

ENGINEERING TOMORROW
Panduan Pemrograman
VLT® AQUA Drive FC 202
Versi perangkat lunak: 3.30
www.DanfossDrives.com

Daftar Isi Panduan Pemrograman
Daftar Isi
1 Pendahuluan
1.1 Tujuan Manual
1.2 Sumber Tambahan
1.3 Versi Perangkat Lunak
1.4 Pengesahan
1.5 Simbol
1.6 Arti
1.6.1 Konverter Frekuensi 4
1.6.2 Input 4
1.6.3 Motor 5
1.6.4 Referensi 5
1.6.5 Lain-lain 6
1.7 Singkatan, Simbol, dan Konvensi
1.8 Keselamatan
1.9 Kabel Listrik
2 Cara Memprogram
2.1 Panel Kontrol Lokal Gras dan Numerik
4
4
4
4
4
4
4
8
8
10
13
13
2.2 Cara Memprogram lewat LCP Gras
2.2.1 Layar LCP 14
2.2.2 Transfer Cepat Pengaturan Parameter antara Konverter Frekuensi Multi 17
2.2.3 Mode Layar 17
2.2.4 Mode Layar - Pemilihan Bacaan 17
2.2.5 Pengaturan Parameter 18
2.2.6 Fungsi Tombol Menu Cepat 18
2.2.7 Menu Cepat, Q3 Pengaturan Fungsi 19
2.2.8 Menu Cepat, Q4 SmartStart 20
2.2.9 Modus Menu Utama 20
2.2.10 Pemilihan Parameter 21
2.2.11 Mengubah Data 21
2.2.12 Mengubah Nilai Teks 21
2.2.13 Mengubah Nilai Data 21
2.2.14 Perubahan Variabel Nilai Data Numerik Tak Terhingga 21
2.2.15 Nilai, Langkah demi Langkah 22
2.2.16 Bacaan dan Pemrograman Parameter Berindeks 22
13
2.2.17 Cara Memprogram lewat Panel Kontrol Lokal Numerik 22
2.2.18 Tombol LCP 23
3 Keterangan Parameter
3.1 Pemilihan Parameter
MG20OB9B Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. 1
25
25
Daftar Isi
VLT® AQUA Drive FC 202
3.2 Parameter 0-** Operasi/Tampilan
3.3 Parameter 1-** Beban dan Motor
3.4 Parameters 2-** Brakes
3.5 Parameter 3-** Referensi/Ramp
3.6 Parameter 4-** Batas/Peringatan
3.7 Parameters 5-** In/Out Digital
3.8 Parameter 6-** In/Out Analog
3.9 Parameter 8-** Kom. dan Pilihan
3.10 Parameters 9-** PROFIBUS
3.11 Parameter 10-** Fieldbus CAN
3.12 Parameter 13-** Logika Cerdas
3.13 Parameter 14-** Fungsi Khusus
3.14 Parameter 15-** Info. Frek. Konvrt
3.15 Parameter 16-** Pembacaan Data
3.16 Parameter 18-** Bacaan Data 2
3.17 Parameter 20-** Loop Tertutup Drive
3.18 Parameters 21-** Loop Tertutup Ekst.
26
42
67
71
78
83
100
111
125
125
129
152
163
173
181
184
196
3.19 Parameter 22-** Apl. Fungsi
3.20 Parameter 23-** Fungsi Berbasis-Waktu
3.21 Parameter 24-** Apl. 2 Fungsi
3.22 Parameter 25-** Pengontrol Kaskade
3.23 Parameter 26-** Opsi I/O Analog
MCB 109
3.24 Parameter 27-** Cascade CTL Option
3.25 Parameter 29-** Fungsi Aplikasi Air
3.26 Parameter 30-** Fitur Khusus
3.27 Parameter 31-** Opsi Bypass
3.28 Parameters 35-** Opsi Input Sensor
4 Daftar Parameter
4.1 Opsi Parameter
4.1.1 Pengaturan Default 285
4.1.2 0-** Operasi/Tampilan 286
4.1.3 1-** Beban dan Motor 288
4.1.4 2-** Brake 290
205
221
233
238
251
258
272
280
281
282
285
285
4.1.5 3-** Referensi/Ramp 291
4.1.6 4-** Batas/Peringatan 292
4.1.7 5-** Digital In/Out 293
4.1.8 6-** Analog In/Out 295
4.1.9 8-** Kom. dan Pilihan 297
4.1.10 9-** PROFIdrive 298
2 Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. MG20OB9B
Daftar Isi Panduan Pemrograman
4.1.11 10-** Fieldbus CAN 299
4.1.12 13-** Logika Cerdas 300
4.1.13 14-** Fungsi Khusus 301
4.1.14 15-** Info. Frek. Konvrt 303
4.1.15 16-** Pembacaan Data 305
4.1.16 18-** Info & Bacaan 307
4.1.17 20-** Loop Tertutup Drive 308
4.1.18 21-** Loop Tertutup Ekst. 309
4.1.19 22-** Appl. Fungsi 311
4.1.20 23-** Fungsi berbasis-waktu 313
4.1.21 24-** Apl. 2 Fungsi 314
4.1.22 25-** Pengontrol Kaskade 314
4.1.23 26-** Opsi I/O Analog 315
4.1.24 29-** Water Application Functions 317
4.1.25 30-** Fitur Khusus 319
4.1.26 31-** Bypass Option 319
4.1.27 35-** Opsi Input Sensor 319
5 Pemecahan masalah
5.1 Pesan Status
5.1.1 Pesan/Alarm Peringatan 321
Indeks
321
321
328
MG20OB9B Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. 3
Pendahuluan
VLT® AQUA Drive FC 202
11
1 Pendahuluan
1.1 Tujuan Manual
Panduan pemrograman berisi informasi yang dibutuhkan
untuk memprogram konverter frekuensi dalam aneka
aplikasi.
1.5 Simbol
Simbol-simbol berikut digunakan di dalam panduan ini:
PERINGATAN
VLT® adalah merek dagang terdaftar.
1.2 Sumber Tambahan
Sumber lain tersedia untuk memahami fungsi dan
pemrograman lanjutan konverter frekuensi.
Petunjuk Pengoperasian VLT® AQUA Drive FC
•
202menjelaskan instalasi mekanis dan kelistrikan
konverter frekuensi.
Panduan Rancangan VLT® AQUA Drive FC 202
•
berisi penjelasan rinci tentang kemampuan dan
fungsi untuk merancang sistem kontrol motor.
Petunjuk pengoperasian dengan peralatan
•
opsional.
Tambahan informasi publikasi dan manual tersedia dari
Danfoss. Lihat drives.danfoss.com/knowledge-center/
technical-documentation/ untuk listing.
Menunjukkan situasi yang berpotensi membahayakan
yang dapat mengakibatkan kematian atau cidera serius.
KEWASPADAAN
Menunjukkan situasi yang berpotensi membahayakan
yang dapat mengakibatkan cidera ringan atau sedang.
Simbol ini juga dapat digunakan untuk mengingatkan
akan praktik-praktik yang tidak aman.
CATATAN!
Menunjukkan informasi penting, termasuk situasi yang
dapat mengakibatkan kerusakan terhadap peralatan atau
harta benda.
1.6 Arti
1.6.1 Konverter Frekuensi
Versi Perangkat Lunak
1.3
Versi perangkat lunak: 3.30
Nomor versi perangkat lunak dapat dilihat dari
parameter 15-43 Versi Perangkat Lunak.
1.4 Pengesahan
I
VLT,MAX
Arus output maksimum.
I
VLT,N
Rating arus output yang dicatu oleh konverter frekuensi.
U
VLT,MAX
Voltase output maksimum.
1.6.2 Input
Perintah kontrol
Hidupkan dan matikan motor yang tersambung dengan
input CLP dan digital.
Fungsi terbagi menjadi 2 grup.
Fungsi-fungsi dalam grup 1 lebih tinggi prioritasnya
dibanding fungsi-fungsi dalam grup 2.
Grup 1 Tombol coast stop, reset dan coast stop, berhenti
cepat, rem DC, berhenti, dan [OFF].
Grup 2 Start, start denyut, mundur, start mundur, jog,
hentikan output.
Tabel 1.1 Grup Fungsi
4 Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. MG20OB9B
175ZA078.10
Pull-out
RPM
Torque
Pendahuluan Panduan Pemrograman
1.6.3 Motor
Motor berjalan
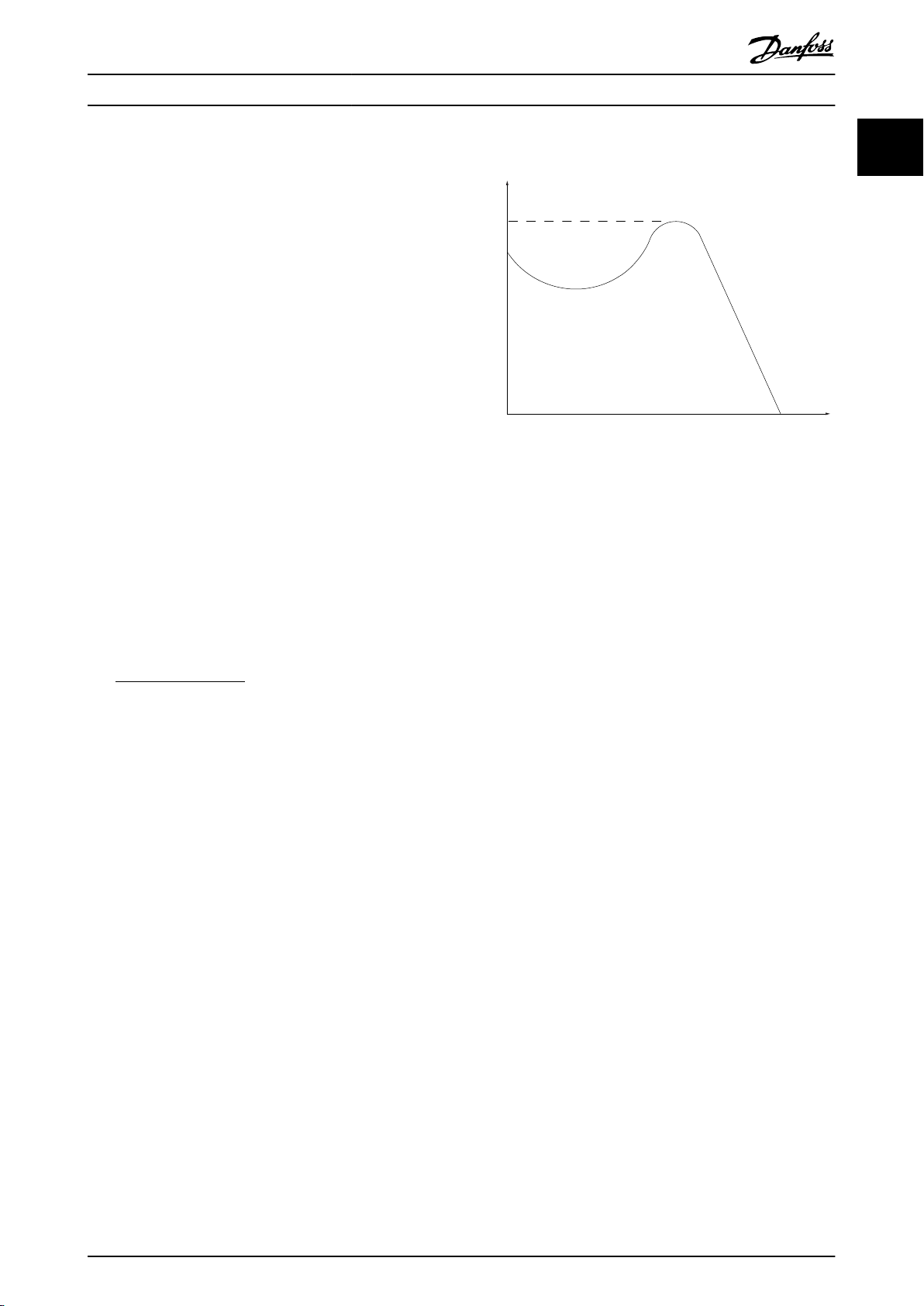
Torsi yang dihasilkan oleh poros output dan kecepatan dari
0 RPM hingga kecepatan maksimum motor.
f
JOG
Frekuensi motor saat fungsi jog diaktifkan (via terminal
digital).
f
M
Frekuensi motor.
f
MAX
Frekuensi motor maksimum.
f
MIN
Frekuensi motor minimum.
f
M,N
Rating frekuensi motor (data pelat nama).
I
M
Arus motor (aktual).
I
M,N
Rating arus motor (data pelat nama).
n
M,N
Kecepatan motor nominal (data pelat nama).
n
s
Kecepatan motor sinkron.
2 × par . 1 − 23 × 60s
ns=
n
slip
Selip motor.
P
M,N
Rating daya motor (data pelat nama dalam kW atau hp).
T
M,N
Rating torsi (motor).
U
M
Voltase motor instan.
U
M,N
Rating voltase motor (data pelat nama).
par . 1 − 39
Torsi maksimum dibutuhkan
Ilustrasi 1.1 Torsi Maksimum Dibutuhkan
η
VLT
Esiensi konverter frekuensi ditetapkan sebagai rasio antara
output daya dan input daya.
Perintah mulai penonaktifan
Salah satu perintah berhenti dalam perintah kontrol Grup 1
- lihat Tabel 1.1.
Perintah berhenti
Salah satu perintah berhenti dalam perintah kontrol Grup 1
- lihat Tabel 1.1.
1.6.4 Referensi
Referensi analog
Sinyal yang ditransmisikan ke input analog 53 atau 54
(voltase atau arus).
Referensi biner
Sinyal yang ditransmisikan ke port komunikasi seri.
Referensi prasetel
Referensi preset yang ditentukan untuk diatur antara
-100% hingga +100% rentang referensi. Pemilihan 8
referensi preset lewat terminal digital.
Referensi pulsa
Sinyal frekuensi denyut yang ditransmisikan ke input digital
(terminal 29 atau 33).
Ref
MAX
Menentukan relasi antara input referensi pada 100% nilai
skala penuh (umumnya 10 V, 20 mA) dan referensi yang
dihasilkan. Nilai referensi maksimum ditentukan dalam
parameter 3-03 Referensi Maksimum.
Ref
MIN
Menentukan relasi antara input referensi pada 0% nilai
skala penuh (umumnya 0 V, 0 mA, 4 mA) dan referensi
yang dihasilkan. Nilai referensi minimum ditentukan dalam
parameter 3-02 Referensi Minimum.
1 1
MG20OB9B Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. 5

Pendahuluan
VLT® AQUA Drive FC 202
11
1.6.5 Lain-lain
Input analog
Input analog digunakan untuk mengontrol aneka fungsi
konverter frekuensi.
Ada 2 tipe input analog:
Input arus, 0–20 mA, dan 4–20 mA
Input voltase, -10 V DC hingga +10 V DC.
Output analog
Output analog dapat mengirim sinyal sebesar 0–20 mA, 4–
20 mA.
Adaptasi motor otomatis, AMA
Algoritma AMA menentukan parameter kelistrikan untuk
motor yang tersambung dalam kondisi diam.
Resistor rem
Resistor rem adalah modul yang mampu menyerap daya
rem yang dihasilkan selama pengereman regeneratif. Daya
rem regeneratif ini meningkatkan voltase DC-link dan unit
pengereman memastikan daya ditransmisikan ke resistor
rem.
Karakteristik CT
Karakteristik torsi konstan yang digunakan untuk semua
aplikasi seperti ban berjalan, pompa displacement, dan
keran.
Input digital
Input analog dapat digunakan untuk mengontrol aneka
fungsi konverter frekuensi.
Keluaran Digital
Konverter frekuensi menggunakan 2 output solid-state
yang dapat menghasilkan sinyal 24 V DC (maksimum 40
mA).
DSP
Prosesor sinyal digital.
ETR
Relai termal elektronik adalah perhitungan beban termal
berdasarkan beban dan waktu sekarang. Tujuannya adalah
memprakirakan suhu motor.
HIPERFACE
HIPERFACE® adalah merek dagang milik Stegmann.
Menginisialisasi
Saat inisialisasi dijalankan (parameter 14-22 Modus Operasi),
konverter frekuensi kembali ke pengaturan default.
Siklus tugas intermiten
Rating tugas intermiten adalah sekuens siklus tugas. Tiap
siklus tersusun atas periode beban dan tanpa beban.
Operasi dapat beru[a tugas periodik atau non-periodik.
LCP
Panel kontrol lokal melengkapi interface untuk kontrol dan
pemrograman konverter frekuensi. Panel kontrol ini dapat
dilepas dan dipasang hingga jarak 3 m (10 kaki) dari
konverter frekuensi, atau, di depan panel dengan opsi kit
instalasi.
®
NLCP
Interface panel kontrol lokal numerik untuk kontrol dan
pemrograman konverter frekuensi. Tampilan ini berbentuk
numerik dan panel digunakan untuk menampilkan nilai
proses. NLCP tidak dilengkapi fungsi simpan dan salin.
lsb
Bit kurang penting.
msb
Bit paling penting.
MCM
Singkatan untuk mile circular mil, satuan ukuran Amerika
untuk diameter kabel 1 MCM=0.5067 mm2.
Parameter online/oine
Perubahan terhadap parameter online segera diaktifkan
setelah nilai data diubah. Tekan [OK] untuk mengaktifkan
perubahan terhadap parameter o-line.
PID proses
Kontrol PID mempertahankan kecepatan, tekanan, suhu,
dan semua lainnya yang dibutuhkan dengan menyesuaikan
frekuensi output terhadap perubahan beban.
PCD
Data kontrol proses.
Siklus daya
Matikan sumber listrik sampai layar (LCP) gelap, kemudian
hidupkan lagi daya.
Input denyut/enkoder inkremen
Transmitter denyut digital eksternal yang digunakan untuk
mengirim kembali informasi tentang kecepatan motor.
Enkoder ini digunakan dalam aplikasi yang sangat
menuntut akurasi kontrol kecepatan.
RCD
Perangkat arus residu.
Pengaturan
Simpan pengaturan parameter dalam 4 pengaturan. Beralih
antara 4 pengaturan parameter dan mengedit 1
pengaturan, saat pengaturan lain aktif.
SFAVM
Pola penyalaan yang disebut modulasi vektor asinkron
berorientasi stator-uks (parameter 14-00 Pola switching).
Kompensasi selip
Konverter frekuensi mengompensasi selip motor dengan
memberi frekuensi tambahan berdasarkan beban motor
terukur untuk mempertahankan kecepatan motor hampir
konstan.
Ini
SLC (smart logic control) adalah rangkaian tindakan
ditentukan pengguna yang dijalankan saat peristiwa yang
ditentukan pengguna dianggap benar oleh SLC. (Lihat
bab 3.12 Parameter 13-** Logika Cerdas).
STW
Kata status
6 Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. MG20OB9B
Pendahuluan Panduan Pemrograman
Bus standar FC
Mencakup bus RS485 dengan protokol FC atau MC. Lihat
parameter 8-30 Protokol.
THD
Distorsi harmonik total menentukan kontribusi total
harmonik.
Termistor
Resistor tergantung suhu yang dipasang pada konverter
frekuensi atau motor.
Anjlok
Status yang dimasuki dalam kondisi bermasalah, misalnya,
jika suhu konverter frekuensi terlalu tinggi atau saat
konverter frekuensi melindungi motor, proses, atau
mekanisme. Konverter frekuensi mencegah restart sampai
penyebab masalah diatasi. Untuk membatalkan status
anjlok (trip state), start ulang konverter frekuensi. Jangan
gunakan status anjlok untuk keselamatan pribadi.
Kunci anjlok
Konverter frekuensi memasuki status ini dalam situasi
bermasalah untuk melindungi diri. Konverter frekuensi
membutuhkan intervensi sik, misalnya, saat output
mengalami arus pendek. Kunci anjlok hanya dapat
dibatalkan dengan memutus sumber listrik, menghilangkan
penyebab masalah, dan menghubungkan kembali
konverter frekuensi. Restart tidak dapat dilakukan sampai
status anjlok dibatalkan dengan mengaktifkan reset, atau,
kadang, dengan diprogram untuk melakukan reset
otomatis. Jangan gunakan status kunci anjlok untuk
keselamatan pribadi.
Karakteristik VT
Karakteristik torsi variabel yang digunakan untuk pompa
dan kipas.
+
VVC
Dibanding kontrol rasio voltase/frekuensi standar, kontrol
vektor (VVC+) memperbaiki dinamik dan stabilitas, baik
saat referensi kecepatan diubah maupun dalam kaitannya
dengan torsi beban.
60° AVM
60° modulasi vektor asinkron (parameter 14-00 Pola
switching).
Faktor daya
Faktor daya adalah relasi antara I1 dan I
Daya faktor =
3xUxI1cosϕ
3xUxI
RMS
RMS
.
Faktor daya untuk kontrol 3 fasa:
Daya faktor =
I1xcosϕ1
I
RMS
=
I
1
sinuscosϕ1 = 1
I
RMS
Faktor daya menunjukkan seberapa besar beban yang
diberikan konverter frekuensi pada catu sumber listrik.
Semakin rendah daya, semakin tinggi I
untuk performa
RMS
kW yang sama.
I
RMS
=
I
+ I
1
5
+ I
2
+ .. + I
7
2
n
2
2
Selain itu, jika faktor daya tinggi, artinya arus harmonik
lainnya rendah.
Lilitan DC di dalam konverter frekuensi menghasilkan
faktor daya yang tinggi, yang meminimalkan beban yang
diberikan pada catu sumber listrik.
Posisi target
Posisi target nal ditentukan oleh perintah pemosisian.
Generator prol menggunakan posisi ini untuk
menghitung prol kecepatan.
Posisi diperintahkan
Referensi posisi aktual yang dihitung oleh generator prol.
Konverter frekuensi menggunakan posisi diperintahkan
sebagai setpoint untuk PI posisi.
Posisi aktual
Posisi aktual dari sebuah enkoder, atau nilai yang kontrol
motor hitung dalam simpal terbuka. Konverter frekuensi
menggunakan posisi aktual sebagai umpan balik untuk PI
posisi.
Salah posisi
Kesalahan posisi adalah perbedaan antara posisi aktual dan
posisi diperintahkan. Kesalahan posisi adalah input untuk
kontroler PI posisi.
Unit posisi
Unit sik untuk nilai posisi.
1 1
MG20OB9B Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. 7

Pendahuluan
VLT® AQUA Drive FC 202
11
1.7 Singkatan, Simbol, dan Konvensi
°C
°F
AC Arus bolak-balik
AEO Optimisasi energi otomatis
AWG Ukuran kawat Amerika
AMA Adaptasi motor otomatis
DC Arus searah
EMC Kompatibilitas elektromagnetik
ETR Relai termal elektronik
f
M,N
FC Konverter frekuensi
I
INV
I
LIM
I
M,N
I
VLT,MAX
I
VLT,N
IP Proteksi ingress
LCP Panel kontrol lokal
MCT Alat kontrol gerak
n
s
P
M,N
PELV Voltase ekstra rendah pelindung
PCB Papan sirkuit cetak
PM Motor Motor magnet permanen
PWM Modulasi lebar pulsa
RPM Revolusi per menit
Regen Terminal regeneratif
T
LIM
U
M,N
Derajat Celsius
Derajat Fahrenheit
Frekuensi motor nominal
Rating arus output inverter
Batas arus
Arus motor nominal
Arus output maksimum
Rating arus output yang dicatu oleh
konverter frekuensi
Kecepatan motor sinkron
Daya motor nominal
Batasan torsi
Voltase motor nominal
1.8 Keselamatan
PERINGATAN
TEGANGAN TINGGI
Konverter frekuensi mengandung tegangan tinggi saat
terhubung ke sumber listrik AC, catu daya DC, atau
pembagi beban. Pemasangan, penyalaan, dan perawatan
konverter selain oleh teknisi yang cakap dapat mengakibatkan kematian atau cidera serius.
Pemasangan, penyalaan, dan perawatan hanya
•
boleh dilakukan oleh teknisi yang cakap.
Sebelum melakukan servis atau perbaikan,
•
gunakan alat pengukur tegangan yang sesuai
untuk memastikan tidak ada sisa tegangan di
dalam konverter frekuensi.
Peraturan keselamatan
Akhiri koneksi konverter frekuensi dari sumber
•
arus sebelum melakukan pekerjaan reparasi.
Periksa apakah pasokan hantaran listrik telah
diputus dan bahwa waktu yang diperlukan telah
terlewati sebelum melepas colokan motor dan
hantaran listrik. Untuk informasi tentang waktu
pengosongan, lihat Tabel 1.2.
[O] tidak mengakhiri koneksi sumber listrik dan
•
oleh karena itu tidak boleh digunakan sebagai
saklar keselamatan.
Bumikan peralatan dengan benar. Lindungi
•
pengguna dari voltase catu dan motor dari
kelebihan beban sesuai peraturan nasional dan
lokal yang berlaku.
Arus kebocoran pembumi melampaui 3.5 mA.
•
Perlindungan terhadap kelebihan motor tidak
•
termasuk pada pengaturan pabrik. Jika fungsi ini
dibutuhkan, aturparameter 1-90 Proteksi pd termal
motor ke nilai data [4] ETR trip 1 atau nilai data [3]
ETR warning 1.
Jangan lepaskan colokan untuk motor dan
•
masukan hantaran listrik ketika konverter
frekuensi tersambung ke hantaran listrik. Periksa
apakah masukan hantaran pasokan listrik telah
diputus dan bahwa waktu yang diperlukan telah
terlewati sebelum melepas colokan motor dan
hantaran listrik.
Konverter frekuensi memiliki sumber voltase
•
selain L1, L2, dan L3, saat pembagi beban
(sambungan DC-link) atau 24 V DC eksternal
terpasang. Cek apakah semua sumber voltase
sudah dimatikan dan waktu tunggu telah lewat
sebelum memulai pekerjaan reparasi. Untuk
informasi tentang waktu pengosongan, lihat
Tabel 1.2.
8 Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. MG20OB9B
Pendahuluan Panduan Pemrograman
PERINGATAN
START TIDAK DISENGAJA
Saat konverter frekuensi terhubung ke sumber listrik AC,
catu daya DC, atau pembagi beban, motor dapat
menyala kapan saja. Start tanpa sengaja selama
pemrograman, servis, atau perbaikan dapat mengakibatkan kematian, cidera serius atau kerusakan harta
benda. Motor dapat start melalui saklar eksternal,
perintah eldbus, sinyal reference input dari LCP, atau
setelah kondisi masalah yang telah selesai.
Untuk mencegah motor menyala tanpa sengaja:
Matikan daya dari sumber listrik ke konverter
•
frekuensi terlebih dahulu.
Tekan [O/Reset] pada LCP sebelum
•
memprogram parameter.
Sambung kabel dan rakit konverter frekuensi,
•
motor, dan peralatan apa pun yang terhubung
ke konverter frekuensi secara sempurna
sebelum menghubungkan konverter ke sumber
listrik AC, catu daya DC, atau pembagi beban.
PERINGATAN
WAKTU PENGOSONGAN
Di dalam konverter frekuensi ini terdapat kapasitor
DC-link, yang tetap berisi arus meski konverter frekuensi
tidak dialiri daya. Voltase tinggi mungkin masih ada
meski lampu indikator LED peringatan sudah mati.
Tunggu beberapa saat setelah daya dimatikan sebelum
melakukan servis atau perbaikan untuk mencegah
kematian atau cidera serius.
Matikan motor.
•
Cabut sumber listrik AC dan catu daya DC link,
•
termasuk baterai cadangan, UPS, dan koneksi
DC-link ke konverter frekuensi lain.
Matikan daya atau kunci motor PM.
•
Tunggu sampai kapasitor kosong sepenuhnya.
•
Durasi minimum waktu tunggu disebutkan
dalam Tabel 1.2dan juga dapat dilihat pada
pelat nama produk di bagian atas konverter
frekuensi.
Sebelum melakukan servis atau perbaikan,
•
gunakan alat pengukur voltase yang sesuai
untuk memastikan kapasitor sudah benar-benar
kosong.
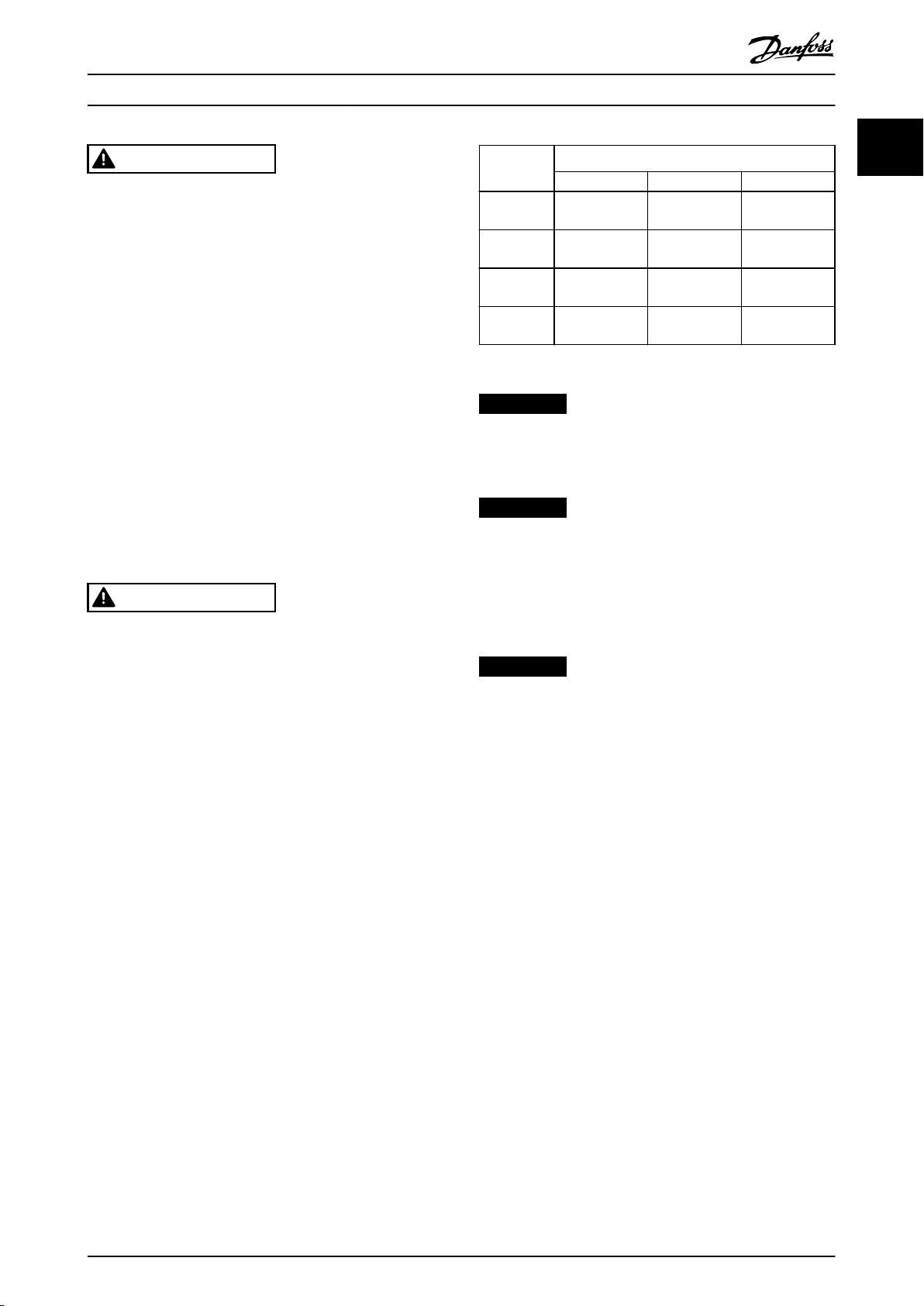
Voltase (V)
200–240 0.25–3.7 kW
(0.34–5 hp)
380–480 0.37–7.5 kW
(0.5–10 hp)
525–600 0.75–7.5 kW
(1–10 hp)
525–690 – 1.1–7.5 kW
Tabel 1.2 Waktu pengosongan
Tunggu sedikitnya (menit)
4 7 15
– 5.5–45 kW
(7.5–60 hp)
– 11–90 kW
(15–121 hp)
– 11–90 kW
(15–121 hp)
11–90 kW
(1.5–10 hp)
(15–121 hp)
CATATAN!
Saat menggunakan Safe Torque O, selalu ikuti petunjuk
dalam VLT® Konverter Frekuensi - Petunjuk Pengoperasian
Safe Torque O.
CATATAN!
Sinyal kontrol dari atau dalam konverter frekuensi, meski
jarang, dapat terpicu tanpa sengaja, terlambat, atau
gagal muncul sepenuhnya. Saat konverter frekuensi
digunakan dalam situasi di mana keselamatan sangat
penting, sinyal kontrol ini tidak boleh diandalkan
sepenuhnya.
CATATAN!
Situasi berbahaya wajib diidentikasi oleh pembangun/
integrator mesin yang bertanggung jawab mengambil
langkah preventif. Alat monitor dan perlindungan lain
dapat ditambahkan, berdasarkan peraturan keselamatan
nasional yang berlaku, misalnya, undang-undang tentang
peralatan mekanis, serta peraturan tentang pencegahan
kecelakaan.
Mode proteksi
Begitu batas arus motor atau voltase DC-link perangkat
keras terlampaui, konverter frekuensi memasuki mode
proteksi. Mode proteksi mengubah strategi modulasi PWM
dan frekuensi switching rendah untuk meminimalkan
kehilangan. Kondisi ini akan berlangsung selama 10 detik
setelah kesalahan terakhir dan meningkatkan keandalan
serta kekuatan konverter frekuensi sekaligus mengendalikan motor secara penuh.
1 1
MG20OB9B Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. 9
*
91 (L1)
92 (L2)
93 (L3)
PE
88 (-)
89 (+)
50 (+10 V OUT)
53 (A IN)
54 (A IN)
55 (COM A IN)
0/4-20 mA
12 (+24 V OUT)
13 (+24 V OUT)
18 (D IN)
20 (COM D IN)
15 mA 200 mA
(U) 96
(V) 97
(W) 98
(PE) 99
(COM A OUT) 39
(A OUT) 42
0/4-20 mA
03
0-10 V DC
+10 V DC
0-10 V DC
0/4-20 mA
240 V AC, 2 A
24 V DC
02
01
05
04
06
240 V AC, 2 A
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
19 (D IN)
24 V (NPN)
0 V (PNP)
27
24V
0V
(D IN/OUT)
0 V (PNP)
24 V (NPN)
(D IN/OUT)
0V
24V
29
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
33 (D IN)
32 (D IN)
1 2
ON
S201
ON
21
S202
ON=0-20 mA
OFF=0-10 V
95
400 V AC, 2 A
P 5-00
(R+) 82
(R-) 81
37 (D IN)
+ - + -
e30be257.11
(P RS485) 68
(N RS485) 69
(COM RS485) 61
0 V
5V
S801
RS485
RS485
21
ON
S801
3-phase
power
input
DC bus
Switch mode
power supply
Motor
Analog output
Interface
relay1
relay2
ON=Terminated
OFF=Open
Brake
resistor
(NPN) = Sink
(PNP) = Source
Pendahuluan
VLT® AQUA Drive FC 202
11
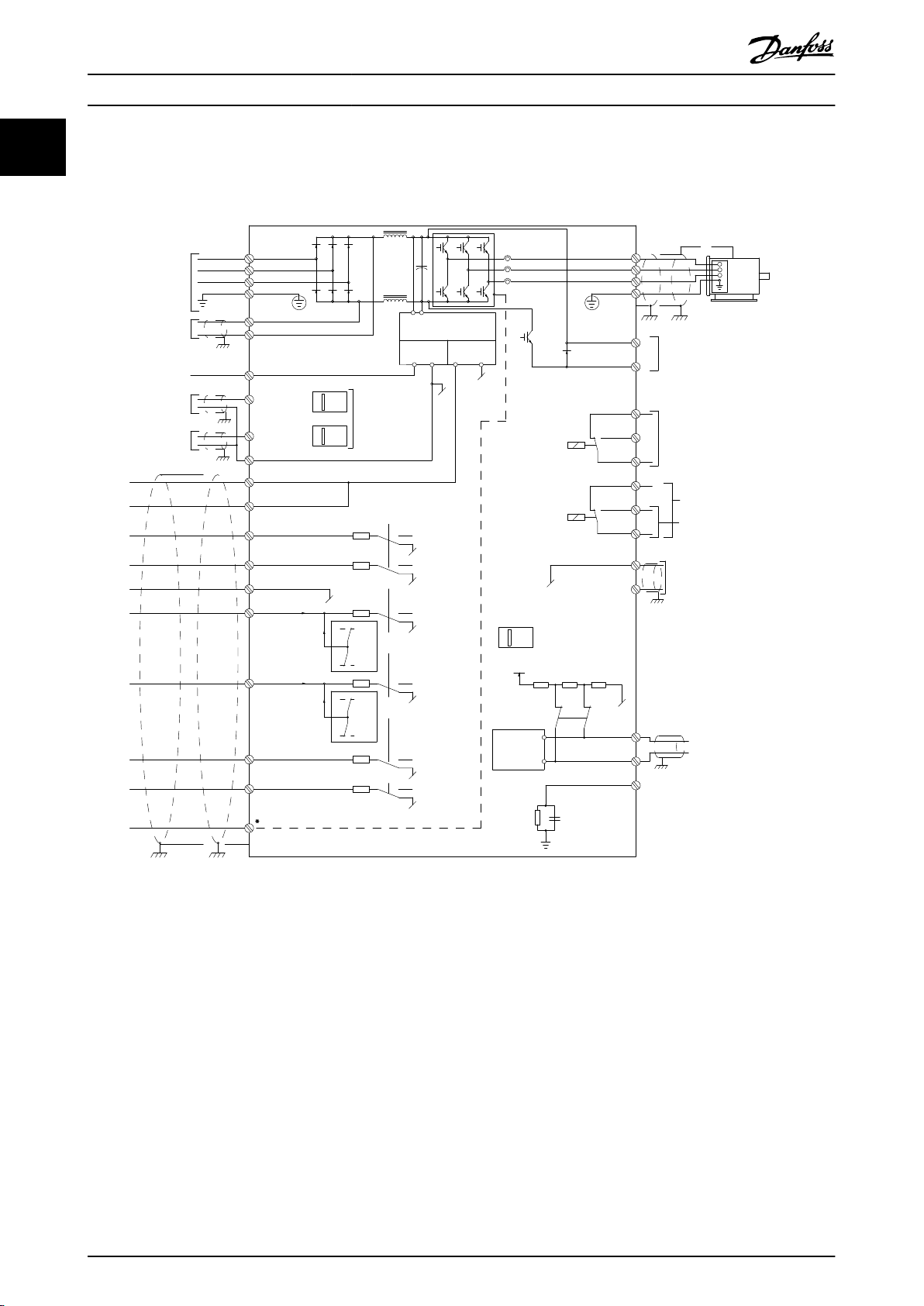
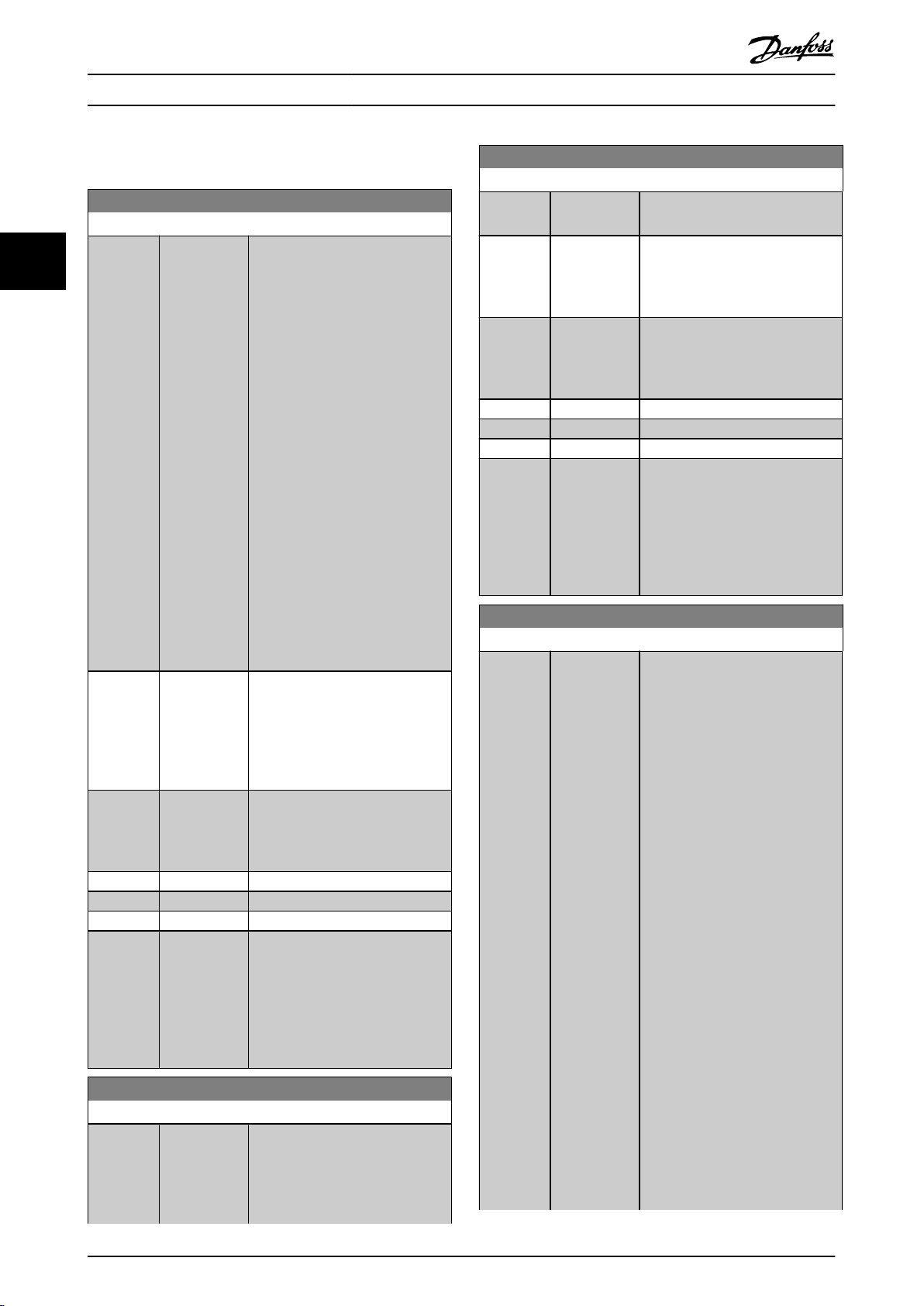
1.9 Kabel Listrik
1.9.1 Sambungan Kabel Kelistrikan - Kabel Kontrol
Ilustrasi 1.2 Gambar Skema Perkawatan Dasar
A = Analog, D = Digital
Terminal 37 digunakan untuk Safe Torque O. Untuk petunjuk instalasi Safe Torque O, lihat Konverter Frekuensi ® VLT -
Petunjuk Pengoperasian Safe Torque O.
* Terminal 37 tidak disertakan dalam FC 202 (kecuali penutup ukuran A1). Relai 2 dan terminal 29 tidak mempunyai fungsi
dalam VLT® AQUA Drive FC 202.
Meski jarang terjadi dan tergantung instalasinya, kabel
kontrol yang panjang dan sinyal analog menghasilkan arus
pembumi 50/60 Hz akibat noise dari kabel catu sumber
listrik.
Jika masalah ini terjadi, buka pelindung atau sisipkan
sebuah kapasitor 100 nF antara pelindung dan penutup.
10 Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. MG20OB9B
Hubungkan input dan output digital dan analog secara
terpisah ke input bersama (terminal 20, 55, dan 39) pada
konverter frekuensi untuk mencegah arus pembumi dari
kedua kelompok tersebut memengaruhi kelompok lainnya.
Contohnya, switching input digital dapat mengganggu
sinyal input analog.
12 13 18 19 27 29 32 33 20 37
+24 VDC
0 VDC
130BT106.10
PNP (Sumber)
Kabel input Digital
NPN (Sink)
Kabel input Digital
12 13 18 19 27 29 32 33 20 37
+24 VDC
0 VDC
130BT107.11
130BA681.10
Pendahuluan Panduan Pemrograman
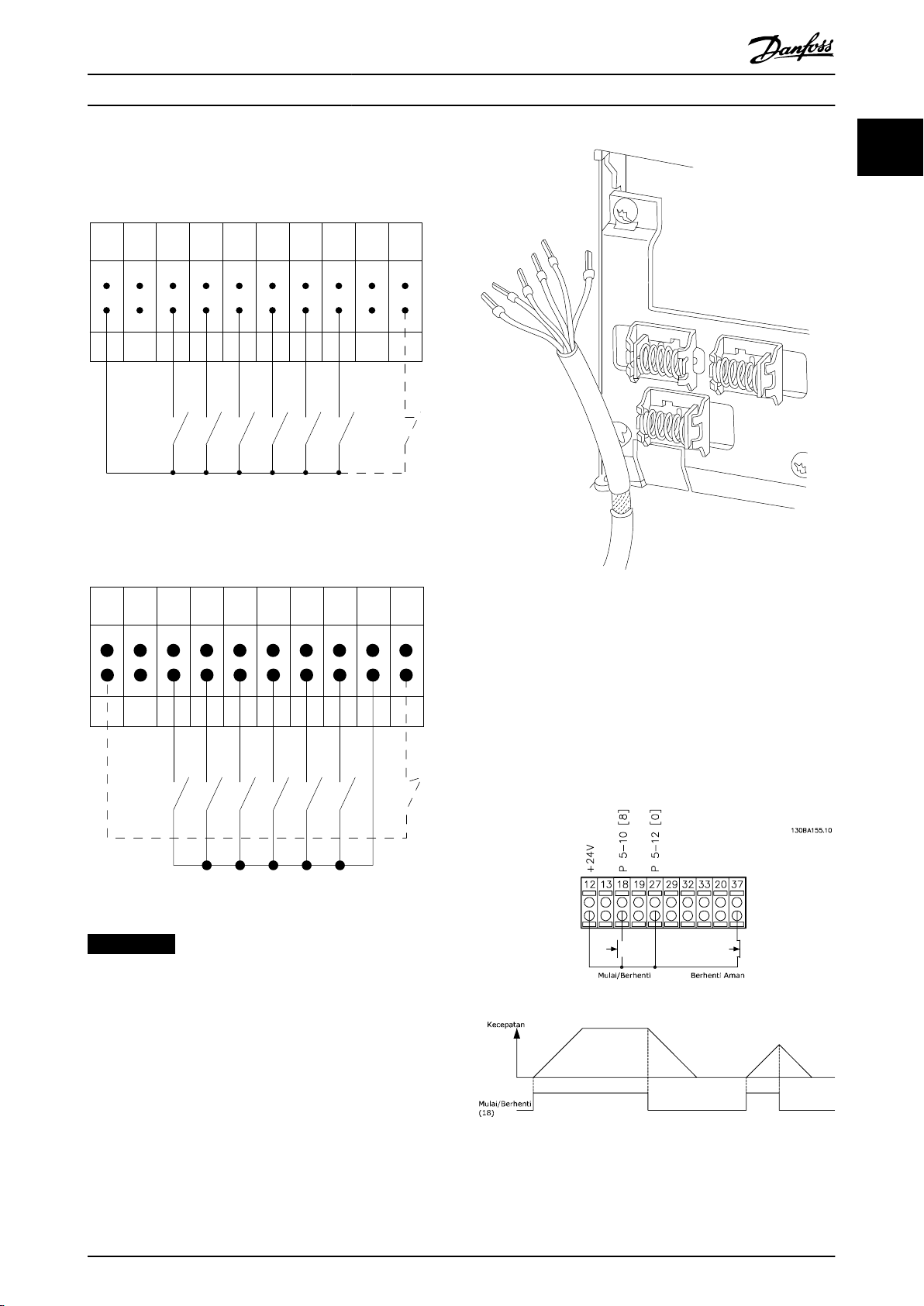
Polaritas masukan dari terminal kontrol
Ilustrasi 1.3 PNP (Sumber)
1 1
Ilustrasi 1.5 Pembumian Kabel Kontrol Berpelindung/Lapis
Baja
Ilustrasi 1.4 NPN (Sink)
CATATAN!
Kabel kontrol wajib dilindungi/lapis baja.
Lihat bagian Pembumian Kabel Kontrol Berpelindung dalam
panduan rancangan untuk cara benar menterminasi kabel
kontrol.
1.9.2 Mulai/Berhenti
Terminal 18 = Parameter 5-10 Input Digital Terminal 18 [8]
Start.
Terminal 27 = Parameter 5-12 Terminal 27 Input Digital [0]
Tidak ada operasi (default [2] Coast inverse).
Terminal 37 = Safe Torque O (jika ada).
Ilustrasi 1.6 Mulai/Berhenti
MG20OB9B Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. 11

