


Technical Information
Digital Displacement® Pump Gen 1
DDP096 and DPC12
www.danfoss.com
Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
Revision history Table of revisions
Date Changed Rev
June 2021 Added new Gen 1 content; recreated document structure 0201
December 2019 Revised to reflect 420 bar limit and updated software features 0102
October 2019 First edition: 280 bar, industrial 0101
2 | © Danfoss | June 2021 BC306384089197en-000201

Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
Contents
General information
Overview..............................................................................................................................................................................................5
About the DDP.................................................................................................................................................................................. 5
Theory of operation.........................................................................................................................................................................5
Multi-outlet pump...................................................................................................................................................................... 6
Features and benefits..................................................................................................................................................................... 8
General safety warnings.................................................................................................................................................................8
Fluid under high pressure........................................................................................................................................................8
OEM responsibility......................................................................................................................................................................8
Pressure relief............................................................................................................................................................................... 9
Failure and fault states..............................................................................................................................................................9
Intended use.................................................................................................................................................................................9
Improper use.................................................................................................................................................................................9
Personnel qualifications.........................................................................................................................................................10
Technical specifications
DDP096 pump specifications.................................................................................................................................................... 11
DDP general specifications................................................................................................................................................... 11
DDP fluid specifications......................................................................................................................................................... 11
DDP mechanical specifications........................................................................................................................................... 12
DPC12 controller specifications................................................................................................................................................13
DPC12 input power supply...................................................................................................................................................13
Separate coil and logic power supplies...................................................................................................................... 13
Wiring and fuses.................................................................................................................................................................. 14
Pressure sensors for DPC12............................................................................................................................................. 14
Non-volatile memory write/erase ratings........................................................................................................................14
General ratings.......................................................................................................................................................................... 14
Environmental standards and criteria...............................................................................................................................15
LED messages............................................................................................................................................................................ 16
DPC12 housing..........................................................................................................................................................................16
DDP characteristics
Performance.....................................................................................................................................................................................17
Overall pump efficiency......................................................................................................................................................... 17
Idle losses.....................................................................................................................................................................................17
Pump discharged flow and shrinkage.............................................................................................................................. 18
Input torque................................................................................................................................................................................19
Electronic control losses.........................................................................................................................................................20
Noise characteristics..................................................................................................................................................................... 20
Control operation
Control modes, limits, and features........................................................................................................................................ 21
Control modes and sources..................................................................................................................................................21
Limits.............................................................................................................................................................................................21
Other features............................................................................................................................................................................22
Control diagrams......................................................................................................................................................................23
Example use cases....................................................................................................................................................................25
Controller interaction...................................................................................................................................................................25
Overview......................................................................................................................................................................................25
PLUS+1® CAN/USB gateway..................................................................................................................................................25
Configuration and tuning......................................................................................................................................................25
Commissioning mode.............................................................................................................................................................26
Diagnostics and errors............................................................................................................................................................26
Model code
DDP model code............................................................................................................................................................................ 27
DDP part options............................................................................................................................................................................28
Mechanical installation
Pump transport and handling...................................................................................................................................................30
Storage...............................................................................................................................................................................................31
©
Danfoss | June 2021 BC306384089197en-000201 | 3

Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
Contents
Installation requirements............................................................................................................................................................31
Pump arrangement..................................................................................................................................................................31
Pump shaft coupling...............................................................................................................................................................31
Understanding and minimizing system noise............................................................................................................... 31
Air removal..................................................................................................................................................................................32
Removing air with gravity................................................................................................................................................32
Removing air with an auxiliary pump..........................................................................................................................33
Removing air through the DDP outlet port...............................................................................................................33
Removing air by submersion.......................................................................................................................................... 34
Flushing........................................................................................................................................................................................34
Filtration.......................................................................................................................................................................................34
Controller mounting................................................................................................................................................................35
Pump dimensions..........................................................................................................................................................................36
Common dimensions..............................................................................................................................................................36
Shaft end view dimensions..............................................................................................................................................37
Side view dimensions........................................................................................................................................................ 38
Top view dimensions.........................................................................................................................................................39
Rear view dimensions........................................................................................................................................................40
Single-outlet pump dimensions......................................................................................................................................... 41
Multi-outlet pump dimensions............................................................................................................................................43
Multi-outlet pump side view dimensions.................................................................................................................. 44
Multi-outlet pump rear view dimensions...................................................................................................................45
Controller dimensions..................................................................................................................................................................46
Electrical installation
Installation requirements............................................................................................................................................................47
Wiring overview........................................................................................................................................................................ 47
Machine wiring guidelines....................................................................................................................................................47
Machine welding guidelines................................................................................................................................................ 48
CAN bus installation................................................................................................................................................................ 48
System diagnostic connector...............................................................................................................................................49
Fuses..............................................................................................................................................................................................49
Grounding...................................................................................................................................................................................49
Hot plugging..............................................................................................................................................................................49
Connectors....................................................................................................................................................................................... 50
Pump connectors..................................................................................................................................................................... 51
Controller connectors............................................................................................................................................................. 54
Commissioning and troubleshooting
Basic commissioning procedure.............................................................................................................................................. 59
Commissioning and troubleshooting with PLUS+1 Service Tool................................................................................ 59
Initial procedure........................................................................................................................................................................59
Commissioning DDP valves and hydraulic installation.............................................................................................. 59
Further system commissioning and validation............................................................................................................. 60
Symptoms and diagnosis............................................................................................................................................................61
Serviceability....................................................................................................................................................................................61
4 | © Danfoss | June 2021 BC306384089197en-000201
E
C
G
B
A D
F
Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
General information
Overview
This document contains important information about the safe operation and control of the open circuit
hydraulic Digital Displacement® Pump (DDP096) and its partnered electronic controller (DPC12).
Throughout this document the complete partnered product will be referred to as the Digital
Displacement® Pump or DDP.
Guidance is given on the transportation, commissioning and operation of the pump. For disposal please
contact Danfoss.
All safety guidance provided in this document must be followed. Relevant residual risks and control
measures are outlined.
This document is not a substitute for appropriate professional training and competency dealing with
hydraulic circuits. Only competent persons should install, operate or maintain the pump and controller.
About the DDP
Digital displacement is a new hydraulic pump technology based on a radial piston pump design. An
electronic controller selectively enables each piston by actuating a corresponding on/off valve. In this
way, the pump displacement is digitally variable resulting in fast and accurate flow control. Digital
Displacement® Pumps have high efficiency and very low idle losses because they use only as many
pistons as are needed to meet the demand.
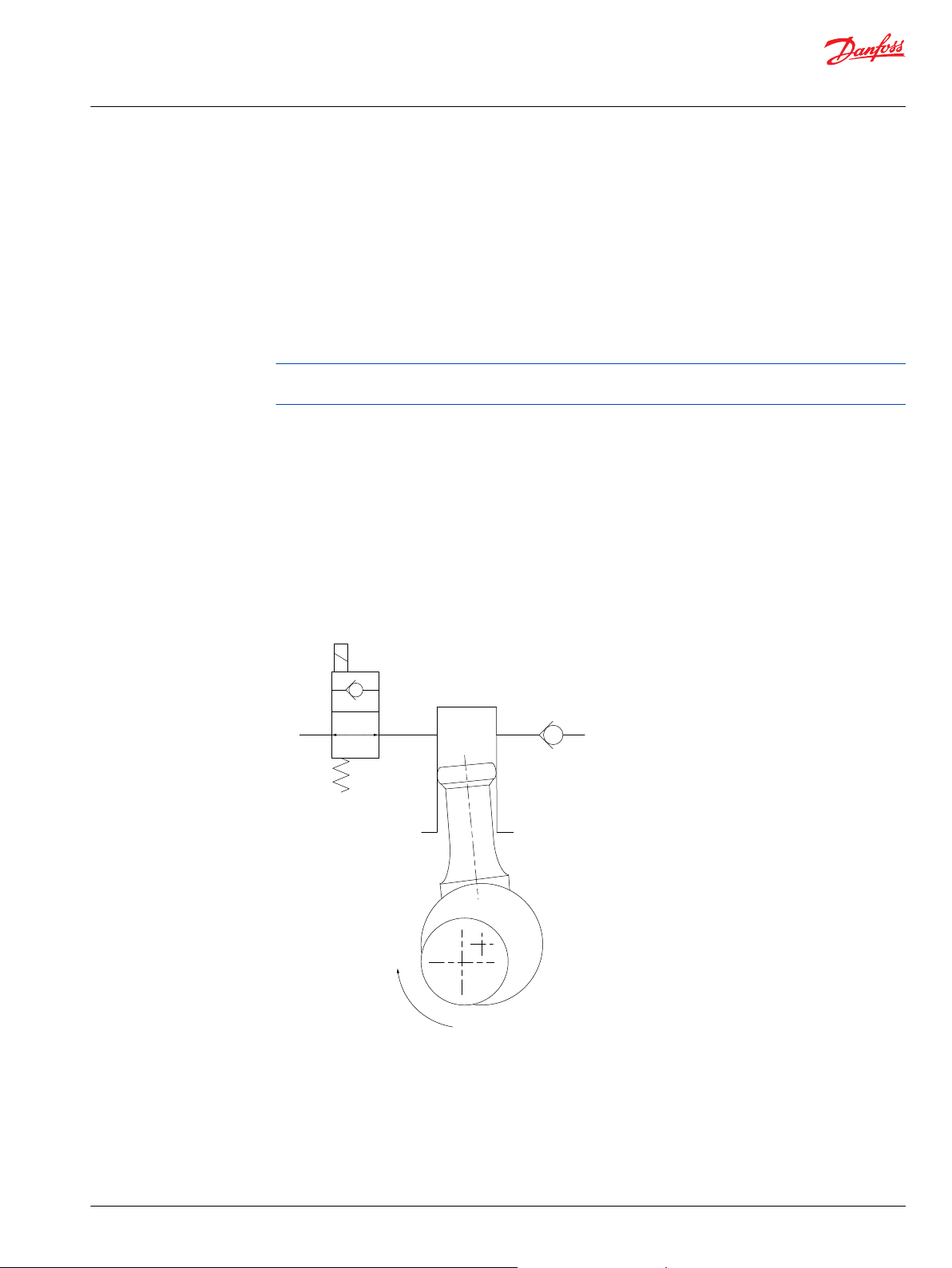
Theory of operation
Check valves connect each of the pump’s piston chambers to the inlet and outlet, as shown below.
The outlet check valve is passive. The inlet check valve is actively controlled and is normally open and can
be closed by energizing a solenoid coil. As the pump’s input shaft rotates, it turns an eccentric cam which
pushes the piston up and down in the piston chamber. The controller determines whether or not the
piston will pump fluid to the outlet. If the piston is idling, the inlet check valve is not energized and the
inlet check valve remains in the open position. The fluid displaced by the piston moves freely back and
forth from the inlet. No fluid is discharged to the outlet.
To pump each piston, the controller closes the solenoid valve when the piston is at bottom dead center.
The inlet check valve closes and the piston forces the fluid through the outlet check valve. When the
A Inlet
B Inlet check valve
C Outlet check valve
D Outlet
E Piston
F Cam
G Shaft rotation
©
Danfoss | June 2021 BC306384089197en-000201 | 5
Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
General information
piston reaches top dead center, the inlet check valve reopens and fluid is drawn from the inlet into the
piston chamber as the piston moves out to begin another cycle.
The DDP has 12 pistons which each displaces 8cc of fluid per stroke for a total displacement volume of 96
cc/rev. The pump geometry is designed so that the pistons are evenly spaced 30° apart. Every piston is
enabled at full displacement (displacement fraction Fd = 1), and every piston is disabled at Fd = 0. For 0 <
Fd < 1, the controller uses a sequence of enabled and disabled pistons which are represented by ones
and zeros respectively in the following table of examples.
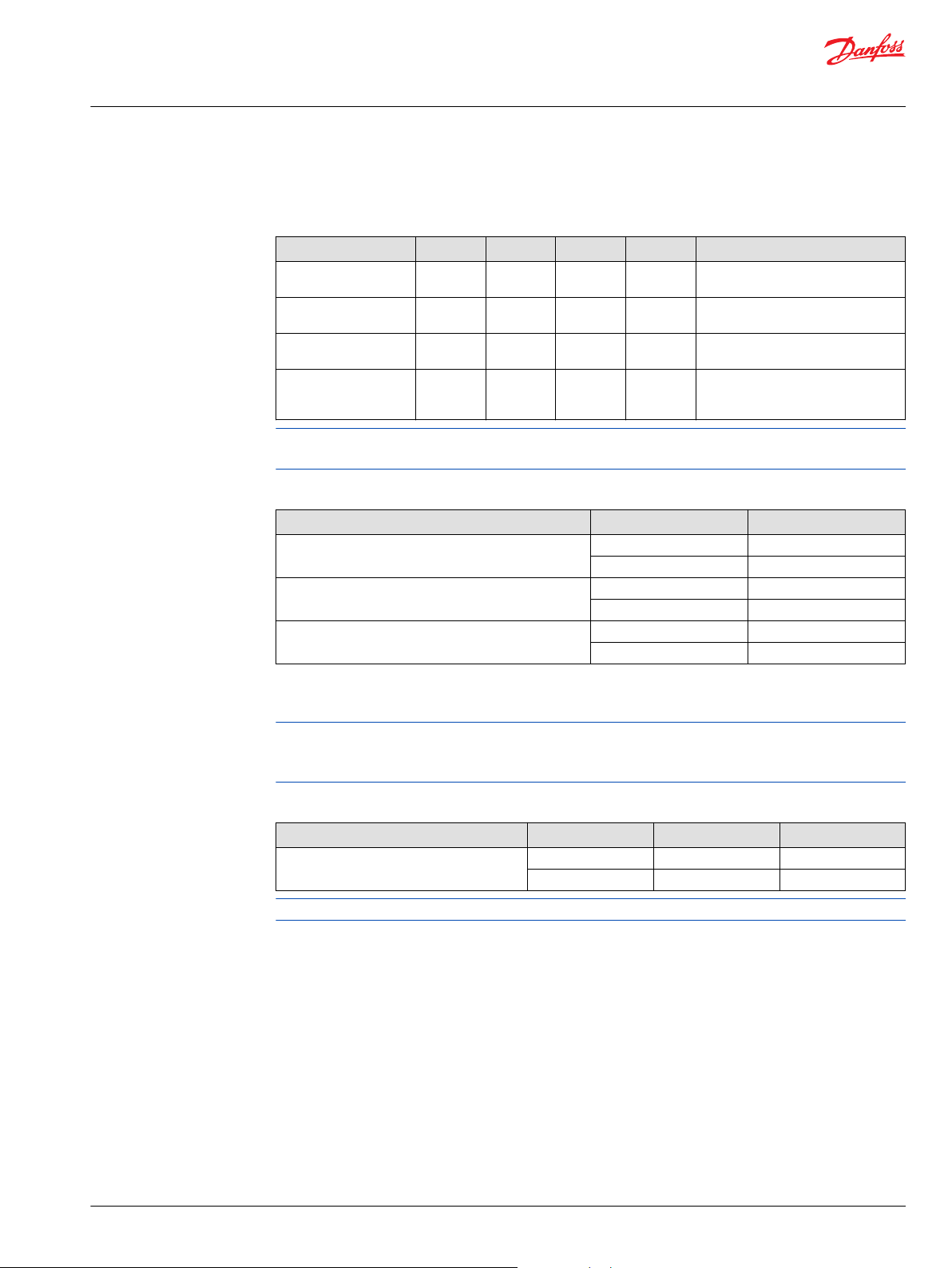
Displacement Fraction Piston Sequence Sequence Length
0.5 01… 2
0.25 0001… 4
7/12 = 0.583 010101101011… 12
19/24 = 0.792 111101111011 110111101110… 24
The desired displacement fraction is achieved as an average over time. Some displacement fractions can
be achieved with short sequences like 01… or 001… Other displacement fractions are achieved with
longer sequences. For example, Fd = 0.792 = 19/24 has 10 active pistons during the first revolution and 9
active pistons during the second revolution. Fd = 0.51 requires a repeating sequence of length 100 with
51 ones and 49 zeros. Any value of Fd can be achieved with a sufficiently long binary sequence.
The controller does not use fixed or pre-programmed sequences of on and off pistons. At every 30
degrees of shaft rotation, the controller determines whether to enable the next piston based on the
current Fd command and the history of pistons enabled. In the preceding table, the commanded
displacement is constant, so the piston sequence is periodic. The same pistons are not necessarily
enabled or disabled, but can change with each shaft rotation.
The DDP can operate in various control modes including pressure control, load sensing, flow control,
displacement control, torque or power control and combinations of these. The control modes are
monitored by the DPC12 pump controller based on sensor inputs and configured with parameters and
limits at a software level. For instance, to regulate the pump pressure in pressure control mode, the
controller compares the measured pressure to the desired pressure and calculates a displacement
command with a proportional-integral control algorithm.
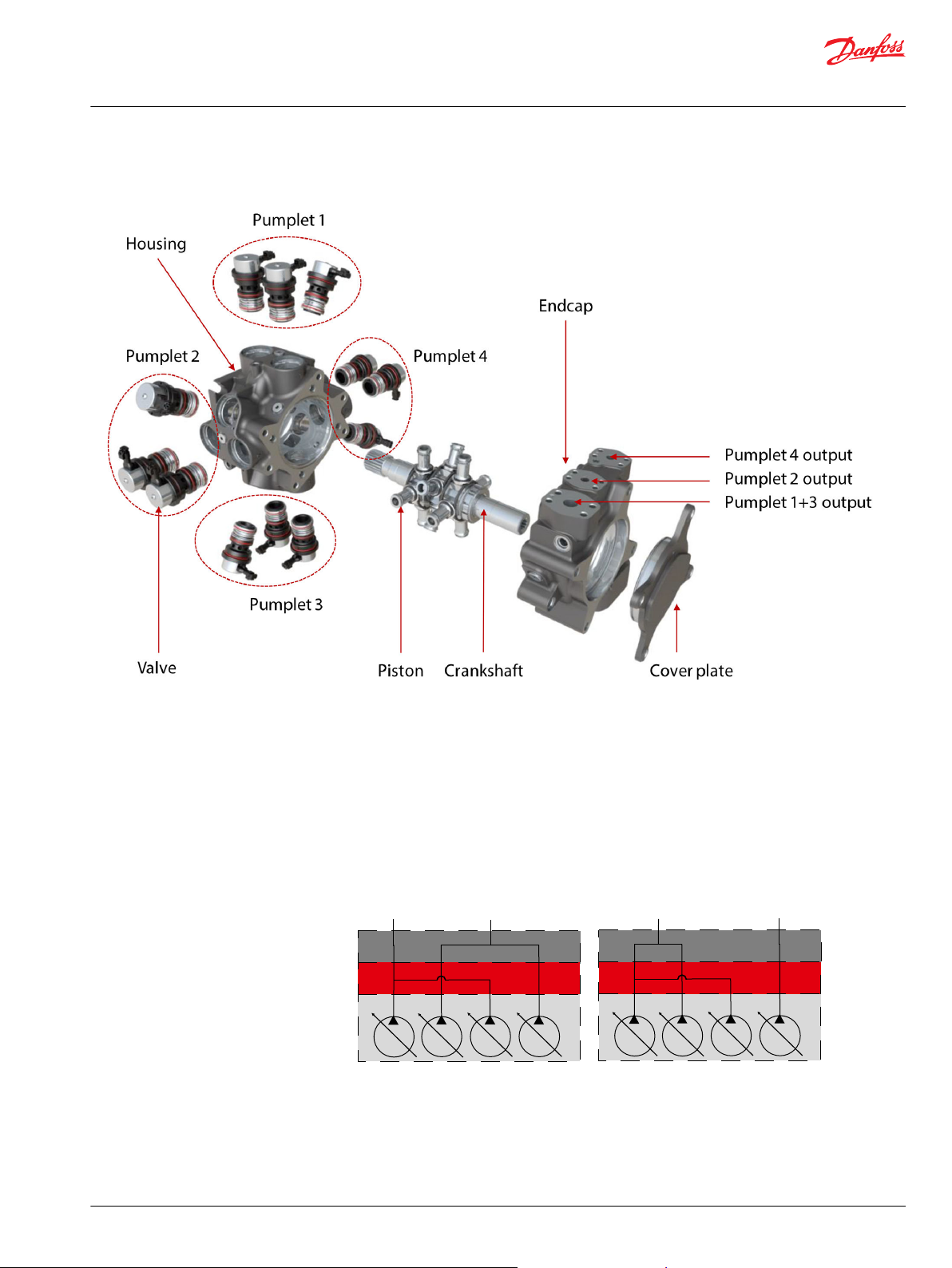
Multi-outlet pump
The DDP096 is composed of 12 pistons and valves (i.e. 12 pumping units). These pumping units are
divided into four groups called pumplets. The DDP can be perceived as a combination of four
independent pumplets producing each up to 24cc/rev, given its unique radial design and digital control.
The DDP096 is available either as a single-outlet endcap or a multi-outlet endcap. The single-outlet DDP
has one inlet and one outlet like other conventional hydraulic pumps. However, the multi-outlet DDP
leverages the four pumplets to offer multiple outputs from a single pump with independent flows,
pressures, and control modes.
6 | © Danfoss | June 2021 BC306384089197en-000201
2 services 2 services
Ganging
manifold
48-24-24 cc/rev
endplate
Pumplets
48 cc/rev
48 cc/rev
P1 P2
P4
24 cc/rev
24 cc/rev24 cc/rev
24 cc/rev
1
2 3
4
72 cc/rev
24 cc/rev
P1 P2
P4
24 cc/rev
24 cc/rev 24 cc/rev
24 cc/rev
1
2 3
4
Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
General information
Three-outlet DDP096 exploded view
The current multi-outlet endcap provides three outlets to the DDP:
•
2 outlets producing up to 24 cc/rev each
•
1 outlet producing up to 48 cc/rev
With this multi-outlet endcap, different displacements are achievable with a ganging manifold to suit an
application using two services. A service is one level higher than the pump outlet and represents the
number of fluid consumers of the DDP. A service is essential to control the DDP096 with the DPC12.
Services diagram
©
Danfoss | June 2021 BC306384089197en-000201 | 7
Currently, only 2-service operation (Service 1 and Service 2) is available. There are two settings possible
for 2-service operation:
Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
General information
•
P1 / (P2 + P4) [48 / 48 cc/rev]
•
(P1 + P2) / P4 [72 / 24 cc/rev]
P1, P2, and P4 represent the outlet ports of the multi-outlet DDP096 endcap. (P2+P4) means that the P2
and P4 ports must be connected with a ganging manifold. Refer to Pump dimensions for more
information on ports.
Service 1 (S1) and Service 2 (S2) must be selected at the software level and configured accordingly. Refer
to Software manual for more information.
Features and benefits
Features and benefits of the DDP are as follows.
•
High efficiency radial piston pump with exceptional part-load performance
•
Low idle losses even when pressurized
•
Near-silent operation for pressure-holding applications
•
Fast response, low displacement hysteresis
•
CAN bus interface with performance and diagnostic information, sensored outputs, tunable
parameters, PLUS+1® Compliant
•
Virtually no leakage at zero flow output
•
Zero to full displacement (or the reverse) in half a revolution
•
Options for multiple independent outlets from a single pump, through-shaft capability and auxiliary
mounting
*
General safety warnings
The DDP has been manufactured according to the generally accepted rules of hydraulic machine design
and uses the latest advanced valve concepts to maximize operating efficiency and user controllability.
Fluid under high pressure
Escaping hydraulic fluid under pressure can have sufficient force to penetrate skin causing serious injury
and/or infection.
Additionally, the fluid may cause burns.
Use caution when dealing with hydraulic fluid under pressure.
Always relieve pressure in the system before removing hoses, fittings, gauges, or other components.
Never use hands or any other body parts to check for leaks in a pressurized component; seek medical
attention immediately if you are cut by hydraulic fluid.
OEM responsibility
The OEM of a machine or vehicle in which Danfoss products are installed has the full responsibility for all
consequences that might occur. Danfoss has no responsibility for any consequences, direct or indirect,
caused by failures or malfunctions.
*
Half a revolution plus 8.5 ms for communication and processing time. For example, at 1800 rpm, processing time is 16.2 ms + 8.5
ms = 24.7 ms.
8 | © Danfoss | June 2021 BC306384089197en-000201
W
W
Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
General information
•
Danfoss has no responsibility for any accidents caused by incorrectly mounted or maintained
equipment.
•
Danfoss does not assume any responsibility for Danfoss products being incorrectly applied or the
system being programmed in a manner that jeopardizes safety.
•
All safety critical systems shall include an emergency stop to switch off the main supply voltage for
the outputs of the electronic control system. All safety critical components shall be installed in such a
way that the main supply voltage can be switched off at any time. The emergency stop must be easily
accessible to the operator.
•
The hydraulic system must also be designed to withstand an emergency shutdown where hydraulic
flow will stop, and pressure may drop significantly.
Warning
There is the potential to cause personal injury or damage to equipment if the following instructions and
warning are not followed.
•
Please read these instructions thoroughly before commissioning the pump.
•
Keep these instructions in an accessible location and always pass them on to the end user of the
pump.
•
Consult with Danfoss if there are any questions about the intended use of the pump or safety
implications from operating the pump.
•
Operating conditions and technical data given in the data sheet must be followed at all times.
Pressure relief
The pump is not supplied with any mechanical pressure limiting device as standard. Pressure transducers
present on the pump are for pressure compensation and can not substitute as a safety device.
A pressure relief valve rated for full flow in the hydraulic circuit is important in protecting the product and
personnel.
The OEM is responsible for designing the system to mitigate potential unsafe situations, such as
providing adequate pressure relief.
Failure and fault states
If electrical power to the DPC12 controller is lost, the DDP096 pump will output zero flow. Some software
faults also cause the DDP096 to stop providing flow. If zero output flow is an undesirable failure/fault
mode in the application, means of providing backup flow must be designed into the system.
Intended use
Digital Displacement® pumps are components in terms of the EU machinery directive 98/37/EC. Hydraulic
pumps are not ready to use machines as described in the EU machine directive. Digital Displacement
pumps are produced with the sole intention of being incorporated within a machine or further assembly
to form a machine or system. The product may only be fully commissioned after it has been installed in
the machine or system for which it is intended.
The Digital Displacement® pump produces and controls the flow of hydraulic fluid most commonly with
the function of regulating the output pressure. It is assumed that a flow control device, such as a closed
center proportional valve, is present in the system between the pump and the controlled load. Other
applications may be acceptable but should be discussed with Danfoss first.
®
Improper use
Warning
Digital Displacement® pumps may not be used in explosive environments. Digital Displacement® pumps
may not be used in life critical applications.
Please contact Danfoss for further information on use in specific applications.
©
Danfoss | June 2021 BC306384089197en-000201 | 9

Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
General information
Personnel qualifications
The system operates with high pressure fluid. Assembly and disassembly of the pump for maintenance
purposes is only to be carried out by Danfoss or a qualified service technician authorized by Danfoss.
Installation of the pump and electrical equipment must be carried out by suitably qualified personnel
with experience and knowledge of working with hydraulic and electrical systems.
10 | © Danfoss | June 2021 BC306384089197en-000201
Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
Technical specifications
DDP096 pump specifications
DDP general specifications
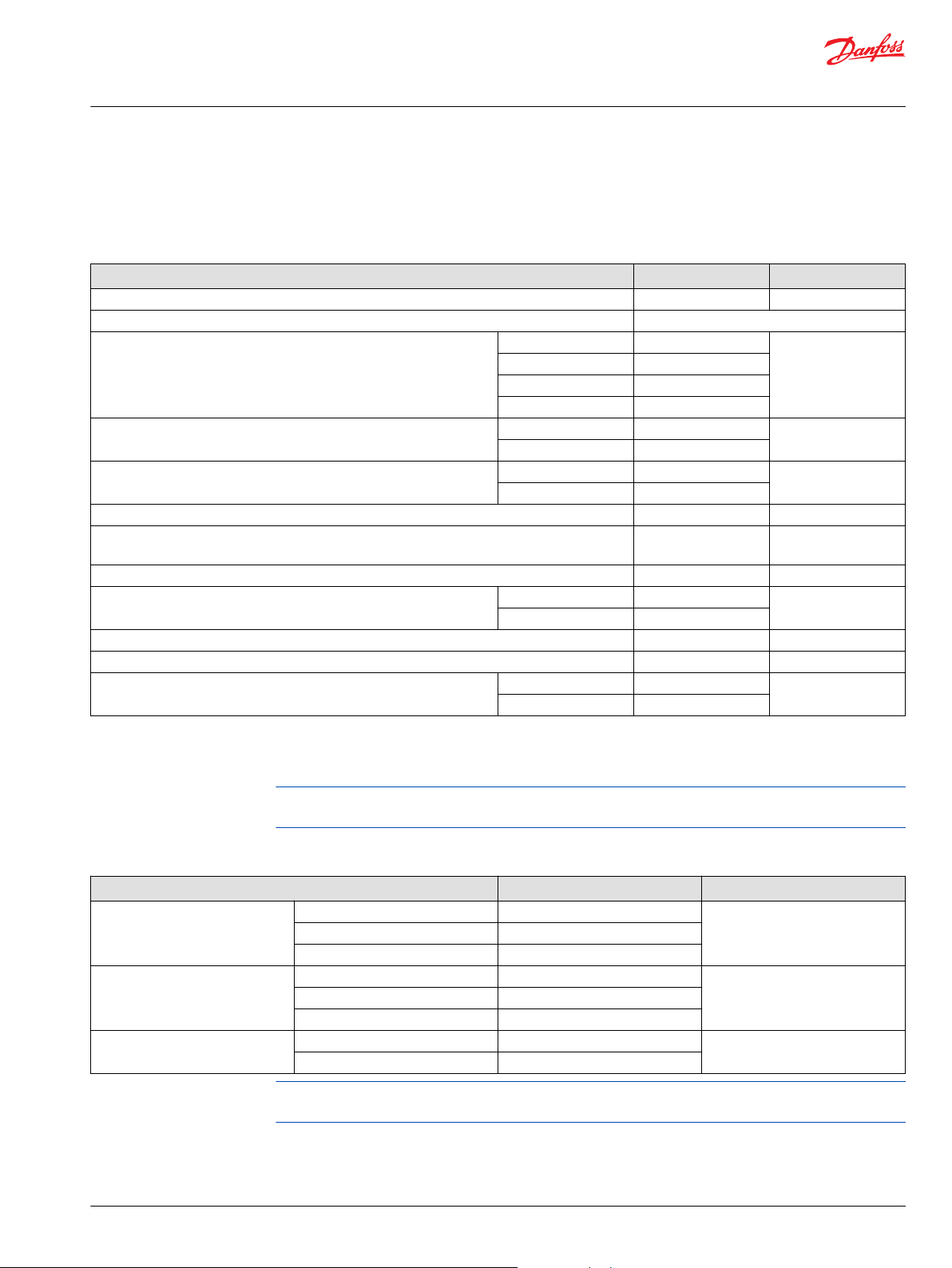
The below table contains information for displacement, pressure, torque, and temperature.
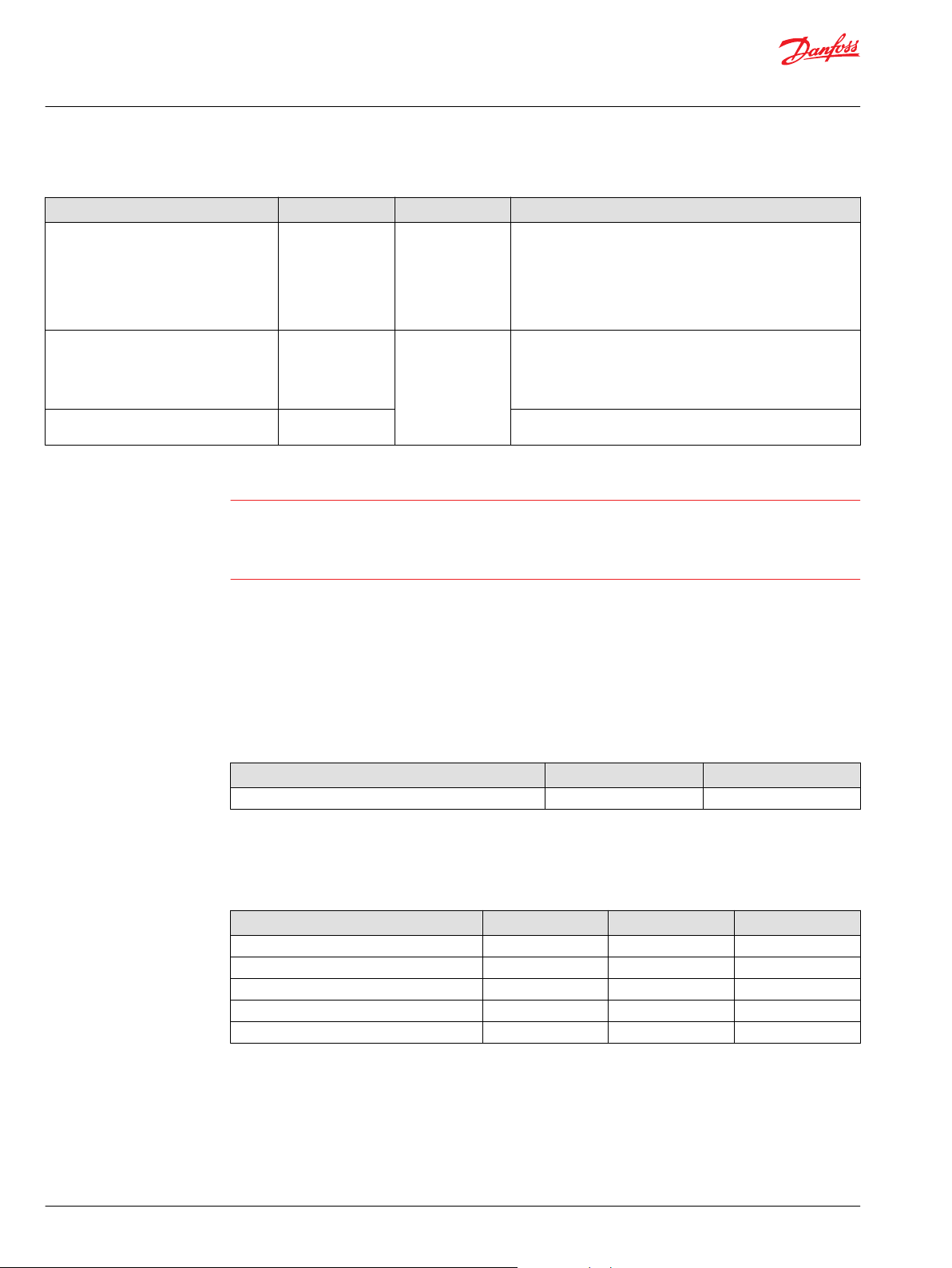
Description Value Units
Maximum displacement 96 [5.86] cm3/rev [in3/rev]
Available rotation (viewed from shaft end of the pump) Clockwise (CW) [R]
Outlet pressure Maximum peak 450 [6530] bar [psi]
Maximum continuous 420 [6090]
Minimum continuous 20 [290]
Minimum intermittent11 [15]
Inlet pressure (absolute)
Input speed Minimum 1450 min-1 (rpm)
Maximum power 45 [60] kW [hp]
Flow at rated speed and maximum displacement (theoretical)
Torque at full displacement, 1500 rpm & ∆p=400 bar
Mass Single outlet 51.6 [114] kg [lb]
Approximate filling capacity 2.3 [0.61] L [US gal]
Mass moment of inertia of internal rotating components (single pump without through shaft) 0.001037 [0.00076] kg·m2 [slug·ft2]
Ambient temperature Minimum 0 [32] °C [°F]
1
Performance degradation expected.
2
Size hoses or piping appropriately to ensure the minimum pressure condition is satisfied.
3
For more information, refer to Input torque on page 19.
2
3
Minimum 0.8 [12] bar [psi]
Maximum 3.5 [50]
Maximum 1850
144 [38] @1500 rpm
173 [45.6] @1800 rpm
600 [5310] N·m [lbf·in]
Multi outlet 53.9 [119]
Maximum 70 [158]
L/min [US gal/min]
Maximum power and speed specifications represent the current qualification. Wider speed operation
and/or higher power limit may be possible. Check with your Danfoss representative.
DDP fluid specifications
Description Value Units
Viscosity Minimum continuous 10 cSt
Recommended range 16 - 40
Maximum for cold start 1000
Temperature Minimum for cold start 0 [32] °C [°F]
Maximum continuous 60 [140]
Maximum intermittent 70 [158]
Cleanliness per ISO4406:1999 Recommended 17/15/12
Minimum 18/16/13
Viscosity and temperature specifications represent the current qualification. Wider temperature and/or
viscosity operation may be possible. Check with your Danfoss representative.
©
Danfoss | June 2021 BC306384089197en-000201 | 11
Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
Technical specifications
DDP mechanical specifications
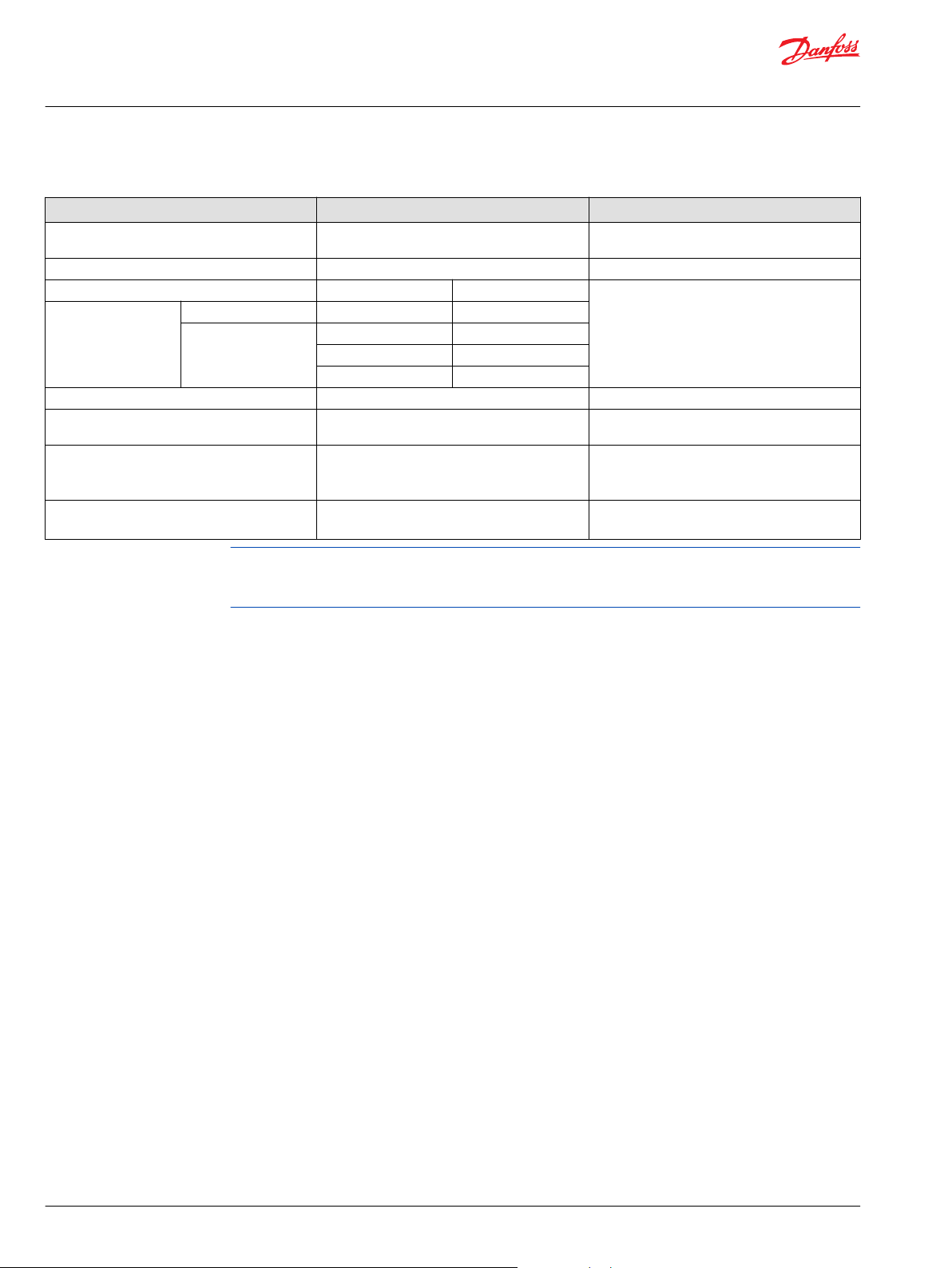
Description Value Notes
Front mounting flange SAE C 4-bolt Flange 127-4 adhering to ISO 3019-1 (SAE
Front input shaft 23 tooth 16/32 pitch Spline per ANSI B92.1b-1996 class 6e
Inlet/Suction port S DN 51 (Ø 51 mm) Shipped with steel cover. For more information,
Outlet/Pressure port(s) Single outlet P DN 25 (Ø 25 mm)
Multi outlet P1 DN 19 (Ø 19 mm)
P2 DN 13 (Ø 13 mm)
P4 DN 13 (Ø 13 mm)
Bleed port plugs M14 x 1.5 per ISO 6149-1 Steel plugs
Lifting brackets Two brackets on endcap bolts, and another
Pump wiring harness connectors
Sensors included in DDP
aligned with outlet port(s)
DTM04-12PC (green) – C3
DTM04-12PA (grey) – C4
DTM04-12PB (green) – C5
1 speed and temperature sensor
1 (to 3) pressure sensor(s)
J744:1996)
see pump dimensions.
Only intended for lifting pump and Danfoss
supplied sensors/wiring
C3 is for the sensor harness
C4 is for the coil harness “A”
C5 is for the coil harness “B”
The DDP has a pressure sensor (0-600 bar) on
each service.
Substituting the factory supplied speed/temperature or pressure sensors will void the warranty. Only
replace sensors with genuine Danfoss replacements parts. Contact your Danfoss representative for more
details.
12 | © Danfoss | June 2021 BC306384089197en-000201
Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
Technical specifications
DPC12 controller specifications
DPC12 input power supply
Description Minimum Typical Maximum Unit Notes
Supply voltage 21.6 24 26.4 VDC For both coil and logic power
Cranking voltage 6 VDC Minimum voltage before the logic
Voltage disabling coil
outputs
DPC12 power-on time 1.5 s Time from power-on to completing
Supply voltage range represents the current qualification. Wider supply voltage range may be possible.
Check with your Danfoss representative.
Coil power consumption
Description Typical Unit
Approximate coil power vs theoretical flow, full
displacement
Full displacement @ 1500 rpm
Full displacement @ 1800 rpm
*
Tests performed at full displacement Fd=1 (most power consuming condition); 24 VDC power supply; 34 mΩ for
each pump-to-controller coil cable @ 20°C (2 meter cable with a 1 mm2 CSA). Refer to Wiring and fuses on page 14
for recommendations.
*
*
*
9 VDC Minimum voltage before coil outputs
supplies
resets
turn off
address claim procedure, ready to
pump
51 mA/(L/min)
1.2 W/(L/min)
8.0 A
192 W
8.8 A
211 W
Power consumption values are reported as mean values. The DPC12 draws a variable pulsed load from
the coil power supply, so the power supply must be able to handle higher peak currents. If operating
from a switch-mode converter, consult Danfoss on recommended parts.
Logic power consumption
Description Typical Maximum Unit
Logic power consumption (with 24 VDC
power supply)
100 220 mA
2 5 W
The maximum logic power consumption is with 6 pressure sensors (4-20 mA).
Separate coil and logic power supplies
The controller coil and logic supply inputs (i.e. power) are internally separated, while the supply returns
(i.e. ground) are internally connected (see Grounding on page 49). This means that supply inputs and
returns must be supplied to both to produce flow. The separation allows the coil circuitry to be deenergized while the logic remains powered, thus providing communication with the controller while the
coils can no longer cause pumping. Any switching device used must be on the supply inputs. The coil
and logic supply returns must always be connected to system ground and all supply return pins must be
used in order to provide the appropriate current sinking. Due to higher power requirements of the coil
circuitry compared to the logic circuitry, different gauges of wire may be needed.
©
Danfoss | June 2021 BC306384089197en-000201 | 13
W
Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
Technical specifications
Wiring and fuses
Description Value Unit Notes
Pump-to-controller coil cable resistance 25 - 55 @ 20 °C mΩ One-way resistance of pump-to-controller cable (from pump
Coil supply fuse requirements (24V
system)
Logic supply fuse recommendations 3 Fuse recommended for system protection. Fuse not required for
30 A Use fast acting fuses of I2t ≤ 3500 A2s. A fused coil power supply
connector C4/C5 to controller connector C4/C5, excluding pins
and crimps). Any additional connections between the pump
connector and controller connector should be included in the
resistance calculation. Contact your Danfoss representative if
your application requires pump-to-controller cables that cannot
satisfy this rule.
is essential to protect the DPC12 against reverse polarity
conditions. Without a fuse, the DPC12 can be damaged.
Multiple or sustained reverse polarity events can also damage
the DPC12.
reverse polarity protection.
Warning
When powering the DPC12 from a current limited power supply, use special consideration to ensure
power supply has enough margin to blow the chosen fuse. For example, pairing a 40A fuse with a current
limited power supply of 40A is potentially dangerous. The fuse current must be exceeded by a large
margin to guarantee the fuse blows before hardware damage.
Pressure sensors for DPC12
While the DDP096 pump is already equipped with pressure sensor(s), additional pressure sensor(s) may
be required for load sensing operation. The DPC12 is only compatible with 4-20 mA pressure sensors. The
controller supplies a minimum supply voltage of 12V to pressure sensors. The receiver has a maximum
load resistance of 160 Ω. A 4-20 mA sensor that accepts a minimum supply voltage of 8V or less is
recommended. Contact your Danfoss representative for recommended pressure sensors.
Non-volatile memory write/erase ratings
Description Value Unit
EEPROM write/erase cycles
*
Minimum valid cycles over entire operating temperature range
*
4 x 10
6
General ratings
Environmental
Description Minimum Maximum Unit
Ambient operating temperature -40 [-40] 70 [158] °C [°F]
Electronics temperature shut down
Storage temperature -55 [-67] 85 [185] °C [°F]
Humidity 80 %
Ingress Protection (IP) ratings
1
Internal electronics temperature monitoring will error in extreme temperatures.
2
Documented IP ratings are valid only when the mating connectors are in place and unused connector pin positions
have sealing plugs installed.
1
2
-40 [-40] 105 [221] °C [°F]
IP69K
14 | © Danfoss | June 2021 BC306384089197en-000201
Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
Technical specifications
Product compliance
Description EU Directive
CE rating -
EMC 2014/30/EU
RoHS 2011/65/EU
REACH (EC) No 1907/2006
CAN port
Description Value Unit
Available baud rates 125 kbps
*
Default value; see the DPC12 software manual for more information.
Environmental standards and criteria
250
500
1000
*
Climate environmental standards
Description Applicable standard
Storage operating IEC 60068-2-1, test Ab
Operating temperature IEC 60068-2-1, test Ab
Thermal cycle IEC 60068-2-2, test Na
Humidity IEC 60068-2-78,
Solar radiation (UV exposure) ASTM G154
Degree of protection (IP) IEC 60529
IEC 60068-2-2 test Bb
IEC 60068-2-2, test Bd
IEC 60068-2-38 (partial)
IEC 60068-2-30, test Db
Chemical standards
Criteria Applicable standard
Ice water shock ISO 16750-4
Chemical resistance ISO 16750-5
Mechanical and electrical connection standards
Criteria Applicable standard
Random vibration (Level 2)
Bump IEC 60068-2-29, test Eb
Shock IEC 60068-2-27, test Ea
Free fall IEC 60068-2-32, test Ed
Wire force IEC 60730-1 section 11.7
IEC 60068-2-6, test Fc
IEC 6008-2-64, test Fh
©
Danfoss | June 2021 BC306384089197en-000201 | 15
Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
Technical specifications
Electrical and electromagnetic standards
Criteria Applicable standard Additional information
EMC emissions ISO 13766 Electromagnetic compatibility for earth moving
EMC immunity ISO 13766 Electromagnetic compatibility for earth moving
Electrostatic discharge
Auto electrical transients
For more information about criteria and standards please contact your Danfoss representative.
LED messages
LED characteristics meaning
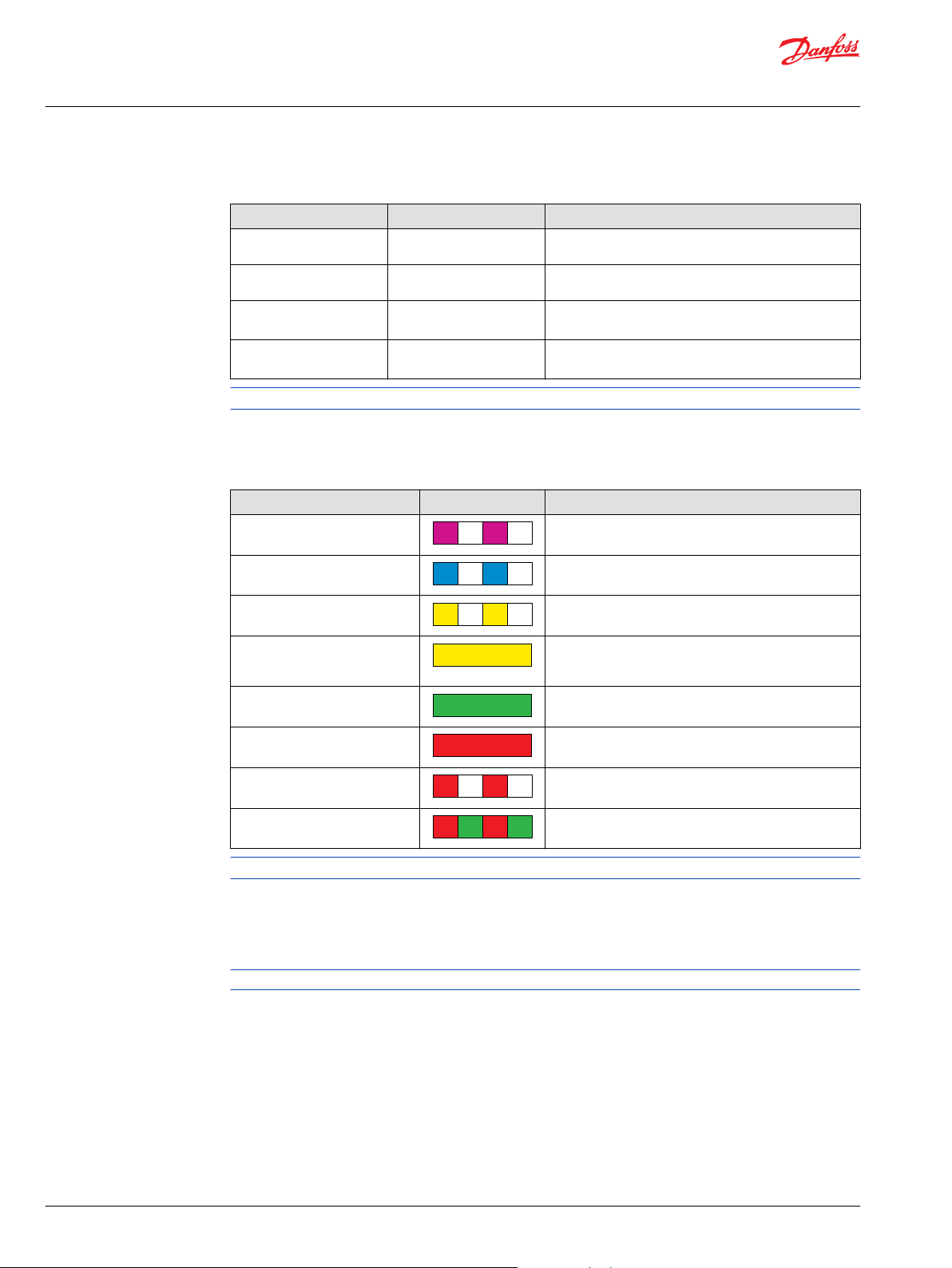
Characteristic LED Indication
Magenta; blink rate 1.5 Hz Device is in BOOT-LOADER mode
EN 61000-4-2
SAE J1113-13
ISO 7637-2
ISO 7637-3
machinery
machinery
Electrostatic discharge immunity test
Road vehicles — Electrical disturbances from conduction
and coupling
Blue; fast irregular blinking Device is downloading application software
Yellow; blink rate 1.5 Hz Device is in COMMISSIONING mode
Yellow; continuous Device is either waiting for DM13 message to enable the
Green; continuous Device is in ACTIVE state
Red; continuous Device is in ERROR or ERROR_HOLD state
Red; blinking J1939 address claim fault
Alternating red/green Device is in LIMP mode and there is no severe error
pump, in INIT state directly after power up, or in
DISABLED state
Refer to the DPC12 Software manual for details on operation modes.
DPC12 housing
The DPC12 housing features a snap together assembly. The controller weighs 2.8 kg [6.2 lbs]. Once
assembled at the factory, the housing cannot be opened for service.
The DPC12 controller is not field serviceable. Opening the DPC12 housing voids the factory warranty.
16 | © Danfoss | June 2021 BC306384089197en-000201
Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
DDP characteristics
Performance
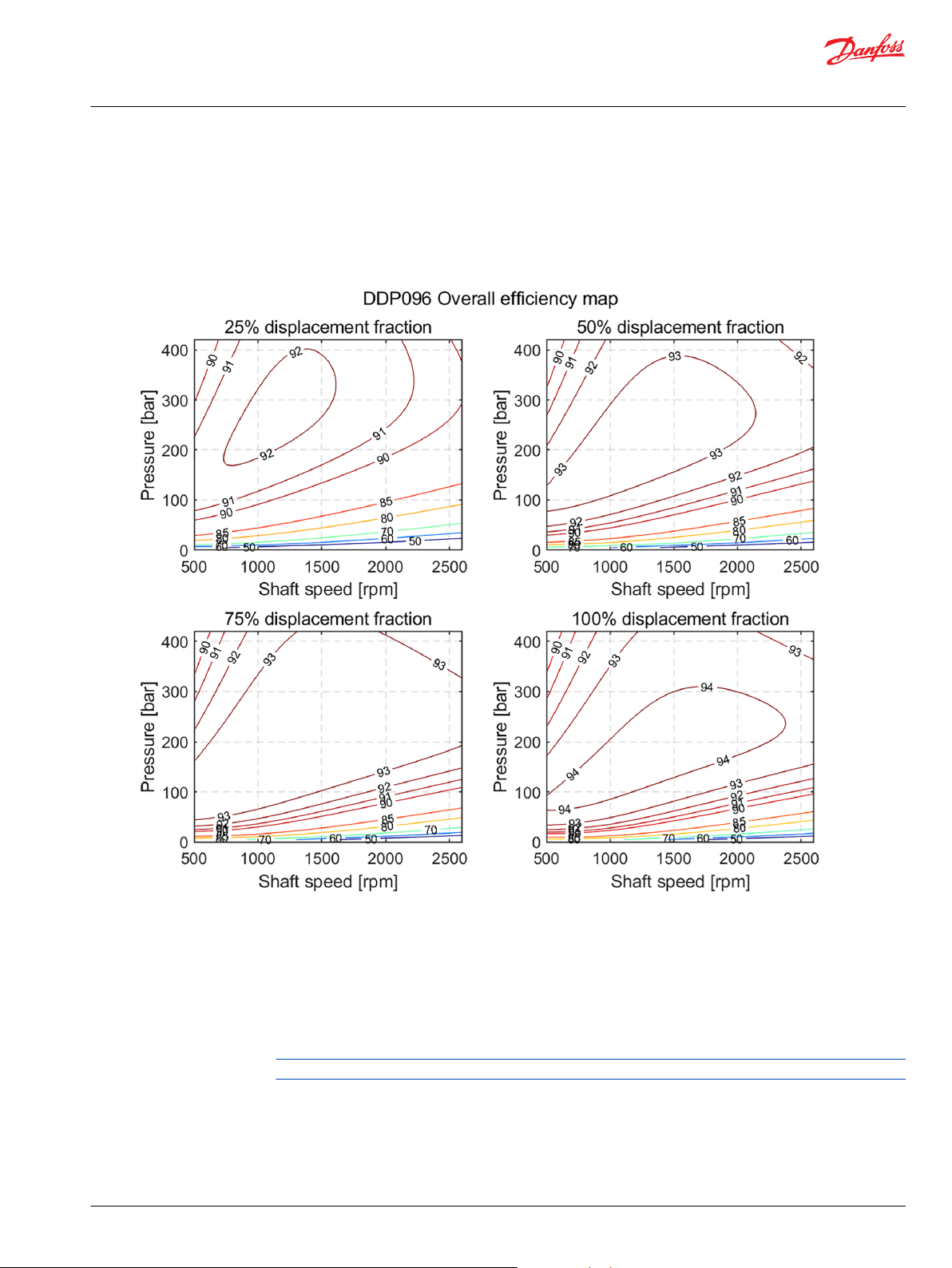
Overall pump efficiency
The overall pump efficiency is the ratio of the hydraulic output power to the mechanical input power.
Inlet pressure 1.0 bar abs – inlet temperature 49°C with ISO VG46 oil.
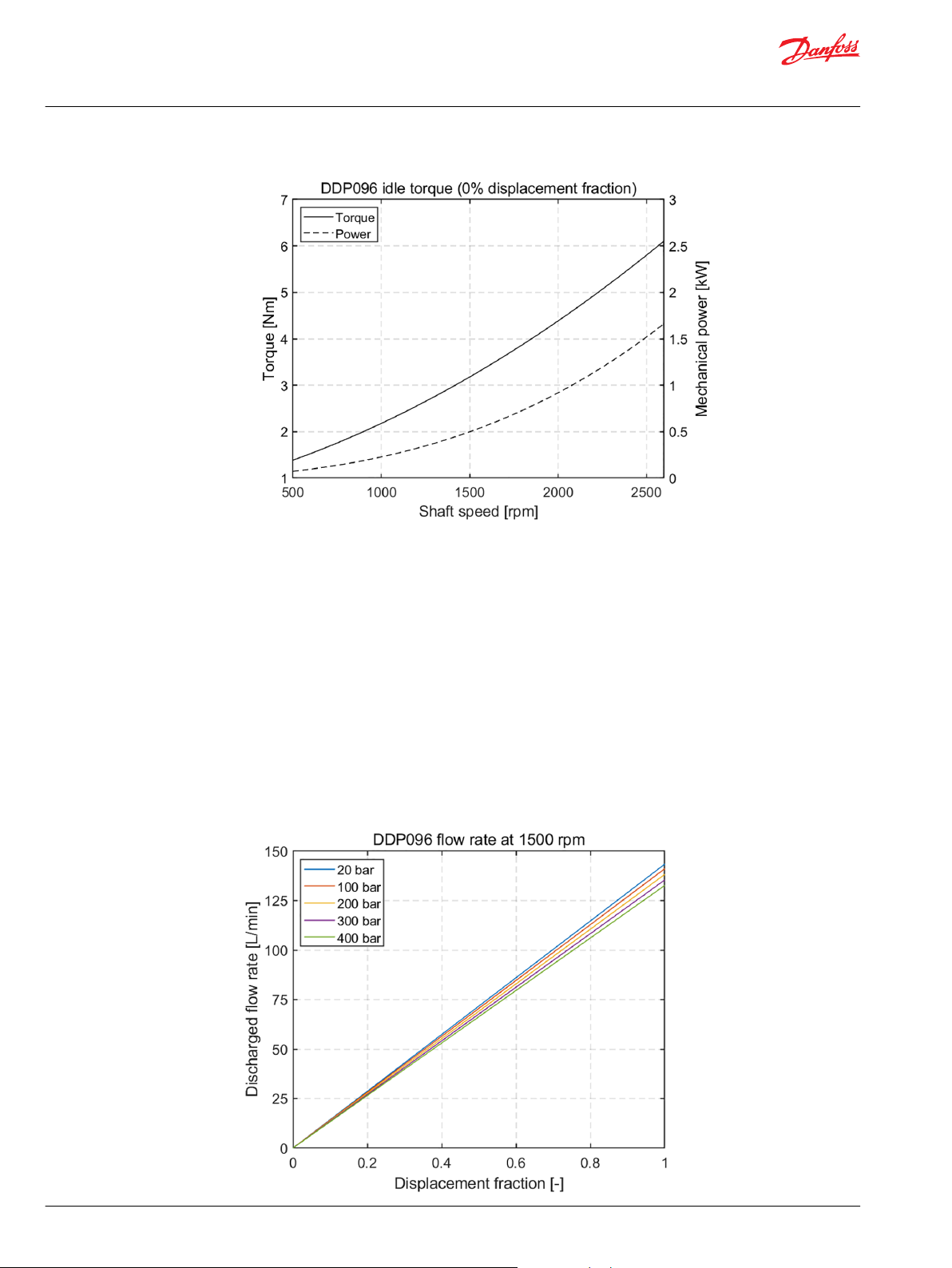
Idle losses
In a Digital Displacement® pump each piston chamber is isolated from the outlet line by a high-pressure
valve, acting as a check valve. As a result, the idle losses of the DDP096 are independent from the outlet
pressure.
While in idling mode, the discharge flow of the pump is exactly 0 L/min.
See Theory of operation on page 5 for more information.
©
Danfoss | June 2021 BC306384089197en-000201 | 17
Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
DDP characteristics
Pump discharged flow and shrinkage
Pump shrinkage
The DDP096 output flow rate is proportional to the displacement fraction as the number of valves being
enabled increases linearly with the displacement fraction. The discharged flow rate will also decrease as
the pressure increases. In conventional machines, such a decrease in flow is normally associated with
volumetric efficiency, as the energy is lost as leakage. With Digital Displacement® pumps, this decrease is
due to pump shrinkage and is mostly caused by the compression of oil. Most of the energy stored in the
compressed oil is then transferred back to the crankshaft when the piston chamber is depressurized after
top dead center.
The conventional definition of volumetric efficiency (defined by ISO4409:2019) is therefore inappropriate
for Digital Displacement® pumps. For a more accurate definition of the DDP’s volumetric efficiency, please
refer to A More Accurate Definition of Mechanical and Volumetric Efficiencies for Digital Displacement Pumps
from Christopher Williamson and Noah Manring.
18 | © Danfoss | June 2021 BC306384089197en-000201
Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
DDP characteristics
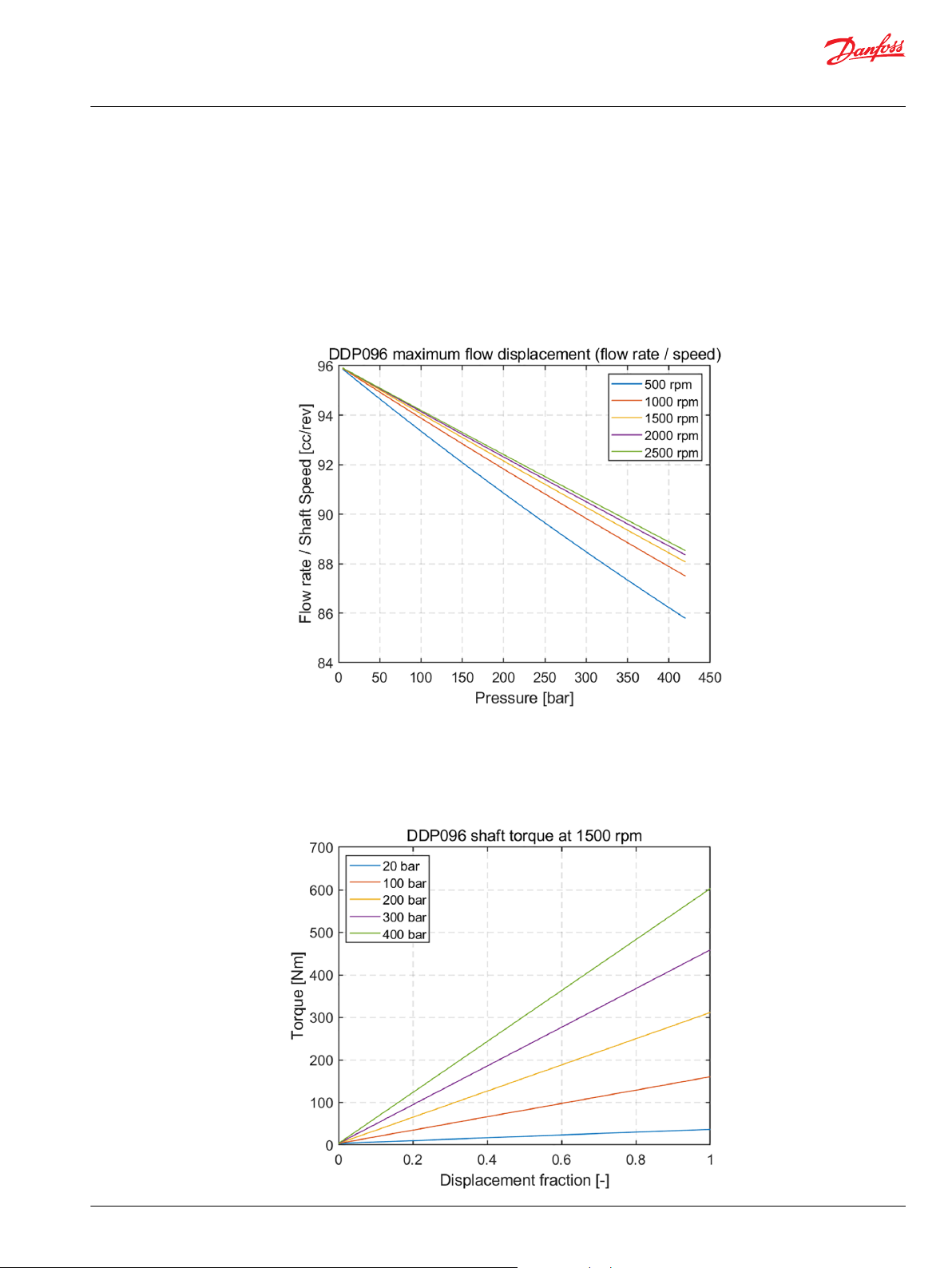
Discharged flow
To estimate the actual DDP096 discharged flow rate at a given pressure and shaft speed, the shaft speed
should be multiplied by the “Flow rate / Shaft Speed” (i.e. pump displacement) presented in the graph
below. For example, at 400 bar and 2500 rpm the DDP096 pump displaces a maximum of 88.5 cc/rev,
equivalent to 177 L/min.
As each valve actuation is done independently, the pump shrinkage ratio is independent of the pump
displacement demand. Therefore, when requesting 25% of pump output flow, the pump will displace
exactly 25% of maximum flow in the same condition of pressure speed and viscosity.
Input torque
Due to internal compressed energy recovery, the torque and input power follow the same rule as the
pump discharge flow; the input torque and power increases less with pressure than would be expected
from the theoretical value.
©
Danfoss | June 2021 BC306384089197en-000201 | 19

Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
DDP characteristics
Noise characteristics
Electronic control losses
The DDP does not have hydraulic control losses. Controller electrical losses are directly linked to pump
output flow (i.e. displacement and speed) as this translates into more valve actuations. Refer to DPC12
input power supply on page 13 for more information.
Conventional hydraulic machines have predominant tonal content caused by the rapid discharge of
pressurized oil at the end of each pumping cycle. The frequency content of this tone is directly linked to
the shaft speed and the number of pumping chambers. The sound power level is correlated to system
pressure and shaft speed, but marginally to displacement – and therefore not necessarily correlated to
output power.
The DDP sound pressure level is typically lower than comparable variable displacement swashplate type
pumps. But more importantly, due to its fundamental operating principle, DDP sound characteristics are
very different from conventional hydraulic pumps.
With Digital displacement, audible sound is generated during individual pumping events (influenced by
pressure and shaft speed). At idle, a DDP is therefore silent. Sound power level will increase with output
flow and system pressure. In other terms, the DDP sound power level is correlated to output power.
There is no predominant tone in the noise output when DDP idles as compressed oil is not discharged
but reused; the frequency content is low. A DDP sound will typically not be noticeable when used in
combination with internal combustion applications.
The lack of tonal content in DDP improves the noise characteristic in variable-speed applications. Human
ears can detect variation of tone frequency which is considered disturbing. DDP is expected to be
beneficial in electrified applications, where noise emission of the hydraulic system becomes
predominant.
Although air-borne noise from the pump will be low, DDP can create additional fluid-borne noise and
structure-borne noise which can generate system level noise. It is important to mitigate such vibrations
by adequately isolating the pump from the rest of the system. See the Understanding and minimizing
system noise on page 31 for more information on pressure pulsation mitigation.
20 | © Danfoss | June 2021 BC306384089197en-000201

Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
Control operation
Together with a Digital Displacement® Pump, the DPC12 controller is an integral part of the product; the
pump cannot function without its controller.
The DPC12 offers different modes for controlling the pump and to aid in system startup. Parameters are
used to set the behavior of the DPC12 and are selected through use of the Danfoss PLUS+1® Service Tool
and diagnostic file (P1D). Whichever control modes or limits are applied, the same pump and controller
hardware (DDP096 and DPC12) are used.
For multi-service pumps, the control mode is selected for each service. The control loop for each service is
independent of all other control loops. For example, one service may be in Displacement control while
another is in Load-sense control. The specific valid combinations depend on the software version. Refer
to the Software Manual for details.
Software control of the DDP provides many benefits including the following:
Flexibility Change control modes of the pump or services to allow the same pump to work for
multiple applications
Ease of tuning Tune response and recovery behavior with parameters rather than changing hardware
CAN control Send variable control mode setpoints via CAN to create more versatile or precise
applications
Diagnostics Receive real-time feedback of DDP performance as well as errors codes to aid in
troubleshooting
Control modes, limits, and features
Control modes and sources
The DDP096 operates in three principle modes:
Displacement control The service is commanded to provide a fraction of its maximum displacement
Pressure control The service is commanded to maintain a certain pressure at its output
Load sense control The service is commanded to maintain a pressure at its output that is a certain
Each control mode has a reference (displacement reference, pressure reference, pressure margin
reference) that must be provided by a source. Each control reference is converted into a target
displacement (Fd) to meet the demand.
Control references can be sourced from either a parameter in the DPC12 on-board memory (configured
with the PLUS+1® Service Tool) or another controller in the system using CAN messages. To avoid
overloading the J1939 CAN bus, only the needed parameters should be actively transmitted.
Flow control is a common control request and can be handled by setting the control mode to pressure
control with a flow limit over J1939 (refer to Limits on page 21).
Limits
On top of the target displacement, the DPC12 controller can apply limits. The following limits are
available for configuration:
Flow limit
•
Torque limit
•
Power limit
•
Pressure limit
•
margin pressure greater than the pressure at the load-sense pressure sensor
If a limit is reached, then the displacement is capped to the maximum displacement within the limit.
Limits may also be set to the unlimited source, which means the limit will not be applied. Setting a limit to
zero will limit the displacement to zero, preventing the service from producing flow.
©
Danfoss | June 2021 BC306384089197en-000201 | 21

Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
Control operation
Multiple limits can be active at once depending on the valid configurations available in the software
version.
Not all limits can be applied together or with the principle control modes. The specific valid combinations
depend on the software version. Refer to the Software Manual for details or contact your Danfoss
representative for available combinations.
Other features
Given its digital nature, DDP has some unique features:
Minimum speed
for pumping
Startup ramp
time
Pressure fault
limit
Enable/disable
service
DM11 A J1939 standard Diagnostic Message (DM) used to transition the DPC12 controller
DM13 A J1939 standard Diagnostic Message (DM) used to prevent the DPC12 controller
See the Software Manual or contact your Danfoss representative for more details on these features.
The DDP will not pump when below a set speed threshold. This feature allows the
prime mover to come up to speed with very little torque from the DDP.
This feature can be enabled so that a displacement limit is ramped from 0 to 100%
over a set time, allowing control modes to load the prime mover more slowly.
The pump will go to an error state and stop pumping when the pressure exceeds
this limit.
Each service can be enabled or disabled via CAN or a Service Tool parameter
depending on the valid configurations.
out of ERROR_HOLD status without needing to power cycle the controller.
from raising low severity errors until the message is received, allowing time for other
controllers to boot and send required signals.
22 | © Danfoss | June 2021 BC306384089197en-000201

Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
Control operation
Control diagrams
Service control algorithm diagram
©
Danfoss | June 2021 BC306384089197en-000201 | 23

Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
Control operation
Only specific combinations of control modes and limits are available. Refer to Software manual or contact
your Danfoss representative for details.
The service control algorithm diagram represents the signals and parameters used to control each service
of a DDP.
Note that Fd stands for displacement fraction and represents a normalized displacement from 0 to 1 for a
given service.
The +∞ symbol is used to represent that demand/limit is unlimited, but when the signal has been
converted to Fd and saturated, only a value of 1 will be passed along.
The MIN block signifies that multiple demands/limits may be active at once, but the lowest Fd (i.e.
minimum) is given priority and passed to the pumping algorithm. Since the lowest value is given priority,
unlimited demands/limits use values of 1. A value of 0 is not used to turn off a demand/limit since this
would be passed to the flow algorithm resulting in no flow from the pump.
Flow, Torque and Power Limits can also be considered “demands” if the primary control mode (e.g.
pressure control) is commanding a higher Fd than the limit. In this situation, the limit is being used as the
active command. This allows the DPC12 to be used in a flow control setup, for example, even though
there is no apparent primary control mode for this.
It may not be desirable to operate on a Torque, Power or Pressure Limit for significant periods of time
since these have high gains and can cause system instability. They can however be useful in avoiding
excess load on the prime mover and stall conditions.
Control loop diagram
The control loop diagram represents the pressure control loop which is part of the service control
algorithm diagram. The pressure control loop requires the signal from the pressure sensor mounted at
the outlet of the service. A load-sense pressure signal is required from a pressure sensor in the load-sense
resolving network of the service if Load-Sense Mode is used. The proportional gains and integration time
are tuned via non-volatile parameters. Contact your Danfoss representative for details on tuning these
parameters.
24 | © Danfoss | June 2021 BC306384089197en-000201

Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
Control operation
Example use cases
Here are some example combinations of control modes and limits:
Single Service Displacement control by PLUS+1®: Entire pump displacement used for one service,
•
controlled by a displacement command that is saved in a parameter in non-volatile memory. The
service is enabled/disabled by another parameter in memory.
Single Service Displacement control by J1939 with Torque Limit: Entire pump displacement used for
•
one service, controlled by a displacement command that is sent to the DPC12 via J1939 CAN
message. A Torque Limit is sent via CAN to limit the maximum torque applied to prime mover from
the service. A Pressure Limit is set via two parameters saved in memory. The service is enabled/
disabled via CAN message.
Single Service Pressure control by J1939 with Flow Limit: Entire pump displacement used for one
•
service, controlled by a pressure command that is sent to the DPC12 via J1939 CAN message. A Flow
Limit is sent via CAN to limit the maximum flow produced by the service. A Power Limit is set via one
parameter saved in memory. The service is enabled/disabled via CAN message.
Two Service Mixed Displacement/Load Sense control by J1939: Pump displacement used for 2
•
services. Service 1 has displacement control, torque limit, and enable/disable by CAN messages, as
well as pressure limit from a parameter saved in memory. Service 2 has Load Sense control, torque
limit, and enable/disable by CAN messages, as well as pressure limit from a parameter saved in
memory.
The combinations above are all available in software version v2.7.1.
Controller interaction
Overview
Interaction with the DPC12 for configuration, tuning commissioning and diagnostics is achieved with the
PLUS+1® Service Tool and the PLUS+1® Diagnostic (P1D) file that matches the controller software version.
Communication occurs over the CAN bus and a CAN gateway such as the Danfoss CG150 is required. The
diagnostic file allows parameter changes which select the control mode, limits, tuning gains, and other
features. These parameters are saved in non-volatile memory. There are also pages to interact with
Commissioning Mode and to see past and active Errors.
PLUS+1® CAN/USB gateway
Communication between the DPC12 and a personal computer (PC) on software uploads, downloads,
Service Tool, and Diagnostic Page interaction is accomplished using the system´s CAN bus.
The PLUS+1® CG150-2 CAN/USB gateway provides the communication interface between the system
CAN bus and a PC USB port. When connected to a PC, the gateway acts as a USB slave. In this
configuration, all required electrical power is supplied to the gateway by the upstream PC host. No other
power source is required.
Refer to the PLUS+1® Guide Software User Manual (document number AQ152886483724) for gateway setup information. Refer to the CG150-2 CAN/USB Gateway Data Sheet (document number AI152986480800)
for electrical specifications and connector pin details.
Other CAN gateways can be used. Please contact your Danfoss representative for more information.
Configuration and tuning
Configuring the DPC12 involves selecting the desired CAN Node Address, control mode, and limits using
the diagnostic file associated with the software version.
Tuning is required for pressure and load sensing control modes. Gain parameters are set to achieve
different pump response behavior in the application system. These parameters are typically set by system
engineers during pump commissioning in the system. For further information and help with tuning,
contact your Danfoss representative.
©
Danfoss | June 2021 BC306384089197en-000201 | 25

Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
Control operation
Identical application systems, such as machines of the same make and model, can use the same
configuration and tuning parameters. Use the DPC12 All Params page in the diagnostic file to export
parameters from one controller and import them to another.
Commissioning mode
Commissioning mode is used during initial DDP installation to incrementally test the functionality of the
solenoids and valves, help with air removal, and to aid in troubleshooting of the system. In this mode,
some limits and errors are ignored to enable these activities.
To enter commissioning mode and access system functions, follow these steps:
1. Go to the DPC12 Commissioning page of the diagnostic file and press the Enter Commissioning
Mode button.
The device is now in commissioning mode.
2. Choose the appropriate commissioning action types from the Commissioning Action Type
parameter dialog.
Available parameters are as follows:
Fire
Pump
Raw
Displacement
After the action type is chosen, action type specific interfaces will be available on screen.
To exit Commissioning mode, press the Exit Commissioning Mode button, then follow the prompts. For
more information on Commissioning Mode parameters and interaction, contact your Danfoss
representative.
Diagnostics and errors
The DPC12 logs active and previously active errors. These errors are broadcast over CAN using standard
Diagnostic Messages such as DM1 and DM2. Errors can also be accessed through the DPC12 Errors page
of the diagnostic file.
There are four error severity levels: INFO, WARNING, CRITICAL and SEVERE. INFO level errors will not cause
the DPC12 to transition to ERROR or ERROR_HOLD states. WARNING and CRITICAL level errors will cause
the DPC12 to transition to ERROR state when active, but once they are all inactive, the DPC12 will
transition to ERROR_HOLD. Once SEVERE level errors are active, they cause the DPC12 to transition to
ERROR state, but will not cause it to change to ERROR_HOLD even if they become inactive. SEVERE level
errors require the DPC12 to be power cycled.
For more information on error code meanings and CAN message descriptions, see the Software Manual
or contact your Danfoss representative.
Actuates the specified coil as soon as possible. Use when the shaft is not
spinning to verify wiring.
Actuates the specified coil at the correct shaft position to enable the pumping
unit (one piston and its valve) to pump a full stroke 1 or 100 times depending on
the Action Type chosen. Use while shaft is spinning to verify pumping or create
small amounts of flow for leak testing.
Actuates coils as necessary to achieve the desired percentage of displacement.
Use to check that correct flow rate is produced or to allow limited functionality
of open center hydraulic circuits.
26 | © Danfoss | June 2021 BC306384089197en-000201

Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
Model code
DDP model code
The example model code below and the following section describes how to identify parts of the model
code and availability of certain part options.
Model code sections
A B C D E F G H I J K L M
DD P 096 SMNN R C ANA CP 1AAA AA A N NNN (continued
N O P Q R S T U V W X Y
NN NNNN NN A NNN A1 NN A1 A1 AA 02071 00004
Model code breakdown
A Series
B Pump
C Displacement
below)
D Product type
E Rotation
F Mounting flange
G Input shaft spline and auxiliary shaft spline
H Auxiliary mounting flange (through-drive flange)
I Endcap
J Sensors and harness
K Common parts
L Tandem pump mounting flange
M Tandem pump input shaft spline and auxiliary shaft spline
N Tandem pump auxiliary mounting flange
O Tandem pump endcap
P Tandem pump sensors and harness
Q Tandem pump common parts
R Accessory block
S Paint and nametag
T Special hardware or features
U Electronic hardware
V Electronic hardware nametag
W Software build
X Software version
Y Software parameter set
©
Danfoss | June 2021 BC306384089197en-000201 | 27

Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
Model code
DDP part options
Below is a list of the available configuration options for the DDP. Note that not all combinations are
possible.
The tandem pump and through-drive options are not available yet; part options that use the tandem
section of the model code have been removed.
The stand-alone letter in the title corresponds with model code location. Please refer to DDP model code
on page 27 for entire model code breakdown.
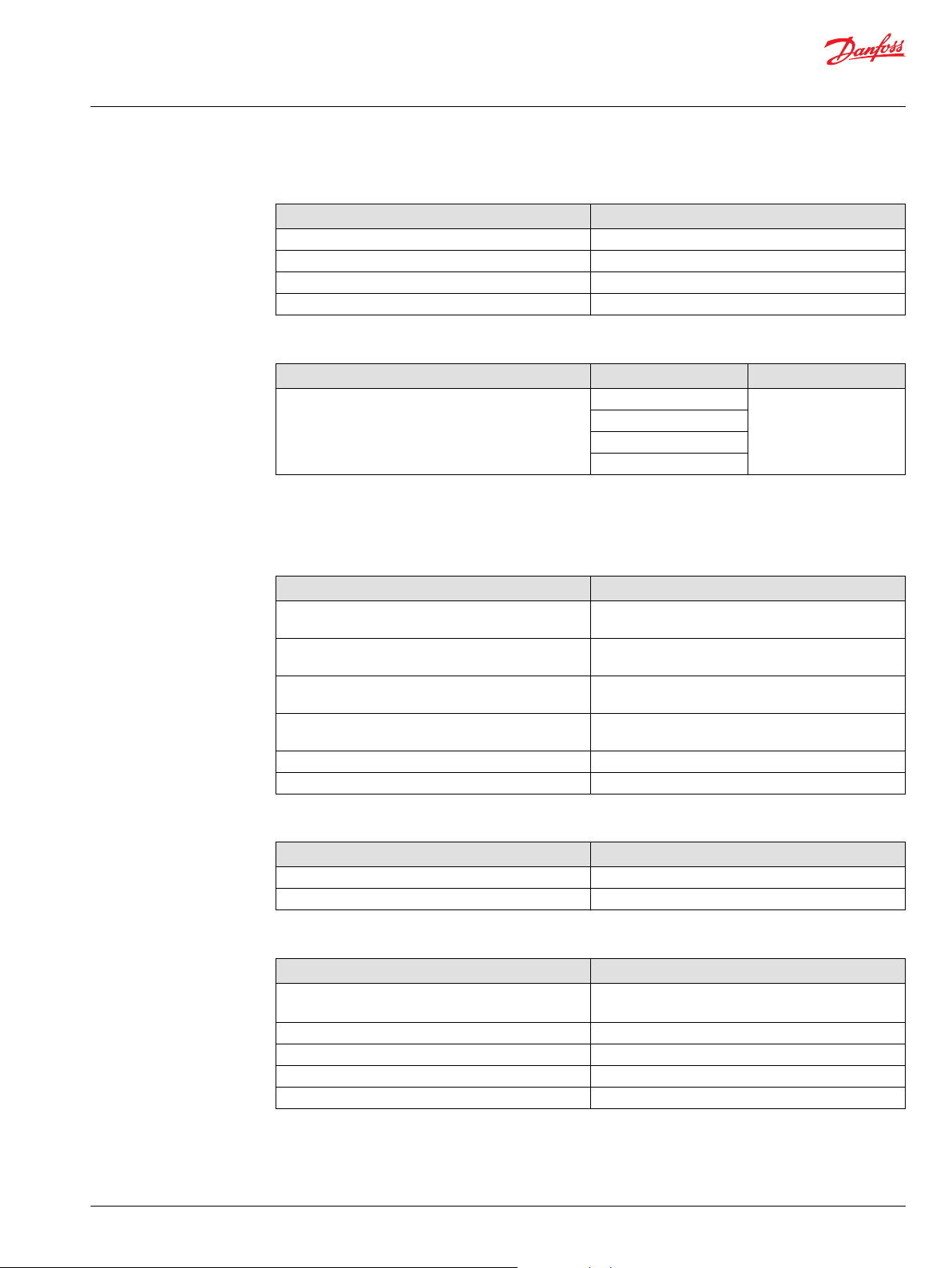
C; Displacement
Code Description
096 96 cm3/rev [5.86 in3/rev maximum displacement
D; Product type
SMNN Single pump for medium-power applications (Gen 1)
E; Rotation
R Clockwise rotation [CW]
F; Mounting flange
C SAE C 4-bolt
G; Input shaft spline and auxiliary shaft spline
ANN 23T; no auxiliary shaft
H; Auxiliary mounting flange (through-drive shaft)
CP Cover plate (no auxiliary flange)
I; Endcap (inlet and outlet ports)
1AAA
3BAA
Inlet port S: DN 51 ISO 6162-1 ; M12 x 1.75
Outlet port P: DN 25 ISO 6162-2; M12 x 1.75
Inlet port S: DN 51 ISO 6162-1; M12 x 1.75
Outlet port P1: DN 19 ISO 6162-2; M10 x 1.5
Outlet port P2: DN 13 ISO 6162-2; M8 x 1.25
Outlet port P4: DN 13 ISO 6162-2; M8 x 1.25
J; Sensors and harness
AA For a 1-service pump (speed/temperature sensor W; pressure sensor M)
AG For a 2-service pump (speed/temperature sensor W; pressure sensors M1 & M4)
K; Common parts
A
R; Accessory block
NNN None
28 | © Danfoss | June 2021 BC306384089197en-000201

Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
Model code
S; Paint and pump nametag
Code Description
A1 Black paint; Danfoss standard tag
T; Special hardware
NN None
U; Electronic hardware
A1 DPC12 pump controller
V; Electronic hardware nametag
A1 Danfoss standard tag
W; Software build
AA For 1-service operation with DDP096 single
AB For 2-service operation with DDP096 single
X; Software version
02071 v2.7.1 software version
Y; Software parameter set
00004 Unconfigured parameter set (1-service operation and v2.7.1)
00005 Unconfigured parameter set (2-service operation and v2.7.1)
©
Danfoss | June 2021 BC306384089197en-000201 | 29

Lifting
Lifting
Orientation
C
Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
Mechanical installation
Pump transport and handling
Due to the electrically actuated nature of each valve in the pump and the presence of multiple sensors,
there are wires attached to the outside of the pump body and to each coil, making the pump susceptible
to mechanical impacts.
Any damage to the wires, connectors, sensors, or coils may cause the pump not to function correctly.
Avoid all impacts while transporting the pump. Contact your Danfoss representative if there is any
damage to any of the wires, sensors, or coils on the pump.
Do not directly or indirectly strike the coupling or driveshaft of the pump as this may cause internal
damage.
Do not drop the pump. If dropped, do not use the pump and contact your Danfoss representative.
There are three lifting brackets on DDP096 pumps. One bracket is on one side of the housing (pumplet 1)
and the two other brackets are opposite of each other on the endcap at the rear of the pump. For each
lifting bracket the weight limit is 70 kg.
It is recommended to lift a single pump by attaching hooks to the two lifting brackets on the endcap and
using the bracket on the housing for orientation. It is also possible to lift a single pump by attaching a
hook on the housing lifting bracket and using the endcap brackets for orientation.
Lifting brackets and orientation
Lifting brackets are not aligned with the center of gravity. Some swiveling should be expected when
handling.
Alternatively, the M12 x 16 mm bolt holes (non-standard depth) in the pump housing can be used for
lifting with eyebolts (torqued to 105 N·m ± 10%). There are four bolt holes in total around the pump –
one for each pumplet (located adjacent to the coils of bank A and C and opposite to the bleed port). For
30 | © Danfoss | June 2021 BC306384089197en-000201
more information, see Common dimensions on page 36.
Make certain all lifting gear is rated for the load to be applied and that standard precautions and best
practices are used while lifting the pump.
Caution
The lifting brackets are not rated for any duty other than lifting the pump and the factory supplied wires
and sensors. The brackets are not rated to lift any hoses or pipes that may be attached to the pump
during installation. Lifting brackets on the endcap must not be removed under any circumstance.
If the pump needs to be temporarily stored outside the application or the provided packaging, we
recommend resting the pump vertically (shaft pointing downwards) on the SAE C flange. Stable spacers
are required to avoid contact with the input shaft. It is also possible to rest the pump horizontally, using
cast features of the pump as supports. Suitable spacers must be used to avoid any contact with the coils,
sensors and wiring harnesses of the pump.

C
Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
Mechanical installation
Caution
Ensure no load is applied to coils, sensors, or wiring when placing the pump on a surface for storage as
these may become damaged.
Storage
The packaging supplied with the pump provides a stable storage method with the shaft pointing
downwards and held in place by the box’s lid to avoid any movement during transport. The controller
and other accessories provided will be in a different compartment of the box. All elements will be
protected against corrosion and reasonable handling shocks. This packaging is suitable for storage.
The storage area must be free from corrosive materials and gasses. The storage area must be dry (5-60%
relative humidity, non-condensing). The ideal temperature for storage is between 5°C and 30°C.
After removing a pump from storage, check over the unit for visible damage to any of the wiring or
sensors.
If the pump must be stored for long periods or in a humid environment (relative humidity > 60%), seal
the parts in airtight bags with desiccant sachets and use VCI materials to protect the hydraulic items.
Store the controller in an antistatic bag.
Installation requirements
The installation locations and position of the pump must be as described in this document. Adhere to all
limits specified in the DDP096 pump specifications section regarding pressure, temperature, viscosity
and cleanliness of the hydraulic fluid. Other configurations are possible; please contact your Danfoss
representative for direction.
Pump arrangement
It is recommended to install the pump in a below-oil level and horizontal or near-horizontal shaft
position. This is the location the pump is installed outside of the tank and below the minimum level of
fluid in the tank or inside the tank with sufficient fluid above. Other arrangements are possible, for which
care must be taken to bleed the pump case.
Pump shaft coupling
At low displacement (Fd < 0.2), Digital Displacement® pumps create torque oscillations with torque
reversals increasing the risk of fretting corrosion at the input shaft interface. It is required to take great
care in shaft coupling interface to increase operating life.
Flooded input shaft installation provides good corrosion protection. For dry shaft installation, a clamped
coupling is recommended. If clamped coupling is not possible, care must be taken to reduce the risk of
shaft interface damage. Application of specific anti-corrosion grease is required in this case and regular
maintenance is highly recommended. For information on lubrication of spline shafts, refer to Lubrication
of Spline Shafts – Technical Specifications.
Excessive misalignment can cause premature wear. Refer to coupling manufacturer specifications for
allowable misalignment. Hardness of the mating spline must be at least 55 Rc and have full spline depth.
Understanding and minimizing system noise
By providing discrete pulses of flow of 8cc per actuation, the control principle of DDP can create fluidborne pulsation at low frequencies. The frequency content of the discharge flow is defined by the
pumping frequency required to meet the requested output flow. For example, at 1000 rpm and
requesting 1/12th of the pump displacement (~8 L/min), only one piston would be used each revolution
generating a pumping frequency of 16.7 Hz. To generate lower flows, it is possible to pump at less than
once per revolution. For example, at 1000 rpm to produce 1 L/min, the DDP would be pumping roughly
one cylinder every 8 revolutions generating a pumping frequency of ~2.1 Hz.
©
Danfoss | June 2021 BC306384089197en-000201 | 31

Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
Mechanical installation
The resulting flow and torque pulsations generated by a DDP can translate into a range of undesirable
behaviors and can be transmitted to the rest of the system.
•
Air-borne noise is often caused by excitation of resonating mechanical structures, mechanical impact
of loose structures, or system valves clicking or chattering.
•
Structure-borne noise or mechanical vibrations can be perceived by the operator through direct
mechanical coupling of the DDP to the chassis or excitation of natural frequencies by transmission of
fluid-borne noise. It is also possible to feel vibration through hydraulic actuator interfaces such as
steering wheels or mechanical levers.
•
Pressure pulsations can lead to difficulties maintaining stable and accurate pressure or load sense
margin control by a DDP. This can lead to unstable behavior requiring less aggressive gains slowing
the response time of the pump.
A range of countermeasures has been developed over time to manage these impacts. Standard best
practices such as increasing hydraulic compliance or decoupling the hydraulic circuit from the
application chassis can have a big impact.
The following suggestions can help minimize noise and vibration in applications:
•
Increase system compliance by installing longer or larger hoses, thermoplastic hoses, accumulators,
or more oil volume.
•
Use flexible hoses instead of steel plumbing.
•
Limit system line length.
•
If possible, optimize system line position to minimize noise.
•
If steel plumbing is necessary, clamp the lines.
•
If adding additional support, use rubber mounts.
•
Test for resonances in the operating range; if possible, avoid these operating conditions.
Some applications or actuators are more susceptible to vibration than others. Systems with physical
characteristics such as low actuator inertia or very high hydraulic stiffness at low flow rates will need to be
considered more carefully. Contact your Danfoss representative for more support.
Air removal
Air within the pump must be removed to ensure proper operation.
Trapped air in the inlet passages can impair valve function, causing zero output flow from the affected
pistons. The pump is unable to pump the air out of the piston chamber as soon as discharge pressure
reaches a few bars; air must be removed from the case before starting to pump.
Air must be bled from the pump body at commissioning, when changing oil in the system, and after long
periods without running or maintenance. There are several options to remove the air from the pump
case.
To check that there is no air left in the pump, use the PLUS+1® Service Tool and the DDP diagnostic file
(P1D) to enter Commissioning mode and follow the commissioning procedure (see Commissioning mode
on page 26).
There are several options for removing air from the pump case.
Removing air with gravity
If the pump is located under the oil level with a direct inlet hose connection (no swan neck connection
above oil level), use one of the four radial bleed ports (L1 to L4) in the pump body.
The radial bleed ports (with plugs installed) are indicated in Common dimensions on page 36 and can be
used for air removal or flushing.
32 | © Danfoss | June 2021 BC306384089197en-000201

Auxiliary pump
Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
Mechanical installation
1. Connect the inlet hose and fill the tank.
2. Remove the topmost bleed port plug to allow trapped air to escape.
Allowing air to escape through the bleed port will also allow oil to flow out of the case. Loosen the
plug gradually to avoid spurting oil.
3. Replace the plug when there is a steady stream of oil draining from the case (no air bubbles).
4. Torque the plug to 35 N·m ± 10%.
Removing air with an auxiliary pump
If the pump is located above the oil level and/or the inlet hose goes over the oil level, loosening the bleed
port plugs will not allow air removal. It is possible to connect the topmost bleed port of the pump to a tee
connector at the inlet of an auxiliary pump, such as a fixed displacement pump commonly used for
brakes, fans or other auxiliary functions. This method can be used to remove build-up of air if the pump is
installed near the tank oil level or if during operation the pump is at or above the tank oil level (such as in
a vehicle on a slope).
It is important that the pump case is as full as possible before spinning the shaft.
If the pump case is not at least half full, there is a risk of damaging the bearings and other internal
components.
Use moderate shaft speed (<1000 rpm) and check that the pump is operating correctly within half a
minute.
Check auxiliary pump priming requirements.
Removing air through the DDP outlet port
Oil can be suctioned out of the DDP outlet port by temporarily connecting the inlet of a commissioning
pump to the outlet of the DDP. The outlet check valves will open and allow oil to fill the crankcase and all
piston chambers. It will prevent air to go back in the machine and leave time to connect the highpressure system hose to the DDP outlet port.
In the case of a multi-service system, connect the commissioning pump to the service connected to the
topmost pumplet of the DDP. Refer to Multi-outlet pump on page 6 for more information on pumplets
and services.
©
Danfoss | June 2021 BC306384089197en-000201 | 33

Commissioning pump
Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
Mechanical installation
Ensure that the shaft is not spinning while the discharge port is not connected to the final hydraulic
circuit.
If the shaft is spinning, the DDP could pump and the outlet line could over-pressurize. Over-pressurizing
the outlet line creates a risk of injury and damage.
Removing air by submersion
If the pump is fully submerged in the hydraulic tank, the bleed port plugs can be removed completely
from all four locations in the pump body. The air will automatically leave the case.
Flushing
The DDP does not have a case drain port to connect to the tank, as the fluid volume within the pump
body is connected to the inlet. Any fluid that leaks out of the piston chambers is drawn back into the
inlet. In normal operation, oil flowing through the pump from the inlet cools the moving parts when
pumping.
For applications involving prolonged idle operation with close to no flow rate (less than 5 L/min for more
than 5 minutes), the case must be flushed with cooled and filtered oil to prevent fluid stagnation and
local high temperature build-up in the crankcase.
Bleed ports (from L1 to L4) can be used for flushing purposes. Flow can either be pushed or sucked from
the crankcase.
When designing a flushing circuit, adhere to the maximum pressure limit of the crankcase (refer to the
maximum inlet pressure value in DDP general specifications on page 11) and be aware of any filter backflushing potential on suction lines. Any fluid pushed into the crankcase may reverse the flow in the inlet
line and back-flush to the tank.
The DPC12 controller will detect and report the over-temperature condition. It can prevent pump
operation when crankcase temperature exceeds the error limit. This error limit does not protect the
pump from overheating since the pump controller cannot prevent shaft rotation.
Filtration
Fluid entering the pump inlet must be free of contaminants to prevent damage and premature wear to
the pump. Digital Displacement® pumps require system filtration capable of maintaining fluid cleanliness
of at least a class 18/16/13 according to ISO 4406-1999 with a recommended range of 17/15/12.
Suction line filtration is not recommended. This type of filtration can cause high inlet vacuum which
limits the pump operating speed and can reduce its operating life. Suction strainers can have similar
effects. If you plan to use a suction strainer, discuss it with your Danfoss representative.
Return line filtration is the preferred method for open circuit systems. Consider these factors when
selecting a system filter:
34 | © Danfoss | June 2021 BC306384089197en-000201

C
Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
Mechanical installation
•
Cleanliness specifications
•
Contaminant ingression rates
•
Flow capacity
•
Desired maintenance interval
Each system is unique, and only a thorough testing and evaluation program can fully validate the
filtration system. For more information, see Design Guidelines for Hydraulic Fluid Cleanliness (document
BC152886482150).
Use hydraulic fluid free of air and water. Excess bubbles or moisture can cause damage to the pump´s
internal components.
Do not use any cleaning material that may deposit lint or other debris in the hydraulic system. Do not use
PTFE tapes to seal fittings.
Controller mounting
Ensure that the DPC12 is positioned so water and moisture drain away from the connectors. Provide a
drip loop in the harness. Provide strain relief for mating connector wires. If the product is likely to be
cleaned using high pressure washing, connector shields must be installed to prevent the possibility of a
direct high-pressure stream.
Caution
Operating the DPC12 over the maximum temperature value can cause the controller to overheat and
disable pumping. Refer to General ratings on page 14 for acceptable ambient temperatures.
Fasteners for DPC12 controller only
Recommended outer diameter (OD) Maximum torque
M6 [1/4 inch] 10 N·m [88 in·lbs]
©
Danfoss | June 2021 BC306384089197en-000201 | 35

B2
A2
C2
B3
C3
A3
C1
A1
B1
A4
C4
B4
Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
Mechanical installation
Pump dimensions
Common dimensions
Label Name Description Coil harness connection
A1 Coil A1 Coil 1 from bank A Coil harness “A”
A2 Coil A2 Coil 2 from bank A Coil harness “A”
A3 Coil A3 Coil 3 from bank A Coil harness “B”
A4 Coil A4 Coil 4 from bank A Coil harness “B”
B1 Coil B1 Coil 1 from bank B Coil harness “A”
B2 Coil B2 Coil 2 from bank B Coil harness “A”
B3 Coil B3 Coil 3 from bank B Coil harness “B”
B4 Coil B4 Coil 4 from bank B Coil harness “B”
C1 Coil C1 Coil 1 from bank C Coil harness “A”
C2 Coil C2 Coil 2 from bank C Coil harness “A”
C3 Coil C3 Coil 3 from bank C Coil harness “B”
C4 Coil C4 Coil 4 from bank C Coil harness “B”
Common dimensions are made on drawings from the single-outlet pump.
36 | © Danfoss | June 2021 BC306384089197en-000201

152.7 [6]
1 CG 59.2 [2.3]
(22°) CG
D
146 [5.7]
157 [6.1]
1 CG
152.7 [6]
305.4 [12]
114.6 ± 0.6
[4.5 ± 0.02]
57.3 ± 0.3
[2.3 ± 0.01]
S
CG
4x Ø 14.3 ± 0.4
57.3 ± 0.3
[2.3 ± 0.01]
114.6 ± 0.6
[4.5 ± 0.02]
305.4 [12]
Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
Mechanical installation
Shaft end view dimensions
Dimensions in mm [in]
©
Danfoss | June 2021 BC306384089197en-000201 | 37

122 [4.8]; CG
(11°) CG
D
D
E
L4
Ø 127 ± 0.015
[Ø 5 ± 0.0006]
12.45 ± 0.25
[0.49 ± 0.01]
17.8 [0.7]
62 ± 0.5
[2.44 ± 0.02]
38.2 ± 0.2
[1.5 ± 0.007]
8 ± 0.5
[0.3 ± 0.02]
Ø 37.59 ± 0.08
[Ø 1.47 ± 0.003]
Ø 32.5 ± 0.05
[Ø 1.27 ± 0.002]
Coupling must not protrude
beyond this point
See spline data
S
CG
4x 268.3 [10.56]
4x 131.8 [5.19]
Coils
D
L2
4x
54 [2.1]
Coils
39 [1.53]
D
M*
S
W
156.8 [6.17]
201.8 [7.94]*
231.5 [9.11]
4x 18 [0.71]
Bleed ports
92.9 [3.66] lifting bracket
4x coils in bank B
4x bleed ports
Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
Mechanical installation
Side view dimensions
Shaft oriented right; dimensions in mm [in]
Shaft oriented left; dimensions in mm [in]
* Unique to single-outlet pumps
38 | © Danfoss | June 2021 BC306384089197en-000201

