

Page 1

1.1.1. Submersible Pump Application
1. Submersible Pump Application for VLT
AQUA Drive FC 200
The system consists of a submersible pump controlled by a Danfoss VLT AQUA Drive and a pressure transmitter. The transmitter gives a 4-20 mA feedback
signal to the VLT AQUA Drive, which keeps a constant pressure by controlling the speed of the pump. To design a drive for a submersible pump application,
there are a few important issues to take into consideration. Therefore the drive used must be chosen according to motor current.
1. The motor is a so called “Can motor” with a stainless steel can between the rotor and stator. Ther e is a larger and a more magnetic resista nt
air-gap than on a normal motor hence a weaker field which results in the motors being designed with a higher rated current than a norm motor
with similar rated power.
2. The pump contains thrust bearings which will be damaged when running below minimum speed which normally will be 30 Hz.
3. The motor reactance is nonlinear in submersible pump motors and there fore Automatic Motor Adaption (AMA) may no t be po ssible. However,
normally submersible pumps are operated with very long motor cables that might eliminate the nonlinear motor reactance and enable the drive
to perform AMA. If AMA fails, the motor data can be set from parameter group 1-3* (see motor datasheet). Be aware that if AMA has succeeded
the drive will compensate for voltage drop in the l ong motor cabl es, so i f the Adva nced mot or data are set ma nually, the lengt h of the motor
cable must be taken into considerations to optimize system performance.
4. It is important that the system is operated with a minimum of wear and tear of the pump and motor. A Danfoss Sine-Wave filter can lower the
motor insulation stress and increase lifetime (check actual motor insulation and VLT AQUA Drive du/dt specification). It is recommended to use
a filter to reduce the need for service.
5. EMC performance can be difficult to achieve due to the fact that the special pump cable which is able to withstand the wet conditions in the well
normally is unscreened. A solution could be to use a screened cable above the well and fix the screen to the well pipe if it is made of steel (can
also be made of plastic). A Sine-Wave filter will also reduce the EMI from unscreened motor cables.
The special “can motor” is used due to th e wet installation conditions. The drive needs to be designed for the system accordin g to output current to be
