

ENGINEERING TOMORROW
Guia de Programação
VLT® AQUA Drive FC 202
Versão do software: 3.30
vlt-drives.danfoss.com


Índice Guia de Programação
Índice
1 Introdução
1.1 Objetivo do Manual
1.2 Recursos adicionais
1.3 Versão do Software
1.4 Aprovações
1.5 Símbolos
1.6 Denições
1.6.1 Conversor de Frequência 4
1.6.2 Entrada 4
1.6.3 Motor 5
1.6.4 Referências 5
1.6.5 Diversos 6
1.7 Abreviações, Símbolos e Convenções
1.8 Segurança
1.9 Fiação Elétrica
2 Como Programar
2.1 O Painel de Controle Local Gráco e Numérico
4
4
4
4
4
4
4
8
8
10
13
13
2.2 Como Programar no LCP Gráco
2.2.1 Display do LCP 14
2.2.2 Transferência Rápida das Programações de Parâmetros entre Múltiplos Conversores de Frequência 17
2.2.3 Modo Display 17
2.2.4 Modo Display - Seleção de leituras 17
2.2.5 Setup de Parâmetro 18
2.2.6 Funções da Tecla Quick Menu (Menu Rápido) 18
2.2.7 Quick Menu, Q3 Setups da Função 19
2.2.8 Quick Menu, Q4 SmartStart 21
2.2.9 Modo Main Menu (Menu Principal) 21
2.2.10 Seleção de Parâmetro 21
2.2.11 Alteração de Dados 21
2.2.12 Alterando um Valor do Texto 21
2.2.13 Alterar um valor de dados 22
2.2.14 Alteração dos Valores Numéricos de Dados Innitamente Variáveis 22
2.2.15 Valor, passo a passo 22
2.2.16 Leitura e programação de parâmetros indexados 22
13
2.2.17 Como programar no Painel de controle local numérico 23
2.2.18 Teclas do LCP 24
3 Descrição do Parâmetro
MG20OB28 Danfoss A/S © 05/2018 Todos os direitos reservados. 1
26
Índice
VLT® AQUA Drive FC 202
3.1 Seleção de Parâmetro
3.2 Parâmetros 0-** Operação/Display
3.3 Parâmetros 1-** Carga e Motor
3.4 Parâmetros 2-** Freios
3.5 Parâmetros 3-** Referência/Rampas
3.6 Parâmetros 4-** Limites/Advertêncs
3.7 Parâmetros 5-** Entrada/Saída Digital
3.8 Parâmetros 6-** Entrad/Saíd Analóg
3.9 Parâmetros 8-** Com. e Opcionais
3.10 Parâmetros 9-** PROFIBUS+
3.11 Parâmetros 10-** CAN Fieldbus
3.12 Parâmetros 13-** Smart Logic
3.13 Parâmetros 14-** Funções Especiais
3.14 Parâmetros 15-** Informação do VLT
3.15 Parâmetros 16-** Leituras de Dados
3.16 Parâmetros 18-** Leituras de Dados 2
3.17 Parâmetros 20-** Malha Fechada do FC
26
28
44
70
75
82
87
105
116
130
130
134
158
170
180
188
191
3.18 Parâmetros 21-** Malha Fechada Estendida
3.19 Parâmetros 22-** Funções da Aplicação
3.20 Parâmetros 23-** Funções Baseadas no Tempo
3.21 Parâmetros 24-** Funções de Aplicação 2
3.22 Parâmetros 25-** Controlador em Cascata
3.23 Parâmetros 26-** Opção E/S Analógica MCB 109
3.24 Parâmetros 27-** Cascade CTL Option
3.25 Parâmetros 29-** Water Application Functions
3.26 Parâmetros 30-** Recursos Especiais
3.27 Parâmetros 31-** OpcionlBypass
3.28 Parâmetros 35-** Opcional de Entrada do Sensor
4 Listas de Parâmetros
4.1 Opções de Parâmetro
4.1.1 Congurações Padrão 298
4.1.2 0-** Operação/Display 299
4.1.3 1-** Carga e Motor 301
4.1.4 2-** Freios 303
203
212
229
242
248
262
269
284
293
294
295
298
298
4.1.5 3-** Referência/Rampas 304
4.1.6 4-** Limites/Advertêncs 305
4.1.7 5-** Entrad/Saíd Digital 306
4.1.8 6-** Entrad/Saíd Analóg 308
4.1.9 8-** Com. e Opcionais 310
4.1.10 9-** PROFIdrive 311
2 Danfoss A/S © 05/2018 Todos os direitos reservados. MG20OB28
Índice Guia de Programação
4.1.11 10-** Fieldbus CAN 312
4.1.12 13-** Smart Logic 313
4.1.13 14-** Funções Especiais 314
4.1.14 15-** Informação do VLT 316
4.1.15 16-** Leitura de Dados 318
4.1.16 18-** Informações e Leituras 320
4.1.17 20-** Malha Fechada do Drive 321
4.1.18 21-** Ext. Malha Fechada 322
4.1.19 22-** Aplic. Funções 324
4.1.20 23-** Funções Baseadas no Tempo 326
4.1.21 24-** Aplic. Funções 2 327
4.1.22 25-** Controlador em Cascata 327
4.1.23 26-** Opção E/S Analógica 328
4.1.24 29-** Funções de Aplicação Hidráulica 330
4.1.25 30-** Recursos especiais 332
4.1.26 31-** Opcionais de Bypass 332
4.1.27 35-** Opcional de entrada do sensor 332
5 Resolução de Problemas
5.1 Mensagens de Status
5.1.1 Mensagens de advertência/alarme 334
Índice
334
334
341
MG20OB28 Danfoss A/S © 05/2018 Todos os direitos reservados. 3
Introdução
VLT® AQUA Drive FC 202
11
1 Introdução
1.1 Objetivo do Manual
O guia de programação fornece as informações necessárias
para programar o conversor de frequência em uma
diversidade de aplicações.
1.5 Símbolos
Os seguintes símbolos são usados neste guia:
ADVERTÊNCIA
VLT® é marca registrada.
1.2 Recursos adicionais
Outros recursos estão disponíveis para entender a
programação e as funções avançadas do conversor de
frequência.
As Instruções de Utilização do VLT® AQUA Drive FC
•
202 descrevem as instalações mecânica e elétrica
do conversor de frequência.
O Guia de Design do VLT® AQUA Drive FC 202
•
fornece informações detalhadas sobre recursos e
funcionalidades para projetar sistemas de
controle de motores.
Instruções para operação com equipamento
•
opcional.
Publicações e manuais complementares estão disponíveis
em Danfoss. Consulte drives.danfoss.com/knowledge-center/
technical-documentation/ para obter as listas.
Versão do Software
1.3
Versão do software: 3.30
O número da versão de software pode ser lido no
parâmetro 15-43 Versão de Software.
Indica uma situação potencialmente perigosa que possa
resultar em morte ou ferimentos graves.
CUIDADO
Indica uma situação potencialmente perigosa que possa
resultar em ferimentos menores ou moderados. Também
pode ser usado para alertar contra práticas inseguras.
AVISO!
Indica informações importantes, incluindo situações que
podem resultar em danos ao equipamento ou à
propriedade.
1.6 Denições
1.6.1 Conversor de Frequência
I
VLT,MAX
Corrente de saída máxima.
I
VLT,N
Corrente de saída nominal fornecida pelo conversor de
frequência.
U
VLT,MAX
Tensão de saída máxima.
1.6.2 Entrada
1.4 Aprovações
4 Danfoss A/S © 05/2018 Todos os direitos reservados. MG20OB28
Comando de controle
Dê partida e pare o motor conectado com o LCP e
entradas digitais.
As funções estão divididas em dois grupos.
As funções do grupo 1 têm prioridade mais alta que as do
grupo 2.
Grupo 1 Reinicializar, parada por inércia, reinicializar e
parada por inércia, parada rápida, freio CC,
parada, a tecla [OFF].
Grupo 2 Partida, partida por pulso, reversão, partida
reversa, jog, congelar frequência de saída.
Tabela 1.1 Grupos de função
175ZA078.10
Arranque
RPM
Torque
Introdução Guia de Programação
1.6.3 Motor
Motor em funcionamento
Torque gerado no eixo de saída e velocidade de 0 RPM até
a velocidade máxima no motor.
f
JOG
Frequência do motor quando a função jog é ativada (por
meio dos terminais digitais).
f
M
Frequência do motor.
f
MAX
Frequência do motor máxima.
f
MIN
Frequência do motor mínima.
f
M,N
Frequência nominal do motor (dados da plaqueta de
identicação).
I
M
Corrente do motor (real).
I
M,N
Corrente nominal do motor (dados da plaqueta de identi-
cação).
n
M,N
Velocidade nominal do motor (dados da plaqueta de
identicação).
n
s
Velocidade do motor síncrono.
2 × par . 1 − 23 × 60s
ns=
n
slip
Deslizamento do motor.
P
M,N
Potência nominal do motor (dados da plaqueta de identicação em kW ou hp).
T
M,N
Torque nominal (motor).
U
M
Tensão instantânea do motor.
U
M,N
Tensão nominal do motor (dados da plaqueta de identi-
cação).
par . 1 − 39
Torque de segurança
Ilustração 1.1 Torque de segurança
η
VLT
A eciência do conversor de frequência é denida como a
relação entre a potência de saída e a de entrada.
Comando inibidor da partida
Um comando de parada que pertence aos comandos de
controle do Grupo 1 - consulte Tabela 1.1.
Comando de parada
Um comando de parada que pertence aos comandos de
controle do Grupo 1 - consulte Tabela 1.1.
1.6.4 Referências
Referência analógica
Um sinal transmitido para as entradas analógicas 53 ou 54
(tensão ou corrente).
Referência binária
Um sinal transmitido para a porta de comunicação serial.
Referência predenida
Uma referência predenida a ser programada de -100% a
+100% da faixa de referência. Seleção de 8 referências
predenidas via terminais digitais.
Referência de pulso
É um sinal de pulso transmitido às entradas digitais
(terminal 29 ou 33).
Ref
MÁX
Determina a relação entre a entrada de referência com
valor de escala total de 100% (tipicamente 10 V, 20 mA) e
a referência resultante. O valor máximo de referência está
programado em parâmetro 3-03 Referência Máxima.
Ref
MÍN
Determina a relação entre a entrada de referência com
valor de escala total de 0% (tipicamente 0 V, 0 mA, 4 mA)
e a referência resultante. O valor mínimo de referência está
programado em parâmetro 3-02 Referência Mínima.
1 1
MG20OB28 Danfoss A/S © 05/2018 Todos os direitos reservados. 5
Introdução
VLT® AQUA Drive FC 202
11
1.6.5 Diversos
Entradas analógicas
As entradas analógicas são utilizadas para controlar várias
funções do conversor de frequência.
Há 2 tipos de entradas analógicas:
Entrada de corrente, 0–20 mA e 4–20 mA
Entrada de tensão, -10 V CC a +10 V CC.
Saídas analógicas
As saídas analógicas podem fornecer um sinal de 0–20 mA,
4–20 mA.
Adaptação automática do motor, AMA
O algoritmo AMA determina os parâmetros elétricos para o
motor conectado quando parado.
Resistor de frenagem
O resistor de frenagem é um módulo capaz de absorver a
potência de frenagem gerada na frenagem regenerativa.
Essa potência de frenagem regenerativa aumenta a tensão
do barramento CC e um circuito de frenagem garante que
a potência seja transmitida ao resistor de frenagem.
Características de TC
Características do torque constante usadas por todas as
aplicações tais como esteiras, bombas de deslocamento e
guindastes.
Entradas digitais
As entradas digitais podem ser utilizadas para controlar
várias funções do conversor de frequência.
Saídas digitais
O conversor de frequência apresenta 2 saídas de estado
sólido que podem fornecer um sinal de 24 V CC (máximo
de 40 mA).
DSP
Processador de sinal digital.
ETR
O relé térmico eletrônico é um cálculo da carga térmica
baseado na carga atual e no tempo. Sua
uma estimativa da temperatura do motor.
HIPERFACE
HIPERFACE® é uma marca registrada da Stegmann.
Inicialização
Se a inicialização for executada (parâmetro 14-22 Modo
Operação), o conversor de frequência retornará à
conguração padrão.
Ciclo útil intermitente
Uma característica útil intermitente refere-se a uma
sequência de ciclos úteis. Cada ciclo consiste de um
período com carga e outro sem carga. A operação pode
ser de funcionamento periódico ou de funcionamento
aperiódico.
LCP
O painel de controle local compõe uma interface completa
para controle e programação do conversor de frequência.
O painel de controle é desconectável e pode ser instalado
®
nalidade é fazer
a até 3 m (10 pés) do conversor de frequência, ou seja, em
um painel frontal com o kit de instalação opcional.
NLCP
O painel de controle local numérico faz a interface para o
controle e programação do conversor de frequência. O
visor é numérico e o painel é usado para mostrar os
valores de processo. O NLCP não tem funções de armazenamento e cópia.
lsb
É o bit menos signicativo.
msb
É o bit mais signicativo.
MCM
Abreviado para mille circular mil (milhares de polegadas
circulares), uma unidade de medida dos EUA para seção
transversal do cabo. 1 MCM=0,5067 mm2.
Parâmetros Online/Oine
As alterações nos parâmetros online são ativadas imediatamente após o valor dos dados ser alterado. Pressione
[OK] para ativar alterações em parâmetros oine.
PID de processo
O controle do PID mantém a velocidade, a pressão e a
temperatura necessárias, ajustando a frequência de saída
para corresponder à variação de carga.
PCD
Dados de controle de processo.
Ciclo de energização
Desligue a rede elétrica até o display (LCP) car escuro,
depois ligue novamente.
Entrada de pulso/encoder incremental
É um transmissor digital de pulso, externo, utilizado para
retornar informações sobre a velocidade do motor. O
encoder é utilizado em aplicações onde há necessidade de
extrema precisão no controle da velocidade.
RCD
Dispositivo de corrente residual.
Setup
Salve a programação do parâmetro em 4 setups. Alterne
entre os quatro setups de parâmetros e edite um setup
enquanto outro estiver ativo.
SFAVM
Padrão de chaveamento chamado modulação vetorial
assíncrona orientada ao uxo do estator
(parâmetro 14-00 Padrão de Chaveamento).
Compensação de escorregamento
O conversor de frequência compensa o deslizamento do
motor, acrescentando um suplemento à frequência que
acompanha a carga medida do motor, mantendo a
velocidade do motor praticamente constante.
6 Danfoss A/S © 05/2018 Todos os direitos reservados. MG20OB28
Introdução Guia de Programação
SLC
O SLC (smart logic control) é uma sequência de ações
denida pelo usuário que são executadas quando os
eventos associados denidos pelo usuário são avaliados
como verdadeiros pelo SLC. (Consulte
capétulo 3.12 Parâmetros 13-** Smart Logic).
STW
Status word.
Barramento padrão do FC
Inclui o barramento RS485 com o Protocolo Danfoss FC ou
o protocolo MC. Consulte o parâmetro 8-30 Protocolo.
THD
A distorção harmônica total determina a contribuição total
das harmônicas.
Termistor
Um resistor dependente da temperatura instalado no
conversor de frequência ou no motor.
Desarme
Um estado que ocorre em situações de falha. Por exemplo,
se o conversor de frequência está em superaquecimento
ou quando o conversor de frequência está protegendo o
motor, processo ou mecanismo. O conversor de frequência
impede a nova partida até que a causa da falha tenha
desaparecido. Para cancelar o estado de desarme, reinicie o
conversor de frequência. Não use o estado de desarme
para segurança pessoal.
Bloqueio por desarme
O conversor de frequência entra neste estado em situações
de falha para se proteger. O conversor de frequência
requer intervenção física, como por exemplo quando há
curto-circuito na saída. Um bloqueio por desarme só pode
ser cancelado desligando a rede elétrica, eliminando a
causa da falha e reconectando o conversor de frequência.
A reinicialização é impedida até que o estado de desarme
seja cancelado, ativando a reinicialização ou, às vezes,
sendo programado para reinicializar automaticamente. Não
use o estado de desarme para segurança pessoal.
Características de VT
Características de torque variável, utilizado em bombas e
ventiladores.
+
VVC
Se comparado com o controle padrão da relação tensão/
frequência, o controle vetorial de tensão (VVC+) melhora a
dinâmica e a estabilidade, tanto quando a referência da
velocidade é mudada quanto em relação ao torque de
carga.
AVM a 60°
60° modulação vetorial assíncrona (parâmetro 14-00 Padrão
de Chaveamento).
Fator de potência
O fator de potência é a relação entre I1 e I
Fator depotência =
3xUxI1cosϕ
3xUxI
RMS
RMS
.
O fator de potência para controle trifásico:
Fator depotência =
I1xcosϕ1
I
RMS
=
I
1
desdecosϕ1 = 1
I
RMS
O fator de potência indica em que intensidade o conversor
de frequência oferece uma carga na alimentação de rede
elétrica.
Quanto menor o fator de potência, maior será a I
RMS
para o
mesmo desempenho em kW.
I
RMS
=
I
+ I
1
5
+ I
2
+ .. + I
7
2
n
2
2
Além disso, um fator de potência alto indica que as
diferentes correntes harmônicas são baixas.
As bobinas CC nos conversores de frequência geram um
fator de potência alto, o que minimiza a carga imposta na
alimentação de rede elétrica.
Posição de destino
A posição de destino nal especicada pelos comandos de
posicionamento. O gerador de perl usa esta posição para
calcular o perl da velocidade.
Posição comandada
A referência da posição real calculada pelo gerador de
perl. O conversor de frequência usa a posição comandada
como setpoint para a posição PI.
Posição real
A posição real de um encoder ou um valor que o controle
do motor calcula em malha aberta. O conversor de
frequência usa a posição real como feedback para a
posição PI.
Erro de posição
O erro de posição é a diferença entre a posição real e a
posição comandada. O erro de posição é a entrada para o
controlador PI da posição.
Unidade de posição
A unidade física para os valores de posição.
1 1
MG20OB28 Danfoss A/S © 05/2018 Todos os direitos reservados. 7
Introdução
VLT® AQUA Drive FC 202
11
1.7 Abreviações, Símbolos e Convenções
°C
°F
CA Corrente alternada
AEO Otimização automática de energia
AWG American Wire Gauge
AMA Adaptação automática do motor
CC Corrente contínua
EMC Compatibilidade eletromagnética
ETR Relé térmico eletrônico
f
M,N
FC Conversor de frequência
I
INV
I
LIM
I
M,N
I
VLT,MAX
I
VLT,N
IP Proteção de entrada
LCP Painel de controle local
MCT
n
s
P
M,N
PELV
PCB Placa de circuito impresso
Motor PM Motor com ímã permanente
PWM Modulação por largura de pulso
RPM Rotações por minuto
Regen Terminais regenerativos
T
LIM
U
M,N
Graus Celsius
Graus Fahrenheit
Frequência nominal do motor
Corrente nominal de saída do inversor
Limite de corrente
Corrente nominal do motor
Corrente de saída máxima
Corrente de saída nominal fornecida
pelo conversor de frequência
Ferramenta de controle de
movimento
Velocidade de sincronização do motor
Potência nominal do motor
Tensão de proteção extremamente
baixa
Limite de torque
Tensão nominal do motor
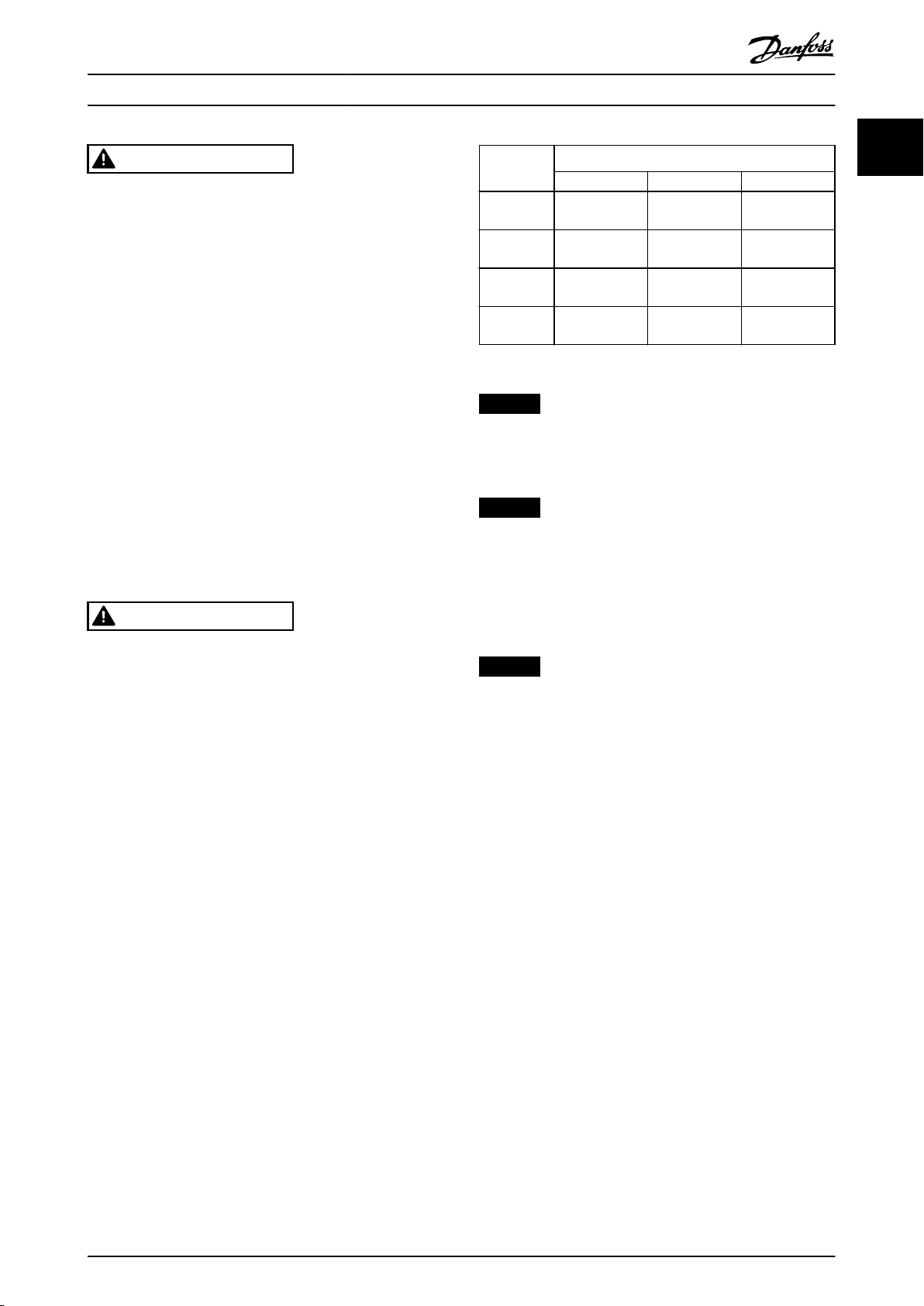
Normas de segurança
Desconecte a alimentação de rede elétrica do
•
conversor de frequência sempre que for
necessário realizar serviços de manutenção.
Verique se a alimentação da rede foi desligada e
que haja passado tempo suciente, antes de
remover os plugues do motor e da alimentação
de rede elétrica. Para obter informações sobre o
tempo de descarga, consulte Tabela 1.2.
[O] não desconecta a alimentação de rede
•
elétrica e, portanto, não deve ser usado como um
interruptor de segurança.
Aterre o equipamento corretamente. Proteja o
•
usuário contra a tensão de alimentação e o motor
contra sobrecarga, de acordo com as normas
nacionais e locais aplicáveis.
A corrente de fuga para o terra excede 3,5 mA.
•
A proteção contra sobrecarga do motor não está
•
incluída na conguração de fábrica. Se esta
função for necessária, programe
parâmetro 1-90 Proteção Térmica do Motor para o
valor dos dados [4] Desarme por ETR 1 ou o valor
dos dados [3] Advertência do ETR 1.
Não remova os plugues do motor, nem da
•
alimentação da rede, enquanto o conversor de
frequência estiver ligado a esta rede. Verique se
a alimentação da rede foi desligada e que haja
passado tempo suciente, antes de remover o
motor e os plugues da rede elétrica.
O conversor de frequência tem mais fontes de
•
tensão do que L1, L2 e L3 quando a divisão de
carga (ligação do barramento CC) ou 24 V CC
externo está instalado. Verique se todas as
fontes de tensão foram desligadas e se já
decorreu o tempo necessário, antes de iniciar o
1.8 Segurança
trabalho de reparo. Para obter informações sobre
o tempo de descarga, consulte Tabela 1.2.
ADVERTÊNCIA
ALTA TENSÃO
Os conversores de frequência contêm alta tensão quando
estão conectados à entrada da rede elétrica CA,
alimentação CC ou Load Sharing. Negligenciar em
realizar a instalação, partida e manutenção por pessoal
qualicado pode resultar em ferimentos graves ou fatais.
Somente pessoal qualicado deverá realizar a
•
instalação, partida e manutenção.
Antes de realizar qualquer serviço de
•
manutenção ou outro serviço, use um
dispositivo de medição de tensão apropriado
para assegurar que não há tensão restante no
conversor de frequência.
8 Danfoss A/S © 05/2018 Todos os direitos reservados. MG20OB28
Introdução Guia de Programação
ADVERTÊNCIA
PARTIDA ACIDENTAL
Quando o conversor de frequência estiver conectado à
rede elétrica CA, alimentação CC ou load sharing, o
motor pode iniciar a qualquer momento. A partida
acidental durante a programação, serviço ou o serviço de
manutenção pode resultar em morte, ferimentos graves
ou danos à propriedade. O motor pode dar partida por
meio de um interruptor externo, um comando do
eldbus, um sinal de referência de entrada do LCP ou
após uma condição de falha eliminada.
Para impedir a partida acidental do motor:
Desconecte o conversor de frequência da rede
•
elétrica.
Pressione [O/Reset] no LCP antes de programar
•
os parâmetros.
Conecte completamente a ação e monte o
•
conversor de frequência, o motor e qualquer
equipamento acionado antes de conectar o
conversor de frequência à rede elétrica CA,
alimentação CC ou load sharing.
ADVERTÊNCIA
TEMPO DE DESCARGA
O conversor de frequência contém capacitores de
barramento CC, que podem permanecer carregados
mesmo quando o conversor de frequência não está
energizado. Pode haver alta tensão presente mesmo
quando as luzes LED de advertência estiverem apagadas.
Se o tempo especicado após a energia ter sido
desligada não for aguardado para executar ou serviço de
manutenção, isto pode resultar em morte ou ferimentos
graves.
Pare o motor.
•
Desconecte as fontes de alimentação da rede
•
elétrica CA e do barramento CC, incluindo os
backups de bateria, UPS e conexões do
barramento CC para os outros conversores de
frequência.
Desconecte ou trave o motor PM.
•
Aguarde os capacitores se descarregarem por
•
completo. O tempo mínimo de espera é especicado em Tabela 1.2 e também é visível na
plaqueta de identicação na parte superior do
conversor de frequência.
Antes de realizar qualquer serviço de
•
manutenção, use um dispositivo de medição de
tensão apropriado para ter certeza de que os
capacitores estejam completamente descarregados.
Tensão [V]
200–240 0,25–3,7 kW
380–480 0,37–7,5 kW
525–600 0,75–7,5 kW
525–690 – 1,1–7,5 kW
Tabela 1.2 Tempo de descarga
Tempo de espera mínimo (minutos)
4 7 15
– 5,5–45 kW
(0,34–5 hp)
– 11–90 kW
(0,5–10 hp)
– 11–90 kW
(1–10 hp)
(1,5–10 hp)
(7,5–60 hp)
(15–121 hp)
(15–121 hp)
11–90 kW
(15–121 hp)
AVISO!
Ao usar o Safe Torque O, siga sempre as instruções
contidas nas Instruções de Utilização dos Conversores de
Frequência VLT® - Safe Torque O.
AVISO!
Os sinais de controle provenientes ou internos do
conversor de frequência podem, em casos raros, ser
ativados por engano, podem ser atrasados ou podem
simplesmente não ocorrer. Quando usados em situações
em que a segurança é fundamental, não deve-se conar
somente nesses sinais de controle.
AVISO!
Situações perigosas devem ser identicadas pelo
construtor/integrador da máquina que é o responsável
por levar em consideração os meios preventivos
necessários. Mais dispositivos de monitoramento e
proteção podem ser incluídos, sempre de acordo com as
normas de segurança nacionais válidas; por exemplo, a
legislação acerca de ferramentas mecânicas, normas para
a prevenção de acidentes.
Modo de proteção
Quando um limite do hardware na corrente do motor ou
na tensão do barramento CC for excedido, o conversor de
frequência entra no modo de proteção. O modo de
proteção signica uma mudança da estratégia de
modulação PWM e uma frequência de chaveamento baixa
para minimizar as perdas. Isto continua por 10 s após a
última falha e aumenta a conabilidade e a robustez do
conversor de frequência, enquanto restabelece controle
total do motor.
1 1
MG20OB28 Danfoss A/S © 05/2018 Todos os direitos reservados. 9
*
91 (L1)
92 (L2)
93 (L3)
PE
88 (-)
89 (+)
50 (+10 V OUT)
53 (A IN)
54 (A IN)
55 (COM A IN)
0/4-20 mA
12 (+24 V OUT)
13 (+24 V OUT)
18 (D IN)
20 (COM D IN)
15 mA 200 mA
(U) 96
(V) 97
(W) 98
(PE) 99
(COM A OUT) 39
(A OUT) 42
0/4-20 mA
03
0-10 V DC
+10 V DC
0-10 V DC
0/4-20 mA
240 V AC, 2 A
24 V DC
02
01
05
04
06
240 V AC, 2 A
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
19 (D IN)
24 V (NPN)
0 V (PNP)
27
24V
0V
(D IN/OUT)
0 V (PNP)
24 V (NPN)
(D IN/OUT)
0V
24V
29
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
33 (D IN)
32 (D IN)
1 2
ON
S201
ON
21
S202
ON=0-20 mA
OFF=0-10 V
95
400 V AC, 2 A
P 5-00
(R+) 82
(R-) 81
37 (D IN)
+ - + -
e30be257.11
(P RS485) 68
(N RS485) 69
(COM RS485) 61
0 V
5V
S801
RS485
RS485
21
ON
S801
3-phase
power
input
DC bus
Switch mode
power supply
Motor
Analog output
Interface
relay1
relay2
ON=Terminated
OFF=Open
Brake
resistor
(NPN) = Sink
(PNP) = Source
Introdução
VLT® AQUA Drive FC 202
11
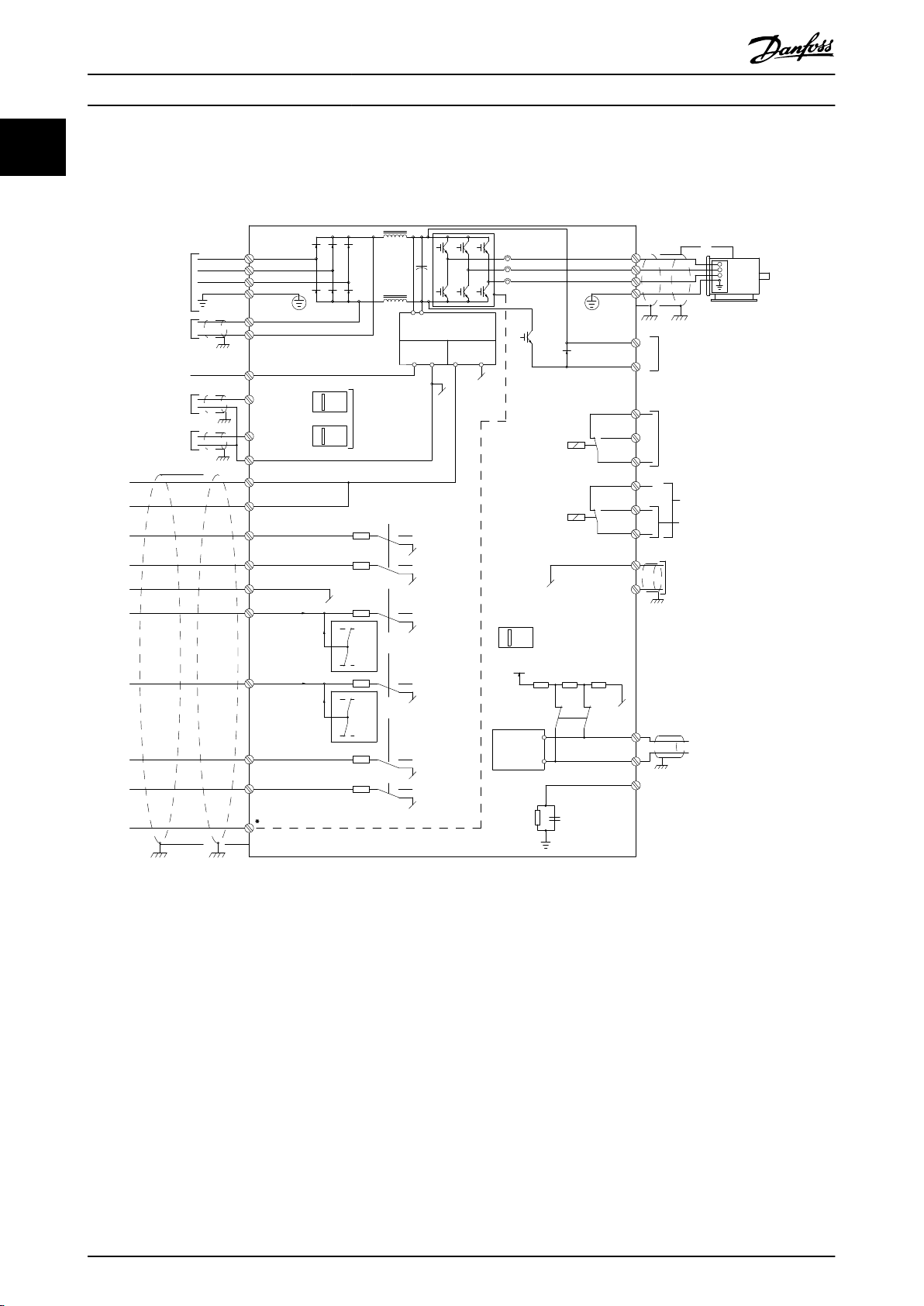
1.9 Fiação Elétrica
1.9.1 Fiação elétrica - Cabos de controle
Ilustração 1.2 Diagrama esquemático de ação básica
A = Analógica, D = Digital
O Terminal 37 é usado para Safe Torque O. Para obter as instruções de instalação de Safe Torque O, consulte as Instruções
de Utilização dos VLT® -Frequency Converters - Safe Torque O.
* O terminal 37 não está incluído no FC 202 (exceto gabinete tamanho A1). O relé 2 e o terminal 29 não têm nenhuma
função no VLT® AQUA Drive FC 202.
Cabos de controle longos e sinais analógicos podem, em
raras ocasiões e dependendo da instalação, resultar em
malhas de aterramento de 50/60 Hz devido ao ruído
proveniente dos cabos de alimentação de rede elétrica.
Se isto acontecer, é possível que haja a necessidade de
romper a blindagem ou inserir um capacitor de 100 nF
entre a blindagem e o gabinete.
10 Danfoss A/S © 05/2018 Todos os direitos reservados. MG20OB28
Conecte as entradas e saídas digitais e analógicas separadamente às entradas comuns (terminais 20, 55 e 39) do
conversor de frequência para evitar que correntes de
aterramento de ambos os grupos afetem outros grupos.
Por exemplo, o chaveamento na entrada digital pode
interferir no sinal da entrada analógica.
12 13 18 19 27 29 32 33 20 37
+24 VCC
0 VCC
130BT106.10
PNP (Origem)
Cabeamento entrada digital
NPN (Dissipador)
Cabeamento entrada digital
12 13 18 19 27 29 32 33 20 37
+24 VCC
0 VCC
130BT107.11
130BA681.10
Introdução Guia de Programação
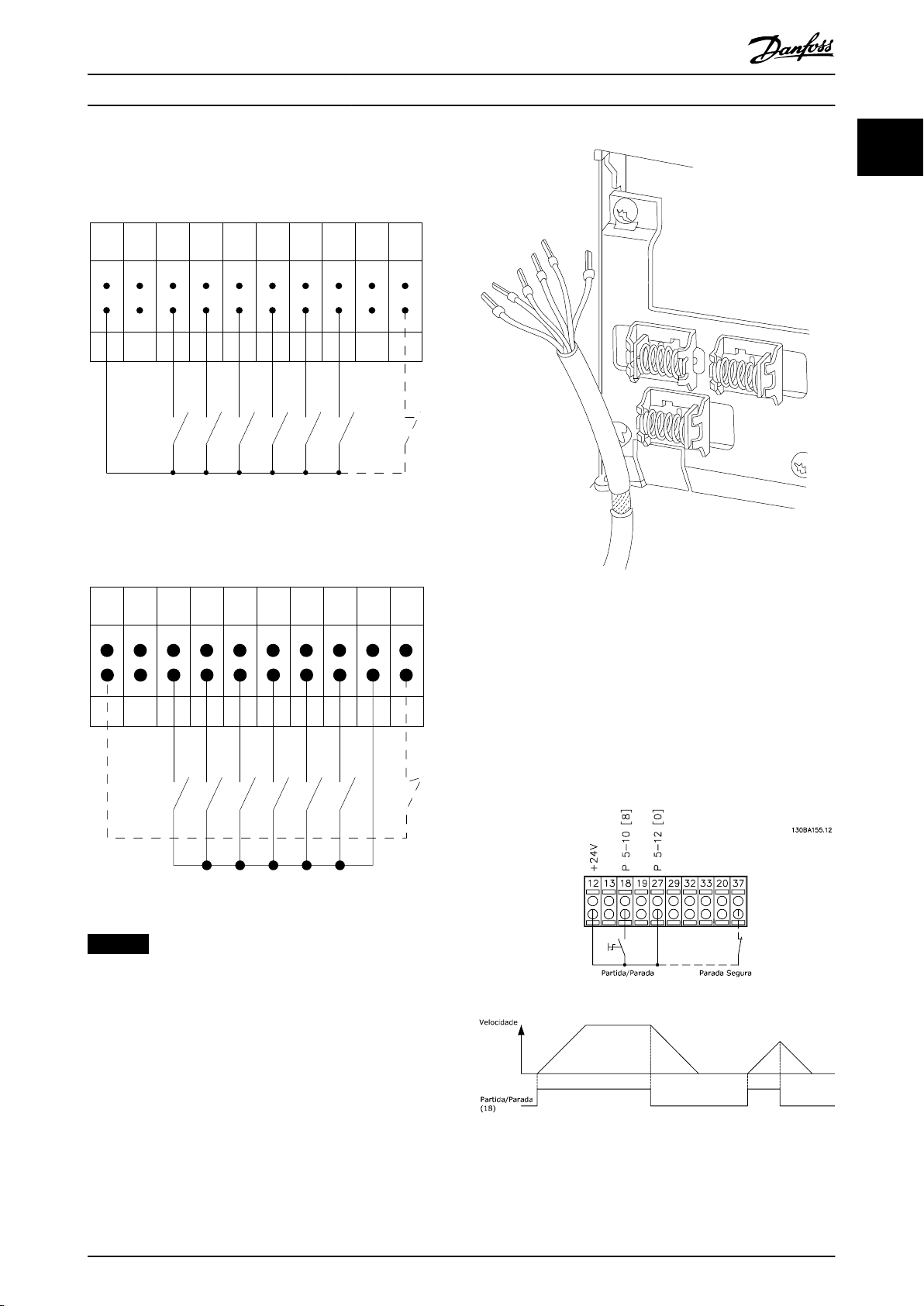
Polaridade da entrada dos terminais de controle
Ilustração 1.3 PNP (Origem)
1 1
Ilustração 1.5 Aterramento de cabos de controle blindados/
reforçados
Ilustração 1.4 NPN (Dissipador)
AVISO!
Os cabos de controle devem ser blindados/reforçados.
Consulte a seção Aterramento de cabos de controle
blindados no guia de design para saber a terminação
correta dos cabos de controle.
1.9.2 Partida/Parada
Terminal 18 = Parâmetro 5-10 Terminal 18 Entrada digital [8]
Partida.
Terminal 27 = Parâmetro 5-12 Terminal 27, Entrada Digital
[0] Sem Operação (padrão [2] Paradp/inérc,reverso).
Terminal 37 = Safe Torque O (quando estiver disponível).
Ilustração 1.6 Partida/Parada
MG20OB28 Danfoss A/S © 05/2018 Todos os direitos reservados. 11
12
18
27
29
32
37
+24V
Par. 5-10
Par. 5-12
Par. 5-13
Par. 5-14
130BA021.12
Velocidade RPM
P 6-15
Tensão ref.
P 6-11 10 V
+10 V/30 mA
1 kΩ
130BA154.11
Introdução
VLT® AQUA Drive FC 202
11
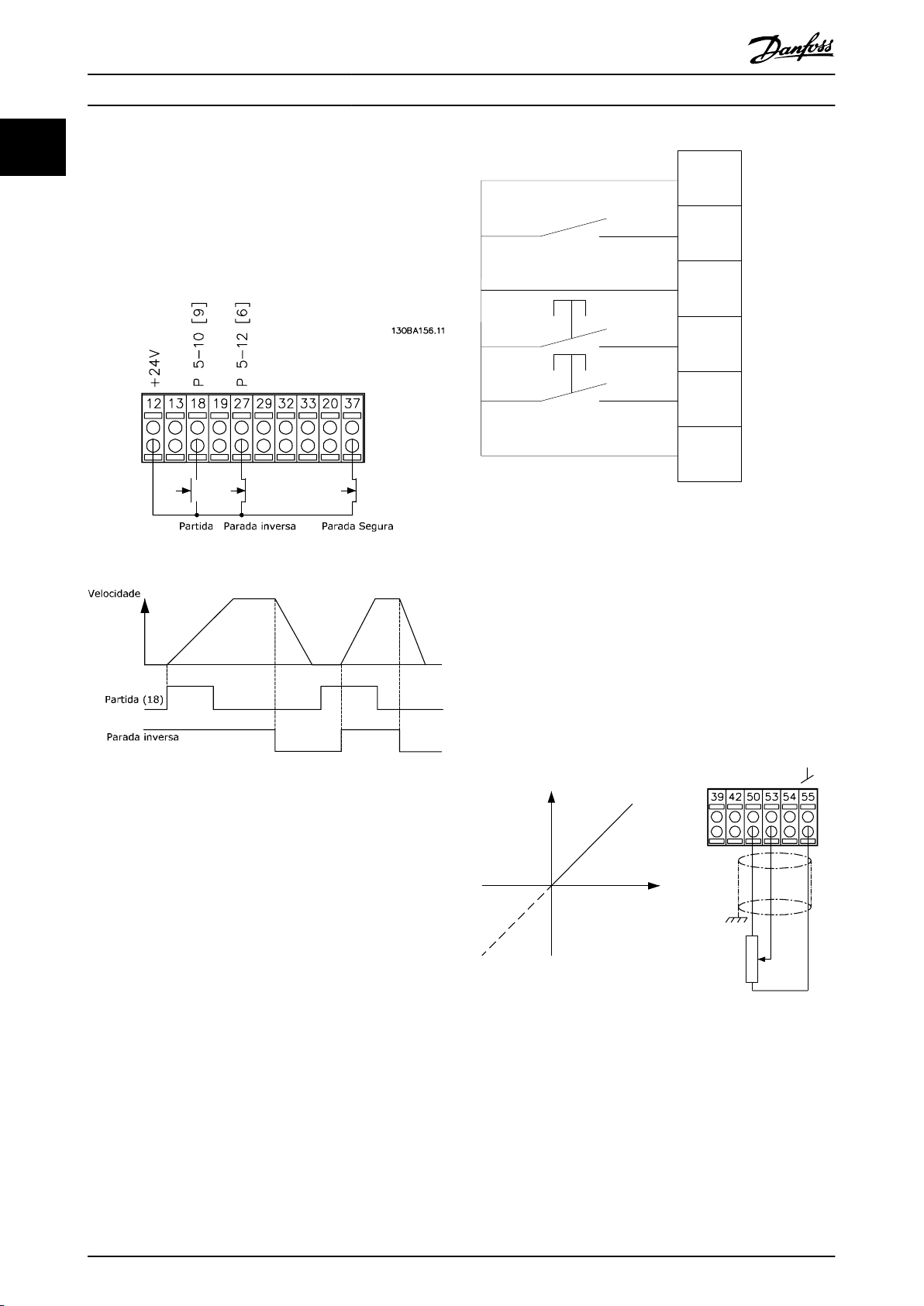
1.9.3 Partida/Parada por Pulso
Terminal 18 = Parâmetro 5-10 Terminal 18 Entrada digital [9]
Partida por pulso.
Terminal 27 = Parâmetro 5-12 Terminal 27, Entrada Digital
[6] Parada inversa.
Terminal 37 = Safe Torque O (quando estiver disponível).
Ilustração 1.8 Aceleração/Desaceleração
1.9.5 Referência do Potenciômetro
Tensão de referência através de um potenciômetro
Fonte da referência 1 = [1] Entrada analógica 53 (padrão).
Terminal 53, Baixa Tensão = 0 V.
Terminal 53, Alta Tensão = 10 V.
Terminal 53, Ref./Feedback Baixo = 0 rpm.
Terminal 53, Ref./Feedback Alto = 1500 rpm.
Interruptor S201 = OFF (U).
Ilustração 1.7 Partida/Parada por Pulso
1.9.4 Aceleração/Desaceleração
Terminais 29/32 =Aceleração/desaceleração
Terminal 18 = Parâmetro 5-10 Terminal 18 Entrada digital [9]
Partida (padrão).
Terminal 27 = Parâmetro 5-12 Terminal 27, Entrada Digital
[19] Congelar referência.
Terminal 29 = Parâmetro 5-13 Terminal 29, Entrada Digital
[21] Aceleração.
Terminal 32 = Parâmetro 5-14 Terminal 32, Entrada Digital
[22] Desaceleração.
Ilustração 1.9 Referência do Potenciômetro
12 Danfoss A/S © 05/2018 Todos os direitos reservados. MG20OB28
Auto
On
Reset
Hand
On
Off
Status
Quick
Menu
Main
Menu
Alarm
Log
Back
Cancel
Info
OK
Status
1(0)
1234rpm 10,4A 43,5Hz
Run OK
43,5Hz
On
Alarm
Warn.
e30ba018.14
1
2
3
4
b
a
c
Como Programar Guia de Programação
2 Como Programar
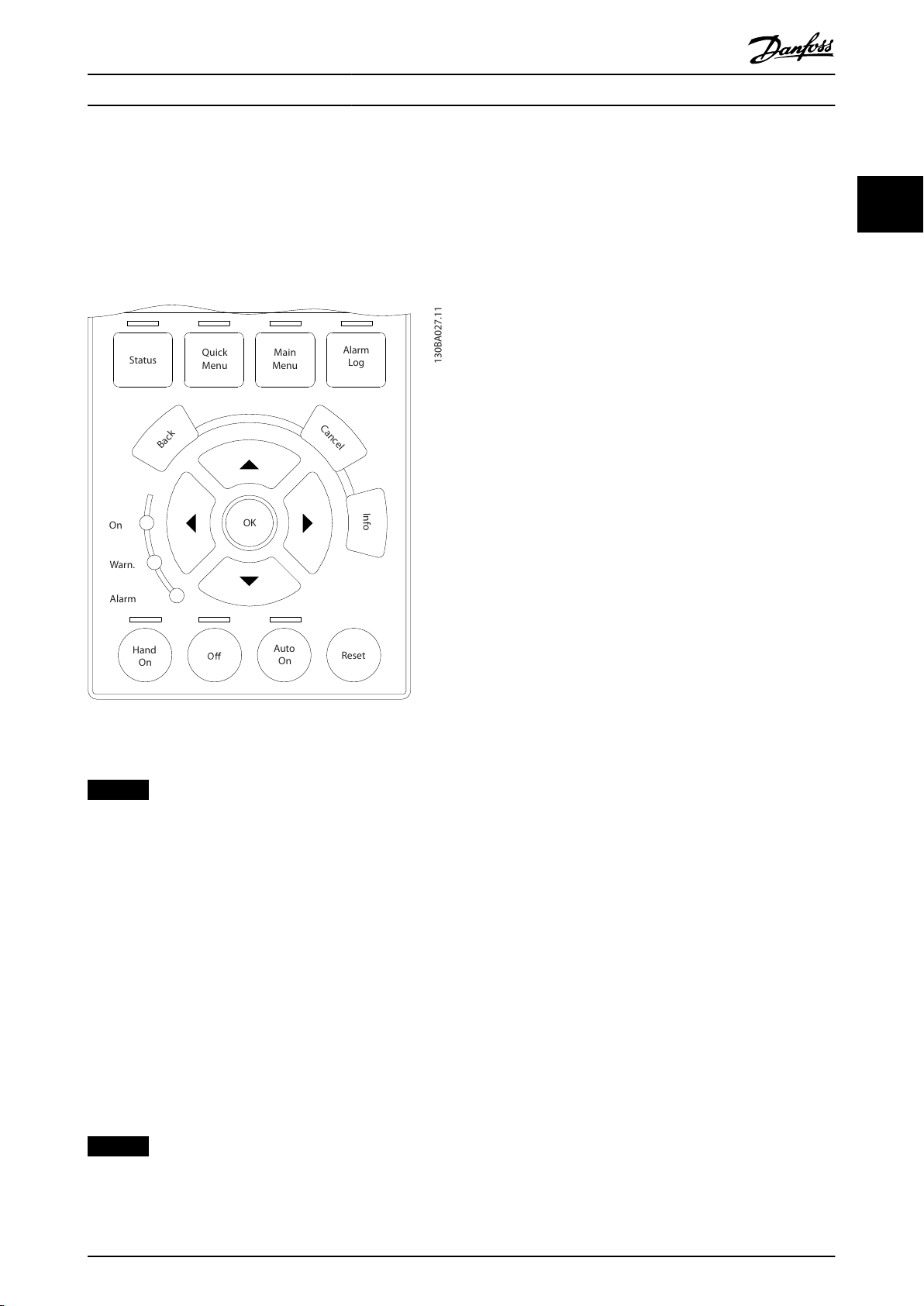
2.1 O Painel de Controle Local Gráco e
Numérico
A programação fácil do conversor de frequência é feita por
meio do LCP gráco (LCP 102). Para obter informações
sobre como utilizar o painel de controle local numérico
(LCP 101), consulte capétulo 2.2.17 Como programar no
Painel de controle local numérico.
2.2 Como Programar no LCP Gráco
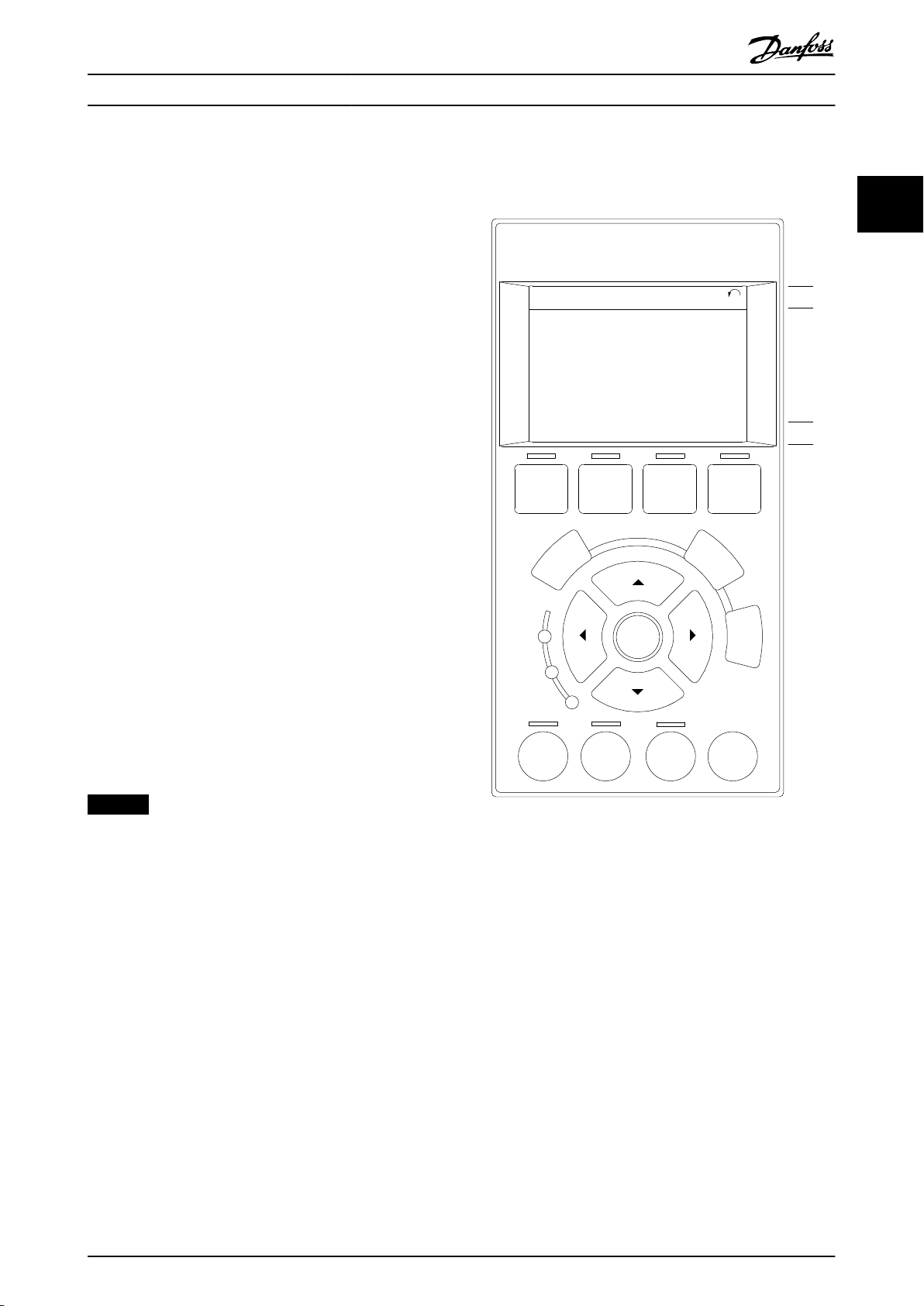
O LCP é dividido em 4 grupos funcionais:
1. Display gráco com linhas de status.
2. Teclas de menu e luzes indicadoras - para alterar
parâmetros e alternar entre funções de display.
3. Teclas de navegação e luzes indicadoras.
4. Teclas de operação e luzes indicadoras.
O display do LCP pode mostrar até 5 itens de dados
operacionais enquanto exibe o Status.
2 2
Linhas do display:
a. Linha de Status: Mensagens de status mostrando
ícones e
grácos.
b. Linha 1–2: Linhas de dados do operador
mostrando dados denidos ou selecionados.
Adicione até 1 linha adicional pressionando
[Status].
c. Linha de Status: Mensagens de status mostrando
o texto.
AVISO!
Se a inicialização estiver atrasada, o LCP mostrará a
Ilustração 2.1 LCP
mensagem INICIALIZANDO até que esteja pronta.
Adicionar ou remover opcionais pode atrasar a inicialização.
MG20OB28 Danfoss A/S © 05/2018 Todos os direitos reservados. 13
Seção do topo
Seção do meio
Seção inferior
