

Page 1

技术手册
液位控制器
EKE 347
EKE 347 控制器专门用于调节液位:
• 桶泵系统
• 气液分离器
• 中间冷却器
• 经济器
• 冷凝器
• 储液器
液位传感器会不断检测容器内的制冷剂液位,
并将液位信号传输给 EKE347
EKE 347 接受液位信号后给出指令,控制阀门
开度,调节容器内的进/出流量,从而使液位
始终处于允许范围内。
特点 液位控制
液位报警功能
液位上限、液位下限和报警液位的继电器
输出
提供首次配置所需的简单方便的设置向导
PI 控 制
低压或高压侧液位控制
当 使用膨胀阀 AKV/A 时,主/从系统能够管理
最多可达 3 个分步式开度的 AKV/A 阀
手动控制输出
能够限制开度
通过迟滞进行 开/关 控制
编程菜单采用三个访问级别和独立密码
能够连接其他 EKE347 控制器
能够连接有线远程显示屏
总线通信:
- CAN Bus(仅丹佛斯内部使用)
- MODBUS RTU RS485 适用于通过 PLC 通信
© Danfoss | DCS (ADAP-KOOL®) |2016-04
DKRCI.PD.RP0.A4.41 | 1
Page 2
技术手册 | 液位控制器 | EKE 347
Danfoss
M84H0081_1
AKS 4100/
AKS 4100U
EKE 347
Dan
M84H0086_
Dan
M84H0087_
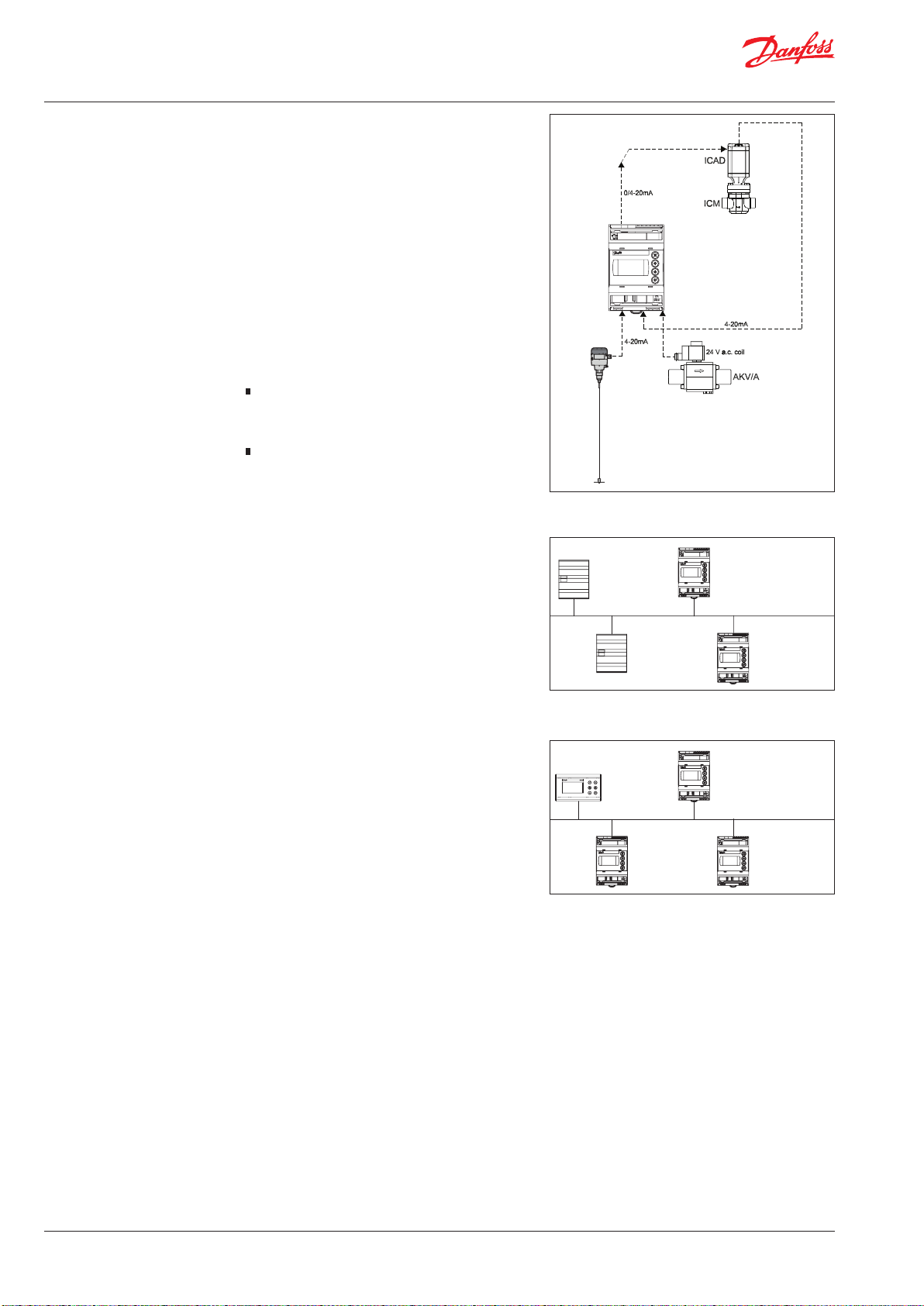
液位传感器
采用导向微波棒 AKS 4100/4100U 能够在大范
围内设定制冷剂液位。
EKE 347
控制器可以根据接收的信号来控制高压侧或低
压侧液位(参阅第 3 页)。
EKE 347 支持两种类型的丹佛斯膨胀阀。(参阅
下文)
如果使用的是电动阀 ICM,还可接收来自 ICM 的
模拟量信号反馈,显示阀门 ICM 的开度。
膨胀阀 可以采用两种类型的丹佛斯膨胀阀
ICM
ICM 是通过数字步进电机 ICAD 驱动的直动式
电动阀门
AKV/A
AK VA 或 AKV 是脉宽调制的电子膨胀阀。
MODBUS 通 信
EKE 347 配有标准的基于 RS 485 的 MODBUS-RTU
总线通信接口来连接第三方设备,比如 PLC。
能够通过 MODBUS 在 EKE 347 控制器上实现参
数读写。
能够通过 SCADA 系统的 PLC 来执行运行、监控
和数据收集。
PLC
Master
EKE 347
Slave
MODBUS-RTU network
1
foss
PLC
Slave
EKE 347
Slave
远程显示屏 — 选配
控制器具有数据通信功能,可通过面板安装
的远程显示屏来查看和访问所有与内置丹佛
斯 CAN 总线连接的 EKE 347 控制器。
EKE 347
Remote
display
Danfoss CAN bus
1
foss
EKE 347
EKE 347
© Danfoss | DCS (ADAP-KOOL®) | 2016-04
DKRCI.PD.RP0.A4.41 | 2
Page 3
