

Page 1

Documentation
KL3361 and KL3362
Oscilloscope Terminal
Version:
Date:
2.2.0
2019-10-17
Page 2

Page 3

Table of contents
Table of contents
1 Foreword ....................................................................................................................................................5
1.1 Notes on the documentation..............................................................................................................5
1.2 Safety instructions .............................................................................................................................6
1.3 Documentation issue status ..............................................................................................................7
1.4 Beckhoff Identification Code (BIC) ....................................................................................................8
2 Product overview.....................................................................................................................................10
2.1 General............................................................................................................................................10
2.2 KL3361 - Single-channel oscilloscope terminal...............................................................................11
2.3 Technical Data of the KL3361 .........................................................................................................12
2.4 KL3362 - two-channel oscilloscope terminal ...................................................................................13
2.5 Technical Data of the KL3362 .........................................................................................................14
2.6 Trigger units.....................................................................................................................................15
3 Mounting and wiring................................................................................................................................16
3.1 Instructions for ESD protection........................................................................................................16
3.2 Installation on mounting rails ...........................................................................................................16
3.3 Installation instructions for enhanced mechanical load capacity .....................................................19
3.4 Connection ......................................................................................................................................20
3.4.1 Connection system .......................................................................................................... 20
3.4.2 Wiring............................................................................................................................... 22
3.4.3 Shielding .......................................................................................................................... 23
3.5 Connecting the KL3361 ...................................................................................................................24
3.6 Connecting the KL3362 ...................................................................................................................26
3.7 ATEX - Special conditions (standard temperature range) ...............................................................27
3.8 ATEX Documentation ......................................................................................................................28
4 Configuration software KS2000 .............................................................................................................29
4.1 KS2000 - Introduction......................................................................................................................29
4.2 Parameterization with KS2000 ........................................................................................................31
4.3 Masks for KL3361............................................................................................................................33
4.3.1 Trigger logic for KL3361 .................................................................................................. 33
4.3.2 Trigger values for KL3361 ............................................................................................... 33
4.3.3 Process data for KL3361 ................................................................................................. 35
4.4 Masks for KL3362............................................................................................................................35
4.4.1 Trigger logic for KL3362 .................................................................................................. 35
4.4.2 General settings for KL3362 ............................................................................................ 37
4.4.3 Trigger values for KL3362 ............................................................................................... 38
4.4.4 Process data for KL3362 ................................................................................................. 39
4.5 Settings in detail ..............................................................................................................................40
4.5.1 Trigger logic ..................................................................................................................... 40
4.5.2 General settings............................................................................................................... 42
4.5.3 Trigger values .................................................................................................................. 43
4.5.4 Output process data ........................................................................................................ 44
4.5.5 Input process data ........................................................................................................... 46
4.6 Sample program for KL register communication via EtherCAT on KL3314 exemplary...................47
KL3361 and KL3362 3Version: 2.2.0
Page 4

Table of contents
5 Access from the user program ..............................................................................................................50
5.1 Process image.................................................................................................................................51
5.1.1 Process image of the KL3361.......................................................................................... 51
5.1.2 Process image of the KL3362.......................................................................................... 51
5.1.3 Control and status bytes .................................................................................................. 52
5.2 RAM and ROM register ...................................................................................................................56
5.2.1 Register overview ............................................................................................................ 56
5.2.2 Register description ......................................................................................................... 57
5.2.3 Examples of Register Communication............................................................................. 65
6 Appendix ..................................................................................................................................................69
6.1 Support and Service ........................................................................................................................69
KL3361 and KL33624 Version: 2.2.0
Page 5

Foreword
1 Foreword
1.1 Notes on the documentation
Intended audience
This description is only intended for the use of trained specialists in control and automation engineering who
are familiar with the applicable national standards.
It is essential that the documentation and the following notes and explanations are followed when installing
and commissioning these components.
It is the duty of the technical personnel to use the documentation published at the respective time of each
installation and commissioning.
The responsible staff must ensure that the application or use of the products described satisfy all the
requirements for safety, including all the relevant laws, regulations, guidelines and standards.
Disclaimer
The documentation has been prepared with care. The products described are, however, constantly under
development.
We reserve the right to revise and change the documentation at any time and without prior announcement.
No claims for the modification of products that have already been supplied may be made on the basis of the
data, diagrams and descriptions in this documentation.
Trademarks
Beckhoff®, TwinCAT®, EtherCAT®, EtherCATG®, EtherCATG10®, EtherCATP®, SafetyoverEtherCAT®,
TwinSAFE®, XFC®, XTS® and XPlanar® are registered trademarks of and licensed by Beckhoff Automation
GmbH. Other designations used in this publication may be trademarks whose use by third parties for their
own purposes could violate the rights of the owners.
Patent Pending
The EtherCAT Technology is covered, including but not limited to the following patent applications and
patents: EP1590927, EP1789857, EP1456722, EP2137893, DE102015105702 with corresponding
applications or registrations in various other countries.
EtherCAT® is registered trademark and patented technology, licensed by Beckhoff Automation GmbH,
Germany.
Copyright
© Beckhoff Automation GmbH & Co. KG, Germany.
The reproduction, distribution and utilization of this document as well as the communication of its contents to
others without express authorization are prohibited.
Offenders will be held liable for the payment of damages. All rights reserved in the event of the grant of a
patent, utility model or design.
KL3361 and KL3362 5Version: 2.2.0
Page 6

Foreword
1.2 Safety instructions
Safety regulations
Please note the following safety instructions and explanations!
Product-specific safety instructions can be found on following pages or in the areas mounting, wiring,
commissioning etc.
Exclusion of liability
All the components are supplied in particular hardware and software configurations appropriate for the
application. Modifications to hardware or software configurations other than those described in the
documentation are not permitted, and nullify the liability of Beckhoff Automation GmbH & Co. KG.
Personnel qualification
This description is only intended for trained specialists in control, automation and drive engineering who are
familiar with the applicable national standards.
Description of instructions
In this documentation the following instructions are used.
These instructions must be read carefully and followed without fail!
DANGER
Serious risk of injury!
Failure to follow this safety instruction directly endangers the life and health of persons.
WARNING
Risk of injury!
Failure to follow this safety instruction endangers the life and health of persons.
CAUTION
Personal injuries!
Failure to follow this safety instruction can lead to injuries to persons.
NOTE
Damage to environment/equipment or data loss
Failure to follow this instruction can lead to environmental damage, equipment damage or data loss.
Tip or pointer
This symbol indicates information that contributes to better understanding.
KL3361 and KL33626 Version: 2.2.0
Page 7

Foreword
1.3 Documentation issue status
Version Comment
2.2.0 • Update chapter “Instructions for ESD protection”
• Chapter “Beckhoff Identification Code (BIC)” added
2.1.0 • Design of the safety instructions adapted to IEC 82079-1
• Update Technical data
• Chapter Instructions for ESD protection added
• Update chapter Connection system -> Connection
• Chapter Installation instructions for enhanced mechanical load capacity added
• Example program added to chapter KS2000 Configuration software
• Correction in chapter Register overview
• Update structure
2.0.0 • Migration
1.1.0 • Technical data updated
• Installation and wiring revised
1.0 • Description of the KL336x parameterization with the KS2000 software corrected
(trigger logic details)
0.6 • Description of the KL336x parameterization with the KS2000 software updated
(trigger logic details)
0.5 • Description of the process image revised
0.4 • Description of control and status byte extended
• Register description updated
• English version available
0.3 • Connection instructions extended
• Description of the KL336x parameterization with the KS2000 software updated
• Register description updated
• Description of control and status byte revised
0.2 • Connection instructions added
• Description of the KL336x parameterization with the KS2000 software extended
• Register description revised
0.1 • First provisional preliminary version
Firmware and hardware versions
Documentation
version
2.1.0 1D 05 1J 05
2.0.0 1D 04 1J 04
1.1.0 1D 01 1I 01
1.0 1D 01 1F 01
0.6 09.05.2003 1D 01 1D 01
0.5 11.11.2002 1D 01 1D 01
0.4 18.10.2002 1D 01 1D 01
0.3 23.09.2002 1D 01 1D 01
0.2 09.09.2002 1D 01 1D 01
0.1 23.08.2002 1B 00 1D 01
The firmware and hardware versions (delivery state) can be taken from the serial number printed on the side
of the terminal.
KL3361 and KL3362 7Version: 2.2.0
KL3361 KL3362
Firmware Hardware Firmware Hardware
Page 8

Foreword
Syntax of the serial number
Structure of the serial number: KK YY FF HH Sample with ser. no.: 35 04 1F 01:
KK - week of production (calendar week) 35 - week of production 35
YY - year of production 04 - year of production 2004
FF - firmware version 1F - firmware version 1F
HH - hardware version 01 - hardware version 01
1.4 Beckhoff Identification Code (BIC)
The Beckhoff Identification Code (BIC) is increasingly being applied to Beckhoff products to uniquely identify
the product. The BIC is represented as a Data Matrix Code (DMC, code scheme ECC200), the content is
based on the ANSI standard MH10.8.2-2016.
Fig.1: BIC as data matrix code (DMC, code scheme ECC200)
The BIC will be introduced step by step across all product groups.
Depending on the product, it can be found in the following places:
• on the packaging unit
• directly on the product (if space suffices)
• on the packaging unit and the product
The BIC is machine-readable and contains information that can also be used by the customer for handling
and product management.
Each piece of information can be uniquely identified using the so-called data identifier
(ANSIMH10.8.2-2016). The data identifier is followed by a character string. Both together have a maximum
length according to the table below. If the information is shorter, spaces are added to it. The data under
positions 1 to 4 are always available.
The following information is contained:
KL3361 and KL33628 Version: 2.2.0
Page 9

Item
Type of
no.
information
1 Beckhoff order
number
2 Beckhoff Traceability
Number (BTN)
3 Article description Beckhoff article
4 Quantity Quantity in packaging
5 Batch number Optional: Year and week
6 ID/serial number Optional: Present-day
7 Variant number Optional: Product variant
...
Explanation Data
Beckhoff order number 1P 8 1P072222
Unique serial number,
see note below
description, e.g.
EL1008
unit, e.g. 1, 10, etc.
of production
serial number system,
e.g. with safety products
number on the basis of
standard products
Foreword
Number of digits
identifier
S 12 SBTNk4p562d7
1K 32 1KEL1809
Q 6 Q1
2P 14 2P401503180016
51S 12 51S678294104
30P 32 30PF971, 2*K183
incl. data identifier
Example
Further types of information and data identifiers are used by Beckhoff and serve internal processes.
Structure of the BIC
Example of composite information from item 1 to 4 and 6. The data identifiers are marked in red for better
display:
BTN
An important component of the BIC is the Beckhoff Traceability Number (BTN, item no.2). The BTN is a
unique serial number consisting of eight characters that will replace all other serial number systems at
Beckhoff in the long term (e.g. batch designations on IO components, previous serial number range for
safety products, etc.). The BTN will also be introduced step by step, so it may happen that the BTN is not yet
coded in the BIC.
NOTE
This information has been carefully prepared. However, the procedure described is constantly being further
developed. We reserve the right to revise and change procedures and documentation at any time and without prior notice. No claims for changes can be made from the information, illustrations and descriptions in
this information.
KL3361 and KL3362 9Version: 2.2.0
Page 10

Product overview
2 Product overview
2.1 General
The KL3361 and KL3362 oscilloscope terminals enable decentralized pre-processing of analog input data.
The input values are digitized with a 14-bit resolution and written into an internal memory. A powerful preprocessing processor can determine or monitor the following values, among others:
• Maximum value of a recording
• Minimum value of a recording
• RMS value of a recording
• Arithmetic mean of a recording
• Peak-peak value of a recording
• Envelope monitoring
• Cycle duration
• Most frequent value of a recording
• etc.
The result or all the measured values are transported to the higher-level automation unit.
Supported Bus Couplers
Not all bus couplers support the KL3361 and KL3362 oscilloscope terminals. These include
BK2000, BK3000, BK3100, BK4000, BK4500, BK5000, BK7500.
KL3361 [}11]
Single-channel oscilloscope terminal for an input voltage range of -16mV to +16mV.
Typical application:
Logging and pre-processing of the differential signal from strain gauges in a bridge circuit [}24].
KL3362 [}13]
Two-channel oscilloscope terminal for an input voltage range of -10V to +10V.
Typical application:
Logging and pre-processing of standard analog signals.
KL3361 and KL336210 Version: 2.2.0
Page 11

2.2 KL3361 - Single-channel oscilloscope terminal
Product overview
Fig.2: KL3361
The KL3361 analog input terminal makes it possible to perform non-central preliminary processing of analog
values. The input values are digitized with a 14-bit resolution and written into an internal memory. An efficient
processor can pre-process the values. Limit values, maximum and minimum values will be determined or
monitored. The KL3361 can also carry out envelope monitoring. A trigger starts cyclical processes. The
result or all the measured values are transported to the higher-level automation unit.
The supply voltage Uv can be drawn from the terminal or can be supplied from an external source. The
terminal supplies 5 V. The maximum input voltage U is limited to 10 V.
LED indicators - meanings
LED No. Display
No wire (rot) A This LED is on if the wire breaks at the trigger input.
Output (green) B This LED is on if the digital output is set.
Error (red) C In preparation.
Trigger (green) D This LED is on if a signal is present at the trigger input.
For pin assignment see Connecting the KL3361 [}24].
KL3361 and KL3362 11Version: 2.2.0
Page 12

