

Page 1

Operating Instructions for
EL2911
TwinSAFE Potential Supply Terminal with 4 digital fail-safe
inputs
Version:
Date:
1.0.0
2018-08-24
Page 2

Page 3

Table of contents
Table of contents
1 Foreword ....................................................................................................................................................5
1.1 Notes on the documentation..............................................................................................................5
1.2 Safety instructions .............................................................................................................................6
1.2.1 Delivery state ..................................................................................................................... 6
1.2.2 Operator's obligation to exercise diligence ........................................................................ 6
1.2.3 Description of safety symbols ............................................................................................ 7
1.3 Documentation issue status ..............................................................................................................7
1.4 Version history of the TwinSAFE product..........................................................................................8
2 System description ...................................................................................................................................9
2.1 The Beckhoff EtherCAT Terminal system .........................................................................................9
2.1.1 EtherCAT Bus Coupler .................................................................................................... 10
2.1.2 EtherCAT Terminals ........................................................................................................ 11
2.1.3 E-bus ............................................................................................................................... 11
2.1.4 Power contacts ................................................................................................................ 11
2.2 TwinSAFE........................................................................................................................................12
2.2.1 The I/O construction kit is extended safely ...................................................................... 12
2.2.2 Safety concept ................................................................................................................. 12
2.2.3 The fail-safe principle (Fail Stop) ..................................................................................... 13
3 Product description.................................................................................................................................14
3.1 EL2911 - TwinSAFE potential supply terminal with 4 digital fail-safe inputs ...................................14
3.2 Intended use....................................................................................................................................15
3.3 Requirements for the potential group ..............................................................................................17
3.4 Technical data .................................................................................................................................19
3.5 Safety parameters ...........................................................................................................................20
3.6 Safe inputs and outputs...................................................................................................................20
3.7 Characteristic curve of the inputs ....................................................................................................20
3.8 Dimensions......................................................................................................................................21
4 Operation..................................................................................................................................................22
4.1 Environmental conditions ................................................................................................................22
4.2 Installation .......................................................................................................................................22
4.2.1 Safety instructions ........................................................................................................... 22
4.2.2 Transport / storage .......................................................................................................... 22
4.2.3 Mechanical installation..................................................................................................... 22
4.2.4 Electrical installation ........................................................................................................ 29
4.3 Configuration of the terminal in TwinCAT........................................................................................34
4.3.1 Inserting a Bus Coupler ................................................................................................... 34
4.3.2 Inserting a Bus Terminal.................................................................................................. 34
4.3.3 Adding an EL2911 ........................................................................................................... 34
4.3.4 Using the integrated TwinSAFE Logic functions.............................................................. 35
4.3.5 Address settings on TwinSAFE terminals with 1023 possible addresses ....................... 36
4.3.6 Alias devices.................................................................................................................... 37
4.3.7 EL2911 parameters in TwinCAT...................................................................................... 38
4.3.8 EL2911 process image .................................................................................................... 41
EL2911 3Version: 1.0.0
Page 4

Table of contents
4.4 TwinSAFE reaction times ................................................................................................................42
4.5 Diagnosis.........................................................................................................................................44
4.5.1 Status LEDs..................................................................................................................... 44
4.5.2 Diagnostic LEDs .............................................................................................................. 44
4.5.3 Flash code display ........................................................................................................... 45
4.5.4 Diagnosis History............................................................................................................. 45
4.5.5 Diag History tab ............................................................................................................... 48
4.6 Maintenance ....................................................................................................................................50
4.7 Service life .......................................................................................................................................51
4.8 Decommissioning ............................................................................................................................51
4.9 Firmware update of TwinSAFE products.........................................................................................52
5 Appendix ..................................................................................................................................................55
5.1 Support and Service ........................................................................................................................55
5.2 Certificates.......................................................................................................................................56
EL29114 Version: 1.0.0
Page 5

Foreword
1 Foreword
1.1 Notes on the documentation
Intended audience
This description is only intended for the use of trained specialists in control and automation engineering who
are familiar with the applicable national standards.
It is essential that the following notes and explanations are followed when installing and commissioning
these components.
The responsible staff must ensure that the application or use of the products described satisfy all the
requirements for safety, including all the relevant laws, regulations, guidelines and standards.
Origin of the document
This documentation was originally written in German. All other languages are derived from the German
original.
Currentness
Please check whether you are using the current and valid version of this document. The current version can
be downloaded from the Beckhoff homepage at http://www.beckhoff.com/english/download/twinsafe.htm.
In case of doubt, please contact Technical Support [}55].
Product features
Only the product features specified in the current user documentation are valid. Further information given on
the product pages of the Beckhoff homepage, in emails or in other publications is not authoritative.
Disclaimer
The documentation has been prepared with care. The products described are subject to cyclical revision. For
that reason the documentation is not in every case checked for consistency with performance data,
standards or other characteristics. We reserve the right to revise and change the documentation at any time
and without prior announcement. No claims for the modification of products that have already been supplied
may be made on the basis of the data, diagrams and descriptions in this documentation.
Trademarks
Beckhoff®, TwinCAT®, EtherCAT®, EtherCATP®, SafetyoverEtherCAT®, TwinSAFE®, XFC® and XTS® are
registered trademarks of and licensed by Beckhoff Automation GmbH.
Other designations used in this publication may be trademarks whose use by third parties for their own
purposes could violate the rights of the owners.
Patent Pending
The EtherCAT Technology is covered, including but not limited to the following patent applications and
patents: EP1590927, EP1789857, DE102004044764, DE102007017835 with corresponding applications or
registrations in various other countries.
The TwinCAT Technology is covered, including but not limited to the following patent applications and
patents: EP0851348, US6167425 with corresponding applications or registrations in various other countries.
EL2911 5Version: 1.0.0
Page 6

Foreword
EtherCAT® and Safety over EtherCAT® are registered trademarks and patented technologies, licensed by
Beckhoff Automation GmbH, Germany.
Copyright
© Beckhoff Automation GmbH & Co. KG, Germany.
The reproduction, distribution and utilization of this document as well as the communication of its contents to
others without express authorization are prohibited.
Offenders will be held liable for the payment of damages. All rights reserved in the event of the grant of a
patent, utility model or design.
Delivery conditions
In addition, the general delivery conditions of the company Beckhoff Automation GmbH & Co. KG apply.
1.2 Safety instructions
1.2.1 Delivery state
All the components are supplied in particular hardware and software configurations appropriate for the
application. Modifications to hardware or software configurations other than those described in the
documentation are not permitted, and nullify the liability of Beckhoff Automation GmbH & Co. KG.
1.2.2 Operator's obligation to exercise diligence
The operator must ensure that
• the TwinSAFE products are only used as intended (see chapter Product description);
• the TwinSAFE products are only operated in sound condition and in working order.
• the TwinSAFE products are operated only by suitably qualified and authorized personnel.
• the personnel is instructed regularly about relevant occupational safety and environmental protection
aspects, and is familiar with the operating instructions and in particular the safety instructions contained
herein.
• the operating instructions are in good condition and complete, and always available for reference at the
location where the TwinSAFE products are used.
• none of the safety and warning notes attached to the TwinSAFE products are removed, and all notes
remain legible.
EL29116 Version: 1.0.0
Page 7

1.2.3 Description of safety symbols
In these operating instructions the following instructions are used.
These instructions must be read carefully and followed without fail!
DANGER
Serious risk of injury!
Failure to follow this safety instruction directly endangers the life and health of persons.
WARNING
Risk of injury!
Failure to follow this safety instruction endangers the life and health of persons.
CAUTION
Personal injuries!
Failure to follow this safety instruction can lead to injuries to persons.
NOTE
Damage to the environment/equipment or data loss
Failure to follow this instruction can lead to environmental damage, equipment damage or data loss.
Foreword
Tip or pointer
This symbol indicates information that contributes to better understanding.
1.3 Documentation issue status
Version Comment
1.0.0 • Certificate added
• First release
0.0.5 • Overview screen updated
0.0.4 • Connection added
• Parameter description updated
0.0.3 • Requirements for the potential group added
0.0.2 • Update after review
0.0.1 • First draft
EL2911 7Version: 1.0.0
Page 8

Foreword
1.4 Version history of the TwinSAFE product
This version history lists the software and hardware version numbers. A description of the changes
compared to the previous version is also given.
Updated hardware and software
TwinSAFE products are subject to a cyclical revision. We reserve the right to revise and change the
TwinSAFE products at any time and without prior notice.
No claims for changes to products already delivered can be asserted from these hardware and/or
software changes.
A description of how a firmware (software) update can be performed can be found in chapter Firmware
update of TwinSAFE products [}52].
Date Software ver-
sion
16.08.2018 01 00 First release of the EL2911
Hardware
version
Modifications
EL29118 Version: 1.0.0
Page 9

System description
2 System description
2.1 The Beckhoff EtherCAT Terminal system
The Beckhoff EtherCAT Terminal system is used for decentralized connection of sensors and actuators to a
controller. The components of the Beckhoff EtherCAT Terminal system are mainly used in industrial
automation and building management systems. As a minimum, a bus station consists of an EtherCAT
Coupler and connected EtherCAT Terminals. The EtherCAT Coupler forms the communication interface to
the higher-level controller, while the EtherCAT Terminals form the interface to the sensors and actuators.
The whole bus station is clipped onto a 35mm DIN mounting rail (EN 60715). The mechanical link of the bus
station is established with a slot and key system on EtherCAT Couplers and EtherCAT Terminals.
The sensors and actuators are connected with the terminals via the screwless (spring-loaded) connection
system.
Fig.1: Slot and key system and screwless (spring-loaded) connection system
EL2911 9Version: 1.0.0
Page 10