技术手册 | 液位控制器 | EKE 347
⭫ᵰε
Danf
80G75_06-2014
Danfoss
80G76_06-2014
EKE 347
AKS 4100/
AKS 4100U
Danfoss
Danfoss
80G78_06-2014
EKE 347
AKS 4100/
AKS 4100U
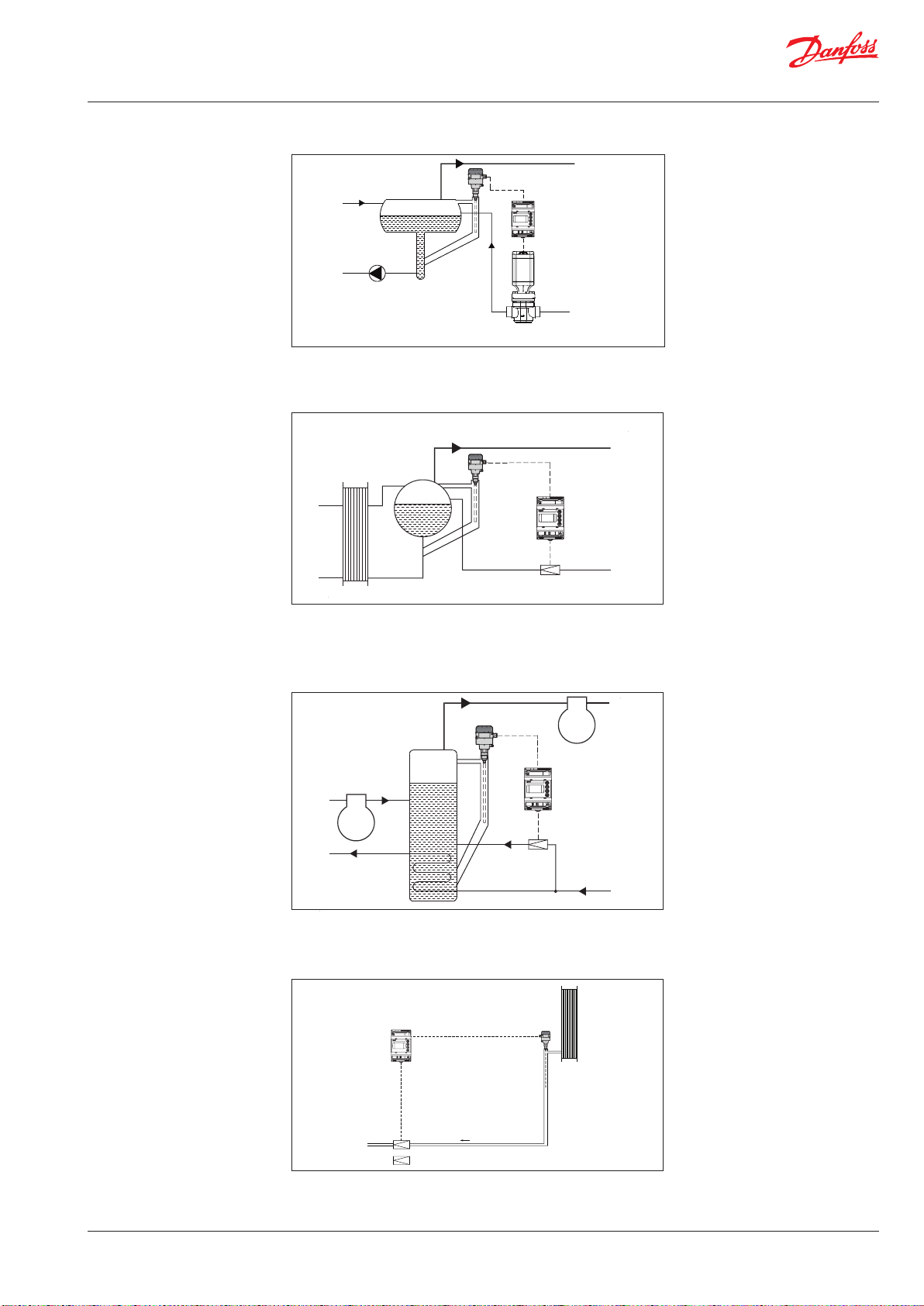
应用举例 桶泵系统
控制进液量能够实现更稳定的液位和吸气压力。
满液式蒸发器的气液分离器
— 即使在负荷变化剧烈的情况下,调整控制和使用大容量的阀门都可以保证液位稳定。
80G77_01-2014
AKS 4100/
AKS 4100U
EKE 347
ICM 䰶䰞
δᑜ ICAD
oss
系统配置 ICAD
高低压侧控制选择:低
液位传感器:AKS 4100/U
系统配置 AKV/A
高低压侧控制选择:低
液位传感器:AKS 4100/U
AKS 4100/
AKS 4100U
EKE 347
中间冷却器
— 液位传感器的测量范围非常宽,因此可以用于控制容器的各种液位高度,还可以利用安全
功能信号控制最高允许液位。
系统配置 AKV/A
高低压侧控制选择:低
液位传感器:AKS 4100/U
储液器/冷凝器
控制系统响应时间短这一特点,特别适用于在制冷剂充注量少的高压液位系统。
系统配置 AKV/A
高低压侧控制选择:高
液位传感器:AKS 4100/U
© Danfoss | DCS (ADAP-KOOL®) | 2016-04
DKRCI.PD.RP0.A4.41 | 3
Page 4
技术手册 | 液位控制器 | EKE 347
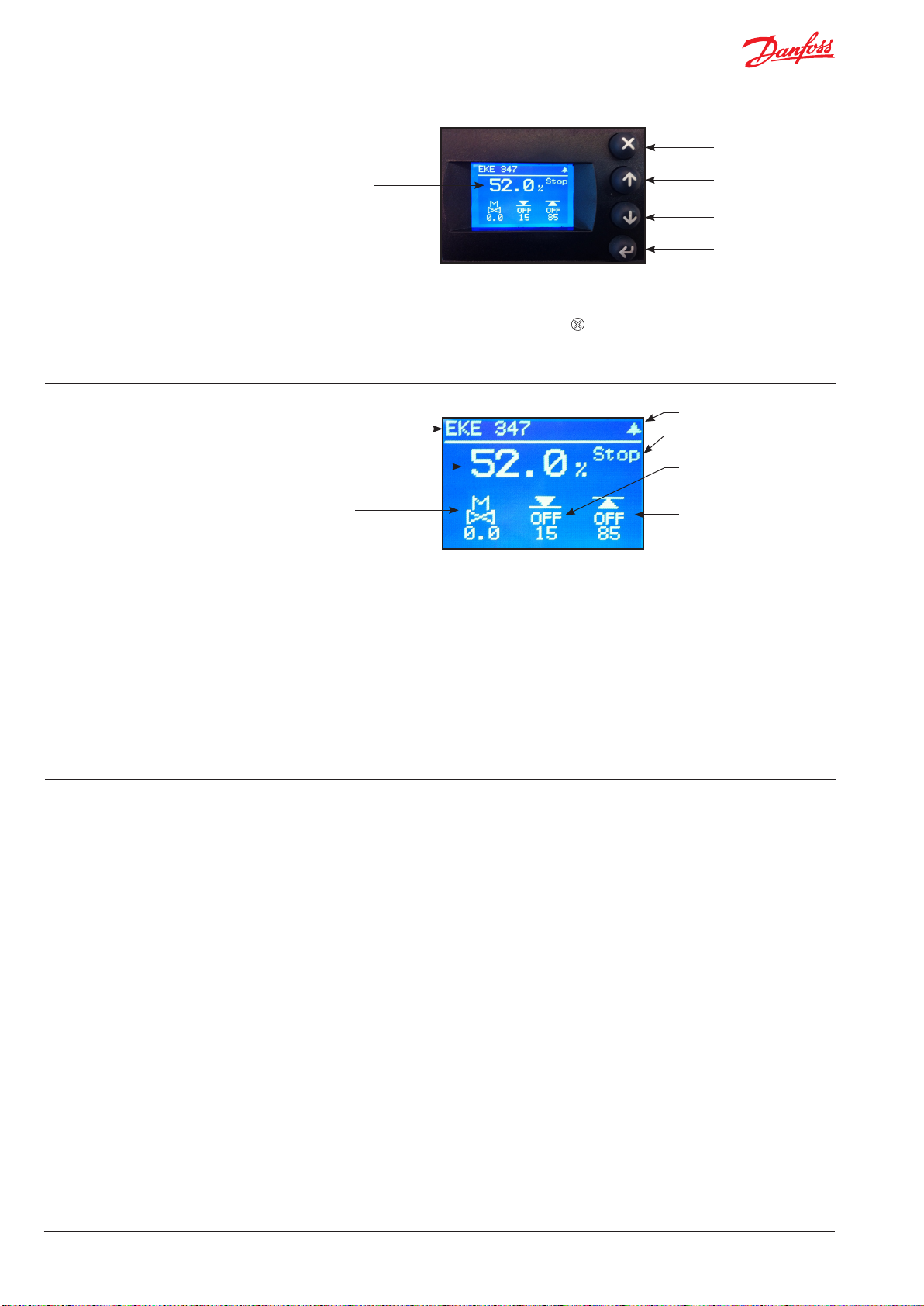
控制面板
显示
主界面
控制面板的用户界面包括显示屏和四个
钮 :“ 输 入 ” 按 钮 、“ 向 上 键 ” 按 钮 、“ 向 下
和“ 返 回 ”按 钮 。
控制器名称
实际液位
阀门开启度
独立按
键 ”按 钮
返回
按住 = 退出
向上键
向下键
输入
按住 = 进入菜单
此图显示主显示屏界面。是进入菜单的初始界面,
按 1–3 次(取决于实际所在界面)即可切换到
此界面。
闪铃 = 启用报警
控制器运行状态
低液位报警关闭(泵启动)
高液位报警关闭
显示屏将显示液位、控制器运行状态(控制器
开/关)、阀门开启度、低液位报警(开 = 无报警)
和 高 液 位 报 警( 关 = 无 报 警 )。
当系统出现报警时,除了外部连接的声光报警 ,右
上角还会出现闪铃符号提醒。
通过操作按钮可进入两个不同主菜单,查看系统性
能和 设 置参 数。
当前为主界面时,按 一次输入按 钮 即可进入状 态菜
单。
当前为主界面时,按住输入按钮即可进入设置和检
修菜单。进入菜单需使用调试时设定的密码。
© Danfoss | DCS (ADAP-KOOL®) | 2016-04
DKRCI.PD.RP0.A4.41 | 4
Page 5
技术手册 | 液位控制器 | EKE 347
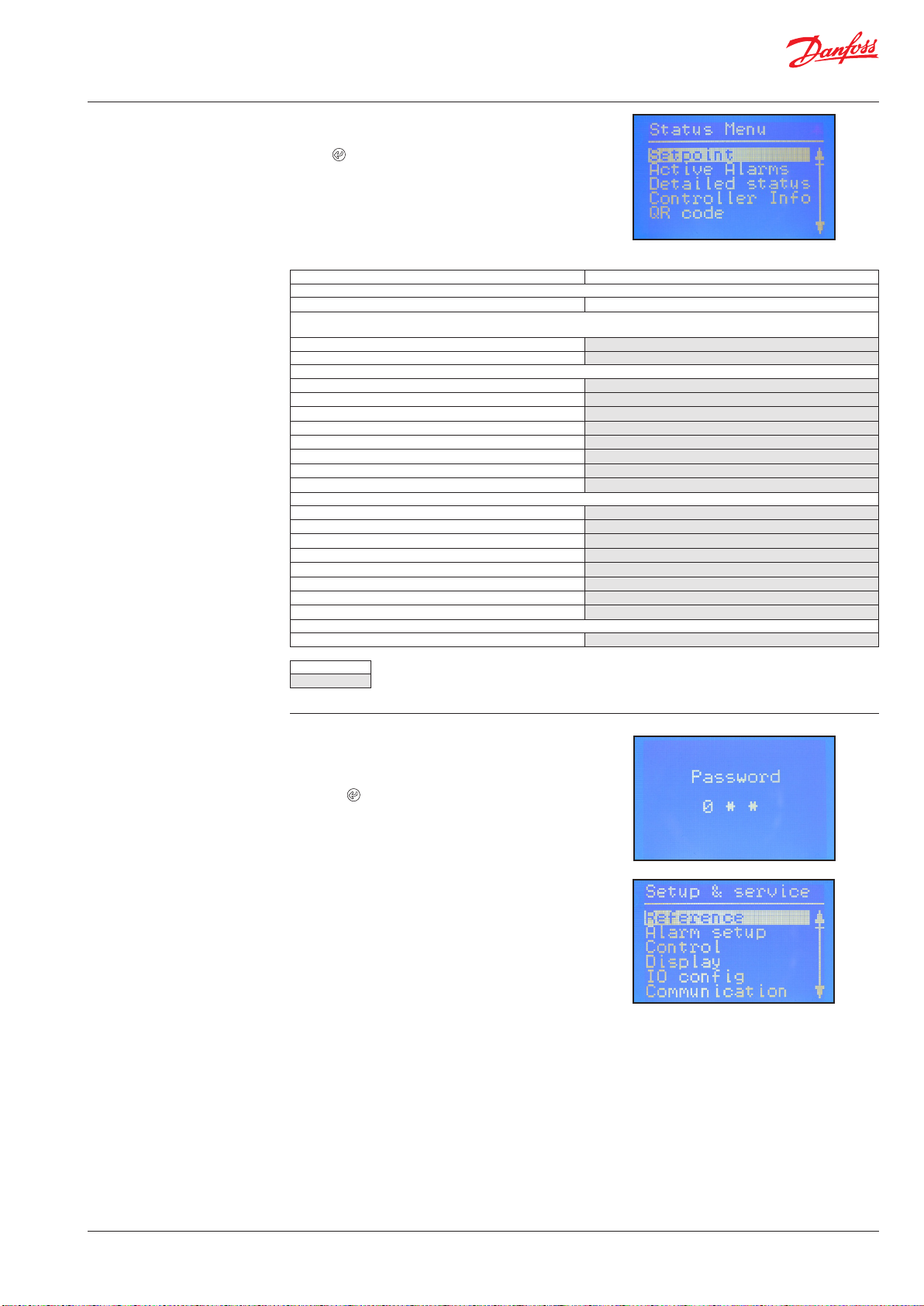
