

Page 1
Sommario
Sommario
VLT® DriveMotor serie FCM
1 Introduzione
1.1.1 Vers. software 4
1.1.5 Norme di sicurezza 5
1.1.6 Avviso contro l'avviamento involontario 5
1.3.1 Integrazione di convertitore di frequenza e motore 6
1.4.1 Modulo d'ordine 7
1.4.2 Gamma dei prodotti 8
1.4.3 Ordinazione 9
1.4.4 Tool software PC 9
1.4.5 Informazioni per l'ordine di telai e flange 10
1.4.6 Informazioni per gli ordini sulla posizione scatola inverter e sulla posizione foro
di scarico 11
2 Installazione
2.1.1 FCM 305-375 per 3 fasi, 380-480 V 12
2.1.2 Dati tecnici generali 13
2.1.3 Coppie di serraggio 16
2.1.4 Sezione trasversale massima dei cavi 16
4
12
2.1.5 Misura delle viti 16
2.1.6 Protezione 17
2.2 Descrizione del motore
2.2.1 Uso del motore FC 19
2.2.2 Cuscinetti 19
2.2.3 Alberi uscita 20
2.2.4 Dimensioni 20
2.2.5 Installazione del motore FC 23
2.2.6 Allineamento 23
2.2.7 Coppie bulloni 24
2.2.8 Manutenzione 24
2.2.9 Protezione termica dell'FCM 300 25
2.3.1 Kit connettore di servizio (175N2546) 25
2.3.2 Kit connettore (175N2545) 26
2.3.3 Kit di montaggio remoto (175N0160) 26
2.3.5 Opzione potenziometro (177N0011) 27
2.3.6 Tastiera di funzionamento locale (LOP) (175N0128) IP65 27
18
3 Programmazione
3.1.1 Pannello di controllo (175NO131) 29
3.1.2 Installazione dell'LCP 29
3.1.3 Funzioni dell'LCP 29
29
MG03BA06 - VLT® è un marchio registrato Danfoss 1
Page 2
Sommario
VLT® DriveMotor serie FCM
3.1.4 Display 30
3.1.5 LED 30
3.1.6 Tasti di comando 30
3.1.7 Funzioni dei tasti di comando 31
3.1.8 Stato di visualizzazione del display 32
3.1.9 Modalità di visualizzazione 32
3.1.10 Modalità visualizzazione - selezione dello stato di visualizzazione 32
3.1.11 Modalità menu rapido rispetto alla modalità menu 33
3.1.12 Setup rapido tramite menu rapido 33
3.1.13 Selezione di parametri 34
3.1.14 Modalità menu 34
3.1.15 Gruppi di parametri 34
3.1.16 Modifica dei dati 34
3.1.17 Modifica di un valore di testo 35
3.1.18 Variazione continua di un valore del dato numerico 35
3.1.19 Struttura del menu 36
3.1.20 Gruppo di parametri 0-** Funzionamento / Display 37
3.2.1 Gruppo di parametri 1-** Carico / Motore 41
3.4 Parametri 317-340 - Guida alla progettazione FCM 300
3.5 Parametri 400-446 - Guida alla progettazione FCM 300
3.6.1 Bus seriale 62
3.6.2 Trasmissione dei telegrammi 62
3.6.3 Struttura del telegramma 62
3.6.4 Byte di dati 63
3.6.5 Parola di controllo secondo lo standard del profilo Fieldbus 65
3.7.1 Gruppo di parametri 5-** Comunicazione seriale 71
3.8 Parametri 600-678 - Guida alla progettazione FCM 300
3.8.1 Parametri Gruppo 6-** Funzioni tecniche 76
4 Tutto sull'FCM 300
4.1.1 Isolamento galvanico (PELV) 80
4.1.2 Corrente di dispersione verso terra 80
4.1.3 Condizioni di funzionamento estreme 81
48
54
76
80
4.1.4 Rumorosità acustica 81
4.1.5 Bilanciamento 81
4.1.6 Protezione termica e riduzione della potenza 82
4.1.7 Declassamento per temperatura ambiente 82
4.1.8 Declassamento in base alla pressione dell'aria atmosferica 82
4.1.9 Declassamento in relazione ad un funzionamento a bassa velocità 82
4.1.10 Declassamento in relazione ad alte frequenze di commutazione 83
4.1.11 Vibrazioni e urti 83
2 MG03BA06 - VLT® è un marchio registrato Danfoss
Page 3
Sommario
VLT® DriveMotor serie FCM
4.1.12 Umidità dell'aria 83
4.1.13 Norma UL 83
4.1.14 Rendimento 83
4.1.15 Interferenza di rete/armoniche 84
4.1.16 Fattore di potenza 85
4.1.17 Che cos'è il marchio CE? 85
4.1.18 La direttiva macchine (98/37/CEE) 85
4.1.19 La direttiva sulla bassa tensione (73/23/CEE) 85
4.1.20 La direttiva EMC (89/336/CEE) 85
4.1.21 Campo di applicazione della direttiva 85
4.1.22 Motore serie FCM 300 Danfoss e marchio CE 86
4.1.23 Conformità alla Direttiva EMC 89/336/CEE 86
4.1.24 Standard EMC 86
4.1.25 Ambienti aggressivi 87
4.2.1 Elenco degli avvisi e degli allarmi 88
4.2.2 Cosa fare se il motore non si avvia? 88
4.2.3 Avvisi 89
4.2.4 Parola di avviso, parola di stato esteso e parola di allarme 91
4.3 Elenco dei parametri
Indice
92
97
MG03BA06 - VLT® è un marchio registrato Danfoss 3
Page 4
Introduzione
VLT® DriveMotor serie FCM
11
1 Introduzione
1.1.4 Avvisi generali
1.1 Sicurezza
NOTA!
1.1.1 Vers. software
Serie FCM 300
Guida alla Progettazione
Versione software: 3.1x
La presente Guida alla progettazione può essere utilizzata per
tutti i convertitori di frequenza della serie FCM 300 dotati della
versione software 3.1x.
Il numero della versione software è indicato nel parametro 624
Versione SW n..
Tabella 1.1
Tutti gli interventi devono essere effettuati da personale
opportunamente addestrato.
Usare tutti i dispositivi di sollevamento disponibili, ad
esempio entrambi i punti di sollevamento oppure il punto
di sollevamento singolo, se installati*.
Sollevamento verticale. Evitare rotazioni non controllate.
Sollevare la macchina. Non sollevare altre apparecchiature
con i soli punti di sollevamento del motore.
Prima dell'installazione, controllare la presenza di danni al
coperchio della ventola, danni all'albero, danni ai piedini/di
montaggio e dispositivi di fissaggio allentati. Controllare i
particolari della targhetta.
Verificare che la superficie di installazione sia piana e che
l'installazione sia equilibrata e ben allineata.
Le guarnizioni, i sigillanti e le protezioni devono essere
correttamente installati.
Correggere la tensione della cinghia.
Istruzioni per lo smaltimento
1.1.2
Le attrezzature costituite da componenti
elettrici non possono essere smaltite con i
rifiuti domestici.
Devono essere raccolte a parte insieme ai
rifiuti elettrici ed elettronici in conformità
alle leggi locali vigenti.
Tabella 1.2
Simboli
1.1.3
I seguenti simboli vengono usati nella presente Guida alla
Progettazione e richiedono una particolare attenzione.
AVVISO
Indica una situazione potenzialmente rischiosa che, se non
evitata, potrebbe causare morte o lesioni gravi.
NOTA!
Evidenzia informazioni che dovrebbero essere considerate
con attenzione per evitare errori o un funzionamento del
sistema con prestazioni inferiori a quelle ottimali,
ATTENZIONE
Indica una situazione potenzialmente rischiosa che, se non
evitata, può causare lesioni leggere o moderate. Potrebbe
essere utilizzata anche per avvisare di pratiche non sicure.
Rispettare le regole relative al declassamento. Vedere
4.1 Condizioni speciali.
*Nota: la capacità di sollevamento (manuale) massima è di
20 kg sotto la spalla ma sopra il livello del pavimento. Pesi
lordi max:
- Dimensioni del telaio 80: 15 kg
- Dimensioni del telaio 90 e 100: 30 kg
- Dimensioni del telaio 112: 45 kg
- Dimensioni del telaio 132: 80 kg
AVVISO
Il motore FC, se collegato alla rete, è soggetto a tensioni
pericolose. L’errata installazione del motore FC può essere
causa di anomalie alle apparecchiature e di lesioni gravi o
mortali alle persone.
Di conseguenza è necessario osservare le istruzioni del
presente manuale, nonché le norme di sicurezza locali e
nazionali.
Toccare le parti elettriche può avere conseguenze letali,
anche dopo aver disinserito l’alimentazione di rete.
Attendere almeno 4 minuti.
- L'installazione deve essere opportunamente isolata.
- Installare coperchi e passacavi.
4 MG03BA06 - VLT® è un marchio registrato Danfoss
Page 5
175NA161.10
Promotion
All
users
X = version number
YY = language
Misc.
Quick Setup
MG.03.FX.YY
Design
Guide
MG03BXYY
PROFIBUS-
Manual
MG.03.EX.YY
Brochure
MB.03.CX.YY
Articles
MZ.03.AX.YY
MCT 10 Setup
Software Manual
MG10RXYY
Data sheet
MD.03.AX.YY
Introduzione
VLT® DriveMotor serie FCM
AVVISO
Per altitudini superiori ai 2 km, contattare Danfoss Drives
per informazioni sulle caratteristiche PELV.
NOTA!
È responsabilità dell’utente o dell’elettricista qualificato
garantire il corretto collegamento a massa e protezione in
conformità alle norme e agli standard locali e nazionali
applicabili.
1.1.5 Norme di sicurezza
Se devono essere effettuati lavori di riparazione, il
•
VLT DriveMotor (motore FC) deve essere
scollegato dalla rete.
Accertarsi che la rete di alimentazione sia stata
disinserita e che sia trascorso il tempo necessario
(4 minuti).
Per l'unità deve essere prevista una messa a terra
•
di protezione, l'utente deve essere protetto dalla
tensione di alimentazione e il motore deve essere
protetto dal sovraccarico in conformità con le
norme locali e nazionali vigenti in materia.
L'uso degli RCD (relè ELCB) è descritto in 4.1.2
Corrente di dispersione verso terra .
Le correnti di dispersione a terra sono superiori a
•
3,5 mA. Ciò significa che il motore FC richiede
un’installazione fissa e permanente nonché una
messa a terra di protezione rinforzata.
arrestato mediante i comandi digitali, i comandi
bus o i riferimenti.
Se per considerazioni di sicurezza personale
risulta necessario evitare ogni possibilità di
avviamento involontario, queste misure di arresto
non sono sufficienti.
Il motore potrebbe avviarsi durante la modifica
•
dei parametri.
Un motore arrestato può avviarsi anche in
•
seguito ad anomalie dei componenti elettronici
del motore FC, a un sovraccarico temporaneo
oppure un guasto nella rete di alimentazione.
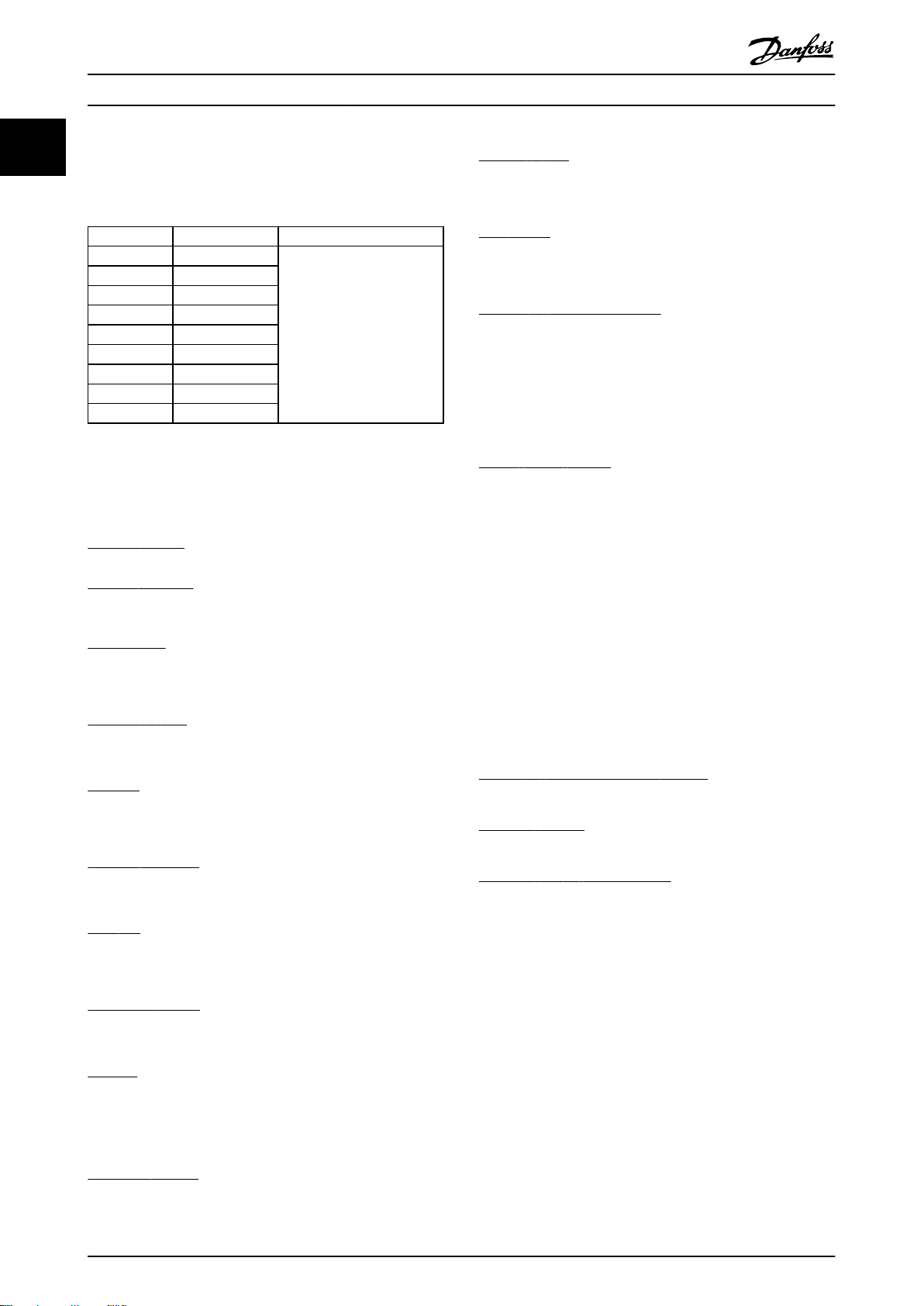
1.2 Introduzione
Pubblicazioni tecniche specifiche sulla serie FCM 300:
Guida alla Progettazione:
Programmazione
rapida:
Tabella 1.3
Fornisce tutte le informazioni necessarie
per la progettazione, nonché un'approfondita descrizione di concetti base,
gamma dei prodotti, dati tecnici,
comando, programmazione ecc.
Aiuta gli utenti ad installare e far
funzionare rapidamente il proprio motore
della serie FCM 300.
Questo manuale è sempre in dotazione
con il motore.
1 1
Avviso contro l'avviamento
1.1.6
involontario
Quando il convertitore di frequenza è collegato
•
alla rete di alimentazione, il motore può essere
Disegno 1.1 Documentazione disponibile per la serie FCM 300
Per ulteriori informazioni sulla serie FCM 300, contattare il
fornitore locale Danfoss.
MG03BA06 - VLT® è un marchio registrato Danfoss 5
Page 6
Introduzione
VLT® DriveMotor serie FCM
11
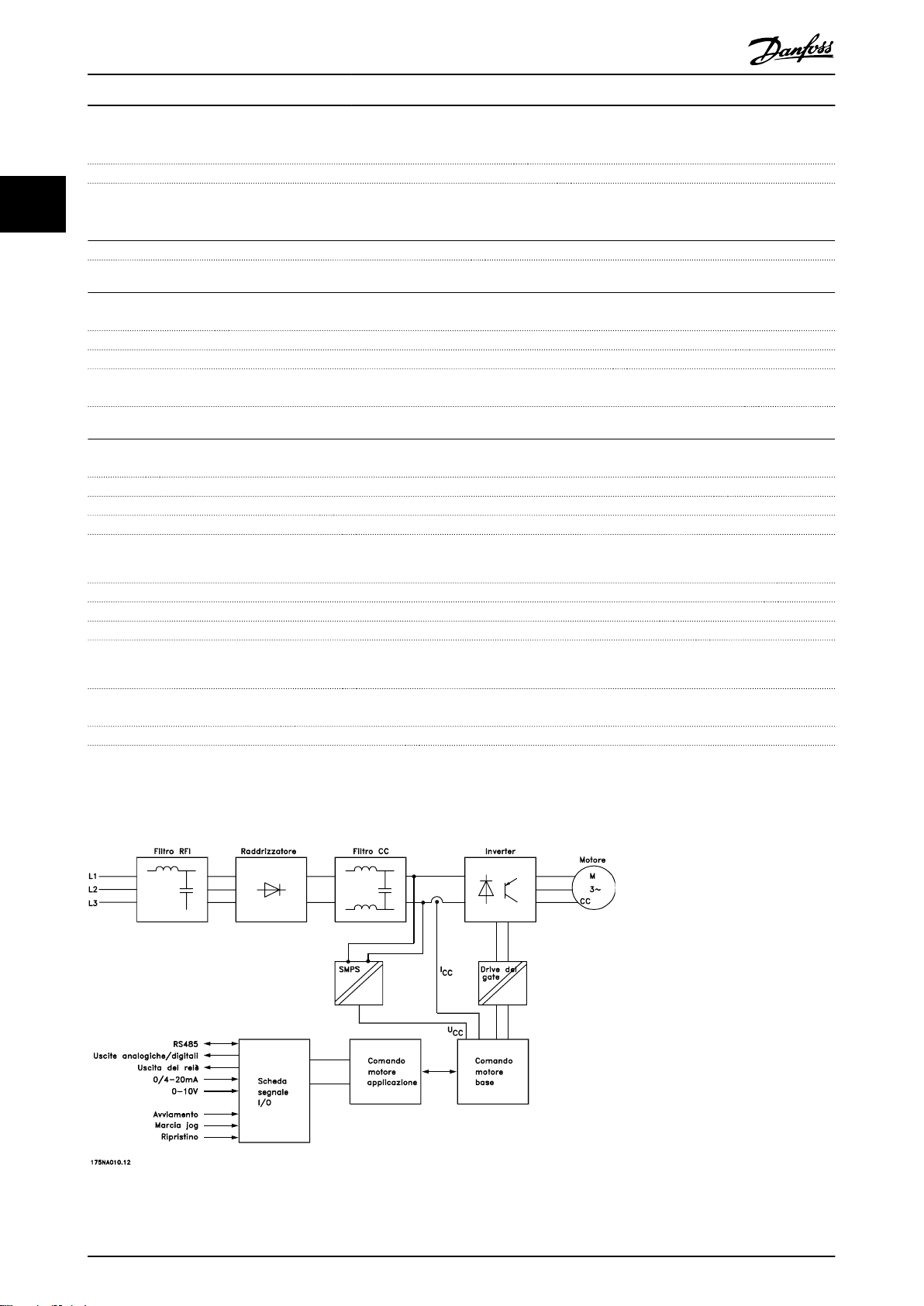
1.3 Principio del prodotto
1.3.1 Integrazione di convertitore di
frequenza e motore
Il convertitore di frequenza VLT Danfoss integrato in un
motore asincrono consente una regolazione continua della
velocità in un'unica unità.
Il VLT DriveMotor Serie FCM 300 rappresenta un'alternativa
molto compatta alla soluzione ordinaria con convertitore di
frequenza VLT e motore separati. Il convertitore di
frequenza viene collegato al posto della morsettiera del
motore e non è più alto di una morsettiera standard né
più largo o più lungo del motore (vedere 2.2.4
Dimensioni ).
L'installazione è estremamente facile. Lo spazio per i
pannelli non è un problema e non occorre un cablaggio
speciale per rispettare la direttiva EMC in quanto non sono
necessari cavi motore. Gli unici collegamenti sono quelli
alla rete e al sistema di comando.
L’adattamento di fabbrica fra convertitore di frequenza e
motore consente un comando preciso ed efficace oltre ad
eliminare le preimpostazioni in loco.
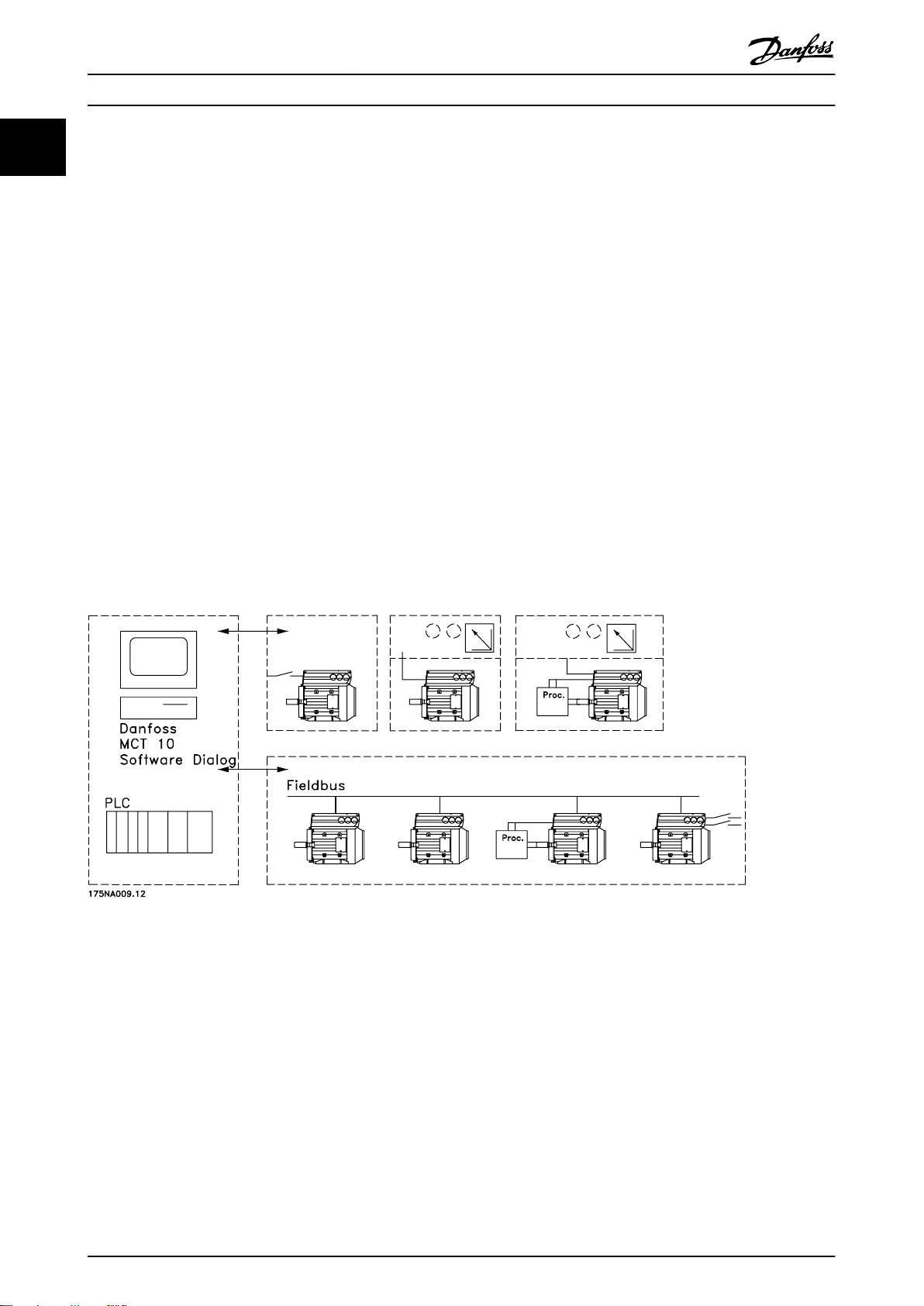
Il motore FC può essere impiegato in sistemi autonomi con
segnali di comando tradizionali, quali segnali di avvio/
arresto, riferimenti alla velocità e regolazione di processo
ad anello chiuso oppure in sistemi di comando multipli
con segnali di comando distribuiti da un bus di campo.
È possibile combinare segnali di comando fieldbus e
tradizionali e un controllo PID ad anello chiuso.
Disegno 1.2 Strutture di controllo
6 MG03BA06 - VLT® è un marchio registrato Danfoss
Page 7
Introduzione
VLT® DriveMotor serie FCM
1.4 Selezione del motore FC, FCM 300
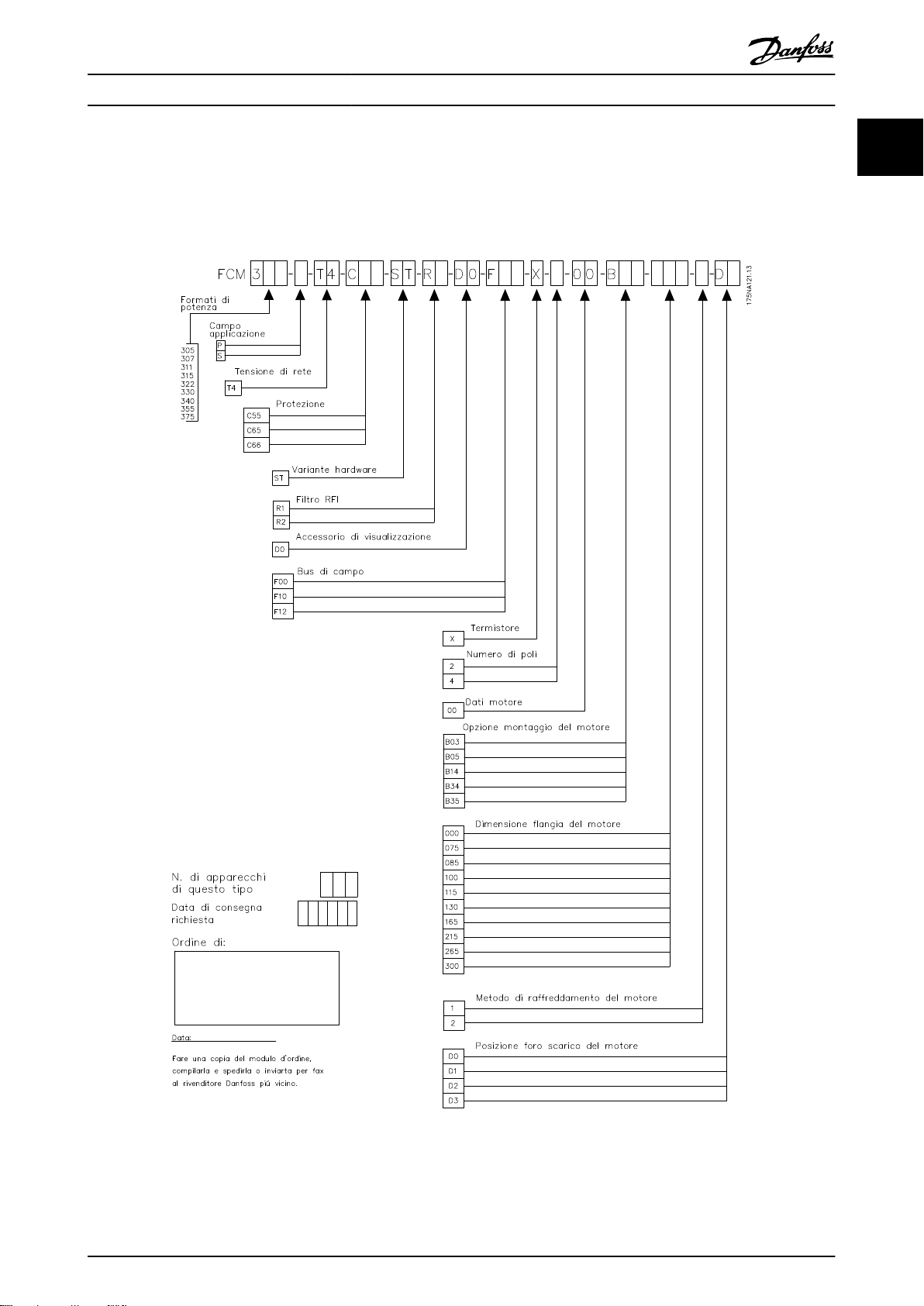
1.4.1 Modulo d'ordine
1 1
Disegno 1.3
MG03BA06 - VLT® è un marchio registrato Danfoss 7
Page 8
Introduzione
VLT® DriveMotor serie FCM
11
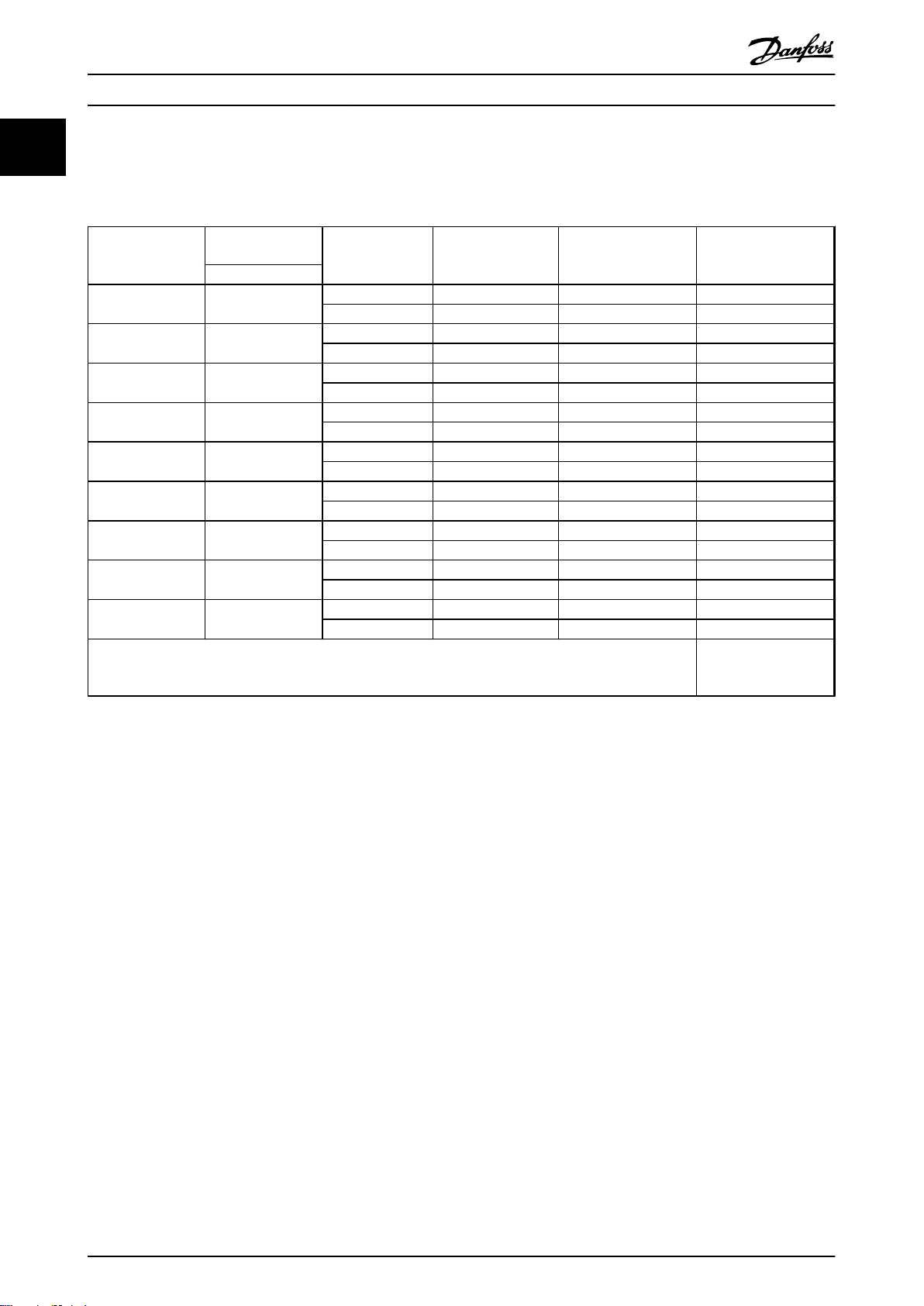
1.4.2 Gamma dei prodotti
VLT DriveMotor Serie FCM 300, motori a 2/4 poli
Tipo Uscita motore Alimentazione di rete
FCM 305 0,55 kW
FCM 307 0,75 kW
FCM 311 1,1 kW
FCM 315 1,5 kW
FCM 322 2,2 kW
FCM 330 3,0 kW
FCM 340 4,0 kW
FCM 355 5,5 kW
FCM 375 7,5 kW
Tabella 1.4 Potenza
Ogni tipo di motore contenuto nella gamma dei prodotti è
disponibile in diverse versioni.
Versioni inverter
Taglia di potenza:
(Vedere Tabella 1.4)
Adattamento
P: Processo
•
S: Sensorless (OEM pompe speciali)
•
Tensione di rete:
T4: Tensione di alimentazione trifase 380-480 V
•
Custodia
C55: IP55
•
C66: IP66
•
Variante hardware:
ST: Standard
•
Filtro RFI
R1: Conformità alla classe 1A
•
R2: Conformità alla classe 1B
•
Connettore display
D0: Nessun connettore per il display
•
Fieldbus
F00: Nessun bus di campo
•
F10: Profibus DPV1 3 MB
•
F12: Profibus DPV1 12 MB
•
Termistore motore
Trifase 380-480 V
Numero di poli
2: Motore a 2 poli
•
4: Motore a 4 poli
•
Dati motore
B2: Motore ad alto rendimento IE2
•
BC: Motore ad alta efficienza IE2/ghisa
•
Opzione di montaggio motore
B03: Montaggio con piedi
•
B05: Flangia B5
•
B14: Flangia B14
•
B34: Piede e flangia B14
•
B35: Piede e flangia B5
•
Codice flangia motore
(per quanto riguarda le dimensioni standard della flangia e
le dimensioni di flangia disponibili, vedere
1.4.5 Informazioni per l'ordine di telai e flange).
000: Solo montaggio con piedi
•
085: 85 mm
•
100: 100 mm
•
115: 115 mm
•
130: 130 mm
•
165: 165 mm
•
215: 215 mm
•
265: 265 mm
•
300: 300 mm
•
Metodo di raffreddamento del motore
1: Ventola montata sull'albero
•
Posizione inverter
D: Di norma sulla parte superiore
•
Posizione foro di scarico motore
(vedi 1.4.6 Informazioni per gli ordini sulla posizione scatola
inverter e sulla posizione foro di scarico)
0: Nessun foro di scarico
•
1: Opposti a entrambe i lati del modulo inverter
•
(comando/non comando)
2: 90° scatola inverter destra
•
3: 90° scatola inverter sinistra
•
X: Nessun termistore motore
•
8 MG03BA06 - VLT® è un marchio registrato Danfoss
Page 9

