


Ultrasonic
Ultraschall / Détecteurs ultrasoniques /
Ultrasonidos / Sensori ad ultrasuoni / Ultrasonisk
Diffuse, Programmable Outputs
Abstandssensor, programmierbare Ausgänge /
Réflexion directe objet, sorties programmables /
Detección directa, salidas programables /
Sensori a riflessione, uscite programmabili /
Diffuse, programmerbare udgange
User Manual
Bedienungsanleitung
Manuel de l’utilisateur
Manual del usuario
Manuale d’istruzione
Brugerhåndbog
ENGLISHDEUTSCHFRANÇAISESPAÑOL
ITALIANO
DANSK
Page 3
Seite 15
Page 27
Pagina 39
Pagina 51
Side 63

3
Ultrasonic
Diffuse, Programmable Outputs
Types UA 30 CLD .. F. M7
CONTENTS Page
Installation 3
Software Description 4
Specifications 74
Detection Range 76
Wiring 77
Dimensions 77
Installation Hints 78
ENGLISHFRANÇAISESPAÑOLITALIANODANSK DEUTSCH
1. Mounting the sensor
Mount the sensor in the required position pointing at the target and
make sure that the distance to the target is within the range of the
sensor.
2. Supplying the sensor
To supply the sensor connect pin 2 to ground (0 V GND) and pin 1
to + (19 - 30 VDC).
3. Programming the sensor
Program the parametres according to the software description.
Installation
4
ENGLISHDEUTSCHFRANÇAISESPAÑOL
ITALIANO
DANSK
Software Description
The program UDSProg.EXE is designed for the Windows platform and
makes it easy to set up the sensor by going through self-explaining menus.
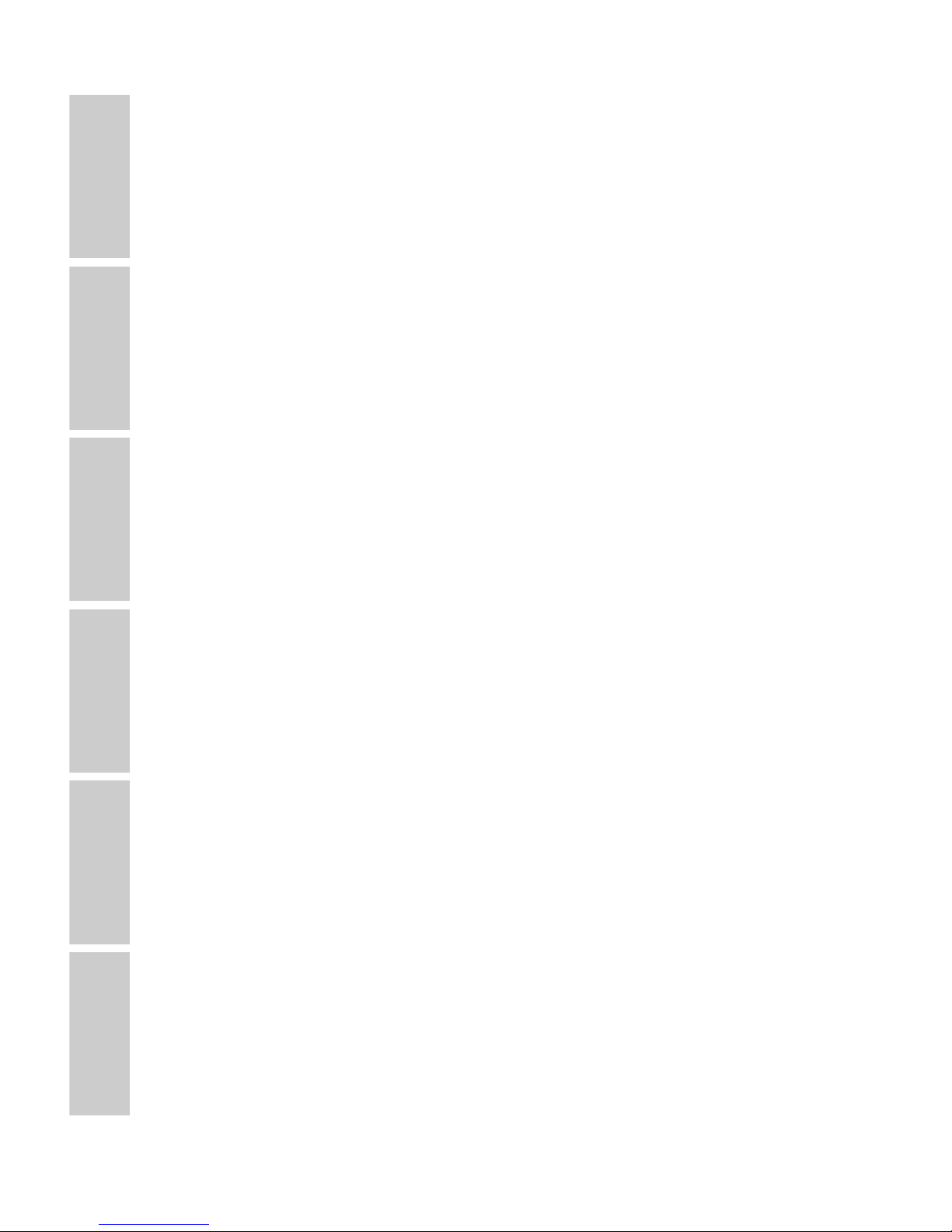
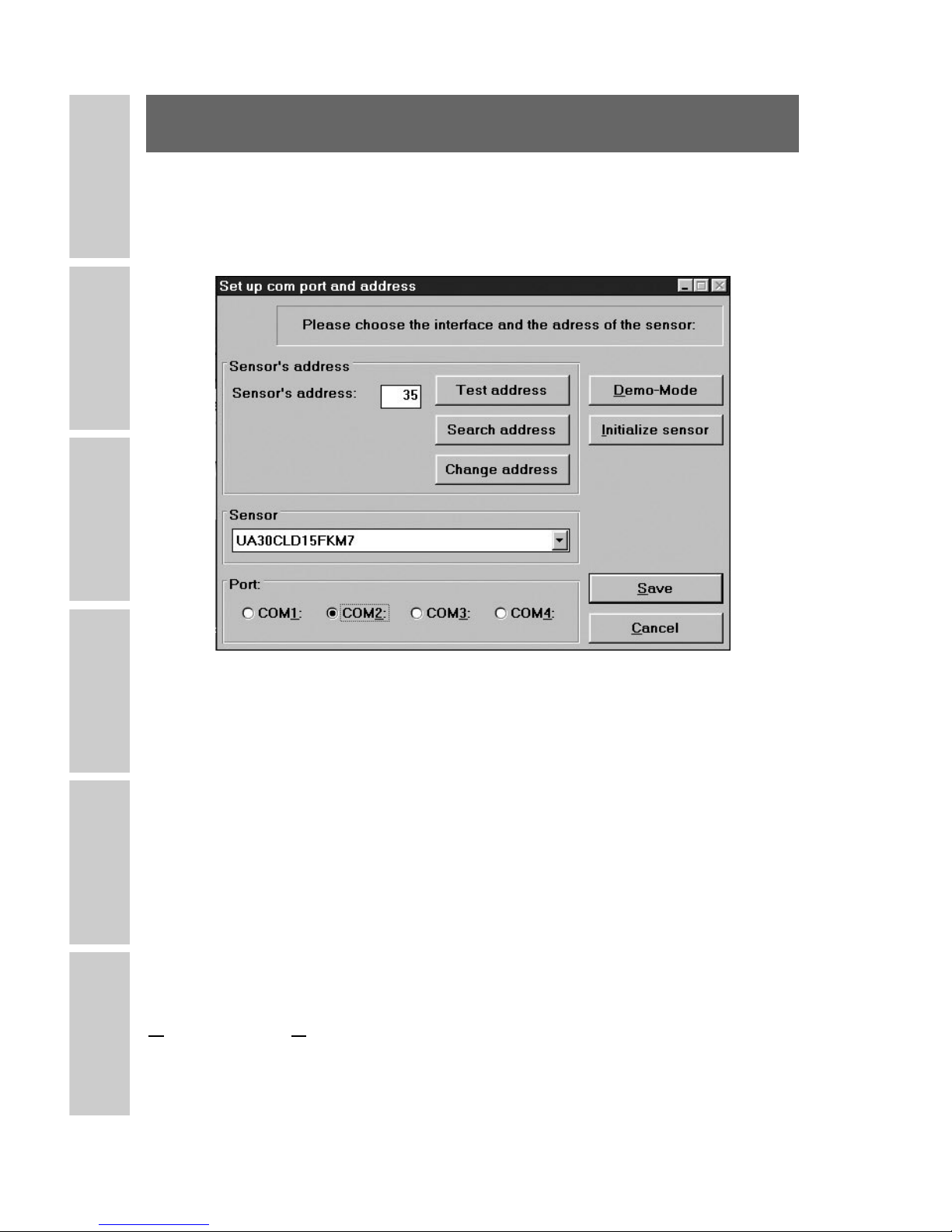
Setting up COM Port and Address
Port
The COM port used for the programming adapter is selected in the first
window which appears when the program starts.
Sensor
In the drop-down menu, the correct sensor type is selected.
Address
The factory setting is 97. The address can be changed to any number
between 0 and 99.
Search address
If a sensor has been connected and the address is unknown, "Search
address" will find the correct address.
D
emo-Mode
The sensor can run in demo-mode. Programming is not possible - only
verification of the settings.

5
ENGLISHFRANÇAISESPAÑOLITALIANODANSK DEUTSCH
Initialize sensor
The sensor is reset to factory settings.
O
k
The settings are confirmed, and the main menu appears.
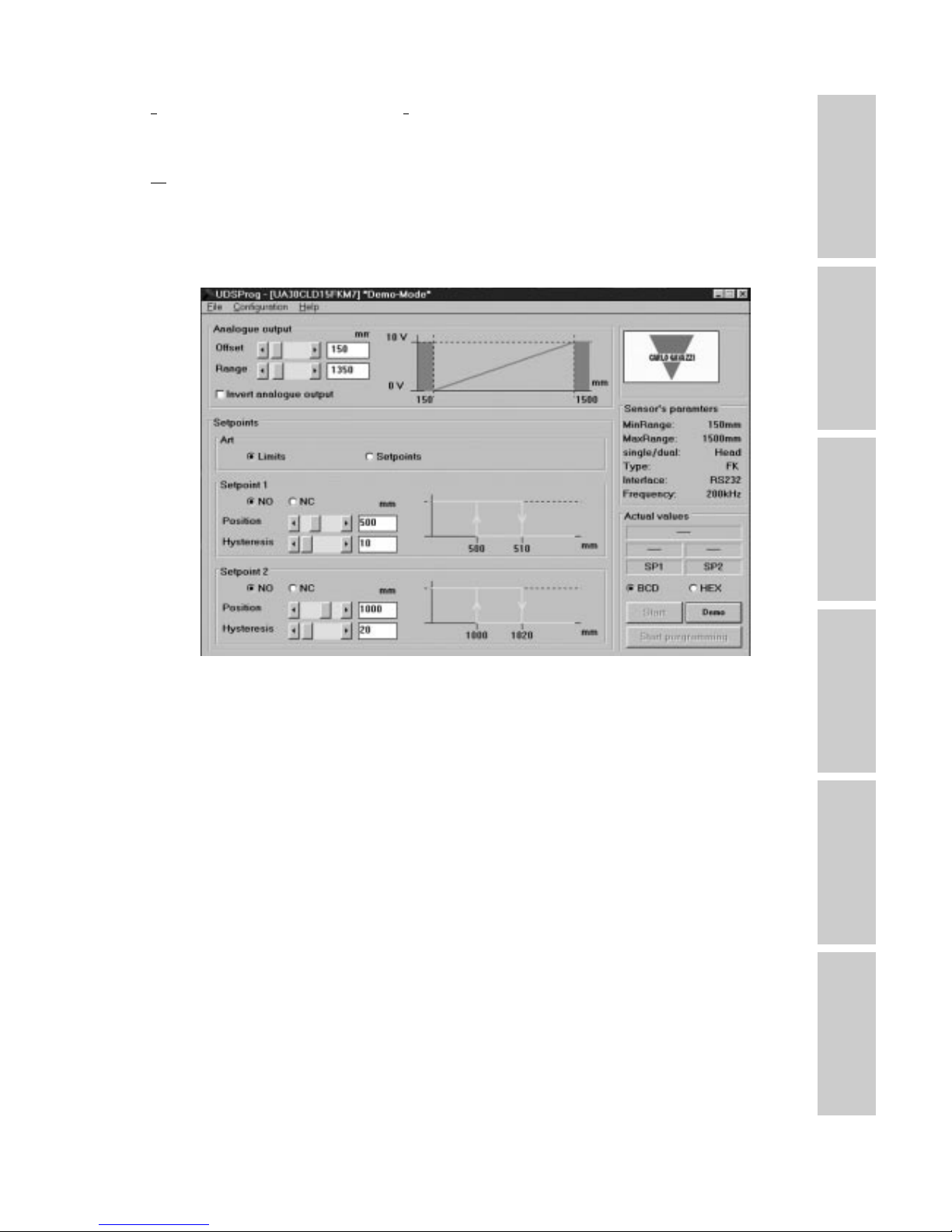
Main menu
Analogue output
The analogue output is programmed with two parameters, offset and
range. Offset is the distance from the sensor front to the closest end of
the range. Range is the distance which causes the output to change
from 0-10 V or 4-20 mA.
The offset and the range are selected in steps (in mm) - by scrolling the
bars or by entering the values. Click the box if an inversion of the analogue output is required. The chosen output characteristic is shown.
Setpoint outputs
Setpoints are selected either as limits (using the mode “Limits”) or as
setpoints (using the mode “Setpoints”) where a window is defined by
“Position” and “Hysteresis”.
Depending upon the choice of NO and NC, the setpoints are normally
open or normally closed functions.
6
ENGLISHDEUTSCHFRANÇAISESPAÑOL
ITALIANO
DANSK
NO: When a setpoint is exceeded, the output impedance is high.
Within the range, the output impedance is low and current flows (<100 mA).
NC: When a setpoint is exceeded, the output impedance is low and
current flows (<100 mA). Within the range the output impedance is high.
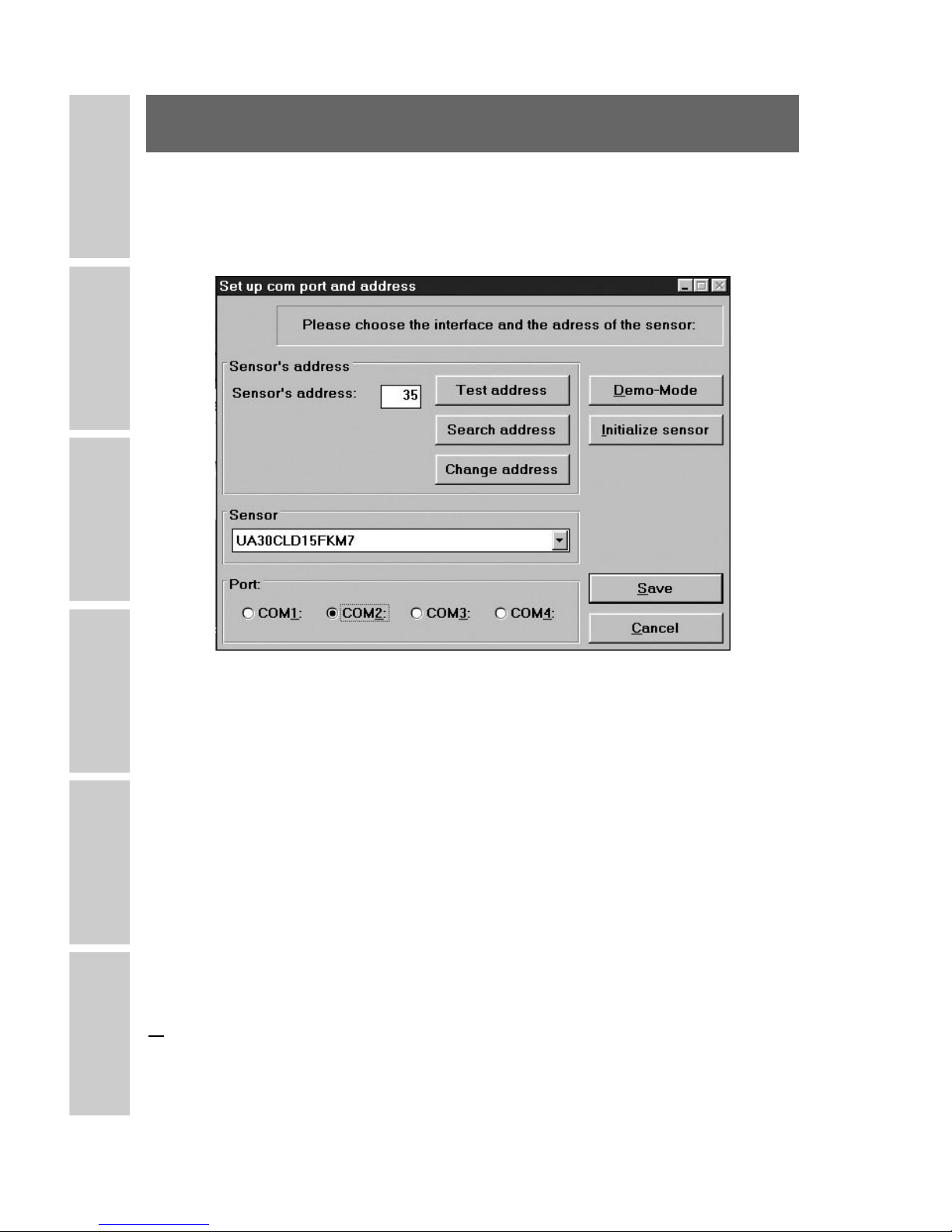
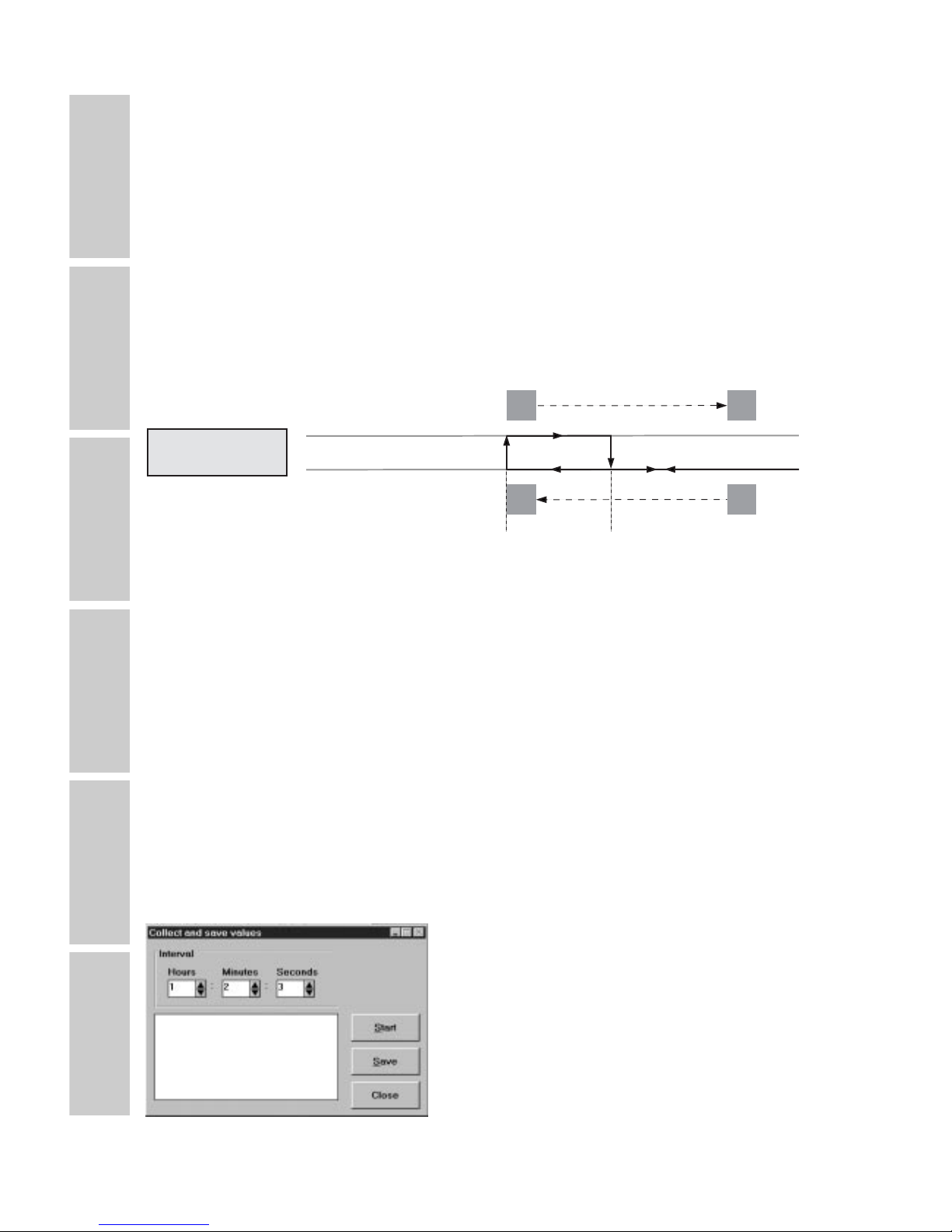
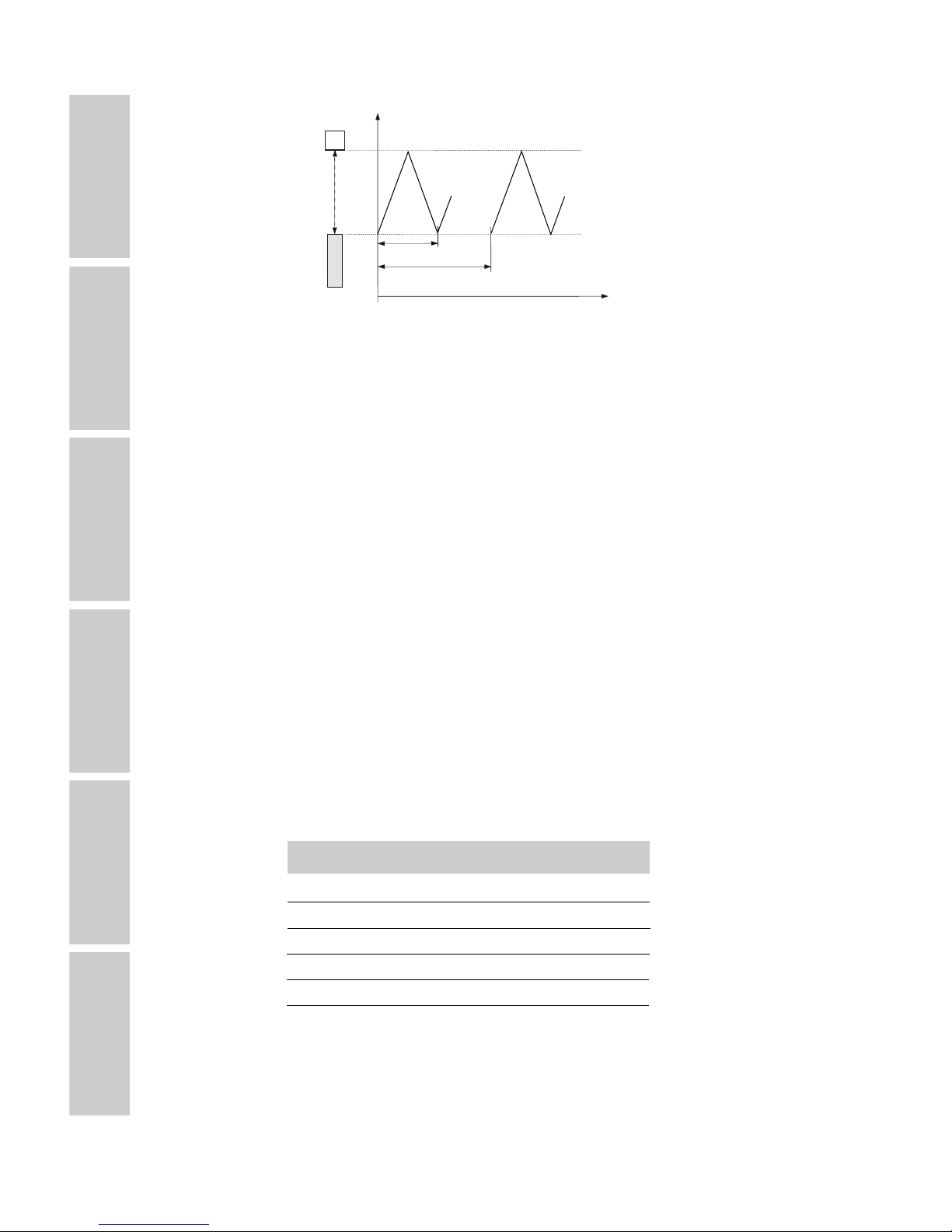
Hysteresis
To ensure a stable output (when a measured distance equals the setpoint), a hysteresis can be programmed. Example for a NO output:
If a target approaches the sensor, the output will change when the distance equals the setpoint. If the target moves back from this point, the
output changes back when the distance equals the setpoint + hysteresis.
File Menu
Collect and Save values
By choosing this, a new window opens. The frequency of the measurements can be selected (seconds, minutes and hours).
“Start” starts the recording.
“Save” stores the values (these can be evaluated in Excel).
Write sensor parametres
The parametres of the actual displayed
settings are written in a file on disc.
Load sensor parametres
The parameters from a file on disc are
loaded into the sensor.
Sensor
Target
Output
Setpoint Setpoint
+ hysteresis