菜单
状态菜单
主界面进入状态菜单:
按一次 按 钮 。
状态菜单是可以任意访问的开放式菜单。因此,这
里只有 1 个参数可以更改。在状态菜单中可以查看
其他参 数。
状态菜单(开放式菜单)
设定值
液位设定值
有效报警
报警内容示例。在未出现报警时,此列表将在正常运行时清空。
液位信号超出范围 小 时 分钟
待机模式 小 时 分钟
详细状态
控制器状态 停止、手动、自动、从动、开关
实际液位
实际参数
实际开启度
数字信号输入状态
实际液位电流信号
振荡幅度
振荡周期
控制器信息
型号
Name(控制器名称)
SW(软件版本)
Bios(Bios 版本)
Adr(控制器地址)
SN(序列号)
PV(产品版本)
Site(生产地点)
二维码
代码
选项
0 - 100%
0.0 - 100%
0.0 - 100%
0.0 - 100%
开/关
mA
0.0 - 100%
Sec
读写
只读
设置和检修菜单
(进入调试菜单需登录密码)
从主界面进入设置和检修菜单:
按住按钮 。
在状态菜单和设置和检修菜单中进行操作时,通
过 第 4 页 中 的 四 个 按 钮 完 成 。
设置和检修菜单分为三个访问级别,分别拥有各自
的访问权限。
最高访问级别为调试,该级别可以访问变更所有允
许的参数,包括密码和重新运行设置向导。
检修访问级别专为检修人员提供,其权限低于调
试访问级 别。
最低访问级别为日常,该级别仅能进行为数不多的
变更。
下页中的图表显示了调试访问级别的授权。
© Danfoss | DCS (ADAP-KOOL®) | 2016-04
DKRCI.PD.RP0.A4.41 | 5
Page 6
技术手册 | 液位控制器 | EKE 347
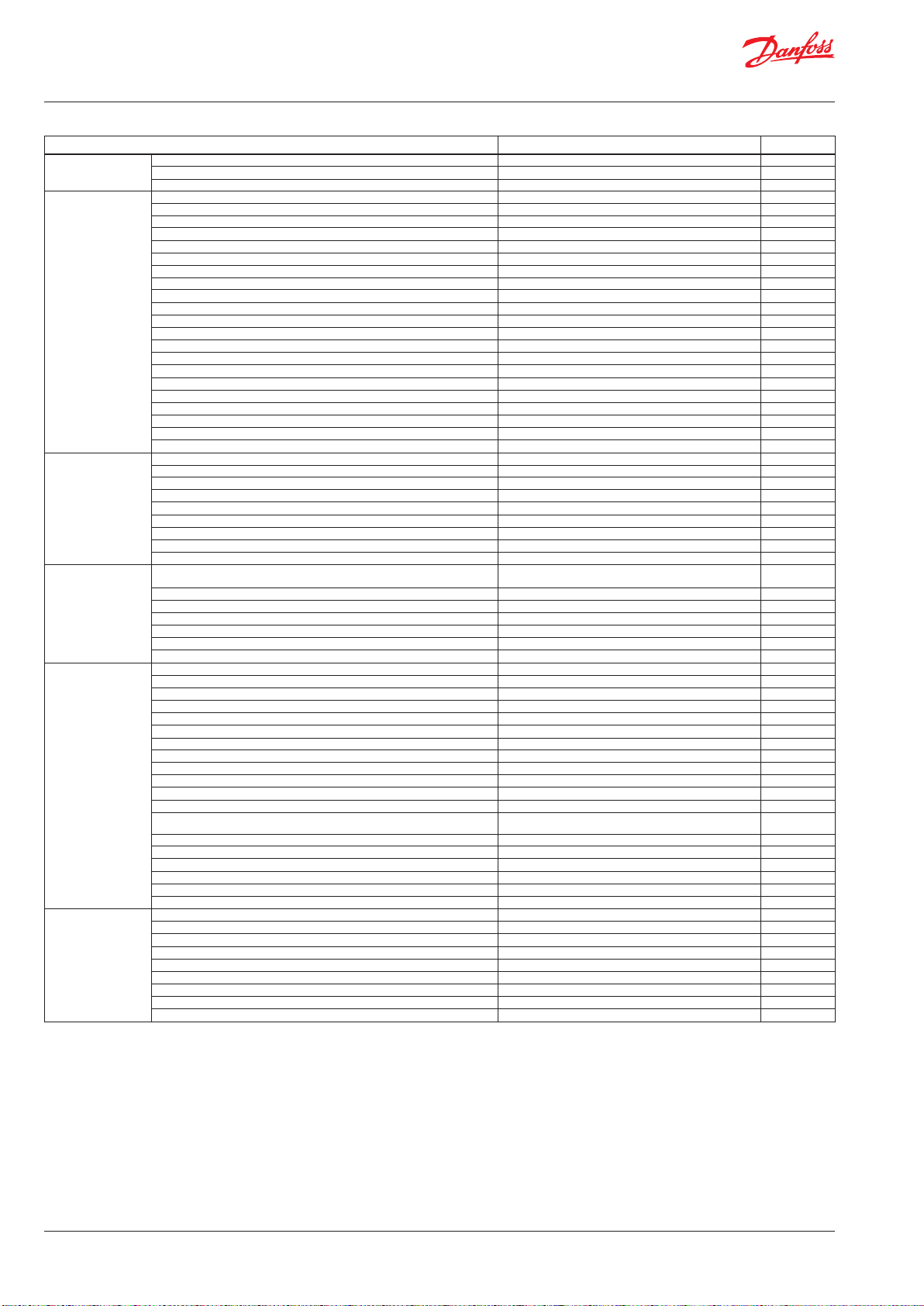
设置和检修菜单 — 调 试
参数 选项 默认值
参考
报警设置
控制器
显示
输入输出配置
通信
主开关
液位设 定值
工作模式 主 动 、开 关 、从 动 主
液位下限
液位上限
液位报警模式 时 间 、回 差 时间
低液位报警延时
高液位报警延时
低液位回差
高液位回差
普通报警模式 不遵循、遵循、低遵循、全 遵循 不遵循
振荡检测带
振荡检测超时
在停止模式下强制关闭泵
IO 液 位 下 限 0 - 100% 5%
IO 液 位 上 限 0 - 100% 95%
IO 低液位回差 0 - 20 % 3%
IO 高 液 位 回 差 0 - 20 % 3%
IO 低液位报警延时 0 - 999 秒 10 秒
IO 高 液 位 报 警 延 时 0 - 999 秒 50 秒
IO 液 位 限 制 0 - 100% 50%
IO 液 位 报 警 延 时 0 - 999 秒 10 秒
IO 液 位 回 差 0 - 20 % 3%
IO 液 位 变 化
控制方法 开 关 、 P 控 制 器 、P I 控 制 器
高低压侧控制选择
比例带
积分时间 Tn 60 - 600 秒 400 秒
中性区
回差
AKV/AKVA 周 期 时 间 3-15 秒 6 秒
最小开启度
