

Page 1

Data sheet
Superheat Controller
Type EKD 316 and EKD 316C
EKD 316 / EKD 316C is a superheat controller for
the stepper motor valve that can be used where
there are requirements for accurate control of
superheat in connection with refrigeration.
The controller and valve can be used where
there are requirements for accurate control of
superheat in connection with refrigeration.
Applications:
• Processing plant (water chillers)
• Cold store (air coolers)
• A/C plant
• Heat pumps
• Air conditioning
Benets • The superheat is regulated to the lowest
possible value.
• The evaporator is charged optimally – even
when there are great variations of load and
suction pressure.
Main features
• Regulation of superheat
• MOP function
• ON/OFF input for start/stop of regulation
• Relay output to alarm
• Energy savings – the adaptive regulation of
the refrigerant injection ensures optimum
utilisation of the evaporator and thus a high
suction pressure.
• MOD bus communication
• Safety features and
• Alarm indications
© Danfoss | DCS (sw) | 2016.11
DKRCC.PD.RR0.B2.02 | 1
Page 2

Data sheet | Superheat controller type EKD 316, EKD 316C
Contents Pages
Applications..................................................................................................................................................3
Function overview ..........................................................................................................................................3
Data ...........................................................................................................................................................4
Ordering ......................................................................................................................................................4
Dimensions ..................................................................................................................................................4
Accessories ...................................................................................................................................................4
Related products ............................................................................................................................................4
Connections .................................................................................................................................................5
Conguration ................................................................................................................................................6
Parallel Evaporators with common suction line .........................................................................................................7
Data communication .......................................................................................................................................8
Installation ...................................................................................................................................................9
Installation sensors ........................................................................................................................................ 10
Start of controller.......................................................................................................................................... 11
Settings and checks to be made before start .......................................................................................................... 11
Stepper motor valve type ................................................................................................................................ 12
Operation .................................................................................................................................................. 13
Types of regulation ........................................................................................................................................ 14
Manually operating the valve ............................................................................................................................ 15
Finding the optimum settings ........................................................................................................................... 16
If the superheat uctuates ............................................................................................................................... 16
Troubleshooting ........................................................................................................................................... 17
Alarms ...................................................................................................................................................... 17
Appendix I.................................................................................................................................................. 18
- Menu survey EKD 316 ............................................................................................................................ 18 - 19
- Survey of functions .......................................................................................................................... 20 - 21 - 22
Appendix II ................................................................................................................................................. 23
- General information to MODBUS communication via a PLC etc. ................................................................................ 23
- EKD 316 – Parameter identication (modbus) ..................................................................................................... 24
- EKD 316C – Parameter identication (modbus) .............................................................................................. 25 - 26
- Installation considerations ............................................................................................................................ 27
List of literature ............................................................................................................................................ 27
Acronyms and abbreviations used in this manual:
LOC Loss of charge indication
SH Superheat
MOP Maximum operating pressure
MSS Minimum stable superheat
PNU Parameter number
Te Saturated suction temperature
Pe Evaporator pressure
S2 Evaporator temperature
S4 Evaporator outlet temperature
OD Opening degree
EEV Electronic expansion valve
∆Tm Temperature dierence between media temperature and evaporating temperature
© Danfoss | DCS (sw) | 2016.11
DKRCC.PD.RR0.B2.02 | 2
Page 3
Data sheet | Superheat controller type EKD 316, EKD 316C
Applications
The following gives an idea of the application scope of the
EKD 316 / EKD 316C controller.
Water chiller using direct expansion
The most common application is water chillers using direct
expansion. The regulation can be single loop using an AKS 32R
pressure transmitter to measure evaporator pressure and an S2
sensor to measure superheated gas. If double loop regulation is
used, the S4 sensor should be located at the water outlet pipe to
measure the leaving water temperature. It is recommended to
start with factory settings.
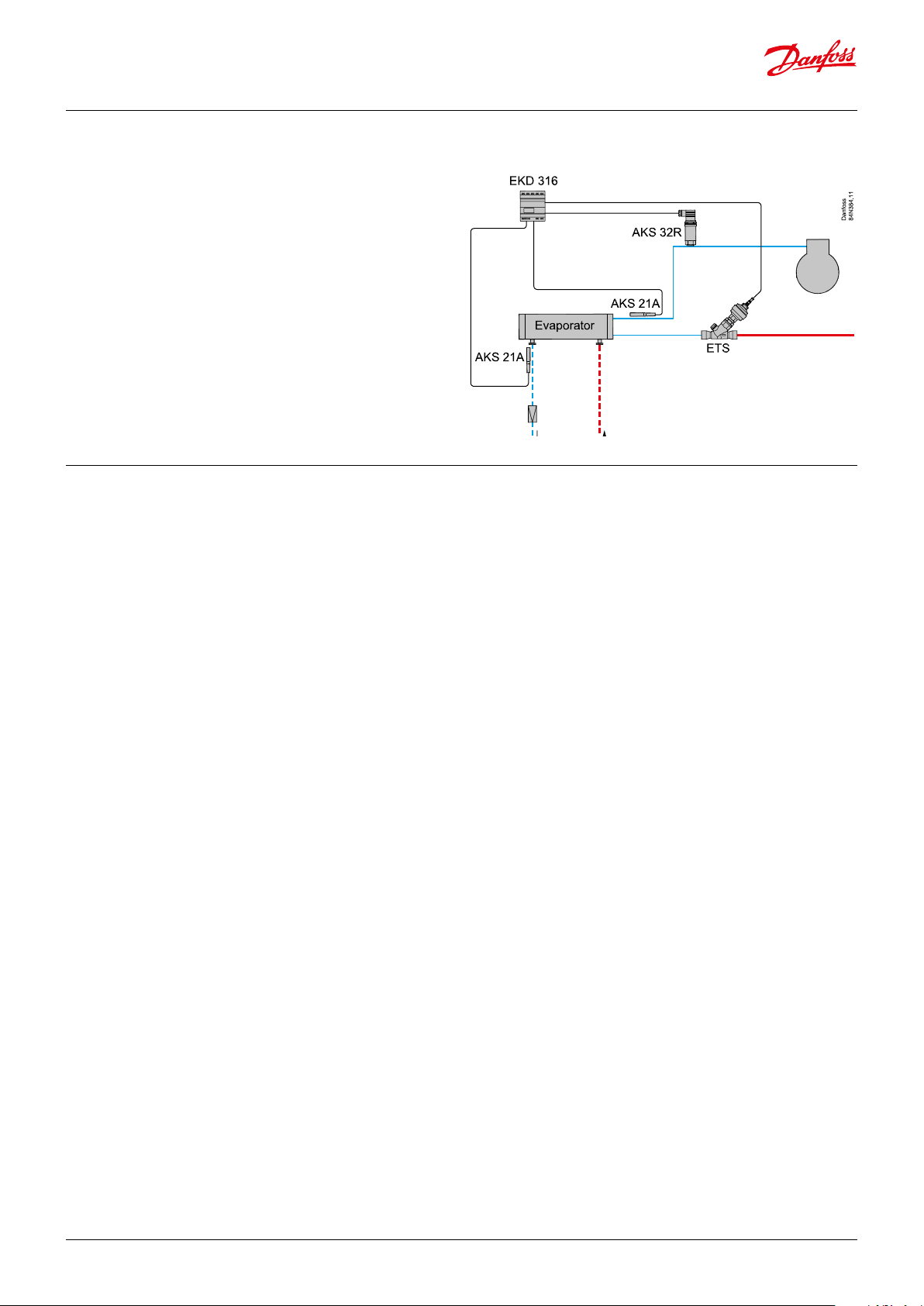
The application diagram shows the use of EKD 316 as a superheat
controller, where temperature sensor AKS 21A and pressure
transmitter AKS 32R have been shown as an example.
Function overview
Minimum Stable Superheat (MSS)
The controller will search for the minimum stable superheat
between an upper and lower boundry. If the superheat has been
stable for a period, the superheat reference is decreased. If the
superheat becomes unstable, the reference is raised again. This
process continues as long as the superheat is within the bounds
set by the user. The purpose of this is to search for the lowest
possible superheat that can be obtained while still maintaining a
stable system. The superheat reference can also be xed, in which
case this function is disabled.
Maximum Operating Pressure (MOP)
In order to reduce the strain of the compressor, a maximum
operating pressure can be set. If the pressure comes above this
limit, the controller will control the valve to provide a lower
pressure instead of a low superheat. The limit for this function
is usually a xed pressure, but it is possible to oset the limit
temporarily.
Stand-alone function
EKD 316 / EKD 316C is designed to operate in conjunction with a
system master controller, which will control the EKD 316 /
EKD 316C via MODBUS or analog signal. It is however possible
to use it in a standalone mode using one temperature and one
pressure transducer.
Manual Control as a valve driver
The valve can be controlled manually by setting the desired
operating degree using MODBUS. Alternatively, the controller may
also be started and stopped externally using the analog signal 4 to
20 mA/0 to 10 V DC, /1 to 5 V DC.
Forced opening during startup
In some applications it is necessary to open the valve quickly when
the compressor turns on to prevent suction pressure becoming
too low. This is ensured by setting a xed opening degree and
a startup time for the controller. Note that this will give a xed
opening degree for the duration of the start time, regardless of the
superheat value.
Relay
The relay for the alarm function is an alternating relay. In the event
of an alarm, the relay will close, which may, for instance, be used
for an alarm buzzer.
© Danfoss | DCS (sw) | 2016.11
DKRCC.PD.RR0.B2.02 | 3
Page 4
Data sheet | Superheat controller type EKD 316, EKD 316C
Data
Compatible valves
EKD 316 C
Compatible valves
EKD 316
Supply voltage
Power consumption
Input signal
*)Ri: mA: 400 ohm
V: 50 kohm
Sensor input 2 pcs. Pt 1000 ohm
Alarm relay 1 pcs. SPDT, Max 24V, 1A resistive - Class II
Step motor output
Data communication RS 485 Modbus data communication
Environments
Enclosure IP 20
Weight 300 g
Montage DIN rail
Operation
Approvals
ETS / CCM / CCMT 0 - 42 / CTR / ETS 6 /
ETS C / KVS C
ETS / CCM / CCMT 0 - 42 / CTR / ETS 6
ETS / KVS / CCM / CCMT 2 - CCMT 8
24 V AC / DC ±15% 50/60 Hz, 10 VA / 5 Watt
ETS 6 / CCMT 16 - CCMT 42:
24 V AC / DC ±15% 50/60 Hz, 15 VA / 8 Watt
(the supply voltage is not galvanically
separated from the input and output signals)
Controller
ETS step motor
Current signal * 4 - 20 mA or 0 - 20 mA
Voltage signal * 0 - 10 V or 1 - 5 V
Pressure transmitter AKS 32R
Digital input from external contact function
EKD 316 : Switching 30 - 300 mA RMS
EKD 316C : Switching 30 - 600 mA RMS
0 to +55°C, during operations
-40 to +70°C, during transport
20 - 80% Rh, not condensed
No shock inuence/vibrations
External display type EKA 164A or AK-ST via data
communication and system unit
EU Low Voltage Directive and EMC demands re. CEmarking complied with.
LVD-tested acc. to EN 60730-1 and EN 60730-2-9
EMC-tested acc. to EN50081-1 and EN 50082-2
5 VA
1.3 VA
DI : < 800 ohm = ON
DI : > 30 kohm = OFF
Ordering
Type Function Code no.
EKD 316C
EKD 316
EKA 164A
EKA 183A Programming key 084B8582
Superheat controller
(with terminals)
Superheat controller
(with terminals)
External display
(with MODBUS communication)
For technical details please see
literature reference on last page.
084B8045
084B8040
084B8563
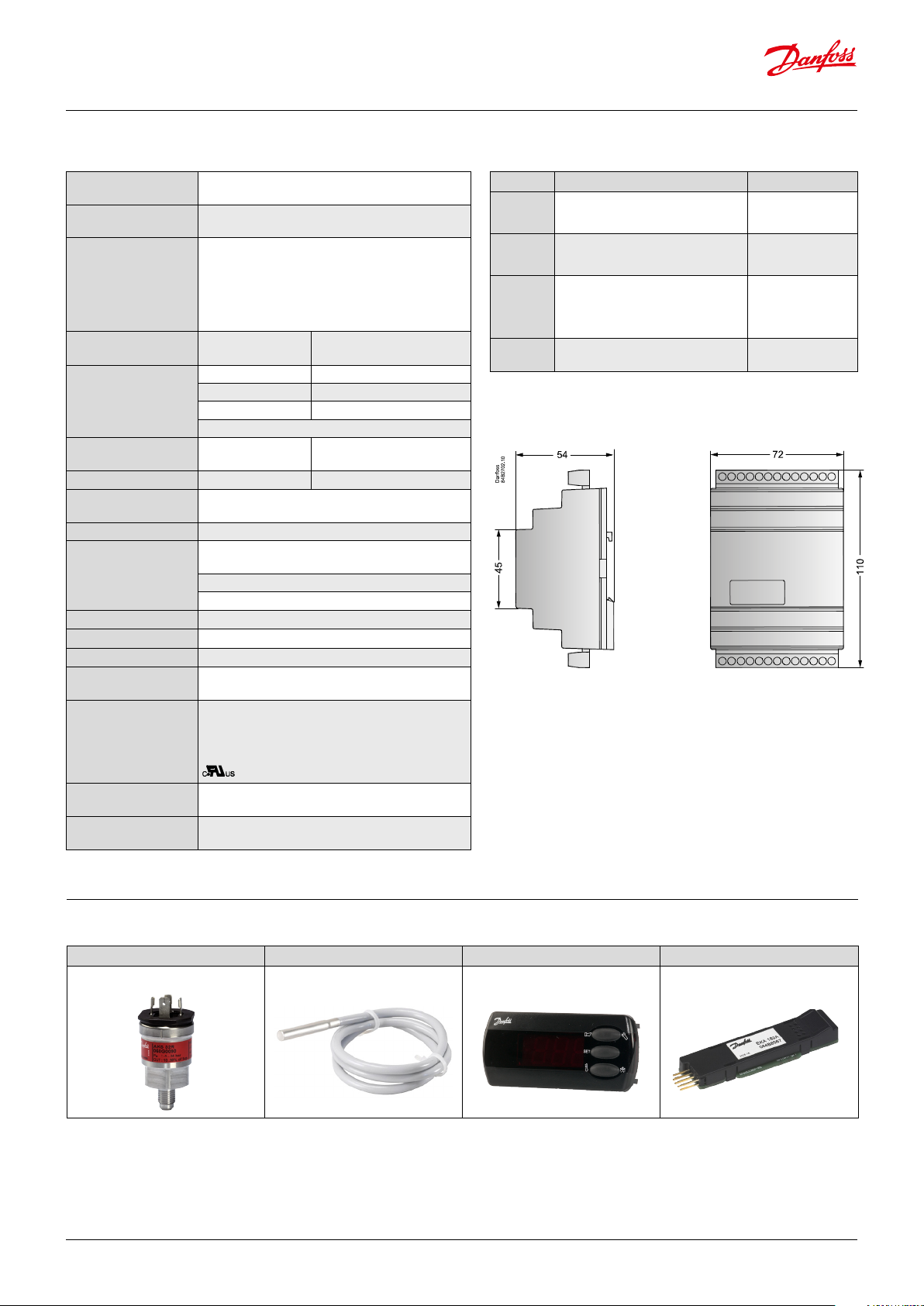
Dimensions [mm]
Battery backup
Max. distance between
controller and valve
If battery backup is used, the requirements for the
battery are: 18 - 24 V DC See also page 12.
30 m
