

Conner CFP1080S, CFP1080E user manual
CFP1080S/CFP1080E
Intelligent Disk Drive
Product Manual
Production Release Per ECO 6561
P/N 20401007-001
Revision A
August 1995
3081 Zanker Road
San Jose, CA 95134-2128
(408) 456-4500

FCC Notice
This equipment generates and uses radio frequency energy and, if not installed
and used properly; that is, in strict accordance with the manufacturer's
instructions, may cause interference to radio and television reception. It has
been type tested and found to comply with the limits for a Class B computing
device in accordance with the specifications in Part 15 of FCC Rules, which are
designed to provide reasonable protection against such interference in a
residential installation. However, there is no guarantee that interference will
not occur in a particular installation. If this equipment does cause interference
to radio or television reception, which can be determined by turning the
equipment on and off, you are encouraged to try to correct the interference by
one or more of the following measures:
• Reorient the receiving antenna.
• Relocate the computer with respect to the receiver.
• Move the computer into a different outlet so that the computer and receiver
are on different branch circuits.
If necessary, you should consult the dealer or an experienced radio/television
technician for additional suggestions. You may find the following booklet
prepared by the Federal Communications Commission helpful:
How to Identify and Resolve Radio-TV Interference Problems
This booklet (Stock No. 004-000-00345-4) is available from the U.S. Government
Printing Office, Washington, DC 20402.
Warning: Changes or modifications made to this equipment which have not
been expressly approved by Conner Peripherals, Inc. may cause radio and
television interference problems that could void the user's authority to operate
the equipment.
Further, this equipment complies with the limits for a Class B digital apparatus
in accordance with Canadian Radio Interference Regulations.
Cet appareil numérique de la classe B est conforme au Règlement sur le
brouillage radioélectrique, C.R.C., ch. 1374.
Conner and the Conner logo are registered trademarks of Conner Peripherals,
Inc. All other trademarks mentioned in this manual are property of their
respective owners.
Copyright 1994,1995 Conner Peripherals, Inc.
All rights reserved.
Document No. 501-082 08/95
Important Information About this Manual
All information contained in or disclosed by this document is considered
proprietary by Conner Peripherals, Inc. By accepting this material, the recipient
agrees that this material and the information contained therein are held in
confidence and in trust and will not be used, reproduced in whole or in part, nor
its contents revealed to others, except to meet the purpose for which it was
delivered. It is understood that no right is conveyed to reproduce or translate
any item herein disclosed without express written permission from Conner
Peripherals, Inc.
Conner Peripherals, Inc. provides this manual "as is," without warranty of any
kind, either expressed or implied, including, but not limited to, the implied
warranties of merchantability and fitness for a particular purpose. Conner
Peripherals, Inc. reserves the right to change, without notification, the
specifications contained in this manual.
Conner Peripherals, Inc. assumes no responsibility for the accuracy,
completeness, sufficiency, or usefulness of this manual, nor for any problem that
might arise from the use of the information in this manual.
Table of Contents
1. Drive Overview 1
2. Specifications 9
Drive Description 1
Drive Features 2
Drive Components 3
Mechanical Design Features 3
Drive Assembly Housing 4
Drive Motor and Spindle 5
Head Positioning Mechanism 5
Read/Write Heads and Disks 5
Data and Power Connections 5
Electrical Design Features 5
Integrated Circuit 5
Circuit Board 5
Read/Write Channel 6
Firmware 6
Specifications in this Chapter 9
Drive Capacity 10
Formatted Capacity 10
Physical Configuration 10
Physical Configuration per Zone 10
Performance Characteristics 11
Seek Times (typical)
Average Latency 11
Rotation Speed (+0.1%) 11
Controller Overhead
Start Time(Power Up)
Stop Time at Power Down 11
Interleave 11
Read/Write Characteristics 12
Recording Method 12
Recording Density (maximum) 12
Flux Density (maximum) 12
SCSI Characteristics 12
Command Set 12
Data Transfer Rate 12
Maximum Synchronous Transfer Offset: 12
Maximum Tagged Command Queue Depth: 12
Reliability 13
Data Reliability 13
Component Design Life 13
Start/Stop cycles 13
Mean Time Between Failures: 13
Mean Time to Repair 13
Preventive Maintenance 13
Power Requirements 13
Minimum/Maximum Voltage: 13
Environmental Tolerances 14
Magnetic Field: 14
1
3
4
11
11
11
Technical Reference Manual Page i

