

Page 1

Design Guide
Capacity controller with
heat recovery function
AK-PC 781
ADAP-KOOL® Refrigeration control systems
Page 2

Contents
1. Introduction ............................................................................. 3
Application .................................................................................................. 3
Principles...................................................................................................... 4
2. Design of a controller ..............................................................7
Module survey ........................................................................................... 8
Common data for modules .................................................................10
Controller ...........................................................................................12
Extension module AK-XM 101A .................................................14
Extension module AK-XM 102A / AK-XM 102B .....................16
Extension module AK-XM 103A .................................................18
Extension module AK-XM 204A / AK-XM 204B .....................20
Extension module AK-XM 205A / AK-XM 205B .....................22
Extension module AK-XM 208C ................................................24
Extension module AK-OB 110 ....................................................26
Extension module AK-OB 101A..................................................27
Extension module EKA 163B / EKA 164B / EKA 166 ............ 28
Graphic display AK-MMI ...............................................................28
Power supply module AK-PS 075 / 150 / 250 ........................29
Communication module AK-CM 102 .......................................30
Preface to design ....................................................................................32
Functions ............................................................................................32
Connections ...................................................................................... 33
Limitations ......................................................................................... 33
Design of a compressor and condenser control .........................34
Procedure: ..........................................................................................34
Sketch .................................................................................................. 34
Compressor and condenser functions ....................................34
Connections ...................................................................................... 35
Planning table .................................................................................. 37
Length .................................................................................................38
Linking of modules ......................................................................... 38
Determine the connection points ............................................39
Connection diagram ...................................................................... 40
Supply voltage ................................................................................ 42
Ordering ..................................................................................................... 43
3. Mounting and wiring .............................................................45
Mounting ................................................................................................... 46
Mounting of analog output module ........................................ 46
Mounting of extension module on the basic module ....... 47
Wiring .......................................................................................................... 48
4. Conguration and operation ................................................51
Conguration ...........................................................................................52
Connect PC ........................................................................................ 52
Authorization .................................................................................... 54
Unlock the conguration of the controllers ..........................55
System setup ....................................................................................56
Set plant type ................................................................................... 57
Set control of compressors ..........................................................58
Set oil management ....................................................................... 61
Setup control of condenser fans ...............................................63
Setup control of high pressure ...................................................65
Setup control of receiver pressure ............................................66
Setup control of heat recovery..................................................67
Setup Display .................................................................................... 70
Setup Functions for General purpose ......................................71
Separate thermostats ............................................................. 72
Separate pressostats ..............................................................72
Separate voltage signals .......................................................73
Separate alarm inputs ............................................................ 73
Separate PI functions ............................................................. 74
Conguration of inputs and outputs .......................................75
Set alarm priorities..........................................................................77
Lock conguration ..........................................................................79
Check conguration .......................................................................80
Check of connections ............................................................................ 82
Check of settings.....................................................................................84
Schedule function .................................................................................. 86
Installation in network .......................................................................... 87
First start of control ................................................................................88
Start the control ............................................................................... 89
Manual capacity control ............................................................... 90
5. Regulating functions .............................................................91
Suction group ..........................................................................................92
Controlling sensor selection .......................................................92
Reference ...........................................................................................93
Capacity control of compressors ...............................................94
Capacity distribution methods ........................................... 96
Power pack types – compressor combinations ............97
Compressor timers ................................................................101
The capacity from the digital scroll compressor ........101
Load shedding ........................................................................102
Cascade systems – coordination and injection ..........103
Injection ON ............................................................................105
Liquid injection in suction line .........................................106
Safety functions .............................................................................106
Oil management............................................................................108
Condenser ...............................................................................................110
Capacity control of condenser .................................................110
Reference for condensing pressure ........................................110
Capacity distribution ...................................................................112
Step regulation ......................................................................................112
Speed regulation ..................................................................................112
Condenser couplings ...................................................................113
Safety functions for condenser ................................................113
EC motor ...........................................................................................113
CO2 transcritical system and heat recovery ........................114
Circuit for heat recovery or hot tap water ....................115
Circuit for recovery for heating .........................................116
Circuits for control of CO2 gas pressure ........................119
Receiver control .....................................................................121
Parallel compression ............................................................122
General monitoring functions .........................................................124
Miscellaneous ........................................................................................126
Appendix A – Compressor combinations and coupling pat-
terns ...........................................................................................................130
Appendix B - Alarm texts ...................................................................136
Appendix C - Recommended connection - AK-PC 781 ...........138
2 Capacity controller RS8GG602 © Danfoss 2015-03 AK-PC 781
Page 3
Application
1. Introduction
SW = 4.5x
AK-PC 781 is complete regulating units for capacity control of
compressors and condensers in refrigeration systems. The controller is with oil management, heat recovery function and CO2
gas pressure control.
In addition to capacity control the controllers can give signals to
other controllers about the operating condition, e.g. forced closing of expansion valves, alarm signals and alarm messages.
The controller’s main function is to control compressors and
condensers so that operation all the time takes place at the
energy-optimum pressure conditions. Both suction pressure
and condensing pressure are controlled by signals from pressure
transmitters.
Capacity control can be carried out by suction pressure P0, media
temperature S4 or separate control pressure Pctrl (for cascade).
Among the dierent functions are:
- Capacity control of up to 8 compressors
- Up to 3 unloaders for each compressor
- Oil management. Either shared or individual for all of the compressor's oil valves. Receiver pressure control.
- Speed control of one or two compressors
- Up to 6 safety inputs for each compressor
- Option for capacity limitation to minimize consumption peaks
- When the compressor does not start, signals can be transmitted
to other controllers so that the electronic expansion valves will
be closed
- Regulation of liquid injection into suction line
- Start/stop of liquid injection in heat exchanger (cascade)
- MT/LT - coordination between controllers in cascade control
- Safety monitoring of high pressure / low pressure / discharge
temperature
- Capacity control of up to 8 fans
- Floating reference with regard to outside temperature
- Heat recovery function
- CO2 gas cooler control and receiver control
- Parallel compression on transcritical CO2 system
- Step coupling, speed regulation or a combination
- Safety monitoring of fans
- The status of the outputs and inputs is shown by means of lightemitting diodes on the front panel
- Alarm signals can be generated via data communication
- Alarms are shown with texts so that the cause of the alarm is
easy to see.
- Plus some completely separate functions that are totally independent of the regulation – such as alarm, thermostat ,pressure
and PI-regulating functions.
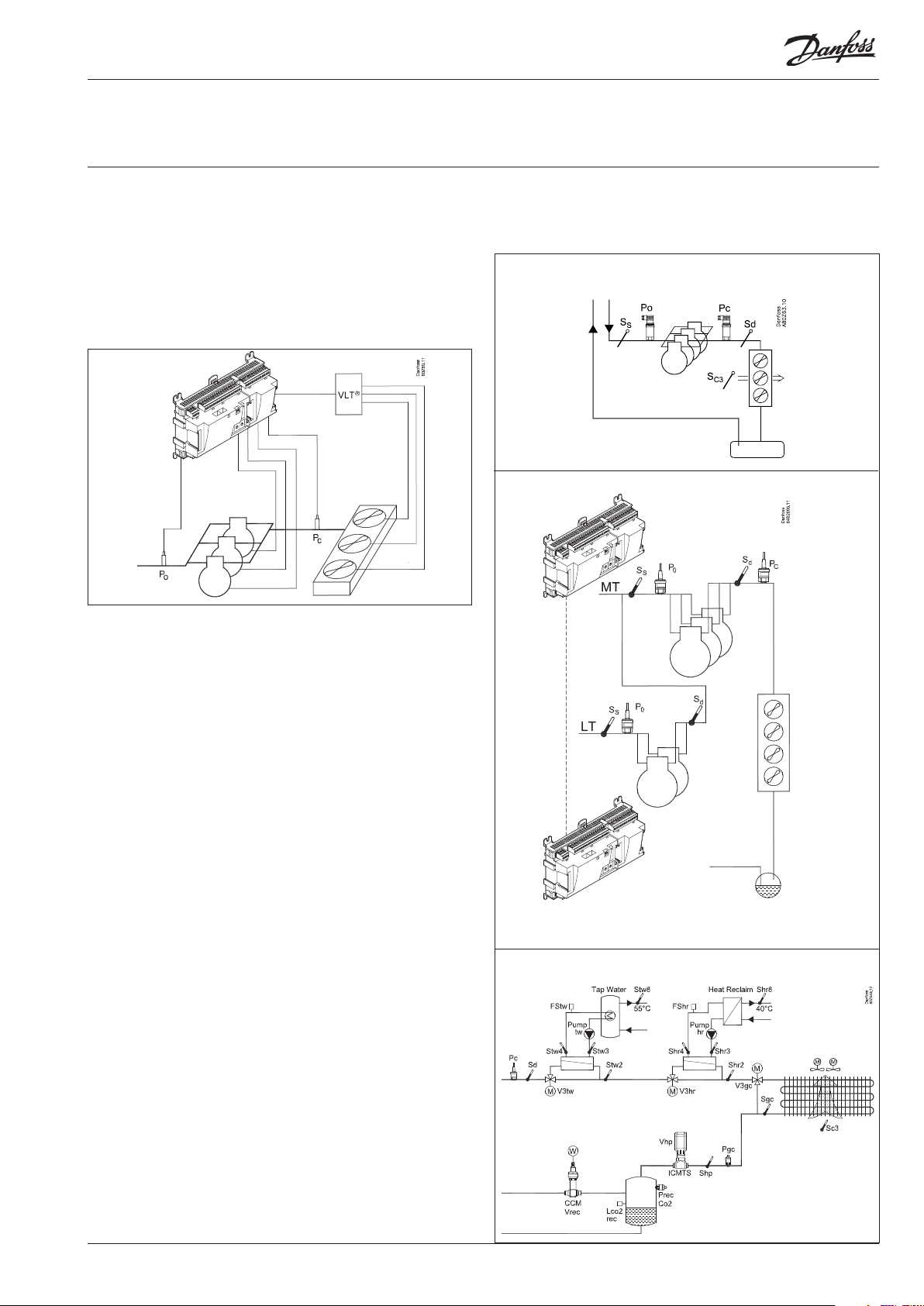
Examples
Traditional capacity control
Booster control with 2 controls
(For pure booster control without MT cooling, the intermediate pressure
must be connected to the receiver to prevent Pmin and Pmax cut-outs
during the start-up).
Heat recovery functions, controlling the condensing pressure and
receiver pressure of a CO2 plant
AK-PC 781 Capacity controller RS8GG602 © Danfoss 2015-03 3
Page 4
Principles
The great advantage of this series of controllers is that it can be
extended as the size of the plant is increased. It has been developed for refrigeration control systems, but not for any specic
application – variation is created through the read-in software and
the way you choose to dene the connections.
It is the same modules that are used for each regulation and the
composition can be changed, as required. With these modules
(building blocks) it is possible to create a multitude of various
kinds of regulations. But it is you who must help adjusting the
regulation to the actual needs – these instructions will assist you
to nd your way through all the questions so that the regulation
can be dened and the connections made.
Controller
Top part
Advantages
• The controller’s size can “grow” as systems grow
• The software can be set for one or more regulations
• Several regulations with the same components
• Extension-friendly when systems requirements are changed
• Flexible concept:
- Controller series with common construction
- One principle – many regulation uses
- modules are selected for the actual connection requirements
- The same modules are used from regulation to regulation
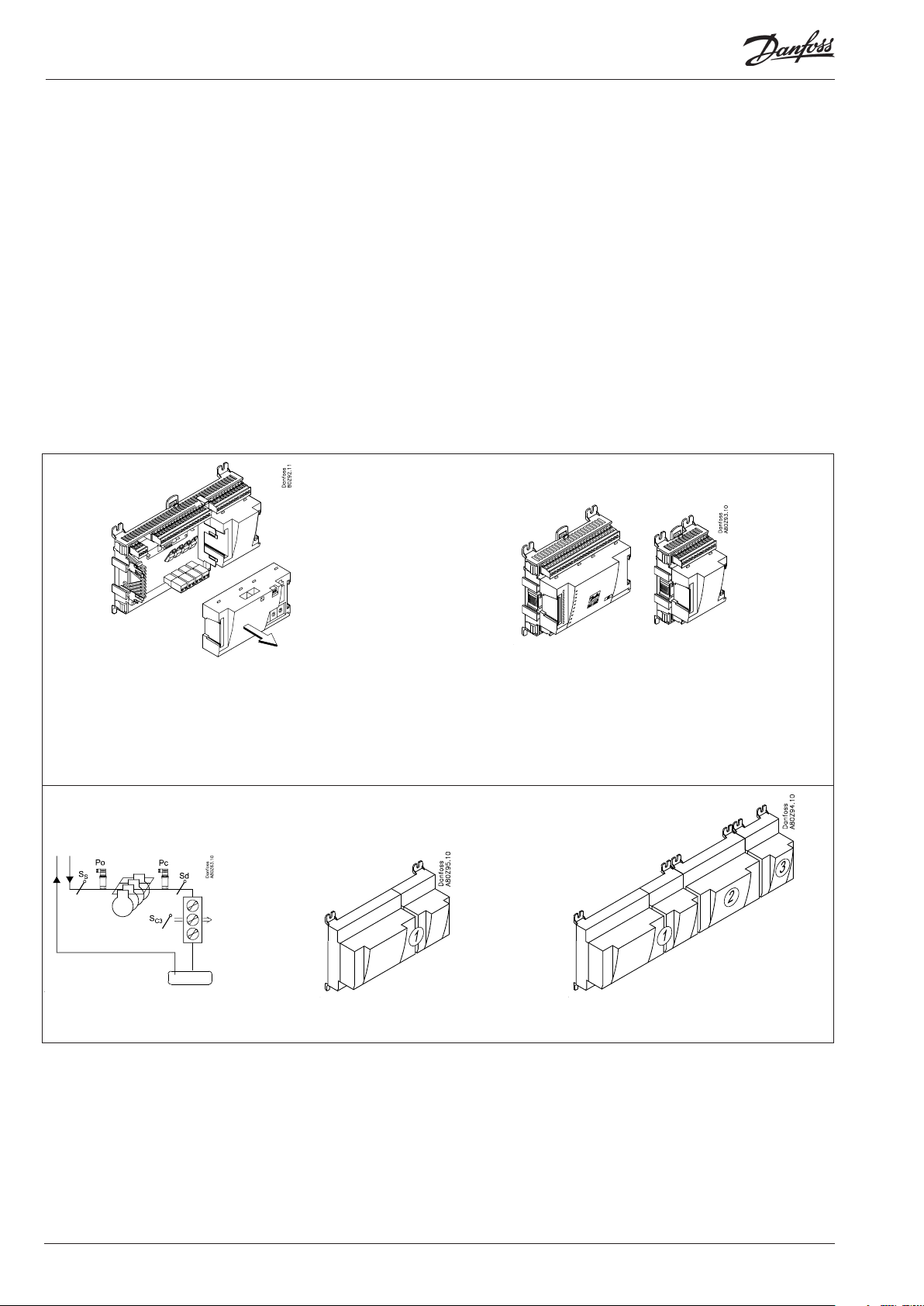
Extension modules
Bottom part
The controller is the cornerstone of the regulation. The module has inputs and
outputs capable of handling small systems.
• The bottom part – and hence the terminals – are the same for all controller types.
• The top part contains the intelligence with software. This unit will vary according
to controller type. But it will always be supplied together with the bottom part.
• In addition to the software the top part is provided with connections for data
communication and address setting.
Examples
A regulation with few connections can
be performed with the controller module
alone
If the system grows and more functions have to be controlled, the regulation can be
extended.
With extra modules more signals can be received and more relays cut in and out –
how many of them – and which – is determined by the relevant application.
If there are many connections one or more extension modules have to be mounted
4 Capacity controller RS8GG602 © Danfoss 2015-03 AK-PC 781
Page 5
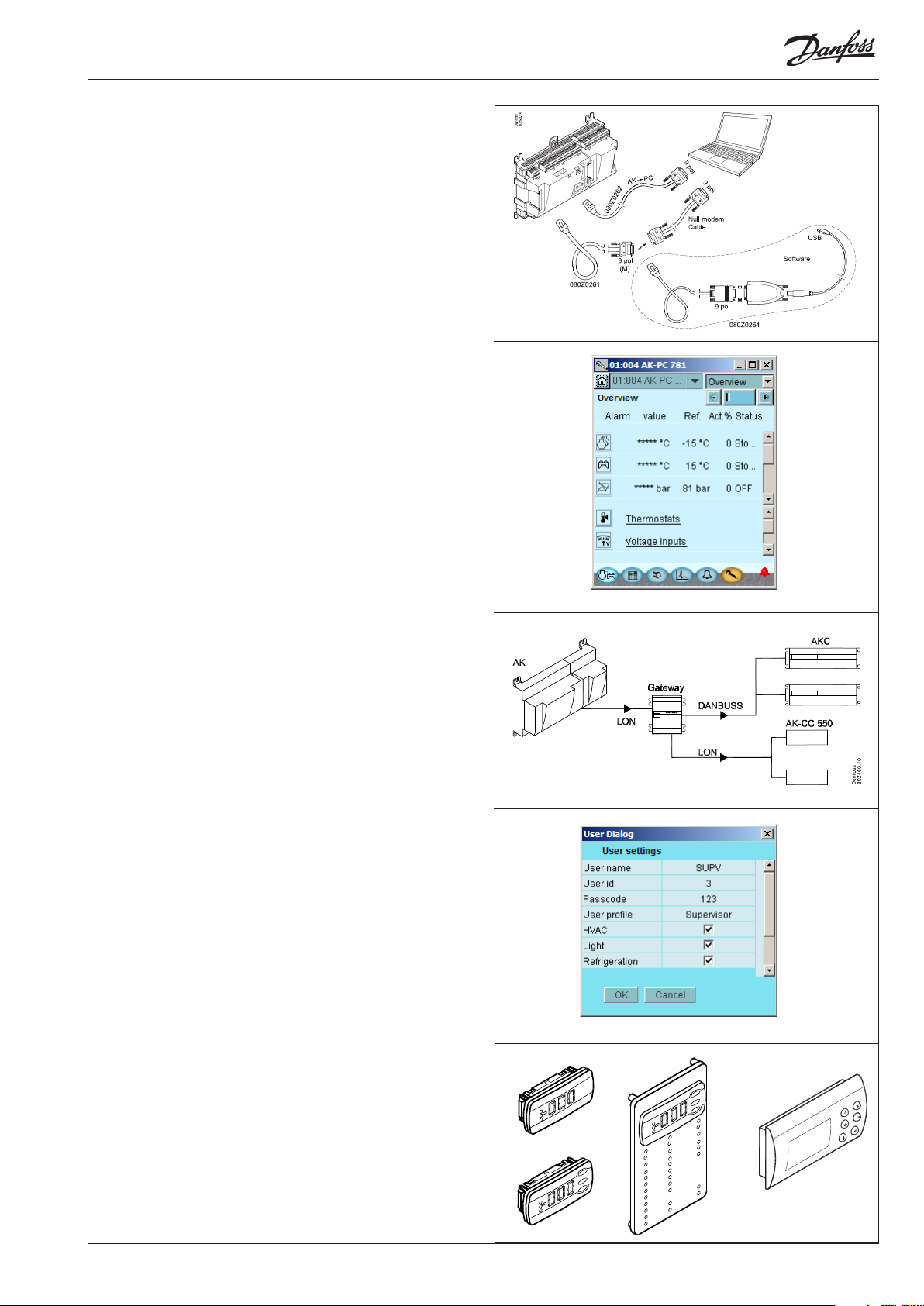
Direct connection
Setup and operation of an AK controller must be accomplished via
the “AK-Service Tool” software program.
The program is installed on a PC, and setup and operation of
the various functions are carried out via the controller’s menu
displays.
Displays
The menu displays are dynamic, so that dierent settings in one
menu will result in dierent setting possibilities in other menus.
A simple application with few connections will give a setup with
few settings.
A corresponding application with many connections will give a
setup with many settings.
From the overview display there is access to further displays for
the compressor regulation and the condenser regulation.
At the bottom of the display there is access to a number of general
functions, such as “time table”, “manual operation”, “log function”,
“alarms”, and “service” (conguration).
Network linking
The controller can be linked up into a network together with other
controllers in an ADAP-KOOL® refrigeration control system. After
the setup operation can be performed at a distance with, say, our
software program type AKM.
Users
The controller comes supplied with several languages, one of
which can be selected and employed by the user. If there are several users, they may each have their choice of language. All users
must be assigned a user prole which either gives access to full
operation or gradually limits the operation to the lowest level that
only allows you “to see”.
Language selection is part of the service tool settings.
If the language selection is not available in the service tool for the
current regulator, English texts will be displayed.
External display
An external display can be tted in order for P0 (Suction) and Pc
(Condensing) readings to be displayed.
A total of 4 displays can be tted and with one setting it is possible to choose between the following readings: suction pressure,
suction pressure in temperature, Pctrl, S4, Ss, Sd, condenser pressure, condenser pressure in temperature, S7 gas cooler temperature, hot tap water at heat recovery and heat exchanger temperature at heat recovery.
A graphical display with control buttons can also be tted.
AK-PC 781 Capacity controller RS8GG602 © Danfoss 2015-03 5
Page 6
Light-emitting diodes
A number of light-emitting diodes makes it possible to follow the
signals that are received and transmitted by the controller.
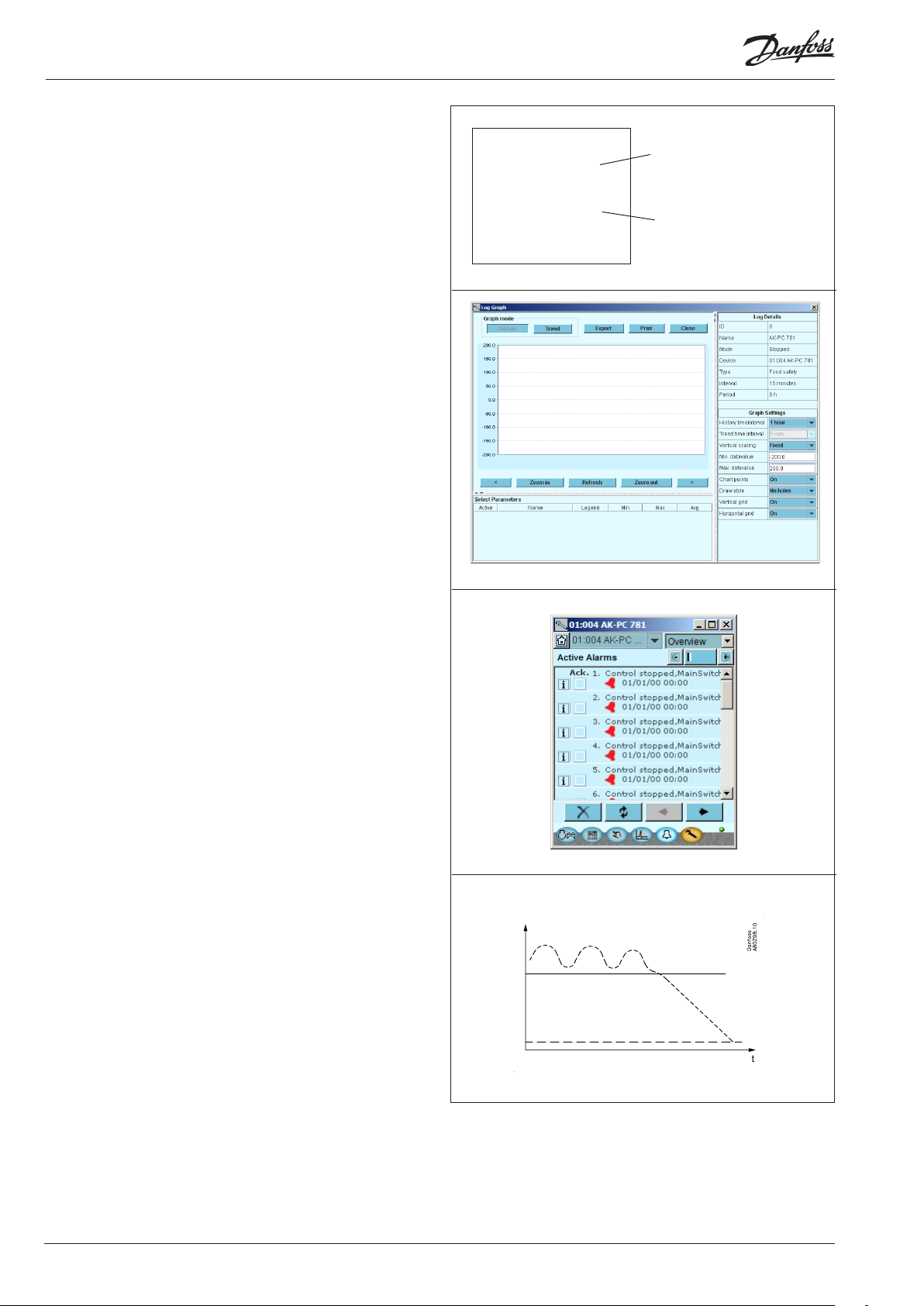
Log
From the log function you can dene the measurements you wish
to be shown.
The collected values can be printed, or you may export them to a
le. You can open the le in Excel.
If you are in a service situation you can show measurements in a
trend function. The measurements are then made real-time and
displayed instantly.
■ Power
■ Comm
■ DO1 ■ Status
■ DO2 ■ Service Tool
■ DO3 ■ LON
■ DO4 ■ I/O Extension
■ DO5 ■ Alarm
■ DO6
■ DO7
■ DO8 ■ Service Pin
Slow ash = OK
Quick ash = answer from gateway
Constantly ON = error
Constantly OFF = error
Flash = active alarm/not cancelled
Constant ON = Active alarm/cancelled
Alarm
The display gives you an overview of all active alarms. If you wish
to conrm that you have seen the alarm you can cross it o in the
acknowledge eld.
If you want to know more about a current alarm you can click on it
and obtain an information display on the screen.
A corresponding display exists for all earlier alarms. Here you can
upload information if you need further details about the alarm
history.
Trouble-shooting
The controller contains a function that continuously follows
a number of measurements and deals with them. The result
indicates whether the function is OK or whether an error may be
expected within a given period of time (“the trip down the roller
coaster has started”). At this time an alarm is transmitted about
the situation – no error has appeared as yet, but it will come.
One example may be slow clogging-up of a condenser. When the
alarm comes the capacity has been reduced, but the situation is
not serious. There will be time to plan a service call.
Alarm
Error
6 Capacity controller RS8GG602 © Danfoss 2015-03 AK-PC 781
Page 7