175NA162.10
Introduzione
VLT® DriveMotor serie FCM
1.4.3 Ordinazione
Fare una copia del modulo d'ordine, vedere 1.4.1 Modulo
d'ordine Compilare l'ordine e inviarlo per posta o per fax al
più vicino ufficio locale dell'organizzazione vendite
Danfoss. Al motore Serie FCM 300 viene assegnato un
codice in base all’ordine.
Il modulo di ordinazione dell'unità base deve sempre
essere completo. Quando viene compilato il codice,
indicare sempre i caratteri della stringa di base (1-34).
Insieme alla conferma dell'ordine il cliente riceverà un
codice ad 8 cifre da utilizzare per le ordinazioni successive.
Software per PC Danfoss per la comunicazione seriale, MCT
10
Tutti i motori della Serie FCM 300 dispongono per default
di una porta RS 485 che consente la comunicazione ad
esempio con un PC. A tale scopo è disponibile un
programma denominato MCT 10 (vedere 1.4.4 Tool
software PC ).
Codici d'ordine, MCT 10
Usare il codice 130B1000 per ordinare il CD contenete il
software di setup MCT 10.
1.4.4
Tool software PC
Software PC - MCT 10
Tutti i convertitori di frequenza sono dotati di una porta di
comunicazione seriale. Danfoss fornisce uno strumento PC
per la comunicazione tra il PC e il convertitore di
frequenza, il software di configurazione VLT Motion Control
Tool MCT 10.
Software di configurazione MCT 10
Il software MCT 10 è stato progettato come strumento
interattivo facile da utilizzare per l'impostazione dei
parametri nei nostri convertitori di frequenza.
Il software di configurazione MCT 10 sarà utile per:
Pianificare una rete di comunicazione fuori linea.
•
L'MCT 10 contiene un database completo di
convertitori di frequenza
Collaudo dei convertitori di frequenza in linea
•
Salvare le impostazioni di tutti i convertitori di
•
frequenza
Sostituire un'unità in una rete
•
Espansione di una rete esistente
•
Supportare lo sviluppo di unità future
•
1 1
Accessori del motore FC
Il motore FC è dotato di una tastiera LOP per il funzionamento locale e l'avvio/arresto. La LOP è provvista di
protezione IP 65. È disponibile anche un quadro di
comando (LCP 2) che rappresenta un'interfaccia completa
per il funzionamento, la programmazione e il monitoraggio
del motore FC.
Numeri d'ordine, accessori
Tastiera di funzionamento locale incl. cavo (LOP)
Pannello di Controllo Locale (LCP 2) 175N0131
Kit di montaggio remoto (LCP 2) 175N0160
Kit connettore (LCP 2) 175N2545
Cavo per kit connettore (LCP 2) 175N0162
Cavo (montaggio diretto) (LCP 2) 175N0165
Kit connettore di manutenzione (LCP 2) 175N2546
Opzione potenziometro 177N0011
Tabella 1.5
175N0128
Moduli del software di installazione MCT 10
Nel pacchetto software sono compresi i seguenti moduli:
Disegno 1.4
MG03BA06 - VLT® è un marchio registrato Danfoss 9
Page 10
Introduzione
VLT® DriveMotor serie FCM
11
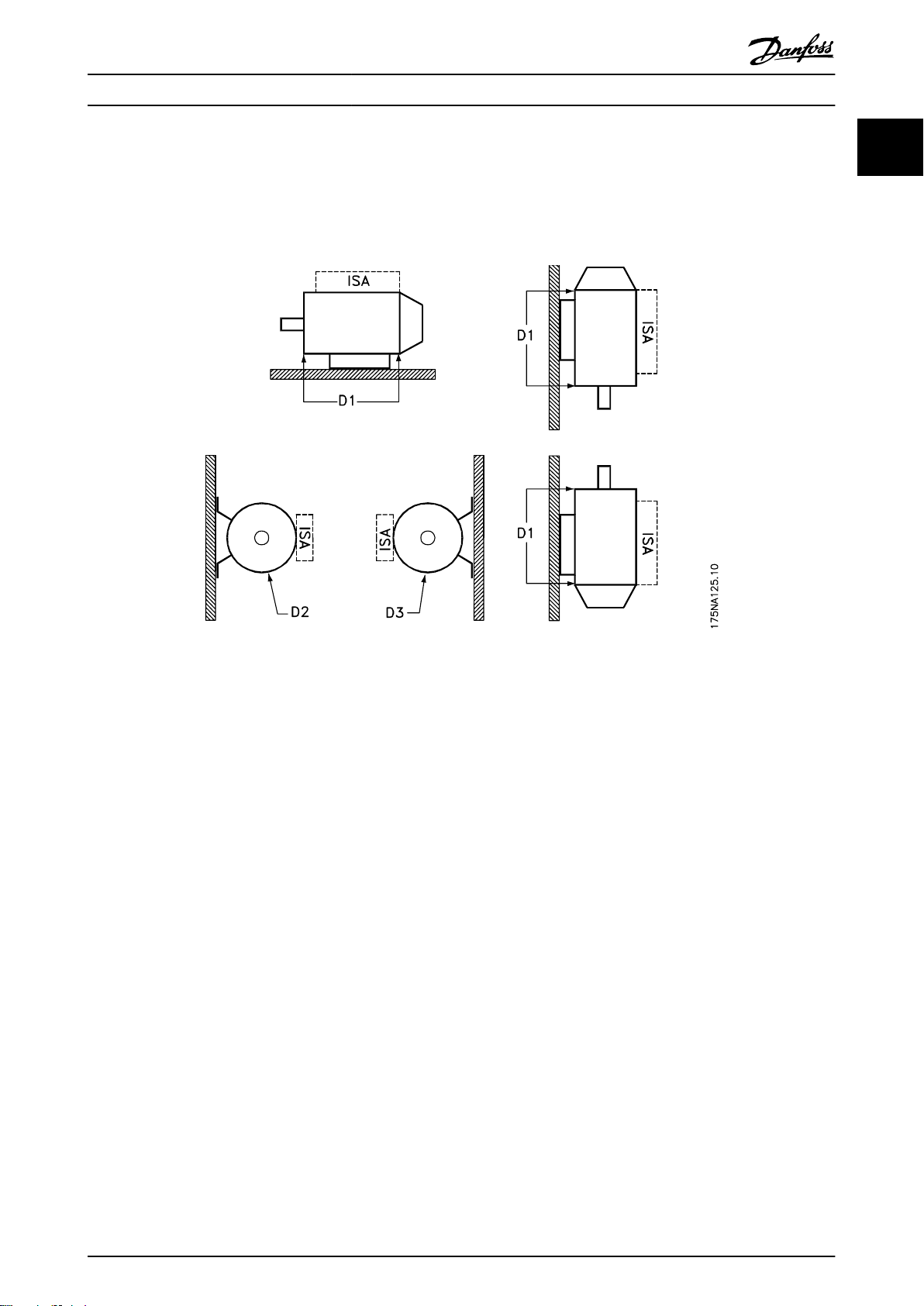
1.4.5 Informazioni per l'ordine di telai e flange
Dimensioni dei telai e delle corrispondenti flange per le diverse versioni di montaggio
Dimensioni telaio
Tipo
FCM 305 80
FCM 307 80
FCM 311 90
FCM 315 90
FCM 322 100
FCM 330 100
FCM 340 112
FCM 355 132
FCM 375 132
S: Disponibile come albero standard
A: disponibile come alternativa con un albero particolarmente allungato, per fornire un albero standard al telaio
B: disponibile come alternativa con albero standard per il telaio, non richiede modifiche
motore
4 poli
Versione di
montaggio
B5/B35 165 115/130
B14/B34 100 75/85/115/130
B5/B35 165 115/130
B14/B34 100 75/85/115/130
B5/B35 165 110/115/130 215
B14/B34 115 85/100/130/165
B5/B35 165 110/115/130 215
B14/B34 115 85/100/130/165
B5/B35 215 165
B14/B34 130 165 85/100/115
B5/B35 215 165
B14/B34 130 165 85/100/115
B5/B35 215 165
B14/B34 130 165 85/100/115
B5/B35 265 215
B14/B34 165 215
B5/B35 265 215
B14/B34 165 215
Dimensioni flangia,
standard (S) [mm]
Dimensioni flangia,
alternative (A) [mm]
Dimensioni flangia,
alternative (B) [mm]
Tabella 1.6
10 MG03BA06 - VLT® è un marchio registrato Danfoss
Page 11
Introduzione
VLT® DriveMotor serie FCM
1.4.6 Informazioni per gli ordini sulla posizione scatola inverter e sulla posizione foro di
scarico
Posizione scatola inverter, montata sempre in alto.
Tutti i fori di scarico sono montati con viti e rondelle, IP 66 se non aperti.
1 1
Disegno 1.5
1: Fori di scarico opposti all'estremità dell'inverter,
all'estremità di comando e di non comando.
2/3: Fori di scarico a 90° rispetto all'inverter, all'estremità di
comando e di non comando.
MG03BA06 - VLT® è un marchio registrato Danfoss 11
Page 12
Installazione
VLT® DriveMotor serie FCM
2 Installazione
22
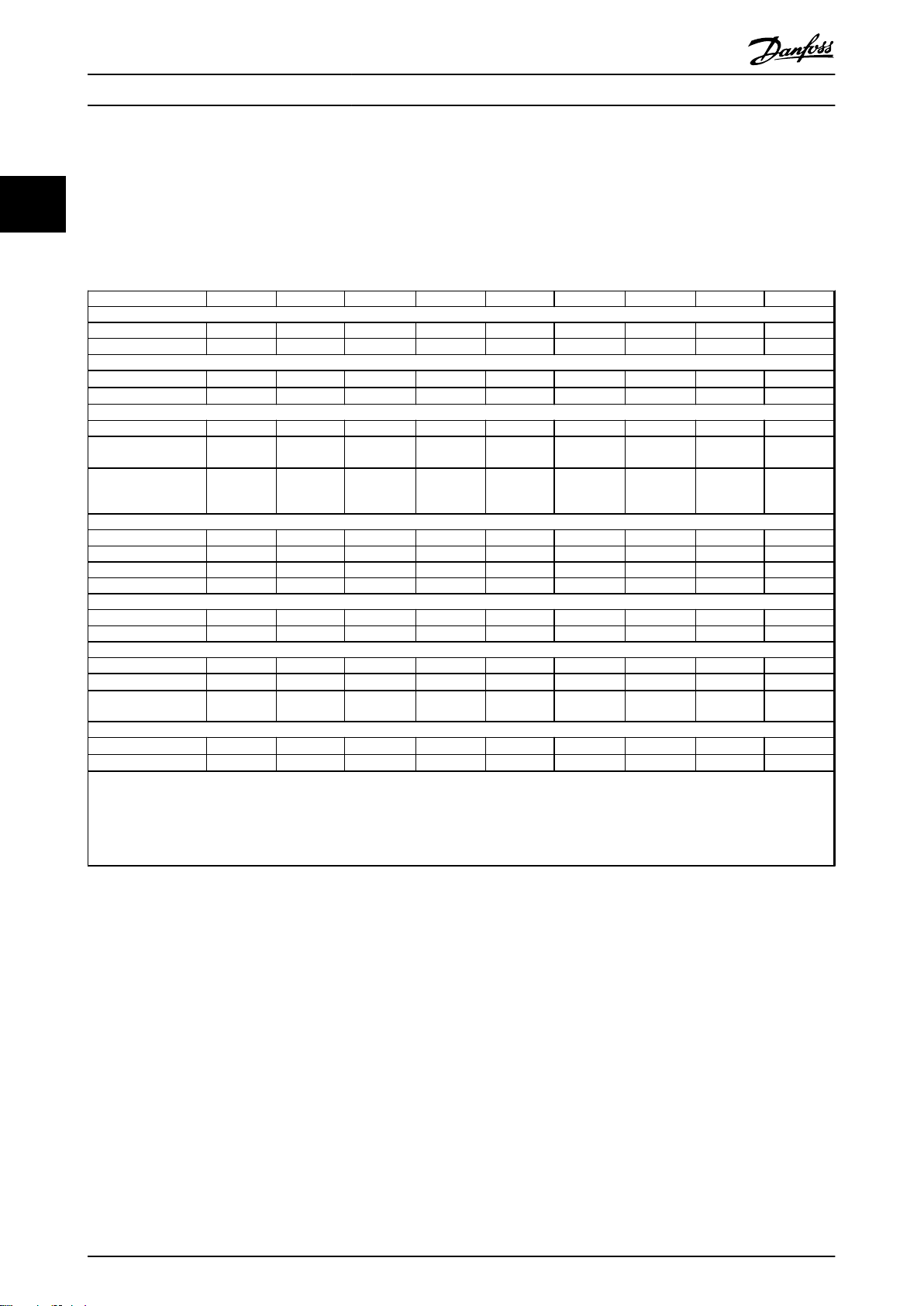
2.1 Dati tecnici
2.1.1 FCM 305-375 per 3 fasi, 380-480 V
FCM 305 307 311 315 322 330 340 355 375
Uscita motore
[HP] 0,75 1,0 1,5 2,0 3,0 4,0 5,0 7,5 10,0
[kW] 0,55 0,75 1,1 1,5 2,2 3,0 4,0 5,5 7,5
Coppia motore
2 poli [Nm]
4 poli [Nm]
Telaio
telaio [mm] 80 80 90 90 100 100 112 132 132
Peso DriveMotor
[kg]
Peso del convertitore di frequenza
[kg]
Corrente in ingresso [A]
380 V 2 p 1,5 1,8 2,3 3,4 4,5 5,0 8,0 12,0 15,0
380 V 4 p 1,4 1,7 2,5 3,3 4,7 6,4 8,0 11,0 15,5
480 V 2 p 1,2 1,4 1,8 2,7 3,6 4,0 6,3 9,5 11,9
480 V 4 p 1,1 1,3 2,0 2,6 3,7 5,1 6,3 8,7 12,3
Rendimento a velocità nom.
2 poli 73,4 75,3 77,5 79,0 81,3 82,7 83,8 85,1 86,2
4 poli 75,9 77,5 79,3 80,5 82,4 83,6 84,6 85,8 86,7
Morsetti potenza
[AWG] 10 10 10 10 10 10 10 6 6
[mm2]
Dimensioni
passacavo
Prefusibile max.
UL4) [A]
IEC4) [A]
1)
A 400 V 3000 giri/min
2)
A 400 V 1500 r/min
3)
Motore a 2 poli - B3
4)
Devono essere usati i fusibili di tipo gG. Per mantenere la conformità alle norme UL/cUL, usare prefusibili di tipo Bussmann KTS-R 500
V, o Ferraz Shawmut, ATMR Classe C (max 30 A). I fusibili devono garantire la protezione di un circuito in grado di fornire una corrente di
100.000 amp RMS (simmetrica), 500 V massimo
1)
2)
3)
1,8 2,4 3,5 4,8 7,0 9,5 12,6 17,5 24,0
3,5 4,8 7,0 9,6 14,0 19,1 25,4 35,0 48,0
11 13 17 20 26 28 37 56 61
2,2 2,2 2,8 2,8 4,1 4,2 6,4 10,4 10,4
4 4 4 4 4 4 4 10 10
3xM20x1,5 3xM20x1,5 3xM20x1,5 3xM20x1,5 3xM20x1,5 3xM20x1,5 3xM20x1,5 1xM25x1,5/
2xM20x1,5
10 10 10 10 10 15 15 25 25
25 25 25 25 25 25 25 25 25
1xM25x1,5/
2xM20x1,5
Tabella 2.1
12 MG03BA06 - VLT® è un marchio registrato Danfoss
Page 13
Installazione
2.1.2 Dati tecnici generali
VLT® DriveMotor serie FCM
Alimentazione di rete, TT, TN e IT* (L1, L2, L3)
Tensione di alimentazione unità 380-480 V 3x380/400/415/440/460/480 V ±10%
Frequenza di alimentazione 50/60 Hz
Sbilanciamento max. della tensione di alimentazione: ±2% della tensione di alimentazione nominale
Fattore di potenza / cos max. 0,9/1,0 al carico nominale
N. di commutazioni sull'ingresso di alimentazione L1, L2, L3 circa 1 volta/2 min.
*) Non valido per le unità RFI classe 1B
Caratteristiche della coppia
Coppia di avviamento/coppia di sovraccarico 160% for 1 min
Coppia continua vedere sopra
Scheda di controllo, ingressi digitali/a impulsi
Numero degli ingressi digitali programmabili 4
N. morsetti X101-2, -3, -4, -5
Livello di tensione 0-24 V CC (logiche positive PNP)
Livello di tensione, 0 logico <5 V CC
Livello di tensione, 1 logico >10 V CC
Tensione massima sull’ingresso 28 V CC
Resistenza d'ingresso, Ri circa 2 kΩ
Tempo di scansione 20 msec
Scheda di controllo, ingresso a impulsi
N. di ingressi digitali programmabili 1
N. morsetti X101-3
Frequenza max. sul morsetto 3, collettore aperto / push pull 24 V 8 kHz/70 kHz
Risoluzione 10 bit
Precisione (0,1-1 kHz), morsetto 3 Errore max.: 0,5% del fondo scala
Precisione (1-12 kHz), morsetto 3 Errore max.: 0,1% del fondo scala
2 2
Scheda di controllo, ingressi analogici
N. di ingressi analogici in tensione programmabili 1
N. morsetti X101-2
Livello di tensione 0-10 V CC (scalabile)
Resistenza d'ingresso, Ri ca. 10 kΩ
Numero degli ingressi di corrente analogici programmabili 1
N. di morsetto X101-1
Intervallo di corrente 0 - 20 mA (scalabile)
Resistenza d'ingresso, Ri circa 300 Ω
Risoluzione 9 bit
Precisione sull'ingresso Errore max. 1% del fondo scala
Tempo di scansione 20 ms.
Scheda di controllo, uscite digitali/a impulsi e analogiche
N. di uscite digitali e analogiche programmabili 1
N. morsetti X101-9
Livello di tensione sull'uscita digitale/carico 0 - 24 V CC/25 mA
Corrente sull'uscita analogica 0 - 20 mA
R
Carico massimo al telaio (morsetto 8) sull'uscita analogica
Precisione dell'uscita analogica Errore max.: 1,5% del fondo scala
Risoluzione sull'uscita analogica 8 bit
Uscita relè
N. di uscite a relè programmabili 1
Numero morsetto (carico resistivo e induttivo) 1-3 (apertura), 1-2 (chiusura)
Carico max. morsetti (CA1) su 1-3, 1-2 250 V CA, 2 A, 500 VA
LOAD
500 Ω
MG03BA06 - VLT® è un marchio registrato Danfoss 13
Page 14
Installazione
Carico max. morsetti (CC1) (IEC 947) su 1-3, 1-2 25 V CC, 3A/50 V CC, 1,5 A , 75 W
Carico min. morsetti (CA/CC) su 1-3, 1-2 scheda di controllo 24 V CC, 10 mA/24 V CA, 100 mA
22
Valori nominali per fino a 300.000 operazioni (con carichi induttivi il numero di operazioni viene ridotto del 50%)
Scheda di controllo, comunicazione seriale RS 485
N. morsetti X100-1, -2
Caratteristiche di controllo (convertitore di frequenza)
Campo di frequenza
Risoluzione sulla frequenza di uscita 0,1%
Tempo di risposta del sistema Max. 40 ms.
Precisione della velocità (anello aperto, modalità CT, motore 4 P condotto a una velocità di 150-1500 giri/
min.) ±15 giri/min.
Parti esterne
Custodia
Prova di vibrazione 1 g
Umidità relativa massima 95% per immagazzinamento/trasporto/funzionamento
Temperatura ambiente Max. 40° C (media nelle 24 ore max. 35° C)
Vedere 4.1.7 Declassamento per temperatura ambiente
Temperatura ambiente min. a pieno funzionamento 0°C
Temperatura ambiente min. durante il funzionamento a regime ridotto -10° C
Temperatura durante il magazzinaggio/trasporto -25-+65/70° C
Altezza max. sopra il livello del mare 1000 m
Vedere 4.1.8 Declassamento in base alla pressione dell'aria atmosferica
Norme EMC applicate, Emissioni EN 61000-6-3/EN 6100-6-4, EN 61800-3, EN 55011, EN 55014
Norme EMC applicate, Immunità
Norme di sicurezza applicate, EN 60146, EN 50178, EN 60204, UL508
Vedere 4.1 Condizioni speciali per i campi di frequenza per motori IP 66 al termine di questa sezione.
Consultare 4.1 Condizioni speciali per i campi di frequenza per motori IP 66 al termine di questa sezione.
VLT® DriveMotor serie FCM
0-132 Hz
IP 55 (IP65, IP66)
EN 61000-6-2, EN 61000-4-2, EN 61000-4-3, EN 61000-4-4, EN 61000-4-5, EN 61000-4-6,
ENV 50204
NOTA!
La soluzione standard IP 66 è concepita solamente per accelerare a un massimo di 3000 giri/min. Se è necessaria una
velocità maggiore, specificarlo al momento dell'ordine.
Disegno 2.1 Diagramma chiave per la serie FCM 300
14 MG03BA06 - VLT® è un marchio registrato Danfoss
Page 15
Installazione
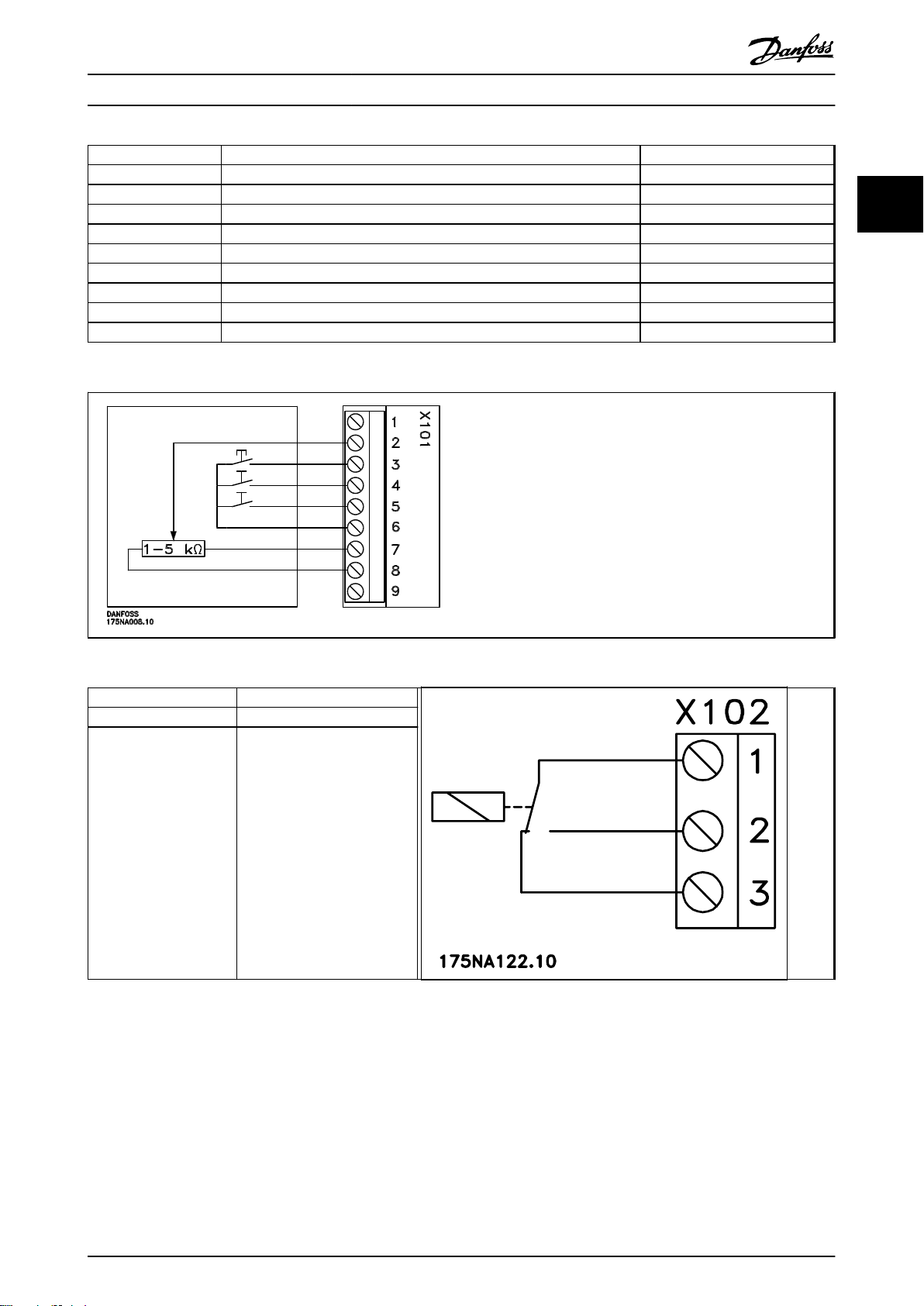
N. morsetto Funzione Esempio
1 Ingresso analogico (0-20 mA) Segnale di retroazione
2 Ingresso analogico (0-10 V)/digitale 2 Riferimento velocità
3 Ingresso digitale (o impulsi) 3 Ripristino
4 Ingresso digitale (o arresto di precisione) 4 Avviamento
5 Ingresso digitale (altro) 5 Jog (velocità fissa)
6 Alimentazione a 24 V CC per ingressi digitali (max. 150 mA)
7 Alimentazione a 10 V CC per potenziometro (max. 15 mA)
8 0 V per morsetti 1-7 e 9
9 Uscita analogica (0-20 mA)/digitale Segnale di guasto
Tabella 2.2 X101: Morsettiera per segnali di controllo analogici/digitali
VLT® DriveMotor serie FCM
-
Mantenere Ripristino chiuso per un breve intervallo per
ripristinare i guasti elettrici
-
Avviamento deve essere chiuso per passare alla modalità di
funzionamento
-
Marcia jog funzionerà a velocità fissa mentre è chiuso (10 Hz)
-
Riferimento di velocità (0-10 V) determina la velocità durante la
modalità di funzionamento
2 2
Tabella 2.3 Schema di collegamento - impostazione di fabbrica
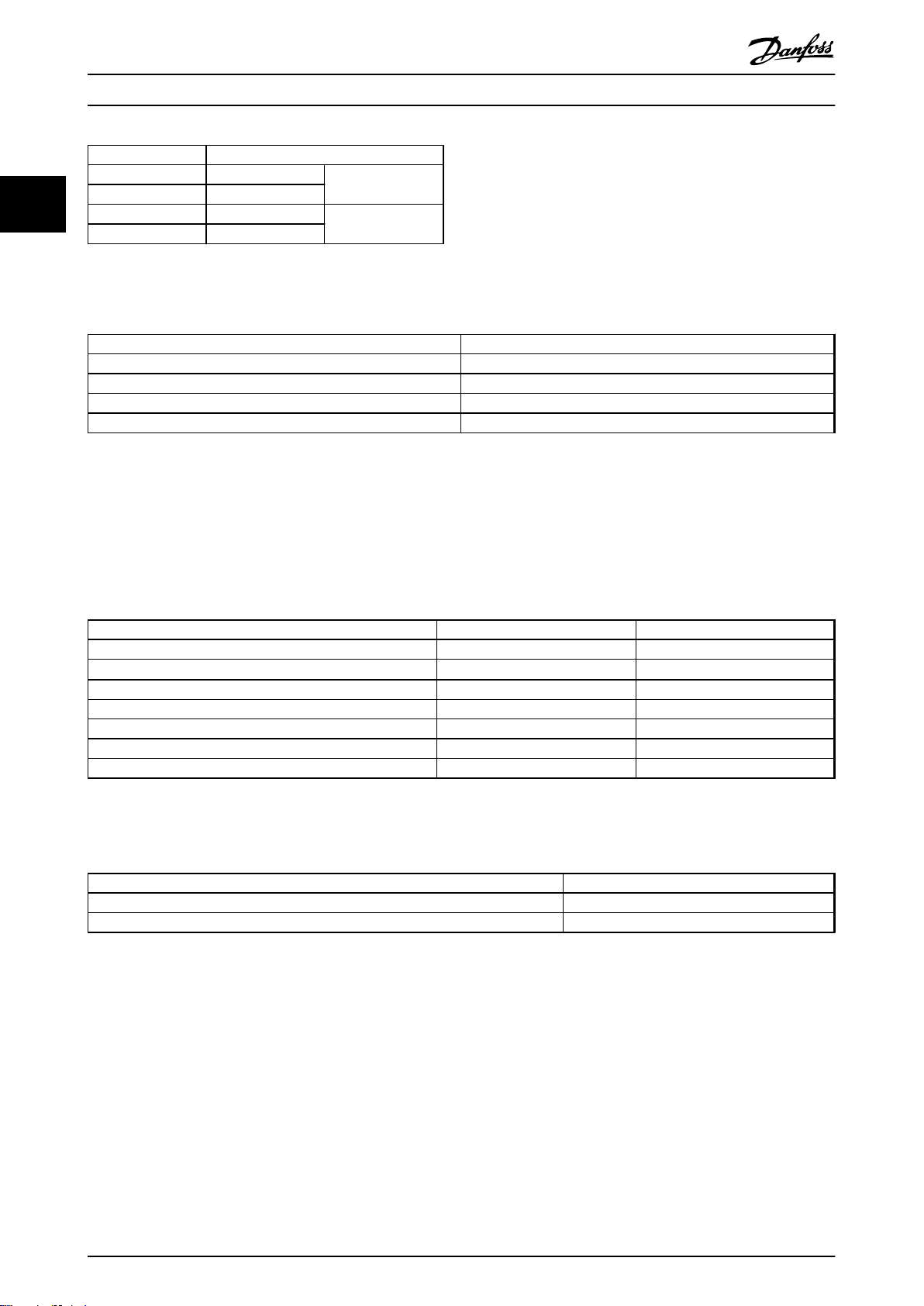
N. morsetto
1-2 Chiusura (norm. aperto)
1-3 Apertura (norm. chiuso)
Tabella 2.4 X102: Morsettiera per uscita relè
Funzione
NOTA!
Vedere il parametro 323 (uscita relè) per la programmazione dell'uscita relè.
MG03BA06 - VLT® è un marchio registrato Danfoss 15
Page 16
Installazione
VLT® DriveMotor serie FCM
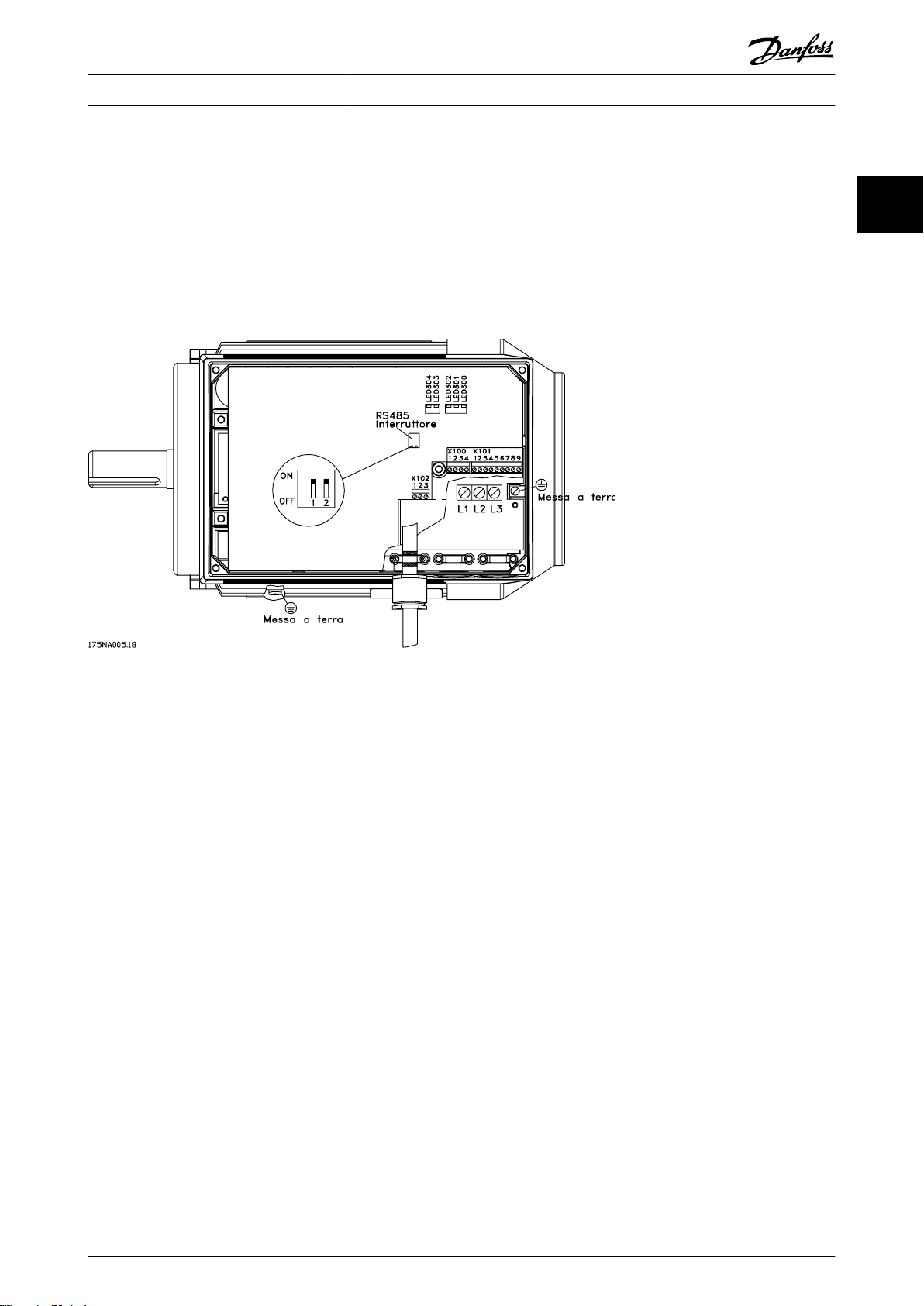
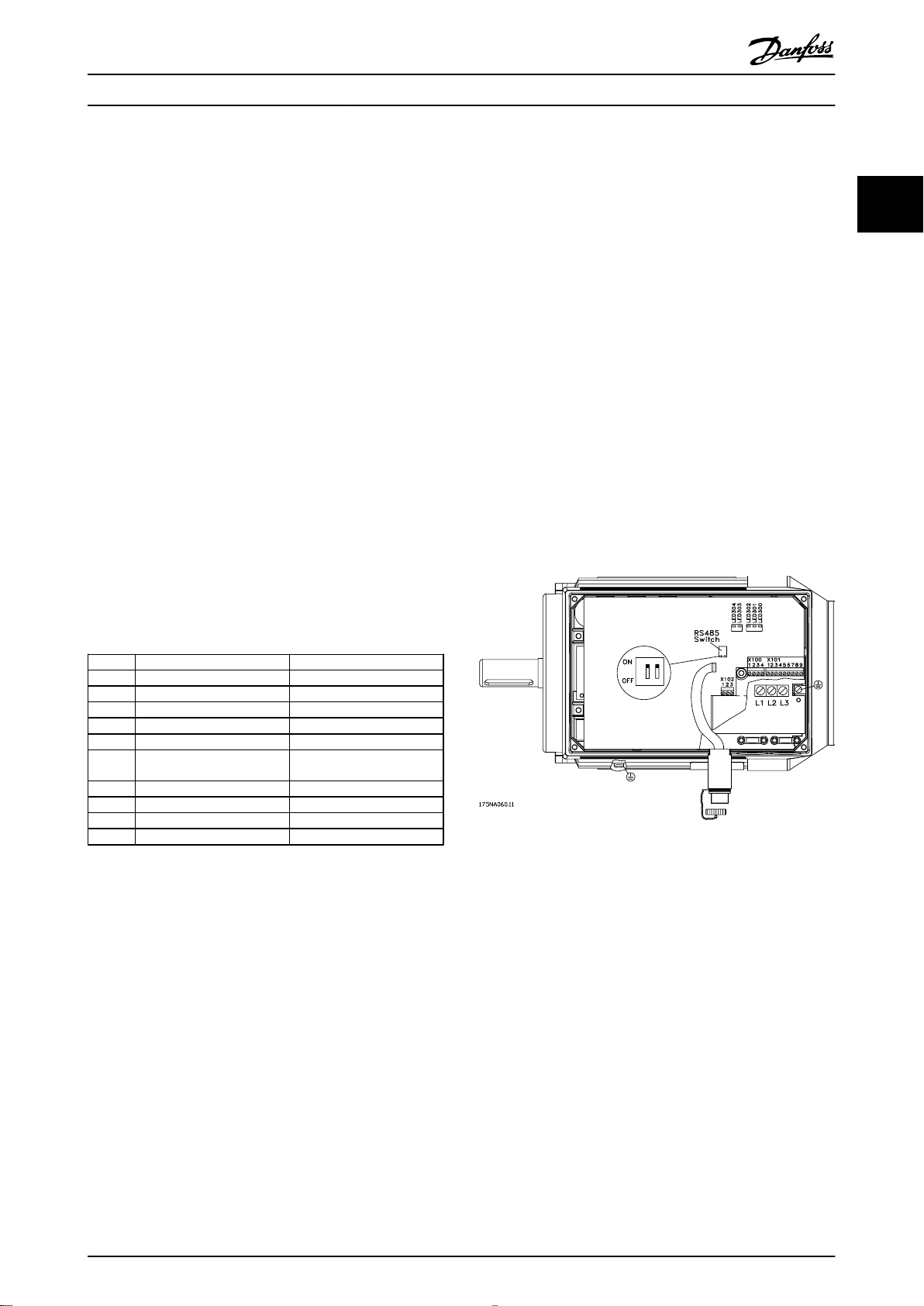
N. morsetto Funzione
1 P RS 485 Per collegamento a
2 N RS 485
22
Tabella 2.5 X100: Morsettiera per comunicazione dati
3 5 V CC Alimentazione per
4 0 V CC
bus o PC
bus RS 485
LED 300-304
LED 300 (rosso): Scatto in caso di guasto
LED 301 (giallo): Avviso
LED 302 (verde): Alimentato
LED 303-304: Comunicazione
Per le versioni PROFIBUS, consultare il manuale MG90AXYY.
2.1.3 Coppie di serraggio
Viti del coperchio 25,6-31lb-in (3-3,5 Nm)
Connettori entrata cavo di plastica 19,5 lb-in (2.2 Nm)
Viti L1, L2, L3 (rete CA) (FCM 305-340) 5-7 lb-in (0,5-0,6 Nm)
Viti L1, L2, L3 (rete CA) (FCM 355-375) 15 lb-in (1,2-1,5 Nm)
Massa a terra 30,1 lb-in (3,4 Nm)
Tabella 2.6
Le viti di terminazione richiedono un cacciavite con estremità piatta di massimo 2,5 mm.
Le viti della rete CA richiedono un cacciavite a punta piatta di 8 mm.
Le viti del coperchio, le viti di massa a terra e delle fascette per cavi richiedono tutte un cacciavite di tipo T-20 Torx o con
punta piatta (velocità di serraggio massima 300 giri/min.)
Sezione trasversale massima dei cavi
2.1.4
Nota
Usare conduttori in rame °60 C o di qualità superiore
AWG
Misura max del cavo di rete CA (FCM 305-340) 10 4,0
Misura max del cavo di rete CA (FCM 355-375) 6 10
Misura max del cavo di controllo 16 1,5
Misura max del cavo di comunicazione seriale 16 1,5
Massa a terra 6 10
Tabella 2.7
Misura delle viti
2.1.5
Viti del coperchio M5
Viti di massa a terra e delle fascette per cavi (FCM 305-340): M4
Viti di massa a terra e delle fascette per cavi (FCM 355-375) M5
Tabella 2.8
mm
2
16 MG03BA06 - VLT® è un marchio registrato Danfoss
Page 17
Installazione
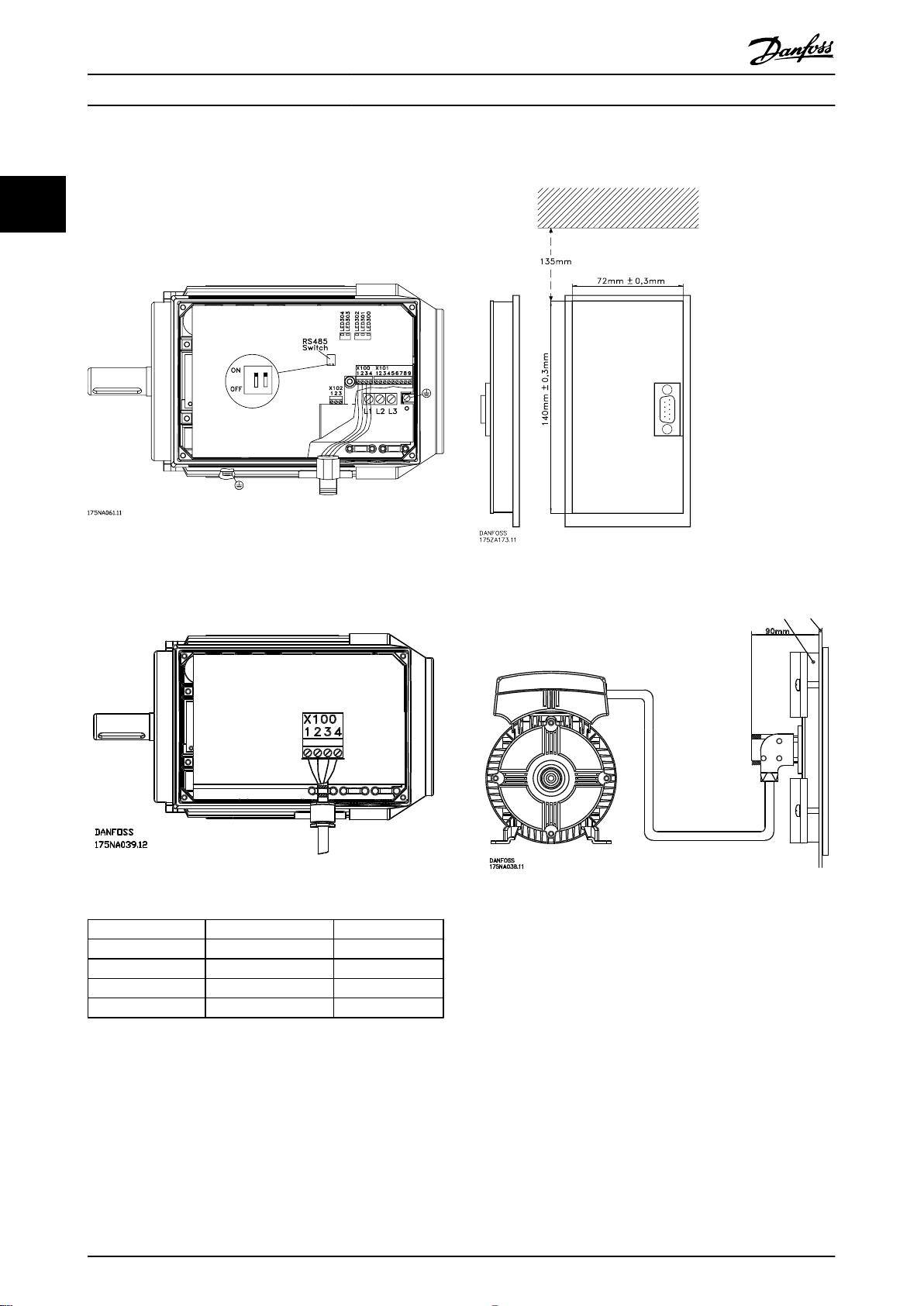
2.1.6 Protezione
Protezione termica contro le sovracorrenti del motore e dell'elettronica.
•
Il monitoraggio della tensione sul circuito intermedio consente di disinserire l'inverter se tale tensione diventa
•
troppo elevata o troppo bassa.
Se manca una delle fasi di alimentazione, l'inverter viene disinserito quando si collega un carico al motore.
•
VLT® DriveMotor serie FCM
2 2
Disegno 2.2 Configurazione morsetti (per l'installazione consultare la guida rapida, MG03AXYY)
MG03BA06 - VLT® è un marchio registrato Danfoss 17
Page 18
175NA163.10
Installazione
VLT® DriveMotor serie FCM
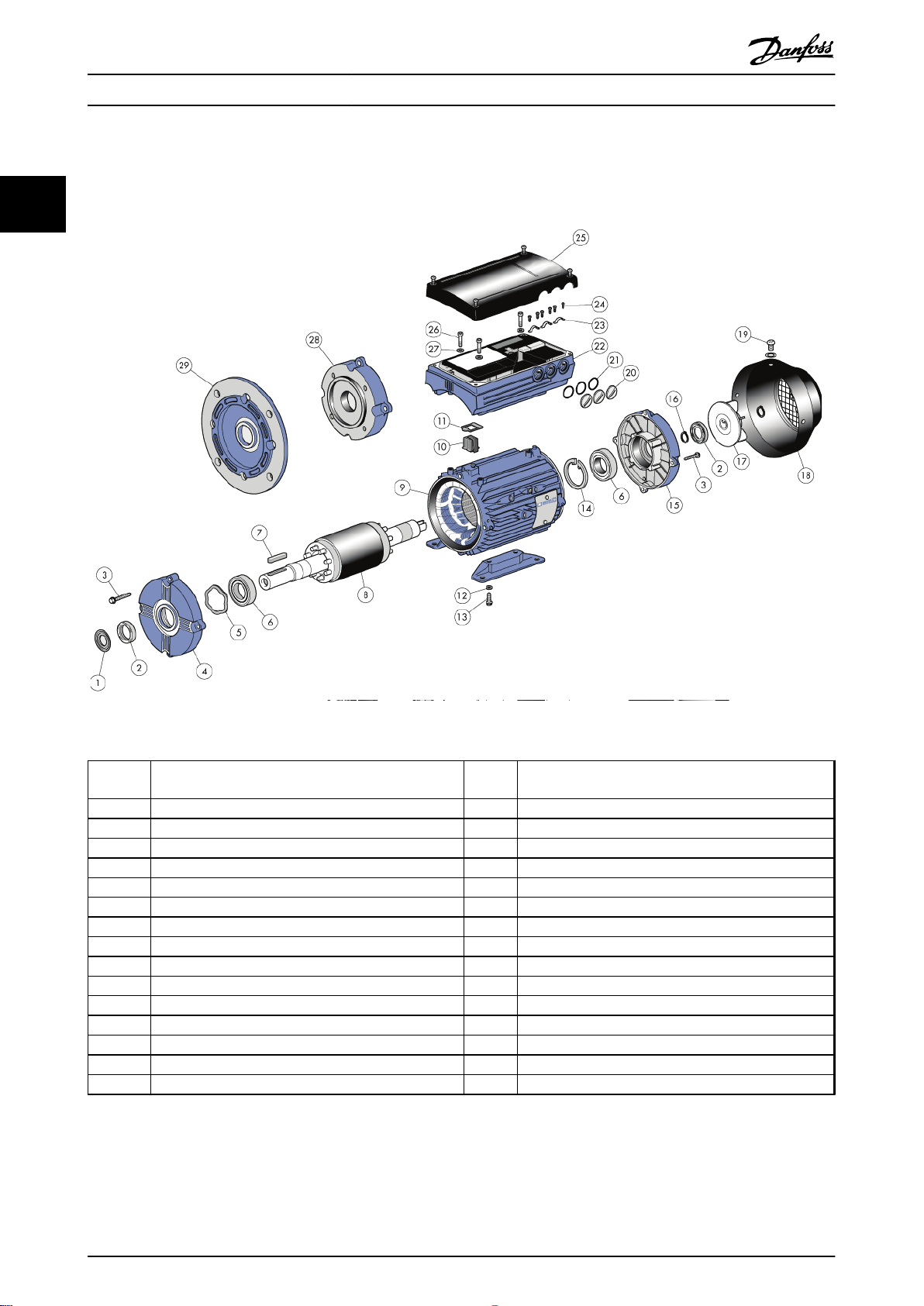
2.2 Descrizione del motore
Il motore FC è formato dai seguenti pezzi:
22
Disegno 2.3
Elemento
1 Nottolino (se montato) 16 Anello elastico cuscinetto
2 Convertitore di frequenza a guarnizione tenuta olio 17 Ventilazione
3 Bullone di fissaggio schermo terminale 18 Coperchio ventola
4 Convertitore di frequenza e schermo terminale 19 Vite e rondella coperchio ventola
5 Rondella precaricamento 20 Tappo avvitato
6 Cuscinetto 21 O-ring
7 Chiavetta albero 22 Scatola ISM
8 Gruppo rotore 23 Fermacavo
9 Gruppo statore con o senza piedini 24 Viti fermacavo
10 Raccordo 25 Coperchio scatola ISM
11 Guarnizione 26 Vite Torx
12 Piedino smontabile 27 Rondella
13 Bullone e rondella di fissaggio piedino 28 Schermo terminale frontale
14 Anello elastico tenuta cuscinetto 29 Schermo terminale flangiato
15 Schermo terminale non di comando
Tabella 2.9
Descrizione ElementoDescrizione
18 MG03BA06 - VLT® è un marchio registrato Danfoss
Page 19
Installazione
VLT® DriveMotor serie FCM
2.2.1 Uso del motore FC
Il montaggio e il sollevamento dei motori VLT Drive
(motori FC) devono essere effettuati esclusivamente da
personale qualificato. Per un montaggio sicuro è necessario
che, unitamente agli utensili e all'attrezzatura, siano
disponibili anche la documentazione completa sul
prodotto e le istruzioni per l'uso. I bulloni ad occhiello e/o
i carrelli di sollevamento dotati del motore FC sono
progettati per sostenere solo il peso del motore FC, non il
peso del motore FC e di un'eventuale unità ausiliaria
collegata ad esso. Occorre essere assolutamente certi che
gru, martinetti, imbragature e travi di sollevamento siano
idonei per sopportare il peso dell'attrezzatura da sollevare.
Se unitamente al motore viene fornito un bullone ad
occhiello, esso dovrà essere avvitato finché il suo
spallamento non è fissato fermamente contro la parte
anteriore del telaio dello statore da sollevare.
Tipo FCM Peso appross. [kg]
FCM 305 11
FCM 307 13
FCM 307 17
FCM 315 20
FCM 322 26
FCM 330 28
FCM 340 37
FCM 355 56
FCM 375 61
Cuscinetti
2.2.2
La soluzione standard è di montare i cuscinetti nella parte
di comando del motore (parte di uscita dell'albero).
Per evitare alterazioni statiche, la superficie dove viene
posto il motore non deve essere soggetta a vibrazioni.
Qualora l'esposizione a vibrazioni fosse inevitabile, l'albero
dovrà essere bloccato. I cuscinetti possono essere montati
con un dispositivo di bloccaggio dell'albero che dev'essere
conservato in loco per il periodo in cui il motore resta in
magazzino. Gli alberi devono essere ruotati manualmente
per un quarto di giro ad intervalli settimanali. I cuscinetti
vengono consegnati dalla fabbrica completamente
ingrassati di grasso a base di litio.
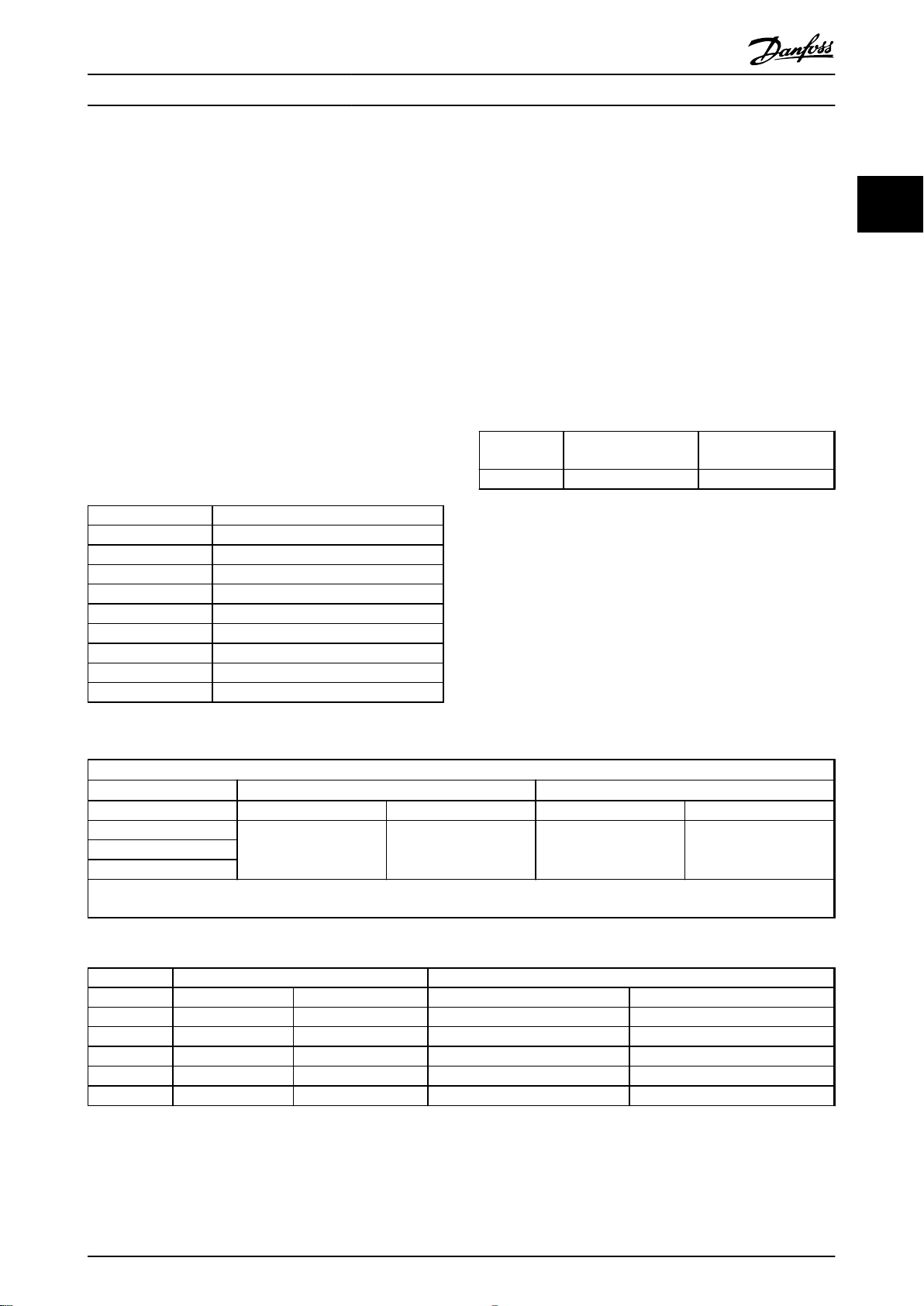
Dimensioni
del telaio
80-132 Esso unirex N3 Da -30°C a + 140°C
Tabella 2.11 Lubrificazione
Tipo di lubrificante Range di temperatura
2 2
Tabella 2.10 Peso
Durata massima del cuscinetto in ore (Lna) prevista ad una temperatura del cuscinetto di 80°C x 103 ore.
FCM
Orizz. Vertic. Orizz. Vertic.
305-315
30 30 30 30322-340
355-375
La vita massima del cuscinetto in ore corrisponde alla vita L10 modificata tenendo conto di: - affidabilità, miglioramenti del materiale,
condizioni di lubrificazione.
Tabella 2.12 Durata del cuscinetto
FCM Cuscinetti Guarnizioni tenuta olio - Foro x DE x larghezza in mm
Estr. di com. Estr. non di com. Estr. di com. Estr. non di com.
305-307 6204ZZ 6003ZZ 20x30x7 17x28x6
311-315 6205ZZ 6003ZZ 25x35x7 17x28x6
322-330 6206ZZ 6005ZZ 30x42x7 25x37x7
340 6206ZZ 6005ZZ 30x42x7 25x37x7
355-375 6208ZZ 6005ZZ 40x52x7 25x37x7
Tabella 2.13 Riferimenti cuscinetti standard e guarnizioni tenuta olio
3000 min
-1
1500 min
-1
MG03BA06 - VLT® è un marchio registrato Danfoss 19
Page 20
Installazione
VLT® DriveMotor serie FCM
2.2.3 Alberi uscita
22
Gli alberi motore vengono prodotti utilizzando acciaio ad
alta resistenza da 35/40 t (460/540 MN/m2). Gli alberi delle
estremità di comando sono dotati di serie di un foro
filettato conforme alla norma DIN 332 Forma D e di una
sede per chiavetta a profilo chiuso.
Bilanciamento
Tutti i motori sono bilanciati dinamicamente in conformità
alla norma ISO 8821 con convenzione alla norma CEI
FCM 2 poli 4 poli
305 0,00082 0,0019
307 0,00082 0,0027
311 0,00090 0,0022
315 0,0011 0,0030
322 0,0024 0,0042
330 0,0028 0,0050
340 0,0053 0,0091
355 0,0072 0,0143
375 0,0097 0,0190
J [kgm2]
60034-14.
Tabella 2.14 Inerzia
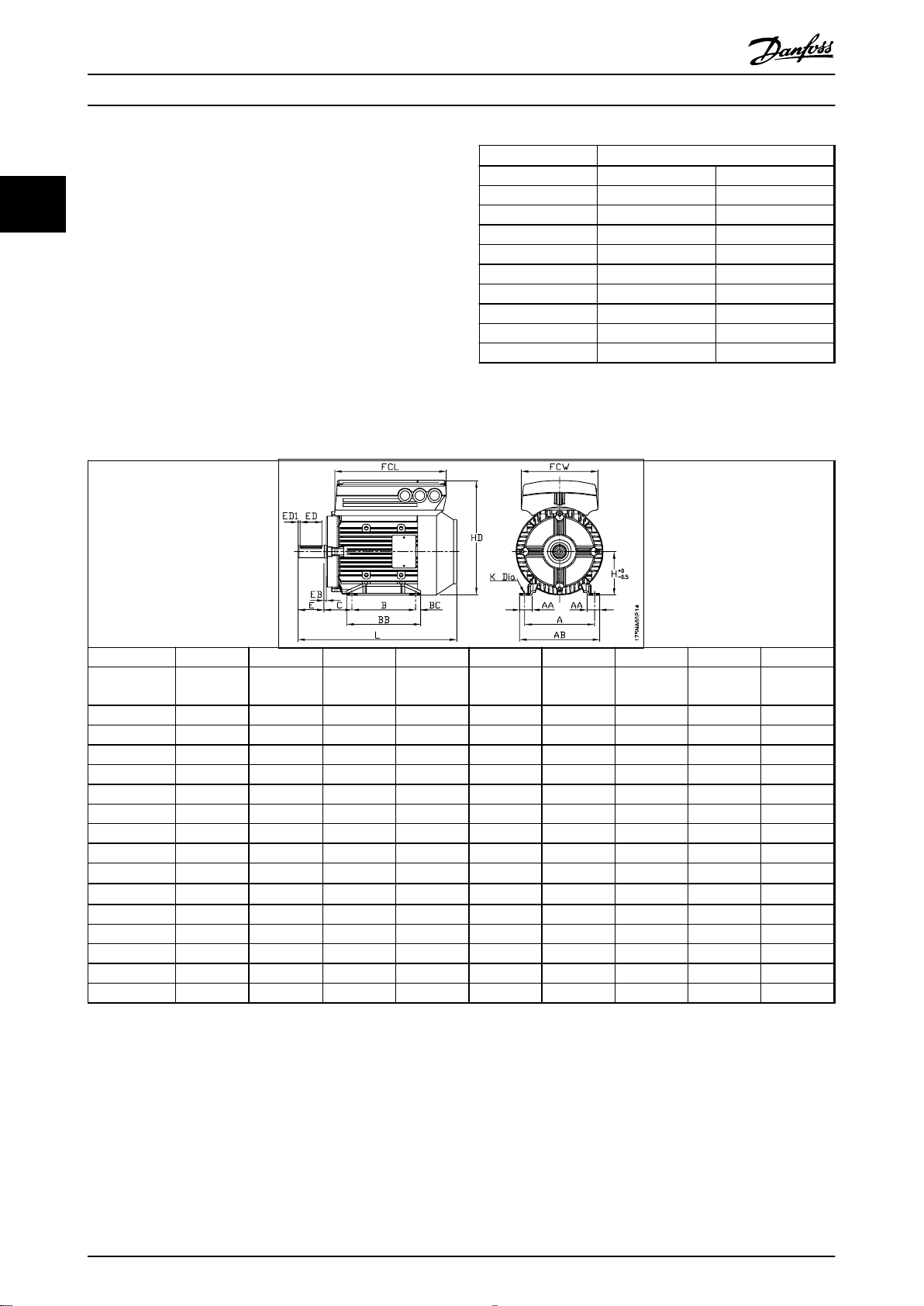
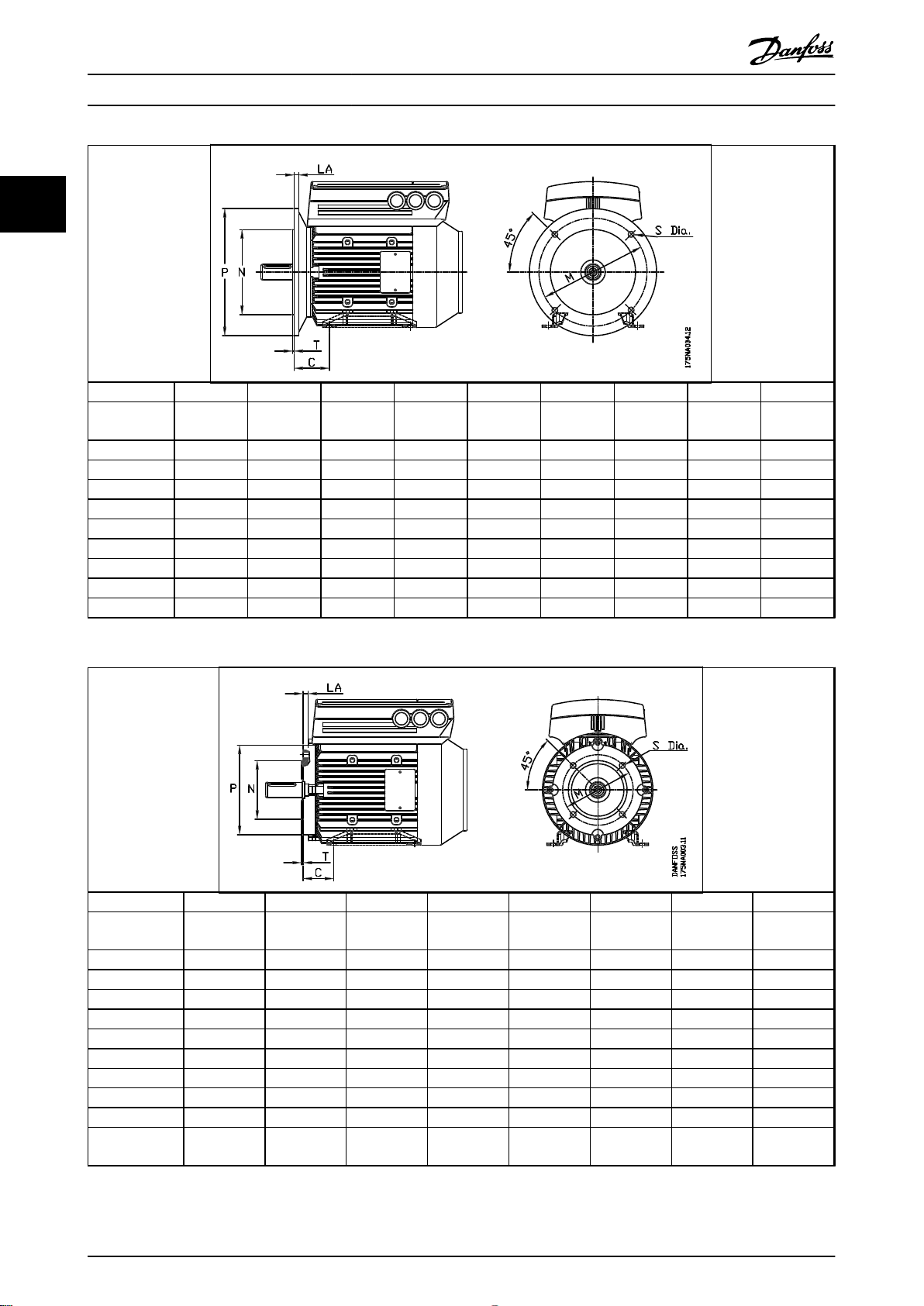
Dimensioni
2.2.4
FCM generali 305 307 311 315 322 330 340 355 375
Dimensioni del
telaio
A [mm] 125 125 140 140 160 160 190 216 216
B [mm] 125 125 140 140 140 140 178
C [mm] 50 50 56 56 63 63 70 89 89
H [mm] 80 80 90 90 100 100 112 132 132
K [mm] 10 10 10 10 12 12 12 12 12
AA [mm 27 27 28 28 28 28 35 38 38
AB [mm 157 157 164 164 184 184 218 242 242
BB [mm] 127 127 150 150 170 170 170 208 208
BC [mm] 13,5 13,5
L [mm] 278 278 322 322 368 368 382 484,5
AC [mm] 160 160 178 178 199 199 215 255 255
HD [mm] 219,5 219,5 238 238 264 264 292 334 334
EB [mm] 1,5 1,5 2,5 2,5 6 6 6 6 6
FCL [mm] 206 206 230 230 256 256 286 357,5 357,5
FCW [mm] 141 141 158 158 176 176 196 242,5 242,5
Tabella 2.15 Montaggio con piedi - B3
1)
Motore a 2 poli = 37,5. 2)Motore a 2 poli = 53
80 80 90 90 100 100 112 132 132
12,5
1)
12,5
1)
15 15 15 53 15
484,5
2)
20 MG03BA06 - VLT® è un marchio registrato Danfoss
Page 21
Installazione
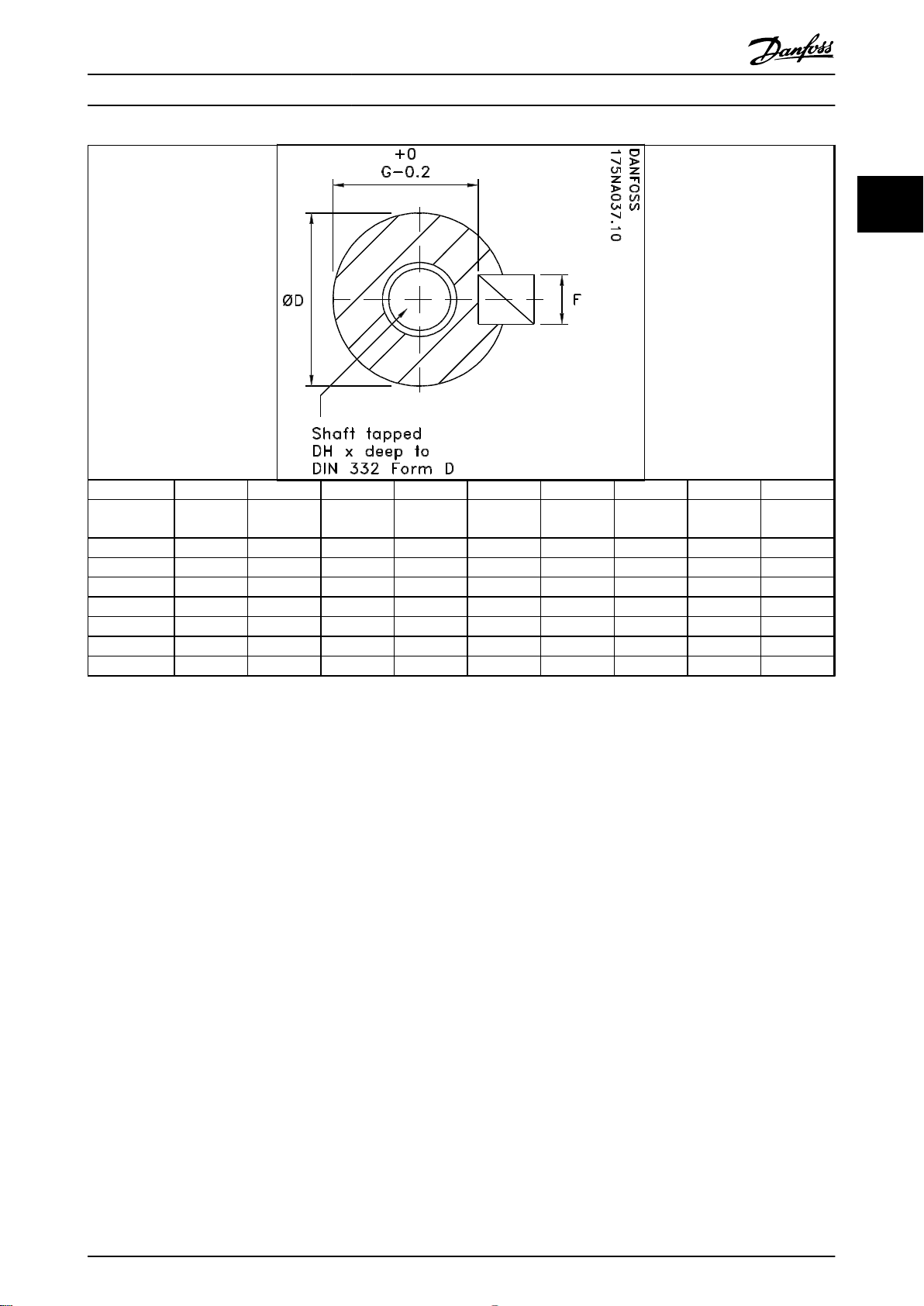
FCM 305 307 311 315 322 330 340 355 375
Dimensioni del
telaio
D [mm] 19 19 24 24 28 28 28 38 38
E [mm] 40 40 50 50 60 60 60 80 80
ED [mm] 32 32 40 40 50 50 50 70 70
ED1 [mm] 4 4 5 5 5 5 5 5 5
DH M6x16 M6x16 M8x19 M8x19 M10x22 M10x22 M10x22 M12x28 M12x28
F [mm] 6 6 8 8 8 8 8 10 10
G [mm] 15,5 15,5 20 20 24 24 24 33 33
80 80 90 90 100 100 112 132 132
VLT® DriveMotor serie FCM
2 2
Tabella 2.16 Estremità di comando dell'albero
MG03BA06 - VLT® è un marchio registrato Danfoss 21
Page 22
Installazione
VLT® DriveMotor serie FCM
22
B5 FCM 305/307 311/315 322/330 340 355/375
Dimensioni del
telaio
Rif. CEI FF85 FF100 FF115 FF130 FF165 FF165 FF215 FF215 FF265
Rif. DIN A105 A120 A140 A160 A200 A200 A250 A250 A300
C [mm] 50 56 63 70 89
M [mm] 85 100 115 130 165 165 215 215 265
N [mm] 70 80 95 110 130 130 180 180 230
P [mm] 105 120 140 160 200 200 250 250 300
S [mm] 10 10 12 12 14,5 14,5 14,5
T [mm] 3 3,5 3,5 3,5 4 4 4
LA [MM] 7 7 12 10 12 12 12
48 56 63 71 80 90 100 112 132
Tabella 2.17 Montaggio della flangia - B5, B35 (B3+B5)
B14 FCM
Dimensioni del
telaio
Rif. CEI FT65 FT75 FT85 FT100 FT115 FT130 FT130 FT165
Rif. DIN C80 C90 C105 C120 C140 C160 C160 C2OO
C [mm] 50 56 63 70 89
M [mm] 65 75 85 100 115 130 130 165
N [mm] 50 60 70 80 95 110 110 130
P [mm] 80 90 105 120 140 160 164 200
S [mm] M5 M6 M6 M8 M8 M8 M10
T [mm] 2,5 2,5 3 3 3,5 3,5 3,5
LA [MM] 9 9 9 9 8,5 13 13
Max. la flangia
B14
305/307 311/315 322/330 340 355/375
56 63 71 80 90 100 112 132
8,5 11 11 11,5 15 15,5 17
Tabella 2.18 Montaggio parte anteriore - B14, B34 (B3+B14)
22 MG03BA06 - VLT® è un marchio registrato Danfoss
Page 23
Installazione
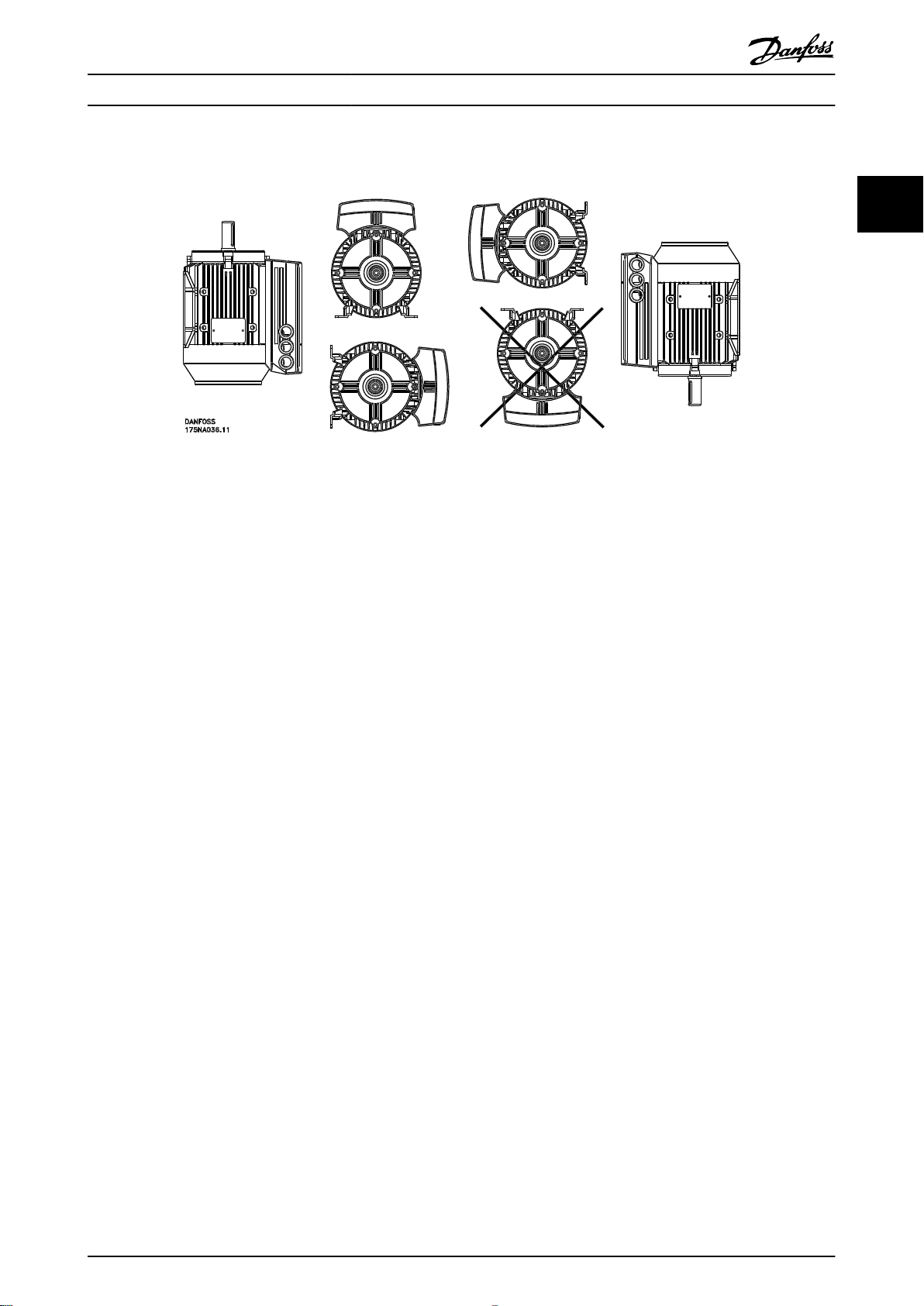
2.2.5 Installazione del motore FC
Disegno 2.4
VLT® DriveMotor serie FCM
2 2
I motori FC devono essere installati in modo da poter
essere facilmente accessibili per la manutenzione ordinaria.
Si raccomanda di mantenere uno spazio di lavoro di 0,75
m intorno al motore. Inoltre è necessario lasciare uno
spazio adeguato intorno al motore, soprattutto in
corrispondenza dell'entrata della ventola (50 mm), per
agevolare la circolazione dell'aria.
Nel caso in cui diversi motori FC vengano installati molto
vicini l'uno all'altro, occorre garantire il ricircolo dell'aria
calda esausta. Le fondazioni devono essere solide, rigide e
livellate.
NOTA!
Installazione elettrica
Non rimuovere la pellicola superiore all'interno del
componente dell'inverter poiché trattasi di una misura di
protezione.
Pignoni, pulegge e manicotti di montaggio
Questi componenti devono essere forati attenendosi alle
nostre misure standard e montati sull'albero mediante
avvitamento. Prestare attenzione all'adeguata protezione di
tutte le parti mobili.
NOTA!
Il montaggio dei pezzi sull'albero motore FC con un
martello o un mazzuolo danneggia i cuscinetti. Si
determina così un aumento della rumorosità e una
riduzione notevole della vita del cuscinetto.
NOTA!
Max. la flangia B14, vedere 2.2.4 Dimensioni .
2.2.6 Allineamento
Se l'applicazione richiede un accoppiamento diretto, gli
alberi dovranno essere allineati correttamente su tutti e tre
i piani. Se questa operazione non viene svolta correttamente si avranno rumorosità e vibrazioni.
Consentire il gioco assiale dell'albero e l'espansione
termica su entrambi i piani, assiale e verticale. È preferibile
usare manicotti flessibili.
MG03BA06 - VLT® è un marchio registrato Danfoss 23
Page 24
Installazione
Albero orizzontale Albero verticale
Tipo Poli Carico verso il
22
W-DA80
W-DA90
W-DA100
W-DA112
W-DA132
Tabella 2.19 Carichi massimi esterni assiali e radiali consentiti in Newton
2 339 539 321 565 362 521 774
4 303 503 283 530 330 583 729
2 444 684 421 716 476 661 915
4 398 638 366 682 442 606 854
2 781 1101 743 1159 839 1063 1295
4 710 1030 655 1107 787 975 1215
2 768 1088 715 1170 850 1035 1295
4 690 1010 612 1131 811 932 1202
2 1355 1707 1266 1838 1486 1618 2114
4 1253 1605 1130 1779 1427 1482 2068
motore
VLT® DriveMotor serie FCM
Carico lontano
dal motore
Carico verso il
Albero sopra Albero sotto
motore
Carico
lontano dal
motore
Carico verso
l'alto
Carico
verso il
basso
Carico radiale
massimo consentito
all'estremità
dell'albero (montaggio
orizzontale)
Coppie bulloni
2.2.7
Gli schermi estremità e il coperchio devono essere fissati
con bulloni di dimensioni e coppia indicate in Tabella 2.20.
Tipo FCM Dimensioni
del telaio
305-307 80 M5 5
311-315 90 M5 5
322-330 100 M6 (taptite) 8-10
340 112 M6 (taptite) 8-10
355-375 132 M8 (taptite) 29
Coppia viti coperchio: 2,2-2,4 Nm
Tabella 2.20 Coppie bulloni per il fissaggio degli schermi estremità
Manutenzione
2.2.8
Diametro del bullone
Nm.
Coppia
Pulizia ordinaria del motore FC
Togliere il coperchio della ventola ed accertarsi che tutti i
fori di presa d'aria siano completamente puliti. Rimuovere
ogni traccia di sporco e ostruzioni dalla ventola, lungo le
alette del telaio e fra il motore e l'inverter.
Manutenzione periodica della parte del motore
1. Smontare l'inverter, il coperchio della ventola e la
ventola stessa che è inchiavettata alla prolunga
dell'albero. Allentare ed estrarre le viti copricuscinetto e i bulloni/perni dei coperchi. I coperchi
dovrebbero in seguito essere tolti dai loro
centraggi.
2. Ora il motore può essere estratto con cautela
dallo statore, prestando attenzione a non
danneggiare il foro statore ed entrambe le spire
dello statore e del rotore.
3. Dopo aver estratto il motore, si può effettuare la
manutenzione per rimuovere tutto lo sporco. A
tale scopo è meglio utilizzare aria compressa ad
una pressione relativamente bassa, poiché un
flusso d'aria molto forte potrebbe spingere lo
sporco negli spazi fra le spire e il rivestimento
isolante ecc. I solventi per sgrassare possono
danneggiare la vernice o il rivestimento isolante.
4. Rimontare il motore FC procedendo nella
sequenza inversa a quella seguita per smontarlo,
ricordando di allentare gli schermi estremità sui
cuscinetti e i giunti. NON FORZARE.
5. Prima di avviare il motore, controllare che il
rotore possa girare liberamente. Assicurarsi che i
collegamenti elettrici siano stati effettuati correttamente.
6. Rimontare qualsiasi puleggia, manicotto,
dentatura che sia stata smontata, prestando
particolare attenzione che l'allineamento con la
trasmissione sia corretto, poiché un allineamento
errato può causare danni ai cuscinetti e la rottura
dell'albero.
7. Quando si sostituiscono viti e bulloni, occorre
utilizzare solo quelli con requisiti di qualità e
carico di rottura raccomandati dal produttore.
Inoltre tali viti e bulloni devono avere lo stesso
tipo di filettatura e la stessa lunghezza (vedere
Tabella 2.24).
24 MG03BA06 - VLT® è un marchio registrato Danfoss
Page 25
Installazione
VLT® DriveMotor serie FCM
2.2.9 Protezione termica dell'FCM 300
La protezione termica di FC e del motore viene eseguita
come segue:
Le situazioni di sovraccarico sono gestite dal
•
carico elettrico calcolato (I 2X t).
La ventilazione mancante e l'elevata temperatura
•
ambiente viene gestita dalla misurazione della
temperatura. Il declassamento per bassa velocità
(dovuto all'assenza di ventilazione) non è
compresa nel calcolo elettronico del carico ma è
monitorata dalla misurazione della temperatura.
La ventilazione forzata è pertanto garantita
automaticamente.
Carico elettrico
Dopo aver misurato la corrente nel collegamento CC viene
calcolato un valore di stima del carico. Il livello di carico
elettrico corrisponde a una coppia di uscita del 105%. Al di
sopra di questo livello il contatore subisce un aumento,
mentre al di sotto di tale livello, subisce una riduzione. Il
contatore ha come valore di partenza zero. Quando il
contatore raggiunge il valore del 100% l'unità scatta; con
un valore pari al 98% i segnali di avviso (LED e parola di
stato) si attivano.
Livello di scatto⇒ Scatto immediato e indicazione di
allarme (LED e parola di stato).
Il valore può essere letto nel parametro 537 (LCP: Temp.
dissipatore).
I livelli di temperatura sembrano essere alti ma grazie a un
riscaldamento locale del sensore i livelli pratici della
temperatura dell'aria interna sono in realtà inferiori di circa
10° C.
2.3 Comando locale
2.3.1 Kit connettore di servizio (175N2546)
Scopo
Far funzionare contemporaneamente LCP2 e PROFIBUS. Il
connettore di servizio può essere utilizzato con FCM 300
con numero di serie 03Gxx e versioni di software a partire
dalla 2.03. Utilizzato insieme al cavo per kit connettore
175N0162.
2 2
Carica Tempo da 0 a 100 Tempo da 100 a 0
0% - 60 s
20% - 100 s
40% - 150 s
60% - 200 s
80% - 250 s
105% 900 s (se superiore al
105%)
120% 550 s 140% 210 s 160% 60 s >165% 20 s -
Tabella 2.21
Con una frenatura dinamica completa (parametro 400)
viene simulato un carico > 165% => 20 sec. allo scatto.
Il valore può essere letto nel parametro 527. (LCP: termico
FC).
La misurazione della temperatura rileva la temperatura
all'interno della scatola elettronica.
Con un livello di guardia⇒ si attivano i segnali di avviso
(LED e parola stato) e l'unità potrebbe scattare se la
temperatura non ritorna, entro 15 minuti, a un valore al di
sotto del livello di guardia. Se la funzione TEMP.DEP.SW nel
parametro 412 è attivata, la frequenza di commutazione
diminuisce gradualmente fino a 2 kHz al fine di diminuire
la temperatura.
300 s (se inferiore al 105%)
Disegno 2.5
MG03BA06 - VLT® è un marchio registrato Danfoss 25
Page 26
Installazione
VLT® DriveMotor serie FCM
2.3.2 Kit connettore (175N2545)
22
Scopo
Per effettuare un collegamento mediante spina fra LCP 2 e
FCM 300.
Utilizzato insieme al cavo per kit connettore 175N0162.
Disegno 2.6
Kit di montaggio remoto (175N0160)
2.3.3
2.3.4
Kit di montaggio remoto (continua)
Disegno 2.8
Disegno 2.7 Collegamenti
Colore del filo/ Morsetto X100/ Spina D-sub
giallo 1 8
verde 2 9
rosso 3 2
blu 4 3
Tabella 2.22
26 MG03BA06 - VLT® è un marchio registrato Danfoss
Disegno 2.9
Page 27
Installazione
VLT® DriveMotor serie FCM
2.3.5 Opzione potenziometro (177N0011)
Opzione per controllare il riferimento per mezzo di un
potenziometro. L'opzione viene montata invece di
utilizzare un passacavo. Il potenziometro viene azionato
rimuovendo il tappo di chiusura per impostare il
riferimento desiderato. In seguito rimontare il tappo di
chiusura.
Disegno 2.10
Colore del filo Morsetto su X101
Bianco 2 (ingresso analogico)
Rosso 8 (0 V)
Nero 7 (+10 V)
Tabella 2.23
2 2
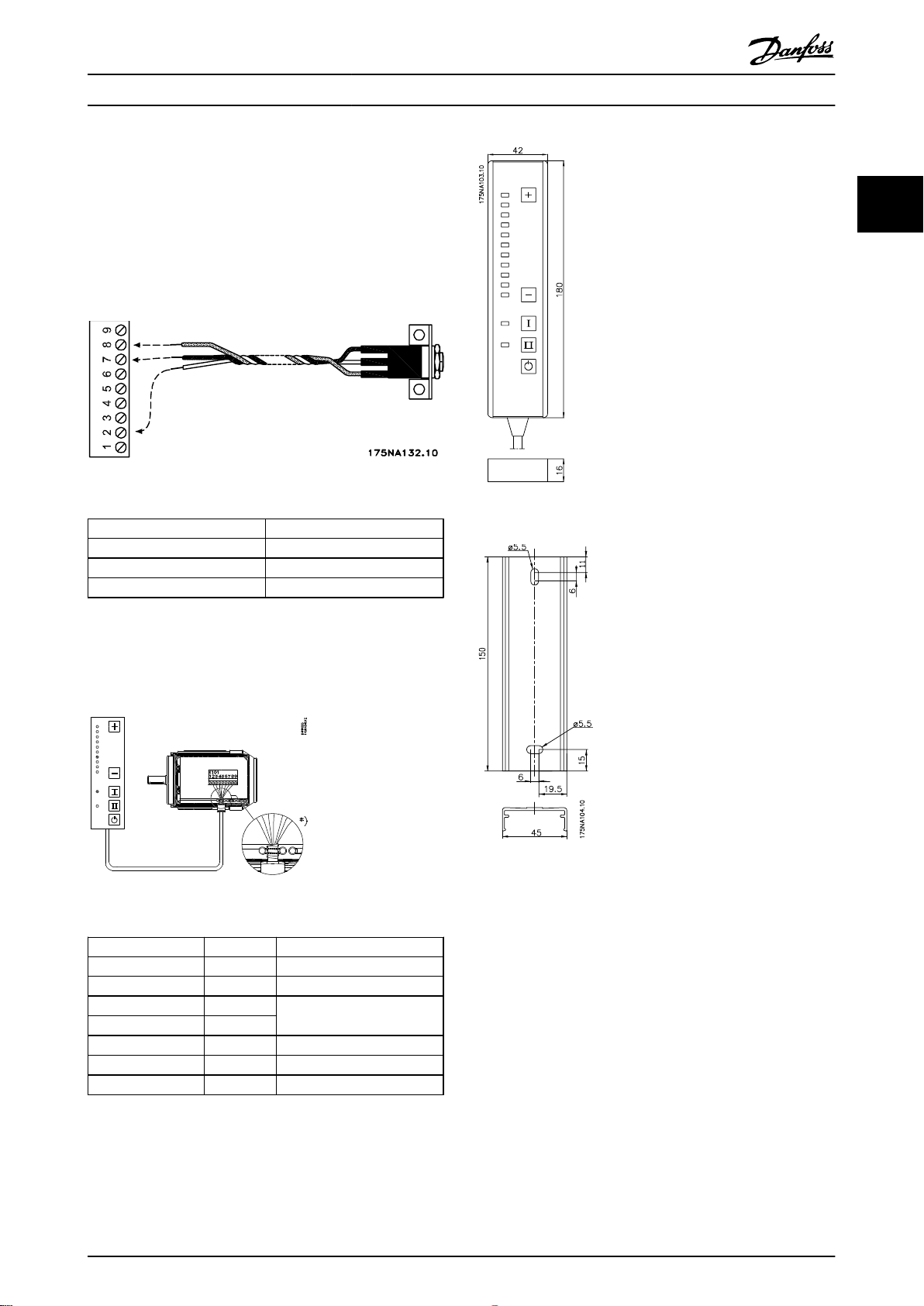
Disegno 2.12 Quadro di comando locale (LOP) 175N0128 IP 65
Tastiera di funzionamento locale
2.3.6
(LOP) (175N0128) IP65
Disegno 2.11
Colore del filo Morsetto Funzione
Bianco 2 Riferimento
Marrone 3 Ripristino
Viola* o Grigio 4
Verde 5
Rosso 6 +24 V
Giallo 7 +10 V
Blu 8 Terra
Vedere Disegno 2.11
Disegno 2.13 Fissaggio per LOP 175N2717 (incluso nel
175N0128)
Tabella 2.24 Cablaggio
* In alcuni cavi può essere arancione
MG03BA06 - VLT® è un marchio registrato Danfoss 27
Page 28
Installazione
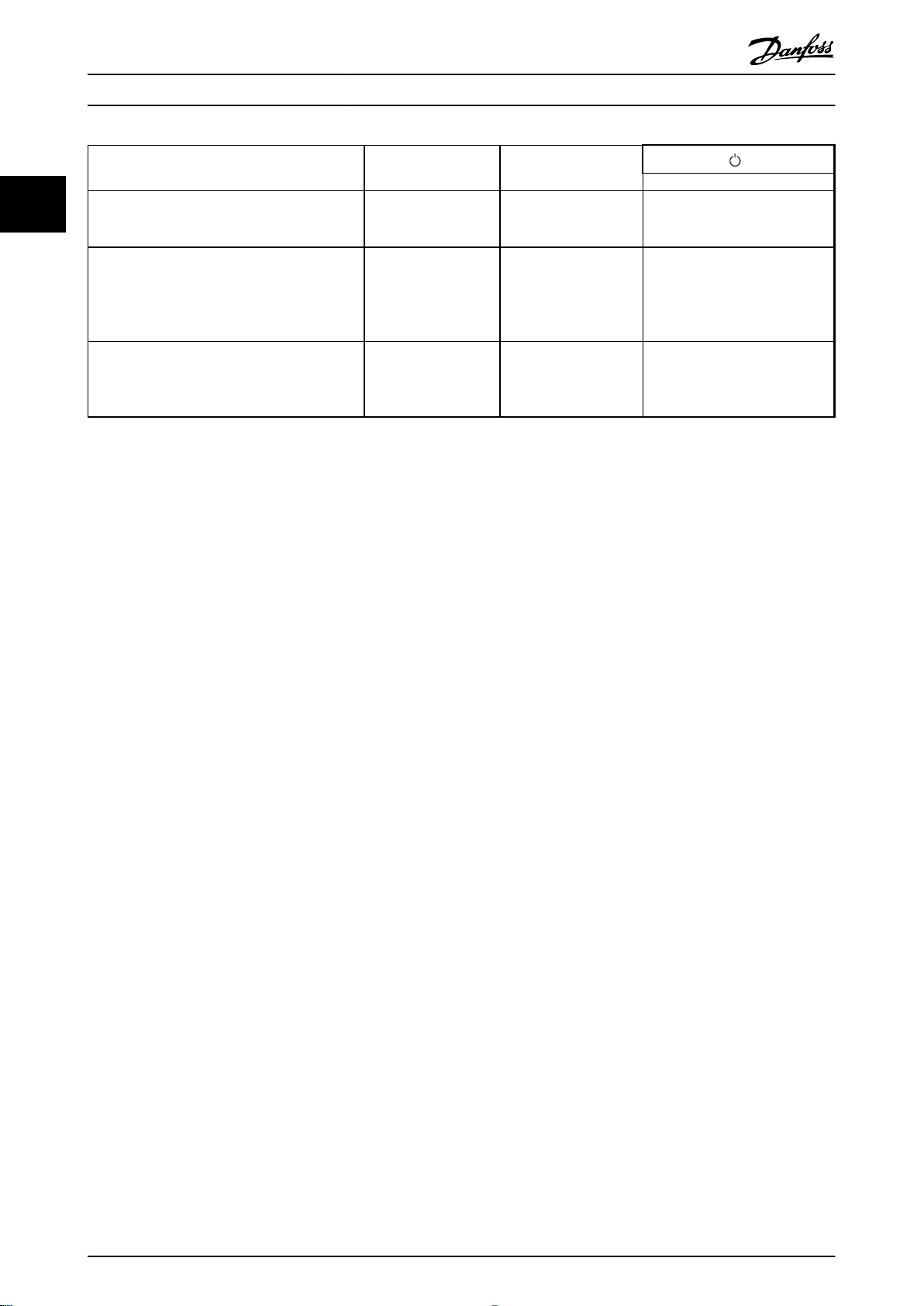
Funzione/impostazioni Tasto I (Avvio) Tasto II (Avvio)
22
Impostazione predefinita - Funzionamento a due
velocità (collegare il filo viola):
Nessuna variazione all'impostazione di fabbrica.
Funzione 2 - Funzionamento in due modalità
(collegare il filo viola):
Selezionare i modi di funzionamento desiderati
nei Setup 1 e 2 (usare i par. 4-6) Parametro 335 =
18 (selezionare Setup)
Funzione 3 - Funzionamento in due sensi
(collegare il filo grigio):
Parametro 335 = 10 (avviamento inversione)
Parametro 200 = 1 (entrambi i sensi)
Tabella 2.25
*Se il ripristino non è necessario, non collegare il filo marrone
**oppure impostare il parametro 213
VLT® DriveMotor serie FCM
Tasto (Arresto)
Marcia su riferimento
impostato (+/-)
Marcia con Setup 1 Marcia con Setup 2 Arresto (e ripristino* - in caso di
Marcia in senso orario Marcia in senso
Marcia a velocità jog 10
Hz**
antiorario
Arresto (e ripristino* - in caso di
scatto)
scatto)
Arresto (e ripristino* - in caso di
scatto)
Per impostare il riferimento, utilizzare i tasti [+]/[-]
All'accensione l'unità è sempre in modo di arresto. Il riferimento impostato viene memorizzato ad unità spenta. Se si
desidera il modo di avvio permanente, collegare il morsetto 6 al morsetto 4 e non collegare il filo viola/grigio al morsetto 4.
Ciò significa che la funzione di arresto è disabilitata sulla tastiera di funzionamento locale.
NOTA!
Dopo il montaggio, tagliare o isolare i fili in eccesso.
28 MG03BA06 - VLT® è un marchio registrato Danfoss
Page 29
Programmazione
3 Programmazione
VLT® DriveMotor serie FCM
3.1 Parametri
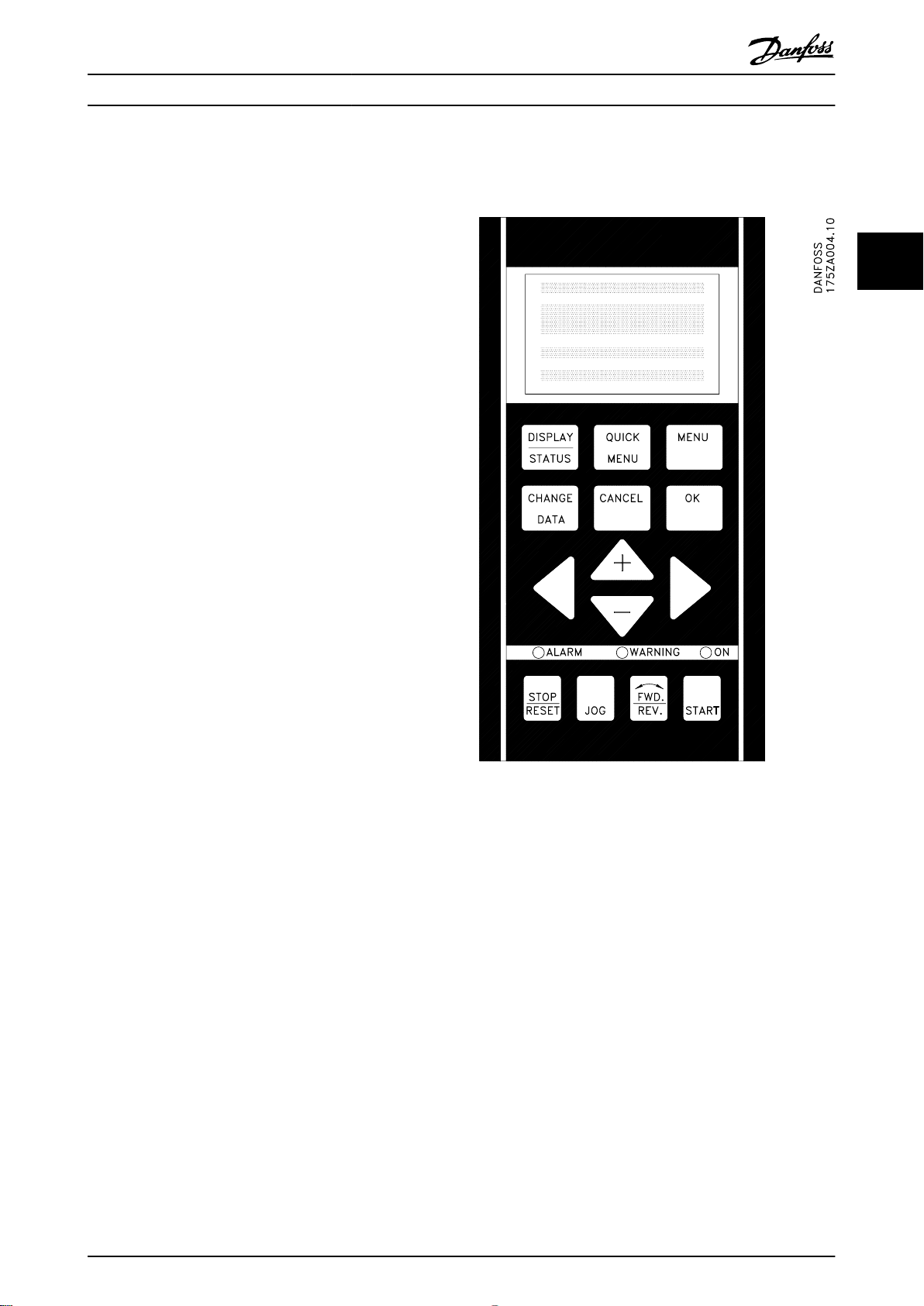
3.1.1 Pannello di controllo (175NO131)
Il motore FC dispone di un Pannello di Controllo Locale
opzionale - l'LCP 2, che rappresenta un'interfaccia
completa per il funzionamento e il monitoraggio del
motore FC.
IP 65 sulla parte anteriore.
3.1.2 Installazione dell'LCP
L'LCP 2 è collegato al morsetto X100, 1-4 (vedere le
istruzioni separate MI03AXYY).
1. Kit connettore di servizio (175N2546) (vedere
2.3.1 Kit connettore di servizio (175N2546)) e cavo
175N0162
2.
Kit connettori (175N2545) (vedere 2.3.2 Kit
connettore (175N2545)) e cavo 175N0162
3. Kit di montaggio remoto (175N0160) (vedere
2.3.4 Kit di montaggio remoto (continua))
3
3
Funzioni dell'LCP
3.1.3
Le funzioni del quadro di comando possono essere divise
in tre gruppi:
Display
•
Tasti per la modifica dei parametri di program-
•
mazione
Tasti per il funzionamento locale
•
Tutti i dati vengono indicati per mezzo di un display alfanumerico di 4 righe, che durante il funzionamento normale
è in grado di visualizzare 4 variabili di funzionamento e 3
condizioni di funzionamento in modo continuo. Durante la
programmazione, verranno visualizzate tutte le
informazioni necessarie per una rapida ed efficace
impostazione dei parametri del motore FC. Oltre al display,
sono presenti tre luci spia (LED) per indicare tensione,
avvisi e allarmi. Tutti i parametri di programmazione del
motore FC possono essere modificati immediatamente dal
quadro di comando, a meno che questa funzione non sia
stata bloccata con il parametro 018.
Disegno 3.1
MG03BA06 - VLT® è un marchio registrato Danfoss 29
Page 30
Programmazione
VLT® DriveMotor serie FCM
3
3.1.4 Display
Il display dell'LCP è retroilluminato e presenta un totale di
4 righe alfanumeriche insieme ad una casella che mostra il
senso di rotazione (freccia) e il setup selezionato, nonché il
setup in cui viene eventualmente effettuata la programmazione.
Disegno 3.2
La 1.a riga mostra fino a 3 variabili di funzionamento nel
normale stato di funzionamento oppure un testo
esplicativo della 2.a riga.
La 2.a riga mostra un valore di misurazione con relativa
unità di misura, indipendentemente dallo stato (tranne nel
caso di un allarme/avviso).
3.1.5
LED
Alla base del quadro di comando vi è un LED rosso
d'allarme ed un LED giallo d'avviso, ed anche un LED di
tensione verde.
Disegno 3.4
Se vengono superati determinati valori soglia, la spia di
allarme e/o di avviso si accende insieme a un testo di stato
e di allarme sul quadro di comando.
Il LED di tensione viene attivato quando il motore FC
riceve tensione; allo stesso tempo, verrà accesa anche l'illuminazione posteriore del display.
Tasti di comando
3.1.6
I tasti di comando sono divisi per funzioni. Ciò significa
che i tasti tra il display e gli indicatori LED vengono usati
per la programmazione dei parametri, inclusa la selezione
delle indicazioni del display durante il funzionamento
normale.
La 3.a riga è di norma vuota e viene usata in modalità
menu per mostrare il numero di parametro selezionato dal
gruppo di parametri.
La 4.a riga viene usata durante il normale funzionamento
per mostrare un testo di stato oppure, nel modo modifica
dati, per mostrare il valore del parametro selezionato.
Disegno 3.3
Una freccia indica il verso di rotazione del motore. Inoltre è
mostrato il setup scelto come setup attivo nel parametro
004. Se si programma un setup diverso da quello attivo, il
numero del setup che si sta programmando apparirà sulla
destra. Questo secondo numero di setup lampeggerà.
Disegno 3.5
I tasti per il comando locale si trovano sotto i LED
indicatori.
Disegno 3.6
30 MG03BA06 - VLT® è un marchio registrato Danfoss
Page 31