System description
2.1.1 EtherCAT Bus Coupler
Mechanical data Bus Coupler
Material polycarbonate, polyamide (PA6.6).
Dimensions (W x H x D) 44mm x 100mm x 68mm
Mounting on 35 mm mounting rail (EN60715) with locking
Attachable by double slot and key connection
Fig.2: Bus Coupler (EtherCAT)
Connection technology Bus Coupler
Wiring Spring-loaded system
Connection cross-section 0.08mm² ... 2.5mm², stranded wire, solid wire
Fieldbus connection EtherCAT
Power contacts 3 spring contacts
Current load 10A
Nominal voltage 24V
DC
EL291110 Version: 1.0.0
Page 11

2.1.2 EtherCAT Terminals
Mechanical data Bus Terminal
Material polycarbonate, polyamide (PA6.6).
Dimensions (W x H x D) 12mm x 100mm x 68mm or 24mm x 100mm x 68mm
Mounting on 35 mm mounting rail (EN60715) with locking
Attachable by double slot and key connection
System description
Fig.3: Overview of EtherCAT Terminals
Connection technology Bus Terminal
Wiring Spring-loaded system
Connection cross-section typically 0.08mm² – 2.5mm², stranded wire, solid wire
Communication E-bus
Power contacts Up to 3 blade/spring contacts
Current load 10A
Nominal voltage Depending on terminal type (typically 24 VDC)
2.1.3 E-bus
The E-bus is the data path within a terminal strip. The E-bus is led through from the Bus Coupler through all
the terminals via six contacts on the terminals' side walls.
2.1.4 Power contacts
The operating voltage is passed on to following terminals via three power contacts. Terminal strip can be
split into galvanically isolated groups by means of potential supply terminals as required. The supply
terminals play no part in the control of the terminals, and can be inserted at any locations within the terminal
strip.
EL2911 11Version: 1.0.0
Page 12

System description
2.2 TwinSAFE
2.2.1 The I/O construction kit is extended safely
The integrated TwinSAFE safety solution is the logical continuation of the open, PC-based Beckhoff control
philosophy. Due to their modularity and versatility, the TwinSAFE components fit seamlessly into the
Beckhoff control system. The I/O components are available in the formats Bus Terminal, EtherCAT Terminal,
EtherCAT plug-in module and EtherCAT Box.
Thanks to the fieldbus-neutral safety protocol (TwinSAFE/Safety-over-EtherCAT), TwinSAFE devices can be
integrated into any fieldbus system. They are integrated into existing networks with K-bus or EtherCAT and
can be used directly in the machine as IP67 modules. These safety I/Os form the interfaces to the safetyrelevant sensors and actuators.
The possibility to transmit the safety-relevant signals over a standard bus system gives rise to substantial
advantages in terms of planning, installation, operation, maintenance, diagnostics and costs.
The safety application is configured or programmed respectively in the TwinCAT software. This application is
then transferred via the bus to a TwinSAFE logic component. These form the heart of the TwinSAFE system.
All safety devices in the system communicate with this logic component. Due to the enormous flexibility of
the system, several TwinSAFE logic components can also be operated simultaneously in a network.
2.2.2 Safety concept
TwinSAFE: Safety and I/O technology in one system
• Extension of the familiar Beckhoff I/O system with TwinSAFE Terminals
• Freely selectable mix of safe and standard signals
• Logic link of the I/Os in the TwinSAFE logic component, e.g. EL6910
• Safety-relevant networking of machines via bus systems
TwinSAFE protocol (FSoE / Safety-over-EtherCAT)
• Transfer of safety-relevant data via any media (“genuine black channel”)
• TwinSAFE communication via fieldbus systems such as EtherCAT, Lightbus, PROFIBUS or Ethernet
• IEC 61508:2010 SIL 3 compliant
TwinCAT software and TwinSAFE editor
• Safety application is configured or programmed in the TwinCAT software
• Certified function blocks such as emergency stop, operation mode, etc.
• simple handling
• Transfer of the application via the bus to the TwinSAFE logic component
TwinSAFE logic component, e.g. EL6910
• Processing of the safety-related application and communication with the TwinSAFE terminals
• No safety requirements for higher-level control system
• TwinSAFE enables a network with up to 65,535 TwinSAFE components.
• TwinSAFE logic component can establish up to 512 connections (TwinSAFE connections).
• Several TwinSAFE logic components can be operated in a network
• Suitable for applications up to SIL 3 according to IEC 61508:2010 and category 4 / PL e according to
ENISO13849-1:2015.
EL291112 Version: 1.0.0
Page 13

System description
TwinSAFE I/O components
• The TwinSAFE I/O components are available in the formats Bus Terminal, EtherCAT Terminal,
EtherCAT plug-in module, EtherCAT Box and TwinSAFE Drive option card
• All common safety sensors and actuators can be connected
• Operation with a TwinSAFE logic component
• Typically meet the requirements of IEC 61508:2010 up to SIL 3 and ENISO13849-1:2015 up to
Category 4, PLe. More detailed information can be found in the respective user documentation
2.2.3 The fail-safe principle (Fail Stop)
The basic rule for a safety system such as TwinSAFE is that failure of a part, a system component or the
overall system must never lead to a dangerous condition.
CAUTION
Safe state
The safe state of the TwinSAFE system is always the switched-off and de-energized state.
EL2911 13Version: 1.0.0
Page 14

Product description
3 Product description
3.1 EL2911 - TwinSAFE potential supply terminal with 4 digital fail-safe inputs
The EL2911 is a safe potential supply terminal for the power contacts for a downstream potential group. In
addition, it has 4 fail-safe inputs for sensors with potential-free contacts for 24VDC.
The EL2911 meets the requirements of IEC61508:2010SIL3 and ENISO13849-1:2015(Cat4, PLe). The
safe inputs of the EL2911 meet the requirements of EN62061:2005/A2:2015 up to SILCL3, the safe output
up to SILCL2.
The TwinSAFE Terminal has the usual design of a 24mm EtherCAT Terminal. It has no power contacts on
the left side and therefore forms the start of a new potential group.
The safe inputs and the safe output are supplied from UP.
Fig.4: EL2911 - TwinSAFE potential supply terminal with 4 fail-safe inputs
EL291114 Version: 1.0.0
Page 15

Product description
3.2 Intended use
WARNING
Caution - Risk of injury!
TwinSAFE components may only be used for the purposes described below!
The TwinSAFE Terminals expand the application area of Beckhoff Bus Terminal system with functions that
enable them to be used for machine safety applications. The TwinSAFE Terminals are designed for machine
safety functions and directly associated industrial automation tasks. They are therefore only approved for
applications with a defined fail-safe state. This safe state is the switched-off and de-energized state. Failsafety according to the relevant standards is required.
The TwinSAFE I/O components allow the connection of:
• 24VDC sensors such as
emergency stop push-buttons, rope pull switches, position switches, two-hand switches, safety
switching mats, light curtains, light barriers, laser scanners, etc.
• 24VDC actuators such as
contactors, protective door switches with tumbler, signal lamps, servo drives, etc.
Test pulses
When selecting actuators please ensure that the test pulses of the TwinSAFE component do not
lead to switching of the actuator or a diagnostic message of the TwinSAFE component.
The following TwinSAFE components were developed for these tasks:
• The EL1904 is an EtherCAT Terminal with 4 digital fail-safe inputs
• The EL2904 is an EtherCAT Terminal with 4 digital fail-safe outputs
• The EL6900 is an EtherCAT Terminal with integrated TwinSAFE logic
These TwinSAFE components are suitable for operation on the
• Beckhoff EKxxxx series Bus Couplers
• Beckhoff CXxxxx series Embedded PCs with E-bus connection
WARNING
The fail-safe principle!
The basic rule for a safety system such as TwinSAFE is that failure of a part, a system component or the
overall system must never lead to a dangerous condition. The safe state is always the switched off and
wattless state.
WARNING
System limits
The TÜV SÜD certificate applies to these TwinSAFE components, the function blocks available in it, the
documentation and the engineering tool. TwinCAT 3.1 and the TwinSAFE Loader are permitted as engineering tools. Any deviations from these procedures or tools, particularly externally generated xml files for
TwinSAFE import or externally generated automatic project creation procedures, are not covered by the
certificate.
WARNING
Power supply from SELV/PELV power supply unit!
The TwinSAFE components must be supplied with 24VDC by an SELV/PELV power supply unit with an output voltage limit U
of 36VDC. Failure to observe this can result in a loss of safety.
max
WARNING
Commissioning test
Before the EL2911 can be used for the safety task, the user must carry out a commissioning test so that
sensor and actuator wiring errors can be ruled out.
EL2911 15Version: 1.0.0
Page 16

