이와 관계 없이) AC 드라이브
에 의해서만 제어되는 펌프를 의미하고 펌프2
는 릴레이1에 의해 제어되는 펌프를 의미합니
다. 가변 속도 펌프(리드)는 기본형 캐스케이드
컨트롤러에서 인터록할 수 없습니다.
표 3.14
을(를) 참조하십시오.
파라미터 그룹 25-** 캐스
[8] 기
파라미터 25-50 리드 펌프 절체
또는
[3] 스테이징 또는 명령
파라미터 25-51 절체 이벤
파라미터 25-06 펌프 대수
[0] 아니오
[1] 예
로 설정되어 있으면 펌
의 설
로 설정되어
파라미터 그룹
5-1* 디지털
입력
의 설정
[0] 아니오 [1] 예
[130] 펌프1 인터록릴레이1에 의해
[131] 펌프2 인터록릴레이2에 의해제어릴레이1에 의해
[132] 펌프3 인터록릴레이3에 의해제어릴레이2에 의해
[133] 펌프4 인터록릴레이4에 의해제어릴레이3에 의해
[134] 펌프5 인터록릴레이5에 의해제어릴레이4에 의해
[135] 펌프6 인터록릴레이6에 의해제어릴레이5에 의해
[136] 펌프7 인터록릴레이7에 의해제어릴레이6에 의해
[137] 펌프8 인터록릴레이8에 의해제어릴레이7에 의해
[138] 펌프9 인터록릴레이9에 의해제어릴레이8에 의해
5-10 단자 18 디지털 입력
해당 파라미터는 옵션
그룹 5-1* 디지털 입력
합니다.
[32] 펄스 입력
에 나열된 모든 옵션 및 기능을 포함
5-11 단자 19 디지털 입력
해당 파라미터는 옵션
그룹 5-1* 디지털 입력
합니다.
[32] 펄스 입력
에 나열된 모든 옵션 및 기능을 포함
5-12 단자 27 디지털 입력
해당 파라미터는 옵션
그룹 5-1* 디지털 입력
합니다.
[32] 펄스 입력
에 나열된 모든 옵션 및 기능을 포함
5-13 단자 29 디지털 입력
해당 파라미터는
모든 옵션 및 기능을 포함합니다.
파라미터 그룹 5-1* 디지털 입력
5-14 단자 32 디지털 입력
해당 파라미터는 옵션
그룹 5-1* 디지털 입력
합니다.
[32] 펄스 입력
에 나열된 모든 옵션 및 기능을 포함
파라미터 25-06 펌프 대수
설정
AC 드라이브에
제어
(리드 펌프만 제
외)
을 제외하고,
을 제외하고,
을 제외하고,
을 제외하고,
의해 제어
(인터록할 수 없
음)
제어
제어
제어
제어
제어
제어
제어
제어
파라미터
파라미터
파라미터
에 나열된
파라미터
의
3 3
5-15 단자 33 디지털 입력
해당 파라미터는
모든 옵션 및 기능을 포함합니다.
MG20OB39 Danfoss A/S © 05/2018 All rights reserved. 83
파라미터 그룹 5-1* 디지털 입력
에 나열된

5-19 단자 37 안전 정지
이 파라미터를 사용하여 Safe Torque Off 기능을 구성합니
다. 경고 메시지는 AC 드라이브가 모터를 코스팅(프리런)하
게 하고 자동 재기동을 활성화합니다. 알람 메시지는 AC 드
라이브가 모터를 코스팅(프리런)하게 하며 (필드버스, 디지털
입/출력 또는 LCP의 [RESET]을 통해) 수동 재기동이 필요
합니다. VLT® PTC Thermistor Card MCB 112가 장착되어
있으면 PTC 옵션을 구성하여 알람을 완벽히 처리할 수 있습
니다.
옵션: 기능:
[1] * 안전 정지 알람Safe Torque Off가 활성화된 경
우, AC 드라이브를 코스팅(프리
런)합니다. LCP, 디지털 입력 또
는 필드버스를 통해 수동 리셋합
니다.
[3] 안전 정지 경고Safe Torque Off가 활성화된 경
우(단자 37 꺼짐), AC 드라이브를
코스팅(프리런)합니다. Safe
Torque Off 회로가 다시 작동하
면 AC 드라이브는 수동 리셋 없
이 계속 운전합니다.
[4] PTC 1 알람 Safe Torque Off가 활성화된 경
우, AC 드라이브를 코스팅(프리
런)합니다. LCP, 디지털 입력 또
는 필드버스를 통해 수동 리셋합
니다.
[5] PTC 1 경고 Safe Torque Off가 활성화된 경
우(단자 37 꺼짐), AC 드라이브를
5-19 단자 37 안전 정지
이 파라미터를 사용하여 Safe Torque Off 기능을 구성합니
다. 경고 메시지는 AC 드라이브가 모터를 코스팅(프리런)하
게 하고 자동 재기동을 활성화합니다. 알람 메시지는 AC 드
라이브가 모터를 코스팅(프리런)하게 하며 (필드버스, 디지털
입/출력 또는 LCP의 [RESET]을 통해) 수동 재기동이 필요
합니다. VLT® PTC Thermistor Card MCB 112가 장착되어
있으면 PTC 옵션을 구성하여 알람을 완벽히 처리할 수 있습
니다.
옵션: 기능:
코스팅(프리런)합니다. Safe
Torque Off 회로가 다시 작동하
면
[80] PTC 카드 1
로 설정된
디지털 입력이 활성화되어 있지
않는 한 AC 드라이브는 수동 리
셋 없이 계속 운전합니다.
[6] PTC 1 및 릴
레이 A
단자 37에 연결된 안전 릴레이를
통해 정지 키와 함께 VLT® PTC
Thermistor Card MCB 112를 사
용하는 경우에 이 옵션이 사용됩
니다. Safe Torque Off가 활성화
된 경우, AC 드라이브를 코스팅
(프리런)합니다. LCP, 디지털 입
력 또는 필드버스를 통해 수동 리
셋합니다.
[7] PTC 1 및 릴
레이 W
단자 37에 연결된 안전 릴레이를
통해 정지 키와 함께 VLT® PTC
Thermistor Card MCB 112를 사
용하는 경우에 이 옵션이 사용됩
니다. Safe Torque Off가 활성화
된 경우(단자 37 꺼짐), AC 드라
이브를 코스팅(프리런)합니다.
Safe Torque Off 회로가 다시 작
동하면
[80] PTC 카드 1
로 설정
된 디지털 입력이 활성화되어 있
지 않는 한 AC 드라이브는 수동
리셋 없이 계속 운전합니다.
[8] PTC1및릴레
이A/W
이 옵션을 선택하면 알람과 경고
를 함께 사용할 수 있습니다.
[9] PTC1및릴레
이W/A
이 옵션을 선택하면 알람과 경고
를 함께 사용할 수 있습니다.
파라미터 설명
VLT® AQUA Drive FC 202
5-16 단자 X30/2 디지털 입력
옵션: 기능:
[0] * 운전하
지 않음
33
이 파라미터는 AC 드라이브에 VLT
General Purpose I/O MCB 101가 설치된
경우에 활성화됩니다. 해당 파라미터는 옵션
[32] 펄스 입력
5-1* 디지털 입력
능을 포함합니다.
을 제외하고,
에 나열된 모든 옵션 및 기
®
파라미터 그룹
5-17 단자 X30/3 디지털 입력
옵션: 기능:
[0] * 운전하
지 않음
이 파라미터는 AC 드라이브에 VLT
General Purpose I/O MCB 101가 설치된
경우에 활성화됩니다. 해당 파라미터는 옵션
[32] 펄스 입력
5-1* 디지털 입력
능을 포함합니다.
을 제외하고,
에 나열된 모든 옵션 및 기
®
파라미터 그룹
5-18 단자 X30/4 디지털 입력
옵션: 기능:
[0] * 운전하
지 않음
이 파라미터는 AC 드라이브에 VLT
General Purpose I/O MCB 101가 설치된
경우에 활성화됩니다. 해당 파라미터는 옵션
[32] 펄스 입력
을 제외하고,
5-1* 디지털 입력
능을 포함합니다.
에 나열된 모든 옵션 및 기
84 Danfoss A/S © 05/2018 All rights reserved. MG20OB39
®
파라미터 그룹

파라미터 설명 프로그래밍 지침서
주의 사항
옵션
[4] PTC 1 알람 ~ [9] PTC 1 및 릴레이 W/A는
MCB 112가 연결된 경우에만 사용할 수 있습니다.
주의 사항
자동 재기동/경고
동이 활성화됩니다.
기능 번호PTC 릴레이
기능 없음 [0] – –
Safe Torque Off 알람[1]* – Safe Torque Off
Safe Torque Off 경고[3] – Safe Torque Off
PTC 1 알람 [4] PTC 1 Safe
PTC 1 경고 [5] PTC 1 Safe
PTC 1 및 릴레이 A [6] PTC 1 Safe
PTC 1 및 릴레이 W [7] PTC 1 Safe
PTC1및릴레이A/W [8] PTC 1 Safe
PTC 1 및 릴레이
W/A
표 3.14 기능, 알람 및 경고 개요
W는 경고를 의미하고 A는 알람을 의미합니다. 자세한 정보는
장을 5 고장수리의 알람 및 경고를 참조하십시오.