Related products
Pressure transducer Temperature sensor External display Programming key
AKS 32R, NSK AKS 21, AKS 11 EKA 164A EKA 183A
© Danfoss | DCS (sw) | 2016.11
DKRCC.PD.RR0.B2.02 | 4
Page 5
Data sheet | Superheat controller type EKD 316, EKD 316C
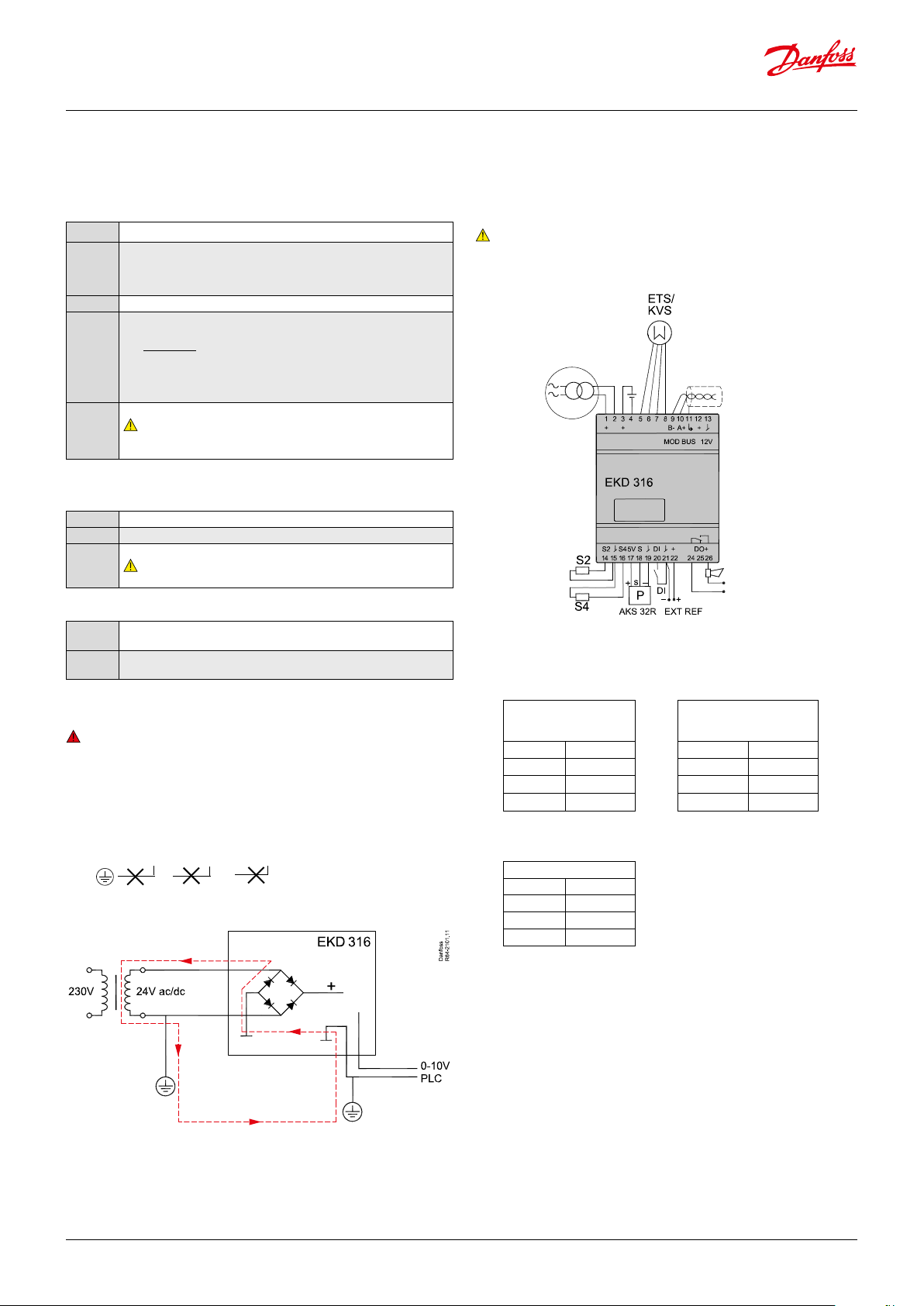
Connections
Necessary connections
Terminals:
1-2
3-4 Battery (the voltage will close the ETS valve if the
5-8 Supply to stepper motor
9-13 Operation via data communication
20-21 Switch function for start/stop of regulation.
Application-dependent connections
Superheat control
Supply voltage 24 V AC / DC
controller losses its supply voltage).
The battery voltage must not be connected from terminals 1
and 2.
EITHER EKA 164A OR System unit + software.
It is important that the installation of the data communication
cable be done correctly.
For further information on data communication: see literature
list page 23
Note:
If a switch is not connected, terminals 20 and 21 must be short
circuited.
14-15 Pt 1000 sensor at evaporator outlet (S2)
15-16 Pt 1000 sensor for measuring air temperature (S4)
17-19 Pressure transmitter type AKS 32R
Note:
The signal can not be shared with other controllers
A dedicated transformer must be used.
24V 18V
Class II
Danfoss
84B3201.10
Control of the valves opening degree with analog signal
21-22 Current signal or voltage signal from other regulation
(Ext. Ref.)
24-26 Alarm relay
There is connection between 24 and 26 in alarm situa tions.
Warning
Any external connection with grounding could create a ground
loop through a diode in the rectier bridge which could destroy
the power supply in EKD 316 / EKD 316C.
1,2 3,4 21,22
Connection to earth will destroy the controller
Connections EKD 316 Connections EKD 316 C
ETS / KVS / CCMT2 CCMT42 / CCM / CTR
White 5 White 5
Black 6 Black 6
Red 7 Red 7
Green 8 Green 8
Connections EKD 316 /
Connections EKD 316 C
ETS 6 / CCMT 0 - CCMT 1
Orange 5
Yellow 6
Red 7
Black 8
ETS C / KVD C / ETS / KVS
/ CCMT2 - CCMT42 / CCM
/ CTR
© Danfoss | DCS (sw) | 2016.11
DKRCC.PD.RR0.B2.02 | 5
Page 6
OD
Data sheet | Superheat controller type EKD 316, EKD 316C
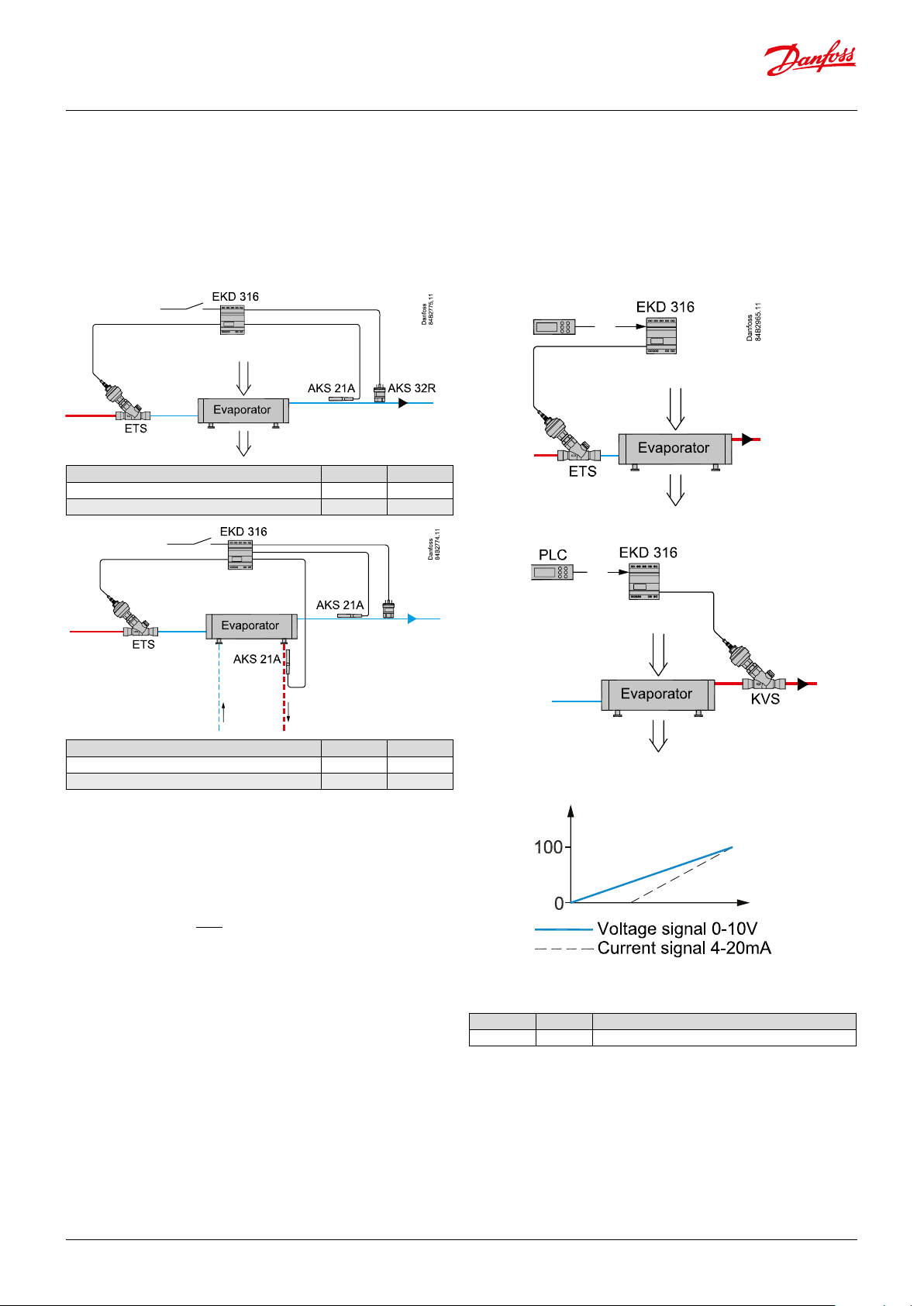
Conguration
Independent superheat regulation
The superheat in the evaporator is controlled by one pressure
transmitter P and one temperature sensor S2. This can be done
setting o61 = 2.
Fitting the "S4" temperature sensor is optional, but the regulation
is improved by an "inner loop control" when the sensor is tted.
Function Parameter Value
Application Mode – superheat regulation o61 2
Selection of normal control mode 056 1
Valve driver (Via Analog Signal)
This is where the controller receives signals from another
controller, after which it controls the valve’s opening degree.
The signal can either be a current signal or a voltage signal.
The valve can be any of the stepper motor valves listed on “valve
overview”.
Details can be found on the section “valve overview”.
I/V
Function Parameter Value
Application Mode – superheat regulation o61 2
Selection of inner loop control mode 056 2
We recommend this inner loop control application mode setting, if
the superheating is to be regulated with precision. Here the S4 and
T0 temperature are part of an inner loop control.
The regulation algorithms require that a temperature sensor be
tted in the chilled medium.
The temperature sensor is connected to input "S4" and mounted
in the chilled medium after the evaporator. (Danfoss calls a sensor
S4 when it is mounted in the refrigerant after the evaporator).
External start/stop of regulation
The controller can be started and stopped externally via a contact
function connected to input terminals 20 and 21. Regulation is
stopped when the connection is interrupted. The function must
be used when the compressor is stopped. The controller then
closes the ETS valve so that the evaporator is not charged with
refrigerant.
Battery
For safety reasons the liquid ow to the evaporator must be cut
o if there is a power failure to the controller. As the ETS valve
is provided with a stepper motor, it will remain open in such a
situation. When mounting the battery backup, the valve will close
in the event of a power cut.
I/V
Danoss
84B2966.12
Danfoss
84B2707.10
I/V
Parameter Value Function
o61 1 Application Mode - control via analog signal
Relays
The relay for the alarm function is an alternating relay.
In the event of an alarm the relay will close to connect terminals 24
and 26. This can, for instance, be used for an alarm buzzer. When
there is no alarm or the controller is o, terminals 24 and 25 are
connected.
© Danfoss | DCS (sw) | 2016.11
DKRCC.PD.RR0.B2.02 | 6
Page 7
Data sheet | Superheat controller type EKD 316, EKD 316C
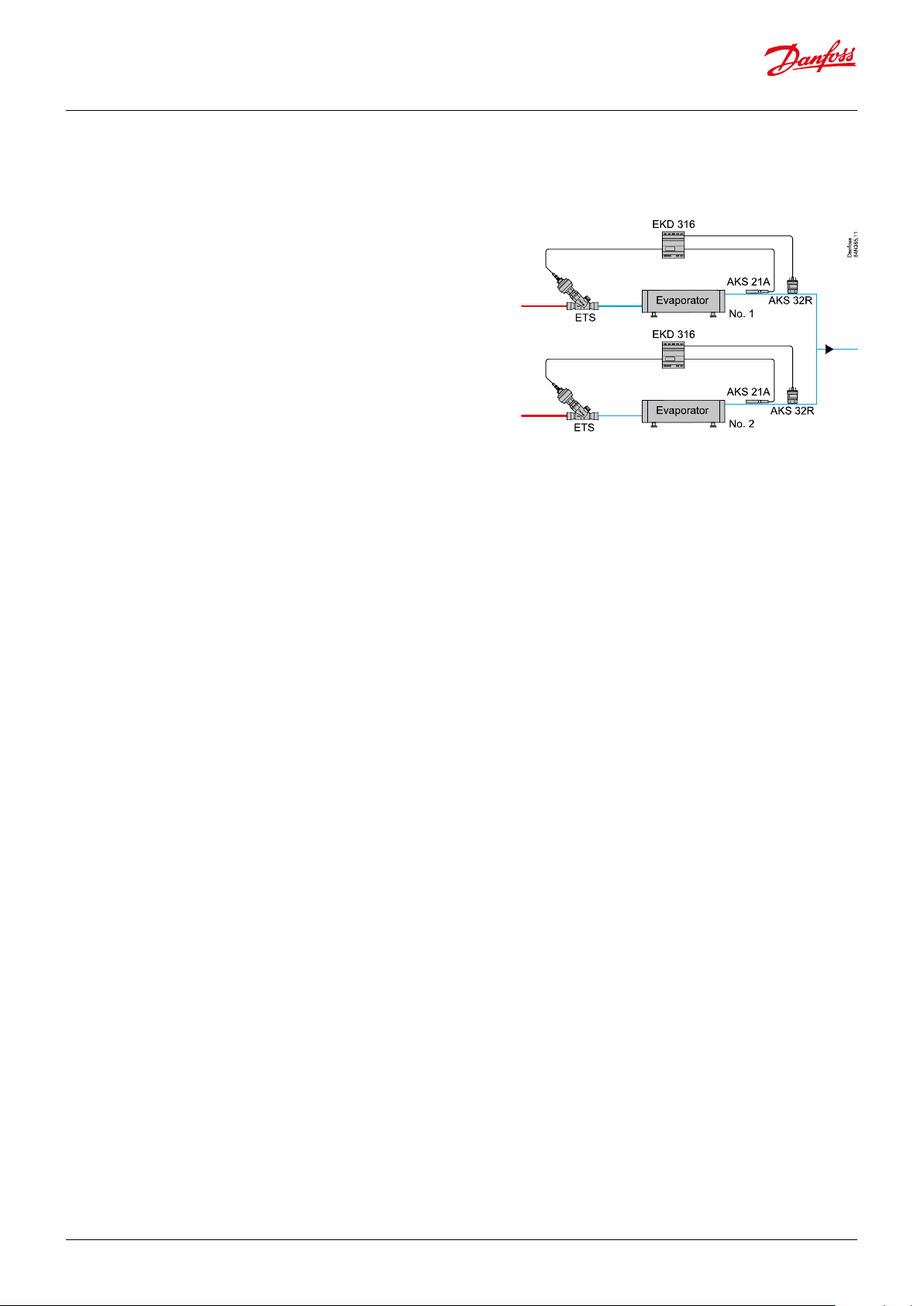
Parallel Evaporators with common suction line
Since the introduction of EEV, it has been observed the
phenomena the so-called Sleeping Evaporators phenomena have
been observed. This happens when the outlet of the evaporators
has a common suction line.
This is seen when using the Adaptive superheat Mode in some of
the controllers. What happens is that by controlling using the same
superheat reference in both controllers, evaporator No. 1 might be
controlling in the correct manner, but the EEV for evaporator No. 2
might be closed.
However, the measured superheat of controller No. 2 will be the
same as No. 1 because both S2 sensors will measure the same
temperature.
In other words, the open degree of the EEV integrates down to 0%
but, the measured superheat complies with the reference valve.
One solution is to use the Load-dened superheat Mode in the
controller because the measured superheat governs the opening
degree of the connected EEV.
© Danfoss | DCS (sw) | 2016.11
DKRCC.PD.RR0.B2.02 | 7
Page 8
EKD 316
Danfoss
84B3082.10
Data sheet | Superheat controller type EKD 316, EKD 316C
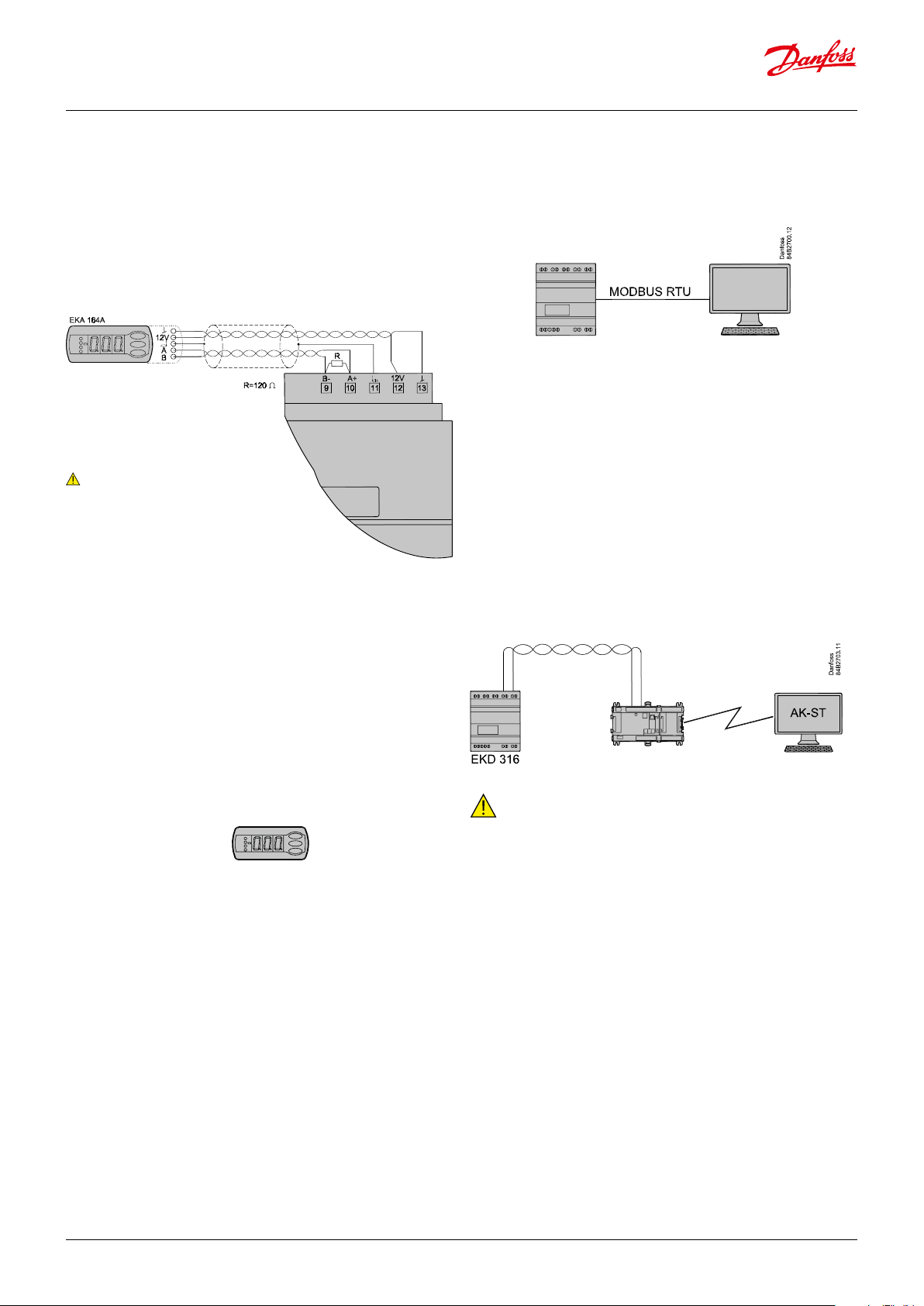
Data communication
Data communication with the EKD 316 is possible using one of the
following two ways:
• 1. Via External display (EKA 164A)
• 2. Via standard MODBUS Device
Via external display (EKA 164A)
Use an external display to operate the controller. This must be
done as follows:
Note:
Max. distance between controller and
display is 30 m.
The supply voltage to the display must be
maintained at 12 V +/- 15%.
The values are shown in three digits, and with a setting you
can determine whether the temperature is shown in °C or in °F.
(Pressure in bar or psig.)
In order to change a setting, the upper and lower buttons will
give you a higher or lower value depending on the button you
are pushing. But before you change the value, you must have
access to the menu. You obtain this by pushing the upper button
for a couple of seconds – you will then enter the column with
parameter codes. Find the parameter code you want to change
and push the middle button until the value for the parameter is
shown. When you have changed the value, save the new value by
pushing once more on the middle button.
By pushing the middle button you go directly to the Main Switch
setting (r12).
Example
Set a menu
1. Push the upper button until a parameter is shown
2. Push the upper or the lower button and nd the parameter you
want to change
3. Push the middle button and the value is shown
4. Push the upper or the lower button and select the new value
5. Push the middle button again to conclude the setting
Via standard MODBUS device
Communication direct to MODBUS RTU protocol.
There are 3 dierent MODBUS baud rates available, which are
9,600 baud, 19,200 baud and 38,400 baud.
The default MODBUS baud rate is 19,200 baud.
A scan is performed once the EKD 316 / EKD 316C controller is
connected to the network. This will auto detect the baud rate
used by the master and will automatically adjust to its setting. This
process usually take a few seconds.
The only available xed communication settings are 8 data bit,
EVEN parity and 1 stop bit.
The default unit address is 240 which, can be changed using
parameter "03 unit address".
EKD 316 can be operated from a PC that has AK-ST software
loaded.
System unit
Communication from a third party controller or monitoring
system
Settings and values can be read from the EKD 316 / EKD 316C via
MODBUS. However, the sensor values are from the local sensors
and software has not been developed to receive values from
another source.
A data list of EKD 316 parameters is provided in Appendix II and
the data for EKD 316C you can nd it in the installation guide
DKRCC.PI.RR0.A1.02
Please note that it is not possible to connect the EKA 164A
universal display in this conguration.
© Danfoss | DCS (sw) | 2016.11
DKRCC.PD.RR0.B2.02 | 8
Page 9
Data sheet | Superheat controller type EKD 316, EKD 316C
Installation
The EKD 316 / EKD 316C is normally mounted on a DIN rail, and
the necessary connections are shown in the diagram. If the sensor
S4 is not used to measure air temperature in connection with
thermostat function or as part of the controlling loop, then it is
not necessary to connect the S4 sensor. The 18-24 V battery input
at terminals 15 and 16 is not required if battery back-up is not
needed.
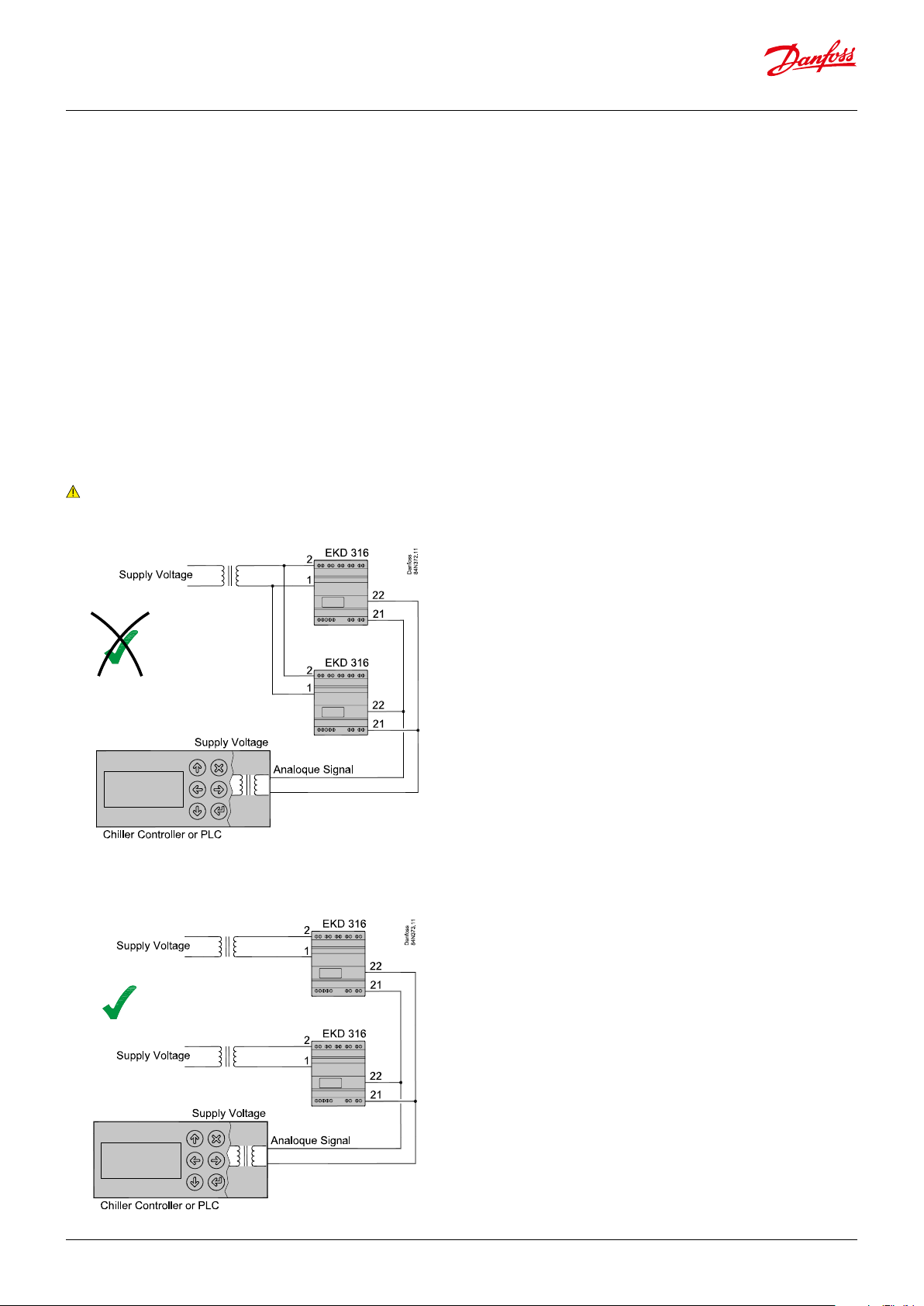
Power supply considerations
The terminals 1 and 2 for the voltage supply are not isolated
from the rest of the controller terminals. This means care should
be taken when connecting two or more controllers to the same
voltage supply. In the example below, the two controllers are
connected to the same voltage supply and on the input side,
terminals 21 (Analogue Input) are connected to each controller
and similarly terminals 22 (GND).
This way of connecting the controllers can cause damage and
should be avoided.
Note:
The same applies to other signal inputs e.g. terminals 2 and 4.
See warning page 5.
Stepper motor output
After installation the following checks can be made to the
connection between the EKD 316 controller and the stepper
motor of the ETS 6 / ETS valve.
With the power o, check that resistance between terminals 5 and
6 and terminals 7 and 8 is approximately:
ETS 6 / CCMT 0 : 46 Ohm
CCMT 1 : 31 Ohm
ETS / KVS / CCMT 2 - CCMT 8 / CCM : 53 Ohm
CCMT 16 - CCMT 42: 29 Ohm
ETS C / KVS C : 10 Ohm.
Make slight allowances for cable resistance.
If resistance values dier from above, ensure that the cable is
properly connected to the actuator of the stepper motor valve.
1. With the power on and parameter o18 set to 1, measure the
phase current from terminal 5 (or 6) and terminal 7 (or 8 ) with
a true RMS multimeter when the valve is operating. The valve
can be driven from 0% to 100% and vice versa by changing
the valve opening percentage in parameter o45. The phase
current should be 100 mA rms (for ETS) when operating.
2. If this not the case and the cable connections are correct, then
the stepper motor driver in the EKD 316 might be damaged.
Remember to set o18 back to 0 after checks. If checks 1) and
2) are not correct, ensure that motor cable corrections are
correct and the cable length is less than 30 meters.
If the controllers are operated by a common analogue signal as
above, the voltage supply should be separate as shown below.
Output relay contact
The contact of the alarm relay will be made when there is an alarm.
Battery back-up
A battery back-up can be connected to terminals 3 (+) and 4 (-).
It is recommended to use 24 V DC 100 mAh UPS. The voltage
should be at least 18 V and this can be achieved by using two 9 V
100 mAh batteries in series, if temporary solution is to be used.
© Danfoss | DCS (sw) | 2016.11
DKRCC.PD.RR0.B2.02 | 9
Page 10

