

MOTOROLA
SEMICONDUCTOR TECHNICAL DATA
Order this document by:
DSP56007/D
DSP56007
SYMPHONY AUDIO DSP FAMILY
24-BIT DIGITAL SIGNAL PROCESSORS
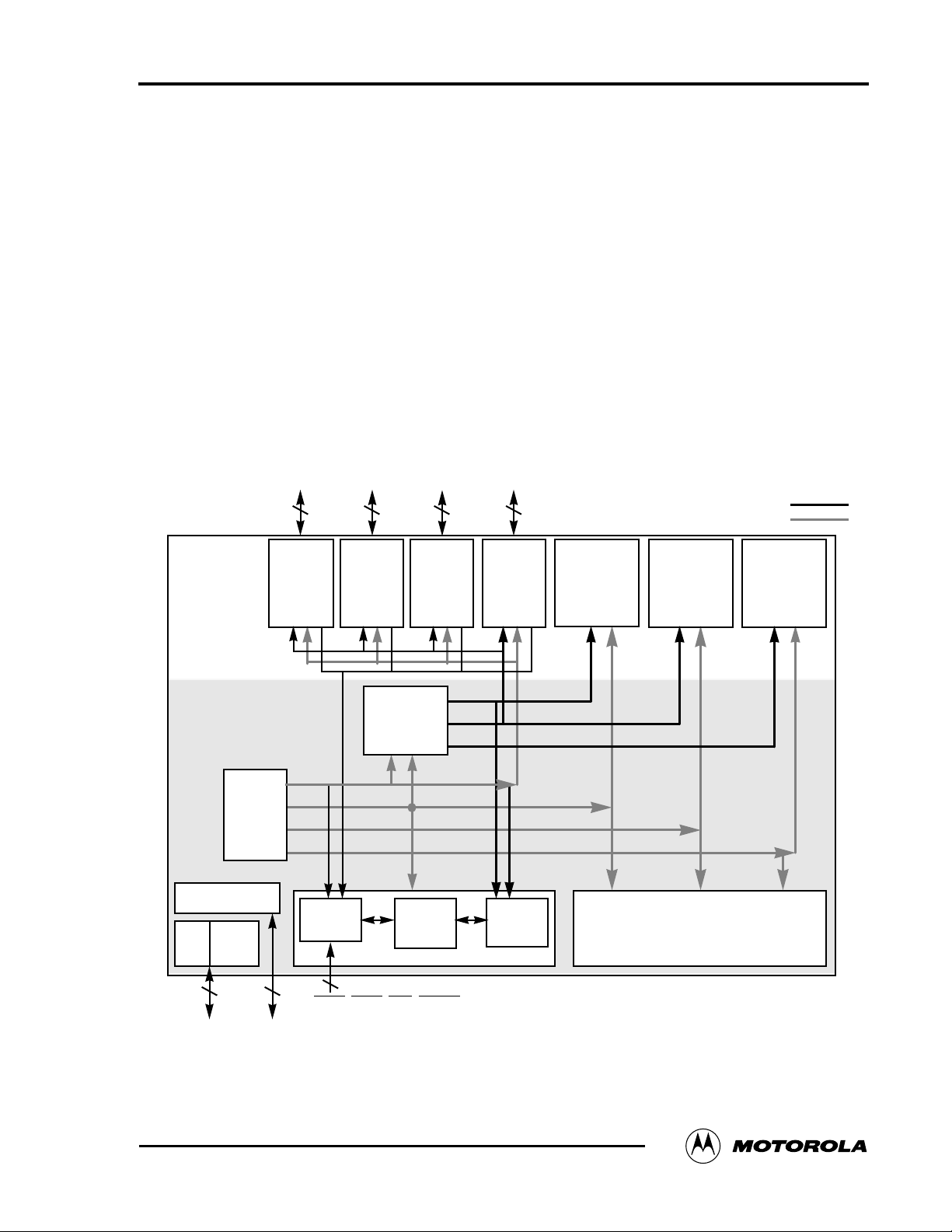
Motorola designed the Symphony family of high-performance, programmable Digital Signal
Processors (DSPs) to support a variety of digital audio applications, including Dolby ProLogic,
ATRAC, and Lucasfilm Home THX processing. Software for these applications is licensed by
Motorola for integration into products like audio/video receivers, televisions, and automotive
sound systems with such user-developed features as digital equalization and sound field
processing. The DSP56007 is an MPU-style general purpose DSP, composed of an efficient 24-bit
Digital Signal Processor core, program and data memories, various peripherals optimized for
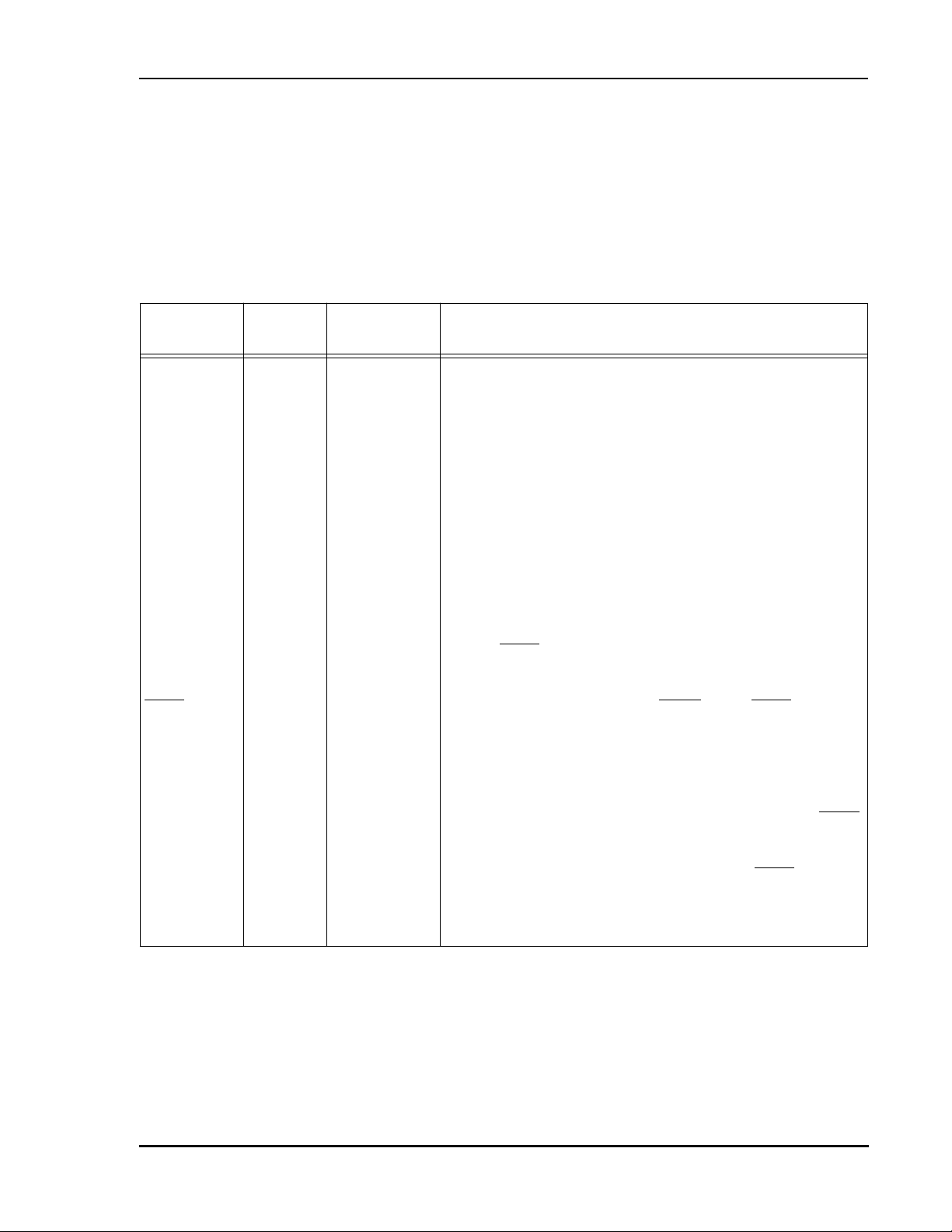
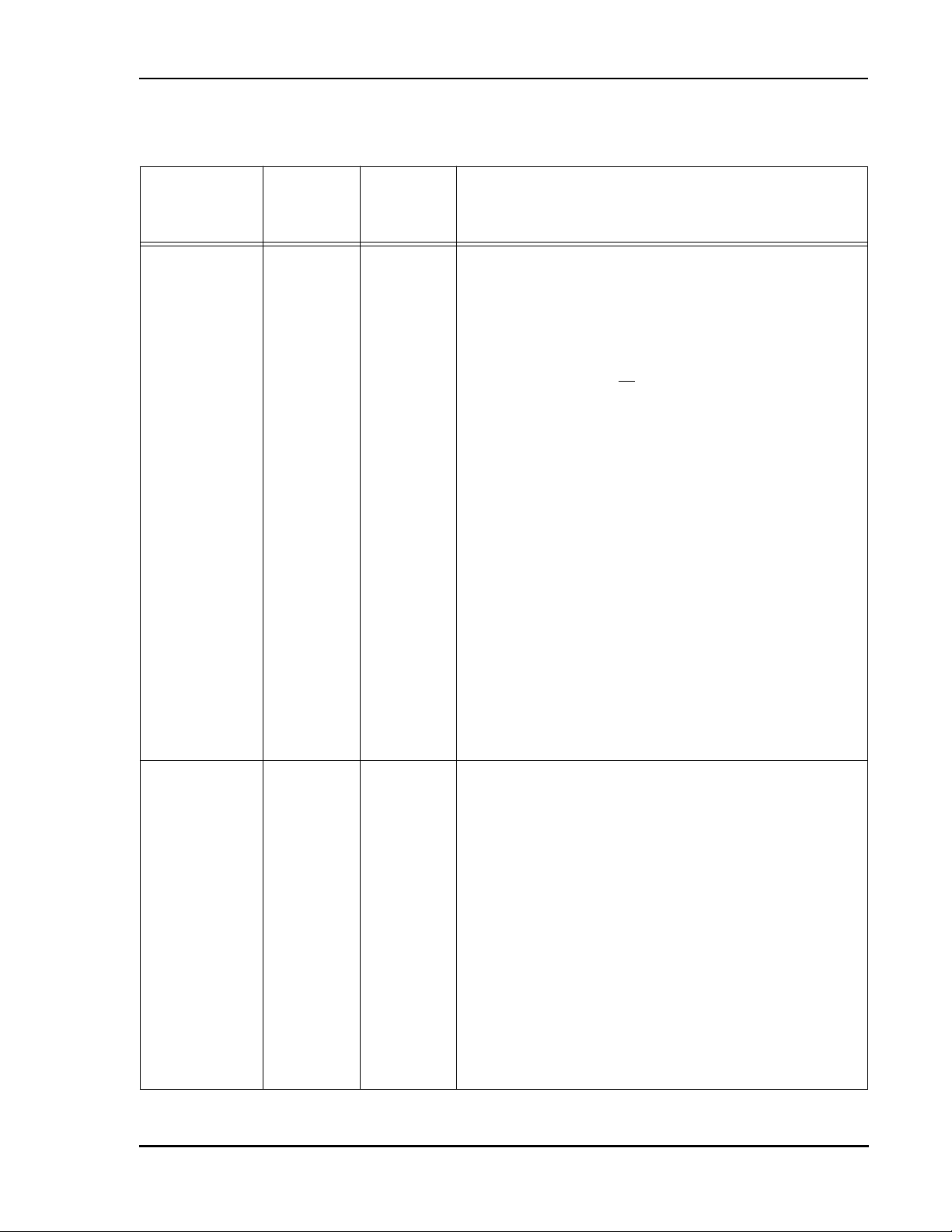
audio, and support circuitry. As illustrated in
DSP is fed by program memory, two independent data RAMs and two data ROMs, a Serial
Audio Interface (SAI), Serial Host Interface (SHI), External Memory Interface (EMI), dedicated
I/O lines, on-chip Phase Lock Loop (PLL), and On-Chip Emulation (OnCE
DSP56007 has significantly more on-chip memory than the DSP56004.
4 9 5 29
General
Purpose
Input/
Output
Serial
Audio
Interface
(SAI)
Serial
Host
Interface
(SHI)
Figure 1 , the DSP56000 core family compatible
) port. The
ˇ
16-Bit Bus
24-Bit Bus
External
Memory
Interface
(EMI)
Program
Memory*
X Data
Memory*
Y Data
Memory*
Program
Address
PAB
XAB
YAB
Data ALU
24 × 24 + 56 → 56-Bit MAC
Two 56-Bit Accumulators
Refer to Table 1 for memory configurations.
*
AA0248
24-Bit
DSP56000
Core
Internal
Switch
OnCETM Port
Clock
PLL
Gen.
Data
Bus
Address
Generation
Interrupt
Control
Program Control Unit
43
4
IRQA, IRQB, NMI, RESET
Unit
Program
Decode
Controller
GDB
PDB
XDB
YDB
Generator
Figure 1 DSP56007 Block Diagram
©1996, 1997 MOTOROLA, INC.
T
TABLE OF CONTENTS
SECTION 1 SIGNAL/CONNECTION DESCRIPTIONS. . . . . . . . . . . . . . . . . . . . .1-1
SECTION 2 SPECIFICATIONS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-1
SECTION 3 PACKAGING . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-1
SECTION 4 DESIGN CONSIDERATIONS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-1
SECTION 5 ORDERING INFORMATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-1
FOR TECHNICAL ASSISTANCE:
Telephone: 1-800-521-6274
Email: dsphelp@dsp.sps.mot.com
Internet: http://www.motorola-dsp.com
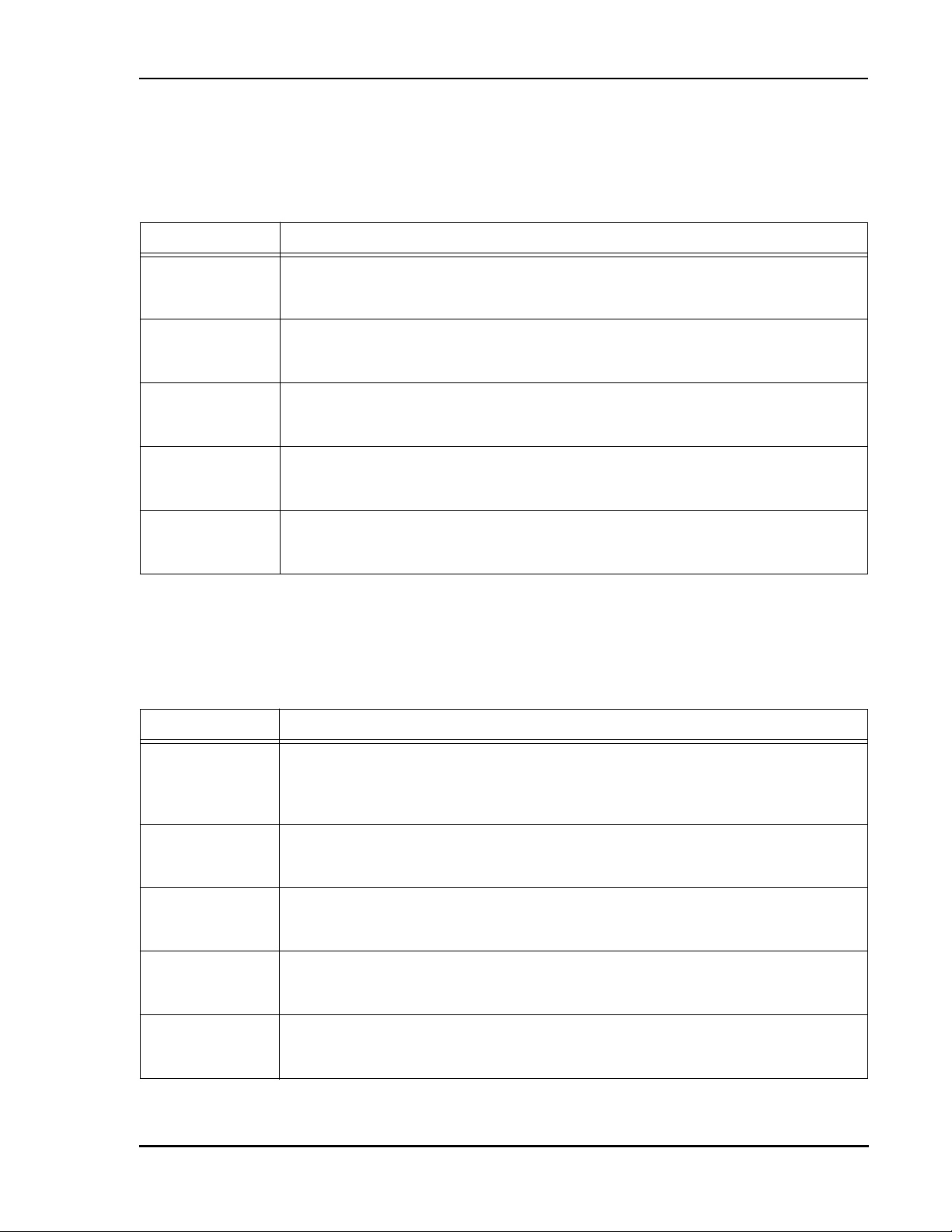
Data Sheet Conventions
his data sheet uses the following conventions:
OVERBAR Used to indicate a signal that is active when pulled low (For example, the RESET pin is
active when low.)
“asserted” Means that a high true (active high) signal is high or that a low true (active low) signal
is low
“deasserted” Means that a high true (active high) signal is low or that a low true (active low) signal
is high
Examples:
Signal/Symbol Logic State Signal State Voltage
PIN True Asserted VIL/V
PIN False Deasserted VIH/V
PIN True Asserted VIH/V
OL
OH
OH
PIN False Deasserted VIL/V
Note: Values for VIL, VOL, VIH, and VOH are defined by individual product specifications.
OL
ii DSP56007/D MOTOROLA

×
×
FEATURES
Digital Signal Processing Core
• Efficient, object code compatible with the 24-bit DSP56000 core family engine
• Up to 44 Million Instructions Per Second (MIPS)—22.7 ns instruction cycle at
88 MHz
• Highly parallel instruction set with unique DSP addressing modes
• Two 56-bit accumulators including extension byte
DSP56007
Features
Memory
• Parallel 24
• Double precision 48
• 56-bit addition/subtraction in 1 instruction cycle
• Fractional and integer arithmetic with support for multiprecision arithmetic
• Hardware support for block floating-point Fast Fourier Transforms (FFT)
• Hardware nested DO loops
• Zero-overhead fast interrupts (2 instruction cycles)
• Four 24-bit internal data buses and three 16-bit internal address buses for
simultaneous accesses to one program and two data memories
• Fabricated in high-density CMOS
• On-chip modified Harvard architecture, which permits simultaneous accesses
to program and two data memories
• Bootstrap loading from Serial Host Interface or External Memory Interface
24-bit multiply-accumulate in 1 instruction cycle (2 clock cycles)
48-bit multiply with 96-bit result in 6 instruction cycles
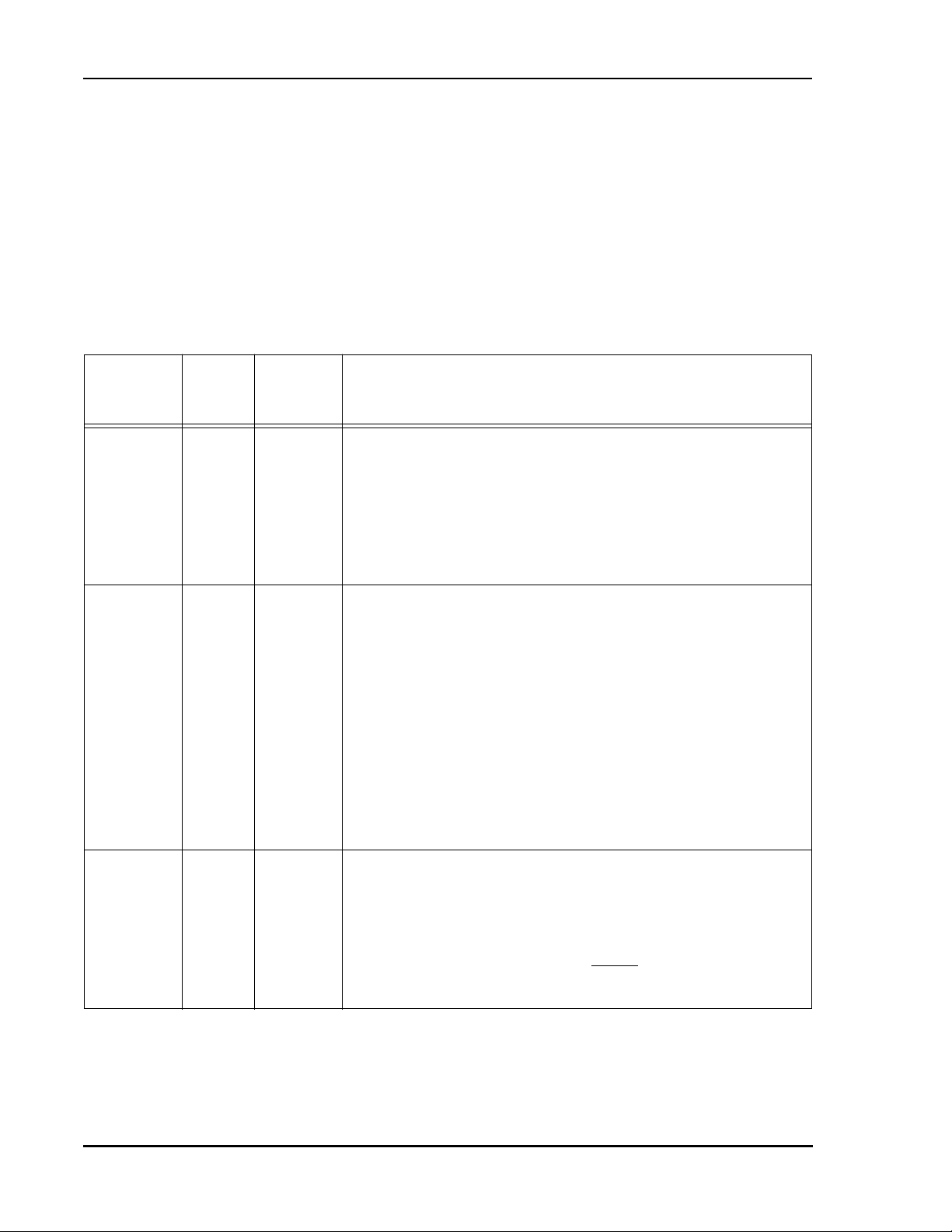
Table 1 Memory Configuration (Word width is 24 bits)
Mode Program X Data Y Data
PE ROM RAM ROM RAM ROM RAM
0 6400 None 512 1024 512 2176 52
1 5120 1024 512 1024 512 1152 52
Bootstrap
ROM
MOTOROLA DSP56007/D iii