Table of Contents Conner CFP1080E/CFP1080S
Acoustic Noise: 14
Safety Standards 15
Physical Characteristics - CFP1080E 16
Physical Characteristics - CFP1080S 17
3. Drive Operation 19
Drive Functions 19
Drive Operational Modes 19
Error Correction 20
Read Retry Operations 20
Downloadable Microcode 21
Buffer Management and Command Execution 22
SCSI Look Ahead Control Code 22
Write Caching 24
SCSI Queuing Control Code 25
Command Re-ordering 25
Buffer Management 25
4. Installing the Drive 27
Take These Precautions 27
Installing the Drive 27
Installing a CFP1080E 28
Setting the Drive's Jumpers - CFP1080E 28
Setting the SCSI Bus Address - CFP1080E 28
Disabling Spin-Up at Power On - CFP1080E 29
Delaying Spin Up at Power On - CFP1080E 29
Host Interface Connection - CFP1080E 29
Attaching Power to the Drive - CFP1080E 31
Mounting the Drive - CFP1080E 31
Installing a CFP1080S 32
Setting the Drive's Jumpers - CFP1080S 32
Setting the SCSI Bus Address - CFP1080S 33
Disabling Spin-Up at Power On - CFP1080S 34
Disabling SCSI Bus Terminator Power (TERMPWR) -
CFP1080S 34
Setting the Bus Termination - CFP1080S 35
Cabling the Drive - CFP1080S 36
SCSI Bus Cable 36
Spindle Synchronization 36
Attaching Power to the Drive - CFP1080S 37
Attaching a Remote LED - CFP1080S 37
Mounting the Drive - CFP1080S 37
5. Interface Physical Characteristics 39
Electrical Description 39
Output Characteristics 39
Input Characteristics 40
Model-Specific SCSI Physical Characteristics 40
CFP1080E (WIDE, 80-pin Single Connector Attachment [SCA]) 41
External Terminator Power 41
Internal Termination 41
Cable Requirements 41
Page ii Conner CFP1080E/CFP1080S

Conner CFA850/CFA1275 Table of Contents
Connector Requirements 42
Single Connector Attachment (SCA) Signal Definitions 42
Power 42
Spindle Sync 42
LED Out 42
Motor Start Controls 43
SCSI ID Selection 43
Interface Pin Assignments 44
Model CFP1080S (Narrow, 50-pin SCSI) 45
External Terminator Power 45
Internal Termination 45
Cable Requirements 46
Connector Requirements 47
Interface Pin Assignments 48
Interface Timing Requirements 49
6. SCSI Command Implementation 51
SCSI Command Summary 51
Drive Dependent SCSI Mode Sense Data 51
Format Device Page - 03
Rigid Disk Geometry Page - 04
Notch Page - 0C
H
H
H
52
54
55
Technical Reference Manual Page iii

Table of Contents Conner CFP1080E/CFP1080S
Page iv Conner CFP1080E/CFP1080S
Drive Overview
Drive Description
The CFP1080S and CFP1080E are high performance 3.5-inch low-profile (1.0
inch high) disk drives. The both offer 11 millisecond average seek time for
Reading, 11.5 millisecond seek time for Writing, with an average latency of only
5.56ms. High capacity is achieved by utilizing a zone density recording
technique using 8 recording zones at an areal density of 247 Mbits per square
inch. These drives feature high performance while maintaining low power
consumption to reduce power supply current and system cooling requirements in
disk arrays.
They are designed to operate on the Small Computer System Interface (SCSI)
and are SCSI-2 command compatible. The mechanical and major electronic
components are identical between the models and differ only in the SCSI
physical interface.
Drive Model Form Factor Interface Capacity
CFP1080S
CFP1080E
1
1 inch high, 3.5 inch
1 inch high, 3.5 inch 80-pin Single Ended FAST 1080MB
50-pin Single Ended FAST
1080MB
For simplicity, we often refer to these drives collectively in this manual as “the
drive.”
Technical Reference Manual Page 1

