

Page 1
Dokumentation | DE
EL2212
2-Kanal-Digital-Ausgangsklemme 24…72 V DC mit Übererregung, Multi-Timestamp
03.03.2021 | Version: 2.5
Page 2

Page 3

Inhaltsverzeichnis
Inhaltsverzeichnis
1 Vorwort .......................................................................................................................................................5
1.1 Hinweise zur Dokumentation.............................................................................................................5
1.2 Sicherheitshinweise...........................................................................................................................6
1.3 Ausgabestände der Dokumentation ..................................................................................................7
1.4 Versionsidentifikation von EtherCAT-Geräten...................................................................................8
1.4.1 Beckhoff Identification Code (BIC)................................................................................... 12
2 Produktübersicht.....................................................................................................................................14
2.1 EL2212 - Einführung........................................................................................................................14
2.2 EL2212 - Technische Daten ............................................................................................................15
2.3 Technologie: PWM und induktive Last ............................................................................................16
2.4 Start Up ...........................................................................................................................................17
3 Grundlagen der Kommunikation............................................................................................................18
3.1 EtherCAT-Grundlagen.....................................................................................................................18
3.2 EtherCAT-Verkabelung - Drahtgebunden .......................................................................................18
3.3 Allgemeine Hinweise zur Watchdog-Einstellung .............................................................................19
3.4 EtherCAT State Machine.................................................................................................................21
3.5 CoE-Interface ..................................................................................................................................23
3.6 Distributed Clock .............................................................................................................................28
4 Montage und Verdrahtung......................................................................................................................29
4.1 Tragschienenmontage.....................................................................................................................29
4.2 Hinweise zur Strommessung über Hall-Sensor...............................................................................31
4.3 Anschlusstechnik.............................................................................................................................32
4.4 Positionierung von passiven Klemmen............................................................................................35
4.5 Einbaulagen.....................................................................................................................................36
4.6 EL2212 - Anschlussbelegung..........................................................................................................39
5 Inbetriebnahme........................................................................................................................................40
5.1 TwinCAT Quickstart.........................................................................................................................40
5.1.1 TwinCAT 2 ....................................................................................................................... 43
5.1.2 TwinCAT 3 ....................................................................................................................... 53
5.2 TwinCAT Entwicklungsumgebung...................................................................................................66
5.2.1 Installation TwinCAT Realtime Treiber ............................................................................ 67
5.2.2 Hinweise ESI-Gerätebeschreibung.................................................................................. 72
5.2.3 TwinCAT ESI Updater ..................................................................................................... 76
5.2.4 Unterscheidung Online/Offline......................................................................................... 76
5.2.5 OFFLINE Konfigurationserstellung .................................................................................. 77
5.2.6 ONLINE Konfigurationserstellung.................................................................................... 82
5.2.7 EtherCAT Teilnehmerkonfiguration ................................................................................. 90
5.2.8 Import/Export von EtherCAT-Teilnehmern mittels SCI und XTI .................................... 100
5.3 Allgemeine Inbetriebnahmehinweise des EtherCAT Slaves .........................................................106
5.4 Quickstart.......................................................................................................................................115
5.5 Grundlagen zur Funktion ...............................................................................................................120
5.5.1 Weitere Eigenschaften................................................................................................... 121
5.5.2 Aktivierung der externen PWM ...................................................................................... 124
EL2212 3Version: 2.5
Page 4

Inhaltsverzeichnis
5.6 Anwendungshinweise....................................................................................................................127
5.7 Prozessdaten.................................................................................................................................127
5.8 Prozessdatenvorauswahl ..............................................................................................................142
5.9 Distributed Clocks Einstellungen ...................................................................................................146
5.10 Objektbeschreibung und Parametrierung......................................................................................151
5.10.1 Restore-Objekt............................................................................................................... 151
5.10.2 Konfigurationsdaten (kanalspezifisch)........................................................................... 152
5.10.3 Kommando-Objekt ........................................................................................................ 155
5.10.4 Eingangsdaten............................................................................................................... 155
5.10.5 Ausgangsdaten.............................................................................................................. 156
5.10.6 Informations-/Diagnostikdaten (kanalspezifisch) ........................................................... 158
5.10.7 Hersteller-Konfigurationsdaten (gerätespezifisch)......................................................... 160
5.10.8 Informations-/Diagnostikdaten (gerätespezifisch).......................................................... 160
5.10.9 Distributed Clocks Ein-/Ausgangsdaten ........................................................................ 161
5.10.10 Diagnosis History Daten ................................................................................................ 161
5.10.11 Timestamp..................................................................................................................... 162
5.10.12 Standardobjekte............................................................................................................. 162
5.11 Anwendungsdemonstration 1: 12 V Relais....................................................................................177
5.12 Anwendungsdemonstration 2: 24 V Druckluftventil.......................................................................181
5.13 Beispielprogramme........................................................................................................................186
5.13.1 Beispiel 1: Ausgabe und Auswertung von Pulsen ......................................................... 186
5.13.2 Beispiel 2: Multi-Timestamping...................................................................................... 190
6 Diagnose.................................................................................................................................................198
6.1 Diagnose-LEDs .............................................................................................................................200
6.2 Diagnose - Grundlagen zu Diag Messages...................................................................................201
7 Anhang ...................................................................................................................................................211
7.1 Firmware Kompatibilität .................................................................................................................211
7.2 Firmware Update EL/ES/ELM/EM/EPxxxx ....................................................................................212
7.2.1 Gerätebeschreibung ESI-File/XML ................................................................................ 213
7.2.2 Erläuterungen zur Firmware .......................................................................................... 216
7.2.3 Update Controller-Firmware *.efw ................................................................................. 217
7.2.4 FPGA-Firmware *.rbf ..................................................................................................... 219
7.2.5 Gleichzeitiges Update mehrerer EtherCAT-Geräte ....................................................... 223
7.3 EtherCAT AL Status Codes...........................................................................................................224
7.4 Wiederherstellen des Auslieferungszustandes..............................................................................224
7.5 Support und Service ......................................................................................................................226
EL22124 Version: 2.5
Page 5

Vorwort
1 Vorwort
1.1 Hinweise zur Dokumentation
Zielgruppe
Diese Beschreibung wendet sich ausschließlich an ausgebildetes Fachpersonal der Steuerungs- und
Automatisierungstechnik, das mit den geltenden nationalen Normen vertraut ist.
Zur Installation und Inbetriebnahme der Komponenten ist die Beachtung der Dokumentation und der
nachfolgenden Hinweise und Erklärungen unbedingt notwendig.
Das Fachpersonal ist verpflichtet, für jede Installation und Inbetriebnahme die zu dem betreffenden Zeitpunkt
veröffentlichte Dokumentation zu verwenden.
Das Fachpersonal hat sicherzustellen, dass die Anwendung bzw. der Einsatz der beschriebenen Produkte
alle Sicherheitsanforderungen, einschließlich sämtlicher anwendbaren Gesetze, Vorschriften, Bestimmungen
und Normen erfüllt.
Disclaimer
Diese Dokumentation wurde sorgfältig erstellt. Die beschriebenen Produkte werden jedoch ständig weiter
entwickelt.
Wir behalten uns das Recht vor, die Dokumentation jederzeit und ohne Ankündigung zu überarbeiten und zu
ändern.
Aus den Angaben, Abbildungen und Beschreibungen in dieser Dokumentation können keine Ansprüche auf
Änderung bereits gelieferter Produkte geltend gemacht werden.
Marken
Beckhoff®, TwinCAT®, EtherCAT®, EtherCATG®, EtherCATG10®, EtherCATP®, SafetyoverEtherCAT®,
TwinSAFE®, XFC®, XTS® und XPlanar® sind eingetragene und lizenzierte Marken der Beckhoff Automation
GmbH. Die Verwendung anderer in dieser Dokumentation enthaltenen Marken oder Kennzeichen durch
Dritte kann zu einer Verletzung von Rechten der Inhaber der entsprechenden Bezeichnungen führen.
Patente
Die EtherCAT-Technologie ist patentrechtlich geschützt, insbesondere durch folgende Anmeldungen und
Patente: EP1590927, EP1789857, EP1456722, EP2137893, DE102015105702 mit den entsprechenden
Anmeldungen und Eintragungen in verschiedenen anderen Ländern.
EtherCAT® ist eine eingetragene Marke und patentierte Technologie lizenziert durch die Beckhoff
Automation GmbH, Deutschland.
Copyright
© Beckhoff Automation GmbH & Co. KG, Deutschland.
Weitergabe sowie Vervielfältigung dieses Dokuments, Verwertung und Mitteilung seines Inhalts sind
verboten, soweit nicht ausdrücklich gestattet.
Zuwiderhandlungen verpflichten zu Schadenersatz. Alle Rechte für den Fall der Patent-, Gebrauchsmusteroder Geschmacksmustereintragung vorbehalten.
EL2212 5Version: 2.5
Page 6
Vorwort
1.2 Sicherheitshinweise
Sicherheitsbestimmungen
Beachten Sie die folgenden Sicherheitshinweise und Erklärungen!
Produktspezifische Sicherheitshinweise finden Sie auf den folgenden Seiten oder in den Bereichen Montage,
Verdrahtung, Inbetriebnahme usw.
Haftungsausschluss
Die gesamten Komponenten werden je nach Anwendungsbestimmungen in bestimmten Hard- und SoftwareKonfigurationen ausgeliefert. Änderungen der Hard- oder Software-Konfiguration, die über die
dokumentierten Möglichkeiten hinausgehen, sind unzulässig und bewirken den Haftungsausschluss der
Beckhoff Automation GmbH & Co. KG.
Qualifikation des Personals
Diese Beschreibung wendet sich ausschließlich an ausgebildetes Fachpersonal der Steuerungs-,
Automatisierungs- und Antriebstechnik, das mit den geltenden Normen vertraut ist.
Erklärung der Hinweise
In der vorliegenden Dokumentation werden die folgenden Hinweise verwendet.
Diese Hinweise sind aufmerksam zu lesen und unbedingt zu befolgen!
GEFAHR
Akute Verletzungsgefahr!
Wenn dieser Sicherheitshinweis nicht beachtet wird, besteht unmittelbare Gefahr für Leben und Gesundheit
von Personen!
WARNUNG
Verletzungsgefahr!
Wenn dieser Sicherheitshinweis nicht beachtet wird, besteht Gefahr für Leben und Gesundheit von Personen!
VORSICHT
Schädigung von Personen!
Wenn dieser Sicherheitshinweis nicht beachtet wird, können Personen geschädigt werden!
HINWEIS
Schädigung von Umwelt/Geräten oder Datenverlust
Wenn dieser Hinweis nicht beachtet wird, können Umweltschäden, Gerätebeschädigungen oder Datenverlust entstehen.
Tipp oder Fingerzeig
Dieses Symbol kennzeichnet Informationen, die zum besseren Verständnis beitragen.
EL22126 Version: 2.5
Page 7
1.3 Ausgabestände der Dokumentation
Version Kommentar
2.5 • Update Kapitel "Technische Daten“
• Update Struktur
2.4 • Update Kapitel "Einführung“
• Update Struktur
• Update Revisionsstand
2.3 • Update Kapitel "Grundlagen zur Funktion“
• Update Kapitel "Objektbeschreibung und Parametrierung"
• Update Struktur
• Update Revisionsstand
2.2 • Update Kapitel "Inbetriebnahme", „Beispielprogramme“
2.1 • Update Kapitel "Hinweise zur Dokumentation"
• Korrektur Technische Daten
• Update Kapitel "TwinCAT 2.1x" -> Kapitel "TwinCAT Entwicklungsumgebung" und Kapitel
"TwinCAT Quick Start"
• Update Revisionsstand
2.0 • Migration
• Ergänzung neuer Features zu FW 08 (Externe PWM, Multi-Timestamp)
• Beispielprogramm 2 hinzugefügt
• Anwendungsdemonstration 1 und 2 sowie Kapitel „Technologie: PWM und induktive Last“
überarbeitet
• Kapitel „Weitere Eigenschaften“ ergänzt
• „Detaillierte Erläuterung zu Enable time check/ Force order“ im Kapitel „Prozessdaten“
hinzugefügt
1.2 • Update Kapitel "Prozessdaten"
• Update Kapitel "Prozessdatenvorauswahl"
• Update Kapitel "Objektbeschreibung und Parametrierung"
1.1 • Update Kapitel "Technische Daten"
1.0 • Ergänzungen & Korrekturen, 1. Veröffentlichung
0.2 - 0.6 • Ergänzungen & Korrekturen
0.1 • vorläufige Dokumentation für EL2212
Vorwort
EL2212 7Version: 2.5
Page 8
Vorwort
1.4 Versionsidentifikation von EtherCAT-Geräten
Bezeichnung
Ein Beckhoff EtherCAT-Gerät hat eine 14stellige technische Bezeichnung, die sich zusammensetzt aus
• Familienschlüssel
• Typ
• Version
• Revision
Beispiel Familie Typ Version Revision
EL3314-0000-0016 EL-Klemme
(12 mm, nicht steckbare
Anschlussebene)
ES3602-0010-0017 ES-Klemme
(12 mm, steckbare
Anschlussebene)
CU2008-0000-0000 CU-Gerät 2008
3314
(4 kanalige
Thermoelementklemme)
3602
(2 kanalige Spannungsmessung)
(8 Port FastEthernet Switch)
0000
(Grundtyp)
0010
(Hochpräzise
Version)
0000
(Grundtyp)
0016
0017
0000
Hinweise
• die oben genannten Elemente ergeben die technische Bezeichnung, im Folgenden wird das Beispiel
EL3314-0000-0016 verwendet.
• Davon ist EL3314-0000 die Bestellbezeichnung, umgangssprachlich bei „-0000“ dann oft nur EL3314
genannt. „-0016“ ist die EtherCAT-Revision.
• Die Bestellbezeichnung setzt sich zusammen aus
- Familienschlüssel (EL, EP, CU, ES, KL, CX, ...)
- Typ (3314)
- Version (-0000)
• Die Revision -0016 gibt den technischen Fortschritt wie z.B. Feature-Erweiterung in Bezug auf die
EtherCAT Kommunikation wieder und wird von Beckhoff verwaltet.
Prinzipiell kann ein Gerät mit höherer Revision ein Gerät mit niedrigerer Revision ersetzen, wenn nicht
anders z.B. in der Dokumentation angegeben.
Jeder Revision zugehörig und gleichbedeutend ist üblicherweise eine Beschreibung (ESI, EtherCAT
Slave Information) in Form einer XML-Datei, die zum Download auf der Beckhoff Webseite bereitsteht.
Die Revision wird seit 2014/01 außen auf den IP20-Klemmen aufgebracht, siehe Abb. „EL5021 EL-
Klemme, Standard IP20-IO-Gerät mit Chargennummer und Revisionskennzeichnung (seit 2014/01)“.
• Typ, Version und Revision werden als dezimale Zahlen gelesen, auch wenn sie technisch hexadezimal
gespeichert werden.
Identifizierungsnummer
Beckhoff EtherCAT Geräte der verschiedenen Linien verfügen über verschiedene Arten von
Identifizierungsnummern:
Produktionslos/Chargennummer/Batch-Nummer/Seriennummer/Date Code/D-Nummer
Als Seriennummer bezeichnet Beckhoff im IO-Bereich im Allgemeinen die 8-stellige Nummer, die auf dem
Gerät aufgedruckt oder auf einem Aufkleber angebracht ist. Diese Seriennummer gibt den Bauzustand im
Auslieferungszustand an und kennzeichnet somit eine ganze Produktions-Charge, unterscheidet aber nicht
die Module einer Charge.
Aufbau der Seriennummer: KK YY FF HH
KK - Produktionswoche (Kalenderwoche)
YY - Produktionsjahr
FF - Firmware-Stand
HH - Hardware-Stand
EL22128 Version: 2.5
Page 9

Vorwort
Beispiel mit
Ser. Nr.: 12063A02: 12 - Produktionswoche 12 06 - Produktionsjahr 2006 3A - Firmware-Stand 3A 02 Hardware-Stand 02
Ausnahmen können im IP67-Bereich auftreten, dort kann folgende Syntax verwendet werden (siehe
jeweilige Gerätedokumentation):
Syntax: D ww yy x y z u
D - Vorsatzbezeichnung
ww - Kalenderwoche
yy - Jahr
x - Firmware-Stand der Busplatine
y - Hardware-Stand der Busplatine
z - Firmware-Stand der E/A-Platine
u - Hardware-Stand der E/A-Platine
Beispiel: D.22081501 Kalenderwoche 22 des Jahres 2008 Firmware-Stand Busplatine: 1 Hardware Stand
Busplatine: 5 Firmware-Stand E/A-Platine: 0 (keine Firmware für diese Platine notwendig) Hardware-Stand
E/A-Platine: 1
Eindeutige Seriennummer/ID, ID-Nummer
Darüber hinaus verfügt in einigen Serien jedes einzelne Modul über eine eindeutige Seriennummer.
Siehe dazu auch weiterführende Dokumentation im Bereich
• IP67: EtherCAT Box
• Safety: TwinSafe
• Klemmen mit Werkskalibrierzertifikat und andere Messtechnische Klemmen
Beispiele für Kennzeichnungen
Abb.1: EL5021 EL-Klemme, Standard IP20-IO-Gerät mit Seriennummer/ Chargennummer und
Revisionskennzeichnung (seit 2014/01)
EL2212 9Version: 2.5
Page 10

Vorwort
Abb.2: EK1100 EtherCAT Koppler, Standard IP20-IO-Gerät mit Seriennummer/ Chargennummer
Abb.3: CU2016 Switch mit Seriennummer/ Chargennummer
Abb.4: EL3202-0020 mit Seriennummer/ Chargennummer 26131006 und eindeutiger ID-Nummer 204418
EL221210 Version: 2.5
Page 11

Vorwort
Abb.5: EP1258-00001 IP67 EtherCAT Box mit Chargennummer/ DateCode 22090101 und eindeutiger
Seriennummer 158102
Abb.6: EP1908-0002 IP67 EtherCAT Safety Box mit Chargennummer/ DateCode 071201FF und eindeutiger
Seriennummer 00346070
Abb.7: EL2904 IP20 Safety Klemme mit Chargennummer/ DateCode 50110302 und eindeutiger
Seriennummer 00331701
Abb.8: ELM3604-0002 Klemme mit eindeutiger ID-Nummer (QR Code) 100001051 und Seriennummer/
Chargennummer 44160201
EL2212 11Version: 2.5
Page 12