12
18
27
29
32
37
+24V
Par. 5-10
Par. 5-12
Par. 5-13
Par. 5-14
130BA021.12
Kecepatan RPM
P 6-15
Tegangan ref.
P 6-11 10 V
+10 V/30 mA
1 kΩ
130BA154.11
Pendahuluan
VLT® AQUA Drive FC 202
11
1.9.3 Pulsa Mulai/Berhenti
Terminal 18 = Parameter 5-10 Input Digital Terminal 18 [9]
Start terkunci.
Terminal 27 = Parameter 5-12 Terminal 27 Input Digital [6]
Stop terbalik.
Terminal 37 = Safe Torque O (jika ada).
Ilustrasi 1.8 Akselerasi/Deselerasi
1.9.5 Referensi potensiometer
Referensi voltase melalui potentiometer
Sumber Referensi 1 = [1] Input analog 53 (default)
Terminal 53, Voltase Rendah = 0 V.
Terminal 53, Voltase Tinggi = 10 V.
Terminal 53, Ref/Umpan Balik Rendah = 0 RPM.
Terminal 53, Ref/Umpan Balik Tinggi = 1500 RPM.
Sakelar S201 = OFF (U).
Ilustrasi 1.7 Pulsa Mulai/Berhenti
1.9.4 Akselerasi/Deselerasi
Terminal 29/32 = Menaikkan/menurunkan kecepatan
Terminal 18 = Parameter 5-10 Input Digital Terminal 18 [9]
Start (default).
Terminal 27 = Parameter 5-12 Terminal 27 Input Digital [19]
Tahan referensi.
Terminal 29 = Parameter 5-13 Terminal 29 Input Digital [21]
Menaikkan kecepatan.
Terminal 32 = Parameter 5-14 Terminal 32 Input Digital [22]
Turunkan kecepatan.
Ilustrasi 1.9 Referensi potensiometer
12 Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. MG20OB9B
Auto
On
Reset
Hand
On
Off
Status
Quick
Menu
Main
Menu
Alarm
Log
Back
Cancel
Info
OK
Status
1(0)
1234rpm 10,4A 43,5Hz
Run OK
43,5Hz
On
Alarm
Warn.
e30ba018.14
1
2
3
4
b
a
c
Cara Memprogram Panduan Pemrograman
2 Cara Memprogram
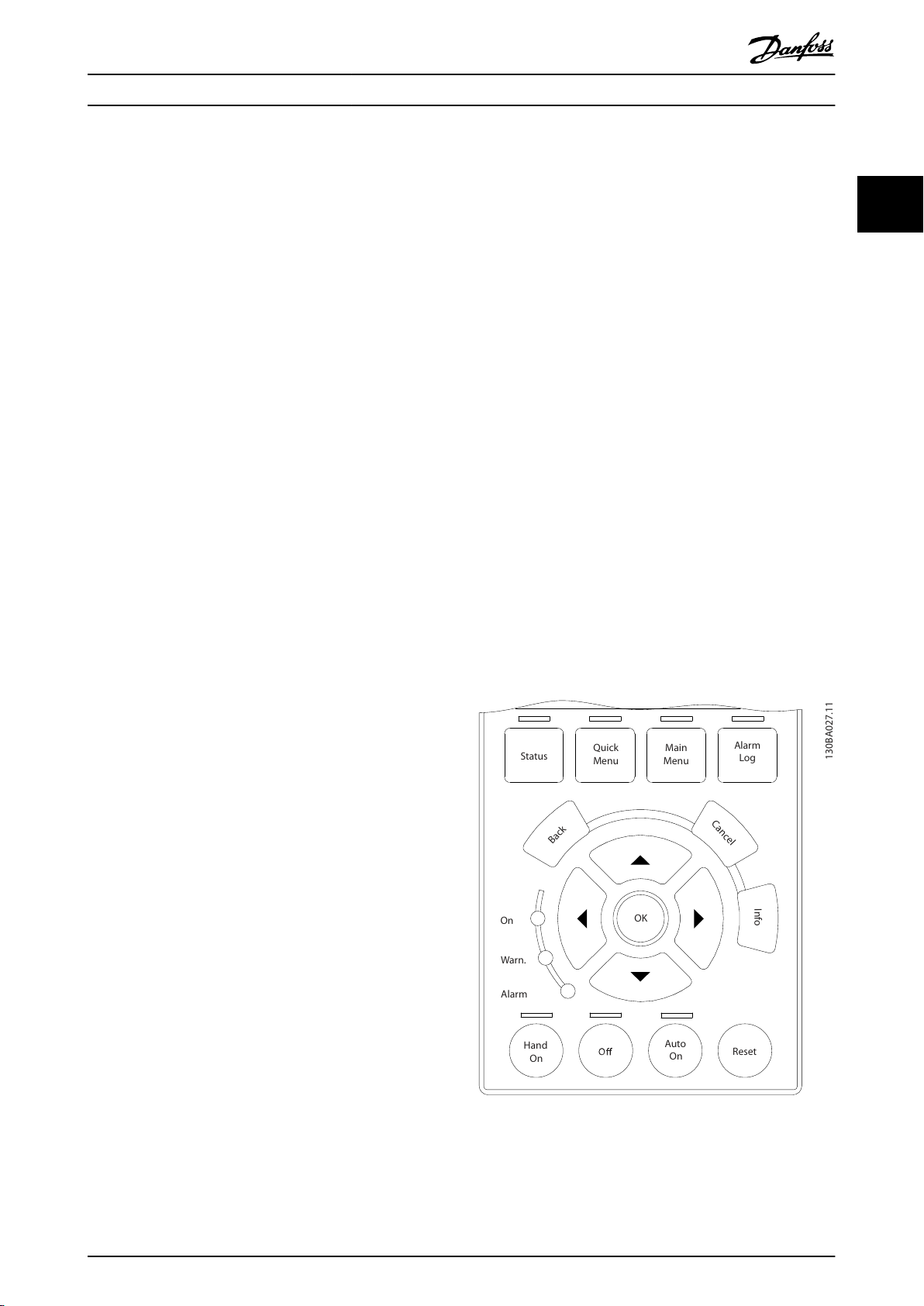
2.1 Panel Kontrol Lokal Gras dan Numerik
Konverter frekuensi mudah diprogram lewat LCP gras
(LCP 102). Untuk informasi tentang penggunaan panel
kontrol lokal numerik (LCP 101), lihat bab 2.2.17 Cara
Memprogram lewat Panel Kontrol Lokal Numerik.
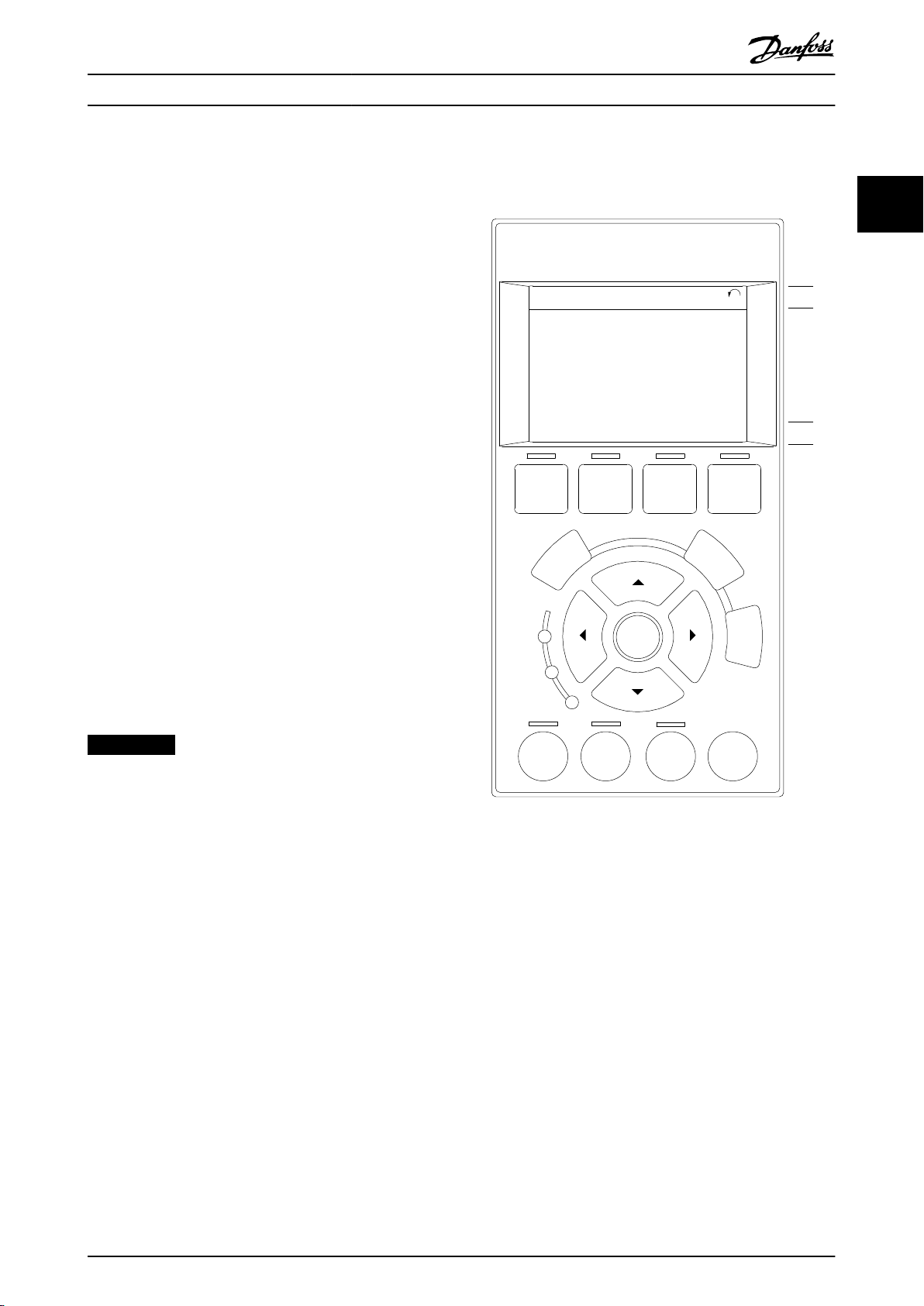
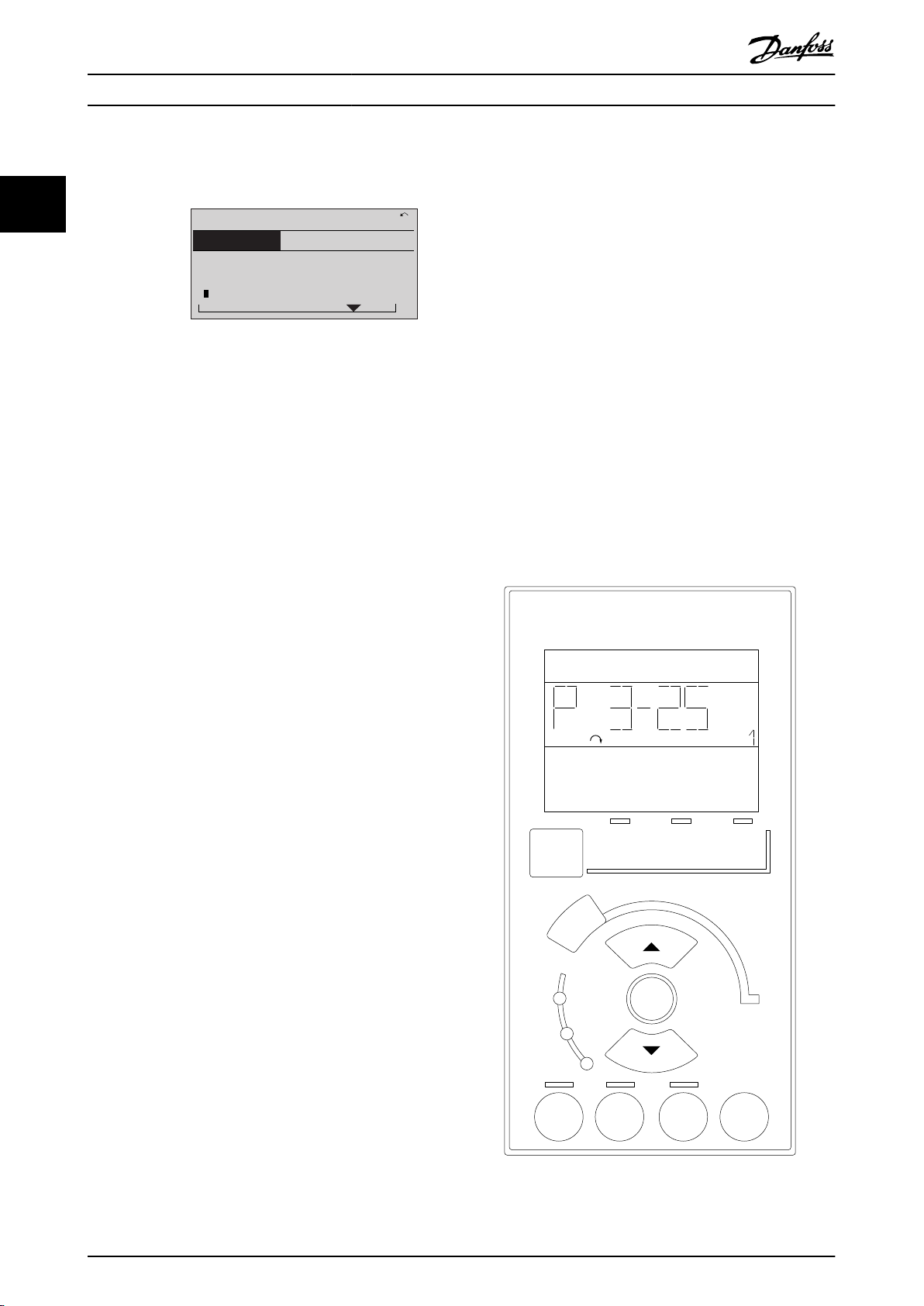
2.2 Cara Memprogram lewat LCP Gras
LCP dibagi dalam 4 grup fungsi:
1. Tampilan gras dengan baris status.
2. Tombol menu dan lampu indikator – untuk
fungsi-fungsi mengubah parameter dan switching
antara fungsi tampilan.
3. Tombol navigasi dan lampu indikator.
4. Tombol operasi dan lampu indikator.
Layar LCP dapat menampilkan hingga 5 item data
pengoperasian sambil menampilkan Status.
2 2
Baris tampilan:
a. Baris status: Pesan status menampilkan ikon dan
gras.
b. Baris 1-2: Baris data operator menampilkan data
yang ditentukan atau dipilih. Tambahkan hingga
1 baris ekstra dengan menekan [Status].
c. Baris status: Pesan status menampilkan teks.
CATATAN!
Jika penyalaan ditunda, LCP menampilkan pesan INISIALISASI sampai siap. Menambah atau menghapus opsi
dapat menunda penyalaan.
Ilustrasi 2.1 LCP
MG20OB9B Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. 13
Bagian atas
Bagian tengah
Bagian Bawah
Status
43 RPM
1,4 Hz
Remote Berjalan Otomatis
! Suhu kartu daya (W29)
2,9%
5,44 A 25,3kW
1(1)
130BP074.10
!
On
Warn.
Alarm
130BP044.10
130BP045.10
Status
Quick
Menu
Main
Menu
Alarm
Log
Cara Memprogram
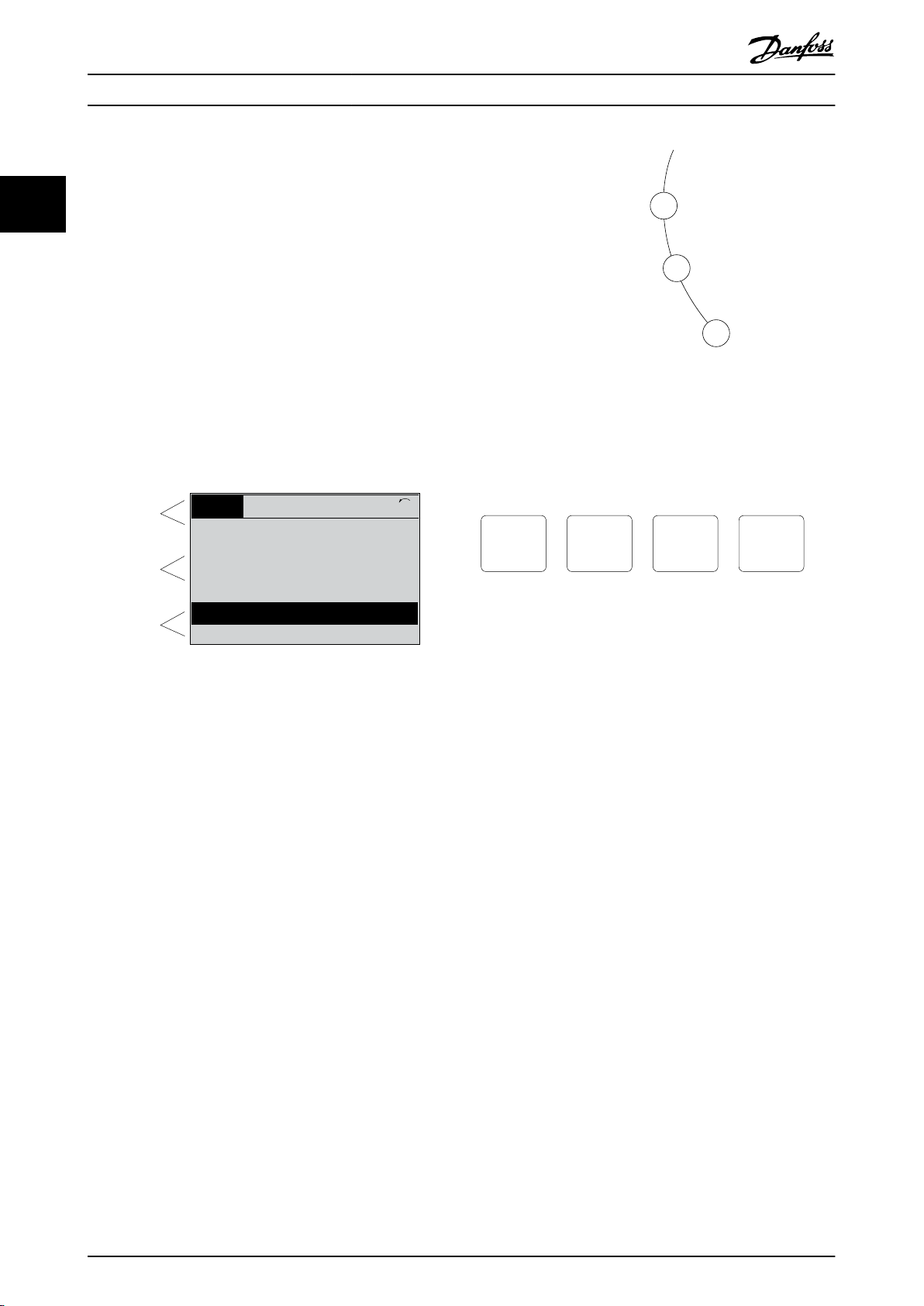
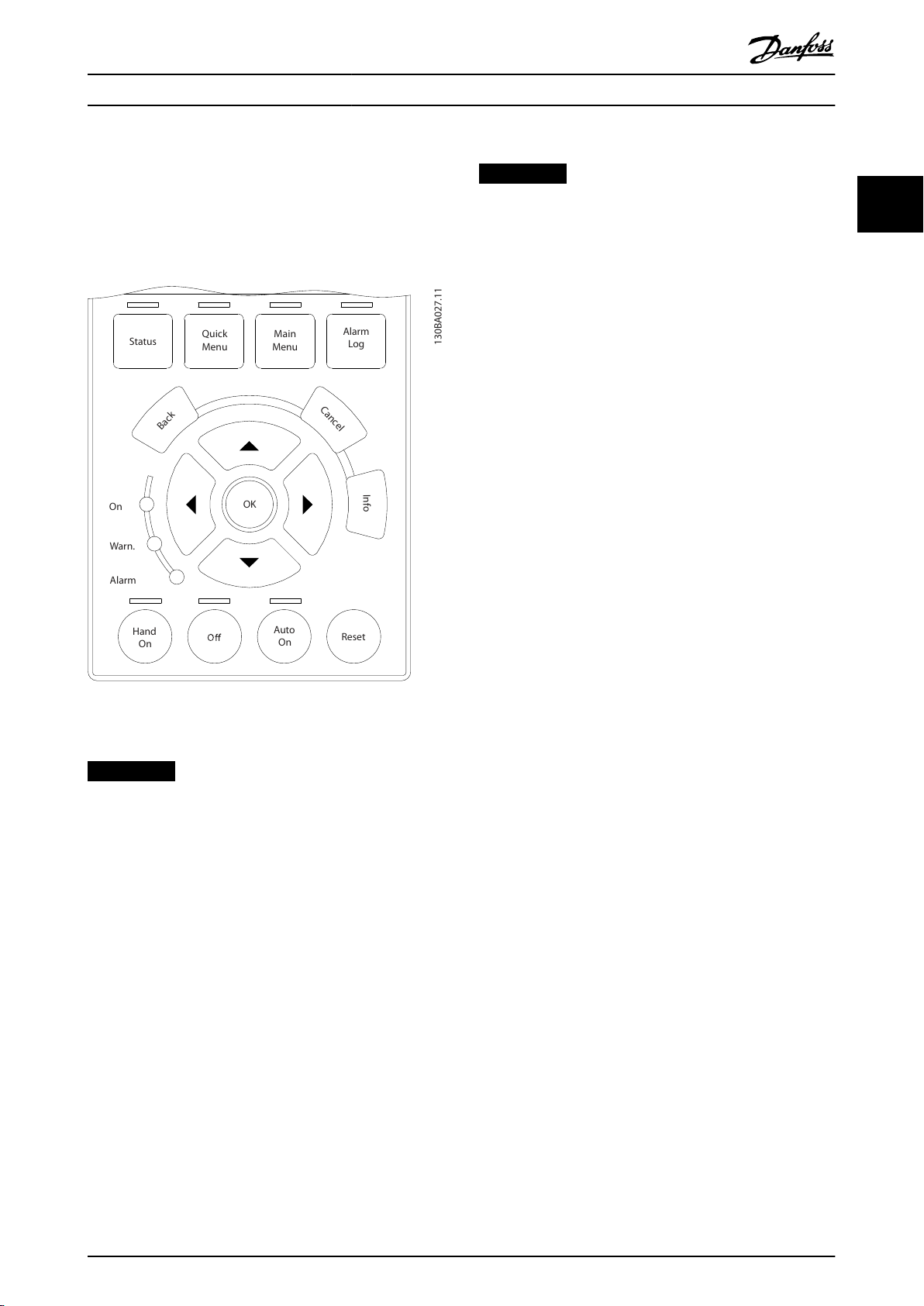
2.2.1 Layar LCP
VLT® AQUA Drive FC 202
22
Layar LCP dilengkapi lampu dan 6 baris alfanumerik total.
Baris pada layar menampilkan arah rotasi (anak panah),
pengaturan yang dipilih, serta pengaturan pemrograman.
Layar dibagi menjadi 3 bagian.
Bagian atas
Menampilkan hingga 2 pengukuran dalam status pengoperasian normal.
Bagian tengah
Baris teratas menampilkan hingga 5 pengukuran dengan
satuan terkait, apa pun statusnya (kecuali jika terjadi alarm/
peringatan).
Bagian Bawah
Selalu memperlihatkan status konverter frekuensi pada
mode Status.
Ilustrasi 2.3 Lampu Indikator
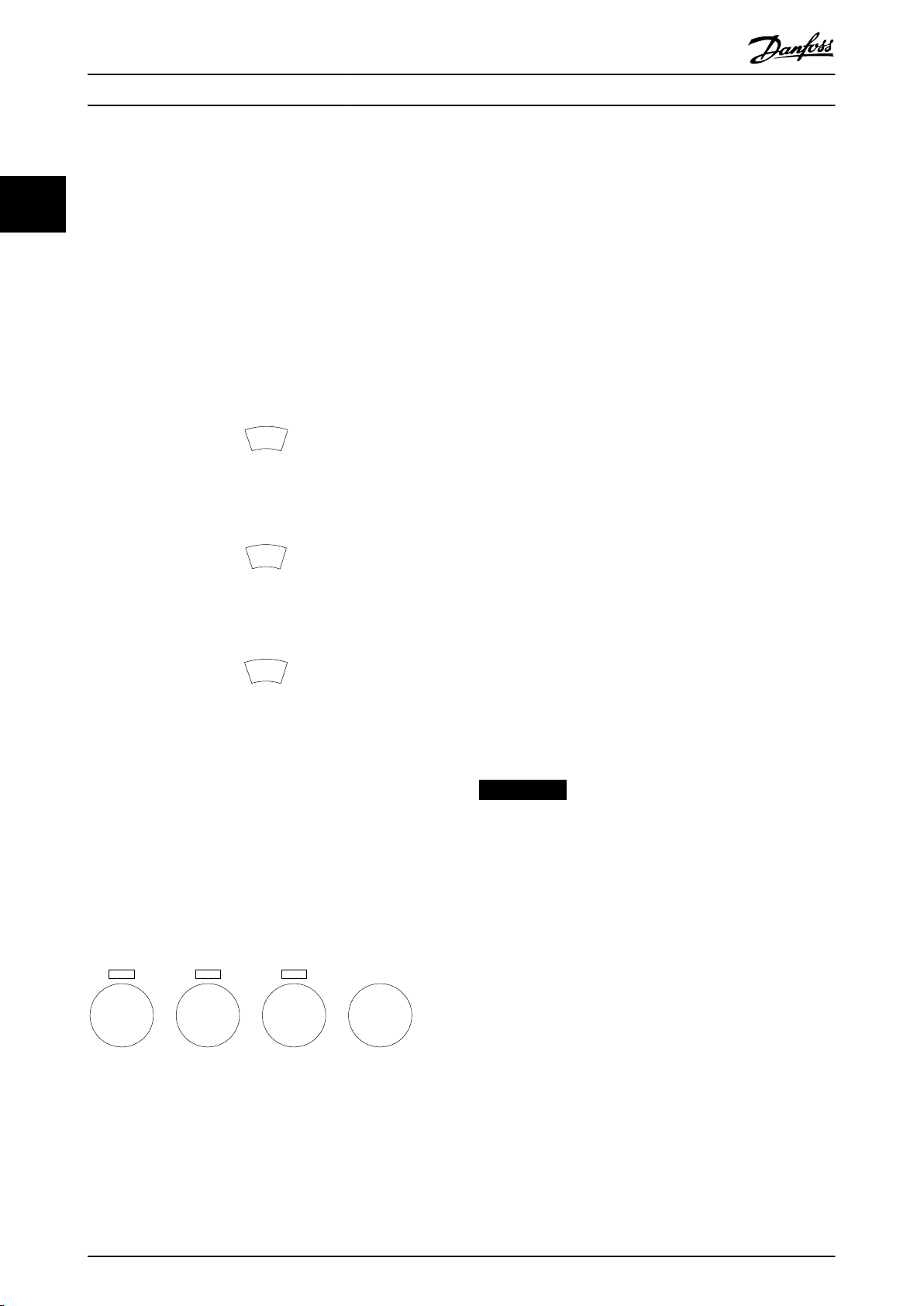
Tombol LCP
Tombol kontrol dibagi ke dalam beberapa fungsi. Tomboltombol di bawah layar dan lampu indikator digunakan
untuk pengaturan parameter, termasuk opsi indikasi layar
selama pengoperasian normal.
Ilustrasi 2.4 Tombol LCP
Ilustrasi 2.2 Bagian Bawah
Pengaturan aktif (dipilih sebagai pengaturan aktif dalam
parameter 0-10 Pengaturan aktif) ditampilkan. Untuk
pemrograman selain pengaturan aktif, jumlah pengaturan
terprogram muncul di sebelah kanan.
Tampilan penyesuaian kontras
Tekan [Status] dan [▲] untuk mempergelap layar.
Tekan [Status] dan [▼] untuk menambah kecerahan layar.
Sebagian besar pengaturan parameter dapat diubah
seketika lewat LCP, kecuali dilindungi sandi yang dibuat
lewatparameter 0-60 Kt. sandi Menu Utama atau lewat
parameter 0-65 Sandi Menu Pribadi.
Lampu indikator
Jika nilai ambang tertentu terlampaui, alarm dan/atau
indikator peringatan akan menyala. Status dan teks alarm
muncul pada LCP.
Lampu indikator HIDUP menyala saat konverter frekuensi
menerima voltase dari sumber listrik, terminal DC bus, atau
catu daya eksternal 24 V. Pada saat bersamaan, lampu latar
akan menyala.
LED Hijau/Nyala: Bagian kontrol sedang bekerja.
•
Yellow LED/Warn.: Menunjukkan peringatan.
•
LED Merah Berkedip/Alarm: Menunjukkan alarm.
•
14 Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. MG20OB9B
[Status]
Menunjukkan status dari konverter frekuensi dan/atau
motornya. Pilih satu dari 3 bacaan yang ada dengan
menekan [Status]. Bacaan 5 baris, bacaan 4 baris, atau
kontrol smart logic.
Tekan [Status] untuk memilih mode tampilan, atau kembali
ke mode tampilan dari mode Menu Cepat, Menu Utama,
atau Alarm. Anda juga bisa menggunakan [Status] untuk
beralih antara mode bacaan tunggal dan ganda.
[Quick Menu]
Menyediakan akses cepat ke fungsi-fungsi paling umum
pada konverter frekuensi.
[Quick Menu] terdiri atas:
Q1: Menu pribadiku
•
Q2: Pengaturan cepat
•
Q3: Pengaturan fungsi.
•
Q4: SmartStart.
•
Q5: Perubahan yang dibuat.
•
Q6: Logging.
•
Q7: Air dan pompa.
•
Au t o
On R eset
Hand
On
S
ta
tus
Q
uick
M
enu
M
ain
M
enu
A
lar
m
Lo
g
Back
C
anc
el
I
n
fo
OK
On A lar m W
ar
n.
130BA027.11
Cara Memprogram Panduan Pemrograman
Pengaturan fungsi menyediakan akses cepat ke semua
parameter yang dibutuhkan untuk sebagian besar aplikasi
air dan air limbah termasuk:
Torsi variabel.
•
Torsi konstan.
•
Pompa.
•
Pompa dosis.
•
Pompa sumur.
•
Pompa booster.
•
Pompa mixer.
•
Blower aerasi.
•
Pompa lainnya.
•
Aplikasi kipas.
•
Konverter frekuensi ini juga dilengkapi parameter untuk
memilih beberapa item berikut:
Variabel mana yang akan ditampilkan pada LCP.
•
Kecepatan preset digital.
•
Penskalaan referensi analog.
•
Aplikasi zona tunggal dan multi zona simpal
•
tertutup.
Fungsi spesik untuk air.
•
Aplikasi air limbah.
•
Menu cepat Q7: Air dan Pompa menyediakan akses
langsung ke beberapa tur khusus paling penting untuk
aplikasi air dan pompa:
Q7-1: Ramp khusus (ramp awal, ramp nal, ramp
•
katup kontrol).
Q7-2: Mode tidur.
•
Q7-3: Deragging.
•
Q7-4: Operasi Tanpa Beban.
•
Q7-5: Akhir Deteksi Lengkungan
•
Q7-6: Kompensasi Aliran.
•
Q7-7: Pengisian Pipa (Pipa Horizontal, Pipa
•
Vertikal, Sistem Campuran).
Q7-8: Performa Kontrol.
•
Q7-9: Min. Speed Monitor.
•
Parameter Menu Cepat dapat diakses seketika, kecuali
dilindungi sandi yang dibuat lewat salah satu parameter
berikut:
Parameter 0-60 Kt. sandi Menu Utama.
•
Parameter 0-61 Akses ke Menu Utama tanpa kt.
•
Sandi.
Parameter 0-65 Sandi Menu Pribadi.
•
Parameter 0-66 Akses ke Menu Pribadi tanpa Sandi.
•
Anda dapat beralih antara mode Menu Cepat dan mode
Menu Utama.
[Main Menu]
Bagian ini digunakan untuk memprogram semua
parameter.
Parameter Menu Utama dapat diakses seketika, kecuali
dilindungi sandi yang dibuat lewat salah satu parameter
berikut:
Parameter 0-60 Kt. sandi Menu Utama.
•
Parameter 0-61 Akses ke Menu Utama tanpa kt.
•
Sandi.
Parameter 0-65 Sandi Menu Pribadi.
•
Parameter 0-66 Akses ke Menu Pribadi tanpa Sandi.
•
Untuk sebagian besar aplikasi air dan air limbah, tidak
perlu mengakses parameter Menu Utama. Menu Cepat,
pengaturan cepat, dan pengaturan fungsi menyediakan
akses paling sederhana dan cepat ke parameter umum
yang dibutuhkan.
Anda dapat beralih antara mode Menu Utama dan mode
Menu Cepat secara langsung.
Untuk membuat pintasan parameter, tekan [Main Menu]
selama 3 detik. Jalan pintas parameter memungkinkan
akses langsung ke parameter mana pun.
[Alarm Log]
Menampilkan daftar alarm dari 5 alarm terakhir (bernomor
A1-A5). Untuk rincian selengkapnya tentang alam, tekan
tombol navigasi untuk menuju nomor alarm lalu tekan
[OK]. Sesaat sebelum memasuki mode alarm, informasi
tentang kondisi konverter frekuensi ditampilkan.
Ilustrasi 2.5 LCP
2 2
MG20OB9B Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. 15
B
a
c
k
C
a
n
c
e
l
I
n
f
o
e30bp046.12
Hand
On
Off
Auto
On
Reset
Cara Memprogram
VLT® AQUA Drive FC 202
[Back]
Kembali ke langkah atau lapis sebelumnya dalam struktur
navigasi.
22
[Cancel]
Perubahan atau perintah terakhir dibatalkan sepanjang
tampilan tidak diubah.
[Info]
Menampilkan informasi tentang perintah, parameter, atau
fungsi pada salah satu jendela tampilan. [Info]
menyediakan informasi terinci sewaktu-waktu diperlukan
bantuan.
Keluar dari mode info dengan menekan salah satu, [Info],
[Back], atau [Cancel].
Ilustrasi 2.6 Kembali
[Hand On]
Mengaktifkan kontrol konverter frekuensi lewat LCP. [Hand
On] juga menyalakan motor, dan sekarang Anda dapat
memasukkan data kecepatan motor dengan tombol
navigasi. Tombol dapat dipilih sebagai [1] Aktifkan atau [0]
Nonaktifkan via parameter 0-40 [Manual] tombol pd LCP.
Sinyal berhenti eksternal yang diaktifkan dengan sinyal
kontrol, atau eldbus, mengalahkan perintah start via LCP.
Sinyal kontrol berikut tetap aktif saat [Hand On] diaktifkan:
[Hand On] - [O] - [Auto On].
•
Reset.
•
Coast stop inverse.
•
Mundur.
•
Bit pilih pengaturan 0 - Bit pilih pengaturan 1.
•
Perintah berhenti dari komunikasi seri.
•
Berhenti cepat.
•
Rem DC.
•
[O]
Menghentikan motor yang terhubung. Tombol dapat
dipilih sebagai [1] Aktifkan atau [0] Nonaktifkan via
Ilustrasi 2.7 Batal
parameter 0-41 [O] tombol pd LCP. Jika fungsi berhenti
eksternal tidak dipilih dan tombol [O] tidak aktif, hentikan
motor dengan memutus voltase.
[Auto On]
Mengaktifkan kontrol konverter frekuensi via terminal
kontrol dan/atau komunikasi seri. Saat sinyal start dikirim
Ilustrasi 2.8 Info
ke terminal kontrol dan/atau eldbus, konverter frekuensi
menyala. Tombol dapat dipilih sebagai [1] Aktifkan atau [0]
Nonaktifkan via parameter 0-42 (Nyala Otomatis) Tombol
Tombol navigasi
Keempat tombol navigasi digunakan untuk menjelajah di
antara pilihan yang tersedia dalam Menu Cepat, Menu
Utama, dan Log Alarm. Tekan tombol untuk menggerakkan
kursor.
pada LCP.
CATATAN!
Sinyal HAND OFF AUTO aktif via input digital lebih
diprioritaskan daripada tombol kontrol [Hand On] dan
[Auto On].
[OK]
Digunakan untuk memilih parameter yang telah ditandai
oleh kursor dan mengaktifkan perubahan parameter.
Tombol kontrol lokal
Tombol kontrol lokal berada di dasar LCP.
[Reset]
Digunakan untuk mereset konverter frekuensi setelah
alarm (anjlok). Tombol dapat dipilih sebagai [1] Aktifkan
atau [0] Nonaktifkan via parameter 0-43 [Reset] tombol pd
LCP.
Pintasan parameter dapat dibuat dengan menekan tombol
[Main Menu] selama 3 detik. Jalan pintas parameter
memungkinkan akses langsung ke parameter mana pun.
Ilustrasi 2.9 Tombol Kontrol Lokal
16 Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. MG20OB9B
Au t o
On R eset
Hand
On
S
ta
tus
Q
uick
M
enu
M
ain
M
enu
A
lar
m
Lo
g
Back
C
anc
el
I
n
fo
OK
On A lar m W
ar
n.
130BA027.11
Cara Memprogram Panduan Pemrograman
2.2.2 Transfer Cepat Pengaturan Parameter
antara Konverter Frekuensi Multi
Setelah pengaturan konverter frekuensi selesai, simpan
data dalam LCP atau PC via Perangkat Lunak Persiapan
MCT 10.
Transfer data dari LCP ke konverter frekuensi
CATATAN!
Hentikan motor sebelum melakukan pengoperasian ini.
Untuk mentransfer data dari LCP ke konverter frekuensi:
1. Ke parameter 0-50 Copy LCP.
2. Tekan tombol [OK].
3. Pilih [2] Semua dari LCP.
4. Tekan tombol [OK].
Parameter yang tersimpan di dalam LCP sekarang
ditransfer ke konverter frekuensi dan ditunjukkan oleh
baris kemajuan. Bila sudah mencapai 100%, tekan [OK].
2.2.3 Mode Layar
Pada operasional normal, hingga 5 variabel operasional
dapat ditunjukkan secara kontinu di bagian tengah: 1.1,
1.2, dan 1.3 serta 2 dan 3.
2.2.4 Mode Layar - Pemilihan Bacaan
Tekan [Status] untuk beralih antara 3 layar bacaan status.
Variabel pengoperasian dengan format yang berbeda pada
setiap layar status. Untuk informasi lebih lanjut, lihat
contoh dalam bab ini.
2 2
Ilustrasi 2.10 LCP
Penyimpanan Data in LCP
CATATAN!
Hentikan motor sebelum melakukan pengoperasian ini.
Untuk menyimpan data dalam LCP:
1. Ke parameter 0-50 Copy LCP.
2. Tekan tombol [OK].
3. Pilih [1] Semua ke LCP.
4. Tekan tombol [OK].
Semua parameter sekarang tersimpan di dalam LCP dan
ditunjukkan oleh baris kemajuan. Bila sudah mencapai
100%, tekan [OK].
Hubungkan LCP ke konverter frekuensi yang lain lalu salin
juga pengaturan parameter tersebut ke konverter frekuensi
ini.
Beberapa nilai atau pengukuran dapat dikaitkan ke setiap
variabel operasional yang ditayangkan. Nilai atau
pengukuran yang akan ditampilkan dapat ditentukan lewat
parameter berikut:
Parameter 0-20 Tampilan Baris 1,1 Kecil.
•
Parameter 0-21 Tampilan Baris 1,2 Kecil.
•
Parameter 0-22 Tampilan Baris 1,3 Kecil.
•
Parameter 0-23 Tampilan Baris 2 Besar.
•
Parameter 0-24 Tampilan Baris 3 Besar.
•
Akses parameter via [Quick Menu], Q3 Pengaturan Fungsi,
Q3-1 Pengaturan Umum, Q3-13 Pengaturan Layar.
Setiap parameter bacaan yang dipilih dalam
parameter 0-20 Tampilan Baris 1,1 Kecil to
parameter 0-24 Tampilan Baris 3 Besar memiliki skala dan
digit sendiri setelah titik desimal. Semakin tinggi nilai
numerik sebuah parameter, semakin sedikit digit yang
ditampilkan setelah titik desimal.
Contoh: Bacaan arus 5.25 A; 15.2 A; 105 A.
Lihat grup parameter 0-2* Tampilan LCP untuk penjelasan
lebih lengkap.
MG20OB9B Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. 17
1.1
2
3
1.3
1.2
130BP041.10
799 RPM
Remote Ramping Otomatis
1 (1)
36,4 kw7,83 A
0,000
53,2 %
Status
1.1
1.2
2
1.3
130BP062.10
207RPM
Remote Berjalan Otomatis
1 (1)
24,4 kW5,25A
6,9Hz
Status
130BP063.10
778 RPM
Remote Berjalan Otomatis
1 (1)
4,0 kW0,86 A
Keadaan: 0 tidak aktif 0 (tidak aktif)
Bila: Do: -
Status
130BC916.10
Q1 My Personal Menu
Q2 Quick Setup
Q4 Smart Setup
Q5 Changes Made
0RPM 0.00A 1(1)
Quick Menus
Cara Memprogram
VLT® AQUA Drive FC 202
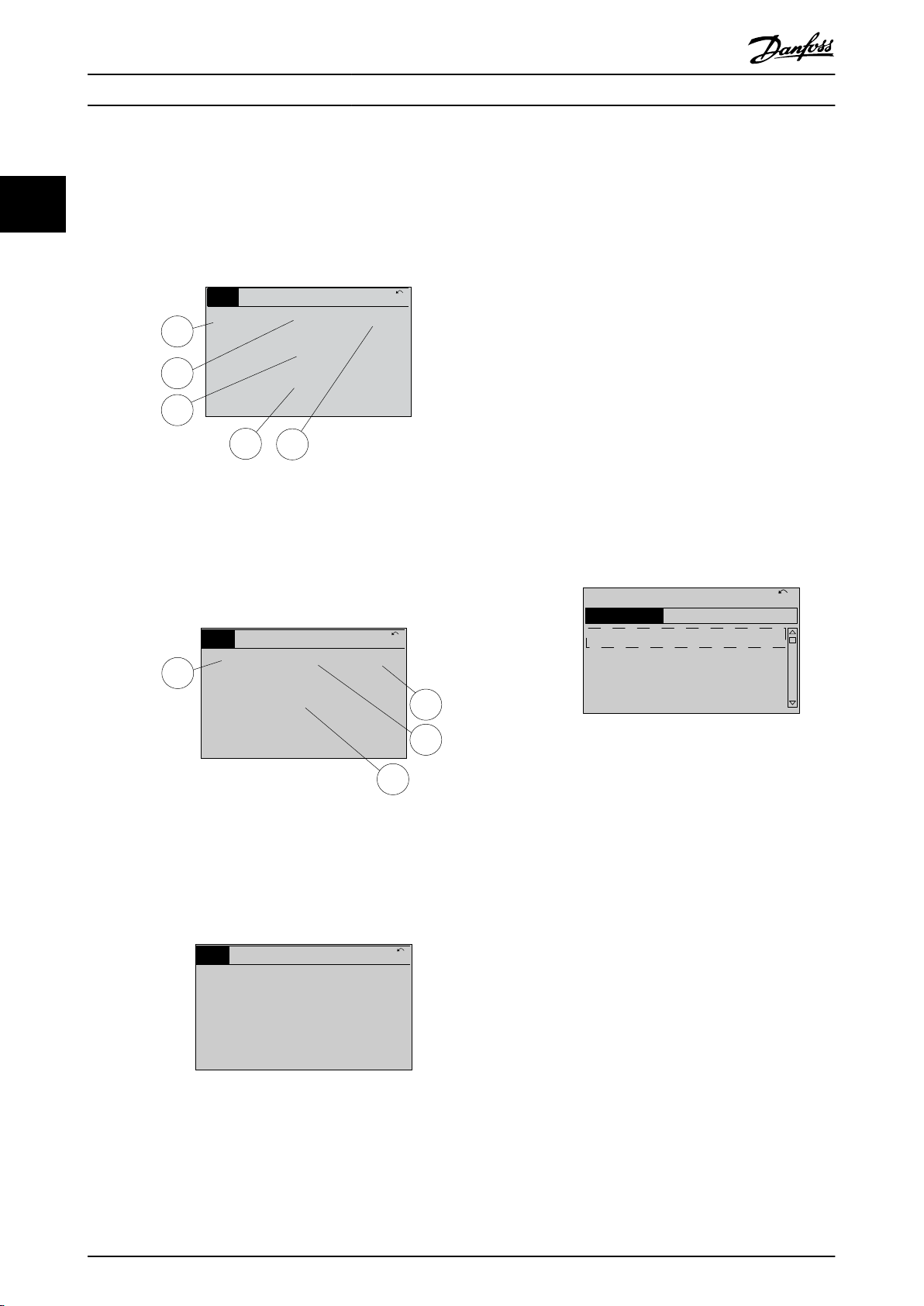
Layar status I
2.2.5 Pengaturan Parameter
Status bacaan standar setelah penyalaan atau inisialisasi.
Tekan [Info] untuk informasi tentang tautan pengukuran ke
22
variabel pengoperasian yang ditampilkan (1.1, 1.2, 1.3, 2,
dan 3).
Lihat variabel pengoperasian yang ditampilkan dalam
Ilustrasi 2.11.
Konverter frekuensi dapat digunakan untuk hampir semua
tugas dan menawarkan 2 opsi pemrograman.
Mode menu utama.
•
Mode menu cepat.
•
Menu utama menyediakan akses ke semua parameter.
Menu cepat membawa pengguna melewati beberapa
parameter, sehingga mempercepat pengoperasian
konverter frekuensi.
Ubah parameter dalam mode menu utama atau menu
cepat.
2.2.6 Fungsi Tombol Menu Cepat
Tekan [Quick Menu] untuk masuk ke beberapa area dalam
Ilustrasi 2.11 Layar Status I
Layar status II
Lihat variabel pengoperasian (1.1, 1.2, 1.3, and 2) yang
ditampilkan dalam Ilustrasi 2.12.
Dalam contoh ini, kecepatan, arus motor, daya motor, dan
frekuensi dipilih sebagai variabel dalam 2 baris pertama.
Menu Cepat.
Pilih Q1 Menu Personal Saya untuk menampilkan parameter
personal yang dipilih. Parameter ini terpilih di
parameter 0-25 Menu Pribadiku. Hingga 50 parameter
berbeda dapat ditambahkan dalam menu ini.
Ilustrasi 2.14 Menu Cepat
Pilih Q2 Pengaturan Cepat untuk melihat-lihat pilihan
Ilustrasi 2.12 Layar Status II
parameter agar motor dapat dioperasikan secara optimal.
Pengaturan default untuk parameter lain mempertimbangkan fungsi kontrol yang dibutuhkan serta kongurasi
Layar status III
input/output sinyal (terminal kontrol).
Status ini menampilkan peristiwa dan tindakan smart logic
control. Untuk informasi lebih lengkap, lihat grup parameter
13-** Logika Cerdas.
Ilustrasi 2.13 Layar Status III
18 Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. MG20OB9B
Pemilihan parameter dilakukan dengan tombol navigasi.
Parameter dalam Tabel 2.1 dapat diakses.
Cara Memprogram Panduan Pemrograman
Parameter Pengaturan
Parameter 0-01 Bahasa
Parameter 1-20 Daya Motor [kW] [kW]
Parameter 1-22 Tegangan Motor [V]
Parameter 1-23 Frekuensi Motor [Hz]
Parameter 1-24 Arus Motor [A]
Parameter 1-25 Kecepatan Nominal Motor [RPM]
Parameter 5-12 Terminal 27 Input Digital
Parameter 1-29 Penyesuaian Motor
Otomatis (AMA)
Parameter 3-02 Referensi Minimum [RPM]
Parameter 3-03 Referensi Maksimum [RPM]
Parameter 3-41 Waktu tanjakan Ramp 1 [s]
Parameter 3-42 Waktu Turunan Ramp 1 [s]
Parameter 3-13 Situs Referensi
Tabel 2.1 Pemilihan Parameter
1) Jika terminal 27 diatur ke [0] Tidak ada fungsi, tidak diperlukan
sambungan ke +24 V pada terminal 27.
Pilih Perubahan yang dibuat untuk mendapatkan informasi
tentang:
10 perubahan yang terakhir. Gunakan tombol
•
navigasi [▲] [▼] untuk berpindah antara 10
parameter terakhir yang diubah.
Perubahan yang dibuat sejak pengaturan default.
•
Pilih Logging untuk memperoleh informasi tentang bacaan
baris yang ditampilkan. Informasi ditampilkan dalam
bentuk grak.
Hanya parameter yang dipilih dalam
parameter 0-20 Tampilan Baris 1,1 Kecil dan
parameter 0-24 Tampilan Baris 3 Besar dapat dilihat. Anda
Parameter pengaturan fungsi dikelompokkan dengan cara berikut:
[0] Tidak ada fungsi
[1] Aktifkan AMA
lengkap
1)
dapat menyimpan hingga 120 sampel ke dalam memori
untuk referensi.
2.2.7 Menu Cepat, Q3 Pengaturan Fungsi
Pengaturan fungsi menyediakan akses cepat ke semua
parameter yang dibutuhkan untuk sebagian besar aplikasi
air dan air limbah termasuk:
Torsi variabel.
•
Torsi konstan.
•
Pompa.
•
Pompa dosis.
•
Pompa sumur.
•
Pompa booster.
•
Pompa mixer.
•
Blower aerasi.
•
Pompa lainnya.
•
Aplikasi kipas.
•
Menu pengaturan fungsi juga dilengkapi parameter untuk
memilih beberapa item berikut:
Variabel mana yang akan ditampilkan pada LCP.
•
Kecepatan preset digital.
•
Penskalaan referensi analog.
•
Aplikasi zona tunggal dan multi zona simpal
•
tertutup.
Fungsi spesik untuk air.
•
Aplikasi air limbah.
•
2 2
Q3-1 Pengaturan umum
Q3-10 Pengaturan Jam Q3-11 Pengaturan Tampilan Q3-12 Keluaran Analog Q3-13 Relays
Parameter 0-70 Tanggal dan
Waktu
Parameter 0-71 Format Tgl. Parameter 0-21 Tampilan Baris 1,2
Parameter 0-72 Format Waktu Parameter 0-22 Tampilan Baris 1,3
Parameter 0-74 DST/Summertime Parameter 0-23 Tampilan Baris 2
Parameter 0-76 DST/Start
Summertime
Parameter 0-77 DST/Akhir
Summertime
– Parameter 0-38 Teks Tampilan 2 – –
– Parameter 0-39 Teks Tampilan 3 – –
Tabel 2.2 Q3-1 Pengaturan Umum
MG20OB9B Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. 19
Parameter 0-20 Tampilan Baris 1,1
Kecil
Kecil
Kecil
Besar
Parameter 0-24 Tampilan Baris 3
Besar
Parameter 0-37 Teks Tampilan 1 – –
Parameter 6-50 Terminal 42 Output
Parameter 6-51 Terminal 42 Skala
Output Min.
Parameter 6-52 Terminal 42 Skala
Output Maks.
– Relai opsi
– Relai opsi
Relai 1⇒Parameter 5-40 Relai
Fungsi
Relai 2⇒Parameter 5-40 Relai
Fungsi
Relai opsi
7⇒Parameter 5-40 Relai Fungsi
8⇒Parameter 5-40 Relai Fungsi
9⇒Parameter 5-40 Relai Fungsi
130BP066.10
1107 RPM
0 - ** Operasi/Tampilan
1 - ** Beban/Motor
2 - ** Rem
3 - ** Referensi / Ramp
3,84 A 1 (1)
Menu Utama
Cara Memprogram
Q3-20 Referensi digital Q3-21 Referensi analog
22
Parameter 3-02 Referensi Minimum Parameter 3-02 Referensi Minimum
Parameter 3-03 Referensi Maksimum Parameter 3-03 Referensi Maksimum
Parameter 3-10 Referensi preset Parameter 6-10 Terminal 53 Tegangan Rendah
Parameter 5-13 Input Digital Terminal 29 Parameter 6-11 Terminal 53 Tegangan Tinggi
Parameter 5-14 Input Digital Terminal 32 Parameter 6-14 Terminal 53 Ref Rdh/Nilai Ump-Balik
Parameter 5-15 Input Digital Terminal 33 Parameter 6-15 Terminal 53 Ref Tinggi/Nilai Ump-Balik
Tabel 2.3 Q3-2 P'aturan Loop Terbuka
Q3-30 Feedback settings (Pengaturan umpan balik) Q3-31 PID settings (Pengaturan PID)
Parameter 1-00 Mode Kongurasi Parameter 20-81 Kontrol Normal/Terbalik PID
Parameter 20-12 Referensi/Unit Umpan Balik Parameter 20-82 Kecep. Start PID [RPM]
Parameter 3-02 Referensi Minimum Parameter 20-21 Setpoint 1
Parameter 3-03 Referensi Maksimum Parameter 20-93 Perolehan Proporsi. PID
Parameter 6-20 Terminal 54 Tegangan Rendah Parameter 20-94 Waktu Integral PID
Parameter 6-21 Terminal 54 Tegangan Tinggi
Parameter 6-24 Terminal 54 Ref Rdh/Nilai Ump-Balik
Parameter 6-25 Terminal 54 Ref Tinggi/Nilai Ump-Balik
Parameter 6-00 Waktu Istirahat Arus/Teg. t'lalu rdh
Parameter 6-01 Fungsi Istirahat arus/teg. t'lalu rdh
VLT® AQUA Drive FC 202
Q3-2 P'aturan Loop Terbuka
Q3-3 P'aturan Loop Tertutup
Tabel 2.4 Q3-3 P'aturan Loop Tertutup
2.2.8 Menu Cepat, Q4 SmartStart
SmartStart menyala secara otomatis saat konverter
frekuensi dinyalakan untuk kali pertama atau setelah
direset ke pengaturan pabrik. SmartStart memandu
pengguna melewati serangkaian langkah untuk
memastikan kontrol motor dilakukan secara benar dan
paling esien. SmartStart juga dapat dijalankan langsung
via Menu Cepat.
Pengaturan berikut tersedia via SmartStart:
Pompa/motor tunggal: Dalam simpan terbuka
•
atau tertutup.
Penggiliran motor: 2 motor berbagi 1 konverter
•
frekuensi.
Kontrol kaskade dasar: Kontrol kecepatan pompa
•
tunggal dalam sebuah sistem multi pompa.
Sebagai contoh, cara ini adalah solusi murah
untuk set booster.
Master/slave: Kontrol hingga 8 konverter
•
frekuensi dan pompa untuk memastikan
pengoperasian sistem pompa secara keseluruhan
berjalan mulus.
2.2.9 Modus Menu Utama
Tekan [Main Menu] untuk membuka mode menu utama.
Bacaan dalam Ilustrasi 2.15 muncul pada layar.
Bagian tengah dan bawah layar menampilkan daftar grup
parameter, yang dapat dipilih dengan menekan tombol [▲]
dan [▼].
Ilustrasi 2.15 Modus Menu Utama
Setiap parameter memiliki nama dan nomor yang akan
tetap sama apa pun mode pemrogramannya. Dalam mode
menu menu utama, parameter dibagi ke dalam beberapa
grup. Digit pertama pada nomor parameter (dari kiri)
menunjukkan nomor grup parameter.
Semua parameter dapat diubah pada Menu Utama. Akan
tetapi, tergantung
kongurasi (parameter 1-00 Mode
Kongurasi), beberapa parameter mungkin disembunyikan.
20 Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. MG20OB9B
Sebagai contoh, simpal terbuka menyembunyikan semua
parameter PID, dan opsi lain yang diaktifkan menampilkan
lebih banyak grup parameter.
130BP067.10
740RPM
0 -01 Bahasa
[0] Inggris
10,64A 1 [1]
0-0*
Pengaturan Dasar
130BP068.10
740RPM
0 -01 Bahasa
[0] Inggris
10,64 A 1 [1]
0-0*
Pengaturan Dasar
130BP069.10
1- 6*
113 RPM 1,78 A 1(1)
Pengaturan tergantung beban
1 - 60 Beban kecepatan rendah
kompensasi
1
0
0%
130BP070.10
1 - 60 Beban kecepatan rendah
kompensasi
1 0%
Pengaturan tergantung beban 1- 6*
729RPM 6,21A 1(1)
6
130BP073.10
Cara Memprogram Panduan Pemrograman
2.2.10 Pemilihan Parameter
Dalam mode menu menu utama, parameter dibagi ke
dalam beberapa grup. Pilih grup parameter dengan tombol
navigasi.
Setelah memilih grup parameter, pilih sebuah parameter
dengan tombol navigasi.
Bagian tengah layar menampilkan nomor dan nama
parameter, serta nilai parameter yang dipilih.
Ilustrasi 2.16 Pemilihan Parameter
2.2.11 Mengubah Data
Prosedur untuk mengubah data sama dalam mode menu
cepat maupun mode menu utama. Tekan [OK] untuk
mengubah parameter yang dipilih.
Prosedur untuk mengubah data tergantung pada apakah
parameter yang dipilih merupakan nilai data numerik atau
nilai teks.
2.2.13 Mengubah Nilai Data
Jika parameter yang dipilih menampilkan sebuah nilai data
numerik, ubah nilai data yang dipilih dengan tombol
navigasi [◀] [▶] dan [▲] [▼]. Tekan tombol [◀] [▶] untuk
menggerakkan kursor secara horizontal.
Ilustrasi 2.18 Mengubah Nilai Data
Tekan tombol [▲] [▼] untuk mengubah nilai data. [▲]
menambah nilai data, dan [▼] mengurangi nilai data.
Arahkan kursor pada nilai yang akan disimpan dan tekan
[OK].
2 2
2.2.12 Mengubah Nilai Teks
Jika parameter yang dipilih adalah nilai teks, ubahlah nilai
teks dengan tombol navigasi [▲] [▼].
Arahkan kursor pada nilai yang akan disimpan dan tekan
[OK].
Ilustrasi 2.17 Mengubah Nilai Teks
Ilustrasi 2.19 Menyimpan Nilai Data
2.2.14 Perubahan Variabel Nilai Data
Numerik Tak Terhingga
Jika parameter yang dipilih menampilkan sebuah nilai data
numerik, pilih digit dengan [◀] [▶].
Ilustrasi 2.20 Memilih Digit
MG20OB9B Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. 21
Ubah digit yang dipilih secara tak terhingga dan variabel
dengan [▲] [▼].
130BP072.10
957RPM
1-71 High starting torque time
0. s
11.58A 1 (1)
1-7*Start Adjustments
4
e30ba191.11
1
Auto
On
Reset
Hand
On
Off
Menu
Status
Quick
Setup
Main
Menu
Back
2
3
4
OK
On
Alarm
Warn.
Setup
Cara Memprogram
VLT® AQUA Drive FC 202
Kursor menunjukkan digit yang dipilih. Arahkan kursor
pada digit yang akan disimpan dan tekan [OK].
22
Baris tampilan
Pesan status menampilkan ikon dan nilai numerik.
Ilustrasi 2.21 Menyimpan
2.2.15 Nilai, Langkah demi Langkah
Parameter tertentu dapat diubah selangkah-demiselangkah. Ini berlaku untuk:
Parameter 1-20 Daya Motor [kW].
•
Parameter 1-22 Tegangan Motor.
•
Parameter 1-23 Frekuensi Motor.
•
Parameter diubah baik sebagai kelompok nilai data
numerik maupun sebagai nilai data numerik yang
senantiasa berubah.
Lampu indikator
Tombol LCP
[Menu]
Pilih salah satu mode berikut:
Tampilan numerik.
•
Tombol menu dan lampu indikator – untuk
•
fungsi-fungsi mengubah parameter dan switching
antara fungsi tampilan.
Tombol navigasi dan lampu indikator.
•
Tombol operasi dan lampu indikator.
•
LED Hijau/Nyala: Menunjukkan bahwa bagian
•
kontrol sedang aktif.
LED Kuning/Peringatan: Menunjukkan peringatan.
•
LED Merah Berkedip/Alarm: Menunjukkan alarm.
•
Status.
•
Pengaturan cepat
•
Menu utama.
•
2.2.16 Bacaan dan Pemrograman Parameter
Berindeks
Parameter diindeks saat ditempatkan pada rolling stack.
Parameter 15-30 Log Alarm: Kode Kesalahan hingga
parameter 15-32 Log Alarm: Waktu berisi log gangguan,
yang dapat dibaca. Pilih parameter, tekan [OK], lalu tekan
[▲] [▼] untuk melihat log nilai.
Sebagai contoh, parameter 3-10 Referensi preset diubah
sebagai berikut:
1.
Pilih parameter, tekan [OK], lalu tekan [▲] [▼]
untuk melihat nilai terindeks.
2. Untuk mengubah nilai parameter, pilih nilai yang
diindeks dan tekan tombol [OK].
3.
Ubah nilai dengan menekan [▲] [▼].
4. Tekan [OK] untuk menerima pengaturan baru.
5. Tekan [Cancel] untuk membatalkan. Tekan [Back]
untuk meninggalkan parameter.
2.2.17 Cara Memprogram lewat Panel
Kontrol Lokal Numerik
Petunjuk di bawah ini adalah benar untuk LCP numerik
(LCP 101).
Panel kontrol dibagi dalam 4 grup fungsi:
22 Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. MG20OB9B
Ilustrasi 2.22 Tombol LCP
130BP077.10
22.8
rpm
Setup 1
Setup 1
130BP078.10
A 17
e30bp046.12
Hand
On
Off
Auto
On
Reset
Cara Memprogram Panduan Pemrograman
Mode status
Mode status menunjukkan status konverter frekuensi atau
motor.
Jika alarm berbunyi, NLCP akan secara otomatis beralih ke
modus status.
Beberapa alarm mungkin ditampilkan.
CATATAN!
Parameter tidak dapat disalin dengan panel kontrol lokal
numerik LCP-101.
2.2.18 Tombol LCP
Ilustrasi 2.23 Mode Status
Tombol kontrol lokal berada di dasar LCP.
2 2
Ilustrasi 2.25 Menu Utama/Pengaturan Cepat
Ilustrasi 2.24 Alarm
Menu Utama/Pengaturan Cepat
Digunakan untuk memprogram semua parameter atau
parameter dalam Menu Cepat saja (lihat juga penjelasan
untuk LCP 102 dalam bab 2.1 Panel Kontrol Lokal Gras dan
Numerik).
Begitu nilai berkedip, tekan [▲] atau [▼] untuk mengubah
nilai parameter.
1. Tekan [Main Menu] untuk memilih menu utama.
2. Pilih grup parameter [xx-__] dan tekan [OK]
3. Pilih kelompok parameter [__-xx] dan tekan [OK]
4. Apabila parameter merupakan parameter arai,
pilih nomor arai dan tekan [OK]
5. Pilih nilai data yang dibutuhkan dan tekan [OK]
Parameter dengan opsi fungsi menampilkan nilai seperti
[1], [2], dan seterusnya. Penjelasan untuk aneka opsi dapat
dilihat dalam penjelasan parameter individu dalam
bab 3 Keterangan Parameter.
[Back]
Digunakan untuk melangkah mundur.
[▲] [▼] digunakan untuk bermanuver antara perintah dan
di dalam parameter.
Ilustrasi 2.26 Tombol LCP
[Hand On]
Mengaktifkan kontrol konverter frekuensi lewat LCP. [Hand
On] juga menyalakan motor, dan sekarang Anda dapat
memasukkan data kecepatan motor dengan tombol
navigasi. Tombol dapat dipilih sebagai [1] Aktifkan atau [0]
Nonaktifkan via parameter 0-40 [Manual] tombol pd LCP.
Sinyal berhenti eksternal yang diaktifkan dengan sinyal
kontrol, atau eldbus, mengalahkan perintah start via LCP.
Sinyal kontrol berikut tetap aktif saat [Hand On] diaktifkan:
[Hand On] - [O] - [Auto On].
•
Reset.
•
Coast stop inverse.
•
Mundur.
•
Bit pilih pengaturan lsb - Bit pilih pengaturan
•
msb.
Perintah berhenti dari komunikasi seri.
•
Berhenti cepat.
•
Rem DC.
•
[O]
Menghentikan motor yang terhubung. Tombol dapat
dipilih sebagai [1] Aktifkan atau [0] Nonaktifkan via
parameter 0-41 [O] tombol pd LCP.
Jika fungsi berhenti eksternal tidak dipilih dan tombol [O]
tidak aktif, hentikan motor dengan memutus voltase.
MG20OB9B Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. 23

