

conner CP30204 product manual

Conner Peripherals, Inc.
Cougar Series
CP30204
Intelligent Disk Drive
Product Manual
00501-043
Revision B
April, 1992
3081 Zanker Road
San Jose, CA 95134-2128
(408) 456-4500

Notice
Conner Peripherals makes no warranty of any kind with
regard to this material, including, but not limited to, the
implied warranties of merchantability and fitness for a
particular purpose. Conner Peripherals shall not be liable
for errors contained herein or for incidental consequential
damages in connection with the furnishing, performance
or use of this material.
Conner Peripherals, Inc. reserves the right to change, without
notification, the specifications contained in this manual.
© Copyright Conner Peripherals, Inc. No part of this publication
may be reproduced or translated into any language in any form
without the written permission of Conner Peripherals, Inc.
IBM, PC/AT and PC/XT are registered trademarks of
International Business Machines Corporation.

1.0 Introduction
This manual describes the key features, specification
summary, physical characteristics, environmental
characteristics, functional description, electrical interface,
recommended mounting configuration, timing requirements, host address decoding, command description,
operations description, and error reporting for Conner
Peripheral's Cougar model CP30204.
Revision B - 1 -

2.0 Key Features
The CP30204 Cougar is a high performance 3.5-inch lowprofile (1.0 inch high) 213 megabyte (formatted) disk drive
with 12 ms average seek time that is designed to operate
on an IBM PC/AT
drives feature fast 12 ms average seek time, low 6.7 ms
average rotational latency and high shock resistance.
Because the drive contains the Task File within its control
logic, it requires a simplified adapter board to operate.
Conner Peripherals has developed an adapter board to be
used in conjunction with the drive on an AT or equivalent
system, the logic and a description of this adapter board
can be found in Appendix A of this document.
• High performance rotary voice coil actuator with
embedded servo system
• Auto translate feature, allowing operation as any
drive type (not exceeding its capacity)
®
or equivalent in translate mode. The
• 1,7 run length limited code
• High shock resistance
• Sealed HDA
• Automatic actuator latch against inner stop upon
power down
• Microprocessor-controlled diagnostic routines that
are automatically executed at start-up
• Automatic error correction and retries
• 512 byte block size
- 2 - Revision B

• Emulates IBM Task File and supports additional
commands
• Up to two drives may be daisy-chained on the AT
interface
• 256KB segmentable cache with LRU caching
algorithm
• Redundancy on entire data path from data
reception
• Single burst ECC on-the-fly
Revision B - 3 -
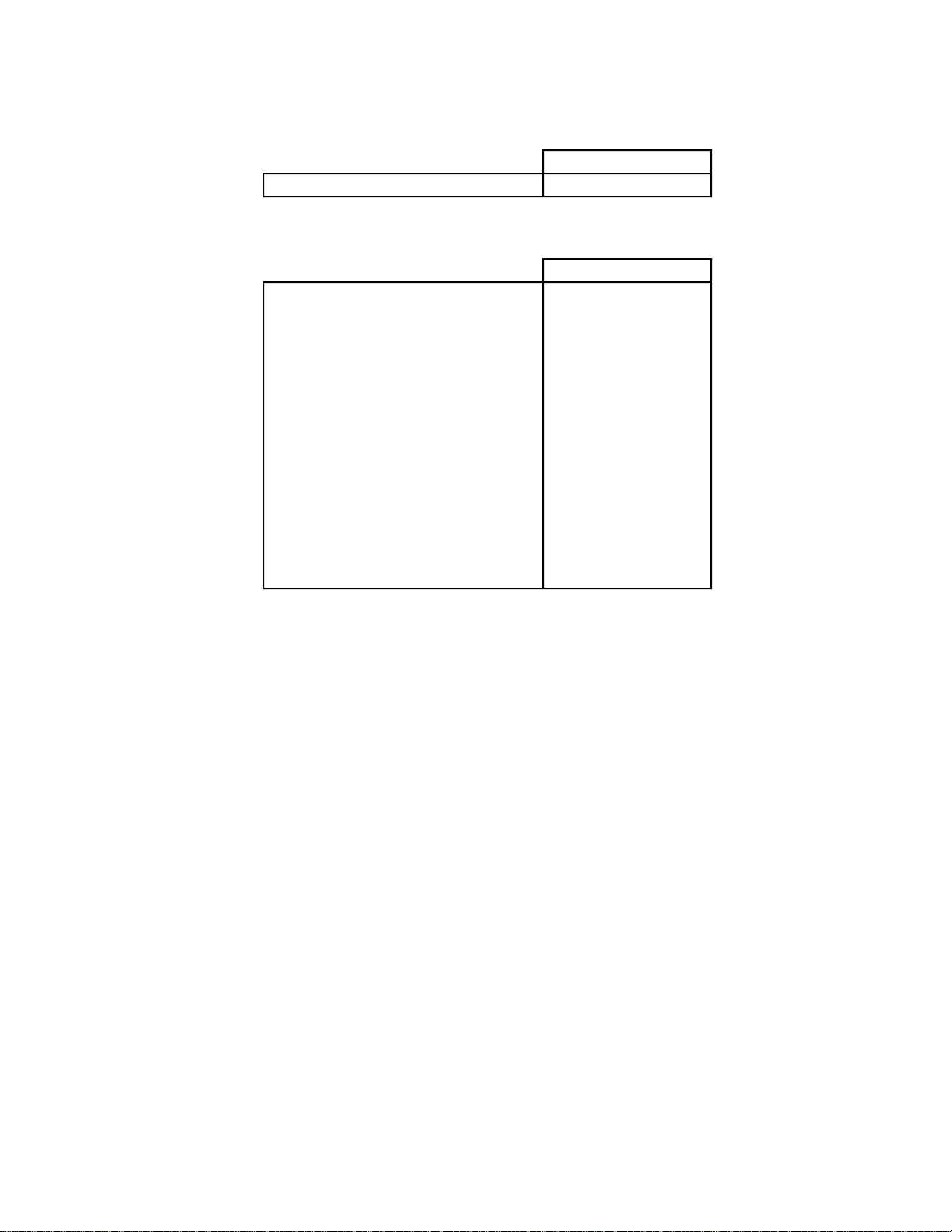
3.0 Specification Summary
3.1 Capacity
CP30204
Formatted Mbytes 212.6
3.2 Physical Configuration
Disk Type Thin film
Head Type Thin film
Actuator Type Rotary Voice-Coil
Number of Disks 2
Data Surfaces 4
Data Heads 4
Servo Embedded
Tracks per Surface 2,124
Track Density (TPI) 2,496 TPI
Formatted Track Capacity 25,088 bytes
Bytes per Block 512
Blocks per Drive 416,304
Sectors per Track (user): 49
Buffer Size 256KB segmentable
1
The physical parameters of the drive are listed in the table.
