

Page 1

MoBL-USB™ FX2LP18 USB Microcontroller
1.0 CY7C68053 Features
• USB 2.0 – USB-IF High-Speed and Full-Speed Compliant
(TID# 40000188)
• Single-chip integrated USB 2.0 transceiver, smart SIE, and
enhanced 8051 microprocessor
• Ideal for mobile applications (cell phone, smart phones,
PDAs, MP3 players)
— Ultra low power
— Suspend current: 20 µA (typical)
• Software: 8051 code runs from:
— Internal RAM, which is loaded from EEPROM
• 16 kBytes of on-chip Code/Data RAM
• Four programmable BULK/INTERRUPT/ISOCHRONOUS
endpoints
— Buffering options: double, triple, and quad
• Additional programmable (BULK/INTERRUPT) 64-byte
endpoint
• 8- or 16-bit external data interface
• Smart Media Standard ECC generation
• GPIF (General Programmable Interface)
— Allows direct connection to most parallel interface
— Programmable waveform descriptors and configuration
registers to define waveforms
— Supports multiple Ready (RDY) inputs and Control (CTL)
outputs
CY7C68053
• Integrated, industry standard enhanced 8051
— 48 MHz, 24 MHz, or 12 MHz CPU operation
— Four clocks per instruction cycle
— Three counter/timers
— Expanded interrupt system
— Two data pointers
• 1.8V core operation
• 1.8V - 3.3V IO operation
• Vectored USB interrupts and GPIF/FIFO interrupts
• Separate data buffers for the Set-up and Data portions of a
CONTROL transfer
• Integrated I
• Four integrated FIFO’s
— Integrated glue logic and FIFO’s lower system cost
— Automatic conversion to and from 16-bit buses
— Master or slave operation
— Uses external clock or asynchronous strobes
— Easy interface to ASIC and DSP IC’s
• Available in Industrial temperature grade
• Available in one lead-free package with up to 24 GPIO’s
— 56-pin VFBGA (24 GPIO’s)
2
C™ controller, runs at 100 or 400 kHz
Block Diagram
24 MHz
Ext. XTAL
High-performance micro
using standard tools
with lower-power options
MoBL-USB FX2LP18
2
I
C
Master
Additional I/Os (24)
GPIF
4 KB
FIFO
RDY (2)
CTL (3)
8/16
Abundant I/O
General
Programmable I/F
To Baseband processors/
Application processors/
ASICS/DSPs
Up to 96 MBytes/sec
Burst Rate
Integrated
Full- and High-speed
XCVR
D+
D–
VCC
1.5K
Connected for
Full-Speed
USB
XCVR
Enhanced USB Core
Simplifies 8051 Code
2.0
x20
PLL
/0.5
/1.0
/2.0
CY
Smart
USB
1.1/2.0
Engine
8051 Core
12/24/48 MHz,
Four Clocks/Cycle
16 KB
RAM
“Soft Configuration”
Easy Firmware Changes
ECC
Address (16)/ Data Bus(8)
FIFO and Endpoint Memory
(master or slave operation)
Cypress Semiconductor Corporation • 198 Champion Court • San Jose, CA 95134-1709 • 408-943-2600
Document # 001-06120 Rev *F Revised September 9th 2006
[+] Feedback
Page 2

CY7C68053
Cypress Semiconductor Corporation’s MoBL-USB FX2LP18
(CY7C68053) is a low-voltage (1.8 volt) version of the EZ-
®
USB
FX2LP (CY7C68013A), which is a highly integrated,
low-power USB 2.0 microcontroller. By integrating the USB 2.0
transceiver, serial interface engine (SIE), enhanced 8051
microcontroller, and a programmable peripheral interface in a
single chip, Cypress has created a very cost-effective solution
that provides superior time-to-market advantages with low
power to enable bus powered applications.
The ingenious architecture of MoBL-USB FX2LP18 results in
data transfer rates of over 53 Mbytes per second, the
maximum allowable USB 2.0 bandwidth, while still using a lowcost 8051 microcontroller in a package as small as a 56
VFBGA (5 mm x 5 mm). Because it incorporates the USB 2.0
transceiver, the MoBL-USB FX2LP18 is more economical,
providing a smaller footprint solution than USB 2.0 SIE or
external transceiver implementations. With MoBL-USB
FX2LP18, the Cypress Smart SIE handles most of the USB 1.1
and 2.0 protocol in hardware, freeing the embedded microcontroller for application-specific functions and decreasing development time to ensure USB compatibility.
The General Programmable Interface (GPIF) and
Master/Slave Endpoint FIFO (8- or 16-bit data bus) provide an
easy and glueless interface to popular interfaces such as
UTOPIA, EPP, PCMCIA, and most DSP/processors.
The 56VFBGA package is defined for the family.
The MoBL-USB FX2LP18 is also referred to as FX2LP18 in
this document.
ATA,
2.0 Applications
There are a wide variety of applications for the MoBL-USB
FX2LP18. It is used in cell phone, smart phones, PDAs, and
MP3 players, to name a few.
The ‘Reference Designs’ section of the Cypress web site
provides additional tools for typical USB 2.0 applications. Each
reference design comes complete with firmware source and
object code, schematics, and documentation. For more information, visit http://www.cypress.com.
3.0 Functional Overview
The functionality of this chip is described in the sections below.
3.1 USB Signaling Speed
FX2LP18 operates at two of the three rates defined in the USB
Specification Revision 2.0, dated April 27, 2000.
• Full-speed, with a signaling bit rate of 12 Mbps
• High-speed, with a signaling bit rate of 480 Mbps.
FX2LP18 does not support the low-speed signaling mode of
1.5 Mbps.
3.2 8051 Microprocessor
The 8051 microprocessor embedded in the FX2LP18 family
has 256 bytes of register RAM, an expanded interrupt system,
and three timer/counters.
3.2.1 8051 Clock Frequency
FX2LP18 has an on-chip oscillator circuit that uses an external
24 MHz (±100-ppm) crystal with the following characteristics:
• Parallel resonant
• Fundamental mode
• 500 µW drive level
• 12 pF (5% tolerance) load capacitors
An on-chip PLL multiplies the 24 MHz oscillator up to 480 MHz,
as required by the transceiver/PHY; internal counters divide it
down for use as the 8051 clock. The default 8051 clock
frequency is 12 MHz. The clock frequency of the 8051 can be
changed by the 8051 through the CPUCS register, dynamically.
Figure 3-1. Crystal Configuration
24 MHz
C1
12 pf
20 × PLL
12 pF capacitor values assumes a trace capacitance
of 3 pF per side on a four-layer FR4 PCA
The CLKOUT pin, which can be tri-stated and inverted using
internal control bits, outputs the 50% duty cycle 8051 clock, at
the selected 8051 clock frequency — 48, 24, or 12 MHz.
3.2.2 Special Function Registers
Certain 8051 Special Function Register (SFR) addresses are
populated to provide fast access to critical FX2LP18 functions.
These SFR additions are shown in Ta bl e 3- 1. Bold type
indicates non-standard, enhanced 8051 registers. The two
SFR rows that end with ‘0’ and ‘8’ contain bit-addressable
registers. The four IO ports A – D use the SFR addresses used
in the standard 8051 for ports 0 – 3, which are not implemented
in FX2LP18. Because of the faster and more efficient SFR
addressing, the FX2LP18 IO ports are not addressable in
external RAM space (using the MOVX instruction).
C2
12 pf
Document # 001-06120 Rev *F Page 2 of 39
[+] Feedback
Page 3

CY7C68053
Table 3-1. Special Function Registers
x 8x 9x Ax Bx Cx Dx Ex Fx
0
1SP EXIF
2DPL0 MPAGE OEA
3DPH0
4 DPL1
5 DPH1 OED
6 DPS
7PCON
8 TCON SCON0 IE IP T2CON EICON EIE EIP
9TMOD SBUF0
ATL0AUTOPTRH1 EP2468STAT EP01STAT RCAP2L
BTL1AUTOPTRL1 EP24FIFOFLGS GPIFTRIG RCAP2H
CTH0Reserved EP68FIFOFLGS TL2
DTH1AUTOPTRH2 GPIFSGLDATH TH2
E CKCON AUTOPTRL2 GPIFSGLDATLX
F Reserved AUTOPTRSET-UP GPIFSGLDATLNOX
IOA IOB IOC IOD SCON1 PSW ACC B
INT2CLR IOE SBUF1
OEB
OEC
OEE
3.3 I2C™ Bus
FX2LP18 supports the I2C bus as a master only at 100-/400KHz. SCL and SDA pins have open-drain outputs and
hysteresis inputs. These signals must be pulled up to either
V
CC
to V
or V
CC_IO
, even if no I2C device is connected.(Connecting
CC_IO
may be more convenient.)
3.4 Buses
This 56-pin package has an 8- or 16-bit ‘FIFO’ bidirectional
data bus, multiplexed on IO ports B and D.
3.5 USB Boot Methods
During the power-up sequence, internal logic checks the I2C
port for the connection of an EEPROM whose first byte is
0xC2. If found, it boot-loads the EEPROM contents into
internal RAM (0xC2 load). If no EEPROM is present, an
external processor must emulate an I
2
C slave. The FX2LP18
does not enumerate using internally stored descriptors (for
example, Cypress’ VID/PID/DID is not used for enumer-
[1]
ation).
3.6 ReNumeration™
Because the FX2LP18’s configuration is soft, one chip can
take on the identities of multiple distinct USB devices.
When first plugged into USB, the FX2LP18 enumerates
automatically and downloads firmware and USB descriptor
tables over the USB cable. Next, the FX2LP18 enumerates
again, this time as a device defined by the downloaded information. This patented two-step process, called
ReNumeration, happens instantly when the device is
Note
1. The I
2
C bus SCL and SDA pins must be pulled up, even if an EEPROM is not connected. Otherwise this detection method does not work properly.
plugged in, with no hint that the initial download step has
occurred.
Two control bits in the USBCS (USB Control and Status)
register control the ReNumeration process: DISCON and
RENUM. To simulate a USB disconnect, the firmware sets
DISCON to 1. To reconnect, the firmware clears DISCON to 0.
Before reconnecting, the firmware sets or clears the RENUM
bit to indicate whether the firmware or the Default USB Device
handles device requests over endpoint zero: if RENUM = 0,
the Default USB Device handles device requests; if
RENUM = 1, the firmware does.
3.7 Bus-powered Applications
The FX2LP18 fully supports bus-powered designs by enumerating with less than 100 mA as required by the USB 2.0 specification.
3.8 Interrupt System
The FX2LP18 interrupts are described in this section.
3.8.1 INT2 Interrupt Request and Enable Registers
FX2LP18 implements an autovector feature for INT2. There
are 27 INT2 (USB) vectors. See the MoBL-USB™ Technical
Reference Manual (TRM) for more details.
3.8.2 USB Interrupt Autovectors
The main USB interrupt is shared by 27 interrupt sources. To
save the code and processing time that is normally required to
identify the individual USB interrupt source, the FX2LP18
provides a second level of interrupt vectoring, called ‘Autovectoring.’ When a USB interrupt is asserted, the FX2LP18
Document # 001-06120 Rev *F Page 3 of 39
[+] Feedback
Page 4

CY7C68053
pushes the program counter onto its stack then jumps to
address 0x0043, where it expects to find a ‘jump’ instruction to
the USB interrupt service routine.
The FX2LP18 jump instruction is encoded as shown in
Tab le 3- 2.
Table 3-2. INT2 USB Interrupts
USB INTERRUPT TABLE FOR INT2
Priority INT2VEC Value Source Notes
1 00 SUDAV Set-up Data Available
2 04 SOF Start of Frame (or microframe)
3 08 SUTOK Set-up Token Received
4 0C SUSPEND USB Suspend request
5 10 USB RESET Bus reset
6 14 HISPEED Entered high-speed operation
7 18 EP0ACK FX2LP18 ACK’d the CONTROL Handshake
8 1C Reserved
9 20 EP0-IN EP0-IN ready to be loaded with data
10 24 EP0-OUT EP0-OUT has USB data
11 28 EP1-IN EP1-IN ready to be loaded with data
12 2C EP1-OUT EP1-OUT has USB data
13 30 EP2 IN: buffer available. OUT: buffer has data
14 34 EP4 IN: buffer available. OUT: buffer has data
15 38 EP6 IN: buffer available. OUT: buffer has data
16 3C EP8 IN: buffer available. OUT: buffer has data
17 40 IBN IN-Bulk-NAK (any IN endpoint)
18 44 Reserved
19 48 EP0PING EP0 OUT was Pinged and it NAK’d
20 4C EP1PING EP1 OUT was Pinged and it NAK’d
21 50 EP2PING EP2 OUT was Pinged and it NAK’d
22 54 EP4PING EP4 OUT was Pinged and it NAK’d
23 58 EP6PING EP6 OUT was Pinged and it NAK’d
24 5C EP8PING EP8 OUT was Pinged and it NAK’d
25 60 ERRLIMIT Bus errors exceeded the programmed limit
26 64
27 68 Reserved
28 6C Reserved
29 70 EP2ISOERR ISO EP2 OUT PID sequence error
30 74 EP4ISOERR ISO EP4 OUT PID sequence error
31 78 EP6ISOERR ISO EP6 OUT PID sequence error
32 7C EP8ISOERR ISO EP8 OUT PID sequence error
If Autovectoring is enabled (AV2EN = 1 in the INTSET-UP
register), the FX2LP18 substitutes its INT2VEC byte.
Therefore, if the high byte (‘page’) of a jump-table address is
preloaded at location 0x0044, the automatically-inserted
INT2VEC byte at 0x0045 directs the jump to the correct
address out of the 27 addresses within the page.
Document # 001-06120 Rev *F Page 4 of 39
[+] Feedback
Page 5

Figure 3-2. Reset Timing Plots
CY7C68053
RESET#
V
IL
1.8V
1.62V
V
CC
0V
T
RESET
Power on Reset
3.9 Reset and Wakeup
The reset and wakeup pins are described in detail in this
section.
3.9.1 Reset Pin
The input pin, RESET#, resets the FX2LP18 when asserted.
This pin has hysteresis and is active LOW. When a crystal is
used with the CY7C68053, the reset period must allow for the
stabilization of the crystal and the PLL. This reset period must
be approximately 5 ms after VCC has reached 3.0V. If the
crystal input pin is driven by a clock signal the internal PLL
stabilizes in 200 µs after VCC has reached 3.0V
shows a power on reset condition and a reset applied during
operation. A power on reset is defined as the time reset is
asserted while power is being applied to the circuit. A powered
reset is defined to be when the FX2LP18 has previously been
powered on and operating and the RESET# pin is asserted.
Cypress provides an application note which describes and
recommends power on reset implementation and can be found
on the Cypress web site. For more information on reset implementation for the MoBL-USB™ family of products, visit the
Cypress web site at http://www.cypress.com.
Table 3-3. Reset Timing Values
Condition T
Power on Reset with crystal 5 ms
Power on Reset with external
200 µs + Clock stability time
clock
Powered Reset 200 µs
3.9.2 Wakeup Pins
The 8051 puts itself and the rest of the chip into a power-down
mode by setting PCON.0 = 1. This stops the oscillator and PLL.
When WAKEUP is asserted by external logic, the oscillator
restarts, after the PLL stabilizes, and then the 8051 receives a
wakeup interrupt. This applies whether or not FX2LP18 is
connected to the USB.
[2]
RESET
. Figure 3-2
RESET#
V
IL
1.8V
V
CC
0V
T
RESET
Powered Reset
The FX2LP18 exits the power-down (USB suspend) state
using one of the following methods:
• USB bus activity (if D+/D– lines are left floating, noise on
these lines may indicate activity to the FX2LP18 and initiate
a wakeup)
• External logic asserts the WAKEUP pin
• External logic asserts the PA3/WU2 pin
The second wakeup pin, WU2, can also be configured as a
general purpose IO pin. This allows a simple external R-C
network to be used as a periodic wakeup source. Note that
WAKEUP is by default active LOW.
3.9.3 Lowering Suspend Current
Good design practices for CMOS circuits dictate that any
unused input pins must not be floating between V
Floating input pins will not damage the chip, but can substan-
and VIH.
IL
tially increase suspend current. To achieve the lowest suspend
current, any unused port pins must be configured as outputs.
Any unused input pins must be tied to ground. Some examples
of pins that need attention during suspend are:
• Port pins. For Port A, B, D pins, extra care must be taken in
shared bus situations.
— Completely unused pins must be pulled to V
GND.
CC_IO
or
— In a single-master system, the firmware must output en-
able all the port pins and drive them high or low, before
FX2LP18 enters the suspend state.
— In a multi-master system (FX2LP18 and another proces-
sor sharing a common data bus), when FX2LP18 is suspended, the external master must drive the pins high or
low. The external master may not let the pins float.
• CLKOUT. If CLKOUT is not used, it must be tri-stated during
normal operation, but driven during suspend.
• IFCLK, RDY0, RDY1. These pins must be pulled to V
or GND or driven by another chip.
CC_IO
• CTL0-2. If tri-stated via GPIFIDLECTL, these pins must be
pulled to V
• RESET#, WAKEUP#. These pins must be pulled to V
or GND or driven by another chip during suspend.
or GND or driven by another chip.
CC_IO
CC_IO
Note
2. If the external clock is powered at the same time as the CY7C680xx and has a stabilization wait period, it must be added to the 200 µs.
Document # 001-06120 Rev *F Page 5 of 39
[+] Feedback
Page 6