Cara Memprogram
VLT® AQUA Drive FC 202
[Auto On]
Mengaktifkan kontrol konverter frekuensi via terminal
kontrol dan/atau komunikasi seri. Bila sinyal start diberikan
22
pada terminal kontrol dan/atau bus, konverter frekuensi
memulai. Tombol dapat dipilih sebagai [1] Aktifkan atau [0]
Nonaktifkan via parameter 0-42 (Nyala Otomatis) Tombol
pada LCP.
CATATAN!
Sinyal HAND OFF AUTO aktif via input digital lebih
diprioritaskan daripada tombol kontrol [Hand On] dan
[Auto On].
[Reset]
Digunakan untuk mereset konverter frekuensi setelah
alarm (anjlok). Tombol dapat dipilih sebagai [1] Aktifkan
atau [0] Nonaktifkan via parameter 0-43 [Reset] tombol pd
LCP.
2.3.1 Inisialisasi ke Pengaturan Default
Inisialisasi konverter frekuensi ke pengaturan default dalam
2 cara.
Saran inisialisasi (via parameter 14-22 Modus Operasi)
1. Pilih parameter 14-22 Modus Operasi.
2. Tekan [OK].
3. Pilih [2] inisialisasi.
4. Tekan [OK].
5. Hentikan aliran daya dan tunggu sampai layar
mati.
6. Alirkan kembali daya. Konverter frekuensi
sekarang direset.
Parameter 14-22 Modus Operasi menginisialisasi semua
kecuali:
Parameter 14-50 Filter RFI.
•
Parameter 8-30 Protokol.
•
Parameter 8-31 Alamat.
•
Parameter 8-32 Baud Rate Port FC.
•
Parameter 8-35 Penundaan tanggapan Minimum.
•
Parameter 8-36 Penundaan Tanggapan Maks.
•
Parameter 8-37 Penundaan Inter-Char Maks.
•
Parameter 15-00 Jam Pengoperasian hingga
•
parameter 15-05 Keleb. Tegangan.
Parameter 15-20 Log historis: Peristiwa hingga
•
parameter 15-22 Log historis: Waktu.
Parameter 15-30 Log Alarm: Kode Kesalahan hingga
•
parameter 15-32 Log Alarm: Waktu.
Inisialisasi manual
1. Putus dari hantaran listrik dan tunggu hingga
layar mati.
2. 2a Tekan [Status] - [Main Menu] - [OK]
secara bersamaan sambil menghidupkan
LCP 102, tampilan gras.
2b Tekan [Menu] - [OK] secara bersamaan
sambil menghidupkan LCP 101, tampilan
numerik.
3. Lepaskan tombol setelah 5 detik.
4. Konverter frekuensi sekarang diprogram menurut
pengaturan default.
Prosedur ini menginisialisasi semua kecuali:
Parameter 15-00 Jam Pengoperasian.
•
Parameter 15-03 Penyalaan.
•
Parameter 15-04 Kelebihan Suhu.
•
Parameter 15-05 Keleb. Tegangan.
•
CATATAN!
Inisialisasi manual juga mereset pengaturan komunikasi
seri, pengaturan lter RFI (parameter 14-50 Filter RFI), dan
pengaturan log kesalahan.
24 Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. MG20OB9B
Keterangan Parameter Panduan Pemrograman
3 Keterangan Parameter
3.1 Pemilihan Parameter
Parameter dikelompokkan ke dalam aneka grup parameter untuk memudahkan pemilihan parameter yang tepat untuk
mengoptimalkan pengoperasian konverter frekuensi.
Tinjauan umum dari grup parameter
Grup Fungsi
0-** Operasi/Tampilan Parameter terkait dengan fungsi dasar konverter frekuensi, fungsi tombol LCP, dan kongurasi dari
tampilan LCP.
1-** Beban dan Motor Parameter terkait pengaturan motor..
2-** Brake Parameter terkait tur rem dalam konverter frekuensi.
3-** Referensi/Ramp Parameter penanganan referensi, denisi batasan, dan kongurasi reaksi konverter frekuensi terhadap
perubahan.
4-** Batas/Peringatan Parameter untuk mengongurasi batas dan peringatan.
5-** Digital In/Out Parameter untuk mengongurasi input dan output digital.
6-** Analog In/Out Parameter untuk mengongurasi input dan output analog.
8-** Komunikasi dan Opsi Kelompok parameter untuk mengkongurasi komunikasi dan opsi.
9-** PROFIBUS
10-** Fieldbus CAN
13-** Logika Cerdas Grup parameter untuk smart logic control.
14-** Fungsi Khusus Kelompok parameter untuk mengkongurasi fungsi khusus konverter frekuensi.
15-** Info. Frek. Konvrt Grup parameter yang berisi informasi konverter frekuensi seperti data pengoperasian, kongurasi
16-** Pembacaan Data Grup parameter untuk bacaan data, misalnya, referensi aktual, voltase, kontrol, alarm, peringatan, dan
18-** Pembacaan Data 2 Grup parameter ini berisi 10 log perawatan preventif terakhir.
20-** Loop Tertutup Drive Kelompok parameter digunakan untuk mengongurasi kontroler PID simpal tertutup yang
21-** Loop Tertutup Ekst. Parameter untuk mengongurasi 3 kontroler PID simpal tertutup ekstensi.
22-** Fungsi Aplikasi Parameter untuk aplikasi air.
23-** Fungsi berbasis-waktu Parameter untuk langkah yang harus diambil setiap hari atau minggu.
24-** Fungsi aplikasi 2 Parameter untuk bypass konverter frekuensi.
25-** Pengontrol Kaskade Parameter untuk mengongurasi kontroler kaskade dasar untuk kontrol rangkaian beberapa pompa.
26-** Opsi I/O Analog MCB 109
29-** Water Application Functions Parameter untuk mengatur fungsi spesik air.
30-** Fitur Khusus Parameter untuk mengongurasi tur spesik.
31-** Opsi Bypass Parameter untuk mengongurasi fungsi bypass.
35-** Opsi Input Sensor Parameter untuk mengongurasi fungsi input sensor.
Grup parameter untuk parameter spesik Probus (mensyaratkan VLT® PROFIBUS DP MCA 101).
Grup parameter untuk parameter spesik DeviceNet (mensyaratkan VLT® DeviceNet MCA 104)..
perangkat keras, dan versi perangkat lunak.
kata status.
mengontrol frekuensi output dari unit.
Parameter untuk mengongurasi Opsi I/O Analog VLT®MCB 109.
3 3
Tabel 3.1 Grup parameter
Penjelasan dan pemilihan parameter ditampilkan pada LCP
gras atau numerik. Lihat bab 2 Cara Memprogram untuk
penjelasan lebih rinci. Akses parameter dengan menekan [Quick Menu] atau [Main Menu] pada LCP. Menu Cepat secara
khusus digunakan untuk menguji coba unit saat penyalaan dengan menyediakan parameter yang dibutuhkan untuk
memulai pengoperasian. Menu Utama menyediakan akses ke semua parameter untuk pemrograman aplikasi secara rinci.
Semua terminal masukan/keluaran digital dan terminal masukan/keluaran analog bersifat multifungsi. Semua terminal
memiliki fungsi standar pabrik yang cocok untuk hampir semua aplikasi air. Fungsi khusus lain, jika dibutuhkan, wajib
diprogram dalam grup parameter 5-** In/out Digital atau 6-** In/out Analog.
MG20OB9B Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. 25
0-01 Bahasa
Option: Fungsi:
Memilih bahasa yang akan
digunakan pada tampilan layar.
Konverter frekuensi tersedia dalam
2 paket bahasa berbeda. Bahasa
Inggris dan Jerman termasuk ke
dalam kedua paket tersebut. Bahasa
Inggris tidak dapat dihapus atau
diubah.
[0] * English Bagian paket bahasa 1-2.
[1] Deutsch Bagian paket bahasa 1-2.
[2] Francais Bagian paket bahasa 1.
[3] Dansk Bagian paket bahasa 1.
[4] Spanish Bagian paket bahasa 1.
[5] Italiano Bagian paket bahasa 1.
[6] Svenska Bagian paket bahasa 1.
[7] Nederlands Bagian paket bahasa 1.
[10] Chinese Bagian paket bahasa 2.
[20] Suomi Bagian paket bahasa 1.
[22] English US Bagian paket bahasa 1.
[27] Greek Bagian paket bahasa 1.
[28] Bras.port Bagian paket bahasa 1.
[36] Slovenian Bagian paket bahasa 1.
[39] Korean Bagian paket bahasa 2.
[40] Japanese Bagian paket bahasa 2.
[41] Turkish Bagian paket bahasa 1.
[42] Trad.Chinese Bagian paket bahasa 2.
[43] Bulgarian Bagian paket bahasa 1.
[44] Srpski Bagian paket bahasa 1.
[45] Romanian Bagian paket bahasa 1.
[46] Magyar Bagian paket bahasa 1.
[47] Czech Bagian paket bahasa 1.
[48] Polski Bagian paket bahasa 1.
[49] Russian Bagian paket bahasa 1.
[50] Thai Bagian paket bahasa 2.
[51] Bahasa
Indonesia
Bagian paket bahasa 2.
0-01 Bahasa
Option: Fungsi:
[52] Hrvatski Bagian paket bahasa 2.
0-02 Unit Kecepatan Motor
Option: Fungsi:
CATATAN!
Parameter ini tidak dapat
disesuaikan saat motor
berjalan.
Informasi yang ditampilkan pada
layar bergantung pada pengaturan
dalam parameter 0-02 Unit
Kecepatan Motor dan
parameter 0-03 Pengaturan Wilayah.
Pengaturan default
parameter 0-02 Unit Kecepatan
Motor dan
parameter 0-03 Pengaturan Wilayah
bergantung pada kawasan
pengiriman konverter frekuensi ini.
CATATAN!
Mengubah satuan kecepatan
motor mengembalikan
parameter tertentu ke nilai
awalnya. Pilih satuan
kecepatan motor sebelum
mengubah parameter lain.
[0] * RPM Pilih tampilkan variabel dan
parameter kecepatan motor
menggunakan kecepatan motor
(RPM).
[1] Hz Pilih tampilkan variabel dan
parameter kecepatan motor
menggunakan frekuensi output
(Hz).
0-03 Pengaturan Wilayah
Option: Fungsi:
CATATAN!
Parameter ini tidak dapat
disesuaikan saat motor
berjalan.
Output yang ditampilkan
bergantung pada pengaturan dalam
parameter 0-02 Unit Kecepatan
Motor dan
parameter 0-03 Pengaturan Wilayah.
Pengaturan default
Keterangan Parameter
3.2 Parameter 0-** Operasi/Tampilan
Parameter terkait dengan fungsi dasar konverter frekuensi,
fungsi tombol LCP, dan kongurasi dari tampilan LCP.
3.2.1 0-0* Pengaturan Dasar
33
26 Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. MG20OB9B
VLT® AQUA Drive FC 202
0-03 Pengaturan Wilayah
Option: Fungsi:
parameter 0-02 Unit Kecepatan
Motor and
parameter 0-03 Pengaturan Wilayah
bergantung pada kawasan
pengiriman konverter frekuensi ini.
Program ulang pengaturan sesuai
kebutuhan.
Pengaturan yang tidak digunakan
tidak ditampilkan.
[0] Internasional Mengatur parameter 1-20 Daya
Motor [kW] satuan ke [kW] dan nilai
standar parameter 1-23 Frekuensi
Motor ke 50 Hz.
[1] Amerika Utara Mengatur satuan
parameter 1-21 Daya motor [HP]ke
[hp] dan nilai standar
parameter 1-23 Frekuensi Motor ke
60 Hz.
0-04 Status Operasi saat Daya hidup
Option: Fungsi:
Pilih mode pengoperasian setelah
mengalirkan kembali voltase
sumber listrik ke konverter frekuensi
setelah listrik mati selama
beroperasi dalam mode hand on
(lokal).
[0] * Lanjutkan Melanjutkan pengoperasian
konverter frekuensi dengan
referensi lokal lokal dan kondisi
start/stop yang sama. Kondisi start/
stop diterapkan dengan [Hand On]/
[O] pada LCP atau start lokal via
input digital sebelum konverter
frekuensi dimatikan.
[1] Stop paksa,
ref=old
Menghentikan konverter frekuensi
tapi pada saat yang sama
menyimpan referensi kecepatan
lokal sebelum pematian di dalam
memori. Setelah voltase sumber
listrik tersambung kembali dan
setelah menerima perintah start
(menekan [Hand On] atau perintah
start lokal via input digital),
konverter frekuensi direstart dan
beroperasi pada referensi kecepatan
tersimpan.
0-05 Unit Modus Lokal
Option: Fungsi:
Menentukan apakah satuan
referensi lokal ditampilkan sebagai
kecepatan poros motor (dalam
RPM/Hz) atau persen.
[0] * Sbg Unit
Kecep. Motor
[1] %
Keterangan Parameter Panduan Pemrograman
MG20OB9B Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. 27
3.2.2 0-1* Operasi Pengaturan
Tentukan dan kontrol pengaturan parameter secara
individual.
Konverter frekuensi memiliki 4 pengaturan parameter yang
dapat diprogram secara sendiri-sendiri. Ini membuat
penggunaan konverter frekuensi sangat eksibel dan dapat
memenuhi aneka kebutuhan skema kontrol sistem
manajemen air, dan sering dapat menghemat biaya
perlengkapan kontrol eksternal. Sebagai contoh,
pengaturan ini dapat digunakan untuk memrogram
konverter frekuensi agar dapat beroperasi berdasarkan
skema kontrol 1 dalam pengaturan 1 (misalnya pengoperasian siang hari) dan skema kontrol lain dalam pengaturan
lain (misalnya pengoperasian pada malam hari). Selain itu,
pengaturan ini dapat digunakan oleh unit penanganan
udara atau unit OEM untuk menyeragamkan pemrograman
semua konverter frekuensi yang dipasang pada pabrik
mereka untuk beragam model peralatan dalam rentang
tertentu dengan parameter yang sama. Selama produksi/uji
coba, pilih pengaturan
frekuensi.
Pilih pengaturan aktif (yakni, pengaturan yang digunakan
untuk mengoperasikan konverter frekuensi) dalam
parameter 0-10 Pengaturan aktif. LCP selanjutnya
menampilkan pengaturan aktif yang dipilih. Dengan
pengaturan multi, pengaturan dapat diubah saat konverter
frekuensi dalam kondisi beroperasi atau berhenti, lewat
input digital, atau perintah komunikasi seri (misalnya untuk
pengoperasian pada malam hari). Apabila diperlukan untuk
mengubah pengaturan saat unit berjalan, pastikan
parameter 0-12 Pengaturan ini Berhubungan ke sudah
diprogram sesuai kebutuhan. Untuk sebagian besar aplikasi
manajemen air/air limbah, tidak perlu memrogram
parameter 0-12 Pengaturan ini Berhubungan ke meski
perubahan pengaturan dibutuhkan selama pengoperasian.
Akan tetapi, untuk aplikasi kompleks menggunakan eksi-
bilitas penuh pengaturan multi, pemrograman mungkin
diperlukan. Dengan parameter 0-11 Pengaturan
Pemrograman, parameter dalam salah satu pengaturan
dapat diubah tanpa menghentikan pengoperasian
konverter frekuensi dalam pengaturan aktifnya. Pengaturan
aktif bisa saja berbeda dari pengaturan yang sedang diedit.
Menggunakan parameter 0-51 Copy Pengaturan, pengaturan
parameter antar pengaturan dapat disalin untuk
spesik menurut model konverter
3 3
0-10 Pengaturan aktif
Option: Fungsi:
Pilih pengaturan untuk mengoperasikan konverter frekuensi.
Gunakanparameter 0-51 Copy
Pengaturan untuk menyalin
pengaturan ke 1 atau semua
pengaturan lain. Untuk menghindari
konik pengaturan parameter yang
sama dalam dua pengaturan
berbeda, tautkan pengaturan
tersebut
menggunakanparameter 0-12 Pengat
uran ini Berhubungan ke. Hentikan
konverter frekuensi sebelum beralih
antara pengaturan di mana
parameter yang ditandai sebagai
not changeable during operation
(tidak dapat diubah selama
operasional) memiliki nilai yang
berbeda.
Parameter yang tidak dapat diubah
selama pengoperasian ditandai
sebagai FALSE dalam bab 4 Daftar
Parameter.
[0] Pengaturan
pabrik
Tidak dapat dirubah. Ini berisi
seperangkat data Danfoss, dan
dapat digunakan sebagai sumber
data saat pengaturan lain
dikembalikan ke status yang
diketahui.
[1] * Pengaturan 1 [1] Pengaturan 1 hingga [4]
Pengaturan 4 adalah pengaturan 4
parameter yang semua parameternya dapat diprogram.
[2] Pengaturan 2
[3] Pengaturan 3
[4] Pengaturan 4
[9] Pengaturan
multi
Digunakan untuk memilih
pengaturan dari jarak jauh
menggunakan input digital dan
port komunikasi seri. Pengaturan ini
menggunakan pengaturan dari
parameter 0-12 Pengaturan ini
Berhubungan ke.
0-11 Pengaturan Pemrograman
Option: Fungsi:
Pilih pengaturan yang akan diedit
(yaitu diprogram) selama operasi;
pengaturan aktif atau salah satu
pengaturan nonaktif. Angka
pengaturan yang sedang diedit
0-11 Pengaturan Pemrograman
Option: Fungsi:
ditampilkan di LCP di dalam
kurung.
[0] Pengaturan
pabrik
Tidak dapat diedit tetapi berguna
sebagai sumber data untuk
mengembalikan pengaturan lain ke
kondisi yang dikenal.
[1] Pengaturan 1 [1] Pengaturan 1 hingga [4]
Pengaturan 4 dapat diedit secara
bebas selama operasi, terpisah dari
pengaturan aktif.
[2] Pengaturan 2
[3] Pengaturan 3
[4] Pengaturan 4
[9] * Pengaturan
aktif
Pengaturan pengoperasian
konverter frekuensi dapat diedit
selama pengoperasian. Pengeditan
parameter di pengaturan yang
dipilih biasanya dilakukan dari LCP,
namun juga bisa dari port
komunikasi seri lainnya.
0-12 Pengaturan ini Berhubungan ke
Option: Fungsi:
Hanya gunakan parameter ini jika
perubahan pengaturan diperlukan
saat motor sedang berjalan.
Parameter ini memastikan
pengaturan parameter yang tidak
dapat diubah selama pengoperasian sama dalam semua
pengaturan yang relevan.
Untuk mengaktifkan perubahan
bebas konik dari satu pengaturan
ke pengaturan yang lain ketika
konverter frekuensi berjalan,
hubungkan semua pengaturan
yang berisi parameter yang tidak
dapat diubah selama operasi. Link
ini akan menjamin terjadinya
sinkronisasi nilai-nilai parameter
yang tidak dapat diubah selama
operasional saat berpindah dari satu
pengaturan ke pengaturan yang
lain selama operasi. Parameter yang
ditandai sebagai FALSE dalam daftar
parameter (dalam bab 4 Daftar
Parameter) tidak dapat diubah saat
konverter frekuensi sedang berjalan.
Fitur parameter 0-12 Pengaturan ini
Berhubungan ke digunakan saat [9]
Pengaturan multi dalam
parameter 0-10 Pengaturan aktif
Keterangan Parameter
mempercepat uji coba jika pengaturan parameter yang
sama dibutuhkan dalam pengaturan berbeda.
33
28 Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. MG20OB9B
VLT® AQUA Drive FC 202

0-12 Pengaturan ini Berhubungan ke
Option: Fungsi:
dipilih. Gunakan [9] Pengaturan
multi untuk beralih dari pengaturan
1 ke pengaturan lain selama
pengoperasiaan saat motor sedang
berjalan.
Contoh:
Gunakan [9] Pengaturan multi untuk
beralih dari pengaturan 1 ke
pengaturan 2 motor sedang
berjalan. Program parameter dalam
pengaturan 1 dulu, kemudian
pastikan pengaturan 1 dan 2
disinkronkan (atau ditautkan).
Sinkronisasi dapat dilakukan dalam
2 cara:
•
Ubah edit pengaturan ke
[2] Pengaturan 2 dalam
parameter 0-11 Pengaturan
Pemrogramanlalu atur
parameter 0-12 Pengaturan
ini Berhubungan ke ke [1]
Pengaturan 1. Langkah ini
memulai proses pengaitan
(sinkronisasi).
130BP075.10
Ilustrasi 3.1 Penanganan
Pengaturan
•
Selama dalam pengaturan
1, dengan
parameter 0-50 Copy LCP,
salin pengaturan 1 ke
pengaturan 2. Kemudian,
atur
parameter 0-12 Pengaturan
ini Berhubungan ke ke [2]
Pengaturan 2. Ini akan
memulai proses pengaitan.
130BP076.10
Ilustrasi 3.2 Penanganan
Pengaturan
0-12 Pengaturan ini Berhubungan ke
Option: Fungsi:
Setelah sinkronisasi selesai,
parameter 0-13 Pembacaan:
Pengaturan terhubung membaca
pengaturan 1 dan 2 untuk
menunjukkan bahwa semua
parameter yang tidak dapat diubah
selama pengoperasian sekarang
sama antara pengaturan 1 dan
pengaturan 2. Perubahan apa pun
terhadap parameter yang tidak
dapat diubah selama pengoperasian
dalam pengaturan 2, sebagai
contoh parameter 1-30 Resistansi
Stator (Rs), akan secara otomatis
dilakukan pada pengaturan 1.
Perubahan antara pengaturan 1 dan
pengaturan 2 selama pengoperasian sekarang dapat dilakukan.
[0] * Tidak
terhubung
[1] Pengaturan 1
[2] Pengaturan 2
[3] Pengaturan 3
[4] Pengaturan 4
0-13 Pembacaan: Pengaturan terhubung
Arai [5]
Range: Fungsi:
0* [0 - 255 ] Lihat daftar semua pengaturan
yang disinkronkan oleh
parameter 0-12 Pengaturan ini
Berhubungan ke. Parameter memiliki
1 indeks untuk setiap pengaturan
parameter. Nilai tiap indeks
menunjukkan pengaturan yang
disinkronkan dengan pengaturan
parameter tersebut.
Indeks Nilai LCP
0 {0}
1 {1,2}
2 {1,2}
3 {3}
4 {4}
Tabel 3.2 Contoh Sinkronisasi
Pengaturan
Keterangan Parameter Panduan Pemrograman
3 3
MG20OB9B Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. 29

0-14 Pembacaan: P'aturan Prog. / Saluran
Range: Fungsi:
0* [-2147483648
-
2147483647 ]
Lihat pengaturan
parameter 0-11 Pengaturan
Pemrograman untuk masing-masing
dari ke-4 saluran komunikasi
berbeda. Apabila angka ditampilkan
dalam satuan hex, seperti pada LCP,
setiap angka mewakili 1 saluran.
Angka 1-4 menunjukkan angka
pengaturan; F singkatan dari
pengaturan pabrik, dan A adalah
pengaturan aktif. Salurannya adalah
dari kanan ke kiri: LCP, eldbus,
USB, HPFB1.5.
Contoh: Nilai AAAAAA21h artinya
saluran eldbus menggunakan
pengaturan 2 dalam
parameter 0-11 Pengaturan
Pemrograman, LCP menggunakan
pengaturan 1, dan semua saluran
lain menggunakan pengaturan aktif.
0-20 Tampilan Baris 1,1 Kecil
Option: Fungsi:
Pilih variabel untuk ditampilkan
pada baris 1, posisi kiri.
[0] Tidak ada Tidak ada tampilan nilai yang
dipilih
[15] Readout:
actual setup
[37] Teks Tampilan1Menampilkan kata kontrol
[38] Teks Tampilan
2
[39] Teks Tampilan
3
[89] Pembacaan
Tgl. dan Waktu
[953] Kata
Peringatan
Probus
Menampilkan peringatan
komunikasi PROFIBUS.
0-20 Tampilan Baris 1,1 Kecil
Option: Fungsi:
[1005] P'htg.
Kesalahan
Pengiriman
P'baca
Menampilkan jumlah kesalahan
tranmsisi kontrol CAN sejak
penyalaan terakhir.
[1006] P'htg.
Kesalahan
Penerimaan
P'baca
Menampilkan jumlah kesalahan
penerimaan kontrol CAN sejak
penyalaan terakhir.
[1007] Pembacaan
penghitungan
Bus O
Menampilkan jumlah peristiwa buss
o sejak penyalaan terakhir.
[1013] Parameter
Peringatan
Menampilkan kata peringatan
khusus untuk DeviceNet. Satu bit
terpisah ditetapkan ke setiap
peringatan.
[1230] Parameter
Peringatan
[1397] Alert Alarm
Word
[1398] Alert Warning
Word
[1399] Alert Status
Word
[1500] Jam Pengope-
rasian
Menunjukkan jumlah angka jam
dari konverter frekuensi.
[1501] Jam Putaran Melihat jumlah jam kerja motor.
[1502] Penghitung
kWh
Melihat konsumsi sumber listrik
pada kWh.
[1580] Jam Putaran
[1600] Kata Kontrol Menampilkan kata kontrol yang
dikirim dari konverter frekuensi
melalui port komunikasi seri dalam
kode hex.
[1601] * Referensi
[Unit]
Jumlah total referensi (jumlah
digital, analog, preset, bus, referensi
diam, pengejaran, dan pelambatan)
dalam satuan yang dipilih.
[1602] Referensi % Jumlah total referensi (jumlah
digital, analog, preset, bus, referensi
diam, pengejaran, dan pelambatan)
dalam satuan persen.
[1603] Kata Status Menampilkan kata status.
[1605] Nilai Aktual
Utama [%]
Satu atau beberapa peringatan
pada kode hex.
[1609] Pembacaan
custom
Menampilkan bacaan yang
ditentukan pengguna seperti
ditentukan dalam:
Keterangan Parameter
33
3.2.3 0-2* Tampilan LCP
Tentukan variabel yang ditampilkan pada LCP.
CATATAN!
Untuk penjelasan tentang cara menuliskan teks tampilan,
lihat:
•
•
•
30 Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. MG20OB9B
Parameter 0-37 Teks Tampilan 1.
Parameter 0-38 Teks Tampilan 2.
Parameter 0-39 Teks Tampilan 3.
VLT® AQUA Drive FC 202

0-20 Tampilan Baris 1,1 Kecil
Option: Fungsi:
•
Parameter 0-30 Unit
Pembacaan Custom.
•
Parameter 0-31 Nilai Min.
Pembacaan Custom.
•
Parameter 0-32 Nilai Maks.
Pembacaan Custom.
[1610] Daya [kW] Daya aktual yang dikonsumsi oleh
motor pada kW.
[1611] Daya [hp] Daya aktual yang dikonsumsi oleh
motor pada hp.
[1612] Tegangan
Motor
Voltase yang disuplai ke motor.
[1613] Frekuensi Frekuensi motor, yakni, frekuensi
output dari konverter frekuensi
dalam Hz.
[1614] Arus Motor Arus fasa dari motor yang diukur
sebagai nilai efektif.
[1615] Frekuensi [%] Frekuensi motor, yakni, frekuensi
output dari konverter frekuensi
dalam persen.
[1616] Torsi [Nm] Beban motor sekarang sebagai
persentase dari torsi motor terukur.
[1617] Kecepatan
[RPM]
Kecepatan dalam RPM (putaran per
menit), yakni, kecepatan poros
motor dalam simpal tertutup
berdasarkan data pelat nama motor
yang dimasukkan, frekuensi output
dan beban pada konverter
frekuensi.
[1618] Termal Motor Beban termal pada motor yang
dihitung dengan fungsi ETR. Lihat
juga grup parameter 1-9* Suhu
Motor.
[1619] Suhu sensor
KTY
[1622] Torsi [%] Menampilkan torsi aktual yang
dihasilkan dalam persentase.
[1623] Motor Shaft
Power [kW ]
Menampilkan daya mekanis yang
diterapkan ke poros motor.
[1624] Calibrated
Stator
Resistance
[1626] Daya Dilter
[kW]
[1627] Daya Dilter
[hp]
[1630] Tegangan DC
link
Voltase DC-link dalam konverter
frekuensi.
[1631] System Temp.
0-20 Tampilan Baris 1,1 Kecil
Option: Fungsi:
[1632] Energi Brake /
det.
Menunjukkan daya rem yang
ditransfer ke resistor rem eksternal.
Menampilkan nilai seketika.
[1633] Energi Brake /
2 mnt.
Daya rem ditransfer ke resistor rem
eksternal. Daya rata-rata dihitung
secara terus-menerus untuk 120
detik terakhir.
[1634] Suhu Heatsink Menunjukkan suhu heatsink dari
konverter frekuensi. Batas putus
adalah 95 ±5 °C. Pemutusan terjadi
pada suhu 70 ±5 °C.
[1635] Termal
Pembalik
Persentase beban inverter.
[1636] Arus Nominal
Inverter
Arus nominal konverter frekuensi.
[1637] Arus Maks.
Inverter
Arus maksimal konverter frekuensi.
[1638] Kondisi
Pengontrol SL
Status peristiwa yang dieksekusi
oleh kontrol.
[1639] Suhu Kartu
Kontrol
Suhu dari kartu kontrol.
[1642] Service Log
Counter
[1645] Motor Phase U
Current
[1646] Motor Phase V
Current
[1647] Motor Phase
W Current
[1650] Referensi
Eksternal
Jumlah referensi eksternal sebagai
persentase, yaitu, jumlah analog,
denyut, dan bus.
[1652] Umpan Balik
[Unit]
Nilai sinyal dalam satuan dari input
digital terprogram.
[1653] Referensi Digi
Pot
Menampilkan kontribusi dari
potensiometer digital ke umpan
balik referensi aktual.
[1654] Ump. Balik 1
[Unit]
Lihat nilai umpan balik 1. Lihat juga
parameter grup 20-0* Umpan balik.
[1655] Ump. Balik 2
[Unit]
Lihat nilai umpan balik 2. Lihat juga
parameter grup 20-0* Umpan balik.
[1656] Ump. Balik 3
[Unit]
Lihat nilai umpan balik 3. Lihat juga
parameter grup 20-0* Umpan balik.
[1658] Keluaran PID
[%]
Mengembalikan nilai output
kontroler PID simpal tertutup dalam
persen.
[1659] Adjusted
Setpoint
Menampilkan setpoint operasi nyata
setelah dimodikasi oleh
kompensasi aliran. Lihat juga
Keterangan Parameter Panduan Pemrograman
MG20OB9B Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. 31
3 3