able to run the motor at nominal power.
To prevent damage to the thru st bearings of the pump, it is important to ramp the pump from stop to min. speed as quick as possible. Well-known
manufacturers of submersible pumps recommend that the pump is ramped to min. spee d (30 Hz) in max. 2 -3 se conds. The new VLT© AQUA Drive is
designed with Initial and Final Ramp for these applica tio ns. The Initial and Final ramps are 2 individual ramps, where Initial Ramp, if enabled, will ramp
the motor from stop to min. speed and automatically switch to normal ramp, when min. speed is reached. Final ramp will do the opposite from min. speed
to stop in a stop situation.
1
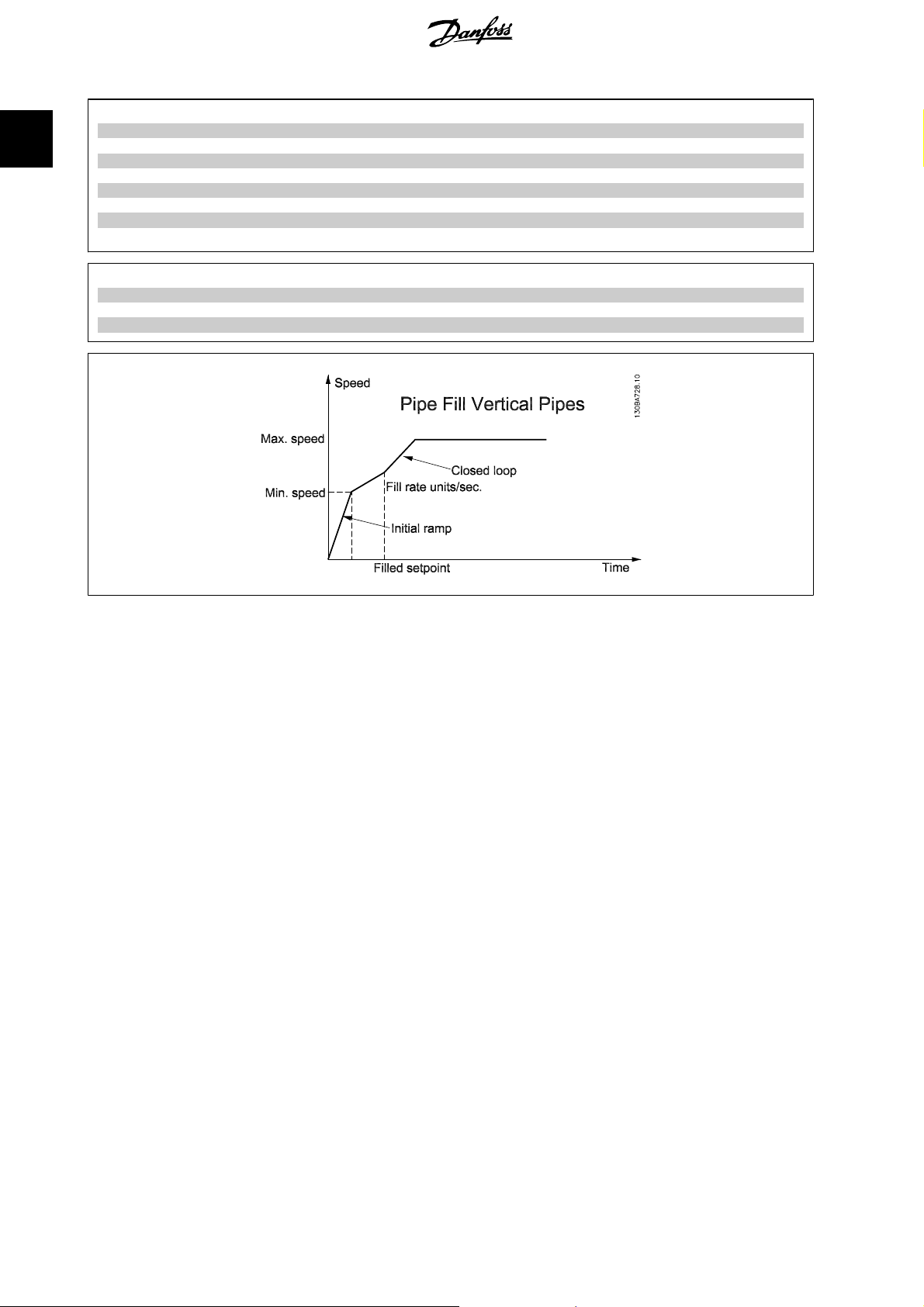
Pipe-Fill mode can be enabled to prevent water hammering. The Danf oss VLT AQUA Dri ve is cap able of f illing ve rtical p ipes using the PI D controller to
slowly ramp up the pressure with a user specified rate (units/sec). If enabled the drive will, when it reaches min. speed after startup, enter pipe fill mode.
The pressure will slowly be ramped up until it reaches a user specified Filled Set Point, where after the drive automatically disables Pipe Fill Mode and
continues in normal closed loop operation.
This feature is designed for irrigation applications.
Electrical Wiring
Typical parameter settings
Typical/recommended settings in brackets().
Parameters:
Motor Rated Power Par. 1-20 / par. 1-21
Motor Rated Voltage Par. 1-22
Motor Current Par. 1-24
Motor Rated Speed Par. 1-28
Enable Automatic Motor Adaptation (AMA in par. 1-29)
NB!
Please set analogue input 2, (terminal (54) format to
mA. (switch 202).
MN.20.A1.02 - VLT
®
is a registered Danfoss trademark
1
Page 2
1
1. Submersible Pump Application for VLT
AQUA Drive FC 200
Min. Reference Par. 3-01 (30 Hz)
Max. Reference Par. 3-02 (50/60 Hz)
Initial Ramp Up Time Par. 3-84 (2 sec.)
Final Ramp Down Time Par. 3-88 (2 sec.)
Normal Ramp Up Time Par. 3-41 (8 sec. depending on size)
Normal Ramp Down Time Par. 3-42 (8 sec. depending on size)
Motor Min. Speed Par. 4-11 (30 Hz)
Motor Max. Speed Par. 4-13 (50/60 Hz)
Use the “Closed Loop” wizard under “Quick Menu_Funtion_Setup”, to easily set up the feedback settings in the PID controller.
Pipe Fill Mode
Pipe Fill Enable Par. 29-00
Pipe Fill Rate Par. 29-04 (Feedback units/sec.)
Filled Set Point Par. 29-05 (Feedback units)
2
MN.20.A1.02 - VLT
®
is a registered Danfoss trademark
 Loading...
Loading...