Vorwort
1.4.1 Beckhoff Identification Code (BIC)
Der Beckhoff Identification Code (BIC) wird vermehrt auf Beckhoff-Produkten zur eindeutigen
Identitätsbestimmung des Produkts aufgebracht. Der BIC ist als Data Matrix Code (DMC, Code-Schema
ECC200) dargestellt, der Inhalt orientiert sich am ANSI-Standard MH10.8.2-2016.
Abb.9: BIC als Data Matrix Code (DMC, Code-Schema ECC200)
Die Einführung des BIC erfolgt schrittweise über alle Produktgruppen hinweg.
Er ist je nach Produkt an folgenden Stellen zu finden:
• auf der Verpackungseinheit
• direkt auf dem Produkt (bei ausreichendem Platz)
• auf Verpackungseinheit und Produkt
Der BIC ist maschinenlesbar und enthält Informationen, die auch kundenseitig für Handling und
Produktverwaltung genutzt werden können.
Jede Information ist anhand des so genannten Datenidentifikators (ANSIMH10.8.2-2016) eindeutig
identifizierbar. Dem Datenidentifikator folgt eine Zeichenkette. Beide zusammen haben eine maximale Länge
gemäß nachstehender Tabelle. Sind die Informationen kürzer, werden sie um Leerzeichen ergänzt. Die
Daten unter den Positionen 1 bis 4 sind immer vorhanden.
Folgende Informationen sind enthalten:
EL221212 Version: 2.5
Page 13
Pos-
Art der Information Erklärung Dateniden-
Nr.
1 Beckhoff-
Artikelnummer
2 Beckhoff Traceability
Number (BTN)
3 Artikelbezeichnung Beckhoff
4 Menge Menge in
5 Chargennummer Optional: Produktionsjahr
6 ID-/Seriennummer Optional: vorheriges
7 Variante Optional:
...
Beckhoff Artikelnummer
Eindeutige
Seriennummer, Hinweis
s. u.
Artikelbezeichnung, z.B.
EL1008
Verpackungseinheit,
z.B. 1, 10…
und -woche
Seriennummer-System,
z.B. bei Safety-Produkten
oder kalibrierten Klemmen
Produktvarianten-Nummer
auf Basis von
Standardprodukten
Vorwort
Anzahl Stellen inkl.
tifikator
1P 8 1P072222
S 12 SBTNk4p562d7
1K 32 1KEL1809
Q 6 Q1
2P 14 2P401503180016
51S 12 51S678294104
30P 32 30PF971, 2*K183
Datenidentifikator
Beispiel
Weitere Informationsarten und Datenidentifikatoren werden von Beckhoff verwendet und dienen internen
Prozessen.
Aufbau des BIC
Beispiel einer zusammengesetzten Information aus den Positionen 1 bis 4 und 6.
Die Datenidentifikatoren sind zur besseren Darstellung jeweils rot markiert:
BTN
Ein wichtiger Bestandteil des BICs ist die Beckhoff Traceability Number (BTN, Pos.-Nr.2). Die BTN ist eine
eindeutige, aus acht Zeichen bestehende Seriennummer, die langfristig alle anderen SeriennummernSysteme bei Beckhoff ersetzen wird (z. B. Chargenbezeichungen auf IO-Komponenten, bisheriger
Seriennummernkreis für Safety-Produkte, etc.). Die BTN wird ebenfalls schrittweise eingeführt, somit kann
es vorkommen, dass die BTN noch nicht im BIC codiert ist.
HINWEIS
Diese Information wurde sorgfältig erstellt. Das beschriebene Verfahren wird jedoch ständig weiterentwickelt. Wir behalten uns das Recht vor, Verfahren und Dokumentation jederzeit und ohne Ankündigung zu
überarbeiten und zu ändern. Aus den Angaben, Abbildungen und Beschreibungen in dieser Information
können keine Ansprüche auf Änderung geltend gemacht werden.
EL2212 13Version: 2.5
Page 14
Produktübersicht
2 Produktübersicht
2.1 EL2212 - Einführung
Zweikanalige Digital Ausgangsklemme 24..72 V DC mit Übererregung und Timestamp
Die digitale Ausgangsklemme EL2212 schaltet die binären Steuersignale des Automatisierungsgerätes –
galvanisch getrennt zur Prozessebene – an die Aktoren weiter. Ab FW04 unterstützt sie auch das
Multitimestamp-Verfahren - durch Multi-Timestamp können zudem in jedem EtherCAT-Zyklus so viele
Ereignisse pro Kanal einzeln ausgegeben werden, wie im internen Buffer vorgeladen wurden.
Sie ist für mechanische Aktoren, z. B. Ventile oder Relais geeignet, die besonders schnell geschaltet werden
sollen. Zu diesem Zweck wird die Klemme mit einer höheren Betriebsspannung gespeist, als der
Nennspannung des Aktors entspricht. Im Einschaltmoment wird diese Spannung für einige Millisekunden an
den Aktor weitergegeben und sorgt dort durch den entsprechend erhöhten Laststrom für dynamisches
Schalten. Einstellungsgemäß schaltet sie dann automatisch in einen stromregelnden PWM-Modus, senkt
den Haltestrom ab und reduziert damit insbesondere die Verlustleistung. Das Abschalten der Last und damit
ggf. die mechanische Rückbewegung wird durch ein aktives Umpolen der Betriebsspannung erheblich
beschleunigt. Die gesamte Dynamik des Schaltvorgangs wird im CoE der Klemme parametriert. Das An-/
Abschalten wird über die Prozessdaten gesteuert.
Zusätzlich ist es möglich, mit einer übergeordneten An/Aus-Steuerung, der sog. „externen PWM“, den Aktor
pulsierend zu betreiben um z.B. eine dauerhafte ON-Schaltung zu vermeiden (Langsamfahrschutz).
Die EL2212 kann als normale 2-kanalige Ausgangsklemme betrieben werden. Sie schaltet also nach
Empfang der Prozessdaten. Als weitere Betriebsart kann die Klemme auch mit Distributed Clocks und
Timestamp-Funktion wie die EL2252 betrieben werden und schaltet die Ausgänge dann mit der
Nanosekunden-genauen Distributed-Clocks-Präzision unabhängig vom Buszyklus. Dadurch ist die
zeitsynchrone Zusammenarbeit mit anderen Klemmen im Distributed-Clocks-System möglich.
Die EL2212 enthält zwei Kanäle, deren Signalzustand durch Leuchtdioden angezeigt wird.
Als Einspeiseklemme für eine Versorgungsspannung von >24V kann die EL9150 verwendet werden.
EL221214 Version: 2.5
Page 15
Produktübersicht
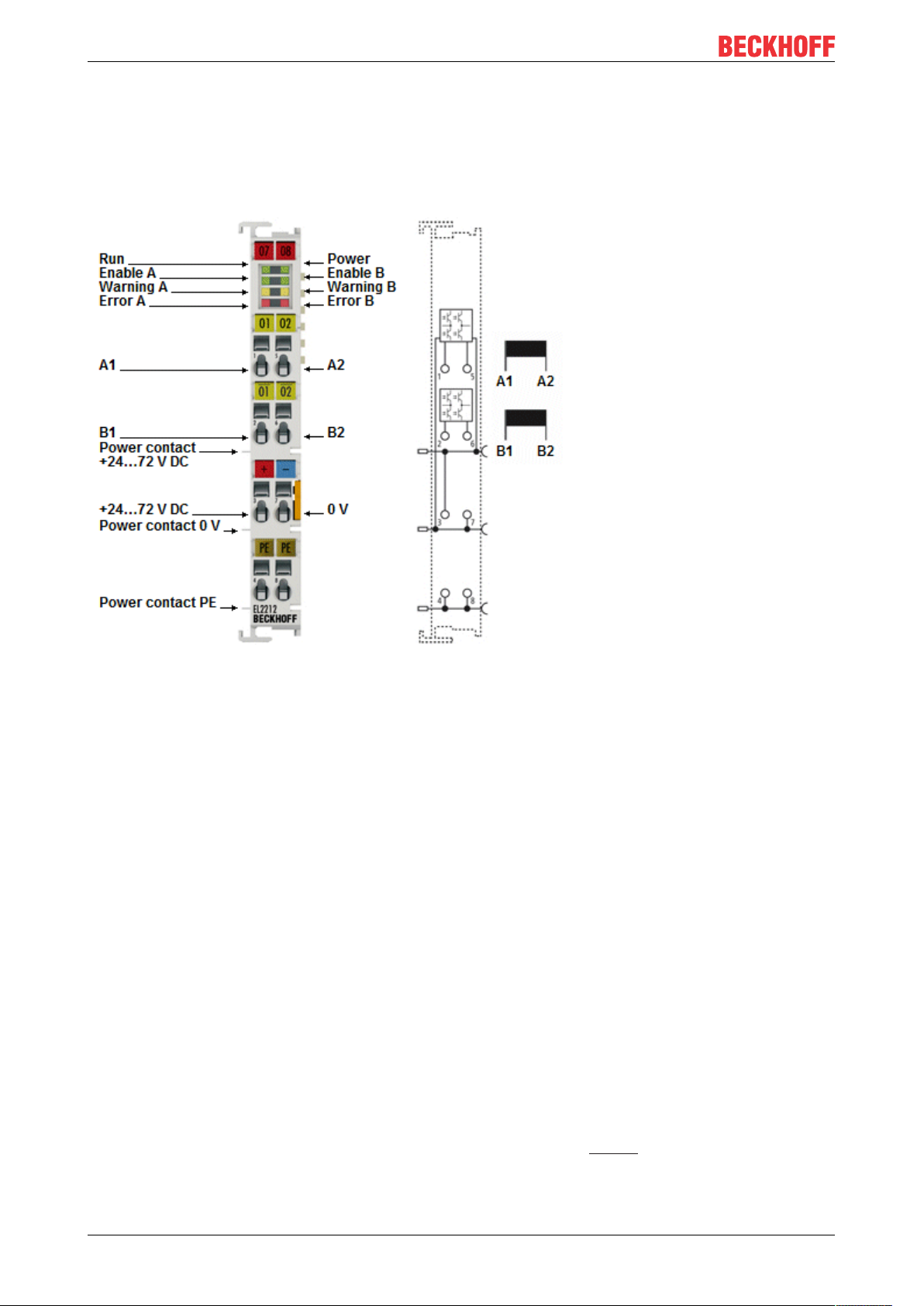
2.2 EL2212 - Technische Daten
Technische Daten EL2212
Anzahl der Ausgänge 2
Nennlastspannung 24…72 V DC (-15%/+0%)
Lastart induktiv > 1 mH
Auflösung Time Stamp 1ns
Genauigkeit Time Stamp in der Klemme 10ns (+ Ausgangsschaltungsdrift)
Distributed Clocks ja
Genauigkeit der Distributed Clocks << 1 µs
Ausgangsstrom (je Kanal) Peakstrom: max. 10A Peakstrom "Boost-On-Phase" je Kanal
Haltestrom: 0,2 .. 2,5 A je Kanal
Kurzschlussstrom Ausgang kurzschlussgeschützt, typ. 12 A
Verpolungsschutz nein
Schaltzeiten ohne Distributed Clocks: TON/T
mit Distributed Clocks: TON/T
Kompensation
(siehe Hinweise Delay [}120])
Ausgangsstufe Vollbrücke (Push/Pull)
Spannungsversorgung für Elektronik über den E-Bus
Stromaufnahme aus dem E-Bus typ. 120 mA
Stromaufnahme Powerkontakte
abhängig von Last und Dynamik
(Versorgungskontakte)
Unterstützt Funktion NoCoeStorage
ja
[}24]
Potenzialtrennung 500 V
(E-Bus/Feldspannung)
eff
Konfiguration über TwinCAT System Manager
Gewicht ca. 50 g
zulässiger
0°C ... + 55°C
Umgebungstemperaturbereich im
Betrieb
zulässiger
-25°C ... + 85°C
Umgebungstemperaturbereich bei
Lagerung
zulässige relative Luftfeuchtigkeit 95%, keine Betauung
Abmessungen (B x H x T) ca. 15 mm x 100 mm x 70 mm
Montage [}29]
auf 35mm Tragschiene nach EN60715
Vibrations-/Schockfestigkeit gemäß EN60068-2-6/ EN60068-2-27
EMV-Festigkeit/Aussendung gemäß EN61000-6-2/ EN61000-6-4
Schutzart IP 20
Einbaulage beliebig
Zulassung CE
: 20 µs typ.
OFF
: < 1 µs typ. durch interne
OFF
EL2212 15Version: 2.5
Page 16
Produktübersicht
2.3 Technologie: PWM und induktive Last
Interne PWM der Klemme
Die 2-Kanal-Digital-Ausgangsklemme EL2212 hat für jeden Kanal eine kompakte PWM-Endstufe in kleinster
Bauform integriert, die in 3 Phasen einen bzw. zwei Aktoren ansteuert. Dabei wird in jedem Fall die
angelegte Versorgungsspannung auf den Aktor durchgeschaltet. Um einen in Abhängigkeit vom ohmschen
Widerstand des Aktors ggf. unzulässig zu hohen Laststrom entgegen zu wirken, wird in den verschiedenen
Phasen durch Pulsweitenmodulation (PWM) die Spannung an den Aktor nur pulsierend durchgeschaltet. Im
zeitlichen Mittel stellt sich dadurch am Aktor insgesamt ein geringerer Strom ein, der durch die induktive
Komponente des Aktors nahezu zu einer Gleichspannung geglättet wird. Dieser Vorgang kommt bei der
Klemme EL2212 zum Einsatz und erfolgt stets durch die Vorgabe des Haltestroms und der
Versorgungsspannung: der vorgegebene Strom wird als Sollwert eingeregelt auch wenn die
Versorgungsspannung mit dem Innenwiderstand des Aktors einen weitaus größeren Laststrom ermöglicht.
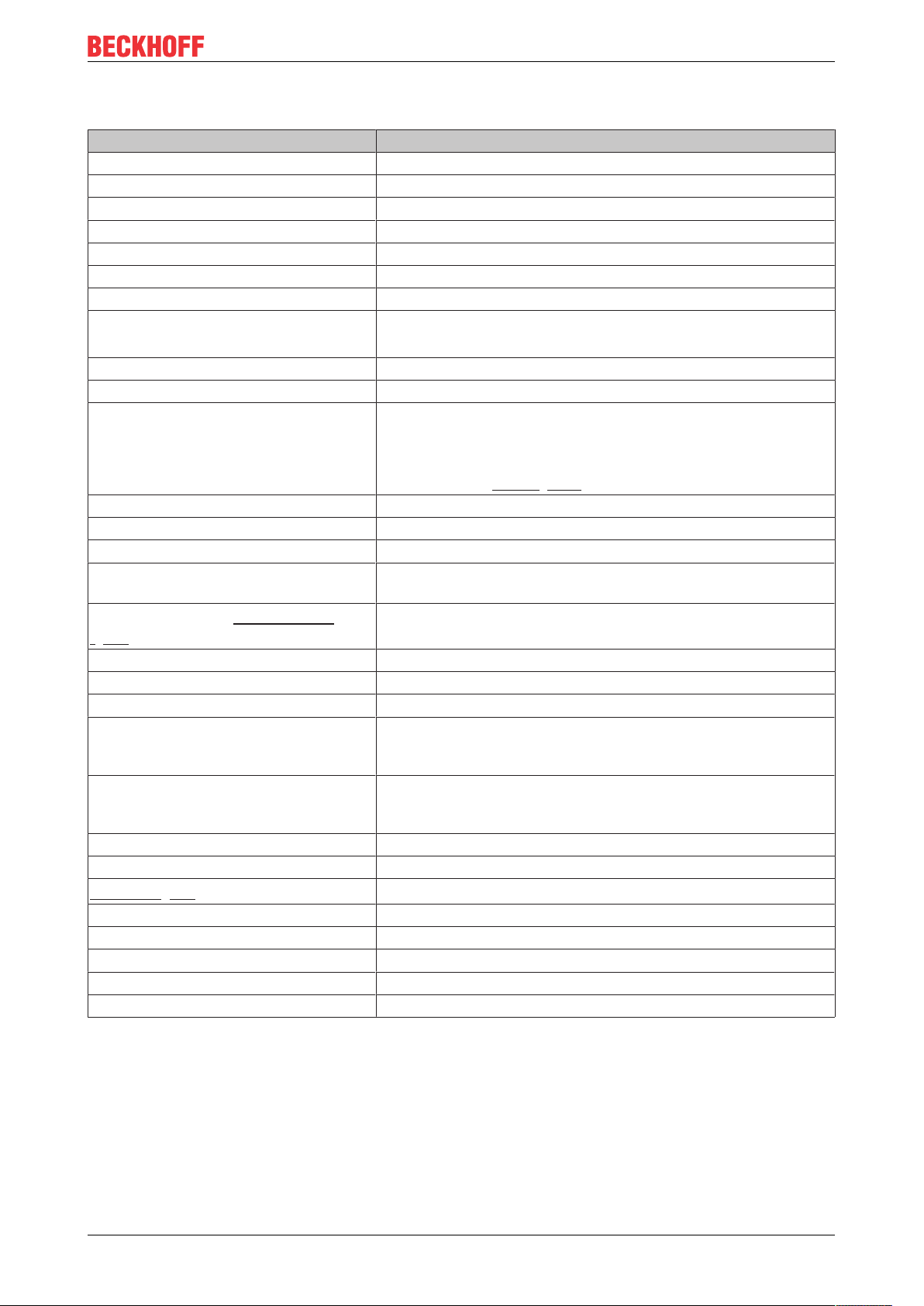
Pulsweitenmodulation zur Stromregelung
Mittels PWM-Endstufe wird die Pulsweitenmodulation (PWM) der Versorgungsspannung zur Regelung des
Ausgangsstroms einer angeschlossenen Ohmsch-Induktiven Last eingesetzt. Dem Ausgang wird dabei die
Versorgungsspannung in voller Höhe mit einer bestimmten Frequenz pulsierend zugeführt. Nur mit dem
High -Pegel baut sich an der Induktivität ein Laststrom auf. Eine Änderung des Laststroms erfolgt nun nicht
durch Änderung der Spannungshöhe, sondern durch die Dauer des Ausschaltens (Pulsweite) im Verhältnis
zur Periodendauer. Dies ergibt ein Tastverhältnis von Pulsweite dividiert durch Periodendauer entsprechend
zwischen 0 bis 100% und ist proportional zum Laststrom.
Abb.10: Betrieb an Last mit ausreichend großer Induktivität
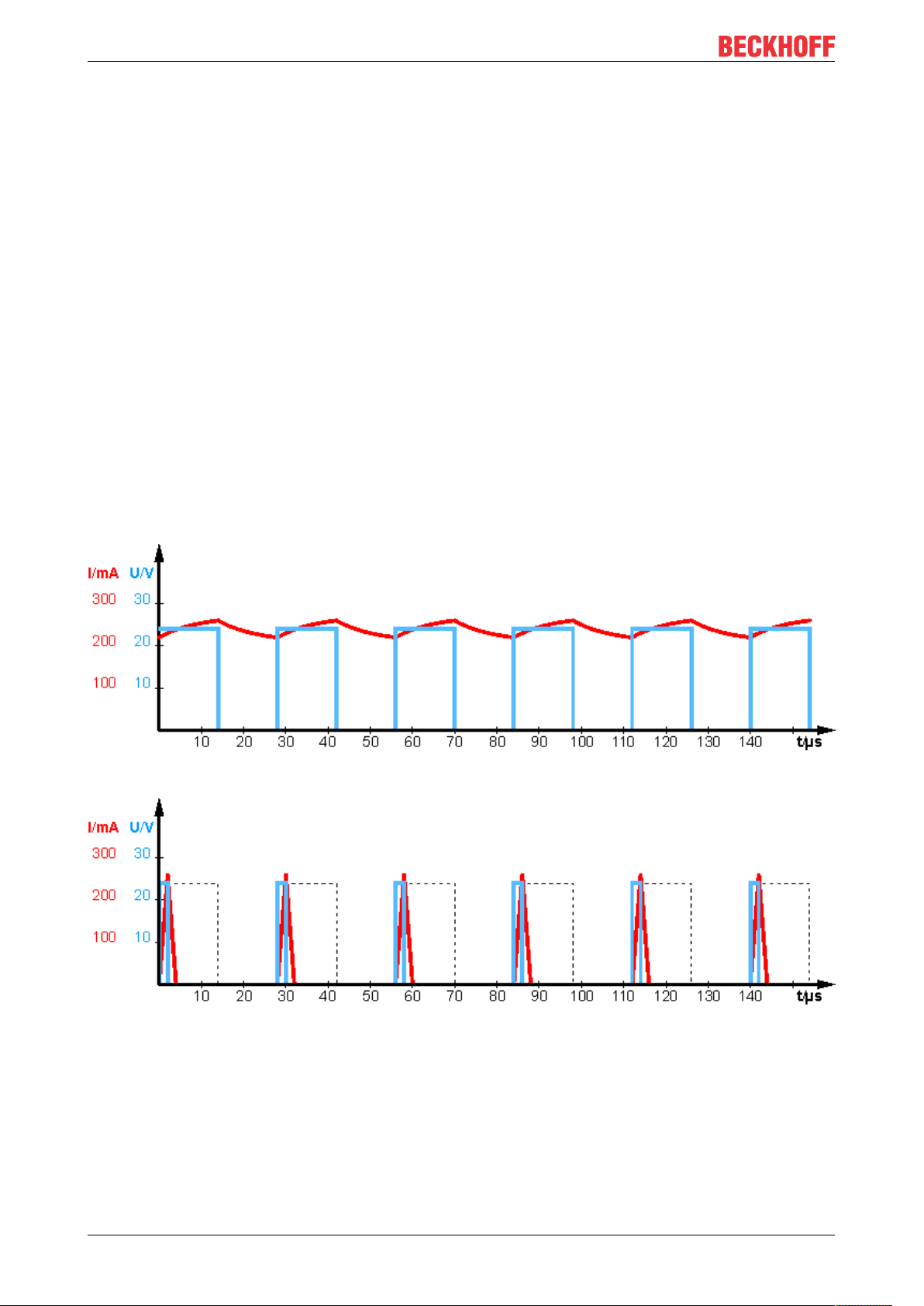
Abb.11: Betrieb an Last mit zu kleiner Induktivität (nahezu ohmsch)
In der Abbildung „Betrieb an Last mit zu kleiner Induktivität“ ist zur Veranschaulichung der Betrieb mit einer
nicht ausreichend großen Induktivität dargestellt. Ein kontinuierlicher Stromfluss kommt nicht zustande. Der
Strom "lückt". Diese Betriebsart ist nicht zulässig.
EL221216 Version: 2.5
Page 17
Pulsweitenstromklemmen benötigen induktive Lasten
Die Induktivität der Last sollte mindestens 1 mH betragen! Ein Betrieb der Pulsweitenstromklemmen
an Lasten mit einer Induktivität von weniger als 1 mH wird nicht empfohlen, weil auf Grund des unterbrochenen Stromflusses kein Bezug zwischen dem Sollwert und dem arithmetischen Mittelwert
des Stroms gegeben ist!
2.4 Start Up
Zur Inbetriebsetzung:
• montieren Sie den EL2212 wie im Kapitel Montage und Verdrahtung [}29] beschrieben
• konfigurieren Sie den EL2212 in TwinCAT wie im Kapitel Inbetriebnahme [}115] beschrieben.
Produktübersicht
EL2212 17Version: 2.5
Page 18
Grundlagen der Kommunikation
3 Grundlagen der Kommunikation
3.1 EtherCAT-Grundlagen
Grundlagen zum Feldbus EtherCAT entnehmen Sie bitte der EtherCAT System-Dokumentation.
3.2 EtherCAT-Verkabelung - Drahtgebunden
Die zulässige Leitungslänge zwischen zwei EtherCAT-Geräten darf maximal 100 Meter betragen. Dies
resultiert aus der FastEthernet-Technologie, die vor allem aus Gründen der Signaldämpfung über die
Leitungslänge eine maximale Linklänge von 5 + 90 + 5 m erlaubt, wenn Leitungen mit entsprechenden
Eigenschaften verwendet werden. Siehe dazu auch die Auslegungsempfehlungen zur Infrastruktur für
EtherCAT/Ethernet.
Kabel und Steckverbinder
Verwenden Sie zur Verbindung von EtherCAT-Geräten nur Ethernet-Verbindungen (Kabel + Stecker), die
mindestens der Kategorie 5 (CAT5) nach EN 50173 bzw. ISO/IEC 11801 entsprechen. EtherCAT nutzt 4
Adern des Kabels für die Signalübertragung.
EtherCAT verwendet beispielsweise RJ45-Steckverbinder. Die Kontaktbelegung ist zum Ethernet-Standard
(ISO/IEC 8802-3) kompatibel.
Pin Aderfarbe Signal Beschreibung
1 gelb TD+ Transmission Data +
2 orange TD- Transmission Data 3 weiß RD+ Receiver Data +
6 blau RD- Receiver Data -
Aufgrund der automatischen Kabelerkennung (Auto-Crossing) können Sie zwischen EtherCAT-Geräten von
Beckhoff sowohl symmetrisch (1:1) belegte als auch Cross-Over-Kabel verwenden.
Empfohlene Kabel
Es wird empfohlen die entsprechenden Beckhoff Komponenten zu verwenden, z.B.
- Kabelsätze ZK1090-9191-xxxx bzw.
- feldkonfektionierbare RJ45 Stecker ZS1090-0005
- feldkonfektionierbare Ethernet Leitung ZB9010, ZB9020
Geeignete Kabel zur Verbindung von EtherCAT-Geräten finden Sie auf der Beckhoff Website!
E-Bus-Versorgung
Ein Buskoppler kann die an ihm angefügten EL-Klemmen mit der E-Bus-Systemspannung von 5V
versorgen, in der Regel ist ein Koppler dabei bis zu 2A belastbar (siehe Dokumentation des jeweiligen
Gerätes).
Zu jeder EL-Klemme ist die Information, wie viel Strom sie aus der E-Bus-Versorgung benötigt, online und im
Katalog verfügbar. Benötigen die angefügten Klemmen mehr Strom als der Koppler liefern kann, sind an
entsprechender Position im Klemmenstrang Einspeiseklemmen (z.B. EL9410) zu setzen.
Im TwinCAT System Manager wird der vorberechnete theoretische maximale E-Bus-Strom angezeigt. Eine
Unterschreitung wird durch negativen Summenbetrag und Ausrufezeichen markiert, vor einer solchen Stelle
ist eine Einspeiseklemme zu setzen.
EL221218 Version: 2.5
Page 19

Grundlagen der Kommunikation
Abb.12: System Manager Stromberechnung
HINWEIS
Fehlfunktion möglich!
Die E-Bus-Versorgung aller EtherCAT-Klemmen eines Klemmenblocks muss aus demselben Massepotential erfolgen!
3.3 Allgemeine Hinweise zur Watchdog-Einstellung
Die ELxxxx Klemmen sind mit einer Sicherungseinrichtung (Watchdog) ausgestattet, die z.B. bei
unterbrochenem Prozessdatenverkehr nach einer voreinstellbaren Zeit die Ausgänge in einen sicheren
Zustand schaltet, in Abhängigkeit vom Gerät und Einstellung z.B. auf AUS.
Der EtherCAT Slave Controller (ESC) verfügt dazu über zwei Watchdogs:
• SM-Watchdog (default: 100 ms)
• PDI-Watchdog (default: 100 ms)
SM-Watchdog (SyncManagerWatchdog)
Der SyncManager-Watchdog wird bei jeder erfolgreichen EtherCAT-Prozessdaten-Kommunikation mit der
Klemme zurückgesetzt. Findet z.B. durch eine Leitungsunterbrechung länger als die eingestellte und
aktivierte SM-Watchdog-Zeit keine EtherCAT-Prozessdaten-Kommunikation mit der Klemme statt, löst der
Watchdog aus und setzt die Ausgänge auf FALSE. Der OP-Status der Klemme bleibt davon unberührt. Der
Watchdog wird erst wieder durch einen erfolgreichen EtherCAT-Prozessdatenzugriff zurückgesetzt. Die
Überwachungszeit ist nach unten genanntem Verfahren einzustellen.
Der SyncManager-Watchdog ist also eine Überwachung auf korrekte und rechtzeitige
Prozessdatenkommunikation mit dem ESC von der EtherCAT-Seite aus betrachtet.
PDI-Watchdog (Process Data Watchdog)
Findet länger als die eingestellte und aktivierte PDI-Watchdog-Zeit keine PDI-Kommunikation mit dem
EtherCAT Slave Controller (ESC) statt, löst dieser Watchdog aus.
PDI (Process Data Interface) ist die interne Schnittstelle des ESC, z.B. zu lokalen Prozessoren im EtherCAT
Slave. Mit dem PDI-Watchdog kann diese Kommunikation auf Ausfall überwacht werden.
Der PDI-Watchdog ist also eine Überwachung auf korrekte und rechtzeitige Prozessdatenkommunikation mit
dem ESC, aber von der Applikations-Seite aus betrachtet.
Die Einstellungen für SM- und PDI-Watchdog sind im TwinCAT System Manager für jeden Slave gesondert
vorzunehmen:
EL2212 19Version: 2.5
Page 20

Grundlagen der Kommunikation
Abb.13: Karteireiter EtherCAT -> Erweiterte Einstellungen -> Verhalten --> Watchdog
Anmerkungen:
• der Multiplier ist für beide Watchdogs gültig.
• jeder Watchdog hat dann noch eine eigene Timer-Einstellung, die zusammen mit dem Multiplier eine
resultierende Zeit ergibt.
• Wichtig: die Multiplier/Timer-Einstellung wird nur beim Start in den Slave geladen, wenn die Checkbox
davor aktiviert ist.
Ist diese nicht aktiviert, wird nichts herunter geladen und die im ESC befindliche Einstellung bleibt
unverändert.
Multiplier
Beide Watchdogs erhalten ihre Impulse aus dem lokalen Klemmentakt, geteilt durch den WatchdogMultiplier:
1/25 MHz * (Watchdog-Multiplier + 2) = 100 µs (bei Standard-Einstellung 2498 für den Multiplier)
Die Standard Einstellung 1000 für den SM-Watchdog entspricht einer Auslösezeit von 100ms.
Der Wert in Multiplier + 2 entspricht der Anzahl 40ns-Basisticks, die einen Watchdog-Tick darstellen.
Der Multiplier kann verändert werden, um die Watchdog-Zeit in einem größeren Bereich zu verstellen.
Beispiel „Set SM-Watchdog“
Die Checkbox erlaubt eine manuelle Einstellung der Watchdog-Zeiten. Sind die Ausgänge gesetzt und tritt
eine EtherCAT-Kommunikationsunterbrechung auf, löst der SM-Watchdog nach der eingestellten Zeit ein
Löschen der Ausgänge aus. Diese Einstellung kann dazu verwendet werden, um eine Klemme an langsame
EL221220 Version: 2.5
Page 21
Grundlagen der Kommunikation
EtherCAT-Master oder sehr lange Zykluszeiten anzupassen. Der Standardwert des SM-Watchdog ist auf
100ms eingestellt. Der Einstellbereich umfasst 0...65535. Zusammen mit einem Multiplier in einem Bereich
von 1...65535 deckt dies einen Watchdog-Zeitraum von 0...~170 Sekunden ab.
Berechnung
Multiplier = 2498 → Watchdog-Basiszeit = 1 / 25MHz * (2498 + 2) = 0,0001Sekunden = 100µs
SM Watchdog = 10000 → 10000 * 100µs = 1 Sekunde Watchdog-Überwachungszeit
VORSICHT
Ungewolltes Verhalten des Systems möglich!
Die Abschaltung des SM-Watchdog durch SM Watchdog = 0 funktioniert erst in Klemmen ab Version
-0016. In vorherigen Versionen wird vom Einsatz dieser Betriebsart abgeraten.
VORSICHT
Beschädigung von Geräten und ungewolltes Verhalten des Systems möglich!
Bei aktiviertem SM-Watchdog und eingetragenem Wert 0 schaltet der Watchdog vollständig ab! Dies ist die
Deaktivierung des Watchdogs! Gesetzte Ausgänge werden dann bei einer Kommunikationsunterbrechung
NICHT in den sicheren Zustand gesetzt!
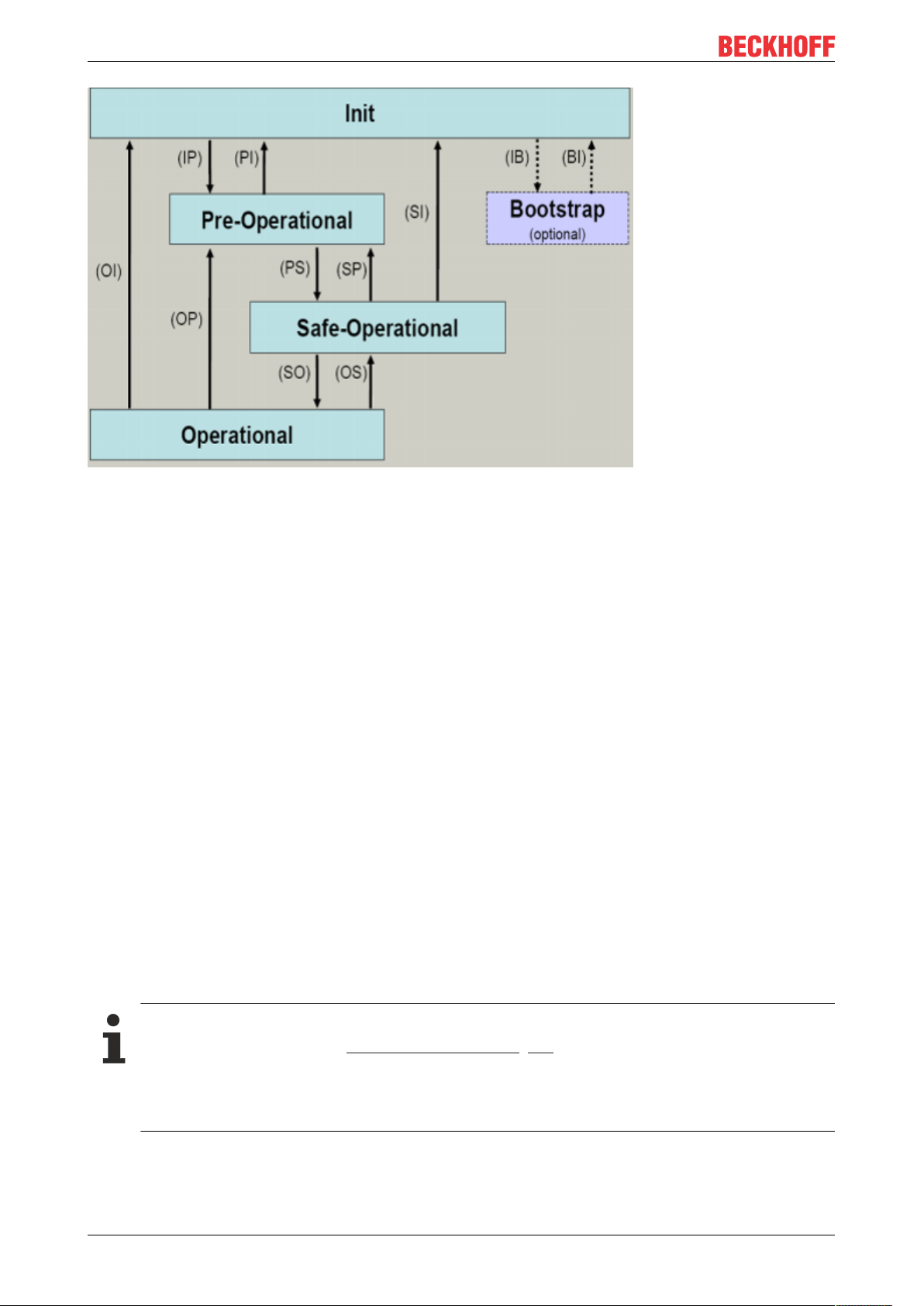
3.4 EtherCAT State Machine
Über die EtherCAT State Machine (ESM) wird der Zustand des EtherCAT-Slaves gesteuert. Je nach
Zustand sind unterschiedliche Funktionen im EtherCAT-Slave zugänglich bzw. ausführbar. Insbesondere
während des Hochlaufs des Slaves müssen in jedem State spezifische Kommandos vom EtherCAT Master
zum Gerät gesendet werden.
Es werden folgende Zustände unterschieden:
• Init
• Pre-Operational
• Safe-Operational und
• Operational
• Boot
Regulärer Zustand eines jeden EtherCAT Slaves nach dem Hochlauf ist der Status OP.
EL2212 21Version: 2.5
Page 22
Grundlagen der Kommunikation
Abb.14: Zustände der EtherCAT State Machine
Init
Nach dem Einschalten befindet sich der EtherCAT-Slave im Zustand Init. Dort ist weder Mailbox- noch
Prozessdatenkommunikation möglich. Der EtherCAT-Master initialisiert die Sync-Manager-Kanäle 0 und 1
für die Mailbox-Kommunikation.
Pre-Operational (Pre-Op)
Beim Übergang von Init nach Pre-Op prüft der EtherCAT-Slave, ob die Mailbox korrekt initialisiert wurde.
Im Zustand Pre-Op ist Mailbox-Kommunikation aber keine Prozessdaten-Kommunikation möglich. Der
EtherCAT-Master initialisiert die Sync-Manager-Kanäle für Prozessdaten (ab Sync-Manager-Kanal 2), die
FMMU-Kanäle und falls der Slave ein konfigurierbares Mapping unterstützt das PDO-Mapping oder das
Sync-Manager-PDO-Assignement. Weiterhin werden in diesem Zustand die Einstellungen für die
Prozessdatenübertragung sowie ggf. noch klemmenspezifische Parameter übertragen, die von den
Defaulteinstellungen abweichen.
Safe-Operational (Safe-Op)
Beim Übergang von Pre-Op nach Safe-Op prüft der EtherCAT-Slave, ob die Sync-Manager-Kanäle für die
Prozessdatenkommunikation sowie ggf. ob die Einstellungen für die Distributed-Clocks korrekt sind. Bevor er
den Zustandswechsel quittiert, kopiert der EtherCAT-Slave aktuelle Inputdaten in die entsprechenden DPRAM-Bereiche des EtherCAT-Slave-Controllers (ECSC).
Im Zustand Safe-Op ist Mailbox- und Prozessdaten-Kommunikation möglich, allerdings hält der Slave seine
Ausgänge im sicheren Zustand und gibt sie noch nicht aus. Die Inputdaten werden aber bereits zyklisch
aktualisiert.
Ausgänge im SAFEOP
Die standardmäßig aktivierte Watchdogüberwachung [}19] bringt die Ausgänge im Modul in Abhängigkeit von den Einstellungen im SAFEOP und OP in einen sicheren Zustand - je nach Gerät
und Einstellung z.B. auf AUS. Wird dies durch Deaktivieren der Watchdogüberwachung im Modul
unterbunden, können auch im Geräte-Zustand SAFEOP Ausgänge geschaltet werden bzw. gesetzt
bleiben.
EL221222 Version: 2.5
Page 23

