

Page 1
ENGINEERING TOMORROW
Guide de programmation
VLT® AQUA Drive FC 202
Version du logiciel : 3.30
vlt-drives.danfoss.com
Page 2

Page 3
Table des matières Guide de programmation
Table des matières
1 Introduction
1.1 Objet de ce Manuel
1.2 Ressources supplémentaires
1.3 Version logiciel
1.4 Approbations
1.5 Symboles
1.6 Dénitions
1.6.1 Variateur de fréquence 4
1.6.2 Entrée 4
1.6.3 Moteur 4
1.6.4 Références 5
1.6.5 Divers 5
1.7 Abréviations, symboles et conventions
1.8 Sécurité
1.9 Câblage électrique
2 Programmation
2.1 Panneau de commande local graphique et numérique
4
4
4
4
4
4
4
7
8
10
13
13
2.2 Programmation du LCP graphique
2.2.1 L’achage du LCP 14
2.2.2 Transfert rapide du réglage des paramètres entre plusieurs variateurs de fréquence 17
2.2.3 Mode d'achage 17
2.2.4 Mode d’achage - Sélection des lectures 17
2.2.5 Conguration des paramètres 18
2.2.6 Fonctions de la touche [Quick Menu] 18
2.2.7 Menu rapide, Q3 Régl. fonction 19
2.2.8 Menu rapide, Q4 SmartStart 21
2.2.9 Mode Main Menu (menu principal) 21
2.2.10 Sélection des paramètres 21
2.2.11 Modication de données 21
2.2.12 Changement de texte 21
2.2.13 Modication d’une valeur de donnée 22
2.2.14 Modication à l'inni d'une valeur numérique 22
2.2.15 Valeur, pas à pas 22
2.2.16 Achage et programmation des paramètres indexés 22
13
2.2.17 Programmation du panneau de commande local numérique 23
2.2.18 Touches du LCP 24
3 Description du paramètre
MG20OB04 Danfoss A/S © 05/2018 Tous droits réservés. 1
26
Page 4
Table des matières
VLT® AQUA Drive FC 202
3.1 Sélection des paramètres
3.2 Paramètres 0-** Fonction./Achage
3.3 Paramètres 1-** Charge et moteur
3.4 Paramètres 2-** Freins
3.5 Paramètres 3-** Référence / rampes
3.6 Paramètres 4-** Limites/avertis.
3.7 Paramètres 5-** E/S Digitale
3.8 Paramètres 6-** E/S ana.
3.9 Paramètres 8-** Comm. et options
3.10 Paramètres 9-** PROFIBUS
3.11 Paramètres 10-**Bus réseau CAN
3.12 Paramètres 13-** Logique avancée
3.13 Parameters 14-** Fonct.particulières
3.14 Paramètres 15-** Info.variateur
3.15 Paramètres 16-** Lecture données
3.16 Paramètres 18-** Info & lectures
3.17 Paramètres 20-** Boucl.fermé.variat.
26
27
43
69
73
80
85
103
114
127
127
131
155
167
177
186
189
3.18 Paramètres 21-** Boucl.fermée ét.
3.19 Paramètres 22-** Fonctions application
3.20 Paramètres 23-** Fonct. liées au tps
3.21 Paramètres 24-** Fonct. application 2
3.22 Paramètres 25-** Contrôleur cascade
3.23 Paramètres 26-** Option E/S ana.
3.24 Paramètres 27-** Cascade CTL Option
3.25 Paramètres 29-** Water Application Functions
3.26 Paramètres 30-** Caract.spéciales
3.27 Paramètres 31-** Option bipasse
3.28 Paramètres 35-** Option entrée capteur
4 Listes des paramètres
4.1 Options des paramètres
4.1.1 Réglages par défaut 294
4.1.2 0-** Fonction./Achage 295
4.1.3 1-** Charge et moteur 297
4.1.4 2-** Freins 299
201
210
227
240
246
259
266
280
289
290
291
294
294
4.1.5 3-** Référence / rampes 300
4.1.6 4-** Limites/avertis. 301
4.1.7 5-** E/S Digitale 302
4.1.8 6-** E/S ana. 304
4.1.9 8-** Comm. et options 306
4.1.10 9-** PROFIdrive 307
2 Danfoss A/S © 05/2018 Tous droits réservés. MG20OB04
Page 5
Table des matières Guide de programmation
4.1.11 10-** Bus réseau CAN 308
4.1.12 13-** Logique avancée 309
4.1.13 14-** Fonct.particulières 310
4.1.14 15-** Info.variateur 312
4.1.15 16-** Lecture données 314
4.1.16 18-** Info & lectures 316
4.1.17 20-** Boucl.fermé.variat. 317
4.1.18 21-** Boucl.fermée ét. 318
4.1.19 22-** Fonctions application 320
4.1.20 23-** Fonct. liées au tps 322
4.1.21 24-** Fonct. application 2 323
4.1.22 25-** Contrôleur cascade 323
4.1.23 26-** Option E/S ana. 324
4.1.24 29-** Water Application Functions 326
4.1.25 30-** Caract.spéciales 328
4.1.26 31-** Option bipasse 328
4.1.27 35-** Option entrée capteur 328
5 Dépannage
5.1 Messages d’état
5.1.1 Avertissements/messages d’alarme 330
Indice
330
330
337
MG20OB04 Danfoss A/S © 05/2018 Tous droits réservés. 3
Page 6
Introduction
VLT® AQUA Drive FC 202
11
1 Introduction
1.1 Objet de ce Manuel
Le Guide de programmation fournit les informations
requises pour programmer le variateur de fréquence dans
diverses applications.
VLT® est une marque déposée.
1.2 Ressources supplémentaires
D’autres ressources sont disponibles pour bien comprendre
les fonctions avancées et la programmation des variateurs
de fréquence.
Le Manuel d’utilisation du VLT® AQUA Drive FC
•
202 décrit l’installation mécanique et électrique
du variateur de fréquence.
Le Manuel de conguration du VLT® AQUA Drive
•
FC 202 détaille les possibilités et les fonctionnalités pour congurer des systèmes de contrôle
de moteurs.
Instructions d’utilisation avec les équipements
•
optionnels
Des publications et des manuels supplémentaires sont
disponibles auprès de Danfoss. Voir drives.danfoss.com/
knowledge-center/technical-documentation/ pour en obtenir
la liste.
Version logiciel
1.3
Version du logiciel : 3.30
Le numéro de la version du logiciel est indiqué au
paramétre 15-43 Version logiciel.
1.4 Approbations
ATTENTION
Indique une situation potentiellement dangereuse qui
peut entraîner des blessures supercielles à modérées.
Ce signe peut aussi être utilisé pour mettre en garde
contre des pratiques non sûres.
AVIS!
Fournit des informations importantes, notamment sur les
situations qui peuvent entraîner des dégâts matériels.
1.6 Dénitions
1.6.1 Variateur de fréquence
I
VLT,MAX
Courant maximal de sortie.
I
VLT,N
Courant nominal de sortie fourni par le variateur de
fréquence.
U
VLT,MAX
Tension de sortie maximale.
1.6.2 Entrée
Ordre de commande
Démarrer et arrêter le moteur raccordé à l'aide du LCP et
des entrées digitales.
Les fonctions sont réparties en deux groupes.
Les fonctions du groupe 1 ont une priorité supérieure aux
fonctions du groupe 2.
Groupe 1 Réinitialisation, arrêt roue libre, réinitialisation et
arrêt roue libre, arrêt rapide, freinage par injection
de courant continu, arrêt et touche [O].
Groupe 2 Démarrage, impulsion de démarrage, inversion,
démarrage avec inversion, jogging et gel sortie.
Tableau 1.1 Groupes de fonctions
1.6.3 Moteur
Moteur tourne
Couple généré sur l'arbre de sortie et vitesse de 0 tr/min à
1.5 Symboles
Les symboles suivants sont utilisés dans ce manuel :
AVERTISSEMENT
Indique une situation potentiellement dangereuse qui
peut entraîner des blessures graves ou le décès.
4 Danfoss A/S © 05/2018 Tous droits réservés. MG20OB04
la vitesse max. du moteur.
f
JOG
Fréquence du moteur lorsque la fonction jogging est
activée (via les bornes digitales).
f
M
Fréquence du moteur.
f
MAX
Fréquence moteur maximale.
Page 7
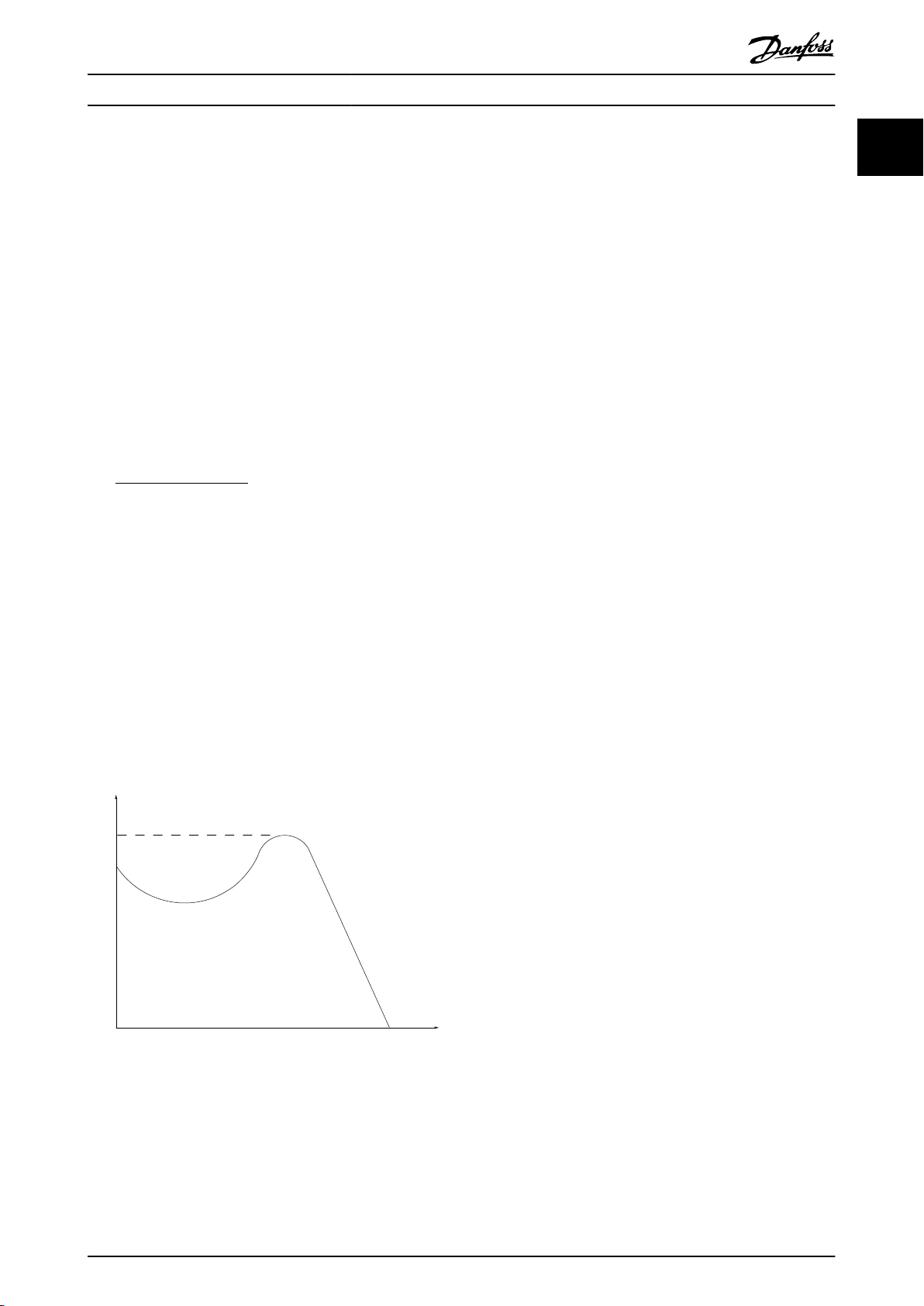
175ZA078.10
couple de décrochage
tr / mn
couple
Introduction Guide de programmation
f
MIN
Fréquence moteur minimale.
f
M,N
Fréquence nominale du moteur (données de la plaque
signalétique).
I
M
Courant du moteur (eectif).
I
M,N
Courant nominal du moteur (données de la plaque
signalétique).
n
M,N
Vitesse nominale du moteur (données de la plaque
signalétique).
n
s
Vitesse moteur synchrone.
2 × par. . 1 − 23 × 60s
ns=
n
glissement
par. . 1 − 39
Glissement du moteur.
P
M,N
Puissance nominale du moteur (données de la plaque
signalétique en kW ou en HP).
T
M,N
Couple nominal (moteur).
U
M
Tension instantanée du moteur.
U
M,N
Tension nominale du moteur (données de la plaque
signalétique).
Couple de décrochage
Ordre de démarrage désactivé
Ordre d'arrêt faisant partie du groupe 1 d'ordres de
commande, voir le Tableau 1.1.
Ordre d'arrêt
Ordre d'arrêt faisant partie du groupe 1 d'ordres de
commande, voir le Tableau 1.1.
1.6.4 Références
Référence analogique
Signal transmis vers les entrées analogiques 53 ou 54
(tension ou courant).
Référence binaire
Signal appliqué au port de communication série.
Référence prédénie
Référence prédénie réglable entre -100 % et +100 % de la
plage de référence. Huit références prédénies peuvent
être sélectionnées par l’intermédiaire des bornes digitales.
Référence d’impulsions
Signal impulsionnel appliqué aux entrées digitales (borne
29 ou 33).
Réf
MAX
Détermine la relation entre l’entrée de référence à 100 %
de la valeur de l’échelle complète (généralement 10 V,
20 mA) et la référence résultante. La valeur de référence
maximale est dénie au paramétre 3-03 Réf. max..
Réf
MIN
Détermine la relation entre l’entrée de référence à la valeur
0 % (généralement 0 V, 0 mA, 4 mA) et la référence
résultante. La valeur de référence minimale est dénie au
paramétre 3-02 Référence minimale.
1 1
Illustration 1.1 Couple de décrochage
η
VLT
Le rendement du variateur de fréquence est déni comme
le rapport entre la puissance dégagée et la puissance
absorbée.
1.6.5 Divers
Entrées analogiques
Les entrées analogiques permettent de contrôler diverses
fonctions du variateur de fréquence.
Il en existe 2 types :
Entrée de courant, 0-20 mA et 4-20 mA
Entrée de tension, -10 à +10 V CC.
Sorties analogiques
Les sorties analogiques peuvent fournir un signal de 0-20
mA, 4-20 mA.
Adaptation automatique au moteur, AMA
L’algorithme d’AMA détermine, à l’arrêt, les paramètres
électriques du moteur raccordé.
Résistance de freinage
La résistance de freinage est un module capable
d’absorber la puissance de freinage générée lors du
freinage par récupération. Cette puissance de freinage par
récupération augmente la tension du circuit intermédiaire
et un hacheur de freinage veille à transmettre la puissance
à la résistance de freinage.
MG20OB04 Danfoss A/S © 05/2018 Tous droits réservés. 5
Page 8
Introduction
VLT® AQUA Drive FC 202
11
Caractéristiques de couple constant
Caractéristique de couple constant que l’on utilise pour
toutes les applications telles que les convoyeurs à bande,
les pompes volumétriques et les grues.
Entrées digitales
Les entrées digitales permettent de contrôler diverses
fonctions du variateur de fréquence.
Sorties digitales
Le variateur de fréquence est doté de 2 sorties à semiconducteurs qui peuvent fournir un signal 24 V CC (max.
40 mA).
DSP
Processeur de signal numérique.
ETR
Le relais thermique électronique constitue un calcul de
charge thermique basé sur une charge et un temps
instantanés. Il permet d’estimer la température du moteur.
HIPERFACE
HIPERFACE® est une marque déposée de Stegmann.
Initialisation
Si l’on
exploitation), le variateur de fréquence revient à ses
réglages par défaut.
Cycle d’utilisation intermittent
Une utilisation intermittente fait référence à une séquence
de cycles d’utilisation. Chaque cycle est composé d’une
période en charge et d’une période à vide. Le fonctionnement peut être périodique ou non périodique.
LCP
Le panneau de commande local constitue une interface
complète de commande et de programmation du
variateur. Le panneau de commande est amovible et peut
être installé, à l’aide d’un kit de montage, à une distance
maximale de 3 m (10 pi) du variateur de fréquence, par
exemple dans un panneau frontal.
NLCP
Le panneau de commande local numérique constitue une
interface complète de commande et de programmation du
variateur. L’achage est numérique et le panneau sert à
acher les valeurs de process. Le NLCP n’a pas de fonction
d’enregistrement ni de copie.
lsb
Bit de poids faible.
msb
Bit de poids fort.
MCM
Abréviation de Mille Circular Mil, unité de mesure
américaine de la section de câble. 1 MCM = 0,5067 mm².
Paramètres en ligne/hors ligne
Les modications apportées aux paramètres en ligne sont
activées immédiatement après modication de la valeur
des données. Appuyer sur [OK] pour activer les modi-
cations apportées aux paramètres hors ligne.
®
eectue une initialisation (paramétre 14-22 Mod.
Process PID
Le régulateur PID maintient les vitesse, pression,
température, etc. requises en adaptant la fréquence de
sortie à la variation de charge.
PCD
Données de contrôle de process.
Cycle de puissance
Couper le secteur jusqu’à ce que l’achage (LCP) devienne
sombre, puis mettre à nouveau sous tension.
Entrée impulsions/codeur incrémental
Générateur externe d’impulsions digitales utilisé pour
fournir un retour sur la vitesse du moteur. Le codeur est
utilisé dans des applications qui nécessitent une grande
précision de la commande de vitesse.
RCD
Relais de protection diérentielle.
Process
Enregistrement des réglages des paramètres dans quatre
process. Changement d’un process à l’autre et édition d’un
process pendant qu’un autre est actif.
SFAVM
Type de modulation appelé Stator Flux-oriented
Asynchronous Vector Modulation (modulation vectorielle
asynchrone à ux statorique orienté, paramétre 14-00 Type
modulation).
Compensation du glissement
Le variateur de fréquence compense le glissement du
moteur en augmentant la fréquence en fonction de la
charge du moteur mesurée, la vitesse du moteur restant
ainsi quasiment constante.
SLC
Le SLC (Smart Logic Control, contrôleur logique avancé) est
une séquence d’actions dénies par l’utilisateur exécutées
lorsque les événements associés dénis par l’utilisateur
sont évalués comme étant vrais par le SLC (voir le
chapitre 3.12 Paramètres 13-** Logique avancée).
STW
Mot d’état.
Bus standard FC
Inclut le bus RS485 avec le protocole FC ou MC. Voir le
paramétre 8-30 Protocole.
THD
La distorsion harmonique totale indique la contribution
totale des harmoniques.
Thermistance
Résistance dépendant de la température placée sur le
variateur de fréquence ou le moteur.
Déclenchement
État résultant de situations de panne, p. ex. en cas de
surchaue du variateur de fréquence ou lorsque celui-ci
protège le moteur, le process ou le mécanisme. Le
variateur de fréquence empêche tout redémarrage tant
que l’origine de la panne n’a pas été résolue. Pour annuler
6 Danfoss A/S © 05/2018 Tous droits réservés. MG20OB04
Page 9
Introduction Guide de programmation
l’état d’alarme, redémarrer le variateur de fréquence. Ne
pas utiliser l’état d’alarme à des ns de sécurité des
personnes.
Alarme verrouillée
En situations de panne, le variateur de fréquence entre
dans cet état an de se protéger. Le variateur de fréquence
nécessite une intervention physique, p. ex. en cas de courtcircuit sur la sortie. Une alarme verrouillée ne peut être
annulée que par coupure de l’alimentation secteur,
résolution de l’origine de la panne et reconnexion du
variateur de fréquence. Le redémarrage est impossible tant
que l’état d’arrêt n’a pas été annulé par un reset ou, dans
certains cas, grâce à un reset programmé automatiquement. Ne pas utiliser l’état d’alarme verrouillée à des
ns de sécurité des personnes.
Caractéristique Couple Variable
Caractéristiques de couple variable que l’on utilise pour les
pompes et les ventilateurs.
+
VVC
Si on la compare au contrôle standard de proportion
tension/fréquence, la commande vectorielle de tension
(VVC+) améliore la dynamique et la stabilité, à la fois
lorsque la référence de vitesse est
modiée et lorsqu’elle
est associée au couple de charge.
60° AVM
Modulation vectorielle asynchrone 60°
(paramétre 14-00 Type modulation)
Facteur de puissance
Le facteur de puissance est le rapport entre I1 et I
Facteurde puissance =
3xUxI1cosϕ
3xUxI
RMS
RMS
.
Facteur de puissance pour alimentation triphasée :
Facteurde puissance =
I1xcosϕ1
I
RMS
=
I
1
puisquecosϕ1 = 1
I
RMS
Le facteur de puissance indique dans quelle mesure le
variateur de fréquence impose une charge à l’alimentation
secteur.
Plus le facteur de puissance est bas, plus l’I
RMS
est élevé
pour la même performance en kW.
I
RMS
=
I
+ I
1
5
+ I
2
+ .. + I
7
2
n
2
2
En outre, un facteur de puissance élevé indique que les
diérentes harmoniques de courant sont faibles.
Les bobines CC présentes dans les variateurs de fréquence
génèrent un facteur de puissance élevé, qui minimise la
charge imposée à l’alimentation secteur.
Position cible
La position cible nale spéciée par ordres de positionnement. Le générateur de prol utilise cette position pour
calculer le prol de vitesse.
Position ordonnée
La référence de position eective calculée par le
générateur de prol. Le variateur de fréquence utilise la
position ordonnée comme point de consigne pour position
PI.
Position eective
La position eective depuis un codeur, ou une valeur que
la commande de moteur calcule en boucle ouverte. Le
variateur de fréquence utilise la position eective comme
point de consigne pour position PI.
Erreur de position
L’erreur de position est la diérence entre la position
eective et la position ordonnée. L’erreur de position est
l’entrée du régulateur PI de position.
Unité de position
Unité physique des valeurs de position.
1.7 Abréviations, symboles et conventions
°C
°F
CA Courant alternatif
AEO Optimisation automatique de l’énergie
AWG
AMA Adaptation automatique au moteur
CC Courant continu
CEM Compatibilité électromagnétique
ETR Relais thermique électronique
f
M,N
FC Variateur de fréquence
I
INV
I
LIM
I
M,N
I
VLT,MAX
I
VLT,N
IP Protection contre les inltrations
LCP Panneau de commande local
MCT Outil de contrôle du mouvement
n
s
P
M,N
PELV
PCB Carte à circuits imprimés
Moteur PM Moteur à aimant permanent
PWM Modulation par largeur d’impulsion
Tr/min Tours par minute
Régén. Bornes régénératives
T
LIM
U
M,N
Degrés Celsius
Degrés Fahrenheit
American Wire Gauge (calibre
américain des ls)
Fréquence nominale du moteur
Courant de sortie nominal onduleur
Limite courant
Courant nominal du moteur
Courant de sortie maximal
Courant nominal de sortie fourni par
le variateur de fréquence
Vitesse moteur synchrone
Puissance nominale du moteur
Protective extra low voltage (très
basse tension de protection)
Limite couple
Tension nominale du moteur
1 1
MG20OB04 Danfoss A/S © 05/2018 Tous droits réservés. 7
Page 10
Introduction
VLT® AQUA Drive FC 202
11
1.8 Sécurité
AVERTISSEMENT
HAUTE TENSION
Les variateurs de fréquence contiennent des tensions
élevées lorsqu'ils sont reliés à l'alimentation secteur CA,
à l'alimentation CC ou à la répartition de la charge. Le
non-respect de la réalisation de l'installation, du
démarrage et de la maintenance par du personnel
qualié peut entraîner la mort ou des blessures graves.
L'installation, le démarrage et la maintenance ne
•
doivent être eectués que par du personnel
qualié.
Avant tout entretien ou toute réparation, utiliser
•
un dispositif de mesure de tension approprié
pour s'assurer que le variateur de fréquence est
complètement déchargé.
Normes de sécurité
Couper l’alimentation secteur du variateur de
•
fréquence avant d’intervenir sur ce dernier.
S’assurer que l’alimentation secteur est bien
coupée et que le temps nécessaire s’est écoulé
avant de déconnecter les bornes du moteur et du
secteur. Pour des informations sur le temps de
décharge, voir le Tableau 1.2.
La touche
•
secteur et, par conséquent, ne doit en aucun cas
être utilisée comme commutateur de sécurité.
Mettre correctement l’équipement à la terre.
•
Protéger l’utilisateur contre la tension d’alimentation et le moteur contre les surcharges,
conformément aux réglementations locales et
nationales.
Le courant de fuite à la terre dépasse 3,5 mA.
•
Le réglage d’usine ne prévoit pas de protection
•
contre la surcharge du moteur. Pour obtenir cette
fonction, régler le paramétre 1-90 Protect.
thermique mot. sur les valeurs de données [4] ETR
Alarme ou [3] ETR Avertis. 1.
Ne pas déconnecter les bornes d’alimentation du
•
moteur et du secteur lorsque le variateur de
fréquence est connecté au secteur. S’assurer que
l’alimentation secteur est bien coupée et que le
temps nécessaire s’est écoulé avant de
déconnecter les ches du moteur et du secteur.
Le variateur de fréquence comporte d’autres
•
sources de tension que L1, L2 et L3 lorsque la
répartition de la charge (connexion de circuit
intermédiaire) ou l’alimentation externe 24 V CC
est installée. Vérier que toutes les sources de
tension sont débranchées et que le temps
nécessaire s’est écoulé avant de commencer la
[O] ne coupe pas l’alimentation
DÉMARRAGE IMPRÉVU
Lorsque le variateur de fréquence est connecté au
secteur CA, à l'alimentation CC ou est en répartition de
la charge, le moteur peut démarrer à tout moment. Un
démarrage imprévu pendant la programmation, une
opération d'entretien ou de réparation peut entraîner la
mort, des blessures graves ou des dégâts matériels. Le
moteur peut être démarré par un commutateur externe,
un ordre de bus de terrain, un signal de référence
d'entrée, à partir du LCP ou suite à la suppression d'une
condition de panne.
Pour éviter un démarrage imprévu du moteur :
réparation. Pour des informations sur le temps de
décharge, voir le Tableau 1.2.
AVERTISSEMENT
Déconnecter le variateur de fréquence du
•
secteur.
Activer la touche [O/Reset] sur le LCP avant de
•
programmer les paramètres.
Câbler et assembler entièrement le variateur de
•
fréquence, le moteur et tous les équipements
entraînés avant de connecter le variateur de
fréquence au secteur CA, à l'alimentation CC ou
en répartition de la charge.
8 Danfoss A/S © 05/2018 Tous droits réservés. MG20OB04
Page 11
Introduction Guide de programmation
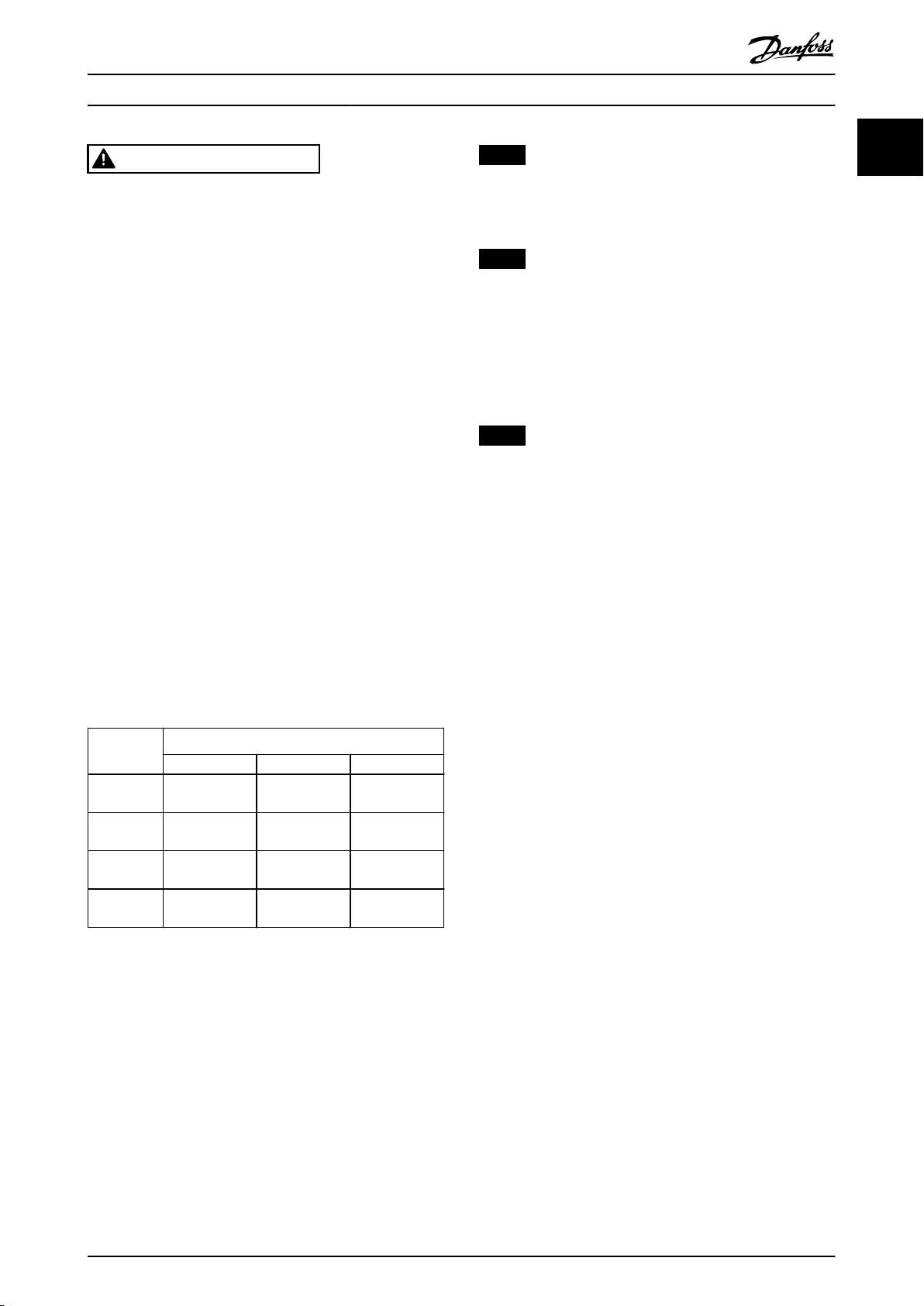
AVERTISSEMENT
TEMPS DE DÉCHARGE
Le variateur de fréquence contient des condensateurs
dans le circuit intermédiaire qui peuvent rester chargés
même lorsque le variateur de fréquence n’est pas
alimenté. Une haute tension peut être présente même
lorsque les voyants d’avertissement sont éteints. Le nonrespect du temps d’attente spécié après la mise hors
tension avant un entretien ou une réparation peut
entraîner le décès ou des blessures graves.
Arrêter le moteur.
•
Déconnecter le secteur CA et les alimentations à
•
distance du circuit intermédiaire, y compris les
batteries de secours, les alimentations sans
interruption et les connexions du circuit
intermédiaire aux autres variateurs de
fréquence.
Déconnecter ou verrouiller le moteur PM.
•
Attendre que les condensateurs soient complè-
•
tement déchargés. Le temps d’attente minimal
est spécié dans le Tableau 1.2 et est également
indiqué sur la plaque signalétique située sur le
dessus du variateur de fréquence.
Avant tout entretien ou toute réparation, utiliser
•
un dispositif de mesure de tension approprié
pour s’assurer que les condensateurs sont
complètement déchargés.
Tension [V]
200–240 0,25–3,7 kW
380–480 0,37-7,5 kW
525–600 0,75–7,5 kW
525–690 – 1,1–7,5 kW
Temps d’attente minimum (minutes)
4 7 15
– 5,5–45 kW
(0,34–5 HP)
– 11–90 kW
(0,5-10 HP)
– 11–90 kW
(1–10 HP)
(1,5–10 HP)
(7,5–60 HP)
(15–121 HP)
(15–121 HP)
11–90 kW
(15–121 HP)
AVIS!
Pour les instructions d’installation de la fonction Safe
Torque O, se reporter au Manuel d’utilisation de la
fonction Safe Torque O des variateurs de fréquence VLT®.
AVIS!
Des signaux de commande internes ou venant du
variateur de fréquence peuvent, en de rares occasions,
être activés par erreur, être retardés ou ne pas se
produire totalement. Lorsqu’ils sont utilisés dans des
situations critiques pour la sécurité, il convient de ne pas
tenir compte exclusivement de ces signaux de
commande.
AVIS!
Les situations dangereuses doivent être identiées par le
fabricant de machines/l’intégrateur chargé des moyens
préventifs nécessaires. Des dispositifs de protection et de
surveillance supplémentaires peuvent être inclus, conformément aux réglementations de sécurité nationales en
vigueur, p. ex. législation sur les outils mécaniques,
réglementations sur la prévention des accidents.
Mode protection
Lorsqu’une limite matérielle au niveau du courant moteur
ou de la tension du circuit CC est dépassée, le variateur de
fréquence passe en mode protection. Le mode protection
implique un changement de la stratégie de modulation
PWM et une fréquence de commutation basse pour
minimiser les pertes. Cela continue pendant 10 s après la
dernière panne et augmente la abilité et la robustesse du
variateur de fréquence tout en rétablissant le contrôle
complet du moteur.
1 1
Tableau 1.2 Temps de décharge
MG20OB04 Danfoss A/S © 05/2018 Tous droits réservés. 9
Page 12
*
91 (L1)
92 (L2)
93 (L3)
PE
88 (-)
89 (+)
50 (+10 V OUT)
53 (A IN)
54 (A IN)
55 (COM A IN)
0/4-20 mA
12 (+24 V OUT)
13 (+24 V OUT)
18 (D IN)
20 (COM D IN)
15 mA 200 mA
(U) 96
(V) 97
(W) 98
(PE) 99
(COM A OUT) 39
(A OUT) 42
0/4-20 mA
03
0-10 V DC
+10 V DC
0-10 V DC
0/4-20 mA
240 V AC, 2 A
24 V DC
02
01
05
04
06
240 V AC, 2 A
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
19 (D IN)
24 V (NPN)
0 V (PNP)
27
24V
0V
(D IN/OUT)
0 V (PNP)
24 V (NPN)
(D IN/OUT)
0V
24V
29
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
33 (D IN)
32 (D IN)
1 2
ON
S201
ON
21
S202
ON=0-20 mA
OFF=0-10 V
95
400 V AC, 2 A
P 5-00
(R+) 82
(R-) 81
37 (D IN)
+ - + -
e30be257.11
(P RS485) 68
(N RS485) 69
(COM RS485) 61
0 V
5V
S801
RS485
RS485
21
ON
S801
3-phase
power
input
DC bus
Switch mode
power supply
Motor
Analog output
Interface
relay1
relay2
ON=Terminated
OFF=Open
Brake
resistor
(NPN) = Sink
(PNP) = Source
Introduction
VLT® AQUA Drive FC 202
11
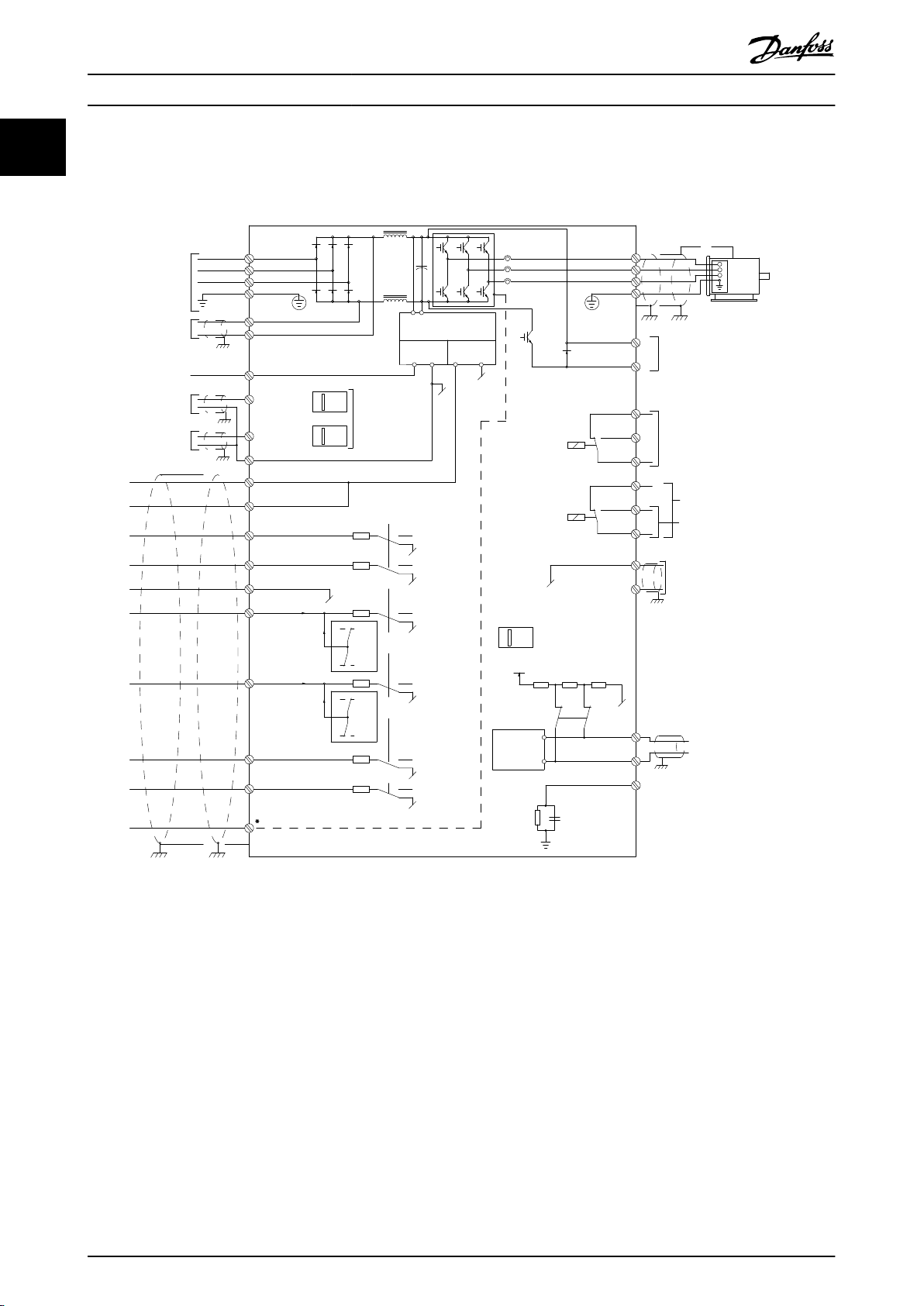
1.9 Câblage électrique
1.9.1 Câblage électrique - câbles de commande
Illustration 1.2 Dessin schématique du câblage de base
A = analogique, D = digitale
La borne 37 est utilisée pour la fonction Safe Torque O. Pour obtenir les instructions d’installation de la fonction Safe
Torque O, se reporter au Manuel d’utilisation de la fonction Safe Torque O des variateurs de fréquence VLT®.
* La borne 37 n’est pas incluse dans le FC 202 (sauf taille de boîtier A1). Le relais 2 et la borne 29 n’ont aucune fonction sur
le VLT® AQUA Drive FC 202.
Les câbles de commande longs et les signaux analogiques
peuvent, dans de rares cas et en fonction de l’installation,
provoquer des boucles de mise à la terre de 50/60 Hz en
raison du bruit provenant des câbles de l’alimentation
secteur.
Dans ce cas, il peut être nécessaire de rompre le blindage
ou d’insérer un condensateur de 100 nF entre le blindage
et la protection.
10 Danfoss A/S © 05/2018 Tous droits réservés. MG20OB04
Connecter les entrées et sorties digitales et analogiques
séparément aux entrées communes (bornes 20, 55, 39) du
variateur de fréquence an d’éviter que les courants de
terre des deux groupes n’aectent d’autres groupes. Par
exemple, la commutation sur l’entrée digitale peut troubler
le signal d’entrée analogique.
Page 13
12 13 18 19 27 29 32 33 20 37
+24 V CC
0 V CC
130BT106.10
PNP (source)
Câblage entrée digitale
NPN (dissipateur)
Câblage entrée digitale
12 13 18 19 27 29 32 33 20 37
+24 V CC
0 V CC
130BT107.11
130BA681.10
Introduction Guide de programmation
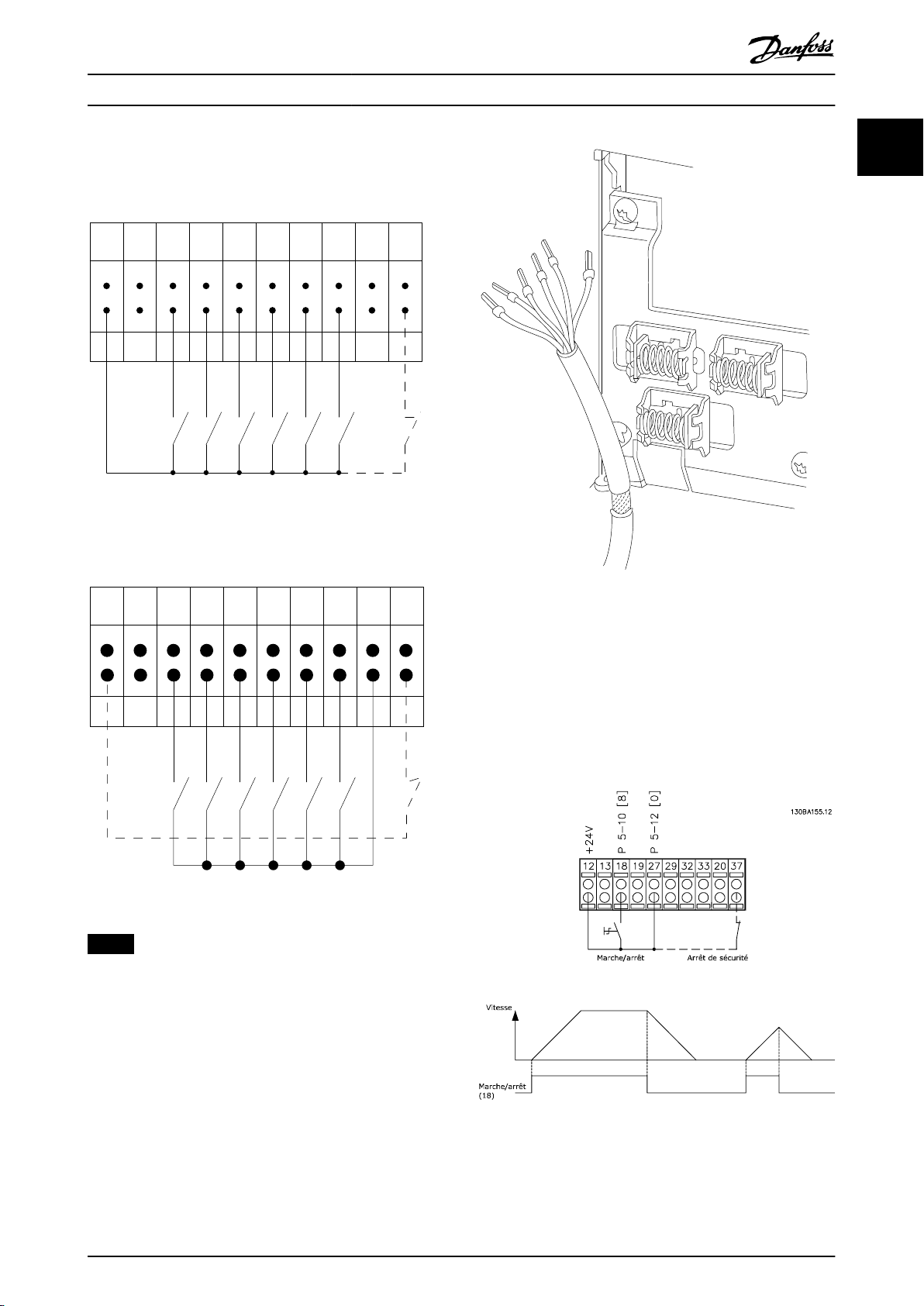
Polarité d’entrée des bornes de commande
Illustration 1.3 PNP (source)
1 1
Illustration 1.5 Mise à la terre des câbles de commande
blindés/armés
Illustration 1.4 NPN (dissipateur)
AVIS!
Les câbles de commande doivent être blindés/armés.
Voir le chapitre Mise à la terre de câbles de commande
blindés du manuel de conguration pour la terminaison
correcte des câbles de commande.
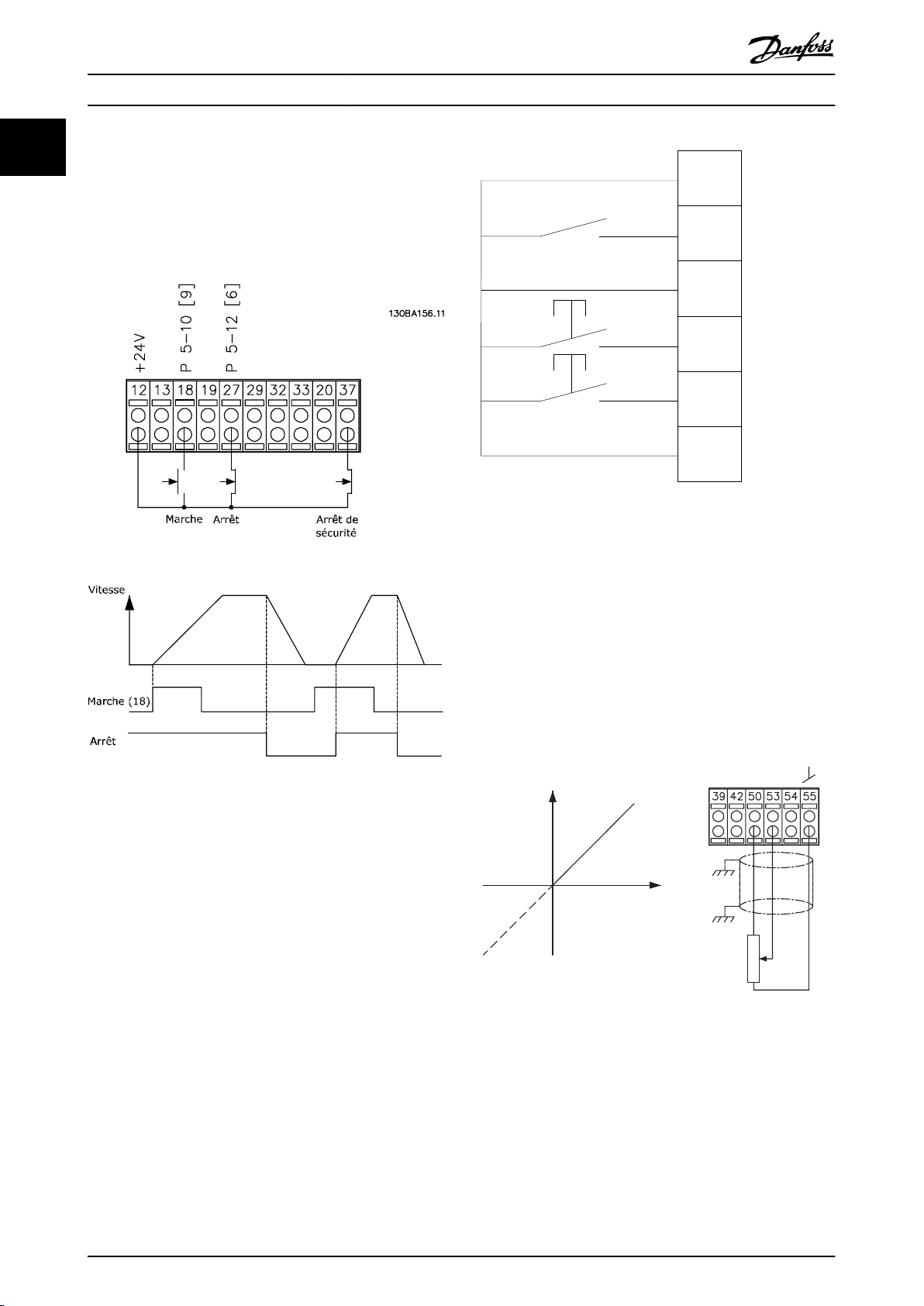
1.9.2 Marche/arrêt
Borne 18 = Paramétre 5-10 E.digit.born.18 [8] Démarrage.
Borne 27 = Paramétre 5-12 E.digit.born.27 [0] Inactif ([2]
Lâchage par défaut).
Borne 37 = Safe Torque O (si disponible).
Illustration 1.6 Marche/arrêt
MG20OB04 Danfoss A/S © 05/2018 Tous droits réservés. 11
Page 14
12
18
27
29
32
37
+24V
Par. 5-10
Par. 5-12
Par. 5-13
Par. 5-14
130BA021.12
Vitesse tr/min
P 6-15
Tension de réf.
P 6-11 10 V
+10 V/30 mA
130BA154.11
1 kΩ
Introduction
VLT® AQUA Drive FC 202
11
1.9.3 Impulsion de démarrage/d’arrêt
Borne 18 = Paramétre 5-10 E.digit.born.18 [9] Impulsion
démarrage.
Borne 27 = Paramétre 5-12 E.digit.born.27 [6] Arrêt NF.
Borne 37 = Safe Torque O (si disponible).
Illustration 1.8 Accélération/décélération
1.9.5 Référence du potentiomètre
Référence de tension via un potentiomètre
Source de référence 1 = [1] Entrée ANA 53 (par défaut).
Borne 53, basse tension = 0 V.
Borne 53, haute tension = 10 V.
Borne 53, ret./réf. bas. = 0 tr/min.
Borne 53, ret./réf. bas. = 1500 tr/min.
Commutateur S201 = Inactif (U).
Illustration 1.7 Impulsion de démarrage/d’arrêt
1.9.4 Accélération/décélération
Bornes 29/32 = Accélération/décélération
Borne 18 = Paramétre 5-10 E.digit.born.18 [9] Impulsion
démarrage (par défaut).
Borne 27 = Paramétre 5-12 E.digit.born.27 [19] Gel référence.
Borne 29= Paramétre 5-13 E.digit.born.29 [21] Accélération.
Borne 32 = Paramétre 5-14 E.digit.born.32 [22] Décélération.
Illustration 1.9 Référence du potentiomètre
12 Danfoss A/S © 05/2018 Tous droits réservés. MG20OB04
Page 15
Auto
On
Reset
Hand
On
Off
Status
Quick
Menu
Main
Menu
Alarm
Log
Back
Cancel
Info
OK
Status
1(0)
1234rpm 10,4A 43,5Hz
Run OK
43,5Hz
On
Alarm
Warn.
e30ba018.14
1
2
3
4
b
a
c
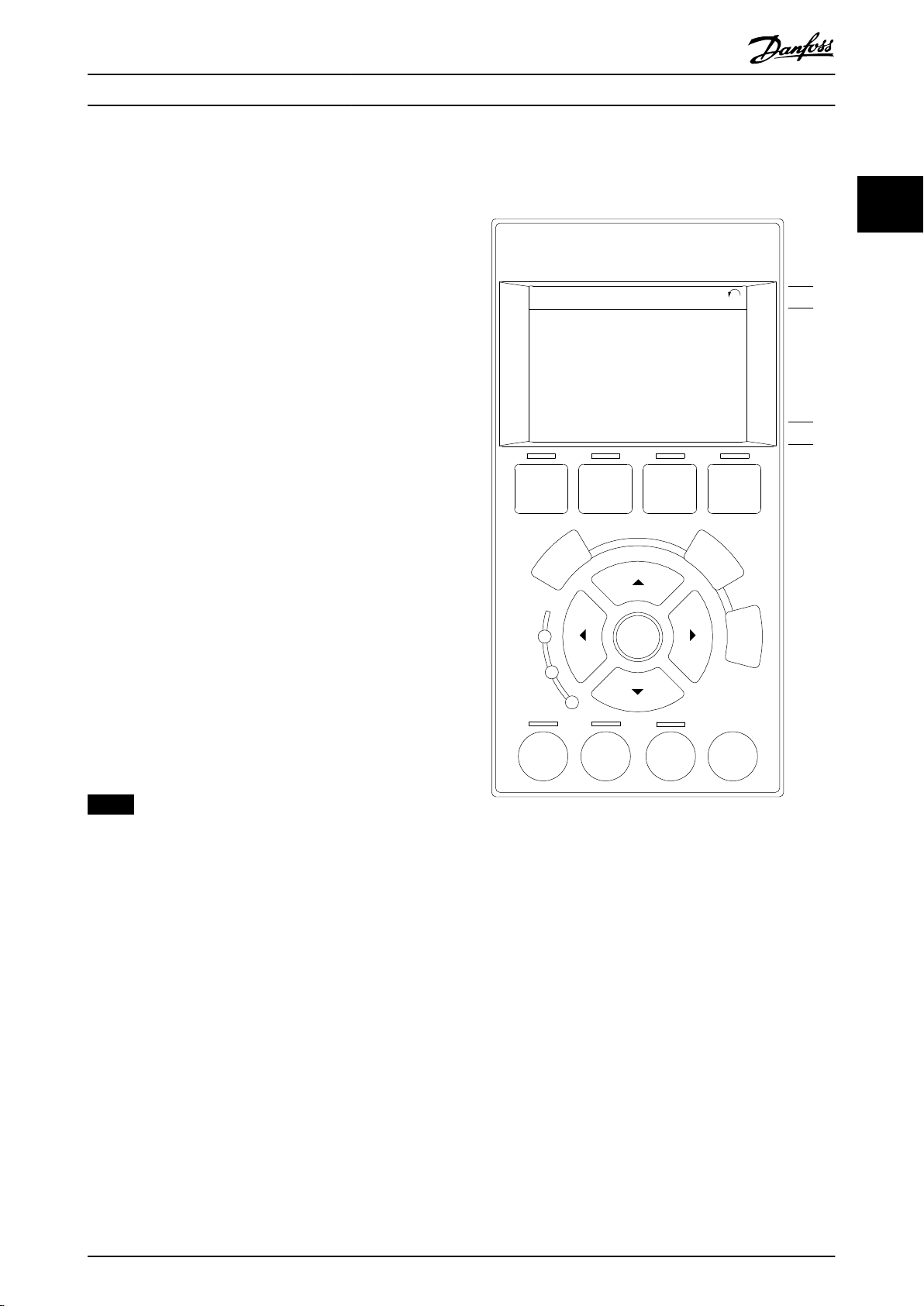
Programmation Guide de programmation
2 Programmation
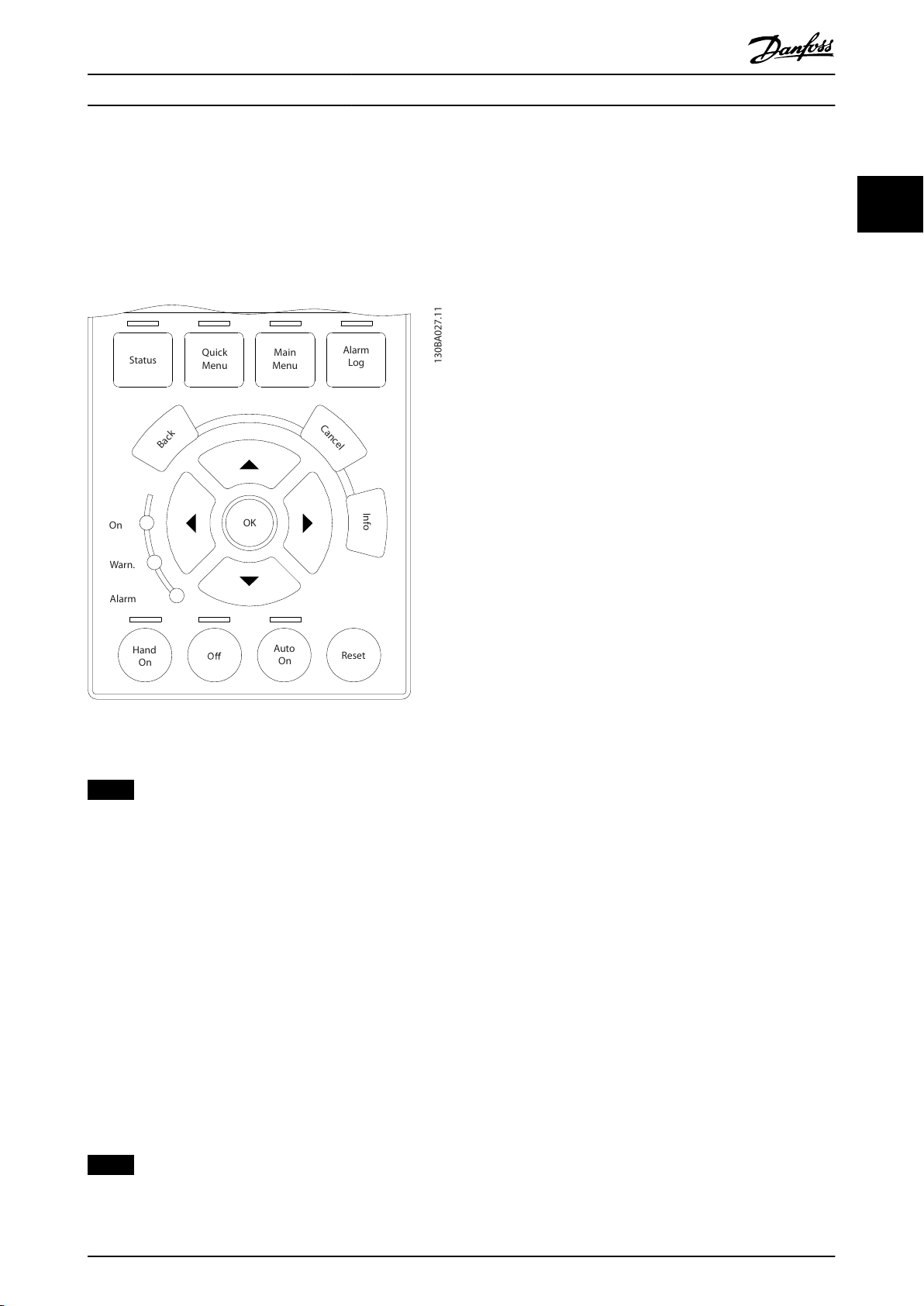
2.1 Panneau de commande local graphique
et numérique
Une programmation simple du variateur de fréquence est
réalisée par le LCP graphique (LCP 102). Pour plus d’informations sur l’utilisation du panneau de commande local
numérique (LCP 101), voir le chapitre 2.2.17 Programmation
du panneau de commande local numérique.
2.2 Programmation du LCP graphique
Le LCP est divisé en 4 groupes fonctionnels :
1. Achage graphique avec lignes d’état.
2. Touches de menu et voyants - Changement des
paramètres et basculement entre les fonctions
d’achage.
3. Touches de navigation et voyants
4. Touches d’exploitation et voyants
L’écran LCP peut acher jusqu’à 5 éléments de variables
d’exploitation lors de l’achage associé à Status.
2 2
d’achage :
Lignes
a. Ligne d’état : messages d’état achant des
icônes et des graphiques.
b. Lignes 1-2 : lignes de données de l’opérateur
présentant des données dénies ou
sélectionnées. Ajouter jusqu’à une ligne supplémentaire en appuyant sur [Status].
c. Ligne d’état : messages d’état achant un texte.
AVIS!
Si le démarrage est retardé, le LCP ache le message
Illustration 2.1 LCP
INITIALISATION jusqu’à ce qu’il soit prêt. L’ajout ou le
retrait d’options peut retarder le démarrage.
MG20OB04 Danfoss A/S © 05/2018 Tous droits réservés. 13
Page 16
Partie supérieure