CY7C68053
Figure 3-3. FX2LP18 Internal Code Memory
FFFF
7.5 kBytes
USB regs and
4K FIFO buffers
E200
E1FF
0.5 kBytes RAM
Data
E000
.
.
.
3FFF
16 kBytes RAM
Code and Data
0000
3.10 Program/Data RAM
This section describes the FX2LP18 RAM.
3.10.1 Size
The FX2LP18 has 16 kBytes of internal program/data RAM.
No USB control registers appear in this space.
Memory maps are shown in Figure 3-3 and Figure 3-4.
3.10.2 Internal Code Memory
This mode implements the internal 16-kByte block of RAM
(starting at 0) as combined code and data memory. Only the
internal 16 kBytes and scratch pad 0.5 kBytes RAM spaces
have the following access:
• USB download
• USB upload
• Set-up data pointer
2
•I
C interface boot load
3.11 Register Addresses
Figure 3-4. Register Address Memory
FFFF
F000
EFFF
E800
E7FF
E7C0
E7BF
E780
E77F
E740
E73F
E700
E6FF
E500
E4FF
E480
E47F
E400
E3FF
E200
E1FF
E000
4 kBytes EP2-EP8
buffers
(8 x 512)
2 kBytes RESERVED
64 Bytes EP1IN
64 Bytes EP1OUT
64 Bytes EP0 IN/OUT
64 Bytes RESERVED
8051 Addressable Registers
(512)
Reserved (128)
128 Bytes GPIF Waveforms
Reserved (512)
512 Bytes
8051 xdata RAM
3.12 Endpoint RAM
This section describes the FX2LP18 Endpoint RAM.
3.12.1 Size
• 3 × 64 bytes (Endpoints 0, 1)
• 8 × 512 bytes (Endpoints 2, 4, 6, 8)
3.12.2 Organization
• EP0
• Bidirectional endpoint zero, 64-byte buffer
• EP1IN, EP1OUT
• 64-byte buffers: bulk or interrupt
• EP2, 4, 6, 8
• Eight 512-byte buffers: bulk, interrupt, or isochronous. EP4
and EP8 can be double buffered, while EP2 and 6 can be
double, triple, or quad buffered. For high-speed endpoint
configuration options, see Figure 3-5.
Document # 001-06120 Rev *F Page 6 of 39
3.12.3 Set-up Data Buffer
A separate 8-byte buffer at 0xE6B8-0xE6BF holds the set-up
data from a CONTROL transfer.
3.12.4 Endpoint Configurations (High-speed Mode)
Endpoints 0 and 1 are the same for every configuration.
Endpoint 0 is the only CONTROL endpoint, and endpoint 1 can
be either BULK or INTERRUPT. The endpoint buffers can be
configured in any one of the 12 configurations shown in the
[+] Feedback
Page 7

CY7C68053
vertical columns of Figure 3-5. When operating in full-speed
BULK mode only the first 64 bytes of each buffer are used. For
example, in high-speed the maximum packet size is 512 bytes,
but in full-speed it is 64 bytes. Even though a buffer is
configured to be a 512 byte buffer, in full-speed only the first
Figure 3-5. Endpoint Configuration
EP0 IN&OUT
EP1 IN
EP1 OUT
64
64
64
EP2
512
512
EP4
512
512
EP6
512
512
EP8
512
512
1
64
64
64
EP2
512
512
EP4
512
512
EP6
512
512
512
512
2
64
64
64
EP2
512
512
EP4
512
512
EP6
1024
1024
3
EP2
512
512
512
512
EP6
512
EP8
512
512
64
64
64
512
4
64
64
64
EP2
512
512
512
512
EP6
512
512
512
512
5
64 bytes are used. The unused endpoint buffer space is not
available for other operations. An example endpoint configuration is:
EP2–1024 double buffered; EP6–512 quad buffered
(column 8).
64
64
64
EP2
512
512
512
512
EP6
1024
1024
6
64
64
64
EP2
1024
1024
EP6
512
512
EP8
512
512
64
64
64
EP2
1024
1024
EP6
512
512
512
512
7
64
64
64
EP2
1024
1024
EP6
1024
1024
8
64
64
64
EP2
512
512
512
EP6
512
512
512
EP8
512
512
10
9
64
64
64
EP2
1024
1024
1024
1024
EP8
512
512
11
64
64
64
EP2
1024
1024
1024
1024
12
3.12.5 Default Full-Speed Alternate Settings
Table 3-4. Default Full-Speed Alternate Settings
[3, 4]
Alternate Setting 0 1 2 3
ep0 64 64 64 64
ep1out 0 64 bulk 64 int 64 int
ep1in 0 64 bulk 64 int 64 int
ep2 0 64 bulk out (2×) 64 int out (2×) 64 iso out (2×)
ep4 0 64 bulk out (2×) 64 bulk out (2×) 64 bulk out (2×)
ep6 0 64 bulk in (2×) 64 int in (2×) 64 iso in (2×)
ep8 0 64 bulk in (2×) 64 bulk in (2×) 64 bulk in (2×)
Notes
3. ‘0’ means ‘not implemented.’
4. ‘2×’ means ‘double buffered.’
Document # 001-06120 Rev *F Page 7 of 39
[+] Feedback
Page 8
3.12.6 Default High-Speed Alternate Settings
CY7C68053
Table 3-5. Default High-Speed Alternate Settings
[3, 4]
Alternate Setting 0 1 2 3
ep0 64 64 64 64
ep1out 0 512 bulk
ep1in 0 512 bulk
[5]
[5]
64 int 64 int
64 int 64 int
ep2 0 512 bulk out (2×) 512 int out (2×) 512 iso out (2×)
ep4 0 512 bulk out (2×) 512 bulk out (2×) 512 bulk out (2×)
ep6 0 512 bulk in (2×) 512 int in (2×) 512 iso in (2×)
ep8 0 512 bulk in (2×) 512 bulk in (2×) 512 bulk in (2×)
3.13 External FIFO Interface
The architecture, control signals, and clock rates are
presented in this section.
3.13.1 Architecture
The FX2LP18 slave FIFO architecture has eight 512-byte
blocks in the endpoint RAM that directly serve as FIFO
memories and are controlled by FIFO control signals (such as
IFCLK, SLCS#, SLRD, SLWR, SLOE, PKTEND, and flags).
In operation, some of the eight RAM blocks fill or empty from
the SIE while the others are connected to the IO transfer logic.
The transfer logic takes two forms: the GPIF for internally
generated control signals or the slave FIFO interface for externally controlled transfers.
In Slave (S) mode, the FX2LP18 accepts either an internally
derived clock or externally supplied clock (IFCLK, maximum
frequency 48 MHz) and SLCS#, SLRD, SLWR, SLOE,
PKTEND signals from external logic. When using an external
IFCLK, the external clock must be present before switching to
the external clock with the IFCLKSRC bit. Each endpoint can
individually be selected for byte or word operation by an
internal configuration bit, and a Slave FIFO Output Enable
signal (SLOE) enables data of the selected width. External
logic must insure that the output enable signal is inactive when
writing data to a slave FIFO. The slave interface can also
operate asynchronously, where the SLRD and SLWR signals
act directly as strobes, rather than a clock qualifier as in
synchronous mode. The signals SLRD, SLWR, SLOE and
PKTEND are gated by the signal SLCS#.
3.13.2 Master/Slave Control Signals
The FX2LP18 endpoint FIFO’s are implemented as eight
physically distinct 256x16 RAM blocks. The 8051/SIE can
switch any of the RAM blocks between two domains, the USB
(SIE) domain and the 8051-IO Unit domain. This switching is
instantaneous, giving zero transfer time between ‘USB FIFO’s’
and ‘Slave FIFO’s.’ Since they are physically the same
memory, no bytes are actually transferred between buffers.
At any given time, some RAM blocks are filling and emptying
with USB data under SIE control, while other RAM blocks are
available to the 8051 and/or the IO control unit. The RAM
blocks operate as single port in the USB domain, and dual port
in the 8051-IO domain. The blocks can be configured as
single, double, triple, or quad buffered as previously shown.
The IO control unit implements either an internal master (M for
master) or external master (S for Slave) interface.
In Master (M) mode, the GPIF internally controls
FIFOADR[1:0] to select a FIFO. The two RDY pins can be
used as flag inputs from an external FIFO or other logic. The
GPIF can be run from either an internally derived clock or
externally supplied clock (IFCLK), at a rate that transfers data
up to 96 Megabytes/s (48 MHz IFCLK with 16-bit interface).
3.13.3 GPIF and FIFO Clock Rates
An 8051 register bit selects one of two frequencies for the internally supplied interface clock: 30 MHz and 48 MHz. Alternatively, an externally supplied clock of 5 MHz – 48 MHz feeding
the IFCLK pin can be used as the interface clock. IFCLK can
be configured to function as an output clock when the GPIF
and FIFO’s are internally clocked. An output enable bit in the
IFCONFIG register turns this clock output off. Another bit
within the IFCONFIG register will invert the IFCLK signal
whether internally or externally sourced.
3.14 GPIF
The GPIF is a flexible 8- or 16-bit parallel interface driven by a
user programmable finite state machine. It allows the
CY7C68053 to perform local bus mastering, and can
implement a wide variety of protocols such as ATA interface,
parallel printer port, and Utopia.
The GPIF has three programmable control outputs (CTL), and
two general purpose ready inputs (RDY). The data bus width
can be 8 or 16 bits. Each GPIF vector defines the state of the
control outputs, and determines what state a ready input (or
multiple inputs) must be before proceeding. The GPIF vector
can be programmed to advance a FIFO to the next data value,
advance an address, and so on. A sequence of the GPIF
vectors make up a single waveform that is executed to perform
the desired data move between the FX2LP18 and the external
device.
Notes
5. Even though these buffers are 64 bytes, they are reported as 512 for USB 2.0 compliance. The user must never transfer packets larger than 64 bytes to EP1.
Document # 001-06120 Rev *F Page 8 of 39
[+] Feedback
Page 9

CY7C68053
3.14.1 Three Control OUT Signals
The 56-pin package brings out three of these signals,
CTL0–CTL2. The 8051 programs the GPIF unit to define the
CTL waveforms. CTLx waveform edges can be programmed
to make transitions as fast as once per clock cycle (20.8 ns
using a 48 MHz clock).
3.14.2 Two Ready IN Signals
The FX2LP18 package brings out all two Ready inputs
(RDY0–RDY1). The 8051 programs the GPIF unit to test the
RDY pins for GPIF branching.
3.14.3 Long Transfer Mode
In master mode, the 8051 appropriately sets GPIF transaction
count registers (GPIFTCB3, GPIFTCB2, GPIFTCB1, or
GPIFTCB0) for unattended transfers of up to 2
32
transactions.
The GPIF automatically throttles data flow to prevent under or
overflow until the full number of requested transactions
complete. The GPIF decrements the value in these registers
to represent the current status of the transaction.
3.15 ECC Generation
[6]
The MoBL-USB can calculate Error Correcting Codes (ECC’s)
on data that passes across its GPIF or Slave FIFO interfaces.
There are two ECC configurations: two ECC’s, each calculated
over 256 bytes (SmartMedia Standard) and one ECC calculated over 512 bytes.
The ECC can correct any 1-bit error or detect any 2-bit error.
3.15.1 ECC Implementation
The two ECC configurations are selected by the ECCM bit.
3.15.1.1 ECCM = 0
Two 3-byte ECC’s are each calculated over a 256-byte block
of data. This configuration conforms to the SmartMedia
Standard.
This configuration writes any value to ECCRESET, then
passes data across the GPIF or Slave FIFO interface. The
ECC for the first 256 bytes of data is calculated and stored in
ECC1. The ECC for the next 256 bytes is stored in ECC2. After
the second ECC is calculated, the values in the ECCx registers
do not change until ECCRESET is written again, even if more
data is subsequently passed across the interface.
3.15.1.2 ECCM = 1
One 3-byte ECC is calculated over a 512-byte block of data.
This configuration writes any value to ECCRESET then
passes data across the GPIF or Slave FIFO interface. The
ECC for the first 512 bytes of data is calculated and stored in
ECC1; ECC2 is unused. After the ECC is calculated, the value
in ECC1 does not change until ECCRESET is written again,
even if more data is subsequently passed across the interface.
3.16 USB Uploads and Downloads
The core has the ability to directly edit the data contents of the
internal 16-kByte RAM and of the internal 512-byte scratch
pad RAM via a vendor-specific command. This capability is
normally used when ‘soft’ downloading user code and is
available only to and from internal RAM, only when the 8051
is held in reset. The available RAM spaces are 16 kBytes from
0x0000–0x3FFF (code/data) and 512 bytes from
0xE000–0xE1FF (scratch pad data RAM).
[7]
3.17 Autopointer Access
FX2LP18 provides two identical autopointers. They are similar
to the internal 8051 data pointers, but with an additional
feature: they can optionally increment after every memory
access.The autopointers are available in external FX2LP18
registers, under control of a mode bit (AUTOPTRSET-UP.0).
Using the external FX2LP18 autopointer access (at 0xE67B –
0xE67C) allows the autopointer to access all RAM. Also, the
autopointers can point to any FX2LP18 register or endpoint
buffer space.
3.18 I2C Controller
FX2LP18 has one I2C port that is driven by two internal
controllers. One automatically operates at boot time to load the
VID/PID/DID, configuration byte, and firmware and a second
controller that the 8051, once running, uses to control external
2
I
C devices. The I2C port operates in master mode only.
2
3.18.1 I
The I
up resistors even if no EEPROM is connected to the FX2LP18.
The value of the pull up resistors required may vary, depending
on the combination of V
EEPROM. The pull up resistors used must be such that when
the EEPROM pulls SDA low, the voltage level meets the V
specification of the FX2LP18. For example, if the EEPROM
runs off a 3.3V supply and V
recommended are 10K ohm. This requirement may also vary
depending on the devices being run on the I2C pins. Refer to
the I
External EEPROM device address pins must be configured
properly. See Tab le 3- 6 for configuring the device address
pins.
If no EEPROM is connected to the I
emulation is required by an external processor.This is because
the FX2LP18 comes out of reset with the DISCON bit set, so
the device will not enumerate without an EEPROM (C2 load)
or EEPROM emulation.
C Port Pins
2
C pins SCL and SDA must have external 2.2K ohm pull
and the supply used for the
CC_IO
is 1.8V, the pull up resistors
CC_IO
2
C specifications for details.
2
C port, EEPROM
IL
Notes
6. To use the ECC logic, the GPIF or Slave FIFO interface must be configured for byte-wide operation.
7. After the data has been downloaded from the host, a ‘loader’ can execute from internal RAM in order to transfer downloaded data to external memory.
Document # 001-06120 Rev *F Page 9 of 39
[+] Feedback
Page 10
CY7C68053
Table 3-6. Strap Boot EEPROM Address Lines to These
Val ues
Bytes Example EEPROM A2 A1 A0
16 24AA00
[8]
N/A N/A N/A
12824AA01 000
25624AA02 000
4K 24AA32 0 0 1
8K 24AA64 0 0 1
16K 24AA128 0 0 1
3.18.2 I2C Interface Boot Load Access
At power on reset the I2C interface boot loader loads the
VID/PID/DID and configuration bytes and up to 16 kBytes of
program/data. The available RAM spaces are 16 kBytes from
Figure 4-1. Signals
Port GPIF Master Slave FIFO
PD7
PD6
PD5
PD4
PD3
PD2
PD1
PD0
PB7
PB6
XTALIN
XTALOUT
RESET#
WAKEUP#
SCL
SDA
IFCLK
CLKOUT
DPLUS
DMINUS
PB5
PB4
PB3
PB2
PB1
PB0
INT0#/PA0
INT1#/PA1
PA2
WU2/PA3
PA4
PA5
PA6
PA7
0x0000–0x3FFF and 512 bytes from 0xE000–0xE1FF. The
8051 is reset. I
2
C interface boot loads only occur after power
on reset.
3.18.3 I
The 8051 can control peripherals connected to the I2C bus
using the I2CTL and I2DAT registers. FX2LP18 provides I
master control only, it is never an I
2
C Interface General Purpose Access
2
C slave.
2
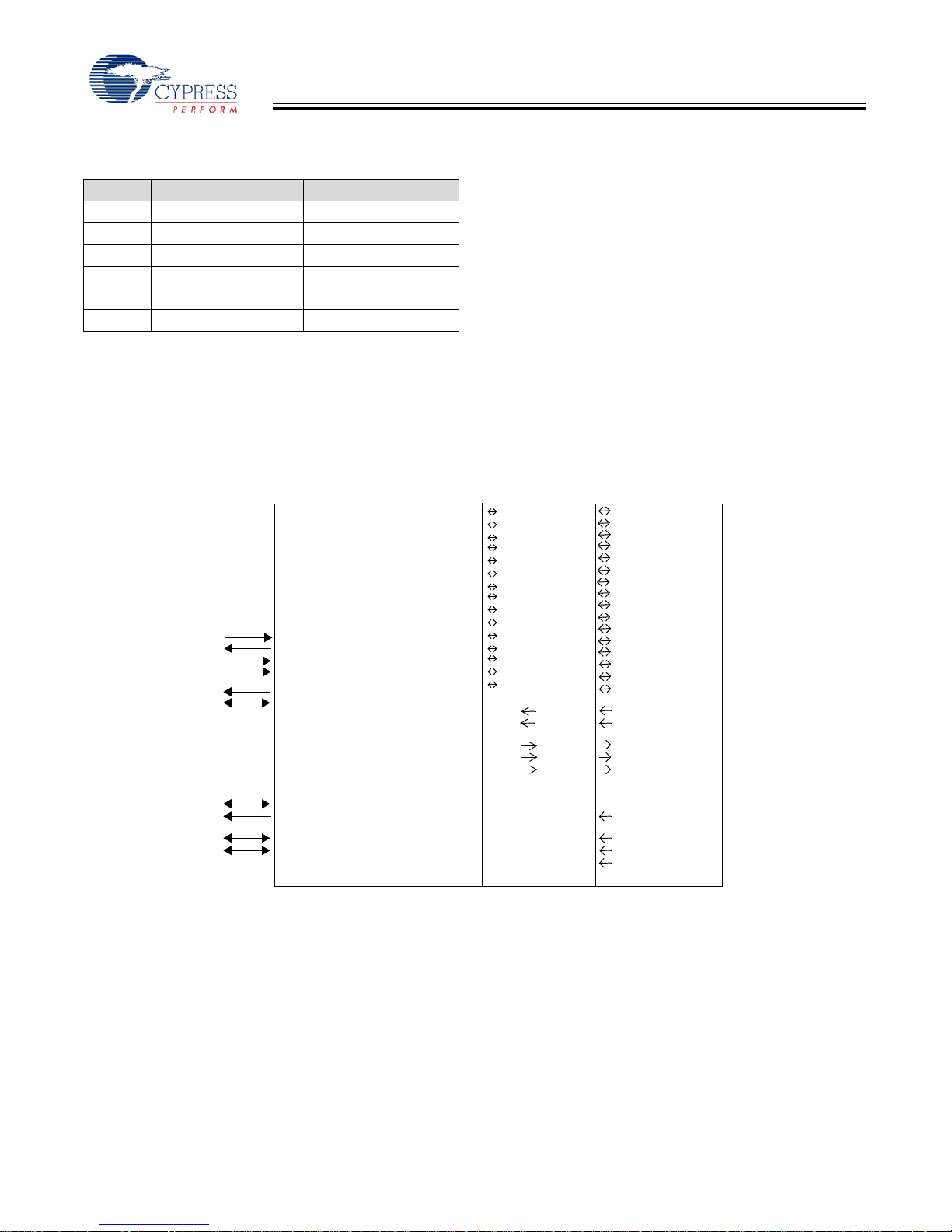
4.0 Pin Assignments
Figure 4-1 identifies all signals for the package. It is followed
by the pin diagram.Three modes are available: Port, GPIF
master, and Slave FIFO. These modes define the signals on
the right edge of the diagram. The 8051 selects the interface
mode using the IFCONFIG[1:0] register bits. Port mode is the
power on default configuration.
FD[15]
FD[14]
FD[13]
FD[12]
FD[11]
FD[10]
FD[9]
FD[8]
FD[7]
FD[6]
FD[5]
FD[4]
FD[3]
FD[2]
FD[1]
FD[0]
RDY0
RDY1
CTL0
CTL1
CTL2
INT0#/PA0
INT1#/PA1
PA2
WU2/PA3
PA4
PA5
PA6
PA7
FD[15]
FD[14]
FD[13]
FD[12]
FD[11]
FD[10]
FD[9]
FD[8]
FD[7]
FD[6]
FD[5]
FD[4]
FD[3]
FD[2]
FD[1]
FD[0]
SLRD
SLWR
FLAGA
FLAGB
FLAGC
INT0#/PA0
INT1#/PA1
SLOE
WU2/PA3
FIFOADR0
FIFOADR1
PKTEND
PA7/FLAGD/SLCS#
C
Note
8. This EEPROM does not have address pins.
Document # 001-06120 Rev *F Page 10 of 39
[+] Feedback
Page 11