7
ENGLISHFRANÇAISESPAÑOLITALIANODANSK DEUTSCH
Configuration Menu
Read configuration from sensor
The actual configuration will be downloaded from the sensor and shown.
Write configuration to sensor
The parametres shown on the screen will be transferred to the sensor.
The same result is achieved by clicking the button “Start programming”
in the main menu.
Initialize sensor
The sensor will be set to factory settings.
Configure sensor and interface
Sensor, COM-port and similar can be selected.
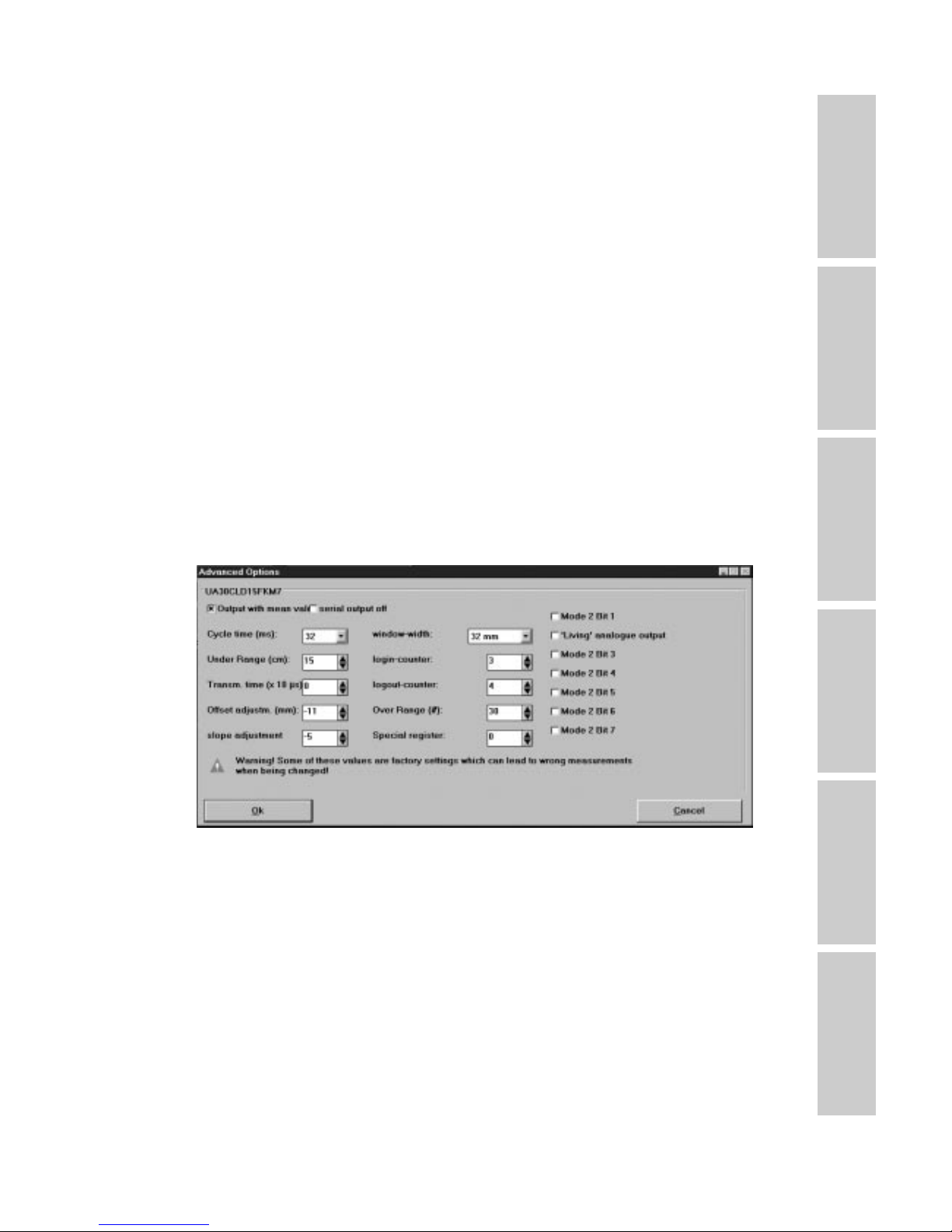
Advanced options
Output with mean value
Selection of a mean value procedure.
Serial output off
Disables serial output of data from the sensor. In case of time critical
applications, this can be a a useful function.
Cycle Time
Selection of cycle time in steps of 64, 32, 16, 8 or 4 ms.
The principle of distance measurement is shown in the following drawing.

8
ENGLISHDEUTSCHFRANÇAISESPAÑOL
ITALIANO
DANSK
The diagram shows the signal position versus time. The sensor transmits an ultrasonic pulse. The target reflects the signal and the sensor
receives this echo. The front of the sensor generates a new echo, an
echo of the echo. This is a weak signal for no use - therefore the T
measure
gates through only the usable signal (first echo). The T
cycle
determines
when the next pulse is transmitted.
The cycle time determines the response time of the sensor. Obviously,
sensors used for long distance measurement also have long response
times. With the programming of the cycle time, the response time of the
sensor can be adjusted to the application.
The duration of the cycle time must be longer than the time needed to
receive the echo of the transmitted pulse!
T
measure
is proportional to the distance to the object (from the pulse is
transmitted and until the echo is received). T
measure
is a proportional expression for the distance; therefore the time is converted to a distance,
expressed as an analogue value.
A guideline for maximum distance for a given cycle time is:
Under Range
Under range can be adjusted in steps from 0 to 255 cm. During transmission the sensor cannot receive, and therefore the length of the
transmission pulse determines the shortest detection distance. This
range, limited by the length of the transmission pulse, is called the blind
zone.
Target
Sensor
Signal Position
Time
T
measure
T
cycle
Cycle time (ms) Distance (m)
4 0.3
8 0.7
16 2.5
32 4.5
64 10
9
ENGLISHFRANÇAISESPAÑOLITALIANODANSK DEUTSCH
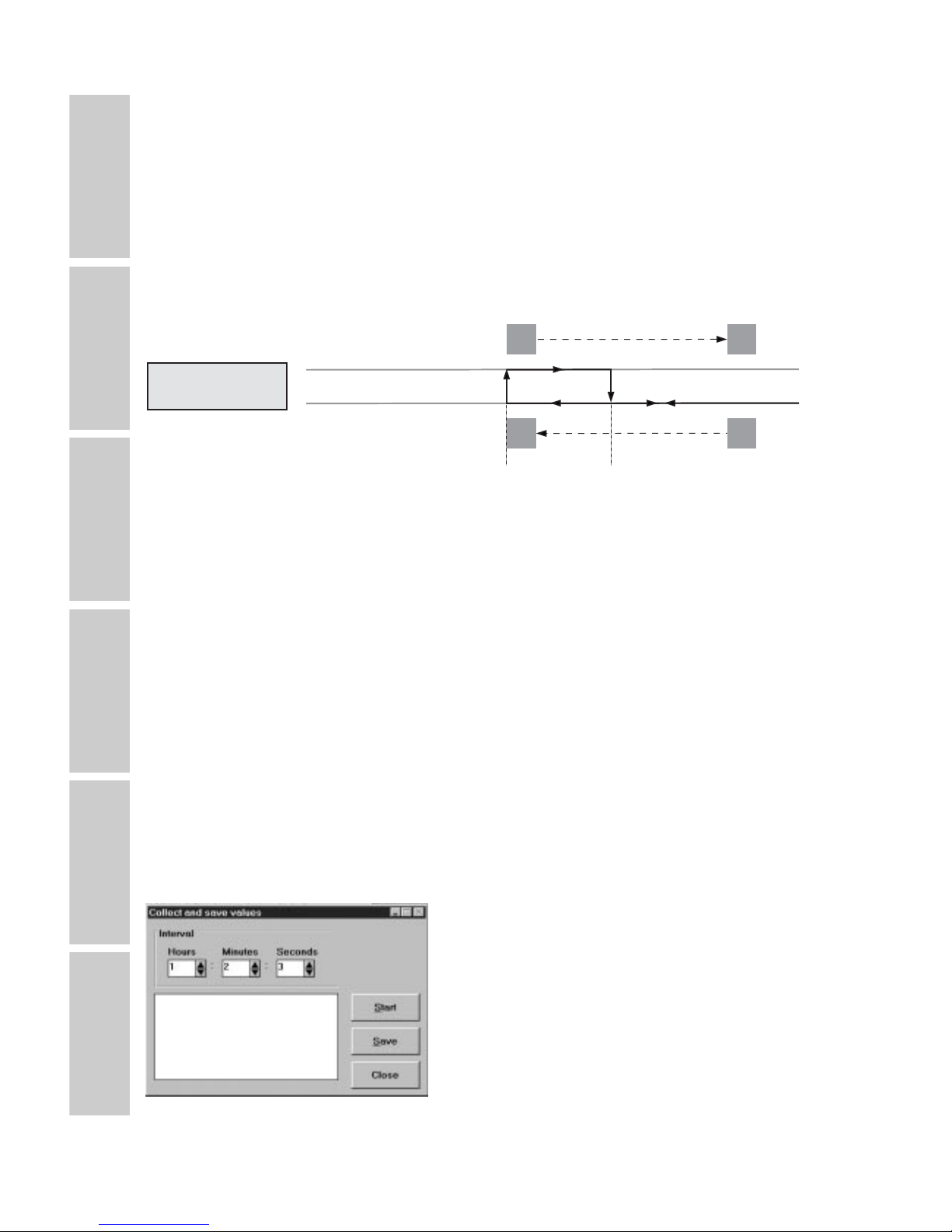
It is possible to control the under range. By setting the under range to a
certain distance, it is possible to ignore echoes received from targets
between the sensor front and the under range limit. This means that it is
possible to ignore disturbing objects close to the sensor.
A sensor can detect targets for example through a protecting grid without being disturbed by the reflections from this grid.
Limitations
• Minimum under range is determined by the transducer ringing.
• Echoes of a massive target in the dead zone will be suppressed but
2nd or 3rd echoes can be received if the time is longer than the
programmed dead zone. The output will indicate a distance which is
2 or 3 times longer.
Transmission Time
The transmission time defines the length of the pulse transmitted. It can
be selected in 10 µsec steps up to 2.55 ms. If 0 is selected, the length
varies with the measured distance.
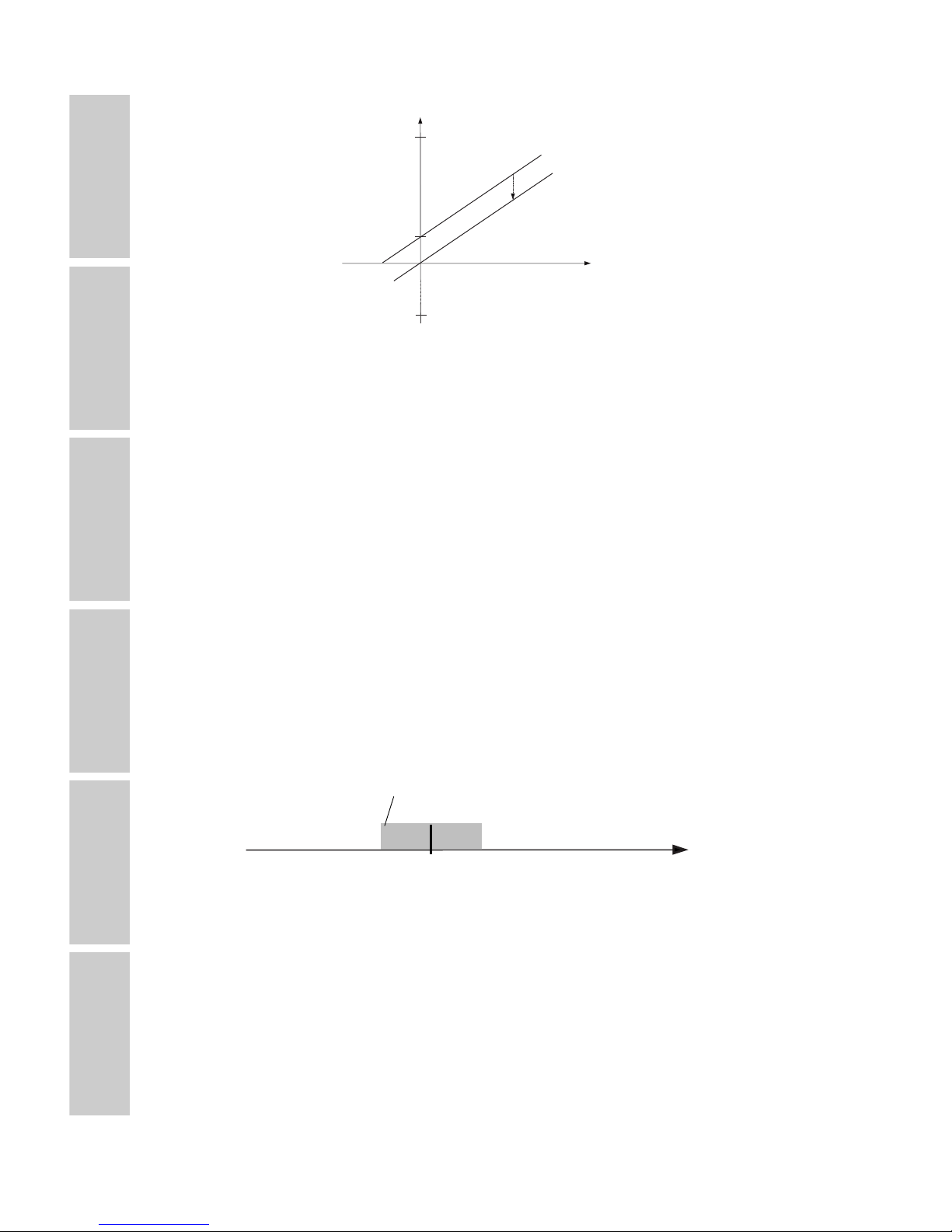
Offset and Slope Adjustment
These adjustments are done by factory. Please be careful and avoid
change of these settings. These parameters are for fine-tuning.
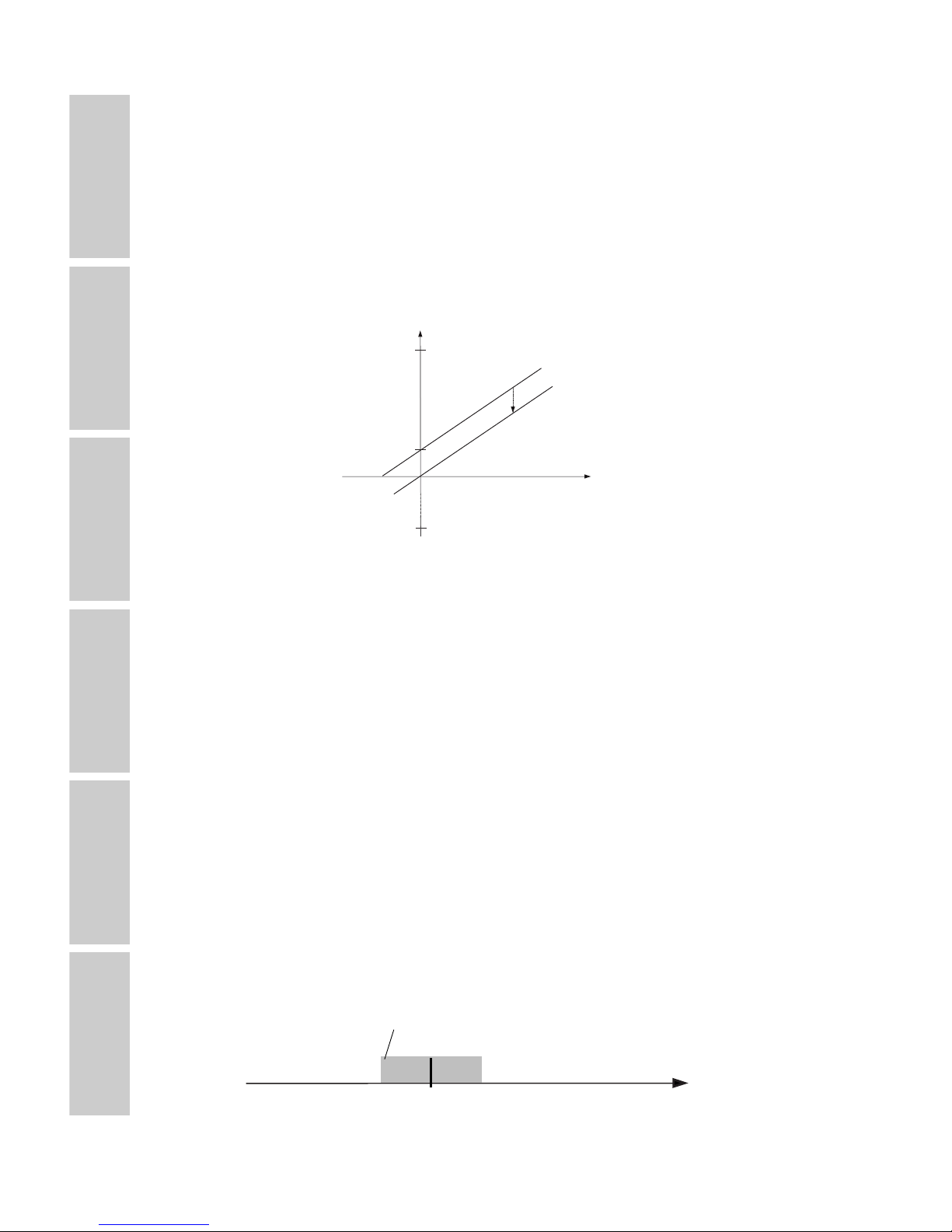
Offset Adjustment
A difference can exist between the read-out and the real distance.
0 mm in the read-out and 0 mm in the physical length might differ. The
position of 0 mm can be adjusted with the sensor head offset adjustment +/-128 mm in mm steps.
Example of negative offset (see following drawing):
The output indicates a distance which is 30 mm behind the target. By
setting the offset to -30 mm, this misreading is neutralized as 30 mm
are subtracted from all measurements.
Target
Sensor
Grid
Blind
zone
Under
range
10
ENGLISHDEUTSCHFRANÇAISESPAÑOLITALIANODANSK
Slope adjustment
The slope adjustment changes the slope of the analogue output. Using
a wrong slope adjustment can affect the linearity and the temperature
compensation.
Window Width
By operating the sensor with the mean value routine a window is created
around the actual measured distance. All measured values within this
window form the basis for the read-out. This read-out is then the centre
of the window for the next read-out, and therefore the window is moving with the target. The maximum speed of the window movement limits the speed of a target that should be detected. If the target moves
too fast, the fail pulse suppression algorithm will ignore distance measurements.
The maximum speed depends upon the cycle time and the size of the
used measuring window. With the command “Cycle time adjustment” it
is also possible to adjust the measurement window. Normal size of this
measurement window is ± 32 mm.
Login-Logout Counter
The Login-Logout Counter is part of the ‘Fail Pulse Suppression’ software of the sensor. Please change only with caution!
Sensor electronics are well protected against electromagnetic disturbances
from the environment. In addition, the microprocessor is used in a very
effective way to filter the right signal out of a noisy environment.
Factory settings are optimised to fulfill most of the measurement tasks.
127
30
-128
Real distance
Distance output
Measurement window
Actual
output
Distance