Partie centrale
Partie inférieure
État
43tr/min
1,4Hz
Fonctionnement auto à distance
! Temp. carte puiss. (W29)
2,9%
5,44A 25,3kW
1(1)
130BP074.10
!
130BP044.10
130BP045.10
Status
Quick
Menu
Main
Menu
Alarm
Log
Programmation
VLT® AQUA Drive FC 202
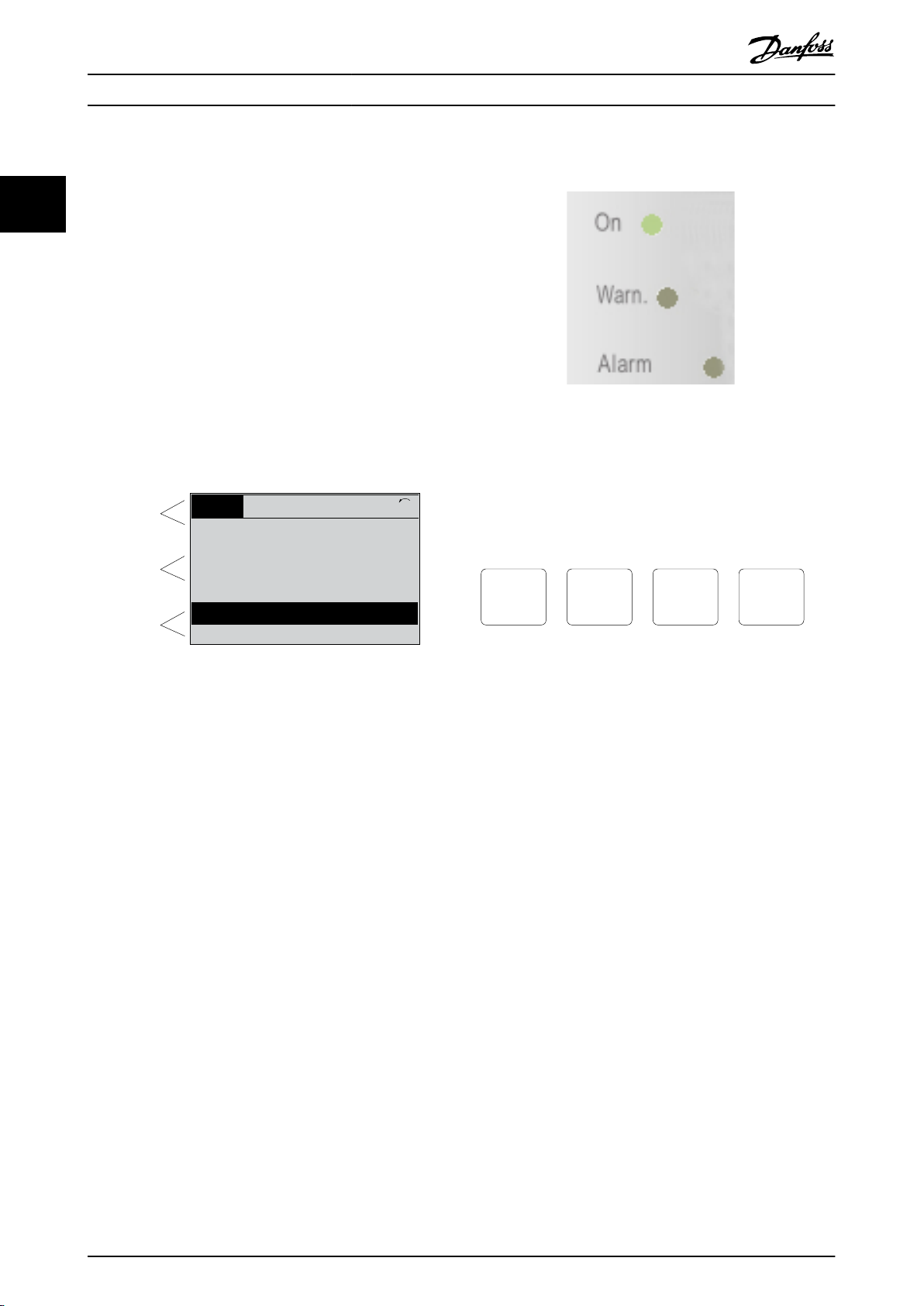
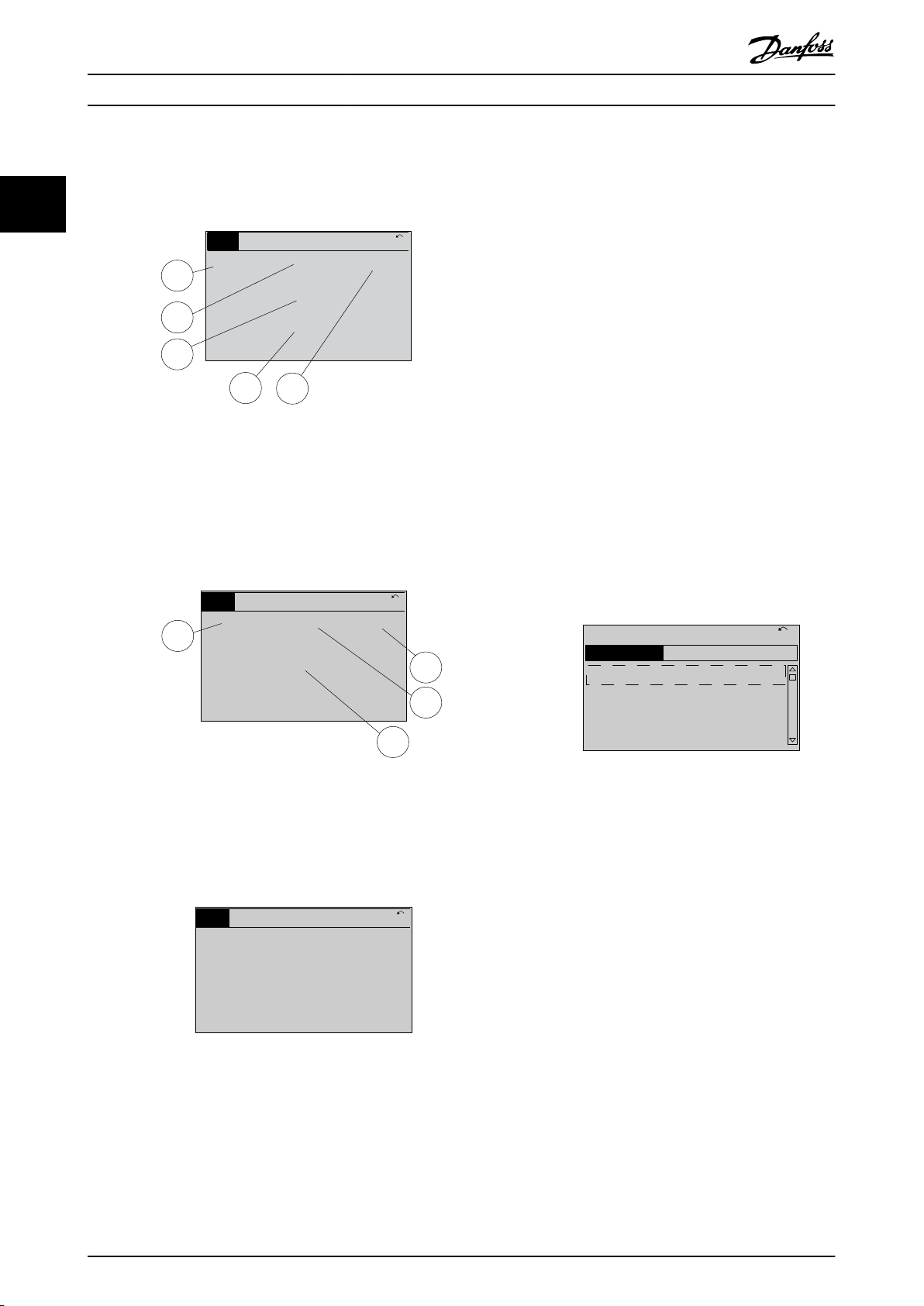
2.2.1 L’achage du LCP
22
L’achage du LCP dispose d’un rétroéclairage et d’un total
de 6 lignes alphanumériques. Les lignes d’achage
indiquent le sens de rotation (èche), le process choisi
ainsi que le process de programmation. L’achage est
divisé en 3 sections.
Partie supérieure
Ache jusqu’à 2 mesures en état d’exploitation normal.
Partie centrale
La ligne du haut ache jusqu’à 5 mesures avec les unités
correspondantes, indépendamment de l’état (sauf en cas
d’avertissement ou d’alarme).
Partie inférieure
Indique en permanence l’état du variateur de fréquence en
mode Status (état).
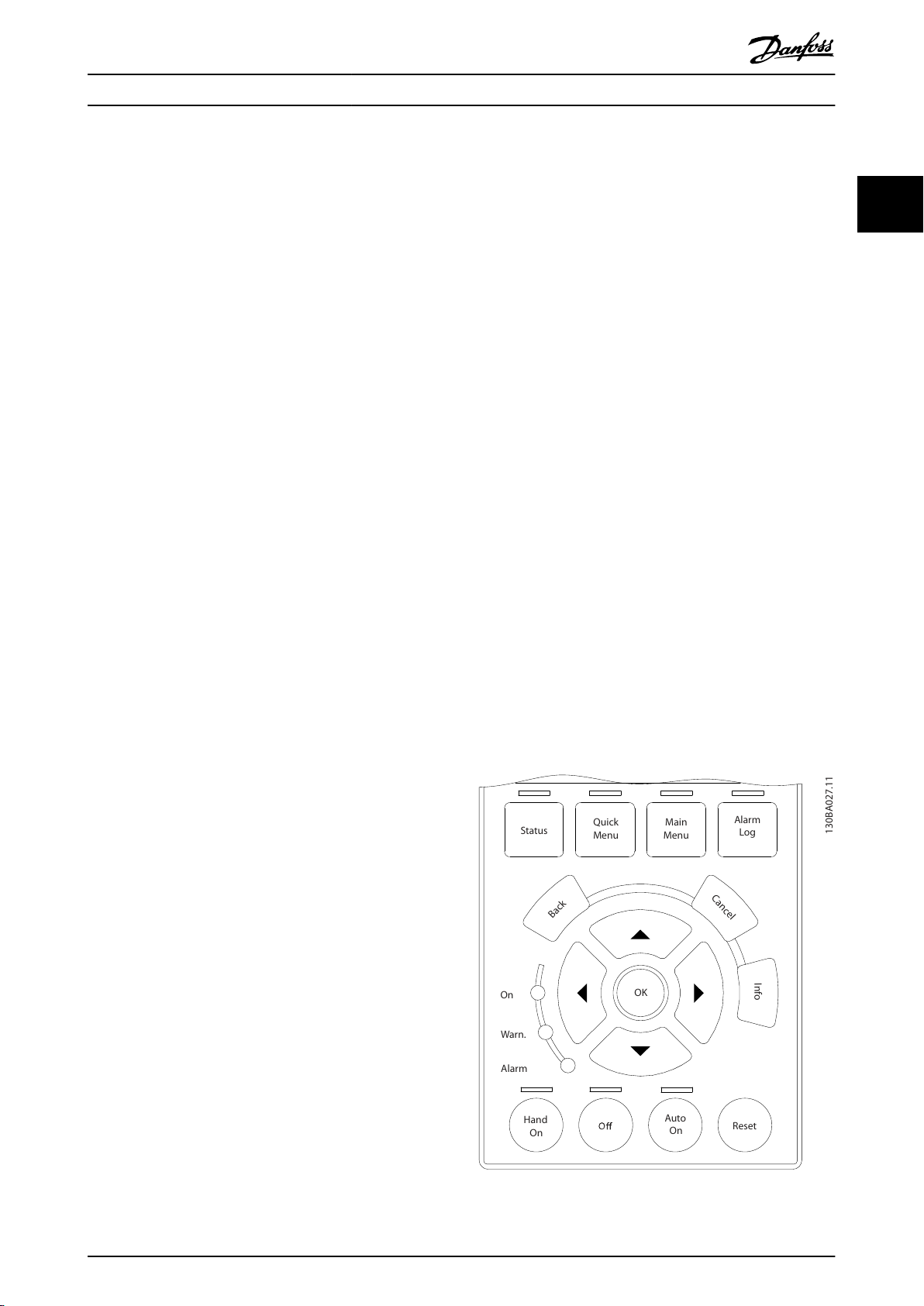
Illustration 2.3 Voyants
Touches du LCP
Les touches de commande sont réparties selon leurs
fonctions. Les touches situées sous l’écran d’achage et les
voyants sont utilisées pour la conguration des paramètres,
notamment le choix des indications de l’achage en
fonctionnement normal.
LED rouge clignotante/Alarm : indique une
•
alarme.
Illustration 2.4 Touches du LCP
Illustration 2.2 Partie inférieure
[Status]
Le process actif (sélectionné au paramétre 0-10 Process
actuel) est indiqué. Lors de la programmation d’un process
autre que le process actif, le numéro du process
programmé apparaît à droite.
Réglage du contraste de l’achage
Appuyer sur [Status] et [▲] pour assombrir l’achage.
Appuyer sur [Status] et sur [▼] pour éclaircir l’achage.
La plupart des congurations de paramètres peuvent être
modiées immédiatement via le LCP, à moins qu’un mot
de passe n’ait été créé via le paramétre 0-60 Mt de passe
menu princ. ou le paramétre 0-65 Mot de passe menu
personnel.
Voyants
En cas de dépassement de certaines valeurs limites, le
voyant d’alarme et/ou d’avertissement s’allume Un texte
d’état et d’alarme s’ache sur le LCP.
Le voyant de tension est activé lorsque le variateur de
fréquence est alimenté par la tension secteur, par une
connexion du circuit intermédiaire ou par une alimentation
externe 24 V. En même temps, le rétroéclairage est actif.
LED verte/On : indique que la section de contrôle
•
fonctionne.
LED jaune/Warn. : indique un avertissement.
•
14 Danfoss A/S © 05/2018 Tous droits réservés. MG20OB04
Indique l’état du variateur de fréquence et/ou du moteur.
Choix possible entre 3 achages diérents en appuyant
sur [Status] : achages 5 lignes, achages 4 lignes ou
contrôleur logique avancé.
Utiliser la touche [Status] pour choisir le mode d’achage
ou pour revenir au mode d’achage à partir des modes
Quick Menu (menu rapide), Main Menu (menu principal) ou
Alarm (alarme). Utiliser également cette touche pour passer
en mode achage simple ou double.
[Quick Menu]
Permet d’accéder rapidement aux fonctions les plus
courantes du variateur de fréquence.
Les paramètres de [Quick Menu] sont :
Q1 : Mon menu personnel
•
Q2 : Conguration rapide
•
Q3 : Conguration des fonctions
•
Q4 : SmartStart
•
Q5 : Modications eectuées
•
Q6 : Enregistrements
•
Q7 : Eau et pompes
•
La conguration des fonctions donne accès rapidement à
tous les paramètres requis pour la plupart des applications
liées à l’eau et aux eaux usées, notamment :
Page 17
Au t o
On R eset
Hand
On
S
ta
tus
Q
uick
M
enu
M
ain
M
enu
A
lar
m
Lo
g
Back
C
anc
el
I
n
fo
OK
On A lar m W
ar
n.
130BA027.11
Programmation Guide de programmation
couple variable ;
•
couple constant ;
•
pompes ;
•
pompes de dosage ;
•
pompes de puits ;
•
pompes de surpression ;
•
pompes mélangeuses ;
•
ventilateurs ;
•
autres pompes ;
•
applications de ventilateur.
•
Entre autres caractéristiques, elle inclut aussi des
paramètres permettant de sélectionner :
les variables à acher sur le LCP ;
•
des vitesses digitales prédénies ;
•
la mise à l’échelle des références analogiques ;
•
des applications multizones ou à zone unique, à
•
boucle fermée ;
certaines fonctions liées à l’eau ;
•
des applications liées aux eaux usées.
•
Le menu rapide Q7 : Eau et pompes ore un accès direct à
certaines des caractéristiques les plus importantes liées à
l’eau et aux pompes :
Q7-1 : Rampes spéciales (rampe initiale, rampe
•
nale, rampe clapet anti-retour)
Q7-2 : Mode veille
•
Q7-3 : Décolmatage
•
Q7-4 : Fonctionnement à sec
•
Q7-5 : Détection de n de courbe
•
Q7-6 : Compensation du débit
•
Q7-7 : Remplissage des tuyaux (tuyaux
•
horizontaux, tuyaux verticaux, systèmes mixtes)
Q7-8 : Performance de contrôle
•
Q7-9 : Commande de vitesse min.
•
Les paramètres du Quick Menu (menu rapide) sont
accessibles immédiatement, à moins qu’un mot de passe
n’ait été créé via l’un des paramètres suivants :
Paramétre 0-60 Mt de passe menu princ..
•
Paramétre 0-61 Accès menu princ. ss mt de passe.
•
Paramétre 0-65 Mot de passe menu personnel.
•
Paramétre 0-66 Accès menu personnel ss mt de
•
passe.
Il est possible de basculer directement entre le mode Quick
Menu (menu rapide) et le mode Main Menu (menu
principal).
[Main Menu]
Cette section est utilisée pour programmer tous les
paramètres.
Les paramètres du Main Menu (menu principal) sont
accessibles immédiatement, à moins qu’un mot de passe
n’ait été créé via l’un des paramètres suivants :
Paramétre 0-60 Mt de passe menu princ..
•
Paramétre 0-61 Accès menu princ. ss mt de passe.
•
Paramétre 0-65 Mot de passe menu personnel.
•
Paramétre 0-66 Accès menu personnel ss mt de
•
passe.
Pour la plupart des applications liées à l’eau et aux eaux
usées, il n’est pas nécessaire d’accéder aux paramètres du
Main Menu (menu principal). Le Quick Menu (menu rapide),
la conguration rapide et la conguration des fonctions
fournissent un accès simple et rapide à tous les paramètres
typiques nécessaires.
Il est possible de basculer directement entre le mode Main
Menu (menu principal) et le mode Quick Menu (menu
rapide).
Pour créer un raccourci vers les paramètres, appuyer sur la
touche [Main Menu] pendant 3 s. Ce raccourci permet
d’accéder directement à n’importe quel paramètre.
[Alarm Log]
Ache une liste des cinq dernières alarmes (numérotées
de A1 à A5). Pour obtenir des détails supplémentaires au
sujet d’une alarme, utiliser les touches de navigation pour
se positionner sur le numéro de l’alarme, puis appuyer sur
[OK]. Des informations au sujet de l’état du variateur de
fréquence sont fournies juste avant de passer en mode
Alarm (alarme).
Illustration 2.5 LCP
2 2
MG20OB04 Danfoss A/S © 05/2018 Tous droits réservés. 15
Page 18
B
a
c
k
C
a
n
c
e
l
I
n
f
o
e30bp046.12
Hand
On
Off
Auto
On
Reset
Programmation
VLT® AQUA Drive FC 202
[Back]
Renvoie à l’étape ou au niveau précédent de la structure
de navigation.
22
[Cancel]
Annule la dernière modication ou commande tant que
l’achage n’a pas été modié.
[Info]
Fournit des informations au sujet d’une commande, d’un
paramètre ou d’une fonction dans n’importe quelle fenêtre
de visualisation. [Info] fournit des informations détaillées
dès que l’on a besoin d’aide.
Pour quitter le mode Info, appuyer sur la touche [Info],
[Back] ou [Cancel].
Illustration 2.6 Back
l’aide des touches de navigation. La touche peut être
sélectionnée en tant que [1] Activé ou [0] Désactivé via le
paramétre 0-40 Touche [Hand on] sur LCP.
Les signaux d’arrêt externes activés à l’aide de signaux de
commande ou d’un bus de terrain annulent un ordre de
démarrage donné via le LCP.
Les signaux de commande suivants restent toujours actifs
lorsque [Hand On] est activé :
[Hand On] - [O] - [Auto On] ;
•
reset ;
•
arrêt en roue libre, inverse ;
•
inversion ;
•
sélection process bit 0 - sélection process bit 1 ;
•
ordre d’arrêt de la communication série ;
•
arrêt rapide ;
•
freinage CC.
•
[O]
Arrête le moteur connecté. La touche peut être
sélectionnée en tant que [1] Activé ou [0] Désactivé via le
paramétre 0-41 Touche [O] sur LCP. Si aucune fonction
Illustration 2.7 Cancel
d’arrêt externe n’est sélectionnée et que la touche [O] est
inactive, arrêter le moteur en coupant l’alimentation.
[Auto On]
Permet de contrôler le variateur de fréquence à partir des
bornes de commande et/ou de la communication série.
Lorsqu’un signal de démarrage est appliqué sur les bornes
Illustration 2.8 Info
de commande et/ou sur le bus de terrain, le variateur de
fréquence démarre. La touche peut être sélectionnée en
tant que [1] Activé ou [0] Désactivé via le
Touches de navigation
Utiliser ces 4 touches pour faire déler les diérentes
options disponibles dans le Quick Menu (menu rapide), le
Main Menu (menu principal) et l'Alarm log (journal
d’alarmes). Appuyer sur les touches pour déplacer le
curseur.
[OK]
Permet de sélectionner un paramètre indiqué par le
curseur ou de valider la modication d’un paramètre.
Touches de commande locale
Les touches de commande locale se trouvent en bas du
LCP.
paramétre 0-42 Touche [Auto on] sur LCP.
AVIS!
Un signal actif HAND-OFF-AUTO via les entrées digitales
a une priorité supérieure aux touches de commande
[Hand On] et [Auto On].
[Reset]
Est utilisé après une alarme (arrêt) pour réinitialiser le
variateur de fréquence. Cette touche peut être
sélectionnée en tant que [1] Activé ou [0] Désactivé via le
paramétre 0-43 Touche [Reset] sur LCP.
Pour établir un raccourci de paramètre, appuyer sur la
touche [Main Menu] pendant 3 secondes. Ce raccourci
permet d’accéder directement à n’importe quel paramètre.
Illustration 2.9 Touches de commande locale
[Hand On]
Permet de commander le variateur de fréquence via le LCP.
[Hand On] démarre aussi le moteur. Il est maintenant
possible d’introduire les données de vitesse du moteur à
16 Danfoss A/S © 05/2018 Tous droits réservés. MG20OB04
Page 19
Au t o
On R eset
Hand
On
S
ta
tus
Q
uick
M
enu
M
ain
M
enu
A
lar
m
Lo
g
Back
C
anc
el
I
n
fo
OK
On A lar m W
ar
n.
130BA027.11
Programmation Guide de programmation
2.2.2 Transfert rapide du réglage des
paramètres entre plusieurs variateurs
de fréquence
Une fois la programmation d’un variateur de fréquence
terminée, mémoriser les données dans le LCP ou sur un PC
via le Logiciel de programmation MCT 10.
Pour transférer les données du LCP vers le variateur de
fréquence :
1. Aller au paramétre 0-50 Copie LCP.
2. Appuyer sur la touche [OK].
3. Sélectionner [2] Ecrit.PAR. LCP.
4. Appuyer sur la touche [OK].
Les réglages des paramètres stockés dans le LCP sont alors
transférés vers le variateur, comme l’indique la barre de
progression. Quand le pourcentage de 100 % est atteint,
appuyer sur [OK].
2.2.3 Mode d'achage
En fonctionnement normal, il est possible d'indiquer en
continu jusqu'à 5 variables d'exploitation diérentes dans
la section centrale : 1.1, 1.2 et 1.3 ainsi que 2 et 3.
2.2.4 Mode d’achage - Sélection des
lectures
Appuyer sur la touche [Status] pour alterner entre ces trois
achages.
Les variables d’exploitation dont la mise en forme est
diérente sont indiquées dans chaque écran d’état. Pour
plus d’informations, voir les exemples de ce chapitre.
2 2
Illustration 2.10 LCP
Stockage de données dans le LCP
AVIS!
Arrêter le moteur avant d’exécuter cette opération.
Pour mémoriser les données dans le LCP :
1. Aller au paramétre 0-50 Copie LCP.
2. Appuyer sur la touche [OK].
3. Sélectionner [1] Lect.PAR.LCP.
4. Appuyer sur la touche [OK].
Tous les réglages de paramètres sont maintenant stockés
dans le LCP, comme la barre de progression l’indique.
Quand le pourcentage de 100 % est atteint, appuyer sur
[OK].
Connecter le LCP à un autre variateur de fréquence et
copier aussi les réglages des paramètres vers ce variateur
de fréquence.
Transfert de données du LCP vers le variateur de
fréquence
AVIS!
Arrêter le moteur avant d’exécuter cette opération.
Plusieurs valeurs ou mesures peuvent être reliées à
chacune des variables d’exploitation achées. Les valeurs
ou mesures à acher peuvent être dénies aux paramètres
suivants :
Paramétre 0-20 Ach. ligne 1.1 petit.
•
Paramétre 0-21 Ach. ligne 1.2 petit.
•
Paramétre 0-22 Ach. ligne 1.3 petit.
•
Paramétre 0-23 Ach. ligne 2 grand.
•
Paramétre 0-24 Ach. ligne 3 grand.
•
Accéder aux paramètres via la touche [Quick Menu], Q3
Régl. fonction, Q3-1 Régl. généraux, Q3-11 Régl. achage.
Chaque paramètre d’achage sélectionné du
paramétre 0-20 Ach. ligne 1.1 petit au
paramétre 0-24 Ach. ligne 3 grand dispose de sa propre
échelle et de ses propres chires après l’éventuelle virgule
décimale. Plus la valeur numérique d’un paramètre est
élevée, moins il y a de chires après la virgule.
Exemple : achage actuel 5,25 A ; 15,2 A ; 105 A.
Voir le groupe de paramètres 0-2* Ecran LCP pour plus
d’informations.
Écran d’état I
État d’indication par défaut après démarrage ou initialisation.
MG20OB04 Danfoss A/S © 05/2018 Tous droits réservés. 17
Page 20
1.1
2
3
1.3
1.2
130BP041.10
799tr/min
Fonctionnement auto par rampe à distance
1 (1)
36,4kW7,83A
0,000
53,2 %
État
1.1
1.2
2
1.3
130BP062.10
207tr/min
Fonctionnement auto à distance
1 (1)
24,4kW5,25A
6,9 Hz
État
130BP063.10
778rpm
Fonctionnement auto à distance
1 (1)
4,0 kW0,86A
État: 0 arrêt 0 (arrêt)
Quand: Faire: -
État
130BC916.10
Q1 My Personal Menu
Q2 Quick Setup
Q4 Smart Setup
Q5 Changes Made
0RPM 0.00A 1(1)
Quick Menus
Programmation
VLT® AQUA Drive FC 202
Appuyer sur [Info] pour obtenir des informations sur les
2.2.5 Conguration des paramètres
liens de mesure vers les variables d’exploitation achées
(1.1, 1.2, 1.3, 2 et 3).
22
Voir les variables d’exploitation sur l’Illustration 2.11.
Le variateur de fréquence est conçu pour s’adapter à des
applications très variées et propose deux options de
programmation :
le mode Main Menu (menu principal) ;
•
le mode Quick Menu (menu rapide).
•
Le Main Menu (menu principal) permet d’accéder à tous
les paramètres. Le Quick Menu (menu rapide) assiste l’utilisateur lors de quelques paramétrages qui facilitent le
démarrage du variateur de fréquence.
Modier un paramètre en mode Main Menu (menu
principal) ou Quick Menu (menu rapide).
Illustration 2.11 Écran d’état I
2.2.6 Fonctions de la touche [Quick Menu]
Écran d’état II
Voir les variables d’exploitation (1.1, 1.2, 1.3 et 2) sur
l’Illustration 2.12.
Dans l’exemple, vitesse, courant moteur, puissance moteur
et fréquence sont sélectionnés comme variables des deux
premières lignes.
Appuyer sur [Quick Menu] pour acher une liste des
diérentes zones du menu rapide.
Sélectionner Q1 Mon menu personnel pour acher les
paramètres personnels sélectionnés. Ces paramètres sont
sélectionnés au paramétre 0-25 Mon menu personnel. On
peut ajouter jusqu’à 50 paramètres
diérents dans ce
menu.
Illustration 2.12 Écran d’état II
Écran d’état III
Cet état indique l’événement et l’action du contrôleur
logique avancé. Pour plus de détails, voir le groupe de
paramètres 13-** Logique avancée.
Illustration 2.14 Menus rapides
Sélectionner Q2 Cong. rapide pour accéder à une sélection
de paramètres de manière à faire fonctionner le moteur de
manière quasi optimale. Les réglages par défaut des autres
paramètres prennent en compte les fonctions de
commande souhaitées et la conguration des entrées/
sorties de signaux (bornes de commande).
Les paramètres sont sélectionnés à l’aide des touches de
navigation. Les paramètres du Tableau 2.1 sont accessibles.
Illustration 2.13 Écran d’état III
18 Danfoss A/S © 05/2018 Tous droits réservés. MG20OB04
Page 21
Programmation Guide de programmation
Paramètre Réglage
Paramétre 0-01 Langue
Paramétre 1-20 Puissance moteur [kW ] [kW]
Paramétre 1-22 Tension moteur [V]
Paramétre 1-23 Fréq. moteur [Hz]
Paramétre 1-24 Courant moteur [A]
Paramétre 1-25 Vit.nom.moteur [tr/min]
Paramétre 5-12 E.digit.born.27
Paramétre 1-29 Adaptation auto. au
moteur (AMA)
Paramétre 3-02 Référence minimale [tr/min]
Paramétre 3-03 Réf. max. [tr/min]
Paramétre 3-41 Temps d'accél. rampe 1 [s]
Paramétre 3-42 Temps décél. rampe 1 [s]
Paramétre 3-13 Type référence
Tableau 2.1 Choix de paramètres
1) Si [0] Inactif est sélectionné à la borne 27, aucune connexion à
+ 24 V n’est nécessaire sur cette borne.
Sélectionner Modif. eectuées pour obtenir des
informations concernant :
les 10 dernières modications. Utiliser les touches
•
de navigation [▲] [▼] pour faire déler les
10 derniers paramètres modiés.
les modications apportées depuis le réglage par
•
défaut.
Sélectionner Enregistrements pour obtenir des informations
concernant les lignes d’achage. Les informations
apparaissent sous forme graphique.
Seuls les paramètres d’achage sélectionnés au
paramétre 0-20 Ach. ligne 1.1 petit et au
paramétre 0-24 Ach. ligne 3 grand peuvent être visualisés.
Il est possible de mémoriser jusqu’à 120 exemples à des
ns de référence ultérieure.
[0] Inactif
[1] AMA activée
compl.
1)
Parmi d’autres fonctions, le menu de conguration des
fonctions comprend aussi des paramètres permettant de
sélectionner :
les variables à acher sur le LCP ;
•
des vitesses digitales prédénies ;
•
la mise à l’échelle des références analogiques ;
•
des applications multizones ou à zone unique, à
•
boucle fermée ;
certaines fonctions liées à l’eau ;
•
des applications liées aux eaux usées.
•
2 2
2.2.7 Menu rapide, Q3 Régl. fonction
La conguration des fonctions donne accès rapidement à
tous les paramètres requis pour la plupart des applications
liées à l’eau et aux eaux usées, notamment :
couple variable ;
•
couple constant ;
•
pompes ;
•
pompes de dosage ;
•
pompes de puits ;
•
pompes de surpression ;
•
pompes mélangeuses ;
•
ventilateurs ;
•
autres pompes ;
•
applications de ventilateur.
•
MG20OB04 Danfoss A/S © 05/2018 Tous droits réservés. 19
Page 22
Programmation
VLT® AQUA Drive FC 202
Les paramètres de conguration des fonctions sont regroupés de la manière suivante :
22
Q3-10 Régl. horloge Q3-11 Régl. achage Q3-12 Sortie ana. Q3-13 Relays
Paramétre 0-70 Régler date&heure Paramétre 0-20 Ach. ligne 1.1
petit
Paramétre 0-71 Format date Paramétre 0-21 Ach. ligne 1.2
petit
Paramétre 0-72 Format heure Paramétre 0-22 Ach. ligne 1.3
petit
Paramétre 0-74 Heure d'été Paramétre 0-23 Ach. ligne 2
grand
Paramétre 0-76 Début heure d'été Paramétre 0-24 Ach. ligne 3
grand
Paramétre 0-77 Fin heure d'été Paramétre 0-37 Ach. texte 1 – –
– Paramétre 0-38 Ach. texte 2 – –
– Paramétre 0-39 Ach. texte 3 – –
Tableau 2.2 Q3-1 Régl. généraux
Q3-20 Référence digitale Q3-21 Référence analogique
Paramétre 3-02 Référence minimale Paramétre 3-02 Référence minimale
Paramétre 3-03 Réf. max. Paramétre 3-03 Réf. max.
Paramétre 3-10 Réf.prédénie Paramétre 6-10 Ech.min.U/born.53
Paramétre 5-13 E.digit.born.29 Paramétre 6-11 Ech.max.U/born.53
Paramétre 5-14 E.digit.born.32 Paramétre 6-14 Val.ret./Réf.bas.born.53
Paramétre 5-15 E.digit.born.33 Paramétre 6-15 Val.ret./Réf.haut.born.53
Q3-1 Régl. généraux
Paramétre 6-50 S.born.42 Relais
1⇒Paramétre 5-40 Fonction
relais
Paramétre 6-51 Echelle min s.born.42 Relais
2⇒Paramétre 5-40 Fonction
relais
Paramétre 6-52 Echelle max s.born.42 Option relais
7⇒Paramétre 5-40 Fonction
relais
– Option relais
8⇒Paramétre 5-40 Fonction
relais
– Option relais
9⇒Paramétre 5-40 Fonction
relais
Q3-2 Régl.boucl.ouverte
Tableau 2.3 Q3-2 Régl.boucl.ouverte
Q3-3 Régl. boucle fermée
Q3-30 Feedback Settings Q3-31 PID Settings
Paramétre 1-00 Mode Cong. Paramétre 20-81 Contrôle normal/inversé PID
Paramétre 20-12 Unité référence/retour Paramétre 20-82 Vit.dém. PID [tr/mn]
Paramétre 3-02 Référence minimale Paramétre 20-21 Consigne 1
Paramétre 3-03 Réf. max. Paramétre 20-93 Gain proportionnel PID
Paramétre 6-20 Ech.min.U/born.54 Paramétre 20-94 Tps intégral PID
Paramétre 6-21 Ech.max.U/born.54
Paramétre 6-24 Val.ret./Réf.bas.born.54
Paramétre 6-25 Val.ret./Réf.haut.born.54
Paramétre 6-00 Temporisation/60
Paramétre 6-01 Fonction/Tempo60
Tableau 2.4 Q3-3 Régl. boucle fermée
20 Danfoss A/S © 05/2018 Tous droits réservés. MG20OB04
Page 23
130BP066.10
1 107tr/min
0 - ** Fonction./achage
1 - ** Charge/moteur
2 - ** Freins
3 - ** Référence/rampes
3,84A 1 (1)
Menu principal
130BP067.10
740tr/min
0 -01 Langue
[0] Français
10,64A 1 [1]
0-0*
Réglages de base
130BP068.10
740tr/min
0 -01 Langue
[0] Français
10,64A 1 [1]
0-0*
Réglages de base
Programmation Guide de programmation
2.2.8 Menu rapide, Q4 SmartStart
SmartStart s’exécute automatiquement lors de la première
mise sous tension du variateur de fréquence ou après un
retour aux réglages d’usine. SmartStart guide les
utilisateurs dans une série d’étapes an de garantir le
contrôle correct et ecace du moteur. SmartStart peut
aussi être démarré directement via le Quick menu (menu
rapide).
Les réglages suivants sont disponibles via SmartStart :
Pompe/moteur unique : en boucle ouverte ou
•
fermée.
Alternance moteur : 2 moteurs partagent 1
•
variateur de fréquence.
Contrôle en cascade de base : commande de
•
vitesse d’une seule pompe dans un système à
plusieurs pompes.
Par exemple, cette solution peut être rentable
dans les groupes survolteurs.
Maître/esclave : commande de 8 variateurs de
•
fréquence et pompes max. pour garantir un
fonctionnement régulier de l’ensemble du
système de pompage.
paramètres peuvent être masqués. Boucle ouverte, par
exemple, masque tous les paramètres PID et l’activation
d’autres options ache un plus grand nombre de groupes
de paramètres.
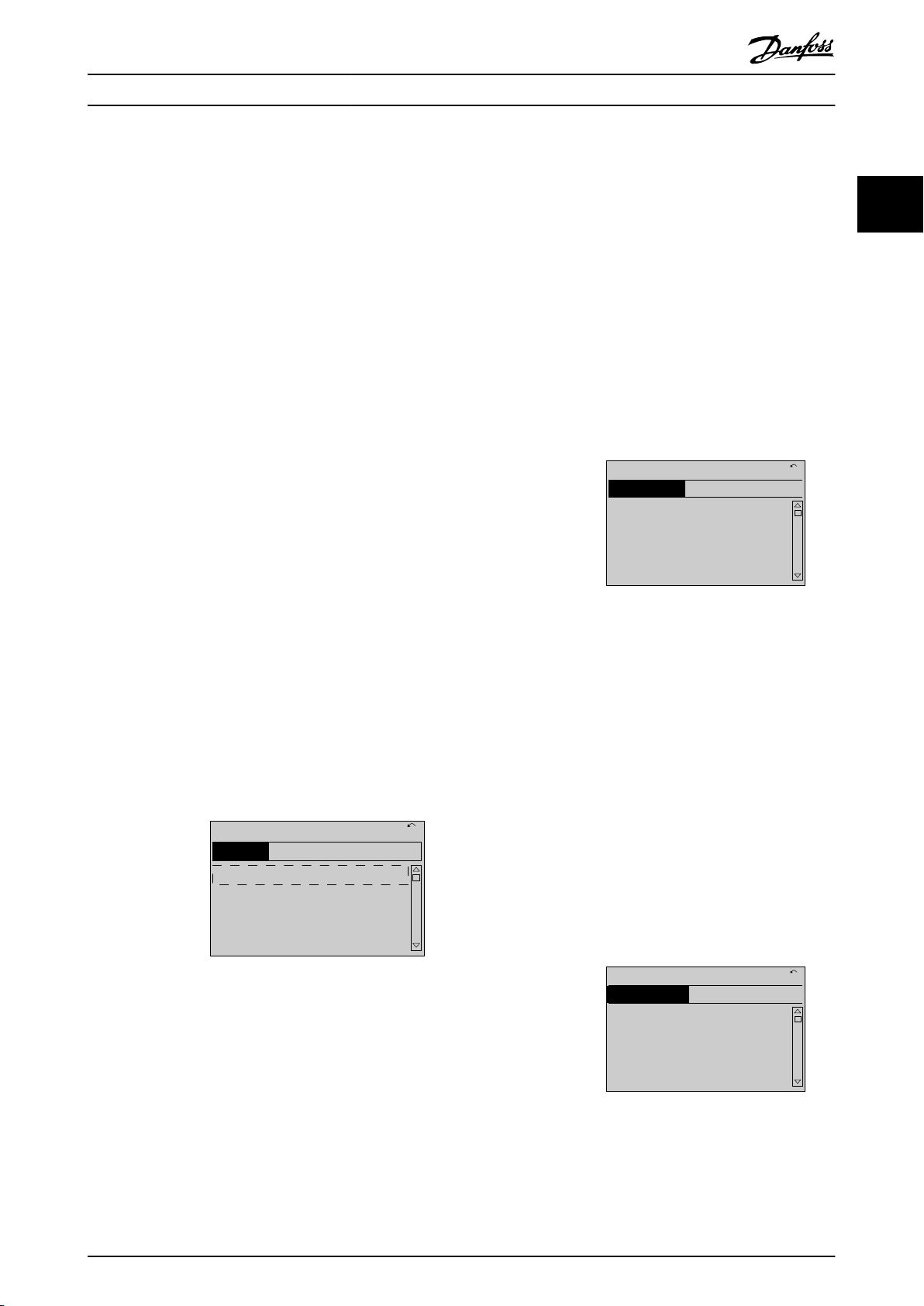
2.2.10 Sélection des paramètres
En mode menu principal, les paramètres sont répartis en
groupes. Sélectionner un groupe de paramètres à l'aide
des touches de navigation.
Après avoir choisi un groupe, sélectionner un paramètre à
l'aide des touches de navigation.
La partie centrale de l'écran indique le numéro et le nom
du paramètre ainsi que sa valeur.
Illustration 2.16 Sélection des paramètres
2 2
2.2.9 Mode Main Menu (menu principal)
Appuyer sur [Main Menu] pour entrer dans le mode Main
Menu (menu principal). L’achage représenté à
l’Illustration 2.15 apparaît à l’écran.
Les parties centrale et basse de l’écran répertorient une
liste de groupes de paramètres qui peuvent être
sélectionnés à l’aide des touches [▲] et [▼].
Illustration 2.15 Mode Main Menu (menu principal)
Chaque paramètre a un nom et un numéro qui restent les
mêmes quel que soit le mode de programmation. En
mode Main Menu (menu principal), les paramètres sont
répartis en groupes. Le premier chire du numéro de
paramètre (en partant de la gauche) indique le numéro de
groupe de paramètres.
2.2.11 Modication de données
La procédure de modication des données est identique
en mode menu rapide et menu principal. Appuyer sur [OK]
pour modier le paramètre sélectionné.
La procédure de modication de la valeur du paramètre
sélectionné dépend du fait que celui-ci représente une
valeur numérique ou un texte.
2.2.12 Changement de texte
Si le paramètre sélectionné est un texte, le modier à l'aide
des touches [▲] [▼].
Placer le curseur sur la valeur à enregistrer et appuyer sur
[OK].
Illustration 2.17 Changement de texte
Tous les paramètres peuvent être modiés dans le Main
Menu (menu principal). Cependant, selon le choix de
conguration (paramétre 1-00 Mode Cong.), certains
MG20OB04 Danfoss A/S © 05/2018 Tous droits réservés. 21
Page 24
130BP069.10
1- 6*
113tr/min 1,78A 1(1)
Proc.dépend.charge
1 - 60 Comp. charge à vitesse
basse
100%
130BP070.10
1 - 60 Comp. charge à vitesse
basse
1 0%
Proc.dépend.charge 1- 6*
729tr/min 6,21A 1(1)
6
130BP073.10
130BP072.10
Programmation
VLT® AQUA Drive FC 202
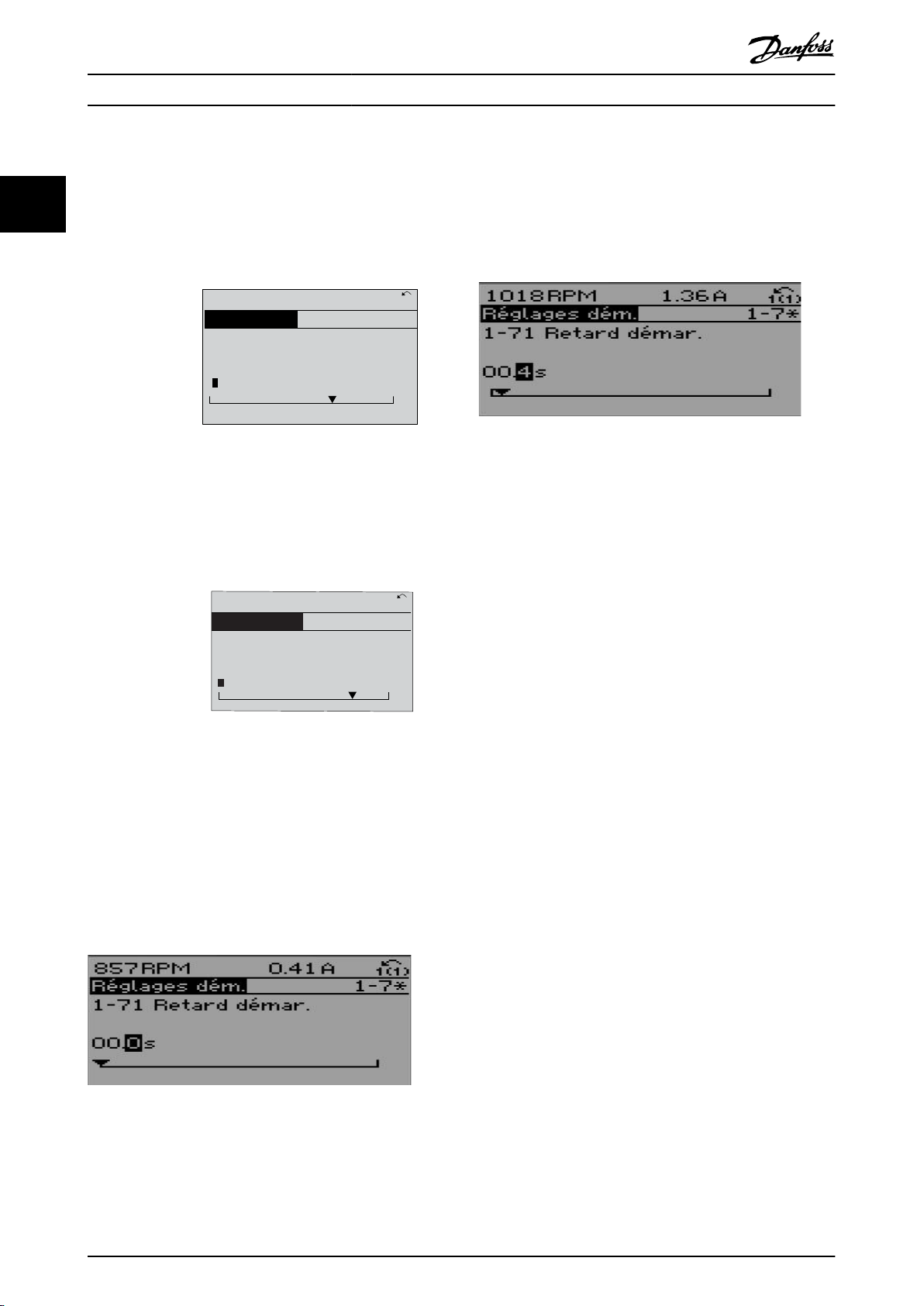
2.2.13 Modication d’une valeur de donnée
22
Si le paramètre sélectionné ache une valeur de données
numérique, modier cette valeur à l’aide des touches de
navigation [◀] [▶] et [▲] [▼]. Appuyer sur les touches [◀]
[▶] pour déplacer le curseur horizontalement.
Illustration 2.18 Modication d’une valeur de donnée
Appuyer sur les touches [
données. [▲] augmente la valeur, tandis que [▼] la réduit.
Placer le curseur sur la valeur à enregistrer et appuyer sur
[OK].
Illustration 2.19 Enregistrement d’une valeur de donnée
] [▼] pour
▲
modier la valeur des
Modier le chire variable à l'inni sélectionné à l'aide des
touches [▲] [▼].
Le curseur indique le chire sélectionné. Placer le curseur
sur le chire à enregistrer et appuyer sur [OK].
Illustration 2.21 Mémorisation
2.2.15 Valeur, pas à pas
Certains paramètres peuvent être modiés progressivement. Cela s'applique à :
Paramétre 1-20 Puissance moteur [kW].
•
Paramétre 1-22 Tension moteur.
•
Paramétre 1-23 Fréq. moteur.
•
Cela signie que les paramètres sont modiés soit en tant
que groupe de valeurs numériques, soit en modiant à
l'inni les valeurs numériques.
2.2.16 Achage et programmation des
2.2.14 Modication à l'inni d'une valeur
numérique
Si le paramètre sélectionné ache une valeur de donnée
numérique, sélectionner un chire à l'aide des touches [◀]
[▶].
Illustration 2.20 Sélectionner un chire
22 Danfoss A/S © 05/2018 Tous droits réservés. MG20OB04
Les paramètres sont indexés en cas de placement dans
une barre de délement.
Les paramètres entre le Paramétre 15-30 Journal alarme :
code et le paramétre 15-32 Journal alarme : heure
contiennent une mémoire des défauts qui peut être lue.
Sélectionner un paramètre, appuyer sur [OK] et utiliser les
touches [▲] [▼] pour faire déler le journal des valeurs.
Par exemple, voici comment modier le
paramétre 3-10 Réf.prédénie :
paramètres indexés
1. Choisir un paramètre, appuyer sur [OK] et utiliser
les touches [▲] [▼] pour naviguer dans les valeurs
indexées.
2. Pour modier la valeur du paramètre, sélectionner
la valeur indexée et appuyer sur [OK].
3.
Modier la valeur en appuyant sur [▲] [▼].
4. Pour accepter la nouvelle valeur, appuyer sur
[OK].
5. Appuyer sur [Cancel] pour annuler. Appuyer sur
[Back] pour quitter le paramètre.
Page 25
e30ba191.11
1
Auto
On
Reset
Hand
On
Off
Menu
Status
Quick
Setup
Main
Menu
Back
2
3
4
OK
On
Alarm
Warn.
Setup
130BP077.10
22.8
rpm
Setup 1
Programmation Guide de programmation
2.2.17 Programmation du panneau de
commande local numérique
Les instructions suivantes sont valables pour le LCP
numérique (LCP 101).
Le panneau de commande est divisé en quatre groupes
fonctionnels :
Achage numérique.
•
Touches de menu et voyants - Changement des
•
paramètres et basculement entre les fonctions
d’achage.
Touches de navigation et voyants
•
Touches d’exploitation et voyants
•
Achage ligne
Messages d’état composés d’icônes et d’une valeur
numérique.
Voyants
LED verte/On : indique si la section de contrôle
•
fonctionne.
LED jaune/Warn. : indique un avertissement.
•
LED rouge clignotante/Alarm : indique une
•
alarme.
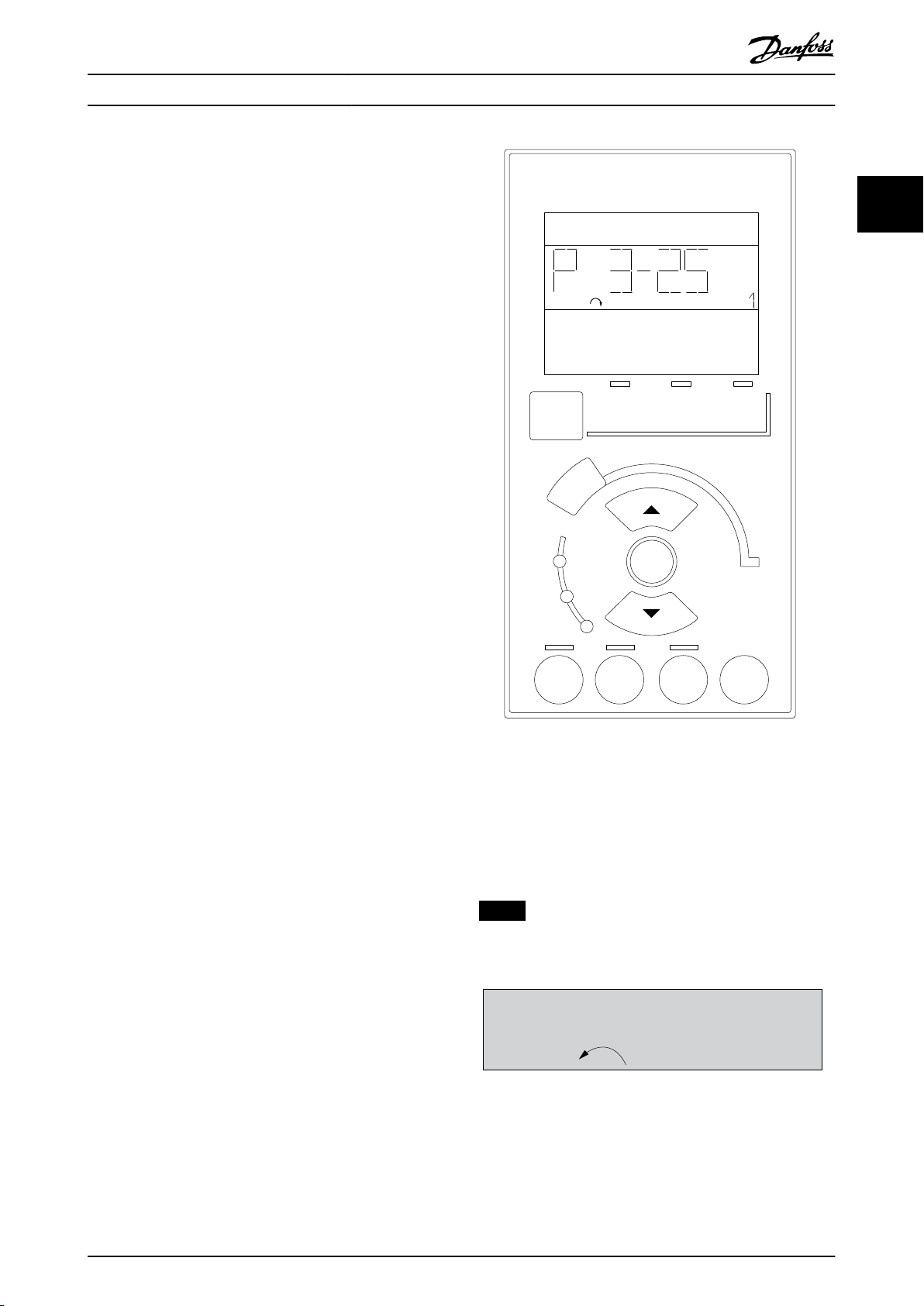
Touches du LCP
[Menu]
Sélectionner l’un des modes suivants :
État
•
Conguration rapide
•
Menu principal
•
2 2
Illustration 2.22 Touches du LCP
Mode Status (état)
Le mode Status (état) indique l’état du variateur de
fréquence ou du moteur.
En présence d’une alarme, le NLCP passe automatiquement
en mode Status (état).
Plusieurs alarmes peuvent s’acher.
AVIS!
La copie de paramètres n’est pas possible avec le
panneau de commande local numérique LCP 101.
Illustration 2.23 Mode Status (état)
MG20OB04 Danfoss A/S © 05/2018 Tous droits réservés. 23
Page 26
Setup 1
130BP078.10
A 17
e30bp046.12
Hand
On
Off
Auto
On
Reset
Programmation
VLT® AQUA Drive FC 202
2.2.18 Touches du LCP
22
Illustration 2.24 Alarm (alarme)
Main Menu (menu principal)/Quick Set-up (conguration
rapide)
Sert à programmer l’ensemble des paramètres ou
uniquement les paramètres du Quick Menu (menu rapide)
(voir également la description du LCP 102 au
chapitre 2.1 Panneau de commande local graphique et
numérique).
Lorsque la valeur clignote, appuyer sur [▲] ou [▼] pour
modier la valeur du paramètre.
1. Appuyer sur [Main Menu] pour sélectionner le
menu principal.
2. Sélectionner le groupe de paramètres [xx-__] puis
appuyer sur [OK].
3. Sélectionner le paramètre [__-[xx] puis appuyer
sur [OK].
4. Si le paramètre est un paramètre de tableau, en
sélectionner le numéro puis appuyer sur [OK].
5. Sélectionner la valeur de donnée souhaitée puis
appuyer sur [OK].
Paramètres avec valeurs d’achage des options fonctionnelles telles que [1], [2], etc. Pour une description des
diérentes options, voir les descriptions des paramètres
dans le chapitre 3 Description du paramètre.
[Back]
Pour revenir en arrière.
Les touches [▲] [▼] sont utilisées pour naviguer entre les
commandes et parmi les paramètres.
Illustration 2.25 Main Menu (menu principal)/Quick Set-up
(conguration rapide)
Les touches de commande locale se trouvent en bas du
LCP.
Illustration 2.26 Touches du LCP
[Hand On]
Permet de commander le variateur de fréquence via le LCP.
[Hand On] démarre aussi le moteur. Il est maintenant
possible d’introduire les données de vitesse du moteur à
l’aide des touches de navigation. La touche peut être
sélectionnée en tant que [1] Activé ou [0] Désactivé via le
paramétre 0-40 Touche [Hand on] sur LCP.
Les signaux d’arrêt externes activés à l’aide de signaux de
commande ou d’un bus de terrain annulent un ordre de
démarrage donné via le LCP.
Les signaux de commande suivants restent toujours actifs
lorsque [Hand On] est activé :
[Hand On] - [O] - [Auto On] ;
•
Reset ;
•
Arrêt en roue libre, inverse ;
•
Inversion ;
•
Sélection process lsb - sélection process msb ;
•
Ordre d’arrêt de la communication série ;
•
Arrêt rapide ;
•
Freinage CC.
•
[O]
Arrête le moteur connecté. La touche peut être
sélectionnée en tant que [1] Activé ou [0] Désactivé via le
paramétre 0-41 Touche [O] sur LCP.
Si aucune fonction d’arrêt externe n’est sélectionnée et que
la touche [O] est inactive, arrêter le moteur en coupant
l’alimentation.
[Auto On]
Permet de contrôler le variateur de fréquence à partir des
bornes de commande et/ou de la communication série.
Lorsqu’un signal de démarrage est appliqué sur les bornes
de commande et/ou sur le bus, le variateur de fréquence
démarre. La touche peut être sélectionnée en tant que [1]
Activé ou [0] Désactivé via le paramétre 0-42 Touche [Auto
on] sur LCP.
24 Danfoss A/S © 05/2018 Tous droits réservés. MG20OB04
Page 27