0-20 Tampilan Baris 1,1 Kecil
Option: Fungsi:
parameter grup 22-8* Kompensasi
Aliran.
[1660] Input Digital Menampilkan status input digital.
Sinyal lemah=0; Sinyal kuat=1.
Tentang susunan, lihat
parameter 16-60 Input Digital. Bit 0
adalah sangat benar.
[1661] Terminal 53
Pegaturan
switch
Pengaturan dari terminal input 53.
Arus=0; voltase=1.
[1662] Input Analog53Nilai aktual pada input 53 baik
sebagai referensi atau nilai perlindungan.
[1663] Terminal 54
pengaturan
switch
Pengaturan dari terminal input 54
Arus=0; voltase=1.
[1664] Input Analog54Nilai aktual pada input 54 baik
sebagai referensi atau nilai perlindungan.
[1665] Output Analog
42 [mA]
Nilai aktual pada output 42 dalam
mA. Gunakan
parameter 6-50 Terminal 42 Output
untuk memilih variabel yang akan
ditampilkan dalam 42.
[1666] Output Digital
[bin]
Nilai biner semua output digital.
[1667] Input Pulsa
#29 [Hz]
Nilai aktual dari frekuensi yang
diterapkan pada terminal 29
sebagai masukan pulsa.
[1668] Input Pulsa
#33 [Hz]
Nilai aktual dari frekuensi yang
diterapkan pada terminal 33
sebagai masukan pulsa.
[1669] Output Pulsa
#27 [Hz]
Nilai aktual dari pulsa yang
diterapkan ke terminal 27 pada
mode keluaran digital.
[1670] Output Pulsa
#29 [Hz]
Nilai aktual dari pulsa yang
diterapkan ke terminal 29 pada
mode keluaran digital.
[1671] Output Relai
[bin]
Melihat pengaturan dari semua
relai.
[1672] Penghitung A Menampilkan nilai sekarang
penghitung A.
[1673] Penghitung B Menampilkan nilai sekarang
penghitung B.
[1675] Masuk Analog
X30/11
Nilai aktual sinyal pada input
X30/11 (VLT® General Purpose I/O
MCB 101, opsional).
0-20 Tampilan Baris 1,1 Kecil
Option: Fungsi:
[1676] Masuk Analog
X30/12
Nilai aktual sinyal pada input
X30/12 (VLT® General Purpose I/O
MCB 101, opsional).
[1677] Keluar Analog
X30/8 [mA]
Nilai aktual pada output X30/8
(VLT® General Purpose I/O MCB 101,
opsional). Gunakan
parameter 6-60 Keluaran Terminal
X30/8untuk memilih variabel yang
akan ditampilkan.
[1678] Keluaran
Analog X45/1
[mA]
[1679] Keluaran
Analog X45/3
[mA]
[1680] Fieldbus CTW1Kata kontrol (CTW) yang diterima
dari eldbus.
[1682] Fieldbus REF 1 Nilai referensi utama dikirim
dengan kata kontrol lewat jaringan
komunikasi seri, misalnya dari BMS,
PLC atau kontroler lainnya.
[1684] Kom. Pilihan
STW
Kata status opsi komunikasi eldbus
yang diperluas.
[1685] Port FC CTW 1 Kata kontrol (CTW) yang diterima
dari eldbus.
[1686] Port FC REF 1 Kata status (STW) dikirim ke
eldbus.
[1687] Bus Readout
Alarm/Warning
[1689] Congurable
Alarm/Warning
Word
Menampilkan kata alarm/peringatan
yang dikongurasikan dalam
parameter 8-17 Congurable Alarm
and Warningword.
[1690] Kata Alarm Satu atau beberapa alarm dalam
kode hex (digunakan untuk
komunikasi seri).
[1691] Alarm word 2 Satu atau beberapa alarm dalam
kode hex (digunakan untuk
komunikasi seri).
[1692] Kata
Peringatan
Satu atau beberapa peringatan
dalam kode hex (digunakan untuk
komunikasi seri).
[1693] Kata
Peringatan 2
Satu atau beberapa peringatan
dalam kode hex (digunakan untuk
komunikasi seri).
[1694] Ekst. Kata
Status
Satu atau beberapa kondisi status
dalam kode hex (digunakan untuk
komunikasi seri).
Keterangan Parameter
33
32 Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. MG20OB9B
VLT® AQUA Drive FC 202

0-20 Tampilan Baris 1,1 Kecil
Option: Fungsi:
[1695] Kata Status
Ekst. 2
Satu atau beberapa kondisi status
dalam kode hex (digunakan untuk
komunikasi seri).
[1696] Kata Pemeli-
haraan
Bit yang menunjukkan status
peristiwa perawatan preventif
terprogram dalam grup parameter
23-1* Perawatan.
[1697] Alarm Word 3
[1698] Warning Word
3
[1830] Input Analog
X42/1
Menampilkan nilai sinyal yang
diterapkan ke terminal X42/1 pada
kartu I/O analog.
[1831] Input Analog
X42/3
Menampilkan nilai sinyal yang
diterapkan ke terminal X42/3 pada
kartu I/O analog.
[1832] Input Analog
X42/5
Menampilkan nilai sinyal yang
diterapkan ke terminal X42/5 pada
kartu I/O analog.
[1833] Out Analog
X42/7 [V ]
Menampilkan nilai sinyal yang
diterapkan ke terminal X42/7 pada
kartu I/O analog.
[1834] Out Analog
X42/9 [V ]
Menampilkan nilai sinyal yang
diterapkan ke terminal X42/9 pada
kartu I/O analog.
[1835] Out Analog
X42/11 [V ]
Menampilkan nilai sinyal yang
diterapkan ke terminal X42/11 pada
kartu I/O analog.
[1836] Masukan
analog X48/2
[mA]
[1837] Masukan Suhu
X48/4
[1838] Masukan Suhu
X48/7
[1839] Masukan Suhu
X48/10
[1850] Tanpa Sensor
Pembacaan
[unit]
[1860] Digital Input 2
[1870] Mains Voltage
[1871] Mains
Frequency
[1872] Mains
Imbalance
[1875] Rectier DC
Volt.
[2117] Referensi 1
Ekst. [Unit]
Nilai referensi untuk perpanjangan
kontroler simpal tertutup 1.
0-20 Tampilan Baris 1,1 Kecil
Option: Fungsi:
[2118] Ump. Balik 1
Ekst. [Unit]
Nilai sinyal umpan balik untuk
perpanjangan kontroler simpal
tertutup 1.
[2119] Output 1 Ekst.
[%]
Nilai output untuk perpanjangan
kontroler simpal tertutup 1.
[2137] Referensi 2
Ekst. [Unit]
Nilai referensi untuk perpanjangan
kontroler simpal tertutup 2.
[2138] Ump. Balik 2
Ekst. [Unit]
Nilai sinyal umpan balik untuk
perpanjangan kontroler simpal
tertutup 2.
[2139] Output 2 Ekst.
[%]
Nilai output untuk perpanjangan
kontroler simpal tertutup 2.
[2157] Referensi 3
Ekst. [Unit]
Nilai referensi untuk perpanjangan
kontroler simpal tertutup 3.
[2158] Ump. Balik 3
Ekst. [Unit]
Nilai sinyal umpan balik untuk
perpanjangan kontroler simpal
tertutup 3.
[2159] Output 3 Ekst.
[%]
Nilai output untuk perpanjangan
kontroler simpal tertutup 3.
[2230] Daya Tiada
Aliran
Daya tanpa aliran terhitung untuk
kecepatan pengoperasian aktual.
[2316] Pemeliharaan
Teks
[2580] Status
Kaskade
Status pengoperasian kontroler
berjenjang (cascade).
[2581] Status Pompa Status pengoperasian masing-
masing pompa individu yang
dikendalikan dengan kontroler
berjenjang (cascade).
[2791] Cascade
Reference
Output referensi untuk digunakan
dengan konverter frekuensi anak.
[2792] % Of Total
Capacity
Parameter bacaan yang
menunjukkan titik operasional
sistem sebagai persen kapasitas dari
kapasitas total sistem.
[2793] Cascade
Option Status
Parameter bacaan untuk
menampilkan status sistem
berjenjang.
[2794] Status Sistem
Kaskade
[2795] Advanced
Cascade Relay
Output [bin]
[2796] Extended
Cascade Relay
Output [bin]
[2920] Derag
Power[kW]
Keterangan Parameter Panduan Pemrograman
MG20OB9B Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. 33
3 3

0-20 Tampilan Baris 1,1 Kecil
Option: Fungsi:
[2921] Derag
Power[HP]
[2965] Totalized
Volume
[2966] Actual Volume
[2969] Flow
[3110] Kata Status
Bypass
[3111] Jam Berjalan
Bypass
[3401] Tulis PCD 1
dari MCO
[3402] Tulis PCD 2
dari MCO
[3403] Tulis PCD 3
dari MCO
[3404] Tulis PCD 4
dari MCO
[3405] Tulis PCD 5
dari MCO
[3406] Tulis PCD 6
dari MCO
[3407] Tulis PCD 7
dari MCO
[3408] Tulis PCD 8
dari MCO
[3409] Tulis PCD 9
dari MCO
[3410] Tulis PCD 10
dari MCO
[3421] Baca PCD 1
dari MCO
[3422] Baca PCD 2
dari MCO
[3423] Baca PCD 3
dari MCO
[3424] Baca PCD 4
dari MCO
[3425] Baca PCD 5
dari MCO
[3426] Baca PCD 6
dari MCO
[3427] Baca PCD 7
dari MCO
[3428] Baca PCD 8
dari MCO
[3429] Baca PCD 9
dari MCO
[3430] Baca PCD 10
dari MCO
[9920] Fan Ctrl deltaT
[9921] Fan Ctrl
Tmean
0-20 Tampilan Baris 1,1 Kecil
Option: Fungsi:
[9922] Fan Ctrl NTC
Cmd
[9923] Fan Ctrl i-term
[9924] Rectier
Current
[9952] PC Debug 0
[9953] PC Debug 1
[9954] PC Debug 2
[9961] FPC Debug 0
[9962] FPC Debug 1
[9963] FPC Debug 2
[9964] FPC Debug 3
[9965] FPC Debug 4
0-25 Menu Pribadiku
Arai [50]
Range: Fungsi:
Size
related*
[0 - 9999 ] Pilih maksimal 20 parameter yang
akan ditampilkan dalam Q1 Menu
Pribadi, yang dapat diakses via
tombol [Quick Menu] pada LCP.
Parameter ditampilkan pada Q1
Menu Pribadi dengan urutan sesuai
pemrogramannya ke parameter arai
ini. Hapus parameter dengan
mengatur nilai ke 0000.
Sebagai contoh, fungsi ini dapat
digunakan untuk menyediakan
akses yang cepat dan mudah ke 1
atau hingga 50 parameter yang
perlu diubah secara teratur.
Keterangan Parameter
33
34 Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. MG20OB9B
VLT® AQUA Drive FC 202
0-21 Baris Tampilan 1.2 Kecil
Opsi sama seperti pada parameter 0-20 Tampilan Baris 1,1 Kecil.
Pilih variabel untuk ditampilkan pada baris 1, posisi tengah.
0-22 Baris Tampilan 1.3 Kecil
Opsi sama seperti pada parameter 0-20 Tampilan Baris 1,1 Kecil.
Pilih variabel untuk ditampilkan pada baris 1, posisi kanan.
0-23 Baris Tampilan 2 Besar
Opsi sama seperti pada parameter 0-20 Tampilan Baris 1,1 Kecil.
Pilih variabel untuk ditampilkan pada baris 2.
0-24 Baris Tampilan 3 Besar
Opsi sama seperti pada parameter 0-20 Tampilan Baris 1,1 Kecil.
Pilih variabel untuk ditampilkan pada baris 2.

0-30 Unit Pembacaan Custom
Option: Fungsi:
Program nilai untuk ditampilkan di
layar LCP. Relasi bersifat linear,
kuadrat, atau kubik terhadap
kecepatan. Relasi bergantung pada
tipe unit yang dipilih (lihat
Tabel 3.3). Nilai terhitung aktual
dapat dibaca dalam
parameter 16-09 Pembacaan custom,
dan/atau ditampilkan pada layar
dengan memilih [1609] Bacaan
Kustom dalam
parameter 0-20 Tampilan Baris 1,1
Kecil hingga
parameter 0-24 Tampilan Baris 3
Besar.
[0]
[1] * %
[5] PPM
[10] 1/menit
[11] RPM
[12] PULSA/detik
[20] lt/detik
[21] lt/menit
[22] lt/jam
[23] m³/s
[24] m³/min
[25] m³/h
[30] kg/detik
[31] kg/menit
[32] kg/jam
[33] t/menit
[34] t/jam
[40] m/detik
[41] m/menit
[45] m
[60] °C
[70] mbar
[71] bar
[72] Pa
[73] kPa
[74] m WG
[75] mm Hg
[80] kW
[120] GPM
[121] galon/detik
[122] galon/menit
[123] galon/jam
Keterangan Parameter Panduan Pemrograman
3.2.4 0-3* Pbaca. Cust. LCP
Dimungkinkan mengkustomisasi elemen layar untuk
berbagai tujuan:
Bacaan kustom. Nilai proporsional terhadap
•
kecepatan (linear, kuadrat, atau kubik tergantung
satuan yang dipilih dalam parameter 0-30 Unit
Pembacaan Custom).
Tampilkan teks. Untai teks yang tersimpan dalam
•
parameter.
Bacaan kustom
Nilai terhitung yang akan ditampilkan bergantung pada
pengaturan dalam:
•
•
•
•
•
•
Ilustrasi 3.3 Bacaan Kustom
Parameter 0-30 Unit Pembacaan Custom.
Parameter 0-31 Nilai Min. Pembacaan Custom
(linear saja).
Parameter 0-32 Nilai Maks. Pembacaan Custom.
Parameter 4-13 Batasan Tinggi Kecepatan Motor
[RPM].
Parameter 4-14 Batasan Tinggi Kecepatan Motor
[Hz].
Kecepatan aktual
Relasi bergantung pada tipe unit yang dipilih dalam
parameter 0-30 Unit Pembacaan Custom:
Jenit unit Relasi kecepatan
Tanpa Dimensi
Kecepatan
Aliran, volume
Aliran, massa
Kecepatan
Panjang
Suhu
Tekanan Kuadratik
MG20OB9B Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. 35
Jenit unit Relasi kecepatan
Daya Kubik
Tabel 3.3 Relasi Kecepatan untuk Berbagai Tipe Unit
3 3
Linear

0-30 Unit Pembacaan Custom
Option: Fungsi:
[124] CFM
[125] ft³/s
[126] ft³/min
[127] ft³/h
[130] lb/detik
[131] lb/menit
[132] lb/jam
[140] ft/detik
[141] ft/menit
[145] kaki
[160] °F
[170] psi
[171] pon/in²
[172] dalam wg
[173] kaki WG
[174] in Hg
[180] HP
0-31 Nilai Min. Pembacaan Custom
Range: Fungsi:
Size
related*
[ -999999.99 -
100.00
CustomReado-
utUnit]
Dengan parameter ini, nilai
minimum bacaan kustom dapat
dipilih (terjadi pada kecepatan nol).
Nilai selain 0 hanya dapat dipilih
jika menggunakan unit linear dalam
parameter 0-30 Unit Pembacaan
Custom. Untuk satuan kuadrat dan
kubik, nilai minimum adalah 0.
0-32 Nilai Maks. Pembacaan Custom
Range: Fungsi:
100
CustomReadoutUnit*
[ par. 0-31 -
999999.99
CustomReado-
utUnit]
TParameter ini mengatur nilai
maksimum yang akan ditampilkan
saat kecepatan motor telah
mencapai nilai yang ditentukan
untuk parameter 4-13 Batasan Tinggi
Kecepatan Motor [RPM] atau
parameter 4-14 Batasan Tinggi
Kecepatan Motor [Hz] (tergantung
pengaturan dalam
parameter 0-02 Unit Kecepatan
Motor).
0-37 Teks Tampilan 1
Range: Fungsi:
0* [0 - 25 ] Dalam parameter ini, untai teks
individu untuk ditampilkan pada
LCP atau dibaca via komunikasi seri
dapat ditulis.
Untuk menampilkan teks secara
permanen, pilih [37] Tampilkan Teks
1 dalam salah satu parameter
berikut:
0-37 Teks Tampilan 1
Range: Fungsi:
•
Parameter 0-20 Tampilan
Baris 1,1 Kecil.
•
Parameter 0-21 Tampilan
Baris 1,2 Kecil.
•
Parameter 0-22 Tampilan
Baris 1,3 Kecil.
•
Parameter 0-23 Tampilan
Baris 2 Besar.
•
Parameter 0-24 Tampilan
Baris 3 Besar.
•
Parameter 0-37 Teks
Tampilan 1.
Mengubah parameter 12-08 Nama
Host akan mengubah
parameter 0-37 Teks Tampilan 1 -
tapi ini tidak berlaku sebaliknya.
0-38 Teks Tampilan 2
Range: Fungsi:
0* [0 - 25 ] Dalam parameter ini, untai teks
individu untuk ditampilkan pada
LCP atau dibaca via komunikasi seri
dapat ditulis.
Untuk menampilkan teks secara
permanen, pilih [38] Tampilkan Teks
2 dalam:
•
Parameter 0-20 Tampilan
Baris 1,1 Kecil.
•
Parameter 0-21 Tampilan
Baris 1,2 Kecil.
•
Parameter 0-22 Tampilan
Baris 1,3 Kecil.
•
Parameter 0-23 Tampilan
Baris 2 Besar.
•
Parameter 0-24 Tampilan
Baris 3 Besar.
Tekan [▲] atau [▼] untuk
mengubah sebuah karakter. Tekan
[◀] dan [▶] untuk menggerakkan
kursor. Setelah karakter disorot
dengan kursor, karakter ini dapat
diubah. Karakter dapat disisipkan
dengan menempatkan kursor di
antara 2 karakter dan menekan [▲]
atau [▼].
Keterangan Parameter
VLT® AQUA Drive FC 202
33
36 Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. MG20OB9B

0-39 Teks Tampilan 3
Range: Fungsi:
0* [0 - 25 ] Dalam parameter ini, untai teks
individu untuk ditampilkan pada
LCP atau dibaca via komunikasi seri
dapat ditulis. Untuk menampilkan
teks secara permanen, pilih
tampilkan teks 3 dalam:
parameter 0-20 Tampilan Baris 1,1
Kecil, parameter 0-21 Tampilan Baris
1,2 Kecil, parameter 0-22 Tampilan
Baris 1,3 Kecil,
parameter 0-23 Tampilan Baris 2
Besar, atau parameter 0-24 Tampilan
Baris 3 Besar. Tekan [▲] atau [▼]
untuk mengubah sebuah karakter.
Tekan [◀] dan [▶] untuk menggerakkan kursor. Setelah karakter
disorot dengan kursor, karakter ini
dapat diubah. Karakter dapat
disisipkan dengan menempatkan
kursor di antara 2 karakter dan
menekan [▲] atau [▼].
0-40 [Manual] tombol pd LCP
Option: Fungsi:
[0] Tidak Dapat Pilih untuk menonaktifkan tombol.
[1] * Dapat Tombol [Hand On] diaktifkan.
[2] Kata Sandi Hindari start tanpa sengaja dalam
mode hand on. Jika
parameter 0-40 [Manual] tombol pd
LCP disertakan dalam Menu
Pribadiku, tentukan sandi dalam
parameter 0-65 Sandi Menu Pribadi.
Jika tidak, tentukan sandi dalam
parameter 0-60 Kt. sandi Menu
Utama.
[3] Enabled
without OFF
[4] Password
without OFF
[5] Diaktifkan
dengan OFF
[6] Password with
OFF
[9] Enabled, ref =
0
0-41 [O] tombol pd LCP
Option: Fungsi:
[0] Tidak Dapat Pilih untuk menonaktifkan tombol.
[1] * Dapat Tombol [O] diaktifkan.
[2] Kata Sandi Hindari stop tanpa sengaja. Jika
parameter 0-41 [O] tombol pd LCP
disertakan dalam Menu Pribadiku,
tentukan sandi dalam
parameter 0-65 Sandi Menu Pribadi.
Jika tidak, tentukan sandi dalam
parameter 0-60 Kt. sandi Menu
Utama.
0-42 (Nyala Otomatis) Tombol pada LCP
Option: Fungsi:
[0] Tidak Dapat Pilih untuk menonaktifkan tombol.
[1] * Dapat Tombol [Auto on] aktif.
[2] Kata Sandi Hindari start tanpa sengaja dalam
mode auto on. Jika
parameter 0-42 (Nyala Otomatis)
Tombol pada LCP disertakan dalam
Menu Pribadiku, tentukan sandi
dalam parameter 0-65 Sandi Menu
Pribadi. Jika tidak, tentukan sandi
dalam parameter 0-60 Kt. sandi
Menu Utama.
0-43 [Reset] tombol pd LCP
Option: Fungsi:
[0] Tidak Dapat Pilih untuk menonaktifkan tombol.
[1] * Dapat Tombol [Reset] diaktifkan.
[2] Kata Sandi Hindari reset tanpa sengaja. Jika
parameter 0-43 [Reset] tombol pd
LCP disertakan dalam
parameter 0-25 Menu Pribadiku,
tentukan sandi dalam
parameter 0-65 Sandi Menu Pribadi.
Jika tidak, tentukan sandi dalam
parameter 0-60 Kt. sandi Menu
Utama.
[3] Enabled
without OFF
[4] Password
without OFF
[5] Diaktifkan
dengan OFF
Menekan tombol ini mereset
konverter frekuensi, tapi tidak
menyalakannya.
[6] Password with
OFF
Mencegah reset tanpa sengaja.
Setelah sengaja direset, konverter
frekuensi tidak menyala. Lihat opsi
[2] Sandi untuk penjelasan tentang
cara membuat sandi.
Keterangan Parameter Panduan Pemrograman
3 3
3.2.5 0-4* Tombol LCP
Aktifkan, nonaktifkan, dan lindungi tombol individu pada
LCP dengan sandi.
MG20OB9B Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. 37

0-44 Tombol [O/Reset] pada LCP
Aktifkan atau nonaktifkan tombol [O/Reset].
Option: Fungsi:
[0] Tidak Dapat
[1] * Dapat
[2] Kata Sandi
0-45 Kunci [Bypass Drive] pada LCP
Tekan [O] lalu pilih [0] Nonaktif untuk mencegah konverter
frekuensi dihentikan tanpa sengaja. Tekan [O] lalu pilih [2] Sandi
untuk mencegah konverter frekuensi di-bypass tanpa sengaja.
Jika parameter 0-45 Kunci [Bypass Drive] pada LCP disertakan
dalam Menu Cepat, tentukan sandi dalam parameter 0-65 Sandi
Menu Pribadi.
Option: Fungsi:
[0] Tidak Dapat Pilih untuk menonaktifkan tombol.
[1] * Dapat
[2] Kata Sandi
0-50 Copy LCP
Option: Fungsi:
CATATAN!
Parameter ini tidak dapat
disesuaikan saat motor
berjalan.
[0] * Tdk copy
[1] Semua ke LCP Salin semua parameter pada semua
pengaturan dari memori konverter
frekuensi ke memori LCP. Untuk
keperluan servis, salin semua
persiapan ke LCP setelah uji coba.
[2] Semua dari
LCP
Salin semua parameter pada semua
pengaturan dari memori LCP ke
memori konverter frekuensi.
[3] Ukrn. tak
t'gantung
Salin semua parameter tanpa
tergantung ukuran motor. Gunakan
pemilihan terakhir untuk
memprogram beberapa konverter
frekuensi dengan fungsi sama tanpa
mengganggu data motor yang
sudah jadi.
[10] Delete LCP
copy data
0-51 Copy Pengaturan
Option: Fungsi:
[0] * Tdk ada copy Tidak berfungsi.
[1] Salin ke
pengaturan 1
Menyalin semua parameter dalam
pengaturan pemrograman sekarang
(ditentukan dalam
parameter 0-11 Pengaturan
Pemrograman) ke pengaturan 1.
[2] Salin ke
pengaturan 2
Menyalin semua parameter dalam
pengaturan pemrograman sekarang
(ditentukan dalam
parameter 0-11 Pengaturan
Pemrograman) ke pengaturan 2.
[3] Salin ke
pengaturan 3
Menyalin semua parameter dalam
pengaturan pemrograman sekarang
(ditentukan dalam
parameter 0-11 Pengaturan
Pemrograman) ke pengaturan 3.
[4] Salin ke
pengaturan 4
Menyalin semua parameter dalam
pengaturan pemrograman sekarang
(ditentukan
dalamparameter 0-11 Pengaturan
Pemrograman) ke pengaturan 4
[9] Copy ke
semua
Menyalin semua parameter dalam
pengaturan pemrograman sekarang
ke masing-masing pengaturan 1
hingga 4.
0-60 Kt. sandi Menu Utama
Range: Fungsi:
100* [-9999 -
9999 ]
Tentukan sandi untuk mengakses
Menu Utama lewat tombol [Main
Menu]. Jika parameter 0-61 Akses ke
Menu Utama tanpa kt. Sandi diatur
ke [0] Akses penuh, parameter ini
diabaikan.
0-61 Akses ke Menu Utama tanpa kt. Sandi
Option: Fungsi:
[0] * Akses penuh Menonaktifkan sandi yang
ditentukan dalam parameter 0-60 Kt.
sandi Menu Utama. Jika opsi ini
dipilih, parameter 0-60 Kt. sandi
Menu Utama, parameter 0-65 Sandi
Menu Pribadi, dan
parameter 0-66 Akses ke Menu
Pribadi tanpa Sandi diabaikan.
[1] LCP: Baca saja Mencegah perubahan tanpa
sengaja pada parameter Menu
Utama.
Keterangan Parameter
VLT® AQUA Drive FC 202
33
3.2.6 0-5* Copy/simpan
Salin parameter dari dan ke LCP. Gunakan parameter ini
untuk menyimpan dan menyalin pengaturan dari 1
konverter frekuensi ke konverter frekuensi lainnya.
38 Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. MG20OB9B
3.2.7 0-6* Kata Sandi

0-61 Akses ke Menu Utama tanpa kt. Sandi
Option: Fungsi:
[2] LCP: Tak ada
akses
Mencegah penayangan dan
perubahan tanpa sengaja pada
parameter Menu Utama.
[3] Bus: Baca saja Menyediakan akses baca saja ke
parameter via eldbus.
[4] Bus: Tak ada
akses
Menonaktifkan akses ke parameter
via eldbus.
[5] Alt: Baca saja Mencegah perubahan tanpa
sengaja pada parameter Menu
Utama dan menyediakan akses
baca saja ke parameter via eldbus.
[6] Alt: Tidak ada
akses
Mencegah perubahan tanpa
sengaja pada parameter Menu
Utama dan menonaktifkan akses
baca saja ke parameter via eldbus.
0-65 Sandi Menu Pribadi
Range: Fungsi:
200* [-9999 -
9999 ]
Tentukan sandi untuk mengakses
Menu Pribadiku lewat tombol [Quick
Menu]. Jika parameter 0-66 Akses ke
Menu Pribadi tanpa Sandi diatur ke
[0] Akses penuh, parameter ini
diabaikan.
0-66 Akses ke Menu Pribadi tanpa Sandi
Jika parameter 0-61 Akses ke Menu Utama tanpa kt. Sandi diatur
ke [0] Akses penuh, parameter ini diabaikan.
Option: Fungsi:
[0] * Akses penuh Menonaktifkan sandi yang
ditentukan dalam
parameter 0-65 Sandi Menu Pribadi.
[1] LCP: Baca saja Mencegah perubahan tanpa
sengaja pada parameter Menu
Pribadiku.
[3] Bus: Baca saja
[5] Alt: Baca saja
0-67 Akses Kata Sandi Bus
Range: Fungsi:
0* [0 - 9999 ] Kunci konverter frekuensi dapat
dibuka dari bus dengan menulis ke
parameter ini/Perangkat Lunak
Persiapan MCT 10.
0-70 Tanggal dan Waktu
Range: Fungsi:
Size
related*
[ 0 - 0 ] Mengatur tanggal dan jam pada
jam internal. Format yang
digunakan ditetapkan di
parameter 0-71 Format Tgl. dan
parameter 0-72 Format Waktu.
Jika menggunakan VLT® Real-time
Clock MCB 117, waktu disinkronkan
pada pukul 15:00 setiap hari.
Keterangan Parameter Panduan Pemrograman
3.2.8 0-7* Pengaturan Jam
Atur tanggal dan waktu jam internal. Sebagai contoh, jam
internal dapat digunakan untuk:
Jam dapat diprogram untuk daylight saving time/waktu
musim panas, hari kerja/hari libur mingguan, termasuk 20
pengecualian (hari libur dan lain sebagainya). Meski dapat
dilakukan lewat LCP, pengaturan jam juga dapat dilakukan
bersama tindakan berwaktu dan fungsi perawatan
preventif menggunakan alat Perangkat Lunak Persiapan
MCT 10.
Tindakan berwaktu.
•
Log energi.
•
Analisis tren.
•
Cap tanggal/jam pada alarm.
•
Data dalam log
•
Perawatan preventif.
•
3 3
MG20OB9B Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. 39
CATATAN!
Konverter frekuensi tidak dilengkapi fungsi jam
cadangan dan tanggal/jam yang ditetapkan direset ke
default (01.01.2007 00:00 Sen) setelah daya mati, kecuali
modul jam real time dengan cadangan dipasang. Apabila
tidak dilengkapi modul dengan cadangan, hanya
gunakan fungsi jam jika konverter frekuensi diintegrasikan ke sistem eksternal dengan komunikasi seri, di
mana sistem mempertahankan sinkronisasi jam waktu
peralatan kontrol. Dalam parameter 0-79 Masalah Jam,
peringatan dapat diprogram meski jam belum diatur
dengan benar, misalnya, setelah daya mati.
CATATAN!
Untuk pemasangan Opsi I/O Analog VLT®MCB 109 atau
VLT® Real-time Clock MCB 117, cadangan baterai tanggal
dan jam disertakan.

0-71 Format Tgl.
Option: Fungsi:
[0] YYYY-MM-DD Mengatur format tanggal untuk
digunakan pada LCP.
[1] DD-MM-YYYY Mengatur format tanggal untuk
digunakan pada LCP.
[2] MM/DD/YYYY Mengatur format tanggal untuk
digunakan pada LCP.
0-72 Format Waktu
Option: Fungsi:
Mengatur format waktu untuk
digunakan pada LCP.
[0] 24 jam
[1] 12 jam
0-73 Oset Zona Waktu
Range: Fungsi:
0 min* [-780 - 780
min]
Masukkan perubahan zona waktu
berdasarkan UTC. Parameter ini
dibutuhkan untuk menyesuaikan
daylight saving time secara
otomatis.
0-74 DST/Summertime
Option: Fungsi:
Pilih cara menangani daylight
saving time/jam musim panas.
Untuk mengatur DST/jam musim
panas secara manual, masukkan
tanggal mulai dan tanggal selesai
dalam parameter 0-76 DST/Star t
Summertime dan
parameter 0-77 DST/Akhir
Summertime.
[0] * Mati
[2] Manual
0-76 DST/Start Summertime
Range: Fungsi:
Size
related*
[ 0 - 0 ] Mengatur tanggal dan jam
dimulainya DST/jam musim panas.
Tanggal diprogram dengan format
yang dipilih pada
parameter 0-71 Format Tgl..
0-77 DST/Akhir Summertime
Range: Fungsi:
Size
related*
[ 0 - 0 ] Mengatur tanggal dan jam
berakhirnya DST/jam musim panas.
Tanggal diprogram dengan format
yang dipilih pada
parameter 0-71 Format Tgl..
0-79 Masalah Jam
Option: Fungsi:
Mengaktifkan atau menonaktifkan
peringatan jam, ketika jam belum
diatur atau telah di-reset karena
listrik mati dan ketika tidak
dipasangi cadangan. Jika dilengkapi
Opsi I/O Analog VLT® MCB
109pengaturan default adalah [1]
Aktif.
[0] Nonaktif
[1] Aktif
0-81 Hari Kerja
Arai [7]
Arai dengan 7 elemen 0]–[6] ditampilkan di bawah nomor
parameter pada layar. Tekan [OK] dan beralih antar elemen
dengan [▲] dan [▼].
Option: Fungsi:
Atur tiap hari dalam seminggu
antara hari kerja atau non-kerja.
Elemen pertama arai tersebut
adalah Senin. Hari kerja digunakan
untuk tindakan berwaktu.
[0] Tidak
[1] Ya
0-82 Hari Kerja Tambahan
Arai [5]
Arai dengan 5 elemen 0]–[4] ditampilkan di bawah nomor
parameter pada layar. Tekan [OK] dan beralih antar elemen
dengan [▲] dan [▼].
Range: Fungsi:
Size
related*
[ 0 - 0 ] Menentukan tanggal untuk hari
kerja tambahan yang biasanya
adalah hari non- kerja menurut
parameter 0-81 Hari Kerja.
0-83 Bukan Hari Kerja Tambahan
Arai [15]
Arai dengan 15 elemen 0]–[14] ditampilkan di bawah nomor
parameter pada layar. Tekan [OK] dan beralih antar elemen
dengan [▲] dan [▼].
Range: Fungsi:
Size
related*
[ 0 - 0 ] Menentukan tanggal untuk hari
kerja tambahan yang biasanya
adalah hari non- kerja menurut
parameter 0-81 Hari Kerja.
0-84 Time for Fieldbus
Range: Fungsi:
0* [0 -
4294967295 ]
Menampilkan waktu untuk eldbus.
Keterangan Parameter
VLT® AQUA Drive FC 202
33
40 Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. MG20OB9B

0-85 Summer Time Start for Fieldbus
Range: Fungsi:
0* [0 -
4294967295 ]
Menampilkan awal jam musim
panas untuk eldbus.
0-86 Summer Time End for Fieldbus
Range: Fungsi:
0* [0 -
4294967295 ]
Menampilkan akhir jam musim
panas untuk eldbus.
0-89 Pembacaan Tgl. dan Waktu
Range: Fungsi:
0* [0 - 25 ] Menampilkan tanggal dan jam
sekarang. Tanggal dan jam
diperbarui secara kontinu.
Jam tidak akan mulai menghitung
hingga pengaturan yang berbeda
dari standar selesai dibuat dalam
parameter 0-70 Tanggal dan Waktu.
Keterangan Parameter Panduan Pemrograman
3 3
MG20OB9B Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. 41

1-00 Mode Kongurasi
Option: Fungsi:
CATATAN!
Parameter ini tidak dapat
disesuaikan saat motor
berjalan.
CATATAN!
Ketika diatur ke [3] Loop
Tertutup, perintah mundur dan
start mundur tidak akan
membalik arah motor.
[0] Loop Terbuka Kecepatan motor ditentukan
dengan menerapkan referensi
kecepatan atau dengan mengatur
kecepatan dalam mode hand-on.
Simpal terbuka juga digunakan jika
konverter frekuensi merupakan
bagian dari sistem kontrol simpal
tertutup berdasarkan kontroler PID
eksternal yang menyediakan sinyal
referensi kecepatan sebagai output.
[3] Loop Tertutup Kecepatan motor ditentukan oleh
referensi dari kontrol PID
terintegrasi yang mengubah
kecepatan motor seperti dalam
sebuah proses kontrol simpal
tertutup (misalnya tekanan atau
aliran konstan). Kongurasikan
kontroler PID dalam grup parameter
20 ** Umpan-balik atau lewat
Pengaturan Fungsi yang diakses
dengan menekan [Quick Menu].
1-01 Dasar kontrol Motor
Option: Fungsi:
CATATAN!
Parameter ini tidak dapat
disesuaikan saat motor
berjalan.
Pilih prinsip kontrol motor yang
akan digunakan.
[0] U/f Mode motor khusus untuk motor
yang tersambung secara paralel
dalam aplikasi motor khusus. Jika
U/f dipilih, edit karakteristik prinsip
1-01 Dasar kontrol Motor
Option: Fungsi:
kontrol dalam
parameter 1-55 Karakteristik V/f - V
dan parameter 1-56 Karakteristik V/f
- f.
[1] * VVC+ Prinsip kontrol vektor voltase yang
cocok untuk hampir semua aplikasi.
Kelebihan utama pengoperasian
VVC+ penggunaan model motor
yang kokoh.
1-03 Karakteristik Torsi
Option: Fungsi:
[0] Torsi
Kompresor
Untuk kontrol kecepatan dalam
aplikasi bertorsi konstan seperti:
•
Pompa aksial
•
Pompa pergeseran positif.
•
Blower.
Menyediakan voltase, yang dioptimalkan untuk karakteristik beban
torsi konstan motor dalam seluruh
rentang kecepatan.
[1] Torsi Variabel Untuk kontrol kecepatan pompa
sentrifugal dan kipas. Juga
digunakan untuk mengontrol lebih
dari 1 motor dari konverter
frekuensi yang sama (misalnya,
beberapa kipas kondensor atau
kipas menara pendingin).
Menyediakan voltase, yang dioptimalkan untuk karakteristik beban
torsi kuadrat motor.
[2] CT optim.
energi
otomatis
Untuk kontrol kecepatan kompresor
sekrup dan gulungan secara
optimal dan hemat energi.
Menyediakan voltase, yang dioptimalkan untuk karakteristik beban
torsi konstan motor dalam seluruh
rentang hingga 15 Hz.. Selain itu,
tur AEO menyesuaikan voltase
persis berdasarkan situasi beban
yang ada, mengurangi konsumsi
energi dan suara bising dari motor.
Untuk mengoptimalkan performa,
atur cos phi faktor daya motor
dengan benar. Nilai ini diatur di
parameter 14-43 Cosphi Motor.
Parameter memiliki nilai default
yang secara otomatis akan
disesuaikan ketika data motor
diprogram. Pengaturan ini biasanya
memastikan voltase optimum
motor, tetapi jika cos phi faktor
Keterangan Parameter
3.3 Parameter 1-** Beban dan Motor
3.3.1 1-0* Pengaturan Umum
Menentukan apakah konverter frekuensi beroperasi pada
loop terbuka atau loop tertutup.
33
42 Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. MG20OB9B
VLT® AQUA Drive FC 202

1-03 Karakteristik Torsi
Option: Fungsi:
daya motor perlu ditala, fungsi AMA
dapat dijalankan menggunakan
parameter 1-29 Penyesuaian Motor
Otomatis (AMA).
[3] * VT optim.
energi
otomatis
Untuk kontrol kecepatan pompa
sentrifugal dan kipas secara optimal
dan hemat energi. Menyediakan
voltase, yang dioptimalkan untuk
karakteristik beban torsi kuadrat
motor. Selain itu, tur AEO
menyesuaikan voltase persis
berdasarkan situasi beban yang
ada, mengurangi konsumsi energi
dan suara bising dari motor. Untuk
mengoptimalkan performa, atur
faktor daya motor dengan benar.
Nilai ini diatur di
parameter 14-43 Cosphi Motor.
Parameter memiliki nilai default
yang secara otomatis akan
disesuaikan ketika data motor
diprogram. Pengaturan ini biasanya
memastikan voltase optimum
motor, tetapi jika cos phi faktor
daya motor perlu ditala, fungsi AMA
dapat dijalankan menggunakan
parameter 1-29 Penyesuaian Motor
Otomatis (AMA). Jarang parameter
faktor daya motor perlu disesuaikan
secara manual.
1-04 Modus kelebihan beban
Pilih level torsi dalam mode kelebihan beban.
Option: Fungsi:
[0] Torsi tinggi Memberikan toleransi kelebihan
torsi hingga 160% untuk motor
berukuran kecil.
[1] * Torsi normal Memberikan toleransi kelebihan
torsi hingga 110%.
1-06 Searah Jarum Jam
Option: Fungsi:
CATATAN!
Parameter ini tidak dapat
disesuaikan saat motor
berjalan.
1-06 Searah Jarum Jam
Option: Fungsi:
Menurut parameter ini, istilah
searah jarum jam sama dengan
anak panah arah pada LCP.
Digunakan untuk memudahkan
pengubahan arah putaran poros
tanpa mengganti kabel motor.
[0] * Normal Poros motor berputar searah jarum
jam saat konverter frekuensi
tersambung U⇒U, V⇒V, dan W⇒W
ke motor.
[1] Kebalikan Poros motor berputar melawan arah
jarum jam saat konverter frekuensi
tersambung U⇒U, V⇒V, dan W⇒W
ke motor.
Keterangan Parameter Panduan Pemrograman
3.3.2 1-1* Pemilihan Motor
3 3
CATATAN!
Parameter 1-03 Karakteristik Torsi tidak berpengaruh saat
parameter 1-10 Konstruksi Motor = [1] PM,SPM tak
mnyolok.
MG20OB9B Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. 43
CATATAN!
Parameter ini tidak dapat disesuaikan saat motor
berjalan.
Parameter berikut aktif tergantung pengaturan dalam
parameter 1-10 Konstruksi Motor.
Parameter 1-10 Konstr
uksi Motor
Parameter 1-00 Mode
Kongurasi
Parameter 1-03 Karakte
ristik Torsi
Parameter 1-06 Searah
Jarum Jam
Parameter 1-14 Penam
bahan Damping
Parameter 1-15 Waktu
Konstan Filter
Kecepatan Rendah
Parameter 1-16 Waktu
Konstan Filter
Kecepatan Tinggi
Parameter 1-17 Waktu
konstan lter tegangan
Parameter 1-20 Daya
Motor [kW]
Parameter 1-21 Daya
motor [HP]
Parameter 1-22 Tegang
an Motor
[1]
[0]
PM,SPM
Asinkron-
tak
mnyolok
x x x x
x – - -
x x x x
– x x x
– x x x
– x x x
– x x x
x – – –
x – – –
x – – –
[2] PM,
IPM tak
menyolo
k
[3]
Motor
SynRM

Keterangan Parameter
VLT® AQUA Drive FC 202
[1]
Parameter 1-10 Konstr
uksi Motor
Parameter 1-23 Frekuen
si Motor
33
Parameter 1-24 Arus
Motor
Parameter 1-25 Kecepa
tan Nominal Motor
Parameter 1-26 Torsi
Terukur Kontrol Motor
Parameter 1-28 Periksa
Rotasi Motor
Parameter 1-29 Penyes
uaian Motor Otomatis
(AMA)
Parameter 1-30 Resista
nsi Stator (Rs)
Parameter 1-31 Resista
nsi Rotor (Rr)
Parameter 1-35 Reakta
nsi Utama (Xh)
Parameter 1-37 Indukta
nsi sumbu-d (Ld)
Parameter 1-39 Kutub
Motor
Parameter 1-40 EMF
Balik pada 1000 RPM
Parameter 1-44 d-axis
Inductance Sat. (LdSat)
Parameter 1-45 q-axis
Inductance Sat. (LqSat)
Parameter 1-46 Posisi
Penguatan Deteksi
Parameter 1-47 Torque
Calibration
Parameter 1-48 Inducta
nce Sat. Point
Parameter 1-49 q-axis
Inductance Sat. Point
Parameter 1-50 Magnet
isasi motor pada
Kecepatan Nol
Parameter 1-51 Mgnet.
Norm. Kec. Min. [RPM]
Parameter 1-52 Magnet
. Norm. Kec. Min. [Hz]
Parameter 1-58 Flying
Start Test Pulses
Current
Parameter 1-59 Flying
Start Test Pulses
Frequency
[0]
PM,SPM
Asinkron-
tak
mnyolok
x – – –
x x x x
x x x x
– x x x
x x x x
x x x x
x x x x
x – – –
x – – –
– x x x
x x x x
– x x –
– – – x
– – x –
– x x x
– x x x
– – – x
– – x –
x – – –
x – – –
x – – –
x x x –
x x x –
[2] PM,
IPM tak
menyolo
k
[3]
Motor
SynRM
Parameter 1-10 Konstr
uksi Motor
Parameter 1-60 Kompe
nsasi Beban Kecepatan
Rendah
Parameter 1-61 Kompe
nsasi Beban Kecepatan
Tinggi
Parameter 1-62 Kompe
nsasi Slip
Parameter 1-63 Tetapa
n Waktu Kompensasi
Slip
Parameter 1-64 Pereda
man Resonansi
Parameter 1-65 Tetapa
n Waktu peredaman
resonansi
Parameter 1-66 Arus
min. pada Kecepatan
Rendah
Parameter 1-70 Modus
Start
Parameter 1-71 Penund
aan start
Parameter 1-72 Fungsi
start
Parameter 1-73 Start
Melayang
Parameter 1-80 Fungsi
saat Stop
Parameter 1-81 Fungsi
dari kcptn. min. pd
stop [RPM]
Parameter 1-82 Kec.
Min utk Fungsi B'henti
[Hz]
Parameter 1-86 Kecepa
tan Trip Rendah [RPM]
Parameter 1-87 Kecepa
tan Trip Rendah [Hz]
Parameter 1-90 Proteksi
pd termal motor
Parameter 1-91 Kipas
Eksternal Motor
Parameter 1-93 Sumber
Thermistor
Parameter 2-00 Arus
Penahan DC/Prapanas
Parameter 2-01 Arus
Brake DC
Parameter 2-02 Waktu
Pengereman DC
[1]
[0]
PM,SPM
Asinkron-
tak
mnyolok
x – – –
x – – –
x – – –
x – – –
x – – –
x – – –
– x x x
– x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x – x x
x x x x
x – x x
[2] PM,
IPM tak
menyolo
k
[3]
Motor
SynRM
44 Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. MG20OB9B

1-10 Konstruksi Motor
Pilih tipe konstruksi motor.
Option: Fungsi:
[0] * Asinkron Untuk motor asinkron.
[1] PM,SPM tak
mnyolok
Untuk motor dengan magnet
permanen (PM). Motor PM dibagi
menjadi 2 grup, di mana magnet
dipasang pada permukaan (nonsalient) atau interior (salient).
[2] PM, IPM tak
menyolok
[5] SynRM
Keterangan Parameter Panduan Pemrograman
Parameter 1-10 Konstr
uksi Motor
Parameter 2-03 Kecepa
tan Penyelaan Rem DC
[RPM]
Parameter 2-04 Kecepa
tan Penyelaan Rem DC
[Hz]
Parameter 2-06 Arus
Parkir
Parameter 2-07 Waktu
Parkir
Parameter 2-10 Fungsi
Brake
Parameter 2-11 Tahana
n Brake
Parameter 2-12 Batas
Daya Brake (kW)
Parameter 2-13 Pemant
auan Daya Brake
Parameter 2-15 Cek
Brake
Parameter 2-16 Arus
Maks. rem AC
Parameter 2-17 Pengon
trol tegangan berlebih
Parameter 4-10 Arah
Kecepatan Motor
Parameter 4-11 Batasa
n Rendah Kecepatan
Motor [RPM]
Parameter 4-12 Batasa
n Rendah Kecepatan
Motor [Hz]
Parameter 4-13 Batasa
n Tinggi Kecepatan
Motor [RPM]
Parameter 4-14 Batasa
n Tinggi Kecepatan
Motor [Hz]
Parameter 4-16 Mode
Motor Batasan Torsi
Parameter 4-17 Mode
generator Batasan Torsi
Parameter 4-18 Batas
Arus
Parameter 4-19 Frekuen
si Output Maks.
Parameter 4-58 Fungsi
Fasa Motor Hilang
Parameter 14-40 Tingk
at VT
MG20OB9B Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. 45
[0]
Asinkron-
x – x x
x – x x
– x x x
– x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x – – –
x x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x – x x
x – – –
[1]
PM,SPM
tak
mnyolok
[2] PM,
IPM tak
menyolo
k
[3]
Motor
SynRM
Parameter 1-10 Konstr
uksi Motor
Parameter 14-41 Magn
etisasi Minimum AEO
Parameter 14-42 Frekue
nsi Minimum AEO
Parameter 14-43 Cosph
i Motor
[1]
[0]
PM,SPM
Asinkron-
tak
mnyolok
x – – –
x – – –
x – – –
[2] PM,
IPM tak
menyolo
k
[3]
Motor
SynRM
3.3.3 Pengaturan Motor Asinkron
Masukkan motor data berikut. Mencari informasi pada
pelat nama motor.
1. Parameter 1-20 Daya Motor [kW] atau
parameter 1-21 Daya motor [HP].
2. Parameter 1-22 Tegangan Motor.
3. Parameter 1-23 Frekuensi Motor.
4. Parameter 1-24 Arus Motor.
5. Parameter 1-25 Kecepatan Nominal Motor.
Agar dapat diperoleh performa optimum di modus VVC+,
tambahan data motor diperlukan untuk pengaturan
parameter berikut. Mencari data di lembar data motor
(data ini tidak tersedia di pelat nama motor). Menjalankan
adaptasi motor otomatis lengkap (AMA) menggunakan
parameter 1-29 Penyesuaian Motor Otomatis (AMA) [1]
Aktifkan AMA Lengkap atau masukkan parameter secara
manual. Parameter 1-36 Resistansi Kerugian Besi (Rfe) selalu
dimasukkan secara manual.
1. Parameter 1-30 Resistansi Stator (Rs).
2. Parameter 1-31 Resistansi Rotor (Rr).
3. Parameter 1-33 Reaktansi Kebocoran Stator (X1).
4. Parameter 1-34 Reaktansi Kebocoran Rotor (X2).
5. Parameter 1-35 Reaktansi Utama (Xh).
3 3