Grundlagen der Kommunikation
Operational (Op)
Bevor der EtherCAT-Master den EtherCAT-Slave von Safe-Op nach Op schaltet, muss er bereits gültige
Outputdaten übertragen.
Im Zustand Op kopiert der Slave die Ausgangsdaten des Masters auf seine Ausgänge. Es ist Prozessdatenund Mailbox-Kommunikation möglich.
Boot
Im Zustand Boot kann ein Update der Slave-Firmware vorgenommen werden. Der Zustand Boot ist nur über
den Zustand Init zu erreichen.
Im Zustand Boot ist Mailbox-Kommunikation über das Protokoll File-Access over EtherCAT (FoE) möglich,
aber keine andere Mailbox-Kommunikation und keine Prozessdaten-Kommunikation.
3.5 CoE-Interface
Allgemeine Beschreibung
Das CoE-Interface (CAN application protocol over EtherCAT) ist die Parameterverwaltung für EtherCATGeräte. EtherCAT-Slaves oder auch der EtherCAT-Master verwalten darin feste (ReadOnly) oder
veränderliche Parameter, die sie zum Betrieb, Diagnose oder Inbetriebnahme benötigen.
CoE-Parameter sind in einer Tabellen-Hierarchie angeordnet und prinzipiell dem Anwender über den
Feldbus lesbar zugänglich. Der EtherCAT-Master (TwinCAT System Manager) kann über EtherCAT auf die
lokalen CoE-Verzeichnisse der Slaves zugreifen und je nach Eigenschaften lesend oder schreibend
einwirken.
Es sind verschiedene Typen für CoE-Parameter möglich wie String (Text), Integer-Zahlen, Bool'sche Werte
oder größere Byte-Felder. Damit lassen sich ganz verschiedene Eigenschaften beschreiben. Beispiele für
solche Parameter sind Herstellerkennung, Seriennummer, Prozessdateneinstellungen, Gerätename,
Abgleichwerte für analoge Messung oder Passwörter.
Die Ordnung erfolgt in zwei Ebenen über hexadezimale Nummerierung: zuerst wird der (Haupt)Index
genannt, dann der Subindex. Die Wertebereiche sind
• Index: 0x0000…0xFFFF (0...65535
• SubIndex: 0x00…0xFF (0...255
dez
)
dez
)
Üblicherweise wird ein so lokalisierter Parameter geschrieben als 0x8010:07 mit voranstehendem „0x“ als
Kennzeichen des hexadezimalen Zahlenraumes und Doppelpunkt zwischen Index und Subindex.
Die für den EtherCAT-Feldbusanwender wichtigen Bereiche sind
• 0x1000: hier sind feste Identitäts-Informationen zum Gerät hinterlegt wie Name, Hersteller,
Seriennummer etc. Außerdem liegen hier Angaben über die aktuellen und verfügbaren
Prozessdatenkonstellationen.
• 0x8000: hier sind die für den Betrieb erforderlichen funktionsrelevanten Parameter für alle Kanäle
zugänglich wie Filtereinstellung oder Ausgabefrequenz.
Weitere wichtige Bereiche sind:
• 0x4000: hier befinden sich bei manchen EtherCAT-Geräten die Kanalparameter. Historisch war dies
der erste Parameterbereich, bevor der 0x8000 Bereich eingeführt wurde. EtherCAT Geräte, die früher
mit Parametern in 0x4000 ausgerüstet wurden und auf 0x8000 umgestellt wurden, unterstützen aus
Kompatibilitätsgründen beide Bereiche und spiegeln intern.
• 0x6000: hier liegen die Eingangs-PDO („Eingang“ aus Sicht des EtherCAT-Masters)
• 0x7000: hier liegen die Ausgangs-PDO („Ausgang“ aus Sicht des EtherCAT-Masters)
EL2212 23Version: 2.5
Page 24
Grundlagen der Kommunikation
Verfügbarkeit
Nicht jedes EtherCAT Gerät muss über ein CoE-Verzeichnis verfügen. Einfache I/O-Module ohne
eigenen Prozessor verfügen in der Regel. über keine veränderlichen Parameter und haben deshalb
auch kein CoE-Verzeichnis.
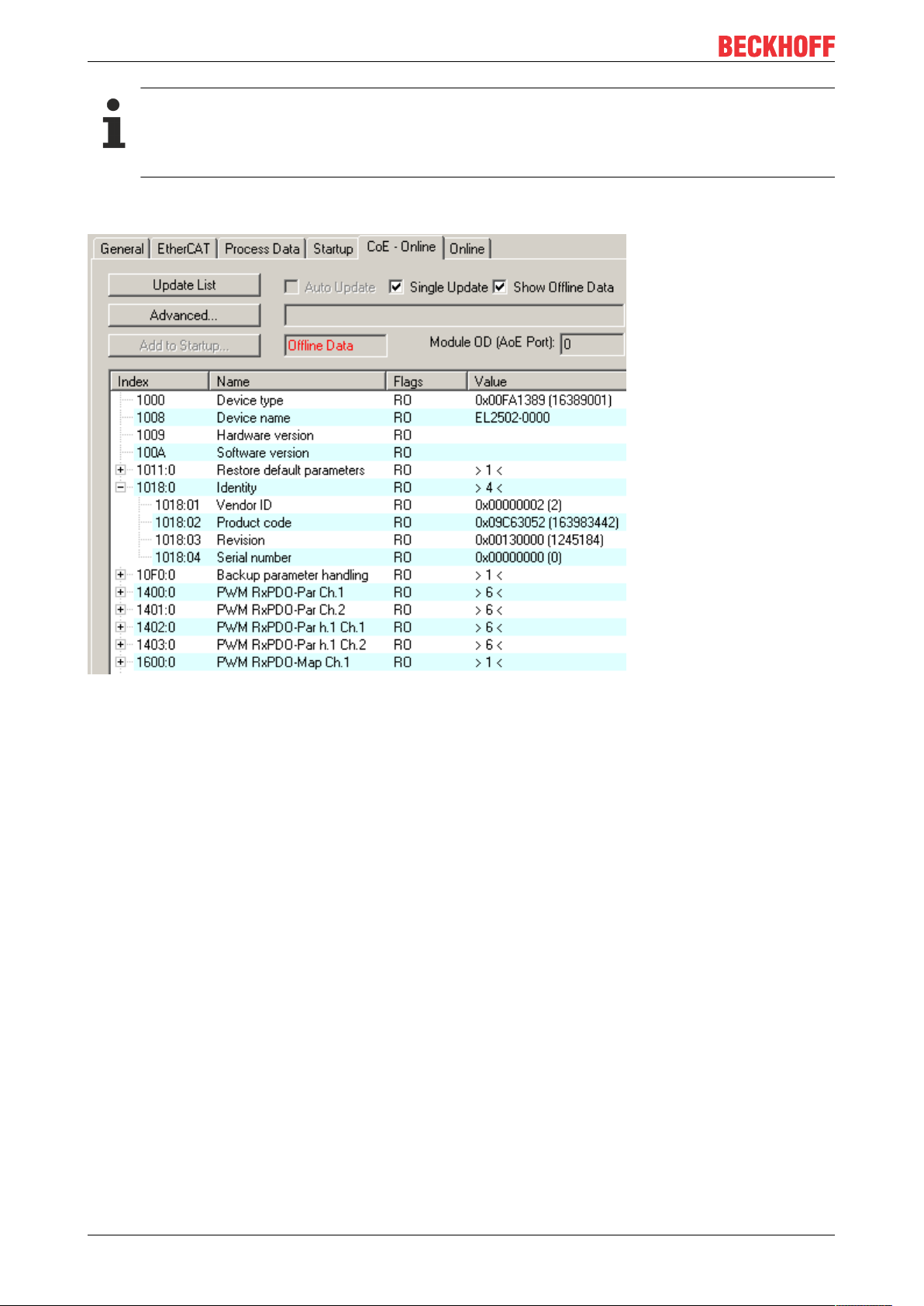
Wenn ein Gerät über ein CoE-Verzeichnis verfügt, stellt sich dies im TwinCAT System Manager als ein
eigener Karteireiter mit der Auflistung der Elemente dar:
Abb.15: Karteireiter „CoE-Online“
In der oberen Abbildung sind die im Gerät „EL2502“ verfügbaren CoE-Objekte von 0x1000 bis 0x1600
zusehen, die Subindizes von 0x1018 sind aufgeklappt.
Datenerhaltung und Funktion „NoCoeStorage“
Einige, insbesondere die vorgesehenen Einstellungsparameter des Slaves sind veränderlich und
beschreibbar. Dies kann schreibend/lesend geschehen
• über den System Manager (Abb. Karteireiter „CoE-Online“) durch Anklicken
Dies bietet sich bei der Inbetriebnahme der Anlage/Slaves an. Klicken Sie auf die entsprechende Zeile
des zu parametrierenden Indizes und geben sie einen entsprechenden Wert im „SetValue“-Dialog ein.
• aus der Steuerung/PLC über ADS z.B. durch die Bausteine aus der TcEtherCAT.lib Bibliothek
Dies wird für Änderungen während der Anlangenlaufzeit empfohlen oder wenn kein System Manager
bzw. Bedienpersonal zur Verfügung steht.
EL221224 Version: 2.5
Page 25
Grundlagen der Kommunikation
Datenerhaltung
Werden online auf dem Slave CoE-Parameter geändert, wird dies in Beckhoff-Geräten üblicherweise ausfallsicher im Gerät (EEPROM) gespeichert. D.h. nach einem Neustart (Repower) sind die
veränderten CoE-Parameter immer noch erhalten.
Andere Hersteller können dies anders handhaben.
Ein EEPROM unterliegt in Bezug auf Schreibvorgänge einer begrenzten Lebensdauer. Ab typischerweise 100.000 Schreibvorgängen kann eventuell nicht mehr sichergestellt werden, dass neue
(veränderte) Daten sicher gespeichert werden oder noch auslesbar sind. Dies ist für die normale Inbetriebnahme ohne Belang. Werden allerdings zur Maschinenlaufzeit fortlaufend CoE-Parameter
über ADS verändert, kann die Lebensdauergrenze des EEPROM durchaus erreicht werden.
Es ist von der FW-Version abhängig, ob die Funktion NoCoeStorage unterstützt wird, die das Abspeichern veränderter CoE-Werte unterdrückt.
Ob das auf das jeweilige Gerät zutrifft, ist den technischen Daten dieser Dokumentation zu entnehmen.
• wird unterstützt: die Funktion ist per einmaligem Eintrag des Codeworts 0x12345678 in CoE
0xF008 zu aktivieren und solange aktiv, wie das Codewort nicht verändert wird. Nach dem Einschalten des Gerätes ist sie nicht aktiv.
Veränderte CoE-Werte werden dann nicht im EEPROM abgespeichert, sie können somit beliebig
oft verändert werden.
• wird nicht unterstützt: eine fortlaufende Änderung von CoE-Werten ist angesichts der o.a. Lebensdauergrenze nicht zulässig.
Startup List
Veränderungen im lokalen CoE-Verzeichnis der Klemme gehen im Austauschfall mit der alten
Klemme verloren. Wird im Austauschfall eine neue Klemme mit Werkseinstellungen ab Lager
Beckhoff eingesetzt, bringt diese die Standardeinstellungen mit. Es ist deshalb empfehlenswert, alle
Veränderungen im CoE-Verzeichnis eines EtherCAT Slave in der Startup List des Slaves zu verankern, die bei jedem Start des EtherCAT Feldbus abgearbeitet wird. So wird auch ein im Austauschfall ein neuer EtherCAT Slave automatisch mit den Vorgaben des Anwenders parametriert.
Wenn EtherCAT Slaves verwendet werden, die lokal CoE-Wert nicht dauerhaft speichern können,
ist zwingend die StartUp-Liste zu verwenden.
Empfohlenes Vorgehen bei manueller Veränderung von CoE-Parametern
• gewünschte Änderung im System Manager vornehmen
Werte werden lokal im EtherCAT Slave gespeichert
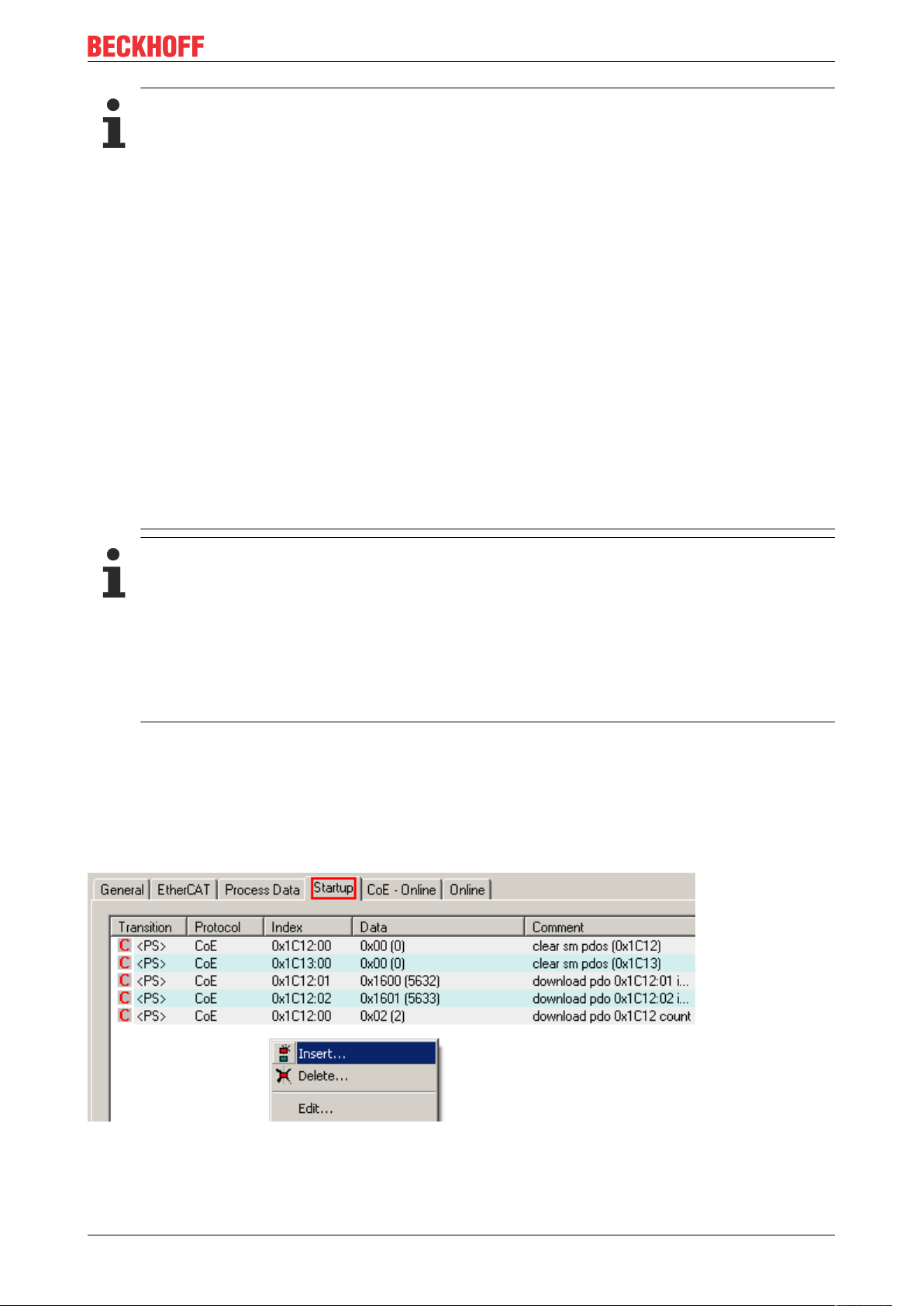
• wenn der Wert dauerhaft Anwendung finden soll, einen entsprechenden Eintrag in der StartUp-Liste
vornehmen.
Die Reihenfolge der StartUp-Einträge ist dabei i.d.R. nicht relevant.
Abb.16: StartUp-Liste im TwinCAT System Manager
In der StartUp-Liste können bereits Werte enthalten sein, die vom System Manager nach den Angaben der
ESI dort angelegt werden. Zusätzliche anwendungsspezifische Einträge können angelegt werden.
EL2212 25Version: 2.5
Page 26
Grundlagen der Kommunikation
Online/Offline Verzeichnis
Während der Arbeit mit dem TwinCAT System Manager ist zu unterscheiden ob das EtherCAT-Gerät gerade
„verfügbar“, also angeschaltet und über EtherCAT verbunden und damit online ist oder ob ohne
angeschlossene Slaves eine Konfiguration offline erstellt wird.
In beiden Fällen ist ein CoE-Verzeichnis nach Abb. „Karteireiter ‚CoE-Online‘“ zu sehen, die Konnektivität
wird allerdings als offline/online angezeigt.
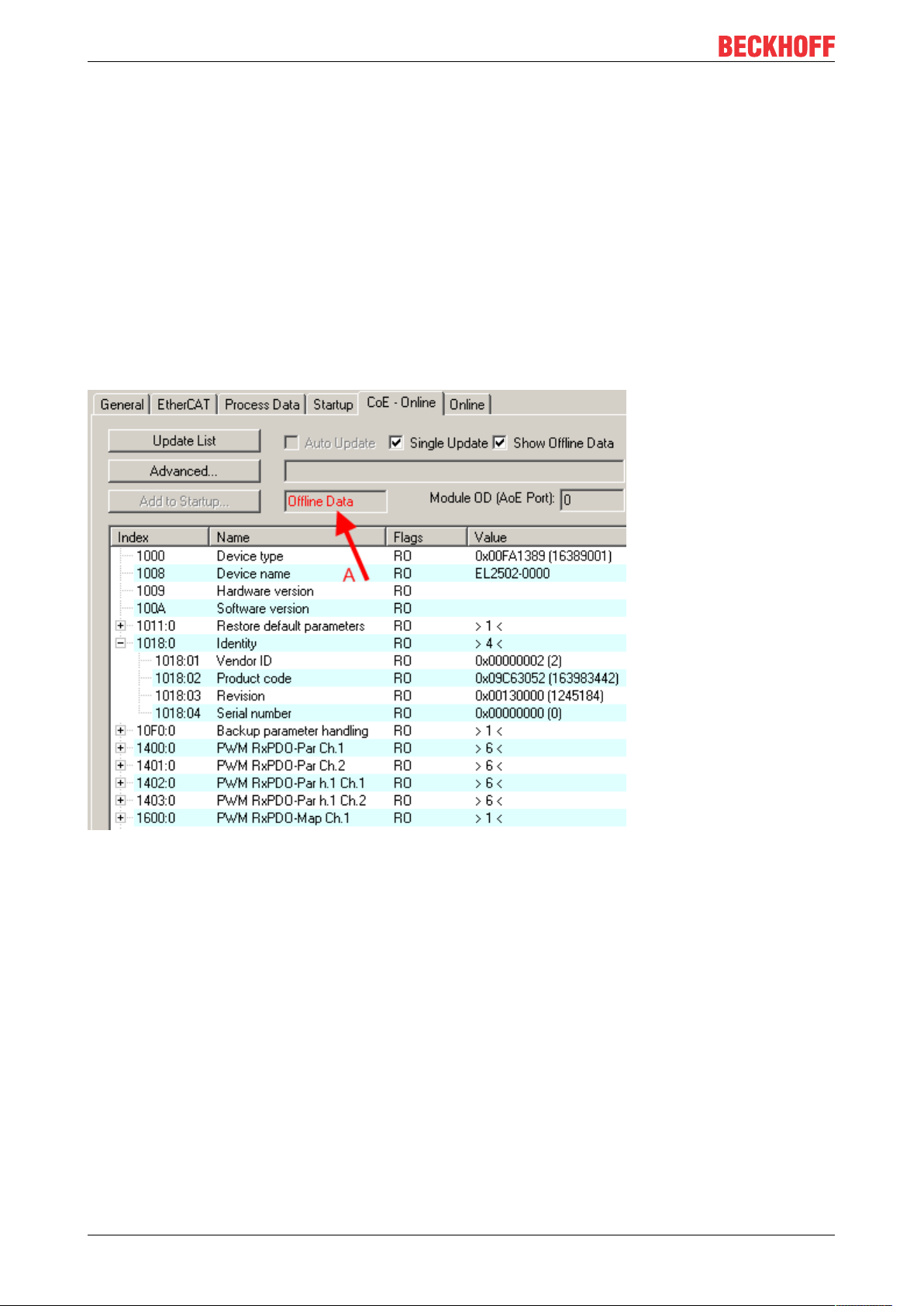
• wenn der Slave offline ist:
◦ wird das Offline-Verzeichnis aus der ESI-Datei angezeigt. Änderungen sind hier nicht sinnvoll bzw.
möglich.
◦ wird in der Identität der konfigurierte Stand angezeigt
◦ wird kein Firmware- oder Hardware-Stand angezeigt, da dies Eigenschaften des realen Gerätes
sind.
◦ ist ein rotes Offline zu sehen
Abb.17: Offline-Verzeichnis
• wenn der Slave online ist
◦ wird das reale aktuelle Verzeichnis des Slaves ausgelesen. Dies kann je nach Größe und
Zykluszeit einige Sekunden dauern.
◦ wird die tatsächliche Identität angezeigt
◦ wird der Firmware- und Hardware-Stand des Gerätes laut elektronischer Auskunft angezeigt
◦ ist ein grünes Online zu sehen
EL221226 Version: 2.5
Page 27
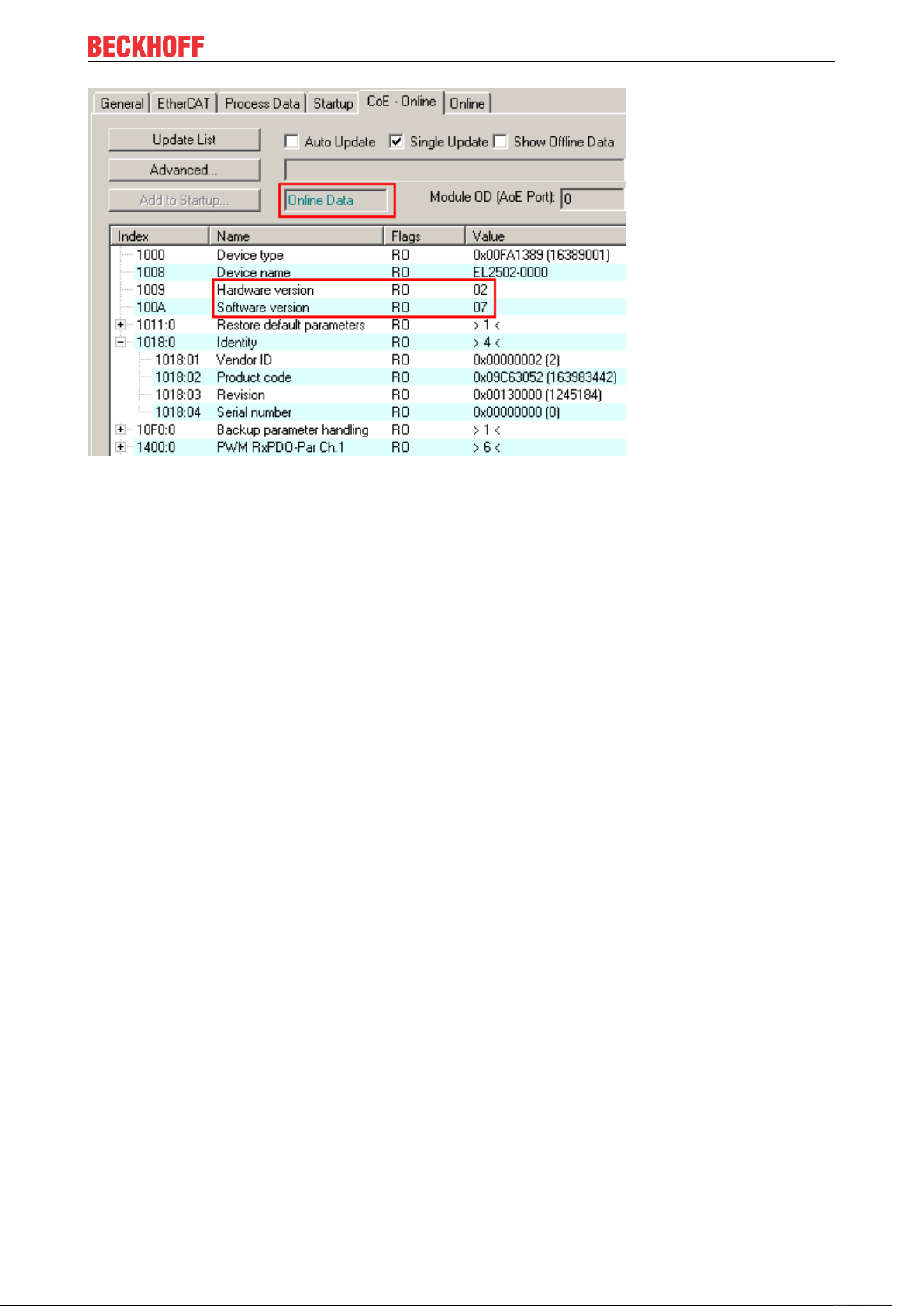
Abb.18: Online-Verzeichnis
Grundlagen der Kommunikation
Kanalweise Ordnung
Das CoE-Verzeichnis ist in EtherCAT Geräten angesiedelt, die meist mehrere funktional gleichwertige
Kanäle umfassen. z.B. hat eine 4 kanalige Analogeingangsklemme 0...10V auch vier logische Kanäle und
damit vier gleiche Sätze an Parameterdaten für die Kanäle. Um in den Dokumentationen nicht jeden Kanal
auflisten zu müssen, wird gerne der Platzhalter „n“ für die einzelnen Kanalnummern verwendet.
Im CoE-System sind für die Menge aller Parameter eines Kanals eigentlich immer 16 Indizes mit jeweils 255
Subindizes ausreichend. Deshalb ist die kanalweise Ordnung in 16
dez
/10
-Schritten eingerichtet. Am
hex
Beispiel des Parameterbereichs 0x8000 sieht man dies deutlich:
• Kanal 0: Parameterbereich 0x8000:00 ... 0x800F:255
• Kanal 1: Parameterbereich 0x8010:00 ... 0x801F:255
• Kanal 2: Parameterbereich 0x8020:00 ... 0x802F:255
• ...
Allgemein wird dies geschrieben als 0x80n0.
Ausführliche Hinweise zum CoE-Interface finden Sie in der EtherCAT-Systemdokumentation auf der
Beckhoff Website.
EL2212 27Version: 2.5
Page 28