Product description
CAUTION
Follow the machinery directive!
The TwinSAFE components may only be used in machines as defined in the machinery directive.
CAUTION
Ensure traceability!
The buyer has to ensure the traceability of the device via the serial number.
CAUTION
Note on approval according to EN 81-20, EN 81-22 and EN 81-50
• The TwinSAFE components may only be used in machines that have been designed and installed in accordance with the requirements of the EN60204-1 standard.
• Provide a surge filter for the supply voltage of the TwinSAFE components against overvoltages. (Reduction to overvoltage category II)
• EN81 requires that in the case of devices with internal temperature monitoring, a stop must be reached
in the event of an overtemperature. In this case, passengers must be able to disembark (see EN81-20
chapter 5.10.4.3, for example). To ensure this, application measures are necessary. The internal terminal temperature of the TwinSAFE components can be read out by the user. There is a direct switch-off at
the maximum permissible temperature of e.g. 95°C when using the EL terminals.
The user must select a temperature threshold below the maximum temperature such that a stop can be
reached in all cases before the maximum temperature is reached. Information on the optimum terminal
configuration can be found under Notes on the arrangement of TwinSAFE components and under Example configuration for temperature measurement.
• For the use of the TwinSAFE components according to EN81-22 and EN81-50, the conditions described in the manuals for achieving category4 according to ENISO13849-1:2015 must be observed.
• The use of TwinSAFE components is limited to indoor applications.
• Basic protection against direct contact must be provided, either by fulfilling protection class IP2X or by
installing the TwinSAFE components in a control cabinet which corresponds at least to protection class
IP54 according to EN60529.
• The ambient conditions regarding temperature, humidity, heat dissipation, EMC and vibrations, as specified in the operating instructions under technical data, must be observed.
• The operating conditions in potentially explosive atmospheres (ATEX) are specified in the operating instructions.
• The safe state (triggering) of the application must be the de-energized state. The safe state of the TwinSAFE components is always the de-energized, switched-off state, and this cannot be changed.
• The service life specified in the operating instructions must be observed.
• If the TwinSAFE component is operated outside the permissible temperature range, it changes to
"Global Shutdown" state.
• The TwinSAFE components must be installed in a control cabinet with protection class IP54 according to
EN60529, so that the requirement for contamination level3 according to EN60664-1 can be reduced to
level2.
• The TwinSAFE components must be supplied by a SELV/PELV power supply unit with a maximum voltage of U
<=36VDC.
max
EL291116 Version: 1.0.0
Page 17

Product description
3.3 Requirements for the potential group
WARNING
Prevention of feedback
Feedback must be prevented through the following measures:
• No switching of loads with a separate power supply
• Excluding a line short-circuit fault (see following alternatives)
CAUTION
Non-reactive EtherCAT Terminals
In the potential group connected through the EL2911, only non-reactive standard terminals must be used. A
list the non-reactive EtherCAT Terminals can be found in the Beckhoff Information System under http://in-
fosys.beckhoff.de
NOTE
Maximum achievable safety level for the safe output
Provided feedback is avoided by excluding line short-circuit faults, the following safety levels can be
achieved:
• EN ISO 13849-1: max. Cat. 4 / PL e
• IEC 61508: max. SIL3
• EN 62061: max. SIL2
No switching of loads with a separate power supply
Loads that have their own power supply must not be switched by standard terminals, since in this case
feedback via the load cannot be ruled out.
Fig.5: External load
EL2911 17Version: 1.0.0
Page 18

Product description
CAUTION
Exceptions
Exceptions to the general requirement are allowed only if the manufacturer of the connected load guarantees that feedback to the control input cannot occur.
Cable short-circuit fault exclusion
It must be possible to avoid the risk of feedback due to a short circuit in the line through further measures.
The following measures can be implemented as an alternative.
Fig.6: protected wiring
Alternative 1: Load connection via separate sheathed cables
The non-safely switched potential of the standard terminal may not be conducted together with other
potential-conducting cores inside the same sheathed cable
Alternative 2: Wiring only inside the control cabinet
All loads connected to the non-safe standard terminals must be located in the same control cabinet as the
terminals. The cables are routed entirely inside the control cabinet.
Alternative 3: Dedicated earth connection per conductor
All conductors connected to the non-safe standard terminals are protected by a separate ground connection.
Alternative 4: Permanent (fixed) wiring, protected from external damage
All conductors connected to the non-safe standard terminals are permanently installed and protected from
external damage, e.g. through a cable duct or an armored conduit.
CAUTION
Fault exclusion
The machine manufacturer or the user is solely responsible for the correct execution and evaluation of the
applied alternatives.
EL291118 Version: 1.0.0
Page 19

Product description
3.4 Technical data
Product designation EL2911-0000
Number of inputs 4
Number of outputs 1 (for the power and spring force contacts)
Status display 10 (one green LED for each input and output + 5 DIAG LEDs)
Reaction time (read input/write to E-bus) typically: 4ms,
Fault response time ≤ watchdog time
Cable length between sensor and terminal unshielded max. 100m (0.75 or 1mm²)
Output current of the clock outputs typically 10mA, max. 12mA
Safe output max. 10 A (for the power and spring force contacts)
Input process image 6byte
Output process image 6byte
EL2911 supply voltage (PELV) 24VDC (–15%/+20%)
Signal voltage "0" inputs
Signal voltage "1" inputs
Current consumption of the module electronics at 24V (without current consumption of sensors)
Current consumption via E-bus 5 channels occupied: approx. 180mA
Power dissipation of the terminal typically 2.7W (at 10A output current)
Electrical isolation (between the channels) No
Electrical isolation (between the channels and the E-bus) Yes
Insulation voltage (between the channels and the E-bus, un-
der common operating conditions)
Dimensions (WxHxD) 24 mm x 100 mm x 68 mm
Weight app.98g
Permissible ambient temperature (operation)
Permissible ambient temperature (transport/storage) -40°C to +85°C
Permissible air humidity 5% to 95%, non-condensing
Permissible air pressure (operation/storage/transport) 750hPa to 1100hPa
Climate category according to EN60721-3-3 3K3
Permissible level of contamination
according to EN 60664-1
Inadmissible operating conditions TwinSAFE Terminals must not be used under the following operating
EMC immunity/emission conforms to EN61000-6-2/ EN61000-6-4
Vibration/shock resistance conforms to EN60068-2-6/ EN60068-2-27
Shocks 15g with pulse duration 11ms in all three axes
Protection class IP20
Permitted operating environment In the control cabinet or terminal box, with minimum protection class
correct installation position horizontal
Approvals CE, TÜV SÜD
maximally: see error reaction time
shielded max. 100m (0.75 or 1mm²)
Diagnosis:
In switched-off state, external feeds are detected above 5 V.
-3V ... 5V (EN61131-2, type 3) see chapter Characteristic curve of the
inputs [}20]
11V ... 30 V (EN61131-2, type 3) see chapter Characteristic curve of the
inputs [}20]
5 channels occupied: typically 29mA
0 channels occupied: typically 5mA
insulation tested with 500V
-25°C to +55°C (see chapter on Temperature measurement [}24])
(this corresponds to an altitude of approx. -690m to 2450m above sea
level, assuming an international standard atmosphere)
(the deviation from 3K3 is possible only with optimal environmental conditions and also applies only to the technical data which are specified differently in this documentation)
level of contamination 2
(note chapter Maintenance [}50])
conditions:
• under the influence of ionizing radiation (exceeding the natural
background radiation)
• in corrosive environments
• in an environment that leads to unacceptable contamination of
the TwinSAFE component
IP54 according to IEC60529
(see chapter Installation position and minimum distances [}23])
DC
EL2911 19Version: 1.0.0
Page 20

Product description
3.5 Safety parameters
Characteristic numbers EL2911-0000
Lifetime [a] 20
Prooftest Interval [a] not required
PFH
D
PFD 5.00 E-05
MTTF
D
DC high
Performance level PL e
Category 4
HFT 1
Element classification
1. Special proof tests are not required during the entire service life of the EL2911 EtherCAT Terminal.
2. Classification according to IEC 61508-2:2010 (chapter 7.4.4.1.2 and 7.4.4.1.3)
The EL2911 EtherCAT Terminal can be used for safety-related applications within the meaning of
IEC61508:2010 up to SIL3 and ENISO13849-1:2015 up to PL e (Cat4).
2
4.50 E-09
high
Type B
1
Further information on calculating or estimating the MTTFD value from the PFHD value can be found in the
TwinSAFE application manual or in ENISO13849-1:2015, TableK.1.
In terms of safety-related parameters, the Safety-over-EtherCAT communication is already considered with
1% of SIL3 according to the protocol specification.
3.6 Safe inputs and outputs
The safe inputs and corresponding clock outputs are consolidated in a module. This has the advantage that
a two-channel safe sensor can be used on any of the EL2911 channels, and a fault such as cross-circuit or
external feed results in shutdown of the whole module.
The safe output module has a single-channel design.
NOTE
Clocked signals inside a sheathed cable
The clocked signals (clock outputs for the safe inputs) can be used in any way that may be required within
a sheathed cable, since faults such as cross-circuit or external feed result in shutdown of the whole input
module.
NOTE
Safe inputs in Cat.4 / PL e
If two safe input channels in category 4 structure are to be used, any of the EL2911 channels can be used.
3.7 Characteristic curve of the inputs
The characteristic curve of the inputs is similar to type 3 according to EN 61131-2.
EL291120 Version: 1.0.0
Page 21

Product description
Fig.7: Characteristic curve of the inputs
3.8 Dimensions
Fig.8: EL2911 dimensions
Width: 24mm (side-by-side installation)
Height: 100mm
Depth: 68mm
EL2911 21Version: 1.0.0
Page 22