11
ENGLISHFRANÇAISESPAÑOL
ITALIANO
DANSK DEUTSCH
Selecting output with mean value activates the routine. With the actual
measured distance as the centre, a ± 32 mm window is created. This
window is called measurement window (for adjustment of this, see
“Measurement Window”).
If the next measurement or new value is within this measurement window, it will be used to calculate the new distance which then will be
read-out. The new value is used as the centre of a new measurement
window.
Two counters, ‘A’ for the read-out of the actual distance and ‘B’ for the
login, are reset to 0. If the next measurement or new value is outside
the window this measurement will be ignored and the distance output
will remain unchanged. A counter counting the number of measurements outside the window is increased by 1.
If the Logout Counter A is below 3 (programmable), the program jumps
back to the start and a new measurement is made.
If it is higher than or equals 3, the Login Counter B is increased.
If B = 1, the measured value is assumed to be the new distance and a
new measurement window is created. The program jumps back to the
start and a new measurement starts.
If B > 1 and the new measurement is outside the new measurement
window, B is set to 1 and the program jumps back to the start and a
new measurement starts.
If B = 4 (programmable), the new measurement is realised as the new
distance. Output is now changed and the logout and login counters are
reset to 0. The program jumps back to the start and a new measurement is started.
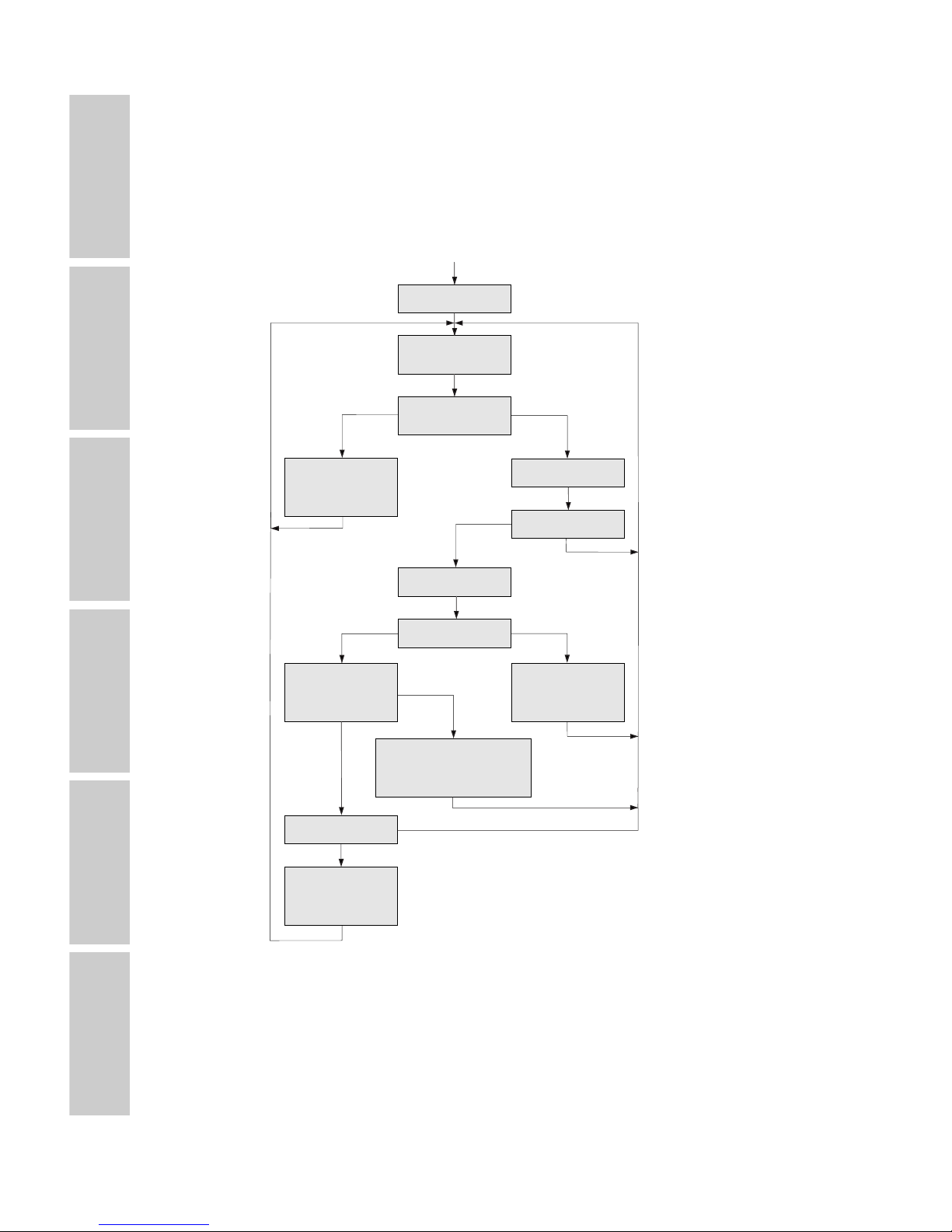
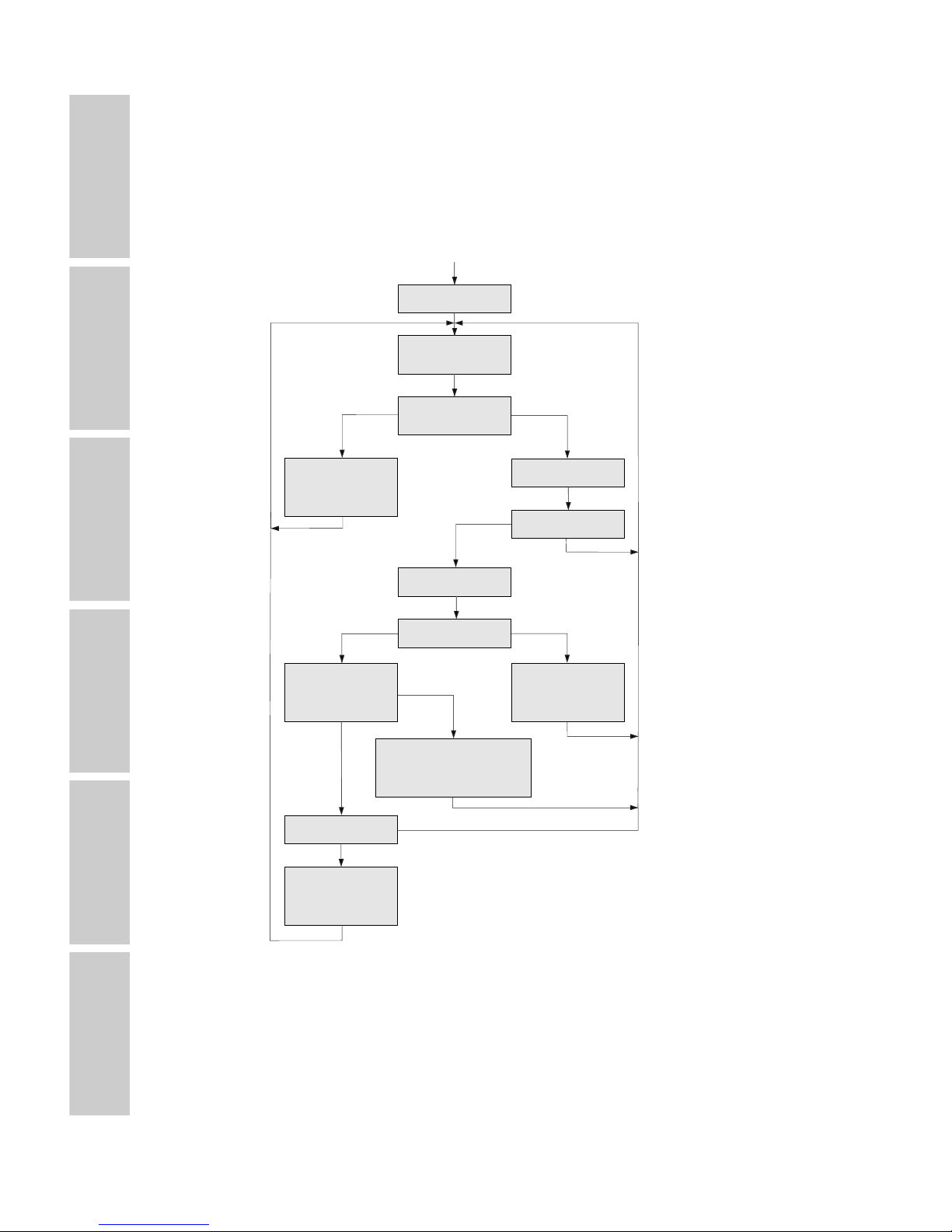
The following flow chart shows the structure of the program.
12
ENGLISHDEUTSCHFRANÇAISESPAÑOL
ITALIANO
DANSK
A & B = 0
Start
New value
Within range of
old measurement?
Yes
No
A = A+1
A ≥ 3?
No
Yes
Calculate new
distance
Change outputs
A & B = 0
B = B+1
B = 1?
No
Yes
B = 4?
No
Yes
Yes
No
New value =
New distance
Change outputs
A & B = 0
New value in
“possible”
measurement
window
New value is centre of
“possible”
measurement window
B = 1
New value is cen-
tre of “possible”
measurement
window
13
ENGLISHFRANÇAISESPAÑOLITALIANODANSK DEUTSCH
Over Range
This counter can be set to 0-255. If the sensor has to measure the distance to a small target that is difficult to detect, the sensor outputs may
be very unstable. They will flicker between the actual distance and over
range. These unwanted changes can be suppressed with the over
range counter.
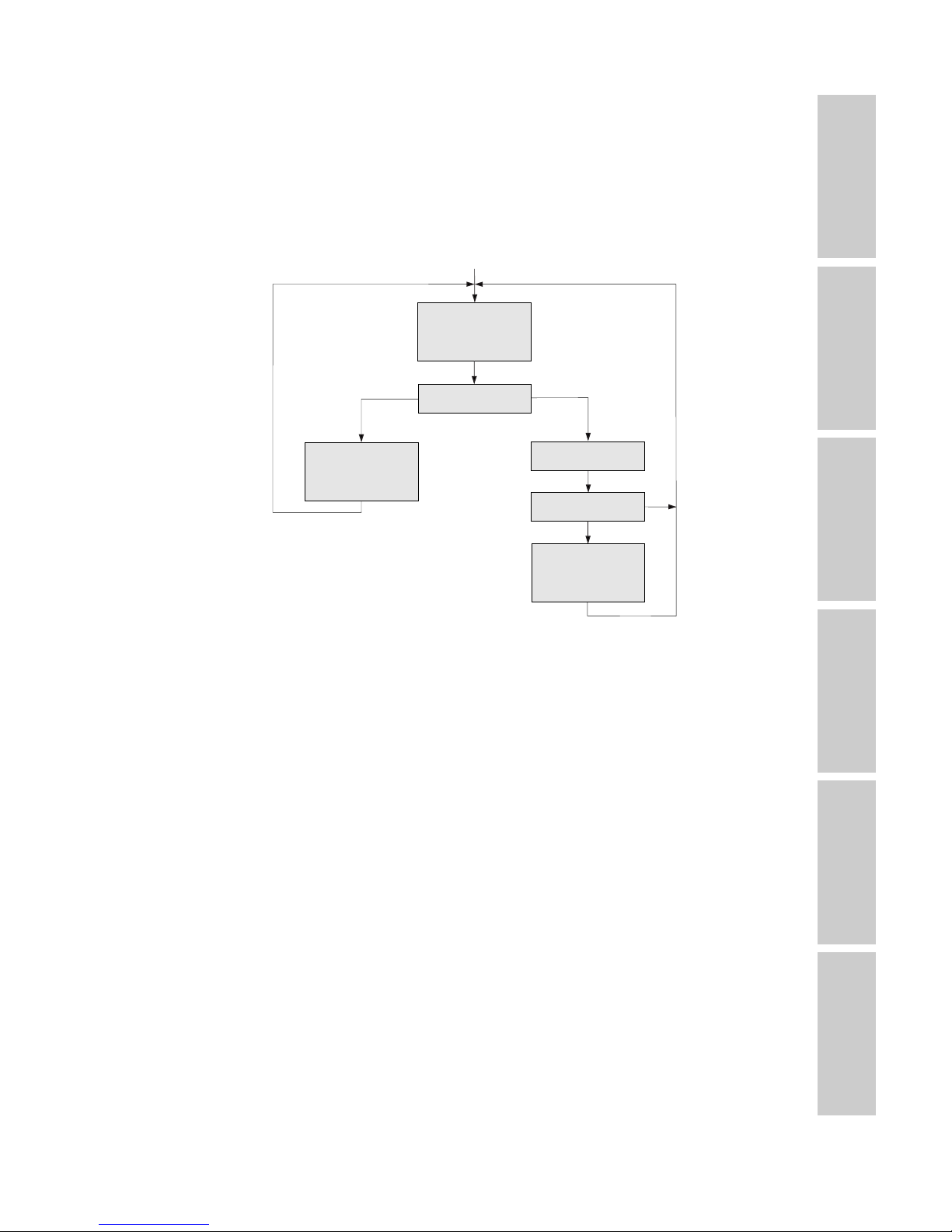
The operation is shown in the flow chart:
In the beginning of the measurement cycle, the sensor is transmitting a
pulse.
If an echo is received, the over range counter ORC will be reset to 0,
the new measured distance calculated and - if necessary - the outputs
changed, and transmission of the next pulse will take place.
If no echo is received, the over range counter ORC will be increased.
If ORC is below the parameter p, there will be no changes in the output
and the sensor will transmit a pulse during the next measurement cycle.
If ORC is equal to or higher than p, the outputs will be changed to over
range, and the sensor will transmit a pulse during the next measurement cycle.
Example: A sensor with the following setting:
Cycle time = 64 ms
Over Range = 200
If the target suddenly disappears, the sensor needs 200*64 ms = 12.8 s
until the outputs change to over range.
Yes
No
Echo received?
No
Yes
Start new cycle
Send pulse
Increase ORC
ORC ≥ p?
Change output to
Over range
Set ORC = 0
Calculate distance
Change outputs
14
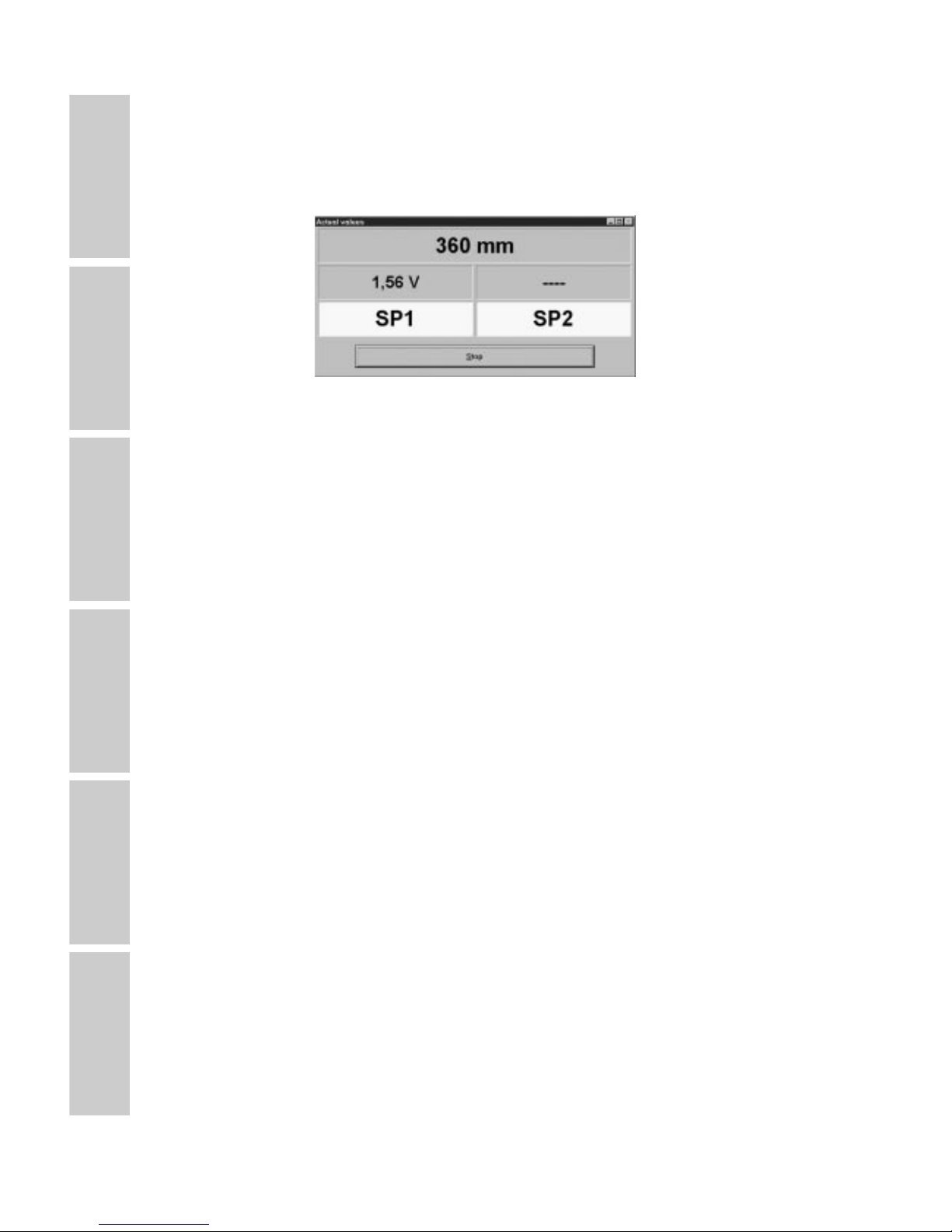
Additional window in test-mode
In the start modus, a separate window can be opened, where distance
and status of switching output is displayed.
ENGLISHDEUTSCHFRANÇAISESPAÑOL
ITALIANO
DANSK