Chapter 1 Overview of the Drives
Drive Features
The drives provide the following features:
• 256 KB segmented cache buffer in the CFP1080S and 512 KB segmented
cache buffer in the CFP1080E.
• Tagged Command Queuing with Minimum Access Time Re-ordering and
Write/Read Coalescing
• Down-loadable Code through SCSI Interface
• SCSI-2 Compatibility
• 88 bit Reed-Solomon EDAC with on the fly error correction
• Microprocessor-controlled diagnostic routines execute at start-up
• Automatic Spindle Synchronization
• Voltage Regulated Termination Power with removable Resistor Packs (SCSI-
2, Alternative 2)
• Active Negation output drivers
• High performance rotary voice coil actuator with embedded servo system
• No thermal recalibration required to maintain performance levels
• High Shock resistance
• Automatic actuator latch against the inner stop upon power down with
dedicated landing zone
• Sealed HDA
• 1,7 run length limited code
Page 2 Conner CFP1080E/CFP1080S
Overview of the Drives Chapter 1
Drive Components
The drive is composed of mechanical, electrical, and firmware elements.
Mechanical Design Features
The drive’s hardware includes the components described in the following
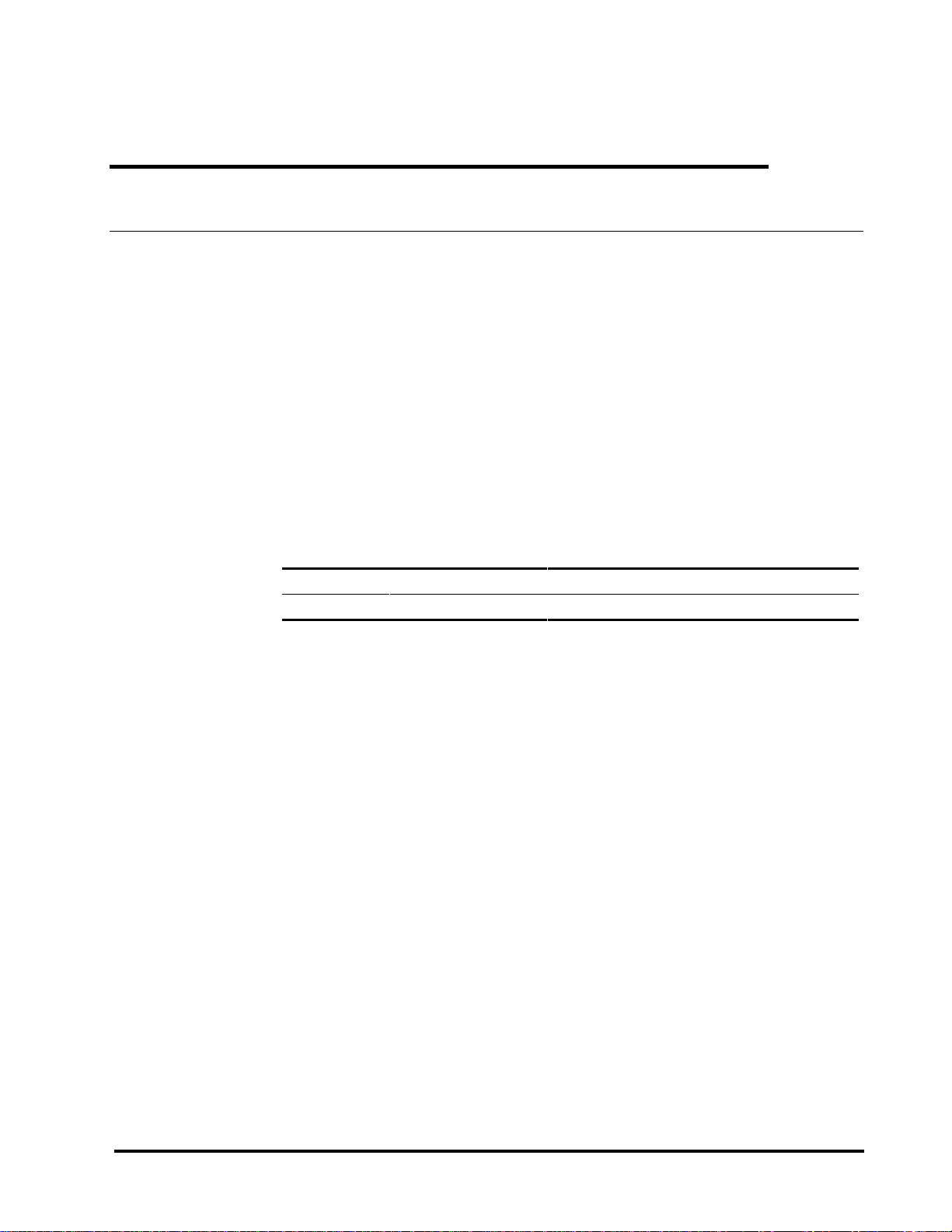
sections. Figure 1-1 shows the drive top level assembly.
Figure 1-1
Drive Top Level Assembly
Damper
Head-Disk
Assembly
Printed Circuit
Board Assembly
Shield
Printed
Circuit
Board
Assembly
Technical Reference Manual Page 3
Chapter 1 Overview of the Drives
Drive Assembly Housing
The drive assembly housing, or Head-Disk Assembly (HDA) consists of a die-cast
aluminum base on which is mounted a die-cast aluminum cover. Both the base
and the cover are fabricated using an alloy and surface finishing process
designed to inhibit oxidation. A gasket seals the joint between the base and
cover to retard the entry of moisture and environmental contaminants from the
assembly.
This assembly, the head-disk assembly (HDA), contains an integral 0.3 micron
filter, which maintains a clean environment. Critical drive components are
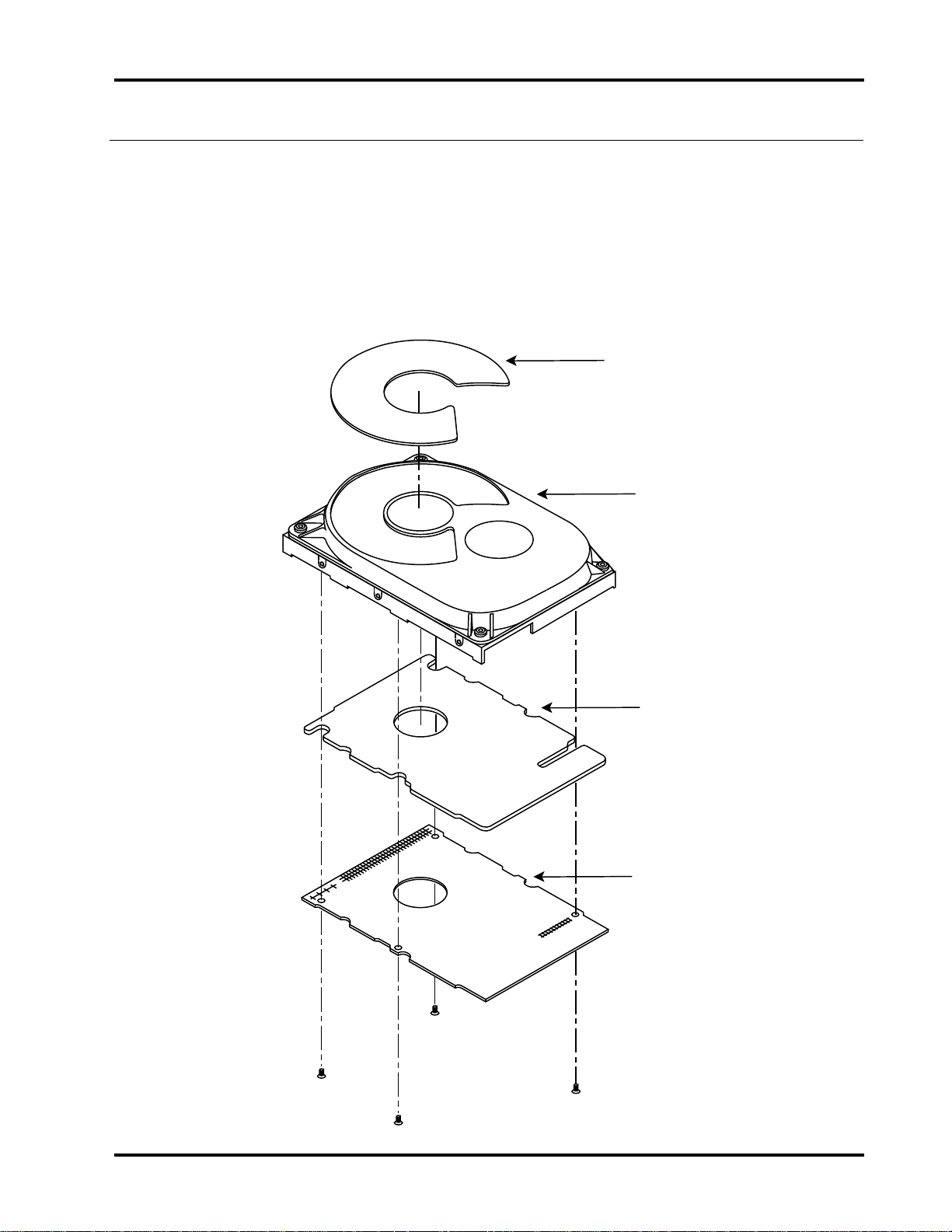
contained within this contaminant-free environment. Figure 1-2 shows the HDA
and the major assemblies contained within it:
Figure 1-2
Head-Disk Assembly
Disk (1 of 3)
Disk
Spacer (1 of 2)
Disk Clamp
Top Cover
Filter
Gasket
Preamplifier/
Flex Circuit
Assembly
Head-Stack
Assembly
Actuator
Magnet
Assembly
Spindle Motor
Base Assembly
080S_1_2
Page 4 Conner CFP1080E/CFP1080S

