

Page 1

ВЕCЫ ЭЛЕКТРОННЫЕ АВТОМОБИЛЬНЫЕ
Версия 090414
RW
РУКОВОДСТВО ПО ЭКСПЛУАТАЦИИ
Page 2

СОДЕРЖАНИЕ:
1 МЕРЫ БЕЗОПАСНОСТИ .................................................................................. 3
2 ОПИСАНИЕ И РАБОТА .................................................................................... 4
2.1 ОБЩИЕ СВЕДЕНИЯ ................................................................................... 4
2.2 ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ................................................... 5
2.3 ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ ......................................................... 8
2.4 КОМПЛЕКТ ПОСТАВКИ .......................................................................... 8
2.5 СХЕМА СОЕДИНЕНИЯ ............................................................................. 8
2.6 ТЕСТИРОВАНИЕ ......................................................................................... 9
2.6.1 ПРОВЕРКА КОДОВ КЛАВИАТУРЫ ................................................................................... 9
2.6.2 ПРОВЕРКА ВЫСВЕЧИВАНИЯ ДИСПЛЕЯ ...................................................................... 10
2.6.3 ПРОВЕРКА ТЕНЗОДАТЧИКА И АЦП .............................................................................. 10
2.6.4 ПРОВЕРКА ИНТЕРФЕЙСА RS-232C И ПРИНТЕРА ....................................................... 10
2.7 НАСТРОЙКА ФУНКЦИЙ ........................................................................ 10
3 МЕТОДИКА ИЗМЕРЕНИЙ ............................................................................. 12
3.1 ВВЕДЕНИЕ ................................................................................................... 12
3.2 НОРМАТИВНЫЕ ДОКУМЕНТЫ........................................................... 12
3.3 ТЕРМИНЫ И ОПРЕДЕЛЕНИЯ............................................................... 12
3.4 ИСПОЛЬЗУЕМЫЕ ТЕХНИЧЕСКИЕ СРЕДСТВА ............................. 13
3.5 ТРЕБОВАНИЯ БЕЗОПАСНОСТИ ......................................................... 13
3.6 ТРЕБОВАНИЯ К ВНЕШНИМ УСЛОВИЯМ ........................................ 13
3.7 ПОДГОТОВКА К ПРОВЕДЕНИЮ ИЗМЕРЕНИЙ .............................. 14
3.7.1 ТРЕБОВАНИЯ К МЕСТУ УСТАНОВКИ ГРУЗОПРИЕМНЫХ ПЛАТФОРМ ............... 14
3.7.2 РЕГУЛИРОВКА УСТАНОВКИ ГРУЗОПРИЕМНОЙ ПЛАТФОРМЫ ............................ 15
3.7.3 УСТАНОВКА ПАССИВНЫХ ПЛОЩАДОК И ВЪЕЗДНЫХ ПАНДУСОВ ................... 15
3.7.4 ТРЕБОВАНИЯ К МЕСТУ УСТАНОВКИ ВЕСОИЗМЕРИТЕЛЬНОГО ПРИБОРА ........ 15
3.8 ПРОВЕДЕНИЕ ИЗМЕРЕНИЙ ПРИ ОПРЕДЕЛЕНИИ НАГРУЗКИ НА
ОСЬ ТРАНСПОРТНОГО СРЕДСТВА ............................................................... 16
3.9 ПРОВЕДЕНИЕ ИЗМЕРЕНИЙ ПРИ ОПРЕДЕЛЕНИИ ПОЛНОЙ
МАССЫ ТРАНСПОРТНОГО СРЕДСТВА ....................................................... 17
3.10 ОФОРМЛЕНИЕ РЕЗУЛЬТАТОВ ИЗМЕРЕНИЙ ................................. 18
4 ХАРАКТЕРНЫЕ НЕИСПРАВНОСТИ И СПОСОБЫ ИХ УСТРАНЕНИЯ 19
5 ТЕХНИЧЕСКОЕ ОБСЛУЖИВАНИЕ ........................................................... 20
6 ГОСУДАРСТВЕННАЯ ПОВЕРКА ................................................................. 21
7 ТРАНСПОРТИРОВКА, ХРАНЕНИЕ И УТИЛИЗАЦИЯ ........................... 22
7.1 ТРАНСПОРТИРОВКА .............................................................................. 22
7.2 ХРАНЕНИЕ .................................................................................................. 22
7.3 УТИЛИЗАЦИЯ ............................................................................................ 22
8 ГАРАНТИЙНЫЕ ОБЯЗАТЕЛЬСТВА ........................................................... 23
Page 3

Благодарим Вас за покупку весов электронных RW. Просим ознакомиться с
настоящим руководством прежде, чем приступить к работе с этими весами.
Обращайтесь к нему по мере необходимости.
Весы электронные RW производства фирмы CAS Corp. (Республика Корея)
относятся к электронным тензометрическим весам среднего класса точности. Они
предназначены для определения нагрузки на отдельную ось автомобиля и массы
автомобиля в целом. Масса автомобиля в целом может определяться только при
условии одновременного нахождения всех колес автомобиля на грузоприемных
платформах. Нагрузка на ось может определяться только при условии выравнивания
всех осей с использованием пассивных площадок.
Весы характеризуются следующими особенностями:
Весы портативные, легко переносимые.
Быстрая установка грузоприемных платформ под автомобили разных габаритов.
Регистрация нагрузки на каждую ось с последующей распечаткой суммарной
массы автомобиля.
Конструкция платформы из алюминия.
Продолжительная работа от перезаряжаемого аккумулятора; встроенное зарядное
устройство.
Автоматическая подсветка дисплея при плохом внешнем освещении.
Интерфейсный разъем RS-232C.
Встроенные часы и принтер с указанием даты и времени.
По дополнительному заказу поставляется комплект пассивных площадок.
1 МЕРЫ БЕЗОПАСНОСТИ
Электрическое сопротивление и электрическая прочность изоляции должны быть
исправны.
Хранение весов допускается только в сухом месте.
Для протирки дисплея и клавиатуры не допускается использование растворителей
и других летучих веществ.
Весы не должны подвергаться сильной вибрации.
Не допускаются резкие перепады температуры окружающей среды.
Весы не следует устанавливать вблизи высоковольтных кабелей, двигателей,
радиопередатчиков и других источников электромагнитных помех.
Не допускается перегруз грузоприемной платформы, а также продолжительное
(более 1 минуты) воздействие нагрузки. Следует учитывать то, что кроме общей
максимальной нагрузки также существует ограничение по нагрузке на каждую из
платформ. Предел нагрузки на платформу зависит от модификации и указывается в
обозначении весов. Например, весы RW-10-4P имеют 4 грузоприемные платформы, на
каждую из которых нагрузка не должна превышать 10 т.
Page 4