Data sheet | Superheat controller type EKD 316, EKD 316C
Installation sensors
S2 sensor positioning in the suction line
The position of the S2 sensor is crucial for an optimal control of the
liquid injection.
The main purpose is to measure temperature of the superheated
gas leaving the evaporator. In addition to this, the S2 sensor plays
an important role detecting fast changes of superheat. Suction
pressure is on the whole stable whereas the leaving gas condition
is dependent on the temporary mixture of gas, liquid refrigerant
and oil.
The sensor is also there to react quickly on liquid passing the
evaporator, to avoid damage to the compressor.
An S2 sensor placed two-thirds of the way up a riser after an oil
trap is where conditions are at their optimum, i.e. good mixture of
gas, oil and liquid droplets, provided this is not more than 0.5 m
from the evaporator.
If a horizontal pipe is the only option, the S2 sensor must be
placed at least half a meter away from the evaporator.
S1 (Po pressure) is less critical but must be close to the actual
suction pressure right after the evaporator.
If the measured value is 1-2 K lower than the actual value of Po
right after the evaporator, it may cause the evaporator to ood.
This is the case when the pressure transmitter is located in the
machine room away from the evaporator. If the measured value
is higher than the actual value of Po, the evaporator might be
starved of liquid.
Choice of S2 sensor type
Surface sensor S2 *
Suction pipe of copper or on thin (≤ 3mm) steel pipe.
Remember to put on heat conducting paste and insulate the
sensor.
Pocket sensor S2 **
Suction pipe of steel ≥ 3mm
*) Pt1000 Ω Type AKS21 or AKS10
**) Pt1000 Ω Type AKS21W
AKS 21W
Heat compound
S2 sensor xing on the suction pipe:
When the S2 sensor is xed to the surface of the suction pipe, the
angle of the sensor position will depend on the diameter of the
pipe, as given in the following diagram:
© Danfoss | DCS (sw) | 2016.11
DKRCC.PD.RR0.B2.02 | 10
Page 11