Status
43 RPM
1,4 Hz
Execut Auto TC
! TempCartPot (W29)
2,9%
5,44 A 25,3kW
1(1)
130BP074.10
!
On
Warn.
Alarm
130BP044.10
130BP045.10
Status
Quick
Menu
Main
Menu
Alarm
Log
Como Programar
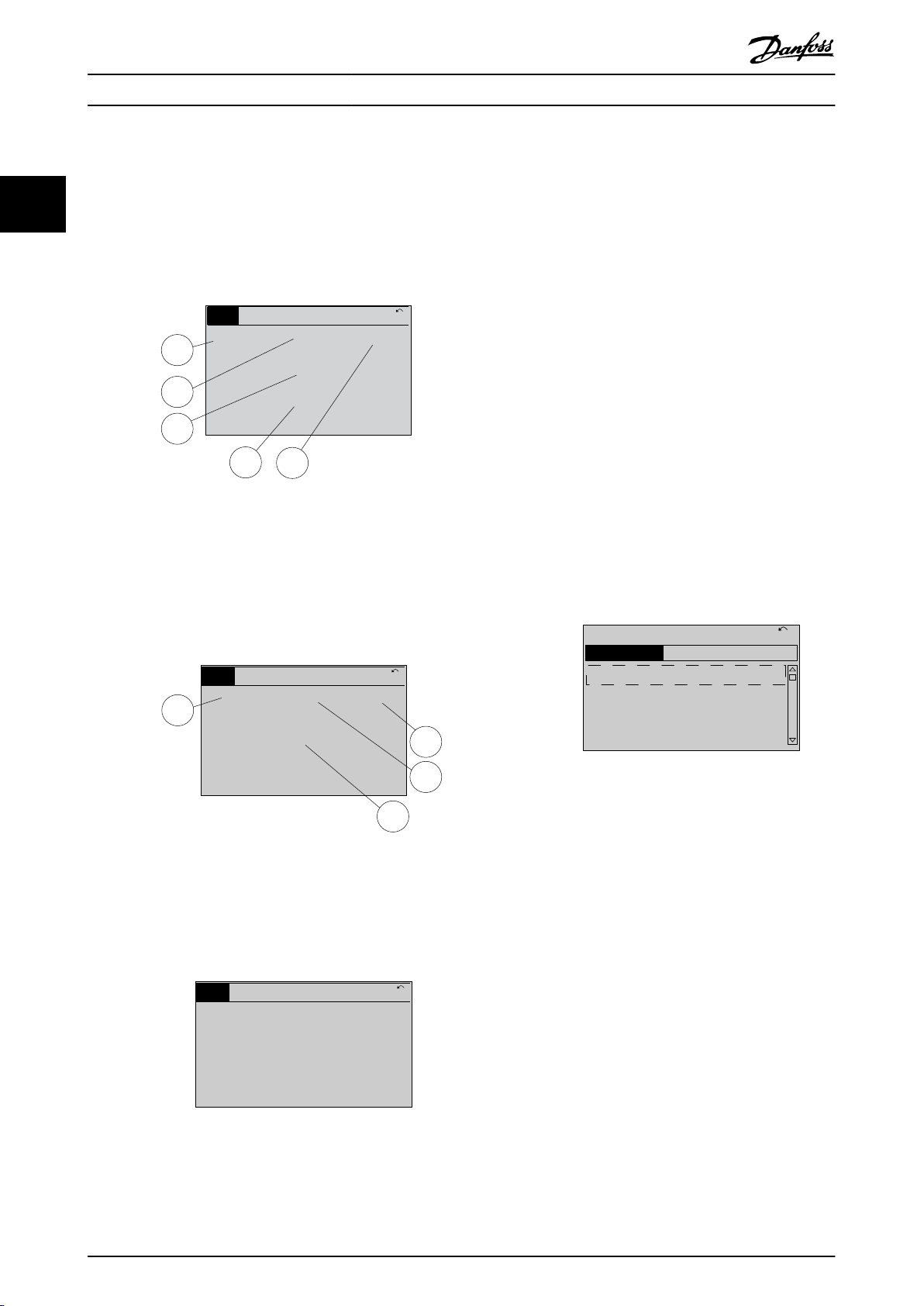
2.2.1 Display do LCP
VLT® AQUA Drive FC 202
22
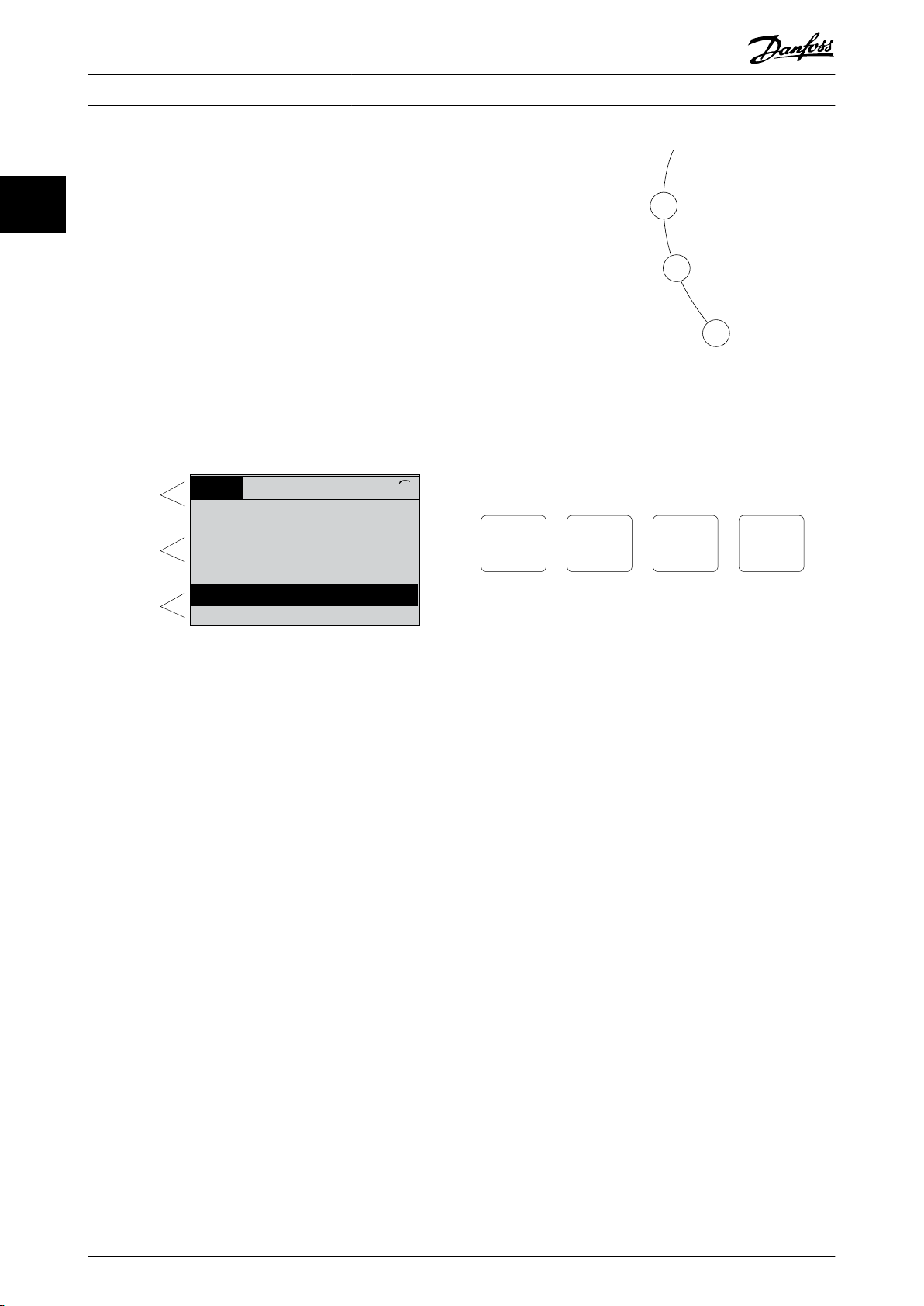
O display do LCP possui luz de fundo e 6 linhas alfanuméricas. As linhas de display mostram o sentido de rotação
(seta), o setup selecionado e o setup de programação. O
display é dividido em 3 seções.
Seção do topo
Mostra até 2 medições no status operacional normal.
Seção intermediária
A linha superior exibe até 5 medições com as respectivas
unidades, independentemente do status (exceto no caso
de alarme/advertência).
Seção inferior
Sempre mostra o estado do conversor de frequência no
modo Status.
Ilustração 2.2 Seção inferior
A conguração ativa (selecionada como conguração ativa
parâmetro 0-10 Setup Ativo) é mostrada. Ao programar um
setup diferente da conguração ativa, o número do setup
programado aparece à direita.
Ajuste do contraste do display
Pressione [Status] e [▲] para escurecer o display.
Pressione [Status] e [▼] para clarear o display.
A maioria dos setups de parâmetro podem ser alterados
imediatamente por meio do LCP, a menos que uma senha
tenha sido criada por meio de parâmetro 0-60 Senha do
Menu Principal ou parâmetro 0-65 Senha de Menu Pessoal.
Luzes indicadoras
Se determinados valores limites forem excedidos, o alarme
e/ou luzes indicadoras de advertência se acenderão. Um
status e um texto de alarme aparecerão no LCP.
A luz indicadora ON acende quando o conversor de
frequência recebe tensão de rede, ou por meio de um
terminal de barramento CC ou alimentação de 24 V
externa. Ao mesmo tempo, a luz de fundo está acesa.
LED Verde/Ligado: Indica que a seção de controle
•
está funcionando.
LED Amarelo/Advert.: Indica que há uma
•
advertência.
•
14 Danfoss A/S © 05/2018 Todos os direitos reservados. MG20OB28
LED Vermelho piscando/Alarme: Indica que há um
alarme.
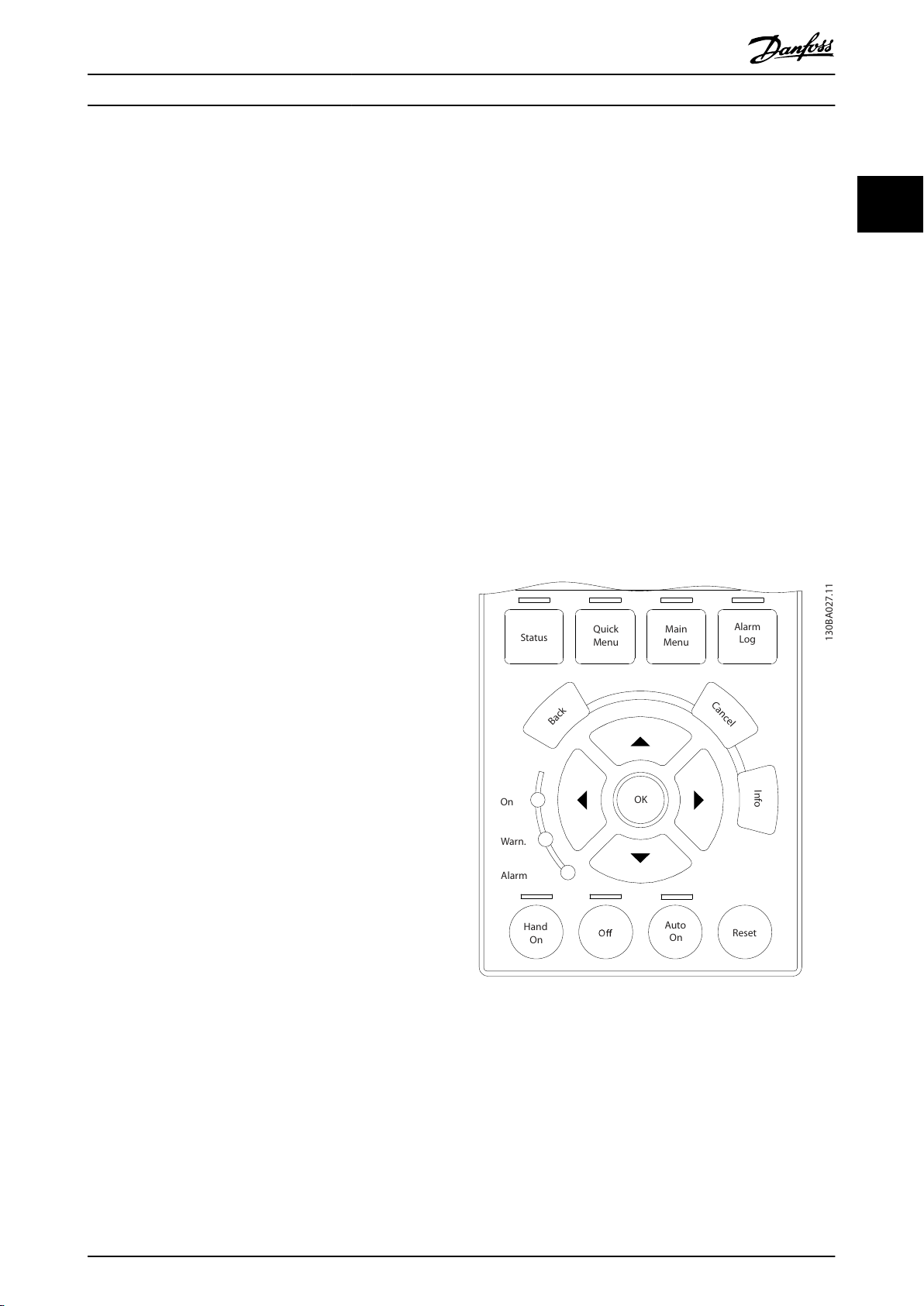
Ilustração 2.3 Luzes Indicadoras
Teclas do LCP
As teclas de controle estão divididas por funções. As teclas
abaixo do display e as luzes indicadoras são usadas para
conguração de parâmetros, incluindo a opção de
indicação de exibição durante a operação normal.
Ilustração 2.4 Teclas do LCP
[Status]
Indica o status do conversor de frequência e/ou do motor.
Selecione entre 3 leituras diferentes pressionando [Status]:
leituras de 5 linhas, leituras de 4 linhas ou Smart Logic
Control.
Pressione [Status] para selecionar o modo de exibição ou
para retornar ao modo de exibição a partir do modo Quick
Menu, do modo Menu Principal ou do modo Alarme. Use
[Status] também para alternar entre os modos leitura
simples ou duplo.
[Quick Menu]
Fornece acesso rápido às funções mais comuns do
conversor de frequência.
O [Quick Menu] (Menu Rápido) consiste de:
Q1: Meu menu pessoal.
•
Q2: Conguração rápida.
•
Q3: Setups de função.
•
Q4: SmartStart.
•
Q5: Alterações feitas.
•
Q6: Registros.
•
Q7: Água e bombas.
•
O setup de função fornece acesso rápido a todos os
parâmetros necessários para a maioria das aplicações de
água e esgoto, incluindo:
Torque variável.
•
Torque constante.
•
Bombas.
•
Au t o
On R eset
Hand
On
S
ta
tus
Q
uick
M
enu
M
ain
M
enu
A
lar
m
Lo
g
Back
C
anc
el
I
n
fo
OK
On A lar m W
ar
n.
130BA027.11
Como Programar Guia de Programação
Bombas de dosagem.
•
Bombas submersas.
•
Bombas de recalque.
•
Bombas de mistura.
•
Ventoinhas de ventilação.
•
Outras bombas.
•
Aplicações de ventilador.
•
Entre outros recursos, também inclui a seleção de
parâmetros:
Quais variáveis exibir no LCP.
•
Velocidades digitais predenidas.
•
Escalas de referências analógicas.
•
Aplicações em malha fechada de zona única e
•
zonas múltiplas.
Funções especícas relacionadas à água.
•
Aplicações de águas residuais.
•
O quick menu Q7: Água e bombas fornecem acesso direto a
alguns dos mais importantes recursos dedicados de água e
bombas:
Q7-1: Rampas especiais (rampa inicial, rampa
•
nal, rampa da válvula de retenção).
Q7-2: Sleep mode.
•
Q7-3: Limpeza da bomba.
•
Q7-4: Funcionamento a seco.
•
Q7-5: Detecção de nal de curva.
•
Q7-6: Compensação de vazão.
•
Q7-7: Enchimento do cano (canos horizontais,
•
canos verticais, sistemas combinados).
Q7-8: Controle de desempenho.
•
Q7-9: Monitoramento de velocidade mínima.
•
Os parâmetros do Quick Menu podem ser acessados
rapidamente, a menos que uma senha tenha sido criada
através de 1 dos seguintes parâmetros:
Parâmetro 0-60 Senha do Menu Principal.
•
Parâmetro 0-61 Acesso ao Menu Principal s/ Senha.
•
Parâmetro 0-65 Senha de Menu Pessoal.
•
Parâmetro 0-66 Acesso ao Menu Pessoal s/ Senha.
•
É possível alternar diretamente entre o modo Quick Menu e
o modo Menu Principal.
[Main Menu] (Menu Principal)
Esta seção é usada para programar todos os parâmetros.
Os parâmetros do Quick Menu podem ser acessados
rapidamente, a menos que uma senha tenha sido criada
através de 1 dos seguintes parâmetros:
Parâmetro 0-60 Senha do Menu Principal.
•
Parâmetro 0-61 Acesso ao Menu Principal s/ Senha.
•
Parâmetro 0-65 Senha de Menu Pessoal.
•
Parâmetro 0-66 Acesso ao Menu Pessoal s/ Senha.
•
Para a maioria das aplicações de água e águas residuais,
não é necessário acessar os parâmetros do Menu Principal.
O Quick Menu, a conguração rápida e as congurações de
função fornecem o acesso mais simples e rápido aos
parâmetros geralmente necessários.
É possível alternar diretamente entre o modo Menu
Principal e o modo Quick Menu.
Para criar um atalho de parâmetros, pressione [Main Menu]
por 3 s. O atalho de parâmetro permite acesso direto a
qualquer parâmetro.
[Alarm Log] (Registro de Alarme)
Mostra uma lista de alarmes com os 5 últimos alarmes
(numerados A1–A5). Para obter mais detalhes sobre um
alarme, pressione as teclas de navegação para ir até o
número do alarme e pressione [OK]. Antes de entrar no
modo de alarme, são fornecidas informações sobre a
condição do conversor de frequência.
Ilustração 2.5 LCP
[Back] (Voltar)
Retorna à etapa ou camada anterior na estrutura de
navegação.
[Cancel] (Cancelar)
Cancela a última alteração ou comando, desde que o
display não tenha sido alterado.
2 2
MG20OB28 Danfoss A/S © 05/2018 Todos os direitos reservados. 15
B
a
c
k
C
a
n
c
e
l
I
n
f
o
e30bp046.12
Hand
On
Off
Auto
On
Reset
Como Programar
VLT® AQUA Drive FC 202
[Info] (Info)
Fornece informações sobre um comando, parâmetro ou
função em qualquer janela de display. [Info] fornece
22
informações detalhadas sempre que uma ajuda for
necessária.
Para sair do modo info, pressione [Info], [Back] ou [Cancel].
Ilustração 2.6 Voltar
[Hand On] (Manual Ligado) - [O] (Desligado) -
•
[Auto On] (Automático Ligado)
Reset.
•
Parada por inércia inversa.
•
Reversão.
•
Setup selecione bit 0 - Setup selecione bit 1.
•
Comando de parada a partir da comunicação
•
serial.
Parada rápida.
•
Freio CC.
•
[O]
Para o motor conectado. A tecla pode ser selecionada
Ilustração 2.7 Cancelar
como [1] Ativado ou [0] Desativado via parâmetro 0-41 Tecla
[O] do LCP. Se nenhuma função de parada externa for
selecionada e a tecla [O] estiver inativa, pare o motor
desconectando a tensão.
[Auto On]
Ativa o controle do conversor de frequência através dos
Ilustração 2.8 Info
terminais de controle e/ou da comunicação serial. Quando
um sinal de partida é aplicado nos terminais de controle
e/ou no eldbus, o conversor de frequência dá partida. A
tecla pode ser selecionada como [1] Ativado ou [0]
Teclas de navegação
As 4 teclas de navegação são usadas para navegar entre as
Desativado via parâmetro 0-42 Tecla [Auto on] (Automát.
ligado) do LCP.
diferentes opções disponíveis em Quick Menu, Menu
Principal e Registro de Alarme. Pressione as teclas para
mover o cursor.
[OK]
É usado para selecionar um parâmetro assinalado pelo
cursor e para permitir a alteração de um parâmetro.
Teclas de controle local
Teclas de controle local estão na parte inferior do LCP.
AVISO!
Um sinal HAND-OFF-AUTO ativado através das entradas
digitais tem mais prioridade que as teclas de controle
[Hand On] e [Auto On].
[Reset]
É usado para reinicializar o conversor de frequência após
um alarme (desarme). A tecla pode ser selecionada como
[1] Ativado ou [0] Desativado via parâmetro 0-43 Tecla
[Reset] do LCP.
O atalho de parâmetro pode ser criado pressionando [Main
Menu] por 3 s. O atalho de parâmetro permite acesso
Ilustração 2.9 Teclas de Controle Local
direto a qualquer parâmetro.
[Hand On] (Manual Ligado)
Ativa o controle do conversor de frequência através do LCP.
O [Hand On] também dá partida no motor e a partir daí é
possível inserir os dados de velocidade do motor usando
as teclas de navegação. A tecla pode ser selecionada como
[1] Ativado ou [0] Desativado via parâmetro 0-40 Tecla [Hand
on] (Manual ligado) do LCP.
Sinais de parada externos ativados por sinais de controle,
ou via eldbus, substituem um comando de partida
através do LCP.
Os seguintes sinais de controle ainda estão ativos quando
[Hand On] é ativado:
16 Danfoss A/S © 05/2018 Todos os direitos reservados. MG20OB28
Au t o
On R eset
Hand
On
S
ta
tus
Q
uick
M
enu
M
ain
M
enu
A
lar
m
Lo
g
Back
C
anc
el
I
n
fo
OK
On A lar m W
ar
n.
130BA027.11
Como Programar Guia de Programação
2.2.2 Transferência Rápida das
Programações de Parâmetros entre
Múltiplos Conversores de Frequência
Uma vez concluído o setup de um conversor de
frequência, armazene os dados no LCP ou em um PC via
Software de Setup MCT 10.
Como transferir os dados do LCP para o conversor de
frequência:
1. Ir para parâmetro 0-50 Cópia do LCP.
2. Aperte a tecla [OK].
3. Selecione [2] Todos a partir d LCP.
4. Aperte a tecla [OK].
Então as programações de parâmetros gravadas no LCP
são transferidas para o conversor de frequência, como
indicado pela barra de progressão. Quando 100% forem
atingidos, pressione [OK].
2.2.3 Modo Display
Na operação normal, até 5 variáveis de operação diferentes
podem ser indicadas, continuamente, na seção intermediária. 1.1, 1.2 e 1.3 assim como 2 e 3.
2.2.4 Modo Display - Seleção de leituras
Pressione [Status] para alternar entre 3 telas de leitura de
status.
Variáveis de operação com formatações diferentes são
mostradas em cada tela de status. Para obter mais
informações, conra os exemplos deste capítulo.
2 2
Ilustração 2.10 LCP
Armazenagem de dados no LCP
AVISO!
Pare o motor antes de executar esta operação.
Como armazenar dados no LCP:
1. Ir para parâmetro 0-50 Cópia do LCP.
2. Aperte a tecla [OK].
3. Selecione [1] Tudo para o LCP.
4. Aperte a tecla [OK].
Todas as programações de parâmetro agora estão
armazenadas no LCP, conforme indicado pela barra de
progressão. Quando 100% forem atingidos, pressione [OK].
Conecte o LCP a outro conversor de frequência e copie as
programações de parâmetro para esse conversor de
frequência também.
Transferência de dados do LCP para o conversor de
frequência
AVISO!
Pare o motor antes de executar esta operação.
Diversos valores ou medições podem ser conectados a
cada uma das variáveis operacionais mostradas. Os valores
ou medições a serem exibidos podem ser denidos através
dos seguintes parâmetros:
Parâmetro 0-20 Linha do Display 1.1 Pequeno.
•
Parâmetro 0-21 Linha do Display 1.2 Pequeno.
•
Parâmetro 0-22 Linha do Display 1.3 Pequeno.
•
Parâmetro 0-23 Linha do Display 2 Grande.
•
Parâmetro 0-24 Linha do Display 3 Grande.
•
Acesse os parâmetros pelo [Quick Menu], Q3 Setups da
Função, Q3-1 Programações Gerais, Q3-13 Congurações do
Display.
Cada parâmetro de leitura selecionado em
parâmetro 0-20 Linha do Display 1.1 Pequeno a
parâmetro 0-24 Linha do Display 3 Grande tem sua própria
escala e dígitos após uma vírgula decimal. Quanto mais
alto o valor numérico de um parâmetro, menos dígitos são
exibidos após a vírgula decimal.
Exemplo: Leitura de corrente 5,25 A; 15,2 A; 105 A.
Conra o grupo do parâmetro 0-2* Display do LCP para
obter mais detalhes.
MG20OB28 Danfoss A/S © 05/2018 Todos os direitos reservados. 17
1.1
2
3
1.3
1.2
130BP041.10
799 RPM
Rampa Remota Automática
1 (1)
36,4 kw7,83 A
0,000
53,2 %
Status
1.1
1.2
2
1.3
130BP062.10
207RPM
Execut Auto TC
1 (1)
24,4 kW5,25A
6,9Hz
Status
130BP063.10
778 RPM
Execut Auto TC
1 (1)
4,0 kW0,86 A
Estado: 0 o 0 (o)
Quando: Do: -
Status
130BC916.10
Q1 My Personal Menu
Q2 Quick Setup
Q4 Smart Setup
Q5 Changes Made
0RPM 0.00A 1(1)
Quick Menus
Como Programar
VLT® AQUA Drive FC 202
Tela de status I
2.2.5 Setup de Parâmetro
Este estado de leitura é padrão após a energização ou
inicialização.
22
Pressione [Info] para obter informações sobre as conexões
de medição para as variáveis de operação mostradas (1.1,
1.2, 1.3, 2 e 3).
Consulte as variáveis de operação mostradas em
Ilustração 2.11.
O conversor de frequência pode ser usado praticamente
para todas as tarefas e oferece 2 opções de modos de
programação:
Modo menu principal.
•
Modo quick menu.
•
O menu principal fornece acesso a todos os parâmetros. O
quick menu orienta o usuário sobre alguns parâmetros,
tornando possível iniciar o funcionamento do conversor de
frequência.
Altere um parâmetro no modo menu principal ou no
modo quick menu.
2.2.6 Funções da Tecla Quick Menu (Menu
Rápido)
Ilustração 2.11 Tela de Status I
Tela de status II
Consulte as variáveis de operação (1.1, 1.2, 1.3 e 2)
mostradas em Ilustração 2.12.
No exemplo, velocidade, corrente do motor, potência do
motor e frequência estão selecionadas como variáveis nas
primeiras 2 linhas.
Pressione [Quick Menu] para acessar uma lista das
diferentes áreas contidas no Quick Menu.
Selecione Q1 Meu Menu Pessoal para exibir os parâmetros
pessoais selecionados. Esses parâmetros estão selecionados
em parâmetro 0-25 Meu Menu Pessoal. Até 50 parâmetros
diferentes podem ser adicionados nesse menu.
Ilustração 2.14 Quick Menus
Selecione Q2 Setup Rápido para percorrer uma seleção de
Ilustração 2.12 Tela de Status II
parâmetros para o motor funcionar de maneira quase
ideal. As congurações padrão para os demais parâmetros
consideram as funções de controle requisitadas e a
Tela de status III
Este estado mostra o evento e a ação do smart logic
conguração das entradas/saídas de sinal (terminais de
controle).
control. Para obter mais informações, consulte o grupo do
parâmetro 13-** Smart Logic.
A seleção de parâmetro é realizada com as teclas de
navegação. Os parâmetros em Tabela 2.1 são acessíveis.
Ilustração 2.13 Tela de Status III
18 Danfoss A/S © 05/2018 Todos os direitos reservados. MG20OB28
Como Programar Guia de Programação
Parâmetro Conguração
Parâmetro 0-01 Idioma
Parâmetro 1-20 Potência do Motor [kW] [kW]
Parâmetro 1-22 Tensão do Motor [V]
Parâmetro 1-23 Freqüência do Motor [Hz]
Parâmetro 1-24 Corrente do Motor [A]
Parâmetro 1-25 Velocidade nominal do
motor
Parâmetro 5-12 Terminal 27, Entrada
Digital
Parâmetro 1-29 Adaptação Automática do
Motor (AMA)
Parâmetro 3-02 Referência Mínima [RPM]
Parâmetro 3-03 Referência Máxima [RPM]
Parâmetro 3-41 Tempo de Aceleração da
Rampa 1
Parâmetro 3-42 Tempo de Desaceleração
da Rampa 1
Parâmetro 3-13 Tipo de Referência
Tabela 2.1 Seleção do parâmetro
1) Se o terminal 27 estiver programado para [0] Sem Operação,
nenhuma conexão para +24 V no terminal 27 é necessária.
Selecione Alterações feitas para obter informações sobre:
As últimas 10 alterações. Use as teclas de
•
navegação [▲] [▼] para rolar entre os 10 últimos
parâmetros alterados.
As alterações feitas desde a
•
Selecione Registros para obter informações sobre as leituras
das linhas de display. As informações são exibidas na
forma de gráco.
Somente os parâmetros selecionados em
parâmetro 0-20 Linha do Display 1.1 Pequeno e
parâmetro 0-24 Linha do Display 3 Grande e podem ser
visualizados. É possível armazenar até 120 amostras na
memória, para referência posterior.
[RPM]
[0] Sem função
[1] Ativar AMA
completa
[s]
[s]
conguração padrão.
1)
2.2.7 Quick Menu, Q3 Setups da Função
O setup de função fornece acesso rápido a todos os
parâmetros necessários para a maioria das aplicações de
água e esgoto, incluindo:
Torque variável.
•
Torque constante.
•
Bombas.
•
Bombas de dosagem.
•
Bombas submersas.
•
Bombas de recalque.
•
Bombas de mistura.
•
Ventoinhas de ventilação.
•
Outras bombas.
•
Aplicações de ventilador.
•
Entre outros recursos, o menu de setups da função
também inclui parâmetros para selecionar:
Quais variáveis exibir no LCP.
•
Velocidades digitais predenidas.
•
Escalas de referências analógicas.
•
Aplicações em malha fechada de zona única e
•
zonas múltiplas.
Funções especícas relacionadas à água.
•
Aplicações de águas residuais.
•
2 2
MG20OB28 Danfoss A/S © 05/2018 Todos os direitos reservados. 19
Como Programar
VLT® AQUA Drive FC 202
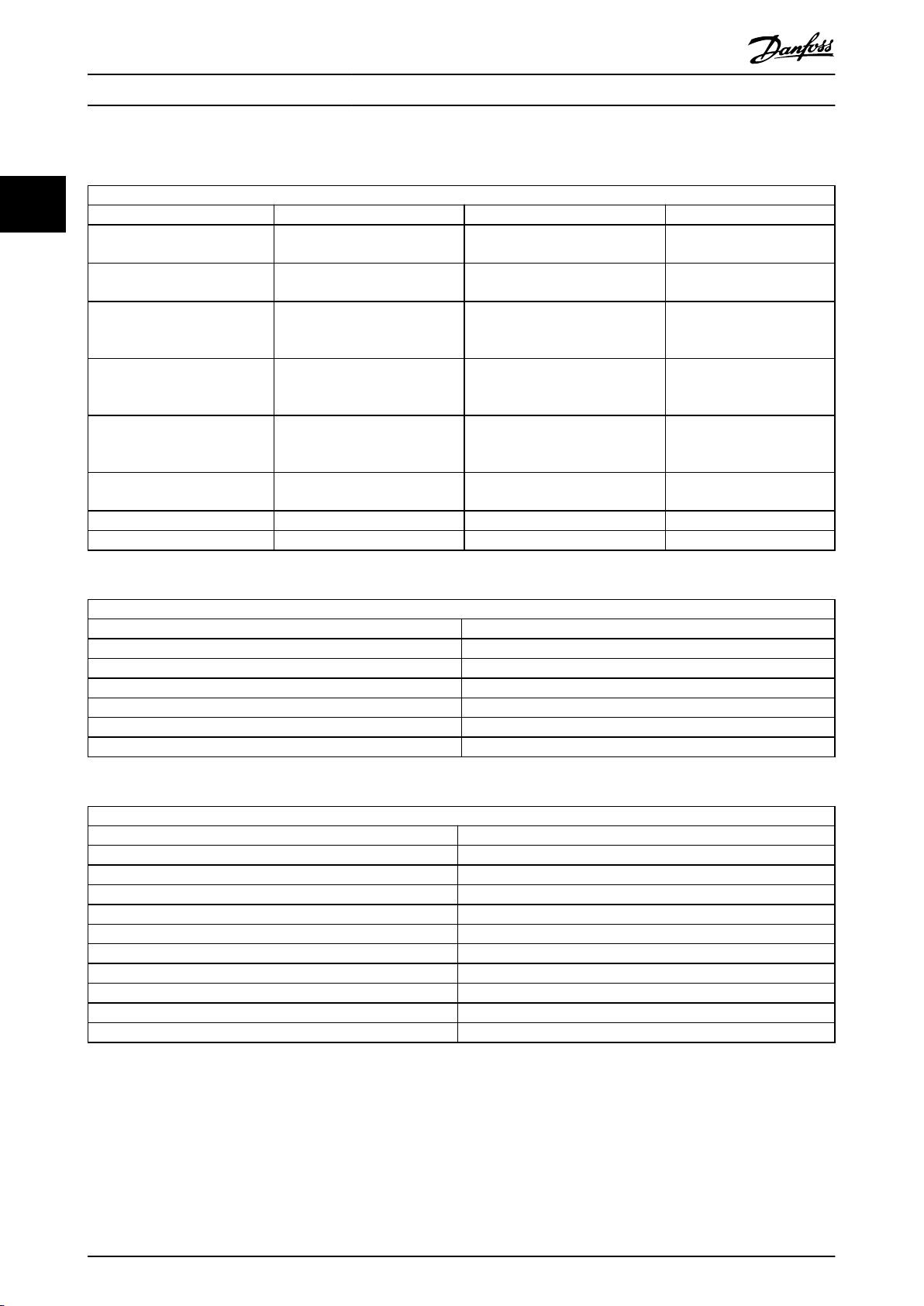
Os parâmetros de setup da função estão agrupados da seguinte maneira:
22
Q3-10 Programação do Relógio Q3-11 Conguração do Display Q3-12 Saída Analógica Q3-13 Relés
Parâmetro 0-70 Data e Hora Parâmetro 0-20 Linha do Display
1.1 Pequeno
Parâmetro 0-71 Formato da Data Parâmetro 0-21 Linha do Display
1.2 Pequeno
Parâmetro 0-72 Formato da Hora Parâmetro 0-22 Linha do Display
1.3 Pequeno
Parâmetro 0-74 DST/Horário de
Verão
Parâmetro 0-76 DST/Início do
Horário de Verão
Parâmetro 0-77 DST/Fim do
Horário de Verão
– Parâmetro 0-38 Texto de Display 2 – –
– Parâmetro 0-39 Texto de Display 3 – –
Tabela 2.2 Q3-1 Programaç Gerais
Q3-20 Referência digital Q3-21 Referência analógica
Parâmetro 3-02 Referência Mínima Parâmetro 3-02 Referência Mínima
Parâmetro 3-03 Referência Máxima Parâmetro 3-03 Referência Máxima
Parâmetro 3-10 Referência Predenida Parâmetro 6-10 Terminal 53 Tensão Baixa
Parâmetro 5-13 Terminal 29 Entrada digital Parâmetro 6-11 Terminal 53 Tensão Alta
Parâmetro 5-14 Terminal 32 Entrada digital Parâmetro 6-14 Terminal 53 Ref./Feedb. Valor Baixo
Parâmetro 5-15 Terminal 33 Entrada digital Parâmetro 6-15 Terminal 53 Ref./Feedb. Valor Alto
Parâmetro 0-23 Linha do Display 2
Grande
Parâmetro 0-24 Linha do Display 3
Grande
Parâmetro 0-37 Texto de Display 1 – –
Q3-1 Programações gerais
Parâmetro 6-50 Terminal 42 Saída
Parâmetro 6-51 Terminal 42 Escala
Mínima de Saída
Parâmetro 6-52 Terminal 42 Escala
Máxima de Saída
– Relé opcional
– Relé opcional
Q3-2 Denições de malha aberta
Relé 1⇒Parâmetro 5-40 Função
do Relé
Relé 2⇒Parâmetro 5-40 Função
do Relé
Relé opcional
7⇒Parâmetro 5-40 Função do
Relé
8⇒Parâmetro 5-40 Função do
Relé
9⇒Parâmetro 5-40 Função do
Relé
Tabela 2.3 Q3-2 Denições de Malha aberta
Q3-3 Denições de malha fechada
Q3-30 Congurações de feedback Q3-31 Congurações do PID
Parâmetro 1-00 Modo Conguração Parâmetro 20-81 Controle Normal/Inverso do PID
Parâmetro 20-12 Unidade da Referência/Feedback Parâmetro 20-82 Velocidade de Partida do PID [RPM]
Parâmetro 3-02 Referência Mínima Parâmetro 20-21 Setpoint 1
Parâmetro 3-03 Referência Máxima Parâmetro 20-93 Ganho Proporcional do PID
Parâmetro 6-20 Terminal 54 Tensão Baixa Parâmetro 20-94 Tempo de Integração do PID
Parâmetro 6-21 Terminal 54 Tensão Alta
Parâmetro 6-24 Terminal 54 Ref./Feedb. Valor Baixo
Parâmetro 6-25 Terminal 54 Ref./Feedb. Valor Alto
Parâmetro 6-00 Timeout do Live Zero
Parâmetro 6-01 Função Timeout do Live Zero
Tabela 2.4 Q3-3 Denições de Malha fechada
20 Danfoss A/S © 05/2018 Todos os direitos reservados. MG20OB28
130BP066.10
1107 RPM
0 - ** Operação/Display
1 - ** Carga/Motor
2 - ** Freios
3 - ** Referência / Rampas
3,84 A 1 (1)
Menu principal
130BP067.10
740RPM
0 -01 Idioma
[0] Inglês
10,64A 1 [1]
0-0*
Programaç.Básicas
130BP068.10
740RPM
0 -01 Idioma
[0] Inglês
10,64 A 1 [1]
0-0*
Programaç.Básicas
Como Programar Guia de Programação
2.2.8 Quick Menu, Q4 SmartStart
O SmartStart funciona automaticamente na primeira
energização do conversor de frequência ou após uma
reinicialização para as congurações de fábrica. O
SmartStart orienta os usuários por uma série de etapas
para garantir um controle do motor correto e mais
eciente. O SmartStart também pode ser iniciado
diretamente pelo Quick Menu.
As
congurações a seguir estão disponíveis pelo
SmartStart:
Única bomba/motor: Em malha aberta ou em
•
malha fechada.
Alternação do motor: 2 motores dividem 1
•
conversor de frequência.
Controle em cascata básico: O controle da
•
velocidade de uma única bomba em um sistema
de várias bombas.
Por exemplo, isso pode ser uma solução
econômica em conjuntos de recalque.
Mestre/escravo: Controle de até 8 conversores de
•
frequência e bombas para garantir uma boa
operação de todo o sistema de bombas.
podem estar ocultos. Por exemplo, a malha aberta oculta
todos os parâmetros PID e outras opções ativadas tornam
visíveis mais grupos do parâmetro.
2 2
2.2.10 Seleção de Parâmetro
No modo Menu Principal, os parâmetros estão divididos
em grupos. Selecione um grupo do parâmetro com as
teclas de navegação.
Após selecionar um grupo do parâmetro, selecione um
parâmetro por meio das teclas de navegação.
A seção central do display mostra o número e o nome do
parâmetro e também o valor do parâmetro selecionado.
Ilustração 2.16 Seleção de Parâmetro
2.2.9 Modo Main Menu (Menu Principal)
Pressione [Main Menu] para entrar no modo menu
principal. A leitura mostrada em Ilustração 2.15 é exibida
no display.
As seções intermediária e inferior no display mostram uma
lista de grupos do parâmetro, que podem ser selecionados
alternando as teclas [▲] e [▼].
Ilustração 2.15 Modo Main Menu (Menu Principal)
Cada parâmetro tem um nome e um número, que
permanecem sem alteração, independentemente do modo
de programação. No modo menu principal, os parâmetros
estão divididos em grupos. O primeiro dígito do número
do parâmetro (da esquerda para a direita) indica o número
do grupo do parâmetro.
2.2.11 Alteração de Dados
O procedimento para alterar dados é o mesmo no modo
Quick Menu e no modo Menu Principal. Pressione [OK]
para alterar o parâmetro selecionado.
O procedimento para alteração de dados depende de o
parâmetro selecionado representar um valor numérico de
dados ou um valor do texto.
2.2.12 Alterando um Valor do Texto
Se o parâmetro selecionado for um valor do texto, altere o
valor de texto com as teclas [▲] [▼].
Posicione o cursor sobre o valor a ser salvo e pressione
[OK].
Ilustração 2.17 Alterando um Valor do Texto
Todos os parâmetros podem ser alterados no Menu
Principal. No entanto, dependendo da conguração
(parâmetro 1-00 Modo Conguração), alguns parâmetros
MG20OB28 Danfoss A/S © 05/2018 Todos os direitos reservados. 21
130BP069.10
1- 6*
113 RPM 1,78 A 1(1)
PrgrmDepnd.dCarg
1 - 60 Carga em velocidade baixa
compensação
1
0
0%
130BP070.10
1 - 60 Carga em velocidade baixa
compensação
1 0%
PrgrmDepnd.dCarg 1- 6*
729RPM 6,21A 1(1)
6
130BP073.10
130BP072.10
957RPM
1-71 High starting torque time
0. s
11.58A 1 (1)
1-7*Start Adjustments
4
Como Programar
VLT® AQUA Drive FC 202
2.2.13 Alterar um valor de dados
Altere o dígito selecionado innitamente variável com [▲]
[▼].
22
dados, altere o valor de dados selecionado com as teclas
Se o parâmetro selecionado mostrar um valor numérico de
O cursor indica o dígito selecionado. Posicione o cursor no
dígito a ser salvo e pressione [OK].
de navegação [◀] [▶] e as teclas de navegação [▲] [▼].
Pressione as teclas [◀] [▶] para mover o cursor horizontalmente.
Ilustração 2.21 Economizando
2.2.15 Valor, passo a passo
Ilustração 2.18 Alterar um valor de dados
Determinados parâmetros podem ser mudados passo a
passo. Isto se aplica a:
Parâmetro 1-20 Potência do Motor [kW].
Pressione as teclas [
] [▼] para alterar o valor dos dados.
▲
[▲] aumenta o valor dos dados e [▼] diminui o valor dos
dados. Posicione o cursor sobre o valor a ser salvo e
pressione [OK].
•
Parâmetro 1-22 Tensão do Motor.
•
Parâmetro 1-23 Freqüência do Motor.
•
Os parâmetros são alterados tanto como um grupo de
valores de dados numéricos quanto como valores
numéricos de dados innitamente variáveis.
Ilustração 2.19 Salvar o valor de dados
2.2.14 Alteração dos Valores Numéricos de
Dados Innitamente Variáveis
Se o parâmetro selecionado exibir um valor numérico de
dados, selecione um dígito com [◀] [▶].
2.2.16 Leitura e programação de
parâmetros indexados
Os parâmetros são indexados, quando colocados em uma
pilha rolante.
Parâmetro 15-30 Log Alarme: Cód Falha a
parâmetro 15-32 LogAlarme:Tempo contêm um registro de
falhas que pode ser lido. Selecione um parâmetro,
pressione [OK] e pressione as teclas [▲] [▼] para percorrer
o registro de valores.
Por exemplo, parâmetro 3-10 Referência
alterado da seguinte maneira:
1. Selecione o parâmetro, pressione [OK] e pressione
[▲] [▼] para rolar pelos valores indexados.
2. Para alterar o valor do parâmetro, selecione o
valor indexado e pressione a tecla [OK].
3.
Altere o valor pressionando [▲] [▼].
4. Pressione [OK] para aceitar a nova conguração.
5. Pressione [Cancel] para abortar. Pressione [Back]
para sair do parâmetro.
Predenida é
Ilustração 2.20 Selecionando um dígito
22 Danfoss A/S © 05/2018 Todos os direitos reservados. MG20OB28
e30ba191.11
1
Auto
On
Reset
Hand
On
Off
Menu
Status
Quick
Setup
Main
Menu
Back
2
3
4
OK
On
Alarm
Warn.
Setup
130BP077.10
22.8
rpm
Setup 1
Como Programar Guia de Programação
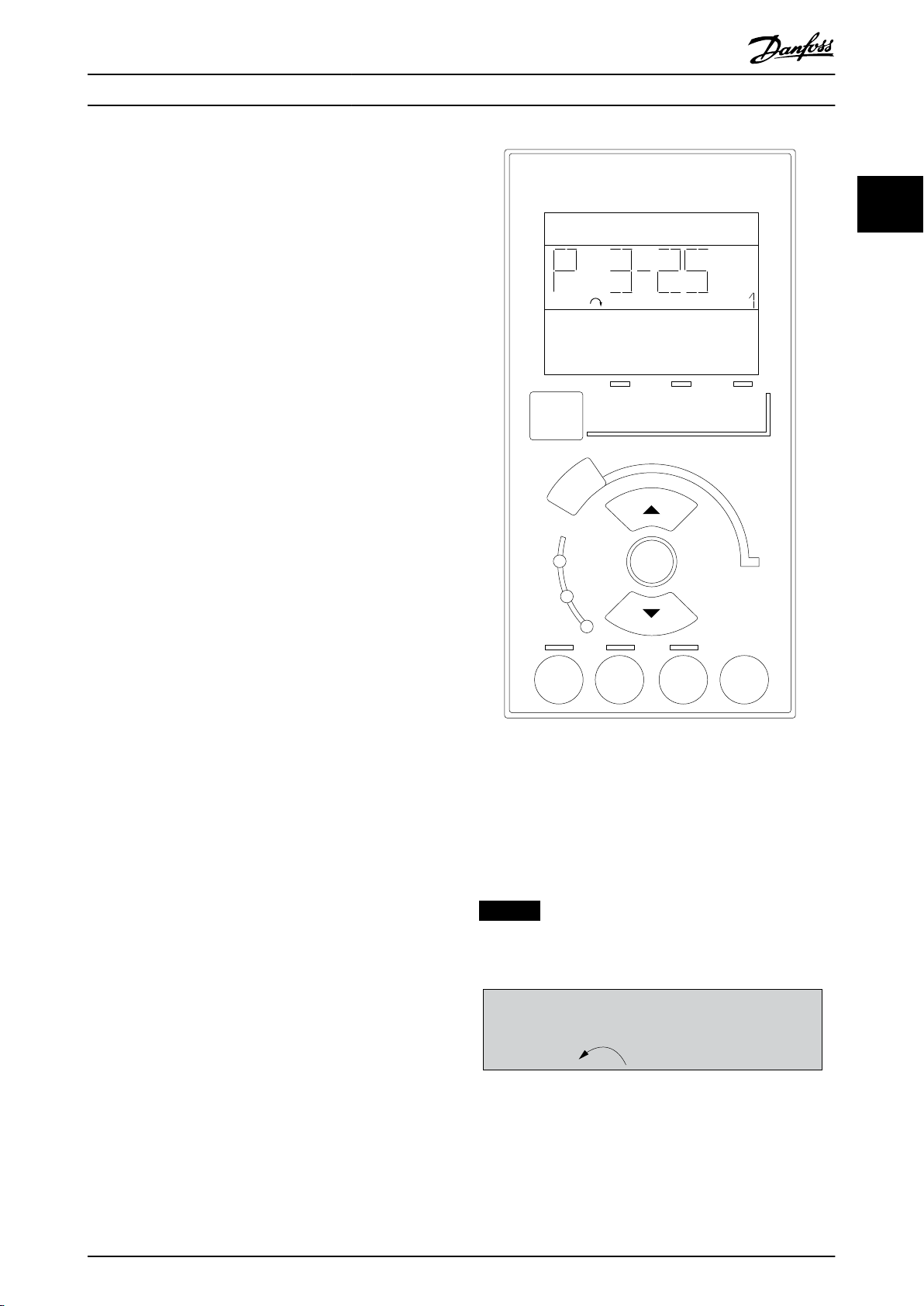
2.2.17 Como programar no Painel de
controle local numérico
As instruções a seguir são válidas para o LCP numérico
(LCP 101).
O painel de controle é dividido em quatro grupos
funcionais:
Display numérico.
•
Teclas de menu e luzes indicadoras - para alterar
•
parâmetros e alternar entre funções de display.
Teclas de navegação e luzes indicadoras.
•
Teclas de operação e luzes indicadoras.
•
Linha de display
Mensagens de status mostrando ícones e um valor
numérico.
Luzes indicadoras
LED Verde/Ligado: Indica se a seção de controle
•
está funcionando.
LED amarelo/Advert: Indica que há uma
•
advertência.
LED Vermelho piscando/Alarme: Indica que há um
•
alarme.
Teclas do LCP
[Menu]
Selecione um dos seguintes modos:
Status.
•
Conguração rápida.
•
Menu principal.
•
2 2
Ilustração 2.22 Teclas do LCP
Modo Status
O modo Status mostra o status do conversor de frequência
ou do motor.
Se ocorrer um alarme, o NLCP chaveia automaticamente
para o modo status.
Vários alarmes podem ser mostrados.
AVISO!
A cópia de parâmetros não é possível com o painel de
controle local numérico LCP 101.
Ilustração 2.23 Modo Status
MG20OB28 Danfoss A/S © 05/2018 Todos os direitos reservados. 23
Setup 1
130BP078.10
A 17
e30bp046.12
Hand
On
Off
Auto
On
Reset
Como Programar
VLT® AQUA Drive FC 202
2.2.18 Teclas do LCP
22
As teclas de controle local estão na parte inferior do LCP.
Ilustração 2.24 Alarme
Menu principal/Conguração rápida
Usados para programar todos os parâmetros ou somente
os parâmetros do Quick Menu (veja também a descrição
do LCP 102 em capétulo 2.1 O Painel de Controle Local
Gráco e Numérico).
Quando o valor piscar, pressione [▲] ou [▼] para alterar
valores do parâmetro.
1. Pressione [Main Menu] para selecionar o menu
principal.
2. Selecione o grupo do parâmetro [xx-__] e
pressione OK].
3. Selecione o parâmetro [__-xx] e pressione [OK].
4. Se o parâmetro for um parâmetro de matriz,
selecione o número da matriz e pressione [OK].
5. Selecione o valor de dados requerido e pressione
[OK].
Os parâmetros com opções funcionais exibem valores
como [1], [2] etc. Para obter uma descrição das diferentes
opções, consulte a descrição individual dos parâmetros em
capétulo 3 Descrição do Parâmetro.
[Back] (Voltar)
Usada para retroceder.
[▲] [▼] são usadas para navegar entre os comandos e
dentro dos parâmetros.
Ilustração 2.25 Menu
principal/Conguração rápida
Ilustração 2.26 Teclas do LCP
[Hand On] (Manual Ligado)
Ativa o controle do conversor de frequência através do LCP.
O [Hand On] também dá partida no motor e a partir daí é
possível inserir os dados de velocidade do motor usando
as teclas de navegação. A tecla pode ser selecionada como
[1] Ativado ou [0] Desativado via parâmetro 0-40 Tecla [Hand
on] (Manual ligado) do LCP.
Sinais de parada externos ativados por sinais de controle,
ou via eldbus, substituem um comando de partida
através do LCP.
Os seguintes sinais de controle ainda estão ativos quando
[Hand On] é ativado:
[Hand On] (Manual Ligado) - [O] (Desligado) -
•
[Auto On] (Automático Ligado)
Reset.
•
Parada por inércia inversa.
•
Reversão.
•
Setup seleciona lsb - Setup seleciona msb.
•
Comando de parada a partir da comunicação
•
serial.
Parada rápida.
•
Freio CC.
•
[O]
Para o motor conectado. A tecla pode ser selecionada
como [1] Ativado ou [0] Desativado via parâmetro 0-41 Tecla
[O] do LCP.
Se nenhuma função de parada externa for selecionada e a
tecla [O] estiver inativa, pare o motor desconectando a
tensão.
[Auto On]
Ativa o controle do conversor de frequência através dos
terminais de controle e/ou da comunicação serial. Quando
um sinal de partida é aplicado nos terminais de controle
e/ou no barramento, o conversor de frequência inicia. A
tecla pode ser selecionada como [1] Ativado ou [0]
Desativado via parâmetro 0-42 Tecla [Auto on] (Automát.
ligado) do LCP.
24 Danfoss A/S © 05/2018 Todos os direitos reservados. MG20OB28