2. Design of a controller
This section describes how the controller is designed.
The controller in the system is based on a uniform connection
platform where any deviations from regulation to regulation is
determined by the used top part with a specic software and
by which input and output signals the relevant application will
require. If it is an application with few connections, the controller
module (top part with belonging bottom part) may be sucient.
If it is an application with many connections it will be necessary to
use the controller module plus one or more extension modules.
This section will give you a survey of possible connections plus
assistance in selecting the modules required by your actual ap-
plication.
AK-PC 781 Capacity controller RS8GG602 © Danfoss 2015-03 7
Page 8
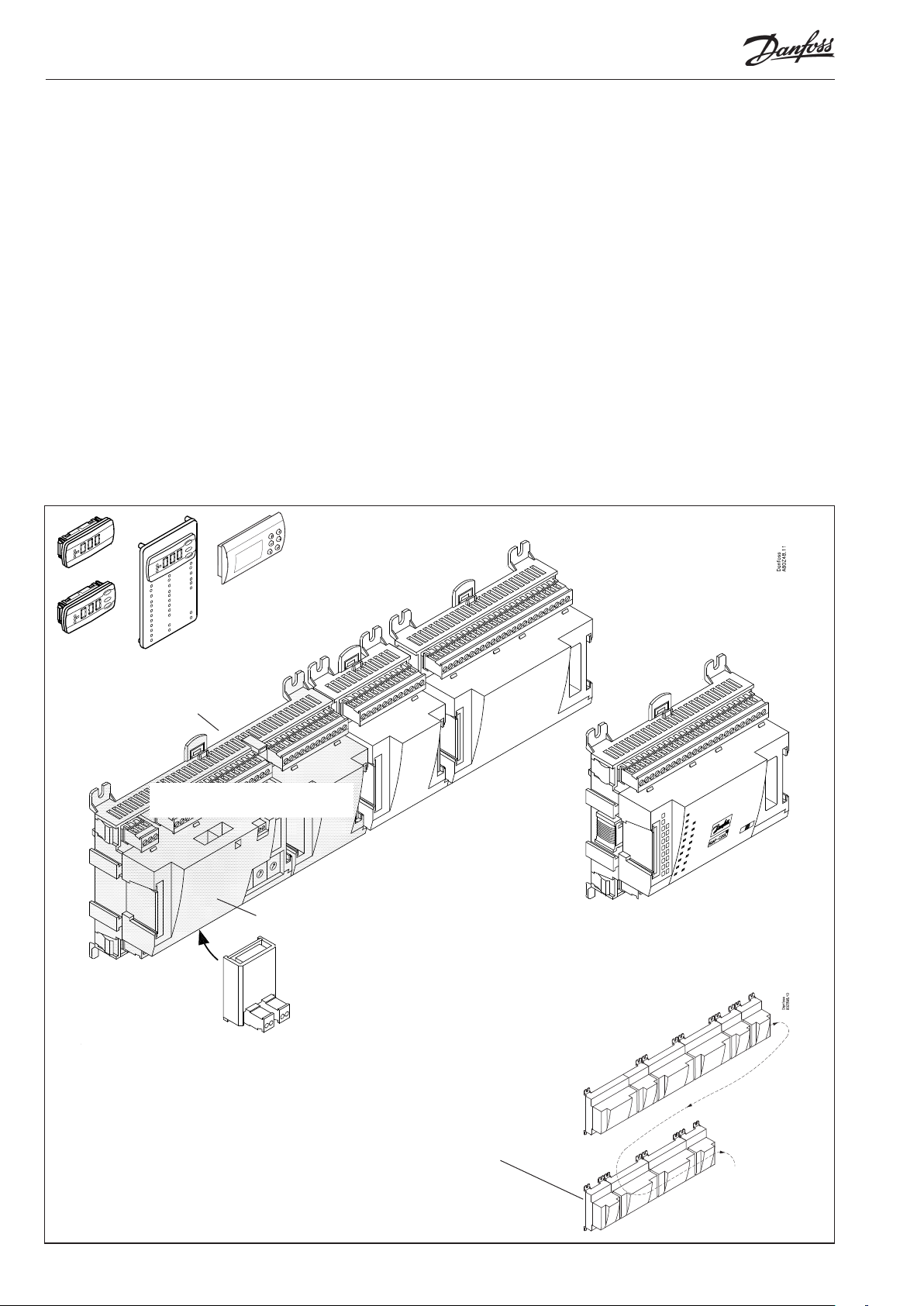
Module survey
• Controller module – capable of handling minor plant requirements.
• Extension modules. When the complexity becomes greater
and additional inputs or outputs are required, modules can be
attached to the controller. A plug on the side of the module will
transmit the supply voltage and data communication between
the modules.
• Top part
The upper part of the controller module contains the intelligence. This is the unit where the regulation is dened and where
data communication is connected to other controllers in a bigger network.
• Connection types
There are various types of inputs and outputs. One type may, for
example, receive signals from sensors and switches, another may
receive a voltage signal, and a third type may be outputs with
relays etc. The individual types are shown in the table below.
Extension module with additional analog inputs
• Optional connection
When a regulation is planned (set up) it will generate a need for
a number of connections distributed on the mentioned types.
This connection must then be made on either the controller
module or an extension module. The only thing to be observed
is that the types must not be mixed (an analog input signal must
for instance not be connected to a digital input).
• Programming of connections
The controller must know where you connect the individual
input and output signals. This takes place in a later conguration where each individual connection is dened based on the
following principle:
- to which module
- at which point (”terminals”)
- what is connected (e.g. pressure transmitter/type/
pressure range)
Extension module with additional
relay outputs and additional analog inputs.
External display for
suction pressure etc.
Bottom part
Controller with analog inputs and
relay outputs.
Top part
Extension module with
2x analog output signals
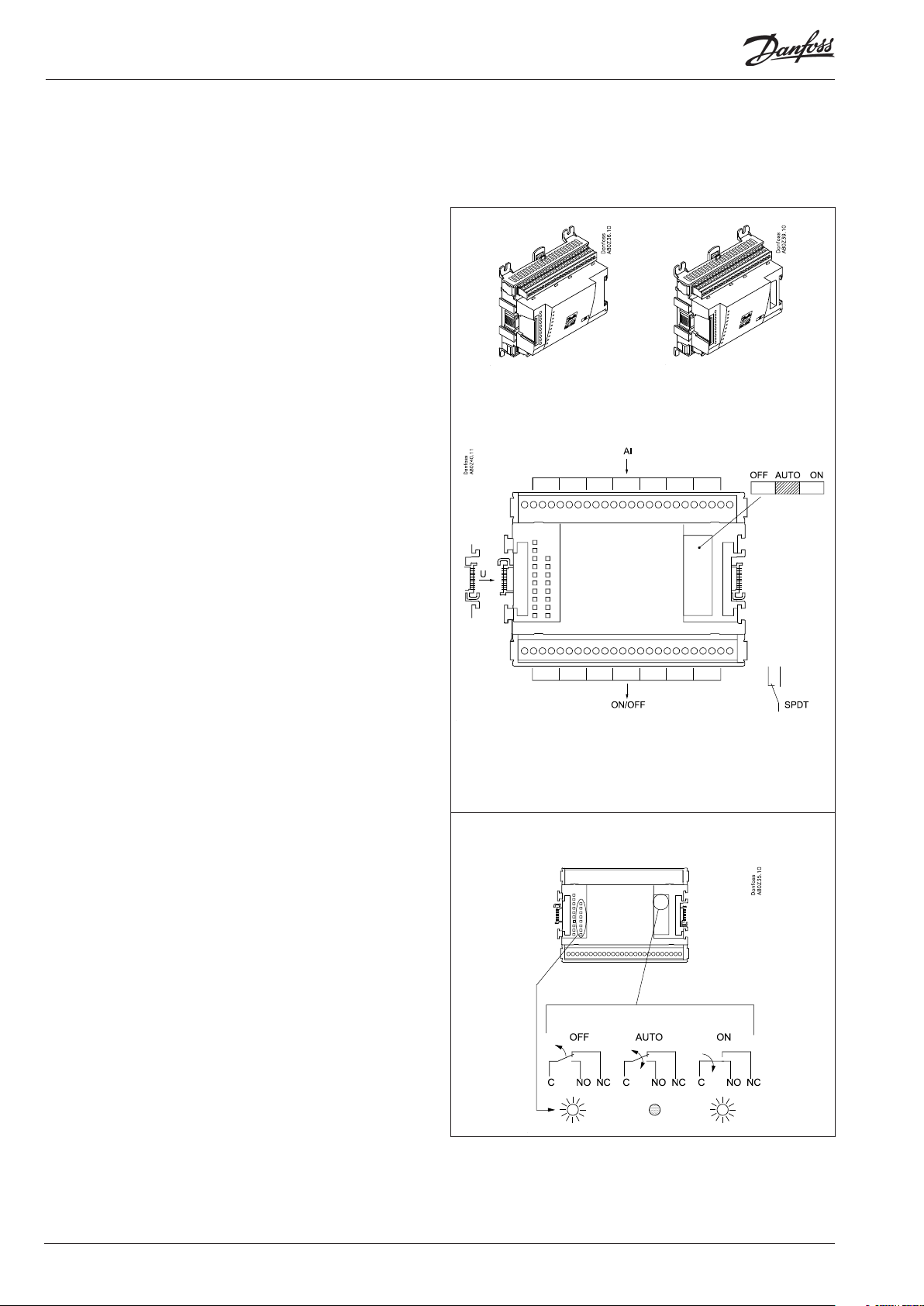
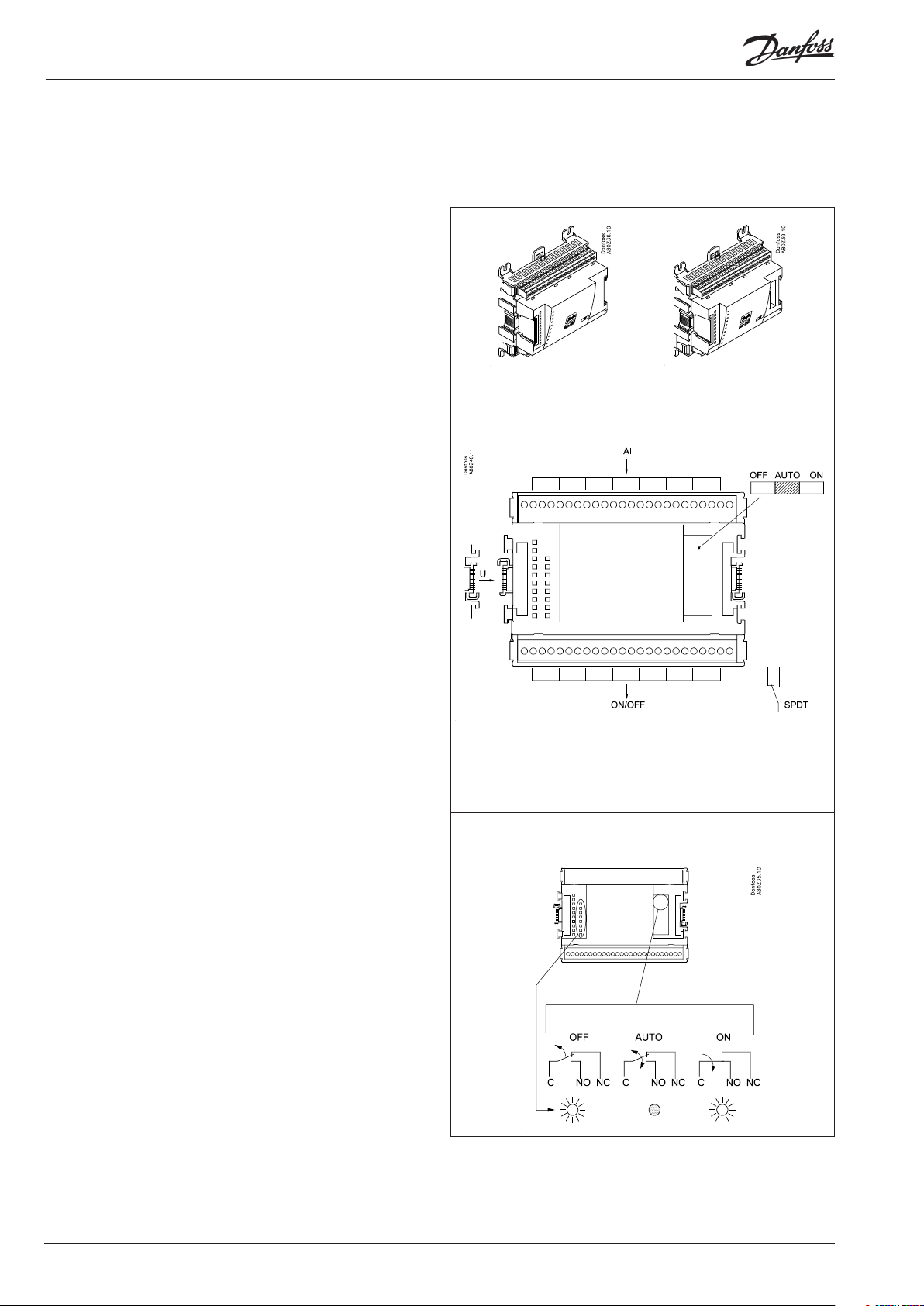
The module with additional relay outputs is
also available in a version where the top part
is provided with change-over switches so
that the relays can be overridden.
If the row of modules needs to
be interrupted due to length or
external positioning, a communication module should be used.
8 Capacity controller RS8GG602 © Danfoss 2015-03 AK-PC 781
Page 9
1. Controller
Type Function Application
AK-PC 781
Controller for capacity control of compressors and condensers
8 compressors with up to 3 unloaders, 8 fans, max. 120 inputs/outputs
Compressor / Condenser / Both/
Oil management / Heat recovery / CO2 gas
pressure
2. Extension modules and survey of inputs and outputs
Type Analog
inputs
For sensors, pressure transmitters
etc.
Controller 11 4 4 - - - -
Extension modules
AK-XM 101A 8
AK-XM 102A 8
AK-XM 102B 8
AK-XM 103A 4 4
AK-XM 204A 8
AK-XM 204B 8 x
AK-XM 205A 8 8
AK-XM 205B 8 8 x
AK-XM 208C 8 4
On/O outputs On/o supply voltage
Relay
(SPDT)
Solid state Low voltage
(DI signal)
(max. 80 V)
High voltage
(max. 260 V)
Analog
outputs
0-10 V d.c. For valves
Stepper
output
with step
control
Module with
switches
For override of
relay outputs
The following extension module can be placed on the PC board in the controller module.
There is only room for one module.
AK-OB 110 2
3. AK operation and accessories
Type Function Application
Operation
AK-ST 500 Software for operation of AK controllers AK-operation
- Cable between PC and AK controller AK - Com port
-
- Cable between PC and AK controller AK - USB
Accessories Power supply module 230 V / 115 V to 24 V d.c.
AK-PS 075 18 VA
AK-PS 250 60 VA
Accessories External display that can be connected to the controller module. For showing, say, the suction pressure
EKA 163B Display
EKA 164B Display with operation buttons
EKA 166 Display with operation buttons and LED for function cut in
AK-MMI Graphic display with operation
-
Cable between zero modem cable and AK controller /
Cable between PDA cable and AK controller
Cable between display and controller Length = 2 m, 6 m
Cable between graphic display and controller Length = 1.5 m, 3.0 m
AK - RS 232
Supply for controllerAK-PS 150 36 VA
Accessories Real time clock for use in controllers that require a clock function, but are not wired with data communication.
AK-OB 101A Real time clock with battery backup. To be mounted in an AK controller
Accessories Communication modules for controllers where modules cannot be connected continuously
AK-CM 102 Communication module
Data communication for external extension
modules
On the following pages there is data specic to each module.
AK-PC 781 Capacity controller RS8GG602 © Danfoss 2015-03 9
Page 10
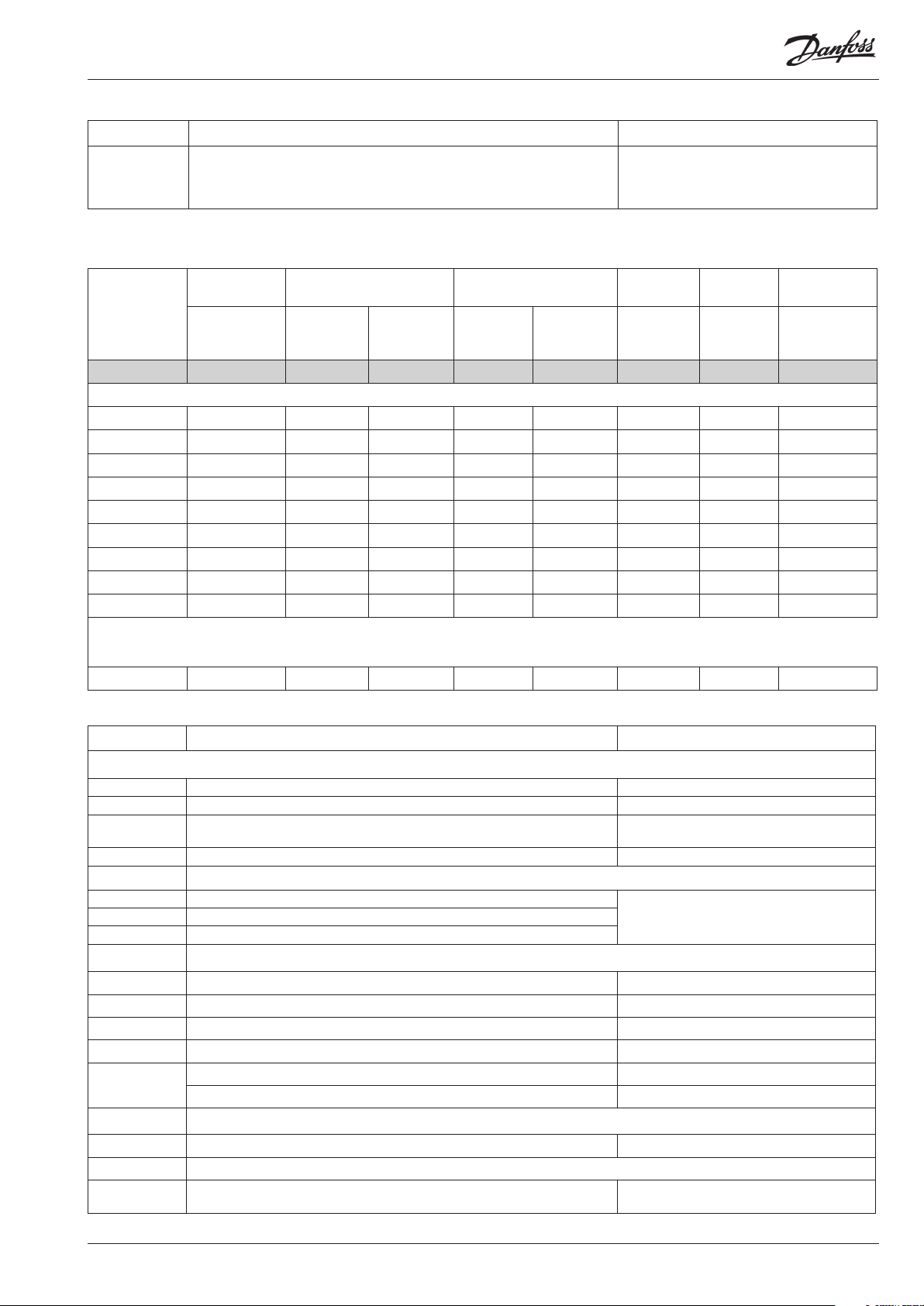
Common data for modules
Supply voltage 24 V d.c./a.c. +/- 20%
Power consumption AK-__ (controller) 8 VA
AK-XM 101, 102, 103, 107, AK-CM 102 2 VA
AK-XM 204, 205, 208 5 VA
Analog inputs Pt 1000 ohm /0°C Resolution: 0.1°C
Pressure transmitter type AKS 32R / AKS
2050
AKS 32 (1-5 V)
Other pressure transmitter:
Ratiometric signal
Min. and Max. pressure must be set
Voltage signal 0-10 V
Contact function (On/O ) On at R < 20 ohm
On/o supply voltage inputs Low voltage
Relay outputs
SPDT
0 / 80 V a.c./d.c.
High voltage
0 / 260 V a.c.
AC-1 (ohmic) 4 A
AC-15 (inductive) 3 A
U Min. 24 V
Accuracy: +/- 0.5°C
Resolution:1 mV
Accuracy +/- 10 mV
Max. connection of 5 pressure transmitters on one module
O at R > 2K ohm
(Gold -plated contacts not necessary)
O: U < 2 V
On: U > 10 V
O: U < 24 V
On: U > 80 V
Max. 230 V
Low and high voltage must not be connected to the same
output group
Solid state outputs Can be used for loads that are cut in and
out frequently, e.g. :
Oil valves, fans and AKV valves
Stepper outputs Used for valves with stepper input 20-500 step/s
Ambient temperature During transport -40 to 70°C
During operation -20 to 55°C ,
Enclosure Material PC / ABS
Density IP10 , VBG 4
Mounting For mounting on panel wall or DIN rail
Weight with screw terminals Modules in 100- / 200- / controller-series Ca. 200 g / 500 g / 600 g
Approvals EU low voltage directive and EMC require-
ments are complied with
UL 873,
The mentioned data applies to all modules.
If data is specic, this is mentioned together with the module in question.
Max. 240 V a.c. , Min. 48 V a.c.
Max. 0,5 A,
Leak < 1 mA
Max. 1 AKV
Separate supply to stepper outputs : 24 a.c./d.c. / 13 VA
0 to 95% RH (non condensing)
No shock inuences / vibrations
LVD tested according to EN 60730
EMC tested
Immunity according to EN 61000-6-2
Emission according to EN 61000-6-3
UL le number: E166834 for XM and CM-modules
UL le number: E31024 for PC-modules
10 Capacity controller RS8GG602 © Danfoss 2015-03 AK-PC 781
Page 11
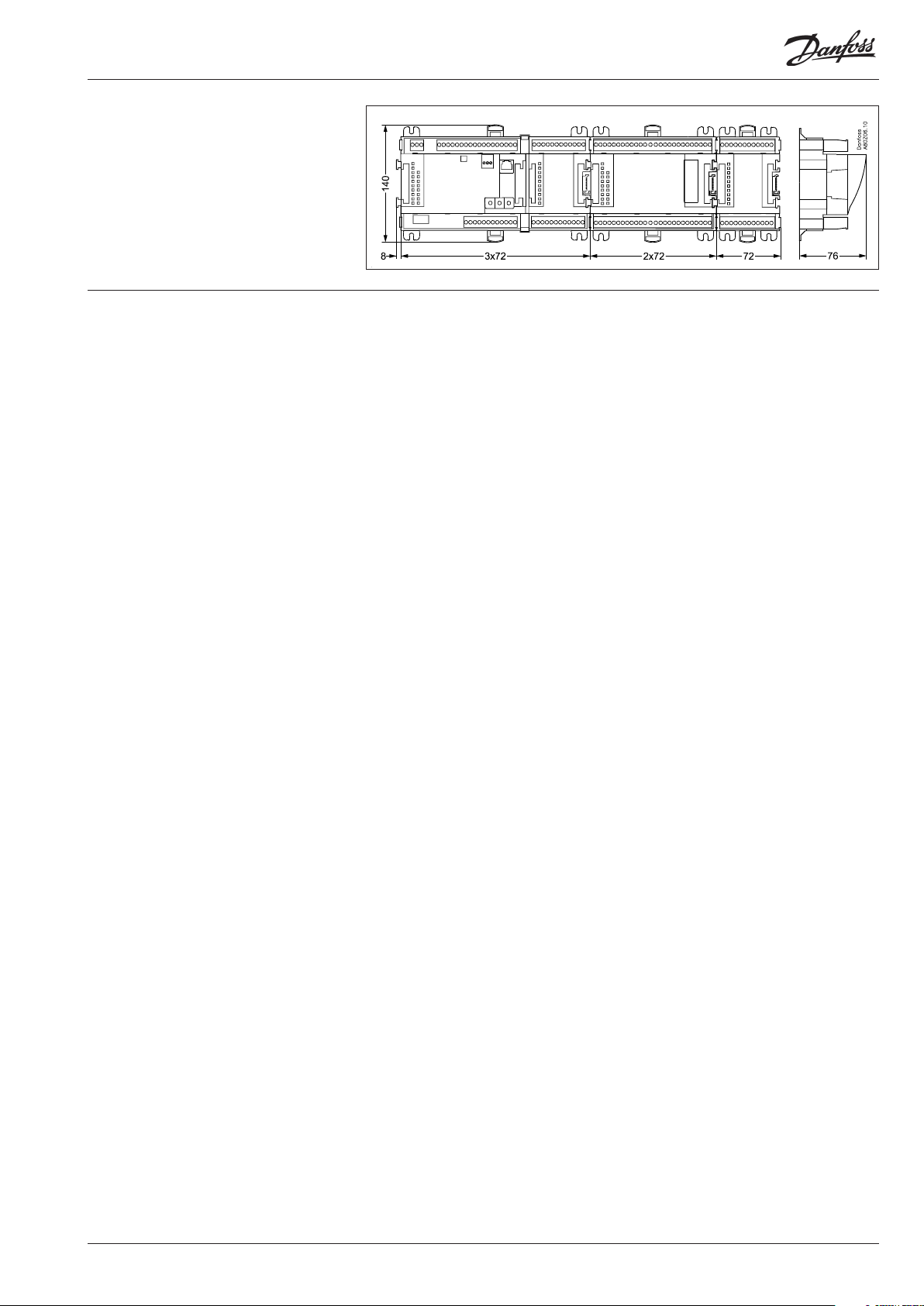
Dimensions
The module dimension is 72 mm.
Modules in the 100-series consist of one
module
Modules in the 200-series consist of two
modules
Controllers consist of three modules
The length of an aggregate unit = n x 72 + 8
AK-PC 781 Capacity controller RS8GG602 © Danfoss 2015-03 11
Page 12
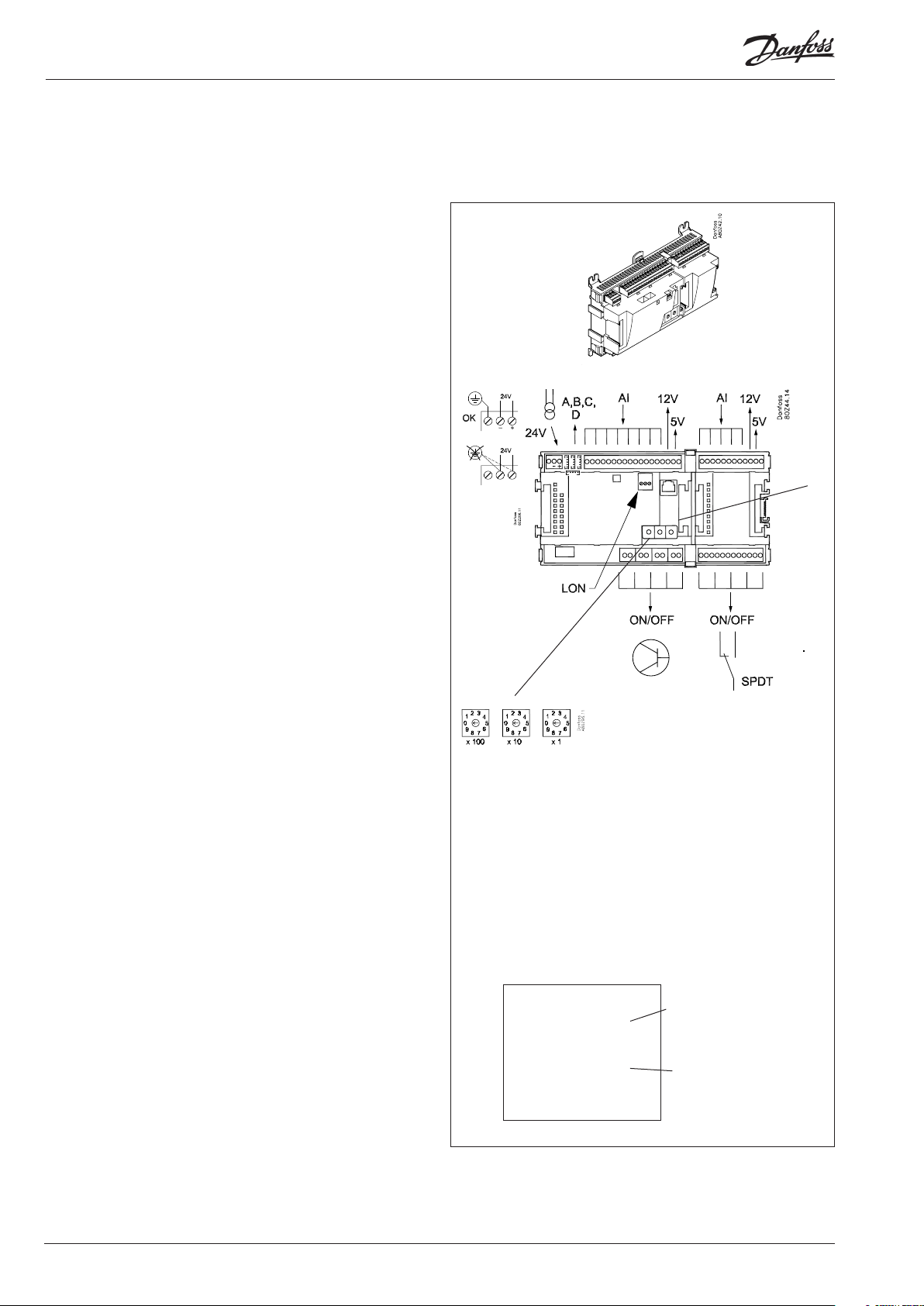
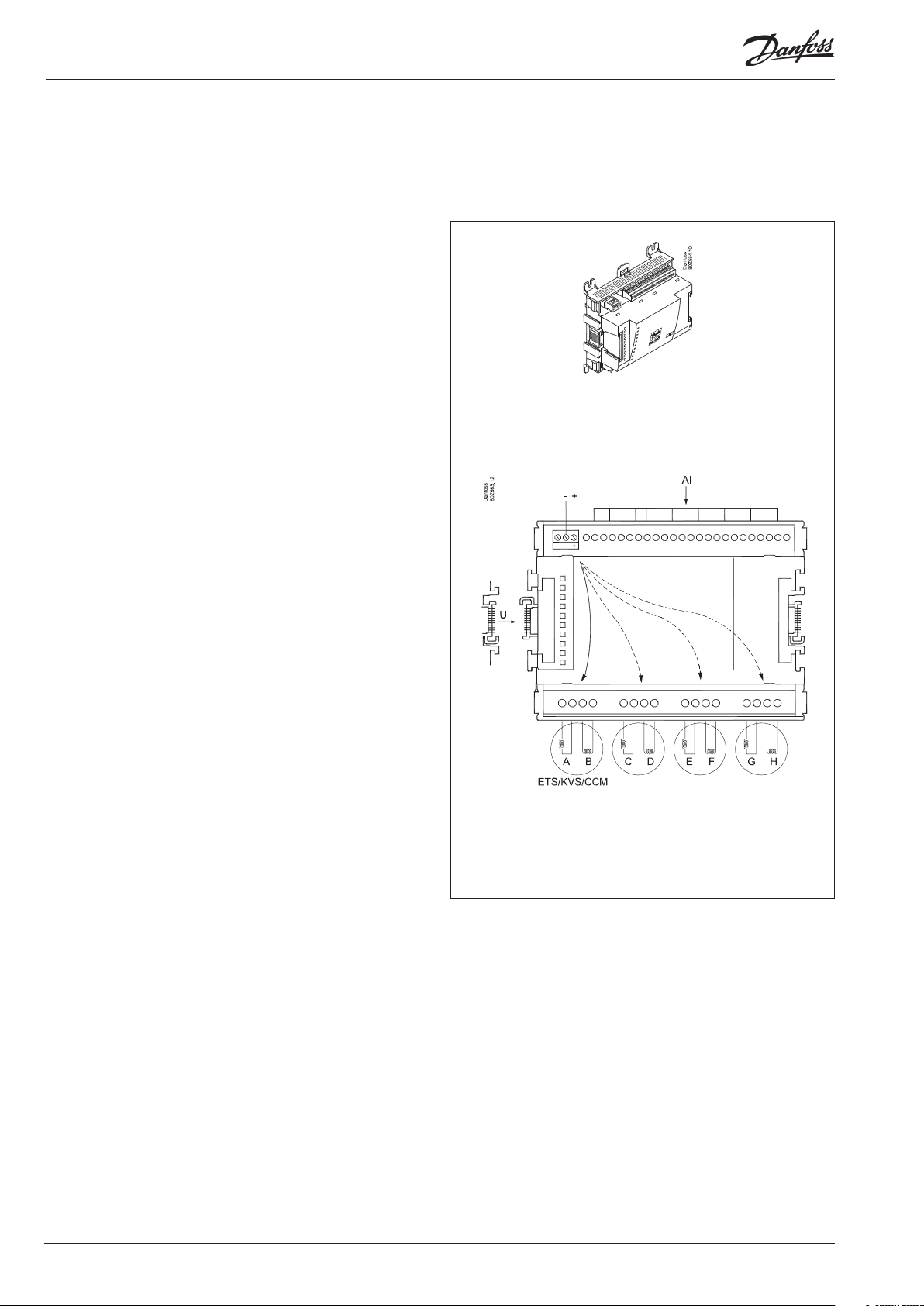
Controller
Function
There are several controllers in the series. The function is determined by the programmed software, but outwardly the controllers are identical – they all have the same connection possibilities:
11 analog inputs for sensors, pressure transmitters, voltage signals
and contact signals.
8 digital outputs, with 4 Solid state outputs and 4 relay outputs
Supply voltage
24 V a.c. or d.c. to be connected to the controller.
The 24 V must not be retransmitted and used by other controllers as it is not galvanically separated from inputs and outputs. In
other words, you must use a transformer for each controller. Class
II is required. The terminals must not be earthed.
The supply voltage to any extension modules is transmitted via
the plug on the right-hand side.
The size of the transformer is determined by the power requirement of the total number of modules.
The supply voltage to a pressure transmitter can be taken either
from the 5 V output or from the 12 V output depending on transmitter type.
PIN
Data communication
If the controller is to be included in a system, communication
must take place via the LON connection.
The installation has to be made as mentioned in the separate
instructions for LON communication.
Address setting
When the controller is connected to a gateway type AKA 245,
the controller’s address must be set between 1 and 119. (If it is a
system manager AK-SM .., then 1-999).
Service PIN
When the controller is connected to the data communication
cable the gateway must have knowledge of the new controller.
This is obtained by pushing the key PIN. The LED “Status” will ash
when the gateway sends an acceptance message.
Operation
The conguration operation of the controller must take place
from the software program “Service Tool”. The program must be
installed on a PC, and the PC must be connected to the controller
via the network plug on the front of the unit.
Light-emitting diodes
There are two rows with LED’s. They mean:
Left row:
• Voltage supply to the controller
• Communication active with the bottom PC board (red = error)
• Status of outputs DO1 to DO8
Right row:
• Software status (slow ash = OK)
• Communication with Service Tool
• Communication on LON
• Communication with AK-CM 102
• Alarm when LED ashes
- 2 LED’s that are not used
• “Service Pin” switch has been activated
Address
■ Power
■ Comm
■ DO1 ■ Status
■ DO2 ■ Service Tool
■ DO3 ■ LON
■ DO4 ■ I/O Extension
■ DO5 ■ Alarm
■ DO6
■ DO7
■ DO8 ■ Service Pin
Slow ash = OK
Quick ash = answer from gateway
Constantly ON = error
Constantly OFF = error
Flash = active alarm/not cancelled
Constant ON = Active alarm/cancelled
Keep the safety
distance!
Low and high
voltage must not
be connected to
the same output
group
A small module (option board) can be placed on the bottom part
of the controller. The module is described later in the document.
12 Capacity controller RS8GG602 © Danfoss 2015-03 AK-PC 781
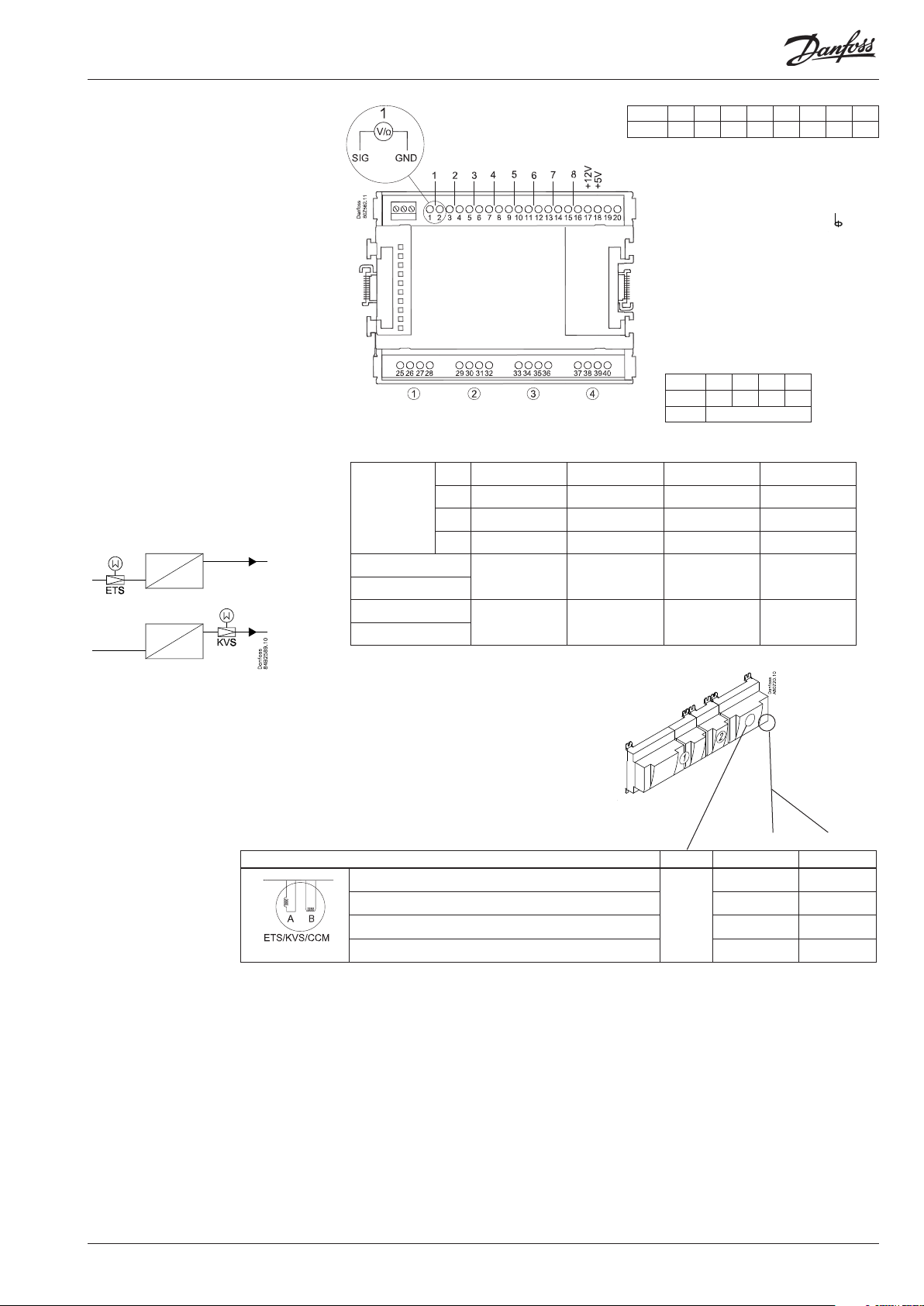
Page 13
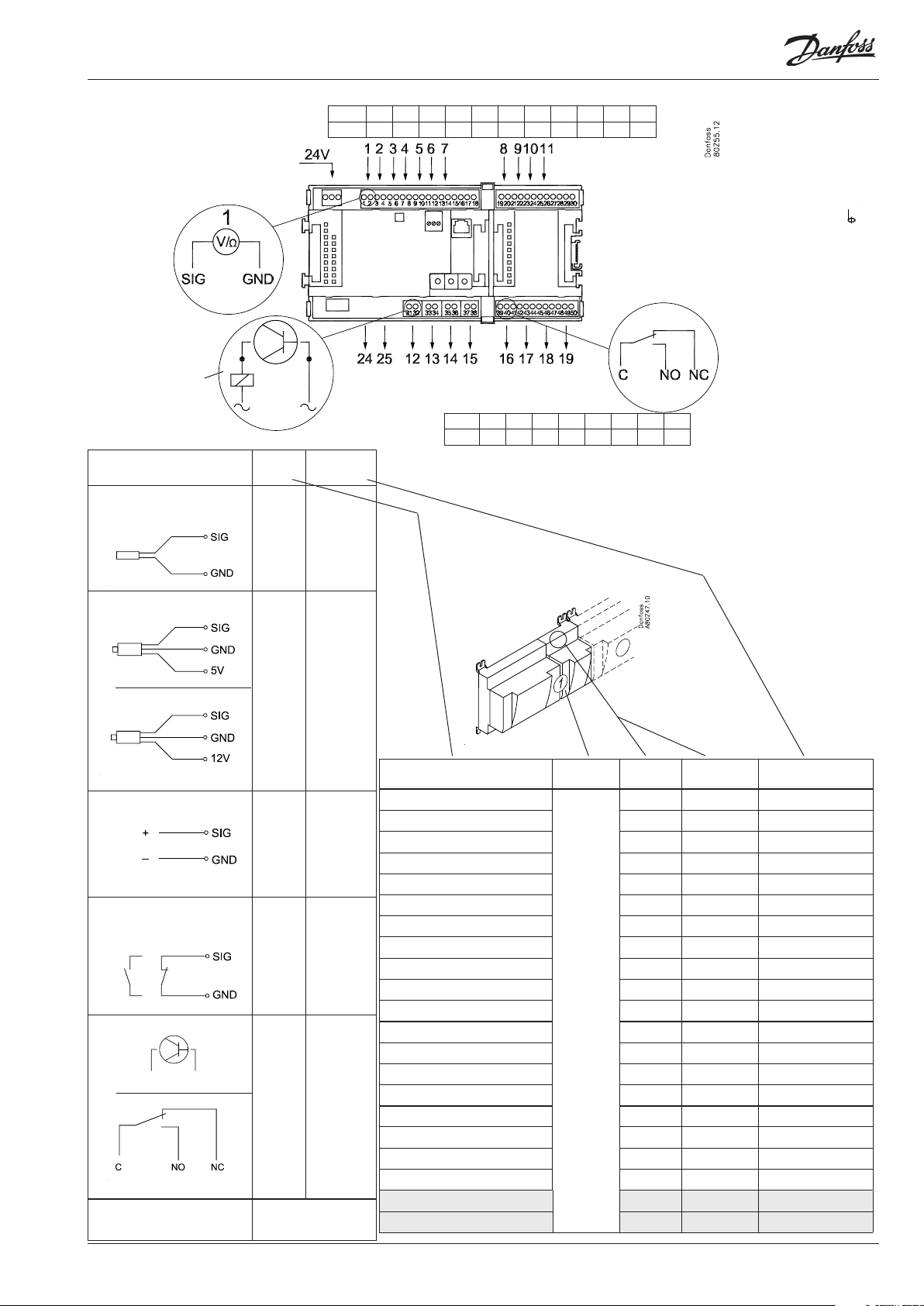
Point
Point 1 2 3 4 5 6 7 8 9 10 11
Type AI1 AI2 AI3 AI4 AI5 AI6 AI7 AI8 AI9 AI10 AI11
Terminal 15: 12 V
Terminal 16: 5 V
Terminal 27: 12 V
Terminal 28: 5 V
Analog
inputs
on 1 - 11
Solid state outputs
on 12 - 15
Relay or AKV coil
fx 230 V a.c.
Signal Signal
S
S1
S2
Pt 1000 ohm/0°C
Saux_
SsA
SdA
Shr
Stw
Sgc
P
AKS 32R
3: Brown
2: Blue
1: Black
P0A
P0B
PcA
PcB
AKS 32
3: Brown
2: Black
1: Red
Paux
Pgc
Prec
U
...
On/O Ext.
Main
switch
Day/
Night
Door
Level
switch
DO
AKV
AKV
Comp 1
Comp 2
Fan 1
Alarm
Light
Rail heat
Defrost
Solenoid
valve
Option Board
Please see the signal
on the page with the
module.
24 and 25 used
only when "Option board tted"
type
Pt 1000
AKS 32R /
AKS 2050
-1 - xx bar
AKS 32
-1 - zz bar
0 - 5 V
0 - 10 V
Active at:
Closed
/
Open
Active at:
On
/
O
Point 12 13 14 15 16 17 18 19
Type DO1 DO2 DO3 DO4 DO5 DO6 DO7 DO8
Signal Module Point
1 (AI 1) 1 - 2
2 (AI 2) 3 - 4
3 (AI 3) 5 - 6
4 (AI 4) 7 - 8
5 (AI 5) 9 - 10
6 (AI 6) 11 - 12
7 (AI 7) 13 - 14
8 (AI 8) 19 - 20
9 (AI 9) 21 - 22
10 (AI 10) 23 - 24
11 (AI 11) 25 - 26
1
12 (DO 1) 31 - 32
13 (DO 2) 33 - 34
14 (DO 3) 35 - 36
15 (DO 4) 37 - 38
16 (DO 5) 39 - 40- 41
17 (DO6) 42 - 43 - 44
18 (DO7) 45 - 46 - 47
19 (DO8) 48 - 49 - 50