最大开启度
语言
输出指示
登录延时
背光延时
日常密码
服务密码
密码更改
系统配置
液位信号设置
低液位电压
高液位电压
低液位电流
高液位电流
阀门位置设置 未 使 用 、电 流 、电 压 未使用
阀门全关 位置电 压
阀门全开位 置电压
阀门全关 位置电 流
阀门全开位 置电流
普通报警设置
多阀门设置
多阀门连接方式
阀门 A 制 冷 量 0 -100% 50%
阀门 B 制 冷 量 0-100 % 50%
阀门 C 制 冷 量 0-10 0% 30%
后序阀门切入时前序阀门开启度
IO 模 块 设 置
CAN 编 号 1 - 127 1
CAN 波 特 率 20k, 50k, 125k, 250k, 500k, 1M 500k
Modbus 编 号 0 - 120 1
Modbus 波 特 率 0, 1200, 2400, 4800, 9600, 14400, 19200, 28800, 38400 1920 0
Modbus 模 式 8N1, 8E1, 8N2 8E1
Modbus 映 射
阀门 B CAN 编 号 1 - 127 2
阀门 C CAN 编 号 1 - 127 3
IO 模 式 CAN 编 号 1 - 127 4
开/关
0 - 100% 50.0%
0 - 100% 15%
0 - 100% 85%
0 - 999 秒 10 秒
0 - 999 秒 50 秒
0 - 20 % 3%
0 - 20 % 5%
0 - 100% 100 %
2 - 30 分钟 20 分 钟
一 / 无
下 降 、上 升 下降
低 、高 低
5 - 200% 30.0%
0 - 25% 2.0%
0.5-25% 2%
0 - 99% 0%
1 - 100% 100 %
英语、中文、葡 萄牙 语、俄 语、西 班 牙语、法 语、意大利语、
德 语 、阿 拉 伯 语
液位、OD
1 - 120 分 钟 10 分钟
0 - 120 分 钟 2 分钟
三位数 0-999 100
三位数 0-999 200
三位数 0-999 300
ICAD+NC、ICAD、A KV/A+N C、AK V/A、仅 NC ICAD + NC
AK S 4100、A KS 41、电 流 、电 压 AK S4100
0-10V 0 V
0-10V 10 V
0-20 mA 4 mA
0-20 mA 20 mA
0-10V 0 V
0-10V 10 V
0-20 mA 4 mA
0-20 mA 20 mA
DO4、高 位 报 警 、DO3、仅 显 示
未使 用、2 相 同 制 冷 量 、 2 不 同 制 冷 量 、3 相 同 制 冷
量、3 不 同 制 冷 量
并 联 、串 联 并联
0-100 % 80%
未使用、已使用 未使用
运 行 、设 置 运行
关
无
PI
EN
液位
高位报警
未使用
未完待续……
© Danfoss | DCS (ADAP-KOOL®) | 2016-04
DKRCI.PD.RP0.A4.41 | 6
Page 7

技术手册 | 液位控制器 | EKE 347
设置和检修菜单 — 调试(续)