Programmation Guide de programmation
AVIS!
Un signal actif HAND-OFF-AUTO via les entrées digitales
a une priorité supérieure aux touches de commande
[Hand On] et [Auto On].
[Reset]
Est utilisé pour réinitialiser le variateur de fréquence après
une alarme (arrêt). Cette touche peut être sélectionnée en
tant que [1] Activé ou [0] Désactivé via le
paramétre 0-43 Touche [Reset] sur LCP.
2.3.1 Initialisation aux réglages par défaut
Le variateur de fréquence peut être initialisé aux réglages
par défaut de deux façons.
Initialisation recommandée (via le paramétre 14-22 Mod.
exploitation)
1. Sélectionner le paramétre 14-22 Mod. exploitation.
2. Appuyer sur [OK].
3. Sélectionner [2] Restaura° régl.usine.
4. Appuyer sur [OK].
5. Déconnecter l’alimentation secteur et attendre
que l’écran s’éteigne.
6. Rebrancher l’alimentation secteur. Le variateur de
fréquence est alors réinitialisé.
Le Paramétre 14-22 Mod. exploitation initialise tout sauf :
Paramétre 14-50 Filtre RFI.
•
Paramétre 8-30 Protocole.
•
Paramétre 8-31 Adresse.
•
Paramétre 8-32 Vit. transmission.
•
Paramétre 8-35 Retard réponse min..
•
Paramétre 8-36 Retard réponse max.
•
Paramétre 8-37 Retard inter-char max.
•
Paramétre 15-00 Heures mises ss tension à
•
paramétre 15-05 Surtension.
Paramétre 15-20 Journal historique: Événement à
•
paramétre 15-22 Journal historique: heure.
Paramétre 15-30 Journal alarme : code à
•
paramétre 15-32 Journal alarme : heure.
Initialisation manuelle
1. Mettre hors tension et attendre que l’écran
s’éteigne.
2. 2a Appuyer en même temps sur [Status] -
[Main Menu] - [OK] tout en mettant sous
tension l’achage graphique, LCP 102.
2b Appuyer sur [Menu] - [OK] lors de la
mise sous tension de l’achage
numérique, LCP 101.
3. Relâcher les touches au bout de 5 s.
4. Le variateur de fréquence est maintenant
programmé selon les réglages par défaut.
Tous les paramètres sont initialisés à l’exception de :
Paramétre 15-00 Heures mises ss tension.
•
Paramétre 15-03 Mise sous tension.
•
Paramétre 15-04 Surtemp..
•
Paramétre 15-05 Surtension.
•
AVIS!
Lorsque l’on eectue une initialisation manuelle, on
réinitialise aussi les réglages de la communication série,
du ltre RFI (paramétre 14-50 Filtre RFI) et de la mémoire
des défauts.
2 2
MG20OB04 Danfoss A/S © 05/2018 Tous droits réservés. 25
Page 28
Description du paramètre
VLT® AQUA Drive FC 202
3 Description du paramètre
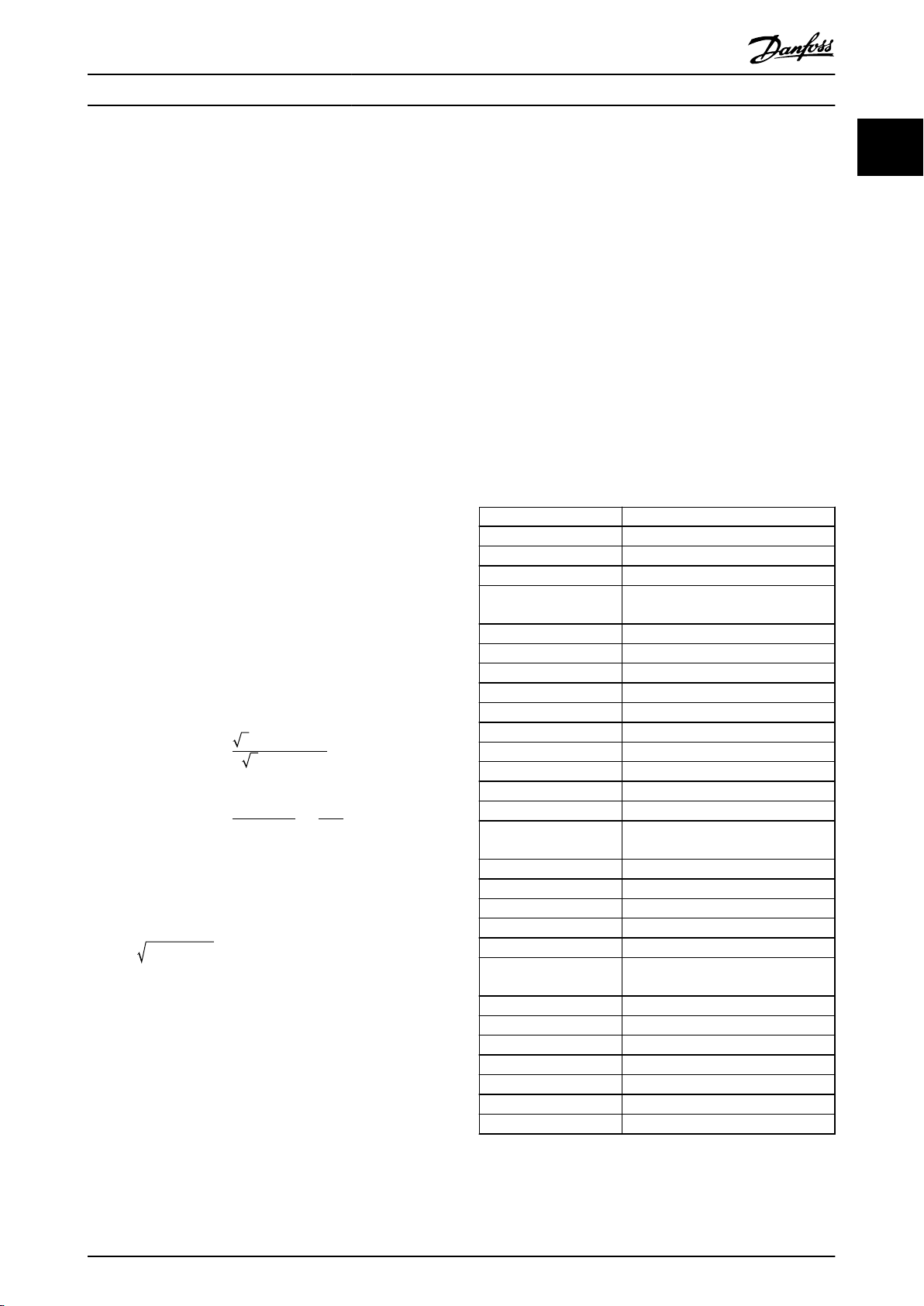
3.1 Sélection des paramètres
33
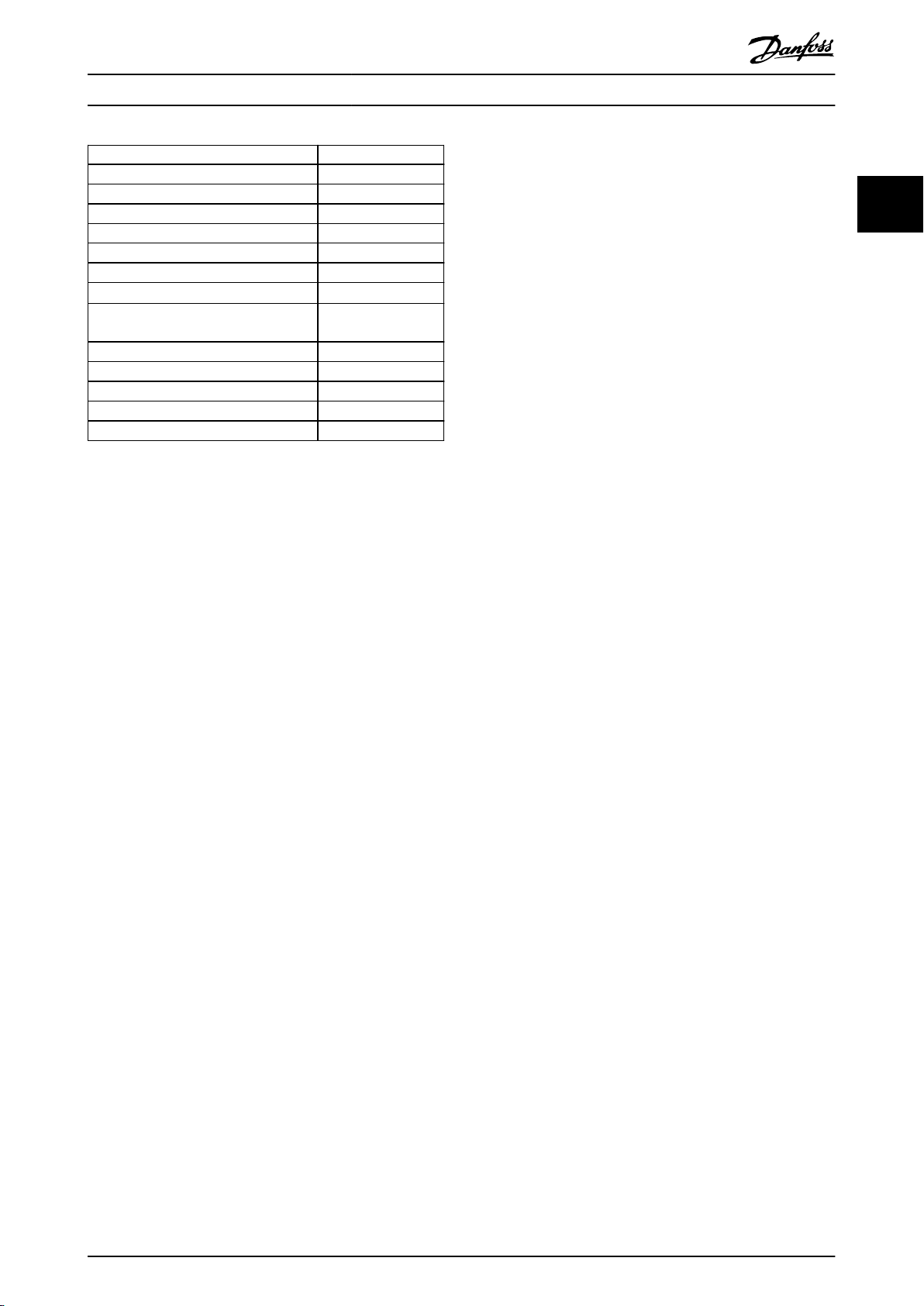
Les paramètres sont rassemblés dans divers groupes an de faciliter la sélection du bon paramètre pour une exploitation
optimale du variateur de fréquence.
Aperçu des groupes de paramètres
Groupe Fonction
0-** Fonction./Achage Paramètres liés aux fonctions de base du variateur de fréquence, à la fonction des touches du LCP et
à la conguration de l’achage du LCP.
1-** Charge et moteur Paramètres liés aux réglages du moteur.
2-** Freins Paramètres liés aux fonctions du frein dans le variateur de fréquence.
3-** Référence / rampes Paramètres d’utilisation des références, de dénition des limites et de conguration de la réponse du
variateur de fréquence aux changements.
4-** Limites/avertis. Paramètres de conguration des limites et avertissements.
5-** E/S Digitale Paramètres de conguration des entrées et sorties digitales.
6-** E/S ana. Paramètres de conguration des entrées et sorties analogiques.
8-** Comm. et options Groupe de paramètres de conguration des communications et options.
9-** PROFIdrive
10-** Bus réseau CAN
13-** Logique avancée Groupe de paramètres pour le contrôleur logique avancé.
14-** Fonct.particulières Groupe de paramètres de conguration des fonctions spéciales du variateur de fréquence.
15-** Info.variateur Groupe de paramètres contenant des informations sur le variateur de fréquence, notamment les
16-** Lecture données Groupe de paramètres pour les lectures de données, comme les références réelles, les tensions, les
18-** Info & lectures Ce groupe de paramètres contient les 10 derniers journaux de maintenance préventive.
20-** Boucl.fermé.variat. Ce groupe de paramètres est utilisé pour congurer le régulateur PID en boucle fermée, qui contrôle
21-** Boucl.fermée ét. Paramètres de conguration des trois régulateurs PID en boucle fermée étendue.
22-** Fonctions application Paramètres pour les applications liées à l’eau.
23-** Fonct. liées au tps Paramètres pour les actions quotidiennes ou hebdomadaires.
24-** Fonct. application 2 Paramètres pour le bipasse du variateur de fréquence.
25-** Contrôleur cascade Paramètres de conguration du contrôleur de cascade de base pour le contrôle séquentiel de
26-** Option E/S ana. MCB 109
29-** Water Application Functions Paramètres de conguration des fonctions spéciques à l’eau.
30-** Caract.spéciales Paramètres de conguration des fonctions spéciales.
31-** Option bipasse Paramètres de conguration de l’option bipasse.
35-** Option entrée capteur Paramètres de conguration de la fonction d’entrée du capteur.
Groupe de paramètres spéciques à Probus (VLT® PROFIBUS DP MCA 101 requis).
Groupe de paramètres spéciques à DeviceNet (VLT® DeviceNet MCA 104 requis).
variables d’exploitation, la conguration du matériel, les versions logicielles.
mots de contrôle, d’alarme, d’avertissement et d’état.
la fréquence de sortie de l’unité.
plusieurs pompes.
Paramètres de conguration de l’option VLT® Analog I/O MCB 109.
Tableau 3.1 Groupes de paramètres
Les descriptions et sélections des paramètres apparaissent sur le LCP graphique ou numérique. Voir le chapitre 2 Programmation pour plus de précisions. Pour accéder aux paramètres, appuyer sur la touche [Quick Menu] ou [Main Menu] du LCP. Le
Quick Menu (menu rapide) est principalement utilisé pour mettre en service l’unité au démarrage en
orant l’accès aux
paramètres nécessaires à la mise en fonctionnement. Le Main Menu (menu principal) ore l’accès à tous les paramètres pour
une programmation détaillée des applications.
Toutes les bornes d’entrée et de sortie digitales et analogiques sont multifonctionnelles. Toutes les bornes disposent des
fonctions d’usine par défaut qui conviennent pour la plupart des applications liées à l’eau. Si d’autres fonctions spéciques
sont requises, elles doivent être programmées dans les groupes de paramètres 5-** E/S Digitale ou 6-** E/S ana.
26 Danfoss A/S © 05/2018 Tous droits réservés. MG20OB04
Page 29
0-01 Langue
Option: Fonction:
Dénit la langue qui sera utilisée
pour l’achage.
Le variateur de fréquence est fourni
avec 2 ensembles de langues
diérents. L’anglais et l’allemand
sont inclus d’oce. Il est impossible
d’eacer ou de manipuler l’anglais.
[0] * English Inclus dans les ensembles de
langues 1 et 2
[1] Deutsch Inclus dans les ensembles de
langues 1 et 2
[2] Francais Inclus dans l’ensemble de langues 1
[3] Dansk Inclus dans l’ensemble de langues 1
[4] Spanish Inclus dans l’ensemble de langues 1
[5] Italiano Inclus dans l’ensemble de langues 1
[6] Svenska Inclus dans l’ensemble de langues 1
[7] Nederlands Inclus dans l’ensemble de langues 1
[10] Chinese Inclus dans l’ensemble de langues
2.
[20] Suomi Inclus dans l’ensemble de langues 1
[22] English US Inclus dans l’ensemble de langues 1
[27] Greek Inclus dans l’ensemble de langues 1
[28] Bras.port Inclus dans l’ensemble de langues 1
[36] Slovenian Inclus dans l’ensemble de langues 1
[39] Korean Inclus dans l’ensemble de langues 2
[40] Japanese Inclus dans l’ensemble de langues 2
[41] Turkish Inclus dans l’ensemble de langues 1
[42] Trad.Chinese Inclus dans l’ensemble de langues 2
[43] Bulgarian Inclus dans l’ensemble de langues 1
[44] Srpski Inclus dans l’ensemble de langues 1
[45] Romanian Inclus dans l’ensemble de langues 1
[46] Magyar Inclus dans l’ensemble de langues 1
[47] Czech Inclus dans l’ensemble de langues 1
[48] Polski Inclus dans l’ensemble de langues 1
[49] Russian Inclus dans l’ensemble de langues 1
[50] Thai Inclus dans l’ensemble de langues 2
0-01 Langue
Option: Fonction:
[51] Bahasa
Indonesia
Inclus dans l’ensemble de langues 2
[52] Hrvatski Inclus dans l’ensemble de langues 2
0-02 Unité vit. mot.
Option: Fonction:
AVIS!
Ce paramètre ne peut pas être
réglé lorsque le moteur est en
marche.
Les informations achées à l’écran
dépendent des réglages du
paramétre 0-02 Unité vit. mot. et du
paramétre 0-03 Réglages régionaux.
Les réglages par défaut du
paramétre 0-02 Unité vit. mot. et du
paramétre 0-03 Réglages régionaux
dépendent de la région du monde
où le variateur de fréquence est
livré.
AVIS!
Le fait de modier l’unité de
vitesse du moteur réinitialise
certains paramètres à leur
valeur initiale. Sélectionner en
premier l’unité de vitesse du
moteur, avant de modier les
autres paramètres.
[0] * Tr/min Sélectionner pour acher les
variables de vitesse du moteur et
les paramètres utilisant la vitesse du
moteur (tr/min).
[1] Hz Sélectionner pour acher les
variables de vitesse du moteur et
les paramètres utilisant la fréquence
de sortie (Hz).
0-03 Réglages régionaux
Option: Fonction:
AVIS!
Ce paramètre ne peut pas être
réglé lorsque le moteur est en
marche.
L’achage dépend des réglages
réalisés au paramétre 0-02 Unité vit.
mot. et au paramétre 0-03 Réglages
régionaux. Les réglages par défaut
du paramétre 0-02 Unité vit. mot. et
du paramétre 0-03 Réglages
Description du paramètre Guide de programmation
3.2 Paramètres 0-** Fonction./Achage
Paramètres liés aux fonctions de base du variateur de
fréquence, à la fonction des touches du LCP et à la
conguration de l’achage du LCP.
3.2.1 0-0* Réglages de base
MG20OB04 Danfoss A/S © 05/2018 Tous droits réservés. 27
3 3
Page 30
0-03 Réglages régionaux
Option: Fonction:
régionaux dépendent de la région
du monde où le variateur de
fréquence est livré. Reprogrammer
les réglages selon les besoins.
Les réglages inutilisés sont
invisibles.
[0] International Règle le paramétre 1-20 Puissance
moteur [kW] sur [kW] et la valeur
par défaut du paramétre 1-23 Fréq.
moteur sur 50 Hz.
[1] Amérique
Nord
Règle le paramétre 1-21 Puissance
moteur [CV] sur [HP] et dénit la
valeur par défaut du
paramétre 1-23 Fréq. moteur sur 60
Hz.
0-04 État exploi. à mise ss tension
Option: Fonction:
Sélectionner le mode d’exploitation
après la reconnexion du variateur
de fréquence à la tension secteur
après une mise hors tension en
mode Hand On (local).
[0] * Redém auto Reprend l’exploitation du variateur
de fréquence en maintenant la
même référence locale et le même
état de marche/d’arrêt. L’état de
marche/d’arrêt est appliqué à l’aide
de la touche [Hand On]/[O] sur le
LCP ou par démarrage local via une
entrée digitale avant que le
variateur de fréquence ne soit mis
hors tension.
[1] Arr.forcé,
réf.mémor
Arrête le variateur de fréquence,
mais, simultanément, conserve en
mémoire la référence de vitesse
locale antérieure à la mise hors
tension. Une fois la tension secteur
reconnectée et après réception d’un
ordre de démarrage (à l’aide de la
touche [Hand On] ou d’un ordre de
démarrage local via une entrée
digitale), le variateur de fréquence
redémarre et fonctionne à la
référence de vitesse conservée en
mémoire.
0-05 Unité mode local
Option: Fonction:
Dénit si la référence locale est
achée en termes de vitesse
d’arbre moteur (tr/min ou Hz) ou
sous la forme d’un pourcentage.
0-05 Unité mode local
Option: Fonction:
[0] * Comme unité
vit.mot.
[1] %
Description du paramètre
33
28 Danfoss A/S © 05/2018 Tous droits réservés. MG20OB04
VLT® AQUA Drive FC 202
3.2.2 0-1* Gestion process
Dénir et contrôler les congurations des paramètres
individuels.
Le variateur de fréquence propose quatre congurations
de paramètres qui peuvent être programmées indépendamment les unes des autres. Il fait donc preuve de
souplesse à l’usage, ce qui lui permet de répondre aux
exigences de nombreux schémas de contrôle des systèmes
de traitement de l’eau, économisant ainsi souvent le coût
d’un équipement de contrôle externe. Par exemple, ces
congurations peuvent être utilisées pour programmer le
variateur de fréquence an qu’il fonctionne conformément
à un schéma de contrôle donné pour un process (p. ex. :
fonctionnement de jour) et à un autre schéma pour un
autre process (p. ex. : retour au réglage de nuit). Elles
peuvent également être utilisées par une centrale de
traitement de l’air ou un système OEM pour programmer à
l’identique tous ses variateurs de fréquence montés en
usine pour diérents modèles d’équipement au sein d’une
plage présentant les mêmes paramètres. Lors de la
production/mise en service, sélectionner un process
spécique en fonction du modèle de variateur de
fréquence.
Sélectionner le process actif (c.-à-d. le process de fonctionnement du variateur de fréquence) au
paramétre 0-10 Process actuel. Le LCP ache ensuite le
process actif sélectionné. Grâce aux process multiples, il est
possible de basculer entre les process, que le variateur
fonctionne ou non, via des ordres d’entrée digitale ou de
communication série (p. ex. : pour la régulation de nuit).
S’il est nécessaire de modier des process en cours de
fonctionnement, vérier que le paramétre 0-12 Ce réglage
lié à est programmé en conséquence. Pour la plupart des
applications liées à l’eau et aux eaux usées, il n’est pas
nécessaire de programmer le paramétre 0-12 Ce réglage lié
à, même si le changement de process est nécessaire lors
du fonctionnement. Cependant, pour les applications
complexes utilisant pleinement la exibilité des process
multiples, cela peut se révéler nécessaire. À l’aide du
paramétre 0-11 Programmer process, il est possible de
modier les paramètres d’un des process tout en
continuant à faire fonctionner le variateur de fréquence
dans son process actif. Le process actif peut être diérent
de celui en cours de modication. Le paramétre 0-51 Copie
process permet également de copier des réglages de
paramètres entre process pour permettre une mise en
service plus rapide si des réglages de paramètres similaires
sont requis dans diérents process.
Page 31

0-10 Process actuel
Option: Fonction:
Sélectionner le process sur lequel
fonctionne le variateur de
fréquence.
Utiliser le paramétre 0-51 Copie
process pour copier un process vers
un ou tous les autres process. Pour
éviter tout conit de réglages d’un
même paramètre dans deux
process diérents, lier les process à
l’aide du paramétre 0-12 Ce réglage
lié à. Arrêter le variateur de
fréquence avant de passer d’un
process à un autre lorsque les
paramètres signalés comme non
modiables en cours de fonctionnement présentent des valeurs
diérentes.
Les paramètres qui sont non
modiables en cours de fonctionnement sont signalés comme FAUX
dans le chapitre 4 Listes des
paramètres.
[0] Process usine Ne peut pas être modié. Cette
option renferme l’ensemble des
données Danfoss et peut être
utilisée comme source lorsque l’on
ramène les autres process à un état
connu.
[1] * Proc.1 [1] Les paramètres Proc.1 à [4] Proc.4
sont les 4 congurations de
paramètres dans lesquelles tous les
paramètres peuvent être
programmés.
[2] Proc.2
[3] Proc.3
[4] Proc.4
[9] Multi process Est utilisé pour les sélections de
process à distance à l’aide d’entrées
digitales et du port de communication série. Ce process utilise les
réglages du paramétre 0-12 Ce
réglage lié à.
0-11 Programmer process
Option: Fonction:
Sélectionner le process à éditer
(c’est-à-dire à programmer) pendant
le fonctionnement ; soit le process
actif, soit l’un des process inactifs.
Le numéro du process en cours de
modication s’ache sur le LCP
entre parenthèses.
0-11 Programmer process
Option: Fonction:
[0] Process usine Ne peut pas être modié, mais peut
servir de référence pour ramener
éventuellement les autres process à
un état connu.
[1] Proc.1 [1] Proc.1 à [4] Proc.4 peuvent être
modiés librement pendant le
fonctionnement, indépendamment
du process actif.
[2] Proc.2
[3] Proc.3
[4] Proc.4
[9] * Process actuel Le process utilisé par le variateur de
fréquence peut être modié en
cours de fonctionnement. La
modication des paramètres dans le
process choisi s’eectue
normalement à partir du LCP, mais
il est également possible de la
réaliser à partir d’un des ports de
communication série.
0-12 Ce réglage lié à
Option: Fonction:
N'utiliser ce paramètre que s’il est
nécessaire de changer de process
alors que le moteur est en marche.
Ce paramètre garantit la cohérence
du réglage des paramètres non
modiables en cours de fonctionnement dans tous les process
correspondants.
Pour permettre des modications
sans conit de l’un des process vers
un autre alors que le variateur de
fréquence est en cours de fonctionnement, lier les process contenant
des paramètres qui ne sont pas
modiables pendant le fonctionnement. La liaison assure la
synchronisation des valeurs de
paramètre non modiables en cours
de fonctionnement lorsque l’on
passe d’un process à un autre
pendant le fonctionnement. Les
paramètres marqués d’un FAUX
dans la liste des paramètres (au
chapitre 4 Listes des paramètres) ne
peuvent pas être modiés lorsque
le variateur de fréquence
fonctionne.
La fonction du paramétre 0-12 Ce
réglage lié à est utilisée lorsque [9]
Multi process est sélectionné au
Description du paramètre Guide de programmation
MG20OB04 Danfoss A/S © 05/2018 Tous droits réservés. 29
3 3
Page 32

0-12 Ce réglage lié à
Option: Fonction:
paramétre 0-10 Process actuel.
Utiliser [9] Multi process pour passer
d’un process à l’autre en cours de
fonctionnement, lorsque le moteur
fonctionne.
Par exemple :
utiliser [9] Multi process pour passer
du process 1 au process 2 pendant
que le moteur tourne. Programmer
les paramètres sur Proc.1, puis
s’assurer que le process 1 et le
process 2 sont synchronisés (ou
liés).
La synchronisation peut se faire
suivant deux procédures :
•
Attribuer la valeur [2] Proc.
2 au
paramétre 0-11 Programme
r process, puis dénir le
paramétre 0-12 Ce réglage
lié à sur [1] Proc.1. Le
processus de liaison
(synchronisation) démarre.
130BP075.10
Illustration 3.1 Gestion process
•
Toujours dans le process 1,
copier le process 1 vers le
process 2 à l’aide du
paramétre 0-50 Copie LCP.
Régler ensuite le
paramétre 0-12 Ce réglage
lié à sur [2] Proc.2. Le
processus de liaison
démarre.
130BP076.10
Illustration 3.2 Gestion process
Une fois la liaison
eectuée, le
paramétre 0-13 Lecture: Réglages
joints ache les process 1 et 2,
conrmant que tous les paramètres
0-12 Ce réglage lié à
Option: Fonction:
non modiables en cours de
fonctionnement actifs sont
désormais identiques dans les
process 1 et 2. Si l’un des
paramètres non modiables en cours
de fonctionnement est modié dans
le process 2, par exemple le
paramétre 1-30 Résistance stator (Rs),
il l’est également automatiquement
dans le process 1. Le passage de
process 1 à process 2 pendant le
fonctionnement est désormais
possible.
[0] * Non lié
[1] Proc.1
[2] Proc.2
[3] Proc.3
[4] Proc.4
0-13 Lecture: Réglages joints
Tableau [5]
Range: Fonction:
0* [0 - 255 ] Acher une liste de tous les
process actuellement liés les uns
aux autres à l'aide du
paramétre 0-12 Ce réglage lié à. Le
paramètre comporte un indice pour
chaque conguration des
paramètres. La valeur pour chaque
indice représente les process liés à
chaque conguration des
paramètres.
Index Valeur LCP
0 {0}
1 {1,2}
2 {1,2}
3 {3}
4 {4}
Tableau 3.2 Exemple de liaisons
Description du paramètre
33
VLT® AQUA Drive FC 202
30 Danfoss A/S © 05/2018 Tous droits réservés. MG20OB04
Page 33

0-14 Lecture: prog. process/canal
Range: Fonction:
0* [-2147483648
2147483647 ]
Acher le réglage du
paramétre 0-11 Programmer process
pour chacun des quatre canaux de
communication diérents. Lorsque
la lecture est hexadécimale, comme
c’est le cas sur le LCP, chaque
numéro représente un canal.
Les numéros 1 à 4 représentent un
numéro de process ; F correspond
au réglage d’usine et A au process
actif. Les canaux sont, de droite à
gauche : LCP, bus de terrain, USB,
HPFB1.5.
Exemple : la valeur AAAAAA21h
signie que le canal du bus de
terrain utilise le process 2 au
paramétre 0-11 Programmer process,
que le LCP utilise le process 1 et
que tous les autres canaux utilisent
le process actif.
0-20 Ach. ligne 1.1 petit
Option: Fonction:
Sélectionner une variable à acher
sur la ligne 1, à gauche.
[0] Aucun Aucune valeur d’achage
sélectionnée.
[15] Readout:
actual setup
[37] Ach. texte 1 Mot de contrôle en cours
[38] Ach. texte 2
[39] Ach. texte 3
[89] Lecture date
et heure
[953] Mot d'avertis-
sement
probus.
Ache les avertissements de
communication PROFIBUS.
0-20 Ach. ligne 1.1 petit
Option: Fonction:
[1005] Cptr lecture
erreurs
transmis.
Indique le nombre d’erreurs de
transmission de commande CAN
depuis la dernière mise sous
tension.
[1006] Cptr lecture
erreurs reçues
Indique le nombre d’erreurs de
réception de commande CAN
depuis la dernière mise sous
tension.
[1007] Cptr lectures
val.bus désact.
Indique le nombre de désactivations de bus depuis la dernière
mise sous tension.
[1013] Avertis.par. Indique un mot d’avertissement
spécique à DeviceNet. Un bit
distinct est aecté à chaque avertissement.
[1230] Avertis.par.
[1397] Alert Alarm
Word
[1398] Alert Warning
Word
[1399] Alert Status
Word
[1500] Heures mises
ss tension
Indiquer le nombre d’heures de
fonctionnement du variateur.
[1501] Heures
fonction.
Ache le nombre d’heures de
fonctionnement du moteur.
[1502] Compteur
kWh
Indique la consommation moyenne
en kWh.
[1580] Heures de fct
du ventilateur
[1600] Mot contrôle Acher le mot de contrôle transmis
au variateur de fréquence via le
port de communication série en
code hexadécimal.
[1601] * Réf. [unité] Référence totale (somme des
références digitales/analogiques/
prédénies/bus/gel réf. et des
valeurs de rattrapage et de ralentissement) dans l’unité sélectionnée.
[1602] Réf. % Référence totale (somme des
références digitales/analogiques/
prédénies/bus/gel réf. et des
valeurs de rattrapage et de ralentissement) en pourcentage.
[1603] Mot état
[binaire]
Mot d’état en cours.
[1605] Valeur réelle
princ. [%]
Un ou plusieurs avertissements en
code hexadécimal.
[1609] Lect.paramétr. Acher les lectures dénies par
l’utilisateur aux :
Description du paramètre Guide de programmation
3.2.3 0-2* Ecran LCP
Dénir les variables achées sur le LCP.
AVIS!
Pour obtenir des informations sur la manière d'écrire des
textes d'achage, se reporter aux :
•
•
•
MG20OB04 Danfoss A/S © 05/2018 Tous droits réservés. 31
Paramétre 0-37 Ach. texte 1.
Paramétre 0-38 Ach. texte 2.
Paramétre 0-39 Ach. texte 3.
3 3
Page 34