Grundlagen der Kommunikation
3.6 Distributed Clock
Die Distributed Clock stellt eine lokale Uhr im EtherCAT Slave Controller (ESC) dar mit den Eigenschaften:
• Einheit 1 ns
• Nullpunkt 1.1.2000 00:00
• Umfang 64 Bit (ausreichend für die nächsten 584 Jahre); manche EtherCAT-Slaves unterstützen
jedoch nur einen Umfang von 32 Bit, d.h. nach ca. 4,2 Sekunden läuft die Variable über
• Diese lokale Uhr wird vom EtherCAT Master automatisch mit der Master Clock im EtherCAT Bus mit
einer Genauigkeit < 100 ns synchronisiert.
Detaillierte Informationen entnehmen Sie bitte der vollständigen EtherCAT-Systembeschreibung.
EL221228 Version: 2.5
Page 29
Montage und Verdrahtung
4 Montage und Verdrahtung
4.1 Tragschienenmontage
WARNUNG
Verletzungsgefahr durch Stromschlag und Beschädigung des Gerätes möglich!
Setzen Sie das Busklemmen-System in einen sicheren, spannungslosen Zustand, bevor Sie mit der Montage, Demontage oder Verdrahtung der Busklemmen beginnen!
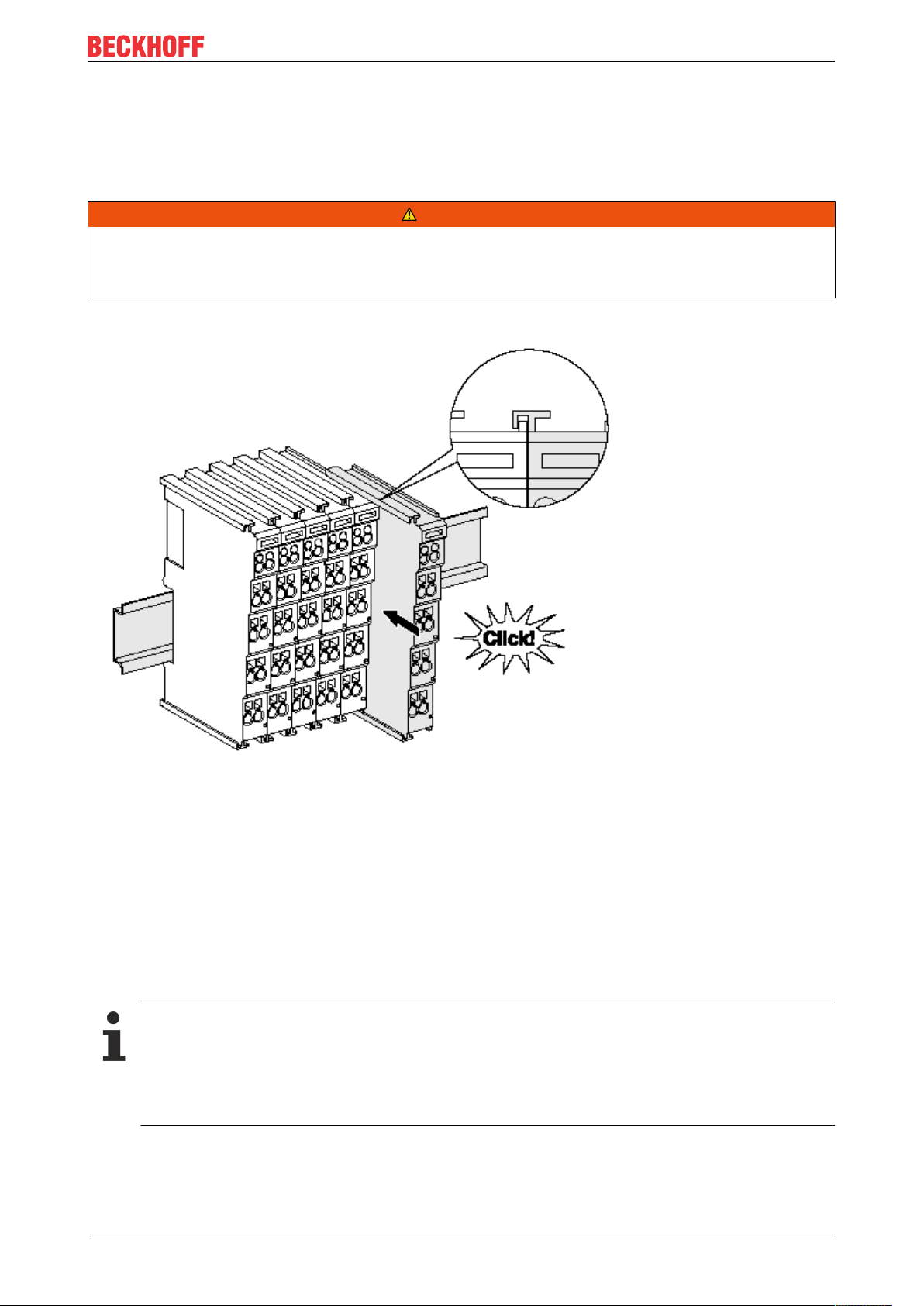
Montage
Abb.19: Montage auf Tragschiene
Die Buskoppler und Busklemmen werden durch leichten Druck auf handelsübliche 35 mm Tragschienen
(Hutschienen nach EN60715) aufgerastet:
1. Stecken Sie zuerst den Feldbuskoppler auf die Tragschiene.
2. Auf der rechten Seite des Feldbuskopplers werden nun die Busklemmen angereiht. Stecken Sie dazu
die Komponenten mit Nut und Feder zusammen und schieben Sie die Klemmen gegen die Tragschiene, bis die Verriegelung hörbar auf der Tragschiene einrastet.
Wenn Sie die Klemmen erst auf die Tragschiene schnappen und dann nebeneinander schieben ohne
das Nut und Feder ineinander greifen, wird keine funktionsfähige Verbindung hergestellt! Bei richtiger
Montage darf kein nennenswerter Spalt zwischen den Gehäusen zu sehen sein.
Tragschienenbefestigung
Der Verriegelungsmechanismus der Klemmen und Koppler reicht in das Profil der Tragschiene hinein. Achten Sie bei der Montage der Komponenten darauf, dass der Verriegelungsmechanismus
nicht in Konflikt mit den Befestigungsschrauben der Tragschiene gerät. Verwenden Sie zur Befestigung von Tragschienen mit einer Höhe von 7,5mm unter den Klemmen und Kopplern flache Montageverbindungen wie Senkkopfschrauben oder Blindnieten.
EL2212 29Version: 2.5
Page 30
Montage und Verdrahtung
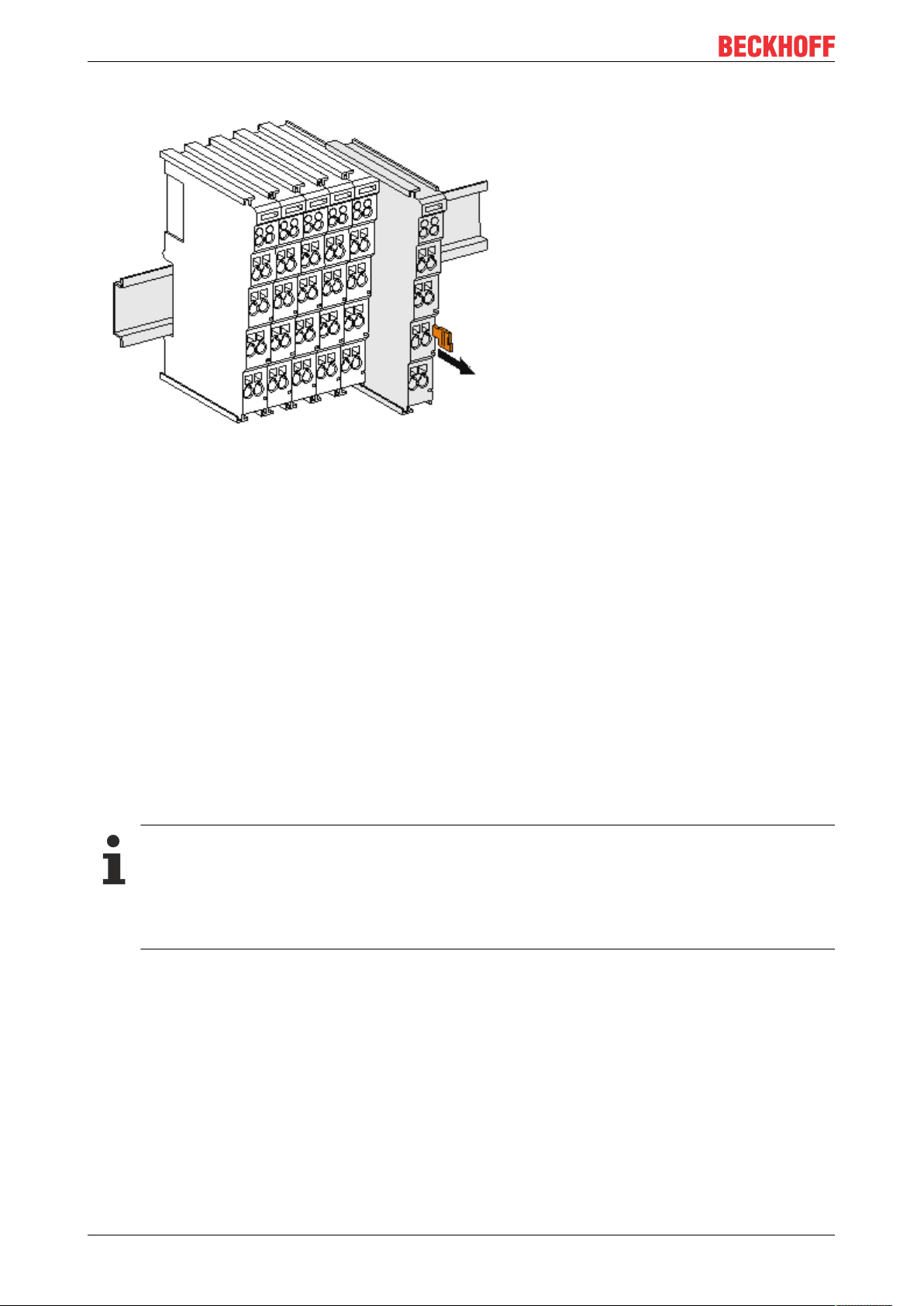
Demontage
Abb.20: Demontage von Tragschiene
Jede Klemme wird durch eine Verriegelung auf der Tragschiene gesichert, die zur Demontage gelöst werden
muss:
1. Ziehen Sie die Klemme an ihren orangefarbigen Laschen ca. 1 cm von der Tragschiene herunter. Dabei wird die Tragschienenverriegelung dieser Klemme automatisch gelöst und Sie können die Klemme
nun ohne großen Kraftaufwand aus dem Busklemmenblock herausziehen.
2. Greifen Sie dazu mit Daumen und Zeigefinger die entriegelte Klemme gleichzeitig oben und unten an
den Gehäuseflächen und ziehen sie aus dem Busklemmenblock heraus.
Verbindungen innerhalb eines Busklemmenblocks
Die elektrischen Verbindungen zwischen Buskoppler und Busklemmen werden durch das
Zusammenstecken der Komponenten automatisch realisiert:
• Die sechs Federkontakte des K-Bus/E-Bus übernehmen die Übertragung der Daten und die
Versorgung der Busklemmenelektronik.
• Die Powerkontakte übertragen die Versorgung für die Feldelektronik und stellen so innerhalb des
Busklemmenblocks eine Versorgungsschiene dar. Die Versorgung der Powerkontakte erfolgt über
Klemmen auf dem Buskoppler (bis 24V) oder für höhere Spannungen über Einspeiseklemmen.
Powerkontakte
Beachten Sie bei der Projektierung eines Busklemmenblocks die Kontaktbelegungen der einzelnen
Busklemmen, da einige Typen (z.B. analoge Busklemmen oder digitale 4-Kanal-Busklemmen) die
Powerkontakte nicht oder nicht vollständig durchschleifen. Einspeiseklemmen (KL91xx, KL92xx
bzw. EL91xx, EL92xx) unterbrechen die Powerkontakte und stellen so den Anfang einer neuen Versorgungsschiene dar.
PE-Powerkontakt
Der Powerkontakt mit der Bezeichnung PE kann als Schutzerde eingesetzt werden. Der Kontakt ist aus
Sicherheitsgründen beim Zusammenstecken voreilend und kann Kurzschlussströme bis 125A ableiten.
EL221230 Version: 2.5
Page 31

Abb.21: Linksseitiger Powerkontakt
Montage und Verdrahtung
HINWEIS
Beschädigung des Gerätes möglich
Beachten Sie, dass aus EMV-Gründen die PE-Kontakte kapazitiv mit der Tragschiene verbunden sind. Das
kann bei der Isolationsprüfung zu falschen Ergebnissen und auch zur Beschädigung der Klemme führen
(z.B. Durchschlag zur PE-Leitung bei der Isolationsprüfung eines Verbrauchers mit 230V Nennspannung).
Klemmen Sie zur Isolationsprüfung die PE- Zuleitung am Buskoppler bzw. der Einspeiseklemme ab! Um
weitere Einspeisestellen für die Prüfung zu entkoppeln, können Sie diese Einspeiseklemmen entriegeln und
mindestens 10mm aus dem Verbund der übrigen Klemmen herausziehen.
WARNUNG
Verletzungsgefahr durch Stromschlag!
Der PE-Powerkontakt darf nicht für andere Potentiale verwendet werden!
4.2 Hinweise zur Strommessung über Hall-Sensor
Das in dieser Dokumentation angesprochene Gerät verfügt über einen oder mehrere integrierte HallSensoren zur Strommessung.
Dabei wird das magnetische Feld, das durch einen Stromfluss durch einen Leiter erzeugt wird, von dem
Hall-Sensor quantitativ erfasst.
Um die Messung nicht zu beeinträchtigen wird empfohlen, äußere Magnetfelder vom Gerät abzuschirmen
oder hinreichend weit entfernt zu halten.
EL2212 31Version: 2.5
Page 32

Montage und Verdrahtung
Hintergrund
Ein stromdurchflossener Leiter erzeugt in seinem Umfeld ein magnetisches Feld nach
B = µ0 * I / (2π * d)
mit
B [Tesla] magnetisches Feld
µ0 = 4*π*10-7 [H/m] (Annahme: keine magnetische Abschirmung)
I [A] Strom
d [m] Abstand zum Leiter
Beeinträchtigung durch äußere Magnetfelder
Die magnetische Feldstärke sollte allseitig um das Gerät herum eine zulässige Größe nicht übersteigen.
Praktisch bedeutet dies für den empfohlenen Mindestabstand eines benachbarten Stromleiters zur
Geräteoberfläche:
● Strom 10 A: 12 mm
● Strom 20 A: 25 mm
● Strom 40 A: 50 mm
Wenn es in der Gerätedokumentation nicht anders spezifiziert ist, ist das Aneinanderreihen von Modulen (z.B. Reihenklemmen im 12 mm Rastermaß) gleichen Typs (z.B. EL2212-0000) darüberhinaus zulässig.
4.3 Anschlusstechnik
WARNUNG
Verletzungsgefahr durch Stromschlag und Beschädigung des Gerätes möglich!
Setzen Sie das Busklemmen-System in einen sicheren, spannungslosen Zustand, bevor Sie mit der Montage, Demontage oder Verdrahtung der Busklemmen beginnen!
Übersicht
Mit verschiedenen Anschlussoptionen bietet das Busklemmensystem eine optimale Anpassung an die
Anwendung:
• Die Klemmen der Serien KLxxxx und ELxxxx mit Standardverdrahtung enthalten Elektronik und
Anschlussebene in einem Gehäuse.
EL221232 Version: 2.5
Page 33

Montage und Verdrahtung
• Die Klemmen der Serien KSxxxx und ESxxxx haben eine steckbare Anschlussebene und ermöglichen
somit beim Austausch die stehende Verdrahtung.
• Die High-Density-Klemmen (HD-Klemmen) enthalten Elektronik und Anschlussebene in einem
Gehäuse und haben eine erhöhte Packungsdichte.
Standardverdrahtung
Abb.22: Standardverdrahtung
Die Klemmen der Serien KLxxxx und ELxxxx sind seit Jahren bewährt und integrieren die schraublose
Federkrafttechnik zur schnellen und einfachen Montage.
Steckbare Verdrahtung
Abb.23: Steckbare Verdrahtung
Die Klemmen der Serien KSxxxx und ESxxxx enthalten eine steckbare Anschlussebene.
Montage und Verdrahtung werden wie bei den Serien KLxxxx und ELxxxx durchgeführt.
Im Servicefall erlaubt die steckbare Anschlussebene, die gesamte Verdrahtung als einen Stecker von der
Gehäuseoberseite abzuziehen.
Das Unterteil kann, über das Betätigen der Entriegelungslasche, aus dem Klemmenblock herausgezogen
werden.
Die auszutauschende Komponente wird hineingeschoben und der Stecker mit der stehenden Verdrahtung
wieder aufgesteckt. Dadurch verringert sich die Montagezeit und ein Verwechseln der Anschlussdrähte ist
ausgeschlossen.
Die gewohnten Maße der Klemme ändern sich durch den Stecker nur geringfügig. Der Stecker trägt
ungefähr 3mm auf; dabei bleibt die maximale Höhe der Klemme unverändert.
Eine Lasche für die Zugentlastung des Kabels stellt in vielen Anwendungen eine deutliche Vereinfachung
der Montage dar und verhindert ein Verheddern der einzelnen Anschlussdrähte bei gezogenem Stecker.
Leiterquerschnitte von 0,08mm2 bis 2,5mm2 können weiter in der bewährten Federkrafttechnik verwendet
werden.
Übersicht und Systematik in den Produktbezeichnungen der Serien KSxxxx und ESxxxx werden wie von den
Serien bekannt KLxxxx und ELxxxx weitergeführt.
EL2212 33Version: 2.5
Page 34

Montage und Verdrahtung
High-Density-Klemmen (HD-Klemmen)
Abb.24: High-Density-Klemmen
Die Busklemmen dieser Baureihe mit 16 Anschlusspunkten zeichnen sich durch eine besonders kompakte
Bauform aus, da die Packungsdichte auf 12mm doppelt so hoch ist wie die der Standard-Busklemmen.
Massive und mit einer Aderendhülse versehene Leiter können ohne Werkzeug direkt in die
Federklemmstelle gesteckt werden.
Verdrahtung HD-Klemmen
Die High-Density-Klemmen der Serien ELx8xx und KLx8xx unterstützen keine stehende Verdrahtung.
Ultraschall-litzenverdichtete Leiter
Ultraschall-litzenverdichtete Leiter
An die Standard- und High-Density-Klemmen (HD-Klemmen) können auch ultraschall-litzenverdichtete (ultraschallverschweißte) Leiter angeschlossen werden. Beachten Sie die unten stehenden Ta-
bellen zum Leitungsquerschnitt [}34]!
Verdrahtung
Klemmen für Standardverdrahtung ELxxxx/KLxxxx und für steckbare Verdrahtung ESxxxx/KSxxxx
Abb.25: Befestigung einer Leitung an einem Klemmenanschluss
Bis zu acht Anschlüsse ermöglichen den Anschluss von massiven oder feindrähtigen Leitungen an die
Busklemmen. Die Klemmen sind in Federkrafttechnik ausgeführt. Schließen Sie die Leitungen
folgendermaßen an:
EL221234 Version: 2.5
Page 35

Montage und Verdrahtung
1. Öffnen Sie eine Federkraftklemme, indem Sie mit einem Schraubendreher oder einem Dorn leicht in
die viereckige Öffnung über der Klemme drücken.
2. Der Draht kann nun ohne Widerstand in die runde Klemmenöffnung eingeführt werden.
3. Durch Rücknahme des Druckes schließt sich die Klemme automatisch und hält den Draht sicher und
dauerhaft fest.
Klemmengehäuse ELxxxx, KLxxxx ESxxxx, KSxxxx
Leitungsquerschnitt 0,08 ... 2,5mm
2
0,08 ... 2,5mm
2
Abisolierlänge 8 ... 9mm 9 ... 10mm
High-Density-Klemmen ELx8xx, KLx8xx (HD)
Bei den HD-Klemmen erfolgt der Leiteranschluss bei massiven Leitern werkzeuglos, in Direktstecktechnik, d.
h. der Leiter wird nach dem Abisolieren einfach in die Kontaktstelle gesteckt. Das Lösen der Leitungen
erfolgt, wie bei den Standardklemmen, über die Kontakt-Entriegelung mit Hilfe eines Schraubendrehers. Den
zulässigen Leiterquerschnitt entnehmen Sie der nachfolgenden Tabelle.
Klemmengehäuse HD-Gehäuse
Leitungsquerschnitt (Aderleitung mit Aderendhülse) 0,14 ... 0,75mm
Leitungsquerschnitt (massiv) 0,08 ... 1,5 mm
Leitungsquerschnitt (feindrähtig) 0,25 ... 1,5mm
Leitungsquerschnitt (ultraschall-litzenverdichtet)
nur 1,5mm2 (siehe Hinweis [}34]!)
2
2
2
Abisolierlänge 8 ... 9mm
Schirmung
Schirmung
Analoge Sensoren und Aktoren sollten immer mit geschirmten, paarig verdrillten Leitungen angeschlossen werden.
4.4 Positionierung von passiven Klemmen
Hinweis zur Positionierung von passiven Klemmen im Busklemmenblock
EtherCAT-Klemmen (ELxxxx / ESxxxx), die nicht aktiv am Datenaustausch innerhalb des Busklemmenblocks teilnehmen, werden als passive Klemmen bezeichnet. Zu erkennen sind diese Klemmen
an der nicht vorhandenen Stromaufnahme aus dem E-Bus. Um einen optimalen Datenaustausch zu
gewährleisten, dürfen nicht mehr als zwei passive Klemmen direkt aneinander gereiht werden!
Beispiele für die Positionierung von passiven Klemmen (hell eingefärbt)
Abb.26: Korrekte Positionierung
EL2212 35Version: 2.5
Page 36