参数 选项 默认值
检修
设置向导 设置向导 重新运行设置向导 -
I/O 检 查
控制器名称 控制器名称 控制器 名称中的型号 -
控制器状态 -
实际液位 -
实际参数 -
实际开启度 -
实际阀门位置
数字输入状态 -
实际液位电压信号
实际液位电流信号 -
实际阀位电压信号
实际阀位电流信号
阀门 A 实 际 开 启 度
阀门 B 实际开启度
阀门 C 实际开启度
手动模式
手动 OD 0 - 100% 50.0%
手动低位报警 开关 关
手动高位报警 开关 关
手动普通报警 开关 开
采用默认值 无 、出 厂 无
主开关 EKE 操作:
AKS 4100 EKE 操 作 :
ICAD EKE 操 作 :
Nor.常 闭 式( NC)EKE 操 作 :
高 液 位( 报 警 )EKE 操 作 :
低液位(报警)EKE 操 作 :
开/关
关
关
-
-
-
-
-
读写
只读
报警和错误代码:
当检测到外部信号源发出的报警或显示屏出现闪铃时,在有效报警的状态菜单中可
以查看报警内容的文字描述。
报警和错误均将在此显示。如果报警和错误同时出现,将显示列表。
警报:
高液位
低液位
待机模式
阀门 B CAN 编号冲突
阀门 C CAN 编号冲突
IO 模块 CAN 编号冲突
IO 模块通信
主控制器通信丢失
最小/最大 OD 冲突
普通报警 HW 冲突
控制方法冲突
多阀门设置冲突
阀门 C 报 警
阀门 B 报警
液位信号振荡
阀门位置
多阀门制冷量
阀门 C 通信
阀门 B 通信
错误:
内部故障
液位信号超出范围
阀门位置信号超出范围
传感器电源过载
AKS 4100 故障
过高电流 AI3
过高电流 AI4
DO4 过载
© Danfoss | DCS (ADAP-KOOL®) | 2016-04
DKRCI.PD.RP0.A4.41 | 7
Page 8
技术手册 | 液位控制器 | EKE 347
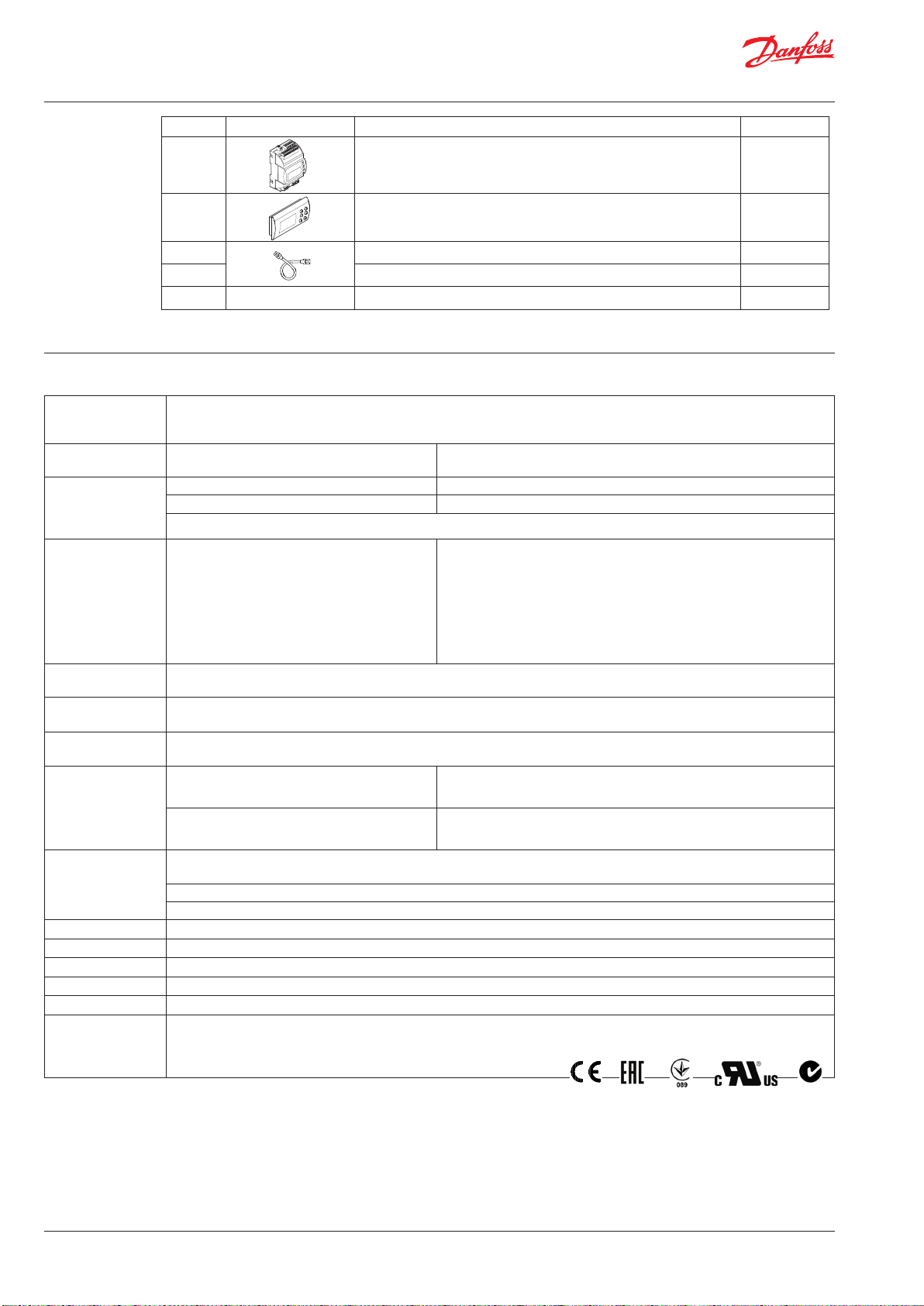
订购
数据
电源电压
功耗
输入信号
* Ri =
0(4)-20mA: 33 ohm
0(2)-10 V: 100 kohm
继电器输出
电流输出
阀门
数据通信
所支持 Modbus 命令
环境
防护等级
重量
安装
显示
接线端
认证
型号 说明 代码
EKE 347
MMIGRS2 远程显示屏、面板、S 080G0294
-
-
-
24 V a.c.+/-20% 50/60 Hz or 24 V d.c.+/-20%
(供电电源应和输入输出信号隔离 )
控制器
20 W 线圈(AKV / AKVA)
液位信号 *
ICM 阀门反馈信号 * 来自 ICAD 0/4-20 mA
触点功能启动/停止调节
3 个 SPDT(低液位报警、高液位报警、普通报
警/NC 电磁阀)
0-20 mA 或 4-20 mA
最大负载: 500 ohm
ICM - 通过电流输出
AKV/A - 通过 24 a.c.脉宽度调制输出
MODBUS RTU:与系统控制器进行通信,RS485 上的 MODBUS:电镀绝缘(500 V d.c.)
