

Page 1

Instrukcja obsługi
Regulatory przegrzania
Typu EKE 1A, EKE 1B, EKE 1C (SW 2.02)
Elastyczny, wstępnie zaprogramowany regulator przegrzania typu
EKE marki Danfoss stanowi szczytowe osiągnięcie w dziedzinie
algorytmów regulacji i pozwala dostosować pracę układu ściśle do
wymagań użytkownika. Sterownik EKE nadaje się znakomicie do
sterowania pracą różnorodnych komercyjnych urządzeń klimatyzacyjnych i chłodniczych tak, aby osiągnąć jak najwyższą efektywność
i obniżyć koszty ruchowe – nawet o 20% przy minimalnym wysiłku.
Regulatory EKE znajdują zastosowanie zasadniczo w układach
chłodniczych i klimatyzacyjnych, w których wymaga się dokładnej
regulacji przegrzania lub temperatury. Przegrzanie w krótkim czasie
sprowadzane jest do możliwie najniższego poziomu, dzięki czemu
uzyskuje się optymalne zasilanie parownika, nawet przy dużych
zmianach obciążenia, a w rezultacie obniżeniu ulega zużycie energii
i koszty ruchowe.
Typowe zastosowania:
• Agregaty chłodnicze
• Urządzenia przetwórcze / meble chłodnicze
• Komory chłodnicze (z chłodnicami powietrza)
• Instalacje klimatyzacyjne
• Pompy ciepła, w tym domowe
• Transportowe urządzenia chłodnicze
Charakterystyka / Zalety
Zasilanie:
• Proste okablowanie.
- Izolacja: brak ryzyka krótkiego spięcia podczas podłączania
zasilania do innych urządzeń.
- Większa solidność układu.
• 24 V AC lub 24 V DC: elastyczność doboru zasilacza.
Sterowanie zaworem:
• Napędy dwubiegunowe i jednobiegunowe z możliwością
wyboru sposobu sterowania.
• Maksymalnie do 1,2 A w piku oraz 848 mA RMS na uzwojenie:
zgodność z większą liczbą zaworów.
• Wzbudzanie mikrokroków: Lepsza praca układu w porównaniu
do innych metod sterowania.
• Brak problemów z hałasem, rezonansem i drganiami oraz
lepsza dokładność i rozdzielczość napędu krokowego.
Mikroprocesor:
• 3x (potencjalnie 5x) szybszy niż w innych sterownikach
dostępnych na rynku.
Obsługa:
• Instalacja „podłącz i używaj”. Łatwa i szybka konguracja przy
pomocy kreatora. Darmowe oprogramowanie do transmisji
danych w celu dokonywania nastaw i rejestracji.
Więcej informacji
o regulatorach EKE
Wejścia analogowe:
Dostępne są rozmaite wejścia programowalne
• Dostępne wejście różnicowe niskonapięciowe.
• Elastyczny wybór rodzaju czujnika temperatury przegrzania:
Pt1000 lub NTC.
• Wysoka precyzja i dokładność dla każdego wybranego typu wejścia.
• Silne i efektywne ltry hałasu i zakłóceń.
• Pasmo przenoszenia sygnału można ustawić programowo:
dostosowanie do szybkości regulowanego procesu.
Wejścia cyfrowe:
• Szybkie wejścia inicjujące wybrane reakcje.
• Do 3 wejść cyfrowych.
Interfejs użytkownika: Zewnętrzny panel sterujący
• Wzornictwo wysokiej klasy z dużym, elastycznym wyświetlaczem
gracznym.
• Klawiatura z sześcioma przyciskami.
Transmisja danych:
CAN / CAN RJ / MODbus RS485 RTU (EKE 1B / EKE 1C)
Oprogramowanie:
• Energooszczędna regulacja przegrzania według: minimalnego
sygnału stabilnego, obciążenia cieplnego, stałej nastawy, różnicy
temperatury.
• Zabezpieczenia: MOP, LOP, min. S4, HCTP, przegrzanie krytyczne.
• Poprawiony i szybki rozruch z krótkim czasem obniżania
temperatury.
• Dostosowanie do konkretnych zastosowań, jak np. pompy ciepła,
agregaty chłodnicze.
• Praca sprzyjająca trwałości zaworów z silnikami krokowymi.
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 1
Page 2
Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
Spis treści
1.0 Zamawianie .................................................... 3
1.1 Porównanie urządzeń .................................................3
1.2 Oznakowanie urządzenia i identykacja ...............................3
1.3 Wymiary: EKE 1A, EKE 1B, EKE 1C .......................................4
1.4 Rodzina regulatorów EKE ..............................................4
2.0 Wyposażenie dla regulatorów przegrzania typu EKE ............. 5
2.1 Akcesoria ..............................................................6
3.0 Przegląd zasadniczych funkcji ................................... 7
3.1 Urządzenia ............................................................7
3.2 Oprogramowanie .....................................................8
3.3 Typowe funkcje wykorzystywane w różnych zastosowaniach ...........9
4.0 Charakterystyka techniczna ................................... 10
4.1 Charakterystyka ogólna ..............................................10
4.2 Dane elektryczne .....................................................10
4.3 Wejścia / wyjścia ......................................................11
5.0 Podłączenia ................................................... 12
5.1 Podłączenia EKE 1A ...................................................13
5.2 Podłączenia EKE 1B ...................................................14
5.3.1 EKE 1C – Podłączenia panelu przedniego .............................15
5.3.2 EKE 1C – Podłączenia panelu tylnego .................................16
6.0 Instalacja ......................................................17
6.1 Uwagi ogólne ........................................................17
6.2 Instalowanie czujników ...............................................17
6.2.1 Czujnik temperatury ..................................................17
6.2.2 Przetwornik ciśnienia .................................................17
6.2.3 Dzielenie sygnału z przetwornika ciśnienia ............................17
6.2.4 Dzielenie sygnału ciśnienia/temperatury
w regulatorach EKE 1C przez CanBus ..................................18
6.2.5 Wykorzystanie sygnałów zewnętrznych
z układu transmisji danych ............................................18
6.2.6 Grupy dzielonych sygnałów ..........................................18
6.3 Kompensacja czujników . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
6.4 Wspólne sygnały wejściowe ..........................................19
6.5 Wspólne wejścia cyfrowe .............................................19
6.6 Wspólne zasilanie i podtrzymywanie bateryjne .......................19
6.7 Okablowanie .........................................................20
6.7.1 Długości przewodów .................................................20
7.0 Zawory z silnikami krokowymi ................................. 21
7.1 Podłączenia zaworów marki Danfoss ..................................21
7.2 Parametry sterowania zaworami silnikowymi .........................22
7.3 Parametry sterowania zaworami przydatne
w różnych przypadkach ..............................................24
8.0 Transmisja danych przez Modbus ............................... 25
8.1 Nastawa Modbus RTU ................................................25
8.2 Konwencja adresowania ..............................................25
8.3 Kody funkcji magistrali RS485 .........................................26
8.4 Przykład: Transmisja danych przez MODBus ...........................26
9.0 Interfejs użytkownika: Panel MMIGRS2 ......................... 27
9.1 Podłączenia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
9.2 Widok podstawowy ..................................................28
9.3 Jednostki i hasła ......................................................28
9.4 Przywrócenie ustawień fabrycznych ..................................28
10.0 Kreator konguracji ........................................... 30
11.0 Interfejs użytkownika KoolProg ................................ 31
11.1 Nastawianie ..........................................................32
11.2 Ekran główny .........................................................32
11.3 Ekran serwisowy .....................................................33
11.4 Graczna prezentacja zarejestrowanych danych ......................33
12.0 Konguracja .................................................. 34
12.1 Przewodnik szybkiej nastawy parametrów ............................34
12.2 Lista kontrolna czynności przed uruchomieniem ......................35
12.3 Pierwsze uruchomienie ...............................................36
13.0 Zastosowania EKE ............................................. 37
13.1 Sterownik zaworu ....................................................37
13.2 Regulator ............................................................38
14.0 Tryb sterownika ............................................... 39
14.1 Sygnał analogowy ....................................................39
14.2 Sygnał z układu transmisji danych ....................................39
15.0 Tryb ręczny .................................................... 40
15.1 Otwarcie zaworu sygnałem na wejściu cyfrowym .....................40
15.2 Ręczne sterowanie przekaźnikiem ....................................40
15.3 Ręczne sterowanie zaworem .........................................40
15.4 Ręczny powrót do pozycji wyjściowej .................................40
15.5 Przełączanie między trybem automatycznym i ręcznym ...............41
16.0 Regulacja temperatury ........................................ 42
16.1 Termostat ON/OFF ....................................................42
16.2 Termostat modulowany (MTR) ........................................43
17.0 Metody wyznaczania przegrzania odniesienia .................. 45
17.1 Porównanie metod regulacji przegrzania .............................45
17.2 MSS .................................................................46
17.3 Stała wartość .........................................................47
17.4 Obciążenie ...........................................................47
17.5 Różnica temperatury .................................................48
18.0 Zewnętrzny sygnał odniesienia dla przegrzania
lub temperatury ............................................... 49
18.1 Przegrzanie odniesienia ..............................................49
18.2 Temperatura odniesienia .............................................49
18.3 Korekta wg prędkości sprężarki .......................................50
19.0 Ograniczenia .................................................. 51
19.1 Priorytety ograniczeń ................................................51
19.2 Przegrzanie krytyczne ................................................52
19.3 Minimalne ciśnienie robocze (LOP) ....................................52
19.4 Maksymalna temperatura skraplania ..................................53
19.5 Min. temperatura medium na wylocie / S4 ............................54
19.6 Maksymalne ciśnienie robocze (MOP) .................................55
20.0 Rozruch ....................................................... 56
20.1 Regulacja typu P .....................................................56
20.2 Rozruchowe otwarcie zaworu .........................................56
20.3 Stały stopień otwarcia i czas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
21.0 Sekwencja odszraniania ....................................... 57
22.0 Układy odwracalne, zdwojone nastawy
parametrów regulacji .......................................... 58
23.0 Praca w trybie awaryjnym ......................................59
24.0 Tryb serwisowy ................................................ 60
25.0 Alarmy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
25.1 Działanie po wystąpieniu alarmu .....................................61
25.2 Alarm o spadku wydajności ...........................................61
25.3 Alarm o niewłaściwym przegrzaniu ...................................61
26.0 Tabela alarmów i błędów ................................... 62 - 65
27.0 Rozwiązywanie problemów ................................66 - 70
Dodatek 1 Skróty i oznaczenia ....................................... 71
Dodatek 2 Ogólne porównanie przetworników ciśnienia AKS i NSK .... 71
Dodatek 3 Nastawy panelu MMIGRS2 ................................72
Dodatek 4 Wprowadzanie nowego czynnika chłodniczego ........... 72
Dodatek 5 Palne czynniki chłodnicze ................................ 73
Dodatek 6 Przywracanie nastaw fabrycznych ........................ 73
Dodatek 7 Przesterowanie .......................................... 74
Dodatek 8 Typowe zastosowania .................................... 75
A. Agregat chłodniczy (tylko chłodzenie) .......................... 75
B. Układ odwracalny (woda - powietrze) ........................... 75
C. Odwracalna pompa ciepła ..................................... 76
D. Klimatyzator ..................................................77
E. Komora chłodnicza ............................................ 77
F. Układ wieloparownikowy ...................................... 77
Dodatek 9 Lista parametrów .................................... 78 - 84
Panel sterujący MMIGRS2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .85 - 86
Bramka MMIMYK .........................................................87 - 88
Zasilacze ACCTRD .............................................................89
Zasilacze AK-PS ...............................................................90
Czujniki ACCPBT ..............................................................91
Przewody ACCCBI .............................................................93
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 2
Page 3
Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
1.0 Zamawianie
Regulatory EKE
Akcesoria
1.1 Porównanie urządzeń
Typ Opakowanie Nr katalogowy
Regulator elektroniczny EKE 1A Pojedyncze 080G5300
Regulator elektroniczny EKE 1B Pojedyncze 080G5350
Regulator elektroniczny EKE 1C Pojedyncze 080G5400
Panel sterujący MMIGRS2 Pojedyncze 080G0294
Bramka MMIMYK Pojedyncze 080G0073
Przewód telefoniczny ACCCBI z przyłączem 1,5 m Pojedyncze 080G0075
*Numery dla różnych dostępnych wariantów znajdują się w dodatku
EKE 1A EKE 1B EKE 1C
Zasilanie
Napięcie zasilania 24 V AC / DC ± 20%
Zasilanie wspólne
Wejście podtrzymywania bateryjnego 18 – 24 V DC
Transmisja danych
MODbus RS 485 RTU -
CANbus przewodowo Do połączenia z produktami marki Danfoss - -
CANbus RJ Port serwisowy Danfoss MMI
Wejścia
PT1000 - -
Rodzaj czujnika temperatury
Liczba czujników temperatury 1 2 3
Rodzaj przetwornika ciśnienia
Liczba przetworników ciśnienia 1 1
Dzielenie sygnału o wartości ciśnienia
Odczyt wartości czujnika zewnętrznego Przez MODbus -
Zewnętrzny sygnał wartości odniesienia
Liczba zewnętrznych sygnałów wartości odniesienia 1 1 1
Wejścia cyfrowe ze stykami beznapięciowymi (możliwe 4 funkcje) 3 2 2
Wyjścia
Wyjście cyfrowe 1 1 1
Klasa izolacji Klasa II
Przekaźnik SPDT 3 A maks. 1 1 1
Funkcje przekaźnika
NTC 10K, typu EKS
NTC 10K, typu ACCPBT
NTC 10K, typu Sensata
Ratiometryczny 0,5 – 4,5 V DC
0 – 20 mA - 1 – 5 V / 0 – 10 V
Do 5 urządzeń
Przez przewodowy CANbus - -
4 – 20 mA - 0 – 20 mA - Sygnał prądowy użytkownika - 0 – 10 V
1 – 5 V
Sygnał napięciowy użytkownika
Alarm lub sterowanie zaworem
elektromagnetycznym (NC)
•• •• ••
•• •• ••
•• •• ••
•• ••
•• •• ••
•• •• ••
•• •• ••
•• •• ••
•• •• ••
•• •• ••
(1 P oraz
1 sygnał
•• •• -
•• ••
•• •• ••
•• •• ••
•• •• ••
•• •• ••
•• •• ••
••
••
••
2 lub
zewn.)
••
••
••
••
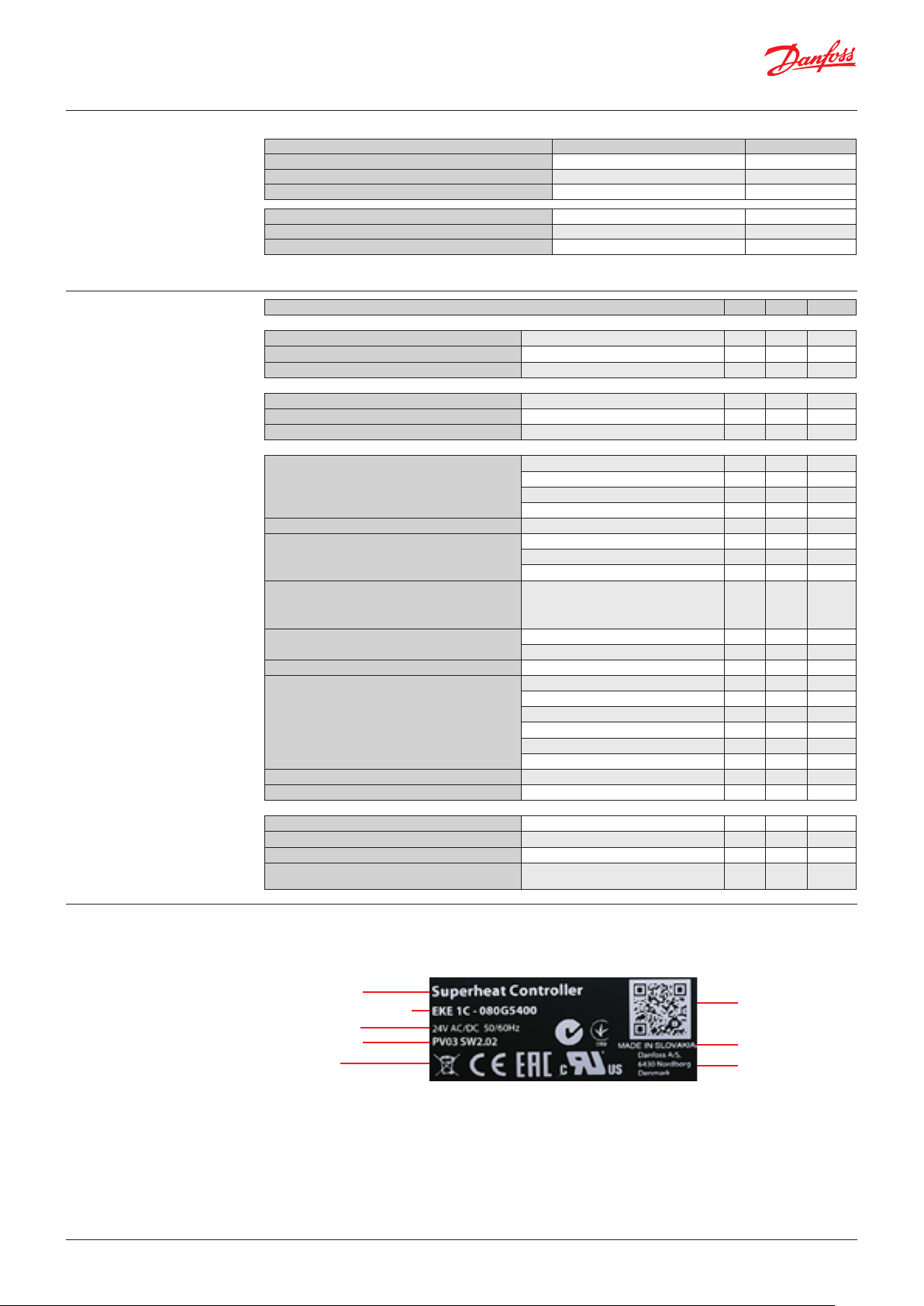
1.2 Oznakowanie
urządzenia
i identykacja
© Danfoss | DCS | 2020.10
Nazwa urządzenia
Typ urządzenia – nr kodowy
Dane elektryczne
Wersja urządzenia
Dopuszczenia
Kod QR urządzenia
Kraj pochodzenia
Adres producenta
Przykład: EKE 1C
DKRCC.PD.RS0.A4.49 | 3
Page 4
130
Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
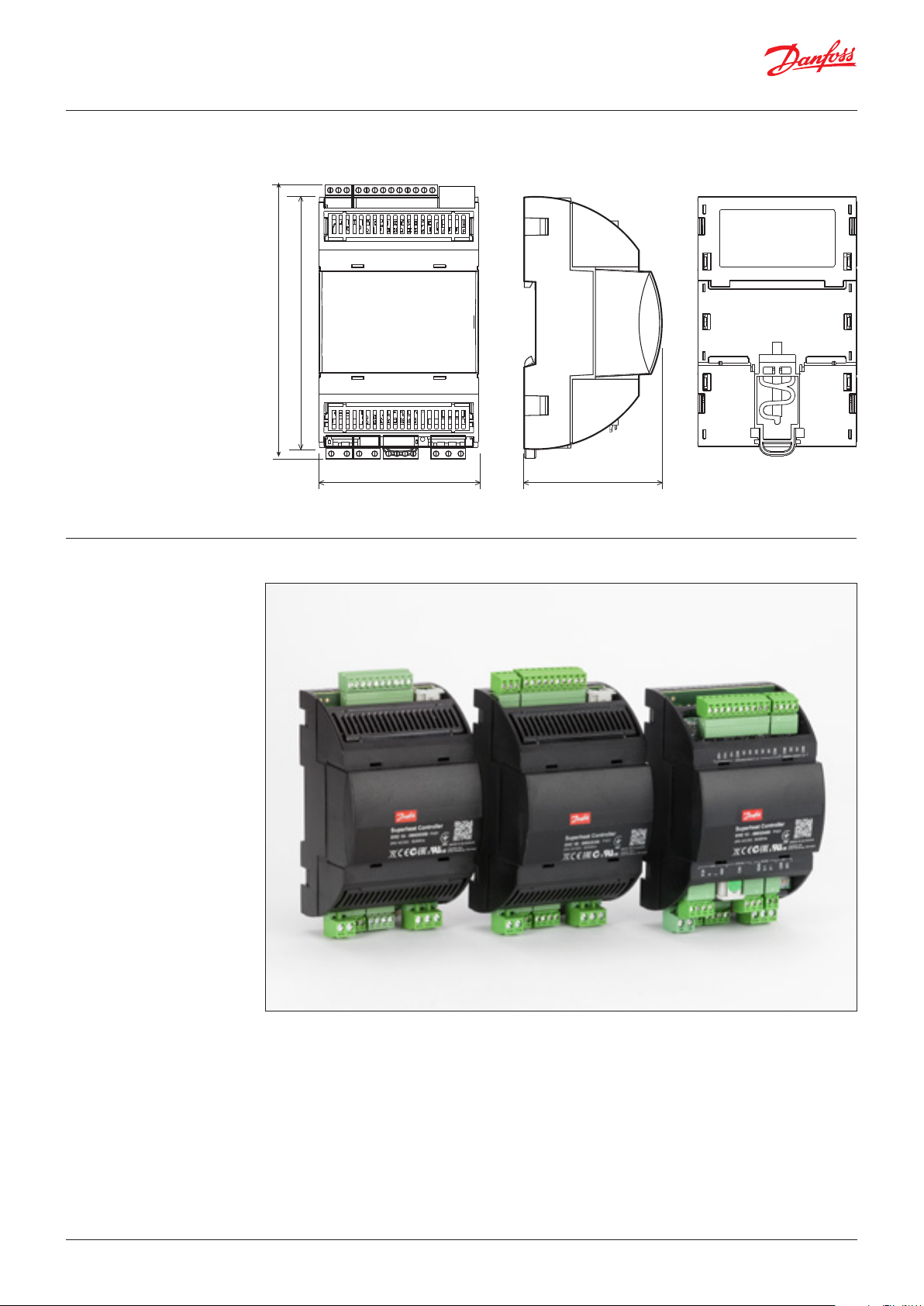
1.3 Wymiary:
EKE 1A, EKE 1B, EKE 1C
CAN RJ
110
Wszystkie wymiary w mm.
Masa:
EKE 1C: 190 g
EKE 1A / EKE 1B: 152 g
70 60
Danfoss
80G8215.11
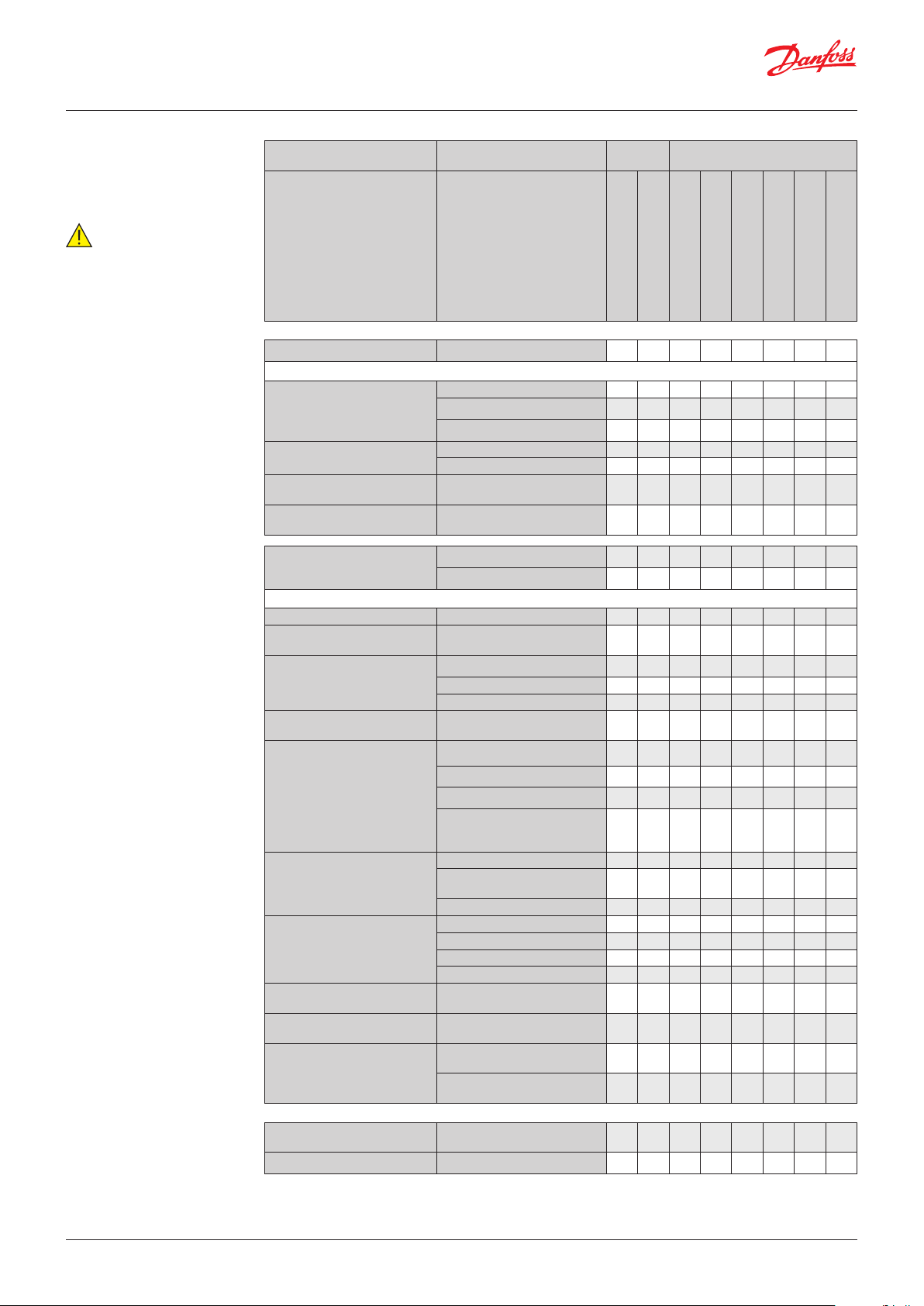
1.4 Rodzina
regulatorów EKE
EKE 1A EKE 1B EKE 1C
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 4
Page 5

o
s
Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
2.0 Wyposażenie
dla regulatorów
przegrzania typu EKE
KoolProg PC tool
To podstawowe
oprogramowanie do
komunikacji z regulatorem
zasilania parownika typu EKE.
Wymaga połączenia gniazda
USB komputera z portem
serwisowym sterownika EKE
za pośrednictwem bramki
MMIMYK. Służy ona do
ustanowienia bezpośredniego
połączenia urządzeń
z gniazdami USB i CAN.
Zalety
• Łatwe połączenie
• Edycja parametrów na bieżąco
• Edycja parametrów
w konguracji oine
• Wgrywanie predeniowanych
konguracji
• Bezpieczne zapisywanie
parametrów
• Kreator nastaw
MMIGRS2
Może służyć jako:
• Zewnętrzny panel sterujący
regulatora EKE 1A / EKE 1B
/ EKE 1C do zmiany nastaw.
Podłączenie bezpośrednie
do regulatora przewodem
telefonicznym CAN RJ12
• Stały panel sterujący np.
w drzwiach mebla
chłodniczego. Należy wtedy
skorzystać z przewodowego
podłączenia CAN
(jeśli występuje).
Danfoss
MMIGRS 2
nadrzędny
Jednostka nadrzędna
Nadrzędny sterownik
układu zawiaduje pracą
regulatora przegrzania EKE za
pośrednictwem połączenia
sieciowego lub sygnałów
analogowych bądź cyfrowych.
W przypadku magistrali
MODbus pełni rolę sterownika
nadrzędnego (master) wobec
regulatora EKE (slave). Jednostką
nadrzędną może być np.
AK-SM800, sterownik
Danfoss MCX lub sterownik
programowalny (PLC).
Sterownik
PLC
MODbus RTU przez przewodową
magistralę RS485
KoolProg
PC Tool
s
8212.10
nf
Danfoss
80G8212.10
Bramka USB/CAN typu
Danfoss MMIMYK
przyłączona do gniazda
serwisowego regulatora
Gniazdo serwisowe CAN-RJ12 (tylko dla połączenia
bezpośredniego). Można tu podłączyć albo MMIGRS2,
albo komputer z oprogramowaniem KoolProg PC Tool
(przez bramkę MMIMYK).
EKE 1A, EKE 1B i EKE 1C.
EKE 1C
podłączony
przez CAN
lub MODbus
EKE 1B
podłączony
tylko przez
MODbus
EKE 1A
Bez
podłączenia
sieciowego
Sygnał analogowy (włącznik
główny, wartość odniesienia,
wyjścia alarmowe itp.)
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 5
Page 6

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
2.1 Akcesoria i powiązane wyroby
Panel MMIGRS2 Przewód ACCCBI Bramka MMIMYK
Panel sterowniczy użytkownika MMIGRS2 Przewód ACCCBI do podłączenia panelu MMI i bramki. Bramka MMIMYK do podłączenia regulatora EKE do
Przetworniki ciśnienia Czujniki temperatury Zasilacze
Przetwornik ciśnienia AKS
Dostępny z sygnałem ratiometrycznym lub 4 – 20 mA.
NSK
Ratiometryczny przetwornik ciśnienia
XSK
Przetwornik ciśnienia 4 – 20 mA
Zawory z silnikami krokowymi Przewód M12 z wtyczką kątową
PT 1000
AKS jest czujnikiem temperatury o wysokiej dokładności
AKS 11 (preferowany), AKS 12, AKS 21; ACCPBT PT1000
Czujniki NTC
EKS 221 ( NTC-10 KΩ)
ACCPBT
Czujnik temperatury NTC (IP 67 /68)
komputera PC z oprogramowaniem KoolProg do
nastawiania parametrów i rejestracji danych.
AK-PS
Wejście: 100 – 240 V AC, 45 – 65 Hz
Wyjście: 24 V DC: dostępne z 18 VA, 36 VA i 60 VA
ACCTRD
Wejście: 230 V AC, 50 – 60 Hz
Wyjście: 24 V AC, dostępne z 12 VA, 22 VA and 35 VA
Regulator EKE może pracować z zaworami silnikowymi
marki Danfoss z silnikami krokowymi, tj. Danfoss ETS 6,
ETS, KVS, ETS Colibri®, KVS colibri®, CTR, CCMT .
© Danfoss | DCS | 2020.10
Dostępne są różne długości standardowego przewodu
M12 do podłączenia zaworu z silnikiem krokowym.
DKRCC.PD.RS0.A4.49 | 6
Page 7

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
3.0 Przegląd zasadniczych funkcji
3.1 Urządzenia
Wejścia cyfrowe (DI)
Wyjście cyfrowe DO
(przekaźnikowe)
Liczba dostępnych wejść cyfrowych różni się w zależności od modelu regulatora EKE. Są one przydatne
szczególnie tam, gdzie regulator EKE nie ma możliwości transmisji danych ze sterownikiem układu.
W takim przypadku można skorzystać z wejść cyfrowych w celu komunikacji z regulatorem EKE.
Dostępne wejścia cyfrowe można wykorzystać do realizacji następujących funkcji:
a. Sterowanie wtryskiem czynnika ON/OFF. b. Odszranianie. c. Wybór trybów grzania i chłodzenia.
d. Nastawa stopnia otwarcia zaworu.
Sterowanie wtryskiem czynnika ON/OFF
Regulator można włączyć i wyłączyć sygnałem zewnętrznym podawanym na wejście cyfrowe, o ile
aktywowano tę funkcję. Brak sygnału wyłącza regulator. Funkcję należy wykorzystać tak, aby przy
zatrzymanej sprężarce regulator zamknął zawór odcinając tym samym zasilanie parownika w czynnik
chłodniczy. Osiąga się to następująco:
W przypadku regulatora EKE 1A parametrem O003 (konguracja DI). Jeśli parametr ma wartość
„Not used” (nieużywane), regulator można włączyć parametrem R012. Jeśli natomiast parametr
O003 ustawiono jako „Main switch” (włącznik główny), to do włączenia regulatora potrzeba zarówno
aktywacji wejścia cyfrowego DI1, jak i właściwej wartości parametru R012.
W przypadku regulatorów EKE 1B i EKE 1C właściwym parametrem jest O002 (konguracja DI). Przy
nastawie “Bus->Start Stop”, do włączenia regulatora potrzeba zarówno właściwej wartości parametru
R012, jak i sygnału z magistrali MODbus. Jeśli natomiast parametr O002 ustawiono jako „Main switch”
(włącznik główny), to do włączenia regulatora potrzeba zarówno aktywacji wejścia cyfrowego DI1, jak
i właściwej wartości parametru R012
Wybór trybów grzania i chłodzenia
Funkcja ta zasadniczo znajduje zastosowanie w przypadku pomp ciepła wymagających dwóch
odrębnych nastaw parametrów regulacji przegrzania. Wyboru trybu grzania bądź chłodzenia można
dokonać z wykorzystaniem funkcji wejścia cyfrowego lub przez magistralę RS485.
Przekaźnik zaworu elektromagnetycznego w przewodzie cieczowym załącza się, gdy istnieje potrzeba
chłodzenia. Z kolei przekaźnik alarmowy załącza się w sytuacji alarmowej oraz przy zaniku zasilania
regulatora. Wyjście cyfrowe DO1 można skongurować parametrem O013 do pracy z zaworem
elektromagnetycznym, na maksymalną wydajność bądź jako przekaźnik alarmowy.
Zabezpieczenie na
wypadek zaniku
zasilania
Regulacja ręczna
Wejścia analogowe (AI)
Transmisja danych:
RS485 RTU / CANbus
Ze względów bezpieczeństwa, w przypadku awarii zasilania regulatora trzeba zatrzymać dopływ
ciekłego czynnika chłodniczego do parownika. Jeśli wtrysk czynnika odbywa się za pomocą zaworu
rozprężnego z silnikiem krokowym, to po zaniku zasilania pozostanie on otwarty. Można sobie z tą
sytuacją poradzić na dwa sposoby:
• Przed zaworem rozprężnym zainstalować elektromagnetyczny zawór odcinający
• Zapewnić bateryjne podtrzymywanie zasilania
Zaworem można sterować ręcznie, wymuszając wymagany stopień otwarcia za pomocą sygnału
analogowego lub sygnału z magistrali transmisji danych. Na potrzeby obsługi technicznej czy testów
można też skorzystać ze specjalnego trybu serwisowego.
We wszystkich modelach regulatorów EKE można wykorzystać sygnał napięciowy, np. 0 – 10 V.
Natomiast sygnał prądowy, np. 0 – 20 mA, obsługuje tylko wariant EKE 1C.
Zewnętrzny sygnał wartości odniesienia:
Zewnętrzny sygnał analogowy może posłużyć do:
a. Ustawienia stopnia otwarcie zaworu silnikowego
b. Przesunięcia temperatury odniesienia lub przegrzania odniesienia i maksymalnego stopnia
otwarcia zaworu.
Regulator można wyposażyć w układ transmisji danych, co pozwala połączyć go z innymi
urządzeniami w danym systemie, również posiadającymi taką możliwość. W takim przypadku,
sterowanie, nadzór i rejestrację danych można prowadzić z jednego urządzenia, tj. komputera PC
– co jest korzystne z punktu widzenia diagnostyki bądź podczas instalowania układu.
Odczyt wartości z zewnętrznych czujników:
Sygnały z zycznych czujników podłączonych do regulatora EKE można zastąpić sygnałami
z magistrali MODbus. Ich wartości należy uaktualniać, z częstotliwością zgodną z maksymalnym
interwałem uaktualnień MODbus zadanym parametrem G004.
Diody świecące (LED)
© Danfoss | DCS | 2020.10
Dwa zestawy diod LED umożliwiają podgląd statusu pracy zaworu i regulatora. Sygnalizują one:
• Zasilanie / transmisję danych oraz alarm / błąd
• Status roboczy zaworu silnikowego
DKRCC.PD.RS0.A4.49 | 7
Page 8