The drive's default native mode is 683 cylinders, 16 heads
and 38 sectors. This drive also supports Universal Translate.
1
CP30204
- 4 - Revision B
3.3 Performance
Seek Times
1
Physical Track to Track 3.0 ms
Logical (translated) track to track
Average
7.0 ms
12.0 ms
Maximum stroke 30.0 ms
Average Latency 6.7 ms
Rotation Speed (+0.1%) 4498 RPM
Controller Overhead < 500 µs
Data Transfer Rate (to/from Media) 2.5 Mbyte/second
Data Transfer Rate (to/from Buffer) 8.0 Mbyte/second
Start Time(Power Up)
(0 RPM - 4498 RPM)
3
typical: 10 seconds
maximum: 15 seconds
(0 RPM - Ready)
typical: 15 seconds
maximum: 20 seconds
Stop Time (Power Down) typical: 15 seconds
maximum: 20 seconds
Start/Stop cycles 20,000 minimum
Interleave 1:1
1
The timing is measured through the interface with the drive
operating at nominal DC input voltages. The timing is based
upon the physical parameters of the disk and may be affected
by translation and/or DOS overhead at the system level.
2
The average seek time is determined by averaging the seek
time for a minimum of 1000 seeks of random length over the
surface of the disk.
3
These numbers assume spin recovery is not invoked. If spin
recovery is invoked, the maximum could be 40 seconds.
Briefly removing power can lead to spin recovery being
invoked.
2
Revision B - 5 -
3.4 Read/Write
Interface Task File
Recording Method 1 of 7 RLL code
Recording Density (ID) 44,610 bits per inch
Flux Density (ID) 34,207 flux reversals per inch
3.5 Power Requirements (Typical)
+5V DC ± 5%
(Typical)
Read/Write Mode 440 ma 400 ma 7.0 W
Seek Mode 320 ma 420 ma 6.6 W
Idle Mode 320 ma 300 ma 5.2 W
Spin-up Mode 550 ma 1500 ma n/a
+12V DC ± 10%
(Typical)
Power
Maximum noise allowed (DC to 1 MHZ, with equivalent
resistive load):
Voltage Noise
+5 Volt 2%
+12 Volt 1%
Read/Write Mode occurs when data is being read from
or written to the disk.
Seek Mode occurs while the actuator is in motion.
Idle Mode occurs when the drive is not reading, writing
or seeking. The motor is up to speed and DRIVE READY
condition exists. Actuator is residing on last accessed
track.
- 6 - Revision B
Spin-Up Mode occurs while the spindle motor is
accelerating from its rest state to its operating speed. The
specified current is the average value over the spin-up
cycle.
3.6 Physical Characteristics
Outline Dimensions ±.010" 1.00" x 4.00" x 5.75"
Weight 1.3 pounds
Revision B - 7 -
4.0 Environmental Characteristics
4.1 Temperature
Operating 5°C to 55°C
Non-operating -40°C to 60°C
Thermal Gradient 20°C per hour maximum
4.2 Humidity
Operating 8% to 80% non-condensing
Non-operating 8% to 80% non-condensing
Maximum Wet Bulb 26°C
4.3 Altitude (relative to sea level)
Operating -200 to 10,000 feet
Non-operating (maximum) 40,000 feet
4.4 Reliability And Maintenance
MTBF 150,000 hours (POH)
MTTR 10 minutes typical
Preventive Maintenance None
Component Design Life 5 years
Data Reliablity <1 non-recoverable error in
1013 bits read
1
Projected MTBF based on comparison of similar
Conner products.
- 8 - Revision B
1
4.5 Shock and Vibration
Shock 1/2 sine pulse, 11 millisecond duration
Vibration Swept sine, 1 octave per minute
Non-operating shock 75G's
Non-operating vibration
5-62 HZ (1/2 oct/min) 0.020 inch displacement (double amplitude)
63-500 Hz (1/2 oct/min) 4 G's peak
Operating Shock 5 G's (without non-recoverable errors)
Operating Vibration
5-22 Hz .010 inch displacement (double amplitude)
23-500 Hz .5 G's (without non-recoverable error)
4.6 Magnetic Field
The disk drive will meet its specified performance while
operating in the presence of an externally produced
magnetic field of 6 gauss DC maximum.