0-20 Ach. ligne 1.1 petit
Option: Fonction:
•
Paramétre 0-30 Unité lect.
déf. par utilisateur.
•
Paramétre 0-31 Val.min.lect
ure déf.par utilis..
•
Paramétre 0-32 Val.max.
déf. par utilis..
[1610] Puissance
moteur [kW]
Puissance réelle absorbée par le
moteur (en kW).
[1611] Puissance
moteur[CV]
Puissance réelle absorbée par le
moteur (en HP).
[1612] Tension
moteur
Tension appliquée au moteur.
[1613] Fréquence
moteur
Fréquence du moteur, c.-à-d.
fréquence de sortie du variateur de
fréquence (en Hz).
[1614] Courant
moteur
Courant de phase du moteur
(valeur ecace).
[1615] Fréquence [%] Fréquence du moteur, c.-à-d.
fréquence de sortie du variateur de
fréquence (en %).
[1616] Couple [Nm] Charge du moteur en cours en
pourcentage du couple moteur
nominal.
[1617] Vitesse moteur
[tr/min]
Vitesse en tr/min (tours par minute),
c.-à-d. la vitesse de l’arbre du
moteur en boucle fermée basée sur
les données de la plaque
signalétique du moteur saisies, la
fréquence de sortie et la charge sur
le variateur de fréquence.
[1618] Thermique
moteur
Charge thermique du moteur,
calculée par la fonction ETR. Voir
aussi le groupe de paramètres 1-9* T
° moteur.
[1619] Température
du capteur
KTY
[1622] Couple [%] Indique le couple réel produit, en
pourcentage.
[1623] Motor Shaft
Power [kW ]
Indique la puissance mécanique
appliquée à l’arbre moteur.
[1624] Calibrated
Stator
Resistance
[1626] Puissance
ltrée[kW]
[1627] Puissance
ltrée[CV]
0-20 Ach. ligne 1.1 petit
Option: Fonction:
[1630] Tension DC
Bus
Tension du circuit intermédiaire
dans le variateur de fréquence.
[1631] System Temp.
[1632] Puis.Frein. /s Puissance de freinage instantanée
transmise à une résistance de
freinage externe.
Indique une valeur instantanée.
[1633] Puis.Frein. /2
min
Puissance de freinage transmise à
une résistance de freinage externe.
La puissance moyenne est calculée
de manière continue pour les
120 dernières secondes.
[1634] Temp.
radiateur
Température instantanée du
radiateur du variateur de fréquence.
La valeur limite de coupure est de
95 ± 5 °C. Le rétablissement
intervient à 70 ± 5 °C.
[1635] Thermique
onduleur
Charge des onduleurs en
pourcentage.
[1636] InomVLT Courant nominal du variateur de
fréquence.
[1637] ImaxVLT Courant maximum du variateur de
fréquence.
[1638] Etat ctrl log
avancé
État de l’événement exécuté par le
contrôleur.
[1639] Temp. carte
ctrl.
Température de la carte de
commande.
[1642] Service Log
Counter
[1645] Motor Phase U
Current
[1646] Motor Phase V
Current
[1647] Motor Phase
W Current
[1650] Réf.externe Somme des références externes en
pourcentage, c’est-à-dire la somme
des références analogiques,
impulsionnelles et bus.
[1652] Signal de
retour [Unité]
Valeur du signal des entrées
digitales programmées, en unités.
[1653] Référence pot.
dig.
Indique la contribution du
potentiomètre digital au signal de
retour de référence eectif.
[1654] Retour 1
[Unité]
Ache la valeur du signal de retour
1. Voir également le groupe de
paramètres 20-0* Retour.
Description du paramètre
33
32 Danfoss A/S © 05/2018 Tous droits réservés. MG20OB04
VLT® AQUA Drive FC 202
Page 35

0-20 Ach. ligne 1.1 petit
Option: Fonction:
[1655] Retour 2
[Unité]
Ache la valeur du signal de retour
2. Voir également le groupe de
paramètres 20-0* Retour.
[1656] Retour 3
[Unité]
Ache la valeur du signal de retour
3. Voir également le groupe de
paramètres 20-0* Retour.
[1658] Sortie PID [%] Retourne la valeur de sortie du
régulateur PID en boucle fermée en
%.
[1659] Adjusted
Setpoint
Ache le point de consigne réel
une fois modié par la compensation du débit. Voir le groupe de
paramètres 22-8* Compensa° du
débit.
[1660] Entrée dig. Ache l’état des entrées digitales.
Signal bas = 0, signal haut = 1.
En ce qui concerne l’ordre, voir le
paramétre 16-60 Entrée dig.. Le bit 0
est le plus à droite.
[1661] Régl.commut.b
orn.53
Réglage de la borne d’entrée 53.
Courant = 0, tension = 1.
[1662] Entrée ANA 53 Valeur eective sur l’entrée 53
comme une valeur de référence ou
de protection.
[1663] Régl.commut.b
orn.54
Réglage de la borne d’entrée 54.
Courant = 0, tension = 1.
[1664] Entrée ANA 54 Valeur eective sur l’entrée 54
comme une valeur de référence ou
de protection.
[1665] Sortie ANA 42
[ma]
Valeur eective en mA sur la sortie
42. Utiliser le paramétre 6-50 S.born.
42 pour sélectionner la variable à
acher sur la sortie 42.
[1666] Sortie digitale
[bin]
Valeur binaire de toutes les sorties
digitales.
[1667] Entrée
impulsions 29
[Hz]
Valeur eective de la fréquence
appliquée sur la borne 29 comme
entrée d’impulsions.
[1668] Entrée
impulsions 33
[Hz]
Valeur eective de la fréquence
appliquée sur la borne 33 comme
entrée d’impulsions.
[1669] Sortie
impulsions 27
[Hz]
Valeur eective des impulsions
appliquées à la borne 27 en mode
sortie digitale.
[1670] Sortie
impulsions 29
[Hz]
Valeur eective des impulsions
appliquées à la borne 29 en mode
sortie digitale.
[1671] Sortie relais
[bin]
Indique le réglage de tous les relais.
0-20 Ach. ligne 1.1 petit
Option: Fonction:
[1672] Compteur A Indique la valeur actuelle du
compteur A.
[1673] Compteur B Indique la valeur actuelle du
compteur B.
[1675] Entrée ANA
X30/11
Valeur eective du signal sur
l’entrée X30/11 (VLT® General
Purpose I/O MCB 101, en option).
[1676] Entrée ANA
X30/12
Valeur eective du signal sur
l’entrée X30/12 (VLT® General
Purpose I/O MCB 101, en option).
[1677] Sortie ANA
X30/8 [mA]
Valeur eective au niveau de la
sortie X30/8 (VLT® General Purpose
I/O MCB 101, en option). Utiliser le
paramétre 6-60 Sortie borne X30/8
pour sélectionner la variable à
acher.
[1678] Sortie ANA
X45/1 [mA]
[1679] Sortie ANA
X45/3 [mA]
[1680] Mot ctrl.1 bus Mot de contrôle (CTW) reçu du bus
de terrain.
[1682] Réf.1 port bus Valeur de référence principale
envoyée avec le mot de contrôle
via le réseau de communication
série, p. ex. par le BMS, le PLC ou
un autre contrôleur.
[1684] Impulsion
démarrage
Mot d’état élargi de l’option de
communication du bus de terrain.
[1685] Mot ctrl.1 portFCMot de contrôle (CTW) reçu du bus
de terrain.
[1686] Réf.1 port FC Mot d’état (STW) envoyé au bus de
terrain.
[1687] Bus Readout
Alarm/Warning
[1689] Congurable
Alarm/Warning
Word
Indique le mot d’avertissement/
d’alarme conguré au
paramétre 8-17 Congurable Alarm
and Warningword.
[1690] Mot d'alarme Une ou plusieurs alarmes en code
hexadécimal (utilisé pour la
communication série).
[1691] Mot d'alarme2Une ou plusieurs alarmes en code
hexadécimal (utilisé pour la
communication série).
[1692] Mot avertis. Un ou plusieurs avertissements en
code hexadécimal (utilisé pour la
communication série).
Description du paramètre Guide de programmation
MG20OB04 Danfoss A/S © 05/2018 Tous droits réservés. 33
3 3
Page 36

0-20 Ach. ligne 1.1 petit
Option: Fonction:
[1693] Mot d'avertis-
sement 2
Un ou plusieurs avertissements en
code hexadécimal (utilisé pour la
communication série).
[1694] Mot état élargi Une ou plusieurs conditions d’état
en code hexadécimal (utilisé pour
les communications série).
[1695] Mot état élargi2Une ou plusieurs conditions d’état
en code hexadécimal (utilisé pour
les communications série).
[1696] Mot
maintenance
Les bits reètent l’état des
événements de maintenance
préventive programmés dans le
groupe de paramètres 23-1*
Maintenance.
[1697] Alarm Word 3
[1698] Warning Word
3
[1830] Entrée ANA
X42/1
Ache la valeur du signal appliqué
à la borne X42/1 sur la carte d’E/S
analogique.
[1831] Entrée ANA
X42/3
Ache la valeur du signal appliqué
à la borne X42/3 sur la carte d’E/S
analogique.
[1832] Entrée ANA
X42/5
Ache la valeur du signal appliqué
à la borne X42/5 sur la carte d’E/S
analogique.
[1833] Sortie ANA
X42/7 [V]
Ache la valeur du signal appliqué
à la borne X42/7 sur la carte d’E/S
analogique.
[1834] Sortie ANA
X42/9 [V]
Ache la valeur du signal appliqué
à la borne X42/9 sur la carte d’E/S
analogique.
[1835] Sortie ANA
X42/11 [V]
Ache la valeur du signal appliqué
à la borne X42/11 sur la carte d’E/S
analogique.
[1836] Entrée ANA
X48/2 [mA]
[1837] Entrée
temp.X48/4
[1838] Entrée
temp.X48/7
[1839] Entrée t°
X48/10
[1850] Achage ss
capt. [unité]
[1860] Digital Input 2
[1870] Mains Voltage
[1871] Mains
Frequency
[1872] Mains
Imbalance
0-20 Ach. ligne 1.1 petit
Option: Fonction:
[1875] Rectier DC
Volt.
[2117] Réf. ext. 1
[unité]
Valeur de la référence du contrôleur
de la boucle fermée étendue 1.
[2118] Retour ext. 1
[unité]
Valeur du signal de retour du
contrôleur de la boucle fermée
étendue 1.
[2119] Sortie ext. 1
[%]
Valeur de la sortie du contrôleur de
la boucle fermée étendue 1.
[2137] Réf. ext. 2
[unité]
Valeur de la référence du contrôleur
de la boucle fermée étendue 2.
[2138] Retour ext. 2
[unité]
Valeur du signal de retour du
contrôleur de la boucle fermée
étendue 2.
[2139] Sortie ext. 2
[%]
Valeur de la sortie du contrôleur de
la boucle fermée étendue 2.
[2157] Réf. ext. 3
[unité]
Valeur de la référence du contrôleur
de la boucle fermée étendue 3.
[2158] Retour ext. 3
[unité]
Valeur du signal de retour du
contrôleur de la boucle fermée
étendue 3.
[2159] Sortie ext. 3
[%]
Valeur de la sortie du contrôleur de
la boucle fermée étendue 3.
[2230] Puiss. sans
débit
Puissance sans débit calculée pour
la vitesse de fonctionnement réelle.
[2316] Texte
maintenance
[2580] État cascade État d’exploitation du contrôleur de
cascade.
[2581] État pompes État d’exploitation de chaque
pompe contrôlée par le contrôleur
de cascade.
[2791] Cascade
Reference
Sortie de référence pour l’utilisation
de variateurs de fréquence esclaves.
[2792] % Of Total
Capacity
Paramètre d’achage qui indique le
point de fonctionnement du
système en % de la capacité totale
du système.
[2793] Cascade
Option Status
Paramètre d’achage indiquant
l’état du système de cascade.
[2794] État système
cascade
[2795] Advanced
Cascade Relay
Output [bin]
[2796] Extended
Cascade Relay
Output [bin]
Description du paramètre
33
34 Danfoss A/S © 05/2018 Tous droits réservés. MG20OB04
VLT® AQUA Drive FC 202
Page 37

0-20 Ach. ligne 1.1 petit
Option: Fonction:
[2920] Derag
Power[kW]
[2921] Derag
Power[HP]
[2965] Totalized
Volume
[2966] Actual Volume
[2969] Flow
[3110] Mot état
bipasse
[3111] Heures fct
bipasse
[3401] Ecriture PCD 1
sur MCO
[3402] Ecriture PCD 2
sur MCO
[3403] Ecriture PCD 3
sur MCO
[3404] Ecriture PCD 4
sur MCO
[3405] Ecriture PCD 5
sur MCO
[3406] Ecriture PCD 6
sur MCO
[3407] Ecriture PCD 7
sur MCO
[3408] Ecriture PCD 8
sur MCO
[3409] Ecriture PCD 9
sur MCO
[3410] Ecriture PCD
10 sur MCO
[3421] Lecture MCO
par PCD 1
[3422] Lecture MCO
par PCD 2
[3423] Lecture MCO
par PCD 3
[3424] Lecture MCO
par PCD 4
[3425] Lecture MCO
par PCD 5
[3426] Lecture MCO
par PCD 6
[3427] Lecture MCO
par PCD 7
[3428] Lecture MCO
par PCD 8
[3429] Lecture MCO
par PCD 9
[3430] Lecture MCO
par PCD 10
[9920] Fan Ctrl deltaT
0-20 Ach. ligne 1.1 petit
Option: Fonction:
[9921] Fan Ctrl
Tmean
[9922] Fan Ctrl NTC
Cmd
[9923] Fan Ctrl i-term
[9924] Rectier
Current
[9952] PC Debug 0
[9953] PC Debug 1
[9954] PC Debug 2
[9961] FPC Debug 0
[9962] FPC Debug 1
[9963] FPC Debug 2
[9964] FPC Debug 3
[9965] FPC Debug 4
0-25 Mon menu personnel
Tableau [50]
Range: Fonction:
Size
related*
[0 - 9999 ] Dénir jusqu’à 20 paramètres qui
apparaîtront dans le menu personnel
Q1 accessible via la touche [Quick
Menu] du LCP. Les paramètres sont
achés dans le menu personnel Q1
selon l’ordre programmé dans ce
paramètre de tableau. Eacer en
réglant la valeur sur 0000.
Cela peut par exemple être utilisé
pour orir un accès simple et
rapide à 50 paramètres maximum,
devant être modiés régulièrement.
Description du paramètre Guide de programmation
MG20OB04 Danfoss A/S © 05/2018 Tous droits réservés. 35
3 3
0-21 Ach. ligne 1.2 petit
Les options sont identiques à celles énumérées pour le
paramétre 0-20 Ach. ligne 1.1 petit. Sélectionner une variable à
acher sur la ligne 1, au milieu.
0-22 Ach. ligne 1.3 petit
Les options sont identiques à celles énumérées pour le
paramétre 0-20 Ach. ligne 1.1 petit. Sélectionner une variable à
acher sur la ligne 1, à droite.
0-23 Ach. ligne 2 grand
Les options sont identiques à celles énumérées pour le
paramétre 0-20 Ach. ligne 1.1 petit. Sélectionner une variable à
acher sur la ligne 2.
0-24 Ach. ligne 3 grand
Les options sont identiques à celles énumérées pour le
paramétre 0-20 Ach. ligne 1.1 petit. Sélectionner une variable à
acher sur la ligne 2.
Page 38

130BT105.11
0
Lecture personnalisée (Valeur)
Par. DR–09
Unité de lecture personalisée
Par. K–30
Valuer max
Par K–32
Valuer min
Par K–31
Vitesse du moteur
Limite haute
Vitesse moteur
Par F–17 (Tr/mn)
Par F–15 (Hz)
Unité quadratic (pression)
Unité cubic (puissance)
Unités lineaires
uniquement
Unités lineaires (p. ex. vitesse et débit)
0-30 Unité lect. déf. par utilisateur
Option: Fonction:
Programmer une valeur à acher
sur l’écran du LCP. La valeur
sélectionnée présente une relation
linéaire, carrée ou cubique par
rapport à la vitesse. Cette relation
dépend de l’unité sélectionnée (voir
le Tableau 3.3). La valeur calculée
réelle peut être consultée au
paramétre 16-09 Lect.paramétr. et/ou
achée à l’écran en sélectionnant
[1609] Lect.paramétr. du
paramétre 0-20 Ach. ligne 1.1 petit
au paramétre 0-24 Ach. ligne 3
grand.
[0]
[1] * %
[5] PPM
[10] 1/min
[11] Tr/min
[12] IMPULSION/s
[20] l/s
[21] l/min
[22] l/h
[23] m³/s
[24] m³/min
[25] m³/h
[30] kg/s
[31] kg/min
[32] kg/h
[33] t/min
[34] t/h
[40] m/s
[41] m/min
[45] m
[60] °C
[70] mbar
[71] bar
[72] Pa
[73] kPa
[74] m WG
[75] mm Hg
[80] kW
[120] GPM
[121] gal/s
[122] gal/min
[123] gal/h
[124] CFM
[125] ft³/s
[126] ft³/min
[127] ft³/h
[130] lb/s
[131] lb/min
Description du paramètre
3.2.4 0-3* Lecture LCP
Il est possible de personnaliser les éléments d'achage à
des ns diverses :
Lecture personnalisée : valeur proportionnelle à la
•
33
Lecture personnalisée
La valeur calculée à acher s'appuie sur les réglages des :
Illustration 3.3 Lecture personnalisée
La relation dépend du type d'unité sélectionné au
paramétre 0-30 Unité lect. déf. par utilisateur :
Type d'unité Relation de vitesse
Sans dimension
Vitesse
Débit, volume
Débit, masse
Vitesse
Longueur
Température
Pression Quadratique
Facteur Cubique
Tableau 3.3 Relations de vitesse pour diérents types d'unités
36 Danfoss A/S © 05/2018 Tous droits réservés. MG20OB04
vitesse (linéaire, au carré ou au cube selon l'unité
sélectionnée au paramétre 0-30 Unité lect. déf. par
utilisateur).
Texte aché : chaîne de texte enregistrée dans
•
•
•
•
•
•
•
un paramètre.
Paramétre 0-30 Unité lect. déf. par utilisateur.
Paramétre 0-31 Val.min.lecture déf.par utilis.
(linéaire uniquement).
Paramétre 0-32 Val.max. déf. par utilis..
Paramétre 4-13 Vit.mot., limite supér. [tr/min].
Paramétre 4-14 Vitesse moteur limite haute [Hz].
Vitesse réelle
Linéaire
VLT® AQUA Drive FC 202
Page 39

0-30 Unité lect. déf. par utilisateur
Option: Fonction:
[132] lb/h
[140] ft/s
[141] ft/min
[145] ft
[160] °F
[170] psi
[171] lb/in²
[172] in wg
[173] ft WG
[174] in Hg
[180] HP
0-31 Val.min.lecture déf.par utilis.
Range: Fonction:
Size
related*
[ -999999.99 -
100.00
CustomRea-
doutUnit]
Ce paramètre permet de choisir la
valeur min. de la lecture dénie par
l’utilisateur (à vitesse nulle). Il est
possible de sélectionner une valeur
diérente de 0 uniquement lors de
la sélection d’une unité linéaire au
paramétre 0-30 Unité lect. déf. par
utilisateur. Pour les unités
quadratique et cubique, la valeur
minimale est 0.
0-32 Val.max. déf. par utilis.
Range: Fonction:
100
CustomReadoutUni
t*
[ par. 0-31 -
999999.99
CustomRea-
doutUnit]
Ce paramètre dénit la valeur
maximale à acher lorsque la
vitesse du moteur a atteint la valeur
réglée pour le
paramétre 4-13 Vit.mot., limite supér.
[tr/min] ou le paramétre 4-14 Vitesse
moteur limite haute [Hz] (dépend du
réglage du paramétre 0-02 Unité vit.
mot.).
0-37 Ach. texte 1
Range: Fonction:
0* [0 - 25 ] Ce paramètre permet d'écrire une
chaîne de texte individuelle à
acher sur le LCP ou à lire via la
communication série.
Pour acher le texte en
permanence, sélectionner [37]
Ach. texte 1 dans l'un des
paramètres suivants :
•
Paramétre 0-20 Ach. ligne
1.1 petit.
•
Paramétre 0-21 Ach. ligne
1.2 petit.
0-37 Ach. texte 1
Range: Fonction:
•
Paramétre 0-22 Ach. ligne
1.3 petit.
•
Paramétre 0-23 Ach. ligne
2 grand.
•
Paramétre 0-24 Ach. ligne
3 grand.
•
Paramétre 0-37 Ach. texte
1.
Toute modication du
paramétre 12-08 Nom d'hôte
entraîne une modication du
paramétre 0-37 Ach. texte 1, mais
l'inverse n'est pas vrai.
0-38 Ach. texte 2
Range: Fonction:
0* [0 - 25 ] Ce paramètre permet d’écrire une
chaîne de texte individuelle à
acher sur le LCP ou à lire via la
communication série.
Pour acher le texte en
permanence, sélectionner [38]
Ach. texte 2 aux :
•
Paramétre 0-20 Ach. ligne
1.1 petit.
•
Paramétre 0-21 Ach. ligne
1.2 petit.
•
Paramétre 0-22 Ach. ligne
1.3 petit.
•
Paramétre 0-23 Ach. ligne
2 grand.
•
Paramétre 0-24 Ach. ligne
3 grand.
Appuyer sur [▲] ou [▼] pour
modier un caractère. Appuyer sur
[◀] et [▶] pour déplacer le curseur.
Lorsqu’un caractère est mis en
surbrillance par le curseur, il peut
être modié. Pour insérer un
caractère, placer le curseur entre 2
caractères et appuyer sur [▲] ou
[▼].
Description du paramètre Guide de programmation
3 3
MG20OB04 Danfoss A/S © 05/2018 Tous droits réservés. 37
Page 40

0-39 Ach. texte 3
Range: Fonction:
0* [0 - 25 ] Ce paramètre permet d’écrire une
chaîne de texte individuelle à
acher sur le LCP ou à lire via la
communication série. Pour acher
le texte en permanence,
sélectionner l’achage du texte 3
au paramétre 0-20 Ach. ligne 1.1
petit, au paramétre 0-21 Ach. ligne
1.2 petit, au paramétre 0-22 Ach.
ligne 1.3 petit, au
paramétre 0-23 Ach. ligne 2 grand
ou au paramétre 0-24 Ach. ligne 3
grand. Appuyer sur [▲] ou [▼] pour
modier un caractère. Appuyer sur
[◀] et [▶] pour déplacer le curseur.
Lorsqu’un caractère est mis en
surbrillance par le curseur, il peut
être modié. Pour insérer un
caractère, placer le curseur entre 2
caractères et appuyer sur [▲] ou
[▼].
0-40 Touche [Hand on] sur LCP
Option: Fonction:
[0] Désactivé Sélectionner pour désactiver la
touche.
[1] * Activé La touche [Hand On] est activée.
[2] Mot de passe Évite un démarrage non autorisé en
mode Hand On. Si le
paramétre 0-40 Touche [Hand on] sur
LCP est compris dans Mon menu
personnel, dénir le mot de passe
au paramétre 0-65 Mot de passe
menu personnel. Sinon dénir le
mot de passe au paramétre 0-60 Mt
de passe menu princ..
[3] Activé sans
OFF
[4] Mot de passe
ss OFF
[5] Activé avec
OFF
[6] Mot passe
avec OFF
[9] Enabled, ref =
0
0-41 Touche [O] sur LCP
Option: Fonction:
[0] Désactivé Sélectionner pour désactiver la
touche.
[1] * Activé La touche [O] est activée.
[2] Mot de passe Évite un arrêt non autorisé. Si le
paramétre 0-41 Touche [O] sur LCP
est compris dans Mon menu
personnel, dénir le mot de passe
au paramétre 0-65 Mot de passe
menu personnel. Sinon dénir le
mot de passe au paramétre 0-60 Mt
de passe menu princ..
0-42 Touche [Auto on] sur LCP
Option: Fonction:
[0] Désactivé Sélectionner pour désactiver la
touche.
[1] * Activé La touche [Auto On] est activée.
[2] Mot de passe Évite tout démarrage non autorisé
en mode Auto On. Si le
paramétre 0-42 Touche [Auto on] sur
LCP est compris dans Mon menu
personnel, dénir le mot de passe
au paramétre 0-65 Mot de passe
menu personnel. Sinon dénir le
mot de passe au paramétre 0-60 Mt
de passe menu princ..
0-43 Touche [Reset] sur LCP
Option: Fonction:
[0] Désactivé Sélectionner pour désactiver la
touche.
[1] * Activé La touche [Reset] est activée.
[2] Mot de passe Évite un reset non autorisé. Si le
paramétre 0-43 Touche [Reset] sur
LCP est compris dans le
paramétre 0-25 Mon menu personnel,
dénir le mot de passe au
paramétre 0-65 Mot de passe menu
personnel. Sinon dénir le mot de
passe au paramétre 0-60 Mt de passe
menu princ..
[3] Activé sans
OFF
[4] Mot de passe
ss OFF
[5] Activé avec
OFF
Appuyer sur la touche permet de
réinitialiser le variateur de
fréquence mais pas de le démarrer.
[6] Mot passe
avec OFF
Empêche toute réinitialisation non
autorisée. En cas de reset autorisé,
le variateur de fréquence ne
Description du paramètre
VLT® AQUA Drive FC 202
33
3.2.5 0-4* Clavier LCP
Activer, désactiver et protéger par mot de passe les
touches individuelles sur le LCP.
38 Danfoss A/S © 05/2018 Tous droits réservés. MG20OB04
Page 41

0-43 Touche [Reset] sur LCP
Option: Fonction:
démarre pas. Voir l’option [2] Mot de
passe pour obtenir des informations
sur la dénition du mot de passe.
0-44 Touche [O/Reset] sur LCP
Activer ou désactiver la touche [O/Reset].
Option: Fonction:
[0] Désactivé
[1] * Activé
[2] Mot de passe
0-45 Touche [Drive Bypass] du LCP
Appuyer sur [O] et sélectionner [0] Désactivé an d’éviter tout
arrêt accidentel du variateur. Appuyer sur [O] et choisir [2] Mot
de passe pour éviter tout bipasse non autorisé du variateur de
fréquence. Si le paramétre 0-45 Touche [Drive Bypass] du LCP est
compris dans le Quick Menu (menu rapide), dénir un mot de
passe au paramétre 0-65 Mot de passe menu personnel.
Option: Fonction:
[0] Désactivé Sélectionner pour désactiver la
touche.
[1] * Activé
[2] Mot de passe
0-50 Copie LCP
Option: Fonction:
AVIS!
Ce paramètre ne peut pas être
réglé lorsque le moteur est en
marche.
[0] * Pas de copie
[1] Lect.PAR.LCP Copie tous les paramètres de tous
les process de la mémoire du
variateur de fréquence vers la
mémoire du LCP. À des ns de
maintenance, copier tous les
paramètres vers le LCP après la
mise en service.
[2] Ecrit.PAR. LCP Copie tous les paramètres de tous
les process de la mémoire du LCP
vers celle du variateur de
fréquence.
[3] Ecrit.LCP sans
puis.
Copie uniquement les paramètres
qui sont indépendants de la taille
du moteur. Utiliser la dernière
0-50 Copie LCP
Option: Fonction:
sélection pour programmer
plusieurs variateurs de fréquence
avec la même fonction sans altérer
les données du moteur qui sont
déjà dénies.
[10] Delete LCP
copy data
0-51 Copie process
Option: Fonction:
[0] * Pas de copie Pas de fonction.
[1] Copie dans
process 1
Copie tous les paramètres du
process en cours de programmation
(dénie au
paramétre 0-11 Programmer process)
vers le process 1.
[2] Copie dans
process 2
Copie tous les paramètres du
process en cours de programmation
(dénie au
paramétre 0-11 Programmer process)
vers le process 2.
[3] Copie dans
process 3
Copie tous les paramètres du
process en cours de programmation
(dénie au
paramétre 0-11 Programmer process)
vers le process 3.
[4] Copie dans
process 4
Copie tous les paramètres du
process en cours de programmation
(dénie au
paramétre 0-11 Programmer process)
vers le process 4.
[9] Copie vers
tous
Copie les paramètres du process
actuel vers chacun des process 1 à
4.
0-60 Mt de passe menu princ.
Range: Fonction:
100* [-9999 -
9999 ]
Dénir le mot de passe pour
accéder au menu principal via la
touche [Main Menu]. Si le
paramétre 0-61 Accès menu princ. ss
mt de passe est réglé sur [0] Accès
complet, ce paramètre est ignoré.
0-61 Accès menu princ. ss mt de passe
Option: Fonction:
[0] * Accès complet Désactive le mot de passe déni au
paramétre 0-60 Mt de passe menu
princ.. Si cette option est
Description du paramètre Guide de programmation
3 3
3.2.6 0-5* Copie/Sauvegarde
Copier les paramètres depuis et vers le LCP. Utiliser ces
paramètres pour enregistrer et copier les process d'un
variateur de fréquence à un autre.
MG20OB04 Danfoss A/S © 05/2018 Tous droits réservés. 39
3.2.7 0-6* Mot de passe
Page 42

0-61 Accès menu princ. ss mt de passe
Option: Fonction:
sélectionnée, le paramétre 0-60 Mt
de passe menu princ., le
paramétre 0-65 Mot de passe menu
personnel et le paramétre 0-66 Accès
menu personnel ss mt de passe sont
ignorés.
[1] LCP: lecture
seule
Empêche toute modication non
autorisée des paramètres du Main
Menu (menu principal).
[2] LCP: pas
d'accès
Empêche les consultations et les
modications non autorisées des
paramètres du Main Menu (menu
principal).
[3] Bus: lecture
seule
Fournit un accès en lecture seule
aux paramètres via un bus de
terrain.
[4] Bus: pas
d'accès
Bloque l’accès aux paramètres via
un bus de terrain.
[5] Alt: lecture
seule
Empêche les modications non
autorisées des paramètres du Main
Menu (menu principal) et fournit un
accès en lecture seule aux
paramètres via un bus de terrain.
[6] Alt: pas
d'accès
Empêche les consultations et les
modications non autorisées des
paramètres du Main Menu (menu
principal) et bloque l’accès aux
paramètres via un bus de terrain.
0-65 Mot de passe menu personnel
Range: Fonction:
200* [-9999 -
9999 ]
Dénir le mot de passe d’accès à
Mon menu personnel via la touche
[Quick Menu]. Si le
paramétre 0-66 Accès menu
personnel ss mt de passe est réglé
sur [0] Accès complet, ce paramètre
est ignoré.
0-66 Accès menu personnel ss mt de passe
Si le paramétre 0-61 Accès menu princ. ss mt de passe est réglé sur
[0] Accès complet, ce paramètre est ignoré.
Option: Fonction:
[0] * Accès complet Désactive le mot de passe déni au
paramétre 0-65 Mot de passe menu
personnel.
[1] LCP: lecture
seule
Empêche toute modication non
autorisée des paramètres de Mon
menu personnel.
[3] Bus: lecture
seule
0-66 Accès menu personnel ss mt de passe
Si le paramétre 0-61 Accès menu princ. ss mt de passe est réglé sur
[0] Accès complet, ce paramètre est ignoré.
Option: Fonction:
[5] Alt: lecture
seule
0-67 Mot de passe accès bus
Range: Fonction:
0* [0 - 9999 ] Le choix de ce paramètre permet
de déverrouiller le variateur de
fréquence depuis le bus/Logiciel de
programmation MCT 10.
Description du paramètre
33
40 Danfoss A/S © 05/2018 Tous droits réservés. MG20OB04
VLT® AQUA Drive FC 202
3.2.8 0-7* Régl. horloge
Régler l’heure et la date de l’horloge interne. Par exemple,
l’horloge interne peut être utilisée pour :
Il est possible de programmer l’horloge pour l’heure d’été,
les jours ouvrables/chômés hebdomadaires, incluant
20 exceptions (vacances, etc.). Les réglages de l’horloge
peuvent être déterminés via le LCP. Le Logiciel de
programmation MCT 10 permet également de dénir ces
réglages ainsi que des actions temporisées et des fonctions
de maintenance préventive.
AVIS!
Le variateur de fréquence ne comporte pas de
sauvegarde de la fonction horloge et le réglage de la
date et de l’heure est réinitialisé à la valeur par défaut
(01.01.2007 00:00 Lun) après une mise hors tension, sauf
si un module d’horloge en temps réel avec sauvegarde
est installé. Si aucun module avec sauvegarde n’est
installé, n’utiliser la fonction d’horloge que si le variateur
de fréquence est intégré à un système externe qui utilise
une communication série, le système maintenant la
synchronisation des horloges des équipements de
contrôle. Le paramétre 0-79 Déf.horloge permet de
programmer un avertissement au cas où l’horloge
n’aurait pas été correctement réglée, après une mise hors
tension par exemple.
AVIS!
Lors du montage de l’option VLT® Analog I/O MCB 109
ou du VLT® Real-time Clock MCB 117, une alimentation
de secours pour la date et l’heure est incluse.
les actions temporisées ;
•
le journal énergétique ;
•
l’analyse des tendances ;
•
l’horodatage des alarmes ;
•
les données enregistrées ;
•
la maintenance préventive.
•
Page 43

0-70 Régler date&heure
Range: Fonction:
Size
related*
[ 0 - 0 ] Règle la date et l’heure de l’horloge
interne. Le format à utiliser est
réglé au paramétre 0-71 Format date
et au paramétre 0-72 Format heure.
Lors de l’utilisation du VLT® Realtime Clock MCB 117, l’heure est
synchronisée tous les jours à 15h00.
0-71 Format date
Option: Fonction:
[0] AAAA-MM-JJ Règle le format de date à utiliser
sur le LCP.
[1] JJ-MM-AAAA Règle le format de date à utiliser
sur le LCP.
[2] MM/JJ/AAAA Règle le format de date à utiliser
sur le LCP.
0-72 Format heure
Option: Fonction:
Règle le format de l’heure à utiliser
sur le LCP.
[0] 24 h
[1] 12 h
0-73 Écart fuseau hor.
Range: Fonction:
0 min* [-780 - 780
min]
Régler le décalage horaire à UTC.
Ce paramètre est nécessaire pour
régler automatiquement l’heure
d’été.
0-74 Heure d'été
Option: Fonction:
Choisir le mode de gestion de
l’heure d’été. Pour régler l’heure
d’été manuellement, saisir les dates
de début et de n au
paramétre 0-76 Début heure d'été et
au paramétre 0-77 Fin heure d'été.
[0] * Inactif
[2] Manuel
0-76 Début heure d'été
Range: Fonction:
Size
related*
[ 0 - 0 ] Règle la date et l’heure de début
de l’heure d’été. La date est
programmée au format sélectionné
au paramétre 0-71 Format date.
0-77 Fin heure d'été
Range: Fonction:
Size
related*
[ 0 - 0 ] Règle la date et l’heure de n de
l’heure d’été. La date est
programmée au format sélectionné
au paramétre 0-71 Format date.
0-79 Déf.horloge
Option: Fonction:
Active/désactive l'avertissement
d'horloge, quand l'horloge n'est pas
réglée ou a été remise à 0 après
une mise hors tension et qu'aucune
alimentation de secours n'est
installée. Si l'option VLT® Analog I/O
Option MCB 109 est installée, [1]
Activé est le réglage par défaut.
[0] Désactivé
[1] Activé
0-81 Jours de fct
Tableau [7]
Tableau comportant 7 éléments, [0]-[6], achés sous le numéro
de paramètre de l'achage. Appuyer sur [OK] et passer d'un
élément à un autre à l'aide des touches [▲] et [▼].
Option: Fonction:
Dénir pour chaque jour de la
semaine s'il s'agit d'un jour
ouvrable ou chômé. Le premier
élément du tableau correspond à
lundi. Les jours ouvrables sont
utilisés pour les actions
temporisées.
[0] Non
[1] Oui
0-82 Jours de fct supp.
Tableau [5]
Tableau comportant 5 éléments, [0]-[4], achés sous le numéro
de paramètre de l'achage. Appuyer sur [OK] et passer d'un
élément à un autre à l'aide des touches [▲] et [▼].
Range: Fonction:
Size
related*
[ 0 - 0 ] Dénit les dates de jours de
fonctionnement supplémentaires
qui devraient être des jours sans
fonctionnement selon le
paramétre 0-81 Jours de fct.
Description du paramètre Guide de programmation
3 3
MG20OB04 Danfoss A/S © 05/2018 Tous droits réservés. 41
Page 44

0-83 Jours d'arrêt supp.
Tableau [15]
Tableau comportant 15 éléments, [0]-[14], achés sous le
numéro de paramètre de l'achage. Appuyer sur [OK] et passer
d'un élément à un autre à l'aide des touches [▲] et [▼].
Range: Fonction:
Size
related*
[ 0 - 0 ] Dénit les dates de jours de
fonctionnement supplémentaires
qui devraient être des jours sans
fonctionnement selon le
paramétre 0-81 Jours de fct.
0-84 Time for Fieldbus
Range: Fonction:
0* [0 -
4294967295 ]
Ache l’heure du bus de terrain.
0-85 Summer Time Start for Fieldbus
Range: Fonction:
0* [0 -
4294967295 ]
Ache le début de l’heure d’été du
bus de terrain.
0-86 Summer Time End for Fieldbus
Range: Fonction:
0* [0 -
4294967295 ]
Ache la n de l’heure d’été du
bus de terrain.
0-89 Lecture date et heure
Range: Fonction:
0* [0 - 25 ] Indique la date et l'heure actuelles.
La date et l'heure sont mises à jour
en permanence.
L'horloge ne commence à compter
que lorsque le réglage par défaut a
été modié au
paramétre 0-70 Régler date&heure.
Description du paramètre
VLT® AQUA Drive FC 202
33
42 Danfoss A/S © 05/2018 Tous droits réservés. MG20OB04
Page 45

1-00 Mode Cong.
Option: Fonction:
AVIS!
Ce paramètre ne peut pas être
réglé lorsque le moteur est en
marche.
AVIS!
Lorsque ce paramètre est réglé
sur [3] Boucle fermée, les
ordres Inversion et Démarrage
avec inversion n’inversent pas
le sens du moteur.
[0] Boucle
ouverte
La vitesse du moteur est
déterminée par l’application d’une
référence de vitesse ou par le
réglage de la vitesse en mode Hand
On.
La boucle ouverte est également
utilisée si le variateur de fréquence
fait partie d’un système de contrôle
en boucle fermée basé sur un
régulateur PID externe fournissant
un signal de référence de vitesse
comme sortie.
[3] Boucle fermée La vitesse du moteur est
déterminée par une référence
provenant du régulateur PID intégré
qui change la vitesse du moteur
dans le cadre d’un processus de
contrôle en boucle fermée (une
pression ou un débit constant, par
exemple). Congurer le régulateur
PID dans le groupe de paramètres
20-0* Retour ou via le menu Régl.
fonction accessible en appuyant sur
la touche [Quick Menu].
1-01 Principe Contrôle Moteur
Option: Fonction:
AVIS!
Ce paramètre ne peut pas être
réglé lorsque le moteur est en
marche.
Sélectionner le principe de contrôle
du moteur à employer.
1-01 Principe Contrôle Moteur
Option: Fonction:
[0] U/f Mode moteur spécial pour des
moteurs connectés en parallèle
dans des applications motorisées
particulières. Quand U/f est
sélectionné, modier la caractéristique du principe de contrôle au
paramétre 1-55 Caract. V/f - V et au
paramétre 1-56 Caract. V/f - f.
[1] * VVCplus Principe de contrôle vectoriel de
tension convenant à la plupart des
applications. L’avantage principal du
mode VVC+ est le recours à un
modèle de moteur robuste.
1-03 Caract.couple
Option: Fonction:
[0] Couple
compresseur
Pour une commande de vitesse des
applications à couple constant
telles que :
•
les pompes axiales ;
•
les pompes volumétriques ;
•
les ventilateurs.
Fournit une tension optimisée pour
une caractéristique de charge de
couple constant du moteur dans
toute la plage de vitesse.
[1] Couple
variable
Pour la commande de vitesse des
pompes centrifuges et ventilateurs.
À utiliser également en cas de
contrôle de plusieurs moteurs par le
même variateur de fréquence (p. ex.
ventilateurs de condenseur
multiples ou ventilateurs de tour de
refroidissement). Fournit une
tension optimisée pour une caractéristique de charge au carré du
moteur.
[2] Optim.AUTO
énergie CT
Pour une commande de vitesse
avec ecacité énergétique optimale
des compresseurs à vis et à spirale.
Fournit une tension optimisée pour
une caractéristique de charge de
couple constant du moteur dans
toute la plage s’étendant jusqu’à
15 Hz. En outre, la caractéristique
d’optimisation automatique de
l’énergie (AEO) adapte aussi la
tension à la situation exacte de la
charge de courant, réduisant ainsi
la consommation d’énergie et le
bruit du moteur. Pour atteindre des
Description du paramètre Guide de programmation
3.3 Paramètres 1-** Charge et moteur
3.3.1 1-0* Réglages généraux
Dénir si le variateur de fréquence fonctionne en boucle
ouverte ou en boucle fermée.
3 3
MG20OB04 Danfoss A/S © 05/2018 Tous droits réservés. 43
Page 46

1-03 Caract.couple
Option: Fonction:
performances optimales, régler
correctement le facteur de
puissance cos phi du moteur. Cette
valeur est réglée au
paramétre 14-43 Cos phi moteur. La
valeur par défaut de ce paramètre
est automatiquement réglée
lorsque les données du moteur
sont programmées. Ces réglages
assurent généralement une tension
optimale du moteur, mais si le
facteur de puissance du moteur cos
phi nécessite un réglage, une
fonction AMA peut être exécutée à
l’aide du paramétre 1-29 Adaptation
auto. au moteur (AMA).
[3] * Optim.AUTO
énergie VT
Pour une commande de vitesse
avec ecacité énergétique optimale
des pompes centrifuges et
ventilateurs. Fournit une tension
optimisée pour une caractéristique
de charge au carré du moteur. En
outre, la caractéristique d’optimisation automatique de l’énergie
(AEO) adapte aussi la tension à la
situation exacte de la charge de
courant, réduisant ainsi la consommation d’énergie et le bruit du
moteur. Pour atteindre des performances optimales, régler
correctement le facteur de
puissance cos phi du moteur. Cette
valeur est réglée au
paramétre 14-43 Cos phi moteur. La
valeur par défaut de ce paramètre
est automatiquement réglée
lorsque les données du moteur
sont programmées. Ces réglages
assurent généralement une tension
optimale du moteur, mais si le
facteur de puissance du moteur cos
phi nécessite un réglage, une
fonction AMA peut être exécutée à
l’aide du paramétre 1-29 Adaptation
auto. au moteur (AMA). Il est
rarement nécessaire d’adapter le
paramètre de facteur de puissance
du moteur manuellement.
1-04 Mode de surcharge
Sélectionner le niveau de couple en mode de surcharge.
Option: Fonction:
[0] Couple élevé Permet jusqu’à 160 % de surcouple
pour les moteurs sousdimensionnés.
[1] * Couple normal Permet jusqu’à 110 % de surcouple.
1-06 Sens horaire
Option: Fonction:
AVIS!
Ce paramètre ne peut pas être
réglé lorsque le moteur est en
marche.
Ce paramètre dénit le terme sens
horaire correspondant à la èche de
direction du LCP. Permet de
changer facilement le sens de
rotation de l’arbre sans intervertir
les ls du moteur.
[0] * Normal L’arbre du moteur tourne dans le
sens horaire lorsque le variateur de
fréquence est raccordé au moteur
comme suit : U⇒U, V⇒V et W⇒W.
[1] Inverse L’arbre du moteur tourne dans le
sens antihoraire lorsque le variateur
de fréquence est raccordé au
moteur comme suit : U⇒U, V⇒V et
W⇒W.
Description du paramètre
33
AVIS!
Le Paramétre 1-03 Caract.couple n’a pas d’eet lorsque
paramétre 1-10 Construction moteur = [1] PM, SPM non
saillant.
44 Danfoss A/S © 05/2018 Tous droits réservés. MG20OB04
VLT® AQUA Drive FC 202
3.3.2 1-1* Sélection Moteur
AVIS!
Ce groupe de paramètres ne peut pas être réglé quand
le moteur est en marche.
Les paramètres suivants sont actifs en fonction du réglage
du paramétre 1-10 Construction moteur.
Paramétre 1-10 Constr
uction moteur
Paramétre 1-00 Mode
Cong.
Paramétre 1-03 Caract.
couple
Paramétre 1-06 Sens
horaire
Paramétre 1-14 Amort.
facteur gain
[0]
[1] PM,
Asynchro
SPM non
ne
saillant
x x x x
x – - -
x x x x
– x x x
[2]
IPMSM
[3]
Moteur
SynRM
Page 47

Description du paramètre Guide de programmation
[0]
Paramétre 1-10 Constr
uction moteur
Paramétre 1-15 Const.
temps de ltre faible
vitesse
Paramétre 1-16 Const.
temps de ltre vitesse
élevée
Paramétre 1-17 Const.
temps de ltre tension
Paramétre 1-20 Puissan
ce moteur [kW]
Paramétre 1-21 Puissan
ce moteur [CV]
Paramétre 1-22 Tension
moteur
Paramétre 1-23 Fréq.
moteur
Paramétre 1-24 Couran
t moteur
Paramétre 1-25 Vit.nom
.moteur
Paramétre 1-26 Couple
nominal cont. moteur
Paramétre 1-28 Ctrl
rotation moteur
Paramétre 1-29 Adapta
tion auto. au moteur
(AMA)
Paramétre 1-30 Résista
nce stator (Rs)
Paramétre 1-31 Résista
nce rotor (Rr)
Paramétre 1-35 Réacta
nce principale (Xh)
Paramétre 1-37 Inducta
nce axe d (Ld)
Paramétre 1-39 Pôles
moteur
Paramétre 1-40 FCEM à
1000 tr/min.
Paramétre 1-44 d-axis
Inductance Sat. (LdSat)
Paramétre 1-45 q-axis
Inductance Sat. (LqSat)
Paramétre 1-46 Gain
détection position
Paramétre 1-47 Étal.co
uple à vit.basse
Paramétre 1-48 Inducta
nce Sat. Point
Paramétre 1-49 Couran
t à inductance min.
[1] PM,
Asynchro
SPM non
ne
saillant
– x x x
– x x x
– x x x
x – – –
x – – –
x – – –
x – – –
x x x x
x x x x
– x x x
x x x x
x x x x
x x x x
x – – –
x – – –
– x x x
x x x x
– x x –
– – – x
– – x –
– x x x
– x x x
– – – x
– – x –
[2]
IPMSM
[3]
Moteur
SynRM
Paramétre 1-10 Constr
uction moteur
Paramétre 1-50 Magnét
isation moteur à vitesse
nulle
Paramétre 1-51 Magnét
is. normale vitesse min
[tr/min]
Paramétre 1-52 Magnét
is. normale vitesse min
[Hz]
Paramétre 1-58 Couran
t impuls° test démarr.
volée
Paramétre 1-59 Fréq.
test démarr. à la volée
Paramétre 1-60 Comp.c
harge à vit.basse
Paramétre 1-61 Compe
ns. de charge à vitesse
élevée
Paramétre 1-62 Comp.
gliss.
Paramétre 1-63 Cste
tps comp.gliss.
Paramétre 1-64 Amort.
résonance
Paramétre 1-65 Tps
amort.resonance
Paramétre 1-66 Couran
t min. à faible vitesse
Paramétre 1-70 Mode
de démarrage
Paramétre 1-71 Retard
démar.
Paramétre 1-72 Fonctio
n au démar.
Paramétre 1-73 Démarr
. volée
Paramétre 1-80 Fonctio
n à l'arrêt
Paramétre 1-81 Vit.
min. pour fonct. à
l'arrêt [tr/min]
Paramétre 1-82 Vit.
min. pour fonct. à
l'arrêt [Hz]
Paramétre 1-86 Arrêt
vit. basse [tr/min]
Paramétre 1-87 Arrêt
vit. basse [Hz]
Paramétre 1-90 Protect.
thermique mot.
[0]
[1] PM,
Asynchro
SPM non
ne
saillant
x – – –
x – – –
x – – –
x x x –
x x x –
x – – –
x – – –
x – – –
x – – –
x – – –
x – – –
– x x x
– x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x x x x
[2]
IPMSM
[3]
Moteur
SynRM
3 3
MG20OB04 Danfoss A/S © 05/2018 Tous droits réservés. 45
Page 48

