

Page 1
AN118
Application Note
Interfacing the CS5521/22/23/24/28 to the 80C51
TABLE OF CONTENTS
1. INTRODUCTION ................................................... 1
2. ADC DIGITAL INTERFACE ................................... 1
3. SOFTWARE DESCRIPTION ................................. 1
3.1 Main Program Loop .......................................... 2
3.2 Initialize ............................................................. 2
3.3 Transfer Data To/From ADC ............................. 3
3.4 Transfer Data To/From PC ............................... 3
3.5 Decoding PC Commands ................................. 5
3.6 Sample Index .................................................... 6
3.7 Test Modes ....................................................... 6
4. MAXIMUM SCLK RATE ......................................... 8
5. DEVELOPMENT TOOL DESCRIPTION ................ 8
6. CONCLUSION ....................................................... 8
7. APPENDIX: 80C51 MICROCONTROLLER CODE 9
1. INTRODUCTION
This application note details the interface of Crys-
tal Semiconductor’s CS5521/22/23/24/28 Analogto-Digital Converter (ADC) to an 80C51 microcontroller. It includes the comple te code written for
the CDB5521/22/23/24/28 Evaluation Board,
which also interfaces the 80C51 to a PC. All algorithms discussed are included in Section 7. “Appendix: 80C51 Microcontroller Code” on page 9.
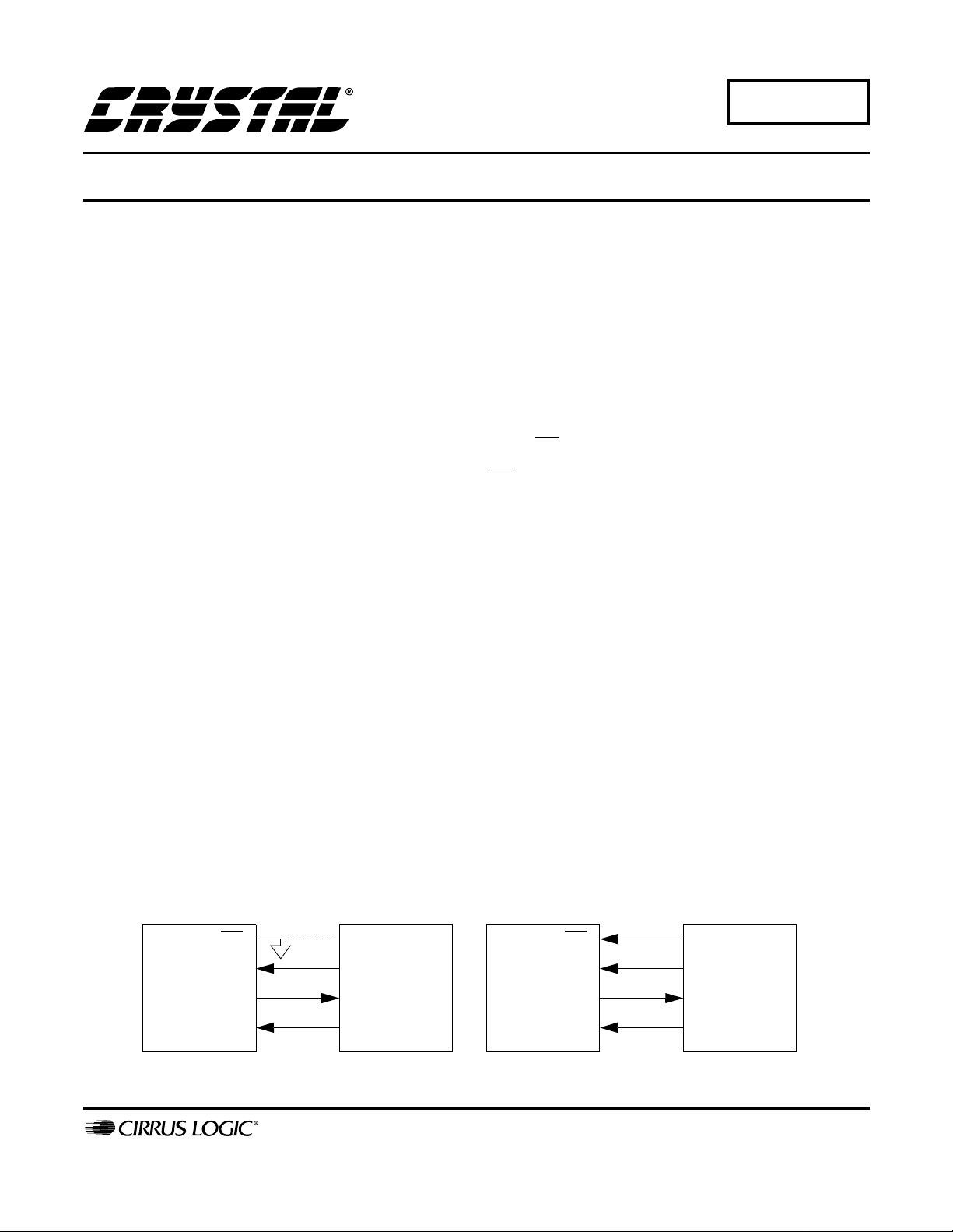
2. ADC DIGITAL INTERFACE
The CS5521/22/23/24/28 interfaces to the 80C51
through either a three-wire or a four-wire interface.
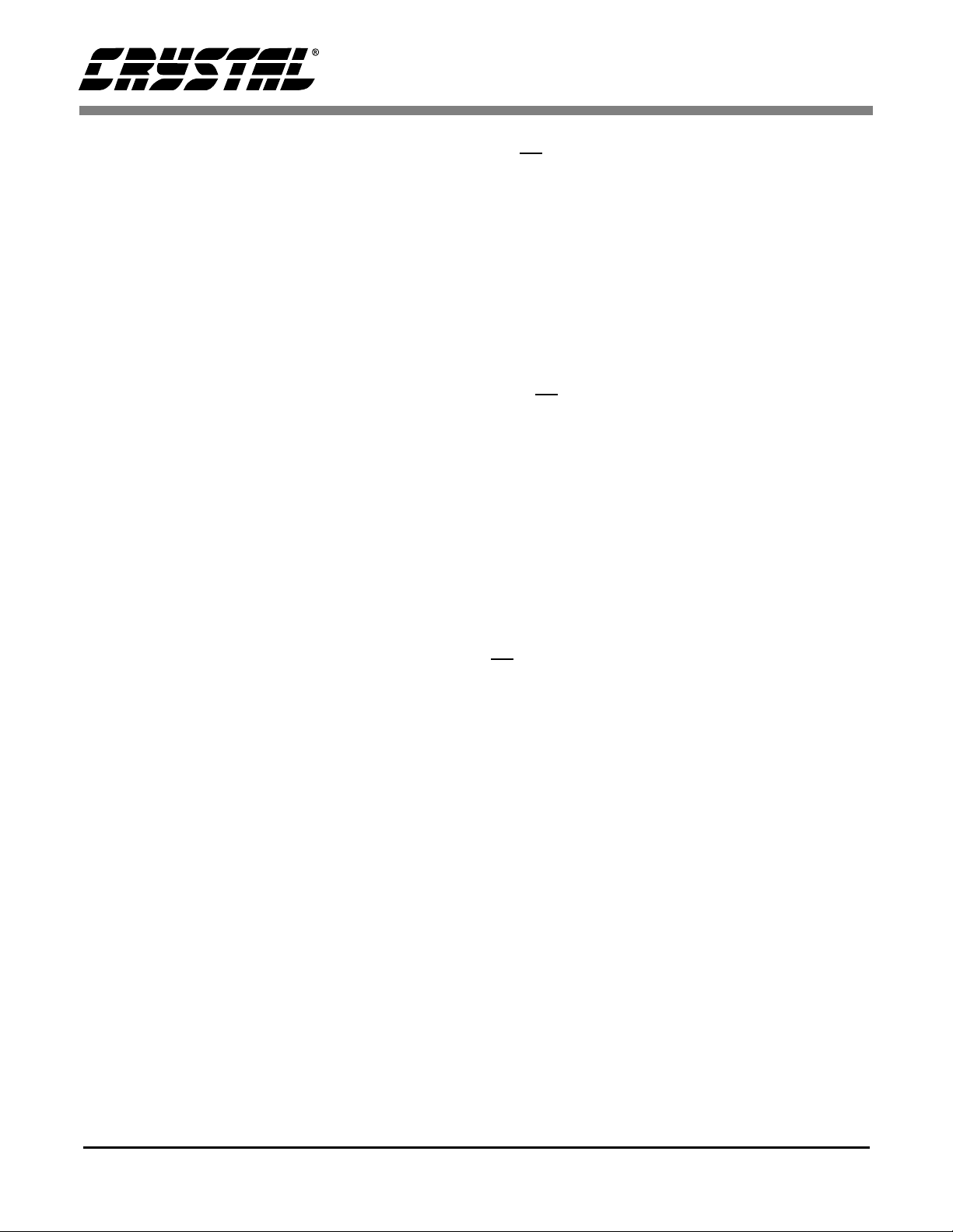
Figure 1 depicts the interface between the two devices. This software was written to interface to Port
1 (P1) on the 80C51 with either type of interface.
The ADC’s serial port consists of four control
lines: CS, SCLK, SDI, and SDO.
CS, Chip Select, is the control line which enables
access to the serial port.
SCLK, Serial Clock, is the bit-clock which controls
the shifting of data to or from the ADC’s serial
port.
SDI, Serial Data In, is the data signal used to transfer data from the 80C51 to the ADC.
SDO, Serial Data Out, is the data signal used to
transfer output data from the ADC to the 80C51.
3. SOFTWARE DESCRIPTION
This note details all of the algorithms contained in
the CDB5521/22/23/24/28 Evaluation Board software. The software is written for the 80C51 microcontroller on the evaluation board. The more
important communication algorithms are written in
CS5521/22/23/24/28
CS
SDI
SDO
SCLK
P.O. Box 17847, Austin, Texas 78760
(512) 445 7222 FAX: (512) 445 7581
http://www.cirrus.com
80C51
P1.0 (logic 0)
P1.1
P1.2
P1.3
Figure 1. 3-Wire and 4-Wire Interfaces
CS5521/22/23/24/28 80C51
CS
SDI
SDO
SCLK
Copyright Cirrus Logic, Inc. 1999
(All Rights Reserved)
P1.0
P1.1
P1.2
P1.3
NOV ‘99
AN118REV2
1
Page 2
80C51 assembly language, providing a good set of
tools for both C and assembly programmers to
build their own designs upon. While reading this
application note, please refer to Section 7. “Appendix: 80C51 Microcontroller Code” on page 9 for
the code listing.
AN118
START
INITIALIZE
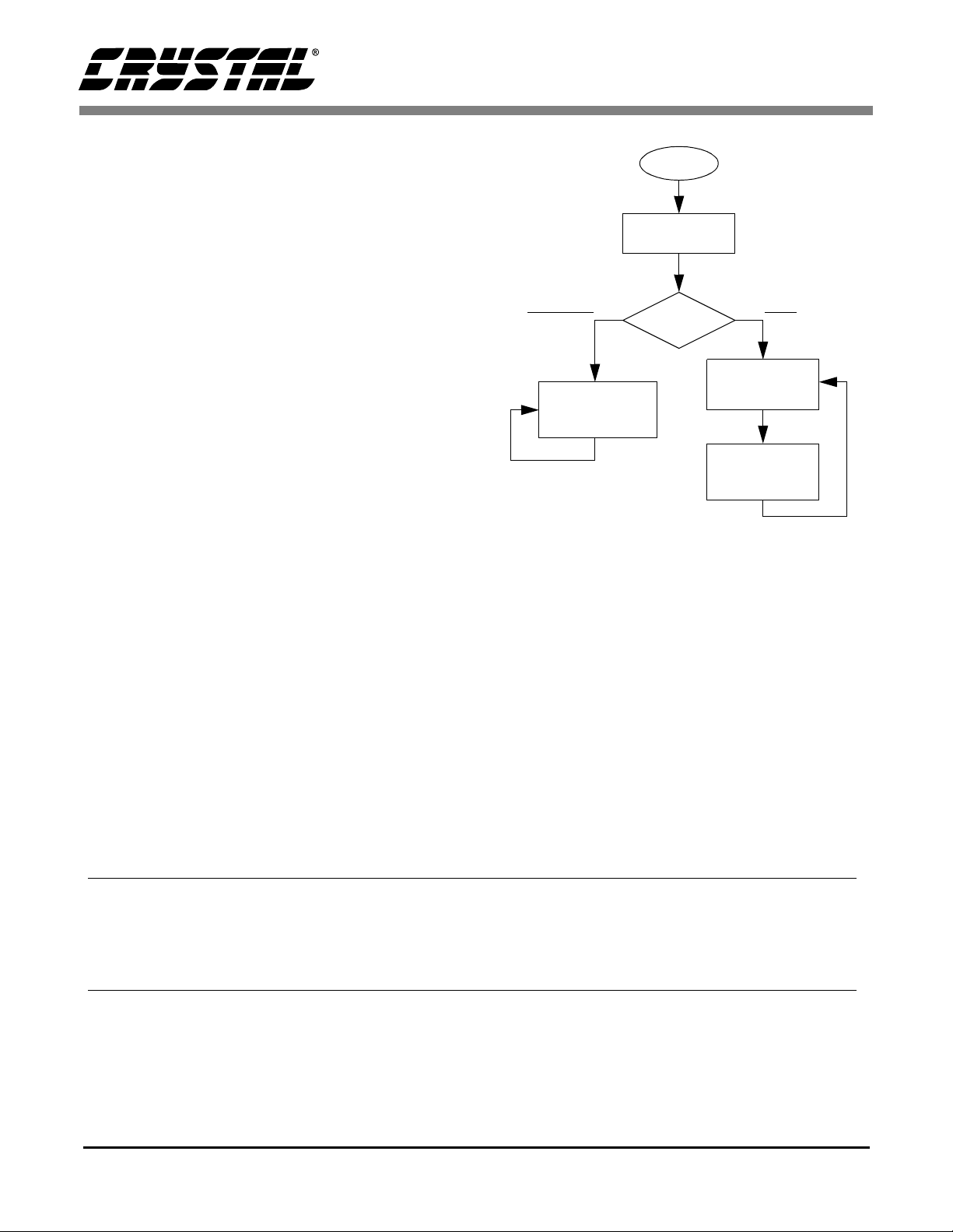
3.1 Main Program Loop
The main loop of the program is responsible for
calling all other algorithms and controlling the program flow. Figure 2 depicts the data flow of the
main loop. When the evaluation board is first powered up, or after a system reset, the microcontroller
and ADC are set up by calling the initialize routine.
The value present on the DIP switches is then
checked. If this value is anything other than zero,
the program goes into test mode. If the value is
equal to zero, the program goes into a continuous
loop, where it receives commands from the PC, decodes them, and performs the desired actions.
3.2 Initialize
Initialize is used to configure the microcontroller
and the ADC to the proper settings that will allow
the PC to control the ADC indirectly through the
microcontroller. The 80C51’s port P1 is configured
as depicted in Figure 1 (for more information on
configuring ports refer to the 80C51 Data Sheet).
Next, port P2 is written twice, once with all zeros
and once with all ones, with a delay in between to
control the LEDs attached to the port and inform
the user that the board has been reset successfully.
CHECK
DIPS
TEST MODES
Figure 2. So ftware Flow Diagram
COMMAND
ZeroNon-Zero
GET
DECODE
COMMAND
Port P3 is then set up to use the 80C51’s internal
UART to interface to the PC at 9600 baud, no parity bit, eight data bits, and one stop bit. To allow
time for the ADCs oscillator to start up, a delay
state is entered (oscillator start-up time is typically
500ms). After this delay, the ADC is ready to accept data. However, it is a good idea to reset the
ADC’s serial port before communicating with it.
To reset the serial port on the ADC, SDI is asserte d,
and 255 SCLKs are provided. SDI is then cleared,
and one final SCLK is provided (this is a slight
overkill, as only 15 bytes of logic 1’s followed by a
Contacting Cirrus Logic Support
For a complete listing of Direct Sales, Distributor, and Sales Representative contacts, visit the Cirrus Logic web site at:
http://www.cirrus. com/corporat e/contact s/
SPI is a trademark of Motorola.
MICROWIRE is a trademark of National Semiconductor.