2 ОПИСАНИЕ И РАБОТА
Вид
взвешивания
1-е
взвешивание
2-е
взвешивание
3-е
взвешивание
4-е
взвешивание
3-х осное
Поочередное
взвешивание
первой, второй
и третьей осей
(2
грузоприемные
платформы и 12
пассивных
площадок)
4-х осное
Поочередное
взвешивание
первой, второй,
третьей и
четвертой осей
(2
грузоприемные
платформы и 12
пассивных
площадок)
2.1 ОБЩИЕ СВЕДЕНИЯ
Весы состоят из 2-х, 4-х, 6-ти, 8-ми, 10-ти или 12-ти грузоприемных платформ и
отдельного весоизмерительного устройства (блока управления). Нагрузка от
находящегося на платформе колеса автомобиля воспринимается тензодатчиками,
которые вырабатывают определяемый нагрузкой электрический сигнал. Сигнал
передается в блок управления, где после его обработки выдается результат измерения
нагрузки на платформы для визуальной регистрации. Соединение двух платформ
позволяет осуществить измерение нагрузки на ось, а если все колеса автомобиля будут
одновременно опираться на весоизмерительные платформы, можно измерить полный
вес автомобиля.
Весы имеют интерфейсный разъем RS-232С для передачи данных измерения на
внешнее устройство (например, компьютер). В блок управления вмонтирован принтер,
распечатывающий результаты измерений. Кроме того, имеется возможность вводить в
распечатку номер автомобиля (до 5 знаков), а благодаря встроенным часам – дату и
время измерения.
При работе в темное время суток, при плохом внешнем освещении, дисплей
блока управления для удобства считывания данных подсвечивается сзади.
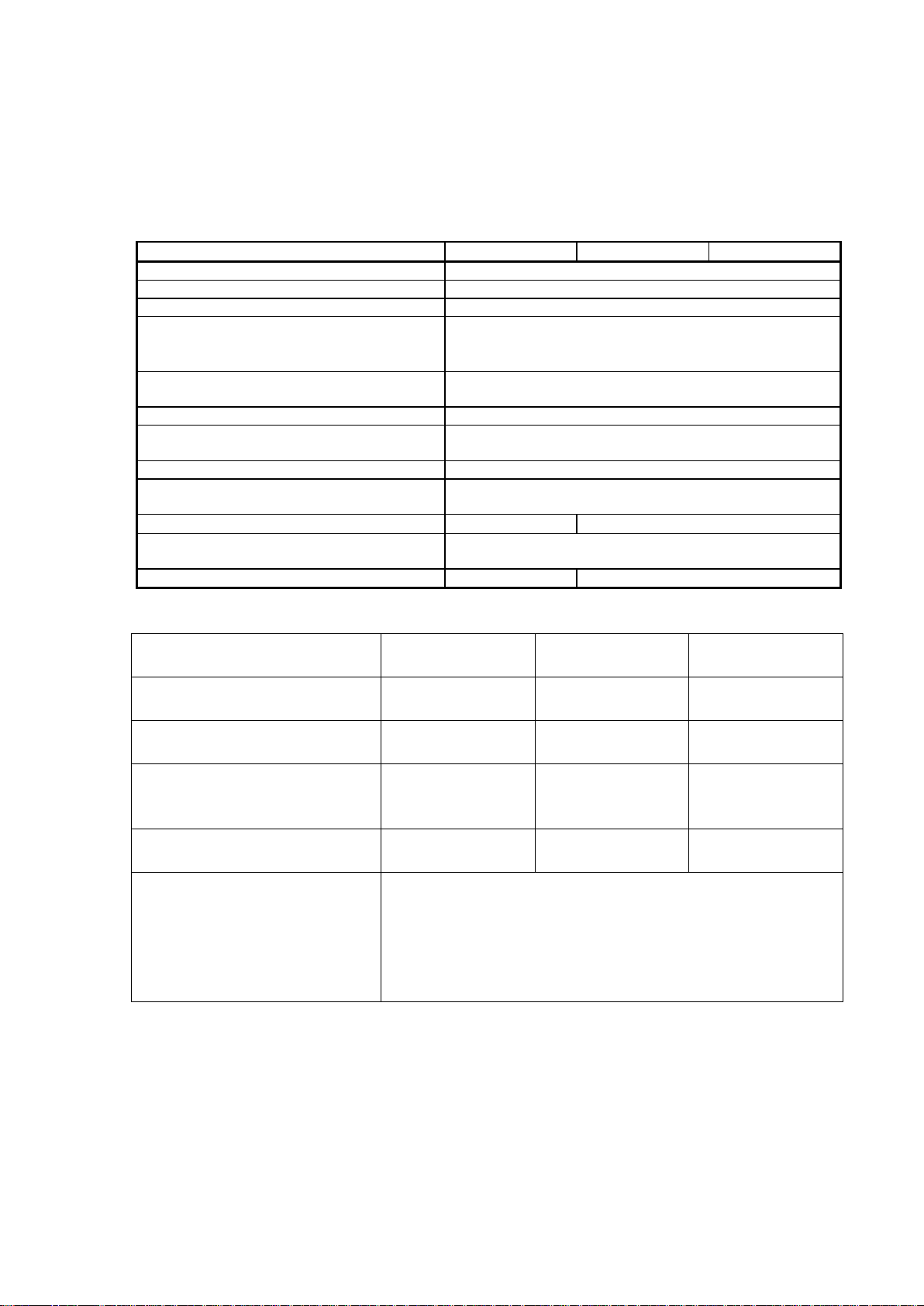
При взвешивании отдельных осей транспортных средств необходимо
использовать пассивные площадки для всех остальных колес транспортного средства.
Таблица – Взвешивание 3-х и 4-х-осных транспортных средств.
Page 5
2.2 ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
Модель
RW-05
RW-10
RW-15
Разрядность индикатора
5 знаков высотой 25 мм
Тип индикатора
Жидкокристаллический (с подсветкой)
Тип измерения
Тензометрический
Диапазон рабочих температур
Для грузоприемного устройства:
Для весоизмерительного устройства:
- 40 ~ + 40 С
- 10 ~ + 40 С
Диапазон температур при
транспортировке
- 40 ~ + 80 С
Влажность, %, не более
90
Питание от сети через адаптер или от
перезаряжаемого аккумулятора
Частота 49 ~ 51 Гц, напряжение 187 ~ 242 В
Потребляемая мощность, ВА
0,8
Продолжительность работы от
батарей, час
20
Размеры платформы, мм
50040039
90050039
Размеры весоизмерительного
устройства, мм
417х223х209
Масса, кг, не более
16
30,2
Метрологическая
характеристика
RW-05
RW-10
RW-15
Максимальная нагрузка,
Max, т
5
10
15
Минимальная нагрузка, Min,
т
0,1
0,1
0,2
Поверочное деление е, и
действительная
цена деления, d, (e=d), кг
5 5 10
Число поверочных делений
(n)
1000
2000
1500
Пределы допускаемой
погрешности, mpe, при
поверке
0<m≤500e
500е<m≤ 2000е
2000е<m≤3000e
±0,5е
±1е
±1,5е
В таблице 2.1 приведены общие технические характеристики, а в таблицах 2.2-
2.6 – метрологические.
Таблица 2.1 – Общие технические характеристики
Таблица 2.2
Page 6
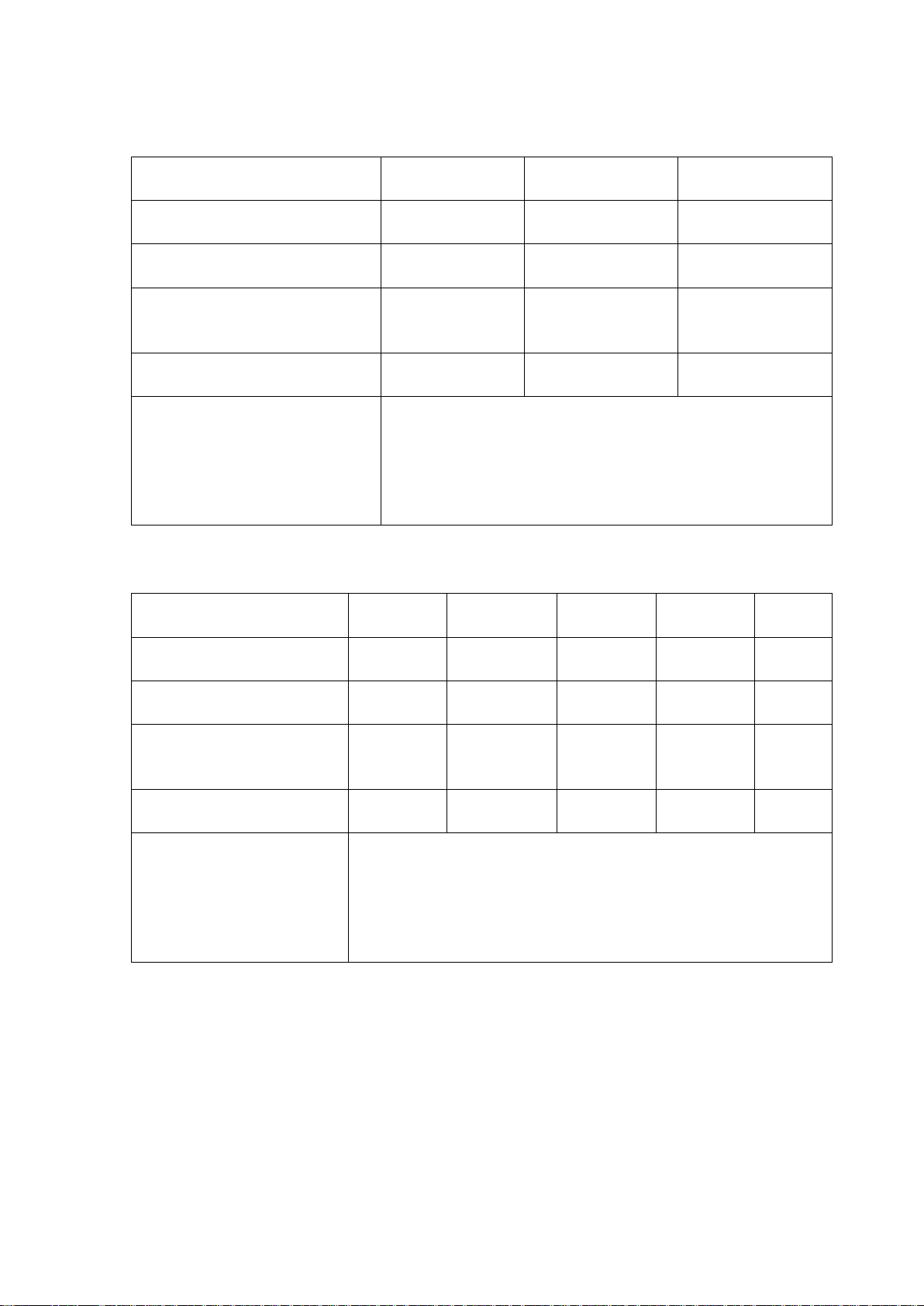
Метрологические характеристики для 2 платформ
Метрологическая
характеристика
RW-05-2
RW-10-2
RW-15-2
Максимальная нагрузка,
Max, т
10
20
30
Минимальная нагрузка, Min,
т
0,2
0,2
0,4
Поверочное деление е, и
действительная
цена деления, d, (e=d), кг
10
10
20
Число поверочных делений
(n)
1000
2000
1500
Пределы допускаемой
погрешности, mpe, при
поверке
0<m≤500e
500е<m≤ 2000е
2000е<m≤3000e
±0,5е
±1е
±1,5е
Метрологическая
характеристика
RW-05-4
RW-05-6
RW-05-8
RW-05-10
RW-05-
12
Максимальная нагрузка,
Max, т
20
30
40
50
60
Минимальная нагрузка,
Min, т
0,4 1 1 1 2
Поверочное деление е, и
действительная
цена деления, d, (e=d), кг
20
50
50
50
100
Число поверочных
делений (n)
1000
600
800
1000
600
Пределы допускаемой
погрешности, mpe, при
поверке
0<m≤500e
500е<m≤ 2000е
2000е<m≤3000e
±0,5е
±1е
±1,5е
Таблица 3
Метрологические характеристики для 4, 6, 8, 10, 12 платформ
Таблица 4
Page 7
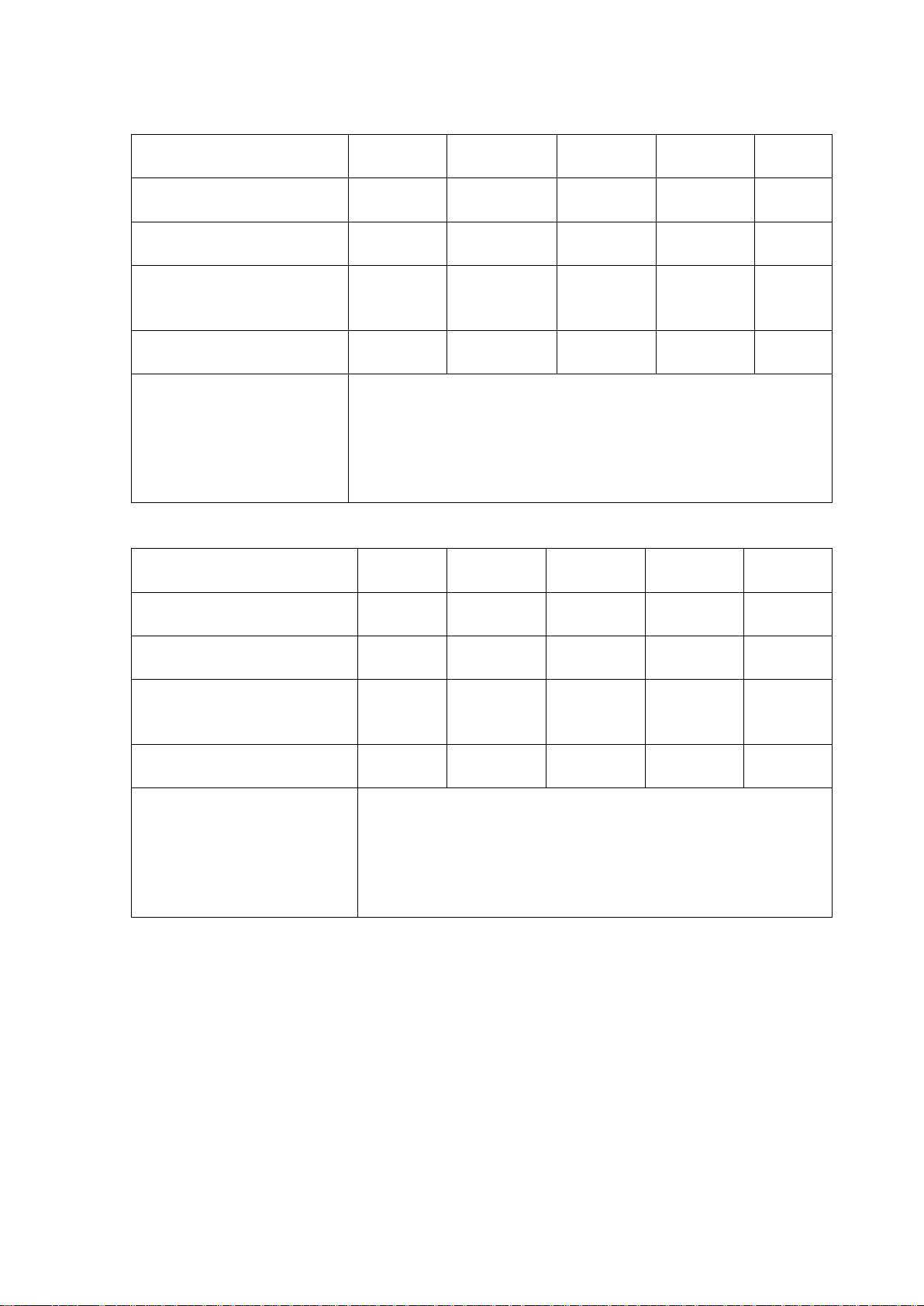
Таблица 5
Метрологическая
характеристика
RW-10-4
RW-10-6
RW-10-8
RW-10-10
RW-10-
12
Максимальная нагрузка,
Max, т
40
60
80
100
120
Минимальная нагрузка,
Min, т
1 1 2 2 2
Поверочное деление е, и
действительная
цена деления, d, (e=d), кг
50
50
100
100
100
Число поверочных
делений (n)
800
1200
800
1000
1200
Пределы допускаемой
погрешности, mpe, при
поверке
0<m≤500e
500е<m≤ 2000е
2000е<m≤3000e
±0,5е
±1е
±1,5е
Метрологическая
характеристика
RW-15-4
RW-15-6
RW-15-8
RW-15-10
RW-15-12
Максимальная нагрузка,
Max, т
60
90
120
150
180
Минимальная нагрузка,
Min, т
1 2 2 2 10
Поверочное деление е, и
действительная
цена деления, d, (e=d), кг
50
100
100
100
500
Число поверочных
делений (n)
1200
900
1200
1500
360
Пределы допускаемой
погрешности, mpe, при
поверке
0<m≤500e
500е<m≤ 2000е
2000е<m≤3000e
±0,5е
±1е
±1,5е
Таблица 6
соответствуют количеству грузоприемных платформ.
пределам допускаемой погрешности при поверке.
Примечание. Цифры 2, 4, 6, 8, 10 и 12, входящие в обозначения моделей,
Пределы допускаемой погрешности при эксплуатации равны удвоенным
Page 8