Como Programar Guia de Programação
AVISO!
Um sinal HAND-OFF-AUTO ativado através das entradas
digitais tem mais prioridade que as teclas de controle
[Hand On] e [Auto On].
[Reset]
Usado para reinicialização do conversor de frequência após
um alarme (desarme). A tecla pode ser selecionada como
[1] Ativado ou [0] Desativado via parâmetro 0-43 Tecla
[Reset] do LCP.
2.3.1 Inicialização para as congurações
padrão
Inicializar o conversor de frequência com as congurações
padrão de 2 formas.
Inicialização recomendada (via parâmetro 14-22 Modo
Operação)
1. Selecione parâmetro 14-22 Modo Operação.
2. Pressione [OK]
3. Selecione [2] inicialização.
4. Pressione [OK]
5. Desconecte a alimentação de rede elétrica e
aguarde até o display desligar.
6. Reconecte a alimentação de rede elétrica. O
conversor de frequência agora é reinicializado.
Parâmetro 14-22 Modo Operação inicializa tudo, exceto:
Parâmetro 14-50 Filtro de RFI.
•
Parâmetro 8-30 Protocolo.
•
Parâmetro 8-31 Endereço.
•
Parâmetro 8-32 Baud Rate da Porta do FC.
•
Parâmetro 8-35 Atraso Mínimo de Resposta.
•
Parâmetro 8-36 Atraso Máx de Resposta.
•
Parâmetro 8-37 Atraso Inter-Caractere Máximo.
•
Parâmetro 15-00 Horas de funcionamento a
•
parâmetro 15-05 Sobretensões.
Parâmetro 15-20 Registro do Histórico: Evento a
•
parâmetro 15-22 Registro do Histórico: Tempo.
Parâmetro 15-30 Log Alarme: Cód Falha a
•
parâmetro 15-32 LogAlarme:Tempo.
Inicialização manual
1. Desconecte da rede elétrica e aguarde até que o
display apague.
2. 2a Pressione [Status] - [Main Menu] - [OK]
ao mesmo tempo durante a energização
do LCP 102, display gráco.
2b Pressione [Menu] - [OK] ao mesmo
tempo durante a energização do LCP
101, display numérico.
3. Solte as teclas, após 5 s.
4. O conversor de frequência agora está
programado, de acordo com as congurações
padrão.
Este procedimento inicializa tudo, exceto:
Parâmetro 15-00 Horas de funcionamento.
•
Parâmetro 15-03 Energizações.
•
Parâmetro 15-04 Superaquecimentos.
•
Parâmetro 15-05 Sobretensões.
•
AVISO!
A inicialização manual também reinicializa a
comunicação serial, conguração de ltro de RFI
(parâmetro 14-50 Filtro de RFI) e congurações de
registros de falhas.
2 2
MG20OB28 Danfoss A/S © 05/2018 Todos os direitos reservados. 25
Descrição do Parâmetro
3 Descrição do Parâmetro
3.1 Seleção de Parâmetro
VLT® AQUA Drive FC 202
33
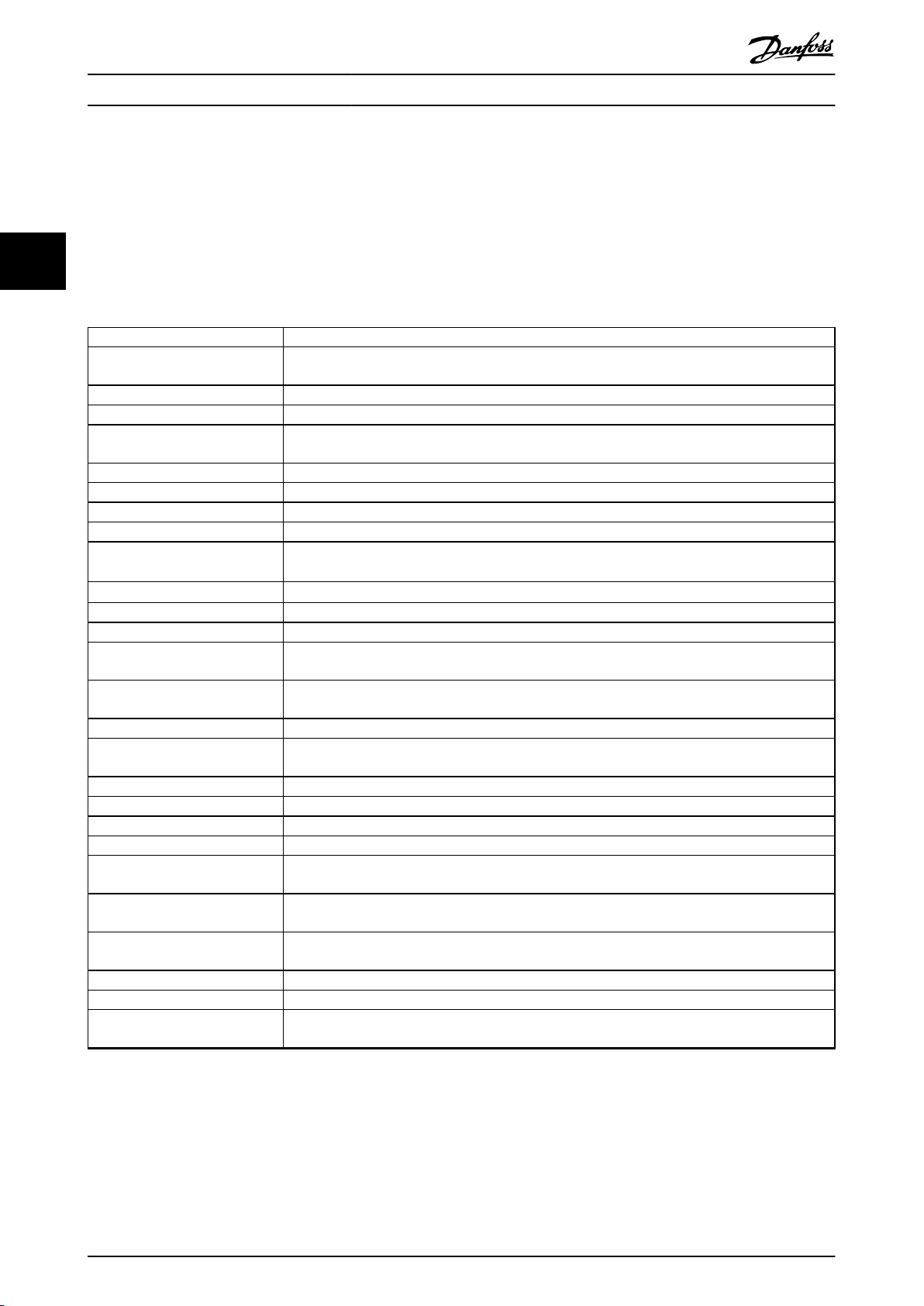
Os parâmetros estão agrupados em diversos grupos do parâmetro para fácil seleção do parâmetro correto, possibilitando
uma operação otimizada do conversor de frequência.
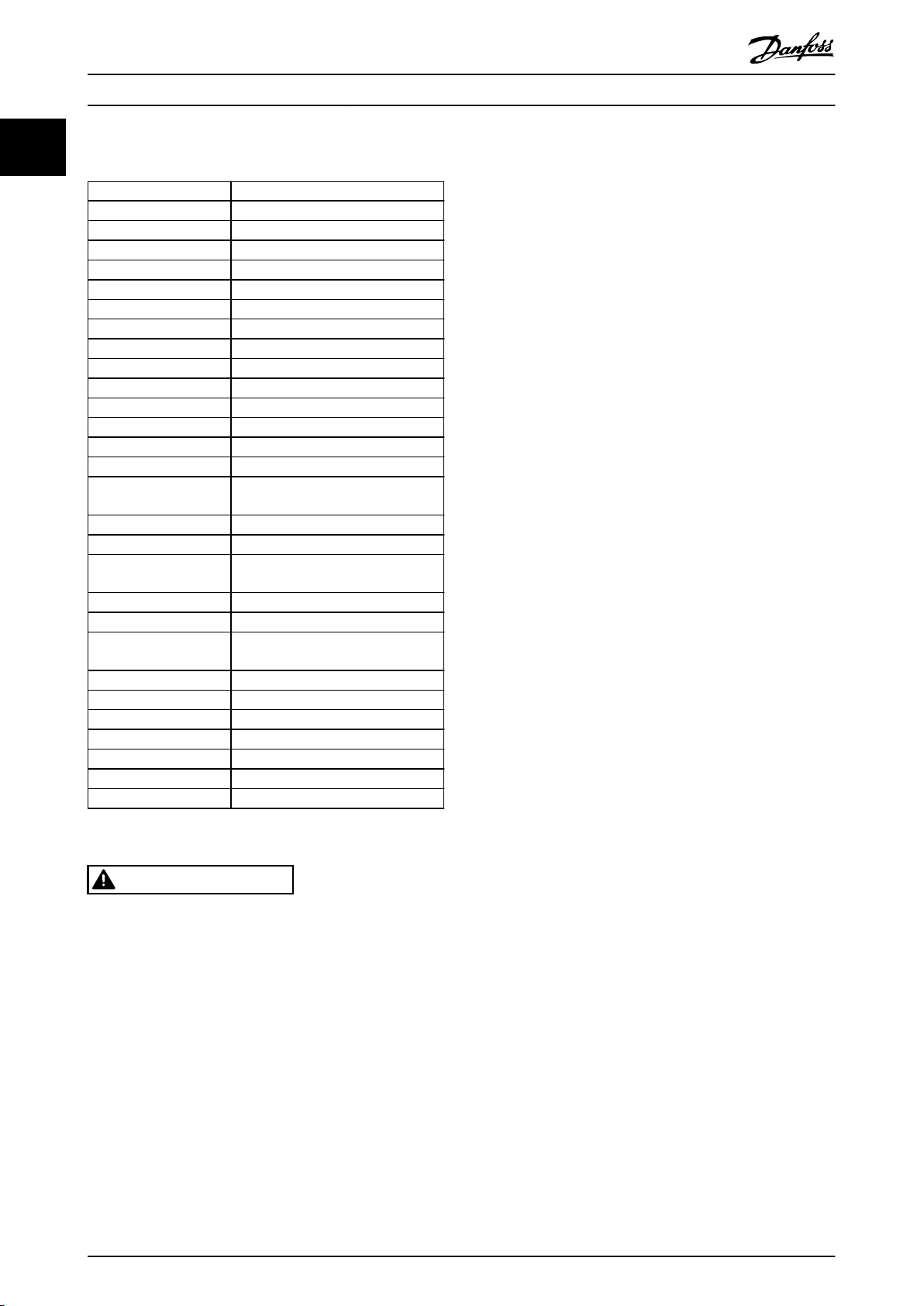
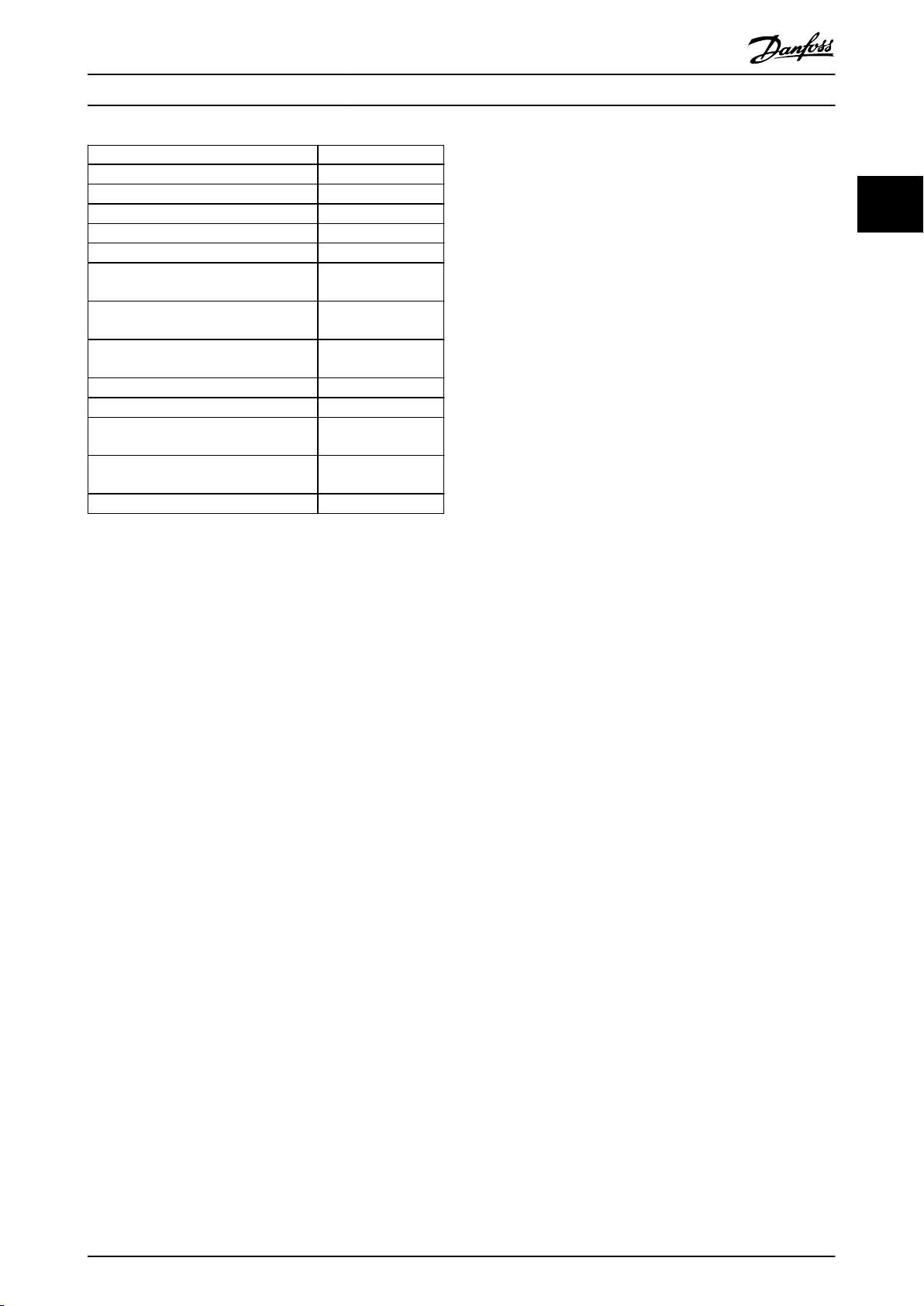
Visão geral dos grupos de parâmetros
Grupo Função
0-** Operação/Display Parâmetros relacionados às funções básicas do conversor de frequência, função das teclas do LCP e
conguração do display do LCP.
1-** Carga e Motor Parâmetros relacionados às congurações do motor.
2-** Freios Parâmetros relacionados a recursos do freio no conversor de frequência.
3-** Referência/Rampas Parâmetros para o tratamento de referência, denições de limitações e conguração da reação do
conversor de frequência a alterações.
4-** Limites/Advertêncs Parâmetros para congurar limites e advertências.
5-** Entrad/Saíd Digital Parâmetros para congurar as entradas e saídas digitais.
6-** Entrad/Saíd Analóg Parâmetros para congurar as entradas e saídas analógicas.
8-** Com. e Opcionais Grupo de parâmetros para congurar as comunicações e opcionais.
9-** PROFIBUS
10-** Fieldbus CAN
13-** Smart Logic Grupo do parâmetro para Smart Logic Control
14-** Funções Especiais Grupo do parâmetro para congurar as funções especiais do conversor de frequência.
15-** Informação do VLT Grupo do parâmetro contendo informações do conversor de frequência, como dados operacionais,
16-** Leitura de Dados Grupo do parâmetro para leituras de dados, por exemplo, referências reais, tensões, controle, alarme,
18-** Leituras de dados 2 Este grupo do parâmetro contém os últimos 10 registros de manutenção preventiva.
20-** Malha Fechada do Drive Este grupo do parâmetro é utilizado para congurar o controlador PID de malha fechada que
21-** Ext. Malha Fechada Parâmetros para congurar os 3 controladores PID de malha fechada estendidos.
22-** Aplic. Funções Parâmetros para aplicações de água.
23-** Funções Baseadas no Tempo Parâmetros para ações a serem executadas diariamente ou semanalmente.
24-** Aplic. Funções 2 Parâmetros para o bypass do conversor de frequência.
25-** Controlador em Cascata Parâmetros para congurar o controlador em cascata básico para controle sequencial de diversas
26-** Opção E/S Analógica MCB
109
29-** Funções de Aplicação
Hidráulica
30-** Recursos especiais Parâmetros para congurar os recursos especiais.
31-** Opcionais de Bypass Parâmetros para congurar a função de bypass.
35-** Opcional de entrada do
sensor
Grupo de parâmetros para parâmetros especícos do Probus (requer o VLT® PROFIBUS DP MCA
101).
Grupo de parâmetros para parâmetros especícos do DeviceNet (requer o VLT® DeviceNet MCA 104).
conguração de hardware e versões de software.
advertência e status word.
controla a frequência de saída da unidade.
bombas.
Parâmetros para congurar o VLT® Analog I/O Option MCB 109.
Parâmetros para congurar as funções hídricas especícas.
Parâmetros para congurar a função de entrada do sensor.
Tabela 3.1 Grupos de Parâmetros
As descrições e seleções de parâmetros são mostradas no LCP gráco ou no LCP numérico. Consulte capétulo 2 Como
Programar para obter mais detalhes. Acesse os parâmetros pressionando [Quick Menu] ou [Main Menu] no LCP. O Quick Menu
é utilizado fundamentalmente para colocar a unidade em funcionamento, na inicialização, disponibilizando os parâmetros
necessários à operação de partida. O Main Menu fornece o acesso a todos os parâmetros, para a programação detalhada da
aplicação.
26 Danfoss A/S © 05/2018 Todos os direitos reservados. MG20OB28

Descrição do Parâmetro Guia de Programação
Todos os terminais de entrada/saída digital e entrada/saída analógica são multifuncionais. Todos os terminais têm funções
padrão de fábrica adequadas para a maioria das aplicações hídricas. Se outras funções especiais forem necessárias, elas
deverão ser programadas nos grupos do parâmetro 5-** Entrad/Saíd Digital ou 6-** Entrad/Saíd Analóg.
3 3
MG20OB28 Danfoss A/S © 05/2018 Todos os direitos reservados. 27
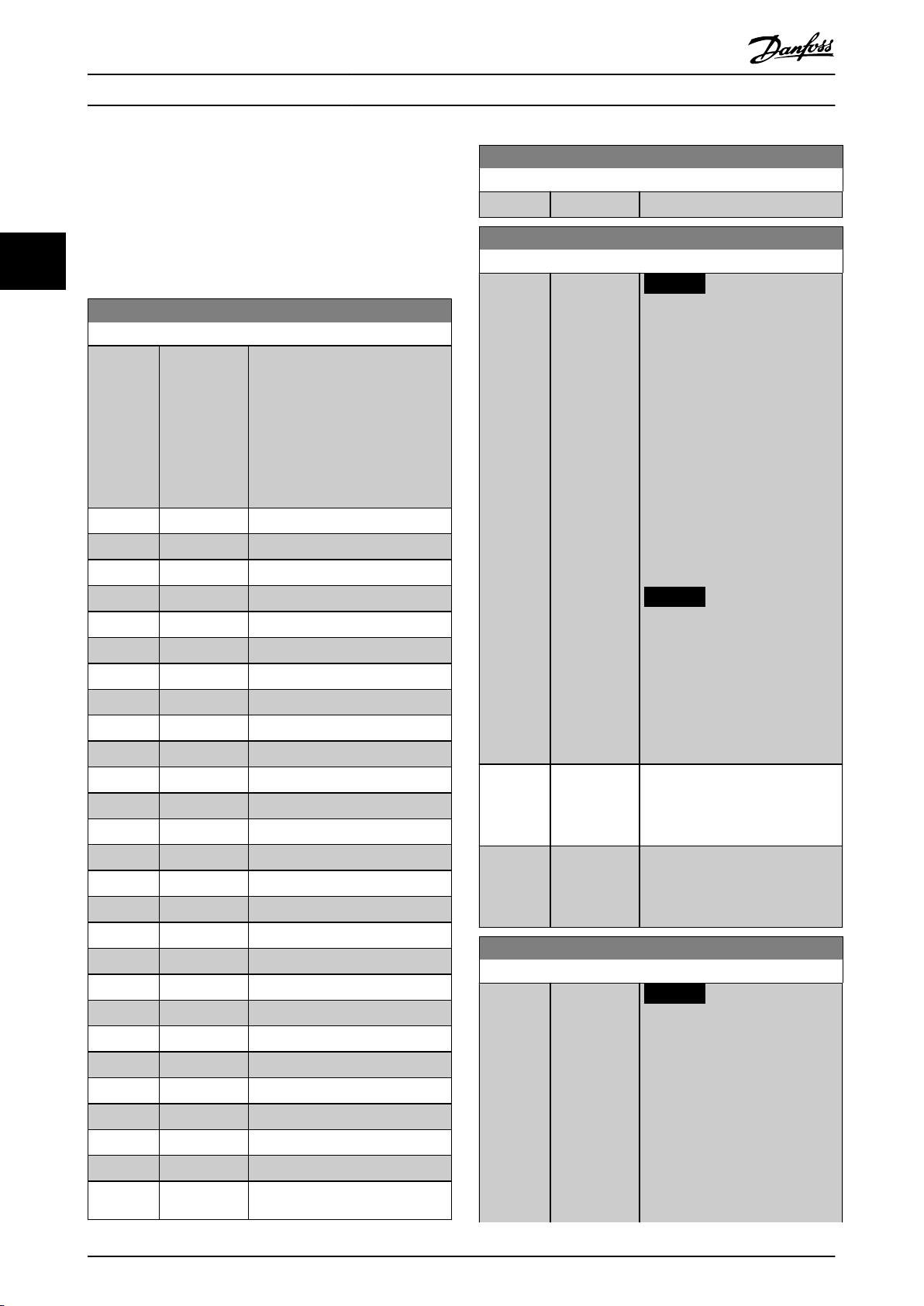
0-01 Idioma
Option: Funcão:
Dene o idioma a ser utilizado no
display.
O conversor de frequência é
entregue com 2 pacotes de idiomas
diferentes. Inglês e Alemão estão
incluídos em todos os pacotes. O
inglês não pode ser apagado ou
alterado.
[0] * English Parte dos pacotes de idiomas 1–2.
[1] Deutsch Parte dos pacotes de idiomas 1–2.
[2] Francais Parte do pacote de idioma 1.
[3] Dansk Parte do pacote de idioma 1.
[4] Spanish Parte do pacote de idioma 1.
[5] Italiano Parte do pacote de idioma 1.
[6] Svenska Parte do pacote de idioma 1.
[7] Nederlands Parte do pacote de idioma 1.
[10] Chinese Parte do pacote de idioma 2.
[20] Suomi Parte do pacote de idioma 1.
[22] English US Parte do pacote de idioma 1.
[27] Greek Parte do pacote de idioma 1.
[28] Bras.port Parte do pacote de idioma 1.
[36] Slovenian Parte do pacote de idioma 1.
[39] Korean Parte do pacote de idioma 2.
[40] Japanese Parte do pacote de idioma 2.
[41] Turkish Parte do pacote de idioma 1.
[42] Trad.Chinese Parte do pacote de idioma 2.
[43] Bulgarian Parte do pacote de idioma 1.
[44] Srpski Parte do pacote de idioma 1.
[45] Romanian Parte do pacote de idioma 1.
[46] Magyar Parte do pacote de idioma 1.
[47] Czech Parte do pacote de idioma 1.
[48] Polski Parte do pacote de idioma 1.
[49] Russian Parte do pacote de idioma 1.
[50] Thai Parte do pacote de idioma 2.
[51] Bahasa
Indonesia
Parte do pacote de idioma 2.
0-01 Idioma
Option: Funcão:
[52] Hrvatski Parte do pacote de idioma 2.
0-02 Unidade da Veloc. do Motor
Option: Funcão:
AVISO!
Não se pode ajustar este
parâmetro enquanto o motor
estiver em funcionamento.
As informações mostradas no
display dependem das congu-
rações em parâmetro 0-02 Unidade
da Veloc. do Motor e
parâmetro 0-03 Denições Regionais.
As congurações padrão de
parâmetro 0-02 Unidade da Veloc. do
Motor e parâmetro 0-03 Denições
Regionais dependem de para qual
região do mundo o conversor de
frequência é fornecido.
AVISO!
Alterar a unidade de
velocidade de motor
reinicializa determinados
parâmetros a seus valores
iniciais. Selecione a unidade de
velocidade de motor antes de
alterar outros parâmetros.
[0] * RPM Selecione para mostrar as variáveis
e parâmetros da velocidade do
motor usando a velocidade do
motor (RPM).
[1] Hz Selecione para mostrar as variáveis
e parâmetros da velocidade do
motor utilizando a frequência de
saída (Hz).
0-03 Denições Regionais
Option: Funcão:
AVISO!
Não se pode ajustar este
parâmetro enquanto o motor
estiver em funcionamento.
As informações mostradas no
display dependem das congu-
rações em parâmetro 0-02 Unidade
da Veloc. do Motor e
parâmetro 0-03 Denições Regionais.
As congurações padrão de
parâmetro 0-02 Unidade da Veloc. do
Descrição do Parâmetro
VLT® AQUA Drive FC 202
3.2 Parâmetros 0-** Operação/Display
Parâmetros relacionados às funções básicas do conversor
de frequência, função das teclas do LCP e conguração do
display do LCP.
33
3.2.1 0-0* Congurações Básicas
28 Danfoss A/S © 05/2018 Todos os direitos reservados. MG20OB28

0-03 Denições Regionais
Option: Funcão:
Motor e parâmetro 0-03 Denições
Regionais dependem da região do
mundo para a qual o conversor de
frequência é fornecido. Reprograme
as congurações conforme
necessário.
As congurações não usadas carão
ocultas.
[0] Internacional Programa as unidades de
parâmetro 1-20 Potência do Motor
[kW] para [kW] e o valor padrão do
parâmetro 1-23 Freqüência do Motor
para 50 Hz.
[1] América do
Norte
Programa as unidades de
parâmetro 1-21 Potência do Motor
[HP] para [hp] e o valor padrão de
parâmetro 1-23 Freqüência do Motor
para 60 Hz.
0-04 Estado Operacional na Energização
Option: Funcão:
Selecione o modo de operação
após a reconexão do conversor de
frequência à tensão de rede após o
desligamento ao operar em modo
manual (local) ligado.
[0] * Retomar Retoma a operação do conversor de
frequência, mantendo a mesma
referência local e a mesma
condição de partida/parada. A
condição de partida/parada é
aplicada por [Hand On]/[O] no LCP
ou partida local através de uma
entrada digital antes de o conversor
de frequência ter sido desligado.
[1] Parad
forçd,ref=ant.
Para o conversor de frequência, mas
ao mesmo tempo armazena na
memória a referência de velocidade
local antes de desligar. Após a
tensão de rede ser reconectada e
receber um comando de partida
(pressionando [Hand On] ou
comando de partida local através
de uma entrada digital), o
conversor de frequência reinicia e
opera na referência de velocidade
armazenada na memória.
0-05 Unidade de Modo Local
Option: Funcão:
Dene se a unidade de referência
local é mostrada em termos da
velocidade do eixo do motor (em
RPM/Hz) ou como porcentagem.
[0] * Na Unidade
da Veloc. do
Motor
[1] %
Descrição do Parâmetro Guia de Programação
MG20OB28 Danfoss A/S © 05/2018 Todos os direitos reservados. 29
3.2.2 0-1* Operações Setup
Denir e controlar os setups dos parâmetros individuais.
O conversor de frequência tem 4 setups de parâmetro que
podem ser programados independentemente uns dos
outros. Isso torna o conversor de frequência exível para
uso e capaz de atender aos requisitos de diferentes
esquemas de controle de sistemas de água, geralmente
economizando o custo do equipamento de controle
externo. Por exemplo, os setups podem ser utilizados para
programar o conversor de frequência para operar de
acordo com um esquema de controle em um setup (por
exemplo, funcionamento durante o dia) e outro esquema
de controle em outro setup (por exemplo, operação
noturna). Como alternativa, eles podem ser usados por
uma unidade de tratamento de ar ou uma unidade OEM
para programar igualmente todos os conversores de
frequência com padrão de fábrica para diferentes modelos
de equipamentos dentro de uma margem para calcular o
mesmos parâmetros. Durante a produção/colocação em
funcionamento, selecione um setup
do modelo do conversor de frequência.
Selecione a conguração ativa (ou seja, o setup em que o
conversor de frequência está operando) em
parâmetro 0-10 Setup Ativo. Em seguida, o LCP mostra a
conguração ativa selecionada. Utilizando o setup múltiplo,
é possível alternar entre setups, com o conversor de
frequência funcionando ou parado, através da entrada
digital ou de comandos de comunicação serial (por
exemplo, para operação noturna). Se for necessário alterar
os setups enquanto em funcionamento, certique-se de
que parâmetro 0-12 Este Set-up é dependente de esteja
programado conforme necessário. Para a maioria das
aplicações hidráulicas, não é necessário programar
parâmetro 0-12 Este Set-up é dependente de, mesmo se for
necessária uma mudança de setup enquanto em funcionamento. No entanto, isso pode ser necessário para que
aplicações complexas usem toda a exibilidade dos setups
múltiplos. Utilizando parâmetro 0-11 Set-up da Programação
é possível editar parâmetros em qualquer setups enquanto
mantém a operação do conversor de frequência em seu
setup ativo. A conguração ativa pode ser um setup
diferente do que está sendo editado. Utilizando
parâmetro 0-51 Cópia do Set-up é possível copiar programações do parâmetro entre os setups para permitir uma
especíco dependendo
3 3

0-10 Setup Ativo
Option: Funcão:
Selecione o setup no qual o
conversor de frequência deverá
funcionar.
Utilize parâmetro 0-51 Cópia do Set-
-up para copiar um setup para 1 ou
para todos os outros setups. Para
evitar congurações conitantes do
mesmo parâmetro em 2 setups
diferentes, vincule os setups usando
parâmetro 0-12 Este Set-up é
dependente de. Para o conversor de
frequência antes de alternar entre
setups onde os parâmetros
marcados como não variáveis
durante a operação têm valores
diferentes.
Os parâmetros não alteráveis
durante a operação são marcados
como FALSE (falso) em
capétulo 4 Listas de Parâmetros.
[0] Setup de
fábrica
Não pode ser alterado. Contém o
conjunto de dados Danfoss e pode
ser usado como fonte de dados ao
retornar os demais setups a um
estado conhecido.
[1] * Setup 1 [1] Setup 1 para [4] Setup 4 são as 4
congurações de parâmetro nas
quais todos os parâmetros podem
ser programados.
[2] Setup 2
[3] Setup 3
[4] Setup 4
[9] Setup Múltiplo Usado para seleções remotas de
setup por entradas digitais e da
porta de comunicação serial. Este
setup utiliza as programações do
parâmetro 0-12 Este Set-up é
dependente de.
0-11 Set-up da Programação
Option: Funcão:
Selecione o setup a ser editado
(que está programado) durante a
operação; a conguração ativa ou 1
das congurações inativas. O
número do setup que está sendo
editado é mostrado no LCP entre
colchetes.
[0] Setup de
fábrica
Não pode ser editado, mas é útil
como fonte de dados para retornar
0-11 Set-up da Programação
Option: Funcão:
os demais setups a um estado
conhecido.
[1] Setup 1 [1] Setup 1 a [4] Setup 4 podem ser
editados livremente durante a
operação, independentemente da
conguração ativa.
[2] Setup 2
[3] Setup 3
[4] Setup 4
[9] * Ativar Set-up O setup em que o conversor de
frequência está operando pode ser
editado durante a operação. A
edição de parâmetros no setup
selecionado normalmente seria feita
no LCP, mas também é possível em
qualquer porta de comunicação
serial.
0-12 Este Set-up é dependente de
Option: Funcão:
Use este parâmetro somente se for
necessário uma mudança de setups
enquanto o motor estiver em
funcionamento. Este parâmetro
assegura que parâmetros não
alteráveis durante a operação
tenham a mesma conguração em
todos os setups pertinentes.
Para ativar alterações isentas de
conito de um setup para outro
enquanto o conversor de frequência
está em funcionamento, vincule
setups que contenham parâmetros
não alteráveis durante a operação.
O vínculo assegura a sincronização
dos valores dos parâmetros não
variáveis durante a operação ao
passar de um setup para outro. Os
parâmetros marcados como FALSE
(falso) nas listas de parâmetros (em
capétulo 4 Listas de Parâmetros) não
podem ser alterados enquanto o
conversor de frequência estiver
funcionando.
O recurso parâmetro 0-12 Este Set-
-up é dependente de é usado
quando [9] Setup múltiplo em
parâmetro 0-10 Setup Ativo estiver
selecionado. Use [9] Setup múltiplo
para mover de um setup para outro
durante a operação enquanto o
motor estiver em funcionamento.
Por exemplo:
Descrição do Parâmetro
colocação em funcionamento mais rápida se parâmetros
similares forem necessários em setups diferentes.
33
30 Danfoss A/S © 05/2018 Todos os direitos reservados. MG20OB28
VLT® AQUA Drive FC 202