4.7 Acoustic Noise
The sound pressure level will not exceed 40 dBA at a
distance of 1 meter from the drive.
Revision B - 9 -

4.8 Safety Standards
Conner Peripherals disk drives are designed to comply
with relevant product safety standards such as:
• UL 478, 5th edition, Standard for Information
Processing and Business Equipment and
UL 1950, Safety of Information Technology
Equipment including Electrical Business
Equipment
• CSA 22.2 #220, Information Processing and
Business Equipment and
CSA 22.2 #950, Safety of Information Technology
Equipment including Electrical Business
Equipment
• TUV-IEC 380, Safety of Electrically Energized
Office Machines and
TUV-IEC 950, Safety of Information Technology
Equipment including Electrical Business
Equipment
• TUV-VDE EN60950
VDE 0805/5.9
• FCC Class B Part 15 Subpart J
- 10 - Revision B

5.0 Functional Description
The drive contains all necessary mechanical and
electronic parts to interpret control signals, position the
recording heads over the desired track, read and write
data, and provide a contaminant free environment for the
heads and disks.
5.1 Read/Write and Control Electronics
One integrated circuit is mounted within the sealed
enclosure in close proximity to the read/write heads. Its
function is to provide head selection, read preamplification, and write drive circuitry.
The dual microprocessor-controlled circuit card provides
the remaining electronic functions which include:
• Read/Write Circuitry
• Rotary Actuator Control
• Interface Control
• Spin Speed Control
• Dynamic Braking
At power down the heads are automatically retracted to
the inner diameter of the disk and are latched and parked
on a landing zone that is off of the data tracks at the inner
diameter of the disk.
5.2 Drive Mechanism
A brushless DC direct drive motor rotates the spindle.
The motor/spindle assembly is dynamically balanced to
provide minimal mechanical runout to the disks. A
dynamic brake is used to provide a fast stop to the spindle
motor and return the heads to the landing zone when
power is removed.
Revision B - 11 -

5.3 Air Filtration System
The head-disk assembly is a sealed enclosure with an
integral 0.3 micron filter which maintains a clean
environment for the heads and disks.
5.4 Head Positioning Mechanism
The read/write heads are supported by a mechanism
coupled to a rotary voice coil actuator.
5.5 Read/Write Heads and Disks
Data is recorded on 95mm diameter disks through
miniature 3370 type thin film heads.
5.6 Customer Options
C/D
Up to two drives may be daisy chained together utilizing
the 40 pin Task File connector. The maximum cable
length is 18 inches. In order to install more than one
drive, it is necessary to set a jumper option. The C/D
jumper is used to determine whether the drive is a master
(drive C) or slave (drive D). The drive is configured as a
master (drive C) when jumpered and as a slave drive (D
drive) when not jumpered. (Refer to description of
-PDIAG signal for further information on master/slave in
Conner drives.)
- 12 - Revision B
DSP & SS
This pair of jumpers determines the signals on pin 39 of
the interface connector.
Jumper
DSP SS Action
- spindle synchronization signal disabled on pin 39.
X
- activity LED signal available on pin 39.
- spindle synchronization signal enabled on pin 39.
X
- activity LED signal disabled from pin 39.
- pin 39 floating.
Master/slave in ATA compatible mode uses pin 39 in a
time multiplexed manner to indicate that a slave drive is
present. During power-on-reset or after RESET is
asserted, this line is asserted by the slave drive within
400 ms to indicate its presence. The master drive allows
up to 450 msec for the slave drive to assert -HOST
SLV/ACT. -HOST SLV/ACT is deasserted by the slave
drive following its acceptance of the first valid command
or after 31 seconds, whichever comes first.
Jumpers E1, E2, E3
E1 Jumper in disables spin-up at power-on. The drive will
automatically spin up when it receives a command which accesses
the drive.
E2 Unused
E3 Unused
Revision B - 13 -

J3 Connector
A drive select LED may be driven using two alternative
pins on this drive. Pin 39 on the interface connector can
be used to drive the LED with a current limited 5 volt
supply if it is not configured for Spindle Synchronization.
The 16-pin auxiliary connector (J3), pins 3 and 4 provide
an open collector drive signal and a current limiting
resistor connected to +5V.
The spindle synchronization signal is also available on
Pin 2 of J3.