Programmazione
VLT® DriveMotor serie FCM
3.1.7 Funzioni dei tasti di comando
[DISPLAY/STATUS] viene usato per
selezionare il modo del display o per
tornare alla modalità di visualizzazione
dalla modalità Menu rapido o dalla
modalità Menu.
[QUICK MENU] viene usato per
programmare i parametri appartenenti
alla modalità Menu rapido. È possibile
passare direttamente dalla modalità Menu
alla modalità Menu rapido.
[MENU] viene usato per programmare
tutti i parametri. È possibile passare
direttamente dalla modalità Menu rapido
alla modalità Menu.
Tabella 3.1
[CHANGE DATA] viene usato per
modificare il parametro selezionato in
modalità Menu o in modalità Menu
rapido.
[CANCEL] viene usato se non deve essere
eseguita alcuna modifica del parametro
selezionato.
[OK] viene usato per confermare la
modifica del parametro selezionato.
[+]/[-] sono usati per scegliere il
parametro e per cambiare il parametro
scelto o per cambiare la lettura della riga
2.
[<][>] viene usato per selezionare un
gruppo e per la modifica dei dati dei
parametri numerici.
[STOP/RESET] viene usato per arrestare o
ripristinare il motore FC dopo un guasto
(scatto). Può essere attivato o disattivato
mediante il parametro 014. Se è attivato
[STOP], la riga 2 lampeggia ed è
necessario attivare il tasto [START].
[JOG] cambia la frequenza di uscita a una
frequenza preimpostata mentre il tasto
viene tenuto premuto. Può essere attivato
o disattivato mediante il parametro 015.
[FWD/REV] consente di modificare il senso
di rotazione del motore indicato da una
freccia sul display, sebbene solo in
Comando locale. Può essere attivato o
disattivato mediante il parametro 016 (il
parametro 013 deve essere impostato su
[1] o [3] e il parametro 200 su [1]).
[START] viene usato per avviare il motore
FC dopo un arresto con il tasto [Stop]. È
sempre attivo, ma non può escludere un
comando di arresto immesso mediante la
morsettiera.
Tabella 3.3
NOTA!
Se sono stati attivati i tasti per il comando locale, essi
rimarranno attivi indipendentemente dal fatto che la
frequenza sia stata impostata su Comando locale o su
Controllo remoto con il parametro 002, ad eccezione di
[FWD/REV] che è attivo solo in funzionamento locale.
NOTA!
Se non è stata selezionata alcuna funzione esterna di stop
e il tasto [STOP] è stato disattivato mediante il parametro
014, il motore FC può essere avviato e potrà essere
arrestato solo scollegando la tensione dal motore.
3
3
Tabella 3.2
NOTA!
Premendo [STOP/RESET] si impedirà il funzionamento del
motore anche con l'LCP 2 scollegato. Il riavvio è solo
possibile tramite il tasto LCP 2 [START].
MG03BA06 - VLT® è un marchio registrato Danfoss 31
Page 32

195NA113.10
VAR 2
SETUP
1
STATUS
VAR 1.1 VAR 1.2 VAR 1.3
MOTORE IN MARCIA
FREQUENZA
50.0 Hz
Programmazione
VLT® DriveMotor serie FCM
3
3.1.8 Stato di visualizzazione del display
Lo stato di visualizzazione del display può variare, vedere
3.1.15 Gruppi di parametri, a seconda che il motore FC stia
funzionando normalmente o sia in corso di programmazione.
3.1.9 Modalità di visualizzazione
In condizioni di funzionamento normale, possono essere
visualizzate in modo continuo fino a 4 diverse variabili
operative: 1.1, 1.2, 1.3 e 2, e nella riga 4 è visualizzato lo
stato operativo attuale oppure gli allarmi e gli avvisi che si
sono verificati.
Disegno 3.7
Variabile operativa:
Riferimento [%]
Riferimento [unit]*
Retroazione [unit]*
Frequenza [Hz]
Frequenza x scala [-]
Corrente motore [A]
Coppia [%]
Potenza [kW]
Potenza [HP]
Tensione motore [V]
Tensione bus CC [V]
Termico FC [%]
Ore di esercizio [Hours]
Stato ingresso, ingr. digitale [Binary code]
Riferimento esterno [%]
Parola di stato [Hex]
Temp. dissip. [ºC]
Parola d'allarme [Hex]
Parola di controllo [Hex]
Parola di avviso 1 [Hex]
Parola di avviso 2 [Hex]
Ingr. analog. 1 [mA]
Ingresso analogico 2 [V]
*) Selezionare nel parametro 416. L'unità viene visualizzata nello
stato di visualizzazione 1 riga 1, altrimenti comparirà 'U'.
Unità
3.1.10
Modalità visualizzazione - selezione
dello stato di visualizzazione
Sono disponibili tre opzioni in combinazione con la scelta
dello stato di visualizzazione nella modalità Visualizzazione:
modalità I, II e III. La selezione dello stato di visualizzazione
determina il numero di variabili di funzionamento
visualizzate.
Stato di
visualizzazione:
Riga 1 Descrizione
Tabella 3.4
Tabella 3.5 indica le unità collegate alle variabili nella prima
e nella seconda riga del display (vedere il parametro 009).
I: II: III:
Valore dati per
della variabile
operativa nella
riga 2
3 variabili
operative nella
riga 1
Descrizione
delle 3 variabili
operative nella
riga 1
Tabella 3.5
Le variabili operative 1.1, 1.2 e 1.3 nella prima riga e la
variabile operativa 2 nella seconda riga vengono
selezionate mediante i parametri 009, 010, 011 e 012.
Stato di visualizzazione I:Questo stato di visualizzazione è
lo stato predefinito dopo l'avviamento oppure dopo
l'inizializzazione.
La riga 2 indica il valore di una variabile operativa con la
relativa unità, mentre la riga 1 presenta un testo che
spiega la riga 2, vedere la tabella. Nell'esempio, Frequenza
è stata selezionata come variabile mediante il parametro
009. Durante il funzionamento normale, un'altra variabile
può essere immediatamente visualizzata con i tasti [+]/[-].
Stato di visualizzazione II:
32 MG03BA06 - VLT® è un marchio registrato Danfoss
Page 33