Safe Torque Off와 관련하여 위험한 결함이 발생하면
알람 72, 실패모터사용
표 5.1
를 참조하십시오.
5-20 단자 X46/1 디지털 입력
이 파라미터는 VLT® Extended Relay Card MCB 113의 디
지털 입력과 관련이 있습니다. 해당 파라미터는 옵션
스 입력
을 제외하고,
열된 모든 옵션 및 기능을 포함합니다.
5-21 단자 X46/3 디지털 입력
이 파라미터는 VLT® Extended Relay Card MCB 113의 디
지털 입력과 관련이 있습니다. 해당 파라미터는 옵션
스 입력
을 제외하고,
열된 모든 옵션 및 기능을 포함합니다.
5-22 단자 X46/5 디지털 입력
이 파라미터는 VLT® Extended Relay Card MCB 113의 디
지털 입력과 관련이 있습니다. 해당 파라미터는 옵션
스 입력
을 제외하고,
열된 모든 옵션 및 기능을 포함합니다.
를 선택하면 AC 드라이브의 자동 재기
[A68]
[W68]
–
Torque Off [A71]
–
Torque Off [W71]
Safe Torque Off
Torque Off [A71]
Torque Off [W71]
Torque Off [A71]
[9] PTC 1 Safe
Torque Off [W71]
[A68]
Safe Torque Off
[W68]
Safe Torque Off
[W68]
Safe Torque Off
[A68]
이 나타납니다.
[32] 펄
파라미터 그룹 5-1* 디지털 입력
에 나
[32] 펄
파라미터 그룹 5-1* 디지털 입력
에 나
[32] 펄
파라미터 그룹 5-1* 디지털 입력
에 나
5-23 단자 X46/7 디지털 입력
이 파라미터는 VLT® Extended Relay Card MCB 113의 디
지털 입력과 관련이 있습니다. 해당 파라미터는 옵션
스 입력
을 제외하고,
열된 모든 옵션 및 기능을 포함합니다.
파라미터 그룹 5-1* 디지털 입력
[32] 펄
에 나
5-24 단자 X46/9 디지털 입력
이 파라미터는 VLT® Extended Relay Card MCB 113의 디
지털 입력과 관련이 있습니다. 해당 파라미터는 옵션
스 입력
을 제외하고,
열된 모든 옵션 및 기능을 포함합니다.
파라미터 그룹 5-1* 디지털 입력
[32] 펄
에 나
5-25 단자 X46/11 디지털 입력
이 파라미터는 VLT® Extended Relay Card MCB 113의 디
지털 입력과 관련이 있습니다. 해당 파라미터는 옵션
스 입력
을 제외하고,
열된 모든 옵션 및 기능을 포함합니다.
파라미터 그룹 5-1* 디지털 입력
[32] 펄
에 나
5-26 단자 X46/13 디지털 입력
이 파라미터는 VLT® Extended Relay Card MCB 113의 디
지털 입력과 관련이 있습니다. 해당 파라미터는 옵션
스 입력
을 제외하고,
열된 모든 옵션 및 기능을 포함합니다.
파라미터 그룹 5-1* 디지털 입력
[32] 펄
에 나
3.7.3 5-3* 디지털 출력
출력 단자의 출력 기능을 구성하는 파라미터입니다. 2
개의 고정 상태 디지털 출력은 단자 27과 29에 공통으
로 해당됩니다.
27의 입/출력 기능을 설정하고
모드
에서 단자 29의 입/출력 기능을 설정합니다.
파라미터 5-01 단자 27 모드
파라미터 5-02 단자 29
에서 단자
주의 사항
모터가 운전하는 동안에는 이 파라미터를 설정할 수 없
습니다.
디지털 입력을 다음과 같은 기능으로 프
로그래밍할 수 있습니다.
[0] 운전하지않음모든 디지털 출력과 릴레이 출력의 초기
설정입니다.
[1] 제어 준비 제어보드가 공급 전압을 수신합니다.
[2] 운전 준비 AC 드라이브가 운전 준비되며 제어반에
공급 신호가 전달됩니다.
[3] 인버터준비
원격제어
[4] 사용가능/
경고없음
[5] 구동 모터가 운전 중입니다.
[6] 구동/경고없음출력 속도가
AC 드라이브가 운전 준비되며 자동 운전
모드가 됩니다.
AC 드라이브의 운전 준비가 완료되었습
니다. 기동 또는 정지 명령은 실행할 수
없습니다(기동/사용안함). 경고가 없습니
다.
파라미터 1-81 정지 시 기
능을 위한 최소 속도 [RPM]
속도보다 높습니다. 모터가 구동 중이며
경고는 발생하지 않습니다.
에서 설정한
3 3
MG20OB39 Danfoss A/S © 05/2018 All rights reserved. 85

파라미터 설명
VLT® AQUA Drive FC 202
[8] 지령시 구
동/경고 없
음
[9] 알람 알람이 활성화됩니다. 경고가 없습니다.
[10] 알람 또는경고알람 또는 경고가 활성화됩니다.
33
[11] 토오크 한
계 도달
[12] 전류 범위초과모터 전류가
[13] 하한전류보
다낮음
[14] 상한 전류
보다 높음
[15] 속도 범위초과출력 속도가
[16] 하한속도보
다낮음
[17] 상한 속도
보다 높음
[18] 피드백 범
위 초과
[19] 피드백 하
한 이하
[20] 피드백 상
한 이상
[21] 과열 경고 모터, AC 드라이브, 제동 저항 또는 써미
[25] 역회전 역회전 논리 1 = 릴레이 활성화, 모터가
[26] 버스통신OK직렬 통신 포트를 통한 활성 통신(타임아
[27] 토크전류한
계,정지
[28] 제동,경고없음브레이크가 활성화되며 경고는 발생하지
[29] 제동준비,
무결함
[30] 제동장치결
함(IGBT)
[35] 외부 인터록외부 인터록 기능은 디지털 입력 중 하나
[40] 지령 범위
초과
모터가 지령 속도로 운전합니다.
파라미터 4-16 모터 운전의 토오크 한계
에서 설정된 토오크 한계를 초과하였습니
다.
파라미터 4-18 전류 한계
서 설정한 범위를 벗어났습니다.
모터 전류가
의 설정보다 낮습니다.
모터 전류가
의 설정보다 높습니다.
파라미터 4-50 저전류 경고
파라미터 4-51 고전류 경고
에
파라미터 4-52 저속 경고
및
파라미터 4-53 고속 경고
범위를 벗어났습니다.
출력 속도가
서 설정된 한계보다 낮습니다.
출력 속도가
서 설정된 한계보다 높습니다.
피드백이
고
및
에서 설정한 범위를 벗어났습니다.
피드백이
설정된 한계보다 낮습니다.
피드백이
고
에서 설정된 한계보다 높습니다.
스터의 온도가 한계를 초과했을 때 써멀
경고가 발생합니다.
시계방향으로 회전할 때 24VDC. 논리 0
= 릴레이 비활성화, 모터가 반시계방향으
로 회전할 때 신호 없음.
웃 없음).
코스팅(프리런) 정지를 실행할 때 사용하
거나 토오크 한계 조건에서 사용합니다.
AC 드라이브가 정지 신호를 수신하고 토
오크 한계에 도달했을 때, 신호는 논리 0
입니다.
않습니다.
브레이크가 운전 준비되며 결함이 없습니
다.
제동 IGBT가 단락되면 출력은 논리 1입
니다. 브레이크 모듈에 결함이 있는 경우
에는 이 기능을 사용하여 AC 드라이브를
보호합니다. 출력/릴레이를 사용하여 AC
드라이브의 주전원 전압을 차단합니다.
를 통해 활성화됩니다.
파라미터 4-52 저속 경고
파라미터 4-53 고속 경고
파라미터 4-56 피드백 낮음 경
파라미터 4-57 피드백 높음 경고
파라미터 4-52 저속 경고
파라미터 4-56 피드백 낮음 경
에서 설정된
에
에
에서
[41] 지령 이하,
낮음
[42] 지령 이상,
높음
[45] 버스통신
제어
[46] 시간 초과
시 1
[47] 시간 초과
시 0
[55] 펄스 출력
[60] 비교기 0
[61] 비교기 1
[62] 비교기 2
[63] 비교기 3
[64] 비교기 4
[65] 비교기 5
[70] 논리 규칙
0
[71] 논리 규칙
1
[72] 논리 규칙
2
[73] 논리 규칙
3
[74] 논리 규칙
4
[75] 논리 규칙
5
파라미터 그룹 13-1* 비교기
시오. 비교기 0이 TRUE(참)로 연산되면
출력이 높아지고 FALSE(거짓)로 연산되
면 출력이 낮아집니다.
파라미터 그룹 13-1* 비교기
시오. 비교기 1이 TRUE(참)로 연산되면
출력이 높아지고 FALSE(거짓)로 연산되
면 출력이 낮아집니다.
파라미터 그룹 13-1* 비교기
시오. 비교기 2가 TRUE(참)로 연산되면
출력이 높아지고 FALSE(거짓)로 연산되
면 출력이 낮아집니다.
파라미터 그룹 13-1* 비교기
시오. 비교기 3이 TRUE(참)로 연산되면
출력이 높아지고 FALSE(거짓)로 연산되
면 출력이 낮아집니다.