Cirrus Logic, Inc. has made best efforts to ensure that the information contained in this document is accurate and reliable. However, the i nform atio n
is subject to change without notice and is provided “AS IS” without warranty of any kind (express or implied). No responsibility is assumed by Cirr us
Logic, Inc. for the use of this information, nor for infringements of patents or other rights of third parties. This document is the prop erty of Cirru s
Logic, Inc. and implies no license under patents, copyrights, trademarks, or trade secrets. No part of this publication may be copied, reproduced,
stored in a retrieval system, or transmitted, in any form or by any means (electronic, mechanical, photographic, or otherwise). Furthermore, no part
of this publ ication may be us ed as a basis f or m anufacture or s a le of any ite ms without the p rior writte n c ons ent of Cirrus Logic, Inc. The names of
products of C irrus Logi c, Inc. or oth er ve ndor s and suppl iers ap pea ring in this d ocume nt m ay be trade marks or se rvice m arks o f their respective
owners which may be registered in some jurisdictions. A list of Cirrus Logic, Inc. trademarks and service marks can be found at http://www.cirrus.com.
2 AN118REV2
Page 3
AN118
final byte with its LSB at logic 0 are needed to reset
the serial port). This places the ADC in the command state, where it awaits a valid command. Finally, before returning to the main routine, the
mode pin is queried to determine whether a three or
four-wire interface is being used.
3.3 Transfer Data To/From ADC
Transferring data to and from the ADC is done
through the transfer_byte and receive_byte functions. Transfer_byte takes one byte of input and
sends it to the ADC one bit at a time (MSB first) by
applying the bit information to P1.1 (SDI) and then
pulsing P1.3 (SCLK). This is repeated eight times
to transfer the entire byte of data to the ADC.
Receive_byte works in just the opposite direction,
obtaining byte information MSB-first on the P1.2
(SDO) line as it provides the clock on P1.3. The
functions write_to_register and read_register
make use of these byte transfer functions to send
and receive internal register information in the
proper order from the ADC. Write_to_register
writes four bytes of information to the ADC using
transfer_byte. The command byte is written first,
followed by the high, middle, and low bytes of the
24-bit register word. Read_register, on the other
hand, sends a command byte to the ADC using
transfer_byte, and then obtains the 24-bit register
word by calling receive_byte three times in succession. Due to the conversion time delay, reading
conversion data requires a slightly different method
than reading register information. The
read_conversion algorithm is designed for this purpose. The configuration register is read and stored
in memory using the read_register command. The
LP, RC, and MC bits are then masked to zero, and
the register is written using write_to_register. The
command to start a conversion is then written using
transfer_byte, and SDO is polled until the ADC indicates that the conversion is complete. Once a valid conversion has been obtained, eight zeros are
sent to the ADC with transfer_byte to start the
transfer of data, at which time receive_byte is
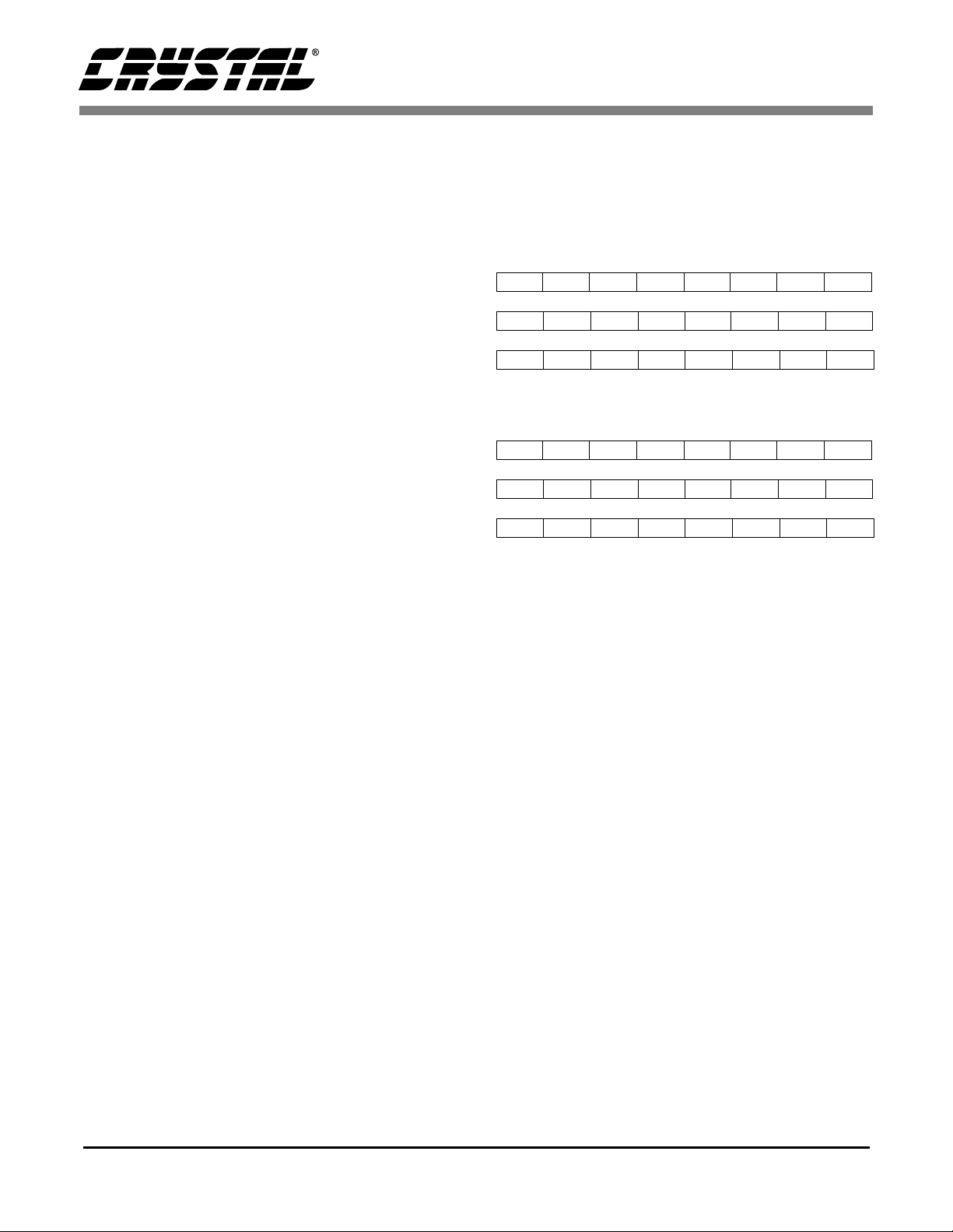
called three times to obtain the data word (see Figure 3 for more detail on how the information is organized among the three bytes) Figure 6 shows the
conversion data timing.
MSB High-Byte
D23 D22 D21 D20 D19 D18 D17 D16
Mid-Byte
D15 D14 D13 D12 D11 D10 D9 D8
Low-Byte
D7 D6 D5 D4 D3 D2 D1 D0
A) 24-bit Conversion Data Word (CS5522/24/28)
MSB High-Byte
D15 D14 D13 D12 D11 D10 D9 D8
Mid-Byte
D7 D6 D5 D4 D3 D2 D1 D0
Low-Byte
1110CI1CI0ODOF
B) 16-bit Conversion Data Word (CS5521/23)
0 - always zero, 1 - always 1
CI1, CI0 - Channel Indicator Bits
OD - Oscillation Detect, OF - Overflow
Figure 3. Bit Representation/Storage in 80C51
3.4 Transfer Data To/From PC
Transferring data to and from a PC through the
80C51’s serial port is accomplished with the routines txser and rxser. These two routines rely upon
status bits in the 80C51’s Serial Control Register
(SCON, located at address 0x98 Hex). Txser transfers data to the serial port by first polling TI (Transfer Interrupt, bit 1 in SCON) until the 80C51’s
serial buffer is empty, and ready to receive information. Once TI is at a logic high level, the software clears the TI bit and moves the byte to be
transferred into the 80C51’s serial buffer, where it
is transmitted to the PC LSB first. Rxse r receives a
byte in a similar fashion, by polling RI (Receive Interrupt, bit 0 in SCON) until there is valid data
available in the 80C51’s serial buffer. When RI is
at a logic high level, the data is transferred out of
the serial buffer to an immediate memory location.
AN118REV2 3
Page 4
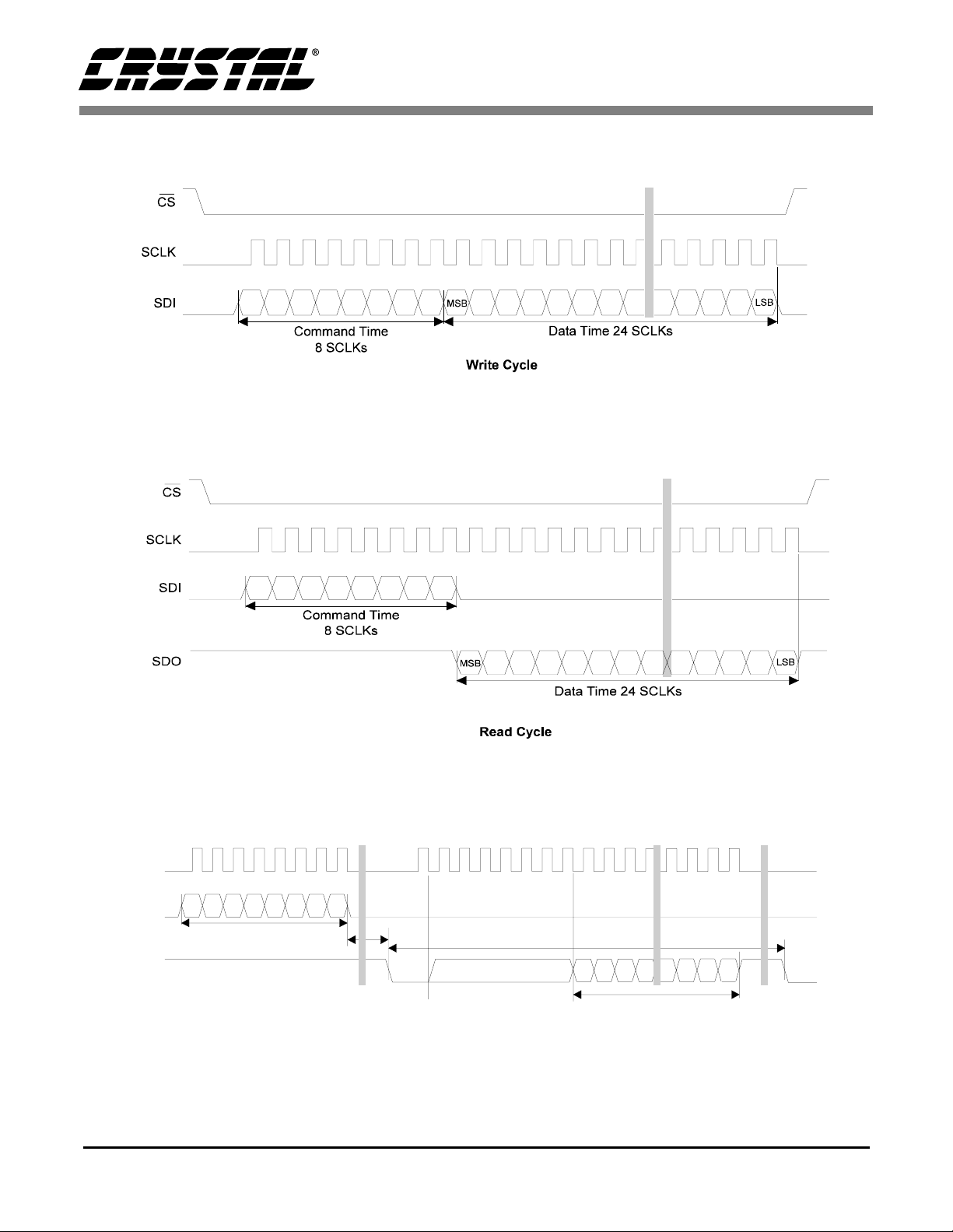
Figure 4. Write-Cycle Timing
AN118
Figure 5. R ead-Cycle Timing
SCLK
SDI
*
t
ommand Time
C
8SCLKs
DO
S
td = XIN/OWR clock cycles for each conversion except the
*
first conversion which will take XIN/OWR + 7 clock cycles
d
Data SDO Continuous Conversion Read
SCLKs Clear SDO Flag
8
SB
M
ata Time
D
24 SCLKs
IN/OWR
X
Clock Cycles
SB
L
Figure 6. Conversion/Acquisition Cycle Timing
4 AN118REV2
Page 5