1-10 Construction moteur
Sélectionner le type de construction moteur.
Option: Fonction:
[0] * Asynchrone Pour les moteurs asynchrones.
[1] PM, SPM non
saillant
Pour les moteurs à aimant
permanent (PM). Les moteurs PM
sont divisés en 2 groupes : avec
aimants montés en surface (non
saillants) ou internes (saillants).
[2] IPMSM
[5] SynRM
Description du paramètre
[0]
Paramétre 1-10 Constr
uction moteur
Paramétre 1-91 Ventil.
ext. mot.
Paramétre 1-93 Source
33
Thermistance
Paramétre 2-00 I
maintien/préchau.CC
Paramétre 2-01 Couran
t frein CC
Paramétre 2-02 Temps
frein CC
Paramétre 2-03 Vitesse
frein CC [tr/min]
Paramétre 2-04 Vitesse
frein CC [Hz]
Paramétre 2-06 Couran
t de parking
Paramétre 2-07 Temps
de parking
Paramétre 2-10 Fonctio
n Frein et Surtension
Paramétre 2-11 Frein
Res (ohm)
Paramétre 2-12 P. kW
Frein Res.
Paramétre 2-13 Frein
Res Therm
Paramétre 2-15 Contrôl
e freinage
Paramétre 2-16 Couran
t max. frein CA
Paramétre 2-17 Contrôl
e Surtension
Paramétre 4-10 Directio
n vit. moteur
Paramétre 4-11 Vit.
mot., limite infér. [tr/
min]
Paramétre 4-12 Vitesse
moteur limite basse
[Hz]
Paramétre 4-13 Vit.mot.
, limite supér. [tr/min]
Paramétre 4-14 Vitesse
moteur limite haute
[Hz]
Paramétre 4-16 Mode
moteur limite couple
Paramétre 4-17 Mode
générateur limite
couple
Paramétre 4-18 Limite
courant
46 Danfoss A/S © 05/2018 Tous droits réservés. MG20OB04
Asynchro
[1] PM,
SPM non
ne
saillant
x x x x
x x x x
x – x x
x x x x
x – x x
x – x x
x – x x
– x x x
– x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x – – –
x x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x x x x
x x x x
VLT® AQUA Drive FC 202
[2]
IPMSM
[3]
Moteur
SynRM
Paramétre 1-10 Constr
uction moteur
Paramétre 4-19 Frq.sort
.lim.hte
Paramétre 4-58 Surv.
phase mot.
Paramétre 14-40 Nivea
u VT
Paramétre 14-41 Magn
étisation AEO minimale
Paramétre 14-42 Fréqu
ence AEO minimale
Paramétre 14-43 Cos
phi moteur
[1] PM,
Asynchro
SPM non
ne
saillant
x x x x
x – x x
x – – –
x – – –
x – – –
x – – –
[2]
IPMSM
[3]
Moteur
SynRM
[0]
3.3.3 Conguration de moteur asynchrone
Saisir les données du moteur suivantes. Ces informations
sont disponibles sur la plaque signalétique du moteur.
1. Paramétre 1-20 Puissance moteur [kW] ou
paramétre 1-21 Puissance moteur [CV].
2. Paramétre 1-22 Tension moteur.
3. Paramétre 1-23 Fréq. moteur.
4. Paramétre 1-24 Courant moteur.
5. Paramétre 1-25 Vit.nom.moteur.
Pour une performance optimale en mode VVC+, des
données de moteur supplémentaires sont nécessaires pour
le réglage des paramètres suivants. Les données sont
disponibles sur la che technique du moteur (ces données
ne sont généralement pas disponibles sur la plaque
signalétique du moteur). Lancer une adaptation
automatique au moteur (AMA) complète à l’aide du
paramétre 1-29 Adaptation auto. au moteur (AMA) [1] AMA
activée compl. ou saisir les paramètres manuellement. Le
Paramétre 1-36 Résistance perte de fer (Rfe) est toujours saisi
manuellement.
Page 49
Description du paramètre Guide de programmation
1. Paramétre 1-30 Résistance stator (Rs).
2. Paramétre 1-31 Résistance rotor (Rr).
3. Paramétre 1-33 Réactance fuite stator (X1).
4. Paramétre 1-34 Réactance de fuite rotor (X2).
5. Paramétre 1-35 Réactance principale (Xh).
6. Paramétre 1-36 Résistance perte de fer (Rfe).
Ajustement en fonction des applications en mode VVC
VVC+ est le mode de commande le plus robuste. Dans la
plupart des situations, il assure un fonctionnement optimal
sans nécessiter aucun autre réglage. Lancer une AMA
complète pour assurer une performance optimale.
+
3.3.4 Conguration de moteur PM
Cette section décrit la conguration d’un moteur PM.
Étapes de programmation initiale
Pour activer l’exploitation de moteur PM, sélectionner [1]
PM, SPM non saillant ou [2] IPMSM au
paramétre 1-10 Construction moteur.
Programmation des données du moteur
Lorsqu’un moteur PM est sélectionné, les paramètres liés
au moteur PM dans les groupes de paramètres 1-2* Données
moteur, 1-3* Données av. moteur et 1-4* Données av. moteur
II sont actifs.
Les données nécessaires sont disponibles sur la plaque
signalétique du moteur et sur la che technique du
moteur.
Programmer les paramètres suivants dans l’ordre donné :
1. Paramétre 1-24 Courant moteur.
2. Paramétre 1-25 Vit.nom.moteur.
3. Paramétre 1-26 Couple nominal cont. moteur.
4. Paramétre 1-39 Pôles moteur.
Lancer une AMA complète à l’aide du
paramétre 1-29 Adaptation auto. au moteur (AMA) [1] AMA
activée compl.
AVIS!
Lors de l’utilisation d’une AMA, s’assurer que la valeur du
paramétre 1-40 FCEM à 1000 tr/min. est calculée à l’aide
de la vitesse nominale.
Si une AMA complète n’est pas réalisée, congurer manuellement les paramètres suivants :
1. Paramétre 1-30 Résistance stator (Rs)
Saisir la résistance des enroulements du stator de
la phase au commun (Rs). Si seules les données
phase à phase sont disponibles, diviser la valeur
phase à phase par 2 pour obtenir la valeur de la
phase au commun.
2. Paramétre 1-37 Inductance axe d (Ld)
Saisir l’inductance de l’axe direct du moteur PM
de la phase au commun.
Si seules les données phase à phase sont
disponibles, diviser la valeur phase à phase par 2
pour obtenir la valeur de la phase au commun.
3. Paramétre 1-40 FCEM à 1000 tr/min..
Saisir la force contre-électromotrice du moteur
PM phase à phase à 1 000 tr/min (valeur ecace).
La force contre-électromotrice est la tension
générée par un moteur PM lorsqu’aucun variateur
de fréquence n’est connecté et que l’arbre est
tourné vers l’extérieur. Généralement, elle est
spéciée comme mesure entre deux phases pour
la vitesse nominale du moteur ou pour 1 000 tr/
min. Si la valeur n’est pas disponible pour une
vitesse de moteur de 1 000 tr/min, calculer la
valeur correcte comme suit.
Si la force contre-électromotrice est p. ex. de
320 V à 1 800 tr/min, sa valeur à 1 000 tr/min
peut être calculée comme suit :
FCEM = (tension / tr/min) * 1 000 = (320/1 800) *
1 000 = 178.
4. Pour les moteurs IPM : congurer les valeurs
d’inductance aux paramètres suivants :
Paramétre 1-38 Inductance axe q(Lq).
•
Paramétre 1-44 d-axis Inductance Sat.
•
(LdSat).
Paramétre 1-45 q-axis Inductance Sat.
•
(LqSat).
Paramétre 1-49 Courant à inductance
•
min..
AVIS!
Certaines valeurs d’inductance peuvent ne pas se trouver
sur les plaques signalétiques ou dans les ches
techniques des moteurs IPM. Générer une AMA pour
obtenir les valeurs valides.
Test de fonctionnement du moteur
1. Démarrer le moteur à vitesse faible (100 à 200 tr/
min). Si le moteur ne tourne pas, vérier l’installation, la programmation générale et les données
de moteur.
2. Vérier si la fonction au démarrage au
paramétre 1-70 Mode de démarrage est adaptée
aux exigences de l’application.
Détection position rotor
Cette fonction est recommandée pour les applications où
le moteur démarre depuis la position de veille, p. ex. les
pompes ou les convoyeurs. Sur certains moteurs, un signal
sonore est émis lorsque le variateur de fréquence eectue
3 3
MG20OB04 Danfoss A/S © 05/2018 Tous droits réservés. 47
Page 50

Description du paramètre
VLT® AQUA Drive FC 202
la détection de position rotor. Cela n’endommage pas le
3.3.5 Conguration de moteur SynRM
moteur.
Parking
Cette fonction est recommandée pour les applications où
Cette section décrit la conguration d’un moteur
synchrone à reluctance.
le moteur tourne à faible vitesse, p. ex. le moulinet dans
33
les applications de ventilateur. Le Paramétre 2-06 Courant
de parking et le paramétre 2-07 Temps de parking peuvent
être ajustés. Augmenter le réglage d’usine de ces
paramètres pour les applications à forte inertie.
Ajustement en fonction des applications en mode VVC
+
VVC+ est le mode de commande le plus robuste. Dans la
plupart des situations, il assure un fonctionnement optimal
sans nécessiter aucun autre réglage. Lancer une AMA
complète pour assurer une performance optimale.
Démarrer le moteur à vitesse nominale. Si l’application ne
fonctionne pas bien,
vérier les réglages PM VVC+. Le
Tableau 3.4 fournit des recommandations pour diverses
applications.
Application Réglages
Applications à faible
inertie
I
charge/Imoteur
Applications à faible
inertie
50 > I
Applications à forte inertie
I
charge/Imoteur
Charge élevée à basse
vitesse
< 30 % (vitesse nominale)
< 5
charge/Imoteur
> 50
> 5
Multiplier le paramétre 1-17 Const.
temps de ltre tension par un facteur
compris entre 5 et 10.
Réduire le paramétre 1-14 Amort.
facteur gain.
Réduire le paramétre 1-66 Courant
min. à faible vitesse (< 100 %).
Garder les valeurs par défaut.
Augmenter le paramétre 1-14 Amort.
facteur gain, le paramétre 1-15 Const.
temps de ltre faible vitesse et le
paramétre 1-16 Const. temps de ltre
vitesse élevée.
Augmenter le paramétre 1-17 Const.
temps de ltre tension.
Ajuster le couple de démarrage en
augmentant le
paramétre 1-66 Courant min. à faible
vitesse. Un courant de 100 % fournit
un couple de démarrage égal au
couple nominal. Un fonctionnement
à un niveau de courant supérieur à
100 % pendant trop longtemps peut
provoquer une surchaue du
moteur.
Étapes de programmation initiale
Pour activer l’exploitation de moteur SynRM, sélectionner
l’option [5] SynRM au paramétre 1-10 Construction moteur.
Programmation des données du moteur
Lorsque l’option [5] SynRM est sélectionnée, les paramètres
liés au moteur SynRM dans les groupes de paramètres 1-2*
Données moteur, 1-3* Données av. moteur et 1-4* Données
av. moteur II sont actifs.
Les données nécessaires sont disponibles sur la plaque
signalétique du moteur et sur la che technique du
moteur.
Programmer les paramètres suivants dans l’ordre donné :
1. Paramétre 1-24 Courant moteur.
2. Paramétre 1-25 Vit.nom.moteur.
3. Paramétre 1-26 Couple nominal cont. moteur.
4. Paramétre 1-39 Pôles moteur.
Lancer une AMA complète à l’aide du
paramétre 1-29 Adaptation auto. au moteur (AMA) [1] AMA
activée compl.
Si une AMA complète n’est pas réalisée, congurer manuellement les paramètres suivants :
1. Paramétre 1-30 Résistance stator (Rs)
Saisir la résistance des enroulements du stator de
la phase au commun (Rs). Si seules les données
phase à phase sont disponibles, diviser la valeur
phase à phase par 2 pour obtenir la valeur de la
phase au commun.
2. Paramétre 1-37 Inductance axe d (Ld)
Saisir l’inductance de l’axe direct du moteur de la
phase au commun.
Si seules les données phase à phase sont
disponibles, diviser la valeur phase à phase par 2
pour obtenir la valeur de la phase au commun.
3. Paramétre 1-38 Inductance axe q(Lq).
Saisir l’inductance de l’axe en quadrature du
moteur de la phase au commun.
Si seules les données phase à phase sont
disponibles, diviser la valeur phase à phase par 2
pour obtenir la valeur de la phase au commun.
4. Paramétre 1-44 d-axis Inductance Sat. (LdSat).
Tableau 3.4 Recommandations pour diverses applications
Saisir la valeur saturée d’inductance de l’axe d de
la phase au commun. Il s’agit de la valeur à un
Si le moteur commence à osciller à une certaine vitesse,
augmenter le paramétre 1-14 Amort. facteur gain.
Augmenter la valeur par petits incréments. En fonction du
moteur, ce paramètre peut être réglé sur une valeur de 10
courant supérieur au courant nominal où
l’inductance est complètement saturée.
5. Paramétre 1-48 Inductance Sat. Point.
à 100 % supérieure à la valeur par défaut.
48 Danfoss A/S © 05/2018 Tous droits réservés. MG20OB04
Page 51
Description du paramètre Guide de programmation
Saisir le pourcentage de courant nominal où
l’inductance de l’axe d est à moitié saturée, c’està-dire lorsqu’elle correspond à la valeur moyenne
des valeurs saturée et non saturée.
AVIS!
Certaines valeurs d’inductance peuvent ne pas se trouver
sur les plaques signalétiques ou dans les ches
techniques des moteurs. Générer une AMA pour obtenir
les valeurs valides.
Test de fonctionnement du moteur
1. Démarrer le moteur à vitesse faible (100 à 200 tr/
min). Si le moteur ne tourne pas, vérier l’installation, la programmation générale et les données
de moteur.
2. Vérier si la fonction au démarrage au
paramétre 1-70 Mode de démarrage est adaptée
aux exigences de l’application.
Détection position rotor
Cette fonction est recommandée pour les applications où
le moteur démarre depuis la position de veille, p. ex. les
pompes ou les convoyeurs. Sur certains moteurs, un signal
sonore est émis lorsque le variateur de fréquence eectue
la détection de position rotor. Cela n’endommage pas le
moteur.
Parking
Cette fonction est recommandée pour les applications où
le moteur tourne à faible vitesse, p. ex. le moulinet dans
les applications de ventilateur. Le Paramétre 2-06 Courant
de parking et le paramétre 2-07 Temps de parking peuvent
être ajustés. Augmenter le réglage d’usine de ces
paramètres pour les applications à forte inertie.
Ajustement en fonction des applications en mode VVC
VVC+ est le mode de commande le plus robuste. Dans la
plupart des situations, il assure un fonctionnement optimal
sans nécessiter aucun autre réglage. Lancer une AMA
complète pour assurer une performance optimale.
Démarrer le moteur à vitesse nominale. Si l’application ne
fonctionne pas bien,
vérier les réglages SynRM VVC+. Le
Tableau 3.5 propose des recommandations pour diverses
applications.
+
Application Réglages
Applications à faible
inertie
I
charge/Imoteur
Applications à faible
inertie
50 > I
Applications à forte inertie
I
charge/Imoteur
Charge élevée à basse
vitesse
< 30 % (vitesse nominale)
Tableau 3.5 Recommandations pour diverses applications
< 5
charge/Imoteur
> 50
> 5
Multiplier le paramétre 1-17 Const.
temps de ltre tension par un facteur
compris entre 5 et 10.
Réduire le paramétre 1-14 Amort.
facteur gain.
Réduire le paramétre 1-66 Courant
min. à faible vitesse (< 100 %).
Garder les valeurs par défaut.
Augmenter le paramétre 1-14 Amort.
facteur gain, le paramétre 1-15 Const.
temps de ltre faible vitesse et le
paramétre 1-16 Const. temps de ltre
vitesse élevée.
Augmenter le paramétre 1-17 Const.
temps de ltre tension.
Ajuster le couple de démarrage en
augmentant le
paramétre 1-66 Courant min. à faible
vitesse. Un courant de 100 % fournit
un couple de démarrage égal au
couple nominal. Un fonctionnement
à un niveau de courant supérieur à
100 % pendant trop longtemps peut
provoquer une surchaue du
moteur.
Si le moteur commence à osciller à une certaine vitesse,
augmenter le paramétre 1-14 Amort. facteur gain.
Augmenter la valeur par petits incréments. En fonction du
moteur, ce paramètre peut être réglé sur une valeur de 10
à 100 % supérieure à la valeur par défaut.
3.3.6
1-1* VVC+ PM/SYN RM
Les paramètres de commande par défaut du noyau de
contrôle du moteur PMSM VVC+ sont optimisés pour les
applications ainsi que pour les charges d’inertie dans une
plage de 50 > Jl/Jm > 5, où Jl est l’inertie de la charge de
l’application et Jm l’inertie de la machine.
Pour les applications à faible inertie (où Jl/Jm < 5), il faut
augmenter le paramétre 1-17 Const. temps de ltre tension
d’un facteur compris entre 5 et 10, et parfois le
paramétre 1-14 Amort. facteur gain également pour
améliorer les performances et la stabilité.
Pour les applications à forte inertie (où Jl/Jm > 50),
augmenter le paramétre 1-15 Const. temps de ltre faible
vitesse, le paramétre 1-16 Const. temps de ltre vitesse élevée
et le paramétre 1-14 Amort. facteur gain pour améliorer les
performances et la stabilité.
3 3
MG20OB04 Danfoss A/S © 05/2018 Tous droits réservés. 49
Page 52

1-14 Amort. facteur gain
Range: Fonction:
Size
related*
[0 - 250 %] Le paramètre stabilise le moteur PM
an qu’il fonctionne de manière
souple et stable. La valeur de
l’amortissement de gain contrôle la
performance dynamique du moteur
PM. Un gain d’amortissement faible
se traduit par une performance
dynamique élevée et une valeur
haute par une performance
dynamique faible. Si le gain d’amortissement est trop important ou
trop faible, la commande devient
irrégulière. La performance
dynamique qui en résulte est liée
aux données de la machine et au
type de la charge.
1-15 Const. temps de ltre faible vitesse
Range: Fonction:
Size
related*
[0.01 - 20 s] Une constante de temps d’amortis-
sement du ltre passe-haut
détermine le temps de réponse aux
étapes de charge. Une constante de
temps d’amortissement de courte
durée se traduit par une régulation
rapide. Cependant, si cette valeur
est trop basse, la régulation devient
instable. Cette constante de temps
est utilisée en dessous de 10 % de
la vitesse nominale.
1-16 Const. temps de ltre vitesse élevée
Range: Fonction:
Size
related*
[0.01 - 20 s] Une constante de temps d’amortis-
sement du ltre passe-haut
détermine le temps de réponse aux
étapes de charge. Une constante de
temps d’amortissement de courte
durée se traduit par une régulation
rapide. Cependant, si cette valeur
est trop basse, la régulation devient
instable. Cette constante de temps
est utilisée au-dessus de 10 % de la
vitesse nominale.
1-17 Const. temps de ltre tension
Range: Fonction:
Size
related*
[0.001 - 2 s] La constante de temps de ltre de
tension d’alimentation permet de
réduire l’inuence des ondulations
haute fréquence et des résonances
du système dans le calcul de la
tension d’alimentation de la
machine. Sans ce ltre, les
ondulations présentes dans les
courants peuvent déformer la
tension calculée et nuire à la
stabilité du système.
Description du paramètre
VLT® AQUA Drive FC 202
Pour une charge élevée à faible vitesse (< 30 % de la
vitesse nominale), augmenter le paramétre 1-17 Const.
temps de ltre tension en raison de la non-linéarité de
l’onduleur à basse vitesse.
1-11 Motor Model (Fabricant moteur)
33
Option: Fonction:
Ajuste automatiquement les valeurs par
défaut du moteur sélectionné. Si la valeur
par défaut Std. Asynchron est utilisée, dénir
les réglages manuellement conformément au
choix eectué au paramétre 1-10 Construction
moteur.
[1] Std.
Asynchron
[2] Std. PM, non
salient (PM
Std., non
saillant)
[10] Danfoss OGD
LA10
[11] Danfoss OGD
V210
Modèle par défaut du moteur si [0]
Asynchrone est sélectionné au
paramétre 1-10 Construction moteur.
Sélectionnable lorsque [1] PM, SPM non
saillant est sélectionné au
paramétre 1-10 Construction moteur.
Sélectionnable lorsque [1] PM, SPM non
saillant est sélectionné au
paramétre 1-10 Construction moteur.
Uniquement disponible pour T4, T5 en
1,5-3 kW. Les réglages sont chargés automatiquement pour ce moteur spécique.
Sélectionnable lorsque [1] PM, SPM non
saillant est sélectionné au
paramétre 1-10 Construction moteur.
Uniquement disponible pour T4, T5 en
0,75-3 kW. Les réglages sont chargés automatiquement pour ce moteur spécique.
50 Danfoss A/S © 05/2018 Tous droits réservés. MG20OB04
Page 53

1-20 Puissance moteur [kW]
Range: Fonction:
Size
related*
[ 0.09 -
2000.00 kW]
AVIS!
Ce paramètre ne peut pas être
réglé lorsque le moteur est en
marche.
Saisir la puissance nominale du
moteur en kW conformément aux
données de la plaque signalétique
du moteur. La valeur par défaut
correspond à la puissance nominale
de sortie de l’unité.
En fonction des choix faits au
paramétre 0-03 Réglages régionaux,
le paramétre 1-20 Puissance moteur
[kW] ou le paramétre 1-21 Puissance
moteur [CV] est invisible.
1-21 Puissance moteur [CV]
Range: Fonction:
Size
related*
[ 0.09 -
500.00 hp]
AVIS!
Ce paramètre ne peut pas être
réglé lorsque le moteur est en
marche.
Saisir la puissance nominale du
moteur en HP en fonction des
données de la plaque signalétique
du moteur. La valeur par défaut
correspond à la puissance nominale
de sortie de l’unité.
En fonction des choix faits au
paramétre 0-03 Réglages régionaux,
1-21 Puissance moteur [CV]
Range: Fonction:
le paramétre 1-20 Puissance moteur
[kW] ou le paramétre 1-21 Puissance
moteur [CV] est invisible.
1-22 Tension moteur
Range: Fonction:
Size
related*
[ 10 - 1000
V]
AVIS!
Ce paramètre ne peut pas être
réglé lorsque le moteur est en
marche.
Saisir la tension nominale du
moteur conformément aux données
de la plaque signalétique du
moteur. La valeur par défaut
correspond à la puissance nominale
de sortie de l’unité.
1-23 Fréq. moteur
Range: Fonction:
Size
related*
[20 - 1000
Hz]
AVIS!
Ce paramètre ne peut pas être
réglé lorsque le moteur est en
marche.
Sélectionner la valeur de fréquence
du moteur indiquée dans les
données de la plaque signalétique
du moteur. Pour un fonctionnement
à 87 Hz avec des moteurs à
230/400 V, dénir les données de la
plaque signalétique pour 230 V/
50 Hz. Adapter le
paramétre 4-13 Vit.mot., limite supér.
[tr/min] et le paramétre 3-03 Réf.
max. à l’application 87 Hz.
1-24 Courant moteur
Range: Fonction:
Size
related*
[ 0.10 -
10000.00 A]
AVIS!
Ce paramètre ne peut pas être
réglé lorsque le moteur est en
marche.
Saisir le courant nominal du moteur
indiqué sur la plaque signalétique
du moteur. Les données sont
utilisées pour calculer le couple
moteur, la protection thermique du
moteur, etc.
Description du paramètre Guide de programmation
3.3.7 1-2* Données moteur
Ce groupe de paramètres contient les données d'entrée de
la plaque signalétique apposée sur le moteur raccordé.
AVIS!
Un changement de valeur dans ces paramètres a un eet
sur le réglage d'autres paramètres.
AVIS!
Les paramètres suivants n'ont aucun eet lorsque le
paramétre 1-10 Construction moteur est réglé sur [1] PM,
SPM non saillant, [2] PM, salient IPM, [5] Sync. Reluctance :
Paramétre 1-20 Puissance moteur [kW].
•
Paramétre 1-21 Puissance moteur [CV].
•
Paramétre 1-22 Tension moteur.
•
Paramétre 1-23 Fréq. moteur.
•
3 3
MG20OB04 Danfoss A/S © 05/2018 Tous droits réservés. 51
Page 54

1-25 Vit.nom.moteur
Range: Fonction:
Size
related*
[100 - 60000
RPM]
AVIS!
Ce paramètre ne peut pas être
réglé lorsque le moteur est en
marche.
Saisir la vitesse nominale du moteur
en fonction des données de la
plaque signalétique du moteur. Les
données sont utilisées pour calculer
les compensations automatiques du
moteur.
1-26 Couple nominal cont. moteur
Range: Fonction:
Size
related*
[1 - 10000.0
Nm]
Saisir la valeur selon les données de
la plaque signalétique du moteur.
La valeur par défaut correspond à
la puissance nominale de sortie. Ce
paramètre est disponible si le
paramétre 1-10 Construction moteur
est réglé sur [1] PM, SPM non
saillant, c’est-à-dire que le
paramètre est valable pour les
moteurs PM et SPM non saillants
uniquement.
1-28 Ctrl rotation moteur
Option: Fonction:
AVERTISSEMENT
HAUTE TENSION
Les variateurs de fréquence
contiennent des tensions
élevées lorsqu’ils sont reliés à
l’alimentation secteur CA, à
l’alimentation CC ou à la
répartition de la charge.
•
L’alimentation secteur
doit être coupée
avant de débrancher
les câbles de phase
moteur.
1-28 Ctrl rotation moteur
Option: Fonction:
AVIS!
Une fois le contrôle de la
rotation du moteur activé,
l’achage indique : Note! Mot.
peut tourner dans mauvais
sens.
Appuyer sur [OK], [Back] ou
[Cancel] pour eacer le
message et en acher un
nouveau : Appuyer sur [Hand
On] pour démarrer le moteur.
Appuyer sur [Cancel] pour
annuler. Une pression sur la
touche [Hand On] démarre le
moteur à 5 Hz en marche
avant et l’achage indique :
Moteur tourne. Vérier si sens
de rotation du mot. correct.
Presser [O] pour arrêter mot.
Une pression sur la touche
[O] arrête le moteur et
réinitialise le
paramétre 1-28 Ctrl rotation
moteur. Si le sens de rotation
du moteur est incorrect, 2
câbles de phase moteur
doivent être intervertis.
Après avoir installé et raccordé le
moteur, cette fonction permet de
vérier le sens de rotation correct
du moteur. L’activation de cette
fonction annule tout ordre de bus
ou toute entrée digitale, sauf le
blocage externe et Safe Torque O
(STO) (le cas échéant).
[0] * Inactif Le contrôle de la rotation moteur
n’est pas activé.
[1] Activé Le contrôle de la rotation moteur
est activé.
1-29 Adaptation auto. au moteur (AMA)
Option: Fonction:
La fonction AMA maximise le
rendement dynamique du moteur
en optimisant automatiquement les
paramètres avancés du moteur
(paramétre 1-30 Résistance stator (Rs)
à paramétre 1-35 Réactance
principale (Xh)) alors que le moteur
est xe.
[0] * Inactif Pas de fonction.
Description du paramètre
33
52 Danfoss A/S © 05/2018 Tous droits réservés. MG20OB04
VLT® AQUA Drive FC 202
Page 55

1-29 Adaptation auto. au moteur (AMA)
Option: Fonction:
[1] AMA activée
compl.
Eectue une AMA de la résistance
du stator RS, de la résistance du
rotor Rr, de la réactance de fuite du
stator X1, de la réactance du rotor à
la fuite X2 et de la réactance
secteur Xh.
[2] AMA activée
réduite
Eectue une AMA réduite de la
résistance du stator Rs dans le
système uniquement. Sélectionner
cette option si un ltre LC est
utilisé entre le variateur de
fréquence et le moteur.
[3] Enable
Complete
AMA II
Eectue une AMA II (fonctionnalité
améliorée) de la résistance du stator
RS, de la résistance du rotor Rr, de
la réactance de fuite du stator X1,
de la réactance de fuite du rotor X
2
et de la réactance secteur Xh. Pour
des résultats améliorés, mettre à
jour le paramétre 14-43 Cos phi
moteur.
[4] Enable
Reduced AMA
II
Eectue une AMA II réduite de la
résistance du stator Rs dans le
système uniquement. Sélectionner
cette option si un ltre LC est
utilisé entre le variateur de
fréquence et le moteur.
130BA375.11
R
S
P 1-30
R
1s
X
h
P1-35
R
1
X
2
X
1
U
1
I
1
Description du paramètre Guide de programmation
AVIS!
Le Paramétre 1-29 Adaptation auto. au moteur (AMA) n’a
pas d’eet lorsque paramétre 1-10 Construction moteur =
[1] PM, SPM non saillant.
Activer la fonction AMA en appuyant sur la touche [Hand
On] après avoir sélectionné [1] AMA activée compl. ou [2]
AMA activée réduite. Voir aussi le chapitre Adaptation
automatique au moteur dans le manuel de conguration.
Après le parcours normal, l’écran ache : Press.OK pour
arrêt AMA. Après avoir appuyé sur [OK], le variateur de
fréquence est prêt à l’exploitation.
AVIS!
•
•
AVIS!
Éviter de générer un couple extérieur pendant l’AMA.
MG20OB04 Danfoss A/S © 05/2018 Tous droits réservés. 53
Réaliser l’AMA sur un moteur froid an d’obtenir
la meilleure adaptation du variateur de
fréquence.
L’AMA ne peut pas être réalisée lorsque le
moteur fonctionne.
AVIS!
Si l’un des réglages du groupe de paramètres 1-2*
Données moteur est modié, les paramètres du
paramétre 1-30 Résistance stator (Rs) au
paramétre 1-39 Pôles moteur reviennent à leur réglage
par défaut.
Ce paramètre ne peut pas être réglé lorsque le moteur
3 3
est en marche.
AVIS!
L’AMA complète doit s’eectuer uniquement sans ltre
tandis que l’AMA réduite doit s’eectuer avec ltre.
Voir aussi le chapitre Adaptation automatique au moteur
dans le manuel de conguration du VLT® AQUA Drive FC 202.
3.3.8 1-3* Données av. moteur
Paramètres pour les données avancées du moteur. Les
données moteur, présentes du paramétre 1-30 Résistance
stator (Rs) au paramétre 1-39 Pôles moteur, doivent correspondre au moteur concerné, an que le moteur fonctionne
de manière optimale. Les réglages par défaut sont basés
sur des valeurs communes de paramètres moteur pour des
moteurs standard normaux. Si les paramètres moteur sont
mal congurés, le système peut faire l’objet de dysfonctionnements. Si les données moteur avancées sont
inconnues, il est conseillé de réaliser une AMA. Voir aussi le
chapitre Adaptation automatique au moteur dans le manuel
de
conguration du VLT® AQUA Drive FC 202. La séquence
AMA règle tous les paramètres du moteur, à l’exception du
moment d’inertie du rotor et de la résistance à la perte de
fer (paramétre 1-36 Résistance perte de fer (Rfe)).
Illustration 3.4 Schéma moteur équivalent pour un moteur
asynchrone
Page 56

I
R
s
Par. 1-30
L
d
Par. 1-37
ω
sLqIq
U
d
I
R
s
Par. 1-30
L
q=Ld
Par. 1-37
ω
sLdId
+
-
+ -
+ -
Par. 1-40
ω
sλPM
U
q
q
q
d-axis equivalent circuit
q-axis equivalent circuit
130BC056.11
1-30 Résistance stator (Rs)
Range: Fonction:
Size
related*
[ 0.0140 -
140.0000
Ohm]
AVIS!
Ce paramètre ne peut pas être
réglé lorsque le moteur est en
marche.
Pour les moteurs PM, consulter la
description au
paramétre 1-37 Inductance axe d
(Ld).
Régler la valeur de la résistance du
stator. Saisir la valeur de la che
technique du moteur ou eectuer
une AMA sur un moteur froid.
1-31 Résistance rotor (Rr)
Range: Fonction:
Size
related*
[ 0.0100 -
100.0000
Ohm]
AVIS!
Le Paramétre 1-31 Résistance
rotor (Rr) n’a pas d’eet
lorsque le
paramétre 1-10 Construction
moteur est réglé sur [1] PM,
SPM non saillant, [5] Sync.
Reluctance (Sync. à reluctance).
Régler la valeur de la résistance du
rotor Rr an d’améliorer la
performance de l’arbre à l’aide de
l’une de ces méthodes :
1-31 Résistance rotor (Rr)
Range: Fonction:
•
Réaliser une AMA sur
moteur froid. Le variateur
de fréquence mesure la
valeur à partir du moteur.
Toutes les compensations
sont remises à 100 %.
•
Saisir la valeur Rr manuellement. Se procurer la
valeur auprès du
fournisseur du moteur.
•
Utiliser le réglage par
défaut Rr. Le variateur de
fréquence dénit le
réglage en fonction des
données de la plaque
signalétique du moteur.
1-33 Réactance fuite stator (X1)
Range: Fonction:
Size
related*
[ 0.0400 -
400.0000
Ohm]
AVIS!
Ce paramètre concerne
uniquement les moteurs
asynchrones.
Régler la réactance de fuite du
stator du moteur à l’aide de l’une
des méthodes suivantes :
•
Réaliser une AMA sur
moteur froid. Le variateur
de fréquence mesure la
valeur à partir du moteur.
•
Saisir la valeur X1 manuellement. Se procurer la
valeur auprès du
fournisseur du moteur.
•
Utiliser le réglage par
défaut de X1. Le variateur
de fréquence dénit le
réglage en fonction des
données de la plaque
signalétique du moteur.
Voir l'Illustration 3.4.
AVIS!
La valeur du paramètre est
mise à jour après chaque
étalonnage de couple si
l’option [3] 1st start with store
ou [4] Every start with store est
sélectionnée au
paramétre 1-47 Étal.couple à
vit.basse.
Description du paramètre
VLT® AQUA Drive FC 202
33
Illustration 3.5 Schéma de câblage moteur équivalent pour un
moteur PM non saillant
54 Danfoss A/S © 05/2018 Tous droits réservés. MG20OB04
Page 57

1-34 Réactance de fuite rotor (X2)
Range: Fonction:
Size
related*
[ 0.0400 -
400.0000
Ohm]
AVIS!
Ce paramètre concerne
uniquement les moteurs
asynchrones.
Régler la réactance de fuite du
rotor du moteur à l’aide de l’une
des méthodes suivantes :
•
Réaliser une AMA sur
moteur froid. Le variateur
de fréquence mesure la
valeur à partir du moteur.
•
Saisir la valeur X2 manuellement. Se procurer la
valeur auprès du
fournisseur du moteur.
•
Utiliser le réglage par
défaut de X2. Le variateur
de fréquence dénit le
réglage en fonction des
données de la plaque
signalétique du moteur.
Voir l'Illustration 3.4.
AVIS!
La valeur du paramètre est
mise à jour après chaque
étalonnage de couple si
l’option [3] 1st start with store
ou [4] Every start with store est
sélectionnée au
paramétre 1-47 Étal.couple à
vit.basse.
1-35 Réactance principale (Xh)
Range: Fonction:
Size
related*
[ 1.0000 -
10000.0000
Ohm]
AVIS!
Le Paramétre 1-35 Réactance
principale (Xh) n’a pas d’eet
lorsque
paramétre 1-10 Construction
moteur = [1] PM, SPM non
saillant.
AVIS!
Ce paramètre ne peut pas être
réglé lorsque le moteur est en
marche.
1-35 Réactance principale (Xh)
Range: Fonction:
Régler la réactance principale du
moteur à l’aide de l’une des
méthodes suivantes :
•
Réaliser une AMA sur
moteur froid. Le variateur
de fréquence mesure la
valeur à partir du moteur.
•
Saisir la valeur Xh manuellement. Se procurer la
valeur auprès du
fournisseur du moteur.
•
Utiliser le réglage par
défaut de Xh. Le variateur
de fréquence dénit le
réglage en fonction des
données de la plaque
signalétique du moteur.
1-36 Résistance perte de fer (Rfe)
Range: Fonction:
Size
related*
[ 0 -
10000.000
Ohm]
AVIS!
Ce paramètre ne peut pas être
réglé lorsque le moteur est en
marche.
Saisir la valeur de la résistance à la
perte de fer équivalente (RFe) pour
compenser les pertes de fer du
moteur.
La valeur RFe ne peut pas être
retrouvée en réalisant une AMA.
Elle est particulièrement importante
dans les applications de commande
de couple. Si RFe est inconnue,
laisser le paramétre 1-36 Résistance
perte de fer (Rfe) sur le réglage par
défaut.
1-37 Inductance axe d (Ld)
Range: Fonction:
Size
related*
[0.000 -
1000.000 mH]
AVIS!
Ce paramètre n’est actif que
lorsque le
paramétre 1-10 Construction
moteur est réglé sur [1] PM,
SPM non saillant.
Saisir la valeur d’inductance de l’axe
d. Celle-ci se trouve sur la che
technique des moteurs PM.
Description du paramètre Guide de programmation
3 3
MG20OB04 Danfoss A/S © 05/2018 Tous droits réservés. 55
Page 58

Line to common (starpoint)
Line-to-line values
Rs and Ld
Rs and Ld
e30bc008.12
Permanent magnet motors
e30bc009.11
Line-to-line back
EMF in RMS value
at 1000 RPM
speed (mech)
1-38 Inductance axe q(Lq)
Range: Fonction:
Size
related*
[0.000 - 1000
mH]
AVIS!
Ce paramètre ne peut pas être
réglé lorsque le moteur est en
marche.
Régler la valeur d’inductance de
l’axe q. Voir la che technique du
moteur.
1-39 Pôles moteur
Range: Fonction:
Size
related*
[2 - 132 ]
AVIS!
Ce paramètre ne peut pas être
réglé lorsque le moteur est en
marche.
Saisir le nombre de pôles du
moteur.
Pôles ~nn à 50 Hz ~nn à 60 Hz
2 2700–2880 3250–3460
4 1350–1450 1625–1730
6 700–960 840–1153
Tableau 3.7 Nombre de pôles et
fréquences associées
Le Tableau 3.7 présente le nombre
de pôles pour la plage de vitesse
normale de diérents types de
Description du paramètre
VLT® AQUA Drive FC 202
Pour les moteurs asynchrones, les valeurs de résistance
stator et d’inductance de l’axe d sont normalement
décrites dans les spécications techniques comme étant
entre la phase et le commun (point de début). Pour les
moteurs PM, elles sont généralement décrites dans les
spécications techniques comme étant de phase à phase.
33
Les moteurs PM sont en principe conçus pour une
connexion en étoile.
Paramétre 1-30 Résistance
stator (Rs)
(phase au commun)
Paramétre 1-37 Inductanc
e axe d (Ld)
(phase au commun)
Paramétre 1-40 FCEM à
1000 tr/min.
RMS (valeur phase à
phase)
Ce paramètre donne une résistance
des enroulements du stator (Rs)
identique à la résistance stator du
moteur asynchrone. La résistance
stator est dénie pour la mesure
phase au commun. Pour les données
phase à phase, lorsque la résistance
stator est mesurée entre deux phases
quelconques, les diviser par deux.
Ce paramètre donne accès à
l’inductance de l’axe d du moteur PM.
L’inductance de l’axe d est dénie
pour la mesure phase au commun.
Pour les données phase à phase,
lorsque la résistance stator est
mesurée entre deux phases
quelconques, les diviser par deux.
Ce paramètre fournit la force contreélectromotrice dans la borne stator du
moteur PM à une vitesse mécanique
spécique de 1 000 tr/min. Elle est
dénie entre deux phases et est
exprimée en RMS.
Illustration 3.6 Congurations des enroulements du stator
Illustration 3.7 Dénitions des paramètres machine de la FCEM
des moteurs PM
Tableau 3.6 Paramètres liés aux moteurs PM
AVIS!
Les fabricants de moteur fournissent des valeurs pour la
résistance stator (paramétre 1-30 Résistance stator (Rs)) et
l’inductance de l’axe d (paramétre 1-37 Inductance axe d
(Ld)) dans les spécications techniques comme étant
entre la phase et le commun (point de début) ou entre
deux phases. Il n’existe pas de norme générale. Les
diérentes congurations de la résistance des
enroulements du stator et de l’induction sont présentées
sur l’Illustration 3.6. Les variateurs de fréquence Danfoss
nécessitent toujours la valeur phase au commun. La
force contre-électromotrice du moteur PM est dénie
comme la force électromotrice induite développée sur
l’une des deux phases des enroulements du stator du
moteur fonctionnant librement. Les variateurs de
fréquence Danfoss requièrent systématiquement la
valeur RMS phase à phase mesurée à 1 000 tr/min,
vitesse mécanique de rotation. Ceci est indiqué sur
l’Illustration 3.7.
56 Danfoss A/S © 05/2018 Tous droits réservés. MG20OB04
Page 59

1-39 Pôles moteur
Range: Fonction:
moteurs. Dénir séparément les
moteurs conçus pour d’autres
fréquences. La valeur des pôles de
moteur doit toujours être paire
puisqu’elle fait référence au nombre
total de pôles du moteur (et non
de paires). Le variateur de
fréquence procède au réglage initial
du paramétre 1-39 Pôles moteur en
fonction du paramétre 1-23 Fréq.
moteur et du
paramétre 1-25 Vit.nom.moteur.
1-40 FCEM à 1000 tr/min.
Range: Fonction:
Size
related*
[ 10 - 9000V]Régler la force contre-électro-
motrice FCEM nominale du moteur
fonctionnant à 1 000 tr/min. Ce
paramètre n’est actif que lorsque le
paramétre 1-10 Construction moteur
est réglé sur [1] PM, SPM non
saillant.
1-44 d-axis Inductance Sat. (LdSat)
Range: Fonction:
Size
related*
[0 - 1000
mH]
Saisir la saturation de l’inductance
Ld. Idéalement, ce paramètre a la
même valeur que le
paramétre 1-37 Inductance axe d
(Ld). Si le fabricant du moteur
fournit une courbe d’induction,
saisir la valeur d’induction à 200 %
de la valeur nominale.
1-45 q-axis Inductance Sat. (LqSat)
Range: Fonction:
Size
related*
[0 - 1000
mH]
Ce paramètre correspond à la
saturation de l’inductance de Lq.
Idéalement, ce paramètre a la
même valeur que le
paramétre 1-38 Inductance axe q(Lq).
Si le fabricant du moteur fournit
une courbe d’induction, saisir la
valeur d’induction à 200 % de la
valeur nominale.
1-47 Étal.couple à vit.basse
Option: Fonction:
Utiliser ce paramètre pour optimiser
le couple estimé sur toute la plage
de vitesse. Le couple estimé est
calculé à partir de la puissance de
l’arbre, P
arbre
= Pm - Rs * I². S’assurer
1-47 Étal.couple à vit.basse
Option: Fonction:
que la valeur Rs est correcte. La
valeur de Rs dans cette formule doit
être égale à la perte de puissance
dans le moteur, le câble et le
variateur de fréquence. Lorsque ce
paramètre est actif, le variateur de
fréquence calcule la valeur de Rs à
la mise sous tension, an de vérier
l’estimation de couple optimal et la
performance optimale. Utiliser cette
fonction lorsqu’il n’est pas possible
d’ajuster le
paramétre 1-30 Résistance stator (Rs)
sur chaque variateur de fréquence
pour compenser la longueur de
câble, les pertes du variateur de
fréquence et l’écart de température
sur le moteur.
[0] * Inactif
[1] 1er dém.
après tens°
Étalonne lors du premier démarrage
après la mise sous tension et
conserve cette valeur jusqu’à la
réinitialisation par un cycle de
puissance.
[2] Chaque dém. Étalonne à chaque démarrage pour
compenser une éventuelle modi-
cation de la température du moteur
depuis le dernier démarrage. La
valeur est réinitialisée après un
cycle de puissance.
[3] 1st start with
store
Le variateur de fréquence étalonne
le couple lors du premier
démarrage après la mise sous
tension. Cette option sert à mettre
à jour les paramètres du moteur :
•
Paramétre 1-30 Résistance
stator (Rs).
•
Paramétre 1-33 Réactance
fuite stator (X1).
•
Paramétre 1-34 Réactance
de fuite rotor (X2).
•
Paramétre 1-37 Inductance
axe d (Ld).
[4] Every start
with store
Le variateur de fréquence étalonne
le couple à chaque démarrage pour
compenser une éventuelle modi-
cation de la température du moteur
depuis le dernier démarrage. Cette
option sert à mettre à jour les
paramètres du moteur :
Description du paramètre Guide de programmation
MG20OB04 Danfoss A/S © 05/2018 Tous droits réservés. 57
3 3
Page 60

1-47 Étal.couple à vit.basse
Option: Fonction:
•
Paramétre 1-30 Résistance
stator (Rs).
•
Paramétre 1-33 Réactance
fuite stator (X1).
•
Paramétre 1-34 Réactance
de fuite rotor (X2).
•
Paramétre 1-37 Inductance
axe d (Ld).
1-48 Inductance Sat. Point
Range: Fonction:
Size
related*
[1 - 500 %] Saisir le point de saturation de
l’inductance.
1-49 Courant à inductance min.
Range: Fonction:
Size
related*
[ 0 - 200 %]
AVIS!
Réaliser une AMA pour dénir
la valeur de ce paramètre. Ne
modier la valeur manuellement que si l’application
nécessite une valeur autre que
celle déterminée par l’AMA.
Saisir le point de saturation
d’inductance axe q. Le variateur de
fréquence utilise cette valeur pour
optimiser les performances des
moteurs IPM.
Choisir la valeur qui correspond au
point où l’inductance est égale à la
valeur moyenne du
paramétre 1-38 Inductance axe q(Lq)
et du paramétre 1-45 q-axis
Inductance Sat. (LqSat), en
pourcentage du courant nominal.
1-50 Magnétisation moteur à vitesse nulle
Range: Fonction:
100 %* [0 - 300 %]
AVIS!
Le Paramétre 1-50 Magnétisation moteur à vitesse nulle n’a
pas d’eet lorsque
paramétre 1-10 Construction
moteur = [1] PM, SPM non
saillant.
1-50 Magnétisation moteur à vitesse nulle
Range: Fonction:
À utiliser avec le
paramétre 1-51 Magnétis. normale
vitesse min [tr/min] an d’obtenir
une autre charge thermique du
moteur quand celui-ci tourne à
faible vitesse.
Saisir une valeur en pourcentage du
courant nominal de magnétisation.
Si le réglage est trop bas, le couple
sur l’arbre moteur peut être réduit.
Illustration 3.8 Courant de
magnétisation
1-51 Magnétis. normale vitesse min [tr/min]
Range: Fonction:
Size
related*
[10 - 300
RPM]
AVIS!
Le Paramétre 1-51 Magnétis.
normale vitesse min [tr/min] n’a
pas d’eet lorsque
paramétre 1-10 Construction
moteur = [1] PM, SPM non
saillant.
Dénir la fréquence requise pour
un courant de magnétisation
normal. Le paramétre 1-50 Magnéti-
sation moteur à vitesse nulle et le
paramétre 1-51 Magnétis. normale
vitesse min [tr/min] ne sont plus
signicatifs si la vitesse réglée est
inférieure à celle du glissement
moteur.
À utiliser avec le
paramétre 1-50 Magnétisation
moteur à vitesse nulle. Voir le
Tableau 3.7.
Description du paramètre
VLT® AQUA Drive FC 202
33
3.3.9 1-5* Proc.indép.charge
58 Danfoss A/S © 05/2018 Tous droits réservés. MG20OB04
Page 61