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
3.2 Oprogramowanie
Minimalny sygnał stabilny
(MSS)
Regulacja wg obciążenia
(LoadAp)
Stałe przegrzanie
Regulacja wg różnicy
temperatury
Regulacja temperatury
Maksymalne ciśnienie
robocze (MOP)
Minimalne ciśnienie
robocze (LOP)
Algorytm regulacji stara się sprowadzić przegrzanie do najniższego stabilnego poziomu,
mieszczącego się w nastawionym zakresie wartości minimalnej „Min SH” i maksymalnej „Max SH”.
Funkcja podwyższa wartość odniesienia przy wzroście obciążenia cieplnego. O obciążeniu świadczy
stopień otwarcia zaworu. Metoda ta jest w pewnym stopniu wstępnie sparametryzowaną regulacją
według MSS. Daje ona pewną wartość przegrzania odniesienia i w wielu przypadkach najlepiej
odpowiada charakterystyce układu.
Ta funkcja znajduje zastosowanie w układach, w których przegrzanie powinno być utrzymywane na
stałym poziomie.
W tej metodzie przegrzanie odniesienia obliczane jest na podstawie różnicy temperatury medium
i temperatury parownika. Jest to możliwe tylko wtedy, gdy zainstalowano czujnik temperatury
medium (S3), a parownik ma postać bloku lamelowego.
Regulatory typu EKE posiadają funkcję regulacji temperatury. Może się ona odbywać w trybie
termostatu dwupołożeniowego (ON/OFF) lub modulowanego (MTR). Funkcję MTR wykorzystuje
się typowo w sklepowych urządzeniach chłodniczych, zasadniczo wyposażonych w sprężarki
o zmiennych obrotach. Zachodzi wtedy płynna regulacja temperatury parowania, sprzyjająca
stabilizacji temperatury towaru.
Maksymalne ciśnienie robocze nastawia się w celu zmniejszenia obciążenia sprężarki. Gdy ciśnienie
wzrasta powyżej tej wartości, regulator steruje zaworem tak, aby uzyskać niższe ciśnienie, zamiast
niskiego przegrzania.
Funkcja ta (zwana też „zimnym startem”) pozwala urządzeniom takim, jak pompy ciepła na rozruch
przy niskiej temperaturze otoczenia, zapobiegając zatrzymaniu sprężarki z powodu niskiego
ciśnienia ssania.
Minimalne przegrzanie
Maksymalne ciśnienie
skraplania (HCTP)
Szybki rozruch
Wymuszone otwarcie
po wyłączeniu
Odszranianie
Praca w trybie
awaryjnym
Alarm o spadku
wydajności
Kreator konguracji
Gdy przegrzanie spadnie poniżej nastawionej wartości minimalnej, zawór zamknie się
szybciej, aby uchronić sprężarkę przed zalaniem cieczą i przywrócić przegrzanie do poziomu
odniesienia.
Zabezpieczenie przed zbyt wysokim ciśnieniem skraplania zapewnia redukcję obciążenia skraplacza,
w przypadku wystąpienia zbyt wysokiej temperatury skraplania. Osiąga się to ograniczając stopień
otwarcia zaworu.
W niektórych urządzeniach istnieje potrzeba szybkiego otwarcia zaworu rozprężnego po załączeniu
sprężarki, aby zapobiec zbyt niskiemu ciśnieniu ssania oraz dla szybszej stabilizacji przegrzania bądź
regulowanej temperatury. Realizuje się to albo dzięki regulacji typu P, albo rozruchowej nastawie
stopnia otwarcia z ochroną, albo stałej nastawie stopnia otwarcia. Ten rozruchowy tryb pracy
utrzymuje się do upływu nastawionego czasu, albo do osiągnięcia właściwego przegrzania.
W pewnych przypadkach po wyłączeniu regulatora zawór powinien pozostać otwarty. Można to
wymusić odpowiednią nastawą stopnia otwarcia zaworu. Po wyłączeniu regulatora włącznikiem
głównym zawór przyjmie narzucony stopień otwarcia.
Regulator sam nie posiada funkcji odszraniania parownika. Można jednak wprowadzić specjalną
sekwencję odtajania z priorytetem względem normalnej pracy zaworu.
Gdy w toku pracy pojawi się błąd czujnika, zawór może się całkowicie zamknąć, albo przyjąć
nastawione położenie, albo przejść do uśrednionego stopnia otwarcia.
Funkcja ma sygnalizować utratę wydajności przez zawór bądź ucieczkę czynnika chłodniczego. Polega
na załączeniu alarmu, bez podejmowania przez regulator innych działań.
Kreator szybko i łatwo przeprowadza użytkownika przez proces konguracji regulatora. Wprowadzone
zostają nastawy parametrów odpowiednie dla danego zastosowania i warunków pracy.
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 8
Page 9
Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
3.3 Typowe funkcje
wykorzystywane
w różnych
zastosowaniach
Uwaga:
Skróty i oznaczenia objaśniono
w dodatku 1
Funkcja Szczegóły
Sterownik
zaworu
Z sygnałem analogowym
Z RS485 RTU
Regulator
chłodzenie)
Odwracalny agregat
Agregat chłodniczy (tylko
Odwracalna pompa ciepła
chłodniczy (powietrze/woda)
Klimatyzator
chłodnicza
Wolnostojąca komora
Funkcje sprzętowe
Transmisja danych MODbus / CAN
Wejścia / wyjścia
Czujnik temperatury
Czujnik ciśnienia
Zewnętrzny sygnał odniesienia
(funkcja sterownika)
Wejście cyfrowe
Wyjście cyfrowe: przekaźnik
S2
S3
S4
Po
P1
4 – 20 mA / 0 – 20 mA
0 – 10 V / 1 – 5 V
DI1 – regulacja przegrzania ON/
OFF
Alarm
Funkcja NC (zawór zamknięty)
Funkcje oprogramowania
Termostat ON/OFF
Termostat modulowany MTR
Zewnętrzny sygnał odniesienia
Regulacja przegrzania
Metoda regulacji przegrzania
Rozruch
Ograniczenia / zabezpieczenia
Wymuszony stopień otwarcia po
wyłączeniu/standby
Odszranianie
Funkcje dla pomp ciepła
Tylko przy regulowanej wydajności
agregatu skraplającego
Przegrzanie odniesienia
Żądany stopień otwarcia
Temperatura odniesienia
Korekta wg prędkości sprężarki
(przez MODbus)
MSS
Stała wartość
Wg obciążenia
Wg różnicy temperatury (S3-T0)
(układ chłodzony powietrzem
z parownikiem lamelowym)
Stały stopień otwarcia i czas
Stały stopień otwarcia i czas
z ochroną
Regulacja typu P
MOP
LOP
S4 min
Przegrzanie krytyczne
Start / stop przez DI lub
magistralę
Zabezpieczenie przed wysoką
temperaturą skraplania
Tryb grzania / chłodzenia – przez
magistralę lub DI
Funkcje zaawansowane
Praca w trybie awaryjnym
Dzielenie sygnałów Temperatura i ciśnienie
Funkcje wykorzystywane typowo
Wybór reakcji na błąd czujnika
S2 / S3
Zależne od specyfiki zastosowania
Wiele parowników i sprężarek
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 9
Page 10
Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
4.0 Charakterystyka
techniczna
4.1 Charakterystyka
ogólna
Cecha Opis
Zasilanie Zasilacz impulsowy z izolacją galwaniczną.
Pobór mocy Całkowity pobór mocy z poniższymi zaworami i panelem MMIGRS2
Obudowa z tworzywa sztucznego Montaż na szynie DIN zgodnie z EN 50022
Przyłącza Zaciski śrubowe 3,5 mm, zaciski przekaźnika i zasilania 5 mm, CAN MMI:
Warunki robocze -20 – 60 °C, wilgotność względna 90% bez wykraplania
Warunki przechowywania / transportu -30 – 80 °C, wilgotność względna 90% bez wykraplania
Odporność na drgania i wstrząsy Zgodnie z IEC 60068-2-27 Ea
Integracja z urządzeniami Klasy I lub II
Stopień ochrony IP40 tylko dla panelu przedniego
Ochrona obwodów drukowanych Brak (bez pokrycia)
Okres przepięcia elektrycznego między
odizolowanymi częściami
Odporność na ciepło i ogień Kategoria D
Odporność na przepięcia Kategoria II
Klasa i struktura oprogramowania Klasa A
Dopuszczenia Zgodność CE:
Napięcie zasilania (AC) 24 V AC ± 20% (min. 19,2 V AC – maks. 28,8 V AC)
Częstotliwość zasilania (AC): 50 / 60 Hz
Napięcie zasilania (DC): 24 V DC (min. 20 – maks. 40 V DC)
5 W na wyjściach 5 V i 15 V odizolowanych od wejścia 24 V
Izolacja między zasilaniem i niskim napięciem
podłączonym do regulatora:
CCMT 16 - CCMT 42: 15VA /10W
ETS 6: 11 VA / 7.5W
ETS 12C - ETS 100C: 20VA / 14W
KVS C: 20VA / 14W
ETS 12.5 - ETS 400 7 VA / 5W
CCMT 2 - CCMT 8 7 VA / 5W
CTR 20: 7 VA / 5W
Tworzywo samogasnące V0 wg IEC 60695-11-10 i testowane rozżarzonym/
gorącym drutem o temperaturze 960°C zgodnie z IEC 60695-2-12
Materiał obudowy zgodny z UL94-V0 oraz RoHS
Test kulowy: 125°C wg IEC 60730-1
Prąd upływowy ≥ 250 V zgodnie z IEC 60112
modułowe Jack 6P4C
Materiał przyłączy zgodny z RoHS i UL
Długi
Produkt zaprojektowano zgodnie z następującymi aktami unijnymi:
• Dyrektywa niskonapięciowa 2014/35/EU
• Zgodność elektromagnetyczna EMC: 2014/30/EU oraz z następującymi
normami:
– EN61000-6-1, EN61000-6-3 (odporność i standardy emisji dla środowiska
budynków mieszkalnych, komercyjnych i przemysłu lekkiego)
– EN61000-6-2, EN61000-6-4 (odporność i standardy emisji dla środowiska
przemysłowego)
– EN60730-1 i EN60730-2-9 (Elektryczne układy automatycznej regulacji dla
urządzeń użytku domowego i podobnego)
Zgodność RoHS wg 2011/65/EU oraz brak elementów z negatywnej listy wg
500B0751
4.2 Dane elektryczne
© Danfoss | DCS | 2020.10
Cecha Rodzaj Opis
Zabezpieczenie Krótkie spięcie Silnik: dysypatywne zabezpieczenie nadprądowe
Nadmierne napięcie Wejście analogowe: ograniczenie prądu i wewnętrzna dioda ustalająca
Nadmierna
temperatura
Niestabilne
wejście cyfrowe
Wejście cyfrowe: ograniczenie prądu i wewnętrzna dioda ustalająca
Transmisja danych: karta sieciowa IC
Silnik: wyłączenie przy 150 °C
Ciągłe zmiany stanu wejścia cyfrowego
DKRCC.PD.RS0.A4.49 | 10
Page 11
Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
4.3 Wejścia / wyjścia
Ostrzeżenie!
Zaciski baterii podtrzymującej
nie służą do ładowania
urządzeń.
Nie podłączać zasilania
zewnętrznego do wejść
cyfrowych, gdyż grozi to
zniszczeniem regulatora.
Do wyjścia przekaźnikowego nie
wolno bezpośrednio podłączać
obciążenia pojemnościowego
w rodzaju diod LED czy układów
sterowania ON/OFF silnikami
EC. Każde takie urządzenie
trzeba podłączyć za pomocą
odpowiedniego stycznika.
WEJŚCIA/WYJŚCIA RODZAJ PARAMETRY
Wejścia
analogowe
0 – 5 V EKE 1C, AI3, AI4, oraz EKE 1A / EKE 1B, AI3. Dokładność ± 40 mV, rozdzielczość 1,2 mV.
0 – 10 V EKE 1C, AI3, AI4, oraz EKE 1A / EKE 1B, AI4. Dokładność ± 50 mV, rozdzielczość 2,5 mV.
0 – 20 mA
(tylko EKE 1C)
Czujnik
termistorowy
(NTC)
Czujnik Pt 1000 Zakres: 723 Ω do 1684 Ω
Czujnik ciśnienia Rodzaj sygnału: ratiometryczny
Wejścia cyfrowe Styki
Wyjście cyfrowe
(D01)
Silnik krokowy Wyjście
Bateria
podtrzymująca
Przesyłanie
danych
beznapięciowe
Przekaźnik Normalnie otwarte: 3 A ogólnego przeznaczenia, 250 V AC, 100 k cykl
dla silnika
bipolarnego /
unipolarnego
RS-485 RTU Izolacja galwaniczna. Brak zakończenia magistrali.
CAN Poczwórne złącze RJ do bezpośredniego podłączenia i zasilania panelu sterowniczego (MMI).
Maks. napięcie wejściowe 15 V.
Nie podłączać źródeł napięcia do niezasilanych urządzeń bez ograniczenia natężenia
prądu na wejściach analogowych (sumarycznie 80 mA).
Diagnostyka w obwodzie otwartym dla wejść napięciowych AI3 i AI4 (EKE 1C) AI4 (EKE 1A
i EKE 1B).
Dokładność ± 100 μA, rozdzielczość 10 μA.
Rezystancja wejściowa: <100 Ω
Czujniki temperatury NTC, 10 kΩ przy 25°C. Zakres: 300 kΩ do 100 Ω
Dokładność: 50 – 120 °C: 1,5 K, -40 – 50 °C: 0,4 K, 0 °C: 0,2 K
Rozdzielczość: ≤ 0,1 K, ≤ 0,3 K (EKE 1C, AI5)
Dokładność: ≤ 0,5 K
Rozdzielczość: 0,1 K
- Dokładność: 1,6%
- Zakres: 0,5 – 4,5 V
- Rozdzielczość: 1,2 mV
- Napięcie zasilania: 5 V DC / 15 mA, ochrona przeciw przeciążeniom około 150 mA
Prąd ciągły 1 mA (tylko EKE 1C). Pojawienie się sygnału na wejściu załącza funkcję.
Prąd czyszczenia 100 mA przy 15 V DC.
On: RIL < = 300 Ω. O: RIH > = 3,5 k Ω.
Podłączenie bieguna + baterii do wejścia nie jest destrukcyjne
(tylko dla wejścia cyfrowego na dolnej płytce drukowanej).
Min. czas impulsu 64 ms.
Normalnie otwarte: 3 A indukcyjne (AC-15), 250 V AC, 100 k cykl
Normalnie zamknięte: 2 A ogólnego przeznaczenia, 250 V AC, 100 k cykl
- Zawory Danfoss ETS / KVS / ETS C / KVS C / CCMT 2 – CCMT 42 / CTR
(zielony, czerwony, czarny, bialy)
- ETS6 / CCMT 0 / CCMT 1 (czarny, czerwony, żółty, pomarańczowy)
Inne zawory:
- prędkość 10 – 400 pps
- tryb napędu 1/8 mikrokroków
- maks. prąd szczytowy: 1,2 A (848 mA RMS)
- maks. napięcie zasilania 40 V
- maks. moc wyjściowa 12 W
VBATT: 18 – 24 V DC:
Upływ: <15 μA @ 30 V DC
Opcja: alarm krytyczny poniżej 12V
Opcja: alarm przy 17 V, alarm wysokiego napięcia przy 27 V
Po zaniku zasilania zawór się nie zamknie, jeśli napięcie przekracza 27 V
Moc potrzebna do 1 zamknięcia zaworu silnikowego:
ETS 6: 110 J / 30 VmAh
ETS 12.5 - ETS 400: 60 J / 17 VmAh
KVS 15 / KVS 42: 60 J / 17 VmAh
ETS 12C - ETS 100C: 55 J / 15 VmAh
KVS 2C / KVS 5C: 55 J / 15 VmAh
CCMT 2 - CCMT 8: 60 J / 17 VmAh
CCMT 16 - CCMT 42: 175 J / 49 VmAh
CTR 20: 60 J / 17 VmAh
Obsługiwane komendy z maks. czasem odpowiedzi 50 ms: 0 x 03, 0 x 04, 0 x 06.
Tylko dla sterowników rmy Danfoss.
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 11
Page 12

80G8286.01
Zasilanie
Bateria ZAWÓR
WYJŚCIE CYFROWE
Not used
Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
5.0 Podłączenia A. Podłączenia sterownika EKE 1A B. Podłączenia sterownika EKE 1B
WEJŚCIA ANALOGOWE / CYFROWE
Danfoss
80G8286.01
COM
5V+
DI2
DI1
EKA 1A - 080G5300
–/~
+/~
GND
Bat+A1A2B1B2
CAN - RJ
COM
AI4
AI3
AI2
DI3
COM
CAN RJ
NO1C1NC1
WEJŚCIA ANALOGOWE / CYFROWE
COM
5V+
RGND
+/~
DI2
EKA 1B - 080G5350
GND
Bat+A1A2B1B2
D –
D+
–/~
CAN - RJRS485
DI1
COM
AI4
AI3
AI2
AI1
COM
NO1C1NC1
CAN RJ
Zasilanie
24 V
Bateria ZAWÓR
KROKOWY
WYJŚCIE CYFROWE
C.1 Podłączenia sterownika
EKE 1C: panel tylny
Danfoss
80G8286.01
EKE 1C - 080G5400
Zasilanie
24 V
Bateria ZAWÓR
KROKOWY
WYJŚCIE CYFROWE
C. 2 Podłączenia sterownika
EKE 1C: panel przedni
AI1
CYFROWE 1-2
COM
WEJŚCIA
COM
Danfoss
80G8286.01
WEJŚCIA ANALOGOWE 1-5
15V+
5V+
COM
AI5
AI4
AI3
AI2
EKE 1C - 080G5400
DI2
DI1
COM
© Danfoss | DCS | 2020.10
R120
CANH
CANL
GND
CAN RJ
–/~
+/~
GND
Bat+A1A2B1B2
NO1C1NC1
CAN
CAN RJ
RGNDD+D-
RS485 AO1
COM
AO1
DKRCC.PD.RS0.A4.49 | 12
Page 13
Danfoss
80G311.10
–/~
+/~
GND
Bat+A1A2B1B2
NO1C1NC1
–/~
+/~
GND
Bat+A1A2B1B2
NO1C1NC1
–
+
+
18 V
–/~
+/~
GND
Bat+A1A2B1B2
NO1C1NC1
–/~
+/~
GND
Bat+A1A2B1B2
NO1C1NC1
COM
5V+
DI2
DI1
COM
AI4
AI3
AI2
DI3
COM
CAN RJ
COM
5V+
DI2
DI1
COM
AI4
AI3
AI2
DI3
COM
CAN RJ
1
2
3
C
CAN RJCAN RJ
COM
5V+
DI2
DI1
COM
AI4
AI3
AI2
DI3
COM
CAN RJ
COM
5V+
DI2
DI1
COM
AI4
AI3
AI2
DI3
COM
C1 NC1
Zasilanie
C1 NO1
Zasilanie
Superheat controller
EKE 1A - 080G5300
A1A2B1
B2
NO1C1NC1
A1A2B1
B2
NO1C1NC1
A1A2B1B2NO1C1NC1
A1A2B1B2NO1C1NC1
AI3
AI2
DI3
COM
CAN RJ
AI3
AI2
DI3
COM
CAN RJ
C
CAN RJCAN RJ
DI1
COM
AI4
AI3
AI2
DI3
COM
CAN RJ
DI1
COM
AI4
AI3
AI2
DI3
COM
C1 NC1
Zasilanie
C1 NO1
Zasilanie
Bat+A1A2B1B2
NO1C1NC1
Bat+A1A2B1B2
NO1C1NC1
+
18 V
+/~
GND
Bat+A1A2B1B2
NO1C1NC1
+/~
GND
Bat+A1A2B1B2
NO1C1NC1
DI1
COM
AI4
AI3
AI2
DI3
COM
CAN RJ
DI1
COM
AI4
AI3
AI2
DI3
COM
CAN RJ
C
CAN RJCAN RJ
COM
5V+
DI2
DI1
COM
AI4
AI3
AI2
DI3
COM
CAN RJ
COM
5V+
DI2
DI1
COM
AI4
AI3
AI2
DI3
COM
C1 NC1
Zasilanie
C1 NO1
Zasilanie
Superheat controller
EKE 1A - 080G5300
Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
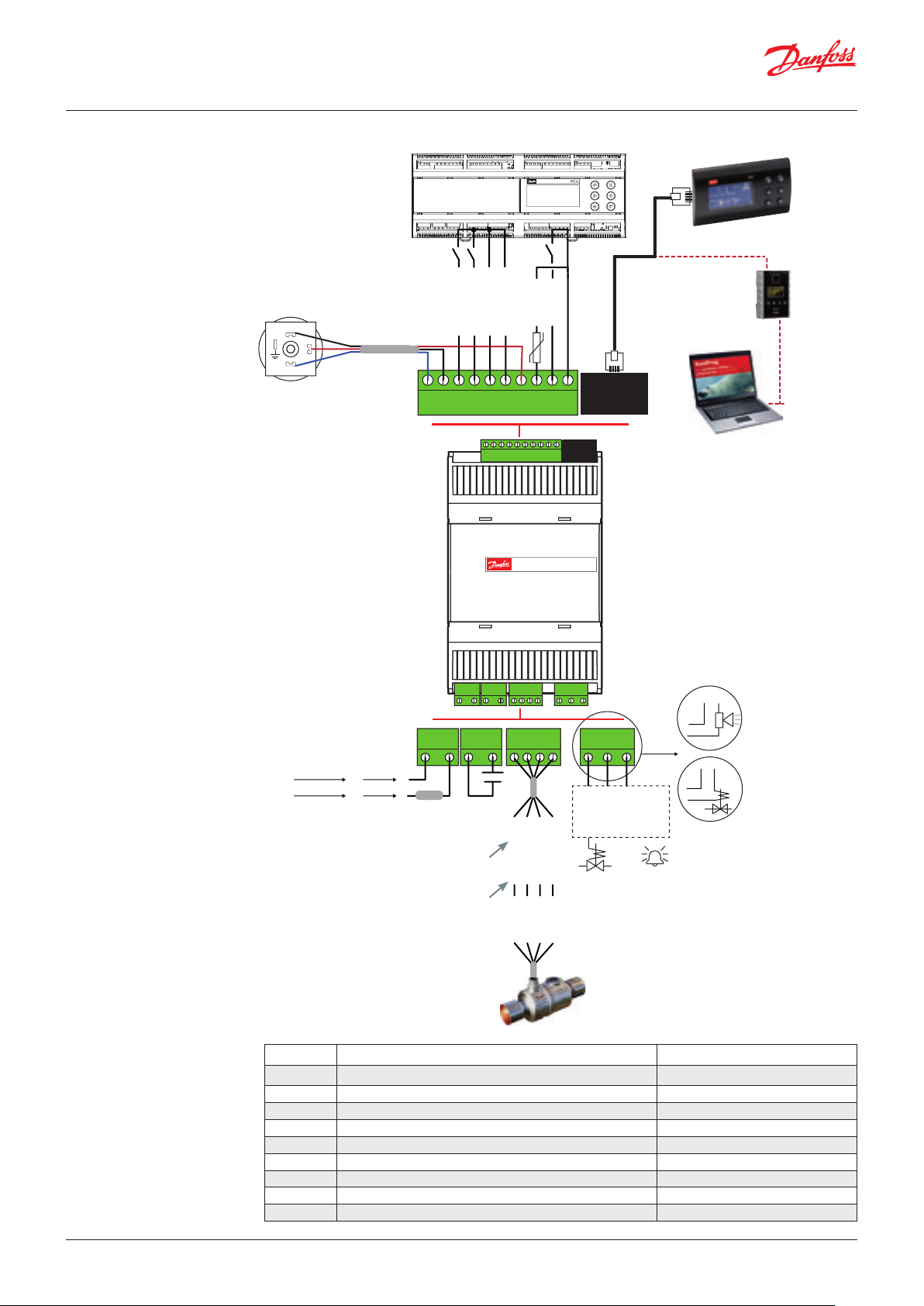
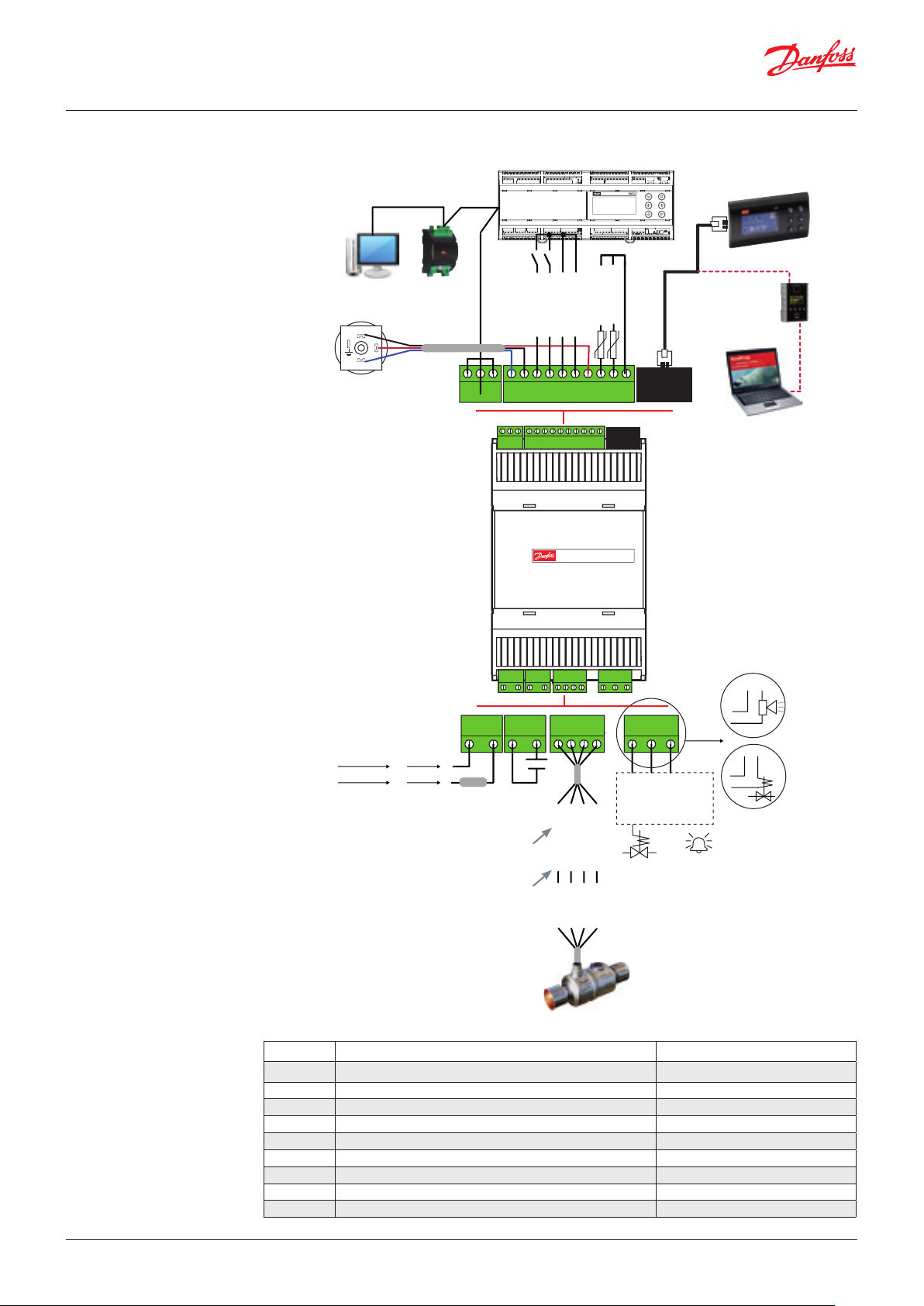
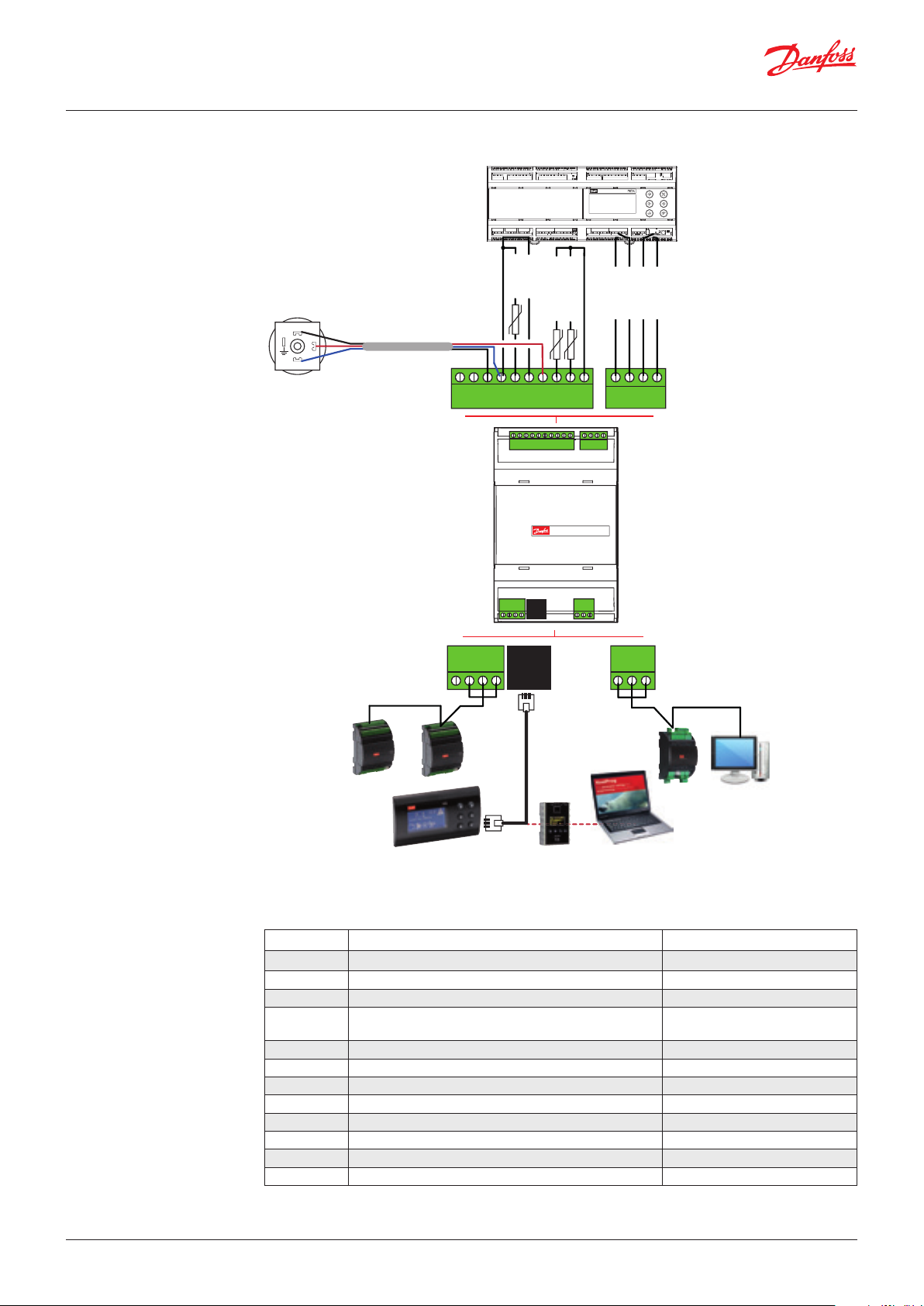
5.1 Podłączenia EKE 1A
Przetwornik ciśnienia
0,5 – 4,5 V
ratiometrycznie
np. AKS 32R
Przewód
przyłączeniowy
AKS
060G1034
Sterownik nadrzędny
DI2
COM
DI1 (ON/OFF)*
AI4 (napięciowe)
NTC (S2)
DI3
CAN RJ
* Uwaga:
Nieużywane wejście
DI1 (On/OFF) trzeba
dezaktywować
odpowiednią
CANBus
nastawą parametru
konguracji DI1
080G0075 (opcja)
Panel MMIGRS2
080G0294 (opcjonalnie)
Bramka
MMIMYK
Oprogramowanie
PC KoolProg
Zasilanie
24 V DC
± 20%
Bezpiecznik
T 2,5 A
(opcja)
Podtrzymywanie
bateryjne
(opcja)
Zawór
ETS 6
Zawory
ETS / KVS
pomarańczowy
biały
żółty
czarny
czarny
czerwony
zielony
czerwony
Przekaźnik
normalnie otwarty
albo normalnie
zamknięty (opcja)
Zawór
elektro-
magnetyczny
ON/OFF
Alarm
24 V AC
± 20%
Wejścia analogowe (AI) / cyfrowe (DI)
COM Wspólny
DI3 Wejście cyfrowe 3 Kongurowane programowo
AI2 Wejście analogowe NTC 10 K S2
AI3 Wejście analogowe 0 – 5 V / Ratiometryczny przetwornik ciśnienia Pe
AI4 Wejście analogowe 0 – 10 V Zewnętrzny sygnał odniesienia
COM Wspólny
DI1 Wejście cyfrowe 1 Włącznik główny (sprzętowy)
DI2/3 Wejście cyfrowe 2 Kongurowane programowo
5V+ Zasilanie ratiometrycznego przetwornika ciśnienia 0 – 5 V
COM Wspólny
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 13
Page 14
Danfoss
80G318.10
COM
5V+
DI2
DI1
COM
AI4
AI3
AI2
DI3
COM
D–D+RGND
CAN RJ
–/~
+/~
GND
Bat+A1A2B1B2
NO1C1NC1
COM
5V+
DI2
DI1
COM
AI4
AI3
AI2
AI1
COM
CAN RJ
–/~
+/~
GND
Bat+A1A2B1B2
NO1C1NC1
–
+
+
18 V
1
2
3
COM
5V+
DI2
DI1
COM
AI4
AI3
AI2
DI3
COM
D–D+RGND
CAN RJ
–/~
+/~
GND
Bat+A1A2B1B2
NO1C1NC1
COM
5V+
DI2
DI1
COM
AI4
AI3
AI2
AI1
COM
CAN RJ
–/~
+/~
GND
Bat+A1A2B1B2
NO1C1NC1
C1 NC1
Zasilanie
C1 NO1
Zasilanie
Superheat controller
EKE 1B - 080G5350
COM
5V+
DI2
DI1
COM
AI4
AI3
AI2
DI3
COM
RGND
CAN RJ
+/~
GND
Bat+A1A2B1B2
NO1C1NC1
COM
5V+
DI2
DI1
COM
AI4
AI3
AI2
AI1
COM
CAN RJ
+/~
GND
Bat+A1A2B1B2
NO1C1NC1
+
18 V
COM
5V+
DI2
DI1
COM
AI4
AI3
AI2
DI3
COM
D–D+RGND
CAN RJ
–/~
+/~
GND
Bat+A1A2B1B2
NO1C1NC1
COM
5V+
DI2
DI1
COM
AI4
AI3
AI2
AI1
COM
CAN RJ
–/~
+/~
GND
Bat+A1A2B1B2
NO1C1NC1
C1 NC1
Zasilanie
C1 NO1
Zasilanie
Superheat controller
EKE 1B - 080G5350
COM
AI4
AI3
AI2
DI3
COM
CAN RJ
A1A2B1
B2
NO1C1NC1
COM
AI4
AI3
AI2
AI1
COM
CAN RJ
A1A2B1
B2
NO1C1NC1
DI1
COM
AI4
AI3
AI2
DI3
COM
CAN RJ
A1A2B1B2NO1C1NC1
DI1
COM
AI4
AI3
AI2
AI1
COM
CAN RJ
A1A2B1B2NO1C1NC1
C1 NC1
Zasilanie
C1 NO1
Zasilanie
Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
5.2 Podłączenia EKE 1B
RS485 MODBus
Sieć nadzorcy
Przewód
przyłączeniowy
060G1034
Przetwornik ciśnienia
Ratiometryczny: 0,5 – 4,5 V
np. AKS 32R
EKE
RS485 RTU MODBus
Sterownik nadrzędny
DI2
DI1 (ON/OFF)*
NTC (S2)
COM
AO2 (0 / 10 V)
NTC (S3 / S4)
(opcjonalnie)
Panel MMIGRS2
CAN RJ
080G0294 (opcjonalnie)
Bramka
MMIMYK
CANBus
080G0075 (opcja)
Oprogramowanie
PC KoolProg
* Uwaga:
Nieużywane wejście DI1 (On/OFF)
trzeba zewrzeć
Zasilanie
24 V DC
± 20%
Bezpiecznik
T 2,5 A
(opcja)
Podtrzy-
mywanie
bateryjne
(opcja)
Zawór
ETS 6
Zawory
ETS / KVS
pomarańczowy
biały
żółty
czerwony
czarny
czerwony
normalnie otwarty
zamknięty (opcja)
czarny
Zawór
elektro-
magnetyczny
ON/OFF
zielony
Przekaźnik
albo normalnie
Alarm
24 V AC
± 20%
Wejścia analogowe (AI) / cyfrowe (DI)
COM Wspólny
AI1 Wejście analogowe NTC 10 K S3/S4 wybierane programowo
AI2 Wejście analogowe NTC 10 K S2
AI3 Wejście analogowe 0 – 5 V / Ratiometryczny przetwornik ciśnienia Pe
AI4 Wejście analogowe 0 – 10 V Zewnętrzny napięciowy sygnał odniesienia
COM Wspólny
DI1 Wejście cyfrowe 1 Włącznik główny (sprzętowy)
DI2 Wejście cyfrowe 2 Kongurowane programowo
5V+ Zasilanie ratiometrycznego przetwornika ciśnienia 0 – 5 V
COM Wspólny
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 14
Page 15
Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
g. AKS 32R
5.3.1 EKE 1C – Podłączenia panelu przedniego
Przetwornik ciśnienia
0,5 – 4,5 V ratiometrycznie
1
3
2
np. AKS 32R
e.e.g. AKS 32R
Przewód przyłączeniowy AKS
060G1034
COM
Sterownik nadrzędny
AI4 (V / I)
(opcjonalnie)
NTC (S3 / S4)
C
C
C
5V+
DI2
DI1
COM
COM
AI5
AI4
COM
5V+
DI2
15V+
5V+
Superheat controller
EKE 1C - 080G5400
AI4
DI1
COM
15V+
5V+
NTC / PT1000 (S2)
AI3
AI2
AI3
AI2
COM
AI4
AI3
AI2
DI3
AI5
AI4
AI3
AI2
AI1
(COM)
NTC / PT1000
(S3 / S4) (opcjonalnie)
DI3
COM
AI1
COM
COM
COM
COM
COM
DI2
DI1
COM
(DI2)
(COM)
(DI1 (ON/OFF*)
DI2
DI1
* Uwaga: Nieużywane
wejście DI1 (On/OFF) trzeba
zewrzeć
COM
R120
CANH
CANL
Lokalna sieć CANbus
Panel MMIGRS
080G0294 (opcja)
Danfoss
R120
80G315.10
CANH
CANL
GND
GND
CAN RJ
CANbus
CAN RJ
CAN RJ
080G0075
(opcjonalnie)
Bramka
MMIMYK
RGNDD+D-
RGNDD+D-
RS485 RTU MODbus
EKE /
Sterownik
nadrzędny
Oprogramowanie
PC KoolProg
Sieć nadzorcy
Wejścia analogowe (AI) / cyfrowe (DI)
COM Wspólny
AI1 Wejście analogowe czujnika temperatury NTC 10 K / Pt1000 S3/S4 wybierane programowo
AI2 Wejście analogowe czujnika temperatury NTC 10 K / Pt1000 S2
AI3 Wejście analogowe napięciowe / prądowe Pe
AI4 Wejście analogowe napięciowe / prądowe Zewnętrzny sygnał odniesienia
lub Pc
AI5 Wspólny S3/S4 wybierane programowo
COM Zasilanie ratiometrycznego przetwornika ciśnienia 0 – 5 V
5V+ Zasilanie przetwornika ciśnienia z sygnałem prądowym
15V+ Wejście cyfrowe 1
DI1 Wejście cyfrowe 2 Włącznik główny (sprzętowy)
DI2 Nieużywane w EKE 1C Kongurowane programowo
24V+ Nieużywane w EKE 1C
AO1 Not used in EKE 1C
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 15
Page 16
Danfoss
80G316.10
–/~
+/~
GND
Bat+A1A2B1B2
NO1C1NC1
–/~
+/~
GND
Bat+A1A2B1B2
NO1C1NC1
–/~
+/~
GND
Bat+A1A2B1B2
NO1C1NC1
–/~
+/~
GND
Bat+A1A2B1B2
NO1C1NC1
–
+
+
18 V
C1 NO1
Zasilanie
C1 NC1
Zasilanie
Superheat controller
EKE 1C - 080G5400
GND
Bat+A1A2B1B2
NO1C1NC1
GND
Bat+A1A2B1B2
NO1C1NC1
Bat+A1A2B1B2
NO1C1NC1
Bat+A1A2B1B2
NO1C1NC1
C1 NO1
Zasilanie
C1 NC1
Zasilanie
Superheat controller
EKE 1C - 080G5400
A1A2B1B2NO1C1NC1
A1A2B1B2NO1C1NC1
A1A2B1
B2
NO1C1NC1
A1A2B1
B2
NO1C1NC1
C1 NO1
Zasilanie
C1 NC1
Zasilanie
Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
Przyłącze dla sygnału 4 – 20 mA
z przetwornika ciśnienia
Uwaga:
Regulatory EKE 1A/1B
obsługują tylko
przetworniki ciśnienia
z ratiometrycznym
sygnałem 0,5 do 4,5 V.
1
2
Przetwornik ciśnienia
4 – 20 mA
np. AKS 33
Regulator EKE 1C współpracuje z wieloma rodzajami przetworników ciśnienia i należy się upewnić,
że właściwie podłączono zasilanie wybranego przetwornika, zgodnie z poniższymi wytycznymi.
Przetwornik ciśnienia Sygnał Podłączenie do EKE
Nie sprecyzowany - AKS 32R Ratiometryczny 10 – 90% Zasilanie 5 V z EKE
112CP (Sensata) Ratiometryczny 10 – 90% Zasilanie 5 V z EKE
Inny z sygnałem ratiometrycznym Skongurowany za pomocą parametrów Zasilanie 5 V z EKE
NSK (Saginomiya) Ratiometryczny 10 – 90%, 0,5 do 4,5 V Zasilanie 5 V z EKE
AKS 32 1-5V 1 – 5 V Zasilanie 15 V z EKE
Inny z sygnałem napięciowym Skongurowany za pomocą parametrów Zasilanie 15 V z EKE
Sygnał z magistrali Przez RS485 MODbus AKS 32 1-6V 1 – 6 V Zasilanie 15 V z EKE
AKS 32 0-10V 0 – 10 V Zasilanie 15 V z EKE
AKS 33 4 – 20 mA Zasilanie 15 V z EKE
XSK (Saginomiya) 4 – 20 mA Zasilanie 15 V z EKE
Inny z sygnałem prądowym Skongurowany za pomocą parametrów Zasilanie 15 V z EKE
5.3.2 EKE 1C – Podłączenia panelu tylnego
3
Analogowe wejście EKE 1C na zaciskach 1 – 5
Dla innych rodzajów przetworników sprawdzić
Danfoss
80G298.10
COM
5V+
DI2
DI1
COM
AI4
AI3
AI2
15V+
5V+
COM
AI5
DI3
AI4
AI3
AI2
AI1
w specykacji regulatora EKE.
COM
COM
© Danfoss | DCS | 2020.10
Zasilanie
24 V AC
± 20%
24 V DC
± 20%
Bezpiecznik
T 2,5 A
(opcja)
Zawór ETS 6
Zawory
ETS / KVS
Colibri*
CCMT
bateryjne
Podtrzy
mywanie
(opcja)
pomarańczowy
biały
żółty
czerwony
czarny
czerwony
normalnie otwarty
zamknięty (opcja)
czarny
Zawór
elektro-
magnetyczny
ON/OFF
zielony
Przekaźnik
albo normalnie
Alarm
DKRCC.PD.RS0.A4.49 | 16
Page 17
Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
6.0 Instalacja
6.1 Uwagi ogólne
Uwaga:
W każdym przypadku należy
zamontować odpowiednie
czujniki i zawór rozprężny
o właściwej wydajności
– jak najbliżej parownika.
Przewymiarowany bądź za mały
zawór może pogorszyć pracę
układu. Z kolei zainstalowanie
czujników z dala od parownika
może wpłynąć na dokładność
regulacji i osiągi urządzenia.
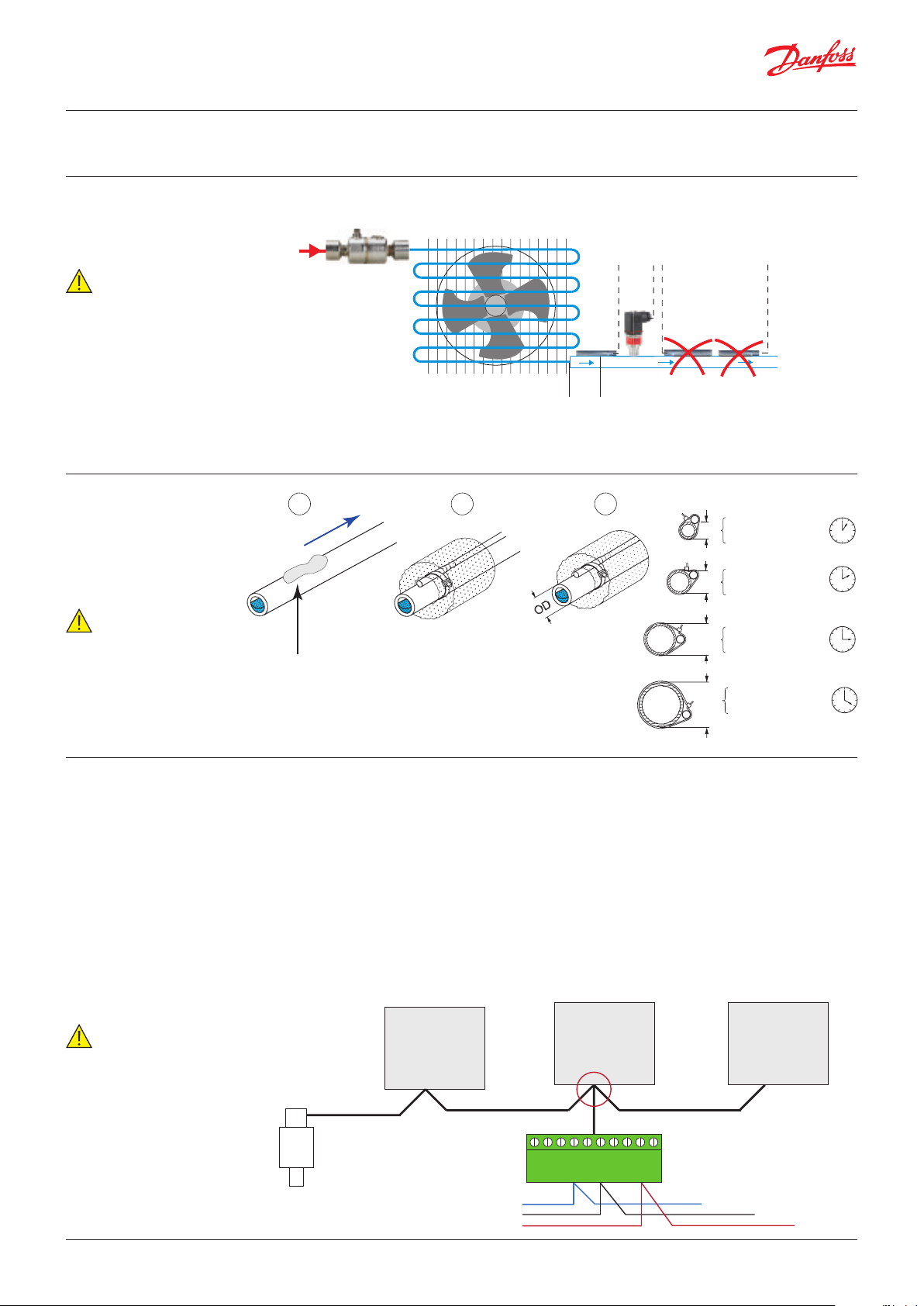
6.2 Instalowanie czujników
6.2.1 Czujnik temperatury
Uwaga:
• Czujnik umieścić na powierzchni
czystej, bez farby.
• Skorzystać z pasty przewodzącej
ciepło i zaizolować czujnik.
• Dla dokładności pomiaru czujnik
zainstalować najdalej 5 cm
od wylotu parownika.
• Sygnał z zycznego czujnika
temperatury nie może
być dzielony.
W tym rozdziale krótko opisano typowy sposób instalacji układu regulacji. Szczegółowe informacje
zawiera instrukcja instalacji regulatorów typu EKE.
Danfoss
84N403.10
Danfoss
60G496.11
Pasta
przewodząca
Parownik
21
oss
Wylot
parownik
Blisko
parownika
3
Danfoss
84N366.12
OD
OD
OD
OD
1
12 - 16 mm
/2 - 5/8”
3
/4 - 7/8”
18 - 22 mm
3
1 - 1
/8”
25 - 35 mm
3
/8” i większa
1
35 mm i większa
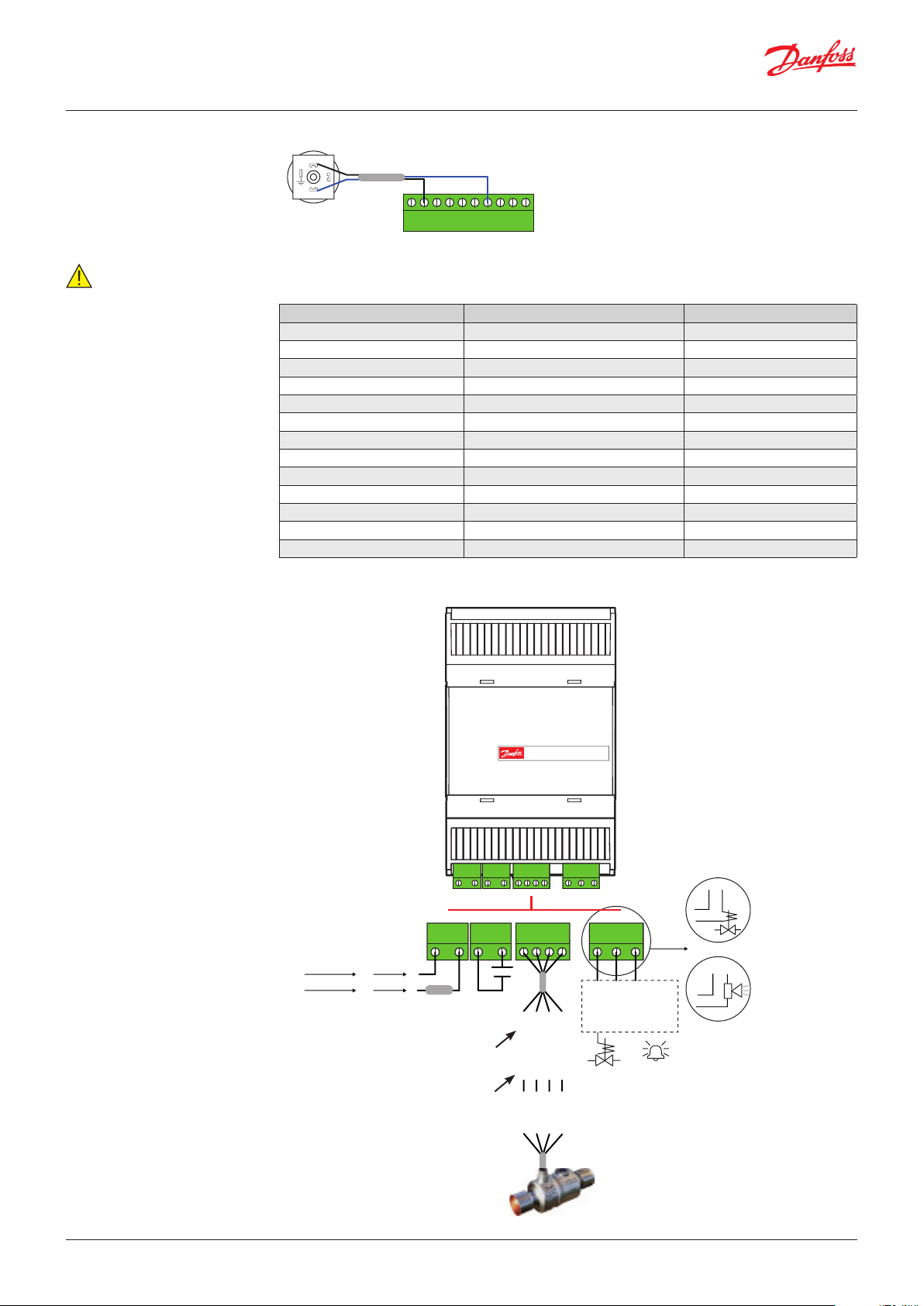
6.2.2 Przetwornik
ciśnienia
6.2.3 Dzielenie sygnału z
przetwornika ciśnienia
Uwaga
Regulatory EKE 1C nie mogą
korzystać ze wspólnego
przetwornika ciśnienia.
Sygnał może być dzielony
przez kilka jednostek tylko
za pośrednictwem magistrali
CANbus.
Montaż przetwornika ciśnienia jest mniej newralgiczny. Trzeba go jednak podłączyć blisko czujnika
temperatury, tuż za parownikiem i pionowo w górę.
W przypadku regulatorów typu EKE 1A i EKE 1B, z ratiometrycznego sygnału z przetwornika ciśnienia
może korzystać do 5 jednostek EKE.
Jeśli kilka parowników podłączono do wspólnego przewodu ssawnego, sygnał z przetwornika
ciśnienia można rozdzielić na maks. 5 regulatorów, jak pokazano poniżej. Dla prawidłowego
odbioru sygnału przez wszystkie jednostki, do każdej trzeba poprowadzić wszystkie trzy przewody
(uziemienie, 5 V i sygnał wyjściowy przetwornika).
W przypadku modelu EKE 1C nie dopuszcza się korzystania przez kilka regulatorów z jednego sygnału
pochodzącego bezpośrednio z przetwornika ciśnienia. Można jednak doprowadzić do kilku jednostek
wspólny sygnał za pośrednictwem magistrali CANbus.
EKE 1B
Zasilanie
AKS
32R
Danfoss
80G335.10
EKE 1B
COM
Com
5V+
DI2
AI1/ DI3
Ai2
DI1
AI3
EKE 1B
COM
AI4
AI4
Com
AI3
DI1
AI2
DI2
DI3
+5V
COM
Com
COM
Sygnał
Uziemienie
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 17
Page 18
Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
80G337.10
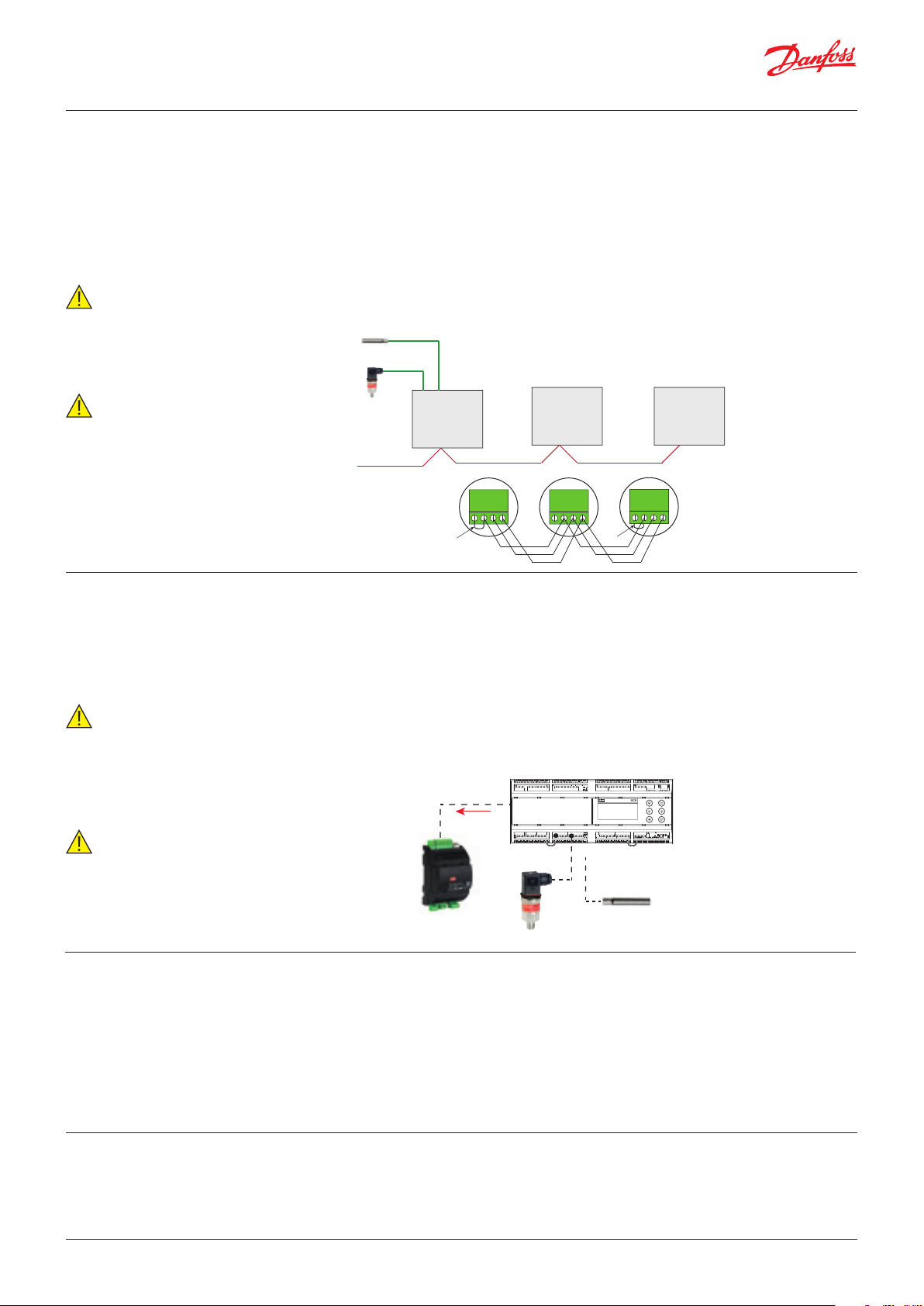
6.2.4 Dzielenie sygnału
ciśnienia/temperatury
w regulatorach EKE 1C
i EKE 1B przez CanBus
Uwaga:
Nie ma możliwości transmisji
sygnału przez MODbus.
W przypadku błędu czujnika
transmisja ustaje.
Uwaga:
Należy się upewnić, że każdy
regulator, który ma być
połączony magistralą CANbus
ma inny adres (G001). Dopiero
wtedy można podłączyć
wspólny sygnał.
Za pośrednictwem CANbus
można przesyłać tylko
parametry Pe, Pc i S3.
Regulatory EKE 1C mogą korzystać ze wspólnego sygnału pomiarowego za pośrednictwem magistrali
CANbus. Jest on przesyłany do wszystkich regulatorów raz na sekundę szeregowym połączeniem CAN.
Poniższe parametry włączają i wyłączają transmisję lokalnych sygnałów:
• [G012 - dzielenie sygnału Pe]
• [G013 - dzielenie sygnału Pc]
• [G014 - dzielenie sygnału S3]
Jeśli do układu regulatorów podłączono dwa lub więcej czujników, to wspólny sygnał wysyła
regulator, który włączy się jako pierwszy, zaś pozostałe jednostki będą go ignorować. Jeśli regulator
nie otrzyma transmitowanego sygnału w ciągu 3 sekund (parametr G003 – minimalny interwał
uaktualniania „CANbus min update interval”), to przełączy się na czujnik lokalny.
Łącząc regulatory magistralą CANbus każdy jej koniec trzeba zamknąć przez połączenie zworką
zacisków CANH i R120.
Czujnik temperatury
Przetwornik
ciśnienia
CAN
Danfoss
80G336.10
EKE 1C
Zworka
RI 20
EKE 1C
CAN H
CAN L
GND
RI 20
CAN H
CAN L
GND
Zworka
RI 20
EKE 1C
CAN H
CAN L
GND
6.2.5 Wykorzystanie
sygnałów zewnętrznych
z układu transmisji
danych
Uwaga:
Przed podaniem magistralą
do regulatora EKE, zewnętrzny
sygnał wartości ciśnienia
należy przeskalować x100, zaś
temperatury x10. Np.: ciśnienie
manometryczne 8,4 bar podaje
się jako 8400, zaś 2,4°C jako 24.
Uwaga:
Wartość sygnału zewnętrznego
musi być na bieżąco
uaktualniana – szczegóły
na liście parametrów.
6.2.6 Grupy dzielonych
sygnałów
Za pośrednictwem układu transmisji danych regulatory EKE 1B/1C mogą otrzymywać zewnętrzne
sygnały o wartościach mierzonych parametrów Po, Pc, S2, S3 i S4. W niektórych urządzeniach ciśnienie
ssania bądź temperaturę czynnika za parownikiem mierzy główny sterownik układu. Często ma to
miejsce w przypadkach, gdzie na podstawie pomiaru ciśnienia ssania sterownik układu ma załączać
alarm niskiej temperatury lub ciśnienia. Regulator EKE może wtedy pominąć sygnał z czujnika i zamiast
niego bazować na wartości otrzymywanej za pośrednictwem MODbus. Wymaga to ciągłego przesyłania
tego sygnału ze sterownika głównego do regulatora EKE, gdyż jeśli nie dotrze on w ciągu przedziału
czasu nastawionego parametrem G004, regulator EKE załączy alarm błędu czujnika i zatrzyma regulację.
Przykład: Dzielenie wspólnego sygnału dla temperatury ssania S2 i ciśnienia parowania Pe można
aktywować parametrami odpowiednio „I040 = 5” oraz „I044 = 8”.
Sterownik nadrzędny
RS485 MODbus
Sygnały
Regulator EKE
pomiarowe
Czujnik temperatury
Przetwornik ciśnienia
Danfoss
Wspólne sygnały podzielono na grupy przypisując im adresy:
Grupa 1 adresy 1 do 31
Grupa 2 adresy 32 do 63
Grupa 3 adresy 64 do 95
Grupa 4 adresy 96 do 125
Adres 0 jest nieważny i nie należy go używać.
Adresy 126 i 127 zarezerwowano dla panelu zewnętrznego.
Regulator zna adres własny oraz adres, z którego pochodzi transmitowany sygnał. Informacje te
pozwalają odrzucać sygnały sterowników spoza swojej grupy.
6.3 Kompensacja czujników
© Danfoss | DCS | 2020.10
Każdy sygnał z czujnika można skorygować. Kompensacja wymagana jest tylko w przypadku długich
i cienkich przewodów sygnałowych z czujników. Wyświetlacz i poszczególne funkcje bazują na
skorygowanych wartościach.
Czujniki temperatury Pt1000 są wrażliwe na długość i rodzaj przewodów przyłączeniowych.
Odmienna rezystancja wymaga skompensowania. Zwykle 1°C przekłada się na około 4 Ω.
DKRCC.PD.RS0.A4.49 | 18
Page 19