Figure 4-2. CY7C68053 56-pin VFBGA Pin Assignment - Top view
12345678
CY7C68053
A
B
C
D
E
F
G
H
1A 2A 3A 4A 5A 6A 7A 8A
1B 2B 3B 4B 5B 6B 7B 8B
1C 2C 3C 4C 5C 6C 7C 8C
1D 2D 7D 8D
1E 2E 7E 8E
1F 2F 3F 4F 5F 6F 7F 8F
1G 2G 3G 4G 5G 6G 7G 8G
1H 2H 3H 4H 5H 6H 7H 8H
Document # 001-06120 Rev *F Page 11 of 39
[+] Feedback
Page 12
CY7C68053
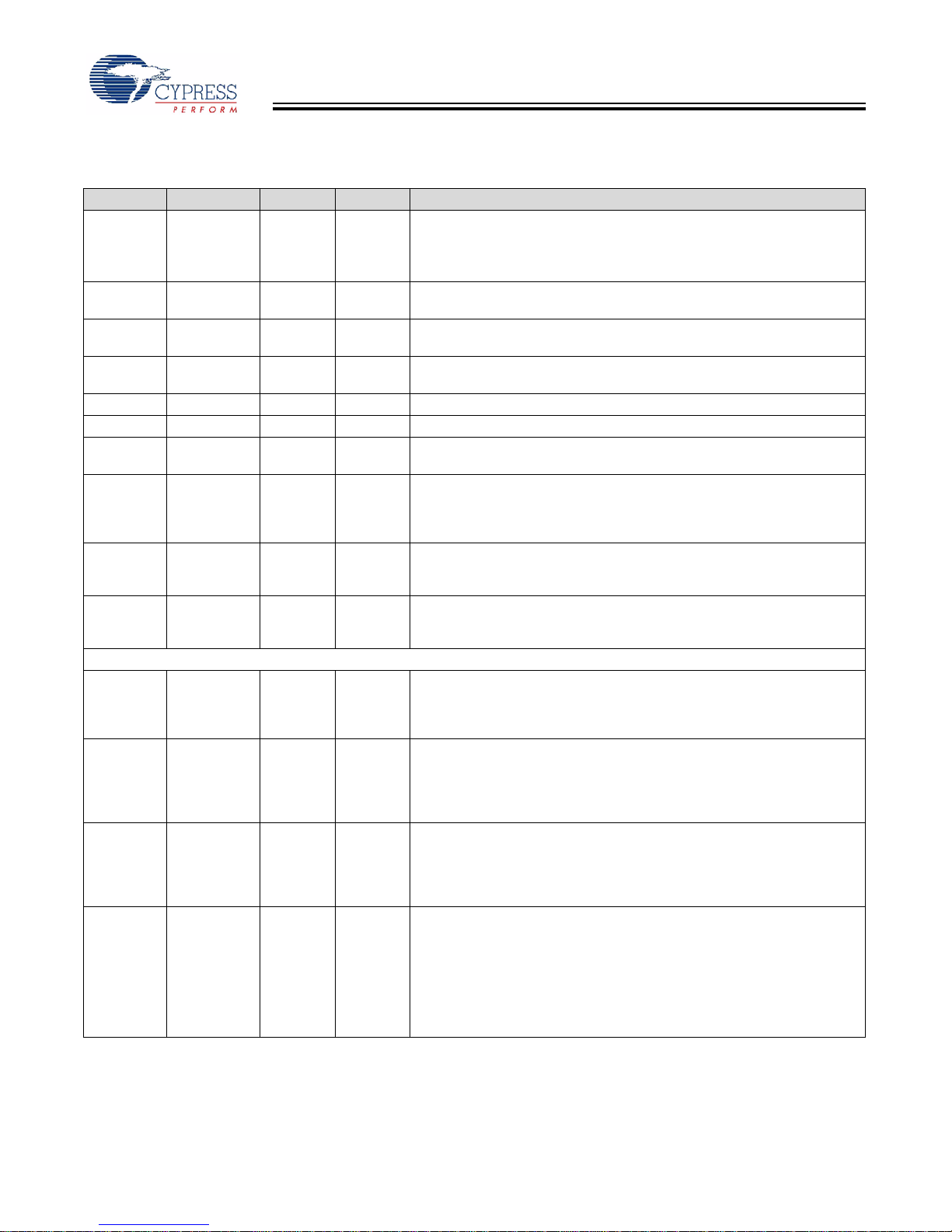
4.1 CY7C68053 Pin Descriptions
Table 4-1. FX2LP18 Pin Descriptions
56 VFBGA Name Type Default Description
2D AV
1D AV
CC
CC
Power N/A Analog VCC. Connect this pin to 3.3V power source. This signal provides
Power N/A Analog VCC. Connect this pin to 3.3V power source. This signal provides
2F AGND Ground N/A Analog Ground. Connect this pin to ground with as short a path as
1F AGND Ground N/A Analog Ground. Connect to this pin ground with as short a path as
1E DMINUS I/O/Z Z USB D– Signal. Connect this pin to the USB D– signal.
2E DPLUS I/O/Z Z USB D+ Signal. Connect this pin to the USB D+ signal.
8B RESET# Input N/A Active LOW Reset. This pin resets the entire chip. See Section 3.9 ”Reset
1C XTALIN Input N/A Crystal Input. Connect this signal to a 24 MHz parallel resonant, funda-
2C XTALOUT Output N/A Crystal Output. Connect this signal to a 24 MHz parallel resonant, funda-
2B CLKOUT O/Z 12 MHz CLKOUT. 12-, 24- or 48-MHz clock, phase locked to the 24 MHz input
Port A
8G PA0 or
I/O/Z I
INT0#
6G PA1 or
I/O/Z I
INT1#
8F PA2 or
I/O/Z I
SLOE
7F PA3 or
I/O/Z I
WU2
[9]
power to the analog section of the chip.
Appropriate bulk/bypass capacitance should be provided for this
supply rail.
power to the analog section of the chip.
possible.
possible.
and Wakeup” on page 5 for more details.
mental mode crystal and load capacitor to GND.
It is also correct to drive XTALIN with an external 24-MHz square wave
derived from another clock source.
mental mode crystal and load capacitor to GND.
If an external clock is used to drive XTALIN, leave this pin open.
clock. The 8051 defaults to 12 MHz operation. The 8051 may tri-state this
output by setting CPUCS.1 = 1.
(PA0)
(PA1)
(PA2)
(PA3)
Multiplexed pin whose function is selected by PORTACFG.0
PA0 is a bidirectional IO port pin.
INT0# is the active LOW 8051 INT0 interrupt input signal, which is either
edge triggered (IT0 = 1) or level triggered (IT0 = 0).
Multiplexed pin whose function is selected by:
PORTACFG.1
PA1 is a bidirectional IO port pin.
INT1# is the active LOW 8051 INT1 interrupt input signal, which is either
edge triggered (IT1 = 1) or level triggered (IT1 = 0).
Multiplexed pin whose function is selected by two bits:
IFCONFIG[1:0].
PA2 is a bidirectional IO port pin.
SLOE is an input-only output enable with programmable polarity
(FIFOPINPOLAR.4) for the slave FIFO’s connected to FD[7:0] or FD[15:0].
Multiplexed pin whose function is selected by:
WAKEUP.7 and OEA.3
PA3 is a bidirectional IO port pin.
WU2 is an alternate source for USB Wakeup, enabled by WU2EN bit
(WAKEUP.1) and polarity set by WU2POL (WAKEUP.4). If the 8051 is in
suspend and WU2EN = 1, a transition on this pin starts up the oscillator
and interrupts the 8051 to allow it to exit the suspend mode. Asserting this
pin inhibits the chip from suspending, if WU2EN = 1.
Note
9. Unused inputs must not be left floating. Tie either HIGH or LOW as appropriate. Outputs should only be pulled up or down to ensure signals at power up and
in standby. Note also that no pins should be driven while the device is powered down
Document # 001-06120 Rev *F Page 12 of 39
[+] Feedback
Page 13

CY7C68053
(PA4)
(PA5)
(PA6)
(PA7)
(PB0)
(PB1)
(PB2)
(PB3)
(PB4)
(PB5)
(PB6)
(PB7)
[9]
Multiplexed pin whose function is selected by:
IFCONFIG[1:0].
PA4 is a bidirectional IO port pin.
FIFOADR0 is an input-only address select for the slave FIFO’s connected
to FD[7:0] or FD[15:0].
Multiplexed pin whose function is selected by:
IFCONFIG[1:0].
PA5 is a bidirectional IO port pin.
FIFOADR1 is an input-only address select for the slave FIFO’s connected
to FD[7:0] or FD[15:0].
Multiplexed pin whose function is selected by the IFCONFIG[1:0] bits.
PA6 is a bidirectional IO port pin.
PKTEND is an input used to commit the FIFO packet data to the endpoint
and whose polarity is programmable using FIFOPINPOLAR.5.
Multiplexed pin whose function is selected by the IFCONFIG[1:0] and
PORTACFG.7 bits.
PA7 is a bidirectional IO port pin.
FLAGD is a programmable slave FIFO output status flag signal.
SLCS# gates all other slave FIFO enable/strobes
Multiplexed pin whose function is selected by the following bits:
IFCONFIG[1:0].
PB0 is a bidirectional IO port pin.
FD[0] is the bidirectional FIFO/GPIF data bus.
Multiplexed pin whose function is selected by the following bits:
IFCONFIG[1:0].
PB1 is a bidirectional IO port pin.
FD[1] is the bidirectional FIFO/GPIF data bus.
Multiplexed pin whose function is selected by the following bits:
IFCONFIG[1:0].
PB2 is a bidirectional IO port pin.
FD[2] is the bidirectional FIFO/GPIF data bus.
Multiplexed pin whose function is selected by the following bits:
IFCONFIG[1:0].
PB3 is a bidirectional IO port pin.
FD[3] is the bidirectional FIFO/GPIF data bus.
Multiplexed pin whose function is selected by the following bits:
IFCONFIG[1:0].
PB4 is a bidirectional IO port pin.
FD[4] is the bidirectional FIFO/GPIF data bus.
Multiplexed pin whose function is selected by the following bits:
IFCONFIG[1:0].
PB5 is a bidirectional IO port pin.
FD[5] is the bidirectional FIFO/GPIF data bus.
Multiplexed pin whose function is selected by the following bits:
IFCONFIG[1:0].
PB6 is a bidirectional IO port pin.
FD[6] is the bidirectional FIFO/GPIF data bus.
Multiplexed pin whose function is selected by the following bits:
IFCONFIG[1:0].
PB7 is a bidirectional IO port pin.
FD[7] is the bidirectional FIFO/GPIF data bus.
Table 4-1. FX2LP18 Pin Descriptions (continued)
56 VFBGA Name Type Default Description
6F PA4 or
FIFOADR0
8C PA5 or
FIFOADR1
7C PA6 or
PKTEND
6C PA7 or
FLAGD or
SLCS#
Port B
3H PB0 or
FD[0]
4F PB1 or
FD[1]
4H PB2 or
FD[2]
4G PB3 or
FD[3]
5H PB4 or
FD[4]
5G PB5 or
FD[5]
5F PB6 or
FD[6]
6H PB7 or
FD[7]
I/O/Z I
I/O/Z I
I/O/Z I
I/O/Z I
I/O/Z I
I/O/Z I
I/O/Z I
I/O/Z I
I/O/Z I
I/O/Z I
I/O/Z I
I/O/Z I
Document # 001-06120 Rev *F Page 13 of 39
[+] Feedback
Page 14