MOTORE IN MARCIA
50.0 Hz
REF% COPPIA% CORR.A
MOTORE IN MARCIA
50.0 Hz
REF% COPPIA% CORR.A
50.0 Hz
SETUP
1
ITALIANO
001 SELEZIONE,LINGUA
QUICK MENU X OF Y
Programmazione
VLT® DriveMotor serie FCM
È possibile passare dallo stato di visualizzazione I al II
premendo il tasto [DISPLAY/STATUS].
In questo stato, i valori dati delle quattro variabili sono
mostrati contemporaneamente con le relative unità di
misura, vedi tabella. Nell'esempio, Riferimento, Coppia,
Corrente e Frequenza vengono selezionati come variabili
nella prima e nella seconda riga.
Stato di visualizzazione III:
Questo stato di visualizzazione rimane attivo finché viene
premuto il tasto [DISPLAY/STATUS]. Una volta rilasciato il
tasto, il sistema torna allo stato di visualizzazione II, a
meno che il tasto non venga premuto per meno di 1 s
circa.
comando desiderate e della configurazione delle
entrate/uscite di segnale (morsetti di comando).
La modalità Menu consente di selezionare e
•
modificare tutti i parametri in base alle scelte
dell'utente. Tuttavia alcuni parametri saranno
"bloccati", in base alla configurazione prescelta
(parametro 100), per esempio la Regolazione ad
anello aperto nasconde tutti i parametri PID.
Oltre ad avere un nome, ad ogni parametro è assegnato
un numero che è sempre lo stesso indipendentemente dal
modo di programmazione. In modalità Menu, i parametri
sono suddivisi in gruppi, con la prima cifra del numero del
parametro (da sinistra) che indica il numero del gruppo di
appartenenza del parametro in questione.
Indipendentemente dal modo di programmazione, la
modifica di un parametro avrà un effetto immediato e sarà
visibile sia in modalità Menu che in modalità Menu rapido.
3.1.12
Il setup rapido inizia premendo il tasto [Quick Menu], che
determina la seguente visualizzazione sul display:
Setup rapido tramite menu rapido
3
3
Vengono visualizzati i nomi e le unità di misura delle
variabili della prima riga, mentre la seconda riga rimane
invariata.
3.1.11
Modalità menu rapido rispetto alla
modalità menu
Il motore FC può essere usato praticamente per numerosissimi scopi ed è per questo motivo che il numero di
parametri è piuttosto elevato. Questa serie offre inoltre la
possibilità di scegliere fra due modalità di programmazione: una modalità Menu e una modalità Menu rapido.
Il Menu rapido conduce l'utente attraverso un
•
numero di parametri che possono essere
sufficienti per garantire un funzionamento quasi
ottimale del motore, se l’impostazione di fabbrica
per gli altri parametri tiene conto delle funzioni di
Nella parte inferiore del display, vengono indicati il numero
e il nome del parametro insieme con lo stato/valore del
primo parametro nel Setup rapido. La prima volta che
viene premuto il tasto [Quick Menu] dopo l'accensione
dell'unità, le visualizzazioni avranno sempre inizio dalla
pos. 1, vedere Tabella 3.6.
MG03BA06 - VLT® è un marchio registrato Danfoss 33
Page 34

SETUP
1
FREQUENZA
50.0 Hz
0 TAST & DISPLAY
SETUP
1
FREQUENZA
50.0 Hz
001 SELEZIONE LINGUA
ITALIANO
Programmazione
VLT® DriveMotor serie FCM
3
3.1.13 Selezione di parametri
La selezione del parametro viene effettuata tramite i tasti
[+]/[-]. È possibile accedere ai seguenti parametri:
Pos.: N.: Parametro: Unità:
1 001 Lingua
2 200 Senso di rotazione
3 101 Caratteristiche della
coppia
4 204 Riferimento min. [Hz]
5 205 Riferimento max [Hz]
6 207 Tempo rampa di salita [s]
7 208 Tempo rampa di discesa [s]
8 002 Controllo locale/remoto
9 003 Riferimento locale
10 500 Indirizzo bus
Tabella 3.6 Selezione dei parametri
3.1.14
La modalità Menu viene avviata premendo il tasto [Menu],
che determina la seguente visualizzazione sul display:
Modalità menu
Gruppo n.
0 Funzionamento e Display
1 Carico e Motore
2 Riferimenti e limiti
3 Ingressi e uscite
4 Funzioni speciali
5 Comunicazione seriale
6 Funzioni tecniche
*Per informazioni sul gruppo di parametri 800 e 900 del
PROFIBUS, vedere il manuale Profibus FCM MG03EXYY.
Tabella 3.7
Dopo aver selezionato il gruppo di parametri desiderato, è
possibile selezionare ciascun parametro con i tasti [+]/[-]:
Gruppo di parametri
Disegno 3.8
La riga 3 del display mostra il numero e il nome del
gruppo del parametro.
3.1.15
In modalità Menu, i parametri sono suddivisi in gruppi. La
selezione del gruppo di parametri viene effettuata
mediante i tasti [<][>].
È possibile accedere ai seguenti gruppi di parametri:
Gruppi di parametri
Disegno 3.9
La riga 3 del display mostra il numero e il nome del
parametro mentre lo stato / il valore del parametro
selezionato sono mostrati nella riga 4.
3.1.16
Indipendentemente dal fatto che un parametro sia stato
selezionato con la modalità Menu rapido o con la modalità
Menu, la procedura per modificare i dati è la stessa.
Premere il tasto [Change Data] per poter modificare il
parametro selezionato, dopodiché la sottolineatura nella
riga 4 del display comincerà a lampeggiare. La procedura
per la modifica dei dati dipende dal fatto che il parametro
selezionato rappresenti un valore del dato numerico o un
valore di testo.
Modifica dei dati
34 MG03BA06 - VLT® è un marchio registrato Danfoss
Page 35

SETUP
1
FREQUENZA
50.0 Hz
001 SELEZIONE LINGUA
ITALIANO
50.0 Hz
SETUP
1
FREQUENZA
130 FREQ. START
09,0 HZ
50.0 Hz
SETUP
1
FREQUENZA
130 FREQ. START
10,0 HZ
Programmazione
VLT® DriveMotor serie FCM
3.1.17 Modifica di un valore di testo
Se il parametro selezionato è un valore di testo, il valore
viene modificato per mezzo dei tasti [+]/[-].
Disegno 3.10
La riga inferiore del display visualizza il valore di testo che
verrà immesso (memorizzato) una volta data la conferma
[OK].
Quindi la cifra selezionata viene modificata infinitamente
con i tasti [+]/[-]:
Disegno 3.12
La cifra selezionata è evidenziata dalla cifra lampeggiante.
La riga inferiore del display visualizzerà il valore dato che
verrà immesso (memorizzato) una volta data la conferma
[OK].
3
3
3.1.18
Se il parametro selezionato rappresenta un valore dato
numerico, viene prima selezionata una cifra con i tasti [<]
[>].
Variazione continua di un valore del
dato numerico
Disegno 3.11
MG03BA06 - VLT® è un marchio registrato Danfoss 35
Page 36

175ZA446.11
MODO DISPLAY
MODO MENU
MODO MENU RAPIDO
MODO MODIFICA DATI
MODO MODIFICA DATI
Selezione
parametro
MODO DATI
Selezione di
un valore
dato
Selezione
gruppo
SETUP
1
SETUP
1
SETUP
1
SETUP
1
SETUP
1
SETUP
1
▲
▲
▲
▲
▲
▲
▲
▲
▲
VAR 1.1 VAR 1.2 VAR 1.3
VAR 2
STATUS
FREQUENZA
50.0 HZ
0 TAST & DISPLAY
QUICK MENU 1 OF 13
50.0 HZ
001 SELEZIONE LINGUA
ITALIANO
QUICK MENU 1 OF 13
50.0 HZ
001 SELEZIONE LINGUA
ITALIANO
FREQUENZA
50.0 HZ
001 SELEZIONE LINGUA
ITALIANO
FREQUENZA
50.0 HZ
001 SELEZIONE LINGUA
ITALIANO
3
Programmazione
3.1.19 Struttura del menu
VLT® DriveMotor serie FCM
Disegno 3.13
36 MG03BA06 - VLT® è un marchio registrato Danfoss
Page 37

Programmazione
VLT® DriveMotor serie FCM
3.1.20 Gruppo di parametri 0-**
Funzionamento / Display
001 Lingua
Valore:
Inglese (ENGLISH) [0]
Tedesco (DEUTSCH) [1]
Francese (FRANCAIS) [2]
Danese (DANSK) [3]
Spagnolo (ESPAÑOL) [4]
Italiano (ITALIANO) [5]
Lo stato alla consegna può variare dall'impostazione di
fabbrica.
Funzione:
Questo parametro definisce la lingua da utilizzare sul
display.
Descrizione:
È possibile scegliere fra [0] Inglese, [1] Tedesco, [2] Francese,
[3] Danese, [4] Spagnolo e [5] Italiano.
002 Controllo locale/remoto
Valore:
Controllo remoto (REMOTO) [0]
Comando locale (LOCALE) [1]
Funzione:
È possibile scegliere fra due metodi di controllo del motore
FC:[0] Controllo remoto e [1] Comando locale.
Descrizione:
Se viene selezionato [0] Controllo remoto, il motore FC può
essere controllato mediante:
1. I morsetti di controllo o la porta di comunicazione seriale.
2. Il tasto [Start]. Tuttavia in questo modo non è
possibile escludere i comandi di arresto (quindi la
disabilitazione dell’avviamento) immessi mediante
gli ingressi digitali o la porta di comunicazione
seriale.
3. I tasti [Stop], [Jog] e [Reset], a condizione che
siano attivi (vedere i parametri 014, 015 e 017).
Se è selezionato [1] Comando locale, il motore FC può
essere controllato tramite:
1. Il tasto [Start]. Tuttavia questo tasto non è in
grado di escludere i comandi di arresto dei
morsetti digitali (se è stato selezionato [2] o [4]
nel parametro 013).
2. I tasti [Stop], [Jog] e [Reset], a condizione che
siano attivi (vedere i parametri 014, 015 e 017).
3. Il tasto [FWD/REV], a condizione che sia stato
attivato nel parametro 016 e che nel parametro
013 sia stato selezionato [1] o [3].
4. Tramite il parametro 003, il riferimento locale può
essere controllato grazie ai tasti "Freccia su" e
"Freccia giù".
003 Riferimento locale
Valore:
Par. 013 impostato su [1] o [2]:
0 - f
MAX
Par. 013 impostato su [3] o [4] e par. 203 =
[0] impostato su:
Rif
- Rif
MIN
MAX
Par. 013 impostato su [3] o [4] e par. 203 =
[1] impostato su:
-Rif
- + Rif
MAX
Funzione:
Questo parametro consente l'impostazione manuale del
valore di riferimento desiderato (velocità o riferimento alla
configurazione selezionata, in base alla selezione effettuata
nel parametro 013).
L'unità segue la configurazione selezionata nel parametro
100, a condizione che siano state selezionate [3]
Regolazione del processo, anello chiuso.
Descrizione:
[1] È necessario selezionare Locale nel parametro 002
perché questo parametro venga utilizzato.
Il valore impostato viene salvato in caso di caduta di
tensione, vedere il parametro 019.
In questo parametro non si esce automaticamente dal
modo Modifica dati (dopo il timeout).
Il riferimento locale non può essere impostato mediante la
porta di comunicazione seriale.
004 Programmazione attiva
Valore:
Setup di fabbrica (SETUP DI FABBRICA) [0]
Setup 1 (SETUP 1) [1]
Setup 2 (SETUP 2) [2]
Setup multiplo (MULTI SETUP) [5]
Funzione:
Questo parametro definisce il numero di programmazione
desiderato per il controllo delle funzioni del motore FC.
Tutti i parametri possono essere definiti in due programmazioni individuali: Programmazione 1 e Programmazione
2. Inoltre è disponibile una programmazione preimpostata,
chiamata programmazione di fabbrica, che non può essere
modificata.
Descrizione:
[0] Setup di fabbrica contiene i dati di fabbrica. Può essere
usata come fonte di dati se le altre programmazioni
devono essere riportate a uno stato noto.
I parametri 005 e 006 consentono di effettuare copie da
una programmazione all’altra.
[1] Setup 1 e [2] 2 sono due setup individuali che possono
essere selezionati come richiesti.
MAX
000,000
000,000
000,000
3
3
MG03BA06 - VLT® è un marchio registrato Danfoss 37
Page 38

Programmazione
VLT® DriveMotor serie FCM
3
[5] Multi Setup viene utilizzato se si desidera un passaggio
con controllo remoto fra i diversi setup. Per il passaggio fra
le programmazioni possono essere utilizzati i morsetti 2, 3,
4 e 5 nonché la porta di comunicazione seriale.
005 Setup di programmazione
Valore:
Setup di fabbrica (SETUP DI FABBRICA) [0]
Setup 1 (SETUP 1) [1]
Setup 2 (SETUP 2) [2]
Setup attivo (SETUP ATTIVO) [5]
Funzione:
Viene selezionato il setup in cui deve avvenire la programmazione (cambio dei dati) durante il funzionamento. È
possibile programmare i due setup indipendentemente dal
setup selezionato come setup attivo (selezionato nel
parametro 004).
Descrizione:
Il [0] Setup di fabbrica contiene i dati di fabbrica e può
essere usato come una sorgente di dati se gli altri setup
devono essere riportate ad uno stato noto.
[1] Setup 1 e [2] 2 sono setup individuali che possono
essere usati come richiesto. Possono essere programmati
liberamente, indipendentemente dal setup selezionato
come setup attivo, preposto pertanto al controllo del
motore FC.
006 Copia di setup
Valore:
Nessuna copia (NESSUNA COPIA) [0]
Copia al setup 1 da # (COPIA AL SETUP 1) [1]
Copia al setup 2 da # (COPIA AL SETUP 2) [2]
Copia al tutti i setup da # (COPIA A TUTTI) [5]
# = il setup selezionato nel parametro 005
Funzione:
Una copia viene effettuata dal setup selezionato nel
parametro 005 a uno degli altri setup o a tutti gli altri
setup simultaneamente.
007 Copia LCP
Valore:
Nessuna copia (NESSUNA COPIA) [0]
Carica tutti i parametri (CARICA TUTTI I PARAM) [1]
Scarica tutti i parametri (SCARICA TUTTI) [2]
Scaricamento dei parametri che non dipendono
dalla potenza.
(SCARICA INDIP. ALIM.) [3]
Funzione:
Il parametro 007 viene usato se si desidera utilizzare la
funzione di copiatura integrata del quadro di comando. È
quindi possibile copiare facilmente valori parametrici da un
motore FC ad un altro.
Descrizione:
Selezionare [1] Carica tutti i parametri se tutti i valori dei
parametri devono essere trasmessi al quadro di comando.
Selezionare [2] Scarica tutti i parametri se tutti i valori dei
parametri trasmessi devono essere copiati al motore FC su
cui è stato installato il quadro di comando. Selezionare [3]
Scarica parametri non dipendenti dalla potenza se devono
essere scaricati solo i parametri indipendenti dalla potenza.
Viene usato se lo scaricamento su un motore FC ha una
potenza nominale diversa rispetto a quella da cui ha
origine il setup dei parametri.
008
Valore:
0.0-100.00 [1-10000]
1.00 [100]
Funzione:
Questo parametro sceglie il fattore da moltiplicare per la
frequenza motore, fM, per la presentazione nel display,
quando i parametri 009-012 sono stati impostati su
Frequenza x Scala [5].
Descrizione:
Impostare il fattore di scala desiderato.
009 Riga 2 del display
Valore:
Nessuno [0]
Riferimento [%] (RIFERIMENTO [%]) [1]
Riferimento [unit] (RIFERIMENTO [UNIT]) [2]
Retroazione [unit] (RETROAZIONE [UNIT]) [3]
Frequenza [Hz] (FREQUENZA [Hz]) [4]
Frequenza x Scala [-] (FREQUENZA X SCALA) [5]
Corrente motore [A] (CORRENTE MOTORE [A]) [6]
Coppia [%] (COPPIA [%]) [7]
Potenza [kW] (POTENZA [kW]) [8]
Potenza [HP] (POTENZA [hp] [US]) [9]
Tensione motore [V] (TENSIONE MOTORE [V]) [11]
Tensione bus CC [V] (TENSIONE BUS CC [V]) [12]
Carico termico, FC [%] (TERMICA FC [%]) [14]
Ore di esercizio [Hours] (ORE DI ESERCIZIO) [15]
Ingresso digitale [Binary code] (INGRESSO
DIGITALE [BIN]) [16]
Riferimento esterno [%] (RIF. ESTERNO [%]) [21]
Parola di stato [Hex] (PAROLA DI STATO [HEX]) [22]
Temperatura dissipatore [°C] (TEMP. DISSIP. [°C]) [25]
Parola di allarme [Hex] (PAROLA DI ALLARME
[HEX]) [26]
Control word [Hex] (PAROLA DI CONTROLLO
[HEX]) [27]
Parola di avviso 1 [Hex]
(PAROLA DI AVVISO 1 [HEX]) [28]
Visualizzare il fattore di scala della frequenza
motore
38 MG03BA06 - VLT® è un marchio registrato Danfoss
Page 39

Programmazione
VLT® DriveMotor serie FCM
Parola di avviso 2 [Hex]
(PAROLA DI STATO ESTESA [HEX]) [29]
Ingresso analogico 1 [mA] (INGRESSO
ANALOGICO 1 [mA]) [30]
Ingresso analogico 2 [V] (INGRESSO ANALOGICO
2 [V]) [31]
Funzione:
Questo parametro consente di scegliere il valore da
visualizzare nella riga 2 del display, ogniqualvolta il VLT
venga riacceso.
I parametri 010-012 consentono l'uso di tre valori dato
supplementari da visualizzare nella riga 1.
Per visualizzazioni sul display, premere il pulsante
[DISPLAY/STATUS], vedere 3.1.7 Funzioni dei tasti di
comando.
Descrizione:
Riferimento [%] corrisponde al riferimento totale (somma
dei riferimenti digitali/analogici/preimpostati/bus/congelati/
catch-up e slow-down).
Riferimento [unità] indica la somma dei riferimenti con
l'unità di misura definita sulla base della configurazione nel
parametro 100 (Hz, Hz e giri/min.).
Retroazione [unità] indica il valore di stato del morsetto 1 e
2 usando l'unità/scala selezionata nel parametro 414, 415 e
416.
Frequenza [Hz] indica la frequenza del motore, vale a dire
la frequenza di uscita al motore.
Frequenza x Scala [-] corrisponde all'attuale frequenza del
motore attuale fM moltiplicata per un fattore (scala)
impostato nel parametro 008.
Corrente motore [A] indica la corrente di fase del motore
misurata come valore effettivo.
Coppia [%] indica il carico attuale del motore in relazione
alla coppia nominale del motore.
Potenza [kW] indica la potenza effettivamente assorbita dal
motore in kW.
Potenza [HP] indica la potenza attualmente assorbita dal
motore in HP.
Tensione motore [V] indica la tensione erogata al motore.
Tensione bus CC [V] indica la tensione del circuito
intermedio nel motore FC.
Carico termico, FC [%] indica il carico termico calcolato/
stimato sul motore FC. 100% è il limite di disinserimento.
Ore di esercizio [Ore] indica il numero di ore di funzionamento del motore a partire dall'ultimo ripristino nel
parametro 619.
Ingresso digitale [Codice binario] indica gli stati dei segnali
dai 4 morsetti digitali (2, 3, 4 e 5). L'ingresso 5 corrisponde
al bit all'estrema sinistra. '0' = nessun segnale, '1' = segnale
collegato.
Riferimento esterno [%] indica la somma in percentuale dei
riferimenti esterni (somma di rif. analogici/impulsi/bus).
Parola di stato [Hex] indica la parola di stato inviata
mediante la porta di comunicazione seriale in codice
esadecimale dal motore FC.
Temperatura dissipatore
del dissipatore del motore FC. Il limite di disinserimento è
di 90 ± 5°C; la riattivazione avviene a 60 ± 5°C.
Parola di allarme [Hex] indica uno o più allarmi in un
codice esadecimale. Vedere 4.2.4 Parola di avviso, parola di
stato esteso e parola di allarme.
Parola di controllo [Hex] indica la parola di controllo per il
motore FC. Vedere 3.6 Comunicazione seriale - Guida alla
progettazione FCM 300.
Parola di avviso 1 [Hex] indica uno o più avvisi in codice
esadecimale. Vedere 4.2.4 Parola di avviso, parola di stato
esteso e parola di allarme per ulteriori informazioni.
Parola di stato per esteso [Hex] indica una o più condizioni
di stato in codice Hex. Vedere 4.2.4 Parola di avviso, parola
di stato esteso e parola di allarme per ulteriori informazioni.
Ingresso analogico 1 [mA] indica il valore del segnale sul
morsetto 1.
Ingresso analogico 2 [V] indica il valore del segnale sul
morsetto 2.
010 Riga 1.1 del display
Valore:
Riferimento [%] [1]
Vedere il parametro 009.
Funzione:
Questo parametro consente di scegliere il primo dei tre
valori dato visualizzati sul display, riga 1, posizione 1.
Descrizione:
È possibile scegliere fra 24 valori diversi, descritti nel
parametro 009.
011 Riga 1.2 del display
Valore:
Corrente motore [A] [1]
Vedere parametro 009
Funzione:
Questo parametro consente di scegliere il secondo dei tre
valori dato visualizzati sul display, riga 1, posizione 2.
Per visualizzazioni sul display, premere il pulsante
[DISPLAY/STATUS], vedere 3.1.7 Funzioni dei tasti di
comando
Descrizione:
È possibile scegliere fra 24 valori diversi, descritti nel
parametro 009.
012 Riga 1.3 del display
Valore:
Potenza [kW] [8]
Vedere parametro 009
Funzione:
Questo parametro consente di scegliere il terzo dei tre
valori dato visualizzati sul display, riga 1, posizione 3.
Le visualizzazioni sul display si ottengono premendo il
pulsante [DISPLAY/STATUS], vedere 3.1.7 Funzioni dei tasti
di comando.
[°C] indica la temperatura attuale
3
3
MG03BA06 - VLT® è un marchio registrato Danfoss 39
Page 40

Programmazione
VLT® DriveMotor serie FCM
3
Descrizione:
È possibile scegliere fra 24 valori diversi, descritti nel
parametro 009.
013
Valore:
Locale non attivo (DISABILITA) [0]
Controllo LCP e anello aperto.
(CTRL LCP/ANELLO APERTO) [1]
Controllo digitale da LCP e anello aperto.
(LCP + CTRL DIG/ANELLO AP.) [2]
Controllo da LCP, come nel parametro 100.
(CTRL LCP/COME P100) [3]
Controllo digitale da LCP/come parametro 100.
(LCP+CTRL DIG/COME P100) [4]
Funzione:
Questo parametro consente di selezionare la funzione
desiderata se è stato scelto Comando locale nel parametro
002. Vedere anche la descrizione del parametro 100.
Descrizione:
Se è selezionato Locale non attivo [0], viene bloccata una
possibile impostazione del Riferimento locale mediante
parametro 003. È possibile passare a Locale non attivo [0]
da una delle altre opzioni di impostazione del parametro
013, quando il motore FC è stato impostato su Controllo
remoto [0] nel parametro 002.
Controllo da LCP e anello aperto [1] viene usato quando la
velocità deve essere regolata (in Hz) mediante il parametro
003, se il motore FC è stato impostato su Comando locale
[1] nel parametro 002.
Se il parametro 100 non è stato impostato su Regolazione
velocità, anello aperto [0], passare a Regolazione velocità,
anello aperto [0].
Controllo digitale da LCP e anello aperto [2] funziona come
Controllo da LCP e anello aperto [1], l’unica differenza sta
nel fatto che se il parametro 002 è stato impostato su
Funzionamento locale [1], il motore viene controllato
mediante gli ingressi digitali.
Controllo da LCP, come parametro 100 [3] viene selezionato
se il riferimento deve essere impostato mediante il
parametro 003.
Controllo digitale da LCP, come parametro 100 [4] funziona
come Controllo LCP/come parametro 100 [3], sebbene,
quando il parametro 002 è stato impostato su Funzio-
namento locale [1], il motore può essere controllato
mediante gli ingressi digitali.
La frequenza del motore e il senso di rotazione attuali
devono essere mantenuti. Se il senso di rotazione attuale
non corrisponde al segnale di inversione (riferimento
negativo), la frequenza del motore fM verrà impostata su 0
Hz.
Passaggio da Controllo digitale da LCP e anello aperto a
Controllo remoto:
Sarà attiva la configurazione selezionata (parametro 100).
La funzione garantisce passaggi senza sobbalzi.
Comando locale/Configurazione come
parametro 100
Passaggio
parametro 100 o Controllo digitale da LCP, come parametro
100.
Il riferimento attuale sarà mantenuto. Se il segnale di
riferimento è negativo, il riferimento locale verrà impostato
a 0.
Passaggio da Controllo da LCP/come parametro 100 o
Controllo remoto da LCP come parametro 100 a Controllo
remoto.
Il riferimento verrà sostituito dal segnale di riferimento
attivo del comando remoto.
014 Arresto locale
Valore:
Funzione:
Questo parametro abilita/disabilita la funzione di arresto
locale in questione dal quadro di comando. Questo tasto
viene usato quando il parametro 002 è stato impostato su
[0] Controllo remoto [1] Locale.
Descrizione:
Se in questo parametro viene selezionato [0] Disabilita il
tasto [STOP] sarà inattivo.
015 Jog locale
Valore:
Funzione:
In questo parametro, la funzione jog può essere abilitata/
disabilitata sul quadro di comando.
Descrizione:
Se in questo parametro viene selezionato [0] Disabilita, il
tasto [JOG] sarà inattivo.
016 Inversione locale
Valore:
Funzione:
In questo parametro, la funzione in questione può essere
abilitata/disabilitata sul quadro di comando. Questo tasto
può essere usato solo se il parametro 002 è stato
impostato su [0] Funzionamento locale e il parametro 013
su [1] Controllo LCP con anello aperto o [3] Controllo LCP
come parametro 100.
Descrizione:
Se in questo parametro viene selezionato [0] Disabilitato, il
tasto [FWD/REV] sarà inattivo.
Vedere il parametro 200.
daControllo remotoa Controllo da LCP, come
Non possibile (DISABILITA) [0]
Possibile (ABILITA) [1]
Non possibile (DISABILITA) [0]
Possibile (ABILITA) [1]
Non possibile (DISABILITA) [0]
Possibile (ABILITA) [1]
40 MG03BA06 - VLT® è un marchio registrato Danfoss
Page 41

Programmazione
VLT® DriveMotor serie FCM
017 Ripristino locale dello scatto
Valore:
Non possibile (DISABILITA) [0]
Possibile (ABILITA) [1]
Funzione:
Con questo parametro la funzione di ripristino può essere
selezionata/eliminata dalla tastiera. Questo tasto può
essere usato quando il parametro 002 è stato impostato su
[0] Controllo remoto o [1] Comando locale.
Descrizione:
Se in questo parametro viene selezionato [0] Disabilita, il
tasto [RESET] sarà inattivo.
018 Blocco per modifica dati
Valore:
Non bloccato (NON BLOCCATO) [0]
Bloccato (BLOCCATO) [1]
Funzione:
In questo parametro il software può “bloccare” la programmazione, vale a dire che non possono essere effettuate
modifiche dei dati tramite LCP 2 (tuttavia ciò è ancora
possibile mediante la porta di comunicazione seriale).
Descrizione:
Se viene selezionato [1] Bloccato, non possono essere
effettuate modifiche ai dati.
019
Valore:
Riavviamento automatico, usare rif. memorizzato
(RIAVVIO AUTOM.) [0]
Arresto forzato, usare rif. memorizzato (ARRESTO
LOCALE) [1]
Arresto forzato, rif. azzerato (ARRESTO LOCALE, RIF
0) [2]
Funzione:
Impostazione del modo operativo desiderato quando la
tensione di rete è collegata.
Questa funzione può essere attiva solo in connessione con
[1] Comando locale nel parametro 002.
Descrizione:
[0] Riavvio automatico, rif. memorizzato viene selezionato se
l'unità deve essere avviata con lo stesso riferimento locale
(impostato nel parametro 003) e le stesse condizioni di
avvio/arresto (determinate con i tasti [Start/Stop]) del
motore FC prima del suo spegnimento.
[1] Arresto forzato, rif. memorizzato viene usato se l'unità
deve rimanere arrestata quando viene collegata la tensione
di rete, finché viene premuto il tasto [START]. Dopo il
comando di avviamento, il riferimento locale usato è
quello precedentemente memorizzato nel parametro 003.
[2] Arresto forzato, rif. azzerato viene selezionato se l'unità
deve rimanere arrestata quando la tensione di rete è
collegata. Il riferimento locale (parametro 003) è
ripristinato.
Stato di funzionamento all'accensione,
comando locale
3.2.1
Gruppo di parametri 1-** Carico /
Motore
100 Configurazione
Valore:
Modo velocità, anello aperto (ANELLO APERTO
VEL.) [0]
Processo, modalità anello chiuso
(ANELLO CHIUSO) [1]
Funzione:
Questo parametro viene usato per selezionare la configurazione alla quale il motore FC deve essere adattato.
Descrizione:
Se viene selezionato il parametro [0] Modo velocità, anello
aperto, si ottiene un normale controllo di velocità (senza
segnale di retroazione), ma con una compensazione
automatica dello scorrimento, che assicura una velocità
costante al variare del carico. Le compensazioni sono attive
ma possono essere disabilitate secondo necessità nei
parametri 133 - 136.
In caso di selezione di [3] Processo, modalità anello chiuso, il
regolatore di processo interno sarà attivato consentendo
cosi una precisa regolazione del processo in relazione ad
un dato segnale. Il segnale di riferimento può essere
impostato come valore percentuale o nell'unità fisica della
variabile di processo. Un segnale di retroazione deve
essere fornito dal processo, e occorre definirne il punto di
regolazione. Nel processo ad anello chiuso, l'opzione
Entrambi i sensi
101 Caratteristiche di coppia
Valore:
Coppia costante (COPPIA COSTANTE) [1]
Coppia variabile: bassa (COPPIA VAR.: BASSA) [2]
Coppia var.: media (COPPIA VAR.: MEDIA) [3]
Coppia variabile: elevata (COPPIA VAR.: ALTA) [4]
Funzione:
In questo parametro, viene selezionato il principio di
regolazione delle caratteristiche U/f del motore FC, in base
alle caratteristiche della coppia del carico.
Descrizione:
Se viene selezionata [1] Coppia costante, si ottiene una
caratteristica U/f dipendente dal carico in cui la tensione di
uscita aumenta in caso di un aumento del carico
(corrente), in modo da sostenere la magnetizzazione del
motore.
Selezionare [2] Coppia variabile, bassa, [3] Coppia variabile,
media o [4] Coppia variabile, alta se il carico è quadratico
(pompe centrifughe, ventilatori).
non è consentita nel parametro 200.
3
3
MG03BA06 - VLT® è un marchio registrato Danfoss 41
Page 42

3
Programmazione
VLT® DriveMotor serie FCM
Il valore può variare tra 0% (OFF) e 100%.
Il 100% corrisponde al guadagno proporzionale massimo
consentito che dipende dal modello. Il valore predefinito è
OFF.
Descrizione della funzionalità:
La coppia del sistema viene stimata sulla base del bus CC
e retroazionata a un regolatore proporzionale.
A un determinato livello di corrente attiva del motore,
dipendente dall'unità, il regolatore viene disattivato.
Descrizione:
Impostare il grado del guadagno proporzionale per la
retroazione della coppia tra lo 0% (OFF) e il 100%.
Disegno 3.14
102 Potenza motore
Valore:
XX,XX kW - dipende dal motore FC [XXXX]
Funzione:
Parametro di sola lettura.
103 Tensione motore
Valore:
XX V - dipende dal motore FC [XX]
Funzione:
Parametro di sola lettura.
104 Frequenza motore
Valore:
XX,X Hz - dipende dal motore FC [XXX]
Funzione:
Parametro di sola lettura.
105 Corrente motore
Valore:
XX,X X A- dipende dal motore FC. [XXXX]
Funzione:
Parametro di sola lettura.
106 Velocità nominale del motore
Valore:
XX giri/min. - dipende dal motore FC [XX]
Funzione:
Parametro di sola lettura.
117 Smorzamento di risonanza
Valore:
OFF - 100% [OFF -100]
OFF%. [OFF]
Funzione:
È possibile ottimizzare lo smorzamento di risonanza. Il
grado di influenza è regolato in questo parametro.
118 Smorzamento risonanze disinserito
Valore:
0-200% [0-200]
In funzione del motore
Funzione:
La risonanza ad alta frequenza può essere eliminata
impostando i parametri 117 e 118.
Descrizione:
Adattare la percentuale del carico a partire dal quale la
funzione di smorzamento delle risonanze non deve più
essere attiva.
126 Tempo di frenatura CC
Valore:
0,0 - 60,0 sec. [0-600]
10,0 sec. [100]
Frenata CC, vedere P132
Funzione:
Questo parametro viene utilizzato per impostare il tempo
di frenata CC per il quale deve essere attiva la tensione di
frenata CC (parametro 132).
0,0 sec. = OFF
Descrizione:
Impostare il tempo desiderato.
127 Frequenza di inserimento freno CC
Valore:
0,0-f
(parametro 202)
MAX
0,0 Hz = OFF [0]
Frenata CC, vedere P132
Funzione:
Questo parametro viene utilizzato per impostare la
frequenza di inserimento freno CC, per la quale deve
essere attiva la tensione di frenata CC (parametro 132) in
connessione con un comando di arresto.
Descrizione:
Impostare la frequenza desiderata.
[0 -]
42 MG03BA06 - VLT® è un marchio registrato Danfoss
Page 43

Programmazione
VLT® DriveMotor serie FCM
128 Protezione termica del motore
Valore:
Nessuna protezione (NO PROTEZIONE) [0]
Funzione:
Parametro di sola lettura
Fare riferimento alla sezione Protezione termica dell'FCM
300.
132 Tensione di frenatura in CC
Valore:
0-100% [0-100]
0% [0]
Funzione:
Frenatura in CC:
Se lo statore in asincrono è fornito con un voltaggio CC,
una coppia freno potrà attivarsi.
Se lo statore in un motore asincrono viene alimentato con
tensione CC, ne deriverà una coppia di frenata che
dipenderà dalla tensione di frenata CC selezionata.
Per applicare una coppia di frenata per mezzo di una
frenatura in CC, il campo rotante (CA) nel motore viene
cambiato con un campo fermo (CC)
La frenatura in CC sarà attiva quando la frequenza di
inserimento indicata in basso e l'arresto vengono attivati
allo stesso tempo. P126, P127 e P132 sono usati per il
controllo della frenatura in CC.
La frenatura in CC può inoltre essere attivata direttamente
da un ingresso digitale.
Funzione:
Se lo statore in un motore asincrono viene alimentato con
tensione CC, ne deriverà una coppia di frenata che
dipenderà dalla tensione di frenata CC selezionata. La
tensione di frenata CC è indicata come percentuale della
tensione di frenata massima.
Descrizione:
Impostare la tensione desiderata come percentuale della
tensione di frenata massima.
133 Tensione di avviamento
Valore:
0,00-100,00 V [0-10000]
Dipende dal motore
Funzione:
È possibile impostare la tensione del motore al di sotto del
punto di indebolimento di campo indipendentemente
dalla corrente motore. Usare questo parametro per
compensare una coppia di avviamento troppo bassa.
La tensione di avviamento è la tensione al 0 Hz.
Descrizione:
Impostare la tensione di avviamento desiderata.
134 Compensazione del carico
Valore:
0.0-300.0% [0-3000]
100,0% [1000]
Funzione:
In questo parametro viene definita la caratteristica del
carico. Aumentando la compensazione del carico il motore
riceve una tensione extra ed integra la frequenza in caso di
aumento di carichi. Questa funzione è usata in motori/
applicazioni in cui sussiste una forte differenza fra la
corrente a pieno carico e la corrente a vuoto del motore.
Descrizione:
Se le impostazioni di fabbrica non sono adeguate, la
compensazione del carico va impostata per permettere al
motore di avviarsi ad un dato carico.
ATTENZIONE
Andrebbe impostato a 0% in caso di variazioni veloci del
carico. Una compensazione del carico troppo elevata può
causare instabilità.
135 Rapporto U/f
Valore:
0,00-20,00 V/Hz [0-2000]
In funzione del motore
Funzione:
La tensione di uscita al motore può essere regolata su base
lineare da 0 alla frequenza nominale.
Disegno 3.15
136 Compens. scorrim.
Valore:
-500,0-+500,0% [-5000 - +5000]
100,0% [1000]
Funzione:
La compensazione allo scorrimento nominale
(impostazione di fabbrica) viene calcolata sulla base dei
parametri motore. Nel parametro 136 la compensazione
dello scorrimento può essere regolata con precisione.
Questa ottimizzazione rende la velocità del motore meno
dipendente dal carico. Questa funzione non è attiva
contemporaneamente a Coppia variabile (parametro 101).
3
3
MG03BA06 - VLT® è un marchio registrato Danfoss 43
Page 44

Programmazione
VLT® DriveMotor serie FCM
3
Descrizione:
Immettere un valore % della compensazione allo
scorrimento nominale.
137 Tensione di mantenimento CC
Valore:
0-100% [0-100]
0 (OFF)% [0]
Funzione:
Questo parametro viene usato per sostenere il funzionamento del motore (coppia di mantenimento) o per il
preriscaldamento del motore. La tensione di mantenimento
CC è attiva a motore fermo se è impostata su un valore
diverso da 0. L'arresto per inerzia disattiverà la funzione.
Descrizione:
Immettere un valore percentuale.
138 Frequenza di disinserimento freno
Valore:
0,5-132 Hz (parametro 200) [5-]
3,0 Hz [30]
Funzione:
Questo parametro consente di selezionare la frequenza alla
quale deve essere rilasciato il freno esterno mediante
l'uscita impostata nel parametro 323 o 340 durante il
funzionamento.
Descrizione:
Impostare la frequenza desiderata.
139
Valore:
0,5-132 Hz (parametro 200) [5-]
3,0 Hz [30]
Funzione:
Questo parametro consente di selezionare la frequenza alla
quale deve essere attivato il freno esterno mediante
l'uscita definita nel parametro 323 o 340 durante la decelerazione del motore fino all'arresto.
Descrizione:
Impostare la frequenza desiderata.
Vedere Disegno 3.16.
Frequenza di inserimento freno con arresto
attivo
147 Setup del tipo di motore
Valore:
Dipende dall'unità
Funzione:
Qui viene selezionato il motore specifico nel quale deve
essere installato il pezzo di ricambio.
Descrizione:
Selezionare il motore in base alla marca, al numero dei poli
e alla taglia di potenza.
Esempio: ATB STD-4-075 significa motore ATB a 4 poli, 0,75
kW.
Gruppo di parametri 2-** Riferimenti /
3.3.1
Limiti
200 Senso di rotazione
Valore:
Solo orario,
(Solo orario) [0]
Entrambe le direzioni,
0-132 Hz
(132 Hz 2 DIREZIONI) [1]
Solo antiorario, 0-132 Hz
(132 Hz SENSO ANTIORARIO) [2]
Funzione:
Questo parametro garantisce la protezione contro
un'inversione non desiderata.
Se si usa la modalità Processo, modalità anello chiuso
MAX
.
non deve essere
MAX
(la
(parametro 100), il parametro 200
impostato su [1] Entrambi i sensi.
Descrizione:
Selezionare il senso desiderato visto dall'estremità di
comando del motore.
Notare che in caso di selezione di [0] Senso orario, 0-132 Hz
o [2] Senso antiorario, 0-132 Hz, la frequenza di uscita sarà
limitata all'intervallo f
In caso di selezione di [1] Entrambe le direzioni, 0-132 Hz, la
frequenza di uscita sarà limitata fino all’intervallo ± f
frequenza minima non ha alcuna importanza).
Pertanto
si raccomanda di non impostare il parametro 200 con
valori diversi nei 2 setup. Nel caso fosse necessario
impostare tale parametro, l'utente dovrà accertarsi che le
modifiche di impostazione siano eseguite esclusivamente a
motore spento.
MIN
- f
201 Frequenza di uscita min.
Disegno 3.16 Profilo velocità per la funzione freno
44 MG03BA06 - VLT® è un marchio registrato Danfoss
Valore:
0,0 HZ - f
0,0 HZ [0]
Funzione:
In questo parametro, può essere selezionato un limite di
frequenza minima del motore, corrispondente alla
frequenza minima a cui il motore deve funzionare.
(parametro 202)
MAX
[0 -]
Page 45

Programmazione
VLT® DriveMotor serie FCM
La frequenza minima non potrà mai essere superiore alla
frequenza massima, f
MAX
.
In caso di selezione di Entrambe le direzioni nel parametro
200, la frequenza minima non ha importanza.
Descrizione:
Può essere scelto un valore compreso fra 0,0 Hz e la
frequenza max nel parametro 202 (f
MAX
).
202 Frequenza di uscita max.
Valore:
f
(parametro 201) - f
MIN
f
RANGE
(132 Hz, par. 200)
RANGE
Funzione:
In questo parametro può essere selezionata una frequenza
massima del motore, che corrisponde alla frequenza
massima a cui il motore può funzionare.
Vedere anche il parametro 205.
Descrizione:
È possibile selezionare un valore da f
a 132 Hz.
MIN
203 Campo di riferimento/retroazione
Valore:
Min - Max (MIN - MAX) [0]
- Max - + Max (-MAX-+MAX) [1]
Funzione:
Questo parametro determina se il segnale di riferimento e
il segnale di retroazione devono essere positivi o possono
essere sia positivi che negativi.
Funzione:
Il Riferimento massimo fornisce il valore massimo che può
essere assunto dalla somma di tutti i riferimenti. Se il
parametro 100 è stato impostato su anello chiuso, l'impostazione massima è 132 Hz.
Se è stato selezionato anello chiuso, il riferimento massimo
impostato non può essere superiore alla retroazione
massima (parametro 415).
Descrizione:
Impostare il valore desiderato.
207 Tempo della rampa di salita 1
Valore:
0,15-3600,00 s [5 -360000]
3,00 s [300]
Funzione:
Il tempo della rampa di salita è il tempo di accelerazione
da 0 Hz alla frequenza f
nominale del motore
M,N
(parametro 104). Ciò presuppone che non si raggiunga il
limite di corrente (da impostare nel parametro 221).
3
3
Selezionare [0] Min - Max se nel parametro 100 è stato
selezionato Processo, modalità anello chiuso.
Descrizione:
Selezionare l'intervallo desiderato.
204 Riferimento minimo
Valore:
-100,000.000-Rif
(par. 205)
MAX
[-100000000 -]
0,000 [0]
Dipende dal parametro 100.
Funzione:
Il Riferimento minimo fornisce il valore minimo che può
essere assunto dalla somma di tutti i riferimenti.
Il Riferimento minimo è attivo solo se [0] Min - Max è stato
impostato nel parametro 203; tuttavia è sempre attivo
nella in Processo, modalità anello chiuso (parametro 100).
Descrizione:
È attivo solo se il parametro 203 è stato impostato su [0]
Min - Max.
Impostare il valore desiderato.
205 Riferimento massimo
Valore:
Rif
(parameter 204)-100,000,000
MIN
[-100000000]
50,000 Hz [50000]
Disegno 3.17
Descrizione:
Programmare il tempo della rampa di salita desiderato.
208 Tempo della rampa di discesa 1
Valore:
0,15-3600,00 s [5 - 360000]
3,00 s [300]
Funzione:
Il tempo della rampa di discesa è il tempo di decelerazione
dalla frequenza nominale del motore f
(parametro 104)
M,N
a 0 Hz, a condizione che non sussista sovratensione nell'inverter a causa del funzionamento rigenerativo del motore,
oppure se si raggiunge il limite di corrente (da impostare
nel parametro 221).
Descrizione:
Programmare la rampa di discesa desiderata.
MG03BA06 - VLT® è un marchio registrato Danfoss 45
Page 46

3
Programmazione
VLT® DriveMotor serie FCM
209 Tempo della rampa di salita 2
Valore:
0,15-3600,00 s [5 -360000]
3,00 s [300]
Funzione:
Il tempo della rampa di salita è il tempo di accelerazione
da 0 Hz alla frequenza f
nominale del motore
M,N
(parametro 104). Ciò presuppone che non si raggiunga il
limite di corrente (da impostare nel parametro 221).
Descrizione:
Programmare il tempo della rampa di salita desiderato.
Passare dalla rampa 1 alla rampa 2 attivando la rampa 2
mediante un ingresso digitale.
210 Tempo della rampa di discesa 2
Valore:
0,15-3600,00 s [5-360000]
3,00 s [300]
Funzione:
Il tempo della rampa di discesa è il tempo di decelerazione
dalla frequenza nominale del motore f
(parametro 104)
M,N
a 0 Hz, a condizione che non sussista sovratensione nell'inverter a causa del funzionamento rigenerativo del motore,
oppure se si raggiunge il limite di corrente (da impostare
nel parametro 221).
Descrizione:
Programmare la rampa di discesa desiderata.
Passare dalla rampa 1 alla rampa 2 attivando la rampa 2
mediante un ingresso digitale
211 Tempo di rampa jog
Valore:
0,15-3600,00 s [5-360000]
3,00 s [300]
Funzione:
La rampa jog è il tempo di accelerazione/decelerazione da
0 Hz alla frequenza nominale del motore f
(parametro
M,N
104), a condizione che non sussista sovratensione
nell’inverter a causa del funzionamento rigenerativo del
motore e che non venga raggiunto il limite di corrente (da
impostare nel parametro 221).
Disegno 3.18
Il tempo di rampa jog viene attivato se un segnale di
marcia jog viene inviato tramite gli ingressi digitali o la
porta di comunicazione seriale.
Descrizione:
Impostare la rampa desiderata.
212
Tempo della rampa di discesa in arresto
rapido
Valore:
0,15-3600,00 s [5-360000]
3,00 s [300]
Funzione:
Il tempo della rampa di discesa è il tempo di decelerazione
dalla frequenza nominale del motore a 0 Hz, a condizione
che non si verifichi sovratensione nell’inverter a causa del
funzionamento rigenerativo del motore, e che non venga
raggiunto il limite di corrente (da impostare nel parametro
221).
L'arresto rapido viene attivato per mezzo di un segnale su
uno dei morsetti di ingresso digitale (2-5) oppure mediante
la porta di comunicazione seriale.
Descrizione:
Programmare la rampa di discesa desiderata.
213 Frequenza jog
Valore:
0,0 Hz-parametro 202 [0 -]
10,0 Hz [100]
Funzione:
La frequenza jog f
è la frequenza fissa di uscita alla
JOG
quale funziona il motore FC quando è attivata la funzione
jog.
Descrizione:
Impostare la frequenza desiderata.
46 MG03BA06 - VLT® è un marchio registrato Danfoss
Page 47