×
×
×
×
DSP56007
Features
Peripheral and Support Circuits
• Serial Audio Interface (SAI) includes two receivers and three transmitters,
master or slave capability, implementation of I
protocols; and two sets of SAI interrupt vectors
• Serial Host Interface (SHI) features single master capability, 10-word receive
FIFO, and support for 8-, 16-, and 24-bit words
• External Memory Interface (EMI), implemented as a peripheral supporting:
– Page-mode DRAMs (one or two chips): 64 K
and 4 M
– SRAMs (one to four): 256 K
– Data bus may be 4 or 8 bits wide
– Data words may be 8, 12, 16, 20, or 24 bits wide
• Four dedicated, independent, programmable General Purpose Input/Output
(GPIO) lines
• On-chip peripheral registers memory mapped in data memory space
• Three external interrupt request pins
• On-Chip Emulation (OnCE) port for unobtrusive, processor speedindependent debugging
4 bits
8 bits
2
S, Sony, and Matsushita audio
4, 256 K × 4,
• Software-programmable, Phase Lock Loop-based (PLL) frequency synthesizer
for the core clock
• Power-saving Wait and Stop modes
• Fully static, HCMOS design for operating frequencies down to DC
• 80-pin plastic Quad Flat Pack surface-mount package; 14
(2.15–2.45 mm range); 0.65 mm lead pitch
• Complete pinout compatibility between DSP56009, DSP56004,
DSP56004ROM, and DSP56007 for easy upgrades
• 5 V power supply
14 × 2.20 mm
iv DSP56007/D MOTOROLA
Product Documentation
PRODUCT DOCUMENTATION
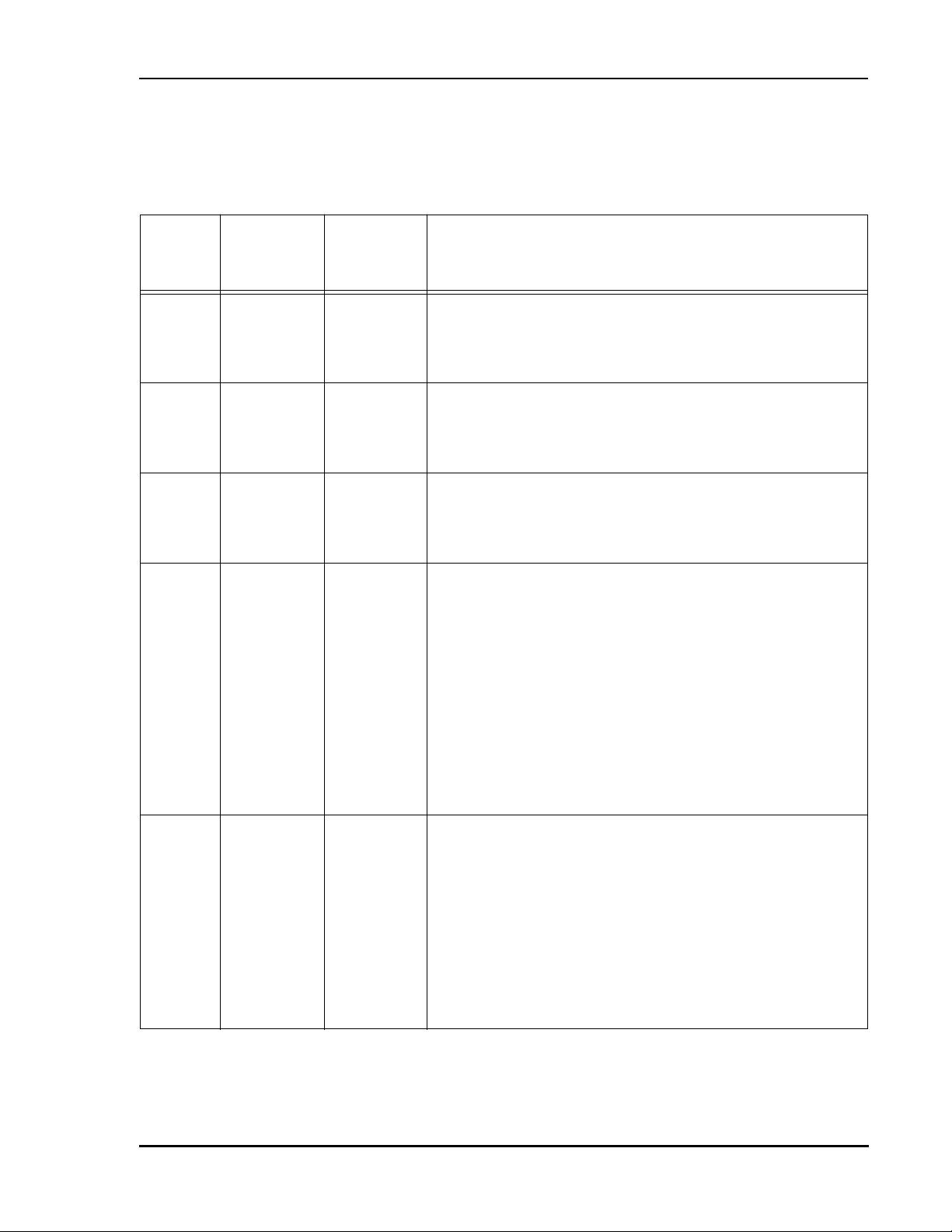
Table 2 lists the documents that provide a complete description of the DSP56007 and
are required to design properly with the part. Documentation is available from a local
Motorola distributor, a Motorola semiconductor sales office, a Motorola Literature
Distribution Center, or through the Motorola DSP home page on the Internet (the
source for the latest information).
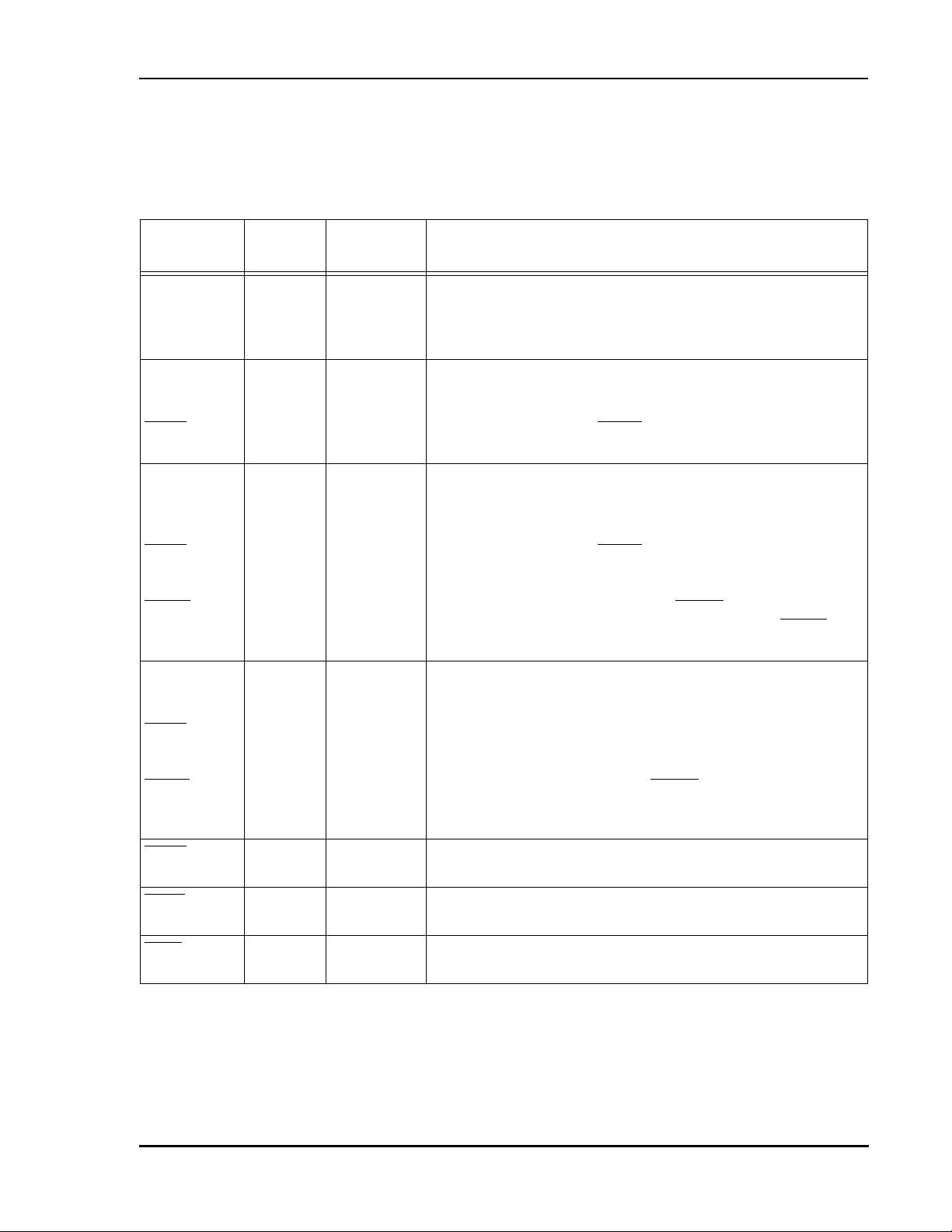
Table 2 DSP56007 Documentation
Document Name Description of Content Order Number
DSP56007
DSP56000 Family
Manual
DSP56007 User’s
Manual
DSP56007 Technical
Data
DSP56000 core family architecture and the 24-bit
core processor and instruction set
Memory, peripherals, and interfaces DSP56007UM/AD
Electrical and timing specifications,
and pin and package descriptions
DSP56KFAMUM/AD
DSP56007/D
MOTOROLA DSP56007/D v