파라미터 그룹 13-1* 비교기
시오. 비교기 4가 TRUE(참)로 연산되면
출력이 높아지고 FALSE(거짓)로 연산되
면 출력이 낮아집니다.
파라미터 그룹 13-1* 비교기
시오. 비교기 5가 TRUE(참)로 연산되면
출력이 높아지고 FALSE(거짓)로 연산되
면 출력이 낮아집니다.
파라미터 그룹 13-4* 논리 규칙
하십시오. 논리 규칙 0이 TRUE(참)로 연
산되면 출력이 높아지고 FALSE(거짓)로
연산되면 출력이 낮아집니다.
파라미터 그룹 13-4* 논리 규칙
하십시오. 논리 규칙 1이 TRUE(참)로 연
산되면 출력이 높아지고 FALSE(거짓)로
연산되면 출력이 낮아집니다.
파라미터 그룹 13-4* 논리 규칙
하십시오. 논리 규칙 2가 TRUE(참)로 연
산되면 출력이 높아지고 FALSE(거짓)로
연산되면 출력이 낮아집니다.
파라미터 그룹 13-4* 논리 규칙
하십시오. 논리 규칙 3이 TRUE(참)로 연
산되면 출력이 높아지고 FALSE(거짓)로
연산되면 출력이 낮아집니다.
파라미터 그룹 13-4* 논리 규칙
하십시오. 논리 규칙 4가 TRUE(참)로 연
산되면 출력이 높아지고 FALSE(거짓)로
연산되면 출력이 낮아집니다.
파라미터 그룹 13-4* 논리 규칙
하십시오. 논리 규칙 5가 TRUE(참)로 연
를 참조하십
를 참조하십
를 참조하십
를 참조하십
를 참조하십
를 참조하십
을 참조
을 참조
을 참조
을 참조
을 참조
을 참조
86 Danfoss A/S © 05/2018 All rights reserved. MG20OB39
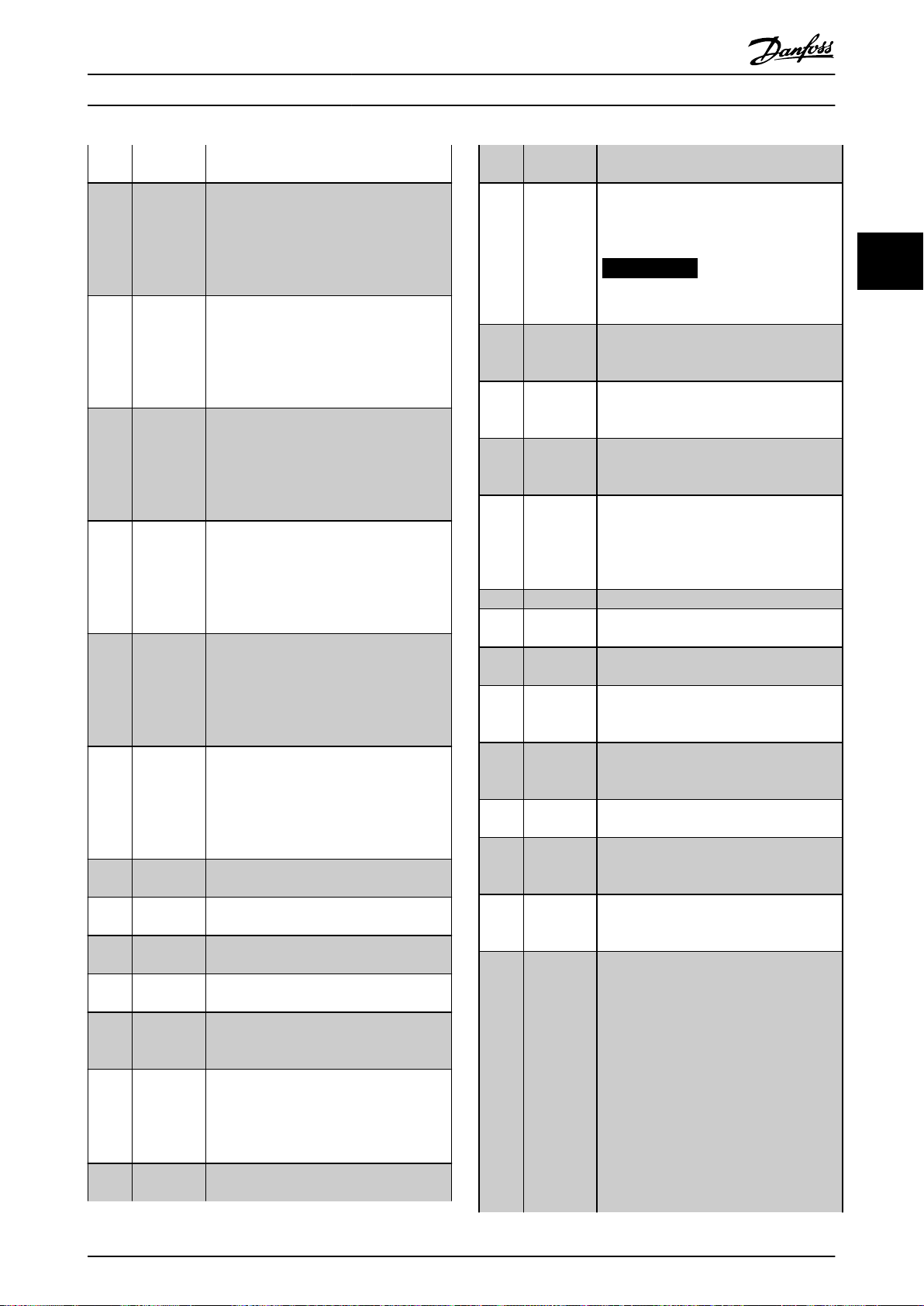
파라미터 설명 프로그래밍 지침서
산되면 출력이 높아지고 FALSE(거짓)로
연산되면 출력이 낮아집니다.
[80] SL 디지털
출력 A
[81] SL 디지털
출력 B
[82] SL 디지털
출력 C
[83] SL 디지털
출력 D
[84] SL 디지털
출력 E
[85] SL 디지털
출력 F
[90] 적산전력계펄스AC 드라이브가 1 kWh를 사용할 때마다
[120] 시스템 지
령값 도달
[155] 유량 확인
중
[160] 알람 없음 알람이 발생하지 않을 때 출력이 높아집
[161] 역회전 구동AC 드라이브가 반시계방향(상태 비트 구
[165] 현장 지령가동LCP가 수동 운전 모드일 때
파라미터 13-52 SL 컨트롤러 동작
참조하십시오. 스마트 로직 동작
지출력A최고설정
이 높아집니다. 스마트 로직 동작
디지출력A최저설정
력이 낮아집니다.
이 실행될 때마다 출력
이 실행될 때마다 출
파라미터 13-52 SL 컨트롤러 동작
참조하십시오. 스마트 로직 동작
지출력B최고설정
이 높아집니다. 스마트 로직 동작
디지출력B최저설정
력이 낮아집니다.
이 실행될 때마다 출력
이 실행될 때마다 출
파라미터 13-52 SL 컨트롤러 동작
참조하십시오. 스마트 로직 동작
지출력C최고설정
이 높아집니다. 스마트 로직 동작
디지출력C최저설정
력이 낮아집니다.
이 실행될 때마다 출력
이 실행될 때마다 출
파라미터 13-52 SL 컨트롤러 동작
참조하십시오. 스마트 로직 동작
지출력D최고설정
이 높아집니다. 스마트 로직 동작
디지출력D최저설정
력이 낮아집니다.
이 실행될 때마다 출력
이 실행될 때마다 출
파라미터 13-52 SL 컨트롤러 동작
참조하십시오. 스마트 로직 동작
지출력E최고설정
이 높아집니다. 스마트 로직 동작
디지출력E최저설정
력이 낮아집니다.
이 실행될 때마다 출력
이 실행될 때마다 출
파라미터 13-52 SL 컨트롤러 동작
참조하십시오. 스마트 로직 동작
지출력F최고설정
이 높아집니다. 스마트 로직 동작
디지출력F최저설정
력이 낮아집니다.
디지털 출력에 펄스를 생성합니다.
니다.
동 AND 역회전의 논리 생성)으로 운전할
때 출력이 높아집니다.
이 실행될 때마다 출력
이 실행될 때마다 출
을(를)
[38] 디
[32]
을(를)
[39] 디
[33]
을(를)
[40] 디
[34]
을(를)
[41] 디
[35]
을(를)
[42] 디
[36]
을(를)
[43] 디
[37]
파라미
터 3-13 지령 위치=[2] 현장
또는
파라
미터 3-13 지령 위치=[0] 수동/자동에
링크
를 동시에 선택하면 출력이 높아집니
다.
[166] 원격 지령가동LCP가 자동 운전 모드일 때
터 3-13 지령 위치가 [1] 원격
파라미
또는
[0]
수동/자동에 링크
력이 높아집니다.
[167] 기동 명령동작활성화된 기동 명령이 있는 경우(예를 들
어, 자동 운전, 디지털 입력이나 버스통신
을 통해 기동 명령이 활성화된 경우 또는
[Hand On]), 출력이 높아집니다.