Programmazione
VLT® DriveMotor serie FCM
214 Funzione di riferimento
Valore:
Somma (SOMMA) [0]
Esterno/preimpostato (ESTERNO/PREIMPOSTATO) [2]
Funzione:
È possibile definire in che modo i riferimenti preimpostati
debbano essere aggiunti agli altri riferimenti. A questo
scopo, viene utilizzato Somma. È anche possibile, usando la
funzione Esterno/Preimpostato, selezionare se si desidera un
passaggio da riferimenti esterni a riferimenti preimpostati e
viceversa.
Descrizione:
Selezionando [0] Somma, uno dei riferimenti preimpostati
(parametri 215-216) viene aggiunto come valore
percentuale del riferimento massimo possibile.
Selezionando [2] Esterno/Preimpostato, è possibile passare
da riferimenti esterni a riferimenti preimpostati mediante i
morsetti 2, 3, 4 o 5 (parametri 332, 333, 334 o 335). I
riferimenti preimpostati sono un valore percentuale
dell’intervallo di riferimento.
I riferimenti esterni sono la somma dei riferimenti
analogici, dei riferimenti a impulsi e dei riferimenti bus.
215 Riferimento preimp. 1
216 Riferimento preimp. 2
Valore:
-100,00%-+100,00% [-10000-+10000]
% del campo di riferimento/riferimento esterno
0,00% [0]
Funzione:
Due diversi riferimenti preimpostati possono essere
programmati nei parametri 215-216.
Il riferimento preimpostato è indicato come una
percentuale del valore Rif
o come una percentuale degli
MAX
altri riferimenti esterni, in base alla selezione effettuata nel
parametro 214. Se è stato programmato Rif
MIN
≠ 0, il
riferimento preimpostato come percentuale verrà calcolato
sulla base della differenza tra Rif
valore viene aggiunto a Rif
MIN
MAX
e Rif
, dopodiché il
MIN
.
Descrizione:
Impostare il riferimento o i riferimenti fissi che
costituiranno le opzioni.
Per usare i riferimenti fissi, è necessario selezionare Rif.
preimpostato abilitato sul morsetto 2, 3, 4 o 5 (parametri
332-335).
Le selezioni fra i riferimenti fissi possono essere effettuate
attivando il morsetto 2, 3, 4 o 5 - vedere Tabella 3.8.
Morsetti 2/3/4/5
219 Valore di catch-up/slow down
Valore:
0.00-100.00% [0-10000]
0,00% [0]
Funzione:
Questo parametro consente di immettere un valore in
percentuale (relativo) che sarà aggiunto o sottratto dal
riferimento preimpostato.
Descrizione:
Se Catch up è stato selezionato tramite uno dei morsetti 2,
3, 4 o 5 (parametri 332-335), il valore percentuale (relativo)
selezionato nel parametro 219 verrà sommato al
riferimento totale.
Se Slow down è stato selezionato tramite uno dei morsetti
2, 3, 4 o 5 (parametri 332 - 335), il valore percentuale
(relativo) selezionato nel parametro 219 verrà detratto dal
riferimento totale.
221 Limite di corrente per la modalità motore
Valore:
Limite min. (XX.X) - limite max. (XXX.X)
in% di I
RATED
[XXX - XXXX]
Limite max (XXX.X) [XXXX]
I
= corrente nominale del motore
RATED
Limite min. = corrente di magnetizzazione in % di I
RATED
Limite max. = limite dipendente dall’apparecchio in % di
I
RATED
Funzione:
Questa funzione è rilevante tutte le configurazioni dell'applicazione; la regolazione della velocità e dei processi. In
questo punto viene impostato il limite di corrente per il
funzionamento del motore.
Disegno 3.19
3
3
Riferimento preimpostato
Riferimento preimp. 1 0
Riferimento preimp. 2 1
Tabella 3.8
MG03BA06 - VLT® è un marchio registrato Danfoss 47
Page 48

3
Programmazione
Disegno 3.20
Descrizione:
Impostare la % desiderata.
229 Bypass frequenza, ampiezza di banda
Valore:
0 (OFF)-100% [0-100]
0 (OFF)% [0]
Funzione:
Alcuni sistemi richiedono di evitare alcune frequenze di
uscita a causa di problemi di risonanza.
Nei parametri 230-231 queste frequenze di uscita possono
essere programmate per essere saltate (bypass frequenza).
In questo parametro (229), è possibile definire un'ampiezza
di banda centrata rispetto alla frequenza di salto.
Descrizione:
La banda di bypass è la frequenza di bypass +/- la metà
dell'ampiezza di banda impostata.
Viene selezionata una percentuale dell'impostazione nei
parametri 230-231.
230 Bypass frequenza 1
231 Frequenza di salto 2
Valore:
0,0-132 Hz (parametro 200) [0 -]
0,0 Hz [0]
Funzione:
Alcuni sistemi richiedono di evitare alcune frequenze di
uscita a causa di problemi di risonanza.
Descrizione:
Immettere le frequenze da evitare.
VLT® DriveMotor serie FCM
Vedere anche il parametro 229.
241 Riferim. preimp. 1
242 Riferim. preimp. 2
243 Riferim. preimp. 3
244 Riferim. preimp. 4
245 Riferim. preimp. 5
246 Riferim. preimp. 6
247 Riferim. preimp. 7
Valore:
-100,00%-+100,00% [-10000-+10000]
% del campo di riferimento/riferimento esterno
0,00% [0]
Funzione:
Sette diversi riferimenti possono essere programmati nei
parametri 241-247 riferimento preimpostato. Il riferimento
preimpostato è indicato come una percentuale del valore
Rif
o come una percentuale degli altri riferimenti
MAX
esterni, in base alla selezione effettuata nel parametro 214.
Se è stato programmato Rif
preimpostato come percentuale verrà calcolato sulla base
della differenza tra Rif
aggiunto a Rif
La selezione delle preimpostazioni di riferimento può
essere effettuata mediante gli ingressi digitali o la comunicazione seriale.
Descrizione:
Impostare il riferimento o i riferimenti fissi che
costituiranno l'opzione.
Vedere i parametri 332, 333, 334 e 335 per informazioni
sull'ingresso digitale.
3.4
Parametri 317-340 - Guida alla
MIN
MAX
.
≠ 0, il riferimento
MIN
e Rif
, dopodiché il valore viene
MIN
progettazione FCM 300
3.4.1 Gruppo di parametri 3-** Ingresso /
Uscita
317 Timeout
Valore:
1-99 s [1-99]
10 s [10]
Funzione:
Se il valore del segnale di riferimento collegato all’ingresso,
morsetto 1, si abbassa al di sotto del 50% del valore
impostato nel parametro 336 per un periodo superiore al
tempo impostato nel parametro 317, verrà attivata la
funzione selezionata nel parametro 318.
Descrizione:
Impostare il tempo desiderato.
48 MG03BA06 - VLT® è un marchio registrato Danfoss
Page 49

Programmazione
VLT® DriveMotor serie FCM
318 Funzione dopo il timeout
Valore:
Off (OFF) [0]
Stop e scatto (STOP CON ALLARME) [5]
Funzione:
Questo parametro consente di selezionare la funzione da
all’ingresso, morsetto 1, scende al di sotto del 50% del
valore impostato nel parametro 336 per un periodo
superiore al tempo impostato nel parametro 317.
Se la funzione di time-out (parametro 318) si verifica
contemporaneamente ad una funzione di time-out del bus
(parametro 514), verrà attivata la funzione di time-out
(parametro 318).
attivare se il valore del segnale di riferimento collegato
Impostazioni:
Nessuna funz.
Segnale di pronto (INVERTER PRONTO) [1]
Abilitato, nessun avviso (ABIL./NO PREALLARME) [2]
In funzione (MARCIA) [3]
Funzionamento, nessun avviso (MARCIA NO/PREALLARME) [4]
Funzionamento su riferimento, nessun avviso (MARCIA/RIF. RAGG.) [5]
Guasto (ALLARME) [6]
Guasto o avviso (ALLARME O AVVISO) [7]
Limite corrente (LIMITE COPPIA) [8]
Avviso termico (TERMICA AVVISO) [9]
Inversione (INVERSIONE) [10]
Bit 11 par. di contr. (CONTROL WORD BIT 11) [11]
Bit 12 par. di contr. (BIT PAROLA DI CONTROLLO 12) [12]
Freno meccanico (FRENO MECCANICO) [20]
Modo pausa (FUNZIONE PAUSA MOT) [21]
(NESSUNA OPERAZIONE) [0]
3
3
Tabella 3.9 323 Morsetto X102, funzione relè (FUNZ. RELE)
L'uscita del relè può essere usata per indicare lo stato
attuale o un avviso.
Relè
1 - 3 apertura, 1- 2 chiusura
Max. 250 V CA, 5 Amp.
Tabella 3.10
Descrizione:
Segnale Unità Pronta, il motore FC è pronto per l'uso.
Abil./no preallarme, il motore FC è pronto per l'uso; non è
stato trasmesso alcun comando di avviamento o di arresto
(avviamento/ disabilitazione). Nessun avviso.
Marcia, è stato dato un comando d'avviamento.
Marcia, nessun avviso, è stato emesso un comando
d'avviamento. Nessun avviso.
Marcia/rif. ragg., nessun avviso, velocità in base al
riferimento.
Allarme, l'uscita viene attivata da un allarme.
Allarme o avviso, l’uscita viene attivata da un allarme o un
avviso.
Corrente limite, è stato superato il limite di corrente del
parametro 221.
Termica avviso, è stato superato il limite di temperatura nel
convertitore di frequenza.
Inversione.
'1' logico = relè attivato, 24 V CC sull'uscita
quando il motore ruota in senso orario. '0' logico = relè
non attivato, nessun segnale sull'uscita, quando il motore
ruota in senso antiorario.
Parola di controllo bit 11, se bit 11 = “1” nella parola di
controllo (sia Profilo Fieldbus sia Profilo FC) il relè verrà
attivato.
Parola di controllo bit 12, se bit 12 = “1” nella parola di
controllo (sia Profilo Fieldbus sia Profilo FC) il relè verrà
attivato.
Freno meccanico, permette il controllo di un freno
meccanico esterno facoltativo (vedere anche i parametri
138 e 139).
Modo pausa, attivo quando l'unità è in modo pausa.
Vedere 3.5.2 Modo pausa.
327 Riferimento impulsi, frequenza, frequenza max.
Valore:
100-70000 Hz [100-70000]
5000 HZ [5000]
Funzione:
In questo parametro, il valore del segnale viene impostato
in modo da corrispondere al valore di riferimento/
retroazione massimo definito nel parametro 205/415.
Descrizione:
Impostare la frequenza a impulsi desiderata.
MG03BA06 - VLT® è un marchio registrato Danfoss 49
Page 50

3
Programmazione
VLT® DriveMotor serie FCM
[1] Riferimento. Viene selezionato per consentire di
331 Morsetto 1, corrente ingresso analogico
Valore:
N. funzione (NESSUNA FUNZIONE) [0]
Riferimento (RIFERIMENTO) [1]
Retroazione (RETROAZIONE) [2]
modificare il riferimento per mezzo di un segnale
analogico.
Se sono collegati altri ingressi, questi vengono sommati
considerando il loro segno.
[2] Retroazione. Viene selezionato in caso di impiego di una
regolazione ad anello chiuso con un segnale analogico.
Funzione:
Questo parametro consente di scegliere fra le diverse
funzioni disponibili per l'ingresso, morsetto 1.
La scala del segnale di ingresso viene eseguita nei
parametri 336 e 337.
332 Morsetto 2, ingresso analogico/digitale
333 Morsetto 3, ingresso digitale
334 Morsetto 4, ingresso digitale
335 Morsetto 5, ingresso digitale
Descrizione:
[0] Nessun funzionamento. Viene selezionato se il motore
FC non deve reagire ai segnali trasmessi al morsetto.
Descrizione 332 333 334 335
Ingresso digitale sul morsetto n. 2 3 4 5
Impostazioni
Nessuna funz. (NESSUNA OPERAZIONE) [0] [0] [0] [0]
Ripristino (RESET) [1]
Arresto a ruota libera, comando attivo basso (EVOLUZIONE LIBERA) [2] [2] [2] [2]
Ripristino e arresto a ruota libera, comando
attivo basso
Arr. rapido (negato) (Q. STOP (NEGATO)) [4] [4] [4] [4]
Frenata CC, comando attivo basso (FRENATURA CC (NEG.)) [5] [5] [5] [5]
Stop (negato) (STOP (NEGATO)) [6] [6] [6] [6]
Avviamento STOP (NEGATO) [7] [7]
Avv. a impulsi (START SU IMPULSO) [8] [8] [8] [8]
Inversione (INVERSIONE) [9] [9] [9] [9]
Avv. inversione (START+ INVERSIONE) [10] [10] [10] [10]
Avviamento in senso orario, abilitato (START+ABILITAZIONE) [11] [11] [11] [11]
Avviamento in senso antiorario, abilitato (INVERSIONE+ABILITAZ.) [12] [12] [12] [12]
Marcia jog (JOG) [13] [13] [13]
Riferimento congelato (BLOCCO RIF.) [14] [14] [14] [14]
Blocco uscita (BLOCCO USCITA) [15] [15] [15] [15]
Speed up (SPEED UP) [16] [16] [16] [16]
Speed down (SPEED DOWN) [17] [17] [17] [17]
Selezione del setup (SELEZIONE SETUP) [18] [18] [18] [18]
Catch-up (CATCH UP) [19] [19] [19] [19]
Slow-down (SLOW DOWN) [20] [20] [20] [20]
Riferimento preimpostato (RIFERIMENTO PREIMP.) [21] [21] [21] [21]
Riferimento preimpostato, on (RIFERIMENTO PREIMP. ON) [22] [22] [22] [22]
Arresto di precisione, comando attivo basso (STOP PRECISE) [23]
Riferimento impulsi (RIFERIMENTO IMPULSI) [24]
Retroazione impulsi (RETROAZIONE IMPULSI) [25]
Riferimento analogico (RIFERIMENTO)
Retroazione analogica (RETROAZIONE) [31]
Ripristino e avviamento (RESET AND START) [32] [32] [32] [32]
Riferimento congelato e avviamento (FREEZE REF AND START) [33] [33] [33] [33]
Rampa 2 (RAMPA 2) [34] [34] [34] [34]
Rif. avviam. bit 1 (START-REF BIT 1) [35] [35] [35] [35]
Rif. avviam. bit 2 (START-REF BIT 2) [36] [36] [36] [36]
(RESET E EV LIB NEG) [3] [3] [3] [3]
[30]
[1]
[1] [1]
[7]
[7]
[13]
50 MG03BA06 - VLT® è un marchio registrato Danfoss
Page 51

Programmazione
Descrizione 332 333 334 335
Ingresso digitale sul morsetto n. 2 3 4 5
Impostazioni
Rif. avviam. bit 3 (START-REF BIT 3) [37] [37] [37] [37]
VLT® DriveMotor serie FCM
Tabella 3.11
Funzione:
Nei parametri 332-335 è possibile scegliere tra diverse
possibili funzioni relative agli ingressi 2-5. Le opzioni delle
funzioni sono illustrate in Tabella 3.13.
Descrizione:
Viene selezionata Nessuna funzione se il motore FC non
deve reagire ai segnali trasmessi al morsetto.
Ripristino resetta il motore FC dopo un allarme; tuttavia
non tutti gli allarmi possono essere ripristinati senza
togliere l'alimentazione di rete.
Arresto a ruota libera, comando attivo basso viene utilizzato
affinché il motore FC giri a ruota libera fino all’arresto. '0'
logico provoca l'arresto a ruota libera.
Ripristino e arresto a ruota libera, comando attivo basso,
viene usato per attivare l'arresto a ruota libera contemporaneamente al ripristino.
'0' logico determina l’arresto a ruota libera e il ripristino.
Arresto rapido, comando attivo basso, viene usato per
arrestare il motore in conformità con la rampa di arresto
rapido (impostata nel parametro 212).
'0' logico provoca un arresto rapido.
Frenata CC, comando attivo basso viene usato per arrestare
il motore alimentandolo con una tensione CC per un dato
tempo, vedere i parametri 126-132.
È necessario tenere presente che questa funzione è attiva
solo se i valori dei parametri 126-132 sono diversi da 0. '0'
logico determina la frenatura CC.
Arresto, comando attivo basso viene attivato interrompendo
la tensione al morsetto. Ciò significa che se il morsetto non
ha tensione, il motore non può funzionare. L’arresto verrà
effettuato in accordo con la rampa selezionata (parametri
207/208).
Avviamento viene selezionato se si desidera un comando di
avviamento/arresto. '1' logico = avviamento, ‘0’ logico =
arresto (stand-by).
Start su impulso - se viene fornito un impulso (min. 20 ms),
il motore si avvierà, a condizione che non sia stato
impartito un comando di arresto. Il motore si arresta se
viene azionato brevemente Arresto, comando attivo basso.
Inversione viene utilizzato per modificare il senso di
rotazione dell'albero motore. "0" logico non determina
l’inversione. "1" logico determina l’inversione. Il segnale di
inversione cambia solo il senso di rotazione, ma non attiva
la funzione di avviamento.
Da non utilizzare con Processo, modalità anello chiuso.
Start inversione, viene usato per l’avviamento/l’arresto e per
l’inversione con lo stesso segnale. Non è ammesso contem-
poraneamente alcun segnale di avviamento. Questo
comando agisce come Avviamento su impulso in senso
antiorario, a condizione che Avviamento su impulso sia
stato selezionato per un altro morsetto.
Da non utilizzare con Processo, modalità anello chiuso.
Marcia in senso orario, viene utilizzato per far sì che il
motore ruoti solo in senso orario (all'avviamento).
Da non utilizzare con Processo, modalità anello chiuso.
Avviamento in senso antiorario, abilitato, viene utilizzato per
far sì che il motore ruoti in senso antiorario (all'avviamento).
Da non utilizzare con Processo, modalità anello chiuso.
Jog viene usato per richiamare la frequenza jog impostata
nel parametro 213. Il tempo di rampa può essere
impostato nel parametro 211. La funzione Marcia jog non
è attiva se è stato inviato un comando di arresto (disabilitazione avviamento).
Jog esclude l'arresto (stand-by).
Blocco rif. - congela il riferimento attuale. Il riferimento
bloccato è ora il punto che abilita/condiziona l’utilizzo di
Speed up e Speed down.
Se viene utilizzato speed up/down, la variazione di velocità
segue sempre la rampa 2 (parametri 209/210)
nell’intervallo 0 - Rif
Blocco uscita - blocca la frequenza del motore attuale (Hz).
La frequenza motore bloccata è ora il punto che abilita/
condiziona l’utilizzo di Speed up e Speed down.
Uscita congelata esclude lo standby e l'avviamento, la
compensazione dello scorrimento e il controllo di processo
ad anello chiuso.
Se viene usato speed up/dwon, la variazione di velocità
segue sempre la rampa normale (parametri 207/208)
nell’intervallo 0 - f
Speed up e Speed down vengono selezionate se si desidera
un controllo digitale della velocità di accelerazione e
decelerazione (potenziometro motore). Questa funzione è
attiva solo se sono stati selezionati Blocco rif. o Blocco
uscita.
Finché permane un '1' logico sul morsetto selezionato per
lo speed up, il riferimento o la frequenza di uscita
aumenteranno.
Finché permane un '1' logico sul morsetto selezionato per
la decelerazione, il riferimento o la frequenza di uscita
diminuiranno.
Gli impulsi ('1' logico a livello alto per almeno 20 ms con
una pausa minima di 20 ms) determineranno una
variazione della velocità pari allo 0,1% (riferimento) o a 0,1
Hz (frequenza di uscita).
M,N
MAX
.
.
3
3
MG03BA06 - VLT® è un marchio registrato Danfoss 51
Page 52

Programmazione
VLT® DriveMotor serie FCM
3
Morsetto Blocco rif./
2-5 2-5 Blocco uscita
Nessuna variazione di
velocità
Speed down 0 1 1
Speed up 1 0 1
Speed down 1 1 1
Tabella 3.12 Esempio:
0 0 1
Selezione del setup, consente di scegliere uno dei due
setup; tuttavia ciò presuppone che il parametro 004 sia
stato impostato su Multi Setup.
Catch-up/Slow-down vengono selezionati se il valore di
riferimento deve essere aumentato o ridotto di un valore
percentuale programmabile impostato nel parametro 219.
Slow-down Catch-up
Velocità invariata 0 0
Ridotta del valore % 1 0
Aumentata del valore % 0 1
Ridotta del valore % 1 1
Tabella 3.13
Riferimento preimp., consente di scegliere uno dei due
riferimenti preimpostati, conformemente alla tabella nei
parametri 215 e 216. Per attivarlo, è necessario selezionare
Riferimento pr. on.
Riferimento preimp. viene usato per passare dai riferimenti
esterni ai riferimenti preimpostati. Si presume che sia stata
selezionato [2] Esterno/preimpostato nel parametro 214. '0'
logico = riferimenti esterni attivi; '1' logico = è attivo uno
dei due riferimenti preimpostati.
Precise stop corregge il tempo rampa di decelerazione per
ottenere una precisione elevata e ripetibile del punto di
arresto.
Rif. impulsi viene selezionato se si utilizza una sequenza di
impulsi (frequenza) di 0 Hz, corrispondente a Ref
MIN
,
parametro 204. La frequenza viene impostata nel
parametro 327, corrispondente a Ref
MAX
.
Retroazione impulsi viene selezionato se il segnale di
retroazione è una sequenza di impulsi (frequenza). Vedere
anche il parametro 327.
Riferimento analogico viene selezionato per attivare la
modifica del riferimento per mezzo di un segnale
analogico.
Se sono collegati altri ingressi, questi vengono sommati
considerando il loro segno.
Retroazione analogica viene selezionato in caso di utilizzo
di una regolazione ad anello chiuso con un segnale
analogico.
Ripristino e avviamento viene usato per avviare e
ripristinare contemporaneamente.
Rif. congelato e avviamento. Verranno inizializzati sia un
comando di START che un comando di BLOCCO RIF..
Quando si usano SPEED UP/SPEED DOWN, entrambi i
comandi BLOCCO RIF. e START devono essere attivati. Con
l'implementazione di tale funzione si può fare a meno di
un ingresso digitale.
Rampa 2, viene selezionata se è richiesto il passaggio tra la
rampa 1 (parametri 207-208) e la rampa 2 (parametri
209-210). "0" logico attiva la rampa 1 e "1" logico attiva la
rampa 2.
Rif. avviam. bit 1,2 e 3. Consente di selezionare il RIF SEL
(1-7) da usare. I REF PRESET (1-7) vengono impostati nei
parametri da 241 a 247.
N. par. Velocità fissa AVVIAMENTO RIF
BIT
321
- - - Stand by 000
241 RIF SEL 1 001
242 RIF SEL 2 010
243 RIF SEL 3 011
244 RIF SEL 4 100
245 RIF SEL 5 101
246 RIF SEL 6 110
247 RIF SEL 7 111
Tabella 3.14
Se almeno uno dei tre ingressi digitali viene attivato, l'FCM
riceve un segnale di avviamento. Le sette possibili
combinazioni di ingresso stabiliscono in seguito la velocità
preimpostata da usare.
Se solamente uno o due ingressi digitali vengono usati,
rispettivamente le velocità 1 o 3 possono essere scelte in
base al criterio esposto sopra.
Se si usano due programmazioni, possono essere
selezionate fino a quattordici velocità preimpostate
mediante quattro ingressi digitali. Le impostazioni dei
parametri 241 e 242 si rifletteranno in quelle dei parametri
215 e216.
Ad es.:
Ingressi digitali 2,3 e 4: parametri 332 [choice 35 selected],
333 [choice 36 selected] e 334 [choice 37 selected]
Combinazione di ingresso sugli ingressi digitali 2,3 e 4:
"010".
Ciò significa che RIF SEL 2 sarà la velocità preimpostata.
La scala del segnale di ingresso viene eseguita nei
parametri 338 e 339.
336 Morsetto 1, scala min.
Valore:
0,0-20,0 mA [0-200]
0,0 mA [0]
Funzione:
Questo parametro imposta il valore del segnale di
riferimento che deve corrispondere al valore di riferimento
minimo impostato nel parametro 204.
Se deve essere usata la funzione Timeout del parametro
317, l’impostazione deve essere > 2 mA.
52 MG03BA06 - VLT® è un marchio registrato Danfoss
Page 53

Programmazione
VLT® DriveMotor serie FCM
Descrizione:
Impostare il valore della corrente desiderato.
337 Morsetto 1, scala max.
Valore:
0,0-20,0 mA [0-200]
20,0 mA [200]
Funzione:
Questo parametro imposta il valore del segnale di
riferimento che deve corrispondere al valore di riferimento
massimo impostato nel parametro 205.
Descrizione:
Impostare il valore della corrente desiderato.
retroazione minima, parametro 204 Riferimento minimo,
Ref
/ 414 Retroazione minima, FB
MIN
MIN
.
Descrizione:
Impostare il valore della tensione necessario. Per garantire
la precisione, compensare le perdite di tensione in cavi
segnale lunghi. Se devono essere usate le funzioni di
timeout (parametri 317 Timeout e 318 Funzione dopo il
timeout), il valore impostato deve essere superiore a 1 Volt.
339 Morsetto 2, scala max.
Valore:
0,0-10,0 V [0-100]
10,0 V [100]
Funzione:
338 Morsetto 2, scala min.
Valore:
0,0-10,0 V [0-100]
0,0 V [0]
Funzione:
Questo parametro viene utilizzato per impostare il valore
di segnale corrispondente al riferimento minimo o alla
Questo parametro consente di impostare il valore del
segnale che deve corrisponde al valore di riferimento
massimo impostato nel parametro 205 Riferimento
massimo, Rif
/415 Retroazione massima, FB
MAX
MAX
.
Descrizione:
Impostare il valore della tensione necessario. Per garantire
la precisione, compensare le perdite di tensione nei cavi
segnale lunghi.
Impostazioni:
Nessuna funz.
Segnale di pronto (INVERTER PRONTO) [1]
Abilitato, nessun avviso (ABIL./NO PREALLARME) [2]
In funzione (MARCIA) [3]
Funzionamento, nessun avviso (MARCIA NO/PREALLARME) [4]
Funzionamento su riferimento, nessun avviso (MARCIA/RIF. RAGG.) [5]
Guasto (ALLARME) [6]
Guasto o avviso (ALLARME O AVVISO) [7]
Limite corrente (LIMITE COPPIA) [8]
Avviso termico (TERMICA AVVISO) [9]
Inversione (INVERSIONE) [10]
Bit 11 par. di contr. (CONTROL WORD BIT 11) [11]
Frequenza attuale 0-20 mA (0-FMAX = 0-20 mA) [12]
Frequenza attuale 4-20 mA (0-FMAX = 4-20 mA) [13]
Riferimento
Riferimento
Retroazione
Retroazione
Corrente attuale 0-20 mA (0-IMAX = 0-20 mA) [18]
Corrente attuale 4-20 mA (0-IMAX = 4-20 mA) [19]
Freno meccanico (FRENO MECCANICO) [20]
Modo pausa (FUNZIONE PAUSA MOT) [21]
Coppia 0-20 mA (0-TMAX = 0-20 mA) [22]
Coppia 4-20mA (0-TMAX = 4-20 mA) [23]
- riferimento
MIN
- riferimento
MIN
- retroazione
MIN
- retroazione
MIN
: 0-20 mA (RIF MIN-MAX =0-20 mA) [14]
MAX
: 4-20 mA (RIF MIN-MAX =4-20 mA) [15]
MAX
: 0-20 mA (FB MIN-MAX =0-20 mA) [16]
MAX
: 4-20 mA (FB MIN-MAX =4-20 mA) [17]
MAX
(NESSUNA OPERAZIONE) [0]
3
3
Tabella 3.15 340 Morsetto 9, funzioni uscita (FUNZIONE USCITA)
Funzione:
Questa uscita può funzionare sia come uscita digitale che
come uscita analogica. Se usata come uscita digitale
(valore dato [0]-[23]), viene trasmesso un segnale a 24 V
MG03BA06 - VLT® è un marchio registrato Danfoss 53
CC; se usata come uscita analogica viene trasmesso un
segnale da 0-20 mA o un segnale da 4-20 mA.
Descrizione:
Segnale Unità Pronta, il motore FC è pronto per l'uso.
Page 54

Programmazione
VLT® DriveMotor serie FCM
3
Abil./no preallarme, il motore FC è pronto per l'uso; non è
stato trasmesso alcun comando di avviamento o di arresto
(avviamento/ disabilitazione). Nessun avviso.
Marcia, è stato dato un comando d'avviamento.
Marcia, nessun avviso, è stato emesso un comando
d'avviamento. Nessun avviso.
Marcia/rif. ragg., nessun avviso, velocità in base al
riferimento.
Allarme, l'uscita viene attivata da un allarme.
Allarme o avviso, l’uscita viene attivata da un allarme o un
avviso.
Corrente limite, è stato superato il limite di corrente del
parametro 221.
Termica avviso, è stato superato il limite di temperatura nel
convertitore di frequenza.
Inversione. '1' logico = relè attivato, 24 V CC sull'uscita
quando il motore ruota in senso orario. '0' logico = relè
non attivato, nessun segnale sull'uscita, quando il motore
ruota in senso antiorario.
Bit parola di controllo 11, se il bit 11 = “1” nella parola di
controllo (sia Profilo Fieldbus sia Profilo FC) l'uscita digitale
verrà attivata.
0-f
(parametro 202)
MAX
0-f
(parametro 202)
MAX
Riferimento
Riferimento
Retroazione
Retroazione
0-I
VLT, MAX
0-I
VLT, MAX
- Riferimento
MIN
- Riferimento
MIN
BASSA
BASSA
⇒
0-20 mA e
⇒
4-20 mA
⇒
0-20 mA e
⇒
4-20 mA
- Retroazione
- Retroazione
: 0-20 mA e
MAX
: 4-20 mA
MAX
ALTA
ALTA
: 0-20 mA e
: 4-20 mA
Freno meccanico, permette il controllo di un freno
meccanico esterno facoltativo (vedere anche i parametri
138 e 139).
Modo pausa, attivo quando l'unità è in modo pausa.
Vedere 3.5.2 Modo pausa
0-T
⇒ 0-20 mA e
MAX
⇒
0-T
3.5
4-20 mA e
MAX
Parametri 400-446 - Guida alla
progettazione FCM 300
3.5.1 Gruppo di par. 4-** Funzioni speciali
400 Funzioni freno
Valore:
OFF (OFF) [0]
Freno CA (FRENO CA) [4]
Funzione:
[4] Freno CA può essere selezionato per migliorare la
frenatura. Grazie alla nuova funzione di frenata CA è
possibile controllare il tempo delle dispersioni in aumento
del motore, pur continuando a proteggere termicamente
lo stesso. Tale funzione renderà tra l'80 e il 20% del potere
di frenata nell'intero intervallo di velocità e alla velocità di
base (50 Hz). Al di sopra della velocità di base la frenata
supplementare scomparirà gradualmente.
Disegno 3.21
Descrizione:
Selezionare [4] Freno CA se si verificano carichi generati a
breve termine.
Modo pausa
3.5.2
La funzione pausa motore consente di fermare automaticamente il motore quando questo gira alla minima velocità
e contemporaneamente il valore di riferimento dell'impianto viene ugualmente soddisfatto. Appena la
retroazione scende sotto il valore di riferimento automaticamente il motore si riavvia e l'impianto riprende a
funzionare regolarmente.
NOTA!
Questa funzione consente di risparmiare energia, attivando
il motore solo quando l'impianto lo richiede.
Il modo pausa non è attivo se sono stati selezionati
Riferimento locale o Marcia jog.
Questa funzione attiva sia in Anello aperto che in Anello
chiuso.
Nel parametro 403 Funzione pausa motore, la funzione di
blocco motore attivata. Nel parametro 403 Tempo pausa
motore, viene impostato un timer che determina per
quanto tempo la frequenza di uscita pu essere inferiore
alla frequenza impostata nel parametro 404 Frequenza di
pausa. Quando il timer scade, il convertitore di frequenza
decelererà il motore fino all'arresto mediante il parametro
208 Tempo rampa di discesa. Se la frequenza di uscita
54 MG03BA06 - VLT® è un marchio registrato Danfoss
Page 55

Programmazione
VLT® DriveMotor serie FCM
supera la frequenza impostata nel parametro 404
Frequenza di pausa, il timer viene ripristinato.
Mentre il motore si trova in stato di arresto causato dal
convertitore di frequenza VLT in funzione di blocco
motore, viene calcolata una frequenza di uscita teorica
sulla base del segnale di riferimento. Quando la frequenza
di uscita ipotetica è superiore alla frequenza del parametro
407 Frequenza fine pausa, il convertitore di frequenza
riavvierà il motore e la frequenza di uscita accelererà fino
al valore di riferimento.
Negli impianti muniti di regolazione costante della
pressione, conveniente aumentare la pressione di rete
prima di mandare in pausa il motore. In questo modo
possibile aumentare considerevolmente il tempo di pausa
evitando inutili e ripetuti avviamenti ed arresti del motore.
Per aumentare del 25% la pressione, prima che il motore
vada in pausa, impostare il parametro 406 Riferimento pre-
pausa al 125%.
Il parametro 406 Riferimento pre-pausa attivo solo in Anello
chiuso.
NOTA!
Nei processi di pompaggio altamente dinamici, si
suggerisce di spegnere la funzione Riaggancio al volo
(parametro 445).
Disegno 3.22
403 Timer modalità pausa
Valore:
0 - 300 s (301 s = OFF)
Funzione:
Questo parametro abilita il convertitore di frequenza ad
arrestare il motore se il carico su di esso minimo. Il timer
impostato nel parametro 403 Funzione pausa motore viene
avviato quando la frequenza di uscita scende al di sotto
del valore impostato nel parametro 404 Frequenza di
pausa.
Allo scadere del tempo impostato nel timer, il convertitore
di frequenza spegne il motore.
Il convertitore di frequenza riavvierà il motore, quando la
frequenza di uscita ipotetica supera la frequenza del
parametro 407 Frequenza fine pausa.
OFF
Descrizione:
Selezionare Off se non si desidera attivare questa funzione.
Impostare il valore di soglia in modo da attivare la
funzione pausa motore quando la frequenza di uscita
scende sotto il valore impostato nel parametro 404
Frequenza di pausa.
404 Frequenza di pausa
Valore:
000,0- par. 407 Frequenza fine pausa
Funzione:
Nel momento in cui la frequenza di uscita scende sotto il
valore preimpostato, viene attivato il timer impostato nel
parametro 403 Modo pausa. La frequenza di uscita attuale
uguale alla frequenza di uscita teorica fino a quando non
viene raggiunto f
Descrizione:
Impostare la frequenza desiderata.
405 Funzione di ripristino
Valore:
Ripristino manuale (RIPRISTINO manuale) [0]
Riprist. autom. x 1 (AUTOMATICO X 1) [1]
Riprist. autom. x 2 (AUTOMATICO X 2) [2]
Riprist. autom. x 3 (AUTOMATICO X 3) [3]
Riprist. autom. x 4 (AUTOMATICO X 4) [4]
Riprist. autom. x 5 (AUTOMATICO X 5) [5]
Riprist. autom. x 6 (AUTOMATICO X 6) [6]
Riprist. autom. x 7 (AUTOMATICO X 7) [7]
Riprist. autom. x 8 (AUTOMATICO X 8) [8]
Riprist. autom. x 9 (AUTOMATICO X 9) [9]
Riprist. autom. x 10 (AUTOMATICO X 10) [10]
Ripristino all'accens. (RIPRISTINO ALL'AC-
CENSIONE) [11]
Funzione:
Questo parametro consente di selezionare la funzione di
ripristino desiderata dopo lo scatto.
Dopo il ripristino il motore FC può essere riavviato dopo
1,5 sec.
Descrizione:
Se viene selezionato [0] Ripristino manuale, il ripristino deve
essere effettuato mediante gli ingressi digitali.
Se il motore FC deve effettuare un ripristino automatico
(max 1-10 volte entro 10 minuti) dopo lo scatto,
selezionare il valore dato [1]-[10].
406 Riferimento sovralimentazione
Valore:
1 - 200 %
Funzione:
Questa funzione può essere utilizzata solo se nel
parametro 100 è stato selezionato Anello chiuso.
MIN
.
100 % del setpoint
0,0 Hz
3
3
MG03BA06 - VLT® è un marchio registrato Danfoss 55
Page 56

Programmazione
VLT® DriveMotor serie FCM
3
Negli impianti muniti di regolazione costante della
pressione, conviene aumentare la pressione nel sistema
prima che il convertitore di frequenza arresti il motore. In
questo modo è possibile aumentare il tempo durante il
quale il convertitore di frequenza arresta il motore e contribuisce ad evitare avviamenti ed arresti frequenti del
motore, ad es. nel caso di perdite nel sistema di alimentazione idrica.
Utilizzare Timeout sovralim., par. 472, per impostare il
timeout pre-pausa. Se il setpoint di sovralimentazione non
può essere raggiunto entro il tempo definito, il convertitore di frequenza continuerà nel funzionamento normale
(non entra nel modo pausa).
Descrizione:
Impostare il Riferimento sovralim. desiderato come valore
percentuale del riferimento risultante durante il funzionamento normale. Il 100% corrisponde al riferimento senza
sovralimentazione (aggiuntiva).
407 Frequenza fine pausa
Valore:
Par 404 Frequenza di pausa - par. 202 f
Funzione:
Quando la frequenza di uscita teorica supera il valore
preimpostato, il convertitore di frequenza riavvia il motore.
Descrizione:
Impostare la frequenza desiderata.
MAX
50 Hz
commutazione massima viene determinata dal valore
impostato nel parametro 411.
Descrizione:
Selezionare [0] Non possibile se si desidera una frequenza
di commutazione permanente. Impostare la frequenza di
commutazione nel parametro 411.
In caso di selezione di [1] Frequenza di commutazione
variabile, la frequenza di commutazione diminuirà all'aumentare della frequenza di uscita. Questo parametro viene
usato in applicazioni con caratteristiche di coppia
quadratiche (pompe centrifughe e ventilatori) nelle quali il
carico varia in relazione alla frequenza di uscita.
Se viene selezionato [2] Frequenza di commutazione
dipendente dalla temperatura, la frequenza di
commutazione diminuirà all’aumentare della temperatura
dell’inverter, vedere Disegno 3.23.
411 Frequenza di commutazione
Valore:
1,5-14,0 kHz [1500-14000]
Dipende dall'unità
Funzione:
Questo valore determina la frequenza di commutazione
dell’inverter. Un adeguato valore di frequenza di
commutazione può contribuire a ridurre l'eventuale
rumorosità acustica del motore.
Descrizione:
Se il motore è in funzione, la frequenza di commutazione
può essere variata nel parametro 411 fino a ottenere una
frequenza alla quale il motore è il più silenzioso possibile.
Vedere anche il parametro 446 - modello di
commutazione. Vedere 4.1.6 Protezione termica e riduzione
della potenza
412 Frequenza di commutazione variabile
Valore:
Non possibile (DISABILITA) [0]
Freq. di commutazione variabile (FREQ. COMM.
VARIAB.) [1]
Freq. di commutazione dipendente dalla
temperatura (FREQ. COMM. TEMPER.) [2]
Funzione:
Questa funzione consente di modificare la frequenza di
commutazione in base al carico. Tuttavia la frequenza di
Disegno 3.23
413 Funzione di sovramodulazione
Valore:
Off (OFF) [0]
On (ON) [1]
Funzione:
Questo parametro consente di impostare il fattore di
sovramodulazione della tensione di uscita.
Descrizione:
[0] Disabilitato significa che non sussiste sovramodulazione
della frequenza di uscita, vale a dire che si evita una
possibile ondulazione della coppia sull’albero motore.
Questa è una funzione utile su macchine rettificatrici.
[1] Abilitato significa che è possibile ottenere una tensione
di uscita corrispondente alla tensione di rete (fino al 5%).
56 MG03BA06 - VLT® è un marchio registrato Danfoss
Page 57

Programmazione
VLT® DriveMotor serie FCM
414 Retroazione minima
Valore:
-100,000,000 - FB
0,000 [0]
Funzione:
I parametri 414 e 415 vengono usati per demoltiplicare il
campo di retroazione ai valori fisici usati dall’utente. Il
valore sarà anche il limite del riferimento (parametri 204 e
205).
Usato insieme con Processo, modalità anello chiuso
(parametro 100).
Descrizione:
È attiva solo se il parametro 203 è stato impostato su [0]
Min-Max.
415 Retroazione massima
Valore:
(par. 414) FB
1.500.000 [1500000]
Funzione:
Vedere la descrizione del parametro 414.
416 Unità riferimento/retroazione
Valore:
NESSUNA UNITÀ [0]
% [1]
PPM [2]
Giri/min. [3]
bar [4]
CICLO/min [5]
IMPULSI/s [6]
UNITÀ/s [7]
UNITÀ/min [8]
UNITÀ/h [9]
°C [10]
Pa [11]
l/s [12]
m3/s [13]
l/min [14]
m3/min [15]
l/h [16]
m3/h [17]
kg/s [18]
kg/min [19]
kg/h [20]
t/min [21]
t/h [22]
m [23]
Nm [24]
m/s [25]
m/min [26]
LOW
(par. 415)
ALTA
- 100.000.000
[-100000000 -]
[- 100000000]
°F [27]
in wg [28]
gal/s [29]
ft3/s [30]
gal/min [31]
ft3/min [32]
gal/h [33]
ft3/h [34]
lb/s [35]
lb/min [36]
lb/h [37]
lb ft [38]
ft/s [39]
ft/min [40]
Funzione:
Scegliere le unità di misura da visualizzare sul display.
Questa unità viene usata anche in Regolazione processo,
anello chiuso, direttamente per Riferimento minimo/massimo
(parametri 204/205) e Retroazione minima/massima
(parametri 414/415).
La possibilità di scegliere un'unità nel parametro 416
dipenderà dalle selezioni effettuate nei seguenti parametri:
Par. 002 Comando locale/remoto.
Par. 013 Comando locale/config. come il par. 100.
Par. 100 Configurazione.
Selezionare Controllo remoto nel parametro 002
Se nel parametro 100 viene selezionata Regolazione
velocità, anello aperto, l'unità selezionata nel parametro
416 può essere usata nelle visualizzazioni (par. 009-12
Retroazione [unità]) dei parametri di processo.
Nota: Il riferimento può essere mostrato solo in Hz
(Regolazione velocità, anello aperto).
Se nel par. 100 è stata selezionata Regolazione processo,
anello chiuso, l'unità selezionata nel parametro 416 verrà
usata per visualizzare sia il riferimento (par. 009-12:
Riferimento [unit]) che la retroazione (par. Retroazione
[unit]).
Selezionare Comando locale nel parametro 002
Se nel parametro 013 sono stati selezionati Controllo da
LCP, anello aperto o Controllo da LCP e morsettiera, anello
aperto, il riferimento verrà visualizzato in Hz, indipenden-
temente dalla selezione effettuata nel parametro 416. Se
nel parametro 013 è stato selezionato Controllo da LCP/
come nel par.100 o Controllo da LCP e morsettiera/come nel
par. 100, l'unità corrisponderà a quella descritta nel
parametro 002, Controllo remoto.
Descrizione:
Selezionare l'unità desiderata per il segnale di riferimento/
retroazione.
3
3
MG03BA06 - VLT® è un marchio registrato Danfoss 57
Page 58

Programmazione
VLT® DriveMotor serie FCM
3
3.5.3 Regolatore FCM 300
Regolazione del processo
Il regolatore PID mantiene una modalità di processo
costante (pressione, temperatura, flusso ecc.) e regola la
velocità del motore in base al riferimento/punto di funzionamento e al segnale di retroazione.
Un trasmettitore fornisce al regolatore PID un segnale di
retroazione dal processo che indica lo stato attuale del
processo stesso. Il segnale di retroazione varia al variare
del carico del processo.
Ciò significa che sussiste uno scostamento fra riferimento/
punto di funzionamento e stato attuale del processo. Tale
scostamento è compensato dal regolatore PID aumentando
e diminuendo la frequenza di uscita in relazione all'entità
dello scostamento fra riferimento/punto di funzionamento
e stato attuale del processo.
Il regolatore PID integrato nel convertitore di frequenza è
stato ottimizzato per l'uso in applicazioni di processo. Ciò
significa che nel convertitore di frequenza sono disponibili
numerose funzioni speciali.
In precedenza era necessario ottenere un sistema per
gestire queste funzioni speciali installando moduli I/O
supplementari e programmando il sistema. Il convertitore
di frequenza evita l’installazione di moduli supplementari. I
parametri specifici del regolazione del processo sono quelli
dal 437 al 444.
Funzioni PID
3.5.4
Unità di riferimento/retroazione
In caso di selezione di Regolazione processo, anello chiuso
nel parametro 100 Configurazione, l’'unità è definita nel
parametro 416 Unità di riferimento/retroazione:
Retroazione
Deve essere impostato un campo di retroazione per il
regolatore. Questo campo di retroazione limita simultaneamente il campo di riferimento potenziale di modo che,
se la somma di tutti i riferimenti non rientra nel campo di
retroazione, il riferimento sarà limitato nell'ambito del
campo di retroazione.
Il segnale di retroazione deve essere collegato ad un
morsetto del convertitore di frequenza. Se la retroazione è
selezionata su due morsetti simultaneamente, i due segnali
saranno sommati.
Usare la sintesi sottostante per determinare il morsetto da
impiegare e i parametri da programmare.
Tipo di retroazione
Impulso 3 333, 327
Tensione 2 332, 338, 339
Corrente 1 331, 336, 337
Tabella 3.16
Morsetto Parametri
È possibile correggere una perdita di tensione in cavi
segnale lunghi se viene usato un trasmettitore con
un'uscita di tensione. Ciò è possibile nei parametri 338/339
Scala Min/Max.
I parametri 414/415 Retroazione minima/massima vanno
anche preimpostati secondo il valore dell'unità di processo
corrispondente ai valori di scala minima e massima per i
segnali connessi al morsetto.
Riferimento
Nel parametro 205 Riferimento massimo, Ref
, è possibile
MAX
impostare un riferimento massimo che rapporta in scala la
somma di tutti i riferimenti, cioè il riferimento risultante.
Il riferimento minimo nel parametro 204 è un'espressione
del valore minimo che il riferimento risultante può
assumere.
Tutti i riferimenti saranno sommati e la somma sarà il
riferimento rispetto al quale avrà luogo la regolazione. È
possibile limitare il campo di riferimento a dimensioni
inferiori a quelle del campo di retroazione. Ciò può
risultare opportuno se si desidera evitare una modifica non
intenzionale di un riferimento esterno che scosti eccessivamente la somma rispetto al riferimento opzionale. Il
campo di riferimento non può superare il campo di
retroazione.
La reimpostazione dei riferimenti avviene nei parametri da
215 a 216 Riferimento preimpostato. Vedere la descrizione
di Funzione riferimento e Gestione dei riferimenti nel
parametro 214.
Se il segnale corrente è usato come segnale di retroazione,
sarà possibile usare solo tensione come riferimento
analogico. Usare la sintesi sottostante per determinare il
morsetto da impiegare e i parametri da programmare.
Tipo di riferimento
Impulso 3 333, 327
Tensione 2 332, 338, 339
Corrente 1 331, 336, 337
Riferimenti
preimpostati
Riferimento bus 68+69
Tabella 3.17
Morsetto Parametri
215-216
(241-247)
58 MG03BA06 - VLT® è un marchio registrato Danfoss
Page 59