0-12 Este Set-up é dependente de
Option: Funcão:
Use o [9] Setup múltiplo para passar
do setup 1 para o setup 2,
enquanto o motor estiver em
funcionamento. Programe primeiro
parâmetros no setup 1; em seguida,
garanta que o setup 1 e o setup 2
estejam sincronizados (ou
vinculados).
A sincronização pode ser executada
de 2 maneiras:
•
Altere o setup de edição
para [2] Setup 2 em
parâmetro 0-11 Set-up da
Programação e programe
parâmetro 0-12 Este Set-up
é dependente de para [1]
Setup 1. Isso inicia o
processo de vinculação
(sincronização).
130BP075.10
Ilustração 3.1 Tratamento do
Setup
•
Enquanto ainda no setup
1, usando
parâmetro 0-50 Cópia do
LCP, copie o setup 1 para
o setup 2. Em seguida,
programe
parâmetro 0-12 Este Set-up
é dependente de para [2]
Setup 2. Isso inicia o
processo de vinculação.
130BP076.10
Ilustração 3.2 Tratamento do
Setup
Após concluir a vinculação,
parâmetro 0-13 Leitura: Setups
Conectados lê os setups 1 e 2 para
indicar que todos os parâmetros
não alteráveis durante a operação
0-12 Este Set-up é dependente de
Option: Funcão:
são, agora, os mesmos no setup 1 e
setup 2. Se houver alterações em
um parâmetro não variável durante
a operação no setup 2, por
exemplo, parâmetro 1-30 Resistência
do Estator (Rs), eles também serão
alterados no setup 1. Agora é
possível alternar entre o setup 1 e
o setup 2 durante a operação.
[0] * Não
conectado
[1] Setup 1
[2] Setup 2
[3] Setup 3
[4] Setup 4
0-13 Leitura: Setups Conectados
Matriz [5]
Range: Funcão:
0* [0 - 255 ] Veja uma lista de todos os setups
vinculados por parâmetro 0-12 Este
Set-up é dependente de. O
parâmetro tem 1 índice para cada
setup de parâmetro. O valor para
cada índice representa os setups
que estão vinculados a esse setup
de parâmetro.
Índice Valor no LCP
0 {0}
1 {1,2}
2 {1,2}
3 {3}
4 {4}
Tabela 3.2 Exemplo de
vinculação de setup
0-14 Leitura: Set-ups. Prog. / Canal
Range: Funcão:
0* [-2147483648
-
2147483647 ]
Exibir a conguração do
parâmetro 0-11 Set-up da
Programação para cada um dos 4
canais de comunicação diferentes.
Quando o número é exibido em
hexadecimal, como no LCP, cada
número mostra um canal.
Os números de 1–4 representam
um número de setup; F representa
a conguração de fábrica, e A
representa uma conguração ativa.
Os canais são, da direita para a
Descrição do Parâmetro Guia de Programação
3 3
MG20OB28 Danfoss A/S © 05/2018 Todos os direitos reservados. 31

0-14 Leitura: Set-ups. Prog. / Canal
Range: Funcão:
esquerda: LCP, eldbus, USB,
HPFB1.5.
Exemplo: O valor AAAAAA21h
signica que o canal do eldbus
usa o setup 2 em
parâmetro 0-11 Set-up da
Programação, o LCP usa o setup 1,
e todos os demais canais usam a
conguração ativa.
0-20 Linha do Display 1.1 Pequeno
Option: Funcão:
Selecione uma variável para mostrar
na linha 1, posição esquerda.
[0] Nenhum Não foi selecionado nenhum valor
de display
[15] Readout:
actual setup
[37] Texto de
Display 1
Control word atual
[38] Texto de
Display 2
[39] Texto de
Display 3
[89] Leitura da
Data e Hora
[953] Warning Word
do Probus
Mostra alertas de comunicação do
PROFIBUS.
[1005] Leitura do
Contador de
Erros d Transm
Exibe o número de erros de
transmissão de controle da CAN
desde a última energização.
[1006] Leitura do
Contador de
Erros d Recepç
Exibe o número de erros de
recepção de controle da CAN desde
a última energização.
[1007] Leitura do
Contador de
Bus o
Exibe o número de eventos de bus-
-o desde a última energização.
0-20 Linha do Display 1.1 Pequeno
Option: Funcão:
[1013] Parâmetro de
Advertência
Mostra um warning word especíco
do DeviceNet. Um bit especíco é
associado para cada advertência.
[1230] Parâmetro de
Advertência
[1397] Alert Alarm
Word
[1398] Alert Warning
Word
[1399] Alert Status
Word
[1500] Horas de
funcio-
namento
Exibir as horas de funcionamento
do conversor de frequência.
[1501] Horas em
Funcio-
namento
Exibe o número de horas de funcionamento do motor.
[1502] Medidor de
kWh
Exibe o consumo de energia de
rede elétrica, em kWh.
[1580] Horas de
funcio-
namento do
ventilador
[1600] Control Word Visualize a control word enviada do
conversor de frequência através da
porta de comunicação serial em
código hex.
[1601] * Referência
[Unidade]
Referência total (soma de digital,
analógico, predenido, bus,
congelar referência, catch-up e
redução de velocidade) na unidade
selecionada.
[1602] Referência % Referência total (soma de digital,
analógico, predenido, bus,
congelar referência, catch-up e
redução de velocidade) em
porcentagem.
[1603] Est. Status word atual.
[1605] Valor Real
Principal [%]
Uma ou mais advertências em
código hex.
[1609] Leit.Personalz. Conra as leituras denidas pelo
usuário conforme denido em:
•
Parâmetro 0-30 Unidade de
Leitura Personalizada.
•
Parâmetro 0-31 Valor Mín
Leitura Personalizada.
•
Parâmetro 0-32 Valor Máx
Leitura Personalizada.
[1610] Potência [kW] Energia real consumida pelo motor,
em kW.
Descrição do Parâmetro
33
3.2.3 0-2* Display do LCP
Dena as variáveis mostradas no LCP.
AVISO!
Para obter informações sobre como escrever textos do
display, consulte:
•
•
•
32 Danfoss A/S © 05/2018 Todos os direitos reservados. MG20OB28
Parâmetro 0-37 Texto de Display 1.
Parâmetro 0-38 Texto de Display 2.
Parâmetro 0-39 Texto de Display 3.
VLT® AQUA Drive FC 202

0-20 Linha do Display 1.1 Pequeno
Option: Funcão:
[1611] Potência [hp] Energia real consumida pelo motor,
em hp.
[1612] Tensão do
motor
Tensão fornecida ao motor.
[1613] Freqüência Frequência do motor, ou seja, a
frequência de saída do conversor
de frequência em Hz.
[1614] Corrente do
motor
Corrente de fase do motor, medida
como valor ecaz.
[1615] Freqüência [%] Frequência do motor, ou seja, a
frequência de saída do conversor
de frequência em percentual.
[1616] Torque [Nm] Carga atual do motor, como uma
porcentagem do torque nominal do
motor.
[1617] Velocidade
[RPM]
Velocidade em rpm (rotações por
minuto), ou seja, a velocidade do
eixo do motor em malha fechada
com base nos dados inseridos da
plaqueta de identicação do motor,
na frequência de saída e na carga
no conversor de frequência.
[1618] Térmico
Calculado do
Motor
Carga térmica no motor, calculada
pela função ETR. Consulte também
o grupo do parâmetro 1-9* Temper.
do Motor.
[1619] Temperatura
Sensor KTY
[1622] Torque [%] Exibe o torque real produzido, em
porcentagem.
[1623] Motor Shaft
Power [kW ]
Exibe a potência mecânica aplicada
ao eixo do motor.
[1624] Calibrated
Stator
Resistance
[1626] Potência
Filtrada [kW]
[1627] Potência
Filtrada [hp]
[1630] Tensão de
Conexão CC
Tensão do barramento CC no
conversor de frequência.
[1631] System Temp.
[1632] Energia de
Frenagem /s
Potência de frenagem atual
transferida para um resistor de freio
externo.
Exibe um valor instantâneo.
[1633] Energia de
Frenagem /2
min
Potência de frenagem transferida
para um resistor de freio externo. A
potência média é calculada
0-20 Linha do Display 1.1 Pequeno
Option: Funcão:
continuamente para os últimos 120
s.
[1634] Temp. do
Dissipador de
Calor
Temperatura atual do dissipador de
calor do conversor de frequência. O
limite de desativação é 95 ±5 °C. A
reativação ocorre a 70 ±5 °C.
[1635] Térmico do
Inversor
Porcentagem da carga dos
inversores.
[1636] Corrente
Nom.do
Inversor
Corrente nominal do conversor de
frequência.
[1637] Corrente
Máx.do
Inversor
Corrente máxima do conversor de
frequência.
[1638] Estado do SLC Estado do evento executado pelo
controle.
[1639] Temp.do
Control Card
Temperatura do cartão de controle.
[1642] Service Log
Counter
[1645] Motor Phase U
Current
[1646] Motor Phase V
Current
[1647] Motor Phase
W Current
[1650] Referência
Externa
Soma da referência externa como
uma porcentagem, ou seja, a soma
de analógico, pulso e barramento.
[1652] Feedback
[Unidade]
O valor do sinal em unidades a
partir das entradas digitais
programadas.
[1653] Referência do
DigiPot
Conra a contribuição do
potenciômetro digital para o
feedback de referência real.
[1654] Feedback 1
[Unidade]
Veja o valor do feedback 1.
Consulte também o grupo do
parâmetro 20-0* Feedback.
[1655] Feedback 2
[Unidade]
Veja o valor do feedback 2.
Consulte também o grupo do
parâmetro 20-0* Feedback.
[1656] Feedback 3
[Unidade]
Veja o valor do feedback 3.
Consulte também o grupo do
parâmetro 20-0* Feedback.
[1658] Saída do PID
[%]
Retorna o valor da saída do
controlador PID de malha fechada
em porcentagem.
[1659] Adjusted
Setpoint
Mostra o setpoint de operação real
depois de ser alterado pela
compensação de vazão. Consulte o
Descrição do Parâmetro Guia de Programação
MG20OB28 Danfoss A/S © 05/2018 Todos os direitos reservados. 33
3 3

0-20 Linha do Display 1.1 Pequeno
Option: Funcão:
grupo do parâmetro 22-8* Compens.
de Vazão.
[1660] Entrada digital Exibe o status das entradas digitais.
Sinal baixo=0, sinal alto=1.
Relativamente ao pedido de
compra, consulte o
parâmetro 16-60 Entrada digital. O
bit 0 está no extremo direito.
[1661] Denição do
Terminal 53
Conguração do terminal de
entrada 53. Corrente=0, tensão=1.
[1662] Entrada
Analógica 53
Valor real na saída 53, como uma
referência ou como um valor de
proteção.
[1663] Denição do
Terminal 54
Conguração do terminal de
entrada 54. Corrente=0, tensão=1.
[1664] Entrada
Analógica 54
Valor real na entrada 54, como
referência ou valor de proteção.
[1665] Saída
Analógica 42
[mA]
Valor real na saída 42, em mA. Use
parâmetro 6-50 Terminal 42 Saída
para selecionar a variável a ser
mostrada na saída 42.
[1666] Saída Digital
[bin]
Valor binário de todas as saídas
digitais.
[1667] Entr Pulso #29
[Hz]
Valor real da frequência aplicada no
terminal 29, como uma entrada de
pulso.
[1668] Entr Pulso #33
[Hz]
Valor real da frequência aplicada no
terminal 33, como uma entrada de
pulso.
[1669] Saída de Pulso
#27 [Hz]
Valor real de pulsos aplicados ao
terminal 27, no modo de saída
digital.
[1670] Saída de Pulso
#29 [Hz]
Valor real de pulsos aplicados ao
terminal 29, no modo de saída
digital.
[1671] Saída do Relé
[bin]
Exibir a conguração de todos os
relés.
[1672] Contador A Conra o valor atual do contador A.
[1673] Contador B Conra o valor atual do contador B.
[1675] Entr. Analógica
X30/11
Valor real do sinal na entrada
X30/11 (VLT® General Purpose I/O
MCB 101, opcional).
[1676] Entr. Analógica
X30/12
Valor real do sinal na entrada
X30/12 (VLT® General Purpose I/O
MCB 101, opcional).
[1677] Saída
Analógica
X30/8 [mA]
Valor real na saída X30/8 (VLT
®
General Purpose I/O MCB 101,
opcional). Use
0-20 Linha do Display 1.1 Pequeno
Option: Funcão:
parâmetro 6-60 Terminal X30/8 Saída
para selecionar a variável a ser
mostrada.
[1678] Saída Anal.
X45/1 [mA]
[1679] Saída
Analógica
X45/3 [mA]
[1680] CTW 1 do
Fieldbus
Control word (CTW) recebida do
eldbus.
[1682] REF 1 do
Fieldbus
Valor da referência principal
enviado com a control word através
da rede de comunicações serial, por
exemplo, oriundo do BMS, PLC ou
de outro controlador.
[1684] StatusWord do
Opcional d
Comunicação
Status word estendida do opcional
de comunicação do eldbus.
[1685] CTW 1 da
Porta Serial
Control word (CTW) recebida do
eldbus.
[1686] REF 1 da Porta
Serial
Status word (STW) enviada ao
eldbus.
[1687] Bus Readout
Alarm/Warning
[1689] Congurable
Alarm/Warning
Word
Mostra a alarm/warning word que é
congurada em
parâmetro 8-17 Congurable Alarm
and Warningword.
[1690] Alarm Word Um ou mais alarmes em código hex
(usado para comunicação serial).
[1691] Alarm Word 2 Um ou mais alarmes em código hex
(usado para comunicação serial).
[1692] Warning Word Uma ou mais advertências em
código hex (usado para
comunicação serial).
[1693] Warning Word2Uma ou mais advertências em
código hex (usado para
comunicação serial).
[1694] Status Word
Estendida
Uma ou mais condições de status
em código hex (usada para
comunicação serial).
[1695] Est. Status
Word 2
Uma ou mais condições de status
em código hex (usada para
comunicação serial).
[1696] Word de
Manutenção
Os bits reetem o status dos
eventos de manutenção preventiva
programados no grupo do
parâmetro 23-1* Manutenção.
[1697] Alarm Word 3
Descrição do Parâmetro
33
34 Danfoss A/S © 05/2018 Todos os direitos reservados. MG20OB28
VLT® AQUA Drive FC 202

0-20 Linha do Display 1.1 Pequeno
Option: Funcão:
[1698] Warning Word
3
[1830] Entr.analóg.X4
2/1
Mostra o valor do sinal aplicado no
terminal X42/1 no cartão de E/S
analógica.
[1831] Entr.Analóg.X4
2/3
Mostra o valor do sinal aplicado no
terminal X42/3 no cartão de E/S
analógica.
[1832] Entr.analóg.X4
2/5
Mostra o valor do sinal aplicado no
terminal X42/5 no cartão de E/S
analógica.
[1833] Saída Anal
X42/7 [V]
Mostra o valor do sinal aplicado no
terminal X42/7 no cartão de E/S
analógica.
[1834] Saída Anal
X42/9 [V]
Mostra o valor do sinal aplicado no
terminal X42/9 no cartão de E/S
analógica.
[1835] Saída Anal
X42/11 [V]
Mostra o valor do sinal aplicado no
terminal X42/11 no cartão de E/S
analógica.
[1836] Entrada
analógica
X48/2 [mA]
[1837] EntradaTemp
X48/4
[1838] EntradaTemp
X48/7
[1839] EntradaTemp
X48/10
[1850] Leitura Sem o
Sensor
[unidade]
[1860] Digital Input 2
[1870] Mains Voltage
[1871] Mains
Frequency
[1872] Mains
Imbalance
[1875] Rectier DC
Volt.
[2117] Referência Ext.
1[Unidade]
O valor da referência do
controlador de malha fechada
estendida 1.
[2118] Feedback Ext.
1 [Unidade]
O valor do sinal de feedback do
controlador de malha fechada
estendida 1
[2119] Saída Ext. 1
[%]
O valor da saída do controlador de
malha fechada estendida 1.
[2137] Referência Ext.
2 [Unidade]
O valor da referência do
controlador de malha fechada
estendida 2.
0-20 Linha do Display 1.1 Pequeno
Option: Funcão:
[2138] Feedback Ext.
2 [Unidade]
O valor do sinal do feedback do
controlador de malha fechada
estendida 2.
[2139] Saída Ext. 2
[%]
O valor da saída do controlador de
malha fechada estendida 2.
[2157] Referência Ext.
3 [Unidade]
O valor da referência do
controlador de malha fechada
estendida 3.
[2158] Feedback Ext.
3 [Unidade]
O valor do sinal do feedback do
controlador de malha fechada
estendida 3.
[2159] Saída Ext. 3
[%]
O valor da saída do controlador de
malha fechada estendida 3.
[2230] Potência de
Fluxo-Zero
A potência de uxo-zero calculada
para a velocidade operacional real.
[2316] Texto.Manuten
ção
[2580] Status de
Cascata
Status da operação do controlador
em cascata.
[2581] Status da
Bomba
Status da operação de cada bomba
individual controlada pelo
controlador em cascata.
[2791] Cascade
Reference
Saída de referência para uso com
conversores de frequência escravos.
[2792] % Of Total
Capacity
Parâmetro de leitura para mostrar o
ponto de operação do sistema
como uma porcentagem da
capacidade total do sistema.
[2793] Cascade
Option Status
É um parâmetro de leitura que
exibe o status do sistema em
cascata.
[2794] Status do
Sistema em
Cascata
[2795] Advanced
Cascade Relay
Output [bin]
[2796] Extended
Cascade Relay
Output [bin]
[2920] Derag
Power[kW]
[2921] Derag
Power[HP]
[2965] Totalized
Volume
[2966] Actual Volume
[2969] Flow
[3110] Status Word-
-Bypass
Descrição do Parâmetro Guia de Programação
MG20OB28 Danfoss A/S © 05/2018 Todos os direitos reservados. 35
3 3

0-20 Linha do Display 1.1 Pequeno
Option: Funcão:
[3111] Bypass Horas
Funcion
[3401] PCD 1 Gravar
no MCO
[3402] PCD 2 Gravar
no MCO
[3403] PCD 3 Gravar
no MCO
[3404] PCD 4 Gravar
no MCO
[3405] PCD 5 Gravar
no MCO
[3406] PCD 6 Gravar
no MCO
[3407] PCD 7 Gravar
no MCO
[3408] PCD 8 Gravar
no MCO
[3409] PCD 9 Gravar
no MCO
[3410] PCD 10 Gravar
no MCO
[3421] PCD 1 Ler do
MCO
[3422] PCD 2 Ler do
MCO
[3423] PCD 3 Ler do
MCO
[3424] PCD 4 Ler do
MCO
[3425] PCD 5 Ler do
MCO
[3426] PCD 6 Ler do
MCO
[3427] PCD 7 Ler do
MCO
[3428] PCD 8 Ler do
MCO
[3429] PCD 9 Ler do
MCO
[3430] PCD 10 Ler do
MCO
[9920] Fan Ctrl deltaT
[9921] Fan Ctrl
Tmean
[9922] Fan Ctrl NTC
Cmd
[9923] Fan Ctrl i-term
[9924] Rectier
Current
[9952] PC Debug 0
[9953] PC Debug 1
[9954] PC Debug 2
0-20 Linha do Display 1.1 Pequeno
Option: Funcão:
[9961] FPC Debug 0
[9962] FPC Debug 1
[9963] FPC Debug 2
[9964] FPC Debug 3
[9965] FPC Debug 4
0-25 Meu Menu Pessoal
Matriz [50]
Range: Funcão:
Size
related*
[0 - 9999 ] Dena até 20 parâmetros a serem
incluídos no Q1 Menu Pessoal,
acessível pela tecla [Quick Menu]
(Menu Rápido) no LCP. Os
parâmetros são mostrados em Q1
Menu pessoal, na ordem em que
estão programados nesse
parâmetro de matriz. Eliminar
parâmetros congurando o valor
0000.
Por exemplo, isso pode ser usado
para fornecer acesso simples e
rápido a apenas 1 ou até 50
parâmetros que necessitam de
alterações regulares.
Descrição do Parâmetro
33
36 Danfoss A/S © 05/2018 Todos os direitos reservados. MG20OB28
VLT® AQUA Drive FC 202
0-21 Linha de Display 1.2 Pequeno
As opções são as mesmas que as listadas para
parâmetro 0-20 Linha do Display 1.1 Pequeno. Selecione uma
variável para mostrar na linha 1, posição central.
0-22 Linha de Display 1.3 Pequeno
As opções são as mesmas que as listadas para
parâmetro 0-20 Linha do Display 1.1 Pequeno. Selecione uma
variável para mostrar na linha 1, posição direita.
0-23 Linha de Display 2 Grande
As opções são as mesmas que as listadas para
parâmetro 0-20 Linha do Display 1.1 Pequeno. Selecione uma
variável para mostrar na linha 2.
0-24 Linha de Display 3 Grande
As opções são as mesmas que as listadas para
parâmetro 0-20 Linha do Display 1.1 Pequeno. Selecione uma
variável para mostrar na linha 2.

0
130BT105.12
Limite Superior da
Velocidade do Motor
P 4-13 (RPM)
P 4-14 (HZ)
Velocidade do Mot
Unidade Cubia (Potencia)
Unidade Quadratica (pressao)
Unidade Linear (p.ex. Velocidade e fluxo)
Valor min
Somente unidades
Lineares
P 0-31
Leitura Personalizada (Valor)
P 16-09
Unidade da Leitura
Personalizada P 0-30
Valor max
P 0-32
0-30 Unidade de Leitura Personalizada
Option: Funcão:
Programe um valor a ser exibido no
display do LCP. O valor tem uma
relação linear, ao quadrado ou
cúbica com a velocidade. Essa
relação depende da unidade de
medida selecionada (consulte
Tabela 3.3). O valor real calculado
pode ser lido em
parâmetro 16-09 Leit.Personalz. e/ou
exibido no display selecionando
[1609] Leitura Personalizada em
parâmetro 0-20 Linha do Display 1.1
Pequeno a parâmetro 0-24 Linha do
Display 3 Grande.
[0]
[1] * %
[5] PPM
[10] 1/min
[11] RPM
[12] PULSOS/s
[20] l/s
[21] l/min
[22] l/h
[23] m³/s
[24] m³/min
[25] m³/h
[30] kg/s
[31] kg/min
[32] kg/h
[33] t/min
[34] t/h
[40] m/s
[41] m/min
[45] m
[60] °C
[70] mbar
[71] bar
[72] Pa
[73] kPa
Descrição do Parâmetro Guia de Programação
3.2.4 0-3* Leitura do LCP
É possível personalizar os elementos da tela para diversas
nalidades:
Leitura personalizada. Valor proporcional à
•
velocidade (linear, ao quadrado ou cúbica,
dependendo da unidade de medida selecionada
em parâmetro 0-30 Unidade de Leitura Persona-
lizada).
Texto do display. String de texto armazenada em
•
um parâmetro.
Leitura personalizada
O valor calculado a ser mostrado é baseado nos ajustes
em:
Parâmetro 0-30 Unidade de Leitura Personalizada.
•
Parâmetro 0-31 Valor Mín Leitura Personalizada
•
(somente linear).
Parâmetro 0-32 Valor Máx Leitura Personalizada.
•
Parâmetro 4-13 Lim. Superior da Veloc. do Motor
•
[RPM].
Parâmetro 4-14 Lim. Superior da Veloc do Motor
•
•
Ilustração 3.3 Leit.Personalz.
A relação depende do tipo de unidade de medida,
selecionada em parâmetro 0-30 Unidade de Leitura Persona-
lizada:
MG20OB28 Danfoss A/S © 05/2018 Todos os direitos reservados. 37
[Hz].
Velocidade real.
Tipo de unidade Relação de velocidade
Adimensional
Máx.
Vazão, volume
Vazão, massa
Velocidade
Comprimento
Temperatura
Pressão Quadrática
Fator de Cúbica
Tabela 3.3 Relações de velocidade para diferentes tipos de unidade
Linear
3 3

0-30 Unidade de Leitura Personalizada
Option: Funcão:
[74] m WG
[75] mm Hg
[80] kW
[120] GPM
[121] galão/s
[122] galão/min
[123] galão/h
[124] CFM
[125] pé cúbico/s
[126] pé cúbico/min
[127] pé cúbico/h
[130] lb/s
[131] lb/min
[132] lb/h
[140] pés/s
[141] pés/min
[145] pé
[160] °F
[170] psi
[171] lb/pol²
[172] pol wg
[173] pé WG
[174] poleg Hg
[180] HP
0-31 Valor Mín Leitura Personalizada
Range: Funcão:
Size
related*
[ -999999.99 -
100.00
CustomRea-
doutUnit]
Este parâmetro permite a escolha
do valor mínimo da leitura denida
pelo usuário (ocorre em velocidade
zero). Só é possível selecionar um
valor diferente de 0 ao selecionar
uma unidade linear em
parâmetro 0-30 Unidade de Leitura
Personalizada. Para unidades
quadráticas e cúbicas, o valor
mínimo é 0.
0-32 Valor Máx Leitura Personalizada
Range: Funcão:
100
CustomReadoutUni
t*
[ par. 0-31 -
999999.99
CustomRea-
doutUnit]
Este parâmetro congura o valor
máximo a ser mostrado quando a
velocidade do motor atingir o valor
denido para parâmetro 4-13 Lim.
Superior da Veloc. do Motor [RPM]
ou parâmetro 4-14 Lim. Superior da
Veloc do Motor [Hz] (depende da
conguração em
parâmetro 0-02 Unidade da Veloc. do
Motor).
0-37 Texto de Display 1
Range: Funcão:
0* [0 - 25 ] Neste parâmetro, é possível gravar
uma sequência de texto individual
que será exibida no LCP ou para ser
lida por uma comunicação serial.
Para mostrar o texto permanentemente, selecione [37] Texto do
Display 1 em um dos seguintes
parâmetros:
•
Parâmetro 0-20 Linha do
Display 1.1 Pequeno.
•
Parâmetro 0-21 Linha do
Display 1.2 Pequeno.
•
Parâmetro 0-22 Linha do
Display 1.3 Pequeno.
•
Parâmetro 0-23 Linha do
Display 2 Grande.
•
Parâmetro 0-24 Linha do
Display 3 Grande.
•
Parâmetro 0-37 Texto de
Display 1.
Alterar parâmetro 12-08 Nome do
Host altera parâmetro 0-37 Texto de
Display 1 - mas não vice-versa.
0-38 Texto de Display 2
Range: Funcão:
0* [0 - 25 ] Neste parâmetro, é possível gravar
uma sequência de texto individual
que será exibida no LCP ou para ser
lida por uma comunicação serial.
Para mostrar o texto permanentemente, selecione [38] Texto de
Display 2 em:
•
Parâmetro 0-20 Linha do
Display 1.1 Pequeno.
•
Parâmetro 0-21 Linha do
Display 1.2 Pequeno.
•
Parâmetro 0-22 Linha do
Display 1.3 Pequeno.
•
Parâmetro 0-23 Linha do
Display 2 Grande.
•
Parâmetro 0-24 Linha do
Display 3 Grande.
Pressione [▲] ou [▼] para alterar
um caractere. Pressione [◀] e [▶]
para mover o cursor. Quando um
caractere é realçado pelo cursor,
este caractere pode ser alterado.
Um caractere pode ser inserido
posicionando o cursor entre 2
Descrição do Parâmetro
VLT® AQUA Drive FC 202
33
38 Danfoss A/S © 05/2018 Todos os direitos reservados. MG20OB28

0-38 Texto de Display 2
Range: Funcão:
caracteres e pressionando [▲] ou
[▼].
0-39 Texto de Display 3
Range: Funcão:
0* [0 - 25 ] Neste parâmetro, é possível gravar
uma sequência de texto individual
que será exibida no LCP ou para ser
lida por uma comunicação serial.
Para mostrar o texto permanentemente, selecione texto do display
3 em parâmetro 0-20 Linha do
Display 1.1 Pequeno,
parâmetro 0-21 Linha do Display 1.2
Pequeno, parâmetro 0-22 Linha do
Display 1.3 Pequeno,
parâmetro 0-23 Linha do Display 2
Grande ou parâmetro 0-24 Linha do
Display 3 Grande. Pressione [▲] ou
[▼] para alterar um caractere.
Pressione [◀] e [▶] para mover o
cursor. Quando um caractere é
realçado pelo cursor, este caractere
pode ser alterado. Um caractere
pode ser inserido posicionando o
cursor entre 2 caracteres e
pressionando [▲] ou [▼].
0-40 Tecla [Hand on] (Manual ligado) do LCP
Option: Funcão:
[0] Desativado Selecione para desabilitar a tecla.
[1] * Ativado A tecla [Hand On] (Manual ligado)
está ativada.
[2] Senha Evite que ocorra uma partida não
autorizada no modo manual ligado.
Se parâmetro 0-40 Tecla [Hand on]
(Manual ligado) do LCP estiver
incluído em Meu menu pessoal,
dena a senha em
parâmetro 0-65 Senha de Menu
Pessoal. Caso contrário, dena a
senha em parâmetro 0-60 Senha do
Menu Principal.
[3] Ativado sem
OFF
[4] Senha sem
OFF
0-40 Tecla [Hand on] (Manual ligado) do LCP
Option: Funcão:
[5] Ativado com
OFF
[6] Senha com
OFF
[9] Enabled, ref =
0
0-41 Tecla [O] do LCP
Option: Funcão:
[0] Desativado Selecione para desabilitar a tecla.
[1] * Ativado A tecla [O] (Desligado] está
ativada.
[2] Senha Evite efetuar paradas acidentais. Se
parâmetro 0-41 Tecla [O] do LCP
estiver incluído em Meu menu
pessoal, dena a senha em
parâmetro 0-65 Senha de Menu
Pessoal. Caso contrário, dena a
senha em parâmetro 0-60 Senha do
Menu Principal.
0-42 Tecla [Auto on] (Automát. ligado) do LCP
Option: Funcão:
[0] Desativado Selecione para desabilitar a tecla.
[1] * Ativado A tecla [Auto On] (Automático
Ligado) está ativada.
[2] Senha Evite que ocorra uma partida não
autorizada no modo automático
ligado. Se parâmetro 0-42 Tecla
[Auto on] (Automát. ligado) do LCP
estiver incluído em Meu menu
pessoal, dena a senha em
parâmetro 0-65 Senha de Menu
Pessoal. Caso contrário, dena a
senha em parâmetro 0-60 Senha do
Menu Principal.
0-43 Tecla [Reset] do LCP
Option: Funcão:
[0] Desativado Selecione para desabilitar a tecla.
[1] * Ativado A tecla [Reset] (Reinicializar) está
ativada.
[2] Senha Evite efetuar reinicializações não
autorizadas. Se parâmetro 0-43 Tecla
[Reset] do LCP estiver incluído em
parâmetro 0-25 Meu Menu Pessoal,
dena a senha em
parâmetro 0-65 Senha de Menu
Pessoal. Caso contrário, dena a
senha em parâmetro 0-60 Senha do
Menu Principal.
Descrição do Parâmetro Guia de Programação
3 3
3.2.5 0-4* Teclado do LCP
Ative, desabilite e proteja com senha as teclas individuais
do LCP.
MG20OB28 Danfoss A/S © 05/2018 Todos os direitos reservados. 39

0-43 Tecla [Reset] do LCP
Option: Funcão:
[3] Ativado sem
OFF
[4] Senha sem
OFF
[5] Ativado com
OFF
Pressionar a tecla reinicializa o
conversor de frequência, mas não
dá partida.
[6] Senha com
OFF
Impede uma reinicialização não
autorizada. Após a reinicialização
autorizada, o conversor de
frequência não dá partida. Conra a
opção [2] Senha para saber como
denir a senha.
0-44 Tecla [O/Reset]-LCP
Ativa ou desativa a tecla [O/Reset].
Option: Funcão:
[0] Desativado
[1] * Ativado
[2] Senha
0-45 Tecla [Drive Bypass] LCP
Pressione [O] e selecione [0] Desativado para evitar a parada
acidental do conversor de frequência. Pressione [O] e selecione
[2] Senha para evitar bypass não autorizado do conversor de
frequência. Se parâmetro 0-45 Tecla [Drive Bypass] LCP estiver
incluído no Quick Menu (Menu Rápido), dena então a senha em
parâmetro 0-65 Senha de Menu Pessoal.
Option: Funcão:
[0] Desativado Selecione para desabilitar a tecla.
[1] * Ativado
[2] Senha
0-50 Cópia do LCP
Option: Funcão:
AVISO!
Não se pode ajustar este
parâmetro enquanto o motor
estiver em funcionamento.
[0] * Sem cópia
[1] Todos para o
LCP
Copia todos os parâmetros em
todos os setups, a partir da
memória do conversor de
frequência, para a memória do LCP.
Para ns de serviço, copie todos os
0-50 Cópia do LCP
Option: Funcão:
parâmetros para o LCP após a
colocação em funcionamento.
[2] Todos a partir
d LCP
Copia todos os parâmetros em
todos os setups, da memória do
LCP para a memória do conversor
de frequência.
[3] Indep.d
tamanh.de
LCP
Copia somente os parâmetros que
são independentes do tamanho do
motor. Use a seleção mais recente
para programar diversos
conversores de frequência com a
mesma função sem perturbar os
dados do motor que já estão
denidos.
[10] Delete LCP
copy data
0-51 Cópia do Set-up
Option: Funcão:
[0] * Sem cópia Sem função.
[1] Copiar p/set-
-up1
Copia todos os parâmetros no
setup de programação atual
(denido em parâmetro 0-11 Set-up
da Programação) para o setup 1.
[2] Copiar p/set-
-up2
Copia todos os parâmetros no
setup de programação atual
(denido em parâmetro 0-11 Set-up
da Programação) para o setup 2
[3] Copiar p/set-
-up3
Copia todos os parâmetros no
setup de programação atual
(denido em parâmetro 0-11 Set-up
da Programação) para o setup 3
[4] Copiar p/set-
-up4
Copia todos os parâmetros no
setup de programação atual
(denido em parâmetro 0-11 Set-up
da Programação) para o setup 4.
[9] Copiar para
todos
Copia os parâmetros do setup atual
em cada um dos setups de 1 a 4.
0-60 Senha do Menu Principal
Range: Funcão:
100* [-9999 -
9999 ]
Denir a senha de acesso ao Menu
Principal, por meio da tecla [Main
Menu]. Se parâmetro 0-61 Acesso ao
Menu Principal s/ Senha estiver
programado para [0] Acesso total,
este parâmetro é ignorado.
Descrição do Parâmetro
VLT® AQUA Drive FC 202
33
3.2.6 0-5* Copiar/Salvar
Copiar parâmetros do e para o LCP. Use esses parâmetros
para salvar e copiar setups de um conversor de frequência
para outro.
40 Danfoss A/S © 05/2018 Todos os direitos reservados. MG20OB28
3.2.7 0-6* Senha

0-61 Acesso ao Menu Principal s/ Senha
Option: Funcão:
[0] * Acesso total Desativa a senha denida no
parâmetro 0-60 Senha do Menu
Principal. Se esta opção for
selecionada, parâmetro 0-60 Senha
do Menu Principal,
parâmetro 0-65 Senha de Menu
Pessoal e parâmetro 0-66 Acesso ao
Menu Pessoal s/ Senha são
ignorados.
[1] LCP: Somente
leitura
Impede a edição não autorizada
dos parâmetros do Menu Principal.
[2] LCP: Sem
acesso
Impede a exibição e edição não
autorizadas dos parâmetros do
Menu Principal.
[3] Bus: Somente
leitura
Fornece acesso somente de leitura
aos parâmetros através do eldbus.
[4] Bus: Sem
acesso
Desativa o acesso aos parâmetros
através do eldbus.
[5] Alt: Somente
leitura
Impede a edição não autorizada de
parâmetros do Menu Principal e
fornece acesso somente de leitura
aos parâmetros através do eldbus.
[6] Alt: Sem
acesso
Impede a exibição e edição não
autorizadas de parâmetros do Menu
Principal e desativa o acesso aos
parâmetros através do eldbus.
0-65 Senha de Menu Pessoal
Range: Funcão:
200* [-9999 -
9999 ]
Dena a senha de acesso ao Meu
Menu Pessoal por meio da tecla
[Quick Menu] (Menu Rápido). Se
parâmetro 0-66 Acesso ao Menu
Pessoal s/ Senha estiver programado
para [0] Acesso total, este parâmetro
é ignorado.
0-66 Acesso ao Menu Pessoal s/ Senha
Se parâmetro 0-61 Acesso ao Menu Principal s/ Senha estiver
programado para [0] Acesso total, este parâmetro é ignorado.
Option: Funcão:
[0] * Acesso total Desativa a senha denida no
parâmetro 0-65 Senha de Menu
Pessoal.
[1] LCP: Somente
leitura
Impede a edição não autorizada
dos parâmetros do Meu Menu
Pessoal.
[3] Bus: Somente
leitura
[5] Alt: Somente
leitura
0-67 Acesso à Senha do Bus
Range: Funcão:
0* [0 - 9999 ] Gravar neste parâmetro permite o
desbloqueio do conversor de
frequência a partir do barramento/
Software de Setup MCT 10.
0-70 Data e Hora
Range: Funcão:
Size
related*
[ 0 - 0 ] Programa a data e a hora do
relógio interno. O formato a ser
usado é programado no
parâmetro 0-71 Formato da Data e
no parâmetro 0-72 Formato da Hora.
Descrição do Parâmetro Guia de Programação
3.2.8 0-7* Programação do Relógio
Programe a data e a hora do relógio interno. Por exemplo,
o relógio interno pode ser usado para:
Ações temporizadas.
•
Registro de energia.
•
Análise de tendência.
•
Registros de data/hora em alarmes.
•
Dados registrados.
•
Manutenção preventiva.
•
É possível programar o relógio para horário de verão, para
dias úteis/dias de folga semanais, incluindo 20 exceções
(feriados e assim por diante). Embora as congurações do
relógio possam ser programadas por meio do LCP, elas
podem também ser programadas juntamente com ações
temporizadas e funções de manutenção preventiva através
da ferramenta Software de Setup MCT 10.
3 3
MG20OB28 Danfoss A/S © 05/2018 Todos os direitos reservados. 41
AVISO!
O conversor de frequência não possui backup da função
relógio e a data/hora programada é reinicializada com o
padrão (01.01.2007 00:00 Seg) após um desligamento, a
menos que haja instalado um módulo de relógio de
tempo real com backup. Se não houver instalado um
módulo com backup, use somente a função de relógio se
o conversor de frequência estiver integrado a um sistema
externo através da comunicação serial, com o sistema
mantendo a sincronização dos horários dos equipamentos de controle. Em parâmetro 0-79 Falha de Clock, é
possível programar uma advertência para o caso de o
relógio não ter sido ajustado corretamente, por exemplo,
após um desligamento.
AVISO!
Ao instalar o VLT® Analog I/O Option MCB 109 ou o VLT
Real-time Clock MCB 117, está incluída uma bateria de
backup para a data e hora.
®

0-70 Data e Hora
Range: Funcão:
Ao usar o VLT® Real-time Clock MCB
117, o horário é sincronizado
diariamente às 15:00.
0-71 Formato da Data
Option: Funcão:
[0] AAAA-MM-DD Programa o formato da data a ser
utilizado no LCP.
[1] DD-MM-AAAA Programa o formato da data a ser
utilizado no LCP.
[2] MM/DD/AAAA Programa o formato da data a ser
utilizado no LCP.
0-72 Formato da Hora
Option: Funcão:
Programa o formato de hora a ser
utilizado no LCP.
[0] 24 h
[1] 12 h
0-73 Diferença de fuso horário
Range: Funcão:
0 min* [-780 - 780
min]
Insira a diferença de fuso horário
relativa à UTC. Este parâmetro é
necessário para o ajuste automático
do horário de verão.
0-74 DST/Horário de Verão
Option: Funcão:
Selecione como trabalhar com o
horário de verão. Para conguração
manual do horário de verão, digite
a data de início e de m em
parâmetro 0-76 DST/Início do Horário
de Verão e parâmetro 0-77 DST/Fim
do Horário de Verão.
[0] * [O] (Desligar)
[2] Manual
0-76 DST/Início do Horário de Verão
Range: Funcão:
Size
related*
[ 0 - 0 ] Programa a data e hora de início
do horário de verão. A data é
programada no formato
selecionado no
parâmetro 0-71 Formato da Data.
0-77 DST/Fim do Horário de Verão
Range: Funcão:
Size
related*
[ 0 - 0 ] Programa a data e hora de término
do horário de verão. A data é
programada no formato
selecionado no
parâmetro 0-71 Formato da Data.
0-79 Falha de Clock
Option: Funcão:
Ativa ou desativa a advertência do
relógio quando o relógio não tiver
sido ajustado, ou tiver sido reinicializado devido a um desligamento e
nenhum backup estiver instalado.
Se o VLT® Analog I/O Option MCB
109 estiver instalado, [1] Ativado é o
padrão.
[0] Desativado
[1] Ativado
0-81 Dias Úteis
Matriz [7]
Matriz com 7 elementos [0]–[6] mostrada abaixo do número do
parâmetro no display. Pressione [OK] e navegue entre os
elementos com [▲] e [▼].
Option: Funcão:
Para cada dia da semana,
programe-o como dia útil ou de
folga. O primeiro elemento da
matriz é Segunda-feira. Os dias
úteis são usados para ações
temporizadas.
[0] Não
[1] Sim
0-82 Dias Úteis Adicionais
Matriz [5]
Matriz com 5 elementos [0]–[4] mostrada abaixo do número do
parâmetro no display. Pressione [OK] e navegue entre os
elementos com [▲] e [▼].
Range: Funcão:
Size
related*
[ 0 - 0 ] Dene as datas dos dias úteis
adicionais que normalmente seriam
dias de folga de acordo com
parâmetro 0-81 Dias Úteis.
Descrição do Parâmetro
VLT® AQUA Drive FC 202
33
42 Danfoss A/S © 05/2018 Todos os direitos reservados. MG20OB28

0-83 Dias Não-Úteis Adicionais
Matriz [15]
Matriz com 15 elementos [0]–[14] mostrada abaixo do número
do parâmetro no display. Pressione [OK] e navegue entre os
elementos com [▲] e [▼].
Range: Funcão:
Size
related*
[ 0 - 0 ] Dene as datas dos dias úteis
adicionais que normalmente seriam
dias de folga de acordo com
parâmetro 0-81 Dias Úteis.
0-84 Time for Fieldbus
Range: Funcão:
0* [0 -
4294967295 ]
Mostra o horário do eldbus.
0-85 Summer Time Start for Fieldbus
Range: Funcão:
0* [0 -
4294967295 ]
Mostra o início do horário de verão
do eldbus.
0-86 Summer Time End for Fieldbus
Range: Funcão:
0* [0 -
4294967295 ]
Mostra o nal do horário de verão
do eldbus.
0-89 Leitura da Data e Hora
Range: Funcão:
0* [0 - 25 ] Mostra a data e hora atuais. A data
e a hora são atualizadas
continuamente.
O relógio não inicia a contagem até
uma conguração diferente da
padrão ser denida em
parâmetro 0-70 Data e Hora.
Descrição do Parâmetro Guia de Programação
3 3
MG20OB28 Danfoss A/S © 05/2018 Todos os direitos reservados. 43

1-00 Modo Conguração
Option: Funcão:
AVISO!
Não se pode ajustar este
parâmetro enquanto o motor
estiver em funcionamento.
AVISO!
Quando programado para [3]
Malha Fechada, os comandos
de reversão e partida reversa
não invertem o sentido de
rotação do motor.
[0] Malha Aberta A velocidade do motor é
determinada aplicando uma
referência de velocidade ou
congurando a velocidade quando
em modo manual ligado.
A malha aberta é também usada se
o conversor de frequência for parte
de um sistema de controle de
malha fechada com base em um
controlador PID externo que
fornece um sinal de referência de
velocidade como saída.
[3] Malha
Fechada
A velocidade do motor é
determinada por uma referência do
controlador PID interno que varia a
velocidade do motor, como em um
processo de controle de malha
fechada (por exemplo, pressão ou
uxo constante). Congure o
controlador PID no grupo do
parâmetro 20-** Feedback ou por
meio dos Setups da Função
acessados ao pressionar [Quick
Menu].
1-01 Principio de Controle do Motor
Option: Funcão:
AVISO!
Não se pode ajustar este
parâmetro enquanto o motor
estiver em funcionamento.
Selecione qual princípio de controle
do motor utilizar.
1-01 Principio de Controle do Motor
Option: Funcão:
[0] U/f Modo especial do motor para
motores conectados em paralelo
em aplicações especiais de motor.
Quando U/f estiver selecionado,
edite a característica do princípio
de controle em
parâmetro 1-55 Características V/f - V
e parâmetro 1-56 Característica V/f f.
[1] * VVC+ Princípio de controle vetorial de
tensão adequado para a maioria
das aplicações. O principal benefício
da operação VVC+ é que ela usa um
modelo de motor robusto.
1-03 Características de Torque
Option: Funcão:
[0] Torque
compressor
Para controle de velocidade de
aplicações de torque constante,
como:
•
Bombas axiais.
•
Bombas de deslocamento
positivo.
•
Ventiladores.
Fornece uma tensão, que é
otimizada para uma característica
de carga de torque constante do
motor em toda a faixa de
velocidade.
[1] Torque
variável
Para o controle de velocidade de
bombas centrífugas e ventiladores.
Também deve ser usado ao
controlar mais de um motor a partir
do mesmo conversor de frequência
(por exemplo, vários ventiladores
do condensador ou ventiladores da
torre de resfriamento). Fornece uma
tensão, que é otimizada por uma
característica de carga de torque
quadrático do motor.
[2] Otim. Autom.
Energia TC
Para um controle de velocidade
ideal e com eciência energética de
compressores de rosca e rolagem.
Fornece uma tensão, que é
otimizada para uma característica
de carga de torque constante do
motor, em toda a faixa até 15 Hz.
Além disso, o recurso AEO adapta a
tensão exatamente à situação da
carga atual, reduzindo o consumo
de energia e o ruído do motor. Para
obter desempenho ideal, programe
Descrição do Parâmetro
VLT® AQUA Drive FC 202
3.3 Parâmetros 1-** Carga e Motor
3.3.1 1-0* Programaç Gerais
Dena se o conversor de frequência deve funcionar em
malha aberta ou em malha fechada.
33
44 Danfoss A/S © 05/2018 Todos os direitos reservados. MG20OB28