2.3 ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ
Наименование
Количество (шт.)
Весоизмерительное устройство
1
Грузоприемная платформа
1, 2, 4, 6, 8, 10 или 12
Руководство по эксплуатации
1
КЛАВИША
ФУНКЦИЯ
УКАЗАТЕЛЬ
КОГДА ВКЛЮЧЕН
ZERО ◄
Обнуление показаний в случае дрейфа
при пустой платформе
STABLE
Нагрузка на весы
стабильна
ТАRЕ ►
Выборка массы тары из диапазона
взвешивания
ZERO
На платформе
отсутствует груз
Программное обеспечение (далее – ПО) весов является встроенным.
Идентификационным признаком ПО служит номер версии, который
отображается на дисплее весов при их включении.
Уровень защиты ПО от непреднамеренных и преднамеренных воздействий в
соответствии с МИ 3286-2010 – «C».
Идентификация программного обеспечения осуществляется по номеру версии,
который отображается на дисплее весов при их включении. Версия программного
обеспечения: 1.00, 1.01 или 1.02.
2.4 КОМПЛЕКТ ПОСТАВКИ
Перечень поставляемых изделий приведен в таблице 1.5.
Таблица 1.5 – Комплект поставки
2.5 СХЕМА СОЕДИНЕНИЯ
Каждая из платформ, представляющая собой корпус из алюминиевого литья в
износоустойчивом и коррозионностойком исполнении, установлена на 4 или 6 тензометрических датчиках, опирающихся непосредственно на площадку, на которой останавливается перед взвешиванием автомобиль. Платформы имеют въездные пандусы
из твердой резины, которые позволяют легко съезжать и наезжать колесу автомобиля.
Для удобства переноса платформ в их корпусе сделаны отверстия (модель RW-05Р)
или с одной стороны имеются роликовые катки (модели RW-10Р и RW-15Р).
ДИСПЛЕЙ
КЛАВИАТУРА УКАЗАТЕЛИ ДИСПЛЕЯ
Page 9