로 설정되어 있으면 출
주의 사항
모든 인버스 정지/코스팅(프리런) 명
령은 비활성화되어야 합니다.
[168] 수동 운전모드AC 드라이브가 수동 운전 모드일 때 출
력이 높아집니다([Hand On] 위의 표시
램프에 나타남).
[169] 자동 운전모드AC 드라이브가 자동 운전 모드일 때 출
력이 높아집니다([Auto On] 위의 표시
램프에 나타남).
[180] 클럭 결함 주전원 차단으로 인해 클럭 기능이 초기
설정값(2000-01-01)으로 리셋되었습니
다.
[181] 예방적 유
지보수
[182] 디래깅 디래깅이 활성화됩니다.
[188] AHF 컨덴
서 연결
[189] 외부 팬 제어외부 팬 제어가 활성화됩니다.
[190] 비유량
[191] 드라이 펌프드라이 펌프 조건이 감지되었습니다.
[192] 유량 과다 유량 과다 조건이 발생할 때 활성화됩니
[193] 슬립 모드 AC 드라이브/시스템이 슬립 모드로 진입
[194] 벨트 파손 벨트 파손 조건이 감지되었습니다.
[195] 바이패스
밸브 제어
파라미터 23-10 유지보수 항목
그래밍된 하나 이상의 예방적 유지보수
이벤트가
에서 지정된 동작을 수행할 시간을 놓쳤
습니다.
파라미터 23-11 유지보수 동작
에서 프로
파라미터 5-80 AHF 커패시터 재연결 지
연
을(를) 참조하십시오.
파라미터 22-21 저출력 감지
경우, 비유량 상황이나 최소 속도 상황이
감지되었습니다.
가 활성화된
파
라미터 22-26 드라이 펌프 감지시 동작
설정
에서 이 기능을 활성화합니다.
다.
했습니다.
드
를 참조하십시오.
파라미터 그룹 22-4* 슬립 모
파라
미터 22-60 벨트 파손시 동작설정
이 기능을 활성화합니다.
바이패스 밸브 제어(AC 드라이브의 디지
털/릴레이 출력)는 바이패스 밸브를 사용
하여 기동하는 동안 압축기를 언로드하기
위해 압축기 시스템에 사용됩니다. 기동
명령을 받은 후에 바이패스 밸브는 AC
드라이브가
한계 [RPM]
니다. 한계에 도달한 후에 바이패스 밸브
가 닫히고 압축기는 정상적으로 작동합니
다. 기동이 새로 초기화되고 기동 신호를
받는 동안 AC 드라이브 속도가 0이 되기
전에는 이 절차가 다시 활성화되지 않습
니다.
기동을 지연하는데 사용할 수 있습니다.
파라미터 4-11 모터의 저속
에 도달할 때까지 열려 있습
파라미터 1-71 기동 지연
에서
은 모터
3 3
MG20OB39 Danfoss A/S © 05/2018 All rights reserved. 87
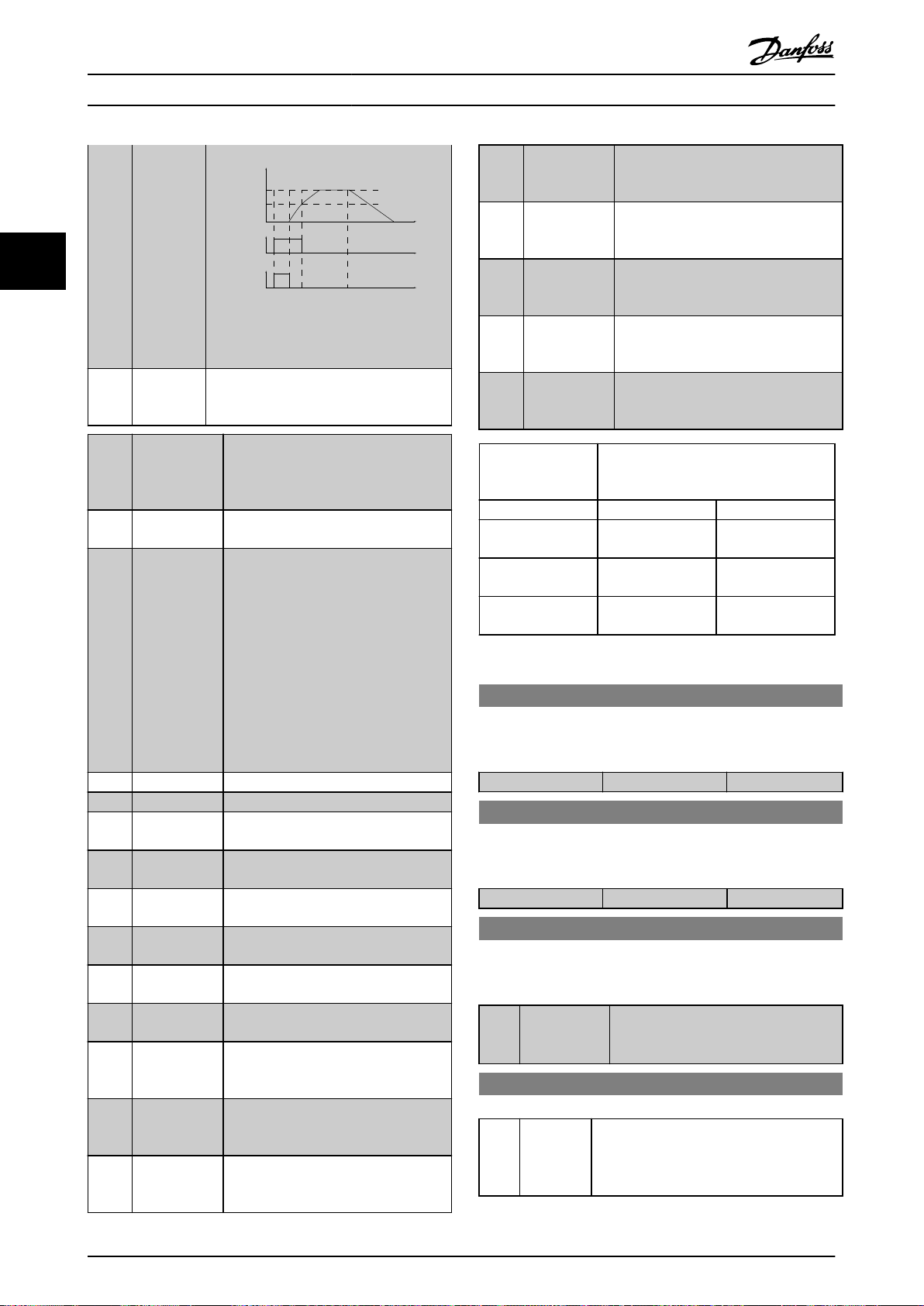
Time
REF
Min
Speed
ON
Time
Time
OFF
ON
OFF
Start
Stop
130BA251.10
Speed
파라미터 설명
VLT® AQUA Drive FC 202
[243] RS 플립플랍
3
파라미터 13-15 RS-FF Operand S
파라미터 13-16 RS-FF Operand R
,
참조.
[244] RS 플립플랍
4
파라미터 13-15 RS-FF Operand S
파라미터 13-16 RS-FF Operand R
,
참조.
33
[245] RS 플립플랍
5
파라미터 13-15 RS-FF Operand S
파라미터 13-16 RS-FF Operand R
,
참조.
그림 3.28 바이패스 밸브 제어 방식
[246] RS 플립플랍
6
파라미터 13-15 RS-FF Operand S
파라미터 13-16 RS-FF Operand R
,
참조.
[199] 배관 급수 배관 급수 기능이 작동 중일 때 활성화됩
니다.
파라미터 그룹 29-** 수처리 어플
리케이션 기능
을 참조하십시오.
아래 설정 옵션은 모두 캐스케이스 컨
트롤러와 관계가 있습니다.
자세한 내용은
캐스케이드 컨트롤러
파라미터 그룹 25-**
를 참조하십시오.
[200] 용량 100%사용모든 펌프가 최고 속도로 구동 중입니
다.
[201] 펌프1 구동 캐스케이드 컨트롤러에 의해 제어되는
펌프가 하나 이상 구동 중입니다. 해당
기능은 또한
드 펌프
아니오
파라미터 25-05 고정 리
의 설정에 따라 다릅니다.
로 설정되어 있으면 펌프 1은
[0]
릴레이1 등에 의해 제어되는 펌프를
의미하며
[1] 예
로 설정되어 있으면
펌프 1은 (내장 릴레이와 관계 없이)
AC 드라이브에 의해서만 제어되는 펌
프를 의미하고 펌프 2는 릴레이1에 의
해 제어되는 펌프를 의미합니다.
표 3.15
을(를) 참조하십시오.
[202] 펌프2 구동 [201] 참조.
[203] 펌프3 구동 [201] 참조.
[204] 펌프 4 구동
중
[205] 펌프 5 구동
중
[206] 펌프 6 구동
중
[207] 펌프 7 구동
중
[208] 펌프 8 구동
중
[209] 펌프 9 구동
중
[240] RS 플립플랍
0
파라미터 13-15 RS-FF Operand S
파라미터 13-16 RS-FF Operand R
,
참조.
[241] RS 플립플랍
1
파라미터 13-15 RS-FF Operand S
파라미터 13-16 RS-FF Operand R
,
참조.