CY7C68053
(PD0)
(PD1)
(PD2)
(PD3)
(PD4)
(PD5)
(PD6)
(PD7)
[9]
Multiplexed pin whose function is selected by the IFCONFIG[1:0] and
EPxFIFOCFG.0 (wordwide) bits.
FD[8] is the bidirectional FIFO/GPIF data bus.
Multiplexed pin whose function is selected by the IFCONFIG[1:0] and
EPxFIFOCFG.0 (wordwide) bits.
FD[9] is the bidirectional FIFO/GPIF data bus.
Multiplexed pin whose function is selected by the IFCONFIG[1:0] and
EPxFIFOCFG.0 (wordwide) bits.
FD[10] is the bidirectional FIFO/GPIF data bus.
Multiplexed pin whose function is selected by the IFCONFIG[1:0] and
EPxFIFOCFG.0 (wordwide) bits.
FD[11] is the bidirectional FIFO/GPIF data bus.
Multiplexed pin whose function is selected by the IFCONFIG[1:0] and
EPxFIFOCFG.0 (wordwide) bits.
FD[12] is the bidirectional FIFO/GPIF data bus.
Multiplexed pin whose function is selected by the IFCONFIG[1:0] and
EPxFIFOCFG.0 (wordwide) bits.
FD[13] is the bidirectional FIFO/GPIF data bus.
Multiplexed pin whose function is selected by the IFCONFIG[1:0] and
EPxFIFOCFG.0 (wordwide) bits.
FD[14] is the bidirectional FIFO/GPIF data bus.
Multiplexed pin whose function is selected by the IFCONFIG[1:0] and
EPxFIFOCFG.0 (wordwide) bits.
FD[15] is the bidirectional FIFO/GPIF data bus.
Table 4-1. FX2LP18 Pin Descriptions (continued)
56 VFBGA Name Type Default Description
PORT D
8A PD0 or
FD[8]
7A PD1 or
FD[9]
6B PD2 or
FD[10]
6A PD3 or
FD[11]
3B PD4 or
FD[12]
3A PD5 or
FD[13]
3C PD6 or
FD[14]
2A PD7 or
FD[15]
I/O/Z I
I/O/Z I
I/O/Z I
I/O/Z I
I/O/Z I
I/O/Z I
I/O/Z I
I/O/Z I
1A RDY0 or
SLRD
1B RDY1 or
SLWR
7H CTL0 or
FLAGA
7G CTL1 or
FLAGB
8H CTL2 or
FLAGC
Input N/A Multiplexed pin whose function is selected by the following bits:
IFCONFIG[1:0].
RDY0 is a GPIF input signal.
SLRD is the input only read strobe with programmable polarity (FIFOPIN-
POLAR.3) for the slave FIFO’s connected to FD[7:0] or FD[15:0].
Input N/A Multiplexed pin whose function is selected by the following bits:
IFCONFIG[1:0].
RDY1 is a GPIF input signal.
SLWR is the input only write strobe with programmable polarity (FIFOPIN-
POLAR.2) for the slave FIFO’s connected to FD[7:0] or FD[15:0].
O/Z H Multiplexed pin whose function is selected by the following bits:
IFCONFIG[1:0].
CTL0 is a GPIF control output.
FLAGA is a programmable slave FIFO output status flag signal.
Defaults to programmable for the FIFO selected by the FIFOADR[1:0] pins.
O/Z H Multiplexed pin whose function is selected by the following bits:
IFCONFIG[1:0].
CTL1 is a GPIF control output.
FLAGB is a programmable slave FIFO output status flag signal.
Defaults to FULL for the FIFO selected by the FIFOADR[1:0] pins.
O/Z H Multiplexed pin whose function is selected by the following bits:
IFCONFIG[1:0].
CTL2 is a GPIF control output.
FLAGC is a programmable slave FIFO output status flag signal.
Defaults to EMPTY for the FIFO selected by the FIFOADR[1:0] pins.
Document # 001-06120 Rev *F Page 14 of 39
[+] Feedback
Page 15

CY7C68053
Table 4-1. FX2LP18 Pin Descriptions (continued)
[9]
56 VFBGA Name Type Default Description
2G IFCLK I/O/Z Z Interface Clock, used for synchronously clocking data into or out of the
slave FIFO’s. IFCLK also serves as a timing reference for all slave FIFO
control signals and GPIF. When internal clocking is used (IFCONFIG.7 = 1)
the IFCLK pin can be configured to output 30/48 MHz by bits IFCONFIG.5
and IFCONFIG.6. IFCLK may be inverted, whether internally or externally
sourced, by setting the bit IFCONFIG.4 =1.
7B WAKEUP Input N/A USB Wakeup. If the 8051 is in suspend, asserting this pin starts up the
oscillator and interrupts the 8051 to allow it to exit the suspend mode.
Holding WAKEUP asserted inhibits the MoBL-USB
chip from
suspending. This pin has programmable polarity (WAKEUP.4).
3F SCL OD Z Clock for the I
pull up resistor. (An I
3G SDA OD Z Data for the I
up resistor. (An I
5A V
CC_IO
Power N/A VCC. Connect this pin to 1.8V to 3.3V power source.
2
C interface. Connect to V
2
C peripheral is required).
2
C interface. Connect to V
2
C peripheral is required).
or VCC with a 2.2K - 10K
CC_IO
or VCC with a 2.2K - 10K pull
CC_IO
Appropriate bulk/bypass capacitance should be provided for this
supply rail.
5B V
7E V
8E V
5C V
CC_IO
CC_IO
CC_IO
CC_D
Power N/A VCC. Connect this pin to 1.8V to 3.3V power source
Power N/A VCC. Connect this pin to 1.8V to 3.3V power source.
Power N/A VCC. Connect this pin to 1.8V to 3.3V power source.
Power N/A VCC. Connect this pin to 1.8V power source.(Supplies power to internal
digital 1.8V circuits)
Appropriate bulk/bypass capacitance should be provided for this
supply rail.
1G V
CC_A
Power N/A VCC. Connect this pin to 1.8V power source.(Supplies power to internal
analog 1.8V circuits)
1H GND Ground N/A Ground.
2H GND Ground N/A Ground.
4A GND Ground N/A Ground.
4B GND Ground N/A Ground.
4C GND Ground N/A Ground.
7D GND Ground N/A Ground.
8D GND Ground N/A Ground.
Document # 001-06120 Rev *F Page 15 of 39
[+] Feedback
Page 16

CY7C68053
5.0 Register Summary
FX2LP18 register bit definitions are described in the MoBL-USB TRM in greater detail.
Table 5-1. FX2LP18 Register Summary
Hex Size Name Description b7 b6 b5 b4 b3 b2 b1 b0 Default Access
E400 128 WAVEDATA GPIF Waveform
E480 128 Reserved
E50D GPCR2 General Purpose Configu-
E600 1 CPUCS CPU Control & Status 0 0 PORTCSTB CLKSPD1 CLKSPD0 CLKINV CLKOE 8051RES 00000010 rrbbbbbr
E601 1 IFCONFIG Interface Configuration
E602 1 PINFLAGSAB
E603 1 PINFLAGSCD
E604 1 FIFORESET
E605 1 BREAKPT Breakpoint Control 0 0 0 0 BREAK BPPULSE BPEN 0 00000000 rrrrbbbr
E606 1 BPADDRH Breakpoint Address H A15 A14 A13 A12 A11 A10 A9 A8 xxxxxxxx RW
E607 1 BPADDRL Breakpoint Address L A7 A6 A5 A4 A3 A2 A1 A0 xxxxxxxx RW
E608 1 Re served Reserved 0 0 0 0 0 0 0 0 00000000 rrrrrrbb
E609 1 FIFOPINPOLAR
E60A 1 REVID Chip Revision rv7 rv6 rv5 rv4 rv3 rv2 rv1 rv0 RevA
E60B 1 REVCTL
E60C 1 GPIFHOLDAMOUNT MSTB Hold Time
E610 1 EP1OUTCFG Endpoint 1-OUT
E611 1 EP1INCFG Endpoint 1-IN
E612 1 EP2CFG Endpoint 2 Configuration VA LID DIR TYPE1 TYPE0 SIZE 0 BUF1 BUF0 10100010 bbbbbrbb
E613 1 EP4CFG Endpoint 4 Configuration VA LID DIR TYPE1 TYPE0 0 0 0 0 10100000 bbbbrrrr
E614 1 EP6CFG Endpoint 6 Configuration VA LID DIR TYPE1 TYPE0 SIZE 0 BUF1 BUF0 11100010 bbbbbrbb
E615 1 EP8CFG Endpoint 8 Configuration VA LID DIR TYPE1 TYPE0 0 0 0 0 11100000 bbbbrrrr
E618 1 EP2FIFOCFG
E619 1 EP4FIFOCFG
E61A 1 EP6FIFOCFG
E61B 1 EP8FIFOCFG
E61C 4 Reserved
E620 1 EP2AUTOINLENH
E621 1 EP2AUTOINLENL
E622 1 EP4AUTOINLENH
E623 1 EP4AUTOINLENL
E624 1 EP6AUTOINLENH
E625 1 EP6AUTOINLENL
E626 1 EP8AUTOINLENH
E627 1 EP8AUTOINLENL
E628 1 ECCCFG ECC Configuration 0 0 0 0 0 0 0 ECCM 00000000 rrrrrrrb
E629 1 ECCRESET ECC Reset x x x x x x x x 00000000 W
E62A 1 ECC1B0 ECC1 Byte 0 Address LINE15 LINE14 LINE13 LINE12 LINE11 LINE10 LINE9 LINE8 00000000 R
E62B 1 ECC1B1 ECC1 Byte 1 Address LINE7 LINE6 LINE5 LINE4 LINE3 LINE2 LINE1 LINE0 00000000 R
Note
10. Read and writes to these registers may require synchronization delay, see Technical Reference Manual for ‘Synchronization Delay.’
GPIF Waveform Memories
GENERAL CONFIGURATION
UDMA
3 Reserved
ENDPOINT CONFIGURATION
2 Reserved
]
]
]
[10]
[10]
Slave FIFO FLAGC and
[10]
[10]
[10]
[10]
[10]
[10]
[10]
[10
[10]
[10
[10]
[10
[10]
[10
[10]
Descriptor 0, 1, 2, 3 data
ration Register 2
(Ports, GPIF, slave
FIFO’s)
Slave FIFO FLAGA and
FLAGB Pin Configuration
FLAGD Pin Configuration
Restore FIFO’s to default
state
Slave FIFO Interface pins
polarity
Chip Revision Control 0 0 0 0 0 0 dyn_out enh_pkt 00000000 rrrrrrbb
(for UDMA)
Configuration
Configuration
Endpoint 2/slave FIFO
configuration
Endpoint 4/slave FIFO
configuration
Endpoint 6/slave FIFO
configuration
Endpoint 8/slave FIFO
configuration
Endpoint 2 AUTOIN
Packet Length H
Endpoint 2 AUTOIN
Packet Length L
Endpoint 4 AUTOIN
Packet Length H
Endpoint 4 AUTOIN
Packet Length L
Endpoint 6 AUTOIN
Packet Length H
Endpoint 6 AUTOIN
Packet Length L
Endpoint 8 AUTOIN
Packet Length H
Endpoint 8 AUTOIN
Packet Length L
D7 D6 D5 D4 D3 D2 D1 D0 xxxxxxxx RW
Reserved Reserved Reserved FULL_SPEE
IFCLKSRC 3048MHZ IFCLKOE IFCLKPOL ASYNC GSTATE IFCFG1 IFCFG0 10000000 RW
FLAGB3 FLAGB2 FLAGB1 FLAGB0 FLAGA3 FLAGA2 FLAGA1 FLAGA0 00000000 RW
FLAGD3 FLAGD2 FLAGD1 FLAGD0 FLAGC3 FLAGC2 FLAGC1 FLAGC0 00000000 RW
NAKALL 0 0 0 EP3 EP2 EP1 EP0 xxxxxxxx W
0 0 PKTEND SLOE SLRD SLWR EF FF 00000000 rrbbbbbb
0 0 0 0 0 0 HOLDTIME1 HOLDTIME0 00000000 rrrrrrbb
VAL ID 0 TYPE1 TYPE0 0 0 0 0 10100000 brbbrrrr
VAL ID 0 TYPE1 TYPE0 0 0 0 0 10100000 brbbrrrr
0 INFM1 OEP1 AUTOOUT AUTOIN ZEROLENIN 0 WORDWIDE 00000101 rbbbbbrb
0 INFM1 OEP1 AUTOOUT AUTOIN ZEROLENIN 0 WORDWIDE 00000101 rbbbbbrb
0 INFM1 OEP1 AUTOOUT AUTOIN ZEROLENIN 0 WORDWIDE 00000101 rbbbbbrb
0 INFM1 OEP1 AUTOOUT AUTOIN ZEROLENIN 0 WORDWIDE 00000101 rbbbbbrb
0 0 0 0 0 PL10 PL9 PL8 00000010 rrrrrbbb
PL7 PL6 PL5 PL4 PL3 PL2 PL1 PL0 00000000 RW
0 0 0 0 0 0 PL9 PL8 00000010 rrrrrrbb
PL7 PL6 PL5 PL4 PL3 PL2 PL1 PL0 00000000 RW
0 0 0 0 0 PL10 PL9 PL8 00000010 rrrrrbbb
PL7 PL6 PL5 PL4 PL3 PL2 PL1 PL0 00000000 RW
0 0 0 0 0 0 PL9 PL8 00000010 rrrrrrbb
PL7 PL6 PL5 PL4 PL3 PL2 PL1 PL0 00000000 RW
D_ONLY
Reserved Reserved Reserved Reserved 00000000 R
00000001
R
Document # 001-06120 Rev *F Page 16 of 39
[+] Feedback
Page 17

CY7C68053
Table 5-1. FX2LP18 Register Summary (continued)
Hex Size Name Description b7 b6 b5 b4 b3 b2 b1 b0 Default Access
E62C 1 ECC1B2 ECC1 Byte 2 Address COL5 COL4 COL3 COL2 COL1 COL0 LINE17 LINE16 00000000 R
E62D 1 ECC2B0 ECC2 Byte 0 Address LINE15 LINE14 LINE13 LINE12 LINE11 LINE10 LINE9 LINE8 00000000 R
E62E 1 ECC2B1 ECC2 Byte 1 Address LINE7 LINE6 LINE5 LINE4 LINE3 LINE2 LINE1 LINE0 00000000 R
E62F 1 ECC2B2 ECC2 Byte 2 Address COL5 COL4 COL3 COL2 COL1 COL0 0 0 00000000 R
E630
1 EP2FIFOPFH
H.S.
E630
F. S.
E631
H.S.
E631
F. S
E632
H.S.
E632
F. S
E633
H.S.
E633
F. S
E634
H.S.
E634
F. S
E635
H.S.
E635
F. S
E636
H.S.
E636
F. S
E637
H.S.
E637
F. S
1 EP2FIFOPFH
1 EP2FIFOPFL
1 EP2FIFOPFL
1 EP4FIFOPFH
1 EP4FIFOPFH
1 EP4FIFOPFL
1 EP4FIFOPFL
1 EP6FIFOPFH
1 EP6FIFOPFH
1 EP6FIFOPFL
1 EP6FIFOPFL
1 EP8FIFOPFH
1 EP8FIFOPFH
1 EP8FIFOPFL
1 EP8FIFOPFL
8 Reserved
E640 1 EP2ISOINPKTS EP2 (if ISO) IN Packets
E641 1 EP4ISOINPKTS EP4 (if ISO) IN Packets
E642 1 EP6ISOINPKTS EP6 (if ISO) IN Packets
E643 1 EP8ISOINPKTS EP8 (if ISO) IN Packets
E644 4 Re served
E648 1 INPKTEND
E649 7 OUTPKTEND
INTERRUPTS
E650 1 EP2FIFOIE
E651 1 EP2FIFOIRQ
E652 1 EP4FIFOIE
E653 1 EP4FIFOIRQ
E654 1 EP6FIFOIE
E655 1 EP6FIFOIRQ
E656 1 EP8FIFOIE
E657 1 EP8FIFOIRQ
E658 1 IBNIE IN-BULK-NAK Interrupt
E659 1 IBNIRQ
E65A 1 NAKIE Endpoint Ping-NAK/IBN
E65B 1 NAKIRQ
E65C 1 USBIE USB Int Enables 0 EP0ACK HSGRANT URES SUSP SUTOK SOF SUDAV 00000000 RW
E65D 1 USBIRQ
[10]
Endpoint 2/slave FIFO
Programmable Flag H
[10]
Endpoint 2/slave FIFO
Programmable Flag H
[10]
Endpoint 2/slave FIFO
Programmable Flag L
[10]
Endpoint 2/slave FIFO
Programmable Flag L
[10]
Endpoint 4/slave FIFO
Programmable Flag H
[10]
Endpoint 4/slave FIFO
Programmable Flag H
[10]
Endpoint 4/slave FIFO
Programmable Flag L
[10]
Endpoint 4/slave FIFO
Programmable Flag L
[10]
Endpoint 6/slave FIFO
Programmable Flag H
[10]
Endpoint 6/slave FIFO
Programmable Flag H
[10]
Endpoint 6/slave FIFO
Programmable Flag L
[10]
Endpoint 6/slave FIFO
Programmable Flag L
[10]
Endpoint 8/slave FIFO
Programmable Flag H
[10]
Endpoint 8/slave FIFO
Programmable Flag H
[10]
Endpoint 8/slave FIFO
Programmable Flag L
[10]
Endpoint 8/slave FIFO
Programmable Flag L
per frame (1-3)
per frame (1-3)
per frame (1-3)
per frame (1-3)
[10]
Force IN Packet End Skip 0 0 0 EP3 EP2 EP1 EP0 xxxxxxxx W
[10]
Force OUT Packet End Skip 0 0 0 EP3 EP2 EP1 EP0 xxxxxxxx W
[10]
Endpoint 2 slave FIFO
Flag Interrupt Enable
[10,11]
Endpoint 2 slave FIFO
Flag Interrupt Request
[10]
Endpoint 4 slave FIFO
Flag Interrupt Enable
[10,11]
Endpoint 4 slave FIFO
Flag Interrupt Request
[10]
Endpoint 6 slave FIFO
Flag Interrupt Enable
[10,11]
Endpoint 6 slave FIFO
Flag Interrupt Request
[10]
Endpoint 8 slave FIFO
Flag Interrupt Enable
[10,11]
Endpoint 8 slave FIFO
Flag Interrupt Request
[11]
[11]
[11]
Enable
IN-BULK-NAK interrupt
Request
Interrupt Enable
Endpoint Ping-NAK/IBN
Interrupt Request
USB Interrupt Requests 0 EP0ACK HSGRANT URES SUSP SUTOK SOF SUDAV 0xxxxxxx rbbbbbbb
DECIS PKTSTAT IN:PKTS[2]
OUT:PFC12
DECIS PKTSTAT OUT:PFC12 OUT:PFC11 OUT:PFC10 0 PFC9 IN:PKTS[2]
IN:PKTS[1]
OUT:PFC11
IN:PKTS[0]
OUT:PFC10
0 PFC9 PFC8 10001000 bbbbbrbb
OUT:PFC8
PFC7 PFC6 PFC5 PFC4 PFC3 PFC2 PFC1 PFC0 00000000 RW
IN:PKTS[1]
OUT:PFC7
DECIS PKTSTAT 0 IN: PKTS[1]
IN:PKTS[0]
OUT:PFC6
PFC5 PFC4 PFC3 PFC2 PFC1 PFC0 00000000 RW
OUT:PFC10
IN: PKTS[0]
OUT:PFC9
0 0 PFC8 10001000 bbrbbrrb
DECIS PKTSTAT 0 OUT:PFC10 OUT:PFC9 0 0 PFC8 10001000 bbrbbrrb
PFC7 PFC6 PFC5 PFC4 PFC3 PFC2 PFC1 PFC0 00000000 RW
IN: PKTS[1]
OUT:PFC7
DECIS PKTSTAT IN:PKTS[2]
DECIS PKTSTAT OUT:PFC12 OUT:PFC11 OUT:PFC10 0 PFC9 IN:PKTS[2]
IN: PKTS[0]
OUT:PFC6
PFC5 PFC4 PFC3 PFC2 PFC1 PFC0 00000000 RW
OUT:PFC12
IN:PKTS[1]
OUT:PFC11
IN:PKTS[0]
OUT:PFC10
0 PFC9 PFC8 00001000 bbbbbrbb
OUT:PFC8
PFC7 PFC6 PFC5 PFC4 PFC3 PFC2 PFC1 PFC0 00000000 RW
IN:PKTS[1]
OUT:PFC7
DECIS PKTSTAT 0 IN: PKTS[1]
IN:PKTS[0]
OUT:PFC6
PFC5 PFC4 PFC3 PFC2 PFC1 PFC0 00000000 RW
OUT:PFC10
IN: PKTS[0]
OUT:PFC9
0 0 PFC8 00001000 bbrbbrrb
DECIS PKTSTAT 0 OUT:PFC10 OUT:PFC9 0 0 PFC8 00001000 bbrbbrrb
PFC7 PFC6 PFC5 PFC4 PFC3 PFC2 PFC1 PFC0 00000000 RW
IN: PKTS[1]
OUT:PFC7
IN: PKTS[0]
OUT:PFC6
PFC5 PFC4 PFC3 PFC2 PFC1 PFC0 00000000 RW
AADJ 0 0 0 0 0 INPPF1 INPPF0 00000001 brrrrrbb
AADJ 0 0 0 0 0 INPPF1 INPPF0 00000001 brrrrrrr
AADJ 0 0 0 0 0 INPPF1 INPPF0 00000001 brrrrrbb
AADJ 0 0 0 0 0 INPPF1 INPPF0 00000001 brrrrrrr
0 0 0 0 EDGEPF PF EF FF 00000000 RW
0 0 0 0 0 PF EF FF 00000000 rrrrrbbb
0 0 0 0 EDGEPF PF EF FF 00000000 RW
0 0 0 0 0 PF EF FF 00000000 rrrrrbbb
0 0 0 0 EDGEPF PF EF FF 00000000 RW
0 0 0 0 0 PF EF FF 00000000 rrrrrbbb
0 0 0 0 EDGEPF PF EF FF 00000000 RW
0 0 0 0 0 PF EF FF 00000000 rrrrrbbb
0 0 EP8 EP6 EP4 EP2 EP1 EP0 00000000 RW
0 0 EP8 EP6 EP4 EP2 EP1 EP0 00xxxxxx rrbbbbbb
EP8 EP6 EP4 EP2 EP1 EP0 0 IBN 00000000 RW
EP8 EP6 EP4 EP2 EP1 EP0 0 IBN xxxxxx0x bbbbbbrb
10001000 bbbbbrbb
00001000 bbbbbrbb
Note
11. The register can only be reset, it cannot be set.
Document # 001-06120 Rev *F Page 17 of 39
[+] Feedback
Page 18