1-52 Magnétis. normale vitesse min [Hz]
Range: Fonction:
Size
related*
[ 0.3 - 10.0
Hz]
AVIS!
Le Paramétre 1-52 Magnétis.
normale vitesse min [Hz] n’a
pas d’eet lorsque
paramétre 1-10 Construction
moteur = [1] PM, SPM non
saillant.
Dénir la fréquence requise pour
un courant de magnétisation
normal. Le paramétre 1-50 Magnéti-
sation moteur à vitesse nulle et le
paramétre 1-51 Magnétis. normale
vitesse min [tr/min] sont inactifs si la
fréquence réglée est inférieure à la
fréquence de glissement du moteur.
À utiliser avec le
paramétre 1-50 Magnétisation
moteur à vitesse nulle. Voir le
Tableau 3.7.
1-55 Caract. V/f - V
Tableau [6]
Range: Fonction:
Size
related*
[0 - 1000 V] Saisir la tension à chaque point de
fréquence pour former manuellement une caractéristique U/f
correspondant au moteur.
Les points de fréquence sont dénis
au paramétre 1-56 Caract. V/f - f.
Ce paramètre est un paramètre de
tableau [0-5] et n’est accessible que
lorsque le paramétre 1-01 Principe
Contrôle Moteur est réglé sur [0] U/f.
1-56 Caract. V/f - f
Tableau [6]
Range: Fonction:
Size
related*
[ 0 - 1000.0
Hz]
Saisir les points de fréquence pour
former manuellement une caractéristique U/f correspondant au
moteur.
La tension de chaque point est
dénie au paramétre 1-55 Caract. V/f
- V.
Ce paramètre est un paramètre de
tableau [0-5] et n’est accessible que
lorsque le paramétre 1-01 Principe
Contrôle Moteur est réglé sur [0] U/f.
1-58 Courant impuls° test démarr. volée
Range: Fonction:
Size
related*
[ 0 - 200 %] Règler l’importance du courant de
magnétisation des impulsions
utilisées pour détecter le sens du
moteur. La plage de valeurs et la
fonction dépendent du
paramétre 1-10 Construction moteur.
[0] Asynchrone : [0–200%]
La réduction de cette valeur a pour
eet de diminuer le couple généré.
100 % correspond au courant
nominal total du moteur. Dans ce
cas, la valeur par défaut est 30 %.
[1] PM, SPM non saillant : [0–40%]
Un réglage général de 20 % est
recommandé sur les moteurs PM.
Des valeurs plus élevées peuvent
accroître les performances.
Cependant, sur les moteurs avec
une force contre-électromotrice
supérieure à 300 VLL (rms) à la
vitesse nominale et à forte
inductance des enroulements (plus
de 10 mH), une valeur moindre est
recommandée pour éviter une
estimation de vitesse erronée. Le
paramètre est actif lorsque le
paramétre 1-73 Démarr. volée est
activé.
Description du paramètre Guide de programmation
Illustration 3.9 Caractéristique U/f
3 3
MG20OB04 Danfoss A/S © 05/2018 Tous droits réservés. 59
Page 62

1-59 Fréq. test démarr. à la volée
Range: Fonction:
Size
related*
[ 0 - 500 %]
AVIS!
Voir la description du
paramétre 1-70 Mode de
démarrage pour obtenir un
aperçu de la relation entre les
paramètres de démarrage à la
volée PM.
La plage de valeurs et la fonction
dépendent du
paramétre 1-10 Construction moteur.
[0] Asynchrone : [0–500%]
Contrôle le pourcentage de la
fréquence des impulsions utilisées
pour détecter le sens du moteur.
L’augmentation de cette valeur a
pour eet de diminuer le couple
généré. Avec ce mode, 100 %
équivaut à 2 fois la fréquence de
glissement.
[1] PM, SPM non saillant : [0–10%]
Ce paramètre dénit la vitesse du
moteur (en % de la vitesse
nominale du moteur) sous laquelle
la fonction Parking (voir
paramétre 2-06 Courant de parking
et paramétre 2-07 Temps de parking)
devient active. Ce paramètre n’est
actif que lorsque le
paramétre 1-70 Mode de démarrage
présente la valeur [1] Parking et
uniquement après le démarrage du
moteur.
1-60 Comp.charge à vit.basse
Range: Fonction:
100 %* [0 - 300 %]
AVIS!
Le Paramétre 1-60 Comp.charge
à vit.basse n’a pas d’eet
lorsque
paramétre 1-10 Construction
moteur = [1] PM, SPM non
saillant.
Saisir la valeur en % pour
compenser la tension en fonction
de la charge quand le moteur
tourne à faible vitesse et obtenir
une caractéristique U/f optimale. La
taille du moteur détermine la plage
1-60 Comp.charge à vit.basse
Range: Fonction:
de fréquences à laquelle ce
paramètre est actif.
Taille du
moteur [kW]
Inversion [Hz]
0.25–7.5 <10
11–45 <5
55–550 <3–4
Tableau 3.8 Fréquence
d’inversion
1-61 Compens. de charge à vitesse élevée
Range: Fonction:
100 %* [0 - 300 %]
AVIS!
Le Paramétre 1-61 Compens. de
charge à vitesse élevée n’a pas
d’eet lorsque
paramétre 1-10 Construction
moteur = [1] PM, SPM non
saillant.
Saisir la valeur en % pour
compenser la tension en fonction
de la charge quand le moteur
tourne à vitesse élevée et obtenir la
caractéristique U/f optimale. La
taille du moteur détermine la plage
de fréquences à laquelle ce
paramètre est actif.
Description du paramètre
VLT® AQUA Drive FC 202
33
3.3.10 1-6* Proc.dépend. charge
60 Danfoss A/S © 05/2018 Tous droits réservés. MG20OB04
Illustration 3.10 Compensation de la charge à faible vitesse
Page 63
1-61 Compens. de charge à vitesse élevée
Range: Fonction:
Taille du
moteur [kW]
Inversion [Hz]
0.25–7.5 >10
11–45 <5
55–550 <3–4
Tableau 3.9 Fréquence
d’inversion
1-62 Comp. gliss.
Range: Fonction:
0 %* [-500 -
500 %]
AVIS!
Le Paramétre 1-62 Comp. gliss.
n’a pas d’eet lorsque
paramétre 1-10 Construction
moteur = [1] PM, SPM non
saillant.
Pour compenser les tolérances de la
valeur n
M,N
, saisir la valeur en % de
compensation du glissement. La
compensation du glissement est
calculée automatiquement en
utilisant la vitesse nominale du
moteur n
M,N
.
1-63 Cste tps comp.gliss.
Range: Fonction:
Size
related*
[0.05 - 5 s]
AVIS!
Le Paramétre 1-63 Cste tps
comp.gliss. n’a pas d’eet
lorsque
paramétre 1-10 Construction
moteur = [1] PM, SPM non
saillant.
Saisir le temps de réaction de la
compensation du glissement. Une
valeur élevée se traduit par une
réaction lente, une valeur basse par
une réaction rapide. Allonger ce
temps si des résonances
interviennent à basses fréquences.
1-64 Amort. résonance
Range: Fonction:
Size
related*
[0 - 500 %]
AVIS!
Le Paramétre 1-64 Amort.
résonance n’a pas d’eet
lorsque
paramétre 1-10 Construction
moteur = [1] PM, SPM non
saillant.
Saisir la valeur d’atténuation des
résonances. Régler le
paramétre 1-64 Amort. résonance et
le paramétre 1-65 Tps
amort.resonance pour aider à
éliminer les problèmes de
résonance à haute fréquence. Pour
réduire l’oscillation des résonances,
augmenter la valeur du
paramétre 1-64 Amort. résonance.
1-65 Tps amort.resonance
Range: Fonction:
5 ms* [5 - 50 ms]
AVIS!
Le Paramétre 1-65 Tps
amort.resonance n’a pas d’eet
lorsque
paramétre 1-10 Construction
moteur = [1] PM, SPM non
saillant.
Régler le paramétre 1-64 Amort.
résonance et le paramétre 1-65 Tps
amort.resonance pour aider à
éliminer les problèmes de
résonance à haute fréquence. Saisir
la constante de temps permettant
une atténuation maximale.
1-66 Courant min. à faible vitesse
Range: Fonction:
Size
related*
[ 1 - 200 %]
AVIS!
Le Paramétre 1-66 Courant min.
à faible vitesse n’a pas d’eet si
paramétre 1-10 Construction
moteur = [0] Asynchrone.
Saisir le courant moteur min. à
faible vitesse.
L’augmentation de ce courant
améliore le couple du moteur
développé à basse vitesse. La faible
vitesse est dénie ici comme une
vitesse inférieure à 6 % de la
vitesse nominale du moteur
Description du paramètre Guide de programmation
3 3
MG20OB04 Danfoss A/S © 05/2018 Tous droits réservés. 61
Page 64

1-66 Courant min. à faible vitesse
Range: Fonction:
(paramétre 1-25 Vit.nom.moteur)
dans le contrôle PM VVC+.
1-70 Mode de démarrage
Option: Fonction:
[0] Détection
position rotor
Convient à toutes les applications
où le moteur est immobile au
démarrage (p. ex. convoyeurs,
pompes et ventilateurs ne tournant
pas en moulinet).
[1] Parking Si le moteur tourne à faible vitesse
(à savoir moins de 2 à 5 % de la
vitesse nominale) en raison, p. ex.,
de ventilateurs à moulinet,
sélectionner [1] Parking et régler en
conséquence le
paramétre 2-06 Courant de parking
et le paramétre 2-07 Temps de
parking.
[2] Rotor Det. w/
Parking
1-71 Retard démar.
Range: Fonction:
00 s* [0 - 300 s] Saisir la temporisation entre l’ordre
de démarrage et le moment où le
variateur de fréquence alimente le
moteur.
Ce paramètre se rapporte à la
fonction au démarrage sélectionnée
au paramétre 1-72 Fonction au
démar..
1-72 Fonction au démar.
Option: Fonction:
Sélectionner la fonction au
démarrage pendant le retard de
démarrage. Ce paramètre est lié au
paramétre 1-71 Retard démar..
[0] Tempo.maintie
n CC
Applique un courant continu de
maintien (paramétre 2-00 I maintien/
préchau.CC) au moteur pendant la
temporisation du démarrage.
[2] Roue libre
temporisé
Moteur mis en roue libre pendant
ce laps de temps (onduleur hors
circuit).
Choix possibles en fonction du
paramétre 1-10 Construction moteur :
[0] Asynchrone :
1-72 Fonction au démar.
Option: Fonction:
•
[2] Roue libre temporisé
•
[0] Tempo.maintien CC
[1] PM, SPM non saillant :
•
[2] Roue libre temporisé
1-73 Démarr. volée
Option: Fonction:
Cette fonction permet de rattraper
un moteur à la volée, p. ex. à cause
d’une panne de courant.
Lorsque le paramétre 1-73 Démarr.
volée est activé, le
paramétre 1-71 Retard démar. est
inactif.
La recherche du sens du démarrage
à la volée est associée au réglage
du paramétre 4-10 Direction vit.
moteur.
[0] Sens horaire : le démarrage à la
volée eectue la recherche dans le
sens horaire. En cas d’échec, un
freinage par injection de courant
continu est eectué.
[2] Les deux directions : le démarrage
à la volée eectue d’abord une
recherche dans le sens déterminé
par la dernière référence (direction).
S’il ne trouve pas la vitesse, il
eectue une recherche dans l’autre
sens. En cas d’échec, un arrêt CC est
activé dans le délai xé au
paramétre 2-02 Temps frein CC. Le
démarrage s’exécute ensuite à partir
de 0 Hz.
[0] Désactivé Sélectionner [0] Désactivé si la
fonction n’est pas souhaitée.
[1] Activé Sélectionner [1] Activé pour
permettre au variateur de
fréquence de rattraper et de
contrôler un moteur qui tourne à
vide.
Le paramètre est toujours réglé sur
[1] Activé si
paramétre 1-10 Construction moteur
= [1] PM, SPM non saillant.
Paramètres connexes importants :
•
Paramétre 1-58 Courant
impuls° test démarr. volée.
•
Paramétre 1-59 Fréq. test
démarr. à la volée.
Description du paramètre
VLT® AQUA Drive FC 202
33
3.3.11 1-7* Réglages dém.
62 Danfoss A/S © 05/2018 Tous droits réservés. MG20OB04
Page 65

1-73 Démarr. volée
Option: Fonction:
•
Paramétre 1-70 Mode de
démarrage.
•
Paramétre 2-03 Vitesse frein
CC [tr/min].
•
Paramétre 2-04 Vitesse frein
CC [Hz].
•
Paramétre 2-06 Courant de
parking.
•
Paramétre 2-07 Temps de
parking.
1-79 Tps max. démar. comp. avant arrêt
Range: Fonction:
0 s* [ 0 - 3600.0s]Si le moteur n’atteint pas la vitesse
spéciée au paramétre 1-86 Arrêt vit.
basse [tr/min] dans le temps spécié
dans ce paramètre, le variateur de
fréquence se déclenche. Le temps
de ce paramètre comprend le
temps spécié au
paramétre 1-71 Retard démar.. Par
exemple, si la valeur du
paramétre 1-71 Retard démar. est
supérieure ou égale à celle du
paramétre 1-79 Tps max. démar.
comp. avant arrêt, le variateur de
fréquence ne démarre jamais.
1-80 Fonction à l'arrêt
Option: Fonction:
Sélectionner la fonction du
variateur de fréquence après un
ordre d’arrêt ou lorsque la vitesse a
connu une descente de rampe
jusqu’aux réglages du
paramétre 1-81 Vit. min. pour fonct.
à l'arrêt [tr/min].
Choix possibles en fonction du
paramétre 1-10 Construction moteur :
[0] Asynchrone :
•
[0] Roue libre
•
[1] Maintien/préchauf.mot.
CC
[1] PM, SPM non saillant :
•
[0] Roue libre
[0] * Roue libre Laisse le moteur en fonctionnement
libre.
Description du paramètre Guide de programmation
Lorsque le paramétre 1-73 Démarr. volée est activé, le
paramétre 1-71 Retard démar. est inactif.
La fonction de démarrage à la volée utilisée pour les
moteurs PM repose sur une estimation de vitesse initiale.
La vitesse est toujours estimée immédiatement après un
signal de démarrage actif. En fonction du réglage du
paramétre 1-70 Mode de démarrage, la situation suivante se
produit :
Paramétre 1-70 Mode de démarrage = [0] Détection position
rotor :
si l’estimation de la vitesse est supérieure à 0 Hz, le
variateur de fréquence rattrape le moteur à cette vitesse et
reprend un fonctionnement normal. Sinon, le variateur de
fréquence estime la position du rotor et fonctionne ensuite
normalement.
de 200-240 V jusqu’à 2,2 kW (3 HP) inclus et
toutes les unités de 380-480 V jusqu’à 4 kW
(5,4 HP) inclus.
Le test de courant est limité à une puissance
•
maximale de machine de 22 kW (30 HP).
Préparation pour une machine à pôles saillants
•
(IPMSM), mais pas encore de vérication sur ces
types de machine.
Pour les applications à forte inertie (lorsque
•
l’inertie de la charge est plus de 30 fois
supérieure à l’inertie du moteur), il est
recommandé d’utiliser une résistance de freinage
pour éviter un arrêt pour surtension lors d’un
engagement à haute vitesse de la fonction de
démarrage à la volée.
3 3
Paramétre 1-70 Mode de démarrage = [1] Parking :
si l’estimation de la vitesse est inférieure au réglage du
paramétre 1-59 Fréq. test démarr. à la volée, la fonction
Parking est enclenchée (voir le paramétre 2-06 Courant de
parking et le paramétre 2-07 Temps de parking). Sinon, le
variateur de fréquence rattrape le moteur à cette vitesse et
reprend un fonctionnement normal. Se reporter à la
description du paramétre 1-70 Mode de démarrage pour
consulter les réglages conseillés.
Limites de courant du principe de démarrage à la volée
utilisé pour les moteurs PM :
•
•
•
MG20OB04 Danfoss A/S © 05/2018 Tous droits réservés. 63
La plage de vitesses s’étend jusqu’à 100 % de la
vitesse nominale ou l’aaiblissement de champ
(le plus bas).
Le PMSM avec une force contre-électromotrice
élevée (> 300 VLL(rms)) et une forte inductance
des enroulements (> 10 mH) nécessite plus de
temps pour réduire le courant de court-circuit à
zéro et est susceptible de générer une erreur
d’estimation.
Le test de courant est limité à une plage de
vitesses maximale de 300 Hz. Pour certaines
unités, la limite est de 250 Hz ; toutes les unités
3.3.12 1-8* Réglages arrêts
Page 66

1-80 Fonction à l'arrêt
Option: Fonction:
[1] Maintien/
préchauf.mot.
CC
Applique au moteur un courant
continu de maintien (voir le
paramétre 2-00 I maintien/
préchau.CC).
[2] Test moteur
[6] Test moteur,
alarme
1-81 Vit. min. pour fonct. à l'arrêt [tr/min]
Range: Fonction:
Size
related*
[0 - 600
RPM]
Régler la vitesse à laquelle le
paramétre 1-80 Fonction à l'arrêt
doit être activé.
1-82 Vit. min. pour fonct. à l'arrêt [Hz]
Range: Fonction:
Size
related*
[ 0 - 20.0 Hz] Régler la fréquence de sortie à
laquelle le paramétre 1-80 Fonction
à l'arrêt est activé.
N
RPM
T
N
1-86
T
1-79
T
1-71
0
1
1-86 Arrêt vit. basse [tr/min]
Range: Fonction:
Size
related*
[ 0 - par. 4-13
RPM]
AVIS!
Ce paramètre n’est disponible
que si le paramétre 0-02 Unité
vit. mot. est réglé sur [0] Tr/
min.
Saisir la limite basse correspondant
à la vitesse du moteur à laquelle le
variateur de fréquence se
déclenche. Si la valeur est 0, la
fonction n’est pas active. Si à tout
moment après le démarrage (ou
pendant un arrêt), la vitesse chute
en dessous de la valeur de ce
paramètre, le variateur de
fréquence se déclenche avec
l’alarme 49, Limite Vit.
1-87 Arrêt vit. basse [Hz]
Range: Fonction:
Size
related*
[ 0 - par. 4-14
Hz]
AVIS!
Ce paramètre n’est disponible
que si le paramétre 0-02 Unité
vit. mot. est réglé sur [1] Hz.
Saisir la limite basse correspondant
à la vitesse du moteur à laquelle le
variateur de fréquence se
déclenche. Si la valeur est 0, la
fonction n’est pas active. Si à tout
moment après le démarrage (ou
pendant un arrêt), la vitesse chute
en dessous de la valeur de ce
paramètre, le variateur de
Description du paramètre
VLT® AQUA Drive FC 202
33
T
1-71
T
1-79
N
1-86
1 Fonctionnement normal
Illustration 3.11 Surveillance de la vitesse minimum avancée
Paramétre 1-71 Retard démar..
Paramétre 1-79 Tps max. démar. comp. avant arrêt. Ce
temps inclut le temps spécié dans T
Paramétre 1-86 Arrêt vit. basse [tr/min]. Si la vitesse
descend en dessous de cette valeur pendant le
fonctionnement normal, le variateur de fréquence se
déclenche.
1-71
.
3.3.13 Surveillance de la vitesse minimum
avancée des pompes submersibles
Certaines pompes sont sensibles au fonctionnement à
basse vitesse. Les raisons typiques sont une lubrication ou
un refroidissement insusant à basse vitesse.
Dans des conditions de surcharge, le variateur de
fréquence se protège en utilisant ses caractéristiques de
protection intégrales, qui incluent l’abaissement de la
vitesse. Par exemple, le contrôleur de limite de courant
peut abaisser la vitesse. Dans certains cas, la vitesse peut
être inférieure à celle spéciée au paramétre 4-11 Vit. mot.,
limite infér. [tr/min] et au paramétre 4-12 Vitesse moteur
limite basse [Hz].
Si la vitesse descend au-dessous d’une certaine valeur, la
caractéristique de surveillance de la vitesse minimum
avancée déclenche le variateur de fréquence. Si le moteur
de la pompe n’atteint pas la vitesse spéciée au
paramétre 1-86 Arrêt vit. basse [tr/min] dans le temps déni
au paramétre 1-79 Tps max. démar. comp. avant arrêt (l’accé-
lération est trop longue), le variateur de fréquence se
déclenche. Les temporisateurs du paramétre 1-71 Retard
démar. et du paramétre 1-79 Tps max. démar. comp. avant
arrêt démarrent en même temps lorsque l’ordre de
démarrage est émis. Par exemple, cela signie que si la
valeur du paramétre 1-71 Retard démar. est supérieure ou
égale à celle du paramétre 1-79 Tps max. démar. comp.
avant arrêt, le variateur de fréquence ne démarre jamais.
64 Danfoss A/S © 05/2018 Tous droits réservés. MG20OB04
Page 67

1-87 Arrêt vit. basse [Hz]
Range: Fonction:
fréquence se déclenche avec
l’alarme 49, Limite Vit.
Description du paramètre Guide de programmation
3.3.14 1-9* T° moteur
1-90 Protect. thermique mot.
Option: Fonction:
La protection du moteur peut être améliorée
en utilisant un éventail de techniques :
Pour le marché d’Amérique du Nord : les
fonctions ETR assurent la protection de
classe 20 contre la surcharge du moteur en
conformité avec NEC.
[0] Absence
protection
[1] Avertis.
Thermist.
[2] Arrêt
thermistance
[3] ETR Avertis. 1 Calcule la charge lorsque le process 1 est
MG20OB04 Danfoss A/S © 05/2018 Tous droits réservés. 65
Surcharge continue du moteur, si aucun
avertissement ou déclenchement du
variateur de fréquence n’est nécessaire.
Active un avertissement lorsque la
thermistance ou le capteur KTY raccordé au
moteur réagit en cas de surchaue du
moteur.
Arrête (déclenche) le variateur de fréquence
lorsque la thermistance ou le capteur KTY
raccordé dans le moteur réagit en cas de
surchaue du moteur.
La valeur de déclenchement de la
thermistance doit être supérieure à 3 kΩ.
Intégrer une thermistance (capteur PTC)
dans le moteur pour une protection des
bobines.
actif et active un avertissement sur
l’achage quand le moteur est en
Par l’intermédiaire d’un capteur PTC
•
placé dans les bobines du moteur
et raccordé à l’une des entrées
analogiques ou digitales
(paramétre 1-93 Source
Thermistance). Voir le
chapitre 3.3.15 Connexion de la
thermistance PTC.
En calculant la charge thermique
•
(ETR = relais thermique
électronique), en fonction de la
charge réelle et du temps. La
charge thermique calculée est
comparée au courant nominal du
moteur I
nominale du moteur f
chapitre 3.3.16 ETR et le
chapitre 3.3.17 ATEX ETR.
Via un thermocontact mécanique
•
(type Klixon). Voir le
chapitre 3.3.18 Klixon.
et à la fréquence
M,N
M,N
. Voir le
1-90 Protect. thermique mot.
Option: Fonction:
surcharge. Programmer un signal d’avertissement via l’une des sorties digitales.
[4] ETR Alarme Calcule la charge lorsque le process 1 est
actif et arrête le variateur de fréquence
(déclenchement) quand le moteur est en
surcharge. Programmer un signal d’avertissement via l’une des sorties digitales. Le
signal apparaît en cas d’avertissement et si
le variateur se déclenche (avertissement
thermique).
[5] ETR Avertis. 2
[6] ETR Alarme
[7] ETR Avertis. 3
[8] ETR Alarme
[9] ETR Avertis. 4
[10] ETR Alarme
[20] ATEX ETR Active la fonction de surveillance thermique
des moteurs Ex-e pour ATEX. Active le
paramétre 1-94 ATEX ETR cur.lim. speed
reduction, le paramétre 1-98 ATEX ETR
interpol. points freq. et le paramétre 1-99 ATEX
ETR interpol points current.
AVIS!
Si [20] ATEX ETR est sélectionné, observer strictement les
instructions décrites dans le chapitre consacré à ce point
du manuel de conguration et les instructions fournies
par le fabricant du moteur.
AVIS!
Si [20] ATEX ETR est sélectionné, le paramétre 4-18 Limite
courant doit être réglé sur 150 %.
3 3
Page 68

1,21,0 1,4
30
10
20
100
60
40
50
1,81,6 2,0
2 000
500
200
400
300
1 000
600
t [s]
175ZA052.11
f
OUT
= 0,2 x f
M,N
f
OUT
= 2 x f
M,N
f
OUT
= 1 x f
M,N
I
MN
I
M
Description du paramètre
VLT® AQUA Drive FC 202
3.3.15 Connexion de la thermistance PTC
Régler le paramétre 1-90 Protect. thermique mot.
•
sur [2] Arrêt thermistance.
Régler le paramétre 1-93 Source Thermistance sur
•
[2] Entrée ANA 54.
33
Illustration 3.14 Connexion de la thermistance PTC - entrée
analogique
Illustration 3.12 Prol PTC
Utilisation d'une entrée digitale et du 10 V comme alimentation :
Exemple : Le variateur de fréquence disjoncte lorsque la
température du moteur est trop élevée.
Conguration des paramètres :
Régler le paramétre 1-90 Protect. thermique mot.
•
sur [2] Arrêt thermistance.
Régler le paramétre 1-93 Source Thermistance sur
•
[6] Entrée digitale 33.
Entrée
digitale/
analogique
Digitale 10 V
Analogique 10 V
Tableau 3.10 Valeurs seuil de déclenchement
AVIS!
Vérier que la tension d'alimentation choisie respecte la
spécication de l'élément de thermistance utilisé.
3.3.16 ETR
Les calculs évaluent le besoin de charge moindre à une
vitesse inférieure suite à une réduction du refroidissement
à partir du ventilateur intégré au moteur.
Tension
d'alimentation
Valeurs
seuil de déclenchement
< 800 Ω ⇒ 2,7 kΩ
< 3,0 kΩ ⇒ 3,0 kΩ
Illustration 3.13 Connexion de la thermistance PTC - entrée
digitale
Utilisation d'une entrée analogique et du 10 V comme
alimentation :
Exemple : Le variateur de fréquence disjoncte lorsque la
température du moteur est trop élevée.
Illustration 3.15 Prol ETR
Conguration des paramètres :
66 Danfoss A/S © 05/2018 Tous droits réservés. MG20OB04
Page 69

1-91 Ventil. ext. mot.
Option: Fonction:
[0] * Non Aucune ventilation externe n'est
requise, c'est-à-dire que le moteur
est déclassé à faible vitesse.
[1] Oui Applique une ventilation externe,
ainsi le déclassement du moteur à
faible vitesse est inutile. La courbe
supérieure sur l'Illustration 3.15 (f
out
= 1 x f
M,N
) est respectée si le
courant du moteur est inférieur au
courant nominal du moteur (voir le
paramétre 1-24 Courant moteur). Si
le courant du moteur dépasse le
courant nominal, le temps de
fonctionnement diminue comme si
aucun ventilateur n'était installé.
Description du paramètre Guide de programmation
3.3.17 ATEX ETR
La carte VLT® PTC Thermistor Card MCB 112 permet de
surveiller la température du moteur conformément aux
directives ATEX. Il est également possible d’utiliser un
dispositif de protection PTC externe, agréé ATEX.
AVIS!
Utiliser uniquement les moteurs homologués Ex-e ATEX
pour cette fonction. Voir la plaque signalétique du
moteur, le certicat d’approbation, la che technique ou
contacter le fournisseur du moteur.
Lors de la commande d’un moteur Ex-e avec sécurité
renforcée, il est primordial de garantir certaines limitations.
Les paramètres devant être programmés sont présentés
dans le Tableau 3.11.
Fonction Réglage
Paramétre 1-90 Protect.
thermique mot.
Paramétre 1-94 ATEX ETR
cur.lim. speed reduction
Paramétre 1-98 ATEX ETR
interpol. points freq.
Paramétre 1-99 ATEX ETR
interpol points current
Paramétre 1-23 Fréq. moteur Saisir la même valeur qu’au
Paramétre 4-19 Frq.sort.lim.hte Plaque signalétique du moteur,
Paramétre 4-18 Limite courant Déni à 150 % par 1-90 [20]
Paramétre 5-15 E.digit.born.33 [80] Carte PTC 1
Paramétre 5-19 Arrêt de sécurité
borne 37
Paramétre 14-01 Fréq. commut. Vérier que la valeur par défaut
Paramétre 14-26 Temps en U
limit.
Tableau 3.11 Paramètres
AVIS!
Comparer la fréquence de commutation minimale exigée
par le fabricant du moteur à la fréquence de
commutation du variateur de fréquence, valeur par
défaut au paramétre 14-01 Fréq. commut.. Si le variateur
de fréquence ne répond pas à cette exigence, il convient
d’utiliser un ltre sinus.
MG20OB04 Danfoss A/S © 05/2018 Tous droits réservés. 67
[20] ATEX ETR
20%
Plaque signalétique du moteur.
paramétre 4-19 Frq.sort.lim.hte.
éventuellement réduite pour les
câble moteur longs, ltre sinus
ou tension d’alimentation
réduite.
[4] Alarme PTC 1
répond à l’exigence de la plaque
signalétique du moteur. Si ce
n’est pas le cas, utiliser un ltre
sinus.
0
Plus de détails sur la surveillance thermique ETR ATEX sont
disponibles dans la Note applicative de la fonction de
surveillance thermique ETR ATEX du FC 300.
3.3.18 Klixon
Le disjoncteur thermique de type Klixon utilise une capsule
en métal KLIXON®. À une surcharge prédéterminée, la
chaleur générée par le courant au travers de la cuvette
provoque un arrêt.
Utilisation d'une entrée digitale et du 24 V comme alimentation :
Exemple : Le variateur de fréquence disjoncte lorsque la
température du moteur est trop élevée.
Conguration des paramètres :
Régler le paramétre 1-90 Protect. thermique mot.
•
sur [2] Arrêt thermistance.
Régler le paramétre 1-93 Source Thermistance sur
•
[6] Entrée digitale 33.
Illustration 3.16 Connexion de la thermistance
3 3
Page 70

1-93 Source Thermistance
Option: Fonction:
AVIS!
Ce paramètre ne peut pas être
réglé lorsque le moteur est en
marche.
AVIS!
Régler l'entrée digitale sur [0]
PNP - Actif à 24 V au
paramétre 5-00 Mode E/S
digital.
Choisir l'entrée de raccordement à
la thermistance (capteur PTC). Une
option d'entrée analogique [1]
Entrée ANA 53 ou [2] Entrée ANA 54
ne peut pas être sélectionnée si
l'entrée analogique est déjà utilisée
comme une source de référence
(choisie au paramétre 3-15 Source
référence 1, au
paramétre 3-16 Source référence 2 ou
au paramétre 3-17 Source référence
3).
Lors de l'utilisation de la carte VLT
®
PTC Thermistor Card MCB 112,
toujours sélectionner [0] Aucun.
[0] * Aucun
[1] Entrée ANA 53
[2] Entrée ANA 54
[3] Entrée digitale
18
[4] Entrée digitale
19
[5] Entrée digitale
32
[6] Entrée digitale
33
1-95 Type de capteur KTY
Option: Fonction:
Sélectionner le type de capteur de
thermistance.
[0] * Sonde KTY 1
1 kΩ à 100 °C (212 °F).
[1] Sonde KTY 2
1 kΩ à 25 °C (77 °F).
[2] Sonde KTY 3
2 kΩ à 25 °C (77 °F).
[3] Pt1000
1-96 Source Thermistance KTY
Option: Fonction:
Sélectionner la borne d’entrée
analogique 54 en tant qu’entrée du
capteur de thermistance. Il est
impossible de sélectionner la borne
54 comme source de thermistance
si elle est utilisée par ailleurs
comme référence (voir
paramétre 3-15 Source référence 1 à
paramétre 3-17 Source référence 3).
AVIS!
Connexion du capteur de
thermistance entre les bornes
54 et 55 (terre). Voir le
chapitre 3.3.15 Connexion de la
thermistance PTC.
[0] * Aucun
[2] Entrée ANA 54
1-97 Niveau de seuil KTY
Range: Fonction:
80 °C* [ -40 -
220 °C]
Sélectionner le niveau de seuil du
capteur de thermistance pour la
protection thermique du moteur.
Description du paramètre
VLT® AQUA Drive FC 202
33
68 Danfoss A/S © 05/2018 Tous droits réservés. MG20OB04
Page 71

2-00 I maintien/préchau.CC
Range: Fonction:
50 %* [ 0 - 160 %]
AVIS!
Le Paramétre 2-00 I maintien/
préchau.CC n’a pas d’eet
lorsque
paramétre 1-10 Construction
moteur = [1] PM, SPM non
saillant.
AVIS!
La valeur maximale dépend du
courant nominal du moteur.
Éviter un courant de 100 %
pendant une période trop
longue, sous peine
d’endommager le moteur.
Pour le courant de maintien, saisir
une valeur en % du courant
nominal du moteur I
M,N
dénie au
paramétre 1-24 Courant moteur. Un
courant continu de maintien de
100 % correspond à I
M,N
.
Ce paramètre permet de garder le
moteur à l’arrêt (couple de
maintien) ou de le
préchauer.
Ce paramètre est actif si [1]
Maintien/préchauf.mot. CC est
sélectionné au
paramétre 1-80 Fonction à l'arrêt.
2-01 Courant frein CC
Range: Fonction:
50 %* [ 0 - 1000 %]
AVIS!
La valeur maximale dépend du
courant nominal du moteur.
Éviter un courant de 100 %
pendant une période trop
longue, sous peine
d’endommager le moteur.
Pour le courant, saisir une valeur en
% du courant nominal du moteur
I
M,N
, voir le paramétre 1-24 Courant
moteur. Un courant continu de
maintien de 100 % correspond à
I
M,N.
2-01 Courant frein CC
Range: Fonction:
Lors d’une commande d’arrêt, le
courant du frein CC est appliqué
lorsque la vitesse est inférieure à la
limite du :
•
Paramétre 2-03 Vitesse frein
CC [tr/min].
•
Paramétre 2-04 Vitesse frein
CC [Hz], quand la fonction
de freinage CC (contact
NF) est active ou via le
port de communication
série.
Le courant de freinage est actif
pendant la période dénie au
paramétre 2-02 Temps frein CC.
2-02 Temps frein CC
Range: Fonction:
10 s* [0 - 60 s] Régler la durée du courant de
freinage CC déni au
paramétre 2-01 Courant frein CC, une
fois le freinage activé.
2-03 Vitesse frein CC [tr/min]
Range: Fonction:
Size
related*
[ 0 - 0 RPM]
AVIS!
Le Paramétre 2-03 Vitesse frein
CC [tr/min] n’a pas d’eet
lorsque
paramétre 1-10 Construction
moteur = [1] PM, SPM non
saillant.
Régler la vitesse d’application du
frein CC pour activer le courant de
freinage CC déni au
paramétre 2-01 Courant frein CC
après un ordre d’arrêt.
Lorsque le
paramétre 1-10 Construction moteur
présente la valeur [1] PM, SPM non
saillant, cette valeur est limitée à
0 tr/min (OFF).
Description du paramètre Guide de programmation
3.4 Paramètres 2-** Freins
3.4.1 2-0* Frein-CC
Groupe de paramètres de conguration des fonctions Frein
CC et Maintien CC.
3 3
MG20OB04 Danfoss A/S © 05/2018 Tous droits réservés. 69
Page 72

2-04 Vitesse frein CC [Hz]
Range: Fonction:
Size
related*
[ 0 - 0.0 Hz]
AVIS!
Le Paramétre 2-04 Vitesse frein
CC [Hz] n’a pas d’eet lorsque
paramétre 1-10 Construction
moteur = [1] PM, SPM non
saillant.
Régler la vitesse d’application du
frein CC pour activer le courant de
freinage CC déni au
paramétre 2-01 Courant frein CC
après un ordre d’arrêt.
2-06 Courant de parking
Range: Fonction:
50 %* [ 0 - 1000 %]
AVIS!
Paramétre 2-06 Courant de
parking et
paramétre 2-07 Temps de
parking : actifs uniquement si
[1] PM, SPM non saillant est
sélectionné au
paramétre 1-10 Construction
moteur.
Dénir le courant sous forme de
pourcentage du courant nominal
du moteur (paramétre 1-24 Courant
moteur). Actif avec le
paramétre 1-73 Démarr. volée. Le
courant de freinage est actif
pendant la période dénie au
paramétre 2-07 Temps de parking.
2-07 Temps de parking
Range: Fonction:
3 s* [0.1 - 60 s] Régler la durée du courant de
parking déni au
paramétre 2-06 Courant de parking.
Actif avec le paramétre 1-73 Démarr.
volée.
AVIS!
Le Paramétre 2-07 Temps de
parking est actif uniquement
lorsque [1] PM, SPM non
saillant est sélectionné au
paramétre 1-10 Construction
moteur.
2-10 Fonction Frein et Surtension
Option: Fonction:
Choix possibles en fonction du
paramétre 1-10 Construction moteur :
[0] Asynchrone :
•
[0] Inactif
•
[1] Freinage résistance
•
[2] Frein CA
[1] PM, SPM non saillant :
•
[0] Inactif
•
[1] Freinage résistance
[0] Inactif Pas de résistance de freinage
installée.
[1] Freinage
résistance
Une résistance de freinage est
raccordée au système, pour la
dissipation de l’énergie de freinage
excédentaire, comme la chaleur. Le
raccordement d’une résistance de
freinage permet une tension bus CC
plus élevée lors du freinage
(fonctionnement générateur). La
fonction de freinage de la
résistance n’est active que dans les
variateurs de fréquence équipés
d’un freinage dynamique intégré.
[2] Frein CA Le frein CA ne fonctionne qu’en
mode couple compresseur au
paramétre 1-03 Caract.couple.
2-11 Frein Res (ohm)
Range: Fonction:
Size
related*
[ 5 - 65535
Ohm]
Régler la valeur de la résistance de
freinage en Ω. Cette valeur est
utilisée pour la surveillance de la
puissance dégagée par la résistance
de freinage au paramétre 2-13 Frein
Res Therm. Ce paramètre est actif
uniquement sur des variateurs de
fréquence avec freinage dynamique
intégral.
Utiliser ce paramètre pour des
valeurs sans décimale. Pour une
sélection avec deux décimales,
utiliser le paramétre 30-81 Frein Res
(ohm).
Description du paramètre
VLT® AQUA Drive FC 202
3.4.2 2-1* Fonct.Puis.Frein.
Groupe de paramètres de sélection des réglages de
freinage dynamique. Uniquement pour variateurs de
fréquence avec hacheur de freinage.
33
70 Danfoss A/S © 05/2018 Tous droits réservés. MG20OB04
Page 73

2-12 P. kW Frein Res.
Range: Fonction:
Size
related*
[ 0.001 -
2000.000 kW]
AVIS!
Ce paramètre est actif
uniquement sur des variateurs
de fréquence avec freinage
dynamique intégral.
Régler la limite de surveillance de la
puissance de freinage transmise à la
résistance.
La limite de surveillance est le
produit du cycle d’utilisation
maximum (120 s) et de la puissance
maximum de la résistance de
freinage pour ce cycle. Voir les
formules ci-après.
Pour unités de 200-240 V :
P
résistance
=
3902 × durée d’utilisation
R × 120
Pour unités de 380-480 V :
P
résistance
=
7782 × durée d’utilisation
R × 120
Pour unités de 525-600 V :
P
résistance
=
9432 × durée d’utilisation
R × 120
2-13 Frein Res Therm
Option: Fonction:
AVIS!
Ce paramètre est actif
uniquement sur des variateurs
de fréquence avec freinage
dynamique intégral.
Ce paramètre permet d’activer un
système surveillant la puissance
transmise à la résistance de
freinage. Puissance calculée selon
résistance (paramétre 2-11 Frein Res
(ohm)), tension CC bus et temps de
fonctionnement de la résistance.
[0] * Inactif Aucune surveillance de puissance
du freinage n’est nécessaire.
Si la surveillance de puissance est
réglée sur [0] Inactif ou [1] Avertis-
sement, la fonction de freinage
continue d’être active, même si la
limite de surveillance est dépassée.
Ceci implique aussi un risque de
surcharge thermique de la
résistance. Il est également possible
de générer un avertissement via les
sorties relais/digitales. La précision
de mesure de la surveillance de
2-13 Frein Res Therm
Option: Fonction:
puissance dépend de la précision
de la résistance (supérieure à
± 20 %).
[1] Avertissement Active un avertissement lorsque la
puissance transmise sur 120 s
dépasse 100 % de la limite de
surveillance (paramétre 2-12 P. kW
Frein Res.).
L’avertissement disparaît lorsque la
puissance transmise tombe en
dessous de 80 % de la limite de
surveillance.
[2] Alarme Arrête le variateur de fréquence et
ache une alarme lorsque la
puissance calculée dépasse 100 %
de la limite de surveillance.
[3] Avertis.et
alarme
Active les deux éléments
précédents, y compris avertissement, arrêt et alarme.
[4] Warning 30s
[5] Trip 30s
[6] Warning & trip
30s
[7] Warning 60s
[8] Trip 60s
[9] Warning & trip
60s
[10] Warning 300s
[11] Trip 300s
[12] Warning & trip
300s
[13] Warning 600s
[14] Trip 600s
[15] Warning & trip
600s
2-15 Contrôle freinage
Option: Fonction:
AVIS!
Pour éliminer un avertissement
résultant de [0] Inactif ou [1]
Avertissement, déconnecter et
reconnecter l’alimentation
secteur. Corriger d’abord la
panne. Pour [0] Inactif ou [1]
Avertissement, le variateur de
fréquence continue de
fonctionner même lorsqu’une
panne a été détectée.
Sélectionner le type de fonction de
test et de surveillance pour vérier
Description du paramètre Guide de programmation
3 3
MG20OB04 Danfoss A/S © 05/2018 Tous droits réservés. 71
Page 74

2-15 Contrôle freinage
Option: Fonction:
le raccordement à la résistance de
freinage ou si une résistance de
freinage est présente et pour
acher ensuite un avertissement
ou une alarme si une panne
survient. La fonction de
déconnexion de la résistance de
freinage est contrôlée lors de la
mise sous tension. Cependant, le
contrôle de l’IGBT du frein est
eectué lorsqu’il n’y a pas de
freinage. La fonction de freinage est
interrompue par un avertissement
ou un déclenchement.
La séquence du test est la
suivante :
1. Mesurer l’amplitude
d’ondulation du circuit
intermédiaire pendant
300 ms sans freinage.
2. Mesurer l’amplitude
d’ondulation du circuit
intermédiaire pendant
300 ms, frein activé.
3. Si l’amplitude d’ondulation
du circuit intermédiaire
pendant le freinage est
inférieure à celle avant le
freinage + 1 %, le contrôle
de freinage échoue. Si la
vérication du frein
échoue, un avertissement
ou une alarme est
renvoyé.
4. Si l’amplitude d’ondulation
du circuit intermédiaire
pendant le freinage est
supérieure à celle avant le
freinage + 1 %, le contrôle
de freinage est correct.
[0] * Inactif Surveille la résistance de freinage et
le court-circuit de l’IGBT du frein en
cours d’exploitation. Si un courtcircuit se produit, un avertissement
apparaît.
[1] Avertissement Surveille si la résistance de freinage
ou l’IGBT du frein est court-circuitée
et réalise un test de déconnexion
de la résistance de freinage lors de
la mise sous tension.
[2] Alarme Surveille un court-circuit ou une
déconnexion de la résistance de
2-15 Contrôle freinage
Option: Fonction:
freinage, ou un court-circuit de
l’IGBT du frein. Si une panne se
produit, le variateur de fréquence
s’arrête avec une alarme (alarme
verrouillée).
[3] Arrêt et
alarme
Surveille un court-circuit ou une
déconnexion de la résistance de
freinage, ou un court-circuit de
l’IGBT du frein. Si une panne se
produit, le variateur de fréquence
décélère jusqu’à être en roue libre
puis s’arrête. Une alarme verrouillée
est achée.
[4] Frein CA Surveille un court-circuit ou une
déconnexion de la résistance de
freinage, ou un court-circuit de
l’IGBT du frein. Si une panne se
produit, le variateur de fréquence
eectue une rampe de décélération
contrôlée.
2-16 Courant max. frein CA
Range: Fonction:
100 %* [ 0 -
1000.0 %]
AVIS!
Le Paramétre 2-16 Courant
max. frein CA n’a pas d’eet
lorsque
paramétre 1-10 Construction
moteur = [1] PM, SPM non
saillant.
Saisir le courant maximal autorisé
lors de l’utilisation du frein CA pour
éviter une surchaue des
enroulements du moteur.
2-17 Contrôle Surtension
Option: Fonction:
[0] Désactivé Le contrôle de surtension (OVC)
n’est pas souhaité.
[2] * Activé Active le contrôle de surtension.
2-19 Gain surtension
Range: Fonction:
100 %* [10 - 200 %] Sélectionner un gain de surtension.
Description du paramètre
33
72 Danfoss A/S © 05/2018 Tous droits réservés. MG20OB04
VLT® AQUA Drive FC 202
Page 75

3-02 Référence minimale
Range: Fonction:
Size
related*
[ -999999.999
- par. 3-03
ReferenceFeedbackUnit]
Saisir la valeur minimale pour la
référence distante. La valeur et
l’unité de la référence minimale
correspondent aux choix de
conguration eectués au
paramétre 1-00 Mode Cong. et au
paramétre 20-12 Unité référence/
retour.
3-03 Réf. max.
Range: Fonction:
Size
related*
[ par. 3-02 -
999999.999
ReferenceFeedbackUnit]
Saisir la valeur maximale acceptable
pour la référence distante. La valeur
et l’unité de la référence maximale
correspondent aux choix de
conguration eectués au
paramétre 1-00 Mode Cong. et au
paramétre 20-12 Unité référence/
retour.
3-04 Fonction référence
Option: Fonction:
[0] * Somme Additionne les sources de référence
prédénies et externes.
[1] Externe/
prédénie
Utilise la source de référence
externe ou prédénie.
Le passage entre externe et
prédénie s'eectue via un ordre
ou une entrée digitale.
3-10 Réf.prédénie
Tableau [8]
Range: Fonction:
0 %* [-100 -
100 %]
Saisir jusqu’à huit références
prédénies (0-7) dans ce paramètre
en utilisant une programmation de
type tableau. La référence
prédénie est exprimée en
pourcentage de la valeur Réf
MAX
(paramétre 3-03 Réf. max.). En cas
d’utilisation de références
prédénies, sélectionner Réf
3-10 Réf.prédénie
Tableau [8]
Range: Fonction:
prédénie bit 0/1/2 [16], [17] ou [18]
pour les entrées digitales correspondantes dans le groupe de
paramètres 5-1* Entrées digitales.
P3-03
P3-02
0 50 100%
P3-10
130BB036.10
3-11 Fréq.Jog. [Hz]
Range: Fonction:
Size
related*
[ 0 - par. 4-14
Hz]
La vitesse de jogging est la
fréquence de sortie xe à laquelle
le variateur de fréquence tourne
lorsque la fonction Jogging est
activée.
Voir aussi le
paramétre 3-19 Fréq.Jog. [tr/min] et
le paramétre 3-80 Tps rampe Jog..
Description du paramètre Guide de programmation
3.5 Paramètres 3-** Référence / rampes
3.5.1 3-0* Limites de réf.
3 3
3.5.2 3-1* Consignes
Sélectionner les références prédénies. Sélectionner Réf
prédénie bit 0/1/2 [16], [17] ou [18] pour les entrées
digitales correspondantes dans le groupe de paramètres
5-1* Entrées digitales.
MG20OB04 Danfoss A/S © 05/2018 Tous droits réservés. 73
Illustration 3.17 Réf.prédénie
Illustration 3.18 Schéma de références prédénies
Page 76

3-13 Type référence
Option: Fonction:
Sélectionner l’emplacement de la
référence à activer.
[0] * Mode hand/
auto
Utiliser la référence locale en mode
Hand On ou la référence à distance
en mode Auto On.
[1] A distance Utiliser la référence distante dans
les deux modes.
[2] Local Utiliser la référence locale dans les
deux modes.
AVIS!
Lorsqu’il est réglé sur [2] Local,
le variateur de fréquence
démarre à nouveau avec ce
paramètre après une mise hors
tension.
[3] Linked to H/A
MCO
Sélectionner cette option an
d’activer le facteur FFACC. L’activation de FFACC réduit la déviation
et accélère la transmission entre le
contrôleur de mouvement et la
carte de commande du variateur de
fréquence. Ainsi, les temps de
réponse sont raccourcis pour les
applications dynamiques et le
contrôle de position. Pour plus
d’informations sur FFACC, voir le
manuel d’utilisation du VLT® Motion
Control MCO 305.
3-14 Réf.prédéf.relative
Range: Fonction:
0 %* [-100 -
100 %]
La référence réelle X est augmentée
ou diminuée du pourcentage Y
déni au
paramétre 3-14 Réf.prédéf.relative.
La référence réelle Z est ainsi
obtenue. La référence réelle (X) est
la somme des entrées sélectionnées
aux :
•
Paramétre 3-15 Source
référence 1.
•
Paramétre 3-16 Source
référence 2.
•
Paramétre 3-17 Source
référence 3.
•
Paramétre 8-02 Source
contrôle.
X
100
%
0-100
Z
Y
X+X*Y/100
P 3-14
130BA278.10
3-15 Source référence 1
Option: Fonction:
AVIS!
Ce paramètre ne peut pas être
réglé lorsque le moteur est en
marche.
Sélectionner l’entrée de référence à
utiliser pour le premier signal de
référence :
•
Paramétre 3-15 Source
référence 1.
•
Paramétre 3-16 Source
référence 2.
•
Paramétre 3-17 Source
référence 3.
Dénir jusqu’à 3 signaux de
référence diérents. La somme de
ces signaux de référence dénit la
référence eective.
[0] Pas de
fonction
[1] * Entrée ANA 53
[2] Entrée ANA 54
[7] Entrée
impulsions 29
[8] Entrée
impulsions 33
[20] Potentiomètre
digital
[21] Entrée ANA
X30/11
[22] Entrée ANA
X30/12
Description du paramètre
VLT® AQUA Drive FC 202
Illustration 3.19 Réf.prédéf.relative
33
Illustration 3.20 Référence réelle
74 Danfoss A/S © 05/2018 Tous droits réservés. MG20OB04
Page 77