Montage und Verdrahtung
Abb.27: Inkorrekte Positionierung
4.5 Einbaulagen
HINWEIS
Einschränkung von Einbaulage und Betriebstemperaturbereich
Entnehmen Sie den technischen Daten zu einer Klemme, ob sie Einschränkungen bei Einbaulage und/oder
Betriebstemperaturbereich unterliegt. Sorgen Sie bei der Montage von Klemmen mit erhöhter thermischer
Verlustleistung dafür, dass im Betrieb oberhalb und unterhalb der Klemmen ausreichend Abstand zu anderen Komponenten eingehalten wird, so dass die Klemmen ausreichend belüftet werden!
Optimale Einbaulage (Standard)
Für die optimale Einbaulage wird die Tragschiene waagerecht montiert und die Anschlussflächen der EL/KLKlemmen weisen nach vorne (siehe Abb. Empfohlene Abstände bei Standard-Einbaulage). Die Klemmen
werden dabei von unten nach oben durchlüftet, was eine optimale Kühlung der Elektronik durch
Konvektionslüftung ermöglicht. Bezugsrichtung „unten“ ist hier die Erdbeschleunigung.
EL221236 Version: 2.5
Page 37

Montage und Verdrahtung
Abb.28: Empfohlene Abstände bei Standard-Einbaulage
Die Einhaltung der Abstände nach Abb. Empfohlene Abstände bei Standard-Einbaulage wird empfohlen.
Weitere Einbaulagen
Alle anderen Einbaulagen zeichnen sich durch davon abweichende räumliche Lage der Tragschiene aus,
siehe Abb. Weitere Einbaulagen.
Auch in diesen Einbaulagen empfiehlt sich die Anwendung der oben angegebenen Mindestabstände zur
Umgebung.
EL2212 37Version: 2.5
Page 38

Montage und Verdrahtung
Abb.29: Weitere Einbaulagen
EL221238 Version: 2.5
Page 39

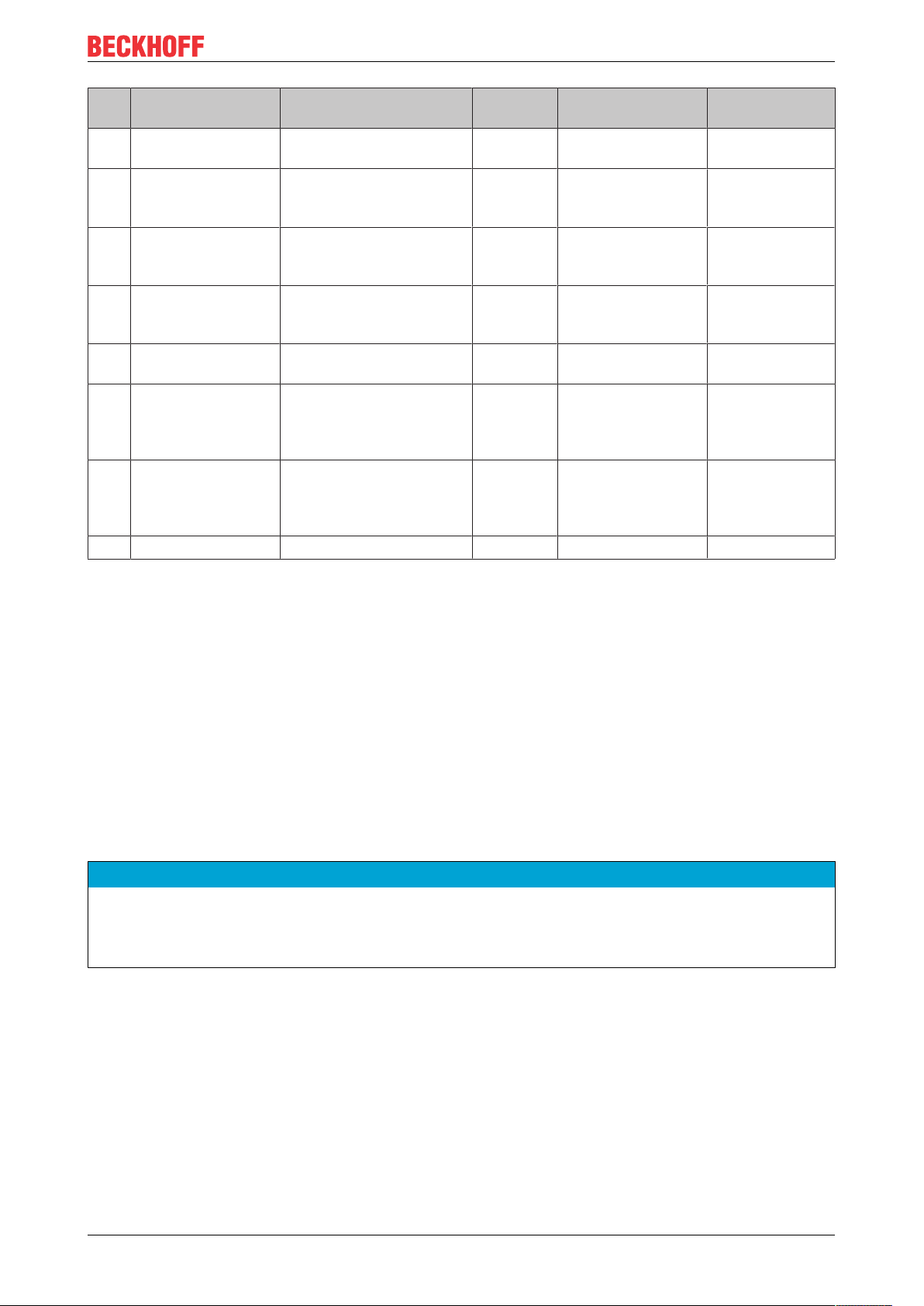
4.6 EL2212 - Anschlussbelegung
Montage und Verdrahtung
Klemmstelle Beschreibung
Bezeichnung Nr.
A1 1 Ausgang A1 für Last A
B1 2 Ausgang B1 für Last B
POWER + 24..72 V 3 Eingang Versorgungsspannung Last, intern verbunden mit positiven
Powerkontakt
PE 4 PE (intern verbunden mit Klemmstelle 8 und PE Powerkontakt)
A2 5 Ausgang A2 für Last A
B2 6 Ausgang B2 für Last B
POWER 0V 7 Eingang Versorgungsspannung Last, intern verbunden mit negativen
Powerkontakt
PE 8 PE (intern verbunden mit Klemmstelle 4 und PE Powerkontakt)
Aufladung bei Anschluss Versorgungsspannung
In der EL2212 sind große Kapazitäten zur Sicherstellung der hohen Stoßströme enthalten. Deshalb
kann es beim Anschluss an die Versorgungsspannung durch die Aufladung der Kapazitäten zu
Funkenentladung am Kontaktpunkt kommen. Es wird empfohlen, zuerst die Leitungsverbindungen
herzustellen, und erst dann die Spannungsversorgung (Transformator, Netzteil) einzuschalten.
EL2212 39Version: 2.5
Page 40

Inbetriebnahme
5 Inbetriebnahme
5.1 TwinCAT Quickstart
TwinCAT stellt eine Entwicklungsumgebung für Echtzeitsteuerung mit Multi-SPS-System, NC Achsregelung,
Programmierung und Bedienung dar. Das gesamte System wird hierbei durch diese Umgebung abgebildet
und ermöglicht Zugriff auf eine Programmierumgebung (inkl. Kompilierung) für die Steuerung. Einzelne
digitale oder analoge Eingänge bzw. Ausgänge können auch direkt ausgelesen bzw. beschrieben werden,
um diese z.B. hinsichtlich ihrer Funktionsweise zu überprüfen.
Weitere Informationen hierzu erhalten Sie unter http://infosys.beckhoff.de:
• EtherCAT Systemhandbuch:
Feldbuskomponenten → EtherCAT-Klemmen → EtherCAT System Dokumentation → Einrichtung im
TwinCAT System Manager
• TwinCAT2 → TwinCAT System Manager → E/A- Konfiguration
• Insbesondere zur TwinCAT – Treiberinstallation:
Feldbuskomponenten → Feldbuskarten und Switche → FC900x – PCI-Karten für Ethernet →
Installation
Geräte, d.h. „devices“ beinhalten jeweils die Klemmen der tatsächlich aufgebauten Konfiguration. Dabei gibt
es grundlegend die Möglichkeit sämtliche Informationen des Aufbaus über die „Scan“ - Funktion
einzubringen („online“) oder über Editorfunktionen direkt einzufügen („offline“):
• „offline“: der vorgesehene Aufbau wird durch Hinzufügen und entsprechendes Platzieren einzelner
Komponenten erstellt. Diese können aus einem Verzeichnis ausgewählt und Konfiguriert werden.
◦ Die Vorgehensweise für den „offline“ – Betrieb ist unter http://infosys.beckhoff.de einsehbar:
TwinCAT2 → TwinCAT System Manager → EA - Konfiguration → Anfügen eines E/A-Gerätes
• „online“: die bereits physikalisch aufgebaute Konfiguration wird eingelesen
◦ Sehen Sie hierzu auch unter http://infosys.beckhoff.de:
Feldbuskomponenten → Feldbuskarten und Switche → FC900x – PCI-Karten für Ethernet →
Installation → Geräte suchen
Vom Anwender –PC bis zu den einzelnen Steuerungselementen ist folgender Zusammenhang vorgesehen:
EL221240 Version: 2.5
Page 41

Inbetriebnahme
Abb.30: Bezug von der Anwender Seite (Inbetriebnahme) zur Installation
Das anwenderseitige Einfügen bestimmter Komponenten (E/A – Gerät, Klemme, Box,..) erfolgt bei
TwinCAT2 und TwinCAT3 auf die gleiche Weise. In den nachfolgenden Beschreibungen wird
ausschließlich der „online“ Vorgang angewandt.
Beispielkonfiguration (realer Aufbau)
Ausgehend von der folgenden Beispielkonfiguration wird in den anschließenden Unterkapiteln das Vorgehen
für TwinCAT2 und TwinCAT3 behandelt:
• Steuerungssystem (PLC) CX2040 inkl. Netzteil CX2100-0004
• Rechtsseitig angebunden am CX2040 (E-Bus):
EL1004 (4-Kanal-Digital-Eingangsklemme 24VDC)
• Über den X001 Anschluss (RJ-45) angeschlossen: EK1100 EtherCAT-Koppler
• Rechtsseitig angebunden am EK1100 EtherCAT-Koppler (E-Bus):
EL2008 (8-Kanal-Digital-Ausgangsklemme 24VDC;0,5A)
• (Optional über X000: ein Link zu einen externen PC für die Benutzeroberfläche)
EL2212 41Version: 2.5
Page 42

Inbetriebnahme
Abb.31: Aufbau der Steuerung mit Embedded-PC, Eingabe (EL1004) und Ausgabe (EL2008)
Anzumerken ist, dass sämtliche Kombinationen einer Konfiguration möglich sind; beispielsweise könnte die
Klemme EL1004 ebenso auch nach dem Koppler angesteckt werden oder die Klemme EL2008 könnte
zusätzlich rechts an dem CX2040 angesteckt sein – dann wäre der Koppler EK1100 überflüssig.
EL221242 Version: 2.5
Page 43

Inbetriebnahme
5.1.1 TwinCAT 2
Startup
TwinCAT2 verwendet grundlegend zwei Benutzeroberflächen: den „TwinCAT System Manager“ zur
Kommunikation mit den elektromechanischen Komponenten und „TwinCAT PLC Control“ für die Erstellung
und Kompilierung einer Steuerung. Begonnen wird zunächst mit der Anwendung des „TwinCAT System
Manager“.
Nach erfolgreicher Installation des TwinCAT-Systems auf den Anwender PC der zur Entwicklung verwendet
werden soll, zeigt der TwinCAT2 (System Manager) folgende Benutzeroberfläche nach dem Start:
Abb.32: Initiale Benutzeroberfläche TwinCAT2
Es besteht generell die Möglichkeit das TwinCAT „lokal“ oder per „remote“ zu verwenden. Ist das TwinCAT
System inkl. Benutzeroberfläche (Standard) auf dem betreffenden PLC installiert, kann TwinCAT „lokal“
eingesetzt werden und mit Schritt „Geräte einfügen [}45]“ fortgesetzt werden.
Ist es vorgesehen, die auf einem PLC installierte TwinCAT Laufzeitumgebung von einem anderen System
als Entwicklungsumgebung per „remote“ anzusprechen, ist das Zielsystem zuvor bekannt zu machen. Im
Menü unter „Aktionen“ → „Auswahl des Zielsystems...“, über das Symbol „ “ oder durch Taste „F8“ wird
folgendes Fenster hierzu geöffnet:
EL2212 43Version: 2.5
Page 44

Inbetriebnahme
Abb.33: Wähle Zielsystem
Mittels „Suchen (Ethernet)...“ wird das Zielsystem eingetragen. Dadurch wird ein weiterer Dialog geöffnet um
hier entweder:
• den bekannten Rechnernamen hinter „Enter Host Name / IP:“ einzutragen (wie rot gekennzeichnet)
• einen „Broadcast Search“ durchzuführen (falls der Rechnername nicht genau bekannt)
• die bekannte Rechner - IP oder AmsNetId einzutragen
Abb.34: PLC für den Zugriff des TwinCAT System Managers festlegen: Auswahl des Zielsystems
Ist das Zielsystem eingetragen steht dieses wie folgt zur Auswahl (ggf. muss zuvor das korrekte Passwort
eingetragen werden):
Nach der Auswahl mit „OK“ ist das Zielsystem über den System Manager ansprechbar.
EL221244 Version: 2.5
Page 45

Inbetriebnahme
Geräte einfügen
In dem linksseitigen Konfigurationsbaum der TwinCAT2 – Benutzeroberfläche des System Managers wird
„E/A Geräte“ selektiert und sodann entweder über Rechtsklick ein Kontextmenü geöffnet und „Geräte
Suchen…“ ausgewählt oder in der Menüleiste mit die Aktion gestartet. Ggf. ist zuvor der TwinCAT
System Manager in den „Konfig Modus“ mittels oder über das Menü
„Aktionen“ → „Startet/ Restarten von TwinCAT in Konfig-Modus“(Shift + F4) zu versetzen.
Abb.35: Auswahl „Gerät Suchen..“
Die darauf folgende Hinweismeldung ist zu bestätigen und in dem Dialog die Geräte „EtherCAT“ zu wählen:
Abb.36: Automatische Erkennung von E/A Geräten: Auswahl der einzubindenden Geräte
Ebenfalls ist anschließend die Meldung „nach neuen Boxen suchen“ zu bestätigen, um die an den Geräten
angebundenen Klemmen zu ermitteln. „Free Run“ erlaubt das Manipulieren von Ein- und Ausgangswerten
innerhalb des „Config Modus“ und sollte ebenfalls bestätigt werden.
Ausgehend von der am Anfang dieses Kapitels beschriebenen Beispielkonfiguration [}41] sieht das
Ergebnis wie folgt aus:
EL2212 45Version: 2.5
Page 46

Inbetriebnahme
Abb.37: Abbildung der Konfiguration im TwinCAT2 System Manager
Der gesamte Vorgang setzt sich aus zwei Stufen zusammen, die auch separat ausgeführt werden können
(erst das Ermitteln der Geräte, dann das Ermitteln der daran befindlichen Elemente wie Boxen, Klemmen
o.ä.). So kann auch durch Markierung von „Gerät ..“ aus dem Kontextmenü eine „Suche“ Funktion (Scan)
ausgeführt werden, die hierbei dann lediglich die darunter liegenden (im Aufbau vorliegenden) Elemente
einliest:
Abb.38: Einlesen von einzelnen an einem Gerät befindlichen Klemmen
Diese Funktionalität ist nützlich, falls die Konfiguration (d.h. der „reale Aufbau“) kurzfristig geändert wird.
PLC programmieren und integrieren
TwinCAT PLC Control ist die Entwicklungsumgebung zur Erstellung der Steuerung in unterschiedlichen
Programmumgebungen: Das TwinCAT PLC Control unterstützt alle in der IEC 61131-3 beschriebenen
Sprachen. Es gibt zwei textuelle Sprachen und drei grafische Sprachen.
• Textuelle Sprachen
◦ Anweisungsliste (AWL, IL)
EL221246 Version: 2.5
Page 47

Inbetriebnahme
◦ Strukturierter Text (ST)
• Grafische Sprachen
◦ Funktionsplan (FUP, FBD)
◦ Kontaktplan (KOP, LD)
◦ Freigrafischer Funktionsplaneditor (CFC)
◦ Ablaufsprache (AS, SFC)
Für die folgenden Betrachtungen wird lediglich vom strukturierten Text (ST) Gebrauch gemacht.
Nach dem Start von TwinCAT PLC Control wird folgende Benutzeroberfläche für ein initiales Projekt
dargestellt:
Abb.39: TwinCAT PLC Control nach dem Start
Nun sind für den weiteren Ablauf Beispielvariablen sowie ein Beispielprogramm erstellt und unter dem
Namen „PLC_example.pro“ gespeichert worden:
EL2212 47Version: 2.5
Page 48

Inbetriebnahme
Abb.40: Beispielprogramm mit Variablen nach einem Kompiliervorgang (ohne Variablenanbindung)
Die Warnung 1990 (fehlende „VAR_CONFIG“) nach einem Kompiliervorgang zeigt auf, dass die als extern
definierten Variablen (mit der Kennzeichnung „AT%I*“ bzw. „AT%Q*“) nicht zugeordnet sind. Das TwinCAT
PLC Control erzeugt nach erfolgreichen Kompiliervorgang eine „*.tpy“ Datei in dem Verzeichnis in dem das
Projekt gespeichert wurde. Diese Datei („*.tpy“) enthält u.a. Variablenzuordnungen und ist dem System
Manager nicht bekannt, was zu dieser Warnung führt. Nach dessen Bekanntgabe kommt es nicht mehr zu
dieser Warnung.
Im System Manager ist das Projekt des TwinCAT PLC Control zunächst einzubinden. Dies geschieht über
das Kontext Menü der „SPS- Konfiguration“ (rechts-Klick) und der Auswahl „SPS Projekt Anfügen…“:
Abb.41: Hinzufügen des Projektes des TwinCAT PLC Control
EL221248 Version: 2.5
Page 49

Inbetriebnahme
Über ein dadurch geöffnetes Browserfenster wird die PLC- Konfiguration „PLC_example.tpy“ ausgewählt.
Dann ist in dem Konfigurationsbaum des System Manager das Projekt inklusive der beiden „AT“ –
gekennzeichneten Variablen eingebunden:
Abb.42: Eingebundenes PLC Projekt in der SPS- Konfiguration des System Managers
Die beiden Variablen „bEL1004_Ch4“ sowie „nEL2008_value“ können nun bestimmten Prozessobjekten der
E/A - Konfiguration zugeordnet werden.
Variablen Zuordnen
Über das Kontextmenü einer Variable des eingebundenen Projekts „PLC_example“ unter „Standard“ wird
mittels „Verknüpfung Ändern…“ ein Fenster zur Auswahl eines passenden Prozessobjektes (PDOs)
geöffnet:
Abb.43: Erstellen der Verknüpfungen PLC-Variablen zu Prozessobjekten
In dem dadurch geöffneten Fenster kann aus dem SPS-Konfigurationsbaum das Prozessobjekt für die
Variable „bEL1004_Ch4“ vom Typ BOOL selektiert werden:
EL2212 49Version: 2.5
Page 50

Inbetriebnahme
Abb.44: Auswahl des PDO vom Typ BOOL
Entsprechend der Standarteinstellungen stehen nur bestimmte PDO Objekte zur Auswahl zur Verfügung. In
diesem Beispiel wird von der Klemme EL1004 der Eingang von Kanal 4 zur Verknüpfung ausgewählt. Im
Gegensatz hierzu muss für das Erstellen der Verknüpfung der Ausgangsvariablen die Checkbox „Alle
Typen“ aktiviert werden, um in diesem Fall eine Byte-Variable einen Satz von acht separaten Ausgangsbits
zuzuordnen. Die folgende Abbildung zeigt den gesamten Vorgang:
Abb.45: Auswahl von mehreren PDO gleichzeitig: Aktivierung von „Kontinuierlich“ und „Alle Typen“
Zu sehen ist, dass überdies die Checkbox „Kontinuierlich“ aktiviert wurde. Dies ist dafür vorgesehen, dass
die in dem Byte der Variablen „nEL2008_value“ enthaltenen Bits allen acht ausgewählten Ausgangsbits der
Klemme EL2008 der Reihenfolge nach zugeordnet werden sollen. Damit ist es möglich, alle acht Ausgänge
der Klemme mit einem Byte entsprechend Bit 0 für Kanal 1 bis Bit 7 für Kanal 8 von der PLC im Programm
später anzusprechen. Ein spezielles Symbol ( ) an dem gelben bzw. roten Objekt der Variablen zeigt an,
dass hierfür eine Verknüpfung existiert. Die Verknüpfungen können z.B. auch überprüft werden, indem
„Goto Link Variable“ aus dem Kontextmenü einer Variable ausgewählt wird. Dann wird automatisch das
gegenüberliegende verknüpfte Objekt, in diesem Fall das PDO selektiert:
EL221250 Version: 2.5
Page 51

Abb.46: Anwendung von „Goto Link Variable“ am Beispiel von „MAIN.bEL1004_Ch4“
Inbetriebnahme
Anschließend wird mittels Menüauswahl „Aktionen“ → „Zuordnung erzeugen…“ oder über der
Vorgang des Zuordnens von Variablen zu PDO abgeschlossen.
Dies lässt sich entsprechend in der Konfiguration einsehen:
Der Vorgang zur Erstellung von Verknüpfungen kann auch in umgekehrter Richtung, d.h. von einzelnen
PDO ausgehend zu einer Variablen erfolgen. In diesem Beispiel wäre dann allerdings eine komplette
Auswahl aller Ausgangsbits der EL2008 nicht möglich, da die Klemme nur einzelne digitale Ausgänge zur
Verfügung stellt. Hat eine Klemme einen Byte, Word, Integer oder ein ähnliches PDO, so ist es möglich dies
wiederum einen Satz von bit-typisierten Variablen (Typ „BOOL“) zuzuordnen. Auch hier kann ebenso in die
andere Richtung ein „Goto Link Variable“ ausgeführt werden, um dann die betreffende Instanz der PLC zu
selektieren.
Aktivieren der Konfiguration
Die Zuordnung von PDO zu PLC Variablen hat nun die Verbindung von der Steuerung zu den Ein- und
Ausgängen der Klemmen hergestellt. Nun kann die Konfiguration aktiviert werden. Zuvor kann mittels
(oder über „Aktionen“ → „Konfiguration überprüfen…“) die Konfiguration überprüft werden. Falls kein Fehler
vorliegt, kann mit (oder über „Aktionen“ → „Aktiviert Konfiguration…“) die Konfiguration aktiviert
werden, um dadurch Einstellungen im System Manger auf das Laufzeitsystem zu übertragen. Die darauf
folgenden Meldungen „Alte Konfigurationen werden überschrieben!“ sowie „Neustart TwinCAT System in
Run Modus“ werden jeweils mit „OK“ bestätigt.
Einige Sekunden später wird der Realtime Status unten rechts im System Manager angezeigt.
Das PLC System kann daraufhin wie im Folgenden beschrieben gestartet werden.
Starten der Steuerung
Ausgehend von einem remote System muss nun als erstes auch die PLC Steuerung über „Online“ →
„Choose Run-Time System…“ mit dem embedded PC über Ethernet verbunden werden:
EL2212 51Version: 2.5
Page 52

Inbetriebnahme
Abb.47: Auswahl des Zielsystems (remote)
In diesem Beispiel wird das „Laufzeitsystem 1 (Port 801)“ ausgewählt und bestätigt. Mittels Menüauswahl
„Online“ → „Login“, Taste F11 oder per Klick auf wird auch die PLC mit dem Echtzeitsystem
verbunden und nachfolgend das Steuerprogramm geladen, um es ausführen lassen zu können. Dies wird
entsprechend mit der Meldung „Kein Programm auf der Steuerung! Soll das neue Programm geladen
werden?“ bekannt gemacht und ist mit „Ja“ zu beantworten. Die Laufzeitumgebung ist bereit zum
Programstart:
Abb.48: PLC Control Logged-in, bereit zum Programmstart
EL221252 Version: 2.5
Page 53

Inbetriebnahme
Über „Online“ → „Run“, Taste F5 oder kann nun die PLC gestartet werden.
5.1.2 TwinCAT 3
Startup
TwinCAT3 stellt die Bereiche der Entwicklungsumgebung durch das Microsoft Visual-Studio gemeinsam zur
Verfügung: in den allgemeinen Fensterbereich erscheint nach dem Start linksseitig der ProjektmappenExplorer (vgl. „TwinCAT System Manager“ von TwinCAT2) zur Kommunikation mit den
elektromechanischen Komponenten.
Nach erfolgreicher Installation des TwinCAT-Systems auf den Anwender PC der zur Entwicklung verwendet
werden soll, zeigt der TwinCAT3 (Shell) folgende Benutzeroberfläche nach dem Start:
Abb.49: Initale Benutzeroberfläche TwinCAT3
Zunächst ist die Erstellung eines neues Projekt mittels (oder unter
„Datei“→“Neu“→“Projekt…“) vorzunehmen. In dem darauf folgenden Dialog werden die entsprechenden
Einträge vorgenommen (wie in der Abbildung gezeigt):
EL2212 53Version: 2.5
Page 54