Product overview
2.3 Technical Data of the KL3361
Single-channel oscilloscope terminal, -20mV to +20mV
Technical data KL3361
Number of inputs 1 analog, 1 trigger
Signal voltage U
IN
Input resistance > 1MOhm (UIN)
Power supply for the measuring bridge U
V
Resolution 14bit (plus 1 sign bit)
Sampling rate (configurable)
Measuring error (full measuring range) ±1% of the full scale value
Internal memory 32kbyte
Bit width in the input process image 2 data words, 1 control byte
Bit width in the output process image 2 data words, 1 status byte
Power supply for the electronics via the K-bus
Current input from the K-Bus with external supply of the
measuring bridge
Current consumption from the K-Bus with supply of the
measuring bridge (4x350 Ohm) via KL3361
Dielectric strength 500V (shielding, base plate / K-Bus)
Permissible ambient temperature range during operation 0°C ... + 55°C
Permissible ambient temperature range during storage -25°C ... + 85°C
Permissible relative humidity 95%, no condensation
Vibration/shock resistance conforms to EN 60068-2-6 / EN 60068-2-27, see
EMC immunity/emission conforms to EN 61000-6-2 / EN 61000-6-4
Weight approx. 55 g
Dimensions (W x H x D) approx. 15 mm x 100 mm x 70 mm
Mounting [}16]
Installation position variable
Protection class IP20
Approvals
-20 mV to +20 mV
5VDC, 20 mA max.
minimum 100µs, (minimum 10µs for fast
sampling [}42])
typically 120mA
typically 140mA
also Installation instructions for terminals with
increased mechanical load cpacity [}19]
on 35 mm mounting rail conforms to EN 60715
CE, ATEX [}27], cULus
KL3361 and KL336212 Version: 2.2.0
Page 13

2.4 KL3362 - two-channel oscilloscope terminal
Product overview
Fig.3: KL3362
The KL3362 analog input terminal makes it possible to perform non-central preliminary processing of analog
values. The input values are digitized with a 14-bit resolution and written into an internal memory. An efficient
processor can pre-process the values. Limit values, maximum and minimum values will be determined or
monitored. The KL3362 can also carry out envelope monitoring. A trigger starts cyclical processes. The
result or all the measured values are transported to the higher-level automation unit.
LED indicators - meanings
LED No. Display
Error 1 (red) A in preparation
Output (green) B This LED is on if the digital output is set.
Error 2 (red) C in preparation
Trigger (green) D This LED is on if a signal is present at the trigger input.
For pin assignment see Connecting the KL3362 [}26].
KL3361 and KL3362 13Version: 2.2.0
Page 14

Product overview
2.5 Technical Data of the KL3362
Two-channel oscilloscope terminal, -10 V to +10 V
Technical data KL3362
Number of inputs 2 analog, 1 trigger
Signal voltage U
Input resistance (IN1-GND, IN2-GND) > 500 kOhm
Resolution 14bit (plus 1 sign bit)
Sampling rate (configurable)
Measuring error (full measuring range) ±0,5% of the full scale value
Internal memory 32 kbyte
Bit width in the input process image Per channel: 2 data words, 1 control byte
Bit width in the output process image Per channel: 2 data words, 1 status byte
Power supply for the electronics via the K-bus
Current consumption from K-bus typically 120 mA
Dielectric strength 500 V (shielding, base plate / K-Bus)
Permissible ambient temperature range during
operation
Permissible ambient temperature range during storage -25°C ... + 85°C
Permissible relative humidity 95%, no condensation
Vibration/shock resistance conforms to EN 60068-2-6 / EN 60068-2-27
EMC immunity/emission conforms to EN 61000-6-2 / EN 61000-6-4
Weight approx. 55 g
Dimensions (W x H x D) approx. 15 mm x 100 mm x 70 mm
Mounting [}16]
Installation position variable
Protection class IP20
Approvals
IN
-10 V to +10 V
minimum 100µs, (minimum 10µs for fast sampling
[}42])
0°C ... + 55°C
on 35 mm mounting rail conforms to EN 60715
CE, ATEX [}27], cULus
KL3361 and KL336214 Version: 2.2.0
Page 15

Product overview
2.6 Trigger units
The oscilloscope terminals have two trigger units per signal channel. They are configured via sets of
registers. The first trigger unit is configured via registers R40 [}62] to R45, the second one via registers R46
[}63] to R51.
Optionally, the following are used as a trigger source [}62]:
• an output word of the fieldbus
• a timer
• the analog inputs
• the digital input
• the output of trigger unit 1 for trigger unit 2
The following can be selected as a trigger event [}40]:
• rising or falling edge
• a positive or negative pulse that is greater or smaller than a specified pulse width (glitch)
The trigger can be enabled [}41] as follows:
• always, i.e. each trigger event is immediately enabled
• via the signal at the analog inputs or the digital input (each with positive or negative logic and
associated switching thresholds).
Enabling of the trigger evens can prompt various actions [}41]:
• start of recording
• start of a timer (chronometer)
• setting of the digital output
• saving of the current timer value
• resetting of the timer
• starting of a further timer, which is associated with the Valid Trigger Time register
The trigger units can be cascaded. This enables extremely flexible triggering depending on the cause of
events. For cascaded trigger units, the Valid Trigger Time register specifies a time window, during which the
subsequent trigger event must occur. If this does not happen, everything is reset and the first trigger event is
once again awaited.
KL3361 and KL3362 15Version: 2.2.0
Page 16

Mounting and wiring
3 Mounting and wiring
3.1 Instructions for ESD protection
NOTE
Destruction of the devices by electrostatic discharge possible!
The devices contain components at risk from electrostatic discharge caused by improper handling.
• Please ensure you are electrostatically discharged and avoid touching the contacts of the device directly.
• Avoid contact with highly insulating materials (synthetic fibers, plastic film etc.).
• Surroundings (working place, packaging and personnel) should by grounded probably, when handling
with the devices.
• Each assembly must be terminated at the right hand end with a KL9010 bus end terminal, to ensure the
protection class and ESD protection.
Fig.4: Spring contacts of the Beckhoff I/O components
3.2 Installation on mounting rails
WARNING
Risk of electric shock and damage of device!
Bring the bus terminal system into a safe, powered down state before starting installation, disassembly or
wiring of the bus terminals!
KL3361 and KL336216 Version: 2.2.0
Page 17

Assembly
Mounting and wiring
Fig.5: Attaching on mounting rail
The bus coupler and bus terminals are attached to commercially available 35mm mounting rails (DIN rails
according to EN60715) by applying slight pressure:
1. First attach the fieldbus coupler to the mounting rail.
2. The bus terminals are now attached on the right-hand side of the fieldbus coupler. Join the components with tongue and groove and push the terminals against the mounting rail, until the lock clicks
onto the mounting rail.
If the terminals are clipped onto the mounting rail first and then pushed together without tongue and
groove, the connection will not be operational! When correctly assembled, no significant gap should
be visible between the housings.
Fixing of mounting rails
The locking mechanism of the terminals and couplers extends to the profile of the mounting rail. At
the installation, the locking mechanism of the components must not come into conflict with the fixing
bolts of the mounting rail. To mount the mounting rails with a height of 7.5mm under the terminals
and couplers, you should use flat mounting connections (e.g. countersunk screws or blind rivets).
KL3361 and KL3362 17Version: 2.2.0
Page 18

Mounting and wiring
Disassembly
Fig.6: Disassembling of terminal
Each terminal is secured by a lock on the mounting rail, which must be released for disassembly:
1. Pull the terminal by its orange-colored lugs approximately 1cm away from the mounting rail. In doing
so for this terminal the mounting rail lock is released automatically and you can pull the terminal out of
the bus terminal block easily without excessive force.
2. Grasp the released terminal with thumb and index finger simultaneous at the upper and lower grooved
housing surfaces and pull the terminal out of the bus terminal block.
Connections within a bus terminal block
The electric connections between the Bus Coupler and the Bus Terminals are automatically realized by
joining the components:
• The six spring contacts of the K-Bus/E-Bus deal with the transfer of the data and the supply of the Bus
Terminal electronics.
• The power contacts deal with the supply for the field electronics and thus represent a supply rail within
the bus terminal block. The power contacts are supplied via terminals on the Bus Coupler (up to 24V)
or for higher voltages via power feed terminals.
Power Contacts
During the design of a bus terminal block, the pin assignment of the individual Bus Terminals must
be taken account of, since some types (e.g. analog Bus Terminals or digital 4-channel Bus Terminals) do not or not fully loop through the power contacts. Power Feed Terminals (KL91xx, KL92xx
or EL91xx, EL92xx) interrupt the power contacts and thus represent the start of a new supply rail.
PE power contact
The power contact labeled PE can be used as a protective earth. For safety reasons this contact mates first
when plugging together, and can ground short-circuit currents of up to 125A.
KL3361 and KL336218 Version: 2.2.0
Page 19

Fig.7: Power contact on left side
Mounting and wiring
NOTE
Possible damage of the device
Note that, for reasons of electromagnetic compatibility, the PE contacts are capacitatively coupled to the
mounting rail. This may lead to incorrect results during insulation testing or to damage on the terminal (e.g.
disruptive discharge to the PE line during insulation testing of a consumer with a nominal voltage of 230V).
For insulation testing, disconnect the PE supply line at the Bus Coupler or the Power Feed Terminal! In order to decouple further feed points for testing, these Power Feed Terminals can be released and pulled at
least 10mm from the group of terminals.
WARNING
Risk of electric shock!
The PE power contact must not be used for other potentials!
3.3 Installation instructions for enhanced mechanical load capacity
WARNING
Risk of injury through electric shock and damage to the device!
Bring the Bus Terminal system into a safe, de-energized state before starting mounting, disassembly or
wiring of the Bus Terminals!
Additional checks
The terminals have undergone the following additional tests:
Verification Explanation
Vibration 10 frequency runs in 3 axes
6 Hz < f < 60 Hz displacement 0.35 mm, constant amplitude
60.1Hz<f<500Hz acceleration 5g, constant amplitude
Shocks 1000 shocks in each direction, in 3 axes
25 g, 6 ms
KL3361 and KL3362 19Version: 2.2.0
Page 20

Mounting and wiring
Additional installation instructions
For terminals with enhanced mechanical load capacity, the following additional installation instructions apply:
• The enhanced mechanical load capacity is valid for all permissible installation positions
• Use a mounting rail according to EN 60715 TH35-15
• Fix the terminal segment on both sides of the mounting rail with a mechanical fixture, e.g. an earth
terminal or reinforced end clamp
• The maximum total extension of the terminal segment (without coupler) is:
64 terminals (12 mm mounting with) or 32 terminals (24 mm mounting with)
• Avoid deformation, twisting, crushing and bending of the mounting rail during edging and installation of
the rail
• The mounting points of the mounting rail must be set at 5 cm intervals
• Use countersunk head screws to fasten the mounting rail
• The free length between the strain relief and the wire connection should be kept as short as possible. A
distance of approx. 10 cm should be maintained to the cable duct.
3.4 Connection
3.4.1 Connection system
WARNING
Risk of electric shock and damage of device!
Bring the bus terminal system into a safe, powered down state before starting installation, disassembly or
wiring of the bus terminals!
Overview
The Bus Terminal system offers different connection options for optimum adaptation to the respective
application:
• The terminals of ELxxxx and KLxxxx series with standard wiring include electronics and connection
level in a single enclosure.
• The terminals of ESxxxx and KSxxxx series feature a pluggable connection level and enable steady
wiring while replacing.
• The High Density Terminals (HD Terminals) include electronics and connection level in a single
enclosure and have advanced packaging density.
Standard wiring (ELxxxx / KLxxxx)
Fig.8: Standard wiring
The terminals of ELxxxx and KLxxxx series have been tried and tested for years.
They feature integrated screwless spring force technology for fast and simple assembly.
KL3361 and KL336220 Version: 2.2.0
Page 21

Mounting and wiring
Pluggable wiring (ESxxxx / KSxxxx)
Fig.9: Pluggable wiring
The terminals of ESxxxx and KSxxxx series feature a pluggable connection level.
The assembly and wiring procedure is the same as for the ELxxxx and KLxxxx series.
The pluggable connection level enables the complete wiring to be removed as a plug connector from the top
of the housing for servicing.
The lower section can be removed from the terminal block by pulling the unlocking tab.
Insert the new component and plug in the connector with the wiring. This reduces the installation time and
eliminates the risk of wires being mixed up.
The familiar dimensions of the terminal only had to be changed slightly. The new connector adds about 3
mm. The maximum height of the terminal remains unchanged.
A tab for strain relief of the cable simplifies assembly in many applications and prevents tangling of individual
connection wires when the connector is removed.
Conductor cross sections between 0.08mm2 and 2.5mm2 can continue to be used with the proven spring
force technology.
The overview and nomenclature of the product names for ESxxxx and KSxxxx series has been retained as
known from ELxxxx and KLxxxx series.
High Density Terminals (HD Terminals)
Fig.10: High Density Terminals
The Bus Terminals from these series with 16 terminal points are distinguished by a particularly compact
design, as the packaging density is twice as large as that of the standard 12mm Bus Terminals. Massive
conductors and conductors with a wire end sleeve can be inserted directly into the spring loaded terminal
point without tools.
Wiring HD Terminals
The High Density (HD) Terminals of the ELx8xx and KLx8xx series doesn't support pluggable
wiring.
Ultrasonically "bonded" (ultrasonically welded) conductors
Ultrasonically “bonded" conductors
It is also possible to connect the Standard and High Density Terminals with ultrasonically
"bonded" (ultrasonically welded) conductors. In this case, please note the tables concerning the
wire-size width below!
KL3361 and KL3362 21Version: 2.2.0
Page 22

Mounting and wiring
3.4.2 Wiring
WARNING
Risk of electric shock and damage of device!
Bring the bus terminal system into a safe, powered down state before starting installation, disassembly or
wiring of the Bus Terminals!
Terminals for standard wiring ELxxxx/KLxxxx and for pluggable wiring ESxxxx/KSxxxx
Fig.11: Connecting a cable on a terminal point
Up to eight terminal points enable the connection of solid or finely stranded cables to the Bus Terminal. The
terminal points are implemented in spring force technology. Connect the cables as follows:
1. Open a terminal point by pushing a screwdriver straight against the stop into the square opening
above the terminal point. Do not turn the screwdriver or move it alternately (don't toggle).
2. The wire can now be inserted into the round terminal opening without any force.
3. The terminal point closes automatically when the pressure is released, holding the wire securely and
permanently.
See the following table for the suitable wire size width.
Terminal housing ELxxxx, KLxxxx ESxxxx, KSxxxx
Wire size width (single core wires) 0.08 ... 2.5mm
Wire size width (fine-wire conductors) 0.08 ... 2.5mm
Wire size width (conductors with a wire end sleeve) 0.14 ... 1.5mm
2
2
2
0.08 ... 2.5mm
0,08 ... 2.5mm
0.14 ... 1.5mm
2
2
2
Wire stripping length 8 ... 9mm 9 ... 10mm
High Density Terminals (HD Terminals [}21]) with 16 terminal points
The conductors of the HD Terminals are connected without tools for single-wire conductors using the direct
plug-in technique, i.e. after stripping the wire is simply plugged into the terminal point. The cables are
released, as usual, using the contact release with the aid of a screwdriver. See the following table for the
suitable wire size width.
KL3361 and KL336222 Version: 2.2.0
Page 23