- 14 - Revision B
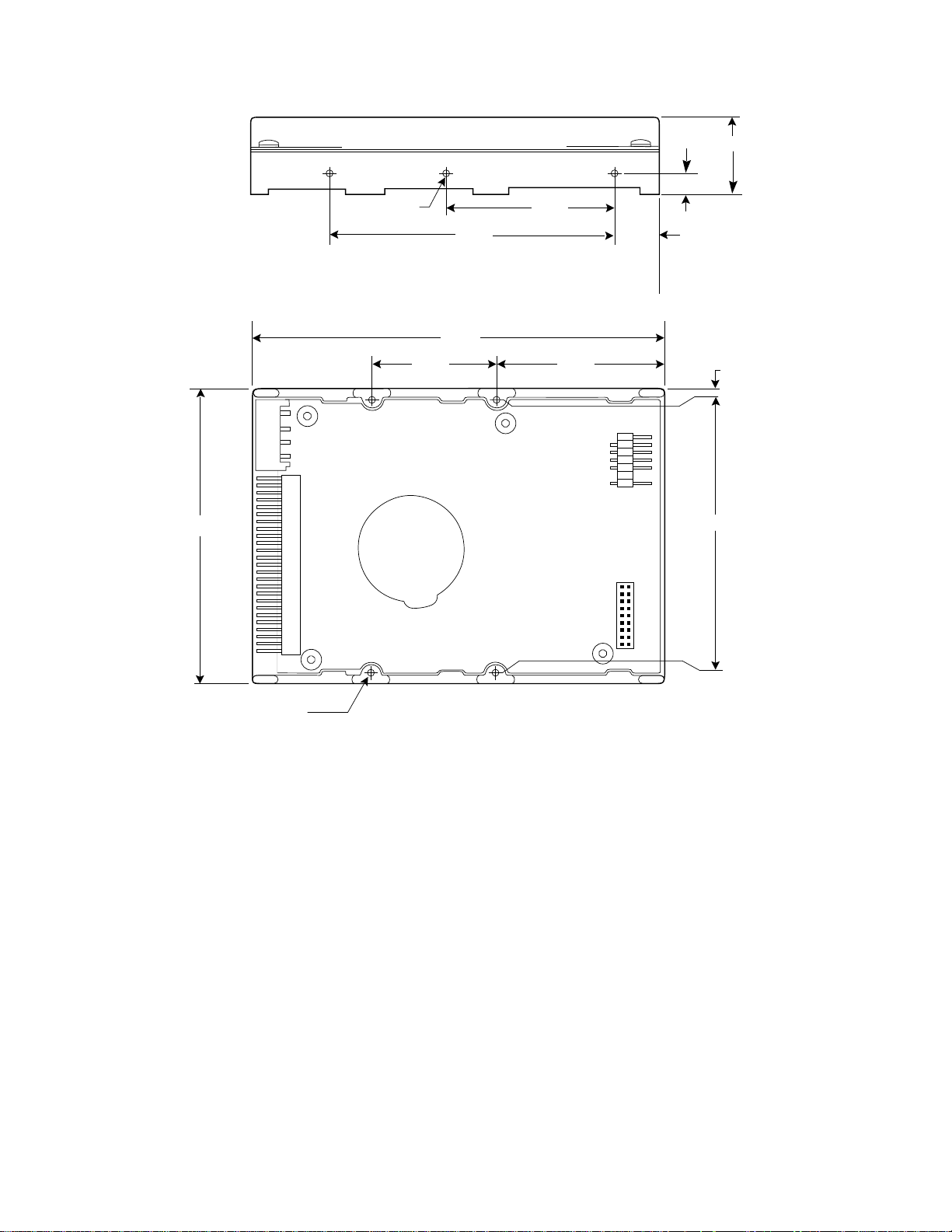
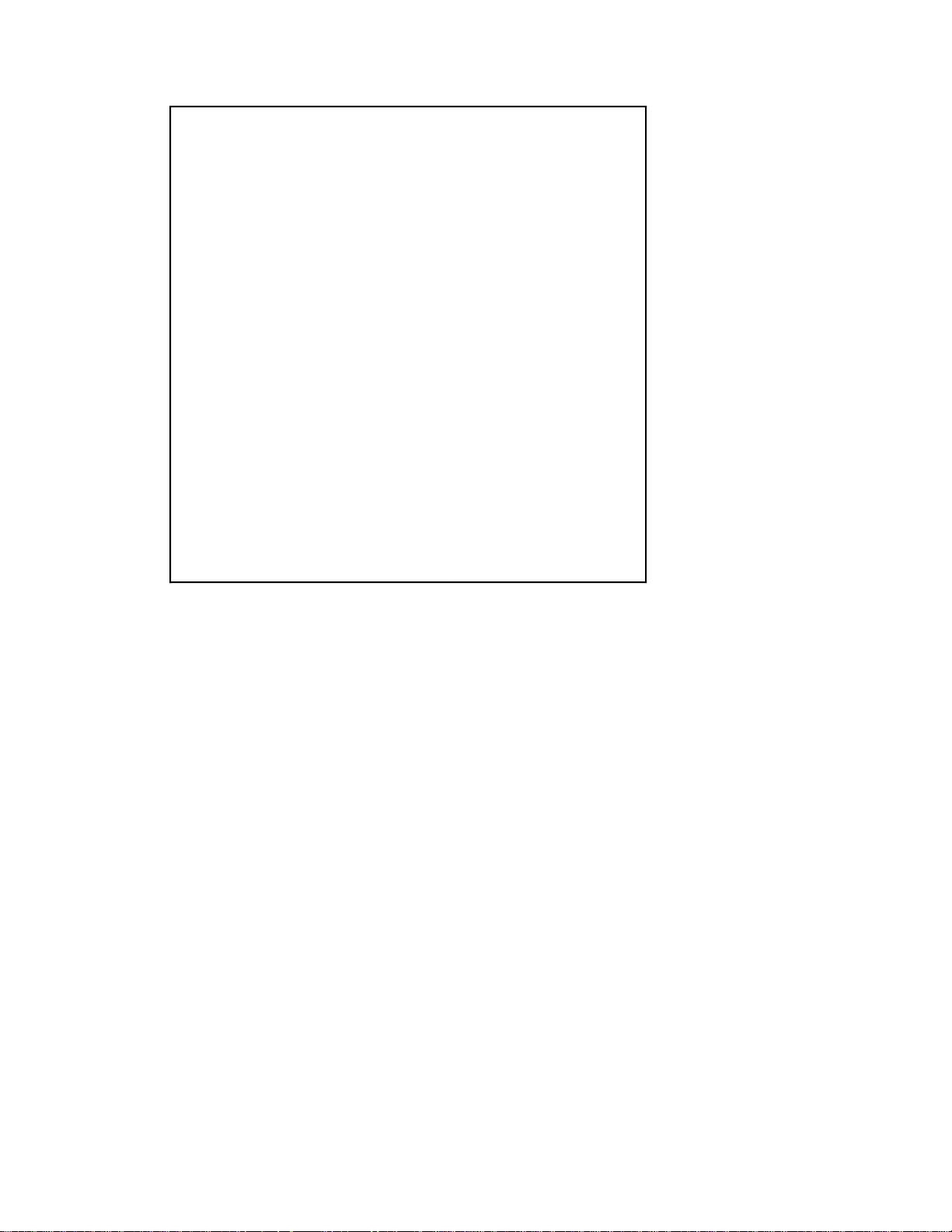
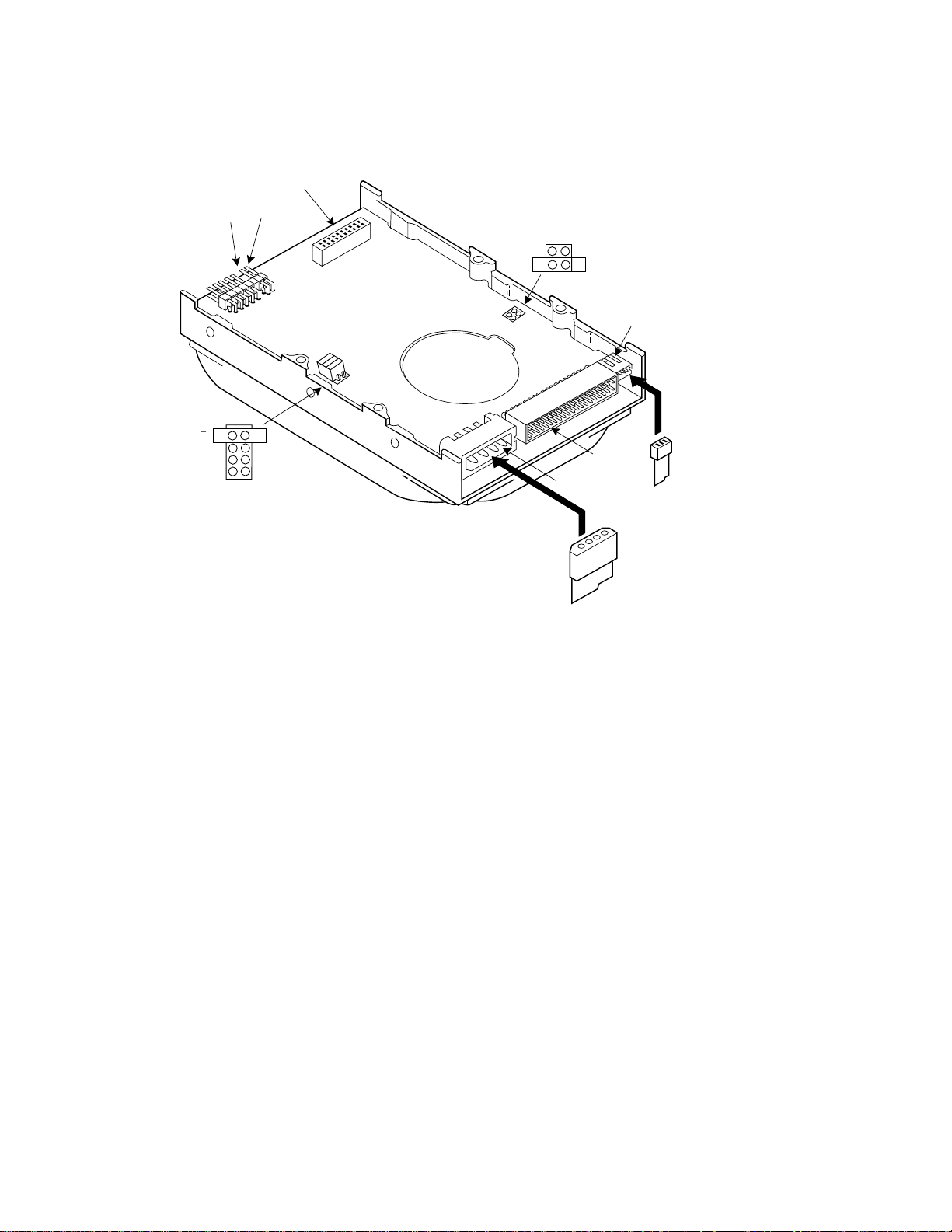
6.0 Mounting Configuration
6-32 UNC 2B
5/32" MAX (6X)
4.000
5.75
1
2
3
4
2.362
2.3751.750
1.00
.250
.630
.125
4.00
6-32 UNC 2B
3/8" MAX (4X)
TOLERANCES: .XXX .010
Figure 1. Mounting Configuration
Revision B - 15 -
3.750
+
–

7.0 Measuring Drive Specifications
7.1 Seek Times
The timing is measured through the interface with the
drive operating at nominal DC input voltages. The timing
also assumes that the BIOS and PC system hardware
dependency have been subtracted from timing
requirements and that the drive is operated using its
native drive parameters.
Average seek time is determined by averaging the seek
time for a minimum of 1000 seeks of random length over
the disk surface.
7.2 Start Time (Power Up)
Numbers specified assume that spin recovery is not
invoked. If spin recovery is invoked, the max could be 40
seconds. Briefly removing power can lead to spin recovery
being invoked.
7.3 Shock
Drives are subjected to specified G level shock for 11
milliseconds with a 1/2 sine wave pulse. The drive meets
specification without suffering non-recoverable READ or
WRITE errors or other damage.