1-03 Características de Torque
Option: Funcão:
o fator de potência do motor
cosphi corretamente. O valor do
contador deve ser programado no
parâmetro 14-43 Cosphi do Motor. O
parâmetro tem um valor padrão
que é ajustado automaticamente ao
programar os dados do motor.
Geralmente, estas congurações
garantem uma tensão do motor
otimizada; no entanto, caso seja
preciso ajustar o fator de potência
do motor cosphi, uma função AMA
pode ser executada usando
parâmetro 1-29 Adaptação
Automática do Motor (AMA).
[3] * Otimiz.
Automática de
Energia TV
Para um controle de velocidade
ideal e com eciência energética de
bombas centrífugas e ventiladores.
Fornece uma tensão, que é
otimizada por uma característica de
carga de torque quadrático do
motor. Além disso, o recurso AEO
adapta a tensão exatamente à
situação da carga atual, reduzindo o
consumo de energia e o ruído do
motor. Para obter desempenho
ideal, programe o fator de potência
do motor corretamente. O valor do
contador deve ser programado no
parâmetro 14-43 Cosphi do Motor. O
parâmetro tem um valor padrão
que é ajustado automaticamente ao
programar os dados do motor.
Geralmente, estas congurações
garantem uma tensão do motor
otimizada; no entanto, caso seja
preciso ajustar o fator de potência
do motor cosphi, uma função AMA
pode ser executada usando
parâmetro 1-29 Adaptação
Automática do Motor (AMA).
Raramente é necessário ajustar
manualmente o parâmetro do fator
de potência do motor.
1-04 Modo Sobrecarga
Selecione o nível de torque no modo de sobrecarga.
Option: Funcão:
[0] Torque alto Permite até 160% de excesso de
torque para motores subdimensionados.
[1] * Torque normal Permite até 110% de excesso de
torque.
1-06 Sentido Horário
Option: Funcão:
AVISO!
Não se pode ajustar este
parâmetro enquanto o motor
estiver em funcionamento.
Esse parâmetro dene o termo
sentido horário correspondente
para a seta de direção do LCP.
Usado para mudar com facilidade o
sentido de rotação do eixo sem
trocar os os do motor.
[0] * Normal O eixo do motor gira no sentido
horário quando o conversor de
frequência estiver conectado U⇒U,
V⇒V e W⇒W para o motor.
[1] Inverso O eixo do motor gira no sentido
anti-horário quando o conversor de
frequência estiver conectado U⇒U,
V⇒V e W⇒W para o motor.
Descrição do Parâmetro Guia de Programação
AVISO!
Parâmetro 1-03 Características de Torque não tem efeito
quando parâmetro 1-10 Construção do Motor = [1] PM,
SPM não saliente.
MG20OB28 Danfoss A/S © 05/2018 Todos os direitos reservados. 45
3.3.2 1-1* Seleção do Motor
AVISO!
Este grupo do parâmetro não pode ser ajustado
enquanto o motor estiver em funcionamento.
Os parâmetros a seguir estão ativos dependendo da
conguração em parâmetro 1-10 Construção do Motor.
Parâmetro 1-10 Constr
ução do Motor
Parâmetro 1-00 Modo
Conguração
Parâmetro 1-03 Caracte
rísticas de Torque
Parâmetro 1-06 Sentido
Horário
[1]
[0]
Motor
Assíncro-
PM
nos
não
saliente
x x x x
x – - -
x x x x
[2]
Motor
PM IPM
Saliente
[3]
Motor
SynRM
3 3

Descrição do Parâmetro
VLT® AQUA Drive FC 202
[1]
[0]
Parâmetro 1-10 Constr
ução do Motor
Parâmetro 1-14 Fator
33
de Ganho de Amortecimento
Parâmetro 1-15 Const.
de Tempo do Filtro de
Baixa Veloc
Parâmetro 1-16 Const.
de Tempo do Filtro de
Alta Veloc.
Parâmetro 1-17 Const.
de tempo do ltro de
tensão
Parâmetro 1-20 Potênci
a do Motor [kW]
Parâmetro 1-21 Potênci
a do Motor [HP]
Parâmetro 1-22 Tensão
do Motor
Parâmetro 1-23 Freqüê
ncia do Motor
Parâmetro 1-24 Corrent
e do Motor
Parâmetro 1-25 Velocid
ade nominal do motor
Parâmetro 1-26 Torque
nominal do Motor
Parâmetro 1-28 Verica
ção da Rotação do
motor
Parâmetro 1-29 Adapta
ção Automática do
Motor (AMA)
Parâmetro 1-30 Resistê
ncia do Estator (Rs)
Parâmetro 1-31 Resistê
ncia Rotor(Rr)
Parâmetro 1-35 Reatân
cia Principal (Xh)
Parâmetro 1-37 Indutâ
ncia do eixo-d (Ld)
Parâmetro 1-39 Pólos
do Motor
Parâmetro 1-40 Força
Contra Eletromotriz em
1000RPM
Parâmetro 1-44 d-axis
Inductance Sat. (LdSat)
Parâmetro 1-45 q-axis
Inductance Sat. (LqSat)
Parâmetro 1-46 Ganho
de Detecção de Posição
Assíncro-
Motor
PM
nos
não
saliente
– x x x
– x x x
– x x x
– x x x
x – – –
x – – –
x – – –
x – – –
x x x x
x x x x
– x x x
x x x x
x x x x
x x x x
x – – –
x – – –
– x x x
x x x x
– x x –
– – – x
– – x –
– x x x
[2]
Motor
PM IPM
Saliente
[3]
Motor
SynRM
Parâmetro 1-10 Constr
ução do Motor
Parâmetro 1-47 Calibra
ção de Torque em
Baixa Velocidade
Parâmetro 1-48 Inducta
nce Sat. Point
Parâmetro 1-49 Corrent
e na Indutância Mín.
Parâmetro 1-50 Magne
tização do Motor a 0
Hz
Parâmetro 1-51 Veloc
Mín de Magnetizção
Norm. [RPM]
Parâmetro 1-52 Veloc
Mín de Magnetiz.
Norm. [Hz]
Parâmetro 1-58 Corrent
e de Pulsos de Teste
Flystart
Parâmetro 1-59 Freqüê
ncia de Pulsos de Teste
Flystart
Parâmetro 1-60 Compe
nsação de Carga em
Baix Velocid
Parâmetro 1-61 Compe
nsação de Carga em
Alta Velocid
Parâmetro 1-62 Compe
nsação de Escorregamento
Parâmetro 1-63 Const
d Tempo d Compens
Escorregam
Parâmetro 1-64 Amorte
cimento da
Ressonância
Parâmetro 1-65 Const
Tempo Amor tec
Ressonânc
Parâmetro 1-66 Corrent
e Mín. em Baixa
Velocidade
Parâmetro 1-70 Modo
de Partida
Parâmetro 1-71 Atraso
da Partida
Parâmetro 1-72 Função
de Partida
Parâmetro 1-73 Flying
Start
Assíncro-
[1]
[0]
Motor
PM
nos
não
saliente
– x x x
– – – x
– – x –
x – – –
x – – –
x – – –
x x x –
x x x –
x – – –
x – – –
x – – –
x – – –
x – – –
x – – –
– x x x
– x x x
x x x x
x x x x
x x x x
[2]
Motor
PM IPM
Saliente
[3]
Motor
SynRM
46 Danfoss A/S © 05/2018 Todos os direitos reservados. MG20OB28

1-10 Construção do Motor
Selecionar o tipo de construção do motor.
Option: Funcão:
[0] * Assíncrono Para motores assíncronos.
[1] PM, SPM não
saliente
Para motores de ímã permanente
(PM). Os motores PM são divididos
em dois grupos: com ímãs
montados na superfície (não
saliente) ou com ímãs internos
(saliente).
[2] PM, IPM
saliente
[5] SynRM
Descrição do Parâmetro Guia de Programação
[1]
[0]
Parâmetro 1-10 Constr
ução do Motor
Parâmetro 1-80 Função
na Parada
Parâmetro 1-81 Veloc.
Mín.p/Função na
Parada[RPM]
Parâmetro 1-82 Veloc.
Mín p/ Funcionar na
Parada [Hz]
Parâmetro 1-86 Velocid
ade de Desarme Baixa
[RPM]
Parâmetro 1-87 Velocid
ade de Desarme Baixa
[Hz]
Parâmetro 1-90 Proteçã
o Térmica do Motor
Parâmetro 1-91 Ventila
dor Externo do Motor
Parâmetro 1-93 Fonte
do Termistor
Parâmetro 2-00 Corrent
e de Hold CC/Preaquecimento
Parâmetro 2-01 Corrent
e de Freio CC
Parâmetro 2-02 Tempo
de Frenagem CC
Parâmetro 2-03 Veloc.A
cion Freio CC [RPM]
Parâmetro 2-04 Veloc.A
cion.d FreioCC [Hz]
Parâmetro 2-06 Corrent
e de Estacionamento
Parâmetro 2-07 Tempo
de Estacionamento
Parâmetro 2-10 Função
de Frenagem
Parâmetro 2-11 Resistor
de Freio (ohm)
Parâmetro 2-12 Limite
da Potência de
Frenagem (kW)
Parâmetro 2-13 Monito
ramento da Potência d
Frenagem
Parâmetro 2-15 Verica
ção do Freio
Parâmetro 2-16 Corr
Máx Frenagem CA
Parâmetro 2-17 Control
e de Sobretensão
MG20OB28 Danfoss A/S © 05/2018 Todos os direitos reservados. 47
Assíncro-
Motor
PM
nos
não
saliente
x x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x – x x
x x x x
x – x x
x – x x
x – x x
– x x x
– x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x – – –
x x x x
[2]
Motor
PM IPM
Saliente
[3]
Motor
SynRM
Parâmetro 1-10 Constr
ução do Motor
Parâmetro 4-10 Sentido
de Rotação do Motor
Parâmetro 4-11 Lim.
Inferior da Veloc. do
Motor [RPM]
Parâmetro 4-12 Lim.
Inferior da Veloc. do
Motor [Hz]
Parâmetro 4-13 Lim.
Superior da Veloc. do
Motor [RPM]
Parâmetro 4-14 Lim.
Superior da Veloc do
Motor [Hz]
Parâmetro 4-16 Limite
de Torque do Modo
Motor
Parâmetro 4-17 Limite
de Torque do Modo
Gerador
Parâmetro 4-18 Limite
de Corrente
Parâmetro 4-19 Freqüê
ncia Máx. de Saída
Parâmetro 4-58 Função
de Fase do Motor
Ausente
Parâmetro 14-40 Nível
do VT
Parâmetro 14-41 Magn
etização Mínima do
AEO
Parâmetro 14-42 Freqü
ência AEO Mínima
Parâmetro 14-43 Cosph
i do Motor
[1]
[0]
Motor
Assíncro-
PM
nos
não
saliente
x x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x – x x
x – – –
x – – –
x – – –
x – – –
[2]
Motor
PM IPM
Saliente
[3]
Motor
SynRM
3 3

Descrição do Parâmetro
VLT® AQUA Drive FC 202
3.3.3 Setup de motor assíncrono
Insira os seguintes dados do motor. Procure a informação
na plaqueta de identicação do motor.
33
1. Parâmetro 1-20 Potência do Motor [kW] ou
parâmetro 1-21 Potência do Motor [HP].
2. Parâmetro 1-22 Tensão do Motor.
3. Parâmetro 1-23 Freqüência do Motor.
4. Parâmetro 1-24 Corrente do Motor.
5. Parâmetro 1-25 Velocidade nominal do motor.
Para obter um desempenho ótimo no modo VVC+, são
necessários dados adicionais do motor para
seguintes parâmetros. Encontre os dados na folha de
dados do motor (esses dados tipicamente não estão
disponíveis na plaqueta de identicação do motor).
Execute uma adaptação automática do motor (AMA)
completa usando parâmetro 1-29 Adaptação Automática do
Motor (AMA) [1] Ativar AMA completa ou insira os
parâmetros manualmente. Parâmetro 1-36 Resistência de
Perda do Ferro (Rfe) é sempre inserido manualmente.
1. Parâmetro 1-30 Resistência do Estator (Rs).
2. Parâmetro 1-31 Resistência Rotor(Rr).
3. Parâmetro 1-33 Reatância Parasita do Estator (X1).
4. Parâmetro 1-34 Reatância Parasita do Rotor (X2).
5. Parâmetro 1-35 Reatância Principal (Xh).
6. Parâmetro 1-36 Resistência de Perda do Ferro (Rfe).
Ajuste
especíco da aplicação ao executar VVC
VVC+ é o modo de controle mais robusto. Na maioria das
situações, ele fornece desempenho ideal sem ajustes
posteriores. Execute uma AMA completa para o melhor
desempenho.
congurar os
+
3.3.4 Setup do motor PM
Esta seção descreve como fazer o setup de um motor PM.
Etapas iniciais de programação
Para ativar a operação do motor PM, selecione [1] PM, SPM
não saliente ou [2] PM, IPM saliente em
parâmetro 1-10 Construção do Motor.
Programar os dados do motor
Após selecionar um Motor PM, os parâmetros relacionados
ao motor PM nos grupos do parâmetro 1-2* Dados do
motor, 1-3* Dados avançados do motor e 1-4* DadosAvanç d
Motr II estão ativos.
Os dados necessários podem ser encontrados na plaqueta
de identicação do motor e na folha de dados do motor.
Programe os parâmetros a seguir na ordem indicada:
1. Parâmetro 1-24 Corrente do Motor.
2. Parâmetro 1-25 Velocidade nominal do motor.
3. Parâmetro 1-26 Torque nominal do Motor.
4. Parâmetro 1-39 Pólos do Motor.
Execute uma AMA completa usando
parâmetro 1-29 Adaptação Automática do Motor (AMA) [1]
Ativar AMA completa.
AVISO!
Ao usar a AMA, certique-se de que o valor de
parâmetro 1-40 Força Contra Eletromotriz em 1000RPM
seja calculado utilizando a velocidade nominal.
Se não for executada uma AMA completa, congure os
parâmetros a seguir manualmente:
1. Parâmetro 1-30 Resistência do Estator (Rs)
Insira a resistência de enrolamento do estator (Rs)
linha para comum. Se houver apenas dados
disponíveis linha-linha, divida o valor de linha-
-linha por 2 para obter o valor linha-comum.
2. Parâmetro 1-37 Indutância do eixo-d (Ld)
Insira a indutância de eixo direto de linha para
comum do motor PM.
Se houver apenas dados disponíveis linha-linha,
divida o valor de linha-linha por 2 para obter o
valor linha-comum.
3. Parâmetro 1-40 Força Contra Eletromotriz em
1000RPM.
Insira a Força Contra Eletromotriz linha a linha do
motor PM a 1000 RPM (valor RMS). Força Contra
Eletromotriz é a tensão gerada por um motor PM
quando nenhum conversor de frequência estiver
conectado e o eixo está girado externamente. É
normalmente especicado para a velocidade
nominal do motor ou para 1000 RPM medidos
entre 2 linhas. Se o valor não estiver disponível
para uma velocidade do motor de 1000 RPM,
calcule o valor correto da seguinte maneira:
Se a Força Contra Eletromotriz é, por exemplo,
320 V a 1800 RPM, ela pode ser calculada a 1000
RPM da seguinte maneira:
Força Contra Eletromotriz = (Tensão/RPM)x1000 =
(320/1800)x1000 = 178.
4. Para motores IPM: Congure os valores de
indutância nos seguintes parâmetros:
Parâmetro 1-38 Indutância do eixo-q (Lq).
•
Parâmetro 1-44 d-axis Inductance Sat.
•
(LdSat).
Parâmetro 1-45 q-axis Inductance Sat.
•
(LqSat).
Parâmetro 1-49 Corrente na Indutância
•
Mín..
48 Danfoss A/S © 05/2018 Todos os direitos reservados. MG20OB28

Descrição do Parâmetro Guia de Programação
AVISO!
As plaquetas de identicação e as folhas de dados
podem não conter alguns valores de indutância dos
motores IPM. Execute a AMA para obter os valores
válidos.
Teste da operação do motor
1. Inicie o motor em baixa velocidade (100–200
RPM). Se o motor não girar, verique a instalação,
a programação geral e os dados do motor.
2. Verique se a função de partida em
parâmetro 1-70 Modo de Partida se adequa aos
requisitos da aplicação.
Detecção do rotor
Esta função é a seleção recomendada para aplicações em
que o motor começa a partir da parada, como por
exemplo, em bombas ou transportadores. Em alguns
motores, ouve-se um som quando o conversor de
frequência executa a detecção do rotor. Isto não danica o
motor.
Estacionamento
Esta função é a seleção recomendada para aplicações em
que o motor está girando em baixa velocidade, como por
exemplo, em rotação livre em aplicações de ventilador.
Parâmetro 2-06 Corrente de Estacionamento e
parâmetro 2-07 Tempo de Estacionamento podem ser
ajustados. Aumente a conguração de fábrica desses
parâmetros para aplicações com alta inércia.
Ajuste especíco da aplicação ao executar VVC
VVC+ é o modo de controle mais robusto. Na maioria das
situações, ele fornece desempenho ideal sem ajustes
posteriores. Execute uma AMA completa para o melhor
desempenho.
Inicie o motor em velocidade nominal. Se a aplicação não
funcionar bem,
verique as congurações PM VVC+.
Tabela 3.4 contém recomendações para várias aplicações.
Aplicação Congurações
Aplicações de baixa inércia
I
Carga/IMotor
Aplicações de baixa inércia
50>I
Aplicações de alta inércia
I
Carga/IMotor
<5
Carga/IMotor
>50
>5
Aumente parâmetro 1-17 Const. de
tempo do ltro de tensão por um
fator 5–10.
Reduza parâmetro 1-14 Fator de
Ganho de Amor tecimento.
Reduza parâmetro 1-66 Corrente Mín.
em Baixa Velocidade (<100%).
Mantenha os valores padrão.
Aumente parâmetro 1-14 Fator de
Ganho de Amor tecimento,
parâmetro 1-15 Const. de Tempo do
Filtro de Baixa Veloc e
parâmetro 1-16 Const. de Tempo do
Filtro de Alta Veloc.
+
Aplicação Congurações
Alta carga em baixa
velocidade
<30% (velocidade
nominal)
Tabela 3.4 Recomendações para várias aplicações
Aumente parâmetro 1-17 Const. de
tempo do ltro de tensão
Aumente parâmetro 1-66 Corrente
Mín. em Baixa Velocidade para ajustar
o torque de partida. 100% de
corrente fornece torque nominal
como torque de partida. O funcionamento em um nível de corrente
maior do que 100% durante tempo
prolongado pode superaquecer o
motor.
Se o motor começar a oscilar a uma certa velocidade,
aumente parâmetro 1-14 Fator de Ganho de Amortecimento.
Aumente o valor em pequenas etapas. Dependendo do
motor, este parâmetro pode ser programado de 10% a
100% maior que o valor padrão.
3.3.5 Setup do motor SynRM
Esta seção descreve como fazer o setup de um motor de
relutância síncrono.
Etapas iniciais de programação
Para ativar a operação do motor SynRM, selecione a opção
[5] SynRM em parâmetro 1-10 Construção do Motor.
Programar os dados do motor
Após selecionar a opção [5] SynRM, os parâmetros
relacionados ao motor SynRM nos grupos do parâmetro
1-2* Dados do Motor, 1-3* Dados avançados do motor e 1-4*
DadosAvanç d Motr II estão ativos.
Os dados necessários podem ser encontrados na plaqueta
de identicação do motor e na folha de dados do motor.
Programe os parâmetros a seguir na ordem indicada:
1. Parâmetro 1-24 Corrente do Motor.
2. Parâmetro 1-25 Velocidade nominal do motor.
3. Parâmetro 1-26 Torque nominal do Motor.
4. Parâmetro 1-39 Pólos do Motor.
Execute uma AMA completa usando
parâmetro 1-29 Adaptação Automática do Motor (AMA) [1]
Ativar AMA completa.
Se não for executada uma AMA completa, congure os
parâmetros a seguir manualmente:
1. Parâmetro 1-30 Resistência do Estator (Rs)
Insira a resistência de enrolamento do estator (Rs)
linha para comum. Se houver apenas dados
disponíveis linha-linha, divida o valor de linha-
-linha por 2 para obter o valor linha-comum.
2. Parâmetro 1-37 Indutância do eixo-d (Ld)
3 3
MG20OB28 Danfoss A/S © 05/2018 Todos os direitos reservados. 49

Descrição do Parâmetro
VLT® AQUA Drive FC 202
Insira a indutância de eixo direto de linha para
comum do motor.
Se houver apenas dados disponíveis linha-linha,
Inicie o motor em velocidade nominal. Se a aplicação não
funcionar bem, verique as congurações SynRM VVC+. A
Tabela 3.5 contém recomendações para várias aplicações.
divida o valor de linha-linha por 2 para obter o
valor linha-comum.
33
3. Parâmetro 1-38 Indutância do eixo-q (Lq).
Insira a indutância de quadratura do eixo de linha
para comum do motor.
Se houver apenas dados disponíveis linha-linha,
divida o valor de linha-linha por 2 para obter o
valor linha-comum.
4. Parâmetro 1-44 d-axis Inductance Sat. (LdSat).
Insira o valor saturado de linha para comum da
indutância do eixo-d. Esse é o valor em uma
corrente maior que a corrente nominal em que a
indutância é totalmente saturada.
5. Parâmetro 1-48 Inductance Sat. Point.
Insira a porcentagem de corrente nominal em
que a indutância do eixo-d é meio saturada, ou
seja, tem o valor médio dos valores não-saturado
e saturado.
AVISO!
As plaquetas de identicação e as folhas de dados
podem não conter alguns valores de indutância dos
motores. Execute a AMA para obter os valores válidos.
Teste da operação do motor
1. Inicie o motor em baixa velocidade (100–200
RPM). Se o motor não girar, verique a instalação,
Aplicação Congurações
Aplicações de baixa inércia
I
Carga/IMotor
Aplicações de baixa inércia
50>I
Aplicações de alta inércia
I
Carga/IMotor
Alta carga em baixa
velocidade
<30% (velocidade
nominal)
<5
Carga/IMotor
>50
>5
Aumente parâmetro 1-17 Const. de
tempo do ltro de tensão por um
fator 5–10.
Reduza parâmetro 1-14 Fator de
Ganho de Amor tecimento.
Reduza parâmetro 1-66 Corrente Mín.
em Baixa Velocidade (<100%).
Mantenha os valores padrão.
Aumente parâmetro 1-14 Fator de
Ganho de Amor tecimento,
parâmetro 1-15 Const. de Tempo do
Filtro de Baixa Veloc e
parâmetro 1-16 Const. de Tempo do
Filtro de Alta Veloc.
Aumente parâmetro 1-17 Const. de
tempo do ltro de tensão
Aumente parâmetro 1-66 Corrente
Mín. em Baixa Velocidade para ajustar
o torque de partida. 100% de
corrente fornece torque nominal
como torque de partida. O funcionamento em um nível de corrente
maior do que 100% durante tempo
prolongado pode superaquecer o
motor.
a programação geral e os dados do motor.
2. Verique se a função de partida em
parâmetro 1-70 Modo de Partida se adequa aos
requisitos da aplicação.
Detecção do rotor
Esta função é a seleção recomendada para aplicações em
que o motor começa a partir da parada, como por
Tabela 3.5 Recomendações para várias aplicações
Se o motor começar a oscilar a uma certa velocidade,
aumente parâmetro 1-14 Fator de Ganho de Amortecimento.
Aumente o valor em pequenas etapas. Dependendo do
motor, este parâmetro pode ser programado de 10% a
100% maior que o valor padrão.
exemplo, em bombas ou transportadores. Em alguns
motores, ouve-se um som quando o conversor de
frequência executa a detecção do rotor. Isto não danica o
motor.
Estacionamento
Esta função é a seleção recomendada para aplicações em
que o motor está girando em baixa velocidade, como por
exemplo, em rotação livre em aplicações de ventilador.
Parâmetro 2-06 Corrente de Estacionamento e
parâmetro 2-07 Tempo de Estacionamento podem ser
ajustados. Aumente a conguração de fábrica desses
parâmetros para aplicações com alta inércia.
Ajuste especíco da aplicação ao executar VVC
+
VVC+ é o modo de controle mais robusto. Na maioria das
situações, ele fornece desempenho ideal sem ajustes
posteriores. Execute uma AMA completa para o melhor
desempenho.
3.3.6
1-1* VVC+ PM/SynRM
Os parâmetros de controle padrão para o núcleo de
controle de PMSM VVC+ são otimizados para aplicações e
carga de inércia na faixa de 50>Jl/Jm>5. Jl é a inércia de
carga da aplicação e Jm é a inércia da máquina.
Para aplicações de baixa inércia (Jl/Jm<5), aumente
parâmetro 1-17 Const. de tempo do ltro de tensão com um
fator de 5–10 e, às vezes, parâmetro 1-14 Fator de Ganho de
Amortecimento para melhorar o desempenho e a estabi-
lidade.
Para aplicações de inércia alta (Jl/Jm> 50), aumente
parâmetro 1-15 Const. de Tempo do Filtro de Baixa Veloc,
parâmetro 1-16 Const. de Tempo do Filtro de Alta Veloc. e
parâmetro 1-14 Fator de Ganho de Amortecimento para
melhorar o desempenho e a estabilidade.
50 Danfoss A/S © 05/2018 Todos os direitos reservados. MG20OB28

1-14 Fator de Ganho de Amortecimento
Range: Funcão:
Size
related*
[0 - 250 %] O parâmetro estabiliza o motor PM
para que funcione de maneira
suave e estável. O valor do ganho
de amortecimento controla o
desempenho dinâmico do motor
PM. Baixo ganho de amortecimento
resulta em alto desempenho
dinâmico e um alto valor resulta
em um baixo desempenho
dinâmico. Se o ganho de amortecimento for muito alto ou baixo, o
controle se torna instável. O
desempenho dinâmico resultante
está relacionado aos dados da
máquina e ao tipo de carga.
1-15 Const. de Tempo do Filtro de Baixa Veloc
Range: Funcão:
Size
related*
[0.01 - 20 s] A constante de tempo de amorte-
cimento do ltro passa-alta
determina o tempo de resposta
para as etapas de carga. Obtenha
controle rápido com uma constante
de tempo de amortecimento
pequena. No entanto, se esse valor
for muito baixo, o controle cará
instável. Esta constante de tempo é
usada abaixo de 10% da velocidade
nominal.
1-16 Const. de Tempo do Filtro de Alta Veloc.
Range: Funcão:
Size
related*
[0.01 - 20 s] A constante de tempo de amorte-
cimento do ltro passa-alta
determina o tempo de resposta
para as etapas de carga. Obtenha
controle rápido com uma constante
de tempo de amortecimento
pequena. No entanto, se esse valor
for muito baixo, o controle cará
instável. Esta constante de tempo é
usada acima de 10% da velocidade
nominal.
1-17 Const. de tempo do ltro de tensão
Range: Funcão:
Size
related*
[0.001 - 2 s] A constante de tempo do ltro da
tensão de alimentação é usada para
reduzir a inuência dos ripples de
alta frequência e das ressonâncias
do sistema no cálculo da tensão de
alimentação da máquina. Sem esse
ltro, os ripples nas correntes
podem distorcer a tensão calculada
e afetar a estabilidade do sistema.
Descrição do Parâmetro Guia de Programação
Para carga alta em baixa velocidade (<30% da velocidade
nominal), aumente parâmetro 1-17 Const. de tempo do ltro
de tensão devido à não linearidade no inversor em
velocidade baixa.
1-11 Modelo do motor
Option: Funcão:
Dene automaticamente os valores de fábrica
do motor selecionado. Se o valor de padrão
Assíncrono for usado, determine as congu-
rações manualmente de acordo com a
seleção parâmetro 1-10 Construção do Motor.
[1] Padrão
Assíncrono
[2] PM padrão,
não saliente
[10] Danfoss
OGD LA10
[11] Danfoss
OGD V210
Modelo de motor padrão quando [0]
Assíncrono estiver selecionado em
parâmetro 1-10 Construção do Motor.
Selecionável quando [1] PM, SPM não saliente
estiver selecionado em
parâmetro 1-10 Construção do Motor.
Selecionável quando [1] PM, SPM não saliente
estiver selecionado em
parâmetro 1-10 Construção do Motor.
Disponível somente para T4, T5 em 1,5–3 kW.
As congurações são carregadas automaticamente para este motor especíco.
Selecionável quando [1] PM, SPM não saliente
estiver selecionado em
parâmetro 1-10 Construção do Motor.
Disponível somente para T4, T5 em 0,75–3
kW. As congurações são carregadas automaticamente para este motor especíco.
3 3
MG20OB28 Danfoss A/S © 05/2018 Todos os direitos reservados. 51

1-20 Potência do Motor [kW]
Range: Funcão:
Size
related*
[ 0.09 -
2000.00 kW]
AVISO!
Não se pode ajustar este
parâmetro enquanto o motor
estiver em funcionamento.
Digite a potência nominal do
motor, em kW, de acordo com os
dados da plaqueta de identicação
do motor. O valor padrão
corresponde à saída nominal efetiva
da unidade.
Dependendo das escolhas feitas em
parâmetro 0-03 Denições Regionais,
parâmetro 1-20 Potência do Motor
[kW] e parâmetro 1-21 Potência do
Motor [HP] cam ocultos.
1-21 Potência do Motor [HP]
Range: Funcão:
Size
related*
[ 0.09 -
500.00 hp]
AVISO!
Não se pode ajustar este
parâmetro enquanto o motor
estiver em funcionamento.
Digite a potência nominal do
motor, em hp, de acordo com os
dados da plaqueta de identicação
do motor. O valor padrão
corresponde à saída nominal efetiva
da unidade.
1-21 Potência do Motor [HP]
Range: Funcão:
Dependendo das escolhas feitas em
parâmetro 0-03 Denições Regionais,
parâmetro 1-20 Potência do Motor
[kW] e parâmetro 1-21 Potência do
Motor [HP] cam ocultos.
1-22 Tensão do Motor
Range: Funcão:
Size
related*
[ 10 - 1000
V]
AVISO!
Não se pode ajustar este
parâmetro enquanto o motor
estiver em funcionamento.
Insira a tensão nominal do motor,
de acordo com os dados da
plaqueta de identicação do motor.
O valor padrão corresponde à saída
nominal efetiva da unidade.
1-23 Freqüência do Motor
Range: Funcão:
Size
related*
[20 - 1000
Hz]
AVISO!
Não se pode ajustar este
parâmetro enquanto o motor
estiver em funcionamento.
Selecionar o valor da frequência do
motor, a partir dos dados da
plaqueta de identicação do motor.
Para funcionamento em 87 Hz, com
motores de 230/400 V, programe os
dados da plaqueta de identicação
para 230 V/50 Hz. Adapte o
parâmetro 4-13 Lim. Superior da
Veloc. do Motor [RPM] e o
parâmetro 3-03 Referência Máxima
para a aplicação de 87 Hz.
1-24 Corrente do Motor
Range: Funcão:
Size
related*
[ 0.10 -
10000.00 A]
AVISO!
Não se pode ajustar este
parâmetro enquanto o motor
estiver em funcionamento.
Insira o valor da corrente nominal
do motor, a partir dos dados da
plaqueta de identicação do motor.
Os dados são usados para calcular
o torque do motor, a proteção
térmica do motor e assim por
diante.
Descrição do Parâmetro
VLT® AQUA Drive FC 202
3.3.7 1-2* Dados do Motor
Este grupo do parâmetro contém dados de entrada da
plaqueta de identicação do motor conectado.
33
AVISO!
As alterações no valor destes parâmetros afetam a
conguração de outros parâmetros.
AVISO!
Os parâmetros a seguir não têm efeito quando
parâmetro 1-10 Construção do Motor estiver programado
para [1] PM, SPM não saliente, [2] PM, IPM saliente, [5]
Sinc. Relutância:
Parâmetro 1-20 Potência do Motor [kW].
•
Parâmetro 1-21 Potência do Motor [HP].
•
Parâmetro 1-22 Tensão do Motor.
•
Parâmetro 1-23 Freqüência do Motor.
•
52 Danfoss A/S © 05/2018 Todos os direitos reservados. MG20OB28

1-25 Velocidade nominal do motor
Range: Funcão:
Size
related*
[100 - 60000
RPM]
AVISO!
Não é possível ajustar este
parâmetro enquanto o motor
estiver em funcionamento.
Digite o valor da velocidade
nominal do motor dos dados da
plaqueta de identicação do motor.
Os dados são usados para calcular
as compensações do motor
automáticas.
1-26 Torque nominal do Motor
Range: Funcão:
Size
related*
[1 - 10000.0
Nm]
Insira o valor a partir dos dados da
plaqueta de identicação do motor.
O valor padrão corresponde à saída
nominal da unidade. Esse
parâmetro está disponível quando
parâmetro 1-10 Construção do Motor
estiver programado para [1] PM,
SPM não saliente, ou seja, o
parâmetro é válido somente para
motores PM e SPM não salientes.
1-28 Vericação da Rotação do motor
Option: Funcão:
ADVERTÊNCIA
ALTA TENSÃO
Os conversores de frequência
contêm alta tensão quando
estão conectados à entrada da
rede elétrica CA, alimentação CC
ou Load Sharing.
•
Remova a energia da
rede elétrica antes de
desconectar os cabos
das fases do motor.
1-28 Vericação da Rotação do motor
Option: Funcão:
AVISO!
Quando a vericação da
rotação do motor estiver
ativada, o display mostrará:
Observação! O motor poderá
girar na direção errada.
Pressionar [OK], [Back] ou
[Cancel] apagará a mensagem
e mostrará uma nova:
Pressione [Hand On] para iniciar
o motor. Pressione [Cancel] para
abortar. Pressionar [Hand On]
dá partida no motor a 5 Hz
para frente e o display mostra:
O motor está funcionando.
Verique se o sentido de
rotação do motor está correto.
Pressione [O] para parar o
motor. Pressionando [O], o
motor para e reinicializa o
parâmetro 1-28 Vericação da
Rotação do motor. Se o sentido
da rotação do motor estiver
incorreto, inverta 2 cabos de
fase do motor.
Acompanhando a instalação e
conexão do motor, esta função
permite vericar o sentido correto
de rotação do motor. Ativar esta
função substitui qualquer comando
de bus ou entradas digitais, exceto
bloqueio externo e Safe Torque O
(STO) (se incluso).
[0] * [O] (Desligar) A vericação da rotação do motor
não está ativada.
[1] Ativado A vericação da rotação do motor
está ativada.
1-29 Adaptação Automática do Motor (AMA)
Option: Funcão:
A função AMA otimiza o
desempenho dinâmico do motor ao
otimizar automaticamente o motor
avançado parâmetro 1-30 Resistência
do Estator (Rs) a
parâmetro 1-35 Reatância Principal
(Xh)) enquanto o motor estiver
parado.
[0] * O (Desligado) Sem função.
[1] Ativar AMA
completa
Executa a AMA da resistência do
estator RS, da resistência do rotor
Descrição do Parâmetro Guia de Programação
MG20OB28 Danfoss A/S © 05/2018 Todos os direitos reservados. 53
3 3

1-29 Adaptação Automática do Motor (AMA)
Option: Funcão:
Rr, da reatância de fuga do estator
X1, da reatância de fuga do rotor X
2
e da reatância principal Xh.
[2] Ativar AMA
reduzida
Executa a AMA reduzida da
resistência do estator Rs, somente
no sistema. Selecione esta opção se
for utilizado um ltro LC, entre o
conversor de frequência e o motor.
[3] Enable
Complete
AMA II
Executa a funcionalidade avançada
AMA II da resistência do estator RS,
da resistência do rotor Rr, a
reatância de fuga do estator X1, a
reatância de fuga do rotor X2 e da
reatância principal Xh. Para obter
melhores resultados, atualize
parâmetro 14-43 Cosphi do Motor.
[4] Enable
Reduced AMA
II
Executa a AMA II reduzida da
resistência do estator Rs, somente
no sistema. Selecione esta opção se
for utilizado um ltro LC, entre o
conversor de frequência e o motor.
130BA375.11
R
S
P 1-30
R
1s
X
h
P1-35
R
1
X
2
X
1
U
1
I
1
Descrição do Parâmetro
33
AVISO!
Parâmetro 1-29 Adaptação Automática do Motor (AMA)
não tem efeito quando parâmetro 1-10 Construção do
Motor = [1] PM, SPM não saliente.
Ative a função AMA pressionando [Hand On] após
selecionar [1] Ativar AMA completa ou [2] Ativar AMA
reduzida. Consulte também o capítulo Adaptação
Automática do Motor no guia de design. Depois de uma
sequência normal, o display indica: Pressione [OK] para
encerrar a AMA. Após pressionar [OK], o conversor de
frequência está pronto para operação.
AVISO!
•
•
AVISO!
Evite gerar um torque externo durante a AMA.
54 Danfoss A/S © 05/2018 Todos os direitos reservados. MG20OB28
Para obter a melhor adaptação possível do
conversor de frequência, recomenda-se executar
a AMA quando o motor estiver frio.
A AMA não pode ser executada enquanto o
motor estiver funcionando.
VLT® AQUA Drive FC 202
AVISO!
Se uma das programações do grupo do parâmetro 1-2*
Dados do Motor for alterada, parâmetro 1-30 Resistência
do Estator (Rs) a parâmetro 1-39 Pólos do Motor retornam
para a conguração padrão.
Não se pode ajustar este parâmetro enquanto o motor
estiver em funcionamento.
AVISO!
A AMA completa deverá ser executada somente sem o
ltro, enquanto a AMA reduzida deverá ser executada
com ltro.
Consulte o capítulo Adaptação Automática do Motor no
Guia de Design do VLT® AQUA Drive FC 202.
3.3.8 1-3* Dados Avanç do Motor
Parâmetros para os dados avançados do motor. Os dados
do motor em parâmetro 1-30 Resistência do Estator (Rs) a
parâmetro 1-39 Pólos do Motor devem corresponder ao
motor para que o motor funcione perfeitamente. As
congurações padrão são números baseados em valores
de parâmetros comuns de motor, obtidos a partir de
motores padrão. Se os parâmetros de motor não forem
programados corretamente, o sistema do conversor de
frequência pode não funcionar adequadamente. Se os
dados avançados do motor não forem conhecidos, é
recomendável utilizar uma AMA. Consulte o capítulo
Adaptação Automática do Motor no Guia de Design do VLT
AQUA Drive FC 202. A sequência da AMA ajusta todos os
parâmetros do motor, exceto o momento de inércia do
rotor e a resistência de perda do ferro
(parâmetro 1-36 Resistência de Perda do Ferro (Rfe)).
Ilustração 3.4 Diagrama equivalente de motor para um motor
assíncrono
®

I
R
s
Par. 1-30
L
d
Par. 1-37
ω
sLqIq
U
d
I
R
s
Par. 1-30
L
q=Ld
Par. 1-37
ω
sLdId
+
-
+ -
+ -
Par. 1-40
ω
sλPM
U
q
q
q
d-axis equivalent circuit
q-axis equivalent circuit
130BC056.11
1-30 Resistência do Estator (Rs)
Range: Funcão:
Size
related*
[ 0.0140 -
140.0000
Ohm]
AVISO!
Não se pode ajustar este
parâmetro enquanto o motor
estiver em funcionamento.
Para motores PM, consulte a
descrição em
parâmetro 1-37 Indutância do eixo-d
(Ld).
Programar o valor da resistência do
estator. Forneça o valor de uma
folha de dados do motor ou
execute uma AMA em um motor
frio.
1-31 Resistência Rotor(Rr)
Range: Funcão:
Size
related*
[ 0.0100 -
100.0000
Ohm]
AVISO!
Parâmetro 1-31 Resistência
Rotor(Rr) não tem efeito
quando
parâmetro 1-10 Construção do
Motor estiver programado para
[1] PM, SPM não saliente, [5]
Sinc. Relutância.
1-31 Resistência Rotor(Rr)
Range: Funcão:
Programe o valor da resistência do
rotor Rr para melhorar o
desempenho do eixo usando 1 dos
seguintes métodos:
•
Execute uma AMA quando
o motor estiver frio. O
conversor de frequência
mede o valor a partir do
motor. Todas as compensações são reinicializadas
para 100%.
•
Insira o valor de R
r
manualmente. O valor
pode ser obtido com o
fornecedor do motor.
•
Utilize a conguração
padrão da Rr. O conversor
de frequência estabelece a
conguração com base
nos dados da plaqueta de
identicação do motor.
1-33 Reatância Parasita do Estator (X1)
Range: Funcão:
Size
related*
[ 0.0400 -
400.0000
Ohm]
AVISO!
Esse parâmetro é relevante
somente para motores
assíncronos.
Programe a reatância de fuga do
estator do motor usando 1 dos
seguintes métodos:
•
Execute uma AMA quando
o motor estiver frio. O
conversor de frequência
mede o valor a partir do
motor.
•
Insira o valor de X1,
manualmente. O valor
pode ser obtido com o
fornecedor do motor.
•
Utilize a conguração
padrão de X1. O conversor
de frequência estabelece a
conguração com base
nos dados da plaqueta de
identicação do motor.
Consulte Ilustração 3.4.
Descrição do Parâmetro Guia de Programação
Ilustração 3.5 Diagrama de circuito equivalente de motor para
motor PM não saliente
3 3
MG20OB28 Danfoss A/S © 05/2018 Todos os direitos reservados. 55

1-33 Reatância Parasita do Estator (X1)
Range: Funcão:
AVISO!
O valor do parâmetro é
atualizado após cada
calibração de torque se o
opcional [3] 1st start with store
ou [4] Every start with store
estiver selecionado em
parâmetro 1-47 Calibração de
Torque em Baixa Velocidade.
1-34 Reatância Parasita do Rotor (X2)
Range: Funcão:
Size
related*
[ 0.0400 -
400.0000
Ohm]
AVISO!
Esse parâmetro é relevante
somente para motores
assíncronos.
Programe a reatância de fuga do
rotor do motor usando 1 dos
seguintes métodos:
•
Execute uma AMA quando
o motor estiver frio. O
conversor de frequência
mede o valor a partir do
motor.
•
Insira o valor de X
2
manualmente. O valor
pode ser obtido com o
fornecedor do motor.
•
Utilize a conguração
padrão de X2. O conversor
de frequência estabelece a
conguração com base
nos dados da plaqueta de
identicação do motor.
Consulte Ilustração 3.4.
AVISO!
O valor do parâmetro é
atualizado após cada
calibração de torque se o
opcional [3] 1st start with store
ou [4] Every start with store
estiver selecionado em
parâmetro 1-47 Calibração de
Torque em Baixa Velocidade.
1-35 Reatância Principal (Xh)
Range: Funcão:
Size
related*
[ 1.0000 -
10000.0000
Ohm]
AVISO!
Parâmetro 1-35 Reatância
Principal (Xh) não tem efeito
quando
parâmetro 1-10 Construção do
Motor=[1] PM, SPM não
saliente.
AVISO!
Não se pode ajustar este
parâmetro enquanto o motor
estiver em funcionamento.
Programe a reatância principal do
motor usando 1 dos seguintes
métodos:
•
Execute uma AMA quando
o motor estiver frio. O
conversor de frequência
mede o valor a partir do
motor.
•
Insira o valor X
h
manualmente. O valor
pode ser obtido com o
fornecedor do motor.
•
Utilize a
conguração
padrão Xh. O conversor de
frequência estabelece a
conguração pelos dados
da plaqueta de identicação do motor.
1-36 Resistência de Perda do Ferro (Rfe)
Range: Funcão:
Size
related*
[ 0 -
10000.000
Ohm]
AVISO!
Não se pode ajustar este
parâmetro enquanto o motor
estiver em funcionamento.
Insira o valor da resistência de
perda do ferro (RFe) equivalente
para compensar as perdas de ferro
do motor.
O valor de RFe não pode ser obtido
executando uma AMA.
O valor de RFe é especialmente
importante nas aplicações de
controle do torque. Se RFe não for
conhecida, assuma a conguração
padrão do
parâmetro 1-36 Resistência de Perda
do Ferro (Rfe).
Descrição do Parâmetro
VLT® AQUA Drive FC 202
33
56 Danfoss A/S © 05/2018 Todos os direitos reservados. MG20OB28

1-37 Indutância do eixo-d (Ld)
Range: Funcão:
Size
related*
[0.000 -
1000.000 mH]
AVISO!
Este parâmetro está ativo
somente quando
parâmetro 1-10 Construção do
Motor estiver programado para
[1] PM, SPM não saliente.
Insira o valor da indutância do eixo-
-d. Obtenha o valor da folha de
dados do motor PM.
Line to common (starpoint)
Line-to-line values
Rs and Ld
Rs and Ld
e30bc008.12
Permanent magnet motors
e30bc009.11
Line-to-line back
EMF in RMS value
at 1000 RPM
speed (mech)
1-38 Indutância do eixo-q (Lq)
Range: Funcão:
Size
related*
[0.000 - 1000
mH]
AVISO!
Não se pode ajustar este
parâmetro enquanto o motor
estiver em funcionamento.
Programe o valor da indutância do
eixo q. Consulte a folha de dados
do motor.
Descrição do Parâmetro Guia de Programação
Para motores assíncronos, os valores de resistência do
estator e indutância do eixo-d estão normalmente
descritos nas especicações técnicas como entre linha e
comum (ponto de partida). Para motores PM, geralmente
estão descritos nas especicações técnicas como entre
linha-linha. Os motores PM geralmente são construídos
para conexão em estrela.
AVISO!
Os fabricantes de motores fornecem os valores para a
resistência do estator (parâmetro 1-30 Resistência do
Estator (Rs)) e para a indutância do eixo-d
(parâmetro 1-37 Indutância do eixo-d (Ld)) em especi-
cações técnicas como entre linha e comum (ponto de
partida) ou entre linha e linha. Não há um padrão geral.
Os diferentes setups de resistência e indução do
enrolamento do estator são mostrados em Ilustração 3.6.
Os conversores de frequência da Danfoss sempre exigem
o valor linha para comum. A Força Contra Eletromotriz
de um motor PM é denida como a Força Eletromotriz
induzida entre 2 fases quaisquer do enrolamento do
estator de um motor girando livremente. Os conversores
de frequência da Danfoss sempre exigem o valor RMS
linha para linha medido a 1.000 rpm, velocidade de
rotação mecânica. Isso é mostrado em Ilustração 3.7.
3 3
Parâmetro 1-30 Resistênci
a do Estator (Rs)
(linha para comum).
Parâmetro 1-37 Indutânci
a do eixo-d (Ld)
(linha para comum).
Parâmetro 1-40 Força
Contra Eletromotriz em
1000RPM
RMS (valor linha para
linha).
Tabela 3.6 Parâmetros relacionados a motores PM
Este parâmetro fornece a resistência
de enrolamento do estator (Rs)
semelhante à resistência do estator do
motor assíncrono. A resistência do
estator é denida para medição de
linha para comum. Para dados linha-
-linha, em que a resistência do estator
é medida entre 2 linhas quaisquer,
divida por 2.
Este parâmetro fornece a indutância
direta do eixo do motor PM. A
indutância do eixo-d é denida para
medição fase para comum. Para
dados linha-linha, em que a
resistência do estator é medida entre
2 linhas quaisquer, divida por 2.
Este parâmetro fornece a Força Contra
Eletromotriz através do terminal do
estator do motor PM a uma
velocidade mecânica de 1.000 rpm,
especicamente. É denido entre
linha para linha e expresso em valor
RMS.
Ilustração 3.6 Setups do enrolamento do estator
Ilustração 3.7 Denições dos parâmetros da máquina para a
Força Contra Eletromotriz de Motores PM
MG20OB28 Danfoss A/S © 05/2018 Todos os direitos reservados. 57