DSP56007
Product Documentation
vi DSP56007/D MOTOROLA

SECTION 1
SIGNAL/CONNECTION DESCRIPTIONS
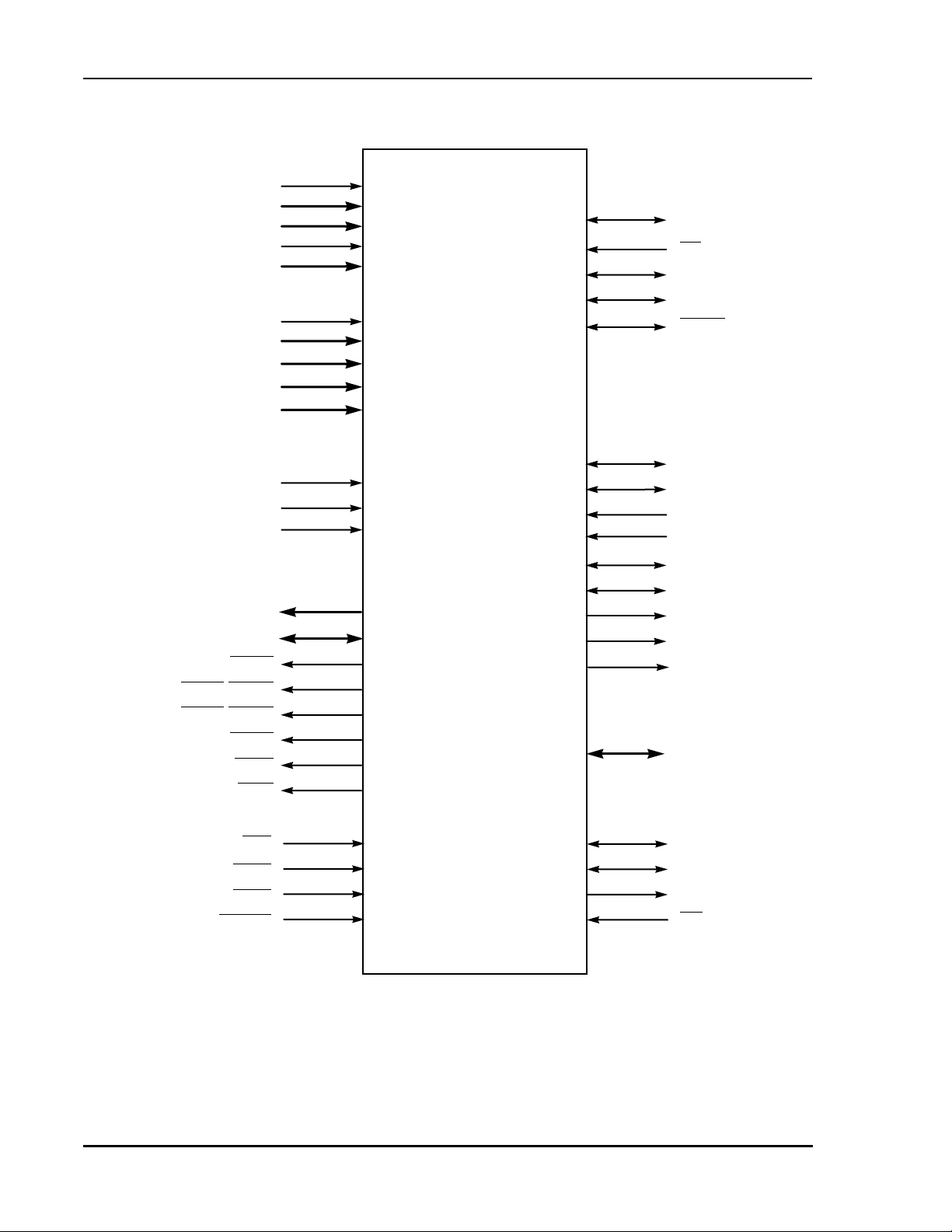
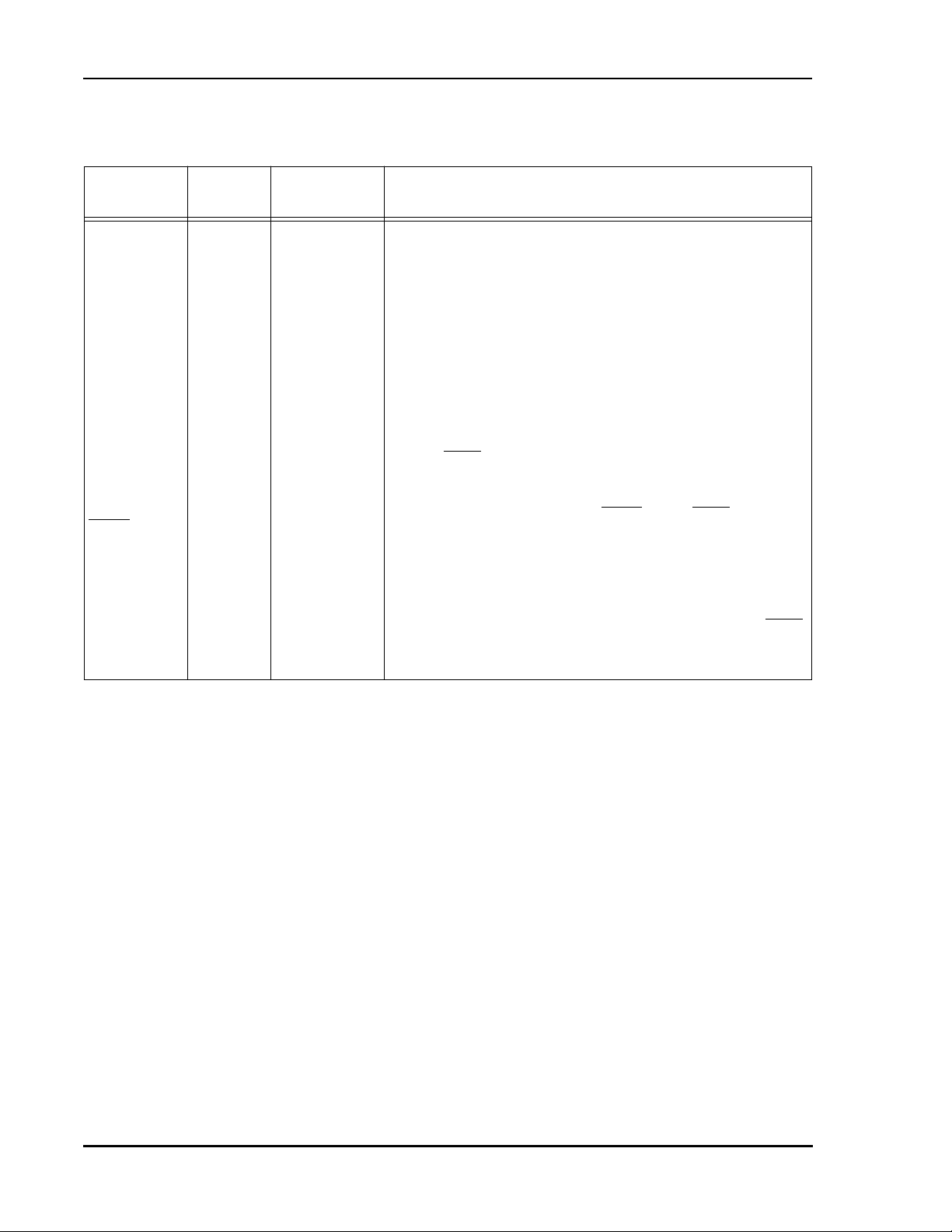
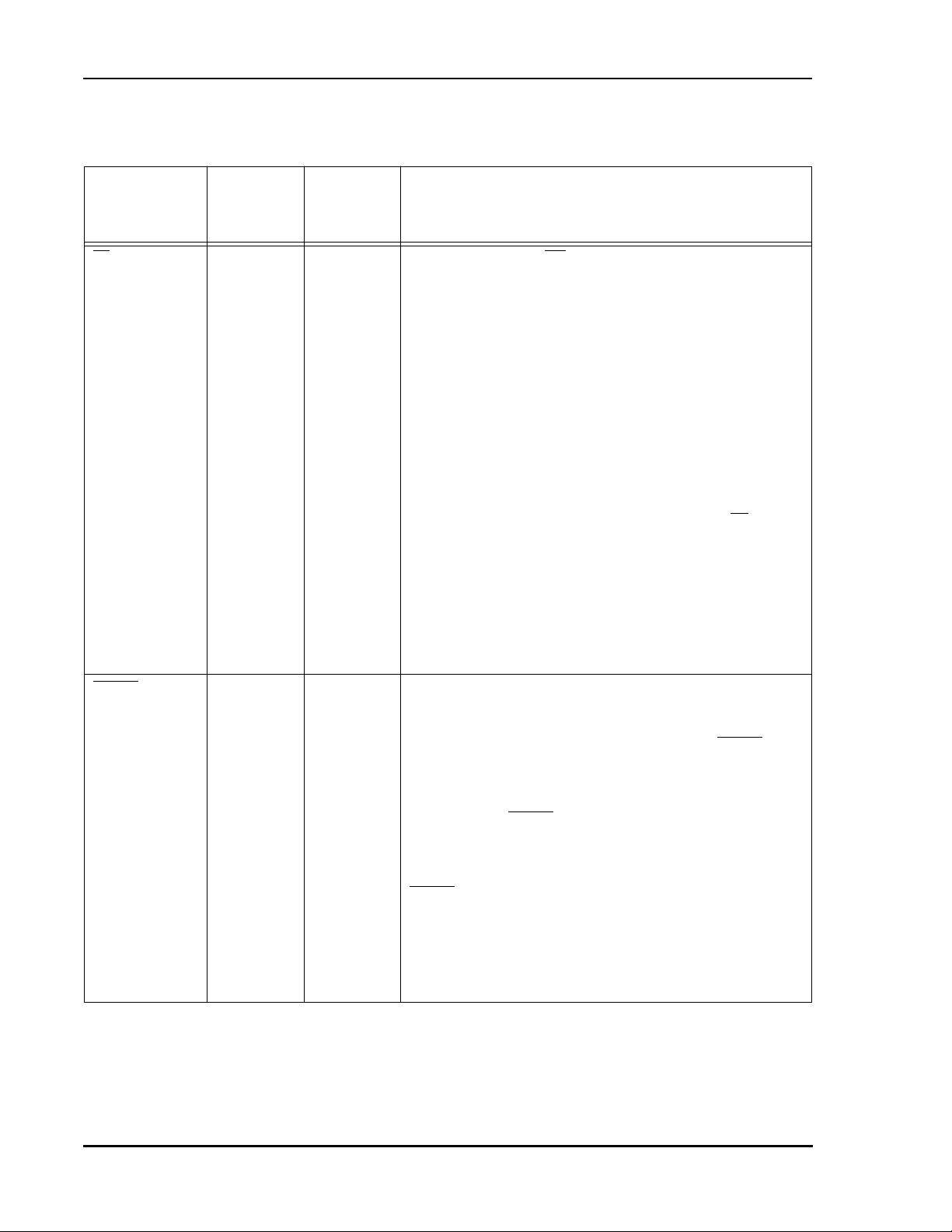
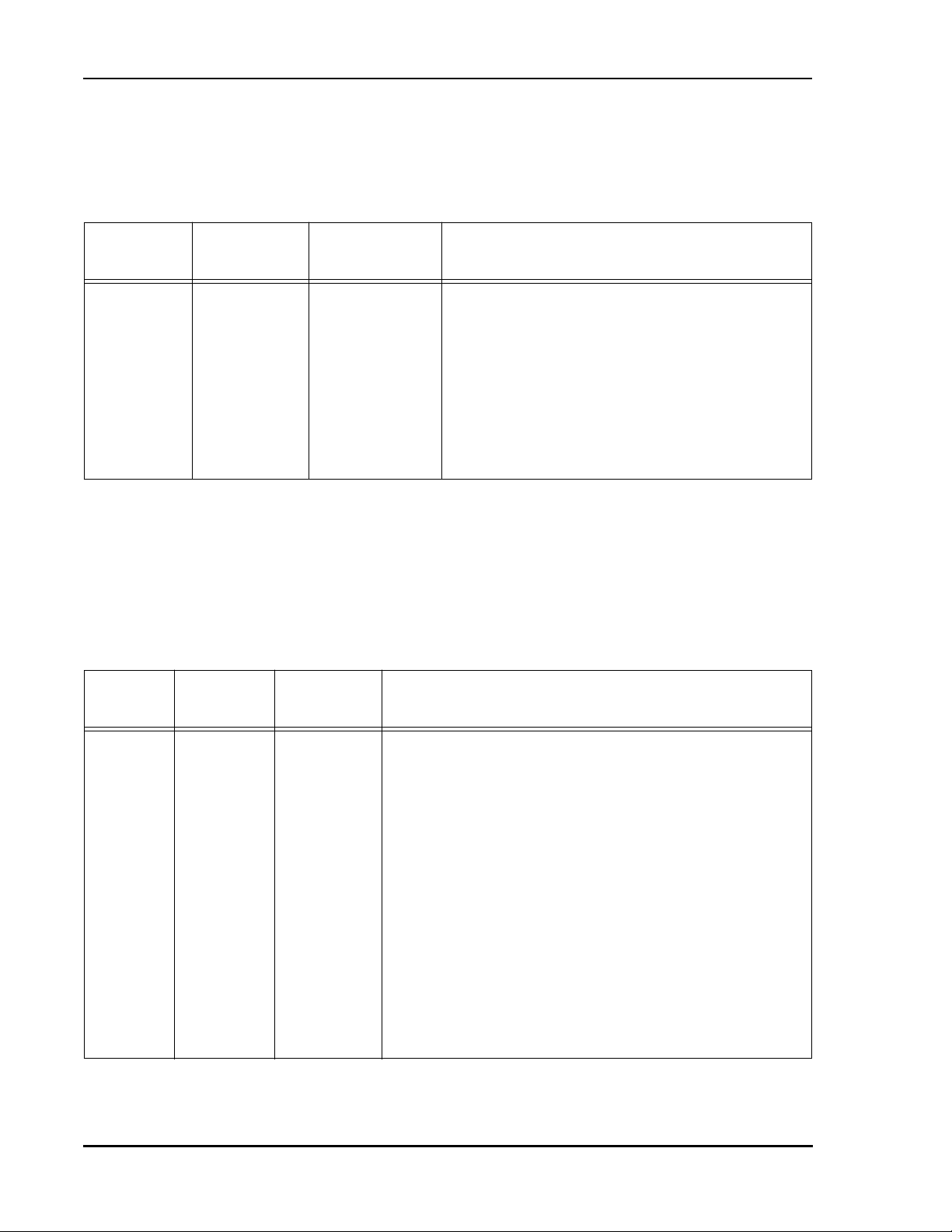
SIGNAL GROUPINGS
The DSP56007 input and output signals are organized into the nine functional
groups, as shown in
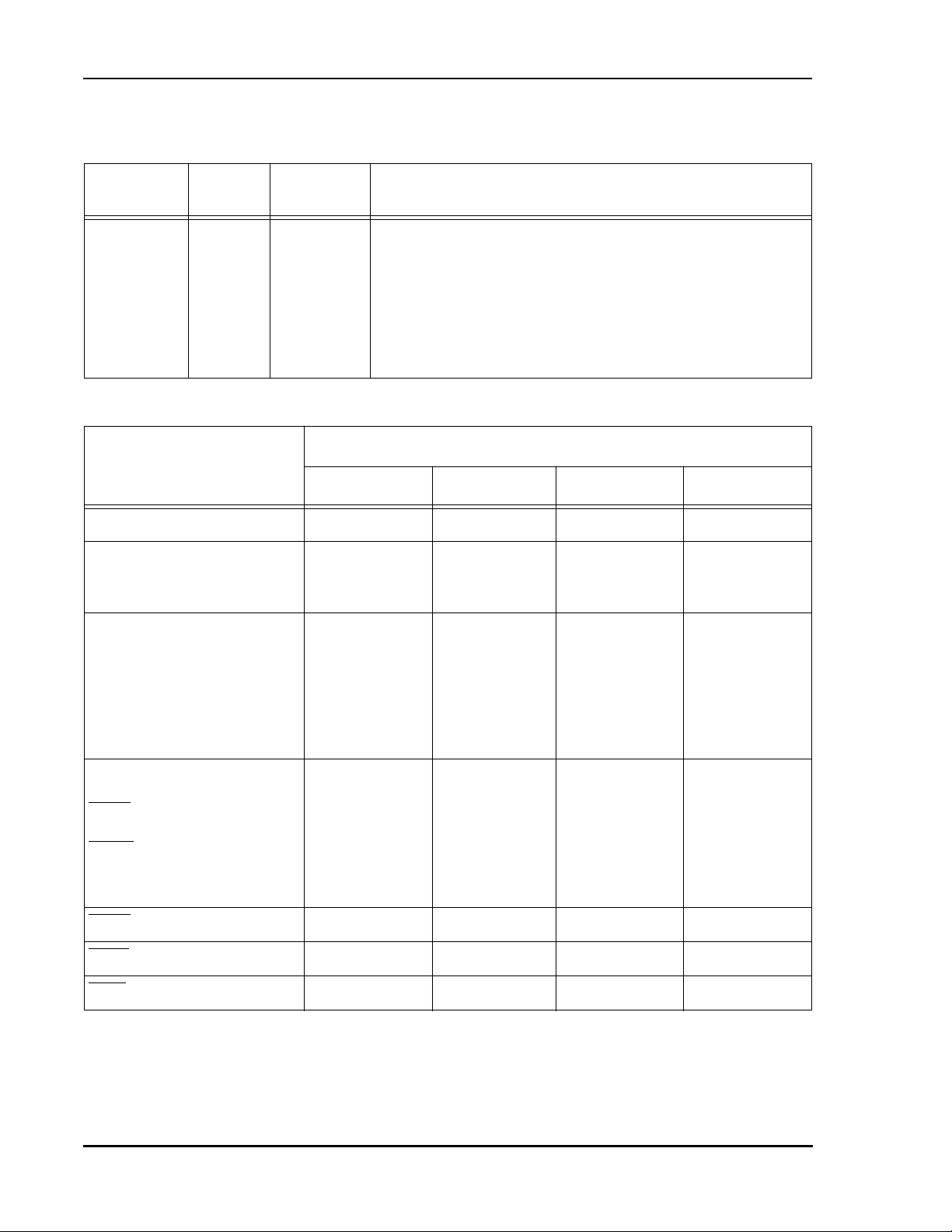
Table 1-1 DSP56007 Functional Group Signal Allocations
Functional Group Number of Signals Detailed Description
Table 1-1 . The individual signals are illustrated in Figure 1-1 .
Power (V
Ground (GND) 13
Phase Lock Loop (PLL) 3
External Memory Interface (EMI) 29
Interrupt and Mode Control 4
Serial Host Interface (SHI) 5
Serial Audio Interface (SAI) 9
General Purpose Input/Output (GPIO) 4
On-Chip Emulation (OnCE) port 4
)9
CC
Total 80
Table 1-2
Table 1-3
Table 1-4
Table 1-5
Table 1-6
Table 1-7
Table 1-8
Table 1-9
Table 1-10
Table 1-11
Table 1-12
and
and
MOTOROLA DSP56007/D 1-1
Signal/Connection Descriptions
Signal Groupings
Power Inputs
V
CCP
V
CCQ
V
CCA
V
CCD
V
CCS
Ground
GND
GND
GND
GND
GND
PCAP
PINIT
EXTAL
MA0–MA14
MD0–MD7
MA15/MCS3
MA16/MCS2/MCAS
MA17/MCS1/MRAS
MCS0
MWR
MRD
DSP56007
3
2
2
Port B
Serial Host
Interface
P
3
Q
4
A
2
D
3
S
Port C
MOSI/HA0
SS/HA2
MISO/SDA
SCK/SCL
HREQ
Serial Audio
Interface
WSR
SCKR
PLL
Rec0
Rec1
SDI0
SDI1
WST
15
8
Tran0
Tran1
Tran2
SCKT
SDO0
SDO1
SDO2
Port A
External Memory
Interface
GPIO
4
GPIO0–GPIO3
MODC/NMI
MODB/IRQB
MODA/IRQA
RESET
Mode/Interrupt
Control
Reset
80 signals
OnCE™
Port
DSCK/OS1
DSI/OS0
DSO
DR
AA0249G
Figure 1-1 DSP56007 SIgnals
1-2 DSP56007/D MOTOROLA
POWER
Table 1-2 Power Inputs
Power Name Description
Signal/Connection Descriptions
Power
V
CCP
V
CCQ
V
CCA
V
CCD
V
CCS
GROUND
PLL Power —V
provides isolated power for the Phase Lock Loop (PLL). The
CCP
voltage should be well-regulated and the input should be provided with an
extremely low impedance path to the V
Quiet Power —V
provides isolated power for the internal processing logic. This
CCQ
power rail.
CC
input must be tied externally to all other chip power inputs. The user must provide
adequate external decoupling capacitors.
Address Bus Power —V
provides isolated power for sections of the address bus
CCA
I/O drivers. This input must be tied externally to all other chip power inputs. The
user must provide adequate external decoupling capacitors.
Data Bus Power —V
provides isolated power for sections of the data bus I/O
CCD
drivers. This input must be tied externally to all other chip power inputs. The user
must provide adequate external decoupling capacitors.
Serial Interface Power—V
provides isolated power for the SHI and SAI. This
CCS
input must be tied externally to all other chip power inputs. The user must provide
adequate external decoupling capacitors.
Table 1-3 Grounds
Ground Name Description
GND
P
PLL Ground—GNDP is ground dedicated for PLL use. The connection should be
provided with an extremely low-impedance path to ground. V
should be
CCP
bypassed to GNDP by a 0.47 µF capacitor located as close as possible to the chip
package.
GND
Q
Quiet Ground—GNDQ provides isolated ground for the internal processing logic.
This connection must be tied externally to all other chip ground connections. The
user must provide adequate external decoupling capacitors.
GND
A
Address Bus Ground—GNDA provides isolated ground for sections of the address
bus I/O drivers. This connection must be tied externally to all other chip ground
connections. The user must provide adequate external decoupling capacitors.
GND
D
Data Bus Ground—GNDD provides isolated ground for sections of the data bus I/O
drivers. This connection must be tied externally to all other chip ground
connections. The user must provide adequate external decoupling capacitors.
GND
S
Serial Interface Ground—GNDS provides isolated ground for the SHI and SAI. This
connection must be tied externally to all other chip ground connections. The user
must provide adequate external decoupling capacitors.
MOTOROLA DSP56007/D 1-3
Signal/Connection Descriptions
Clock and PLL signals
CLOCK AND PLL SIGNALS
Note: While the PLL on this DSP is identical to the PLL described in the
Family Manual
, two of the signals have not been implemented externally.
DSP56000
Specifically, there is no PLOCK signal or CKOUT signal available. Therefore,
the internal clock is not directly accessible and there is no external indication
that the PLL is locked. These signals were omitted to reduce the number of
pins and allow this DSP to be put in a smaller, less expensive package.
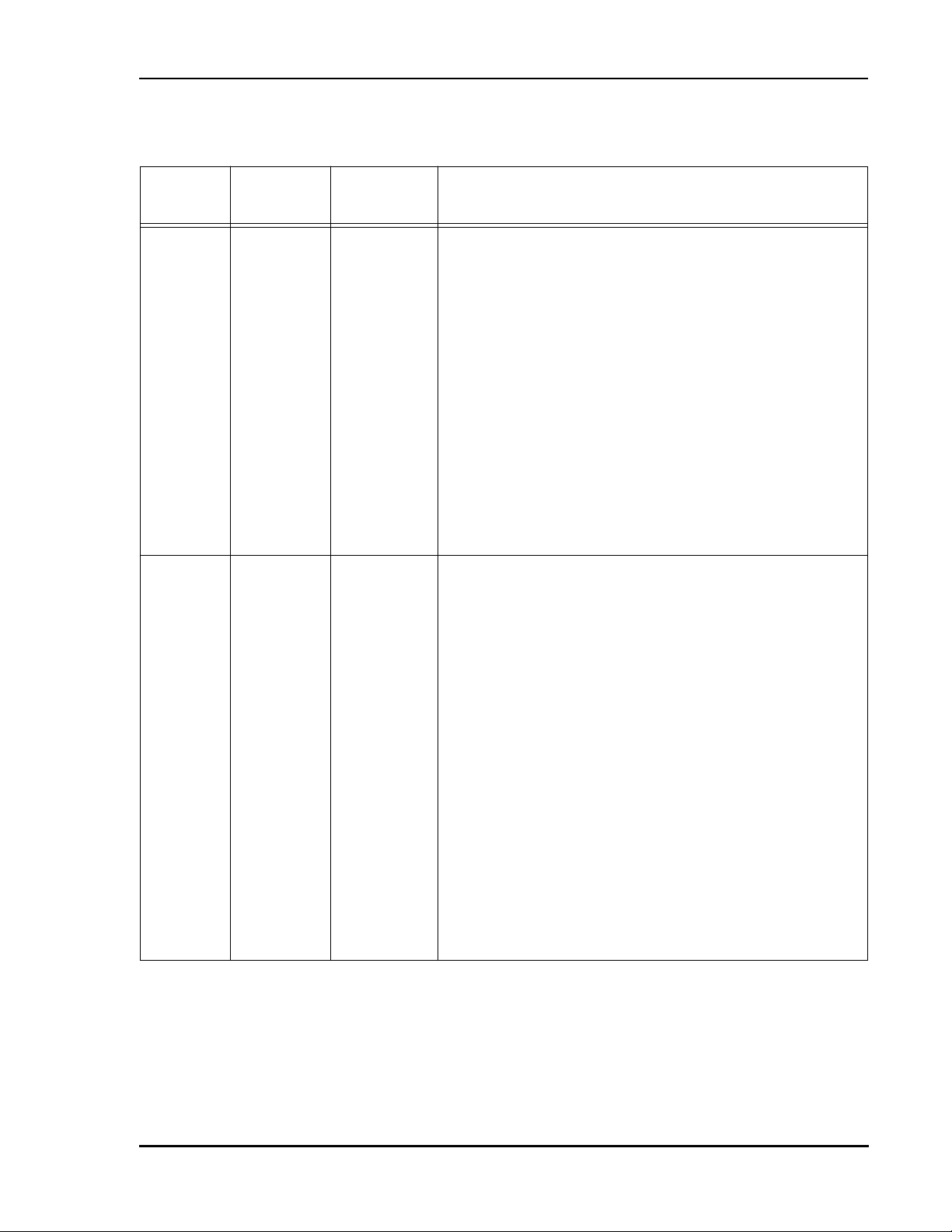
Table 1-4 Clock and PLL Signals
Signal
Name
EXTAL Input Input External Clock/Crystal—This input should be connected to an
PCAP Input Input PLL Filter Capacitor—This input is used to connect a high-
Signal
Type
State
during
Reset
Signal Description
external clock source. If the PLL is enabled, this signal is
internally connected to the on-chip PLL. The PLL can multiply
the frequency on the EXTAL pin to generate the internal DSP
clock. The PLL output is divided by two to produce a four-phase
instruction cycle clock, with the minimum instruction time being
two PLL output clock periods. If the PLL is disabled, EXTAL is
divided by two to produce the four-phase instruction cycle clock.
quality (high “Q” factor) external capacitor needed for the PLL
filter. The capacitor should be as close as possible to the DSP with
heavy, short traces connecting one terminal of the capacitor to
PCAP and the other terminal to V
value is specified in Table 2-6 on page 2-6.
. The required capacitor
CCP
Note: When short lock time is critical, low dielectric absorption
capacitors such as polystyrene, polypropylene, or teflon are
recommended.
If the PLL is not used (i.e., it remains disabled at all times), there is
no need to connect a capacitor to the PCAP pin. It may remain
unconnected, or be tied to either Vcc or GND.
PINIT Input Input PLL Initialization (PINIT)—During the assertion of hardware
reset, the value on the PINIT line is written into the PEN bit of the
PCTL register. When set, the PEN bit enables the PLL by causing
it to derive the internal clocks from the PLL voltage controlled
oscillator output. When the bit is cleared, the PLL is disabled and
the DSP’s internal clocks are derived from the clock connected to
the EXTAL signal. After hardware RESET is deasserted, the
PINIT signal is ignored.
1-4 DSP56007/D MOTOROLA
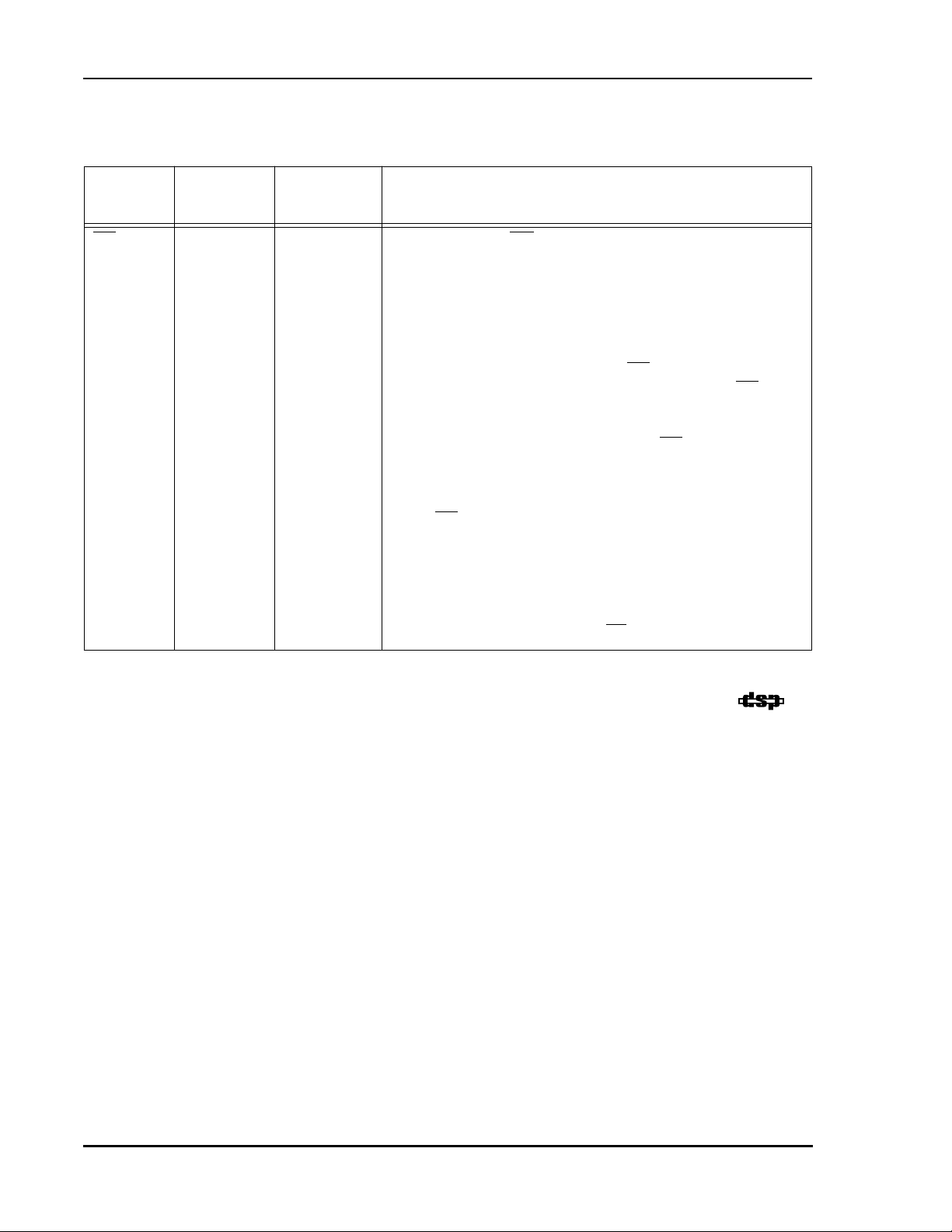
EXTERNAL MEMORY INTERFACE (EMI)
Table 1-5 External Memory Interface (EMI) Signals
Signal/Connection Descriptions
External Memory Interface (EMI)
Signal Name
MA0–MA14 Output Table 1-6 Memory Address Lines 0–14—The MA0–MA10 lines provide
MA15
MCS3
MA16
MCS2
MCAS
MA17
Signal
Type
Output Table 1-6 Memory Address Line 15 (MA15)—This line functions as the
Output Table 1-6 Memory Address Line 16 (MA16)—This line functions as the
Output Table 1-6 Memory Address Line 17 (MA17)—This line functions as the
State during
Reset
Signal Description
the multiplexed row/column addresses for DRAM accesses.
Lines MA0–MA14 provide the non-multiplexed address lines
0–14 for SRAM accesses.
non-multiplexed address line 15.
Memory Chip Select 3 (MCS3)—For SRAM accesses, this line
functions as memory chip select 3.
non-multiplexed address line 16 or as memory chip select 2 for
SRAM accesses.
Memory Chip Select 2 (MCS2)—For SRAM access, this line
functions as memory chip select 2.
Memory Column Address Strobe (MCAS)—This line
functions as the Memory Column Address Strobe (MCAS)
during DRAM accesses.
non-multiplexed address line 17.
MCS1
MRAS
MCS0 Output Table 1-6 Memory Chip Select 0—This line functions as memory chip
MWR Output Table 1-6 Memory Write Strobe—This line is asserted when writing to
MRD Output Table 1-6 Memory Read Strobe—This line is asserted when reading
Memory Chip Select 1 (MCS1)—This line functions as chip
select 1 for SRAM accesses.
Memory Row Address Strobe (MRAS)—This line also
functions as the Memory Row Address Strobe during DRAM
accesses.
select 0 for SRAM accesses.
external memory.
external memory.
MOTOROLA DSP56007/D 1-5
Signal/Connection Descriptions
External Memory Interface (EMI)
Table 1-5 External Memory Interface (EMI) Signals (Continued)
Signal Name
Signal
Type
MD0–MD7 Bidi-
rectional
State during
Reset
Signal Description
Tri-stated Data Bus—These signals provide the bidirectional data bus for
EMI accesses. They are inputs during reads from external
memory, outputs during writes to external memory, and tristated if no external access is taking place. If the data bus width
is defined as four bits wide, only signals MD0–MD3 are active,
while signals MD4–MD7 remain tri-stated. While tri-stated,
MD0–MD7 are disconnected from the pins and do not require
external pull-ups.
.
Table 1-6 EMI States during Reset and Stop States
Operating Mode
Signal
Hardware Reset Software Reset Individual Reset Stop Mode
MA0–MA14 Driven High Previous State Previous State Previous State
MA15
MCS3
MA16
Driven High
Driven High
Driven High
Driven High
Driven High
Driven High
Previous State
Driven High
Previous State
Previous State
Driven High
Previous State
MCS2
Driven High
Driven High
Driven High
Driven High
MCAS:
DRAM refresh disabled
DRAM refresh enabled
MA17
MCS1
Driven High
Driven High
Driven High
Driven High
Driven High
Driven High
Driven High
Driven High
Driven High
Driven Low
Previous State
Driven High
Driven High
Driven High
Previous State
Driven High
MRAS:
DRAM refresh disabled
DRAM refresh enabled
Driven High
Driven High
Driven High
Driven High
Driven High
Driven Low
Driven High
Driven High
MCS0 Driven High Driven High Driven High Driven High
MWR Driven High Driven High Driven High Driven High
MRD Driven High Driven High Driven High Driven High
1-6 DSP56007/D MOTOROLA
INTERRUPT AND MODE CONTROL
The interrupt and mode control signals select the DSP’s operating mode as it comes
out of hardware reset and receives interrupt requests from external sources after
reset.
Table 1-7 Interrupt and Mode Control Signals
Signal/Connection Descriptions
Interrupt and Mode Control
Signal Name
MODA
IRQA
Signal
Type
Input Input (MODA) Mode Select A—This input signal has three functions:
State during
Reset
Signal Description
• to work with the MODB and MODC signals to select
the DSP’s initial operating mode,
• to allow an external device to request a DSP
interrupt after internal synchronization, and
• to turn on the internal clock generator when the DSP
is in the Stop processing state, causing the DSP to
resume processing.
MODA is read and internally latched in the DSP when the
processor exits the Reset state. The logic state present on the
MODA, MODB, and MODC pins selects the initial DSP
operating mode. Several clock cycles after leaving the Reset
state, the MODA signal changes to the external interrupt
request IRQA. The DSP operating mode can be changed by
software after reset.
External Interrupt Request A (IRQA)—The IRQA input is a
synchronized external interrupt request. It may be
programmed to be level-sensitive or negative-edgetriggered. When the signal is edge-triggered, triggering
occurs at a voltage level and is not directly related to the fall
time of the interrupt signal. However, as the fall time of the
interrupt signal increases, the probability that noise on IRQA
will generate multiple interrupts also increases.
While the DSP is in the Stop mode, asserting IRQA gates on
the oscillator and, after a clock stabilization delay, enables
clocks to the processor and peripherals. Hardware reset
causes this input to function as MODA.
MOTOROLA DSP56007/D 1-7
Signal/Connection Descriptions
Interrupt and Mode Control
Table 1-7 Interrupt and Mode Control Signals (Continued)
Signal Name
MODB
IRQB
Signal
Type
Input Input (MODB) Mode Select B—This input signal has two functions:
State during
Reset
Signal Description
• to work with the MODA and MODC signals to select
the DSP’s initial operating mode, and
• to allow an external device to request a DSP
interrupt after internal synchronization.
MODB is read and internally latched in the DSP when the
processor exits the Reset state. The logic state present on the
MODA, MODB, and MODC pins selects the initial DSP
operating mode. Several clock cycles after leaving the Reset
state, the MODB signal changes to the external interrupt
request IRQB
software after reset.
External Interrupt Request B (IRQB)—The IRQB input is a
synchronized external interrupt request. It may be
programmed to be level-sensitive or negative-edgetriggered. When the signal is edge-triggered, triggering
occurs at a voltage level and is not directly related to the fall
time of the interrupt signal. However, as the fall time of the
interrupt signal increases, the probability that noise on IRQB
will generate multiple interrupts also increases. Hardware
reset causes this input to function as MODB.
. The DSP operating mode can be changed by
1-8 DSP56007/D MOTOROLA
Signal/Connection Descriptions
Interrupt and Mode Control
Table 1-7 Interrupt and Mode Control Signals (Continued)
Signal Name
MODC
NMI
Signal
Type
Input,
edge-
triggered
State during
Reset
Input (MODC) Mode Select C—This input signal has two functions:
• to work with the MODA and MODB signals to select
the DSP’s initial operating mode, and
• to allow an external device to request a DSP
interrupt after internal synchronization.
MODC is read and internally latched in the DSP when the
processor exits the Reset state. The logic state present on the
MODA, MODB, and MODC pins selects the initial DSP
operating mode. Several clock cycles after leaving the Reset
state, the MODC signal changes to the Non-Maskable
Interrupt request, NMI
changed by software after reset.
Non-Maskable Interrupt Request—The NMI input is a
negative-edge-triggered external interrupt request. This is a
level 3 interrupt that can not be masked out. Triggering
occurs at a voltage level and is not directly related to the fall
time of the interrupt signal. However, as the fall time of the
interrupt signal increases, the probability that noise on NMI
will generate multiple interrupts also increases. Hardware
reset causes this input to function as MODC.
Signal Description
. The DSP operating mode can be
RESET input active RESET—This input causes a direct hardware reset of the
processor. When RESET is asserted, the DSP is initialized and
placed in the Reset state. A Schmitt-trigger input is used for
noise immunity. When the reset signal is deasserted, the initial
DSP operating mode is latched from the MODA, MODB, and
MODC signals. The DSP also samples the PINIT signal and
writes its status into the PEN bit of the PLL Control Register.
When the DSP comes out of the Reset state, deassertion
occurs at a voltage level and is not directly related to the rise
time of the RESET signal. However, the probability that
noise on RESET will generate multiple resets increases with
increasing rise time of the RESET signal.
For proper hardware reset to occur, the clock must be active,
since a number of clock ticks are required for proper
propagation of the hardware Reset state.
MOTOROLA DSP56007/D 1-9
Signal/Connection Descriptions
Serial Host Interface (SHI)
SERIAL HOST INTERFACE (SHI)
Signal Name
SCK
SCL
The Serial Host Interface (SHI) has five I/O signals, which may be configured to
2
operate in either SPI or I
C mode. Table 1-8 lists the SHI signals.
Table 1-8 Serial Host Interface (SHI) signals
Signal
Type
Input or
Output
Input or
Output
State
during
Reset
Tri-stated SPI Serial Clock (SCK)—The SCK signal is an output
when the SPI is configured as a master, and a Schmitttrigger input when the SPI is configured as a slave. When
the SPI is configured as a master, the SCK signal is
derived from the internal SHI clock generator. When the
SPI is configured as a slave, the SCK signal is an input,
and the clock signal from the external master
synchronizes the data transfer. The SCK signal is ignored
by the SPI if it is defined as a slave and the Slave Select
(SS) signal is not asserted. In both the master and slave
SPI devices, data is shifted on one edge of the SCK signal
and is sampled on the opposite edge where data is stable.
Edge polarity is determined by the SPI transfer protocol.
I2C Serial Clock (SCL)—SCL carries the clock for bus
transactions in the I2C mode. SCL is a Schmitt-trigger
input when configured as a slave, and an open-drain
output when configured as a master. SCL should be
connected to VCC through a pull-up resistor. The
maximum allowed internally generated bit clock
frequency is
I2C mode where F
maximum allowed externally generated bit clock
frequency is
I2C mode. This signal is tri-stated during hardware reset,
software reset, or individual reset (no need for external
pull-up in this state).
Signal Description
Fosc
/4 for the SPI mode and
is the clock on EXTAL. The
osc
Fosc
/3 for the SPI mode and
Fosc
/6 for the
Fosc
/5 for the
1-10 DSP56007/D MOTOROLA
Signal/Connection Descriptions
Serial Host Interface (SHI)
Table 1-8 Serial Host Interface (SHI) signals (Continued)
Signal Name
MISO
SDA
Signal
Type
Input or
Output
Input or
Output
State
during
Signal Description
Reset
Tri-stated SPI Master-In-Slave-Out (MISO)—When the SPI is
configured as a master, MISO is the master data input
line. The MISO signal is used in conjunction with the
MOSI signal for transmitting and receiving serial data.
This signal is a Schmitt-trigger input when configured
for the SPI Master mode, an output when configured for
the SPI Slave mode, and tri-stated if configured for the
SPI Slave mode when SS
is deasserted.
I2C Serial Data and Acknowledge (SDA)—In I2C mode,
SDA is a Schmitt-trigger input when receiving and an
open-drain output when transmitting. SDA should be
connected to VCC through a pull-up resistor. SDA carries
the data for I2C transactions. The data in SDA must be
stable during the high period of SCL. The data in SDA is
only allowed to change when SCL is low. When the bus
is free, SDA is high. The SDA line is only allowed to
change during the time SCL is high in the case of Start
and Stop events. A high-to-low transition of the SDA line
while SCL is high is an unique situation, and is defined
as the Start event. A low-to-high transition of SDA while
SCL is high is an unique situation, and is defined as the
Stop event.
MOSI
HA0
Input or
Output
Input
Note: This line is tri-stated during hardware reset, software
reset, or individual reset (no need for external pull-up
in this state).
Tri-stated SPI Master-Out-Slave-In (MOSI)—When the SPI is
configured as a master, MOSI is the master data output
line. The MOSI signal is used in conjunction with the
MISO signal for transmitting and receiving serial data.
MOSI is the slave data input line when the SPI is
configured as a slave. This signal is a Schmitt-trigger
input when configured for the SPI Slave mode.
I2C Slave Address 0 (HA0)—This signal uses a Schmitttrigger input when configured for the I2C mode. When
configured for I2C Slave mode, the HA0 signal is used to
form the slave device address. HA0 is ignored when the
SHI is configured for the I2C Master mode.
Note: This signal is tri-stated during hardware reset,
software reset, or individual reset (no need for
external pull-up in this state).
MOTOROLA DSP56007/D 1-11
Signal/Connection Descriptions
Serial Host Interface (SHI)
Table 1-8 Serial Host Interface (SHI) signals (Continued)
Signal Name
SS
HA2
Signal
Type
Input
Input
State
during
Reset
Tri-stated
Signal Description
SPI Slave Select (SS)—This signal is an active low
Schmitt-trigger input when configured for the SPI
mode. When configured for the SPI Slave mode, this
signal is used to enable the SPI slave for transfer.
When configured for the SPI Master mode, this
signal should be kept deasserted. If it is asserted
while configured as SPI master, a bus error
condition will be flagged.
2
C Slave Address 2 (HA2)—This signal uses a
I
Schmitt-trigger input when configured for the I
2
mode. When configured for the I
C Slave mode, the
2
C
HA2 signal is used to form the slave device address.
2
HA2 is ignored in the I
C Master mode. If SS is
deasserted, the SHI ignores SCK clocks and keeps
the MISO output signal in the high-impedance
state.
Note: This signal is tri-stated during hardware reset,
software reset, or individual reset (no need for
external pull-up in this state).
HREQ Input or
Output
Tri-stated Host Request—This signal is an active low Schmitt-
trigger input when configured for the Master mode, but
an active low output when configured for the Slave
mode. When configured for the Slave mode, HREQ is
asserted to indicate that the SHI is ready for the next data
word transfer and deasserted at the first clock pulse of
the new data word transfer. When configured for the
Master mode, HREQ is an input and when asserted by
the external slave device, it will trigger the start of the
data word transfer by the master. After finishing the data
word transfer, the master will await the next assertion of
HREQ to proceed to the next transfer.
Note: This signal is tri-stated during hardware, software,
individual reset, or when the HREQ[1:0] bits (in the
HCSR) are cleared (no need for external pull-up in this
state).
1-12 DSP56007/D MOTOROLA
SERIAL AUDIO INTERFACE (SAI)
The SAI is composed of separate receiver and transmitter sections.
SAI Receiver Section
Table 1-9 Serial Audio Interface (SAI) Receiver signals
Signal/Connection Descriptions
Serial Audio Interface (SAI)
Signal
Name
SDI0 Input Tri-stated Serial Data Input 0—While in the high impedance
SDI1 Input Tri-stated Serial Data Input 1—While in the high impedance
SCKR Input or
Signal
Type
Output
State during
Reset
state, the internal input buffer is disconnected from
the pin and no external pull-up is necessary. SDI0 is
the serial data input for receiver 0.
Note: This signal is high impedance during hardware or
software reset, while receiver 0 is disabled
(R0EN = 0), or while the DSP is in the Stop state.
state, the internal input buffer is disconnected from
the pin and no external pull-up is necessary. SDI1 is
the serial data input for receiver 1.
Note: This signal is high impedance during hardware or
software reset, while receiver 1 is disabled
(R1EN = 0), or while the DSP is in the Stop state.
Tri-stated Receive Serial Clock—SCKR is an output if the
receiver section is programmed as a master, and a
Schmitt-trigger input if programmed as a slave. While
in the high impedance state, the internal input buffer
is disconnected from the pin and no external pull-up is
necessary.
Signal Description
Note: SCKR is high impedance if all receivers are
disabled (individual reset) and during hardware or
software reset, or while the DSP is in the Stop state.
MOTOROLA DSP56007/D 1-13
Signal/Connection Descriptions
Serial Audio Interface (SAI)
Table 1-9 Serial Audio Interface (SAI) Receiver signals (Continued)
Signal
Name
Signal
Type
WSR Input or
Output
State during
Reset
Signal Description
Tri-stated Word Select Receive (WSR)—WSR is an output if the
receiver section is configured as a master, and a
Schmitt-trigger input if configured as a slave. WSR is
used to synchronize the data word and to select the
left/right portion of the data sample.
Note: WSR is high impedance if all receivers are disabled
(individual reset), during hardware reset, during
software reset, or while the DSP is in the Stop state.
While in the high impedance state, the internal
input buffer is disconnected from the signal and no
external pull-up is necessary.
1-14 DSP56007/D MOTOROLA
SAI Transmitter Section
Table 1-10 Serial Audio Interface (SAI) Transmitter signals
Signal/Connection Descriptions
Serial Audio Interface (SAI)
Signal
Name
Signal
Type
State
during
Reset
SDO0 Output Driven
High
SDO1 Output Driven
High
SDO2 Output Driven
High
SCKT Input or
Tri-stated Serial Clock Transmit (SCKT)—This signal provides the
Output
Signal Description
Serial Data Output 0 (SDO0)—SDO0 is the serial output for
transmitter 0. SDO0 is driven high if transmitter 0 is disabled,
during individual reset, hardware reset, and software reset,
or when the DSP is in the Stop state.
Serial Data Output 1 (SDO1)—SDO1 is the serial output for
transmitter 1. SDO1 is driven high if transmitter 1 is disabled,
during individual reset, hardware reset and software reset, or
when the DSP is in the Stop state.
Serial Data Output 2 (SDO2)—SDO2 is the serial output for
transmitter 2. SDO2 is driven high if transmitter 2 is disabled,
during individual reset, hardware reset and software reset, or
when the DSP is in the Stop state.
clock for the SAI. SCKT can be an output if the transmit
section is configured as a master, or a Schmitt-trigger input if
the transmit section is configured as a slave. When the SCKT
is an output, it provides an internally generated SAI transmit
clock to external circuitry. When the SCKT is an input, it
allows external circuitry to clock data out of the SAI.
Note: SCKT is high impedance if all transmitters are disabled
(individual reset), during hardware reset, software reset, or
while the DSP is in the Stop state. While in the high
impedance state, the internal input buffer is disconnected
from the pin and no external pull-up is necessary.
WST Input or
Output
Tri-stated Word Select Transmit (WST)—WST is an output if the
transmit section is programmed as a master, and a Schmitttrigger input if it is programmed as a slave. WST is used to
synchronize the data word and select the left/right portion of
the data sample.
Note: WST is high impedance if all transmitters are disabled
(individual reset), during hardware or software reset, or
while the DSP is in the Stop state. While in the high
impedance state, the internal input buffer is disconnected
from the pin and no external pull-up is necessary.
MOTOROLA DSP56007/D 1-15
Signal/Connection Descriptions
General Purpose I/O
GENERAL PURPOSE I/O
Table 1-11 General Purpose I/O (GPIO) Signals
Signal
Name
GPIO0–
GPIO3
Signal
Type
Standard
Output,
Open-drain
Output, or
Input
State during
Reset
Disconnected GPIO lines can be used for control and handshake
ON-CHIP EMULATION (OnCE
There are four signals associated with the OnCE port controller and its serial
interface.
Table 1-12 On-Chip Emulation Port Signals
Signal
Name
Signal
Type
State during
Reset
TM
) PORT
Signal Description
functions between the DSP and external circuitry.
Each GPIO line can be configured individually as
disconnected, open-drain output, standard output,
or an input.
Note: Hardware reset or software reset configures all
the GPIO lines as disconnected (external
circuitry connected to these pins may need pullups until the pins are configured for operation).
Signal Description
DSI
OS0
Input
Output
Output,
Driven Low
Debug Serial Input (DSI)—The DSI signal is the signal
through which serial data or commands are provided to the
OnCE port controller. The data received on the DSI signal
will be recognized only when the DSP has entered the
Debug mode of operation. Data must have valid TTL logic
levels before the serial clock falling edge. Data is always
shifted into the OnCE port Most Significant Bit (MSB) first.
Operating Status 0 (OS0)—When the DSP is not in the Debug
mode, the OS0 signal provides information about the DSP
status if it is an output and used in conjunction with the OS1
signal. When switching from output to input, the signal is
tri-stated.
Note: If the OnCE port is in use, an external pull-down resistor
should be attached to the DSI/OS0 signal. If the OnCE
port is not in use, the resistor is not required.
1-16 DSP56007/D MOTOROLA
Signal/Connection Descriptions
On-Chip Emulation (OnCETM) Port
Table 1-12 On-Chip Emulation Port Signals (Continued)
Signal
Name
DSCK
OS1
DSO Output Driven High Debug Serial Output (DSO)—The DSO line provides the
Signal
Type
Input
Output
State during
Reset
Output,
Driven Low
Debug Serial Clock (DSCK)—The DSCK/OS1 signal,
when an input, is the signal through which the serial clock
is supplied to the OnCE port. The serial clock provides
pulses required to shift data into and out of the OnCE port.
Data is clocked into the OnCE port on the falling edge and
is clocked out of the OnCE port on the rising edge.
Operating Status 1 (OS1)—If the OS1 signal is an output
and used in conjunction with the OS0 signal, it provides
information about the DSP status when the DSP is not in the
Debug mode. The debug serial clock frequency must be no
greater than 1/8 of the processor clock frequency. The
signal is tri-stated when it is changing from input to output.
Note: If the OnCE port is in use, an external pull-down resistor
data contained in one of the OnCE port controller registers
as specified by the last command received from the
command controller. The Most Significant Bit (MSB) of the
data word is always shifted out of the OnCE port first. Data
is clocked out of the OnCE port on the rising edge of DSCK.
Signal Description
should be attached to the DSCK/OS1 pin. If the OnCE
port is not in use, the resistor is not required.
The DSO line also provides acknowledge pulses to the
external command controller. When the DSP enters the
Debug mode, the DSO line will be pulsed low to indicate
that the OnCE port is waiting for commands. After
receiving a read command, the DSO line will be pulsed low
to indicate that the requested data is available and the
OnCE port is ready to receive clock pulses in order to
deliver the data. After receiving a write command, the DSO
line will be pulsed low to indicate that the OnCE port is
ready to receive the data to be written; after the data is
written, another acknowledge pulse will be provided.
Note: During hardware reset and when idle, the DSO line is
held high.
MOTOROLA DSP56007/D 1-17
Signal/Connection Descriptions
On-Chip Emulation (OnCETM) Port
Table 1-12 On-Chip Emulation Port Signals (Continued)
Signal
Name
DR Input Input Debug Request (DR)—The debug request input provides a
Signal
Type
State during
Reset
Signal Description
means of entering the Debug mode of operation. This signal,
when asserted (pulled low), will cause the DSP to finish the
current instruction being executed, to save the instruction
pipeline information, to enter the Debug mode, and to wait
for commands to be entered from the debug serial input line.
While the DSP is in the Debug mode, the user can reset the
OnCE port controller by asserting DR
acknowledge pulse on DSO, and then deasserting DR. It
may be necessary to reset the OnCE port controller in cases
where synchronization between the OnCE port controller
and external circuitry is lost. Asserting DR when the DSP is
in the Wait or the Stop mode, and keeping it asserted until
an acknowledge pulse in the DSP is produced, puts the DSP
into the Debug mode. After receiving the acknowledge
pulse, DR must be deasserted before sending the first OnCE
port command. For more information, see Methods Of
Entering The Debug Mode in the
Manual
Note: If the OnCE port is not in use, an external pull-up resistor
.
should be attached to the DR
, waiting for an
DSP56000 Family
line.
1-18 DSP56007/D MOTOROLA
SECTION 2
SPECIFICATIONS
INTRODUCTION
The DSP56007 is fabricated in high density CMOS with Transistor-Transistor Logic
(TTL) compatible inputs and outputs.
MAXIMUM RATINGS
This device contains circuitry protecting
against damage due to high static voltage or
electrical fields; however, normal precautions
should be taken to avoid exceeding maximum
voltage ratings. Reliability is enhanced if
unused inputs are tied to an appropriate logic
voltage level (e.g., either GND or V
Note: In the calculation of timing requirements, adding a maximum value of one
specification to a minimum value of another specification does not yield a
reasonable sum. A maximum specification is calculated using a worst case
variation of process parameter values in one direction. The minimum
specification is calculated using the worst case for the same parameters in the
opposite direction. Therefore, a “maximum” value for a specification will
never occur in the same device that has a “minimum” value for another
specification; adding a maximum to a minimum represents a condition that
can never exist.
CAUTION
CC
).
MOTOROLA DSP56007/D 2-1