7.4 Vibration
Drives are subjected to specified vibration levels at 1/2
octave per minute sweep. The drive meets the
specification without non-recoverable errors, READ or
WRITE errors, or other damage.
- 16 - Revision B
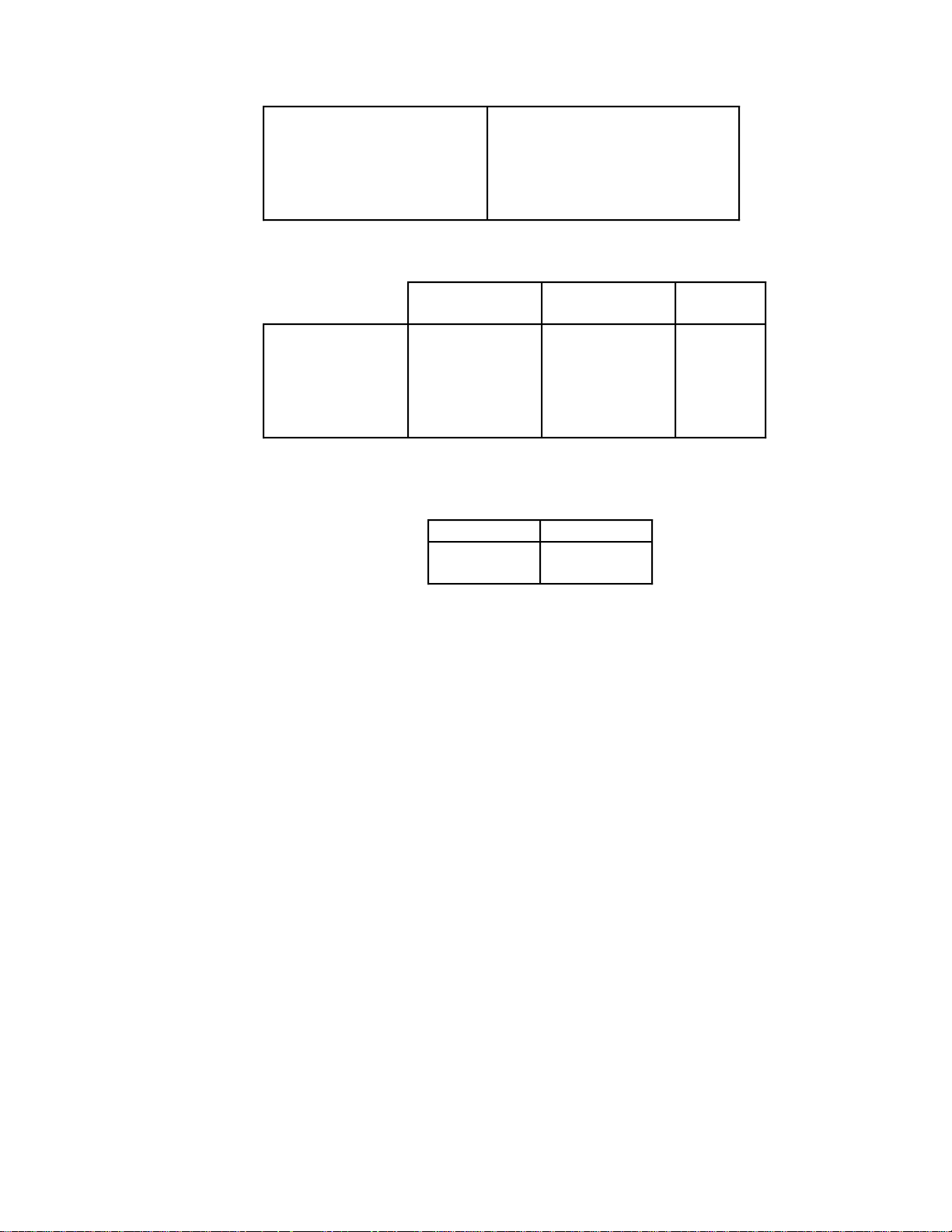
LED
SPINSYNC
HDA
SPNSYNC
DSP
POWER
CONNECTOR
J4
C/D
E1
E2
E3
Figure 2. Connectors and Jumper Options
Revision B - 17 -
J6
POWER
1
J2
40 PIN
TASK FILE
INTERFACE
4
3
2
3
2
1
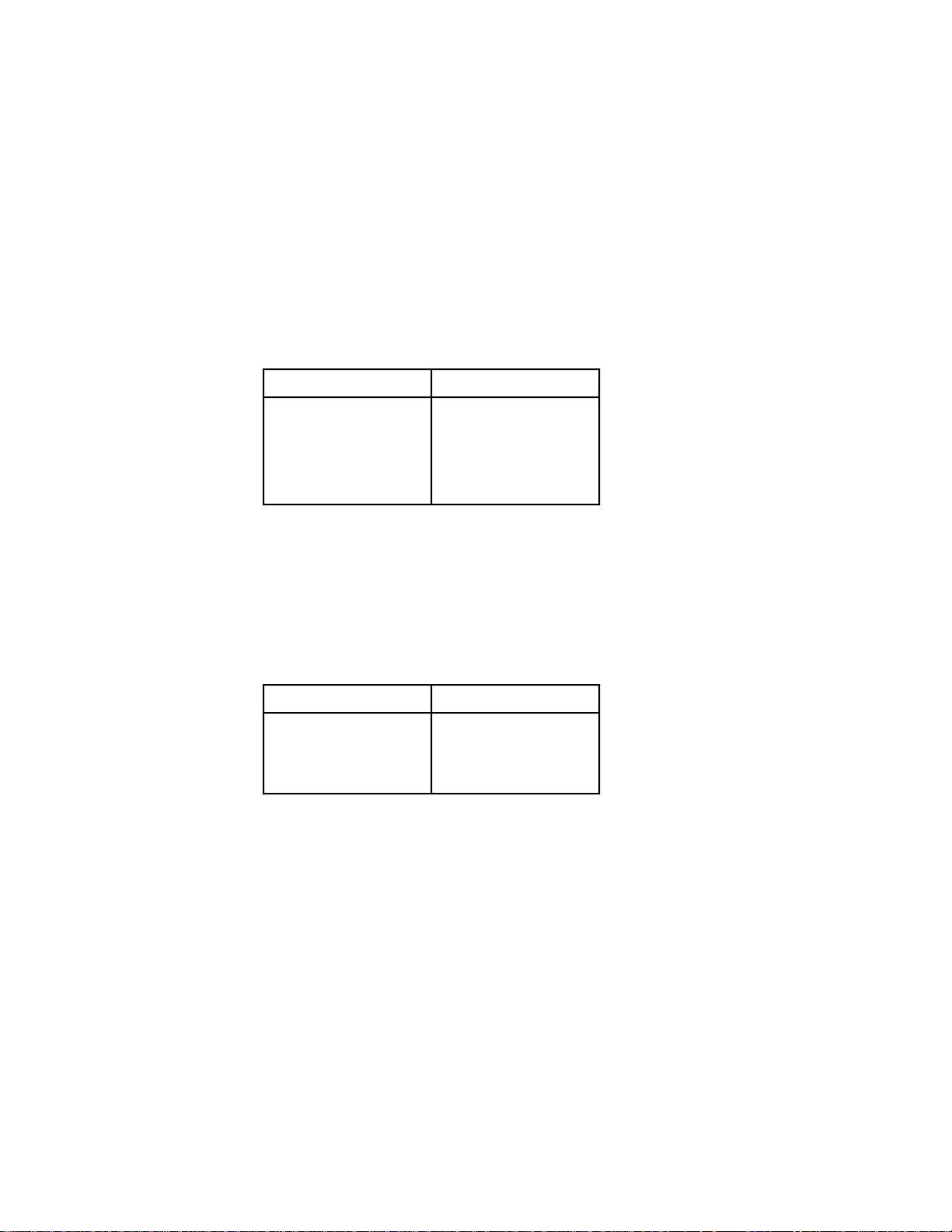
8.0 Electrical Description
8.1 Power Connectors
The drive has two power connectors; a standard 4 pin DC