Data sheet | Superheat controller type EKD 316, EKD 316C
Start of controller
When the electric wires have been connected to the controller, the
following points have to be attended to before the regulation starts:
1. Switch o the external ON/OFF switch that starts and stops the
regulation.
2. Follow the menu survey in Appendix I, and set the various
parameters to the required values.
3. Switch on the external switch, and regulation will start.
4. Follow the actual superheat on the display.
Settings and checks to be made before
shown on the following table:
start
Basic settings
Before using the controller, there are settings that have to be made
for each individual application. These are the refrigerant type, the
pressure transducer range and the total number of steps for the
ETS valve.
It is good practice and in some cases necessary to set the Main
Switch r12 to OFF when making these changes.
If terminal 20-21 has been used as a start/stop regulation, then the
interaction between internal and external start/stop function is, as
Refrigerant type
It is possible to choose from a list of 42 dierent refrigerants in the
controller.
Refrigerant setting
Before refrigeration can be started, the refrigerant must be dened.
You can select the following refrigerants:
1 = R12
2 = R22
3 = R134a
4 = R502
5 = R717
6 = R13
7 = R13b1
8 = R23
9 = R500
10 = R503
11 = R114
12 = R142b
13 = User-dened
14 = R32
15 = R227
16 = R401
17 = R507
18 = R402A
19 = R404A
20 = R407C
21 = R407A
22 = R407B
23 = R410A
24 = R170
For EKD 316C the default factory setting for parameter o30 is 0 = none refrigerant selected
Internal
Start/stop
External
start/stop (DI)
O O => O No Yes
O On => O No Yes
On O => O Yes No
On On => Ye s Yes No
If the refrigerant is not found on the list, it is possible to enter the
Antione constants for the unlisted refrigerant using MODBUS
communication and setting o30 to 13.
25 = R290
26 = R600
27 = R600a
28 = R744
29 = R1270
30 = R417A
31 = R422A
32 = R413A
33 = R422D
34 = 427A
35 = R438A
36 = Opteon XP10
37 = R407F
38 = R1234ze
39 = R1234yf
40 = R448A
Regulation Sensor
monitoring
41 = R449A
42 = R452A
Conguration
settings
o30
( Warning: Wrong selection of refrigerant may cause damage to the compressor).
© Danfoss | DCS (sw) | 2016.11
DKRCC.PD.RR0.B2.02 | 11
Page 12