Terminal housing High Density Housing
Wire size width (single core wires) 0.08 ... 1.5mm
Wire size width (fine-wire conductors) 0.25 ... 1.5mm
Wire size width (conductors with a wire end sleeve) 0.14 ... 0.75mm
Wire size width (ultrasonically “bonded" conductors) only 1.5mm
2
2
2
2
Wire stripping length 8 ... 9mm
3.4.3 Shielding
Shielding
Encoder, analog sensors and actors should always be connected with shielded, twisted paired
wires.
Mounting and wiring
KL3361 and KL3362 23Version: 2.2.0
Page 24

Mounting and wiring
3.5 Connecting the KL3361
WARNING
Risk of injury through electric shock and damage to the device!
Bring the Bus Terminals system into a safe, de-energized state before starting mounting, disassembly or
wiring of the Bus Terminals.
Fig.12: Connecting the KL3361
The diagram shows the connection of four strain gauges (SG) as a bridge circuit, with supply of the
measuring bridge
• through the oscilloscope terminal (left) or
• from an external voltage source U
Terminal point No. Connection
+ 24 V 1 Supply voltage for digital output
OUT 24 V 2 Digital output
UB+ 3 Input for differential voltage of the measuring bridge
UV+ 4 5 V supply voltage for the strain gauges in a bridge circuit or
reference input for the external supply voltage of the measuring bridge
24 V Trigger 5 Trigger input
0V 6 Ground for trigger input
UB- 7 Input for differential voltage of the measuring bridge
UV- 8 0 V supply voltage for the strain gauges in a bridge circuit or
reference input for the external supply voltage of the measuring bridge
Supply of the measuring bridge via KL3361
The total resistance of the measuring bridge should be dimensioned in such a way that the current to be
supplied by the oscilloscope terminal at the terminals UV+ and UV- never exceeds 20 mA.
(right).
ext
KL3361 and KL336224 Version: 2.2.0
Page 25

Mounting and wiring
Supply of the measuring bridge from an external voltage source
Note the following if the measuring bridge is supplied from an external voltage source:
The external supply voltage
• must also be applied to the UV+ and UV- connections for reference;
• must be within the range +5 V to +10 V;
• must not vary by more than ±5% during operation.
Fluctuations of the external supply voltage increase the measurement error!
After changing the external supply voltage, the oscilloscope terminal has to be restarted for rebalancing!
The internal voltage source switches off automatically, as soon as an external voltage of more than 5 V is
applied to the UV+ and UV- terminals of the oscilloscope terminal.
KL3361 and KL3362 25Version: 2.2.0
Page 26

Mounting and wiring
3.6 Connecting the KL3362
WARNING
Risk of injury through electric shock and damage to the device!
Bring the Bus Terminals system into a safe, de-energized state before starting mounting, disassembly or
wiring of the Bus Terminals.
Fig.13: Connecting the KL3362
The diagram shows the connection of two function generators (FG1, FG2) to the channels of the KL3362
oscilloscope terminal.
Terminal point No. Connection
+ 24V 1 Supply voltage for digital output
OUT 24V 2 Digital output
IN 1 3 Oscilloscope input channel 1 ( -10 V to +10 V)
GND 4 Ground for oscilloscope input channel 1 (internally connected with
terminal no. 8)
24V Trigger 5 Trigger input
0V 6 Ground for trigger input
IN 2 7 Oscilloscope input channel 2 ( -10 V to +10 V)
GND 8 Ground for oscilloscope input channel 2 (internally connected with
terminal no. 4)
KL3361 and KL336226 Version: 2.2.0
Page 27

Mounting and wiring
3.7 ATEX - Special conditions (standard temperature range)
WARNING
Observe the special conditions for the intended use of Beckhoff fieldbus components with
standard temperature range in potentially explosive areas (directive 2014/34/EU)!
• The certified components are to be installed in a suitable housing that guarantees a protection class of at
least IP54 in accordance with EN60079-15! The environmental conditions during use are thereby to be
taken into account!
• If the temperatures during rated operation are higher than 70°C at the feed-in points of cables, lines or
pipes, or higher than 80°C at the wire branching points, then cables must be selected whose temperature data correspond to the actual measured temperature values!
• Observe the permissible ambient temperature range of 0 to 55°C for the use of Beckhoff fieldbus components standard temperature range in potentially explosive areas!
• Measures must be taken to protect against the rated operating voltage being exceeded by more than
40% due to short-term interference voltages!
• The individual terminals may only be unplugged or removed from the Bus Terminal system if the supply
voltage has been switched off or if a non-explosive atmosphere is ensured!
• The connections of the certified components may only be connected or disconnected if the supply voltage has been switched off or if a non-explosive atmosphere is ensured!
• The fuses of the KL92xx/EL92xx power feed terminals may only be exchanged if the supply voltage has
been switched off or if a non-explosive atmosphere is ensured!
• Address selectors and ID switches may only be adjusted if the supply voltage has been switched off or if
a non-explosive atmosphere is ensured!
Standards
The fundamental health and safety requirements are fulfilled by compliance with the following standards:
• EN 60079-0:2012+A11:2013
• EN 60079-15:2010
Marking
The Beckhoff fieldbus components with standard temperature range certified according to the ATEX directive
for potentially explosive areas bear one of the following markings:
II 3GKEMA 10ATEX0075 X Ex nA IIC T4 GcTa: 0…+55°C
or
II 3GKEMA 10ATEX0075 X Ex nC IIC T4 GcTa: 0…+55°C
KL3361 and KL3362 27Version: 2.2.0
Page 28

Mounting and wiring
3.8 ATEX Documentation
Notes about operation of the Beckhoff terminal systems in potentially explosive areas (ATEX)
Pay also attention to the continuative documentation
Notes about operation of the Beckhoff terminal systems in potentially explosive areas (ATEX)
that is available in the download area of the Beckhoff homepage http:\\www.beckhoff.com!
KL3361 and KL336228 Version: 2.2.0
Page 29

Configuration software KS2000
4 Configuration software KS2000
4.1 KS2000 - Introduction
The KS2000 configuration software permits configuration, commissioning and parameterization of bus
couplers, of the affiliated bus terminals and of Fieldbus Box Modules. The connection between bus coupler/
Fieldbus Box Module and the PC is established by means of the serial configuration cable or the fieldbus.
Fig.14: KS2000 configuration software
Configuration
You can configure the Fieldbus stations with the Configuration Software KS2000 offline. That means, setting
up a terminal station with all settings on the couplers and terminals resp. the Fieldbus Box Modules can be
prepared before the commissioning phase. Later on, this configuration can be transferred to the terminal
station in the commissioning phase by means of a download. For documentation purposes, you are provided
with the breakdown of the terminal station, a parts list of modules used and a list of the parameters you have
modified. After an upload, existing fieldbus stations are at your disposal for further editing.
Parameterization
KS2000 offers simple access to the parameters of a fieldbus station: specific high-level dialogs are available
for all bus couplers, all intelligent bus terminals and Fieldbus Box modules with the aid of which settings can
be modified easily. Alternatively, you have full access to all internal registers of the bus couplers and
intelligent terminals. Refer to the register description for the meanings of the registers.
KL3361 and KL3362 29Version: 2.2.0
Page 30

Configuration software KS2000
Commissioning
The KS2000 software facilitates commissioning of machine components or their fieldbus stations: Configured
settings can be transferred to the fieldbus modules by means of a download. After a login to the terminal
station, it is possible to define settings in couplers, terminals and Fieldbus Box modules directly online. The
same high-level dialogs and register access are available for this purpose as in the configuration phase.
The KS2000 offers access to the process images of the bus couplers and Fieldbus Box modules.
• Thus, the coupler's input and output images can be observed by monitoring.
• Process values can be specified in the output image for commissioning of the output modules.
All possibilities in the online mode can be used in parallel with the actual fieldbus mode of the terminal
station. The fieldbus protocol always has the higher priority in this case.
KL3361 and KL336230 Version: 2.2.0
Page 31

Configuration software KS2000
4.2 Parameterization with KS2000
Connect the configuration interface of your fieldbus coupler with the serial interface of your PC via the
configuration cable and start the KS2000 configuration software.
Click on the Login button. The configuration software will now load the information for
the connected fieldbus station.
In the sample shown, this is
• a BK9000 Bus Coupler for Ethernet
• a KL1xx2 digital input terminal
• a KL3661 oscilloscope terminal
• a KL9010 Bus end terminal
Fig.15: Display of the fieldbus station in KS2000
The left-hand KS2000 window displays the terminals of the fieldbus station in a tree structure.
The right-hand KS2000 window contains a graphic display of the fieldbus station terminals.
In the tree structure of the left-hand window, click on the plus-sign next to the terminal whose parameters
you wish to change (item 2 in the sample).
KL3361 and KL3362 31Version: 2.2.0
Page 32

Configuration software KS2000
Fig.16: KS2000 tree branches for channel 1 of the KL3681
Click on Settings. You can now change the settings of the oscilloscope terminal.
KL3361:
• Trigger logic [}33]
• Operating mode and trigger values [}33]
• Process data [}35]
KL3362:
• Trigger logic [}35]
• Trigger values [}38]
• Operation mode [}42]
• Process data [}39]
KL3361 and KL336232 Version: 2.2.0
Page 33

Configuration software KS2000
4.3 Masks for KL3361
4.3.1 Trigger logic for KL3361
In the Trigger logic tab, you can specify the trigger behavior of the KL3361 oscilloscope terminal.
Fig.17: Trigger logic for KL3361
• Source
Here you can select the trigger source (see Trigger logic in detail [}40]).
• Event
Here you can specify the trigger event (see Trigger logic in detail [}40]).
• Enable
Connect the lower input of the And gate with the desired function in order to specify when the And gate
should switch through a trigger pulse (see Trigger logic in detail [}41]).
• Action
Connect the output of the And gate with the desired function in order to specify which task should be
triggered (see Trigger logic in detail [}41]).
4.3.2 Trigger values for KL3361
In the Trigger values tab, you can set the mode, the scaling and the switching thresholds, the pulse width
and the valid trigger time for the two trigger units of the KL3361 oscilloscope terminal.
KL3361 and KL3362 33Version: 2.2.0
Page 34

Configuration software KS2000
Fig.18: Trigger values for KL3361
• Operation mode
Here you can specify the trigger type (see General settings in detail [}42]).
• General
Here you can specify the general trigger settings (see General settings in detail [}42]).
• Scaling
Here you can specify the scaling (see General settings in detail [}42]).
• Trigger unit 1
Here you can specify the trigger values for trigger unit 1 (see Trigger values [}43] in detail).
• Trigger unit 2
Here you can specify the trigger values for trigger unit 2 (see Trigger values [}43] in detail).
KL3361 and KL336234 Version: 2.2.0
Page 35

Configuration software KS2000
4.3.3 Process data for KL3361
In the Process data tab, you can specify which data are displayed in the process image of the KL3361
oscilloscope terminal.
Fig.19: Process data for KL3361
Output process image
• Data word 0
For trigger unit 1, select which trigger parameter you wish to specify with data word 0 (DataOUT0
[}51]) of the KL3361 (see Output process data in detail [}44]).
• Data word 1
For trigger unit 2, select which trigger parameter you wish to specify with data word 1 (DataOUT1
[}51]) of the KL3361 (see Output process data in detail [}44]).
Input process image
• Data word 0
Here you can specify which input value is transferred with data word 0 (DataIN0 [}51]) from the
KL3361 to the control (see Input process data in detail [}46]).
• Data word 1
Here you can specify which input value is transferred with data word 1 (DataIN1 [}51]) from the
KL3361 to the control (see Input process data in detail [}46]).
4.4 Masks for KL3362
4.4.1 Trigger logic for KL3362
In the Trigger logic tab, you can specify the trigger behavior of the KL3362 oscilloscope terminal.
KL3361 and KL3362 35Version: 2.2.0
Page 36