24 -
25 -
Terminal
17, 18, 29, 30:
(Cable screen)
Relay outputs on
16 - 19
Terminal
Signal type /
Active at
AK-PC 781 Capacity controller RS8GG602 © Danfoss 2015-03 13
Page 14
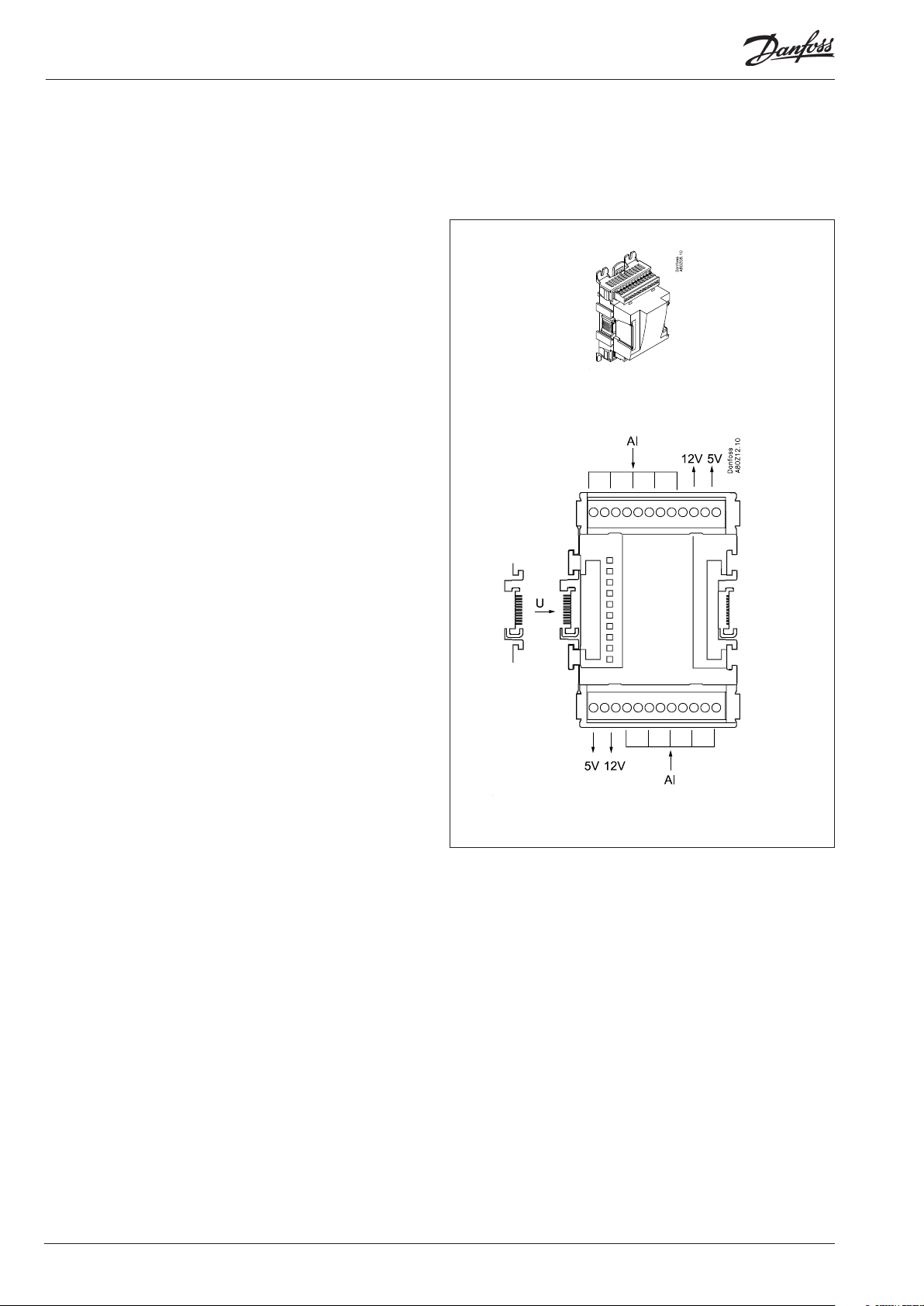
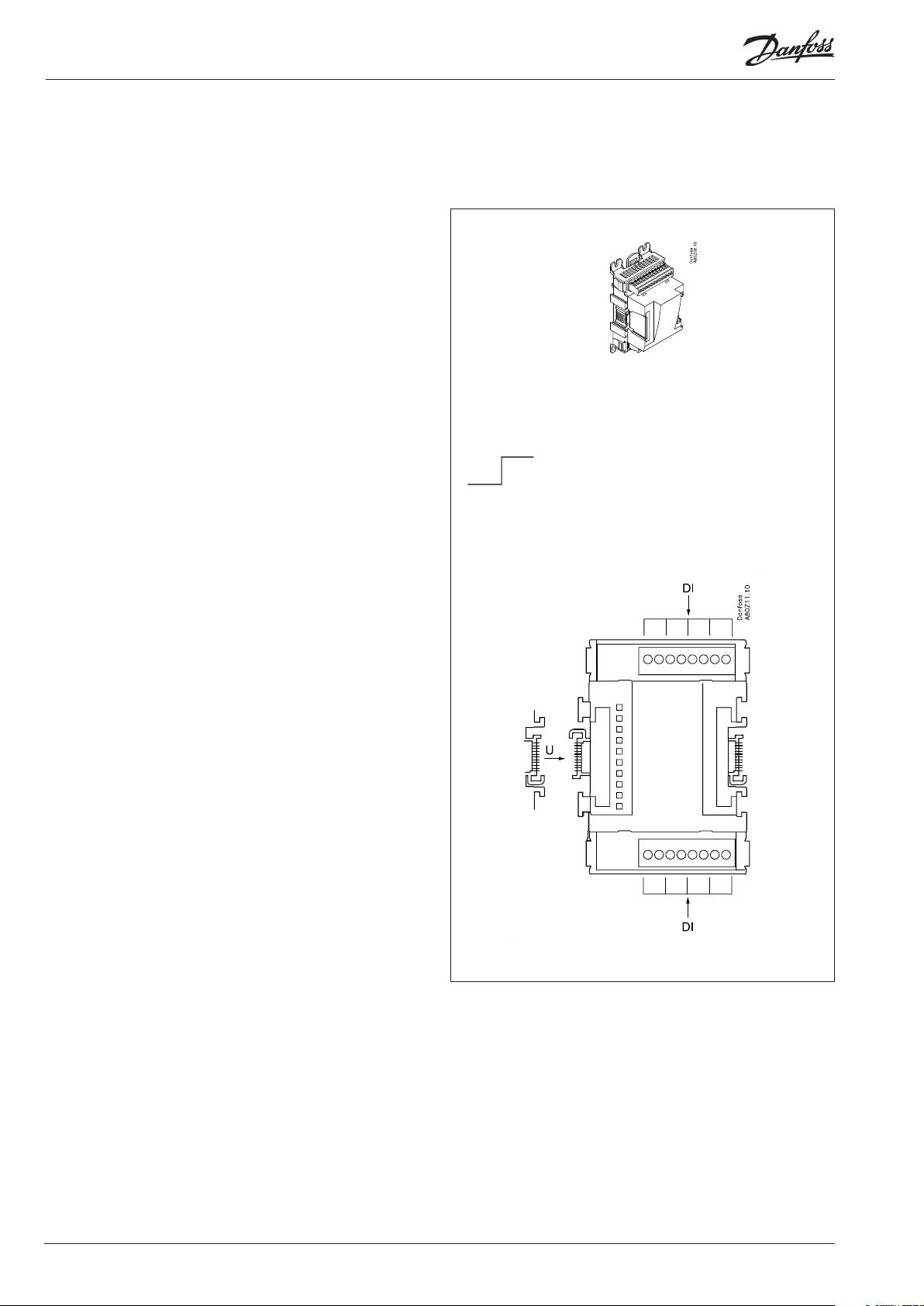
Extension module AK-XM 101A
Function
The module contains 8 analog inputs for sensors, pressure transmitters, voltage signals and contact signals.
Supply voltage
The supply voltage to the module comes from the previous module in the row.
Supply voltage to a pressure transmitter can be taken from either
the 5 V output or the 12 V output depending on transmitter type.
Light-emitting diodes
Only the two top LED’s are used. They indicate the following:
• Voltage supply to the module
• Communication with the controller is active (red = error)
14 Capacity controller RS8GG602 © Danfoss 2015-03 AK-PC 781
Page 15
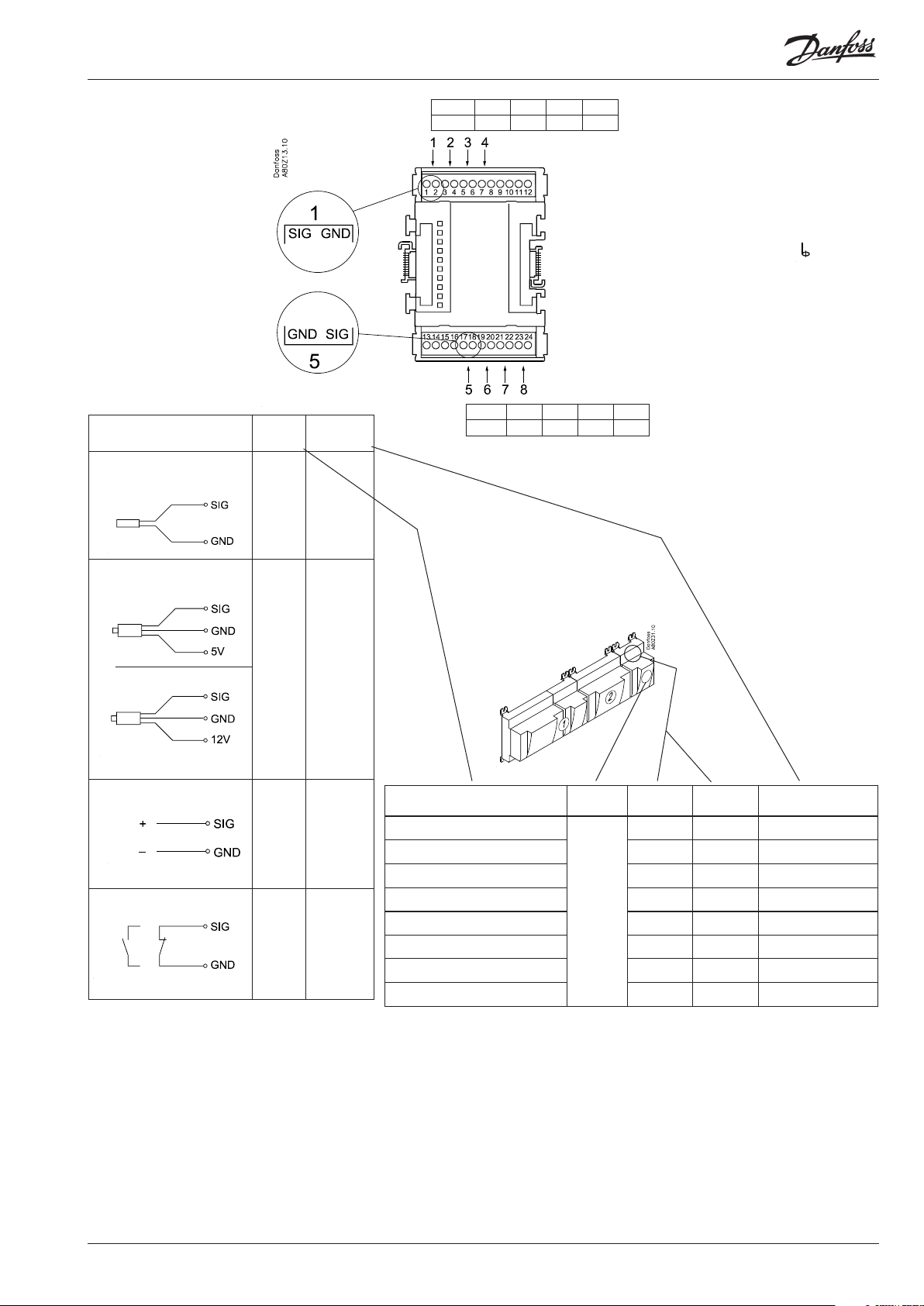
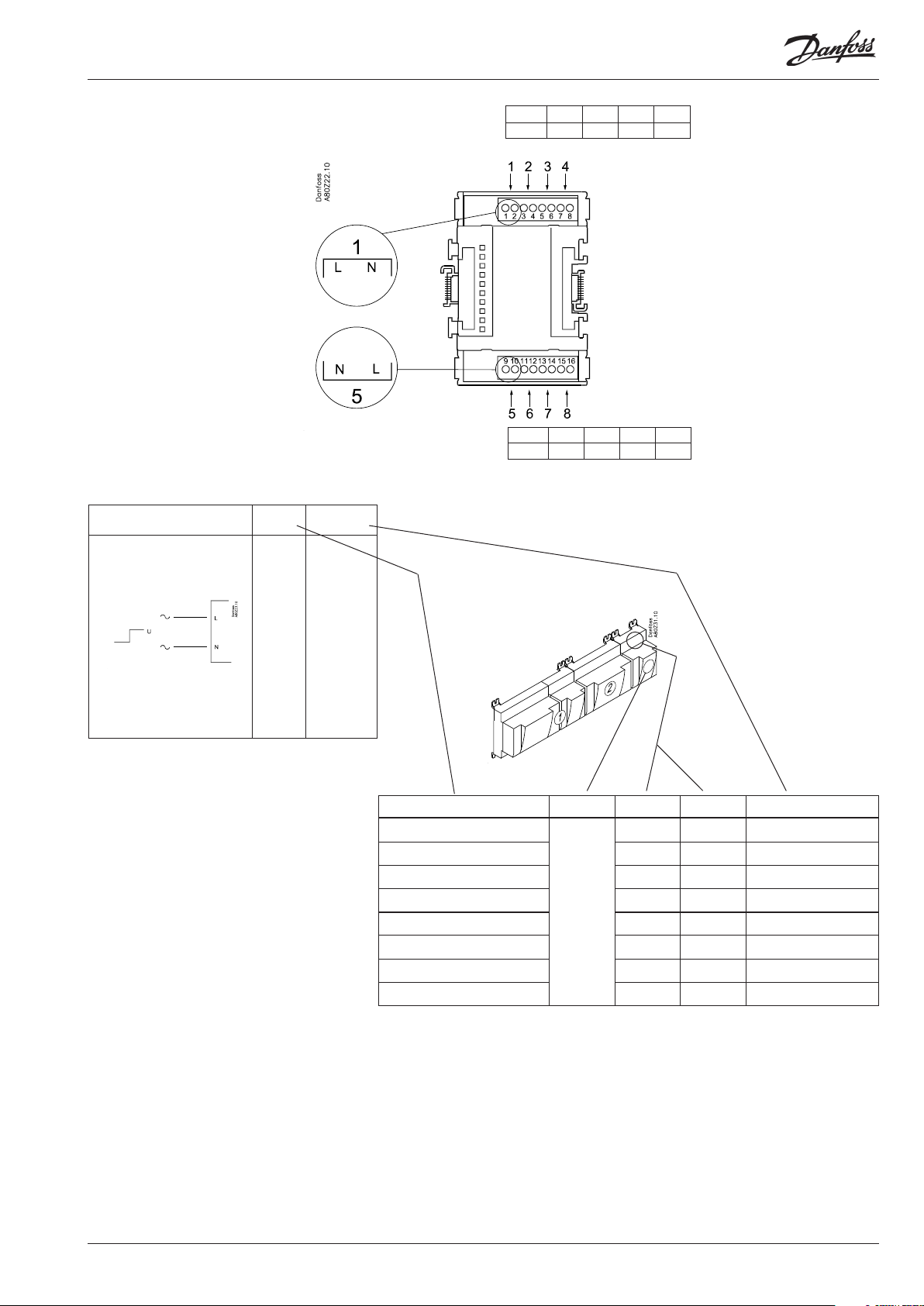
Point
Point 1 2 3 4
Type AI1 AI2 AI3 AI4
Terminal 9: 12 V
Terminal 10: 5 V
S
Pt 1000 ohm/0°C
P
AKS 32R
AKS 32
At the top the
signal input is
the left of the
two terminals.
At the bottom
the signal input
is the right of the
two terminals.
3: Brown
2: Blue
1: Black
3: Brown
2: Black
1: Red
Signal Signal
type
S1
S2
Saux
SsA
Pt 1000
SdA
Shr
Stw
Sgc
P0A
P0B
PcA
PcB
Paux
Pgc
Prec
AKS 32R /
AKS 2050
-1 - xx bar
AKS 32
-1 - zz bar
Terminal 15: 5 V
Terminal 16: 12 V
Terminal
11, 12, 13, 14:
(Cable screen)
Point 5 6 7 8
Type AI5 AI6 AI7 AI8
U
On/O
...
Ext.
Main
switch
Day/
Night
Door
Level
switch
0 - 5 V
0 - 10 V
Active at:
Closed
/
Open
Signal Module Point
1 (AI 1) 1 - 2
2 (AI 2) 3 - 4
3 (AI 3) 5 - 6
4 (AI 4) 7 - 8
5 (AI 5) 17 - 18
6 (AI 6) 19 - 20
7 (AI 7) 21 - 22
8 (AI 8) 23 - 24
Terminal
Signal type /
Active at
AK-PC 781 Capacity controller RS8GG602 © Danfoss 2015-03 15
Page 16
Extension module AK-XM 102A / AK-XM 102B
Function
The module contains 8 inputs for on/o voltage signals.
Signal
AK-XM 102A is for low voltage signals.
AK-XM 102B is for high voltage signals.
Supply voltage
The supply voltage to the module comes from the previous
module in the row.
Light-emitting diodes
They indicate:
• Voltage supply to the module
• Communication with the controller is active (red = error)
• Status of the individual inputs 1 to 8 (when lit = voltage)
AK-XM 102A
Max. 24 V
On/O:
On: DI > 10 V a.c.
O: DI < 2 V a.c.
AK-XM 102B
Max. 230 V
On/O:
On: DI > 80 V a.c.
O: DI < 24 V a.c.
16 Capacity controller RS8GG602 © Danfoss 2015-03 AK-PC 781
Page 17
Point
DI
AK-XM 102A: Max. 24 V
AK-XM 102B: Max. 230 V
Signal Active at
Ext.
Main
switch
Day/
Night
Comp.
safety 1
Comp.
safety 2
Level
switch
Closed
(voltage on)
/
Open
(voltage o)
Point 1 2 3 4
Type DI1 DI2 DI3 DI4
Point 5 6 7 8
Type DI5 DI6 DI7 DI8
Signal Module Point Terminal Active at
1 (DI 1) 1 - 2
2 (DI 2) 3 - 4
3 (DI 3) 5 - 6
4 (DI 4) 7 - 8
5 (DI 5) 9 - 10
6 (DI 6) 11 - 12
7 (DI 7) 13 - 14
8 (DI 8) 15 - 16
AK-PC 781 Capacity controller RS8GG602 © Danfoss 2015-03 17
Page 18
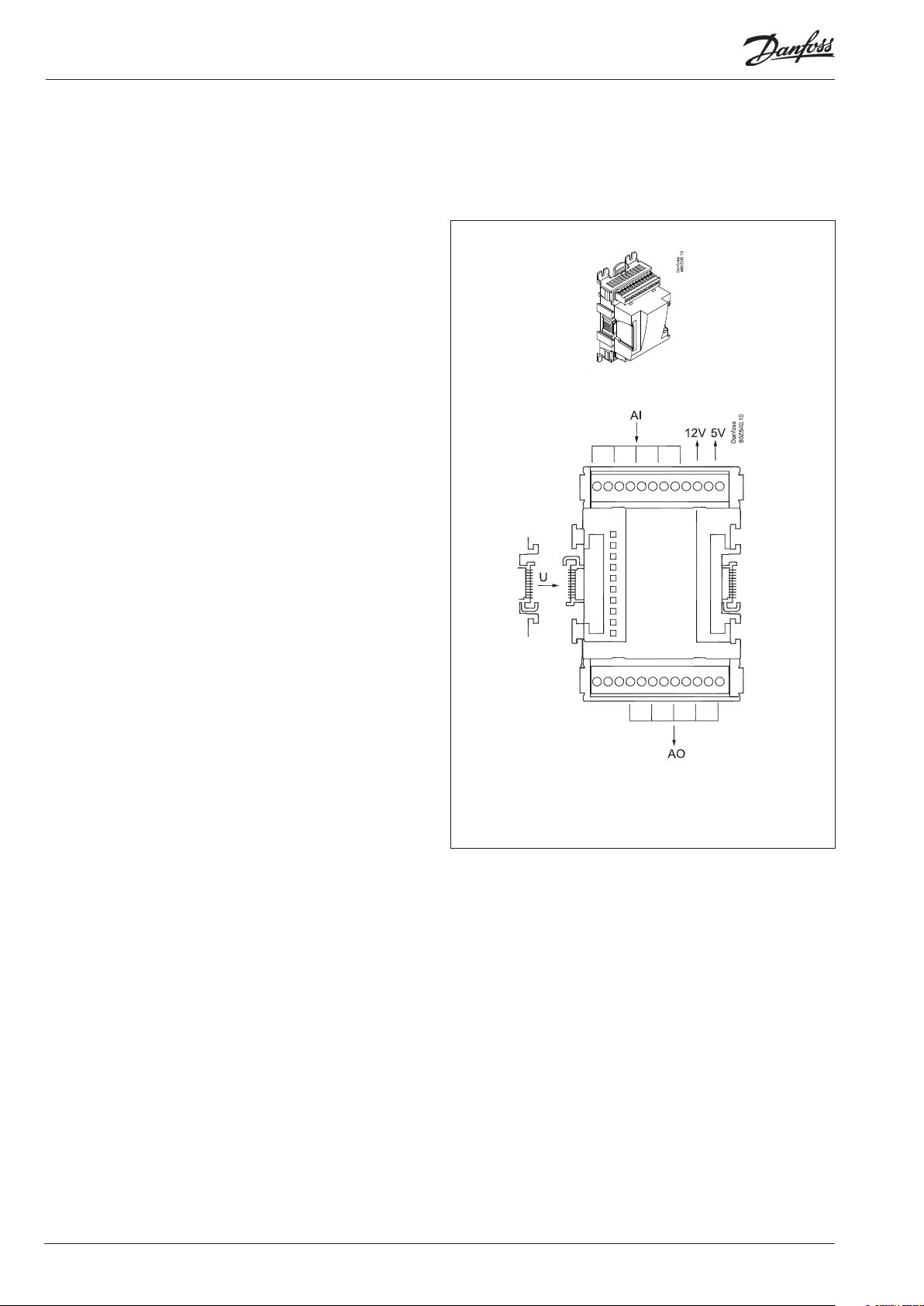
Extension module AK-XM 103A
Function
The module contains :
4 analog inputs for sensors, pressure transmitters, voltage signals
and contact signals.
4 analog voltage outputs of 0 - 10 V
Supply voltage
The supply voltage to the module comes from the previous
module in the row.
Supply voltage to a pressure transmitter can be taken from either
the 5 V output or the 12 V output depending on transmitter type.
Galvanic isolation
The inputs are galvanically separated from the outlets.
The outlets AO1 and AO2 are galvanically separated from AO3 and
AO4.
Light-emitting diodes
Only the two top LED’s are used. They indicate the following:
• Voltage supply to the module
• Communication with the controller is active (red = error)
18 Capacity controller RS8GG602 © Danfoss 2015-03 AK-PC 781
Page 19
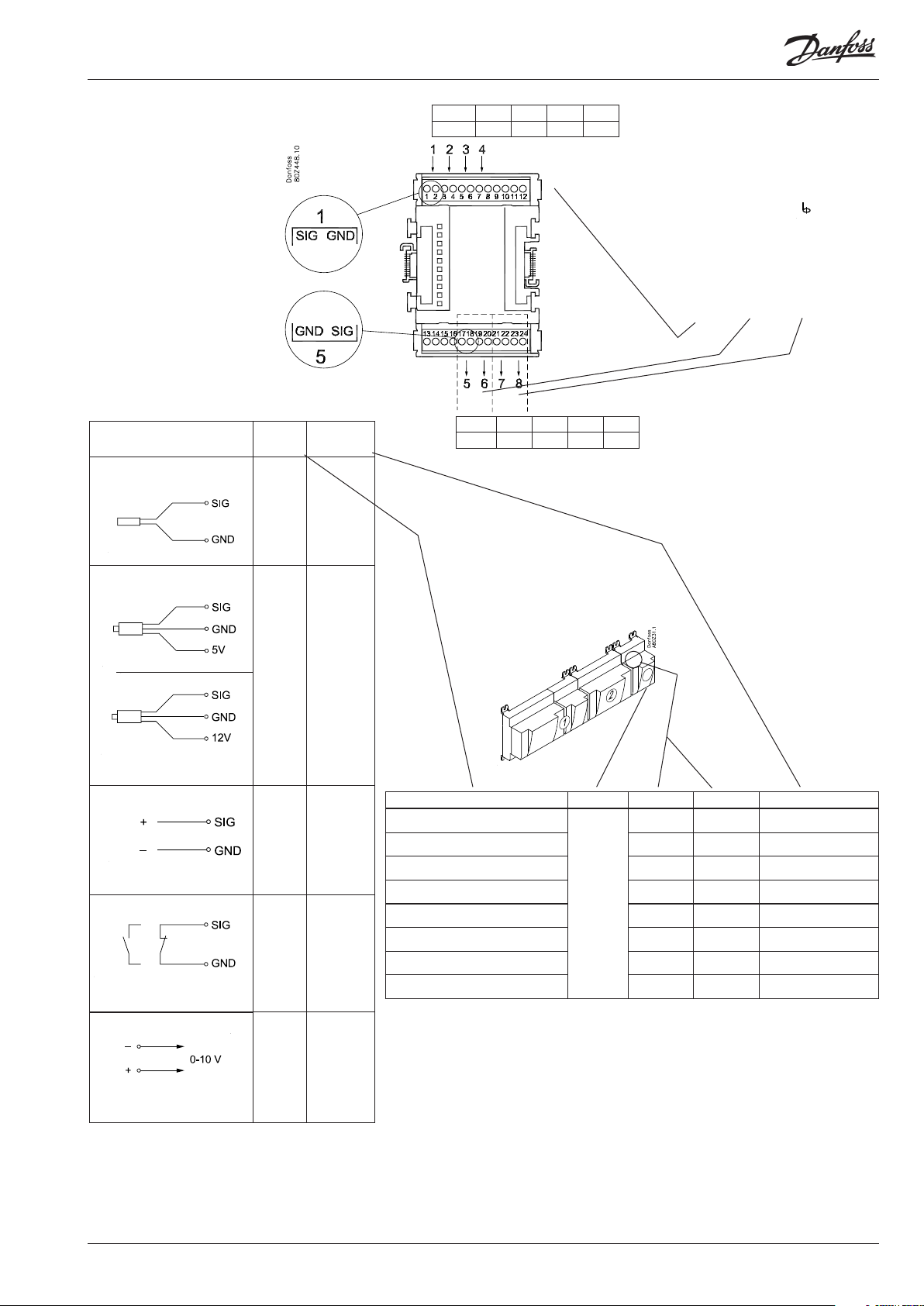
Point
Point 1 2 3 4
Type AI1 AI2 AI3 AI4
Terminal 9: 12 V
Terminal 10: 5 V
S
Pt 1000 ohm/0°C
P
AKS 32R
AKS 32
At the top the
signal input is
the left of the
two terminals.
At the bottom
the signal input
is the right of the
two terminals.
3: Brown
2: Blue
1: Black
3: Brown
2: Black
1: Red
Signal Signal
type
S1
S2
Saux
SsA
Pt 1000
SdA
Shr
Stw
Sgc
P0A
P0B
PcA
AKS 32R /
AKS 2050
-1 - xx bar
PcB
Paux
Pgc
AKS 32
-1 - zz bar
Prec
Terminal
11, 12:
(Cable screen)
Galvanic isolation:
AI 1-4 ≠ AO 1-2 ≠ AO 3-4
Point 5 6 7 8
Type AO1 AO2 AO3 AO4
U
...
On/O Ext.
Main
switch
Day/
Night
Door
Level
switch
AO
0 - 5 V
0 - 10 V
Active at:
Closed
/
Open
0-10 V
Signal Module Point Terminal Signal type /Active at
1 (AI 1) 1 - 2
2 (AI 2) 3 - 4
3 (AI 3) 5 - 6
4 (AI 4) 7 - 8
5 (AO 1) 17 - 18
6 (AO 2) 19 - 20
7 (AO 3) 21 - 22
8 (AO 4) 23 - 24
AK-PC 781 Capacity controller RS8GG602 © Danfoss 2015-03 19
Page 20
Extension module AK-XM 204A / AK-XM 204B
Function
The module contains 8 relay outputs.
Supply voltage
The supply voltage to the module comes from the previous module in the row.
AK-XM 204B only
Override of relay
Eight change-over switches at the front make it possible to override the relay’s function.
Either to position OFF or ON.
In position Auto the controller carries out the control.
Light-emitting diodes
There are two rows with LED’s. They mean:
Left row:
• Voltage supply to the controller
• Communication active with the bottom PC board (red = error)
• Status of outputs DO1 to DO8
Right row: (AK-XM 204B only):
• Override of relays
ON = override
OFF = no override
Fuses
Behind the upper part there is a fuse for each output.
AK-XM 204A AK-XM 204B
Max. 230 V
AC-1: max. 4 A (ohmic)
AC-15: max. 3 A (Inductive)
Keep the safety distance!
Low and high voltage
must not be connected to
the same output group
AK-XM 204B
Override of relay
Note
If the changeovers are used to override the compressor operation,
it is necessary to wire a safety relay into the circuit for oil management. Without this safety relay, the controller will fail to stop the
compressor if it should run out of oil. See Regulating functions.
20 Capacity controller RS8GG602 © Danfoss 2015-03 AK-PC 781
Page 21
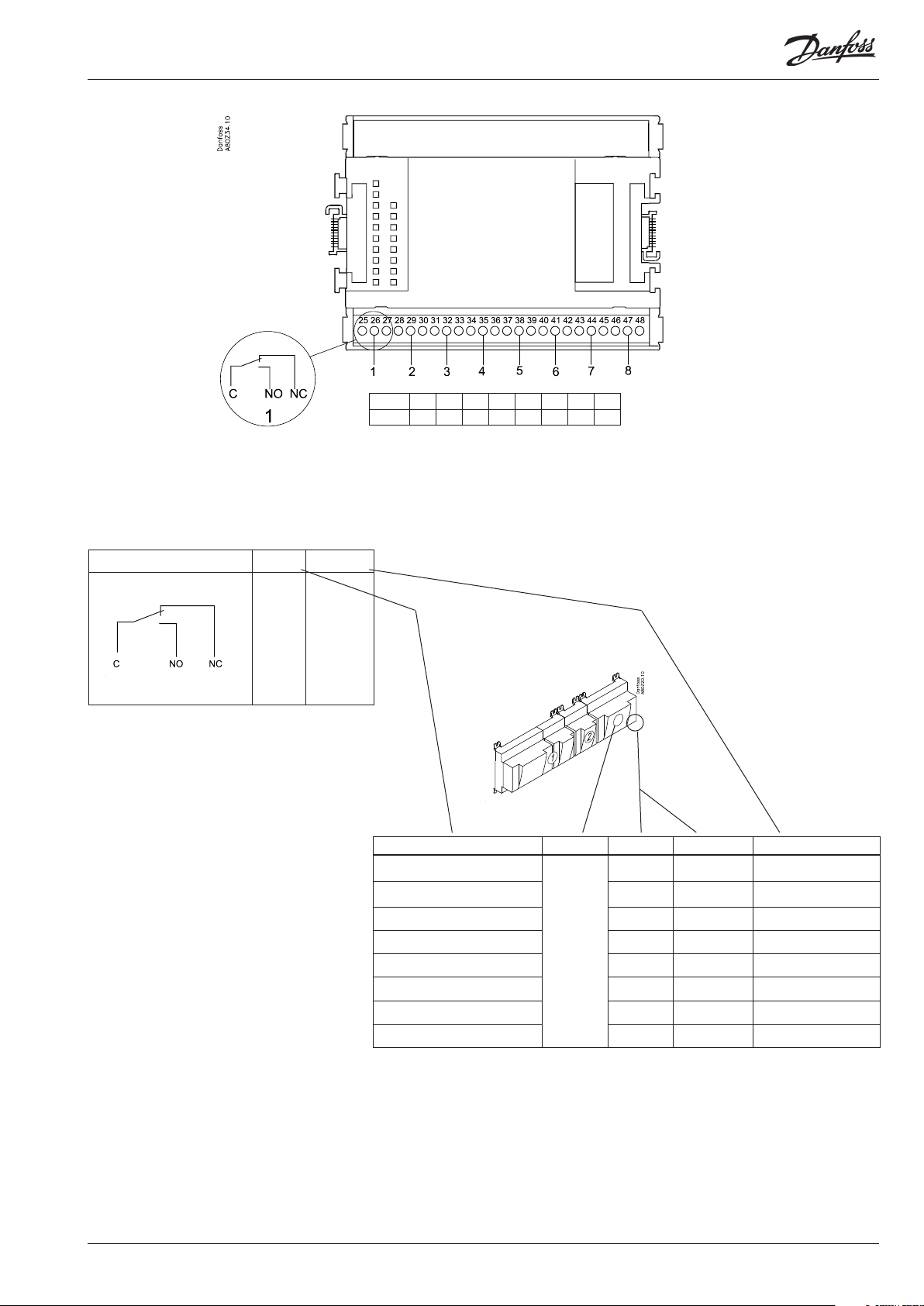
Point
DO
Signal Active at
Comp. 1
Comp. 2
Fan 1
Alarm
Solenoid
valve
On
/
O
Point 1 2 3 4 5 6 7 8
Type DO1 DO2 DO3 DO4 DO5 DO6 DO7 DO8
Signal Module Point Terminal Active at
1 (DO 1) 25 - 27
2 (DO 2) 28 - 30
3 (DO 3) 31 - 33
4 (DO 4) 34 -36
5 (DO 5) 37 - 39
6 (DO 6) 40 - 41 - 42
7 (DO 7) 43 - 44 - 45
8 (DO 8) 46 - 47 - 48
AK-PC 781 Capacity controller RS8GG602 © Danfoss 2015-03 21
Page 22
Extension module AK-XM 205A / AK-XM 205B
Function
The module contains:
8 analog inputs for sensors, pressure transmitters, voltage signals
and contact signals.
8 relay outputs.
Supply voltage
The supply voltage to the module comes from the previous module in the row.
AK-XM 205B only
Override of relay
Eight change-over switches at the front make it possible to override the relay’s function.
Either to position OFF or ON.
In position Auto the controller carries out the control.
Light-emitting diodes
There are two rows with LED’s. They mean:
Left row:
• Voltage supply to the controller
• Communication active with the bottom PC board (red = error)
• Status of outputs DO1 to DO8
Right row: (AK-XM 205B only):
• Override of relays
ON = override
OFF = no override
AK-XM 205A AK-XM 205B
max. 10 V
Fuses
Behind the upper part there is a fuse for each output.
Note
If the changeovers are used to override the compressor operation,
it is necessary to wire a safety relay into the circuit for oil management. Without this safety relay, the controller will fail to stop the
compressor if it should run out of oil. See Regulating functions.
Max. 230 V
AC-1: max. 4 A (ohmic)
AC-15: max. 3 A (Inductive)
AK-XM 205B
Override of relay
Keep the safety distance!
Low and high voltage
must not be connected to
the same output group
22 Capacity controller RS8GG602 © Danfoss 2015-03 AK-PC 781
Page 23
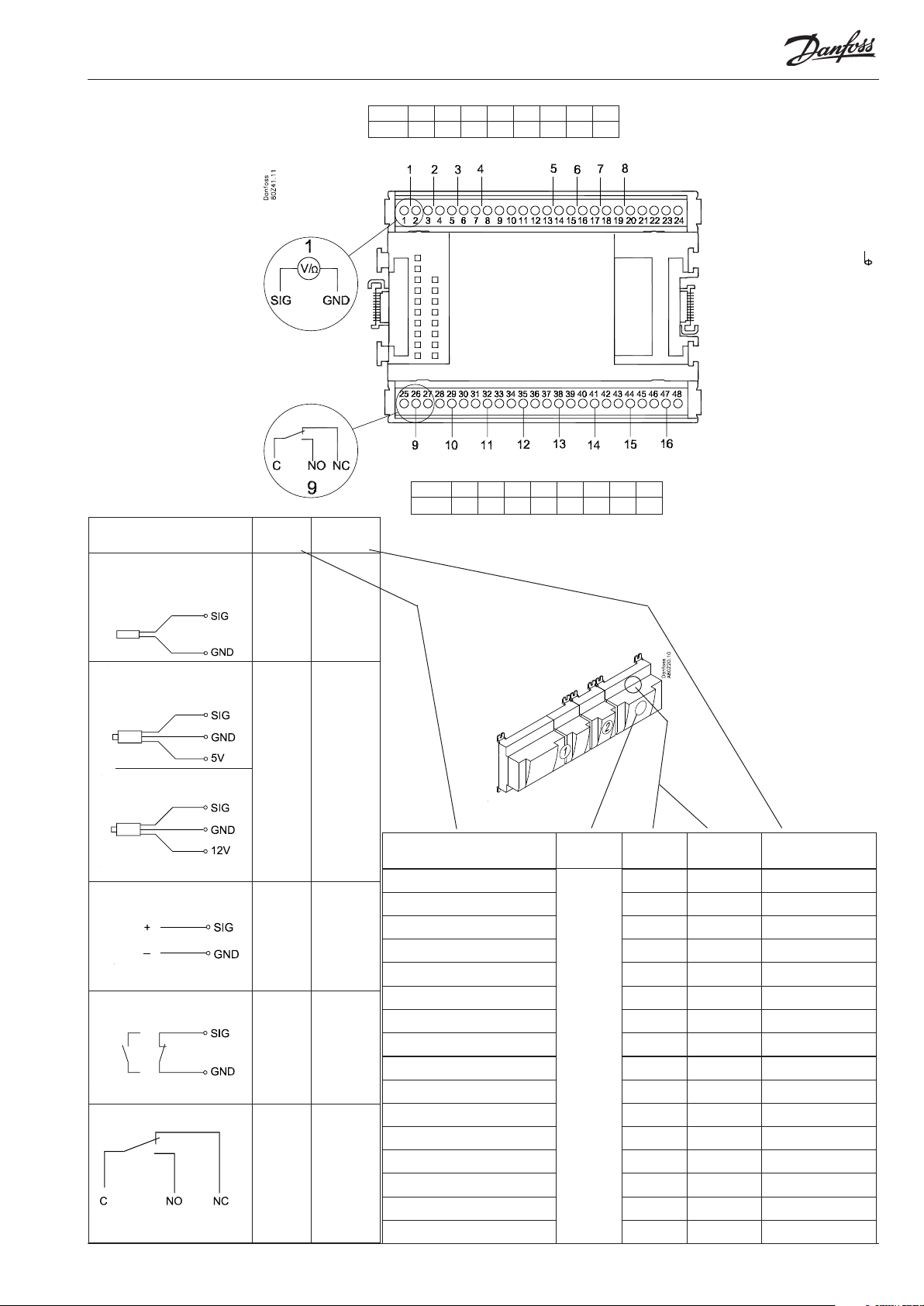
Point
S
Pt 1000 ohm/0°C
P
AKS 32R
AKS 32
U
On/O
DO
3: Brown
2: Blue
1: Black
3: Brown
2: Black
1: Red
Signal Signal
type
S1
S2
Saux
SsA
Pt 1000
SdA
Shr
Stw
Sgc
P0A
P0B
PcA
PcB
Paux
Pgc
AKS 32R /
AKS 2050
-1 - xx bar
AKS 32
-1 - zz bar
Prec
0 - 5 V
...
Ext. Main
switch
Day/
Night
Door
0 - 10 V
Active at:
Closed
Open
Level
switch
Comp 1
Active at:
Comp 2
Fan 1
on
Alarm
Light
Rail heat
O
Defrost
Solenoid
valve
Point 1 2 3 4 5 6 7 8
Type AI1 AI2 AI3 AI4 AI5 AI6 AI7 AI8
Point 9 10 11 12 13 14 15 16
Type DO1 DO2 DO3 DO4 DO5 DO6 DO7 DO8
Signal Module Point
/
/
Terminal 9: 12 V
Terminal 10: 5 V
Terminal 21: 12 V
Terminal 22: 5 V
Terminal 11, 12, 23, 24 :
(Cable screen)
Terminal
1 (AI 1) 1 - 2
2 (AI 2) 3 - 4
3 (AI 3) 5 - 6
4 (AI 4) 7 - 8
5 (AI 5) 13 - 14
6 (AI 6) 15 - 16
7 (AI 7) 17 - 18
8 (AI 8) 19 -20
9 (DO 1) 25 - 26 - 27
10 (DO 2) 28 - 29 - 30
11 (DO 3) 31 - 30 - 33
12 (DO 4) 34 - 35 - 36
13 (DO 5) 37 - 36 - 39
14 (DO6) 40 - 41 - 42
15 (DO7) 43 - 44 - 45
16 (DO8) 46 - 47 - 48
Signal type /
Active at
AK-PC 781 Capacity controller RS8GG602 © Danfoss 2015-03 23
Page 24
Extension module AK-XM 208C
Function
The module contains:
8 analog inputs for sensors, pressure transmitters, voltage signals
and contact signals.
4 outputs for stepper motors.
Supply voltage
The supply voltage to the module comes from the previous module in the row.
The supply voltage to the valves must be from a separate supply,
which must be galvanically separated from the supply for the
control range.
24 V d.c. +/-20%.
(Power requirements: 7.8 VA for controller + 1.3 VA per valve).
A UPS may be necessary if the valves need to open/close during a
power failure.
Light-emitting diodes
There is one row with LED’s. It indicate the following:
• Voltage supply to the module
• Communication active with the bottom PC board (red = error)
• Status of outputs step1 to step4
Separate voltage
supply is required
24 V d.c. 13 VA
max. 10 V
Output:
24 V d.c.
I
= 500 m A / coil
max.
20-500 step/s
24 Capacity controller RS8GG602 © Danfoss 2015-03 AK-PC 781
Page 25
Point
CCM
Step /
Terminal
ETS
CCM / CCMT
KVS 15
KVS 42-54
Point 1 2 3 4 5 6 7 8
Type AI1 AI2 AI3 AI4 AI5 AI6 AI7 AI8
Terminal 17: 12 V
Terminal 18: 5 V
Terminal 19, 20:
(Cable screen)
Point 9 10 11 12
Step 1 2 3 4
Type AO
1 25 26 27 28
2 29 30 31 32
3 33 34 35 36
4 37 38 39 40
White Black Red Green
White Black Green Red
Valve Module Step Terminal
1 (point 9) 25 - 28
2 (point 10) 29 - 32
3 (point 11) 33 - 36
4 (point 12) 37 - 40
AK-PC 781 Capacity controller RS8GG602 © Danfoss 2015-03 25
Page 26
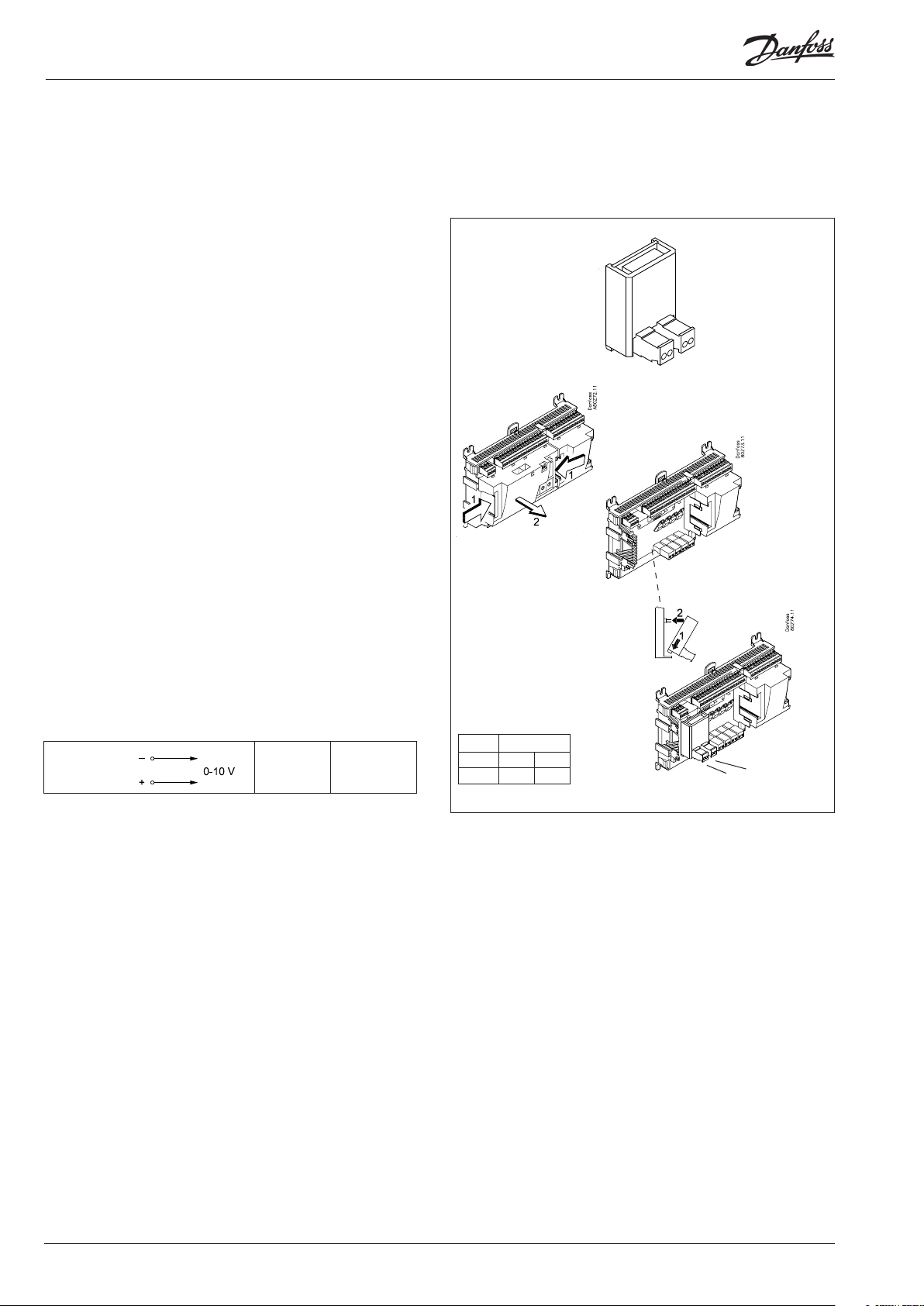
Extension module AK-OB 110
Function
The module contains two analog voltage outputs of 0 – 10 V.
Supply voltage
The supply voltage to the module comes from the controller
module.
Placing
The module is placed on the PC board in the controller module.
Point
The two outputs have points 24 and 25. They are shown on the
earlier page where the controller is also mentioned.
Max. load
I < 2.5 mA
R > 4 kohm
AO
AO 0 - 10 V
Module
Point 24 25
Type AO1 AO2
1
AO2
AO1
26 Capacity controller RS8GG602 © Danfoss 2015-03 AK-PC 781
Page 27
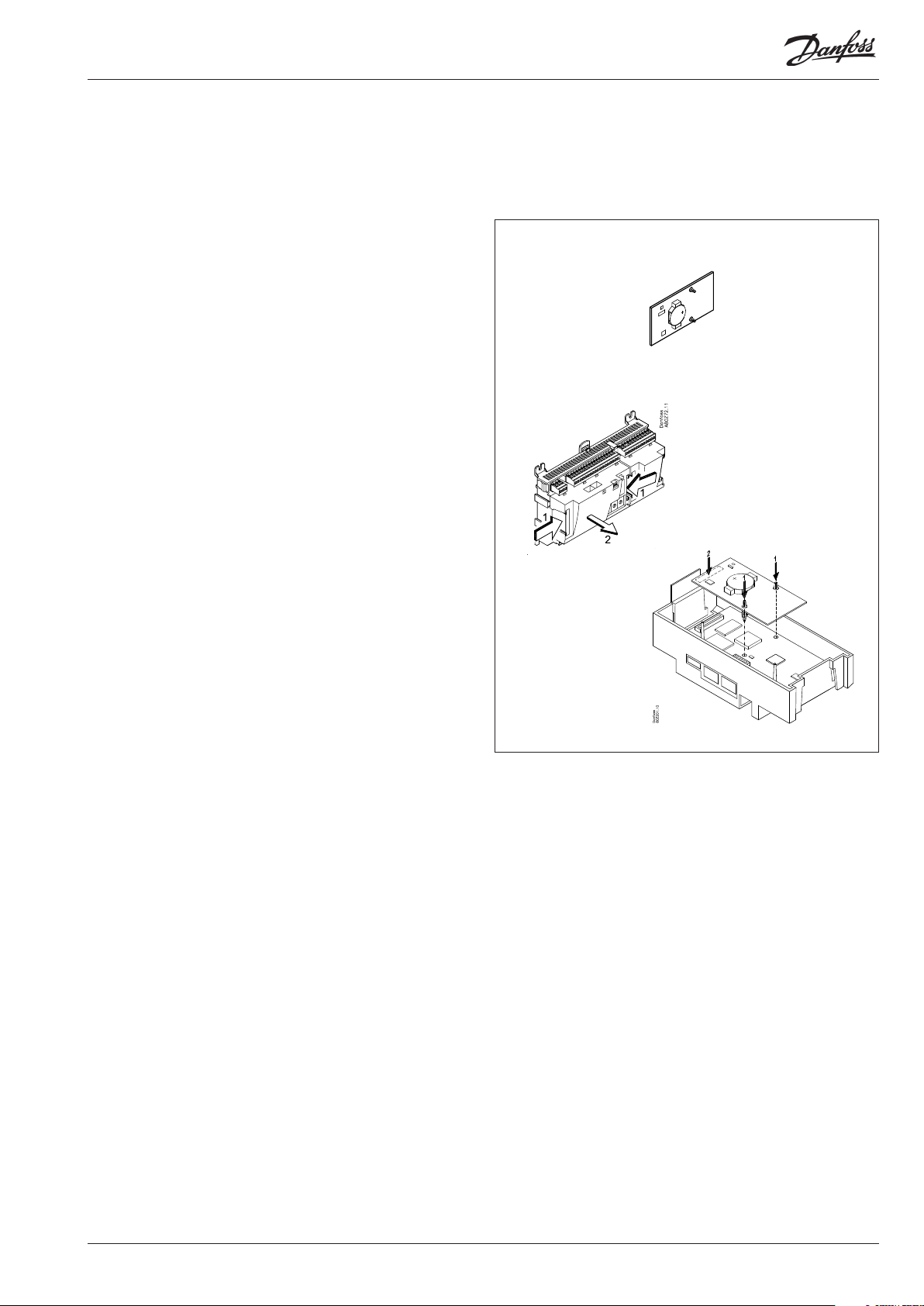
Extension module AK-OB 101A
Function
The module is a real time clock module with battery backup.
The module can be used in controllers that are not linked up in
a data communication unit together with other controllers. The
module is used here if the controller needs battery backup for the
following functions
• Clock function
• Fixed times for day/night change-over
• Fixed defrost times
• Saving of alarm log in case of power failure
• Saving of temperature log in case of power failure
Connection
The module is provided with plug connection.
Placing
The module is placed on the PC board inside the top part.
Point
No point for a clock module to be dened – just connect it.
Working life of the battery
The working life of the battery is several years – even if there are
frequent power failures.
An alarm is generated when the battery has to be replaced.
After the alarm there are still several months of operating hours
left in the battery.
AK-PC 781 Capacity controller RS8GG602 © Danfoss 2015-03 27
Page 28