3-15 Source référence 1
Option: Fonction:
[23] Entrée ANA
X42/1
[24] Entrée ANA
X42/3
[25] Entrée ANA
X42/5
[29] Entrée ANA
X48/2
[30] Boucle fermée
ét. 1
[31] Boucle fermée
ét. 2
[32] Boucle fermée
ét. 3
[35] Digital input
select
Le variateur de fréquence
sélectionne AI53 ou AI54 comme
source de référence en fonction du
signal d’entrée déni dans l’option
[42] Ref source bit 0 de l’une des
entrées digitales. Pour plus d’informations, voir le groupe de
paramètres 5-1* Entrées digitales,
option [42] Ref source bit 0.
3-16 Source référence 2
Option: Fonction:
AVIS!
Ce paramètre ne peut pas être
réglé lorsque le moteur est en
marche.
Sélectionner l’entrée de référence à
utiliser pour le deuxième signal de
référence :
•
Paramétre 3-15 Source
référence 1.
•
Paramétre 3-16 Source
référence 2.
•
Paramétre 3-17 Source
référence 3.
Dénir jusqu’à 3 signaux de
référence diérents. La somme de
ces signaux de référence dénit la
référence eective.
[0] * Pas de
fonction
[1] Entrée ANA 53
[2] Entrée ANA 54
[7] Entrée
impulsions 29
[8] Entrée
impulsions 33
3-16 Source référence 2
Option: Fonction:
[20] Potentiomètre
digital
[21] Entrée ANA
X30/11
[22] Entrée ANA
X30/12
[23] Entrée ANA
X42/1
[24] Entrée ANA
X42/3
[25] Entrée ANA
X42/5
[29] Entrée ANA
X48/2
[30] Boucle fermée
ét. 1
[31] Boucle fermée
ét. 2
[32] Boucle fermée
ét. 3
[35] Digital input
select
Le variateur de fréquence
sélectionne AI53 ou AI54 comme
source de référence en fonction du
signal d’entrée déni dans l’option
[42] Ref source bit 0 de l’une des
entrées digitales. Pour plus d’informations, voir le groupe de
paramètres 5-1* Entrées digitales,
option [42] Ref source bit 0.
3-17 Source référence 3
Option: Fonction:
AVIS!
Ce paramètre ne peut pas être
réglé lorsque le moteur est en
marche.
Sélectionner l’entrée de référence à
utiliser pour le troisième signal de
référence :
•
Paramétre 3-15 Source
référence 1.
•
Paramétre 3-16 Source
référence 2.
•
Paramétre 3-17 Source
référence 3.
Dénir jusqu’à 3 signaux de
référence diérents. La somme de
ces signaux de référence dénit la
référence eective.
[0] * Pas de
fonction
Description du paramètre Guide de programmation
3 3
MG20OB04 Danfoss A/S © 05/2018 Tous droits réservés. 75
Page 78

3-17 Source référence 3
Option: Fonction:
[1] Entrée ANA 53
[2] Entrée ANA 54
[7] Entrée
impulsions 29
[8] Entrée
impulsions 33
[20] Potentiomètre
digital
[21] Entrée ANA
X30/11
[22] Entrée ANA
X30/12
[23] Entrée ANA
X42/1
[24] Entrée ANA
X42/3
[25] Entrée ANA
X42/5
[29] Entrée ANA
X48/2
[30] Boucle fermée
ét. 1
[31] Boucle fermée
ét. 2
[32] Boucle fermée
ét. 3
[35] Digital input
select
Le variateur de fréquence
sélectionne AI53 ou AI54 comme
source de référence en fonction du
signal d’entrée déni dans l’option
[42] Ref source bit 0 de l’une des
entrées digitales. Pour plus d’informations, voir le groupe de
paramètres 5-1* Entrées digitales,
option [42] Ref source bit 0.
3-19 Fréq.Jog. [tr/min]
Range: Fonction:
Size
related*
[ 0 - par. 4-13
RPM]
Saisir une valeur pour la vitesse de
jogging n
JOG
qui est une fréquence
de sortie xe. Le variateur de
fréquence fonctionne à cette vitesse
lorsque la fonction de jogging est
activée. La limite maximale est
déterminée au
paramétre 4-13 Vit.mot., limite supér.
[tr/min].
Voir aussi le
paramétre 3-11 Fréq.Jog. [Hz] et le
paramétre 3-80 Tps rampe Jog..
3-41 Temps d'accél. rampe 1
Range: Fonction:
Size
related*
[ 0.10 - 3600s]Saisir la rampe d’accélération, c’est-
à-dire le temps d’accélération
nécessaire pour passer de 0 tr/min
à la valeur du
paramétre 1-25 Vit.nom.moteur.
Choisir une rampe d’accélération
telle que le courant de sortie ne
dépasse pas la limite de courant au
paramétre 4-18 Limite courant au
cours de la rampe. Voir la rampe de
décélération au
paramétre 3-42 Temps décél. rampe
1.
par. . 3 − 41 =
tacc × nnom par. .1 − 25
ré f Tr/min
s
3-42 Temps décél. rampe 1
Range: Fonction:
Size
related*
[ 0.10 - 3600s]Saisir la rampe de décélération,
c’est-à-dire le temps de décélération
qu’il faut pour passer de la valeur
du paramétre 1-25 Vit.nom.moteur à
0 tr/min. Sélectionner une rampe
de décélération empêchant une
surtension sur l’onduleur due au
mode générateur du moteur. La
rampe de décélération doit aussi
être assez longue pour empêcher
que le courant généré ne dépasse
la limite de courant dénie au
paramétre 4-18 Limite courant. Voir
la rampe d’accélération au
paramétre 3-41 Temps d'accél. rampe
1.
Description du paramètre
VLT® AQUA Drive FC 202
3.5.3 3-4* Rampe 1
Congurer les temps de rampe pour chacune des deux
rampes (groupes de paramètres 3-4* Rampe 1 et 3-5*
Rampe 2).
33
Illustration 3.21 Rampe 1
76 Danfoss A/S © 05/2018 Tous droits réservés. MG20OB04
Page 79

3-42 Temps décél. rampe 1
Range: Fonction:
par. . 3 − 42 =
tdéc × nnom par. . 1 − 25
ré f Tr/min
s
3-51 Temps d'accél. rampe 2
Range: Fonction:
Size
related*
[ 0.10 - 3600s]Saisir la rampe d’accélération, c’est-
à-dire le temps d’accélération
nécessaire pour passer de 0 tr/min
à la valeur du
paramétre 1-25 Vit.nom.moteur.
Choisir une rampe d’accélération
telle que le courant de sortie ne
dépasse pas la limite de courant au
paramétre 4-18 Limite courant au
cours de la rampe. Voir la rampe de
décélération au
paramétre 3-52 Temps décél. rampe
2.
par. . 3 − 51 =
tacc × nnom par .. 1 −25
ré f tr/ min
s
3-52 Temps décél. rampe 2
Range: Fonction:
Size
related*
[ 0.10 - 3600s]Saisir la rampe de décélération,
c’est-à-dire le temps de décélération
qu’il faut pour passer de la valeur
du paramétre 1-25 Vit.nom.moteur à
0 tr/min. Choisir une rampe de
décélération telle que le fonctionnement générateur du moteur
n’occasionne pas de surtension
dans l’onduleur et telle que le
courant généré ne dépasse pas la
limite de courant dénie au
paramétre 4-18 Limite courant. Voir
la rampe d’accélération au
paramétre 3-51 Temps d'accél. rampe
2.
par. . 3 − 52 =
tdéc × nnom par. .1 − 25
ré f tr/ min
s
3-80 Tps rampe Jog.
Range: Fonction:
Size
related*
[0.1 - 3600 s] Saisir le temps de la rampe de
jogging, c.-à-d. le temps d’accélération ou de décélération entre
0 tr/min et la vitesse nominale du
moteur (n
M,N
) (dénie au
paramétre 1-25 Vit.nom.moteur).
S’assurer que le courant de sortie
qui en résulte, nécessaire pour le
temps de la rampe de jogging
donné, ne dépasse pas la limite de
courant dénie au
paramétre 4-18 Limite courant. Le
temps de rampe de jogging est
déclenché par l’activation d’un
signal dédié au niveau du panneau
de commande, d’une entrée digitale
sélectionnée ou du port de
communication série.
par. . 3 − 80 =
t jog. × nnom par. . 1 − 25
jog. jog. par .. 3 − 19
s
3-84 Tps rampe initial
Range: Fonction:
0 s* [0 - 60 s] Saisir la rampe d’accélération initiale
depuis une vitesse nulle à la limite
inférieure de la vitesse du moteur
(paramétre 4-11 Vit. mot., limite infér.
[tr/min] ou paramétre 4-12 Vitesse
moteur limite basse [Hz]). Les
pompes submersibles pour puits
profonds peuvent être
endommagées par un fonctionnement sous la vitesse minimale.
Un temps de rampe rapide en
Description du paramètre Guide de programmation
3.5.5 3-8* Autres rampes
3.5.4 3-5* Rampe 2
Pour sélectionner les paramètres de rampe, voir le groupe
de paramètres 3-4* Rampe 1.
3 3
MG20OB04 Danfoss A/S © 05/2018 Tous droits réservés. 77
Illustration 3.22 Tps rampe Jog.
Page 80

3-84 Tps rampe initial
Range: Fonction:
dessous de la vitesse minimale de
la pompe est recommandé. Ce
paramètre peut être appliqué
comme un taux de rampe rapide
depuis une vitesse nulle à la limite
inférieure de la vitesse du moteur.
Voir l'Illustration 3.23.
130BA962.10
Vitesse du moteur
Vitesse du moteur
élevée
basse
Normal
(rampes)
Initiale
(rampe)
Finale
(rampe)
Temps
Vitesse
3-85 Check Valve Ramp Time
Range: Fonction:
0 s* [0 - 650 s] An de protéger les clapets à bille
dans une situation d’arrêt, la rampe
du clapet anti-retour peut être
utilisée comme un taux de rampe
lent depuis le paramétre 4-11 Vit.
mot., limite infér. [tr/min] ou le
paramétre 4-12 Vitesse moteur limite
basse [Hz] jusqu’à la vitesse d’arrêt
de rampe du clapet anti-retour,
dénie au paramétre 3-86 Check
Valve Ramp End Speed [RPM] ou au
paramétre 3-87 Check Valve Ramp
End Speed [HZ]. Lorsque le
paramétre 3-85 Check Valve Ramp
Time est diérent de 0 seconde, le
temps de rampe du clapet antiretour est activé et utilisé pour
décélérer de la vitesse moteur
limite basse à la vitesse d’arrêt du
clapet anti-retour réglée au
paramétre 3-86 Check Valve Ramp
End Speed [RPM] ou au
paramétre 3-87 Check Valve Ramp
End Speed [HZ]. Voir
l'Illustration 3.24.
130BA961.10
Vitesse
Vitesse du
moteur
Normal
Clapet antiretour
Vitesse du
moteur
élevée
basse
Temps
(rampe)
3-86 Check Valve Ramp End Speed [RPM]
Range: Fonction:
Size
related*
[ 0 - par. 4-11
RPM]
Régler la vitesse en [tr/min] sous la
vitesse moteur limite basse lorsque
le clapet anti-retour est censé être
fermé. Vérier que le clapet n’est
plus actif. Voir l'Illustration 3.24.
3-87 Check Valve Ramp End Speed [HZ]
Range: Fonction:
Size
related*
[ 0 - par. 4-12
Hz]
Régler la vitesse en [Hz] sous la
vitesse moteur limite basse où la
rampe du clapet anti-retour n’est
plus active. Voir l'Illustration 3.24.
3-88 Tps de rampe nal
Range: Fonction:
0 s* [0 - 60 s] Saisir le temps de rampe nal à
utiliser pour la rampe de décélération de la valeur du
paramétre 4-11 Vit. mot., limite infér.
[tr/min] ou du
paramétre 4-12 Vitesse moteur limite
basse [Hz] à vitesse nulle.
Les pompes submersibles pour
puits profonds peuvent être
endommagées par un fonctionnement sous la vitesse minimale.
Un temps de rampe rapide en
dessous de la vitesse minimale de
la pompe est recommandé. Ce
paramètre peut être appliqué
comme un taux de rampe rapide
du paramétre 4-11 Vit. mot., limite
infér. [tr/min] ou du
paramétre 4-12 Vitesse moteur limite
basse [Hz] à vitesse nulle. Voir
l'Illustration 3.23.
Description du paramètre
VLT® AQUA Drive FC 202
33
Illustration 3.24 Check Valve Ramp
Illustration 3.23 Temps de rampe initial et nal
78 Danfoss A/S © 05/2018 Tous droits réservés. MG20OB04
Page 81

3-90 Dimension de pas
Range: Fonction:
0.10 %* [0.01 200 %]
Saisir la taille d'incrément
nécessaire pour augmenter/
diminuer, sous forme de % de la
vitesse moteur synchrone, ns. Si la
fonction augmenter/diminuer est
activée, la référence résultante
augmente/diminue de la quantité
dénie dans ce paramètre.
3-91 Temps de rampe
Range: Fonction:
1 s [0 - 3600 s] Saisir le temps de rampe, c.-à-d. le
temps qu’il faut pour régler la
référence de 0 % à 100 % de la
fonction de potentiomètre digital
spéciée (Augmenter, Diminuer ou
Eacer).
Si la fonction augmenter/diminuer
est activée pendant un retard de
rampe plus long que le retard
spécié au paramétre 3-95 Retard de
rampe, la référence réelle accélère/
décélère selon ce temps de rampe.
Le temps de rampe est déni
comme le temps qu’il faut pour
régler la référence grâce à la
dimension de pas spéciée au
paramétre 3-90 Dimension de pas.
3-92 Restauration de puissance
Option: Fonction:
[0] * Inactif Réinitialise la référence du
potentiomètre à 0 % après la mise
sous tension.
[1] Actif Restaure la référence du
potentiomètre la plus récente lors
de la mise sous tension.
3-93 Limite maximale
Range: Fonction:
100 %* [-200 -
200 %]
Dénir la valeur maximale autorisée
pour la référence résultante. Cela
est recommandé si le
potentiomètre digital est destiné à
ajuster précisément la référence
résultante.
3-94 Limite minimale
Range: Fonction:
0 %* [-200 -
200 %]
Dénir la valeur minimale autorisée
pour la référence résultante. Cela
est recommandé si le
potentiomètre digital est destiné à
ajuster précisément la référence
résultante.
3-95 Retard de rampe
Range: Fonction:
Size
related*
[ 0 - 0 ] Saisir le retard souhaité à partir de
l’activation de la fonction du
potentiomètre digital jusqu’à ce que
le variateur de fréquence
commence à accélérer jusqu’à la
référence. Avec un retard de 0 ms,
la référence commence à monter
dès que Augmenter/Diminuer est
activé. Voir aussi le
paramétre 3-91 Temps de rampe.
Description du paramètre Guide de programmation
3.5.6 3-9* Potentiomètre dig.
Utiliser la fonction de potentiomètre digital pour
augmenter ou diminuer la référence réelle en ajustant la
programmation des entrées digitales à l’aide des fonctions
Augmenter, Diminuer ou Eacer. Pour activer cette
fonction, au moins une entrée digitale doit être
programmée comme Augmenter ou Diminuer.
3 3
MG20OB04 Danfoss A/S © 05/2018 Tous droits réservés. 79
Illustration 3.25 Cas no 1 de retard de rampe
Illustration 3.26 Cas no 2 de retard de rampe
Page 82

4-10 Direction vit. moteur
Option: Fonction:
Sélectionner le sens souhaité de la
vitesse du moteur. Lorsque le
paramétre 1-00 Mode Cong. est
réglé sur [3] Boucle fermée, la valeur
par défaut de ce paramètre passe
sur [0] Sens horaire. Si les deux sens
sont choisis, le fonctionnement
dans le sens antihoraire ne peut
pas être sélectionné à partir du LCP.
[0] * Sens horaire
[2] Les deux
directions
4-11 Vit. mot., limite infér. [tr/min]
Range: Fonction:
Size
related*
[ 0 - par. 4-13
RPM]
Saisir la limite minimale pour la
vitesse du moteur en tr/min. La
limite inférieure de la vitesse du
moteur peut être réglée pour
correspondre à la vitesse minimale
du moteur recommandée par le
fabricant. La limite inférieure de la
vitesse du moteur ne doit pas
dépasser le réglage au
paramétre 4-13 Vit.mot., limite supér.
[tr/min].
4-12 Vitesse moteur limite basse [Hz]
Range: Fonction:
Size
related*
[ 0 - par. 4-14
Hz]
Saisir la limite minimale pour la
vitesse du moteur en Hz. Peut être
réglée pour correspondre à la
fréquence de sortie minimale de
l’arbre moteur. La limite basse de
vitesse ne doit pas dépasser le
réglage au paramétre 4-14 Vitesse
moteur limite haute [Hz].
4-13 Vit.mot., limite supér. [tr/min]
Range: Fonction:
Size
related*
[ 0 - 60000
RPM]
AVIS!
Toute modication apportée
au paramétre 4-13 Vit.mot.,
limite supér. [tr/min] ramène la
valeur du
paramétre 4-53 Avertis. vitesse
haute à la valeur dénie au
paramétre 4-13 Vit.mot., limite
supér. [tr/min].
AVIS!
La fréquence de sortie
maximale ne doit pas dépasser
10 % de la fréquence de
commutation de l’onduleur
(paramétre 14-01 Fréq.
commut.).
Saisir la limite maximale pour la
vitesse du moteur en tr/min. Cette
limite peut être réglée pour correspondre à la vitesse maximum du
moteur recommandée par le
fabricant. La limite haute de la
vitesse du moteur doit être
supérieure au réglage du
paramétre 4-11 Vit. mot., limite infér.
[tr/min].
Le nom du paramètre apparaît au
paramétre 4-11 Vit. mot., limite infér.
[tr/min] ou au paramétre 4-12 Vitesse
moteur limite basse [Hz], selon :
•
Les réglages des autres
paramètres dans le Main
Menu (menu principal).
•
Les réglages par défaut
basés sur l’emplacement
géographique.
Description du paramètre
VLT® AQUA Drive FC 202
3.6 Paramètres 4-** Limites/avertis.
3.6.1 4-1* Limites moteur
33
ainsi que la réaction du variateur de fréquence lorsque les
limites sont dépassées.
Une limite peut générer un message sur l'achage. Un
avertissement génère toujours un message sur l'achage
ou le bus de terrain. Une fonction de surveillance peut
entraîner un avertissement ou une alarme qui provoque
l'arrêt du variateur de fréquence et l'apparition d'un
message d'alarme.
Dénir les limites de couple, courant et vitesse du moteur
80 Danfoss A/S © 05/2018 Tous droits réservés. MG20OB04
Page 83

4-14 Vitesse moteur limite haute [Hz]
Range: Fonction:
Size
related*
[ .1 - par.
4-19 Hz]
Saisir la limite maximale pour la
vitesse du moteur en Hz. Le
Paramétre 4-14 Vitesse moteur limite
haute [Hz] peut être déni pour
correspondre à la vitesse maximale
recommandée par le fabricant. La
limite haute de vitesse du moteur
doit dépasser la valeur du
paramétre 4-12 Vitesse moteur limite
basse [Hz]. La fréquence de sortie
ne doit pas dépasser 10 % de la
fréquence de commutation
(paramétre 14-01 Fréq. commut.).
4-16 Mode moteur limite couple
Range: Fonction:
Size
related*
[ 0 -
1000.0 %]
Saisir la limite de couple maximale
pour le fonctionnement du moteur.
La limite de couple est active dans
la plage de vitesse jusqu’à la vitesse
nominale du moteur incluse dénie
au paramétre 1-25 Vit.nom.moteur.
An de protéger le moteur en
l’empêchant d’atteindre le couple
de décrochage, la valeur par défaut
est de 1,1 fois le couple nominal du
moteur (valeur calculée). Voir le
paramétre 14-25 Délais Al./C.limit ?
pour de plus amples détails.
Si un réglage du
paramétre 1-00 Mode Cong. au
paramétre 1-28 Ctrl rotation moteur
est modié, le paramétre 4-16 Mode
moteur limite couple n’est pas
automatiquement réinitialisé au
réglage par défaut.
4-17 Mode générateur limite couple
Range: Fonction:
100 %* [ 0 -
1000.0 %]
Saisir la limite de couple maximale
pour le fonctionnement en mode
générateur. La limite de couple est
active dans la plage de vitesse
jusqu’à la vitesse nominale du
moteur incluse
(paramétre 1-25 Vit.nom.moteur).
Pour plus de détails, se reporter au
paramétre 14-25 Délais Al./C.limit ?.
Si un réglage du
paramétre 1-00 Mode Cong. au
paramétre 1-28 Ctrl rotation moteur
est modié, le paramétre 4-17 Mode
générateur limite couple n’est pas
4-17 Mode générateur limite couple
Range: Fonction:
automatiquement réinitialisé au
réglage par défaut.
4-18 Limite courant
Range: Fonction:
Size
related*
[ 1.0 -
1000.0 %]
Saisir la limite de courant pour le
fonctionnement en mode moteur et
générateur. An de protéger le
moteur en l’empêchant d’atteindre
le couple de décrochage, la valeur
par défaut est de 1,1 fois le couple
nominal du moteur (valeur
calculée). Si un réglage du
paramétre 1-00 Mode Cong. au
paramétre 1-26 Couple nominal cont.
moteur est modié, le
paramétre 4-18 Limite courant n’est
pas automatiquement réinitialisé au
réglage par défaut.
4-19 Frq.sort.lim.hte
Range: Fonction:
Size
related*
[ 1 - 590 Hz]
AVIS!
Ce paramètre ne peut pas être
réglé lorsque le moteur est en
marche.
AVIS!
Lorsque le
paramétre 1-10 Construction
moteur est réglé sur [1] PM,
SPM non saillant, la valeur
maximale est limitée à 300 Hz.
Saisir la valeur de fréquence de
sortie maximale. Le
Paramétre 4-19 Frq.sort.lim.hte
spécie la limite absolue de la
fréquence de sortie du variateur de
fréquence pour améliorer la sécurité
dans certaines applications an
d’éviter toute survitesse
accidentelle. Cette limite absolue
s’applique à toutes les
congu-
rations, indépendamment du
réglage du paramétre 1-00 Mode
Cong..
Description du paramètre Guide de programmation
3 3
MG20OB04 Danfoss A/S © 05/2018 Tous droits réservés. 81
Page 84

4-50 Avertis. courant bas
Range: Fonction:
0 A* [ 0 - par. 4-51A]Les avertissements sont achés sur
l’écran, la sortie programmée ou le
bus de terrain.
130BA064.10
I
moteur
I
LIM
(P 4 - 18)
I
HAUT
(P 4 - 51)
I
BAS
(P 4 - 50)
n
BAS
(P 4 - 52)
n
MIN
(P 4 - 11)
n
HAUT
(P 4 - 53)
n
MAX
(P 4 - 13)
REF. MARCHE
A L’INTERIEUR
DES LIMITES
REF
n
moteur
[RPM]
Illustration 3.27 Limite de
courant bas
Saisir la valeur I
BAS
. Lorsque le
courant moteur tombe en dessous
de cette limite (I
BAS
), l’achage
indique Courant bas. Il est possible
de programmer les sorties pour
obtenir un signal d’état à la
borne 27 ou 29, ainsi qu’à la sortie
relais 01 ou 02. Se reporter à
l'Illustration 3.27.
4-51 Avertis. courant haut
Range: Fonction:
Size
related*
[ par. 4-50 par. 16-37 A]
Saisir la valeur I
HAUT
. Lorsque le
courant du moteur dépasse cette
limite (I
HAUT
), l’achage indique
Courant haut. Il est possible de
programmer les sorties pour obtenir
un signal d’état à la borne 27 ou
29, ainsi qu’à la sortie relais 01 ou
02. Se reporter à l'Illustration 3.27.
4-52 Avertis. vitesse basse
Range: Fonction:
0 RPM* [ 0 - par. 4-53
RPM]
Saisir la valeur n
BAS
. Lorsque la
vitesse du moteur tombe audessous de cette limite (n
BAS
),
l’achage indique Vit. basse. Il est
possible de programmer les sorties
pour obtenir un signal d’état à la
4-52 Avertis. vitesse basse
Range: Fonction:
borne 27 ou 29, ainsi qu’à la sortie
relais 01 ou 02. Programmer la
limite inférieure du signal de la
vitesse du moteur, n
BAS
, dans la
plage de fonctionnement normal
du variateur de fréquence. Se
reporter à l'Illustration 3.27.
4-53 Avertis. vitesse haute
Range: Fonction:
Size
related*
[ par. 4-52 par. 4-13 RPM]
AVIS!
Tout changement apporté au
paramétre 4-13 Vit.mot., limite
supér. [tr/min] ramène la valeur
du paramétre 4-53 Avertis.
vitesse haute à la valeur dénie
au paramétre 4-13 Vit.mot.,
limite supér. [tr/min].
Si une valeur diérente est
nécessaire au
paramétre 4-53 Avertis. vitesse
haute, ce dernier doit être
réglé après programmation du
paramétre 4-13 Vit.mot., limite
supér. [tr/min].
Saisir la valeur n
HAUT
. Lorsque la
vitesse du moteur dépasse cette
limite (n
HAUT
), l’achage indique Vit.
haute. Il est possible de
programmer les sorties pour obtenir
un signal d’état à la borne 27 ou
29, ainsi qu’à la sortie relais 01 ou
02. Programmer la limite supérieure
du signal de la vitesse du moteur,
n
HAUT
, dans la plage de fonctionnement normal du variateur de
fréquence. Se reporter à
l'Illustration 3.27.
4-54 Avertis. référence basse
Range: Fonction:
-999999.999* [ -999999.999
- par. 4-55 ]
Saisir la limite inférieure de
référence. Lorsque la référence
eective tombe au-dessous de cette
limite, l’achage indique Réf
basse
. Il
est possible de programmer les
sorties pour obtenir un signal d’état
à la borne 27 ou 29, ainsi qu’à la
sortie relais 01 ou 02.
Description du paramètre
VLT® AQUA Drive FC 202
3.6.2 4-5* Rég. Avertis.
Dénir les limites d’avertissement réglables pour le
courant, la vitesse, la référence et le signal de retour.
33
AVIS!
Non visibles sur l’achage, uniquement dans le Logiciel
de programmation MCT 10.
82 Danfoss A/S © 05/2018 Tous droits réservés. MG20OB04
Page 85
4-55 Avertis. référence haute
Range: Fonction:
999999.999* [ par. 4-54 -
999999.999 ]
Saisir la limite supérieure de
référence. Lorsque la référence
réelle dépasse cette limite,
l’achage indique Réf
haute
. Il est
possible de programmer les sorties
pour obtenir un signal d’état à la
borne 27 ou 29, ainsi qu’à la sortie
relais 01 ou 02.
4-56 Avertis.retour bas
Range: Fonction:
-999999.99
9 ReferenceFeedback
Unit*
[ -999999.999
- par. 4-57
ReferenceFeedbackUnit]
Saisir la limite inférieure du signal
de retour. Lorsque le signal de
retour tombe sous cette limite,
l’achage indique Retour
bas
. Il est
possible de programmer les sorties
pour obtenir un signal d’état à la
borne 27 ou 29, ainsi qu’à la sortie
relais 01 ou 02.
4-57 Avertis.retour haut
Range: Fonction:
999999.999
ReferenceFeedbackU
nit*
[ par. 4-56 -
999999.999
ReferenceFeedbackUnit]
Saisir la limite supérieure du signal
de retour. Lorsque le signal dépasse
cette limite, l’achage indique
Retour
haut
. Il est possible de
programmer les sorties pour obtenir
un signal d’état à la borne 27 ou
29, ainsi qu’à la sortie relais 01 ou
02.
4-58 Surv. phase mot.
Option: Fonction:
AVIS!
Ce paramètre ne peut pas être
réglé lorsque le moteur est en
marche.
Ache une alarme en cas
d’absence de phase moteur.
[0] Désactivé Aucune alarme ne s’ache en cas
d’absence de phase moteur.
[1] Alarme 100msUne alarme s’ache en cas
d’absence de phase moteur.
[2] * Alarme 1000
ms
[5] Motor Check
4-60 Bipasse vitesse de[tr/mn]
Tableau [4]
Range: Fonction:
Size
related*
[ 0 - par. 4-13
RPM]
Sur certains systèmes, il faut éviter
certaines fréquences ou vitesses de
sortie an de limiter les problèmes
de résonance. Saisir les limites
inférieures des fréquences à éviter.
4-61 Bipasse vitesse de [Hz]
Tableau [4]
Range: Fonction:
Size
related*
[ 0 - par. 4-14
Hz]
Sur certains systèmes, il faut éviter
certaines fréquences ou vitesses de
sortie an de limiter les problèmes
de résonance. Saisir les limites
inférieures des fréquences à éviter.
4-62 Bipasse vitesse à [tr:mn]
Tableau [4]
Range: Fonction:
Size
related*
[ 0 - par. 4-13
RPM]
Sur certains systèmes, il faut éviter
certaines fréquences ou vitesses de
sortie an de limiter les problèmes
de résonance. Saisir les limites
supérieures des fréquences à éviter.
4-63 Bipasse vitesse à [Hz]
Tableau [4]
Range: Fonction:
Size
related*
[ 0 - par. 4-14
Hz]
Sur certains systèmes, il faut éviter
certaines fréquences ou vitesses de
sortie an de limiter les problèmes
de résonance. Saisir les limites
supérieures des fréquences à éviter.
Description du paramètre Guide de programmation
3.6.3 4-6* Bipasse vit.
Sur certains systèmes, il faut éviter certaines fréquences ou
vitesses de sortie an de limiter les problèmes de
résonance. Un max. de 4 plages de fréquence ou vitesse
peut être écarté.
3 3
MG20OB04 Danfoss A/S © 05/2018 Tous droits réservés. 83
Page 86

4-64 Régl. bipasse semi-auto
Option: Fonction:
[0] * Inactif Pas de fonction.
[1] Activé Démarre le process bipasse semi-
automatique et poursuit la
procédure décrite dans le
chapitre 3.6.4 Process de bipasse
vitesse semi-automatique.
Description du paramètre
VLT® AQUA Drive FC 202
3.6.4 Process de bipasse vitesse semiautomatique
Ce réglage de la vitesse de bipasse semi-automatique
permet de faciliter la programmation des fréquences à
ignorer suite à des résonances dans le système.
33
Exécuter le processus suivant :
1. Arrêter le moteur.
2. Sélectionner [1] Activé au paramétre 4-64 Régl.
bipasse semi-auto.
3. Appuyer sur [Hand On] sur le LCP pour démarrer
la recherche des bandes de fréquence à l’origine
des résonances. Le moteur accélère conformément à la rampe
4. Lors du passage d’une bande de résonance à une
autre, appuyer sur la touche [OK] du LCP au
moment de quitter la bande. La fréquence réelle
est enregistrée comme le premier élément du
paramétre 4-62 Bipasse vitesse à [tr:mn] ou du
paramétre 4-63 Bipasse vitesse à [Hz] (tableau).
Répéter cette étape pour chaque bande de
résonance identiée à l’accélération (réglage
possible pour quatre bandes maximum).
5. Une fois la vitesse maximale atteinte, le moteur
amorce automatiquement la rampe de décélération. Répéter la procédure ci-dessus lorsque la
vitesse quitte les bandes de résonance au cours
de la décélération. Les fréquences réelles
enregistrées lors de l’activation de la touche [OK]
sont stockées au paramétre 4-60 Bipasse vitesse
de[tr/mn] ou au paramétre 4-61 Bipasse vitesse de
[Hz].
6. Lorsque le moteur a décéléré jusqu’à l’arrêt,
appuyer sur [OK]. Le Paramétre 4-64 Régl. bipasse
semi-auto se réinitialise automatiquement sur
Inactif. Le variateur de fréquence reste en mode
Hand On jusqu’à l’activation de la touche [O] ou
[Auto On] sur le LCP.
Si les fréquences d’une bande de résonance donnée ne
sont pas enregistrées dans le bon ordre, tous les enregistrements sont eacés et le message suivant apparaît :
Chevauchement des zones de vitesse collectées ou détermination incomplète. Appuyer sur [Cancel] pour annuler. Un
enregistrement dans le mauvais ordre survient lorsque les
valeurs de fréquence mémorisées au
paramétre 4-62 Bipasse vitesse à [tr:mn] sont supérieures
aux valeurs gurant au paramétre 4-60 Bipasse vitesse
de[tr/mn] ou lorsque le nombre d’enregistrements n’est pas
le même dans Bipasse de et dans Bipasse à.
dénie.
84 Danfoss A/S © 05/2018 Tous droits réservés. MG20OB04
Page 87

5-00 Mode E/S digital
Option: Fonction:
AVIS!
Ce paramètre ne peut pas être
réglé lorsque le moteur est en
marche.
Les entrées et les sorties digitales
sont pré-programmables pour
fonctionner en PNP ou NPN.
[0] * PNP - Actif à
24 V
Action sur les impulsions directionnelles positives (0). Les systèmes
PNP sont ramenés à GND.
[1] NPN - Actif à
0 V
Action sur les impulsions directionnelles négatives (1). Les systèmes
NPN sont réglés sur +24 V (interne
au variateur de fréquence).
5-01 Mode born.27
Option: Fonction:
AVIS!
Ce paramètre ne peut pas être
réglé lorsque le moteur est en
marche.
[0] * Entrée Dénit la borne 27 comme une
entrée digitale.
[1] Sortie Dénit la borne 27 comme une
sortie digitale.
5-02 Mode born.29
Option: Fonction:
AVIS!
Ce paramètre ne peut pas être
réglé lorsque le moteur est en
marche.
[0] * Entrée Dénit la borne 29 comme une
entrée digitale.
[1] Sortie Dénit la borne 29 comme une
sortie digitale.
Description du paramètre Guide de programmation
3.7 Paramètres 5-** E/S Digitale
Groupe de paramètres de conguration des entrées et
sorties digitales.
3.7.1 5-0* Mode E/S digitales
Paramètres de conguration de l'entrée et de la sortie à
l'aide de NPN et PNP.
MG20OB04 Danfoss A/S © 05/2018 Tous droits réservés. 85
3.7.2 5-1* Entrées digitales
Paramètres de conguration des fonctions d’entrée aux
bornes d’entrée.
Les entrées digitales permettent de sélectionner diverses
fonctions du variateur de fréquence. Toutes les entrées
digitales peuvent assumer les fonctions suivantes :
Les options [120]-[138] sont liées au contrôleur de cascade.
Pour plus de détails, voir le groupe de paramètres 25-**
Contrôleur cascade.
Fonction d’entrée
digitale
Inactif [0] 19, 29, 32, 33
Réinitialisation alarme [1] Toutes
Lâchage [2] 27
Roue libre NF [3] Toutes
Frein NF-CC [5] Toutes
Arrêt NF [6] Toutes
Verrouillage ext. [7] Toutes
Démarrage [8] Toutes
Impulsion démarrage [9] Toutes
Inversion [10] Toutes
Démarrage avec inv. [11] Toutes
Jogging [14] Toutes
Réf. prédénie active [15] Toutes
Réf prédénie bit 0 [16] Toutes
Réf prédénie bit 1 [17] Toutes
Réf prédénie bit 2 [18] Toutes
Gel référence [19] Toutes
Gel sortie [20] Toutes
Accélération [21] Toutes
Décélération [22] Toutes
Sélect.proc.bit 0 [23] Toutes
Sélect.proc.bit 1 [24] Toutes
Entrée impulsions [32] 29, 33
Bit rampe 0 [34] Toutes
Defaut secteur [36] Toutes
Ref source bit 0 [42] Toutes
Hand/Auto Start [51] Toutes
Fct autorisé [52] Toutes
Démar. mode local [53] Toutes
Démar.auto [54] Toutes
Augmenter pot. dig. [55] Toutes
Diminuer pot. dig. [56] Toutes
Eacer pot. dig. [57] Toutes
Compteur A (augm.) [60] 29, 33
Compteur A (dimin.) [61] 29, 33
Reset compteur A [62] Toutes
Compteur B (augm.) [63] 29, 33
Compteur B (dimin.) [64] 29, 33
Reset compteur B [65] Toutes
Mode veille [66] Toutes
Option Borne
3 3
Page 88
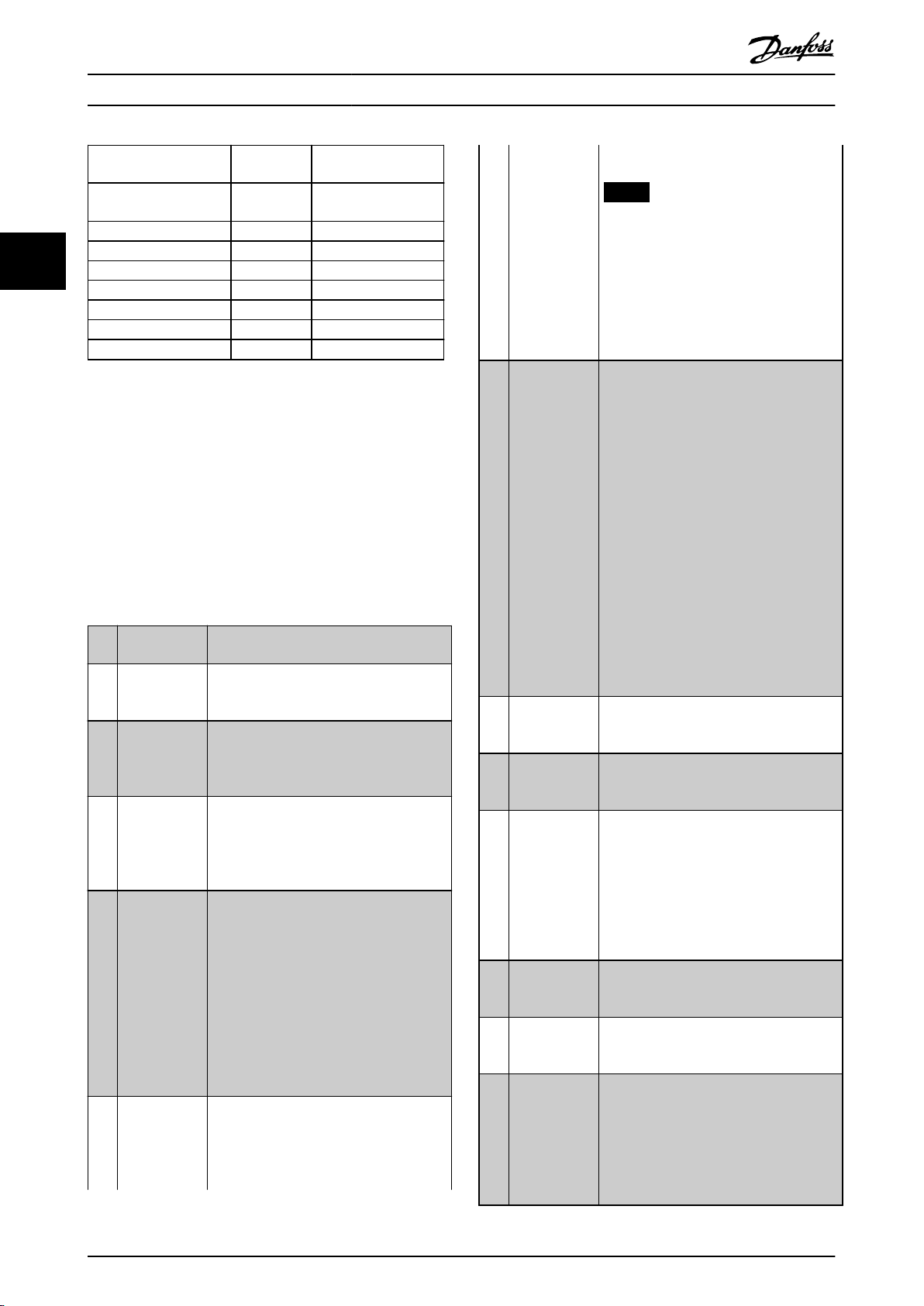
Description du paramètre
VLT® AQUA Drive FC 202
Fonction d’entrée
digitale
Reset mot maintenance
préventive
Carte PTC 1 [80] Toutes
33
Latched Pump Derag [85] Toutes
Démar.pomp.princ. [120] Toutes
Altern.pompe princ. [121] Toutes
Verrouill. pomp1 [130] Toutes
Verrouill. pomp2 [131] Toutes
Verrouill. pomp3 [132] Toutes
Tableau 3.12 Fonctions des entrées digitales
Option Borne
[78] Toutes
[7] Verrouillage
ext.
Toutes désigne les bornes 18, 19, 27, 29, 32, X30/2, X30/3
et X30/4.
X30/X sont les bornes sur le module VLT® General Purpose
I/O MCB 101.
Les fonctions réservées à une seule entrée digitale sont
indiquées dans le paramètre correspondant.
Toutes les entrées digitales peuvent être programmées sur
les fonctions suivantes :
[0] Inactif Pas de réaction aux signaux transmis à la
borne.
[1] Réinitialisation
alarme
[2] Lâchage Laisse le moteur en fonctionnement libre.
[3] Roue libre NF Reset et arrêt en roue libre, entrée inversée
[5] Frein NF-CC Entrée inversée pour freinage CC (NF).
[6] Arrêt NF Fonction arrêt inversé. Génère une fonction
Réinitialise le variateur de fréquence après
une alarme/un arrêt. Toutes les alarmes ne
peuvent donner lieu à une réinitialisation.
Logique 0 = arrêt en roue libre.
(Entrée digitale par défaut 27) Arrêt en
roue libre, entrée inversée (NF).
(NF).
Laisse le moteur en fonctionnement libre,
puis le variateur est réinitialisé. Logique 0 =
arrêt en roue libre et reset.
Arrête le moteur par injection de courant
CC durant un certain temps. Voir du
paramétre 2-01 Courant frein CC au
paramétre 2-03 Vitesse frein CC [tr/min]. La
fonction n’est active que lorsque la valeur
du paramétre 2-02 Temps frein CC dière de
0. Logique 0 = freinage CC.
Cette sélection est impossible lorsque le
paramétre 1-10 Construction moteur est
réglé sur [1] PM, SPM non saillant.
d’arrêt lorsque la borne sélectionnée passe
du niveau logique 1 à 0. L’arrêt est réalisé
en fonction du temps de rampe
sélectionné (paramétre 3-42 Temps décél.
[8] Démarrage Sélectionner Démarrage pour un ordre de
[9] Impulsion
démarrage
[10] Inversion Change le sens de rotation de l’arbre
[11] Démarrage
avec inv.
[14] Jogging Utilisé pour activer la fréquence de jogging.
[15] Réf. prédénie
active
rampe 1 et paramétre 3-52 Temps décél.
rampe 2).
AVIS!
Lorsque le variateur atteint la limite
de couple et qu’il a reçu un ordre
d’arrêt, il risque de ne pas s’arrêter
de lui-même. Pour garantir qu’il
s’arrête, congurer une sortie digitale
sur [27] Limite couple & arrêt et la
raccorder à une entrée digitale
congurée comme roue libre.
Présente la même fonction qu’arrêt en roue
libre (Contact NF), mais le verrouillage
externe génère le message d’alarme Panne
externe lorsque la borne programmée pour
la roue libre inversée est la logique 0. Le
message d’alarme est aussi actif via les
sorties digitales et les sorties relais, si elles
sont programmées pour un verrouillage
externe. L’alarme peut être réinitialisée à
l’aide d’une entrée digitale ou de la touche
[Reset] si le problème à l’origine du
verrouillage externe a été corrigé. Un retard
peut être programmé au
paramétre 22-00 Retard verrouillage ext..
Après avoir appliqué un signal à l’entrée, la
réaction est retardée conformément à la
temporisation dénie au
paramétre 22-00 Retard verrouillage ext..
démarrage/arrêt. 1 = Démarrage, 0 = Arrêt.
(Entrée digitale par défaut 18)
Le moteur démarre si une impulsion est
appliquée pendant au moins 2 ms. Il
s’arrête si Arrêt NF est activé.
moteur. Sélectionner logique 1 pour
inverser. Le signal d’inversion change
seulement le sens de rotation. Il n’active
pas la fonction de démarrage. Sélectionner
les deux directions au
paramétre 4-10 Direction vit. moteur.
(Entrée digitale par défaut 19).
Utilisé pour le démarrage/arrêt et pour
l’inversion sur le même l. Aucun signal de
démarrage n’est autorisé en même temps.
Voir le paramétre 3-11 Fréq.Jog. [Hz].
(Entrée digitale par défaut 29)
Sert à passer de la référence externe à la
référence prédénie et inversement. Il est
supposé que [1] Externe/prédénie a été
sélectionné au paramétre 3-04 Fonction
référence. Niveau logique 0 = consigne
externe active ; niveau logique 1 = l’une
des huit références prédénies est activée.
86 Danfoss A/S © 05/2018 Tous droits réservés. MG20OB04
Page 89

Description du paramètre Guide de programmation
[16] Réf prédénie
bit 0
[17] Réf prédénie
bit 1
[18] Réf prédénie
bit 2
[19] Gel référence Gèle la référence eective. La référence
[20] Gel sortie Gèle la fréquence eective du moteur (en
Permet de choisir l’une des 8 références
prédénies, conformément au Tableau 3.13.
Permet de choisir l’une des 8 références
prédénies, conformément au Tableau 3.13.
Permet de choisir l’une des 8 références
prédénies, conformément au Tableau 3.13.
Bit de réf.
prédénie
Référence
prédénie 0
Référence
prédénie 1
Référence
prédénie 2
Référence
prédénie 3
Référence
prédénie 4
Référence
prédénie 5
Référence
prédénie 6
Référence
prédénie 7
Tableau 3.13 Bit de référence prédénie
gelée représente maintenant le point
activé/la condition an qu’Accélération et
Décélération puissent être utilisées. En cas
d’utilisation de l’accélération/décélération,
le changement de vitesse suit toujours la
rampe 2 (paramétre 3-51 Temps d'accél.
rampe 2 et paramétre 3-52 Temps décél.
rampe 2) dans la plage 0-
paramétre 3-03 Réf. max..
Hz). Cette fréquence sert alors de base et
de condition préalable à la mise en œuvre
de l’accélération et de la décélération. En
cas d’utilisation de l’accélération/décélération, le changement de vitesse suit
toujours la rampe 2 (paramétre 3-51 Temps
d'accél. rampe 2 et paramétre 3-52 Temps
décél. rampe 2) dans la plage 0-
paramétre 1-23 Fréq. moteur.
2 1 0
0 0 0
0 0 1
0 1 0
0 1 1
1 0 0
1 0 1
1 1 0
1 1 1
AVIS!
Lorsque [20] Gel sortie est actif, il
n’est pas possible d’arrêter le
variateur de fréquence via un signal
[13] Démarrage faible. Arrêter le
variateur de fréquence via une borne
programmée pour [2] Lâchage ou [3]
Roue libre NF.
[21] Accélération Pour contrôler de manière numérique
l’accélération et la décélération
(potentiomètre moteur). Pour activer cette
fonction, sélectionner [19] Gel référence ou
[20] Gel sortie. Lorsque [21] Accélération est
activé pendant moins de 400 ms, la
référence résultante augmente de 0,1 %.
Lorsque [21] Accélération est activé pendant
plus de 400 ms, la référence résultante
accélère conformément à la rampe 1 au
paramétre 3-41 Temps d'accél. rampe 1.
[22] Décélération Identique à [21] Accélération.
[23] Sélect.proc.bit0Sélectionne l’un des 4 process. Régler le
paramétre 0-10 Process actuel sur Multi
process.
[24] Sélect.proc.bit1Identique à [23] Sélect.proc.bit 0.
(Entrée digitale par défaut 32)
[32] Entrée
impulsions
[34] Bit rampe 0 Sélectionner la rampe à utiliser. Le niveau
[36] Defaut secteur Active le paramétre 14-10 Panne secteur.
[42] Ref source bit0Une entrée active au bit 0 sélectionne AI54
[51] Hand/Auto
Start
[52] Fct autorisé La borne d’entrée pour laquelle [52] Fct
Sélectionner [32] Entrée impulsions si l’on
utilise une séquence d’impulsions comme
référence ou signal de retour. La mise à
l’échelle est eectuée via le groupe de
paramètres 5-5* Entrée impulsions.
logique 0 sélectionne rampe 1, alors que le
niveau logique 1 sélectionne rampe 2.
Defaut secteur est actif en cas de niveau
logique 0.
comme la source de référence (voir le
groupe de paramètres 3-1* Consignes, option
[35] Digital input select). Une entrée inactive
sélectionne AI53.
Sélectionne le démarrage manuel ou
automatique. Haut = fonctionnement
automatique uniquement, bas = fonction-
nement manuel uniquement.
autorisé a été programmé doit être de
logique 1 pour qu’un ordre de démarrage
puisse être accepté. L’autorisation de
marche présente une fonction logique ET
en rapport avec la borne programmée pour
[8] Démarrage, [14] Jogging ou [20] Gel
sortie. Les deux conditions doivent être
remplies pour que le moteur puisse
démarrer. Si l’option [52] Fct autorisé est
programmée sur plusieurs bornes, elle ne
doit être de niveau logique 1 que sur l’une
des bornes pour pouvoir exécuter la
fonction. Le signal de sortie digitale de
demande de marche ([8] Démarrage, [14]
Jogging ou [20] Gel sortie) programmé au
groupe de paramètres 5-3* Sor ties digitales
ou au groupe de paramètres 5-4* Relais n’est
pas aecté par [52] Fct autorisé.
3 3
MG20OB04 Danfoss A/S © 05/2018 Tous droits réservés. 87
Page 90