Overview of the Drives Chapter 1
Drive Motor and Spindle
A brushless DC direct-drive motor assembly is mounted on the drive’s base. The
motor rotates the drive’s spindle at 5400 RPM. The motor/spindle assembly is
dynamically balanced to provide minimal mechanical runout to the disks. A
dynamic brake is used to provide a fast stop to the spindle motor and return the
heads to the landing zone when power is removed.
Head Positioning Mechanism
The read/write heads are supported by a mechanism coupled to a rotary voice
coil actuator.
Read/Write Heads and Disks
Data is recorded on 95mm diameter disks through 3370-type 70% nano-slider
thin film heads. The drive contains three sputtered thin film disks with six data
surfaces and six read/write heads.
At power-down, the heads are automatically retracted to the inner diameter of
the disk and are latched and parked on a landing zone that is inside the data
tracks.
Data and Power Connections
Data and power connections to the drive are differ between the drive models.
Refer to chapter 4 for information regarding a specific model's requirements.
Electrical Design Features
Integrated Circuit
A single integrated circuit (IC) is mounted within the sealed hard drive assembly
in close proximity to the read/write heads. The IC provides head selection, read
pre-amplification, and write drive circuitry.
Circuit Board
The drive’s microprocessor-controlled circuit board provides the remaining
electronic functions, which include:
• read/write circuitry
• rotary actuator control
• interface control
• spin speed control
• auto-park
• power management
The processor is a 16-bit Motorola 68HC16. The entire data path between the
serializer-deserializer and the interface chip, including the buffer (cache) is 8
bits wide to provide high data throughput. The CFP1080E has a 16-bit wide
data path.
Technical Reference Manual Page 5