Data sheet | Superheat controller type EKD 316, EKD 316C
Stepper motor valve type
It is important to select the right valve type as listed under Valve
denition. On using external display EKA 164A, the valve selection
will be displayed as shown in table below.
In practise, the EKD 316 / EKD 316C external display can only
manage three digits. Therefore the set value at address n37 is
always 10 times greater, i.e. if n37 is set to 263 then the true value
is 2630. The same applies to the n37 address in the MODBUS
The number of steps and steps/sec can also be set in the controller
communication system.
at addresses n37 and n38 respectively:
Valve overview EKD 316
n03 EKA 164A Danfoss valve type n37 n38
0 ETS 12.5, ETS 25, KVS 15 262 300
1 ETS 50, CCM 10, CCM 20, CCM30 262 300
2 ETS 100, CCM 40 353 300
3 ETS 250, KVS 42 381 300
4 ETS 400 381 300
5 User dened - -
6 UKV/SKV/VKV/PKV 24 16
7 ETS 6 24 16
8 CCMT 2, CCMT 4, CCMT 8 110 220
9 CCMT 16 80 200
10 CCMT 24 140 200
11 CCMT 30 230 200
12 CCMT 42 220 200
13 CTR 660 75
14 CCMT 0 24 16
15 CCMT 1 24 16
Valve overview EKD 316C
n03 EKA 164A Danfoss valve type n37 n38
0 ETS 12.5, ETS 25, KVS 15 262 300
1 ETS 50, CCM 10, CCM 20, CCM30 262 300
2 ETS 100, CCM 40 353 300
3 ETS 250, KVS 42 381 300
4 ETS 400 381 300
5 User dened - -
6 UKV/SKV/VKV/PKV 24 16
7 ETS 6 24 16
8 CCMT 2, CCMT 4, CCMT 8 110 220
9 CCMT 16 80 200
10
11
12
13
14
15
16
17
CCMT 24
CCMT 30
CCMT 42
CTR
CCMT 0
CCMT 1
No valve se lected
ETS 12C, ETS 24C , ETS 25C, ETS 50C , ETS 100C, KVS 2C , KVS 3C, KVS 5C
140 200
230 200
220 200
660 75
24 16
24 16
10 160
60 160
Pressure transmitter
The range of the pressure transmitter can be set by entering the
transmitter’s minimum value at address o20 and maximum value
at address o21. The pressure sensor input is set up by default to
accept an AKS 32R pressure transducer. If another sensor is to be
The default range for the typical pressure transducer is 0 to 16 bar.
This can be changed by setting the minimum transducer pressure,
"o20 MinTransPres", and the maximum transducer pressure, "o21
MaxTransPres", to the new values.
used, it is important to note that it needs to be a 5 V ratiometric
type (10% - 90% of supply voltage).
Working range for pressure transmitter
Depending on the application a pressure transmitter with a given working range is used.
For the range of (-1 to 12 bar), the min. value is set to -1 bar o20 MinTransPres.
For the range of (-1 to 12 bar), the max. value is set to 12 bar o21 MaxTransPres.
© Danfoss | DCS (sw) | 2016.11
DKRCC.PD.RR0.B2.02 | 12
Page 13

Data sheet | Superheat controller type EKD 316, EKD 316C
Operation
Superheat function
You may choose between two kinds of superheat regulation,
either:
• Minimum stable superheat (MSS)
• Load-dened superheat
The regulation modes for controlling superheat
There are two dierent ways of controlling superheat, i.e.
controlling according to the minimum stable superheat (MSS) and
Load Dened superheat.
The parameter SH mode selects the controlling form where it can
be set to MSS when set to 1, or Load Dened superheat when set
to 2.
Minimum stable superheat (MSS)
The superheat control algorithm will attempt to regulate the
superheat down to the lowest stable value between the minimum
superheat setting, "Min SH" and the maximum superheat setting,
"Max SH".
The reference follows a dened curve. This curve is dened by
three values: the closing value, the min. value and the max. value.
These three values must be selected in such a way that the curve
is situated between the MSS curve and the curve for average
temperature dierence ∆Tm (temperature dierence between
media temperature and evaporating temperature.
Setting example = n22 = 4, n10 = 6 and n09 =10 K).
Function Parameter Value
Superheat control mode -2
= Load dene
n21 2
Min. Superheat Reference n10 1K - 100K
Max. Superheat Reference n09 1K - 100K
Value of min. SH ref for loads
under 10%
n22
Must be below
Min. SH (n10)
The superheat reference SH ref is adaptive and adjusted.
When using this form of control, there are three settings that have
major aect on this mode of control.
Max. SH – The maximum limit of SH ref.
Min. SH – The minimum limit of SH ref. Care should be taken not
to set this value too low in order to avoid ooding back into the
compressor.
Stability – This factor determines how much instability can be
accepted. Small values will cause the SH ref to increase if the
slightest instability in SH is detected. Higher values will accept a
higher degree of instability.
Function Parameter Default value
Superheat control -MSS n21 1
Min Superheat Reference n10 1K - 100K
Max Superheat Reference n09 1K - 100K
Load dene application
SH ref follows a dened curve as shown below. This curve is
dened by three values: SH close SH max and SH min.
This form of regulation is similar to the thermostatic valve where
the spring force can be adjusted to keep the SH (superheat) in the
stable region to the right of the curve.
The advantage over the thermostatic valve is that there are three
settings to dene the operating curve.
Using the MOP
In order to reduce the current to the compressor it is possible to
control the maximum operating pressure of the evaporator.
Evaporator pressure exceeds the "MOP" limit, the valve opening
degree is controlled by the MOP function which will keep the
pressure below the "MOP" limit. This function takes precedence
over the superheat control, so during MOP control the superheat is
not controlled.
The MOP function (address n11) is active when it is set to values
less than the maximum range of the pressure transmitter. Setting
it above the maximum range of the pressure transmitter or at 200
Bar will deactivate the MOP.. The pressure value is converted to
the corresponding temperature value and when the MOP is active,
the controller will prevent the evaporating temperature T1 from
exceeding this value.
If Maximum Operating suction Pressure MOP parameter n11 is
reset from factory setting 20 to 1 bar (gauge) From the MOP i.e 1
bar point the OD increases slower and slower until the pressure
reaches MOP + 0.5 i.e 1.5 bar. Subsequently the OD decreases
rapidly as the pressure increases.
OD
At this pressure the OD
no longer increases.
Beyond it the OD
decreases.
+ 0.5
MOP
At this pressure the OD
increases slower and
slower.
Pressure Pe
© Danfoss | DCS (sw) | 2016.11
Function Parameter Value
Maximum operating pressure
MOP
n11 0-200 bar
DKRCC.PD.RR0.B2.02 | 13
Page 14

Data sheet | Superheat controller type EKD 316, EKD 316C
Types of regulation
As a general rule, do not use mode 2 (Load dene application)
if the eect is not evaluated by e.g. an OEM chiller
manufacturer in a laboratory.
An incorrect setting will only make regulation poorer than the
factory setting of mode 1.
Instability caused by too much Proportional Gain can be corrected
by reducing to the value of the Kp factor.
This should be done by gradually reducing and observing the
results before making further reductions.
Single Loop (address o56 Reg.type = 1)
The EKD 316 / EKD 316C has the traditional PI controlling function
with the Kp factor for Proportional Gain and Tn for Integration
Time in seconds. This is also known as the Single loop control with
only one PI block, as shown in the diagram below.
Double Loop (address o56 Reg.type = 2)
The controller can regulate the superheat using a double loop
system. The so-called outer loop is really the same as in the single
loop system except that the output of PI block is the reference for
the inner loop.
The inner loop also has a PI block where the Proportional Gain
factor is KpT0 and the Integration Time is TnT0.
The feedback of the inner loop is the temperature dierence
between media temperature S4 and S1. This value represents the
load on the evaporator and large values will tend to increase the
opening degree OD% of the valve.
When to use Single or Double Loop
In most applications and especially air coolers, the single loop is
the best option due to its simplicity and being easier to tune.
In water chillers where the S4 sensor is located at the leaving water
outlet, the double loop gives some advantage in terms of being
less susceptible to compressor or fan step changes. In addition, it
opens the valve quicker during startup. However, the double loop
is less advantageous on air coolers because of the slower response
to the media temperature changes.
If the superheat response is slow to change, it can be increased by
reducing the value of the Integration Time Tn.
When tuning the superheat stability, it is good practice to have a
xed superheat reference by making SH max the same as SH min.
The tuning of the double loop is more complicated than the single
loop and it is advisable not to change too many parameters at
the same time. The starting point should be to use the following
settings.
Function Parameter Value
Kp factor n04 0.7
Tn sec n05 120
KpT0 n20 3
TnT0 sec n44 30
If the superheat is unstable, the KpT0 parameter should be slightly
reduced. The value parameter Kp factor is not large so little is
gained by reducing this parameter.
For details refer to the "Finding the optimum setting” section.
Note:
The S4 sensor has to be connected when Reg. type = 2, otherwise
an alarm sounds.
Note:
After o56 is changed, the controller must be switched o and
powered up again.
Recommended control loop type and settings for some
applicatiions
From the experience of using single loop and double regulation,
the following recommendations are given. These are only
recommendations and the nal choice is made by the end user.
Application Reg. type
address
o56
Air cooler
Water chiller2(Double
1
(Single loop)
loop)
Kp
factor
address
n04
3.0 120 0.4 -
0.7 120 2.0 30
Tn sec KpT0 TnT0 sec
address
n05
address
n20
address
n44
© Danfoss | DCS (sw) | 2016.11
DKRCC.PD.RR0.B2.02 | 14
Page 15

Data sheet | Superheat controller type EKD 316, EKD 316C
Manually operating the valve
There are two modes for operating the valve manually, and these
are described in the following sections.
Operating the valve manually from the external display (or via
MODBUS)
The opening degree of the ETS can be operated manually by
setting parameter o18 to 1 and then setting parameter o45 to the
required opening degree between 0% and 100%. Relay outputs
can also be checked using parameter o18.
Manual control of outputs
For service purposes the valve output and alarm relay outputs can be forced.
OFF: No override
1: Manual control via o45 is enabled
2: The alarm relay releases so that there is a connection between 24 and 25 (= alarm)
3: The alarm relay picks up so that there is a connection between 25 and 26 (= no alarm)
Manual control of the valve’s opening degree 045 0 - 100% valve OD
Operating the valve manually using an external analogue
signal
The opening degree of the stepper motor valve can be operated
manually with 0 - 20 mA or 4 - 20 mA or 0 - 10 V or 1 - 5 V external
analogue signal connected to terminals 21 (-) and 22 (+) of the
controller.
018 Manual ctrl
Controlling a valve with an analogue signal 061 Application mode 061=1
Input signal for external control of the valve's opening degree
Only used if o61 is set to 1.
Denition of the signal's range:
0: No signal
1: 0 - 20 mA
2: 4 - 20 mA
3: 0 - 10 V
4: 1 - 5 V
(At the lower value the valve will be closed. At the upper value the value will be fully open.
There is a linear relationship between the signal and the opening degree. The height of the
valve is not taken into account.)
o10
AI type
© Danfoss | DCS (sw) | 2016.11
DKRCC.PD.RR0.B2.02 | 15
Page 16