GROSS
/NET
Выбор взвешивания массы нетто или
брутто
NET
Индикация полной
массы
kg/lb
Выбор единицы измерения массы (кг
или фунт)
Lb
Показания массы в
фунтах
SUM ▼
Суммирование массы груза на всех
платформах
Kg
Показания массы в кг
PRINT ▲
Распечатка данных
POWER
Питание от сети через
адаптер
TRUCK No
Номер взвешивания
CHARGE
Зарядка встроенного
аккумулятора
ENTER
Запоминание параметров программируемых функций; включение или выключение подсветки
ON/OFF
Включение или выключение весов
2.6 ТЕСТИРОВАНИЕ
При тестировании циклически выполняются следующие проверки:
TEST 1 – проверка кодов клавиатуры;
TEST 2 – проверка высвечивания дисплея;
TEST 3 – проверка тензодатчика и АЦП-преобразователя;
TEST 4 – проверка интерфейса RS-232С и принтера.
Для входа в режим тестирования следует при нажатой клавише TRUCK No
нажать и отпустить клавишу ON/OFF. На дисплее сначала высветится надпись < САS
> и раздастся звуковой сигнал, а затем (после отпускания клавиши ) - надпись < tESt 1
>, которая автоматически переходит в < 0 >. После окончания какого-либо
тестирования переход к следующему осуществляется автоматически или по нажатии
клавиши ENTER.
2.6.1 ПРОВЕРКА КОДОВ КЛАВИАТУРЫ
Нажмите на какую-либо из клавиш, и на индикаторе высветится соответствующий
код этой клавиши:
01 (клавиша ZERО ◄ );
05 (клавиша ТАRЕ ►);
09 (клавиша GROSS /NET);
13 (клавиша kg/lb);
02 (клавиша SUM ▼);
06 (клавиша PRINT ▲);
10 (клавиша TRUCK No);
14 (клавиша ENTER).
Если была нажата клавиша ENTER, то после высвечивания ее кода (1) весы
автоматически перейдут к проверке <tESt 2>.
Page 10