[242] RS 플립플랍
2
88 Danfoss A/S © 05/2018 All rights reserved. MG20OB39
파라미터 13-15 RS-FF Operand S
파라미터 13-16 RS-FF Operand R
참조.
,
[247] RS 플립플랍
7
파라미터 13-15 RS-FF Operand S
파라미터 13-16 RS-FF Operand R
참조.
파라미터 그룹
파라미터 25-05 고정 리드 펌프
의 설정
5-3* 디지털 출력
의 설정
[0] 아니오 [1] 예
[201] 펌프 1
구동
[202] 펌프 2
구동
[203] 펌프 3
구동
릴레이1에 의해제어AC 드라이브에 의해
제어
릴레이2에 의해
제어
– 릴레이2에 의해
릴레이1에 의해
제어
제어
표 3.15 캐스케이드 컨트롤러에 의해 제어되는 펌프 대수
5-30 단자 27 디지털 출력
이 파라미터에는
션이 있습니다.
장을 3.7.3 5-3* 디지털 출력
에 설명된 옵
옵션: 기능:
[0] * 운전하지 않음
5-31 단자29 디지털출력
이 파라미터에는
션이 있습니다.
장을 3.7.3 5-3* 디지털 출력
에 설명된 옵
옵션: 기능:
[0] * 운전하지 않음
5-32 단자 X30/6 디지털 출력(MCB 101)
이 파라미터에는
션이 있습니다.
장을 3.7.3 5-3* 디지털 출력
에 설명된 옵
옵션: 기능:
[0] * 운전하지 않음
이 파라미터는 AC 드라이브에 VLT
General Purpose I/O MCB 101가 장
착된 경우에 활성화됩니다.
5-33 단자 X30/7 디지털 출력(MCB 101)
옵션: 기능:
[0] * 운전하지
않음
이 파라미터는 AC 드라이브에 VLT
General Purpose I/O MCB 101가 장착
된 경우에 활성화됩니다.
5-1* 디지털 입력
파라미터 그룹
과 동일한 옵션 및 기능.
,
®
®

5-40 릴레이 기능
배열 [20]
옵션: 기능:
릴레이의 기능을 설정하려면 옵션
을 선택합니다.
각각의 기계적 릴레이는 배열 파
라미터에서 선택됩니다.
[0] 운전하지 않
음
[1] 제어 준비
[2] 운전 준비
[3] 인버터준비원
격제어
[4] 대기 / 경고
없음
[5] 구동중
[6] 구동 / 경고
없음
[8] 지령시구동/경
고X
[9] 알람
[10] 알람 또는 경
고
[11] 토오크 한계
도달
[12] 전류 범위 초
과
[13] 하한전류보다
낮음
[14] 상한 전류보
다 높음
[15] 속도 범위 초
과
[16] 하한속도보다
낮음
[17] 상한 속도보
다 높음
[18] 피드백 범위
초과
[19] 피드백 하한
이하
[20] 피드백 상한
이상
[21] 과열 경고
[25] 역회전
[26] 버스통신 OK
[27] 토크전류한계,
정지
[28] 제동,경고없음
5-40 릴레이 기능
배열 [20]
옵션: 기능:
[29] 제동준비,무결
함
[30] 제동장치결함
(IGBT)
[33] 안전 정지 활
성화
[35] 외부 인터록
[36] 제어 워드 비
트 11
[37] 제어 워드 비
트 12
[40] 지령 범위 초
과
[41] 지령 이하, 낮
음
[42] 지령 이상, 높
음
[45] 버스통신 제
어
[46] 시간 초과 시
1
[47] 시간 초과 시
0
[51] MCO 제어 완
료
[59] Remote,enab
le,no TW
[60] 비교기 0
[61] 비교기 1
[62] 비교기 2
[63] 비교기 3
[64] 비교기 4
[65] 비교기 5
[70] 논리 규칙 0
[71] 논리 규칙 1
[72] 논리 규칙 2
[73] 논리 규칙 3
[74] 논리 규칙 4
[75] 논리 규칙 5
[80] SL 디지털 출
력 A
[81] SL 디지털 출
력 B
[82] SL 디지털 출
력 C
[83] SL 디지털 출
력 D
[84] SL 디지털 출
력 E
[85] SL 디지털 출
력 F
파라미터 설명 프로그래밍 지침서
3.7.4 5-4* 릴레이
릴레이의 타이밍과 출력 기능을 구성하는 파라미터입니
다.
MG20OB39 Danfoss A/S © 05/2018 All rights reserved. 89
3 3

5-40 릴레이 기능
배열 [20]
옵션: 기능:
[120] System On
Ref
[151] ATEX ETR
cur. alarm
[152] ATEX ETR
freq. alarm
[153] ATEX ETR
cur. warning
[154] ATEX ETR
freq.
warning
[155] Verifying
Flow
[160] 알람 없음
[161] 역회전 구동
[164] Local ref
active, not
OFF
[165] 현장 지령 가
동
[166] 원격 지령 가
동
[167] 기동 명령 동
작
[168] 수동 모드
[169] 자동 모드
[180] 클럭 결함
[181] 예방적 유지
보수
[183] Pre/Post
Lube
[188] AHF 커패시
터 연결
[189] 외부 팬 제어
[190] 유량없음
[191] 드라이 펌프
[192] 유량 과다
[193] 슬립 모드
[194] 벨트 파손
[195] 바이패스 값
제어
[196] 화재 모드 활
성화
[197] 화재 모드 활
성화 이력 있
음
[198] 인버터 바이
패스
[199] Pipe Filling
[211] 캐스케이드
펌프 1
5-40 릴레이 기능
배열 [20]
옵션: 기능:
[212] 캐스케이드
펌프 2
[213] 캐스케이드
펌프 3
[214] 캐스케이드
펌프 4
[215] 캐스케이드
펌프 5
[216] 캐스케이드
펌프 6
[217] 캐스케이드
펌프 7
[218] 캐스케이드
펌프 8
[219] 캐스케이드
펌프 9
[230] Ext.
Cascade Ctrl
[236] Ext. CL 1
on Ref
[237] Ext. CL 2
on Ref
[238] Ext. CL 3
on Ref
[240] RS Flipflop
0
파라미터 13-15 RS-FF
Operand S, 파라미
터 13-16 RS-FF Operand R
참
조.
[241] RS Flipflop
1
파라미터 13-15 RS-FF
Operand S, 파라미
터 13-16 RS-FF Operand R
참
조.
[242] RS Flipflop
2
파라미터 13-15 RS-FF
Operand S, 파라미
터 13-16 RS-FF Operand R
참
조.
[243] RS Flipflop
3
파라미터 13-15 RS-FF
Operand S, 파라미
터 13-16 RS-FF Operand R
참
조.
[244] RS Flipflop
4
파라미터 13-15 RS-FF
Operand S, 파라미
터 13-16 RS-FF Operand R
참
조.
[245] RS Flipflop
5
파라미터 13-15 RS-FF
Operand S, 파라미
터 13-16 RS-FF Operand R
참
조.
[246] RS Flipflop
6
파라미터 13-15 RS-FF
Operand S, 파라미
파라미터 설명
33
90 Danfoss A/S © 05/2018 All rights reserved. MG20OB39
VLT® AQUA Drive FC 202

5-40 릴레이 기능
배열 [20]
옵션: 기능:
터 13-16 RS-FF Operand R
참
조.
[247] RS Flipflop
7
파라미터 13-15 RS-FF
Operand S, 파라미
터 13-16 RS-FF Operand R
참
조.
5-41 작동 지연, 릴레이
배열 [20]
범위: 기능:
0.01 s* [0.01 -
600 s]
릴레이 동작 지연 시간을 입력합
니다. 배열 기능의 내부 기계적 릴
레이 두 가지 중에서 하나를 선택
합니다. 자세한 내용은
파라미
터 5-40 릴레이 기능
을 참조하십
시오.
Selected
Event
Relay
output
Selected
Event
Relay
output
On Delay
P 5-41
On Delay
P 5-41
O Delay
P 5-42
130BA171.10
5-42 차단 지연, 릴레이
배열[20]
범위: 기능:
0.01 s* [0.01 -
600 s]
릴레이 정지 지연 시간을 입력합
니다. 배열 기능의 내부 기계적 릴
레이 두 가지 중에서 하나를 선택
합니다. 자세한 내용은
파라미
터 5-40 릴레이 기능
을 참조하십
시오. 지연 시간이 끝나기 전에 선
택된 이벤트 조건이 변경되더라도
릴레이 출력은 영향을 받지 않습
니다.
Selected
Event
Relay
output
On Delay
P 5-41
O Delay
P 5-42
130BA172.10
130BA076.10
(RPM)
Ref.
Low freq.
P 5-50/
P 5-55
Input
(Hz)
High
ref.
value
P 5-53/
p 5-58
High freq.
P 5-51/
P 5-56
Low
ref.
value
P 5-52/
p 5-57
5-50 단자 29 최저 주파수
범위: 기능:
100 Hz* [0 -
110000 Hz]
파라미터 5-52 단자 29 최저 지
령/피드백 값
에서 최저 모터축 속
도에 해당하는 최저 주파수 한계
(즉, 최저 지령 값)를 입력합니다.
이 섹션의
그림 3.31
를 참조하십
시오.