power connector and a smaller 3 pin connector. Power
must only be supplied at one source.
The mating connector for the 4 pin connector is AMP 1480424-0 (Housing) and AMP 60619-4 (loose piece) or
61117-4 (strip) contacts.
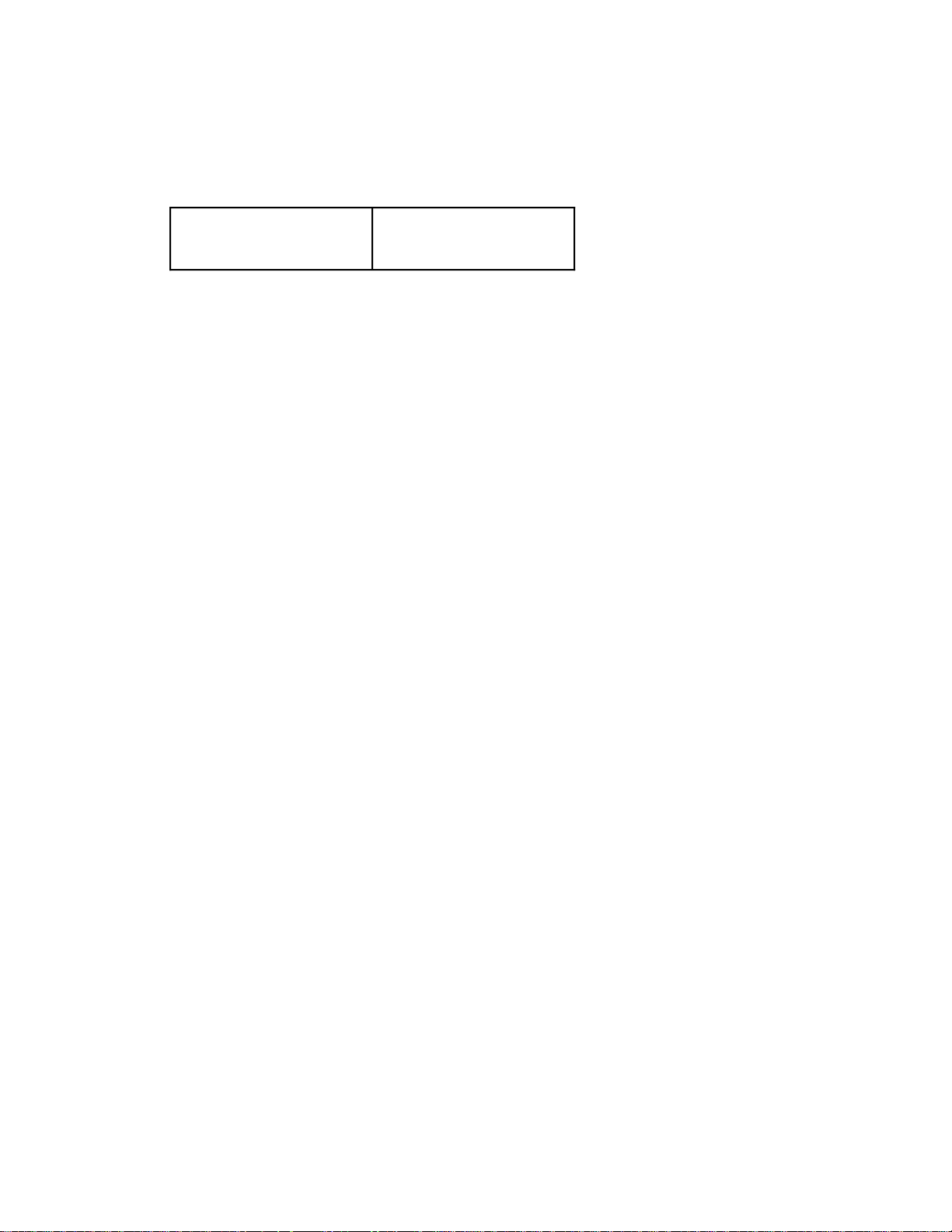
The following table describes the 4 pin power connector
pins:
Pin Signal
1 +12V
2 GND
3 GND
4 +5V
The mating connector for the three pin connector is Molex
series 54-84 Header, housing Molex part number 39-010033 and terminal part number 39-00-0031 (loose) or 3900-0023 (strip).