AN118
3.5 Decoding PC Commands
The decode_command routine is where most of the
functionality of the program lies. It consists of
many smaller routines to direct the flow of data to
the proper locations. Decode_command accepts information from the PC, decides which tasks need to
be done based on that information, and carries out
those tasks accordingly. This is accomplished
through the use of a very large switch statement,
based on the input command byte, which tests for
every possibility and performs the appropriate rou-
tines shown in Section 7. “Appendix: 80C51 Microcontroller Code” on page 9.
Write Register - If t he PC has sent a com mand to
write to a specific register in the
CS5521/22/23/24/28, three more bytes are received from th e PC using rxser (24-bit data is always transferred via the UART in the order: low
byte, middle byte, high byte). Then the information, including the command byte is sent to the converter using the write_to_register function. In
contrast with the PC serial data, data transferred to
or from the ADC is always in the order: high byte,
middle byte, low byte.
Write Channel Setup Registers - In the case that the
PC requests to write to the Channel Setup Registers
(CSRs), the program receives another byte from the
PC to find out how many registers to write to. The
command word 0x05(HEX) is sent to the ADC to
begin writing to the registers. The data is received
from the PC using rxser, and sent directly to the
ADC using transfer_byte. This process of receiving data from the PC and transferring it to the ADC
is repeated until the requested number of bytes has
been sent to the PC.
Read Registers - When the decoded command is
asking to read the ADC’s internal registers,
read_register is called, using the command sent
from the PC. The information obtained by this
function is then sent to the PC using txser.
Read Conversion Data FIFO - To read the conversion data FIFO, the sample size requested, the conversion channel, and the loop bit status are received
from the PC, in that order. The conversion channel
is then sent to the ADC to begin a conversion, and
SDO is polled until it falls, indicating that the conversion is complete. At this time, a byte of zeros is
sent to the ADC to initiate the data transfer, and the
program loops through to receive each 24-bit conversion word and send it to the PC, for as many
times as the sample size that has been requested. If
the LP bit is set, then another sampl e set is received
from the ADC, but not sent to the PC.
Read Channel Setup Registers - To read the CSRs,
this algorithm first obtains the number of registers
to read from the PC using rxser. It then transfers the
0x0D(HEX) command to the ADC, indicating that
the CSRs are to be read. Next, the individual registers are read from the ADC and sent to the PC until
the number of registers specified by the PC command has been met.
Normal Conversions - For a normal conversion using any Setup, the read_conversion subroutine is
executed using the appropriate command word.
The data is then sent directly to the PC using txser.
Self Calibration - To perform a self-offset or selfgain calibration using any Setup, the appropriate
command word is sent to the ADC, and SDO is
polled until the calibration is complete to avoid
sending a new command when the ADC is busy.
System Calibration - System-offset and systemgain calibrations use the same procedure as self calibration, but areseparated in the code to set the two
command sets apart from one another.
Variable Number of Normal Conversions - This
routine is used when a set of samples is requested
from the PC (as opposed to a single sample). The
sample index is obtained from the PC, as well as the
Setup to be used. The decode_sample_index routine is then called to find out exactly how many
conversions to perform. The conversion channel
AN118REV2 5
Page 6