파라미터 설명 프로그래밍 지침서
그림 3.30 차단 지연, 릴레이
작동 지연 시간이나 차단 지연 시간이 끝나기 전에 선
택된 이벤트 조건이 변경되더라도 릴레이 출력은 영향
을 받지 않습니다.
3.7.5 5-5* 펄스 입력
펄스 입력 파라미터는 펄스 입력에 대한 범위 설정 및
필터 설정의 구성을 통해 임펄스 지령 영역에 적합한
범위를 정의할 때 사용합니다. 입력 단자 29 또는 33은
주파수 지령 입력의 역할을 합니다. 단자 29(
터 5-13 단자 29 디지털 입력
터 5-15 단자 33 디지털 입력
) 또는 단자 33(
)을
[32] 펄스 입력
설정합니다. 단자 29를 입력으로 사용한 경우에는
미터 5-02 단자 29 모드을 [0] 입력
으로 설정합니다.
파라미
파라미
으로
파라
3 3
그림 3.29 작동 지연, 릴레이
MG20OB39 Danfoss A/S © 05/2018 All rights reserved. 91
그림 3.31 펄스 입력

5-51 단자 29 최고 주파수
범위: 기능:
100 Hz* [0 -
110000 Hz]
파라미터 5-53 단자 29 최고 지
령/피드백 값
에서 최고 모터축 속
도에 해당하는 최고 주파수(즉, 최
고 지령 값)를 입력합니다.
5-52 단자 29 최저 지령/피드백 값
범위: 기능:
0
Reference
Feedback
Unit*
[-999999.99
9 -
999999.999
ReferenceFe
edbackUnit]
모터축 속도의 최저 지령 값 한계
[RPM]를 입력합니다. 이는 또한
최저 피드백 값이기도 합니다.
파
라미터 5-57 단자 33 최저 지령/
피드백 값
또한 참조하십시오.
5-53 단자 29 최고 지령/피드백 값
범위: 기능:
100
Reference
Feedback
Unit*
[-999999.99
9 -
999999.999
ReferenceFe
edbackUnit]
모터축 속도와 최고 피드백 값에
해당하는 최고 지령 값 [RPM]을
입력합니다(
파라미터 5-58 단자
33 최고 지령/피드백 값
또한 참
조하십시오).
5-54 펄스 필터 시상수 #29
범위: 기능:
100 ms* [5 - 1000
ms]
주의 사항
모터가 운전하는 동안에는 이
파라미터를 설정할 수 없습니
다.
펄스 필터 시정수를 입력합니다.
펄스 필터는 피드백 신호의 공진
을 감소시키고 특히 시스템에 노
이즈가 많이 발생할 때 유용합니
다. 시정수 값이 크면 공진을 더
많이 감소시키기는 하지만 필터를
통한 시간 지연도 함께 증가합니
다.
5-55 단자 33 최저 주파수
범위: 기능:
100 Hz* [0 -
110000 Hz]
파라미터 5-57 단자 33 최저 지
령/피드백 값
에서 최저 모터축 속
도에 해당하는 최저 주파수 한계
(즉, 최저 지령 값)를 입력합니다.
5-56 단자 33 최고 주파수
범위: 기능:
100 Hz* [0 -
110000 Hz]
파라미터 5-58 단자 33 최고 지
령/피드백 값
에서 최고 모터축 속
도에 해당하는 최고 주파수(즉, 최
고 지령 값)를 입력합니다.
5-57 단자 33 최저 지령/피드백 값
범위: 기능:
0
Reference
Feedback
Unit*
[-999999.99
9 -
999999.999
ReferenceFe
edbackUnit]
모터축 속도의 최저 지령 값
[RPM]을 입력합니다. 이는 또한
최저 피드백 값이기도 합니다.
파
라미터 5-52 단자 29 최저 지령/
피드백 값
또한 참조하십시오.
5-58 단자 33 최고 지령/피드백 값
범위: 기능:
100
Reference
Feedback
Unit*
[-999999.99
9 -
999999.999
ReferenceFe
edbackUnit]
모터축 속도의 최고 지령 값
[RPM]을 입력합니다.
파라미
터 5-53 단자 29 최고 지령/피드
백 값
또한 참조하십시오.
5-59 펄스 필터 시상수 #33
범위: 기능:
100 ms* [5 - 1000
ms]
주의 사항
모터가 운전하는 동안에는 이
파라미터를 설정할 수 없습니
다.
펄스 필터 시정수를 입력합니다.
저주파 통과 필터는 제어 시 피드
백 신호의 영향력과 공진을 감소
시킵니다.
이는 특히 시스템에 노이즈가 많
이 발생할 때 유용합니다.
파라미터 설명
VLT® AQUA Drive FC 202
33
92 Danfoss A/S © 05/2018 All rights reserved. MG20OB39
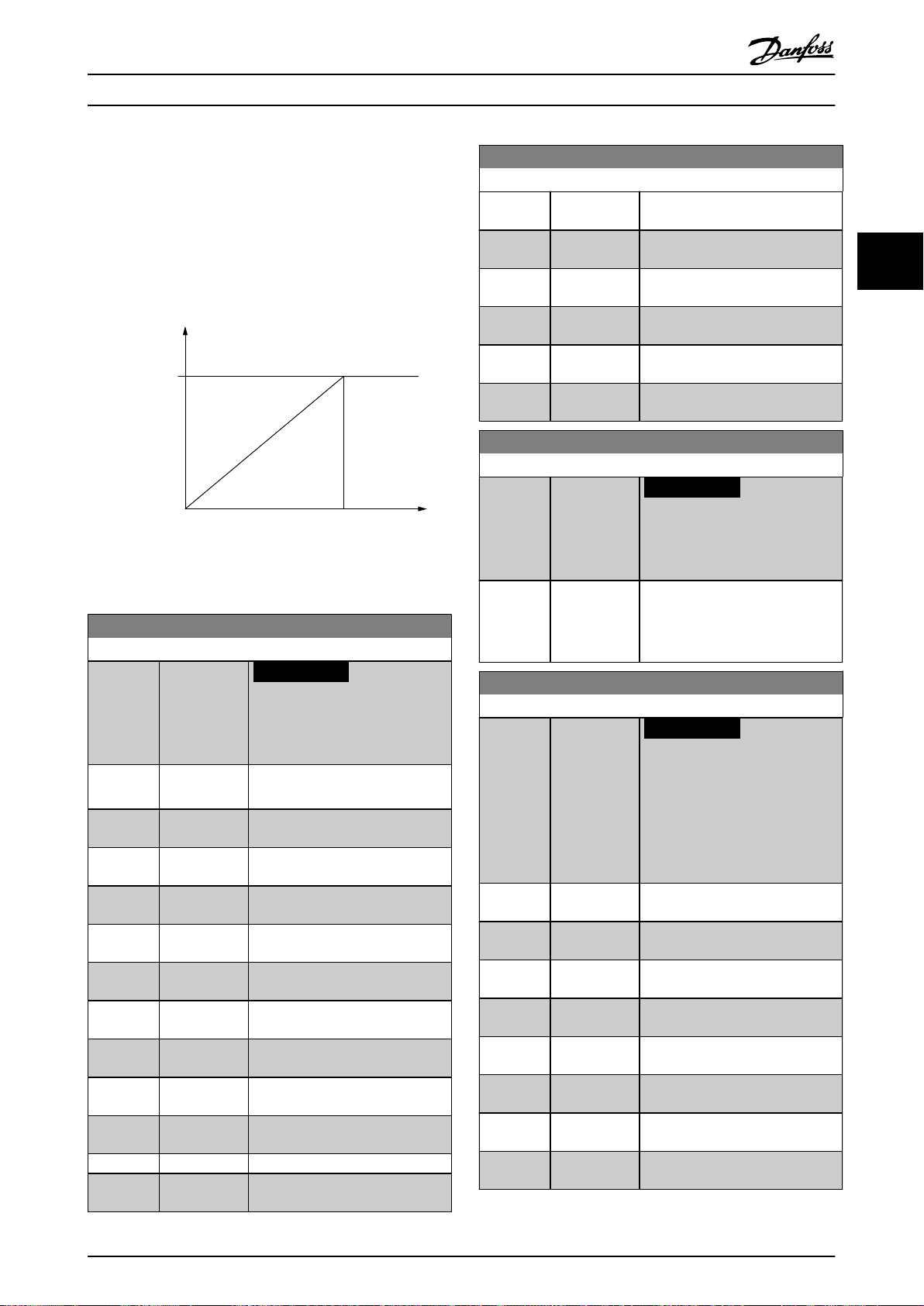
Output value
Output
(Hz)
High output
value
P 5-60(term27)
P 5-63(term29)
High freq.
P 5-62(term27)
P 5-65(term29)
130BA089.11
5-60 단자 27 펄스 출력 변수
범위: 기능:
주의 사항
모터가 운전하는 동안에는 이
파라미터를 설정할 수 없습니
다.
[0] * 운전하지 않음단자 27 표기값에 할당된 운전 변
수를 선택합니다.