15
ENGLISHFRANÇAISESPAÑOLITALIANODANSK DEUTSCH
Ultraschall, Abstandssensor
programmierbare Ausgänge
Typen UA 30 CLD .. F. M7
INHALT Seite
Installation 15
Beschreibung der Software 16
Technische Daten 74
Erfassungsbereich 76
Schaltung 77
Abmessungen 77
Hinweise zur Installation 78
1. Montage des Sensors
Montieren Sie den Sensor in der gewünschten Position mit
Ausrichtung auf das Objekt. Kontrollieren Sie, dass der
Objektabstand innerhalb der Sensorreichweite liegt.
2. Sensorversorgung
Zur Sensorversorgung ist Pin 2 an Erde (0 V DC) und Pin 1 an +
(19 -30 V DC) zu verbinden.
3. Programmierung des Sensors
Die Parameter werden entsprechend der Software-Beschreibung
eingegeben.
Installation
16
ENGLISHDEUTSCHFRANÇAISESPAÑOL
ITALIANO
DANSK
Beschreibung der Software
Das für die Windows-Plattform konzipierte Programm UDSProg.EXE erleichtert die Konfiguration des Sensors anhand selbsterklärender Menüs.
Konfiguration von COM Schnittstelle und Adresse
Schnittstelle (Port)
Die COM Schnittstelle für den Programmieradapter wird im ersten
Fenster ausgewählt, das beim Programmstart erscheint.
Sensor
Im Drop-down-Menü wird der korrekte Sensortyp ausgewählt.
Adresse (Address)
Die werkseitige Einstellung ist 97, doch lässt sich diese Adresse in
einen beliebigen Wert zwischen 0 und 99 ändern.
Adresse suchen (Search address)
Wird ein Sensor mit einer unbekannten Adresse angeschlossen, findet
man mit der Funktion „Adresse suchen“ die korrekte Adresse.
D
emo-Modus (D
emo-Mode)
Der Sensor läuft auch im Demo-Modus. Eine Programmierung ist nicht
möglich, es lassen sich lediglich die Einstellungen überprüfen.
17
ENGLISHFRANÇAISESPAÑOLITALIANODANSK DEUTSCH
Initialisieren des Sensors (Initialize sensor)
Der Sensor wird auf die werkseitigen Einstellungen zurückgestellt.
O
K
Die Einstellungen wurden bestätigt und das Hauptmenü erscheint.
Hauptmenü
Analogausgang (Analogue output)
Für den Analogausgang werden zwei Parameter eingegeben: Offset
und Messbereich. Offset bezeichnet die Entfernung von der
Sensorvorderseite zum nächstgelegenen Endpunkt des Messbereichs.
Der Messbereich bezeichnet die Entfernung, die den Ausgang veranlasst, von 0-10V oder 4-20 mA umzuschalten.
Offset und Messbereich werden schrittweise (in mm) gewählt – durch
Scrollen der Bildlaufleiste oder Eingabe von Werten. Das Kontrollkästchen ist anzuklicken, wenn eine Umkehrung des Analogausgangs
gewünscht wird. Die gewählten Ausgangseigenschaften werden gezeigt.
Sollwerte-Ausgänge (Setpoint outputs)
Sollwerte werden entweder als Grenzwerte (Limits) (im Modus „Limits“)
oder als Sollwerte (Setpoint) (im Modus „Setpoints“) gewählt, wobei ein
Fenster für „Position“ und „Hysterese“ vorhanden ist.
Je nach Wahl (NO oder NC), handelt es sich bei den Sollwerten in der
Regel um Schließer- oder Öffner-Funktionen.
18
ENGLISHDEUTSCHFRANÇAISESPAÑOL
ITALIANO
DANSK
NO: Wird ein Sollwert überschritten, ist die Ausgangsimpedanz hoch.
Innerhalb des Messbereichs ist die Ausgangsimpedanz niedrig und es
fließt Strom (<100 mA).
NC: Wird ein Sollwert überschritten, ist die Ausgangsimpedanz niedrig und es fließt Strom (< 100 mA). Innerhalb des Messbereichs ist die
Ausgangsimpedanz hoch.
Hysterese (Hysteresis)
Um einen stabilen Ausgang zu gewährleisten (wenn eine gemessene
Entfernung dem Sollwert entspricht), kann eine Hysterese festgelegt
werden. Beispiel für einen NO-Ausgang:
Wenn sich ein Objekt dem Sensor nähert, ändert sich der Ausgang,
wenn die Entfernung dem Sollwert entspricht. Entfernt sich das Objekt
von diesem Punkt, geht der Ausgang zurück, wenn die Entfernung dem
Sollwert zuzüglich der Hysterese entspricht.
Datei-Menü
Erfassen und Speichern von Werten
Bei dieser Auswahl öffnet sich ein neues Fenster. Die Frequenz der
Messungen kann gewählt werden (Sekunden, Minuten und Stunden).
„Start“ startet die Erfassung.
„Speichern“ speichert die Werte ab (die sich mithilfe des Programms
Excel auswerten lassen).
Ablegen von Sensor-Parametern
Die Parameter der aktuell angezeigten
Einstellungen werden in einer Datei auf
der Festplatte abgelegt.
Laden der Sensor-Parameter
Die Parameter aus einer Datei auf der
Festplatte werden in den Sensor geladen.
Sensor
Objekt
Ausgang
Sollwert Sollwert
+ Hysterese
19
ENGLISHFRANÇAISESPAÑOLITALIANODANSK DEUTSCH
Konfigurations-Menü
Konfiguration vom Sensor einlesen (Read configuration from sensor)
Die aktuelle Konfiguration des Sensors wird abgerufen und angezeigt.
Übergabe von Konfigurationsdaten an den Sensor
(Write configuration to sensor)
Die auf dem Bildschirm angezeigten Parameter werden an den Sensor
übermittelt. Das gleiche lässt sich auch durch Anklicken der Schaltfläche „Programmierung starten“ (Hauptmenü) erreichen.
Initialisieren des Sensors (Initialize sensor)
Der Sensor wird auf die werkseitigen Einstellungen zurückgestellt.
Konfiguration von Sensor und Schnittstelle
(Configure sensor and interface)
Sensor, serielle Schnittstelle und weitere Einstellungen lassen sich auswählen.
Weitere Optionen
Ausgang mit Durchschnittswerten (Output with mean value)
Auswahl eines Durchschnittwert-Verfahrens.
Serielle Ausgabe ausgeschaltet (Serial output off)
Deaktiviert die serielle Datenausgabe vom Sensor. Bei zeitkritischen
Anwendungen kann diese Funktion hilfreich sein.
Zykluszeit (Cycle Time)
Die Zykluszeit lässt sich stufenweise einstellen: 64, 32, 16, 8 oder 4 ms.
Das Prinzip der Entfernungsmessung ist in der nachfolgenden Grafik
dargestellt.
20
ENGLISHDEUTSCHFRANÇAISESPAÑOL
ITALIANO
DANSK
Das Schaubild zeigt die Signalposition im Verhältnis zur Zeit. Der
Sensor sendet einen Ultraschallimpuls aus. Das Objekt reflektiert
das Signal, und dieses Echo wird vom Sensor empfangen. An der
Vorderseite des Sensors wird ein neues Echo erzeugt, also ein Echo
des Echos. Da es sich hierbei um ein schwaches nicht verwendbares
Signal handelt – lässt T
measure
(Messzeit) nur das nutzbare Signal durch
(erstes Echo). Mit T
cycle
(Zykluszeit) wird festgelegt, wann der nächste
Impuls übermittelt wird.
Mit der Zykluszeit wird die Reaktionszeit des Sensors festgelegt. Natürlich weisen Sensoren mit größerer Reichweite auch längere Reaktionszeiten auf. Bei der Eingabe der Zykluszeit lässt sich auch die Reaktionszeit des Sensors nach Einsatzbereich einstellen.
Die Zykluszeit muss länger andauern als die Zeit, die zum Empfangen
des Echos nach der Aussendung des Impulses erforderlich ist!
T
measure
ist proportional der Entfernung zum Objekt (von der Aussendung
des Impulses bis zum Empfangen des Echos). T
measure
ist ein proportionaler Ausdruck für die Entfernung, weshalb die Zeit in Entfernung
umgerechnet und als analoger Wert angegeben wird.
Eine Richtlinie für die maximale Reichweite innerhalb einer bestimmten
Zykluszeit ist:
Messbereichsunterschreitung (Under Range)
Diese lässt sich stufenweise von 0 bis 255 cm einstellen. Während der
Aussendung ist der Sensor nicht empfangsbereit, weshalb die Länge
Objekt
Sensor
Signalposition
Zeit
T
measure
T
cycle
Zykluszeit (ms) Entfernung (m)
4 0.3
8 0.7
16 2.5
32 4.5
64 10

21
ENGLISHFRANÇAISESPAÑOLITALIANODANSK DEUTSCH
des Sende-Impulses auch für die kürzeste Entfernung zur Erfassung
maßgebend ist. Diese Reichweite, die durch die Länge des SendeImpulses begrenzt wird, nennt sich „Toter Bereich“.
Es ist möglich, die Messbereichsunterschreitung zu kontrollieren. Indem
man die Messbereichsunterschreitung auf eine bestimmte Entfernung
einstellt, kann man Echos ignorieren, die von Objekten zwischen der
Sensorvorderseite und der Grenze zur Messbereichsunterschreitung
liegen. Dadurch wird es ermöglicht, dicht vor dem Sensor auftretende
Störobjekte zu ignorieren.
Ein Sensor kann beispielsweise durch ein Gitter hindurch Objekte ausmachen, ohne durch Reflexionen von Ersterem gestört zu werden.
Beschränkungen (Limitations)
• Die mindestmögliche Messbereichsunterschreitung hängt vom
Sender-Schwingkreis ab.
• Echos von einem massigen Objekt in einem toten Bereich werden
unterdrückt, aber Zweit- und Drittechos können aufgefangen werden, wenn der Zeitwert den eingegebenen Wert für den toten
Bereich übersteigt. Der Ausgangswert zeigt dann eine Entfernung
an, die 2 bis 3 mal länger ist.
Aussendungszeit (Transmission Time)
Aussendungszeit ist der Wert, mit dem die Länge des ausgesendeten
Impulses bezeichnet wird. Er lässt sich in Schritten von 10 µs bis zum
Wert von 2.55 ms festlegen. Wurde der Wert 0 gewählt, verändert sich
die Länge entsprechend der gemessenen Entfernung.
Einstellung von Offset und Neigung (Offset and Slope Adjustment)
Diese Einstellungen werden werkseitig vorgenommen. Lassen Sie bitte
Vorsicht walten und verändern Sie diese nach Möglichkeit nicht, denn
diese Parameter dienen der Feineinstellung.
Einstellung von Offset (Offset Adjustment)
Zwischen der angezeigten und wirklichen Entfernung kann ein Unterschied bestehen.
0 mm bei der Anzeige und 0 mm als physische Länge können diffe-
Objekt
Sensor
Gitter
Toter
Bereich
Messbereichs-
unterschreitung
22
ENGLISHDEUTSCHFRANÇAISESPAÑOL
ITALIANO
DANSK
rieren. Die Position 0 mm lässt sich mit der Ausgleichsvorrichtung am
Sensorkopf in Millimeter-Schritten im Bereich +/-128 mm verändern.
Beispiel für einen negativen Offset (s. nachfolgende Abb.):
Der Ausgang gibt eine Entfernung an, die sich 30 mm hinter dem Objekt
befindet. Durch Einstellen vom Offset auf -30 mm kann die Falschanzeige aufgehoben werden, weil bei allen Messungen 30 mm abgezogen werden.
Einstellung der Neigung (Slope adjustment)
Damit lässt sich die Neigung des analogen Ausgangs verändern.
Werden bei der Neigungseinstellung falsche Werte eingegeben, können
Linearität und Temperaturausgleich beeinflusst werden.
Fensterbreite (Window Width)
Arbeitet der Sensor in der Durchschnittswert-Betriebsart wird ein
Fenster um den aktuellen Messwert gelegt. Alle gemessenen Werte innerhalb dieses Fensters bilden die Grundlage für die Anzeige. Die
Anzeige bildet dann den Mittelpunkt des Fensters für die nächste
Anzeige, weshalb sich das Fenster entsprechend der Bewegung des
Objektes verschiebt. Die Höchstgeschwindigkeit der Fensterverschiebungen begrenzt auch die Geschwindigkeit des zu erfassenden
Objektes. Bewegt das Objekt sich zu schnell, ignoriert der Algorithmus
der Fehlimpuls-Unterdrückung die Entfernungsmessung.
Die maximale Geschwindigkeit hängt von der Zykluszeit und der Größe
des verwendeten Messfensters ab. Mit dem Befehl „Cycle time adjustment“ (Einstellung von Zykluszeit) besteht die Möglichkeit, das
Messfenster anzupassen. Die „Normalgröße“ des Messfensters liegt im
Bereich ± 32 mm.
127
30
-128
Tatsächliche Enfernung
Entfernungs-Ausgangswert
Messfenster
Aktueller
Ausgangswert
Entfernung

23
ENGLISHFRANÇAISESPAÑOLITALIANODANSK DEUTSCH
An- und Abmeldezähler (Login-Logout Counter)
Dieser Zähler ist Teil der Sensor-Software (Fehlimpuls-Unterdrückung).
Bei Veränderungen ist daher Vorsicht geboten!
Die Sensorelektronik ist gegen elektromagnetische Störungen von
außen bestens abgeschirmt. Außerdem ist der Mikroprozessor in der
Lage, das Nutzsignal aus einem Bereich mit vielen Störsignalen herauszufiltern. Die werkseitigen Einstellungen sind so optimiert, dass sie
den allermeisten Messaufgaben gewachsen sind.
Bei Auswahl des Ausgangs mit Durchschnittswert wird eine Routine aktiviert die wie folgt abläuft. Die aktuell gemessene Entfernung wird als
Mittelpunkt eines Fensters (± 32) angenommen. Dieses wird Messfenster genannt (zu dessen Einstellung beachten Sie bitte den Abschnitt
„Messfenster“).
Befindet sich die nächste Messung bzw. der neue Wert innerhalb des
Messfensters, werden sie zur erneuten Ermittlung der Entfernung
herangezogen, die dann angezeigt wird. Der neue Wert bildet dann den
Mittelpunkt des Messfensters.
Die beiden Zähler‚ ,A’ (Logout-Zähler) für das Auslesen der jeweiligen
Entfernung und ‚B’ (Login-Zähler) werden auf 0 zurückgesetzt. Befindet
sich die nächste Messung bzw. der neue Wert außerhalb des Fensters,
wird diese Messung ignoriert und der Entfernungs-Ausgangswert bleibt
unverändert. Das Zählwerk für die Messungen außerhalb des Fensters
erhöht sich jeweils um 1.
Liegt der Wert des Logout-Zählers A unter 3 (programmierbar), springt
das Programm zur Startposition zurück und beginnt mit einer neuen
Messung.
Ist der Wert größer als oder gleich 3, erhöht sich der Wert im LoginZähler B.
Ist B = 1, wird davon ausgegangen, dass der gemessene Wert die neue
Entfernung darstellt, und ein neues Messfenster wird generiert. Das
Programm springt zurück in Startposition und beginnt mit einer neuen
Messung.
Ist B > 1, und der neue Messwert liegt außerhalb des neuen Messfensters, wird B auf den Wert 1 gesetzt, das Programm springt zurück
in Startposition und beginnt mit einer neuen Messung.
Ist B = 4 (programmierbar), wird die neue Messung als neue Entfernung
angenommen. Der Ausgang verändert sich daraufhin, und die Login-
24
ENGLISHDEUTSCHFRANÇAISESPAÑOL
ITALIANO
DANSK
A & B = 0
Start
Neuer Wert
Innerhalb des alten
Messbereichs?
Ja
Nein
A = A+1
A ≥ 3?
Nein
Ja
Neue Entfernung
ermitteln
Ausgänge ändern
A & B = 0
B = B+1
B = 1?
Nein
Ja
B = 4?
Nein
Ja
Ja
Nein
Neuer Wert =
neue Entfernung
Ausgänge ändern
A & B = 0
Neuer Wert im
„möglichen“
Messfenster
Neuer Wert steht im
Mittelpunkt des
„möglichen“ Messfensters
B = 1
Neuer Wert steht
im Mittelpunkt des
„möglichen“
Messfensters
und Logout-Zähler A und B werden auf 0 zurückgesetzt. Das Programm
springt zurück in Startposition und beginnt mit einer neuen Messung.
Das folgende Ablaufdiagramm zeigt die Programmstruktur.