1-39 Pólos do Motor
Range: Funcão:
Size
related*
[2 - 132 ]
AVISO!
Não se pode ajustar este
parâmetro enquanto o motor
estiver em funcionamento.
Insira o número de polos do motor.
Polos ~nn@ 50 Hz ~nn@ 60 Hz
2 2700–2880 3250–3460
4 1350–1450 1625–1730
6 700–960 840–1153
Tabela 3.7 Contagens de polos e
frequências relacionadas
Tabela 3.7 mostra os números de
polos para as faixas de velocidade
normal de vários tipos de motor.
Dena os motores desenvolvidos
para outras frequências separadamente. O valor de polos do
motor é sempre um número par,
pois se refere ao número total de
polos, não a pares de polos. O
conversor de frequência cria a
programação inicial do
parâmetro 1-39 Pólos do Motor, com
base nos parâmetro 1-23 Freqüência
do Motor e
parâmetro 1-25 Velocidade nominal
do motor.
1-40 Força Contra Eletromotriz em 1000RPM
Range: Funcão:
Size
related*
[ 10 - 9000V]Programe a FCE nominal do motor
em funcionamento a 1.000 RPM.
Este parâmetro está ativo somente
quando parâmetro 1-10 Construção
do Motor estiver programado para
[1] PM, SPM não saliente.
1-44 d-axis Inductance Sat. (LdSat)
Range: Funcão:
Size
related*
[0 - 1000
mH]
Insira a saturação da indutância de
Ld. Idealmente, este parâmetro tem
o mesmo valor do que
parâmetro 1-37 Indutância do eixo-d
(Ld). Se o fornecedor do motor
fornecer uma curva de indução,
insira o valor de indução a 200% do
valor nominal.
1-45 q-axis Inductance Sat. (LqSat)
Range: Funcão:
Size
related*
[0 - 1000
mH]
Este parâmetro corresponde à
saturação de indutância de Lq.
Idealmente, este parâmetro tem o
mesmo valor do que
parâmetro 1-38 Indutância do eixo-q
(Lq). Se o fornecedor do motor
fornecer uma curva de indução,
insira o valor de indução a 200% do
valor nominal.
1-47 Calibração de Torque em Baixa Velocidade
Option: Funcão:
Utilize este parâmetro para otimizar
o torque estimado em toda a faixa
de velocidade. O torque estimado
baseia-se na potência do eixo, P
eixo
= Pm - Rs x I2. Certique-se de que
o valor de Rs está correto. O valor
Rs nesta fórmula é igual à perda de
energia no motor, no cabo e no
conversor de frequência. Quando
este parâmetro estiver ativo, o
conversor de frequência calcula o
valor Rs durante a energização,
garantindo o torque estimado ideal
e o desempenho ideal. Use este
recurso em casos quando não for
possível ajustar
parâmetro 1-30 Resistência do Estator
(Rs) em cada conversor de
frequência para compensar o
comprimento de cabo, perdas do
conversor de frequência e o desvio
de temperatura no motor.
[0] * O (Desligado)
[1] Primeira
partida depois
da
energização
Calibra na primeira partida após a
energização e mantém este valor
até ser reinicializado por um ciclo
de energização.
[2] Cada partida Calibra em cada inicialização,
compensando uma possível
mudança na temperatura do motor
desde a última partida. O valor é
reinicializado após um ciclo de
energização.
[3] 1st start with
store
O conversor de frequência calibra o
torque na primeira partida após a
energização. Esta opção é usada
para atualizar os parâmetros do
motor:
Descrição do Parâmetro
33
58 Danfoss A/S © 05/2018 Todos os direitos reservados. MG20OB28
VLT® AQUA Drive FC 202

1-47 Calibração de Torque em Baixa Velocidade
Option: Funcão:
•
Parâmetro 1-30 Resistência
do Estator (Rs).
•
Parâmetro 1-33 Reatância
Parasita do Estator (X1).
•
Parâmetro 1-34 Reatância
Parasita do Rotor (X2).
•
Parâmetro 1-37 Indutância
do eixo-d (Ld).
[4] Every start
with store
O conversor de frequência calibra o
torque em cada inicialização,
compensando uma possível
mudança na temperatura do motor
desde a última partida. Esta opção
é usada para atualizar os
parâmetros do motor:
•
Parâmetro 1-30 Resistência
do Estator (Rs).
•
Parâmetro 1-33 Reatância
Parasita do Estator (X1).
•
Parâmetro 1-34 Reatância
Parasita do Rotor (X2).
•
Parâmetro 1-37 Indutância
do eixo-d (Ld).
1-48 Inductance Sat. Point
Range: Funcão:
Size
related*
[1 - 500 %] Insira o ponto de saturação da
indução.
1-49 Corrente na Indutância Mín.
Range: Funcão:
Size
related*
[ 0 - 200 %]
AVISO!
Execute uma AMA para
programar o valor deste
parâmetro. Edite o valor
manualmente somente quando
a aplicação exigir um valor
diferente do determinado pela
AMA.
Insira o ponto de saturação da
indutância do eixo q. O conversor
de frequência usa esse valor para
otimizar o desempenho dos
motores IPM.
Selecione o valor compatível com o
ponto em que a indutância é igual
ao valor médio de
parâmetro 1-38 Indutância do eixo-q
(Lq) e parâmetro 1-45 q-axis
1-49 Corrente na Indutância Mín.
Range: Funcão:
Inductance Sat. (LqSat), como uma
porcentagem da corrente nominal.
1-50 Magnetização do Motor a 0 Hz
Range: Funcão:
100 %* [0 - 300 %]
AVISO!
Parâmetro 1-50 Magnetização
do Motor a 0 Hz não tem efeito
quando
parâmetro 1-10 Construção do
Motor = [1] PM, SPM não
saliente.
Use este parâmetro com o
parâmetro 1-51 Veloc Mín de
Magnetizção Norm. [RPM] para obter
uma carga térmica diferente no
motor, com o motor funcionando
em baixa velocidade.
Insira um valor que seja uma
porcentagem da corrente de
magnetização nominal. Se a o valor
for demasiadamente baixo, o torque
no eixo do motor pode ser
diminuído.
Ilustração 3.8 Corrente de
magnetização
1-51 Veloc Mín de Magnetizção Norm. [RPM]
Range: Funcão:
Size
related*
[10 - 300
RPM]
AVISO!
Parâmetro 1-51 Veloc Mín de
Magnetizção Norm. [RPM] não
tem efeito quando
parâmetro 1-10 Construção do
Motor = [1] PM, SPM não
saliente.
Programe a velocidade necessária
para a corrente de magnetização
normal. Se a velocidade for
programada abaixo da velocidade
de escorregamento do motor, os
Descrição do Parâmetro Guia de Programação
MG20OB28 Danfoss A/S © 05/2018 Todos os direitos reservados. 59
3.3.9 1-5* Indep. Carga, Conguração
3 3

1-51 Veloc Mín de Magnetizção Norm. [RPM]
Range: Funcão:
parâmetro 1-50 Magnetização do
Motor a 0 Hz e parâmetro 1-51 Veloc
Mín de Magnetizção Norm. [RPM]
não serão signicativos.
Utilizar este parâmetro junto com o
parâmetro 1-50 Magnetização do
Motor a 0 Hz. Consulte o Tabela 3.7.
1-52 Veloc Mín de Magnetiz. Norm. [Hz]
Range: Funcão:
Size
related*
[ 0.3 - 10.0
Hz]
AVISO!
Parâmetro 1-52 Veloc Mín de
Magnetiz. Norm. [Hz] não tem
efeito quando
parâmetro 1-10 Construção do
Motor = [1] PM, SPM não
saliente.
Programe a frequência requerida
para corrente de magnetização
normal. Se a frequência for
programada abaixo da frequência
de deslizamento do motor, os
parâmetro 1-50 Magnetização do
Motor a 0 Hz e parâmetro 1-51 Veloc
Mín de Magnetizção Norm. [RPM]
carão inativos.
Utilizar este parâmetro junto com o
parâmetro 1-50 Magnetização do
Motor a 0 Hz. Consulte o Tabela 3.7.
1-55 Características V/f - V
Matriz [6]
Range: Funcão:
Size
related*
[0 - 1000 V] Insira a tensão em cada ponto de
frequência para formar
manualmente uma característica U/f
que corresponda ao motor.
Os pontos de frequência são
denidos em
parâmetro 1-56 Característica V/f - f.
Este parâmetro é um parâmetro de
matriz [0–5] e só é acessível
quando parâmetro 1-01 Principio de
Controle do Motor estiver
programado para [0] U/f.
1-56 Característica V/f - f
Matriz [6]
Range: Funcão:
Size
related*
[ 0 - 1000.0
Hz]
Insira os pontos de frequência para
formar manualmente uma característica U/f que corresponda ao
motor.
A tensão em cada ponto é denida
em parâmetro 1-55 Características
V/f - V.
Este parâmetro é um parâmetro de
matriz [0–5] e só é acessível
quando parâmetro 1-01 Principio de
Controle do Motor estiver
programado para [0] U/f.
1-58 Corrente de Pulsos de Teste Flystart
Range: Funcão:
Size
related*
[ 0 - 200 %] Programe a magnitude da corrente
de magnetização para os pulsos
usados na detecção do sentido de
rotação do motor. A faixa de
valores e a função dependem de
parâmetro 1-10 Construção do Motor:
[0] Assíncrono: [0–200%]
Reduzir esse valor reduz o torque
gerado. 100% indica a corrente
nominal do motor total. Neste caso,
o valor padrão é 30%.
[1] PM não saliente: [0–40%]
Recomenda-se uma conguração
geral de 20% para motores PM.
Valores mais altos podem aumentar
o desempenho. No entanto, em
motores com uma Força Contra
Eletromotriz acima de 300 VLL (rms)
na velocidade nominal e alta
indutância do enrolamento (acima
Descrição do Parâmetro
VLT® AQUA Drive FC 202
33
60 Danfoss A/S © 05/2018 Todos os direitos reservados. MG20OB28
Ilustração 3.9 Característica U/f

1-58 Corrente de Pulsos de Teste Flystart
Range: Funcão:
de 10 mH), recomenda-se um valor
menor para evitar uma estimativa
errada da velocidade. O parâmetro
está ativo quando o
parâmetro 1-73 Flying Start estiver
ativado.
1-59 Freqüência de Pulsos de Teste Flystart
Range: Funcão:
Size
related*
[ 0 - 500 %]
AVISO!
Consulte a descrição de
parâmetro 1-70 Modo de
Partida para obter uma visão
geral da relação entre os
parâmetros PM Flying Start.
A faixa de valores e a função
dependem de
parâmetro 1-10 Construção do Motor:
[0] Assíncrono: [0–500%]
Controle a porcentagem da
frequência dos pulsos usados para
detectar o sentido de rotação do
motor. Aumentar esse valor reduz o
torque gerado. Neste modo, 100%
signica 2 vezes a frequência do
deslizamento.
[1] PM não saliente: [0–10%]
Este parâmetro dene a velocidade
do motor (em % da velocidade
nominal do motor) abaixo da qual a
função de estacionamento (consulte
parâmetro 2-06 Corrente de Estacionamento e parâmetro 2-07 Tempo de
Estacionamento) se torna ativa. Este
parâmetro só está ativo quando
parâmetro 1-70 Modo de Partida
está programado para [1] Estacionamento e somente após a partida
do motor.
1-60 Compensação de Carga em Baix Velocid
Range: Funcão:
100 %* [0 - 300 %]
AVISO!
Parâmetro 1-60 Compensação
de Carga em Baix Velocid não
tem efeito quando
parâmetro 1-10 Construção do
Motor = [1] PM, SPM não
saliente.
Insira o valor porcentual para
compensar a tensão em relação à
carga quando o motor estiver
funcionando em baixa velocidade e
obtiver a característica U/f ideal. A
potência do motor determina a
faixa de frequência dentro da qual
este parâmetro está ativo.
Tamanho do
motor [kW]
Comutação [Hz]
0.25–7.5 <10
11–45 <5
55–550 <3–4
Tabela 3.8 Frequência de
comutação
Descrição do Parâmetro Guia de Programação
3.3.10 1-6* Dependente da carga
Conguração
3 3
MG20OB28 Danfoss A/S © 05/2018 Todos os direitos reservados. 61
Ilustração 3.10 Compensação de carga de baixa velocidade

1-61 Compensação de Carga em Alta Velocid
Range: Funcão:
100 %* [0 - 300 %]
AVISO!
Parâmetro 1-61 Compensação
de Carga em Alta Velocid não
tem efeito quando
parâmetro 1-10 Construção do
Motor = [1] PM, SPM não
saliente.
Para compensar a tensão em
relação à carga, digite o valor
porcentual quando o motor estiver
em funcionamento, em velocidade
alta e obtiver, assim, a característica
U/f ótima. A potência do motor
determina a faixa de frequência
dentro da qual este parâmetro está
ativo.
Tamanho do
motor [kW]
Comutação [Hz]
0.25–7.5 >10
11–45 <5
55–550 <3–4
Tabela 3.9 Frequência de
comutação
1-62 Compensação de Escorregamento
Range: Funcão:
0 %* [-500 -
500 %]
AVISO!
Parâmetro 1-62 Compensação
de Escorregamento não tem
efeito quando
parâmetro 1-10 Construção do
Motor = [1] PM, SPM não
saliente.
Para compensar as tolerâncias no
valor de n
M, N
, insira a % para a
compensação de escorregamento. A
compensação de escorregamento é
calculada automaticamente com
base na velocidade nominal do
motor n
M,N
.
1-63 Const d Tempo d Compens Escorregam
Range: Funcão:
Size
related*
[0.05 - 5 s]
AVISO!
Parâmetro 1-63 Const d Tempo
d Compens Escorregam não
tem efeito quando
parâmetro 1-10 Construção do
Motor = [1] PM, SPM não
saliente.
Inserir a velocidade de reação da
compensação do escorregamento.
Um valor alto redunda em uma
reação lenta e um valor baixo em
uma reação rápida. Se ocorrerem
problemas de ressonância de baixa
frequência, utilize uma conguração
com um tempo maior.
1-64 Amortecimento da Ressonância
Range: Funcão:
Size
related*
[0 - 500 %]
AVISO!
Parâmetro 1-64 Amortecimento
da Ressonância não tem efeito
quando
parâmetro 1-10 Construção do
Motor = [1] PM, SPM não
saliente.
Insira o valor do amortecimento de
ressonância. Programe
parâmetro 1-64 Amortecimento da
Ressonância e parâmetro 1-65 Const
Tempo Amor tec Ressonânc para
ajudar a eliminar problemas de
ressonância de alta frequência. Para
reduzir oscilação de ressonância, o
valor do parâmetro 1-64 Amorte-
cimento da Ressonância deve ser
aumentado.
1-65 Const Tempo Amortec Ressonânc
Range: Funcão:
5 ms* [5 - 50 ms]
AVISO!
Parâmetro 1-65 Const Tempo
Amortec Ressonânc não tem
efeito quando
parâmetro 1-10 Construção do
Motor = [1] PM, SPM não
saliente.
Programe parâmetro 1-64 Amortecimento da Ressonância e
parâmetro 1-65 Const Tempo
Descrição do Parâmetro
VLT® AQUA Drive FC 202
33
62 Danfoss A/S © 05/2018 Todos os direitos reservados. MG20OB28

1-65 Const Tempo Amortec Ressonânc
Range: Funcão:
Amortec Ressonânc para ajudar a
eliminar problemas de ressonância
de alta frequência. Insira a
constante de tempo que
proporciona o melhor amortecimento.
1-66 Corrente Mín. em Baixa Velocidade
Range: Funcão:
Size
related*
[ 1 - 200 %]
AVISO!
Parâmetro 1-66 Corrente Mín.
em Baixa Velocidade não tem
efeito se
parâmetro 1-10 Construção do
Motor = [0] Assíncrono.
Insira a corrente mínima do motor
em velocidade baixa.
Aumentar essa corrente melhora o
torque do motor desenvolvido em
velocidade baixa. Velocidade baixa
é denida como velocidades abaixo
de 6% da velocidade nominal do
motor (parâmetro 1-25 Velocidade
nominal do motor) em Controle PM
VVC+.
1-70 Modo de Partida
Option: Funcão:
[0] Detecção de
Rotor
Adequado para todas as aplicações
em que se sabe que o motor está
parado ao dar partida (por
exemplo, transportadores, bombas
e ventiladores com rotação livre).
[1] Estacio-
namento
Se o motor funciona a uma baixa
velocidade (inferior a 2–5% da
velocidade nominal), por exemplo,
devido à ventiladores com rotação
livre, selecione [1] Estacionamento e
ajuste parâmetro 2-06 Corrente de
Estacionamento e
parâmetro 2-07 Tempo de Estacionamento de acordo.
[2] Rotor Det. w/
Parking
1-71 Atraso da Partida
Range: Funcão:
00 s* [0 - 300 s] Insira o atraso de tempo entre o
comando de partida e o momento
em que o conversor de frequência
fornece a energia ao motor.
Esse parâmetro está relacionado à
função de partida selecionada em
parâmetro 1-72 Função de Partida.
1-72 Função de Partida
Option: Funcão:
Selecione a função partida durante
o retardo de partida. Este
parâmetro está vinculado ao
parâmetro 1-71 Atraso da Partida.
[0] Retnç CC/
temp atras
Energiza o motor com uma
corrente de hold CC
(parâmetro 2-00 Corrente de Hold
CC/Preaquecimento) durante o
tempo de retardo da partida.
[2] ParadInérc/
tempAtra
O motor parou por inércia durante
o tempo de retardo da partida
(inversor desligado).
As seleções disponíveis dependem
de parâmetro 1-10 Construção do
Motor: [0] Assíncrono:
•
[2] Parada por inércia.
•
[0] Retenção CC.
[1] PM não saliente:
•
[2] Parada por inércia.
1-73 Flying Start
Option: Funcão:
Esta função possibilita a captura do
motor que está girando livremente
devido a uma queda da rede
elétrica.
Quando o parâmetro 1-73 Flying
Start está ativo, o
parâmetro 1-71 Atraso da Partida
ca sem função.
A direção de busca do ying start
está vinculada à conguração em
parâmetro 4-10 Sentido de Rotação
do Motor.
[0] Sentido horário: Flying start
busca no sentido horário. Caso
falhe, um freio CC é aplicado.
[2] Nos dois sentidos: O ying start
faz primeiro uma busca no sentido
determinado pela última referência
(sentido). Se a velocidade não for
Descrição do Parâmetro Guia de Programação
3 3
3.3.11 1-7* Ajustes da Partida
MG20OB28 Danfoss A/S © 05/2018 Todos os direitos reservados. 63

1-73 Flying Start
Option: Funcão:
encontrada, é feita uma busca no
sentido oposto. Caso falhe, um freio
CC é ativado no tempo programado
em parâmetro 2-02 Tempo de
Frenagem CC. Em seguida, a partida
ocorre a partir de 0 Hz.
[0] Desativado Selecione [0] Desabilitar caso esta
função não seja necessária.
[1] Ativo Selecione [1] Ativar para habilitar o
conversor de frequência para
capturar e controlar um motor
girando.
O parâmetro está sempre
programado para [1] Ativar quando
parâmetro 1-10 Construção do Motor
= [1] PM não saliente.
Parâmetros importantes
relacionados:
•
Parâmetro 1-58 Corrente de
Pulsos de Teste Flystart.
•
Parâmetro 1-59 Freqüência
de Pulsos de Teste Flystart.
•
Parâmetro 1-70 Modo de
Partida.
•
Parâmetro 2-03 Veloc.Acion
Freio CC [RPM].
•
Parâmetro 2-04 Veloc.Acion.
d FreioCC [Hz].
•
Parâmetro 2-06 Corrente de
Estacionamento.
•
Parâmetro 2-07 Tempo de
Estacionamento.
1-79 TempMáx.Part.Comp.p/Desarm
Range: Funcão:
0 s* [ 0 - 3600.0s]Se o motor não atingir a velocidade
especicada em
parâmetro 1-86 Velocidade de
Desarme Baixa [RPM] no tempo
especicado neste parâmetro, o
conversor de frequência desarma. O
tempo indicado neste parâmetro
inclui o tempo especicado em
parâmetro 1-71 Atraso da Partida.
Por exemplo, se o valor indicado
em parâmetro 1-71 Atraso da Partida
for maior ou igual ao valor indicado
em
parâmetro 1-79 TempMáx.Part.Comp.
p/Desarm, o conversor de
frequência nunca dará partida.
Descrição do Parâmetro
33
Quando o parâmetro 1-73 Flying Start está ativo, o
parâmetro 1-71 Atraso da Partida ca sem função.
A função ying start usada para motores PM é baseada em
uma estimativa de velocidade inicial. A velocidade é
sempre estimada imediatamente após ser dado um sinal
ativo de partida. Baseado na conguração de
parâmetro 1-70 Modo de Partida, acontece o seguinte:
Parâmetro 1-70 Modo de Partida = [0] Detecção de Rotor:
Se a estimativa de velocidade for superior a 0 Hz, o
conversor de frequência captura o motor nessa velocidade
e retoma a operação normal. Caso contrário, o conversor
de frequência estima a posição do rotor e prossegue a
operação normal.
Parâmetro 1-70 Modo de Partida=[1] Estacionamento:
Se a estimativa de velocidade for inferior à velocidade
programada em parâmetro 1-59 Freqüência de Pulsos de
64 Danfoss A/S © 05/2018 Todos os direitos reservados. MG20OB28
VLT® AQUA Drive FC 202
Teste Flystart, a função de estacionamento é acionada
(consulte parâmetro 2-06 Corrente de Estacionamento e
parâmetro 2-07 Tempo de Estacionamento). Caso contrário, o
conversor de frequência pega o motor nessa velocidade e
retoma a operação normal. Consulte a descrição de
parâmetro 1-70 Modo de Partida para obter as congu-
rações recomendadas.
Atuais limitações do princípio do ying start usado para
motores PM:
A faixa de velocidade é de até 100% da
•
velocidade nominal ou da velocidade de
enfraquecimento do campo (o que for menor).
PMSM com alta Força Contra Eletromotriz
•
(>VLL 300(rms)) e alta indutância de enrolamento
(>10 mH) precisa de mais tempo para zerar a
corrente de curto-circuito e pode estar suscetível
a erro de estimativa.
Teste de corrente limitado a uma faixa de
•
velocidade de até 300 Hz. Para determinadas
unidades, o limite é 250 Hz; todas as unidades
200–240 V até e incluindo 2,2 kW (3 hp) e todas
as unidades 380–480 V até e incluindo 4 kW
(5,4 hp).
Teste de corrente limitado a uma potência de
•
máquina de até 22 kW (30 hp).
Preparado para máquina de polos salientes
•
(IPMSM), mas ainda não
máquina.
Para aplicações de alta inércia (onde a inércia da
•
carga é mais de 30 vezes maior que a inércia do
motor), um resistor de freio é recomendado para
evitar o desarme de sobretensão durante o
engate de alta velocidade da função ying start.
vericado nesses tipos de

1-80 Função na Parada
Option: Funcão:
Selecione a função do conversor de
frequência, após um comando de
parada ou depois que a velocidade
é desacelerada até as congurações
no parâmetro 1-81 Veloc.Mín.p/
Função na Parada[RPM].
As seleções disponíveis dependem
de parâmetro 1-10 Construção do
Motor:
[0] Assíncrono:
•
[0] Parada por inércia.
•
[1] Retenção CC.
[1] PM não saliente:
•
[0] Parada por inércia.
[0] * Parada por
inércia
Deixe o motor em modo livre.
[1] Hold de CC/
Preaquecimento do
Motor
Energiza o motor com uma
corrente de hold CC (consulte
parâmetro 2-00 Corrente de Hold CC/
Preaquecimento).
[2] Vericação do
motor
[6] Verif.motor,
alarme
1-81 Veloc.Mín.p/Função na Parada[RPM]
Range: Funcão:
Size
related*
[0 - 600
RPM]
Programe a velocidade para ativar o
parâmetro 1-80 Função na Parada.
1-82 Veloc. Mín p/ Funcionar na Parada [Hz]
Range: Funcão:
Size
related*
[ 0 - 20.0 Hz] Programar a frequência de saída
que ativa o parâmetro 1-80 Função
na Parada.
N
RPM
T
N
1-86
T
1-79
T
1-71
0
1
1-86 Velocidade de Desarme Baixa [RPM]
Range: Funcão:
Size
related*
[ 0 - par. 4-13
RPM]
AVISO!
Este parâmetro só estará
disponível se
parâmetro 0-02 Unidade da
Veloc. do Motor estiver
programado para [11] RPM.
Insira o limite inferior para a
velocidade do motor em que o
conversor de frequência desarma.
Se o valor for 0, a função não está
ativa. Se a velocidade em qualquer
momento após a partida (ou
durante uma parada) cair abaixo do
valor do parâmetro, o conversor de
Descrição do Parâmetro Guia de Programação
3.3.12 1-8* Ajustes de Parada
Veloc. do Motor [RPM] e parâmetro 4-12 Lim. Inferior da
Veloc. do Motor [Hz].
Se a velocidade cair abaixo de um determinado valor, o
recurso de monitoramento avançado da velocidade mínima
desarma o conversor de frequência. Se o motor da bomba
não atingir a velocidade especicada em
parâmetro 1-86 Velocidade de Desarme Baixa [RPM] no
tempo especicado em
parâmetro 1-79 TempMáx.Part.Comp.p/Desarm (a aceleração
leva muito tempo), o conversor de frequência desarma.
Temporizadores para parâmetro 1-71 Atraso da Partida e
parâmetro 1-79 TempMáx.Part.Comp.p/Desarm começam ao
mesmo tempo quando o comando de partida é emitido.
Por exemplo, isso signica que se o valor em
parâmetro 1-71 Atraso da Partida for maior ou igual ao
valor em parâmetro 1-79 TempMáx.Part.Comp.p/Desarm, o
conversor de frequência nunca dará partida.
3 3
3.3.13 Monitoramento avançado da
Algumas bombas são sensíveis à operação em baixa
velocidade. Resfriamento ou lubricação insucientes em
baixa velocidade são motivos comuns.
Em condições de sobrecarga, o conversor de frequência se
protege usando seus recursos de proteção integral, entre
os quais inclui a redução da velocidade. Por exemplo, o
controlador de limite de corrente pode reduzir a
velocidade. Às vezes, a velocidade pode ser inferior à
velocidade especicada em parâmetro 4-11 Lim. Inferior da
MG20OB28 Danfoss A/S © 05/2018 Todos os direitos reservados. 65
velocidade mínima para bombas
submersíveis
T
1-71
T
1-79
N
1 Operação normal.
Ilustração 3.11 Monitoramento avançado da velocidade
mínima
Parâmetro 1-71 Atraso da Partida.
Parâmetro 1-79 TempMáx.Part.Comp.p/Desarm. Esse
tempo inclui o tempo em T
Parâmetro 1-86 Velocidade de Desarme Baixa [RPM]. Se
1-86
a velocidade cair abaixo desse valor durante a
operação normal, o conversor de frequência desarma.
1-71
.

1-86 Velocidade de Desarme Baixa [RPM]
Range: Funcão:
frequência desarma com alarme 49,
Limite de Velocidade.
1-87 Velocidade de Desarme Baixa [Hz]
Range: Funcão:
Size
related*
[ 0 - par. 4-14
Hz]
AVISO!
Este parâmetro só está
disponível se
parâmetro 0-02 Unidade da
Veloc. do Motor estiver
programado para [1] Hz.
Insira o limite inferior para a
velocidade do motor em que o
conversor de frequência desarma.
Se o valor for 0, a função não está
ativa. Se a velocidade em qualquer
momento após a partida (ou
durante uma parada) cair abaixo do
valor do parâmetro, o conversor de
frequência desarma com alarme 49,
Limite de Velocidade.
Descrição do Parâmetro
33
3.3.14 1-9* Temperatura do Motor
1-90 Proteção térmica do motor
Option: Funcão:
A proteção térmica do motor pode ser
implementada usando diversas técnicas:
•
•
66 Danfoss A/S © 05/2018 Todos os direitos reservados. MG20OB28
•
Para o mercado Norte Americano: As funções
ETR oferecem proteção de sobrecarga do
VLT® AQUA Drive FC 202
Por meio de um sensor PTC nos
enrolamentos do motor conectado
a 1 das entradas analógicas ou
digitais (parâmetro 1-93 Fonte do
Termistor). Consulte o
capétulo 3.3.15 Conexão do Termistor
PTC.
Por meio do cálculo da carga
térmica (ETR = Electronic Thermal
Relay - Relé Térmico Eletrônico) ,
baseado na carga real e no tempo.
A carga térmica calculada é
comparada com a corrente nominal
do motor I
nominal do motor f
capétulo 3.3.16 ETR e
capétulo 3.3.17 ATEX ETR.
Por meio de um interruptor térmico
mecânico (do tipo Klixon). Consulte
o capétulo 3.3.18 Klixon.
e a frequência
M,N
M,N
. Consulte
1-90 Proteção térmica do motor
Option: Funcão:
motor classe 20, em conformidade com a
NEC.
[0] Sem
proteção
[1] Advertência
do termistor
[2] Desarme do
termistor
[3] Advertência
do ETR 1
[4] Desarme do
ETR 1
[5] Advertência
do ETR 2
[6] Desarme do
ETR 2
[7] Advertência
do ETR 3
[8] Desarme do
ETR 3
[9] Advertência
do ETR 4
[10] Desarme do
ETR 4
[20] ATEX ETR Ativa a função de monitoramento térmico
Motor sobrecarregado continuamente,
quando não houver necessidade de
nenhuma advertência ou desarme do
conversor de frequência.
Ativa uma advertência quando o termistor
ou o sensor KTY conectado no motor reagir
se ocorrer um superaquecimento do motor.
Para (desarma) o conversor de frequência
quando o termistor ou o sensor KTY
conectado no motor reagir se ocorrer um
superaquecimento do motor.
O valor de desativação do termistor deve ser
maior do que 3 kΩ.
Instale um termistor (sensor PTC) no motor
para proteção do enrolamento.
Calcula a carga quando o setup 1 estiver
ativo e aciona uma advertência no display
quando o motor estiver sobrecarregado.
Programa um sinal de advertência através de
1 das saídas digitais.
Calcula a carga quando o setup 1 estiver
ativo e para (desarma) o conversor de
frequência quando o motor estiver sobrecarregado. Programa um sinal de advertência
através de 1 das saídas digitais. O sinal
aparece se houver uma advertência e se o
conversor de frequência desarmar
(advertência térmica).
para motores Ex-e para ATEX. Habilita
parâmetro 1-94 ATEX ETR cur.lim. speed
reduction, parâmetro 1-98 ATEX ETR interpol.
points freq. e parâmetro 1-99 ATEX ETR
interpol points current.
AVISO!
Se [20] ATEX ETR estiver selecionado, siga as instruções
no capítulo dedicado do guia de design e as instruções
fornecidas pelo fabricante do motor.

1,21,0 1,4
30
10
20
100
60
40
50
1,81,6 2,0
2000
500
200
400
300
1000
600
t [s]
175ZA052.11
fOUT = 0,2 x f M,N
fOUT = 2 x f M,N
fOUT = 1 x f M,N
IMN
IM
Descrição do Parâmetro Guia de Programação
AVISO!
Se [20] ATEX ETR estiver selecionado, programe
parâmetro 4-18 Limite de Corrente para 150%.
3.3.15 Conexão do Termistor PTC
Programe parâmetro 1-90 Proteção Térmica do
•
Motor para [2] Desarme do Termistor.
Programe parâmetro 1-93 Fonte do Termistor para
•
[2] Entrada Analógica 54.
Ilustração 3.14 Conexão do termistor PTC - Entrada analógica
3 3
Ilustração 3.12 Perl do PTC
Utilizando uma entrada digital e uma alimentação de 10 V:
Exemplo: O conversor de frequência desarma quando a
temperatura do motor estiver muito alta.
Conguração de parâmetros:
Programe parâmetro 1-90 Proteção Térmica do
•
Motor para [2] Desarme do Termistor.
Programe parâmetro 1-93 Fonte do Termistor para
•
[6] Entrada Digital.
Entrada
digital/
analógica
Digital 10 V
Analógica 10 V
Tabela 3.10 Valores limite de desativação
Tensão de
alimentação
Valores
limite de desativação
<800 Ω⇒2,7 kΩ
<3,0 kΩ⇒3,0 kΩ
AVISO!
Verique se a tensão de alimentação selecionada está de
acordo com a especicação do elemento termistor usado.
3.3.16 ETR
Os cálculos fornecem uma estimativa da necessidade de
uma carga menor e velocidade mais baixa devido ao
menor resfriamento suprido pelo ventilador do motor.
Ilustração 3.13 Conexão do termistor PTC - Entrada digital
Ilustração 3.15 Perl do ETR
Utilizando uma entrada analógica e uma alimentação de
10 V:
Exemplo: O conversor de frequência desarma quando a
temperatura do motor estiver muito alta.
Conguração de parâmetros:
MG20OB28 Danfoss A/S © 05/2018 Todos os direitos reservados. 67

Descrição do Parâmetro
VLT® AQUA Drive FC 202
3.3.17 ATEX ETR
AVISO!
Compare o requisito de frequência de chaveamento
O VLT® PTC Thermistor Card MCB 112 oferece monitoramento aprovado pela ATEX da temperatura do motor.
Como alternativa, uma fonte externa de dispositivo de
proteção de PTC aprovada pela ATEX pode ser usada.
33
AVISO!
mínima declarado pelo fabricante do motor com a
frequência de chaveamento mínima do conversor de
frequência, o valor padrão em
parâmetro 14-01 Freqüência de Chaveamento. Use um
ltro de onda senoidal se o conversor de frequência não
atender esse requisito.
Use somente motores Ex-e aprovados pela ATEX para
essa função. Consulte a plaqueta de identicação do
motor, certicado de aprovação, folha de dados, ou entre
em contato com o fornecedor do motor.
É importante garantir determinadas limitações ao controlar
Mais informações sobre monitoramento térmico ATEX ETR
podem ser encontradas nas Notas de Aplicação para a
Função de Monitoramento Térmico ETR ATEX para FC 300.
3.3.18 Klixon
um motor Ex-e com segurança aumentada. Os parâmetros
que devem ser programados são apresentados em
Tabela 3.11.
O disjuntor térmico tipo Klixon usa um disco de metal
KLIXON®. Em uma sobrecarga predeterminada, o calor
causado pela corrente através do disco causa um desarme.
Função Conguração
Parâmetro 1-90 Proteção
Térmica do Motor
Parâmetro 1-94 ATEX ETR
cur.lim. speed reduction
Parâmetro 1-98 ATEX ETR
interpol. points freq.
Parâmetro 1-99 ATEX ETR
interpol points current
Parâmetro 1-23 Freqüência do
Motor
Parâmetro 4-19 Freqüência
Máx. de Saída
Parâmetro 4-18 Limite de
Corrente
Parâmetro 5-15 Terminal 33
Entrada Digital
Parâmetro 5-19 Terminal 37
Parada Segura
Parâmetro 14-01 Freqüência de
Chaveamento
Parâmetro 14-26 Atraso
Desarme-Defeito Inversor
[20] ATEX ETR
20%
Plaqueta de identicação do
motor.
Insira o mesmo valor que para
parâmetro 4-19 Freqüência Máx.
de Saída.
Plaqueta de identicação do
motor, possivelmente reduzida
para cabos de motor longos,
ltro de onda senoidal ou tensão
de alimentação reduzida.
Forçado para 150% por 1-90 [20]
[80] Cartão 1 do PTC
[4] Alarme do PTC 1
Verique se o valor padrão
atende o requisito que está na
plaqueta de identicação do
motor. Se não atender, use um
ltro de onda senoidal.
0
Utilizando uma entrada digital e uma alimentação de 24 V:
Exemplo: O conversor de frequência desarma quando a
temperatura do motor estiver muito alta.
Conguração de parâmetros:
Programe parâmetro 1-90 Proteção Térmica do
•
Motor para [2] Desarme do Termistor.
Programe parâmetro 1-93 Fonte do Termistor para
•
[6] Entrada Digital.
Ilustração 3.16 Conexão do termistor
Tabela 3.11 Parâmetros
68 Danfoss A/S © 05/2018 Todos os direitos reservados. MG20OB28

1-91 Ventilador Externo do Motor
Option: Funcão:
[0] * Não Não é necessário nenhum
ventilador externo, ou seja, o motor
será derate a velocidade baixa.
[1] Sim É aplicado um ventilador externo
(ventilação externa), de modo que
não há necessidade de nenhum
derating do motor em velocidade
baixa. A curva superior em
Ilustração 3.15 (f
fora
= 1 x f
M,N
) é
seguida se a corrente do motor
está abaixo da corrente nominal do
motor (consulte
parâmetro 1-24 Corrente do Motor).
Se a corrente do motor exceder a
corrente nominal, o tempo de
operação ainda diminui como se
nenhum ventilador tivesse sido
instalado.
1-93 Fonte do Termistor
Option: Funcão:
AVISO!
Não se pode ajustar este
parâmetro enquanto o motor
estiver em funcionamento.
AVISO!
Ajuste a entrada digital para
[0] PNP - Ativo a 24 V em
parâmetro 5-00 Modo I/O
Digital.
Selecionar a entrada na qual o
termistor (sensor PTC) deverá ser
conectado. Um opcional de entrada
analógica [1] Entrada analógica 53
ou [2] Entrada analógica 54 não
pode ser selecionado se a entrada
analógica já estiver em uso como
fonte da referência (selecionado em
parâmetro 3-15 Fonte da Referência
1, parâmetro 3-16 Fonte da
Referência 2, ou
parâmetro 3-17 Fonte da Referência
3).
Ao usar o VLT® PTC Thermistor Card
MCB 112 selecione sempre [0]
Nenhum.
[0] * Nenhum
[1] Entrada
analógica 53
[2] Entrada
analógica 54
1-93 Fonte do Termistor
Option: Funcão:
[3] Entrada digital
18
[4] Entrada digital
19
[5] Entrada digital
32
[6] Entrada digital
33
1-95 Sensor Tipo KTY
Option: Funcão:
Selecione o tipo de sensor do
termistor.
[0] * Sensor KTY 1
1 kΩ a 100 °C (212 °F).
[1] Sensor KTY 2
1 kΩ a 25 °C (77 °F).
[2] Sensor KTY 3
2 kΩ a 25 °C (77 °F).
[3] Pt1000
1-96 Recurso Termistor KTY
Option: Funcão:
Selecione o terminal de entrada
analógica 54 como uma entrada do
sensor do termistor. O terminal 54
não pode ser selecionado como
fonte do termistor se for utilizado
como referência (consulte
parâmetro 3-15 Fonte da Referência 1
a parâmetro 3-17 Fonte da
Referência 3).
AVISO!
Conexão do sensor do
termistor entre os terminais 54
e 55 (GND). Consulte o
capétulo 3.3.15 Conexão do
Termistor PTC.
[0] * Nenhum
[2] Entrada
analógica 54
1-97 Nível Limiar d KTY
Range: Funcão:
80 °C* [ -40 -
220 °C]
Selecione o nível limite do sensor
do termistor para a proteção
térmica do motor.
Descrição do Parâmetro Guia de Programação
3 3
MG20OB28 Danfoss A/S © 05/2018 Todos os direitos reservados. 69

2-00 Corrente de Hold CC/Preaquecimento
Range: Funcão:
50 %* [ 0 - 160 %]
AVISO!
Parâmetro 2-00 Corrente de
Hold CC/Preaquecimento não
tem efeito quando
parâmetro 1-10 Construção do
Motor = [1] PM, SPM não
saliente.
AVISO!
O valor máximo depende da
corrente nominal do motor.
Evite 100% de corrente
durante muito tempo. O motor
pode ser danicado.
Digite um valor para corrente de
holding como uma porcentagem da
corrente nominal do motor I
M,N
programada em
parâmetro 1-24 Corrente do Motor.
100% da corrente de hold CC
corresponde a I
M,N
.
Este parâmetro mantém (torque de
holding) ou pré-aquece o motor.
Este parâmetro
cará ativo se [1]
Retenção CC/Pré-aquecimento estiver
selecionado no
parâmetro 1-80 Função na Parada.
2-01 Corrente de Freio CC
Range: Funcão:
50 %* [ 0 - 1000 %]
AVISO!
O valor máximo depende da
corrente nominal do motor.
Evite 100% de corrente
durante muito tempo. O motor
pode ser danicado.
Digite um valor para a corrente
como uma porcentagem da
corrente nominal do motor I
M,N
,
consulte parâmetro 1-24 Corrente do
Motor. 100% da corrente de freio
CC corresponde a I
M,N
.
2-01 Corrente de Freio CC
Range: Funcão:
Uma corrente de freio CC é
aplicada em um comando de
parada, quando a velocidade for
menor do que o limite programado
em:
•
Parâmetro 2-03 Veloc.Acion
Freio CC [RPM].
•
Parâmetro 2-04 Veloc.Acion.
d FreioCC [Hz], quando a
função de inversão da
frenagem CC estiver ativa,
ou através da porta de
comunicação serial.
A corrente de frenagem está ativa
durante o intervalo de tempo
programado no
parâmetro 2-02 Tempo de Frenagem
CC.
2-02 Tempo de Frenagem CC
Range: Funcão:
10 s* [0 - 60 s] Programe a duração da corrente de
freio CC programada em
parâmetro 2-01 Corrente de Freio CC
assim que for ativada.
2-03 Veloc.Acion Freio CC [RPM]
Range: Funcão:
Size
related*
[ 0 - 0 RPM]
AVISO!
Parâmetro 2-03 Veloc.Acion
Freio CC [RPM] não tem efeito
quando
parâmetro 1-10 Construção do
Motor = [1] PM, SPM não
saliente.
Programe a velocidade de ativação
do freio CC para ativar a corrente
de freio CC programada em
parâmetro 2-01 Corrente de Freio CC
após um comando de parada.
Quando parâmetro 1-10 Construção
do Motor estiver programado para
[1] PM, SPM não saliente, esse valor
é limitado a 0 rpm (desligado).
Descrição do Parâmetro
VLT® AQUA Drive FC 202
3.4 Parâmetros 2-** Freios
3.4.1 2-0* Freios CC
Grupo do parâmetro para congurar as funções do Freio
CC e Retenção CC.
33
70 Danfoss A/S © 05/2018 Todos os direitos reservados. MG20OB28

2-04 Veloc.Acion.d FreioCC [Hz]
Range: Funcão:
Size
related*
[ 0 - 0.0 Hz]
AVISO!
Parâmetro 2-04 Veloc.Acion.d
FreioCC [Hz] não tem efeito
quando
parâmetro 1-10 Construção do
Motor = [1] PM, SPM não
saliente.
Programe a velocidade de ativação
do freio CC para a ativação da
corrente de freio CC programada
em parâmetro 2-01 Corrente de Freio
CC após um comando de parada.
2-06 Corrente de Estacionamento
Range: Funcão:
50 %* [ 0 - 1000 %]
AVISO!
Parâmetro 2-06 Corrente de
Estacionamento e
parâmetro 2-07 Tempo de
Estacionamento Ativo somente
se [1] PM, SPM não saliente
estiver selecionado em
parâmetro 1-10 Construção do
Motor.
Dena a corrente como uma
porcentagem da corrente nominal
do motor, parâmetro 1-24 Corrente
do Motor. Ativo com
parâmetro 1-73 Flying Start. A
corrente de estacionamento está
ativa durante o período de tempo
programado em
parâmetro 2-07 Tempo de Estacionamento.
2-07 Tempo de Estacionamento
Range: Funcão:
3 s* [0.1 - 60 s] Programe a duração do tempo de
corrente de estacionamento
programado em
parâmetro 2-06 Corrente de Estacionamento. Ativo com
parâmetro 1-73 Flying Start.
2-07 Tempo de Estacionamento
Range: Funcão:
AVISO!
Parâmetro 2-07 Tempo de
Estacionamento só estará ativo
quando [1] PM, SPM não
saliente estiver selecionado em
parâmetro 1-10 Construção do
Motor.
2-10 Função de Frenagem
Option: Funcão:
As seleções disponíveis dependem
de parâmetro 1-10 Construção do
Motor:
[0] Assíncrono:
•
[0] Desligado.
•
[1] Resistor do freio.
•
[2] Frenagem CA.
[1] PM não saliente:
•
[0] Desligado.
•
[1] Resistor do freio.
[0] O (Desligado) Não há nenhum resistor de freio
instalado.
[1] Resistor de
freio
Resistor de freio instalado no
sistema, para a dissipação do
excesso de energia de frenagem, na
forma de calor. Conectar um
resistor de frenagem permite uma
maior tensão do barramento CC
durante a frenagem (operação de
geração). A função de frenagem do
resistor só está ativa em
conversores de frequência com um
freio dinâmico integral.
[2] Freio CA A frenagem CA funciona somente
no modo de torque do compressor
em parâmetro 1-03 Características de
Torque.
Descrição do Parâmetro Guia de Programação
3 3
3.4.2 2-1* Funções do Freio
Grupo do parâmetro para selecionar os parâmetros de
frenagem dinâmica. válido somente para conversores de
frequência com circuito de frenagem.
MG20OB28 Danfoss A/S © 05/2018 Todos os direitos reservados. 71