CAN:与其他 EKE 控制器进行通信
所支持命令最大响应时间为 50 ms
所支持命令未设定最大响应时间
–20 - 55°C,运行期间
–30 - 80°C,储存期间
90% Rh,无冷凝
无冲击影响/振动
IP 20 / IP 40,前端安装到面板中
193 g
DIN 导 轨
图形 LED 显 示
插接端子 1.5 或 2.5 mm2 多芯线缆
欧盟低电压指令和 EMC 认证标识 LVD 测试符合 EN 60730-1 和 EN 60730-2-9
EMC 测试符合 EN61000-6-3 和 EN 61000-6-2
UL 認證(文件E31024
液位控制器
显示设备线缆,长度 1,5 米(1 件)
显示设备线缆,长度 3 米(1 件)
EKE / EKC 配件应用嵌入式安装
15 VA / 10W
55 VA
4-20 mA 或 0-10 V
常開 :
3 A GP*, 2.2 FLA / 13.2 LRA, 1/6 hp, PD 220 VA, 250 V a.c. 100 k
3 FLA / 18 LRA, 1/10 hp, PD 150 VA, 125 V a.c. 100 k
常關:
3 A GP*, 250 V a.c. 100 k
(*GP = General purpose).
可以采用最高 240 V a.c. 或 24V a.c./d.c.,但相同电压类型必须在
DO3 和 DO2 使用。
03 (0x03) 读取维持注册器
04 (0x04) 读取输入注册器
06 (0x06) 写下单个注册器
08 (0x08) 诊断
16 (0x10) 写下多个注册器(多达 20 个 注册器)
43 (0x2b) 读取设备标识
080G5000
080G0075
080G0076
027F0309
© Danfoss | DCS (ADAP-KOOL®) | 2016-04
DKRCI.PD.RP0.A4.41 | 8
Page 9

技术手册 | 液位控制器 | EKE 347
Danf
80G74_}01-2014
接线
必要接线
端子:
28-29 电源电压 24 V a.c. 或 d.c.
1-7 信号来自 AKS 4100/4100U 型液位传感器
7-10 信号来自 AKS 41 型液位传感器
36-37 膨胀阀类型 AKV 或 AK VA,
根据应用接线
端子:
33-35 普通报警继电器。
安装人员可以选择常开(33-34)或常闭
(34-35)回路。
继电器将根据编程设置启动。
25-27 低液位限制继电器。
安装人员可以选择常开(26-27)或常闭
(25-26)回路。
继电器在超过设定值时启动。
23-24 膨胀阀类型: ICM 阀门(带 ICAD)
13-14 启 动 /停止控制器的开关功能。如果未连
接开关,端子 13 和 14 必须短接。
参阅下页图表。
30-32 高液位限制继电器。
安装人员可以选择常开(30-31)或常闭
(31-32)回路。
继电器在超过设定值时启动。
6-10 来自 ICAD 的0/4-20 mA ICM 阀门反馈信号
尺寸
oss
5
110
70
60
63
© Danfoss | DCS (ADAP-KOOL®) | 2016-04
DKRCI.PD.RP0.A4.41 | 9
Page 10

技术手册 | 液位控制器 | EKE 347
接线 — 控制器上层端子接线
䘔Ă
儎⏨փ
AKS 41
23
高液位连接
24 V DC
1
24 V AC
L
N
AKS 4100/4100U
4-20 mA
+
哺㢨
㬓㢨
㢨
㬓㢨
ICAD ㅢ 1 ԙ
ICAD/ICM
ICAD ㅢ 2 ԙ
反馈
–
4-20 mA
24 V+
15 V+
5 V+
COM
AI 5
AI 4
AI 3
AI 2
AI 1
COM
1
2 3 4 5 6 7 8 9 10 11 12 13 14
COM
DI 2
DI 1
COM
DI1 ѱᔶީ
фެԌ EKE ಞⲺ
© Danfoss | DCS (ADAP-KOOL®) | 2016-04
15 16 17 18 19 20 21 22 23 24
CAN L
GND
CAN RJ
R GNDD+D-
䘒ぁᱴ⽰ኅ
ᨈཪ
ModBUS
R120
CAN H
CANbus 䘔
COM
AO 1
哺㢨
⚦㢨
㢨
哺㢨
ICAD ㅢ 1 ԙ(2010 ᒪࢃ)
ICAD ㅢ 2 ԙ(2010 ᒪ)
㔵㢨
Ἃ㢨
Ἃ㢨
ⲳ㢨
24 V DC
24 V DC
DKRCI.PD.RP0.A4.41 | 10
Page 11

技术手册 | 液位控制器 | EKE 347
接线 — 控制器下层端子接线
䘔Ă
ք⏨փ
AKV/AKVA
注意:
AKV(A) 线圈电压必须采用与控制
器电源电压相同的 AC 或 DC
ާ⭞
ᑮᔶᡌᑮ䰣
–/~
NO 4
37
36 35 34 33 32 31 30
NC 3
C 3
NO 3
NC 2
儎փᣛ䆜
ᑮᔶᡌᑮ䰣
C 2
低液位连接
NO 2
NC 2
C 2
NO 2
29
POWER
SUPPLY
-/~
–
+
24 V AC
+/- 20% 15 VA
如果使用 AKV(A),则电源必须支持
AKV(A) 线圈功率
24 V DC
+/- 20% 10 W
28 27 26 25
NO 1
+/~
C 1
քփᣛ䆜
ᑮᔶᡌᑮ䰣
NC 3
C 3
NO 3
NO 1
C 1
NC 1
NC 1
© Danfoss | DCS (ADAP-KOOL®) | 2016-04
DKRCI.PD.RP0.A4.41 | 11
Page 12

技术手册 | 液位控制器 | EKE 347
Danf
M84H0075_1
Danf
M84H0076_1
Danf
M84H0077_1
Danf
M84H0078_1
EKE 347 — 开关应用。
打开/关闭电磁阀(带 24-230 V 线圈)
–/~
NO 4
NC 3
C 3
NO 3
NC 2
C 2
NO 2
连接示例
AKS 4100/
AKS 4100U
⭫ু:
POWER
SUPPLY
–
+
AKS 41/
AKS 41U
oss
NO 1
C 1
NC 1
AKS 4100/
AKS 4100U
oss
24 - 230 V a.c.