Configuration software KS2000
Fig.20: Trigger logic for KL3362
• Source
Here you can select the trigger source (see Trigger logic in detail [}40]).
• Event
Here you can specify the trigger event (see Trigger logic in detail [}40]).
• Enable
Connect the lower input of the And gate with the desired function in order to specify when the And gate
should switch through a trigger pulse (see Trigger logic in detail [}41]).
• Action
Connect the output of the And gate with the desired function in order to specify which task should be
triggered (see Trigger logic in detail [}41]).
KL3361 and KL336236 Version: 2.2.0
Page 37
Configuration software KS2000
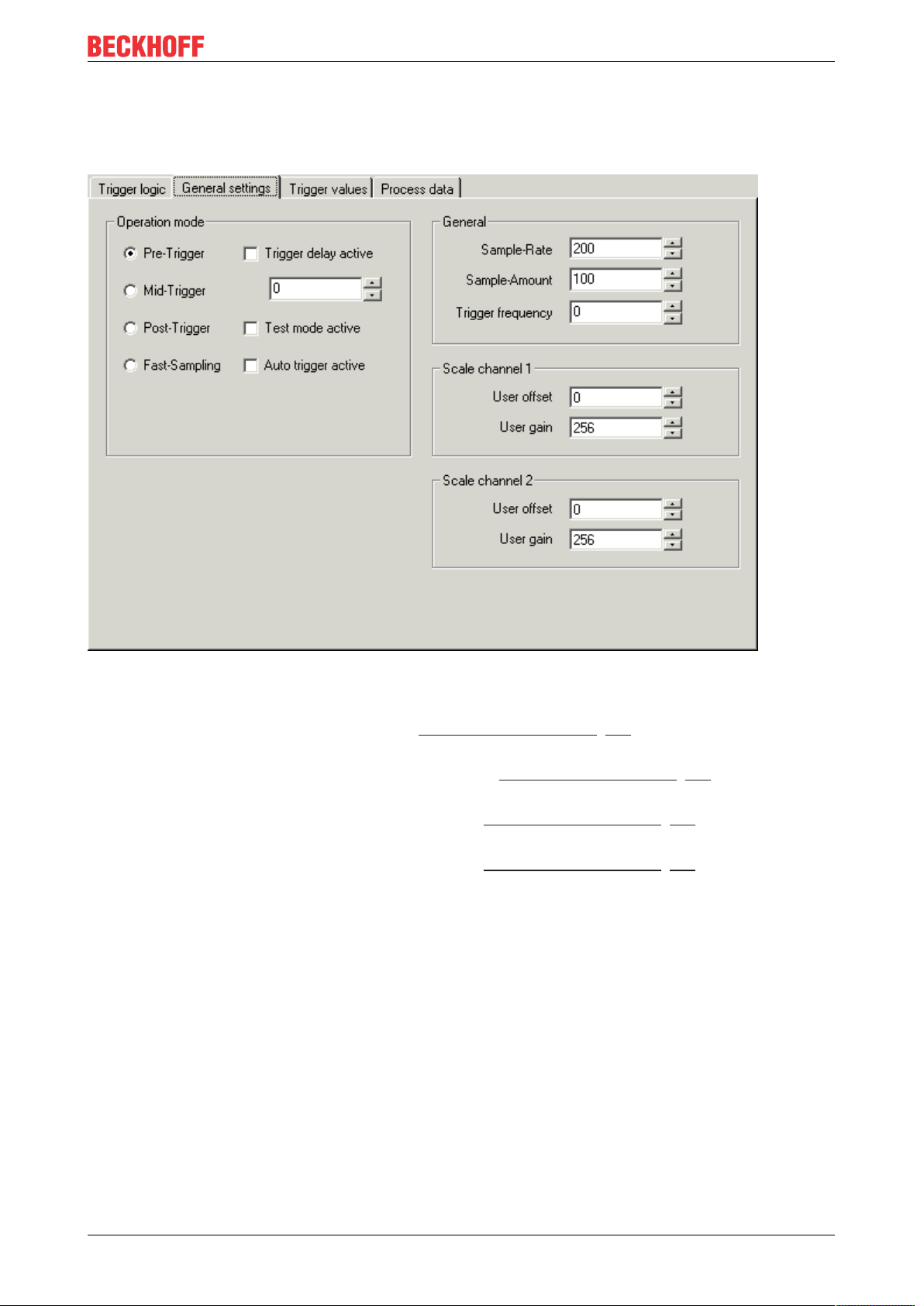
4.4.2 General settings for KL3362
In the General settings tab, you can specify the operating mode, general settings and the scaling of both
channels of the KL3362 oscilloscope terminal.
Fig.21: General settings for KL3362
• Operation mode
Here you can specify the trigger type (see General settings in detail [}42]).
• General
Here you can specify the general trigger settings (see General settings in detail [}42]).
• Scaling channel 1
Here you can specify the scaling for channel 1 (see General settings in detail [}42]).
• Scaling channel 2
Here you can specify the scaling for channel 2 (see General settings in detail [}42]).
KL3361 and KL3362 37Version: 2.2.0
Page 38

Configuration software KS2000
4.4.3 Trigger values for KL3362
In the Trigger values tab, you can specify the switching thresholds, the pulse width and the valid trigger time
for the four trigger units of the KL3362 oscilloscope terminal.
Fig.22: Trigger values for KL3362
• Trigger unit 1
Here you can specify the trigger values for trigger unit 1 (see Trigger values in detail [}43]).
• Trigger unit 2
Here you can specify the trigger values for trigger unit 2 (see Trigger values in detail [}43]).
• Trigger unit 3
Here you can specify the trigger values for trigger unit 3 (see Trigger values in detail [}43]).
• Trigger unit 4
Here you can specify the trigger values for trigger unit 4 (see Trigger values in detail [}43]).
KL3361 and KL336238 Version: 2.2.0
Page 39

Configuration software KS2000
4.4.4 Process data for KL3362
In the Process data tab, you can specify which data are displayed in the process image of the KL3362
oscilloscope terminal.
Fig.23: Process data for KL3362
Output process image
• Data word 0
For trigger unit 1, select which trigger parameter you wish to specify with data word 0 (DataOUT0,
channel 1 [}51]) of the KL3362 (see Output process data in detail [}44]).
• Data word 1
For trigger unit 2, select which trigger parameter you wish to specify with data word 1 (DataOUT1,
channel 1 [}51]) of the KL3362 (see Output process data in detail [}44]).
• Data word 2
For trigger unit 3, select which trigger parameter you wish to specify with data word 2 (DataOUT0,
channel 2 [}51]) of the KL3362 (see Output process data in detail [}44]).
• Data word 3
For trigger unit 4, select which trigger parameter you wish to specify with data word 3 (DataOUT1,
channel 2 [}51]) of the KL3362 (see Output process data in detail [}44]).
Input process image
• Data word 0
Here you can specify which input value is transferred with data word 0 (DataIN0, channel 1 [}51])
from the KL3362 to the controller (see Input process data in detail [}46]).
• Data word 1
Here you can specify which input value is transferred with data word 1 (DataIN1, channel 1 [}51])
from the KL3362 to the controller (see Input process data in detail [}46]).
KL3361 and KL3362 39Version: 2.2.0
Page 40

Configuration software KS2000
• Data word 2
Here you can specify which input value is transferred with data word 2 (DataIN0, channel 2 [}51])
from the KL3362 to the controller (see Input process data in detail [}46]).
• Data word 3
Here you can specify which input value is transferred with data word 3 (DataIN1, channel 2 [}51])
from the KL3362 to the controller (see Input process data in detail [}46]).
4.5 Settings in detail
4.5.1 Trigger logic
Source
You may select one of the following trigger sources (R40 [}62]):
Shot The trigger pulse is triggered by the fieldbus via a control word.
Timer The trigger pulse is triggered at regular intervals by a timer. The
frequency of the timer can be specified under General trigger
settings [}42].
Digital input The trigger pulse is triggered by the trigger input (24 V trigger).
Analog input 1 The trigger pulse is triggered by analog input 1.
Analog input 2 The trigger pulse is triggered by analog input 2.
(KL3362 only)
Event
Here you can specify the event (R40 [}62]) that triggers the trigger.
Rising edge (default) The trigger unit responds to the rising edge of the input signal. The
associated threshold level can be specified via the Trigger values
[}43] tab.
Falling edge The trigger unit responds to the falling edge of the input signal. The
associated threshold level can be specified via the Trigger values
[}43] tab.
Positive pulse longer
than set pulse width
Positive pulse shorter
than set pulse width
Negative pulse longer
than set pulse width
Negative pulse shorter
than set pulse width
The trigger unit responds if the positive pulse width is longer than
the configured pulse width, which can be specified via the Trigger
values [}43] tab.
The trigger unit responds if the positive pulse width is shorter than
the configured pulse width, which can be specified via the Trigger
values [}43] tab.
The trigger unit responds if the negative pulse width is longer than
the configured pulse width, which can be specified via the Trigger
values [}43] tab.
The trigger unit responds if the negative pulse width is shorter than
the configured pulse width, which can be specified via the Trigger
values [}43] tab.
KL3361 and KL336240 Version: 2.2.0
Page 41
Configuration software KS2000
Enable
Connect the lower input of the And gate with the desired function in order to specify when the And gate
should switch through a trigger pulse (R40 [}62]).
Always enabled The trigger pulse is always switched through.
Digital input High The trigger pulse is switched through, if the trigger input (24 V
trigger) of the oscilloscope terminal is on High potential.
Analog input 1 above
switching threshold
Analog input 2 above
switching threshold
(KL3362 only)
Digital input Low The trigger pulse is switched through, if the trigger input (24 V
Analog input 1 below
switching threshold
Analog input 2 below
switching threshold
(KL3362 only)
The trigger pulse is switched through, if the signal at analog input 1
of the oscilloscope terminal increases above the switching
threshold 2. The threshold level can be specified via the Trigger
values [}43] tab.
The trigger pulse is switched through, if the signal at analog input 2
of the oscilloscope terminal increases above the switching
threshold 2. The threshold level can be specified via the Trigger
values [}43] tab.
trigger) of the oscilloscope terminal is on Low potential.
The trigger pulse is switched through, if the signal at analog input 1
of the oscilloscope terminal decreases below the specified
switching threshold 2. The threshold level can be specified via the
Trigger values [}43] tab.
The trigger pulse is switched through, if the signal at analog input 2
of the oscilloscope terminal decreases below the specified
switching threshold 2. The threshold level can be specified via the
Trigger values [}43] tab.
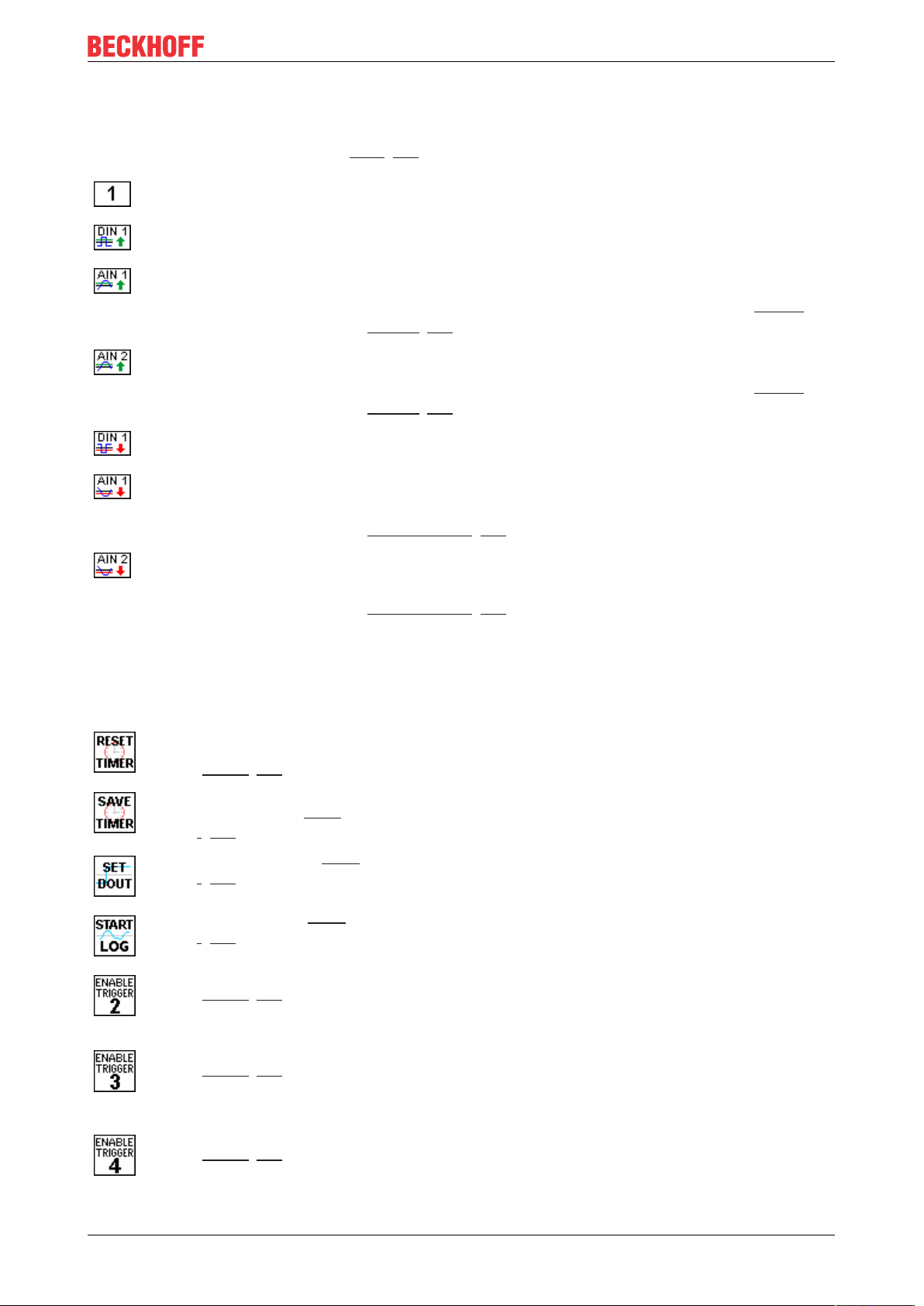
Action
Connect the output of the And gate with the desired function in order to specify which task should be
triggered.
Reset the timer
(chronometer) to zero
(R40.2 [}62])
Save timer
(chronometer) (R40.3
[}62])
Set digital output (R40.4
[}62])
Start recording (R40.5
[}62])
Enable trigger unit 2
(R40.5 [}62])
Enable trigger unit 3
(R40.5 [}62])
(KL3362 only)
Enable trigger unit 4
(R40.5 [}62])
(KL3362 only)
Resets the timer back to zero. The timer will start running again
automatically immediately.
Saves the current value of the running timer at the trigger instant.
Sets the digital output, e.g. to the synchronous triggers of the
second oscilloscope channel of a KL3362. This function must be
released with bit2 of the control byte1 (CB1.2)
Starts the recording
If the output of the And gate in trigger unit 1 is connected with the
function Enable trigger 2, the trigger signal is transferred to trigger
unit 2, which can be accessed via the Unit 2 button in the Selection
field for parameterization.
If the output of the And gate in trigger unit 2 is connected with the
function Enable trigger 3, the trigger signal is transferred to trigger
unit 3, which can be accessed via the Unit 3 button in the Selection
field for parameterization.
If the output of the And gate in trigger unit 3 is connected with the
function Enable trigger 4, the trigger signal is transferred to trigger
unit 4, which can be accessed via the Unit 4 button in the Selection
field for parameterization.
KL3361 and KL3362 41Version: 2.2.0
Page 42