Keterangan Parameter
VLT® AQUA Drive FC 202
6. Parameter 1-36 Resistansi Kerugian Besi (Rfe).
Aplikasi spesik-penyetelan ketika sedang berjalan VVC
VVC+ yang paling robust modus kontrol. Dalam
kebanyakan situasi, hal ini menyediakan performa
33
optimum tanpa penyetelan selanjutnya. Menjalankan AMA
lengkap untuk kinerja yang maksimal.
+
3.3.4 Pengaturan Motor PM
Bagian ini menjelaskan cara mengatur motor PM.
Langkah-langkah pemrograman awal
Untuk mengaktifkan pengoperasian motor PM, pilih [1]
PM,SPM tak mnyolok atau [2] PM, IPM tak menyolok dalam
parameter 1-10 Konstruksi Motor.
Memprogram data motor
Setelah memilih Motor PM, motor PM-parameter yang
terkait di grup parameter 1-2* Data motor, 1-3* Lanjut. Data
Motor, dan 1-4* Lanjut Data Motor II aktif.
Data yang diperlukan dapat ditemukan di pelat nama
motor dan di lembar data motor.
Memprogram parameter berikut di daftar pemesanan:
1. Parameter 1-24 Arus Motor.
2. Parameter 1-25 Kecepatan Nominal Motor.
3. Parameter 1-26 Torsi Terukur Kontrol Motor.
4. Parameter 1-39 Kutub Motor.
Menjalankan AMA lengkap menggunakan
parameter 1-29 Penyesuaian Motor Otomatis (AMA) [1]
aktifkan AMA lengkap.
CATATAN!
Motor IPM mungkin kehilangan beberapa nilai
induktansi pada pelat nama atau lembar data. Jalankan
AMA untuk memperoleh nilai yang valid.
Pengujian Operasi Motor
CATATAN!
Saat menggunakan AMA, pastikan nilai
parameter 1-40 EMF Balik pada 1000 RPM dihitung
menggunakan kecepatan normal.
Apabila AMA lengkap tidak dilakukan, kongurasikan
parameter berikut secara manual:
1. Parameter 1-30 Resistansi Stator (Rs)
Masukkan resistansi lilitan kabel ke stator
bersama (Rs). Apabila hanya-baris data baris
tersedia, bagi yang garis-garis nilai dengan 2
untuk mendapatkan yang garis nilai umum.
2. Parameter 1-37 Induktansi sumbu-d (Ld)
Masukkan garis-ke-umum induksi axis langsung
dari motor PM.
Apabila hanya-baris data baris tersedia, bagi yang
garis-garis nilai dengan 2 untuk mendapatkan
yang garis nilai umum.
3. Parameter 1-40 EMF Balik pada 1000 RPM.
Masukkan back EMF garis ke garis Motor PM
pada 1000 RPM (nilai RMS). Back EMF merupakan
voltase yang dihasilkan oleh motor PM pada saat
Deteksi Rotor
Fungsi ini merupakan pilihan yang disarankan untuk
aplikasi di mana motor memulai dari stasioner, contohnya
pompa atau konveyor. Pada beberapa motor, suara
terdengar pada saat konverter frekuensi menjalankan
deteksi rotor. Hal ini tidak membahayakan motor.
Parkir
Fungsi ini merupakan pilihan yang disarankan untuk
aplikasi di mana motor perputaran pada kecepatan lambat,
contoh windmilling pada aplikasi kipas. Parameter 2-06 Arus
Parkir dan parameter 2-07 Waktu Parkir dapat disesuaikan.
Peningkatan pengaturan pabrik dari parameter ini untuk
aplikasi dengan inersia tinggi.
Aplikasi spesik-penyetelan ketika sedang berjalan VVC
VVC+ yang paling robust modus kontrol. Dalam
kebanyakan situasi, hal ini menyediakan performa
optimum tanpa penyetelan selanjutnya. Menjalankan AMA
lengkap untuk kinerja yang maksimal.
Mulai motor pada kecepatan nominal. Apabila aplikasi
tidak berjalan dengan baik, periksa pengaturan VVC+ PM.
Tabel 3.4 berisi rekomendasi untuk berbagai aplikasi.
tidak ada drive yang tersambung dan poros
diputar secara eksternal. Ini biasanya ditentukan
untuk kecepatan motor nominal atau untuk 1000
RPM yang terukur diantara 2 baris. Apabila nilai
tidak tersedia untuk kecepatan motor 1000 RPM,
hitunglah nilai yang benar sebagai berikut:
Jika, misalnya, back EMF adalah 320 V pada
1800 RPM, nilainya dapat dihitung pada
1000 RPM sebagai berikut:
Back EMF= (Voltase/RPM)x1000 =
(320/1800)x1000 = 178.
4. Untuk motor IPM. Kongurasikan nilai reluktansi
dalam parameter berikut:
Parameter 1-38 q-axis Inductance (Lq).
•
Parameter 1-44 d-axis Inductance Sat.
•
(LdSat).
Parameter 1-45 q-axis Inductance Sat.
•
(LqSat).
Parameter 1-49 q-axis Inductance Sat.
•
Point.
1. Memulai motor pada kecepatan rendah (100–200
RPM). Apabila motor tidak berputar, periksa
instalasi, program umum, dan data motor.
2. Periksa apabila fungsi start pada
parameter 1-70 Modus Start sesuai aplikasi
persyaratan.
+
46 Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. MG20OB9B

Keterangan Parameter Panduan Pemrograman
Aplikasi P'aturan
Aplikasi Inersia rendah
I
Beban/IMotor
Aplikasi Inersia rendah
50>I
Aplikasi Inersia tinggi
I
Beban/IMotor
Beban tinggi pada
kecepatan rendah
<30% (rating kecepatan)
Tabel 3.4 Rekomendasi untuk Berbagai Aplikasi
<5
Beban/IMotor
>50
>5
Tambah parameter 1-17 Waktu
konstan lter tegangan oleh faktor 5–
10.
Mengurangi
parameter 1-14 Penambahan
Damping.
Mengurangi parameter 1-66 Arus
min. pada Kecepatan Rendah
(<100%).
Menjaga angka standar.
Menambah
parameter 1-14 Penambahan
Damping, parameter 1-15 Waktu
Konstan Filter Kecepatan Rendah, dan
parameter 1-16 Waktu Konstan Filter
Kecepatan Tinggi
Tambah parameter 1-17 Waktu
konstan lter tegangan
Menambah parameter 1-66 Arus min.
pada Kecepatan Rendah untuk
menyesuaikan torsi awal. 100% arus
menyediakan torsi nominal sebagai
torsi awal. Bekerja pada tingkat arus
tinggi daripada 100% untuk waktu
lebih lama dapat menyebabkan
motor untuk kelebihan panas.
Apabila motor berjalan pada kecepatan tertentu, naikkan
parameter 1-14 Penambahan Damping. Naikkan nilai
dengan langkah berikut. Tergantung pada motor,
parameter ini dapat ditetapkan ke 10–100% lebih tinggi
daripada nilai standar.
3.3.5 Pengaturan Motor SynRM
Bagian ini menjelaskan cara mengatur motor reluktansi
sinkron.
Langkah-langkah pemrograman awal
Untuk mengaktifkan pengoperasian motor SynRM, pilih
opsi [5] SynRM dalam parameter 1-10 Konstruksi Motor.
Memprogram data motor
Setelah memilih opsi [5] SynRM, parameter terkait motor
SynRM dalam grup parameter 1-2* Motor Data, 1-3* Lanjut.
Data Motor, dan 1-4* Lanjut Data Motor II aktif.
Data yang diperlukan dapat ditemukan di pelat nama
motor dan di lembar data motor.
Memprogram parameter berikut di daftar pemesanan:
1. Parameter 1-24 Arus Motor.
2. Parameter 1-25 Kecepatan Nominal Motor.
3. Parameter 1-26 Torsi Terukur Kontrol Motor.
4. Parameter 1-39 Kutub Motor.
Menjalankan AMA lengkap menggunakan
parameter 1-29 Penyesuaian Motor Otomatis (AMA) [1]
aktifkan AMA lengkap.
Apabila AMA lengkap tidak dilakukan, kongurasikan
parameter berikut secara manual:
1. Parameter 1-30 Resistansi Stator (Rs)
Masukkan resistansi lilitan kabel ke stator
bersama (Rs). Apabila hanya-baris data baris
tersedia, bagi yang garis-garis nilai dengan 2
untuk mendapatkan yang garis nilai umum.
2. Parameter 1-37 Induktansi sumbu-d (Ld)
Masukkan induktansi kabel ke sumbu langsung
bersama motor.
Apabila hanya-baris data baris tersedia, bagi yang
garis-garis nilai dengan 2 untuk mendapatkan
yang garis nilai umum.
3. Parameter 1-38 q-axis Inductance (Lq).
Masukkan induktansi kabel ke sumbu kuadratur
bersama motor.
Apabila hanya-baris data baris tersedia, bagi yang
garis-garis nilai dengan 2 untuk mendapatkan
yang garis nilai umum.
4. Parameter 1-44 d-axis Inductance Sat. (LdSat).
Masukkan nilai kabel ke saturasi bersama
induktansi sumbu-d. Ini nilai pada arus lebih
tinggi daripada arus nominal di mana induktansi
tersaturasi sepenuhnya.
5. Parameter 1-48 Inductance Sat. Point.
Masukkan persentase arus nominal di mana
induktansi sumbu-d tersaturasi separuhnya, yaitu,
nilainya setengah dari nilai non-saturasi dan
saturasi.
CATATAN!
Motor mungkin kehilangan beberapa nilai induktansi
pada pelat nama atau lembar data. Jalankan AMA untuk
memperoleh nilai yang valid.
Pengujian Operasi Motor
1. Memulai motor pada kecepatan rendah (100–200
RPM). Apabila motor tidak berputar, periksa
instalasi, program umum, dan data motor.
2. Periksa apabila fungsi start pada
parameter 1-70 Modus Start sesuai aplikasi
persyaratan.
Deteksi Rotor
Fungsi ini merupakan pilihan yang disarankan untuk
aplikasi di mana motor memulai dari stasioner, contohnya
pompa atau konveyor. Pada beberapa motor, suara
terdengar pada saat konverter frekuensi menjalankan
deteksi rotor. Hal ini tidak membahayakan motor.
3 3
MG20OB9B Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. 47

1-14 Penambahan Damping
Range: Fungsi:
Size
related*
[0 - 250 %] Parameter ini menstabilkan motor
PM sehingga berjalan mulus dan
stabil. Nilai gain peredaman
mengontrol performa dinamis
motor PM. Semakin rendah gain
peredaman semakin tinggi
performa dinamis dan semakin
tinggi gain peredaman semakin
rendah perfoma dinamis. Jika gain
peredaman terlalu tinggi atau
rendah, kontrol menjadi tidak stabil.
Performa dinamis yang dihasilkan
Keterangan Parameter
VLT® AQUA Drive FC 202
Parkir
3.3.6
1-1* VVC+ PM/SynRM
Fungsi ini merupakan pilihan yang disarankan untuk
aplikasi di mana motor perputaran pada kecepatan lambat,
contoh windmilling pada aplikasi kipas. Parameter 2-06 Arus
Parkir dan parameter 2-07 Waktu Parkir dapat disesuaikan.
Peningkatan pengaturan pabrik dari parameter ini untuk
33
aplikasi dengan inersia tinggi.
Aplikasi spesik-penyetelan ketika sedang berjalan VVC
VVC+ yang paling robust modus kontrol. Dalam
kebanyakan situasi, hal ini menyediakan performa
optimum tanpa penyetelan selanjutnya. Menjalankan AMA
lengkap untuk kinerja yang maksimal.
Mulai motor pada kecepatan nominal. Jika aplikasi tidak
berjalan dengan baik, periksa pengaturan VVC+ SynRM.
Tabel 3.5 beris rekomendasi untuk aneka aplikasi.
Aplikasi P'aturan
Aplikasi Inersia rendah
I
Beban/IMotor
Aplikasi Inersia rendah
50>I
Aplikasi Inersia tinggi
I
Beban/IMotor
Beban tinggi pada
kecepatan rendah
<30% (rating kecepatan)
<5
Beban/IMotor
>50
>5
Tambah parameter 1-17 Waktu
konstan lter tegangan oleh faktor
5–10.
Mengurangi
parameter 1-14 Penambahan
Damping.
Mengurangi parameter 1-66 Arus
min. pada Kecepatan Rendah
(<100%).
Menjaga angka standar.
Menambah
parameter 1-14 Penambahan
Damping, parameter 1-15 Waktu
Konstan Filter Kecepatan Rendah, dan
parameter 1-16 Waktu Konstan Filter
Kecepatan Tinggi
Tambah parameter 1-17 Waktu
konstan lter tegangan
Menambah parameter 1-66 Arus min.
pada Kecepatan Rendah untuk
menyesuaikan torsi awal. 100% arus
menyediakan torsi nominal sebagai
torsi awal. Bekerja pada tingkat arus
tinggi daripada 100% untuk waktu
lebih lama dapat menyebabkan
motor untuk kelebihan panas.
Parameter kontrol standar untuk inti kontrol VVC+ PMSM
dioptimalkan untuk aplikasi dan beban inersia dalam
rentang 50>Jl/Jm>5. Jl adalah beban inersia dari aplikasi
dan Jm adalah inersia mesin.
Untuk aplikasi dengan inersia rendah (Jl/Jm<5), naikkan
+
parameter 1-17 Waktu konstan lter tegangan dengan faktor
5–10 dan sesekali parameter 1-14 Penambahan Damping
untuk meningkatkan performa dan stabilitas.
Untuk aplikasi dengan inersia tinggi (Jl/Jm>50) naikkan
parameter 1-15 Waktu Konstan Filter Kecepatan Rendah,
parameter 1-16 Waktu Konstan Filter Kecepatan Tinggi, dan
parameter 1-14 Penambahan Damping untuk meningkatkan
performa dan stabilitas.
Untuk beban tinggi pada kecepatan rendah (<30% rating
kecepatan), naikkan parameter 1-17 Waktu konstan lter
tegangan akibat non-linearitas inverter pada kecepatan
rendah.
1-11 Model Motor
Option: Fungsi:
Nilai pabrik diatur secara otomatis untuk motor
yang dipilih. Jika nilai default Std. Asynchron
digunakan, tentang pengaturan secara manual
menurut pilihan parameter 1-10 Konstruksi
Motor.
[1] Std.
Asinkron
[2] Std. PM,
non salient
[10] Danfoss
OGD LA10
[11] Danfoss
OGD V210
Model motor default saat [0] Asinkron dipilih
dalam parameter 1-10 Konstruksi Motor.
Dapat dipilih saat [1] PM, non-salient SPM
dipilih dalam parameter 1-10 Konstruksi Motor.
Dapat dipilih saat [1] PM, non-salient SPM
dipilih dalam parameter 1-10 Konstruksi Motor.
Hanya tersedia untuk T4, T5 dalam 1.5–3 kW.
Pengaturan dimuat secara otomatis untuk
motor spesik ini.
Dapat dipilih saat [1] PM, non-salient SPM
dipilih dalam parameter 1-10 Konstruksi Motor.
Hanya tersedia untuk T4, T5 dalam 0.75–3 kW.
Pengaturan dimuat secara otomatis untuk
motor spesik ini.
Tabel 3.5 Rekomendasi untuk Berbagai Aplikasi
Apabila motor berjalan pada kecepatan tertentu, naikkan
parameter 1-14 Penambahan Damping. Naikkan nilai
dengan langkah berikut. Tergantung pada motor,
parameter ini dapat ditetapkan ke 10–100% lebih tinggi
daripada nilai standar.
48 Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. MG20OB9B

1-14 Penambahan Damping
Range: Fungsi:
berhubungan dengan data mesin
dan tipe beban.
1-15 Waktu Konstan Filter Kecepatan Rendah
Range: Fungsi:
Size
related*
[0.01 - 20 s] Konstanta waktu peredaman lter
high-pass menentukan waktu
respons terhadap langkah beban.
Kontrol cepat dapat diperoleh
dengan memperkecil konstanta
waktu peredaman. Akan tetapi, jika
nilai terlalu rendah, kontrol menjadi
tidak stabil. Konstanta waktu ini
digunakan di bawah 10% rating
kecepatan.
1-16 Waktu Konstan Filter Kecepatan Tinggi
Range: Fungsi:
Size
related*
[0.01 - 20 s] Konstanta waktu peredaman lter
high-pass menentukan waktu
respons terhadap langkah beban.
Kontrol cepat dapat diperoleh
dengan memperkecil konstanta
waktu peredaman. Akan tetapi, jika
nilai terlalu rendah, kontrol menjadi
tidak stabil. Konstanta waktu ini
digunakan di atas 10% rating
kecepatan.
1-17 Waktu konstan lter tegangan
Range: Fungsi:
Size
related*
[0.001 - 2 s] Konstanta waktu lter voltase catu
digunakan untuk mengurangi efek
riak frekuensi tinggi dan resonansi
sistem dalam perhitungan voltase
catu mesin. Tanpa lter ini, riak
dalam arus dapat mendistorsi
voltase hasil perhitungan dan
mengurangi stabilitas sistem.
1-20 Daya Motor [kW]
Range: Fungsi:
Size
related*
[ 0.09 -
2000.00 kW]
CATATAN!
Parameter ini tidak dapat
disesuaikan saat motor
berjalan.
Masukkan daya motor nominal
dalam kW menurut data pelat nama
motor. Nilai default sesuai dengan
output terukur nominal unit.
Tergantung pilihan yang dibuat
dalam parameter 0-03 Pengaturan
Wilayah, parameter 1-20 Daya Motor
[kW] atau parameter 1-21 Daya
motor [HP] ditampilkan.
1-21 Daya motor [HP]
Range: Fungsi:
Size
related*
[ 0.09 -
500.00 hp]
CATATAN!
Parameter ini tidak dapat
disesuaikan saat motor
berjalan.
Masukkan daya motor nominal
dalam hp menurut data pelat nama
motor. Nilai default sesuai dengan
output terukur nominal unit.
Tergantung pilihan yang dibuat
dalam parameter 0-03 Pengaturan
Wilayah, parameter 1-20 Daya Motor
[kW] atau parameter 1-21 Daya
motor [HP] ditampilkan.
Keterangan Parameter Panduan Pemrograman
3.3.7 1-2* Data Motor
Grup parameter ini berisi data input dari pelat nama pada
motor yang terhubung.
CATATAN!
Pengubahan nilai parameter ini akan mempengaruhi
pengaturan parameter lain.
CATATAN!
Parameter berikut tidak berdampak saat
parameter 1-10 Konstruksi Motor diatur ke [1] PM,SPM tak
mnyolok, [2] PM, IPM tak menyolok, [5] Sync. Reluktansi:
Parameter 1-20 Daya Motor [kW].
•
Parameter 1-21 Daya motor [HP].
•
Parameter 1-22 Tegangan Motor.
•
Parameter 1-23 Frekuensi Motor.
•
3 3
MG20OB9B Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. 49

1-22 Tegangan Motor
Range: Fungsi:
Size
related*
[ 10 - 1000
V]
CATATAN!
Parameter ini tidak dapat
disesuaikan saat motor
berjalan.
Masukkan voltase motor nominal
dalam menurut data pelat nama
motor. Nilai default sesuai dengan
output terukur nominal unit.
1-23 Frekuensi Motor
Range: Fungsi:
Size
related*
[20 - 1000
Hz]
CATATAN!
Parameter ini tidak dapat
disesuaikan saat motor
berjalan.
Pilih nilai frekuensi motor dari data
pelat nama motor. Untuk operasi 87
Hz dengan motor 230/400 V, atur
data pelat nama untuk 230 V/50 Hz.
Sesuaikan parameter 4-13 Batasan
Tinggi Kecepatan Motor [RPM] dan
parameter 3-03 Referensi Maksimum
untuk aplikasi 87 Hz.
1-24 Arus Motor
Range: Fungsi:
Size
related*
[ 0.10 -
10000.00 A]
CATATAN!
Parameter ini tidak dapat
disesuaikan saat motor
berjalan.
Masukkan nilai arus motor nominal
dari data pelat nama motor. Data
digunakan untuk menghitung torsi
motor, proteksi termal motor, dll.
1-25 Kecepatan Nominal Motor
Range: Fungsi:
Size
related*
[100 - 60000
RPM]
CATATAN!
Parameter ini tidak dapat
disesuaikan saat motor
berjalan.
Masukkan nilai kecepatan motor
nominal dari data pelat nama
motor. Data digunakan untuk
menghitung kompensasi motor
otomatis.
1-26 Torsi Terukur Kontrol Motor
Range: Fungsi:
Size
related*
[1 - 10000.0
Nm]
Masukkan nilai dari data pelat
nama motor. Nilai default sama
dengan rating output nominal.
Parameter ini hanya tersedia saat
parameter 1-10 Konstruksi Motor
diatur ke [1] PM, non-salient SPM,
yaitu, parameter ini valid untuk
motor PM and motor SPM nonsalient saja.
1-28 Periksa Rotasi Motor
Option: Fungsi:
PERINGATAN
VOLTASE TINGGI
Konverter frekuensi
mengandung voltase tinggi
saat terhubung ke sumber
listrik AC, catu daya DC, atau
pembagi beban.
•
Akhiri aliran sumber
listrik sebelum
melepas kabel fasa
motor.
CATATAN!
Setelah cek putaran motor
diaktifkan, layar menampilkan:
Catatan! Motor dapat berjalan
dgn arah keliru.
Tekan [OK], [Back] atau
[Cancel] untuk mengabaikan
pesan dan menampilkan pesan
baru: Tekan [Hand On] untuk
start motor. Tekan [Cancel]
untuk membatalkan. Menekan
[Hand On] menyalakan motor
pada frekuensi 5 Hz dalam
arah maju dan layar
menampilkan: Motor berjalan.
Periksa apakah arah rotasi
motor sudah benar. Tekan [O]
untuk menghentikan motor.
Penekanan [O] akan menstop motor dan me-reset
parameter 1-28 Periksa Rotasi
Motor. Apabila arah putaran
tidak benar, tukar kedua kabel
fasa motor.
Setelah pemasangan dan
sambungan motor, fungsi ini
Keterangan Parameter
33
VLT® AQUA Drive FC 202
50 Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. MG20OB9B

1-28 Periksa Rotasi Motor
Option: Fungsi:
memungkinkan arah rotasi motor
yang benar untuk diverikasi.
Perintah bus atau input digital,
kecuali interlock eksternal dan Safe
Torque O (STO) (jika ada),
dikesampingkan dengan mengaktifkan fungsi ini.
[0] * Mati Cek putaran motor tidak aktif.
[1] Aktif Cek putaran motor aktif.
1-29 Penyesuaian Motor Otomatis (AMA)
Option: Fungsi:
Fungsi AMA mengoptimalkan
performa motor dinamis dengan
mengoptimalkan motor lanjut
secara otomatis
parameter 1-30 Resistansi Stator (Rs)
hingga parameter 1-35 Reaktansi
Utama (Xh)) saat motor dalam
kondisi stasioner.
[0] * Padam Tidak berfungsi.
[1] AMA berhasil Menjalankan AMA resistansi stator
RS, resistansi rotor Rr, reaktansi
kebocoran stator X1, reaktansi
kebocoran rotor X2 dan reaktansi
utama X
h
[2] AMA dapat
dikurangi
Jalankan AMA yang berkurang dari
tahanan stator Rs hanya pada
sistem. Pilih opsi ini apabila lter LC
digunakan antara konverter
frekuensi dan motor.
[3] Enable
Complete
AMA II
Menjalankan fungsi lanjut AMA II
untuk resistansi stator RS, resistansi
rotor Rr, reaktansi kebocoran stator
X1, reaktansi kebocoran rotor X
2
dan reaktansi utama Xh Untuk hasil
yang lebih baik, perbarui
parameter 14-43 Cosphi Motor.
[4] Enable
Reduced AMA
II
Menjalankan fungsi AMA II dasar
untuk resistansi stator Rs dalam
sistem saja. Pilih opsi ini apabila
lter LC digunakan antara konverter
frekuensi dan motor.
Keterangan Parameter Panduan Pemrograman
dasar. Lihat juga bab tentang Adaptasi Motor Otomatis
dalam panduan rancangan. Setelah urutan normal,
tampilan membaca: Tekan [OK] untuk menyelesaikan AMA.
Setelah [OK] ditekan, konverter frekuensi siap dioperasikan.
CATATAN!
Parameter 1-29 Penyesuaian Motor Otomatis (AMA) tidak
berpengaruh saat parameter 1-10 Konstruksi Motor = [1]
PM,SPM tak mnyolok.
Aktifkan fungsi AMA dengan menekan [Hand On] setelah
memilih [1] Aktifkan AMA lengkap atau [2] Aktifkan AMA
MG20OB9B Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. 51
CATATAN!
Untuk adaptasi terbaik konverter frekuensi,
•
jalankan AMA pada motor dingin.
AMA tidak dapat dijalankan sewaktu motor
•
berjalan.
CATATAN!
Hindari pembentukan torsi eksternal selama AMA.
CATATAN!
Jika salah satu pengaturan dalam grup parameter 1-2*
Data Motor diubah, parameter 1-30 Resistansi Stator (Rs)
untuk parameter 1-39 Kutub Motor kembali ke
pengaturan default.
Parameter ini tidak dapat disesuaikan saat motor
berjalan.
CATATAN!
AMA lengkap sebaiknya dijalankan tanpa lter,
sementara AMA dasar dengan lter.
Lihat bab tentang Automatic Motor Adaptation (Adaptasi
Motor Otomatis) dalam VLT® AQUA Drive FC 202Panduan
Rancangan.
3.3.8 1-3* Lamjut Data Motor
Parameter untuk data motor lanjut. Data motor dalam
parameter 1-30 Resistansi Stator (Rs) to parameter 1-39 Kutub
Motor wajib cocok dengan motor yang bersangkutan agar
motor dapat berjalan optimal. Pengaturan default adalah
angka-angka yang didasarkan kepada nilai parameter
motor umum dari motor standar normal. Apabila
parameter motor tidak ditetapkan secara benar, sistem
konverter frekuensi dapat mengalami kerusakan. Jika data
motor lanjut tidak diketahui, sebaiknya lakukan AMA. Lihat
bab tentang Automatic Motor Adaptation (Adaptasi Motor
Otomatis) dalam VLT® AQUA Drive FC 202Panduan
Rancangan. Prosedur AMA menyesuaikan semua parameter
motor kecuali momen inersia rotor dan resistansi
kehilangan besi (parameter 1-36 Resistansi Kerugian Besi
(Rfe)).
3 3

130BA375.11
R
S
P 1-30
R
1s
X
h
P1-35
R
1
X
2
X
1
U
1
I
1
I
R
s
Par. 1-30
L
d
Par. 1-37
ω
sLqIq
U
d
I
R
s
Par. 1-30
L
q=Ld
Par. 1-37
ω
sLdId
+
-
+ -
+ -
Par. 1-40
ω
sλPM
U
q
q
q
d-axis equivalent circuit
q-axis equivalent circuit
130BC056.11
1-30 Resistansi Stator (Rs)
Range: Fungsi:
Size
related*
[ 0.0140 -
140.0000
Ohm]
CATATAN!
Parameter ini tidak dapat
disesuaikan saat motor
berjalan.
Untuk motor PM, lihat penjelasan
dalam parameter 1-37 Induktansi
sumbu-d (Ld).
Tetapkan nilai resistansi stator.
Masukkan nilai dari lembar data
motor atau lakukan AMA pada
motor dingin.
1-31 Resistansi Rotor (Rr)
Range: Fungsi:
Size
related*
[ 0.0100 -
100.0000
Ohm]
CATATAN!
Parameter 1-31 Resistansi Rotor
(Rr) tidak berdampak saat
parameter 1-10 Konstruksi
Motor diatur ke [1] PM,SPM tak
mnyolok, [5] Sync. Reluktansi.
Atur nilai resistansi motor Rr untuk
meningkatkan performa poros
menggunakan salah satu dari
beberapa metode berikut:
•
Jalankan AMA pada motor
dingin. Konverter frekuensi
mengukur nilai tersebut
dari motor. Semua
kompensasi direset ke
100%.
•
Masukkan nilai Rr secara
manual. Dapatkan nilai
dari penyuplai motor.
•
Gunakan pengaturan
default Rr. Konverter
frekuensi membuat
pengaturan berdasarkan
data pelat nama motor.
1-33 Reaktansi Kebocoran Stator (X1)
Range: Fungsi:
Size
related*
[ 0.0400 -
400.0000
Ohm]
CATATAN!
Parameter ini hanya relevan
untuk motor asinkron.
Tetapkan reaktansi kebocoran stator
motor menggunakan salah satu
metode berikut:
•
Jalankan AMA pada motor
dingin. Konverter frekuensi
mengukur nilai tersebut
dari motor.
•
Masukkan nilai X1 secara
manual. Dapatkan nilai
dari penyuplai motor.
•
Gunakan pengaturan
default X1. Konverter
frekuensi membuat
pengaturan berdasarkan
data pelat nama motor.
LihatIlustrasi 3.4.
Keterangan Parameter
VLT® AQUA Drive FC 202
33
Ilustrasi 3.4 Diagram Ekuivalen Motor untuk Motor Asinkron
Ilustrasi 3.5 Diagram Rangkaian Ekuivalen Motor untuk Motor
PM Non-salient
52 Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. MG20OB9B

1-33 Reaktansi Kebocoran Stator (X1)
Range: Fungsi:
CATATAN!
Nilai parameter ini diperbarui
setiap kalibrasi torsi selesai
dilakukan jika opsi [3] start
ke-1 dengan penyimpanan atau
opsi [4] Setiap kali start dengan
penyimpanan dipilih dalam
parameter 1-47 Torque
Calibration.
1-34 Reaktansi Kebocoran Rotor (X2)
Range: Fungsi:
Size
related*
[ 0.0400 -
400.0000
Ohm]
CATATAN!
Parameter ini hanya relevan
untuk motor asinkron.
Tetapkan reaktansi kebocoran rotor
motor menggunakan salah satu
metode berikut:
•
Jalankan AMA pada motor
dingin. Konverter frekuensi
mengukur nilai tersebut
dari motor.
•
Masukkan nilai X2 secara
manual. Dapatkan nilai
dari penyuplai motor.
•
Gunakan pengaturan
default X2. Konverter
frekuensi membuat
pengaturan berdasarkan
data pelat nama motor.
LihatIlustrasi 3.4.
CATATAN!
Nilai parameter ini diperbarui
setiap kalibrasi torsi selesai
dilakukan jika opsi [3] start
ke-1 dengan penyimpanan atau
opsi [4] Setiap kali start dengan
penyimpanan dipilih dalam
parameter 1-47 Torque
Calibration.
1-35 Reaktansi Utama (Xh)
Range: Fungsi:
Size
related*
[ 1.0000 -
10000.0000
Ohm]
CATATAN!
Parameter 1-35 Reaktansi
Utama (Xh) tidak berpengaruh
saatparameter 1-10 Konstruksi
Motor= [1] PM,SPM tak
mnyolok.
CATATAN!
Parameter ini tidak dapat
disesuaikan saat motor
berjalan.
Tetapkan reaktansi utama motor
menggunakan salah satu metode
ini:
•
Jalankan AMA pada motor
dingin. Konverter frekuensi
mengukur nilai tersebut
dari motor.
•
Masukkan nilai Xh secara
manual. Dapatkan nilai
dari penyuplai motor.
•
Gunakan pengaturan
default Xh. Konverter
frekuensi membuat
pengaturan berdasarkan
data pelat nama motor.
1-36 Resistansi Kerugian Besi (Rfe)
Range: Fungsi:
Size
related*
[ 0 -
10000.000
Ohm]
CATATAN!
Parameter ini tidak dapat
disesuaikan saat motor
berjalan.
Masukkan nilai resistansi kehilangan
besi ekivalen (RFe) untuk mengkompensasi kehilangan besi pada
motor.
Nilai RFe tidak dapat ditemukan
dengan menjalankan AMA.
Nilai RFe khususnya penting pada
aplikasi kontrol torsi. Apabila R
Fe
tidak diketahui, biarkan
parameter 1-36 Resistansi Kerugian
Besi (Rfe) pada pengaturan default.
Keterangan Parameter Panduan Pemrograman
3 3
MG20OB9B Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. 53

1-37 Induktansi sumbu-d (Ld)
Range: Fungsi:
Size
related*
[0.000 -
1000.000 mH]
CATATAN!
Parameter ini hanya aktif saat
parameter 1-10 Konstruksi
Motor diatur ke [1] PM,SPM tak
mnyolok.
Masukkan nilai induktans sumbu-d.
Lihat nilai ini dari lembar data
motor PM.
Line to common (starpoint)
Line-to-line values
Rs and Ld
Rs and Ld
e30bc008.12
Permanent magnet motors
e30bc009.11
Line-to-line back
EMF in RMS value
at 1000 RPM
speed (mech)
1-38 q-axis Inductance (Lq)
Range: Fungsi:
Size
related*
[0.000 - 1000
mH]
CATATAN!
Parameter ini tidak dapat
disesuaikan saat motor
berjalan.
Atur nilai induktansi sumbu q. Lihat
lembar data motor PM.
Keterangan Parameter
VLT® AQUA Drive FC 202
CATATAN!
Produsen motor menyediakan nilai resistansi stator
(parameter 1-30 Resistansi Stator (Rs)) dan induktansi
sumbu d (parameter 1-37 Induktansi sumbu-d (Ld)) dalam
spesikasi teknis sebagai antara titik dan bersama (titik
33
Untuk motor asinkron, nilai resistansi stator, dan induktansi
sumbu-d umumnya disebutkan dalam spesikasi teknis
sebagai antara saluran dan bersama (line and common)
(titik start). Untuk motor PM, nilai resistansi stator, dan
induktansi sumbu-d umumnya disebutkan dalam spesikasi
teknis sebagai antara saluran-saluran (line-line). Motor PM
umumnya dibangun untuk koneksi bintang.
start) atau titik antar titik. Tidak ada standar umum.
Berbagai pengaturan resistansi lilitan stator dan induksi
ditampilkan dalam Ilustrasi 3.6. Danfoss konverter
frekuensi selalu mensyaratkan nilai line to common. Back
EMF sebuah motor PM didenisikan sebagai EMF induksi
yang berkembang pada salah satu dari 2 fasa lilitan
stator motor yang berjalan beban. Konverter frekuensi
Danfoss selalu membutuhkan nilai RMS garis-ke-garis
(line-to-line) yang diukur pada kecepatan 1000 RPM,
kecepatan mekanis rotasi. Ini ditunjukkan dalam
Ilustrasi 3.7.
Parameter 1-30 Resistansi
Stator (Rs)
(garis ke bersama).
Parameter 1-37 Induktansi
sumbu-d (Ld)
(garis ke bersama).
Parameter 1-40 EMF Balik
pada 1000 RPM
RMS (nilai garis ke garis).
Tabel 3.6 Parameter Terkait Motor PM.
Resistansi lilitan stator (Rs) yang
dihasilkan oleh parameter ini sama
dengan resistansi stator motor
asinkron. Resistansi stator ini
ditetapkan untuk pengukuran garis ke
bersama. Untuk data garis ke garis,
jika resistansi stator diukur antara 2
titik, bagi 2.
Parameter ini memberikan induksi axis
langsung dari motor PM. Induktansi
sumbu-d ditetapkan untuk
pengukuran fasa ke bersama. Untuk
data garis ke garis, jika resistansi
stator diukur antara 2 titik, bagi 2.
Parameter ini menghasilkan back
EMFke seluruh terminal stator motor
PM pada kecepatan mekanis 1000
RPM. Kecepatan ini ditentukan antara
titik-ke-titik dan dinyatakan dalam
nilai RMS.
Ilustrasi 3.6 Pengaturan Lilitan Stator
Ilustrasi 3.7 Batasan Parameter Mesin Back EMF Motor PM
54 Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. MG20OB9B

1-39 Kutub Motor
Range: Fungsi:
Size
related*
[2 - 132 ]
CATATAN!
Parameter ini tidak dapat
disesuaikan saat motor
berjalan.
Masukkan jumlah kutub motor.
Kutub~nn@ 50 Hz ~nn@ 60 Hz
2 2700–2880 3250–3460
4 1350–1450 1625–1730
6 700–960 840–1153
Tabel 3.7 Jumlah Kutub dan
Frekuensi Terkait
Tabel 3.7 memperlihatkan jumlah
kutub untuk kisaran kecepatan
normal dari berbagai jenis motor.
Tentukan motor yang dirancang
untuk frekuensi lain secara terpisah.
Nilai kutub motor selalu angka
genap, karena menunjukkan total
jumlah kutub, dan bukan pasangan
kutub. Konverter frekuensi
membuat pengaturan awal
parameter 1-39 Kutub Motor
berdasarkan
parameter 1-23 Frekuensi Motor dan
parameter 1-25 Kecepatan Nominal
Motor.
1-40 EMF Balik pada 1000 RPM
Range: Fungsi:
Size
related*
[ 10 - 9000V]Atur back EMF nominal motor saat
berjalan pada kecepatan 1000 RPM.
Parameter ini hanya aktif saat
parameter 1-10 Konstruksi Motor
diatur ke [1] PM,SPM tak mnyolok.
1-44 d-axis Inductance Sat. (LdSat)
Range: Fungsi:
Size
related*
[0 - 1000
mH]
Masukkan saturasi induktansi Ld.
Secara ideal, parameter ini memiliki
nilai yang sama seperti
parameter 1-37 Induktansi sumbu-d
(Ld). Jika produsen motor
menyediakan kurva induksi,
masukkan nilai induksi 200% dari
nilai nominalnya.
1-45 q-axis Inductance Sat. (LqSat)
Range: Fungsi:
Size
related*
[0 - 1000
mH]
Parameter ini sama dengan saturasi
induktansi Lq. Secara ideal,
parameter ini memiliki nilai yang
sama seperti parameter 1-38 q-axis
Inductance (Lq). Jika produsen
motor menyediakan kurva induksi,
masukkan nilai induksi 200% dari
nilai nominalnya.
1-47 Torque Calibration
Option: Fungsi:
Gunakan parameter ini untuk
mengoptimalkan estimasi torsi
dalam rentang kecepatan penuh.
Estimasi torsi ini didasarkan atas
daya poros, P
shaft
= Pm - Rs x I2.
Pastikan nilai Rs sudah benar. Nilai
RS dalam rumus ini sama dengan
kehilangan daya pada motor, kabel,
dan konverter frekuensi. Saat
parameter ini aktif, konverter
frekuensi menghitung nilai R
S
selama penyalaan, memastikan
estimasi torsi dan performa optimal
diperoleh. Gunakan tur ini saat
tidak mungkin menyesuaikan
parameter 1-30 Resistansi Stator (Rs)
pada masing-masing konverter
frekuensi untuk mengompensasi
panjang kabel, kehilangan pada
konverter frekuensi, dan penyimpangan suhu pada motor.
[0] * O
[1] 1st start after
pwr-up
Mengalibrasi start pertama setelah
penyalaan dan menyimpan nilai ini
sampai direset lewat siklus daya.
[2] Every start Mengalibrasi setiap kali start
dilakukan, mengompensasi potensi
perubahan suhu motor sejak startup terakhir. Nilai ini direset setelah
siklus daya.
[3] 1st start with
store
Konverter frekuensi mengalibrasi
torsi saat start pertama setelah
penyalaan. Opsi ini digunakan
untuk memperbarui parameter
motor.
•
Parameter 1-30 Resistansi
Stator (Rs).
•
Parameter 1-33 Reaktansi
Kebocoran Stator (X1).
•
Parameter 1-34 Reaktansi
Kebocoran Rotor (X2).
Keterangan Parameter Panduan Pemrograman
MG20OB9B Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. 55
3 3

1-47 Torque Calibration
Option: Fungsi:
•
Parameter 1-37 Induktansi
sumbu-d (Ld).
[4] Every start
with store
Konverter frekuensi mengalibrasi
torsi setiap kali start dilakukan,
mengompensasi potensi perubahan
suhu motor sejak start-up terakhir.
Opsi ini digunakan untuk
memperbarui parameter motor.
•
Parameter 1-30 Resistansi
Stator (Rs).
•
Parameter 1-33 Reaktansi
Kebocoran Stator (X1).
•
Parameter 1-34 Reaktansi
Kebocoran Rotor (X2).
•
Parameter 1-37 Induktansi
sumbu-d (Ld).
1-48 Inductance Sat. Point
Range: Fungsi:
Size
related*
[1 - 500 %] Masukkan titik saturasi induktansi.
1-49 q-axis Inductance Sat. Point
Range: Fungsi:
Size
related*
[ 0 - 200 %]
CATATAN!
Jalankan AMA untuk mengatur
nilai parameter ini. Edit nilai
secara manual hanya jika
aplikasi mensyaratkan nilai
selain yang ditentukan oleh
AMA.
Masukkan titik saturasi induktansi
Sumbu q. Konverter frekuensi
menggunakan nilai ini untuk
mengoptimalkan performa motor
IPM.
Pilih nilai yang cocok dengan titik
di mana induktansi sama dengan
nilai parameter 1-38 q- axis
Inductance (Lq) dan
parameter 1-45 q-axis Inductance
Sat. (LqSat), sebagai persentase arus
nominal.
1-50 Magnetisasi motor pada Kecepatan Nol
Range: Fungsi:
100 %* [0 - 300 %]
CATATAN!
Parameter 1-50 Magnetisasi
motor pada Kecepatan Nol
tidak berpengaruh saat
parameter 1-10 Konstruksi
Motor = [1] PM,SPM tak
mnyolok.
Gunakan parameter ini bersama
parameter 1-51 Mgnet. Norm. Kec.
Min. [RPM] untuk memperoleh
beban panas berbeda atas motor
saat berjalan pada kecepatan
rendah.
Masukkan nilai yang merupakan
persentase dari arus magnitisasi
terukur. Apabila pengaturan terlalu
rendah, torsi pada poros motor
dapat berkurang.
Ilustrasi 3.8 Arus Magnetisasi
1-51 Mgnet. Norm. Kec. Min. [RPM]
Range: Fungsi:
Size
related*
[10 - 300
RPM]
CATATAN!
Parameter 1-51 Mgnet. Norm.
Kec. Min. [RPM] tidak
berpengaruh saat
parameter 1-10 Konstruksi
Motor = [1] PM,SPM tak
mnyolok.
Tetapkan kecepatan yang
diperlukan untuk arus magnetisasi
normal. Jika kecepatan diatur lebih
rendah daripada kecepatan selip
motor, parameter 1-50 Magnetisasi
motor pada Kecepatan Nol dan
parameter 1-51 Mgnet. Norm. Kec.
Min. [RPM] menjadi tidak penting.
Gunakan parameter ini bersama
parameter 1-50 Magnetisasi motor
pada Kecepatan Nol. Lihat Tabel 3.7.
Keterangan Parameter
VLT® AQUA Drive FC 202
3.3.9 1-5* T. T'gant. beban
33
56 Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. MG20OB9B

1-52 Magnet. Norm. Kec. Min. [Hz]
Range: Fungsi:
Size
related*
[ 0.3 - 10.0
Hz]
CATATAN!
Parameter 1-52 Magnet. Norm.
Kec. Min. [Hz] tidak
berpengaruh saat
parameter 1-10 Konstruksi
Motor = [1] PM,SPM tak
mnyolok.
Tetapkan frekuensi yang diperlukan
untuk arus magnetisasi normal. Jika
frekuensi diatur lebih rendah
daripada frekuesi selip motor,
parameter 1-50 Magnetisasi motor
pada Kecepatan Nol dan
parameter 1-51 Mgnet. Norm. Kec.
Min. [RPM] tidak aktif.
Gunakan parameter ini bersama
parameter 1-50 Magnetisasi motor
pada Kecepatan Nol. Lihat Tabel 3.7.
1-55 Karakteristik V/f - V
Arai [6]
Range: Fungsi:
Size
related*
[0 - 1000 V] Masukkan voltase pada tiap titik
frekuensi untuk membentuk
karakteristik U/f yang cocok dengan
motor secara manual.
Titik-titik frekuensi ditentukan
dalam parameter 1-56 Karakteristik
V/f - f.
Parameter ini adalah paramater arai
[0–5] dan hanya dapat diakses saat
parameter 1-01 Dasar kontrol Motor
diatur ke [0] U/f.
1-56 Karakteristik V/f - f
Arai [6]
Range: Fungsi:
Size
related*
[ 0 - 1000.0
Hz]
Masukkan titik frekuensi untuk
membentuk karakteristik U/f yang
cocok dengan motor secara manual.
Voltase pada titap titik ditentukan
dalam parameter 1-55 Karakteristik
V/f - V.
Parameter ini adalah paramater arai
[0–5] dan hanya dapat diakses saat
parameter 1-01 Dasar kontrol Motor
diatur ke [0] U/f.
1-58 Flying Start Test Pulses Current
Range: Fungsi:
Size
related*
[ 0 - 200 %] Atur magnitudo arus magnetisasi
untuk denyut yang digunakan
mendeteksi arah motor. Rentang
nilai dan fungsi bergantung pada
parameter 1-10 Konstruksi Motor:
[0] Asinkron: [0–200%]
Mengurangi nilai ini mengurangi
torsi yang dihasilkan - 100% artinya
arus motor nominal penuh. Dalam
hal ini, nilai default-nya adalah 30%.
[1] PM non-salient: [0–40%]
20% adalah pengaturan umum
yang disarankan untuk motor PM.
Semakin tinggi nilai semakin bagus
performa. Akan tetapi, pada motor
dengan back EMF di atas 300 VLL
(rms) pada kecepatan nominal dan
induktansi lilitan tinggi (di atas 10
mH), sebaiknya gunakan nilai yang
lebih rendah untuk mencegah
kesalahan estimasi kecepatan.
Parameter ini aktif saat
parameter 1-73 Start Melayang
diaktifkan.
Keterangan Parameter Panduan Pemrograman
3 3
Ilustrasi 3.9 Karakteristik U/f
MG20OB9B Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. 57

1-59 Flying Start Test Pulses Frequency
Range: Fungsi:
Size
related*
[ 0 - 500 %]
CATATAN!
Lihat penjelasan
parameter 1-70 Modus Start
untuk gambar umum relasi
antar parameter Start
Melayang PM.
Rentang nilai dan fungsi
bergantung pada
parameter 1-10 Konstruksi Motor:
[0] Asinkron: [0–500%]
Kontrol persentase frekuensi denyut
yang digunakan untuk mendeteksi
arah motor. Meningkatkan nilai ini
mengurangi torsi yang dihasilkan.
Dalam mode ini, 100% artinya 2 kali
frekuensi selip.
[1] PM non-salient: [0–10%]
Parameter ini menentukan
kecepatan motor (dalam %
kecepatan motor nominal) . Kurang
dari kecepatan tersebut, fungsi
parkir (lihat parameter 2-06 Arus
Parkir dan parameter 2-07 Waktu
Parkir) menjadi aktif. Parameter ini
hanya aktif saat
parameter 1-70 Modus Start diatur
ke [1] Parkir dan hanya setelah
motor di-start.
1-60 Kompensasi Beban Kecepatan Rendah
Range: Fungsi:
100 %* [0 - 300 %]
CATATAN!
Parameter 1-60 Kompensasi
Beban Kecepatan Rendah tidak
berpengaruh saat
parameter 1-10 Konstruksi
Motor = [1] PM,SPM tak
mnyolok.
Masukkan nilai % untuk mengkompensasi voltase berkaitan dengan
beban ketika motor berjalan pada
kecepatan rendah dan
mendapatkan karakteristik U/f
optimum. Ukuran motor
menentukan kisaran frekuensi di
dalam mana parameter ini aktif.
1-60 Kompensasi Beban Kecepatan Rendah
Range: Fungsi:
Ukuran motor
[kW]
Changeover
[Hz]
0.25–7.5 <10
11–45 <5
55–550 <3–4
Tabel 3.8 Frekuensi Changeover
1-61 Kompensasi Beban Kecepatan Tinggi
Range: Fungsi:
100 %* [0 - 300 %]
CATATAN!
Parameter 1-61 Kompensasi
Beban Kecepatan Tinggi tidak
berpengaruh saat
parameter 1-10 Konstruksi
Motor = [1] PM,SPM tak
mnyolok.
Masukkan nilai % untuk mengkompensasi voltase berkaitan dengan
beban ketika motor berjalan pada
kecepatan tinggi dan mendapatkan
karakteristik U/f optimum. Ukuran
motor menentukan kisaran
frekuensi di dalam mana parameter
ini aktif.
Ukuran motor
[kW]
Changeover
[Hz]
0.25–7.5 >10
11–45 <5
55–550 <3–4
Tabel 3.9 Frekuensi Changeover
Keterangan Parameter
VLT® AQUA Drive FC 202
33
3.3.10 1-6* Tergantung Beban. Pengaturan
58 Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. MG20OB9B
Ilustrasi 3.10 Kompensasi Beban Kecepatan Rendah