2.6.2 ПРОВЕРКА ВЫСВЕЧИВАНИЯ ДИСПЛЕЯ
После высвечивания сообщения <tESt 2> на индикаторе высветятся все сегменты в
течение некоторого времени, а затем устройство автоматически перейдет к
проверке <tESt 3>.
2.6.3 ПРОВЕРКА ТЕНЗОДАТЧИКА И АЦП
После высвечивания сообщения <tESt 3> на индикаторе будет высвечиваться попе-
ременно номер тестируемой платформы, например < PF1 >, и оцифрованное
значение текущего веса в единицах внутреннего разрешения. Изменяя нагрузку,
проверьте, изменяются ли показания. Если они фиксированы или нулевые,
проверьте подсоединение тензодатчика.
Для окончания текущей проверки и перехода к следующей нажмите клавишу
ENTER. На индикаторе высветится сообщение <tESt 4>.
2.6.4 ПРОВЕРКА ИНТЕРФЕЙСА RS-232C И ПРИНТЕРА
Итак, переход к этой проверке выполняется нажатием клавиши ENTER, после чего
появляется сообщение <tESt 4>. Предварительно принтер должен быть
подсоединен к устройству, и установлена принтерная функция F02 = 1.
Для проверки связи устройства с принтером нажмите любую клавишу, кроме
клавиши ENTER. При положительном результате проверки на индикаторе
высветится сообщение <GOOd>. В противном случае появляется сообщение об
ошибке <Err 06>. Кроме того, принтер распечатает подтверждение правильности в
форме
TEST OK
Если при проверке была нажата клавиша ENTER, произойдет выход из режима
проверки и переход в режим взвешивания.
ФОРМАТ ПЕЧАТИ
1999. 11. 11 11 : 11 : 11
WEIGHT 1 0000 kg
WEIGHT 2 0000 kg
WEIGHT 3 0000 kg
WEIGHT 4 0000 kg
TOTAL 000 kg
2.7 НАСТРОЙКА ФУНКЦИЙ
Данные весы обладают несколькими функциями, которые должны быть
настроены (запрограммированы) до вхождения в рабочие режимы. Для этого каждой
из пронумерованных функций присваивается параметр, который и определяет
характер действия данной функции. Эти параметры запоминаются во внутренней
памяти весов.
Page 11

Для входа в режим программирования следует при нажатой клавише ENTER
Номер
Наименование
Пара-
метр
Результат
F01
Единица измерения массы
0
1
кг
фунт
F02
Использование
RS-порта
0
1
Персональный компьютер или выносной индикатор
Принтер/непрерывная передача данных
F03
Автоматическая
установка нуля
0
1 ~ 9
Без обнуления
Каждая единица параметра соответствует допусти-
мому дрейфу в 0,5 дискретности d
F04
Цифровая
фильтрация
1
~ 9
Малая скорость колебаний нагрузки
Большая скорость колебаний нагрузки
F07
Защита данных
0
1
Результаты измерений не сохраняются
Результаты измерений сохраняются при внезапом
отключении питания
F10
Номер устройства
00
~ 99
Код устройства в локальной сети вводится при
включении устройства в систему
F13
Количество платформ в весах
1 ~ 6
1; 2; 4; 6
F14
Дата и время
0
1
не вводятся
формат 10 апреля 2000 г. в 17 часов 23 мин 00 сек
есть С1 00
С2 04
С3 10
С4 17
С5 23
С6 00
нажать и отпустить клавишу ON/OFF или включить весы тубмлером ON/OFF (в
зависимости от исполнения). На дисплее сначала высветится надпись < САS >, и
раздастся звуковой сигнал, а затем (после отпускания клавиши ENTER)- надпись <
SEt >, которая автоматически переходит в < F01 0 >. После окончания какого-либо
тестирования переход к следующему осуществляется автоматически или по нажатию
клавиши. Двузначное число после буквы F есть номер функции, а число справа (здесь
нуль, но может быть и другое) – это параметр функции F01.
Сначала высвечивается параметр, который был запрограммирован для данной
функции в последний раз перед этим. Если его надо изменить, нажимают клавишу
ZERO. С каждым ее нажатием параметр увеличивается на единицу вплоть до
максимального, после чего параметр переустанавливается на минимальное значение, и
можно опять выбирать нужный параметр той же самой клавишей.
Когда на дисплее высвечивается требуемое значение параметра, нажимают
клавишу ENTER для сохранения его в памяти устройства. Одновременно происходит
переход к программированию функции, имеющей следующий номер в порядке
возрастания. После программирования функции с максимальным номером (для весов
RW – это функция F14) устройство переходит в режим взвешивания.
В таблице приведена сводка всех программируемых функций:
Page 12

3 МЕТОДИКА ИЗМЕРЕНИЙ
3.1 ВВЕДЕНИЕ
Настоящей методикой установлена процедура определения нагрузки на ось
транспортного средства и процедура определения полной массы транспортного
средства с использованием весов электронных автомобильных RW, изготовленных
фирмой «CAS Corporation LTD».
3.2 НОРМАТИВНЫЕ ДОКУМЕНТЫ
1. ГОСТ 53228-2008 «Весы неавтоматического действия. Часть1. Метрологические и
технические требования» в части терминов и определений, метрологических
требований.
2. Весы автомобильные RW. Руководство по эксплуатации.
3. ГОСТ 12.0.004-90 «Организация обучения безопасности труда».
4. ГОСТ 12.1.019-2009 «Электробезопасность. Общие требования и номенклатура
видов защиы».
3.3 ТЕРМИНЫ И ОПРЕДЕЛЕНИЯ
Весоизмерительное оборудование – комплект, включающий в себя
электронные автомобильные весы RW , предназначенный для определения нагрузки на
ось автомобиля или полной массы транспортного средства и состоящий из прибора
весоизмерительного, грузоприемных платформ, въездных пандусов, пассивных
площадок (только при определении нагрузки на ось автомобиля) и соединительных
кабелей.
Весоизмерительный датчик – конструктивный элемент весов, расположенный
под грузоприемной платформой, и предназначенный для преобразования силы
тяжести, передаваемой от грузоприемной платформы, в электрический сигнал,
подаваемый на вход весоизмерительного прибора.
Весоизмерительный прибор – конструктивная часть весов, предназначенная
для преобразования электрического сигнала, принимаемого от весоизмерительных
датчиков, в цифровую форму, его суммирование, округление и вывода на внешние
устройства (дисплей, принтер и др.).
Въездной пандус – вспомогательная часть комплекта весоизмерительного
оборудования, обеспечивающая пологий угол заезда или съезда колеса автомобиля с
грузоприемной платформы.
Грузоприемная платформа – конструктивная часть весов, предназначенная
для расположения на ней колеса транспортного средства, восприятия его силы
тяжести и передачи ее на весоизмерительные датчики в форме электрического
сигнала.
Пара грузоприемных платформ – две соседние грузоприемные платформы,
предназначенные для расположения колес одной оси транспортного средства.
Пассивная площадка – вспомогательная часть комплекта весоизмерительного
оборудования, обеспечивающая расположение на одном горизонтальном уровне
нижней части поверхности колес соседних с измеряемой осью осей автомобиля.
Соединительный кабель – кабель, по которому осуществляется питание
весоизмерительных датчиков и передача измеренного сигнала от весоизмерительных
датчиков каждой платформы на весоизмерительный прибор RW-2601P.
Page 13