25
ENGLISHFRANÇAISESPAÑOLITALIANODANSK DEUTSCH
Messbereichsüberschreitung (Over Range)
Der Zähler lässt sich auf Werte zwischen 0 bis 255 einstellen. Wenn der
Sensor die Entfernung zu einem kleinen, schwer erfassbaren Objekt
messen soll, können die Ausgangswerte sehr instabil sein. Sie springen
dann zwischen der tatsächlichen Entfernung und Messbereichsüberschreitung hin und her. Diese unerwünschten „Sprünge“ lassen sich mit
dem ORC (Überschreitungszähler) unterdrücken.
Dieser Vorgang geht aus folgendem Ablaufdiagramm hervor:
Zu Beginn des Messzyklus’ sendet der Sensor einen Impuls aus.
Beim Empfangen des Echos werden der ORC (Over Range Counter) auf
den Wert 0 zurückgesetzt, eine neue Entfernung ermittelt und ggf. die
Ausgänge verändert. Danach erfolgt die Aussendung eines neuen
Impulses.
Wird kein Echo empfangen, erhöht sich der Wert des ORC.
Liegt der Wert des ORC unter dem Parameter p, erfolgen keine Änderungen am Ausgang, und der Sensor sendet im nächsten Messzyklus
einen Impuls aus.
Ist dieser Wert größer als oder gleich p, werden die Ausgänge auf
Messbereichsüberschreitung gesetzt, und der Sensor sendet beim
nächsten Messzyklus einen Impuls aus.
Beispiel: Sensor mit folgenden Einstellungen:
Zykluszeit = 64 ms
Messbereichsüberschreitung = 200
Verschwindet das Objekt plötzlich, benötigt der Sensor 200*64 ms = 12.8
Sek. zum Umschalten der Ausgänge auf Messbereichsüberschreitung.
Ja
Nein
Echo aufgefangen?
Nein
Ja
Neuen Zyklus
starten
Impuls aussenden
ORC erhöhen
ORC ≥ p?
Ausgang in
Messbereichsüber-
schreitung ändern
ORC Einstellung = 0
Entfernung ermitteln
Ausgänge ändern

26
Weiteres Fenster im Test-Modus
Im Start-Modus lässt sich ein separates Fenster öffnen, in dem Entfernung und Status des Kontaktausgangs angezeigt wird.
ENGLISHDEUTSCHFRANÇAISESPAÑOL
ITALIANO
DANSK

27
ENGLISHFRANÇAISESPAÑOLITALIANODANSK DEUTSCH
Détecteurs Ultrasoniques
Réflexion directe Objet,
Sorties programmables
Types UA 30 CLD .. F. M7
SOMMAIRE Page
Installation 27
Description du logiciel 28
Caractéristiques 74
Distance de détection 76
Câblage 77
Dimensions 77
Astuces de montage 78
1. Montage du détecteur
Installer le détecteur selon la position requise en l’orientant
vers la cible et en s’assurant que la distance à la cible se
trouve bien à l’intérieur des limites de la plage de
détection du détecteur.
2. Alimentation du détecteur
Pour alimenter électriquement le détecteur, raccorder la broche 2 à
la masse (0 VCC) et la broche 1 au plus (+) (19 - 30 VCC).
3. Programmation du détecteur
Programmation des paramètres d’après le descriptif du logiciel.
Installation

28
ENGLISHDEUTSCHFRANÇAISESPAÑOL
ITALIANO
DANSK
Description du Logiciel
Conçu pour la plate-forme Windows, le programme UDSProg.EXE simplifie la configuration du détecteur grâce à ses menus intuitifs.
Configuration du port COM et de l’adresse
Port
Sélectionner le port COM (adaptateur de programmation) dans la
première fenêtre qui apparaît au démarrage du programme.
Détecteur
Dans le menu déroulant, sélectionner le type de détecteur adéquat.
Adresse
97 constitue l’adresse définie par défaut en usine. On peut affecter
toute adresse dont le numéro est compris entre 0 et 99.
Recherche d’adresse
La fonction "Search address" permet de localiser l’adresse d’un
détecteur raccordé mais dont l’adresse est inconnue.
Mode D
émo
En mode démo, on ne peut pas programmer un détecteur. Ce mode
permet uniquement de vérifier les paramètres.

29
ENGLISHFRANÇAISESPAÑOLITALIANODANSK DEUTSCH
Initialisation du détecteur
Remise à zéro des paramètres de configuration d’usine.
O
k
Confirmation des paramètres et affichage du menu.
Menu Principal
Sortie analogique
On configure la sortie analogique au moyen de deux paramètres : offset
et range. Offset (décalage) est la distance entre la face avant du détecteur et le point le plus proche sur une distance de détection. Range
(distance) est la distance qui provoque commutation de la sortie
analogique de 0 à10 V ou de 4 à 20 mA.
Pour sélectionner les paramètres de décalage et de distance (en mm),
utiliser les barres de défilement ou saisir les valeurs directement. Si une
inversion de la sortie analogique est requise, cocher la case.
Points de consigne de sortie
On sélectionne les points de consigne sous forme de butées (mode
"Limits") ou de valeurs définies (mode "Setpoints") à condition d’avoir
défini une fenêtre par « Position » et "Hysteresis".
Le point de consigne (fonction normalement ouvert ou normalement
fermé) agit selon la sortie NO ou NF sélectionnée..6

30
ENGLISHDEUTSCHFRANÇAISESPAÑOL
ITALIANO
DANSK
NO: En cas de dépassement d’un point de consigne, la sortie passe
en haute impédance. A l’intérieur de la distance, l’impédance de sortie
est basse et le courant passe (<100 mA).
NC: En cas de dépassement d’un point de consigne, la sortie passe
en basse impédance et le courant passe (<100 mA). A l’intérieur de la
distance, la sortie est en haute impédance.
Hystérésis
Pour garantir la stabilité de la sortie (mesurée = point de consigne) ; on
peut programmer un hystérésis. Exemple d’une sortie NO:
Lorsqu’une cible approche du détecteur, le niveau logique de la sortie
change dès que la distance égale le point de consigne. Lorsque la cible
revient en deçà de ce point, le niveau logique rechange dès que la distance égale le point de consigne augmentée de l’hystérésis.
Menu "Fichier"
Collect and Save values (collecte et sauvegarde des valeurs)
Lorsqu’on sélectionne ce menu, une nouvelle fenêtre s’ouvre. On peut
sélectionner la fréquence des mesures (secondes, minutes et heures).
"Start" : démarrage enregistrement.
"Save" sauvegarde des valeurs (pour évaluation ultérieure sous Excel).
Write sensor parameters (écriture
des paramètres du détecteur)
Stockage sur disque d’un fichier contenant les paramètres réels affichés.
Load sensor parameters (chargement des paramètres du détecteur)
Téléchargement dans le détecteur des
paramètres stockés sur disque.
Détecteur
Cible
Sortie
Point de
con-
signe
Point de con-
signe +
hystérésis.

31
ENGLISHFRANÇAISESPAÑOLITALIANODANSK DEUTSCH
Menu "Configuration"
Read configuration from sensor
(consultation de la configuration sur le détecteur même)
Le détecteur télécharge et affiche la configuration.
Write configuration to sensor
(enregistrement de la configuration dans le détecteur)
Les paramètres affichés sont transférés au détecteur.
Pour transférer les paramètres au détecteur, on peut également cliquer
sur le bouton "Start programming" dans le menu principal.
Initialize sensor (initialisation du détecteur)
Initialisation du détecteur aux paramètres d’usine.
Configure sensor and interface
(configuration du détecteur et communication)
Menu qui permet de sélectionner un détecteur, un COM…
Options avancées
Output with mean value (sortie à valeur moyenne)
Sélection d’un mode opératoire en valeur moyenne.
Serial output off (Désactivation sortie série)
Désactivation des données série émise par le détecteur. Cette fonction
est utile dans les applications ou le temps joue un rôle critique.
Cycle Time (Durée de cycle)
Sélection d’une durée de cycle en séquences de 64, 32, 16, 8 ou 4 ms.
Le principe de la mesure de distance est illustré dans le diagramme suivant.

32
ENGLISHDEUTSCHFRANÇAISESPAÑOL
ITALIANO
DANSK
Sur ce diagramme la position du signal est représentée en fonction du
temps. Le détecteur émet une impulsion ultrasonique. Ce signal est
réfléchi par la cible tandis que le détecteur en capte l’écho. Un nouvel
écho (l’écho d’un écho) est généré en face avant du détecteur. Ce signal faible est inutilisable – et la logique T
measure
ne laisse passer que le
signal utile (le premier écho). T
cycle
détermine le temps d’émission de
l’impulsion suivante.
La durée du cycle détermine le temps de réponse du détecteur. A l’évidence, le temps de réponse d’un détecteur est proportionnel à la distance mesurée. Grâce à la programmation de la durée du cycle on peut
ajuster le temps de réponse du détecteur selon l’application.
La durée d’un cycle doit être supérieure au temps qu’il faut au détecteur
pour recevoir l’écho de l’impulsion émise!
T
measure
est proportionnel à la distance à l’objet (de l’émission de l’impul-
sion à la réception de l’écho). T
measure
est une expression proportionnelle
de la distance; c’est pourquoi le temps est converti en distance et exprimé sous forme d’une valeur analogique.
Pour un cycle donné, la distance maximale est fonction des règles suivantes:
Dépassement de distance en moins
Le détecteur permet de régler le dépassement distance en moins par
incrément de 0 à 255 cm. Pendant l’émission, le détecteur ne reçoit pas
et la durée de l’impulsion d’émission détermine donc la distance de détection la plus courte. Cette distance limitée par la durée de l’impulsion
d’émission porte le nom de zone aveugle.
Cible
Détecteur
Position du signal
Temps
T
measure
T
cycle
Durée du cycle (ms) Distance (m)
4 0,3
8 0,7
16 2,5
32 4,5
64 10

33
ENGLISHFRANÇAISESPAÑOLITALIANODANSK DEUTSCH
On peut contrôler le dépassement en moins. En donnant au dépassement en moins une certaine valeur, on peut faire abstraction des échos
provenant de cibles situées entre la face avant du détecteur et la limite
du dépassement en moins. En d’autres termes, on peut ignorer les perturbations provoquées par les objets situés à proximité du détecteur.
Un détecteur peut ainsi détecter des cibles à travers une grille de protection sans que la mesure ne soit affectée par les réflexions issues de
la grille.
Limitations
• Le dépassement minimum de distance "en moins" est déterminé
par une alarme (sonnerie) du transducteur.
• Les échos issus d’une cible massive en zone aveugle sont sup
primés mais si la durée est supérieure à la longueur de la zone
aveugle définie, le détecteur peut recevoir le 2ème ou 3ème écho.
La sortie indique une distance de 2 ou 3 fois plus longue.
Transmission Time (Durée d’émission)
La durée d’émission définit la durée d’impulsion émise. On peut sélectionner
une valeur comprise entre 10 µsec et 2,55 ms. Si l’on choisit une durée
de 0, la durée d’impulsion varie en fonction de la distance mesurée.
Offset and Slope Adjustment (Réglage du décalage et de la pente)
Ces réglages sont effectués en usine. En particulier, éviter de modifier
ces paramètres qui sont dédiés au réglage fin.
Offset Adjustment (Réglage du décalage)
Une différence peut exister entre la distance affichée et la distance
réelle. Le 0 mm affiché et le 0 mm de la distance physique mesurée
peuvent être différents. On peut régler la position du 0 mm en réglant le
décalage de la tête du détecteur, millimètre par millimètre, sur une
plage de +/-128 mm.
Exemple de décalage négatif (voir schéma ci-après).
La sortie indique une distance de 30 mm derrière la cible. Lorsqu’on
paramètre le décalage à -30 mm, le détecteur soustrait 30 mm de
toutes les mesures neutralisant ainsi l’erreur de mesure.
Cible
Détecteur
Grille
Zone
aveugle
Dépassement
en moins

34
ENGLISHDEUTSCHFRANÇAISESPAÑOL
ITALIANO
DANSK
Slope adjustment (réglage de pente)
Le réglage de pente modifie la pente de la sortie analogique. Un
réglage erroné de la pente peut affecter la linéarité et la compensation
en température.
Window Width (largeur de fenêtre)
Lorsque le détecteur fonctionne avec un programme de valeurs
moyennes, il crée une fenêtre de la distance réelle mesurée. Toutes les
valeurs affichées dans cette fenêtre constituent la base de la mesure.
Une valeur affichée donnée devient alors le centre de la fenêtre pour la
mesure suivante et c’est pourquoi la fenêtre se déplace avec la cible. La
vitesse maximale de déplacement de la fenêtre limite la vitesse de la
cible à détecter. Si le déplacement de la cible est trop rapide, l’algorithme de suppression des impulsions parasites ignore les mesures de
distance.
La vitesse maximale dépend de la durée du cycle et de la taille de la
fenêtre de mesure utilisée. La commande "Cycle time adjustment"
(réglage de durée de cycle) permet également d’ajuster taille de la
fenêtre de mesure. La taille normale de cette fenêtre est de ± 32 mm.
Login-Logout Counter (compteur des connexions/déconnexions)
Le compteur des connexions/déconnexions procède du logiciel de
l’algorithme de suppression des impulsions parasites du détecteur.
Procéder à toute modification éventuelle avec une attention particulière!
L’électronique des détecteurs est bien protégée contre les perturbations
électromagnétiques de l’environnement. De plus, la grande efficacité du filtre permet au microprocesseur d’extraire le signal correct d’un environnement bruyant.
L’optimisation des réglages d’usine permet au détecteur d’accomplir la
plupart des tâches de mesure.
127
30
-128
Distance réelle
Sortie distance
Fenêtre de mesure
Sortie
réelle
Distance

35
ENGLISHFRANÇAISESPAÑOLITALIANODANSK DEUTSCH
La sélection d’une sortie en valeur moyenne active le programme des
valeurs moyennes. Avec la distance réelle mesurée au centre, on crée
une fenêtre de ± 32 mm désignée fenêtre de mesure (le réglage est
décrit dans la section ”Fenêtre de Mesure”).
Si la mesure suivante ou si une nouvelle mesure se situe à l’intérieur de
la fenêtre de mesure, le détecteur l’utilise pour calculer la nouvelle distance à mesurer. La nouvelle valeur sert de centre à une nouvelle
fenêtre de mesure.
Les deux compteurs (compteur A pour la mesure de la distance réelle
et compteur B pour la connexion) sont remis à zéro. Si la mesure suivante ou si une nouvelle se situe à l’extérieur de la fenêtre de mesure, le
détecteur ignore l’une ou l’autre et la sortie distance demeure inchangée. Le compteur de journalisation des mesures extérieures à la
fenêtre incrémente de 1.
Si le compteur A affiche moins de 3 (programmable), le programme
reprends au début et une nouvelle mesure démarre.
Si le compteur A affiche 3 ou plus, le compteur B incrémente.
Si B = 1, le détecteur considère que la valeur mesurée est la nouvelle
distance et crée une nouvelle fenêtre de mesure. Le programme
reprends au début et une nouvelle mesure démarre.
Si B > 1 et si la nouvelle mesure se situe à l’extérieur de la nouvelle
fenêtre de mesure, B est positionné à 1, le programme reprend au
début et une nouvelle mesure démarre.
If B = 4 (programmable), la nouvelle mesure est effectuée en tant que
nouvelle distance. A ce stade, la sortie change et les compteurs de
connexion/déconnexion A et B sont réinitialisés. Le programme
reprends au début et une nouvelle mesure démarre.
La structure du programme est illustrée dans l’organigramme suivant.

36
ENGLISHDEUTSCHFRANÇAISESPAÑOL
ITALIANO
DANSK
A & B = 0
Démarrage
Nouvelle valeur
Cette valeur est-elle
continue dans l’anci-
enne mesure?
Oui
Non
A = A+1
A ≥ 3?
Non
Oui
Calcul de la nouvelle
distance
Modification des sorties
A & B = 0
B = B+1
B = 1?
Non
Oui
B = 4?
Non
Oui
Oui
Non
Nouvelle valeur =
Nouvelle distance
Modification des sorties
A & B = 0
Nouvelle valeur
dans la fenêtre de
mesure "possible"
La nouvelle valeur est le
centre de la fenêtre de
mesure "possible"
B = 1
La nouvelle valeur
est le centre de la
fenêtre de mesure
"possible"

37
ENGLISHFRANÇAISESPAÑOLITALIANODANSK DEUTSCH
Over Range (Dépassement de distance en plus)
Ce compteur est programmable de 0 à 255. Lorsqu’un détecteur
mesure la distance qui le sépare d’une petite cible difficile à détecter,
une forte instabilité des sorties est à prévoir ainsi qu’un battement entre
la distance réelle et le dépassement de cette distance en plus. Le
compteur de dépassement de distance en plus permet de supprimer
ces modifications indésirables.
Le fonctionnement est illustré dans l’organigramme:
Au début du cycle de mesure, le détecteur émet une impulsion. S’il
reçoit un écho, le compteur ORC (dépassement de distance en plus)
est réinitialisé à 0, la nouvelle distance mesurée est calculée et – si
nécessaire les sorties changent et le détecteur émet l’impulsion suivante.
S’il ne reçoit pas d’écho, ce même compteur ORC incrémente. Si le
compteur ORC est inférieur au paramètre p, les sorties ne changent
pas et le détecteur émet une impulsion au cours du cycle de mesure
suivant.
Si la valeur du compteur ORC est supérieure ou égale à p, les sorties
passent en dépassement de distance en plus, et le détecteur émet une
impulsion au cours du cycle de mesure suivant.
Exemple d’un détecteur configuré comme suit
Durée du cycle = 64 ms
Dépassement de distance en plus = 200
Si la cible disparaît soudain, le temps nécessaire au détecteur est de
200*64 ms = 12,8 s jusqu’à ce que les sorties passent en dépassement
de distance en plus.
Oui
Non
Réception d’un écho
Non
Oui
Démarrage d’un
nouveau cycle
Emission d’une
impulsion
Augmentation du
compteur ORC
ORC ≥ p?
Changement de la
sortie en dépasse-
ment en plus
Paramétrage du
compteur à 0
Calcul de la distance
Modification des sorties

38
Fenêtre complémentaire en mode test
Au démarrage, on peut ouvrir une fenêtre séparée dans laquelle s’affichent
la distance et l’état des sorties de commutation.
ENGLISHDEUTSCHFRANÇAISESPAÑOL
ITALIANO
DANSK

39
ENGLISHFRANÇAISESPAÑOLITALIANODANSK DEUTSCH
Ultrasonidos
Detección Directa, Salidas Programables
Modelos UA 30 CLD .. F. M7
CONTENIDO Página
Instalación 39
Descripción del software 40
Especificaciones 74
Distancia de detección 76
Conexiones 77
Dimensiones 77
Normas de instalación 78
1. Montaje del sensor
Monte el sensor en la posición requerida apuntando hacia el objeto
y compruebe que la distancia al objeto esté dentro del alcance del
sensor.
2. Alimentación del sensor
Para alimentar el sensor, conecte la patilla 2 a tierra (0 VCC) y la
patilla 1 a + (19 a 30 VCC).
3. Cómo programar el sensor
Programe los parámetros según la descripción del software.
Instalación

40
ENGLISHDEUTSCHFRANÇAISESPAÑOL
ITALIANO
DANSK
Descripción del software
El programa UDSProg.EXE está diseñado para la plataforma Windows
y facilita el proceso de instalación del sensor mediante menús auto explicativos.
Instalación del Puerto y de la Dirección COM
Puerto (Port)
El puerto Com utilizado para programar el adaptador se selecciona en
la primera ventana que aparece al inicio del programa.
Sensor (Sensor)
En el menú desplegable se selecciona el tipo de sensor adecuado.
Dirección (Address)
La configuración de fábrica es 97. La dirección puede cambiarse a
cualquier número entre 0 y 99.
Búsqueda de dirección (Search address)
Si el sensor ha sido conectado y la dirección es desconocida, la
"Búsqueda de dirección" encontrará la dirección correcta.
Modo de demostración (D
emo-Mode)
El sensor puede operar en modo de demostración. Aquí no se puede
programar, sólo es posible la verificación de los ajustes.