Operation
4 Operation
4.1 Environmental conditions
Please ensure that the TwinSAFE components are only transported, stored and operated under the specified
conditions (see technical data)!
WARNING
Risk of injury!
The TwinSAFE components must not be used under the following operating conditions.
• under the influence of ionizing radiation (that exceeds the level of the natural environmental radiation)
• in corrosive environments
• in an environment that leads to unacceptable soiling of the TwinSAFE component
NOTE
Electromagnetic compatibility
The TwinSAFE components comply with the current standards on electromagnetic compatibility with regard
to spurious radiation and immunity to interference in particular.
However, in cases where devices such as mobile phones, radio equipment, transmitters or high-frequency
systems that exceed the interference emissions limits specified in the standards are operated near TwinSAFE components, the function of the TwinSAFE components may be impaired.
4.2 Installation
4.2.1 Safety instructions
Before installing and commissioning the TwinSAFE components please read the safety instructions in the
foreword of this documentation.
4.2.2 Transport / storage
Use the original packaging in which the components were delivered for transporting and storing the
TwinSAFE components.
CAUTION
Note the specified environmental conditions
Please ensure that the digital TwinSAFE components are only transported and stored under the specified
environmental conditions (see technical data).
4.2.3 Mechanical installation
DANGER
Risk of injury!
Bring the bus system into a safe, de-energized state before starting installation, disassembly or wiring of
the devices!
EL291122 Version: 1.0.0
Page 23

4.2.3.1 Instructions for ESD protection
NOTE
Devices can be destroyed by electrostatic charging!
The devices contain electrostatically sensitive components which can be damaged by improper handling.
• Please ensure you are electrostatically discharged when handling the components; also
avoid touching the spring contacts directly (see illustration).
• Avoid contact with highly insulating materials (synthetic fibers, plastic films etc.)
• When handling the components, ensure good grounding of the environment (workplace,
packaging and persons)
• Each bus station must be terminated on the right side with the EL9011 or EL9012 end cap
to ensure the protection class and ESD protection.
Operation
Fig.9: Spring contacts of Beckhoff I/O components
4.2.3.2 Control cabinet / terminal box
The TwinSAFE terminals must be installed in a control cabinet or terminal box with IP54 protection class
according to IEC60529 as a minimum.
4.2.3.3 Installation position and minimum distances
For the prescribed installation position the mounting rail is installed horizontally and the mating surfaces of
the EL/KL terminals point toward the front (see illustration below). The terminals are ventilated from below,
which enables optimum cooling of the electronics through convection. The direction indication “down”
corresponds to the direction of positive acceleration due to gravity.
EL2911 23Version: 1.0.0
Page 24

Operation
Fig.10: Installation position and minimum distances
In order to ensure optimum convection cooling, the distances to neighboring devices and to control cabinet
walls must not be smaller than those shown in the diagram.
4.2.3.4 Temperature measurement
The temperature measurement consists of an EK1100 EtherCAT Coupler, to which EtherCAT Terminals are
attached, based on the typical distribution of digital and analog signal types at a machine. On the EL6910 a
safety project is active, which reads safe inputs and enables safe outputs during the measurement.
NOTE
External heat sources / radiant heat / impaired convection
The maximum permissible ambient temperature of 55°C was checked with the example configuration described above. Impaired convection, an unfavorable location near heat sources or an unfavorable configuration of the EtherCAT Terminals may result in overheating of the TwinSAFE components.
The key parameter is always the maximum permitted internally measured temperature of 110°C, above
which the TwinSAFE components switch to safe state and report an error. The internal temperature can be
read from the TwinSAFE components via CoE.
EL291124 Version: 1.0.0
Page 25

Operation
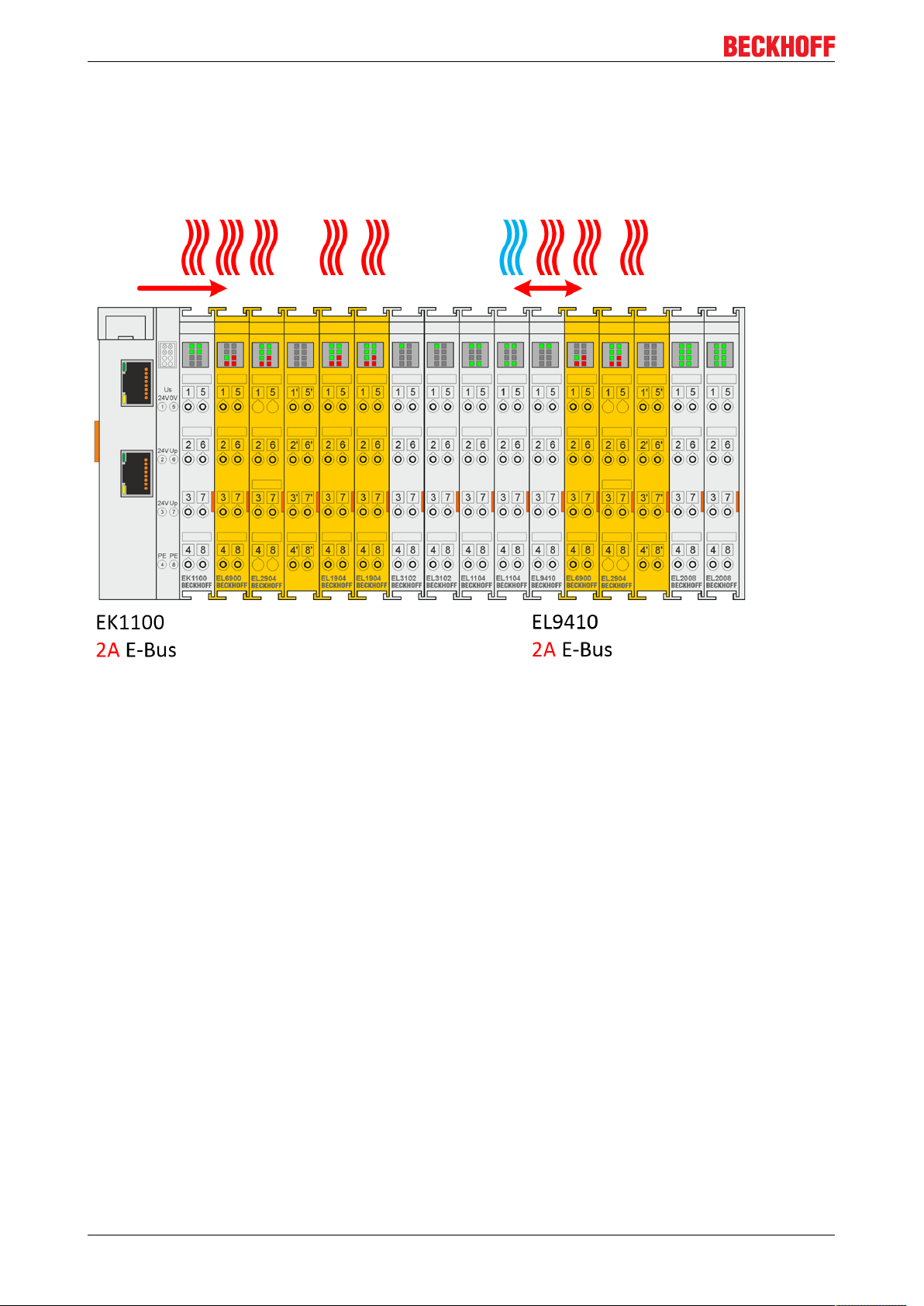
4.2.3.5 Notes on the arrangement of TwinSAFE components
The following notes show favorable and unfavorable arrangement of the terminals in relation to thermal
aspects. Components with higher waste heat are marked with a red symbol and components with low
waste heat with a blue symbol .
EtherCAT coupler EK11xx and power supply terminal EL9410
The more terminals are connected behind an EtherCAT coupler or a power supply terminal, the higher is the
E-Bus current, which must be supplied by their power supply units. As the current increases, the waste heat
of the power supply units is also increased..
EL69x0
The EL69x0 has a rather high waste heat because it has a high internal clock and high logic power.
EL2904
The EL2904 has a rather high waste heat, due to the possibly high output current of the connected
actuators.
EL1904
Even the EL1904 has a rather high waste heat, although the external load by clock outputs and safe inputs is
rather low.
EL2911 25Version: 1.0.0
Page 26
Operation
Thermally unfavorable arrangement of the TwinSAFE terminals
The following structure is rather unfavorable, since terminals with rather high waste heat are connected
directly to couplers or power supply terminals with high E-Bus load. The additional external heating of the
TwinSAFE terminals by the adjacent power supply units increases the internal terminal temperature, which
can lead to the maximum permissible temperature being exceeded. This leads to a diagnosis message
"overtemperature”.
Fig.11: Thermally unfavorable arrangement of the TwinSAFE terminals
EL291126 Version: 1.0.0
Page 27

Operation
Thermally favorable arrangement of the TwinSAFE terminals
The following structure is thermally favorable, since between the coupler / power supply terminal and
terminals with rather high waste heat, terminals with low current consumption and thus rather low waste heat
are placed.
Fig.12: Thermally favorable arrangement of the TwinSAFE terminals
4.2.3.6 Installation on mounting rails
WARNING
Risk of electric shock and damage of device!
Bring the bus terminal system into a safe, powered down state before starting installation, disassembly or
wiring of the Bus Terminals!
Mounting
The Bus Couplers and Bus Terminals are attached to commercially available 35mm mounting rails
(according to EN60715) by applying slight pressure:
EL2911 27Version: 1.0.0
Page 28