Specifications
Thermal characteristics
Table 2-1 Maximum Ratings (GND = 0 V
Rating Symbol Value Unit
Supply Voltage V
All Input Voltages V
Current Drain per Pin excluding V
and GND I 10 mA
CC
Operating Temperature Range:
• 50 and 66 MHz
• 88 MHz
Storage Temperature T
THERMAL CHARACTERISTICS
Table 2-2 Thermal Characteristics
Characteristic Symbol QFP Value
Junction-to-ambient thermal resistance
Junction-to-case thermal resistance
1
R
or
JA
θ
2
R
or
JC
θ
)
dc
CC
IN
T
J
STG
θ
JA
θ
JC
(GND – 0.25) to (V
61.5 37
11.8 —
–0.3 to +7.0 V
+ 0.25) V
CC
–40 to +125
–40 to +110
–55 to +125
3
QFP Value
4
Unit
˚
C/W
˚
C/W
° C
° C
° C
Thermal characterization parameter
Notes: 1. Junction-to-ambient thermal resistance is based on measurements on a horizontal-single-sided
Printed Circuit Board per SEMI G38-87 in natural convection.(SEMI is Semiconductor Equipment
and Materials International, 805 East Middlefield Rd., Mountain View, CA 94043, (415) 964-5111)
2. Junction-to-case thermal resistance is based on measurements using a cold plate per SEMI G3088, with the exception that the cold plate temperature is used for the case temperature.
3. These are measured values. See note 1 for test board conditions.
4. These are measured values; testing is not complete. Values were measured on a non-standard
four-layer thermal test board (two internal planes) at one watt in a horizontal configuration.
Ψ
JT
2.7 —
˚
C/W
2-2 DSP56007/D MOTOROLA

×
×
×
×
×
×
DC ELECTRICAL CHARACTERISTICS
Table 2-3 DC Electrical Characteristics
50 MHz 66 MHz 88 MHz
Characteristics Symbol
Min Typ Max Min Typ Max Min Typ Max
Specifications
DC Electrical Characteristics
Unit
Supply voltage V
Input high voltage
• EXTAL
• RESET
• MODA, MODB,
V
V
V
MODC
• SHI inputs
1
V
• All other inputs
Input low voltage
• EXTAL
• MODA, MODB,
MODC
• SHI inputs
1
V
V
• All other inputs
Input leakage current
• EXTAL, RESET,
MODA, MODB,
MODC, DR
• Other Input Pins
(@ 2.4 V/0.4 V)
High impedance (off-state)
input current (@ 2.4 V / 0.4 V)
IHM
V
V
V
I
I
CC
IHC
IHR
IHS
IH
ILC
ILM
ILS
IL
IN
TSI
4.75 5.0 5.25 4.75 5.0 5.25 4.75 5.0 5.25 V
—
—
—
—
—
—
—
—
V
V
V
V
V
0.3
4.0
2.5
3.5
0.7
V
CC
2.0
–0.5
–0.5
–0.5
V
–0.5
—
–1
–10——110
CC
CC
CC
CC
CC
0.4
2.0
CC
0.8
0.7
V
–0.5
–0.5
–0.5
–0.5
—
—
—
—
—
—
—
—
V
V
V
V
V
0.4
2.0
0.3
4.0
2.5
3.5
CC
2.0
V
—
0.8
–1
–10——110
4.0
CC
2.5
CC
3.5
CC
0.7
CC
V
2.0
CC
–0.5
–0.5
–0.5
CC
–0.5
–1
–10——110
CC
—
V
V
V
V
V
0.4
2.0
0.3
V
0.8
CC
CC
CC
CC
CC
CC
—
—
—
—
—
—
—
—
–10 — 10 –10 — 10 –10 — 10 µ A
V
V
V
V
V
V
V
V
V
µ A
µ A
Output high voltage
(I
= –0.4 mA)
OH
Output low voltage
(I
= 3.2 mA)
OL
SCK/SCL I
MISO/SDA I
HREQ I
OL
= 6.7 mA
OL
= 6.7 mA
OL
= 6.7 mA
V
OH
V
OL
2.4 — — 2.4 — — 2.4 — — V
— — 0.4 — — 0.4 — — 0.4 V
Internal Supply Current
• Normal mode
• Wait mode
• Stop mode
2
I
CCI
I
CCW
I
CCS
—
—
—
80
14
4
105
25
5
110
—
—
—
110
18
5
130
30
110
4
—
147
—
24
—
5
169
33
110
4
mA
mA
µ A
MOTOROLA DSP56007/D 2-3