1-62 Kompensasi Slip
Range: Fungsi:
0 %* [-500 -
500 %]
CATATAN!
Parameter 1-62 Kompensasi Slip
tidak berpengaruh saat
parameter 1-10 Konstruksi
Motor = [1] PM,SPM tak
mnyolok.
Untuk mengompensasi toleransi
nilai n
M,N
, masukkan % nilai
kompensasi selip. Kompensasi selip
dihitung secara otomatis, yakni
berdasarkan kecepatan motor
terukur n
M,N
.
1-63 Tetapan Waktu Kompensasi Slip
Range: Fungsi:
Size
related*
[0.05 - 5 s]
CATATAN!
Parameter 1-63 Tetapan Waktu
Kompensasi Slip tidak
berpengaruh saat
parameter 1-10 Konstruksi
Motor = [1] PM,SPM tak
mnyolok.
Masukkan kecepatan reaksi
kompensasi selip. Nilai tinggi
menyebabkan reaksi rendah, dan
nilai rendah menyebabkan reaksi
cepat. Apabila muncul masalah
resonansi frekuensi-rendah,
perpanjang pengaturan waktu.
1-64 Peredaman Resonansi
Range: Fungsi:
Size
related*
[0 - 500 %]
CATATAN!
Parameter 1-64 Peredaman
Resonansi tidak berpengaruh
saat parameter 1-10 Konstruksi
Motor = [1] PM,SPM tak
mnyolok.
Masukkan nilai peredaman
resonansi. Atur
parameter 1-64 Peredaman
Resonansi dan
parameter 1-65 Tetapan Waktu
peredaman resonansi untuk
membantu mengatasi gangguan
resonansi frekuensi tinggi. Untuk
mengurangi osilasi resonansi,
naikkan nilai
1-64 Peredaman Resonansi
Range: Fungsi:
parameter 1-64 Peredaman
Resonansi.
1-65 Tetapan Waktu peredaman resonansi
Range: Fungsi:
5 ms* [5 - 50 ms]
CATATAN!
Parameter 1-65 Tetapan Waktu
peredaman resonansi tidak
berpengaruh saat
parameter 1-10 Konstruksi
Motor = [1] PM,SPM tak
mnyolok.
Atur parameter 1-64 Peredaman
Resonansi dan
parameter 1-65 Tetapan Waktu
peredaman resonansi untuk
membantu mengatasi gangguan
resonansi frekuensi tinggi.
Masukkan tetapan waktu yang
menyediakan peredaman terbaik.
1-66 Arus min. pada Kecepatan Rendah
Range: Fungsi:
Size
related*
[ 1 - 200 %]
CATATAN!
Parameter 1-66 Arus min. pada
Kecepatan Rendah tidak
berpengaruh jika
parameter 1-10 Konstruksi
Motor = [0] Asinkron.
Masukkan arus motor minimum
pada kecepatan rendah.
Menambah arus ini meningkatkan
torsi motor yang dihasilkan pada
kecepatan rendah. Kecepatan
rendah di sini adalah kecepatan di
bawah 6% kecepatan motor
nominal (parameter 1-25 Kecepatan
Nominal Motor) dalam VVC+ PM
Control.
Keterangan Parameter Panduan Pemrograman
3 3
MG20OB9B Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. 59

1-70 Modus Start
Option: Fungsi:
[0] Deteksi Rotor Cocok untuk semua aplikasi dengan
motor diam saat start (misalnya
konveyor, pompa, dan kipas tanpa
efek kincir).
[1] Waktu Parkir Jika motor berjalan pada kecepatan
rendah (yaitu kurang dari 2–5%
kecepatan nominal), misalnya akibat
efek kincir (windmilling) pada kipas,
pilih [1] Parkir lalu sesuaikan
parameter 2-06 Arus Parkir dan
parameter 2-07 Waktu Parkir.
[2] Rotor Det. w/
Parking
1-71 Penundaan start
Range: Fungsi:
00 s* [0 - 300 s] Masukkan penundaan waktu antara
saat perintah start diberikan dan
saat konverter frekuensi
mengalirkan daya ke motor.
Parameter ini berkaitan dengan
fungsi start yang dipilih dalam
parameter 1-72 Fungsi start.
1-72 Fungsi start
Option: Fungsi:
Pilih fungsi start selama tunda start.
Parameter ini berkaitan dengan
parameter 1-71 Penundaan start.
[0] Tahan DC/
p'nunda.
Mengalirkan arus DC-hold ke motor
(parameter 2-00 Arus Penahan DC/
Prapanas) selama waktu tunda start.
[2] Coast/wkt
tunda
Motor coasting selama waktu tunda
start (inverter mati).
Pilihan yang tersdia bergantung
pada parameter 1-10 Konstruksi
Motor: [0] Asinkron:
•
[2] Coast/wkt tunda.
•
[0] Tahan DC/p'nunda.
[1] PM non-salient:
•
[2] Coast/wkt tunda.
1-73 Start Melayang
Option: Fungsi:
Dengan fungsi ini, motor yang
berputar bebas akibat anjloknya
sumber listrik dapat ditangkap.
Apabila parameter 1-73 Star t
Melayang diaktifkan,
1-73 Start Melayang
Option: Fungsi:
parameter 1-71 Penundaan start
tidak memiliki fungsi.
Arah pencarian untuk start
melayang berkaitan dengan
pengaturan dalam
parameter 4-10 Arah Kecepatan
Motor.
[0] Searah jarum jam: Start
melayang mencari searah jarum
jam. Jika tidak berhasil, rem DC
akan dijalankan.
[2] Kedua Arah: Start melayang akan
mulai mencari dalam arah yang
ditentukan oleh referensi terakhir
(arah). Jika tidak menemukan
kecepatan, maka pencarian
dilakukan ke arah lain. Jika tidak
berhasil, rem DC akan dijalankan
dalam waktu yang diatur dalam
parameter 2-02 Waktu Pengereman
DC. Selanjutnya, start akan terjadi
dari 0 Hz.
[0] Nonaktif Pilih Nonaktif [0] jika fungsi ini tidak
diperlukan.
[1] Aktif Pilih [1] Aktifkan untuk agar
konverter frekuensi dapat
menangkap dan mengontrol motor
yang berputar.
Parameter ini selalu diatur ke [1]
Aktifkan saat
parameter 1-10 Konstruksi Motor =
[1] PM non-salient.
Parameter terkait penting:
•
Parameter 1-58 Flying Start
Test Pulses Current.
•
Parameter 1-59 Flying Start
Test Pulses Frequency.
•
Parameter 1-70 Modus
Start.
•
Parameter 2-03 Kecepatan
Penyelaan Rem DC [RPM].
•
Parameter 2-04 Kecepatan
Penyelaan Rem DC [Hz].
•
Parameter 2-06 Arus Parkir.
•
Parameter 2-07 Waktu
Parkir.
Keterangan Parameter
3.3.11 1-7* Penyesuaian Start
33
60 Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. MG20OB9B
VLT® AQUA Drive FC 202
Apabila parameter 1-73 Start Melayang diaktifkan,
parameter 1-71 Penundaan start tidak memiliki fungsi.

1-79 Waktu Start Max Kompressor hingga trip
Range: Fungsi:
0 s* [ 0 - 3600.0s]Jika motor tidak mencapai
kecepatan yang ditentukan dalam
parameter 1-86 Kecepatan Trip
Rendah [RPM] dalam waktu yang
ditentukan dalam parameter ini,
konverter frekuensi anjlok. Waktu
1-79 Waktu Start Max Kompressor hingga trip
Range: Fungsi:
dalam parameter ini mencakup
waktu yang ditentukan dalam
parameter 1-71 Penundaan start.
Sebagai contoh, jika nilai dalam
parameter 1-71 Penundaan start
lebih besar atau sama dengan nilai
dalam parameter 1-79 Waktu Start
Max Kompressor hingga trip,
konverter frekuensi tidak akan
pernah bisa distart.
1-80 Fungsi saat Stop
Option: Fungsi:
Pilih fungsi konverter frekuensi
setelah perintah stop atau setelah
kecepatan diturunkan ke
pengaturan pada
parameter 1-81 Fungsi dari kcptn.
min. pd stop [RPM].
Pilihan yang tersdia bergantung
pada parameter 1-10 Konstruksi
Motor:
[0] Asinkron:
•
[0] Coast.
•
[1] Tahan DC/p'nunda.
[1] PM non-salient:
•
[0] Coast.
[0] * Coast Meninggalkan motor dalam mode
bebas.
[1] Pra-panas DC
Hold/Motor
Mengalirkan arus DC-hold ke motor
(lihat parameter 2-00 Arus Penahan
DC/Prapanas).
[2] Cek Motor
[6] Periksa Motor,
Alarm
1-81 Fungsi dari kcptn. min. pd stop [RPM]
Range: Fungsi:
Size
related*
[0 - 600
RPM]
Atur kecepatan untuk mengaktifkan
fungsi parameter 1-80 Fungsi saat
Stop.
1-82 Kec. Min utk Fungsi B'henti [Hz]
Range: Fungsi:
Size
related*
[ 0 - 20.0 Hz] Atur frekuensi output untuk
mengaktifkan parameter 1-80 Fungsi
saat Stop.
Keterangan Parameter Panduan Pemrograman
Fungsi start melayang yang digunakan untuk motor PM
didasarkan atas estimasi kecepatan awal. Kecepatan selalu
diestimasi segera setelah sinyal start aktif diberikan.
Berdasarkan pengaturan parameter 1-70 Modus Start, hal
berikut terjadi:
Parameter 1-70 Modus Start = [0] Deteksi Rotor:
Jika estimasi kecepatan lebih tinggi daripada 0 Hz,
konverter frekuensi menangkap motor pada kecepatan
tersebut dan melanjutkan operasi normal. Jika sebaliknya,
konverter frekuensi mengestimasi posisi motor dan
memulai operasi normal dari sana.
Parameter 1-70 Modus Start=[1] Parkir:
Jika estimasi kecepatan lebih rendah daripada pengaturan
dalam parameter 1-59 Flying Start Test Pulses Frequency,
3.3.12 1-8* Stop Penyesuaian
fungsi parkir diaktifkan (lihat parameter 2-06 Arus Parkir dan
parameter 2-07 Waktu Parkir). Jika lebih tinggi, konverter
frekuensi menangkap motor pada kecepatan tersebut dan
melanjutkan operasi normal. Lihat penjelasan
parameter 1-70 Modus Startuntuk pengaturan yang direkomendasikan.
3 3
Batas arus prinsip start melayang yang digunakan untuk
motor PM:
Rentang kecepatan hingga 100% kecepatan
•
nominal atau kecepatan pelemahan medan
(mana yang paling rendah).
PMSM dengan back EMF tinggi - (>300 VLL(rms))
•
dan induktansi lilitan tinggi (>10 mH) perlu waktu
lebih lama untuk mengurangi arus korslet ke 0
dan mungkin rawan melakukan kesalahan
estimasi.
Uji arus dibatasi untuk rentang kecepatan
•
maksimal 300 Hz. Untuk unit tertentu, batasnya
MG20OB9B Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. 61
adalah 250 Hz; semua unit 200-240"V hingga dan
termasuk 2.2 kW (3 hp) dan semua unit 380–
480 V hingga dan termasuk 4 kW (5.4 hp).
Uji arus dibatasi untuk ukuran daya mesin
•
•
•
maksimal 22 kW (30 hp).
Disiapkan untuk mesin berkutup salient (IPMSM)
tapi belum
Untuk aplikasi inersia tinggi (dengan inersia 30
kali lebih besar daripada inersia motor),
penggunaan resistor rem direkomendasikan
untuk mencegah anjlok akibat kelebihan voltase
selama pengaktifan fungsi start melayang
berkecepatan tinggi.
diverikasi untuk jenis mesin tersebut.

N
RPM
T
N
1-86
T
1-79
T
1-71
0
1
1-86 Kecepatan Trip Rendah [RPM]
Range: Fungsi:
Size
related*
[ 0 - par. 4-13
RPM]
CATATAN!
Parameter ini hanya tersedia
jika parameter 0-02 Unit
Kecepatan Motor diatur ke [11]
RPM.
1-86 Kecepatan Trip Rendah [RPM]
Range: Fungsi:
Masukkan batas bawah kecepatan
motor yang akan mematikan
konverter frekuensi. Jika nilai adalah
0, fungsi ini tidak aktif. Jika
kecepatan kapan saja setelah start
(atau selama stop) turun di bawah
nilai dalam parameter, konverter
frekuensi anjlok dengan alarm 49,
Batas Kecepatan.
1-87 Kecepatan Trip Rendah [Hz]
Range: Fungsi:
Size
related*
[ 0 - par. 4-14
Hz]
CATATAN!
Parameter ini hanya tersedia
jika parameter 0-02 Unit
Kecepatan Motor diatur ke [1]
Hz.
Masukkan batas bawah kecepatan
motor yang akan mematikan
konverter frekuensi. Jika nilai adalah
0, fungsi ini tidak aktif. Jika
kecepatan kapan saja setelah start
(atau selama stop) turun di bawah
nilai dalam parameter, konverter
frekuensi anjlok dengan alarm 49,
Batas Kecepatan.
Keterangan Parameter
VLT® AQUA Drive FC 202
3.3.13 Pemonitoran Kecepatan Minimum
Lanjut untuk Pompa Rendam
Beberapa pompa rentan jika dioperasikan pada kecepatan
rendah. Kurangnya pendinginan atau lubrikasi pada
33
kecepatan rendah adalah penyebab paling umum.
Dalam kondisi kelebihan beban, konverter frekuensi
melindungi diri dengan tur perlindungan integral,
termasuk dengan menurunkan kecepatan. Sebagai contoh,
kontroler batas arus dapat menurunkan kecepatan.
Kadang, kecepatan bahkan dapat turun lebih rendah
daripada kecepatan yang ditentukan dalam
parameter 4-11 Batasan Rendah Kecepatan Motor [RPM] dan
parameter 4-12 Batasan Rendah Kecepatan Motor [Hz].
Jika kecepatan turun di bawah nilai tertentu, tur
pemonitoran kecepatan minimum lanjut mematikan
konverter frekuensi. Jika motor tidak mencapai kecepatan
yang ditentukan dalam parameter 1-86 Kecepatan Trip
Rendah [RPM] dalam dalam waktu yang ditentukan dalam
parameter 1-79 Waktu Start Max Kompressor hingga trip
(ramping terlalu lama), konverter frekuensi anjlok. Timer
untuk parameter 1-71 Penundaan start dan
parameter 1-79 Waktu Start Max Kompressor hingga trip
dimulai bersamaan dengan saat perintah start diberikan.
Sebagai contoh, jika nilai dalam parameter 1-71 Penundaan
start lebih besar atau sama dengan nilai dalam
parameter 1-79 Waktu Start Max Kompressor hingga trip,
konverter frekuensi tidak akan pernah bisa distart.
T
1-71
T
1-79
N
1-86
1 Operasi normal.
Parameter 1-71 Penundaan start.
Parameter 1-79 Waktu Start Max Kompressor hingga trip.
Waktu ini mencakup waktu dalam T
Parameter 1-86 Kecepatan Trip Rendah [RPM]. Jika
kecepatan turun di bawah nilai tertentu selama
operasi normal, konverter frekuensi anjlok.
Ilustrasi 3.11 Pemonitoran Kecepatan Minimum Lanjut
62 Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. MG20OB9B
1-71
3.3.14 1-9* Suhu Motor
1-90 Proteksi Termal Motor
Option: Fungsi:
Proteksi termal motor dapat diterapkan
dengan beberapa teknik:
.
Via sensor PTC dalam lilitan motor
•
yang dihubungkan ke salah satu
input analog atau digital input
(parameter 1-93 Sumber Thermistor).
Lihat bab 3.3.15 Sambungan
Thermistor PTC.
Melalui perhitungan (ETR = Relai
•
Termal Elektronik) dari beban termal,
didasarkan pada beban dan waktu
aktual. Beban termal yang dihitung
kemudian dibandingkan dengan
rating arus motor I
frekuensi motor f
bab 3.3.16 ETR dan bab 3.3.17 ATEX
ETR.
Melalui switch thermal mekanis (tipe
•
Klixon). Lihat bab 3.3.18 Klixon.
M,N
M,N
. Lihat
dan rating

PTC / Thermistor
R
OFF
ON
<800 Ω
+10V
130BA152.10
>2.7 kΩ
12 13 18 37322719 29 33 20
5550
39 42 53 54
Keterangan Parameter Panduan Pemrograman
1-90 Proteksi Termal Motor
Option: Fungsi:
Untuk pasar Amerika Utara: Fungsi ETR
menyediakan perlindungan kelebihan beban
kelas 20 sesuai dengan NEC.
[0] Tanpa
perlindungan
[1] Peringatan
termistor
[2] Trip
Thermistor
[3] Peringatan
ETR 1
[4] ETR 1 anjlok Menghitung beban pada saat pengaturan 1
[5] Peringatan
ETR 2
[6] Trip ETR 2
[7] Peringatan
ETR 3
[8] Trip ETR 3
[9] Peringatan
ETR 4
[10] Trip ETR 4
[20] ATEX ETR Mengaktifkan fungsi pemantauan termal
Secara terus-menerus motor kelebihan beban,
apabila tidak ada peringatan atau trip dari
konverter frekuensi yang diminta.
Mengaktifkan peringatan saat termistor atau
sensor KTY yang terhubung dalam motor
bereaksi jika suhu motor terlalu tinggi.
Menghentikan (anjlok) konverter frekuensi
saat termistor atau sensor KTY yang
terhubung dalam motor bereaksi jika suhu
motor terlalu tinggi.
Nilai pematian termistor harus di atas 3 kΩ.
Padukan thermistor (sensor PTC) pada motor
untuk perlindungan perputaran.
Menghitung beban pada saat pengaturan 1
telah aktif dan mengaktifkan peringatan pada
tampilan pada saat motor kelebihan beban.
Programkan sinyal peringatan melalui salah
satu output digital.
aktif dan mematikan (anjlok) konverter
frekuensi saat motor kelebihan beban.
Programkan sinyal peringatan melalui salah
satu output digital. Sinyal muncul ketika ada
peringatan dan jika konverter frekuensi anjlok
(peringatan termal).
untuk Ex-e motor untuk ATEX. Mengaktifkan
parameter 1-94 ATEX ETR cur.lim. speed
reduction, parameter 1-98 ATEX ETR interpol.
points freq., dan parameter 1-99 ATEX ETR
interpol points current.
3.3.15 Sambungan Thermistor PTC
Ilustrasi 3.12 Prol PTC
Menggunakan input digital dan 10 V sebagai catu:
Contoh: Konverter frekuensi akan trip ketika suhu motor
terlalu tinggi.
Pengaturan parameter:
Atur parameter 1-90 Proteksi pd termal motor ke
•
[2] Termistor Anjlok.
Atur parameter 1-93 Sumber Thermistor ke [6]
•
Input Digital.
Ilustrasi 3.13 Sambungan Termistor PTC - Input Digital
3 3
CATATAN!
Jika [20] ATEX ETR dipilih, ikuti petunjuk dalam bab
khusus panduan rancangan dan petunjuk yang
disediakan oleh produsen motor.
CATATAN!
Apabila [20] ATEX ETR yang dipilih, atur
parameter 4-18 Batas Arus ke 150%.
MG20OB9B Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. 63
Menggunakan input analog dan 10 V sebagai catu:
Contoh: Konverter frekuensi akan trip ketika suhu motor
terlalu tinggi.
Pengaturan parameter:
Atur parameter 1-90 Proteksi pd termal motor ke
•
[2] Termistor Anjlok.
Atur parameter 1-93 Sumber Thermistor ke [2]
•
Input Analog 54.

1.21.0 1.4
30
10
20
100
60
40
50
1.81.6 2.0
2000
500
200
400
300
1000
600
w [d]
175ZA052.11
fKELUAR = 0,2 x f M,N
fKELUAR = 2 x f M,N
fKELUAR = 1 x f M,N
IMN
IM
Keterangan Parameter
VLT® AQUA Drive FC 202
3.3.17 ATEX ETR
VLT® PTC Thermistor Card MCB 112 menawarkan alat
monitor suhu motor yang disetujuji ATEX. Pilihan lainnya,
perangkat proteksi PTC eksternal yang disetujui ATEX dapat
digunakan.
33
CATATAN!
Ilustrasi 3.14 Sambungan Termistor PTC - Input Analog
Hanya gunakan motor yang yang disetujui ATEX Ex-e
untuk fungsi ini. Lihat pelat nama motor, sertikat
persetujuan, lembar data, atau hubungi pemasok motor.
Input
digital/analog
Digital 10 V
Analog 10 V
Voltase catu Ambang
nilai pematian
<800 Ω⇒2.7 kΩ
<3.0 kΩ⇒3.0 kΩ
Tabel 3.10 Ambang Nilai Pematian
CATATAN!
Pastikan voltase yang dialirkan mengikuti spesikasi
elemen termistor yang digunakan.
3.3.16 ETR
Perhitungan memperkirakan kebutuhan untuk beban yang
lebih rendah pada kecepatan yang lebih rendah karena
kurangnya pendinginan dari kipas yang dipasang pada
motor.
Ilustrasi 3.15 Prol ETR
Saat mengendalikan motor Ex-e dengan peningkatan
keselamatan, perhatikan batasan tertentu. Parameter yang
wajib diprogram ditampilkan dalam Tabel 3.11.
Fungsi Pengaturan
Parameter 1-90 Proteksi pd
termal motor
Parameter 1-94 ATEX ETR cur.lim.
speed reduction
Parameter 1-98 ATEX ETR
interpol. points freq.
Parameter 1-99 ATEX ETR
interpol points current
Parameter 1-23 Frekuensi Motor Masukkan nilai yang sama
Parameter 4-19 Frekuensi Output
Maks.
Parameter 4-18 Batas Arus Dipaksa ke 150% dengan 1-90
Parameter 5-15 Terminal 33
Input Digital
Parameter 5-19 Terminal 37
Berhenti Aman
Parameter 14-01 Frekuensi
switching
Parameter 14-26 Pnunda.Trip pd
Krusak Pmblk.
Tabel 3.11 Parameter
[20] ATEX ETR
20%
Nama pelat motor
seperti untuk
parameter 4-19 Frekuensi Output
Maks..
Pelat nama motor, jika kabel
motor terlalu panjang mungkin
dikurangi, lter gelombang
sinus, atau pengurangan
voltase catu.
[20]
[80] PTC Kartu 1
[4] Alarm PTC 1
Pastikan nilai default memenuhi
syarat dari pelat nama motor.
Jika tidak memenuhi syarat,
gunakan lter gelombang sinus.
0
64 Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. MG20OB9B

PTC / Thermistor
OFF
ON
+24V
12 13 18 3732
A
2719 29 33B20
GND
R<6.6 k Ω >10.8 k Ω
130BA151.11
1-91 Kipas Eksternal Motor
Option: Fungsi:
[0] * Tidak Kipas eksternal tidak dibutuhkan,
karena rating motor diturunkan
pada kecepatan rendah.
[1] Ya Menerapkan kipas motor eksternal
(ventilasi eksternal), sehingga tidak
diperlukan penurunan rating motor
pada kecepatan rendah. Kurva atas
dalam Ilustrasi 3.15 (f
out
= 1 x f
M,N
)
diikuti jika arus motor lebih rendah
daripada arus motor nominal (lihat
parameter 1-24 Arus Motor). Jika
arus motor melampaui arus
nominal, waktu operasi masih
1-91 Kipas Eksternal Motor
Option: Fungsi:
berkurang seperti saat kipas tidak
terpasang.
1-93 Sumber Thermistor
Option: Fungsi:
CATATAN!
Parameter ini tidak dapat
disesuaikan saat motor
berjalan.
CATATAN!
Ditetapkan input digital ke [0]
PNP–Aktif pada 24 V di
parameter 5-00 Mode I/O
Digital.
Pilih input untuk menyambung
thermistor (sensor PTC). Opsi input
analog [1] Input Analog 53 atau [2]
Input Analog 54 tidak dapat dipilih
jika input analog sudah digunakan
sebagai sumber referensi (dipilih
dalam parameter 3-15 Sumber 1
Referensi, parameter 3-16 Sumber 2
Referensi, atau
parameter 3-17 Sumber 3 Referensi).
Jika menggunakan VLT® PTC
Thermistor Card MCB 112, selalu
pilih [0] Tidak satupun.
[0] * Tidak ada
[1] Input analog
53
[2] Input analog
54
[3] Input digital
18
[4] Input digital
19
[5] Input digital
32
[6] Input digital
33
1-95 Jenis Sensor KTY
Option: Fungsi:
Pilih tipe sensor termistor.
[0] * KTY Sensor 1
1 kΩ pada suhu 100 °C (212 °F).
[1] KTY Sensor 2
1 kΩ pada suhu 25 °C (77 °F).
[2] KTY Sensor 3
2 kΩ pada suhu 25 °C (77 °F).
[3] Pt1000
Keterangan Parameter Panduan Pemrograman
CATATAN!
Bandingkan ketentuan frekuensi penyalaan minimum
yang disebutkan oleh produsen motor terhadap
frekuensi penyalaan minimum konverter frekuensi, nilai
default dalam parameter 14-01 Frekuensi switching.
Apabila konverter frekuensi tidak memenuhi persyaratan
ini, gunakan lter gelombang sinus.
Informasi lebih lengkap tentang pemonitoran termal ATEXETR dapat ditemukan dalam Catatan Aplikasi untuk Fungsi
Pemonitoran Termal FC 300 ATEX ETR.
3.3.18 Klixon
Pemutus rangkaian termal tipe Klixon menggunakan
piringan logam KLIXON®. Pada kelebihan beban yang
ditentukan, panas yang disebabkan oleh arus lewat
piringan menyebabkan anjlok.
Menggunakan input digital dan 24 V sebagai catu:
Contoh: Konverter frekuensi akan trip ketika suhu motor
terlalu tinggi.
Pengaturan parameter:
•
•
Atur parameter 1-90 Proteksi pd termal motor ke
[2] Termistor Anjlok.
Atur parameter 1-93 Sumber Thermistor ke [6]
Input Digital.
3 3
Ilustrasi 3.16 Sambungan Termistor
MG20OB9B Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. 65

1-96 Sumber Termistor KTY
Option: Fungsi:
Pilih terminal input analog 54
sebagai input sensor termistor.
Terminal 54 tidak dapat dipilih
sebagai sumber termistor jika sudah
digunakan sebagai referensi (lihat
parameter 3-15 Sumber 1 Referensi
hingga parameter 3-17 Sumber 3
Referensi).
CATATAN!
Sambungan sensor termistor
antara terminal 54 dan 55
(GND). Lihat
bab 3.3.15 Sambungan
Thermistor PTC.
[0] * Tidak ada
[2] Input analog
54
1-97 Tingkat Ambang KTY
Range: Fungsi:
80 °C* [ -40 -
220 °C]
Pilih tingkat ambang sensor
termistor sebagai proteksi termal
motor.
Keterangan Parameter
VLT® AQUA Drive FC 202
33
66 Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. MG20OB9B

2-00 Arus Penahan DC/Prapanas
Range: Fungsi:
50 %* [ 0 - 160 %]
CATATAN!
Parameter 2-00 Arus Penahan
DC/Prapanas tidak efektif saat
parameter 1-10 Konstruksi
Motor = [1] PM,SPM tak
mnyolok.
CATATAN!
Nilai maksimum tergantung
pada rating arus motor.
Hindari arus 100% terlalu
lama. Dapat merusak motor.
Masukkan nilai arus penahan
(holding current) sebagai
persentase rating arus motor I
M,N
yang diatur dalam
parameter 1-24 Arus Motor. 100%
arus DC hold sama dengan I
M,N
.
Parameter ini menahan motor (torsi
penahan) atau memprapanaskan
motor.
Parameter ini aktif jika [1] DC hold/
Prepanas dipilih dalam
parameter 1-80 Fungsi saat Stop.
2-01 Arus Brake DC
Range: Fungsi:
50 %* [ 0 - 1000 %]
CATATAN!
Nilai maksimum tergantung
pada rating arus motor.
Hindari arus 100% terlalu
lama. Dapat merusak motor.
Masukkan nilai arus sebagai
persentase rating arus motor I
M,N
,
lihat parameter 1-24 Arus Motor.
100% arus rem DC sama dengan
I
M,N
.
Arus rem DC diterapkan
berdasarkan perintah stop, saat
kecepatan lebih rendah daripada
batas yang diatur dalam:
2-01 Arus Brake DC
Range: Fungsi:
•
Parameter 2-03 Kecepatan
Penyelaan Rem DC [RPM].
•
Parameter 2-04 Kecepatan
Penyelaan Rem DC [Hz],
saat fungsi inverse rem DC
aktif, atau lewat port
komunikasi serial.
Arus rem aktif selama jangka waktu
yang ditetapkan dalam
parameter 2-02 Waktu Pengereman
DC.
2-02 Waktu Pengereman DC
Range: Fungsi:
10 s* [0 - 60 s] Atur durasi arus rem DC yang
ditetapkan dalam
parameter 2-01 Arus Brake DC,
begitu diaktifkan.
2-03 Kecepatan Penyelaan Rem DC [RPM]
Range: Fungsi:
Size
related*
[ 0 - 0 RPM]
CATATAN!
Parameter 2-03 Kecepatan
Penyelaan Rem DC [RPM] tidak
efektif saat
parameter 1-10 Konstruksi
Motor = [1] PM,SPM tak
mnyolok.
Atur kecepatan penyelaan rem DC
untuk mengaktifkan arus rem DC
yang ditetapkan dalam
parameter 2-01 Arus Brake DC
setelah perintah stop.
Saat parameter 1-10 Konstruksi
Motor diatur ke [1] PM,SPM tak
mnyolok, nilai ini dibatasi ke 0 RPM
(OFF).
2-04 Kecepatan Penyelaan Rem DC [Hz]
Range: Fungsi:
Size
related*
[ 0 - 0.0 Hz]
CATATAN!
Parameter 2-04 Kecepatan
Penyelaan Rem DC [Hz] tidak
efektif saat
parameter 1-10 Konstruksi
Motor = [1] PM,SPM tak
mnyolok.
Atur kecepatan penyelaan rem DC
untuk mengaktifkan arus rem DC
yang ditetapkan dalam
Keterangan Parameter Panduan Pemrograman
3.4 Parameters 2-** Brakes
3.4.1 2-0* DC brakes
Kelompok parameter untuk mengkongurasi fungsi rem
DC dan fungsi tahan DC.
3 3
MG20OB9B Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. 67

2-04 Kecepatan Penyelaan Rem DC [Hz]
Range: Fungsi:
parameter 2-01 Arus Brake DCsetelah
perintah stop.
2-06 Arus Parkir
Range: Fungsi:
50 %* [ 0 - 1000 %]
CATATAN!
Parameter 2-06 Arus Parkir dan
parameter 2-07 Waktu Parkir:
Hanya aktif jika [1] PM,SPM tak
mnyolok dipilih dalam
parameter 1-10 Konstruksi
Motor.
Atur arus sebagai persentase rating
arus motor, parameter 1-24 Arus
Motor. Aktif dengan
parameter 1-73 Start Melayang. Arus
parkir aktif selama jangka waktu
yang ditetapkan dalam
parameter 2-07 Waktu Parkir.
2-07 Waktu Parkir
Range: Fungsi:
3 s* [0.1 - 60 s] Pilih durasi waktu aktif arus parkir
yang ditetapkan dalam
parameter 2-06 Arus Parkir. Aktif
dengan parameter 1-73 Star t
Melayang.
CATATAN!
Parameter 2-07 Waktu Parkir
hanya aktif saat [1] PM, nonsalient SPM dipilih dalam
parameter 1-10 Konstruksi
Motor.
2-10 Fungsi Brake
Option: Fungsi:
Pilihan yang tersdia bergantung
pada parameter 1-10 Konstruksi
Motor:
[0] Asinkron:
•
[0] Mati.
•
[1] Rem resistor.
•
[2] Pengereman AC.
2-10 Fungsi Brake
Option: Fungsi:
[1] PM non-salient:
•
[0] Mati.
•
[1] Rem resistor.
[0] Padam Tidak ada resistor rem terpasang.
[1] Tahanan Brake Resistor rem terpasang ke sistem,
untuk menyerap energi rem yang
berlebihan sebagai panas. Voltase
DC-link dapat ditingkatkan dengan
menghubungkan resistor rem
selama pengereman (operasi
pembangkitan). Fungsi rem resistor
hanya aktif pada konverter
frekuensi yang dilengkapi rem
dinamis integral.
[2] Rem AC Rem AC hanya bekerja dalam mode
torsi kompresor dalam
parameter 1-03 Karakteristik Torsi.
2-11 Tahanan Brake
Range: Fungsi:
Size
related*
[ 5 - 65535
Ohm]
Tetapkan nilai resistor rem dalam Ω.
Nilai ini digunakan untuk
memantau daya ke resistor rem
pada parameter 2-13 Pemantauan
Daya Brake. Parameter ini hanya
aktif pada konverter frekuensi
dengan rem dinamis terpadu.
Gunakan parameter untuk nilai
tanpa desimal. Untuk pilihan
dengan 2 desimal, gunakan
parameter 30-81 Tahanan Rem
(ohm).
2-12 Batas Daya Brake (kW)
Range: Fungsi:
Size
related*
[ 0.001 -
2000.000 kW]
CATATAN!
Parameter ini hanya aktif pada
konverter frekuensi dengan
rem dinamis terpadu.
Tetapkan batas pemantauan dari
daya rem yang dikirim ke resistor.
Batas pemonitoran adalah produk
siklus tugas maksimum (120 s) dan
daya maksimum resistor rem pada
siklus tugas tersebut. Lihat rumus di
bawah.
Untuk unit 200-240 V:
P
resistor
=
3902 × waktu beban
R × 120
Untuk unit 380–480 V:
Keterangan Parameter
VLT® AQUA Drive FC 202
33
3.4.2 2-1* Fungsi Energi Brake
Grup parameter untuk memilih parameter rem dinamis.
Hanya valid untuk konverter frekuensi dengan unit
pengeremen.
68 Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. MG20OB9B

2-12 Batas Daya Brake (kW)
Range: Fungsi:
P
resistor
=
7782 × waktu beban
R × 120
Untuk unit 525–600 V:
P
resistor
=
9432 × waktu beban
R × 120
2-13 Pemantauan Daya Brake
Option: Fungsi:
CATATAN!
Parameter ini hanya aktif pada
konverter frekuensi dengan
rem dinamis terpadu.
Parameter ini memungkinkan
pemantauan daya ke resistor rem.
Daya dihitung berdasarkan
resistansi (parameter 2-11 Tahanan
Brake), voltase DC-link, dan waktu
tugas resistor.
[0] * Padam Tidak diperlukan pemantauan daya
rem.
Jika pemantauan daya ditetapkan
ke [0] Padam atau [1] Peringatan,
fungsi rem akan tetap aktif, meski
batas pemantauan terlampaui. Ini
mungkin dapat mengakibatkan
kelebihan beban termal pada
resistor. Ini mungkin juga dapat
menimbulkan peringatan lewat
output relai/digital. Akurasi
pengukuran pemantauan daya
bergantung pada akurasi resistansi
dari resistor (lebih baik daripada
± 20%).
[1] Peringatan Mengaktifkan peringatan saat daya
yang ditransmisikan selama 120s
melampaui 100% batas
pemantauan (parameter 2-12 Batas
Daya Brake (kW)).
Peringatan akan hilang ketika daya
yang ditransmisikan jatuh di bawah
80% batas pemantauan.
[2] Trip 120s Membuat konverter frekuensi anjlok
dan menampilkan alarm saat daya
terhitung melampaui 100% batas
pemantauan.
[3] Peringantan
dan Trip
Mengaktifkan keduanya, termasuk
peringatan, anjlok, dan alarm.
[4] Warning 30s
[5] Trip 30s
[6] Warning & trip
30s
2-13 Pemantauan Daya Brake
Option: Fungsi:
[7] Warning 60s
[8] Trip 60s
[9] Warning & trip
60s
[10] Warning 300s
[11] Trip 300s
[12] Warning & trip
300s
[13] Warning 600s
[14] Trip 600s
[15] Warning & trip
600s
2-15 Cek Brake
Option: Fungsi:
CATATAN!
Menghilangkan peringatan
yang akan muncul dengan
Peringatan [0] Padam atau [1]
dengan mensikluskan supply
sumber listrik. Perbaiki dulu
penyebab masalah. Untuk [0]
Padam atau [1] Peringatan,
konverter frekuensi tetap
berjalan sekalipun masalah
ditemukan.
Pilih jenis fungsi uji dan
pemantauan untuk memeriksa
sambungan ke resistor rem, atau
apakah resistor rem ada, dan
kemudian menampilkan peringatan
atau alarm apabila terjadi
kerusakan. Fungsi pemutusan
resistor rem diuji selama power-up.
Akan tetapi, uji IGBT rem dilakukan
saat tidak ada pengereman.
Peringatan atau trip akan memutus
fungsi rem.
Urutan ujinya adalah sebagai
berikut:
1. Ukur amplitudo riak DC
link selama 300 ms tanpa
mengerem.
2. Ukur amplitudo riak DC
link selama 300 ms
dengan rem aktif.
3. Jika amplitudo riak DC link
selama pengereman lebih
rendah daripada
amplitudo riak DC link
Keterangan Parameter Panduan Pemrograman
3 3
MG20OB9B Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. 69

2-15 Cek Brake
Option: Fungsi:
sebelum pengereman+1%,
pengecekan rem gagal.
Jika pengecekan rem
gagal, peringatan atau
alarm kembali.
4. Jika amplitudo riak DC link
selama pengereman lebih
tinggi daripada amplitudo
riak DC link sebelum
pengereman+1%,
pengecekan rem OK.
[0] * Padam Memantau resistor rem dan IGBT
rem apakah korslet selama
pengoperasian. Jika terjadi korslet,
peringatan muncul.
[1] Peringatan Memantau resistor rem dan IGBT
rem apakah korslet dan
menjalankan tes apakah
sambungan resistor rem lepas
selama penyalaan.
[2] Trip Memantau apakah terjadi korslet
atau lepasnya sambungan resistor
rem, atau IGBT rem korslet. Apabila
terjadi kerusakan, konverter
frekuensi mati dan menampilkan
alarm (kunci anjlok).
[3] Berhenti dan
Trip
Memantau apakah terjadi korslet
atau lepasnya sambungan resistor
rem, atau IGBT rem korslet. Apabila
terjadi kerusakan, konverter
frekuensi akan ramp down untuk
meluncur dan kemudian trip. Alarm
kunci anjlok ditampilkan.
[4] Rem AC Memantau apakah terjadi korslet
atau lepasnya sambungan resistor
rem, atau IGBT rem korslet. Apabila
terjadi kerusakan, konverter
frekuensi menjalankan ramp down
yang terkontrol.
2-16 Arus Maks. rem AC
Range: Fungsi:
100 %* [ 0 -
1000.0 %]
CATATAN!
Parameter 2-16 Arus Maks. rem
AC tidak efektif saat
parameter 1-10 Konstruksi
Motor = [1] PM,SPM tak
mnyolok.
Masukkan toleransi arus maksimum
saat menggunakan rem AC untuk
mencegah lilitan motor terlalu
panas.
2-17 Pengontrol tegangan berlebih
Option: Fungsi:
[0] Nonaktif Tanpa OVC yang diperlukan.
[2] * Aktif Aktifkan OVC.
2-19 Over-voltage Gain
Range: Fungsi:
100 %* [10 - 200 %] Pilih gain kelebihan voltase.
Keterangan Parameter
33
70 Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. MG20OB9B
VLT® AQUA Drive FC 202

3-02 Referensi Minimum
Range: Fungsi:
Size
related*
[ -999999.999
- par. 3-03
ReferenceFeedbackUnit]
Masukkan nilai minimum untuk
referensi jarak jauh. Nilai dan unit
referensi minimum cocok dengan
pilihan kongurasi yang dibuat
dalam parameter 1-00 Mode
Kongurasi dan
parameter 20-12 Referensi/Unit
Umpan Balik.
3-03 Referensi Maksimum
Range: Fungsi:
Size
related*
[ par. 3-02 -
999999.999
ReferenceFeedbackUnit]
Masukkan nilai maksimum yang
diterima untuk referensi jauh. Nilai
dan unit referensi maksimum cocok
dengan opsi kongurasi yang
dipilih dalam parameter 1-00 Mode
Kongurasi dan
parameter 20-12 Referensi/Unit
Umpan Balik.
3-04 Fungsi Referensi
Option: Fungsi:
[0] * Jumlah Jumlah kedua sumber referensi
eksternal dan preset.
[1] Eksternal/Pra-
Setel
Gunakan salah satu sumber
referensi preset maupun eksternal.
Beralih antara eksternal dan preset
via perintah atau input digital.
3-10 Referensi preset
Larik [8]
Range: Fungsi:
0 %* [-100 -
100 %]
Masukkan hingga 8 berbeda
referensi preset referensi (0–7) pada
parameter ini, menggunakan
susunan program. Referensi preset
dinyatakan sebagai persentase nilai
Ref
MAX
(parameter 3-03 Referensi
Maksimum). Jika menggunakan
referensi preset, pilih Bit ref. preset
0/1/2 [16], [17], atau [18] untuk
input digital terkait dalam grup
parameter 5-1* Input Digital.
P3-03
P3-02
0 50 100%
P3-10
130BB036.10
[P 5-13=Preset ref. bit 0]
Preset
[P 5-14=Preset ref. bit 1]
[P 5-15=Preset ref. bit 2]
10101010
76543210
29
12
(+24V)
11001100
32
11110000
33
130BA149.10
3-11 Kecepatan Jog [Hz]
Range: Fungsi:
Size
related*
[ 0 - par. 4-14
Hz]
Kecepatan jog merupakan
kecepatan output tetap di mana
konverter frekuensi berjalan ketika
fungsi jog diaktifkan.
Lihat juga parameter 3-19 Kecepatan
Jog [RPM] dan
parameter 3-80 Waktu Ramp Jog.
3-13 Situs Referensi
Option: Fungsi:
Pilih acuan referensi mana yang
akan diaktifkan.
[0] * T'hubung ke
Manual
Gunakan referensi lokal saat dalam
mode hand-on; atau referensi jarak
jauh saat dalam mode auto-on.
[1] Remote Gunakan referensi jarak jauh saat
dalam mode hand-on maupun
mode auto-on.
Keterangan Parameter Panduan Pemrograman
3.5 Parameter 3-** Referensi/Ramp
3.5.1 3-0* Batas Referensi
3 3
Ilustrasi 3.17 Referensi Preset
3.5.2 3-1* Referensi
Pilih referensi preset. Pilih Bit ref. preset 0/1/2 [16], [17], atau
[18] untuk input digital terkait dalam grup parameter 5-1*
Input Digital.
MG20OB9B Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. 71
Ilustrasi 3.18 Skema Referensi Preset

3-13 Situs Referensi
Option: Fungsi:
[2] Lokal Gunakan referensi lokal saat dalam
mode hand-on maupun auto-on.
CATATAN!
Jika diatur ke [2] Lokal,
konverter frekuensi dimulai
dengan pengaturan ini lagi
setelah daya mati.
[3] Linked to H/A
MCO
Pilih opsi ini untuk mengaktifkan
faktor FFACC. Mengaktifkan FFACC
mengurangi getaran dan
mempercepat transmisi dari
kontroler gerak ke kartu kontrol
konverter frekuensi. Ini
mempercepat waktu respons untuk
aplikasi dinamis dan kontrol posisi.
Untuk informasi lebih lengkap
tentang FFACC, lihat Petunjuk
Pengoperasian VLT® Motion Control
MCO 305.
3-14 Referensi relatif preset
Range: Fungsi:
0 %* [-100 -
100 %]
Referensi aktual, X, dinaikkan atau
diturunkan bersama persentase Y,
yang diatur dalam
parameter 3-14 Referensi relatif
preset.
Ini menghasilkan referensi aktual Z.
Referensi aktual (X) adalah hasil
penjumlahan input yang dipilih
dalam:
•
Parameter 3-15 Sumber 1
Referensi.
•
Parameter 3-16 Sumber 2
Referensi.
•
Parameter 3-17 Sumber 3
Referensi.
•
Parameter 8-02 Sumber
Kontrol.
Relatif
Z=X+X*Y/100
Referenci
sebenarnya
yang
dihasilkan
Y
X
130BA059.12
Z
X
100
%
0-100
Z
Y
X+X*Y/100
P 3-14
130BA278.10
3-15 Sumber 1 Referensi
Option: Fungsi:
CATATAN!
Parameter ini tidak dapat
disesuaikan saat motor
berjalan.
Pilih input referensi yang akan
digunakan untuk sinyal referensi
ke-1.
•
Parameter 3-15 Sumber 1
Referensi.
•
Parameter 3-16 Sumber 2
Referensi.
•
Parameter 3-17 Sumber 3
Referensi.
Tentukan hingga 3 sinyal referensi
referensi berbeda. Jumlah dari
sinyal referensi ini menentukan
referensi aktual.
[0] Tidak ada
fungsi
[1] * Input analog
53
[2] Input analog
54
[7] Input pulsa 29
[8] Input pulsa 33
[20] Pot.meter
digital
[21] Input analog
X30/11
[22] Input analog
X30/12
[23] Input Analog
X42/1
[24] Input Analog
X42/3
[25] Input Analog
X42/5
Keterangan Parameter
33
VLT® AQUA Drive FC 202
Ilustrasi 3.20 Referensi Aktual
Ilustrasi 3.19 Referensi Relatif Preset
72 Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. MG20OB9B

3-15 Sumber 1 Referensi
Option: Fungsi:
[29] Input Analog
X48/2
[30] Loop Tertutup
Ekst. 1
[31] Loop Tertutup
Ekst. 2
[32] Loop Tertutup
Ekst. 3
[35] Digital input
select
Konverter frekuensi memilih AI53
atau AI54 sebagai sumber referensi
berdasarkan sinyal input yang
ditentukan dalam opsi [42] Bit
sumber referensi 0 sebagai salah
satu input digital. Untuk informasi
lebih lengkap, lihat grup parameter
5-1* Input Digital, opsi [42] Bit
sumber ref 0.
3-16 Sumber 2 Referensi
Option: Fungsi:
CATATAN!
Parameter ini tidak dapat
disesuaikan saat motor
berjalan.
Pilih input referensi yang akan
digunakan untuk sinyal referensi
ke-2.
•
Parameter 3-15 Sumber 1
Referensi.
•
Parameter 3-16 Sumber 2
Referensi.
•
Parameter 3-17 Sumber 3
Referensi.
Tentukan hingga 3 sinyal referensi
referensi berbeda. Jumlah dari
sinyal referensi ini menentukan
referensi aktual.
[0] * Tidak ada
fungsi
[1] Input analog
53
[2] Input analog
54
[7] Input pulsa 29
[8] Input pulsa 33
[20] Pot.meter
digital
[21] Input analog
X30/11
[22] Input analog
X30/12
3-16 Sumber 2 Referensi
Option: Fungsi:
[23] Input Analog
X42/1
[24] Input Analog
X42/3
[25] Input Analog
X42/5
[29] Input Analog
X48/2
[30] Loop Tertutup
Ekst. 1
[31] Loop Tertutup
Ekst. 2
[32] Loop Tertutup
Ekst. 3
[35] Digital input
select
Konverter frekuensi memilih AI53
atau AI54 sebagai sumber referensi
berdasarkan sinyal input yang
ditentukan dalam opsi [42] Bit
sumber referensi 0 sebagai salah
satu input digital. Untuk informasi
lebih lengkap, lihat grup parameter
5-1* Input Digital, opsi [42] Bit
sumber ref 0.
3-17 Sumber 3 Referensi
Option: Fungsi:
CATATAN!
Parameter ini tidak dapat
disesuaikan saat motor
berjalan.
Pilih input referensi yang akan
digunakan untuk sinyal referensi
ke-3.
•
Parameter 3-15 Sumber 1
Referensi.
•
Parameter 3-16 Sumber 2
Referensi.
•
Parameter 3-17 Sumber 3
Referensi.
Tentukan hingga 3 sinyal referensi
referensi berbeda. Jumlah dari
sinyal referensi ini menentukan
referensi aktual.
[0] * Tidak ada
fungsi
[1] Input analog
53
[2] Input analog
54
[7] Input pulsa 29
[8] Input pulsa 33
Keterangan Parameter Panduan Pemrograman
3 3
MG20OB9B Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. 73