Configuration software KS2000
4.5.2 General settings
Operation mode
Pre-trigger (R32.8-10 [}59])
Mid-trigger (R32.8-10
[}59])
Post-trigger (R32.8-10
[}59])
default
Fast sampling (R32.8-10
[}59])
Trigger delay active (R32.4
[}59])
default: not activated
Trigger delay (R52 [}63])
default: 0
Test mode active (R32.5
[}59])
default: not activated
Auto-trigger active (R32.6
[}59])
default not activated
Recording ceases as soon as a trigger
event occurs.
The trigger event is the center of the
recording.
Recording commences as soon as a trigger
event occurs.
Operation with increased sampling rate of
up to 10µs:
• The recording can only be started via the
trigger input.
• The settings of the trigger units are not
taken into account.
• Only the first channel is recorded, even
for KL3362.
Switches the trigger delay on.
A trigger delay (tTD) can be specified here.
The number of skipped samples (n
STD
) is
entered as the parameter. The trigger delay
thus depends on the sample rate! Sample:
- Sample Rate:Ts=200µs
- Skipped Samples: n
t
=Tsxn
TD
=200µsx100=20ms
STD
STD
=100
Switches the test mode on. In test mode, a
ramp is output instead of converted analog
values. It runs from 0 to 0x3FFF and back
again.
Switches the auto trigger function on. With
auto trigger switched on, the trigger unit is
automatically activated once the preceding
event has been evaluated. To this end, bit 0
is toggled in status register 1 (SR1) with
each new evaluation.
General
Sample rate (R35 [}60])
default: 200µs
Sample amount (R36)
default: 100
Trigger frequency (R56
[}64])
default: 0
Interval (Ts) between two samples (scans) in
microseconds.
The sampling speed is limited to Ts =100 µs
(10 kHz) by the evaluation of the trigger
detectors.
Only the Fast sampling mode enables
sampling at Ts =10 µs (100 kHz).
Number of sampling values to be recorded.
A maximum of 4,000 values can be
recorded.
Here you can specify the trigger frequency
of the timer [}33].
KL3361 and KL336242 Version: 2.2.0
Page 43

Scaling channel 1
Configuration software KS2000
Scaling channel 2 (KL3362 only)
4.5.3 Trigger values
Trigger unit 1
User offset (R33 [}59])
default: 0
User gain (R34 [}59])
default: 256
User offset (R33 [}59])
default: 0
User gain (R34 [}59])
default: 256
Here you can enter an offset. Scaling:
offset = full scale value x parameter /
resolution
Sample for KL3361: 16mVx100 / 32767 =
0.049mV
Here you can enter the gain factor for
scaling the input value by this factor.
Here you can enter an offset. Scaling:
offset = full scale value x parameter /
resolution
Sample for KL3361: 16mVx100 / 32767 =
0.049mV
Here you can enter the gain factor for
scaling the input value by this factor.
Switching threshold1 (R41
[}62])
default: 1000
Switching threshold2 (R42
[}63])
default: 1000
Pulse width (R43 [}63])
default: 100
valid trigger time (R44
[}63])
default:
Timeframe active (R40.6
[}62])
default: not activated
Here you can specify the switching threshold
for the trigger source of trigger unit 1. Scaling:
Threshold value = full scale value x parameter /
resolution
Sample for KL3361: 16mVx1000 / 32767 =
0,488 mV
Here you can specify the switching threshold
for enabling the trigger of trigger unit 1.
Scaling: see Switching threshold 1.
Here you can specify the pulse width (tP) of
trigger unit 1 for the glitch mode. The number
of samples (nSP) is entered as the parameter.
The pulse width thus depends on the sample
rate! Sample:
- Sample rate:Ts= 200µs
- Samples:nSP=100
Pulse width: tP = Ts x nSP=200µs x 100 =
20ms
Here you can specify the valid trigger time (tVT)
for trigger unit 1. The number of valid samples
(nVS) is entered as the parameter. The valid
trigger time thus depends on the sample rate!
Sample:
- Sample rate:Ts=200µs
- valid samples:nVS=100
Valid trigger time: tVT=TsxnVS =200µs x 100 =
20ms
Here you can switch on the timeframe for
trigger unit 1.
KL3361 and KL3362 43Version: 2.2.0
Page 44

Configuration software KS2000
Trigger unit 2
Trigger unit 3 (KL3362 only)
See Trigger unit 1.
Trigger unit 4 (KL3362 only)
See Trigger unit 2.
Switching threshold1
(R47 [}63])
default: 1000
Switching threshold2
(R48 [}63])
default: 1000
Pulse width (R49 [}63])
default: 100
valid trigger time (R50
[}63])
default:
Timeframe active (R46
[}63])
default: not activated
Here you can specify the switching threshold
for the trigger source of trigger unit 2.
Scaling: see Trigger unit 1.
Here you can specify the switching threshold
for enabling the trigger of trigger unit 2.
Scaling: see Trigger unit 1.
Here you can specify the pulse width for trigger
unit 2.
Scaling: see Trigger unit 1.
Here you can specify the valid trigger time for
trigger unit 2.
Scaling: see Trigger unit 1.
Here you can switch on the timeframe for
trigger unit 2.
4.5.4 Output process data
Output process data in detail
Data word 0
Here you can choose which trigger parameter you wish to specify with data word 0 of the oscilloscope
terminal for trigger unit 1.
Switching threshold1 Switching threshold 1 of trigger unit 1
Switching threshold2 Switching threshold 2 of trigger unit 1
Pulse width Pulse width of trigger unit 1
Valid trigger time Valid trigger time of trigger unit 1
Not indicated No parameters set
Data word 1
Here you can choose which trigger parameter you wish to specify with data word 1 of the oscilloscope
terminal for trigger unit 1.
Switching threshold1 Switching threshold 1 of trigger unit 2
Switching threshold2 Switching threshold 2 of trigger unit 2
Pulse width Pulse width of trigger unit 2
Valid trigger time Valid trigger time of trigger unit 2
Not indicated No parameters set
KL3361 and KL336244 Version: 2.2.0
Page 45

Configuration software KS2000
Data word 2 (KL3362 only)
Here you can choose which trigger parameter you wish to specify with data word 2 of the oscilloscope
terminal for trigger unit 3 (see Data word 0 for trigger parameters).
Data word 3 (KL3362 only)
Here you can choose which trigger parameter you wish to specify with data word 3 of the oscilloscope
terminal for trigger unit 3 (see Data word 1 for trigger parameters).
KL3361 and KL3362 45Version: 2.2.0
Page 46

Configuration software KS2000
4.5.5 Input process data
Input process data in detail
Data word 0
Here you can specify which input value is transferred with data word 0 from the oscilloscope terminal to the
control.
Fig.24: Selecting the input value for data word0
Input value Comment
Current measurement reading Current analog value
Maximum value Maximum value of a recording
Minimum value Minimum value of a recording
RMS value RMS value of a recording: Sqrt((Sum (x
Mean value Arithmetic mean of a recording: (Sum(xn))/n
Peak-peak value Peak-peak value of a recording
Cycle duration Cycle duration of a recording
Pulse width HIGH • four successive values have to be above the switching
threshold for activating the start
• four successive values have to be below the switching threshold
for activating the stop
Pulse width LOW • four successive values have to be above the switching
threshold for activating the start
• four successive values have to be below the switching threshold
for activating the stop
Duty factor Duty factor
Jitter T
Jitter T
Jitter T
max
min
mean
reserved
reserved
reserved
Histogram Max Most frequent value of a recording
Read value timer 1
stored value of the timer
[}41] (chronometer) from
*) for KL3362 also trigger unit 3 (via
data word 2 or 3)
trigger unit 1*
Current value timer 1
current value of the timer
[}41] (chronometer) from
trigger unit 1*
Read value timer 2
stored value of the timer
[}41] (chronometer) from
**) for KL3362 also trigger unit 4 (via
data word 2 or 3)
trigger unit 2**
Current value timer 2
current value of the timer
[}41] (chronometer) from
trigger unit 2*
Error counter inner envelope curve Error counter of the inner envelope curve
Error counter outer envelope curve Error counter of the outer envelope curve
Number of samples up to analog value
greater than switching threshold
Number of samples up to analog value
less than switching threshold
Number of measurement points recorded up to the time when the
analog value exceeded the switching threshold.
Number of measurement points recorded up to the time when the
analog value was less than the switching threshold.
n
2
))/n
KL3361 and KL336246 Version: 2.2.0
Page 47

Configuration software KS2000
Data word 1
Here you can specify which input value is transferred with data word 1 from the oscilloscope terminal to the
control.
Fig.25: Selecting the input value for data word1
(input values see Data word 0).
Data word 2 (KL3362 only)
Here you can specify which input value is transferred with data word 2 from the oscilloscope terminal to the
control.
Fig.26: Selecting the input value for data word2 (KL3362 only)
(input values see Data word 0).
Data word 3 (KL3362 only)
Here you can specify which input value is transferred with data word 3 from the oscilloscope terminal to the
control.
Fig.27: Selecting the input value for data word3 (KL3362 only)
(input values see Data word 0).
4.6 Sample program for KL register communication via EtherCAT on KL3314 exemplary
Using the sample programs
This document contains sample applications of our products for certain areas of application. The
application notes provided here are based on typical features of our products and only serve as examples. The notes contained in this document explicitly do not refer to specific applications. The
customer is therefore responsible for assessing and deciding whether the product is suitable for a
particular application. We accept no responsibility for the completeness and correctness of the
source code contained in this document. We reserve the right to modify the content of this document at any time and accept no responsibility for errors and missing information.
Program description / function
This example program (TwinCAT 3) provides change of single register values of the KL3314 as selection of
the element type, characteristical settings of the feature register R32 and user scaling offset and gain (R33/
R34) similar as per KS2000.
KL3361 and KL3362 47Version: 2.2.0
Page 48

Configuration software KS2000
Fig.28: Settings of KL3314 via visualisation of TwinCAT 3
At least following configuration setup shall be present:
[coupler (e.g. BK1120) or embedded PC] + KL3314 + KL9010.
Download:
https://infosys.beckhoff.com/content/1033/kl336x/Resources/zip/5996114571.zip
Preparations for starting the sample programs (tnzip file / TwinCAT 3)
• Click on the download button to save the Zip archive locally on your hard disk, then unzip the *.tnzip
archive file in a temporary folder.
Fig.29: Opening the *. tnzip archive
KL3361 and KL336248 Version: 2.2.0
Page 49

Configuration software KS2000
• Select the .tnzip file (sample program).
• A further selection window opens. Select the destination directory for storing the project.
• For a description of the general PLC commissioning procedure and starting the program please refer to
the terminal documentation or the EtherCAT system documentation.
• The EtherCAT device of the example should usually be declared your present system. After selection
of the EtherCAT device in the “Solutionexplorer” select the “Adapter” tab and click on “Search...”:
Fig.30: Search of the existing HW configuration for the EtherCAT configuration of the example
• Checking NetId: the "EtherCAT" tab of the EtherCAT device shows the configured NetId:
.
The first 4 numbers have to be identical with the project NetId of the target system. The project NetId
can be viewed within the TwinCAT environment above, where a pull down menu can be opened to
choose a target system (by clicking right in the text field). The number blocks are placed in brackets
there next to each computer name of a target system.
• Modify the NetId: By right clicking on "EtherCAT device" within the solution explorer a context menu
opens where "Change NetId..." have to be selected. The first 4 numbers of the NetId of the target
computer have to be entered; the both last values are 4.1 usually.
Example:
◦ NetId of project:myComputer (123.45.67.89.1.1)
◦ Entry via „Change NetId...“:123.45.67.89.4.1
KL3361 and KL3362 49Version: 2.2.0
Page 50

Access from the user program
5 Access from the user program
The index registers R38 [}61] and R39 [}62] can be used to specify which process data are cyclically
transferred from the oscilloscope terminal
• KL3361 with registers DataIN11 [}51] and DataIN12 [}51]
• KL3362 with registers DataIN11 [}51] and DataIN12 [}51] (channel 1) or DataIN21 [}51] and
DataIN22 [}51] (channel 2)
to the controller. Maximum values, minimum values, RMS values, mean values, individual sampling values
(sample n after trigger event), rise times, pulse widths etc. can thus optionally be represented directly in the
process data.
The index register R37 [}60] can be used to specify which process data are cyclically transferred to
oscilloscope terminal
• KL3361 with registers DataOUT11 [}51] and DataOUT12 [}51]
• KL3362 with registers DataOUT11 [}51] and DataOUT12 [}51] (channel 1) or DataOUT21 [}51]
and DataOUT22 [}51] (channel 2)
. Switching thresholds, pulse widths etc. can thus optionally be specified via the process data channel.
Evaluation of a recording
A recording is requested via the bEnableTrigger bit. Current values are present in the memory if the
bTriggerDone bit appears in the status byte of the terminal. If the memory is to be read or evaluated, the
bEnableTrigger bit must remain set, otherwise the memory is continuously overwritten.
Evaluation of the memory is activated via the bEvalBuffer bit. Current values are present in the process data,
as soon as the bEvalBufferDone bit appears. Multiple evaluation of the memory is thus possible. Mean
value, maximum value, minimum value, RMS value of the recording can thus be read sequentially.
Reading the trace memory
Samples can be read via the Trace data registers R60 [}64] and R61 [}64]. To this end, the offset within
the memory can be specified via the Trace index register (R62 [}64]).
The Zoom register (R63 [}64]) can be used to specify a number nS of samples for which the maximum
value, minimum value and mean value is calculated, or the sample interval nS at which the values are output.
After each read access of R60 or R61, the Trace index register (R62 [}64]) is incremented by nS.
Sample:
For calling up all values from the memory, enter the value 0x0000 in R62 and 0x0001 in R63. Then read R60
and R61 alternatively. If only every second value is to be read, enter the value 0x0002 in R63.
Envelope monitoring
Each recording can be monitored with a tight or a wide interval. The tight interval is subsequently referred to
as inner envelope curve, the wide interval as outer envelope curve.
Application sample:
• Monitoring of an ageing process via the inner envelope curve
• Monitoring of malfunctions via the outer envelope curve
A reference curve can be placed in the flash memory of the terminal, which is copied to the RAM after a
terminal reset.
If evaluation of the inner or outer error counter is activated, i.e. if the index register for process data (R38
[}61] or R39 [}62]) contains the value 18 or 19, the difference between the respective actual value and
the target value is compared with parameter x of the envelope curve (R53 [}63], R54 [}63]). If the
difference is greater, the respective counter is incremented.
KL3361 and KL336250 Version: 2.2.0
Page 51