41
ENGLISHFRANÇAISESPAÑOLITALIANODANSK DEUTSCH
Iniciar el sensor (Initialize sensor)
El sensor se reajusta a la configuración de fábrica.
O
k
Los ajustes son confirmados y aparece el menú principal
Menú principal
Salida analógica (analogue output)
La salida analógica está programada con dos parámetros: ‘offset’ (desvío) y ‘range’ (alcance). ‘Desvío’ es la distancia desde el frente del sensor hasta el extremo más próximo del alcance. Alcance es la distancia
que provoca el cambio de la salida de 0 a 10 V o de 4 a 20 mA.
El desvío y el alcance se seleccionan en pasos (en mm) o bien avanzando y retrocediendo en las barras o bien introduciendo los valores.
Pulse en la casilla si es necesaria una inversión de la salida analógica.
Aparecerá la característica de la salida elegida.
Salidas de puntos de ajuste (Setpoint outputs)
Los puntos de ajuste se seleccionan o bien como límites (utilizando el
modo ‘Limits’) o bien como puntos de ajuste (utilizando el modo
‘Setpoints’), donde una ventana se define por ‘Position’ (Posición) e
‘Hysteresis’ (Histéresis).
Dependiendo de la selección de NO (normalmente abierto) y NC (normalmente cerrado), los puntos de ajuste son funciones normalmente
cerradas o normalmente abiertas.

42
ENGLISHDEUTSCHFRANÇAISESPAÑOL
ITALIANO
DANSK
NO: Cuando un punto de ajuste es sobrepasado, la impedancia de salida es elevada. Dentro del alcance la impedancia de salida es baja y la
corriente fluye (<100mA)
NC: Cuando un punto de ajuste es sobrepasado, la impedancia de salida es baja y la corriente fluye (<100mA). Dentro del alcance la impedancia de salida es elevada.
Histéresis (Hysteresis)
Para garantizar una salida estable (cuando la distancia medida es igual
al punto de ajuste) puede programarse una histéresis. Ejemplo de una
salida NO:
Si el objeto se acerca al sensor, la salida cambiará cuando la distancia
sea igual al punto de ajuste. Si el objeto retrocede, la salida vuelve a
cambiar cuando la distancia sea igual al punto de ajuste + la histéresis.
Menú de Archivos
Reunir y guardar valores
Si selecciona esta opción se abrirá una nueva ventana. Aquí puede seleccionarse la frecuencia de las medidas (segundos, minutos y horas)
"Start" inicia el registro.
"Save" almacena los valores (estos pueden evaluarse en Excel).
Escribir parámetros del sensor
Los parámetros de los ajustes visualizados actualmente se escriben en un
archivo en disco.
Cargar parámetros del sensor
Los parámetros de un archivo en disco
se cargan en el sensor.
Sensor
Objeto
Salida
Punto de ajuste Punto de ajuste
+ histéresis

43
ENGLISHFRANÇAISESPAÑOLITALIANODANSK DEUTSCH
Menú de Configuración
Leer configuración del sensor
La configuración actual se descarga del sensor y es visualizada.
Escribir configuración en el sensor
Los parámetros que aparecen en la pantalla serán transferidos al sensor. Obtendrá el mismo resultado pulsando el botón de "Start programming" (Iniciar programación) en el menú principal.
Iniciar el sensor
El sensor habrá sido ajustado a la configuración de fábrica.
Configurar sensor e interfaz
Puede seleccionarse el sensor, el puerto COM y similares.
Opciones avanzadas
Salida con valor promedio (Output with mean value)
Selección de un procedimiento de valor promedio
Salida serie desactivada (Serial output off)
Inhabilita la salida serie de datos del sensor. En caso de aplicaciones
de tiempo crítico esta puede ser una función muy útil.
Tiempo del ciclo (Cycle Time)
Selección del tiempo del ciclo en pasos de 64, 32, 16, 8 ó 4 mseg.
El principio de la medida de la distancia se muestra en la siguiente figura.

44
ENGLISHDEUTSCHFRANÇAISESPAÑOL
ITALIANO
DANSK
El diagrama muestra la posición de la señal frente al tiempo. El sensor
transmite un pulso ultrasónico. El objeto refleja la señal y el sensor recibe este eco. El frente del sensor genera un nuevo eco, un eco del eco.
Esta es una señal muy débil e inutilizable, por eso la medida T sólo deja
pasar la señal útil (el primer eco). El ciclo T determina el momento en
que se transmite el siguiente pulso.
El tiempo del ciclo determina el tiempo de respuesta del sensor.
Obviamente, los sensores que se utilizan para mediciones de larga distancia también tendrán que tener tiempos de respuesta largos. Con la
programación del tiempo del ciclo el tiempo de respuesta del sensor
puede ajustarse para cada aplicación
Nota: La duración del tiempo del ciclo deberá ser mayor que el tiempo
necesario para recibir el eco del pulso transmitido.
La
medida
T es proporcional a la distancia al objeto (desde que el pulso es
transmitido hasta que el eco es recibido). La
medida
T es una expresión
proporcional de la distancia, por eso el tiempo es convertido en distancia, que se expresa como valor analógico
Pautas de máxima distancia para un tiempo de ciclo determinado:
Alcance inferior (Under Range)
El alcance inferior puede ajustarse en pasos que van desde 0 hasta 255
cm. Durante la transmisión el sensor no puede recibir, por lo que la longitud del pulso de transmisión determina la distancia de detección más
corta. A este alcance, limitado por la longitud del pulso de transmisión,
se le llama ‘zona oculta’
Objeto
Sensor
Posición de la señal
Tiempo
medida
T
Ciclo
T
Tiempo del ciclo (mseg.) Distancia (m)
4 0.3
8 0.7
16 2.5
32 4.5
64 10

45
ENGLISHFRANÇAISESPAÑOLITALIANODANSK DEUTSCH
El alcance inferior puede controlarse. Ajustando el alcance inferior a
una cierta distancia es posible ignorar los ecos recibidos de objetos
entre el frente del sensor y el límite del alcance inferior. Esto significa
que se pueden ignorar objetos perturbadores cerca del sensor.
Un sensor puede detectar objetos por ejemplo mediante una red de
protección sin ser perturbado por las reflexiones de dicha red.
Limitaciones (Limitations)
• El alcance inferior mínimo viene determinado por la señal de llama
da del transductor.
• Los ecos de un objeto masivo en la zona oculta serán suprimidos,
pero pueden recibirse ecos segundos o terceros si el tiempo es
más largo que la zona oculta programada. La salida indicará una
distancia 2 ó 3 veces mayor.
Tiempo de Transmisión (Transmission Time)
El tiempo de transmisión define la longitud del pulso transmitido. Puede
seleccionarse en pasos de 10 mseg. de hasta 2,55 mseg. Si se selecciona el 0, la longitud varía con la distancia medida.
Ajuste de Desvío e Inclinación (Offset and Slope Adjustment)
Estos ajustes vienen configurados de fábrica. Procure no cambiar esta
configuración. Estos parámetros son para un ajuste de precisión.
Ajuste de Desvío (Offset Adjustment)
Puede existir diferencia entre la distancia de lectura y la distancia real.
0 mm en la lectura y 0 mm de longitud física pueden ser distintos. La
posición de 0 mm puede ser regulada con el ajuste de desvío del frente
del sensor +/- 128 mm en pasos de mm.
Ejemplo de desvío negativo (véase la figura siguiente):
La salida indica una distancia que está 30 mm detrás del objeto. Al ajustar
el desvío a –30 mm esta lectura incorrecta se neutraliza, ya que los 30 mm
son sustraídos de todas las mediciones.
Objeto
Sensor
Red
Zona
oculta
Alcance
inferior

46
ENGLISHDEUTSCHFRANÇAISESPAÑOL
ITALIANO
DANSK
Ajuste de Inclinación (Slope Adjustment)
El ajuste de la inclinación cambia la inclinación de la salida analógica. Un
ajuste incorrecto de la inclinación puede afectar a la linealidad y la compensación de temperatura.
Anchura de la Ventana (Window Width)
Al operar el sensor con la rutina del valor promedio se abre una ventana
en torno a la distancia real medida. Todos los valores medidos dentro de
esta ventana conforman la base de la lectura. Esta lectura es por consiguiente el centro de la ventana de la siguiente lectura, por lo que la ventana se mueve con el objeto. La velocidad máxima del movimiento de la
ventana limita la velocidad de un objeto que debería ser detectado. Si el
objeto se mueve demasiado rápido el algoritmo de supresión de pulso
falso ignorará las medidas de distancia.
La velocidad máxima depende del tiempo del ciclo y del tamaño de la
ventana de medición utilizada. Con la función de "Cycle time adjustment"
(Ajuste del tiempo del ciclo) también es posible ajustar la ventana de medición. El tamaño normal de dicha ventana de medición es de ± 32 mm.
Contador de conexión y desconexión (Login-Logout Counter)
El contador de conexión y desconexión es parte del software de ‘Fail
Pulse Suppression’ (Supresión de Pulso Falso) del sensor. ¡Cámbiese con
precaución!
La electrónica de sensores está muy bien protegida contra las interferencias electromagnéticas del entorno. Además, el microprocesador se utiliza
de modo efectivo para filtrar la señal adecuada de un entorno ruidoso. La
configuración de fábrica está optimizada para cumplir prácticamente
todas las tareas de medición.
127
30
-128
Distancia real
Salida de distancia
Ventana de medición
Salida
actual
Distancia

47
ENGLISHFRANÇAISESPAÑOLITALIANODANSK DEUTSCH
Seleccionando una salida con valor promedio se activa la rutina. Con la
distancia actual medida como centro, se crea una ventana de ± 32 mm.
A esta ventana se le llama ventana de medición (para el ajuste de la
misma véase "Mesurement Window" (Ventana de Medición)).
Si la siguiente medida o el nuevo valor están incluidos en esta ventana
de medición, se utilizarán para calcular la nueva distancia que luego
será extraída por lectura. El nuevo valor se utilizará como centro de una
nueva ventana de medición.
Dos contadores, ‘A’ para la lectura de la distancia actual y ‘B’ para la
conexión (login-counter), están puestos a cero. Si la siguiente medida o
el nuevo valor están fuera de la ventana esta medida será ignorada y la
salida de distancia seguirá siendo la misma. El contador del número de
medidas fuera de la ventana aumenta en 1
Si el logout-counter (contador de desconexión) A está bajo 3 (programable) el programa vuelve al inicio y se realiza una nueva medición
Si es mayor o igual a 3, el contador de conexión B aumenta.
Si B = 1, el valor medido se asume como nueva distancia y se crea una
nueva ventana de medición. El programa vuelve al principio y se inicia
una nueva medición..
Si B >1 y la nueva medida está fuera de la nueva ventana de medición,
B se fija a 1 y el programa vuelve al principio iniciándose una nueva
medición.
Si B = 4 (programable) la nueva medida se asume como la nueva distancia. La salida ha sido cambiada y los contadores de conexión y desconexión son puestos a 0. El programa vuelve al principio y se inicia
una nueva medición.
El siguiente diagrama muestra la estructura del programa.

48
ENGLISH
DEUTSCH
FRANÇAISESPAÑOL
ITALIANO
DANSK
A y B = 0
Inicio
Nuevo valor
¿Dentro del alcance-
de la antigua medida?
Sí
No
A = A+1
¿A ≥ 3?
No
Sí
Calcular nueva
distancia
Cambiar salidas
A y B = 0
B = B+1
¿B = 1?
No
Sí
¿B = 4?
No
Sí
Sí
No
Nuevo valor =
Nueva distancia
Cambiar salidas
A y B = 0
Nuevo valor en
una ‘posible’ ven-
tana de medición
Nuevo valor como centro
de una ‘posible’ ventana
de medición
B = 1
Nuevo valor como
centro de una ‘po-
sible’ ventana de
medición

49
ENGLISHFRANÇAIS
ESPAÑOLITALIANO
DANSK DEUTSCH
Rango máximo (Over Range)
Este contador puede fijarse entre 0 y 255. Si el sensor tiene que medir
la distancia a un objeto pequeño difícil de detectar, las salidas del sensor pueden resultar muy inestables. Fluctuarán entre la distancia actual
y el desbordamiento de capacidad. Estos cambios no deseados pueden suprimirse con el contador de desbordamiento de capacidad.
La operación se ilustra en el siguiente diagrama
Al principio del ciclo de medición, el sensor transmite un pulso. Si se
recibe un eco, el contador de rango máximo (ORC) se pondrá a 0, se
calcula la nueva distancia medida y se realizará la transmisión del siguiente pulso.
Si no se recibe eco, el contador ORC aumentará.
Si el ORC está bajo el parámetro p, no habrá cambios en la salida y el
sensor transmitirá un pulso durante el siguiente ciclo de medición.
Si el ORC es igual o mayor que p, las salidas se cambiarán a rango máximo y el sensor transmitirá un pulso durante el siguiente ciclo de medición.
Ejemplo: Un sensor con la siguiente configuración:
Tiempo del ciclo = 64 mseg.
Rango máximo = 200
Si el objeto desaparece repentinamente, el sensor necesita 200*64
mseg. = 12,8 seg. hasta que las salidas cambian a rango máximo.
Sí
No
¿Eco recibido?
No
Sí
Iniciar nuevo ciclo
Enviar pulso
Aumentar ORC
¿ORC ≥ p?
Cambiar salida a
Rango máximo
Fijar ORC = 0
Calcular distancia
Cambiar salidas

50
Ventana adicional en modo de prueba
En el modo de inicio puede abrirse una ventana en la que aparece la
distancia y el estado de salida de conmutación.
ENGLISHDEUTSCHFRANÇAISESPAÑOL
ITALIANO
DANSK

51
ENGLISHFRANÇAISESPAÑOLITALIANODANSK DEUTSCH
Sensori ad Ultrasuoni
A Riflessione, Uscite Programmabili
Modelli UA 30 CLD .. F. M7
INDICE Pagina
Installazione 51
Descrizione del software 52
Caratteristiche tecniche 74
Distanza di attivazione 76
Schemi di collegamento 77
Dimensioni 77
Consigli per l’installazione 78
1. Montaggio del sensore
Montare il sensore nella posizione desiderata, puntato verso l’oggetto
di riferimento, ed assicurarsi che la distanza tra questo e il sensore
ricada all’interno della distanza di attivazione.
2. Alimentazione del sensore
Per alimentare il sensore collegare il pin 2 a terra (0 VCC) ed il pin 1
a + (19 - 30 VCC).
3. Programmazione del sensore
Programmare i parametri in conformità della descrizione del software.
Installazione

52
ENGLISH
DEUTSCH
FRANÇAISESPAÑOL
ITALIANO
DANSK
Descrizione del software
Il programma UDSProg.EXE è realizzato per la piattaforma Windows e
facilita la regolazione del sensore per mezzo di una procedura guidata
attraverso menù.
Impostazione della porta seriale e degli indirizzi
Porta (Port)
La porta seriale utilizzata per l’adattatore di programmazione viene selezionata nella prima finestra che appare all’avvio del programma.
Sensore (Sensor)
Nel menù a discesa selezionare il corretto tipo di sensore.
Indirizzi (Address)
L’impostazione predefinita è 97. L’indirizzo può essere sostituito da
qualsiasi numero tra 0 e 99.
Cerca indirizzo (Search address)
Se è stato collegato un sensore di cui non si conosce l’indirizzo, la funzione “Cerca indirizzo” troverà l’indirizzo giusto.
M
odalità dimostrativa (Demo-Mode)
Il sensore può funzionare in modalità dimostrativa. Non è permessa la
programmazione, ma la sola verifica dell’impostazione.

53
ENGLISHFRANÇAIS
ESPAÑOLITALIANO
DANSK DEUTSCH
Inizializzazione del sensore (Initialize sensor)
Il sensore viene reimpostato ai valori predefiniti.
O
k
L’impostazione viene confermata ed appare il menù principale.
Menù principale
Uscita analogica (Analogue output)
L’uscita analogica è programmata con due parametri, range (campo) e
offset (scostamento). Lo scostamento è la distanza dalla fronte del sensore all’estremità più vicina del campo. Il campo è la distanza che fa sì
che i valori dell’uscita cambino da 0 a 10 V o da 4 a 20 mA.
Lo scostamento ed il campo vengono selezionati in tappe predefinite
(ed espressi in mm) - mediante la barra di scorrimento o digitando i valori relativi. Cliccare sul riquadro se sia necessaria un’inversione della
uscita analogica. Appariranno quindi le caratteristiche dell’uscita
prescelta.
Configurazione del setpoint delle uscite (Setpoint outputs)
I setpoint sono configurabili come limite (usando la modalità “Limits”) o
come valori di setpoint (usando la modalità “Setpoints”), definiti questi
ultimi in una finestra mediante “Position” (posizione) e “Hysteresis”
(isteresi).
A seconda della scelta di NO e di NC, i setpoint indicano funzioni normalmente aperte o normalmente chiuse.