3-17 Sumber 3 Referensi
Option: Fungsi:
[20] Pot.meter
digital
[21] Input analog
X30/11
[22] Input analog
X30/12
[23] Input Analog
X42/1
[24] Input Analog
X42/3
[25] Input Analog
X42/5
[29] Input Analog
X48/2
[30] Loop Tertutup
Ekst. 1
[31] Loop Tertutup
Ekst. 2
[32] Loop Tertutup
Ekst. 3
[35] Digital input
select
Konverter frekuensi memilih AI53
atau AI54 sebagai sumber referensi
berdasarkan sinyal input yang
ditentukan dalam opsi [42] Bit
sumber referensi 0 sebagai salah
satu input digital. Untuk informasi
lebih lengkap, lihat grup parameter
5-1* Input Digital, opsi [42] Bit
sumber ref 0.
3-19 Kecepatan Jog [RPM]
Range: Fungsi:
Size
related*
[ 0 - par. 4-13
RPM]
Masukkan nilai untuk kecepatan jog
n
JOG
, yang merupakan kecepatan
output tetap. Konverter frekuensi
berjalan pada kecepatan ini ketika
fungsi jog diaktifkan. Batas
maksimum ditentukan di
parameter 4-13 Batasan Tinggi
Kecepatan Motor [RPM].
Lihat juga parameter 3-11 Kecepatan
Jog [Hz] dan parameter 3-80 Waktu
Ramp Jog.
t
t
(Perceptan) deselerasi
130BA169.11
P 3-*2
Ramp (X)
Turun
Waktu
P 4-13
Batas tinggi
RPM
Referensi
P 1-25
Keceptan
P 4-11
Batas
Waktu
P 3-*1
Ramp (X)Nalk
Waktu
motor
rendah
(Perceptan) (Deselerasi)
3-41 Waktu tanjakan Ramp 1
Range: Fungsi:
Size
related*
[ 0.10 - 3600s]Masukkan waktu ramp-up, yakni
waktu akselerasi dari 0 RPM–
parameter 1-25 Kecepatan Nominal
Motor. Pilih waktu ramp-up
sedemikian rupa sehingga arus
output tidak melampaui batas arus
dalam parameter 4-18 Batas Arus
selama ramping. Lihat waktu rampdown di parameter 3-42 Waktu
Turunan Ramp 1.
par . 3 − 41 =
tacc × nnom par .1 − 25
ref RPM
s
3-42 Waktu Turunan Ramp 1
Range: Fungsi:
Size
related*
[ 0.10 - 3600s]Masukkan waktu ramp-down, yakni
waktu deselerasi dari
parameter 1-25 Kecepatan Nominal
Motor–0 RPM. Pilih waktu ramp-
down yang tidak menyebabkan
kelebihan voltase dalam inverter
akibat operasi regeneratif motor.
Waktu ramp-down sebaiknya cukup
lama untuk mencegah arus yang
dihasilkan melampaui batas arus
yang diatur dalam
parameter 4-18 Batas Arus. Lihat
waktu tanjakan (ramp-up) di
parameter 3-41 Waktu tanjakan
Ramp 1.
par . 3 − 42 =
tdec × nnom par .1 − 25
ref RPM
s
Keterangan Parameter
VLT® AQUA Drive FC 202
3.5.3 3-4* Ramp 1
Kongurasikan waktu ramp untuk masing-masing dari 2
ramp ini (grup parameter 3-4* Ramp 1 dan grup parameter
3-5* Ramp 2).
33
Ilustrasi 3.21 Akselerasi/Deselerasi 1
74 Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. MG20OB9B

3-51 Waktu tanjakan Ramp 2
Range: Fungsi:
Size
related*
[ 0.10 - 3600s]Masukkan waktu ramp-up, yakni
waktu akselerasi dari 0 RPM–
parameter 1-25 Kecepatan Nominal
Motor. Pilih waktu ramp-up
sedemikian rupa sehingga arus
output tidak melampaui batas arus
dalam parameter 4-18 Batas Arus
selama ramping. Lihat waktu rampdown di parameter 3-52 Waktu
Turunan Ramp 2.
par . 3 − 51 =
tacc × nnom par .1 − 25
ref rpm
s
3-52 Waktu Turunan Ramp 2
Range: Fungsi:
Size
related*
[ 0.10 - 3600s]Masukkan waktu ramp-down, yakni
waktu deselerasi dari
parameter 1-25 Kecepatan Nominal
Motor–0 RPM. Pilih waktu ramp-
down yang tidak menyebabkan
kelebihan voltase dalam inverter
akibat operasi regeneratif motor
dan arus yang dihasilkan tidak
melampaui batas arus yang diatur
dalam parameter 4-18 Batas Arus.
Lihat waktu tanjakan (ramp-up) di
parameter 3-51 Waktu tanjakan
Ramp 2.
par . 3 − 52 =
tdec × nnom par .1 − 25
ref rpm
s
3-80 Waktu Ramp Jog
Range: Fungsi:
Size
related*
[0.1 - 3600 s] Masukkan waktu jog ramp, yaitu
waktu akselerasi/deselerasi antara 0
RPM dan kecepatan nominal motor
(n
M,N
) (diatur dalam
parameter 1-25 Kecepatan Nominal
Motor). Pastikan arus output yang
dihasilkan untuk waktu jog ramp
tersebut tidak melampaui batas
arus dalamparameter 4-18 Batas
Arus. Waktu jog ramp dimulai
setelah sinyal jog diaktifkan lewat
panel kontrol, input digital terpilih,
atau port komunikasi seri.
par . 3 − 80 =
t jog × nnom par . 1 − 25
jogkecepatan par .3 − 19
s
130BA070.10
Time
P 3-80
RPM
P 4-13 RPM
high limit
P 1-25
Motor speed
Jog speed
P 3-19
P 3-80
Ramp up
(acc)
Ramp down
(dec)
t jog t jog
P 4-11 RPM
low limit
3-84 Initial Ramp Time
Range: Fungsi:
0 s* [0 - 60 s] Masukkan waktu ramp up awal dari
kecepatan nol hingga batas bawah
kecepatan motor,
parameter 4-11 Batasan Rendah
Kecepatan Motor [RPM] atau
parameter 4-12 Batasan Rendah
Kecepatan Motor [Hz]. Pompa sumur
dalam rendam (submersible) juga
dapat rusak karena berjalan di
bawah kecepatan minimum. Waktu
ramp cepat di bawah kecepatan
pump minimum disarankan.
Parameter ini dapat diterapkan
sebagai laju ramp cepat dari
kecepatan nol hingga batas bawah
kecepatan motor. Lihat Ilustrasi 3.23.
130BA962.10
Kecepatan Motor
Kecepatan Motor
Tinggi
Rendah
Normal
Ramps
Awal
Tanjakan
Akhir
Tanjakan
Waktu
Kecepatan
Keterangan Parameter Panduan Pemrograman
3.5.4 3-5* Ramp 2
Untuk memilih parameter ramp, lihat grup parameter 3-4*
Ramp 1.
3 3
Ilustrasi 3.22 Waktu Akselerasi/Deselerasi Jog
3.5.5 3-8* Ramp Lain
MG20OB9B Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. 75
Ilustrasi 3.23 Waktu R\ Awal dan Final

3-85 Check Valve Ramp Time
Range: Fungsi:
0 s* [0 - 650 s] Untuk melindungi katup kontrol
bola dalam situasi berhenti, ramp
katup kontrol dapat digunakan
sebagai laju ramp lambat
dariparameter 4-11 Batasan Rendah
Kecepatan Motor [RPM] atau
parameter 4-12 Batasan Rendah
Kecepatan Motor [Hz] untuk
mengontrol kecepatan akhir ramp
katup, yang diatur dalam
parameter 3-86 Check Valve Ramp
End Speed [RPM] atau
parameter 3-87 Check Valve Ramp
End Speed [HZ]. Jika
parameter 3-85 Check Valve Ramp
Time bukan 0 s, waktu ramp katup
kontrol diterapkan dan digunakan
untuk menurunkan kecepatan dari
batas bawah kecepatan motor ke
kecepatan akhir katup kontrol
dalam parameter 3-86 Check Valve
Ramp End Speed [RPM] atau
parameter 3-87 Check Valve Ramp
End Speed [HZ]. Lihat Ilustrasi 3.24.
130BA961.10
Kecepatan
Kecepatan Motor
Normal
Periksa katup
Kecepatan Motor
Tinggi
Rendah
Wkt
Tanjakan
Akhir Kecepatan
3-86 Check Valve Ramp End Speed [RPM]
Range: Fungsi:
Size
related*
[ 0 - par. 4-11
RPM]
Atur kecepatan dalam [RPM] di
bawah batas kecepatan bawah
motor jika katup kontrol diharapkan
menutup. Pastikan katup tidak lagi
aktif. Lihat Ilustrasi 3.24.
3-87 Check Valve Ramp End Speed [HZ]
Range: Fungsi:
Size
related*
[ 0 - par. 4-12
Hz]
Atur kecepatan dalam [Hz di bawah
batas kecepatan bawah motor jika
katup kontrol tidak lagi aktif. Lihat
Ilustrasi 3.24.
3-88 Final Ramp Time
Range: Fungsi:
0 s* [0 - 60 s] Masukkan waktu ramp nal yang
akan digunakan saat ramp down
dari parameter 4-11 Batasan Rendah
Kecepatan Motor [RPM] atau
parameter 4-12 Batasan Rendah
Kecepatan Motor [Hz] ke kecepatan
nol.
Pompa sumur dalam rendam
(submersible) juga dapat rusak
karena berjalan di bawah kecepatan
minimum. Waktu ramp cepat di
bawah kecepatan pump minimum
disarankan. Parameter ini dapat
diterapkan sebagai laju ramp cepat
dari parameter 4-11 Batasan Rendah
Kecepatan Motor [RPM] atau
parameter 4-12 Batasan Rendah
Kecepatan Motor [Hz]ke kecepatan
nol. Lihat Ilustrasi 3.23.
3-90 Ukuran step
Range: Fungsi:
0.10 %* [0.01 200 %]
Masukkan ukuran inkremen yang
dibutuhkan untuk menambah/
mengurangi sebagai persentase
kecepatan motor sinkron, ns. Jika
tambah/kurangi diaktifkan, referensi
yang dihasilkan dinaikkan atau
diturunkan sebesar nilai yang diatur
dalam parameter ini.
Keterangan Parameter
VLT® AQUA Drive FC 202
33
Ilustrasi 3.24 Periksa Ramp Katup
76 Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. MG20OB9B
3.5.6 3-9* Pot.Meter Digital
Gunakan fungsi potensiometer digital untuk menambah
atau mengurangi referensi aktual dengan menyesuaikan
pengaturan input digital menggunakan fungsi tambah,
kurangi, atau hapus. Untuk mengaktifkan fungsi ini,
minimal 1 input digital harus diatur ke tambah atau
kurangi.

3-91 Ramp Time
Range: Fungsi:
1 s [0 - 3600 s] Masukkan waktu ramp, yaitu, waktu
untuk menyesuaikan referensi
0-100% fungsi potensiometer digital
yang ditentukan (tambah, kurangi,
atau hapus).
Jika tambah/kurangi diaktifkan lebih
lama daripada periode tunda ramp
yang diatur dalam
parameter 3-95 Penundaan Tanjakan,
ramp up/down referensi aktual
dilakukan berdasarkan waktu ramp
ini. Waktu ramp didenisikan
sebagai waktu yang digunakan
untuk menyesuaikan referensi
sebesar ukuran langkah yang
ditentukan dalam
parameter 3-90 Ukuran step.
3-92 Pemulihan Daya
Option: Fungsi:
[0] * Padam Mereset referensi potensiometer
digital ke 0% setelah penyalaan
(power-up).
[1] Nyala Memulihkan referensi potensi-
ometer digital terakhir setelah
penyalaan (power-up).
3-93 Batas Maksimum
Range: Fungsi:
100 %* [-200 -
200 %]
Atur nilai toleransi maksimum untuk
referensi yang dihasilkan. Ini
disarankan apabila menggunakan
potensiometer digital untuk
penalaan halus referensi yang
dihasilkan.
3-94 Batas Minimum
Range: Fungsi:
0 %* [-200 -
200 %]
Atur nilai toleransi minimum untuk
referensi yang dihasilkan. Ini
disarankan apabila menggunakan
potensiometer digital untuk
penalaan halus referensi yang
dihasilkan.
3-95 Penundaan Tanjakan
Range: Fungsi:
Size
related*
[ 0 - 0 ] Masukkan penundaan yang
diperlukan dari aktivasi dari fungsi
potensiometer digital hingga ketuk
start untuk ramp referensi. Dengan
penundaan 0"ms, referensi memulai
ramp saat tambah/kurangi
diaktifkan. Lihat juga
parameter 3-91 Ramp Time.
Speed
Time (s)
Inc
130BA158.11
P 3-95
Speed
Time (s)
Dec
Inc
130BA159.11
P 3-95
Keterangan Parameter Panduan Pemrograman
3 3
Ilustrasi 3.25 Penundaan Ramp Kasus 1
MG20OB9B Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. 77
Ilustrasi 3.26 Penundaan Ramp Kasus 2

4-10 Arah Kecepatan Motor
Option: Fungsi:
Pilih arah kecepatan motor yang
diperlukan. Jika
parameter 1-00 Mode Kongurasi
diatur ke [3] Simpal tertutup, default
parameter diubah ke [0] Searah
jarum jam. Jika kedua arah dipilih,
pengoperasian berlawanan arah
jarum jam tidak dapat dipilih dari
LCP.
[0] * Searah jarum
jam
[2] Kedua arah
4-11 Batasan Rendah Kecepatan Motor [RPM]
Range: Fungsi:
Size
related*
[ 0 - par. 4-13
RPM]
Masukkan batas minimum
kecepatan motor dalam RPM. Batas
bawah kecepatan motor dapat
diatur sama dengan kecepatan
motor minimum yang direkomendasikan produsen. Batas bawah
kecepatan motor tidak boleh
melampaui pengaturan dalam
parameter 4-13 Batasan Tinggi
Kecepatan Motor [RPM].
4-12 Batasan Rendah Kecepatan Motor [Hz]
Range: Fungsi:
Size
related*
[ 0 - par. 4-14
Hz]
Masukkan batas minimum
kecepatan motor dalam Hz. Batas
bawah kecepatan motor dapat
diatur sama dengan frekuensi
output minimum poros motor.
Batas bawah kecepatan tidak boleh
melampaui pengaturan dalam
parameter 4-14 Batasan Tinggi
Kecepatan Motor [Hz].
4-13 Batasan Tinggi Kecepatan Motor [RPM]
Range: Fungsi:
Size
related*
[ 0 - 60000
RPM]
CATATAN!
Perubahan apa pun dalam
parameter 4-13 Batasan Tinggi
Kecepatan Motor [RPM]
mereset nilai dalam
parameter 4-53 Kecepatan
Peringatan Tinggike nilai yang
diatur dalam
parameter 4-13 Batasan Tinggi
Kecepatan Motor [RPM].
CATATAN!
Frekuensi output maksimum
tidak boleh melampaui 10%
frekuensi pengaktifan inverter
(parameter 14-01 Frekuensi
switching).
Masukkan batas maksimum
kecepatan motor dalam RPM. Batas
atas kecepatan motor dapat diatur
sama dengan rating motor
maksimum dari produsen. Batas
atas kecepatan motor wajib
melampaui pengaturan dalam
parameter 4-11 Batasan Rendah
Kecepatan Motor [RPM].
Nama parameter muncul sebagai
parameter 4-11 Batasan Rendah
Kecepatan Motor [RPM] atau
parameter 4-12 Batasan Rendah
Kecepatan Motor [Hz], tergantung:
•
Pengaturan parameter lain
dalam Menu Utama.
•
Pengaturan default
berdasarkan lokasi
geogras.
4-14 Batasan Tinggi Kecepatan Motor [Hz]
Range: Fungsi:
Size
related*
[ .1 - par.
4-19 Hz]
Masukkan batas maksimum
kecepatan motor dalam Hz.
Parameter 4-14 Batasan Tinggi
Kecepatan Motor [Hz] dapat diatur
sama dengan rating motor
maksimum dari produsen. Batas
atas kecepatan motor wajib
melampaui nilai dalam
parameter 4-12 Batasan Rendah
Kecepatan Motor [Hz]. Frekuensi
output tidak boleh melampaui 10%
frekuensi pengaktifan
Keterangan Parameter
VLT® AQUA Drive FC 202
3.6 Parameter 4-** Batas/Peringatan
3.6.1 4-1* Batas Motor
33
dan reaksi konverter frekuensi ketika batas-batas tersebut
terlampaui.
Batas dapat memunculkan pesan di layar. Peringatan selalu
memunculkan pesan di layar atau eldbus. Fungsi
pemantauan dapat memicu peringatan atau anjlok (trip),
menghentikan konverter frekuensi dan memunculkan
pesan alarm.
Menentukan batas torsi, arus dan kecepatan untuk motor,
78 Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. MG20OB9B

4-14 Batasan Tinggi Kecepatan Motor [Hz]
Range: Fungsi:
(parameter 14-01 Frekuensi
switching).
4-16 Mode Motor Batasan Torsi
Range: Fungsi:
Size
related*
[ 0 -
1000.0 %]
Masukkan batas torsi maksimum
untuk operasional motor. Batas torsi
aktif dalam rentang kecepatan
hingga dan termasuk kecepatan
motor nominal yang diatur dalam
parameter 1-25 Kecepatan Nominal
Motor. Untuk melindungi motor dari
mencapai torsi yang jatuh,
pengaturan default adalah 1.1 x
torsi motor terukur (nilai terhitung).
Lihat juga
parameter 14-25 Penundaan Trip
pada Batasan Torsi untuk penjelasan
lebih lengkap.
Meski pengaturan dalam
parameter 1-00 Mode Kongurasi
hingga parameter 1-28 Periksa Rotasi
Motor diubah, parameter 4-16 Mode
Motor Batasan Torsi tidak secara
otomatis direset ke pengaturan
default.
4-17 Mode generator Batasan Torsi
Range: Fungsi:
100 %* [ 0 -
1000.0 %]
Masukkan batas torsi maksimum
untuk operasi mode generator.
Batas torsi aktif dalam rentang
kecepatan hingga dan termasuk
kecepatan motor nominal
(parameter 1-25 Kecepatan Nominal
Motor). Lihat
parameter 14-25 Penundaan Trip
pada Batasan Torsi untuk rincian
lebih lanjut.
Meski pengaturan dalam
parameter 1-00 Mode Kongurasi
hingga parameter 1-28 Periksa Rotasi
Motordiubah, parameter 4-17 Mode
generator Batasan Torsi tidak secara
otomatis direset ke pengaturan
default.
4-18 Batas Arus
Range: Fungsi:
Size
related*
[ 1.0 -
1000.0 %]
Masukkan batas arus untuk
operasional motor dan generator.
Untuk melindungi motor dari
mencapai torsi yang jatuh,
pengaturan default adalah 1.1 x
torsi motor terukur (nilai terhitung).
Meski pengaturan dalam
parameter 1-00 Mode Kongurasi
hingga parameter 1-26 Torsi Terukur
Kontrol Motor diubah,
parameter 4-18 Batas Arus tidak
secara otomatis direset ke
pengaturan default.
4-19 Frekuensi Output Maks.
Range: Fungsi:
Size
related*
[ 1 - 590 Hz]
CATATAN!
Parameter ini tidak dapat
disesuaikan saat motor
berjalan.
CATATAN!
Saat parameter 1-10 Konstruksi
Motor diatur ke [1] PM,SPM tak
mnyolok, nilai maksimum
dibatasi hingga 300 Hz.
Masukkan nilai frekuensi output
maksimum. Parameter 4-19 Frekuensi
Output Maks. menentukan batas
absolut frekuensi output konverter
frekuensi untuk meningkatkan
keamanan dalam aplikasi di mana
batas kecepatan tertentu wajib
dipatuhi. Batas absolut ini berlaku
untuk semua kongurasi dan tidak
bergantung pada pengaturan dalam
parameter 1-00 Mode
Kongurasi.
Keterangan Parameter Panduan Pemrograman
3 3
MG20OB9B Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. 79

4-50 Arus Peringatan Lemah
Range: Fungsi:
0 A* [ 0 - par. 4-51A]Peringatan ditampilkan pada layar,
output terprogram, atau eldbus.
130BA064.10
(P 4-18)
(P 4-51)
(P 4-50)
(P 4-11) (P 4-53)(P 4-52) (P 4-13)
I
HIGH
I
LOW
n
LOW
n
HIGH
n
motor
I
motor
REF
ON REF
IN RANGE
I
LIM
n
MAX
n
MIN
[RPM]
Ilustrasi 3.27 Batas Arus Rendah
Masukkan nilai I
LOW
. Saat arus
motor turun di bawah batas ini
(I
LOW
), layar menampilkan pesan
Arus rendah. Output sinyal dapat
diprogram untuk menghasilkan
sinyal status pada terminal 27 atau
29, dan pada output relai 01 atau
02. Lihat Ilustrasi 3.27.
4-51 Arus Peringatan Tinggi
Range: Fungsi:
Size
related*
[ par. 4-50 par. 16-37 A]
Masukkan nilai I
HIGH
. Saat arus
motor melampaui batas ini (I
HIGH
),
layar menampilkan pesan Arus
tinggi. Output sinyal dapat
diprogram untuk menghasilkan
sinyal status pada terminal 27 atau
29, dan pada output relai 01 atau
02. Lihat Ilustrasi 3.27.
4-52 Kecepatan Peringatan Rendah
Range: Fungsi:
0 RPM* [ 0 - par. 4-53
RPM]
Masukkan nilai n
LOW
. Saat
kecepatan motor turun di bawah
batas ini (n
LOW
), layar menampilkan
pesan Kecepatan Rendah. Output
sinyal dapat diprogram untuk
menghasilkan sinyal status pada
terminal 27 atau 29, dan pada
output relai 01 atau 02. Program
batas bawah sinyal kecepatan
4-52 Kecepatan Peringatan Rendah
Range: Fungsi:
motor, n
LOW
, dalam rentang kerja
normal konverter frekuensi. Lihat
Ilustrasi 3.27.
4-53 Kecepatan Peringatan Tinggi
Range: Fungsi:
Size
related*
[ par. 4-52 par. 4-13 RPM]
CATATAN!
Perubahan apa pun
dalamparameter 4-13 Batasan
Tinggi Kecepatan Motor [RPM]
mereset nilai dalam
parameter 4-53 Kecepatan
Peringatan Tinggike nilai yang
diatur dalam
parameter 4-13 Batasan Tinggi
Kecepatan Motor [RPM].
Perbedaan nilai yang
dibutuhkan dalam
parameter 4-53 Kecepatan
Peringatan Tinggi harus diatur
setelah pemrograman
parameter 4-13 Batasan Tinggi
Kecepatan Motor [RPM].
Masukkan nilai voltase n
TINGGI
. Saat
kecepatan motor melampaui batas
ini (n
HIGH
), layar menampilkan pesan
Kecepatan tinggi. Output sinyal
dapat diprogram untuk menghasilkan sinyal status pada terminal 27
atau 29, dan pada output relai 01
atau 02. Program batas bawah atas
kecepatan motor, n
HIGH
, dalam
rentang kerja normal konverter
frekuensi. Lihat Ilustrasi 3.27.
4-54 Peringatan Referensi Rendah
Range: Fungsi:
-999999.999* [ -999999.999
- par. 4-55 ]
Masukkan batas referensi rendah.
Saat referensi aktual turun di bawah
batas ini, layar akan menampilkan
pesan Ref
RENDAH
. Output sinyal
dapat diprogram untuk menghasilkan sinyal status pada terminal 27
atau 29, dan pada output relai 01
atau 02.
Keterangan Parameter
VLT® AQUA Drive FC 202
3.6.2 4-5* Sesuai Peringatan
Tentukan batas peringatan yang dapat disesuaikan untuk
arus, kecepatan, referensi, dan umpan balik.
33
CATATAN!
Tidak muncul pada layar, hanya dalam Perangkat Lunak
Persiapan MCT 10.
80 Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. MG20OB9B

4-55 Peringatan Referensi Tinggi
Range: Fungsi:
999999.999* [ par. 4-54 -
999999.999 ]
Masukkan batas referensi tinggi.
Saat referensi aktual melampaui
batas ini, layar akan menampilkan
pesan Ref
Tinggi
. Output sinyal dapat
diprogram untuk menghasilkan
sinyal status pada terminal 27 atau
29, dan pada output relai 01 atau
02.
4-56 Peringatan Umpan Balik Rendah
Range: Fungsi:
-999999.99
9 ReferenceFeedback
Unit*
[ -999999.999
- par. 4-57
ReferenceFeedbackUnit]
Masukkan batas umpan balik
rendah. Saat umpan-balik turun di
bawah batas ini, layar menampilkan
pesan Umpanbalik
RENDAH
. Output
sinyal dapat diprogram untuk
menghasilkan sinyal status pada
terminal 27 atau 29, dan pada
output relai 01 atau 02.
4-57 Peringatan Umpan Balik Tinggi
Range: Fungsi:
999999.999
ReferenceFeedbackU
nit*
[ par. 4-56 -
999999.999
ReferenceFeedbackUnit]
Masukkan batas umpan balik atas.
Saat umpan balik melampaui batas
ini, layar akan menampilkan pesan
Umpanbalik
Tinggi
. Output sinyal
dapat diprogram untuk menghasilkan sinyal status pada terminal 27
atau 29, dan pada output relai 01
atau 02.
4-58 Fungsi Fasa Motor Hilang
Option: Fungsi:
CATATAN!
Parameter ini tidak dapat
disesuaikan saat motor
berjalan.
Menampilkan alarm saat fasa motor
hilang.
[0] Nonaktif Tidak menampilkan alarm saat fasa
motor hilang.
[1] Trip 100 ms Alarm ditampilkan saat terjadi
kehilangan fasa motor.
[2] * Trip 1000 ms
[5] Motor Check
4-60 Kecepatan Pintas Dari [RPM]
Arai [4]
Range: Fungsi:
Size
related*
[ 0 - par. 4-13
RPM]
Beberapa sistem menghindari
frekuensi atau kecepatan output
tertentu karena masalah resonansi.
Masukkan batas bawah dari
kecepatan yang harus dihindari.
4-61 Kecepatan Pintas Dari [Hz]
Arai [4]
Range: Fungsi:
Size
related*
[ 0 - par. 4-14
Hz]
Beberapa sistem menghindari
frekuensi atau kecepatan output
tertentu karena masalah resonansi.
Masukkan batas bawah dari
kecepatan yang harus dihindari.
4-62 Kecepatan Pintas ke [RPM]
Arai [4]
Range: Fungsi:
Size
related*
[ 0 - par. 4-13
RPM]
Beberapa sistem menghindari
frekuensi atau kecepatan output
tertentu karena masalah resonansi.
Masukkan batas atas dari kecepatan
yang harus dihindari.
4-63 Kecepatan Pintas Ke [Hz]
Arai [4]
Range: Fungsi:
Size
related*
[ 0 - par. 4-14
Hz]
Beberapa sistem menghindari
frekuensi atau kecepatan output
tertentu karena masalah resonansi.
Masukkan batas atas dari kecepatan
yang harus dihindari.
Keterangan Parameter Panduan Pemrograman
3.6.3 4-6* Kecepatan pintas
Beberapa sistem menghindari frekuensi atau kecepatan
output tertentu karena masalah resonansi. Maksimum 4
rentang frekuensi atau kecepatan dapat dihindari.
3 3
MG20OB9B Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. 81

4-64 P'aturan Pintas Semi-Auto
Option: Fungsi:
[0] * Mati Tidak berfungsi.
[1] Aktif Memulai pengaturan bypass semi
otomatis dan melanjutkan prosedur
yang dijelaskan dalam
bab 3.6.4 Pengaturan Kecepatan
Bypass
Semi-Otomatis.
Keterangan Parameter
VLT® AQUA Drive FC 202
3.6.4 Pengaturan Kecepatan Bypass
Semi-Otomatis
Gunakan kecepatan bypass semi otomatis untuk
memudahkan pemrograman frekuensi yang harus
dilompati akibat resonansi dalam sistem.
33
Jalankan prosedur berikut:
1. Matikan motor.
2. Pilih [1] Diaktifkan dalam parameter 4-64 P'aturan
Pintas Semi-Auto.
3. Tekan [Hand On] pada LCP untuk mulai mencari
pita frekuensi penyebab resonansi. Motor
berakselerasi berdasarkan ramp yang ditetapkan.
4. Setelah menemukan pita penyebab resonansi,
tekan [OK] pada LCP saat keluar dari pita
tersebut. Frekuensi aktual disimpan sebagai
elemen pertama dalam parameter 4-62 Kecepatan
Pintas ke [RPM] atau parameter 4-63 Kecepatan
Pintas Ke [Hz] (arai). Ulangi langkah ini untuk tiap
pita penyebab resonansi yang ditemukan saat
ramp up (maksimum 4 dapat disesuaikan).
5. Setelah kecepatan maksimum tercapai, motor
akan secara otomatis memulai ramp down. Ulangi
prosedur di atas ketika kecepatan meninggalkan
pita resonansi selama deselerasi. Frekuensi aktual
yang didaftarkan saat [OK] ditekan disimpan
dalam parameter 4-60 Kecepatan Pintas Dari [RPM]
atau parameter 4-61 Kecepatan Pintas Dari [Hz].
6. Setelah motor berdeselerasi hingga berhenti,
tekan [OK]. Parameter 4-64 P'aturan Pintas Semi-
Auto akan direset secara otomatis ke
Konverter frekuensi tetap berada dalam mode
hand on sampai [O] atau [Auto On] ditekan
pada LCP.
Jika frekuensi untuk pita tertentu penyebab resonansi tidak
didaftarkan dalam urutan yang benar, semua pendaftaran
dibatalkan dan pesan berikut muncul: Bidang kecepatan
yang terkumpul tumpang-tindih atau tidak ditentukan secara
lengkap. Tekan [Cancel] untuk membatalkan. Salah urut
pendaftaran adalah saat nilai frekuensi yang disimpan
dalam parameter 4-62 Kecepatan Pintas ke [RPM] lebih
tinggi daripada nilai dalam parameter 4-60 Kecepatan Pintas
Dari [RPM], atau jika nilai frekuensi tersebut tidak memiliki
jumlah pendaftaran yang sama untuk Bypass Dari dan
Bypass Ke.
O.
82 Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. MG20OB9B

5-00 Mode I/O Digital
Option: Fungsi:
CATATAN!
Parameter ini tidak dapat
disesuaikan saat motor
berjalan.
Input digital dan output digital
terprogram dapat diprogram untuk
operasi pada sistem PNP dan NPN.
[0] * PNP - Aktif
pada 24V
Operasi pada denyut arah positif
(0). Sistem PNP diturunkan ke GND.
[1] NPN - Aktif
pada 0V
Operasi pada denyut arah negatif
(1). Sistem NPN dinaikkan ke +24 V,
secara internal di dalam konverter
frekuensi.
5-01 Mode Terminal 27
Option: Fungsi:
CATATAN!
Parameter ini tidak dapat
disesuaikan saat motor
berjalan.
[0] * Input Menentukan terminal 27 sebagai
input digital.
[1] Output Menentukan terminal 27 sebagai
output digital.
5-02 Modus Terminal 29
Option: Fungsi:
CATATAN!
Parameter ini tidak dapat
disesuaikan saat motor
berjalan.
[0] * Input Menentukan terminal 29 sebagai
masukan digital.
[1] Output Menentukan terminal 29 sebagai
keluaran digital.
Keterangan Parameter Panduan Pemrograman
3.7 Parameters 5-** In/Out Digital
Kelompok parameter untuk mengkongurasi input dan
output digital.
3.7.1 5-0* Mode I/O Digital
Parameter untuk mengongurasi input dan output
menggunakan NPN dan PNP.
MG20OB9B Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. 83
3.7.2 5-1* Input Digital
Parameter untuk mengkongurasi fungsi input untuk
terminal input.
Input digital digunakan untuk memilih berbagai fungsi
pada konverter frekuensi. Semua input digital dapat diatur
ke fungsi berikut ini:
Opsi [120]-[138] berkaitan dengan fungsi kontroler
kaskade. Untuk informasi lebih lengkap, lihat grup
parameter 25-** Pengontrol Kaskade.
Fungsi input digital Opsi Terminal
Tidak ada operasi [0] 19, 29, 32, 33
Reset [1] Semua
Coast terbalik [2] 27
Coast dan reset inverse [3] Semua
DC-brake inverse [5] Semua
Stop inverse [6] Semua
Interlock eksternal [7] Semua
Start [8] Semua
Latched start [9] Semua
Pembalikan [10] Semua
Start reversing [11] Semua
Jog [14] Semua
Preset referensi on [15] Semua
Preset ref bit 0 [16] Semua
Preset ref bit 1 [17] Semua
Preset ref bit 2 [18] Semua
Freeze reference [19] Semua
Freeze output [20] Semua
Speed up [21] Semua
Speed down [22] Semua
Set-up select bit 0 [23] Semua
Pilih pengaturan bit 1 [24] Semua
Input denyut [32] 29, 33
Ramp bit 0 [34] Semua
K'gagal. hantaran list. [36] Semua
Bit sumber ref 0 [42] Semua
Start hand/auto [51] Semua
Boleh dijalankan [52] Semua
Start manual [53] Semua
Auto start [54] Semua
DigiPot increase [55] Semua
Pengurangan DigiPot [56] Semua
Hapus DigiPot [57] Semua
Penghitung A (naik) [60] 29, 33
Penghitung A (turun) [61] 29, 33
Reset penghitung A [62] Semua
Penghitung B (naik) [63] 29, 33
Penghitung B (turun) [64] 29, 33
Reset penghitung B [65] Semua
Mode tidur [66] Semua
Reset kata pemeliharaan [78] Semua
3 3

Keterangan Parameter
VLT® AQUA Drive FC 202
Fungsi input digital Opsi Terminal
PTC kartu 1 [80] Semua
Derag pompa tertutup [85] Semua
Start pompa utama [120] Semua
Penggiliran pompa
33
utama
Interlock pompa 1 [130] Semua
Interlock pompa 2 [131] Semua
Interlock pompa 3 [132] Semua
[121] Semua
CATATAN!
Apabila konverter frekuensi berada
pada batas torsi dan telah menerima
perintah stop, ini mungkin tidak stop
dengan sendirinya. Untuk
memastikan konverter frekuensi
berhenti, kongurasikan output
digital ke [27] Batas torsi & stop
kemudian sambungkan ke input
digital yang dikongurasi sebagai
Tabel 3.12 Fungsi untuk Input Digital
Semua artinya terminal 18, 19, 27, 29, 32, X30/2, X30/3, dan
X30/4.
X30/X adalah terminal pada VLT® General Purpose I/O MCB
101.
Fungsi khusus untuk 1 input digital saja disebutkan dalam
parameter terkait.
Semua input digital dapat diprogram ke fungsi berikut ini:
[0] Tidak ada
operasi
[1] Reset Mereset konverter frekuensi setelah anjlok/
[2] Coast terbalik Meninggalkan motor dalam mode bebas.
[3] Coast dan
reset inverse
[5] DC-brake
inverse
[6] Stop inverse Stop fungsi pembalikan. Menghasilkan
Tiada reaksi untuk sinyal yang dikirim ke
terminal.
alarm. Tidak semua alarm dapat di-reset.
Logika 0=coast stop.
(Input digital default 27) Coast stop,
inverted input (NC).
Reset dan coast stop inverted input (NC).
Meninggalkan motor dalam mode bebas
dan me-reset konverter frekuensi. Logika
0=coast stop dan reset.
Inverted input untuk rem DC (NC).
Menghentikan motor dengan menyalurkan
energi dengan arus DC untuk periode
waktu tertentu. Lihat parameter 2-01 Arus
Brake DC ke parameter 2-03 Kecepatan
Penyelaan Rem DC [RPM]. Fungsi ini hanya
aktif pada saat nilai di
parameter 2-02 Waktu Pengereman DC
berbeda dari 0. Logika 0=rem DC.
Pilihan ini tidak tersedia saat
parameter 1-10 Konstruksi Motor diatur ke
[1] PM,SPM tak mnyolok.
fungsi stop ketika terminal yang dipilih
beralih dari tingkat logik ‘1’ ke ‘0’. Stop
dilakukan berdasarkan waktu ramp yang
dipilih (parameter 3-42 Waktu Turunan Ramp
1 dan parameter 3-52 Waktu Turunan Ramp
2).
[7] Interlock
eksternal
[8] Start Pilih nilai start untuk perintah start/stop.
[9] Latched start Motor akan menyala jika denyut diterapkan
[10] Pembalikan Mengubah arah rotasi poros motor. Pilih
[11] Start reversing Digunakan untuk start/stop dan untuk
[14] Jog Digunakan untuk mengaktifkan kecepatan
[15] Preset
referensi on
[16] Preset ref bit0Memungkinkan 1 dari 8 referensi preset
[17] Preset ref bit1Memungkinkan 1 dari 8 referensi preset
[18] Preset ref bit2Memungkinkan 1 dari 8 referensi preset
coast.
Fungsinya sama seperti coast stop inverse,
tapi interlock eksternal menghasilkan pesan
alarm gangguan eksternal saat terminal
yang diprogram untuk coast inverse adalah
logik 0. Pesan alarm ini juga aktif via output
digital dan output relai, jika diprogram
untuk interlock eksternal. Alarm dapat direset menggunakan input digital atau
tombol [Reset] setelah penyebab interlock
eksternal teratasi. Tunda dapat diprogram
dalam parameter 22-00 Tunda Interlock
Eksternal. Setelah sinyal diterapkan ke input,
reaksi ditunda dengan waktu yang diatur
dalamparameter 22-00 Tunda Interlock
Eksternal.
1=start, 0=stop.
(Input digital default 18)
minimum 2"ms. Motor berhenti saat stop
inverse diaktifkan.
logik 1’ untuk mundur. Sinyal mundur
hanya mengubah arah rotasi. Ini tidak akan
mengaktifkan fungsi start. Pilih kedua arah
di parameter 4-10 Arah Kecepatan Motor.
(Input digital standar 19).
mundur pada kabel yang sama. Sinyal pada
start tidak diizinkan pada waktu bersamaan.
jog. Lihat parameter 3-11 Kecepatan Jog [Hz].
(Input digital default 29)
Digunakan untuk menggeser antara
referensi eksternal dan referensi preset.
Diasumsikan bahwa [1] eksternal/preset telah
dipilih pada parameter 3-04 Fungsi Referensi.
Logika 0 = referensi eksternal aktif; logik 1
= 1 dari 8 preferensi preset aktif.
dipilih berdasarkan Tabel 3.13.
dipilih berdasarkan Tabel 3.13.
dipilih berdasarkan Tabel 3.13.
84 Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. MG20OB9B

Keterangan Parameter Panduan Pemrograman
Preset ref. bit 2 1 0
Referensi preset 0 0 0 0
Referensi preset 1 0 0 1
Referensi preset 2 0 1 0
Referensi preset 3 0 1 1
Referensi preset 4 1 0 0
Referensi preset 5 1 0 1
Referensi preset 6 1 1 0
Referensi preset 7 1 1 1
Tabel 3.13 Bit Referensi Preset
[19] Bekukan ref. Membekukan referensi aktual. Referensi
yang dibekukan sekarang adalah titik
aktifkan/persiapan tambah kecepatan dan
kurangi kecepatan yang akan digunakan.
Jika tambah kecepatan/kurangi kecepatan
digunakan, perubahan kecepatan selalu
mengikuti ramp 2 (parameter 3-51 Waktu
tanjakan Ramp 2 dan parameter 3-52 Waktu
Turunan Ramp 2) dalam rentang 0–
parameter 3-03 Referensi Maksimum.
[20] Freeze output Membekukan frekuensi motor aktual (Hz).
Frekuensi motor yang dibekukan sekarang
adalah titik aktifkan/persiapan tambah
kecepatan dan kurangi kecepatan yang
akan digunakan. Jika tambah kecepatan/
kurangi kecepatan digunakan, perubahan
kecepatan selalu mengikuti ramp 2
(parameter 3-51 Waktu tanjakan Ramp 2 dan
parameter 3-52 Waktu Turunan Ramp 2)
dalam rentang 0–parameter 1-23 Frekuensi
Motor.
CATATAN!
Apabila [20] Bekukan output aktif,
konverter frekuensi tidak dapat
dihentikan lewat [13] Sinyal start
rendah. Hentikan konverter frekuensi
via terminal yang diprogram untuk
[2] Coast inverse atau [3] Coast and
reset, inverse.
[21] Speed up Untuk kontrol tambah kecepatan/kurangi
kecepatan secara digital (potensiometer
motor). Aktifkan fungsi ini dengan memilih
[19] Bekukan referensi atau [20] Bekukan
output. Saat [21] Tambah kecepatan
diaktifkan selama kurang dari 400 ms,
referensi yang dihasilkan meningkat sebesar
0,1%. Jika [21] Tambah kecepatan diaktifkan
selama lebih dari 400 ms, referensi yang
dihasilkan berakselerasi/deselerasi menurut
ramp 1 dalam parameter 3-41 Waktu
tanjakan Ramp 1.
[22] Speed down Sama dengan [21] Tambah kecepatan.
[23] Set-up select
bit 0
Memilih 1 dari 4 pengaturan. Atur
parameter 0-10 Pengaturan aktif ke
Pengaturan Multi.
[24] Pilih
pengaturan
bit 1
[32] Input denyut Pilih [32] Input denyut jika menggunakan
[34] Ramp bit 0 Pilih ramp mana yang akan digunakan.
[36] K'gagal.
hantaran list.
[42] Bit sumber ref0Sebuah input aktif dalam bit 0 memilih
[51] Start Hand/
Auto
[52] Jalan Permisif Terminal input, yang diprogramkan [52] Izin
[53] Start manual Sinyal yang diterapkan menempatkan
Sama seperti Pengaturan pilih bit 0 [23].
(Input digital default 32).
sekuens denyut sebagai referensi atau
umpan balik. Pengukuran dilakukan dalam
grup parameter 5-5* Input Pulsa.
Logika 0 memilih ramp 1 sedangkan logik 1
memilih ramp 2.
Aktifkan parameter 14-10 Kegagalan
hantaran listrik. Mains failure inverse aktif
dalam situasi logik 0.
AI54 sebagai sumber referensi (lihat grup
parameter 3-1* Referensi, opsi [35] Pilihan
input digital). Sebuah input aktif memilih
AI53.
Memilih start hand atau auto. Sinyal Tinggi
memilih auto-on saja, sinyal Rendah
memilih hand-on saja.
Operasi-nya, wajib dalam logik 1 sebelum
perintah start dapat diterima. Izin operasi
memilih sebuah logik DAN fungsi yang
berhubungan dengan terminal, yang
diprogram untuk [8] Start, [14] Jog, atau [20]
Bekukan Output. Untuk mulai mengoperasikan motor, kedua syarat tersebut wajib
dipenuhi. Jika [52] Izin Operasi diprogram
pada beberapa terminal, logik 1 wajib
ditemukan pada salah satu terminal
tersebut untuk menjalankan fungsi ini.
Permintaan sinyal output digital untuk
pengoperasian ([8] Start, [14] Jog, atau [20]
Bekukan output) yang diprogram dalam
grup parameter 5-3* Output Digital, atau
grup parameter 5-4* Relai, tidak terpengaruh
oleh [52] Izin Operasi.
konverter frekuensi dalam mode hand-on
seperti saat [Hand On] ditekan dan perintah
berhenti normal dikesampingkan. Jika
transmisi sinyal diakhiri, motor berhenti.
Agar perintah start lain valid, berikan input
digital lain ke [54] Auto Start lalu kirim
sinyal ke sini. [Hand On] dan [Auto On]
tidak berpengaruh. [O] mengesampingkan
start lokal dan start otomatis. Tekan [Hand
On] atau [Auto On] untuk mengaktifkan
kembali start lokal dan start otomatis. Jika
tidak ada sinyal pada [53] Hand start
maupun [54] Auto start, motor berhenti
meski perintah start normal diberikan. Jika
sinyal diterapkan ke [53] Hand start maupun
[54] Auto start, fungsi ini akan distart secara
3 3
MG20OB9B Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. 85

Keterangan Parameter
VLT® AQUA Drive FC 202
otomatis. Jika [O] ditekan, motor berhenti
meski ada sinyal [53] Hand start dan [54]
Auto start.
[54] Auto start Sinyal yang diterapkan menempatkan
konverter frekuensi dalam mode auto-on
seperti saat [Auto On] ditekan. Lihat juga
33
[55] Penambahan
DigiPot
[56] Pengurangan
DigiPot
[57] Hapus DigiPot Menggunakan input ini untuk menghapus
[60] Penghitung A
(naik)
[61] Penghitung A
(turun)
[62] Reset
Penghitung A
[63] Penghitung B
(naik)
[64] Penghitung B
(turun)
[65] Reset
Penghitung B
[66] Mode Tidur Memaksa konverter frekuensi memasuki
[78] Reset Kata
Pemeliharaan
Preventif
[80] Kartu PTC 1 Semua input digital dapat ditetapkan ke
[85] Derag Pompa
Tertutup
[53] Hand Start.
Menggunakan input ini sebagai sinyal
naikkan ke fungsi potensiometer digital
yang dijelaskan dalam grup parameter 3-9*
Potensiometer Digital.
Menggunakan input ini sebagai sinyal
turunkan ke fungsi potensiometer digital
yang dijelaskan dalam grup parameter 3-9*
Potensiometer Digital.
referensi potensiometer digital yang
dijelaskan dalam grup parameter 3-9*
Potensiometer Digital.
(Terminal 29 atau 33 saja) Input untuk
penghitungan kenaikan pada penghitung
SLC.
(Terminal 29 atau 33 saja) Input untuk
penghitungan penurunan pada penghitung
SLC.
Input untuk reset penghitung A.
(Terminal 29 dan 33 saja) Input untuk
penghitungan kenaikan pada penghitung
SLC.
(Terminal 29 dan 33 saja) Input untuk
penghitungan penurunan pada penghitung
SLC.
Input untuk reset penghitung B.
mode tidur (lihat grup parameter 22-4*
Mode Tidur). Bereaksi terhadap kenaikan
tepi sinyal yang diterapkan.
Reset semua data pada
parameter 16-96 Kata Pemeliharaan ke 0.
PTC [80] Kartu 1. Akan tetapi, hanya 1 input
digital dipilih untuk opsi ini.
Mulai deragging.
Opsi [120]-[138] berkaitan dengan fungsi kontroler
kaskade. Untuk informasi lebih lengkap, lihat grup
parameter 25-** Pengontrol Kaskade.
[120] Start Pompa
Utama
Start/stop Pompa Utama (dikontrol oleh
konverter frekuensi). Start juga
membutuhkan sinyal start sistem, misalnya
ke salah satu input digital yang diterapkan
untuk [8] Start.
[121] Penggiliran
Pompa
Utama
[130
Interlock
-
Pompa1 –
138]
Interlock
Pompa9
Memaksa pergantian pompa utama dalam
kontrol kaskade. Atur
parameter 25-50 Pompa Utama Bergantian ke
[2] At Command atau [3] At Staging atau At
Command. Parameter 25-51 Peristiwa
Bergantian dapat diatur ke salah satu dari 4
opsi yang ada.
Fungsi ini bergantung pada pengaturan
dalam parameter 25-06 Jumlah Pompa. Jika
diatur ke [0] No, Pompa1 adalah pompa
yang dikontrol oleh relai1 dan seterusnya.
Jika diatur ke [1[ Yes, Pompa1 adalah pompa
yang dikontrol oleh konverter frekuensi saja
(tanpa melibatkan relai terintegrasi) dan
Pompa2 adalah pompa yang dikontrol oleh
relai1. Interlock tidak dapat diterapkan pada
pompa berkecepatan variabel (utama)
dalam kontroler kaskade dasar.
Lihat Tabel 3.14.
Pengaturan
dalam grup
parameter
5-1* Input
Digital
[0] Tidak [1] Ya
[130]
Interlock
Pompa1
[131]
Interlock
Pompa2
[132]
Interlock
Pompa3
[133]
Interlock
Pompa4
[134]
Interlock
Pompa5
[135]
Interlock
Pompa6
[136]
Interlock
Pompa7
[137]
Interlock
Pompa8
[138]
Interlock
Pompa9
Pengaturan dalam
parameter 25-06 Jumlah
Pompa
Dikontrol
oleh relai1
(selain
pompa
utama)
Dikontrol
oleh relai2
Dikontrol
oleh relai3
Dikontrol
oleh relai4
Dikontrol
oleh relai5
Dikontrol
oleh relai6
Dikontrol
oleh relai7
Dikontrol
oleh relai8
Dikontrol
oleh relai9
Dikontrol
oleh
konverter
frekuensi
(tidak dapat
di-interlock)
Dikontrol
oleh relai1
Dikontrol
oleh relai2
Dikontrol
oleh relai3
Dikontrol
oleh relai4
Dikontrol
oleh relai5
Dikontrol
oleh relai6
Dikontrol
oleh relai7
Dikontrol
oleh relai8
86 Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. MG20OB9B