oss
AKS 4100/
AKS 4100U
oss
© Danfoss | DCS (ADAP-KOOL®) | 2016-04
DKRCI.PD.RP0.A4.41 | 12
Page 13

技术手册 | 液位控制器 | EKE 347
M84H0080_1
MASTER
SLAVE 1
SLAVE 2
主从配置
Danfoss
多阀门
AKS 4100/
AKS 4100U
AKVA
(ICAD)
15 16 17 18
R120
CAN H
CAN L
GND
䐩㓵
15-16
如果系统制冷量要求多个控制阀;一个主/从配
置中最多可以同时控制三个阀门,主控制器和每
个从控制器分别控制一个阀门。
如果系统制冷量要求多个控制阀;一个主/从配
置中最多可以同时控制三个阀门,主控制器和每
个从控制器分别控制一个阀门。
• 2 个相同制冷量阀门
• 2 个不同制冷量阀门
• 3 个相同制冷量阀门
• 3 个不同制冷量阀门
15 16 17 18
R120
CAN H
CAN L
AKVA
(ICAD)
15 16 17 18
R120
CAN H
CAN L
GND
䐩㓵
15-16
GND
AKVA
(ICAD)
通过 CAN 总 线 连 接 多 个 控
制 器 时 ,每 个 总 线 必 须 连
接 15 和 16 之 间 的 跳 线 。
此外,必须在输入配置菜单中进行主控制器
编程 - 多阀门样式 - 选项之一:
• 并联阀门
(多个阀门同时调节)
还是
• 串联阀门
(一个阀门主要调节)
参阅下面原理。
从控制器 EKE 只需从控制器识别和阀门 CAN 编号
(通信菜单)。
两个相同阀门(并联) 两个相同阀门(串联)
阀门 B
制冷量
阀门 A
主控制器 EKE 默认显示标准信息以及多个阀门符
号和实际总开启角度(参阅下文)。
阀门 B
制冷量
阀门 A
开启角度开启角度
从控制器 EKE 显示实际液位(同主控制器)、多个
阀门符号、实际总开启角度和单独阀门相关的
开启角度(参阅下文)。
© Danfoss | DCS (ADAP-KOOL®) | 2016-04
DKRCI.PD.RP0.A4.41 | 13
Page 14

技术手册 | 液位控制器 | EKE 347
Danf
M84H0084_1
D01
I/O 配 置
AKS 4100/
AKS 4100U
MASTER
䐩㓵
15-16
15 16 17 18
R120
CAN H
CAN L
AKVA
(ICAD)
GND
䐩㓵
15-16
I/O
15 16 17 18
R120
NC 2
C 2
NO 2
NC 3
C 3
NO 3
NO 1
C 1
NC 1
CAN H
CAN L
GND
通过 CAN 总 线 连 接 多 个 控 制 器
时 ,每 个 总 线 必 须 连 接 15 和 16 之
间的跳线。
D02
D03
oss
远程显示器
示例 1
日常运行可以通过控制器直接设定或通过外部
显示设备进行设定。
终端
© Danfoss | DCS (ADAP-KOOL®) | 2016-04
DKRCI.PD.RP0.A4.41 | 14
Page 15

技术手册 | 液位控制器 | EKE 347
示例 2
示例 3
ERR31
终端
终端
外部显示器报警 - MMIGRS2
若显示器通讯未正确进行,将发送“ERR31”错误通知。
导致此情况的原因可能是显示终端未安装,或者在显示器从控制器检索基本信息时数字通信出现中断情况。
检查完终端后,您应当检查外部显示器软件版本。要进行此操作,按住输入键和 X 键 5 秒钟,直到出现
Bios 菜单。之后,按 X 键,读取右下角的软件版本。软件版本必须为 1.13 或更新版本。
终端
终端
检查完显示器的软件版本后,按照以下步骤检查显示器设置:
1.按住输入键和 X 键 5 秒钟,直到出现 Bios 菜单。
2.选择“MCX Selection”菜单
- 选择“Clear UI”一行,然后按输入
- 选择“Autodetect”一行,然后按输入
3.按 X 键返回 Bios 菜单
4.选择“COM 选择”菜单
- 选择“CAN”一行,然后按输入
5.按 X 键返回 Bios 菜单
6.选择“Start up mode”菜单
- 选择“Remote application”一行,然后按输入
7.按 X 键返回 Bios 菜单
8.选择“CAN”菜单
- 选择“Baudrate”一行,之后选择“Autobaud”设定,然后按输入
- 选择“Node ID”一行,然后设定数值为 126 并按输入
9.按 X 键返回 Bios 菜单
10.选择“Application”菜单,然后按输入
显示器将再次从控制器检索数据。该过程将持续约 5 分钟。
© Danfoss | DCS (ADAP-KOOL®) | 2016-04
DKRCI.PD.RP0.A4.41 | 15
Page 16

技术手册 | 液位控制器 | EKE 347
Modbus parameters
Software version: 1.62.xx
Label Parameter name Min
r12 Main switch 0 1 0 0 3001 NO YES 0 = O | 1 = On
R01 Liquid level setpoint 0 100 50 % 1 3002 NO YES
N07 Operation Mode 0 2 0 0 3003 YES YES 0 = Master | 1 = Slave | 2 = IO
a02 Lower level limit 0 100 15 % 0 3004 NO YES
a01 Upper level limit 0 100 85 % 0 3005 NO YES
a07 Level alarm mode 0 1 0 0 3006 NO YES 0 = Time | 1 = Hysteresis
a04 Lower delay 0 999 10 s 0 3007 NO YES
a03 Upper delay 0 999 50 s 0 3008 NO YES
a06 Lower level hysteresis 0 20 3 % 1 3009 NO YES
a05 Upper level hysteresis 0 20 5 % 1 3010 NO YES
a08 Function common alarm 0 3 0 0 3011 NO YES 0 = Not follow | 1 = Follow up | 2 = Fol-
a12 Oscillation detect band 0 100 100 % 0 3012 NO YES
a13 Oscillation detect timeout 2 30 20 min 0 3013 NO YES
a25 Force pump OFF in stopped mode 0 1 0 0 3117 NO YES 0 = O | 1 = On
a14 IO Lower level limit 0 100 5 % 0 3101 NO YES
a15 IO Upper level limit 0 100 95 % 0 3102 NO YES
a16 IO Lower level hysteresis 0 20 3 % 1 3103 NO YES
a17 IO Upper level hysteresis 0 20 3 % 1 3104 NO YES
a18 IO Lower delay 0 999 10 s 0 3105 NO YES
a19 IO Upper delay 0 999 50 s 0 3106 NO YES
a20 IO Level limit 0 100 50 % 0 3107 NO YES
a21 IO Level delay 0 999 10 s 0 3108 NO YES
a22 IO Level hysteresis 0 20 3 1 3109 NO YES
a23 IO Level action 0 1 0 0 3110 NO YES 0 = Falling | 1 = Rising
N03 Control Method 0 2 2 0 3014 NO YES 0 = On/o | 1 = P-ctrl | 2 = PI-ctrl
n35 Regulating principle 0 1 0 0 3015 NO YES 0 = Low | 1 = High
n04 P-band 5 200 30 % 1 3016 NO YES
n05 Integration time Tn 60 600 400 s 0 3017 NO YES
n34 Neutral zone 0 25 2 % 1 3018 NO YES
N06 Dierence 0,5 25 2 % 1 3019 NO YES
n13 Period time for AKV/AKVA 3 15 6 s 1 3020 NO YES
n33 Minimum OD 0 0 % 0 3021 NO YES
n32 Maximum OD 1 100 100 % 0 3022 NO YES
o11 Language 0 0 0 0 3023 YES YES 0 = $ActiveLanguageList
o17 Output indication 0 1 0 0 3024 NO YES 0 = Level | 1 = OD
K04 Login timeout 1 120 10 min 0 3025 NO YES
K06 Backlight timeout 0 120 2 min 0 3026 NO YES
o05 Password daily 0 999 100 0 3027 NO YES
K02 Password service 0 999 200 0 3028 NO YES
K03 Password commission 0 999 300 0 3029 NO YES
K05 Contrast 0 100 40 % 0 3030 NO YES