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
W
W
6.4 Wspólne sygnały
wejściowe
6.5 Wspólne wejścia
cyfrowe (DI)
6.6 Wspólne zasilanie
i podtrzymywanie
bateryjne
Ostrzeżenie:
Do zacisków podtrzymywania
bateryjnego nie wolno podłączać
głównego zasilania regulatora.
Do regulatorów typu EKE można doprowadzić wspólny analogowy sygnał napięciowy.
Zewnętrzny sygnał odniesienia 0 – 10 V mogą też dzielić regulatory EKE 1A i 1B.
Regulatory typu EKE wyposażono w
styki beznapięciowe. Do zacisków
wejść cyfrowych nie wolno podłączać
zewnętrznego zasilania. Wejścia te nie mogą
też być dzielone. Kiedy sygnał cyfrowy
wymaga rozdzielenia na kilka regulatorów,
należy wykonać obejście dodając do
Danfoss
80G340.10
D1
Zasilanie
–
+
PLC
D0
każdego wejścia własny przekaźnik (lub
EKE
EKE
COM
Przekaźnik
D1
COM
Przekaźnik
D1
transoptor). Jego wyjście – podłączane do
zacisków DI oraz COM – musi wytrzymywać
impulsy o natężeniu 100 mA i napięciu 15 V.
R
COM
EKE
Transoptor
Zasilanie regulatora EKE jest galwanicznie odizolowane od wyjść.
Daje to tę zaletę, że do kilku jednostek EKE można doprowadzić wspólne zasilanie.
Podtrzymywanie bateryjne stanowi opcję. Dzięki niemu po odcięciu zasilania regulator EKE zamknie
zawór silnikowy. Do zacisków podtrzymywania bateryjnego nie wolno podłączać głównego zasilania
regulatora. Napięcie niższe od 16,5 V i wyższe niż 27 V spowoduje załączenie alarmu baterii.
Kilka regulatorów typu EKE może korzystać ze wspólnego podtrzymywania zasilania, należy jednak
się upewnić, że źródło podtrzymujące posiada odpowiednią moc (W / VA) do zasilenia wszystkich
jednostek.
Podłączenie wspólnego zasilania oraz wspólnego podtrzymywania bateryjnego do kilku regulatorów
wymaga szczególnej uwagi. Nie wolno łączyć zasilania głównego prądem przemiennym (AC) z
podtrzymywaniem prądem stałym (DC). W przypadku zasilania obu obwodów prądem stałym
(DC) najbezpieczniej jest połączyć na krótko w każdej jednostce ujemne bieguny baterii i zasilania
głównego. To rozwiązanie wymaga przeprowadzenia testu kompatybilności elektromagnetycznej po
zainstalowaniu regulatorów.
CAN RJ
Ostrzeżenie:
Pod żadnym pozorem nie
dopuszcza się jednoczesnego
podłączenia wspólnego
zasilania prądem przemiennym
i wspólnego podtrzymywania
Danfoss
80G295.10
–/~
+/~
–/~
+/~
spólne zasilanie AC
spólne podtrzymywanie DC
D–D+RGND
–/~
–/~
+/~
+/~
COM
5V+
COM
5V+
GND
GND
EKE 1C
DI2
DI1
DI2
DI1
Bat+A1A2B1B2
Bat+A1A2B1B2
COM
AI4
AI3
AI2
DI3
COM
COM
AI4
AI3
AI2
DI3
COM
Superheat controller
EKE 1x - 080G5xxx
NO1C1NC1
NO1C1NC1
CAN RJ
D–D+RGND
–/~
–/~
COM
5V+
COM
5V+
+/~
GND
+/~
GND
EKE 1C
DI2
DI1
COM
AI4
AI3
AI2
DI2
DI1
COM
AI4
AI3
AI2
Superheat controller
EKE 1x - 080G5xxx
Bat+A1A2B1B2
Bat+A1A2B1B2
CAN RJ
CAN RJ
DI3
COM
DI3
COM
NO1C1NC1
NO1C1NC1
D–D+RGND
–/~
–/~
COM
5V+
COM
5V+
+/~
GND
+/~
GND
EKE 1C
Danfoss
80G338.10
DI2
DI1
COM
AI4
AI3
DI2
DI1
COM
AI4
AI3
Superheat controller
EKE 1x - 080G5xxx
Bat+A1A2B1B2
Bat+A1A2B1B2
CAN RJ
CAN RJ
AI2
DI3
COM
AI2
DI3
COM
NO1C1NC1
NO1C1NC1
bateryjnego prądem stałym.
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 19
Page 20
Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
6.7 Okablowanie
Ostrzeżenie:
Nie należy wspólnie prowadzić
przewodów sygnałowych
i zasilających (również
w tablicach elektrycznych) .
6.7.1 Długości przewodów
Przewody przyłączeniowe czujników i przewody
wejść cyfrowych należy prowadzić w jak
największym oddaleniu (przynajmniej 10 cm)
od przewodów zasilania regulatora i elementów
wykonawczych, w celu uniknięcia ewentualnych
Min 10-15 cm
zakłóceń elektromagnetycznych.
Danfoss
84B3206.10
Do regulatora EKE można przyłączyć przewody o maksymalnej długości jak poniżej.
Długość przewodu Rozmiar przewodu (min. / maks.)
Wejścia analogowe (prądowe / napięciowe) maks. 10 m 0.14 /1.5 mm2
Czujnik temperatury maks. 10 m** -
Zawór krokow y maks. 30 m* 0.14 /1.5 mm2
Zasilanie maks. 5 m 0.2 /2.5 mm2
Wejście cyfrowe maks. 10 m 0.14 /1.5 mm2
Wyjście cyfrowe - 0.2 /2.5 mm2
Panel sterowniczy (MMI) maks. 3 m przez CAN RJ -
Transmisja danych maks. 1000 m 0.14 /1.5 mm2
*FW prz ypadku przewodów dł uższych należy sko rzystać z poniższ ych tabel
** D la dłuższych pr zewodów sygnałow ych z czujników po miar temperatur y można skompensować odp owiednią nastawą parame tru U107.
Dla przewodów innych
niż Danfoss M12
Uwaga:
Nawet w przypadku
zaworów marki Danfoss
i przewodów M12
dłuższych niż 15 m należy
ustawić rodzaj zaworu
jako „zawór użytkownika”
i dokonać niezbędnych
zmian parametrów.
Uwaga:
Najpierw warto wybrać
z menu odpowiedni rodzaj
zaworu marki Danfoss, aby
wgrać jego charakterystykę,
a dopiero potem wybrać
„zawór użytkownika”
i zwiększyć parametr I028.
Wytyczne dla podłączenia zaworów z silnikami krokowymi marki Danfoss za pomocą długich
przewodów M12
• Długie przewody pogarszają jakość pracy.
• Można temu zaradzić zmieniając parametry sterowania zaworu. Wskazówka dotyczy
standardowego rodzaju przewodu do podłączania silników krokowych rmy Danfoss.
Zalecany rozmiar i długość przewodu (skrętki) łączącego regulator EKE i zawór z silnikiem k rokowym
Długość przewodu 1 m – 15 m 15 m – 30 m 30 m – 50 m
Rozmiar przewodu 0,5 mm
2
0,75 mm
2
1–1,5 mm
2
Oprócz wyboru odpowiedniego przewodu zaleca się dokonanie następujących zmian parametrów.
Nastawa parametrów dla długich przewodów M12
Zawór 0 m – 15 m 15 m – 30 m 30 m – 50 m
Zmienić następujący parametr
ETS 12C - ETS 100C
KVS 2C - KVS 5C
ETS 12.5 - ETS 400
KVS 15 - KVS 42
CTR 20
CCMT 2 - CCMT 8
CCM 10 - CCM 40
ETS 6 Wartość domyślna I 028 Prąd zasilania silnika
CCMT 0 Wartość domyślna I028 Prąd zasilania silnika
CCMT 1 Wartość domyślna I028 Prąd zasilania silnika
CCMT 16 - CCMT 42 Wartość domyślna I028 Prąd zasilania silnika
Wartość domyślna I 028 Prąd zasilania silnika
Wartość domyślna
= 925 mA w piku
I028 Prąd zasilania silnika
= 200 mA w piku
= 270 mA w piku
= 270 mA w piku
= 400 mA w piku
= 450 mA w piku
I028 Prąd zasilania silnika
= 1000 mA w piku
I065 Cykl pracy zaworu = 90%
I028 Prąd zasilania silnika
= 300 mA w piku
I028 Prąd zasilania silnika
= 350 mA w piku
I028 Prąd zasilania silnika
= 350 mA w piku
I028 Prąd zasilania silnika
= 500 mA w piku
I028 Prąd zasilania silnika
= 500 mA w piku
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 20
Page 21
Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
7.0 Zawory z silnikami
krokowymi
7.1 Podłączenia zaworów
marki Danfoss
Regulatory tupu EKE mogą sterować pracą wszystkich rodzajów zaworów silnikowych rmy Danfoss.
Podłączenia zaworu silnikowego marki Danfoss dokonuje się jak pokazano na diagramie i w poniższej
tabeli. W przypadku zaworu innego producenta należy pozyskać od wytwórcy odpowiednie dane
elektryczne, przytoczone w kolejnym rozdziale.
Elektryczne zawory rozprężne ETS
Elektryczne zawory regulacyjne KVS
Elektryczne zawory rozprężne
ETS Colibri®
Elektryczne zawory regulacyjne
KVS Colibri®
Elektryczne zawory regulacyjne CCM
Elektryczne zawory regulacyjne CCMT
Elektryczne zawory 3-drogowe CTR
Podłączenie przewodu do zaworu
CCM / CCMT / CTR / ETS Colibri® / KVS Colibri® / ETS/KVS
Przewód Danfoss M12 Biały Cz arny Czerwony Zielony
Zaciski CCM / ETS / KVS 3 4 1 2
Zaciski CCMT / C TR / ETS Colibri / KVS Colibri A1 A2 B1 B2
Zaciski EKE A1 A2 B1 B2
ETS 6
Kolor przewodu Pomarańczowy Żółty Czerwony Czarny Szary
Zaciski EKE A1 A2 B1 B2 Nie podłączony
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 21
Page 22
Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
Szybkość / Kroki na sekundę
IO31 Sz
normalna
IO32 Sz
początkowa 20%
sz
(zalecana)
SCzas
spieszania zaworu na początku ruchu
Prąd impulsu
IO28 P
IO77 P
IO62 P
pr
120% wa
7.2 Parametry sterowania
zaworami silnikowymi
Uwaga:
Zmiany rodzaju zawory
dokonuje się przy
zatrzymanym regulatorze.
Ostrzeżenie:
Modykacja któregokolwiek
parametru wybranego
zaworu marki Danfoss
spowoduje automatyczne
przestawienie parametru
I067 na wartość 1, czyli
„zawór użytkownika”.
Uwaga:
Dla jednobiegunowego
(unipolarnego) silnika zaworu
obowiązuje nastawa liczby
„półkroków”.
I067 – Valve Conguration – Konguracja zaworu
W przypadku zaworu silnikowego rmy Danfoss należy wybrać jego typ z listy. Regulator
automatycznie przyjmie odpowiednie dla niego nastawy domyślne. Użytkownik nie musi nastawiać
żadnych innych parametrów sterowania silnikiem zaworu.
Zawór użytkownika
Dla zaworu innego producenta należy wybrać opcję „zawór użytkownika” (User dened valve),
ustawiając parametr I067 = 1. Nastawa ta wymaga skongurowania poniższych parametrów silnika
krokowego w oparciu o informacje od producenta zaworu.
I027 – Valve Motor Type – Rodzaj silnika zaworu
Należy sprecyzować rodzaj silnika zainstalowanego w zaworze (unipolarny / bipolarny). Nastawa
ta spowoduje też automatyczny wybór trybu dezaktywacji zaworu. Można zamiast tego inaczej
skongurować ten parametr, jeśli potrzeba więcej opcji. Nie należy jednak ustawiać obu
wspomnianych parametrów naraz dla danego zaworu.
I028 – Phase Current Peak /Valve drive current – Prąd impulsu / prąd zasilania zaworu
Nastawia się tu natężenie prądu elektrycznego dla każdej fazy silnika krokowego podczas ruchu
zaworu. Należy sprawdzić zakres dla podłączonego sterownika zaworu i pamiętać, że jest to szczytowa
wartość impulsu. Niektórzy producenci zaworów używają wartości skutecznej prądu (RMS)!
I077 – Holding Current – Prąd zatrzymania
Procent maksymalnej wartości natężenia prądu, jaki powinien być na każdej fazie, gdy zawór
pozostaje w bezruchu. Może on być potrzebny do utrzymywania przez zawór danej pozycji.
I030 – Max Operating Steps /Total no of valve steps – Całkowita liczba kroków
Liczba kroków odpowiadająca całkowitemu otwarciu zaworu. Różni się ona zależnie od wybranego
rodzaju silnika zaworu.
Przykładowo: zawór ETS 6 posiada 480 „półkroków” w trybie przełączania między wzbudzeniem jednej
i dwóch faz („half-stepping”), a tylko 240 pełnych kroków przy wzbudzaniu pojedynczych faz.
I031 – Step Rate /Speed – Szybkość
Wymagana szybkość ruchu zaworu w krokach na sekundę.
Należy pamiętać, że wyższa liczba kroków na sekundę oznacza mniejszy moment obrotowy.
Dlatego w układach o dużej różnicy ciśnienia lepiej ustawić mniejszą szybkość.
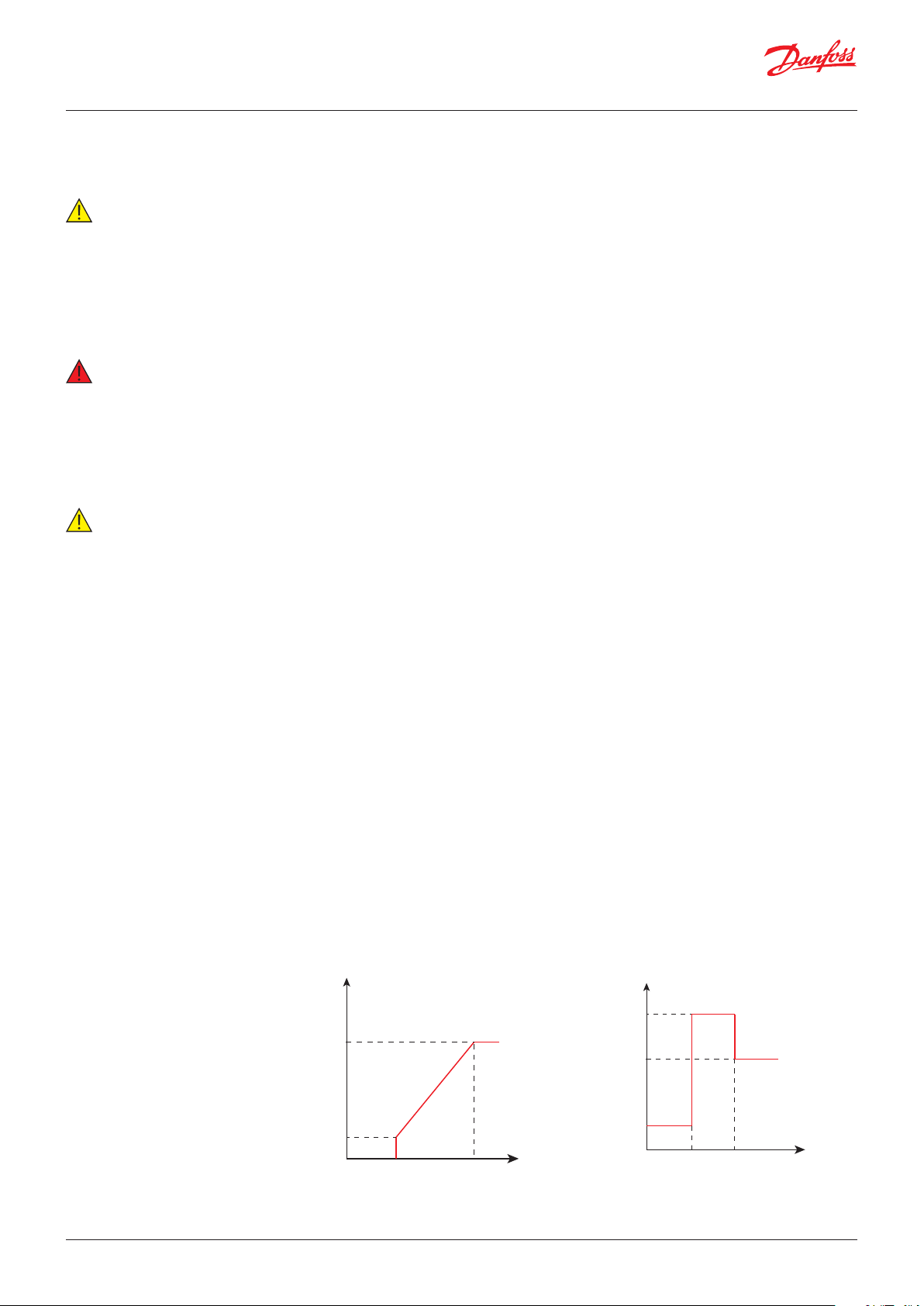
I032 – Valve Start Speed (1-100% of Valve speed ) – Szybkość początkowa
Parametr ten przydaje się w przypadku zaworów o dużej szybkości rzędu 200 do 400 kroków
na sekundę.
Ograniczenie szybkości początkowej służy uzyskaniu wyższego momentu silnika na początku ruchu
zaworu i zapobiega ewentualnemu gubieniu kroków przez zawór. Szczegóły zobrazowano
na poniższym wykresie.
I062 – Valve Acceleration Current – Prąd przyspieszania zaworu ,
I063 – Valve Acceleration Time – Czas przyspieszania zaworu
Funkcje te znajdują zastosowanie dla zaworów o szybkości rzędu 300 kroków na sekundę i większej.
Zwykle potrzebny jest większy moment do poruszenia elementami zaworu. Uzyskuje się go dzięki
odpowiedniemu prądowi przyspieszania. Poniższy wykres obrazuje zależność między szybkością
zaworu i natężeniem prądu oraz zalecany procent prądu przyspieszania.
Prąd przy
ybkość
Szybkość zaworu na początku ruchu
rąd
zyspieszania zaworu,
rtości I028
rąd normalny
© Danfoss | DCS | 2020.10
ybkość
ybkości normalnej
IO63 Czas przyspieszania
Danfoss
80G344.10
rąd zatrzymania
IO63 Czas przyspieszania
DKRCC.PD.RS0.A4.49 | 22
Danfoss
80G345.10
Czas
Page 23
Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
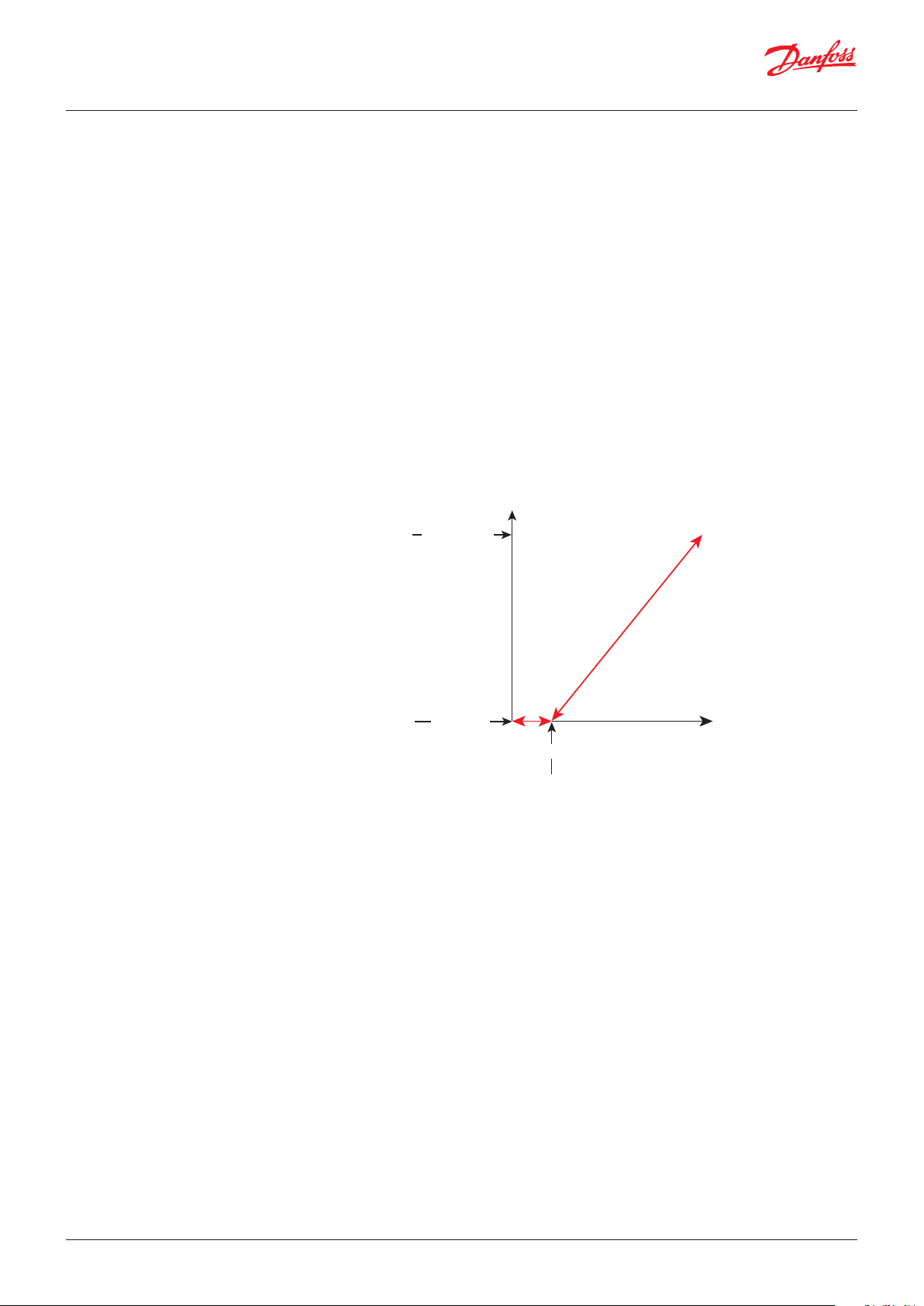
w
Wymagany stopień otwarcia
I064 – Valve step mode – Metoda wzbudzania zaworu
Silnikiem krokowym można sterować z wykorzystaniem różnych metod wzbudzania go do ruchu.
Na wybór odpowiedniej metody wpływają wymagania ze strony zaworu, a także warunki pracy
urządzenia.
Zawór może wykonywać pełne kroki 1/1, „półkroki” 1/2, albo mikrokroki (1/4, 1/8, 1/16). Danfoss
zaleca tryb mikrokroków 1/8, który cechuje się dobrą równowagą między momentem obrotowym
a szybkością ruchu zaworu oraz zapewnia jego płynną pracę.
Metoda pełnych kroków 1/1 zapewnia większy moment, który potrzebny jest w przypadku dużej
różnicy ciśnienia. Jednak wysokie tempo przyspieszania podnosi ryzyko gubienia kroków.
Metoda „półkroków” 1/2 zasadniczo występuje w silnikach unipolarnych, a mikrokroki 1/16 stosuje się
dla zapewnienia płynnej pracy. Skutkuje to nieco niższym momentem początkowym.
I065 – Valve duty cycle – Cykl roboczy zaworu
Parametrem tym można ustawić pożądany roboczy cykl zaworu pomiędzy 5 – 100%. Niektóre zawory
wymagają dłuższego cyklu roboczego, kiedy pracują z płynem o niskiej temperaturze. W przypadku
płynów o temperaturze wysokiej cykl roboczy należy zredukować.
I070 – Start Backlash – Luz początkowy
Parametr ten determinuje działanie funkcji luzu na początku ruchu zaworu. Odtąd zawór zacznie się
normalnie otwierać.
100% otwarcia
Danfoss
80G343.10
0% otwarcia
Luz początkowy
Całkowita liczba krokó
I071 – Backlash compensation (Hysteresis) – Kompensacja luzu (histereza)
Liczba kroków potrzebna do skompensowania histerezy mechanicznej zaworu wyposażonego
w przekładnię. Nastawę wprowadza się tylko wtedy, gdy potrzebne jest dodatkowe otwarcie zaworu.
Dla zapewnienia minimalnego luzu silnik wykona pewną liczbę dodatkowych kroków za każdym
razem, kiedy zmieni się kierunek obrotów.
I076 Valve excitation time after stop – Czas zasilania zaworu po zatrzymaniu
Czas podawania prądu roboczego po zatrzymaniu silnika, a przed podawaniem prądu zatrzymania.
Zapewnia to osiągnięcie przez zawór końcowej pozycji, zanim będzie podawany prąd zatrzymania.
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 23
Page 24
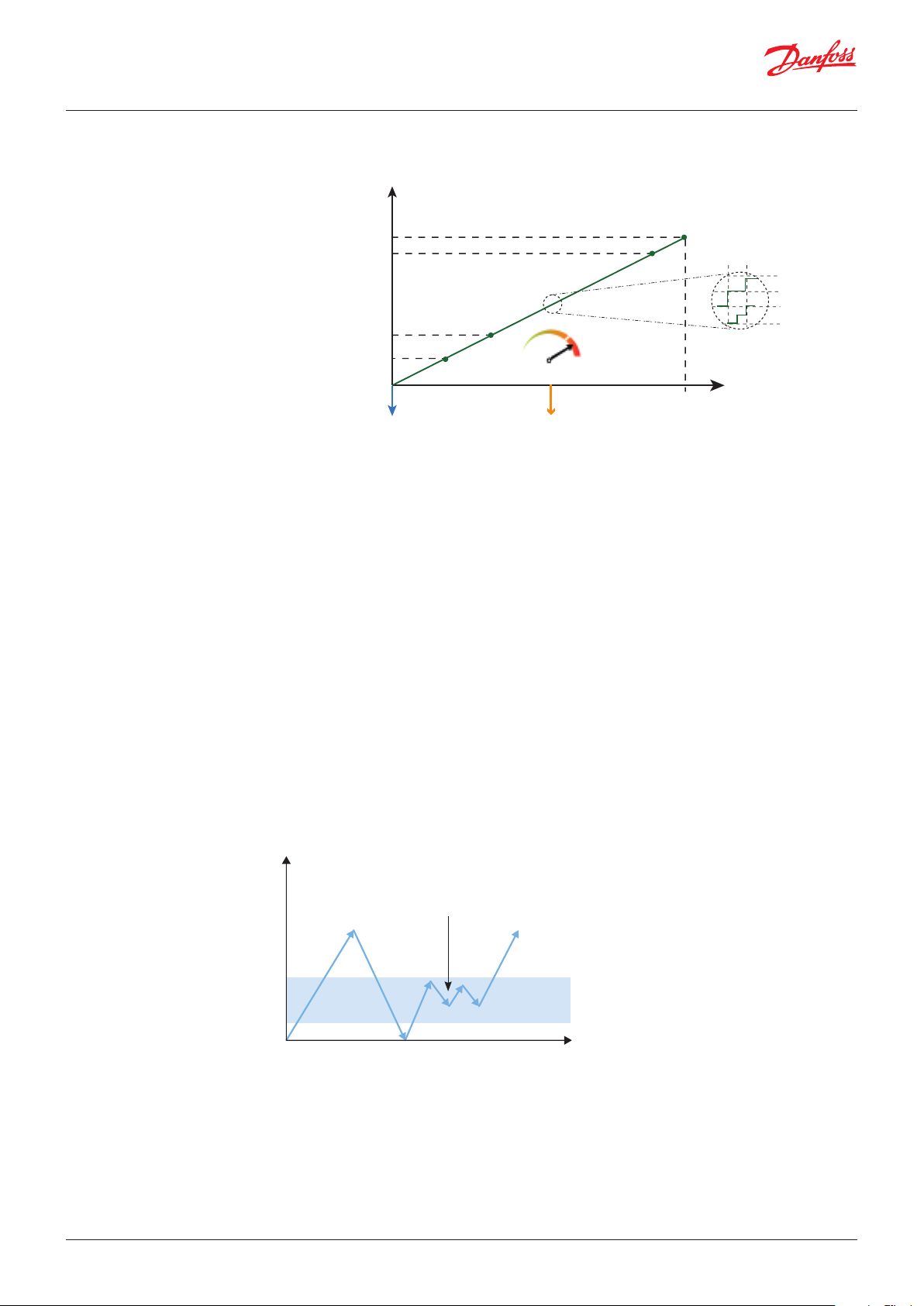
Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
7.3 Parametry sterowania
zaworami przydatne w
różnych przypadkach
W różnych przypadkach może zajść potrzeba skorzystania z poniższych parametrów.
Stopień otwarcia zaworu, %
Maks. ograniczenie otwarcia, %
Stopień otwarcia po wyłączeniu
Min. ograniczenie otwarcia, %
100% otwarcia
(I066 – domyślnie 100)
(I069 – domyślnie 0)
(I032 – domyślnie 0)
Luz początkowy
(I070)
Szybkość zaworu I031
Wymuszone otwarcie
(I073 – domyślnie 0)
Całkowita liczba kroków zaworu
(I030 – domyślnie 1)
(I029 – Pozycjonowanie zaworu)
(I064 – Metoda wzbudzania zaworu)
Pełny krok
„Półkrok”
Liczba kroków
Danfoss
80G346.10
(pełnych, połowicznych, 1/8, 1/16)
I061– Valve emergency speed – Awaryjna szybkość zaworu
W przypadku awarii zasilania zawór może zamknąć się szybciej. Do realizacji tej funkcji niezbędne jest
bateryjne podtrzymywanie zasilania regulatora EKE.
I066 – Minimum OD limit – Minimalne ograniczenie otwarcia
W razie potrzeby, można nastawić minimalny stopień otwarcia zaworu. Jest to przydatne w układach,
w których zawsze musi być zapewniony pewien minimalny przepływ. Funkcja działa tylko w trybie
regulacji zasilania parownika.
N032 – Maximum OD limit – Maksymalne ograniczenie otwarcia
Funkcja jest przydatna do ograniczenia stopnia otwarcia przewymiarowanego zaworu. Domyślna
nastawa wynosi 100% stopnia otwarcia i w razie konieczności można ją obniżyć. Funkcja działa tylko
w trybie regulacji zasilania parownika.
I069 – Valve OD during stop – Stopień otwarcia po wyłączeniu
W niektórych przypadkach po wyłączeniu regulatora zawór musi pozostać otwarty i temu służy
ta nastawa. Po wyłączeniu regulatora włącznikiem głównym zawór przyjmie nastawione położenie.
Funkcję tę nazywa się też wymuszonym otwarciem zaworu podczas postoju („bleed function”).
I068 – Valve neutral Zone – Strefa nieczułości
W regulatorach typu EKE zaimplementowano złożony algorytm przeciwdziałania oscylacjom sygnału
sterującego stopniem otwarcia zaworu. W tym celu ustanowiono pewną neutralną strefę nieczułości,
wewnątrz której zwór nie zmienia położenia. Zostaje wzbudzony dopiero po przekroczeniu zadanej
różnicy obecnego i wymaganego stopnia otwarcia.
Sygnał stopnia otwarcia zaworuSygnał stopnia otwarcia zaworu
mA
Strefa nieczułości
Zawór nieruchomy
Danfoss
Małe odchylenia
wymaganego stopnia otwarcia
80G244.01
© Danfoss | DCS | 2020.10
Domyślna nastawa strefy nieczułości to 0,5%. Zawór pozostaje w bezruchu do wystąpienia
sygnału o większej różnicy.
Funkcja ta nie pogarsza jakości pracy układu, a zapobiega problemom związanym
z oscylacjami sygnału, gubieniem kroków i histerezą zaworu.
Failsafe Position – Awaryjny stopień otwarcia
W trybie pracy awaryjnej (np. w przypadku błędu czujnika temperatury przegrzania lub środowiska
chłodzonego) zawór można całkowicie zamknąć, ustawić w położeniu zadanym bądź wyliczonej na
podstawie uśrednionego stopnia otwarcia. Szczegóły podano w rozdziale „Praca w trybie awaryjnym”,
a odnośne parametry zawarto na liście parametrów w sekcji diagnostyki i chłodzenia w trybie
awaryjnym.
DKRCC.PD.RS0.A4.49 | 24
Page 25
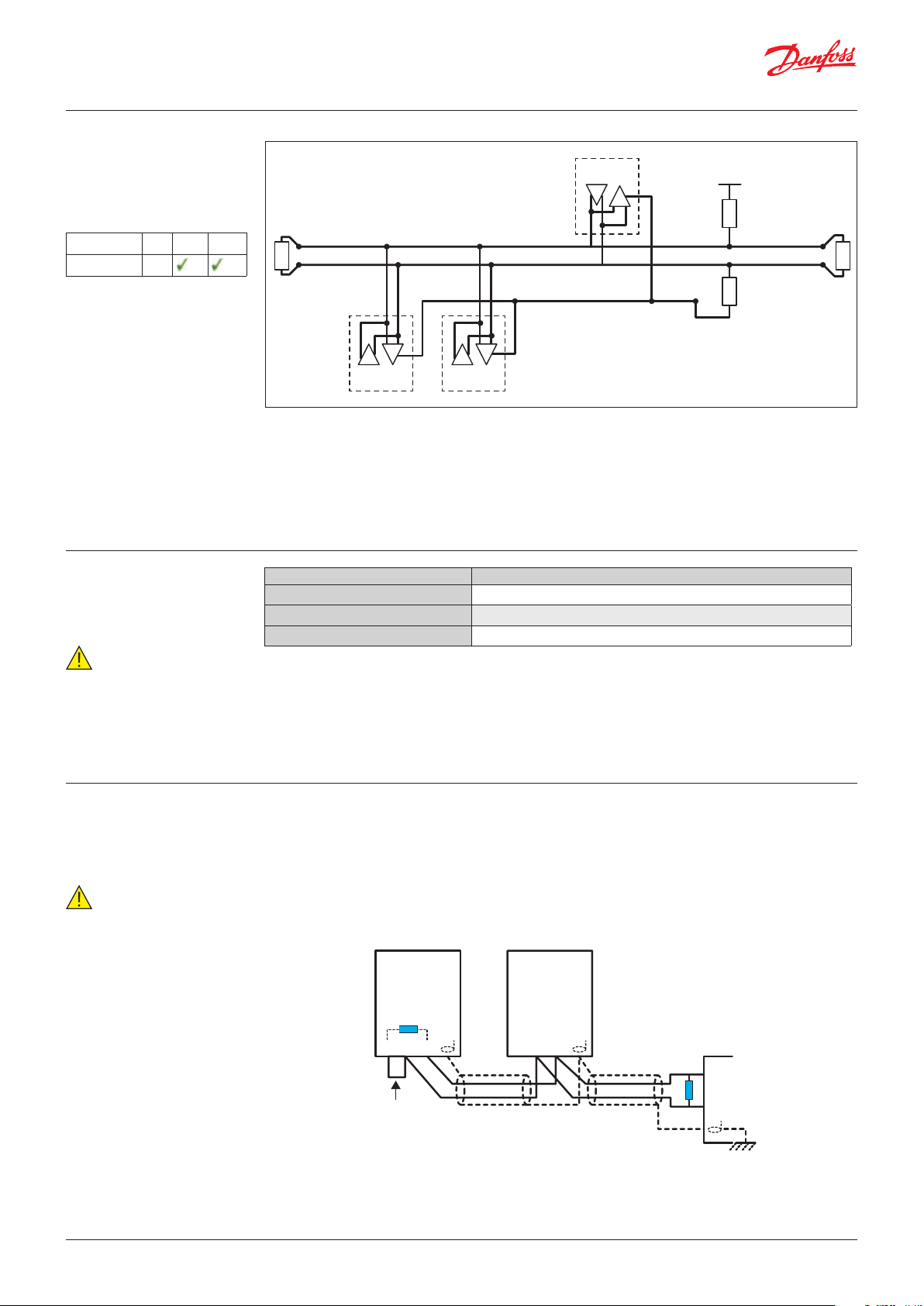
Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
8.0 Transmisja danych
przez MODbus
Model EKE 1A 1B 1C
Obsługa
-
8.1 Nastawa Modbus RTU
Uwaga:
Domyślna konguracja
MODbus: 19200 8E1
Master
D
R
5 V
Rezystor
polaryzujący
Danfoss
(pull up)
D+
Zakończenie Zakończenie
Przewód
(skrętka)
D-
Rezystor
Wspólna masa
R
D
R
D
polaryzujący
(pull down)
Slave 1 Slave 2
Szczegółowe informacje o protokole komunikacyjnym MODbus można znaleźć w poradniku EKD / EIM
Data communication MODbus RS 485 RTU design guide”.
Poniżej podano kluczowe informacje.
Regulatory typu EKE wyposażono w standardowy pół-dupleksowy protokół MODbus RTU.
Wartości domyślne: Prędkość transmisji 19200, parzystość i jeden bit stopu. Dla AK-SM800
prędkość zmienić na 38400. Domyślnym adresem jednostki jest 1. Można go zmienić parametrem
G001”Controller Adr”.
Parametr Opcje
Adres regulatora (G001) Zakres 1 – 120, domyślnie 1
Prędkość transmisji przez MODbus (G005) 1200, 2400, 4800, 9600, 14400,19200, 28800, 38400; domyślnie: 19200
Tryb MODbus, wybór (G008) 8N1, 8E1, 8O1 oraz 8N2
Magistrala musi posiadać zakończenie z obu stron. Rezystor końca magistrali o rezystancji 120 Ω
należy podłączyć pomiędzy przewody D+ i D- magistrali RS-485.
Powyższy rysunek pokazuje typowy sposób zakończenia magistrali MODbus. Rezystory oznaczone
jako „Zakończenie” typowo posiadają rezystancję 120 Ω.
Rezystory polaryzujące (pull up oraz pull down) zwykle znajdują się w nadrzędnej jednostce „Master”
układu MODbus. Nie ma ich w regulatorach Danfoss EKE.
80G8269.01
8.2 Konwencja
adresowania
Uwaga:
Adres MODbus = PNU – 1
© Danfoss | DCS | 2020.10
W regulatorach typu EKE dopuszczalne są adresy rejestrów MODbus z zakresu 0-65535 (0x0000 do
0xFFFF). W tej konwencji zakres akceptowanych numerów rejestrów to 1-65536, a adres 0 odpowiada
numerowi rejestru 1.
W regulatorach Danfoss EKE stosowana jest właśnie taka konwencja, toteż np. numer parametru
(PNU) 117 odwołuje się danych z adresu 116. Czyli adres = PNU – 1.
Danfoss
EKE
120Ω
T D+ D-
Zakończenie
EKE
D+ D-
80G270.10
120Ω
D-
D+
Sterownik
nadrzędny
magistrali
DKRCC.PD.RS0.A4.49 | 25
Page 26
Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
8.3 Kody funkcji
magistrali RS485
8.4 Przykład: Transmisja
danych przez
MODBus
Uwaga:
Przesyłane są tylko wartości
w jednostkach układu SI
(metrycznych):
Panel MMIGRS2 wyświetla
temperaturę, różnicę
temperatury i ciśnienie
manometryczne odpowiednio
w °C, K i bar.
Uwaga:
Nastawę trzeba wyskalować x10.
Czyli 5°C = 50 (HEX: 32)
Kod funkcji Nazwa funkcji Opis funkcji
(0x03) Odczyt rejestrów Odczyt zawartości ciągłego bloku rejestrów za pomocą urządzenia zdalnego
(0x06) Zapis pojedynczego rejestru Zapis pojedynczego rejestru w urządzeniu zdalnym
(0x10) Zapis wielu rejestrów Zapis bloku rejestrów (1 do 123 rejestrów) w urządzeniu zdalnym
(0x2B) Identykacja urządzenia Obsługa obligatoryjnych danych
Poniższy przykład ilustruje sposób odczytu i zapisu numerów parametrów (PNU).
PNU Nazwa parametru
3006 R101 Nastawa temperatury
3007 R001 Różnica
PNU Nazwa parametru
3006 R101 Nastawa temperatury
3007 R001 Różnica
Funkcja 03odczyt rejestru
Przykład 1: Odczyt 2 rejestrów od 3005, czyli 3005-3006, tj. PNU 3006-3007; z urządzenia o adresie 1
(na niebiesko)
TX: [01][03][0B][BD][00][02][56][0B]
RX: [01][03][04][00][1E][00][14][9A][3A]
Wynik
Odczyt nastawy temperatury i różnicy
PNU Nazwa parametru Wartość
3006 R101 Nastawa temperatury 30 (3.0)
3007 R001 Różnica 20 ( 2.0)
Funkcja 06 zapis rejestru
Przykład 2: Zapis R101 Nastawy temperatury jako 5,0 (50 0x32)
TX: [01][06][0B][BD][00][32][9A][1F]
RX [01][06][0B][BD][00][32][9A][1F]
Zatwierdzenie w jednostce Slave
Funkcja 0x10 zapis wielu rejestrów
Przykład 3: Zapis R101 Nastawy temperatury jako 4,8 (48 0x32) oraz R001 Różnicy jako 10,0 (100 0x64)
TX: [01][10][0B][BE][00][02][04][00][64][00][30][4B][AC]
RX: [01][10][0B][BE][00][02][23][C8]
Zatwierdzenie w jednostce Slave
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 26
Page 27
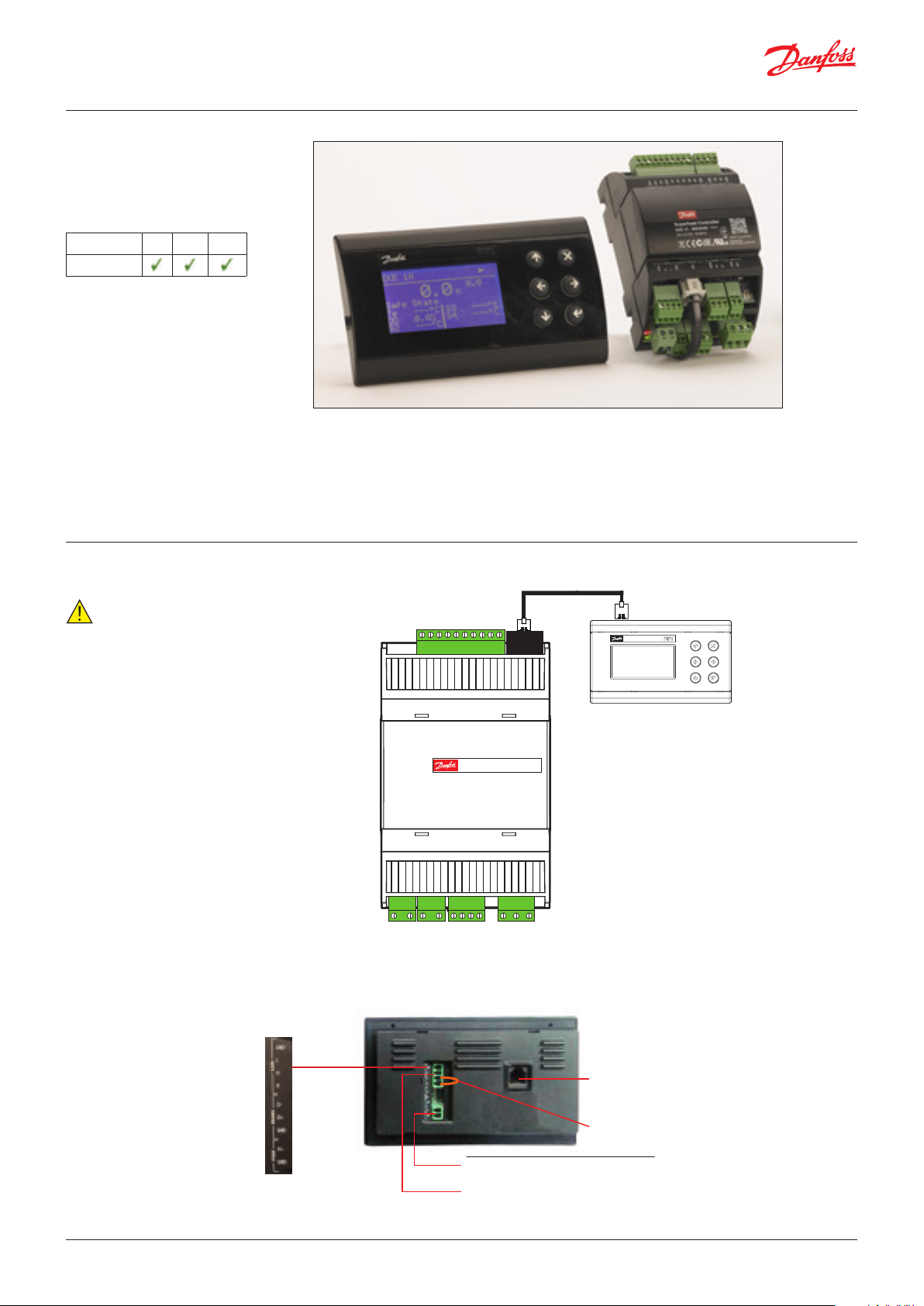
Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
9.0 Interfejs użytkownika:
Panel MMIGRS2
Model EKE 1A 1B 1C
Obsługa
Interfejs użytkownika MMIGRS2 to zdalny panel sterujący wyposażony w wyświetlacz graczny.
Podłączenie do regulatora EKE odbywa się za pośrednictwem magistrali CAN RJ lub CANcus.
Cała charakterystyka panelu sterującego jest zapisana w regulatorze EKE, stąd nie ma potrzeby
programowania interfejsu MMIGRS2. Panel zasilany jest ze źródła zewnętrznego lub z regulatora,
do którego został podłączony i automatycznie wyświetla dane interfejsu.
Menu wyświetlacza jest dynamiczne. W prostym przypadku z niewielką liczbą podłączeń wprowadza
się tylko kilka nastaw, podczas gdy bardziej rozbudowany układ wymaga obszerniejszej konguracji.
9.1 Podłączenia
Uwaga:
Bez podłączenia panelu MMI
do regulatora EKE za pomocą
przewodu telefonicznego nie
będzie działać funkcja autodetekcji
adresu CAN. Dlatego należy
zwerykować następujące
nastawy panelu MMIGRS2:
1) wejść do menu BIOS przez
wciśnięcie i przytrzymanie przez 5
s klawiszy X + Enter
2) wybrać „MCXselection” – >
„Manual Mode” i wprowadzić adres
CAN regulatora EKE, do którego
ma być podłączony interfejs.
Zaciski CAN H i CAN R należy
połączyć tylko w pierwszym
i drugim elemencie sieci.
Magistrala CANbus wymaga
zakończenia na obu końcach
w postaci rezystora 120 Ω.
Posiadają je modele EKE 1A i EKE
1B. W przypadku modelu EKE 1C
oraz panelu MMI zakończenie
należy wykonać łącząc przewodem
zaciski CAN R oraz CAN H.
MMIGRS2 (Widok z tyłu)
COM
5V+
COM
5V+
Superheat controller
EKE 1A - 080G5300
–/~
+/~
GND
–/~
+/~
GND
DI2
DI1
COM
AI4
AI3
DI2
DI1
COM
AI4
AI3
Bat+A1A2B1B2
Bat+A1A2B1B2
AI2
AI2
DI3
COM
DI3
COM
NO1C1NC1
NO1C1NC1
CAN RJ
CAN RJ
ACCCBI080G0075
MMIGRS2
Danfoss
80G313.10
CAN RJ
© Danfoss | DCS | 2020.10
Gniazdo RJ CAN
dla przewodu < 3 m
Zwarte zaciski
R i H
Gniazdo dla przewodu > 3 m (tylko w EKE 1C)
Danfoss
34G306.10
2-zaciskowe gniazdo zasilania
4-zaciskowe gniazdo CANbus
DKRCC.PD.RS0.A4.49 | 27
Page 28
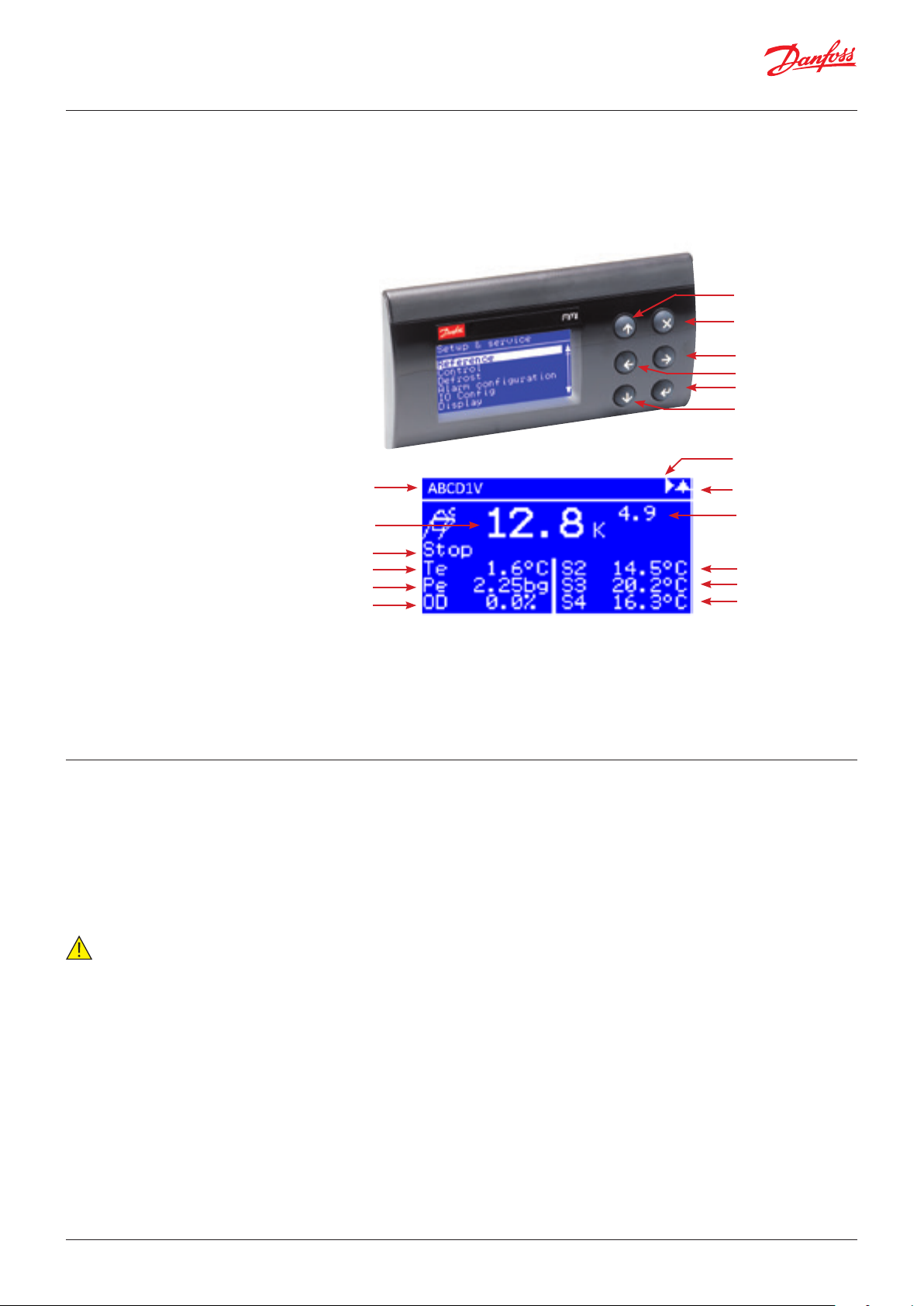
Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
9.2 Widok podstawowy
Na widoku podstawowym wyświetlacz prezentuje następujące informacje:
• główne odczyty z wejść analogowych bądź inne informacje
• ikonę pracy w trybie regulacji przegrzania albo temperatury
• status regulatora
• ikony alarmu lub serwisu.
Widok podstawowy
Etykieta regulatora
Odczyt priorytetowy
Status
Temperatura parowania
Ciśnienie parowania
Stopień otwarcia zaworu
UW górę
Wyjście (Kasuj)
Następny (W prawo)
Poprzedni (W lewo)
Enter (Zatwierdź)
W dół
Pomoc
Sygnalizacja alarmu
Wartość odniesienia
S2 – S4
Temperatura
medium
9.3 Jednostki i hasła
Uwaga:
Ekran haseł wywołuje się
przez przytrzymanie klawisza
Enter przez około 3 sekundy.
Jak zmienić wyświetlany parametr
1. Przejść do parametru
2. Klawiszem Enter przejść do trybu edycji
3. Zmienić wartość strzałkami w górę / w dół
4. Zaakceptować klawiszem Enter
Zmiana jednostki mierzonej wielkości: Parametr R005
R005 = 0 = SI (metryczne) oraz R005 = 1 = US (imperialne)
Jednostki metryczne (SI): panel MMIGRS2 wyświetla temperaturę, różnicę temperatury
i ciśnienie manometryczne odpowiednio w °C, K i bar.
Jednostki imperialne (US): panel MMIGRS2 wyświetla temperaturę, różnicę temperatury
i ciśnienie manometryczne odpowiednio w °F, °R i psi.
Dostęp do menu ustawień i serwisu
Dostęp do tych opcji wymaga podania hasła. Można przydzielić personelowi trzy różne
poziomy dostępu.
Najszerszy dostęp oferuje poziom Rozruch (Commissioning), z którego można zmienić wszystkie
dostępne parametry, włącznie z hasłami i ponownym uruchomieniem kreatora nastaw. Domyślnym
hasłem jest tu 300.
Poziom Serwis (Service) oferuje okrojony dostęp, odpowiedni dla personelu serwisowego.
Domyślne hasło to 200.
Najniższy jest Podstawowy (Daily) poziom dostępu, który umożliwia wprowadzenie tylko kilku
zmian. Hasło domyślne to 100.
9.4 Przywrócenie ustawień
fabrycznych
© Danfoss | DCS | 2020.10
1. Wejść do menu BIOS przez wciśnięcie i przytrzymanie przez 5 s klawiszy X + Enter
2. Wybrać MCX SELECTION
3. Wybrać CLEAR UI
DKRCC.PD.RS0.A4.49 | 28
Page 29