Data sheet | Superheat controller type EKD 316, EKD 316C
Finding the optimum settings
Details on the controller algorithm and settings
Kp factor (n04) and Kp min (n19)
The Proportional Gain is dependent on the value of the measured
superheat SH relative to Reference superheat SH ref. The
Proportional Gain has the following values relative to superheat SH:
If SH is more than 2.5K greater than SH ref, then Gain equals Kp
factor.
If SH is within the range -0.5 and 2.5K from SH ref, then Gain equals
Kp factor times Kp min.
The reason for this variable Gain is to provide stable superheat for
values near the superheat reference.
Note:
The value of Gain does not change suddenly but gradually when
SH gets close to SH ref.
Proportional Gain
Kp factor
Danfoss
84N375.11
Problems with startup
Sometimes in one-to-one applications, the valve does not open
suciently on startup, and troublesome low pressure trips may
occur. This problem is typical when using the single loop control
where only the SH controls the opening of the valve.
The force opening of valve function has been implemented in
the EKD 316 / EKD 316C controller. After startup, this function
will provide a constant, set minimum opening degree during a
set time period, regardless of the superheat value. The setting
parameters are called Start OD% (n17) and StartUp time (n15).
Please observe that the Start OD% is a minimum value after
startup and if the measured superheat (u21) produces a value
greater than Start OD% then the value will be valve opening
degree (u24) – see the diagram.
OD%
Valve OD%
Start OD%
Reg.OD%
Danfoss
84N378.11
Kp factor multiplied Kp min.
-0.5
2.5
SH ref
SH
Initial "Kick start" startup
In general the valve opening degree is controlled by the measured
value of the superheat SH. This means that during certain
situations during startup, the valve will be slow to open due to
the built-up of superheat from a small value. To prevent this from
happening, the valve is given an initial opening degree dependent
on the Kp factor, the measured superheat SH and SH close, as
given in the following relationship:
Initial OD% = kp factor*(SH – SH close)
This procedure is not to be confused with the force opening of the
valve given in the “Problems with startup” section.
OD%
Kp factor* (SH - SH Close)
When Kp factor = 3, SH = 12, Close = 2
Initial OD % = 30%
Start
Time
Danfoss
84N376.11
Forced OD%
Normal Reg.
Start Up time*
Start
Time from start
If the superheat uctuates
When the refrigerating system has been made to work steadily,
the controller’s factory-set control parameters should in most
cases provide a stable and relatively fast regulating system.
If the system, however, uctuates this may be due to the fact that
superheat parameters that are too low have been selected. Before
starting any adjustment of the factory settings check the S2 sensor
location – see section “Installation sensors”.
If adaptive superheat has been selected (n21 = 1):
Adjust: n09, n10 and n18.
If load-dened superheat MSS has been selected (n21 = 2):
Adjust: n09, n10 and n22.
Alternatively it may be due to the fact that the set regulation
parameters are not optimal.
If the time of oscillation is longer than the integration time:
(Tp > Tn (Tn is e.g. 240 seconds))
1. Increase Tn to 1.2 times T
2. Wait until the system is in balance again
3. If there is still oscillation, reduce Kp by e.g. 20%
4. Wait until the system is in balance
5. If it continues to oscillate, repeat 3 and 4
If the time of oscillation is shorter than the integration time:
(Tp < Tn (Tn is e.g. 240 seconds))
1. Reduce Kp by e.g. 20% of the scale reading
2. Wait until the system is in balance
3. If it continues to oscillate, repeat 1 and 2.
p
© Danfoss | DCS (sw) | 2016.11
DKRCC.PD.RR0.B2.02 | 16
Page 17

Data sheet | Superheat controller type EKD 316, EKD 316C
Troubleshooting
Symptom Possible Cause Remedy
Pressure drop across the evaporator too high
Lack of subcooling ahead of expansion valve
Evaporator superheat too high
Suction pressure too low
Pressure drop across the expansion valve less than valve is
sized for
Expansion valve too small
Expansion valve block with foreign material Remove valve and examine the orice.
Evaporator wholly or partly iced up De-ice evaporator
Superheat of expansion valve too low Increase the values of SH close and SH min.
Liquid hammer
in compressor
Superheat reference set too low Increase the value of SH min
The S2 sensor not in good contact with the suction line
Alarms
Check refrigerant ahead of expansion valve.
If the valve is placed much higher than condenser outlet,
check pressure dierence.
1. Check superheat performance, the settings
SH min and SH max.
2. Check valve capacity.
3. Check that the maximum number of steps of
valve is same as parameter n37.
Check pressure drop across expansion valve. Replace with
larger valve.
Check refrigeration system capacity and compare with
expansion valve capacity. Replace with larger valve if
necessary.
Ensure that S2 sensor is secured on suction line. Insulate
sensor.
Symptom Possible Cause Fault Message Remedy
E1 Fault in controller
E24 S2 Sensor error
Error message
The controller can give the
following messages
Alarm message
Status codes
E25 S4 Sensor error
E19 The input signal on terminals 21 - 22 is outside the range.
E20
A11 No refrigerant has been selected
A44 Battery alarm (no voltage or too low voltage)
S5 MOP
S10 Refrigeration stopped r12=o
non Regulation, no fault
Note:
1. Only one alarm is displayed at a time in the controller display and are shown in
the order given above. All alarms are displayed in the AKM system.
2. The alarm E19 will only be active if address o10 is set to 1 or more.
3. EKD 316 / EKD 316C with change over relay ( 3 terminals 24-25-26)
4. The battery alarm A44 is only active when battery alarm address A34 is set to ON.
The input signal on terminals 17 - 19 is below
minumum limit (P0 signal)
© Danfoss | DCS (sw) | 2016.11
DKRCC.PD.RR0.B2.02 | 17
Page 18

Data sheet | Superheat controller type EKD 316, EKD 316C
Appendix I
Menu survey for EKD 316
(For EKD 316C default parameter setting see Parameter identication table)
262
Application
choice
menu = o61
Function
The menus from either column 1 or column 2 are shown 1 2
Normal display
During regulation the actual level of superheating is displayed.
(If you would like to see the expansion valve’s actual opening degree, press the bottom button for approx. one second.)
During control with an analogue signal the opening degree is displayed. - % -
Reference
Units (0 = °C +bar / 1 = °F + psig) r05 0 1 0
Correction of signal from S2 r09 -10.0 K 10.0 K 0.0
Correction of signal from S4 r10 -10.0 K 10.0 K 0.0
Start/stop of refrigeration r12 O/0 On/1 O/0
Alarm
Battery monitoring A34 O/0 On/1 O/0
Regulating parameters
Valve denition:
0 = ETS 12.5, ETS 25, KVS 15
1 = ETS 50, CCM 10 – CCM 30
2 = ETS 100, CCM 40
3 = ETS 250, KVS 42
4 = ETS 400
5 = user-dened
On using external display EKA 164A, please check section valve overview
P: Amplication factor Kp
o56 = 1; n04 = 2.0
o56 = 2; n04 = 0.7
( Warning: Changes to n04 are lost when changing o56)
I: Integration time T n05 30 s 600 s 120
D: Dierentiation time Td (0 = o)
Max. value of superheat reference n09 1 K 100 K 10
Min. value of superheat reference n10 1 K 100 K 6
MOP (max = o) n11 0.0 bar 200 bar 20
Signal reliability during startup. Safety time period.
Should only be changed by trained sta
Signal reliability during startup – opening degree’s start value. Should only be changed by trained sta. n17 0% 100% 0
Stability factor for superheat control.
Changes should only be made by trained sta
Damping of amplication around reference value
Changes should only be made by trained sta
Amplication factor for superheat
Changes should only be made by trained sta
o56 = 1; n20 = 0.4
o56 = 2; n20 = 3.0
( Warning: Changes to n20 are lost when changing o56)
Denition of superheat control mode
1 = MSS,
2 = LOADAP
Value of min. superheat reference for loads under 10% n22 1 K 15 K 4
Max. opening degree
Changes should only be made by trained sta
Number of steps from 0 - 100% opening degree (only if n03 = 5 (User-dened))
Note: The display can only show three digits, but the setting value is four digits.
Only the three most important are shown, i.e. a reading of e.g. 250 means a setting of 2500.
(Automatic setting when valve is selected in n03).
Number of steps per second n38 5 stp/s 300 stp/s 300
Start backlash (extra closing steps at 0% opening (in % of n37)) n39 0% 100% 10
Integration time for inner loop (TnT0) n44 10 s 120 s 30
Compensation for spindle play n40 0 stp 100 stp 23 stp
6 = UKV/SKV/VKV/PKV
7 = ETS 6
8 = CCMT 2 – CCMT 8
9 = CCMT 16
10 = CCMT 24
11 = CCMT 30
12 = CCMT 42
13 = CTR
14 = CCMT 0
15 = CCMT 1
Para-
meter
n03 0 15 1
n04 0.5 20 2.0/0.7
n06 0 s 90 s 0
n15 0 sec. 90 sec. 0
n18 0 10 5
n19 0.0 1.0 0.3
n20 0.0 10.0 0.4/3.0
n21 1 2 1
n32 0 % 100 % 100
n37
Min. Max.
- K -
10
(100 stp)
Factory
setting
999
(9990
stp)
© Danfoss | DCS (sw) | 2016.11
DKRCC.PD.RR0.B2.02 | 18
Page 19

Data sheet | Superheat controller type EKD 316, EKD 316C
Menu survey for EKD 316 continued
Function
The menus from either column 1 or column 2 are shown
Parameter
Min. Max.
Miscellaneous
Controller’s address o03 0 240 240
If the valve’s opening degree should be controlled with an external signal, the signal is dened as:
0: no
signal
1: 0 - 20 mA 2: 4 - 20 mA 3: 0 - 10 V 4: 1 - 5 V
o10 0 4 0
Manual control of outputs:
OFF: no manual control
1: Manual control with "o45" enabled
o18 o/0 3 O /0
2: Simulate Alarm o : connection between 24 and 25
3: Simulate Alarm on : connection between 24 and 26
Working range for pressure transmitter – min. value
o20 -1 bar 0 bar -1.0
Working range for pressure transmitter – max. value o21 1 bar
Refrigerant setting
1 = R12
2 = R22
3 = R134a
4 = R502
5 = R717
6 = R13
7 = R13b1
8 = R23
9 = R500
10 = R503
11 = R114
12 = R142b
13 = User def.
14 = R32
15 = R227
16 = R401A
17 = R507
18 = R402A
19 = R404A
20 = R407C
21 = R407A
22 = R407B
23 = R410A
24 = R170
25 = R290
26 = R600
27 = R600a
28 = R744
29 = R1270
30 = R417A
31 = R422A
32 = R413A
33 = R422D
34 = 427A
35 = R438A
36 = R513A
37 = R407F
38 = R1234ze
39 = R1234yf
40 = R448A
41 = R449A
42 = R452A
o30 0 42 0
For EKD 316C the default factory setting for parameter o30 is 0 = none refrigerant selected
Manual control of the valve’s opening degree. The function can only be operated if o18 has been set
to "1".
o45 0 % 100 % 0
This function is only for manual operation. It must not be used for as a regulation function.
Selection of control mode:
1= Normal
o56 1 2 1
2 = With inner loop (S media temperature less T0)
Application mode. Menus blanked out so only the shaded menus are seen. See the two columns to
the right.
1: Controlling a valve with an analogue signal
o61 1 2 2 1 2
2: Superheat regulation
Holding current h22 0 % 100 % 20 %
High pressure alarm o99 0 1 0
Overdrive
Open hysteresis is the minimum requested opening degree required before the valve will open. This value cannot
be lower than the Close hysteresis.
Close hysteresis: if the requested opening degree is below this value, the valve will close to 0%. This value cannot
be set higher than the Open hysteresis.
Overdrive enable level. The opening degree needs to be above this value, before the overdrive will become enabled. When the overdrive is enabled the valve will overdrive once it is closed to 0%
Overdrive protection time. The valve will not overdrive until this time has elapsed after the last overdrive. This
prevents too frequent overdrives. The default is 0 meaning that it is o and doesn’t limit overdrives.
Forced overdrive time. The valve is forced to close and overdrive after this time has elapsed. The valve will then
open again to the desired opening degree. The default is 0 meaning it is o and doesn’t force close.
P67 0% 100% 1%
P68 0% 100% 1%
P69 0% 100% 10%
P70 0 hours
P71 0 hours
Service
Analog input (21 - 22) u06 mA (V)
Read status of input DI (20 - 21) u10 on/o
Temperature at S2 sensor u20 °C
Superheat u21 K
Superheat reference u22 K
Read valve’s opening degree u24 %
Read evaporating pressure u25 bar
Read evaporating temperature u26 °C
Temperature at S4 sensor u27 °C
Conguration settings (n03, n37, n38, n39, n40, o03, o30, o56 and o61) available only when regulation is stopped (r12=o).
Factory settings are indicated for standard unit (see code number, page 1). Other code number have customised settings.
200
bar
999
hours
999
hours
Factory
setting
12.0
0
0
Application
choice
menu = o61
1 2
© Danfoss | DCS (sw) | 2016.11
DKRCC.PD.RR0.B2.02 | 19
Page 20