Specifications
AC Electrical Characteristics
Table 2-3 DC Electrical Characteristics (Continued)
50 MHz 66 MHz 88 MHz
Characteristics Symbol
Min Typ Max Min Typ Max Min Typ Max
PLL supply current — 0.7 1.1 — 1.0 1.5 — 1.3 2.2 mA
Input capacitance
Notes: 1. The SHI inputs are: MOSI/HA0, SS/HA2, MISO/SDA, SCK/SCL, and HREQ.
2. In order to obtain these results, all inputs must be terminated (i.e., not allowed to float). PLL signals are
3. Periodically sampled and not 100% tested
4. Maximum values are derived using the methodology described in
3
disabled during Stop state.
application dependent and may vary widely from these numbers.
C
IN
—10— —10— —10— pF
Section 4
. Actual maximums are
Unit
AC ELECTRICAL CHARACTERISTICS
The timing waveforms in the AC Electrical Characteristics are tested with a V
maximum of 0.5 V and a V
MODA, MODB, MODC, and SHI pins (MOSI/HA0, SS
SCL, HREQ
). These pins are tested using the input levels set forth in the DC Electrical
minimum of 2.4 V for all pins, except EXTAL, RESET,
IH
/HA2, MISO/SDA, SCK/
IL
Characteristics. AC timing specifications that are referenced to a device input signal
are measured in production with respect to the 50% point of the respective input
signal’s transition. DSP56007 output levels are measured with the production test
machine V
OL
and V
reference levels set at 0.8 V and 2.0 V, respectively.
OH
All output delays are given for a 50 pF load unless otherwise specified.
For load capacitance greater than 50 pF, the drive capability of the output pins
typically decreases linearly:
1. At 1.5 ns per 10 pF of additional capacitance at all output pins except
MOSI/HA0, MISO/SDA, SCK/SCL, HREQ
2. At 1.0 ns per 10 pF of additional capacitance at output pins MOSI/HA0,
MISO/SDA, SCK/SCL, HREQ
(in SPI mode only)
2-4 DSP56007/D MOTOROLA

INTERNAL CLOCKS
Specifications
Internal Clocks
For each occurrence of T
, TL, TC, or I
H
, substitute with the numbers in Table 2-4.
CYC
Table 2-4 Internal Clocks
Characteristics Symbol Expression
Internal Operation Frequency f —
Internal Clock High Period
• with PLL disabled
• with PLL enabled and MF ≤ 4
• with PLL enabled and MF > 4
Internal Clock Low Period
• with PLL disabled
• with PLL enabled and MF ≤ 4
• with PLL enabled and MF > 4
Internal Clock Cycle Time T
Instruction Cycle Time I
T
H
T
L
C
CYC
ET
(Min) 0.48 × T
(Max) 0.52 × T
(Min) 0.467 × T
(Max) 0.533 × T
ET
(Min) 0.48 × T
(Max) 0.52 × T
(Min) 0.467 × T
(Max) 0.533 × T
(DF /MF) × ET
2 × T
H
C
C
C
C
L
C
C
C
C
C
C
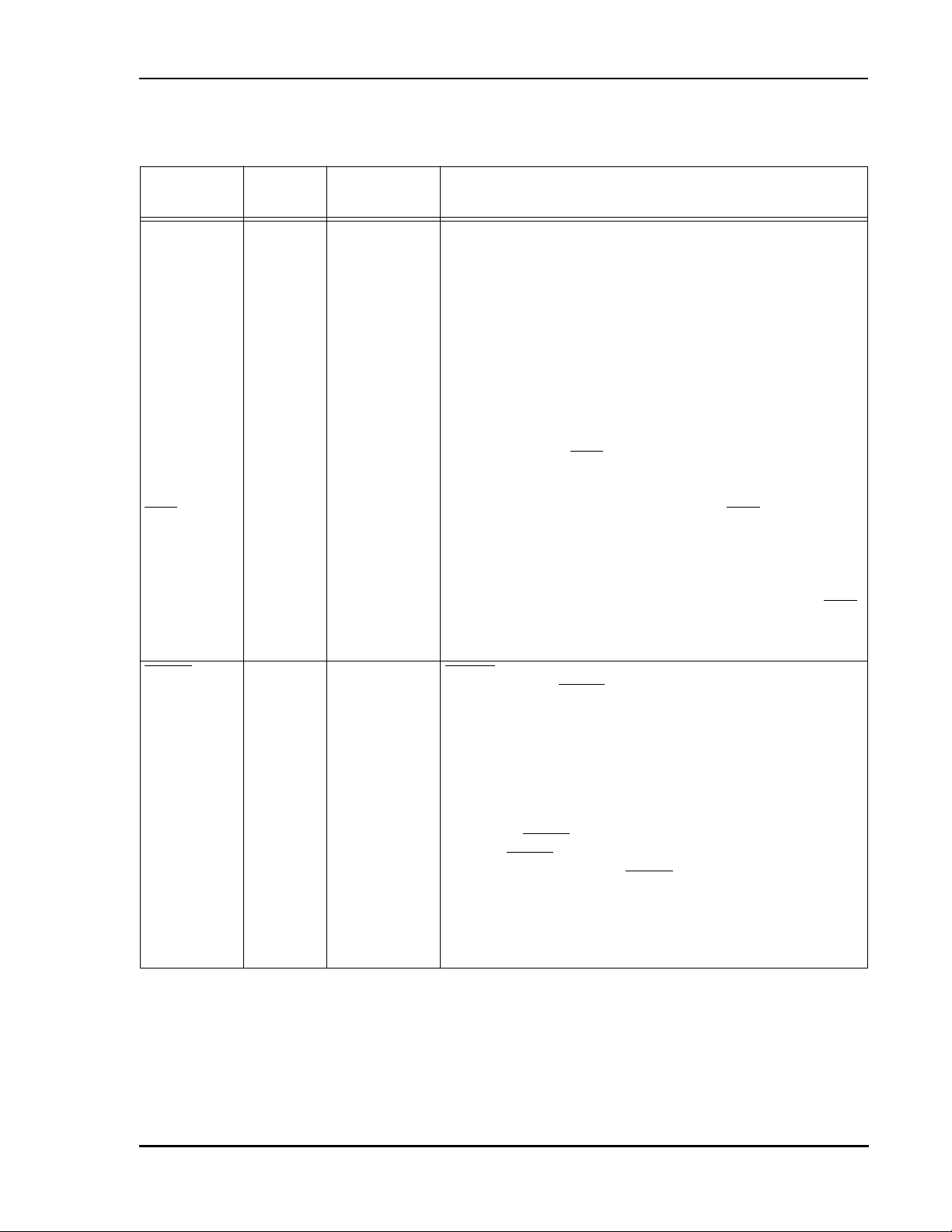
EXTERNAL CLOCK (EXTAL PIN)
The DSP56007 system clock is externally supplied via the EXTAL pin. Timings shown
in this document are valid for clock rise and fall times of 3 ns maximum.
Table 2-5 External Clock (EXTAL Pin)
50 MHz 66 MHz 88 MHz
No. Characteristics Sym.
Min Max Min Max Min Max
— Frequency of External Clock (EXTAL Pin) Ef 0 50 0 66 0 88 MHz
1 External Clock Input High—EXTAL Pin1
• with PLL disabled
ET
H
9.3
7.1
5.3
(46.7%–53.3% duty cycle)
• with PLL enabled
8.5∞235500
6.4∞235500
4.8∞235500
(42.5%–57.5% duty cycle)
Unit
ns
ns
MOTOROLA DSP56007/D 2-5

Specifications
Phase Lock Loop (PLL) Characteristics
Table 2-5 External Clock (EXTAL Pin) (Continued)
No. Characteristics Sym.
50 MHz 66 MHz 88 MHz
Unit
Min Max Min Max Min Max
2 External Clock Input Low—EXTAL Pin1
• with PLL disabled
ET
L
9.3
7.1
5.4
ns
(46.7%–53.3% duty cycle)
• with PLL enabled
8.5∞235500
6.4∞235500
4.8∞235500
ns
(42.5%–57.5% duty cycle)
3 External Clock Cycle Time
• with PLL disabled
• with PLL enabled
4 Instruction Cycle Time = I
• with PLL disabled
• with PLL enabled
Note: 1. External Clock Input High and External Clock Input Low are measured at 50% of the input transition.
1
= 2 × T
cyc
ET
C
20
20∞409600
1
C
I
cyc
40
40∞819200
15.15
15.15∞409600
30.3
30.3∞819200
11.4
11.4∞409600nsns
22.7
22.7∞819200nsns
EXTAL
1 2
ET
H
3
ET
ET
L
C
4
AA0250
Figure 2-1 External Clock Timing
PHASE LOCK LOOP (PLL) CHARACTERISTICS
Table 2-6 Phase Lock Loop (PLL) Characteristics
Characteristics Expression Min Max Unit
VCO frequency when PLL enabled MF × Ef 10 f
PLL external capacitor
(PCAP pin to V
CCP
)
MF × C
@ MF ≤ 4
@ MF > 4
Note: 1. Cpcap is the value of the PLL capacitor (connected between PCAP pin and V
The recommended value for Cpcap is 400 pF for MF ≤ 4 and 540 pF for MF > 4.
The maximum VCO frequency is limited to the internal operation frequency, defined in Table 2-4.
PCAP
1
MF × 340
MF × 380
2-6 DSP56007/D MOTOROLA
1
MF × 480
MF × 970
) for MF = 1.
CCP
MHz
pF
pF

Specifications
RESET, Stop, Mode Select, and Interrupt Timing
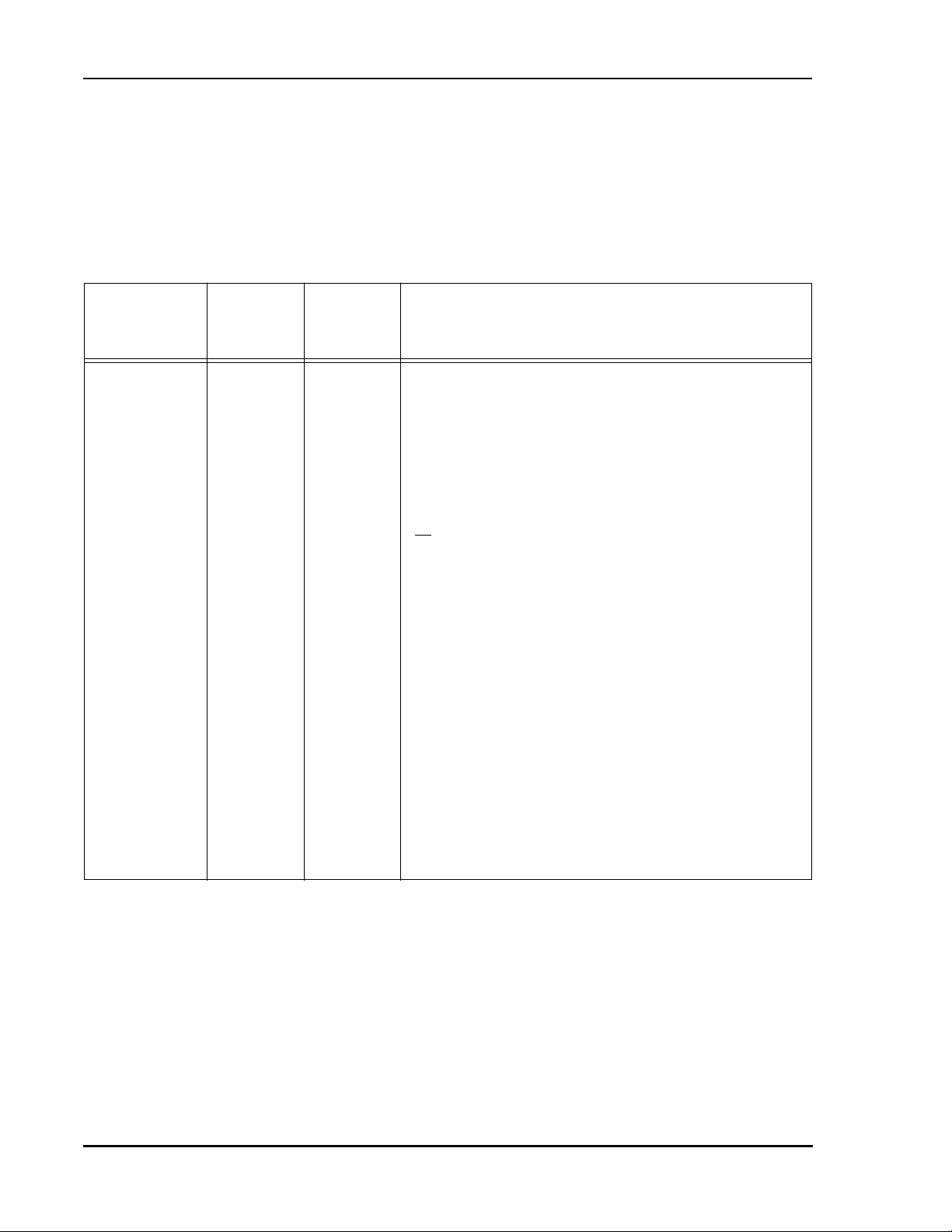
RESET, STOP, MODE SELECT, AND INTERRUPT TIMING
Table 2-7 Reset, Stop, Mode Select, and Interrupt Timing (CL = 50 pF + 2 TTL Loads)
No. Characteristics Min Max Unit
10 Minimum RESET assertion width:
• PLL disabled
• PLL enabled
1
14 Mode Select Setup Time 21 — ns
15 Mode Select Hold Time 0 — ns
16 Minimum Edge-triggered Interrupt Request Assertion
Width
16a Minimum Edge-triggered Interrupt Request
Deassertation Width
18 Delay from IRQA
, IRQB, NMI Assertion to GPIO Valid
Caused by First Interrupt Instruction Execution
22 Delay from General Purpose Output Valid to Interrupt
Request Deassertation for Level Sensitive Fast
Interrupts—If Second Interrupt Instruction is: 2
• Single Cycle
• Two Cycles
25 Duration of IRQA Assertion for Recovery from Stop State 12 — ns
27 Duration for Level Sensitive IRQA Assertion to ensure
interrupt service (when exiting “STOP”)
• Stable External Clock, OMR Bit 6 = 1
• Stable External Clock, PCTL Bit 17 = 1
Note: 1. This timing requirement is sensitive to the quality of the external PLL capacitor connected to the PCAP
pin. For capacitor values less than or equal to 2 nF, asserting RESET
will ensure proper processor initialization for capacitors with a deltaC/C less than 0.5%. (This is typical
for ceramic capacitors.) For capacitor values greater than 2 nF, asserting RESET
requirement will ensure proper processor initialization for capacitors with a deltaC/C less than 0.01%.
(This is typical for Teflon, polystyrene, and polypropylene capacitors.) However, capacitors with values
greater than 2 nF with a deltaC/C greater than 0.01% may require longer RESET
proper initialization.
2. When using fast interrupts and IRQA
prevent multiple interrupt service. To avoid these timing restrictions, the Negative Edge-triggered
mode is recommended when using fast interrupts. Long interrupts are recommended when using
Level-sensitive mode.
and IRQB are defined as level-sensitive, then timing 22 applies to
25 × T
C
2500 × ET
C
—
—
ns
ns
13 — ns
13 — ns
12 × TC + TH —ns
TL – 31
(2 × TC) + TL – 31nsns
6 × TC + T
L
12
according to this timing requirement
—
—
according to this timing
assertion to ensure
ns
ns
V
IHR
RESET
10
AA0251
Figure 2-2 Reset Timing
MOTOROLA DSP56007/D 2-7

Specifications
RESET, Stop, Mode Select, and Interrupt Timing
RESET
MODA, MODB
MODC
IRQA, IRQB,
NMI
IRQA, IRQB,
NMI
General
Purpose
I/O
(Output)
IRQA
IRQB
NMI
14
V
IHM
V
ILM
15
V
V
Figure 2-3 Operating Mode Select Timing
16
16A
Figure 2-4 External Interrupt Timing (Negative Edge-triggered)
2218
General Purpose I/O
V
IH
IRQA, IRQB,
NMI
IL
IHR
AA0252
AA0253
AA0254
Figure 2-5 External Level-sensitive Fast Interrupt Timing
25
IRQA
AA0255
Figure 2-6 Recovery from Stop State Using IRQA
27
IRQA
AA0256
Figure 2-7 Recovery from Stop State Using IRQA Interrupt Service
2-8 DSP56007/D MOTOROLA

External Memory Interface (EMI) DRAM Timing
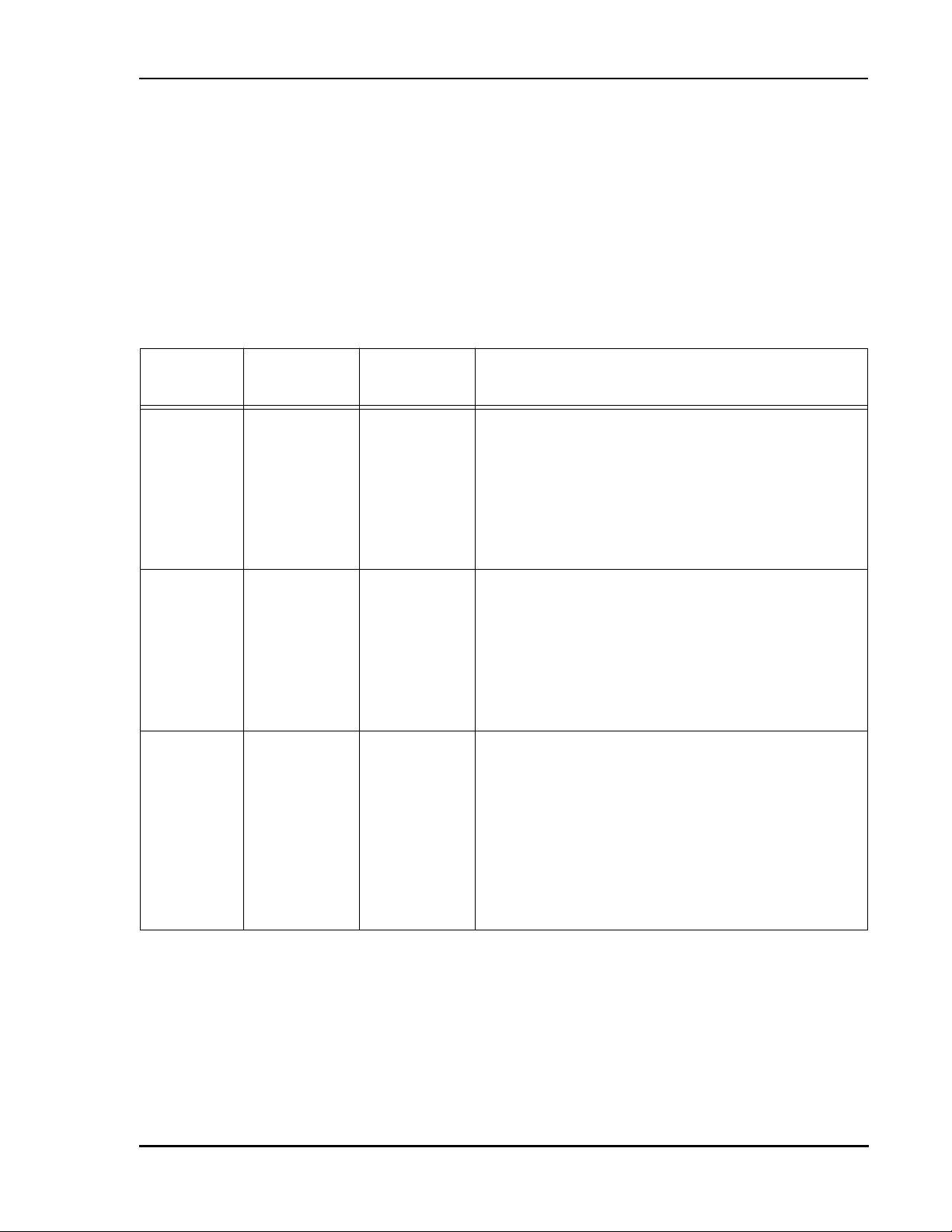
EXTERNAL MEMORY INTERFACE (EMI) DRAM TIMING
(CL = 50 pF + 2 TTL Loads)
Table 2-8 External Memory Interface (EMI) DRAM Timing
Specifications
No. Characteristics Symbol
41 Page Mode Cycle Time t
42 RAS or RD Assertion to
Data Valid
43 CAS Assertion to Data
t
RAC
t
T
PC
GA
CAC
,
Valid
44 Column Address Valid
t
AA
to Data Valid
45 CAS Assertion to Data
T
CLZ
Active
46 RAS Assertion Pulse
1
Width
t
RASP
(Page Mode Access
Only)
47 RAS Assertion Pulse
t
RAS
Width
(Single Access Only)
48 RAS or CAS
Deassertation to RAS
tRP,
T
CRP
Assertion
49 CAS Assertion Pulse
T
CAS
Width
50 Last CAS Assertion to
t
RSH
RAS Deassertation
(Page Mode Access
Only)
51
RAS or WR Assertion to
CAS Deassertation
52 RAS Assertion to CAS
T
T
t
CSH
CWL
RCD
,
Assertion
53 RAS Assertion to
t
RAD
Column Address Valid
Timing
Mode
slow
fast
slow
fast
slow
fast
slow
fast
slow
fast
slow
fast
slow
fast
slow
fast
slow
fast
slow
fast
slow
fast
slow
fast
50 MHz 66 MHz 88 MHz
Expression
Min Max Min Max Min Max
7
5
4 × T
3 × T
× T
× T
C
C
C
C
– 16
– 16——
8060——6146——45.5
34.1——nsns
12484——9060——63.5
3 × TC – 10
2 × TC – 10——5030——3520——
3 ×TC + TL – 7
——6343——4630——32.8
2 × TC + TL –
7
0 0—0—0—ns
3 ×TC –11
+ n × 4 × T
2 × TC –11
+ n × 3 ×T
7 × TC – 11
5 × TC – 11
5 × TC – 5
3 × TC – 59555——7040——
3 × TC – 10
2 × TC – 105030——3520——
3 × TC – 15
2 × TC – 154525——3015——
7 × TC – 15
5 × TC – 15
4 ×TC – 13
3 × TC – 136747——4732——
3 ×TC + TH –
209
C
149——
C
156
110——
12989——9565——68.5
12585——9161——64.5
5737——4025——26.8
114
79.9——nsns
45.8——nsns
51.8
29.1——nsns
24.1
12.7——nsns
19.1
7.7——nsns
41.8——nsns
32.5
21.1——nsns
13
2 ×TC + TH –
15.4——nsns
13
Unit
40.8nsns
24.1
12.7nsns
21.4nsns
MOTOROLA DSP56007/D 2-9

Specifications
External Memory Interface (EMI) DRAM Timing
Table 2-8 External Memory Interface (EMI) DRAM Timing (Continued)
No. Characteristics Symbol
54 CAS Deassertation Pulse
T
CP
Width
(Page Mode Access
Only)
55 Row Address Valid to
t
ASR
RAS Assertion
(Row Address Setup
Time)
56 RAS
Assertion to ROW
t
RAH
Address Not Valid
(Row Address Hold
Time)
57 Column Address Valid
t
ASC
to CAS Assertion
(Column Address Setup
Time)
58 CAS Assertion to
T
CAH
Column Address Not
Valid
(Column Address Hold
Time)
59
Last CAS Assertion to
T
CAH
Column Address Not
Valid (Column Address
Hold Time)
60 RAS Assertion to
t
AR
Column Address Not
Valid
61 Column Address Valid
t
RAL
to RAS Deassertation
62 CAS, RAS, RD, or WR
Deassertation to WR or
t
RCH
t
RRH
,
RD Assertion
63 CAS or RD
Deassertation to Data
t
OFF
tGZ
,
Not Valid
(Data Hold Time)
Timing
Mode
slow
fast
slow
fast
slow
fast
slow
fast
slow
fast
slow
fast
50 MHz 66 MHz 88 MHz
Expression
Min Max Min Max Min Max
TC – 5 15 — 10 — 6.4 — ns
TL – 6 4—2—0.1—ns
3 × TC + TH –
5636——3924——25.8
14
2 × TC + TH –
14.4——nsns
14
TL – 6 4—2—0.1—ns
3 × TC + TH –
5636——3924——25.8
14
2 × TC + TH –
14.4——nsns
14
7 × TC + TH –
13676——10054——71.2
14
4 × T
+ TH –
C
37.1——nsns
14
7 × TC + TH –
13696——10069——71.2
14
5 × TC + TH –
48.5——nsns
14
3 × TC + TL –
7
6343——4630——32.8
21.2——nsns
2 × TC + TL –
7
5 × TC – 11
3 × TC – 118949——6535——
45.8
23.1——nsns
0 0—0—0—ns
Unit
2-10 DSP56007/D MOTOROLA

