

Baldor VS1SD Installation And Operation Manual
VS1SD
Analog I/O
Jumper Settings
Control Circuit Board
Relay outputs
Type
Function
Internal
supply
Active
high
JP6
JP1
J1 J2 J3
P3
JP3
JP3
JP2
ENP
ENP
EPN
EPN
EPN
EPN
EPN
DFT
DFT
DFT
DFT
DFT
INP
INP
INP
INP
INP
ENP
ENP
ENP
JP6
120 ohm
termination
No
termination
JP5
JP5
JP5
JP5
JP5
JP6 JP6
JP6
Factory
settings as
shown
Note:
Relay outputs are
rated at 10-30 VDC or
240 VAC @ 5 A resistive
(non-inductive).
Digital input connections
shown when using factory
default jumper settings
1
1
1
1 2 3 4 5 6
7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22
Load
Load
Load
P1503 P1504
Load
Relay Out 1 N.C.
Enable
0-10 VDC
Dig. Input 1
Analog GND
Analog input 1
Pot. reference
Analog input +2
Analog output 1*
Analog output 2*
*Referenced to J1-1
Analog input -2
P1408
P1510, P1511, P1512
P1513, P1514, P1515
Dig. Input 2
Dig. Input 3
Dig. Input 4
Dig. Input 5
Dig. Input 6
Dig. Input 7
Dig. Input 8
Relay Out 1 COM
Relay Out 2 COM
Relay Out 1 N.O.
Relay Out 2 N.O.
Relay Out 1 N.C.
232425 26 27 28 29 30
P1
Fault
USB
USB port
1
1
1
1
RS485
S G A B S
1
1
Active
low
External
supply
ANAIN2
JP1
ANAOUT1
JP2
Voltage
Current
Communications
Termination jumper
Digital Outputs
Control Board
Control Board
Sourcing Current Connections
Sinking Current Connections
Note: Digital outputs are rated at 24 VDC @ 60 mA resistive (non-inductive).
J2
J2
P1501
Out 1
P1501
Out 1
P1502
Out 2
P1502
Out 2
J3
J3
Digital output 1+ (Collector)
Digital output 1+ (Collector)
Digital output 2+ (Collector)
Digital output 2+ (Collector)
Digital output 1- (Emitter)
Digital output 1- (Emitter)
Digital output 2- (Emitter)
Digital output 2- (Emitter)
External User Return
External User Return
External User +24 V
External User +24 V
Internal +24 V
Internal +24 V
Internal 24 V Return
Internal 24 V Return
171718181919202021212222232324
24
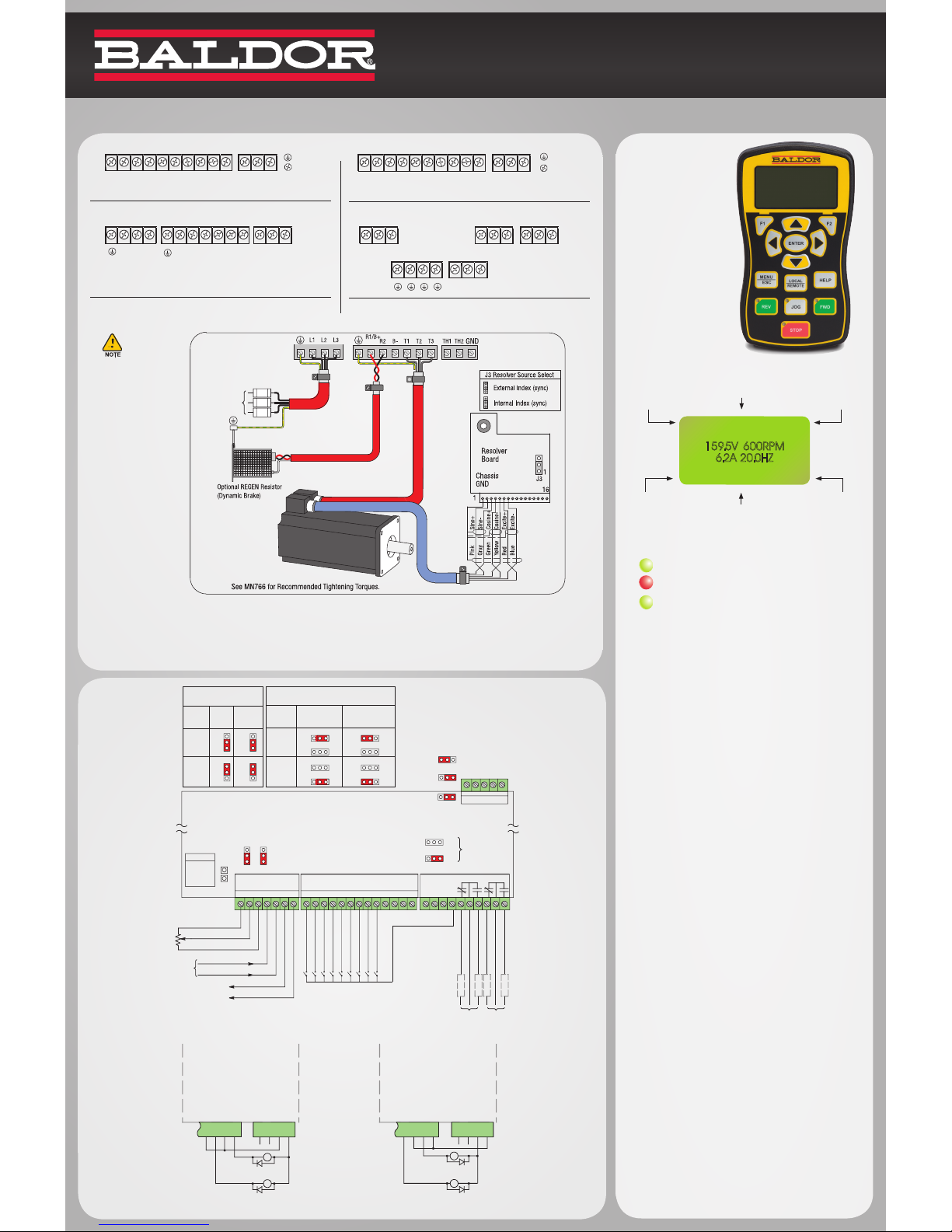
Note: Optional equipment
such as input/output
reactors/filters are not
shown. See instruction
manual MN766.