Chapter 1 Overview of the Drives
The data buffer (cache) utilizes two 256 KB x 4 Dynamic RAMs in the CFP1080S
and a single 256K x 16 Dynamic RAM in the CFP1080E. Data path integrity is
ensured by appending a 4-byte CRC to blocks as they are transferred from the
interface to the buffer through the SCSI controller chip. This CRC is verified by
the buffer manager chip as blocks are transferred from the buffer to the disk. A
sector data field consists of 512 bytes of data, 4 bytes of CRC and 11 bytes of
Error Detection And Correction (EDAC) code. The CRC is checked by the SCSI
controller chip as blocks are transferred from the buffer to the interface. The
CRC is not sent to the initiator.
Low SCSI transaction overhead is maintained by automating common SCSI bus
phases with the SCSI controller chip.
Read/Write Channel
The Read/Write channel, in addition to the preamplifier discussed earlier,
consists of three integrated functions in a single IC:
• Pulse Detector
• Data Separator
• Time base
Firmware
The drive’s firmware can be considered in three parts. There are two types of
SCSI control code and the disk control code with SCSI boot code.
The disk control and SCSI boot code reside in the ROM for the 68HC16
processor. This firmware is responsible for:
• starting the spindle motor and maintaining precise rotational speed
• controlling track following and actuator motion during seeking
• managing disk (media) R/W activity
• power management
• monitoring the overall health of the drive
• serial port communications
• uploading SCSI control code from the disk to RAM
• downloading SCSI control code to the disk
• supporting SCSI commands which do not require disk access
Page 6 Conner CFP1080E/CFP1080S