AN118
data is then transferred to the ADC, and SDO is
polled until the conversion is ready. A byte of zeros
is then transmitted to the ADC to begin the data
transfer, and the data word is received. The data
word is then sent to the PC, and the process is repeated until the sample size has been reached. Once
enough samples have been collected and transferred to the PC, a command byte consisting of all
ones is sent to the ADC to instruct it to stop converting data, and the final conversion word is received from the ADC and discarded.
Variable Number of Offset or Gain Calibrations When more than one offset or gain calibration is requested, the software obtains a sample index, the
type of calibration (self or system), and which Setup is being used to calibrate from the PC.
Decode_sample_index is called to determine the
actual number of calibrations to be performed, and
then the calibration type is sent to the ADC. SDO is
polled until the calibration is completed, and then
the calibration register is sent. The calibrated register is returned by the ADC, and sent to the PC. This
process continues until the number of calibrations
requested have been performed.
Serial Port Initialization - This routine re-initialize s
the serial port on the ADC if it is requested. To accomplish this, the SDI pin is set to a l ogic high level, and SCLK is pulsed 255 times. SDI is then
brought low and a single SCLK pulse is sent. This
initialization routine is the same as what is done
within the start-up initialize command, but is l imited to the serial port on the ADC.
cycle and poll the RV bit until the reset is successful.
Read Output Latch Pins - The ADC’s output latch
pins (A0 and A1) are connected to pins P1.4 and
P1.5, respectively, on the 80C51. If the PC requests
the status of these pins, they are read from the proper pins and transmitted to the PC.
Arbitrary Read - This routine is used to read any
number of bytes from the ADC and return them to
the PC. The number of bytes requested is obtained
from the PC, and then bytes are successively read
from the ADC and transmitted to the PC until that
number has been reached.
Arbitrary Write - This routine asks for one byte
from the PC, and transfers it to the ADC.
If none of these conditions are met, the software
does nothing but return to the main routine.
3.6 Sample Index
When the PC requests an enti re sample set, the microcontroller code assumes that it will be sending a
sample index. This number, 0-10, is passed to the
decode_sample_index routine to select one of the
ten sample set size options. The sample s et sizes are
based on the FFT algorithms in the PC evaluation
board software, which require a sample set size of
N
samples, and the software’s internal limitation
2
of between 16 and 8192 samples. A single sample
option is also included, and if none of these are selected, the sample size defaults to zero.
3.7 Test Modes
Reset Converter Via RS and RV Bits - This routine
resets the ADC, and returns all of its internal registers to their initial states. The command 0x03 followed by 0x800000(HEX) is sent to the ADC,
which sets the RS (Reset) bit and nothing else.
Then the 0x0B(HEX) register is read, and the low
byte is masked for the RV (Reset Valid) bit. If a
valid reset has occurred, the RS bit is cleared. If no
valid reset has occurred, the routine continues to
6 AN118REV2
There are a seven self-test modes built in the controller software, contained in the routine test_mode.
These tests allow the user to troubleshoot certain
problems that may be occurring with the evaluation
board and its software. The test modes are entered
by setting the DIP switches to a value greater than
zero and resetting the board. This instructs the main
routine to skip over the normal operation loop and
go straight into test mode. To exit any of these rou-
Page 7
AN118
tines, the user must place the DIP switches back
into the ‘000’ position and reset the evaluation
board. Each of the seven test modes is now described.
Mode 1, Loop Back Test - This test is used to check
the 80C51’s on-chip UART. To perform this test,
the user must place HDR7 in loop back position as
indicated on the evaluation board, and set the DIP
switches to ‘001’. When this mode is entered, a
byte (0xAA) is sent out to the UART and then a
byte is received from the UART. A delay is inserted to allow time for the information t o be transmitted and received, and then the received byte is
compared to the transmitted information. If the received byte is equal to 0xAA(HEX), then the test
was successful, and the code calls the
toggle_all_leds routine, which continuously blinks
all four LEDs. If the information does not match
up, the test failed, and the code branches to the
toggle_two_leds routine, which continuously
blinks only the first two LEDs (RESET and
COMM).
Mode 2, Read/Write to ADC - This mode tests the
microcontroller’s ability to read and write the internal registers of the ADC. To perform this test, the
user sets the DIPs to ‘010’ and resets the board.
Upon entering this test mode, the code writes
0xAA0000(HEX) to both the offset and gain registers of Physical Channel 1 (PC1). The information
is then read from these two registers, and the high
byte of each is compared to the value 0xAA(HEX).
If they are both the same, then the test passed, and
toggle_all_leds is called. If either of the registers
were not written properly, the test failed, and
toggle_two_leds is called.
Mode 3, Continuously Acquire Single Conversion
- In this mode, conversions are continuously obtained from the ADC. This test mode is initi ated by
setting the DIPs to ‘011’. The first two LEDs are
lighted, and the code loops and continuously gathers conversions until the evaluation board is reset.
By probing HDR6 on the evaluation board and using CS as a triggering pin, an oscilloscope or logic
analyzer will display how the m icrocontroller reads
conversion data in real-time.
Mode 4, Continuously Write Gain Register - In
mode 4, the gain register of PC1 is written to continuously. The test mode is entered by setting the
DIPs to ‘100’. The third LED (GAIN_CAL) is lit,
and the code loops and keeps writing to the gain
register of PC1 until the evaluation board is reset.By probing HDR6 on the evaluation board and
using CS as a triggering pin, an oscilloscope or logic analyzer will display how the microcontroller
writes information to the ADC’s internal registers
in real-time.
Mode 5, Continuously Read Gain Register - This
mode continuously reads the gain register on PC1.
Setting the DIPs to ‘101’ selects this test mode. The
odd LEDs (RESET and GAIN_CAL) are lit, and
the code loops through to read from the gain register of PC1 until the evaluation board is reset. By
probing HDR6 on the evaluation board and using
CS as a triggering pin, an oscilloscope or logic analyzer will display how the microcontroller reads
data from the ADC’s internal registers in real-time.
Mode 6, PC to Microcontroller RS-232 Communication Link Test - This test is performed in conjunction with the PC to verify that the RS-232 link
is fully operational on both ends. Setting the DIPs
to ‘110’ selects for this test mode. When HDR7 is
in the Normal position, the controller receives three
bytes of information from the PC, and then echoes
them back in the same order that they were received and calls toggle_all_leds. When HDR7 is in
the Loopback position, the three bytes are automatically looped back to the PC through the RS-232
circuitry. The PC software indicates whether this
test passes or fails, based upon the bytes it receives
back from the board.
Mode 7, Toggle LEDs - This mode is used to test
the functionality of the LEDs on the evaluation
AN118REV2 7
Page 8