2-11 Resistor de Freio (ohm)
Range: Funcão:
Size
related*
[ 5 - 65535
Ohm]
Programe o valor do resistor do
freio em Ω. Este valor é usado para
monitoramento da energia do
resistor do freio em
parâmetro 2-13 Monitoramento da
Potência d Frenagem. Este
parâmetro somente está ativo em
conversores de frequência com um
freio dinâmico integral.
Utilize este parâmetro para valores
que não tenham decimais. Para
uma seleção com 2 decimais, use
parâmetro 30-81 Resistor de Freio
(ohm).
2-12 Limite da Potência de Frenagem (kW)
Range: Funcão:
Size
related*
[ 0.001 -
2000.000 kW]
AVISO!
Este parâmetro somente está
ativo em conversores de
frequência com um freio
dinâmico integral.
Programe o limite de monitoramento da potência de frenagem
transmitida ao resistor.
O limite de monitoramento é um
produto do ciclo útil máximo (120
s) e da potência máxima do resistor
do freio, nesse mesmo ciclo. Veja as
fórmulas abaixo.
Para unidades 200–240 V:
P
resistor
=
3902 × dutytime
R × 120
Para unidades 380–480 V:
P
resistor
=
7782 × dutytime
R × 120
Para unidades 525–600 V:
P
resistor
=
9432 × dutytime
R × 120
2-13 Monitoramento da Potência d Frenagem
Option: Funcão:
AVISO!
Este parâmetro somente está
ativo em conversores de
frequência com um freio
dinâmico integral.
Este parâmetro ativa o monitoramento da energia transmitida ao
resistor de frenagem. A potência é
calculada com base na resistência
2-13 Monitoramento da Potência d Frenagem
Option: Funcão:
(parâmetro 2-11 Resistor de Freio
(ohm)), na tensão do barramento
CC e no ciclo útil do resistor.
[0] * O (Desligado) Não é necessário nenhum monito-
ramento da energia de frenagem.
Se o monitoramento da potência
estiver programado para [0] O
(Desligado) ou [1] Advertência, a
função de frenagem permanece
ativa mesmo se o limite de monitoramento for excedido. Isto pode
levar a uma sobrecarga térmica do
resistor. Também é possível gerar
uma advertência através da saída
de relé/digital. A precisão da
medição do monitoramento da
energia depende da precisão da
resistência do resistor (melhor que
±20%).
[1] Advertência Ativa uma advertência quando a
potência transmitida ao longo de
120 s excede 100% do limite de
monitoramento
(parâmetro 2-12 Limite da Potência
de Frenagem (kW)).
A advertência desaparece quando a
potência transmitida cair abaixo de
80% do limite de monitoramento.
[2] Desarme Desarma o conversor de frequência
e mostra um alarme quando a
potência calculada exceder 100%
do limite de monitoramento.
[3] Advertênc e
desarme
Ativa ambos acima mencionados,
inclusive advertência, desarme e
alarme.
[4] Warning 30s
[5] Trip 30s
[6] Warning & trip
30s
[7] Warning 60s
[8] Trip 60s
[9] Warning & trip
60s
[10] Warning 300s
[11] Trip 300s
[12] Warning & trip
300s
[13] Warning 600s
[14] Trip 600s
[15] Warning & trip
600s
Descrição do Parâmetro
33
72 Danfoss A/S © 05/2018 Todos os direitos reservados. MG20OB28
VLT® AQUA Drive FC 202

2-15 Vericação do Freio
Option: Funcão:
AVISO!
Remove uma advertência
decorrente de [0] O
(desligado) ou [1] Advertência
por ciclagem da alimentação
de rede elétrica. Corrija o
defeito primeiro. Para [0] O
(Desligado) ou [1] Advertência,
o conversor de frequência
continua funcionando mesmo
se uma falha for encontrada.
Seleciona o tipo de teste e a função
de monitoramento para vericar a
conexão ao resistor do freio ou se
há um resistor do freio instalado, e,
em seguida, mostra uma
advertência ou um alarme caso haja
uma falha. A função de desconexão
do resistor de freio é testada
durante a energização. No entanto,
o teste IGBT do freio é executado
quando não há frenagem. Uma
advertência ou desarme desconecta
a função de frenagem.
A sequência de teste é a seguinte:
1. Meça a amplitude do
ripple do barramento CC
durante 300 ms sem
frenagem.
2. Meça a amplitude do
ripple do barramento CC
durante 300 ms com os
freios acionados.
3. Se a amplitude do ripple
do barramento CC durante
a frenagem for menor que
a amplitude do ripple do
barramento CC antes da
frenagem +1%, a
vericação do freio falha.
Se a vericação do freio
falhar, uma advertência ou
um alarme será retornado.
4. Se a amplitude do ripple
do barramento CC durante
a frenagem for maior que
a amplitude do ripple do
barramento CC antes da
frenagem +1%, a
vericação do freio está
correta.
2-15 Vericação do Freio
Option: Funcão:
[0] * O (Desligado) Monitora o resistor do freio e o
IGBT do freio quanto a um curto
circuito durante a operação. Se
ocorrer um curto-circuito, uma
advertência é exibida.
[1] Advertência Monitora o resistor do freio e o
IGBT do freio quanto a um curto
circuito e executa um teste de
desconexão do resistor do freio
durante a energização.
[2] Desarme Monitora quanto a um curto-
-circuito ou desconexão do resistor
do freio, ou quanto a um curto
circuito do IGBT do freio. Se ocorrer
uma falha, o conversor de
frequência desativa enquanto exibe
um alarme (bloqueio por desarme).
[3] Parada e
desarme
Monitora quanto a um curto-
-circuito ou desconexão do resistor
do freio, ou quanto a um curto
circuito do IGBT do freio. Caso
ocorra uma falha, o conversor de
frequência desacelera, começa a
parar por inércia e, em seguida,
desarma. Um alarme de bloqueio
de desarme é mostrado.
[4] Freio CA Monitora quanto a um curto-
-circuito ou desconexão do resistor
do freio, ou quanto a um curto
circuito do IGBT do freio. Se ocorrer
uma falha, o conversor de
frequência executa uma desaceleração controlada.
2-16 Corr Máx Frenagem CA
Range: Funcão:
100 %* [ 0 -
1000.0 %]
AVISO!
Parâmetro 2-16 Corr Máx
Frenagem CA não tem efeito
quando
parâmetro 1-10 Construção do
Motor = [1] PM, SPM não
saliente.
Insira a corrente máxima permitida
ao usar frenagem CA para evitar
superaquecimento dos enrolamentos do motor.
Descrição do Parâmetro Guia de Programação
MG20OB28 Danfoss A/S © 05/2018 Todos os direitos reservados. 73
3 3

2-17 Controle de Sobretensão
Option: Funcão:
[0] Desativado Não é necessário nenhum OVC.
[2] * Ativado Ativa o OVC
2-19 Ganho de Sobretensão
Range: Funcão:
100 %* [10 - 200 %] Seleciona ganho de sobretensão.
Descrição do Parâmetro
VLT® AQUA Drive FC 202
33
74 Danfoss A/S © 05/2018 Todos os direitos reservados. MG20OB28

3-02 Referência Mínima
Range: Funcão:
Size
related*
[ -999999.999
- par. 3-03
ReferenceFeedbackUnit]
Insira o valor mínimo para a
referência remota. O valor mínimo
de referência e a unidade correspondem à escolha de conguração
feita em parâmetro 1-00 Modo
Conguração e
parâmetro 20-12 Unidade da
Referência/Feedback.
3-03 Referência Máxima
Range: Funcão:
Size
related*
[ par. 3-02 -
999999.999
ReferenceFeedbackUnit]
Insira o valor máximo aceitável para
a referência remota. O valor
máximo de referência e a unidade
correspondem à opção de
conguração selecionada em
parâmetro 1-00 Modo Conguração
e parâmetro 20-12 Unidade da
Referência/Feedback.
3-04 Função de Referência
Option: Funcão:
[0] * Soma Soma as fontes de referência
externa e predenida.
[1] Externa/
Predenida
Utilize a fonte de referência
predenida ou a externa.
Alterna um comando ou uma
entrada digital entre as vias externa
e predenida.
3-10 Referência Predenida
Matriz [8]
Range: Funcão:
0 %* [-100 -
100 %]
Insira até 8 referências predenidas
diferentes (0–7) neste parâmetro
usando programação de matriz. A
referência predenida é indicada
como um percentual do valor
Ref
MAX
(parâmetro 3-03 Referência
Máxima). Ao usar referências
predenidas, selecione as Ref.
predenidas bit 0/1/2 [16], [17] ou
3-10 Referência Predenida
Matriz [8]
Range: Funcão:
[18] para as respectivas entradas
digitais no grupo do parâmetro 5-1*
Entradas Digitais.
P3-03
P3-02
0 50 100%
P3-10
130BB036.10
3-11 Velocidade de Jog [Hz]
Range: Funcão:
Size
related*
[ 0 - par. 4-14
Hz]
A velocidade de jog é uma
velocidade constante de saída, na
qual o conversor de frequência está
funcionando, quando a função jog
está ativa.
Consulte também
parâmetro 3-19 Velocidade de Jog
[RPM] e parâmetro 3-80 Tempo de
Rampa do Jog.
Descrição do Parâmetro Guia de Programação
3.5 Parâmetros 3-** Referência/Rampas
3.5.1 3-0* Limites de Referência
3 3
3.5.2 3-1* Referências
Selecione as referências predenidas. Selecione as Ref.
predenidas bit 0/1/2 [16], [17] ou [18] para as respectivas
entradas digitais no grupo do parâmetro 5-1* Entradas
Digitais.
MG20OB28 Danfoss A/S © 05/2018 Todos os direitos reservados. 75
Ilustração 3.17 Referência predenida
Ilustração 3.18 Esquema de referência predenida

3-13 Tipo de Referência
Option: Funcão:
Selecionar o tipo de referência a ser
ativada.
[0] * Dependnt d
Hand/Auto
Utilize a referência local quando
estiver no modo manual ligado, ou
a referência remota quando estiver
em modo automático ligado.
[1] Remoto Use referência remota tanto no
modo manual ligado como no
modo automático ligado.
[2] Local Use referência local tanto no modo
manual ligado como no modo
automático ligado.
AVISO!
Quando programado para [2]
Local, o conversor de
frequência inicia com essa
conguração novamente após
desligar.
[3] Linked to H/A
MCO
Selecione esta opção para ativar o
fator FFACC. Ativar FFACC reduz
solavancos e faz com que a
transmissão do controlador de
movimento para o cartão de
controle do conversor de frequência
seja mais rápida. Isso resulta em um
tempo de resposta mais rápido para
aplicações dinâmicas e controle de
posição. Para obter mais
informações sobre FFACC, consulte
Controle de movimento VLT® MCO
305, Instruções de utilização.
3-14 Referência Relativa Pré-denida
Range: Funcão:
0 %* [-100 -
100 %]
A referência real, X, é aumentada
ou diminuída com a porcentagem
Y, programada no
parâmetro 3-14 Referência Relativa
Pré-denida.
Isso resulta na referência real Z. A
referência real (X) é a soma das
entradas selecionadas em:
•
Parâmetro 3-15 Fonte da
Referência 1.
•
Parâmetro 3-16 Fonte da
Referência 2.
•
Parâmetro 3-17 Fonte da
Referência 3.
•
Parâmetro 8-02 Origem do
Controle.
X
100
%
0-100
Z
Y
X+X*Y/100
P 3-14
130BA278.10
3-15 Fonte da Referência 1
Option: Funcão:
AVISO!
Não se pode ajustar este
parâmetro enquanto o motor
estiver em funcionamento.
Selecione a entrada de referência a
ser usada para o 1o sinal de
referência:
•
Parâmetro 3-15 Fonte da
Referência 1.
•
Parâmetro 3-16 Fonte da
Referência 2.
•
Parâmetro 3-17 Fonte da
Referência 3.
Dena até 3 sinais de referência
diferentes. A soma destes sinais de
referência dene a referência real.
[0] Sem função
[1] * Entrada
analógica 53
[2] Entrada
analógica 54
[7] Entr Pulso 29
[8] Entr Pulso 33
[20] Potenc. digital
[21] Entr Anal
X30/11
[22] Entr Anal
X30/12
[23] Entr.analóg.X4
2/1
Descrição do Parâmetro
VLT® AQUA Drive FC 202
Ilustração 3.19 Referência predenida relativa
33
Ilustração 3.20 Referência real
76 Danfoss A/S © 05/2018 Todos os direitos reservados. MG20OB28

3-15 Fonte da Referência 1
Option: Funcão:
[24] Entr.Analóg.X4
2/3
[25] Entr.analóg.X4
2/5
[29] Entrada
Analógica
X48/2
[30] Ext. Malha
Fechada 1
[31] Ext. Malha
Fechada 2
[32] Ext. Malha
Fechada 3
[35] Digital input
select
O conversor de frequência seleciona
AI53 ou AI54 como a fonte de
referência com base no sinal de
entrada denido na opção [42]
Fonte de ref bit 0 como 1 das
entradas digitais. Para obter mais
informações, consulte o grupo do
parâmetro 5-1* Entradas Digitais,
opção [42] Fonte de ref bit 0.
3-16 Fonte da Referência 2
Option: Funcão:
AVISO!
Não se pode ajustar este
parâmetro enquanto o motor
estiver em funcionamento.
Selecione a entrada de referência a
ser usada para o 2o sinal de
referência:
•
Parâmetro 3-15 Fonte da
Referência 1.
•
Parâmetro 3-16 Fonte da
Referência 2.
•
Parâmetro 3-17 Fonte da
Referência 3.
Dena até 3 sinais de referência
diferentes. A soma destes sinais de
referência dene a referência real.
[0] * Sem função
[1] Entrada
analógica 53
[2] Entrada
analógica 54
[7] Entr Pulso 29
[8] Entr Pulso 33
[20] Potenc. digital
[21] Entr Anal
X30/11
3-16 Fonte da Referência 2
Option: Funcão:
[22] Entr Anal
X30/12
[23] Entr.analóg.X4
2/1
[24] Entr.Analóg.X4
2/3
[25] Entr.analóg.X4
2/5
[29] Entrada
Analógica
X48/2
[30] Ext. Malha
Fechada 1
[31] Ext. Malha
Fechada 2
[32] Ext. Malha
Fechada 3
[35] Digital input
select
O conversor de frequência seleciona
AI53 ou AI54 como a fonte de
referência com base no sinal de
entrada denido na opção [42]
Fonte de ref bit 0 como 1 das
entradas digitais. Para obter mais
informações, consulte o grupo do
parâmetro 5-1* Entradas Digitais,
opção [42] Fonte de ref bit 0.
3-17 Fonte da Referência 3
Option: Funcão:
AVISO!
Não se pode ajustar este
parâmetro enquanto o motor
estiver em funcionamento.
Selecione a entrada de referência a
ser usada para o 3o sinal de
referência:
•
Parâmetro 3-15 Fonte da
Referência 1.
•
Parâmetro 3-16 Fonte da
Referência 2.
•
Parâmetro 3-17 Fonte da
Referência 3.
Dena até 3 sinais de referência
diferentes. A soma destes sinais de
referência dene a referência real.
[0] * Sem função
[1] Entrada
analógica 53
[2] Entrada
analógica 54
[7] Entr Pulso 29
Descrição do Parâmetro Guia de Programação
3 3
MG20OB28 Danfoss A/S © 05/2018 Todos os direitos reservados. 77

3-17 Fonte da Referência 3
Option: Funcão:
[8] Entr Pulso 33
[20] Potenc. digital
[21] Entr Anal
X30/11
[22] Entr Anal
X30/12
[23] Entr.analóg.X4
2/1
[24] Entr.Analóg.X4
2/3
[25] Entr.analóg.X4
2/5
[29] Entrada
Analógica
X48/2
[30] Ext. Malha
Fechada 1
[31] Ext. Malha
Fechada 2
[32] Ext. Malha
Fechada 3
[35] Digital input
select
O conversor de frequência seleciona
AI53 ou AI54 como a fonte de
referência com base no sinal de
entrada denido na opção [42]
Fonte de ref bit 0 como 1 das
entradas digitais. Para obter mais
informações, consulte o grupo do
parâmetro 5-1* Entradas Digitais,
opção [42] Fonte de ref bit 0.
3-19 Velocidade de Jog [RPM]
Range: Funcão:
Size
related*
[ 0 - par. 4-13
RPM]
Digite um valor para a velocidade
de jog n
JOG
, que é uma velocidade
constante de saída. O conversor de
frequência funciona nesta
velocidade, quando a função jog
estiver ativa. O limite máximo está
denido no parâmetro 4-13 Lim.
Superior da Veloc. do Motor [RPM].
Consulte também
parâmetro 3-11 Velocidade de Jog
[Hz] e parâmetro 3-80 Tempo de
Rampa do Jog.
t
acc
t
dec
130BA169.11
RPM
Time
P 3-*1
Tempo (Acc) de
Aceleracao(x)
P 3-*2
Tempo (Dec) de
Desaceleracao (x)
P 4-13
Limite
Superior
P 1-25
Velocidade
do motor
P 4-11
Limite
inferior
Referencia
3-41 Tempo de Aceleração da Rampa 1
Range: Funcão:
Size
related*
[ 0.10 - 3600s]Insira o tempo de aceleração, ou
seja, o tempo de aceleração de 0
rpm–parâmetro 1-25 Velocidade
nominal do motor. Escolha um
tempo de aceleração que impeça
que a corrente de saída exceda o
limite de corrente em
parâmetro 4-18 Limite de Corrente
durante a rampa. Consulte o tempo
de desaceleração no
parâmetro 3-42 Tempo de Desaceleração da Rampa 1.
par . 3 − 41 =
taceleração × nnom par . 1 − 25
ref RPM
s
3-42 Tempo de Desaceleração da Rampa 1
Range: Funcão:
Size
related*
[ 0.10 - 3600s]Insira o tempo de desaceleração, ou
seja, o tempo de desaceleração de
parâmetro 1-25 Velocidade nominal
do motor–0 rpm. Selecione um
tempo de desaceleração para
impedir o desenvolvimento de
sobretensão no inversor devido à
operação regenerativa do motor. O
tempo de desaceleração deve
também ser sucientemente longo
para impedir que a corrente gerada
exceda o limite de corrente
programado em
parâmetro 4-18 Limite de Corrente.
Consulte tempo de aceleração, no
Descrição do Parâmetro
VLT® AQUA Drive FC 202
3.5.3 3-4* Rampa 1
Congure os tempos de rampa para cada uma das 2
rampas (grupo do parâmetro 3-4* Rampa de velocid 1 e
grupo do parâmetro 3-5* Rampa de velocid 2).
33
Ilustração 3.21 Rampa 1
78 Danfoss A/S © 05/2018 Todos os direitos reservados. MG20OB28

3-42 Tempo de Desaceleração da Rampa 1
Range: Funcão:
parâmetro 3-41 Tempo de Aceleração
da Rampa 1.
par . 3 − 42 =
tdesaceleração × nnom par . 1 − 25
ref RPM
s
3-51 Tempo de Aceleração da Rampa 2
Range: Funcão:
Size
related*
[ 0.10 - 3600s]Insira o tempo de aceleração, ou
seja, o tempo de aceleração de 0
rpm–parâmetro 1-25 Velocidade
nominal do motor. Escolha um
tempo de aceleração que impeça
que a corrente de saída exceda o
limite de corrente em
parâmetro 4-18 Limite de Corrente
durante a rampa. Consulte o tempo
de desaceleração no
parâmetro 3-52 Tempo de Desaceleração da Rampa 2.
par . 3 − 51 =
taceleração × nnom par . 1 − 25
ref rpm
s
3-52 Tempo de Desaceleração da Rampa 2
Range: Funcão:
Size
related*
[ 0.10 - 3600s]Insira o tempo de desaceleração, ou
seja, o tempo de desaceleração de
parâmetro 1-25 Velocidade nominal
do motor–0 rpm. Selecione um
tempo de desaceleração de modo
que não ocorra sobretensão no
inversor devido à operação regenerativa do motor, e de modo que a
corrente gerada não exceda o limite
de corrente programada em
parâmetro 4-18 Limite de Corrente.
Consulte tempo de aceleração, no
parâmetro 3-51 Tempo de Aceleração
da Rampa 2.
par . 3 − 52 =
tdesaceleração × nnom par . 1 − 25
ref rpm
s
3-80 Tempo de Rampa do Jog
Range: Funcão:
Size
related*
[0.1 - 3600 s] Insira o tempo de rampa do jog, ou
seja, o tempo de aceleração/desaceleração entre 0 rpm e a velocidade
nominal do motor (n
M,N
)
3-80 Tempo de Rampa do Jog
Range: Funcão:
(programado em
parâmetro 1-25 Velocidade nominal
do motor). Certique-se de que a
corrente de saída resultante
necessária para um tempo de
rampa do jog especíco não
ultrapasse o limite de corrente em
parâmetro 4-18 Limite de Corrente. O
tempo de rampa de jog começa
após a ativação de um sinal de jog
através do painel de controle, de
uma entrada digital selecionada ou
da porta de comunicação serial.
par . 3 − 80 =
t jog × nnom par . 1 − 25
jogvelocidade par . 3 − 19
s
3-84 Tempo Inicial de Rampa
Range: Funcão:
0 s* [0 - 60 s] Insira o tempo de aceleração inicial
da velocidade zero até o limite
inferior de velocidade do motor,
parâmetro 4-11 Lim. Inferior da Veloc.
do Motor [RPM] ou
parâmetro 4-12 Lim. Inferior da Veloc.
do Motor [Hz]. Bombas submersíveis
de poço profundo podem ser
danicadas por funcionar abaixo da
velocidade mínima. Recomenda-se
um rápido tempo de rampa abaixo
da velocidade mínima da bomba.
Este parâmetro pode ser aplicado
como uma taxa de rampa rápida da
velocidade zero até o limite inferior
da velocidade do motor. Consulte o
Ilustração 3.23.
Descrição do Parâmetro Guia de Programação
3.5.4 3-5* Rampa 2
Para selecionar os parâmetros da rampa, ver grupo do
parâmetro 3-4* Rampa 1.
3 3
3.5.5 3-8* Outras Rampas
MG20OB28 Danfoss A/S © 05/2018 Todos os direitos reservados. 79
Ilustração 3.22 Tempo de Rampa do Jog

130BA962.10
Velocidade
do Motor
Velocidade
do Motor
Alto
Baixo
Normal
Rampas
Inicial
Rampa
Final
Rampa
Tempo
Velocidade
3-85 Check Valve Ramp Time
Range: Funcão:
0 s* [0 - 650 s] Para proteger as válvulas de
retenção de esfera em uma situação
de parada, a rampa da válvula de
retenção pode ser utilizada como
uma taxa de rampa lenta de
parâmetro 4-11 Lim. Inferior da Veloc.
do Motor [RPM] ou
parâmetro 4-12 Lim. Inferior da Veloc.
do Motor [Hz] para a velocidade
nal da rampa da válvula de
retenção, programada em
parâmetro 3-86 Check Valve Ramp
End Speed [RPM] ou
parâmetro 3-87 Check Valve Ramp
End Speed [HZ]. Quando
parâmetro 3-85 Check Valve Ramp
Time for diferente de 0 s, o tempo
da rampa da válvula de retenção é
efetivado e é usado para
desacelerar a velocidade do limite
inferior da velocidade do motor
para a velocidade nal da válvula
de retenção em
parâmetro 3-86 Check Valve Ramp
End Speed [RPM] ou
parâmetro 3-87 Check Valve Ramp
End Speed [HZ]. Consulte o
Ilustração 3.24.
130BA961.10
Velocidade
Velocidade
do Motor
Normal
Velocidade
do Motor
Alto
Baixo
Tempo
Aceleração
3-86 Check Valve Ramp End Speed [RPM]
Range: Funcão:
Size
related*
[ 0 - par. 4-11
RPM]
Programe a velocidade em [RPM]
abaixo do limite inferior da
velocidade do motor em que se
espera que a válvula de retenção
esteja fechada. Verique se a
válvula não está mais ativa.
Consulte o Ilustração 3.24.
3-87 Check Valve Ramp End Speed [HZ]
Range: Funcão:
Size
related*
[ 0 - par. 4-12
Hz]
Programe a velocidade em [Hz]
abaixo do limite inferior da
velocidade do motor em que a
rampa da válvula de retenção não
está mais ativa. Consulte o
Ilustração 3.24.
3-88 Tempo de Rampa Final
Range: Funcão:
0 s* [0 - 60 s] Insira o tempo de rampa nal a ser
usado ao desacelerar de
parâmetro 4-11 Lim. Inferior da Veloc.
do Motor [RPM] ou
parâmetro 4-12 Lim. Inferior da Veloc.
do Motor [Hz] para a velocidade
zero.
Bombas submersíveis de poço
profundo podem ser danicadas
por funcionar abaixo da velocidade
mínima. Recomenda-se um rápido
tempo de rampa abaixo da
velocidade mínima da bomba. Este
parâmetro pode ser aplicado como
uma taxa de rampa rápida de
parâmetro 4-11 Lim. Inferior da Veloc.
do Motor [RPM] ou
parâmetro 4-12 Lim. Inferior da Veloc.
do Motor [Hz] até a velocidade zero.
Consulte o Ilustração 3.23.
Descrição do Parâmetro
VLT® AQUA Drive FC 202
33
Ilustração 3.23 Tempo Inicial e Final de Rampa
Ilustração 3.24 Rampa da Válvula de Retenção
80 Danfoss A/S © 05/2018 Todos os direitos reservados. MG20OB28

3-90 Tamanho do Passo
Range: Funcão:
0.10 %* [0.01 200 %]
Insira o tamanho do incremento
necessário para aumentar/diminuir
como uma porcentagem da
velocidade do motor síncrono, ns.
Se aumentar/diminuir estiver
ativado, a referência resultante é
aumentada ou diminuída pelo valor
programado neste parâmetro.
3-91 Tempo de Rampa
Range: Funcão:
1 s [0 - 3600 s] Insira o tempo de rampa, que é o
tempo para o ajuste da referência
0–100% da função especicada do
potenciômetro digital (aumentar,
diminuir ou liberar).
Se aumentar/diminuir estiver
ativado por mais tempo do que o
período de atraso especicado em
parâmetro 3-95 Atraso da Rampa de
Velocidade, a referência real estará
acelerada/desacelerada de acordo
com este tempo de rampa. O
tempo de rampa é denido como o
tempo gasto para ajustar a
referência pelo tamanho do passo
especicado em
parâmetro 3-90 Tamanho do Passo.
3-92 Restabelecimento da Energia
Option: Funcão:
[0] * O (Desligado) Reinicializa a referência do
potenciômetro digital para 0% após
a energização.
[1] On (Ligado) Restabelece a referência do
potenciômetro digital mais recente
na energização.
3-93 Limite Máximo
Range: Funcão:
100 %* [-200 -
200 %]
Programa o valor máximo permitido
para a referência resultante. Isso é
recomendável se o potenciômetro
digital for usado para a sintonização
na da referência resultante.
3-94 Limite Mínimo
Range: Funcão:
0 %* [-200 -
200 %]
Programe o valor mínimo permitido
para a referência resultante. Isso é
recomendável se o potenciômetro
digital for usado para a sintonização
na da referência resultante.
3-95 Atraso da Rampa de Velocidade
Range: Funcão:
Size
related*
[ 0 - 0 ] Insira o atraso necessário da
ativação da função do
potenciômetro digital, até que o
conversor de frequência comece a
ativar a referência na rampa. Com
um atraso de 0 ms, a referência
começa a seguir na rampa quando
aumentar/diminuir for ativado.
Consulte também
parâmetro 3-91 Tempo de Rampa.
Descrição do Parâmetro Guia de Programação
3.5.6 3-9* Potenciômetro digital
Use a função do potenciômetro digital para aumentar ou
diminuir a referência real ao ajustar o setup das entradas
digitais utilizando as funções aumentar, diminuir ou limpar.
Para ativar a função, pelo menos 1 entrada digital deverá
ser programada para aumentar ou diminuir.
3 3
MG20OB28 Danfoss A/S © 05/2018 Todos os direitos reservados. 81
Ilustração 3.25 Atraso de Rampa Caso 1
Ilustração 3.26 Atraso de Rampa Caso 2

4-10 Sentido de Rotação do Motor
Option: Funcão:
Seleciona o sentido requerido para
a rotação do motor. Quando
parâmetro 1-00 Modo Conguração
estiver programado para [3] Malha
Fechada, o padrão do parâmetro é
alterado para [0] Sentido horário. Se
os dois sentidos forem escolhidos, o
funcionamento no sentido anti-
-horário não pode ser selecionado
no LCP.
[0] * Sentido
horário
[2] Nos dois
sentidos
4-11 Lim. Inferior da Veloc. do Motor [RPM]
Range: Funcão:
Size
related*
[ 0 - par. 4-13
RPM]
Insira o limite mínimo para a
velocidade do motor em rpm. O
limite inferior da velocidade do
motor pode ser programado para
corresponder à velocidade mínima
do motor recomendada pelo
fabricante. O limite inferior da
velocidade do motor não deve
exceder a conguração em
parâmetro 4-13 Lim. Superior da
Veloc. do Motor [RPM].
4-12 Lim. Inferior da Veloc. do Motor [Hz]
Range: Funcão:
Size
related*
[ 0 - par. 4-14
Hz]
Insira o limite mínimo para a
velocidade do motor em Hz. O
limite inferior da velocidade do
motor pode ser programado para
corresponder à frequência mínima
de saída do eixo do motor. O limite
inferior da velocidade não deve
exceder a conguração em
4-12 Lim. Inferior da Veloc. do Motor [Hz]
Range: Funcão:
parâmetro 4-14 Lim. Superior da
Veloc do Motor [Hz].
4-13 Lim. Superior da Veloc. do Motor [RPM]
Range: Funcão:
Size
related*
[ 0 - 60000
RPM]
AVISO!
Qualquer alteração em
parâmetro 4-13 Lim. Superior
da Veloc. do Motor [RPM]
redene o valor em
parâmetro 4-53 Advertência de
Velocidade Alta para o valor
programado em
parâmetro 4-13 Lim. Superior
da Veloc. do Motor [RPM].
AVISO!
A frequência de saída máxima
não pode ultrapassar 10% da
frequência de chaveamento do
inversor
(parâmetro 14-01 Freqüência de
Chaveamento).
Insira o limite máximo para a
velocidade do motor em rpm. O
limite superior da velocidade do
motor pode ser programado para
corresponder à velocidade máxima
do motor fornecida pelo fabricante.
O limite superior da velocidade do
motor não deve exceder a
conguração em
parâmetro 4-11 Lim. Inferior da Veloc.
do Motor [RPM].
O nome do parâmetro aparece
como parâmetro 4-11 Lim. Inferior
da Veloc. do Motor [RPM] ou
parâmetro 4-12 Lim. Inferior da Veloc.
do Motor [Hz], dependendo de:
•
A conguração de outros
parâmetros no Menu
principal.
•
Congurações padrão
baseadas na localização
geográca.
Descrição do Parâmetro
VLT® AQUA Drive FC 202
3.6 Parâmetros 4-** Limites/Advertêncs
3.6.1 4-1* Limites do Motor
33
motor e a resposta do conversor de frequência quando os
limites forem excedidos.
Um limite pode gerar uma mensagem no display. Uma
advertência sempre gerará uma mensagem no display ou
no eldbus. Uma função de monitoramento pode iniciar
uma advertência ou um desarme, o que faz o conversor de
frequência parar e gera uma mensagem de alarme.
Dena os limites de velocidade, torque e corrente para o
82 Danfoss A/S © 05/2018 Todos os direitos reservados. MG20OB28

4-14 Lim. Superior da Veloc do Motor [Hz]
Range: Funcão:
Size
related*
[ .1 - par.
4-19 Hz]
Insira o limite máximo de
velocidade do motor em Hz.
Parâmetro 4-14 Lim. Superior da
Veloc do Motor [Hz] pode ser
programado para corresponder à
velocidade máxima do motor
recomendada pelo fabricante. O
limite superior da velocidade do
motor deve exceder o valor em
parâmetro 4-12 Lim. Inferior da Veloc.
do Motor [Hz]. A frequência de saída
não deve exceder 10% da
frequência de chaveamento
(parâmetro 14-01 Freqüência de
Chaveamento).
4-16 Limite de Torque do Modo Motor
Range: Funcão:
Size
related*
[ 0 -
1000.0 %]
Inserir o limite máximo de torque
para o funcionamento do motor. O
limite de torque está ativo durante
a faixa de velocidade até e
incluindo a velocidade nominal do
motor programado em
parâmetro 1-25 Velocidade nominal
do motor. Para proteger o motor,
impedindo-o de atingir o torque de
travamento, a conguração padrão
é 1,1 vezes o torque nominal do
motor (valor calculado). Consulte
também o parâmetro 14-25 Atraso
do Desarme no Limite de Torque
para obter mais detalhes.
Se uma conguração nos
parâmetro 1-00 Modo Conguração
ao parâmetro 1-28 Vericação da
Rotação do motor for alterada, o
parâmetro 4-16 Limite de Torque do
Modo Motor não será automati-
camente reinicializado com a
conguração padrão.
4-17 Limite de Torque do Modo Gerador
Range: Funcão:
100 %* [ 0 -
1000.0 %]
Insira o limite máximo de torque
para a operação no modo gerador.
O limite de torque está ativo
durante a faixa de velocidade até e
incluindo a velocidade nominal do
motor (parâmetro 1-25 Velocidade
nominal do motor). Consulte
parâmetro 14-25 Atraso do Desarme
no Limite de Torque para obter
detalhes adicionais.
4-17 Limite de Torque do Modo Gerador
Range: Funcão:
Se alguma conguração do
parâmetro 1-00 Modo Conguração
ao parâmetro 1-28 Vericação da
Rotação do motor for alterada, o
parâmetro 4-17 Limite de Torque do
Modo Gerador não será automati-
camente reinicializado com a
conguração padrão.
4-18 Limite de Corrente
Range: Funcão:
Size
related*
[ 1.0 -
1000.0 %]
Inserir o limite de corrente para
funcionamento como motor e
como gerador. Para proteger o
motor, impedindo-o de atingir o
torque de travamento, a
conguração padrão é 1,1 vezes o
torque nominal do motor (valor
calculado). Se uma conguração
nos parâmetro 1-00 Modo
Conguração ao
parâmetro 1-26 Torque nominal do
Motor for alterada, o
parâmetro 4-18 Limite de Corrente
não será automaticamente reinicializado com a conguração padrão.
4-19 Freqüência Máx. de Saída
Range: Funcão:
Size
related*
[ 1 - 590 Hz]
AVISO!
Não se pode ajustar este
parâmetro enquanto o motor
estiver em funcionamento.
AVISO!
Quando
parâmetro 1-10 Construção do
Motor estiver programado para
[1] PM, SPM não saliente, o
valor máximo é limitado a 300
Hz.
Insira o valor máximo da frequência
de saída. Parâmetro 4-19 Freqüência
Máx. de Saída especica o limite
absoluto na frequência da saída do
conversor de frequência para maior
segurança em aplicações em que o
excesso de velocidade acidental
deve ser evitado. Este limite
absoluto se aplica a todas as
congurações e independe da
Descrição do Parâmetro Guia de Programação
3 3
MG20OB28 Danfoss A/S © 05/2018 Todos os direitos reservados. 83

4-19 Freqüência Máx. de Saída
Range: Funcão:
programação do
parâmetro 1-00 Modo Conguração.
4-50 Advertência de Corrente Baixa
Range: Funcão:
0 A* [ 0 - par. 4-51A]As advertências são exibidas no
display, na saída programada ou no
eldbus.
130BA064.10
(P 4-18)
(P 4-51)
(P 4-50)
(P 4-11) (P 4-53)(P 4-52) (P 4-13)
I
HIGH
I
LOW
n
LOW
n
HIGH
n
motor
I
motor
REF
ON REF
I
LIM
n
MAX
n
MIN
[RPM]
DENTRO DA GAMA
Ilustração 3.27 Limite de corrente
baixa
Insira o valor de I
BAIXA
. Quando a
corrente do motor cair abaixo desse
limite (I
BAIXA
), o display indicará
Corrente baixa. As saídas de sinal
podem ser programadas para gerar
um sinal de status no terminal 27
ou 29, e na saída de relé 01 ou 02.
Consulte Ilustração 3.27.
4-51 Advertência de Corrente Alta
Range: Funcão:
Size
related*
[ par. 4-50 par. 16-37 A]
Insira o valor I
ALTA
. Quando a
corrente do motor ultrapassar esse
limite (I
ALTA
), o display indicará
Corrente alta. As saídas de sinal
podem ser programadas para gerar
um sinal de status no terminal 27
ou 29, e na saída de relé 01 ou 02.
Consulte Ilustração 3.27.
4-52 Advertência de Velocidade Baixa
Range: Funcão:
0 RPM* [ 0 - par. 4-53
RPM]
Insira o valor de n
BAIXA
. Quando a
velocidade do motor cair abaixo
desse limite (n
BAIXA
), o display
indicará Velocidade baixa. As saídas
de sinal podem ser programadas
para gerar um sinal de status no
terminal 27 ou 29, e na saída de
relé 01 ou 02. Programe o limite
inferior do sinal da velocidade do
motor, n
BAIXA
, dentro do intervalo
normal de trabalho do conversor de
frequência. Consulte Ilustração 3.27.
4-53 Advertência de Velocidade Alta
Range: Funcão:
Size
related*
[ par. 4-52 par. 4-13 RPM]
AVISO!
Qualquer alteração em
parâmetro 4-13 Lim. Superior
da Veloc. do Motor [RPM]
redene o valor em
parâmetro 4-53 Advertência de
Velocidade Alta para o valor
programado em
parâmetro 4-13 Lim. Superior
da Veloc. do Motor [RPM].
Se um valor diferente for
necessário em
parâmetro 4-53 Advertência de
Velocidade Alta, ele deverá ser
programado depois da
programação de
parâmetro 4-13 Lim. Superior
da Veloc. do Motor [RPM].
Insira o valor de n
ALTA
. Quando a
velocidade do motor ultrapassar
esse limite (n
ALTA
), o display indicará
Velocidade alta. As saídas de sinal
podem ser programadas para gerar
um sinal de status no terminal 27
ou 29, e na saída de relé 01 ou 02.
Programe o limite superior do sinal
da velocidade do motor, n
ALTA
,
dentro do intervalo normal de
trabalho do conversor de
frequência. Consulte Ilustração 3.27.
Descrição do Parâmetro
VLT® AQUA Drive FC 202
33
3.6.2 4-5* Ajuste Advertências
Dena os limites de advertência ajustáveis para corrente,
velocidade, referência e feedback.
AVISO!
Não visível no display, somente no Software de Setup
MCT 10.
84 Danfoss A/S © 05/2018 Todos os direitos reservados. MG20OB28

4-54 Advert. de Refer Baixa
Range: Funcão:
-999999.999* [ -999999.999
- par. 4-55 ]
Insira o limite de referência inferior.
Quando a referência real cair abaixo
deste limite, o display indicará
Ref
Low
. As saídas de sinal podem ser
programadas para gerar um sinal
de status no terminal 27 ou 29, e
na saída de relé 01 ou 02.
4-55 Advert. Refer Alta
Range: Funcão:
999999.999* [ par. 4-54 -
999999.999 ]
Insira o limite de referência
superior. Quando a referência real
ultrapassar esse limite, o display
indicará Ref
Alta
. As saídas de sinal
podem ser programadas para gerar
um sinal de status no terminal 27
ou 29, e na saída de relé 01 ou 02.
4-56 Advert. de Feedb Baixo
Range: Funcão:
-999999.99
9 ReferenceFeedback
Unit*
[ -999999.999
- par. 4-57
ReferenceFeedbackUnit]
Insira o limite inferior de feedback.
Quando o feedback cair abaixo
desse limite, o display indicará
Feedb
Baixo
. As saídas de sinal podem
ser programadas para gerar um
sinal de status no terminal 27 ou
29, e na saída de relé 01 ou 02.
4-57 Advert. de Feedb Alto
Range: Funcão:
999999.999
ReferenceFeedbackU
nit*
[ par. 4-56 -
999999.999
ReferenceFeedbackUnit]
Insira o limite superior de feedback.
Quando o feedback ultrapassar esse
limite, o display indicará Feedb
Alto
.
As saídas de sinal podem ser
programadas para gerar um sinal
de status no terminal 27 ou 29, e
na saída de relé 01 ou 02.
4-58 Função de Fase do Motor Ausente
Option: Funcão:
AVISO!
Não se pode ajustar este
parâmetro enquanto o motor
estiver em funcionamento.
Mostra um alarme se uma fase do
motor estiver faltando.
[0] Desativado Nenhum alarme será exibido se
faltar uma fase do motor.
[1] Desarme 100msUm alarme é exibido se faltar uma
fase do motor.
4-58 Função de Fase do Motor Ausente
Option: Funcão:
[2] * Desarme em
1000 ms
[5] Motor Check
4-60 Bypass de Velocidade de [RPM]
Matriz [4]
Range: Funcão:
Size
related*
[ 0 - par. 4-13
RPM]
Alguns sistemas requerem que
certas frequências ou velocidades
de saída sejam evitadas devido a
problemas de ressonância no
sistema. Insira os limites inferiores
das velocidades a serem evitadas.
4-61 Bypass de Velocidade de [Hz]
Matriz [4]
Range: Funcão:
Size
related*
[ 0 - par. 4-14
Hz]
Alguns sistemas requerem que
certas frequências ou velocidades
de saída sejam evitadas devido a
problemas de ressonância no
sistema. Insira os limites inferiores
das velocidades a serem evitadas.
4-62 Bypass de Velocidade até [RPM]
Matriz [4]
Range: Funcão:
Size
related*
[ 0 - par. 4-13
RPM]
Alguns sistemas requerem que
certas frequências ou velocidades
de saída sejam evitadas devido a
problemas de ressonância no
sistema. Insira os limites superiores
das velocidades a serem evitadas.
4-63 Bypass de Velocidade até [Hz]
Matriz [4]
Range: Funcão:
Size
related*
[ 0 - par. 4-14
Hz]
Alguns sistemas requerem que
certas frequências ou velocidades
de saída sejam evitadas devido a
problemas de ressonância no
sistema. Insira os limites superiores
das velocidades a serem evitadas.
Descrição do Parâmetro Guia de Programação
3 3
3.6.3 4-6* Bypass de Velocidade
Alguns sistemas precisam que determinadas frequências de
saída ou velocidades sejam evitadas por problemas de
ressonância no sistema. Um máximo de quatro faixas de
frequências ou de velocidade podem ser evitadas.
MG20OB28 Danfoss A/S © 05/2018 Todos os direitos reservados. 85

4-64 Setup de Bypass Semi-Auto
Option: Funcão:
[0] * [O] (Desligar) Sem função.
[1] Ativado Inicia o setup semi-automático de
bypass e continua com o
procedimento descrito em
capétulo 3.6.4 Setup semi-automático
do bypass de velocidade.
Descrição do Parâmetro
VLT® AQUA Drive FC 202
3.6.4 Setup semi-automático do bypass de
velocidade
Use o setup semi-automático do bypass de velocidade
para facilitar a programação das frequências a serem
ignoradas devido a ressonâncias no sistema.
33
Execute o seguinte procedimento:
1. Pare o motor.
2. Selecione [1] Ativado em parâmetro 4-64 Setup de
Bypass Semi-Auto.
3. Pressione [Hand On] no LCP para iniciar a busca
por bandas de frequência causando ressonâncias.
O motor acelera de acordo com a rampa
programada.
4. Ao fazer a varredura em uma banda de
ressonância, pressione [OK] no LCP ao sair da
banda. A frequência real é armazenada como o
primeiro elemento em parâmetro 4-62 Bypass de
Velocidade até [RPM] ou parâmetro 4-63 Bypass de
Velocidade até [Hz] (matriz). Repita este
procedimento para cada banda de ressonância
identicada na aceleração (pode-se ajustar quatro
no máximo).
5. Ao atingir a velocidade máxima, o motor começa
a desacelerar automaticamente. Repita o
procedimento acima quando a velocidade estiver
saindo das bandas de ressonância, durante a
desaceleração. As frequências reais registradas ao
pressionar [OK] são armazenadas em
parâmetro 4-60 Bypass de Velocidade de [RPM] ou
parâmetro 4-61 Bypass de Velocidade de [Hz].
6. Quando o motor tiver desacelerado até parar,
pressione [OK]. Parâmetro 4-64 Setup de Bypass
Semi-Auto é redenido automaticamente para O
(desligado). O conversor de frequência permanece
no modo manual ligado até [O] ou [Auto On]
serem pressionados no LCP.
Se as frequências de uma determinada banda de
ressonância não forem registradas na ordem correta, todos
os registros são cancelados e a seguinte mensagem é
mostrada: Áreas de velocidade coletadas com sobreposição
ou não completamente determinadas. Pressione [Cancel] para
abortar. Registros na ordem errada é quando valores de
frequência armazenados em parâmetro 4-62 Bypass de
Velocidade até [RPM] são maiores que os valores em
parâmetro 4-60 Bypass de Velocidade de [RPM], ou se eles
não tiverem o mesmo número de registro para o Bypass De
e Bypass Para.
86 Danfoss A/S © 05/2018 Todos os direitos reservados. MG20OB28

5-00 Modo I/O Digital
Option: Funcão:
AVISO!
Não se pode ajustar este
parâmetro enquanto o motor
estiver em funcionamento.
As entradas digitais e saídas digitais
programadas são pré-programáveis
para operação em sistemas PNP ou
NPN.
[0] * PNP - Ativo
em 24 V
Ação em pulsos direcionais
positivos (0). Sistemas PNP são
ligados no GND(Ponto de
Aterramento).
[1] NPN - Ativo
em 0 V
Ação em pulsos direcionais
negativos (1). Os sistemas NPN são
conectados a + 24 V, internamente,
no conversor de frequência.
5-01 Modo do Terminal 27
Option: Funcão:
AVISO!
Não se pode ajustar este
parâmetro enquanto o motor
estiver em funcionamento.
[0] * Entrada Dene o terminal 27 como uma
entrada digital.
[1] Saída Dene o terminal 27 como uma
saída digital.
5-02 Modo do Terminal 29
Option: Funcão:
AVISO!
Não se pode ajustar este
parâmetro enquanto o motor
estiver em funcionamento.
[0] * Entrada Dene o terminal 29 como uma
entrada digital.
[1] Saída Dene o terminal 29 como uma
saída digital.
Descrição do Parâmetro Guia de Programação
3.7 Parâmetros 5-** Entrada/Saída Digital
Grupo do parâmetro para congurar a entrada e saída
digitais.
3.7.1 5-0* Modo E/S Digital
Parâmetros para congurar a entrada e saída utilizando
NPN e PNP.
MG20OB28 Danfoss A/S © 05/2018 Todos os direitos reservados. 87
3.7.2 5-1* Entradas Digitais
Parâmetros para congurar as funções de entrada dos
terminais de entrada.
As entradas digitais são utilizadas para selecionar as
diversas funções do conversor de frequência. Todas as
entradas digitais podem ser programadas para as seguintes
funções:
As opções [120]–[138] estão relacionadas à funcionalidade
do controlador em cascata. Para obter mais informações,
consulte o grupo do parâmetro 25-** Controlador em
Cascata.
Função de entrada
digital
Sem operação [0] 19, 29, 32, 33
Reinicializar [1] Todos
Parada por inércia
inversa
Parada por inércia e
reinicio, inverso
Freio CC, inversão [5] Todos
Parada por inércia
inversa
Bloqueio externo [7] Todos
Iniciar [8] Todos
Partida por pulso [9] Todos
Reversão [10] Todos
Partida em reversão [11] Todos
Jog [14] Todos
Referência predenida on
(ligada)
Referência predenida
bit 0
Referência predenida
bit 1
Referência predenida
bit 2
Congelar referência [19] Todos
Congelar frequência de
saída
Aceleração [21] Todos
Desaceleração [22] Todos
Seleção do setup bit 0 [23] Todos
Seleção do setup bit 1 [24] Todos
Entrada de pulso [32] 29, 33
Bit 0 da rampa [34] Todos
FalhAlimnt-Ativ em 0 [36] Todos
Fonte de ref bit 0 [42] Todos
Partida manual/
automática
Funcionamento
permissivo
Partida manual [53] Todos
Opcional Terminal
[2] 27
[3] Todos
[6] Todos
[15] Todos
[16] Todos
[17] Todos
[18] Todos
[20] Todos
[51] Todos
[52] Todos
3 3