54
ENGLISHDEUTSCHFRANÇAISESPAÑOL
ITALIANO
DANSK
NO: Quando viene superato il setpoint, l’impedenza di uscita è alta.
All’interno del campo l’impedenza di uscita è bassa e c’è flusso di corrente
(< 100 mA).
NC: Quando viene superato il setpoint, l’impedenza di uscita è bassa
e c’è flusso di corrente (< 100 mA). All’interno del campo l’impedenza di
uscita è alta.
Isteresi (Hysteresis)
Per assicurare stabilità all’uscita (quando il valore della distanza è
uguale a quella di setpoint), è possibile programmare un isteresi.
Esempio di uscita NO:
Se un oggetto si avvicina al sensore, l’uscita cambierà quando il valore
della distanza è uguale a quello di setpoint. Se l’oggetto si allontana dal
setpoint, l’uscita ritorna ai valori precedenti quando il valore della distanza è uguale a quello di setpoint + isteresi.
Menu File
Raccogliere ed immagazzinare i valori ottenuti
(Collect and Save values)
Questa scelta apre una nuova finestra. La frequenza delle misurazioni
può essere definita (secondi, minuti e ore).
“Start” avvia la registrazione.
“Save” salva ed immagazzina i valori ottenuti (che poi potranno essere
analizzati in Excel).
Scrivi i parametri del sensore (Write sensor parametres)
I parametri dell’impostazione visualizzata vengono memorizzati sul disco in
un apposito file.
Carica i parametri del sensore (Load
sensor parametres)
Nel sensore vengono caricati i parametri memorizzati in un file sul disco.
Sensore
Oggetto
Uscita
Setpoint Setpoint
+ isteresi

55
ENGLISHFRANÇAISESPAÑOLITALIANODANSK DEUTSCH
Menù di configurazione
Leggi configurazione dal sensore (Read configuration from sensor)
La configurazione rilevante viene scaricata dal sensore e visualizzata.
Scrivi configurazione sul sensore (Write configuration to sensor)
I parametri che appaiono sullo schermo vengono trasferiti al sensore.
Lo stesso risultato si ottiene cliccando sul pulsante “Start programming” (Avvia programmazione) nel menù principale.
Inizializza il sensore (Initialize sensor)
Il sensore viene reimpostato ai valori predefiniti.
Configura il sensore e l’interfaccia (Configure sensor and interface)
E’ possibile selezionare il sensore, la porta COM e simili.
Opzioni avanzate
Uscita con valore principale (Output with mean value)
Selezione di una procedura di valore principale.
Uscita seriale disattivata (Serial output off)
Disattiva l’uscita seriale di dati dal sensore. Tale funzione si rivela utile
in caso di applicazioni time-critical.
Tempo del ciclo di funzionamento (Cycle Time)
Selezione del tempo richiesto dal ciclo di funzionamento in tappe predefinite di 64, 32, 16, 8 o 4 ms.
Il principio alla base della misurazione della distanza risulta dal seguente
disegno.

56
ENGLISHDEUTSCHFRANÇAISESPAÑOL
ITALIANO
DANSK
Il grafico mostra la posizione del segnale in rapporto al tempo. Il sensore trasmette un impulso ultrasonico. L’oggetto riflette il segnale ed il
sensore ne riceve l’eco. Il fronte del sensore genera una nuova eco, e
cioè una eco dell’eco. Si tratta di un segnale debole non utilizzabile cosicchè T
measure
(Tempo di misura) lascia passare soltanto il segnale
utilizzabile (la prima eco). T
cycle
(Tempo di ciclo) determina quando viene
trasmesso il successivo impulso.
Il tempo del ciclo di funzionamento determina il tempo di risposta del
sensore. Ovviamente i sensori usati per misurazioni di lunga distanza
hanno anche lunghi tempi di risposta. La programmazione del tempo
del ciclo di funzionamento consente di regolare il tempo di risposta del
sensore per l’applicazione in questione.
La durata del tempo del ciclo di funzionamento deve essere maggiore
del tempo necessario a ricevere la eco dell’impulso trasmesso!
T
measure
è proporzionale alla distanza dall’oggetto (dalla trasmissione
dell’impulso alla ricezione dell’eco). T
measure
è un’espressione proporzionale della distanza; perciò il tempo viene convertito in distanza,
espressa come valore analogico.
Una guida approssimativa per la definizione della distanza massima per
un determinato tempo del ciclo di funzionamento è:
Under range
Il valore di underrange può essere regolato in tappe predefinite, da 0 a
255 cm. Durante la trasmissione il sensore non è in grado di ricevere, e
la lunghezza dell’impulso di trasmissione determina quindi la più breve
Oggetto
Sensore
Posizione del segnale
Tempo
T
measure
T
cycle
Ciclo di funzionamento (ms) Distanza (m)
4 0.3
8 0.7
16 2.5
32 4.5
64 10

57
ENGLISHFRANÇAISESPAÑOLITALIANODANSK DEUTSCH
distanza di rilevamento. Tale campo, delimitato dalla lunghezza dell’impulso di trasmissione, viene chiamato zona cieca.
E’ possibile regolare il valore di underrange. Impostando il valore di underrange ad una certa distanza è possibile ignorare le eco ricevute dagli
oggetti posizionati tra la fronte del sensore ed il limite di underrange.
Ciò consente di ignorare oggetti di disturbo nelle vicinanze del sensore.
Un sensore, ad esempio, può rilevare oggetti attraverso una griglia di
protezione senza che la rilevazione venga disturbata dai riflessi generati
dalla griglia.
Limitazioni (Limitations)
• Il valore minimo di underrange è determinato dal ringing del trasduttore.
• Le eco di un oggetto massiccio nella zona morta verranno soppresse, ma la seconda o terza eco possono essere ricevute se l’intervallo di tempo è più lungo di quello impostato per la zona morta.
L’uscita indicherà una distanza che è due o tre volte più lunga.
Tempo di trasmissione (Transmission Time)
Il tempo di trasmissione determina la lunghezza dell’impulso trasmesso.
E’ possibile selezionarlo in tappe predefinite di 10 µsec fino ad un valore di 2,55 ms. Se il valore selezionato è 0, la lunghezza varierà al variare della distanza misurata.
Regolazione dello scostamento e della variazione progressiva di
corrente/pendenza (Offset and Slope Adjustment)
L’impostazione di questi valori è predefinita. Si raccomanda di evitare
di modificare tale impostazione, o di farlo con la massima prudenza.
Tali parametri vanno utilizzati per la regolazione di precisione.
Regolalazione dello scostamento (Offset Adjustment)
Può esservi differenza tra il valore di lettura e la distanza reale.
0 mm della lettura può differire da 0 mm di lunghezza fisica. La posizione
di 0 mm può essere regolata mediante regolazione dello scostamento
della testina di rilevamento +/-128 mm in tappe predefinite in mm.
Esempio di scostamento negativo (vedere il disegno seguente):
Oggetto
Sensore
Griglia
Zona
cieca
Under
range

58
ENGLISHDEUTSCHFRANÇAISESPAÑOL
ITALIANO
DANSK
L’uscita indica una distanza che è di 30 mm dietro l’oggetto.
Impostando lo scostamento a -30 mm viene neutralizzato tale errore di
lettura, in quanto si sottraggono 30 mm da tutte le misurazioni.
Regolazione della variazione progressiva di corrente/pendenza
(Slope adjustment)
La regolazione della pendenza modifica la pendenza dell’uscita analogica. L’errata regolazione della pendenza può avere effetti sulla linearità e
sulla compensazione termica.
Ampiezza della finestra (Window Width)
Azionando il sensore con la procedura di valore medio viene creata una
finestra intorno alla distanza realmente misurata. Tutti i valori misurati
che rientrano in questa finestra formano la base di lettura. Tale lettura
costituisce quindi il centro della finestra per la lettura successiva, cosicché la finestra si muove insieme all’oggetto. La velocità massima di
movimento della finestra limita la velocità dell’oggetto da rilevare. Se
l’oggetto si muove troppo velocemente, l’algoritmo di soppressione
degli impulsi errati ignorerà le misurazioni di distanza.
La velocità massima dipende dal tempo del ciclo di funzionamento e
dalle dimensioni della finestra di misurazione utilizzata. La finestra di
misurazione può essere regolata anche mediante il comando “Cycle
time adjustment” (Regolazione del tempo del ciclo di funzionamento).
La dimensione normale della finestra di misurazione è di ± 32 mm.
Contatore di Login/Logout (Login-Logout Counter)
Il contatore di Login/Logout è parte del software di ‘Fail Pulse
Suppression’ (Soppressione impulsi errati) del sensore. Si raccomanda
la massima prudenza nell’effettuare modifiche!
127
30
-128
Distanza reale
Distanza in uscita
Finestra di misurazione
Uscita
reale
Distanza

59
ENGLISHFRANÇAISESPAÑOLITALIANODANSK DEUTSCH
I componenti elettronici del sensore sono ben protetti nei riguardi dei disturbi elettromagnetici provenienti dall’ambiente circostante. Il microprocessore viene usato, inoltre, in maniera molto efficace per filtrare il
segnale giusto in ambienti rumorosi. L’impostazione predefinita è ottimizzata per soddisfare la maggior parte dei diversi tipi di misurazione.
Selezionando l’uscita con valore medio viene attivata la procedura.
Viene così creata una finestra di ± 32 mm, con centro nella distanza
realmente misurata. Tale finestra è denominata finestra di misurazione
(per la sua regolazione, vedere il paragrafo “Finestra di misurazione”).
Se la misurazione successiva o il nuovo valore si mantiene all’interno
della finestra di misurazione, essa sarà alla base del calcolo della nuova
distanza, di cui verrà effettuata la lettura. Il nuovo valore diventa così
centro di una nuova finestra di misurazione.
I due contatori, ‘A’ per la lettura della distanza reale e ‘B’ per i Login,
vengono reimpostati a 0. Se la nuova misurazione o il nuovo valore ricade al di fuori della finestra, tale misurazione verrà ignorata e l’uscita
di distanza resterà inalterata. Il valore del contatore che registra il numero di misurazioni che ricadono al di fuori della finestra viene aumentato di 1.
Se il valore del contatore di Logout A è al di sotto di 3 (programmabile),
il programma ritorna all’inizio e viene fatta una nuova misurazione.
Se tale valore è maggiore o uguale a 3, cresce il valore del contatore di
Login B.
Se B = 1, il valore misurato è assunto come nuova distanza e viene
creata una nuova finestra di misurazione. Il programma ritorna all’inizio
e comincia una nuova misurazione.
Se B > 1 e la nuova misurazione cade al di fuori della nuova finestra di
misurazione, B viene impostato a 1 ed il programma ritorna all’inizio;
comincia quindi una nuova misurazione.
Se B = 4 (programmabile), la nuova misurazione viene fissata come
nuova distanza. L’uscita è così modificata ed i valori dei contatori di
Login e di Logout è reimpostato a 0. Il programma ritorna all’inizio e
viene fatta una nuova misurazione.
Il seguente diagramma di flusso (flow chart) mostra la struttura del programma.

60
ENGLISHDEUTSCHFRANÇAISESPAÑOL
ITALIANO
DANSK
A & B = 0
Avvio
Nuovo valore
Ricade nel vecchio
campo di misurazione
Si
No
A = A+1
A ≥ 3?
No
Si
Calcolare la nuova
distanza
Cambiare le uscite
A & B = 0
B = B+1
B = 1?
No
Si
B = 4?
No
Si
Si
No
Nuovo valore =
Nuova distanza
Cambiare le uscite
A & B = 0
Nuovo valore in
una “possibile”
finestra di
misurazione
Il nuovo valore è centro
della “possibile” finestra di
misurazione
B = 1
Il nuovo valore è
centro della “pos-
sibile” finestra di
misurazione

61
ENGLISHFRANÇAISESPAÑOLITALIANODANSK DEUTSCH
Superamento limiti (Over Range)
Questo contatore può essere impostato a 0-255. Se il sensore deve misurare la distanza di un piccolo oggetto difficile da rilevare, le uscite del
sensore possono essere molto instabili. I loro valori oscilleranno tra la
distanza reale ed il superamento dei limiti. Queste variazioni indesiderate
possono essere eliminate mediante il contatore di overrange.
L’operazione è illustrata nel diagramma di flusso:
All’inizio del ciclo di misurazione, il sensore trasmette un impulso.
Se viene ricevuta una eco, il contatore di overrange ORC verrà reimpostato a 0, verrà calcolata la nuova distanza di misurazione e, se necessario, verranno modificate le uscite, ed avrà luogo la trasmissione
dell’impulso successivo.
Se non viene ricevuta alcuna eco, cresce il valore del contatore di overrange.
Se il valore di ORC è al di sotto del parametro p, non vi saranno
cambiamenti all’uscita, ed il sensore trasmetterà un impulso durante il
ciclo di misurazione successivo.
Se il valore di ORC è uguale o più alto di p, le uscite saranno cambiate
all’overrange, ed il sensore trasmetterà un impulso durante il ciclo di
misurazione successivo.
Esempio: Un sensore con la seguente impostazione:
Tempo del ciclo di funzionamento = 64 ms
Overrange = 200
Se l’oggetto scompare improvvisamente, il sensore necessita di 200*64
ms = 12,8 s perché le uscite cambino in overrange.
Si
No
Eco ricevuta?
No
Si
Avvia nuovo ciclo
Invia Impulso
Aumentare ORC
ORC ≥ p?
Cambiare l’uscita
in overrange
Imposta ORC = 0
Calcolare la dis-
tanza
Cambiare le uscite

62
Finestra addizionale per la modalita test
Durante la procedura di avvio è possibile aprire una nuova finestra, in
cui vengono visualizzati la distanza e lo stato dell’uscita di commutazione.
ENGLISHDEUTSCHFRANÇAISESPAÑOL
ITALIANO
DANSK

63
ENGLISHFRANÇAISESPAÑOLITALIANODANSK DEUTSCH
Ultrasonisk
Diffuse, programmerbare udgange
Type UA 30 CLD .. F. M7
INDHOLDFORTEGNELSE Side
Installation 63
Softwarebeskrivelse 64
Specifikationer 74
Tasteafstand 76
Forbindelsesdiagram 77
Dimensioner 77
Installationsvejledning 78
1. Montering af aftasteren
Monter aftasteren i den ønskede position, så den peger mod emnet.
Sørg for, at afstanden til emnet ligger inden for aftasterens rækkevidde.
2. Aftasterforsyning
For at forsyne aftasteren skal ben 2 forbindes til jord (0 V DC), mens
ben 1 skal forbindes til + (19-30 V DC).
3. Programmering af aftasteren
Parametrene skal programmeres i henhold til softwarebeskrivelsen.
Installation

64
ENGLISHDEUTSCHFRANÇAISESPAÑOL
ITALIANO
DANSK
Softwarebeskrivelse
Programmet UDSProg.EXE er beregnet til en Windows-platform, og
programmet gør opsætningen af aftasteren let ved hjælp af letforståelige menuer.
Opsætning af COM-port og adresse
Port
Den COM-port, der skal anvendes til programmeringsadapteren, vælges i det første vindue, der vises, når programmet starter.
Sensor (aftaster)
Vælg den korrekt aftastertype i rullemenuen.
Sensor’s address (aftasterens adresse)
Fabriksindstillingen er 97. Adressen kan ændres til ethvert tal mellem 0 og 99.
Search address (søg efter adresse)
Hvis der er tilsluttet en aftaster, og adressen er ukendt, kan den korrekte adresse findes med funktionen ”Search address”.
D
emo-Mode (demofunktion)
Aftasteren kan køre i demofunktion. Det er ikke muligt at foretage programmering – kun at kontrollere indstillingerne.

65
ENGLISHFRANÇAISESPAÑOLITALIANODANSK DEUTSCH
Initialize sensor (initialiser aftasteren)
Nulstilling af aftasteren til fabriksindstillingerne.
O
k
Indstillingerne bekræftes, og hovedmenuen vises.
Hovedmenu
Analogue output (analog udgang)
Den analoge udgang programmeres med to parametre, Offset (forskydning) og Range (område). Forskydningen er afstanden fra aftasterens
front til den nærmeste områdegrænse. Området er den afstand, der får
udgangen til at ændres fra 0-10 V eller 4-20 mA.
Forskydningen og området vælges i trin (i mm) ved hjælp af rullepanelerne eller ved at indtaste værdierne. Markér afkrydsningsfeltet ”Invert
analogue output”, hvis der er behov for invertering af den analoge udgang. De valgte udgangskarakteristika vises.
Setpoints (grænseværdier for udgange)
Grænseværdierne vælges enten som reelle grænseværdier (ved at
vælge ”Limits”) eller som sætpunkter (ved at vælge ”Setpoints”), og
området for grænseværdien defineres af ”Position” og ”Hysteresis” (hysterese).
Grænseværdierne skal vælges som normalt åbne (NO) eller normalt lukkede (NC) funktioner.

66
ENGLISHDEUTSCHFRANÇAISESPAÑOL
ITALIANO
DANSK
NO (normalt åben): Når grænseværdien overskrides, er udgangsimpedansen høj. Inden for det indstillede område er udgangsimpedansen
lav, og strømmen flyder (< 100 mA).
NC (normalt lukket): Når grænseværdien overskrides, er udgangsimpedansen lav, og strømmen flyder (< 100 mA). Inden for det indstillede område er udgangsimpedansen høj.
Hysteresis (hysterese)
For at sikre en stabil udgang (når en målt afstand svarer til grænseværdien), kan der programmeres en hysterese. Eksempel for en NO-udgang:
Hvis et emne nærmer sig aftasteren, ændres udgangen, når afstanden
svarer til grænseværdien. Hvis emnet fjernes fra dette punkt, ændres
udgangen tilbage, når afstanden svarer til grænseværdien + hysterese.
Menuen File (filmenu)
Collect and Save values (indhent og gem værdier)
Når dette vælges, åbnes et nyt vindue. Frekvensen for målingerne kan
vælges (sekunder (Seconds), minutter (Minutes) og timer (Hours)).
Med ”Start” påbegyndes optagelsen.
Med ”Save” gemmes værdierne (disse kan efterfølgende evalueres i Excel).
Write sensor parametres (registrer
aftasterparametre)
De aktuelt viste indstillingers parametre
skrives til en hukommelsesfil.
Load sensor parametres (indlæs aftasterparametre)
Parametrene fra en hukommelsesfil indlæses i aftasteren.
Aftaster
Emne
Udgang
Grænseværdi Grænseværdi
+ hysterese

67
ENGLISHFRANÇAISESPAÑOLITALIANODANSK DEUTSCH
Menuen Configuration (konfigurationsmenu)
Read configuration from sensor (indlæs konfiguration fra aftaster)
Den aktuelle konfiguration indlæses fra aftasteren og vises.
Write configuration to sensor (overfør konfiguration til aftaster)
De parametre, der vises på skærmen, overføres til aftasteren. Samme
resultat opnås ved at klikke på knappen ”Start programming” (start programmering) i hovedmenuen.
Initialize sensor (initialiser aftasteren)
Aftasteren indstilles til fabriksindstillingerne.
Configure sensor and interface (konfigurer aftaster og interface)
Aftaster, COM-port og lignende kan vælges.
Advanced options (avancerede indstillinger)
Output with mean value (udgang med middelværdi)
Valg af en middelværdiprocedure.
Serial output off (seriel udgang deaktiveret)
Deaktiverer seriel dataudgang fra aftasteren. Ved tidskritiske applikationer kan dette være en nyttig funktion.
Cycle Time (cyklustid)
Valg af cyklustid i trin på 64, 32, 16, 8 eller 4 ms.
Princippet i afstandsmåling illustreres på følgende tegning.