Data sheet | Superheat controller type EKD 316, EKD 316C
Survey of functions
Function Para-
meter
Normal display
The superheat is normally shown.
The opening degree is displayed during manual operation or if the valve is under
analogue control.
Reference
Unit
Here you select whether the controller is to indicate the temperature values in °C or in
°F and pressure values in bar or psig.
If indication in °F is selected, other temperature settings will also switch to Fahrenheit,
either as absolute values or as delta.
The combination of temperature unit and pressure unit is depicted to the right.
Correction of signal from S2
(Compensation possibility through long sensor cable).
Correction of signal from S4
(Compensation possibility through long sensor cable).
Start/stop of refrigeration
With this setting, refrigeration can be started and stopped. Start/stop of refrigeration
can also be accomplished with the external switch function. See also appendix 1.
Alarm
If there is an alarm, the LEDs on the front of the external display will ash if it is connected. The alarm relay in the controller is closed.
Battery alarm
Here it is dened whether the controller is to monitor the voltage from the battery
backup. If there is low voltage, or no voltage, an alarm will be given
Parameter by operation via
data communication
SH/OD%
Units (Menu = Misc.)
r05
0: °C + bar
1: °F + psig
r09 Adjust S2
r10 Adjust S4
r12 Main Switch
Alarm setting
A34 Batt. alarm
Control parameters Injection control
Valve denition for EKD 316.
For EKD 316C refer to section “Stepper motor valve type”
0 = ETS 12½, ETS 25, KVS 15
1 = ETS 50, CCM 10 – CCM 30
2 = ETS 100, CCM 40
3 = ETS 250, KVS 42
4 = ETS 400
5 = user-dened
On using external display EKA 164A, please check page 9 section ETS valve
6 = UKV/SKV/VKV/PKV
7 = ETS 6
8 = CCMT 2 – CCMT 8
9 = CCMT 16
10 = CCMT 24
11 = CCMT 30
12= CCMT 42
13= CTR
14= CCMT 0
15= CCMT 1
P: Amplication factor Kp
If the Kp value is reduced the regulation becomes slower.
I: Integration time Tn
If the Tn value is increased the regulation becomes slower.
D: Dierentiation time Td
The D-setting can be cancelled by setting the value to min. (0).
Max. value for the superheat reference
Min. value for the superheat reference
Warning:
Due to the risk of liquid ow, the setting should not be lower than approx. 2-4 K.
MOP Note:
If no MOP function is required, select pos. O. (A value of 200 corresponds to O)
Startup time for safety signal
If the controller does not obtain a reliable signal within this period of time the controller will try to establish a stable signal in other ways. (A value that is too high may
result in a ooded evaporator).
The value should only be changed by specially-trained sta .
Signal safety during startup
The control function uses the value as a start value for the valve’s opening degree at
each thermostat cut-in. By adaptive control the controller continuously calculates a
new value.
The value should only be changed by specially-trained sta.
Stability factor for regulation of superheat
With a higher value, the control function will allow a greater uctuation of the superheat before the reference is changed. The value should only be changed by speciallytrained sta.
n03 Valve type
n04 Kp factor
n05 Tn sec.
n06 Td sec.
n09 Max SH
n10 Min SH
n11 MOP (bar)
n15 StartUp time
n17 Start OD%
n18 Stability
© Danfoss | DCS (sw) | 2016.11
DKRCC.PD.RR0.B2.02 | 20
Page 21

Data sheet | Superheat controller type EKD 316, EKD 316C
Survey and function (continued)
Function Para-
Damping of amplication near reference value
This setting damps the normal amplication Kp, but only just around the reference
value. A setting of 0.5 will reduce the KP value by half.
The value should only be changed by specially-trained sta.
Amplication factor for the superheat
This setting determines the valve’s opening degree as a function of the change in
evaporating pressure. An increase of the evaporating pressure will result in a reduced
opening degree. When there is a drop-out on the low-pressure thermostat during
startup, the value must be raised slightly. If there is pendling during start-up, the
value must be reduced slightly.
The value should only be changed by specially-trained sta.
Denition of superheat regulation (Ref. section "Operation")
1: Lowest permissible superheat (MSS). Adaptive regulation.
2: Load-dened superheat. The reference is established based on the line formed by
the three points: n09, n10 and n22.
Value of min. superheat reference for loads under 10%
(The value must be smaller than "n10").
Max. opening degree
The valve’s opening degree can be limited. The value is set in %.
Number of steps from 0% to 100% open (User-dened valve, n03 =5)
(Automatic setting when valve is selected in n03).
Spindle stroke speed (number of steps per second)
(Automatic setting when valve is selected in n03).
Integration time for the inner loop gain
Used only when o56 = 2
The value should only be changed by specially-trained sta.
meter
n19 Kp Min
n20 Kp T0
n21 SH mode
n22 SH Close
n32 ETS OD% Max
n37 Max. steps (100 to 9990 step)
n38 Steps/sec (5 to 300 step/sec)
n44 TnT0 sec
Parameter by operation via
data communication
Miscellaneous
Address/data communication
The controller must always have an address. The factory-set address is 240.
When an external display is connected, the display itself will nd the address of the
controller so that communication can take place.
Note:
A display and a system unit must not be connected at the same time.
The display will not be able to communicate in this situation.
If the controller is to be part of a network with other controllers and a system unit, the
controller‘s address must be within the range 1 to 200.
This address must EITHER be set via a display before it is connected to the data communication and a scan of the network is performed
OR the network is connected and a scan is performed. The address is then set afterwards. A new scan is performed so that the new address is known.
Requirements for the installation and data communication cable are discussed in the
separate document no. "RC8AC".
Application mode
1: The controller receives signals from another controller and must control the valve’s
opening degree.
2: Superheat regulation.
Input signal for external control of the valve‘s opening degree
Only used if o61 is set to 1.
Denition of the signal's range.
0: No signal
1: 0-20 mA / 2: 4-20 mA / 3: 0-10 V / 4: 1-5 V
(At the lower value the valve will be closed. At the upper value the value will be fully
open. There is a linear relationship between the signal and the opening degree. The
height of the valve is not taken into account.)
The controller can be operated via the
system unit and AK service tool.
It cannot be operated via AKM type
system software.
o03 Unit addr.
The address is set between 0 and 200.
(When the address is set, the system
the system unit’s scan function should
be activated)
o61 Appl. mode
o10 AI type
© Danfoss | DCS (sw) | 2016.11
DKRCC.PD.RR0.B2.02 | 21
Page 22

Data sheet | Superheat controller type EKD 316, EKD 316C
Survey and function (continued)
Function Para-
meter
Manual control of outputs
For service purposes the ETS-output and alarm relay outputs can be forced
However, only when regulation has been stopped.
OFF: No override
1: Manual control via o45 is enabled
2: The alarm relay releases so that there is a connection between 24 and 25 (= alarm)
3: The alarm relay picks up so that there is a connection between 25 and 26 (= no alarm)
Manual control of the ETS valve
The valve‘s opening degree can be set manually.
However, it does require "o18" to be set to "1", "2" or "3".
This function must only be used for manual operation. It must not be used for external
control.
Working range for pressure transmitter
Depending on the application, a pressure transmitter with a given working range is
used.
For the range of (-1 to 12 bar), the min. value is set to -1 bar.
For the range of (-1 to 12 bar), the max. value is set to 12 bar. o21 MaxTransPres.
Selection of control algorithm
Depending on the application, control can be carried out based on dierent parameters.
The two possibilities are shown in section "Type of regulation".
1=normal control (single loop)
2=with inner loop regulation and S4 temperature less T0 (double loop)
Note:
* After o56 is changed, the controller must be switched o and powered up again.
Refrigerant setting
Before refrigeration can be started, the refrigerant must be dened. You can select
the following refrigerants:
1 = R12
2 = R22
3 = R134a
4 = R502
5 = R717
6 = R13
7 = R13b1
8 = R23
9 = R500
10 = R503
11 = R114
12 = R142b
13 = User def.
14 = R32
15 = R227
16 = R401A
17 = R507
18 = R402A
19 = R404A
20 = R407C
21 = R407A
22 = R407B
23 = R410A
24 = R170
25 = R290
26 = R600
27 = R600a
28 = R744
29 = R1270
30 = R417A
31 = R422A
32 = R413A
33 = R422D
34 = 427A
35 = R438A
36 = R513A
37 = R407F
38 = R1234ze
39 = R1234yf
40 = R448A
41 = R449A
42 = R452A
For EKD 316C the default factory setting for parameter o30 is 0 = none refrigerant selected
( Warning: Incorrect selection of refrigerant may cause damage to the compressor).
Parameter by operation via
data communication
o18 Manual ctrl
o45 Manual ETS OD%
o20 MinTransPres.
o56 Reg. type *
o30 Refrigerant
Service Service
A number of controller values can be printed for use in a service situation
Read value of external current signal/voltage signal (Ext.Ref.) u06 Analogue input
Read status of input DI (start/stop input) u10 DI
Read the temperature at the S2 sensor u20 S2 temp.
Read superheat u21 SH
Read the control’s actual superheat reference u22 SH ref.
Read the valve’s opening degree u24 OD%
Read evaporating pressure u25 Evap. pres. P
Read evaporating temperature u26 Evap.Press.T
e
e
Read the temperature at the S4 sensor u27 S4 temp.
-- DO1 Alarm
Read status of alarm relay
Operating status
The controller’s operating status can be called forth by a brief (1s) activation of the
upper button. If a status code exists, it will be shown. (Status codes have lower prior-
EKC State
(0 = regulation)
ity than alarm codes. This means that status codes cannot be seen if there is an active
alarm code.
The individual status codes have the following meanings:
S10: Refrigeration stopped by the internal or external start/stop. 10
© Danfoss | DCS (sw) | 2016.11
DKRCC.PD.RR0.B2.02 | 22
Page 23

Data sheet | Superheat controller type EKD 316, EKD 316C
Appendix II
General information to MODBUS
communication via a PLC etc.
* Baudrate : 19200
* EKD Address : 240
* Polarity A-A and B-B
* Termination with 120 ohm resistor
Some parameters have what is called a "cong lock". This means
that they can only be changed when the main switch of the EKD
is set to OFF (r12 = 0). This applies for instance to the type of
refrigerant (o30). So if you want to change the refrigerant, the
main switch (r12) must rst be set to 0, then the refrigerant type
(o30) can be changed.
The following parameters require the main switch to be OFF:
n03 Valve type
n37 Max steps
n38 Max steps/sec
o03 Unit address
o30 Refrigerant
o56 Regulation type
o61 Application mode
Please refer to the manual for descriptions of these parameters.
It should be possible to change all other parameters while the unit
is running (regulation parameters etc.).
Example:
EKD 316 / EKD 316C as simple ETS valve driver function with the
following settings:
• PNU 117 [0] r12 Main switch = 0
• PNU 2075 [1] o18 Manual mode
• PNU 2064 [OD% ] o45 Manual ETS OD% (replace 0-10V signal)
• PNU 3032 [262] n37 Max. steps 2620
• PNU 3033 [250] n38 Steps pr. sec 250
• EKD 316 / EKD 316C address : 240
• PNU 2064 will go back to 0% at power o as the only one
© Danfoss | DCS (sw) | 2016.11
DKRCC.PD.RR0.B2.02 | 23
Page 24