Operation
Fig.13: Installation on the mounting rail
1. First attach the Fieldbus Coupler to the mounting rail.
2. The Bus Terminals are now attached on the right-hand side of the fieldbus Coupler. Join the components with slot and key and push the terminals against the mounting rail, until the lock clicks onto the
mounting rail.
If the terminals are clipped onto the mounting rail first and then pushed together without slot and key,
the connection will not be operational! When correctly assembled, no significant gap should be visible
between the housings.
Fastening of mounting rails
The locking mechanism of the terminals and couplers protrudes into the profile of the mounting rail.
When installing the components, make sure that the locking mechanism doesn't come into conflict
with the fixing bolts of the mounting rail. For fastening mounting rails with a height of 7.5 mm under
the terminals and couplers, use flat fastening components such as countersunk head screws or
blind rivets.
Removal
Fig.14: Removal of mounting rails
EL291128 Version: 1.0.0
Page 29

Operation
1. Carefully pull the orange-colored lugs approximately 1 cm out of the disassembled terminal, until they
protrude loosely. The lock with the mounting rail is now released for this terminal, and the terminal can
be pulled from the mounting rail without excessive force.
2. Grasp the released terminal with thumb and index finger simultaneous at the upper and lower grooved
housing surfaces and pull the terminal away from the mounting rail.
4.2.4 Electrical installation
4.2.4.1 Connections within a Bus Terminal block
The electric connections between the Bus Coupler and the Bus Terminals are automatically realized by
joining the components:
Spring contacts (E-bus)
The six spring contacts of the E-bus deal with the transfer of the data and the supply of the Bus Terminal
electronics.
NOTE
Observe the E-bus current
Observe the maximum current that your Bus Coupler can supply to the E-bus! Use the EL9410 Power Supply Terminal if the current consumption of your terminals exceeds the maximum current that your Bus Coupler can feed to the E-bus supply.
Power contacts
The power contacts deal with the supply for the field electronics and thus represent a supply rail within the
Bus Terminal block. The power contacts are supplied via terminals on the Bus Coupler.
Note the connection of the power contacts
During the design of a Bus Terminal block, the pin assignment of the individual Bus Terminals must
be taken account of, since some types (e.g. analog Bus Terminals or digital 4-channel Bus Terminals) do not or not fully loop through the power contacts.
Potential supply terminals (EL91xx, EL92xx) interrupt the power contacts and thus represent the
start of a new supply rail.
PE power contact
The power contact labelled PE can be used as a protective earth. For safety reasons this contact mates first
when plugging together, and can ground short-circuit currents of up to 125A.
EL2911 29Version: 1.0.0
Page 30

Operation
Fig.15: PE power contact
CAUTION
Insulation tests
Note that, for reasons of electromagnetic compatibility, the PE contacts are capacitatively coupled to the
mounting rail. This may lead to incorrect results during insulation testing or to damage on the terminal (e.g.
disruptive discharge to the PE line during insulation testing of a consumer with a rated voltage of 230V).
For insulation testing, disconnect the PE supply line at the Bus Coupler or the Potential Supply Terminal! In
order to decouple further feed points for testing, these Power Feed Terminals can be released and pulled at
least 10mm from the group of terminals.
DANGER
Serious risk of injury!
The PE power contact must not be used for other potentials!
4.2.4.2 Overvoltage protection
If protection against overvoltage is necessary in your plant, provide a surge filter for the voltage supply to the
Bus Terminal blocks and the TwinSAFE terminals.
EL291130 Version: 1.0.0
Page 31

4.2.4.3 Wiring
Operation
Fig.16: Connection of a cable to a terminal point
Up to eight terminal points enable the connection of solid or finely stranded cables to the Bus Terminal. The
terminal points are implemented in spring force technology. Connect the cables as follows:
1. Open a terminal point by pushing a screwdriver straight against the stop into the square opening
above the terminal point. Do not turn the screwdriver or move it alternately (don't toggle).
2. The wire can now be inserted into the round terminal opening without any force.
3. The terminal closes automatically when the pressure is released, holding the wire safely and permanently.
See the following table for the suitable wire size width.
Wire size width (single core wires) 0.08 ... 2.5mm
Wire size width (fine-wire conductors) 0.08 ... 2.5mm
Wire size width (conductors with a wire end sleeve) 0.14 ... 1.5mm
2
2
2
Wire stripping length 8 ... 9mm
EL2911 31Version: 1.0.0
Page 32

Operation
4.2.4.4 EL2911 pin assignment
Fig.17: EL2911 - pin assignment
Terminal point Input / Out-
Signal
put
1 In1 Input 1+ (clock output)
2 Input 1- (safe input)
3 In3 Input 3+ (clock output)
4 Input 3- (safe input)
5 In2 Input 2+ (clock output)
6 Input 2- (safe input)
7 In4 Input 4+ (clock output)
8 Input 4- (safe input)
1‘ - not used
2‘ Out1 Safe output 1
3‘ - GND UP (0VDC for power supply and safe output)
4‘ - 24 VDC power supply U
P
5‘ - not used
6‘ Out1 Safe output 1
7‘ - GND UP (0VDC for power supply and safe output)
8‘ - 24 VDC power supply U
Power contact
Out1 Safe output 1
P
(top)
Power contact
- GND UP (0VDC for power supply and safe output)
(low)
EL291132 Version: 1.0.0
Page 33

4.2.4.5 Signal cables
Cable routing
Fig.18: Cable routing
Operation
NOTE
Route the signal cable separately
The signal cable must be routed separately from potential sources of interference, such as motor supply cables, 230 VAC power cables etc.!
Interference caused by cables routed in parallel can influence the signal form of the test pulses and thus
cause diagnostic messages (e.g. sensor errors or OpenLoad errors).
D: Distance between the cable ducts should be as large as possible
blue arrows: signal line
red arrows: potential source of interference
The common routing of signals together with other clocked signals in a common cable also reduces the
maximum propagation, since crosstalk of the signals can occur over long cable lengths and cause diagnostic
messages.
EL2911 33Version: 1.0.0
Page 34

Operation
4.3 Configuration of the terminal in TwinCAT
CAUTION
Do not change CoE objects!
Do not change any of the CoE objects in the TwinSAFE terminals. Any modifications (e.g. via TwinCAT) of
the CoE objects will permanently set the terminals to the Fail-Stop state or lead to unexpected behavior of
the terminals!
4.3.1 Inserting a Bus Coupler
See TwinCAT automation software documentation.
4.3.2 Inserting a Bus Terminal
See TwinCAT automation software documentation.
4.3.3 Adding an EL2911
An EL2911 is added in exactly the same way as any other Beckhoff EtherCAT Terminal. Open TwinSAFE
Terminals item in the list and select the EL2911.
Fig.19: Adding an EL2911
EL291134 Version: 1.0.0
Page 35

Operation
4.3.4 Using the integrated TwinSAFE Logic functions
On delivery, the EL2911 behaves like a safe TwinSAFE I/O slave, which can be used as an alias device
within a TwinSAFE Logic, e.g. EL6910.
Alternatively, the local logic function of the EP2911 can be used. To this end please create a TwinSAFE
project in the Safety Editor and select the EL2911 as the target system. Further information on creating a
project can be found in the EL6910 documentation and the description of the function blocks under http://
www.beckhoff.de/german/download/twinsafe.htm.
In order to be able to use the EP2911 again as a safe TwinSAFE I/O slave, please delete the logic, the
mapping and the parameter data on the EtherCAT Terminal and switch the voltage off and on again.
Fig.20: Delete project data
EL2911 35Version: 1.0.0
Page 36

Operation
4.3.5 Address settings on TwinSAFE terminals with 1023 possible addresses
Fig.21: Address settings on TwinSAFE terminals with 1023 possible addresses
The TwinSAFE address of the terminal is set via the 10-way DIP switch on the left-hand side of the
TwinSAFE terminal. TwinSAFE addresses between 1 and 1023 are available.
DIP switch Address
1 2 3 4 5 6 7 8 9 10
ON OFF OFF OFF OFF OFF OFF OFF OFF OFF 1
OFF ON OFF OFF OFF OFF OFF OFF OFF OFF 2
ON ON OFF OFF OFF OFF OFF OFF OFF OFF 3
OFF OFF ON OFF OFF OFF OFF OFF OFF OFF 4
ON OFF ON OFF OFF OFF OFF OFF OFF OFF 5
OFF ON ON OFF OFF OFF OFF OFF OFF OFF 6
ON ON ON OFF OFF OFF OFF OFF OFF OFF 7
... ... ... ... ... ... ... ... ... ... ...
ON ON ON ON ON ON ON ON ON ON 1023
WARNING
TwinSAFE address
Each TwinSAFE address may only be used once within a network/ a configuration!
The address 0 is not a valid TwinSAFE address!
EL291136 Version: 1.0.0
Page 37