Inbetriebnahme
Abb.50: Neues TwinCAT3 Projekt erstellen
Im Projektmappen-Explorer liegt sodann das neue Projekt vor:
Abb.51: Neues TwinCAT3 Projekt im Projektmappen-Explorer
Es besteht generell die Möglichkeit das TwinCAT „lokal“ oder per „remote“ zu verwenden. Ist das TwinCAT
System inkl. Benutzeroberfläche (Standard) auf dem betreffenden PLC (lokal) installiert, kann TwinCAT
„lokal“ eingesetzt werden und mit Schritt „Geräte einfügen [}56]“ fortgesetzt werden.
Ist es vorgesehen, die auf einem PLC installierte TwinCAT Laufzeitumgebung von einem anderen System
als Entwicklungsumgebung per „remote“ anzusprechen, ist das Zielsystem zuvor bekannt zu machen. Über
das Symbol in der Menüleiste:
wird das pull-down Menü aufgeklappt:
EL221254 Version: 2.5
Page 55

und folgendes Fenster hierzu geöffnet:
Inbetriebnahme
Abb.52: Auswahldialog: Wähle Zielsystem
Mittels „Suchen (Ethernet)...“ wird das Zielsystem eingetragen. Dadurch wird ein weiterer Dialog geöffnet um
hier entweder:
• den bekannten Rechnernamen hinter „Enter Host Name / IP:“ einzutragen (wie rot gekennzeichnet)
• einen „Broadcast Search“ durchzuführen (falls der Rechnername nicht genau bekannt)
• die bekannte Rechner - IP oder AmsNetId einzutragen
Abb.53: PLC für den Zugriff des TwinCAT System Managers festlegen: Auswahl des Zielsystems
Ist das Zielsystem eingetragen, steht dieses wie folgt zur Auswahl (ggf. muss zuvor das korrekte Passwort
eingetragen werden):
EL2212 55Version: 2.5
Page 56

Inbetriebnahme
Nach der Auswahl mit „OK“ ist das Zielsystem über das Visual Studio Shell ansprechbar.
Geräte einfügen
In dem linksseitigen Projektmappen-Explorer der Benutzeroberfläche des Visual Studio Shell wird innerhalb
des Elementes „E/A“ befindliche „Geräte“ selektiert und sodann entweder über Rechtsklick ein Kontextmenü
geöffnet und „Scan“ ausgewählt oder in der Menüleiste mit die Aktion gestartet. Ggf. ist zuvor der
TwinCAT System Manager in den „Konfig Modus“ mittels oder über das Menü „TWINCAT“ → „Restart
TwinCAT (Config Mode)“ zu versetzen.
Abb.54: Auswahl „Scan“
Die darauf folgende Hinweismeldung ist zu bestätigen und in dem Dialog die Geräte „EtherCAT“ zu wählen:
Abb.55: Automatische Erkennung von E/A Geräten: Auswahl der einzubindenden Geräte
Ebenfalls ist anschließend die Meldung „nach neuen Boxen suchen“ zu bestätigen, um die an den Geräten
angebundenen Klemmen zu ermitteln. „Free Run“ erlaubt das Manipulieren von Ein- und Ausgangswerten
innerhalb des „Config Modus“ und sollte ebenfalls bestätigt werden.
Ausgehend von der am Anfang dieses Kapitels beschriebenen Beispielkonfiguration [}41] sieht das
Ergebnis wie folgt aus:
EL221256 Version: 2.5
Page 57

Abb.56: Abbildung der Konfiguration in VS Shell der TwinCAT3 Umgebung
Inbetriebnahme
Der gesamte Vorgang setzt sich aus zwei Stufen zusammen, die auch separat ausgeführt werden können
(erst das Ermitteln der Geräte, dann das Ermitteln der daran befindlichen Elemente wie Boxen, Klemmen
o.ä.). So kann auch durch Markierung von „Gerät ..“ aus dem Kontextmenü eine „Suche“ Funktion (Scan)
ausgeführt werden, die hierbei dann lediglich die darunter liegenden (im Aufbau vorliegenden) Elemente
einliest:
Abb.57: Einlesen von einzelnen an einem Gerät befindlichen Klemmen
Diese Funktionalität ist nützlich, falls die Konfiguration (d.h. der „reale Aufbau“) kurzfristig geändert wird.
EL2212 57Version: 2.5
Page 58

Inbetriebnahme
PLC programmieren
TwinCAT PLC Control ist die Entwicklungsumgebung zur Erstellung der Steuerung in unterschiedlichen
Programmumgebungen: Das TwinCAT PLC Control unterstützt alle in der IEC 61131-3 beschriebenen
Sprachen. Es gibt zwei textuelle Sprachen und drei grafische Sprachen.
• Textuelle Sprachen
◦ Anweisungsliste (AWL, IL)
◦ Strukturierter Text (ST)
• Grafische Sprachen
◦ Funktionsplan (FUP, FBD)
◦ Kontaktplan (KOP, LD)
◦ Freigrafischer Funktionsplaneditor (CFC)
◦ Ablaufsprache (AS, SFC)
Für die folgenden Betrachtungen wird lediglich vom strukturierten Text (ST) Gebrauch gemacht.
Um eine Programmierumgebung zu schaffen, wird dem Beispielprojekt über das Kontextmenü von „SPS“ im
Projektmappen-Explorer durch Auswahl von „Neues Element hinzufügen….“ ein PLC Unterprojekt
hinzugefügt:
Abb.58: Einfügen der Programmierumgebung in „SPS“
In dem darauf folgenden geöffneten Dialog wird ein „Standard PLC Projekt“ ausgewählt und beispielsweise
als Projektname „PLC_example“ vergeben und ein entsprechendes Verzeichnis ausgewählt:
EL221258 Version: 2.5
Page 59

Inbetriebnahme
Abb.59: Festlegen des Namens bzw. Verzeichnisses für die PLC Programmierumgebung
Das durch Auswahl von „Standard PLC Projekt“ bereits existierende Programm „Main“ kann über das
„PLC_example_Project“ in „POUs“ durch Doppelklick geöffnet werden. Es wird folgende Benutzeroberfläche
für ein initiales Projekt dargestellt:
Abb.60: Initiales Programm „Main“ des Standard PLC Projektes
Nun sind für den weiteren Ablauf Beispielvariablen sowie ein Beispielprogramm erstellt worden:
EL2212 59Version: 2.5
Page 60

Inbetriebnahme
Abb.61: Beispielprogramm mit Variablen nach einem Kompiliervorgang (ohne Variablenanbindung)
Das Steuerprogramm wird nun als Projektmappe erstellt und damit der Kompiliervorgang vorgenommen:
Abb.62: Kompilierung des Programms starten
Anschließend liegen in den „Zuordnungen“ des Projektmappen-Explorers die folgenden – im ST/ PLC
Programm mit „AT%“ gekennzeichneten Variablen vor:
EL221260 Version: 2.5
Page 61

Inbetriebnahme
Variablen Zuordnen
Über das Menü einer Instanz – Variablen innerhalb des „SPS“ Kontextes wird mittels „Verknüpfung
Ändern…“ ein Fenster zur Auswahl eines passenden Prozessobjektes (PDOs) für dessen Verknüpfung
geöffnet:
Abb.63: Erstellen der Verknüpfungen PLC-Variablen zu Prozessobjekten
In dem dadurch geöffneten Fenster kann aus dem SPS-Konfigurationsbaum das Prozessobjekt für die
Variable „bEL1004_Ch4“ vom Typ BOOL selektiert werden:
EL2212 61Version: 2.5
Page 62

Inbetriebnahme
Abb.64: Auswahl des PDO vom Typ BOOL
Entsprechend der Standarteinstellungen stehen nur bestimmte PDO Objekte zur Auswahl zur Verfügung. In
diesem Beispiel wird von der Klemme EL1004 der Eingang von Kanal 4 zur Verknüpfung ausgewählt. Im
Gegensatz hierzu muss für das Erstellen der Verknüpfung der Ausgangsvariablen die Checkbox „Alle
Typen“ aktiviert werden, um in diesem Fall eine Byte-Variable einen Satz von acht separaten Ausgangsbits
zuzuordnen. Die folgende Abbildung zeigt den gesamten Vorgang:
Abb.65: Auswahl von mehreren PDO gleichzeitig: Aktivierung von „Kontinuierlich“ und „Alle Typen“
EL221262 Version: 2.5
Page 63

Inbetriebnahme
Zu sehen ist, dass überdies die Checkbox „Kontinuierlich“ aktiviert wurde. Dies ist dafür vorgesehen, dass
die in dem Byte der Variablen „nEL2008_value“ enthaltenen Bits allen acht ausgewählten Ausgangsbits der
Klemme EL2008 der Reihenfolge nach zugeordnet werden sollen. Damit ist es möglich, alle acht Ausgänge
der Klemme mit einem Byte entsprechend Bit 0 für Kanal 1 bis Bit 7 für Kanal 8 von der PLC im Programm
später anzusprechen. Ein spezielles Symbol ( ) an dem gelben bzw. roten Objekt der Variablen zeigt an,
dass hierfür eine Verknüpfung existiert. Die Verknüpfungen können z.B. auch überprüft werden, indem
„Goto Link Variable“ aus dem Kontextmenü einer Variable ausgewählt wird. Dann wird automatisch das
gegenüberliegende verknüpfte Objekt, in diesem Fall das PDO selektiert:
Abb.66: Anwendung von "Goto Link Variable" am Beispiel von „MAIN.bEL1004_Ch4“
Der Vorgang zur Erstellung von Verknüpfungen kann auch in umgekehrter Richtung, d.h. von einzelnen
PDO ausgehend zu einer Variablen erfolgen. In diesem Beispiel wäre dann allerdings eine komplette
Auswahl aller Ausgangsbits der EL2008 nicht möglich, da die Klemme nur einzelne digitale Ausgänge zur
Verfügung stellt. Hat eine Klemme einen Byte, Word, Integer oder ein ähnliches PDO, so ist es möglich dies
wiederum einen Satz von bit-typisierten Variablen (Typ „BOOL“) zuzuordnen. Auch hier kann ebenso in die
andere Richtung ein „Goto Link Variable“ ausgeführt werden, um dann die betreffende Instanz der PLC zu
selektieren.
Hinweis zur Art der Variablen-Zuordnung
Diese folgende Art der Variablen Zuordnung kann erst ab der TwinCAT Version V3.1.4024.4 verwendet werden und ist ausschließlich bei Klemmen mit einem Mikrocontroller verfügbar.
In TwinCAT ist es möglich eine Struktur aus den gemappten Prozessdaten einer Klemme zu erzeugen. Von
dieser Struktur kann dann in der SPS eine Instanz angelegt werden, so dass aus der SPS direkt auf die
Prozessdaten zugegriffen werden kann, ohne eigene Variablen deklarieren zu müssen.
Beispielhaft wird das Vorgehen an der EL3001 1-Kanal-Analog-Eingangsklemme -10…+10V gezeigt.
1. Zuerst müssen die benötigten Prozessdaten im Reiter „Prozessdaten“ in TwinCAT ausgewählt werden.
2. Anschließend muss der SPS Datentyp im Reiter „PLC“ über die Check-Box generiert werden.
3. Der Datentyp im Feld „Data Type“ kann dann über den „Copy“-Button kopiert werden.
EL2212 63Version: 2.5
Page 64

Inbetriebnahme
Abb.67: Erzeugen eines SPS Datentyps
4. In der SPS muss dann eine Instanz der Datenstruktur vom kopierten Datentyp angelegt werden.
Abb.68: Instance_of_struct
5. Anschließend muss die Projektmappe erstellt werden. Das kann entweder über die Tastenkombination „STRG + Shift + B“ gemacht werden oder über den Reiter „Erstellen“/ „Build“ in TwinCAT.
6. Die Struktur im Reiter „PLC“ der Klemme muss dann mit der angelegten Instanz verknüpft werden.
Abb.69: Verknüpfung der Struktur
7. In der SPS können die Prozessdaten dann über die Struktur im Programmcode gelesen bzw. geschrieben werden.
EL221264 Version: 2.5
Page 65

Inbetriebnahme
Abb.70: Lesen einer Variable aus der Struktur der Prozessdaten
Aktivieren der Konfiguration
Die Zuordnung von PDO zu PLC Variablen hat nun die Verbindung von der Steuerung zu den Ein- und
Ausgängen der Klemmen hergestellt. Nun kann die Konfiguration mit oder über das Menü unter
„TWINCAT“ aktiviert werden, um dadurch Einstellungen der Entwicklungsumgebung auf das Laufzeitsystem
zu übertragen. Die darauf folgenden Meldungen „Alte Konfigurationen werden überschrieben!“ sowie
„Neustart TwinCAT System in Run Modus“ werden jeweils mit „OK“ bestätigt. Die entsprechenden
Zuordnungen sind in dem Projektmappen-Explorer einsehbar:
Einige Sekunden später wird der entsprechende Status des Run Modus mit einem rotierenden Symbol
unten rechts in der Entwicklungsumgebung VS Shell angezeigt. Das PLC System kann daraufhin wie im
Folgenden beschrieben gestartet werden.
Starten der Steuerung
Entweder über die Menüauswahl „PLC“ → „Einloggen“ oder per Klick auf ist die PLC mit dem
Echtzeitsystem zu verbinden und nachfolgend das Steuerprogramm zu geladen, um es ausführen lassen zu
können. Dies wird entsprechend mit der Meldung „Kein Programm auf der Steuerung! Soll das neue
Programm geladen werden?“ bekannt gemacht und ist mit “Ja” zu beantworten. Die Laufzeitumgebung ist
bereit zum Programmstart mit Klick auf das Symbol , Taste „F5“ oder entsprechend auch über „PLC“ im
Menü durch Auswahl von „Start“. Die gestartete Programmierumgebung zeigt sich mit einer Darstellung der
Laufzeitwerte von einzelnen Variablen:
EL2212 65Version: 2.5
Page 66

Inbetriebnahme
Abb.71: TwinCAT3 Entwicklungsumgebung (VS Shell): Logged-in, nach erfolgten Programmstart
Die beiden Bedienelemente zum Stoppen und Ausloggen führen je nach Bedarf zu der
gewünschten Aktion (entsprechend auch für Stopp „umschalt-Taste + F5“ oder beide Aktionen über das
„PLC“ Menü auswählbar).
5.2 TwinCAT Entwicklungsumgebung
Die Software zur Automatisierung TwinCAT (The Windows Control and Automation Technology) wird
unterschieden in:
• TwinCAT2: System Manager (Konfiguration) & PLC Control (Programmierung)
• TwinCAT3: Weiterentwicklung von TwinCAT2 (Programmierung und Konfiguration erfolgt über eine
gemeinsame Entwicklungsumgebung)
Details:
• TwinCAT2:
◦ Verbindet E/A-Geräte und Tasks variablenorientiert
◦ Verbindet Tasks zu Tasks variablenorientiert
◦ Unterstützt Einheiten auf Bit-Ebene
◦ Unterstützt synchrone oder asynchrone Beziehungen
◦ Austausch konsistenter Datenbereiche und Prozessabbilder
◦ Datenanbindung an NT-Programme mittels offener Microsoft Standards (OLE, OCX, ActiveX,
DCOM+, etc.).
◦ Einbettung von IEC 61131-3-Software-SPS, Software- NC und Software-CNC in Windows
NT/2000/XP/Vista, Windows 7, NT/XP Embedded, CE
◦ Anbindung an alle gängigen Feldbusse
◦ Weiteres…
EL221266 Version: 2.5
Page 67

Inbetriebnahme
Zusätzlich bietet:
• TwinCAT3 (eXtended Automation):
◦ Visual-Studio®-Integration
◦ Wahl der Programmiersprache
◦ Unterstützung der objektorientierten Erweiterung der IEC 61131-3
◦ Verwendung von C/C++ als Programmiersprache für Echtzeitanwendungen
◦ Anbindung an MATLAB®/Simulink®
◦ Offene Schnittstellen für Erweiterbarkeit
◦ Flexible Laufzeitumgebung
◦ Aktive Unterstützung von Multi-Core- und 64-Bit-Betriebssystemen
◦ Automatische Codegenerierung und Projekterstellung mit dem TwinCAT Automation Interface
◦ Weiteres…
In den folgenden Kapiteln wird dem Anwender die Inbetriebnahme der TwinCAT Entwicklungsumgebung auf
einem PC System der Steuerung sowie die wichtigsten Funktionen einzelner Steuerungselemente erläutert.
Bitte sehen Sie weitere Informationen zu TwinCAT2 und TwinCAT3 unter http://infosys.beckhoff.de/.
5.2.1 Installation TwinCAT Realtime Treiber
Um einen Standard Ethernet Port einer IPC Steuerung mit den nötigen Echtzeitfähigkeiten auszurüsten, ist
der Beckhoff Echtzeit Treiber auf diesem Port unter Windows zu installieren.
Dies kann auf mehreren Wegen vorgenommen werden, ein Weg wird hier vorgestellt.
Im System Manager ist über Options → Show realtime Kompatible Geräte die TwinCAT-Übersicht über die
lokalen Netzwerkschnittstellen aufzurufen.
Abb.72: Aufruf im System Manager (TwinCAT2)
Unter TwinCAT3 ist dies über das Menü unter „TwinCAT“ erreichbar:
Abb.73: Aufruf in VS Shell (TwinCAT3)
Der folgende Dialog erscheint:
EL2212 67Version: 2.5
Page 68

Inbetriebnahme
Abb.74: Übersicht Netzwerkschnittstellen
Hier können nun Schnittstellen, die unter „Kompatible Geräte“ aufgeführt sind, über den „Install“ Button mit
dem Treiber belegt werden. Eine Installation des Treibers auf inkompatiblen Devices sollte nicht
vorgenommen werden.
Ein Windows-Warnhinweis bezüglich des unsignierten Treibers kann ignoriert werden.
Alternativ kann auch wie im Kapitel Offline Konfigurationserstellung, Abschnitt „Anlegen des Geräts
EtherCAT“ [}77] beschrieben, zunächst ein EtherCAT-Gerät eingetragen werden, um dann über dessen
Eigenschaften (Karteireiter „Adapter“, Button „Kompatible Geräte…“) die kompatiblen Ethernet Ports
einzusehen:
Abb.75: Eigenschaft von EtherCAT Gerät (TwinCAT2): Klick auf „Kompatible Geräte…“ von „Adapter“
TwinCAT 3: Die Eigenschaften des EtherCAT-Gerätes können mit Doppelklick auf „Gerät .. (EtherCAT)“ im
Projektmappen-Explorer unter „E/A“ geöffnet werden:
Nach der Installation erscheint der Treiber aktiviert in der Windows-Übersicht der einzelnen
Netzwerkschnittstelle (Windows Start → Systemsteuerung → Netzwerk)
EL221268 Version: 2.5
Page 69

Inbetriebnahme
Abb.76: Windows-Eigenschaften der Netzwerkschnittstelle
Eine korrekte Einstellung des Treibers könnte wie folgt aussehen:
Abb.77: Beispielhafte korrekte Treiber-Einstellung des Ethernet Ports
Andere mögliche Einstellungen sind zu vermeiden:
EL2212 69Version: 2.5
Page 70

Inbetriebnahme
Abb.78: Fehlerhafte Treiber-Einstellungen des Ethernet Ports
EL221270 Version: 2.5
Page 71

IP-Adresse des verwendeten Ports
IP Adresse/DHCP
In den meisten Fällen wird ein Ethernet-Port, der als EtherCAT-Gerät konfiguriert wird, keine allgemeinen IP-Pakete transportieren. Deshalb und für den Fall, dass eine EL6601 oder entsprechende
Geräte eingesetzt werden, ist es sinnvoll, über die Treiber-Einstellung „Internet Protocol TCP/IP“ eine feste IP-Adresse für diesen Port zu vergeben und DHCP zu deaktivieren. Dadurch entfällt die
Wartezeit, bis sich der DHCP-Client des Ethernet Ports eine Default-IP-Adresse zuteilt, weil er keine Zuteilung eines DHCP-Servers erhält. Als Adressraum empfiehlt sich z.B. 192.168.x.x.
Inbetriebnahme
Abb.79: TCP/IP-Einstellung des Ethernet Ports
EL2212 71Version: 2.5
Page 72

Inbetriebnahme
5.2.2 Hinweise ESI-Gerätebeschreibung
Installation der neuesten ESI-Device-Description
Der TwinCAT EtherCAT Master/System Manager benötigt zur Konfigurationserstellung im Online- und
Offline-Modus die Gerätebeschreibungsdateien der zu verwendeten Geräte. Diese Gerätebeschreibungen
sind die so genannten ESI (EtherCAT Slave Information) in Form von XML-Dateien. Diese Dateien können
vom jeweiligen Hersteller angefordert werden bzw. werden zum Download bereitgestellt. Eine *.xml-Datei
kann dabei mehrere Gerätebeschreibungen enthalten.
Auf der Beckhoff Website werden die ESI für Beckhoff EtherCAT Geräte bereitgehalten.
Die ESI-Dateien sind im Installationsverzeichnis von TwinCAT abzulegen.
Standardeinstellungen:
• TwinCAT2: C:\TwinCAT\IO\EtherCAT
• TwinCAT3: C:\TwinCAT\3.1\Config\Io\EtherCAT
Beim Öffnen eines neuen System Manager-Fensters werden die Dateien einmalig eingelesen, wenn sie sich
seit dem letzten System Manager-Fenster geändert haben.
TwinCAT bringt bei der Installation den Satz an Beckhoff-ESI-Dateien mit, der zum Erstellungszeitpunkt des
TwinCAT builds aktuell war.
Ab TwinCAT2.11 / TwinCAT3 kann aus dem System Manager heraus das ESI-Verzeichnis aktualisiert
werden, wenn der Programmier-PC mit dem Internet verbunden ist; unter
TwinCAT2: Options → „Update EtherCAT Device Descriptions“
TwinCAT3: TwinCAT → EtherCAT Devices → “Update Device Descriptions (via ETG Website)…”
Hierfür steht der TwinCAT ESI Updater [}76] zur Verfügung.
ESI
Zu den *.xml-Dateien gehören die so genannten *.xsd-Dateien, die den Aufbau der ESI-XML-Dateien beschreiben. Bei einem Update der ESI-Gerätebeschreibungen sind deshalb beide Dateiarten
ggf. zu aktualisieren.
Geräteunterscheidung
EtherCAT Geräte/Slaves werden durch vier Eigenschaften unterschieden, aus denen die vollständige
Gerätebezeichnung zusammengesetzt wird. Beispielsweise setzt sich die Gerätebezeichnung
„EL2521-0025-1018“ zusammen aus:
• Familienschlüssel „EL“
• Name „2521“
• Typ „0025“
• und Revision „1018“
Abb.80: Gerätebezeichnung: Struktur
Die Bestellbezeichnung aus Typ + Version (hier: EL2521-0010) beschreibt die Funktion des Gerätes. Die
Revision gibt den technischen Fortschritt wieder und wird von Beckhoff verwaltet. Prinzipiell kann ein Gerät
mit höherer Revision ein Gerät mit niedrigerer Revision ersetzen, wenn z.B. in der Dokumentation nicht
anders angegeben. Jeder Revision zugehörig ist eine eigene ESI-Beschreibung. Siehe weitere Hinweise
[}8].
EL221272 Version: 2.5
Page 73

Inbetriebnahme
Online Description
Wird die EtherCAT Konfiguration online durch Scannen real vorhandener Teilnehmer erstellt (s. Kapitel
Online Erstellung) und es liegt zu einem vorgefundenen Slave (ausgezeichnet durch Name und Revision)
keine ESI-Beschreibung vor, fragt der System Manager, ob er die im Gerät vorliegende Beschreibung
verwenden soll. Der System Manager benötigt in jedem Fall diese Information, um die zyklische und
azyklische Kommunikation mit dem Slave richtig einstellen zu können.
Abb.81: Hinweisfenster OnlineDescription (TwinCAT2)
In TwinCAT3 erscheint ein ähnliches Fenster, das auch das Web-Update anbietet:
Abb.82: Hinweisfenster OnlineDescription (TwinCAT3)
Wenn möglich, ist das Yes abzulehnen und vom Geräte-Hersteller die benötigte ESI anzufordern. Nach
Installation der XML/XSD-Datei ist der Konfigurationsvorgang erneut vorzunehmen.
HINWEIS
Veränderung der „üblichen“ Konfiguration durch Scan
ü für den Fall eines durch Scan entdeckten aber TwinCAT noch unbekannten Geräts sind zwei Fälle zu
unterscheiden. Hier am Beispiel der EL2521-0000 in der Revision 1019:
a) für das Gerät EL2521-0000 liegt überhaupt keine ESI vor, weder für die Revision 1019 noch für eine äl-
tere Revision. Dann ist vom Hersteller (hier: Beckhoff) die ESI anzufordern.
b) für das Gerät EL2521-0000 liegt eine ESI nur in älterer Revision vor, z.B. 1018 oder 1017.
Dann sollte erst betriebsintern überprüft werden, ob die Ersatzteilhaltung überhaupt die Integration der
erhöhten Revision in die Konfiguration zulässt. Üblicherweise bringt eine neue/größere Revision auch
neue Features mit. Wenn diese nicht genutzt werden sollen, kann ohne Bedenken mit der bisherigen
Revision 1018 in der Konfiguration weitergearbeitet werden. Dies drückt auch die Beckhoff Kompatibilitätsregel aus.
Siehe dazu insbesondere das Kapitel „Allgemeine Hinweise zur Verwendung von Beckhoff EtherCAT IO-
Komponenten" und zur manuellen Konfigurationserstellung das Kapitel „Offline Konfigurationserstellung
[}77]“.
Wird dennoch die Online Description verwendet, liest der System Manager aus dem im EtherCAT Slave
befindlichen EEPROM eine Kopie der Gerätebeschreibung aus. Bei komplexen Slaves kann die EEPROMGröße u.U. nicht ausreichend für die gesamte ESI sein, weshalb im Konfigurator dann eine unvollständige
ESI vorliegt. Deshalb wird für diesen Fall die Verwendung einer offline ESI-Datei vorrangig empfohlen.
EL2212 73Version: 2.5
Page 74