K01 Brightness 0 100 80 % 0 3031 NO YES
I09 System conguration 0 4 0 0 3032 YES YES 0 = ICAD+NC | 1 = ICAD | 2 = AKV/A+NC
o31 Level signal setup 0 3 0 0 3033 YES YES 0 = AKS4100 | 1 = AKS41 | 2 = Current |
o32 Voltage at low liquid level 0 0 V 1 3034 NO YES
o33 Voltage at high liquid level 10 10 V 1 3035 NO YES
I06 Current at low liquid level 0 4 mA 1 3036 NO YES
I07 Current at high liquid level 20 20 mA 1 3037 NO YES
o34 Valve position setup 0 2 0 0 3038 YES YES 0 = Not used | 1 = Current | 2 = Voltage
I02 Voltage at closed valve position 0 0 V 1 3039 NO YES
I03 Voltage at open valve position 10 10 V 1 3040 NO YES
I04 Current at closed valve position 0 4 mA 1 3041 NO YES
I05 Current at open valve position 20 20 mA 1 3042 NO YES
I18 Common alarm setup 0 3 1 0 3043 YES YES 0 = DO4 | 1 = High Alarm | 2 = DO3 | 3
I08 Multiple valve setup 0 4 0 0 3044 YES YES 0 = Not used | 1 = 2 same cap | 2 = 2 dif
I13 Multiple valve pattern 0 1 0 0 3045 NO YES 0 = Parallel | 1 = Sequence
I10 Valve A capacity 0 100 50 % 0 3046 YES YES
value
Max
Default Unit Deci-
value
mals
Modbus
PNU
Locked
by main
switch
EEPROM Enumeration
low low | 3 = Follow all
| 3 = AKV/A | 4 = NC only
3 = Voltage
= Disp only
cap | 3 = 3 same cap | 4 = 3 dif cap
© Danfoss | DCS (ADAP-KOOL®) | 2016-04
DKRCI.PD.RP0.A4.41 | 16
Page 17

技术手册 | 液位控制器 | EKE 347
I11 Valve B capacity 0 100 50 % 0 3047 YES YES
I12 Valve C capacity 0 100 33 % 0 3048 YES YES
I17 ICAD takeover OD 0 100 80 % 0 3052 NO YES
I19 IO module setup 0 1 0 0 3091 YES YES 0 = Not used | 1 = Used
G01 CAN ID 1 127 1 0 4032 NO NO
G02 Can baudrate 0 5 4 0 4033 NO NO 0 = 20k | 1 = 50k | 2 = 125k | 3 = 250k | 4
G06 Modbus ID 0 120 1 0 3055 NO YES
G05 Modbus baudrate 0 8 6 0 3056 NO YES 0 = 0 | 1 = 1200 | 2 = 2400 | 3 = 4800 |
G08 Modbus mode 0 2 1 0 3057 NO YES 0 = 8N1 | 1 = 8E1 | 2 = 8N2
G07 Modbus mapping 0 1 0 0 3058 NO YES 0 = Operation | 1 = Setup
G09 Valve B CAN ID 1 127 2 0 3088 YES YES
G10 Valve C CAN ID 1 127 3 0 3089 YES YES
G11 IO Mod. CAN ID 1 127 4 0 3090 YES YES
B01 Controller state 0 6 0 0 4001 YES NO 0 = Powerup | 1 = Stop | 2 = Auto | 3 =
u01 Actual level 0 100 0 % 1 4002 NO NO
u02 Actual reference 0 100 0 % 1 4003 YES NO
u24 Actual OD 0 100 0 % 1 4004 NO NO
u33 Actual valve position 0 100 0 % 1 4005 NO NO
u10 Digital input status 0 1 0 0 4006 NO NO 0 = O | 1 = On
u31 Actual level signal voltage 0 100 0 V 1 4007 NO NO
u30 Actual level signal current 0 24 0 mA 1 4008 NO NO
B02 Actual position signal voltage 0 100 0 V 1 4009 NO NO
u32 Actual position signal current 0 100 0 mA 1 4010 NO NO
B03 Actual OD A 0 100 0 % 1 4011 NO NO
B04 Actual OD B 0 100 0 % 1 4012 NO NO
B05 Actual OD C 0 100 0 % 1 4013 NO NO
o18 Manual Mode 0 1 0 0 4014 NO NO 0 = O | 1 = On
o45 Manual OD 0 100 50 % 1 3059 NO NO
B08 Manual low alarm 0 1 0 0 3060 NO NO 0 = O | 1 = On
B06 Manual high alarm 0 1 0 0 3061 NO NO 0 = O | 1 = On
B07 Manual common alarm 0 1 0 0 3062 NO NO 0 = O | 1 = On
B09 Apply defaults 0 1 0 0 3063 YES NO 0 = None | 1 = Factory
B11 Oscillation amplitude 0 100 0 % 1 4028 YES NO
B10 Oscillation period 0 3600 0 s 0 4029 YES NO
= 500k | 5 = 1M
4 = 9600 | 5 = 14400 | 6 = 19200 | 7 =
28800 | 8 = 38400
Manual | 4 = Slave | 5 = IO | 6 = Safe
Label Alarm name Modbus
A1 Upper level 1901 8
A2 Lower level 1901 9
A92 Oscillation in level signal 1901 10
A96 Valve position 1901 14
A97 Multiple valve capacity 1901 15
E1 Internal error 1901 0
E21 Level signal out of range 1901 1
E22 Valve position signal out of range 1901 2
E96 AKS 4100 error 1901 3
A45 Standby mode 1901 4
A99 Valve B communication 1901 5
A98 Valve C communication 1901 6
A85 Communication to master lost 1901 7
A91 Valve B alarm 1902 8
PNU
© Danfoss | DCS (ADAP-KOOL®) | 2016-04
Bit
number
A90 Valve C alarm 1902 9
A88 Control method conict 1902 10
A87 Common alarm HW conict 1902 11
A86 Min/max OD conict 1902 12
E95 Sensor supply overload 1902 13
E99 DO4 overload 1902 14
E97 Too much current AI3 1902 15
E98 Too much current AI4 1902 0
A89 Multiple valve setup conict 1902 1
A80 Valve B CAN ID conict 1902 2
A81 Valve C CAN ID conict 1902 3
A82 IO module CAN ID conict 1902 4
A83 IO module communication 1902 5
DKRCI.PD.RP0.A4.41 | 17
Page 18

技术手册 | 液位控制器 | EKE 347
© Danfoss | DCS (ADAP-KOOL®) | 2016-04
DKRCI.PD.RP0.A4.41 | 18
 Loading...
Loading...