Data sheet | Superheat controller type EKD 316, EKD 316C
EKD 316 – Parameter identication (modbus)
Explanations: Parameter – The parameter name and abbreviation
Parameter PNU R/W Cong lock Min Max Default Actual value Scale
Injection control (1)
n04 Kp factor 3003 R/W 0.5 20.0 2.0 20 *10
n05 Tn seconds 3004 R/W 30 600 120 120 *1
n06 Td seconds 3005 R/W 0 90 0 0 *1
n09 Max SH 3015 R/W 1.0 100 10.0 100 *10
n10 Min SH 3021 R/W 1.0 100 6.0 60 *10
n11 MOP 3013 R/W 0.0 200.0 20.0 200 *10
n15 Start time 3017 R/W 1 90 0 0 *1
n17 MinOdAtStart 3012 R/W 0 100 0 0 *1
n18 Stability 3014 R/W 0 10 5 5 *1
n19 Kp min. 3024 R/W 0.0 1.0 0.3 3 *10
n20 Kp T0 3025 R/W 0.0 10.0 0.4 4 *10
n21 SH mode 3026 R/W 1 2 1 1 *1
n22 SH close 3027 R/W 1.0 15.0 4.0 40 *10
n32 ETS OD% Max 3023 R/W 0 100 100 100 *1
n44 TnT0 sec. 3039 R/W 10 120 30 30 *1
o56 Reg. type 2076 R/W x 1 2 1 1 *1
Motor(2)
n37 Max steps 3032 R/W x 10 999 262 262 *1
n38 Max StepsSec 3033 R/W x 5 300 300 300 *1
n39 Start backlash 3034 R/W x 0 100 10 10 *1
n40 Backlash 3035 R/W x 0 100 23 23 *1
n03 Valve type 3002 R/W x 0 15 1 1 *1
N56 Motor current 3051 R/W 0 600 0 0 *1
h22 Holding current 2198 R/W x 0 100 0 0 *1
Alarm settings (3)
A34 Battery low 10035 R/W 0 1 0 0 *1
Miscellaneous (11)
r05 Temp.unit 105 R/W 0 1 0 0 *1
r09 Adjust S2 113 R/W -10.0 10.0 0.0 0 x10
r10 Adjust S3 114 R/W -10.0 10.0 0.0 0 x10
o20 MinTransPres 2034 R/W -1.0 0.0 0.0 0 *10
o21 MaxTransPres 2033 R/W 1.0 200.0 12.0 120 *10
o30 Refrigerant 2551 R/W x 0 42 0 0 *1
o18 Manual ctrl. 2075 R/W 0 3 0 0 *1
o45 Manual OD% 2064 R/W 0 100 0 0 *1
o99 Enable high press. alarm 2199 R/W 0 1 0 0 *1
Service (12)
o61 Appl.mode 2077 R/W x 1 2 2 2 *1
u10 DI1 status 2002 R 0 1 0 0 *1
o10 AI type 2027 R/W 0 4 0 0 *1
u06 Analog input 2504 R 0.0 30.0 0.0 0.0 *10
--- AL/Light rel 2509 R 0 1 0 0 *1
--- Reset alarm 2046 R/W 0 1 0 0 *1
--- Rfg.Fac.A1 2548 R/W 8000 12000 10428 10428 *1
--- Rfg.Fac.A2 2549 R/W -4000 -1000 -2255 -2255 *1
--- Rfg.Fac.A3 2550 R/W 2000 3000 2557 2557 *1
Alarms (13)
--- Standby 20000 R 0 1 0 0 *1
--- EKC Error 20001 R 0 1 0 0 *1
--- S2 Error 20002 R 0 1 0 0 *1
--- S3 Error 20003 R 0 1 0 0 *1
--- Pe inp.error 20004 R 0 1 0 0 *1
--- AI inp.error 20005 R 0 1 0 0 *1
--- No Rfg. Sel. 20006 R 0 1 0 0 *1
--- Battery low 20008 R 0 1 0 0 *1
Danfoss only (14)
o03 Unit addr. 2008 R/W x 1 240 240 240 *1
No text (15)
r12 Main switch 117 R/W 0 1 0 0 *1
u20 S2 temp. 2537 R -200.0 200.0 0.0 0.0 *10
u21 Superheat 2536 R 0.0 100.0 0.0 0.0 *10
u22 SuperheatRef 2535 R 0.0 100.0 0.0 0.0 *10
u24 Opening % 2542 R 0 100 0 0 *1
u25 EvapPress P
u26 EvapTemp T
u27 Temp. S3 2545 R -200.0 200.0 0.0 0.0 *10
--- EKC State 2007 R 0 100 0 0 *1
e
e
PNU – The Parameter Number. Note: This is equivalent to the modbus register number (modbus address + 1)
R/W – R means read only, RW means it can be changed
Cong lock – If the parameter is cong locked it means that the value can only be changed when the main switch is o
Min. – The minimum value of the parameter
Max. – The maximum value of the parameter
Default – The default value of the parameter (factory setting)
Actual value – Values are read/written as 16 bit integer values without decimals. This is the default value as read via modbus
Scale – This shows the scaling factor of the value. *1 means that there is no scaling. *10 means that the read value is
10 times larger than the actual value.
2543 R -200.0 200.0 0.0 0.0 *10
2544 R -200.0 200.0 0.0 0.0 *10
© Danfoss | DCS (sw) | 2016.11
DKRCC.PD.RR0.B2.02 | 24
Page 25

Data sheet | Superheat controller type EKD 316, EKD 316C
EKD 316C – Parameter identication (Modbus)
Lock - the value can only be changed when the main switch is o
PNU - equivalent to to the modbus register no. (modbus adress + 1).
Actual value
Values are read/written as 16 bit integer values without decimals. This is the default value as read via modbus.
Scale
This shows the scaling factor of the value. *1 means that there is no scaling. *10 means that the read value
is 10 times larger thanthe actual value.
Parameter PNU R/W Lock Min. Max. Default
Regulation Control
r12 Main switch (O = 0 / On = 1)
o10 AI type (0: no signal
1: 0-20 mA, 2: 4-20 mA
3: 0-10 V, 4: 1-5 V)
o61 should be set to 1 in order to
use this feature
o18 Manual control 2075
o45 Manual OD%
o56 Reg. type
1= Normal
2 = With inner loop
o61 Appl.mode
1: Valve driver mode using
analogue signal
2: Superheat regulation
117 R/W - 0 1 0 0 *1
2027 R/W - 0 4 0 0 *1
R/W - 0 3 0 0 *1
2064 R/W - 0 100 0 0 *1
2076 R/W x 1 2 1 1 *1
2077 R/W x 1 2 2 2 *1
Actual
value
Scale
Valve
n03 Valve type
Ref. valve overview
n32 ETS OD% Max
n37 Max. steps [Stp]
n38 Max. Stp/Sec (Hz)
n39 Start backlash [%]
n40 Backlash [Stp]
n56 Motor current (mA RMS)
h22 Holding current [%]
3002 R/W x 0 17 16 1 *1
3023 R/W - 0 100 100 100 *1
3032 R/W x 10 999 60 60 *1
3033 R/W x 5 300 160 160 *1
3034 R/W x 0 100 10 3 *1
3035 R/W x 0 100 0 0 *1
3051 R/W x 0 600 0 0 *1
2198 R/W x 0 100 0 0 *1
Refrigerant
o30 Refrigerant
(Ref. appendix 1)
---
Rfg.Fac.A1 2548 R/W - 8000 - 10428 10428 *1
---
Rfg.Fac.A2 2549 R/W - -4000 - -2255 -2255 *1
---
Rfg.Fac.A3 2550 R/W - 1000 3000 2557 2557 *1
2551 R/W x 0 42 0 0 *1
Sensors
r05
Temp.unit 105 R/W - 0 1 0 0 *1
r09
Adjust S2 [K] 113 R/W - -1 10 0 0 x10
r10
Adjust S4 [K] 114 R/W - -1 10 0 0 x10
o20 Min. Trans. Pres.
(bar relative)
o21 Max. Trans. Pres.
(bar relative)
o99
Enable high pressure alarm 2199 R/W - 0 1 0 0 *1
2034 R/W - -1 0 -1 -10 *10
2033 R/W - 1 200 12 120 *10
© Danfoss | DCS (sw) | 2016.11
DKRCC.PD.RR0.B2.02 | 25
Page 26

Data sheet | Superheat controller type EKD 316, EKD 316C
EKD 316C – Parameter identication continued
Parameter PNU R/W Lock Min. Max. Default
Injection control
n04
Kp factor 3003 R/W - 0.5 20 2
n05
Tn seconds 3004 R/W - 30 600 120
n06
Td seconds 3005 R/W - 0 90 0
n09
Max SH 3015 R/W - 1 100 10
n10
Min SH 3021 R/W - 1 100 6
n11
MOP [bar] (max = o) 3013 R/W - 0 200 20
n15
Start time [sec] 3017 R/W - 1 90 0
n17
MinOdAtStart [%] 3012 R/W - 0 100 0
n18
Stability 3014 R/W - 0 10 5
n19
Kp min. 3024 R/W - 0 1 0.3
n20
Kp T0 3025 R/W - 0 10 0.4
n21
SH mode
1= MSS, 2 = Load app.
n22
SH close [K] 3027 R/W - 1 15 4
n44
TnT0 sec. 3039 R/W - 10 120 30
Service
---
AL/Light rel 2509 R - 0 1 0
---
Reset alarm 2046 R/W - 0 1 0
---
EKC State 2007 R - 0 100 0
Alarms
A34
A34 Battery low 10035 R/W - 0 1 0
---
Standby 20000 R - 0 1 0
---
EKC Error 20001 R - 0 1 0
---
S2 Error 20002 R - 0 1 0
---
S3 Error 20003 R - 0 1 0
Peinp. error
---
---
AI inp.error 20005 R - 0 1 0
---
No Rfg. Sel. 20006 R - 0 1 0
Read out
u06
Analog input [mA] 2504 R - 0 30 0
u10
DI1 status 2002 R - 0 1 0
u20
S2 temp. [°C] 2537 R - -200 200 0
u21
Superheat [K] 2536 R - 0 100 0
u22
Superheat Ref [K] 2535 R - 0 100 0
o03
Unit addr. 2008 R/W x 1 240 240
3026 R/W - 1 2 1
20004 R - 0 1 0
Actual val-
ue
20 *10
120 *1
0 *1
100 *10
60 *10
200 *10
0 *1
0 *1
5 *1
3 *10
4 *10
1 *1
40 *10
30 *1
0 *1
0 *1
0 *1
0 *1
0 *1
0 *1
0 *1
0 *1
0 *1
0 *1
0 *1
0 *10
0 *1
0 *10
0 *10
0 *10
240 *1
Scale
© Danfoss | DCS (sw) | 2016.11
DKRCC.PD.RR0.B2.02 | 26
Page 27

Installation considerations
Accidental damage, poor installation, or site conditions can give
rise to malfunctions of the control system, and ultimately lead to a
plant breakdown.
Every possible safeguard is incorporated into our products to
prevent this. However, an incorrect installation, for example, could
still present problems. Electronic controls are no substitute for
normal, good engineering practice.
List of literature
www.danfoss.com
1. Mouse over "Products and solutions"
2. Click on "Products"
3. Click on "Documentation"
4. Click on "Technical literature" Refrigeration and air conditioning
5. Click on "Document search"
6. Click on "Filter"
7. Type or copy literature no. in the "Literature no." eld
• Catalogue RK0YG
• ETS valves, technical brochure DKRCC.PD.VD
• Installation guide for data communication RC8AC
Danfoss will not be responsible for any goods, or plant
components, damaged as a result of the above defects. It is the
installer‘s responsibility to check the installation thoroughly, and
to t the necessary safety devices.
Particular attention is drawn to the need for a "force closing" signal
to controllers in the event of compressor stoppage, and to the
requirement for suction line accumulators.
Your local Danfoss agent will be pleased to assist with further
advice, etc.
Your local Danfoss agent will be pleased to assist with further advice, etc.
© Danfoss | DCS (sw) | 2016.11
DKRCC.PD.RR0.B2.02 | 27
 Loading...
Loading...