The following table describes the 3 pin power connector
pins.
Pin Signal
1 +5V
2 +12V
3 GND
- 18 - Revision B

9.0 Host Interface
9.1 Description
The interface between the drive adapter and the drive is
called the Host Interface. The set of registers in I/O space
of the Host controlled through the Host Interface is
known as the Task File. The physical interface from the
drive to the host is implemented using a 40 pin connector.
9.2 Interface Connector
The recommended mating connector is Molex P/N 15-473401 or equivalent. Two drives may be daisy chained on
this connector, and the maximum cable length is 18
inches.
9.3 Signal Levels
All signal levels are TTL compatible. A logic 1 is > 2.0
Volts. A logic 0 is from 0.00 Volts to .70 Volts.
9.4 Signal Conventions
All signals on the Host Interface shall have the prefix
HOST. All active low signals shall be further prefixed
with a "-" designation. All active high signals shall be
prefixed with a '+' designation. Signals driven only by the
Host will be indicated with an O, the signals driven by the
drive with an I, and signals which can be driven by either
the Host or the drive will be indicated with an I/O.
Revision B - 19 -
9.5 Pin Descriptions
The following table describes all of the pins on the Task
File Interface.
Pin Signal Pin Signal
01 -HOST RESET 02 GND
03 +HOST DATA 7 04 +HOST DATA 8
05 +HOST DATA 6 06 +HOST DATA 9
07 +HOST DATA 5 08 +HOST DATA 10
09 +HOST DATA 4 10 +HOST DATA 11
11 +HOST DATA 3 12 +HOST DATA 12
13 +HOST DATA 2 14 +HOST DATA 13
15 +HOST DATA 1 16 +HOST DATA 14
17 +HOST DATA 0 18 +HOST DATA 15
19 GND 20 KEY
21 RESERVED 22 GND
23 -HOST IOW 24 GND
25 -HOST IOR 26 GND
27 RESERVED 28 +HOST ALE
29 RESERVED 30 GND
31 +HOST IRQ14 32 -HOST IO16
33 +HOST ADDR 1 34 -HOST PDIAG
35 +HOST ADDR 0 36 +HOST ADDR 2
37 -CS0 38 -CS1
39 -HOST SLV/ACT 40 GND
- 20 - Revision B
Signal Name Dir Pin Description
-HOST RESET O 1 Reset signal from the Host
system which is active low
during power up and inactive
thereafter.
GND O 2 Ground between the drive and
the Host.
+HOST DATA I/O 3-18 16 bit bi-directional data bus 0-
15 between the host and the
drive. The lower 8 bits, HD0HD7, are used for register &
ECC access. All 16 bits are
used for data transfers. These
are tri-state lines with 24 mA
drive capability.
GND O 19 Ground between the drive and
the Host.
KEY N/C 20 An unused pin clipped on the
drive and plugged on the cable.
Used to guarantee correct
orientation of the cable.
RESERVED O 21,27,29
GND O 22 Ground between the drive and
the host.
-HOST IOW O 23 Write strobe, the rising edge of
which clocks data from the host
data bus, HD0 through HD15,
into a Task File register on the
drive.
GND O 24 Ground between the drive and
the host.
Revision B - 21 -

Signal Name Dir Pin Description
-HOST READ IOR O 25 Read strobe, which when low
enables data from Task File on
the drive onto the host data bus,
HD0 through HD15. The rising
edge of -HOST IOR latches
data from the drive at the host.
GND O 26 Ground between the drive and
the Host.
+HOST ALE O 28 Host Address Latch Enable. A
signal used to qualify the
address lines. This signal is
presently not used .
GND O 30 Ground between drive and host.
+HOST IRQ14 I 31 Interrupt to the Host system,
enabled only when the drive is
selected, and the host activates
the -IEN bit in the Digital Output
register. When the -IEN bit is
inactive, or the drive is not
selected, this output is in a high
impedance state, regardless of
the state of the IRQ bit. The
interrupt is set when the IRQ bit
is set by the drive CPU. IRQ is
reset to zero by a Host read of
the Status register or a write to
the Command register. This
signal is a tri-state line with 8 ma
drive capacity.
- 22 - Revision B
 Loading...
Loading...