[45] 버스통신 제
어
[48] 버스통신시간
초과
[51] MCO 제어 완
료
[100] 출력 주파수
0-100
[101] 지령 최소-최
대
[102] 피드백
+-200%
[103] 모터 전류 0-
Imax
[104] 토오크 0-
Tlim
[105] 토오크 0-
Tnom
[106] 출력 0-Pnom
[107] 속도 0-
HighLim
5-60 단자 27 펄스 출력 변수
범위: 기능:
[108] 토오크
+-160%
[109] 출력 주파수
0-Fmax
[113] 확장형 폐회
로 1
[114] 확장형 폐회
로 2
[115] 확장형 폐회
로 3
[116] Cascade
Reference
5-62 펄스 출력 최대 주파수 #27
범위: 기능:
주의 사항
모터가 운전하는 동안에는 이
파라미터를 설정할 수 없습니
다.
5000 Hz* [0 -
32000 Hz]
파라미터 5-60 단자 27 펄스 출
력 변수
에서 선택한 출력 변수에
해당하는 단자 27의 최대 주파수
를 설정합니다.
5-63 단자 29 펄스 출력 변수
옵션: 기능:
주의 사항
모터가 운전하는 동안에는 이
파라미터를 설정할 수 없습니
다.
단자 29 표시에 사용할 변수를 선
택합니다.
파라미터 그룹 5-6* 펄
스 출력
과 동일한 옵션 및 기능.
[0] * 운전하지 않
음
[45] 버스통신 제
어
[48] 버스통신시간
초과
[51] MCO 제어 완
료
[100] 출력 주파수
0-100
[101] 지령 최소-최
대
[102] 피드백
+-200%
[103] 모터 전류 0-
Imax
파라미터 설명 프로그래밍 지침서
3.7.6 5-6* 펄스 출력
펄스 출력에 대한 범위 설정 및 출력 기능을 구성하는
파라미터입니다. 펄스 출력은 단자 27 또는 29에 지정
되어 있습니다.
27 출력을 선택하고
단자 29 출력을 선택합니다.
파라미터 5-01 단자 27 모드
파라미터 5-02 단자 29 모드
에서 단자
에서
3 3
그림 3.32 펄스 출력
MG20OB39 Danfoss A/S © 05/2018 All rights reserved. 93

5-63 단자 29 펄스 출력 변수
옵션: 기능:
[104] 토오크 0-
Tlim
[105] 토오크 0-
Tnom
[106] 출력 0-Pnom
[107] 속도 0-
HighLim
[108] 토오크
+-160%
[109] 출력 주파수
0-Fmax
[113] 확장형 폐회
로 1
[114] 확장형 폐회
로 2
[115] 확장형 폐회
로 3
[116] Cascade
Reference
5-65 펄스 출력 최대 주파수 #29
범위: 기능:
5000 Hz* [0 -
32000 Hz]
파라미터 5-63 단자 29 펄스 출
력 변수
에서 설정한 출력 변수에
해당하는 단자 29의 최대 주파수
를 설정합니다.
5-66 단자 X30/6 펄스 출력 변수
단자 X30/6의 판독에 필요한 변수를 선택합니다.
이 파라미터는 AC 드라이브에 VLT® General Purpose I/O
MCB 101가 설치된 경우에 활성화됩니다.
파라미터 그룹 5-6* 펄스 출력
과 동일한 옵션 및 기능.
옵션: 기능:
[0] * 운전하지 않
음
[45] 버스통신 제
어
[48] 버스통신시간
초과
[51] MCO 제어 완
료
[100] 출력 주파수
0-100
[101] 지령 최소-최
대
[102] 피드백
+-200%
[103] 모터 전류 0-
Imax
[104] 토오크 0-
Tlim
[105] 토오크 0-
Tnom
5-66 단자 X30/6 펄스 출력 변수
단자 X30/6의 판독에 필요한 변수를 선택합니다.
이 파라미터는 AC 드라이브에 VLT® General Purpose I/O
MCB 101가 설치된 경우에 활성화됩니다.
파라미터 그룹 5-6* 펄스 출력
과 동일한 옵션 및 기능.
옵션: 기능:
[106] 출력 0-Pnom
[107] 속도 0-
HighLim
[108] 토오크
+-160%
[109] 출력 주파수
0-Fmax
[113] 확장형 폐회
로 1
[114] 확장형 폐회
로 2
[115] 확장형 폐회
로 3
[116] Cascade
Reference
5-68 펄스 출력 최대 주파수 #X30/6
범위: 기능:
5000 Hz* [0 -
32000 Hz]
주의 사항
모터가 운전하는 동안에는 이
파라미터를 설정할 수 없습니
다.
파라미터 5-66 단자 X30/6 펄스
출력 변수
에서 출력 변수를 나타
내는 단자 X30/6의 최대 주파수
를 선택합니다.
이 파라미터는 AC 드라이브에
VLT® General Purpose I/O
MCB 101가 설치된 경우에 활성
화됩니다.
5-80 AHF 커패시터 재연결 지연
범위: 기능:
25 s* [1 - 120s]연속적인 두 AHF 컨덴서 연결 간
의 지연 시간. AHF 컨덴서가 연
결 해제되면 타이머가 시작되며
지연 시간이 만료되고 AC 드라이
브의 출력이 정격 출력의 20% 초
과 30% 미만이면 다시 연결됩니
다.
파라미터 설명
VLT® AQUA Drive FC 202
33
94 Danfoss A/S © 05/2018 All rights reserved. MG20OB39
AHF 컨덴서는 디지털 및 릴레이 출력의 출력 기능을
연결합니다.
기능 설명:
정격 출력의 20%에서 컨덴서를 연결합니다.
•
정격 출력 20%의 히스테리시스 ±50% (=정력
•
출력의 최소 10%, 최대 30%).

10 20 30 40 50 60 70 80 90 100 110 120 130
Time (s)
Relay Output
On
t
1
t
2
130BC368.10
Nominal Power of Drive
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
...................................................................................................................................................................................................................
....................................................................................................................................................................................................................
....................................................................................................................................................................................................................
5-90 디지털 및 릴레이 버스통신 제어
범위: 기능:
0* [0 -
2147483647
]
이 파라미터는 버스통신에 의해
제어되는 디지털 출력과 릴레이의
상태를 유지합니다.
논리 1은 출력이 높거나 활성화됨
을 의미합니다.
논리 0은 출력이 낮거나 비활성화
됨을 의미합니다.
비트0CC 디지털 출력, 단자 27
비트1CC 디지털 출력, 단자 29
비트2GPIO 디지털 출력, 단자 X
30/6
비트3GPIO 디지털 출력, 단자 X
30/7
비트4CC 릴레이 1 출력 단자
비트5CC 릴레이 2 출력 단자
비트6옵션 B 릴레이 1 출력 단자
비트7옵션 B 릴레이 2 출력 단자
비트8옵션 B 릴레이 3 출력 단자
비트
9–15
예비 단자
비트16옵션 C 릴레이 1 출력 단자
비트17옵션 C 릴레이 2 출력 단자
비트18옵션 C 릴레이 3 출력 단자
비트19옵션 C 릴레이 4 출력 단자
비트20옵션 C 릴레이 5 출력 단자
비트21옵션 C 릴레이 6 출력 단자
비트22옵션 C 릴레이 7 출력 단자
비트23옵션 C 릴레이 8 출력 단자
비트
24–31
예비 단자
표 3.16 디지털 출력 비트
파라미터 설명 프로그래밍 지침서
차단 지연 타이머=10초. 컨덴서를 차단하려면
•
정격 출력이 10초간 10% 미만이어야 합니다.
10초 지연 동안 정격 출력이 10%를 초과하면
타이머(10초)가 다시 시작됩니다.
컨덴서 재연결 지연(초기 설정값=1–120초 범
•
위의 25초,
연결 지연
파라미터 5-80 AHF 커패시터 재
참조)은 AHF 컨덴서 출력 기능의
최소 차단 시간에 사용됩니다.
전력 손실이 있는 경우, AC 드라이브는 전력이
•
복원될 때 최소 차단 시간이 보장되도록 합니
다.
3.7.7 5-9* 버스통신 제어
이 파라미터 그룹은 필드버스 설정을 통해 디지털 및
릴레이 출력을 선택합니다.
3 3
그림 3.33 출력 기능의 예시
t1은 차단 지연 타이머(10초)를 나타냅니다.
t2는 컨덴서 재연결 지연(
재연결 지연
AC 드라이브의 정격 출력이 20%를 초과하면 출력 기
능이 켜집니다. 출력이 10% 미만으로 낮아지면 출력이
최저 수준으로 낮아지기 전에 차단 지연 타이머를 만료
해야 합니다. 이는 t1로 나타냅니다. 출력이 최저 수준으
로 낮아진 후에는 출력을 다시 증가하기 전에 컨덴서
재연결 지연 타이머를 만료해야 하며 이는 t2로 나타냅
니다. t2가 만료되면 정격 출력은 30%를 초과하며 릴레
이는 켜지지 않습니다.
)을 나타냅니다.
파라미터 5-80 AHF 커패시터
MG20OB39 Danfoss A/S © 05/2018 All rights reserved. 95

5-93 펄스 출력 #27 버스통신 제어
범위: 기능:
0 %* [0 -
100 %]
버스통신 제어로 구성된 경우, 디
지털 출력 단자 27에 적용할 주파
수가 포함되어 있습니다.