Extension module EKA 163B / EKA 164B / EKA 166
Function
Display of important measurements from the controller, e.g. ap-
pliance temperature, suction pressure or condensing pressure.
Setting of the individual functions can be performed by using the
display with control buttons.
It is the controller used that determines the measurements and
settings that can occur.
Connection
The extension module is connected to the controller module via
a cable with plug connections. You have to use one cable per
module. The cable is supplied in various lengths.
Both types of display (with or without control buttons) can be
connected to either display output A, B, C and D.
Ex.
A: P0. Suction pressure in °C.
B: Pc. Condensing pressure in °C.
When the controller starts up, the display will show the output
that is connected.
- - 1 = output A
- - 2 = output B
etc.
EKA 163B EKA 164B
Placing
The extension module can be placed at a distance of up to 15 m
from the controller module.
Point
No point has to be dened for a display module – you simply connect it.
Graphic display AK-MMI
Function
Setting and display of values in the controller.
Connection
The display connects to the controller via a cable with plug connections. Use plug RJ45 to connect to the controller; the same
plug is also used for service tool AK-ST 500.
Supply voltage
24 V a.c. / d.c. 1.5 VA.
Placing
The display can be placed at a distance of up to 3 m from the
controller.
EKA 166
Point
No point has to be dened for a display – you simply connect it.
28 Capacity controller RS8GG602 © Danfoss 2015-03 AK-PC 781
Page 29
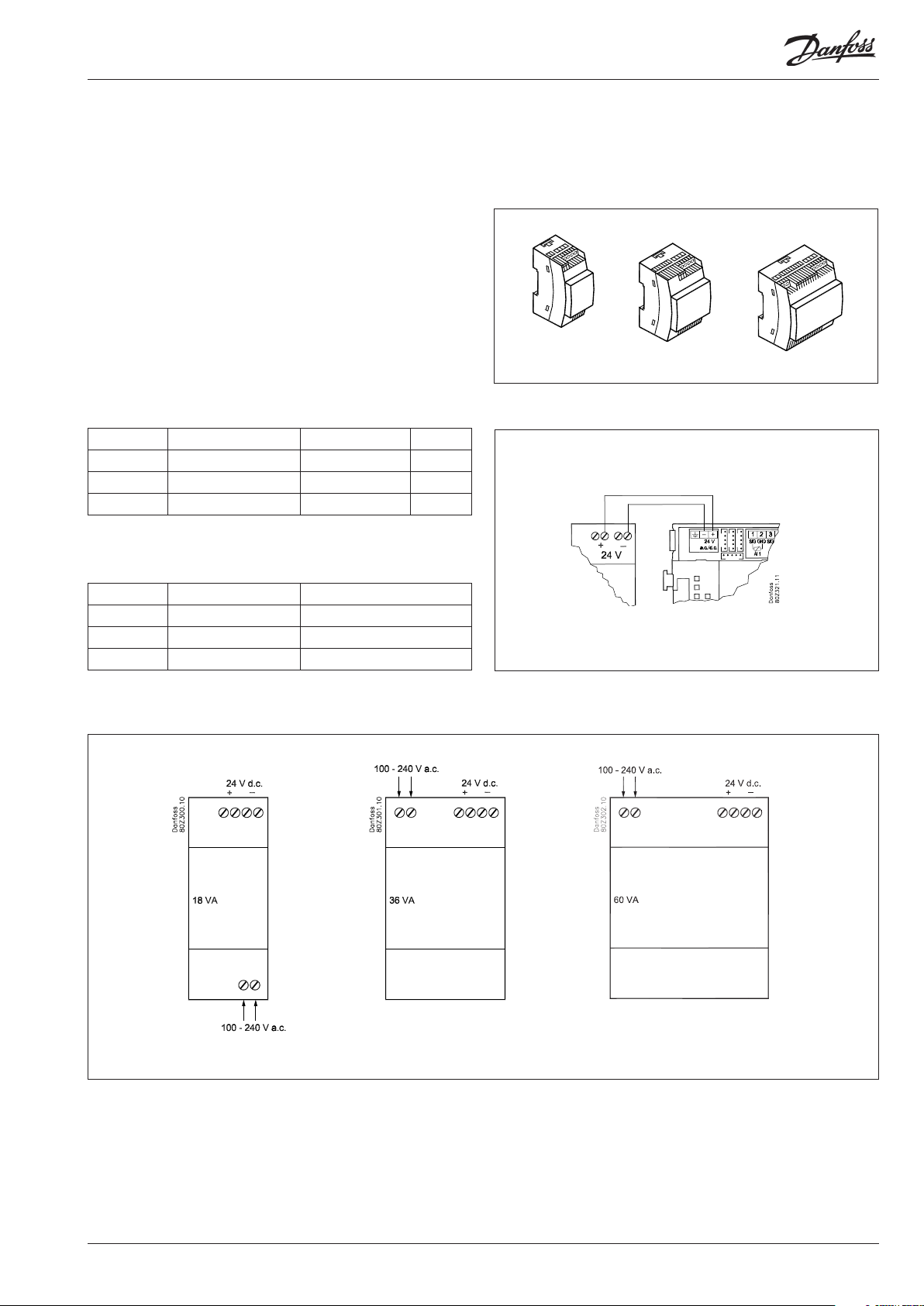
Power supply module AK-PS 075 / 150 / 250
Function
24 V supply for controller.
Supply voltage
230 V a.c or 115 V a.c. (from 100 V a.c. to 240 V a.c.)
Placing
On DIN-rail
Eect
Type Output tension Output current Power
AK-PS 075 24 V d.c. 0.75 A 18 VA
AK-PS 150 24 V d.c. (adjustable) 1.5 A 36 VA
AK-PS 250 24 V d.c. (adjustable) 2.5 A 60 VA
Dimension
Type High Width
AK-PS 075 90 mm 36 mm
AK-PS 150 90 mm 54 mm
AK-PS 250 90 mm 72 mm
Connections
Supply to a controller
AK-PS 075
AK-PS 150
AK-PS 250
AK-PC 781 Capacity controller RS8GG602 © Danfoss 2015-03 29
Page 30
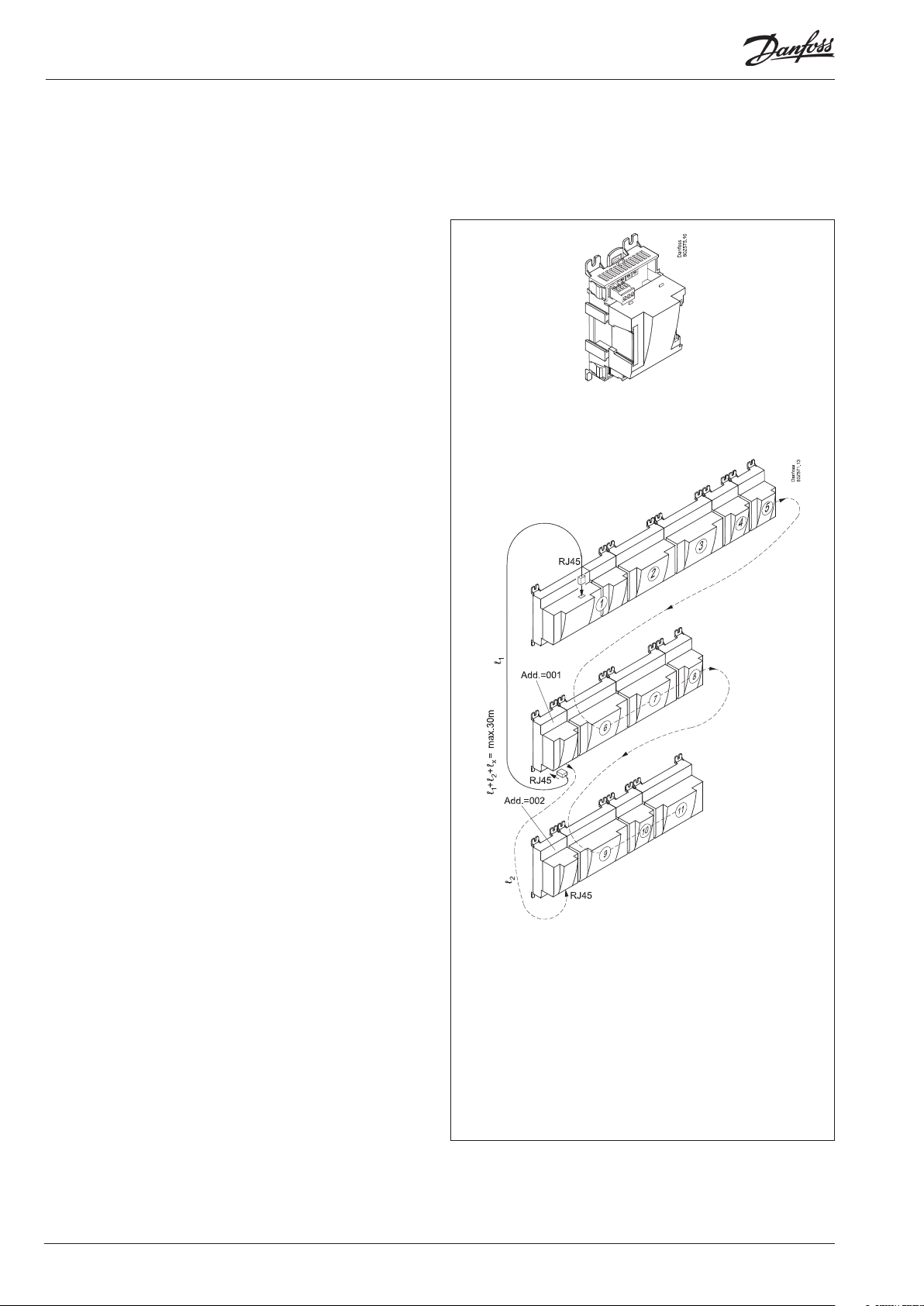
Communication module AK-CM 102
Function
The module is a new communication module, meaning the row of
extension modules can be interrupted.
The module communicates with the regulator via data communication and forwards information between the controller and the
connected extension modules.
Connection
Communication module and controller tted with RJ 45 plug connectors.
Nothing else should be connected to this data communication; a
maximum of 5 communication modules can be connected to one
controller.
The communication module can be used only with controllers of
the type AK-PC 781.
Communication cable
One metre of the following is enclosed:
ANSI/TIA 568 B/C CAT5 UTP cable w/ RJ45 connectors.
Positioning
Max. 30 m from the controller
(The total length of the communication cables is 30 m)
Max. 32 VA
Supply voltage
24 volt AC or DC should be connected to the communication
module.
The 24 V can be sourced from the same supply that supplies the
controller. (The supply for the communication module is galvanically separated from the connected extension modules).
The terminals must not be earthed.
The power consumption is determined by the power consumption of the total number of modules.
The controller strand load must not exceed 32 VA.
Each AK-CM 102 strand load must not exceed 20 VA.
Point
Connection points on the I/O modules should be dened as if the
modules were an extension of each other.
Address
The address for the rst communication module should be set to
1. Any second module should be set to 2. A maximum of 5 modules can be addressed.
Termination
The termination switch on the nal communication module
should be set to ON.
The controller should permanently be set to = ON.
Warning
Additional modules may only be installed following the installation of the nal module. (Here following module no. 11; see the
sketch.)
After conguration, the address must not be changed.
Max. 20 VA
Max. 20 VA
30 Capacity controller RS8GG602 © Danfoss 2015-03 AK-PC 781
Page 31