AN118
board, and is entered by setting the DIPs to ‘111’.
Immediately upon entering mode 7, the
toggle_all_leds routine is called to blink the LEDs
repeatedly until the board is reset.
4. MAXIMUM SCLK RATE
A machine cycle in the 80C51 consists 12 oscillator
periods or 1µs if the microcontroller’s oscillator
frequency is 12 MHz. Since the
CS5521/22/23/24/28’s maximum SCLK rate is
2MHz, additional no operation (NOP) delays may
be necessary to reduce the transfer rate if the microcontroller system requires higher rate oscillators.
5. DEVELOPMENT TOOL DESCRIPTION
The code in this application note was developed using a software development package from Franklin
Software, Inc. The code consists of intermixed C
and assembler algorithms which are used by the
CDB5521/22/23/24/28, a customer evaluation
board designed to help customers evaluate the performance of the CS5521/22/23/24/28 devices.
6. CONCLUSION
This application note describes code that can be
used to interface an 80C51 to both the
CS5521/22/23/24/28 ADC and a PC. It is divided
into two main sections: hardware and software. The
hardware interface illustrates both a three-wire and
a four-wire interface between the 80C51 and the
ADC. The three-wire is SPI™ and MICROWIRE™
compatible. The software, developed with development tools from Franklin Software, Inc., is used in
conjunction with the PC evaluation software and
the CDB5521/22/23/24/28 evaluation board to pro-
vide a system by which the CS5521/22/23/24/28’s
performance can be evaluated. There are four main
routines which interface the CS5521/22/23/24/28
to the 80C51, and provide the communication between the 80C51 and the PC, e.g. transfer_byte,
receive_byte, txser, and rxser. These four routines
are written in 80C51 assembly language, and are
easily imported into application-specific designs
by both C and assembly programmers.
All of the software described in this note is included Section 7. “Appendix: 80C51 Microcontroller
Code” on page 9.
8 AN118REV2
Page 9

7. APPENDIX: 80C51 MICROCONTROLLER CODE
/*CS5521/22/23/24/28 Runtime Constants and Prototypes*/
/*PROTOTYPES*/
void initialize(void);
void decode_command(char command);
void decode_sample_index(void);
void TXSER(char);
char RXSER(void);
char receive_byte(void);
void transfer_byte(char);
void write_to_register(char command,char low,char mid, char high);
void read_register(char command);
void read_conversion(char command);
void Delay(void);
void test_mode(void);
void toggle_all_leds(void);
void toggle_two_leds(void);
/* BYTE Register equates for the register ports */
sfr P0 = 0x80;
sfr P1 = 0x90;
sfr P2 = 0xA0;
sfr P3 = 0xB0;
sfr PSW = 0xD0;
sfr ACC = 0xE0;
sfr B = 0xF0;
sfr SP = 0x81;
sfr DPL = 0x82;
sfr DPH = 0x83;
sfr PCON = 0x87;
sfr TCON = 0x88;
sfr TMOD = 0x89;
sfr TL0 = 0x8A;
sfr TL1 = 0x8B;
sfr TH0 = 0x8C;
sfr TH1 = 0x8D;
sfr IE = 0xA8;
sfr IP = 0xB8;
sfr SCON = 0x98;
sfr SBUF = 0x99;
AN118
/*PORT 1 equates*/
sbit CS = 0x90 ; /* Ch ip Select */
sbit SDI = 0x91 ; /* Serial Data In */
sbit SDO = 0x92 ; /* Serial Data Out */
AN118REV2 9
Page 10

sbit SCLK = 0x93 ; /* Serial Clock */
sbit A1 = 0x94 ; /* Latch Inp ut */
sbit A0 = 0x95 ; /* Latch Inp ut */
sbit RESET = 0xA3;
sbit COMM = 0xA2;
sbit GAIN_CAL = 0xA1;
sbit OFFSET_CAL = 0xA0;
sbit TEST_BIT1 = 0xB2;
sbit TEST_BIT2 = 0xB3;
sbit TEST_BIT3 = 0xB4;
sbit MODE = 0x80;
sbit CTRL3 = 0x83;
sbit CTRL2 = 0x84;
sbit CTRL1 = 0x85;
/* BIT Register */
/* PSW */
sbit CY = 0xD7;
sbit AC = 0xD6;
sbit F0 = 0xD5;
sbit RS1 = 0xD4;
sbit RS0 = 0xD3;
sbit OV = 0xD2;
sbit P = 0xD0;
AN118
/* TCON */
sbit TF1 = 0x8F;
sbit TR1 = 0x8E;
sbit TF0 = 0x8D;
sbit TR0 = 0x8C;
sbit IE1 = 0x8B;
sbit IT1 = 0x8A;
sbit IE0 = 0x89;
sbit IT0 = 0x88;
/* IE */
sbit EA = 0xAF;
sbit ES = 0xAC;
sbit ET1 = 0xAB;
sbit EX1 = 0xAA;
sbit ET0 = 0xA9;
sbit EX0 = 0xA8;
/* IP */
sbit PS = 0xBC;
sbit PT1 = 0xBB;
10 AN118REV2
Page 11

sbit PX1 = 0xBA;
sbit PT0 = 0xB9;
sbit PX0 = 0xB8;
/* P3 */
sbit RD = 0xB7;
sbit WR = 0xB6;
sbit T1 = 0xB5;
sbit T0 = 0xB4;
sbit INT1 = 0xB3;
sbit INT0 = 0xB2;
sbit TXD = 0xB1;
sbit RXD = 0xB0;
/* SCON */
sbit SM0 = 0x9F;
sbit SM1 = 0x9E;
sbit SM2 = 0x9D;
sbit REN = 0x9C;
sbit TB8 = 0x9B;
sbit RB8 = 0x9A;
sbit TI = 0x99;
sbit RI = 0x98;
AN118
/**************************************************************/
/* CDB5521/22/23/24/28 Engineering Microcontroller code Version 1.00 */
/* Purpose: Interfaces the CCS5521/22/23/24/28 to a PC */
/* Comments: */
/************* ********************************** ***************/
#pragma nointvector /* Disable Interrupt Vectors */
#pragma debug /* Include Debug Information with .obj file */
#pragma code /* Include Assemble Code with .lst file */
#pragma small /* Use a Small Memory Model*/
#pragma RB(0) /* Use Register Bank Zero */
#pragma OPTIMIZE(3) /* Use Highest Level of O ptimizing */
#include "cs5522.h"
/* Global Variable */
char command, /* One Byte Variables */
ext_byte,
high_byte,
mid_byte,
low_byte,
temp,
temp1;
int sample_index, /* Two Bytes Long */
sample_size,
i,
mode; /* 0 = three wire 1 = 4 wire */
AN118REV2 11
Page 12

/**************************************************************/
/* Routine - Main */
/* Input - none */
/* Output - none */
/* Description - This routine is the main algorithm used to call */
/* all subroutines. */
/**************************************************************/
main() {
initialize();
/*Check Dip Switches to see which Mode to Enter*/
temp = TEST_BIT3;
temp = temp<<1;
temp = temp |TEST_BIT2;
temp = temp<<1;
temp = temp |TEST_BIT1;
if(temp ==0){
while(1) {
COMM = 0x01; /*Turn off LED*/
command = RXSER(); /*Get Command from PC*/
COMM = 0x00; /*Turn on LED*/
decode_command(command); /*Decode Command*/
}
}
else
test_mode(); /*Enter Test Modes*/
}
AN118
/**************************Subroutines***************************/
/**************************************************************/
/* Routine - Initialize */
/* Input - none */
/* Output - none */
/* Description - This routine is used to setup th e m icrocontroller */
/* and reset the converter. */
/**************************************************************/
void initialize()
{ data int j; /* Local counter variable */
P1 = 0xF4; /*SCLK - output, therefore low*/
/*SDI - output, therefore low*/
/*SDO - input, therefore high*/
/*CSb - ouput, therefore low */
P2 = 0x00; /*Toggle all LED’s, Start Up Sequence indicator*/
Delay();
P2 = 0xFF;
12 AN118REV2
Page 13