Access from the user program
The RAM area can be overwritten with current trace data (Teach-in) via the command register (R7 [}57])
using the instruction WriteEnvCurvToRAM (0x0201), or it can be directly written and read from offset 0x8000.
The command WriteEnvCurvToFLASH (0x0202) can then be used to place data in the flash memory, and
are retained even if the voltage supply fails.
5.1 Process image
5.1.1 Process image of the KL3361
The following 5 bytes are transferred bi-directionally between KL3361 and control:
Oscilloscope
channel
1 0 0 Byte Status byte 1
*) Word alignment: The Bus Coupler places values on even byte addresses
Analog voltages are represented by the oscilloscope terminal KL3361 as follows:
Voltage Decimal Hexadecimal
+20 mV 32767 0x7FFF
0 mV 0 0x0000
-20 mV -32767 0x8001
Byte offset (without word alignment*)
1 2 Word DataIN0 DataOUT0
3 4 Word DataIN1 DataOUT1
Byte offset (with
word alignment*)
Format Input data Output data
Control byte 1
(SB1)
(CB1)
5.1.2 Process image of the KL3362
The following 10 bytes are transferred bi-directionally between KL3362 and control:
Oscilloscope
channel
1 0 0 Byte Status byte 1 (SB1) Control byte 1 (CB1)
2 5 8 Byte Status byte 2 (SB2) Control byte 2 (CB2)
Byte offset
(without word
alignment*)
1 2 Word DataIN0 (channel 1) DataOUT0 (channel 1)
3 4 Word DataIN1 (channel 1) DataOUT1 (channel 1)
6 10 Word DataIN0 (channel 2) DataOUT0 (channel 2)
8 12 Word DataIN1 (channel 2) DataOUT1 (channel 2)
Byte offset
(with word
alignment*)
Format Input data Output data
*) Word alignment: The Bus Coupler places values on even byte addresses
Analog voltages are represented by the oscilloscope terminal KL3362 as follows:
Voltage Decimal Hexadecimal
+10 V 32767 0x7FFF
0 V 0 0x0000
-10 V -32767 0x8001
KL3361 and KL3362 51Version: 2.2.0
Page 52

Access from the user program
5.1.3 Control and status bytes
5.1.3.1 First channel
5.1.3.1.1 Process data mode
Control byte 1 (CB1) in process data mode
The control byteof the first channel can be found in the output image of the oscilloscope terminal and is
transferred from the controller to the terminal.
Bit CB1.7 CB1.6 CB1.5 CB1.4 CB1.3 CB1.2 CB1.1 CB1.0
Name bRegAccess - - - bSetDigitalOut bEnabIntFkt bEvalBuffer bEnableTrigger
Legend
Bit Name Description
CB1.7 bRegAccess 0
CB1.6 - reserved
CB1.5 - reserved
CB1.4 - reserved
CB1.3 bSetDigitalOut Setting the digital output.
CB1.2 bEnabIntFkt Enabling direct setting of the digital output through the trigger unit:
CB1.1 bEvalBuffer The recorded memory is to be evaluated.
CB1.0 bEnableTrigger
Register communication off (process data mode):
bin
• Process data word DataIN0 [}51] is used to transfer the date specified with index register
1 for input data (R38 [}61])* from the terminal to the control.
• Process data word DataIN1 [}51] is used to transfer the date specified with index register
2 for input data (R39 [}62])* from the terminal to the control.
• Process data word DataOUT0 [}51] is used to transfer the parameter specified with the
Low byte of the index register for output data (R37 [}60])* from the control to the terminal.
• Process data word DataOUT1 [}51] is used to transfer the parameter specified with the
High byte of the index register for output data (R37 [}60])* from the control to the
terminal.
*) These registers can be set via the register communication or with the KS2000 [}29] configuration software.
0
The trigger unit must not set the digital output when triggered (default).
bin
1
The trigger unit may set the digital output directly when triggered (SET DOUT [}40]).
bin
The rising edge of this bit activates the trigger in trigger mode Shot [}40].
Status byte 1 (SB1) in process data mode
The status byteof the first channel can be found in the input image of the oscilloscope terminal and is
transferred from the terminal to the controller.
Bit SB1.7 SB1.6 SB1.5 SB1.4 SB1.3 SB1.2 SB1.1 SB1.0
Name bRegAccessQ bError - - bDigitalOutputStatus bExtTriggerInput bEvalBufferDone bTriggerDone
Legend
Bit Name Description
SB1.7 bRegAccessQ 0
SB1.6 bError 0
SB1.5 - reserved
SB1.4 - reserved
SB1.3 bDigitalOutputStatus State of the digital output
SB1.2 bExtTriggerInput State of the trigger input
SB1.1 bEvalBufferDone Evaluation of the memory is complete. There are valid current process data present.
SB1.0 bTriggerDone Acknowledgement for trigger event, values were recorded.
Process data mode acknowledgement
bin
No error
bin
1
An error has occurred
bin
KL3361 and KL336252 Version: 2.2.0
Page 53

Access from the user program
5.1.3.1.2 Register communication
Control byte 1 (CB1) in register communication
The control byteof the first channel can be found in the output image of the oscilloscope terminal and is
transferred from the controller to the terminal.
Bit CB1.7 CB1.6 CB1.5 CB1.4 CB1.3 CB1.2 CB1.1 CB1.0
Name bRegAccess R/W Register number
Legend
Bit Name Description
CB1.7 bRegAccess 1
CB1.6 R/W 0
CB1.5CB1.0
Register number Number of the register that is to be read or written.
bin
bin
1
bin
Register communication switched on.
Read access:
• The process data word DataIN0 [}51] is used to read the register specified with the
register number (CB1.5-CB1.0).
• The process data word DataIN1 [}51] is not used for register communication and is
not available for process data during register communication. See note below! [}53]
Write access:
• The process data word DataOUT0 [}51] is used to write the register specified with the
register number (CB1.5-CB1.0).
• The process data word DataOUT1 [}51] is not used for register communication and is
not available for process data during register communication.
CAUTION
Invalid process data!
Process data that may still be displayed is not valid!
Status byte 1 (SB1) in register communication
The status byteof the first channel can be found in the input image of the oscilloscope terminal and is
transferred from the terminal to the controller.
Bit SB1.7 SB1.6 SB1.5 SB1.4 SB1.3 SB1.2 SB1.1 SB1.0
Name bRegAccessQ R Register number
Legend
Bit Name Description
SB1.7 bRegAccessQ 1
SB1.6 R 0
SB1.5SB1.0
Register number Number of the register that was read or written.
bin
bin
Register access acknowledgement
Read access
KL3361 and KL3362 53Version: 2.2.0
Page 54

Access from the user program
5.1.3.2 Second channel (KL3362 only)
5.1.3.2.1 Process data mode
Control byte 2 (CB2) in process data mode
The control byte of the second channel currently has no function in process data mode.
Bit SB2.7 SB2.6 SB2.5 SB2.4 SB2.3 SB2.2 SB2.1 SB2.0
Name bRegAccess - - - - - - -
Legend
Bit Name Description
SB2.7 bRegAccess 0
SB2.6SB2.0
- reserved
bin
Status byte 2 (SB2) in process data mode
The status byte of the second channel currently has no function in process data mode.
Bit SB2.7 SB2.6 SB2.5 SB2.4 SB2.3 SB2.2 SB2.1 SB2.0
Name bRegAccessQ - - - - - - -
Register communication off (process data mode)
Legend
Bit Name Description
SB2.7 bRegAccessQ 0
SB2.6SB2.0
- reserved
bin
Process data mode acknowledgement
5.1.3.2.2 Register communication
Control byte 2 (CB2) in register communication
The control byteof the second channel can be found in the output image of the oscilloscope terminal and is
transferred from the controller to the terminal.
Bit CB2.7 CB2.6 CB2.5 CB2.4 CB2.3 CB2.2 CB2.1 CB2.0
Name bRegAccess R/W Register number
Legend
Bit Name Description
CB2.7 bRegAccess 1
CB2.6 R/W 0
CB2.5CB2.0
Register number Number of the register that is to be read or written.
bin
bin
1
bin
Register communication switched on.
Read access:
• The process data word DataIN2 [}51] is used to read the register specified with the
register number (CB2.5-CB2.0).
• The process data word DataIN3 [}51] is not used for register communication and is
not available for process data during register communication. See note [}55]!
Write access:
• The process data word DataOUT2 [}51] is used to write the register specified with the
register number (CB2.5-CB2.0).
• The process data word DataOUT3 [}51] is not used for register communication and is
not available for process data during register communication.
KL3361 and KL336254 Version: 2.2.0
Page 55

Access from the user program
CAUTION
Invalid process data!
Process data that may still be displayed is not valid!
Status byte 2 (SB2) in register communication
The status byteof the second channel can be found in the input image of the oscilloscope terminal and is
transferred from the terminal to the controller.
Bit SB2.7 SB2.6 SB2.5 SB2.4 SB2.3 SB2.2 SB2.1 SB2.0
Name bRegAccessQ R Register number
Legend
Bit Name Description
SB2.7 bRegAccessQ 1
SB2.6 R 0
SB2.5SB2.0
Register number Number of the register that was read or written.
bin
bin
Register access acknowledgement
Read access
KL3361 and KL3362 55Version: 2.2.0
Page 56

Access from the user program
5.2 RAM and ROM register
5.2.1 Register overview
The following registers exist for each signal channel of the oscilloscope terminal. This means these registers
exist
• once on the KL3601.
• twice on the KL3602.
Register Comment Default value R/W Memory
R0 [}57]
R1 - R5 reserved 0x0000 0
R6 [}57]
R7 [}57]
R8 [}57]
R9 [}58]
R10 [}58]
R11 [}58]
R12 [}58]
R13 [}58]
R14 reserved 0x0000 0
R15 [}58]
R16 [}58]
R17 Hardware compensation: Offset typically 0x1FFF typically 8191
R18 Hardware compensation: Gain typically 0x1000 typically 4096
R19 Manufacturer scaling: Offset typically 0x0000 typically 0
R20 Manufacturer scaling: Gain typically 0x0100 typically 256
R21 - R30 reserved - - R/W SEEROM/RAM
R31 [}58]
R32 [}59]
R33 [}59]
R34 [}59]
R35 [}60]
R36 [}60]
R37 [}60]
R38 [}61]
R39 [}62]
R40 [}62]
R41 [}62]
R42 [}63]
R43 [}63]
R44 [}63]
R45 reserved - - R/W SEEROM/RAM
R46 [}63]
R47 [}63]
R48 [}63]
R49 [}63]
R50 [}63]
R51 reserved - - R/W SEEROM/RAM
R52 [}63]
R53 [}63]
Raw value of the A/D converter - - R RAM
dec
R RAM
Diagnostic register - - R RAM
Command register 0x0000 0
Terminal description KL3361: 0x0D21
KL3362: 0x0D22
dec
KL3361: 3361
KL3362: 3362
Firmware version e.g. 0x3143 e.g. 12611
Multiplex shift register KL3361: 0x0128
KL3362: 0x0228
Signal channels KL3362: 0x0128
KL3362: 0x0228
Minimum data length 0x2828 10280
Data structure 0x0004 4
KL3361: 296
KL3362: 552
KL3361: 296
KL3362: 552
dec
dec
dec
dec
dec
dec
dec
dec
R/W RAM
R ROM
dec
dec
R ROM
R ROM
R ROM
R ROM
R ROM
R ROM
Alignment register - - R/W RAM
Hardware version number e.g. 0x0000 e.g. 0
Code word register 0x0000 0
Feature register 0x0000 0
User offset 0x0000 0
User gain 0x0100 256
Sample rate 0x00C8 200
Sample amount 0x0064 100
Index register for output data 0x0000 0
Index register 1 for input data 0x0000 0
dec
dec
dec
dec
dec
dec
dec
dec
Index register 2 for input data 0x8010 32784
Trigger unit 1, trigger logic 0x0D21 3361
Trigger unit 1, threshold value 1 0x03E8 1000
Trigger unit 1, threshold value 2 0x03E8 1000
Trigger unit 1, pulse width 0x0064 100
Trigger unit 1, valid trigger time 0x0064 100
dec
dec
Trigger unit 2, trigger logic 0x0D21 3361
Trigger unit 2, threshold value 1 0x03E8 1000
Trigger unit 2, threshold value 2 0x03E8 1000
Trigger unit 2, pulse width 0x0064 100
Trigger unit 2, valid trigger time 0x0064 100
Trigger delay 0x0000 0
Parameter 1 envelope curve 0x0000 0
dec
dec
dec
dec
dec
dec
dec
dec
dec
dec
dec
dec
dec
dec
R/W SEEROM/RAM
R/W SEEROM/RAM
dec
R/W SEEROM/RAM
dec
R/W SEEROM/RAM
R/W SEEROM/RAM
R/W RAM
R/W SEEROM/RAM
R/W SEEROM/RAM
R/W SEEROM/RAM
R/W SEEROM/RAM
R/W SEEROM/RAM
R/W SEEROM/RAM
R/W SEEROM/RAM
R/W SEEROM/RAM
R/W SEEROM/RAM
R/W SEEROM/RAM
R/W SEEROM/RAM
R/W SEEROM/RAM
R/W SEEROM/RAM
R/W SEEROM/RAM
R/W SEEROM/RAM
R/W SEEROM/RAM
R/W SEEROM/RAM
R/W SEEROM/RAM
R/W SEEROM/RAM
R/W SEEROM/RAM
KL3361 and KL336256 Version: 2.2.0
Page 57