Specifications
External Memory Interface (EMI) DRAM Timing
Table 2-8 External Memory Interface (EMI) DRAM Timing (Continued)
RC
Timing
Mode
slow
fast
Expression
12 × T
C
8 × T
C
No. Characteristics Symbol
64 Random Read or Write
t
Cycle Time (Single
Access Only)
65 WR Deassertation to
CAS Assertion
66 CAS Assertion to WR
Deassertation
67 Data Valid to CAS
t
RCS
t
WCH
t
DS
slow
fast
slow
fast
9 × TC – 11
6 × TC – 11
3 × TC – 13
2 × TC – 134727——3217——
TL – 6 4—2—0.1—ns
Assertion
(Data Setup Time)
68 CAS Assertion to Data
Not Valid (Data Hold
Time)
t
DH
slow
fast
3 × TC + TH –
14
2 × TC + TH –
14
69 RAS Assertion to Data
Not Valid
t
DHR
slow
fast
7 × TC + TH –
14
5 × TC + TH –
14
70 WR Assertion to CAS
Assertion
71 WR Assertion Pulse
Width (Single Cycle
t
WCS
t
WP
slow
fast
slow
fast
4 × TC – 14
3 × TC – 146646——4731——
7 × TC – 9
5 × TC – 9
Only)
72
RAS Assertion to WR
Deassertation
t
WCR
slow
fast
7 × TC – 15
5 × TC – 15
(Single Cycle Only)
73 WR Assertion to Data
Active
slow
fast
3 × TC + TH –
13
2 × TC + TH –
13
74 RD or WR Assertion to
RAS Deassertation
t
ROH
t
RWL
,
slow
fast
7 × TC – 13
5 × TC – 13
(Single Cycle Only)
Note: 1. n is the number of successive accesses. n = 2, 3, 4, or 6.
50 MHz 66 MHz 88 MHz
Min Max Min Max Min Max
240
98.8——
169
109——
182
121——
136.4
91.0——nsns
12580——91.3
57.2——nsns
21.1
9.7——nsns
5636——3924——25.8
14.4——nsns
13696——10069——71.2
48.5——nsns
31.4
20.1——nsns
13191——9767——70.5
47.8——nsns
12585——9161——64.5
41.8——nsns
5737——4025——26.8
15.4——nsns
12787——9363——66.5
43.8——nsns
Unit
MOTOROLA DSP56007/D 2-11

Specifications
External Memory Interface (EMI) DRAM Timing
MRAS
MCAS
MA0–MA10
MWR
MRD
55
4748
64
74
52
65
53 59
Row Address Last Column Address
56
43
50
49
60
44
61
48
6257
MD0–MD7
42 63
45
Data In
AA0257
Figure 2-8 DRAM Single Read Cycle
2-12 DSP56007/D MOTOROLA

Specifications
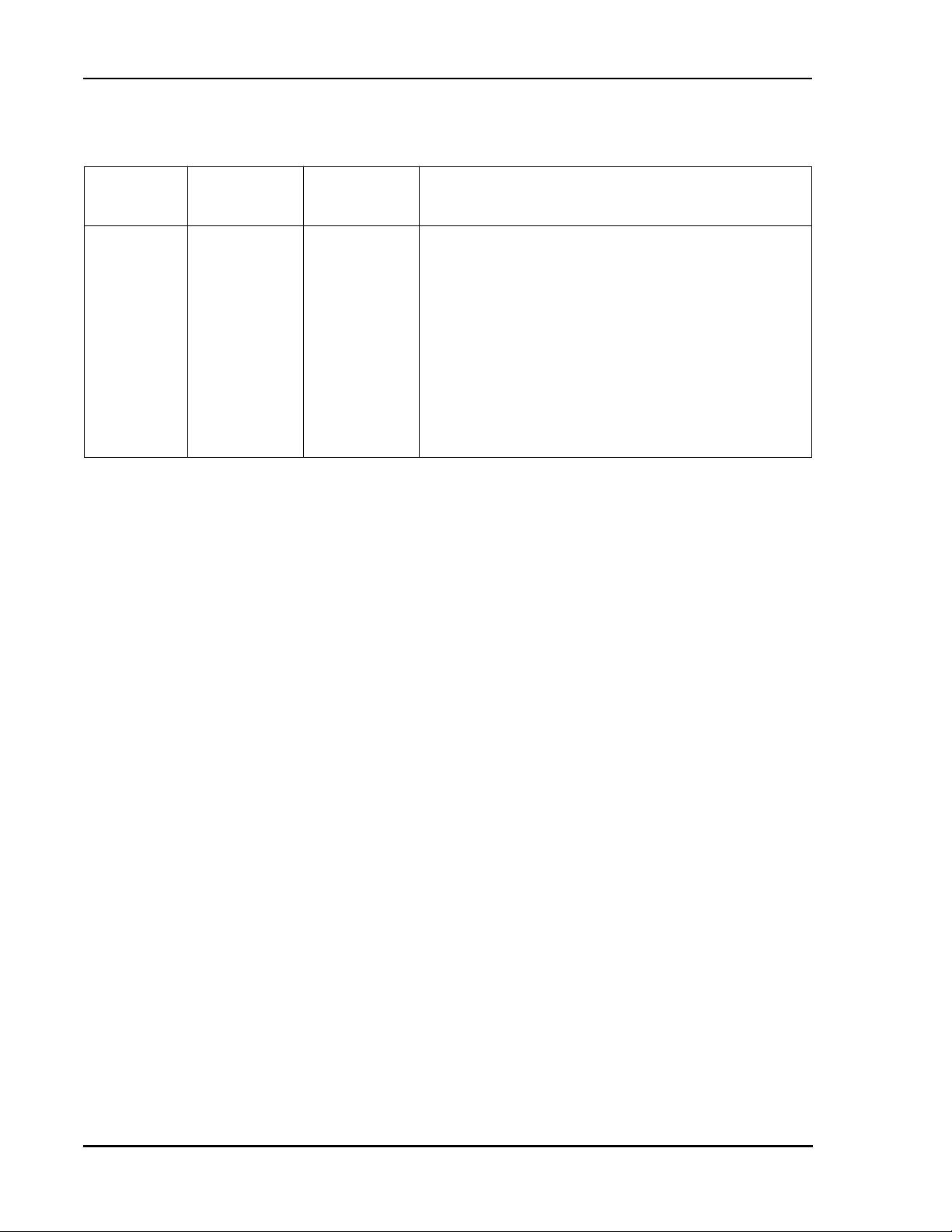
External Memory Interface (EMI) DRAM Timing
MRAS
MCAS
MA0–MA10
MWR
MRD
48 46
60 50
65 41 54
52
54
49
51
55
Col. AddressRow Address Col. Address Last Column Address
56
57
57
44
43
43
61
49
57
48
49
59585853
62
4444
43
MD0–MD7
42 63 63 63
4545 45
Data
InDataIn Data In
Figure 2-9 DRAM Page Mode Read Cycle
AA0263
MOTOROLA DSP56007/D 2-13

Specifications
External Memory Interface (EMI) DRAM Timing
MRAS
65
MCAS
64
47 4848
74
52 50
49
MA0–MA10
MWR
MRD
MD0–MD7
55
61
53
60
Row Address Column Address
56
57
70
72
71
69
67
73
Data Out
Figure 2-10 DRAM Single Write Cycle
66
68
59
62
AA0264
2-14 DSP56007/D MOTOROLA

Specifications
External Memory Interface (EMI) DRAM Timing
MRAS
MCAS
MA0–MA10
MWR
48 46
60 50
65 41 54
52
54
49
51
55
Col. AddressRow Address Col. Address Last Column Address
56
57
57
70
48
49
49
61
59585853
66
62
57
MRD
MD0–MD7
69
68
67
68
67
73
Data Out Data Out
Data Out
Figure 2-11 DRAM Page Mode Write Cycle
68
67
AA0265
MOTOROLA DSP56007/D 2-15

Specifications
External Memory Interface (EMI) DRAM Refresh Timing
EXTERNAL MEMORY INTERFACE (EMI) DRAM REFRESH TIMING
(CL = 50pF + 2 TTL Loads)
Table 2-9 External Memory Interface (EMI) DRAM Refresh Timing
50 MHz 66 MHz 88 MHz
Min Max Min Max Min Max
11373——84———61.2———ns
260
C
180——
C
13191——97———70.5———ns
No. Characteristics Sym.
T
t
RP
CPN
81
RAS Deassertation to
Assertion
RAS
82 CAS
Deassertation to
CAS Assertion
83 Refresh Cycle Time t
84 RAS Assertion Pulse
t
RAS
RC
Width
85 RAS Deassertation to
t
RP
RAS Assertion for
Refresh Cycle
86 CAS Assertion to RAS
2
T
CSR
Timing
Mode
slow
1
fast
slow
1
fast
slow
1
fast
slow
1
fast
slow
1
fast
Exp.
6 × TC – 7
4 × TC – 7
5 × TC – 7
3 × TC – 79353——71———
13 × T
9 × T
7 × TC – 9
5 × TC – 9
5 × TC – 5
3 × TC – 59555——70———
TC – 7 13 — 8 — 4.4 — ns
Assertion on Refresh
Cycle
87 RAS Assertion to CAS
Deassertation on
T
CHR
slow
fast
1
7 × TC – 15
5 × TC – 15
12585——91———64.5———ns
Refresh Cycle
88 RAS Deassertation to
CAS Assertion on a
t
RPC
slow
fast
5 × TC – 11
1
3 × TC – 118949——65———
Refresh Cycle
89 CAS Deassertation to
t
OFF
0 0—0—0—ns
Data Not Valid
Note: 1. Fast mode is not available for operating frequencies above 50 MHz.
2. This happens when a Refresh Cycle is followed by an Access Cycle.
Unit
ns
49.8———ns
ns
197———147.7———ns
ns
ns
51.8———ns
ns
ns
45.8———ns
ns
2-16 DSP56007/D MOTOROLA

MRAS
Specifications
External Memory Interface (EMI) SRAM Timing
83
81 84 85
88
82
MCAS
87
86
89
MD0–MD7
Data In
Figure 2-12 CAS
before RAS Refresh Cycle
EXTERNAL MEMORY INTERFACE (EMI) SRAM TIMING
(CL = 50pF + 2 TTL Loads)
Table 2-10 External Memory Interface (EMI) SRAM Timing
50 MHz 66 MHz 88 MHz
No. Characteristics Symbol Expression
Min Max Min Max Min Max
91
Address Valid and CS
Assertion Pulse Width
92 Address Valid to RD or WR
Assertion
93 RD or WR Assertion Pulse
Width
94 RD or WR Deassertation to
RD or WR Assertion
95 RD or WR Deassertation to
Address not Valid
96 Address Valid to Input Data
Valid
97 RD Assertion to Input Data
Valid
98 RD Deassertation to Data
Not Valid (Data Hold Time)
tRC, t
t
AS
t
WP
WC
4 × TC – 11 +
Ws × T
C
69 — 50 — 34.5 — ns
TC + TL – 13 17 — 10 — 4.4 — ns
2 × TC – 5 +
Ws × T
C
35 — 23 — 17.7 — ns
—2 × TC – 11 29 — 19 — 11.7 — ns
t
WR
tAA, t
t
OE
t
OHZ
AC
TH – 6 4—2—0.1— ns
3 × TC + TL –15 +
Ws × T
C
2 × TC – 15 +
Ws × T
C
— 55 — 38 — 24.8 ns
—25—15—7.7 ns
0 0—0—0—ns
AA0266
Unit
MOTOROLA DSP56007/D 2-17

Specifications
External Memory Interface (EMI) SRAM Timing
Table 2-10 External Memory Interface (EMI) SRAM Timing
No. Characteristics Symbol Expression
50 MHz 66 MHz 88 MHz
Unit
Min Max Min Max Min Max
99 Address Valid to WR
Deassertation
100 Data Setup Time to WR
Deassertation
101 Data Hold Time from WR
TCW, t
3 × TC + TL –14 +
AW
Ws × T
tDS (tDW)T
+ TL – 5 +
C
Ws × T
t
DH
TH – 6 4—2—0.1— ns
56 — 39 — 25.8 — ns
C
25 — 18 — 12.0 — ns
C
Deassertation
102 WR Assertion to Data Valid — TH + 4 — 14 — 12 — 9.7 ns
103 WR
Deassertation to Data
high impedance
1
104 WR Assertion to Data
—T
—T
+ 10 — 20 — 18 — 15.7 ns
H
– 6 4—2—0.1— ns
H
Active
Note: 1. This value is periodically sampled and not 100% tested.
MA0–MA14
MCS3
MA15/
91
MA16/MCS2/MCAS
MA17/MCS1/MRAS
94
92
95
93
MCS0
RD
94
WR
9897
96
MD0–MD7
Data In
AA0267
Figure 2-13 SRAM Read Cycle
2-18 DSP56007/D MOTOROLA

Specifications
External Memory Interface (EMI) SRAM Timing
MA0–MA14
MCS3
MA15/
MA16/MCS2/MCAS
MA17/MCS1/MRAS
MCS0
WR
RD
MD0–MD7
91
99
92
93
94
100
102
Data Out
104 101
Figure 2-14 SRAM Write Cycle
95
94
103
AA0268
MOTOROLA DSP56007/D 2-19

Specifications
Serial Audio Interface (SAI) Timing
SERIAL AUDIO INTERFACE (SAI) TIMING
(CL = 50pF + 2 TTL Loads)
Table 2-11 Serial Audio Interface (SAI) Timing
No. Characteristics Mode Expression
50 MHz 66 MHz 81 MHz
Unit
Min Max Min Max Min Max
111 Minimum Serial Clock Cycle =
t
(min)
SAICC
112 Serial Clock High Period master
113 Serial Clock Low Period master
114 Serial Clock Rise/Fall Time master
115 Data In Valid to SCKR edge
(Data In Set-up Time)
116 SCKR Edge to Data In Not
Valid (Data In Hold Time)
117 SCKR Edge to Word Select Out
master
slave
slave
slave
slave
master
slave
master
slave
4 × T
3 × TC + 5
0.5 × t
× t
0.35
× t
0.5
0.35 × t
0.15 × t
C
SAICC
SAICC
SAICC
SAICC
8
SAICC
26
4
0
14
– 8
– 8
8065——6151——45.5
3223——2218——14.7
3223——2218——14.8
——810——88——8.0
264——264——264——ns
014——014——014——ns
master 20 — 20 — 20 — 20 ns
Valid (WSR Out Delay Time)
118 Word Select In Valid to SCKR
slave 12 12 — 12 — 12 — ns
Edge (WSR In Set-up Time)
119 SCKR Edge to Word Select In
slave 12 12 — 12 — 12 — ns
Not Valid (WSR In Hold Time)
121 SCKT Edge to Data Out Valid
(Data Out Delay Time) master
122 SCKT Edge to Word Select Out
1
slave
2
slave
master 19 — 19 — 19 — 19 ns
13
40
TH + 34
—
—
—
13
40
44
—
—
—
Valid (WST Out Delay Time)
123 Word Select In Valid to SCKT
slave 12 12 — 12 — 12 — ns
Edge (WST In Set-up Time)
124 SCKT Edge to Word Select In
slave 12 12 — 12 — 12 — ns
Not Valid (WST In Hold Time)
Note: 1. When the Frequency Ratio between Parallel and Serial clocks is 1:4 or greater
2. When the Frequency Ratio between Parallel and Serial clocks is 1:3 – 1:4
39.1——nsns
13.7——nsns
13.7——nsns
13
—
40
—
41
—
5.9nsns
13
40
39.7
ns
ns
ns
ns
ns
2-20 DSP56007/D MOTOROLA

SCKR
(RCKP = 1)
SCKR
(RCKP = 0)
115
Specifications
Serial Audio Interface (SAI) Timing
111
112
114 114
113
111
113
114 114
112
116
SDI0–SDI1
(Data Input)
WSR
(Input)
WSR
(Output)
Valid
119
118
Valid
117
AA0269
Figure 2-15 SAI Receiver Timing
MOTOROLA DSP56007/D 2-21

Specifications
Serial Audio Interface (SAI) Timing
SCKT
(T
KP = 1)
C
SCKT
KP = 0)
(T
C
SDO0–SDO2
(Data Output)
WST
(Input)
111
112
114 114
113
111
113
114 114
112
121
124
123
Valid
WST
(Output)
122
AA0270
Figure 2-16 SAI Transmitter Timing
2-22 DSP56007/D MOTOROLA

Serial Host Interface (SHI) SPI Protocol Timing
SERIAL HOST INTERFACE (SHI) SPI PROTOCOL TIMING
Specifications
(CL = 50 pF; V
= 0.7 × VCC, V
IHS
Table 2-12 Serial Host Interface (SHI) SPI Protocol Timing
No. Characteristics Mode
Tolerable Spike Width
on Clock or Data In
141 Minimum Serial Clock
Cycle = t
For frequency below 33
1
MHz
For frequency above 33
1
MHz
CPHA = 0, CPHA = 12
CPHA = 1
142 Serial Clock High Period
CPHA = 0, CPHA = 12
CPHA = 1
143 Serial Clock Low Period
CPHA = 0, CPHA = 1
CPHA = 1
144 Serial Clock Rise/Fall
Time
SPICC
(min)
master
slave
slave
master
slave
slave
master
2
slave
slave
master
slave
Filter
Mode
bypassed
narrow
wide
bypassed
bypassed
narrow
wide
bypassed
narrow
wide
bypassed
narrow
wide
bypassed
narrow
wide
bypassed
narrow
wide
bypassed
narrow
wide
bypassed
narrow
wide
= 0.3 × VCC)
ILS
Expression
4 × T
6 × T
1000
2000
3 × T
3 × TC + 25
3 × TC + 85
3 × TC + 79
3 × TC + 431
3 × TC + 1022
0.5 × t
SPICC
TC + 8
TC + 31
TC + 43
TC + TH + 40
TC + TH + 216
TC + TH + 511
0.5 × t
SPICC
TC + 8
TC + 31
TC + 43
TC + TH + 40
TC + TH + 216
TC + TH + 511
10
2000
C
C
C
50 MHz 66 MHz 88 MHz
Min Max Min Max Min Max
—
0
—
0
—
20
—
20
—
100
—
100
—
—
—
—
120
—
91
—
1000
—
–10
–10
2000
60
85
145
139
491
1082
50
28
51
63
70
246
541
50
28
51
63
70
246
541
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
1000
2000
1067
45
70
130
124
476
35
23
46
58
63
239
534
35
23
46
58
63
239
534
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
——10
2000——102000——102000nsns
—
—
—
—
68.2
1000
2000
34.1
59.1
119.1
113.1
465.1
1056.1
24.1
19.4
42.4
54.4
57.0
233.0
528.0
24.1
19.4
42.4
54.4
57.0
233.0
528.0
0
20
100
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
Unit
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
MOTOROLA DSP56007/D 2-23

Specifications
Serial Host Interface (SHI) SPI Protocol Timing
Table 2-12 Serial Host Interface (SHI) SPI Protocol Timing (Continued)
No. Characteristics Mode
146 SS Assertion to First
slave
SCK Edge CPHA = 0
CPHA = 1
147 Last SCK Edge to SS Not
slave
slave
Asserted
CPHA = 0
CPHA = 1
148 Data In Valid to SCK
3
slave
master
Edge (Data In Set-up
Time)
slave
149 SCK Edge to Data In Not
master
Valid
(Data In Hold Time)
slave
150 SS Assertion to Data Out
slave 4 4—4— 4 —ns
Active
151 SS Deassertation to Data
high impedance
4
152 SCK Edge to Data Out
slave 24 — 24 — 24 — 24 ns
master
Valid (Data Out Delay
Time)
CPHA = 0, CPHA = 12
CPHA = 1
slave
slave
Filter
Mode
bypassed
narrow
wide
bypassed
narrow
wide
bypassed
narrow
wide
bypassed
narrow
wide
bypassed
narrow
wide
bypassed
narrow
wide
bypassed
narrow
wide
bypassed
narrow
wide
bypassed
narrow
wide
bypassed
narrow
wide
bypassed
narrow
wide
Expression
TC + TH + 35
TC + TH + 35
TC + TH + 35
6
0
0
TC + 6
+ 70
T
C
TC + 197
2
66
193
0
MAX {(37 –TC), 0}
MAX {(52 –TC), 0}
0
MAX {(38 –TC), 0}
MAX {(53 –TC), 0}
2 × TC + 17
2 × TC + 18
2 × TC + 28
2 × TC + 17
2 × TC + 18
2 × TC + 28
41
214
504
41
214
504
TC + TH + 40
TC + TH + 216
TC + TH + 511
50 MHz 66 MHz 88 MHz
Min Max Min Max Min Max
65
—
58
—
65
65
6
0
0
26
90
217
2
66
193
0
17
32
0
18
33
57
58
68
57
58
68
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
41
214
504
41
214
504
70
246
541
58
58
6
0
0
21
85
212
2
66
193
0
22
37
0
23
38
47
48
58
47
48
58
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
41
214
504
41
214
504
63
239
534
52.0
52.0
52.0
17.4
81.4
208.4
193
25.6
40.6
26.6
41.6
39.7
40.7
50.7
39.7
40.7
50.7
66
—
—
—
—
—
—
—
—
—
—
—
—
6
—
0
—
0
—
—
—
—
2
—
—
—
0
—
—
—
0
—
—
—
—
—
—
—
—
—
41
214
504
41
214
504
57.0
233
528
Unit
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
2-24 DSP56007/D MOTOROLA