3.4 ИСПОЛЬЗУЕМЫЕ ТЕХНИЧЕСКИЕ СРЕДСТВА
Все измерения проводят только на специализированных площадках.
Определение общей массы автомобиля путем суммирования результатов
измерения нагрузки создаваемой одиночной осью недопустимо.
Значение массы всего АТС, определенное суммированием результатов
последовательных измерений осевых нагрузок в статическом режиме, будет лишь
ориентировочным. Погрешность такого результата зависит от числа осей, типа
подвески (рессорная или пневмо), длины ТС и других факторов, и поэтому не
нормируется.
Определение общей массы АТС, возможно только в том случае, когда все
колеса АТС одновременно опираются на грузоприемные платформы.
Для определения нагрузки, создаваемой осью транспортного средства на
дорогу, используется комплект весов RW, состоящий из прибора весоизмерительного
RW-2601P или RW-2000Z, грузоприемных платформ в количестве 2 шт., въездных
пандусов в количестве 4 шт., пассивных площадок и двух соединительных кабелей
(при использовании прибора весоизмерительного RW-2601P). Количество пассивных
площадок определяется согласно требованиям раздела 3.7 настоящей методики.
Для определения полной массы транспортного средства используется комплект
весов RW , состоящий из прибора весоизмерительного RW-2601P или RW-2000Z,
грузоприемных платформ в количестве не менее удвоенного количества осей
транспортного средства, въездных пандусов в количестве, равном удвоенному
количеству грузоприемных платформ и соединительных кабелей в количестве, равном
количеству грузоприемных платформ (при использовании прибора
весоизмерительного RW-2601P).
Каждая грузоприемная платформа рассчитана максимальную нагрузку 5, 10 или
15 т. (в зависимости от модификации). Число поверочных делений 1000, 2000 и 1500
соответственно.
Длина соединительного кабеля не должна превышать 50 м.
3.5 ТРЕБОВАНИЯ БЕЗОПАСНОСТИ
К проведению подготовительных работ и проведению измерений допускаются
лица, ознакомленные с требованиями безопасности в соответствии с ГОСТ 12.0.004-
90.
Обязательно выполнение требований нормативных документов,
устанавливающих безопасность и правила пожарной безопасности для производства
работ на объекте установки весов.
При установке и использовании весов обязательно выполнение требований мер
безопасности, приведенных в разделе 1 документа «Весы электронные автомобильные
RW. Руководство по эксплуатации».
При использовании в качестве источника питания сеть переменного тока
должна быть обеспечены меры безопасности согласно ГОСТ 12.1.019-2009 и другим
нормативным документам.
3.6 ТРЕБОВАНИЯ К ВНЕШНИМ УСЛОВИЯМ
Измерения должны производиться при температуре воздуха окружающей
среды от минус 40 до плюс 40 С. При этом в случае температуры воздуха
окружающей среды ниже минус 10 С весоизмерительный прибор должен находиться
в помещении с температурой окружающей среды не ниже минус 10 С.
Page 14

Не допускается проводить измерения и подготовку к ним в условиях любых
атмосферных осадков, а также при использовании весов вне помещений проводить
измерения в ветреную погоду.
При питании от сети напряжение должно быть в пределах от 187 до 242 В.
3.7 ПОДГОТОВКА К ПРОВЕДЕНИЮ ИЗМЕРЕНИЙ
3.7.1 ТРЕБОВАНИЯ К МЕСТУ УСТАНОВКИ ГРУЗОПРИЕМНЫХ ПЛАТФОРМ
Место установки грузоприемных платформ, пассивных площадок и въездных
пандусов должно быть оборудовано таким образом, чтобы обеспечивался свободный
заезд и съезд каждой оси транспортного средства или транспортного средства в целом
(при определении полной массы транспортного средства) на грузоприемные
платформы, а также свободное маневрирование транспортного средства до и после
заезда: по крайней мере, с обеих сторон въездных пандусов должны быть прямые
участки дороги длиной, равной или большей длине взвешиваемого транспортного
средства. Недопустимо применение весов на граверных и грунтовых дорогах.
Грузоприемные платформы должны быть установлены на специально
подготовленных площадках с плоской горизонтальной поверхностью. Схема
установки грузоприемных платформ приведена на рисунке 3.1 (в продольном
направлении) и на рисунке 3.2 (в поперечном направлении). Поверхностью может
служить бетонное основание или бетонные плиты на песчано-гравийной подсыпке
либо асфальт. Обязательное требование к любой поверхности – ее твердость должна
быть не менее 50 кг/см2. Продольный уклон всей поверхности площадки и поперечные
уклоны относительно центральной продольной линии площадки не должны быть
более 1º (см. рис. 3.1, рис. 3.2). Твердость измеряют твердомером для определения
твердости дорожного покрытия, величину уклона - уровнем. После выбора
предполагаемого места установки грузоприемных платформ следует оценить
неровности в месте установки платформы, пассивных площадок и въездных пандусов
с учетом обеспечения возможности регулировки расстояния между платформами в
зависимости от расстояния между продольными осями колес оси (колеи)
транспортных средств. При определении полной массы транспортного средства также
следует оценить неровности во всех возможных местах установки грузоприемных
платформ и въездных пандусов в зависимости от расстояния между осями (колесной
базы) транспортных средств. Не допускается установка грузоприемных платформ,
пассивных площадок и въездных пандусов на поверхность, неровность которой
составляет более 3-х мм. Неровность поверхности измеряется профилографом.
Рисунок 3.1 Схема установки грузоприемных платформ в продольном направлении
Рисунок 3.2 Схема установки грузоприемных платформ в поперечном направлении
Page 15