CY7C68053
Table 5-1. FX2LP18 Register Summary (continued)
Hex Size Name Description b7 b6 b5 b4 b3 b2 b1 b0 Default Access
E65E 1 EPIE Endpoint Interrupt
E65F 1 EPIRQ
E660 1 GPIFIE
E661 1 GPIFIRQ
[11]
[10]
GPIF Interrupt Enable 0 0 0 0 0 0 GPIFWF GPIFDONE 00000000 RW
[10]
E662 1 USBERRIE USB Error Interrupt
E663 1 USBERRIRQ
E664 1 ERRCNTLIM USB Error counter and
Enables
Endpoint Interrupt
Requests
GPIF Interrupt Request 0 0 0 0 0 0 GPIFWF GPIFDONE 000000xx RW
Enables
[11]
USB Error Interrupt
Requests
limit
E665 1 CLRERRCNT Clear Error Counter EC3:0 x x x x x x x x xxxxxxxx W
E666 1 INT2IVEC Interrupt 2 (USB)
Autovector
E667 1 Re served 1 0 0 0 0 0 0 0 10000000 R
E668 1 INTSET-UP Interrupt 2&4 set-up 0 0 0 0 AV 2EN 0 Reserved AV 4E N 00000000 RW
E669 7 Re served
INPUT/OUTPUT
E670 1 PORTACFG I/O PORTA Alternate
E671 1 PORTCCFG I/O PORTC Alternate
E672 1 PORTECFG I/O PORTE Alternate
Configuration
Configuration
Configuration
E673 4 Re served
E677 1 Re served
E678 1 I2CS I²C Bus
E679 1 I2DAT I²C Bus
E67A 1 I2CTL I²C Bus
E67B 1 XAUTODAT1 Autoptr1 MOVX access,
E67C 1 XAUTODAT2 Autoptr2 MOVX access,
UDMA CRC
E67D 1 UDMACRCH
E67E 1 UDMACRCL
E67F 1 UDMACRC-
QUALIFIER
Control & Status
Data
Control
when APTREN=1
when APTREN=1
[10]
UDMA CRC MSB CRC15 CRC14 CRC13 CRC12 CRC11 CRC10 CRC 9 CRC8 01001010 RW
[10]
UDMA CRC LSB CRC7 CRC6 CRC5 CRC4 CRC3 CRC2 CRC1 CRC0 10111010 RW
UDMA CRC Qualifier QENABLE 0 0 0 QSTATE QSIGNAL2 QSIGNAL1 QSIGNAL0 00000000 brrrbbbb
USB CONTROL
E680 1 US BCS USB Control & Status HSM 0 0 0 DISCON NOSYNSOF RENUM SIGRSUME x0000000 rrrrbbbb
E681 1 SUSPEND Put chip into suspend x x x x x x x x xxxxxxxx W
E682 1 WAKEUPCS Wakeup Control & Status WU2 WU WU2POL WUPOL 0 DPEN WU2EN WUEN xx000101 bbbbrbbb
E683 1 TOGCTL Toggle Control Q S R IO EP3 EP2 EP1 EP0 x0000000 rrrbbbbb
E684 1 US BFRAMEH USB Frame count H 0 0 0 0 0 FC10 FC9 FC8 00000xxx R
E685 1 US BFRAMEL USB Frame count L FC7 FC6 FC5 FC4 FC3 FC2 FC1 FC0 xxxxxxxx R
E686 1 MICROFRAME Microframe count, 0-7 0 0 0 0 0 MF2 MF1 MF0 00000xxx R
E687 1 FNADDR USB Function address 0 FA6 FA 5 FA4 FA3 FA 2 FA 1 FA0 0xxxxxxx R
E688 2 Re served
ENDPOINTS
E68A 1 EP0BCH
E68B 1 EP0BCL
[10]
[10]
Endpoint 0 Byte Count H (BC15) (BC14) (BC13) (BC12) (BC11) (BC10) (BC9) (BC8) xxxxxxxx RW
Endpoint 0 Byte Count L (BC7) BC6 BC5 BC4 BC3 BC2 BC1 BC0 xxxxxxxx RW
E68C 1 Reserved
E68D 1 EP1OUTBC Endpoint 1 OUT Byte
Count
E68E 1 Reserved
E68F 1 EP1INBC Endpoint 1 IN Byte Count 0 BC6 BC5 BC4 BC 3 BC2 BC1 BC0 0xxxxxxx RW
E690 1 EP2BCH
E691 1 EP2BCL
E692 2 Re served
E694 1 EP4BCH
E695 1 EP4BCL
E696 2 Re served
E698 1 EP6BCH
E699 1 EP6BCL
E69A 2 Reserved
E69C 1 EP8BCH
E69D 1 EP8BCL
[10]
[10]
[10]
[10]
[10]
[10]
[10]
[10]
Endpoint 2 Byte Count H 0 0 0 0 0 BC10 BC9 BC8 00000xxx RW
Endpoint 2 Byte Count L BC7/SKIP BC6 BC5 BC4 BC3 BC2 BC1 BC0 xxxxxxxx RW
Endpoint 4 Byte Count H 0 0 0 0 0 0 BC9 BC8 000000xx RW
Endpoint 4 Byte Count L BC7/SKIP BC6 BC5 BC4 BC3 BC2 BC1 BC0 xxxxxxxx RW
Endpoint 6 Byte Count H 0 0 0 0 0 BC10 BC9 BC8 00000xxx RW
Endpoint 6 Byte Count L BC7/SKIP BC6 BC5 BC4 BC3 BC2 BC1 BC0 xxxxxxxx RW
Endpoint 8 Byte Count H 0 0 0 0 0 0 BC9 BC8 000000xx RW
Endpoint 8 Byte Count L BC7/SKIP BC6 BC5 BC4 BC3 BC2 BC1 BC0 xxxxxxxx RW
E69E 2 Reserved
E6A0 1 EP0CS Endpoint 0 Control and
Stat us
EP8 EP6 EP4 EP2 EP1OUT EP1IN EP0OUT EP0IN 00000000 RW
EP8 EP6 EP4 EP2 EP1OUT EP1IN EP0OUT EP0IN 0 RW
ISOEP8 ISOEP6 ISOEP4 ISOEP2 0 0 0 ERRLIMIT 00000000 RW
ISOEP8 ISOEP6 ISOEP4 ISOEP2 0 0 0 ERRLIMIT 0000000x bbbbrrrb
EC3 EC2 EC1 EC0 LIMIT3 LIMIT2 LIMIT1 LIMIT0 xxxx0100 rrrrbbbb
0 I2V4 I2V3 I2V2 I2V1 I2V0 0 0 00000000 R
FLAGD SLCS 0 0 0 0 INT1 INT0 00000000 RW
GPIFA7 GPIFA6 GPIFA5 GPIFA4 GPIFA3 GPIFA2 GPIFA1 GPIFA0 00000000 RW
GPIFA8 T2EX INT6 RXD1OUT RXD0OUT T2OUT T1OUT T0OUT 00000000 RW
START STOP LASTRD ID1 ID0 BERR ACK DONE 000xx000 bbbrrrrr
d7 d6 d5 d4 d3 d2 d1 d0 xxxxxxxx RW
0 0 0 0 0 0 STOPIE 400KHZ 00000000 RW
D7 D6 D5 D4 D3 D2 D1 D0 xxxxxxxx RW
D7 D6 D5 D4 D3 D2 D1 D0 xxxxxxxx RW
0 BC6 BC5 BC4 BC3 BC2 BC1 BC0 0xxxxxxx RW
HSNAK 0 0 0 0 0 BUSY STALL 10000000 bbbbbbrb
Document # 001-06120 Rev *F Page 18 of 39
[+] Feedback
Page 19

CY7C68053
Table 5-1. FX2LP18 Register Summary (continued)
Hex Size Name Description b7 b6 b5 b4 b3 b2 b1 b0 Default Access
E6A1 1 EP1OUTCS Endpoint 1 OUT Control
E6A2 1 EP1INCS Endpoint 1 IN Control and
E6A3 1 EP2CS Endpoint 2 Control and
E6A4 1 EP4CS Endpoint 4 Control and
E6A5 1 EP6CS Endpoint 6 Control and
E6A6 1 EP8CS Endpoint 8 Control and
E6A7 1 EP2FIFOFLGS Endpoint 2 slave FIFO
E6A8 1 EP4FIFOFLGS Endpoint 4 slave FIFO
E6A9 1 EP6FIFOFLGS Endpoint 6 slave FIFO
E6AA 1 EP8FIFOFLGS Endpoint 8 slave FIFO
E6AB 1 EP2FIFOBCH Endpoint 2 slave FIFO
E6AC 1 EP2FIFOBCL Endpoint 2 slave FIFO
E6AD 1 EP4FIFOBCH Endpoint 4 slave FIFO
E6AE 1 EP4FIFOBCL Endpoint 4 slave FIFO
E6AF 1 EP6FIFOBCH Endpoint 6 slave FIFO
E6B0 1 EP6FIFOBCL Endpoint 6 slave FIFO
E6B1 1 EP8FIFOBCH Endpoint 8 slave FIFO
E6B2 1 EP8FIFOBCL Endpoint 8 slave FIFO
E6B3 1 SUDPTRH Set-up Data Pointer high
E6B4 1 SUDPTRL Set-up Data Pointer low
E6B5 1 SUDPTRCTL Set-up Data Pointer Auto
2 Reserved
E6B8 8 SET-UPDAT 8 bytes of set-up data D7 D6 D5 D4 D3 D2 D1 D0 xxxxxxxx R
GPIF
E6C0 1 GPIFWFSELECT Waveform Selector SINGLEWR1 SINGLEWR0 SINGLERD1 SINGLERD0 FIFOWR1 FIFOWR0 FIFORD1 FIFORD0 11100100 RW
E6C1 1 GPIFIDLECS GPIF Done, GPIF IDLE
E6C2 1 GPIFIDLECTL Inactive Bus, CTL states 0 0 0 0 0 CTL2 CTL1 CTL0 1111 1111 RW
E6C3 1 GPIFCTLCFG CTL Drive Type TRICTL 0 0 0 0 CTL2 CTL1 CTL0 00000000 RW
E6C4 1 Reserved 00000000
E6C5 1 Reserved 00000000
FLOWSTATE
E6C6 1 FLOWSTATE Flowstate Enable and
E6C7 1 FLOWLOGIC Flowstate Logic LFUNC1 LFUNC0 TERMA2 TERMA1 TERMA0 TERMB2 TERMB1 TERMB0 00000000 RW
E6C8 1 FLOWEQ0CTL CTL-Pin States in
E6C9 1 FLOWEQ1CTL CTL-Pin States in Flow-
E6CA 1 FLOWHOLDOFF Holdoff Configuration HOPERIOD3 HOPERIOD2 HOPERIOD1 HOPERIOD0HOSTATE HOCTL2 HOCTL1 HOCTL0 00010010 RW
E6CB 1 FLOWSTB Flowstate Strobe
E6CC 1 FLOWSTBEDGE Flowstate Rising/Falling
E6CD 1 FLOWSTBPERIOD Master-Strobe Half-Period D7 D6 D5 D4 D3 D2 D1 D0 00000010 RW
E6CE 1 GPIFTCB3
and Status
Stat us
Stat us
Stat us
Stat us
Stat us
Flags
Flags
Flags
Flags
total byte count H
total byte count L
total byte count H
total byte count L
total byte count H
total byte count L
total byte count H
total byte count L
address byte
address byte
Mode
SET-UPDAT[0] =
bmRequestType
SET-UPDAT[1] =
bmRequest
SET-UPDAT[2:3] = wValue
SET-UPDAT[4:5] = wIndex
SET-UPDAT[6:7] =
wLength
drive mode
Selector
Flowstate
(when Logic = 0)
state (when Logic = 1)
Configuration
Edge Configuration
[10]
GPIF Transaction Count
Byte 3
0 0 0 0 0 0 BUSY STALL 00000000 bbbbbbrb
0 0 0 0 0 0 BUSY STALL 00000000 bbbbbbrb
0 NPAK2 NPAK1 NPAK0 FULL EMPTY 0 STALL 00101000 rrrrrrrb
0 0 NPAK1 NPAK0 FULL EMPTY 0 STALL 00101000 rrrrrrrb
0 NPAK2 NPAK1 NPAK0 FULL EMPTY 0 STALL 00000100 rrrrrrrb
0 0 NPAK1 NPAK0 FULL EMPTY 0 STALL 00000100 rrrrrrrb
0 0 0 0 0 PF EF FF 00000010 R
0 0 0 0 0 PF EF FF 00000010 R
0 0 0 0 0 PF EF FF 00000110 R
0 0 0 0 0 PF EF FF 00000110 R
0 0 0 BC12 BC11 BC10 BC9 BC8 00000000 R
BC7 BC6 BC5 BC4 BC3 BC2 BC1 BC0 00000000 R
0 0 0 0 0 BC 10 BC9 BC8 00000000 R
BC7 BC6 BC5 BC4 BC3 BC2 BC1 BC0 00000000 R
0 0 0 0 BC11 BC10 BC9 BC8 00000000 R
BC7 BC6 BC5 BC4 BC3 BC2 BC1 BC0 00000000 R
0 0 0 0 0 BC 10 BC9 BC8 00000000 R
BC7 BC6 BC5 BC4 BC3 BC2 BC1 BC0 00000000 R
A15 A14 A13 A12 A11 A10 A9 A8 xxxxxxxx RW
A7 A6 A5 A4 A3 A2 A1 0 xxxxxxx0 bbbbbbbr
0 0 0 0 0 0 0 SDPAUTO 00000001 RW
DONE 0 0 0 0 0 0 IDLEDRV 10000000 RW
FSE 0 0 0 0 FS2 FS1 FS0 00000000 brrrrbbb
CTL0E3 CTL0E2 CTL0E1 CTL0E0 0 CTL2 CTL1 CTL0 00000000 RW
CTL0E3 CTL0E2 CTL0E1 CTL0E0 0 CTL2 CTL1 CTL0 00000000 RW
SLAVE RDYASYNC CTLTOGL SUSTAIN 0 MSTB2 MSTB1 MSTB0 00100000 RW
0 0 0 0 0 0 FA LLI NG RISING 00000001 rrrrrrbb
TC31 TC30 TC29 TC28 TC27 TC26 TC25 TC24 00000000 RW
Document # 001-06120 Rev *F Page 19 of 39
[+] Feedback
Page 20