Operation
4.3.6 Alias devices
The communication between the safety logic and the I/O level is realized via an alias level. At this alias level
(subnode Alias Devices) corresponding alias devices are created for all safe inputs and outputs, and also for
standard signal types. For the safe inputs and outputs, this can be done automatically via the I/O
configuration.
The connection- and device-specific parameters are set via the alias devices.
Fig.22: Starting the automatic import from the I/O configuration
If the automatic import is started from the I/O configuration, a selection dialog opens, in which the individual
terminals to be imported can be selected.
Fig.23: Selection from the I/O tree
The alias devices are created in the safety project when the dialog is closed via OK.
Alternatively, the user can create the alias devices individually. To this end select Add and New item from
the context menu, followed by the required device.
EL2911 37Version: 1.0.0
Page 38

Operation
Fig.24: Creating alias devices by the user
4.3.7 EL2911 parameters in TwinCAT
After creating the alias device, it can be parameterized according to the user specifications. The FSoE
address is set under the Linking tab, and the link to the physical device is created.
Fig.25: Linking tab of the alias device
Under the Connection tab you can make further settings, e.g. the mapping of the info data or the behavior in
case of a module error.
EL291138 Version: 1.0.0
Page 39

Operation
Fig.26: Connection tab of the alias device
The Safety Parameters tab contains the parameters of the EL2911 to be set. The output is parameterized via
parameter 0x8000. The inputs are configured via the objects 0x8010 and 0x8011.
Fig.27: EL2911 parameters
Index Name Default value/
unit
8000:03 Standard outputs active FALSE /
Boolean
8000:04 Diag TestPulse active TRUE / Boolean Switching the internal clocking of the
8000:12 Output cross-circuit detection delay 0x03E8 / 1ms After the output is switched off, the system
EL2911 39Version: 1.0.0
Description
Activation of the logical AND operator of
the safe and standard outputs of the
module
output module on/off
(24VDC at the output is always without
clocking)
waits for the set delay time before the
voltage is read at the output. If the voltage
exceeds 5V, a module error is generated.
Page 40

Operation
Index Name Default value/
unit
8010:01 ModuloDiagTestPulse 0x00 / integer Modulo value for the frequency of
8010:02 MultiplierDiagTestPulse 0x01 / integer Length of the test pulse in multiples of
8010:04 Diag TestPulse active TRUE / Boolean Activation of test pulses for the
8011:01 Channel1.InputFilterTime 0x0014 / 0.1ms Input filter of the safe input. Following this
8011:02 Channel1.DiagTestPulseFilterTime 0x0002 / 0.1ms Input filter for the test pulse signal
8011:04 Channel2.InputFilterTime 0x0014 / 0.1ms Input filter of the safe input. Following this
8011:05 Channel2.DiagTestPulseFilterTime 0x0002 / 0.1ms Input filter for the test pulse signal
8011:07 Channel3.InputFilterTime 0x0014 / 0.1ms Input filter of the safe input. Following this
8011:08 Channel3.DiagTestPulseFilterTime 0x0002 / 0.1ms Input filter for the test pulse signal
8011:0A Channel4.InputFilterTime 0x0014 / 0.1ms Input filter of the safe input. Following this
8011:0B Channel4.DiagTestPulseFilterTime 0x0002 / 0.1ms Input filter for the test pulse signal
Description
generating a test pulse.
0 -> every time
1 -> every 2nd time
...
400µs
corresponding input module
time the internal input signal changes to
the applied signal state.
Internal test pulses can have a length of
up to 2 ms and cannot can be switched
off.
time the internal input signal changes to
the applied signal state.
Internal test pulses can have a length of
up to 2 ms and cannot can be switched
off.
time the internal input signal changes to
the applied signal state.
Internal test pulses can have a length of
up to 2 ms and cannot can be switched
off.
time the internal input signal changes to
the applied signal state.
Internal test pulses can have a length of
up to 2 ms and cannot can be switched
off.
EL291140 Version: 1.0.0
Page 41

4.3.8 EL2911 process image
The process image of the EL2911 consists 6 bytes of process data in the input and the output.
Operation
Fig.28: EL2911 process image
The assignment of the individual signals in the safe data is listed in the following table.
Name Process
image
FSOUT Module.Module Fault IN 0.0 Module error information for safe output
FSIN
Channel1.Channel1.Input
FSIN
Channel2.Channel1.Input
FSIN Module.Channel3.Input IN 0.3 Safe input channel 3
FSIN Module.Channel4.Input IN 0.4 Safe input channel 4
FSIN Module.Module Fault IN 0.5 Module error information for safe input module
FSOUT Module Output OUT 0.0 Safe output to power contact
FSOUT Module.ErrAck OUT 0.1 Error acknowledge for safe output module
FSIN Module.ErrAck OUT 0.2 Error acknowledge for safe input module
IN 0.1 Safe input channel 1
IN 0.2 Safe input channel 2
Bit position Description
EL2911 41Version: 1.0.0
Page 42

Operation
4.4 TwinSAFE reaction times
The TwinSAFE terminals form a modular safety system that exchanges safety-oriented data via the Safetyover-EtherCAT protocol. This chapter is intended to help you determine the system's reaction time from the
change of signal at the sensor to the reaction at the actuator.
Typical reaction time
The typical reaction time is the time that is required to transmit information from the sensor to the actuator, if
the overall system is working without error in normal operation.
Fig.29: Typical reaction time
Definition Description
RTSensor Reaction time of the sensor until the signal is provided at the interface. Typically supplied by
the sensor manufacturer.
RTInput Reaction time of the safe input, such as EL1904 or EP1908. This time can be found in the
technical data. In the case of the EL1904 it is 4 ms.
RTComm Reaction time of the communication This is typically 3x the EtherCAT cycle time, because
new data can only be sent in a new Safety-over-EtherCAT telegram. These times depend
directly on the higher-level standard controller (cycle time of the PLC/NC).
RTLogic Reaction time of the logic terminal. This is the cycle time of the logic terminal and typically
ranges from 500 µs to 10 ms for the EL6900, depending on the size of the safety project.
The actual cycle time can be read from the terminal.
RTOutput Reaction time of the output terminal. This typically lies within the range of 2 to 3 ms.
RTActor Reaction time of the actuator. This information is typically supplied by the actuator
manufacturer
WDComm Watchdog time of the communication
This results in the following equation for the typical reaction time:
with, for example
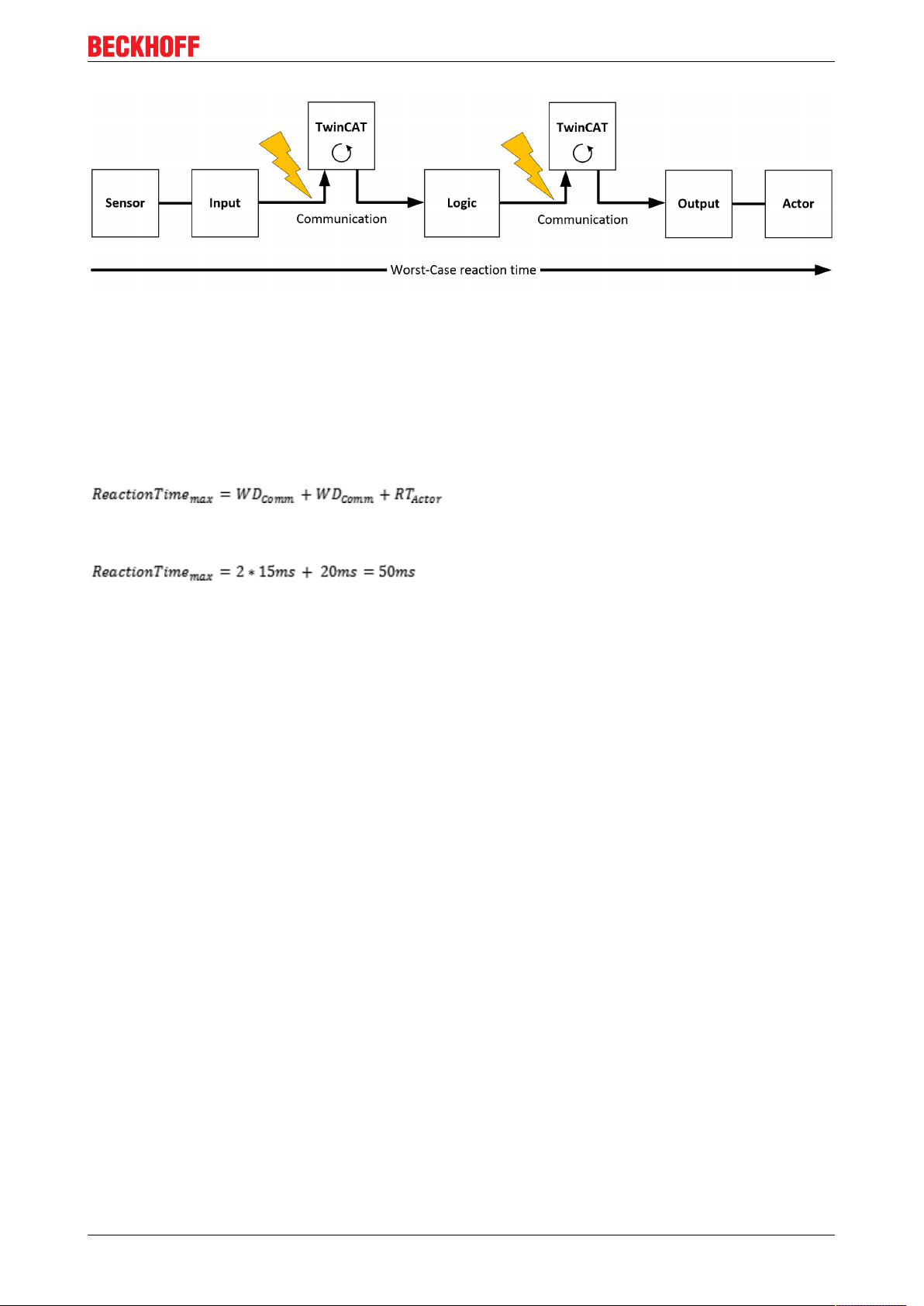
Worst-case reaction time
The worst case reaction time is the maximum time required to switch off the actuator in the case of an error.
EL291142 Version: 1.0.0
Page 43
Operation
Fig.30: Worst-case reaction time
This assumes that a signal change occurs at the sensor and is transmitted to the input. A communication
error occurs at precisely the moment when the signal is to be transferred to the communication interface.
This is detected by the logic following the watchdog time of the communication link. This information should
then be transferred to the output, but a further communication error occurs here. This error is detected at the
output following the expiry of the watchdog time and leads to the switch-off.
This results in the following equation for the worst-case reaction:
with, for example
EL2911 43Version: 1.0.0
Page 44