Description du paramètre
VLT® AQUA Drive FC 202
[53] Démar. mode
local
33
[54] Démar.auto L’application d’un signal place le variateur
[55] Augmenter
pot. dig.
[56] Diminuer pot.
dig.
[57] Eacer pot.
dig.
[60] Compteur A
(augm.)
[61] Compteur A
(dimin.)
[62] Reset
compteur A
[63] Compteur B
(augm.)
[64] Compteur B
(dimin.)
[65] Reset
compteur B
L’application d’un signal active le variateur
de fréquence en mode Hand On de la
même manière que l’activation de la
touche [Hand On], et un ordre d’arrêt
normal est annulé. En cas de déconnexion
du signal, le moteur s’arrête. Pour que les
autres ordres de démarrage soient valides,
une autre entrée digitale doit être attribuée
à [54] Démar.auto et un signal doit lui être
appliqué. Les touches [Hand On] et [Auto
On] n’ont pas d’incidence. La touche [O]
annule le démarrage local et le démarrage
automatique. Appuyer sur [Hand On] ou
[Auto On] pour activer de nouveau le
démarrage local et le démarrage
automatique. En l’absence de signal sur
[53] Démar. mode local ou [54] Démar.auto,
le moteur s’arrête même si un ordre de
démarrage normal a été appliqué. Si un
signal est appliqué à la fois à [53] Démar.
mode local et [54] Démar.auto, la fonction
activée est le démarrage automatique. En
cas d’activation de la touche [O], le
moteur s’arrête même si des signaux ont
été appliqués à [53] Démar. mode local et
[54] Démar.auto.
de fréquence en mode Auto On, comme si
la touche [Auto On] avait été activée. Voir
également [53] Démar. mode local.
Utilise l’entrée comme signal d’augmentation transmis vers la fonction de
potentiomètre digital décrite dans le
groupe de paramètres 3-9* Potentiomètre dig.
Utilise l’entrée comme signal de diminution
transmis vers la fonction de potentiomètre
digital décrite dans le groupe de paramètres
3-9* Potentiomètre dig.
Utilise l’entrée pour eacer la référence du
potentiomètre digital décrite dans le
groupe de paramètres 3-9* Potentiomètre dig.
(Borne 29 ou 33 uniquement) Entrée
servant à l’incrémentation du compteur
SLC.
(Borne 29 ou 33 uniquement) Entrée
servant à la décrémentation du compteur
SLC.
Entrée servant à la réinitialisation du
compteur A.
(Borne 29 et 33 uniquement) Entrée
servant à l’incrémentation du compteur
SLC.
(Borne 29 et 33 uniquement) Entrée
servant à la décrémentation du compteur
SLC.
Entrée servant à la réinitialisation du
compteur B.
[66] Mode veille Force le variateur de fréquence à passer en
mode veille (voir le groupe de paramètres
22-4* Mode veille). Ce mode réagit à la
montée du signal appliqué.
[78] Reset mot
maintenance
préventive
[80] Carte PTC 1 Toutes les entrées digitales peuvent être
[85] Latched Pump
Derag
Remet à zéro toutes les données dans le
paramétre 16-96 Mot maintenance.
réglées sur [80] Carte PTC 1. Cependant,
une seule entrée digitale doit être réglée
sur ce choix.
Lance le décolmatage.
Les options [120]-[138] sont liées au contrôleur de cascade.
Pour plus de détails, voir le groupe de paramètres 25-**
Contrôleur cascade.
[120] Démar.pomp.princ. Démarre/arrête la pompe principale
(contrôlée par le variateur de
fréquence). Un démarrage nécessite
également l’application d’un signal de
démarrage du système, par exemple
sur l’une des entrées digitales dénies
pour [8] Démarrage.
[121] Altern.pompe
princ.
[130
Verrouill. pomp1 -
-
Verrouill. pomp9
138]
Force l’alternance de la pompe
principale dans un contrôleur de
cascade. Régler le
paramétre 25-50 Altern.pompe princ.
sur [2] Sur ordre ou [3] Au démarr. ou
sur ordre. Le
Paramétre 25-51 Événement altern.
peut être réglé sur l’une des quatre
options.
La fonction dépend du réglage du
paramétre 25-06 Nb de pompes. Si le
réglage est déni sur [0] Non, alors
Pompe1 fait référence à la pompe
contrôlée par le relais 1, etc. S’il est
déni sur [1] Oui, Pompe1 fait
référence à la pompe contrôlée par le
variateur de fréquence uniquement
(sans implication des relais intégrés)
et Pompe2 fait référence à la pompe
contrôlée par le relais 1. La pompe à
vitesse variable (principale) ne peut
pas être verrouillée dans le contrôleur
de cascade de base.
Voir le Tableau 3.14.
88 Danfoss A/S © 05/2018 Tous droits réservés. MG20OB04
Page 91

5-19 Arrêt de sécurité borne 37
Utiliser ce paramètre pour congurer la fonctionnalité Safe
Torque O. Un message d’avertissement fait tourner le moteur
en roue libre et permet le redémarrage automatique. Un
message d’alarme fait tourner le moteur en roue libre et
nécessite un redémarrage manuel (via un bus de terrain, une E/S
digitale ou en appuyant sur [RESET] sur le LCP). Si la carte VLT
®
PTC Thermistor Card MCB 112 est montée, congurer les options
PTC pour bénécier pleinement de la gestion des alarmes.
Option: Fonction:
[1] * Alarme arrêt
sécur.
Met le variateur de fréquence en
roue libre lorsque la fonction Safe
Torque O est activée. Reset
manuel depuis le LCP, une entrée
digitale ou le bus de terrain.
Description du paramètre Guide de programmation
Réglage
dans le
groupe de
paramètres
5-1*
Entrées
digitales
[0] Non [1] Oui
[130]
Verrouill.
pomp1
[131]
Verrouill.
pomp2
[132]
Verrouill.
pomp3
[133]
Verrouill.
pompe 4
[134]
Verrouill.
pompe 5
[135]
Verrouill.
pompe 6
[136]
Verrouill.
pomp7
[137]
Verrouill.
pomp8
[138]
Verrouill.
pomp9
Réglage du
paramétre 25-06 Nb de
pompes
Contrôlé
par le
relais 1
(uniqueme
nt s’il ne
s’agit pas
de la
pompe
principale)
Contrôlé
par relais2
Contrôlé
par relais3
Contrôlé
par relais4
Contrôlé
par relais5
Contrôlé
par relais6
Contrôlé
par relais7
Contrôlé
par relais8
Contrôlé
par relais9
Contrôlé
par le
variateur
de
fréquence
(blocage
impossible)
Contrôlé
par relais1
Contrôlé
par relais2
Contrôlé
par relais3
Contrôlé
par relais4
Contrôlé
par relais5
Contrôlé
par relais6
Contrôlé
par relais7
Contrôlé
par relais8
5-13 E.digit.born.29
Le paramètre contient toutes les options et fonctions
répertoriées dans le groupe de paramètres 5-1* Entrées digitales.
5-14 E.digit.born.32
Le paramètre contient toutes les options et fonctions
répertoriées dans le groupe de paramètres 5-1* Entrées digitales
sauf pour l’option [32] Entrée impulsions.
5-15 E.digit.born.33
Le paramètre contient toutes les options et fonctions
répertoriées dans le groupe de paramètres 5-1* Entrées digitales.
5-16 E.digit.born. X30/2
Option: Fonction:
[0] * Inactif
Ce paramètre est actif lorsque le VLT® General
Purpose I/O MCB 101 est installé sur le variateur de
fréquence. Le paramètre contient toutes les options
et fonctions répertoriées dans le groupe de
paramètres 5-1* Entrées digitales sauf pour l’option
[32] Entrée impulsions.
5-17 E.digit.born. X30/3
Option: Fonction:
[0] * Inactif
Ce paramètre est actif lorsque le VLT® General
Purpose I/O MCB 101 est installé sur le variateur de
fréquence. Le paramètre contient toutes les options
et fonctions répertoriées dans le groupe de
paramètres 5-1* Entrées digitales sauf pour l’option
[32] Entrée impulsions.
5-18 E.digit.born. X30/4
Option: Fonction:
[0] * Inactif
Ce paramètre est actif lorsque le VLT® General
Purpose I/O MCB 101 est installé sur le variateur de
fréquence. Le paramètre contient toutes les options
et fonctions répertoriées dans le groupe de
paramètres 5-1* Entrées digitales sauf pour l’option
[32] Entrée impulsions.
3 3
5-10 E.digit.born.18
Le paramètre contient toutes les options et fonctions
répertoriées dans le groupe de paramètres 5-1* Entrées digitales
sauf pour l’option [32] Entrée impulsions.
5-11 E.digit.born.19
Le paramètre contient toutes les options et fonctions
répertoriées dans le groupe de paramètres 5-1* Entrées digitales
sauf pour l’option [32] Entrée impulsions.
5-12 E.digit.born.27
Le paramètre contient toutes les options et fonctions
répertoriées dans le groupe de paramètres 5-1* Entrées digitales
sauf pour l’option [32] Entrée impulsions.
MG20OB04 Danfoss A/S © 05/2018 Tous droits réservés. 89
Page 92

5-19 Arrêt de sécurité borne 37
Utiliser ce paramètre pour congurer la fonctionnalité Safe
Torque O. Un message d’avertissement fait tourner le moteur
en roue libre et permet le redémarrage automatique. Un
message d’alarme fait tourner le moteur en roue libre et
nécessite un redémarrage manuel (via un bus de terrain, une E/S
digitale ou en appuyant sur [RESET] sur le LCP). Si la carte VLT
®
PTC Thermistor Card MCB 112 est montée, congurer les options
PTC pour bénécier pleinement de la gestion des alarmes.
Option: Fonction:
[3] Avert. arrêt
sécurité
Met le variateur en roue libre
lorsque la fonction Safe Torque O
est activée (borne 37 inactive).
Lorsque le circuit de Safe Torque
O est rétabli, le variateur de
fréquence continue sans reset
manuel.
[4] Alarme PTC 1 Met le variateur de fréquence en
roue libre lorsque la fonction Safe
Torque O est activée. Reset
manuel depuis le LCP, une entrée
digitale ou le bus de terrain.
[5] Avertis. PTC 1 Met le variateur en roue libre
lorsque la fonction Safe Torque O
est activée (borne 37 inactive).
Lorsque le circuit de Safe Torque
O est rétabli, le variateur de
fréquence continue sans reset
manuel, à moins qu’une entrée
digitale réglée sur [80] Carte PTC 1
ne soit toujours activée.
[6] PTC 1 & relaisACette option est utilisée lorsque la
carte VLT® PTC Thermistor Card
MCB 112 est reliée à un bouton
d’arrêt via un relais de sécurité à la
borne 37. Met le variateur de
fréquence en roue libre lorsque la
fonction Safe Torque O est activée.
Reset manuel depuis le LCP, une
entrée digitale ou le bus de terrain.
[7] PTC 1 & relaisWCette option est utilisée lorsque la
carte VLT® PTC Thermistor Card
MCB 112 est reliée à un bouton
d’arrêt via un relais de sécurité à la
borne 37. Met le variateur en roue
libre lorsque la fonction Safe Torque
O est activée (borne 37 inactive).
Lorsque le circuit de Safe Torque
O est rétabli, le variateur de
fréquence continue sans reset
manuel, à moins qu’une entrée
digitale réglée sur [80] Carte PTC 1
ne soit toujours activée.
5-19 Arrêt de sécurité borne 37
Utiliser ce paramètre pour congurer la fonctionnalité Safe
Torque O. Un message d’avertissement fait tourner le moteur
en roue libre et permet le redémarrage automatique. Un
message d’alarme fait tourner le moteur en roue libre et
nécessite un redémarrage manuel (via un bus de terrain, une E/S
digitale ou en appuyant sur [RESET] sur le LCP). Si la carte VLT
®
PTC Thermistor Card MCB 112 est montée, congurer les options
PTC pour bénécier pleinement de la gestion des alarmes.
Option: Fonction:
[8] PTC 1 & relais
A/W
Cette option rend possible l’utilisation d’une combinaison d’alarme
et d’avertissement.
[9] PTC 1 & relais
W/A
Cette option rend possible l’utilisation d’une combinaison d’alarme
et d’avertissement.
Description du paramètre
33
90 Danfoss A/S © 05/2018 Tous droits réservés. MG20OB04
VLT® AQUA Drive FC 202
AVIS!
Les options [4] Alarme PTC 1 à [9] PTC 1 & relais W/A ne
sont disponibles que lorsque le MCB 112 est connecté.
AVIS!
Lorsque Auto-reset/Avertissement est sélectionné, le
variateur de fréquence passe en redémarrage
automatique.
Fonction Num
Pas de fonction [0] – –
Safe Torque O
Alarm (Alarme Safe
Torque O)
Safe Torque O
Warning (Avertissement Safe Torque
O)
Alarme PTC 1 [4] PTC 1 Safe Torque
Avertis. PTC 1 [5] PTC 1 Safe Torque
PTC 1 & relais A [6] PTC 1 Safe Torque
PTC 1 & relais W [7] PTC 1 Safe Torque
PTC 1 & relais A/W [8] PTC 1 Safe Torque
PTC 1 & relais W/A [9] PTC 1 Safe Torque
Tableau 3.14 Vue d’ensemble des fonctions, alarmes et avertissements
W signie avertissement et A alarme. Pour de plus amples
informations, voir les alarmes et avertissements au
chapitre 5 Dépannage.
PTC Relais
éro
[1]* – Safe Torque O
[A68]
[3] – Safe Torque O
[W68]
–
O [A71]
–
O [W71]
Safe Torque O
O [A71]
O [W71]
O [A71]
O [W71]
[A68]
Safe Torque O
[W68]
Safe Torque O
[W68]
Safe Torque O
[A68]
Page 93

Description du paramètre Guide de programmation
Une panne dangereuse liée à la fonction Safe Torque O
génère l’alarme 72 Panne danger.
Se reporter au Tableau 5.1.
5-20 E.digit.born. X46/1
Ce paramètre est associé à l’entrée digitale de la carte VLT
Extended Relay Card MCB 113. Le paramètre contient toutes les
options et fonctions répertoriées dans le groupe de paramètres
5-1* Entrées digitales sauf pour l’option [32] Entrée impulsions.
®
5-21 E.digit.born. X46/3
Ce paramètre est associé à l’entrée digitale de la carte VLT
Extended Relay Card MCB 113. Le paramètre contient toutes les
options et fonctions répertoriées dans le groupe de paramètres
5-1* Entrées digitales sauf pour l’option [32] Entrée impulsions.
®
5-22 E.digit.born. X46/5
Ce paramètre est associé à l’entrée digitale de la carte VLT
Extended Relay Card MCB 113. Le paramètre contient toutes les
options et fonctions répertoriées dans le groupe de paramètres
5-1* Entrées digitales sauf pour l’option [32] Entrée impulsions.
®
5-23 E.digit.born. X46/7
Ce paramètre est associé à l’entrée digitale de la carte VLT
Extended Relay Card MCB 113. Le paramètre contient toutes les
options et fonctions répertoriées dans le groupe de paramètres
5-1* Entrées digitales sauf pour l’option [32] Entrée impulsions.
®
5-24 E.digit.born. X46/9
Ce paramètre est associé à l’entrée digitale de la carte VLT
Extended Relay Card MCB 113. Le paramètre contient toutes les
options et fonctions répertoriées dans le groupe de paramètres
5-1* Entrées digitales sauf pour l’option [32] Entrée impulsions.
®
5-25 E.digit.born. X46/11
Ce paramètre est associé à l’entrée digitale de la carte VLT
Extended Relay Card MCB 113. Le paramètre contient toutes les
options et fonctions répertoriées dans le groupe de paramètres
5-1* Entrées digitales sauf pour l’option [32] Entrée impulsions.
®
5-26 E.digit.born. X46/13
Ce paramètre est associé à l’entrée digitale de la carte VLT
Extended Relay Card MCB 113. Le paramètre contient toutes les
options et fonctions répertoriées dans le groupe de paramètres
5-1* Entrées digitales sauf pour l’option [32] Entrée impulsions.
®
3.7.3 5-3* Sorties digitales
Paramètres de conguration des fonctions de sortie pour
les bornes de sortie. Les 2 sorties digitales statiques sont
communes aux bornes 27 et 29. Régler la fonction E/S de
la borne 27 au paramétre 5-01 Mode born.27 et la fonction
E/S de la borne 29 au paramétre 5-02 Mode born.29.
AVIS!
Ces paramètres ne peuvent pas être réglés lorsque le
moteur est en marche.
On peut programmer toutes les sorties
digitales avec ces fonctions :
[0] Inactif Valeur par défaut de l’ensemble des
sorties digitales et sorties relais.
[1] Comm.prete La carte de commande reçoit la tension
d’alimentation.
[2] Variateur prêt Le variateur de fréquence est prêt à
fonctionner et applique un signal
d’alimentation sur la carte de commande.
[3] Var.prêt en
ctrl.dist.
[4] Attente/pas
d’avert.
[5] Fonctionne Le moteur tourne.
[6] Fonction./pas
d’avert.
[8] F.sur réf/pas
avert.
[9] Alarme Une alarme active la sortie. Il n’y a pas
[10] Alarme ou
avertis.
[11] À la limite du
couple
[12] Hors gamme
courant
[13] Courant inf. bas Le courant du moteur est inférieur à la
[14] Courant sup.
haut
[15] Hors plage de
vitesse
[16] Vitesse inf.
basse
[17] Vitesse sup.
haute
[18] Hors gamme
retour
Le variateur de fréquence est prêt à
fonctionner et est en mode Auto On.
Le variateur de fréquence est prêt à
fonctionner. Aucune commande de
démarrage ou d’arrêt n’a été donnée
(démarrage/désactivé). Il n’y a pas d’avertissements.
La fréquence de sortie est supérieure à la
vitesse réglée au paramétre 1-81 Vit. min.
pour fonct. à l'arrêt [tr/min]. Le moteur
fonctionne et il n’y a pas d’avertissements.
Le moteur fonctionne à la vitesse de
référence.
d’avertissements.
La sortie est activée par une alarme ou
un avertissement.
La limite de couple dénie au
paramétre 4-16 Mode moteur limite couple
est dépassée.
Le courant du moteur est hors de la
plage dénie au paramétre 4-18 Limite
courant.
valeur dénie au paramétre 4-50 Avertis.
courant bas.
Le courant du moteur est supérieur à la
valeur dénie au paramétre 4-51 Avertis.
courant haut.
La vitesse de sortie est en dehors de la
plage dénie au paramétre 4-52 Avertis.
vitesse basse et au paramétre 4-53 Avertis.
vitesse haute.
La vitesse de sortie est inférieure à la
valeur dénie au paramétre 4-52 Avertis.
vitesse basse.
La vitesse de sortie est supérieure à la
valeur dénie au paramétre 4-53 Avertis.
vitesse haute.
Le signal de retour est hors de la gamme
dénie au paramétre 4-56 Avertis.retour
3 3
MG20OB04 Danfoss A/S © 05/2018 Tous droits réservés. 91
Page 94
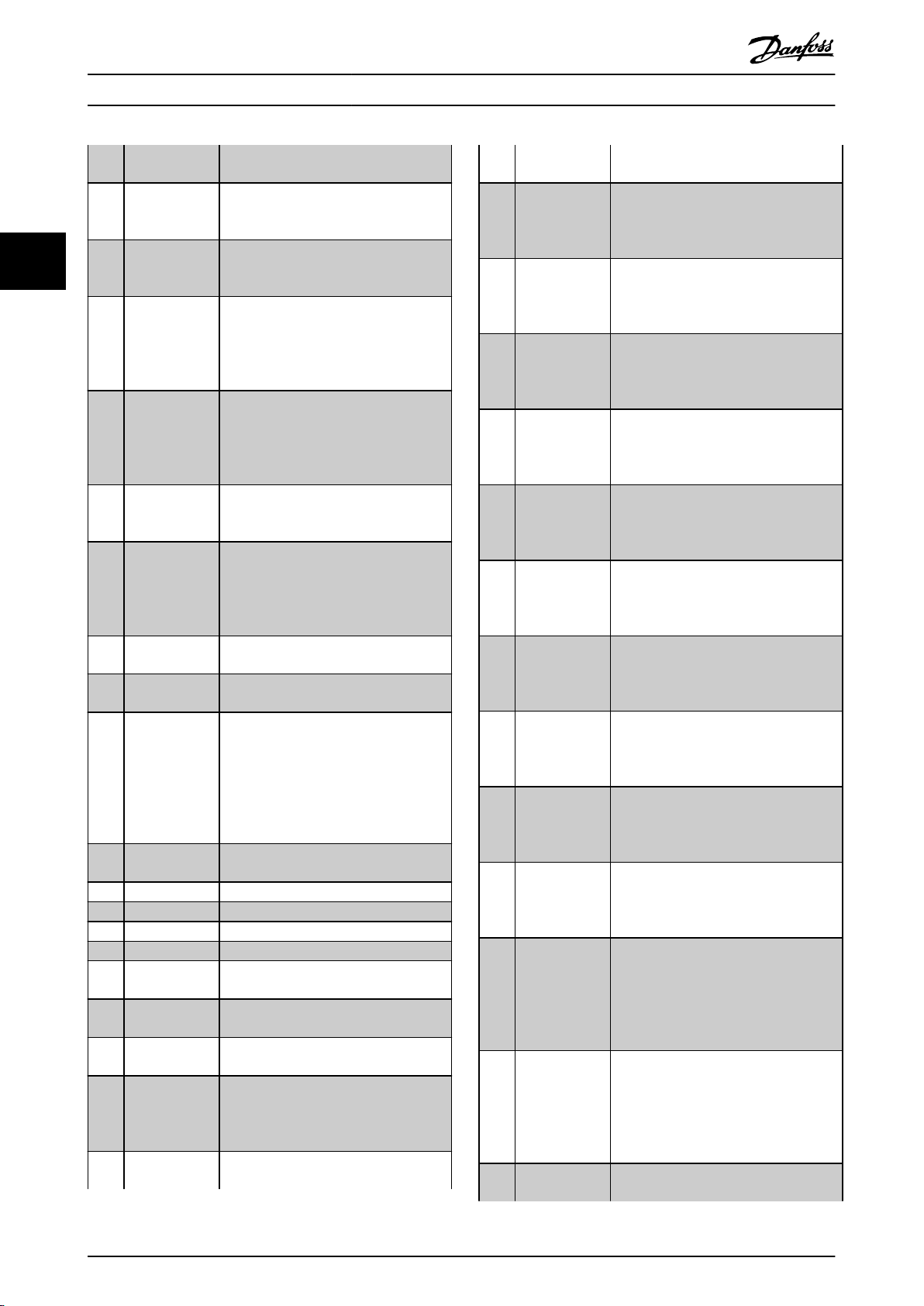
Description du paramètre
VLT® AQUA Drive FC 202
bas et au paramétre 4-57 Avertis.retour
haut.
[19] Inf.retour bas Le retour est au-dessous de la limite
programmée au paramétre 4-52 Avertis.
vitesse basse.
[20] Sup.retour haut Le signal de retour est au-dessus de la
33
[21] Avertis.thermiq. L’avertissement thermique s’allume
[25] Inverse Inversion. Logique 1 = relais activé, 24 V
[26] Bus OK Active un échange de données au niveau
[27] Limite couple &
arrêt
[28] Frein ss avertis. Le frein est actif et il n’y a pas d’avertis-
[29] Frein prêt sans
déf.
[30] Défaut frein.
(IGBT)
[35] Verrouillage ext. La fonction de verrouillage externe est
[40] Hors plage réf.
[41] Inf. réf., bas
[42] Sup. réf., haut
[45] Ctrl bus
[46] Ctrl bus, 1 si
tempo.
[47] Ctrl bus, 0 si
tempo.
[55] Sortie
impulsions
[60] Comparateur 0 Voir le groupe de paramètres 13-1*
[61] Comparateur 1 Voir le groupe de paramètres 13-1*
limite programmée au
paramétre 4-56 Avertis.retour bas.
lorsque la limite de température est
dépassée dans le moteur, le variateur de
fréquence, la résistance de freinage ou la
thermistance.
CC, en cas de rotation du moteur dans le
sens horaire. Logique 0 = relais non
activé, aucun signal, en cas de rotation
antihoraire du moteur.
du port de communication série
(absence de temporisation).
Utilisé lors d’un arrêt en roue libre et en
condition de limite de couple. Le signal a
le niveau logique 0 si le variateur de
fréquence, en limite de couple, a reçu un
signal d’arrêt.
sements.
Le frein est prêt à l’exploitation et il n’y a
pas de panne.
La sortie est de niveau logique 1 en cas
de court-circuit de l’IGBT du frein. Cette
fonction sert à protéger le variateur de
fréquence en cas de panne des modules
de freinage. Utiliser la sortie/le relais
pour couper la tension secteur du
variateur de fréquence.
activée via l’une des entrées digitales.
Comparateurs. Si Comparateur 0 est
évalué comme étant vrai, la sortie
augmente. Sinon, elle est basse.
Comparateurs. Si Comparateur 1 est
[62] Comparateur 2 Voir le groupe de paramètres 13-1*
[63] Comparateur 3 Voir le groupe de paramètres 13-1*
[64] Comparateur 4 Voir le groupe de paramètres 13-1*
[65] Comparateur 5 Voir le groupe de paramètres 13-1*
[70] Règle logique 0 Voir le groupe de paramètres 13-4* Règles
[71] Règle logique 1 Voir le groupe de paramètres 13-4* Règles
[72] Règle logique 2 Voir le groupe de paramètres 13-4* Règles
[73] Règle logique 3 Voir le groupe de paramètres 13-4* Règles
[74] Règle logique 4 Voir le groupe de paramètres 13-4* Règles
[75] Règle logique 5 Voir le groupe de paramètres 13-4* Règles
[80] Sortie digitale A Voir le paramétre 13-52 Action contr.
[81] Sortie digitale B Voir le paramétre 13-52 Action contr.
[82] Sortie digitale C Voir le paramétre 13-52 Action contr.
évalué comme étant vrai, la sortie
augmente. Sinon, elle est basse.
Comparateurs. Si Comparateur 2 est
évalué comme étant vrai, la sortie
augmente. Sinon, elle est basse.
Comparateurs. Si Comparateur 3 est
évalué comme étant vrai, la sortie
augmente. Sinon, elle est basse.
Comparateurs. Si Comparateur 4 est
évalué comme étant vrai, la sortie
augmente. Sinon, elle est basse.
Comparateurs. Si Comparateur 5 est
évalué comme étant vrai, la sortie
augmente. Sinon, elle est basse.
de Logique. Si Règle logique 0 est
évaluée comme étant vraie, la sortie
augmente. Sinon, elle est basse.
de Logique. Si Règle logique 1 est
évaluée comme étant vraie, la sortie
augmente. Sinon, elle est basse.
de Logique. Si Règle logique 2 est
évaluée comme étant vraie, la sortie
augmente. Sinon, elle est basse.
de Logique. Si Règle logique 3 est
évaluée comme étant vraie, la sortie
augmente. Sinon, elle est basse.
de Logique. Si Règle logique 4 est
évaluée comme étant vraie, la sortie
augmente. Sinon, elle est basse.
de Logique. Si Règle logique 5 est
évaluée comme étant vraie, la sortie
augmente. Sinon, elle est basse.
logique avancé. La sortie augmente dès
que l’action logique avancée [38] Déf.
sort. dig. A haut est exécutée. La sortie
diminue dès que l’action logique avancée
[32] Déf. sort. dig. A bas est exécutée.
logique avancé. La sortie augmente dès
que l’action logique avancée [39] Déf.
sort. dig. B haut est exécutée. La sortie
diminue dès que l’action logique avancée
[33] Déf. sort. dig. B bas est exécutée.
logique avancé. La sortie augmente dès
92 Danfoss A/S © 05/2018 Tous droits réservés. MG20OB04
Page 95

Description du paramètre Guide de programmation
que l’action logique avancée [40] Déf.
sort. dig. C haut est exécutée. La sortie
diminue dès que l’action logique avancée
[34] Déf. sort. dig. C bas est exécutée.
[83] Sortie digitaleDVoir le paramétre 13-52 Action contr.
logique avancé. La sortie augmente dès
que l’action logique avancée [41] Déf.
sort. dig. D haut est exécutée. La sortie
diminue dès que l’action logique avancée
[35] Déf. sort. dig. D bas est exécutée.
[84] Sortie digitale E Voir le paramétre 13-52 Action contr.
logique avancé. La sortie augmente dès
que l’action logique avancée [42] Déf.
sort. dig. E haut est exécutée. La sortie
diminue dès que l’action logique avancée
[36] Déf. sort. dig. E bas est exécutée.
[85] Sortie digitale F Voir le paramétre 13-52 Action contr.
logique avancé. La sortie augmente dès
que l’action logique avancée [43] Déf.
sort. dig. F haut est exécutée. La sortie
diminue dès que l’action logique avancée
[37] Déf. sort. dig. F bas est exécutée.
[90] Impuls.
compteur kWh
[120] System On Ref
[155] Verifying Flow
[160] Pas d’alarme La sortie est haute en l’absence
[161] Fonct. inversé La sortie est haute dès lors que le
[165] Référence
locale act.
[166] Réf.dist.active La sortie est haute si paramétre 3-13 Type
[167] Ordre dém.
actif
Crée une impulsion sur la sortie digitale
à chaque fois que le variateur de
fréquence utilise 1 kWh.
d’alarmes.
variateur de fréquence fonctionne dans
le sens antihoraire (produit logique des
bits d’état fonct. ET inversé).
La sortie est haute si paramétre 3-13 Type
référence = [2] Local ou
paramétre 3-13 Type référence = [0] Mode
hand/auto en même temps que le LCP
est en mode Hand On.
référence = [1] A distance ou [0] Mode
hand/auto lorsque le LCP est en mode
Auto On.
La sortie est haute dès lors qu’il existe un
ordre de démarrage actif, Auto On par
exemple, et qu’un ordre de démarrage
via une entrée digitale ou via un bus est
actif, ou si [Hand On] est activé.
AVIS!
Tous les ordres arrêt/roue libre
inversé doivent être inactifs.
[168] Mode manuel La sortie est haute dès lors que le
variateur de fréquence est en mode
Hand on (comme indiqué par le voyant
au-dessus de [Hand On]).
[169] Mode
automatique
La sortie est haute dès lors que le
variateur de fréquence est en mode Auto
On (comme indiqué par le voyant audessus de [Auto On]).
[180] Déf.horloge La fonction d’horloge a été réinitialisée à
la valeur par défaut (01-01-2000) suite à
une panne d’alimentation.
[181] Maintenance
prév.
[182] Deragging Le décolmatage est actif.
[188] Connex°
condens. AHF
[189] Commde ventil.
ext.
[190] Absence de
débit
[191] Pompe à sec Une condition de pompe à sec a été
[192] Fin de courbe Actif lorsqu’une condition de n de
[193] Mode veille Le variateur de fréquence/système est
[194] Courroie cassée Une condition de courroie cassée a été
[195] Bipasse vanne
contrôle
Au moins un événement de maintenance
préventive programmé au
paramétre 23-10 Élément entretenu a
dépassé le délai prévu pour l’action
spéciée au paramétre 23-11 Action de
mainten..
Voir le paramétre 5-80 Temporisation
reconnex° condens. AHF.
La commande de ventilation externe est
active.
Une situation d’absence de débit ou de
vitesse minimum a été détectée si cette
option a été activée au
Paramétre 22-21 Détect.puiss.faible.
détectée. Activer cette fonction au
paramétre 22-26 Fonct.pompe à sec.
courbe apparaît.
passé en mode veille. Voir le groupe de
paramètres 22-4* Mode veille.
détectée. Activer cette fonction au
paramétre 22-60 Fonct.courroi.cassée.
Le contrôle de soupape de décharge
(sortie digitale/relais du variateur de
fréquence) est utilisé pour les systèmes
de compresseur an de décharger le
compresseur au démarrage à l’aide d’une
soupape de décharge. Une fois que
l’ordre de démarrage est passé, la
soupape de décharge s’ouvre jusqu’à ce
que le variateur de fréquence atteigne la
limite basse de la vitesse du moteur
(paramétre 4-11 Vit. mot., limite infér. [tr/
min]). La soupape de décharge se ferme
lorsque la limite est atteinte, permettant
ainsi au compresseur de fonctionner
normalement. Cette procédure ne sera
de nouveau activée qu’au lancement
d’un nouveau démarrage et lorsque la
vitesse du variateur sera nulle à la
réception d’un signal de démarrage. Le
Paramétre 1-71 Retard démar. peut être
utilisé pour temporiser le démarrage du
moteur.
3 3
MG20OB04 Danfoss A/S © 05/2018 Tous droits réservés. 93
Page 96

130BA251.10
Temps
Temps
Temps
Marche
Arret
Vitesse
REF
Min
ON
OFF
ON
OFF
Description du paramètre
VLT® AQUA Drive FC 202
[242] RS Flipop 2 Voir le paramétre 13-15 RS-FF Operand S et
le paramétre 13-16 RS-FF Operand R.
[243] RS Flipop 3 Voir le paramétre 13-15 RS-FF Operand S et
le paramétre 13-16 RS-FF Operand R.
[244] RS Flipop 4 Voir le paramétre 13-15 RS-FF Operand S et
le paramétre 13-16 RS-FF Operand R.
33
[245] RS Flipop 5 Voir le paramétre 13-15 RS-FF Operand S et
le paramétre 13-16 RS-FF Operand R.
[246] RS Flipop 6 Voir le paramétre 13-15 RS-FF Operand S et
Illustration 3.28 Principe de fonctionnement de la soupape de décharge
[247] RS Flipop 7 Voir le paramétre 13-15 RS-FF Operand S et
le paramétre 13-16 RS-FF Operand R.
le paramétre 13-16 RS-FF Operand R.
[199] Pipe Filling Actif lorsque la fonction de remplissage
de tuyau est en cours. Voir le groupe de
paramètres 29-** Water Application
Functions.
Les options de réglage suivantes sont
toutes liées au contrôleur de cascade.
Pour plus de détails, voir le groupe de
paramètres 25-** Contrôleur cascade.
[200] Pleine
Toutes les pompes à pleine vitesse
capacité
[201] Pompe 1 en
fct
Au moins une des pompes contrôlées par le
contrôleur de cascade est en cours de
fonctionnement. La fonction dépend du
Réglage dans le
groupe de
paramètres 5-3*
Sorties digitales
[0] Non [1] Oui
[201] Pompe 1
en fct
[202] Pompe 2
en fct
[203] Pompe 3
en fct
Tableau 3.15 Pompes commandées par le contrôleur de cascade
Réglage du paramétre 25-05 Pomp.princ
xe
Contrôlé par
relais1
Commandé par
variateur de
fréquence
Contrôlé par
relais2
Contrôlé par
relais1
– Contrôlé par
relais2
réglage du paramétre 25-05 Pomp.princ xe.
Si le réglage est déni sur [0] Non, alors
Pompe 1 fait référence à la pompe
contrôlée par le relais 1, etc. S’il est déni
sur [1] Oui, Pompe 1 fait référence à la
pompe contrôlée par le variateur de
fréquence uniquement (sans implication des
5-30 S.digit.born.27
Ce paramètre présente les options décrites dans le
chapitre 3.7.3 5-3* Sorties digitales.
Option: Fonction:
[0] * Inactif
relais intégrés) et Pompe 2 fait référence à
5-31 S.digit.born.29
Ce paramètre présente les options décrites dans le
chapitre 3.7.3 5-3* Sorties digitales.
Option: Fonction:
[0] * Inactif
[202] Pompe 2 en
fct
[203] Pompe 3 en
la pompe contrôlée par le relais 1. Voir le
Tableau 3.15.
Voir [201].
Voir [201].
fct
[204] Pompe 4 en
fct
[205] Pompe 5 en
fct
[206] Pompe 6 en
fct
[207] Pompe 7 en
5-32 S.digit.born. X30/6 (MCB 101)
Ce paramètre présente les options décrites dans le
chapitre 3.7.3 5-3* Sorties digitales.
Option: Fonction:
[0] * Inactif
Ce paramètre est actif lorsque le module VLT
General Purpose I/O MCB 101 est installé sur le
variateur de fréquence.
®
fct
[208] Pompe 8 en
fct
[209] Pompe 9 en
fct
[240] RS Flipop 0 Voir le paramétre 13-15 RS-FF Operand S et
le paramétre 13-16 RS-FF Operand R.
[241] RS Flipop 1 Voir le paramétre 13-15 RS-FF Operand S et
le paramétre 13-16 RS-FF Operand R.
94 Danfoss A/S © 05/2018 Tous droits réservés. MG20OB04
5-33 S.digit.born. X30/7 (MCB 101)
Option: Fonction:
[0] * Inactif
Ce paramètre est actif lorsque le module VLT
General Purpose I/O MCB 101 est installé sur le
variateur de fréquence. Options et fonctions
identiques à celles du groupe de paramètres 5-1*
Entrées digitales.
®
Page 97

5-40 Fonction relais
Tableau [20]
Option: Fonction:
Sélectionner des options pour
dénir la fonction des relais.
La sélection de chaque relais
mécanique est eectuée dans un
paramètre de tableau.
[0] Inactif
[1] Comm.prete
[2] Variateur prêt
[3] Var.prêt en
ctrl.dist.
[4] Attente/pas
d'avert.
[5] Fonctionne
[6] Fonction./pas
d'avert.
[8] F.sur réf/pas
avert.
[9] Alarme
[10] Alarme ou
avertis.
[11] À la limite du
couple
[12] Hors gamme
courant
[13] Courant inf.
bas
[14] Courant sup.
haut
[15] Hors plage de
vitesse
[16] Vitesse inf.
basse
[17] Vitesse sup.
haute
[18] Hors gamme
retour
[19] Inf.retour bas
[20] Sup.retour
haut
[21] Avertis.thermi
q.
[25] Inverse
[26] Bus OK
[27] Limite couple
& arrêt
[28] Frein ss
avertis.
5-40 Fonction relais
Tableau [20]
Option: Fonction:
[29] Frein prêt sans
déf.
[30] Défaut frein.
(IGBT)
[33] Arrêt sécurité
actif
[35] Verrouillage
ext.
[36] Mot contrôle
bit 11
[37] Mot contrôle
bit 12
[40] Hors plage réf.
[41] Inf. réf., bas
[42] Sup. réf., haut
[45] Ctrl bus
[46] Ctrl bus, 1 si
tempo.
[47] Ctrl bus, 0 si
tempo.
[51] Contrôle par
MCO
[59] Remote,enable
,no TW
[60] Comparateur 0
[61] Comparateur 1
[62] Comparateur 2
[63] Comparateur 3
[64] Comparateur 4
[65] Comparateur 5
[70] Règle logique
0
[71] Règle logique
1
[72] Règle logique
2
[73] Règle logique
3
[74] Règle logique
4
[75] Règle logique
5
[80] Sortie digitale
A
[81] Sortie digitale
B
[82] Sortie digitale
C
[83] Sortie digitale
D
[84] Sortie digitale
E
Description du paramètre Guide de programmation
3.7.4 5-4* Relais
Paramètres de conguration des fonctions de temporisation et de sortie des relais.
MG20OB04 Danfoss A/S © 05/2018 Tous droits réservés. 95
3 3
Page 98

5-40 Fonction relais
Tableau [20]
Option: Fonction:
[85] Sortie digitale
F
[120] System On Ref
[151] ATEX ETR cur.
alarm
[152] ATEX ETR freq.
alarm
[153] ATEX ETR cur.
warning
[154] ATEX ETR freq.
warning
[155] Verifying Flow
[160] Pas d'alarme
[161] Fonct. inversé
[164] Local ref
active, not
OFF
[165] Référence
locale act.
[166] Réf.dist.active
[167] Ordre dém.
actif
[168] Mode manuel
[169] Mode
automatique
[180] Déf.horloge
[181] Maintenance
prév.
[183] Pre/Post Lube
[188] Connex°
condens. AHF
[189] Commde
ventil. ext.
[190] Absence de
débit
[191] Pompe à sec
[192] Fin de courbe
[193] Mode veille
[194] Courroie
cassée
[195] Bipasse vanne
contrôle
[196] Mode incendie
actif
[197] Mode incendie
était actif
[198] Bipasse mode
actif
[199] Pipe Filling
[211] Pompe
cascade 1
5-40 Fonction relais
Tableau [20]
Option: Fonction:
[212] Pompe
cascade 2
[213] Pompe
cascade 3
[214] Pompe
cascade 4
[215] Pompe
cascade 5
[216] Pompe
cascade 6
[217] Pompe
cascade 7
[218] Pompe
cascade 8
[219] Pompe
cascade 9
[230] Ext. Cascade
Ctrl
[236] Ext. CL 1 on
Ref
[237] Ext. CL 2 on
Ref
[238] Ext. CL 3 on
Ref
[240] RS Flipop 0 Voir le paramétre 13-15 RS-FF
Operand S et le paramétre 13-16 RSFF Operand R.
[241] RS Flipop 1 Voir le paramétre 13-15 RS-FF
Operand S et le paramétre 13-16 RSFF Operand R.
[242] RS Flipop 2 Voir le paramétre 13-15 RS-FF
Operand S et le paramétre 13-16 RSFF Operand R.
[243] RS Flipop 3 Voir le paramétre 13-15 RS-FF
Operand S et le paramétre 13-16 RSFF Operand R.
[244] RS Flipop 4 Voir le paramétre 13-15 RS-FF
Operand S et le paramétre 13-16 RSFF Operand R.
[245] RS Flipop 5 Voir le paramétre 13-15 RS-FF
Operand S et le paramétre 13-16 RSFF Operand R.
[246] RS Flipop 6 Voir le paramétre 13-15 RS-FF
Operand S et le paramétre 13-16 RSFF Operand R.
[247] RS Flipop 7 Voir le paramétre 13-15 RS-FF
Operand S et le paramétre 13-16 RSFF Operand R.
Description du paramètre
33
96 Danfoss A/S © 05/2018 Tous droits réservés. MG20OB04
VLT® AQUA Drive FC 202
Page 99

5-41 Relais, retard ON
Tableau [20]
Range: Fonction:
0.01 s* [0.01 - 600 s] Saisir le délai d’activation des relais.
Choisir un des 2 relais mécaniques
internes dans une fonction de
tableau. Voir le
paramétre 5-40 Fonction relais pour
plus de précisions.
5-42 Relais, retard OFF
Tableau[20]
Range: Fonction:
0.01 s* [0.01 - 600 s] Saisir le délai de désactivation des
relais. Choisir un des 2 relais
mécaniques internes dans une
fonction de tableau. Voir le
paramétre 5-40 Fonction relais pour
plus de précisions. Si la condition
Événement sélectionné est modiée
avant l'expiration d'une temporisation, la sortie relais n'est pas
aectée.
130BA076.10
Low freq.
P 5-50/
P 5-55
Input
(Hz)
High freq.
P 5-51/
P 5-56
Ref.
[tr/min]
Valeur ref.
haute
P 5-53/
P 5-58
Valeur ref.
basse
P 5-52/
P 5-57
5-50 F.bas born.29
Range: Fonction:
100 Hz* [0 - 110000
Hz]
Saisir la limite de fréquence basse
correspondant à la vitesse de l’arbre
moteur basse (c.-à-d. la valeur de
référence basse) au
paramétre 5-52 Val.ret./Réf.bas.born.
29. Se reporter à l’Illustration 3.31
de cette section.
Description du paramètre Guide de programmation
Illustration 3.30 Relais, retard OFF
Si la condition Événement sélectionné est modiée avant
l'expiration du retard ON ou OFF, la sortie relais n'est pas
aectée.
3.7.5 5-5* Entrée impulsions
Paramètres d’entrées d’impulsions servant à dénir une
fenêtre adaptée à la zone de référence des impulsions
(conguration mise à l’échelle et ltre pour entrées
d’impulsions). Les bornes d’entrée 29 ou 33 agissent
comme des entrées de référence de fréquence. Régler la
borne 29 (paramétre 5-13 E.digit.born.29) ou la borne 33
(paramétre 5-15 E.digit.born.33) sur [32] Entrée impulsions. Si
la borne 29 est utilisée comme entrée, régler le
paramétre 5-02 Mode born.29 sur [0] Entrée.
3 3
Illustration 3.29 Relais, retard ON
MG20OB04 Danfoss A/S © 05/2018 Tous droits réservés. 97
Illustration 3.31 Entrée impulsions
Page 100

5-51 F.haute born.29
Range: Fonction:
100 Hz* [0 - 110000
Hz]
Saisir la limite de fréquence haute
correspondant à la vitesse de l’arbre
moteur élevée (c.-à-d. la valeur de
référence haute) au
paramétre 5-53 Val.ret./Réf.haut.born.
29.
5-52 Val.ret./Réf.bas.born.29
Range: Fonction:
0 ReferenceFeedback
Unit*
[-999999.999
- 999999.999
Reference-
FeedbackUnit]
Saisir la limite de la valeur de
référence basse pour la vitesse de
l’arbre moteur [tr/min]. C’est
également la valeur du signal de
retour la plus basse, (voir
également le paramétre 5-57 Val.ret./
Réf.bas.born.33).
5-53 Val.ret./Réf.haut.born.29
Range: Fonction:
100
ReferenceFeedbackU
nit*
[-999999.999
- 999999.999
Reference-
FeedbackUnit]
Saisir la valeur de référence élevée
[tr/min] pour la vitesse de l’arbre
moteur et la valeur de signal de
retour élevée (voir également le
paramétre 5-58 Val.ret./Réf.haut.born.
33).
5-54 Tps ltre pulses/29
Range: Fonction:
100 ms* [5 - 1000 ms]
AVIS!
Ce paramètre ne peut pas être
réglé lorsque le moteur est en
marche.
Saisir la constante du temps du
ltre d’impulsions. Le ltre
d’impulsions atténue les oscillations
du signal de retour, ce qui constitue
un avantage lorsqu’il y a beaucoup
de bruit dans le système. Une
constante de temps élevée assure
une meilleure atténuation, mais
accroît également le retard via le
ltre.
5-55 F.bas born.33
Range: Fonction:
100 Hz* [0 - 110000
Hz]
Saisir la fréquence basse correspondant à la vitesse de l'arbre
moteur basse (c.-à-d. la valeur de
référence basse) au
paramétre 5-57 Val.ret./Réf.bas.born.
33.
5-56 F.haute born.33
Range: Fonction:
100 Hz* [0 - 110000
Hz]
Saisir la fréquence haute correspondant à la vitesse de l'arbre
moteur élevée (c.-à-d. la valeur de
référence haute) au
paramétre 5-58 Val.ret./Réf.haut.born.
33.
5-57 Val.ret./Réf.bas.born.33
Range: Fonction:
0 ReferenceFeedback
Unit*
[-999999.999
- 999999.999
Reference-
FeedbackUnit]
Saisir la valeur de référence basse
[tr/min] pour la vitesse de l’arbre
moteur. C’est également la valeur
du signal de retour basse (voir aussi
le paramétre 5-52 Val.ret./
Réf.bas.born.29).
5-58 Val.ret./Réf.haut.born.33
Range: Fonction:
100
ReferenceFeedbackU
nit*
[-999999.999
- 999999.999
Reference-
FeedbackUnit]
Saisir la valeur de référence haute
[tr/min] pour la vitesse de l’arbre
moteur. Voir aussi le
paramétre 5-53 Val.ret./Réf.haut.born.
29.
5-59 Tps ltre pulses/33
Range: Fonction:
100 ms* [5 - 1000 ms]
AVIS!
Ce paramètre ne peut pas être
réglé lorsque le moteur est en
marche.
Saisir la constante du temps du
ltre d'impulsions. Le ltre passe-
bas atténue les oscillations du
signal de retour provenant de la
commande et en réduit l'inuence.
Cela présente un avantage en cas
de forte perturbation du signal.
Description du paramètre
VLT® AQUA Drive FC 202
33
98 Danfoss A/S © 05/2018 Tous droits réservés. MG20OB04
 Loading...
Loading...