CY7C68053
Table 5-1. FX2LP18 Register Summary (continued)
Hex Size Name Description b7 b6 b5 b4 b3 b2 b1 b0 Default Access
E6CF 1 GPIFTCB2
E6D0 1 GPIFTCB1
E6D1 1 GPIFTCB0
2 Reserved 00000000 RW
E6D2 1 EP2GPIFFLGSEL
E6D3 1 EP2GPIFPFSTOP Endpoint 2 GPIF stop
E6D4 1 EP2GPIFTRIG
3 Reserved
E6DA 1 EP4GPIFFLGSEL
E6DB 1 EP4GPIFPFSTOP Endpoint 4 GPIF stop
E6DC 1 EP4GPIFTRIG
3 Reserved
E6E2 1 EP6GPIFFLGSEL
E6E3 1 EP6GPIFPFSTOP Endpoint 6 GPIF stop
E6E4 1 EP6GPIFTRIG
3 Reserved
E6EA 1 EP8GPIFFLGSEL
E6EB 1 EP8GPIFPFSTOP Endpoint 8 GPIF stop
E6EC 1 EP8GPIFTRIG
3 Reserved
E6F0 1 XGPIFSGLDATH GPIF Data H
E6F1 1 XGPIFSGLDATLX Read/Write GPIF Data L &
E6F2 1 XGPIFSGLDATL-
E6F3 1 GPIFREADYCFG Internal RDY, Sync/Async,
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
NOX
[10]
GPIF Transaction Count
Byte 2
[10]
GPIF Transaction Count
Byte 1
[10]
GPIF Transaction Count
Byte 0
[10]
Endpoint 2 GPIF Flag
select
transaction on prog. flag
[10]
Endpoint 2 GPIF Trigger x x x x x x x x xxxxxxxx W
[10]
Endpoint 4 GPIF Flag
select
transaction on GPIF Flag
[10]
Endpoint 4 GPIF Trigger x x x x x x x x xxxxxxxx W
[10]
Endpoint 6 GPIF Flag
select
transaction on prog. flag
[10]
Endpoint 6 GPIF Trigger x x x x x x x x xxxxxxxx W
[10]
Endpoint 8 GPIF Flag
select
transaction on prog. flag
[10]
Endpoint 8 GPIF Trigger x x x x x x x x xxxxxxxx W
(16-bit mode only)
trigger transaction
Read GPIF Data L, no
transaction trigger
RDY pin states
TC23 TC22 TC21 TC20 TC19 TC18 TC17 TC16 00000000 RW
TC15 TC14 TC13 TC12 TC11 TC10 TC9 TC8 00000000 RW
TC7 TC6 TC5 TC4 TC3 TC2 TC1 TC0 00000001 RW
0 0 0 0 0 0 FS1 FS0 00000000 RW
0 0 0 0 0 0 0 FIFO2FLAG 00000000 RW
0 0 0 0 0 0 FS1 FS0 00000000 RW
0 0 0 0 0 0 0 FIFO4FLAG 00000000 RW
0 0 0 0 0 0 FS1 FS0 00000000 RW
0 0 0 0 0 0 0 FIFO6FLAG 00000000 RW
0 0 0 0 0 0 FS1 FS0 00000000 RW
0 0 0 0 0 0 0 FIFO8FLAG 00000000 RW
D15 D14 D13 D12 D11 D10 D9 D8 xxxxxxxx RW
D7 D6 D5 D4 D3 D2 D1 D0 xxxxxxxx RW
D7 D6 D5 D4 D3 D2 D1 D0 xxxxxxxx R
INTRDY SAS TCXRDY5 0 0 0 0 0 00000000 bbbrrrrr
E6F4 1 GPIFREADYSTAT GPIF Ready Status 0 0 0 0 0 0 RDY1 RDY0 00xxxxxx R
E6F5 1 GPIFABORT Abort GPIF Waveforms x x x x x x x x xxxxxxxx W
E6F6 2 Reserved
E740 64 EP0BUF EP0-IN/-OUT buffer D7 D6 D5 D4 D3 D2 D1 D0 xxxxxxxx RW
E780 64 EP10UTBUF EP1-OUT buffer D7 D6 D5 D4 D3 D2 D1 D0 xxxxxxxx RW
E7C0 64 EP1INBUF EP1-IN buffer D7 D6 D5 D4 D3 D2 D1 D0 xxxxxxxx RW
E800 2048 Reserved RW
F000 1024 EP2FIFOBUF 512/1024-byte EP 2/slave
F400 512 EP4FIFOBUF 512 byte EP 4/slave FIFO
F600 512 Reserved
F800 1024 EP6FIFOBUF 512/1024-byte EP 6/slave
FC00 512 EP8FIFOBUF 512 byte EP 8/slave FIFO
FE00 512 Reserved
xxxx I²C Configuration Byte 0 DISCON 0 0 0 0 0 400KHZ xxxxxxxx
80 1 IOA
ENDPOINT BUFFERS
FIFO buffer (IN or OUT)
buffer (IN or OUT)
FIFO buffer (IN or OUT)
buffer (IN or OUT)
Special Function Registers (SFRs)
[12]
Port A (bit addressable) D7 D6 D5 D4 D3 D2 D1 D0 xxxxxxxx RW
Notes
12. SFRs not part of the standard 8051 architecture.
13. If no EEPROM is detected by the SIE then the default is 00000000.
Document # 001-06120 Rev *F Page 20 of 39
D7 D6 D5 D4 D3 D2 D1 D0 xxxxxxxx RW
D7 D6 D5 D4 D3 D2 D1 D0 xxxxxxxx RW
D7 D6 D5 D4 D3 D2 D1 D0 xxxxxxxx RW
D7 D6 D5 D4 D3 D2 D1 D0 xxxxxxxx RW
n/a
[13]
[+] Feedback
Page 21

CY7C68053
Table 5-1. FX2LP18 Register Summary (continued)
Hex Size Name Description b7 b6 b5 b4 b3 b2 b1 b0 Default Access
81 1 SP Stack Pointer D7 D6 D5 D4 D3 D2 D1 D0 00000111 RW
82 1 DPL0 Data Pointer 0 L A7 A6 A5 A4 A3 A2 A1 A0 00000000 RW
83 1 DPH0 Data Pointer 0 H A15 A14 A13 A12 A11 A10 A9 A8 00000000 RW
84 1 DPL1
85 1 DPH1
86 1 DPS
87 1 PCON Power Control SMOD 0 x 1 1 x x x IDLE 00110000 RW
88 1 TCON Timer/Counter Control
89 1 TMOD Timer/Counter Mode
8A 1 TL0 Timer 0 reload L D7 D6 D5 D4 D3 D2 D1 D0 00000000 RW
8B 1 TL1 Timer 1 reload L D7 D6 D5 D4 D3 D2 D1 D0 00000000 RW
8C 1 TH0 Timer 0 reload H D15 D14 D13 D12 D11 D10 D9 D8 00000000 RW
8D 1 TH1 Timer 1 reload H D15 D14 D13 D12 D11 D10 D9 D8 00000000 RW
8E 1 CKCON
8F 1 Reserved
90 1 IOB
91 1 EXIF
92 1 MPAGE
93 5 Reserved
98 1 SCON0 Serial Port 0 Control
99 1 SBUF0 Serial Port 0 Data Buffer D7 D6 D5 D4 D3 D2 D1 D0 00000000 RW
9A 1 AUTOPTRH1
9B 1 AUTOPTRL1
9C 1 Reserved
9D 1 AUTOPTRH2
9E 1 AUTOPTRL2
9F 1 Reserved
A0 1 IOC
A1 1 INT2CLR
A2 1 Reserved x x x x x x x x xxxxxxxx W
A3 5 Reserved
A8 1 IE Interrupt Enable
A9 1 Reserved
AA 1 EP2468STAT
AB 1 EP24FIFOFLGS
AC 1 EP68FIFOFLGS
AD 2 Reserved
AF 1 AUTOPTRSETUP
B0 1 IOD
B1 1 IOE
B2 1 OEA
B3 1 OEB
B4 1 OEC
B5 1 OED
B6 1 OEE
B7 1 Reserved
B8 1 IP Interrupt Priority (bit ad-
B9 1 Reserved
BA 1 EP01STAT
BB 1 GPIFTRIG
BC 1 Reserved
BD 1 GPIFSGLDATH
BE 1 GPIFSGLDATLX
BF 1 GPIFSGLDATL-
C0 1 SCON1
C1 1 SBUF1
C2 6 Reserved
C8 1 T2CON Timer/Counter 2 Control
[12]
[12]
NOX
[12]
[12]
[12]
[12]
[12]
[12]
[12]
[12]
[12]
[12]
[12]
[12]
[12]
[12]
[12]
[12]
[12, 10]
[12]
[12]
[12]
Data Pointer 1 L A7 A6 A5 A4 A3 A2 A1 A0 00000000 RW
Data Pointer 1 H A15 A14 A13 A12 A11 A10 A9 A8 00000000 RW
Data Pointer 0/1 select 0 0 0 0 0 0 0 SEL 00000000 RW
(bit addressable)
Control
TF1 TR1 TF0 TR0 IE1 IT1 IE0 IT0 00000000 RW
GATE CT M1 M0 GATE CT M1 M0 00000000 RW
Clock Control x x T2M T1M T0M MD2 MD1 MD0 00000001 RW
Port B (bit addressable) D7 D6 D5 D4 D3 D2 D1 D0 xxxxxxxx RW
External Interrupt Flag(s) IE5 IE4 I²CINT USBNT 1 0 0 0 00001000 RW
Upper Addr Byte of MOVX
using @R0/@R1
(bit addressable)
[12]
Autopointer 1 Address H A15 A14 A13 A12 A11 A10 A9 A8 00000000 RW
[12]
Autopointer 1 Address L A7 A6 A5 A4 A3 A2 A1 A0 00000000 RW
[12]
Autopointer 2 Address H A15 A14 A13 A12 A11 A10 A9 A8 00000000 RW
[12]
Autopointer 2 Address L A7 A6 A5 A4 A3 A2 A1 A0 00000000 RW
A15 A14 A13 A12 A11 A10 A9 A8 00000000 RW
SM0_0 SM1_0 SM2_0 REN_0 TB8_0 RB8_0 TI_0 RI_0 00000000 RW
Port C (bit addressable) D7 D6 D5 D4 D3 D2 D1 D0 xxxxxxxx RW
Interrupt 2 clear x x x x x x x x xxxxxxxx W
(bit addressable)
[12]
Endpoint 2,4,6,8 status
flags
Endpoint 2,4 slave FIFO
status flags
Endpoint 6,8 slave FIFO
status flags
[12]
Autopointer 1&2 set-up 0 0 0 0 0 APTR2INC APTR1INC APTREN 00000110 RW
EA ES1 ET2 ES0 ET1 EX1 ET0 EX0 00000000 RW
EP8F EP8E EP6F EP6E EP4F EP4E EP2F EP2E 01011010 R
0 EP4PF EP4EF EP4FF 0 EP2PF EP2EF EP2FF 00100010 R
0 EP8PF EP8EF EP8FF 0 EP6PF EP6EF EP6FF 01100110 R
Port D (bit addressable) D7 D6 D5 D4 D3 D2 D1 D0 xxxxxxxx RW
Port E
(NOT bit addressable)
D7 D6 D5 D4 D3 D2 D1 D0 xxxxxxxx RW
Port A Output Enable D7 D6 D5 D4 D3 D2 D1 D0 00000000 RW
Port B Output Enable D7 D6 D5 D4 D3 D2 D1 D0 00000000 RW
Port C Output Enable D7 D6 D5 D4 D3 D2 D1 D0 00000000 RW
Port D Output Enable D7 D6 D5 D4 D3 D2 D1 D0 00000000 RW
Port E Output Enable D7 D6 D5 D4 D3 D2 D1 D0 00000000 RW
dressable)
[12]
Endpoint 0&1 Status 0 0 0 0 0 EP1INBSY
Endpoint 2,4,6,8 GPIF
slave FIFO Trigger
[12]
GPIF Data H (16-bit mode
only)
[12]
GPIF Data L w/Trigger D7 D6 D5 D4 D3 D2 D1 D0 xxxxxxxx RW
1 PS1 PT2 PS0 PT1 PX1 PT0 PX0 10000000 RW
EP1OUTBSY
EP0BSY 00000000 R
DONE 0 0 0 0 RW EP1 EP0 10000xxx brrrrbbb
D15 D14 D13 D12 D11 D10 D9 D8 xxxxxxxx RW
GPIF Data L w/No Trigger D7 D6 D5 D4 D3 D2 D1 D0 xxxxxxxx R
Serial Port 1 Control (bit
addressable)
SM0_1 SM1_1 SM2_1 REN_1 TB8_1 RB8_1 TI_1 RI_1 00000000 RW
Serial Port 1 Data Buffer D7 D6 D5 D4 D3 D2 D1 D0 00000000 RW
(bit addressable)
TF2 EXF2 RCLK TCLK EXEN2 TR2 CT2 CPRL2 00000000 RW
Document # 001-06120 Rev *F Page 21 of 39
[+] Feedback
Page 22

CY7C68053
Table 5-1. FX2LP18 Register Summary (continued)
Hex Size Name Description b7 b6 b5 b4 b3 b2 b1 b0 Default Access
C9 1 Reserved
CA 1 RCAP2L Capture for Timer 2, auto-
CB 1 RCAP2H Capture for Timer 2, auto-
CC 1 TL2 Timer 2 reload L D7 D6 D5 D4 D3 D2 D1 D0 00000000 RW
CD 1 TH2 Timer 2 reload H D15 D14 D13 D12 D11 D10 D9 D8 00000000 RW
CE 2 Reserved
D0 1 PSW Program Status Word (bit
D1 7 Reserved
D8 1 EICON
D9 7 Reserved
E0 1 ACC Accumulator (bit address-
E1 7 Reserved
E8 1 EIE
E9 7 Reserved
F0 1 B B (bit addressable) D7 D6 D5 D4 D3 D2 D1 D0 00000000 RW
F1 7 Reserved
F8 1 EIP
F9 7 Reserved
[12]
[12]
[12]
reload, up-counter
reload, up-counter
addressable)
External Interrupt Control SMOD1 1 ERESI RESI INT6 0 0 0 01000000 RW
able)
External Interrupt Enable(s)
External Interrupt Priority
Control
Ledgend
R = all bits read-only
W = all bits write-only
r = read-only bit
w = write-only bit
b = both read/write bit
D7 D6 D5 D4 D3 D2 D1 D0 00000000 RW
D7 D6 D5 D4 D3 D2 D1 D0 00000000 RW
CY AC F0 RS1 RS0 OV F1 P 00000000 RW
D7 D6 D5 D4 D3 D2 D1 D0 00000000 RW
1 1 1 EX6 EX5 EX4 EI²C EUSB 11100000 RW
1 1 1 PX6 PX5 PX4 PI²C PUSB 11100000 RW
Document # 001-06120 Rev *F Page 22 of 39
[+] Feedback
Page 23

CY7C68053
6.0 Absolute Maximum Ratings
Storage Temperature ...........................................................................................................................................– 65°C to +150°C
Ambient Temperature with Power Supplied
Industrial ................................................................................................................................................................– 40°C to +85°C
Supply Voltage to Ground Potential
For 3.3V Power domain ..........................................................................................................................................– 0.5V to +4.0V
For 1.8V Power domain ..........................................................................................................................................– 0.5V to +2.0V
DC Input Voltage to Any Input Pin
For pins under 3.3V Power Domain.................................................................................................................................... 3.6V
For pins under 1.8V - 3.3V Power Domain (GPIO’s) ............................................................................................1.89V to 3.6V
(The GPIO’s are not over voltage tolerant, except the SCL and SDA pins, which are 3.3V tolerant)
DC Voltage Applied to Outputs in High Z State............................................................................................ – 0.5V to VCC + 0.5V
Maximum Power Dissipation
From AVcc Supply ............................................................................................................................................................... 90 mW
From IO Supply....................................................................................................................................................................36 mW
From Core Supply................................................................................................................................................................ 95 mW
Static Discharge Voltage .................................................................................................................................................... > 2000V
(I2C SCL and SDA pins only ... >1500V)
Maximum Output Current, per I/O port .................................................................................................................................10 mA
[14]
[14]
7.0 Operating Conditions
TA (Ambient Temperature Under Bias)
Industrial ............................................................................................................................................................... – 40°C to +85°C
Supply Voltage
3.3V Power Supply ......................................................................................................................................................3.0V to 3.6V
1.8V Power Supply ...................................................................................................................................................1.71V to1.89V
Ground Voltage ........................................................................................................................................................................... 0V
F
(Oscillator or Crystal Frequency) ............................................................................................................. 24 MHz ± 100 ppm
OSC
............................................................................................................................................................................ Parallel Resonant
...........................................................................................................................................................................500 µW drive level
Load capacitors 12 pF
Note
14. It is recommended to not power I/O when chip power is off.
Document # 001-06120 Rev *F Page 23 of 39
[+] Feedback
Page 24