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
Status jednostki Przycisk Funkcja Opis
Widok
podstawowy
W prawo x 1 Aktywny
alarm
W prawo x 2 Trend zmian
przegrzania
z ostatnich
25 minut
W prawo x 3 Szczegóły
statusu
W prawo x 4 Dane
regulatora
W prawo x 5 Kod QR Kod QR kieruje do internetowej strony z
Widoczny status roboczy
Dostęp do listy aktywnych alarmów. Przegląd
listy strzałkami w górę i w dół.
Podgląd wykresu wartości przegrzania
zarejestrowanych przez ostatnie 25 minut.
Dostęp do szczegółowych informacji na temat
statusu roboczego.
Przegląd listy strzałkami w górę i w dół.
Informacja o danym regulatorze.
większą ilością informacji o regulatorze.
Uwaga:
Menu nastaw i serwisu
(wymaga logowania za
pomocą hasła przypisanego
do poziomu dostępu
pełnego/rozruchowego
- Commissioning)
Enter przez 3 s Logowanie
Wyjście / Kasowanie Powrót do widoku podstawowego.
Wyjście przez 3 s Wylogowanie Wylogowanie użytkownika.
Logowanie W górę + Podwyższanie wybranej cyfry.
W dół - Obniżanie wybranej cyfry.
Enter ok Potwierdzenie wartości i przejście do następnej
Wyjście Powrót do menu głównego.
Nawigacja pośród parametrów
Przykład:
Zmiana wartości parametru
Przykład:
W górę Poprzedni Przewinięcie listy parametrów lub grup
W dół Następny Przewinięcie listy parametrów lub grup
Enter Przejście do następnej grupy parametrów,
Wyjście Powrót Powrót do poprzedniego poziomu menu bądź
Enter Zatwierdzenie
W górę + Podwyższenie wartości parametru.
/ Nastawy
i serwis
zmiany
Jeśli użytkownik nie jest zalogowany, należy
wprowadzić hasło. Cyfry zmienia się strzałkami
w górę i w dół, a zatwierdzenie następuje
klawiszem Enter.
cyfry bądź logowanie.
parametrów wstecz.
parametrów dalej.
a w przypadku pojedynczego parametru
wejście w tryb jego nastawy.
do widoku podstawowego.
Wejście do trybu nastawy parametru.
Zatwierdzenie zmiany.
© Danfoss | DCS | 2020.10
W dół - Obniżenie wartości parametru.
Wyjście /
Kasowanie
Powrót Wyjście z trybu nastawiania parametru
z anulowaniem zmiany.
DKRCC.PD.RS0.A4.49 | 29
Page 30

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
10.0 Kreator konguracji
(Setup wizard) w panelu
MMIGRS2
Po wykonaniu wszystkich podłączeń i włączeniu zasilania, na 5 sekund pojawi się logo rmy Danfoss,
a następnie widok podstawowy.
Dostęp do kreatora: wcisnąć i przytrzymać klawisz Enter, zalogować się hasłem dostępu pełnego/
rozruchowego 300, przewinąć w dół menu nastaw i serwisu („Setup and service”) i wybrać „Setup
wi z ard”.
Kolejne kroki w kreatorze są następujące: a) Wybór języka; b) Wybór układu; c) Konguracja wejść; d)
Konguracja wyjść.
Nastawianie poszczególnych parametrów odbywa się w następującej sekwencji:
a) Wybrać odpowiedni parametr
b) Podświetlić pierwszą opcję przez wciśnięcie klawisza Enter
c) Przewijając w górę i w dół wybrać właściwą opcję
d) Zatwierdzić wybór klawiszem Enter
e) Przewinąć menu do kolejnego parametru (powtórzyć kroki od a do e).
Uwaga:
• Jeśli brakuje wiedzy na temat właściwej konguracji regulatora, należy zaakceptować domyślne
wartości parametrów. Wymagane informacje można pozyskać z oprogramowania Danfoss
Coolselector2 obliczającego parametry robocze i właściwy stopień otwarcia zaworu.
• Kreator pozwala nastawić tylko najistotniejsze parametry. Pozostałe funkcje (np. alarmy, MOP/LOP
itp.) konguruje się odrębnie po zakończeniu pracy z kreatorem.
Kreator konguracji dostępny jest też w programie KoolProg.
Procedura przebiega analogicznie, jak to opisano powyżej dla panelu MMIGRS2.
Szczegołowe informacje znajdują się w karcie danych EKE.
Menu statusu
Kod QR
Dane regulatora
Szczegół y statusu
1
Zasilanie
2
Wciśnij i prz ytrzy-
maj Enter
Trend przeg rzania z 25 min
Wyświetlacz
Menu podstawowe
3
Logowanie hasłem:
Danfoss
80G294.20
Rozruch 300
Serwi s 200
Podstawowe 100
5
Escape - W yjście
Nastawianie i serwis
Odniesienie
Regulacja
Odszranianie
Konguracja alarmów
Konguracja wejść/wyjść
Wyświetlacz
Transmisja danych
Serwis
Kreator konguracji
Etykieta regulatora
4
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 30
Page 31

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
11.0 Interfejs użytkownika
KoolProg
Ostrzeżenie!
Dla pełnej zgodności
z najnowszą wersją
oprogramowania
regulatorów typu EKE
należy zainstalować
ostatnią wersję programu
KoolProg
Ważna uwaga!
Dla niezawodności połączenia
USB z hostem (np. komputerem
przemysłowym) należy
użyć przewodu USB
o długości < 1 m.
Oprogramowanie KoolProg nie
obsługuje szeregu połączonych
regulatorów typu EKE.
Przed programowaniem należy
doprowadzić zasilanie do
regulatora EKE.
KoolProg
KoolProg to narzędzie programowe do szybkiej i łatwej konguracji regulatorów typu EKE.
Jego główne funkcje są następujące:
• Zmiana parametrów konguracji online
• Bieżąca kontrola stanu wejść i wyjść
• Szybka, graczna analiza funkcjonowania regulatora.
Oprogramowanie KoolProg można pobrać bezpłatnie ze strony http://koolprog.danfoss.com.
Przed pobraniem użytkownik przechodzi proces rejestracji.
CANRJ
EKE
Zasilanie
USB
Danfoss
80G296B.10
Bramka
MMIMYK
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 31
Page 32

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
Uwaga:
Przycisk „Export” poz wala
przesłać plik do regulatora
w trybie oine.
Tryb oine Tryb online
11.1 Nastawianie
• Utwórz własne pliki konguracyjne na
swoim PC bez potrzeby łączenia
z regulatorem.
• Pobierz plik konguracji parametrów
na swój PC z podłączonego regulatora.
Zachowaj plik i wpisz go do innych
regulatorów tego samego modelu.
• Zaznacz najczęściej używane
parametry jako ulubione.
• Znajdź pełną dokumentację
techniczną każdego modelu
regulatora w jednym miejscu.
• Szybko zaprogramuj jeden lub
wiele regulatorów korzystając ze
wskaźników postępu i ukończenia
procesu.
• Szybko przeanalizuj zachowanie
się regulatora i jego kongurację
korzystając z gracznego narzędzia
do śledzenia trendów zmian.
• Zmieniaj kongurację parametrów
online.
• Kontroluj na bieżąco stan wejść
i wyjść.
11.2 Ekran główny
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 32
Page 33

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
11.3 Ekran serwisowy
Aktywne alarmy
Szukaj parametru
Ulubione
Uwaga:
Dostęp do aktywnych alarmów
i odczytów istnieje tylko
w trybie online, czyli serwisu
i testu.
Grupy parametrów
Szczegółowe
informacje
o parametrze
Funkcja wyszukiwania pokazuje tylko parametry adekwatne dla danej konguracji. Przykładowo,
parametry I035 i I034 (min. i maks. wartość odniesienia dla napięcia zewnętrznego) uwidocznią się
tylko w przypadku ustawienia parametru R102 jako „Valve driver” a I033 jako „Voltage to OD”.
11.4 Graczna prezentacja
zarejestrowanych
danych
Uwaga:
Dostęp do zarejestrowanych
danych istnieje tylko w trybie online,
czyli serwisu i testu.
Kontrola pracy
Po pomyślnym dokonaniu rozruchu można uruchomić rejestrację danych. Korzysta ona z gniazda
serwisowego, toteż w czasie jej aktywności nie ma możliwości korzystania z programu KoolProg
ani z panelu sterującego MMIGRS2. Ich podłączenie wymaga uprzedniego zatrzymania
rejestracji danych.
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 33
Page 34

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
12.0 Konguracja
12.1 Przewodnik szybkiej
nastawy parametrów
Uwaga:
Parametry I036 i I037
- natężenie prądu dla
zewnętrznego sygnału
odniesienia – są dostępne tylko
w modelu EKE 1C.
Uwaga:
Niektóre ważne funkcje
(np. przegrzanie zamknięcia,
regulacja typu P, strefa
nieczułości zaworu) są
aktywne w konguracji
domyślnej.
Przed uruchomieniem
regulatora należy się upewnić,
że pozostałe parametry /
funkcje / alarmy mają nastawy
zgodne z wymaganiami
danego przypadku.
Oprócz kreatora konguracji użytkownik ma do dyspozycji również ten opis szybkiego nastawiania
parametrów dla ogólnych zastosowań.
Sterownik Regulator
Włącznik główny = O
Wybór rodzaju zaworu
Sterownik – Regulator
Rodzaj sygnału analogowego np. 1-5 V / 0-20 mA
EKE
Konguracja sygna łu
odniesienia
dla sterownika
Dolne
napięcie
zewnętrznego
sygnału
odniesienia
Górne
napięcie
zewnętrznego
sygnału
odniesienia
Dolne
natężenie
prądu dla
zewnętrznego
sygnału
odniesienia
Górne
natężenie
prądu dla
zewnętrznego
sygnału
odniesienia
1A 1B 1C
Parametr
I091 I033
I034 I 034 I 034
I035 I035 I 035
- - I036
- - I037
Początek:
Tryb pracy
Wybór przetwornika
Określenie zakresu
Wybór sposobu regulacji
Określenie zakresu
wartości odniesienia
Wybór innych funkcji
Koniec: Włącznik g łówny
Wybór czynnika
Wybór czujnika
temperatury
ciśnienia
ciśnienia
przegrzania
= ON
DI1 = ON
Przed dokonywaniem zmian w nas tawach należy
się upewnić, że włąc znik główny ma wartość OFF.
Nastawa zależy od wymagań układu.
Parametr: R012 Main switch
Wybrać j eden z zaworów rmy Dan foss: ETS, ETS C ,
KVS, K VS C, CCM, CCMT, CTR; albo z awór użytkown ika.
Parametr: I067 Valve Conguration
Wybrać sposób pra cy jednostki EK E: sterownik
zaworu c zy regulator prz egrzania.
Parametr: R102 Operation mode
Wybrać rodzaj czynnik a chłodniczego.
Parametr: O030 Refrigerant
Wybrać t yp czujnika temperatur y: EKS, ACCPBT,
MBT, Sensata 112CP, Sygnał magistrali transmisji
danych, AKS
Parametr: I040 – S2 sensor.
Dla innych c zujników sprawdzić na l iście parametrów.
Wybrać t yp przetwornika ciśnie nia: AKS 32R, Sensata
112CP, OEM Ratio, NSK, AKS 32 1 - 5 V, OEM Volt age,
Sygnał magis trali transmisji danych , AKS 32 1 – 6 V,
AKS 32 0 - 10V, AKS 33, XSK, ACCPBP Current , OEM
Current
Parametr: I043 Pe transmitter conguration.
Dla innych c zujników sprawdzić na liście param etrów.
Wprowadzić minimalną i maksymalną wartość mierzonego
nadciśnienia [bar]. Parametr: O020 – Pe min. , O021 – Pe
max. Dla i nnych czujników spr awdzić na liście par ametrów.
Wybrać sposób reg ulacji przegrz ania w układzie. 1:
MSS, 2: LoadAp, 3: Stałe, 4: De lta SH.
Parametr: N021 SH reference mode
Wprowadzić minimalną i maksymalną wartość prze
grzania odniesienia dla wybranej metody regulacji.
Parametr: N009 SH max., N 010 SH min.
Opcjonalnie – Wymuszony star t, MOP, LOP, alarm,
funkcja termostatu.
Sprawdzić na liście parametrów.
Trzeba pamiętać o nastawieniu włącznika główneg o
na „ON”. Parametr: R012 Main switch
EK E 1A:
ON = Rozpoczęcie regulacji
Parametr: O003: 0 = nieuż ywane; 1 = Włąc znik główny.
EKE 1B lub 1C:
ON = Rozpoczęcie regulacji
Parametr: O002: 0 = Transmisja d anych –> Start/Stop; 1
= Włączn ik główny.
Jeśli nie ko rzysta się z wejś cia DI1, należy połąc zyć
przewo dem zaciski DI1 oraz COM .
-
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 34
Page 35

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
12.2 Lista kontrolna
czynności przed
uruchomieniem
Oddziaływanie wewnętrznej
i zewnętrznej funkcji
start/stop oraz aktywne
funkcje
Kreator
Uwaga:
Kreator uwzględnia jedynie
główne parametry. Pozostałe
wymagane funkcje i parametry
należy skongurować
oddzielnie.
Po wykonaniu podłączeń elektrycznych, a przed włączeniem regulacji należy zwrócić uwagę na
następujące kwestie:
Przed uruchomieniem regulatora EKE trzeba dokonać koniecznych nastaw dla danego zastosowania.
Jeśli wejścia cyfrowego (DI) użyto do aktywacji i wyłączania funkcji sterowania zasilaniem parownika
(Injaction control ON/OFF), to między wewnętrzną (R012) i zewnętrzną (DI) funkcją start/stop
zachodzą następujące interakcje:
Funkcje Wartości
R012 – Włącznik główny OFF OFF ON ON
Zewnętrzny start/stop (DI) OFF ON OFF ON
Wynik
Kontrola konguracji (np. nie zdeniowany S2) dostępna dostępna dostępna dostępna
Kontrola urządzenia (np. niskie przegrzanie) niedostępna dostępna niedostępna dostępna
Kontrola czujników (np. błąd S2) dostępna niedostępna niedostępna dostępna
Stopień otwarcia zaworu 0% 0% 0% Auto, 0-100%
Kreator nastaw w łatwy sposób przeprowadza użytkownika przez proces konguracji parametrów
pod kątem nowego urządzenia/zastosowania. Kreator zadaje użytkownikowi szereg pytań na temat
danego układu i elementów mających współpracować z regulatorem EKE. Po zakończeniu pracy
z kreatorem użytkownik otrzymuje najlepszą kongurację parametrów dla wybranych opcji. Podczas
aktywności kreatora nastaw włącznik główny (R012) zawsze jest wyłączony (OFF).
Rodzaj czynnika chłodniczego
OSTRZEŻENIE!
Wybór niewłaściwego czynnika
może stać się przyczyną
uszkodzenia sprężarki.
Rodzaj zaworu
Czujniki temperatury
Uwaga:
Do regulatora EKE za pomocą
układu transmisji danych można
przesyłać sygnały o wartościach
mierzonych Po, Pe, S2, S3 i S4.
Szczegóły znajdują się w rozdziale
6.2.5: Wykorzystanie sygnałów
zewnętrznych z układu transmisji
danych.
Czujnik ciśnienia
Uwaga:
Przetwornik ciśnienia
z przesunięciem wartości
pogorszy dokładność regulacji,
konieczna jest więc korekta
(„Oset correction”) parametrem
R107 lun R108.
Należy podać ciśnienie
manometryczne w bar.
Regulator oferuje możliwość wyboru z listy 42 różnych czynników chłodniczych.
Jeśli danego czynnika nie ma na liście, można wprowadzić jego własności za pośrednictwem układu
transmisji danych / panelu MMIGRS2 / programu KoolProg. Szczegóły zamieszczono w Dodatku 4.
Ważne jest, aby wybrać z listy „Valve denition” właściwy rodzaj zaworu. Wskazówki zawarto
w rozdziale 7: Zawory z silnikami krokowymi.
Modele EKE 1A i EKE 1B obsługują tylko czujniki temperatury NTC 10K, podczas gdy model EKE 1C
współpracuje zarówno z czujnikami NTC jak i Pt1000. Domyślną nastawą rodzaju czujnika („Sensor
conguration”) w regulatorze EKE 1C jest „Brak”. Użytkownik musi wybrać z listy odpowiednie rodzaje
poszczególnych czujników temperatury.
Jeśli dany czujnik temperatury posiada przesunięcie wartości, przed użyciem należy je skorygować.
Korekta ta znajduje się w EEPROM regulatora EKE.
Z listy można wybrać różne przetworniki ciśnienia rmy Danfoss. Dla przetworników spoza listy
trzeba wprowadzić kompletny zestaw parametrów zestawionych na liście w Dodatku 9.
Po wprowadzeniu rodzaju przetwornika ciśnienia należy podać jego zakres pomiarowy,
przypisując odpowiednim parametrom minimalną i maksymalną wartość ciśnienia.
Należy zaznaczyć, że przetwornik ciśnienia musi być zgodny z wersją danego regulatora EKE
oraz trzeba go podłączyć do odpowiednich zacisków.
Podobnie jak w przypadku czujników temperatury, jeśli przetwornik ciśnienia ma przesunięcie
wartości mierzonej, należy je skorygować. Korekta programowa odbywa się z wykorzystaniem
odpowiednich parametrów konguracji przetwornika.
© Danfoss | DCS | 2020.10
Wszystkie przetworniki ciśnienia muszą mieć podany zakres pomiarowy. Ciśnienie
manometryczne należy podać w bar.
DKRCC.PD.RS0.A4.49 | 35
Page 36

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
Konguracja
wejść i wyjść
Input Output conguration
DI 1
DI 2
DI 3
AI 1
AI 2
AI 3
AI 4
AI 5
DO 1
Regulator EKE
EKE 1A EKE 1B EKE 1C Parametry
Nieużywane
Włącznik główny
Nieużywane
Początek
odszraniania
* Ręczny
Stopień otwarcia
Grzanie /
chłodzenie
Nieużywane
Początek
odszraniania
* Ręczny
Stopień otwarcia
Grzanie /
chłodzenie
-
S2 S2 S2
p0 p0 p0
Nieużywane
Odniesienie zewn.
- -
Alarm
Przewód cieczowy
– Zamknięcie,
Maks. wydajność
Zewn. Start/Stop
Włącznik główny
Nieużywane
Początek odszraniania
* Ręczny
Stopień otwarcia
Grzanie / chłodzenie
- -
Nieużywane
S3
S4
Nieużywane
Odniesienie zewn.
Alarm
Przewód cieczowy
– Zamknięcie, Maks.
wydajność
Zewn. Start/Stop Włącznik
główny
Nieużywane
Początek odszraniania
* Ręczny
Stopień otwarcia
Grzanie / chłodzenie
Nieużywane
S3
S4
Nieużywane
Odniesienie zewn.
Nieużywane
S3
S4
Alarm
Przewód cieczowy
– Zamknięcie, Maks.
wydajność
O003 dla EKE 1A O002
dla EKE 1B i 1C
O022 Konguracja DI2
O037 Konguracja DI3
I020 Konguracja AI1
I021 Konguracja AI4
I022 Konguracja AI5
O013 Konguracja DO1
Kody alarmów
i błędów:
12.3 Pierwsze
uruchomienie
* Opisano w rozdziale 15: Tryb ręczny
Przed włączeniem regulacji konieczne jest wykasowanie wszystkich aktywnych alarmów i błędów, gdyż
mogą one uniemożliwić start regulatora. Konieczność interwencji sygnalizuje migający dzwonek alarmowy
na wyświetlaczu panelu MMIGRS2 bądź symbol aktywnego alarmu w programie KoolProg. Opis alarmu
można znaleźć w postaci wiadomości tekstowej w menu statusu pracy pod aktywnymi alarmami.
Jeśli jednocześnie pojawi się kilka alarmów / błędów, zostaną one podane w kolejnych liniach tekstu.
Jeżeli w przypadku właściwych nastaw i poprawnego montażu czujnika widać tylko „W002 Standby alarm”,
można go wykasować ustawiając parametr „Reference”, „R012 Main switch” (Włącznik główny) = ON.
Szczegółowe informacje na temat alarmów i błędów można znaleźć w sekcji „Tabela alarmów”.
Po wykonaniu wymienionych wyżej czynności kontrolnych, regulator jest gotów do podjęcia pracy.
Przede wszystkim należy sprawdzić, czy mierzone wartości S2, S4, Pe/Te oraz przegrzanie są
poprawne. Można je odczytać na widoku podstawowym wyświetlacza MMIGRS2 lub w programie
KoolProg w grupie menu serwisowego.
Teraz można przeprowadzić pierwszy rozruch. Należy uruchomić urządzenie, a włącznik główny R012
powinien być załączony („ON”) podczas startu sprężarki.
Jeśli regulator nie pracuje optymalnie podczas rozruchu, można go dostroić korzystając
z poniższych podpowiedzi
• Sprawdzić, czy zawór otwiera się, kiedy rusza sprężarka (024 Actual OD – stopień otwarcia, U118
Operation status)
• Przegrzanie (021 Actual superheat) nie powinno być niskie (poniżej 3 K) przez długi czas (1 min.)
– jeśli tak, można zmniejszyć nastawę rozruchowego stopnia otwarcia N017
• Przegrzanie nie powinno być zbyt wysokie (powyżej 15-20 K) przez długi czas (3 min.) – jeśli tak,
można podwyższyć nastawę rozruchowego stopnia otwarcia N017
• Po 10 minutach pracy przegrzanie powinno być bliskie wartości odniesienia (±2 K)
• Po 20 minutach pracy zawór nie powinien migotać (można uruchomić rejestrację parametrów
021 Actual superhest – przegrzanie, 024 Actual OD – stopień otwarcia, U026 Te – temperatura
nasycenia dla ciśnienia parowania, a także U022 Actual SH reference – przegrzanie odniesienia;
a następnie prześledzić ich zmienność na wykresie)
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 36
Page 37