После этого следует убедиться в отсутствии каких-либо загрязнений (дорожная
пыль, песок, снег и др.) мест установки платформ и в отсутствии данных загрязнений
и посторонних предметов со стороны нижних частей платформ. Присутствие воды,
каких-либо загрязнений (дорожной пыли, песка, снега и др.) в месте установки
платформ, пассивных площадок и въездных пандусов, а также со стороны нижней
части грузоприемных платформ не допускается.
3.7.2 РЕГУЛИРОВКА УСТАНОВКИ ГРУЗОПРИЕМНОЙ ПЛАТФОРМЫ
Следует убедиться в отсутствии покачивания грузоприемной платформы
относительно диагональных осей, соединяющих весоизмерительные датчики,
расположенные по краям. В случае покачивания, необходимо его устранить путем
подкладывания под соответствующие датчики регулировочных пластин толщиной 0,51 мм. Если покачивание относительно диагональных осей, соединяющих крайние
весоизмерительные датчики, отсутствует, следует проверить загрузку центральных
датчиков. Для этого следует подложить под них регулировочные пластины. Если есть
покачивание относительно продольной (по направлению движения автомобиля) оси, загрузка центральных датчиков нормальная. В этом случае пластины следует убрать.
Если покачивание отсутствует, следует повторить процедуру размещения пластин.
Также, если присутствует уклон платформы более 1о, следует с помощью
регулировочных пластин отрегулировать его таким образом, чтобы он был в пределах
1о. Аналогичным образом следует выполнить проверку и при необходимости
регулировочные работы для остальных платформ.
3.7.3 УСТАНОВКА ПАССИВНЫХ ПЛОЩАДОК И ВЪЕЗДНЫХ ПАНДУСОВ
После установки грузоприемных платформ следует приступить к установке
пассивных площадок (только при определении нагрузки на ось транспортного
средства). Пассивные площадки должны быть установлены таким образом, чтобы при
измерении нагрузки каждой оси нижние части колес соседних с ней осей,
расположенных на расстоянии до 2-х метров в каждую сторону от измеряемой оси,
находились на одном горизонтальном уровне с нижними частями колес измеряемой
оси. В случае установки весов на объект измерений с целью длительного
использования рекомендуется закрепить пассивные площадки анкерными болтами.
Въездные пандусы устанавливаются к каждой последней пассивной площадке
либо к каждому краю грузоприемной платформы.
Примечание. Установку пассивных площадок и въездных пандусов допускается
производить на этапе проведения измерений (пункты 3.8, 3.9 настоящей методики)
после установки грузоприемных платформ в их окончательное местоположение в
зависимости от расстояния между продольными осями колес оси (колеи) и расстояния
между осями (колесной базы) транспортных средств (при определении полной массы
транспортного средства).
3.7.4 ТРЕБОВАНИЯ К МЕСТУ УСТАНОВКИ ВЕСОИЗМЕРИТЕЛЬНОГО ПРИБОРА
Весоизмерительный прибор следует располагать так, чтобы обеспечивалось
безопасное расстояние от взвешиваемых транспортных средств и удобство
считывания показаний.
После установки весоизмерительного прибора следует открыть крышку его
кейса и произвести при выключенном весоизмерительном приборе подключение
кабеля ко всем грузоприемным платформам, а затем к весоизмерительному прибору
(при использовании весоизмерительного прибора RW-2601P).
Page 16

Затем следует включить его электропитание переключением тумблера
«ON/OFF» в положение «ON» и прогреть весы в течение 30 минут.
3.8 ПРОВЕДЕНИЕ ИЗМЕРЕНИЙ ПРИ ОПРЕДЕЛЕНИИ НАГРУЗКИ
НА ОСЬ ТРАНСПОРТНОГО СРЕДСТВА
Для проведения измерений с целью определения нагрузки на ось транспортного
средства следует использовать технические средства согласно разделу 3.4 настоящей
методики измерений.
При проведении измерений следует соблюдать осторожность, находясь на
безопасном расстоянии от транспортных средств.
Если весы планируется установить на новом месте эксплуатации, следует
выполнить действия, указанные в пункте 3.7 настоящей методики.
После включения весов и прогрева в течение 30 минут можно приступать к
проведению измерений. Для этого необходимо выполнить следующие операции.
На первом шаге необходимо убедиться в том, что на всех платформах
отсутствуют грузы, все подвижные части платформ механически не связаны с
неподвижными, а на индикаторе весоизмерительного прибора установлены нулевые
показания. Если показания ненулевые, весоизмерительный прибор следует обнулить
нажатием клавиши ZERО.
Далее следует выполнить подъезд транспортного средства к въездным
пандусам. Транспортное средство должно быть остановлено в непосредственной
близости колес первой взвешиваемой оси от въездных пандусов, не заезжая на них.
После остановки необходимо визуально оценить местоположение колес измеряемой
оси относительно грузоприемных платформ. Если после въезда автомобиля на
грузоприемные платформы нижняя часть поверхности любого из его колес
взвешиваемой оси окажется полностью или частично вне соприкосновения с
поверхностью грузоприемной платформы, следует произвести регулировку установки
грузоприемных платформ. Регулировка производится путем перестановки одной из
грузоприемных платформ с пассивными площадками и въездными пандусами в
соответствии с расстоянием между продольными осями колес взвешиваемой оси
транспортного средства (колея). При перестановке платформы следует стремиться к
тому, чтобы после въезда автомобиля на грузоприемные платформы нижняя часть
поверхности его колес оказалась в центральных частях грузоприемных платформ.
После выполнения регулировок необходимо проверить выполнение требований к
установке грузоприемных платформ (пункт 3.7.1 настоящей методики) применительно
к каждой грузоприемной платформе и выполнить регулировку (пункт 3.7.2 настоящей
методики). После этого следует установить пассивные площадки и въездные пандусы
в соответствии с пунктом 3.7.3 настоящей методики.
Затем следует выполнить заезд транспортного средства на малой скорости
колесами измеряемой оси на грузоприемные платформы. После заезда транспортного
средства на грузоприемные платформы следует убедиться в том, что площади
контакта нижних частей колес измеряемой оси с горизонтальной поверхностью
полностью находятся в плоскости подвижных частей грузоприемных платформ. Не
допускается хотя бы частичный контакт колеса транспортного средства с
неподвижными частями (например, с пассивными площадками, въездными
пандусами). После остановки транспортного средства следует растормозить все его
колеса, а также отключить их от силового агрегата переключением коробки перемены
передач в нейтральное положение. При этом на всех этапах взвешивания водитель
должен находиться в кабине транспортного средства. После стабилизации показаний
(включения указателя «STABLE») необходимо считать показание на дисплее
Page 17

весоизмерительного прибора. Для вывода показаний на печать следует нажать на
весоизмерительном приборе клавишу PRINT. На печать будет выведена измеренная
нагрузка на ось. После считывания показаний и вывода на печать, если требуется
определить нагрузку от другой оси, следует выполнить заезд транспортного средства
колесами измеряемой оси на грузоприемные платформы и произвести взвешивание с
учетом требований настоящего абзаца. Для вывода показаний на печать следует
нажать на весоизмерительном приборе клавишу PRINT.
3.9 ПРОВЕДЕНИЕ ИЗМЕРЕНИЙ ПРИ ОПРЕДЕЛЕНИИ ПОЛНОЙ
МАССЫ ТРАНСПОРТНОГО СРЕДСТВА
Для проведения измерений с целью определения полной массы транспортного
средства следует использовать технические средства согласно разделу 3.4 настоящей
методики измерений.
При проведении измерений следует соблюдать осторожность, находясь на
безопасном расстоянии от транспортных средств.
Если весы планируется установить на новом месте эксплуатации, следует
выполнить действия, указанные в разделе 3.7 настоящей методики.
После включения весов и прогрева в течение 30 минут можно приступать к
проведению измерений. Для этого необходимо выполнить следующие операции.
На первом шаге необходимо убедиться в том, что на всех платформах
отсутствуют грузы, все подвижные части платформ механически не связаны с
неподвижными, а на индикаторе весоизмерительного прибора установлены нулевые
показания. Если показания ненулевые, весоизмерительный прибор следует обнулить
нажатием клавиши ZERО.
Далее следует выполнить подъезд транспортного средства к въездным
пандусам. Транспортное средство должно быть остановлено в непосредственной
близости передних колес от въездных пандусов, не заезжая на них. После остановки
необходимо визуально оценить местоположение колес относительно грузоприемных
платформ. Если после въезда автомобиля на грузоприемные платформы нижняя часть
поверхности любого из его колес окажется полностью или частично вне
соприкосновения с поверхностью грузоприемной платформы, следует произвести
регулировку установки грузоприемных платформ. На первом этапе производится
регулировка установки грузоприемных платформ в соответствии с расстоянием между
осями (базой) транспортного средства. Регулировка указанного расстояния
производится путем перестановки пар грузоприемных платформ вдоль продольной
оси транспортного средства. После этого производится регулировка установки
грузоприемных платформ в соответствии с расстоянием между продольными осями
колес взвешиваемой оси транспортного средства (колеей). Регулировка указанного
расстояния производится путем перестановки одной грузоприемной платформы из
каждой пары грузоприемных платформ. При перестановке платформы следует
стремиться к тому, чтобы после въезда транспортного средства на грузоприемные
платформы нижняя часть поверхности его колес оказалась в центральных частях
грузоприемных платформ. После выполнения регулировок необходимо проверить
выполнение требований к установке грузоприемных платформ (пункт 3.7.2 настоящей
методики) применительно к каждой грузоприемной платформе и выполнить
регулировку (пункт 3.7.3 настоящей методики). После этого следует установить
въездные пандусы в соответствии с пунктом 3.7.4 настоящей методики.
Затем следует выполнить заезд транспортного средства на малой скорости на
грузоприемные платформы. После заезда транспортного средства на грузоприемные
Page 18