Inbetriebnahme
Der System Manager legt bei „online“ erfassten Gerätebeschreibungen in seinem ESI-Verzeichnis eine neue
Datei „OnlineDescription0000...xml“ an, die alle online ausgelesenen ESI-Beschreibungen enthält.
Abb.83: Vom System Manager angelegt OnlineDescription.xml
Soll daraufhin ein Slave manuell in die Konfiguration eingefügt werden, sind „online“ erstellte Slaves durch
ein vorangestelltes „>“ Symbol in der Auswahlliste gekennzeichnet (siehe Abbildung Kennzeichnung einer
online erfassten ESI am Beispiel EL2521).
Abb.84: Kennzeichnung einer online erfassten ESI am Beispiel EL2521
Wurde mit solchen ESI-Daten gearbeitet und liegen später die herstellereigenen Dateien vor, ist die
OnlineDescription....xml wie folgt zu löschen:
• alle System Managerfenster schließen
• TwinCAT in Konfig-Mode neu starten
• „OnlineDescription0000...xml“ löschen
• TwinCAT System Manager wieder öffnen
Danach darf diese Datei nicht mehr zu sehen sein, Ordner ggf. mit <F5> aktualisieren.
OnlineDescription unter TwinCAT3.x
Zusätzlich zu der oben genannten Datei „OnlineDescription0000...xml“ legt TwinCAT3.x auch einen
so genannten EtherCAT-Cache mit neuentdeckten Geräten an, z.B. unter Windows 7 unter
(Spracheinstellungen des Betriebssystems beachten!)
Diese Datei ist im gleichen Zuge wie die andere Datei zu löschen.
Fehlerhafte ESI-Datei
Liegt eine fehlerhafte ESI-Datei vor die vom System Manager nicht eingelesen werden kann, meldet dies der
System Manager durch ein Hinweisfenster.
EL221274 Version: 2.5
Page 75

Inbetriebnahme
Abb.85: Hinweisfenster fehlerhafte ESI-Datei (links: TwinCAT2; rechts: TwinCAT3)
Ursachen dafür können sein
• Aufbau der *.xml entspricht nicht der zugehörigen *.xsd-Datei → prüfen Sie die Ihnen vorliegenden
Schemata
• Inhalt kann nicht in eine Gerätebeschreibung übersetzt werden → Es ist der Hersteller der Datei zu
kontaktieren
EL2212 75Version: 2.5
Page 76

Inbetriebnahme
5.2.3 TwinCAT ESI Updater
Ab TwinCAT2.11 kann der System Manager bei Online-Zugang selbst nach aktuellen Beckhoff ESI-Dateien
suchen:
Abb.86: Anwendung des ESI Updater (>=TwinCAT2.11)
Der Aufruf erfolgt unter:
„Options“ → „Update EtherCAT Device Descriptions“.
Auswahl bei TwinCAT3:
Abb.87: Anwendung des ESI Updater (TwinCAT3)
Der ESI Updater ist eine bequeme Möglichkeit, die von den EtherCAT Herstellern bereitgestellten ESIs
automatisch über das Internet in das TwinCAT-Verzeichnis zu beziehen (ESI = EtherCAT slave information).
Dazu greift TwinCAT auf die bei der ETG hinterlegte zentrale ESI-ULR-Verzeichnisliste zu; die Einträge sind
dann unveränderbar im Updater-Dialog zu sehen.
Der Aufruf erfolgt unter:
„TwinCAT“ → „EtherCAT Devices“ → „Update Device Description (via ETG Website)…“.
5.2.4 Unterscheidung Online/Offline
Die Unterscheidung Online/Offline bezieht sich auf das Vorhandensein der tatsächlichen I/O-Umgebung
(Antriebe, Klemmen, EJ-Module). Wenn die Konfiguration im Vorfeld der Anlagenerstellung z.B. auf einem
Laptop als Programmiersystem erstellt werden soll, ist nur die „Offline-Konfiguration“ möglich. Dann müssen
alle Komponenten händisch in der Konfiguration z.B. nach Elektro-Planung eingetragen werden.
Ist die vorgesehene Steuerung bereits an das EtherCAT System angeschlossen, alle Komponenten mit
Spannung versorgt und die Infrastruktur betriebsbereit, kann die TwinCAT Konfiguration auch vereinfacht
durch das so genannte „Scannen“ vom Runtime-System aus erzeugt werden. Dies ist der so genannte
Online-Vorgang.
In jedem Fall prüft der EtherCAT Master bei jedem realen Hochlauf, ob die vorgefundenen Slaves der
Konfiguration entsprechen. Dieser Test kann in den erweiterten Slave-Einstellungen parametriert werden.
Siehe hierzu den Hinweis „Installation der neuesten ESI-XML-Device-Description“ [}72].
Zur Konfigurationserstellung
• muss die reale EtherCAT-Hardware (Geräte, Koppler, Antriebe) vorliegen und installiert sein.
EL221276 Version: 2.5
Page 77

Inbetriebnahme
• müssen die Geräte/Module über EtherCAT-Kabel bzw. im Klemmenstrang so verbunden sein wie sie
später eingesetzt werden sollen.
• müssen die Geräte/Module mit Energie versorgt werden und kommunikationsbereit sein.
• muss TwinCAT auf dem Zielsystem im CONFIG-Modus sein.
Der Online-Scan-Vorgang setzt sich zusammen aus:
• Erkennen des EtherCAT-Gerätes [}82] (Ethernet-Port am IPC)
• Erkennen der angeschlossenen EtherCAT-Teilnehmer [}83]. Dieser Schritt kann auch unabhängig
vom vorangehenden durchgeführt werden.
• Problembehandlung [}86]
Auch kann der Scan bei bestehender Konfiguration [}87] zum Vergleich durchgeführt werden.
5.2.5 OFFLINE Konfigurationserstellung
Anlegen des Geräts EtherCAT
In einem leeren System Manager Fenster muss zuerst ein EtherCAT Gerät angelegt werden.
Abb.88: Anfügen eines EtherCAT Device: links TwinCAT2; rechts TwinCAT3
Für eine EtherCAT I/O Anwendung mit EtherCAT Slaves ist der „EtherCAT“ Typ auszuwählen. „EtherCAT
Automation Protocol via EL6601“ ist für den bisherigen Publisher/Subscriber-Dienst in Kombination mit einer
EL6601/EL6614 Klemme auszuwählen.
Abb.89: Auswahl EtherCAT Anschluss (TwinCAT2.11, TwinCAT3)
Diesem virtuellen Gerät ist dann ein realer Ethernet Port auf dem Laufzeitsystem zuzuordnen.
EL2212 77Version: 2.5
Page 78

Inbetriebnahme
Abb.90: Auswahl Ethernet Port
Diese Abfrage kann beim Anlegen des EtherCAT-Gerätes automatisch erscheinen, oder die Zuordnung
kann später im Eigenschaftendialog gesetzt/geändert werden; siehe Abb. „Eigenschaften EtherCAT Gerät
(TwinCAT2)“.
Abb.91: Eigenschaften EtherCAT Gerät (TwinCAT2)
TwinCAT 3: Die Eigenschaften des EtherCAT-Gerätes können mit Doppelklick auf „Gerät .. (EtherCAT)“ im
Projektmappen-Explorer unter „E/A“ geöffnet werden:
Auswahl Ethernet Port
Es können nur Ethernet Ports für ein EtherCAT Gerät ausgewählt werden, für die der TwinCAT Realtime-Treiber installiert ist. Dies muss für jeden Port getrennt vorgenommen werden. Siehe dazu
die entsprechende Installationsseite [}67].
Definieren von EtherCAT Slaves
Durch Rechtsklick auf ein Gerät im Konfigurationsbaum können weitere Geräte angefügt werden.
EL221278 Version: 2.5
Page 79

Inbetriebnahme
Abb.92: Anfügen von EtherCAT Geräten (links: TwinCAT2; rechts: TwinCAT3)
Es öffnet sich der Dialog zur Auswahl des neuen Gerätes. Es werden nur Geräte angezeigt für die ESIDateien hinterlegt sind.
Die Auswahl bietet auch nur Geräte an, die an dem vorher angeklickten Gerät anzufügen sind - dazu wird
die an diesem Port mögliche Übertragungsphysik angezeigt (Abb. „Auswahldialog neues EtherCAT Gerät“,
A). Es kann sich um kabelgebundene FastEthernet-Ethernet-Physik mit PHY-Übertragung handeln, dann ist
wie in Abb. „Auswahldialog neues EtherCAT Gerät“ nur ebenfalls kabelgebundenes Geräte auswählbar.
Verfügt das vorangehende Gerät über mehrere freie Ports (z.B. EK1122 oder EK1100), kann auf der
rechten Seite (A) der gewünschte Port angewählt werden.
Übersicht Übertragungsphysik
• „Ethernet“: Kabelgebunden 100BASE-TX: EK-Koppler, EP-Boxen, Geräte mit RJ45/M8/M12-Konnector
• „E-Bus“: LVDS „Klemmenbus“,„EJ-Module“: EL/ES-Klemmen, diverse anreihbare Module
Das Suchfeld erleichtert das Auffinden eines bestimmten Gerätes (ab TwinCAT2.11 bzw. TwinCAT3).
Abb.93: Auswahldialog neues EtherCAT Gerät
Standardmäßig wird nur der Name/Typ des Gerätes als Auswahlkriterium verwendet. Für eine gezielte
Auswahl einer bestimmen Revision des Gerätes kann die Revision als „Extended Information“ eingeblendet
werden.
EL2212 79Version: 2.5
Page 80

Inbetriebnahme
Abb.94: Anzeige Geräte-Revision
Oft sind aus historischen oder funktionalen Gründen mehrere Revisionen eines Gerätes erzeugt worden,
z.B. durch technologische Weiterentwicklung. Zur vereinfachten Anzeige (s. Abb. „Auswahldialog neues
EtherCAT Gerät“) wird bei Beckhoff Geräten nur die letzte (=höchste) Revision und damit der letzte
Produktionsstand im Auswahldialog angezeigt. Sollen alle im System als ESI-Beschreibungen vorliegenden
Revisionen eines Gerätes angezeigt werden, ist die Checkbox „Show Hidden Devices“ zu markieren, s. Abb.
„Anzeige vorhergehender Revisionen“.
Abb.95: Anzeige vorhergehender Revisionen
Geräte-Auswahl nach Revision, Kompatibilität
Mit der ESI-Beschreibung wird auch das Prozessabbild, die Art der Kommunikation zwischen Master und Slave/Gerät und ggf. Geräte-Funktionen definiert. Damit muss das reale Gerät (Firmware
wenn vorhanden) die Kommunikationsanfragen/-einstellungen des Masters unterstützen. Dies ist
abwärtskompatibel der Fall, d.h. neuere Geräte (höhere Revision) sollen es auch unterstützen,
wenn der EtherCAT Master sie als eine ältere Revision anspricht. Als Beckhoff-Kompatibilitätsregel
für EtherCAT-Klemmen/ Boxen/ EJ-Module ist anzunehmen:
Geräte-Revision in der Anlage >= Geräte-Revision in der Konfiguration
Dies erlaubt auch den späteren Austausch von Geräten ohne Veränderung der Konfiguration (abweichende Vorgaben bei Antrieben möglich).
EL221280 Version: 2.5
Page 81

Inbetriebnahme
Beispiel
In der Konfiguration wird eine EL2521-0025-1018 vorgesehen, dann kann real eine EL2521-0025-1018 oder
höher (-1019, -1020) eingesetzt werden.
Abb.96: Name/Revision Klemme
Wenn im TwinCAT System aktuelle ESI-Beschreibungen vorliegen, entspricht der im Auswahldialog als
letzte Revision angebotene Stand dem Produktionsstand von Beckhoff. Es wird empfohlen, bei Erstellung
einer neuen Konfiguration jeweils diesen letzten Revisionsstand eines Gerätes zu verwenden, wenn aktuell
produzierte Beckhoff-Geräte in der realen Applikation verwendet werden. Nur wenn ältere Geräte aus
Lagerbeständen in der Applikation verbaut werden sollen, ist es sinnvoll eine ältere Revision einzubinden.
Das Gerät stellt sich dann mit seinem Prozessabbild im Konfigurationsbaum dar und kann nur parametriert
werden: Verlinkung mit der Task, CoE/DC-Einstellungen, PlugIn-Definition, StartUp-Einstellungen, ...
Abb.97: EtherCAT Klemme im TwinCAT-Baum (links: TwinCAT2; rechts: TwinCAT3)
EL2212 81Version: 2.5
Page 82

Inbetriebnahme
5.2.6 ONLINE Konfigurationserstellung
Erkennen/Scan des Geräts EtherCAT
Befindet sich das TwinCAT-System im CONFIG-Modus, kann online nach Geräten gesucht werden.
Erkennbar ist dies durch ein Symbol unten rechts in der Informationsleiste:
• bei TwinCAT2 durch eine blaue Anzeige „Config Mode“ im System Manager-Fenster: .
• bei der Benutzeroberfläche der TwinCAT3 Entwicklungsumgebung durch ein Symbol .
TwinCAT lässt sich in diesem Modus versetzen:
• TwinCAT2: durch Auswahl von aus der Menüleiste oder über „Aktionen“ → „Starten/Restarten
von TwinCAT in Konfig-Modus“
• TwinCAT3: durch Auswahl von aus der Menüleiste oder über „TWINCAT“ →
„RestartTwinCAT(ConfigMode)“
Online Scannen im Config Mode
Die Online-Suche im RUN-Modus (produktiver Betrieb) ist nicht möglich. Es ist die Unterscheidung
zwischen TwinCAT-Programmiersystem und TwinCAT-Zielsystem zu beachten.
Das TwinCAT2-Icon ( ) bzw. TwinCAT3-Icon ( ) in der Windows Taskleiste stellt immer den
TwinCAT-Modus des lokalen IPC dar. Im System Manager-Fenster von TwinCAT2 bzw. in der
Benutzeroberfläche von TwinCAT3 wird dagegen der TwinCAT-Zustand des Zielsystems angezeigt.
Abb.98: Unterscheidung Lokalsystem/ Zielsystem (links: TwinCAT2; rechts: TwinCAT3)
Im Konfigurationsbaum bringt uns ein Rechtsklick auf den General-Punkt „I/O Devices“ zum Such-Dialog.
Abb.99: Scan Devices (links: TwinCAT2; rechts: TwinCAT3)
Dieser Scan-Modus versucht nicht nur EtherCAT-Geräte (bzw. die als solche nutzbaren Ethernet-Ports) zu
finden, sondern auch NOVRAM, Feldbuskarten, SMB etc. Nicht alle Geräte können jedoch automatisch
gefunden werden.
EL221282 Version: 2.5
Page 83

Inbetriebnahme
Abb.100: Hinweis automatischer GeräteScan (links: TwinCAT2; rechts: TwinCAT3)
Ethernet Ports mit installierten TwinCAT Realtime-Treiber werden als „RT-Ethernet“ Geräte angezeigt.
Testweise wird an diesen Ports ein EtherCAT-Frame verschickt. Erkennt der Scan-Agent an der Antwort,
dass ein EtherCAT-Slave angeschlossen ist, wird der Port allerdings gleich als „EtherCAT Device“
angezeigt.
Abb.101: Erkannte Ethernet-Geräte
Über entsprechende Kontrollkästchen können Geräte ausgewählt werden (wie in der Abb. „Erkannte
Ethernet-Geräte“ gezeigt ist z.B. Gerät 3 und Gerät 4 ausgewählt). Für alle angewählten Geräte wird nach
Bestätigung „OK“ im nachfolgenden ein Teilnehmer-Scan vorgeschlagen, s. Abb. „Scan-Abfrage nach dem
automatischen Anlegen eines EtherCAT Gerätes“.
Auswahl Ethernet Port
Es können nur Ethernet Ports für ein EtherCAT Gerät ausgewählt werden, für die der TwinCAT Realtime-Treiber installiert ist. Dies muss für jeden Port getrennt vorgenommen werden. Siehe dazu
die entsprechende Installationsseite [}67].
Erkennen/Scan der EtherCAT Teilnehmer
Funktionsweise Online Scan
Beim Scan fragt der Master die Identity Informationen der EtherCAT Slaves aus dem Slave-EEPROM ab. Es werden Name und Revision zur Typbestimmung herangezogen. Die entsprechenden
Geräte werden dann in den hinterlegten ESI-Daten gesucht und in dem dort definierten Default-Zustand in den Konfigurationsbaum eingebaut.
Abb.102: Beispiel Default-Zustand
EL2212 83Version: 2.5
Page 84

Inbetriebnahme
HINWEIS
Slave-Scan in der Praxis im Serienmaschinenbau
Die Scan-Funktion sollte mit Bedacht angewendet werden. Sie ist ein praktisches und schnelles Werkzeug,
um für eine Inbetriebnahme eine Erst-Konfiguration als Arbeitsgrundlage zu erzeugen. Im Serienmaschinebau bzw. bei Reproduktion der Anlage sollte die Funktion aber nicht mehr zur Konfigurationserstellung ver-
wendet werden sondern ggf. zum Vergleich [}87] mit der festgelegten Erst-Konfiguration.
Hintergrund: da Beckhoff aus Gründen der Produktpflege gelegentlich den Revisionsstand der ausgelieferten Produkte erhöht, kann durch einen solchen Scan eine Konfiguration erzeugt werden, die (bei identischem Maschinenaufbau) zwar von der Geräteliste her identisch ist, die jeweilige Geräterevision unterscheiden sich aber ggf. von der Erstkonfiguration.
Beispiel:
Firma A baut den Prototyp einer späteren Serienmaschine B. Dazu wird der Prototyp aufgebaut, in TwinCAT
ein Scan über die IO-Geräte durchgeführt und somit die Erstkonfiguration "B.tsm" erstellt. An einer
beliebigen Stelle sitzt dabei die EtherCAT-Klemme EL2521-0025 in der Revision 1018. Diese wird also so in
die TwinCAT-Konfiguration eingebaut:
Abb.103: Einbau EtherCAT-Klemme mit Revision -1018
Ebenso werden in der Prototypentestphase Funktionen und Eigenschaften dieser Klemme durch die
Programmierer/Inbetriebnehmer getestet und ggf. genutzt d.h. aus der PLC „B.pro“ oder der NC
angesprochen. (sinngemäß gilt das gleiche für die TwinCAT3-Solution-Dateien).
Nun wird die Prototypenentwicklung abgeschlossen und der Serienbau der Maschine B gestartet, Beckhoff
liefert dazu weiterhin die EL2521-0025-0018. Falls die Inbetriebnehmer der Abteilung Serienmaschinenbau
immer einen Scan durchführen, entsteht dabei bei jeder Maschine wieder ein eine inhaltsgleiche BKonfiguration. Ebenso werden eventuell von A weltweit Ersatzteillager für die kommenden Serienmaschinen
mit Klemmen EL2521-0025-1018 angelegt.
Nach einiger Zeit erweitert Beckhoff die EL2521-0025 um ein neues Feature C. Deshalb wird die FW
geändert, nach außen hin kenntlich durch einen höheren FW-Stand und eine neue Revision -1019.
Trotzdem unterstützt das neue Gerät natürlich Funktionen und Schnittstellen der Vorgängerversion(en), eine
Anpassung von „B.tsm“ oder gar „B.pro“ ist somit nicht nötig. Die Serienmaschinen können weiterhin mit
„B.tsm“ und „B.pro“ gebaut werden, zur Kontrolle der aufgebauten Maschine ist ein vergleichernder Scan
[}87] gegen die Erstkonfiguration „B.tsm“ sinnvoll.
Wird nun allerdings in der Abteilung Seriennmaschinenbau nicht „B.tsm“ verwendet, sondern wieder ein
Scan zur Erstellung der produktiven Konfiguration durchgeführt, wird automatisch die Revision -1019 erkannt
und in die Konfiguration eingebaut:
Abb.104: Erkennen EtherCAT-Klemme mit Revision -1019
Dies wird in der Regel von den Inbetriebnehmern nicht bemerkt. TwinCAT kann ebenfalls nichts melden, da
ja quasi eine neue Konfiguration erstellt wird. Es führt nach der Kompatibilitätsregel allerdings dazu, dass in
diese Maschine später keine EL2521-0025-1018 als Ersatzteil eingebaut werden sollen (auch wenn dies in
den allermeisten Fällen dennoch funktioniert).
EL221284 Version: 2.5
Page 85

Inbetriebnahme
Dazu kommt, dass durch produktionsbegleitende Entwicklung in Firma A das neue Feature C der
EL2521-0025-1019 (zum Beispiel ein verbesserter Analogfilter oder ein zusätzliches Prozessdatum zur
Diagnose) gerne entdeckt und ohne betriebsinterne Rücksprache genutzt wird. Für die so entstandene neue
Konfiguration „B2.tsm“ ist der bisherige Bestand an Ersatzteilgeräten nicht mehr zu verwenden.
Bei etabliertem Serienmaschinenbau sollte der Scan nur noch zu informativen Vergleichszwecken gegen
eine definierte Erstkonfiguration durchgeführt werden. Änderungen sind mit Bedacht durchzuführen!
Wurde ein EtherCAT-Device in der Konfiguration angelegt (manuell oder durch Scan), kann das I/O-Feld
nach Teilnehmern/Slaves gescannt werden.
Abb.105: Scan-Abfrage nach dem automatischen Anlegen eines EtherCAT Gerätes (links: TwinCAT2;
rechts TwinCAT3)
Abb.106: Manuelles Auslösen des Teilnehmer-Scans auf festegelegtem EtherCAT Device (links:
TwinCAT2; rechts TwinCAT3)
Im System Manager (TwinCAT2) bzw. der Benutzeroberfläche (TwinCAT3) kann der Scan-Ablauf am
Ladebalken unten in der Statusleiste verfolgt werden.
Abb.107: Scanfortschritt am Beispiel von TwinCAT2
Die Konfiguration wird aufgebaut und kann danach gleich in den Online-Zustand (OPERATIONAL) versetzt
werden.
Abb.108: Abfrage Config/FreeRun (links: TwinCAT2; rechts TwinCAT3)
Im Config/FreeRun-Mode wechselt die System Manager Anzeige blau/rot und das EtherCAT Gerät wird
auch ohne aktive Task (NC, PLC) mit der Freilauf-Zykluszeit von 4ms (Standardeinstellung) betrieben.
EL2212 85Version: 2.5
Page 86

Inbetriebnahme
Abb.109: Anzeige des Wechsels zwischen „Free Run“ und „Config Mode“ unten rechts in der Statusleiste
Abb.110: TwinCAT kann auch durch einen Button in diesen Zustand versetzt werden (links: TwinCAT2;
rechts TwinCAT3)
Das EtherCAT System sollte sich danach in einem funktionsfähigen zyklischen Betrieb nach Abb.
Beispielhafte Online-Anzeige befinden.
Abb.111: Beispielhafte Online-Anzeige
Zu beachten sind
• alle Slaves sollen im OP-State sein
• der EtherCAT Master soll im „Actual State“ OP sein
• „Frames/sec“ soll der Zykluszeit unter Berücksichtigung der versendeten Frameanzahl sein
• es sollen weder übermäßig „LostFrames“- noch CRC-Fehler auftreten
Die Konfiguration ist nun fertig gestellt. Sie kann auch wie im manuellen Vorgang [}77] beschrieben
verändert werden.
Problembehandlung
Beim Scannen können verschiedene Effekte auftreten.
• es wird ein unbekanntes Gerät entdeckt, d.h. ein EtherCAT Slave für den keine ESI-XMLBeschreibung vorliegt.
In diesem Fall bietet der System Manager an, die im Gerät eventuell vorliegende ESI auszulesen.
Lesen Sie dazu das Kapitel „Hinweise zu ESI/XML“.
• Teilnehmer werden nicht richtig erkannt
Ursachen können sein
◦ fehlerhafte Datenverbindungen, es treten Datenverluste während des Scans auf
◦ Slave hat ungültige Gerätebeschreibung
EL221286 Version: 2.5
Page 87

Inbetriebnahme
Es sind die Verbindungen und Teilnehmer gezielt zu überprüfen, z.B. durch den Emergency
Scan.
Der Scan ist dann erneut vorzunehmen.
Abb.112: Fehlerhafte Erkennung
Im System Manager werden solche Geräte evtl. als EK0000 oder unbekannte Geräte angelegt. Ein Betrieb
ist nicht möglich bzw. sinnvoll.
Scan über bestehender Konfiguration
HINWEIS
Veränderung der Konfiguration nach Vergleich
Bei diesem Scan werden z.Z. (TwinCAT2.11 bzw. 3.1) nur die Geräteeigenschaften Vendor (Hersteller),
Gerätename und Revision verglichen! Ein „ChangeTo“ oder „Copy“ sollte nur im Hinblick auf die Beckhoff
IO-Kompatibilitätsregel (s.o.) nur mit Bedacht vorgenommen werden. Das Gerät wird dann in der Konfiguration gegen die vorgefundene Revision ausgetauscht, dies kann Einfluss auf unterstützte Prozessdaten
und Funktionen haben.
Wird der Scan bei bestehender Konfiguration angestoßen, kann die reale I/O-Umgebung genau der
Konfiguration entsprechen oder differieren. So kann die Konfiguration verglichen werden.
Abb.113: Identische Konfiguration (links: TwinCAT2; rechts TwinCAT3)
Sind Unterschiede feststellbar, werden diese im Korrekturdialog angezeigt, die Konfiguration kann
umgehend angepasst werden.
EL2212 87Version: 2.5
Page 88

Inbetriebnahme
Abb.114: Korrekturdialog
Die Anzeige der „Extended Information“ wird empfohlen, weil dadurch Unterschiede in der Revision sichtbar
werden.
Farbe Erläuterung
grün Dieser EtherCAT Slave findet seine Entsprechung auf der Gegenseite. Typ und Revision stimmen
überein.
blau Dieser EtherCAT Slave ist auf der Gegenseite vorhanden, aber in einer anderen Revision. Diese
andere Revision kann andere Default-Einstellungen der Prozessdaten und andere/zusätzliche
Funktionen haben.
Ist die gefundene Revision > als die konfigurierte Revision, ist der Einsatz unter Berücksichtigung
der Kompatibilität möglich.
Ist die gefundene Revision < als die konfigurierte Revision, ist der Einsatz vermutlich nicht
möglich. Eventuell unterstützt das vorgefundene Gerät nicht alle Funktionen, die der Master von
ihm aufgrund der höheren Revision erwartet.
hellblau Dieser EtherCAT Slave wird ignoriert (Button „Ignore“)
rot • Dieser EtherCAT Slave ist auf der Gegenseite nicht vorhanden
• Er ist vorhanden, aber in einer anderen Revision, die sich auch in den Eigenschaften von der
angegebenen unterscheidet.
Auch hier gilt dann das Kompatibilitätsprinzip: Ist die gefundene Revision > als die konfigurierte
Revision, ist der Einsatz unter Berücksichtigung der Kompatibilität möglich, da NachfolgerGeräte die Funktionen der Vorgänger-Geräte unterstützen sollen.
Ist die gefundene Revision < als die konfigurierte Revision, ist der Einsatz vermutlich
nicht möglich. Eventuell unterstützt das vorgefundene Gerät nicht alle Funktionen, die
der Master von ihm aufgrund der höheren Revision erwartet.
EL221288 Version: 2.5
Page 89