Programmazione
VLT® DriveMotor serie FCM
NOTA!
Il riferimento bus può essere preimpostato solo con la
comunicazione seriale.
NOTA!
Si consiglia di preimpostare i morsetti non utilizzati su [0]
Nessuna funzione.
Limite guadagno derivatore
In caso di rapide variazioni in una determinata
applicazione rispetto al segnale di riferimento o al segnale
di retroazione, lo scostamento tra il riferimento/valore di
regolazione e l'attuale modalità del processo verrà
modificato rapidamente. Il differenziale può in tal caso
diventare predominante. Ciò succede perché sta reagendo
alla variazione tra il riferimento e il modo attuale del
processo e, quanto più rapidamente varia lo scostamento,
tanto maggiore sarà il contributo di frequenza risultante
dal derivatore che può pertanto essere limitato per
consentire la preimpostazione di un tempo differenziale
ragionevole per le variazioni lente e un adeguato
contributo in frequenza per le variazioni rapide. Ciò è
possibile nel parametro 443, Processo PID, Limite di
guadagno differenziale.
uno scostamento fra il riferimento e l'attuale modalità di
processo che non può essere ovviato mediante una
variazione di velocità. Questa funzione può essere deselezionata nel parametro 438 Anti saturazione regolatore PID
Condizioni di avviamento
In alcune applicazioni il regolatore di processo è impostato
in modo ottimale quando trascorre un periodo di tempo
relativamente lungo prima di ottenere la condizione di
processo desiderata. In queste applicazioni può essere
opportuno definire una frequenza di uscita alla quale il
convertitore di frequenza deve azionare il motore prima
dell'attivazione del regolatore di processo. Ciò è possibile
programmando una frequenza di avviamento nel
parametro 439 Frequenza di avviamento PID di processo.
Gestione della retroazione
3.5.5
La gestione della retroazione è descritta nel presente
diagramma di flusso.
Il diagramma di flusso mostra quali parametri possono
influire sulla gestione della retroazione e in che modo
intervengono. Si possono selezionare segnali di retroazione
di tensione, corrente e impulsi.
3
3
Filtro passa basso
Se è presente molto rumore nel segnale di retroazione,
questo può essere smorzato usando un filtro passa-basso
integrato. È preimpostata un'opportuna costante di tempo
del filtro passa-basso.
Se il filtro passa basso è preimpostato a 0,1 sec., la
frequenza di disinserimento sarà 10 RAD/sec.,
corrispondente a (10 / 2 x π) = 1,6 Hz. Ciò significa che
saranno smorzate tutte le correnti/tensioni che variano di
oltre 1,6 ondulazioni al secondo. In altre parole, la
regolazione avverrà solo in base a un segnale di
retroazione che varia di una frequenza inferiore a 1,6 Hz.
La costante di tempo appropriata è selezionata nel
parametro 444 Processo, tempo filtro passa-basso PID.
Regolazione inversa
Regolazione normale indica che la velocità del motore
aumenta quando il riferimento/impostazione è maggiore
del segnale di retroazione. Se è necessario utilizzare la
regolazione inversa, in cui la velocità viene ridotta quando
il segnale di retroazione è inferiore al riferimento/valore di
regolazione, il parametro 437 Controllo normale/inverso PID
deve essere programmato su Inverso.
Anti-avvolgimento
Il regolatore di processo è preimpostato nella fabbrica con
una funzione antiavvolgimento attiva. Con questa
funzione, al raggiungimento di un limite di frequenza, un
limite di corrente o un limite di tensione, l'integratore è
inizializzato ad una frequenza corrispondente alla
frequenza d'uscita corrente. Ciò impedisce l'integrazione di
Disegno 3.24
437 PID di processo normale/controllo inverso
Valore:
Coppia (NORMALE) [0]
Inverso (INVERSO) [1]
Funzione:
È possibile scegliere se il regolatore di processo deve
aumentare/ridurre la frequenza di uscita in caso di
differenza fra il segnale di riferimento e il segnale di
retroazione.
Usato insieme con Processo, modalità anello chiuso
(parametro 100).
Descrizione:
Se il motore FC deve ridurre la frequenza di uscita all'aumentare del segnale di retroazione, selezionare [0]
Normale. Se il motore FC deve aumentare la frequenza di
uscita all'aumentare del segnale di retroazione, selezionare
[1] Inverso.
MG03BA06 - VLT® è un marchio registrato Danfoss 59
Page 60

Programmazione
VLT® DriveMotor serie FCM
3
438 Anti saturazione PID di processo
Valore:
Disabilita (DISABILITA) [0]
Abilita (ABILITA) [1]
Funzione:
È possibile selezionare se il regolatore di processo deve
continuare a regolare in caso di errore anche se non è
possibile aumentare/ridurre la frequenza di uscita. Usato
insieme con Processo, modalità anello chiuso (parametro
100).
Descrizione:
L’impostazione di fabbrica è [1] Abilitato, significa che il
processo di integrazione viene attivato in relazione alla
frequenza di uscita attuale qualora sia stato raggiunto il
limite di corrente o la frequenza max./min. Il regolatore di
processo non si modificherà finché l'errore è zero o il suo
segno è cambiato.
Selezionare [0] Disabilitato se l’integratore deve continuare
a integrare un errore, anche se non è possibile eliminare il
guasto con questa regolazione.
439 Frequenza di avviamento PID di processo
Valore:
f
parametro 201
Funzione:
Quando giunge un comando di avviamento, il motore FC
reagirà nella forma di Modo velocità, anello aperto
seguendo la rampa. Solo al raggiungimento della
frequenza di avviamento programmata, passerà al Processo,
modalità anello chiuso. Inoltre è possibile impostare una
frequenza che corrisponda alla velocità alla quale il
processo funziona normalmente, ciò permetterà di
raggiungere più rapidamente le condizioni di processo
richieste.
Usato insieme con Processo, modalità anello chiuso
(parametro 100).
Descrizione:
Impostare la frequenza di avviamento richiesta.
440 Guadagno proporzionale PID di processo
Valore:
0,00 (OFF)-10,00 [0-1000]
0,01 [1]
Funzione:
Il guadagno proporzionale indica il numero di volte che
deve essere applicato l’errore tra il segnale di set point e il
segnale di feedback.
Usato insieme con Processo, modalità anello chiuso
(parametro 100).
(parametro 201 e 202)
MIN-fMAX
[X.X]
Descrizione:
Una regolazione rapida si ottiene con un guadagno
elevato, ma se il guadagno è eccessivo il processo può
diventare instabile.
441 Tempo di integrazione PID di processo
Valore:
0,01-9999 s (OFF) [1-999900]
9999 s [999900]
Funzione:
L'integratore fornisce un guadagno crescente in caso di
variaz. costante fra il punto di regolaz. e il segnale di
retroaz. Tanto maggiore è la differenza, quanto più
rapidamente aumenterà il guadagno. Il tempo di
integrazione è il tempo necess. all’integratore per
raggiungere un valore uguale al guad. proporz.
Usato insieme con Processo, modalità anello chiuso
(parametro 100).
Descrizione:
Si ottiene una regolazione rapida se il tempo integrale è
breve. Tuttavia se questo tempo è troppo breve, il
processo può diventare instabile in caso di sovraelongazione.
Se il tempo integrale è lungo, si possono verificare
scostamenti rilevanti dal punto di regolazione voluto, in
quanto il regolatore di processo necessiterà di troppo
tempo per la regolazione in caso di variazione.
442 Tempo di differenziazione PID di processo
Valore:
0,00 (Off)-10,00 s [0-1000]
0,00 s [0]
Funzione:
Il derivatore non reagisce a un errore costante. Fornisce
solo un guadagno quando l’errore varia. Più rapide sono le
variazioni dell’errore, maggiore è il guadagno dovuto al
derivatore.
Il guadagno è proporzionale alla velocità di variazione del
segnale d'errore.
Usato insieme con Processo, modalità anello chiuso
(parametro 100).
Descrizione:
Una regolazione rapida si ottiene con un tempo di
differenziale lungo; tuttavia se il tempo differenziale è
troppo lungo, il processo può diventare instabile in caso di
sovraelongazione
443 Limite di guadagno diff. PID di processo
Valore:
5.0-50.0 [50-500]
5,0 [50]
Funzione:
È possibile impostare un limite per il guadagno del
derivatore.
Il guadagno del differenziale aumenterà in caso di
variazioni improvvise, ed è questo il motivo per cui può
60 MG03BA06 - VLT® è un marchio registrato Danfoss
Page 61

Programmazione
VLT® DriveMotor serie FCM
essere positivo limitare questo guadagno, ottenendo in tal
modo un guadagno differenziale regolare in caso di
variazioni lente e un guadagno differenziale costante in
caso di variazioni rapide del segnale d'errore.
Usato insieme con Processo, modalità anello chiuso
(parametro 100).
Descrizione:
Selezionare un limite per il guadagno differenziale come
necessario.
444 Tempo filtro passa-basso PID di processo
Valore:
0,02-10,00 s [2-1000]
0,02 s [2]
Funzione:
Le ondulazioni sul segnale di retroazione sono smorzate da
un filtro passa-basso in modo da ridurre il loro impatto
sulla regolazione del processo. Ciò può essere vantaggioso,
p.e. in caso di forte variazione del segnale.
Usato insieme con Processo, modalità anello chiuso
(parametro 100).
Descrizione:
Selezionare la costante di tempo desiderata (τ). Se ad
esempio viene programmata una costante di tempo (τ) di
100 ms, la frequenza di interruzione del filtro passa-basso
sarà 1/0,1 = 10 RAD/sec., corrispondente a (10 / 2 x π) =
1,6 Hz.
Il regolatore di processo regolerà pertanto solo un segnale
di retroazione che varia con una frequenza inferiore a 1,6
Hz. Se il segnale di retroazione varia con una frequenza
superiore a 1,6 Hz, il regolatore di processo non reagirà.
445 Riaggancio al volo
Valore:
Disabilita (DISABILITA) [0]
OK - stessa direzione (OK-STESSA DIREZIONE) [1]
OK - entrambe le direzioni (OK-2 DIREZIONI) [2]
Freno CC prima dell’avvio
(FRENO CC P. START) [3]
Funzione:
Questa funzione rende possibile sincronizzarsi con un
motore che gira liberamente a causa di una caduta della
rete.
Descrizione:
Selezionare [0] Disabilitato se questa funzione non è
necessaria.
[1} OK - stessa direzione: Scelto se il motore può ruotare
solo in un senso all’inserimento.
[2] OK - entrambe le direzioni: Scelto se il motore può
ruotare in entrambi i sensi all’inserimento.
[3] Freno CC prima dell’avvio: Scelto se il motore deve
essere arrestato usando il freno CC prima dell’accelerazione
alla velocità desiderata. Il tempo di frenata CC deve essere
impostato nel parametro 126.
Limitazioni:
1. Un’inerzia troppo bassa causerà l’accelerazione
del carico, che può risultare pericolosa o impedire
l’esito positivo dell’Avviamento lanciato. Usare
invece il freno CC.
2. Se il carico è trascinato, l’apparecchio può
scattare a causa della sovratensione.
3.
Al di sotto di 250 giri/min., il Riaggancio al volo
non funzionerà.
446 Modello di commutazione
Valore:
60° AVM (60° AVM) [0]
SFAVM (SFAVM) [1]
Funzione:
Descrizione:
Di norma non occorre che l’utente imposti questo
parametro.
455 Controllo intervallo di frequenze
Valore:
Disabilita [0]
Abilita [1]
Funzione:
Questo parametro viene utilizzato se occorre rimuovere dal
display l'avviso 35 Fuori dal campo di frequenza in Controllo
di processo, anello chiuso. Questo parametro non influisce
sulla parola di stato estesa.
Descrizione:
Selezionare [1] Abilita per abilitare la visualizzazione sul
display se appare l'avviso 35 Fuori dal campo di frequenza.
Selezionare [0] Disabilita per disabilitare la visualizzazione
sul display se compare l'avviso 35 Fuori dal campo di
frequenza.
461 Conversione della retroazione
Valore:
Lineare (LINEARE) [0]
Radice quadrata (QUADRATICA) [1]
Funzione:
In questo parametro viene selezionata una funzione che
converte un segnale di retroazione proveniente dal
processo in un valore di retroazione uguale alla radice
quadrata del segnale stesso.
Questo si utilizza, per esempio, laddove occorre regolare la
portata (volume) in base alla pressione come segnale di
retroazione (portata = costante x √pressione). Questa
conversione consente di impostare il riferimento in modo
tale che vi sia un collegamento lineare tra il riferimento e
la portata richiesta. Vedere Disegno 3.25.
Descrizione:
Se viene selezionato [0] Lineare, il segnale di retroazione e
il valore di retroazione saranno proporzionali.
3
3
MG03BA06 - VLT® è un marchio registrato Danfoss 61
Page 62

STX LGE ADR DATA BCC
195NA099.10
Programmazione
VLT® DriveMotor serie FCM
3
Se si seleziona [1] Radice quadrata, il convertitore di
frequenza trasforma il segnale di retroazione nel valore
della radice quadrata.
Disegno 3.25 Conversione della retroazione
Bus seriale
3.6.1
viene indicato mediante un bit di parità impostato su “1”
in caso di parità (cioè un numero pari di 1 binari negli 8
bit di dati e nei bit di parità). Il carattere termina con un
bit di stop ed è quindi formato da 11 bit.
Disegno 3.27
3.6.3 Struttura del telegramma
Ogni telegramma inizia con un byte di start (STX) = 02
Hex, seguito da un byte che indica la lunghezza del
telegramma (LGE) e da un byte che indica l'indirizzo (ADR).
Segue quindi un dato numero di byte di dati (variabile in
base al tipo di telegramma). Il telegramma termina con un
byte di controllo dati (BCC).
Disegno 3.26 Bus seriale
3.6.2 Trasmissione dei telegrammi
Telegrammi di controllo e di risposta
La trasmissione dei telegrammi in un sistema master/ slave
è controllata dal master. Ad un master possono essere
collegati fino a 31 slave (motori FC), a meno che non
venga utilizzato un ripetitore - vedere Disegno 3.28 e
Disegno 3.30.
Il master invia continuamente telegrammi di controllo agli
slave e attende da questi i telegrammi di risposta. Il tempo
di risposta degli slave è al massimo 50 ms.
Solo uno slave che abbia ricevuto al proprio indirizzo un
telegramma privo di errori replicherà inviando un
telegramma di risposta.
Broadcast
Un master può inviare lo stesso telegramma contemporaneamente a tutti gli slave collegati al bus. In questa
comunicazione broadcast, il bit broadcast del telegramma
di controllo del bit indirizzo ha un valore di 1 (vedere
indirizzo VLT). I bit indirizzo 0-4 non vengono utilizzati.
Contenuto di un byte
Ogni carattere trasmesso inizia con un bit di start. In
seguito vengono trasmessi 8 bit di dati. Ogni carattere
Disegno 3.28 Telegramma
Lunghezza del telegramma (LGE)
La lunghezza del telegramma è il numero di byte di dati,
più il byte indirizzo ADR, più il byte di controllo dati BCC.
Telegrammi con 4 byte di dati hanno una lunghezza di:
LGE = 4 + 1 + 1 = 6 byte
Telegrammi con 12 byte di dati hanno una lunghezza di:
LGE = 12 + 1 + 1 = 14 byte
Indirizzo VLT (ADR)
Vengono utilizzati due diversi formati di indirizzo:
1. Formato indirizzo protocollo USS Siemens
Disegno 3.29 Formato indirizzo
Bit 5 = 0
Bit 6 non utilizzato
Bit 5 = 1: broadcast, i bit di indirizzo (0-4) non sono usati
Bit 5 = 0: nessun broadcast
Bit 0-4 = indirizzo VLT 1-31
62 MG03BA06 - VLT® è un marchio registrato Danfoss
Page 63

Programmazione
VLT® DriveMotor serie FCM
2. Formato Danfoss:
Disegno 3.30 Formato indirizzo
Bit 7 = 1
Bit 0-6 = Indirizzo VLT 1-127 (0 = Broadcast)
Byte di controllo dati (BCC)
I byte di controllo dati possono essere spiegati nel modo
migliore con un esempio: Prima viene ricevuto il primo
carattere del telegramma, BCC = 0.
Disegno 3.31
Dopo che è stato ricevuto il primo carattere:
BCC
= BCC
NEW
(EXOR = porta esclusiva or)
BCC
= 0 0 0 0 0 0 0 0
OLD
EXOR
"primo byte" = 0 0 0 0 0 0 1 0 (02H)
BCC
= 0 0 0 0 0 0 1 0
NEW
Ogni successivo byte supplementare viene seguito
BCC
EXOR e indica un nuovo BCC
OLD
EXOR "primo byte"
OLD
NEW
, ad es.:
Byte di dati
3.6.4
Il blocco dei byte di dati è diviso in due blocchi più piccoli:
1. Byte di parametro utilizzato per parametri
trasferiti tra master e slave
2. Byte di processo, copertura
- Parola di controllo e valore di
riferimento (dal master allo slave)
- Parola di stato e frequenza di uscita
corrente (dallo slave al master).
Questa struttura vale per il telegramma di comando
(master ⇒ slave) e il telegramma di risposta (slave
⇒master).
Disegno 3.32
Esistono due tipi di telegramma:
- con struttura a 12 byte come sopra, con il blocco
dei byte dei parametri e dei byte di processo
- con 4 byte, che è il blocco di processo del
telegramma da 12 byte.
1. Byte di parametri
3
3
BCC
= 0 0 0 0 0 0 1 0
OLD
EXOR
"secondo byte" = 1 1 0 1 0 1 1 0 (D6H)
BCC
= 1 1 0 1 0 1 0 0
NEW
Il risultato dopo l’ultimo carattere ricevuto è BCC.
Disegno 3.33
MG03BA06 - VLT® è un marchio registrato Danfoss 63
Page 64

Programmazione
VLT® DriveMotor serie FCM
3
Comandi e risposte (AK)
I bit n. 12-15 sono utilizzati per trasmettere i comandi dal
master allo slave e la risposta elaborata dallo slave al
master.
Comandi master ⇒slave:
N. bit
15 14 13 12 Comando
0 0 0 0 Nessun comando
0 0 0 1 Lettura valore del parametro
0 0 1 0 Scrittura valore del parametro
nella RAM (parola)
0 0 1 1 Scrittura valore del parametro
nella RAM (parola doppia)
1 1 0 1 Scrittura valore del parametro
nella RAM e nella EEprom (parola
doppia)
1 1 1 0 Scrittura valore del parametro
nella RAM e nella EEprom (parola)
1 1 1 1 Lettura testo
Tabella 3.18
(risposta 0111)
0 Il numero di parametro usato non esiste
1 Nessun accesso di scrittura al parametro usato
2 Il valore del dato supera i limiti del parametro
3 Il sottoindice utilizzato non esiste
4 Il parametro non è del tipo ad array
5 Il tipo di dati non corrisponde al parametro
17 La modifica dei dati nel parametro chiamato
130 Nessun accesso bus al parametro chiamato
131 La modifica dei dati non è possibile in quanto è
Tabella 3.20
Messaggio di errore
chiamato
non è possibile nel modo attuale del motore
FC. Per esempio alcuni parametri possono
essere modificati solo quando il motore si è
arrestato
stata selezionata l'impostazione di fabbrica
Numeri dei parametri (PNU)
I bit n. 0-10 sono utilizzati per trasmettere i numeri dei
parametri. La funzione di un dato parametro può essere
desunta dalla descrizione dei parametri.
Risposta slave ⇒ master:
N. bit
14 13 12 Risposta
15
0 0 0 0 Nessuna risposta
0 0 0 1 Valore di parametro trasmesso
(parola)
0 0 1 0 Valore di parametro trasmesso
(parola doppia)
0 1 1 1 Il comando non può essere
eseguito
1 1 1 1 Testo trasmesso
Tabella 3.19
Se il comando non può essere eseguito, lo slave invierà
questa risposta (0111) e comunicherà il seguente
messaggio di errore nel valore parametro:
Codice errore
Disegno 3.34
Indice
L’indice è usato con il numero di parametro per l’accesso
di lettura/scrittura ai parametri del tipo array (par. 615, 616
and 617).
Valore parametrico (PWE)
Disegno 3.35
Il valore del parametro dipende dal comando dato. Se il
master desidera un parametro di sola lettura, non
considera il valore del blocco PWE. Se un parametro viene
modificato dal master (scrittura), il nuovo valore viene
trasferito nel blocco PWE. Se lo slave replica alla richiesta
di un parametro (comando di lettura), il valore del
parametro attuale viene trasferito nel blocco PWE.
64 MG03BA06 - VLT® è un marchio registrato Danfoss
Page 65

Programmazione
VLT® DriveMotor serie FCM
Il valore trasmesso corrisponde alle cifre indicate nelle
descrizioni dei parametri. Per esempio il parametro 101, in
cui [1] corrisponde a Coppia costante, [2] corrisponde a
Coppia variabile: bassa ecc. Tuttavia fanno eccezione i
parametri con tipo di dati 9 (stringa di testo), in quanto
questo testo viene trasmesso come stringa di testo ASCII.
Quando una stringa di testo viene trasmessa (letta), la
lunghezza del telegramma è variabile, in quanto i testi
hanno lunghezze diverse. La lunghezza del telegramma è
indicata nel secondo byte del telegramma, chiamato LGE,
vedere 3.6.3 Struttura del telegramma . I parametri 621-634
(dati di targa) hanno dati di tipo 9 (stringa di testo).
Tipi di dati supportati dal convertitore di frequenza VLT
Tipo di dati Descrizione
3 Numero intero 16
4 Numero intero 32
5 Senza segno 8
6 Senza segno 16
7 Senza segno 32
9 Stringa di testo
Tabella 3.21
Senza segno significa che nel telegramma non è incluso
alcun segno.
2. Byte di processo
Il blocco dei byte di processo è diviso in due parti, ognuna
di 16 bit, che appaiono sempre nella sequenza indicata.
Disegno 3.36
PCD1 PCD2
Telegramma di
controllo
(master⇒slave)
Telegramma di
risposta
(slave⇒master)
Tabella 3.22
Parola di controllo secondo lo
3.6.5
Parola di controllo Valore di riferimento
Parola di stato Frequenza di uscita
standard del profilo Fieldbus
(parametro 512 = Profilo Fieldbus) La parola di controllo
viene usata per trasmettere comandi da un master (p.e. un
PC) ad uno slave (motore FC).
3
3
I diversi attributi di ogni parametro sono contenuti nella
sezione delle impostazioni di fabbrica. Siccome un valore
parametrico può essere trasmesso solo come numero
intero, per trasmettere decimali è necessario usare un
fattore di conversione.
Esempio:
Parametro 201: frequenza minima, fattore di conversione
0,1. Se il parametro 201 deve essere impostato a 10 Hz, è
necessario trasmettere un valore di 100, in quanto un
fattore di conversione di 0,1 significa che il valore
trasmesso verrà moltiplicato per 0,1. Un valore pari a 100
verrà quindi inteso come 10.
Indirizzamento mediante ID apparecchio
L'ID apparecchio è stampato sull'etichetta del coperchio in
plastica sotto la copertura della centralina elettronica. I tre
gruppi di ID apparecchio, ognuno di tre cifre, devono
essere convertiti in Hex. L'indirizzo desiderato viene
aggiunto come ultimo byte. Il frame è inviato al parametro
500 Indirizzo bus (e 918) con un telegramma circolare.
PKE: Scrittura nel parametro n. 500 o 918
IND: non utilizzato
Bit
00 OFF 1 ON 1
01 OFF 2 ON 2
02 OFF 3 ON 3
03 Evoluzione libera motore Abilita
04 Arresto rapido Rampa
05 Frequenza di uscita bloccata Abilitazione rampa
06 Arresto rampa Avviamento
07 Nessuna funz. Ripristino
08 Marcia jog 1 OFF ON
09 Marcia jog 2 OFF ON
10 Dati non validi Validi
11 Nessuna funz. Slow-down / relè
12 Nessuna funz. Catch-up / relè 123
13 Setup 1 Setup 2
14
15 Nessuna funz. Inversione
Bit = 0 Bit =1
123 / uscita digitale
morsetto 9
Tabella 3.23
MG03BA06 - VLT® è un marchio registrato Danfoss 65
Page 66

Programmazione
VLT® DriveMotor serie FCM
3
NOTA!
L'uso dei Bit 00, Bit 01 e Bit 02 per disattivare l'alimentazione (mediante il relè) richiederà un’accensione
separata. Ciò a causa dell'assenza di un collegamento
esterno a 24 V per alimentare il controllo del motore FCM
300, necessario per riattivare il motore FCM 300 mediante
il segnale di ingresso.
Bit 00, OFF1/ON1
Un arresto rampa ordinario che utilizza il tempo di rampa
dei parametri 207/208. Bit 00 = “0” determina un arresto.
Bit 00 = "1" significa che il convertitore di frequenza sarà in
grado di avviarsi se sono state soddisfatte le altre
condizioni di avviamento.
Bit 01, OFF2/ON2
Arresto a ruota libera. Bit 01 = "0" determina un arresto a
ruota libera. Bit 01 = "1" significa che il convertitore di
frequenza sarà in grado di avviarsi se sono state
soddisfatte le altre condizioni di avviamento.
Bit 02, OFF3/ON3
Arresto rapido, utilizza il tempo di rampa del para-metro
212. Bit 02 = “0” determina un arresto rapido. Bit 02 = "1"
significa che il convertitore di frequenza sarà in grado di
avviarsi se sono state soddisfatte le altre condizioni di
avviamento.
Bit 03, Evoluzione libera/abilitata
Evoluzione libera. Bit 03 = "0" determina un arresto. Bit 03
= "1" significa che il convertitore di frequenza sarà in grado
di avviarsi se sono state soddisfatte le altre condizioni di
avviamento.
grado di effettuare la regolazione e che viene considerato
il riferimento dato.
Bit 06, Avviamento/arresto rampa
Un arresto rampa ordinario utilizza il tempo di rampa dei
parametri 207/208. Bit 06 = "0" determina un arresto. Bit
06 = "1" significa che il convertitore di frequenza sarà in
grado di avviarsi se sono state soddisfatte le altre
condizioni di avviamento.
NOTA!
Nel parametro 505 viene definito come il Bit 06 debba
essere combinato con la funzione corrispondente sugli
ingressi da morsettiera.
Bit 07, Nessuna funzione/ripristino
Ripristino di uno scatto. Bit 07 = "0" significa che non c’è
alcun ripristino. Bit 07 = "1" significa che lo scatto viene
ripristinato. Dopo il ripristino occorreranno circa 1,5 s
affinché l'apparecchio sia pronto. La parola di stato
indicherà lo stato di pronto.
Bit 08, Marcia jog 1 OFF/ON
Attivazione della velocità preprogrammata nel parametro
509 (Bus JOG 1). JOG 1 è possibile solo se il bit 04 = “0” e i
bit 00-03 = "1".
Bit 09, Jog 2 OFF/ON
Attivazione della velocità preprogrammata nel parametro
510 (Bus JOG 2). JOG 2 è possibile solo se il Bit 04 = "0" e i
Bit 00-03 = "1". Se JOG 1 e JOG 2 sono entrambi attivati
(Bit 08 e 09 = "1"), JOG 1 ha la priorità, vale a dire che
verrà utilizzata la velocità programmata nel parametro 509.
NOTA!
Nel parametro 502 viene definito come il Bit 03 debba
essere combinato con la funzione corrispondente sugli
ingressi da morsettiera.
Bit 04, Arresto rapido/rampa
Arresto rapido che utilizza il tempo di rampa del
parametro 212. Bit 04 = "0" determina un arresto rapido.
Bit 04 = "1" significa che il convertitore di frequenza sarà in
grado di avviarsi, se sono soddisfatte le altre condizioni per
l’avviamento.
NOTA!
Nel parametro 503 viene definito come il Bit 04 debba
essere combinato con la funzione corrispondente sugli
ingressi da morsettiera.
Bit 05, Frequenza di uscita congelata/abilitazione rampa
Bit 05 = "0" significa che la frequenza di uscita data viene
mantenuta anche se il riferimento è cambiato. Bit 05 = "1"
significa che il convertitore di frequenza è di nuovo in
Bit 10, Dati non validi/validi
Utilizzato per comunicare al motore FC se la parola di
comando deve essere usata o ignorata. Bit 10 = "0"
significa che la parola di controllo viene ignorata. Bit 10 =
"1" significa che la parola di controllo viene utilizzata.
Questa funzione è importante perché la parola di controllo
è sempre contenuta nel telegramma, indipendentemente
dal tipo di telegramma usato; vale a dire che è possibile
scollegare la parola di controllo se questa non deve essere
usata in connessione con l’aggiornamento o la lettura dei
parametri.
Bit 11, Nessuna funzione / slow-down, relè 123, uscita
digitale morsetto 9
Viene utilizzata per ridurre il riferimento della velocità del
valore contenuto nel parametro 219. Bit 11 = "0" significa
che non c’è variazione del riferimento. Bit 11 = "1" significa
che il riferimento viene ridotto. Bit 11 = “1” attiverà anche
il relè 123 (a condizione che il parametro 323 = “Parola di
controllo bit 11”) e imposta l'uscita digitale morsetto 9 a
66 MG03BA06 - VLT® è un marchio registrato Danfoss
Page 67

Programmazione
livello alto (a condizione che il parametro 340 = “Parola di
controllo bit 11”).
Bit 12, Nessuna funzione / catch up, relè 123:
Viene utilizzata per aumentare il riferimento della velocità
in base al valore del parametro 219. Bit 12 = "0" significa
che non c’è variazione del riferimento. Bit 12 = "1" significa
che il riferimento viene aumentato. Se sono attivati sia
slow down che catch up (Bit 11 e 12 = "1"), slow down ha
la priorità, vale a dire che il riferimento della velocità viene
ridotto. Bit 12 = “1” attiverà anche il relè 123 (a condizione
che il parametro 323 = “Parola di controllo bit 12”).
Bit 13, Selezione della programmazione
Il bit 13 è usato per effettuare una selezione fra le due
programmazioni di menu sulla base della seguente tabella:
Setup Bit 13
1 0
2 1
Tabella 3.24
Questa funzione è possibile solo se nel parametro 004 è
stato selezionato Multi Setup.
VLT® DriveMotor serie FCM
NOTA!
Il parametro 507 è usato per stabilire come il bit 13 deve
essere combinato con la corrispondente funzione sugli
ingressi digitali.
Bit 15, Off/inversione
Inversione del senso di rotazione del motore. Bit 15 = "0"
non determina alcuna inversione. Bit 15 = "1" determina
un’inversione.
NOTA!
Qualora non sia altrimenti indicato, il bit della parola di
controllo viene combinato con la funzione corrispondente
sugli ingressi digitali come una funzione con logica "or".
Parola di stato (secondo lo standard del profilo Fieldbus)
La parola di stato viene usata per informare il master (p.e.
un PC) sulla condizione di uno slave (motore FC).
Bit
00 Controllo non pronto Pronto
01 FC non pronto Pronto
02 Ruota libera Abilita
03 Nessun guasto Scatto
04 ON 2 OFF 2
05 ON 3 OFF 3
06 Abilitazione avviamento Disabilitazione avviamento
07 Nessun avviso Avviso
08
09 Comando locale Comunicazione seriale
10 Fuori dal campo di
11 Non in funzione In funzione
12
13 Tensione OK Oltre i limiti
14 Corrente OK Oltre i limiti
15 Avviso termico
Bit 00, Controllo non pronto/pronto
Bit 00 = "0" significa che i Bit 00, 01 o 02 della parola di
controllo sono "0" (OFF1, OFF2 o OFF3) oppure che il
convertitore di frequenza è scattato.
Bit 00 = "1" significa che il comando del convertitore di
frequenza è pronto.
Bit 01, FC non pronto/pronto
Stesso significato del bit 00; tuttavia in questo caso la
sezione di potenza viene alimentata e il convertitore di
frequenza è pronto a funzionare quando riceve i necessari
segnali di avviamento.
Bit 02, Evoluzione libera/abilitato
Bit 02 = "0" significa che i Bit 00, 01, 02 o 03 della parola
di comando sono "0" (OFF1, OFF2, OFF3 o Evoluzione
libera) oppure che il motore Serie FCM 300 è scattato.
Bit 02 = "1" significa che i bit 00, 01, 02 o 03 della parola
di controllo sono "1" e che il motore FC non è scattato.
Bit = 0 Bit =1
Velocità ≠ rif.
frequenza
Tabella 3.25
Velocità = rif.
Limite di frequenza OK
3
3
Bit 03, Nessun guasto/scatto
Bit 03 = "0" significa che il motore Serie FCM 300 non è
guasto.
Bit 03 = "1" significa che il motore Serie FCM 300 è
scattato e necessita di un segnale di ripristino per poter
funzionare nuovamente.
MG03BA06 - VLT® è un marchio registrato Danfoss 67
Page 68

Programmazione
VLT® DriveMotor serie FCM
3
Bit 04, ON2/OFF2
Bit 04 = "0" significa che il Bit 01 della parola di controllo =
"1".
Bit 04 = "1" significa che il bit 01 della parola di controllo
= "0".
Bit 05, ON3/OFF3
Bit 05 = "0" significa che il bit 02 della parola di controllo
= "1".
Bit 05 = "1" significa che il bit 02 della parola di controllo
= "0".
Bit 06, Abilitazione/disabilitazione avviamento
Bit 06 è sempre "0" se nel parametro 512 è stato
selezionato FC Drive. Se nel parametro 512 è stato
selezionato [Profidrive] , il bit 06 sarà "1" dopo il ripristino
di uno scatto, dopo l’attivazione di OFF2 o OFF3 e dopo il
collegamento della tensione di rete. Avviamento disabilitato viene ripristinato, impostando il bit 00 della parola di
controllo su "0" e i bit 01, 02 e 10 su "1".
Bit 07, No preallarme/avviso
Bit 07 = "0" significa che la situazione è normale.
Bit 07 = "1" significa che nel motore FC si è verificata una
situazione non normale. Tutti gli avvisi descritti in
4.2 Elenco degli avvisi e degli allarmi - Guida alla Progettazione FCM 300 imposteranno il bit 07 a "1".
Bit 08, Velocità ≠ rif./velocità = rif.
Bit 08 = "0" significa che la velocità attuale del motore è
diversa dal riferimento della velocità impostato. Ciò può
verificarsi ad esempio mentre la velocità viene accelerata /
decelerata tramite rampa durante l’avviamento / l’arresto.
Bit 08 = "1" significa che la velocità attuale del motore è
uguale al riferimento della velocità impostato.
Bit 11, Non in funzione/in funzione
Bit 11 = "0" significa che il motore non è in funzione.
Bit 11 = "1" significa che il motore FC ha ricevuto un
segnale di avviamento o che la frequenza di uscita è
maggiore di 0 Hz.
Bit 13, Tensione OK/oltre il limite
Bit 13 = "0" significa che non sono stati superati i limiti di
tensione del motore FC.
Bit 13 = "1" significa che la tensione CC del circuito
intermedio del motore FC è troppo bassa o troppo alta.
Bit 14, Corrente OK / oltre il limite
Bit 14 = "0" significa che la corrente motore è inferiore al
limite di corrente selezionato nel parametro 221.
Bit 14 = "1" significa che il limite di corrente nel parametro
221 è stato superato.
Bit 15, Avviso termico
Bit 15 = "0" significa che i timer per la protezione termica
del motore e la protezione termica del VLT rispettivamente
non hanno superato il 100%.
Bit 15 = "1" significa che uno dei timer ha superato il
100%.
Parola di comando sotto il Profilo FC (parametro 512 = FC
Drive)
La parola di comando viene usata per inviare comandi da
un master (p.e. un PC) ad uno slave (motore FC).
Bit 09, Funzionamento locale/comando da comunicazione
seriale
Bit
00 Selezione riferimento
Bit 09 = "0" [STOP/RESET] è attivato sul quadro di comando
oppure Controllo locale è selezionato nel parametro 002
Funzionamento locale/remoto. Non è possibile controllare il
convertitore di frequenza mediante la comunicazione
seriale.
Bit 09 = "1" significa che è possibile controllare il convertitore di frequenza mediante la comunicazione seriale.
Bit 10, Fuori dal campo di frequenza
Bit 10 = "0", se la frequenza di uscita ha raggiunto il valore
impostato nel parametro 201 Frequenza di uscita, limite
basso o nel parametro 202 Frequenza di uscita, limite alto.
Bit 10 = "1" significa che la frequenza di uscita rientra nei
limiti definiti.
68 MG03BA06 - VLT® è un marchio registrato Danfoss
01 Nessuna funz.
02 Freno CC Rampa
03 Ruota libera Abilita
04 Arresto rapido Rampa
05 Mantenimento Abilitazione rampa
06 Arresto rampa Avviamento
07 Nessuna funz. Ripristino
08 Nessuna funz. Marcia jog
09 Nessuna funz.
10 Dati non validi Validi
11 Nessuna funz. Relè 123 / ingresso
12 Nessuna funz. Relè 123
13 Setup 1 Setup 2
15 Nessuna funz. Inversione
Bit = 0 Bit =1
preimpostato
Tabella 3.26
digitale morsetto 9
Page 69

Programmazione
VLT® DriveMotor serie FCM
Bit 00
Il bit 00 è usato per effettuare una selezione fra i due
riferimenti preprogrammati (parametri 215-216) sulla base
della seguente tabella:
Rif. preimpostato Descrizione Bit 00
1 215 0
2 216 1
Tabella 3.27
NOTA!
Nel parametro 508 è possibile selezionare il modo in cui i
bit 1/12 devono essere combinati con la corrispondente
funzione sugli ingressi digitali.
Bit 02, Frenatura CC
Bit 02 = "0" determina una frenata CC e l'arresto. La
corrente di frenata e la durata sono impostate nei
parametri 132 e 133.
Bit 02 = "1" determina una rampa.
Bit 03, Evoluzione libera/abilitata
Evoluzione libera. Bit 03 = "0" determina un arresto.
Bit 03 = "1" significa che il convertitore di frequenza è in
grado di avviarsi, a condizione che siano soddisfatte le
altre condizioni per l’avviamento.
NOTA!
Nel parametro 502 viene definito come il Bit 03 debba
essere combinato con la funzione corrispondente sugli
ingressi da morsettiera.
Bit 04, Arresto rapido/rampa
Arresto rapido che utilizza il tempo di rampa del
parametro 212. Bit 04 = "0" determina un arresto rapido.
Bit 04 = “1” significa che il convertitore di frequenza è in
grado di avviarsi, a condizione che siano soddisfatte le
altre condizioni per l’avviamento.
Bit 06 = "1" significa che il convertitore di frequenza è in
grado di avviarsi, a condizione che siano soddisfatte le
altre condizioni per l'avviamento.
NOTA!
Nel parametro 505 viene definito come il Bit 06 debba
essere combinato con la funzione corrispondente sugli
ingressi da morsettiera.
Bit 07, Nessuna funzione/ripristino
Ripristino di uno scatto. Bit 07 = “0” significa che non c’è
alcun ripristino.
Bit 07 = "1" significa che lo scatto viene ripristinato. Dopo
il ripristino occorreranno circa 1,5 s affinché l'apparecchio
sia pronto. La parola di stato indicherà lo stato di pronto.
Bit 08, Attivazione della velocità Jog nel parametro 213
Bit 08 = "0": Velocità jog non attivata.
Bit 08 = "1" significa che il motore sta funzionando alla
velocità Jog.
Bit 10, Dati non validi/validi
Utilizzato per comunicare al motore FC se la parola di
comando deve essere usata o ignorata.
Bit 10 = "0" significa che la parola di controllo viene
ignorata.
Bit 10 = "1" significa che la parola di controllo viene
utilizzata. Questa funzione è importante perché la parola di
controllo è sempre contenuta nel telegramma, indipendentemente dal tipo di telegramma usato; vale a dire che è
possibile scollegare la parola di controllo se questa non
deve essere usata in connessione con l’aggiornamento o la
lettura dei parametri.
Bit 11, Nessuna funzione / relè 123, uscita digitale morsetto
9
Bit 11 = “1” attiverà anche il relè 123 (a condizione che il
parametro 323 = “Parola di controllo bit 11”) e imposta
l'uscita digitale morsetto 9 a livello alto (a condizione che il
parametro 340 = “Parola di controllo bit 11”).
3
3
NOTA!
Nel parametro 503 viene definito come il Bit 04 debba
essere combinato con la funzione corrispondente sugli
ingressi da morsettiera.
Bit 05, Mantenimento / rampa abilitata
Bit 05 = "0" significa che la frequenza di uscita data viene
mantenuta anche se il riferimento è cambiato.
Bit 05 = "1" significa che il convertitore di frequenza è di
nuovo in grado di effettuare la regolazione e che viene
considerato il riferimento dato.
Bit 06, Avviamento/arresto rampa
Un arresto rampa ordinario utilizza il tempo di rampa dei
parametri 207/208. Bit 06 = "0" determina un arresto.
MG03BA06 - VLT® è un marchio registrato Danfoss 69
Bit 12, Disabilitato / relè 123:
Bit 12 = “1” attiverà il relè 123 (a condizione che il
parametro 323 = “Parola di controllo bit 12”).
Bit 13, Selezione del setup
Il bit 13 è usato per effettuare una selezione fra i due
setup di menu sulla base della seguente tabella:
Setup
1 0
2 1
Tabella 3.28
Bit 13
Page 70

Programmazione
VLT® DriveMotor serie FCM
3
La funzione è solo possibile se nel parametro 004 è
selezionato Multi setup.
NOTA!
Il parametro 507 è usato per stabilire come il bit 13 deve
essere combinato con la corrispondente funzione sugli
ingressi digitali.
Bit 15, Off/inversione
Inversione del senso di rotazione del motore.
Bit 15 = "0", non determina alcuna inversione. Bit 15 = "1"
determina un'inversione.
NOTA!
Qualora non sia altrimenti indicato, il bit della parola di
controllo viene combinato con la funzione corrispondente
sugli ingressi digitali come una funzione con logica "or".
Parola di stato sotto profilo FC
La parola di stato viene usata per informare il master (p.e. un
PC) sulle condizioni dello slave (motore FC).
Bit 02, Evoluzione libera/abilitato
Bit 02 = "0" significa che il bit 03 della parola di controllo è
"0" (Evoluzione libera) oppure che il motore FC è scattato.
Bit 02 = “1” significa che il bit 03 della parola di controllo è
“1” e che il motore FC non è scattato.
Bit 03, Nessun guasto/scatto
Bit 03 = "0" significa che il motore Serie FCM 300 non è
guasto.
Bit 03 = “1” significa che il motore Serie FCM 300 è
scattato e necessita di un segnale di ripristino per poter
funzionare nuovamente.
Bit 07, No preallarme/avviso
Bit 07 = "0" significa che la situazione è normale.
Bit 07 = “1” significa che nel motore FC si è verificata una
situazione non normale. Tutti gli avvisi descritti in4.2 Elenco
degli avvisi e degli allarmi - Guida alla Progettazione FCM
300 imposteranno il Bit 07 a “1”.
Bit 08, Velocità ≠ rif./velocità = rif.
Bit 08 = "0" significa che la velocità attuale del motore è
diversa dal riferimento della velocità impostato. Ciò può
verificarsi ad esempio mentre la velocità viene accelerata /
decelerata a rampa durante l’avviamento / l’arresto.
Bit 08 = “1” significa che la velocità attuale del motore è
uguale al riferimento di velocità impostato.
Bit Bit = 0 Bit =1
00 Controllo non pronto Pronto
01 FC non pronto Pronto
02 Ruota libera Abilita
03 Nessun guasto Scatto
04 Riservato
05 Riservato
06 Riservato
07 Nessun avviso Avviso
08
09 Comando locale Controllo bus
10 Fuori dall'intervallo Frequenza OK
11 Non in funzione In funzione
12
13 Tensione OK Oltre i limiti
14 Corrente OK Oltre i limiti
15 Temporizzatore OK Avviso termico
Velocità ≠ rif.
Tabella 3.29
Velocità = rif.
Bit 01, FC non pronto/pronto
Bit 01 = "0" significa che il convertitore di frequenza è
scattato.
Bit 01= "1" significa che il convertitore di frequenza è
pronto.
Bit 09, Funzionamento locale / controllo bus
Bit 09 = "0" [STOP/RESET] è attivato sul quadro di comando
oppure Controllo locale è selezionato nel parametro 002
Funzionamento locale/remoto. Non è possibile controllare il
convertitore di frequenza mediante la comunicazione
seriale.
Bit 09 = "1" significa che è possibile controllare il convertitore di frequenza mediante la comunicazione seriale.
Bit 10, Fuori campo/frequenza
Bit 10 = "0", se la frequenza di uscita ha raggiunto il valore
impostato nel parametro 201 Frequenza di uscita, limite
basso o nel parametro 202 Frequenza di uscita, limite alto.
Bit 10 = "1" significa che la frequenza di uscita rientra nei
limiti definiti.
Bit 11, Non in funzione/in funzione
Bit 11 = "0" significa che il motore non è in funzione.
Bit 11 = “1” significa che il motore FC ha ricevuto un
segnale di avviamento o che la frequenza di uscita è
maggiore di 0 Hz.
Bit 13, Tensione OK/oltre il limite
Bit 13 = "0" significa che non sono stati superati i limiti di
tensione del motore FC.
Bit 13 = "1" significa che la tensione CC del circuito
intermedio del motore FC è troppo bassa o troppo alta.
70 MG03BA06 - VLT® è un marchio registrato Danfoss
Page 71

Programmazione
VLT® DriveMotor serie FCM
Bit 14, Corrente OK / oltre il limite
Bit 14 = “0” significa che la corrente motore è inferiore al
limite di coppia selezionato nel parametro 221.
Bit 14 = “1” significa che il limite di corrente selezionato
nel parametro 221 è stato superato.
Bit 15, Avviso termico
Bit 15 = "0" significa che i timer per la protezione termica
del motore e la protezione termica del VLT rispettivamente
non hanno superato il 100%.
Bit 15 = "1" significa che uno dei timer ha superato il
100%.
Valore di riferimento bus
Disegno 3.37
Il valore di riferimento della frequenza viene trasmesso al
convertitore di frequenza sotto forma di una parola di 16
bit. Il valore viene trasmesso come un numero intero
(0-32767). 16384 (4000 Hex) corrisponde al 100%. (I numeri
negativi sono espressi mediante un complemento a 2.)
Il riferimento bus ha il seguente formato:
Parametro 203 = "0"
"rif
-rif
MAX
- +rif
"
MAX
MAX
- +rif
MAX
MIN
- rif
MAX
MIN
0-16384 (4000 Hex) ~ 0-100% ~ rif
Parameter 203 = "1"
-rif
MAX
-16384 (. . . Hex) - +16384 (4000 Hex) ~
-100- +100% ~ -rif
Frequenza di uscita attuale
Disegno 3.38
Il valore della frequenza di uscita attuale del convertitore
di frequenza viene trasmesso sotto forma di una parola di
16 bit. Il valore viene trasmesso come un numero intero
(0-32767). 16384 (4000 Hex) corrisponde al 100%. (I numeri
negativi sono espressi mediante un complemento a 2).
3.7.1
Gruppo di parametri 5-**
Comunicazione seriale
500 Indirizzo
Valore:
Protocollo parametro 561 = protocollo FC [0]
0 - 126 1
Protocollo parametro 500 = MODBUS RTU [3]
0 - 247 1
Funzione:
Questo parametro consente di assegnare un indirizzo in
una rete di comunicazione seriale ad ogni convertitore di
frequenza.
Descrizione:
Ad ogni convertitore di frequenza deve essere assegnato
un indirizzo unico. Se il numero di unità collegate (convertitore di frequenza + master) è superiore a 31, deve essere
installato un ripetitore. Il parametro 500 Indirizzo non può
essere selezionato mediante la comunicazione seriale ma
deve essere preimpostato tramite il quadro di comando.
501 Baud rate
Valore:
300 Baud (300 BAUD) [0]
600 Baud (600 BAUD) [1]
1200 Baud (1200 BAUD) [2]
2400 Baud (2400 BAUD) [3]
4800 Baud (4800 BAUD) [4]
9600 Baud (9600 BAUD) [5]
Funzione:
Questo parametro viene utilizzato per programmare la
velocità alla quale i dati devono essere trasmessi mediante
il collegamento seriale. Baud rate rappresenta il numero di
bit trasferiti in un secondo.
Descrizione:
La velocità di trasmissione del motore FC deve essere
impostata a un valore corrispondente alla velocità di
trasmissione del PLC/PC.
502 Rotazione libera
503 Arresto rapido
504 Freno CC
505 Avvio
506 Inversione
507 Selezione del setup
508 Selezione della velocità
Valore:
Ingresso digitale (DA MORSETTIERA) [0]
Bus (DA SERIALE) [1]
Logica “And” (LOGICA AND) [2]
Logica OR (LOGICA OR) [3]
3
3
MG03BA06 - VLT® è un marchio registrato Danfoss 71
Page 72