Descrição do Parâmetro
VLT® AQUA Drive FC 202
Função de entrada
digital
Partida automática [54] Todos
Aumento do DigiPot [55] Todos
Diminuição do Digipot [56] Todos
33
Limpar digipot [57] Todos
Contador A (cresc) [60] 29, 33
Contador A (decresc) [61] 29, 33
Reinicializar o contador A [62] Todos
Contador B (cresc) [63] 29, 33
Contador B (decresc) [64] 29, 33
Resetar Contador B [65] Todos
Sleep mode [66] Todos
Reinicializar palavra de
manutenção
Cartão PTC 1 [80] Todos
Derag de bomba com
pulso
Partida da bomba de
comando
Alternação da bomba de
comando
Bloqueio de bomba 1 [130] Todos
Bloqueio de bomba 2 [131] Todos
Bloqueio de bomba 3 [132] Todos
Tabela 3.12 Funções para Entradas Digitais
Todos representa os terminais 18, 19, 27, 29, 32, X30/2,
Opcional Terminal
[6] Parada por
inércia
inversa
[78] Todos
[85] Todos
[120] Todos
[121] Todos
[7] Bloqueio
externo
X30/3 e X30/4.
X30/X são os terminais no VLT® General Purpose I/O MCB
101.
As funções dedicadas a apenas 1 entrada digital são
declaradas no parâmetro associado.
Todas as entradas digitais podem ser programadas para
estas funções:
[0] Sem
operação
[1] Reinicializar Redene o conversor de frequência após um
[2] Parada por
inércia
inversa
[3] Parada por
inércia e
reinicio,
inverso
[5] Freio CC,
inversão
Não responde aos sinais transmitidos para o
terminal.
desarme/alarme. Nem todos os alarmes
podem ser reinicializados.
O conversor de frequência deixa o motor
em modo livre. Lógica 0=parada por inércia.
(Entrada digital 27 padrão) Parada por
inércia, entrada invertida (NC).
Reset e entrada invertida de parada por
inércia (NC).
Deixa o motor em modo livre e reinicializa o
conversor de frequência. Lógica 0=parada
por inércia e reinicialização.
Entrada invertida para freio CC (NC).
Para o motor, energizando-o com uma
tensão CC, durante um determinado período
[8] Iniciar Selecione o valor da partida para um
[9] Partida por
pulso
[10] Reversão Muda o sentido de rotação do eixo do
de tempo. Consulte os
parâmetro 2-01 Corrente de Freio CC a
parâmetro 2-03 Veloc.Acion Freio CC [RPM]. A
função somente estará ativa se o valor do
parâmetro 2-02 Tempo de Frenagem CC for
diferente de 0. Lógica 0=freio CC.
Essa seleção não é possível quando
parâmetro 1-10 Construção do Motor estiver
programado para [1] PM, SPM não saliente.
Função de parada invertida. Gera uma
função de parada quando o terminal
selecionado passa do nível lógico 1 para 0.
A parada é executada de acordo com o
tempo de rampa selecionado
(parâmetro 3-42 Tempo de Desaceleração da
Rampa 1 e parâmetro 3-52 Tempo de Desaceleração da Rampa 2).
AVISO!
Quando o conversor de frequência
está no limite de torque e recebeu um
comando de parada, ele pode não
parar por si próprio. Para assegurar
que o conversor de frequência pare,
congure uma saída digital para [27]
Limite de torque e parada e conecte-a
a uma entrada digital congurada
como parada por inércia.
Mesma função da parada por inércia inversa,
mas o bloqueio externo gera a mensagem
de alarme de falha externa quando o
terminal programado para inversão por
inércia for lógica 0. A mensagem de alarme
também é ativada através das saídas digitais
e saídas de relé se estiverem programadas
para bloqueio externo. O alarme pode ser
reinicializado usando uma entrada digital ou
a tecla [Reset] se a causa do bloqueio
externo tiver sido removida. Um atraso pode
ser programado em parâmetro 22-00 Atraso
de Bloqueio Externo. Após aplicar um sinal na
entrada, a reação é atrasada com o tempo
programado em parâmetro 22-00 Atraso de
Bloqueio Externo.
comando de partida/parada. 1=partida,
0=parada.
(Entrada digital padrão 18).
O motor dá partida se um pulso for
aplicado por no mínimo 2 ms. O motor para
quando a parada por inércia inversa for
ativada.
motor. Selecione lógica 1 para reversão. O
sinal de reversão só mudará o sentido da
rotação. Ele não ativa a função partida.
Selecione ambos os sentidos no
parâmetro 4-10 Sentido de Rotação do Motor.
88 Danfoss A/S © 05/2018 Todos os direitos reservados. MG20OB28

Descrição do Parâmetro Guia de Programação
(Entrada digital padrão 19).
[11] Partida em
reversão
[14] Jog Utilizado para ativar a velocidade de jog.
[15] Referência
predenida
on (ligada)
[16] Referência
predenida
bit 0
[17] Referência
predenida
bit 1
[18] Referência
predenida
bit 2
[19] Congelar ref Congela a referência real. A referência
Utilizada para partida/parada e para
reversão no mesmo o. Não são permitidos
sinais simultâneos na partida.
Consulte o parâmetro 3-11 Velocidade de Jog
[Hz].
(Entrada digital padrão 29).
Utilizada para alternar entre a referência
externa e a referência predenida. É suposto
que [1] Externa/predenida tenha sido
selecionado em parâmetro 3-04 Função de
Referência. Lógica 0 = referência externa
ativa; lógica 1 = 1 das 8 referências
predenidas está ativa.
Permite uma seleção de 1 das 8 referências
predenidas de acordo com Tabela 3.13.
Permite uma seleção de 1 das 8 referências
predenidas de acordo com Tabela 3.13.
Permite uma seleção de 1 das 8 referências
predenidas de acordo com Tabela 3.13.
Bit de referência
predenida
Referência
predenida 0
Referência
predenida 1
Referência
predenida 2
Referência
predenida 3
Referência
predenida 4
Referência
predenida 5
Referência
predenida 6
Referência
predenida 7
Tabela 3.13 Referência predenida Bit
congelada é agora o ponto de ativação/
condição para que a aceleração e a desaceleração sejam usadas. Se aceleração/
desaceleração for utilizada, a alteração da
velocidade sempre segue rampa 2
(parâmetro 3-51 Tempo de Aceleração da
Rampa 2 e parâmetro 3-52 Tempo de Desaceleração da Rampa 2) no intervalo 0–
parâmetro 3-03 Referência Máxima.
2 1 0
0 0 0
0 0 1
0 1 0
0 1 1
1 0 0
1 0 1
1 1 0
1 1 1
[20] Congelar
frequência de
saída
Congela a frequência real do motor (Hz). A
frequência do motor congelada é agora o
ponto de ativação/condição para que a
aceleração e a desaceleração sejam usadas.
Se aceleração/desaceleração for utilizada, a
alteração da velocidade sempre segue
rampa 2 (parâmetro 3-51 Tempo de
Aceleração da Rampa 2 e
parâmetro 3-52 Tempo de Desaceleração da
Rampa 2) no intervalo 0–
parâmetro 1-23 Freqüência do Motor.
AVISO!
Quando [20] Congelar frequência de
saída estiver ativo, o conversor de
frequência não pode ser parado por
meio de um [13] Sinal de partida
baixo. Pare o conversor de frequência
por meio de um terminal programado
para [2] Parada por inércia inversa ou
[3] Parada por inércia e reinicialização,
inversão.
[21] Aceleração Para o controle digital da aceleração/desace-
leração (potenciômetro do motor). Ative esta
função selecionando [19] Congelar referência
ou [20] Congelar frequência de saída. Quando
[21] Aceleração for ativado por menos de
400 ms, a referência resultante é aumentada
em 0,1%. Se [21] Aceleração for ativado por
mais de 400 ms, a rampa de referência varia
de acordo com a rampa 1 em
parâmetro 3-41 Tempo de Aceleração da
Rampa 1.
[22] Desaceleração O mesmo que [21] Aceleração.
[23] Seleção do
setup bit 0
[24] Seleção do
setup bit 1
[32] Entrada de
pulso
[34] Bit 0 da
rampa
[36] FalhAlimnt-
-Ativ em 0
[42] Fonte de ref
bit 0
[51] Partida
Manual/
Automática
Selecione um dos quatro setups. Programe o
parâmetro 0-10 Setup Ativo para Setup
Múltiplo.
O mesmo que [23] Seleção do setup bit 0.
(Entrada digital padrão 32).
Selecione [32] Entrada de pulso ao utilizar
uma sequência de pulsos como referência
ou feedback. A escala é feita no grupo do
parâmetro 5-5* Entrada de Pulso.
Selecione qual rampa utilizar. Lógica 0
seleciona a rampa 1, enquanto lógica 1
seleciona a rampa 2.
Ativa o parâmetro 14-10 Falh red elétr. A
inversão da falha de rede elétrica é ativada
na situação de lógica 0.
Uma entrada ativa no bit 0 seleciona AI54
como a fonte da referência (consulte o
grupo do parâmetro 3-1* Referências, opção
[35] Seleção de entrada digital). Uma entrada
inativa seleciona AI53.
Selecione partida automática ou manual. O
sinal alto seleciona somente automático
3 3
MG20OB28 Danfoss A/S © 05/2018 Todos os direitos reservados. 89

Descrição do Parâmetro
VLT® AQUA Drive FC 202
ligado, o sinal baixo seleciona somente o
manual ligado.
[52] Funcio-
namento
permissivo
33
[53] Partida
manual
[54] Partida
automática
[55] Aumento do
DigiPot
[56] Diminuição
do DigiPot
O terminal de entrada, para o qual o [52]
Funcionamento permissivo foi programado,
deve ser lógica 1 antes de um comando de
partida poder ser aceito. O funcionamento
permissivo possui uma função lógica E
relacionada ao terminal, que é programado
para [8] Partida, [14] Jog ou [20] Congelar
frequência de saída. Para dar partida no
motor, ambas as condições devem ser
atendidas. Se [52] Funcionamento permissivo
for programado em vários terminais, só
precisa ser lógica 1 em um dos terminais
para executar a função. O sinal de saída
digital para solicitação de funcionamento
([8] Partida, [14] Jog ou [20] Congelar
frequência de saída) programado no grupo
do parâmetro 5-3* Saídas Digitais ou grupo
do parâmetro 5-4* Relés, não é afetado pelo
[52] Funcionamento permissivo.
Um sinal aplicado coloca o conversor de
frequência em modo manual ligado como
se [Hand On] tivesse sido pressionado, e um
comando de parada normal é ignorado.
Caso o sinal seja desconectado, o motor
para. Para validar qualquer outro comando
de partida, atribua outra entrada digital para
[54] Partida automática e aplique um sinal a
ela. [Hand On] e [Auto On] não causam
efeito. [O] substitui partida local e partida
automática. Pressione [Hand On] ou [Auto
On] para ativar novamente partida local e
partida automática. Se não houver sinal em
[53] Partida manual nem em [54] Partida
automática, o motor para independen-
temente de qualquer comando de partida
normal aplicado. Se um sinal for aplicado
em [53] Partida manual e [54] Partida
automática, a função será partida
automática. Ao pressionar [O], o motor
para independentemente dos sinais em [53]
Partida manual e [54] Partida automática.
Um sinal aplicado coloca o conversor de
frequência em modo automático ligado
como se [Auto On] tivesse sido pressionado.
Consulte também [53] Partida manual.
Utiliza a entrada como um sinal de aumento
para a função de potenciômetro digital
descrita no grupo do parâmetro 3-9*
Potenciôm. Digital.
Utiliza a entrada como um sinal de
diminuição para a função de potenciômetro
digital descrita no grupo do parâmetro 3-9*
Potenciôm. Digital.
[57] Limpar
Digipot
[60] Contador A
(cresc)
[61] Contador A
(decresc)
[62] Reset
Contador A
[63] Contador B
(cresc)
[64] Contador B
(decresc)
[65] Reinicializar o
contador B
[66] Sleep Mode Força o conversor de frequência para sleep
[78] Reinicializar
Word de
Manutenção
Preventiva
[80] Cartão PTC 1 Todas as entradas digitais podem ser
[85] Derag da
Bomba com
Pulso
Utiliza a entrada para limpar a referência do
potenciômetro digital descrita no grupo do
parâmetro 3-9* Potenciôm. Digital.
(Somente para o terminal 29 ou 33) Entrada
para a contagem incremental no contador
do SLC.
(Somente para o terminal 29 ou 33) Entrada
para a contagem decremental do contador
do SLC.
Entrada para reinicializar o contador A.
(Somente para o terminal 29 ou 33) Entrada
para a contagem incremental no contador
do SLC.
(Somente para o terminal 29 ou 33) Entrada
para a contagem decremental do contador
do SLC.
Entrada para reinicializar o contador B.
mode (consulte o grupo do parâmetro 22-4*
Sleep mode). Reage na borda ascendente do
sinal aplicado.
Zera todos os dados no par.
parâmetro 16-96 Word de Manutenção.
programadas para [80] Cartão 1 do PTC. No
entanto, apenas 1 entrada digital deve ser
programada para esta opção.
Inicia o deragging.
As opções [120]–[138] estão relacionadas à funcionalidade
do controlador em cascata. Para obter mais informações,
consulte o grupo do parâmetro 25-** Controlador em
Cascata.
[120] Partida da
Bomba de
Comando
[121] Alternação
da bomba
de
comando
[130
Bloqueio da
-
Bomba1 –
138]
Dá partida/para a bomba de comando
(controlado pelo conversor de frequência).
Uma partida também requer a aplicação de
um sinal de partida do sistema, por
exemplo, para uma das entradas digitais
programadas para [8] Partida.
Força a alternação da bomba de comando
em um controlador em cascata. Programa
parâmetro 25-50 Alternação da Bomba de
Comando para [2] No Comando ou [3] No
Escalonamento ou No Comando.
Parâmetro 25-51 Evento Alternação pode ser
programado para qualquer uma das 4
opções.
A função depende da conguração em
parâmetro 25-06 Número de Bombas. Se
programado para [0] Não, a Bomba1 refere-
90 Danfoss A/S © 05/2018 Todos os direitos reservados. MG20OB28

Descrição do Parâmetro Guia de Programação
Bloqueio da
Bomba9
-se à bomba controlada pelo relé1 e assim
por diante. Se programado para [1] Sim, a
Bomba1 refere-se à bomba controlada
somente pelo conversor de frequência (sem
qualquer relé interno envolvido) e a Bomba2
à bomba controlada pelo relé1. A bomba de
velocidade variável (de comando) não pode
ser bloqueada no controlador em cascata
básico.
Consulte o Tabela 3.14.
Conguração
no grupo do
parâmetro
5-1* Entradas
Digitais
[0] Não [1] Sim
[130]
Bloqueio de
Bomba 1
[131]
Bloqueio de
Bomba 2
[132]
Bloqueio de
Bomba 3
[133]
Bloqueio de
Bomba 4
[134]
Bloqueio de
Bomba 5
[135]
Bloqueio de
Bomba 6
[136]
Bloqueio de
Bomba 7
[137]
Bloqueio de
Bomba 8
[138]
Bloqueio de
Bomba 9
Congurando
parâmetro 25-06 Número de
Bombas
Controlado
pelo relé 1
(somente se
não for
bomba de
comando)
Controlado
pelo relé 2
Controlado
pelo relé 3
Controlado
pelo relé 4
Controlado
pelo relé 5
Controlado
pelo relé 6
Controlado
pelo relé 7
Controlado
pelo relé 8
Controlado
pelo relé 9
Controlado
pelo
conversor de
frequência
(não pode
ser
bloqueado)
Controlado
pelo relé 1
Controlado
pelo relé 2
Controlado
pelo relé 3
Controlado
pelo relé 4
Controlado
pelo relé 5
Controlado
pelo relé 6
Controlado
pelo relé 7
Controlado
pelo relé 8
5-10 Terminal 18 Entrada digital
O parâmetro contém todas os opções e funções listadas no
grupo do parâmetro 5-1* Entradas Digitais, exceto a opção [32]
Entrada de pulso.
5-11 Terminal 19 Entrada digital
O parâmetro contém todas os opções e funções listadas no
grupo do parâmetro 5-1* Entradas Digitais, exceto a opção [32]
Entrada de pulso.
5-12 Terminal 27 Entrada digital
O parâmetro contém todas os opções e funções listadas no
grupo do parâmetro 5-1* Entradas Digitais, exceto a opção [32]
Entrada de pulso.
5-13 Terminal 29 Entrada digital
O parâmetro contém todas os opções e funções listadas no
grupo do parâmetro 5-1* Entradas Digitais.
5-14 Terminal 32 Entrada digital
O parâmetro contém todas os opções e funções listadas no
grupo do parâmetro 5-1* Entradas Digitais, exceto a opção [32]
Entrada de pulso.
5-15 Terminal 33 Entrada digital
O parâmetro contém todas os opções e funções listadas no
grupo do parâmetro 5-1* Entradas Digitais.
5-16 Terminal X30/2 Entrada digital
Option: Funcão:
[0] * Sem
operação
Este parâmetro está ativo quando o VLT
General Purpose I/O MCB 101 estiver
instalado no conversor de frequência. O
parâmetro contém todas os opções e
funções listadas no grupo do parâmetro 5-1*
Entradas Digitais, exceto a opção [32] Entrada
de pulso.
5-17 Terminal X30/3 Entrada digital
Option: Funcão:
[0] * Sem
operação
Este parâmetro está ativo quando o VLT
General Purpose I/O MCB 101 estiver
instalado no conversor de frequência. O
parâmetro contém todas os opções e
funções listadas no grupo do parâmetro 5-1*
Entradas Digitais, exceto a opção [32] Entrada
de pulso.
5-18 Terminal X30/4 Entrada digital
Option: Funcão:
[0] * Sem
operação
Este parâmetro está ativo quando o VLT
General Purpose I/O MCB 101 estiver
instalado no conversor de frequência. O
parâmetro contém todas os opções e
funções listadas no grupo do parâmetro 5-1*
Entradas Digitais, exceto a opção [32] Entrada
de pulso.
3 3
®
®
®
MG20OB28 Danfoss A/S © 05/2018 Todos os direitos reservados. 91

5-19 Terminal 37 Parada Segura
Use este parâmetro para congurar a funcionalidade Safe Torque
O. Uma mensagem de advertência faz o conversor de
frequência parar o motor por inércia e ativa a nova partida
automática. Uma mensagem de alarme faz o conversor de
frequência parar por inércia o motor e precisa de uma reinicialização manual (via eldbus, E/S digital ou pressionando [RESET]
no LCP). Quando o VLT® PTC Thermistor Card MCB 112 estiver
montado, congure os opcionais do PTC para obter todos os
benefícios do manuseio do alarme.
Option: Funcão:
[1] * AlarmPa-
radSeg
Faz a parada por inércia do
conversor de frequência quando o
Safe Torque O está ativado. Reset
manual a partir do LCP, da entrada
digital ou do eldbus.
[3] AdvertPa-
radSegur
Faz a parada por inércia do
conversor de frequência quando o
Safe Torque O está ativado
(terminal 37 o). Quando o circuito
Safe Torque O for restabelecido, o
conversor de frequência continua
sem reset manual.
[4] Alarme do PTC1Faz a parada por inércia do
conversor de frequência quando o
Safe Torque O está ativado. Reset
manual a partir do LCP, da entrada
digital ou do eldbus.
[5] Advertência
PTC 1
Faz a parada por inércia do
conversor de frequência quando o
Safe Torque O está ativado
(terminal 37 o). Quando o circuito
Safe Torque O é restabelecido, o
conversor de frequência continua
sem reset manual, a menos que
uma entrada digital programada
para [80] Cartão 1 do PTC ainda
esteja ativada.
[6] PTC 1 & ReléAEsta opção é utilizada quando o
VLT® PTC Thermistor Card MCB 112
sincroniza com uma tecla de parada
por meio de um relé de segurança
no terminal 37. Faz a parada por
inércia do conversor de frequência
quando o Safe Torque O está
ativado. Reset manual a partir do
LCP, da entrada digital ou do
eldbus.
[7] PTC 1 & ReléWEsta opção é utilizada quando o
VLT® PTC Thermistor Card MCB 112
sincroniza com uma tecla de parada
por meio de um relé de segurança
no terminal 37. Faz a parada por
inércia do conversor de frequência
5-19 Terminal 37 Parada Segura
Use este parâmetro para congurar a funcionalidade Safe Torque
O. Uma mensagem de advertência faz o conversor de
frequência parar o motor por inércia e ativa a nova partida
automática. Uma mensagem de alarme faz o conversor de
frequência parar por inércia o motor e precisa de uma reinicialização manual (via eldbus, E/S digital ou pressionando [RESET]
no LCP). Quando o VLT® PTC Thermistor Card MCB 112 estiver
montado, congure os opcionais do PTC para obter todos os
benefícios do manuseio do alarme.
Option: Funcão:
quando o Safe Torque O está
ativado (terminal 37 o). Quando o
circuito Safe Torque O é restabelecido, o conversor de frequência
continua sem reset manual, a
menos que uma entrada digital
programada para [80] Cartão 1 do
PTC ainda esteja ativada.
[8] PTC 1 & Relé
A/W
Esta opção torna possível o uso de
uma combinação de alarme e
advertência.
[9] PTC 1 & Relé
W/A
Esta opção torna possível o uso de
uma combinação de alarme e
advertência.
Descrição do Parâmetro
33
92 Danfoss A/S © 05/2018 Todos os direitos reservados. MG20OB28
VLT® AQUA Drive FC 202
AVISO!
Os opcionais [4] Alarme do PTC 1 a [9] PTC 1 e relé W/A
estão disponíveis somente quando MCB 112 estiver
conectado.
AVISO!
Selecionar Reinicialização automática/Advertência ativa
uma nova partida automática do conversor de
frequência.
Função Núm
Sem função [0] – –
Alarme de Safe
Torque O
Advertência de Safe
Torque O
Alarme do PTC 1 [4] PTC 1 de Safe
Advertência PTC 1 [5] PTC 1 de Safe
PTC 1 e Relé A [6] PTC 1 de Safe
PTC 1 e Relé W [7] PTC 1 de Safe
PTC Relé
ero
[1]* – Safe Torque O
[A68]
[3] – Safe Torque O
[W68]
–
Torque O [A71]
–
Torque O [W71]
Safe Torque O
Torque O [A71]
Torque O [W71]
[A68]
Safe Torque O
[W68]

Descrição do Parâmetro Guia de Programação
Função Núm
PTC 1 e Relé A/W [8] PTC 1 de Safe
PTC 1 e Relé W/A [9] PTC 1 de Safe
Tabela 3.14 Visão geral de Funções, Alarmes e Advertências
W signica warning (advertência) e A signica alarme. Para obter
mais informações, consulte Alarmes e Advertências em
capétulo 5 Resolução de Problemas.
Uma falha perigosa relacionada a Safe Torque
PTC Relé
ero
Torque O [A71]
Torque O [W71]
Safe Torque O
[W68]
Safe Torque O
[A68]
O emite o
alarme 72, Falha perigosa.
Consulte Tabela 5.1.
5-20 Terminal X46/1 Entrada digital
Este parâmetro está relacionado à entrada digital no VLT
Extended Relay Card MCB 113. O parâmetro contém todas os
opções e funções listadas no grupo do parâmetro 5-1* Entradas
Digitais, exceto a opção [32] Entrada de pulso.
®
5-21 Terminal X46/3 Entrada digital
Este parâmetro está relacionado à entrada digital no VLT
Extended Relay Card MCB 113. O parâmetro contém todas os
opções e funções listadas no grupo do parâmetro 5-1* Entradas
Digitais, exceto a opção [32] Entrada de pulso.
®
5-22 Terminal X46/5 Entrada digital
Este parâmetro está relacionado à entrada digital no VLT
Extended Relay Card MCB 113. O parâmetro contém todas os
opções e funções listadas no grupo do parâmetro 5-1* Entradas
Digitais, exceto a opção [32] Entrada de pulso.
®
5-23 Terminal X46/7 Entrada digital
Este parâmetro está relacionado à entrada digital no VLT
Extended Relay Card MCB 113. O parâmetro contém todas os
opções e funções listadas no grupo do parâmetro 5-1* Entradas
Digitais, exceto a opção [32] Entrada de pulso.
®
5-24 Terminal X46/9 Entrada digital
Este parâmetro está relacionado à entrada digital no VLT
Extended Relay Card MCB 113. O parâmetro contém todas os
opções e funções listadas no grupo do parâmetro 5-1* Entradas
Digitais, exceto a opção [32] Entrada de pulso.
®
5-25 Terminal X46/11 Entrada digital
Este parâmetro está relacionado à entrada digital no VLT
Extended Relay Card MCB 113. O parâmetro contém todas os
opções e funções listadas no grupo do parâmetro 5-1* Entradas
Digitais, exceto a opção [32] Entrada de pulso.
®
5-26 Terminal X46/13 Entrada digital
Este parâmetro está relacionado à entrada digital no VLT
Extended Relay Card MCB 113. O parâmetro contém todas os
opções e funções listadas no grupo do parâmetro 5-1* Entradas
Digitais, exceto a opção [32] Entrada de pulso.
®
3.7.3 5-3* Saídas Digitais
Parâmetros para congurar as funções de saída para os
terminais de saída. As 2 saídas digitais de estado sólido são
comuns aos terminais 27 e 29. Programar a função de E/S
para o terminal 27 no parâmetro 5-01 Modo do Terminal 27,
e a função de E/S para o terminal 29 no
parâmetro 5-02 Modo do Terminal 29.
AVISO!
Estes parâmetros não podem ser ajustados enquanto o
motor estiver em funcionamento.
As saídas digitais podem ser
programadas com estas funções:
[0] Sem operação Padrão para todas as saídas digitais e
saídas do relé.
[1] Controle pronto A placa de controle recebe tensão de
alimentação.
[2] Conversor
pronto
[3] Conversor
pronto/controle
remoto
[4] Em espera/sem
advertência
[5] Em funcio-
namento
[6] Funcionando/se
m advertência
[8] Funciona na
referência/sem
advertência
[9] Alarme Um alarme ativa a saída. Não há
[10] Alarme ou
advertência
[11] No limite de
torque
O conversor de frequência está pronto
para operação e aplica um sinal de
alimentação na placa de controle.
O conversor de frequência está pronto
para operação e está em modo
Automático ligado.
O conversor de frequência está pronto
para funcionar. Nenhum comando de
partida ou comando de parada foi dado
(partida/desabilitado). Não há
advertências.
O motor está funcionando.
A velocidade de saída é maior que a
velocidade programada no
parâmetro 1-81 Veloc.Mín.p/Função na
Parada[RPM]. O motor está funcionando e
não há advertências.
O motor funciona na velocidade de
referência.
advertências.
Um alarme ou uma advertência ativa a
saída.
O limite de torque programado em
parâmetro 4-16 Limite de Torque do Modo
Motor foi excedido.
3 3
MG20OB28 Danfoss A/S © 05/2018 Todos os direitos reservados. 93

Descrição do Parâmetro
VLT® AQUA Drive FC 202
[12] Fora da faixa
de corrente
[13] Abaixo da
corrente, baixa
33
[14] Acima da
corrente, alta
[15] Fora da faixa
de velocidade
[16] Abaixo da
velocidade,
baixa
[17] Acima da
velocidade, alta
[18] Fora da faixa
de feedback
[19] Abaixo do
feedback, baixo
[20] Acima do
feedback, alto
[21] Advertência
térmica
[25] Reversão Reversão. Lógica 1 = relé ativado, 24 V
[26] Barramento OK Comunicação ativa (sem timeout) via
[27] Limite de
torque e
parada
[28] Freio, s/
advrtência
[29] Freio pronto,
sem falhas
[30] Falha de freio
(IGBT)
A corrente do motor está fora da faixa
programada no parâmetro 4-18 Limite de
Corrente.
A corrente do motor está menor que a
programada em
parâmetro 4-50 Advertência de Corrente
Baixa.
A corrente do motor está maior que a
programada em
parâmetro 4-51 Advertência de Corrente
Alta.
A velocidade de saída está fora da faixa
programada em
parâmetro 4-52 Advertência de Velocidade
Baixa e parâmetro 4-53 Advertência de
Velocidade Alta.
Velocidade de saída menor que a
programada no
parâmetro 4-52 Advertência de Velocidade
Baixa.
Velocidade de saída maior que a
programada no
parâmetro 4-53 Advertência de Velocidade
Alta.
Feedback está fora da faixa programada
em parâmetro 4-56 Advert. de Feedb Baixo
e parâmetro 4-57 Advert. de Feedb Alto.
O feedback está abaixo do limite
programado no
parâmetro 4-52 Advertência de Velocidade
Baixa.
O feedback está acima do limite
programado no parâmetro 4-56 Advert. de
Feedb Baixo.
A advertência térmica é ativada quando a
temperatura excede o limite no motor,
conversor de frequência, resistor do freio
ou no termistor.
CC quando o sentido de rotação do
motor for horário. Lógica 0 = relé não
ativado, nenhum sinal, quando o sentido
de rotação do motor for anti-horário.
porta de comunicação serial.
Usado na execução de uma parada por
inércia e em condições de limite de
torque. Se o conversor de frequência
recebeu um sinal de parada e está
operando no limite de torque, o sinal é
lógica 0.
O freio está ativo e não há advertências.
O freio está pronto para funcionar e não
há defeitos.
A saída é lógica 1 quando o IGBT do
freio estiver em curto-circuito. Utilize esta
[35] Bloqueio
externo
[40] Fora da faixa
de referência
[41] Abaixo da
referência baixa
[42] Acima da
referência alta
[45] Controle do
barramento
[46] Ctrl. bus, 1 se
timeout
[47] Ctrl. bus, 0 se
timeout
[55] Saída de pulso
[60] Comparador 0 Consulte o grupo do parâmetro 13-1*
[61] Comparador 1 Consulte o grupo do parâmetro 13-1*
[62] Comparador 2 Consulte o grupo do parâmetro 13-1*
[63] Comparador 3 Consulte o grupo do parâmetro 13-1*
[64] Comparador 4 Consulte o grupo do parâmetro 13-1*
[65] Comparador 5 Consulte o grupo do parâmetro 13-1*
[70] Regra lógica 0 Consulte o grupo do parâmetro 13-4*
[71] Regra lógica 1 Consulte o grupo do parâmetro 13-4*
[72] Regra lógica 2 Consulte o grupo do parâmetro 13-4*
função para proteger o conversor de
frequência se houver uma falha nos
módulos de frenagem. Utilize a saída/relé
para desligar a tensão de rede do
conversor de frequência.
A função de bloqueio externo foi ativada
através de uma das entradas digitais.
Comparadores. Se o comparador 0 for
avaliado como true (verdadeiro), a saída
é alta. Caso contrário, é baixa.
Comparadores. Se o comparador 1 for
avaliado como true (verdadeiro), a saída
é alta. Caso contrário, é baixa.
Comparadores. Se o comparador 2 for
avaliado como true (verdadeiro), a saída
é alta. Caso contrário, é baixa.
Comparadores. Se o comparador 3 for
avaliado como true (verdadeiro), a saída
é alta. Caso contrário, é baixa.
Comparadores. Se o comparador 4 for
avaliado como true (verdadeiro), a saída
é alta. Caso contrário, é baixa.
Comparadores. Se o comparador 5 for
avaliado como true (verdadeiro), a saída
é alta. Caso contrário, é baixa.
Regras lógicas. Se a regra lógica 0 for
avaliada como true (verdadeiro), a saída é
alta. Caso contrário, é baixa.
Regras lógicas. Se a regra lógica 1 for
avaliada como true (verdadeiro), a saída é
alta. Caso contrário, é baixa.
Regras lógicas. Se a regra lógica 2 for
avaliada como true (verdadeiro), a saída é
alta. Caso contrário, é baixa.
94 Danfoss A/S © 05/2018 Todos os direitos reservados. MG20OB28

Descrição do Parâmetro Guia de Programação
[73] Regra lógica 3 Consulte o grupo do parâmetro 13-4*
Regras lógicas. Se a regra lógica 3 for
avaliada como true (verdadeiro), a saída é
alta. Caso contrário, é baixa.
[74] Regra lógica 4 Consulte o grupo do parâmetro 13-4*
Regras lógicas. Se a regra lógica 4 for
avaliada como true (verdadeiro), a saída é
alta. Caso contrário, é baixa.
[75] Regra lógica 5 Consulte o grupo do parâmetro 13-4*
Regras lógicas. Se a regra lógica 5 for
avaliada como true (verdadeiro), a saída é
alta. Caso contrário, é baixa.
[80] Saída digital A
do SL
[81] Saída digital B
do SL
[82] Saída digital C
do SL
[83] Saída digital D
do SL
[84] Saída digital E
do SL
[85] Saída digital F
do SL
[90] Pulso do
contador de
kWh
[120] Ref. sistema
ligado
[155] Vericação de
uxo
[160] Sem alarme Saída alta, quando não houver alarme
Consulte o parâmetro 13-52 Ação do SLC.
A saída é alta sempre que a ação smart
logic [38] Den saíd dig.A alta for
executada. A saída é baixa sempre que a
ação smart logic [32] Den saíd dig.A
baixa for executada.
Consulte o parâmetro 13-52 Ação do SLC.
A saída é alta sempre que a ação smart
logic [39] Den saíd dig.B alta for
executada. A saída é baixa sempre que a
ação smart logic [33] Den saíd dig.B
baixa for executada.
Consulte o parâmetro 13-52 Ação do SLC.
A saída é alta sempre que a ação smart
logic [40] Den saíd dig.C alta for
executada. A saída é baixa sempre que a
ação smart logic [34] Den saíd dig.C
baixa for executada.
Consulte o parâmetro 13-52 Ação do SLC.
A saída é alta sempre que a ação smart
logic [41] Den saíd dig.D alta for
executada. A saída é baixa sempre que a
ação smart logic [35] Den saíd dig.D
baixa for executada.
Consulte o parâmetro 13-52 Ação do SLC.
A saída é alta sempre que a ação smart
logic [42] Den saíd dig.E alta for
executada. A saída é baixa sempre que a
ação smart logic [36] Den saíd dig.E
baixa for executada.
Consulte o parâmetro 13-52 Ação do SLC.
A saída é alta sempre que a ação smart
logic [43] Den saíd dig.F alta for
executada. A saída é baixa sempre que a
ação smart logic [37] Den saíd dig.F
baixa for executada.
Cria um pulso na saída digital toda vez
que o conversor de frequência usa 1
kWh.
presente.
[161] Rodando em
reversão
[165] Referência local
ativa
[166] Referência
remota ativa
[167] Comando de
partida ativo
A saída é alta quando o conversor de
frequência está funcionando no sentido
anti-horário (o produto lógico dos bits de
status operação E reversão).
A saída é alta quando
parâmetro 3-13 Tipo de Referência=[2]
Local ou quando parâmetro 3-13 Tipo de
Referência=[0] Dependnt d Hand/Auto ao
mesmo tempo em que o LCP está no
modo manual ligado.
A saída é alta quando
parâmetro 3-13 Tipo de Referência é
programado para [1] Remoto ou [0]
Dependnt d Hand/Auto enquanto o LCP
estiver no modo automático ligado.
A saída é alta quando há um comando
de partida ativo, por exemplo,
automático ligado, e um comando de
partida através de uma entrada digital ou
barramento estiver ativo, ou [Hand on].
AVISO!
Todos os comandos de parada/
parada por inércia inversa devem
estar inativos.
[168] Conversor em
modo manual
[169] Conversor em
modo
automático
[180] Falha de Clock A função relógio foi reinicializada com o
[181] Manutenção
Preventiva
[182] Limpeza da
bomba
[188] Conexão do
capacitor AHF
[189] Controle do
ventilador
externo
[190] Fluxo-Zero Uma situação de uxo zero ou situação
[191] Bomba Seca Uma condição de bomba seca foi
A saída é alta quando o conversor de
frequência estiver no modo manual
ligado (como indicado pela luz
indicadora acima de [Hand On]).
A saída é alta quando o conversor de
frequência estiver no modo automático
ligado (como indicado pela luz
indicadora acima de [Auto On]).
padrão (2000-01-01) devido a uma falha
de energia.
Um ou mais eventos de manutenção
preventiva programados em
parâmetro 23-10 Item de Manutenção
tiveram seu prazo expirado para a ação
especicada em parâmetro 23-11 Ação de
Manutenção.
Derag está ativo.
Consulte o parâmetro 5-80 Atraso de
Reconexão da Tampa AHF.
O controle do ventilador externo está
ativo.
de velocidade mínima foi detectada, se
ativada em Parâmetro 22-21 Detecção de
Potência Baixa.
detectada. Ative esta função em
parâmetro 22-26 Função Bomba Seca.
3 3
MG20OB28 Danfoss A/S © 05/2018 Todos os direitos reservados. 95

130BA251.10
Tempo
Tempo
Tempo
Paradapartida
Velocidade
Ref
ON
OFF
ON
OFF
Min
Descrição do Parâmetro
VLT® AQUA Drive FC 202
[192] Final de Curva Ativo quando uma condição de nal de
curva estiver presente.
[193] Sleep Mode O conversor de frequência/sistema entrou
em sleep mode. Consulte o grupo do
parâmetro 22-4* Sleep Mode.
[194] Correia Partida Uma condição de correia partida foi
33
detectada. Ative esta função em
parâmetro 22-60 Função Correia Partida.
[195] Controle da
Válvula de
Bypass
O controle da válvula de bypass (saída do
relé/digital no conversor de frequência) é
usado por sistemas de compressor para
descarregar o compressor durante a
partida com o uso de uma válvula de
bypass. Após o comando de partida, a
válvula de bypass é aberta até que o
conversor de frequência atinja
parâmetro 4-11 Lim. Inferior da Veloc. do
Motor [RPM]). Após o limite ser atingido,
a válvula de bypass é fechada,
permitindo que o compressor funcione
normalmente. Este procedimento não é
ativado novamente antes de uma nova
partida ser iniciada e a velocidade do
conversor de frequência for 0, durante a
recepção do sinal de partida.
Parâmetro 1-71 Atraso da Partida pode ser
[202] Bomba2
Funcionando
[203] Bomba3
Funcionando
[204] Bomba 4 em
funcionamento
[205] Bomba 5 em
funcionamento
[206] Bomba 6 em
funcionamento
[207] Bomba 7
funcionando
[208] Bomba 8
funcionando
[209] Bomba 9
funcionando
[240] RS Flipop 0 Consulte parâmetro 13-15 RS-FF Operand
usado para atrasar a partida do motor.
Fixa. Se programado para [0] Não, a
Bomba 1 refere-se à bomba controlada
pelo relé 1, e assim por diante. Se
programado para [1] Sim, a Bomba 1
refere-se à bomba controlada somente
pelo conversor de frequência (sem
qualquer relé interno envolvido) e a
Bomba 2 à bomba controlada pelo relé
1. Consulte o Tabela 3.15.
Consulte [201].
Consulte [201].
S, parâmetro 13-16 RS-FF Operand R.
[241] RS Flipop 1 Consulte parâmetro 13-15 RS-FF Operand
S, parâmetro 13-16 RS-FF Operand R.
[242] RS Flipop 2 Consulte parâmetro 13-15 RS-FF Operand
S, parâmetro 13-16 RS-FF Operand R.
[243] RS Flipop 3 Consulte parâmetro 13-15 RS-FF Operand
S, parâmetro 13-16 RS-FF Operand R.
[244] RS Flipop 4 Consulte parâmetro 13-15 RS-FF Operand
S, parâmetro 13-16 RS-FF Operand R.
Ilustração 3.28 Princípio de Controle
da Válvula de Bypass
[245] RS Flipop 5 Consulte parâmetro 13-15 RS-FF Operand
S, parâmetro 13-16 RS-FF Operand R.
[246] RS Flipop 6 Consulte parâmetro 13-15 RS-FF Operand
S, parâmetro 13-16 RS-FF Operand R.
[199] Enchimento do
Cano
Ativo quando a função de enchimento
do cano estiver em execução. Consulte o
grupo do parâmetro 29-** Funções de
aplicações hidráulicas.
As opções de conguração abaixo são
todas relacionadas ao controlador em
cascata.
Consulte o grupo do parâmetro 25-**
Controlador em Cascata para obter mais
detalhes.
[200] Capacidade Total Todas as bombas funcionando em
velocidade total.
[201] Bomba1
Funcionando
Uma ou mais bombas controladas pelo
controlador em cascata estão
funcionando. A função também
[247] RS Flipop 7 Consulte parâmetro 13-15 RS-FF Operand
S, parâmetro 13-16 RS-FF Operand R.
Conguração no
grupo do parâmetro
Congurando parâmetro 25-05 Bomba de
Comando Fixa
5-3* Saídas Digitais
[0] Não [1] Sim
[201] Bomba 1
Em funcionamento
Controlado pelo
relé1
Controlado pelo
conversor de
frequência
[202] Bomba 2
Em funcionamento
[203] Bomba 3
Em funcionamento
Controlado pelo
relé2
– Controlado pelo
Controlado pelo
relé1
relé2
Tabela 3.15 Bombas controladas pelo controlador em cascata
depende da conguração em
96 Danfoss A/S © 05/2018 Todos os direitos reservados. MG20OB28
parâmetro 25-05 Bomba de Comando

5-40 Função do Relé
Matriz [20]
Option: Funcão:
Selecione as opções para denir a
função dos relés.
A seleção de cada relé mecânico é
efetivada por meio de um
parâmetro de matriz.
[0] Fora de
funcionament
[1] Placa d Cntrl
Pronta
[2] Drive Pronto
[3] Drive pto/ctrl
rem
[4] Em espera /
sem
advertência
[5] Em funcio-
namento
[6] Rodand sem
advrtênc
5-40 Função do Relé
Matriz [20]
Option: Funcão:
[8] Func ref/sem
advrt
[9] Alarme
[10] Alarme ou
advertênc
[11] No limite de
torque
[12] Fora da faixa
de Corr
[13] Corrent abaix
d baix
[14] Corrent acima
d alta
[15] Fora da faix
de veloc
[16] Veloc abaixo
da baix
[17] Veloc acima
da alta
[18] Fora da faixa
d feedb
[19] Abaixo do
feedb,baix
[20] Acima do
feedb,alto
[21] Advertência
térmica
[25] Reversão
[26] Bus OK
[27] Lim.deTorque&
Parada
[28] Freio, s/
advrtência
[29] Freio
pront,sem
falhs
[30] Falha de freio
(IGBT)
[33] Safe Stop
Ativo
[35] Bloqueio
Externo
[36] Control word
bit 11
[37] Control word
bit 12
[40] Fora faixa da
ref.
[41] Abaixo
ref.,baixa
[42] Acima ref, alta
[45] Ctrl. bus
Descrição do Parâmetro Guia de Programação
5-30 Terminal 27 Saída digital
Este parâmetro tem as opções descritas em capétulo 3.7.3 5-3*
Saídas Digitais.
Option: Funcão:
[0] * Sem operação
5-31 Terminal 29 Saída digital
Este parâmetro tem as opções descritas em capétulo 3.7.3 5-3*
Saídas Digitais.
Option: Funcão:
[0] * Sem operação
5-32 Term X30/6 Saída Digital (MCB 101)
Este parâmetro tem as opções descritas em capétulo 3.7.3 5-3*
Saídas Digitais.
Option: Funcão:
[0] * Sem operação
5-33 Term X30/7 Saída Digital (MCB 101)
Option: Funcão:
[0] * Sem operação
3.7.4 5-4* Relés
Parâmetro para congurar o timing e as funções de saída
dos relés.
MG20OB28 Danfoss A/S © 05/2018 Todos os direitos reservados. 97
Este parâmetro está ativo quando a VLT
General Purpose I/O MCB 101 estiver
montada no conversor de frequência.
Este parâmetro está ativo quando a VLT
General Purpose I/O MCB 101 estiver
montada no conversor de frequência.
Mesmas opções e funções do grupo do
parâmetro 5-3* Entradas Digitais.
3 3
®
®

5-40 Função do Relé
Matriz [20]
Option: Funcão:
[46] Ctrl.bus,1 se
timeout
[47] Ctrl.bus,0 se
timeout
[51] Contrldo
p/MCO
[59] Remote,enable
,no TW
[60] Comparador 0
[61] Comparador 1
[62] Comparador 2
[63] Comparador 3
[64] Comparador 4
[65] Comparador 5
[70] Regra lógica 0
[71] Regra lógica 1
[72] Regra lógica 2
[73] Regra lógica 3
[74] Regra lóg 4
[75] Regra lóg 5
[80] Saída digitl A
do SLC
[81] Saída digitl B
do SLC
[82] Saída digitl C
do SLC
[83] Saída digitl D
do SLC
[84] Saída digitl E
do SLC
[85] Saída digitl F
do SLC
[120] System On Ref
[151] ATEX ETR cur.
alarm
[152] ATEX ETR freq.
alarm
[153] ATEX ETR cur.
warning
[154] ATEX ETR freq.
warning
[155] Verifying Flow
[160] Sem alarme
[161] Rodando em
Revrsão
[164] Local ref
active, not
OFF
[165] Ref. local ativa
[166] Ref. remota
ativa
5-40 Função do Relé
Matriz [20]
Option: Funcão:
[167] Comando de
partida ativo
[168] ModManual
[169] ModoAutom
[180] Falha de Clock
[181] Prev.
Manutenção
[183] Pre/Post Lube
[188] Conect do
Capac AHF
[189] ContrlVentila-
dorExt.
[190] Fluxo-Zero
[191] Bomba Seca
[192] Final de Curva
[193] Sleep mode
[194] Correia Partida
[195] Controle da
Vávula de
Bypass
[196] Fire Mode
Ativo
[197] Fire Mode
Estava Ativo
[198] Bypass do
Drive
[199] Pipe Filling
[211] Bomba em
Cascata 1
[212] Bomba em
Cascata 2
[213] Bomba em
Cascata 3
[214] Bomba em
Cascata 4
[215] Bomba em
Cascata 5
[216] Bomba em
Cascata 6
[217] Bomba em
Cascata 7
[218] Bomba em
Cascata 8
[219] Bomba em
Cascata 9
[230] Ext. Cascade
Ctrl
[236] Ext. CL 1 on
Ref
[237] Ext. CL 2 on
Ref
Descrição do Parâmetro
33
98 Danfoss A/S © 05/2018 Todos os direitos reservados. MG20OB28
VLT® AQUA Drive FC 202
 Loading...
Loading...