Inbetriebnahme
Geräte-Auswahl nach Revision, Kompatibilität
Mit der ESI-Beschreibung wird auch das Prozessabbild, die Art der Kommunikation zwischen Master und Slave/Gerät und ggf. Geräte-Funktionen definiert. Damit muss das reale Gerät (Firmware
wenn vorhanden) die Kommunikationsanfragen/-einstellungen des Masters unterstützen. Dies ist
abwärtskompatibel der Fall, d.h. neuere Geräte (höhere Revision) sollen es auch unterstützen,
wenn der EtherCAT Master sie als eine ältere Revision anspricht. Als Beckhoff-Kompatibilitätsregel
für EtherCAT-Klemmen/ Boxen/ EJ-Module ist anzunehmen:
Geräte-Revision in der Anlage >= Geräte-Revision in der Konfiguration
Dies erlaubt auch den späteren Austausch von Geräten ohne Veränderung der Konfiguration (abweichende Vorgaben bei Antrieben möglich).
Beispiel
In der Konfiguration wird eine EL2521-0025-1018 vorgesehen, dann kann real eine EL2521-0025-1018 oder
höher (-1019, -1020) eingesetzt werden.
Abb.115: Name/Revision Klemme
Wenn im TwinCAT System aktuelle ESI-Beschreibungen vorliegen, entspricht der im Auswahldialog als
letzte Revision angebotene Stand dem Produktionsstand von Beckhoff. Es wird empfohlen, bei Erstellung
einer neuen Konfiguration jeweils diesen letzten Revisionsstand eines Gerätes zu verwenden, wenn aktuell
produzierte Beckhoff-Geräte in der realen Applikation verwendet werden. Nur wenn ältere Geräte aus
Lagerbeständen in der Applikation verbaut werden sollen, ist es sinnvoll eine ältere Revision einzubinden.
Abb.116: Korrekturdialog mit Änderungen
Sind alle Änderungen übernommen oder akzeptiert, können sie durch „OK“ in die reale *.tsm-Konfiguration
übernommen werden.
Change to Compatible Type
TwinCAT bietet mit „Change to Compatible Type…“ eine Funktion zum Austauschen eines Gerätes unter
Beibehaltung der Links in die Task.
EL2212 89Version: 2.5
Page 90

Inbetriebnahme
Abb.117: Dialog „Change to Compatible Type…“ (links: TwinCAT2; rechts TwinCAT3)
Diese Funktion ist vorzugsweise auf die AX5000-Geräte anzuwenden.
Change to Alternative Type
Der TwinCAT System Manager bietet eine Funktion zum Austauschen eines Gerätes: Change to Alternative
Type
Abb.118: TwinCAT2 Dialog Change to Alternative Type
Wenn aufgerufen, sucht der System Manager in der bezogenen Geräte-ESI (hier im Beispiel: EL1202-0000)
nach dort enthaltenen Angaben zu kompatiblen Geräten. Die Konfiguration wird geändert und gleichzeitig
das ESI-EEPROM überschrieben - deshalb ist dieser Vorgang nur im Online-Zustand (ConfigMode) möglich.
5.2.7 EtherCAT Teilnehmerkonfiguration
Klicken Sie im linken Fenster des TwinCAT2 System Managers bzw. bei der TwinCAT3
Entwicklungsumgebung im Projektmappen-Explorer auf das Element der Klemme im Baum, die Sie
konfigurieren möchten (im Beispiel: Klemme 3: EL3751).
Abb.119: „Baumzweig“ Element als Klemme EL3751
Im rechten Fenster des System Managers (TwinCAT2) bzw. der Entwicklungsumgebung (TwinCAT3)
stehen Ihnen nun verschiedene Karteireiter zur Konfiguration der Klemme zur Verfügung. Dabei bestimmt
das Maß der Komplexität eines Teilnehmers welche Karteireiter zur Verfügung stehen. So bietet, wie im
obigen Beispiel zu sehen, die Klemme EL3751 viele Einstellmöglichkeiten und stellt eine entsprechende
Anzahl von Karteireitern zur Verfügung. Im Gegensatz dazu stehen z.B. bei der Klemme EL1004 lediglich
die Karteireiter „Allgemein“, „EtherCAT“, „Prozessdaten“ und „Online“ zur Auswahl. Einige Klemmen, wie
etwa die EL6695 bieten spezielle Funktionen über einen Karteireiter mit der eigenen Klemmenbezeichnung
an, also „EL6695“ in diesem Fall. Ebenfalls wird ein spezieller Karteireiter „Settings“ von Klemmen mit
umfangreichen Einstellmöglichkeiten angeboten (z.B. EL3751).
EL221290 Version: 2.5
Page 91

Inbetriebnahme
Karteireiter „Allgemein“
Abb.120: Karteireiter „Allgemein“
Name Name des EtherCAT-Geräts
Id Laufende Nr. des EtherCAT-Geräts
Typ Typ des EtherCAT-Geräts
Kommentar Hier können Sie einen Kommentar (z.B. zum Anlagenteil) hinzufügen.
Disabled Hier können Sie das EtherCAT-Gerät deaktivieren.
Symbole erzeugen Nur wenn dieses Kontrollkästchen aktiviert ist, können Sie per ADS auf diesen
EtherCAT-Slave zugreifen.
Karteireiter „EtherCAT“
Abb.121: Karteireiter „EtherCAT“
EL2212 91Version: 2.5
Page 92

Inbetriebnahme
Typ Typ des EtherCAT-Geräts
Product/Revision Produkt- und Revisions-Nummer des EtherCAT-Geräts
Auto Inc Adr. Auto-Inkrement-Adresse des EtherCAT-Geräts. Die Auto-Inkrement-Adresse
kann benutzt werden, um jedes EtherCAT-Gerät anhand seiner physikalischen
Position im Kommunikationsring zu adressieren. Die Auto-InkrementAdressierung wird während der Start-Up-Phase benutzt, wenn der EtherCATmaster die Adressen an die EtherCAT-Geräte vergibt. Bei der Auto-InkrementAdressierung hat der erste EtherCAT-Slave im Ring die Adresse 0000
jeden weiteren Folgenden wird die Adresse um 1 verringert (FFFF
, FFFE
hex
und für
hex
hex
usw.).
EtherCAT Adr. Feste Adresse eines EtherCAT-Slaves. Diese Adresse wird vom EtherCAT-
Master während der Start-Up-Phase vergeben. Um den Default-Wert zu ändern,
müssen Sie zuvor das Kontrollkästchen links von dem Eingabefeld markieren.
Vorgänger Port Name und Port des EtherCAT-Geräts, an den dieses Gerät angeschlossen ist.
Falls es möglich ist, dieses Gerät mit einem anderen zu verbinden, ohne die
Reihenfolge der EtherCAT-Geräte im Kommunikationsring zu ändern, dann ist
dieses Kombinationsfeld aktiviert und Sie können das EtherCAT-Gerät
auswählen, mit dem dieses Gerät verbunden werden soll.
Weitere Einstellungen Diese Schaltfläche öffnet die Dialoge für die erweiterten Einstellungen.
Der Link am unteren Rand des Karteireiters führt Sie im Internet auf die Produktseite dieses EtherCATGeräts.
Karteireiter „Prozessdaten“
Zeigt die (Allgemeine Slave PDO-) Konfiguration der Prozessdaten an. Die Eingangs- und Ausgangsdaten
des EtherCAT-Slaves werden als CANopen Prozess-Daten-Objekte (Process Data Objects, PDO)
dargestellt. Falls der EtherCAT-Slave es unterstützt, ermöglicht dieser Dialog dem Anwender ein PDO über
PDO-Zuordnung auszuwählen und den Inhalt des individuellen PDOs zu variieren.
Abb.122: Karteireiter „Prozessdaten“
Die von einem EtherCAT Slave zyklisch übertragenen Prozessdaten (PDOs) sind die Nutzdaten, die in der
Applikation zyklusaktuell erwartet werden oder die an den Slave gesendet werden. Dazu parametriert der
EtherCAT Master (Beckhoff TwinCAT) jeden EtherCAT Slave während der Hochlaufphase, um festzulegen,
welche Prozessdaten (Größe in Bit/Bytes, Quellort, Übertragungsart) er von oder zu diesem Slave
übermitteln möchte. Eine falsche Konfiguration kann einen erfolgreichen Start des Slaves verhindern.
Für Beckhoff EtherCAT Slaves EL, ES, EM, EJ und EP gilt im Allgemeinen:
EL221292 Version: 2.5
Page 93

Inbetriebnahme
• Die vom Gerät unterstützten Prozessdaten Input/Output sind in der ESI/XML-Beschreibung
herstellerseitig definiert. Der TwinCAT EtherCAT Master verwendet die ESI-Beschreibung zur richtigen
Konfiguration des Slaves.
• Wenn vorgesehen, können die Prozessdaten im System Manager verändert werden. Siehe dazu die
Gerätedokumentation.
Solche Veränderungen können sein: Ausblenden eines Kanals, Anzeige von zusätzlichen zyklischen
Informationen, Anzeige in 16Bit statt in 8Bit Datenumfang usw.
• Die Prozessdateninformationen liegen bei so genannten „intelligenten“ EtherCAT-Geräten ebenfalls im
CoE-Verzeichnis vor. Beliebige Veränderungen in diesem CoE-Verzeichnis, die zu abweichenden
PDO-Einstellungen führen, verhindern jedoch das erfolgreiche Hochlaufen des Slaves. Es wird davon
abgeraten, andere als die vorgesehene Prozessdaten zu konfigurieren, denn die Geräte-Firmware
(wenn vorhanden) ist auf diese PDO-Kombinationen abgestimmt.
Ist laut Gerätedokumentation eine Veränderung der Prozessdaten zulässig, kann dies wie folgt
vorgenommen werden, s. Abb. Konfigurieren der Prozessdaten.
• A: Wählen Sie das zu konfigurierende Gerät
• B: Wählen Sie im Reiter „Process Data“ den Input- oder Output-Syncmanager (C)
• D: die PDOs können an- bzw. abgewählt werden
• H: die neuen Prozessdaten sind als link-fähige Variablen im System Manager sichtbar
Nach einem Aktivieren der Konfiguration und TwinCAT-Neustart (bzw. Neustart des EtherCAT
Masters) sind die neuen Prozessdaten aktiv.
• E: wenn ein Slave dies unterstützt, können auch Input- und Output-PDO gleichzeitig durch Anwahl
eines so genannten PDO-Satzes („Predefined PDO-settings“) verändert werden.
Abb.123: Konfigurieren der Prozessdaten
EL2212 93Version: 2.5
Page 94

Inbetriebnahme
Manuelle Veränderung der Prozessdaten
In der PDO-Übersicht kann laut ESI-Beschreibung ein PDO als „fixed“ mit dem Flag „F“ gekennzeichnet sein (Abb. Konfigurieren der Prozessdaten, J). Solche PDOs können prinzipiell nicht in ihrer Zusammenstellung verändert werden, auch wenn TwinCAT den entsprechenden Dialog anbietet
(„Edit“). Insbesondere können keine beliebigen CoE-Inhalte als zyklische Prozessdaten eingeblendet werden. Dies gilt im Allgemeinen auch für den Fall, dass ein Gerät den Download der PDO Konfiguration „G“ unterstützt. Bei falscher Konfiguration verweigert der EtherCAT Slave üblicherweise
den Start und Wechsel in den OP-State. Eine Logger-Meldung wegen „invalid SM cfg“ wird im System Manager ausgegeben: Diese Fehlermeldung „invalid SM IN cfg“ oder „invalid SM OUT cfg“ bietet gleich einen Hinweis auf die Ursache des fehlgeschlagenen Starts.
Eine detaillierte Beschreibung [}98] befindet sich am Ende dieses Kapitels.
Karteireiter „Startup“
Der Karteireiter Startup wird angezeigt, wenn der EtherCAT-Slave eine Mailbox hat und das Protokoll
CANopen over EtherCAT (CoE) oder das Protokoll Servo drive over EtherCAT unterstützt. Mit Hilfe dieses
Karteireiters können Sie betrachten, welche Download-Requests während des Startups zur Mailbox
gesendet werden. Es ist auch möglich neue Mailbox-Requests zur Listenanzeige hinzuzufügen. Die
Download-Requests werden in derselben Reihenfolge zum Slave gesendet, wie sie in der Liste angezeigt
werden.
Abb.124: Karteireiter „Startup“
Spalte Beschreibung
Transition Übergang, in den der Request gesendet wird. Dies kann entweder
• der Übergang von Pre-Operational to Safe-Operational (PS) oder
• der Übergang von Safe-Operational to Operational (SO) sein.
Wenn der Übergang in „<>“ eingeschlossen ist (z.B. <PS>), dann ist der Mailbox Request
fest und kann vom Anwender nicht geändert oder gelöscht werden.
Protokoll Art des Mailbox-Protokolls
Index Index des Objekts
Data Datum, das zu diesem Objekt heruntergeladen werden soll.
Kommentar Beschreibung des zu der Mailbox zu sendenden Requests
Move Up Diese Schaltfläche bewegt den markierten Request in der Liste um eine Position nach
oben.
Move Down Diese Schaltfläche bewegt den markierten Request in der Liste um eine Position nach
unten.
New Diese Schaltfläche fügt einen neuen Mailbox-Download-Request, der währen des Startups
gesendet werden soll hinzu.
Delete Diese Schaltfläche löscht den markierten Eintrag.
Edit Diese Schaltfläche editiert einen existierenden Request.
EL221294 Version: 2.5
Page 95

Inbetriebnahme
Karteireiter „CoE - Online“
Wenn der EtherCAT-Slave das Protokoll CANopen over EtherCAT (CoE) unterstützt, wird der zusätzliche
Karteireiter CoE - Online angezeigt. Dieser Dialog listet den Inhalt des Objektverzeichnisses des Slaves auf
(SDO-Upload) und erlaubt dem Anwender den Inhalt eines Objekts dieses Verzeichnisses zu ändern. Details
zu den Objekten der einzelnen EtherCAT-Geräte finden Sie in den gerätespezifischen
Objektbeschreibungen.
Abb.125: Karteireiter „CoE - Online“
EL2212 95Version: 2.5
Page 96

Inbetriebnahme
Darstellung der Objekt-Liste
Spalte Beschreibung
Index Index und Subindex des Objekts
Name Name des Objekts
Flags RW Das Objekt kann ausgelesen und Daten können in das Objekt geschrieben
werden (Read/Write)
RO Das Objekt kann ausgelesen werden, es ist aber nicht möglich Daten in das
Objekt zu schreiben (Read only)
P Ein zusätzliches P kennzeichnet das Objekt als Prozessdatenobjekt.
Wert Wert des Objekts
Update List Die Schaltfläche Update List aktualisiert alle Objekte in der Listenanzeige
Auto Update Wenn dieses Kontrollkästchen angewählt ist, wird der Inhalt der Objekte
automatisch aktualisiert.
Advanced Die Schaltfläche Advanced öffnet den Dialog Advanced Settings. Hier
können Sie festlegen, welche Objekte in der Liste angezeigt werden.
Abb.126: Dialog „Advanced settings“
Online - über SDOInformation
Offline - über EDS-Datei Wenn dieses Optionsfeld angewählt ist, wird die Liste der im
Wenn dieses Optionsfeld angewählt ist, wird die Liste der im
Objektverzeichnis des Slaves enthaltenen Objekte über SDO-Information
aus dem Slave hochgeladen. In der untenstehenden Liste können Sie
festlegen welche Objekt-Typen hochgeladen werden sollen.
Objektverzeichnis enthaltenen Objekte aus einer EDS-Datei gelesen, die der
Anwender bereitstellt.
EL221296 Version: 2.5
Page 97

Karteireiter „Online“
Inbetriebnahme
Abb.127: Karteireiter „Online“
Status Maschine
Init Diese Schaltfläche versucht das EtherCAT-Gerät auf den Status Init zu
setzen.
Pre-Op Diese Schaltfläche versucht das EtherCAT-Gerät auf den Status Pre-
Operational zu setzen.
Op Diese Schaltfläche versucht das EtherCAT-Gerät auf den Status Operational
zu setzen.
Bootstrap Diese Schaltfläche versucht das EtherCAT-Gerät auf den Status Bootstrap
zu setzen.
Safe-Op Diese Schaltfläche versucht das EtherCAT-Gerät auf den Status Safe-
Operational zu setzen.
Fehler löschen Diese Schaltfläche versucht die Fehleranzeige zu löschen. Wenn ein
EtherCAT-Slave beim Statuswechsel versagt, setzt er eine Fehler-Flag.
Beispiel: ein EtherCAT-Slave ist im Zustand PREOP (Pre-Operational). Nun
fordert der Master den Zustand SAFEOP (Safe-Operational) an. Wenn der
Slave nun beim Zustandswechsel versagt, setzt er das Fehler-Flag. Der
aktuelle Zustand wird nun als ERR PREOP angezeigt. Nach Drücken der
Schaltfläche Fehler löschen ist das Fehler-Flag gelöscht und der aktuelle
Zustand wird wieder als PREOP angezeigt.
Aktueller Status Zeigt den aktuellen Status des EtherCAT-Geräts an.
Angeforderter Status Zeigt den für das EtherCAT-Gerät angeforderten Status an.
DLL-Status
Zeigt den DLL-Status (Data-Link-Layer-Status) der einzelnen Ports des EtherCAT-Slaves an. Der DLLStatus kann vier verschiedene Zustände annehmen:
Status Beschreibung
No Carrier / Open Kein Carrier-Signal am Port vorhanden, der Port ist aber offen.
No Carrier / Closed Kein Carrier-Signal am Port vorhanden und der Port ist geschlossen.
Carrier / Open Carrier-Signal ist am Port vorhanden und der Port ist offen.
Carrier / Closed Carrier-Signal ist am Port vorhanden, der Port ist aber geschlossen.
EL2212 97Version: 2.5
Page 98

Inbetriebnahme
File Access over EtherCAT
Download Mit dieser Schaltfläche können Sie eine Datei zum EtherCAT-Gerät
schreiben.
Upload Mit dieser Schaltfläche können Sie eine Datei vom EtherCAT-Gerät lesen.
Karteireiter „DC“ (Distributed Clocks)
Abb.128: Karteireiter „DC“ (Distributed Clocks)
Betriebsart Auswahlmöglichkeiten (optional):
• FreeRun
• SM-Synchron
• DC-Synchron (Input based)
• DC-Synchron
Erweiterte Einstellungen… Erweiterte Einstellungen für die Nachregelung der echtzeitbestimmende
TwinCAT-Uhr
Detaillierte Informationen zu Distributed Clocks sind unter http://infosys.beckhoff.de angegeben:
Feldbuskomponenten → EtherCAT-Klemmen → EtherCAT System Dokumentation → Distributed Clocks
5.2.7.1 Detaillierte Beschreibung Karteireiter „Prozessdaten“
Sync-Manager
Listet die Konfiguration der Sync-Manager (SM) auf.
Wenn das EtherCAT-Gerät eine Mailbox hat, wird der SM0 für den Mailbox-Output (MbxOut) und der SM1
für den Mailbox-Intput (MbxIn) benutzt.
Der SM2 wird für die Ausgangsprozessdaten (Outputs) und der SM3 (Inputs) für die Eingangsprozessdaten
benutzt.
Wenn ein Eintrag ausgewählt ist, wird die korrespondierende PDO-Zuordnung in der darunter stehenden
Liste PDO-Zuordnung angezeigt.
PDO-Zuordnung
PDO-Zuordnung des ausgewählten Sync-Managers. Hier werden alle für diesen Sync-Manager-Typ
definierten PDOs aufgelistet:
• Wenn in der Sync-Manager-Liste der Ausgangs-Sync-Manager (Outputs) ausgewählt ist, werden alle
RxPDOs angezeigt.
• Wenn in der Sync-Manager-Liste der Eingangs-Sync-Manager (Inputs) ausgewählt ist, werden alle
TxPDOs angezeigt.
Die markierten Einträge sind die PDOs, die an der Prozessdatenübertragung teilnehmen. Diese PDOs
werden in der Baumdarstellung dass System-Managers als Variablen des EtherCAT-Geräts angezeigt. Der
Name der Variable ist identisch mit dem Parameter Name des PDO, wie er in der PDO-Liste angezeigt wird.
EL221298 Version: 2.5
Page 99

Inbetriebnahme
Falls ein Eintrag in der PDO-Zuordnungsliste deaktiviert ist (nicht markiert und ausgegraut), zeigt dies an,
dass dieser Eintrag von der PDO-Zuordnung ausgenommen ist. Um ein ausgegrautes PDO auswählen zu
können, müssen Sie zuerst das aktuell angewählte PDO abwählen.
Aktivierung der PDO-Zuordnung
ü Wenn Sie die PDO-Zuordnung geändert haben, muss zur Aktivierung der neuen PDO-Zuord-
nung
a) der EtherCAT-Slave einmal den Statusübergang PS (von Pre-Operational zu Safe-Operational)
durchlaufen (siehe Karteireiter Online [}97])
b) der System-Manager die EtherCAT-Slaves neu laden
(Schaltfläche bei TwinCAT2 bzw. bei TwinCAT3)
PDO-Liste
Liste aller von diesem EtherCAT-Gerät unterstützten PDOs. Der Inhalt des ausgewählten PDOs wird der
Liste PDO-Content angezeigt. Durch Doppelklick auf einen Eintrag können Sie die Konfiguration des PDO
ändern.
Spalte Beschreibung
Index Index des PDO.
Size Größe des PDO in Byte.
Name Name des PDO.
Wenn dieses PDO einem Sync-Manager zugeordnet ist, erscheint es als Variable des Slaves
mit diesem Parameter als Namen.
Flags F Fester Inhalt: Der Inhalt dieses PDO ist fest und kann nicht vom System-Manager
geändert werden.
M Obligatorisches PDO (Mandatory). Dieses PDO ist zwingend Erforderlich und muss
deshalb einem Sync-Manager Zugeordnet werden! Als Konsequenz können Sie dieses
PDO nicht aus der Liste PDO-Zuordnungen streichen
SM Sync-Manager, dem dieses PDO zugeordnet ist. Falls dieser Eintrag leer ist, nimmt dieses PDO
nicht am Prozessdatenverkehr teil.
SU Sync-Unit, der dieses PDO zugeordnet ist.
PDO-Inhalt
Zeigt den Inhalt des PDOs an. Falls das Flag F (fester Inhalt) des PDOs nicht gesetzt ist, können Sie den
Inhalt ändern.
Download
Falls das Gerät intelligent ist und über eine Mailbox verfügt, können die Konfiguration des PDOs und die
PDO-Zuordnungen zum Gerät herunter geladen werden. Dies ist ein optionales Feature, das nicht von allen
EtherCAT-Slaves unterstützt wird.
PDO-Zuordnung
Falls dieses Kontrollkästchen angewählt ist, wird die PDO-Zuordnung die in der PDO-Zuordnungsliste
konfiguriert ist beim Startup zum Gerät herunter geladen. Die notwendigen, zum Gerät zu sendenden
Kommandos können in auf dem Karteireiter Startup [}94] betrachtet werden.
PDO-Konfiguration
Falls dieses Kontrollkästchen angewählt ist, wird die Konfiguration des jeweiligen PDOs (wie sie in der PDOListe und der Anzeige PDO-Inhalt angezeigt wird) zum EtherCAT-Slave herunter geladen.
EL2212 99Version: 2.5
Page 100

Inbetriebnahme
5.2.8 Import/Export von EtherCAT-Teilnehmern mittels SCI und XTI
SCI und XTI Export/Import – Handling von benutzerdefiniert veränderten EtherCAT Slaves
5.2.8.1 Grundlagen
Ein EtherCAT Slave wird grundlegend durch folgende „Elemente“ parametriert:
• Zyklische Prozessdaten (PDO)
• Synchronisierung (Distributed Clocks, FreeRun, SM‑Synchron)
• CoE‑Parameter (azyklisches Objektverzeichnis)
Hinweis: je nach Slave sind nicht alle drei Elemente vorhanden.
Zum besseren Verständnis der Export/Import‑Funktion wird der übliche Ablauf bei der IO‑Konfiguration
betrachtet:
• Der Anwender/Programmierer bearbeitet die IO‑Konfiguration, d.h. die Gesamtheit der Input/
Output‑Geräte, wie etwa Antriebe, die an den verwendeten Feldbussen anliegen, in der
TwinCAT‑Systemumgebung.
Hinweis: Im Folgenden werden nur EtherCAT‑Konfigurationen in der TwinCAT‑Systemumgebung
betrachtet.
• Der Anwender fügt z.B. manuell Geräte in eine Konfiguration ein oder führt einen Scan auf dem
Online‑System durch.
• Er erhält dadurch die IO‑System‑Konfiguration.
• Beim Einfügen erscheint der Slave in der System‑Konfiguration in der vom Hersteller vorgesehenen
Standard‑Konfiguration, bestehend aus Standard‑PDO, default‑Synchronisierungsmethode und
CoE‑StartUp‑Parameter wie in der ESI (XMLGerätebeschreibung) definiert ist.
• Im Bedarfsfall können dann, entsprechend der jeweiligen Gerätedokumentation, Elemente der
Slave‑Konfiguration verändert werden, z.B. die PDO‑Konfiguration oder die
Synchronisierungsmethode.
Nun kann der Bedarf entstehen, den veränderten Slave derartig in anderen Projekten wiederzuverwenden,
ohne darin äquivalente Konfigurationsveränderungen an dem Slave nochmals vornehmen zu müssen. Um
dies zu bewerkstelligen, ist wie folgt vorzugehen:
• Export der Slave‑Konfiguration aus dem Projekt,
• Ablage und Transport als Datei,
• Import in ein anderes EtherCAT‑Projekt.
Dazu bietet TwinCAT zwei Methoden:
• innerhalb der TwinCAT‑Umgebung: Export/Import als xti‑Datei oder
• außerhalb, d.h. TwinCAT‑Grenzen überschreitend: Export/Import als sci‑Datei.
Zur Veranschaulichung im Folgenden ein Beispiel: eine EL3702‑Klemme in Standard‑Einstellung wird auf
2‑fach Oversampling umgestellt (blau) und das optionale PDO „StartTimeNextLatch“ wahlweise hinzugefügt
(rot):
EL2212100 Version: 2.5
 Loading...
Loading...