платформы следует убедиться в том, что площади контакта нижних частей колес
измеряемой оси с горизонтальной поверхностью полностью находятся в плоскости
подвижных частей грузоприемных платформ. Не допускается хотя бы частичный
контакт колеса транспортного средства с неподвижными частями (например, с
въездными пандусами). На всех этапах взвешивания водитель должен находиться в
кабине транспортного средства. После стабилизации показаний (включения указателя
«STABLE») необходимо считать показание на дисплее весоизмерительного прибора.
Для вывода показаний на печать следует нажать на весоизмерительном приборе
клавишу PRINT. На печать будет выведена измеренная полная масса транспортного
средства.
3.10 ОФОРМЛЕНИЕ РЕЗУЛЬТАТОВ ИЗМЕРЕНИЙ
Результаты измерений оформляются согласно требованиям в соответствующей
сфере государственного регулирования и требований отрасли, в которых применяются
весы электронные автомобильные RW.
Page 19

4 ХАРАКТЕРНЫЕ НЕИСПРАВНОСТИ И СПОСОБЫ ИХ
СООБЩЕНИЕ
ОПИСАНИЕ
НЕИСПРАВНОСТИ
РЕКОМЕНДАЦИИ
<Err 02>
Не подсоединен тензодатчик или
неисправен АЦП
Проверьте полярность сигнала
<Err 06>
Принтер не подключен
Проверьте подсоединение принтера
<Err 13>
Масса тары превышает наибольший предел взвешивания
Установите более легкую тару
<Over>
Перегрузка
Уменьшите нагрузку на весы
<Err 21>
Разрешающая способность весов
установлена вне допустимого
диапазона
Уменьшите наибольший предел взвешивания (CAL 1) или увеличьте дискрет (CAL 2), так чтобы d/НПВ
0.0001
<Err 22>
Для юстировки выбран слишком
малый груз (менее 1 % от НПВ)
Установите рабочую точку при
юстировке CAL 3 не менее 1% от
НПВ
<Err 23>
Для юстировки выбран слишком
большой груз (более 100 % от
НПВ)
Установите рабочую точку при
юстировке CAL3 не более 100% от
НПВ
<Err 24>
Выходной сигнал от тензодатчика при юстировке коэффициента
усиления слишком мал
Откалибруйте при меньшей разрешающей способности согласно таблице
ниже
<Err 25>
Выходной сигнал от тензодатчика при юстировке коэффициента
усиления слишком велик
Откалибруйте при большей разрешающей способности согласно таблице
ниже
<Err 26>
Выходной сигнал от тензодатчика при юстировке нуля слишком
велик
Проверьте отсутствие груза на платформе. После проверки перекалибруйте.
УСТРАНЕНИЯ
Во время работы весов производится их автоматическое диагностирование и при
обнаружении дефектов на индикаторе дисплея появляется сообщение <Err XX>, по
номеру которого XX устанавливается тип неисправности.
Page 20

5 ТЕХНИЧЕСКОЕ ОБСЛУЖИВАНИЕ
При эксплуатации весов пользователем должно производиться ежедневное
обслуживание весов. Оно заключается в следующем:
1. Чистка весов и прилегающих к ним территорий. Особенное внимание следует
уделять загрязнениям под весами, которые могут привести к выходу
погрешности при измерениях за допустимые пределы и к выходу весов из
строя.
2. Проверка отсутствия механических повреждений весовых платформ, всех
соединительных кабелей, разъемов и пассивных площадок (при их наличии).
3. Проверка состояния датчиков: отсутствие посторонних предметов между
основанием и поверхностью весов, между датчиками и их крышками.
Кроме этого, еженедельно следует производить замеры состояния
автодорожного полотна в радиусе 15 м от каждой установленной весовой платформы.
При возникновении отклонений, следует их устранить до проведения измерений.
Page 21

6 ГОСУДАРСТВЕННАЯ ПОВЕРКА
При эксплуатации весов области, на которую распространяется
Государственный метрологический контроль, весы в обязательном порядке подлежат
Государственной поверке. Межповерочный интервал – 1 год. Основное средство
поверки – гири класса точности M1 по ГОСТ 7328-2001.
Page 22

7 ТРАНСПОРТИРОВКА, ХРАНЕНИЕ И УТИЛИЗАЦИЯ
7.1 ТРАНСПОРТИРОВКА
Транспортировка весов может производиться всеми видами открытых и
закрытых транспортных средств, обеспечивающих сохранность груза, в соответствии с
правилами перевозки на данном виде транспорта. Способ укладки весов на
транспортирующем средстве должны исключать возможность их перемещения.
7.2 ХРАНЕНИЕ
Взвешивающие платформы и пассивные площадки могут храниться в
неотапливаемых хранилищах при температуре от минус 50 ºС до + 50 ºС и
относительной влажности воздуха до 90 %.
Хранение блока управления и персонального компьютера осуществляется по
группе 1(Л) ГОСТ 15150 – в отапливаемых помещениях (при температуре
окружающего воздуха от +5 ºС до
+ 40 ºС и относительной влажности воздуха до 70 %).
Грузоприемная платформа и пассивные площадки могут храниться в
оригинальной упаковке предприятия - изготовителя. Консервация ГП и пассивных
площадок производится с предельным сроком защиты без переконсервации один год.
7.3 УТИЛИЗАЦИЯ
По окончании срока службы в соответствии с действующим законодательством
весы подлежат утилизации.
Металлические части взвешивающих платформ подлежат утилизации, путем их
сдачи на металлолом.
Индикатор и весоизмерительные датчики должны утилизироваться по
комплексной системе утилизации, благодаря которой материалы возвращаются в
производство.
Пассивные площадки могут быть переработаны в резиновую крошку.
Page 23

23
8 ГАРАНТИЙНЫЕ ОБЯЗАТЕЛЬСТВА
Условия гарантийных обязательств содержатся в гарантийном талоне,
оформляемом при поставке весов.
 Loading...
Loading...