CY7C68053
8.0 DC Characteristics
Table 8-1. DC Characteristics
Parameter Description Conditions Min. Typ . Max. Unit
AV
CC
V
CC_IO
V
CC_A
V
CC_D
V
IH
V
IL
V
IH_X
V
IL_X
I
I
V
OH
V
OL
I
OH
I
OL
C
IN
I
SUSP
I
CC_AVcc
I
CC_IO
I
CC_CORE
T
RESET
3.3 V supply (to Osc. and PHY)
1.8V to 3.3V supply (to I/O) 1.71 1.8 3.60 V
1.8 V supply to Analog Core 1.71 1.8 1.89 V
1.8 V supply to Digital Core 1.71 1.8 1.89 V
Input HIGH Voltage 0.6*V
Input LOW Voltage 0 0.3*V
Crystal Input HIGH Voltage 2.0 3.60 V
Crystal Input LOW Voltage –0.5 0.8 V
Hysteresis 50 mV
Input Leakage Current 0< VIN < V
Output Voltage HIGH I
Output LOW Voltage I
Output Current HIGH 4mA
Output Current LOW 4mA
Input Pin Capacitance Except D+/D– 10 pF
Suspend Current Connected 220 380
Supply Current (AVCC) 8051 running, connected to USB HS 15 25 mA
Supply Current (V
Supply Current (V
) 8051 running, connected to USB HS 3 10 mA
CC_IO
CC_CORE
Reset Time after Valid Power VCC min = 3.0V 5.0 ms
Pin Reset after powered on 200 µs
[15]
CC_IO
= 4 mA V
OUT
= –4 mA 0.4 V
OUT
3.00 3.3 3.60 V
V
+10%
CC_IO
CC_IO
CC_IO
±10 µA
– 0.4 V
CC_IO
D+/D– 15 pF
[16]
Disconnected 20 150
[16]
8051 running, connected to USB FS 10 20 mA
8051 running, connected to USB FS 1 5 mA
) 8051 running, connected to USB HS 32 50 mA
8051 running, connected to USB FS 24 40 mA
V
V
µA
µA
Notes
15. The pins for this supply can be floated in low-power mode.
16. Measured at Maximum V
CC
, 25°C.
Document # 001-06120 Rev *F Page 24 of 39
[+] Feedback
Page 25

9.0 AC Electrical Characteristics
9.1 USB Transceiver
USB 2.0-compliant in full- and high-speed modes.
9.2 GPIF Synchronous Signals
CY7C68053
[17,18]
[17]
Figure 9-1. GPIF Synchronous Signals Timing Diagram
t
IFCLK
IFCLK
t
SGA
GPIFADR[8:0]
RDY
X
t
SRY
t
N
t
XGD
valid
RYH
t
DAH
N+1
DATA(input)
CTL
DATA(output)
t
SGD
X
t
XCTL
Table 9-1. GPIF Synchronous Signals Parameters with Internally Sourced IFCLK
Parameter Description Min. Max. Unit
t
IFCLK
t
SRY
t
RYH
t
SGD
t
DAH
t
XGD
t
XCTL
8
Table 9-2. GPIF Synchronous Signals Parameters with Externally Sourced IFCLK
IFCLK Period 20.83 ns
RDYX to Clock Set-up Time 8.9 ns
Clock to RDYX 0ns
GPIF Data to Clock Set-up Time 9.2 ns
GPIF Data Hold Time 0 ns
Clock to GPIF Data Output Propagation Delay 11 ns
Clock to CTLX Output Propagation Delay 6.7 ns
[18]
Parameter Description Min. Max. Unit
t
IFCLK
t
SRY
t
RYH
t
SGD
t
DAH
t
XGD
t
XCTL
Notes
17. Dashed lines denote signals with programmable polarity.
18. GPIF asynchronous RDY
19. IFCLK must not exceed 48 MHz.
IFCLK Period
RDYX to Clock Set-up Time 2.9 ns
Clock to RDYX 3.7 ns
GPIF Data to Clock Set-up Time 3.2 ns
GPIF Data Hold Time 4.5 ns
Clock to GPIF Data Output Propagation Delay 15 ns
Clock to CTLX Output Propagation Delay 13.06 ns
signals have a minimum set-up time of 50 ns when using internal 48 MHz IFCLK.
x
[19]
20.83 200 ns
Document # 001-06120 Rev *F Page 25 of 39
[+] Feedback
Page 26

9.3 Slave FIFO Synchronous Read
CY7C68053
Figure 9-2. Slave FIFO Synchronous Read Timing Diagram
t
IFCLK
IFCLK
SLRD
FLAGS
DATA
SLOE
t
OEon
N
t
SRD
t
RDH
t
XFLG
t
XFD
N+1
t
OEoff
Table 9-3. Slave FIFO Synchronous Read Parameters with Internally Sourced IFCLK
[17]
[18]
Parameter Description Min. Max. Unit
t
IFCLK
t
SRD
t
RDH
t
OEon
t
OEoff
t
XFLG
t
XFD
IFCLK Period 20.83 ns
SLRD to Clock Set-up Time 18.7 ns
Clock to SLRD Hold Time 0 ns
SLOE Turn-on to FIFO Data Valid 10.5 ns
SLOE Turn-off to FIFO Data Hold 2.15 10.5 ns
Clock to FLAGS Output Propagation Delay 9.5 ns
Clock to FIFO Data Output Propagation Delay 11 ns
Table 9-4. Slave FIFO Synchronous Read Parameters with Externally Sourced IFCLK
[18]
Parameter Description Min. Max. Unit
t
IFCLK
t
SRD
t
RDH
t
OEon
t
OEoff
t
XFLG
t
XFD
IFCLK Period 20.83 200 ns
SLRD to Clock Set-up Time 12.7 ns
Clock to SLRD Hold Time 3.7 ns
SLOE Turn-on to FIFO Data Valid 10.5 ns
SLOE Turn-off to FIFO Data Hold 2.15 10.5 ns
Clock to FLAGS Output Propagation Delay 13.5 ns
Clock to FIFO Data Output Propagation Delay 17.31 ns
Document # 001-06120 Rev *F Page 26 of 39
[+] Feedback
Page 27

9.4 Slave FIFO Asynchronous Read
CY7C68053
Figure 9-3. Slave FIFO Asynchronous Read Timing Diagram
SLRD
FLAGS
DATA
SLOE
t
OEon
N
Table 9-5. Slave FIFO Asynchronous Read Parameters
t
RDpwl
t
[20]
XFD
t
RDpwh
t
XFLG
N+1
t
OEoff
[17]
Parameter Description Min. Max. Unit
t
RDpwl
t
RDpwh
t
XFLG
t
XFD
t
OEon
t
OEoff
SLRD Pulse Width LOW 50 ns
SLRD Pulse Width HIGH 50 ns
SLRD to FLAGS Output Propagation Delay 70 ns
SLRD to FIFO Data Output Propagation Delay 15 ns
SLOE Turn-on to FIFO Data Valid 10.5 ns
SLOE Turn-off to FIFO Data Hold 2.15 10.5 ns
Note
20. Slave FIFO asynchronous parameter values use internal IFCLK setting at 48 MHz.
Document # 001-06120 Rev *F Page 27 of 39
[+] Feedback
Page 28

9.5 Slave FIFO Synchronous Write
CY7C68053
Figure 9-4. Slave FIFO Synchronous Write Timing Diagram
t
IFCLK
IFCLK
SLWR
DATA
FLAGS
Z
t
SWR
t
WRH
N
t
SFDtFDH
t
XFLG
Table 9-6. Slave FIFO Synchronous Write Parameters with Internally Sourced IFCLK
[17]
Z
[18]
Parameter Description Min. Max. Unit
t
IFCLK
t
SWR
t
WRH
t
SFD
t
FDH
t
XFLG
IFCLK Period 20.83 ns
SLWR to Clock Set-up Time 18.1 ns
Clock to SLWR Hold Time 0 ns
FIFO Data to Clock Set-up Time 10.64 ns
Clock to FIFO Data Hold Time 0 ns
Clock to FLAGS Output Propagation Time 9.5 ns
Table 9-7. Slave FIFO Synchronous Write Parameters with Externally Sourced IFCLK
[10]
Parameter Description Min. Max. Unit
t
IFCLK
t
SWR
t
WRH
t
SFD
t
FDH
t
XFLG
IFCLK Period 20.83 200 ns
SLWR to Clock Set-up Time 12.1 ns
Clock to SLWR Hold Time 3.6 ns
FIFO Data to Clock Set-up Time 3.2 ns
Clock to FIFO Data Hold Time 4.5 ns
Clock to FLAGS Output Propagation Time 13.5 ns
Document # 001-06120 Rev *F Page 28 of 39
[+] Feedback
Page 29

9.6 Slave FIFO Asynchronous Write
CY7C68053
[20]
[17]
Figure 9-5. Slave FIFO Asynchronous Write Timing Diagram
t
WRpwh
SLWR/SLCS#
DATA
FLAGS
t
WRpwl
t
SFD
t
XFD
t
FDH
Table 9-8. Slave FIFO Asynchronous Write Parameters with Internally Sourced IFCLK
Parameter Description Min. Max. Unit
t
WRpwl
t
WRpwh
t
SFD
t
FDH
t
XFD
SLWR Pulse LOW 50 ns
SLWR Pulse HIGH 70 ns
SLWR to FIFO DATA Set-up Time 10 ns
FIFO DATA to SLWR Hold Time 10 ns
SLWR to FLAGS Output Propagation Delay 70 ns
9.7 Slave FIFO Synchronous Packet End Strobe
Figure 9-6. Slave FIFO Synchronous Packet End Strobe Timing Diagram
[17]
IFCLK
t
PEH
PKTEND
FLAGS
Table 9-9. Slave FIFO Synchronous Packet End Strobe Parameters with Internally Sourced IFCLK
t
SPE
t
XFLG
[10]
Parameter Description Min. Max. Unit
t
IFCLK
t
SPE
t
PEH
t
XFLG
Table 9-10. Slave FIFO Synchronous Packet End Strobe Parameters with Externally Sourced IFCLK
IFCLK Period 20.83 ns
PKTEND to Clock Set-up Time 14.6 ns
Clock to PKTEND Hold Time 0 ns
Clock to FLAGS Output Propagation Delay 9.5 ns
[10]
Parameter Description Min. Max. Unit
t
IFCLK
t
SPE
t
PEH
t
XFLG
IFCLK Period 20.83 200 ns
PKTEND to Clock Set-up Time 8.6 ns
Clock to PKTEND Hold Time 3.04 ns
Clock to FLAGS Output Propagation Delay 13.5 ns
Document # 001-06120 Rev *F Page 29 of 39
[+] Feedback
Page 30

CY7C68053
There is no specific timing requirement that needs to be met
for asserting the PKTEND pin with regards to asserting SLWR.
PKTEND can be asserted with the last data value clocked into
the FIFO’s or thereafter. The only consideration is that the setup time t
and the hold time t
SPE
must be met.
PEH
Although there are no specific timing requirements for the
PKTEND assertion, there is a specific corner case condition
that needs attention while using the PKTEND to commit a one
byte/word packet. There is an additional timing requirement
that needs to be met when the FIFO is configured to operate
in auto mode and you want to send two packets back to back:
a full packet (full defined as the number of bytes in the FIFO
meeting the level set in AUTOINLEN register) committed
automatically followed by a short one byte/word packet
committed manually using the PKTEND pin. In this particular
scenario, the user must make sure to assert PKTEND at least
Figure 9-7. Slave FIFO Synchronous Write Sequence and Timing Diagram
t
IFCLK
IFCLK
t
SFA
FIFOADR
>= t
SWR
SLWR
one clock cycle after the rising edge that caused the last
byte/word to be clocked into the previous auto committed
packet. Figure 9-7 shows this scenario. X is the value the
AUTOINLEN register is set to when the IN endpoint is
configured to be in auto mode.
Figure 9-7 shows a scenario where two packets are being
committed. The first packet gets committed automatically
when the number of bytes in the FIFO reaches X (value set in
AUTOINLEN register) and the second one byte/word short
packet is committed manually using PKTEND. Note that there
is at least one IFCLK cycle timing between the assertion of
PKTEND and clocking of the last byte of the previous packet
(causing the packet to be committed automatically). Failing to
adhere to this timing, results in the FX2LP18 failing to send the
one byte/word short packet.
[17]
t
FAH
>= t
WRH
t
t
FDH
SFD
X-2
t
SFD
X-1
t
FDH
t
t
SFD
FDH
X
At least one IFCLK cycle
t
t
FDH
SFD
1
DATA
PKTEND
t
t
SFD
X-4
FDH
t
SFD
X-3
t
FDH
9.8 Slave FIFO Asynchronous Packet End Strobe
Figure 9-8. Slave FIFO Asynchronous Packet End Strobe Timing Diagram
t
PEpwh
PKTEND
FLAGS
Table 9-11. Slave FIFO Asynchronous Packet End Strobe Parameters
t
PEpwl
t
XFLG
[20]
Parameter Description Min. Max. Unit
t
PEpwl
t
PWpwh
t
XFLG
PKTEND Pulse Width LOW 50 ns
PKTEND Pulse Width HIGH 50 ns
PKTEND to FLAGS Output Propagation Delay 115 ns
[17]
t
SPE
t
PEH
Document # 001-06120 Rev *F Page 30 of 39
[+] Feedback
Page 31

9.9 Slave FIFO Output Enable
CY7C68053
Figure 9-9. Slave FIFO Output Enable Timing Diagram
SLOE
t
DATA
t
OEon
OEoff
[17]
Table 9-12. Slave FIFO Output Enable Parameters
Parameter Description Min. Max. Unit
t
OEon
t
OEoff
SLOE Assert to FIFO DATA Output 10.5 ns
SLOE Deassert to FIFO DATA Hold 2.15 10.5 ns
9.10 Slave FIFO Address to Flags/Data
Figure 9-10. Slave FIFO Address to Flags/Data Timing Diagram
FIFOADR [1.0]
t
XFLG
FLAGS
t
XFD
DATA
NN+1
[17]
Table 9-13. Slave FIFO Address to Flags/Data Parameters
Parameter Description Min. Max. Unit
t
XFLG
t
XFD
FIFOADR[1:0] to FLAGS Output Propagation Delay 10.7 ns
FIFOADR[1:0] to FIFODATA Output Propagation Delay 14.3 ns
Document # 001-06120 Rev *F Page 31 of 39
[+] Feedback
Page 32

9.11 Slave FIFO Synchronous Address
Figure 9-11. Slave FIFO Synchronous Address Timing Diagram
IFCLK
SLCS/FIFOADR [1:0]
t
SFAtFAH
CY7C68053
[17]
Table 9-14. Slave FIFO Synchronous Address Parameters
[10]
Parameter Description Min. Max. Unit
t
IFCLK
t
SFA
t
FAH
Interface Clock Period 20.83 200 ns
FIFOADR[1:0] to Clock Set-up Time 25 ns
Clock to FIFOADR[1:0] Hold Time 10 ns
9.12 Slave FIFO Asynchronous Address
Figure 9-12. Slave FIFO Asynchronous Address Timing Diagram
SLCS/FIFOADR [1:0]
t
FAH
SLRD/SLWR/PKTEND
Slave FIFO Asynchronous Address Parameters
[20]
t
SFA
Parameter Description Min. Max. Unit
t
SFA
t
FAH
FIFOADR[1:0] to SLRD/SLWR/PKTEND Set-up Time 10 ns
RD/WR/PKTEND to FIFOADR[1:0] Hold Time 10 ns
[17]
Document # 001-06120 Rev *F Page 32 of 39
[+] Feedback
Page 33