5-19 Terminal 37 Berhenti Aman
Gunakan parameter ini untuk mengongurasikan fungsi Safe
Torque O. Pesan peringatan memaksa konverter frekuensi
memperlambat kecepatan dan akhirnya menghentikan motor
dan memungkinkan restart otomatis. Pesan alarm memaksa
konverter frekuensi memperlambat kecepatan dan akhirnya
menghentikan motor dan restart harus dilakukan secara manual
(via eldbus, I/O Digital, atau dengan menekan [RESET] pada
LCP). Jika konverter dilengkapi VLT®Kartu Termistor PTC, MCB 112
kongurasikan opsi PTC untuk memanfaatkan penangangan
alarm secara maksimal.
Option: Fungsi:
[1] * Alarm Stop
Aman
Memperlambat dan menghentikan
konverter frekuensi saat Safe Torque
O diaktifkan. Reset manual dari
LCP, input digital, atau eldbus.
[3] Peringatan
Stop Aman
Memperlambat dan menghentikan
konverter frekuensi saat Safe Torque
O diaktifkan (terminal 37 mati).
Setelah rangkaian Safe Torque O
terjalin kembali, konverter frekuensi
kembali beroperasi tanpa reset
manual.
[4] Alarm PTC 1 Memperlambat dan menghentikan
konverter frekuensi saat Safe Torque
O diaktifkan. Reset manual dari
LCP, input digital, atau eldbus.
[5] Peringatan
PTC 1
Memperlambat dan menghentikan
konverter frekuensi saat Safe Torque
O diaktifkan (terminal 37 mati).
Setelah rangkaian Safe Torque O
terjalin kembali, konverter frekuensi
kembali beroperasi tanpa reset
manual, kecuali input digital yang
diatur ke [80] Kartu PTC 1 masih
aktif.
[6] PTC 1 & Relai
A
Opsi ini digunakan saat VLT®Kartu
Termistor PTC MCB 112 ditutup
dengan sebuah tombol stop lewat
relai pengaman ke terminal 37.
Memperlambat dan menghentikan
konverter frekuensi saat Safe Torque
O diaktifkan. Reset manual dari
LCP, input digital, atau eldbus.
[7] PTC 1 & Relai
W
Opsi ini digunakan saat VLT®Kartu
Termistor PTC MCB 112 ditutup
dengan sebuah tombol stop lewat
relai pengaman ke terminal 37.
Memperlambat dan menghentikan
konverter frekuensi saat Safe Torque
O diaktifkan (terminal 37 mati).
Setelah rangkaian Safe Torque O
terjalin kembali, konverter frekuensi
kembali beroperasi tanpa reset
Keterangan Parameter Panduan Pemrograman
5-10 Input Digital Terminal 18
Parameter ini berisi semua opsi dan fungsi yang ada dalam grup
parameter 5-1* Input Digital kecuali opsi [32] Input denyut.
5-11 Input Digital Terminal 19
Parameter ini berisi semua opsi dan fungsi yang ada dalam grup
parameter 5-1* Input Digital kecuali opsi [32] Input denyut.
5-12 Input Digital Terminal 27
Parameter ini berisi semua opsi dan fungsi yang ada dalam grup
parameter 5-1* Input Digital kecuali opsi [32] Input denyut.
5-13 Input Digital Terminal 29
Parameter ini berisi semua opsi dan fungsi yang ada dalam grup
parameter 5-1* Input Digital.
5-14 Input Digital Terminal 32
Parameter ini berisi semua opsi dan fungsi yang ada dalam grup
parameter 5-1* Input Digital kecuali opsi [32] Input denyut.
5-15 Input Digital Terminal 33
Parameter ini berisi semua opsi dan fungsi yang ada dalam grup
parameter 5-1* Input Digital.
5-16 Input Digital Terminal X30/2
Option: Fungsi:
[0] * Tidak ada
5-17 Input Digital Terminal X30/3
Option: Fungsi:
[0] * Tidak ada
5-18 Input Digital Terminal X30/4
Option: Fungsi:
[0] * Tidak ada
MG20OB9B Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. 87
Parameter ini aktif jika konverter frekuensi
operasi
operasi
operasi
menggunakan VLT®General Purpose I/O MCB
101 Parameter ini berisi semua opsi dan
fungsi yang ada dalam grup parameter 5-1*
Input Digital kecuali opsi [32] Input denyut.
Parameter ini aktif jika konverter frekuensi
menggunakan VLT®General Purpose I/O MCB
101 Parameter ini berisi semua opsi dan
fungsi yang ada dalam grup parameter 5-1*
Input Digital kecuali opsi [32] Input denyut.
Parameter ini aktif jika konverter frekuensi
menggunakan VLT®General Purpose I/O MCB
101 Parameter ini berisi semua opsi dan
fungsi yang ada dalam grup parameter 5-1*
Input Digital kecuali opsi [32] Input denyut.
3 3

5-19 Terminal 37 Berhenti Aman
Gunakan parameter ini untuk mengongurasikan fungsi Safe
Torque O. Pesan peringatan memaksa konverter frekuensi
memperlambat kecepatan dan akhirnya menghentikan motor
dan memungkinkan restart otomatis. Pesan alarm memaksa
konverter frekuensi memperlambat kecepatan dan akhirnya
menghentikan motor dan restart harus dilakukan secara manual
(via eldbus, I/O Digital, atau dengan menekan [RESET] pada
LCP). Jika konverter dilengkapi VLT®Kartu Termistor PTC, MCB 112
kongurasikan opsi PTC untuk memanfaatkan penangangan
alarm secara maksimal.
Option: Fungsi:
manual, kecuali input digital yang
diatur ke [80] Kartu PTC 1 masih
aktif.
[8] PTC 1 & Relai
A/W
Dengan opsi ini, kombinasi alarm
dan peringatan dapat digunakan.
[9] PTC 1 & Relai
W/A
Dengan opsi ini, kombinasi alarm
dan peringatan dapat digunakan.
Keterangan Parameter
VLT® AQUA Drive FC 202
W artinya peringatan dan A alarm. Untuk informasi lebih lanjut, lihat
Alarm dan Peringatan dalam bab 5 Pemecahan masalah.
Kegagalan berbahaya berkaitan dengan Safe Torque O
memicu alarm 72, Kegagalan berbahaya.
Lihat Tabel 5.1.
33
5-20 Input Digital Terminal X46/1
Parameter ini berkaitan dengan input digital pada VLT® Extended
Relay Card MCB 113. Parameter ini berisi semua opsi dan fungsi
yang ada dalam grup parameter 5-1* Input Digital kecuali opsi [32]
Input denyut.
5-21 Input Digital Terminal X46/3
Parameter ini berkaitan dengan input digital pada VLT® Extended
Relay Card MCB 113. Parameter ini berisi semua opsi dan fungsi
yang ada dalam grup parameter 5-1* Input Digital kecuali opsi [32]
Input denyut.
5-22 Input Digital Terminal X46/5
Parameter ini berkaitan dengan input digital pada VLT® Extended
CATATAN!
Opsi [4] PTC 1 Alarm ke [9] PTC 1 & Relai W/A hanya
Relay Card MCB 113. Parameter ini berisi semua opsi dan fungsi
yang ada dalam grup parameter 5-1* Input Digital kecuali opsi [32]
Input denyut.
tersedia saat MCB 112 tersambung.
5-23 Input Digital Terminal X46/7
CATATAN!
Restart otomatis konverter frekuensi dapat dilakukan
dengan memilih Reset/Peringatan Otomatis.
Parameter ini berkaitan dengan input digital pada VLT® Extended
Relay Card MCB 113. Parameter ini berisi semua opsi dan fungsi
yang ada dalam grup parameter 5-1* Input Digital kecuali opsi [32]
Input denyut.
Fungsi Nom
Tidak Berfungsi [0] – –
Alarm Safe TorqueO[1]* – Safe Torque O
Peringatan Safe
Torque O
Alarm PTC 1 [4] PTC 1 Safe Torque
Peringatan PTC 1 [5] PTC 1 Safe Torque
PTC 1 & Relai A [6] PTC 1 Safe Torque
PTC 1 & Relai W [7] PTC 1 Safe Torque
PTC 1 & Relai A/W [8] PTC 1 Safe Torque
PTC 1 & Relai W/A [9] PTC 1 Safe Torque
Tabel 3.14 Gambaran umum Fungsi, Alarm, dan Peringatan
88 Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. MG20OB9B
PTC Relai
-
or
[3] – Safe Torque O
O [A71]
O [W71]
O [A71]
O [W71]
O [A71]
O [W71]
[A68]
[W68]
–
–
Safe Torque O
[A68]
Safe Torque O
[W68]
Safe Torque O
[W68]
Safe Torque O
[A68]
5-24 Input Digital Terminal X46/9
Parameter ini berkaitan dengan input digital pada VLT® Extended
Relay Card MCB 113. Parameter ini berisi semua opsi dan fungsi
yang ada dalam grup parameter 5-1* Input Digital kecuali opsi [32]
Input denyut.
5-25 Input Digital Terminal X46/11
Parameter ini berkaitan dengan input digital pada VLT® Extended
Relay Card MCB 113. Parameter ini berisi semua opsi dan fungsi
yang ada dalam grup parameter 5-1* Input Digital kecuali opsi [32]
Input denyut.
5-26 Input Digital Terminal X46/13
Parameter ini berkaitan dengan input digital pada VLT® Extended
Relay Card MCB 113. Parameter ini berisi semua opsi dan fungsi
yang ada dalam grup parameter 5-1* Input Digital kecuali opsi [32]
Input denyut.

Keterangan Parameter Panduan Pemrograman
3.7.3 5-3* Digital Output
Parameter untuk mengkongurasi fungsi output untuk
terminal output. Output digital 2 solid-state merupakan hal
umum untuk terminal 27 dan 29. Atur fungsi I/O untuk
terminal 27 dalam parameter 5-01 Mode Terminal 27, dan
atur fungsi I/O untuk terminal 29 dalam
parameter 5-02 Modus Terminal 29.
CATATAN!
Parameter ini tidak dapat disetel saat motor berjalan.
Output digital dapat diprogram dengan
fungsi berikut ini:
[0] Tidak ada
operasi
[1] Kontrol siap Papan kontrol menerima voltase suplai.
[2] Drive siap Konverter frekuensi siap untuk operasi
[3] Drive siap/
kontrol jarak
jauh
[4] Siaga/tanpa
peringatan
[5] Berjalan Motor berjalan.
[6] Berputar/tak
ada peringatan
[8] Berjalan pada
referensi/tak
ada peringatan
[9] Alarm Alarm mengaktifkan output. Tidak ada
[10] Alarm /
peringatan
[11] Pada batas
torsi
[12] Di luar rentang
arus
[13] Di bawah arus,
rendah
[14] Di atas arus,
tinggi
[15] Diluar batas
kecepatan
Default untuk semua output digital dan
output relai.
dan menerapkan sinyal suplai pada papan
kontrol.
Konverter frekuensi siap dioperasikan dan
berada dalam mode auto-on.
Konverter frekuensi siap dioperasikan.
Tidak ada perintah start atau stop
diberikan (start/nonaktifkan). Tidak ada
peringatan.
Kecepatan output lebih tinggi daripada
kecepatan yang ditetapkan di
parameter 1-81 Fungsi dari kcptn. min. pd
stop [RPM]. Motor berjalan dan tidak ada
peringatan.
Motor berjalan pada kecepatan referensi.
peringatan.
Alarm atau peringatan mengaktifkan
output.
Batas torsi yang ditetapkan pada
parameter 4-16 Mode Motor Batasan
Torsitelah terlampaui.
Arus motor di luar kisaran yang
ditetapkan pada parameter 4-18 Batas
Arus.
Arus motor lebih rendah daripada
pengaturan dalam parameter 4-50 Arus
Peringatan Lemah.
Arus motor lebih tinggi daripada
pengaturan dalam parameter 4-51 Arus
Peringatan Tinggi.
Kecepatan output di luar rentang yang
diatur dalam parameter 4-52 Kecepatan
Peringatan Rendah dan
parameter 4-53 Kecepatan Peringatan
Tinggi.
[16] Di bawah
kecepatan,
rendah
[17] Di atas
kecepatan,
tinggi
[18] Di luar kisaran
ump.blk
[19] Di bwh
ump.blk rend
[20] Di atas
ump.blk tgg.
[21] Peringatan
termal
[25] Mundur Mundur. Logika 1 = relai diaktifkan, 24 V
[26] Bus OK Komunikasi aktif (tidak ada waktu habis)
[27] Batas torsi dan
stop
[28] Rem, tanpa
peringatan
[29] Rem siap,tiada
rusak
[30] Rem masalah
(IGBT)
[35] Interlock
eksternal
[40] Di luar kisaran
ref
[41] Di bwh
referensi, rend
[42] Di atas
referensi tinggi
[45] Ktrl Bus
[46] Ktrl Bus 1 jika
wkt habis
Kecepatan output di bawah daripada
yang ditetapkan di
parameter 4-52 Kecepatan Peringatan
Rendah.
Kecepatan output di atas daripada yang
ditetapkan di parameter 4-53 Kecepatan
Peringatan Tinggi.
Umpan balik di luar kisaran yang
ditetapkan pada
parameter 4-56 Peringatan Umpan Balik
Rendah dan parameter 4-57 Peringatan
Umpan Balik Tinggi.
Umpan balik di bawah batas yang
ditetapkan di parameter 4-52 Kecepatan
Peringatan Rendah.
Umpan balik di atas batas yang
ditetapkan diparameter 4-56 Peringatan
Umpan Balik Rendah.
Peringatan termal menyala ketika suhu
melampaui batas pada motor, konverter
frekuensi, resistor rem atau thermistor.
DC saat motor berotasi searah jarum jam.
Logika 0 = relai tidak diaktifkan, tidak ada
sinyal, saat motor berotasi berlawanan
arah jarum jam.
lewat port komunikasi seri.
Digunakan untuk menjalankan coast stop
dan dalam kondisi torsi dibatasi Setelah
konverter frekuensi menerima sinyal stop
dan berada dalam batas torsi, sinyal
adalah logik 0.
Rem aktif dan tidak ada peringatan.
Rem siap untuk operasi dan tidak ada
kerusakan.
Output adalah logik 1 saat IGBT rem
korslet. Gunakan fungsi ini untuk
melindungi konverter frekuensi apabila
ada kerusakan pada modul rem. Gunakan
output/relai untuk mengakhiri voltase
sumber listrik dari konverter frekuensi.
Fungsi interlock eksternal telah diaktifkan
lewat salah satu input digital.
3 3
MG20OB9B Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. 89

Keterangan Parameter
VLT® AQUA Drive FC 202
[47] Bus Ctrl 0 jika
kehabisan
waktu
[55] Output pulsa
[60] Pembanding 0 Lihat grup parameter 13-1* Pembanding.
Jika pembanding 0 dianggap benar,
33
[61] Pembanding 1 Lihat grup parameter 13-1* Pembanding.
[62] Pembanding 2 Lihat grup parameter 13-1* Pembanding.
[63] Pembanding 3 Lihat grup parameter 13-1* Pembanding.
[64] Pembanding 4 Lihat grup parameter 13-1* Pembanding.
[65] Pembanding 5 Lihat grup parameter 13-1* Pembanding.
[70] Aturan Logika0Lihat grup parameter 13-4* Peraturan
[71] Aturan Logika1Lihat grup parameter 13-4* Peraturan
[72] Aturan Logika2Lihat grup parameter 13-4* Peraturan
[73] Aturan Logika3Lihat grup parameter 13-4* Peraturan
[74] Aturan Logika4Lihat grup parameter 13-4* Peraturan
[75] Aturan Logika5Lihat grup parameter 13-4* Peraturan
[80] SL Keluaran
Digital A
output tinggi. Selain itu, output akan
rendah.
Jika pembanding 1 dianggap benar,
output tinggi. Selain itu, output akan
rendah.
Jika pembanding 2 dianggap benar,
output tinggi. Selain itu, output akan
rendah.
Jika pembanding 3 dianggap benar,
output tinggi. Selain itu, output akan
rendah.
Jika pembanding 4 dianggap benar,
output tinggi. Selain itu, output akan
rendah.
Jika pembanding 5 dianggap benar,
output tinggi. Selain itu, output akan
rendah.
Logika. Jika aturan logik 0 dianggap
benar, output tinggi. Selain itu, output
akan rendah.
Logika. Jika aturan logik 1 dianggap
benar, output tinggi. Selain itu, output
akan rendah.
Logika. Jika aturan logik 2 dianggap
benar, output tinggi. Selain itu, output
akan rendah.
Logika. Jika aturan logik 3 dianggap
benar, output tinggi. Selain itu, output
akan rendah.
Logika. Jika aturan logik 4 dianggap
benar, output tinggi. Selain itu, output
akan rendah.
Logika. Jika aturan logik 5 dianggap
benar, output tinggi. Selain itu, output
akan rendah.
Lihat parameter 13-52 Tindakan Pengontrol
SL. Output tinggi kapan saja tindakan
smart logic [38] Atur out digital A tinggi
dijalankan. Output rendah kapan saja
[81] SL Keluaran
Digital B
[82] SL Keluaran
Digital C
[83] SL Keluaran
Digital D
[84] SL Keluaran
Digital E
[85] SL Keluaran
Digital F
[90] penghitung
kWh
[120] Sistem Pada
Ref
[155] Verifying Flow
[160] Tidak ada
alarm
[161] Berjalan
mundur
[165] Referensi lokal
aktif
[166] Referensi jauh
aktif
[167] perintah start
aktif
tindakan smart logic [32] Atur out digital A
rendah dijalankan.
Lihat parameter 13-52 Tindakan Pengontrol
SL. Output tinggi kapan saja tindakan
smart logic [39] Atur out digital B tinggi
dijalankan. Output rendah kapan saja
tindakan smart logic [33] Atur out digital B
rendah dijalankan.
Lihat parameter 13-52 Tindakan Pengontrol
SL. Output tinggi kapan saja tindakan
smart logic [40] Atur out digital C tinggi
dijalankan. Output rendah kapan saja
tindakan smart logic [34] Atur out digital C
rendah dijalankan.
Lihat parameter 13-52 Tindakan Pengontrol
SL. Output tinggi kapan saja tindakan
smart logic [41] Atur out digital D tinggi
dijalankan. Output rendah kapan saja
tindakan smart logic [35] Atur out digital D
rendah dijalankan.
Lihat parameter 13-52 Tindakan Pengontrol
SL. Output tinggi kapan saja tindakan
smart logic [42] Atur out digital E tinggi
dijalankan. Output rendah kapan saja
tindakan smart logic [36] Atur out digital E
rendah dijalankan.
Lihat parameter 13-52 Tindakan Pengontrol
SL. Output tinggi kapan saja tindakan
smart logic [43] Atur out digital F tinggi
dijalankan. Output rendah kapan saja
tindakan smart logic [37] Atur out digital F
rendah dijalankan.
Menghasilkan denyut pada output digital
setiap kali konverter frekuensi
menggunakan 1 kWh.
Output tinggi ketika tidak ada alarm.
Output tinggi saat konverter frekuensi
berjalanan berlawanan arah jarum jam
(produk logika bit status yang berjalan
DAN mundur).
Output tinggi saat parameter 3-13 Situs
Referensi=[2] Lokal atau saat
parameter 3-13 Situs Referensi=[0]
Ditautkan ke hand auto secara bersamaan
saat LCP sedang dalam mode hand-on.
Output tinggi saat parameter 3-13 Situs
Referensi diatur ke [1] Jarak jauh atau [0]
Ditautkan ke hand/auto saat LCP sedang
dalam mode auto-on.
Output tinggi saat ada perintah start aktif,
misalnya auto-on, dan perintah start via
input digital atau bus aktif, atau [Hand
On].
90 Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. MG20OB9B

Waktu
REF
Min
Kecepatan
ON
Waktu
Waktu
OFF
ON
OFF
mulai berhenti
130BA251.10
Kecepatan
Keterangan Parameter Panduan Pemrograman
CATATAN!
Semua perintah inverse stop/coast
tidak boleh aktif.
[168] Drive dalam
mode hand
[169] Drive dalam
mode auto
[180] Jam
Bermasalah
[181] Pemeliharaan
Preventif
[182] Deragging Deragging aktif.
[188] AHF Capacitor
sambung
[189] Kontrol kipas
luar
[190] Tak Ada Aliran Situasi tanpa aliran atau situasi kecepatan
[191] Pompa Kering Kondisi pompa kering terdeteksi. Aktifkan
[192] Akhir Kurva Aktif saat kondisi ujung kurva terjadi.
[193] Mode Tidur Konverter frekuensi/sistem telah
[194] Sabuk Putus Kondisi sabuk putus terdeteksi. Aktifkan
[195] Kontrol Katup
Jalan Pintas
MG20OB9B Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. 91
Output tinggi saat konverter frekuensi
dalam mode hand on (seperti ditunjukkan
oleh lampu indikator di atas [Hand On]).
Output tinggi saat konverter frekuensi
dalam mode auto-on (seperti ditunjukkan
oleh lampu indikator di atas [Auto On]).
Fungsi jam telah di-reset ke default
(2000-01-01) karena listrik mati.
Satu atau beberapa peristiwa perawatan
preventif yang diprogram dalam
parameter 23-10 Item Pemeliharaan telah
melewati waktu untuk tindakan yang
ditentukan dalam
parameter 23-11 Tindakan Pemeliharaan.
Lihat parameter 5-80 Penundaan sambung
kembali Cap AHF.
Kontrol kipas eksternal aktif.
minimum terdeteksi jika diaktifkan dalam
Parameter 22-21 Deteksi Daya Rendah.
fungsi ini dalam parameter 22-26 Fungsi
Pompa Kering.
memasuki mode tidur. Lihat grup
parameter 22-4* Mode Tidur.
fungsi ini dalam parameter 22-60 Fungsi
Belt Putus.
Kontrol katup bypass (output digital/relai
pada konverter frekuensi) digunakan oleh
sistem kompresor untuk membuang
beban kompresor selama penyalaan
menggunakan katup bypass. Setelah
perintah start diberikan, katup bypass
terbuka sampai konverter frekuensi
mencapai parameter 4-11 Batasan Rendah
Kecepatan Motor [RPM]). Setelah batas
tercapai, katup bypass akan ditutup agar
kompresor dapat dioperasikan dengan
normal. Prosedur ini tidak akan diaktifkan
lagi sebelum start baru diinisiasi dan
kecepatan konverter frekuensi 0 selama
menerima sinyal start.
Parameter 1-71 Penundaan start dapat
digunakan untuk menunda start motor.
Ilustrasi 3.28 Prinsip Kontrol Katup
Bypass
[199] Pengisian Pipa Aktif saat fungsi pengisian pipa
beroperasi. Lihat grup parameter 29-**
Water Application Functions.
Semua opsi pengaturan di bawah
berkaitan dengan kontrol kaskade.
Lihat grup parameter 25-** Pengontrol
Kaskade untuk penjelasan lebih lengkap.
[200] Kapasitas
Penuh
[201] Pompa1
Berjalan
Semua pompa berjalan pada kecepatan
penuh
Satu atau beberapa pompa yang dikontrol
oleh kontroler kaskade berjalan. Fungsi ini
juga bergantung pada pengaturan dalam
parameter 25-05 Pompa Utama Tetap. Jika
diatur ke [0] No, Pompa 1 adalah pompa
yang dikontrol oleh relai1 dan seterusnya.
Jika diatur ke [1[ Yes, Pompa 1 adalah
pompa yang dikontrol oleh konverter
frekuensi saja (tanpa melibatkan relai
terintegrasi) dan Pompa 2 adalah pompa
yang dikontrol oleh relai1. Lihat Tabel 3.15.
[202] Pompa2
Lihat [201].
Berjalan
[203] Pompa3
Lihat [201].
Berjalan
[204] Pompa 4
berjalan
[205] Pompa 5
berjalan
[206] Pompa 6
berjalan
[207] Pompa 7
berjalan
[208] Pompa 8
berjalan
[209] Pompa 9
berjalan
[240] RS Flipop 0 Lihat parameter 13-15 RS-FF Operand S,
parameter 13-16 RS-FF Operand R.
[241] RS Flipop 1 Lihat parameter 13-15 RS-FF Operand S,
parameter 13-16 RS-FF Operand R.
[242] RS Flipop 2 Lihat parameter 13-15 RS-FF Operand S,
parameter 13-16 RS-FF Operand R.
[243] RS Flipop 3 Lihat parameter 13-15 RS-FF Operand S,
parameter 13-16 RS-FF Operand R.
[244] RS Flipop 4 Lihat parameter 13-15 RS-FF Operand S,
parameter 13-16 RS-FF Operand R.
3 3

5-40 Relai Fungsi
Arai [20]
Option: Fungsi:
Pilih opsi untuk menentukan fungsi
relai.
Pemilihan masing-masing relai
mekanis direalisasi pada parameter
susunan.
[0] Tidak ada
operasi
[1] Siap kontrol
[2] Siap drive
[3] Drive siap/
kdali jauh
[4] Siaga / tanpa
peringatan
[5] Berjalan
[6] Putar./t ada
p'ingat
[8] Jln ref./tnp
pr'ingat
[9] Alarm
[10] Alarm/
p'ingatan
[11] Pada batasan
torsi
[12] Arus di luar
jangk.
[13] Arus bwh, rdh
[14] Arus diatas,
tinggi
[15] Teg. di luar
j'kauan
[16] Kcptn. di bwh,
rdh
[17] Kcptn. diatas,
ting.
[18] Di luar jngk
ump-blk
[19] Di bwh ump-
blk, rend
[20] Di atas ump-
blk, tgg.
[21] Peringatan
Termal
[25] Balik
[26] Bus OK
[27] Batasan torsi
& stop
Keterangan Parameter
VLT® AQUA Drive FC 202
[245] RS Flipop 5 Lihat parameter 13-15 RS-FF Operand S,
[246] RS Flipop 6 Lihat parameter 13-15 RS-FF Operand S,
[247] RS Flipop 7 Lihat parameter 13-15 RS-FF Operand S,
33
Pengaturan dalam
grup parameter 5-3*
Digital Outputs
[0] Tidak [1] Ya
[201] Pompa 1
Berjalan
[202] Pompa 2
Berjalan
[203] Pompa 3
Tabel 3.15 Pompa Yang Dikontrol oleh Kontroler Kaskade
Berjalan
5-30 Output Digital Terminal 27
Parameter ini memiliki opsi yang dijelaskan dalam bab 3.7.3 5-3*
Digital Output.
Option: Fungsi:
[0] * Tidak ada operasi
5-31 Output Digital Terminal 29
Parameter ini memiliki opsi yang dijelaskan dalam bab 3.7.3 5-3*
Digital Output.
Option: Fungsi:
[0] * Tidak ada operasi
5-32 Out Digi Term X30/6 (MCB 101)
Parameter ini memiliki opsi yang dijelaskan dalam bab 3.7.3 5-3*
Digital Output.
Option: Fungsi:
[0] * Tidak ada operasi Parameter ini aktif jika konverter
5-33 Out Digi Term X30/7 (MCB 101)
Option: Fungsi:
[0] * Tidak ada
operasi
92 Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. MG20OB9B
parameter 13-16 RS-FF Operand R.
parameter 13-16 RS-FF Operand R.
parameter 13-16 RS-FF Operand R.
Pengaturan dalam
parameter 25-05 Pompa Utama Tetap
Dikontrol oleh
relai1
Dikontrol oleh
relai2
– Dikontrol oleh
frekuensi dilengkapi VLT® General
Purpose I/O MCB 101 .
Parameter ini aktif jika konverter frekuensi
dilengkapi VLT® General Purpose I/O MCB
101 . Opsi dan fungsi sama dengan grup
parameter 5-3* Input Digital.
Dikontrol oleh
konverter frekuensi
Dikontrol oleh
relai1
relai2
3.7.4 5-4* Relai
Parameter untuk mengkongurasi timing dan fungsi
output untuk relai.

5-40 Relai Fungsi
Arai [20]
Option: Fungsi:
[28] Tiada pr'ingat.
rem
[29] Rem siap, tak
ada
[30] Kerusak. Brake
(IGB
[33] B'henti Aman
aktif
[35] Interlock
Eksternal
[36] Kata kontrol
bit 11
[37] Kata kontrol
bit 12
[40] Di luar
jangkau. ref.
[41] Di bwh ref.,
rendah
[42] Diatas ref,
tinggi
[45] Ktrl. bus
[46] Ktrl.bus, 1 jk
timeout
[47] Ktrl.bus, 0 jk
timeout
[51] MCO
terkontrol
[59] Remote,enable
,no TW
[60] Pembanding 0
[61] Pembanding 1
[62] Pembanding 2
[63] Pembanding 3
[64] Komparator 4
[65] Komparator 5
[70] Peraturan
logika 0
[71] Peraturan
logika 1
[72] Peraturan
logika 2
[73] Peraturan
logika 3
[74] Aturan logika
4
[75] Aturan logika
5
[80] SL keluaran
digital A
[81] SL keluaran
digital B
5-40 Relai Fungsi
Arai [20]
Option: Fungsi:
[82] SL keluaran
digital C
[83] SL Keluaran
digital D
[84] SL keluaran
digital E
[85] SL keluaran
digital F
[120] System On Ref
[151] ATEX ETR cur.
alarm
[152] ATEX ETR freq.
alarm
[153] ATEX ETR cur.
warning
[154] ATEX ETR freq.
warning
[155] Verifying Flow
[160] Tidak ada
alarm
[161] Putaran
terbalik
[164] Local ref
active, not
OFF
[165] Ref lokal aktif
[166] Remote aktif
ref
[167] Tindakan
perintah start
[168] Mode manual
[169] Mode auto
[180] Masalah Jam
[181] Pemeliharaan
Sblmnya
[183] Pre/Post Lube
[188] AHF Capacitor
sambung
[189] Kontrol kipas
luar
[190] Tiada Aliran
[191] Pompa Kering
[192] Akhir Kurva
[193] Mode Standby
[194] Sabuk Putus
[195] Kontrol Katup
Pintas
[196] Modus
Kebakaran
Aktif
Keterangan Parameter Panduan Pemrograman
MG20OB9B Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. 93
3 3

5-40 Relai Fungsi
Arai [20]
Option: Fungsi:
[197] Mode
Kebakaran
Aktif
[198] Bypass Drive
[199] Pipe Filling
[211] Pompa
Kaskade 1
[212] Pompa
Kaskade 2
[213] Pompa
Kaskade 3
[214] Pompa
Kaskade 4
[215] Pompa
Kaskade 5
[216] Pompa
Kaskade 6
[217] Pompa
Kaskade 7
[218] Pompa
Kaskade 8
[219] Pompa
Kaskade 9
[230] Ext. Cascade
Ctrl
[236] Ext. CL 1 on
Ref
[237] Ext. CL 2 on
Ref
[238] Ext. CL 3 on
Ref
[240] RS Flipop 0 Lihat parameter 13-15 RS-FF Operand
S, parameter 13-16 RS-FF Operand R.
[241] RS Flipop 1 Lihat parameter 13-15 RS-FF Operand
S, parameter 13-16 RS-FF Operand R.
[242] RS Flipop 2 Lihat parameter 13-15 RS-FF Operand
S, parameter 13-16 RS-FF Operand R.
[243] RS Flipop 3 Lihat parameter 13-15 RS-FF Operand
S, parameter 13-16 RS-FF Operand R.
[244] RS Flipop 4 Lihat parameter 13-15 RS-FF Operand
S, parameter 13-16 RS-FF Operand R.
[245] RS Flipop 5 Lihat parameter 13-15 RS-FF Operand
S, parameter 13-16 RS-FF Operand R.
[246] RS Flipop 6 Lihat parameter 13-15 RS-FF Operand
S, parameter 13-16 RS-FF Operand R.
[247] RS Flipop 7 Lihat parameter 13-15 RS-FF Operand
S, parameter 13-16 RS-FF Operand R.
5-41 Penundaan On (Hidup), Relai
Arai [20]
Range: Fungsi:
0.01 s* [0.01 - 600 s] Masukkan penundaan untuk waktu
penyelaan relai. Pilih 1 dari 2 relai
mekanis internal dalam fungsi arai.
Lihat parameter 5-40 Relai Fungsi
untuk rincian lengkapnya.
Selected
Event
Relay
output
Selected
Event
Relay
output
On Delay
P 5-41
On Delay
P 5-41
O Delay
P 5-42
130BA171.10
5-42 Penundaan O (mati), Relai
Arai[20]
Range: Fungsi:
0.01 s* [0.01 - 600 s] Masukkan tunda waktu pemutusan
relai. Pilih 1 dari 2 relai mekanis
internal dalam fungsi arai. Lihat
parameter 5-40 Relai Fungsi untuk
rincian lengkapnya. Meski kondisi
peristiwa yang dipilih berubah
sebelum timer tunda habis, output
relai tidak terpengaruh.
Selected
Event
Relay
output
On Delay
P 5-41
O Delay
P 5-42
130BA172.10
Keterangan Parameter
33
94 Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. MG20OB9B
VLT® AQUA Drive FC 202
Meski kondisi peristiwa yang dipilih berubah sebelum
timer tunda aktif atau tidak aktif habis, output relai tidak
terpengaruh.
Ilustrasi 3.29 Tunda Aktif, Relai
Ilustrasi 3.30 Tunda Tidak Aktif, Relai

130BA076.10
(RPM)
Ref.
Low freq.
P 5-50/
P 5-55
Input
(Hz)
High
ref.
value
P 5-53/
p 5-58
High freq.
P 5-51/
P 5-56
Low
ref.
value
P 5-52/
p 5-57
5-50 Term. 29 Frekuensi Rendah
Range: Fungsi:
100 Hz* [0 - 110000
Hz]
Masukkan batas frekuensi rendah
berdasarkan kecepatan poros motor
rendah (yakni nilai referensi rendah)
dalam parameter 5-52 Term. 29 Ref
Rendah/Nilai Ump-balik. Lihat
Ilustrasi 3.31 pada bagian ini.
5-51 Term. 29 Frekuensi Tinggi
Range: Fungsi:
100 Hz* [0 - 110000
Hz]
Masukkan batas frekuensi tinggi
berdasarkan kecepatan poros motor
tinggi (yakni nilai referensi tinggi)
dalam parameter 5-53 Term. 29 Ref
Tinggi/Nilai Ump-balik.
5-52 Term. 29 Ref Rendah/Nilai Ump-balik
Range: Fungsi:
0 ReferenceFeedback
Unit*
[-999999.999
- 999999.999
Reference-
FeedbackUnit]
Masukkan batas nilai referensi
rendah untuk kecepatan poros
motor [RPM]. Ini juga nilai umpan
balik terendah, lihat juga
parameter 5-57 Term. 33 Ref Rendah/
Nilai Ump-balik.
5-53 Term. 29 Ref Tinggi/Nilai Ump-balik
Range: Fungsi:
100
ReferenceFeedbackU
nit*
[-999999.999
- 999999.999
Reference-
FeedbackUnit]
Masukkan nilai referensi tinggi
[RPM] untuk kecepatan poros motor
dan nilai umpan balik tinggi, lihat
juga parameter 5-58 Term. 33 Ref
Tinggi/Nilai Ump-balik.
5-54 Tetapan Waktu Filter Pulsa #29
Range: Fungsi:
100 ms* [5 - 1000 ms]
CATATAN!
Parameter ini tidak dapat
disesuaikan saat motor
berjalan.
Masukkan tetapan waktu lter
pulsa. Filter pulsa meredam osilasi
dari sinyal umpan balik, yang
merupakan keuntungan pabila ada
banyak derau pada sistem. Semakin
tinggi nilai konstanta waktu,
semakin baik peredaman, tetapi
juga memperpanjang tunda waktu
lewat lter.
5-55 Term. 33 Frekuensi Rendah
Range: Fungsi:
100 Hz* [0 - 110000
Hz]
Masukkan frekuensi rendah
berdasarkan kecepatan poros motor
rendah (yakni nilai referensi rendah)
dalam parameter 5-57 Term. 33 Ref
Rendah/Nilai Ump-balik.
5-56 Term. 33 Frekuensi Tinggi
Range: Fungsi:
100 Hz* [0 - 110000
Hz]
Masukkan frekuensi tinggi
berdasarkan kecepatan poros motor
tinggi (yakni nilai referensi tinggi)
dalam parameter 5-58 Term. 33 Ref
Tinggi/Nilai Ump-balik.
5-57 Term. 33 Ref Rendah/Nilai Ump-balik
Range: Fungsi:
0 ReferenceFeedback
Unit*
[-999999.999
- 999999.999
Reference-
FeedbackUnit]
Masukkan nilai referensi rendah
[RPM] untuk kecepatan poros
motor. Ini juga nilai umpan balik
rendah, lihat juga
parameter 5-52 Term. 29 Ref Rendah/
Nilai Ump-balik.
Keterangan Parameter Panduan Pemrograman
3.7.5 5-5* Input Pulsa
Parameter input pulsa digunakan untuk menentukan
jendela yang sesuai untuk biang referensi impuls dengan
mengkongurasi pengaturan skala dan lter untuk input
pulsa. Terminal input 29 atau 33 bertindak sebagai input
referensi frekuensi. Atur terminal 29 (parameter 5-13 Input
Digital Terminal 29) atau terminal 33 (parameter 5-15 Input
Digital Terminal 33) ke [32] Input denyut. Jika terminal 29
digunakan sebagai input, atur parameter 5-02 Modus
Terminal 29 ke [0] Input.
3 3
Ilustrasi 3.31 Input Denyut
MG20OB9B Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. 95

5-58 Term. 33 Ref Tinggi/Nilai Ump-balik
Range: Fungsi:
100
ReferenceFeedbackU
nit*
[-999999.999
- 999999.999
Reference-
FeedbackUnit]
Masukkan nilai referensi tinggi
[RPM] untuk kecepatan poros
motor. Lihat juga
parameter 5-53 Term. 29 Ref Tinggi/
Nilai Ump-balik.
5-59 Tetapan Waktu Filter Pulsa #33
Range: Fungsi:
100 ms* [5 - 1000 ms]
CATATAN!
Parameter ini tidak dapat
disesuaikan saat motor
berjalan.
Masukkan tetapan waktu lter
pulsa. Filter low-pass mengurangi
pengaruh dan meredam osilasi
sinyal umpan balik dari kontrol.
Ini menguntungkan jika sistem
memiliki banyak noise.
Output value
Output
(Hz)
High output
value
P 5-60(term27)
P 5-63(term29)
High freq.
P 5-62(term27)
P 5-65(term29)
130BA089.11
5-60 Variabel Output Pulsa Terminal 27
Range: Fungsi:
CATATAN!
Parameter ini tidak dapat
disesuaikan saat motor
berjalan.
5-60 Variabel Output Pulsa Terminal 27
Range: Fungsi:
[0] * Tidak ada
operasi
Plih variabel operasi yang
ditetapkan untuk pembacaan
terminal 27.
[45] Ktrl. bus
[48] Ktrl. bus,
timeout
[51] MCO
terkontrol
[100] Frek. keluaran
0-100
[101] Min-Maks
referensi
[102] Umpan balik
+-200%
[103] Arus motor
maks 0-l
[104] Torsi 0-BatasT
[105] Torsi 0-nomT
[106] Daya 0-nomD
[107] Kecepatan 0-
Batas Tinggi
[108] Torsi +-160%
[109] Keluar frek 0-
MaksF
[113] Loop Tertutup
Ekst. 1
[114] Loop Tertutup
Ekst. 2
[115] Loop Tertutup
Ekst. 3
[116] Cascade
Reference
5-62 Frek. Maks. Keluaran Pulsa #27
Range: Fungsi:
CATATAN!
Parameter ini tidak dapat
disesuaikan saat motor
berjalan.
5000 Hz* [0 - 32000
Hz]
Atur frekuensi maksimum untuk
terminal 27 berdasarkan variabel
output yang dipilih dalam
parameter 5-60 Variabel Output Pulsa
Terminal 27.
Keterangan Parameter
VLT® AQUA Drive FC 202
33
3.7.6 5-6* Output Pulsa
Parameter untuk mengkongurasi skala dan fungsi output
dari output pulsa. Input denyut ditransmisikan ke terminal
27 atau 29. Pilih output terminal 27 dalam
parameter 5-01 Mode Terminal 27 dan output terminal 29
dalam parameter 5-02 Modus Terminal 29.
Ilustrasi 3.32 Output Pulsa
96 Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. MG20OB9B

5-63 Variabel Output Pulsa Terminal 29
Option: Fungsi:
CATATAN!
Parameter ini tidak dapat
disesuaikan saat motor
berjalan.
Pilih variabel untuk dilihat pada
terminal 29. Opsi dan fungsi sama
dengan grup parameter 5-6* Output
Pulsa.
[0] * Tidak ada
operasi
[45] Ktrl. bus
[48] Ktrl. bus,
timeout
[51] MCO
terkontrol
[100] Frek. keluaran
0-100
[101] Min-Maks
referensi
[102] Umpan balik
+-200%
[103] Arus motor
maks 0-l
[104] Torsi 0-BatasT
[105] Torsi 0-nomT
[106] Daya 0-nomD
[107] Kecepatan 0-
Batas Tinggi
[108] Torsi +-160%
[109] Keluar frek 0-
MaksF
[113] Loop Tertutup
Ekst. 1
[114] Loop Tertutup
Ekst. 2
[115] Loop Tertutup
Ekst. 3
[116] Cascade
Reference
5-65 Frek. Maks. Keluaran Pulsa #29
Range: Fungsi:
5000 Hz* [0 - 32000
Hz]
Atur frekuensi maksimum untuk
terminal 29 berdasarkan variabel
output yang dipilih
dalamparameter 5-63 Variabel
Output Pulsa Terminal 29.
5-66 Var. Output Pulsa Di Term. X30/6
Pilih variabel untuk dibaca pada terminal X30/6.
Parameter ini aktif jika konverter frekuensi menggunakan
VLT®General Purpose I/O MCB 101
Opsi dan fungsi sama dengan grup parameter 5-6* Output Pulsa.
Option: Fungsi:
[0] * Tidak ada
operasi
[45] Ktrl. bus
[48] Ktrl. bus,
timeout
[51] MCO
terkontrol
[100] Frek. keluaran
0-100
[101] Min-Maks
referensi
[102] Umpan balik
+-200%
[103] Arus motor
maks 0-l
[104] Torsi 0-BatasT
[105] Torsi 0-nomT
[106] Daya 0-nomD
[107] Kecepatan 0-
Batas Tinggi
[108] Torsi +-160%
[109] Keluar frek 0-
MaksF
[113] Loop Tertutup
Ekst. 1
[114] Loop Tertutup
Ekst. 2
[115] Loop Tertutup
Ekst. 3
[116] Cascade
Reference
5-68 Frek. Maks. Keluaran Pulsa #X30/6
Range: Fungsi:
5000 Hz* [0 - 32000
Hz]
CATATAN!
Parameter ini tidak dapat
disesuaikan saat motor
berjalan.
Pilih frekuensi maksimum pada
X30/6 berdasarkan variabel output
dalam parameter 5-66 Var. Output
Pulsa Di Term. X30/6.
Parameter ini aktif jika konverter
frekuensi menggunakan
VLT®General Purpose I/O MCB 101
Keterangan Parameter Panduan Pemrograman
MG20OB9B Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. 97
3 3

5-80 Penundaan sambung kembali Cap AHF
Range: Fungsi:
25 s* [1 - 120 s] Waktu tunda antara 2 sambungan
kapasitor AHF konsekutif. Timer
menyala begitu sambungan
kapasitor AHF diakhiri, dan
tersambung kembali begitu waktu
penundaan habis dan daya
konverter frekuensi di atas 20% dan
di bawah 30% daya nominal.
10 20 30 40 50 60 70 80 90 100 110 120 130
Time (s)
Relay Output
On
t
1
t
2
130BC368.10
Nominal Power of Drive
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
...................................................................................................................................................................................................................
....................................................................................................................................................................................................................
....................................................................................................................................................................................................................
5-90 Kontrol Bus Relai & Digital
Range: Fungsi:
0* [0 -
2147483647 ]
Parameter ini mempertahankan
status output dan relai digital yang
dikontrol oleh bus.
Logika 1 menunjukkan output
tinggi atau aktif.
Logika 0 menunjukkan output
rendah atau tidak aktif.
Bit 0 Output digital CC, terminal
27
Keterangan Parameter
VLT® AQUA Drive FC 202
33
Fungsi output sambungan kapasitor AHF untuk output
digital dan relai
Penjelasan fungsi:
Hubungkan kapasitor saat daya nominal 20%.
•
Histeresis ±50% dari 20% daya nominal
•
(=minimum 10% dan maksimum 30% daya
nominal).
Timer tunda mati = 10 s Daya nominal harus
•
kurang dari 10% selama 10 s untuk mengakhiri
koneksi kapasitor. Jika daya nominal melampaui
10% selama penundaan 10 s, timer (10 s) akan
direstart.
Penundaan rekoneksi kapasitor (default=25 s
•
dengan rentang 1–120 s, lihat
parameter 5-80 Penundaan sambung kembali Cap
AHF) digunakan untuk waktu mati minimum
fungsi output kapasitor AHF.
Jika terjadi kehilangan daya, konverter frekuensi
•
menjamin waktu mati minimum dipatuhi saat
daya pulih kembali.
Ilustrasi 3.33 Contoh Fungsi Output
t1 adalah timer tunda mati (10 s).
t2 adalah penundaan rekoneksi kapasitor
(parameter 5-80 Penundaan sambung kembali Cap AHF).
Saat daya nominal konverter frekuensi melampaui 20,
fungsi output menyala. Saat daya kurang dari 10%, timer
tunda mati harus kehabisan waktu sebelum output
menjadi rendah. Ini diwakili oleh t1. Setelah output turun,
timer tunda rekoneksi kapasitor harus kehabisan waktu
sebelum output boleh diaktifkan kembali, ditunjukkan oleh
t2. Setelah t2 habis, daya nominal di atas 30% dan relai
tidak hidup.
98 Danfoss A/S © 05/2018 Semua hak dilindungi undang-undang. MG20OB9B
3.7.7 5-9* Bus Terkontrol
Kelompok parameter ini memilih output dan relai digital
lewat pengaturan eldbus.
 Loading...
Loading...