21.45 [0.84]
42.9 [1.69]
207.8 [8.18]
L3
W
M*
65 [2.56]
38.9 [1.53]
77.8 [3.06]
Ø 51
S
Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
Mechanical installation
Top view dimensions
Dimensions in mm [in]
* Unique to single-outlet pumps
©
Danfoss | June 2021 BC306384089197en-000201 | 39

(72°)*
117.2 [4.6]*
D*
38.1 [1.5]*
112 [4.41]
S
115.2 [4.54]
M*
3 [0.12]*
W
50°
(72°)
38.2 [1.5]
110 [4.33]*
P*
D
Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
Mechanical installation
Rear view dimensions
Dimensions in mm [in]
* Unique to single-outlet pumps
40 | © Danfoss | June 2021 BC306384089197en-000201

13.9 [0.55] 198.8 [7.83]
27.8 [1.09]
Ø 25 [0.98]
P
28.6 [1.13]
57.2 [2.25]
51 [2]
L1*
Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
Mechanical installation
Single-outlet pump dimensions
Dimensions in mm [in]
* Common
Label information
Label Description
P Pressure port:
S Suction port:
L1, L2, L3, L4 Bleed ports:
D Lifting brackets: 14.2 mm [0.56 in] hole diameter
E Shaft spline (see Shaft spline data below)
W Speed/temperature sensor; M12 x 1 connector
M Pressure sensor M; M12 x 1 connector
CG Approximate center of gravity for single-outlet pump
Split flange boss
DN 25 (Ø25) ISO 6162-2
M12 x 1.75; 24 mm full min thread
Paint free
Split flange boss
DN 51 (Ø 51) ISO 6162-1
M12 x 1.75; 19 mm full min thread (non-standard depth)
Paint free
M14 x 1.5 port ISO 6149-1
Torque to 35 N·m ± 10%
Shaft spline data
Number of teeth
Pitch fraction
Pressure angle
Pitch diameter
Major diameter
23
16/32
30°
36.513 mm [1.438 in]
37.59 ± 0.08 [1.48 in]
©
Danfoss | June 2021 BC306384089197en-000201 | 41

Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
Mechanical installation
Shaft spline data (continued)
Type of fit
Specification
Fillet root side
ANSI B92.1b-1996 class 6e
42 | © Danfoss | June 2021 BC306384089197en-000201

2x 25.4 [1]
2x 50.8 [2]
Ø 19 [0.75]
2x 11.9 [0.47]
2x 23.8 [0.94]
2x Ø 12.5 [0.49]
4x 9.1 [0.36]
4x 18.2 [0.72]
4x 40.5 [1.59]
4x 20.25 [0.8]
210.8 [7.94]
M2
M1
P1
P2
62 [2.44]
76.5 [3.01]
1 [0.04]
P4
M4
197.8 [7.79]
Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
Mechanical installation
Multi-outlet pump dimensions
For other dimensions, see Common dimensions on page 36 and Single-outlet pump dimensions on page
41.
Dimensions in mm [in]
©
Danfoss | June 2021 BC306384089197en-000201 | 43

4.5 [0.18]
M4
S
197.8 [7.79]
220.1 [8.67]
M1
71 [2.8]
M2
S
191.3 [7.53]
Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
Mechanical installation
Multi-outlet pump side view dimensions
Shaft oriented right; dimensions in mm [in]
Shaft oriented left; dimensions in mm [in]
44 | © Danfoss | June 2021 BC306384089197en-000201

(66°)
M4
48.8 [1.92]
S
60°
W*
M2
58.5 [2.3]
114 [4.49]
M1
P1, P2, P4
110.2 [4.34]
Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
Mechanical installation
Multi-outlet pump rear view dimensions
Dimensions in mm [in]
* Common
Label information
Label Description
P1 Pressure port 1:
P2 Pressure port 2:
P4 Pressure port 4:
M1 Pressure sensor M1;
M2 Pressure sensor M2;
M4 Pressure sensor M4;
Split flange boss
DN 19 (Ø19) ISO 6162-2
M10 x 1.5; 19 mm full min thread
Paint free
Split flange boss
DN 13 (Ø12.5) ISO 6162-2
M8 x 1.25; 16 mm full min thread
Paint free
Split flange boss
DN 13 (Ø12.5) ISO 6162-2
M8 x 1.25; 16 mm full min thread
Paint free
M12 x 1 connector
M12 x 1 connector
M12 x 1 connector
Please contact your Danfoss representative for specific dimension drawings or to discuss ganging
manifold designs for a 2-service DDP.
©
Danfoss | June 2021 BC306384089197en-000201 | 45

300 [11.81]
278 [10.94]
244 [9.61]
177.4 [6.98]
C3
C5
C4
C2
A
C6
116.1 [4.57]
59 [2.32]
34 [1.34]
82 [3.23]
C1
4x Ø 6.8 [0.27]
192 [7.56]
216.7 [8.53]
B
120 [4.72]
4x 30.5 [1.2]
57 [2.24]
Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
Mechanical installation
Controller dimensions
Dimensions in mm [in]
Label information
Label Description
A Controller LED
B Minimum clearance to install the 6 mating receptacles
*
C1
*
C2
*
C3
*
C4
*
C5
*
C6
*
Receptacles for the controller wiring harness. For more information, see Connectors on page 50.
Power connection
System connection
Sensor connection
Coil harness “A” connection
Coil harness “B” connection
Communication connection
46 | © Danfoss | June 2021 BC306384089197en-000201

C
Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
Electrical installation
Installation requirements
Wiring overview
The OEM of the machine or vehicle is responsible for wiring the DDP096 and DPC12 into the application.
The DDP096 comes with a wiring harness that must be connected to the DPC12 via the pump-tocontroller wiring harness. The DPC12 must also be connected to a power supply and, if applicable, a CAN
bus.
For more information about the DPC12 connections, see Connectors on page 50.
All mating connectors must be supplied by the OEM and any unused pin positions must have sealing
plugs installed to prevent water ingression.
DDP096 connectors (C3, C4 and C5) must be connected to the DPC12 connectors of the same label (C3,
C4 and C5) via a pump-to-controller wiring harness.
The pin numbers for each connector should correspond to each connection (pin 1 goes with pin 1, etc.).
For more information on wiring the power connector, refer to DPC12 input power supply on page 13 and
Machine wiring guidelines on page 47.
Machine wiring guidelines
Follow these guidelines when wiring the pump and controller.
Caution
Do not handle the controller in high static environments without appropriate precautions.
•
Unused pin positions in the DEUTSCH connectors must have sealing plugs installed to prevent water
ingression
•
Protect wires from mechanical abuse with durable sheathing or by running wires through flexible
conduit tubing
•
Provide strain relief for all wires
•
Avoid hot surfaces; if hot surfaces cannot be avoided, use cables rated for high temperatures: 85°C
(185°F) wire with abrasion-resistant insulation and 105°C (221°F) wire near hot surfaces are
recommended
•
Use a wire size appropriate for the controller; for details on pin sizes, refer to Connectors on page 50
•
Separate high current wires such as solenoids, lights, alternators or fuel pumps from sensor and other
noise-sensitive input wires
•
Run wires along the inside of, or close to, metal machine surfaces where possible to simulate a shield
to minimize the effects of EMI/RFI radiation
•
Do not run wires near sharp metal corners; consider running wires through a grommet when
rounding a corner
•
Avoid running wires near moving or vibrating components
©
Danfoss | June 2021 BC306384089197en-000201 | 47

C
C
C
Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
Electrical installation
•
Avoid long, unsupported wire spans
•
Ground electronic controllers to a dedicated conductor of sufficient size that is connected to the
battery (-)
•
Power the sensors and valve drive circuits by their dedicated wired power sources and ground
returns
•
Use wire harness anchors that will allow wires to float with respect to the machine rather than rigid
anchors
•
To reduce resistive power losses, the power supply cable to the DPC12 controller should use the
maximum wire gauge the connector can accept (2 mm2 or 14 AWG) and be as short as possible; the
maximum length should not be longer than 10 meters, contact your Danfoss representative
otherwise
Caution
Avoid accidentally connecting incorrect pins to supply power. Significant current driven back through an
incorrect pin may damage the controller. Damage to the unit voids the warranty.
Machine welding guidelines
Follow these guidelines when welding on a machine equipped with electronic components.
1. Turn off the engine.
2. Remove electronic components from the machine before any arc welding.
3. Disconnect the negative battery cable from the battery.
Caution
Do not use electrical components to ground the welder.
4. Clamp the ground cable for the welder to the component that will be welded as close as possible to
the weld.
Caution
Do not weld near the DDP096, DPC12 or their wire harnesses.
High voltage from power and signal cables may cause fire or electrical shock and cause an explosion
if flammable gasses or chemicals are present.
Disconnect all power and signal cables connected to the electronic component and remove the
DPC12 before performing any electrical welding on a machine.
CAN bus installation
CAN wires must be twisted pairs with one twist approximately every 100 mm (4 in).
Total bus impedance should be 60 Ω. While CAN pins are tolerant of +/-36V, CAN may only be expected
to function in the standard CAN common mode range of +12V/-7V. If using shielded cable, be sure to
ground the shield appropriately. The DPC12 CAN shield pin is internally to 0V.
Each end of the main backbone of the CAN bus must be terminated with an appropriate resistance to
provide correct termination of the CAN_H and CAN_L conductors. This termination resistance should be
connected between the CAN_H and CAN_L conductors.
Resistor specification for bus termination
Description Minimum Nominal Maximum Unit
Resistance 110 120 130 Ω
Inductance 1 μH
Minimum power dissipation 400 mW (assumes a short of 14VDC to CAN_H)
48 | © Danfoss | June 2021 BC306384089197en-000201

Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
Electrical installation
System diagnostic connector
A diagnostic connector installed on systems using the DPC12 is recommended. The connector should be
located in the operator´s cabin or in the area where system operations are controlled and are easily
accessible.
Communication (software uploads, downloads, service, and diagnostic tool interaction) between DPC12
and personal computers is accomplished over the system CAN network. The diagnostic connector should
tee into the system CAN bus and have the following elements:
CAN +
•
CAN –
•
CAN shield
•
Fuses
Check the Wiring and fuses on page 14 for fuse requirements and recommendations.
Ensure separate fuses for the coil and logic power supplies are used.
Grounding
Proper operation of any electronic control system requires that all control modules including displays,
microcontrollers and expansion modules be connected to a common ground. A dedicated ground wire
of appropriate size connected to the machine battery is recommended.
The DPC12 baseplate is electrically connected to its ground (supply return) pins. All DPC12 ground pins
are internally connected and should use the same wire gauge. Refer to DPC12 input power supply on page
13 for more details.
Hot plugging
Shut off machine power when connecting the DPC12 to mating connectors.
©
Danfoss | June 2021 BC306384089197en-000201 | 49

Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
Electrical installation
Connectors
The DDP096 and DPC12 use DEUTSCH connectors.
DEUTSCH mating connector part information
Crimp tool
Tool 12 pin DTM 8 pin DTM 8 pin DT
Solid HDT-48-00 (12 to 24 AWG) HDT-48-00 (12 to 24 AWG) HDT-48-00 (12 to 24 AWG)
Stamped DTT-16-00 (16 AWG) DTT-20-00 (16 AWG) DTT-16-00 (16 AWG)
Contacts
Description 12 pin DTM 8 pin DTM 8 pin DT
Solid size 20
contacts
Solid size 16
contacts
Stamped size
20 contacts
Stamped size
16 contacts
0462-201-20141 (20 AWG Nickel)
0462-201-2031 (20 AWG Gold)
0462-005-20141 (16 to 18 AWG Nickel)
0462-005-2031 (16 to 18 AWG Gold)
16 to 22 AWG (.75-.125 insulation diameter)
1062-20-0122 (Nickel)
1062-20-0144 (Gold)
16 to 22 AWG (.051-.085 insulation
diameter)
1062-20-0222 (Nickel)
1062-20-0244 (Gold)
14 to 16 AWG (.075 - .125 insulation
diameter)
1062-20-0622 (Nickel)
1062-20-0631 (Gold)
0462-201-20141 (20 AWG Nickel)
0462-201-2031 (20 AWG Gold)
0462-005-20141(16 to 18 AWG Nickel)
0462-005-2031 (16 to 18 AWG Gold)
0462-209-16141 (14 AWG Nickel)
0462-209-1631 (14 AWG Gold)
0462-201-16141 (16 to 20 AWG Nickel)
0462-201-1631 (16 to 20 AWG Gold)
16 to 22 AWG (.75-.125 insulation diameter)
1062-20-0122 (Nickel)
1062-20-0144 (Gold)
16 to 22 AWG (.051-.085 insulation
diameter)
1062-20-0222 (Nickel)
1062-20-0244 (Gold)
14 to 16 AWG (.075 - .125 insulation
diameter)
1062-20-0622 (Nickel)
1062-20-0631 (Gold)
12 to 16 AWG (.075 - .140 insulation
diameter)
1062-16-1222 (Nickel)
1062-16-1244 (Gold)
14 to 18 AWG (.075 - .140 insulation
diameter)
1062-16-0122 (Nickel)
1062-16-0144 (Gold)
14 to 18 AWG (.095 - .150 insulation
diameter)
1062-14-0122 (Nickel)
1062-14-0144 (Gold)
16 to 20 AWG (.055 - .100 insulation
diameter)
1062-16-0622 (Nickel)
1062-16-0644 (Gold)
Connector plug
Type 12 pin DTM 8 pin DTM 8 pin DT
Gray A-key DTM06-12SA DTM06-08SA DT06-08SA
Black B-key DTM06-12SB
Green C-key DTM06-12SC
Brown D-key DTM06-12SD
50 | © Danfoss | June 2021 BC306384089197en-000201

3
2
1
4
5
6
7
8
9
10
11
12
Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
Electrical installation
Wedge, strips and seals
Description 12 pin DTM 8 pin DTM 8 pin DT
Wedge WM-12S WM-8S W8S
Solid strip length 3.96 to 5.54 mm
[0.156 to 0.218 in]
Stamped strip length 3.81 to 5.08 mm
[0.150 to 0.200 in]
Rear seal maximum OD 3.05 mm [0.120 in] 3.05 mm [0.120 in] 3.68mm [0.145 in]
Sealing plugs 0413-204-2005 0413-204-2005 Sealing pin:
Contact Danfoss for further information on compatible DEUTSCH products and tools.
Pump connectors
3.96 to 5.54 mm
[0.156 to 0.218 in]
3.81 to 5.08 mm
[0.150 to 0.200 in]
6.35 to 7.92 mm
[.250 to .312 in]
3.81 to 5.08 mm
[0.150 to 0.200 in]
114017-zz
Locking sealing pin:
0413-217-1605
Pump connectors
Label Connector Description Mating receptacle (for pump-to-
C3 Sensor connector DEUTSCH DTM04-12PC (green) DEUTSCH DTM06-12SC (green)
C4 Coil harness “A”
connector
C5 Coil harness “B”
connector
DEUTSCH DTM04-12PA (gray) DEUTSCH DTM06-12SA (gray)
DEUTSCH DTM04-12PB (black) DEUTSCH DTM06-12SB (black)
connector harness)
Generic connector drawings are used for pin location only.
Pump connector C3 pinout
©
Danfoss | June 2021 BC306384089197en-000201 | 51

3
2
1
12
11
10
9
8
7
6
5
4
Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
Electrical installation
Pin Description
1 Speed/temperature sensor input (SPEED)
2 Speed/temperature sensor signal power (+15V)
3 Speed/temperature sensor signal ground (0V)
4 Speed/temperature sensor signal input (PUMP_TEMP)
*
5
*
6
*
7
*
8
*
9
*
10
11 Seal plug - not used
12 Seal plug - not used
*
For harness AA, AE, AG
For non-standard wiring harness (other than AA, AE, or AG), please contact your Danfoss representative
for the C3 connector pinout. Refer to DDP model code on page 27 for identifying the sensors and harness
configuration.
Pressure sensor M/M1 + (service 1 outlet pressure)
Pressure sensor M/M1 - (service 1 outlet pressure)
Pressure sensor M4 + (service 2 outlet pressure); seal plug if not used
Pressure sensor M4 - (service 2 outlet pressure); seal plug if not used
Pressure sensor M2 + (service 3 outlet pressure); seal plug if not used
Pressure sensor M2 - (service 3 outlet pressure); seal plug if not used
Pump connector C4 pinout
Pin Description
1 Coil C2 +
2 Coil B2 +
3 Coil A2 +
4 Coil C1 +
5 Coil B1 +
6 Coil A1 +
7 Coil A1 8 Coil B1 9 Coil C1 10 Coil A2 11 Coil B2 12 Coil C2 -
52 | © Danfoss | June 2021 BC306384089197en-000201