9.13 Sequence Diagram
Various sequence diagrams and examples are presented in this section.
9.13.1 Single and Burst Synchronous Read Example
Figure 9-13. Slave FIFO Synchronous Read Sequence and Timing Diagram
t
IFCLK
IFCLK
t
T=0
SFA
T=2
FIFOADR
SLRD
SLCS
FLAGS
t
SFA
t=0
t
SRD
t=2
t
FAH
t
RDH
t=3
t
XFLG
>= t
SRD
CY7C68053
[17]
t
FAH
>= t
RDH
T=3
t
XFD
DATA
SLOE
t
OEon
t=1
Data Driven: N
t
OEoff
N+1
t=4
Figure 9-14. Slave FIFO Synchronous Sequence of Events Diagram
FIFO POINTER
FIFO DATA BUS
IFCLK
NN
SLOE SLRD
Not Driven Driven: N
IFCLK IFCLK
IFCLK
N+1 N+2
SLOE
SLRD
N+1 N+2
IFCLK
Not Driven
Figure 9-13 shows the timing relationship of the SLAVE FIFO
signals during a synchronous FIFO read using IFCLK as the
synchronizing clock. The diagram illustrates a single read
followed by a burst read.
• At t = 0 the FIFO address is stable and the signal SLCS is
asserted (SLCS may be tied low in some applications).
Note t
IFCLK is running at 48 MHz, the FIFO address set-up time
has a minimum of 25 ns. This means that when
SFA
is more than one IFCLK cycle.
• At t = 1, SLOE is asserted. SLOE is an output enable only
whose sole function is to drive the data bus. The data that
is driven on the bus is the data that the internal FIFO pointer
is currently pointing to. In this example it is the first data
value in the FIFO. Note The data is pre-fetched and is driven
on the bus when SLOE is asserted.
• At t = 2, SLRD is asserted. SLRD must meet the set-up
time of t
rising edge of the IFCLK) and maintain a minimum hold time
of t
RDH
SLRD signal). If the SLCS signal is used, it must be asserted
(time from asserting the SLRD signal to the
SRD
(time from the IFCLK edge to the deassertion of the
N+1
t
OEon
SLOE
T=1
N+1
N+1
N+1
t
XFD
SLRD
t
XFD
N+2
IFCLK IFCLK
N+3
N+3
IFCLK
N+4
N+4
N+3
SLRD
t
XFD
N+4
t
OEoff
T=4
IFCLK IFCLK
N+4
SLOE
N+4
with SLRD, or before SLRD is asserted (for example, the
SLCS and SLRD signals must both be asserted to start a
valid read condition).
• The FIFO pointer is updated on the rising edge of the IFCLK
while SLRD is asserted. This starts the propagation of data
from the newly addressed location to the data bus. After a
propagation delay of t
of IFCLK) the new data value is present. N is the first data
(measured from the rising edge
XFD
value read from the FIFO. In order to have data on the FIFO
data bus, SLOE MUST also be asserted.
The same sequence of events is shown for a burst read and is
marked with the time indicators of T = 0 through 5. Note For
the burst mode, the SLRD and SLOE are left asserted during
the entire duration of the read. In the burst read mode, when
SLOE is asserted, data indexed by the FIFO pointer is on the
data bus. During the first read cycle on the rising edge of the
clock, the FIFO pointer is updated and increments to point to
address N+1. For each subsequent rising edge of IFCLK while
the SLRD is asserted, the FIFO pointer is incremented and the
next data value is placed on the data bus.
N+4
Not Driven
Document # 001-06120 Rev *F Page 33 of 39
[+] Feedback
Page 34

9.13.2 Single and Burst Synchronous Write
CY7C68053
Figure 9-15. Slave FIFO Synchronous Write Sequence and Timing Diagram
t
IFCLK
IFCLK
t
FIFOADR
SLWR
SLCS
FLAGS
DATA
PKTEND
SFA
t=0
t
SWR
t=2
t=3
t
t
FDH
SFD
N
t=1
t
WRH
t
XFLG
t
FAH
T=0
Figure 9-15 shows the timing relationship of the SLAVE FIFO
signals during a synchronous write using IFCLK as the
synchronizing clock. The diagram illustrates a single write
followed by burst write of 3 bytes and committing all 4 bytes as
a short packet using the PKTEND pin.
• At t = 0 the FIFO address is stable and the signal SLCS is
asserted. (SLCS may be tied low in some applications)
Note t
IFCLK is running at 48 MHz, the FIFO address set-up time
has a minimum of 25 ns. This means that when
SFA
is more than one IFCLK cycle.
• At t = 1, the external master/peripheral must output the data
value onto the data bus with a minimum set-up time of t
before the rising edge of IFCLK.
SFD
• At t = 2, SLWR is asserted. The SLWR must meet the setup time of t
rising edge of IFCLK) and maintain a minimum hold time of
t
(time from the IFCLK edge to the deassertion of the
WRH
SLWR signal). If the SLCS signal is used, it must be asserted
(time from asserting the SLWR signal to the
SWR
with SLWR or before SLWR is asserted. (for example, the
SLCS and SLWR signals must both be asserted to start a
valid write condition).
• While the SLWR is asserted, data is written to the FIFO and
on the rising edge of the IFCLK, the FIFO pointer is incremented. The FIFO flag is also updated after a delay of t
from the rising edge of the clock.
XFLG
The same sequence of events is also shown for a burst write
and is marked with the time indicators of T = 0 through 5.
Note For the burst mode, SLWR and SLCS are left asserted
for the entire duration of writing all the required data values. In
this burst write mode, once the SLWR is asserted, the data on
the FIFO data bus is written to the FIFO on every rising edge
[17]
t
SFA
>= t
t
XFLG
t
t
FDH
SFD
N+3
t
SPE
T=1
T=2
>= t
t
SFD
SWR
N+1
t
FDH
T=3
t
t
SFD
FDH
N+2
T=4
T=5
t
WRH
PEH
t
FAH
of IFCLK. The FIFO pointer is updated on each rising edge of
IFCLK. In Figure 9-15, once the four bytes are written to the
FIFO, SLWR is deasserted. The short 4-byte packet can be
committed to the host by asserting the PKTEND signal.
There is no specific timing requirement that needs to be met
for asserting the PKTEND signal with regards to asserting the
SLWR signal. PKTEND can be asserted with the last data
value or thereafter. The only requirement is that the set-up time
t
and the hold time t
SPE
Figure 9-15, the number of data values committed includes the
must be met. In the scenario of
PEH
last value written to the FIFO. In this example, both the data
value and the PKTEND signal are clocked on the same rising
edge of IFCLK. PKTEND can also be asserted in subsequent
clock cycles. The FIFOADDR lines must be held constant
during the PKTEND assertion.
Although there are no specific timing requirements for the
PKTEND assertion, there is a specific corner case condition
that needs attention while using the PKTEND to commit a one
byte/word packet. Additional timing requirements exist when
the FIFO is configured to operate in auto mode and you want
to send two packets: a full packet (full defined as the number
of bytes in the FIFO meeting the level set in AUTOINLEN
register) committed automatically followed by a short one
byte/word packet committed manually using the PKTEND pin.
In this case, the external master must make sure to assert the
PKTEND pin at least one clock cycle after the rising edge that
caused the last byte/word to be clocked into the previous auto
committed packet (the packet with the number of bytes equal
to what is set in the AUTOINLEN register). Refer to Figure 9-7
for further details on this timing.
Document # 001-06120 Rev *F Page 34 of 39
[+] Feedback
Page 35

9.13.3 Sequence Diagram of a Single and Burst Asynchronous Read
CY7C68053
FIFOADR
SLRD
SLCS
FLAGS
DATA
SLOE
Figure 9-16. Slave FIFO Asynchronous Read Sequence and Timing Diagram
T=0
T=1
t
t
SFA
OEon
t
t
RDpwl
RDpwh
T=3
T=2
t
XFD
N
N+1
T=4
t
RDpwl
t
RDpwh
T=5
t
XFD
T=6
N+2
t
SFA
t=0
t=1
t=2
Data (X)
Driven
t
OEon
t
RDpwl
t
FAH
t
RDpwh
t=3
t
XFLG
t
XFD
N
t
OEoff
t=4
Figure 9-17. Slave FIFO Asynchronous Read Sequence of Events Diagram
t
RDpwl
[17]
t
FAH
t
RDpwh
t
XFLG
t
XFD
N+3
t
OEoff
T=7
SLOE SLRD
FIFO POINTER
NN
FIFO DATA BUS Not Driven Driven: X
SLRD
N
N Not Driven
N+1
N
SLOE
Not Driven
Figure 9-16 illustrates the timing relationship of the SLAVE
FIFO signals during an asynchronous FIFO read. It shows a
single read followed by a burst read.
• At t = 0, the FIFO address is stable and the SLCS signal is
asserted.
• At t = 1, SLOE is asserted. This results in the data bus being
driven. The data that is driven on to the bus is previous data;
it is data that was in the FIFO from a prior read cycle.
• At t = 2, SLRD is asserted. The SLRD must meet the minimum active pulse of t
width of t
serted with SLRD or before SLRD is asserted (for example,
. If SLCS is used then, SLCS must be as-
RDpwh
and minimum de-active pulse
RDpwl
the SLCS and SLRD signals must both be asserted to start
a valid read condition).
SLOE
N+2
N+1
SLOE
N+1
N
SLRD
N+1
N+1
SLRD
N+2
N+1
SLRD
N+2
N+2
SLRD
N+3
• The data that is driven, after asserting SLRD, is the updated
data from the FIFO. This data is valid after a propagation
delay of t
16, data N is the first valid data read from the FIFO. For data
from the activating edge of SLRD. In Figure 9-
XFD
to appear on the data bus during the read cycle (for example,
SLRD is asserted), SLOE MUST be in an asserted state.
SLRD and SLOE can also be tied together.
The same sequence of events is also shown for a burst read
marked with T = 0 through 5. Note In burst read mode, during
SLOE assertion, the data bus is in a driven state and outputs
the previous data. Once SLRD is asserted, the data from the
FIFO is driven on the data bus (SLOE must also be asserted)
and then the FIFO pointer is incremented.
N+3
Document # 001-06120 Rev *F Page 35 of 39
[+] Feedback
Page 36

9.13.4 Sequence Diagram of a Single and Burst Asynchronous Write
CY7C68053
Figure 9-18. Slave FIFO Asynchronous Write Sequence and Timing Diagram
T=0
t
SFA
t
t
WRpwl
WRpwh
T=1
T=3
t
t
SFD
FDH
N+1
T=2
FIFOADR
SLWR
SLCS
FLAGS
DATA
PKTEND
t
SFA
t=0
t =1
t
WRpwl
t=2
t
SFD
t=3
t
WRpwh
t
FDH
N
t
FAH
t
XFLG
Figure 9-18 illustrates the timing relationship of the SLAVE
FIFO write in an asynchronous mode. The diagram shows a
single write followed by a burst write of 3 bytes and committing
the 4-byte-short packet using PKTEND.
• At t = 0 the FIFO address is applied, ensuring that it meets
the set-up time of t
asserted (SLCS may be tied low in some applications).
. If SLCS is used, it must also be
SFA
• At t = 1 SLWR is asserted. SLWR must meet the minimum
active pulse of t
of t
SLWR or before SLWR is asserted.
. If the SLCS is used, it must be asserted with
WRpwh
• At t = 2, data must be present on the bus t
deasserting edge of SLWR.
and minimum de-active pulse width
WRpwl
SFD
before the
• At t = 3, deasserting SLWR causes the data to be written
from the data bus to the FIFO and then the FIFO pointer is
[17]
t
FAH
t
t
t
WRpwl
WRpwh
T=4
T=5
t
T=6
SFD
t
FDH
N+2
T=7
incremented. The FIFO flag is also updated after t
the deasserting edge of SLWR.
WRpwl
T=8
t
WRpwh
T=9
t
XFLG
t
t
SFD
FDH
N+3
t
t
PEpwl
PEpwh
XFLG
The same sequence of events is shown for a burst write and
is indicated by the timing marks of T = 0 through 5. Note In the
burst write mode, once SLWR is deasserted, the data is written
to the FIFO and then the FIFO pointer is incremented to the
next byte in the FIFO. The FIFO pointer is post incremented.
In Figure 9-18 once the four bytes are written to the FIFO and
SLWR is deasserted, the short 4-byte packet can be
committed to the host using the PKTEND. The external device
must be designed to not assert SLWR and the PKTEND signal
at the same time. It must be designed to assert the PKTEND
after SLWR is deasserted and meet the minimum deasserted
pulse width. The FIFOADDR lines are to be held constant
during the PKTEND assertion.
from
Document # 001-06120 Rev *F Page 36 of 39
[+] Feedback
Page 37

CY7C68053
10.0 Ordering Information
Table 10-1. Ordering Information
8051
Ordering Code Package Type RAM Size # Prog I/Os
CY7C68053-56BAXI 56 VFBGA– Lead-Free 16K 24 –
Development Tool Kit
CY3687 MoBL-USB FX2LP18 Development Kit
11.0 Package Diagram
The FX2LP18 is available in a 56-pin VFBGA package.
Figure 11-1. 56 VFBGA (5 x 5 x 1.0 mm) 0.50 Pitch, 0.30 Ball BZ56
Address/Data
Busses
5.00±0.10
0.45
PIN A1 CORNER
13265486
A
B
C
D
E
F
G
H
SEATING PLANE
-C-
TOP VIEW
5.00±0.10
SIDE VIEW
BOTTOM VIEW
Ø0.05 M C
Ø0.15 M C A B
Ø0.30±0.05(56X)
7856 2341
0.50
3.50
5.00±0.10
-B-
-A-
0.10(4X)
0.10 C
0.080 C
REFERENCE JEDEC: MO-195C
PACKAGE WEIGHT: 0.02 grams
0.50
3.50
5.00±0.10
A1 CORNER
A
B
C
D
E
F
G
H
0.21
Document # 001-06120 Rev *F Page 37 of 39
0.160 ~0.260
1.0 max
001-03901-*B
[+] Feedback
Page 38

CY7C68053
12.0 PCB Layout Recommendations
The following recommendations must be followed to ensure
reliable high-performance operation.
• At least a four-layer impedance controlled board is required
to maintain signal quality.
• Specify impedance targets (ask your board vendor what
they can achieve).
• To control impedance, maintain trace widths and trace spacing to within specifications.
• Minimize stubs to minimize reflected signals.
• Connections between the USB connector shell and signal
• Bypass/flyback caps on VBus, near connector, are recommended.
• DPLUS and DMINUS trace lengths must be kept to within
2 mm of each other in length, with preferred length of
20–30 mm.
• Maintain a solid ground plane under the DPLUS and
DMINUS traces. Do not allow the plane to be split under
these traces.
• It is preferable to have no vias placed on the DPLUS or
DMINUS trace routing.
• Isolate the DPLUS and DMINUS traces from all other signal
traces by no less than 10 mm.
ground must be done near the USB connector.
2
Purchase of I
2
C Patent Rights to use these components in an I2C system, provided that the system conforms to the I2C Standard Specification
I
C components from Cypress, or one of its sublicensed Associated Companies, conveys a license under the Philips
as defined by Philips. MoBL-USB FX2LP18, EZ-USB FX2LP and ReNumeration are trademarks, and MoBL-USB is a registered
trademark, of Cypress Semiconductor Corporation. All product and company names mentioned in this document are the trademarks of their respective holders.
Document # 001-06120 Rev *F Page 38 of 39
© Cypress Semiconductor Corporation, 2006. The information contained herein is subject to change without notice. Cypress Semiconductor Corporation assumes no responsibility for the use
of any circuitry other than circuitry embodied in a Cypress product. Nor does it convey or imply any license under patent or other rights. Cypress products are not warranted nor intended to be
used for medical, life support, life saving, critical control or safety applications, unless pursuant to an express written agreement with Cypress. Furthermore, Cypress does not authorize its
products for use as critical components in life-support systems where a malfunction or failure may reasonably be expected to result in significant injury to the user. The inclusion of Cypress
products in life-support systems application implies that the manufacturer assumes all risk of such use and in doing so indemnifies Cypress against all charges.
[+] Feedback
Page 39

CY7C68053
Document History Page
Document Title: CY7C68053 MoBL-USB FX2LP18 USB Microcontroller
Document Number: 001-06120
REV. ECN NO. Issue Date
** 430449 03/03/06 OSG New data sheet
*A 434754 03/24/06 OSG In Section 3.3, stated that SCL and SDA pins can be connected to V
*B 465471 See ECN OSG Changed the recommendation for the pull up resistors on I2C
*C 484726 See ECN ARI Removed all references the part number CY7C68055. Corrected the bullet in
*D 492009 See ECN OSG Added Icc data in DC Characteristics and Maximum Power dissipation
*E 500408 See ECN OSG Changed ESD spec to 1500V
*F 502115 See ECN OSG Changed ESD spec to 2000V and 1500V only for SCL and SDA pins.
Orig. of
Change Description of Change
V
CC_IO
Changed sections 3.5, 3.18.1 and pin descriptions of SCL, SDA to indicate that
since DISCON=1 after reset, an EEPROM or EEPROM emulation is required
on the I2C interface
In pin description table, renamed pin 2H (Reserved) to Ground
In Section 6, added statement “The GPIO’s are not over voltage tolerant,
except the SCL and SDA pins, which are 3.3V tolerant“
In Section 8,added a footnote to the DC char table stating that AVcc can be
floated in low power mode
In Section 8, changed V
max in DC char table from 3.6V to V
IH
Split Icc into 4 different values, corresponding to the different voltage supplies
Changed Isus typical to 20uA and 220uA
Added section 3.9.3 on suspend current considerations
Features to state that 24 GPIO’s are available. Added the Test ID (TID#) to the
Features on the front page. Made changes to the block diagram on the first
page (this is now a Visio drawing instead of a Framemaker drawing). Corrected
the Ambient Temperature with Power Supplied. Moved figure titles to meet the
new template. Checked grammar. Took out 9-bit address bus from the block
diagram on the first page. Corrected Figure 4.1
Added min spec for t
Changed Icc and power dissipation numbers
OEoff
CC_IO
or
CC
+ 10%
Document # 001-06120 Rev *F Page 39 of 39
[+] Feedback
 Loading...
Loading...