Operation
4.5 Diagnosis
4.5.1 Status LEDs
Fig.31: EL2911 status and diagnostics LEDs
LED Color Description
Input 1 green Status display for the respective input and output
Input 2
Input 3
LED lights up: Input/output is set
LED not lit: Input/output is not set
Input 4
Output 1
4.5.2 Diagnostic LEDs
Diagnostic LEDs
LED lit flashes off
Diag1
(green)
Diag2
(red)
Diag3
(red)
Diag4
(red)
Diag Out
(red)
Environment variables,
operating voltage and internal
tests are in the valid range
• If Diag2 flashes, a logic
error code applies
Together with Diag3 and 4:
Global Shutdown1) has
occurred. (see diag history of
the TwinSAFE components)
Global fault or global shutdown
on µC1
Global fault or global shutdown
on µC2
1)
1)
Module error in the output
module
- Environment variables,
operating voltage and internal
tests are outside the valid
range
• If Diag2 flashes, an
environment error code
applies
Logic or environment error
code according to Diag1 and
tables below is output
Together with Diag 3 and 4:
Global Fault1) has occurred.
(see diag history of the
TwinSAFE components)
- No global fault or global
shutdown on µC1
- No global fault or global
shutdown on µC2
- No error in the output module
1)
1)
1. A global fault permanently disables the TwinSAFE component, so that it has to be replaced. A global
shutdown temporarily disables the TwinSAFE component. The error can be reset by switching off and
back on again.
EL291144 Version: 1.0.0
Page 45

Logic error codes of LED Diag2 (if LED Diag1 is lit)
Operation
Flashing
Code
1 Function block error in one of the TwinSAFE groups
2 Communication error in one of the TwinSAFE groups
3 Error combination: Function block and communication
4 General error in one of the TwinSAFE groups
5 Error combination: General and function block
6 Error combination: General and communication
7 Error combination: General, function block and communication
Environment error codes of LED Diag2 (if LED Diag1 is off)
Flashing
Code
1 Maximum supply voltage µC1 exceeded
2 Supply voltage µC1 below minimum value
3 Maximum supply voltage µC2 exceeded
4 Supply voltage µC2 below minimum value
5 Maximum internal temperature exceeded
6 Internal temperature below minimum value
7 Valid temperature difference between µC1 and µC2 exceeded
8 not used
9 not used
10 General error
Description
Description
4.5.3 Flash code display
LED Display Description
flashing 400ms ON / 400ms OFF
1 second pause between the flash codes
flickering 50ms ON / 50ms OFF
4.5.4 Diagnosis History
The diagnostic history of the TwinSAFE devices that support this function is implemented in accordance with
the ETG guideline ETG.1020 Chapter 13 "Diagnosis Handling". The diagnostic messages are saved by the
TwinSAFE device in a dedicated CoE object under 0x10F3 and can be read out by the application or by
TwinCAT.
Both the control entries and the history itself can be found in the CoE object 0x10F3. The entry Newest
Message (0x10F3:02) contains the subindex of 0x10F3, which contains the latest diagnostic message, e.g.
0x06 for diagnostic message 1.
EL2911 45Version: 1.0.0
Page 46

Operation
Index 10F3
Diagnosis History
hex
Index (hex) Name Meaning Data type Flags Default
10F3:0 Diagnosis
History
10F3:01 Maximum
Messages
Maximum number of stored messages. A
maximum of 64 messages can be stored.
UINT8 RO 0x40 (64
After that the respective oldest messages
are overwritten.
10F3:02 Newest
Subindex of the latest message UINT8 RO 0x00 (0
Message
10F3:03 Newest
Subindex of the last confirmed message UINT8 RW 0x00 (0
Acknowledged
Message
10F3:04 New
Indicates that a new message is available BOOLEAN RO 0x00 (0
Messages
Available
10F3:05 Flags Set via the startup list. If set to 0x0001, the
UINT16 RW 0x0000 (0
diagnostic messages are additionally sent
by emergency to the EtherCAT master
10F3:06 Diagnosis
Diagnostic message 1 BYTE[32] RO {0}
Message 001
... ... ... ... ... ...
10F3:45 Diagnosis
Diagnostic message 64 BYTE[32] RO {0}
Message 064
dec
dec
dec
dec
)
)
)
)
)
dec
Structure of the diagnostic messages
• DiagCode (4 bytes) – in this case always 0x 0000 E000
• Flags (2 bytes) - diagnosis type (info, warning or error), timestamp and number of parameters
contained (see the following table)
• Text ID (2 bytes) – ID of the diagnostic message as a reference to the message text from the ESI/XML
• Timestamp (8 bytes) – local slave time in ns since switching on the TwinSAFE device
• dynamic parameters (16 bytes) – parameters that can be inserted in the message text (see following
table)
Flags in diagnostic messages
Data type Offset Description
UINT16 Bits 0 to 3 DiagType (value)
0 Info message
1 Warning message
2 Error message
3…15 reserved
Bit 4 If the bit = 1, the timestamp contained in the message is the local timestamp of the
TwinSAFE device. The age of the diagnostic message can be deduced by
calculation with the current timestamp from the CoE object 0x10F8.
Bits 5 to 7 reserved
Bits 8 to 15 Number of parameters in this diagnostic message
EL291146 Version: 1.0.0
Page 47

Dynamic parameters in the diagnostic messages
Type Data type Description
Flags parameter 1 UINT16 Describes the type of parameter 1
Bits 12 to 15 =0Bits 0 to 11 = data type of parameter 1
0x0001 - BOOLEAN
0x0002 - INT8
0x0003 - INT16
0x0004 - INT32
0x0005 - UINT8
0x0006 - UINT16
0x0007 - UINT32
0x0008 - REAL32
0x0011 - REAL64
0x0015 - INT64
0x001B - UINT64
Text parameters and formats are
specified in ETG.2000.
Parameter 1 Data type in accordance with
flags
Flags parameter 2 UINT16 see Flags parameter 1
Parameter 2 Data type in accordance with
flags
...
Value of parameter 1
Value of parameter 2
Operation
The diagnostic messages are saved in text form in the ESI/XML file belonging to the TwinSAFE device. On
the basis of the Text ID contained in the diagnostic message, the corresponding plain text message can be
found in the respective languages. The parameters can be inserted in the appropriate positions. In the
following example, %x is used for a hexadecimal representation of the parameters.
Fig.32: ESI/XML message text
Via the entry New Messages Available the user receives information that new messages are available. The
messages can be read out via CompleteAccess (a CoE read command for the complete CoE object
0x10F3). The New Messages Available bit is reset after reading the messages.
The sending of emergency messages to the EtherCAT master is activated by adding the CoE object
0x10F3:05 to the startup list (Transition IP, value 0x0001). If new diagnostic messages arrive, they are
entered in object 0x10F3 and additionally sent by emergency to the EtherCAT master.
Fig.33: Startup list
EL2911 47Version: 1.0.0
Page 48

Operation
4.5.5 Diag History tab
All errors occurring within the TwinSAFE components are stored in their diag history. The diag history can be
viewed by selecting the corresponding TwinSAFE component in the I/O tree structure and then selecting the
Diag History tab. Use the Update History button to fetch the current data from the TwinSAFE component.
Errors within the logic, the function blocks, the connections or the component itself are stored with a
corresponding time stamp.
Fig.34: Diag history
Use the Advanced… button to open the advanced settings. Here, the user can customize the behavior of the
diag history.
Fig.35: Diag history – advanced settings
EL291148 Version: 1.0.0
Page 49
Operation
Advanced Settings
Setting Description
Message Types • disable Info
Messages with status Info are not stored in the diag history
• disable Warnings
Messages with status Warning are not stored in the diag history
• disable Errors
Messages with status Error are not stored in the diag history
Emergency In addition to saving the message in the diag history, an emergency object
is also sent and displayed in the TwinCAT logger window.
Overwrite/Acknowledge Mode This setting is currently not supported.
EL2911 49Version: 1.0.0
Page 50
Operation
4.6 Maintenance
Maintenance
The TwinSAFE components are maintenance-free!
Environmental conditions
WARNING
Observe the specified environmental conditions!
Please ensure that the TwinSAFE components are only stored and operated under the specified conditions
(see technical data).
If the TwinSAFE component is operated outside the permitted temperature range it will switch to Global
Shutdown state.
Cleaning
Protect the TwinSAFE component from unacceptable soling during operation and storage!
If the TwinSAFE component was subjected to unacceptable soiling it may no longer be operated!
WARNING
Have soiled terminals checked!
Cleaning of the TwinSAFE component by the user is not permitted!
Please send soiled terminals to the manufacturer for inspection and cleaning!
EL291150 Version: 1.0.0
Page 51