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
13.0 Zastosowania EKE Regulatory typu EKE mogą pracować 3 różnych rolach – jako:
• Sterownik zaworu
• Regulator
- przegrzania
- temperatury
• Urządzenie serwisowe
13.1 Sterownik zaworu Sygnał o pożądanym stopniu otwarcia zaworu dociera do jednostki EKE ze sterownika nadrzędnego
(Master). Może to być sygnał:
• analogowy, np. 0 – 10 V bądź 4 – 20 mA
• z układu transmisji danych RS485 (MODbus RTU)
Normalnie zamknięty zawór elektromagnetyczny zainstalowany przed zaworem rozprężnym stanowi
alternatywę dla rozwiązania z podtrzymywaniem bateryjnym w celu zamknięcia zaworu rozprężnego
w przypadku zaniku zasilania. Wyjście cyfrowe (przekaźnik) może też służyć do wysłania sygnału
alarmowego do sterownika nadrzędnego.
Sterownik nadrzędny (Master) może włączyć jednostkę EKE sygnałem podanym na wejście cyfrowe.
Bateria
Zasilanie 24 V AC / 24 V DC
Sygnał ON/OFF
MODbus lub sygnał analogowy
Jednostka EKE
(w roli sterownika zaworu)
Sygnał alarmowy
Połączenia opcjonalne
Połączenia konieczne
Sterownik nadrzędny
(Master)
Danfoss
80G8221.01
Normalnie
zamknięty
EEV
Zawór rozprężny
P
TT
S2
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 37
Page 38

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
13.2 Regulator
EKE to regulator typu PI sterujący pracą zaworu rozprężnego z silnikiem krokowym w celu regulacji
przegrzania na podstawie sygnałów z czujników ciśnienia P i temperatury (S2).
EKE 1X
Danfoss
80G8222.01
TT
S2
P
EEV
Zawór rozprężny
W trybie regulacji przegrzania regulator dąży do tego, aby przegrzanie było stabilne i bliskie wartości
odniesienia. Służy to optymalnemu wykorzystaniu powierzchni wymiany ciepła w parowniku
i w efekcie uzyskaniu maksymalnej wydajności chłodniczej. Gdy przegrzanie wykazuje tendencję
spadkową, przepustowość zaworu ulega zmniejszeniu, co podwyższa przegrzanie.
Oprócz regulacji przegrzania jednostka EKE może służyć do regulacji temperatury. Potrzebny
do tego jest sygnał z czujnika temperatury S3 umieszczonego w strumieniu powietrza dopływającego
do parownika. Do regulacji temperatury służy funkcja termostatu ON/OFF, która otwiera dopływ
czynnika, kiedy istnieje potrzeba chłodzenia – zawór silnikowy zostaje otwarty, a przekaźnik
termostatu załączony.
Szczegółowe informacje na temat regulacji temperatury znajdują się w kolejnym rozdziale.
Nastawiony stopień otwarcia
Odszranianie
Tryb grzania/chłodzenia
Zewnętrzny włącznik główny
Bateria
Zasilanie 24 V AC / 24 V DC
Zewnętrzny sygnał odniesienia
Połączenia opcjonalne
Połączenia konieczne
Sygnał alarmowy
Normalnie zamknięty
Regulator EKE
EEV
Zawór rozprężny
Danfoss
80G8223.01
TT
S4
TT
P P
S2
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 38
Page 39

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
14.0 Tryb sterownika:
14.1 Sygnał analogowy
Model EKE 1A 1B 1C
Obsługa
Napięciowy
Prądowy
- -
Uwaga:
Model 1A wykorzystuje do
sterowania zaworem tylko
sygnał napięciowy.
Sygnał można wykorzystać do ustawienia pożądanego stopnia otwarcia zaworu.
W najprostszy sposób funkcja służy do przestawienia zaworu silnikowego
w nastawione położenie w trybie serwisowym.
Można to uzyskać, nawet jeśli regulator EKE nie został aktywowany włącznikiem głównym.
Stopień
otwarcia
zaworu %
Analogowy sygnał wejściowy
100%
otwarcia
0% otwarcia
0 V
Parametr Funkcja Opis
RI02 Tryb pracy Wybrać 1 = Sterownik zaworu
I091
I033
I034 Dolne napięcie zewnętrznego
I035 Górne napięcie zewnętrznego
I036 Dolne natężenie prądu dla
I037 Górne natężenie prądu dla
Konguracja sygnału odniesienia
dla modelu 1B
Konguracja sygnału odniesienia
dla modelu 1C
sygnału odniesienia
sygnału odniesienia
zewnętrznego sygnału odniesienia
zewnętrznego sygnału odniesienia
0 = Sygnał napięciowy
0 = Sygnał napięciowy, 3 = Sygnał prądowy
Jeśli I091 lub I033 = 0, należy wprowadzić minimalne napięcie
zewnętrznego sygnału odniesienia
Jeśli I091 lub I033 = 0, należy wprowadzić maksymalne napięcie
zewnętrznego sygnału odniesienia
Jeśli I033 = 3, należy wprowadzić minimalne natężenie prądu
dla zewnętrznego sygnału odniesienia
Jeśli I033 = 3, należy wprowadzić maksymalne natężenie prądu
dla zewnętrznego sygnału odniesienia
Stopień
otwarcia
zaworu %
Analogowy sygnał wejściowy
10 V
20 mA4 mA
Sygnał napięciowy
Sygnał prądowy
Danfoss
80G8271.01
14.2 Sygnał z układu
transmisji danych
Model EKE 1A 1B 1C
Obsługa
-
Stopień otwarcia zaworu silnikowego można zmieniać ręcznie w zakresie od 0% do 100%
za pośrednictwem układu transmisji danych.
Parametr Funkcja Opis
RI02 Tryb pracy Wybrać 1 = Sterownik zaworu
IO91
IO33
O045 Stopień otwarcia – ręcznie Wprowadzić wymagany stopień otwarcia w procentach
B100 Liczba kroków – ręcznie Wprowadzić wymagany stopień otwarcia w liczbie kroków
X004 Włącznik główny przez MODbus 1 = ON, 0 = OFF
X002 Nastawa stopnia otwarcia przez MODbus 1 = ON, 0 = OFF
Konguracja sygnału odniesienia
dla modelu 1B
Konguracja sygnału odniesienia
dla modelu 1C
0 = Sygnał napięciowy, 1 = Sygnał stopnia otwarcia zaworu przez MODbus,
2 = Sygnał liczby kroków przez MODbus, 3 = Sygnał prądowy
1 = Sygnał stopnia otwarcia zaworu przez MODbus, 2 = Sygnał liczby
kroków przez MODbus
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 39
Page 40

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
I078 zadane
otwarcie
15 Tryb ręczny
Model EKE 1A 1B 1C
Obsługa
15.1 Otwarcie zaworu
sygnałem na wejściu
cyfrowym
15.2 Ręczne
sterowanie
przekaźnikiem
Skongurowanie wejścia DI2 / DI3 dla sygnału o zadanym stopniu otwarcia sprawia, że zawór przyjmie
pozycję wymuszoną parametrem I078 „Preset OD”.
Stopień otwarcia zaworu
Zadany stopień otwarcia na wejściu cyfrowym
Automatyczny
Wejście cyfrowe
Ręczna nastawa
stopnia otwarcia
przez wejście DI
stopień otwarcia
Danfoss
80G353.10
Wejście DI
(stopień otwarcia) = OFF
O022 Konguracja DI2 2 = Zadany stopień otwarcia
O037 Konguracja DI3 2 = Zadany stopień otwarcia
I078 Preset OD – Zadany stopień otwarcia Żądana wartość stopnia otwarcia w %
Wejście DI
(stopień otwarcia) = ON
Automatyczny
stopień otwarcia
Wejście DI
(stopień otwarcia) = OFF
Awaryjne sterowanie ręczne możliwe jest tylko przy aktywnym trybie ręcznym. Po aktywacji tego
trybu stan wyjścia alarmowego pozostaje taki sam i zmienia wartość parametru przekaźnika B103
(Manual relay DO1). Wartość tego parametru w chwili dezaktywacji trybu ręcznego stanowi punkt
wyjścia do pracy w następnym trybie.
Ręczna aktywacja alarmu nie jest sygnalizowana na liście alarmów.
Parametr Funkcja Opis
O018 Tryb ręczny („Manual mode”) 1 = On
B101 Czas pracy w trybie ręcznym
B103 Ręczne sterowanie przekaźnikiem („Manual relay DO1”) 0 = O | 1 = ON
Gdy upłynie nastawiony czas (w sekundach), parametr
O018 (tryb ręczny) przyjmie wartość OFF
15.3 Ręczne sterowanie
zaworem
15.4 Ręczny powrót do
pozycji wyjściowej
Ostrzeżenie:
Zbyt częste ręczne
przestawianie zaworu do pozycji
wyjściowej może prowadzić
do jego szybszego zużycia.
Podczas normalnej pracy
lepiej jest korzystać z funkcji
przesterowania.
© Danfoss | DCS | 2020.10
Skongurowanie wejścia DI2 / DI3 dla sygnału o zadanym stopniu otwarcia sprawia, że zawór przyjmie
pozycję wymuszoną parametrem I078 „Preset OD”.
Parametr Funkcja Opis
O018 Tryb ręczny („Manual mode”) 1 = On
B101 Czas pracy w trybie ręcznym
O045 Ręczne sterowanie stopniem otwarcia Żądany stopień otwarcia w procentach
Gdy upłynie nastawiony czas (w sekundach), parametr O018
(tryb ręczny) przyjmie wartość OFF
Wymuszenie pozycji wyjściowej („Manual homing”) służy inicjacji zaworu silnikowego i jego kalibracji
w zerowym stopniu otwarcia. Możliwe jest tylko w aktywnym trybie ręcznym. Po aktywacji tego trybu
ręczny powrót do pozycji wyjściowej zostaje wyłączony (B104 = OFF). Gdy użytkownik wymusi tę funkcję,
zawór przejdzie w pozycję całkowitego zamknięcia. Potem parametr B104 („Manual homing”) z powrotem
przyjmie wartość OFF, zaś parametr O045 („Manual OD” – ręczny stopień otwarcia) będzie wynosić 0%.
Stopień otwarcia w chwili dezaktywacji trybu ręcznego stanowi punkt wyjścia do pracy w trybie regulacji
automatycznej.
Parametr Funkcja Opis
O018 Tryb ręczny („Manual mode”) 1 = On
B104
Ręczny powrót do pozycji wyjściowej
(„Manual homing”)
0 = OFF, 1 = ON. Po aktywacji tej funkcji wartość samoczynnie
powróci na 0.
DKRCC.PD.RS0.A4.49 | 40
Page 41

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
15.5 Przełączanie
między trybem
automatycznym
i ręcznym
Wykres obrazuje pracę zaworu podczas przełączania między automatycznym i ręcznym trybem sterowania.
Regulacja
Tryb ręczny ON
Regulacja automatyczna
automatyczna
Stopień
otwarcia zaworu
Danfoss
80G301.10
Czas
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 41
Page 42

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
16.0 Regulacja temperatury
16.1 Termostat ON/OFF
Model EKE 1A 1B 1C
Obsługa -
Regulatory typu EKE mogą realizować dwie metody regulacji temperatury:
• Termostat dwupołożeniowy (ON/OFF)
• Termostat modulowany (MTR)
Sygnał o zapotrzebowaniu na chłodzenie może pochodzić z czujnika temperatury powietrza na wlocie
(S3) lub wylocie z parownika (S4).
Temperaturę w przestrzeni chłodzonej mierzy jeden lub dwa czujniki umieszczone w strumieniu
powietrza przed parownikiem (zawsze – S3) i ewentualnie na wylocie (S4). Regulacja temperatury
może się odbywać dwojako: typową metodą dwustanową ON/OFF z różnicą łączeń, albo metodą
modulowaną. Zastosowanie regulacji modulowanej jest jednak ograniczone tylko do układów
scentralizowanych. W przypadków urządzeń indywidualnych należy wybrać tryb termostatu ON/OFF.
W układach scentralizowanych można alternatywnie wybrać albo regulację ON/OFF, albo
modulowaną.
Dopóki temperatura środowiska chłodzonego jest wyższa niż nastawa + różnica łączeń, chłodzenie
odbywa się z maksymalną wydajnością. Przegrzanie jest wtedy regulowane według wartości
odniesienia. Chłodzenie trwa do chwili spadku temperatury poniżej nastawy i nie bierze się pod
uwagę ewentualnej potrzeby odszraniania. Do przeprowadzenia odszraniania trzeba zaangażować
inny układ. Podczas rozruchu chłodzenie załącza się, o ile regulowana temperatura przewyższa
nastawę.
S3
T
„Ciepłe” chłodziwo / woda
Pe
S2
R
T
Płytowy wymiennik
ciepła
Różnica łączeń
Nastawa
Termostat
Stopień
otwarcia
zaworu
S4
T
„Zimne” chłodziwo / woda
Temperatura
Off
Danfoss
80G300.10
Danfoss
80G365.10
EEV
Zawór rozprężny
Off OffOn On On
Załączenie
Wyłączenie
Czas
© Danfoss | DCS | 2020.10
Czas
Parametr Funkcja Opis
R014 Tryb pracy termostatu 1 = Włącz / Wyłącz
B101 Nastawa temperatury, °C Wprowadzić żądaną temperaturę środowiska chłodzonego
R001 Różnica łączeń, K Wprowadzić różnicę temperatury załączenia i wyłączenia
U118 Status pracy 7 = Termostat, nastawa (odczyt)
DKRCC.PD.RS0.A4.49 | 42
Page 43

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
Przegrzanie
16.2 Termostat
modulowany (MTR)
Model EKE 1A 1B 1C
Obsługa
-
Dzięki regulacji modulowanej można utrzymywać bardziej stabilną temperaturę środowiska
chłodzonego, a także wyrównywać obciążenie układu, zapewniając sprężarkom lepsze warunki pracy:
• Funkcję tę typowo wykorzystuje się w układach scentralizowanych bądź pośrednich.
• Sterowanie pracą każdej odrębnej sekcji parowników jest indywidualne, z wykorzystaniem funkcji
termostatu modulowanego.
• Tak samo jak w przypadku termostatu ON/OFF, trzeba nastawić temperaturę i różnicę łączeń.
Termostat MTR moduluje wydajność chłodniczą, dopasowując ją do zapotrzebowania.
W fazie obniżania temperatury środowiska chłodzonego, kiedy znacznie przekracza ona wartość
nastawy, wydajność chłodnicza jest maksymalna, a przegrzanie jest regulowane według wartości
odniesienia. Kiedy jednak temperatura zaczyna się zbliżać (zwykle na 4 K) do wartości nastawionej,
wydajność ulega stopniowemu ograniczaniu, dzięki czemu temperatura stabilnie utrzymuje się na
docelowym poziomie.
Ten docelowy poziom w przypadku termostatu MTR jest równy wartości nastawy + ½ różnicy łączeń.
Temperatura S3/S4
Rozruch sprężarki
Start termostatu MTR
1
/
różnicy łączeń
2
Nastawa
temperatury
Stopień otwarcia zaworu
Czas
Danfoss
80G308.10
Przegrzanie
odniesienia
Danfoss
80G352.10
Parametr Funkcja Opis
R014 Tryb pracy termostatu 2 = MTR
B101 Nastawa temperatury, °C Wprowadzić żądaną temperaturę środowiska chłodzonego
R001 Różnica łączeń, K Wprowadzić różnicę temperatury załączenia i wyłączenia
U118 Status pracy 11 = Zasilanie parownika z modulacją (odczyt)
Czas
Czas
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 43
Page 44

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
Porównanie trybu Włącz
/ Wyłącz z regulacją
modulowaną (MTR)
Temperatura
MTR
Włącz / Wyłącz
Różnica łączeń
Nastawa
temperatury
Danfoss
80G307.10
1
/
różnicy łączeń
2
Obszary zastosowania:
Regulacja modulowana znajduje zastosowanie w układach, w których wydajność sprężarki
jest dopasowywana do obciążenia.
Regulacja modulowana oznacza pracę ciągłą, podczas gdy regulacja ON/OFF polega na
włączaniu i wyłączaniu sprężarki.
Załączenie
Wyłączenie
Czas
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 44
Page 45

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
e
Q
17.0 Metody wyznaczania
przegrzania
odniesienia
W trybie regulacji przegrzania regulator dąży do tego, aby przegrzanie było stabilne i bliskie wartości
odniesienia. Służy to optymalnemu wykorzystaniu powierzchni wymiany ciepła w parowniku
i w efekcie uzyskaniu maksymalnej wydajności chłodniczej. Gdy przegrzanie wykazuje tendencję
spadkową, przepustowość zaworu ulega zmniejszeniu, co podwyższa przegrzanie.
Danfoss
80G8225.01
Parametry
robocze
Ciśnienie (P)
regulatora EKE
Przegrzanie
odniesienia
Entalpia jednostkowa (h)
Przegrzanie odniesienia określa się w oparciu o różne metody:
• Stałowartościowo
• Wg obciążenia (LoadAp)
• Wg minimalnego sygnału stabilnego (MSS)
• Wg różnicy temperatury
17.1 Porównanie metod
regulacji przegrzania
100 %
10 %
o
Praca niestabilna
MSS wg
Danfoss
LoadAp wg
Danfoss
Przegrzani
Stałe
przegrzanie
Danfoss
84B1488.10
Regulatory
innych rm
Różnica
temperatury
wg Danfoss
Mechaniczny
TZR
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 45
Page 46

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
Q
o
min.
maks.
s
17.2 MSS Regulator poszukuje minimalnego stabilnego przegrzania w zakresie między dolną i górną wartością
graniczną. Jeśli przez pewien czas przegrzanie jest stabilne, regulator obniża wartość odniesienia.
Model EKE 1A 1B 1C
Obsługa
W przypadku wystąpienia niestabilności wartość odniesienia rośnie na powrót. Ten proces regulacji
trwa, o ile przegrzanie mieści się w granicach narzuconych przez użytkownika. Ma na celu znalezienie
minimalnej wartości przegrzania, jaką można utrzymać przy ciągle stabilnej pracy układu.
MSS wg Danfos
100 %
Praca stabilna
(tylko para)
40 %
Praca niestabilna
(krople cieczy)
10 %
Przegrzanie
Danfoss
84B1487.10
Regulacja typu PI wg MSS bazuje na trzech wartościach:
• współczynniku stabilności
• współczynniku zmienności wartości Te
• przegrzaniu odniesienia
Współczynnik stabilności określa „użytkownik”. Większa akceptowalna zmienność sygnału T0 pozwala
na większą niestabilność. W przypadku wyższego przegrzania odniesienia zezwala się na większą
niestabilność.
Przegrzanie
Przegrzanie
Uwaga:
W typowych zastosowaniach,
regulacja wg MSS powinna
się odbywać w pierwszej
kolejności z nastawami 4
K do 8 K, przy przegrzaniu
statycznym = 2 K.
Przegrzanie odniesienia podlega adaptacji i dostrajaniu. W tej metodzie regulacji największe
znaczenie mają trzy nastawy: przegrzanie minimalne (Min. SH), przegrzanie maksymalne (Max. SH)
oraz przegrzanie krytyczne (SH close).
Obszary zastosowania:
Regulacja wg MSS przynosi korzyści dla układów o długim czasie pracy i wolno zmieniających się
warunkach roboczych, jak instalacje komór i mebli chłodniczych czy agregaty chłodnicze.
Układy pracujące w krótkich cyklach i przy szybko zmieniających się warunkach nie odniosą tu żadnej
korzyści, gdyż funkcja MSS potrzebuje czasu na znalezienie optymalnego przegrzania odniesienia.
Adaptacja do nowej wartości zabiera ok. 15 minut.
Parametr Funkcja Opis
R102 Tryb pracy 0 = Regulacja przegrzania
N021 Metoda regulacji przegrzania 2 = MSS
N009 Przegrzanie maks. Maksymalne dopuszczalne przegrzanie
N010 Przegrzanie min.
N018 Współczynnik stabilności
N129 Współczynnik zmienności T0
N117
N119 Przegrzanie krytyczne Wartość domyślna = 2 K (zalecana)
Funkcja przegrzania
krytycznego
Minimalne dopuszczalne przegrzanie
Uwaga: Musi to być wartość przynajmniej o 0,5 K wyższa od przegrzania
krytycznego, jeśli N117 = 1.
Ma znaczenie tylko dla regulacji wg MSS.
Wyższa wartość zezwala na szersze wahania przegrzania przed zmianą wartości
odniesienia.
Ma znaczenie tylko dla regulacji wg MSS.
Współczynnik określa, jak wahania ciśnienia ssania wpływają na przegrzanie
odniesienia. Zakres nastawy to 0-1 (1 = maks. wpływ Te oraz S2, 0 = tylko S2).
W przypadku częstych zmian ciśnienia ssania w wyniku startu/stopu sprężarki
zaleca się ustawienie pewnego wpływu Te (oraz S2) na MSS.
0 = OFF, 1 = ON (wartość domyślna = 1)
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 46
Page 47

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
Q
o
zanie
17.3 Stała wartość Stałą nastawę przegrzania stosuje się typowo w układach o niezmiennych warunkach pracy
Model EKE 1A 1B 1C
Obsługa
i obciążeniu, a także w urządzeniach pracujących w krótkich cyklach, jak np. agregaty procesowe
utrzymujące wylotową temperaturę medium na określonym poziomie.
Obszary zastosowania:
Ta funkcja znajduje zastosowanie w układach o stabilnym obciążeniu i warunkach roboczych
bądź o krótkich cyklach roboczych.
Parametr Funkcja Opis
R102 Tryb pracy 0 = Regulacja przegrzania
N021 Metoda regulacji przegrzania 0 = Stała wartość
Nastawa odpowiada wartości Przegrzanie maks. = Przegrzanie min.
Uwaga: Musi to być wartość przynajmniej o 0,5 K wyższa od przegrzania
krytycznego, jeśli N117 = 1.
17.4 Obciążenie
Model EKE 1A 1B 1C
Obsługa
N107 Nastawa przegrzania
N117 Funkcja przegrzania krytycznego 0 = OFF, 1 = ON (wartość domyślna = 1)
N119 Przegrzanie krytyczne Wartość domyślna = 2 K (zalecana)
Funkcja LoadAP podwyższa wartość odniesienia przy wzroście obciążenia cieplnego. O obciążeniu
świadczy stopień otwarcia zaworu. Metoda ta jest w pewnym stopniu wstępnie sparametryzowaną
regulacją według MSS. Daje ona pewną wartość przegrzania odniesienia i w wielu przypadkach
najlepiej odpowiada charakterystyce układu.
Ta metoda regulacji przypomina pracę zaworu termostatycznego, w którym siłę napięcia sprężyny można
dopasowywać tak, aby utrzymywać przegrzanie w obszarze stabilnej pracy, na prawo od krzywej MSS.
Przewaga nad zaworem termostatycznym jest taka, że charakterystykę pracy określają dwie nastawy.
%
90 %
LoadAp
wg Danfoss
Δ
Temp = S3 - Te
Danfoss
80G348.10
Praca niestabilna
(krople cieczy)
P
TT
S2
EEV
Zawór rozprężny
10 %
Danfoss
84B1489.10
Praca stabilna
Przegrzanie
min.
(tylko para)
Przegrzanie
maks.
Δ
Temp = S3 - Te
Przegr
W metodzie LoadAp przegrzanie odniesienia postępuje zgodnie z linią pokazaną na wykresie. Jej
przebieg wyznaczają nastawy maksymalnej i minimalnej wartości przegrzania. Te dwie wartości należy
tak dobrać, aby linia mieściła się pomiędzy krzywą MSS i krzywą średniej różnicy temperatury ΔTm
(między temperaturą medium i temperaturą parowania). Przykład konguracji: Przegrzanie krytyczne
= 4 K, Przegrzanie min. = 6 K, Przegrzanie maks. = 10 K.
Zapewnia to bardziej stabilną regulację niż w metodzie MSS, ponieważ regulator nie szuka ciągle
wartości optymalnej, jak to się dzieje w metodzie adaptacyjnej..
Obszary zastosowania
Metoda LoadAp wykazuje przewagę nad MSS w układach z parownikami przyłączonymi równolegle
do wspólnego przewodu ssawnego, gdyż regulacja stopnia otwarcia bazuje na konkretnej wartości
przegrzania, podczas gdy regulacja wg MSS zachodzi powyżej i poniżej nastawy.
Parametr Funkcja Opis
R102 Tryb pracy 0 = Regulacja przegrzania
N021 Metoda regulacji przegrzania 1 = LoadAp
N009 Przegrzanie maks.
N010 Przegrzanie min.
N117
N119 Przegrzanie krytyczne Wartość domyślna = 2 K (zalecana)
Funkcja przegrzania
krytycznego
Maksymalne dopuszczalne przegrzanie dotyczy stopnia otwarcia między 90-100%.
Musi być większe lub równe Przegrzaniu min.
Minimalne dopuszczalne przegrzanie dotyczy stopnia otwarcia między 0-10%.
Uwaga: Musi to być wartość przynajmniej o 0,5 K wyższa od przegrzania
krytycznego, jeśli N117 = 1.
0 = OFF, 1 = ON (wartość domyślna = 1)
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 47
Page 48

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
17.5 Różnica temperatury
Model EKE 1A 1B 1C
Obsługa
-
Uwaga:
Funkcja ta wymaga użycia
czujnika temperatury
medium S3.
Dostępna jest tylko
w modelach EKE 1B i 1C.
Można ją wykorzystać tylko
w przypadku chłodnic
powietrza z parownikami
lamelowymi.
W metodzie bazującej na różnicy temperatury można regulować przegrzanie w oparciu o dodatkowe
informacje, jak ciśnienie parowania Pe i temperatura medium chłodzonego S3. Metoda opiera się na
tym, że większość parowników uzyskuje dobrą efektywność, kiedy przegrzanie odniesienia wynosi
0,65 różnicy między temperaturą dolotową powietrza i temperaturą parowania.
Zaletą tej metody jest szybsza reakcja regulatora na zmiany obciążenia.
Funkcja bada stan obciążenia i lepiej odpowiada na takie zmiany, jak włączenie i wyłączenie czy
stopniowa regulacja wydajności sprężarek bądź wentylatorów skraplaczy, albo rozruch przy pustych
lub pełnych parownikach.
Przegrzanie odniesienia oblicza się w relacji do różnicy temperatury medium i temperatury parowania.
Jest to możliwe tylko przy dostępności czujnika temperatury medium (S3).
Z kolei temperatura parowania wynika z mierzonego ciśnienia i nastawionego rodzaju czynnika
chłodniczego.
Funkcja bazuje na dwóch nastawach:
• Metodzie określania przegrzania odniesienia
• Mnożniku przegrzania: Przegrzanie odniesienia = mnożnik * (S3 – T0)
Danfoss
80G348.10
Danfoss
80G354.10
P
TT
S2
EEV
Zawór rozprężny
Obszary zastosowania
Regulacja przegrzania wg różnicy temperatury jest przydatna wtedy, kiedy przewiduje się
dużą zmienność dolotowej temperatury powietrza (np. pompy ciepła pracujące z powietrzem
zewnętrznym). Funkcja kompensuje też zmiany ciśnienia ssania wynikające ze stopniowej regulacji
wydajności sprężarki.
Przegrzanie SH
= S2 – T0
Parametr Funkcja Opis
R102 Tryb pracy 0 = Regulacja przegrzania
N021 Metoda regulacji przegrzania 3 = Różnica temperatury
N009 Przegrzanie maks. Maksymalne dopuszczalne przegrzanie
N010 Przegrzanie min.
N116 Mnożnik przegrzania
N117
N119 Przegrzanie krytyczne Wartość domyślna = 2 K (zalecana)
Funkcja przegrzania
krytycznego
Minimalne dopuszczalne przegrzanie
Uwaga: Musi to być wartość przynajmniej o 0,5 K wyższa od przegrzania
krytycznego, jeśli N117 = 1.
Uwaga: Wartość ta powinna zawierać się w przedziale od 0,4 do 1. Mniejsza
nastawa może skutkować zalewaniem sprężarki, zaś wartość wyższa pogorszy
efektywność.
0 = OFF, 1 = ON (wartość domyślna = 1)
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 48
Page 49

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
e
Przesunięcie
korekta zewn.
e
Przesunięcie
18.0 Zewnętrzny sygnał
odniesienia
dla przegrzania lub
temperatury
Uwaga:
Linię można też skongurować
w odwrotnym kierunku
18.1 Przegrzanie
odniesienia
Model EKE 1A 1B 1C
Obsługa
Za pomocą zewnętrznego sygnału analogowego można skorygować przegrzanie odniesienia
lub temperaturę odniesienia.
Nie jest dozwolone przesunięcie przegrzania odniesienia poniżej nastawy minimalnego przegrzania.
Zakres korekty wyznaczają parametry R006 i R106, zaś zakres wartości zewnętrznego sygnału określają
parametry I034 i I035 oraz I036 i I037 (domyślnie 0-10 V i 4-20 mA).
R006
Maks.
R106
Min.
korekta zewn.
Dolne napięcie zewn.
I034
5
0
Górne napięcie zewn.
I035
Danfoss
80G354.10
Napięci
10
R006
Maks.
korekta zewn.
R106
Min.
korekta zewn.
4
I036
Dolne
natężenie zewn.
4
-2
Danfoss
80G356.10
Natężeni
20
I037
Górne natężenie zewn.
Na wejście analogowe można podać sygnał przesuwający wartość odniesienia dla przegrzania. Sygnał
ten może być prądowy bądź napięciowy. Przesunięcia można dokonać zarówno na plus, jak i na minus.
Parametr Funkcja Opis
Określić sposób wykorzystania sygnału zewnętrznego
O010
Konguracja zewn. sygnału
odniesienia
7 = mA -> SH: Sygnał prądowy do zmiany przegrzania odniesienia
1 = V -> SH: Sygnał napięciowy do zmiany przegrzania odniesienia
4 = MODbus ->SH: Sygnał z MODbus do zmiany przegrzania odniesienia
18.2 Temperatura
odniesienia
Model EKE 1A 1B 1C
Obsługa
-
I037 Górne natężenie prądu dla
zewnętrznego sygnału odniesienia
I036 Dolne natężenie prądu dla
zewnętrznego sygnału odniesienia
I035 Górne napięcie zewnętrznego
sygnału odniesienia
I034 Dolne napięcie zewnętrznego
sygnału odniesienia
X010 Sygnał zewnętrzny przez MODbus Jeśli O010 = 4, odczyt przesunięcia w K.
Jeśli O010 = 7, należy wprowadzić maksymalne natężenie prądu
dla zewnętrznego sygnału odniesienia
Jeśli O010 = 7, należy wprowadzić minimalne natężenie prądu
dla zewnętrznego sygnału odniesienia
Jeśli O010 = 1, należy wprowadzić maksymalne napięcie zewnętrznego
sygnału odniesienia
Jeśli O010 = 1, należy wprowadzić minimalne napięcie zewnętrznego
sygnału odniesienia
Nastawę temperatury odniesienia można przesunąć tak samo, jak to opisano powyżej, sygnałem
0 – 20 mA lub 4 – 20 mA.
Nastawę termostatu można przesunąć zewnętrznym sygnałem napięciowym, co jest szczególnie
przydatne w chłodzeniu procesowym. Może to być np. sygnał 0 – 5 V lub określony przez użytkownika.
Trzeba podać dwie wartości przesunięcia, jedną dla minimalnej wartości sygnału i drugą dla
maksymalnej. Przesunięcie dotyczy wszystkich sekcji. Nie wpływa na progi alarmowe.
Parametr Funkcja Opis
Określić sposób wykorzystania sygnału zewnętrznego
O010
I037 Górne natężenie prądu dla
I036 Dolne natężenie prądu dla
I035 Górne napięcie zewnętrznego
I034 Dolne napięcie zewnętrznego
X010 Sygnał zewnętrzny przez MODbus Jeśli O010 = 6, odczyt przesunięcia w K.
Konguracja zewn. sygnału
odniesienia
zewnętrznego sygnału odniesienia
zewnętrznego sygnału odniesienia
sygnału odniesienia
sygnału odniesienia
9 = mA -> Temp.: Sygnał prądowy do zmiany temperatury odniesienia
3 = V -> Temp.: Sygnał napięciowy do zmiany temperatury odniesienia
6 = MODbus ->Temp.: Sygnał z MODbus do zmiany temperatury odniesienia
Jeśli O010 = 9, należy wprowadzić maksymalne natężenie prądu
dla zewnętrznego sygnału odniesienia
Jeśli O010 = 9, należy wprowadzić minimalne natężenie prądu
dla zewnętrznego sygnału odniesienia
Jeśli O010 = 3, należy wprowadzić maksymalne napięcie zewnętrznego
sygnału odniesienia
Jeśli O010 = 3, należy wprowadzić minimalne napięcie zewnętrznego
sygnału odniesienia
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 49
Page 50

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
18.3 Korekta wg prędkości
sprężarki
Model EKE 1A 1B 1C
Obsługa
-
Uwaga:
Z funkcji zasadniczo korzysta
się w układach „jeden
na jeden”. Wymaga ona
sygnału o obrotach sprężarki
przesyłanego przez MODbus.
Funkcji nie używa się
w układach
wieloparownikowych.
Gdy zmieniają się obroty sprężarki, zmianie ulega też dynamika pracy układu. Wymogom
funkcjonalności i bezpieczeństwa może wtedy najlepiej sprostać regulator adaptacyjny.
Funkcję korekty wg prędkości sprężarki zaimplementowaną w regulatorach typu EKE przewidziano
właśnie na takie sytuacje.
Kiedy sprężarka przyspiesza lub zwalnia, ciśnienie parowania natychmiast się zmienia, co prowadzi
odpowiednio do wzrostu bądź spadku przegrzania. Funkcja korekty w zależności od prędkości
sprężarki automatycznie dostroi parametry regulacji typu PI, w celu adekwatnej reakcji na zmienione
warunki dla zapewnienia wydajności i bezpieczeństwa pracy.
Funkcja wymaga układu transmisji danych i nadrzędnego sterownika przesyłającego sygnał
o obrotach sprężarki do regulatora EKE.
Sygnał o obrotach sprężarki przez MODbus
Regulator
Danfoss
80G8305.10
P
TT
S2
EEV
Zawór rozprężny
Parametr Funkcja Opis
N135
R100 Wydajność sprężarki Procent wydajności sprężarki przez MODbus
N136 Wydajność graniczna
N137 Współczynnik korekty
Funkcja korekty wg prędkości
sprężarki
0 = OFF, 1 = ON (domyślnie OFF)
Wartość, od której uaktywnia się korekta regulacji przegrzania.
Poniżej niej regulacja odbywa się wolniej.
Maksymalna wartość dodawana do czasu całkowania TN.
Dla 0%: TN = TN normalny * współczynnik
Obszary zastosowania:
Funkcja typowo znajduje zastosowanie w układach wyposażonych w sprężarki z falownikami.
Może też być użyta w przypadku wielostopniowej regulacji wydajności sprężarek.
Nadrzędny sterownik układu musi przesyłać procent wydajności sprężarki przez MODbus.
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 50
Page 51

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
19.0 Ograniczenia
19.1 Priorytety ograniczeń
W tym rozdziale opisano różne funkcje zabezpieczające, w które wyposażono regulatory typu EKE.
W przypadku wielu zabezpieczeń może wystąpić konikt, które z ograniczeń jest dominujące.
Priorytet ograniczeń uszeregowano poniżej:
1. Przegrzanie krytyczne (zawsze trzeba zapobiegać zalaniu sprężarki)
2. LOP (minimalne ciśnienie robocze)
3. HCTP (wysoka temperatura skraplania)
4. Minimalna temperatura S4
5. MOP (maksymalne ciśnienie robocze)
Jako przykład może posłużyć sytuacja, kiedy w tym samym czasie ciśnienie oraz przegrzanie są niskie.
Funkcja LOP otworzyłaby zawór, aby podnieść ciśnienie, jednak to funkcja limitująca przegrzanie
zmniejszy przepływ czynnika w celu przywrócenia bezpiecznej wartości. W tym przypadku
przegrzanie krytyczne jest ważniejsze od minimalnego ciśnienia. Jeśli ten konikt potrwa dłużej,
presostat minimalny w końcu wyłączy sprężarkę.
Danfoss
80G8227.01
Ciśnienie (P)
HCTP
Przegrzanie
krytyczne
MOP
LOP
Przegrzanie
odniesienia
Entalpia jednostkowa (h)
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 51
Page 52

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
Przegrzanie
Przegrzanie
Czas
Temperatur
19.2 Przegrzanie krytyczne
Model EKE 1A 1B 1C
Obsługa
19.3 Minimalne ciśnienie
robocze (LOP)
Model EKE 1A 1B 1C
Obsługa
Ustawienie przegrzania krytycznego zapewnia, że przegrzanie nie spadnie poniżej tej minimalnej
wartości. Jest to zabezpieczenie przeciw zalaniu sprężarki. Kiedy spada temperatura medium
chłodzonego lub sprężarka zwalnia, przegrzanie może się obniżyć poniżej bezpiecznego minimum.
Funkcja przegrzania krytycznego szybko ograniczy przepływ czynnika przez zawór rozprężny w celu
zwiększenia przegrzania do nastawionego poziomu.
Przegrzanie
Przegrzanie
odniesienia
krytyczne
Danfoss
80G357.10
Parametr Funkcja Opis
N117 Funkcja przegrzania krytycznego 0 = OFF, 1 = ON (wartość domyślna = ON)
N119 Przegrzanie krytyczne Wartość domyślna = 2 K
Automatyczna
regulacja
przegrzania
Aktywna funkcja
przegrzania krytycznego
szybko przymyka
zawór, aby z powrotem
podnieść przegrzanie
Automatyczna
regulacja
przegrzania
Wydajność sprężarki
Stopień otwarcia zaworu
Czas
Funkcję tę typowo wykorzystuje się w takich urządzeniach, jak pompy ciepła pracujące przy niskiej
temperaturze otoczenia. Funkcja minimalnego ciśnienia roboczego (LOP) zapewnia , że ciśnienie
parowania (Pe) utrzyma się powyżej nastawy LOP. Podczas rozruchu sprężarki z dużą wydajnością
przy niskiej temperaturze zewnętrznej może zajść konieczność podtrzymania ciśnienia ssania, żeby
presostat minimalny nie wyłączył urządzenia. W tych warunkach jedynym sposobem utrzymania
układu w ruchu jest nadanie funkcji LOP wyższego priorytetu wobec regulacji przegrzania.
Ostrzeżenie:
Zasadniczo, regulator nie
zezwoli na otwarcie zaworu
w warunkach zbyt niskiego
przegrzania. Jeśli jednak na
krótko pojawi się taka potrzeba,
można ustawić parametr N142
„Priorytet LOP” jako „ON”.
W efekcie funkcja LOP
uzyska wyższy priorytet niż
przegrzanie krytyczne, który
będzie obowiązywać przez
czas nastawiony parametrem
N131 „Maks. czas LOP”. Należy
zatroszczyć się o to, żeby ten
stan nie zaszkodził sprężarce.
Ta funkcja zapobiega zatrzymaniu sprężarki z powodu zbyt niskiego ciśnienia ssania. Jeśli ciśnienie to
spadnie poniżej wartości granicznej, regulator szybko otworzy zawór.
Start sprężarki
Danfoss
80G358.10
Zawór otwiera się,
aby zapobiec dalszemu spadkowi Te
a
otoczenia
Nastawa
LOP
Parametr Funkcja Opis
N140 Funkcja LOP 0 = OFF, 1 = ON (Domyślna wartość = OFF)
N141 Nastawa LOP, °C
N142 Priorytet LOP
N131 Maks. czas LOP Czas ważności wyższego priorytetu funkcji LOP, domyślnie 120 s.
Minimalne ciśnienie robocze.
Nastawia się równoważną temperaturę parowania, domyślnie jest to -40°C.
W przypadku koniktu funkcji LOP i przegrzania krytycznego można nadać
tej pierwszej wyższy priorytet (co może być potrzebne na czas rozruchu
w niskiej temperaturze).
ON: Funkcja LOP ma wyższy priorytet
0 = OFF, 1 = ON (Wartość domyślna = OFF)
Temperatura parowania Te
Stopień otwarcia zaworu
Przegrzanie
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 52
Page 53