AK-PC 781 Capacity controller RS8GG602 © Danfoss 2015-03 31
Page 32

Preface to design
Be aware of the following when the number of extension modules
is being planned. A signal may have to be changed, so that an additional module may be avoided.
• An ON/OFF signal can be received in two ways. Either as a
contact signal on an analog input or as voltage on a low or highvoltage module.
• An ON/OFF output signal can be given in two ways. Either with a
relay switch or with solid state. The primary dierence is the permitted load and that the relay switch contains a cutout switch.
Mentioned below are a number of functions and connections that
may have to be considered when a regulation has to be planned.
There are more functions in the controller than the ones mentioned here, but those mentioned have been included in order
that the need for connections can be established.
Functions
Clock function
Clock function and change-over between summer time and winter time are contained in the controller.
The clock is zeroset when there is power failure.
The clock’s setting is maintained if the controller is linked up in a
network with a gateway, a system manager or a clock module can
be mounted in the controller.
Start/stop of regulation
Regulation can be started and stopped via the software. External
start/stop can also be connected.
Warning
The function stops all regulation, including any high-pressure
regulation.
Excess pressure can lead to a loss of charge.
Start/stop of compressors
External start/stop can be connected.
Alarm function
If the alarm is to be sent to a signal transmitter, a relay output will
have to be used.
I'm alive function
A relay can be reserved which is pulled during normal regulation.
The relay will be released if the regulation stops with the main
switch or if the controller fails.
Extra temperature sensors and pressure sensors
If additional measurements have to be carried out beyond the
regulation, sensors can be connected to the analog inputs.
Forced control
The software contains a forced control option. If an extension
module with relay outputs is used, the module’s top part can be
with change-over switches – switches that can override the individual relays into either OFF or ON position.
Wiring should be done with a safety relay. See Regulating functions.
Data communication
The controller module has terminals for LON data communication.
The requirements to the installation are described in a separate
document.
32 Capacity controller RS8GG602 © Danfoss 2015-03 AK-PC 781
Page 33

Connections
In principle there are the following types of connections:
Analog inputs ”AI”
This signal must be connected to two
terminals.
Signals can be received from the following
sources:
• Temperature signal from Pt 1000 ohm
temperature sensor
• Contact signal where the input is shortcircuited or ”opened”, respectively
• Voltage signal from 0 to 10 V
• Signal from pressure transmitter AKS 32,
AKS 32R or AKS 2050
The supply voltage is supplied from the
module’s terminal board where there is
both a 5 V supply and a 12 V supply.
When programming the pressure transmitter’s pressure range must be set.
ON/OFF voltage inputs ”DI”
This signal must be connected to two
terminals.
• The signal must have two levels, either 0 V
or ”voltage” on the input.
There are two dierent extension
modules for this signal type:
- low-voltage signals, e.g. 24 V
- high-voltage signals, e.g. 230 V
When programming the function must be set:
• Active when the input is without voltage
• Active when voltage is applied to the
input.
ON/OFF output signals ”DO”
There are two types, as follows:
• Relay outputs
All relay outputs are with change-over
relay so that the required function can be
obtained when the controller is without
voltage.
• Solid state outputs
Reserved for AKV valves, but output can
cut an external relay in and out, as with a
relay output.
The output is only found on the
controller module.
When programming the function must be set:
• Active when the output is activated
• Active when the output is not activated.
Analog output signal ”AO”
This signal is to be used if a control signal is
to be transmitted to an external unit, e.g. a
frequency converter.
When programming the signal range must
be dened: 0-5 V, 1-5 V, 0-10 V or 2-10 V.
Pulse signal for the stepper motors.
This signal is used by valve motors of the
type ETS, KVS and CCM.
The valve type should be set during programming.
Limitations
As the system is very exible regarding the number of connected
units you must check whether your selection complies with the
few limitations there are.
The complexity of the controller is determined by the software,
the size of the processor, and the size of the memory. It provides
the controller with a certain number of connections from which
data can be downloaded, and others where coupling with relays
can be performed.
AK-PC 781 Capacity controller RS8GG602 © Danfoss 2015-03 33
✔ The sum of connections cannot exceed 120 (AK-PC 781).
✔ The number of extension modules must be limited so that the
total power in a row will not exceed 32 VA (including controller).
If the AK-CM 102 communication module is used, each row of
AK-CM 102 must not exceed 20 VA (incl. AK-CM 102).
There must not be more than a total of 12 modules (controller
+ 11 modules).
✔ No more than 5 pressure transmitters may be connected to one
controller module.
✔ No more than 5 pressure transmitters may be connected to one
extension module.
Page 34

Design of a compressor and condenser control
Procedure:
1. Make a sketch of the system in question
2. Check that the controller’s functions cover the required
application
3. Consider the connections to be made
4. Use the planning table. / Note down the number of connections
./ add up
5. Are there enough connections on the controller module? – If
not, can they be obtained by changing an ON/OFF input signal
from voltage signal to contact signal, or will an extension
module be required?
6. Decide which extension modules are to be used
7. Check that the limitations are observed
8. Calculate the total length of modules
9. The modules are linked together
10. The connection sites are established
11. Draw a connection diagram or a key diagram
12. Size of supply voltage/transformer
1
Follow these 12
steps
Sketch
Make a sketch of the system in question.
2
Compressor and condenser functions
Application
Regulation of a compressor group x
Regulation of a condenser group x
Both compressor group and condenser group x
Regulation of compressor capacity
Regulation sensor. Either P0, S4 or Pctrl x
PI-regulation x
Max. number of compressor steps 8
Max. number of unloaders each compressor 3
Identical compressor capacities x
Dierent compressor capacities x
Speed regulation of 1 or 2 compressors x
Run time equalisation x
Min. restart time x
Min. On-time x
Liquid injection in suction line x
Liquid injection in cascade heat exchanger x
External start/stop of compressors x
Oil management
Oil injection in compressor. Shared or individual x
AK-PC 781
Receiver pressure control x
Monitoring of oil level in receiver x
Management of oil level in oil separator x
Reset of oil management x
Cutout of compressors at oil failure x
Safety relays during forced compressor control x
Suction pressure reference
Override via P0 optimization x
Override via “night setback” x
Override via "0 -10 V signal" x
Regulation of condenser capacity
Regulation sensor. Either: Pc, Sgc or S7 x
Step regulation x
Max. number of steps 8
Speed regulation x
Step and speed regulation x
Speed regulation rst step x
Limitation of speed during night operation x
Heat recovery function for tap water control x
Heat recovery function for heating x
Controlling the gas cooler (high pressure valve). parallel valve, if
applicable
x
34 Capacity controller RS8GG602 © Danfoss 2015-03 AK-PC 781
Page 35

Trouble-shooting function FDD on condenser x
Condenser pressure reference
Floating condensing pressure reference x
Setting of references for heat recovery functions x
Safety functions
Min. suction pressure x
Max. suction pressure x
Max. condensing pressure x
Max. discharge gas temperature x
Min. / Max. superheat x
Safety monitoring of compressors x
A bit more about the functions
Compressor
Regulation of up to 8 compressors. And up to 3 unloaders each
compressor.
Compressor No. 1 or 2 can be speed-regulated.
The following can be used as control sensor:
1) P0 - Suction pressure
2) S4 - Cold brine temperature
3) Pctrl - Condensing pressure in the low pressure circuit controls
the high-pressure circuit for cascade control.
(P0 is also used for 2 and 3, but for low-pressure safety.)
Condenser
Regulation of up to 8 condenser steps.
Fans can be speed-regulated. Either all on one signal or only the
rst fan of several. EC motor can be used.
Relay outputs and solid state outputs may be used, as desired.
The following can be used as control sensor:
1) Pc - Condensing pressure
2) S7 - Warm brine temperature (Pc is used here for high-pressure
safety.)
3) Sgc -Temperature at the gas cooler outlet.
Connection between high-pressure and low-pressure circuits
(MT and LT circuits)
Capacity control of the high-pressure circuit can be adjusted by
the condensing pressure in the low-pressure circuit.
The controller can give o a signal from a relay output so that the
low-pressure circuit can only start when the high-pressure circuit
is on.
The controller can receive a signal from the low-pressure circuit
that there is a need for refrigeration.
Coordination is also required for parallel compression.
Speed regulation of condenser fans
The function requires an analog output module.
A relay output may be used for start/stop of the speed regulation.
The fans may also be cut in and out by relay outputs.
3
Connections
Here is a survey of the possible connections. The texts can be read in
context with the table on the following page.
Analog inputs
Temperature sensors
• S4 (Cold brine temperature)
Must be used when the control sensor for compressor control has been
selected as S4.
• Ss (suction gas temperature)
Must always be used in connection with compressor regulation.
• Sd (discharge gas temperature)
Must always be used in connection with compressor regulation.
Common high pressure monitoring of compressors x
Safety monitoring of condenser fans x
General alarm functions with time delay 10
Miscellaneous
Extra sensors 7
Inject On function x
Option for connection of separate display 2
Separate thermostat functions 5
Separate pressostat functions 5
Separate voltage measurements 5
PI regulation 3
Max. input and output 120
Digital scroll
When using a digital scroll, the unloading of the compressor should
be connected to one of the four solid state outputs in the controller.
Heat recovery
There are adjustment options for hot water and heat containers
for heating.
The controller manages, in order of priority: 1 -tap water 2-heating
3-gas cooler, which removes the remaining excess heat.
Safety circuit
If signals are to be received from one or more parts of a safety
circuit, each signal must be connected to an ON/OFF input.
Day/night signal for raising the suction pressure
The clock function can be used, but an external ON/OFF signal
may be used instead.
If the “P0 optimization” function is used, no signal will be given
concerning the raising of the suction pressure. The P0 optimization will see to this.
“Inject ON” override function
The function closes expansion valves on evaporator controls when
all compressors are prevented from starting.
The function can take place via the data communication, or it may
be wired via a relay output.
Separate thermostat and pressure control functions
A number of thermostats can be used according to your wishes.
The function requires a sensor signal and a relay output. In the
controller there are settings for cutin and cutout values. An associated alarm function may also be used.
Separate voltage measurements
A number of voltage measurements can be used according to
your wishes. The signal can for example be 0-10 V. The function
requires a voltage signal and a relay output. In the controller there
are settings for cutin and cutout values. An associated alarm function may also be used.
If you want to know more about the functions, go to
chapter 5.
• Sc3 (outdoor temperature)
To be used when monitoring function FDD is used.
To be used when regulation is performed with oating condenser reference.
• S7 (warm brine return temperature)
Must be used when the control sensor for condenser has been selected
as S7.
• Saux (1-4), any extra temperature sensors
Up to four additional sensors for monitoring and data collection may be
connected. These sensors can be used for general thermostat functions.
• Stw2, 3, 4 and 8 (temperature sensors for heat recovery)
Must be used when adjusting hot tap water.
Shr2, 3, 4 and 8 (temperature sensors for heat recovery)
Must be used when adjusting the heat receiver for heating.
AK-PC 781 Capacity controller RS8GG602 © Danfoss 2015-03 35
Page 36

• Sgc (temperature sensor for gas cooling controls)
Shall be placed within one metre after the gas cooler.
• Shp (temperature sensor, if the refrigerant can be routed outside of the
gas cooler)
Pressure transmitters
• P0 Suction Pressure
Must always be used in connection with compressor regulation
(frost protection).
• Pctrl (control pressure for cascade)
Must only be used if the control sensor for compressor control has been
selected as Pctrl (cascade)
• Pc Condensing Pressure
Must always be used in connection with compressor or condenser
regulation
• Prec. Oil receiver pressure. Must be used for receiver pressure regulation.
• Pgc Gas cooler pressure. Must be used for CO2 transcritical operation.
• Prec.CO2 Pressure reading in the CO2 receiver. Must be used for CO2
transcritical operation.
• Paux (1-5)
Up to 5 extra pressure transmitters can be connected for monitoring and
data collection.
These sensors can be used for general pressure switch functions.
Note. A pressure transmitter type AKS 32 or AKS 32R can supply signals to
a maximum of ve controllers.
Voltage signal
• Ext. Ref
Used if a reference override signal is received from another control.
• Voltage inputs (1-5)
Up to 5 extra voltage signals can be connected for monitoring and data
collection. These signals are used for general voltage input functions.
On/O-inputs
Contact function (on an analog input) or
voltage signal (on an extension module)
• Common safety input for all compressors (e.g. common high-pressure/
low-pressure pressure switch)
• Up to 6 signals from the safety circuit of each compressor
• Compressor release signal on LT controller in cascade
• Compressor requirements signal on MT controller in cascade
Example
Compressor group:
• MT circuits
• Refrigerant CO2 (R744)
• 4 only compressors with "Best t". One speed controlled
• Safety monitoring of each compressor
• Common high-pressure monitoring
• Po setting -15°C, night displacement 5 K
• Oil management of each compressor
• Pulse reset for stopped compressor (lack of oil)
High pressure controls:
• Heat recovery for tap water
• Heat recovery for heating circuit
• Gas cooler
• Fans, speed controlled
• Pc regulates based on temperature sensor Sc3 and Sgc
Receivers:
• Monitoring of CO2 level
• Control of pressure in oil receiver
• Controlling the tap water receiver temperature, 55°C
• Controlling the receiver temperature for the heating
circuit, 40°C
Fan in plant room
• Thermostat control of fan in engine room
Safety functions:
• Monitoring of Po, Pc, Sd and superheat in suction line
• Po max = -5°C, Po min = -35°C
• Pc max = 50 °C
• Sd max = 120°C
• SH min = 5 °C, SH max = 35 °C
• Monitoring of low and high level in oil receiver
Other:
• Alarm output used
• External compressor stop used
• Signal from the condenser fans safety circuit
• Any signal from the frequency converter’s safety circuit
• External start/stop of regulation
• External day/night signal (raise/lower the suction pressure reference). The
function is not used if the “P0 optimization” function is used.
• DI alarm (1-10) inputs
Up to 10 no. extra on/o signals for general alarm for monitoring and
data collection can be connected.
• Flow switch for heat recovery
• Level contacts
On/o-outputs
Relay outputs
• Compressors
• Unloaders
• Fan motor
• Injection On function (signal for evaporator controls. One per suction
group).
• Start/stop of liquid injection in heat exchanger
• Compressor release, output signal from MT controller in cascade
• Compressor request, output signal from LT controller in cascade
• Start/stop of liquid injection in suction line
• Start/stop of 3-way valves at heat recovery
• ON/OFF signal for start/stop of speed regulation
• Alarm relay. I'm alive relay.
• On/o signals from general thermostats (1-5), pressure switches (1-5) or
voltage input functions (1-5).
• Oil valves
• Safety relays for cutouts of compressors at oil failure
Solid state outputs
The solid state outputs on the controller module may be used for the
same functions as those mentioned under “relay outputs”. (The output will
always be “OFF” when the controller has a power failure).
Analog output
• Speed regulation of the condenser’s fans.
• Speed regulation of the compressor
• Speed control of pumps for heat recovery
• Control signal for high pressure CO2 valve. (stepper signal. if applicable)
• Stepper signal for hot gas by-pass valve
Data from this example is used on the
next page.
The result is that the following modules
should be used:
• AK-PC 781 controller
• AK-XM 205A input and output module
• AK-XM 208C stepper output module
• AK-XM 102B digital input module
• AK-XM 103B analog input and output
module
• AK-OB 110 analog output module
36 Capacity controller RS8GG602 © Danfoss 2015-03 AK-PC 781
Page 37

Planning table
4
The table helps you establish whether there are enough
inputs and outputs on the basic controller.
If there are not enough of them, the controller must be
extended by one or more of the mentioned extension
modules.
Note down the connections you will require and add
them up
Analog inputs
Temperature sensors, Ss, Sd, Sc3, S4, S7, Stw.., Shr.., Sgc 9
Extra temperature sensor / separate thermostats /PI-regulation 1
Pressure transmitters, P0, Pc, Pctrl. Prec / separate pressostats 5 P = Max. 5 / module
Voltage signal from other regulation, separate signals
Heat recovery via thermostat
On/o inputs Contact 24 V 230 V
Safety circuits, common for all compressors 1 Max.1
Safety circuits, Oil pressure Max. 1/ Comp.
Safety circuits, comp. Motor protection
Safety circuits, comp. Motor temp.
Safety circuits, comp. High pres. thermostat
Safety circuits, comp. High pres. pressostat
Safety circuits, general for each compressor 4
Safety circuits, condenser fans, frequency converter Max. 1/ fan
Safety circuits, ow switch 2
External start/stop 1
LT release input / MT request input / IT release input
Night setback of suction pressure
Separate alarm functions via DI 1
Load shedding
Start of Heat recovery 1 1
Liquid level, Oil level, Pulse reset of oil management 9
On/o outputs
Compressors, motors 4
Unloaders
Fan motors, circulation pumps 3
Alarm relay, I'm alive relay
Inject ON Max. 1
Separate thermostat and pressostat functions and voltage measurements
Heat recovery function via thermostat Max.1
Liquid injection in suction line / heat exchanger. Heat gas dump Max.1
MT release output / LT request output / IT on-outp. / IT release outp.
Solenoid valve for Oil. 5
3-way valve 3
Analog control signal, 0-10 V
Frequency converter, Compressor, fans, pumps, valves etc. 5
Valves with stepper motor. Parallel valves, if applicable 1
Sum of connections for the regulation 27 0 8 16 5+1 Sum = max. 120
Number of connections on a controller module 11 11 0 0 0 0 8 8 0 0 0
Missing connections, if applicable 16 - 8 8 5+1
5
Analog input signal
Example
On/o voltage signal
Example
On/o voltage signal
Example
On/O output signal
1 Max. 5+5+5
Example
Analog output signal 0-10 V
Stepper output
Example
7
Limitations
The example:
None of the 3 limitations are exceeded => OK
The missing connections to be supplied by one or more extension modules:
6
AK-XM 101A (8 analog inputs) ___ pcs. á 2 VA = __
AK-XM 102A (8 digital low voltage inputs) ___ pcs. á 2 VA = __
AK-XM 102B (8 digital high voltage outputs) 1 ___ pcs. á 2 VA = __
AK-XM 103A (4 analog inputs, 4 analog outputs) 1 1 ___ pcs. á 2 VA = __
AK-XM 204A / B (8 relay outputs) ___ pcs. á 5 VA = __
AK-XM 205A / B (8 analog inputs. + 8 relay output) 1 1 ___ pcs. á 5 VA = __
AK-XM 208C (8 analog inputs + 4 stepper outputs) 1 1 ___ pcs. á 5 VA = __
AK_OB 110 (2 analog outputs) 1 ___ pcs. á 0 VA = 0
Sum of power
1 pcs. á 8 VA = 8
Sum =
Sum = max. 32 VA
AK-PC 781 Capacity controller RS8GG602 © Danfoss 2015-03 37
Page 38

8
Length
If you use many extension modules the controller’s length will
grow accordingly. The row of modules is a complete unit which
cannot be broken.
If the row becomes longer than desired, the row can be broken by
using AK-CM 102.
The module dimension is 72 mm.
Modules in the 100-series consist of one module
Modules in the 200-series consist of two modules
The controller consist of three modules
The length of an aggregate unit = n x 72 + 8
or in an other way:
Module Type Number at Length
Controller module 1 x 224 = 224 mm
Extension module 200-series _ x 144 = ___ mm
Extension module 100-series _ x 72 = ___ mm
Total length = ___ mm
9
Linking of modules
Start with the controller module and then mount the selected
extension modules. The sequence is of no importance.
However, you must not change the sequence, i.e. rearrange the
modules, after you have made the setup where the controller
is told which connections are found on which modules and on
which terminals.
The modules are attached to one another and kept together by a
connection which at the same time transmits the supply voltage
and the internal data communication to the next module.
Example continued:
Controller module + 2 extension modules in 200-series + 2 extension module in 100 series =
224 + 144 + 144 + 72 + 72 = 656 mm.
Example continued
Mounting and removal must always be performed when there is
no voltage.
The protective cap mounted on the controller’s plug connection
must be moved to the last vacant plug connection so that the
plug will be protected against short-circuit and dirt.
When the regulation has started the controller will all the time
check whether there is connection to the connected modules. This
status can be followed by the light-emitting diode.
When the two catches for the DIN rail mounting are in open position the module can be pushed into place on the DIN rail – no
matter where in the row the module is found.
Removal is likewise carried out with the two catches in the open
position.
38 Capacity controller RS8GG602 © Danfoss 2015-03 AK-PC 781
Page 39

10
Determine the connection points
All connections must be programmed with module and point, so
in principle it does not matter where the connections are made, as
long as it takes place on a correct type of input or output.
• The controller is the rst module, the next one is 2, etc.
• A point is the two or three terminals belonging to an input or
output (e.g. two terminals for a sensor and three terminals for a
relay).
The preparation of the connection diagram and the subsequent
programming (conguration) should take place at the present
time. It is most easily accomplished by lling in the connection
survey for the relevant modules.
Principle:
Name On module On Point Function
fx Compressor 1 x x Close
fx Compressor 2 x x Close
fx Alarm relay x x NC
fx Main switch x x Close
fx P0 x x AKS 32R 1-6 bar
The connection survey from the controller and any extension
modules are uploaded from the paragraph "Module survey. E.g.
controller module:
Module Point
Mind the numbering.
The right-hand part of the
controller module may look like
a separate module. But it isn’t.
Note
The safety relays should not be tted onto a module
with override changeovers, as they can be put out of
operation by an incorrect setting.
Example continued
Signal Module Point
Discharge temperature - Sd
Suction gas temperature- Ss 2 (AI 2) 3 - 4 Pt 1000
Outdoor temperature - Sc3 3 (AI 3) 5 - 6 Pt 1000
External compressor stop 4 (AI 4) 7 - 8 Closed
Thermostat sensor in plant room
- Saux1
Suction pressure - Po 6 (AI 6) 11 - 12 AKS 2050-59
Condensing pressure - Pc 7 (AI 7) 13 - 14 AKS 2050-159
Level switch, oil, comp.1 8 (AI 8) 19 - 20 Closed
Level switch, oil, comp.2 9 (AI 9) 21 - 22 Closed
Level switch, oil, comp.3 10 (AI 10) 23 - 24 Closed
Level switch, oil, comp.4 11 (AI 11) 25 - 26 Closed
Solenoid valve, oil , comp. 1 12 (DO 1) 31 - 32 ON
Solenoid valve, oil , comp. 2 13 (DO 2) 33 - 34 ON
Solenoid valve, oil , comp. 3 14 (DO 3) 35 - 36 ON
Solenoid valve, oil , comp. 4 15 (DO 4) 37 - 38 ON
Solenoid valve, oil, Separator 16 (DO 5) 39 - 40 - 41 ON
Circulation pump tw 17 (DO6) 42 - 43 - 44 ON
Circulation pump hr 18 (DO7) 45 - 46 - 47 ON
Room fan 19 (DO8) 48 - 49 - 50 ON
Voltage signal to high pressure
valve, ICMTS
1 (AI 1) 1 - 2 Pt 1000
5 (AI 5) 9 - 10 Pt 1000
1
24 - 0-10 V
25 -
Terminal
Signal type /
Active at
- Columns 1, 2, 3 and 5 are used for the programming.
- Columns 2 and 4 are used for the connection diagram.
Signal Module Point
Level switch, oil, receiver High
Level switch, oil, receiver Low 2 (AI 2) 3 - 4 Closed
Level switch, oil, Separator 3 (AI 3) 5 - 6 Closed
Level switch, CO2 receiver 4 (AI 4) 7 - 8 Open
Pulse reset of stopped compressor 5 (AI 5) 13 - 14 Pulse
Refrigerant receiver, Prec CO2 7 (AI 7) 17 - 18 AKS 2050-159
Oil receiver, Prec Oil 8 (AI 8) 19 - 20 AKS 2050-159
Compressor 1 9 (DO 1) 25 - 26 - 27 ON
Compressor 2 10 (DO 2) 28 - 29 - 30 ON
Compressor 3 11 (DO 3) 31 - 32 - 33 ON
Compressor 4 12 (DO 4) 34 - 35 - 36 ON
Start /stop of VLT for fans 13 (DO 5) 37 - 38 - 39 ON
3-way valve, tap water, V3tw 14 (DO6) 40 - 41 - 42 ON
3-way valve, heat circuit, V3hr 15 (DO7) 43 - 44 - 45 ON
3-way valve, gas cooler, V3gc 16 (DO8) 46 - 47 - 48 ON
Signal Module Point/Step Terminal Signal type
Tap water temperature - Stw2
Tap water temperature - Stw3 2 (AI 2) 3 - 4 Pt 1000
Tap water temperature - Stw4 3 (AI 3) 5 - 6 Pt 1000
Tap water temperature - Stw8 4 (AI 4) 7 - 8 Pt 1000
Heat reclaim temperature Shr2 5 (AI 5) 9 - 10 Pt 1000
Heat reclaim temperature Shr3 6 (AI 6) 11 - 12 Pt 1000
Heat reclaim temperature Shr4 7 (AI 7) 13 - 14 Pt 1000
Heat reclaim temperature Shr8 8 (AI 8) 15 - 16 Pt 1000
Stepper signal to by-pass valve,
CCM
1 (AI 1) 1 - 2 Closed
6 (AI 6) 15 - 16
2
1 (AI 1) 1 - 2 Pt 1000
3
9 (step1)
10 (step 2) 29 - 30 - 31 - 32
11 (step 3) 33 - 34 - 35 - 36
12 (step 4) 37 - 38 - 39 - 40
Terminal
25 - 26 - 27 - 28
Signal type /
Active at
CCM (ETS)
Continued next page
AK-PC 781 Capacity controller RS8GG602 © Danfoss 2015-03 39
Page 40

Signal Module Point Terminal Active at
Compressor 1 Gen. Safety
Compressor 2 Gen. Safety 2 (DI 2) 3 - 4 Open
Compressor 3 Gen. Safety 3 (DI 3) 5 - 6 Open
Compressor 4 Gen. Safety 4 (DI 4) 7 - 8 Open
Start/stop heat recovery hr 5 (DI 5) 9 - 10 Closed
All compressors common safety 6 (DI 6) 11 - 12 Open
Flow switch FStw 7 (DI 7) 13 - 14 Open
Flow switch FShr 8 (DI 8) 15 - 16 Open
Signal Module Point Terminal Signal type
Temp. gas cooler outlet Sgc
Temp. by-pased gas Shp 2 (AI 2) 3 - 4 Pt 1000
Start/stop heat recovery tw
Gas cooler pressure Pgc
Speed control, compressor 5 (AO 1) 9 - 10
Speed control, gas cooler fan 6 (AO 2) 11 - 12 0 - 10 V
Speed control, pump - tw 7 (AO 3) 13 - 14 0 - 10 V
Speed control, pump - hr 8 (AO 4) 15 - 16 0 - 10 V
1 (DI 1) 1 - 2 Open
4
1 (AI 1) 1 - 2 Pt 1000
3 (AI 3) 5 - 6
4 (AI 4) 7 - 8
5
Closed
AKS 2050-159
0 - 10 V
11
Connection diagram
Drawings of the individual modules may be
ordered from Danfoss.
Format = dwg and dxf.
You may then yourself write the module
number in the circle and draw the individual
connections.
The supply voltage for the pressure
transmitter should be taken from
the same module that receives the
pressure signal.
40 Capacity controller RS8GG602 © Danfoss 2015-03 AK-PC 781
Page 41

Example continued:
AK-PC 781 Capacity controller RS8GG602 © Danfoss 2015-03 41
Page 42