Access from the user program
Register Comment Default value R/W Memory
R54 [}63]
R55 [}64]
R56 [}64]
R57 - R59 reserved - - R/W SEEROM/RAM
R60 [}64]
R61 [}64]
R62 [}64]
R63 [}64]
Parameter 2 envelope curve 0x0000 0
Samples envelope curve 0x0000 0
Trigger frequency 0x0000 0
Trace data register 1 0x0000 0
Trace data register 2 0x0000 0
Trace index register 0x0000 0
Zoom register 0x0000 0
dec
dec
dec
dec
dec
dec
dec
R/W SEEROM/RAM
R/W SEEROM/RAM
R/W SEEROM/RAM
R/W RAM
R/W RAM
R/W RAM
R/W RAM
5.2.2 Register description
The following registers exist for each signal channel of the oscilloscope terminal. This means these registers
exist
• once on the single-channel KL3361;
• twice on the two-channel KL3362.
R0: Raw ADC value
Raw value of the analog/digital converter.
R6: Diagnostic register
In a later firmware version, the diagnostic register will be used to provide diagnostic information about the
state of the oscilloscope terminal.
R7: Command register
This register can be used to transfer commands to the oscilloscope terminal.
Commands
Command 0x0201: WriteEnvCurvToRAM
Writes the sampling values into the RAM envelope curve (Teach-in method).
Return value: 0x201
Command 0x0202: WriteEnvCurvToFLASH
Writes the sampling values into the RAM envelope curve and the flash envelope curve (Teach-in method).
Return value: 0x202
ROM register
The terminal uses two channels for assigning a byte/word/word data structure. This structure is not
supported by couplers that do not have the BK200 switch functionality. In this case, read access to the
second register set is not available.
The terminal always reports with a shift register length of 5 bytes (see general terminal documentation).
R8: Terminal description
Register R8 contains the terminal identifier in hexadecimal coding:
KL3361: 0x0D21 (3361
KL3362: 0x0D22 (3362
dec
dec
)
)
KL3361 and KL3362 57Version: 2.2.0
Page 58

Access from the user program
R9: Firmware version
Register R9 contains the firmware revision level of the terminal in hexadecimal coding, e. g. 0x3144
(12612
dec
).
R10: Shift register length
KL3361: 0x0128
KL3362: 0x0228
R11: Number of signal channels
KL3361: 0x0128
KL3362: 0x0228
R12: Minimum data length
KL3361: 0x2828
KL3362: 0x2828
R13: Data type
Register R13 contains the data type of the Bus Terminal. 0x0004 means analog input.
R15: Alignment register
R16: Hardware version number
Register R16 contains the hardware revision level of the terminal in hexadecimal coding, e.g. 0x0000 (0
User register
The user registers of the oscilloscope terminal can be written by the user program in order to change the
characteristics of the oscilloscope terminal at run-time.
R31: Code word register
• If you write values into the user registers without previously having entered the user code word
(0x1235) in the code word register, these values are only stored in the RAM registers, but not in the
EPROM registers and are therefore lost if the terminal is restarted.
• If you write values into the user registers and have previously entered the user code word (0x1235) in
the code word register, these values are stored in the RAM registers and in the EPROM registers and
are therefore retained if the terminal is restarted.
The code word is reset if the terminal is restarted.
dec
).
KL3361 and KL336258 Version: 2.2.0
Page 59
Access from the user program
R32: Feature register
The feature register specifies the terminal's operating mode.
Bit Operation mode Value Explanation Default
R32.15 - - reserved 0
... - - reserved 0
R32.11 - - reserved 0
R32.10
R32.9
R32.8
Trigger type 000
001
Post-trigger. Recording commences as soon as a
bin
trigger event occurs.
Pre-trigger. Recording ceases as soon as a trigger
bin
bin
bin
bin
000
bin
event occurs.
010
Mid-trigger: The trigger event is the center of the
bin
recording.
011
FastSampling (from firmware version 1B'): Operation
bin
with increased sampling rate of up to 10µs.
• The recording can only be started via the trigger
input.
• The settings of the trigger units are not taken into
account.
• Only the first channel is recorded, even for KL3362.
R32.7 - - reserved 0
R32.6
Auto trigger [}42]
0
bin
1
bin
not active 0
active: The trigger unit is automatically activated once
bin
bin
the preceding event has been evaluated. To this end,
bit 0 is toggled in status byte 1 (SB1) with each new
evaluation.
R32.5
Test mode [}42]
0
bin
1
bin
not active 0
active: The oscilloscope terminal simulates a ramp of
bin
sampling values. The sampling value is incremented
after each reading. The ramp thus runs from 0x0000 to
0x3FFF. From 0x3FFF, the sampling value after each
reading is decremented, so that the ramp returns to
0x0000. The process is repeated cyclically.
R32.4
Trigger delay [}42]
0
bin
1
bin
not active 0
active: Samples skipped after the trigger event. The
bin
number of samples that are skipped is specified in the
Trigger delay register (R52 [}63]).
R32.3 - - reserved 0
... - - reserved 0
R32.0 - - reserved 0
bin
bin
bin
R33: User offset
Offset, can be changed by the user. Scaling:
offset = full scale value x parameter / resolution
Sample for KL3361: 16mVx100 / 32767 = 0,049 mV
R34: User gain
Gain factor, can be changed by the user.
KL3361 and KL3362 59Version: 2.2.0
Page 60

Access from the user program
R35: Sample rate
Interval (Ts) between two samples (scans) in microseconds.
The sampling speed is limited to Ts =100 µs (10 kHz) by the evaluation of the trigger detectors.
Only the Fast sampling [}42] mode enables sampling at Ts =10 µs (100 kHz).
Data transfer rate on the K-bus
The sample rate influences the transmission speed with which the oscilloscope terminal can be addressed by the K-Bus.
This must be taken into account when considering your PLC cycle time:
• A sample rate of 100 µs can only accommodate bus cycles with a minimum duration of 3 ms!
• A sample rate of 150 µs can only accommodate bus cycles with a minimum duration of 2 ms!
• The Fast sampling [}42] mode can only accommodate K-bus cycles with a minimum duration of
2 ms!
R36: Sample amount
Number of sampling values to be recorded. A maximum of 4,000 values can be recorded (default 100).
R37: Index register for output data (terminal parameters)
• Low byte:
The content of the Low byte of this register determines which parameter of the oscilloscope terminal
◦ KL3361 is assigned process data register DataOUT0 [}51]
◦ KL3362 is assigned process data register DataOUT0 (channel 1) [}51] or process data register
DataOUT0 (channel 2) [}51]
is described. The decimal value of the indices corresponds to the register number of the parameter
to be written.
The following indices are supported:
Index Decimal Parameter
0x00 00 Default value
0x29
0x2A
0x2B
0x2C
0x2F
0x30
0x31
0x32
• High byte:
The content of the High byte of this register determines which parameter of the oscilloscope terminal
41 [}62]
42 [}63]
43 [}63]
44 [}63]
47 [}63]
48 [}63]
49 [}63]
50 [}63]
Trigger unit 1, switching threshold 1
Trigger unit 1, switching threshold 2
Trigger unit 1, pulse width
Trigger unit 1, valid trigger time
Trigger unit 2, switching threshold 1
Trigger unit 2, switching threshold 2
Trigger unit 2, pulse width
Trigger unit 2, valid trigger time
◦ KL3361 is assigned process data register DataOUT1 [}51]
◦ KL3362 is assigned process data register DataOUT1 (channel 1) [}51] or process data register
DataOUT1 (channel 2) [}51]
is described (see Low byte [}60] for indices).
KL3361 and KL336260 Version: 2.2.0
Page 61

Access from the user program
R38: Index register 1 for input data
The content of this register (default value: 0x0000) determines which date is shown in the process data
register
• DataIN0 [}51] of oscilloscope terminal KL3361
• DataIN0 (channel 1) [}51] or DataIN0 (channel 2) [}51] of oscilloscope terminal KL3362
The following indices are supported:
Index Decimal Date
0x0000 0 Current analog value
0x0001 1 Maximum value of a recording
0x0002 2 Minimum value of a recording
0x0003 3 RMS value of the recording: Sqrt((Sum (x
n
2
))/n
0x0004 4 Mean value of the recording: (Sum(xn))/n
0x0005 5 Peak-peak value of the recording
0x0006 6 Cycle duration
0x0007 7 Pulse width - high: switching threshold is trigger level 1
• The trigger starts as soon as four successive values are above the
switching threshold
• The trigger is stopped as soon as four successive values are below
the switching threshold
0x0008 8 Pulse width - low: switching threshold is trigger level 1
• The trigger starts as soon as four successive values are below the
switching threshold
• The trigger is stopped as soon as four successive values are above
the switching threshold
0x0009 9 Duty factor
0x000A 10 reserved for jitter T
0x000B 11 reserved for jitter T
0x000C 12 reserved for jitter T
max
min
mean
0x000D 13 Histogram max, i.e. the value that has occurred most frequently.
0x000E 14 Timer1LatchValue
0x000F 15 Timer1Run (read/write)
0x0010 16 Timer2LatchValue
0x0011 17 Timer2Run (read/write)
0x0012 18 Error counter inner envelope curve
0x0013 19 Error counter outer envelope curve
0x0014 20 Number of samples up to analog value greater than switching threshold
1
0x0015 21 Number of samples up to analog value less than switching threshold 1
0x8000 First sampling value.
The recorded sampling values are available from here. The MSB has to
be set to zero in order to determine the trace offset.
0x8001 Second sampling value.
0x8002 Third sampling value.
... ... ...
0x8063 Hundredth sampling value (in the delivery state, 100 values are stored).
... ... ...
0x8F9F Four thousandth sampling value (a maximum of 4,000 values can be
stored).
KL3361 and KL3362 61Version: 2.2.0
Page 62

Access from the user program
R39: Index register 2 for input data
The content of this register (default value: 0x8010) determines which date is shown in the process data
register
• DataIN1 [}51] of oscilloscope terminal KL3361
• DataIN1 (channel 1) [}51] or DataIN1 (channel 2) [}51] of oscilloscope terminal KL3362
(see Index register 1 for process input data [}61] for indices).
R40: Trigger unit 1, trigger logic
Bit Operation mode Value Explanation Default
R40.15 - - reserved 0
R40.14,
R40.13,
R40.12
enableSource 000
001
010
011
100
Trigger always enabled 000
bin
Trigger activated, if signal at analog
bin
input1 above switching threshold2
[}63]
Trigger activated, if signal at analog
bin
input1 below switching threshold2
[}63]
Trigger activated, if signal at analog
bin
input2 above switching threshold2
[}63]
Trigger activated, if signal at analog
bin
input1 below switching threshold2
Analog input 1 is in
• KL3361: the input for differential
voltage of the measuring bridge in
KL3361 (UB+/UB- [}24])
• KL3362: oscilloscope input
channel1 (IN1 [}26])
Analog input 2 is in
• KL3361 not available
• KL3362: oscilloscope input
channel2 (IN2 [}26])
[}63]
R40.11,
R40.10
R40.9,
R40.8
101
110
TriggerSource 00
01
10
11
Trigger mode 00
01
10
Trigger enabled if trigger input (24 V trigger) on high potential.
bin
Trigger enabled if trigger input (24 V trigger) on low potential.
bin
Timer with switching threshold 1 11
bin
first analog input (IN1), with switching threshold 1 [}62]
bin
second analog input (IN2), with switching threshold 1 [}62] (KL3362 only)
bin
Digital input
bin
Shot: The trigger is activated with an edge of bitbEnableTrigger of control
bin
byte1 (CB1.0), if enableSource is set.
Edge: The trigger is triggered via the edge selected via TriggerSource and
bin
bLogic, if it is enabled via enableSource.
Glitch: The trigger is triggered via the pulse selected via TriggerSource, bLogic
bin
and bLarger, if it is enabled via enableSource.
R40.7 - - reserved 0
R40.6 bTriggerWinEn 1
The trigger condition for the following trigger unit must arrive within the valid
bin
trigger time for trigger unit 1 [}43]. Otherwise everything is reset
R40.5 bStartScopeRec 0
1
R40.4 bTriggerOutEn 1
R40.3 bLatchtimer 1
R40.2 bResetTimer 1
R40.1 bLarger 0
The trigger event causes the downstream trigger unit to be enabled 0
bin
The trigger event causes the recording to be started
bin
The trigger event causes the digital output to be set, if this is enabled through
bin
bit2 of control byte1 (CB1.2).
The trigger event causes the current value of the running timer to be stored. 0
bin
The trigger event causes the timer to be reset to zero. The timer will start run-
bin
ning again automatically immediately.
in glitch mode: pulse width less than the pulse width [}63] specified for trig-
bin
ger unit 1 [}63]
1
in glitch mode: pulse width greater than the pulse width [}63] specified for
bin
trigger unit 1 [}63]
R40.0 bLogic 0
1
in edge mode (edge triggering): falling
bin
edge
in edge mode (edge triggering): rising
bin
edge
in glitch mode: negative pulse 1
in glitch mode: positive pulse
01
0
0
0
0
bin
bin
bin
bin
bin
bin
bin
bin
bin
bin
bin
bin
R41: Trigger unit 1, switching threshold 1
Switching threshold for the trigger source [}43] of trigger unit 1
KL3361 and KL336262 Version: 2.2.0
Page 63