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
Przegrzanie
19.4 Maksymalna
temperatura
skraplania
Model EKE 1A 1B 1C
Obsługa - -
Uwaga:
Funkcja HCTP wymaga
zainstalowania przetwornika
ciśnienia Pc na tłoczeniu sprężarki
bądź otrzymywania tej wartości
przez układ transmisji danych.
Zabezpieczenie przed zbyt wysoką temperaturą skraplania (HCTP) zapewnia redukcję obciążenia
skraplacza w przypadku osiągnięcia wysokiej temperatury kondensacji. Zapobiega to przekroczeniu
maksymalnej wartości ciśnienia tłoczenia poprzez zmniejszenie stopnia otwarcia zaworu rozprężnego.
Funkcja HCTP przymyka zawór tak, aby ciśnienie skraplania utrzymało sie poniżej nastawionej
wartości. Ogranicza to wzrost temperatury tłoczenia na skutek zmiany warunków roboczych. Nastawia
się najwyższą dopuszczalną temperaturę skraplania, którą regulator porównuje z temperaturą
nasycenia dla mierzonego ciśnienia tłoczenia.
Danfoss
80G8230.01
P
c
C
E
S2 P
e
EEV
Zawór rozprężny
HFunkcja HCTP aktywuje się, gdy temperatura skraplania znajdzie się w zakresie jej nastawy.
Po zatrzymaniu wzrostu ciśnienia, układ będzie pracować przy aktywnej funkcji HCTP, aż do chwili,
gdy warunki robocze znów umożliwią regulację zasilania parownika. Jeśli jednak warunki jeszcze się
pogorszą, ciśnienie przekroczy nastawę i funkcja alarmowa zacznie naliczać czas. Kiedy przekroczy on
okres nastawiony parametrem „Alarm Timeout HCTP”, załączy się alarm (parametr A15 – maksymalny
czas ochrony przed wysoką temperaturą tłoczenia).
Temperatura skraplania Tc
Danfoss
Nastawa
HCTP
Przegrzanie
Jeśli temperatura skraplania
przewyższa dopuszczalną
wartość maksymalną,
przepływ czynnika zostaje
zmniejszony, co redukuje
obciążenie skraplacza.
W tych warunkach przegrzanie
nie jest regulowane.
odniesienia
Parametr Funkcja Opis
N133 Ograniczenie temperatury skraplania 0 = O | 1 = ON
N134
Nastawa maksymalnej temperatury
skraplania
Dopuszczalna temperatura skraplania.
Nastawia się temperaturę nasycenia dla ciśnienia tłoczenia,
domyślnie jest to 50°C.
80G359.10
Stopień
otwarcia
zaworu
Czas
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 53
Page 54

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
19.5 Min. temperatura
medium na
wylocie / S4
Model EKE 1A 1B 1C
Obsługa
-
Tę funkcję nazywa się też zabezpieczeniem przez zamrożeniem. Dolny limit temperatury S4 zapewnia,
że temperatura medium chłodzonego na wylocie z parownika nie spadnie poniżej tego poziomu.
Krótkotrwałe spadki są jednak możliwe, więc ochrona przeciwzamrożeniowa wymiennika nadal jest
potrzebna, aby zatrzymać sprężarkę zanim lód zniszczy lutowany parownik płytowy.
Aktywna funkcja sprawia, że zredukowany przepływ czynnika przez zawór rozprężny obniża
wydajność wymiennika. Przegrzanie wzrasta i do poziomu nastawy powróci dopiero wtedy, gdy
temperatura S4 wzrośnie znacznie powyżej nastawionego minimum.
S3
T
p0
S2
R
T
Danfoss
°C
„Ciepłe” chłodziwo / woda
S3
Płytowy wymiennik ciepła
S4
„Zimne” chłodziwo / woda
Parametr Funkcja Opis
N126
N127
Ograniczenie minimalnej temperatury
medium na wylocie / S4
Min. temperatura medium
na wylocie / S4
Danfoss
T
80G365.10
Elektryczny zawór rozprężny
Zabezpieczenie przed zbyt niską temperaturą medium chłodzonego
na wylocie z parownika. Jeśli temperatura S4 spadnie poniżej nastawy,
zawór się zamknie redukując wydajność.
0 = OFF, 1 = ON: Funkcja jest aktywna
Dolne ograniczenie temperatury S4 (medium
na wylocie), domyślnie 5°C.
EEV
S4
S4 min
Czas
80G8232.01
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 54
Page 55

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
Temperatura
19.6 Maksymalne ciśnienie
robocze (MOP)
Model EKE 1A 1B 1C
Obsługa
Funkcja MOP (maksymalnego ciśnienia roboczego) zapewnia, że ciśnienie parowania (P0) utrzymuje
się poniżej nastawy. W czasie rozruchu i obniżania temperatury może zachodzić konieczność
utrzymywania niskiego ciśnienia ssania, aby zabezpieczyć sprężarkę przed przeciążeniem. W tym celu
ogranicza się przepływ czynnika przez zawór rozprężny. Ciśnienie P0 nie przekracza wtedy nastawy
MOP, chociaż możliwe są chwilowe skoki. Przegrzanie jest wyższe niż wartość odniesienia.
Funkcja MOP ma pierwszeństwo przed regulacją przegrzania.
Funkcję MOP aktywuje się ustawiając parametr N130 na „ON”.
Mierzone ciśnienie regulator przelicza na odpowiadającą mu temperaturę nasycenia, a aktywna
funkcja MOP zapobiega wzrostowi temperatury parowania Te powyżej ustalonej granicy.
W urządzeniach, w których parownik ma osuszać powietrze, można regulować temperaturę
parowania właśnie przez odpowiednio niską nastawę MOP.
Danfoss
EEV
80G8233.01
TT
P
S2
Zawór rozprężny
Funkcja MOP jest aktywna do wychłodzenia komory
Nastawa
MOP
Danfoss
80G360.10
Przegrzanie
Przegrzanie
odniesienia
Parametr Funkcja Opis
N130
N011
Ograniczenie maksymalnego ciśnienie
roboczego (MOP)
Nastawa maksymalnego ciśnienia
parowania (MOP)
Temperatura komory
Temperatura
parowania Te
Temperatura komory
Stopień otwarcia zaworu
0 = OFF, 1 = ON (Wartość domyślna = OFF)
Nastawia się temperaturę nasycenia dla ciśnienia parowania.
Jeśli nastąpi wzrost do nastawy MOP, zawór przymknie się szybciej,
niezależnie od wartości przegrzania.
Nastawa domyślna to 0°C.
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 55
Page 56

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
Przegrzanie
odniesienia
20.0 Rozruch
Model EKE 1A 1B 1C
Obsługa
20.1 Regulacja typu P
20.2 Rozruchowe otwarcie
zaworu
Uwaga:
Jeśli podczas rozruchu zawór
otworzy się za bardzo, może
dojść do zalania sprężarki
lub zatrzymania układu
przez presostat maksymalny.
Jednak rozruch ze zbyt małym
stopniem otwarcia także grozi
wyłączeniem urządzenia,
tym razem przez presostat
minimalny. Dlatego bezpiecznie
jest uruchamiać układ z
otwarciem zaworu na około 50%,
o ile nie korzysta się z funkcji
regulacji typu P.
Bywają przypadki, że w niektórych urządzeniach podczas rozruchu zawór nie otwiera się dostatecznie
i pojawiają się problemy ze zbyt niskim ciśnieniem ssania. Poniższe funkcje pozwalają szybciej
otworzyć zawór i uzyskać optymalne warunki pracy układu.
Funkcja regulacji typu P szybko stabilizuje przegrzanie w układzie i w krótkim czasie dochodzi do optymalnych warunków roboczych. Regulator zaprogramowano na automatyczną regulację proporcjonalną,
szybko zmieniającą stopień otwarcia zaworu w oparciu o temperaturę parowania i przegrzanie.
Przegrzanie
odniesienia
Przegrzanie
czas rozruchu
Min.
Czas rozruchu
Regulacja typu P
jest aktywna w całym czasie
rozruchu, o ile przegrzanie
nie sięgnie wartości odniesienia
Danfoss
80G361.10
Przegrzanie
czas rozruchu
Min.
jest aktywna w min. czasie
przegrzanie nie sięgnie
wartości odniesienia
Regulacja typu P
Czas rozruchu
rozruchu i dopóki
Czas Czas
Podczas rozruchu funkcja ta wymusza minimalne otwarcie zaworu w nastawionym przedziale czasu.
Jeśli jednocześnie zaktywizują się funkcje zabezpieczające (jak LOP), to zawór będzie się zachowywać
zgodnie z ich działaniem.
)
Regulacja
automatyczna
Normalna regulacja
Czas na rozruch
Otwarcie zaworu na rozruchu
Stopień otwarcia, %
Rozruchowe
otwarcie zaworu, %
(Minimum)
Danfoss
80G8237.01
Start
Automatyczna
regulacja
stopnia
otwarcia
% otwarcia
z zabezpieczeniem
Wymuszony % otwarcia
Czas rozruchu
% otwarcia zaworu
1
20.3 Stały stopień otwarcia
i czas
Uwaga:
W czasie działania tej funkcji
nie ma zabezpieczenia przed
zbyt niskim przegrzaniem.
© Danfoss | DCS | 2020.10
Te funkcja wymusza stały stopień otwarcia zaworu podczas rozruchu, w nastawionym przedziale czasu,
niezależnie od występującego przegrzania. W tym czasie nie działają żadne funkcje zabezpieczające.
Wymuszone otwarcie zaworu
Stopień otwarcia, %
Rozruchowe otwarcie zaworu, %
Wymuszony % otwarcia
Danfoss
80G8235.01
Start
Czas rozruchu
Parametr Funkcja Wartość
N102
Tryb
rozruchowy
Tryb rozruchowy
0 = Regulacja typu P, 1 = Rozruchowe otwarcie zaworu z zabezpieczeniami,
2 = Stały stopień otwarcia bez zabezpieczeń
Regulacja typu P Rozruchowe otwarcie zaworu
Rozruchowy stopień otwarcia N017 N017 N017
Czas rozruchu (w sekundach) N015 N015 N015
Minimalny czas rozruchu (w sekundach) N104 - -
Regulacja automatyczna
% otwarcia zaworu
z zabezpieczeniami
Normalna regulacja
Czas na rozruch
Stały stopień otwarcia
bez zabezpieczeń
DKRCC.PD.RS0.A4.49 | 56
Page 57

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
Czas na zakończenie
21.0 Sekwencja
odszraniania
Model EKE 1A 1B 1C
Obsługa
Sekwencja odszraniania
Regulatory typu EKE nie inicjują odszraniania, potrzebny jest do tego sterownik nadrzędny.
W przypadku samodzielnej pracy regulatora typowe odszranianie nie jest zatem możliwe. Można
jednak w tym celu przełączyć tryb pracy urządzenia z grzania (pompa ciepła) na chłodzenie
(klimatyzator), przez co jednostka zewnętrzna zacznie pracować jako skraplacz i gorąca para ze
sprężarki odszroni wymiennik ciepła. W niektórych układach zamiast pracy odwracalnej instaluje się
grzałki elektryczne, ale i tam można użyć tego sposobu odszraniania.
Stopień
Zasilanie parownika
otwarcia
zaworu, %
Stopień
otwarcia
podczas
odszraniania
Stopień
otwarcia na
zakończenie
odszraniania
Inicjacja
odszraniania
0
Czas inicjacji odszraniania
Danfoss
80G360.10
Parametr Funkcja Wartość domyślna
D101 Minimalne ciśnienie manometryczne podczas odszraniania 1 bar
D102 Czas inicjacji odszraniania 1 s
D100 Stopień otwarcia podczas odszraniania 0%
D104 Czas zamknięcia po odszranianiu 0 s
D103 Czas na zakończenie odszraniania 0 s
D105 Stopień otwarcia na zakończenie odszraniania 50%
Odszranianie
Zatrzymanie
odszraniania
Czas zamknięcia
po odszranianiu
Koniec
sekwencji
odszraniania
odszraniania
Rozruch
Czas
Uwaga:
Jeśli dla sygnałów sekwencji
odtajania przeznaczono
wejście cyfrowe, nie można
jednocześnie sterować
odszranianiem przez
MODbus.
Podczas trybu odszraniania użytkownik może zadać stopień otwarcia zaworu parametrem I078.
Sygnały inicjacji i zakończenia sekwencji odszraniania mogą pochodzić z następujących źródeł.
1. Rejestr MODbus (pamięć trwała) – domyślna wartość przy zasilaniu: OFF
2. Wejście cyfrowe – tylko takie wejście może służyć do tego celu. Sygnał inicjacji sekwencji
odszraniania stanowi zmiana stanu z OFF na ON, zaś jej zakończenie następuje z chwilą zmiany
stanu wejścia z ON na OFF.
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 57
Page 58

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
22.0 Układy odwracalne,
zdwojone nastawy
parametrów regulacji
Model EKE 1A 1B 1C
Obsługa
Regulatory przegrzania typu EKE wyposażono w możliwość pracy w urządzeniach odwracalnych
(chłodzenie / grzanie) z dwukierunkowymi zaworami rozprężnymi. Dynamika pracy układu w tych
dwóch trybach jest zwykle inna, a regulator EKE może mieć zdwojoną kongurację, czyli dwa zbiory
nastaw – oddzielnie dla chłodzenia i grzania.
Regulator
przegrzania
Danfoss
80G309.10
Parownik
ETS
Skraplacz
Zawór 4-drogowy
P
TT
S2
Regulator
przegrzania
Danfoss
80G310.10
Skraplacz
ETS
Parownik
Zawór 4-drogowy
P
TT
S2
Zmiana trybu grzanie / chłodzenie:
Przełączanie trybu pracy między grzaniem i chłodzeniem można realizować zarówno przez zmianę
wartości parametru, jak i za pomocą sygnału na wejściu cyfrowym.
Jeśli użyto w tym celu wejścia cyfrowego (DI), wtedy sterowanie trybem pracy nie może się odbywać
za pośrednictwem MODbus.
Parametr Funkcja Opis
R102 Tryb pracy 0 = Regulacja przegrzania
N021 Metoda regulacji przegrzania 0 = Stała wartość, 1 = MSS, 2 = Różnica temperatury
Parametr Funkcja Opis
X001 Sygnał grzania przez MODbus Tryb grzania inicjowany za pośrednictwem MODbus
U112 Sygnał grzania na DI Odczyt stanu wejścia cyfrowego DI
Parametr dla
chłodzenia / funkcja
Parametr dla
grzania / funkcja
Opis
[N009 - SH max.] [N108 - Heat SH max.] Maksymalne przegrzanie odniesienia
[N010 - SH min.] [N109 - Heat SH min.] Minimalne przegrzanie odniesienia
[N111 - Heat SH Kp min.] Tłumienie wzmocnienia w pobliżu wartości odniesienia.
[N019 - SH Kp min.]
Ta nastawa obniża współczynnik wzmocnienia Kp, ale tylko w pobliżu wartości
odniesienia. Nastawa „0.5” obniży współczynnik wzmocnienia Kp o połowę.
[N113 - Heat SH Kp] Współczynnik wzmocnienia (proporcjonalności) dla regulacji przegrzania.
[N004 - SH Kp]
Obniżenie współczynnika Kp spowalnia regulację, a podwyższenie
przyspiesza. Zbyt wysoka nastawa spowoduje uktuacje przegrzania.
[N110 - Heat SH Tn] Czas całkowania dla regulacji przegrzania. Wydłużenie czasu Tn spowalnia
[N005 - SH Tn]
regulację, zaś skrócenie przyspiesza. Zbyt niska nastawa spowoduje uktuacje
przegrzania.
[N020 - SH Kp Te] [N114 - Heat SH Kp Te] Wzmocnienie sygnału ciśnienia ssania (temperatury parowania)
[N125 - Limit Tn] [N124 - Heat limit Tn] Ograniczenie czasu całkowania dla MOP/LOP/minS4
[N123 - Limit Kp] [N122 - Heat limit Kp] Ograniczenie współczynnika proporcjonalności dla MOP/LOP/minS4
[N017 - startup OD] [N105 - Heat startup OD] Stopień otwarcia podczas rozruchu
[N107 - SH xed
setpoint]
[N106 - Heat SH xed
setpoint]
Stała nastawa przegrzania.
Ostrzeżenie: Z uwagi na groźbę zalewania sprężarki, nastawa nie powinna być
niższa niż ok. 2-4 K. Zaleca się utrzymanie nadwyżki 2 K względem przegrzania
krytycznego.
[N116 - SH ref. delta
temp. factor]
[N115 - Heat SH ref.
delta temp. factor]
Współczynnik różnicy temperatury – dotyczy tylko regulacji przegrzania wg
różnicy temperatury.
Przegrzanie odniesienia jest ułamkiem ze średniej różnicy temperatury S3 i Te.
Obliczane jest jako (S3-Te) * współczynnik
[N015 - Startup
time]
[N119 - SH close
setpoint]
[N104 - min.
startup time]
[N112 - Heat startup
time]
[N118 - Heat SH close
setpoint]
[N103 - Heat min.
startup time]
Maksymalny czas, przez który przegrzanie może być regulowane w trybie
rozruchowym
Przegrzanie krytyczne, poniżej którego zawór ma się szybko przymknąć.
Minimalny czas, przez który przegrzanie jest regulowane w trybie
rozruchowym
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 58
Page 59

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
23.0 Praca w trybie
awaryjnym
Regulacja przegrzania
w trybie awaryjnym
Regulacja temperatury
w trybie awaryjnym
W przypadku błędu czujnika regulator wchodzi w awaryjny tryb pracy („safe mode”),
w którym stopień otwarcie zaworu wynika z poniższych zasad.
Użytkownik może odczytać rodzaj awarii parametrem U118 (Status pracy).
Konguracja Opis
Brak sygnału dla regulatora
przegrzania.
Regulacja przegrzania wymaga
sygnałów Pe i S2, toteż jeśli któryś
z nich nie dociera do regulatora,
nie może on sterować zaworem
adekwatnie do bieżącego przegrzania.
Parametr Funkcja Opis
N143
N145
Konguracja Opis
Błąd czujnika termostatu.
Do regulacji temperatury środowiska
chłodzonego potrzeba sygnału
wybranego parametrem R015
(Wybór czujnika), toteż jeśli nie
dociera on do regulatora, nie może
on realizować funkcji termostatu
adekwatnie do rzeczywistej
temperatury.
Reakcja na błąd czujnika
przegrzania
Stały stopień otwarcia
w trybie awaryjnym
Użytkownik może przy użyciu parametru N143 (Reakcja na błąd czujnika przegrzania)
wybrać następujące opcje regulacji w trybie awaryjnym.
o Stop: wymuszone zamknięcie zaworu, regulacja wyłączona (domyślnie)
o Stały stopień otwarcia: zawór w nastawionym położeniu (awaryjny stopień otwarcia),
urządzenie chłodnicze kontynuuje pracę
o Średni stopień otwarcia: stały stopień otwarcia wyliczony jako wartość średnia na
bazie ostatniej godziny, urządzenie chłodnicze kontynuuje pracę
0 = Stop, 1 = Stały stopień otwarcia, 2 = Średni stopień otwarcia
Jeśli N143 = 1, nastawić stopień otwarcia w %
Użytkownik może przy użyciu parametru N144 (Reakcja na błąd czujnika termostatu)
wybrać następujące opcje regulacji w trybie awaryjnym..
o Stop: wymuszone zamknięcie zaworu, regulacja wyłączona (domyślnie)
o Stały stopień otwarcia: zawór w nastawionym położeniu (awaryjny stopień otwarcia),
urządzenie chłodnicze kontynuuje pracę
o Średni czas pracy: termostat włącza się i wyłącza zgodnie z uśrednionymi
dotychczasowymi czasami pracy i postoju.
• Termostat modulowany (MTR) bierze pod uwagę uśredniony stopień otwarcia
zaworu, zredukowany do 70%.
Uwaga:
Średni stopień otwarcia zaworu
(N138) wyliczany jest w czasie
aktywnej regulacji przegrzania /
temperatury i zapisywany
w pamięci EEPROM. Zapis ten
uaktualnia się co 3 godziny i nie
ulega skasowaniu przy powrocie
do ustawień fabrycznych.
Parametr Funkcja Opis
N144
N145
Konguracja Opis
Błąd czujników termostatu
i przegrzania – kombinacja
powyższych przypadków.
Reakcja na błąd czujnika
termostatu
Stały stopień otwarcia
w trybie awaryjnym
0 = Stop, 1 = Stały stopień otwarcia, 2 = Średni czas pracy
Jeśli N144 = 1, nastawić stopień otwarcia w %
Istnieje tylko jedna reakcja, której użytkownik nie może zmienić:
Stop: wymuszone zamknięcie zaworu (domyślnie)
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 59
Page 60

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
24.0 Tryb serwisowy Tryb serwisowy ustanowiono w celu umożliwienia łatwego sterowania zaworem na potrzeby
diagnostyki i serwisowania. Nie ma tu żadnej automatycznej regulacji, ani zabezpieczeń. Użytkownik
może po prostu otwierać i zamykać zawór korzystając z przycisków panelu sterującego MMIGRS2.
Widok serwisowy
Uwaga:
Obsługa trybu
serwisowego odbywa się
tylko z wykorzystaniem
panelu MMIGRS2. Nie jest
możliwa w programie
KoolProg.
Nazwa regulatora
Bieżąca liczba kroków
Rodzaj zaworu
Szybkość
Natężenie prądu (szczytowe, mA)
Całkowita liczba kroków
W górę: Podwyższenie żądanej liczby kroków
Wyjście: Opuszczenie trybu serwisowego
Pomoc
Żądana
liczba
kroków
Uwaga:
Wyjście z trybu
serwisowego następuje
po wciśnięciu klawisza
„Wyjście” („Esc”)
i potwierdzeniu opcją „yes”.
Prawo, lewo: Przejście do listy alarmów,
statusu, informacji o regulatorze
Enter – krótko: Edycja żądanej pozycji
zaworu / zatwierdzenie zmiany
Enter – przez 2 sekundy:
Zmiana rodzaju zaworu
W górę i w dół – jednocześnie: Ustawienie
liczby kroków na 0
TW tym trybie występuje tylko widok podstawowy i nie ma żadnej struktury menu.
Wszelkie funkcje obsługuje się wymienionymi powyżej klawiszami panelu MMIGRS2.
Wejście w tryb serwisowy
Przejście od normalnej pracy urządzenia do trybu serwisowego wymaga od użytkownika
przestawienia w menu parametru B105 (Wejście w tryb serwisowy) na „1”. Po zatwierdzeniu
tej zmiany regulator uruchomi się w trybie serwisowym.
Wybór rodzaju zaworu
W trybie serwisowym użytkownik musi wybrać rodzaj zaworu, o ile nie zostało to wykonane
dotychczas. Brak tej konguracji sygnalizuje komunikat alarmowy („No valve selected”).
Przycisk „Enter” daje dostęp do parametru I067 (Konguracja zaworu). Użytkownik może teraz
przejrzeć dostępne opcje klawiszami kierunkowymi „Góra” i „Dół” oraz zatwierdzić wybór zaworu
klawiszem „Enter”. Wybranie opcji „Zawór użytkownika” daje możliwość nastawienia parametrów
konguracji zaworu.
Sterowanie zaworem
Przyciskanie na panelu MMIGRS2 klawisza „W górę” powoduje zmianę położenia zaworu
w kierunku większego otwarcia, zaś „W dół” w kierunku zamykania.
Zawór zmienia położenie dopóki dany klawisz jest przyciśnięty i zatrzymuje się
po zwolnieniu przycisku.
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 60
Page 61

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
25.0 Alarmy
25.1 Działanie po
wystąpieniu alarmu
Sygnalizacja LED
Pojawienie się alarmu wywołuje następujące reakcje:
• aktywację przekaźnika alarmowego;
• wyświetlenie symbolu i kodu alarmu;
Na jednostkach wyposażonych w wyświetlacze LCD pojawi się lista aktywnych alarmów
z odpowiednim opisem.
Reset alarmów następuje automatycznie, jak tylko znikną ich przyczyny. W przeciwnym przypadku
użytkownik musi przejść procedurę kasowania alarmu – również po ustaniu sytuacji alarmowej.
Po wyeliminowaniu alarmu dezaktywuje się przekaźnik alarmowy a kod alarmu znika z wyświetlacza.
(A) Dwie diody LED dla statusu pracy
• ciągły zielony = zasilanie włączone
• migający zielony = przesył danych / inicjacja
• migający czerwony = alarm / błąd
(B) Dwie diody LED dla stanu zaworu
• migający czerwony = zawór się zamyka
• ciągły czerwony = zawór całkowicie zamknięty
• migający zielony = zawór się otwiera
• ciągły zielony = zawór całkowicie otwarty
• migający zielony i czerwony = alarm związany
z zaworem
(A)
(B)
25.2 Alarm o spadku
wydajności
25.3 Alarm o niewłaściwym
przegrzaniu
Alarm zbyt niskiego
przegrzania
Brak wydajności zaworu
Alarm o utracie wydajności może stanowić wczesne ostrzeżenie o zablokowanym skraplaczu, wycieku
czynnika bądź zbyt małym zaworze rozprężnym. Możliwą przyczyną jest też zacięcie się zaworu na
niskim stopniu otwarcia. Sytuację, w której układ musi przez dłuższy czas pracować z maksymalnie
otwartym zaworem uważa się za nienormalną.
Alarm o spadku wydajności załącza się, jeśli przez 90% czasu kontrolnego stopień otwarcia zaworu
przekracza wartość maksymalną pomniejszoną o 5%. Dezaktywacja alarmu i reset licznika czasu
następuje, gdy stopień otwarcia zaworu jest niższy od wartości maksymalnej pomniejszonej o 5%
przez 88% czasu kontrolnego, albo po wyłączeniu regulacji.
Uwaga: Ten alarm jest też aktywny w przypadku obejścia gorących par.
Parametr Funkcja Opis
A112 Zwłoka alarmu o spadku wydajności,
w minutach
Czas kontrolny dla wykrycia utraty wydajności przez zawór.
Nastawienie tego czasu na 0 skutkuje wyłączeniem funkcji.
Aktywacja i dezaktywacja alarmu o zbyt wysokim lub niskim przegrzaniu wymaga skongurowania
następujących parametrów.
Parametr Opis
A988 – Wysokie przegrzanie Szczegóły zamieszczono w tabeli alarmów i błędów
A108 – zwłoka alarmu wysokiego
przegrzania
A998 – różnica łączeń dla alarmu
niskiego przegrzania
Czas kontrolny dla wykrycia wysokiego przegrzania.
Nastawienie tego czasu na 0 skutkuje wyłączeniem funkcji.
Wartość odejmowana od przegrzania odniesienia dla uzyskania wartości przegrzania
uznanego za zbyt niskie:
Dolny próg alarmu przegrzania = przegrzanie odniesienia – różnica łączeń.
Jeśli obliczony w ten sposób dolny próg wypadnie poniżej przegrzania krytycznego, to
próg alarmowy = przegrzanie krytyczne. Zatem próg ten nie jest niższy niż 2 K.
Alarm zbyt wysokiego
przegrzania
© Danfoss | DCS | 2020.10
Parametr Opis
A988 – Wysokie przegrzanie Szczegóły zamieszczono w tabeli alarmów i błędów
A108 – zwłoka alarmu wysokiego
przegrzania
A109 – różnica łączeń dla alarmu
wysokiego przegrzania
Czas kontrolny dla wykrycia wysokiego przegrzania.
Nastawienie tego czasu na 0 skutkuje wyłączeniem funkcji.
Wartość dodawana do przegrzania odniesienia dla uzyskania wartości przegrzania
uznanego za zbyt wysokie:
Górny próg alarmu przegrzania = przegrzanie odniesienia + różnica łączeń.
DKRCC.PD.RS0.A4.49 | 61
Page 62

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
26.0 Tabela alarmów
i błędów
Etykieta
Nr parametru
MODbus (PNU)
Nr bitu
Opis alarmu
Konsekwencje
Powód (Jak
alarm jest
załączany)
BŁĘDY KONFIGURACJI
E101 1901 9 Błąd konguracji Wstrzymana praca
E011 1901 1 Nie wybrano
czynnika
chłodniczego
E112 1903 12 AI5 niedostępne
w tym modelu
E113 1903 13 AI3 niedostępne
w tym modelu
E120 1903 4 DI3 niedostępne
w tym modelu
E110 1903 10 Przesunięcie
temperatury
niedostępne w tym
modelu
E111 1903 11 MODbus
niedostępny w tym
modelu
E104 1902 3 Przegrzanie
odniesienia za
blisko krytycznego
E105 1902 4 Zbyt bliskie
nastawy MOP i LOP
E129 1902 5 Brak czujnika S4 Wstrzymana praca
E106 1902 6 Brak czujnika S3 Wstrzymana praca
E107 1902 7 Przegrzanie min.
powyżej maks.
E108 1903 8 Stopień otwarcia
min. powyżej maks.
E109 1903 9 Brak przetwornika
ciśnienia Pc
E125 1903 4 AI5 nie może
współpracować
z czujnikiem AKS
E132 1904 9 Brak czujnika S2 Wstrzymana praca
E133 1904 10 Brak przetwornika
ciśnienia Pe
E134 1904 11 Błąd konguracji
zewnętrznego
sygnału odniesienia
automatyczna
Wstrzymana praca
automatyczna
Wstrzymana praca
automatyczna
Wstrzymana praca
automatyczna
Wstrzymana praca
automatyczna
Wstrzymana praca
automatyczna
Wstrzymana praca
automatyczna
Wstrzymana praca
automatyczna
Wstrzymana praca
automatyczna
automatyczna
automatyczna
Wstrzymana praca
automatyczna
Wstrzymana praca
automatyczna
Wstrzymana praca
automatyczna
Wstrzymana praca
automatyczna
automatyczna
Wstrzymana praca
automatyczna
Aktywny gdy:
- DI2 i DI3 mają tę samą
kongurację,
- AI1 i AI5 mają tę samą
kongurację
Brak nastawy O030 Nastawić O030 na właściwy
Konikt modelu – EKE
1A posiada 1 czujnik
temperatury
Konikt modelu – EKE
1A i 1B. Problem w EKE
1C przy Pt1000
Konikt modelu – nie
ma DI3 w EKE 1B / 1C
Konikt modelu – brak
możliwości przesunięcia
temperatury odniesienia
w EKE 1A
Konikt modelu – EKE
1A nie obsługuje
MODbus
Włączone przegrzanie
krytyczne i ustawione
za blisko wartości
odniesienia / minimalnej
Nastawy MOP i LOP
muszą się różnić o >5 K,
jeśli te funkcje są
używane
Termostat potrzebuje
sygnału S4 (lub MinS4,
jeśli jest S4)
Termostat wymaga
sygnału z czujnika
S3, a nie został on
skongurowany
Przegrzanie maks.
poniżej min.
Stopień otwarcia maks.
poniżej min.
Ograniczenie
temperatury skraplania
wymaga sygnału
z przetwornika Pc
W EKE 1C AI5 przypisano
do czujnika typu AKS
Konguracja S2 = brak Nie podano rodzaju czujnika temperatury S2
Konguracja Pe = brak Nie podano rodzaju przetwornika ciśnienia Pe
Jak
dezaktywować
alarm
Dokonać prawidłowej
konguracji
czynnik
Zmienić ustawienie na takie,
w którym nie używa się S3
ani S4
Czujnik na AI5 ustawić jako
NTC 10K
Ustawić DI3 jako niużywane EKE 1B i 1C posiadają tylko 2 DI. Ustawić O037
Nie ustawiać sygnału
zewnętrznego jako
„V->temp”, ani „mA->temp”
Nie ustawiać sygnału
zewnętrznego jako
„MODbus->temp”, ani
„MODbus->SH”; nie
ustawiać sygnału o stopniu
otwarcia zaworu przez
MODbus
Wyłączyć przegrzanie
krytyczne, albo skorygować
przegrzanie odniesienia
/ minimalne na wartość
wyższą o 0,5 K
Dezaktywować funkcje MOP
i LOP, albo rozsunąć ich
nastawy na >= 5 K
Dezaktywować funkcje
wymagające S4 lub
poprawnie skongurować
ten sygnał
Dezaktywować funkcje
wymagające S3 lub
poprawnie skongurować
ten sygnał
Ustawić maks. >= min. N010 (Przegrzanie min.) jest wyższe niż N009
Ustawić maks. >= min. I066 (Minimum otwarcia) przewyższa N032
Dezaktywować
zabezpieczenie przed
wysoką temperaturą
skraplania (HCTP),
albo skongurować
przetwornik Pc
Skongurować AI5 dla
czujnika typu NTC 10K
Skorygować nastawy Sprawdzić rodzaj zewnętrznego sygnału
Uwagi
Jeden lub więcej błędów konguracji blokują
uruchomienie. Sprawdzić inne aktywne alarmy,
żeby rozpoznać problem z konguracją.
Nie wybrano rodzaju czynnika chłodniczego.
Należy wprowadzić właściwą nastawę. Patrz
parametr O030.
EKE 1A pracuje tylko z 1 czujnikiem
temperatury na wejściu AI2. Ustawić I020
(konguracja AI1) = nieużywane
EKE 1A i 1B nie obsługują 3 czujników
temperatury. Ustawić I022 (konguracja AI5) =
nieużywane
(konguracja DI3) = nieużywane
EKE 1A nie posiada funkcji termostatu. Stąd nie
jest możliwe przesunięcie nastawy temperatury
sygnałem analogowym. Nie ustawiać O010 jako
„V->temp”, ani „mA->temp”
EKE 1A nie obsługuje MODbus. Nie ustawiać
O010 jako „MODbus->temp”, ani „MODbus->SH”
Przegrzanie odniesienia może zanadto zbliżyć
się do przegrzania krytycznego, grożąc
niestabilną pracą. Utrzymać róznicę min. 0,5 K
między minimum przegrzania odniesienia
i przegrzaniem krytycznym (N119)
Nastawy dla 2 funkcji ograniczających ciśnienie
są zbyt bliskie. Ustanowić różnicę min. 5 K
między N011 (nastawa MOP) i N141
(nastawa LOP)
Ustawiono korzystanie z temperatury S4
(medium na wylocie), a nie wybrano czujnika.
Skorygować I020 (Konguracja AI1) lub
I022 (Konguracja AI5) oraz sprawdzić I042
(Konguracja S4)
Ustawiono korzystanie z temperatury S3
(medium na dolocie), a nie wybrano czujnika.
Skorygować I020 (Konguracja AI1) lub
I022 (Konguracja AI5) oraz sprawdzić I041
(Konguracja S3)
(przegrzanie maks.)
(Maksimum otwarcia)
Ustawiono korzystanie z przetwornika Pc, a nie
wybrano go. Skorygować I022 (Konguracja
AI5) oraz sprawdzić I044 (Konguracja Pc)
EKE 1C nie obsługuje czujnika AKS na AI5.
Użyć czujnika typu NTC 10K. Skorygować I022
(Konguracja AI5)
odniesienia i jego kongurację
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 62
Page 63

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
Etykieta
Nr parametru
MODbus (PNU)
Nr bitu
Opis alarmu
Konsekwencje
Powód (Jak
alarm jest
załączany)
ALARMY / BŁĘDY CZUJNIKÓW
E024 1901 11 Błąd czujnika
temperatury
ssania S2
E025 1901 12 Błąd czujnika
temperatury
medium na
dolocie S3
E026 1901 13 Błąd czujnika
temperatury
medium na
wylocie S4
E020 1901 14 Błąd przetwornika
ciśnienia
parowania Pe
E121 1901 15 Błąd przetwornika
ciśnienia
skraplania Pc
A982 1903 6 Brak sygnału dla
termostatu
A981 1903 7 Brak sygnału
przegrzania
E019 1901 0 Alarm
zewnętrznego
sygnału
odniesienia
A999 1903 0 Niestabilny sygnał
na wejściu DI1
A998 1903 6 Niestabilny sygnał
na wejściu DI2
A983 1903 7 Niestabilny sygnał
na wejściu DI3
E102 1901 10 Przeciążenie
zasilania czujnika
E123 1904 8 Niskie napięcie
zasilania
Alarm, jeśli jest sygnał
zastępczy, albo tryb
awaryjny
Alarm, jeśli jest sygnał
zastępczy, albo tryb
awaryjny
Alarm, jeśli jest sygnał
zastępczy, albo tryb
awaryjny
Alarm, jeśli jest sygnał
zastępczy, albo tryb
awaryjny
Alarm, jeśli jest sygnał
zastępczy, albo tryb
awaryjny
Termostat w trybie
awaryjnym
Regulacja przegrzania
w trybie awaryjnym
Wyłączenie DI Niestabilność na DI,
Wyłączenie DI Niestabilność na DI,
Wyłączenie DI Niestabilność na DI,
Wstrzymana praca
automatyczna
Praca wstrzymana
(włącznik główny OFF,
silnik krokowy nie
pracuje)
Czujnik przekazuje
wartość spoza zakresu
+ hist
Jeśli czujnik jest używany,
przekazuje wartość spoza
zakresu + hist
Jeśli czujnik jest używany,
przekazuje wartość spoza
zakresu + hist
Czujnik przekazuje
wartość spoza zakresu
+ hist
Jeśli czujnik jest używany,
przekazuje wartość spoza
zakresu + hist
Przy aktywnej funkcji
termostatu nie ma
sygnału z czujnika S3
bądź S4 (w zależności od
wybranego czujnika)
Brak sygnału z Pe lub S2 Uzyskać ważny sygnał
Zewnętrzny sygnał
odniesienia poza
zakresem + hist
przełączenia ponad 10
razy na minutę
przełączenia ponad 10
razy na minutę
przełączenia ponad 10
razy na minutę
Nadmierny pobór prądu
na +5V 150mA+ lub +15V
(200mA+)
Napięcie na silniku
krokowym zaworu poniżej
16 V
Jak
dezaktywować
alarm
Sprowadzić wartość
sygnału do zakresu
Nie korzystać z S3, albo
sprowadzić wartość
sygnału do zakresu
Nie korzystać z S4, albo
sprowadzić wartość
sygnału do zakresu
Sprowadzić wartość
sygnału do zakresu
Nie korzystać z Pc, albo
sprowadzić wartość
sygnału do zakresu
Uzyskać ważny sygnał
z S3 lub S4
z Pe lub S2
Uzyskać zewnętrzny
sygnał odniesienia
mieszczący się w zakresie
Stabilny sygnał ON i OFF,
poniżej 6 przełączeń na
minutę
Stabilny sygnał ON i OFF,
poniżej 6 przełączeń na
minutę
Stabilny sygnał ON i OFF,
poniżej 6 przełączeń na
minutę
+5V poniżej 50mA oraz
+15V poniżej 30mA
Zapewnić zasilanie silnika
krokowego z napięciem
powyżej 16 V
Uwagi
Sygnał z czujnika temperatury ssania
S2 jest poza zakresem. Sprawdzić
podłączenie i I040 (Konguracja S2)
Sygnał z czujnika temperatury
medium na dolocie S3 jest poza
zakresem. Sprawdzić podłączenie i I041
(Konguracja S3)
Sygnał z czujnika temperatury
medium na wylocie S4 jest poza
zakresem. Sprawdzić podłączenie i I042
(Konguracja S4)
Sygnał z przetwornika ciśnienia
parowania Pe jest poza zakresem.
Sprawdzić podłączenie i I043
(Konguracja Pe)
Sygnał z przetwornika ciśnienia
skraplania Pc jest poza zakresem.
Sprawdzić podłączenie i I044
(Konguracja Pc)
Brak sygnału dla termostatu z powodu
błędu czujnika. Sprawdzić S3 bądź S4
Brak sygnału potrzebnego do wyliczenia
przegrzania. Sprawdzić S2 i Pe
Zewnętrzny sygnał odniesienia
lub przesunięcia nastawy nie mieści się
w zakresie. Sprawdzić podłączenie
oraz O010 (Konguracja sygnału)
i odpowiednie nastawy min./maks.
Niestabilny sygnał na wejściu DI1
(wiele przełączeń w krótkim czasie). DI1
zostanie wyłączone do czasu odzyskania
stabilności sygnału. Sprawdzić
podłączenie
Niestabilny sygnał na wejściu DI2
(wiele przełączeń w krótkim czasie). DI2
zostanie wyłączone do czasu odzyskania
stabilności sygnału. Sprawdzić
podłączenie
Niestabilny sygnał na wejściu DI3
(wiele przełączeń w krótkim czasie). DI3
zostanie wyłączone do czasu odzyskania
stabilności sygnału. Sprawdzić
podłączenie
Przeciążenie zasilania czujnika. Wyjście
ma stan OFF do czasu likwidacji
przeciążenia. Sprawdzić, czy nie ma
zwarcia na COM
Napięcie zasilania spadło poniżej
tolerowanego minimum
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 63
Page 64

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
Etykieta
Nr parametru
MODbus (PNU)
Nr bitu
Opis alarmu
Konsekwencje
Powód (Jak
alarm jest
załączany)
ALARMY / BŁĘDY ZAWORU SILNIKOWEGO
E103 1901 2 Brak konguracji
zaworu
E100 1901 8 Błąd konguracji
zaworu
E114 1903 10 Niezgodność
metody
wzbudzania
i pozycjonowania
zaworu
E115 1903 11 Za duża szybkość
ruchu zaworu
E116 1903 12 Za mała szybkość
ruchu zaworu
E117 1903 13 Za duża awaryjna
szybkość ruchu
zaworu
E118 1903 14 Za mała awaryjna
szybkość ruchu
zaworu
E119 1903 15 Za mała
początkowa
szybkość ruchu
zaworu
E126 1903 5 Zwarcie lub
przegrzany silnik
zaworu
A997 1901 5 Krytycznie niskie
napięcie baterii
A996 1901 6 Za duże napięcie
baterii
W001 1901 7 Niskie napięcie
baterii
E124 1903 3 Rozwarty obwód
silnika
Wstrzymana praca
automatyczna
Wstrzymana praca
automatyczna
Wstrzymana praca
automatyczna
Wstrzymana praca
automatyczna
Wstrzymana praca
automatyczna
Wstrzymana praca
automatyczna
Wstrzymana praca
automatyczna
Wstrzymana praca
automatyczna
Wstrzymana praca
automatyczna, silnik
będzie podejmować
próby powrotu do
pracy co 10 sekund
Wstrzymana praca
automatyczna, silnik
będzie podejmować
próby powrotu do
pracy co 10 sekund
I067 Konguracja zaworu
= brak
Jeden lub więcej błędów
konguracji zaworu
Ustawiono pełny krok
przy wymaganym
”pół-kroku”
Kombinacja metody
wzbudzania i szybkości
daje za wiele mikrokroków
na sekundę (powyżej
12800)
Kombinacja metody
wzbudzania i szybkości
daje za mało mikrokroków
na sekundę (poniżej 8)
Kombinacja metody
wzbudzania i szybkości
daje za wiele mikrokroków
na sekundę (powyżej
12800)
Kombinacja metody
wzbudzania i szybkości
daje za mało mikrokroków
na sekundę (poniżej 8)
Kombinacja metody
wzbudzania i
szybkości daje za mało
mikrokroków na sekundę
(poniżej 8)
Silnik zaworu zatrzymuje
się z powodu zbyt
wysokiej temperatury
Napięcie baterii poniżej
12 V
Napięcie baterii powyżej
27 V
Napięcie baterii poniżej
17 V
Rozwarte obwody 1 lub
2 uzwojeń silnika zaworu
ALARMY / BŁĘDY UKŁADU TRANSMISJI DANYCH
E122 1901 3 Przekroczenie
czasu
uaktualnienia
dzielonego
sygnału
E128 1901 4 Przekroczenie
czasu uaktualnienia zewnętrznego
sygnału
odniesienia
Jeśli przez MODbus W nastawionym przedziale
W nastawionym przedziale
czasu („min. update
interval”) nie dotarł jeden
lub kilka sygnałów (S2,
S3, S4, P0, Pc) dzielonych
przez magistralę CAN lub
MODbus
czasu („MODbus min.
update interval”) nie dotarł
sygnał odniesienia przez
MODbus
Jak
dezaktywować
alarm
Wybrać rodzaj zaworu z
listy opcji dla I067
Skorygować kongurację
zaworu
Jeśli wymagany jest
pełny krok, ustawić
pozycjonowanie na
pełne. Jeśli „pół-krok”,
wybrać minimum pół
kroku
Dostosować szybkość
bądź metodę wzbudzania
Dostosować szybkość
bądź metodę wzbudzania
Dostosować szybkość
bądź metodę wzbudzania
Dostosować szybkość
bądź metodę wzbudzania
Dostosować szybkość
bądź metodę
wzbudzania
Obniżenie temperatury
silnika
Napięcie baterii powyżej
12,2 V
Napięcie baterii poniżej
25 V
Napięcie baterii powyżej
17,2 V
Właściwy przepływ
prądu przez uzwojenia
silnika
Wszystkie potrzebne
sygnały uaktualniane
z właściwą
częstotliwością
Zewnętrzny sygnał
odniesienia uaktualniany
przez MODbus
z właściwą
częstotliwością
Uwagi
Brak typu zaworu. Wybrać odpowiedni
rodzaj dla parametru I067 (Konguracja
zaworu)
Pracę zaworu silnikowego blokuje jeden
lub kilka błędów. Sprawdzić inne aktywne
alarmy dla rozpoznania problemu
z konguracją zaworu
Praca jest możliwa przy nastawie I064
(Metoda wzbudzania zaworu) na „pełen
krok” i I029 (Pozycjonowanie zaworu) na
„pół kroku”. Skorygować któryś z tych
parametrów
Za dużo mikrokroków na sekundę
(powyżej 12800). Obniżyć I031 (Szybkość
zaworu) lub użyć mniej mikrokroków na
pełen krok (I064)
Za mało mikrokroków na sekundę
(poniżej 8). Zwiększyć I031 (Szybkość
zaworu) lub zwiększyć I032 (Szybkość
początkowa) lub użyć więcej
mikrokroków na pełen krok (I064)
Za dużo mikrokroków na sekundę
(powyżej 12800). Obniżyć I061 (Awaryjna
szybkość zaworu)
Za mało mikrokroków na sekundę
(poniżej 8). Podwyższyć I061 (Awaryjna
szybkość zaworu)
Za mało mikrokroków na sekundę
(poniżej 8). Zwiększyć I031 (Szybkość
zaworu) lub zwiększyć I032 (Szybkość
początkowa) lub użyć więcej
mikrokroków na pełen krok (I064)
Silnik nie jest w stanie poruszać
zaworem. Sprawdzić, czy nie ma zwarcia
na uzwojeniach silnika i czy temperatura
otoczenia nie przekracza 60°C
Napięcie baterii jest krytycznie niskie
i w razie awarii zasilania zawór się nie
zamknie. Wymienić baterię / sprawdzić
zaciski
Napięcie baterii jest za wysokie i w razie
awarii zasilania zawór się nie zamknie.
Wymienić baterię na właściwy rodzaj
(18-24 V)
Napięcie baterii jest niskie. Wymienić
baterię
Rozwarte obwody jednego lub większej
liczby uzwojeń silnika zaworu. Sprawdzić
podłączenie silnika zaworu
Brakuje sygnału regulacji / czujnika
/ odniesienia przesyłanego układem
transmisji danych. Sprawdzić połączenia
magistrali i pracę innych przyłączonych
jednostek
Brakuje sygnału odniesienia
przesyłanego przez MODbus. Sprawdzić
połączenia magistrali i pracę innych
przyłączonych jednostek
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 64
Page 65