12
Supply voltage
Supply voltage is only connected to the controller module. The
supply to the other modules is transmitted via the plug between
the modules.
The supply must be 24 V +/-20%. One power supply must be used
for each controller. The power supply must be a class II.
The 24 V must not be shared by other controllers or units. The
analog inputs and outputs are not galvanically separated from the
supply.
The + and – 24V input must not be earthed.
If using stepper motor valves, the supply for these must be provided from a separate power supply.
For CO2 facilities, it will also be necessary to safeguard the voltage
to the controller and valves using UPS.
Example continued:
Controller module 8 VA
+ 2 extension modules in 200 series 10 VA
+ 2 extension modules in 100 series 4 VA
-----Power supply size (least) 22 VA
Power supply size
The power consumption grows with the number of modules used:
Module Type Number á Eect
Controller 1 x 8 = 8 VA
Extension module 200 series _ x 5 = __ VA
Extension module 100 series _ x 2 = __ VA
Total ___ VA
42 Capacity controller RS8GG602 © Danfoss 2015-03 AK-PC 781
Page 43

Ordering
1. Controller
Type Function Application Language Code no.
AK-PC 781
Controller for capacity control of compressors and condensers. With oil management
Compressor /
condenser /
both
English, German, French, Dutch, Italian,
Spanish, Portuguese, Danish, Finnish,
Russian, Czech, Polish, Chinese
080Z0186
2. Extension modules and survey for inputs and outputs
Type Analog
inputs
For sensors,
pressure
transmitters
etc.
Controller 11 4 4 - - - - -
Extension modules
AK-XM 101A 8 080Z0007
AK-XM 102A 8 080Z0008
AK-XM 102B 8 080Z0013 x
AK-XM 103A 4 4 080Z0032 x
AK-XM 204A 8 080Z0011
AK-XM 204B 8 x 080Z0018
AK-XM 205A 8 8 080Z0010 x
AK-XM 205B 8 8 x 080Z0017
AK-XM 208C 8 4 080Z0023
The following extension module can be placed on the PC board in the controller module.
There is only room for one module.
AK-OB 110 2 080Z0251 x
On/O outputs On/o supply voltage
Relay
(SPDT)
Solid state Low volt-
(DI signal)
age
(max. 80 V)
High voltage
(max. 260
V)
Analog
outputs
0-10 V d.c. For valves
Stepper
outputs
with step
control
Module
with
switches
For override
of relay
outputs
Code no.
With screw
terminals
Example
continued
continued
X
Example
3. AK operation and accessories
Type Function Application Code no.
Operation
AK-ST 500 Software for operation of AK controllers AK-operation 080Z0161 x
- Cable between PC and AK controller AK - Com port 080Z0262 x
-
- Cable between PC and AK controller AK - USB 080Z0264
Accessories Power supply module 230 V / 115 V to 24 V d.c.
AK-PS 075 18 VA
AK-PS 150 36 VA 080Z0054 x
AK-PS 250 60 VA 080Z0055
Accessories External display that can be connected to the controller module. For showing, say, the suction pressure
EKA 163B Display 084B8574
EKA 164B Display with operation buttons 084B8575
EKA 166 Display with operation buttons and LED's 084B8578
AK-MMI Graphic display with operation 080G0311
- Cable between display and controller
- Cable between graphic display and controller
Accessories Real time clock for use in controllers that require a clock function, but are not wired with data communication.
AK-OB 101A Real time clock with battery backup. To be mounted in an AK controller 080Z0252
Accessories Communication modules for controllers where modules cannot be connected continuously
AK-CM 102 Communication module Data communication for external extension modules 080Z0064
Cable between zero modem cable and AK controller /
Cable between PDA cable and AK controller
AK - RS 232 080Z0261
080Z0053
Supply for controller
Length = 2 m 084B7298
Length = 6 m 084B7299
Length = 1.5 m 080G0075
Length = 3 m 080G0076
Example
continued
AK-PC 781 Capacity controller RS8GG602 © Danfoss 2015-03 43
Page 44

44 Capacity controller RS8GG602 © Danfoss 2015-03 AK-PC 781
Page 45

3. Mounting and wiring
This section describes how the controller:
• Is tted
• Is connected
We have decided to work on the basis of the example we went
through previously, i.e. the following modules:
• AK-PC 781 controller module
• AK-XM 205A input and output module
• AK-XM 208C analog input module + stepper output module
• AK-XM 102B digital input module
• AK-XM 103B analog input and output module
• AK-OB 110 analog output module
AK-PC 781 Capacity controller RS8GG602 © Danfoss 2015-03 45
Page 46

Mounting
Mounting of analog output module
1. Lift the top part o the basic module
The basic module must not be connected to voltage.
Press in the plate on the left-hand side of the light-emitting
diodes and the plate on the right-hand side for the red address
changers.
Lift the top part o the basic module.
The analog extension module will supply a signal to the ICMTS valve
2. Mount the extension module in the basic module
3. Put the top part back on the basic module
There are two outputs.
46 Capacity controller RS8GG602 © Danfoss 2015-03 AK-PC 781
Page 47

Mounting and wiring - continued
Mounting of extension module on the
basic module
1. Move the protective cap
Remove the protective cap from the connection plug on the
right-hand side of the basic module.
Place the cap on the connection plug to the right of the extension module that is to be mounted on the extreme right-hand
side of the AK assembly.
In our example four extension modules are to be tted to the basic
module. We have chosen to t the module with relays directly on the
basic module and then the following module. The sequence is thus:
All the subsequent settings that aect the four extension modules are
determined by this sequence.
2. Assemble the extension module and the basic
module
The basic module must not be connected to voltage.
When the two snap catches for the DIN rail mounting are in the open
position, the module can be pushed into place on the DIN rail – regardless of where the module is on the row.
Disassembly is thus done with the two snap catches in the open position.
AK-PC 781 Capacity controller RS8GG602 © Danfoss 2015-03 47
Page 48

Mounting and wiring - continued
Wiring
Decide during planning which function is to be connected and
where this will be.
1. Connect inputs and outputs
Here are the tables for the example:
Remember the isolation amplier
If signals are received from dierent controls, e.g. heat recovery for one of the inputs, a galvanically insulated module
should be inserted.
Signal Module Point
Discharge gas temperature - Sd
Suction gas temperature - Ss 2 (AI 2) 3 - 4 Pt 1000
Outdoor temperature - Sc3 3 (AI 3) 5 - 6 Pt 1000
External compressor stop 4 (AI 4) 7 - 8 closed
Thermostat sensor in plant room
- Saux1
Suction pressure - P0 6 (AI 6) 11 - 12 AKS 2050-59
Condenser pressure - Pc 7 (AI 7) 13 - 14 AKS 2050-159
Level switch, oil, comp. 1 8 (AI 8) 19 - 20 closed
Level switch, oil, comp..2 9 (AI 9) 21 - 22 closed
Level switch, oil, comp..3 10 (AI 10) 23 - 24 closed
Level switch, oil, comp..4 11 (AI 11) 25 - 26 closed
Solenoid valve, oil, Comp. 1 12 (DO 1) 31 - 32 ON
Solenoid valve, oil, Comp. 2 13 (DO 2) 33 - 34 ON
Solenoid valve, oil, Comp. 3 14 (DO 3) 35 - 36 ON
Solenoid valve, oil, Comp. 4 15 (DO 4) 37 - 38 ON
Solenoid valve , oil, Separator 16 (DO 5) 39 - 40 - 41 ON
Circulation pump tw 17 (DO6) 42 - 43 - 44 ON
Circulation pump hr 18 (DO7) 45 - 46 - 47 ON
Room fan 19 (DO8) 48 - 49 - 50 ON
Voltage signal to high pressure
valve, ICMTS
Signal Module Point
Level switch, oil, receiver High
Level switch, oil, receiver Low 2 (AI 2) 3 - 4 closed
Level switch, oil, Separator 3 (AI 3) 5 - 6 closed
Level switch, CO2 receiver 4 (AI 4) 7 - 8 Open
Pulse reset of stopped compressor 5 (AI 5) 13 - 14 Pulse
Refrigerant, receiver, Prec CO2 7 (AI 7) 17 - 18 AKS 2050-159
Oil receiver, Prec Oil 8 (AI 8) 19 - 20 AKS 2050-159
Compressor 1 9 (DO 1) 25 - 26 - 27 ON
Compressor 2 10 (DO 2) 28 - 29 - 30 ON
Compressor 3 11 (DO 3) 31 - 32 - 33 ON
Compressor 4 12 (DO 4) 34 - 35 - 36 ON
Start /stop of VLT to fans 13 (DO 5) 37 - 38 - 39 ON
3-way valve, tap water, V3tw 14 (DO6) 40 - 41 - 42 ON
3-way valve, heat circuit, V3hr 15 (DO7) 43 - 44 - 45 ON
3-way valve, gas cooler, V3gc 16 (DO8) 46 - 47 - 48 ON
Signal Module Point/Step Terminal Signal type
Tap water temperature - Stw2
Tap water temperature - Stw3 2 (AI 2) 3 - 4 Pt 1000
Tap water temperature - Stw4 3 (AI 3) 5 - 6 Pt 1000
Tap water temperature - Stw8 4 (AI 4) 7 - 8 Pt 1000
Heat reclaim temperature Shr2 5 (AI 5) 9 - 10 Pt 1000
Heat reclaim temperature Shr3 6 (AI 6) 11 - 12 Pt 1000
Heat reclaim temperature Shr4 7 (AI 7) 13 - 14 Pt 1000
Heat reclaim temperature Shr8 8 (AI 8) 15 - 16 Pt 1000
Stepper signal to by-pass valve,
CCM
1 (AI 1) 1 - 2 Pt 1000
5 (AI 5) 9 - 10 Pt 1000
1
24 - 0-10 V
25 -
1 (AI 1) 1 - 2 closed
6 (AI 6) 15 - 16
2
1 (AI 1) 1 - 2 Pt 1000
3
9 (step 1)
10 (step 2) 29 - 30 - 31 - 32
11 (step 3) 33 - 34 - 35 - 36
12 (step 4) 37 - 38 - 39 - 40
Terminal
Terminal
25 - 26 - 27 - 28
Signal type /
Active at
Signal type /
Active at
CCM (ETS)
The function of the switch functions can be seen in the last column.
There are pressure transmitters AKS 32R and AKS 2050 available for
several pressure ranges.
Here there are two dierent ones. One up to 59 bar and two up to 159
bar.
Signal Module Point Terminal Active at
Compressor 1 Gen. safety
Compressor 2 Gen. safety 2 (DI 2) 3 - 4 Open
Compressor 3 Gen. safety 3 (DI 3) 5 - 6 Open
Compressor 4 Gen. safety 4 (DI 4) 7 - 8 Open
Start/stop heat recovery hr 5 (DI 5) 9 - 10 closed
All comp. common safety 6 (DI 6) 11 - 12 Open
Flow switch FStw 7 (DI 7) 13 - 14 Open
Flow switch FShr 8 (DI 8) 15 - 16 Open
Signal Module Point Terminal Signal type
Temp. gas cooler outlet Sgc
Temp. by-passed gas Shp 2 (AI 2) 3 - 4 Pt 1000
Start/stop heat recovery tw 3 (AI 3) 5 - 6 closed
Gas cooler pressure Pgc 4 (AI 4) 7 - 8 AKS 2050-159
Speed control, compressor 5 (AO 1) 9 - 10 0 - 10 V
Speed control, gas cooler fans 6 (AO 2) 11 - 12 0 - 10 V
Speed control, pump - tw 7 (AO 3) 13 - 14 0 - 10 V
Speed control, pump - hr 8 (AO 4) 15 - 16 0 - 10 V
1 (DI 1) 1 - 2 Open
4
1 (AI 1) 1 - 2 Pt 1000
5
48 Capacity controller RS8GG602 © Danfoss 2015-03 AK-PC 781
Page 49

Mounting and wiring - continued
The connections for the example can be seen here.
Warning
Keep signal cables separate from
cables with high voltage.
The screen on the pressure
transmitter cables must only
be connected at the end of the
controller.
The supply voltage for the pressure
transmitter should be taken from
the same module that receives the
pressure signal.
AK-PC 781 Capacity controller RS8GG602 © Danfoss 2015-03 49
Page 50

2. Connect LON communication network
The installation of the data communication must comply with
the requirements set out in document RC8AC.
3. Connect supply voltage
Is 24 V, and the supply must not be used by other controllers or
devices. The terminals must not be earthed.
4. Follow light-emitting diodes
When the supply voltage is connected the controller will go
through an internal check. The controller will be ready in just
under one minute when the light-emitting diode ”Status” starts
ashing slowly.
5. When there is a network
Set the address and activate the Service Pin.
6. The controller is now ready to be congured.
Internal communication
between the modules:
Quick ash = error
Constantly On = error
■ Power
■ Comm
■ DO1 ■ Status
■ DO2 ■ Service Tool
■ DO3 ■ LON
■ DO4 ■ I/O extension
■ DO5 ■ Alarm
■ DO6
■ DO7
■ DO8 ■ Service Pin
Status on output 1-8
Slow ash = OK
Quick ash = answer from gateway
in 10 min. after network
installation
Constantly ON = error
Constantly OFF = error
External communication
Communication to AK-CM 102
Flash = active alarm/not cancelled
Constant ON = Active alarm/cancelled
Network installation
50 Capacity controller RS8GG602 © Danfoss 2015-03 AK-PC 781
Page 51

4. Conguration and operation
This section describes how the controller:
• Is congured
• Is operated
We have decided to work on the basis of the example we went
through previously, i.e. compressor control with 4 compressors
and high pressure control using heat recovery and gas cooler.
The example is shown two pages in.
AK-PC 781 Capacity controller RS8GG602 © Danfoss 2015-03 51
Page 52

Conguration
Connect PC
PC with the program “Service Tool” is connected to the controller.
The controller must be switched on rst and the LED “Status” must
ash before the Service Tool program is started.
For connecting and operating the "AK service tool" software,
please see the manual for the software.
Start Service Tool programme
Login with user name SUPV
Select the name SUPV and key in the access code.
The rst time the Service Tool is connected to a new version of a controller the start-up of the Service Tool will take longer than usual while
information is retrieved from the controller.
Time can be followed on the bar at the bottom of the display.
When the controller is supplied the SUPV access code is 123.
When you are logged into the controller an overview of it will always
appear.
In case the overview is empty. This is because the controller has not yet
been set up.
The red alarm bell at the bottom right tells you that there is an active
alarm in the controller. In our case the alarm is due to the fact that the
time in the controller has not yet been set.
52 Capacity controller RS8GG602 © Danfoss 2015-03 AK-PC 781
Page 53

Refrigerating plant example
We have decided to describe the setup by means of an example
comprising a MT compressor group and a high pressure control.
The example is the same as the one given in the "Design" section,
i.e. the controller is an AK-PC 781 + extension modules.
Compressor Group
• MT circuit
• Refrigerant CO2 (R744)
• Variable compressor and 3 single step compressors
• 4 only compressors with "Best t"
• Safety monitoring of each compressor
• Common high-pressure monitoring
• Po setting -15°C, night displacement 5 K
• Oil management of each compressor
High pressure control:
• Gas cooler with speed controlled fans (Pgc Max. = 100 bar)
• High pressure control with signal from Sgc and Shp
• Pc regulates oating based on outdoor temperature sensor Sc3
• Control of high pressure valve ICMTS
• Heat recovery for hot tap water. Relay and 0-10 V
• Heat recovery for heating. Relay and 0-10 V
Receivers:
• Monitoring of liquid level of refrigerant
• Control of pressure in refrigerant receiver (reference 34 bar)
• Control of pressure in oil receiver
Fan in plant room
• Thermostat control of fan in engine room
Safety functions:
• Monitoring of Po, Pc, Sd and superheat in suction line
• Po max = -5°C, Po min = -35°C
• Pc max = 103.5 bar
• Sd max = 120°C
• SH min = 5 °C, SH max = 35 °C
• Monitoring of low and high level in oil receiver
There is also an internal main switch as a setting. Both, this and the
external compressor stop must be “ON” before any adjustment is made.
Warning
The main switch will stop all regulations, including high-pressure regulation.
Other
• Start/stop of heat recovery tw and hr
• External compressor stop used
AK-PC 781 Capacity controller RS8GG602 © Danfoss 2015-03 53
Page 54

Conguration - continued
Authorization
1. Go to Conguration menu
Press the orange setup button with the spanner at the bottom
of the display.
2. Select Authorization
3. Change setting for the user ‘SUPV‘
When the controller is supplied it has been set with standard authorization for dierent user interfaces. This setting should be changed and
adapted to the plant. The changes can be made now or later.
You will use this button again and again whenever you want to get to
this display.
On the left-hand side are all the functions not shown yet. There will be
more here the further into the setup we go.
Press the line Authorization to get to the user setup display.
4. Select user name and access code
5. Carry out a new login with the user name and the
new access code
Mark the line with the user name SUPV.
Press the button Change
This is where you can select the supervisor for the specic system and a
corresponding access code for this person.
The controller will utilize the same language that is selected in the
service tool but only if the controller contains this language. If the
language is not contained in the controller, the settings and readings
will be shown in English.
To activate the new settings you must carry out a new login to the controller with the new user name and the relevant access code.
You will access the login display by pressing the padlock at the top left
corner of the display.
54 Capacity controller RS8GG602 © Danfoss 2015-03 AK-PC 781
Page 55

Conguration - continued
Unlock the conguration of the
controllers
1. Go to Conguration menu
2. Select Lock/Unlock conguration
3. Select Conguration lock
Press the blue eld with the text Locked
The controller can only be congured when it is unlocked.
The values can be changed when it is locked, but only for those settings
that do not aect the conguration.
4. Select Unlocked
Select Unlocked.
AK-PC 781 Capacity controller RS8GG602 © Danfoss 2015-03 55
Page 56

Conguration - continued
System setup
1. Go to Conguration menu
2. Select System setup
3. Set system settings
All settings can be changed by pressing in the
blue eld with the setting and then indicating the value of the required setting.
In the rst eld you enter a name for what
the controller will be controlling. The text
written in this eld can be viewed at the top
of all screens, together with the controller's
address.
When the time is set the PC’s time can be
transferred to the controller.
When the controller is connected to a network, date and time will automatically be set
by the system unit in the network. This also
applies to change-over Daylight saving.
56 Capacity controller RS8GG602 © Danfoss 2015-03 AK-PC 781
Page 57

Conguration - continued
Set plant type
1. Go to Conguration menu
2. Select plant type
Press the line Select plant type.
3. Set plant type
4. Set Common functions
Press the +-button to go on to the
next page
6. Quick basis setup
Our example
The comments for the example are shown on the
following pages, in the middle column.
In our example we want the controller to control both a compressor
group and a condenser group. We
therefore select the plant type One
pack.
Subsequent options are then available,
but only those options allowed by the
current selection.
Select the refrigerant type, here CO2,
further options are made available, etc.
In our example, the cooling (MT) is
regulated..
(If it was a cascade control/two step
system, the other controller would need
to be set to "LP".)
The settings for our example can be viewed
in the display.
This setting is special.
Here the user can select a pre-dened
system. We do not use this function in our
example, but perform the adjustments
individually.
Adjust only the two lines with "Smart"
(Only when the refrigerant selected is CO2)
Here you can adjust the overall pressure
values for the system
- Regulation Pgc max
- Regulation Receiver reference.
The controller will then suggest values for all
settings connected with this.
The values can be seen in this display, but
also later in the relevant setup.
Fine adjustments can be made if necessary.
General
If you want to know more about the dierent
conguration options, they are listed in the right
column.
The number refers to the number and picture in
the column on the left.
As the screen only shows the settings and readings
that are required for a given setup, all possible settings have also been included in the right column.
3 - Plant type
Application selection
Select between "One Suction", "One condenser" or both "One Pack"
4- Plant type continued
Refrigerant
Select refrigerant type
Refrigerant factors K1, K2, K3
Only used if “Po refrigerant type” is set to custom
(contact Danfoss for information)
Pack type
MT = Medium temperature. LT = Low temperature
HP control
High pressure control enabled. To be adjusted
later on.
Receiver control
Receiver control enabled. To be adjusted later
on.
IT Compressor
Parallel compressor (there are special settings;
see the section on page 122).
Heat recovery
Heat recovery enabled. To be adjusted later on.
Oil management
Oil control enabled. To be adjusted later on.
Quick setup
A choice will give a number of predened combinations, which at the same time determine
the connection points. The display options
depend on previous settings.
At the end of the manual there is an overview
of the options and connection points.
After conguration of this function, the
controller will shut down and restart. After the
restart, a large number of settings will have
been made. These include the connection
points. Continue with the settings and check
the values.
If you change some of the settings, the new
values will come into force.
External main switch
A switch may be connected for starting and
stopping the regulation.
Mon. Ext. Power loss (signal from an UPS)
Monitoring of external voltage. When selecting
"yes", a digital input is allocated.
Alarm output
Here you may set whether or not it should be
an alarm relay, and which priorities will activate
it.
I'm alive relay
A relay will "release" if the regulation is stopped.
Show Tc
If selecting "yes" the Pc pressure will also be
shown as temperature.
Comp. cap. out to AO
If selecting "yes" indicate the current capacity
of an output.
Comp. run signal DO
If “yes” is selected, an output is reserved that
shows if the compressors are operating.
5 – Quick relative setup
Smart = Setting the controller’s overall pressure
values. The remaining pressure values will be
set automatically.
AK-PC 781 Capacity controller RS8GG602 © Danfoss 2015-03 57
Page 58

Conguration - continued
Set control of compressors
1. Go to Conguration menu
2. Select Suction group
3. Set values for the reference
The conguration menu in the
Service Tool has changed now.
It shows the possible settings for
the selected plant type.
In our example we select the
settings:
- Suction set point = -15°C
- Night oset value = 5 K.
The settings are shown here in the
display.
3 - Reference mode
Displacement of suction pressure as a function of external
signals
0: Reference = set reference + night oset + oset from external
0-10 V signal
1: Reference = set reference + oset from P0 optimization
Setpoint ( -80 to +30°C)
Setting of required suction pressure in °C
Oset via Ext. Ref
Select whether a 0-10V external reference override signal is
required
Oset at max input (-100 to +100 °C)
Displacement value at max. signal (10)
Oset at min input (-100 to +100 °C)
Displacement value at min. signal (0 V)
Oset lter (10 - 1800 Sec)
Here you can set how quickly the reference must become effective.
Night Oset via DI
Select whether a digital input is required for activation of night
operation. Night operation can alternatively be controlled via
internal weekly schedule or via a network signal
Night Oset (-25 to +25 K)
Displacement value for suction pressure in connection with an
active night setback signal (set in Kelvin)
Max reference (-50 to +80 °C)
Max. permissible suction pressure reference
Min reference (-80 to +25 °C)
Min. permissible suction pressure reference
4 - Compressor application
Select one of the available compressor conguration here
Press the +-button to go on to the
next page
4. Set values for capacity control
Press the +-button to go on to the
next page
There are several pages, one after
the other.
The black bar in this eld tells you
which of the pages is currently
displayed.
Move between the pages using
the + and - buttons.
If a screw compressor is chosen
in the rst line, its type must be
determined in the next line.
In our example we select:
- External compressor stop
-VSD + single step
- 4 compressors
- P0 as signal to the regulation
- Best t
Screw compressorer
The following options are available for screw compressors
No. of compressors
Set number of compressors (total)
No. of unloaders
Set number of unloader valves
Ext. compressor stop
An external switch can be connected which will start and stop
the compressor control.
Variable compressor type
Choose between speed control or PWM (digital scroll).
Control sensor
Po: Suction pressure Po is used for control
S4: Media temperature S4 is used for control
Pctrl: Control pressure from the low-pressure circuit for cascade
Po refrigerant type
Select refrigerant type
P0 Refrigerant factors K1, K2, K3
Only used if “Po refrigerant type” is set to custom (contact
Danfoss for information)
Pctrl refrigerant type
Select refrigerant type
Pctrl refrigerant factors K1, K2, K3
Only used if “Pctrl refrigerant type” is set to custom (contact
Danfoss for information)
Step control mode
Select coupling pattern for compressors
Cyclic: Runtime equalisation between compressors (FIFO)
Best t: Compressors are cut in/out in order to make the best
possible t to actual load
MT/LT coordination
Control methods between cold and frost for cascade.
MT Release: MT-control. The controller must connect to a relay
so that a signal can be sent to the controller in the LT circuit.
LT Release:LT-control. The controller must receive a signal from
the controller in the MT-circuit.
MT Coord: MT-control. A signal must both be received and sent.
LT Coord: LT-control. A signal must both be received and sent.
MT Coord release before start: LT starts and MT following. A
signal must be both received and sent.
LT-Comp.request delay
LT-control. Delay on output signal to MT
58 Capacity controller RS8GG602 © Danfoss 2015-03 AK-PC 781
Page 59

Conguration - continued
5. Set values for capacity of the
compressors
Press the +-button to go on to the
next page
6. Set values for main step and any
unloaders
Press the +-button to go on to the
next page
7. Set values for safe operation
Press the +-button to go on to the
next page
In our example there are no
unloaders and hence no changes.
In our example we select:
- Safety limit for discharge
temperature = 120°C
- Safety limit for high condensing
pressure = 103.5 bar
- Safety limit for low suction
pressure = -40°C
- Alarm limit for high suction
pressure = -5°C
- Alarm limit for min. and max.
superheat, respectively = 5 and
35 K.
LT Comp. release delay
LT-control. Delay on input signal from MT
MT-Comp.request delay
MT-control. Delay on input signal from LT
MT Comp. release delay
MT-control. Delay on output signal to LT
Injection heat exchanger
Selects whether an output signal is to be sent for start/stop
of liquid injection in a cascade heat exchanger
Pump down
Select whether a pump down function is required on the last
running compressor
Pump down limit Po (-80 to +30 °C)
Set the actual pump down limit
VSD min speed (0.5 – 60.0 Hz)
Min. speed where the compressor must cutout
VSD start speed (20.0 – 60.0 Hz)
Minimum speed for start of Variable speed drive (Must be set
higher than “VSD Min. Speed Hz”)
VSD max speed (40.0 – 120.0 Hz)
Highest permissible speed for the compressor motor
VSD safety monitoring
Select this if input for monitoring of the frequency converter
is required
PWM period time
Period time for bypass valve (on time + o time)
PWM Min. capacity
Minimum capacity in the period time (without a minimum
capacity the compressor will not be cooled)
PWM Max. capacity
Limitation of capacity during period time (100 = no limit)
Load shed limits
Select which signal is to be used for load limitation
(only via network, a DI + network or two DI + network)
Load limitation period
Set the maximum time permitted for load limitation
Load shed limit 1
Set max capacity limit for load shed input 1
Load shed limit 2
Set max capacity limit for load shed input 2
Override limit Po
Any load below the limit value is freely permitted. If the P0
exceeds the value, a time delay is started. If the time delay
runs out, the load limit is cancelled
Override delay 1
Max. time for capacity limit, if P0 is too high
Override delay 2
Max. time for capacity limit, if P0 is too high
Kp Po (0.1 – 10.0)
Amplications factor for PI regulation
Advanced control settings
Select whether the advanced capacity control settings
should be visible
Po lter
Reduce changes in the Po reference
Pc lter
Reduce changes in the Pc reference
Minimize cycling
The control zone may vary for connections and disconnections when regulating with step coupling. See Section 5.
Initial start time (15 – 900 s)
The time after start-up where the cut-in capacity is limited to
the rst compressor step.
Unloading mode
Select whether one or two capacity controlled compressors
are allowed to be unloaded at the same time at decreasing
capacity
5 - Compressors
In this screen the capacity distribution between the compressors is dened.
Capacities that need to be set depend upon the “compressor
application” and “Step control mode” that has been selected.
Nominal capacity (0.0 – 100000.0 kW)
Set the nominal capacity for the compressor in question.
For compressors with variable speed drive the nominal
capacity must be set for the mains frequency (50/60 Hz)
Unloader
Number of unload valves for each compressor (0-3)
6 - Capacity distribution
The installation is dependent on the combination of compressors and coupling pattern.
Main step
Set the nominal capacity of the main step (Set the percentage of the relevant compressor’s nominal capacity) 0 100%.
AK-PC 781 Capacity controller RS8GG602 © Danfoss 2015-03 59
Page 60

Conguration - continued
8. Set monitoring of compressor
Press the +-button to go on to the
next page
9. Set operation time for compressor
Press the +-button to go on to the
next page .
10. Set times for safety cutouts
Press the +-button to go on to the
next page .
11. Set Misc. functions
In our example we use:
- Common high-pressure pressure
control for all compressors
- One general safety monitoring
unit for each compressor
(The remaining options could have
been selected if specic safety
controls for each compressor had
been required).
Set min. OFF-time for the compressor relay
Set min. ON-time for the compressor relay
Set how often the compressor is
allowed to start
The settings only apply to the
relay that cuts the compressor
motor in and out.
They do not apply to unloaders.
If the restrictions overlap, the
controller will use the longest
restriction time.
In our example we do not use
these functions.
Unload
Readout of the capacity on every unloading 0-100%.
7 - Safety
Emergency cap. day
The desired cut-in capacity for daily use in the case of emergency operations resulting from error in the suction pressure
sensor/ media temperature sensor.
Emergency cap. night
The desired cut-in capacity for night operations in the case
of emergency operations resulting from error in the suction
pressure sensor/ media temperature sensor.
Sd max limit
Max. value for discharge gas temperature
10 K below the limit, the compressor capacity should be
reduced and the entire condenser capacity will be cutin.
If the limit is exceeded, the entire compressor capacity will
be cutout
Pc Max limit
Maximum value for the condenser pressure in °C
3 K below the limit, the entire condenser capacity will be
cutin and the compressor capacity reduced.
If the limit is exceeded, the entire compressor capacity will
be cutout.
Pc Max delay
Time delay for the alarm Pc max
P0 Min limit
Minimum value for the suction pressure in °C
If the limit is reduced, the entire compressor capacity will be
cutout.
P0 Max alarm
Alarm limit for high suction pressure P0
P0 Max delay
Time delay before alarm for high suction pressure P0.
Safety restart time
Common time delay before restarting the compressor.
(Applicable to the functions: "Sd max. limit", Pc max. limit"
and "P0 min. limit).
SH Min alarm
Alarm limit for min. superheat in suction line.
SH Max alarm
Alarm limit for max. superheat in suction line.
SH alarm delay
Time delay before alarm for min./max. superheat in suction
line.
Individuel Sd pr. compressor
Select whether an Sd measurement should be made for each
compressor.
Sd cut out temperature
Set the desired cut-out temperature.
8 - Compressor safety
Common safety
Choose whether an overall, common safety input for all
compressors is desired. If the alarm is activated, all compressors will be cutout.
Oil pressure etc
Dene here whether this type of protection should be connected.
For "General", there is a signal from each compressor.
9 - Minimum operation times
Congure the operation times here so "unnecessary operation" can be avoided.
Restart time is the time interval between two consecutive
starts.
10 - Safety timer
Cutout delay
The time delay resulting from drop-out of automated safety
measures and until the compressor-error is reported. This
setting is common for all safety inputs for the relevant
compressor.
Restart delay
Minimum time that a compressor should be OK after a safety
cut-out. After this interval it can start again.
11 - Misc. functions
Injection On
Select this function if a relay must be reserved for the function. (The function must be wired to controllers with expansion valves in order to close liquid injection for the safety
cut-out of the last compressor.)
Network: The signal is sent to the controllers via data com-
munication.
Liq. inj suction line
Select the function if a liquid injection is required in the
suction line in order to keep the discharge gas temperature
down.
Regulation can be done either using a solenoid valve and a
TEV, or using an AKV valve.
60 Capacity controller RS8GG602 © Danfoss 2015-03 AK-PC 781
Page 61

Conguration - continued
Set oil management
1. Go to Conguration menu
2. Select Oil management
3. Set refrigeration circuit
Press the +-button to go on to the
next page
We do not use safety relays in our
example.
In this example, we want to
control the oil receiver.
This is done with a pressostat.
Here, we have chosen a
pressostat.
The pressostat should be set as
follows:
- Select pressure transmitter
When the pressure drops in the
receiver, the valve should open.
- Set the pressure level at which
the valve should open. Set at 30
bar, here.
- Set the pressure level, at
which the valve should close
completely again. Set at 35 bar,
here.
In the example, we have two level
switches in the receiver. Both one
high and one low.
3
LP sync to HP
Select this if the controller is on low pressure control and
should be synchronised with high pressure regulation.
Use oil equalization
(Only possible with cyclic operation)
Interval time
Set how often a compressor must pause during full
operation.
Equalization time
Set the duration of the oil equalisation (the pause).
Oil control safety relay
If this setting is set to YES, the controller will reserve a safety
relay for each compressor. The relay terminal is connected
in series to the compressor relay. The relay can hereby
stop the compressor, if a lack of oil is registered when the
compressor is force controlled. (Forced controlled to ON
with the setting "Manual" or with the "changeover" on an
extension module.)
Danfoss recommends this function to avoid any compressor damages due to lack of care.
(In order to keep things simple, this function is not used as
an example.)
Oil receiver
Select whether you wish to activate pressure regulation in
one of the oil receivers.
Level switch receiver
Dene the desired level sensors. High / Both Low and
High
Level alarm delay
Delay time tor level alarm
Input for pressure build
Select whether the pressure is controlled by a pressostat or
signal from the pulse counter.
Comp. per. to start seq.
(For pulse counter): Percentage value of total pulses of the
dierent compressors
Pressure buildup seq.
(For pulse counter) Select between:
Only pulses from the HP circuit. Pulses from both HP and
LP are included
Actual pressure
Measured value
Actual state
Status of oil separation
Cut out pressure
Receiver pressure for shutting o oil
Cut in pressure
Receiver pressure for turning on oil
High alarm limit
An alarm is given if a higher pressure is registered
High alarm delay
Time delay for alarm
High alarm text
AK-PC 781 Capacity controller RS8GG602 © Danfoss 2015-03 61
Page 62