Programmazione
VLT® DriveMotor serie FCM
3
Funzione:
I parametri 502-508 consentono di scegliere se controllare
il motore FC mediante i morsetti (ingresso digitale) e/o
mediante il bus.
In caso di selezione di Logica “and” o Bus, il comando in
questione può essere attivato solo se trasmesso mediante
la porta di comunicazione seriale. In caso di Logica “and”, il
comando deve essere attivato anche tramite uno degli
ingressi digitali.
Descrizione:
[0] Ingresso digitale viene selezionato se il comando di
controllo in questione deve essere attivato solo mediante
un ingresso digitale.
[1] Bus viene selezionato se il comando di controllo in
questione deve essere attivato solo mediante un bit della
parola di controllo (comunicazione seriale).
[2] Logica "and" viene selezionato se il comando di
controllo in questione deve essere attivato solo se viene
trasmesso un segnale (segnale attivo = 1) mediante una
parola di controllo e un ingresso digitale.
Ingresso digitale
505-508 Bus Comando di controllo
0 0 0
0 1 0
1 0 0
1 1 1
Tabella 3.30
[3] Logica "or" viene selezionato se il comando di controllo
in question deve essere attivato se viene dato un segnale
(segnale attivo = 1) mediante una parola di controllo o un
ingresso digitale.
Ingresso digitale
505-508 Bus Comando di controllo
0 0 0
0 1 1
1 0 1
1 1 1
Tabella 3.31
Parametro 502 =
Ingresso digitale Bus Comando di controllo
0 0 1 Evoluzione libera
0 1 0 Motore in funzione
1 0 0 Motore in funzione
1 1 0 Motore in funzione
Tabella 3.32
Logica "and"
Parametro 502 =
Ingresso digitale Bus Comando di controllo
Tabella 3.33
Logica "or"
0 0 1 Evoluzione libera
0 1 1 Evoluzione libera
1 0 1 Evoluzione libera
1 1 0 Motore in funzione
509 Bus jog 1
Valore:
Parameter 0.0 202 [0 -]
10,0 HZ [100]
Funzione:
Con questo parametro viene impostata una velocità fissa
(jog) che viene attivata mediante la porta di comunicazione seriale.
Questa funzione è uguale a quella del parametro 213.
Descrizione:
La frequenza jog f
compreso fra f
può essere selezionata nell’intervallo
JOG
(parametro 201) e f
MIN
(parametro 202).
MAX
510 Bus jog 2
Valore:
Parameter 0.0 202 [0 -]
10,0 HZ [100]
Funzione:
Con questo parametro viene impostata una velocità fissa
(jog) che viene attivata mediante la porta di comunicazione seriale.
Questa funzione è uguale a quella del parametro 213.
Descrizione:
La frequenza jog f
compreso fra f
può essere selezionata nell’intervallo
JOG
(parametro 201) e f
MIN
(parametro 202).
MAX
512 Profilo telegramma
Valore:
Profilo Fieldbus (PROFILO FIELDBUS) [0]
Profilo FC (PROFILO FC) [1]
Funzione:
È possibile selezionare due profili con caratteristiche
diverse.
Descrizione:
Selezionare la parola di controllo desiderata.
Per ulteriori informazioni sulle parole di comando, vedere
Comunicazione seriale.
513 Intervallo tempo bus
Valore:
1-99 s [1-99]
1 s [1]
Funzione:
Questo parametro imposta il tempo massimo previsto che
deve trascorrere fra il ricevimento di due telegrammi
72 MG03BA06 - VLT® è un marchio registrato Danfoss
Page 73

Programmazione
VLT® DriveMotor serie FCM
consecutivi. Se questo tempo viene superato, si presume
che la comunicazione seriale si sia arrestata; l'azione che si
può intraprendere in seguito a questo evento è riportata
nel parametro 514.
Descrizione:
Impostare il tempo desiderato.
514 Funzione intervallo tempo bus
Valore:
Off (OFF) [0]
Blocco uscita (BLOCCATO) [1]
Arresto (ARRESTO) [2]
Marcia jog (MARCIA JOG) [3]
Velocità massima (VELOCITA' MASSIMA) [4]
Stop e scatto (STOP CON ALLARME) [5]
Funzione:
Questo parametro consente di selezionare la reazione
desiderata del motore FC quando viene superato il tempo
impostato per il timeout del bus (parametro 513). Se le
selezioni da [1] a [5] sono attive, i relè 01 e 04 saranno
disattivati.
Descrizione:
La frequenza di uscita del motore FC può: essere congelata
al valore attuale, essere congelata al riferimento, andare
all'arresto, andare alla frequenza jog (parametro 213),
andare alla frequenza di uscita max (parametro 202)
oppure arrestarsi e attivare uno scatto.
515 Visualizzazione dati: Riferimento %
Valore:
XXX.X% [XXXX]
Funzione:
Questo parametro può essere visualizzato mediante la
porta di comunicazione seriale.
Descrizione:
Il valore mostrato corrisponde al riferimento totale (somma
di rif. digitali / analogici / preimpostati / bus / congelati /
catch-up e slow-down).
Questo valore viene aggiornato ogni 320 ms.
516 Visualizzazione dati: Unità di riferimento
Valore:
X.XXX Hz or giri/min. [XXXX]
Funzione:
Questo parametro può essere visualizzato mediante la
porta di comunicazione seriale.
Descrizione:
Indica il valore di stato dell’unità data sulla base della
somma di riferimento prescelta.
Questo valore viene aggiornato ogni 320 ms.
517 Visualizzazione dati: Retroazione
Valore:
X.XXX [XXXX]
Funzione:
Questo parametro può essere visualizzato mediante la
porta di comunicazione seriale.
Descrizione:
Indica il valore dei morsetti 1/2 con l’unità di misura/scala
selezionata nei parametri 414 e 415.
Questo valore viene aggiornato ogni 320 ms.
518 Visualizzazione dati: Frequenza
Valore:
XXX.X Hz [XXXX]
Funzione:
Questo parametro può essere visualizzato mediante la
porta di comunicazione seriale.
Descrizione:
Il valore mostrato corrisponde alla frequenza motore
attuale.
Questo valore viene aggiornato ogni 320 ms.
519
Valore:
XXX.X Hz [XXXX]
Funzione:
Questo parametro può essere visualizzato mediante la
porta di comunicazione seriale.
Descrizione:
Il valore corrisponde all'attuale frequenza di uscita
fMmoltiplicato per il fattore preimpostato nel parametro
008 Fattore di scala della frequenza di uscita.
520 Visualizzazione dati: Corrente
Valore:
XXX.XX A [XXXXX]
Funzione:
Questo parametro può essere visualizzato mediante la
porta di comunicazione seriale.
Descrizione:
Il valore mostrato è il valore calcolato della corrente
motore data.
Questo valore viene aggiornato ogni 320 ms.
521 Visualizzazione dati: Coppia
Valore:
XXX.X% [XXXX]
Funzione:
Questo parametro può essere visualizzato mediante la
porta di comunicazione seriale.
Descrizione:
Il valore mostrato è la coppia, con segno, fornita all’albero
motore. Il valore viene dato come percentuale della coppia
nominale.
Non esiste una perfetta linearità fra la corrente motore al
160 % e la coppia in relazione alla coppia nominale. A
causa delle tolleranze e delle differenze di temperatura,
Visualizzazione dati: Frequenza x fattore di
scala
3
3
MG03BA06 - VLT® è un marchio registrato Danfoss 73
Page 74

Programmazione
VLT® DriveMotor serie FCM
3
alcuni motori forniscono una coppia superiore. Di
conseguenza il valore minimo e il valore massimo
dipenderanno dalla corrente massima e minima del motore
usato.
Questo valore viene aggiornato ogni 320 ms.
522 Visualizzazione dati: Corrente, kW
Valore:
XX.XX kW [XXXX]
Funzione:
Questo parametro può essere visualizzato mediante la
porta di comunicazione seriale.
Descrizione:
Il valore mostrato viene calcolato sulla base della tensione
e della corrente del motore attuali.
Questo valore viene aggiornato ogni 320 ms.
523 Visualizzazione dati: Corrente, HP
Valore:
XX.XX HP (Stati Uniti) [XXXX]
Funzione:
Questo parametro può essere visualizzato mediante la
porta di comunicazione seriale.
Descrizione:
Il valore mostrato viene calcolato sulla base della tensione
e della corrente del motore attuali. Il valore viene indicato
sotto forma di HP americani.
Questo valore viene aggiornato ogni 320 ms.
524 Visualizzazione dati: Tensione motore
Valore:
XXX.X V [XXXX]
Funzione:
Questo parametro può essere visualizzato mediante la
porta di comunicazione seriale.
Descrizione:
Il valore mostrato è un valore calcolato usato per
controllate il motore.
Questo valore viene aggiornato ogni 320 ms.
525
Valore:
XXXX V [XXXX]
Funzione:
Questo parametro può essere visualizzato mediante la
porta di comunicazione seriale.
Descrizione:
Il valore mostrato è un valore misurato.
Il valore viene filtrato, vale a dire che possono passare circa
1,3 secondi dalla variazione di un valore in ingresso alla
visualizzazione sul display di questo valore.
Visualizzazione dati: Tensione collegamento CC
Questo valore viene aggiornato ogni 320 ms.
527 Visualizzazione dati: Term. FC
Valore:
0-100% [0-100]
Funzione:
Questo parametro può essere visualizzato mediante la
porta di comunicazione seriale.
Descrizione:
Vengono visualizzati solo numeri interi.
Questo valore viene aggiornato ogni 160 ms.
528 Visualizzazione dati: Ingresso digitale
Valore:
Unità
Funzione:
Questo parametro può essere visualizzato mediante la
porta di comunicazione seriale.
Descrizione:
Il valore mostrato indica lo stato dei segnali dei 4 morsetti
digitali (2, 3, 4 e 5).
Questo valore viene aggiornato ogni 20 ms.
533 Visualizzazione dati: Riferimento esterno %
Valore:
Da -200,0 a +200,0%
Funzione:
Questo parametro può essere visualizzato mediante la
porta di comunicazione seriale.
Descrizione:
Il valore indica, in percentuale, la somma dei riferimenti
esterni (somma di rif. analogici/bus/impulsi).
Questo valore viene aggiornato ogni 80 ms.
534 Visualizzazione dati: Parola di stato, binaria
Valore:
Unità
Funzione:
Questo parametro può essere visualizzato mediante la
porta di comunicazione seriale.
Descrizione:
Indica la "parola" di stato trasmessa mediante la porta di
comunicazione seriale.
537 Visualizzazione dati: Temperatura INV.
Valore:
Unità: ºC
Funzione:
Questo parametro può essere visualizzato mediante la
porta di comunicazione seriale.
74 MG03BA06 - VLT® è un marchio registrato Danfoss
Page 75

Programmazione
VLT® DriveMotor serie FCM
Descrizione:
Indica la temperatura del convertitore di frequenza. Questo
valore viene aggiornato ogni 10 s.
538 Visualizzazione dati: Parola di allarme
Valore:
Unità
Funzione:
Questo parametro può essere visualizzato mediante la
porta di comunicazione seriale. Vedere 4.2.1 Elenco degli
avvisi e degli allarmi.
Descrizione:
Indica l’eventuale presenza di un allarme sul motore FC.
Hex Messaggi di allarme
00000002 Scatto bloccato
00000040 Timeout HPFB
00000080 Timeout bus standard
00000100 Cortocircuito
00000200 Guasto alimentazione 24 V
00000400 Guasto di terra
00000800 Sovracorrente
00004000 Termistore motore
00008000 Sovraccarico inverter
00010000 Sottotensione
00020000 Sovratensione
00040000 Guasto di fase
00080000 Guasto z. trasl.
00100000 Sovratemperatura
02000000 Errore HPFB
08000000 Gu. accens.
10000000 Guasto interno
Tabella 3.34
539 Visualizzazione dati: Parola di controllo
Valore:
Unità
Funzione:
Questo parametro può essere visualizzato mediante la
porta di comunicazione seriale.
Descrizione:
Indica la parola di comando inviata tramite la porta di
comunicazione seriale in codice Hex al motore FC. Questo
valore viene aggiornato ogni 20 ms.
540 Visualizzazione dati: Parola di avviso
Valore:
Unità
Funzione:
Questo parametro può essere visualizzato mediante la
porta di comunicazione seriale. Vedere 4.2.1 Elenco degli
avvisi e degli allarmi.
Descrizione:
Indica in formato Hex la presenza di un eventuale avviso
sul motore FC.
Hex Messaggi di avviso
00000008 Timeout HPFB
00000010 Timeout bus standard
00000040 Limite corrente
00000200 Sovraccarico inverter
00001000 Avviso tensione bassa
00002000 Avviso tensione alta
00004000 Guasto di fase
00010000 Avviso errore zero vivo
00400000 Avviso, limite frequenza di uscita
00800000 Errore HPFB
40000000 Avviso alimentazione 24 V
80000000 Temperatura inverter eccessiva
Tabella 3.35
541 Visualizzazione dati: Parola di stato estesa
Valore:
Unità
Funzione:
Questo parametro può essere visualizzato mediante la
porta di comunicazione seriale.
Descrizione:
Indica in formato Hex la presenza di un eventuale avviso
sul motore FC.
Hex
01 Funz. rampa
04 Avviamento in senso orario/antiorario
08 Slow down
10 Catch-up
8000 Limite di frequenza
Tabella 3.36
542
Visualizzazione dati: Morsetto 1, ingresso
analogico
Messaggi di stato
Valore:
Unità: mA
Funzione:
Questo parametro può essere visualizzato mediante la
porta di comunicazione seriale.
Descrizione:
Il valore mostrato indica il valore del segnale sul morsetto
1.
La scala (parametri 336 e 337) non influenza la visualizzazione. I valori min e max sono determinati dallo scarto e
dalla regolazione del guadagno del convertitore AD.
3
3
MG03BA06 - VLT® è un marchio registrato Danfoss 75
Page 76

Programmazione
VLT® DriveMotor serie FCM
3
Questo valore viene aggiornato ogni 20 ms.
543
Valore:
Unità: X.X V
Funzione:
Questo parametro può essere visualizzato mediante la
porta di comunicazione seriale.
Descrizione:
Il valore mostrato indica il valore del segnale sul morsetto
2.
I fattori di scala (parametri 338 e 339) non influenzano la
visualizzazione. I valori min e max sono determinati dallo
scarto e dalla regolazione del guadagno del convertitore
AD.
Questo valore viene aggiornato ogni 20 ms.
561 Protocollo
Valore:
Protocollo FC (PROTOCOLLO FC) [0]
Modbus RTU [2]
Funzione:
È possibile scegliere fra tre diversi protocolli.
Descrizione:
Selezionare il protocollo della parola di controllo
desiderato.
Per ulteriori informazioni sull'utilizzo del Modbus RTU,
consultare MG10SX.
570 Parità Modbus e framing dei messaggi
Valore:
(PARI/1BIT DI STOP) [0]
(DISPARI/1 BIT DI STOP) [1]
(NESS. PARITÀ/1 BIT DI STOP) [2]
(NESS. PARITÀ/2 BIT DI STOP) [3]
Funzione:
Questo parametro imposta l'interfaccia Modbus RTU del
convertitore di frequenza in modo che possa comunicare
correttamente con il regolatore master. La parità (PARI,
DISPARI, o NESS. PARITÀ) deve essere impostata in modo
tale da corrispondere con l'impostazione del regolatore
master.
Descrizione:
Selezionare la parità che corrisponde all'impostazione per il
regolatore master Modbus. A volte viene utilizzata la parità
pari o dispari per consentire di verificare l'assenza di errori
nella parola trasmessa. Dato che il Modbus RTU utilizza il
più efficace metodo CRC (Cyclic Redundancy Check) per la
verifica degli errori, il controllo della parità viene raramente
utilizzato nelle reti Modbus RTU.
Visualizzazione dati: Morsetto 2, ingresso
analogico
NOTA!
Qualsiasi modifica disattiverà l'unità di visualizzazione
(LCP2) e impedirà anche l'ulteriore programmazione
tramite il protocollo FC.
571 Timeout comunicazioni Modbus
Valore:
10 ms-2000 ms
Funzione:
Questo parametro determina il tempo massimo che il
Modbus RTU del convertitore di frequenza attenderà tra i
singoli caratteri inviati dal regolatore master. Una volta
scaduto questo lasso di tempo, l'interfaccia Modbus RTU
del convertitore di frequenza assumerà di aver ricevuto
l'intero messaggio.
Descrizione:
Generalmente il valore di 100 ms è sufficiente per reti
Modbus RTU, anche se alcune reti Modbus RTU possono
funzionare con un valore di timeout value ridotto di 35 ms.
Se il valore impostato è troppo basso, l'interfaccia Modbus
RTU del convertitore di frequenza potrebbe perdere una
parte del messaggio. Dato che il controllo CRC non sarà
valido, il convertitore di frequenza ignorerà il messaggio.
Le conseguenti ritrasmissioni dei messaggi causeranno il
rallentamento delle comunicazioni sulla rete.
Se il valore impostato è troppo alto, il convertitore di
frequenza attenderà più del necessario per determinare
che il messaggio è completato. Ciò rallenterà la risposta
del convertitore di frequenza al messaggio e potrebbe
causare il timeout del regolatore. Le conseguenti
ritrasmissioni dei messaggi causeranno il rallentamento
delle comunicazioni sulla rete.
3.8
Parametri 600-678 - Guida alla
progettazione FCM 300
3.8.1 Parametri Gruppo 6-** Funzioni
tecniche
600 Dati di funzionamento: Ore di funzionamento
Valore:
Unità: ore
0,0-130.000,0
Funzione:
Questo parametro può essere letto mediante il display o la
porta di comunicazione seriale. Il valore non può essere
resettato.
Descrizione:
Indica il numero di ore di funzionamento del motore FC.
Il valore viene aggiornato nel motore FC ogni ora ed è
salvato allo spegnimento dell'apparecchio.
100 ms
76 MG03BA06 - VLT® è un marchio registrato Danfoss
Page 77

Programmazione
VLT® DriveMotor serie FCM
601 Dati di funzionamento: Ore di esercizio
Valore:
Unità: ore
0,0-130.000,0
Funzione:
Questo parametro può essere letto mediante il display o la
porta di comunicazione seriale. Il valore può essere
azzerato tramite il parametro 619.
Descrizione:
Indica il numero di ore di funzionamento del motore FC a
partire dal ripristino eseguito nel parametro 619.
Il valore viene aggiornato nel motore FC ogni ora ed è
salvato allo spegnimento dell'apparecchio.
603 Dati di funzionamento: Numero di accensione
Valore:
Unità: numero
0-9999
Funzione:
Questo parametro può essere letto mediante il display o la
porta di comunicazione seriale.
Descrizione:
Indica il numero di attivazioni della tensione di alimentazione al motore FC.
604
Valore:
Unità: numero
0-9999
Funzione:
Questo parametro può essere letto mediante il display o la
porta di comunicazione seriale.
Descrizione:
Indica il numero di allarmi per sovratemperatura del
motore FC.
605
Valore:
Unità: numero
0-9999
Funzione:
Questo parametro può essere letto mediante il display o la
porta di comunicazione seriale.
Descrizione:
Indica il numero di sovratensioni del motore FC.
Dati di funzionamento: Numero di sovratemperature
Dati di funzionamento: Numero di
sovratensioni
NOTA!
I parametri 615-617 Log guasti non possono essere
visualizzati mediante il quadro di comando integrato.
615 Log guasti: Codice errore
Valore:
[Indice 1-10] Codice errori: 0-99
Funzione:
Questo parametro consente di vedere il motivo per cui si
verifica uno scatto (disinserimento del convertitore di
frequenza). vengono definiti 10 valori del log [1-10].
Il numero di log più basso [1] contiene il valore dato più
recente/salvato per ultimo. Il numero di log più alto [10]
contiene il valore dato meno recente. In caso di uno
scatto, è possibile vedere la causa, l'ora e il possibile valore
della corrente o della tensione di uscita.
Descrizione:
Questo è indicato come codice guasto, in cui il numero fa
riferimento ad una tabella. Vedere 4.2.1 Elenco degli avvisi e
degli allarmi.
616 Log guasti: Tempo
Valore:
Unità: Ore
[Campo di visualizzazione: XX - XXX]
Funzione:
Parametro di tipo Registro a scorrimento. Questo
parametro consente di vedere il numero totale delle ore di
funzionamento prima del verificarsi dello scatto. Sono
memorizzati 10 numeri di log (1- 10).
Il numero di log inferiore (1) contiene il valore dato più
recente; il numero di log superiore (10) contiene il valore
dato meno recente.
Descrizione:
Visualizzazione opzionale.
Campo di visualizzazione: XX - XXX.
Il log guasti viene ripristinato dopo l'inizializzazione nel
parametro 620.
617 Log guasti: Valore
Valore:
[Indice XX - XXX]
Funzione:
Parametro di tipo Registro a scorrimento. Questo
parametro consente di vedere a quale valore corrente o
tensione si è verificato uno scatto.
Descrizione:
Visualizzazione di un solo valore.
Campo di visualizzazione: 0,0 - 999,9.
Il log guasti viene ripristinato dopo l'inizializzazione (par.
620).
619 Ripristino contatore ore di esercizio
Valore:
Nessun ripristino (NESSUNA OPERAZIONE) [0]
Ripristino (RESET CONTATORE) [1]
Funzione:
Azzeramento del contatore delle ore di esercizio
(parametro 601).
3
3
MG03BA06 - VLT® è un marchio registrato Danfoss 77
Page 78

Programmazione
VLT® DriveMotor serie FCM
3
Descrizione:
Se è stato selezionato [1] Ripristino il contatore delle ore di
esercizio del motore FC viene azzerato.
620 Modo di funzionamento
Valore:
Funzionamento normale (FUNZ. NORMALE) [0]
Test scheda di com. (TEST SCHEDA DI COMANDO) [2]
Inizializzazione (INIZIALIZZAZIONE) [3]
Funzione:
Oltre alla funzione normale, questo parametro può essere
utilizzato per due diversi test.
Inoltre, tutti i parametri (tranne i parametri 603-605)
possono essere inizializzati.
Descrizione:
[0] Funzione normale viene selezionata per il funzionamento normale con il motore nell'applicazione
selezionata.
[2] Test scheda di comando viene selezionato se si desidera
controllare gli ingressi analogici e digitali, nonché le uscite
analogiche, digitali e relè e la tensione di comando +10 V.
Per questo test è necessario un connettore con
collegamenti interni. Setup: uscita analogica / digitale agli
ingressi digitali 3, 4 e 5 e alimentazione 10 V all’ingresso
analogico / digitale 2.
[3] Inizializzazione viene selezionata se si desidera
l’impostazione di fabbrica dell'apparecchio senza il
ripristino dei parametri 500, 501 + 600-605. L'inizializzazione è attiva dopo una nuova accensione.
621 Targhetta: Tipo FC
Valore:
Dipende dall'unità
Funzione:
I dati chiave dell’unità possono essere visualizzati mediante
il display o la comunicazione seriale.
Descrizione:
Tipo indica le dimensioni dell’unità e le funzioni di base
previste.
624 Targhetta: Versione software n.
Valore:
Dipende dall'unità
Funzione:
I dati chiave dell’unità possono essere visualizzati mediante
il display o la comunicazione seriale.
Descrizione:
La versione software indica il numero di versione.
625 Targa dati: N. identificazione LCP
Valore:
Dipende dall’unità
Funzione:
I dati chiave dell’unità possono essere visualizzati mediante
il display o la porta di comunicazione seriale.
Per esempio: ID 1.42 2 kB.
626 Targhetta: N. identificazione database
Valore:
Dipende dall'unità
Funzione:
I dati chiave dell’unità possono essere visualizzati mediante
il display o la porta di comunicazione seriale.
628 Targhetta: Tipo di opzione dell'applicazione
Valore:
Funzione:
I dati chiave dell’unità possono essere visualizzati mediante
il display o la porta di comunicazione seriale.
630
Valore:
Funzione:
I dati chiave dell’unità possono essere visualizzati mediante
il display o la porta di comunicazione seriale.
632 Identificazione software BMC
Valore:
Funzione:
I dati chiave dell’unità possono essere visualizzati mediante
il display o la porta di comunicazione seriale.
633 Identificazione database motore
Valore:
Funzione:
I dati chiave dell’unità possono essere visualizzati mediante
il display o la porta di comunicazione seriale.
634 Identificazione unità per comunicazione
Valore:
Funzione:
I dati chiave dell’unità possono essere visualizzati mediante
il display o la porta di comunicazione seriale.
635 Cod. art. software
Valore:
Funzione:
I dati chiave dell’unità possono essere visualizzati mediante
il display o la porta di comunicazione seriale.
Targhetta: N. d'ordine tipo di opzione di
comunicazione
78 MG03BA06 - VLT® è un marchio registrato Danfoss
Page 79

Programmazione
678 Configurazione scheda di controllo
Valore:
Versione standard (VER. STANDARD) [1]
Versione Profibus 3 Mbaud
(VER. PROFIBUS 3 MB) [2]
Versione Profibus 12 Mbaud
(VER.PROFIBUS 12 MB) [3]
Funzione:
Questo parametro consente di configurare la scheda di
comando Profibus. Il valore predefinito dipende dall’unità
prodotta e corrisponde al valore massimo che è possibile
ottenere. Ciò significa che tale valore può essere solo
ridotto per una versione a prestazioni inferiori.
VLT® DriveMotor serie FCM
3
3
MG03BA06 - VLT® è un marchio registrato Danfoss 79
Page 80

Tutto sull'FCM 300
4 Tutto sull'FCM 300
4.1 Condizioni speciali
VLT® DriveMotor serie FCM
L'entità della corrente di dispersione a terra dipende dai
seguenti fattori, in ordine di priorità:
4.1.1 Isolamento galvanico (PELV)
44
PELV offre protezione mediante bassissima tensione. La
protezione contro le scosse elettriche è garantita se tutti i
dispositivi collegati sono del tipo PELV e l'installazione è
effettuata come descritto nelle norme locali e nazionali
relative all'isolamento PELV.
Nei motori Serie FCM 300, tutti i morsetti di comando
vengono alimentati con o collegati a tensione bassissima
(PELV).
L'isolamento galvanico (garantito) si ottiene ottemperando
ai requisiti relativi ad un isolamento superiore e
garantendo le corrispondenti distanze di creapage/
clearance . Tali requisiti sono descritti nello standard EN
50178.
I componenti l'isolamento elettrico descritto sotto, sono
conformi anche ai requisiti relativi all'isolamento superiore
e al testo corrispondente descritto in EN 50178.
L'isolamento galvanico può essere presente in tre posizioni
(vedere Disegno 4.1) e precisamente:
L’alimentatore (SMPS) include l’isolamento del
•
segnale di UDC, che indica la tensione CC del
circuito intermedio.
Comando di gate che aziona gli IGBT (isolatori
•
ottici).
Trasduttori di corrente (isolatori ottici).
•
Corrente di dispersione verso terra
4.1.2
La corrente di dispersione a terra è causata in primo luogo
dalla capacità fra le fasi del motore e il telaio del motore. Il
filtro RFI determina l'ulteriore formazione di corrente di
dispersione, in quanto il circuito del filtro è collegato a
terra mediante condensatori.
1. Frequenza di commutazione
2. Motore eventualmente messo a terra in loco.
La corrente di dispersione è importante per la sicurezza
durante il funzionamento del convertitore di frequenza, se
(per errore) il convertitore di frequenza non è stato
collegato a massa.
NOTA!
I motori FC 305-375 hanno una corrente di dispersione >
3.5 mA, da 4 a 20 mA circa. Questa varia commutando le
frequenze all'interno dell'intervallo considerato.
Ciò significa che è necessario effettuare una messa a terra
rinforzata per assicurare la conformità con la norma EN
50178.
Non usare mai relè ELCB (interruttore per le correnti di
dispersione a terra) chiamati anche RCD (dispositivo a
corrente residua) che non sono adatti per correnti di
guasto CC (tipo A).
Se si usa un RCD, deve essere:
- idoneità per la protezione di un'apparecchiatura
con una componente continua nella corrente di
guasto (raddrizzatore trifase)
- Adatto per l'accensione con una breve corrente di
carica verso terra
- Idoneità per correnti di dispersione elevate.
Ciò significa che è possibile far funzionare il motore FC 300
su un RCD di tipo B:
L'RCD (Residual Current Devices) di tipo B dispone di una
tolleranza sulla soglia di scatto. Si consiglia pertanto di
usare un RCD quando la corrente di dispersione massima
del motore FC (vedere sopra, 20 mA) è inferiore a 1/3 della
soglia di scatto dell'RCD. Ciò significa che la soglia di
scatto per l'RCD dovrà essere di 60 mA o superiore, ad
esempio un RCD di tipo B con una soglia di scatto di 100
mA può essere usato ai fini della protezione.
80 MG03BA06 - VLT® è un marchio registrato Danfoss
Page 81

Tutto sull'FCM 300
Disegno 4.1 Isolamento galvanico
VLT® DriveMotor serie FCM
4 4
Condizioni di funzionamento estreme
4.1.3
Sovratensione generata dal motore
La tensione nel circuito intermedio subisce un aumento
quando il motore funziona da generatore. Ciò avviene in
due casi:
Il carico fa funzionare il motore (con frequenza di
•
uscita costante dal convertitore di frequenza) e
cioè il carico genera energia.
Durante la decelerazione ("ramp-down") se il
•
momento di inerzia è elevato, il carico è basso e
il tempo di rampa di decelerazione è troppo
breve per consentire che l'energia venga dissipata
nel convertitore di frequenza VLT, nel motore e
nell'installazione.
L'unità di comando cerca, se possibile, di correggere il
valore di rampa.
Quando viene raggiunto un determinato livello di tensione,
l’inverter si disinserisce per proteggere i transistor e
condensatori del circuito intermedio.
Se il motore serie FCM 300 è sovraccaricato (è stato
raggiunto il limite di corrente nel parametro 221), i
dispositivi di controllo riducono la frequenza di uscita nel
tentativo di ridurre il carico.
Se il sovraccarico è eccessivo, può essere presente una
corrente che determina il disinserimento del motore FC
dopo circa 1,5 s.
4.1.4 Rumorosità acustica
Qui di seguito sono riportati i valori tipici, misurati ad una
distanza di 1 m dall'apparecchio a pieno carico:
2 poli 4 poli
FCM 305 54 dB(A)
FCM 311 58 dB(A)
FCM 315 59 dB(A)
FCM 322 58 dB(A)
FCM 330 61 dB(A)
FCM 340 62 dB(A) 63 dB(A)
FCM 355 64 dB(A) 60 dB(A)
FCM 375 61 dB(A)
Caduta di tensione dell'alimentazione di rete
Durante la caduta di tensione dell'alimentazione di rete, i
motori serie FCM 300 continuano a funzionare fino a
quando la tensione sul circuito intermedio non scende al
di sotto del livello minimo di funzionamento: di norma, il
15% al di sotto della tensione di alimentazione minima
della Serie FCM 300.
Il tempo che precede l’arresto dell’inverter dipende dalla
tensione di rete prima della caduta e dal carico del motore.
Sovraccarico statico
MG03BA06 - VLT® è un marchio registrato Danfoss 81
Tabella 4.1
Bilanciamento
4.1.5
L'FCM 300 è bilanciato alla classe R secondo lo standard
ISO8821 (bilanciamento ridotto). Per le applicazioni critiche
specialmente ad alta velocità (>4000 RPM) potrebbe essere
necessario il bilanciamento speciale (classe S).
Page 82

Tutto sull'FCM 300
VLT® DriveMotor serie FCM
4.1.6 Protezione termica e riduzione della
potenza
Il motore Serie FCM 300 è protetto termicamente in caso
di superamento dei valori limite. Alle alte temperature la
frequenza di commutazione viene gradualmente ridotta a
2 kHz e, se necessario, il motore scatta.
44
NOTA!
La combinazione di una frequenza di commutazione
elevata e dell'assenza di una ventola di raffreddamento
potrebbe danneggiare l'unità.
Sopra i 1000 m, la temperatura ambiente (T
corrente di uscita massima (I
in base al grafico seguente:
1. Riduzione della corrente di uscita rispetto
all’altitudine, con T
2. Riduzione della temperatura max. T
all’altitudine, al 100% della corrente di uscita.
) devono essere ridotte
VLT,MAX
= max. 40°C
AMB
AMB
AMB
) o la
rispetto
4.1.7 Declassamento per temperatura
ambiente
La temperatura ambiente (T
massima temperatura ammessa. La temperatura media
(T
almeno 5° C.
) calcolata nelle 24 ore, deve essere inferiore di
AMB, AVG
) corrisponde alla
AMB,MAX
Disegno 4.3
4.1.9 Declassamento in relazione ad un
Se il motore Serie FCM 300 viene azionato a temperature
superiori a 40º C, è necessario procedere ad una riduzione
della corrente di uscita continua.
funzionamento a bassa velocità
Quando una pompa centrifuga o un ventilatore sono
controllati da un motore FC, non è necessario ridurre la
corrente di uscita alle basse velocità in quanto le caratteristiche di carico delle pompe centrifughe/ventilatori
garantiscono automaticamente la riduzione necessaria.
Disegno 4.2
Declassamento in base alla pressione
4.1.8
dell'aria atmosferica
Per altitudini superiori ai 2 km, contattare Danfoss Drives
per informazioni sulle caratteristiche PELV.
Al di sotto dei 1000 m di altitudine, non è necessario
procedere ad alcun declassamento.
Occorre ridurre la potenza (vedere Disegno 4.4) o utilizzare
un ventilatore indipendente (metodo di raffreddamento
del motore 2) in caso di motori FC che azionino in modo
continuo a bassa velocità applicazioni a coppia di carico
costante.
La coppia nominale (100%) può essere mantenuta fino a
15 minuti e ad un ciclo di funzionamento fino al 25% a
bassa velocità.
Disegno 4.4 Declassamento in relazione ad un funzionamento a
bassa velocità
82 MG03BA06 - VLT® è un marchio registrato Danfoss
Page 83

Tutto sull'FCM 300
VLT® DriveMotor serie FCM
4.1.10 Declassamento in relazione ad alte
frequenze di commutazione
Il motore Serie FCM 300 può usare due diversi schemi
PWM: SFAVM e 60° AVM. L’impostazione di fabbrica è
SFAVM. Lo schema PWM può essere modificato nel
parametro 446. Con una velocità inferiore a 25 Hz, il
motore Serie FCM 300 passa automaticamente a SFAVM.
Impostazione di fabbrica della frequenza di commutazione
è 4000 Hz. Può essere impostata fra 2 e 14 kHz nel
parametro 411.
Una frequenza di commutazione superiore consente un
funzionamento più silenzioso ma causa perdite maggiori
nell'elettronica del motore FC e rende necessaria
un'opportuna riduzione di potenza.
Vedere Disegno 4.5
4.1.12
La Serie FCM 300 è stata progettata per essere conforme
allo standard CEI 60068-2-3, EN 50178 articolo 9.4.2.2/DIN
40040, classe E, a 40° C.
Calore di smorzamento ciclico secondo le norme CEI
60068-2-30, a 40° C.
Umidità dell'aria
4.1.13 Norma UL
La serie FCM 300 è conforme alla norma UL.
Vedere 2.1.2 Dati tecnici generali per l'uso corretto dei
prefusibili.
4.1.14
Rendimento dei convertitori di frequenza (η
Il carico applicato sul convertitore di frequenza ha poca
influenza sul suo rendimento. In generale, il rendimento
alla frequenza nominale fM,N, è lo stesso sia quando il
motore fornisce il 100% della coppia nominale dell’albero,
sia quando essa è soltanto pari al 75%, come in caso di
carichi parziali.
Rendimento
VLT
)
4 4
Disegno 4.5 Caratteristiche della coppia
4.1.11
I motori Serie FCM 300 sono stati testati secondo una
procedura basata sui seguenti standard:
IEC 60068-2-6:
IEC 60068-2-34: Vibrazioni casuali banda larga
IEC 60068-2-35: Vibrazioni casuali banda larga
IEC 60068-2-36: Vibrazioni casuali banda larga
I motori serie FCM 300 sono conformi ai requisiti definiti
negli standard suddetti.
Vibrazioni e urti
Vibrazioni (sinusoidali) - 1970
- requisiti generali
- alta riproducibilità
- media riproducibilità
Tabella 4.2
Ciò significa anche che il rendimento del convertitore di
frequenza non varia pur scegliendo caratteristiche U/f
diverse.
Tuttavia le caratteristiche U/f influenzano il rendimento del
motore.
Il rendimento degrada lievemente impostando la frequenza
di commutazione a un valore superiore a 5 kHz. L'efficienza
risulterà inoltre lievemente ridotta in caso di alta tensione
di rete 480 V.
Rendimento del motore (η
Il motore dell'FCM 300 è progettato secondo l'IEC2 e
testato secondo l'IEC 60034-1.
Il rendimento di un motore collegato al convertitore di
frequenza dipende dal livello di magnetizzazione. Con dati
ottimizzati, il rendimento è altrettanto buono quanto con il
funzionamento di rete. Nell'intervallo pari al 75-100% della
coppia nominale, il rendimento del motore è praticamente
costante, indipendentemente dal fatto che il motore sia
controllato da un convertitore di frequenza o che sia
direttamente collegato alla rete. L'influsso della frequenza
di commutazione sull'efficienza è marginale.
MOTORE
)
MG03BA06 - VLT® è un marchio registrato Danfoss 83
Page 84

1,02
1,01
1,00
0,99
0,98
0,97
0,96
0,95
0,94
0,93
0,92
0,91
0,90
0,89
0,88
0,87
0,86
0,85
0,84
0,83
0,82
0,81
0,80
30Hz
40Hz
50Hz
60Hz
70Hz
100% Load 75% Load 50% Load 25% Load
Output Frequency
175NA159.10
Relative Efficiency
175HA034.10
Tutto sull'FCM 300
VLT® DriveMotor serie FCM
Rendimento del sistema (η
Per calcolare l'efficienza del sistema (FCM), è necessario moltiplicare le prestazioni del convertitore di frequenza (η
prestazioni del motore (η
SYSTEM
MOTOR
): η
)
SYSTEM
= η
VLT
x η
MOTOR
) per le
VLT
44
Disegno 4.6 Curve di rendimento tipiche
Il calcolo dell'efficienza dell'FCM 300 calcola l'efficienza
del'FCM 300 in presenza di diversi carichi sulla base di
Disegno 4.6. Il fattore in questo grafico deve essere
moltiplicato per il fattore di rendimento specifico riportato
Correnti
armoniche
Hz 50 Hz 250 Hz 350 Hz 550 Hz
In/I1 [%] 100% 44% 29% 8%
I
1
I
5
I
7
I
11
nelle tabelle a specifica.
Tabella 4.3
Esempio: Assumiamo un FCM 375 ad un carico del 25% ed
una velocità di 30 Hz. Il grafico mostra 0,845 - il
rendimento nominale per un FCM 375 è 0,876.
Le armoniche non contribuiscono direttamente alla
dissipazione di potenza, ma aumentano le perdite di calore
nell’installazione (trasformatore, cavi). Di conseguenza,
Il rendimento effettivo dell'FCM 300 è quindi:
0,845x0,876=0,74 a velocità (30 Hz) e carico (25%) parziali.
4.1.15
Un motore FC assorbe una corrente non sinusoidale dalla
rete, destinata ad aumentare la corrente di ingresso I
Una corrente non sinusoidale può essere trasformata
mediante l’analisi di Fourier, e suddivisa in correnti ad
onde sinusoidali di frequenza differente, e quindi con
differenti correnti armoniche IN aventi una frequenza di
base di 50 Hz:
Interferenza di rete/armoniche
RMS
.
negli impianti con una percentuale elevata di carico di
raddrizzamento, è necessario mantenere le correnti
armoniche ad un livello basso per evitare il sovraccarico
del trasformatore e temperature elevate nei cavi.
Alcune delle correnti armoniche potrebbero generare
disturbi per i dispositivi di comunicazione collegati allo
stesso trasformatore o provocare risonanza con batterie di
rifasamento.
Disegno 4.7
84 MG03BA06 - VLT® è un marchio registrato Danfoss
Page 85

Tutto sull'FCM 300
VLT® DriveMotor serie FCM
Per garantire basse correnti armoniche, il motore FCM 300
è dotato di serie di bobine del circuito intermedio. THD
(corrente) ≤ 54%
La distorsione di tensione sulla rete dipende dalle
dimensioni delle correnti armoniche moltiplicate per
l'impedenza di rete della frequenza in questione. La
distorsione di tensione totale THD è calcolata in base alle
singole armoniche di tensione utilizzando la formula
seguente:
U
THD =
U
2
2
1
+...+U
(%)
2
n
4.1.16 Fattore di potenza
Il fattore di potenza indica la relazione fra I1 e I
Fattore di potenza per regolazione trifase
Il fattore di potenza indica in che misura il motore FC
applica un carico alla rete di alimentazione.
Quanto minore è il fattore di potenza, tanto maggiore è la
corrente di ingresso I
Un fattore di potenza elevato indica inoltre che le
differenti correnti armoniche sono basse.
4.1.17
Il marchi CE hanno lo scopo di evitare ostacoli tecnici al
commercio in ambito EFTA ed UE. Il marchio CE introdotto
dalla UE è un semplice metodo per indicare se un
prodotto è conforme alle corrispondenti direttive UE. Il
marchio CE non fornisce indicazioni sulla qualità o sulle
specifiche dei prodotti. I convertitori di frequenza sono
oggetto di tre direttive UE:
4.1.18
Tutte le macchine con parti critiche in movimento sono
contemplate dalla direttiva macchine entrata in vigore il 1
gennaio 1995. Poiché il funzionamento dei convertitori di
frequenza è in larga misura elettricoe il motore verrà
sempre collegato ad altre macchine, questi non rientrano
nella direttiva macchine. Tuttavia, se un motore FC deve
essere utilizzato su una macchina, forniamo informazioni
sugli aspetti di sicurezza relativi al motore FC mediante
Che cos'è il marchio CE?
La direttiva macchine (98/37/CEE)
per lo stesso rendimento in kW.
RMS
RMS
.
una dichiarazione del produttore. Tali informazioni
vengono fornite mediante una dichiarazione del
produttore.
4.1.19 La direttiva sulla bassa tensione
(73/23/CEE)
I convertitori di frequenza devono essere dotati di marchio
CE in conformità alla direttiva sulla bassa tensione. Tale
direttiva concerne tutte le apparecchiature e gli strumenti
elettrici funzionanti negli intervalli compresi fra 50-1000 V
CA e 75-1500 V CC.
4.1.20
EMC è l'abbreviazione di compatibilità elettromagnetica. La
presenza di compatibilità elettromagnetica significa che
l'interferenza reciproca fra diversi componenti e apparecchiature è talmente ridotta da non influire sul loro
funzionamento. La direttiva EMC è entrata in vigore il 1°
gennaio 1996. La direttiva fa distinzione fra componenti,
apparecchiature, sistemi e installazioni.
4.1.21
La direttiva EMC (89/336/CEE)
Campo di applicazione della
direttiva
Le "Linee direttrici per l’applicazione della direttiva
89/336/CCE del Consiglio" definiscono tre situazioni tipiche
per l’utilizzo di un motore FC. Per ogni situazione viene
indicato se essa è contemplata dalla direttiva EMC e se
deve essere applicato in marchio CE.
1. Il motore FC viene venduto direttamente al
consumatore finale. Il motore FC viene ad
esempio venduto in un mercato "fai da te". Il
consumatore finale è un profano. L'utente finale
installa il motore FC personalmente, ad esempio
su una macchina per praticare un determinato
hobby, un elettrodomestico ecc. Per queste
applicazioni il motore FC deve essere dotato di
marchio CE in base alla direttiva EMC.
2. Il motore FC è destinato ad essere installato in un
impianto. L'impianto è realizzato da professionisti
del settore. Potrebbe essere un impianto di
produzione o un impianto di riscaldamento/
ventilazione progettato e installato da professionisti del settore. Né il motore FC né l'impianto
finito devono essere dotati di marchio CE in base
alla direttiva EMC. Tuttavia l'apparecchio deve
essere conforme ai requisiti EMC fondamentali
della direttiva. L'installatore lo può garantire
utilizzando componenti, apparecchiature e sistemi
dotati di marchio CE in base alla direttiva EMC.
4 4
MG03BA06 - VLT® è un marchio registrato Danfoss 85
Page 86

Tutto sull'FCM 300
VLT® DriveMotor serie FCM
3. Il motore FC viene venduto come parte di un
sistema completo, che viene commercializzato
come tale. Potrebbe essere ad esempio un
sistema di condizionamento dell'aria. Il sistema
completo deve essere dotato di marchio CE in
base alla direttiva EMC. Il produttore del sistema
può garantire il diritto all'applicazione del
marchio CE in base alla direttiva EMC utilizzando
componenti dotati di marchio CE oppure
44
4.1.22
verificando la compatibilità elettromagnetica del
sistema. Scegliendo di usare solo componenti
dotati di marchio CE, non dovrà testare l'intero
sistema.
Motore serie FCM 300 Danfoss e
4.1.23
Conformità alla Direttiva EMC
89/336/CEE
Nella grande maggioranza dei casi il VLT DriveMotor è
usato da professionisti del settore come un componente
complesso facente parte di un'apparecchiatura, un sistema
o un'installazione più grandi. È importante ricordare che
qualsiasi responsabilità relativa alle caratteristiche EMC
finali dell'applicazione, del sistema o dell'impianto, a carico
dell'installatore. Come ausilio per l'installatore, Danfoss ha
realizzato direttive di installazione EMC per sistemi
motorizzati. Vengono rispettati gli standard e i livelli di
prova indicati per i sistemi motorizzati, a condizione che
siano state seguite le istruzioni per un'installazione
conforme ai requisiti EMC.
marchio CE
Standard EMC
- Tutte le specifiche EMC indicate si riferiscono alle
impostazioni di fabbrica.
- Frequenza di commutazione max 4 kHz.
- I cavi dati/comando schermati devono essere
usati per la protezione da sbalzi di corrente.
- Il motore FC deve essere collegato a massa.
- Impedenza di linea massima/minima Z
+ j0,15 ohm; Z
commutazione EN 61800-3)
= 0 + j0 ohm. (camme di
min
max
= 0,24
Il marchio CE ha una funzione positiva quando viene usato
per il suo scopo originale, vale a dire facilitare il
commercio in ambito UE ed EFTA.
Tuttavia il marchio CE può coprire diverse specifiche. Ciò
significa che è necessario verificare cosa concerne specificamente un dato marchio CE.
Le specifiche contemplate possono essere infatti
ampiamente differenti. Questo è il motivo per cui il
marchio CE può infondere negli installatori una falsa
sensazione di sicurezza quando il motore FC viene
impiegato come componente in un sistema.
4.1.24
NOTA!
Danfoss applica il marchio CE ai VLT® DriveMotor in
conformità alla direttiva sulla bassa tensione. Ciò significa
che, se il motore FC è installato correttamente, Danfoss
garantisce la conformità con la direttiva sulla bassa
tensione. Danfoss rilascia una dichiarazione di conformità a
conferma del fatto che il nostro marchio CE è conforme
alla direttiva sulla bassa tensione.
Il marchio CE vale anche per la direttiva EMC, a condizione
che siano state seguite le istruzioni indicate nel Manuale di
funzionamento per un'installazione e un filtraggio corretti
dal punto di vista della compatibilità elettromagnetica. Su
questa base viene rilasciata una dichiarazione di
conformità alla direttiva EMC.
La Guida rapida fornisce istruzioni di installazione
dettagliate per garantire la conformità ai requisiti EMC.
Inoltre Danfoss specifica quali norme vengono soddisfatte
dai nostri diversi prodotti.
Danfoss offre i filtri mostrati nelle specifiche e fornisce
volentieri altri tipi di assistenza che possano contribuire a
ottenere i migliori risultati relativi alla compatibilità elettromagnetica.
Standard generici
Gli standard generici sono enunciati nella direttiva EMC
(89/336/CEE).
Il motore FC è conforme alle norme:
EN 61000-6-3 1), EN 61000-6-1.
Ambiente residenziale, commerciale e di industria leggera.
EN 61000-6-2, EN 61000-6-4.
Ambiente industriale.
1)
I livelli di emissione indicati dalle norme EN 61000-6-3
sono rispettati solo con motori FC provvisti di filtro
opzionale di classe B-1.
Il motore FC è inoltre conforme alle norme: DIN VDE
0160/1990
2)
'Protezione da sovratensione 7.3.1 classe 1'
2)
86 MG03BA06 - VLT® è un marchio registrato Danfoss
Page 87