P3 = 0xFF; /*Use the alternative function of Port 3*/
EA = 0x00; /*Disable all interrupts*/
SCON = 0x72; /*8 bit UART*/
/*Set TI to enable TXSER UART function*/
/*Transmission Rate is 9600,N,8,1*/
TMOD = 0x20; /*Use TIMER1, 8-bit auto-reload */
TH1 = 0xFD; /*Initialize Auto-reload to FD for 11.059MHz external clock*/
PCON = 0x00; /*when set we run at 19200 Baud, 9600 when clear*/
TCON = 0X40; /*Turn internal UART timer on*/
for(j=0;j<2047;j++){ /*Delay 2048 SCLK cycles, ... */
SCLK = 0x01; /*to allow oscillator to start*/
SCLK = 0x00;
}
/*Reset Serial Port*/
SDI = 1; /*SET SDI PIN*/
for(j=0;j<254;j++) {
SCLK = 0x01; /*SET SCLK*/
SCLK = 0x00; /*CLR SCLK*/
}
SDI = 0; /*RESET SDI PIN*/
SCLK = 0x01; /*SET SCLK*/
SCLK = 0x00; /*CLR SCLK*/
AN118
mode = P0 & 0x01; /*Test Mode Pin*/
/*if Mode = 0, three wire mode ...*/
/*if Mode = 1, four wire mode. ...*/
/* NOTE: To change mode board must be Reset.*/
}
/**************************************************************/
/* Routine - write_t o_register */
/* Input - command, low, mid, high */
/* Output - none */
/* Description - This routine is used to write to any in ternal */
/* register. */
/**************************************************************/
void write_to_register(ch ar command,c har low,char mid,char high ){
if(mode == 1) P1 = 0xF4; /* Clear CSb */
transfer_byte(command);
transfer_byte(high);
transfer_byte(mid);
transfer_byte(low);
if(mode == 1) P1 = 0xF5; /* Set CSb */
}
AN118REV2 13
Page 14

/**************************************************************/
/* Routine - read_register */
/* Input - command */
/* Output - none */
/* Description - This routine is used to write to any in ternal */
/* register. */
/**************************************************************/
void read_register(char command){
if(mode == 1) P1 = 0xF4; /*Clear CSb*/
transfer_byte(command); /*Send Command*/
high_byte = receive_byte(); /*Receive Bytes*/
mid_byte = receive_byte();
low_byte = receive_byte();
if(mode == 1) P1 = 0xF5; /*Set CSb*/
}
/**************************************************************/
/* Read a Single Conversion */
/************* *************************************************/
void read_conversion(char command){
read_register(0x0B); /* Read Configuration Registe r */
high_byte = high_byte&0xF8; /* Mask Loop, RC, MC bits to 0 */
write_to_register(0x03,low_byte, mid_byte, high_byte);
AN118
/*Start Conversion*/
if(mode == 1) P1 = 0xF4; /* Clear CSb */
transfer_byte(command); /* Initiate Single conversion */
do { /* Nothing*/} while (SDO !=0); /* Wait for Conversion to Complete */
transfer_byte(0x00); /* Send Command */
high_byte = receive_byte(); /* Receive Bytes */
mid_byte = receive_byte();
low_byte = receive_byte();
if(mode == 1) P1 = 0xF5; /* Set CSb */
}
/**************************************************************/
/* Routine - deco de_command */
/* Input - command */
/* Output - none */
/* Description - This routine is used to transfer the command byte */
/* from the 80C51 to the converter. */
/**************************************************************/
void decode_command(char command)
{ data int j,size;
switch (command) {
/**********************/
/* Write to Register */
/**********************/
case 0x01: /* Offset Register Physical Channel 1 */
14 AN118REV2
Page 15

case 0x11: /* Offset Register Physical Channel 2 */
case 0x21: /* Offset Register Physical Channel 3 */
case 0x31: /* Offset Register Physical Channel 4 */
case 0x41: /* Offset Register Physical Channel 5 */
case 0x51: /* Offset Register Physical Channel 6 */
case 0x61: /* Offset Register Physical Channel 7 */
case 0x71: /* Offset Register Physical Channel 8 */
case 0x02: /* Gain Register Physical Channel 1 */
case 0x12: /* Gain Register Physical Channel 2 */
case 0x22: /* Gain Register Physical Channel 3 */
case 0x32: /* Gain Register Physical Channel 4 */
case 0x42: /* Gain Register Physical Channel 5 */
case 0x52: /* Gain Register Physical Channel 6 */
case 0x62: /* Gain Register Physical Channel 7 */
case 0x72: /* Gain Register Physical Channel 8 */
case 0x03: /* Configuration Register */
low_byte = RXSER(); /*Receive data low byte first*/
mid_byte = RXSER();
high_byte = RXSER();
COMM = 0x00; /* Turn on LED */
Delay();
COMM = 0x01; /* Turn off LED */
write_to_register(command,low_byte,mid_byte,high_byte);
break;
AN118
/*****************************/
/* Write Channel-Setup Registers */
/*****************************/
case 0x05:
COMM = 0x00; /* Turn on LED*/
sample_size = RXSER(); /* How many Registers? */
if(mode == 1) P1 = 0xF4; /* Clear CSb */
transfer_byte(command); /* Send command to A/D */
for (j=0; j<sample_size; j++) {
low_byte = RXSER(); /* Receive Data */
mid_byte = RXSER();
high_byte = RXSER();
transfer_byte(high_byte); /* Transfer Data to A/D */
transfer_byte(mid_byte);
transfer_byte(low_byte);
} /* END for loop */
if(mode == 1) P1 = 0xF5; /* Set CSb */
COMM = 0x01; /* Turn off LED*/
break;
AN118REV2 15
Page 16

/**********************/
/* Read from Register */
/************* *** ******/
case 0x09: /* Offset Register Physical Channel 1 */
case 0x19: /* Offset Register Physical Channel 2 */
case 0x29: /* Offset Register Physical Channel 3 */
case 0x39: /* Offset Register Physical Channel 4 */
case 0x49: /* Offset Register Physical Channel 5 */
case 0x59: /* Offset Register Physical Channel 6 */
case 0x69: /* Offset Register Physical Channel 7 */
case 0x79: /* Offset Register Physical Channel 8 */
case 0x0A: /* Gain Register Physical Channel 1 */
case 0x1A: /* Gain Register Physical Channel 2 */
case 0x2A: /* Gain Register Physical Channel 3 */
case 0x3A: /* Gain Register Physical Channel 4 */
case 0x4A: /* Gain Register Physical Channel 5 */
case 0x5A: /* Gain Register Physical Channel 6 */
case 0x6A: /* Gain Register Physical Channel 7 */
case 0x7A: /* Gain Register Physical Channel 8 */
AN118
case 0x0B: /* Configuration Register */
read_register(command); /* Read register’s content */
TXSER(low_byte); /* Transfer bytes to PC*/
TXSER(mid_byte);
TXSER(high_byte);
COMM = 0x00; /* Turn on LED*/
Delay();
COMM = 0x01; /* Turn off LED*/
break;
/*****************************/
/* Read Conversion Data FIFO */
/************* ****************/
case 0x0C:
COMM = 0x00; /* Turn on LED */
sample_size = RXSER(); /* How many Conversions ? */
temp = RXSER(); /* What conversion channel? */
temp1 = RXSER(); /* Is LP bit set? */
/*Initiate Continuous Conversion*/
if(mode == 1) P1 = 0xF4; /* Clear CSb */
transfer_byte(temp); /* Initiate Single conversion */
do { /* Nothing*/} while (SDO !=0); /* Wait for SD O to fall */
transfer_byte(0x00); /* Send all zeros */
for (j=0; j<sample_size; j++) {
high_byte = receive_byte();/* Receive Bytes */
mid_byte = receive_byte();
16 AN118REV2
Page 17

low_byte = receive_byte();
TXSER(low_byte); /* Return bytes to PC */
TXSER(mid_byte);
TXSER(high_byte);
}
if (temp1 == 1 ){
do { /* Nothing*/} while (SDO !=0);/* Wait for SDO to fall */
transfer_byte(0xFF); /* Send all zeros */
for (j=0; j<sample_size; j++) {
high_byte = receive_byte();/* Receive last conversion */
mid_byte = receive_byte();
low_byte = receive_byte();
} /* END for */
} /* END if */
if(mode == 1) P1 = 0xF5; /* Set CSb */
COMM = 0x01; /* Turn off LED */
break;
AN118
/*****************************/
/* Read Channel-Setup Registers */
/************* ****************/
case 0x0D:
COMM = 0x00; /* Turn on LED*/
sample_size = RXSER(); /* How many Registers? */
if(mode == 1) P1 = 0xF4; /* Clear CSb */
transfer_byte(command); /* Send command to A/D */
for (j=0; j<sample_size; j++) {
high_byte = receive_byte();/* Receive Bytes */
mid_byte = receive_byte();
low_byte = receive_byte();
TXSER(low_byte); /* Transfer data to PC */
TXSER(mid_byte);
TXSER(high_byte);
} /* END for loop */
if(mode == 1) P1 = 0xF5; /* Set CSb */
COMM = 0x01; /* Turn off LED*/
break;
/**********************/
/* Normal Conversions */
/************* *** ******/
case 0x80: /* Normal Conversion on Setup 1 */
case 0x88: /* Normal Conversion on Setup 2 */
case 0x90: /* Normal Conversion on Setup 3 */
case 0x98: /* Normal Conversion on Setup 4 */
AN118REV2 17
Page 18