Conguration - continued
4. Set oil management for the
compressors
Press the +-button to go on to the
next page.
5. Set oil separator
In our example, the oil supply is
controlled separately for each
individual compressor.
The settings are shown here in
the diagram.
The process is as follows:
20 seconds after the signal from
the level switch is given, the oil
injection starts. This pulsates
three times with one minute
intervals. Each pulse lasts one
second. Then there is a pause for
20 seconds. If the level switch
has not registered any oil at this
point, the compressor is stopped.
In our example, there is only one
single separator that has just one
level switch.
The settings are shown here in
the diagram.
The process is as follows:
When a signal is given from the
level switch, the discharging
process to the receiver
commences. This pulsates three
times with one minute intervals.
Each pulse lasts one second. If
the level switch does not register
an oil drop at this point, an alarm
is given when the delay time has
expired.
Write an alarm text
Low alarm limit
An alarm is given if a lower pressure is registered
Low alarm delay
Time delay for alarm
Low alarm text
Write an alarm text
4
Compressor oil setup
Select whether the oil supply to all the compressors is to
be shared at the same time or whether each compressor is
to be controlled separately.
Advanced stop
'Yes' means pulses will be allowed following compressor
stop
Oil cycle pre delay
Delay time before oil pulses commence
Oil cycle post delay
Delay time for signal that will stop oil pulses
High oil alarm delay
If an activation of the level switch is not registered
before the time has expired, an alarm will be given. (the
compressor not use the oil).
No of periods
No. of pulses that are to be enabled in a oil lling sequence
No of periods before stop (Advanced stop = yes)
If oil is still missing after this number of pulses, the
compressor is stopped. The remaining number of pulses
will then be permitted.
Period time
Time between pulses
Oil valve open time
The valve's opening time for each pulse.
5
Separator
Select whether there should be one shared separator for
all the compressors or one separator for each compressor.
Level detection
Select whether the separator is to be controlled by "Full
sequence", "To Level" or "low and high" level switches.
Level alarm delay
Alarm given when using a level switch for low level.
Repeat oil return cycle
Time period between repeat emptying processes from the
separator if the level switch stays at high level.
No oil sep. alarm delay
Alarm delay when a signal is given that oil is not being
separated ("high" level contact not activated)
No of periods
No. of times the valve should open in emptying sequence
Period time
Time between valve openings.
Open time
The open time of the valve
62 Capacity controller RS8GG602 © Danfoss 2015-03 AK-PC 781
Page 63

Conguration - continued
Setup control of condenser
fans
1. Go to Conguration menu
2. Select Condenser fan control
3. Set control mode and reference
Press the +-button to go on to the
next page
4. Set values for capacity regulation
In our example the condenser
pressure is controlled on the basis
of the Sgc and from Sc3 (oating
reference).
The settings shown here in the
display.
In our example we use a number of
fans that are all speed-controlled
in parallel.
The settings shown here in the
display.
For your information the function
”Monitor fan safety” will require
an input signal from each fan.
3 - PC reference
Control sensor
Pc: The condensing pressure PC is used for regulation
Sgc: The temperature at the outlet of the gas cooler (CO2
transcritical only)
S7: Media temperature is used for regulation
Reference Mode
Choice of condenser pressure reference
Fixed setting: Used if a permanent reference is required =
“Setting”
Floating: Used if the reference is changed as a function
of Sc3 the external temperature signal, the congured
"Dimensioning tm K"/"Minimum tm K" and the actual cut in
compressor capacity. (Liquid is recommended for CO2 and
heat recovery.)
Setpoint
Setting of desired condensing pressure in bar
Min. tm
Minimum average temperature dierence between Sc3 air
and Pc condensing temperature with no load.
Dimensioning tm
Dimensioning average temperature dierential between Sc3
air and Pc condensing temperature at maximum load (tm
dierence at max load, typically 8-15 K).
Min reference
Min. permitted condenser pressure reference
Max reference
Max. permitted condenser pressure reference
4 - Capacity control
No of fans
Set number of fans.
Monitoring fan safety
Safety monitoring of fans. A digital input is used to monitor
each fan.
Capacity control mode
Select control mode for condenser
Step: Fans are step-connected via relay outputs
Step/speed: The fan capacity is controlled via a combination
of speed control and step coupling
Speed: The fan capacity is controlled via speed control
(frequency converter)
Speed 1.step: First fan speed controlled, rest step coupling
Fan speed type
VSD (and normal AC motors)
EC motor = DC controlled fan motors
VSD start speed
Minimum speed for start of speed control (Must be congured higher than "VSD Min. Speed %")
VSD min Speed
Minimum speed whereby speed control is cut-out (low
load).
VSD safety monit.
Choice of safety monitoring of frequency converter. A digital
inlet is used for monitoring the frequency converter.
EC Start capacity
The regulation awaits this need to arise before supplying
voltage to the EC motor
EC voltage min
Voltage value at 0% capacity
EC voltage max
Voltage value at 100% capacity
EC Voltage abs. max
Permissible live voltage for EC motor (overcapacity)
Absolut max Tc
Max value for Tc. If this Tc value is exceeded, the EC voltage
will be raised to the value in “EC Voltage abs. max.”
Control type
Choice of control strategy
P-band: The fan capacity is regulated via P-band control. The
P band is congured as "Proportional band Xp"
PI-Control: The fan capacity is regulated by the PI controller.
Continues
AK-PC 781 Capacity controller RS8GG602 © Danfoss 2015-03 63
Page 64

Conguration - continued
Continued
Kp
Amplication factor for P/PI controller
Tn
Integration time for PI controller
Capacity limit at night
Setting of maximum capacity limit during night operations.
Can be used to limit fan speed at night in order to limit the
noise level.
The following settings are not available when the refrigerant
selected is CO2.
Monitor Air ow
Choose whether monitoring is required of the condenser's
air ow via an intelligent error-detection method.
Monitoring requires the use of a Sc3 outer temperature sensor, which must be tted by the condenser's air inlet.
FDD setting
Set error-detection function
Tuning: The controller makes an adjustment to the condenser concerned. Note that tuning should only be done
when the condenser is operating under normal operating
conditions.
ON: Tuning is completed and monitoring has commenced.
OFF: Monitoring is cut out.
FDD sensitivity
Set the sensitivity of error-detection on the condenser’s air
ow. Must only be changed by trained sta.
Air ow tuning value
Actual tuning values for air ow.
64 Capacity controller RS8GG602 © Danfoss 2015-03 AK-PC 781
Page 65

Conguration - continued
Setup control of high
pressure
1. Go to Conguration menu
2. Select HP control
3. Set regulation values
The settings are shown here in the
display
3 - HP control
Output type
Select the signal type for controlling the ICMTS valve.
- Voltage signal (ICMTS must have 0-10 V signal)
- Stepper motor signal via AK-XM 208C
- 2 Stepper motor signals for parallel valves
Extra capacity oset
Adjust how much the pressure shall be increased by when
the function "Extra capacity oset" is activated.
Pgc min.
Min. acceptable pressure in the gas cooler
Pgc max.
Max. acceptable pressure in the gas cooler
Advanced settings
Opens up the following selection possibilities
Pgc max. limit P-band
P-band under "Pgc max" where the valve's degree of opening is increased
dT Subcool
Desired subcooling temperature
Kp
Amplication factor
Tn
Integration time
Valve min. OD
Restriction of the ICMTS valve's degree of closing
Valve max. OD
Restriction of the ICMTS valve's degree of opening
Pgc HR min.
Read the min. acceptable pressure in the high pressure
circuit during heat recovery
Pgc HR oset
Read the pressure increase during heat recovery
Ramp down bar/min.
Here you may select how quickly the reference must be
changed after a completed heat recovery
Temp. at 100 bar
Temperature at 100 bar. Here you may dene the regulation curve during transcritical operation. Set the required
temperature value.
V3gc
Indicates whether a gas bypass valve is used on the gas
cooler.
Bypass low limit
If the sensor Sgc records a temperature that is lower than
the selected value, the gas will be routed outside of the gas
cooler (e.g. startup during very low ambient temperatures).
Bypass permitted after
Minimum time during which the gas must be fed through
the gas cooler before bypass is permitted.
Warning
If the regulation is stopped during high-pressure regulation, the
pressure will rise.
The system must be dimensioned to the higher pressure;
otherwise, there will be a loss of
charge.
AK-PC 781 Capacity controller RS8GG602 © Danfoss 2015-03 65
Page 66

Conguration - continued
Setup control of receiver
pressure
1. Go to Conguration menu
2. Select Receiver control
3. Set regulation values
The settings are shown here in
the display
3 - Receiver control
Output type
Select the signal type for controlling the gas bypass valve:
- Voltage signal
- Stepper motor signal via AK-XM208C
- 2 stepper motor signal for parallel valves
Prec reference
Select the reference for the pressure in the receiver
Kp
Amplication factor
Tn
Integration time
Valve min. OD
Limitation of the CCM valve's degree of closing
Valve max. OD
Limitation of the CCM valve's degree of opening.
Prec min.
Min. permissible pressure in the receiver
Prec max.
Max. permissible pressure in the receiver
(Also becomes regulation reference if the compressors are
stopped with the "External compressor stop" function)
Prec min. limit P-band
P-band under "Prec min" where the ICMTS valve's degree of
opening is increased
Prec max. limit P-band
P-band over "Prec max" where the ICMTS valve's degree of
opening is decreased
Use hot gas dump
Select whether hot gas should be supplied if the receiver
pressure falls too low
Prec hot gas dump
Receiver pressure at which hot gas is turned on
Prec gas dump di.
Dierence at which hot gas is turned o again
IT comp. state
The signal received from the IT controller can be read here
IT comp. start
Opening degree for the Vrec valve when the IT compressor
is to start.
IT comp. delay
The opening degree of the Vrec must be higher during the
entire delay time before the relay pulls, thereby sending a
signal to the IT controller.
IT comp. Sgc min.
The temperature limit for operation with IT compressor. Will
not start when a lower value is detected, regardless of the
opening degree of the Vrec valve.
66 Capacity controller RS8GG602 © Danfoss 2015-03 AK-PC 781
Page 67

Conguration - continued
Setup control of heat
recovery
1. Go to Conguration menu
2. Select heat recovery
3. Dene heat recovery circuits
4. Dene heat circuit requirement
for pressure variation
In our example, we have selected
CO2 as the refrigerant. This opens
for the displayed settings. In our
example we have both a circuit
for hot tap water and a circuit for
heating.
3 -Heat recovery
Heat recovery mode (applies only when the refrigerant
selected is not CO2). See also page 111.
Choice of method for heat recovery
No: Heat recovery not used
Thermostat: Heat recovery operated from thermostat
Digital input: Heat recovery operated from signal on a
digital input.
Heat recovery relay
Choose whether an output is required that should be
activated during heat recovery.
Heat recovery ref
Reference for the condensing pressure, when heat
HFC
recovery is activated.
Heat recovery ramp down
Congure how quickly the reference for the condenser
pressure should be ramped down to normal level after
heat recovery. Congure in Kelvin per minute.
Heat recovery cutout
Temperature value where the thermostat cuts-out the
heat recovery.
Heat recovery cutin
Temperature value where the thermostat cuts-out the
heat recovery.
Heat recovery circuit (applies only when the refrigerant
selected is CO2). See also page 116.
Here you select which recovery circuits shall be regulated:
2
- None
CO
- Circuit for hot tap water
- Circuit for heating
- Both hot tap water and heating
4 - Heat reclaim type
Here you dene how the condensing pressure (HP) shall be
regulated when the recovery circuit for heating requires
heat:
- No HP oset (simple control)
- HP oset. Here the controller must receive a voltage signal. The oset values that apply to the max. value must be
dened in the heat circuit settings. See next page.
- Max heat reclaim. Here the controller must receive a voltage signal, but the regulation is increased to also control
the pump, fans and gas cooler bypass.
Press the +-button to go on to the
next page
AK-PC 781 Capacity controller RS8GG602 © Danfoss 2015-03 67
Page 68

Conguration - continued
5. Setup values for tap water circuits
Press the +-button to go on to the
next page
In our example we use the
settings shown
5 - Tap water circuits (settings are available only when the
refrigerant selected is CO2, and shall be regulated on a
circuit for tap water).
Control mode: Here the regulation of the circuit can be
started (auto) and stopped (o).
Reference: The required temperature for the sensor Stw8
can be set here.
Thermostat band: The acceptable temperature variation
around the reference:
Control signal. . Choose between:
Stw8: if regulation shall be done using only this sensor.
S4-S3: (and a Delta T value) if the controller shall regulate
using this temperature dierence, until the Stw8 reference is met. (During S4-S3 regulation, the pump must
always be speed-regulated).
Stw8 + Stw8A: if two temperature sensors are installed in
the hot water receiver.
Variable speed: Here the pump type is selected. Either
variable speed or on/o.
Advanced settings: The following options are made available:
Flow switch: Must normally be selected for safety purposes
Kp: Amplication factor
Tn: Integration time
Min. pump speed: Pump speed for start/stop
Max. pump speed: The pump's max. permissible speed
Flowswitch delay: Duration of stable signal before the new
status is used in the regulation.
6. Setup values for heating circuit
In our example we use the
settings shown
6 - Heat reclaim circuits (settings are available only when
the refrigerant chosen is CO2, and regulation shall be
done using a circuit for heating).
Control mode: Here the regulation of the circuit can be
started (auto) and stopped (o).
Reference: Here the required temperature of sensor Shr8
(or Shr4) is set.
Thermostat band: The permissible temperature variation
around the reference:
Control signal: Choose between:
Shr8: if regulation shall be done using only this sensor.
S4-S3: (and a Delta T value) if the controller shall regulate
using this temperature dierence, until the Shr8 reference has been met.
Shr4: regulation is done using this sensor, but Shr8 shall
also be installed. (During S4-S3 regulation or Shr4 regula-
tion the pump shall always be speed-regulated).
Variable speed: Here the pump type is selected. Either
variable speed or on/o.
Heat consumers: (Only when the condensation pressure
shall be increased during heat recovery). The number of
signals that can be received is set here. The signal can be
either 0-10 V or 0-5 V. (Settings under "Advanced" will be
used 0-100% for the signal).
Heat consumer lter
The highest of the received signals are made known over
this period
Additional heat output
The function will reserve a relay. The relay will pull in when
the signal for the heat removers reaches 95%.
Advanced settings: The following options are made available:
Flow switch: Must normally be selected for safety pur-
poses
Kp: Amplication factor
Tn: Integration time
Tc max HR: Value at which the bypass of the gas cooler
will terminate.
HR PUMP CONTROL
Min. pump speed: Pump speed for start/stop
Max. pump speed: The pump's max. permissible speed
Pump stop limit: Signal in % at which the pump is
stopped again
Pump start limit: Signal in % at which the pump is started
HP CONTROL
Pgc HR min: Basic reference for the pressure when exter-
nal voltage signal is received.
68 Capacity controller RS8GG602 © Danfoss 2015-03 AK-PC 781
Page 69

Conguration - continued
Pgc HR oset: Pressure displacement at max. voltage
signal
HP low limit: Signal in % at which "Pgc HR min." comes
into force.
HP high limit: Signal in % at which "Pgc HR oset" value
is used.
FAN CONTROL
Fan - Max Cond. Ref oset: Set the displacement at which
the fans shall fully stop.
Fan low limit: Signal in % at which throttling of the fans
commences
Fan high limit: Signal in % at which the fans are stopped
BYPASS CONTROL
V3gc bypass stop limit: Signal in % at which the gas
cooler connects again after completed disconnect.
V3gc bypass start limit: Signal in % at which the gas
cooler is disconnected.
Flowswitch delay: Duration of stable signal before the
new status is used in the regulation.
AK-PC 781 Capacity controller RS8GG602 © Danfoss 2015-03 69
Page 70

Conguration - continued
Setup Display
1. Go to Conguration menu
2. Select Display setup
3. Dene which readings are to be
shown for the individual outputs
In our example, separate displays
are not used. The setting is
included here for information.
3 - Display setup
Display
The following can be read for the four outputs..
Comp. control sensor
P0 in temperature
P0 i bar-absolute
Pctrl bar-absolute
S4
Ss
Sd
Cond. control sensor
Tc
Pc bar-absolute
S7
Sgc
Shp
Pgc bar-absolute
Prec bar-absolute
Stw8
Shr8
Speed Compressor
Unit readout
Choose whether readings are to be in SI units (°C and bar) or
(US-units °F and psi)
70 Capacity controller RS8GG602 © Danfoss 2015-03 AK-PC 781
Page 71

Conguration - continued
Setup Functions for General purpose
1. Go to Conguration menu
2. Select General purpose
3. Dene number of required
functions
In our example we select
one thermostat function for
temperature control in the
compressor room and one alarm
function for monitoring the liquid
level in the receiver.
The following number of dierent functions can be
dened:
5 thermostats
5 pressostats
5 voltage signal
10 alarm signals
3 PI-regulations
AK-PC 781 Capacity controller RS8GG602 © Danfoss 2015-03 71
Page 72

Conguration - continued
Separate thermostats
1. Select thermostats
2. Select actual thermostat
3. Dene the required thermostat
functions
In our example we select
one thermostat function for
monitoring the plant room
temperature.
We have subsequently entered a
name for the function.
3 - Thermostats
The general thermostats can be used to monitor the temperature sensors that are used, as well as 4 extra temperature
sensors. Each thermostat has a separate outlet to control
external automation.
For each thermostat adjust
• Name
• Which of the sensors is used
Actual temp.
Temperature measurement on the sensor that is attached to
the thermostat
Actual state
Actual status on the thermostat outlet
Cut out temp.
Cut-out value for the thermostat
Cut in temp.
Cut-in value for the thermostat
High alarm limit
High alarm limit
Alarm delay high
Time delay for high alarm
Alarm text high
Indicate alarm text for the high alarm
Low alarm limit
Low alarm limit
Alarm delay low
Time delay for low alarm
Alarm text low
Indicate alarm text for low alarm
Separate pressostats
1. Select pressostats
In our example, separate
pressostat functions are not used.
2. Select actual pressostat
3. Dene the required pressostat
functions
72 Capacity controller RS8GG602 © Danfoss 2015-03 AK-PC 781
3 - Pressostats
Settings as the thermostats
Page 73

Conguration - continued
Separate voltage signals
1. Select Voltage inputs
2. Select actual voltage signal
3. Dene the required names
and values attached to the
signal
In our example we do not use
this function, so the display
has been included for your
information only.
The name of the function may be
xx and further down in the display
the alarm texts may be entered.
The values ”Min. and Max.
Readout” are your settings
representing the lower and upper
values of the voltage range. 2V
and 10V, for example. (The voltage
range is selected during the I/O
setup).
For each voltage input dened
the controller will reserve a
relay output in the I/O setup.
It is not necessary to dene
this relay if all you require is
an alarm message via the data
communication.
3 - Voltage inputs
The general volt inlet can be used to monitor external voltage signals. Each volt inlet has a separate outlet to control
external automatic controls.
Set the number of general voltage inputs, specify 1-5:
Name
Actual value
= read-out of the measurement
Actual state
= read-out of outlet status
Min. readout
State read-out values at minimum voltage signal
Max. readout
State read-out values at maximum voltage signal
Cutout
Cut-out value for outlet (scaled value)
Cutin
Cut-in value for outlet (scaled value)
Cutout delay
Time delay for cut-out
Cut in delay
Time delay for cut-in
High alarm limit
High alarm limit
High alarm delay
Time delay for high alarm
High alarm text
Set alarm text for high alarm
Low alarm limit
Low alarm limit
Low alarm delay
Time delay for low alarm
Low alarm text
Indicate alarm text for low alarm
Separate alarm inputs
1. Select General alarm inputs
2. Select actual alarm signal
3. Dene the required names
and values attached to the
signal
AK-PC 781 Capacity controller RS8GG602 © Danfoss 2015-03 73
In our example we select one
alarm function for monitoring
the liquid level in the receiver.
We have subsequently selected a
name for the alarm function and
for the alarm text.
3 - General alarm input
This function can be used to monitor all kinds of digital
signals.
No. of inputs
Set the number of digital alarm inputs
Adjust for each input
• Name
• Delay time for DI alarm (common value for all)
• Alarm text
Page 74

Conguration - continued
Separate PI functions
1. Select PI functions
2. Select actual PI-function
3. Dene the required names
and values attached to the
function
In our example we do not use
this function, so the display
has been included for your
information only.
3 - General PI Control
The function can be used for optional regulation.
Adjust for each regulation
• Name
• Control mode: O, Manual or Auto
• Control type: P or PI
• External DI ctrl: Adjusted to On if there is an external switch
that can start/stop the regulation.
• Input type: Choose which signal the regulation shall receive:
Temperature, pressure, pressure converted to temperature,
, voltage signal, Tc, Pc, Ss or Sd.
• Signal at variable reference: Choose between: : Non,
temperature, pressure, pressure converted to temperature,
voltage signal, Tc, Pc, Ss or DI.
• Reading the signal for the variable reference (not shown in
the display)
• Reading the total reference
• Output. Here you select the outlet function (PWM = pulse
width modulated (fx AKV valve)), Stepper signal for a stepper motor or voltage signal.
• Ref. calc A: Constant for variable value included in the reference. (Reference = Ax + B)
• Ref. calc B: Fixed value included in reference
• Alarm mode: Choose whether an alarm shall be attached to
the function. If it is set to ON, alarm texts and alarm limits
can be entered.
• Advanced ctrl. settings: Regulation parameters can now be
selected.
• PWM period time: Period during which the signal has been
on and o.
• Kp: Amplication factor
• Tn: Integration time
• Minimum reference: Lowest permitted reference
• Maximum reference: Maximum permitted reference
• Filter for reference: Duration for smooth changes to the
reference
• Max. error: Maximum permissible fault signal at which the
integrator remains in the regulation
• Min. control output: Lowest permitted output signal
• Max. control output: Maximum permitted output signal
• Start up time: Time at startup at which the output signal is
force-controlled
• Startup output: The output signal size at the startup time.
74 Capacity controller RS8GG602 © Danfoss 2015-03 AK-PC 781
Page 75

Conguration - continued
Conguration of inputs
and outputs
1. Go to Conguration menu
2. Select I/O conguration
3. Conguration of Digital outputs
Press the +-button to go on to the
next page
4. Setup On/o inputs
The following displays will depend on the earlier denitions. The displays will show which connections the earlier settings will require. The
tables are the same as shown earlier.
• Digital outputs
• Digital inputs
• Analog outputs
• Analog inputs
Load Output Module Point Active at
Solenoid valve, oil, Comp. 1 DO1 1 12 ON
Solenoid valve, oil, Comp. 2 DO2 1 13 ON
Solenoid valve, oil, Comp. 3 DO3 1 14 ON
Solenoid valve, oil, Comp. 4 DO4 1 15 ON
Solenoid valve, oil separator DO5 1 16 ON
Circulation pump tw D06 1 17 ON
Circulation pump hr DO7 1 18 ON
Room fan DO8 1 19 ON
Compressor 1 DO1 2 9 ON
Compressor 2 DO2 2 10 ON
Compressor 3 DO3 2 11 ON
Compressor 4 DO4 2 12 ON
Start /stop of VLT for fans DO5 2 13 ON
3-way valve, tap water, V3tw DO6 2 14 ON
3-way valve, Heat circuit, V3hr DO7 2 15 ON
3-way valve, gas cooler, V3gc DO8 2 16 ON
We set up the controller’s digital outputs by keying in which module
and point on this module each one of these has been connected to.
We furthermore select for each output whether the load is to be active
when the output is in pos. ON or OFF.
Function Input Module Point Active at
External compressor stop AI4 1 4 Closed
Level switch, oil, comp.1 AI8 1 8 Closed
Level switch, oil, comp.2 AI9 1 9 Closed
Level switch, oil, comp.3 AI10 1 10 Closed
Level switch, oil, comp.4 AI11 1 11 Closed
Level switch, oil, receiver High AI1 2 1 Closed
Level switch, oil, receiver Low AI2 2 2 Closed
Level switch, oil, Separator AI3 2 3 Closed
Level switch, CO2 receiver AI4 2 4 Open
Reset of compressor stop AI5 2 5
Compressor 1 Gen. Safety DI1 4 1 Open
Compressor 2 Gen. Safety DI2 4 2 Open
Compressor 3 Gen. Safety DI3 4 3 Open
Compressor 4 Gen. Safety DI4 4 4 Open
Start/stop of heat recovery hr DI5 4 5 Closed
All compressors common safety DI6 4 6 Open
Flow switch FStw
Flow switch FShr
Start/stop of heat recovery tw AI2 5 3 Closed
DI7 4 7 Open
DI8 4 8 Open
Pulse pressure
We set up the controller’s digital input functions by keying in which
module and point on this module each one of these has been connected
to.
We furthermore select for each output whether the function is to be active when the output is in pos. Closed or Open.
Open has been selected here for all the safety circuits. This means that
the controller will receive signal under normal operation and register it
as a fault if the signal is interrupted.
3 - Outputs
The possible functions are
the following:
Comp. 1
Unloader 1-1
Unloader 1-2
Unloader 1-3
Do for Compressor. 2-8
Oil valve comp. 1-8
Lp comp. oil pulse
Oil valve 1-4 (8)
Oil valve separat. 1-8
MT Comp. release
LT Comp. request
Injection heat exchanger
Injection suction line
Injection ON
Fan 1 / VSD
Fan 2 - 8
HP Control
Valve gas cooler V3gc
Heat recovery
Valve tap water V3tw
Pump tap water tw
Valve heat recov. V3hr
Pump heat recov. hr
Additional heat
Alarm
I'm alive relay
Thermostat 1 - 5
Pressostat 1 - 5
Volt input 1 - 5
PI 1-3
4 - Digital inputs
The possible functions are
the following:
Ext. Main switch
Ext. compr. stop
Ext. power loss
Night setback
Load shed 1
Load shed 2
LT Comp. Release
MT Comp. Request
All compressors:
Common safety
Comp. 1
Oil pressure safety
Over current safety
Motor protect. safety
Disch. temp. safety
Disch. press. safety
General safety
VSD comp. Fault
Do for Comp. 2-8
Fan 1 safety
Do for fan 2-8
VSD cond safety
Reset comp. lockout
LP comp.oil counter
Oil receiver low
Oil receiver high
Oil level comp.1-8
Oil separator low 1-8
Oil separator high 1-8
Heat recovery
tw enable
hr enable
Flow switch tw
Flow switch hr
DI 1 Alarm input
DI 2-10 ...
PI-1 Di ref
External DI PI-1
AK-PC 781 Capacity controller RS8GG602 © Danfoss 2015-03 75
Page 76

Conguration - continued
Press the +-button to go on to
the next page.
5. Conguration of Analog
outputs
Press the +-button to go on to
the next page
6. Conguration of Analog
Input signals
Function Output Module Point Type
Voltage signal for high pressure
valve, ICMTS
Stepper signal for by-pass valve, CCM Step 1 3 9 CC M
Speed control, compressor AO1 5 5 0 - 10 V
Speed control, gas cooler fan AO2 5 6 0 - 10 V
Speed control, pump - tw AO3 5 7 0 - 10 V
Speed control, pump - hr AO4 5 8 0 - 10 V
Sensor Input Module Point Type
Disch. gas temperature - Sd AI1 1 1 Pt 1000
Suction gas temperature - Ss AI2 1 2 Pt 1000
Outdoor temp. - Sc3 AI3 1 3 Pt 1000
Thermostat sensor in plant room Saux1
Suction pressure - Po AI6 1 6 AKS 2050-59
Condenser pressure - Pc
Refrigerant receiver, Prec-CO2 AI7 2 7 AKS 2050-159
Oil receiver, Prec-Oil AI8 2 8 AKS 2050-159
Tap water temperature - Stw2 AI1 3 1 Pt 1000
Tap water temperature - Stw3 AI2 3 2 Pt 1000
Tap water temperature - Stw4 AI3 3 3 Pt 1000
Tap water temperature - Stw8 AI4 3 4 Pt 1000
Heat reclaim temperature Shr2 AI5 3 5 Pt 1000
Heat reclaim temperature Shr3 AI6 3 6 Pt 1000
Heat reclaim temperature Shr4 AI7 3 7 Pt 1000
Heat reclaim temperature Shr8 AI8 3 8 Pt 1000
Temp. gas cooler outlet Sgc AI1 5 1 Pt 1000
Temp. by-pased gas Shp AI2 5 2 Pt 1000
Gas cooler pressure Pgc AI4 5 4 AKS 2050-159
AO1 1 24 0-10 V
AI5 1 5 Pt 1000
AI7 1 7 AKS 2050-159
5 - Analog outputs
The possible signals are
the following:
0 -10 V
2 – 10 V
0 -5 V
1 – 5V
Stepper output
Stepper output 2
Stepper user dened: See
section "Miscellaneous"
6 - Analog inputs
The possible signals are
the following:
Temperature sensors:
• Pt1000
• PTC 1000
Pressure transmitters:
• AKS 32, -1 – 6 bar
• AKS 32R, -1 – 6 bar
• AKS 32, - 1 – 9 bar
• AKS 32R, -1 – 9 bar
• AKS 32, - 1 – 12 bar
• AKS 32R, -1 – 12 bar
• AKS 32, - 1 – 20 bar
• AKS 32R, -1 – 20 bar
• AKS 32, - 1 – 34 bar
• AKS 32R, -1 – 34 bar
• AKS 32, - 1 – 50 bar
• AKS 32R, -1 – 50 bar
• AKS 2050, -1 – 59 bar
• AKS 2050, -1 – 99 bar
• AKS 2050, -1 – 159 bar
• User dened (only
ratiometric, min. and max
value of the pressure
range must be set)
S4 Cold brine
Pctrl
Po suction pres.
Ss suction gas
Sd disch. temp.
Pc Cond. Pres.
S7 Warm brine
Sc3 air on
Ext. Ref. Signal
• 0 – 5 V,
• 0 -10 V
Olie receiver
HP control
Pgc
Prec
Sgc
Shp
Stw2,3,4,8
Shr2,3,4,8
HC 1-5
Heat recovery
Saux 1 - 4
Paux 1 - 3
Voltage input 1 - 5
• 0 -5 V,
• 0 -10 V,
• 1 – 5 V,
• 2 – 10 V
PI-in temp
PI-ref temp
PI- in voltage
PI-in pres.
PI-ref pres.
76 Capacity controller RS8GG602 © Danfoss 2015-03 AK-PC 781
Page 77

Conguration - continued
Set alarm priorities
1. Go to Conguration menu
2. Select Alarm priorities
Very many functions have an alarm connected.
Your choice of functions and settings has connected all the relevant
alarms that are current. They will be shown with text in the three
pictures.
All alarms that can occur can be set for a given order of priority:
• ”High” is the most important one
• ”Log only” has lowest priority
• ”Disconnected” gives no action
The interdependence between setting and action can be seen in the
table.
3. Set priorities for Suction group
Setting
High X X X X 1
Medium X X X 2
Low X X X 3
Log only X 4
Disconnected
Se also alarm text page 136.
Log Alarm relay selection Net-
Non High Low - High
work
AKM dest.
Press the +-button to go on to the next page
4. Set alarm priorities for condenser
In our example we select the settings shown here in the display
AK-PC 781 Capacity controller RS8GG602 © Danfoss 2015-03 77
Page 78

Conguration - continued
Press the +-button to go on to the next page
5. Set alarm priorities for thermostat and extra digital
signals
In our example we select the settings shown here in the display
78 Capacity controller RS8GG602 © Danfoss 2015-03 AK-PC 781
Page 79