3
2
1
12
11
10
9
8
7
6
5
4
Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
Electrical installation
Pump connector C5 pinout
Pin Description
1 Coil C4 +
2 Coil B4 +
3 Coil A4 +
4 Coil C3 +
5 Coil B3 +
6 Coil A3 +
7 Coil A3 8 Coil B3 9 Coil C3 10 Coil A4 11 Coil B4 12 Coil C4 -
©
Danfoss | June 2021 BC306384089197en-000201 | 53

1
2
3
4
5
6
7
8
Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
Electrical installation
Controller connectors
A description of each controller connector and the relevant pinout information are detailed below.
Connector descriptions
Label Name Connector type Mating receptacle (for
C1 Power connection DEUTSCH DT04-08PA (gray) DEUTSCH DT06-08SA (gray)
C2 System connection DEUTSCH DTM04-12PD
C3 Sensor connection DEUTSCH DTM04-12PC
C4 Coil harness “A” connection DEUTSCH DTM04-12PA
C5 Coil harness “B” connection DEUTSCH DTM04-12PB
C6 Comm connection DEUTSCH DTM04-08PA
Generic connector drawings are used for pin location only.
(brown)
(green)
(gray)
(black)
(gray)
pump-to-connector
harness)
DEUTSCH DTM06-12SD
(brown)
DEUTSCH DTM06-12SC
(green)
DEUTSCH DTM06-12SA
(gray)
DEUTSCH DTM06-12SB
(black)
DEUTSCH DTM06-08SA
(gray)
Controller connector C1 pinout
Pin Name Description
1 LS+ Logic supply input (externally fused), powers everything expect coil
2 VC+ Coil supply input (externally fused), powers coil drivers
3 VC+ Coil supply input (externally fused), powers coil drivers
4 VC+ Coil supply input (externally fused), powers coil drivers
5 VC- Coil supply return, internally connected to other supply returns
6 VC- Coil supply return, internally connected to other supply returns
7 VC- Coil supply return, internally connected to other supply returns
8 LS- Logic supply return, internally connected to other supply returns
drivers
54 | © Danfoss | June 2021 BC306384089197en-000201

1
2
3
4
5
6
7
8
9
10
11
12
1
2
3
4
5
6
7
8
9
10
11
12
Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
Electrical installation
Controller connector C2 pinout
Pin Name Description
1 CANH CAN data bus differential signal HI
2 CANL CAN data bus differential signal LO
3 CAN Shield Optional. Internally connected to 0V; install sealing pin in mating
4 DigIn1 Reserved – digital input for future use
5 PLS1+ Load sense pressure sensor 1 + signal; install sealing pin in mating
6 PLS1- Load sense pressure sensor 1 - signal; install sealing pin in mating
7 PLS2+ Load sense pressure sensor 2 + signal; install sealing pin in mating
8 PLS2- Load sense pressure sensor 2 - signal; install sealing pin in mating
9 PLS3+ Load sense pressure sensor 3 + signal; install sealing pin in mating
10 PLS3- Load sense pressure sensor 3 - signal; install sealing pin in mating
11 PLS4+ Reserved – do not connect, install sealing pin in mating connector
12 PLS4- Reserved – do not connect, install sealing pin in mating connector
connector if not used
connector if not used
connector if not used
connector if not used
connector if not used
connector if not used
connector if not used
Controller connector C3 pinout
©
Danfoss | June 2021 BC306384089197en-000201 | 55

1
2
3
4
5
6
7
8
9
10
11
12
Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
Electrical installation
Pin Name Description
1 STS Shaft Shaft/temperature sensor shaft signal input (SPEED, 2.5mA to
2 STS V+ Shaft/temperature sensor shaft signal power (+15V)
3 STS V- Shaft/temperature sensor shaft signal ground (0V)
4 STS Temp Shaft/temperature sensor shaft signal input (PUMP_TEMP)
5 PP1+ Pump pressure sensor 1 + signal
6 PP1- Pump pressure sensor 1 - signal
7 PP2+ Pump pressure sensor 2 + signal; install sealing pin in mating
8 PP2- Pump pressure sensor 2 - signal; install sealing pin in mating
9 PP3+ Pump pressure sensor 3 + signal; install sealing pin in mating
10 PP3- Pump pressure sensor 3 - signal; install sealing pin in mating
11 PP4+ Reserved – do not connect, install sealing pin in mating connector
12 PP4- Reserved – do not connect, install sealing pin in mating connector
14.5mA)
connector if not used
connector if not used
connector if not used
connector if not used
Controller connector C4 pinout
Pin Name Description Corresponding
1 Coil 06+ Coil driver positive output C2+
2 Coil 05+ Coil driver positive output B2+
3 Coil 04+ Coil driver positive output A2+
4 Coil 03+ Coil driver positive output C1+
5 Coil 02+ Coil driver positive output B1+
6 Coil 01+ Coil driver positive output A1+
7 Coil 01- Coil driver negative output A18 Coil 02- Coil driver negative output B19 Coil 03- Coil driver negative output C110 Coil 04- Coil driver negative output A211 Coil 05- Coil driver negative output B212 Coil 06- Coil driver negative output C2-
valve coil
56 | © Danfoss | June 2021 BC306384089197en-000201

1
2
3
4
5
6
7
8
9
10
11
12
1
2
3
4
5
6
7
8
Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
Electrical installation
Controller connector C5 pinout
Pin Name Description Corresponding
1 Coil 12+ Coil driver positive output C4+
2 Coil 11+ Coil driver positive output B4+
3 Coil 10+ Coil driver positive output A4+
4 Coil 09+ Coil driver positive output C3+
5 Coil 08+ Coil driver positive output B3+
6 Coil 07+ Coil driver positive output A3+
7 Coil 07- Coil driver negative output A38 Coil 08- Coil driver negative output B39 Coil 09- Coil driver negative output C310 Coil 10- Coil driver negative output A411 Coil 11- Coil driver negative output B412 Coil 12- Coil driver negative output C4-
valve coil
Controller connector C6 pinout
Pin Name Description
1 Clk+ Reserved – do not connect, install sealing pin in mating
©
Danfoss | June 2021 BC306384089197en-000201 | 57
2 Clk- Reserved – do not connect, install sealing pin in mating
3 Dout+ Reserved – do not connect, install sealing pin in mating
4 Dout- Reserved – do not connect, install sealing pin in mating
5 Din+ Reserved – do not connect, install sealing pin in mating
connector
connector
connector
connector
connector

Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
Electrical installation
Pin Name Description
6 Din- Reserved – do not connect, install sealing pin in mating
7 Diag1 (Rx) Reserved – do not connect, install sealing pin in mating
8 Diag2 (Tx) Reserved – do not connect, install sealing pin in mating
connector
connector
connector
58 | © Danfoss | June 2021 BC306384089197en-000201

C
Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
Commissioning and troubleshooting
Basic commissioning procedure
The DDP can be installed and commissioned with the configured software matching the system
requirements.
It should start operating as expected after completing the following steps:
1. After filling the reservoir, remove air from the DDP case by following the steps described in Air
removal on page 32.
2. Check hydraulic circuit to ensure the following:
a) A pressure relief valve is installed on each DDP service.
b) A pressure transducer is connected to each DDP service and is connected to the DPC12.
c) All hydraulic connections are properly installed and secured.
3. Check the electrical connection.
Carry out visual inspection of the pump and wiring harness. Look for any disconnected sensors, and
any damage to wires, connectors, or sensors.
Additional commissioning functionalities are available and described in the following sections to safely
start and commission a new system and/or troubleshoot potential issues with the pump or system
installation.
Commissioning and troubleshooting with PLUS+1 Service Tool
Initial procedure
Before spinning the shaft, follow this initial setup procedure.
It is recommended to use a data acquisition system to monitor pressure, CAN messages and other system
information to support commissioning and troubleshooting activities.
Depending on the system, check that the DDP is transmitting information on the CAN bus.
1. Power up the DPC12 controller.
2. Use the PLUS+1® Service Tool to connect to the DPC12 with a PLUS+1 CAN/USB gateway.
3. Check for any error codes in the DPC12 errors page in the P1D file or DM1 J1939 CAN messages.
Descriptions are available in the Software manual.
4. Check the readings of the pressure and temperature sensors using the DPC12 Monitoring page of the
DDP diagnostic (P1D) file to ensure that the sensors are connected and operating correctly.
5. To check DDP valves connections, enter commissioning mode using the DPC12 Commissioning page
in the P1D file.
a) Follow the onscreen instructions.
b) Use the “Fire” commissioning action to energize each valve solenoid.
A small audible click for each valve actuation should be noticeable at the pump.
6. Depending on the system, check that the DDP is transmitting information on the CAN bus.
Resolve any issues before continuing.
Caution
Before pumping, ensure that there is a relief valve connected to the outlet of each service of the pump
and that pumping will not cause any actuator motion. Make sure that the installation has been done
properly, air has been removed from the crankcase and that the high-pressure system has been checked
for any potential installation errors. Perform the commissioning process at low pressure to minimize risk
of oil spray.
Commissioning DDP valves and hydraulic installation
Make sure the DPC12 is in commissioning mode before starting the prime mover.
©
Danfoss | June 2021 BC306384089197en-000201 | 59

C
Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
Commissioning and troubleshooting
1. Start the prime mover to spin the pump shaft with a low speed.
2. Check that the speed signal is as expected.
3. Select the Pump 1x commissioning action to pump one specific pumping unit (e.g. A1) once.
4. Repeat the previous step for each pumping unit (A1 to C4) and verify proper pumping function, e.g.
pressure pulsation or pressure increase in the system.
a) If none of the pumping units are providing signs of pumping, stop the prime mover and check that
air has been removed from the case.
b) If one or more pumping units are not pumping or providing different flow characteristics and
additional noise, the wiring harness might be the cause. Stop the prime mover and check the
connections of the wiring harness.
c) If some pumping units (typically from the topmost pumplets) are not providing flow, a small
amount of air might still be trapped in the case. Go to the next step to attempt to clear the
pumping units.
5. Select the Pump 100x commissioning action to pump one specific pumping unit (e.g. A1) a hundred
times.
Caution
With the “Pump 100x” action, the DDP displaces a volume of 0.8 L of oil unless the pump outlet
pressure reaches the limit set in the controller. Ensure proper safety precautions to avoid injury.
6. Repeat the previous step for each pumping unit (A1 to C4) and verify proper pumping function.
a) If the pumping units of the topmost pumplet are not delivering flow, wait for outlet pressure to
decrease to a minimum and repeat the Pump 100x action on these pumping units until they are
clear of air. Repeating operation at higher shaft speed (1800+ rpm) can help clear air.
b) If pumping units do not clear after 20 attempts, stop the shaft and double check how to remove air
from the DDP case in Air removal on page 32 and repeat the current step.
Further system commissioning and validation
The DDP can be used to provide fixed amount of displacement which can be used to help commissioning
a new system.
1. Use the commissioning action Raw Displacement to provide a fixed flow to the specified service.
When using a multi-service pump in Commissioning mode, Raw Displacement S1 and Raw
Displacement S2 assume that the pump is set up for a P1 / (P2+P4) split, meaning that Service 1 has 6
pumping units (from P1) and Service 2 has 6 pumping units (from P2+P4). If the application is
plumbed for a (P1+P2) / P4 split, be careful that the flow capability of the Service 2 hydraulic circuit is
not exceeded. For more information, contact your Danfoss representative.
2. The Raw Displacement commissioning action can be used to help clear air from the pump housing.
a) Increase flow of the pump to full displacement and run up to 3-5 minutes; high speed (1800+ rpm)
may be necessary.
The pump is fully bled once discharged flow is smooth.
b) Ensure that the system can handle this amount of flow.
If flow is going over the relief valve, do not stay in this operating condition for long as it can
significantly heat up the oil.
3. Compare expected discharged flow with actuator speed, or flow measurement.
If issues persist, contact Danfoss for assistance. Do not attempt to disassemble the pump. The pump
is not field serviceable and special tools and procedures are required for assembly and disassembly.
The DDP is now commissioned; use the diagnostic file to return to normal operation mode.
Continue with normal incremental startup procedures for the entire hydraulic system. Test out the
functions being supplied by the DDP to ensure they are working properly.
Tuning the control gains is necessary if operating the DDP in pressure or load sense control modes.
Contact your Danfoss representative for more information.
60 | © Danfoss | June 2021 BC306384089197en-000201

Technical Information
Digital Displacement® Pump Gen 1 DDP096 and DPC12
Commissioning and troubleshooting
Symptoms and diagnosis
Routine maintenance of the pump is limited to visual inspection of the casing of the pump for signs of
damage or hoses for leaks. This must be carried out with all pressure removed from the system and pump
housing.
The following information is an overview of scenarios where the pump does not work as expected and
potential causes for them. More detail can be found in the Software manual.
Problem Potential causes
No output flow
(no pumping)
Produces flow but no pressure
(continuous pumping)
Pressure raises but no flow
(sporadic pumping)
Pressure uncontrollable
(does not meet demand)
Pressure uncontrollable
(continuous at pressure relief valve setting)
Pressure uncontrollable
(unstable or oscillating)
Non-continuous output flow
(pump stops and starts randomly)
Over temperature cut-out
No or low power to controller
Inlet is not connected or valve not open
Crankcase is full of air
Shaft not turning or incorrect speed or incorrect direction
Not enabled or no demand e.g. pressure is already at set point
Sensor disconnected or damaged
Wiring harness damaged
Error condition on controller, see Software manual or contact Danfoss
Check setting of system pressure relief valve
Check commanded pressure reference if in pressure control mode or LS control mode
Check for leakage or large demand from hydraulic circuit
Restricted inlet (blocked inlet filter or strainer, reduced inlet pressure, blocked inlet)
Check connection to system (blocked or closed pump outlet or circuit)
Low rate of flow consumption from fluid consumers (no demand)
Pump not bled, or air introduced into pump leading to accumulation
Sensor disconnected or damaged
Wiring harness damaged
Malfunctioning pressure sensor
System instability from control element in circuit
Pump not bled
Malfunctioning pressure sensor
Wiring harness damaged
Malfunctioning pressure sensor
Sensor disconnected or damaged
Wiring harness damaged
Pump not bled
Gain settings need to be adjusted in the pressure control loop – contact Danfoss
Pressure limit set in controller being reached
Temperature limit set in controller being reached
Sensor disconnected or damaged
Wiring harness damaged
Error condition on controller, see Software manual or contact Danfoss
Speed and temperature sensor disconnected or damaged
Excessive internal leakage
Excessive idling
Motor fault
Other factor raising the oil temperature too high
Serviceability
The DDP096 pump is not field serviceable, but some parts are replaceable (e.g. wiring harness, coil,
sensors, shaft seal). The DPC12 is not field serviceable. If other damage or malfunction exists, contact your
Danfoss representative for help.
©
Danfoss | June 2021 BC306384089197en-000201 | 61

Danfoss
Power Solutions GmbH & Co. OHG
Krokamp 35
D-24539 Neumünster, Germany
Phone: +49 4321 871 0
Danfoss
Power Solutions ApS
Nordborgvej 81
DK-6430 Nordborg, Denmark
Phone: +45 7488 2222
Danfoss
Power Solutions (US) Company
2800 East 13th Street
Ames, IA 50010, USA
Phone: +1 515 239 6000
Danfoss
Power Solutions Trading
(Shanghai) Co., Ltd.
Building #22, No. 1000 Jin Hai Rd
Jin Qiao, Pudong New District
Shanghai, China 201206
Phone: +86 21 2080 6201
Products we offer:
Hydro-Gear
www.hydro-gear.com
Daikin-Sauer-Danfoss
www.daikin-sauer-danfoss.com
Cartridge valves
•
DCV directional control
•
valves
Electric converters
•
Electric machines
•
Electric motors
•
Gear motors
•
Gear pumps
•
Hydraulic integrated
•
circuits (HICs)
Hydrostatic motors
•
Hydrostatic pumps
•
Orbital motors
•
PLUS+1® controllers
•
PLUS+1® displays
•
PLUS+1® joysticks and
•
pedals
PLUS+1® operator
•
interfaces
PLUS+1® sensors
•
PLUS+1® software
•
PLUS+1® software services,
•
support and training
Position controls and
•
sensors
PVG proportional valves
•
Steering components and
•
systems
Telematics
•
Danfoss Power Solutions is a global manufacturer and supplier of high-quality hydraulic and
electric components. We specialize in providing state-of-the-art technology and solutions
that excel in the harsh operating conditions of the mobile off-highway market as well as the
marine sector. Building on our extensive applications expertise, we work closely with you to
ensure exceptional performance for a broad range of applications. We help you and other
customers around the world speed up system development, reduce costs and bring vehicles
and vessels to market faster.
Danfoss Power Solutions – your strongest partner in mobile hydraulics and mobile
electrification.
Go to www.danfoss.com for further product information.
We offer you expert worldwide support for ensuring the best possible solutions for
outstanding performance. And with an extensive network of Global Service Partners, we also
provide you with comprehensive global service for all of our components.
Local address:
Danfoss can accept no responsibility for possible errors in catalogues, brochures and other printed material. Danfoss reserves the right to alter its products without notice. This also applies to products
already on order provided that such alterations can be made without subsequent changes being necessary in specifications already agreed.
All trademarks in this material are property of the respective companies. Danfoss and the Danfoss logotype are trademarks of Danfoss A/S. All rights reserved.
©
Danfoss | June 2021 BC306384089197en-000201
 Loading...
Loading...