case 0xA0: /* Normal Conversion on Setup 5 */
case 0xA8: /* Normal Conversion on Setup 6 */
case 0xB0: /* Normal Conversion on Setup 7 */
case 0xB8: /* Normal Conversion on Setup 8 */
case 0xC0: /* Normal Conversion on Setup 9 */
case 0xC8: /* Normal Conversion on Setup 10 */
case 0xD0: /* Normal Conversion on Setup 11 */
case 0xD8: /* Normal Conversion on Setup 12 */
case 0xE0: /* Normal Conversion on Setup 13 */
case 0xE8: /* Normal Conversion on Setup 14 */
case 0xF0: /* Normal Conversion on Setup 15 */
case 0xF8: /* Normal Conversion on Setup 16 */
read_conversion(command);
TXSER(low_byte); /* Return bytes to PC */
TXSER(mid_byte);
TXSER(high_byte);
COMM = 0x00; /* Turn on LED */
Delay();
COMM = 0x01; /* Turn off LED*/
break;
AN118
/********************/
/* Self Calibration */
/************* *******/
case 0x81: /* Self-Offset Cal on Setup 1 */
case 0x89: /* Self-Offset Cal on Setup 2 */
case 0x91: /* Self-Offset Cal on Setup 3 */
case 0x99: /* Self-Offset Cal on Setup 4 */
case 0xA1: /* Self-Offset Cal on Setup 5 */
case 0xA9: /* Self-Offset Cal on Setup 6 */
case 0xB1: /* Self-Offset Cal on Setup 7 */
case 0xB9: /* Self-Offset Cal on Setup 8 */
case 0xC1: /* Self-Offset Cal on Setup 9 */
case 0xC9: /* Self-Offset Cal on Setup 10 */
case 0xD1: /* Self-Offset Cal on Setup 11 */
case 0xD9: /* Self-Offset Cal on Setup 12 */
case 0xE1: /* Self-Offset Cal on Setup 13 */
case 0xE9: /* Self-Offset Cal on Setup 14 */
case 0xF1: /* Self-Offset Cal on Setup 15 */
case 0xF9: /* Self-Offset Cal on Setup 16 */
case 0x82: /* Self-Gain Cal on Setup 1 */
case 0x8A: /* Self-Gain Cal on Setup 2 */
case 0x92: /* Self-Gain Cal on Setup 3 */
case 0x9A: /* Self-Gain Cal on Setup 4 */
case 0xA2: /* Self-Gain Cal on Setup 5 */
case 0xAA: /* Self-Gain Cal on Setup 6 */
case 0xB2: /* Self-Gain Cal on Setup 7 */
case 0xBA: /* Self-Gain Cal on Setup 8 */
18 AN118REV2
Page 19

case 0xC2: /* Self-Gain Cal on Setup 9 */
case 0xCA: /* Self-Gain Cal on Setup 10 */
case 0xD2: /* Self-Gain Cal on Setup 11 */
case 0xDA: /* Self-Gain Cal on Setup 12 */
case 0xE2: /* Self-Gain Cal on Setup 13 */
case 0xEA: /* Self-Gain Cal on Setup 14 */
case 0xF2: /* Self-Gain Cal on Setup 15 */
case 0xFA: /* Self-Gain Cal on Setup 16 */
COMM = 0x00; /* Turn on LED */
if(mode == 1) P1 = 0xF4; /*Clear CSb*/
transfer_byte(command);
do { /* Nothing*/} while (SDO !=0); /* Wait for cal to Complete */
if(mode == 1) P1 = 0xF5; /*Set CSb*/
COMM = 0x01; /* Turn off LED */
break;
/**********************/
/* System Calibration */
/************* *********/
case 0x85: /* System-Offset Cal on Setup 1 */
case 0x8D: /* System-Offset Cal on Setup 2 */
case 0x95: /* System-Offset Cal on Setup 3 */
case 0x9D: /* System-Offset Cal on Setup 4 */
case 0xA5: /* System-Offset Cal on Setup 5 */
case 0xAD: /* System-Offset Cal on Setup 6 */
case 0xB5: /* System-Offset Cal on Setup 7 */
case 0xBD: /* System-Offset Cal on Setup 8 */
case 0xC5: /* System-Offset Cal on Setup 9 */
case 0xCD: /* System-Offset Cal on Setup 10 */
case 0xD5: /* System-Offset Cal on Setup 11 */
case 0xDD: /* System-Offset Cal on Setup 12 */
case 0xE5: /* System-Offset Cal on Setup 13 */
case 0xED: /* System-Offset Cal on Setup 14 */
case 0xF5: /* System-Offset Cal on Setup 15 */
case 0xFD: /* System-Offset Cal on Setup 16 */
AN118
case 0x86: /* System-Gain Cal on Setup 1 */
case 0x8E: /* System-Gain Cal on Setup 2 */
case 0x96: /* System-Gain Cal on Setup 3 */
case 0x9E: /* System-Gain Cal on Setup 4 */
case 0xA6: /* System-Gain Cal on Setup 5 */
case 0xAE: /* System-Gain Cal on Setup 6 */
case 0xB6: /* System-Gain Cal on Setup 7 */
case 0xBE: /* System-Gain Cal on Setup 8 */
case 0xC6: /* System-Gain Cal on Setup 9 */
case 0xCE: /* System-Gain Cal on Setup 10 */
case 0xD6: /* System-Gain Cal on Setup 11 */
case 0xDE: /* System-Gain Cal on Setup 12 */
case 0xE6: /* System-Gain Cal on Setup 13 */
AN118REV2 19
Page 20

case 0xEE: /* System-Gain Cal on Setup 14 */
case 0xF6: /* System-Gain Cal on Setup 15 */
case 0xFE: /* System-Gain Cal on Setup 16 */
COMM = 0x00; /* Turn on LED */
if(mode == 1) P1 = 0xF4; /*Clear CSb*/
transfer_byte(command);
do {/* Nothing*/} while (SDO !=0); /* Wait for cal to Complete */
if(mode == 1) P1 = 0xF5; /*Set CSb*/
COMM = 0x01; /* Turn off LED */
break;
/******************************/
/* Variable # of Normal Conversions */
/******************************/
case 0x1F:
COMM = 0x00; /* Turn on LED */
sample_index = RXSER(); /* How many Conversions? */
temp = RXSER(); /* What conversion channel? */
decode_sample_index();
AN118
/*Initiate Continuous Conversion*/
if(mode == 1) P1 = 0xF4; /* Clear CSb */
transfer_byte(temp); /* Initiate Single conversion */
for (j=0; j<sample_size; j++) {
do { /* Nothing*/} while (SDO !=0); /* Wait for SDO to fall */
transfer_byte(0x00); /* Send all zeros */
high_byte = receive_byte();/* Receive Bytes */
mid_byte = receive_byte();
low_byte = receive_byte();
TXSER(low_byte); /* Return bytes to PC */
TXSER(mid_byte);
TXSER(high_byte);
}
transfer_byte(0xFF); /* Send all zeros */
high_byte = receive_byte(); /* Receive last conversion */
mid_byte = receive_byte();
low_byte = receive_byte();
if(mode == 1) P1 = 0xF5; /* Set CSb */
COMM = 0x01; /* Turn off LED */
break;
/************************************/
/* Variable # of Offset or Gain Calibrations */
/************************************/
case 0x2F:
COMM = 0x00; /* Turn on LED */
sample_index = RXSER(); /* How many Cals? */
temp = RXSER(); /* What type of Cal? */
20 AN118REV2
Page 21

temp1 = RXSER(); /* Which PC Cal. register is influenced? */
decode_sample_index();
if(mode == 1) P1 = 0xF4; /* Clear CSb */
for (j=0; j<sample_size; j++) {
transfer_byte(temp); /* Perform Calibration */
do {/* Nothing*/} while (SDO !=0); /* Wait for cal. to Complete */
transfer_byte(temp1); /*Send Command*/
high_byte = receive_byte();/*Receive Bytes*/
mid_byte = receive_byte();
low_byte = receive_byte();
TXSER(low_byte); /* Transfer Caled Register back */
TXSER(mid_byte);
TXSER(high_byte);
} /* END for loop */
if(mode == 1) P1 = 0xF5; /* Set CSb */
COMM = 0x01; /* Turn off LED */
break;
/**********************/
/* Serial Port Initialization */
/**********************/
case 0x3F:
COMM = 0x00; /* Turn LED on */
if(mode == 1) P1 = 0xF4; /* Clear CSb */
SDI = 1; /* SET SDI PIN */
/* Write 255 bits of 1’s to SDI and then 1 zero */
for(j=0;j<254;j++) {
SCLK = 0x01; /* SET SCLK */
SCLK = 0x00; /* CLR SCLK */
}
SDI = 0; /* RESET SDI PIN */
SCLK = 0x01; /* SET SCLK */
SCLK = 0x00; /* CLR SCLK */
if(mode == 1) P1 = 0xF5; /* Set CSb */
COMM = 0x01; /* Turn LED off */
break;
AN118
/******************************/
/* Reset Converter via RS & RV bits */
/******************************/
case 0x4F:
write_to_register(0x03 ,0x 80,0x00,0x00); /* Set RS bit */
/* Test for Valid Reset */
do {
read_register(0x0B);
temp = low_byte&0x40; /* Mask RV bit to 1 */
if(temp == 0x40)
AN118REV2 21
Page 22

write_to_register(0x03,0x00,0x00,0x00); /* Clear RS Bit */
} while (temp != 0x40);
break;
/**********************/
/* Read Output Latch Pins */
/**********************/
case 0x5F:
temp = A1;
temp = temp<<1;
temp = temp |A0;
TXSER(temp);
COMM = 0x00; /* Turn on LED */
Delay();
COMM = 0x01; /* Turn off LED */
break;
/********************/
/* Arbitrary Read */
/************* *******/
case 0xEF:
temp= RXSER(); /* How many byte to return to PC*/
for(j=0;j<temp;j++){
if(mode == 1) P1 = 0x04;
temp1 = receive_byte();
if(mode == 1) P1 = 0x05;
AN118
TXSER(temp1);
COMM = 0x00; /* Turn LED on */
Delay();
COMM = 0x01; /* Turn LED off */
} /* END for loop */
break;
/********************/
/* Arbitrary Write */
/************* *******/
case 0xFF:
temp = RXSER(); /* How many bytes to write to A/D */
COMM = 0x00; /* Turn on LED */
Delay();
COMM = 0x01; /* Turn off LED */
if(mode == 1) P1 = 0x04;
transfer_byte(temp);
if(mode == 1) P1 = 0x05;
break;
22 AN118REV2
Page 23