Conguration - continued
Lock conguration
1. Go to Conguration menu
2. Select Lock/Unlock conguration
3. Lock Conguration
Press in the eld against Conguration lock.
Select Locked.
The setup of the controller has now been locked. If you subsequently
want to make any changes in the controller’s setup, remember rst to
unlock the conguration.
The controller will now make a comparison of selected functions and dene inputs and outputs. The result can be seen in
the next section where the setup is controlled.
AK-PC 781 Capacity controller RS8GG602 © Danfoss 2015-03 79
Page 80

Conguration - continued
Check conguration
1. Go to Conguration menu
2. Select I/O conguration
3. Check conguration of Digital Outputs
Press the +-button to go on to the next page
This control requires that the setup is locked
(Only when the setup is locked are all settings for in- and outputs activated.)
An error has occurred, if you see the following:
The setup of the digital
outputs appears as it is supposed to according to the
wiring made.
A 0 – 0 next to a dened function.
If a setting has reverted to 0-0, you must control
the setup again.
This may be due to the following:
• A selection has been made of a combination of
module number and point number that does
not exist.
• The selected point number on the selected module had been set up for something dierent.
The error is corrected by setting up the output
correctly.
Remember that the setup must be unlocked before you can change module and point numbers..
4. Check conguration of Digital Inputs
The setup of the digital
inputs appears as it is supposed to according to the
wiring made.
The settings are shown on a RED background.
If a setting has turned red, you must control the
setup again.
This may be due to the following:
• The input or the output has been set up; but the
setup has later been changed so that it should
no longer be applied.
The problem is corrected by setting module
number to 0 and point number to 0.
Remember that the setup must be unlocked before you can change module and point numbers.
80 Capacity controller RS8GG602 © Danfoss 2015-03 AK-PC 781
Page 81

Conguration - continued
Press the +-button to go on to the next page
5. Check conguration of Analog Outputs
Press the +-button to go on to the next page
6. Check conguration of Analog Inputs
The setup of the analog outputs appears as it is supposed to according
to the wiring made.
The setup of the analog inputs appears as it is supposed to according to
the wiring made.
AK-PC 781 Capacity controller RS8GG602 © Danfoss 2015-03 81
Page 82

Check of connections
1. Go to Conguration menu
2. Select I/O status and manual
3. Check Digital Outputs
Before the control is started we check that all inputs and outputs have
been connected as expected.
This controls requires that the setup is locked
By means of the manual control of each output it can be checked
whether the output has been correctly connected.
AUTO The output is controlled by the controller
MAN OFF The output is forced to pos. OFF
MAN ON The output is forced to pos ON
Press the +-button to go on to the next page
4. Check Digital Inputs
Press the +-button to go on to the next page
Cut out the safety circuit for compressor 1.
Check that LED DI1 on the extension module (module 2) goes out.
Check that the value of the alarm for the safety monitoring of compressor 1 changes to ON.
The remaining digital inputs are checked in the same way.
82 Capacity controller RS8GG602 © Danfoss 2015-03 AK-PC 781
Page 83

Check of connections - continued
5. Check Analog outputs
Set Control of output voltage to manual
Press in the Mode eld.
Select MAN.
Press in the Value eld
Select for example 50%.
Press OK.
On the output you can now measure the expected value: In this
example 5 volts
Example of the connection between a dened output signal
and a manual set value.
Denition Setting
0 % 50 % 100 %
0 - 10 V 0 V 5 V 10 V
1 - 10 V 1 V 5.5 V 10 V
0 - 5 V 0 V 2.5 V 5 V
2 - 5 V 2 V 3.5 V 5 V
6. Put the control of the output voltage back to automatic
Press the +-button to go on to the next page
7. Check Analog inputs
Check that all sensors show sensible values.
In our case we have no values. This may be due to the following:
• The sensor has not been connected.
• The sensor is short-circuited.
• The point or module number has not been set up correctly.
• The conguration is not locked.
AK-PC 781 Capacity controller RS8GG602 © Danfoss 2015-03 83
Page 84

Check of settings
1. Go to the overview
2. Select suction group
Before the control starts, we check that all the settings are as they should
be.
The overview display will now show one line for each of the general
functions. Behind each icon there is a number of displays with the
dierent settings. It is all these settings that have to be checked.
3. Move on through all the individual displays for the
suction group
Change displays with the +- button. Remember the settings at
the bottom of the pages – the ones that can only be seen via
the ”Scroll bar”.
4. Safety limits
5. Go back to the overview
The last page contains safety limits and restart times.
6. Select condenser group
84 Capacity controller RS8GG602 © Danfoss 2015-03 AK-PC 781
Page 85

Check of settings - continued
7. Move on through all the individual displays for the
condenser group.
Change displays with the +- button. Remember the settings at
the bottom of the pages – the ones that can only be seen via
the ”Scroll bar”.
8. Safety limits
The last page contains safety limits and restart times.
9. Go back to the overview and Move on to the thermostat group
Check the settings.
10. Go back to the overview and Move on to the press-
sostat group
Check the settings.
11. Go back to the overview and on to the general
alarm inputs
Check the settings.
12. The controller setup has been completed.
AK-PC 781 Capacity controller RS8GG602 © Danfoss 2015-03 85
Page 86

Schedule function
1. Go to Conguration menu
2. Select schedule
3. Setup schedule
Before regulation is started we will set the schedule function for the
night setback of the suction pressure.
In other cases where the controller is installed in a network with one
system unit, this setting may be made in the system unit which will then
transmit a day/night signal to the controller.
Press a weekday and set the time for the day period.
Continue with the other days.
A complete weekly sequence is shown in the display.
86 Capacity controller RS8GG602 © Danfoss 2015-03 AK-PC 781
Page 87

Installation in network
1. Set the address (here, for example 3)
Turn the right-hand address switch so that the arrow will point
at 3.
The arrow of the two other address switches must point at 0.
2. Push the Service Pin
Press down the service pin and keep it down until the Service
Pin LED lights up.
The controller has to be remote-monitored via a network. In this net-
work we assign address number 3 to the controller.
The same address must not be used by more than one controller in the
same network.
Requirement to the system unit
The system unit must be a gateway type AKA 245 with software version
6.0 or higher. It is capable of handling up to 119 AK controllers.
3. Wait for answer from the system unit
Depending on the size of the network it may be up to one
minute before the controller receives an answer as to whether
it has been installed in the network.
When it has been installed the Status LED will start to ash
faster than normal (once every half second). It will continue
with this for about 10 minutes
4. Carry out new login via Service Tool
If the Service Tool was connected to the controller while you
installed it in the network, you must carry out a new login to
the controller via the Service Tool.
Alternatively, it can be an AK-SM 720. It is capable of handling up to 200
AK controllers.
If there is no answer from the system unit
If the Status LED does not start ashing faster than normal, the controller has not been installed in the network. The reason for this may be
one of the following:
The controller has been assigned an address out of range
Address 0 cannot be used.
If the system unit in the network is an AKA 243B Gateway only the addresses between 1 and 10 can be used.
The selected address is already being used by another controller or
unit in the network:
The address setting must be changed to another (vacant) address.
The wiring has not been carried out correctly.
The termination has not been carried out correctly.
The data communication requirements are described in the document:
”Data communication connections to ADAP-KOOL® Refrigeration Controls” RC8AC.
AK-PC 781 Capacity controller RS8GG602 © Danfoss 2015-03 87
Page 88

First start of control
Check alarms
1. Go to the overview
Press the blue overview button with the compressor and condenser at the bottom left of the display.
2. Go to the Alarm list
Press the blue button with the alarm bell at the bottom of the
display.
3. Check active alarms
In our case, we have a series of alarms. We will tidy them up so that we
only have those that are relevant.
4. Remove cancelled alarm from the alarm list
Press the red cross to remove cancelled alarms from the alarm
list.
5. Check active alarm again
In our case an active alarm remains because the control has stopped.
This alarm must be active when control has not started. We are now
ready for the startup of control.
Please note that active plant alarms are automatically cancelled when the
main switch is in pos. OFF.
If active alarms appear when the control is started the reason for these
should be found and remedied.
88 Capacity controller RS8GG602 © Danfoss 2015-03 AK-PC 781
Page 89

First start of control - continued
Start the control
1. Go to Start/Stop display
Press the blue manual control button at the bottom of the
display.
2. Start control
Press in the eld against Main switch.
Select ON.
The controller will now start controlling the compressors and the fans.
Note:
Control does not start until both the internal and external switch are
“ ON ”.
Any external compressor stop breaker must be ON for the compressors
to start.
AK-PC 781 Capacity controller RS8GG602 © Danfoss 2015-03 89
Page 90

Manual capacity control
1. Go to overview
2. Select suction group
Press the suction group button for the suction group that is to
be controlled manually.
Press the +-button to go on to the next page
3. Set capacity control to manual
If you need to manually adjust the capacity of the compressors, you can
use the following procedure:
WARNING!
If you force control the compressors, the oil management will be shut
down. This could cause compressor damages.
(If the wiring of the compressors includes safety relays, monitoring
will continue. See Regulating functions.)
Press the blue eld against Control mode
Select MAN.
4. Set capacity in percent
Press in the blue eld against Manual capacity.
Set the capacity to the required percentage.
Press OK.
90 Capacity controller RS8GG602 © Danfoss 2015-03 AK-PC 781
Page 91

5. Regulating functions
This section describes how the dierent functions work
AK-PC 781 Capacity controller RS8GG602 © Danfoss 2015-03 91
Page 92

Suction group
Controlling sensor selection
Depending on use, the capacity distributor can regulate according
to the suction pressure P0, a media temperature S4 or separate
control pressure Pctrl in a dierent refrigeration circuit, e.g. cascade system.
Cap. Ctrl sensor = P0 / S4 /Pctrl
Example 1 – P0
Example 2 – S4 media sensor
Parallel compression
(Only on CO2 system and control of receiver pressure)
If the controller is to control an IT compressor for parallel compression, the following regulation settings will be required:
• The system type must be set to LT
• The regulation sensor must be set to Po (the signal received from
the receiver - Prec).
Handling of sensor error
Cap. Ctrl. Sensor = P0
When P0 is used as the regulating sensor, an error in the signal will
mean that regulation continues with 50% cutin in daily operation
and 25% cut-in at night, but for a minimum of one step.
Cap. Ctrl. Sensor = S4
Provided that S4 is used as a regulating sensor, an error in this sensor will mean that regulation continues from the P0 signal, but in
accordance with a reference that lies 5K under the real reference.
If there is an error on both S4 and P0, regulation will continue with
50% cut-in in daily operations and 25% of cut-in in night operations, but for a minimum of one step.
When the controlling sensor is selected as S4, P0 is used as a safety
function for low suction pressure and will ensure disconnection of
compressor capacity (frost protection).
Example 3 – Pctrl sensor
Cap. Ctrl. Sensor = Pctrl
When Pctrl is used as a controlling sensor, an error in this sensor
will mean that regulation continues after the P0 signal, but in
accordance with a reference that lies 5 K under the real reference.
If there is an error on both Pctrl and P0, regulation will continue
with e.g. 50% cut-in in daily operations and e.g. 25% cut-in in
night operations, but for a minimum of one step.
When Pctrl is used as controlling sensor, a refrigerant type for this
pressure transmitter must be set, e.g. CO2.
P0 is used as a safety function against insucient suction pressure
and will ensure disconnection of compressor capacity.
On cascade systems the signal from Pctrl can be used by both the
high-pressure and low-pressure controls either for the controlling
sensor or high-pressure monitoring.
92 Capacity controller RS8GG602 © Danfoss 2015-03 AK-PC 781
Page 93

Reference
The reference for the regulation can be dened in 2 ways:
Either
P0Ref = P0 setting + P0 optimization + night displacement
or
P0Ref = P0 setting + night displacement + Ext. Ref
P0 setting
A basic value for the suction pressure is set.
Forced operation of the compressor capacity in the suction
group
A forced operation of the capacity can be carried out which
disregards the normal regulation.
Depending on the selected form of forced operation, the safety
functions will be cancelled.
Forced operation via overload of requested capacity
The control is set to manual and the desired capacity is set in % of
the possible compressor capacity.
P0 optimization
This function displaces the reference so that regulation will not
take place with a lower suction pressure than required.
The function cooperates with controllers on the individual
refrigeration appliances and a system manager. The system
manager obtains data from the individual regulations and adapts
the suction pressure to the optimum energy level. The function is
described in the manual for the System manager.
With this function you can read which appliance is most heavily
loaded at the moment as well as the displacement allowed for the
suction pressure reference.
Night displacement
The function is used to change the suction pressure reference for
night time operation as an energy saving function.
With this function the reference can be displaced by up to 25 K
in positive or negative direction. (When you displace to a higher
suction pressure, a positive value is set).
Displacement can be activated in three ways:
• Signal on an input
• From a master gateway’s override function
• Internal time schedule
The “night displacement” function should not be used when
regulation with the override function “P0-optimisation” is performed.
(Here the override function will itself adapt the suction pressure to the
max. permissible).
Forced operation via overload of digital outlets
The individual outputs can be set to MAN ON or MAN OFF in the
software. The control function disregards this but an alarm is sent
out that the outlet is being overridden.
Forced operation via change-over switches
If the forced operation is done with the switch-over on the front of
an expansion model, this is not registered by the control function and no alarm is sounded. The controller continues to run and
couples with the other relays.
If a short change in the suction pressure is needed (for example,
up to 15 minutes in connection with defrosting) the functions can
be applied. Here the PO-optimisation will not have time to compensate for the change.
Override with a 0 - 10 V signal
When a voltage signal is connected to the controller the reference
can be displaced. In the setup it is dened how big a displacement
is to take place at max. signal (10 V) and at min. signal.
Limitation of reference
To safeguard yourself against a too high or too low regulation
reference, a limitation of the reference must be set.
P0 ref
Max.
Min.
AK-PC 781 Capacity controller RS8GG602 © Danfoss 2015-03 93
Page 94

Capacity control of compressors
PI-control and control zones
AK-PC 781 can control up to 8 compressors. Each compressor can
have up to 3 unloaders. One or two of the compressors can be
equipped with speed regulation.
The calculation of the requested compressor capacity takes place
on the basis of a PI control, but the set up is carried out in the
same way as for a neutral zone which is divided into 5 dierent
control zones as shown in below sketch.
Suction pressure P0
The width of some of the zones can be set via the settings “+ Zone
K”, “NZ K” and “- Zone K”.
Furthermore it is possible to adjust zone timers which is equal to
the Tn integration time for the PI controller whenever the suction
pressure is in the zone in question (please see sketch above).
In the “+ Zone” and “++ Zone” the controller will normally increase
the requested capacity as the suction pressure is above the
set point. But if the suction pressure is decreasing very fast the
requested capacity might decrease also in these zones.
In the “- Zone” and “-- Zone” the controller will normally decrease
the requested capacity as the suction pressure is below the
set point. But if the suction pressure is increasing very fast the
requested capacity might increase also in these zones.
Change capacity
The controller will cutin or cutout capacity based on these basic
rules:
Increase capacity:
The capacity distributor will start extra compressor capacity as
soon as the requested capacity has increased to a value, which
allows the next compressor step to start. Referring to below
example - a compressor step is added as soon as there is “Room”
for this compressor step below the requested capacity curve.
Decrease capacity:
The capacity distributor will stop compressor capacity as soon
as the requested capacity has decreased to a value, which allows
the next compressor to stop. Referring to below example - a
compressor step is stopped as soon as there is no more “Room” for
this compressor step above the requested capacity curve.
Example:
4 compressor of equal size - The capacity curve will look like this
By setting a zone timer to a higher value will make the PI controller
slower in this zone and by setting the zone timer lower will make
the PI controller faster in this zone.
The amplication factor Kp is adjusted as parameter ”Kp Po”
In the neutral zone the controller is only allowed to increase or
decrease the capacity by means of speed control and/or switching
of unloader valves.
In the other zones the controller is also allowed to increase/
decrease capacity by means of starting and stopping compressors.
Operation time rst step
At start-up the refrigeration system must have time to be stable
before the PI controller takes over the control. For this purpose
at start-up of a plant a limitation is made of the capacity so that
only the rst capacity step will cutin after a set period (to be set via
"runtime rst step").
Requested capacity
The readout “Requested capacity” is the output from the PI
controller and it shows the actual requested compressor capacity
by the PI controller. The rate of change in the requested capacity
depends upon in which zone the pressure is and whether the
pressure is stable or whether it is constantly changing.
Cut-out of the last compressor stage:
Normally, the last compressor step will only be cut-out when the
required capacity is 0% and the suction pressure is at "-Zone" or
in "—Zone"
Pump down function:
To avoid too many compressor starts/stops with low load, it is possible to dene a pump down function for the last compressor.
If the pump down function is used, the compressors will be cutout when the actual suction pressure is down to the congured
pump down limit.
Note that the congured pump down limit should be set higher
than the congured safety limit for low suction pressure "Min Po".
The Integrator is looking at the deviation between the set point
and the current pressure only and increases/reduces the requested
capacity correspondingly. The amplication factor Kp on the other
hand only looks at the temporary pressure changes.
94 Capacity controller RS8GG602 © Danfoss 2015-03 AK-PC 781
Page 95

Dynamic extension of the neutral zone
All refrigeration systems have a dynamic response time when
starting and stopping compressors. In order to avoid that the
controller will start/stop compressors shortly after each other, the
controller must be allowed some extra time after a compressor
start/stop to see the eect of the previous change in running
capacity.
In order to achieve this, a dynamic extension of the zones is
added.
The zones will be extended for a short period of time when
starting or stopping a compressor. By extending the zones the
PI controller will be slowed down in a short period of time after a
change in compressor capacity.
The amplitude of the zone extension depends upon the actual
running compressor capacity and upon the size of the compressor
step which is being stopped/started. The amplitude of the zone
extension is bigger when running with low compressor capacity
and when starting/stopping big compressor capacity steps.
However the time period for the zone extension is constant – after
a xed time period after a compressor start/stop the dynamic
zone extension is reduced to 0.
Via the “Minimize number of couplings” setting it is possible to
inuence how big the amplitude of the dynamic zone extension
should be in order to minimize the cycling of the compressors.
By setting “Minimize number of couplings” to “No reduction” there
will be no dynamic extension of the zones.
By setting “Minimize number of couplings” to “Low”, “Medium” or
“High” the dynamic extension of the zones will be activated. The
amplitude of the zone extension will be highest when “Minimize
number of couplings” is set to “High”. Please refer to the next
sketch which shows an example with 6 compressor steps and with
“Minimize number of couplings” set to “High”. Please also note that
the dynamic extension of the zones is highest at low compressor
capacity.
“Minimize number of couplings” = “High”
Actual band
As a consequence of the dynamic extension of the zones the
suction pressure might very well change zone for a period of
time when the controller is starting/stopping a compressor i.e.
the suction pressure is in the +Zone, but as the controller starts
a compressor, the zones are extended for a period of time and
during this period of time the suction pressure will be in the NZ.
In the controller the readout “Actual band” will show in which zone
the PI controller is operating – this includes the extension of the
zones.
The dynamic expansion of the neutral zone is not used when one
of the compressors in the group is speed-regulated.
AK-PC 781 Capacity controller RS8GG602 © Danfoss 2015-03 95
Page 96

Capacity distribution methods
The capacity distributor can work based on 2 distribution
principles.
Coupling pattern – Cyclical operation:
This principle is used if all compressors are of the same type and
size.
The compressor cuts-in and cuts-out in accordance with the "First
In First Out" principle (FIFO) to equalise operating hours between
the compressors.
Speed-regulated compressors will always be cut in rst, and the
variable capacity is used to ll capacity gaps between the subsequent steps.
Timer restrictions and safety cut outs
If a compressor is prevented from starting because it is “hanging”
on the restart timer or is safety cut out, this step is replaced by
another compressor.
Operating time equalisation
The operating hour equalizing is carried out between compressors
of the same type with the same total capacity.
-At the dierent startups the compressor with the lowest number
of operating hours will be started rst.
- At the dierent stops the compressor with the highest number of
operating hours will be stopped rst.
- For compressors with several steps, the operating time equalizing
is carried out between the compressors’ main steps.
Coupling pattern – Best t operation
This principle is used if the compressors are of dierent sizes.
The capacity distributor will cut-in or cut-out the compressor
capacity in order to ensure the least possible capacity jump.
Speed-regulated compressors will always be cut in rst, and the
variable capacity will be used to ll capacity gaps between the
subsequent steps.
Timer restrictions and safety cut outs
If a compressor is prevented from starting because it is “hanging”
on the restart timer or is safety-cut out, this step is replaced by
another compressor or another combination.
- The left column shows the operating hours, according to which
the controller equalises.
- The middle column shows (as a percentage) to what extent
the individual compressor has been activated within the last
24hours.
- The right column shows the compressor's current operating time.
The value should be reset when the compressor is replaced.
96 Capacity controller RS8GG602 © Danfoss 2015-03 AK-PC 781
Page 97

Power pack types – compressor combinations
The controller is able to control power packs with up to 8
compressors of various types:
- One or two speed controlled compressor
- Capacity controlled piston compressors with up to 3 unloader
valves
- Single step compressors – piston
In appendix A there is a more detailed description of the coupling
patterns for the individual compressor applications with associated examples.
The following is a description of some general rules for handling
capacity-regulated compressors, speed-regulated compressors
and also for two speed-regulated compressors.
Capacity-regulated compressors with unload valves
"Unloader control mode" determines how the capacity distributor
should handle these compressors.
The chart below shows the compressor combination which the
controller is capable of controlling. The chart also shows which
coupling pattern can be set for the individual compressor combinations.
Combination Description Cou-
One-step compressors. *1 x x
A compressor with an unload
valve, combined with one-step
compressors. *2
Two compressors with unload
valves, combined with one-step
compressors. *2
All compressors with unload
valves. *2
A speed-regulated compressor combined with one-step
compressors. *1 and *3
A speed-regulated compressor combined with several
compressors with unload valves.
*2 and *3
Two speed-regulated compressors combined with one-step
compressors *4
Screw compressor combined
with one-step compressors
pling
pattern
Cyclical
x
x
x
x x
x
x x
x
Best t
Unloader control mode = 1
Here the capacity distributor allows only one of the compressors
to be unloaded at a time. The advantage of this setting is that it
avoids operating with several compressors unloaded , which is not
energy ecient.
For example:
Two capacity-regulated compressors of 20 kW, each with 2 unload
valves, cyclical coupling pattern.
• For decreasing capacity, the compressor with the most operating
hours is unloaded (C1).
• When C1 is completely unloaded, it is cut-out before compressor
C2 is unloaded.
Unloader control mode = 2
Here the capacity distributor allows two compressors to be unloaded while capacity is decreasing.
The advantage of this setting is it reduces the number of compressor start/stops.
For example:
Two capacity-regulated compressors of 20 kW, each with 2 unload
valves, cyclical coupling pattern.
Two screw compressors combined with one-step compressors
Three screw compressors
combined with one-step compressors
x
x
• For decreasing capacity, the compressor with the most operating
hours is unloaded (C1).
• When C1 is completely unloaded , compressor C2 with one-step
The following types of screw compressor may be used for regulation
Screw with unloader
0%, 50%, 100%
*1) For a cyclical coupling pattern, the one-step compressors must be the same size.
*2) For compressors with unload valves, it is generally true that they must have the
same size, the same number of unload valves (max 3) and the same sized main
steps. If compressors with unload valves are combined with one-step compressors, all compressors should be the same size.
*3) Speed-regulated compressors can have dierent sizes in relation to subsequent
compressors.
*4) When two speed-regulated compressors are used, they must have the same
frequency range.
For cyclical coupling patterns, the two speed-regulated compressors should be
the same size and the subsequent one-step compressors should also be the same
size.
Screw with two unloaders
0, 33%, 66%, 100%
Screw with three unloaders + PWM
0 - 100%
is unloaded before C1 is cut out.
AK-PC 781 Capacity controller RS8GG602 © Danfoss 2015-03 97
Page 98

Speed control compressors:
The controller is able to use speed control on the leading
compressor in dierent compressor combinations. The variable
part of the speed controlled compressor is used to ll in capacity
gaps of the following compressor steps.
General regarding handling:
One of the dened capacity steps for the compressor regulation
may be connected to a speed control unit that may be a
frequency converter type VLT, for example.
An output is connected to the frequency converter’s ON/OFF
input and at the same time an analog output ”AO” is connected to
the frequency converter’s analog input.
The ON/OFF signal will start and stop the frequency converter and
the analog signal will indicate the speed.
It is only the compressor dened as compressor 1 (1+2) that can
be speed controlled.
When the step is in operation it will consist of a xed capacity
and a variable capacity. The xed capacity will be the one that
corresponding to the mentioned min. speed and the variable
one will lie between the min. and max. speed. To obtain the
best regulation the variable capacity must be bigger than the
subsequent capacity steps it has to cover during the regulation.
If there are major short-term variations in the plant’s capacity
requirement it will increase the demand for variable capacity.
This is how you cut the step in and out:
Controlling – increasing capacity
If the need for capacity becomes larger than “Max. Speed” then
the subsequent compressor step will be cut-in. At the same time,
the speed on the capacity step will be reduced so the capacity
is reduced with a size that corresponds to exactly the cut-in
compressor step. Thereby a completely "frictionless" transition is
achieved without capacity holes (refer also to sketch).
Controlling – decreasing capacity
If the capacity requirement becomes less than “Min. speed” then
the subsequent compressor step will be cut-out. At the same
time, the speed on the capacity step is increased so the capacity
is increased with a size that corresponds to exactly the cut-out
compressor step.
Cut-out
The capacity step will be cut-out when the compressor has
reached “Min. Speed” and the requested capacity has dropped to
1%.
Timer restriction on speed controlled compressor
If a speed controlled compressor is not allowed to start due to a
timer restriction, no other compressor is allowed to start. When
the timer restriction has expired the speed controlled compressor
will start.
Cutin
The speed-controlled compressor will always be the rst to start
and the last to stop. The frequency converter will be started when
a capacity requirement corresponding to the mentioned ”Start
speed” arises (the relay output changes to ON and the analog
output is supplied with a voltage corresponding to this speed).
It is now up to the frequency converter to bring the speed up to
”Start speed”.
The capacity step will now be cut in and the required capacity
determined by the controller.
The start speed always ought to be set so high that a fast
lubrication of the compressor is obtained during the start.
Safety cutout on speed controlled compressor
If the speed controlled compressor is cutout on safety other
compressors are allowed to start. As soon as the speed controlled
compressor is ready to start it will be the rst compressor to start.
As mentioned before the variable part of the speed capacity
should be bigger than the capacity of the following compressor
steps in order to achieve a capacity curve without “holes”. In order
to illustrate how the speed control will react at dierent pack
combinations a couple of examples will be given here:
98 Capacity controller RS8GG602 © Danfoss 2015-03 AK-PC 781
Page 99

a) Variable capacity bigger than following compressor steps:
When the variable part of the speed controlled compressor is
bigger than the following compressors there will be no “holes” in
the capacity curve.
Example:
1 speed controlled compressor with a nominal capacity at 50Hz of
10kw - Variable speed range 30 – 90Hz
2 one step compressors of 10 kW
Fixed capacity = 30 HZ / 50 HZ x 10 kW = 6 kW
Variable capacity = 60 HZ / 50Hz x 10 kW = 12 kW
The capacity curve will look like this:
As the variable part of the speed controlled compressor is bigger
than the following compressor steps, the capacity curve will be
without holes.
1) The speed controlled compressor will be cutin when the
requested capacity has reached the start speed capacity.
2) The speed controlled compressor will increase speed until it
reaches max speed at a capacity of 18 kW.
3) The one step compressor C2 of 10 kW is cut in and the speed on
C1 is reduced too so that it corresponds to 8kW (40Hz)
4) The speed controlled compressor will increase speed until the
total capacity reaches 28 kw at max speed
5) The one step compressor C3 of 10 kW is cut in and the speed on
C1 is reduced too so that it corresponds to 8kW (40Hz)
6) The speed controlled compressor will increase speed until the
total capacity reaches 38 kw at max speed
7) When reducing capacity the one step compressors will be cut
out when the speed on C1 is at minimum
b) Variable part smaller than following compressor steps:
If the variable part of the speed controlled compressor is smaller
than the following compressors there will be “holes” in the
capacity curve.
Example:
1 speed controlled compressor with a nominal capacity at 50Hz of
20kw - Variable speed range 25 – 50Hz
2 one step compressors of 20 kW
Fixed capacity = 25 HZ / 50 HZ x 20 kW = 10 kW
Variable capacity = 25 HZ / 50Hz x 20 kW = 10 kW
The capacity curve will look like this:
As the variable part of the speed controlled compressor is smaller
than the following compressor steps the capacity curve will have
some holes that can not be lled out by the variable capacity.
1) The speed controlled compressor will be cutin when the
requested capacity has reached the start speed capacity.
2) The speed controlled compressor will increase speed until it
reaches max speed at a capacity of 20 kw.
3) The speed controlled compressor will stay at max speed until
the requested capacity has increased to 30 kW.
4) The one step compressor C2 of 20 kW is cut in and the speed
on C1 is reduced to min. so that it corresponds to 10kW (25Hz).
Total capacity = 30 kW.
5) The speed controlled compressor will increase speed until the
total capacity reaches 40 kW at max speed
6) The speed controlled compressor will stay at max speed until
the requested capacity has increased to 50 kW.
7) The one step compressor C3 of 20kW is cut in and the speed
on C1 is reduced to min. so that it corresponds to 10kW (25Hz).
Total capacity = 50 kW
8) The speed controlled compressor will increase speed until the
total capacity reaches 60 kw at max speed
9) When reducing capacity the one step compressors will be cut
out when the speed on C1 is at minimum speed.
AK-PC 781 Capacity controller RS8GG602 © Danfoss 2015-03 99
Page 100

Two speed-regulated compressors
The controller is capable of regulating the speed of two compressors of the same or dierent sizes. The compressors can be combined with one-step compressors of the same or dierent sizes,
depending on the choice of coupling pattern.
General regarding handling:
Generally, the two speed-regulated compressors are managed
according to the same principle as for one speed-regulated compressor. The advantage of using two speed-regulated compressors is that it allows for a very low capacity, which is an advantage
for low loads. At the same time, it produces a very large, variable
regulating area.
Compressor 1 and 2 both have their own relay outlets to start/
stop separate frequency converters, for example of type VLT.
Both frequency converters use the same analog output signal AO
which is connected to the frequency converters’ analog signal input. The relay outputs will start and stop the frequency converter
and the analog signal will indicate the speed.
The precondition for using this regulating method is that both
compressors have the same frequency range.
The speed-regulated compressors will always be the rst to start
and the last to stop.
Controlling – decreasing capacity
The speed-regulated compressors will always be the last compressors running.
When the capacity requirement during cyclical operations becomes less than "Min. speed" for both compressors, the speedregulated compressor with the most operating hours will be
cut-out. At the same time, the speed of the last speed-regulated
compressor increases so that the capacity is increased to the level
that matches the cut-out compressor’s step.
Cut-in
The rst speed-regulated compressor will be started when there is
a capacity requirement which matches the setting.
The "Start speed" (relay outlet changes to on and the analog outlet is supplied with a voltage that matches this speed). It is now
up to the frequency converter to bring the speed up to the "Start
speed".
The capacity step will now be cut in and the desired capacity
determined by the controller.
The start speed should always be set so high that a good lubrication of the compressor is quickly reached during start-up.
For a cyclical coupling pattern, the subsequent speed-regulated
compressor will be cut in when the rst compressor runs at max.
speed and the desired capacity has reached a value that allows
the cut-in of the next speed-regulated compressor at start speed.
Afterwards, both compressors will be cut in together and will run
in parallel. The following one-step compressors will be cut in and
out in accordance with the selected coupling pattern.
Cutout
The last speed-regulated compressor will be cut-out when the
compressor has reached ”Min. speed” and the capacity requirement (desired capacity) has decreased to under 1% (see however
the section on the pump down function).
Timer restriction and safety cut-outs
Timer limits and safety cut-outs on speed-regulated compressors should be managed in accordance with the general rules for
individual coupling patterns.
Short descriptions and examples are given below of the handling
of two speed-regulated compressors for the individual coupling
patterns. For a more detailed description, refer to the appendix at
the end of the chapter.
Cyclical operation
For cyclical operations, both speed-regulated compressors will
have the same size and operating hours will be equalized between the compressors in accordance with the First-in-First-Out
Principle (FIFO). The compressor with the least operating hours
will be the rst to start. The following speed-regulated compressor
will be cut in when the rst compressor runs at max. speed and
the desired capacity has reached a value that allows the cut-in of
the next speed-regulated compressor at start speed. Afterwards,
both compressors will be cut in together and they will run in
parallel. The following one-step compressors will be cut in and out
in accordance with First-In-First-Out principle in order to equalise
operating hours.
100 Capacity controller RS8GG602 © Danfoss 2015-03 AK-PC 781
 Loading...
Loading...