Specifications
Serial Host Interface (SHI) SPI Protocol Timing
Table 2-12 Serial Host Interface (SHI) SPI Protocol Timing (Continued)
50 MHz 66 MHz 88 MHz
Min Max Min Max Min Max
0
—
0
57
163
0
57
163
—
—
—
—
—
57
163
0
57
163
—
—
—
—
—
—
0
57
163
0
57
163
—
—
—
—
—
—
Unit
ns
ns
ns
ns
ns
ns
No. Characteristics Mode
153 SCK Edge to Data Out
master
Not Valid
(Data Out Hold Time)
slave
154 SS Assertion to Data Out
slave TC + TH + 35 — 65 — 58 — 52.0 ns
Filter
Mode
bypassed
narrow
wide
bypassed
narrow
wide
Expression
0
57
163
0
57
163
Valid CPHA = 0
157 First SCK Sampling
Edge to HREQ
Output
Deassertation
158 Last SCK Sampling Edge
to HREQ Output Not
Deasserted
slave bypassed
narrow
wide
slave bypassed
narrow
wide
3 × TC + TH + 32
3 × TC + TH + 209
3 × TC + TH + 507
2 × TC + TH + 6
2 × TC + TH + 63
2 × TC + TH + 169
—
—
—
56
113
219
102
279
577
—
—
—
—
—
—
44
101
207
85
262
560
—
—
—
—
—
—
34.4
91.4
197.4
71.8
248.8
546.8
—
—
—
ns
ns
ns
ns
ns
ns
CPHA = 1
159 SS Deassertation to
slave 2 × TC + TH + 7 57 45 35.4 ns
HREQ Output Not
Deasserted
CPHA = 0
160 SS Deassertation Pulse
slave TC + 4 24 — 19 — 15.4 — ns
Width CPHA = 0
161 HREQ In Assertion to
First SCK Edge
162 HREQ In Deassertation
master 0.5 × t
SPICC
+
106 — 82 — 62.8 — ns
2 × TC + 6
master 0 0—0— 0 —ns
to Last SCK Sampling
Edge (HREQ In Set-up
Time) CPHA = 1
163 First SCK Edge to HREQ
master 0 0—0— 0 —ns
In Not Asserted
(HREQ In Hold Time)
Note: 1. For an Internal Clock frequency below 33 MHz, the minimum permissible Internal Clock to Serial Clock frequency
ratio is 4:1. For an Internal Clock frequency above 33 MHz, the minimum permissible Internal Clock to Serial
Clock frequency ratio is 6:1.
2. In CPHA = 1 mode, the SPI slave supports data transfers at t
written at least
transfers at t
SCK of each word.
3. When CPHA = 1, the SS
4. Periodically sampled, not 100% tested
5. Refer to the
modes.
T
ns before the first edge of SCK of each word.In CPHA = 1 mode, the SPI slave supports data
C
= 3 × TC, if the user assures that the HTX is written at least T
SPICC
line may remain active low between successive transfers.
DSP56007 User’s Manual
for a detailed description of how to use the different filtering
SPICC
= 3 × T
, if the user assures that the HTX is
C
ns before the first edge of
C
MOTOROLA DSP56007/D 2-25

Specifications
Serial Host Interface (SHI) SPI Protocol Timing
SS
(Input)
143
142
SCK (CPOL = 0)
(Output)
141
144 144
SCK (CPOL = 1)
(Output)
MISO
(Input)
MOSI
(Output)
HREQ
(Input)
161
142
143
144
148
149
MSB
Valid
148
152 153
MSB LSB
163
Figure 2-17 SPI Master Timing (CPHA = 0)
141
144
149
LSB
Valid
AA0271
2-26 DSP56007/D MOTOROLA

SS
(Input)
SCK (CPOL = 0)
(Output)
142
143
Specifications
Serial Host Interface (SHI) SPI Protocol Timing
141
144 144
SCK (CPOL = 1)
(Output)
MISO
(Input)
MOSI
(Output)
HREQ
(Input)
142
143
144
148 148
149
MSB
Valid
152 153
MSB LSB
161
162
163
Figure 2-18 SPI Master Timing (CPHA = 1)
141
144
149
LSB
Valid
AA0272
MOTOROLA DSP56007/D 2-27

Specifications
Serial Host Interface (SHI) SPI Protocol Timing
SS
(Input)
143
142
SCK (CPOL = 0)
(Input)
144 144
141
147
160
SCK (CPOL = 1)
(Input)
MISO
(Output)
MOSI
(Input)
HREQ
(Output)
150
146
154
142
153
143
152
144
153
MSB LSB
148
148
149
MSB
Valid
Figure 2-19 SPI Slave Timing (CPHA = 0)
141
144
151
149
LSB
Valid
159157
AA0273
2-28 DSP56007/D MOTOROLA

SS
(Input)
Specifications
Serial Host Interface (SHI) SPI Protocol Timing
SCK (CPOL = 0)
(Input)
SCK (CPOL = 1)
(Input)
MISO
(Output)
MOSI
(Input)
HREQ
(Output)
150
143
146
152
142
142
143
152
144 144
144
153
MSB LSB
148
149
MSB LSB
Valid Valid
157
Figure 2-20 SPI Slave Timing (CPHA = 1)
141
148
147
144
151
149
158
AA0274
MOTOROLA DSP56007/D 2-29

Specifications
Serial Host Interface (SHI) I2C Protocol Timing
SERIAL HOST INTERFACE (SHI) I2C PROTOCOL TIMING
(V
= 0.7 × VCC, V
IHS
= 0.3 × VCC)
ILS
(V
(R
= 0.8 × VCC, V
OHS
(min) = 1.5 kΩ)
P
= 0.2 × VCC)
OLS
Table 2-13 SHI I
2
C Protocol Timing
Standard I2C
(CL = 400 pF, RP = 2 kΩ, 100 kHz)
No. Characteristics Symbol
— Tolerable Spike Width on SCL or SDA
Filters Bypassed
Narrow Filters Enabled
Wide Filters Enabled
171 Minimum SCL Serial Clock Cycle t
172 Bus Free Time t
173 Start Condition Set-up Time t
174 Start Condition Hold Time t
175 SCL Low Period t
176 SCL High Period t
SCL
BUF
SU;STA
HD;STA
LOW
HIGH
177 SCL and SDA Rise Time t
178 SCL and SDA Fall Time t
179 Data Set-up Time t
180 Data Hold Time t
182 SCL Low to Data Out Valid t
183 Stop Condition Set-up Time t
Note: Refer to the
modes.
DSP56007 User’s Manual
for a detailed description of how to use the different filtering
SU;DAT
HD;DAT
VD;DAT
SU;STO
All frequencies
Unit
Min Max
—
—
—
0
20
100
ns
ns
ns
10.0 — µs
4.7 — µs
4.7 — µs
4.0 — µs
4.7 — µs
4.0 — µs
r
f
— 1.0 µs
— 0.3 µs
250 — ns
0.0 — ns
— 3.4 µs
4.0 — µs
2-30 DSP56007/D MOTOROLA

Specifications
Serial Host Interface (SHI) I2C Protocol Timing
The Programmed Serial Clock Cycle, t
, is specified by the value of the HDM5–
I2CCP
HDM0 and HRS bits of the HCKR (SHI Clock control Register).
The expression for t
t
I2CCP
is:
I2CCP
Tc 2× HDM[5:0] 1+()× 7 1 HRS–()× 1+()×[]=
where
• HRS is the Prescaler Rate Select bit. When HRS is cleared, the fixed divide-byeight prescaler is operational. When HRS is set, the prescaler is bypassed.
• HDM5–HDM0 are the Divider Modulus Select bits.
• A divide ratio from 1 to 64 (HDM5–HDM0 = 0 to $3F) may be selected.
2
C mode, you may select a value for the Programmed Serial Clock Cycle from
In I
T
6 ×
1024 ×
The DSP56007 provides an improved I
100 kHz I
kHz. The actual maximum frequency is limited by the bus capacitances (C
up resistors (R
(HDM5–HDM0 = 2, HRS = 1) to
C
T
(HDM5–HDM0 = $3F, HRS = 0).
C
2
2
C bus protocol, the SHI in I2C mode supports data transfers at up to 1000
), (which affect the rise and fall time of SDA and SCL, (see table
P
C bus protocol. In addition to supporting the
),the pull-
L
below)), and by the input filters.
Consideration for programming the SHI Clock Control Register (HCKR)—Clock
Divide Ratio: the master must generate a bus free time greater than T172 slave when
2
operating with a DSP56007 SHI I
The table below describes a few examples
C slave.
:
Table 2-14 Considerations for Programming the SHI Clock control Register (HCKR)
Conditions to be Considered Resulting Limitations
Bus Load
CL = 50 pF,
RP = 2 kΩ
Master
Oper-
ating
Freq.
88 MHz 88 MHz Bypassed
Slave
Oper-
ating
Freq.
Master
Filter
Mode
Narrow
Wide
Slave
Filter
Mode
Bypassed
Narrow
Wide
T172
Slave
36 ns
60 ns
95 ns
Min.
Perm-
issible
t
I2CCP
56 × T
60 × T
66 × T
C
C
C
T172
Master
41 ns
66 ns
103 ns
Maximum
I2C Serial
Frequency
1010 kHz
825 kHz
634 kHz
MOTOROLA DSP56007/D 2-31

Specifications
Serial Host Interface (SHI) I2C Protocol Timing
Example: for CL = 50 pF, RP = 2 kΩ, f = 88 MHz, Bypassed Filter mode: The master,
when operating with a DSP56007 SHI I
must generate a bus free time greater than 36 ns (T172 slave). Thus, the minimum
permissible t
is 56 × TC which gives a bus free time of at least 41 ns (T172 master).
I2CCP
This implies a maximum I
In general, bus performance may be calculated from the C
Input Filter modes and operating frequencies of the master and the slave. Table 2-15
contains the expressions required to calculate all relevant performance timing for a
given C
and RP.
L
Table 2-15 SHI Improved I
Improved I2C (CL = 50 pF, RP = 2 kΩ)
No. Char. Sym. Mode
— Tolerable Spike
Width on SCL or
SDA
171 SCL Serial Clock
Cycle
172 Bus Free Time t
t
SCL
BUF
master
slave
master
slave
2
C slave with an 88 MHz operating frequency,
2
C serial frequency of 1010 kHz.
2
C Protocol Timing
Filter
Mode
bypassed
narrow
wide
bypassed
narrow
wide
bypassed
narrow
wide
bypassed
narrow
wide
bypassed
narrow
wide
Expression
0
20
100
t
+ 3 × TC+
I2CCP
72 + t
t
I2CCP
t
I2CCP
r
+ 3 × TC +
245 + t
r
+ 3 × TC +
535 + t
r
4 × TC + TH +
172 + t
r
4 × TC + TH +
366 + t
r
4 × TC + TH +
648 + t
r
0.5 × t
I2CCP
42 – t
I2CCP
42 – t
I2CCP
42 – t
r
r
r
0.5 × t
0.5 × t
2 × TC + 11
2 × TC + 35
2 × TC + 70
–
–
–
and RP of the bus, the
L
50 MHz266 MHz388 MHz4U
Min Max Min Max Min Max
—
0
—
0
—
—
1050
1263
1593
500
694
976
60
80
100
51
75
110
20
100
—
—
—
—
—
—
—
—
—
—
—
—
—
—
1007
1225
1591
478
672
954
46
68
102
41
65
100
20
100
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
981
1199
1557
461
655
937
38.2
60.9
95
33.7
57.7
92.7
0
20
100
—
—
—
—
—
—
—
—
—
—
—
—
n
i
t
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
173 Start Condition
Set-up Time
t
SU;STA
slave bypassed
narrow
wide
12
50
150
12
50
150
—
—
—
12
50
150
—
—
—
12
50
150
2-32 DSP56007/D MOTOROLA
—
—
—
ns
ns
ns

Table 2-15 SHI Improved I2C Protocol Timing (Continued)
Improved I2C (CL = 50 pF, RP = 2 kΩ)
No. Char. Sym. Mode
174 Start Condition
Hold Time
t
HD;STA
master
slave
Filter
Mode
bypassed
narrow
wide
bypassed
narrow
wide
Specifications
Serial Host Interface (SHI) I2C Protocol Timing
50 MHz266 MHz388 MHz4U
Expression
Min Max Min Max Min Max
332
—
318
340
378
59
138
238
—
—
—
—
—
—
49.4
0.5 × t
12 – t
0.5 × t
12 – t
0.5 × t
12 – t
I2CCP
f
I2CCP
f
I2CCP
f
+
+
+
2 × TC + TH + 21
2 × TC + TH + 100
2 × TC + TH + 200
352
372
71
150
250
—
—
—
—
—
310
333
367
128
228
—
—
—
—
—
—
n
i
t
ns
ns
ns
ns
ns
ns
175 SCL Low Period t
176 SCL High Period t
177 SCL Rise Time
Output
1
Input
178 SCL Fall Time
Output
1
Input
LOW
HIGH
t
r
t
f
master
slave
master
slave
bypassed
narrow
wide
bypassed
narrow
wide
bypassed
narrow
wide
bypassed
narrow
wide
0.5 × t
18 – t
0.5 × t
18 – t
0.5 × t
18 – t
I2CCP
f
I2CCP
f
I2CCP
f
+
+
+
2 × TC + 74 + t
2 × TC + 286 + t
2 × TC + 586 + t
0.5 × t
I2CCP
+ 2 ×
TC + 19
0.5 × t
I2CCP
+
2 × TC + 144
0.5 × t
I2CCP
+
2 × TC + 356
2 × TC + TH – 1
2 × TC + TH + 18
2 × TC + TH + 30
1.7 × RP ×
(CL + 20)
2000
20 + 0.1 ×
(CL– 50)
2000
r
r
r
338
—
324
—
316
358
378
352
564
864
379
544
776
49
68
80
——238
2000——
—
—
—
—
—
—
—
—
—
—
—
346
384
342
554
854
375
523
773
37
56
68
—
—
339
—
—
373
—
335
534
847
—
360
—
507
—
754
—
27.4
—
46.4
—
58.4
238
2000——
——20
2000——202000——202000nsns
—
ns
—
ns
—
ns
—
ns
—
ns
—
ns
—
ns
—
ns
—
ns
—
ns
—
ns
—
ns
238
2000nsns
179 Data Set-up Time t
SU;DAT
bypassed
narrow
wide
TC + 8
TC + 60
TC + 74
28
80
94
—
—
—
23
75
89
—
—
—
19.4
71.4
85.4
MOTOROLA DSP56007/D 2-33
—
—
—
ns
ns
ns

Specifications
Serial Host Interface (SHI) I2C Protocol Timing
Table 2-15 SHI Improved I2C Protocol Timing (Continued)
Improved I2C (CL = 50 pF, RP = 2 kΩ)
No. Char. Sym. Mode
Filter
Mode
Expression
50 MHz266 MHz388 MHz4U
Min Max Min Max Min Max
n
i
t
180 Data Hold Time t
182 SCL Low to Data
Out Valid
183 Stop Condition
Set-up Time
184 HREQ In
Deassertation to
Last SCL Edge
(HREQ In Set-up
Time)
186 First SCL
Sampling Edge
to HREQ Output
Deassertation
HD;DAT
t
VD;DAT
t
SU;STO
bypassed
narrow
wide
bypassed
narrow
wide
master
bypassed
narrow
wide
slave
bypassed
narrow
wide
master bypassed
narrow
wide
slave bypassed
narrow
wide
0
0
0
2 × TC + 71 + t
r
2 × TC + 244 + t
2 × TC + 535 + t
0.5 × t
I2CCP
+
TC + TH + 11
0.5 × t
I2CCP
+
TC + TH + 69
0.5 × t
I2CCP
+
TC + TH + 183
11
50
150
0
0
0
3 × TC + TH + 32
3 × TC + TH + 209
3 × TC + TH + 507
0
—
0
—
0
—
ns
0
—
0
—
0
—
ns
0
—
0
—
0
—
ns
—
349
—
339
—
332
ns
—
522
—
512
—
505
r
—
813
—
803
—
—
—
—
—
—
—
—
—
85
262
560
—
346
427
575
11
50
150
0
0
0
—
—
—
r
381
—
359
459
—
440
613
—
592
11
—
11
50
—
50
150
—
150
0
—
0
0
—
0
0
—
0
—
102
—
—
279
—
—
577
—
796
—
—
—
—
—
—
—
—
—
72
249
547
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
187 Last SCL Edge to
HREQ Output
Not Deasserted
188 HREQ In
Assertion to First
SCL Edge
189 First SCL Edge
slave bypassed
narrow
wide
master bypassed
narrow
wide
2 × TC + TH + 6
2 × TC + TH + 63
2 × TC + TH + 169
t
+ 2 × TC + 6
I2CCP
t
+ 2 × TC + 6
I2CCP
t
+ 2 × TC + 6
I2CCP
56
113
219
726
766
846
—
—
—
—
—
—
44
101
207
688
733
809
—
—
—
—
—
—
34.4
91.4
197.4
665
711
779
master 0 0—0— 0 —ns
to HREQ In Not
Asserted (HREQ
In Hold Time)
2-34 DSP56007/D MOTOROLA
—
—
—
—
—
—
ns
ns
ns
ns
ns
ns

Specifications
Serial Host Interface (SHI) I2C Protocol Timing
Table 2-15 SHI Improved I
Improved I2C (CL = 50 pF, RP = 2 kΩ)
No. Char. Sym. Mode
Note: 1. CL is in pF, RP is in kΩ, and result is in ns.
2. A t
Bypassed Filter mode.
A t
Narrow Filter mode.
A t
Filter mode.
3. A t
Bypassed Filter mode.
A t
Narrow Filter mode.
A t
Filter mode.
4. A t
Bypassed Filter mode.
A t
Narrow Filter mode.
A t
Filter mode.
5. Refer to the
modes.
I2CCP
I2CCP
I2CCP
I2CCP
I2CCP
I2CCP
I2CCP
I2CCP
I2CCP
of 34 × T
of 36 × T
of 40 × T
of 43 × T
of 46 × T
of 51 × T
of 56 × T
of 60 × T
of 66 × T
(the maximum permitted for the given bus load) was used for the calculations in the
C
(the maximum permitted for the given bus load) was used for the calculations in the
C
(the maximum permitted for the given bus load) was used for the calculations in the Wide
C
(the maximum permitted for the given bus load) was used for the calculations in the
C
(the maximum permitted for the given bus load) was used for the calculations in the
C
(the maximum permitted for the given bus load) was used for the calculations in the Wide
C
(the maximum permitted for the given bus load) was used for the calculations in the
C
(the maximum permitted for the given bus load) was used for the calculations in the
C
(the maximum permitted for the given bus load) was used for the calculations in the Wide
C
DSP56007 User’s Manual
Filter
Mode
2
C Protocol Timing (Continued)
50 MHz266 MHz388 MHz4U
Expression
Min Max Min Max Min Max
for a detailed description of how to use the different filtering
n
i
t
SCL
SDA
HREQ
171
173 176 175
177
172
179
Stop
Start
174
189
188
Figure 2-21 I2C Timing
178
180
ACKMSB LSB
186 182 183
184
187
Stop
AA0275
MOTOROLA DSP56007/D 2-35

Specifications
General Purpose I/O (GPIO) Timing
GENERAL PURPOSE I/O (GPIO) TIMING
(CL = 50 pF + 2 TTL Loads)
Table 2-16 GPIO Timing
50/66/88 MHz
No. Characteristics Expression
Min Max
201 EXTAL Edge to GPIO Out Valid (GPIO Out Delay Time) 26 — 26 ns
Unit
202 EXTAL Edge to GPIO Out Not Valid (GPIO Out Hold
Time)
203 GPIO In Valid to EXTAL Edge (GPIO In Set-up Time) 10 10 — ns
204 EXTAL Edge to GPIO In Not Valid (GPIO In Hold Time) 6 6 — ns
EXTAL
(Input)
(Note 1)
GPIO(0:3)
(Output)
204203
GPIO(0:3)
(Input)
Note: 1. Valid when the ratio between EXTAL frequency and internal clock frequency equals 1
Valid
22—ns
201
202
AA0276
Figure 2-22 GPIO Timing
2-36 DSP56007/D MOTOROLA

ON-CHIP EMULATION (OnCE) TIMING
(CL = 50 pF + 2 TTL Loads)
Table 2-17 OnCE Timing
No. Characteristics
Specifications
On-Chip Emulation (OnCE) Timing
50/66/88 MHz
Unit
Min Max
230 DSCK Low
231 DSCK High 40 — ns
232 DSCK Cycle Time 200 — ns
233 DR
234 DSCK High to DSO Valid — 42 ns
235 DSCK High to DSO Invalid 3 — ns
236 DSI Valid to DSCK Low (Set-up) 15 — ns
237 DSCK Low to DSI Invalid (Hold) 3 — ns
238 Last DSCK Low to OS0–OS1, ACK Active 3 TC + T
239 DSO (ACK) Asserted to First DSCK High 2 T
240 DSO (ACK) Assertion Width 4 TC + TH – 3 5 TC + 7 ns
241 DSO (ACK) Asserted to OS0–OS1 High
242 OS0–OS1 Valid to EXTAL Transition #2 TC – 21 — ns
Asserted to DSO (ACK) Asserted 5 T
Impedance
1
40 — ns
C
L
C
—0ns
—ns
—ns
—ns
243 EXTAL Transition #2 to OS0–OS1 Invalid 0 — ns
244 Last DSCK Low of Read Register to First DSCK
High of Next Command
245 Last DSCK Low to DSO Invalid (Hold) 3 — ns
246 DR Assertion to EXTAL Transition #2 for Wake
Up from WAIT State
247 EXTAL Transition #2 to DSO After Wake Up from
WAIT State
7 TC + 10 — ns
10 TC – 10 ns
17 T
C
—ns
MOTOROLA DSP56007/D 2-37

Specifications
On-Chip Emulation (OnCE) Timing
Table 2-17 OnCE Timing (Continued)
No. Characteristics
248 DR Assertion Width
• to recover from WAIT
• to recover from WAIT and enter Debug
mode
50/66/88 MHz
Min Max
15
13 TC + 15
12 TC – 15
—
Unit
ns
ns
249 DR Assertion to DSO (ACK) Valid (Enter Debug
mode) After Asynchronous Recovery from WAIT
State
250A DR
Assertion Width to Recover from STOP2
• Stable External Clock, OMR Bit 6 = 0
• Stable External Clock, OMR Bit 6 = 1
• Stable External Clock, PCTL Bit 17 = 1
250B DR Assertion Width to Recover from STOP and
enter Debug mode
2
• Stable External Clock, OMR Bit 6 = 0
• Stable External Clock, OMR Bit 6 = 1
• Stable External Clock, PCTL Bit 17 = 1
251 DR Assertion to DSO (ACK) Valid (Enter Debug
mode) After Recovery from STOP State
2
• Stable External Clock, OMR Bit 6 = 0
• Stable External Clock, OMR Bit 6 = 1
• Stable External Clock, PCTL Bit 17 = 1
Note: 1. Maximum T
2. Periodically sampled, not 100% tested
L
17 T
C
15
15
15
65549 TC + T
21 TC + T
14 TC + T
65553 TC + T
25 TC + T
18 TC + T
L
L
L
L
L
L
—ns
65548 TC + T
20 TC + T
13 TC + T
—
—
—
—
—
—
L
L
ns
L
ns
ns
ns
ns
ns
ns
ns
ns
246 246
230
DSCK
(input)
231
232
AA0277
Figure 2-23 DSP56007 OnCE Serial Clock Timing
2-38 DSP56007/D MOTOROLA

DR
(Input)
Specifications
On-Chip Emulation (OnCE) Timing
233 240
DSO
(Output)
Figure 2-24 DSP56007 OnCE Acknowledge Timing
DSCK
(Input)
DSO
(Output)
236 237 238
DSI
(Input)
Note: 1. High Impedance, external pull-down resistor
(Last)
Figure 2-25 DSP56007 OnCE Data I/O to Status Timing
DSCK
(Input)
DSO
(Output)
234
235 245
(Last)
ACK
(Note 1)
(OS1)
ACK)
(
(OS0)
(Note 1)
(OS0)
AA0278
AA0279
Note: 1. High Impedance, external pull-down resistor
AA0280
Figure 2-26 DSP56007 OnCE Read Timing
240
239
(Note 1)
(Note 1)
(DSCK Input)
(DSO Output)
(DSI Input)
AA0281
OS1
(Output)
241
DSO
(Output)
OS0
(Output)
241 236 237
Note: 1. High Impedance, external pull-down resistor
Figure 2-27 DSP56007 OnCE Data I/O Status Timing
MOTOROLA DSP56007/D 2-39