/********************************/
/* No Cases were met, let port time out */
/********************************/
default:
break;
}
}/* END decode_command*/
/************* *** ********************************** ** **********/
/* Routine - decod e_sample_index */
/* Input - sample_index */
/* Output - none */
/* Description - This routine is used to decod e the meaning of the */
/* variable sample_index. */
/**************************************************************/
void decode_sample_index()
{
switch (sample_index) {
case 0:
sample_size = 16;
break;
case 1:
sample_size = 32;
break;
case 2:
sample_size = 64;
break;
case 3:
sample_size = 128;
break;
case 4:
sample_size = 256;
break;
case 5:
sample_size = 512;
break;
case 6:
sample_size = 1024;
break;
case 7:
sample_size = 2048;
break;
case 8:
sample_size = 4096;
break;
case 9:
sample_size = 8192;
break;
case 10:
AN118
AN118REV2 23
Page 24

sample_size = 1;
break;
default:
sample_size = 0;
break;
}
} /* END decode_sample_index */
/**************************************************************/
/* Routine - test_mode */
/* Input - none */
/* Output - none */
/* Description - This routine is used to perform special test */
/* functions to aid in debugging the CDB hardware. */
/**************************************************************/
void test_mode(){
switch (temp) {
/* Test Mode 1: For this test, user must place HDR7 into
loop back position. A byte of data is sent out UART
of 80C51 and received at same time. It the byte
that is returned is the same all LEDs toggle.
Otherwise, only half the LEDs toggle. */
case 0x01:
RESET = 0x00; /* Set LED Indicator */
TXSER(0xAA);
low_byte = RXSER(); /* low byte first*/
Delay();
if(low_byte == 0xAA)
toggle_all_leds(); /* Test Passed */
else
toggle_two_leds(); /* Test Failed */
break;
AN118
/* Test Mode 2: This test mode writes to the offset and gain
registers of PC1. It then reads the registers.
If the correct data is read back all the LED’s toggle
otherwise only half of them toggle to indicate an error. */
case 0x02:
COMM = 0x01;
write_to_register(0x01,0x00,0x00,0xAA); /* Write Offset PC1 */
write_to_register(0x02,0x00,0x00,0xAA); /* Write Gain PC1 */
read_register(0x09); /* Read Offset PC1 */
if(high_byte ==0xAA){ /* Was dat a sent ? */
read_register(0x0A); /* Read Gain PC1 */
if(high_byte==0xAA)
toggle_all_leds();
else
toggle_two_leds(); /* Test Failed */
} /* END if */
24 AN118REV2
Page 25

else
toggle_two_leds(); /* Test Failed */
break;
/* Test Mode 3: This test lights the first two LED and then
repeatively iniates a conversion and reads it from the serial port. */
case 0x03:
RESET = 0x00;
COMM = 0x00;
while(1)
read_conversion(0x80);
break;
/* Test Mode 4: This test lights the third LED’s. Then it
continuously write to the Gain Registers of PC1. */
case 0x04:
GAIN_CAL = 0x00;
while(1)
write_to_register(0x02,0xAA,0xAA,0xAA);
break;
AN118
/* Test Mode 5: This test lights the odd LED’s. Then it
continuously reads the gain register of PC1. */
case 0x05:
RESET = 0x00;
GAIN_CAL = 0x00;
while(1)
read_register(0x0A); /* Read Gain Register of PC1 */
break;
/* Test Mode 6: This test mode tests the RS232 link.
it receives three bytes from the PC and echoes them
back. This PC determines if the test passed. The last
three LED’s are lit to indicate this test mode. */
case 0x06:
COMM = 0x00;
GAIN_CAL = 0x00;
low_byte = RXSER(); /* Receive low byte from PC */
mid_byte = RXSER();
high_byte = RXSER();
TXSER(low_byte); /* Transfer bytes back to PC */
TXSER(mid_byte);
TXSER(high_byte);
toggle_all_leds();
break;
AN118REV2 25
Page 26

/* Test Mode 7: This test mode tests the operation of
the LEDS’s by turning all of them on and off. */
case 0x07:
toggle_all_leds();
break;
} /* END switch */
} /* End test_mode */
/**************************************************************/
/* Routine - toggle_all_leds */
/* Input - none */
/* Output - none */
/* Description - This routine is used toggle all fo ur LED */
/**************************************************************/
void toggle_all_leds (){
while(1){
P2 = 0x00; /*Toggle all LED’s for Start Up Sequence indicator test*/
Delay();
P2 = 0xFF;
Delay();
}
}
AN118
/**************************************************************/
/* Routine - toggle_two_leds */
/* Input - none */
/* Output - none */
/* Description - This routine is used to ggle two LEDS */
/**************************************************************/
void toggle_two_leds(){
while(1){
RESET = 0x00;
COMM = 0x00;
Delay();
RESET = 0x01;
COMM = 0x01;
Delay();
}
}
26 AN118REV2
Page 27

/**************************************************************/
/* Routine - Delay */
/* Input - none */
/* Output - none */
/* Description - This routine is used as a LED delay routin e */
/**************************************************************/
void Delay(void) {
data int j;
for (j=0; j<10000; j++)
for (j=0; j<10000; j++);
}
;****************************************************************
;* Routine - RECEIVE_BYTE
;* Input - none
;* Output - Byte received is placed in R7
;* Description - This subroutine receives 1 byte from converter
;****************************************************************
; The function prototype is: char RECEIVE_BYTE(void);
AN118
$DEBUG
USING 0 ; Use register bank 0
TCOD SEGMENT CODE ; Define ROUT as a segment of code
PUBLIC RECEIVE_BYTE ; Make subroutine global
RSEG TCOD ; Make code relocatable
RECEIVE_BYTE:
MOV R1,#08 ; Set count to 8 to receive byte
LOOP: ; Receive the byte
MOV C,P1.2 ; Move bit to carry
RLC A ; Rotate A in preparation for next bit
SETB P1.3 ; Set SCLK
CLR P1.3 ; Clear SCLK
DJNZ R1,LOOP ; Decrement byte, repeat loop if not zero
MOV R7,A ; Byte to be return is placed in R7
RET ; Exit subroutine
END
AN118REV2 27
Page 28

;****************************************************************
;* Routine - transfer_byte
;* Input - Byte to be transmitted is placed in Accumulator
;* Output - None
;* Description - This subroutine sends 1 byte to converter
;****************************************************************
;The function prototype is: void TRANSFER_BYTE(char);
$DEBUG
USING 0 ; Use register bank 0
TCOD SEGMENT CODE ; Make TCOD a segment of code
PUBLIC _TRANS FER_BYTE ; Make subroutine global
RSEG TCOD ; Make code relocatable
_TRANSFER_BYTE:
MOV A, R7 ; Move byte to be transmitted to ACC
MOV R1,#08 ; Set count to 8 to transmit byte
CLR P1.3 ; Clear SCLK
AN118
loop: ; Send Byte
RLC A ; Rotate Accumulator, send MSB 1st
MOV P1.1,C ; Transmit MSB first through C bit
SETB P1.3 ; Set SCLK
CLR P1.3 ; Clear SCLK
DJNZ R1,loop ; Decrement byte, repeat loop if not zero
SETB P1 .1 ; Reset SDI to one when not transmitting
RET ; Exit subroutine
END
28 AN118REV2
Page 29

;****************************************************************
;* Routine - RXSER
;* Input - none
;* Output - Byte received is placed in R7
;* Description - This subroutine receives 1 byte from converter
;* via UART. It uses the RS-232 serial protocol to transmit
;* one byte from a PC/UART system to the 8051.
;****************************************************************
; The function prototype is: char RXSER(void);
$DEBUG
USING 0 ; Use register bank 0
TCOD SEGMENT CODE ; Define ROUT as a segment of code
PUBLIC RXSER ; Make subroutin e global
RSEG TCOD ; Make code relocatable
RXSER:
JNB SCON.0,$ ; Poll RI
MOV R7,SBUF ; Place received byte in R7
CLR SCON.0 ; Reset RI bit
RET
END
AN118
AN118REV2 29
Page 30

;****************************************************************
;* Routine - TXSER
;* Input - Byte to be transmitted is placed in R7
;* Output - None
;* Description - This subroutine transfers 1 byte from conve rt er
;* via UART. It uses the RS-232 serial protocol to transmit
;* one byte from a 80C51 to the PC/UART system. To
;* function properly, the programmer must first initialize the
;* TI bit in the SCON register to 0X01.
;****************************************************************
;The function prototype is: void TXSER(char);
$DEBUG
USING 0 ; Use register bank 0
TCOD SEGMENT CODE ; Define TCOD as a segment of code
PUBLIC _TXS ER ; Make subroutine global
RSEG TCOD ; Make code relocatable
_TXSER: JNB SCON.1,$ ; Poll TI
CLR SCON.1 ; Rese t T I
MOV SBUF, R7 ; Move byte to output register
RET ; Exit subroutine
END
AN118
30 AN118REV2
Page 31

• Notes •
Page 32

 Loading...
Loading...