4.7 Service life
The TwinSAFE terminals are designed for a service life of 20 years.
Due to the high diagnostic coverage within the lifecycle no special proof tests are required.
The TwinSAFE terminals bear a date code, which is composed as follows:
Datecode: CWYYSWHW
Operation
Legend:
CW: Calendar week of manufacture
YY: Year of manufacture
SW: Software version
HW: Hardware version
In addition the TwinSAFE terminals bear a unique serial number.
Fig.36: Unique serial number of a TwinSAFE terminal
Sample: DateCode 17110500
Calendar week: 17
Year: 2011
Software version: 05
Hardware version: 00
4.8 Decommissioning
DANGER
Serious risk of injury!
Bring the bus system into a safe, de-energized state before starting disassembly of the devices!
Disposal
In order to dispose of the device, it must be removed and fully dismantled.
• Housing components (polycarbonate, polyamide (PA6.6)) are suitable for plastic recycling.
• Metal parts can be sent for metal recycling.
• Electronic parts such as disk drives and circuit boards must be disposed of in accordance with national
electronics scrap regulations.
EL2911 51Version: 1.0.0
Page 52

Operation
4.9 Firmware update of TwinSAFE products
For TwinSAFE products there is the option of performing a firmware update via the EtherCAT interface. The
complete firmware of the TwinSAFE component is deleted and replaced by a new version.
The latest firmware can be downloaded from the Beckhoff website or requested from Beckhoff Support. The
versions are available in an encrypted form and can only be loaded onto the matching TwinSAFE product.
An incorrect firmware file is rejected by the respective TwinSAFE product.
Prerequisite for a firmware update
DANGER
Put the machine into a safe state!
A firmware update stops the current processing of the firmware of the TwinSAFE product. It is essential that
you switch the TwinSAFE system to the safe state before you start an update.
All safe outputs must be in a safe, de-energized state. If hanging or pulling loads are present on the machine or the TwinSAFE system, these must also be brought into a safe state through external safety measures if necessary.
DANGER
Monitor the machine state!
It is necessary that you have control over the machine, i.e. you can see it and thus ensure that it is in a safe
state and that a firmware update can be carried out without endangering the operators or other personnel.
NOTE
Avoid communication interruptions during the download
Please avoid disconnecting the EtherCAT connection while downloading the firmware under any circumstances. If a communication error does occur, the TwinSAFE product may subsequently be unusable and
must be sent to the Beckhoff Service.
WARNING
Default project for TwinSAFE I/O components with local logic function!
After a firmware update, any implemented default project starts automatically. An EK1960, for example,
would start up as a TwinSAFE I/O slave after a firmware update.
NOTE
Firmware update of TwinSAFE logics
If a firmware update is performed for a TwinSAFE logic component, e.g. on a TwinSAFE logic EL6910, the
safety-related user program must be reloaded to the TwinSAFE logic after the update.
EtherCAT communication
When an EtherCAT component is updated, it is switched to BOOTSTRAP mode. This can have an
effect on the EtherCAT communication with other EtherCAT devices.
EL291152 Version: 1.0.0
Page 53

Operation
Performing the firmware update
Click the button (1) in the TwinCAT system to enter Config mode. Confirm the query with OK (2). After that a
further window appears which must be confirmed with Yes (Ja) (3). Deactivate the "Free Run" with No (Nein)
(4). The system is now in "Configuration mode".
Fig.37: Firmware update of TwinSAFE products - Part 1
EL2911 53Version: 1.0.0
Page 54

Operation
To perform the firmware update, select the "Online" tab (6) for the "EtherCAT Device" (5). If you want to
update several components, you can select the corresponding components (7) together; for individual
components, select only these. Subsequently, click with the right mouse button inside the selected area and
select the command "Firmware Update..." (8) in the command overview.
Fig.38: Firmware update of TwinSAFE products - Part 2
In the place where you have stored the desired firmware version, select the firmware file (9) and click
"Open" (10). Confirm the window that then opens with "OK" (11); the firmware update is then performed.
After successful completion you must click OK (12) in the concluding "Function Succeeded" window. You
can then switch the system back to Run mode and use the TwinSAFE system.
Fig.39: Firmware update of TwinSAFE products - Part 3
EL291154 Version: 1.0.0
Page 55

Appendix
5 Appendix
5.1 Support and Service
Beckhoff and their partners around the world offer comprehensive support and service, making available fast
and competent assistance with all questions related to Beckhoff products and system solutions.
Beckhoff's branch offices and representatives
Please contact your Beckhoff branch office or representative for local support and service on Beckhoff
products!
The addresses of Beckhoff's branch offices and representatives round the world can be found on her internet
pages:
http://www.beckhoff.com
You will also find further documentation for Beckhoff components there.
Beckhoff Headquarters
Beckhoff Automation GmbH & Co. KG
Huelshorstweg 20
33415 Verl
Germany
Phone: +49(0)5246/963-0
Fax: +49(0)5246/963-198
e-mail: info@beckhoff.com
Beckhoff Support
Support offers you comprehensive technical assistance, helping you not only with the application of
individual Beckhoff products, but also with other, wide-ranging services:
• support
• design, programming and commissioning of complex automation systems
• and extensive training program for Beckhoff system components
Hotline: +49(0)5246/963-157
Fax: +49(0)5246/963-9157
e-mail: support@beckhoff.com
Beckhoff Service
The Beckhoff Service Center supports you in all matters of after-sales service:
• on-site service
• repair service
• spare parts service
• hotline service
Hotline: +49(0)5246/963-460
Fax: +49(0)5246/963-479
e-mail: service@beckhoff.com
EL2911 55Version: 1.0.0
Page 56

Appendix
5.2 Certificates
EL291156 Version: 1.0.0
Page 57

List of figures
List of figures
Fig. 1 Slot and key system and screwless (spring-loaded) connection system..................................... 9
Fig. 2 Bus Coupler (EtherCAT).............................................................................................................. 10
Fig. 3 Overview of EtherCAT Terminals ................................................................................................ 11
Fig. 4 EL2911 - TwinSAFE potential supply terminal with 4 fail-safe inputs.......................................... 14
Fig. 5 External load................................................................................................................................ 17
Fig. 6 protected wiring ........................................................................................................................... 18
Fig. 7 Characteristic curve of the inputs ................................................................................................ 21
Fig. 8 EL2911 dimensions ..................................................................................................................... 21
Fig. 9 Spring contacts of Beckhoff I/O components............................................................................... 23
Fig. 10 Installation position and minimum distances ............................................................................... 24
Fig. 11 Thermally unfavorable arrangement of the TwinSAFE terminals ................................................ 26
Fig. 12 Thermally favorable arrangement of the TwinSAFE terminals .................................................... 27
Fig. 13 Installation on the mounting rail................................................................................................... 28
Fig. 14 Removal of mounting rails ........................................................................................................... 28
Fig. 15 PE power contact......................................................................................................................... 30
Fig. 16 Connection of a cable to a terminal point .................................................................................... 31
Fig. 17 EL2911 - pin assignment............................................................................................................. 32
Fig. 18 Cable routing ............................................................................................................................... 33
Fig. 19 Adding an EL2911 ....................................................................................................................... 34
Fig. 20 Delete project data....................................................................................................................... 35
Fig. 21 Address settings on TwinSAFE terminals with 1023 possible addresses ................................... 36
Fig. 22 Starting the automatic import from the I/O configuration ............................................................. 37
Fig. 23 Selection from the I/O tree........................................................................................................... 37
Fig. 24 Creating alias devices by the user............................................................................................... 38
Fig. 25 Linking tab of the alias device...................................................................................................... 38
Fig. 26 Connection tab of the alias device............................................................................................... 39
Fig. 27 EL2911 parameters ..................................................................................................................... 39
Fig. 28 EL2911 process image................................................................................................................ 41
Fig. 29 Typical reaction time.................................................................................................................... 42
Fig. 30 Worst-case reaction time............................................................................................................. 43
Fig. 31 EL2911 status and diagnostics LEDs.......................................................................................... 44
Fig. 32 ESI/XML message text ................................................................................................................ 47
Fig. 33 Startup list.................................................................................................................................... 47
Fig. 34 Diag history.................................................................................................................................. 48
Fig. 35 Diag history – advanced settings................................................................................................. 48
Fig. 36 Unique serial number of a TwinSAFE terminal............................................................................ 51
Fig. 37 Firmware update of TwinSAFE products - Part 1 ........................................................................ 53
Fig. 38 Firmware update of TwinSAFE products - Part 2 ........................................................................ 54
Fig. 39 Firmware update of TwinSAFE products - Part 3 ........................................................................ 54
EL2911 57Version: 1.0.0
 Loading...
Loading...