5-94 펄스 출력 #27 시간 초과 프리셋
범위: 기능:
0 %* [0 -
100 %]
버스통신 제어 타임아웃으로 구성
되고 타임아웃이 감지되는 경우,
디지털 출력 단자 27에 적용할 주
파수가 포함되어 있습니다.
5-95 펄스 출력 #29 버스통신 제어
범위: 기능:
0 %* [0 -
100 %]
버스통신 제어로 구성된 경우, 디
지털 출력 단자 29에 적용할 주파
수가 포함되어 있습니다.
5-96 펄스 출력 #29 시간 초과 프리셋
범위: 기능:
0 %* [0 -
100 %]
버스통신 제어 타임아웃으로 구성
되고 타임아웃이 감지되는 경우,
디지털 출력 단자 29에 적용할 주
파수가 포함되어 있습니다.
5-97 펄스 출력 #X30/6 버스통신 제어
범위: 기능:
0 %* [0 -
100 %]
버스통신 제어로 구성된 경우, 디
지털 출력 단자 6에 적용할 주파
수가 포함되어 있습니다.
5-98 펄스 출력 #X30/6 타임아웃 프리셋
범위: 기능:
0 %* [0 -
100 %]
버스통신 제어 타임아웃으로 구성
되고 타임아웃이 감지되는 경우,
디지털 출력 단자 6에 적용할 주
파수가 포함되어 있습니다.
파라미터 설명
VLT® AQUA Drive FC 202
33
96 Danfoss A/S © 05/2018 All rights reserved. MG20OB39

6-00 외부 지령 보호 시간
범위: 기능:
10 s* [1 - 99 s] 외부 지령 보호 시간을 초 단위로
입력합니다. 외부 지령 보호 시간
은 지령 또는 피드백 소스로 사용
되는 아날로그 입력(단자 53 또는
단자 54)의 경우에 활성화됩니다.
선택한 전류 입력과 관련된 지령
신호 값이 다음에서 설정한 값의
50% 미만으로
•
파라미터 6-10 단자 53
최저 전압
•
파라미터 6-12 단자 53
최저 전류
•
파라미터 6-20 단자 54
최저 전압
•
파라미터 6-22 단자 54
최저 전류
파라미터 6-00 외부 지령 보호
시간
에서 설정한 시간보다 긴 시
간 동안 낮아지면,
파라미
터 6-01 외부 지령 보호 기능
에
서 선택한 기능이 활성화됩니다.
6-01 외부 지령 보호 기능
옵션: 기능:
타임아웃 기능을 선택합니다. 단
자 53 또는 54의 입력 신호가 다
음에서 설정한 값의 50% 미만인
경우,
파라미터 6-01 외부 지령
보호 기능
에서 설정한 기능이 활
성화됩니다.
•
파라미터 6-10 단자 53
최저 전압
.
•
파라미터 6-12 단자 53
최저 전류
.
6-01 외부 지령 보호 기능
옵션: 기능:
•
파라미터 6-20 단자 54
최저 전압
.
•
파라미터 6-22 단자 54
최저 전류
.
이 기능은 또한
파라미
터 6-00 외부 지령 보호 시간
에
서 정의한 시간 동안 활성화될 수
있습니다. 타임아웃이 동시다발적
으로 발생하는 경우에 타임아웃
기능의 우선순위는 다음과 같습니
다.
1.
파라미터 6-01 외부 지
령 보호 기능
.
2.
파라미터 8-04 컨트롤
타임아웃 기능
.
[0] * 꺼짐
[1] 출력 고정 현재 값에서 고정. 외부 지령 보호
시간은 출력 고정에 적용하지 않
습니다.
[2] 정지 현재 속도를 정지로 전환.
[3] 조그 현재 속도를 조그 속도로 전환.
[4] 최대 속도 현재 속도를 최대 속도로 전환.
[5] 정지 및 트립 현재 속도를 다음 트립 시 정지로
전환.
Ref./Feedback
[RPM]
Analog input
High Ref./
Feedb. Value'
Low Ref./
Feedb. Value'
'Low Voltage'or
'Low Current'
'High Voltage'or
'High Current'
130BA038.13
1 V 5 V 10 V
300
600
900
1200
1500
[V]
150
Par 6-xx
Par 6-xx
Par 6-xx
Par 6-xx
파라미터 설명 프로그래밍 지침서
3.8 파라미터 6-** 아날로그 입/출력
3.8.1 6-0* 아날로그I/O모드
아날로그 입/출력 구성을 설정하기 위한 파라미터 그룹
입니다.
AC 드라이브는 2개의 아날로그 입력(단자 53과 54)을
단자 53.
•
단자 54.
•
아날로그 입력은 전압(0-10V) 또는 전류 입력(0/4–20
mA)을 자유롭게 할당할 수 있습니다.
주의 사항
써미스터는 아날로그 입력 또는 디지털 입력에 연결할
수 있습니다.
3 3
MG20OB39 Danfoss A/S © 05/2018 All rights reserved. 97
그림 3.34 외부 지령 보호 조건
6-02 화재 모드 지령 결함 시 타임아웃 기능
옵션: 기능:
비상 모드가 활성화된 경우의 타
임아웃 기능을 선택합니다. 아날
로그 입력의 입력 신호가
파라미
터 6-00 외부 지령 보호 시간
에
서 정의한 시간 동안 최저 값의
50% 미만인 경우, 이 파라미터에
서 설정한 기능이 활성화됩니다.
[0] * 꺼짐
[1] 출력 고정 현재 값에서 고정.
[2] 정지 현재 속도를 정지로 전환.
[3] 조그 현재 속도를 조그 속도로 전환.
[4] 최대 속도 현재 속도를 최대 속도로 전환.
6-10 단자 53 최저 전압
범위: 기능:
0.07 V* [ 0 - par.
6-11 V]
주의 사항
입력 신호 결함 알람을 작동하
려면
파라미터 6-10 단자 53
최저 전압
에 1 V 이상의 값이
있어야 합니다.
최저 전압 값을 입력합니다. 이 아
날로그 입력 범위 설정값은
파라
미터 6-14 단자 53 최저 지령/피
드백 값
에서 설정한 최저 지령 피
드백 값과 일치해야 합니다.
6-11 단자 53 최고 전압
범위: 기능:
10 V* [ par.
6-10 - 10
V]
최고 전압 값을 입력합니다. 이 아
날로그 입력 범위 설정값은
파라
미터 6-15 단자 53 최고 지령/피
드백 값
에서 설정한 최고 지령 피
드백 값과 일치해야 합니다.
6-12 단자 53 최저 전류
범위: 기능:
4 mA* [ 0 - par.
6-13 mA]
최저 전류 값을 입력합니다. 이 지
령 신호는
파라미터 6-14 단자
53 최저 지령/피드백 값
에서 설정
한 최저 지령 피드백 값과 일치해
야 합니다. >2 mA에서 값을 설정
하여
파라미터 6-01 외부 지령
보호 기능
의 외부 지령 보호 기능
을 활성화합니다.
6-13 단자 53 최고 전류
범위: 기능:
20 mA* [ par.
6-12 - 20
mA]
파라미터 6-15 단자 53 최고 지
령/피드백 값
에서 설정한 최고 지
령/피드백 값과 일치하는 최고 전
류 값을 입력합니다.
6-14 단자 53 최저 지령/피드백 값
범위: 기능:
0
Reference
Feedback
Unit*
[-999999.99
9 -
999999.999
ReferenceFe
edbackUnit]
파라미터 6-10 단자 53 최저 전
압과 파라미터 6-12 단자 53 최
저 전류
에 설정된 최저 전압/최저
전류 값에 대응하는 아날로그 입
력 범위 조정 값을 입력합니다.
6-15 단자 53 최고 지령/피드백 값
범위: 기능:
Size
related* [-999999.99
9 -
999999.999
ReferenceFe
edbackUnit]
파라미터 6-11 단자 53 최고 전
압 및파라미터 6-13 단자 53 최
고 전류
에 설정된 최고 전압/최
고 전류 값에 대응하는 아날로그
입력 범위 조정 값을 입력합니다
6-16 단자 53 필터 시정수
범위: 기능:
0.005 s* [0.005 10 s]
주의 사항
모터가 운전하는 동안에는 이
파라미터를 설정할 수 없습니
다.
필터 시정수를 입력합니다. 이는
단자 53의 전기적 노이즈를 줄이
는데 필요한 1차 디지털 저주파
통과 필터 시간입니다. 값이 크면
공진을 더 많이 감소시키기는 하
지만 필터를 통한 지연도 함께 증
가합니다.
6-17 단자 53 입력 신호 결함
옵션: 기능:
이 파라미터를 사용하면 입력 신
호 결함 감시를 비활성화할 수 있
습니다. 예를 들어, 이 파라미터는
아날로그 출력이 분산형 입출력
시스템의 일환으로 사용되는 경우
(예컨대, AC 드라이브와 관련된
제어 기능의 일환이 아니라 외부
제어 시스템에 데이터를 공급하는
경우)에 사용됩니다.
[0] 사용안함
[1] * 사용함
파라미터 설명
VLT® AQUA Drive FC 202
33
3.8.2 6-1* 아날로그 입력 1
아날로그 입력 1(단자 53)의 범위 설정과 한계를 구성
하는 파라미터입니다.
98 Danfoss A/S © 05/2018 All rights reserved. MG20OB39
 Loading...
Loading...