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
Etykieta
Nr parametru
MODbus (PNU)
Nr bitu
Opis alarmu
Konsekwencje
Powód (Jak
alarm jest
załączany)
ALARMY O PRACY URZĄDZENIA
A994 1902 8 Niska temperatura
medium na wylocie S4
A991 1902 11 Wysokie ciśnienie
parowania (MOP)
A990 1902 12 Niskie ciśnienie
parowania (LOP)
A989 1902 13 Wysoka temperatura
skraplania
A988 1902 14 Duże przegrzanie Aktywne zasilanie parownika
A987 1902 15 Małe przegrzanie Aktywne zasilanie parownika
A986 1902 0 Spadek wydajności
zaworu
E135 1904 12 Błąd grzania / chłodzenia
w trybie termostatu
Aktywne zasilanie parownika
i ograniczenie minimum
temperatury S4, a przy tym
wartość S4 poniżej nastawy
minimalnej – upłynął czas
zwłoki alarmu
Aktywne zasilanie parownika
i funkcja MOP, a przy tym Te
powyżej ograniczenia MOP
– upłynął czas zwłoki alarmu
Aktywne zasilanie parownika
i funkcja LOP, a przy tym Te
poniżej ograniczenia LOP
– upłynął czas zwłoki alarmu
Aktywne zasilanie parownika
i funkcja HCTP, a przy tym Tc
powyżej ograniczenia HCTP
– upłynął czas zwłoki alarmu
i przegrzanie powyżej
ograniczenia – upłynął czas
zwłoki alarmu
i przegrzanie poniżej
ograniczenia – upłynął czas
zwłoki alarmu
Aktywne zasilanie parownika
i stopień otwarcia wyższy od
maksimum –5% dłużej niż przez
90% czasu kontrolnego
Wykorzystanie DI do
przełączania między grzaniem
i chodzeniem w trybie
termostatu
ALARMY TERMOSTATU
A993 1902 9 Wysoka temperatura Aktywny termostat i mierzona
A992 1902 10 Niska temperatura Aktywny termostat i mierzona
temperatura (S3/S4) powyżej
wartości granicznej – upłynął
czas zwłoki alarmu
temperatura (S3/S4) poniżej
wartości granicznej – upłynął
czas zwłoki alarmu
ALARM ZATRZYMANIA
W002 1902 1 Stan gotowości
(„Standby”)
Regulator zatrzymany Uruchomienie regulacji Regulator przeszedł w stan
ALARM STEROWANIA RĘCZNEGO
W003 1902 2 Sterowanie ręczne Regulator w trybie sterowania
ręcznego
Jak
dezaktywować
alarm
Wyłączenie regulacji lub
funkcji minimum S4,
albo wzrost wartości S4
powyżej nastawionego
minimum
Wyłączenie regulacji lub
funkcji MOP, albo spadek
Te poniżej nastawionego
maksimum
Wyłączenie regulacji lub
funkcji LOP, albo wzrost
Te powyżej nastawionego
minimum
Wyłączenie regulacji lub
funkcji HCTP, albo spadek
Tc poniżej nastawionego
maksimum
Wyłączenie regulacji,
albo spadek przegrzania
poniżej nastawionego
maksimum
Wyłączenie regulacji,
albo wzrost przegrzania
powyżej nastawionego
minimum
Wyłączenie regulacji,
albo stopień otwarcia
niższy od maksimum –5%
dłużej niż przez 88% czasu
kontrolnego
Nie korzystać z DI do
przełączania między
grzaniem i chodzeniem w
trybie termostatu
Wyłączenie termostatu,
albo spadek mierzonej
temperatury (S3/S4)
poniżej maksimum
Wyłączenie termostatu,
albo wzrost mierzonej
temperatury (S3/S4)
powyżej minimum
Wyłączenie sterowania
ręcznego
Uwagi
Temperatura medium
chłodzonego na wylocie jest zbyt
niska, przez zbyt długi czas
Wartość Pe / Te zbyt wysoka, przez
zbyt długi czas
Wartość Pe / Te zbyt niska, przez
zbyt długi czas
Wartość Pc / Tc zbyt wysoka, przez
zbyt długi czas
Przegrzanie jest zbyt wysokie,
przez zbyt długi czas
Przegrzanie jest zbyt niskie, przez
zbyt długi czas
Zawór pracuje niemal z maksimum
wydajności przez długi czas
Podczas pracy w trybie termostatu
nie jest dostępna funkcja
przełączania między grzaniem
i chłodzeniem
Temperatura środowiska
chłodzonego jest zbyt wysoka
przez zbyt długi czas
Temperatura środowiska
chłodzonego jest zbyt niska przez
zbyt długi czas
gotowości z powodu wyłączenia
włącznikiem głównym – parametr
R012 lub sygnał na DI = OFF
Regulator jest w trybie sterowania
ręcznego, nie ma regulacji
automatycznej, a wiele alarmów
jest wyłączonych
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 65
Page 66

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
27.0 Rozwiązywanie
problemów
ID Objawy Możliwa przyczyna / Reakcja Rozwiązanie
1 Regulacja nie
włącza się w
wybranym
trybie, np. MSS
Nie podłączone wejście cyfrowe DI z przypisaną
funkcją włącznika głównego
Błąd czujnika / przetwornika • Sprawdzić i skasować alarm
Alarmu koniktu konguracji – nie skongurowany
czujnik S2 lub nie wybrany czynnik
Alarm: Stan gotowości („Standby”),
parametr R012 = OFF
• Włączyć przekaźnik na DI
• Sprawdzić i skasować alarm
• Ustawić parametr R012 (włącznik główny) na „1”
2 Za niskie
ciśnienie ssania
3 Wyłączenie na
skutek niskiego
ciśnienia przy
włączaniu /
wyłączaniu
sprężarki
Za duży spadek ciśnienia w parowniku • Sprawdzić czynnik chłodniczy przed zaworem rozprężnym
• Czy zawór jest zainstalowany znacznie powyżej wylotu skraplacza
• Sprawdzić różnicę ciśnienia
Brak dochłodzenia przed zaworem rozprężnym • Zmniejszyć w regulatorze nastawę maksymalnego stopnia otwarcia zaworu
• Sprawdzić wydajność chłodniczą układu i porównać z wydajnością
zaworu rozprężnego
• Użyć zaworu o rozmiarze odpowiednim dla danego układu
Za duże przegrzanie w parowniku • Sprawdzić w sekcji „Duże przegrzanie”
Spadek ciśnienia w zaworze rozprężnym mniejszy
niż wymagany przez zawór
Zawór rozprężny za mały • Sprawdzić wydajność chłodniczą układu i porównać z wydajnością
Ciało obce w bloku zaworu rozprężnego • Zdemontować zawór i sprawdzić dyszę/grzybek
Zła nastawa rodzaju czynnika chłodniczego
w regulatorze
Brak czynnika chłodniczego w układzie • Napełnić układ właściwą ilością czynnika
Zły zakres pomiarowy lub rodzaj przetwornika
ciśnienia
Bardzo niska nastawa MOP • Sprawdzić nastawę MOP. Jeśli korzysta się z MODbus, sprawdzić,
Całkowicie lub częściowo oblodzony parownik • Odszronić parownik
Mały przepływ chłodzonej wody • Sprawdzić zgodność przepływu z wartością projektową
Zbyt niska temperatura chłodzonej wody • Sprawdzić nastawy temperatury z wartościami projektowymi
Brak sygnału do włączenia • Sprawdzić sygnał na wejściu cyfrowym DI i jego kongurację
Problem z rozruchem • Sprawdzić w sekcji „Problemy z rozruchem”
• Sprawdzić spadek ciśnienia w zaworze rozprężnym
• Wymienić zawór na większy
zaworu rozprężnego. W razie potrzeby wymienić zawór na większy
• Sprawdzić wybrany rodzaj zaworu na liście w menu regulatora
• Wybrać właściwy czynnik z listy w menu regulatora
• Sprawdzić układ pod kątem wycieków
• Wprowadzić poprawny zakres ciśnienia
czy sygnały są wyskalowane zgodnie z listą parametrów
4 Uderzenie
hydrauliczne
w sprężarce
(hałaśliwa praca
sprężarki lub
nietypowe
dźwięki) lub
szron na
przewodzie
ssawnym
5 Za małe
przegrzanie
Za niskie przegrzanie odniesienia • Zwiększyć przegrzanie odniesienia przez zmianę parametrów min. i maks.
Za małe przegrzanie • Upewnić się, że funkcja przegrzania krytycznego jest aktywna
Niewłaściwy pomiar przegrzania lub powolna
odpowiedź czujnika S2
Niewłaściwie nastawiony w regulatorze rodzaj
czynnika chłodniczego lub przetwornika ciśnienia
Za niska nastawa minimalnego przegrzania • Podnieść parametr minimalnego przegrzania
Zawór nie zamyka się całkowicie • Zmniejszyć stopień otwarcia zaworu lub czas wymuszonego otwarcia
Za duże otwarcie zaworu podczas rozruchu • Użyć regulacji typu P
Niedokładny pomiar przegrzania • Zamontować czujnik temperatury blisko parownika
Duży spadek ciśnienia w przewodzie ssawnym • Zainstalować przetwornik ciśnienia blisko parownika
Zawór zaciął się w pozycji otwartej • Sprawdzić montaż zaworu
Zalewanie sprężarki • Sprawdzić w sekcji „Uderzenie hydrauliczne”
© Danfoss | DCS | 2020.10
• Podnieść nastawy przegrzania krytycznego i minimalnego
• Sprawdzić też w sekcji „Za małe przegrzanie”
• Upewnić się, że czujnik S2 jest dobrze zamocowany na przewodzie
ssawnym
• Dobrze zaizolować czujnik temperatury
• Sprawdzić w poradniku instalowania rozdział o czujnikach temperatury
• Sprawdzić odnośne parametry
podczas rozruchu
• Zmniejszyć rozruchowy stopień otwarcia
• Sprawdzić w poradniku instalowania rozdział o czujnikach
DKRCC.PD.RS0.A4.49 | 66
Page 67

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
ID Objawy Możliwa przyczyna / Reakcja Rozwiązanie
6 Duże
przegrzanie
Brak dochłodzenia • Zmniejszyć w regulatorze nastawę maksymalnego stopnia otwarcia zaworu
• Sprawdzić wydajność chłodniczą układu i porównać z wydajnością
zaworu rozprężnego. Użyć zaworu o rozmiarze odpowiednim dla
danego układu
Regulator nie jest właściwie nastawiony /
dostrojony
Zły wybór rodzaju zaworu w menu regulatora lub
za mały zawór
Duże obciążenie sezonowe lub przeciążony układ • Sprawdzić czystość wymienników ciepła
• Sprawdzić w regulatorze nastawy min. i maks. przegrzania
i przyłączone czujniki
• Dostroić parametry regulacji PI
• Sprawdzić odpowiednią nastawę rodzaju zaworu bądź zainstalować
o odpowiedniej wielkości dla danego układu
• Sprawdzić przegrzanie
7 Zbyt wysokie
lub zbyt niskie
mierzone
przegrzanie
8 a. Mierzone
przegrzanie
wyższe od
wartości
odniesienia
o ponad 5 K
przez
5-10 minut
b. Mierzone
przegrzanie
jest niższe
od wartości
odniesienia
o ponad 3 K
9 Fluktuacje
przegrzania
10 Ujemne
przegrzanie
11 Przegrzanie
poza
ustawionym
zakresem lub
nie osiąga
nastawy
Zła nastawa rodzaju czujnika, czynnika
chłodniczego, przetwornika ciśnienia lub jego
zakresu
Zmieniło się obciążenie cieplne, a regulator
przegrzania zbyt wolno dostosowuje się do nowej
sytuacji
Zmieniła się wydajność sprężarki, a regulator
przegrzania zbyt wolno dostosowuje się do nowej
sytuacji
Utrata wydajności przez zawór • Sprawdzić, czy zawór jest otwarty na blisko 100% – jeśli tak, jego
Funkcja przegrzania krytycznego nie jest aktywna
bądź ma złe ustawienia
Zmieniła się wydajność sprężarki, a regulator
przegrzania zbyt agresywnie dostosowuje się do
nowej sytuacji
Zły kontakt czujnika S2 z przewodem ssawnym • Zwerykować sposób montażu czujnika temperatury
Szybka zmiana obciążenia i temperatury otoczenia • Poczekać na ustabilizowanie się warunków pracy i sprawdzić ponownie
Do zaworu rozprężnego docierają pęcherzyki pary • Zapewnić stabilne dochłodzenie
Za duże wzmocnienie Kp i wartość KpTe • Zmniejszyć wzmocnienie Kp o 20%, wydłużyć czas całkowania Tn
Zła nastawa rodzaju czujnika, czynnika
chłodniczego, przetwornika ciśnienia
lub jego zakresu
Niskie ciśnienie ssania podczas rozruchu
z powodu niskiej temperatury otoczenia
Układ nie pracuje • Skontrolować układ
Zła nastawa rodzaju zaworu lub jego parametrów • Sprawdzić rodzaj zaworu i jego kongurację
Za mało czynnika chłodniczego • Napełnić układ właściwą ilością czynnika
Za mały zawór rozprężny • W razie potrzeby wymienić zawór na większy
Gubienie kroków przez zawór • Wzbudzać silnik krokowy z zalecaną szybkością
• Sprawdzić odnośne nastawy
• W przypadku przesunięcia wartości czujnika temperatury lub
przetwornika ciśnienia, dokonać stosownej kompensacji
• Zawsze należy stosować dokładne przetworniki ciśnienia
• Czas całkowania Tn można skrócić o 20%, a wzmocnienie Kp zwiększyć
o 20%, trzeba następnie zwrócić uwagę, czy nie pojawiają się oscylacje
stopnia otwarcia lub ciśnienia Pe
• Za kompensację zmian pracy sprężarki odpowiada wartość KpTe.
Można ją zwiększyć o 20%
wydajność jest za mała. Sprawdzić dochłodzenie
• Możliwy wyciek czynnika chłodniczego
• Aktywować funkcję przegrzania krytycznego i ustawić je na 2 K poniżej
minimalnego
• Za kompensację zmian pracy sprężarki odpowiada wartość KpTe.
Można ją zmniejszyć o 20%
o 20%. Jeśli uktuacje istnieją nada, zmniejszyć KpTe o 20%
• Ustawić wyższe przegrzanie odniesienia
• Sprawdzić odnośne nastawy
• Sprawdzić w sekcji „Problemy z rozruchem”
• Sprawdzić układ pod kątem wycieków
• Sprawdzić wybrany rodzaj zaworu w menu regulatora
• Gubienie kroków może wynikać ze zbyt dużej, jak i zbyt małej szybkości
• W przypadku zaworu użytkownika sprawdzić inne jego nastawy, jak
natężenie prądu, cykl roboczy, prąd zatrzymania i in.
• Skorzystać z funkcji wymuszających ruch zaworu, dokonując ustawień
odpowiednich dla danego rodzaju zaworu
• Zła nastawa rodzaju zaworu lub niewłaściwa konguracja jego
parametrów
• Podłączono przewody dłuższe niż w specykacji regulatora
• Odseparować przewód sterowania zaworem od innych przewodów
zasilających i nie grupować przewodów w wiązki
• Zacięcie zaworu lub duże opory ruchu jego elementów
• Wartość MOPD wyższa niż w specykacji zaworu
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 67
Page 68

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
ID Objawy Możliwa przyczyna / Reakcja Rozwiązanie
12 Zbyt długi czas
sprowadzania
przegrzania
do wartości
odniesienia
Za małe wzmocnienie Kp i KpTe lub długi czas
całkowania Tn
Dłuższy czas osiągania właściwego przegrzania lub
temperatury podczas rozruchu
Zła nastawa rodzaju zaworu • Sprawdzić rodzaj zaworu i jego kongurację
Zła nastawa parametrów przegrzania odniesienia • Prawidłowo nastawić przegrzanie min. i maks. i wybrać odpowiednią
• 1. Zwiększyć Kp razy 1,5
• 2. Obniżyć Tn o 25%
• W razie potrzeby powtarzać kroki 1 i 2
• Prowadzić rozruch z regulacją typu P i zwiększyć rozruchowy stopień
otwarcia
• Jeśli po minucie od rozruchu przegrzanie jest wyższe od wartości
odniesienia o 4 K, rozruchowy stopień otwarcia można zwiększyć o 20%
metodę regulacji – wg MSS / Obciążenia / Stałej wartości / Różnicy temp.
• Sprawdzić też w sekcjach „Duże przegrzanie” oraz „Zbyt wysokie lub
zbyt niskie mierzone przegrzanie”
13 Problemy
z rozruchem
14 Problem
z rozruchem po
odszranianiu
15 Brak możliwości
utrzymania
temperatury
medium
chłodzonego
16 Pęcherzyki
pary w zaworze
Wyłączenie podczas rozruchu z powodu niskiego
ciśnienia
Brak synchronizacji sygnałów • Upewnić się o synchronizacji sygnału włącznika głównego i startu
Wysokie przegrzanie po rozruchu • Sprawdzić w sekcji „Zbyt wysokie lub zbyt niskie mierzone przegrzanie”
Wyłączenie z powodu niskiego ciśnienia • Skorzystać z sekwencji odszraniania w regulatorze EKE
Brak dochłodzenia przed zaworem rozprężnym • Ograniczyć w regulatorze maksymalne otwarcie zaworu
Zły rodzaj czujnika temperatury lub jego montaż • Sprawdzić kongurację czujnika
Spadek ciśnienia w ltrze • Sprawdzić przegrzanie
Brak lub za mała ilość czynnika chłodniczego • Napełnić układ właściwą ilością czynnika
Obecność pęcherzyków może prowadzić do
dużego przegrzania i niskiego ciśnienia ssania
Pressure drop across lter. • Sprawdzić i wymienić ltr
• Sprawdzić podłączenie LED alarmu
• Brak synchronizacji regulatora i sprężarki – nie podłączone DI w EKE
• Złe podłączenie zaworu lub jego brak. Sprawdzić podłączenie
przewodu M12 do zaworu i do regulatora
• Sprawdzić inne elementy zainstalowane w przewodzie ssawnym
i cieczowym pod kątem blokowania przepływu
• Skorzystać z funkcji LOP podczas rozruchu
sprężarki; dopuszcza się zwłokę 2 sekund
• Skorzystać z funkcji LOP
• Prowadzić rozruch z regulacją typu P i wydłużyć czas rozruchu
• Sprawdzić poprawność sygnału ze sterownika
• Sprawdzić wydajność chłodniczą układu i porównać z wydajnością
zaworu rozprężnego. Użyć zaworu o rozmiarze odpowiednim dla
danego układu
• Sprawdzić w sekcjach „Duże przegrzanie” i „Niskie ciśnienie ssania”
• Sprawdzić układ pod kątem wycieków
• Jeśli zawór zainstalowano znacznie powyżej wylotu ze skraplacza,
sprawdzić różnicę ciśnienia
• Użyć zaworu o odpowiedniej wielkości
• Sprawdzić też w sekcjach „Duże przegrzanie” i „Za niskie ciśnienie ssania”
17 Zawór
krokowy
otwiera /
zamyka się
zbyt wolno
17 Maksymalny
stopień
otwarcia
zaworu przez
dłuższy czas
Zła nastawa rodzaju zaworu • Skongurować odpowiedni zawór
Nieprawidłowa instalacja zaworu • Sprawdzić i poprawić sposób zamontowania zaworu i podłączenia
Wyższa wartość MOPD niż w specykacji zaworu • Sprawdzić w specykacji zaworu i wybrać odpowiedni zawór
Sprawdzić nastawę szybkości zaworu • Wzbudzać silnik krokowy z zalecaną szybkością
Brak wydajności chłodniczej • Sprawdzić wydajność chłodniczą układu. Sprawdzić też w sekcji
Za niskie ciśnienie skraplania • Sprawdzić temperaturę otoczenia
Zabrudzony ltr odwadniacz • Wymienić ltr odwadniacz
Pęcherzyki pary w przewodzie cieczowym
z powodu za małej ilości czynnika
Zła konguracja zaworu • Zmienić nastawy na odpowiednie dla zainstalowanego zaworu
Zła konguracja przetwornika ciśnienia • Skorygować zakres i rodzaj przetwornika ciśnienia
Zła nastawa rodzaju czynnika chłodniczego • Wybrać właściwy czynnik w menu regulatora
© Danfoss | DCS | 2020.10
elektryczne
• Zbyt duża, jak i zbyt mała szybkość może skutkować gubieniem kroków
przez zawór
• W przypadku zaworu użytkownika sprawdzić inne jego nastawy, jak
natężenie prądu, cykl roboczy, prąd zatrzymania i in.
„Za mały zawór rozprężny”
• Wyregulować sterownik skraplacza
• Sprawdzić w sekcji „Pęcherzyki pary w zaworze”
DKRCC.PD.RS0.A4.49 | 68
Page 69

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
ID Objawy Możliwa przyczyna / Reakcja Rozwiązanie
18 Migotanie
/ oscylacje
położenia
zaworu
Za duże wzmocnienie (Kp i KpTe) lub za krótki czas
całkowania (Tn)
Zły kontakt termiczny czujnika S2 • Sprawdzić sposób montażu czujnika S2. W poradniku instalowania
Fluktuacje sygnału przegrzania odniesienia na
wejściu AI
Fluktuacje sygnału ciśnienia • Sprawdzić w sekcji „Fluktuacje sygnału ciśnienia”
Fluktuacje przegrzania • Sprawdzić w sekcji „Fluktuacje przegrzania”
• 1. Zmniejszyć Kp razy 1,5
• 2. Zwiększyć Tn o 25%
• W razie potrzeby powtarzać kroki 1 i 2
sprawdzić rozdział o czujnikach
• Sprawdzić jakość sygnału na wejściu AI
19 Niestabilny
stopień
otwarcia
w trybie
sterownika
zaworu
20 Wewnętrzny
przeciek w
zaworze
21 Zawór nie
zmienia
położenia
Fluktuacje sygnału na wejściu analogowym AI • Sprawdzić jakość sygnału na wejściu AI
• Skorzystać z funkcji Strefa nieczułości zaworu
Zła nastawa rodzaju zaworu • Sprawdzić rodzaj zaworu i jego kongurację
Gubienie kroków przez zawór silnikowy • Wyłączyć i włączyć regulator
• Aktywować funkcję przeciw gubieniu kroków, czyli wymuszone
sterowanie z konguracją odpowiednią dla zainstalowanego zaworu
• Wzbudzać silnik krokowy z zalecaną szybkością
• Zbyt duża, jak i zbyt mała szybkość może skutkować gubieniem
kroków przez zawór
• Podłączono przewody dłuższe niż w specykacji regulatora
• Odseparować przewód sterowania zaworem od innych
przewodów zasilających i nie grupować przewodów w wiązki
• Zacięcie zaworu lub duże opory ruchu jego elementów
• Wartość MOPD wyższa niż w specykacji zaworu
Wyznaczono strefę nieczułości zaworu • Sprawdzić parametr w rozdziale „Zawory z silnikami krokowymi”
Obluzowane lub niewłaściwe podłączenie
przewodu M12
Zmieniona konguracja • Sprawdzić kongurację zaworu
Niewłaściwe napięcie zasilania regulatora • Sprawdzić źródło zasilania i zmierzyć napięcie wejściowe regulatora
Zablokowany zawór • Sprawdzić sposób zainstalowania zaworu
Silnik zaworu uszkodzony, jego rezystancja różni się
znacznie od wartości w specykacji zaworu
• Zapewnić poprawne i pewne podłączenie przewodów do zacisków
regulatora EKE.
• Sprawdź także rozdział „Zawór działa w przeciwnym kierunku”.
• Sprawdzić stan parametru R012 ON/OFF i wejścia DI
• Jeśli sygnał przychodzi przez AI lub MODbus, sprawdzić jego
poprawność
• Sprawdzić, czy zawór nie jest zabrudzony
• Sprawdzić rezystancję silnika na każdym uzwojeniu
• Upewnić się co do tolerancji na długość przewodu i temperaturę
• Wymienić zawór
22 Zawór zmienia
położenie w
przeciwnym
kierunku
23 Wymuszone
zamknięcie
zaworu
Złe podłączenie przewodu M12 do regulatora • Sprawdzić kolory podłączeń w poradniku instalowania
Złe podłączenie przewodu przedłużającego do
przewodu sterowania zaworem
Regulator EKE przeprowadza kalibrację zaworu
w ramach normalnej procedury w następujących
sytuacjach
a. podczas nastawiania rodzaju zaworu
b. gdy aktywna jest funkcja wymuszonego
sterowania i ma nastawę całkowitego zamknięcia
lub gdy naliczanie czasu wymuszonego sterowania
ma wartość ON
c. po wyłączeniu regulacji na skutek alarmu bądź błędu
d. jeśli wejścia DI użyto w roli włącznika głównego
i jego sygnał ma wartość OFF
© Danfoss | DCS | 2020.10
• Dla zaworów innych rm sprawdzić poprawne podłączenie u dostawcy
• Sprawdzić kolory podłączeń w poradniku instalowania
• Normalna praca
DKRCC.PD.RS0.A4.49 | 69
Page 70

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
ID Objawy Możliwa przyczyna / Reakcja Rozwiązanie
24 Fluktuacje sygnału
ciśnienia
25 Wyłączenie sprężarki
przez zabezpieczenie
termiczne (funkcja
MOP nie pracuje lub
nieskuteczna)
26 Nie działa
zabezpieczenie LOP
27 Regulator w trybie
awaryjnym (sprawdzić
stan LED lub
wyświetlacza)
28 Regulator się zawiesił,
nic się nie dzieje
29 Brak transmisji danych
(sygnalizowany przez
diody LED)
Zmiana obciążenia układu • Obserwować pracę układu po zmianie obciążenia
Wadliwy przetwornik ciśnienia • Wymienić przetwornik ciśnienia
Pęcherzyki pary w przewodzie cieczowym • Sprawdzić w sekcji „Pęcherzyki pary w zaworze”
Funkcje MOP nie jest aktywna lub źle
skongurowana
Zmiana warunków roboczych • Obserwować pracę układu po zmianie warunków
Jeśli przez pewien czas utrzymuje się zarówno
małe przegrzanie, jak i niskie ciśnienie ssania,
funkcja LOP jest nieaktywna
Radykalna zmiana warunków roboczych • Regulator potrzebuje czasu na dostrojenie się do nowego stanu
Wewnętrzny błąd programowy regulatora
(EEPROM)
Poluzowane przewody • Sprawdzić podłączenia do zacisków regulatora EKE
Niewłaściwe napięcie zasilania regulatora • Sprawdzić źródło zasilania i zmierzyć napięcie na wejściu regulatora
Złe ustawienia MODbus • Sprawdzić adres MODbus, prędkość transmisji, protokół
Obluzowane przewody lub brak zakończenia
magistrali
Sprawdzić zasilanie regulatora EKE • Jeśli wyłączone, włączyć regulator
• Sprawdzić nastawy parametrów dla funkcji MOP
• Regulator potrzebuje czasu na dostrojenie się do nowego stanu
ustalonego
• Sprawdzić warunki robocze i nastawy
ustalonego
• Wyłączyć i włączyć regulator. Jeśli to nie pomoże, należy wymienić
regulator
• Wyłączyć i włączyć regulator, obserwować diody LED. Jeśli żadna
dioda nie zaświeci, należy wymienić regulator
• Regulatory EKE obsługują tylko MODbus RS 485 RTU; nie obsługują
konwencji Modicon
• Sprawdzić połączenia sieci MODbus i zakończenia magistrali
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 70
Page 71

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
Dodatek 1 Skróty i oznaczenia
Dodatek 1
Skróty i oznaczenia
Pełna nazwa Skrót / symbol
Sprężarka Comp.
Wydajność cap
Regulator / sterownik cont
Rzeczywisty act
Temperatura na wylocie z parownika S2
Temperatura dolotowa medium chłodzonego S3
Temperatura wylotowa medium chłodzonego S4
Temperatura nasycenia w parowniku (temperatura parowania) Te / T0
Ciśnienie w parowniku Pe / P0
Temperatura nasycenia w skraplaczu (temperatura skraplania) T
Ciśnienie w skraplaczu Pc
Współczynnik proporcjonalności / wzmocnienie Kp
Czas całkowania Tn
Współczynnik proporcjonalności dla temperatury nasycenia K pTe
Stopień otwarcia zaworu OD
Przegrzanie SH
Minimum Min.
Maksimum Max. / Maks.
Wartość odniesienia Ref.
Temperatura Temp.
Współczynnik Fac.
Oscylacje Osc.
Skraplacz Cond.
Sprzężenie w przód FF
Nastawa Sp.
Ratiometryczny Ratio.
Zewnętrzny Ext.
Adres Adr.
Impulsy na sekundę PPS
Krok Stp
Sygnalizacja wycieku LOC
Różnica temperatury medium chłodzonego
i temperatury parowania
Maksymalne ciśnienie robocze MOP
Minimalny sygnał stabilny / minimalne stabilne przegrzanie MSS
Numer parametru PNU
c
ΔTm
Dodatek 2
Ogólne porównanie
przetworników ciśnienia AKS
i NSK
© Danfoss | DCS | 2020.10
Ogólne porównanie AKS NSK
Dokładność w zakresie kompensacji temperatury (0 - 80°C) ± 1% > ± 2.5%
Kompatybilność elektromagnetyczna (EMC) * * * * * * * *
Niezawodność / Solidność * * * * * * * *
Elastyczność / Opcje podłączenia * * * * * *
Długość przewodu * * * * * *
* * * * * oznacza najlepszy, zaś
* oznacza najgorszy.
DKRCC.PD.RS0.A4.49 | 71
Page 72

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
Dodatek 3
Nastawy panelu MMIGRS2
Dodatek 4
Wprowadzanie nowego
czynnika chłodniczego
Uwaga:
Ważne jest, aby zanim
rozpocznie się wprowadzanie
nowego rodzaju czynnika
chłodniczego, pozyskać od rmy
Danfoss odpowiednie wartości
współczynników A1, A2 i A3.
Menu BIOS (tylko panel z wyświetlaczem LCD)
Po włączeniu zasilania, jednoczesne wciśnięcie na 5 sekund klawiszy „Esc” („Wyjście”) i „Enter”
powoduje wejście do specjalnego menu BIOS. Tam można nawigować między opcjami za pomocą
przycisków „W górę” i „W dół”, zatwierdzać wybory klawiszem „Enter” oraz cofać przyciskiem „Esc”.
Menu oferuje następujące opcje:
APPLICATION: wyjście z menu BIOS i powrót do parametrów układu
DISPLAY: dostęp do ustawień wyświetlacza
CONTRAST: kontrast wyświetlacza LCD; “W lewo” = zmniejszenie, “W prawo” = zwiększenie
BRIGHTNESS: jasność wyświetlacza LCD; “W lewo” = zmniejszenie, “W prawo” = zwiększenie
POS / NEG: przełączanie między pozytywem i negatywem za pomocą klawisza „ENTER”
BUZZER: głośność i wyłączenie brzęczyka; “W górę” = zwiększenie, “W dół” = zmniejszenie
CAN: dostęp do menu konguracji układu transmisji danych CAN
NODE ID: adres urządzenia w sieci CAN; “W górę” = zwiększenie, “W dół” = zmniejszenie
BAUDRATE: prędkość transmisji danych przez CAN (od 10 K do 1 M)
Dane dla większości popularnych czynników chłodniczych zakodowano w pamięci regulatora i płyny
te zgrupowano na liście dostępnej parametrem O030. Jeśli danego czynnika brakuje na tej liście,
należy wybrać opcję „czynnik użytkownika”.
Procedura dla programu KoolProg
1. Uzyskać wartości współczynników A1, A2 i A3
2. Włącznik główny regulatora (R012) ustawić na „0”. Jeśli w roli włącznika występuje wejście DI,
ustawić je na „OFF”
3. Wybrać rodzaj czynnika (O030) jako „13”
4. Współczynniki A1, A2 i A3 wprowadzić odpowiednio jako wartości parametrów O100, O101 i O102
5. Ustawić min. i maks. temperaturę czynnika odpowiednio w parametrach O103 i O104. Jeśli brakuje
danych, należy pozostawić wartości domyślne
6. Dokonać pozostałych koniecznych ustawień
7. Przestawić włącznik główny na „1” w celu uruchomienia regulatora.
Procedura dla panelu MMIGRS2
1. Uzyskać wartości współczynników A1, A2 i A3
2. Aktywować panel wciskając klawisz
3. Wcisnąć i przytrzymać klawisz „Enter”
4. Wprowadzić hasło dostępu do menu głównego
5. Spośród opcji „Start / Stop” wybrać wyłączenie włącznika głównego („OFF”)
6. Powrócić do menu głównego przyciskiem „Escape”
7. Przejść do menu podstawowych parametrów regulacji „Control Basic”
8. Wybrać rodzaj czynnika („Refrigerant type”) z menu jako „Czynnik użytkownika” („User dened”)
9. Współczynniki A1, A2 i A3 wprowadzić odpowiednio jako wartości parametrów O100, O101 i O102
10. Ustawić min. i maks. temperaturę czynnika odpowiednio w parametrach O103 i O104. Jeśli brakuje
danych, należy pozostawić wartości domyślne
11. Dokonać pozostałych koniecznych ustawień
12. Przestawić włącznik główny na „ON” w celu uruchomienia regulatora
12. Set main switch to ON enabling the controller to start running.
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 72
Page 73

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
Dodatek 5
Palne czynniki chłodnicze
W przypadku urządzeń z zaworami ETS Colibri® oraz z palnymi czynnikami chłodniczymi zaleca się
zainstalować bezpiecznik o wytrzymałości 2,5 A na każde uzwojenie silnika, zgodnie z IEC 60127.
Bezpiecznik
Danfoss
80G8239.10
Poza strefą ATEX
Strefa ATEX
Dodatek 6
Przywracanie nastaw
fabrycznych
Przywrócenie nastaw fabrycznych umożliwia parametr B007 „Wartości domyślne”, który po włączeniu
zasilania i przywróceniu ustawień fabrycznych powróci do wartości „0”. Niektóre parametry związane
z transmisją danych, wybór języka, historia wyłączeń i załączeń termostatu nie ulegną resetowi.
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 73
Page 74

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
Dodatek 7
Przesterowanie
Czas blokady
przesterowania
Funkcja przesterowania aktywuje się po przekroczeniu progowego stopnia otwarcia. Wtedy zawór ulega
przesterowaniu, kiedy tylko nastąpi całkowite zamknięcie. Liczba dodatkowych kroków wynika z wartości
parametru I072 „Overdrive” i wyskalowana jest w procentach pełnego otwarcia. Parametr I073 „Próg
aktywacji przesterowania” decyduje o stopniu otwarcia umożliwiającym przesterowanie przy najbliższym
zamknięciu zaworu i też jest wyrażony w procentach pełnego otwarcia.
Przesterowanie zaworu po całkowitym zamknięciu służy kompensacji zgubionych kroków i odbywa
się przez wykonanie dodatkowych kroków, zapewniających rzeczywiste pełne zamknięcie. Zbyt częste
przesterowanie może jednak prowadzić do przyspieszonego zużycia zaworu. Aby temu przeciwdziałać,
warto ustawić próg aktywacji przesterowania na wyższy stopień otwarcia.
Należy zauważyć, że jeśli stopień otwarcia nigdy nie przekroczy wartości progowej, to przesterowanie nigdy
nie nastąpi, co może prowadzić do kumulowania się zgubionych kroków. Każdorazowe przesterowanie
dezaktywuje tę funkcję do chwili, kiedy znów zostanie przekroczony próg aktywacji przesterowania.
Rzeczywisty stopień otwarcia
Stopień otwarcia wyższy od progu aktywacji
Próg aktywacji
przesterowania
Danfoss
80G248.10
przesterowania – uaktywnia funkcję
przesterowania
Bez
przesterowania
Czas
Przesterowanie
Aby ograniczyć częstość operacji przesterowania zaworu, można ustawić minimalny czas od ostatniej
operacji za pomocą parametru I074 „Czas blokady przesterowania”. Domyślnie wynosi on 10 minut.
Rzeczywisty stopień otwarcia
Próg aktywacji
przesterowania
Danfoss
80G8350.10
Bez przesterowania
Przesterowanie
Czas blokady
przesterowania
Bez przesterowania
Zamknięcie początkowe Regulator wymusi początkowe zamknięcie zaworu po:
• włączeniu zasilania,
• zmianie całkowitej liczby kroków,
• zmianie sposobu wzbudzania silnika (pełen krok / „pół-krok”)
Regulator nie musi zamykać zaworu po włączeniu zasilania, jeśli ma
informację o jego pełnym zamknięciu, np. po awarii zasilania
i pomyślnym awaryjnym zamknięciu zaworu.
Działanie:
Zawór przestawia się w kierunku zamknięcia o pełną liczbę kroków
+ przesterowanie.
Przesterowanie
Rzeczywisty stopień
otwarcia
Danfoss
80G8351.10
Czas
Pełen suw
zamknięcia
Przesterowanie
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 74
Page 75

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
Chiller cool only
S3
S4
Reversible Chiller Cooling
S3
S
EK
o
Reversible Chiller Heating
Dodatek 8
A. Agregat chłodniczy
(tylko chłodzenie)
B. Układ odwracalny
(woda - powietrze)
Typowe zastosowania
S4
E
ETS Colibri®
S3
P
e
S2
EKE controller
Układ odwracalny w trybie chłodzenia
Danfoss
R64-3030.10
Danfoss
R64-3032.10
C
S4
E
S3
P
P
e
S2
ETS Colibri®
EKE
c
controller
Układ odwracalny w trybie ogrzewania
Danfoss
R64-3030.10
S4
C
S3
ETS Colibri®
C
S3
S4
E
S3
S4
P
© Danfoss | DCS | 2020.10
P
e
S2
DKRCC.PD.RS0.A4.49 | 75
Page 76

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
Air to water heat pump cooling
EK
Air to water heat pump heating
C.
Odwracalna pompa
ciepła
Pompa ciepła powietrze-woda w trybie chłodzenia
Danfoss
R64-3039.10
C
P
EKE
controller
co
e
S2
ETS Colibri®
Pompa ciepła powietrze-woda w trybie ogrzewania
E
Danfoss
R64-3036.10
E
P
EKE
E
co
controller
e
S2
ETS Colibri®
C
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 76
Page 77

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
S3
AC air handler
Cold room
Danfoss
R64-3038.10
In door Out door
S3
S2
P
e
ETS Colibri®
EKE
controller
C
E
Multi evaporator
ccc
contcccc
c
D. Klimatyzator
E. Komora chłodnicza
E
S4
P
e
S2
Komora chłodnicza
ETS Colibri®
Danfoss
R64-3040.10
C
F. Układ
© Danfoss | DCS | 2020.10
wieloparownikowy
Wnętrze budynku Otoczenie
ETS Colibri®
E
S4
P
S2
e
EKE
EKE
controller
S3
ETS Colibri®
EKE
EKE
controller
E
S2
C
Danfoss
R64-3037.10
DKRCC.PD.RS0.A4.49 | 77
Page 78