Overview of the Drives Chapter 1
The SCSI control microcode resides in both ROM and RAM. The RAM portion of
the code can be upgraded in the field with the SCSI Write Buffer command or
through the drive’s serial port. Additional information regarding the RAM code
can be found in Chapter 3, page 21. The SCSI firmware functions include:
• Operating the SCSI bus through the SCSI controller chip.
• reporting drive status and error conditions to the initiator
• manage operating parameters for the drive
• parsing the Command Descriptor Block
• converting the LBA to the respective physical address, then initiating read
and write operations by the disk control code
• grown defect management
• cache management
• queued command reordering (queuing SCSI only)
For more information on the drive’s interface implementation and command set,
refer to the Eighth Generation Disk Drive SCSI Interface Manual.
Technical Reference Manual Page 7
Chapter 1 Overview of the Drives
Page 8 Conner CFP1080E/CFP1080S
Specifications
2
Specifications in this Chapter
This chapter provides the following specifications for the drive:
• drive capacity
• physical configuration
• performance characteristics
• read/write characteristics
• reliability
• power requirements
• environmental tolerances
• safety standards
• physical characteristics
Technical Reference Manual Page 9
Chapter 2 Specifications
CFP1080E:
Sputtered Thin Film
Thin Film
Rotary Voice Coil
3
6
6
Embedded
3658
512 KB
3849 tpi
512
2,110,812
Drive Capacity
Formatted Capacity
• CFP1080S: 1080.7MB
• CFP1080E: 1080.7MB
*1MB is equal to 106 or 1,000,000 bytes
Physical Configuration
Specification
Disk Type Sputtered Thin Film
Head Type Thin Film
Actuator Type Rotary Voice Coil
Number of Disks 3
Data Surfaces 6
Data Heads 6
Servo Embedded
Tracks per Surface (user) 3658
Buffer Size 256 KB
Track Density 3849 tpi
Bytes per Sector 512
Sectors per Drive (user) 2,110,812
*
CFP1080S
Physical Configuration per Zone
Zone 0 (OD)
Zone 1
Zone 2
Zone 3
Zone 4
Zone 5
Zone 6
Zone 7 (ID)
Data Rate
(Mbits/sec)
55.7 4.53 119
50.4 3.96 104
47.9 3.77 99
43.1 3.39 89
40.7 3.20 84
37.3 2.93 77
34.4 2.70 71
31.5 2.74 65
Sustained Data
Rate (MB/sec)
Sectors per
Averaged sustained data rate for the entire disk: 3.66MB/second.
* The physical track configuration includes one spare sector per track.
User
Track *
Page 10 Conner CFP1080E/CFP1080S

Specifications Chapter 2
Performance Characteristics
Seek Times (typical)
1
• Track to Track: 3.0 msec
• Average (read/write): 11/11.5 msec
2
• Full Stroke: 26 msec
1
Drive operating at nominal DC input voltage and nominal operating temperature.
2
The average seek time is determined by averaging the seek time for a minimum of
1000 seeks of random length over the surface of the disk. The apparent average seek
time is reduced if multiple tagged commands are queued to the drive.
Average Latency
• 5.56 milliseconds
Rotation Speed (+0.1%)
• 5400 RPM
Controller Overhead
3
• 700 µsec, typical
3
Measured from the time the disconnect message is acknowledged by the host to the
time the drive begins to execute the command.
Start Time(Power Up)
4
• 0 RPM to Ready
− Typical: 8.5 seconds
− Maximum: 20 seconds
4
These numbers assume spin recovery is not invoked. If spin recovery is invoked, the
maximum could be 40 seconds. Briefly removing power can lead to spin recovery being
invoked.
Stop Time at Power Down
• Typical: 15 seconds
• Maximum: 20 seconds
Interleave
• 1:1
Technical Reference Manual Page 11

Chapter 2 Specifications
Read/Write Characteristics
Recording Method
• 1,7 RLL code
Recording Density (maximum)
• 64,600 bits per inch
Flux Density (maximum)
• 48,400 flux reversals per inch
SCSI Characteristics
Command Set
• SCSI-2 (refer to the Eighth Generation Disk Drive SCSI Interface Manual for
command implementation)
Data Transfer Rate
• To/from Buffer, synchronous narrow: 10.0 MByte/second
• To/from Buffer, synchronous wide (CFP1080E only): 20.0 MByte/second
Maximum Synchronous Transfer Offset:
• 15 bytes
Maximum Tagged Command Queue Depth:
• 32 commands
Page 12 Conner CFP1080E/CFP1080S
 Loading...
Loading...