68
ENGLISHDEUTSCHFRANÇAISESPAÑOL
ITALIANO
DANSK
Diagrammet viser signalpositionen i forhold til tiden. Aftasteren udsender en ultrasonisk impuls. Signalet reflekteres fra emnet, og aftasteren
modtager dette ekko. Aftasterens front genererer et nyt ekko – et ekko
af ekkoet. Dette er et svagt signal, der ikke kan anvendes – derfor slipper T
measure
(måletiden) kun det brugbare signal igennem (det første
ekko). T
cycle
(cyklustiden) afgør, hvornår den næste impuls udsendes.
Cyklustiden bestemmer aftasterens reaktionstid. Det følger rent logisk,
at aftastere til måling over lange afstande også har lange reaktionstider.
Via programmering af cyklustiden kan aftasterens reaktionstid justeres
til den aktuelle applikation.
Cyklustidens varighed skal være længere end den tid, der kræves for at
modtage ekkoet af den udsendte impuls!
T
measure
(måletiden) er proportional med afstanden til emnet (fra impulsen
udsendes, og indtil ekkoet modtages). T
measure
er et proportionelt udtryk
for afstanden. Derfor konverteres tiden til en afstand, der udtrykkes
som en analog værdi.
En tommelfingerregel til den maksimale afstand for en given cyklustid er:
Under Range (underområde)
Underområdet kan justeres i trin fra 0 til 255 cm. Under udsendelsen af
impulsen er aftasteren ikke i stand til at modtage, og derfor afgør sendeimpulsens længde den korteste tasteafstand. Dette område, der begrænses af sendeimpulsens længde, kaldes den blinde zone.
Emne
Aftaster
Signalposition
Tid
T
measure
T
cycle
Cyclustid (ms) Afstand (m)
4 0,3
8 0,7
16 2,5
32 4,5
64 10

69
ENGLISHFRANÇAISESPAÑOLITALIANODANSK DEUTSCH
Det er muligt at styre underområdet. Ved at indstille underområdet til en
bestemt afstand er det muligt at ignorere ekkoer, der modtages fra
emner, der befinder sig mellem aftasterens front og underområdets
grænse. Dette betyder, at det er muligt at ignorere forstyrrende emner,
der befinder sig tæt på aftasteren.
En aftaster kan aftaste et emne gennem f.eks. et beskyttelsesgitter,
uden at blive forstyrret af refleksionerne fra gitteret.
Begrænsninger
• Det mindste underområde bestemmes af transducerringningen.
• Ekkoerne fra et massivt emne i den blinde zone undertrykkes, men
anden- eller tredjeekkoer kan modtages, hvis tiden er længere end
den programmerede blinde zone. Udgangen angiver en afstand, der
er to eller tre gange længere.
Transmission Time (sendetid)
Sendetiden bestemmer længden på den udsendte impuls. Den kan
vælges i trin på 10 µsek. op til 2,55 ms. Hvis 0 vælges, varierer længden
i takt med den målte afstand.
Offset adjustment og Slope adjustment (justering af forskydning og
hældning)
Disse justeringer foretages af fabrikken. Undgå at justere disse indstillinger, da parametrene er beregnet til finindstilling.
Offset Adjustment (forskydningsjustering)
Der kan være en forskel mellem udlæsningen og den faktiske afstand.
Der kan være forskel mellem 0 mm i udlæsningen og 0 mm fysisk afstand. Positionen på 0 mm kan justeres med aftasterens hovedforskydningsjustering +/-128 mm i millimetertrin.
Eksempel på negativ forskydning (se følgende illustration):
Udgangen angiver en afstand, der er 30 mm bag ved emnet. Ved at
indstille forskydningen til -30 mm neutraliseres denne fejlaftastning, eftersom der trækkes 30 mm fra alle målinger.
Emne
Aftaster
Gitter
Blind
zone
Underområde

70
ENGLISHDEUTSCHFRANÇAISESPAÑOL
ITALIANO
DANSK
Slope adjustment (hældningsjustering)
Med hældningsjusteringen ændres den analoge udgangs hældning.
Hvis der anvendes en forkert hældningsjustering, kan dette påvirke lineariteten og temperaturkompensationen.
Window width (grænseværdiområde)
Ved at betjene aftasteren med middelværdiproceduren skabes der et
grænseværdiområde (et ”vindue” omkring den faktisk målte afstand. Alle
målte værdier inden for dette vindue danner grundlaget for udlæsningen.
Denne udlæsning er derefter centrum for næste udlæsnings vindue, og
vinduet flytter sig således med emnet. Den maksimale hastighed for vinduets bevægelse begrænser hastigheden for et emne, der skal aftastes.
Hvis emnet bevæger sig for hurtigt, ignoreres afstandsmålingerne af algoritmen for fejlimpulsundertrykkelse.
Den maksimale hastighed afhænger af cyklustiden og størrelsen på det
anvendte målevindue. Med kommandoen ”Cycle time adjustment” (justering af cyklustid) er det også muligt at justere målevinduet. Den normale størrelse for dette målevindue er ± 32 mm.
Login/Logout counter (tæller for login/logout)
Tælleren for login/logout er en del af aftasterens software til ’fejlimpulsundertrykkelse’. Disse værdier må kun ændres med største forsigtig-
hed!
Aftasterens elektroniske komponenter er effektivt beskyttede mod elektromagnetiske forstyrrelser fra omgivelserne. Desuden anvendes mikroprocessoren meget effektivt til at udfiltrere det korrekte signal fra et støjende
miljø. Fabriksindstillingerne er optimeret, så de kan klare de fleste måleopgaver.
127
30
-128
Faktisk afstand
Afstand, udgang
Målevindue
Reel
udgang
Afstand

71
ENGLISHFRANÇAISESPAÑOLITALIANODANSK DEUTSCH
Når der vælges udgang med middelværdi, aktiveres proceduren. Med den
aktuelt målte afstand som centrum skabes der et ”vindue” på ± 32 mm.
Dette vindue kaldes målevinduet (justering af dette vindue beskrives under
afsnittet ”Målevindue”).
Hvis den næste måling eller nye værdi ligger inden for dette målevindue,
anvendes den til at beregne den nye afstand, der derefter udlæses. Den
nye værdi anvendes som centrum for et nyt målevindue.
De to tællere – ’A’ for udlæsning af den aktuelle afstand og ’B’ for login –
nulstilles til 0. Hvis den næste måling eller nye værdi ligger uden for vinduet,
ignoreres denne måling, og afstandsudgangen forbliver uændret. Tælleren,
der tæller antallet af målinger uden for vinduet, øges med 1.
Hvis værdien for logouttæller A er under 3 (programmerbar), vender programmet tilbage til starten, og der foretages en ny måling.
Hvis værdien er højere end eller lig med 3, øges logintæller B.
Hvis B = 1, antages den målte værdi at være den nye afstand, og der skabes et nyt målevindue. Programmet vender tilbage til starten, og en ny
måling påbegyndes.
Hvis B > 1, og den nye måling ligger uden for det nye målevindue, indstilles
B til 1. Programmet vender tilbage til starten, og en ny måling påbegyndes.
Hvis B = 4 (programmerbar), anvendes den nye måling som den nye afstand. Udgangen ændres nu, og tællerne for login og logout nulstilles til 0.
Programmet vender tilbage til starten, og en ny måling påbegyndes.
Følgende diagram viser programmets struktur.

72
ENGLISHDEUTSCHFRANÇAISESPAÑOL
ITALIANO
DANSK
A & B = 0
Start
Ny værdi
Inden for gamle
målings område?
Ja
Nej
A = A+1
A ≥ 3?
Nej
Ja
Beregn ny afstand
Skift udgange
A & B = 0
B = B+1
B = 1?
Nej
Ja
B = 4?
Nej
Ja
Ja
Nej
Ny værdi =
Ny afstand
Skift udgange
A & B = 0
Ny værdi i ”mu-
ligt” målevindue?
Ny værdi er centrum for
”muligt” målevindue
B = 1
Ny værdi er centrum for ”muligt”
målevindue
Over range (overområde)
Denne tæller kan indstilles til 0-255. Hvis aftasteren skal måle afstanden til
et lille emne, der er vanskeligt at aftaste, kan aftasterens udgange være
meget ustabile. De blinker mellem den reelle afstand og overområdet.
Disse uønskede ændringer kan undertrykkes med overområdetælleren.
Processen vises i følgende diagram:

73
ENGLISHFRANÇAISESPAÑOLITALIANODANSK DEUTSCH
I begyndelsen af målecyklussen udsender aftasteren en impuls.
Hvis der modtages et ekko, nulstilles overområdetælleren (ORC) til 0, den
nye målte afstand beregnes, udgangene ændres om nødvendigt, og næste
impuls udsendes.
Hvis der ikke modtages et ekko, øges overområdetælleren (ORC).
Hvis ORC er under parameter p, sker der ingen ændringer i udgangen, og
aftasteren udsender en impuls under næste målecyklus.
Hvis ORC er højere end eller lig med p, ændres udgangene til overområdet,
og aftasteren udsender en impuls under næste målecyklus.
Eksempel: En aftaster med følgende indstilling:
Cyklustid = 64 ms
Overområde = 200
Hvis emnet pludselig forsvinder, skal aftasteren bruge 200 x 64 ms = 12,8
sek., før udgangene ændres til overområde.
Ja
Nej
Ekko modtaget?
Nej
Ja
Start ny cyklus
Send impuls
Øg ORC
ORC ≥ p?
Skift udgang til
overområde
Indstil ORC = 0
Beregn afstand
Skift udgange
Ekstra vindue i testfunktionen
I startfunktionen kan der åbnes et
særskilt vindue, hvor aktiveringsudgangens afstand og status vises.

74
Rated operational voltage (U
e
) / Nenn-Betriebsspannung /
Tension de fonctionnement nominale / Tensión de alimentación /
Tensione di alimentazione / Nominelt spændingsområde
19 - 30 VDC (19 - 30 VCC)
Rated operational current (I
e
)
/ Nenn-Betriebsstrom /
Courant de fonctionnement nominal / Intensidad de salida /
Corrente di carico / Max. strøm
≤ 100 mA (continuous)
Rated operating distance
(Sn) /
Nenn-Schaltabstand /
Distance nominale de fonctionnement / Distancia nominal de detección /
Distanza di attivazione nominale / Nominel tasteafstand
UA30CLD15 150 - 1500 mm
UA30CLD20 250 - 2000 mm
UA30CLD35 350 - 3500 mm
Output, analogue
/
Ausgang, analog / Sortie analogique /
Salida analógica /
Uscita, analogica / Udgang, analog
UA30CLD..FKM7: Analogue, 0-10 or 10-0 VDC
/ Analog, 0-10 oder
10-0 V DC / Analogique 0-10 ou 10-0 VCC / Analógica,
0 a 10 ó 10 a 0 VCC / Analogica 0-10 o 10-0 VCC /
Analog, 0-10 eller 10-0 V DC
UA30CLD..FGM7: Analogue, 4-20 or 20-4 mA /
Analog, 4-20 oder 20-4
mA / Analogique 4-20 ou 20-4 mA / Analógica, 4 a 20 ó
20 a 4 mA / Analogica 4-20 o 20-4 mA / Analog, 4-20
eller 20-4 mA
Scaling / Skalierung / Echelle / Cambio de escala / Scala / Skalering:
Programmable / Programmierbar / Programmable /
Programable / Programmabile / Programmerbar
Linearity / Linearität / Linéarité / Linearidad / Linearità / Linearitet:
± 0.5%/3 mm
Repeatability
/ Wiederholgenauigkeit / Répétivité / Repetibilidad / Ripetibilità /
Gentagelsesnøjagtighed:
± 0.2%/0.4 mm
Specifications / Technische Daten / Caractéristiques Techniqu
ENGLISHDEUTSCHFRANÇAISESPAÑOL
ITALIANO
DANSK

75
ues / Especificaciones / Caratteristiche Tecniche / Specifikationer
Output, switching
/
Kontaktausgang / Commutation des sorties /
Salida, conmutación
/ Uscita, commutazione /
Udgang, aktivering
2 x PNP, open collector, NO/NC, 100 mA
2 x PNP, offener Kollektor, Schließer / Öffner (NO/NC), 100 mA
2 x PNP, collecteur ouvert, NO/NC, 100 mA
2 x PNP, colector abierto, NA/NC, 100 mA
2 x transistor PNP, con collettore aperto, commutazione NA/NC, 100 mA
2 x transistor PNP, åben kollektor, NO/NC, 100 mA
Operating frequency
/
Schaltfrequenz / Fréquence de marche /
Frecuencia de funcionamiento
/
Frequenza di attivazione
/ Driftsfrekvens
5 - 30 Hz, programmable / programmierbar / programmable / programable /
programmabile / programmerbar
Protection / Schutz / Protection / Protección / Protezione / Beskyttelse
Reverse polarity, short-circuit, transients
Verpolung, Kurzschluss, Transienten /
Inversion de polarité, court-circuit, transitoires /
Inversión de polaridad, cortocircuitos, transitorios /
Inversione di polarità, corto circuito, transitori /
Polaritet, kortslutning, transienter
Operating temperature
/
Umgebungstemperatur, Betrieb /
Température de fonctionnement /
Temperatura ambiente, trabajo /
Temperatura di funzionamento / Omgivelsestemperatur, drift
-15° --> +70°C (5° --> +158°F)
Storage temperature
/
Umgebungstemperatur, Lager /
Température de stockage /
Temperatura ambiente, almacenamiento /
Temperatura di immagazzinaggio / Omgivelsestemperatur, lager
-25° --> +75°C (-13° --> +167°F)
Degree of protection / Schutzart / Indice de protection /
Grado de protección / Grado di protezione / Tæthedsgrad
IP 67 (Nema 1, 3, 4, 6, 13)
Tightening torque
/ Anzugsdrehmoment / Couple de serrage /
Par de apriete / Coppia di serraggio / Bespændingsmoment
UA 18 2.6 Nm
UA 30 7.5 Nm
ENGLISHFRANÇAISESPAÑOLITALIANODANSK DEUTSCH

76
150 mm
250 mm
350 mm
1500 mm
2000 mm
3500 mm
20
20
30
30
40
40
Detection Range / Erfassungsbereich /
Distance de détection / Distancia de detección /
Distanza di attivazione / Tasteafstand
ENGLISHDEUTSCHFRANÇAISESPAÑOL
ITALIANO
DANSK
Guaranteed detection of a target 100 x 100 mm
Garantierte Erfassung eines Objektes mit den Abmessungen 100 x 100 mm
Détection garantie d’une cible de 100 x 100 mm
Detección garantizada de un objeto de 100 x 100 mm
Rilevazione garantita di un obbiettivo 100 x 100 mm
Garanteret aftastning af et emne på 100 x 100 mm
Possible detection of a large target
Mögliche Erfassung eines großen Objektes
Détection possible d’une grande cible
Detección posible de un objeto grande
Possibile rilevamento di un grande obbiettivo
Mulig aftastning af et stort emne

77
Wiring Diagram / Schaltbild / Schéma de Câblage /
Diagrama de Conexiones / Collegamenti Elettrici /
Forbindelsesdiagram
Dimensions / Abmessungen / Dimensions / Dimensiones /
Dimensioni / Dimensioner
ENGLISHFRANÇAISESPAÑOLITALIANODANSK DEUTSCH
Pin Function
Anschluss / Funktion / Fonction /
Broche / Función / Funzione /
Patilla / Pin / Funktion
Ben
1 24 VDC (24 VCC)
20 V
3 Output, 0-10 V
Ausgang, 0-10 V / Sortie, 0-10 V / Salida, 0-10 V /
Uscita, 0-10 V /Udgang, 0-10 V
4 Switching output 1 (PNP)
Kontaktausgang 1 (PNP) / Commutation sortie 1 (PNP) /
Salida de conmutación 1 (PNP) /
Uscita di commutazione 1 (PNP) / Aktiveringsudgang 1 (PNP) /
5 Switching output 2 (PNP)
Kontaktausgang 2 (PNP) / Commutation sortie 2 (PNP) /
Salida de conmutación 2 (PNP) /
Uscita di commutazione 2 (PNP) / Aktiveringsudgang 2 (PNP) /
6 Hold
Halten / Attente / Retención / Mantenere / Hold /
7 RS232 RxD .. RS485-B
8 RS232 TxD .. RS485-A

78
Installation Hints / Installationshinweise / Conseils d’Installation / No
ENGLISHDEUTSCHFRANÇAISESPAÑOL
ITALIANO
DANSK
Relief of cable strain
Protection of the
sensing face
Switch mounted on
mobile carrier
To avoid interference
from inductive voltage/
current peaks, separate the proximity
switch power cables
from any other power
cables, e.g. motor,
contactor or solenoid
cables
The cable should not
be pulled
A proximity switch
should not serve as
mechanical stop
Any repetitive flexing
of the cable should be
avoided
Schutz vor
Überdehnung des
Kabels
Schutz der
Sensorfläche des
Schalters
Mobiler
Näherungsschalter
Um Störungen durch
induktive Spannungs/Stromspitzen zu
vermeiden, Kabel der
Näherungsschalter
getrennt von anderen
stromführenden
Kabeln halten
Nicht am Kabel ziehen
Näherungsschalter
nicht als mechanischen
Anschlag verwenden
Wiederholtes Biegen
des Kabels vermeiden
ENGLISH DEUTSCH

79
ormas de Instalación / Consigli per l’Installazione / Installationsråd og -vink
ENGLISHFRANÇAISESPAÑOLITALIANODANSK DEUTSCH
Tension des câbles
Protection de la face de
détection du détecteur
Détecteur monté sur
support mobile
Pour éviter les
interférences issues des
pics de tension et/ou des
courants inductifs, veiller
à toujours faire cheminer
séparément les câbles
d'alimentation des
détecteurs de proximité
et les câbles d'alimentation des moteurs,
contacts ou solénoïdes
Eviter toute contrainte
en traction du câble
Ne jamais utiliser un
détecteur de proximité
en tant que butée
mécanique
Eviter toute répétition
de courbure dans le
cheminement du câble
Alivio de la tensión del
cable
Protección de la cara
de detección
Conector montado
sobre portadora móvil
Para evitar
interferencias de
tensión inductiva/ picos
de intensidad se deben
separar los cables del
sensor del resto de los
cables de alimentación
tales como cables de
motor, contactores o
solenoides
No se debe tirar del
cable
Un sensor de proximidad
nunca debe funcionar
como tope mecánico
Evitar doblar el cable
repetidas veces
Aflastning af kabel
Beskyttelse af følerens
tasteflade
Aftaster monteret på
bevægeligt underlag
For at undgå støjindflydelse fra induktive
strøm-/spændingsspidser skal aftasterkablet adskilles fra
andre kraftkabler, f.eks.
fra motorer, transformatorer og magnetventiler
Der bør ikke trækkes i
kablet
En aftaster bør ikke
anvendes som
mekanisk stop
Gentagne bøjninger af
kablet bør undgås
Posizione del cavo
Protezione della parte
sensibile del sensore
Sensore installato su
pedana mobile
Al fine di evitare
interferenze di tipo
elettrico, separare i
cavi di alimentazione
del sensore di
prossimità dai cavi di
potenza
Il cavo non deve essere teso
I sensori di prossimità
non devono essere
usati per bloccaggi
meccanici
Evitare qualsiasi flessione ripetuta del cavo
ESPAÑOL ITALIANOFRANÇAIS DANSK

MAN UA30CLD..F MUL 10 02.03 15-029-103
CARLO GAVAZZI INDUSTRI A/S
Over Hadstenvej 40, DK-8370 Hadsten
Phone/Telefon: ++45 89 60 61 00
Fax: ++45 86 98 25 22
Internet: http://www.carlogavazzi.com
Certified in accordance with ISO 9001
Gerätehersteller mit dem ISO 9001/EN 29 001 Zertifikat
Une société qualifiée selon ISO 9001
Empresa que cumple con ISO 9001
Certificato in conformità con l’IS0 9001
Kvalificeret i overensstemmelse med ISO 9001
 Loading...
Loading...