Specifications
On-Chip Emulation (OnCE) Timing
EXTAL
(Note 2)
242
OS0–OS1
(Output)
(Note 1)
243
Note: 1. High Impedance, external pull-down resistor
2. Valid when the ratio between EXTAL frequency and clock frequency equals 1
Figure 2-28 DSP56007 OnCE EXTAL to Status Timing
DSCK
(Input)
(Next Command)
244
Figure 2-29 DSP56007 OnCE DSCK Next Command After Read Register Timing
EXTAL
T0, T2 T1, T3
AA0282
AA0283
DR
(Input)
DSO
(Output)
DR
(Input)
DSO
(Output)
248
246 247
AA0284
Figure 2-30 Synchronous Recovery from WAIT State
248
249
AA0285
Figure 2-31 Asynchronous Recovery from WAIT State
2-40 DSP56007/D MOTOROLA

DR
(Input)
DSO
(Output)
Specifications
On-Chip Emulation (OnCE) Timing
250
251
AA0286
Figure 2-32 Asynchronous Recovery from STOP State
MOTOROLA DSP56007/D 2-41

Specifications
On-Chip Emulation (OnCE) Timing
2-42 DSP56007/D MOTOROLA

SECTION 3
PACKAGING
PIN-OUT AND PACKAGE INFORMATION
This section provides information about the available packages for this product,
including diagrams of the package pinouts and tables describing how the signals
described in Section 1 are allocated. The DSP56007 is available in an 80-pin Quad
Flat Pack (QFP) package.
MOTOROLA DSP56007/D 3-1

Packaging
Pin-out and Package Information
QFP Package Description
Top and bottom views of the QFP package are shown in Figure 3-1 and Figure 3-2
with their pin-outs.
DR
MD7
MD6
MD5
MD4
GND
MD3
MD2
MD1
V
CCD
MD0
GND
GPIO3
GPIO2
GPIO1
GPIO0
MRD
MWR
MA17/MCS1/MRAS
MA16/MCS2/MCAS
DSCK/OS1
DSI/OS0
DSO
SDI0
SDI1
WSR
GNDSV
CCQ
GNDQSCKR
61
(Top View)
D
D
Orientation Mark
1
A
GND
MCS0
MA14
MA13
CCA
V
A
MA12
GND
CCQ
V
Q
GND
WST
SCKT
MA11
MA10
CCS
V
MA9
SDO0
SDO1
A
MA8
GND
SDO2
GNDSHREQ
CCA
MA7
V
MA6
SS/HA2
MA5
MOSI/HA0
41
21
MA4
V
CCS
MODC/NMI
MODB/IRQB
MODA/IRQA
RESET
MISO/SDA
GND
S
V
CCP
PCAP
GND
P
PINIT
GND
Q
V
CCQ
EXTAL
SCK/SCL
MA0
MA1
MA2
MA3
GND
A
MA15/MCS3
Note: An OVERBAR indicates the signal is asserted when the
voltage = ground (active low). To simplify locating the pins,
each fifth pin is shaded in the illustration.
Figure 3-1 Top View
3-2 DSP56007/D MOTOROLA

GND
HREQ
SS/HA2
MOSI/HA0
S
SDO1
SDO2
CCS
V
SDO0
WST
SCKT
Q
GND
SCKR
CCQ
V
S
GND
SDI1
WSR
Packaging
Pin-out and Package Information
DSCK/OS1
DSI/OS0
DSO
SDI0
V
CCS
MODC/NMI
MODB/IRQB
MODA/IRQA
RESET
MISO/SDA
GND
V
CCP
PCAP
GNDP
PINIT
GND
V
CCQ
EXTAL
SCK/SCL
MA0
MA1
MA2
MA3
GND
Note: An OVERBAR indicates the signal is asserted when the
41
61
DR
MD7
(Bottom View)
MD6
MD5
MD4
GND
D
S
MD3
MD2
MD1
V
CCD
MD0
GND
Q
D
GPIO3
GPIO2
GPIO1
GPIO0
MRD
Orientation Mark
21
A
MA4
MA5
MA6
CCA
V
MA7
A
GND
MA8
MA9
MA11
MA10
Q
GND
CCQ
V
A
MA12
GND
CCA
V
MA14
MA13
MCS0
MWR
MA17/MCS1/MRAS
MA16/MCS2/MCAS
1
A
GND
MA15/MCS3
voltage = ground (active low). To simplify locating the pins,
each fifth pin is shaded in the illustration.
Figure 3-2 Bottom View
MOTOROLA DSP56007/D 3-3

Packaging
Pin-out and Package Information
Table 3-1 DSP56007 Pin Identification by Pin Number
Pin # Signal Name Pin # Signal Name Pin # Signal Name
1 GND
A
2 MCS0 29 GND
28 V
CCQ
55 WSR
Q
56 SDI1
3 MA15/MCS3 30 PINIT 57 SDI0
4 MA14 31 GND
P
58 DSO
5 MA13 32 PCAP 59 DSI/OS0
6V
CCA
7 MA12 34 GND
8 GND
9V
10 GND
A
CCQ
Q
33 V
CCP
S
60 DSCK/OS1
61 DR
35 MISO/SDA 62 MD7
36 RESET 63 MD6
37 MODA/IRQA 64 MD5
11 MA11 38 MODB/IRQB 65 MD4
12 MA10 39 MODC/NMI 66 GND
13 MA9 40 V
CCS
67 MD3
D
14 MA8 41 MOSI/HA0 68 MD2
15 GND
A
16 MA7 43 HREQ 70 V
17 V
CCA
18 MA6 45 SDO2 72 GND
42 SS/HA2 69 MD1
CCD
44 GND
S
71 MD0
D
19 MA5 46 SDO1 73 GPIO3
20 MA4 47 SDO0 74 GPIO2
21 GND
A
48 V
CCS
75 GPIO1
22 MA3 49 SCKT 76 GPIO0
23 MA2 50 WST 77 MRD
24 MA1 51 SCKR 78 MWR
25 MA0 52 GND
Q
79 MA17/MCS1/
MRAS
26 SCK/SCL 53 V
CCQ
80 MA16/MCS2/
MCAS
27 EXTAL 54 GND
S
3-4 DSP56007/D MOTOROLA

Packaging
Pin-out and Package Information
Table 3-2 DSP56007 Pin Identification by Signal Name
Signal Name Pin # Signal Name Pin # Signal Name Pin #
DR 61 MA5 19 MRD 77
DSCK 60 MA6 18 MWR 78
DSI 59 MA7 16 NMI 39
DSO 58 MA8 14 OS0 59
EXTAL 27 MA9 13 OS1 60
GND
A
GND
A
GND
A
GND
A
GND
D
GND
D
GND
P
GND
Q
GND
Q
GND
Q
GND
S
GND
S
GND
S
GPIO0 76 MD0 71 SS 42
GPIO1 75 MD1 69 V
GPIO2 74 MD2 68 V
GPIO3 73 MD3 67 V
HA0 41 MD4 65 V
HA2 42 MD5 64 V
HREQ 43 MD6 63 V
IRQA 37 MD7 62 V
IRQB 38 MISO 35 V
MA0 25 MODA 37 V
MA1 24 MODB 38 WSR 55
MA2 23 MODC 39 WST 50
MA3 22 MOSI 41
MA4 20 MRAS 79
1 MA10 12 PCAP 32
8 MA11 11 PINIT 30
15 MA12 7 RESET 36
21 MA13 5 SCK 26
66 MA14 4 SCKR 51
72 MA15 3 SCKT 49
31 MA16 80 SCL 26
10 MA17 79 SDA 35
29 MCAS 80 SDI0 57
52 MCS0 2 SDI1 56
34 MCS1 79 SDO0 47
44 MCS2 80 SDO1 46
54 MCS3 3 SDO2 45
CCA
CCA
CCD
CCP
CCQ
CCQ
CCQ
CCS
CCS
17
70
33
28
53
40
48
6
9
MOTOROLA DSP56007/D 3-5

Packaging
Pin-out and Package Information
Table 3-3 DSP56007 Power Supply Pins
Pin # Signal Name Circuit Supplied
6V
CCA
17
1 GND
A
8
15
21
70 V
66 GND
CCD
D
72
9V
CCQ
28
53
10 GND
Q
29
52
Address Bus Buffers
Data Bus Buffers
Internal Logic
33 V
CCP
31 GND
40 V
CCS
48
34 GND
44
54
PLL
P
Serial Ports
S
3-6 DSP56007/D MOTOROLA

Packaging
Pin-out and Package Information
L
L
-C-
SEATING
PLANE
DATUM
PLANE
-A-
C
-H-
60
61
41
40
S S
-B-
C A-B D
B
DETAIL A
80
120
-DA
0.20 A-B D
0.05
A-B
S SM
C
21
V
M
A-B
0.05
0.20
S
S
0.20 A-B D
M
H
E
H
G
U
K
W
X
DETAIL C
S
M
DETAIL C
DATUM
-H-
PLANE
0.01
M
NOTES:
1. DIMENSIONING AND TOLERANCING PER ANSI
Y14.5M, 1982.
2. CONTROLLING DIMENSION: MILLIMETER.
3. DATUM PLANE -H- IS LOCATED AT BOTTOM OF
LEAD AND IS COINCIDENT WITH THE LEAD WHERE
THE LEAD EXITS THE PLASTIC BODY AT THE
T
R
Q
BOTTOM OF THE PARTING LINE.
4. DATUMS -A-, -B- AND -D- TO BE DETERMINED AT
DATUM PLANE -H-.
5. DIMENSIONS S AND V TO BE DETERMINED AT
SEATING PLANE -C-.
6. DIMENSIONS A AND B DO NOT INCLUDE MOLD
PROTRUSION. ALLOWABLE PROTRUSION IS 0.25
PER SIDE. DIMENSIONS A AND B DO
INCLUDE MOLD MISMATCH AND ARE DETERMINED
AT DATUM PLANE -H-.
7. DIMENSION D DOES NOT INCLUDE DAMBAR
PROTRUSION. ALLOWABLE DAMBAR PROTRUSION
SHALL BE 0.08 TOTAL IN EXCESS OF THE D
DIMENSION AT MAXIMUM MATERIAL CONDITION.
DAMBAR CANNOT BE LOCATED ON THE LOWER
RADIUS OR THE FOOT.
H A-B D
MSS
0.20
0.20
B
B
DETAIL A
F
J
D
M
SECTION B-B
CASE 841B-01
DIM
A
B
C
D
E
F
G
H
J
K
L
M
N
P
Q
R
S
T
U
V
W
X
A-B D
C
ISSUE O
MILLIMETERS
MIN MAX
13.90
13.90
2.15
0.22
2.00
0.22
0.65 BSC
-
0.13
0.65
12.35 BSC
55
0.13
0.325 BSC
05
0.13
16.95
0.13
05
16.95
0.35
1.6 REF
P
-A,B,D-
N
S S
14.10
14.10
2.45
0.38
2.40
0.33
0.25
0.23
0.95
105
0.17
75
0.30
17.45
-
-
17.45
0.45
Figure 3-3 80-pin Quad Flat Pack (QFP) Mechanical Information
MOTOROLA DSP56007/D 3-7

Packaging
Ordering Drawings
ORDERING DRAWINGS
Complete mechanical information regarding DSP56007 packaging is available by
facsimile through Motorola's Mfax™ system. Call the following number to obtain
information by facsimile:
The Mfax automated system requests the following information:
• The receiving facsimile telephone number including area code or country
code
• The caller’s Personal Identification Number (PIN)
Note: For first time callers, the system provides instructions for setting up a PIN,
which requires entry of a name and telephone number.
(602) 244-6591
• The type of information requested:
– Instructions for using the system
– A literature order form
– Specific part technical information or data sheets
– Other information described by the system messages
A total of three documents may be ordered per call.
The DSP56007 80-pin QFP package mechanical drawing is referenced as 841B-01.
3-8 DSP56007/D MOTOROLA

SECTION 4
DESIGN CONSIDERATIONS
THERMAL DESIGN CONSIDERATIONS
An estimation of the chip junction temperature, TJ, in °C can be obtained from the
equation:
Equation 1:
TJTAPDR
×()+=
θJA
Where:
= ambient temperature ˚C
T
A
= package junction-to-ambient thermal resistance ˚C/W
R
θJA
= power dissipation in package
P
D
Historically, thermal resistance has been expressed as the sum of a junction-to-case
thermal resistance and a case-to-ambient thermal resistance:
R
Equation 2:
R
θJA
+=
θJCRθCA
Where:
= package junction-to-ambient thermal resistance ˚C/W
R
θJA
= package junction-to-case thermal resistance ˚C/W
R
θJC
= package case-to-ambient thermal resistance ˚C/W
R
θCA
is device-related and cannot be influenced by the user. The user controls the
R
θJC
thermal environment to change the case-to-ambient thermal resistance, R
θCA
. For
example, the user can change the air flow around the device, add a heat sink, change
the mounting arrangement on the Printed Circuit Board (PCB), or otherwise change
the thermal dissipation capability of the area surrounding the device on a PCB. This
model is most useful for ceramic packages with heat sinks; some 90% of the heat flow
is dissipated through the case to the heat sink and out to the ambient environment.
For ceramic packages, in situations where the heat flow is split between a path to the
case and an alternate path through the PCB, analysis of the device thermal
performance may need the additional modeling capability of a system level thermal
simulation tool.
MOTOROLA DSP56007/D 4-1

Design Considerations
Thermal Design Considerations
The thermal performance of plastic packages is more dependent on the temperature
of the PCB to which the package is mounted. Again, if the estimations obtained from
do not satisfactorily answer whether the thermal performance is adequate, a
R
θJA
system level model may be appropriate.
A complicating factor is the existence of three common ways for determining the
junction-to-case thermal resistance in plastic packages:
• To minimize temperature variation across the surface, the thermal resistance
is measured from the junction to the outside surface of the package (case)
closest to the chip mounting area when that surface has a proper heat sink.
• To define a value approximately equal to a junction-to-board thermal
resistance, the thermal resistance is measured from the junction to where the
leads are attached to the case.
• If the temperature of the package case (T
) is determined by a thermocouple,
T
the thermal resistance is computed using the value obtained by the equation
– TT)/PD.
(T
J
As noted above, the junction-to-case thermal resistances quoted in this data sheet are
determined using the first definition. From a practical standpoint, that value is also
suitable for determining the junction temperature from a case thermocouple reading
in forced convection environments. In natural convection, using the junction-to-case
thermal resistance to estimate junction temperature from a thermocouple reading on
the case of the package will estimate a junction temperature slightly hotter than
actual temperature. Hence, the new thermal metric, Thermal Characterization
Parameter or Ψ
, has been defined to be (TJ – TT)/PD. This value gives a better
JT
estimate of the junction temperature in natural convection when using the surface
temperature of the package. Remember that surface temperature readings of
packages are subject to significant errors caused by inadequate attachment of the
sensor to the surface and to errors caused by heat loss to the sensor. The
recommended technique is to attach a 40-gauge thermocouple wire and bead to the
top center of the package with thermally conductive epoxy.
4-2 DSP56007/D MOTOROLA

ELECTRICAL DESIGN CONSIDERATIONS
CAUTION
This device contains protective circuitry to guard against
damage due to high static voltage or electrical fields.
However, normal precautions are advised to avoid
application of any voltages higher than maximum rated
voltages to this high-impedance circuit. Reliability of
operation is enhanced if unused inputs are tied to an
appropriate logic voltage level (e.g., either GND or V
Use the following list of recommendations to assure correct DSP operation:
Design Considerations
Electrical Design Considerations
).
CC
• Provide a low-impedance path from the board power supply to each V
CC
pin on the DSP, and from the board ground to each GND pin.
• Use at least four 0.01–0.1 µF bypass capacitors positioned as close as
possible to the four sides of the package to connect the V
power source
CC
to GND.
• Ensure that capacitor leads and associated printed circuit traces that
connect to the chip V
and GND pins are less than 0.5 in per capacitor
CC
lead.
• Use at least a four-layer Printed Circuit Board (PCB) with two inner layers
for V
and GND.
CC
• Because the DSP output signals have fast rise and fall times, PCB trace
lengths should be minimal. This recommendation particularly applies to
the address and data buses as well as the IRQA
, IRQB, and NMI pins.
Maximum Printed Circuit Board (PCB) trace lengths on the order of
6 inches are recommended.
• Consider all device loads as well as parasitic capacitance due to PCB
traces when calculating capacitance. This is especially critical in systems
with higher capacitive loads that could create higher transient currents in
the V
and GND circuits.
CC
• All inputs must be terminated (i.e., not allowed to float) using CMOS
levels, except as noted in Section 1.
• Take special care to minimize noise levels on the V
and GNDP pins.
CCP
• If multiple DSP56007 devices are on the same board, check for cross-talk
or excessive spikes on the supplies due to synchronous operation of the
devices.
MOTOROLA DSP56007/D 4-3

Design Considerations
Power Consumption Considerations
POWER CONSUMPTION CONSIDERATIONS
Power dissipation is a key issue in portable DSP applications. Some of the factors
which affect current consumption are described in this section. Most of the current
consumed by CMOS devices is Alternating Current (AC), which is charging and
discharging the capacitances of the pins and internal nodes.
Current consumption is described by the formula:
Equation 3:
I CVf××=
where: C = node/pin capacitance in farads
V = voltage swing
f = frequency of node/pin toggle in hertz
Example 4-1 Current Consumption
For an I/O pin loaded with 50 pF capacitance, operating at 5.25 V, and with a 88 MHz clock,
toggling at its maximum possible rate (22 MHz), the current consumption is:
Equation 4:
I5010
The Maximum Internal Current (I
12–
× 5.25× 22× 106× 5.78mA==
max) value reflects the typical possible
CCI
switching of the internal buses on best-case operation conditions, which is not
necessarily a real application case. The Typical Internal Current (I
CCItyp
) value
reflects the average switching of the internal buses on typical operating conditions.
For applications that require very low current consumption:
• Minimize the number of pins that are switching.
• Minimize the capacitive load on the pins.
• Connect the unused inputs to pull-up or pull-down resistors.
• Disable unused peripherals.
• Disable unused pin activity.
4-4 DSP56007/D MOTOROLA

Current consumption test code:
org p:RESET
jmp MAIN
org p:MAIN
movep #$180000,x:$FFFD
move #0,r0
move #0,r4
move #$00FF,m0
move #$00FF,m4
nop
rep #256
move r0,x:(r0)+
rep #256
mov r4,y:(r4)+
clr a
move l:(r0)+,a
rep #30
mac x0,y0,a x:(r0)+,x0 y:(r4)+,y0
move a,p:(r5)
jmp TP1
TP1 nop
jmp MAIN
Design Considerations
Power Consumption Considerations
MOTOROLA DSP56007/D 4-5

Design Considerations
Power-Up Considerations
POWER-UP CONSIDERATIONS
To power-up the device properly, ensure that the following conditions are met:
• Stable power is applied to the device according to the specifications in Table
2-3 (DC Electrical Characteristics).
• The external clock oscillator is active and stable.
• RESET
Mode Select, and Interrupt Timing).
• The following input pins are driven to valid voltage levels: DR
MODA, MODB, and MODC.
Care should be taken to ensure that the maximum ratings for all input voltages obey
the restrictions on Table 2-1 (Maximum Ratings), at all phases of the power-up
procedure. This may be achieved by powering the external clock, hardware reset, and
mode selection circuits from the same power supply that is connected to the power
supply pins of the chip.
At the beginning of the hardware reset procedure, the device might consume
significantly more current than the specified typical supply current. This is because of
contentions among the internal nodes being affected by the hardware reset signal
until they reach their final hardware reset state.
is asserted according to the specifications in Table 2-7 (Reset, Stop,
, PINIT,
4-6 DSP56007/D MOTOROLA

SECTION 5
ORDERING INFORMATION
Consult a Motorola Semiconductor sales office or authorized distributor to determine
product availability and to place an order.
Table 5-1 Ordering Information
Part
DSPB56007
DSPE56007
Note: 1. The DSPB56007 includes a generic factory-programmed ROM and may be used for RAM-based
1
2
applications. For additional information on future part development, or to request specific ROMbased support, call your local Motorola Semiconductor sales office or authorized distributor.
2. The DSPE56007 includes factory-programmed ROM containing support for Dolby Pro Logic and
Lucasfilm THX applications. This part can be used only be customers licensed for Dolby Pro Logic
and Lucasfilm THX. To request specific support for this chip, call your local Motorola Semiconductor
sales office or authorized distributor.
Supply
Voltage
5 V Quad Flat Pack
5 V Quad Flat Pack
Package Type Pin Count
(QFP)
(QFP)
80 50 DSPB56007FJ50
80 50 DSPE56007FJ50
Frequency
(MHz)
66 DSPB56007FJ66
88 DSPB56007FJ88
66 DSPE56007FJ66
88 DSPE56007FJ88
Order Number
MOTOROLA DSP56007/D 5-1


OnCE, Mfax, and Symphony are trademarks of Motorola, Inc.
Motorola reserves the right to make changes without further notice to any products herein. Motorola makes no
warranty, representation or guarantee regarding the suitability of its products for any particular purpose, nor does
Motorola assume any liability arising out of the application or use of any product or circuit, and specifically disclaims
any and all liability, including without limitation consequential or incidental damages. “Typical” parameters which may
be provided in Motorola data sheets and/or specifications can and do vary in different applications and actual
performance may vary over time. All operating parameters, including “Typicals” must be validated for each customer
application by customer’s technical experts. Motorola does not convey any license under its patent rights nor the rights
of others. Motorola products are not designed, intended, or authorized for use as components in systems intended for
surgical implant into the body, or other applications intended to support life, or for any other application in which the
failure of the Motorola product could create a situation where personal injury or death may occur. Should Buyer
purchase or use Motorola products for any such unintended or unauthorized application, Buyer shall indemnify and
hold Motorola and its officers, employees, subsidiaries, affiliates, and distributors harmless against all claims, costs,
damages, and expenses, and reasonable attorney fees arising out of, directly or indirectly, any claim of personal injury
or death associated with such unintended or unauthorized use, even if such claim alleges that Motorola was negligent
regarding the design or manufacture of the part. Motorola and are registered trademarks of Motorola, Inc.
Motorola, Inc. is an Equal Opportunity/Affirmative Action Employer.
How to reach us:
USA/Europe/Locations Not Listed :
Motorola Literature Distribution
P.O. Box 5405
Denver, Colorado 80217
303-675-2140
1 (800) 441-2447
Mfax™ :
RMFAX0@email.sps.mot.com
TOUCHTONE (602) 244-6609
US & Canada ONLY (800) 774-1848
Asia/Pacific :
Motorola Semiconductors H.K. Ltd.
8B Tai Ping Industrial Park
51 Ting Kok Road
Tai Po, N.T., Hong Kong
852-26629298
Technical Resource Center:
1 (800) 521-6274
DSP Helpline
dsphelp@dsp.sps.mot.com
Japan :
Nippon Motorola Ltd.
Tatsumi-SPD-JLDC
6F Seibu-Butsuryu-Center
3-14-2 Tatsumi Koto-Ku
Tokyo 135, Japan
81-3-3521-8315
Internet :
http://www.motorola-dsp.com
 Loading...
Loading...