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
Dodatek 9
Parameters List
Explanations
Ostrzeżenie:
W układzie MODbus wszystkie
wartości są odczytywane
i zapisywane jako 16-bitowa
liczba całkowita. Mogą
wymagać skalowania, jak
pokazano w tabeli.
Grupa
Odniesienie
Odniesienie
Chłodzenie ON/OFF
Konguracja układu
Regulacja temperatury
Zewnętrzny sygnał
odniesienia
Kompensacja czujnika /
przetwornika
Konguracja zaworu
Nastawy zaworu
Parametr Nazwa i skrót
PNU Numer parametru
R/W - Dostępność R oznacza tylko odczyt. RW oznacza możliwość zmiany
Blokowany
włącznikiem
głównym
Domyślnie Domyślna wartość parametru (Nastawa fabryczna)
Par. min./Par. max. Zakres minimalnej i maksymalnej wartości parametru
Par. Skala Współczynnik wyskalowania wartości parametru
Parametr
R012 Main switch 3001 1 0 0 1 RW x
R102 Operation mode 3002 1 0 0 1 RW
R100 Compressor capacity % 4001 10 0 0 100 RW x x
R015 Sensor select 3004 1 0 0 1 RW
R014 Thermostatic mode 3005 1 0 0 2 RW
R101 Temperature setpoint °C 3006 1 3 -70 70 RW x
R001 Dierential K 3007 10 2 0.1 10 RW x
N100 MTR Tn 3015 1 1800 20 3600 RW x
N101 MTR Kp 3016 10 3 0.2 20 RW x
R006 Ext. ref oset max. K 3008 10 0 0.0 50 RW x
R106 Ext. ref oset min. K 3009 10 0 -50 0 RW x
R009 S2 Correction K 3010 10 0 -10 10 RW x
R010 S3 Correction K 3011 10 0 -10 10 RW x
R105 S4 Correction K 3012 10 0 -10 10 RW x
R107 Pe Correction barg 3013 10 0 -5 5 RW x
R108 Pc Correction barg 3014 10 0 -5 5 RW x
I067 Valve conguration 3132 1 0 0 32 RW
I027 Valve motor type 3133 1 0 0 1 RW x
I028 Valve drive current mA 3134 1 10 10 1000 RW
I029 Valve step positioning 3135 1 0 0 2 RW
I030 Valve total steps stp 3136 1 1 1 8000 RW
I031 Valve speed PPS 3137 1 10 10 400 RW
I032 Valve start speed % 3138 1 20 1 100 RW
I061 Valve emengency speed % 3139 1 100 50 200 RW
I062 Valve acceleration current % 3140 1 100 100 150 RW
I063 Valve acceleration time ms 3141 1 10 10 150 RW
I077 Valve holding current % 3142 1 0 0 300 RW
I064 Valve step mode 3143 1 3 0 4 RW
I065 Valve duty cycle % 3144 1 100 5 100 RW
I066 Minimum OD % 3145 1 0 0 100 RW
N032 Maximum OD % 3146 1 100 0 100 RW
I069 Valve OD during stop % 3147 1 0 0 100 RW x
I070 Start backlash % 3148 10 0 0 50 RW
I071 Compensation backlash % 3149 10 0 0 10 RW
I072 Overdrive % 3150 10 4 0 20 RW
I073 Overdrive enable OD % 3151 1 0 0 100 RW
I074 Overdrive block time min. 3152 1 10 0 1440 RW
I076 Valve excitation time
after stop
I078 Preset OD % 3155 10 50 0 100 RW
I068 Valve neutral zone % 3156 10 0.5 0 5 RW x
Uwaga: odpowiada on numerowi rejestru MODBus (MODbus adres + 1)
Jeśli dany parametr jest oznaczony jako blokowany, oznacza to, że jego wartość można zmienić tylko przy
wyłączonym włączniku głównym („Main switch” = OFF)
*1) oznacza brak przeskalowania
*10) oznacza, że odczytywana wartość jest 10 razy wyższa od rzeczywistej
Jednostka
ms 3154 1 10 0 1000 RW
PNU
Par. Skala
Domyślnie
Par. min.
Par. max.
Dostępność
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
Blokowany włącz-
nikiem głównym
EEPROM
0 = O | 1 = On
0 = SH control | 1 = Valve driver
0 = S3 | 1 = S4
0 = Not Used | 1 = CutIn/CutOut |
2 = MTR
0 = no valve | 1 = UserDef | 2 = ETS
12C | 3 = ETS 24C | 4 = ETS 25C | 5 =
ETS 50C | 6 = ETS 100C | 7 = ETS 6 | 8
= ETS 12.5 | 9 = ETS 25 | 10 = ETS 50
| 11 = ETS 100 | 12 = ETS 250 | 13 =
ETS 400 | 14 = KVS 2C | 15 = KVS 3C |
16 = KVS 5C | 17 = KVS 15 | 18 = KVS
42 | 19 = CCMT 0 | 20 = CCMT 1 | 21 =
CCMT 2 | 22 = CCMT 4 | 23 = CCMT 8
| 24 = CCMT 16 | 25 = CCMT 24 | 26 =
CCMT 30 | 27 = CCMT 42 | 28 = CCM
10 | 29 = CCM 20 | 30 = CCM 30 | 31
= CCM 40 | 32 = CTR 20
0 = Unipolar | 1 = Bipolar
0 = Fullstep | 1 = Halfstep | 2 = Auto
0 = Full | 1 = Half | 2 = 1/4 | 3 = 1/8
| 4 = 1/16
Uwagi
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 78
Page 79

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
Konguracja wejść / wyjść
Wejścia analogowe
Wejścia cyfrowe
Wyjście cyfrowe O013 DO1 conguration 3104 1 0 0 2 RW
Konguracja czujników
Konguracja czujników
Rodzaj czujnika
temperatury
Przetwornik ciśnienia
Pe i Pc
Grupa
I020 AI1 conguration 1B/1C 3098 1 0 0 2 RW
I021 AI4 conguration 1C 3099 1 0 0 2 RW
I022 AI5 conguration 1C 3100 1 0 0 2 RW
I080 AI4 conguration 1A/1B 3260 1 0 0 1 RW
O002 DI1 conguration 1B/C 3101 1 1 0 1 RW
O022 DI2 conguration 3102 1 0 0 3 RW
O037 DI3 conguration 3103 1 0 0 3 RW
I040 S2 sensor conguration 1C 3105 1 0 0 6 RW
I081 S2 sensor conguration 1B 3266 1 0 0 5 RW
I082 S2 sensor conguration 1A 3268 1 0 0 4 RW
I041 S3 sensor conguration 1C 3106 1 0 0 6 RW
I083 S3 sensor conguration 1B 3264 1 0 0 5 RW
I042 S4 sensor conguration 1C 3107 1 0 0 6 RW
I084 S4 sensor conguration 1B 3262 1 0 0 5 RW
I043 Pe transmitter
conguration 1C
I085 Pe transmitter
conguration 1B
I045 Pe ratio. low %
I046 Pe ratio high %
I047 Pe voltage low 1C V
I087 Pe voltage low 1A/1B V
I048 Pe voltage high 1C V
I088 Pe voltage high 1A/B V
I049 Pe current low mA
I050 Pe current high mA
O020 Pe transmitter min. barg
O021 Pe transmitter max. barg
I044 Pc transmitter
conguration 1C
I023 Pc ratio. low %
I024 Pc ratio high %
I025 Pc voltage low V
I026 Pc voltage high V
I038 Pc current low mA
I039 Pc current high mA
O047 Pc transmitter min. barg
O048 Pc transmitter max barg
Parametr
Jednostka
PNU
Par. Skala
Domyślnie
3108 1 0 0 14 RW
3270 1 0 0 8 RW
3109 1 10 3 97 RW
3110 1 90 3 97 RW
3111 10 0 0 10 RW
3276 10 0 0 10 RW
3112 10 10 0 10 RW
3274 10 5 0 5 RW
3113 10 4 0 20 RW
3114 10 20 0 20 RW
3115 10 -1 -1 12 RW
3116 10 12 -1 200 RW
3117 1 0 0 14 RW
3118 1 3 3 97 RW
3119 1 97 3 97 RW
3120 10 0 0 10 RW
3121 10 10 0 10 RW
3122 10 4 0 20 RW
3123 10 20 0 20 RW
3124 10 -1 -1 0 RW
3125 10 34 1 200 RW
Par. min.
Par. max.
Dostępność
Blokowany włącz-
nikiem głównym
EEPROM
0 = Not Used | 1 = S3 | 2 = S4
0 = Not Used | 1 = ExtRef | 2 = pc
0 = Not Used | 1 = S3 | 2 = S4
0 = Not Used | 1 = ExtRef
0 = Bus->Start/Stop | 1 = Main Switch
0 = Not Used | 1 = Defrost Start | 2 =
Preset OD | 3 = Heat/Cool
0 = Not Used | 1 = Defrost Start | 2 =
Preset OD | 3 = Heat/Cool
0 = Alarm | 1 = LLSV | 2 = Max. cap
0 = Not dened | 1 = EKS 221 | 2 =
ACCPBT NTC10K | 3 = MBT 153 10K | 4
= 112CP | 5 = Bus Shared | 6 = AKS
0 = Not dened | 1 = EKS 221 | 2 =
ACCPBT NTC10K | 3 = MBT 153 10K | 4
= 112CP | 5 = Bus Shared
0 = Not dened | 1 = EKS 221 | 2 =
ACCPBT NTC10K | 3 = MBT 153 10K |
4 = 112CP
0 = Not dened | 1 = EKS 221 | 2 =
ACCPBT NTC10K | 3 = MBT 153 10K | 4
= 112CP | 5 = Bus Shared | 6 = AKS
0 = Not dened | 1 = EKS 221 | 2 =
ACCPBT NTC10K | 3 = MBT 153 10K | 4
= 112CP | 5 = Bus Shared
0 = Not dened | 1 = EKS 221
| 2 = ACCPBT NTC10K | 3 = MBT 153
10K | 4 = 112CP | 5 = Bus Shared
| 6 = AKS
0 = Not dened | 1 = EKS 221 | 2 =
ACCPBT NTC10K | 3 = MBT 153 10K | 4
= 112CP | 5 = Bus Shared
0 = Not dened | 1 = AKS 32R | 2 =
ACCPBP Ratio | 3 = 112CP | 4 = OEM
Ratio | 5 = NSK | 6 = AKS 32 1-5V | 7
= OEM Voltage | 8 = Bus shared | 9 =
AKS 32 1-6V | 10 = AKS 32 0-10V | 11
= AKS 33 | 12 = XSK | 13 = ACCPBP
Current | 14 = OEM Current
0 = Not dened | 1 = AKS 32R | 2 =
ACCPBP Ratio | 3 = 112CP | 4 = OEM
Ratio | 5 = NSK | 6 = AKS 32 1-5V | 7 =
OEM Voltage | 8 = Bus shared
x
x
x
x
x
x
x
x
x
x
0 = Not dened | 1 = AKS 32R | 2 =
ACCPBP Ratio | 3 = 112CP | 4 = OEM
Ratio | 5 = NSK | 6 = AKS 32 1-5V | 7
= OEM Voltage | 8 = Bus shared | 9 =
AKS 32 1-6V | 10 = AKS 32 0-10V | 11
= AKS 33 | 12 = XSK | 13 = ACCPBP
Current | 14 = OEM Current
x
x
x
x
x
x
x
x
Uwagi
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 79
Page 80

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
Grupa
I090 Ext ref. conguration 1A 3280 1 0 0 2 RW
I089 Ext ref. conguration 1B 3278 1 0 0 6 RW
O010 Ext ref. conguration 1C 3126 1 0 0 9 RW
Zewnętrzny sygnał
odniesienia
Podstawowe parametry regulacji
Czynnik chłodniczy
Rozruch
Regulacja przegrzania
I037 Ext ref. current high mA
I036 Ext ref. current low mA
I035 Ext ref. voltage high V
I034 Ext ref voltage low V
I091 Driver reference
conguration 1B
I033 Driver reference
conguration 1C
I079 AI4 lowpass bandwidth 3257 1 5 0 5 RW
O030 Refrigerant 3017 1 0 0 49 RW
O100 Refrigerant factor A1 3018 1000 9.8 8 12 RW
O101 Refrigerant factor A2 3019 10 -2250 -3000 -1300 RW
O102 Refrigerant Factor A3 3020 10 253 210 300 RW
O103 Refrigerant min.
temperature
O104 Refrigerant max.
temperature
N102 Startup mode 3023 1 0 0 2 RW
N015 Startup time sec. 3024 1 90 1 600 RW
N104 Min. startup time sec. 3025 1 15 1 240 RW
N017 Startup OD % 3026 1 32 1 100 RW
N021 SH reference mode 3027 1 2 0 3 RW
N107 SH xed setpoint K 3028 10 7 2 40 RW
N009 SH max. K 3029 10 9 4 40 RW
N010 SH min. K 3030 10 4 2 9 RW
N005 SH Tn sec. 3031 1 90 20 900 RW
N019 SH Kp Min. 3032 10 0.6 0.1 1 RW
N004 SH Kp 3033 10 1.5 0.1 20 RW
N020 SH KpTe 3034 10 3 0 20 RW
N116 SH ref. delta temp. factor % 3035 1 65 20 100 RW
Parametr
Jednostka
°C 3021 10 -100 -100 60 RW
°C 3022 10 100 -60 100 RW
PNU
Par. Skala
Domyślnie
Par. min.
Par. max.
3127 10 20 4 20 RW
3128 10 4 0 20 RW
3129 10 10 0 10 RW
3130 10 0 0 10 RW
3282 1 0 0 2 RW x
3131 1 0 0 3 RW x
Dostępność
Blokowany włącz-
nikiem głównym
EEPROM
0 = Not Used | 1 = V->SH | 2 = V->Max
OD
0 = Not Used | 1 = V->SH | 2 = V->Max
OD | 3 = V->Temp | 4 = Modbus>SH | 5 = Modbus->Max OD | 6 =
Modbus->T
0 = Not Used | 1 = V->SH | 2 = V->Max
OD | 3 = V->Temp | 4 = Modbus->SH |
5 = Modbus->Max OD | 6 = Modbus>T. | 7 = mA->SH | 8 = mA->Max OD |
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
9 = mA->Temp
0 = Voltage to OD | 1 = Modbus to OD
| 2 = Modbus to steps
0 = Voltage to OD | 1 = Modbus to OD
| 2 = Modbus to steps | 3 = Current
to OD
0 = None | 1 = 4 Hz | 2 = 2 Hz | 3 = 1
Hz | 4 = 1/2 Hz | 5 = 1/5 Hz
0 = Undef | 1 = R12 | 2 = R22 | 3 =
R134a | 4 = R502 | 5 = R717 | 6 = R13
| 7 = R13b1 | 8 = R23 | 9 = R500 | 10
= R503 | 11 = R114 | 12 = R142b | 13
= R user | 14 = R32 | 15 = R227 | 16 =
R401A | 17 = R507 | 18 = R402A | 19 =
R404A | 20 = R407C | 21 = R407A | 22
= R407B | 23 = R410A | 24 = R170 | 25
= R290 | 26 = R600 | 27 = R600a | 28
= R744 | 29 = R1270 | 30 = R417A | 31
= R422A | 32 = R413A | 33 = R422D |
34 = R427A | 35 = R438A | 36 = R513A
| 37 = R407F | 38 = R1234ze | 39 =
R1234yf | 40 = R448A | 41 = R449A |
42 = R452A | 43 = R450A | 44 = R452B
| 45 = R454B | 46 = R1233zdE | 47 =
R1234zeZ | 48 = R449B | 49 = R407H
To be used only if O030 = 13, O100 is
Antonie constant A1
To be used only if O030 = 13, O100 is
Antonie constant A1
To be used only if O030 = 13, O100 is
Antonie constant A1
0 = Prop. Ctrl | 1 = Fix OD w prot | 2 =
Fix OD wo prot
0 = Fixed sp. | 1 = Loadap | 2 = MSS | 3
= Delta temp
Uwagi
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 80
Page 81

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
Grupa
Zaawansowane parametry regulacji
Przegrzanie krytyczne
Ograniczenie
temperatury S4
Zaawansowane nastawy
dla przegrzania
MOP / LOP (ograniczenie
ciśnienia parowania)
HCTP (ograniczenie
temperatury skraplania)
Korekta wg prędkości
sprężarki
Diagnostyka
przegrzania
Chłodzenie w trybie
awaryjnym
Nastawy dla pompy ciepła
Nastawy dla pompy
ciepła
N117 SH close function 3036 1 1 0 1 RW x
N119 SH close setpoint K 3037 10 2 -5 20 RW x
N120 SH close Tn divide 3038 1 3 1 5 RW x
N121 SH close Kp factor 3039 10 1.5 0.5 10 RW x
N126 Min. S4 mode 3042 1 0 0 1 RW x
N127 Min. S4 setpoint °C 3043 10 5 -50 60 RW x
N018 Stability 3044 10 5 0 10 RW x
N129 T0 varians factor 3045 10 0 0 1 RW x
N123 Limit Kp 3040 10 5 1 20 RW x
N125 Limit Tn sec. 3041 1 45 20 900 RW x
N130 MOP function 3046 1 0 0 1 RW x
N011 MOP setpoint °C 3047 10 0 -70 60 RW x
N140 LOP function 3048 1 0 0 1 RW x
N141 LOP setpoint °C 3049 10 -40 -90 40 RW x
N142 LOP priority mode 3050 1 0 0 1 RW x
N131 LOP max. time sec. 3051 1 120 0 600 RW x
N133 High cond. temp
protection function
N134 High cond. temp.
protection setpoint
N135 Comp. speed feed
forward Function
N136 Comp FF low cap. point % 3056 10 25 0 100 RW x
N137 Comp FF SH Tn factor 3057 1 2 1 5 RW x
N138 Average OD 4002 1 0 0 100 RW x x
N139 Estimated KpTe 4003 10 0 0 100 RW x x
N128 Average delta
temperature
N143 SH control sensor error
action
N144 Thermostatic sensor
error action
N145 Fixed OD during
emergency cooling
N112 Heat startup time sec. 3061 1 90 1 600 RW x
N103 Heat min. startup time sec. 3062 1 15 1 240 RW x
N105 Heat startup OD % 3063 1 32 1 100 RW x
N106 Heat SH xed setpoint K 3064 10 7 2 40 RW
N108 Heat SH max. K 3065 10 9 4 40 RW
N109 Heat SH min. K 3066 10 4 2 9 RW
N115 Heat SH ref. delta temp.
factor
N110 Heat SH Tn sec. 3068 1 90 20 900 RW x
N111 Heat SH Kp min. 3069 10 0.6 0.1 1 RW x
N113 Heat SH Kp 3070 10 1.5 0.1 20 RW x
N114 Heat SH KpTe 3071 10 3 0 20 RW x
N118 Heat SH close setpoint K 3072 10 2 -5 20 RW x
N124 Heat limit Tn sec. 3073 1 45 20 900 RW x
N122 Heat limit Kp 3074 10 5 1 20 RW x
Parametr
Jednostka
°C 3054 10 50 0 100 RW x
% 3060 1 0 0 100 RW x
% 3067 1 65 20 100 RW x
PNU
Par. Skala
Domyślnie
Par. min.
Par. max.
Dostępność
3053 1 0 0 1 RW x
3055 1 0 0 1 RW x
4004 10 0 0 50 RW x x
3058 1 0 0 2 RW x
3059 1 0 0 2 RW x
Blokowany włącz-
nikiem głównym
EEPROM
0 = Stop | 1 = Fixed OD | 2 = Average
0 = Stop | 1 = Fixed OD | 2 = Average
x
x
x
Uwagi
0 = O | 1 = On
0 = O | 1 = On
0 = O | 1 = On
0 = O | 1 = On
0 = O | 1 = On
0 = O | 1 = On
0 = O | 1 = On
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 81
Page 82

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
Konguracja alarmów
Grupa
Alarmy i błędy
Panel sterowniczy
MMIGRS2
Transmisja danych
CAN / MODbus
Wspólny sygnał przez
MODbus
Parametr
A100 Low Min S4 delay sec. 3081 1 60 0 1200 RW x
A101 Low Min S4 band K 3082 10 2 0 30 RW x
A001 Upper temperature
alarm
A002 Lower temperature alarm K 3084 10 3 0 40 RW x
A003 Temperature alarm delay min. 3085 1 30 0 90 RW x
A034 Battery alarm 3086 1 0 0 1 RW x
A103 MOP alarm delay sec. 3087 1 60 0 1200 RW x
A104 MOP alarm dierential K 3088 10 5 0 40 RW x
A105 LOP alarm delay sec. 3089 1 60 0 1200 RW x
A106 LOP alarm dierential K 3090 10 5 0 40 RW x
A107 Cond.temp alarm delay sec. 3091 1 120 0 1200 RW x
A113 Cond. temp. alarm
dierential
A108 High SH alarm delay sec. 3093 1 600 0 1800 RW x
A109 High SH alarm
dierential
A110 Low SH alarm delay sec. 3095 1 60 0 1200 RW x
A102 Low SH alarm dierential K 3096 10 3 0 40 RW x
A112 Lack of capacity alarm
delay
O011 Language
K004 Login timeout
K006 Backlight timeout
O005 Password daily
K002 Password service
K003 Password commission
K005 Contrast % 3163 1 40
K001 Brightness % 3164 1 80
R005 Display unit 3165 1 0
K010 Opening degree unit 3166 1 0 0 1 RW
G001 Controller adr.
G003 CAN bus min. update
interval
G004 Modbus min. update
interval
G005 Modbus baudrate
G008 Modbus mode 3171 1 1 0 2 RW x
G007 Modbus mapping 3172 1 0 0 1 RW x
G002 CAN baudrate
G012 Signal sharing Pe 3174 1 0 0 1 RW x
G013 Signal sharing Pc 3175 1 0 0 1 RW x
G014 Signal sharing S3 3176 1 0 0 1 RW x
Jednostka
K 3083 10 5 0 40 RW x
K 3092 10 5 0 40 RW x
K 3094 10 5 0 40 RW x
min. 3097 1 0 0 120 RW x
min. 3158 1 10 1 120 RW x
min. 3159 1 2 0 120 RW x
sec.
sec.
PNU
Par. Skala
Domyślnie
Par. min.
Par. max.
Dostępność
3157 1 0 0 0 RW
3160 1 100 0 999 RW x
3161 1 200 0 999 RW x
3162 1 300 0 999 RW x
3167 1 1 1 127 RW x
3168 1 5 0 20 RW x
3169 1 5 0 60 RW x
3170 1 6 0 8 RW x
3173 1 1 0 5 RW x
0
100 RW
0
100 RW
0
1 RW x 0 = METRIC | 1 = IMPERIAL
Blokowany włącz-
nikiem głównym
EEPROM
0 = O | 1 = On
0 = $ActiveLanguageList
x
x
x
0 = Percent | 1 = Step
0 = 0 | 1 = 1200 | 2 = 2400 | 3 = 4800
| 4 = 9600 | 5 = 14400 | 6 = 19200 | 7
= 28800 | 8 = 38400
0 = 8N1 | 1 = 8E1 | 2 = 8N2
0 = Operation | 1 = Setup
0 = 20k | 1 = 50k | 2 = 125k | 3 =
250k | 4 = 500k | 5 = 1M
0 = O | 1 = On
0 = O | 1 = On
0 = O | 1 = On
Uwagi
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 82
Page 83

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
Grupa główna
Konguracja układu transmisji danych
X001 Modbus Heating 4043 1 0 0 1 RW x x 0 = O | 1 = On
Sygnał z MODbus na DI
Dzielony sygnał
pomiarowy z MODbus
Status alarmów
Status zaworu
Diody LED
użytkownika
X002 Modbus preset OD 4044 1 0 0 1 RW x x 0 = O | 1 = On
X003 Modbus defrost start 4045 1 0 0 1 RW x x 0 = O | 1 = On
X004 Modbus main switch 4046 1 0 0 1 RW x x 0 = O | 1 = On
X005 Bus shared Pc barg 4047 100 0 -1 200 RW x x
X006 Bus shared Pe barg 4048 100 0 -1 200 RW x x
X007 Bus shared S2 °C 4049 10 0 -200 200 RW x x
X008 Bus shared S3 °C 4050 10 0 -200 200 RW x x
X009 Bus shared S4 °C 4051 10 0 -200 200 RW x x
X010 Bus ext. ref. 4052 10 0 -100 100 RW x x
X015 Number of active alarms 4055 1 0 0 100
X016 Alarm notication 4056 1 0 0 1
X040 Alarm status 4057 1 0 0 1
X017 Warning status 4058 1 0 0 1
X018 Error status 4059 1 0 0 1
X027 Valve current position Steps 4068 1 0 0 10000 R x x
X028 Valve target position Steps 4069 1 0 0 10000 R x x
X031 Service number of steps 4072 1 0 -32767 32767 RW x x
X037 User controls LEDs 4074 1 0 0 1 RW x x 0 = O | 1 = On
X038 Green LED pattern 4075 1 0 0 65535 RW x x
X039 Red LED pattern 4076 1 0 0 65535 RW x x
Parametr
Jednostka
PNU
Par. Skala
Domyślnie
Par. min.
Par. max.
Dostępność
R
R
R
R
R
Blokowany włącz-
nikiem głównym
EEPROM
x
x 0 = No alarms | 1 = Alarms active
x 0 = O | 1 = On
x 0 = O | 1 = On
x 0 = O | 1 = On
Uwagi
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 83
Page 84

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
Grupa główna
Tryb serwisowy
Odczyt statusu
Odczyt wejścia
cyfrowego
Sterowanie ręczne
Parametr
U118 Operation status 4005 1 0 0 20 R x x
U022 Actual SH reference K 4006 10 0 0 100 R x x
U021 Actual superheat K 4007 10 0 0 100 R
U024 Actual OD % 4008 10 0 0 100 R
U100 Actual step stp 4009 1 0 0 10000 R
U028 Actual temperature ref. K 4010 10 0 0 100 R x x
U020 S2 suction pipe °C 4011 10 -50 -50 150 R
U027 S3 media inlet °C 4012 10 -50 -50 150 R
U016 S4 media outlet °C 4013 10 -50 -50 150 R
U025 Pe evaporator barg 4014 10 0 -1 200 R
U026 Te saturated
evaporation temperature
U104 Pc condenser barg 4016 10 0 -1 200 R
U105 Tc saturated condenser
temperature
U101 Actual battery voltage V 4018 10 0 0 30 R x x
U018 Thermostat cut-in time min 4019 1 0 0 16300 R
U119 Thermostat average
cut-in time
U120 Thermostat average cut-
out time
U122 Average temperature °C 4091 10 0 0 100 R x x
U121 Average SH K 4090 10 0 0 100 R x x
U058 Liquid line solenoid valve 4026 1 0 0 1 R
U114 Alarm relay 4027 1 0 0 1 R
U007 External ref.signal V 4028 10 0 0 12 R x x
U006 External ref. signal mA 4029 10 0 0 24 R
U107 Act. ext. ref.
temperature oset
U108 Act.ext. ref. SH oset K 4031 10 0 0 40 R x x
U109 DI main switch 4032 1 0 0 1 R
U110 DI defrost start 4033 1 0 0 1 R
U111 DI preset OD 4034 1 0 0 1 R
U112 DI heating 4035 1 0 0 1 R
O018 Manual mode 4036 1 0 0 1 RW x x 0 = O | 1 = On
B101 Manual mode timeout sec. 3177 1 60 0 3600 RW x
O045 Manual OD % 4037 10 0 0 100 RW x x
B100 Manual step stp 4038 1 0 0 8000 RW x x
B104 Manual homeing 4039 1 0 0 1 RW x x 0 = O | 1 = On
B103 Manual relay DO1 4040 1 0 0 1 RW x x 0 = O | 1 = On
B007 Apply defaults 4041 1 0 0 3 RW
B105 Enter service state 3178 1 0 0 1 RW
Jednostka
PNU
Par. Skala
Domyślnie
Par. min.
Par. max.
Dostępność
Blokowany włącz-
nikiem głównym
°C 4015 10 0 0 100 R
°C 4017 10 0 0 100 R
min 4020 1 15 0 16300 R x x
min 4021 1 15 0 16300 R x x
K 4030 10 0 0 40 R x x
EEPROM
0 = Power up | 1 = Stop | 2 = Manual | 3 =
Service | 4 = Safe State | 5 = Defrosting | 6
= Valve driver | 7 = Ther. Cutout | 8 = Emer.
cooling | 9 = SH ctrl err. | 10 = SH start Pctrl
| 11 = SH start x OD | 12 = SH ctrl normal
| 13 = SH ctrl MTR | 14 = SH ctrl LOP | 15 =
SH ctrl minPC | 16 = SH ctrl MOP | 17 = SH
ctrl maxPc | 18 = SH ctrl SH cl | 19 = SH ctrl
minS4 | 20 = SH ctrl Tc
x
x
x
x
x
x
x
x
x
x
x
x 0 = O | 1 = On
x 0 = O | 1 = On
x
x 0 = O | 1 = On
x 0 = O | 1 = On
x 0 = O | 1 = On
x 0 = O | 1 = On
0 = None | 1 = Factory | 2 = EKD 316 like | 3
x
= EKC 316 like
0 = O | 1 = On
Uwagi
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 84
Page 85

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
Panel sterujący
MMIGRS2
Charakterystyka użytkowa
Charakterystyka
MMIGRS2 to zdalny interfejs użytkownika.
Wyposażony jest w wyświetlacz graczny i może
służyć użytkownikowi do zdalnego odczytywania
parametrów bądź konguracji regulatora. Panel
można podłączyć do każdego modelu regulatora
EKE za pośrednictwem magistrali CANbus.
Cała charakterystyka interfejsu użytkownika
zakodowana jest w regulatorze typu EKE,
toteż nie ma potrzeby programowania panelu
MMIGRS2.
Zasilany jest ze źródła zewnętrznego bądź
z regulatora, do którego jest przyłączony
i automatycznie pokazuje jego interfejs
użytkownika.
• W pełni graczny wyświetlacz LCD
o rozdzielczości 128x64 punktów
• Łatwe podłączenie do regulatora typu EKE
w sieci CANbus za pomocą wtyku
telefonicznego i gniazda CAN
• Brak konieczności programowania:
charakterystyka interfejsu użytkownika
zakodowana jest w regulatorze typu EKE
• Zasilany jest z regulatora, do którego jest
przyłączony
• Wymiary 88x150 mm
• Montaż na tablicy lub na ścianie
• W wersji tablicowej stopień ochrony
obudowy IP64
Dopuszczenia
Kody produktów
Zgodność CE:
Produkt zaprojektowano zgodnie z następującymi aktami unijnymi:
• Dyrektywa niskonapięciowa 2014/35/EU
• Zgodność elektromagnetyczna EMC: 2014/30/EU oraz z następującymi normami:
– EEN61000-6-1, EN61000-6-3 (odporność dla środowiska budynków mieszkalnych,
komercyjnych i przemysłu lekkiego)
– EN61000-6-2, EN61000-6-4 (odporność i standardy emisji dla środowiska przemysłowego)
– EN60730 (Elektryczne układy automatycznej regulacji dla urządzeń użytku domowego
i podobnego)
Dopuszczenie UL:
• Specykacja UL E31024
OPIS Nr kodowy
Zdalny panel sterujący MMIGRS2, TABLICOWY, Opakowanie pojedyncze 080G0294
Zdalny panel sterujący MMIGRS2, ŚCIENNY, Opakowanie pojedyncze 080G0295
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 85
Page 86

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
Panel sterujący
MMIGRS2
Wymiary
137
88
Danfoss
68
80G8079.01
Charakterystyka techniczna
150 16 19
88
150 31.7
DANE TECHNICZNE MMIGRS2
- ze sterownika MCX przez wtyk telefoniczny RJ11
Zasilanie
- 12/30 V DC (zaleca się odrębne zasilanie)
- 24 V AC +10% / -15% (zaleca się odrębne zasilanie)
- maksymalny pobór mocy: 1,5 W
138
110 ± 0.5
ø 2.8 ± 0.1 (x4)
69
76 ± 0.5
Danfoss
80G8079.01
© Danfoss | DCS | 2020.10
INTERFEJS UŻYTKOWNIKA
Wyświetlacz
Klawiatura
Montaż
INNE
CANbus •
Brzęczyk •
Zegar czasu rzeczywistego
Stopień ochrony
- niebieski wyświetlacz graczny LCD
- podświetlenie białymi LED o jasności regulowanej programowo
- rozdzielczość 128x64 punkty
- powierzchnia aktywna 66,5x33,2 mm
- kontrast regulowany programowo
- 6 przycisków podświetlanych białymi diodami
- funkcje przycisków kongurowane programowo
W zależności od wersji:
- tablicowy, patrz szablon pod otwory na śruby w opakowaniu
- naścienny w standardowej skrzynce 3-modułowej
- IP64 ~ NEMA3R (wersja tablicowa)
- IP40 (wersja naścienna)
DKRCC.PD.RS0.A4.49 | 86
Page 87

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
Bramka
MMIMYK
Charakterystyka użytkowa
Charakterystyka
MMIMYK to urządzenie uniwersalne, mogące
spełniać do trzech różnych funkcji:
• Moduł programowania
• Bramka
• Rejestrator danych
Posiada wyświetlacz graczny oraz klawiaturę
do konguracji urządzenia i uruchamiania
różnych funkcji.
Posiada także slot dla karty MMC (Multi Media
Card) rozszerzającej pojemność pamięci.
• W pełni graczny wyświetlacz OLED
o rozdzielczości 128x64 punkty
• Łatwe podłączenie do sterownika MCX w sieci
CANbus za pomocą wtyku telefonicznego
• Slot dla karty MMC dla łatwego uaktualniania
oprogramowania i rejestracji danych
• Szeregowy port MODbus RS485
Zgodność CE:
Produkt zaprojektowano zgodnie z następującymi aktami unijnymi:
• Dyrektywa niskonapięciowa 73/23/EEC
• Zgodność elektromagnetyczna EMC: 89/336/EEC oraz z następującymi normami:
- EN61000-6-1, EN61000-6-3 (odporność dla środowiska budynków mieszkalnych,
komercyjnych i przemysłu lekkiego)
- EN61000-6-2, EN61000-6-4 (odporność i standardy emisji dla środowiska przemysłowego)
- EN60730 (Elektryczne układy automatycznej regulacji dla urządzeń użytku domowego
i podobnego)
• Zasilanie ze sterownika MCX, do którego jest
podłączona bramka lub inne
• Możliwość wykonywania aplikacji jak każde
urządzenie MCX
• Wymiary 105x72 mm
• Montaż na szynie DIN lub przenośnie
Opis Nr kodowy
MMIMYK, INTERFEJS PC/MCX ORAZ MODUŁ PROGRAMOWANIA MCX , REJESTRATOR
DANYCH, opakowanie pojedyncze
Uwaga: opakowanie pojedyncze nie zawiera standardowych przyłączy
080G0073
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 87
Page 88

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
Bramka
MMIMYK
Wymiary
Charakterystyka techniczna
12 Vdc24 Vac
+
-
105
72
DANE TECHNICZNE MMIMYK
WYŚWIETLACZ OLED
Wyświetlacz Graczny OLED
Rozdzielczość 128x64 punkty
Powierzchnia aktywna 35x17,5 mm
CANRS485
D+ D-RHL GND GND
Danfoss
80G8077.01
31
KLAWIATURA
Liczba przycisków 4
Funkcje przycisków Przypisywane programowo
PAMIĘĆ
Wewnętrzna 2 MB
MMC Slot dla rozszerzenia (Multi Media Card) do 2 GB
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 88
Page 89

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
Akcesoria – Zasilacze
ACCTRD
Charakterystyka użytkowa
Dopuszczenia
ACCTRD to awaryjne transformatory z 230 V AC na
24 V AC, zabezpieczone przed krótkim spięciem
i całkowicie zamknięte w epoksydowej obudowie
przystosowanej do montażu na szynie DIN.
Zgodność:
• UNI EN ISO 9001:2000
• IMQ
• VDE
• ENEC
• UL
• RoHS 2002/95/CE
DANE TECHNICZNE ACCTRD
ZASILANIE
Obwód pierwotny 230 V AC
Obwód wtórny 24 V AC
Numery kodowe
Wymiary
INNE
Zabezpieczenie wewnętrzne Termistor PTC
Montaż Szyna DIN
OPIS Nr kodowy
TRANSFORMATOR AWARYJNY ACCTRD, 230VAC/24VAC, 12VA, MONTAŻ DIN 080G0223
TRANSFORMATOR AWARYJNY ACCTRD, 230VAC/24VAC, 22VA, MONTAŻ DIN 080G0225
TRANSFORMATOR AWARYJNY ACCTRD, 230VAC/24VAC, 35VA, MONTAŻ DIN 080G0226
48.3
28.3
35 3572
23.5
76 52.5
52
64.8
28.3
48.3
64.8
70
23.5
72
76
70
52 87.5
70
59.5 69.5
59.5
080G0223 080G0225 080G0226
Danfoss
80G8209.01
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 89
Page 90

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
54 mm / 2.1 in.
90 mm / 3.5 in.
Max. 61 mm / 2.4 in.
36 mm / 1.4 in.
90 mm / 3.5 in.
Akcesoria – Zasilacze
AK-PS
Charakterystyka użytkowa
Dopuszczenia
Charakterystyka
techniczna
Numery kodowe
AK-PS to awaryjne transformatory z 230 V AC na
24 V AC, do montażu na szynie DIN.
Zgodność:
• CE
• UL
• RoHS
DANE TECHNICZNE AK-PS 150
ZASILANIE
Napięcie obwodu pierwotnego
Częstotliwość
Napięcie obwodu wtórnego 24 V AC
Prąd w obwodzie wtórnym 1,5 A
OPIS Nr kodowy
AC 100 – 240 V
50 / 60 Hz
AK-PS 150, Napięcie zasilania AC 100 - 240 V, Częstotliwość 50/60 HZ, 24V DC, 1,5 A 080Z0054
Warunki otoczenia
Wymiary
Masa
Parametry otoczenia:
Robocze: -25°C < t
+70°C / -13°F < t
emp. ot.
emp. ot.
< 158°F
Obniżenie prądu wyjściowego 2,5 % / K > +55°C / 131°F
Składowanie: - 40°C do +85°C / -40°F < t
emp. ot.
< 185°F
Wilgotność względna: 0 - 95 %, bez wykraplania
Danfoss
80G363.10
0.184 Kg
Max. 61 mm / 2.4 in.
AK-PS 075
Danfoss
80G364.10
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 90
Page 91

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
Akcesoria – Czujniki
ACCPBT
Charakterystyka użytkowa
Wymiary
Typoszereg czujników temperatury typu
ACCPBT zaprojektowano z myślą o zaspokojeniu
wszelkich potrzeb w zakresie kontroli
temperatury, zarówno w urządzeniach nisko-,
jak i wysokotemperaturowych.
Są to czujniki termistorowe NTC o stopniu
ochrony IP67 i IP68.
W przypadku wymaganej większej dokładności,
można skorzystać z czujników oporowych
Pt1000 o stopniu ochrony IP68.
080G0202 - ACCPBT, CZUJNIK TEMPERATURY NTC, IP68 6X20, 10 kΩ @ 25°C, PRZEWÓD 3 m
080G0205 - ACCPBT, CZUJNIK TEMPERATURY NTC, IP68 6X40, 10 kΩ @ 25°C, PRZEWÓD 1,5 m
080G0206 - ACCPBT, CZUJNIK TEMPERATURY NTC, IP68 6X40, 10 kΩ @ 25°C, PRZEWÓD 3 m
080G0207 - ACCPBT, CZUJNIK TEMPERATURY NTC, IP68 6X40, 10 kΩ @ 25°C, PRZEWÓD 6 m
080G0209 - ACCPBT, CZUJNIK TEMPERATURY Pt1000, IP68 6X40, PRZEWÓD 1,5 m
080G0210 - ACCPBT, CZUJNIK TEMPERATURY Pt1000, IP68 6X40, PRZEWÓD 6 m
Danfoss
80G8281.01
Danfoss
80G8282.01
Danfoss
80G8284.01
Numery kodowe
OPIS Nr kodowy
ACCPBT, CZUJNIK TEMPERATURY NTC, IP68 6X20, PRZEWÓD 3 m 080G0202
ACCPBT, CZUJNIK TEMPERATURY NTC, IP68 6X40, PRZEWÓD 1,5 m 080G0205
ACCPBT, CZUJNIK TEMPERATURY NTC, IP68 6X40, PRZEWÓD 3 m 080G0206
ACCPBT, CZUJNIK TEMPERATURY NTC, IP68 6X40, PRZEWÓD 6 m 080G0207
ACCPBT, CZUJNIK TEMPERATURY PT1000, IP68 6X40, PRZEWÓD 1,5 m 080G0209
ACCPBT, CZUJNIK TEMPERATURY PT1000, IP68 6X40, PRZEWÓD 6 m 080G0210
MBT 153
Charakterystyka użytkowa MBT 153 to uniwersalne przewodowe czujniki
temperatury, które można wykorzystać do
regulacji temperatury w urządzeniach do
chłodzenia wody bądź w układach wentylacji
o ogólnym zastosowaniu przemysłowym.
Czujniki bazują na termistorach NTC, które
zapewniają niezawodny i dokładny pomiar
temperatury.
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 91
Page 92

Specykacja | Regulatory przegrzania typu EKE 1A, EKE 1B, EKE 1C
Wymiary
Numery kodowe
AKS 12
Charakterystyka użytkowa
Charakterystyka techniczna
Oznaczenie typu
MBT 153 - 0990 - 0350 -50 to 100 °C 1 X NTC 10K ± 0.1 °C at 0 - 70 °C PVC 3.5 m 084Z2284
MBT 153 - 0550 - 2000 -50 to 100 °C 1 X NTC 10K ± 0.1 °C at 0 - 70 °C PVC 20 m 084Z7015
Zakres
temperatury
Rodzaj
czujnika
Dokładność
elementu
pomiarowego
Rodzaj
przewodu
Długość
przewodu
Nr kodowy
Czujniki można wykorzystać w układach
rejestracji i kontroli temperatury wyposażonych
w sterowniki typu EKC, w następujących
obszarach zastosowania:
Chłodnictwo
Klimatyzacja
Ogrzewnictwo
Czujniki są wyskalowane i pod względem
dokładności odpowiadają wymaganiom normy
EN 60751, klasa B.
Rezystancja
nominalna
Dokładność
pomiarowa
1000 Ω przy 0°C
Klasa B
Zakres temperatury -40 do 100°C
Materiał przewodu
PVC
2 x 0,22 mm
2
Tuleja czujnika 18/8, stal nierdzewna
R (Typ.)
Temp.
°C
1117 30 86
1078 20 68
1039
10 50
1000 0 32
Temp.
°F
Zamawianie
© Danfoss | DCS | 2020.10
Stała czasowa 15 sekund
Stopień ochrony IP 67
AMP ital mod 2,
Wtyk AMP
obudowa 280 358
styki zaciskowe
280 708-2
Typ Przewód Liczba szt. w opakowaniu Nr kodowy
AKS 12
961 -10 14
922 -20 -4
882 -30 -22
1 084N0036
1.5 m
30 084N0035
3.5 m 30 084N0039
5.5 m 30 084N0038
DKRCC.PD.RS0.A4.49 | 92
Page 93

Akcesoria – Przewody
ACCCBI
Charakterystyka użytkowa
Numery kodowe
Elementy układu regulacji
Przewody ACCCBI znakomicie nadają się do
łączenia sterowników MCX z interfejsami
użytkownika MMI
OPIS Nr kodowy
ACCCBI, PRZEWÓD TELEFONICZNY DO PODŁĄCZENIA INTERFEJSU UŻYTKOWNIKA, 1,5 m 080G0075
ACCCBI, PRZEWÓD TELEFONICZNY DO PODŁĄCZENIA INTERFEJSU UŻYTKOWNIKA, 3 m 080G0076
Danfoss nie ponosi odpowiedzialności za możliwe błędy drukarskie w katalogach, broszurach i innych materiałach drukowanych. Dane techniczne zawarte
w broszurze mogą ulec zmianie bez wcześniejszego uprzedzenia, jako efekt stałych ulepszeń i modykacji naszych urządzeń. Wszystkie znaki towarowe w tym
materiale są własnością odpowiednich spółek. Danfoss, logotyp Danfoss są znakami towarowymi Danfoss A/S. Wszystkie prawa zastrzeżone.
© Danfoss | DCS | 2020.10
DKRCC.PD.RS0.A4.49 | 93
 Loading...
Loading...