Tutto sull'FCM 300
VLT® DriveMotor serie FCM
Norme dei prodotti
Le norme dei prodotti sono enunciate nell'EN 61800-3 (CEI
61800-3).
Il motore FC è conforme alle norme:
EN 61800-3, distribuzione illimitata
EN 61800-3, distribuzione limitata.
3)
I livelli di emissione indicati dalle norme EN 61800-3,
distribuzione illimitata sono rispettati solo con motori FC
con filtro opzionale di classe B-1.
Norme di base, emissioni
EN 55011: Limiti e metodi di misurazione dei
•
radiodisturbi di apparecchiature industriali,
scientifiche e mediche (ISM) in radiofrequenza.
EN 55022: Limiti e metodi di misurazione dei
•
radiodisturbi di tecnologie di informazione.
EN 61000-3-2: Limiti delle emissioni di correnti
•
armoniche (corrente di ingresso delle apparecchiature ≥ 16 A)
EN 61000-3-4: Limiti delle emissioni di correnti
•
armoniche (corrente di ingresso delle apparecchiature ≤ 16 A)
Norme di base, immunità
EN 61000-2-4 (IEC 61000-2-4):
•
Livelli di compatibilità
Simulazione delle fluttuazioni di tensione e
frequenza, armoniche e buchi sulla linea di
alimentazione.
EN 61000-4-2 (IEC 61000-4-2): Scarica elettrostatica
•
(ESD)
Simulazione di scariche elettrostatiche.
EN 61000-4-4 (IEC 61000-4-4): Oscillazioni
•
transitorie da scoppio, 5/50 nS
Simulazione di interferenze provocate dalla
commutazione di contattori, relè o dispositivi
simili.
EN 61000-4-5 (IEC 61000-4-5):
•
Sbalzi di corrente 1,2/ 50 µS.
Simulazione di oscillazioni transitorie causate ad
esempio da fulmini che cadono vicino alle installazioni.
EN 61000-4-3 (IEC 61000-4-3):
•
Campo elettromagnetico in radiofrequenza.
Modulazione di ampiezza.
Simulazione delle interferenze causate dalle
apparecchiature di trasmissione radio.
EN 61000-4-6: (IEC 61000-4-6):
•
Modo comune RF.
3)
.
Simulazione dell'impatto delle apparecchiature di
trasmissione radio collegate a cavi di
connessione.
ENV 50204:
•
Campo elettromagnetico in radiofrequenza.
Modulazione di impulsi.
Simulazione dell’impatto dei telefoni cellulari
GSM.
Considerazioni generali sulle emissioni EMC
Per la schermatura alle alte frequenze, il cavo schermato
usato per il Profibus, il bus standard, i cavi di comando e
l’interfaccia segnali devono in genere essere collegati alla
protezione a entrambe le estremità.
Aspetti generali dell’immunità EMC
In caso di problemi di interferenze alle basse frequenze
(ondulazioni di terra), il cavo schermato usato per il
Profibus, il bus standard, i cavi di comando e l’interfaccia
segnali possono essere lasciati aperti ad un’estremità.
4.1.25
Come tutte la apparecchiature elettroniche, un convertitore
di frequenza VLT è composto di un elevato numero di
componenti meccanici e elettronici sensibili a condizioni
ambientali particolarmente critiche.
Ambienti aggressivi
AVVISO
Evitare di installare il convertitore di frequenza VLT in
ambienti con liquidi, particelle o gas sospesi nell’aria che
potrebbero danneggiare i componenti elettronici. La
mancata applicazione di misure protettive adeguate
aumenta il rischio di interruzioni del servizio e contemporaneamente riduce la durata del convertitore di frequenza
VLT.
I liquidi trasportati attraverso l’aria possono condensarsi
all’interno del convertitore di frequenza VLT. Inoltre i
liquidi possono generare un processo di corrosione dei
componenti e delle parti metalliche.
Anche il vapore, l'olio e l’acqua salata possono favorire la
corrosione dei componenti e delle parti metalliche.
In questi ambienti, si raccomanda di installare unità dotate
di protezione ≥ IP 54.
In ambienti con temperature e tassi di umidità elevati, i
gas corrosivi, quali ad esempio i composti di zolfo, azoto e
cloro, generano dei processi chimici sui componenti del
convertitore di frequenza VLT. Tali reazioni chimiche
danneggiano in breve tempo i componenti elettronici.
4 4
MG03BA06 - VLT® è un marchio registrato Danfoss 87
Page 88

Tutto sull'FCM 300
NOTA!
L’installazione dei convertitori di frequenza VLT in ambienti
aggressivi aumenta il rischio di interruzioni del servizio e
riduce notevolmente la durata dell’apparecchio.
Prima di procedere con l’installazione del convertitore di
frequenza VLT, si raccomanda di verificare la presenza di
liquidi, particelle e gas nell’ambiente. Ciò può essere fatto
44
controllando lo stato delle unità installate in questo
ambiente. Indicatori tipici della presenza di liquidi dannosi
sospesi nell’aria, sono ad esempio l'acqua o il petrolio
oppure segni di corrosione sulle parti metalliche.
Livelli eccessivi di particelle di polvere vengono spesso
rilevati sui cabinet di installazione e sulle installazioni
elettriche esistenti.
Collettori di rame ed estremità dei cavi di unità già
installate anneriti, normalmente indicano la presenza di gas
aggressivi sospesi nell’aria.
No. Descrizione Avviso Allarme per
2 Guasto zero traslato (ERRORE ZERO VIVO) X X
4 Guasto di fase (MANCA FASE RETE) X X X
5 Avviso tensione alta (TENSIONE CC ALTA) X
6 Avviso tensione bassa (TENSIONE CC BASSA) X
7 Sovratensione (SOVRATENSIONE) X X
8 Sottotensione (SOTTOTENSIONE) X
9 Inverter sovraccarico (TERMICA FC) X X
11 Termistore motore (TERMISTORE MOTORE) X
12 Limite di coppia (LIMITE COPPIA) X
13 Sovracorrente (SOVRACORRENTE) X X
14 Guasto di terra (CORTO A TERRA) X X
15 Guasto alimentazione (GUASTO MODO COMMUTAZIONE) X X
16 Cortocircuito (CORTOCIRCUITO CORR.) X X
17 Bus timeout standard (SERIALE TIMEOUT) X X
18 Timeout bus HPFB (PROFIBUS TIMEOUT) X X
33 Fuori dal campo di frequenza (AVVISO NO IDENTIF.) X
34 Guasto HPFB (ALLARME HPFB) X X
35 Guasto precarica (GUASTO PRECARICA) X X
36 Sovratemperatura (SOVRATEMPERATURA) X X
37 Guasto interno (GUASTO INTERNO) X X
VLT® DriveMotor serie FCM
4.2.1
La tabella mostra i diversi avvisi e allarmi e indica se il
guasto blocca il motore FC. Dopo uno Scatto bloccato, è
necessario disinserire l'alimentazione di rete ed eliminare il
guasto. Ricollegare quindi l'alimentazione di rete e
ripristinare il motore FC. Se Avviso e Allarme riportano
entrambi una croce, ciò può indicare che l'allarme è
preceduto da un preallarme. Può anche indicare la
possibilità di programmare se un dato guasto deve
generare un preallarme o un allarme. Dopo uno scatto,
l’allarme e l’avviso lampeggeranno; se il guasto viene
eliminato lampeggerà solo l’allarme. Dopo un ripristino, il
motore FC sarà nuovamente pronto per il funzionamento.
Elenco degli avvisi e degli allarmi
Scatto bloccato
scatto
Tabella 4.4 Avvisi e allarmi
Cosa fare se il motore non si avvia?
4.2.2
L'LCP potrebbe essere impostato per un arresto locale. In tal caso, il motore non si avvia quando l'LCP viene scollegato. Per
avviare il motore occorre che un LCP sia collegato poiché oltre a non esserci altre modalità, il software di installazione MCT
10 non indica cosa è sbagliato o come procedere. In caso di problemi seguire la procedura illustrata sotto:
88 MG03BA06 - VLT® è un marchio registrato Danfoss
Page 89

175NA117.10
AVV. 6
SETUP
1
NESSUN MOTORE
175NA118.10
SCATTO (RIPRISTINO)
ALLARME: 12
LIMITE COPPIA
SETUP
1
Tutto sull'FCM 300
VLT® DriveMotor serie FCM
AVVISO
Avviso:
Prestare la massima attenzione quando l'apparecchio è in funzione con il coperchio aperto.
Verde Giallo Rosso Azione
LED 302 LED 301 LED 300
OFF OFF OFF Collegare l'alimentazione
ON OFF OFF Dare i segnali di avvio e riferimento
ON OFF ON Dare e togliere il segnale di ripristino
ON ON ON Scollegare l'alimentazione fino a che tutti i LED non si sono spenti
Per ulteriori informazioni consultare la Guida rapida MG03FXYY.
Tabella 4.5
4 4
1. Assicurarsi che nessun parametro sia stato
modificato rispetto allo stato di consegna iniziale
(impostazioni di fabbrica). Usare l'LCP (Local
Control Panel) o la porta seriale per reimpostare
le impostazioni di fabbrica. Assicurarsi che il
parametro 002 sia impostato su remoto (in caso
contrario, il LED 301 giallo lampeggerà
lentamente).
2. Assicurarsi che nessun comando di STOP sia stato
selezionato mediante la tastiera del quadro di
comando opzionale (arresto locale, LED 301 giallo
che lampeggia lentamente *). Il quadro di
comando STOP può essere riattivato mediante il
tasto del quadro di comando START.
3. Controllare i LED visibili attraverso un foro nella
copertura di isolamento (vedere Disegno 2.2)
seguendo la tabella riportata in basso.
*) come nella versione software 2.12
Se l'indirizzo bus è impostato su un valore alto e se
l'indirizzo alto non viene acquisito dal master, la comunicazione potrebbe sembrare impossibile. Le impostazioni
dell'indirizzo non tornano ad essere quelle di fabbrica
ripristinando la funzione impostazione di fabbrica.
Avvisi
4.2.3
Il display lampeggia fra stato normale e avviso. Un avviso
viene visualizzato nella prima e nella seconda riga del
display. Vedere l'esempio Disegno 4.8:
Disegno 4.8 AVVISO LCP 6
Messaggi di allarme
L’allarme viene visualizzato nella 2a e nella 3a riga del
display, vedere esempio Disegno 4.9:
Disegno 4.9 ALLARME LCP:12
AVVISO/ALLARME 2
Guasto tensione zero (ERRORE ZERO VIVO):
MG03BA06 - VLT® è un marchio registrato Danfoss 89
Page 90

Tutto sull'FCM 300
VLT® DriveMotor serie FCM
Il segnale corrente sul morsetto 1 è inferiore al 50% del
valore impostato nel parametro 336 Morsetto 1, scala min .
AVVISO/ALLARME 4
Perdita di fase (TENSIONE SBILANCIATA):
Fase mancante dal lato alimentazione. Controllare la
tensione di alimentazione al motore FC.
44
AVVISO 5
Avviso tensione alta (TENSIONE CC ALTA):
La tensione del circuito intermedio (CC) è superiore al
limite di sovratensione del sistema di controllo; consultare
Tabella 4.6 Il motore FC è ancora attivo.
AVVISO 6
Avviso tensione bassa (TENSIONE CC BASSA):
La tensione del circuito intermedio (CC) è inferiore al limite
di sottotensione del sistema di comando, vedere
Tabella 4.6. Il motore FC è ancora attivo.
ALLARME 11
Termistore motore (TERMISTORE MOTORE):
Se è installato un termistore e il parametro 128 è
impostato su [1] Abilitato, il motore FC scatterà in caso di
surriscaldamento.
AVVISO 12
Limite di corrente (LIMITE CORRENTE):
La corrente è superiore al valore impostato nel parametro
221 (funzionamento motore).
ALLARME 13
Sovraccorrente (SOVRACORRENTE):
Il limite della corrente di picco dell’inverter (circa 230%
della corr. nom.) è stato superato. Il motore FC scatterà
emettendo un allarme.
Spegnere il motore FC e controllare se è possibile ruotare
il motore.
NOTA!
ALLARME 7
Sovratensione (SOVRATENSIONE CC)
Se la tensione del circuito intermedio (CC) supera il limite
di sovratensione dell'inverter (vedere Tabella 4.6), il motore
FC scatterà. Inoltre la tensione verrà indicata sul display.
ALLARME 8
Sottotensione (SOTTOTENSIONE CC):
Se la tensione del circuito intermedio (CC) scende sotto il
limite di tensione minima dell'inverter (vedere Tabella 4.6),
il motore FC scatterà dopo 3-28 sec. in funzione dell'unità.
Inoltre la tensione verrà indicata sul display. Controllare
che la tensione di alimentazione sia adatta per il motore
FC, vedere 2.1.2 Dati tecnici generali.
AVVISO/ALLARME 9
Inverter sovraccarico (TEMPO INVERTER):
La protezione termica elettronica dell’inverter riporta che il
motore FC sta per disinserirsi a causa di un sovraccarico
(corrente troppo elevata troppo a lungo). Il contatore della
protezione termica elettronica dell'inverter invia un avviso
al 95% e scatta al 100%, emettendo un allarme. Il motore
non può essere ripristinato finché il contatore non
FC
mostra un valore inferiore a 90%.
Motore serie FC
Sottotensione 410
Avviso tensione bassa 440
Avviso tensione alta 760
Sovratensione 760*
* 760 V in 5 s o 800 V immediatamente.
Le tensioni indicate sono le tensioni del
circuito intermedio del motore FC.
Tabella 4.6 Limiti di scatto/allarme/avviso
3x380-480 V
[VDC]
Se si verificano delle prese di carico questo allarme
potrebbe comparire.
ALLARME: 14
Guasto di terra (GUASTO DI TERRA):
Si verifica una scarica dalle fasi di uscita a terra, fra
l'inverter e il motore o nel motore stesso.
ALLARME: 15
Guasto alimentazione (GUASTO MODO COMMUTAZIONE):
Guasto nell'alimentazione in modo commutazione (alimentazione interna 24 V).
Contattare il proprio rivenditore Danfoss.
ALLARME: 16
Cortocircuito (CORTOCIRCUITO):
Si verifica un cortocircuito sui morsetti del motore o nel
motore stesso.
Contattare il proprio rivenditore Danfoss.
ALLARME: 17
Timeout bus standard (TIMEOUT BUS STD.)
Assenza di comunicazione col motore FC. L’avviso sarà
attivo solo se il parametro 514 è stato impostato su un
valore diverso da OFF.
Se il parametro 514 è stato impostato su Arresto e scatto,
prima verrà emesso un avviso, quindi seguirà il rallentamento fino allo scatto, con l’emissione contemporanea di
un allarme.
Il parametro 513 intervallo tempo bus può eventualmente
essere aumentato.
AVVISO/ALLARME 18
Timeout bus HPFB (TIMEOUT BUS HPFB)
90 MG03BA06 - VLT® è un marchio registrato Danfoss
Page 91

Tutto sull'FCM 300
VLT® DriveMotor serie FCM
Assenza di comunicazione col motore FC. L'avviso sarà
attivo solo se il parametro 804 è stato impostato su un
valore diverso da OFF. Se il parametro 804 è stato
impostato su Arresto e scatto, prima verrà emesso un
avviso, quindi seguirà il rallentamento fino allo scatto, con
l’emissione contemporanea di un allarme.
Il parametro 803 Timeout bus può eventualmente essere
aumentato.
AVVISO 33
Fuori dall'interv. di frequenza:
Questo allarme è attivo se la frequenza di uscita ha
raggiunto il valore impostato nel parametro 201 Frequenza
d'uscita, limite basso o nel parametro 202 Frequenza d'uscita,
limite alto.
AVVISO/ALLARME 34
Errore HPFB (ALLARME HPFB):
La comunicazione Profibus non funziona correttamente.
ALLARME 35
Guasto precarica (GUASTO PRECARICA):
Questo allarme si verifica quando l'apparecchio è stato
acceso troppe volte in 1 minuto.
Bit (Hex)
00000008 Timeout HPFB
00000010 Timeout bus standard
00000040 Limite corrente
00000200 Sovraccarico inverter
00001000 Avviso tensione bassa
00002000 Avviso tensione alta
00004000 Guasto di fase
00010000 Avviso errore zero vivo
00400000 Avviso, limite frequenza di uscita
00800000 Errore HPFB
40000000 Avviso alimentazione 24 V
80000000 Temperatura inverter eccessiva
Tabella 4.7
Bit (Hex) Parola di stato per esteso (P.541)
Tabella 4.8
Parola di avviso (P. 540)
01 Funz. rampa
04 Avviamento in senso orario/antiorario
08 Slow down
10 Catch-up
8000 Limite di frequenza
4 4
AVISO/ALLARME 36
Sovratemperatura (SOVRATEMPERATURA):
ALLARME: 37
Errore interno (ERRORE INTERNO):
Si è verificato un errore nel SISTEMA. Contattare il proprio
rivenditore Danfoss.
Parola di avviso, parola di stato esteso
4.2.4
e parola di allarme
La parola di avviso, la parola di stato per esteso e la parola
di allarme sono visualizzate su display in formato
esadecimale. In presenza di più avvisi o allarmi, viene
visualizzata una somma di tutti gli avvisi o allarmi.
La parola di avviso, la parola di stato per esteso e la parola
d’allarme possono essere visualizzate usando il bus seriale
nei parametri 540, 541 e 538.
Bit (Hex)
Tabella 4.9
Parola di allarme (P. 538)
00000002 Scatto bloccato
00000040 Timeout HPFB
00000080 Timeout bus standard
00000100 Cortocircuito
00000200 Guasto alimentazione 24 V
00000400 Guasto di terra
00000800 Sovracorrente
00004000 Termistore motore
00008000 Sovraccarico inverter
00010000 Sottotensione
00020000 Sovratensione
00040000 Guasto di fase
00080000 Guasto z. trasl.
00100000 Sovratemperatura
02000000 Errore HPFB
08000000 Gu. accens.
10000000 Guasto interno
MG03BA06 - VLT® è un marchio registrato Danfoss 91
Page 92

Tutto sull'FCM 300
4.3 Elenco dei parametri
VLT® DriveMotor serie FCM
N. di
parametro Funzione
001 Lingua 6 Inglese 5 0
002 Controllo locale/remoto 2 Controllo remoto 5 0
003 Riferimento locale 000,000 4 -3
004 Setup attivo 4 Setup 1 5 0
44
005 Setup di programmazione 4 Setup attivo 5 0
006 Copia dei setup 4 Nessuna copia 5 0
007 Copia LCP 4 Nessuna copia 5 0
008 Fattore di scala della frequenza del motore 100 6 -2
009 Riga 2 del display 24 Frequenza [Hz] 5 0
010 Riga 1.1 del display 24 Riferimento [%] 5 0
011 Riga 1.2 del display 24 Corrente motore [A] 5 0
012 Riga 1.3 del display 24 Potenza [kW] 5 0
013 Controllo/configurazione locale 5 Controllo digitale LCP/par.
014 Arresto locale 2 Possibile 5 0
015 Jog locale 2 Non possibile 5 0
016 Inversione locale 2 Non possibile 5 0
017 Ripristino locale dello scatto 2 Possibile 5 0
018 Blocco per modifica dati 2 Non bloccato 5 0
019 Stato di funzionamento all’accensione,
contr. locale.
Tabella 4.10 Funzioni da programmare, controllare e monitorare tramite bus (PROFIBUS) o tramite PC.
N. di
parametro Funzione
100 Modalità 2 Modo velocità, anello
101 Caratteristiche di coppia 4 Coppia costante 5 0
102 Potenza motore XX.XX kW - in funzione
103 Tensione motore XX,XX V - in funzione dell'unità 6 0
104 Frequenza motore XX.X Hz - in funzione dell'unità 6 -1
105 Corrente motore XX.XX A - in funzione dell'unità 7 -2
106 Velocità nominale del motore XX rpm - in funzione dell'unità 6 0
117 Smorzamento risonanze off -100% off % 6 0
118 Smorzamento risonanze disinserito 0-200% In funzione del motore 5 0
126 Tempo di frenata CC 0,0 (off)-60,0 sec. 10,0 sec. 6 -1
127 Frequenza di inserimento freno CC 0,0 Hz-f
128 Protezione termica del motore 1 Nessuna protezione 5 0
132 Tensione di frenata CC 0-100% 0% 5 0
133 Tensione di avviamento 0,00-100,00 V In funzione del motore 6 -2
134 Compensazione all'avviamento 0.0-300.0% 100,0% 6 -1
135 Rapporto U/f 0,0-20,00 V/Hz In funzione del motore 6 -2
136 Compensazione dello scorrimento -500,0-+500,0% 100,0% 3 -1
137 Tensione di mantenimento CC 0-100% 0% 5 0
138 Frequenza di disinserimento freno 0,5-132 Hz 3,0 Hz 6 -1
139 Frequenza di disinserimento freno 0,5-132 Hz 3,0 Hz 6 -1
147 Setup del tipo di motore in funz. dell'unità in funz. dell'unità 5 0
Campo/numero di impostazioni/
valore Impostazione di fabbrica
100
3 Arresto forzato, usare rif.
Campo/numero di impostazioni/
valore Impostazione di fabbrica
dell'unità
MAX
memorizzato
aperto
6 1
0,0 Hz 6 -1
Tipo di
dati
5 0
5 0
Tipo di
dati
5 0
Indice
di
conv.
Indice
di
conv.
Tabella 4.11 Funzioni da programmare, controllare e monitorare tramite bus (PROFIBUS) o tramite PC.
92 MG03BA06 - VLT® è un marchio registrato Danfoss
Page 93

Tutto sull'FCM 300
VLT® DriveMotor serie FCM
Indice di conversione:
Indica un numero di conversione da usare per la scrittura o
la lettura mediante comunicazione seriale con un convertitore di frequenza.
Vedere 3.6.4 Byte di dati in 3.6.1 Bus seriale
Tipo di dati Descrizione
3 Numero intero 16
4 Numero intero 32
5 Senza segno 8
6 Senza segno 16
7 Senza segno 32
9 Stringa di testo
Tipo di dati:
Il tipo di dati mostra il tipo e la lunghezza del telegramma.
Tabella 4.12
Tipo
N. di
parametro Funzione Campo/numero di impostazioni/valore Impostazione di fabbrica
di
dati
200 Senso di rotazione 3 Solo in senso orario 0-132 Hz 5 0
201 Frequenza di uscita
min. (f
MIN
)
202 Frequenza di uscita
max. (f
MAX
)
203 Campo di riferimento/
0,0 Hz-f
f
MIN-fRANGE
MAX
0,0 Hz 6 -1
f
(132 Hz) 6 -1
RANGE
Min. - max./-max.- +max. Min. - Max. 5 0
retroazione
204 Riferimento minimo -100,000.000-Rif
205 Riferimento massimo Rif
207 Tempo rampa di
-100,000.000 50,000 4 -3
MIN
0,05-3600,00 s 3,00 s 7 -2
MAX
0,000 4 -3
accelerazione 1
208 Tempo rampa di
0,05-3600,00 s 3,00 s 7 -2
decelerazione 1
209 Tempo rampa di
0,15-3600,00 s 3,00 7 -2
accelerazione 2
210 Tempo rampa di
0,15-3600,00 s 3,00 s 7 -2
decelerazione 2
211 Tempo di rampa jog 0,05-3600,00 s 3,00 s 7 -2
212 Tempo rampa di
0,05-3600,00 s 3,00 s 7 -2
decelerazione arresto
rapido
213 Frequenza jog 0 Hz - f
MAX
10,0 Hz 6 -1
214 Funzione di riferimento 2 Somma 5 0
215 Riferimento preimp. 1 -100,00%-+100,00% 0,00% 3 -2
216 Riferimento preimp. 2 -100,00%-+100,00% 0,00% 3 -2
219 Valore di catch-up/slow
0.00-100.00% 0,00% 6 -2
down
221 Limite di corrente per
Limite min. - max. in % di I
rated
Limite max. 6 -1
la modalità motore
229 Bypass frequenza,
0 (off)-100% 0% 6 0
ampiezza di banda
230 Frequenza di salto 1 0,0-132 Hz 0,0 Hz 6 -1
231 Frequenza di salto 2 0,0-132 Hz 0,0 Hz 6 -1
241 Riferimento
-100,00%-+100,00% 0,00% 3 -2
preimpostato 1
242 Riferimento
-100,00%-+100,00% 0,00% 3 -2
preimpostato 2
243 Riferimento
-100,00%-+100,00% 0,00% 3 -2
preimpostato 3
244 Riferimento
-100,00%-+100,00% 0,00% 3 -2
preimpostato 4
245 Riferimento
-100,00%-+100,00% 0,00% 3 -2
preimpostato 5
246 Riferimento
-100,00%-+100,00% 0,00% 3 -2
preimpostato 6
247 Riferimento
-100,00%-+100,00% 0,00% 3 -2
preimpostato 7
Indic
e
di
conv.
4 4
Tabella 4.13 Funzioni da programmare, controllare e monitorare tramite bus (PROFIBUS) o tramite PC.
MG03BA06 - VLT® è un marchio registrato Danfoss 93
Page 94

Tutto sull'FCM 300
VLT® DriveMotor serie FCM
N. di
parametro Funzione
Campo/numero di impostazioni/
valore Impostazione di fabbrica
Tipo di
dati
Indice
di conv.
317 Timeout 1-99 s 10 s 5 0
318 Funzione dopo timeout Off/Arresto e disinnesto Off 5 0
323 X102 funzione del relè 14 N. funzione 5 0
327 Riferimento impulsi/retroazione freq.
100-70000 Hz 5000 Hz 7 0
max.
331 Morsetto 1, tensione ingresso
3 N. funzione 6 0
analogico
332 Morsetto 2, ingresso digitale 31 Riferimento 6 0
333 Ingr. digitale morsetto 3 31 Ripristino 6 0
44
334 Ingr. digitale morsetto 4 30 Avviamento 6 0
335 Ingr. digitale morsetto 5 29 Marcia jog 6 0
336 Morsetto 1, conversione in scala min. 0,0-20,0 mA 0,0 mA 6 -4
337 Morsetto 1, conversione in scala max. 0,0-20,0 mA 20,0 mA 6 -4
338 Morsetto 2, conversione in scala min. 0,0-10,0 V 0,0 V 6 -1
339 Morsetto 2, conversione in scala max. 0,0-10,0 V 10,0 V 6 -1
340 Funzioni di uscita 24 N. funzione 6 0
Tabella 4.14 Funzioni da programmare, controllare e monitorare tramite bus (PROFIBUS) o tramite PC.
N. di
parametro Funzione
Campo/numero di
impostazioni/valore Impostazione di fabbrica
Tipo di
dati
Indice
di conv.
400 Funzione freno Off/Frenata CA Off 5 0
403 Timer modalità pausa 0-300 s Off 6 0
404 Frequenza di pausa f
- par 407 0 Hz 6 -1
MIN
405 Funzione di ripristino 11 Ripristino manuale 5 0
406 Riferimento sovralimentazione 1-200% 100% 6 0
407 Frequenza fine pausa Par 404-f
MAX
50 Hz 6 -1
411 Frequenza di commutazione 1,5-14,0 kHz Dipende dall'unità 6 0
412 Frequenza di commutazione
variabile
3 Freq. di comm. dip. dalla
temp.
5 0
413 Funzione di sovramodulazione Off/On On 5 0
414 Retroazione minima -100000-FB
415 Retroazione massima FB
-100.000 1500 4 -3
LOW
HIGH
0 4 -3
416 Unità riferimento/retroazione 42 % 5 0
437 Processo PID, controllo normale/
Normale/inverso Coppia 5 0
inverso
438 PID di processo anti-saturazione Disabilitato/Abilitato Abilita 5 0
439 Processo PID, frequenza di
f
MIN-fMAX
f
MIN
6 -1
avviamento
440 Guadagno proporzionale PID di
0,00 (off)-10,00 0,01 6 -2
processo
441 Tempo d’integrazione PID di
0,01-9999 s (off) 9999 s 7 -2
processo
442 Tempo di differenziazione PID di
0,00 (off)-10,00 s 0,00 s 6 -2
processo
443 Processo PID, limite di guadagno
5-50 5 6 -1
diff.
444 Tempo filtro passa-basso PID di
0,1-10,00 s 0,1 s 6 -2
processo
445 Riaggancio al volo 4 Disabilita 5 0
446 Modello di commutaz. 2 SFAVM 5 0
455 Controllo intervallo di frequenze Disabilitato/Abilitato Abilita 5 0
461 Conversione della retroazione Radice lineare o quadrata Lineare 5 0
Tabella 4.15 Funzioni da programmare, controllare e monitorare tramite bus (PROFIBUS) o tramite PC.
94 MG03BA06 - VLT® è un marchio registrato Danfoss
Page 95

Tutto sull'FCM 300
VLT® DriveMotor serie FCM
Indice di conversione:
Indica un numero di conversione da usare per la scrittura o
la lettura mediante comunicazione seriale con un convertitore di frequenza.
Vedere 3.6.4 Byte di dati in 3.6.1 Bus seriale
Tipo di dati:
Tipo di dati Descrizione
3 Numero intero 16
4 Numero intero 32
5 Senza segno 8
6 Senza segno 16
7 Senza segno 32
9 Stringa di testo
Il tipo di dati mostra il tipo e la lunghezza del telegramma.
Tabella 4.16
N. di
parametro Funzione
500 Indirizzo bus 1-126 1 5 0
501 Baud rate 300-9600 Baud/6 9600 Baud 5 0
502 Ruota libera 4 Logica OR 5 0
503 Arresto rapido 4 Logica OR 5 0
504 Freno CC 4 Logica OR 5 0
505 Avviamento 4 Logica OR 5 0
506 Inversione 4 Logica OR 5 0
507 Selezione del setup 4 Logica OR 5 0
508 Selezione della velocità 4 Logica OR 5 0
509 Bus jog 1 0,0-f
510 Bus jog 2 0,0-f
512 Profilo telegramma Profildrive/FC Drive Convertitore di frequenzaFC5 0
513 Intervallo tempo bus 1 s 5 0
514 Funzione intervallo tempo bus 6 Off 5 0
515 Visualizzazione dati: Riferimento XXX.X 3 -1
516 Visualizzazione dati: Unità di rif. Hz / giri/min. 4 -3
517 Visualizzazione dati: Retroazione 4 -3
518 Visualizzazione dati: Frequenza Hz 3 -1
519 Visualizzazione dati: Frequenza x scala Hz 7 -2
520 Visualizzazione dati: Corrente A x 100 7 -2
521 Visualizzazione dati: Coppia % 3 -1
522 Visualizzazione dati: Potenza kW 7 1
523 Visualizzazione dati: Potenza hp 7 -2
524 Visualizzazione dati: Tensione motore V 6 -1
525 Visualizzazione dati: Tensione collegamentoCCV 6 0
Campo/numero di
impostazioni/valore Impostazione di fabbrica
MAX
MAX
10,0 Hz 6 -1
10,0 Hz 6 -1
Tipo di
dati
4 4
Indice
di conv.
527 Visualizzazione dati: Term. FC 0-100% 5 0
528 Visualizzazione dati: Ingresso digitale 5 0
533 Visualizzazione dati: Riferimento esterno -200,0-+200,0% 6 -1
534 Visualizzazione dati: Parola di stato, binaria 6 0
537 Visualizzazione dati: Temperatura FC °C 5 0
538 Visualizzazione dati: Parola di allarme,
binaria
539 Visualizzazione dati: Parola di controllo,
binaria
540 Visualizzazione dati: Parola di avviso, 1 7 0
541 Visualizzazione dati: Parola di avviso, 2 7 0
542 Visualizzazione dati: Morsetto 1, ingresso
analogico
543 Visualizzazione dati: Morsetto 2, ingresso
analogico
561 Protocollo Protocollo FC/Modbus RTU Protocollo FC 5 0
570 Parità Modbus e framing dei messaggi 4 1 bit di stop/pari 5 0
571 Timeout comunicazioni Modbus 10-2000 ms 100 ms 6 0
Tabella 4.17 Funzioni da programmare, controllare e monitorare tramite bus (PROFIBUS) o tramite PC.
7 0
6 0
mA X 10 5 -4
V X 10 5 -1
MG03BA06 - VLT® è un marchio registrato Danfoss 95
Page 96

Tutto sull'FCM 300
VLT® DriveMotor serie FCM
N. di
parametro Funzione
600 Dati di funzionamento: Ore di funzio-
601 Dati di funzionamento: Ore di esercizio 0-130.000,0 ore 7 73
603 Dati di funzionamento: Numero di
604 Dati di funzionamento: Numero di
605 Dati di funzionamento: Numero di
44
615 Log guasti, visualizzazione: Codice errore Indice XX-XXX 6 0
616 Log guasti, visualizzazione: Tempo Indice XX-XXX 5 0
617 Log guasti, visualizzazione: valore Indice XX-XXX 7 -1
619 Ripristino contatore ore di esercizio Nessun ripristino/ripristino Nessun ripristino 3 0
620 Modo di funzionamento 3 Funzionamento normale 5 0
621 Targhetta: Tipo motore FC Dipende dall'unità 5 0
624 Targhetta: Versione software n. Dipende dall'unità 9 0
625 Versione LCP Dipende dall'unità 9 0
626 Targhetta: Identificazione database n. Dipende dall'unità 9 0
628 Targhetta: Tipo di opzione dell'appli-
630 Targhetta: Tipo di opzione di comuni-
632 Identificazione software BMC 9 0
633 Identificazione database motore 9 0
634 Identificazione unità per comunicazione 9 0
635 N. versione software 9 0
678 Configurazione scheda di controllo Dipende dall'unità 5 0
namento
accensioni
surriscald.
sovratensioni
cazione
cazione
Campo/numero di impostazioni/
valore Impostazione di fabbrica
0-130.000,0 ore 5 0
0-9999 7 73
0-9999 6 0
0-9999 6 0
9 -2
9 0
Tipo di
dati
Indice
di conv.
Tabella 4.18 Funzioni da programmare, controllare e monitorare tramite bus (PROFIBUS) o tramite PC.
Indice di conversione:
Indica un numero di conversione da usare per la scrittura o
Tipo di dati:
Il tipo di dati mostra il tipo e la lunghezza del telegramma.
la lettura mediante comunicazione seriale con un convertitore di frequenza.
Vedere 3.6.4 Byte di dati in 3.6.1 Bus seriale
Tipo di dati Descrizione
3 Numero intero 16
4 Numero intero 32
5 Senza segno 8
6 Senza segno 16
7 Senza segno 32
9 Stringa di testo
Tabella 4.19
96 MG03BA06 - VLT® è un marchio registrato Danfoss
Page 97

Indice
VLT® DriveMotor serie FCM
Indice
A
Alberi Uscita............................................................................................ 20
Alimentazione Di Rete........................................................................ 13
Allarmi...................................................................................................... 88
Allineamento.......................................................................................... 23
Ambienti Aggressivi............................................................................ 87
Anti Saturazione PID Di Processo................................................... 60
Arresto
Locale................................................................................................... 40
Rapido.................................................................................................. 71
Avvio......................................................................................................... 71
Avvisi......................................................................................................... 88
Avviso Contro L'avviamento Involontario..................................... 5
B
Baud Rate................................................................................................ 71
Blocco Per Modifica Dati.................................................................... 41
Broadcast................................................................................................. 62
Bus
Jog 1...................................................................................................... 72
Jog 2...................................................................................................... 72
Seriale................................................................................................... 62
Bypass
Frequenza 1....................................................................................... 48
Frequenza, Ampiezza Di Banda.................................................. 48
Byte
Di Controllo Dati (BCC)................................................................... 62
Di Dati................................................................................................... 63
Di Parametri....................................................................................... 63
Di Processo......................................................................................... 63
C
Caduta Di Tensione Dell'alimentazione Di Rete........................ 81
Campo
Di Retroazione................................................................................... 58
Di Riferimento/retroazione.......................................................... 45
Caratteristiche
Della Coppia....................................................................................... 13
Di Controllo........................................................................................ 14
Cod. Art. Software................................................................................ 78
Comando Locale/configurazione................................................... 40
Compens. Scorrim................................................................................ 43
Compensazione Del Carico............................................................... 43
Condizioni Di Funzionamento Estreme....................................... 81
Configurazione
Configurazione................................................................................. 41
Morsetti............................................................................................... 17
Conformità Alla Direttiva EMC 89/336/CEE................................. 86
Controllo Locale/remoto................................................................... 37
Copia
Di Setup............................................................................................... 38
LCP......................................................................................................... 38
Coppie Bulloni....................................................................................... 24
Corrente
Di Dispersione Verso Terra........................................................... 80
Motore................................................................................................. 42
Cuscinetti................................................................................................. 19
D
Dati
Di Funziinamento: Numero Di Accensioni.............................. 77
Di Funzionamento: Numero Di Sovratemperature............. 77
Di Funzionamento: Numero Di Sovratensioni...................... 77
Di Funzionamento: Ore Di Esercizio.......................................... 77
Di Funzionamento: Ore Di Funzionamento........................... 76
Tecnici.................................................................................................. 13
Declassamento
In Base Alla Pressione Dell'aria Atmosferica........................... 82
In Relazione Ad Alte Frequenze Di Commutazione............ 83
In Relazione Ad Un Funzionamento A Bassa Velocità........ 82
Per Temperatura Ambiente......................................................... 82
Dimensioni.............................................................................................. 20
Direttiva
EMC....................................................................................................... 85
Macchine............................................................................................. 85
Sulla Bassa Tensione (73/23/CEE)............................................... 85
Display
Display................................................................................................. 30
Dell'LCP................................................................................................ 30
F
Fattore Di Potenza................................................................................ 85
FCM 305-375 Per 3 Fasi, 380-480 V................................................ 12
Filtro Passa Basso.................................................................................. 59
Freno CC.................................................................................................. 71
Frequenza
Di Avviamento PID Di Processo.................................................. 60
Di Commutazione............................................................................ 56
Di Commutazione Variabile......................................................... 56
Di Inserimento Freno CC............................................................... 42
Di Uscita Max..................................................................................... 45
Di Uscita Min...................................................................................... 44
Jog......................................................................................................... 46
Motore................................................................................................. 42
Funzione
Di Riferimento................................................................................... 47
Di Ripristino........................................................................................ 55
Di Sovramodulazione..................................................................... 56
Dopo Il Timeout................................................................................ 49
Intervallo Tempo Bus...................................................................... 73
G
Gamma Dei Prodotti.............................................................................. 8
Guadagno Proporzionale PID Di Processo.................................. 60
MG03BA06 - VLT® è un marchio registrato Danfoss 97
Page 98

Indice
VLT® DriveMotor serie FCM
I
Identificazione
Database Motore.............................................................................. 78
Software BMC.................................................................................... 78
Unità Per Comunicazione............................................................. 78
Il Derivatore............................................................................................ 59
Indirizzo
Indirizzo............................................................................................... 71
VLT (ADR)............................................................................................ 62
Inizializzazione....................................................................................... 78
Installazione Del Motore FC.............................................................. 23
Integrazione Di Convertitore Di Frequenza E Motore............... 6
Interferenza Di Rete/armoniche...................................................... 84
Intervallo Tempo Bus.......................................................................... 72
Inversione
Inversione........................................................................................... 71
Locale................................................................................................... 40
Isolamento Galvanico (PELV)............................................................ 80
Istruzioni Per Lo Smaltimento............................................................ 4
J
Jog Locale................................................................................................ 40
K
Kit
Connettore......................................................................................... 26
Connettore Di Servizio................................................................... 25
Di Montaggio Remoto.................................................................... 26
L
LED
LED........................................................................................................ 30
300-304................................................................................................ 16
Limite
Di Corrente Per La Modalità Motore......................................... 47
Di Guadagno Diff. PID Di Processo............................................ 60
Lingua....................................................................................................... 37
Log
Guasti................................................................................................... 77
Guasti: Tempo................................................................................... 77
Guasti: Valore..................................................................................... 77
Lunghezza Del Telegramma (LGE)................................................. 62
M
Manutenzione Periodica Della Parte Del Motore..................... 24
Marchio CE.............................................................................................. 85
Menu Rapido.......................................................................................... 33
Modalità
Di Visualizzazione............................................................................ 32
Menu..................................................................................................... 34
Modello Di Commutazione............................................................... 61
Modifica Dei Dati.................................................................................. 34
Modo
Di Funzionamento........................................................................... 78
Pausa.................................................................................................... 54
Morsetto
1, Corrente Ingresso Analogico.................................................. 50
1, Scala Max........................................................................................ 53
1, Scala Min......................................................................................... 52
2, Ingresso Analogico/digitale.................................................... 50
2, Scala Max........................................................................................ 53
2, Scala Min......................................................................................... 53
3, Ingresso Digitale.......................................................................... 50
4, Ingresso Digitale.......................................................................... 50
5, Ingresso Digitale.......................................................................... 50
N
Norma UL................................................................................................. 83
Norme Di Sicurezza................................................................................ 5
Numero Di Parametro (PNU)............................................................ 63
O
Opzione Potenziometro (177N0011)............................................ 27
Ordinazione............................................................................................... 9
P
Pannello Di Controllo.......................................................................... 29
Parola
Di Allarme........................................................................................... 91
Di Avviso.............................................................................................. 91
Parti Esterne............................................................................................ 14
PID Di Processo Normale/controllo Inverso................................ 59
Potenza Motore..................................................................................... 42
Profilo Telegramma............................................................................. 72
Protezione Termica Dell'FCM 300................................................... 25
Protocollo................................................................................................ 76
Pulizia Del Motore FC.......................................................................... 24
R
Rapporto U/f........................................................................................... 43
RCD............................................................................................................ 80
Retroazione
Retroazione........................................................................................ 59
Massima............................................................................................... 57
Minima................................................................................................. 57
Riaggancio Al Volo............................................................................... 61
Riferim.
Preimp. 1............................................................................................. 48
Preimp. 2............................................................................................. 48
Preimp. 3............................................................................................. 48
Preimp. 4............................................................................................. 48
Preimp. 5............................................................................................. 48
Preimp. 6............................................................................................. 48
Preimp. 7............................................................................................. 48
98 MG03BA06 - VLT® è un marchio registrato Danfoss
Page 99

Indice
VLT® DriveMotor serie FCM
Riferimento
Riferimento......................................................................................... 58
Locale................................................................................................... 37
Massimo.............................................................................................. 45
Minimo................................................................................................. 45
Riga
1.2 Del Display................................................................................... 39
1.3 Del Display................................................................................... 39
2 Del Display...................................................................................... 38
Del Display 1.1................................................................................... 39
Ripristino
Contatore Ore Di Esercizio............................................................ 77
Locale Dello Scatto.......................................................................... 41
Rotazione Libera................................................................................... 71
Rumorosità Acustica............................................................................ 81
S
Scheda
Di Controllo, Comunicazione Seriale RS 485.......................... 14
Di Controllo, Ingressi Analogici................................................... 13
Di Controllo, Ingressi Digitali/a Impulsi................................... 13
Di Controllo, Ingresso A Impulsi:................................................ 13
Di Controllo, Uscite Digitali/a Impulsi E Analogiche........... 13
Selezione
Del Setup............................................................................................. 71
Della Velocità..................................................................................... 71
Di Parametri....................................................................................... 34
Senso Di Rotazione.............................................................................. 44
Setup
Attivo.................................................................................................... 37
Di Programmazione........................................................................ 38
Smorzamento
Di Risonanza...................................................................................... 42
Risonanze Disinserito..................................................................... 42
Sovraccarico Statico............................................................................ 81
Sovratensione Generata Dal Motore............................................. 81
Standard EMC........................................................................................ 86
Stato
Di Funzionamento All'accensione, Comando Locale......... 41
Di Visualizzazione Del Display..................................................... 32
Struttura Del Menu.............................................................................. 36
Strutture Di Controllo............................................................................ 6
T
Targhetta:
Identificazione Database N.......................................................... 78
Tipo Di Opzione Dell'applicazione............................................ 78
Tipo Di Opzione Di Comunicazione.......................................... 78
Tipo FC................................................................................................. 78
Versione Software N........................................................................ 78
Tasti Di Comando................................................................................. 30
Tastiera Di Funzionamento Locale................................................. 27
Telegrammi Di Controllo E Risposta.............................................. 62
Tempo
Della Rampa Di Discesa 1.............................................................. 45
Della Rampa Di Discesa 2.............................................................. 46
Della Rampa Di Discesa In Arresto Rapido.............................. 46
Della Rampa Di Salita 1.................................................................. 45
Della Rampa Di Salita 2.................................................................. 46
Di Differenziazione PID Di Processo.......................................... 60
Di Frenatura CC................................................................................. 42
Di Integrazione PID Di Processo................................................. 60
Di Rampa Jog..................................................................................... 46
Filtro Passa-basso PID Di Processo............................................ 61
Tensione
Di Avviamento.................................................................................. 43
Di Frenatura In CC............................................................................ 43
Motore................................................................................................. 42
Timeout.................................................................................................... 48
Tool Software PC..................................................................................... 9
Trasmissione Dei Telegrammi.......................................................... 62
U
Umidità Dell'aria................................................................................... 83
Uscita Relè............................................................................................... 13
Uso Del Motore FC............................................................................... 19
V
Valore Di Catch Up/slow Down....................................................... 47
Velocità Nominale Del Motore........................................................ 42
Versioni Inverter...................................................................................... 8
Vibrazioni E Urti..................................................................................... 83
Visualizzare Il Fattore Di Scala Della Frequenza Motore........ 38
Visualizzazione
Dati Riferimento %.......................................................................... 73
Dati: Coppia....................................................................................... 73
Dati: Corrente.................................................................................... 73
Dati: Corrente, HP............................................................................ 74
Dati: Frequenza................................................................................. 73
Dati: Ingresso Digitale.................................................................... 74
Dati: Morsetto 1, Ingresso Analogico........................................ 75
Dati: Morsetto 2, Ingresso Analogico........................................ 76
Dati: Parola D'allarme..................................................................... 75
Dati: Parola Di Avviso...................................................................... 75
Dati: Parola Di Controllo................................................................ 75
Dati: Parola Di Stato Per Esteso................................................... 75
Dati: Parola Di Stato, Binaria......................................................... 74
Dati: Potenza, KW............................................................................. 74
Dati: Retroazione.............................................................................. 73
Dati: Riferimento Esterno %......................................................... 74
Dati: Temperatura INV.................................................................... 74
Dati: Tensione Collegamento CC............................................... 74
Dati: Tensione Motore.................................................................... 74
Dati: Term. FC.................................................................................... 74
Dati: Unità Di Riferimento............................................................. 73
MG03BA06 - VLT® è un marchio registrato Danfoss 99
 Loading...
Loading...