Access from the user program
R42: Trigger unit 1, switching threshold 2
Switching threshold for enabling the trigger [}43] (EnableSource) of trigger unit 1
R43: Trigger unit 1, pulse width
Here you can specify the pulse width [}43] (tP) of trigger unit 1 for the glitch mode. The number of samples
(nSP) is entered as the parameter. The pulse width thus depends on the sample rate! Sample:
• Sample rate:Ts=200µs
• Samples:nSP=100
Pulse width: tP = Ts x nSP=200µs x 100 = 20ms
R44: Trigger unit 1, valid trigger time
Here you can specify the valid trigger time [}43] (tVT) for trigger unit 1. The number of valid samples (nVS) is
entered as the parameter. The valid trigger time thus depends on the sample rate! Sample:
• Sample rate:Ts=200µs
• Valid samples:nVS=100
Valid Trigger Time: tVT=TsxnVS =200µs x 100 = 20ms
R46: Trigger unit 2, trigger logic
see Trigger detector 1 [}62]
R47: Trigger unit 2, switching threshold 1
Switching threshold for the trigger source (TriggerSource) of trigger unit 2
R48: Trigger unit 2, switching threshold 2
Switching threshold for enabling the trigger (EnableSource) of trigger unit 2
R49: Trigger unit 2, pulse width
Here you can specify the pulse width (tP) of trigger unit 2 for the glitch mode (see Trigger unit 1, pulse width
[}63]).
R50: Trigger unit 2, valid trigger time
see Trigger unit 1, valid trigger time [}63]
R52: Trigger delay
A trigger delay [}42] (tTD) can be specified here. The number of skipped samples (n
) is entered as the
STD
parameter. The trigger delay thus depends on the sample rate! Sample: - Sample Rate:Ts=200µs, Skipped Samples: n
t
=Tsxn
TD
=200µsx100=20ms
STD
STD
=100
R53: Parameter 1 envelope curve
e.g. distance of the inner envelope curve
After the trace recording, the envelope curve is evaluated.
R54: Parameter 2 envelope curve
e.g. distance of the outer envelope curve
After the trace recording, the envelope curve is evaluated.
KL3361 and KL3362 63Version: 2.2.0
Page 64

Access from the user program
R55: Samples envelope curve
Number of samples to be evaluated (512 max.).
R56: Trigger frequency
Frequency of the timer [}40] that can be used for triggering.
R60: Trace data register 1
Contains the sampling value from the register specified in the trace index register (R62).
After the end of the read access (change of register address), the trace index (R62) is incremented by the
zoom distance nZ (see R63 [}64]).
R61: Trace data register 2
Contains the sampling value from the register following the register specified in the trace index register
(R62).
After the end of the read access (change of register address), the trace index (R62) is incremented by the
zoom distance nZ (see R63 [}64]).
R62: Trace index register
Writing: Sets the trace index to offset
Reading: Current value of the trace index.
The index is reset to zero at the start of a recording.
Offset zero to 0x3FFF contains the trace data.
From 0x8000, the envelope curve is given
R63: Zoom register
With the zoom register you can specify that
• only certain values or
• pre-processed values (maximum value , minimum value or arithmetic mean value)
are transferred to the control.
Bit Name Value Explanation Default
R63.15
R63.14
R63.13
R63.12
R63.11
...
R63.0
Zoom mode 00
- - reserved -
Zoom distance n
Z
bin
01
bin
10
bin
11
bin
Number nZ of sampling values, by which the trace index register (R62 [}64]) is increased in zoom mode Sample zoom after each reading. Samples:
0x000 The same value is always read.
0x001 All values are read.
0x002 Only every second value is read.
0x00A Only every tenth value is read.
Sample zoom - the trace index register is increased automatically after
each reading by the zoom distance nZ. Therefore, only every nZth value is
read.
Max zoom - the highest of the read values is output
Min zoom - the lowest of the read values is output
Mean value zoom - the arithmetic mean of the read values is output
-
-
KL3361 and KL336264 Version: 2.2.0
Page 65

Access from the user program
5.2.3 Examples of Register Communication
The numbering of the bytes in the examples corresponds to the display without word alignment.
5.2.3.1 Example 1: reading the firmware version from Register 9
Output Data
Byte 0: Control byte Byte 1: DataOUT1, high byte Byte 2: DataOUT1, low byte
0x89 (1000 1001
Explanation:
• Bit 0.7 set means: Register communication switched on.
• Bit 0.6 not set means: reading the register.
• Bits 0.5 to 0.0 specify the register number 9 with 00 1001
• The output data word (byte 1 and byte 2) has no meaning during read access. To change a register,
write the required value into the output word.
Input Data (answer of the bus terminal)
) 0xXX 0xXX
bin
.
bin
Byte 0: Status byte Byte 1: DataIN1, high byte Byte 2: DataIN1, low byte
0x89 0x33 0x41
Explanation:
• The terminal returns the value of the control byte as a receipt in the status byte.
• The terminal returns the firmware version 0x3341 in the input data word (byte 1 and byte 2). This is to
be interpreted as an ASCII code:
◦ ASCII code 0x33 represents the digit 3
◦ ASCII code 0x41 represents the letter A
The firmware version is thus 3A.
5.2.3.2 Example 2: Writing to an user register
Code word
In normal mode all user registers are read-only with the exception of Register 31. In order to deactivate this write protection you must write the code word (0x1235) into Register 31. If a value other
than 0x1235 is written into Register 31, write protection is reactivated. Please note that changes to
a register only become effective after restarting the terminal (power-off/power-on).
I. Write the code word (0x1235) into Register 31.
Output Data
Byte 0: Control byte Byte 1: DataOUT1, high byte Byte 2: DataOUT1, low byte
0xDF (1101 1111
) 0x12 0x35
bin
Explanation:
• Bit 0.7 set means: Register communication switched on.
• Bit 0.6 set means: writing to the register.
• Bits 0.5 to 0.0 specify the register number 31 with 01 1111
.
bin
• The output data word (byte 1 and byte 2) contains the code word (0x1235) for deactivating write
protection.
KL3361 and KL3362 65Version: 2.2.0
Page 66

Access from the user program
Input Data (answer of the bus terminal)
Byte 0: Status byte Byte 1: DataIN1, high byte Byte 2: DataIN1, low byte
0x9F (1001 1111
) 0xXX 0xXX
bin
Explanation:
• The terminal returns a value as a receipt in the status byte that differs only in bit 0.6 from the value of
the control byte.
• The input data word (byte 1 and byte 2) is of no importance after the write access. Any values still
displayed are invalid!
II. Read Register 31 (check the set code word)
Output Data
Byte 0: Control byte Byte 1: DataOUT1, high byte Byte 2: DataOUT1, low byte
0x9F (1001 1111
) 0xXX 0xXX
bin
Explanation:
• Bit 0.7 set means: Register communication switched on.
• Bit 0.6 not set means: reading the register.
• Bits 0.5 to 0.0 specify the register number 31 with 01 1111
.
bin
• The output data word (byte 1 and byte 2) has no meaning during read access.
Input Data (answer of the bus terminal)
Byte 0: Status byte Byte 1: DataIN1, high byte Byte 2: DataIN1, low byte
0x9F (1001 1111
) 0x12 0x35
bin
Explanation:
• The terminal returns the value of the control byte as a receipt in the status byte.
• The terminal returns the current value of the code word register in the input data word (byte 1 and byte
2).
III. Write to Register 32 (change contents of the feature register)
Output data
Byte 0: Control byte Byte 1: DataIN1, high byte Byte 2: DataIN1, low byte
0xE0 (1110 0000
) 0x00 0x02
bin
Explanation:
• Bit 0.7 set means: Register communication switched on.
• Bit 0.6 set means: writing to the register.
• Bits 0.5 to 0.0 indicate register number 32 with 10 0000
.
bin
• The output data word (byte 1 and byte 2) contains the new value for the feature register.
CAUTION
Observe the register description!
The value of 0x0002 given here is just an example!
The bits of the feature register change the properties of the terminal and have a different meaning, depending on the type of terminal. Refer to the description of the feature register of your terminal (chapter Register
description) regarding the meaning of the individual bits before changing the values.
KL3361 and KL336266 Version: 2.2.0
Page 67

Access from the user program
Input data (response from the Bus Terminal)
Byte 0: Status byte Byte 1: DataIN1, high byte Byte 2: DataIN1, low byte
0xA0 (1010 0000
) 0xXX 0xXX
bin
Explanation:
• The terminal returns a value as a receipt in the status byte that differs only in bit 0.6 from the value of
the control byte.
• The input data word (byte 1 and byte 2) is of no importance after the write access. Any values still
displayed are invalid!
IV. Read Register 32 (check changed feature register)
Output Data
Byte 0: Control byte Byte 1: DataOUT1, high byte Byte 2: DataOUT1, low byte
0xA0 (1010 0000
) 0xXX 0xXX
bin
Explanation:
• Bit 0.7 set means: Register communication switched on.
• Bit 0.6 not set means: reading the register.
• Bits 0.5 to 0.0 indicate register number 32 with 10 0000
.
bin
• The output data word (byte 1 and byte 2) has no meaning during read access.
Input Data (answer of the bus terminal)
Byte 0: Status byte Byte 1: DataIN1, high byte Byte 2: DataIN1, low byte
0xA0 (1010 0000
) 0x00 0x02
bin
Explanation:
• The terminal returns the value of the control byte as a receipt in the status byte.
• The terminal returns the current value of the feature register in the input data word (byte 1 and byte 2).
V. Write Register 31 (reset code word)
Output Data
Byte 0: Control byte Byte 1: DataOUT1, high byte Byte 2: DataOUT1, low byte
0xDF (1101 1111
) 0x00 0x00
bin
Explanation:
• Bit 0.7 set means: Register communication switched on.
• Bit 0.6 set means: writing to the register.
• Bits 0.5 to 0.0 specify the register number 31 with 01 1111
.
bin
• The output data word (byte 1 and byte 2) contains 0x0000 for reactivating write protection.
Input Data (answer of the bus terminal)
Byte 0: Status byte Byte 1: DataIN1, high byte Byte 2: DataIN1, low byte
0x9F (1001 1111
) 0xXX 0xXX
bin
Explanation:
• The terminal returns a value as a receipt in the status byte that differs only in bit 0.6 from the value of
the control byte.
KL3361 and KL3362 67Version: 2.2.0
Page 68

Access from the user program
• The input data word (byte 1 and byte 2) is of no importance after the write access. Any values still
displayed are invalid!
KL3361 and KL336268 Version: 2.2.0
Page 69

Appendix
6 Appendix
6.1 Support and Service
Beckhoff and their partners around the world offer comprehensive support and service, making available fast
and competent assistance with all questions related to Beckhoff products and system solutions.
Beckhoff's branch offices and representatives
Please contact your Beckhoff branch office or representative for local support and service on Beckhoff
products!
The addresses of Beckhoff's branch offices and representatives round the world can be found on her internet
pages:
http://www.beckhoff.com
You will also find further documentation for Beckhoff components there.
Beckhoff Headquarters
Beckhoff Automation GmbH & Co. KG
Huelshorstweg 20
33415 Verl
Germany
Phone: +49 5246 963 0
Fax: +49 5246 963 198
e-mail: info@beckhoff.com
Beckhoff Support
Support offers you comprehensive technical assistance, helping you not only with the application of
individual Beckhoff products, but also with other, wide-ranging services:
• support
• design, programming and commissioning of complex automation systems
• and extensive training program for Beckhoff system components
Hotline: +49 5246 963 157
Fax: +49 5246 963 9157
e-mail: support@beckhoff.com
Beckhoff Service
The Beckhoff Service Center supports you in all matters of after-sales service:
• on-site service
• repair service
• spare parts service
• hotline service
Hotline: +49 5246 963 460
Fax: +49 5246 963 479
e-mail: service@beckhoff.com
KL3361 and KL3362 69Version: 2.2.0
Page 70

List of illustration
List of illustration
Fig. 1 BIC as data matrix code (DMC, code scheme ECC200)............................................................. 8
Fig. 2 KL3361 ........................................................................................................................................ 11
Fig. 3 KL3362 ........................................................................................................................................ 13
Fig. 4 Spring contacts of the Beckhoff I/O components......................................................................... 16
Fig. 5 Attaching on mounting rail ........................................................................................................... 17
Fig. 6 Disassembling of terminal............................................................................................................ 18
Fig. 7 Power contact on left side............................................................................................................ 19
Fig. 8 Standard wiring............................................................................................................................ 20
Fig. 9 Pluggable wiring .......................................................................................................................... 21
Fig. 10 High Density Terminals................................................................................................................ 21
Fig. 11 Connecting a cable on a terminal point ....................................................................................... 22
Fig. 12 Connecting the KL3361 ............................................................................................................... 24
Fig. 13 Connecting the KL3362 ............................................................................................................... 26
Fig. 14 KS2000 configuration software .................................................................................................... 29
Fig. 15 Display of the fieldbus station in KS2000 .................................................................................... 31
Fig. 16 KS2000 tree branches for channel 1 of the KL3681.................................................................... 32
Fig. 17 Trigger logic for KL3361 .............................................................................................................. 33
Fig. 18 Trigger values for KL3361 ........................................................................................................... 34
Fig. 19 Process data for KL3361 ............................................................................................................. 35
Fig. 20 Trigger logic for KL3362 .............................................................................................................. 36
Fig. 21 General settings for KL3362 ........................................................................................................ 37
Fig. 22 Trigger values for KL3362 ........................................................................................................... 38
Fig. 23 Process data for KL3362 ............................................................................................................. 39
Fig. 24 Selecting the input value for data word0..................................................................................... 46
Fig. 25 Selecting the input value for data word1..................................................................................... 47
Fig. 26 Selecting the input value for data word2 (KL3362 only) ............................................................. 47
Fig. 27 Selecting the input value for data word3 (KL3362 only) ............................................................. 47
Fig. 28 Settings of KL3314 via visualisation of TwinCAT 3 ..................................................................... 48
Fig. 29 Opening the *. tnzip archive......................................................................................................... 48
Fig. 30 Search of the existing HW configuration for the EtherCAT configuration of the example ........... 49
KL3361 and KL336270 Version: 2.2.0
 Loading...
Loading...