Note: See instruction
manual MN766 for
important information
regarding motor power
wiring and output
reactors.
Thermostat and control
leads must be in
separate conduits.
Frame Size AA 1-Phase Input Drives
Frame Size AA 3-Phase Input Drives
Frame Size B and C Drives
Frame Size D Drives
L1 L2 N GND
R1/B+
R2 B- T1 T2 T3 TH1 TH2 GND L1 L2 L3 GND
R1/B+
R2 B- T1 T2 T3 TH1 TH2 GND
L1 L2 L3
B+/R1
R2 B- T1 T2 T3 TH1 TH2 GND L1 L2 L3 T1 T2 T3R+/R1 R2 B-
Motor
Chassis
Ground
Motor
Chassis
Ground
TH1 TH2 GND
Keypad Components
The keypad is used to
program the control
parameters, to operate
the motor and to monitor
the status and outputs of
the control by accessing
the display options, the
diagnostic menus and the
fault log. Additionally, drive
parameters can be stored
in the keypad for future
retrieval.
Display Features
Speed Reference
Defines action of F2 keyDefines action of F1 key
Local RemotePresent Menu Selection
Stop – Forward – Reverse
Indicator Lights:
(On when indicated Key is active)
FWD & REV: Green light indicator.
STOP: Red light indicator
JOG: Jog Speed Selected Green light indicator
Display Diagnostics –
I/O Status
I/O Function configuration
Modified Parameters
Control Operation Data
Custom Units
Fault Display – 10 Faults with Time Stamp
F2 – Clears faults or undo parameter edit changes or function
indicated by text displayed directly above key.
Up Arrow Left Arrow
Down Arrow Right Arrow
Moves cursor to select menu choices.
LOCAL/REMOTE – Switches between local and remote
modes.
HELP – Provides help at each display screen, setup parameter
and fault. Press to view/close help information.
JOG – Initiates Jog mode. Press FWD or REV for motion. Only
in local mode.
FWD –
When pressed, initiates a forward direction run command.
Indicator Lights – (on indicated key)
STOP key with red light indicator.
FWD key with green light indicator.
REV key with green light indicator.
JOG key with green light indicator.
Keypad Display – Displays status Information during Local or
Remote operation. It also displays information during parameter
setup and fault or Diagnostic information.
F1 – Alternates or "toggles" between the last two menu choices
or function indicated by text displayed directly above key.
ENTER – Press ENTER to save parameter value changes. In
the display mode the ENTER key is used to directly set the local
speed reference. It is also used to select other operations when
prompted by the keypad display.
MENU/ESC – Selects the menu display when viewing status.
The following menu items are shown: Status, Basic Params,
Advanced Prog, Event Log, Diagnostics and Display Options.
Backs up one level for other screens.
REV – When pressed, initiates a reverse direction run
command.
STOP – Initates a stop command.
Note: Pressing the stop key twice in succession will immediately
disable the top drive placing the motor in a coast stop condition.
STATUS FWD LOCAL
159.5V 600RPM
6.2A 20.0HZ
DIAG 600R MAIN
Digital Input Jumper Settings
Please consult the VS1SD Installation and Operation Manual, MN766, before operating the drive.
Also, please read the precautionary and warning statements in the Safety Notice, Paragraph 1.2, in MN766.
AC Input power
PE
Star
Point
See instruction
manual MN766
Fuses
AC Input
Dynamic Brake
SHIELD
STATUS
BASIC PARAMS
ADVANCED PROG
EVENT LOG
DIAGNOSTICS
STATUS BACK
STATUS
BASIC PARAMS
ADVANCED PROG
EVENT LOG
DIAGNOSTICS
STATUS BACK
LEVEL 1 BLOCKS
LEVEL 2 BLOCKS
LEVEL 3 BLOCKS
MODIFIED PARAMS
LINEAR LIST
STATUS BACK
BASIC PARAMS
LEVEL 2 BLOCKS
ADVANCED PROG
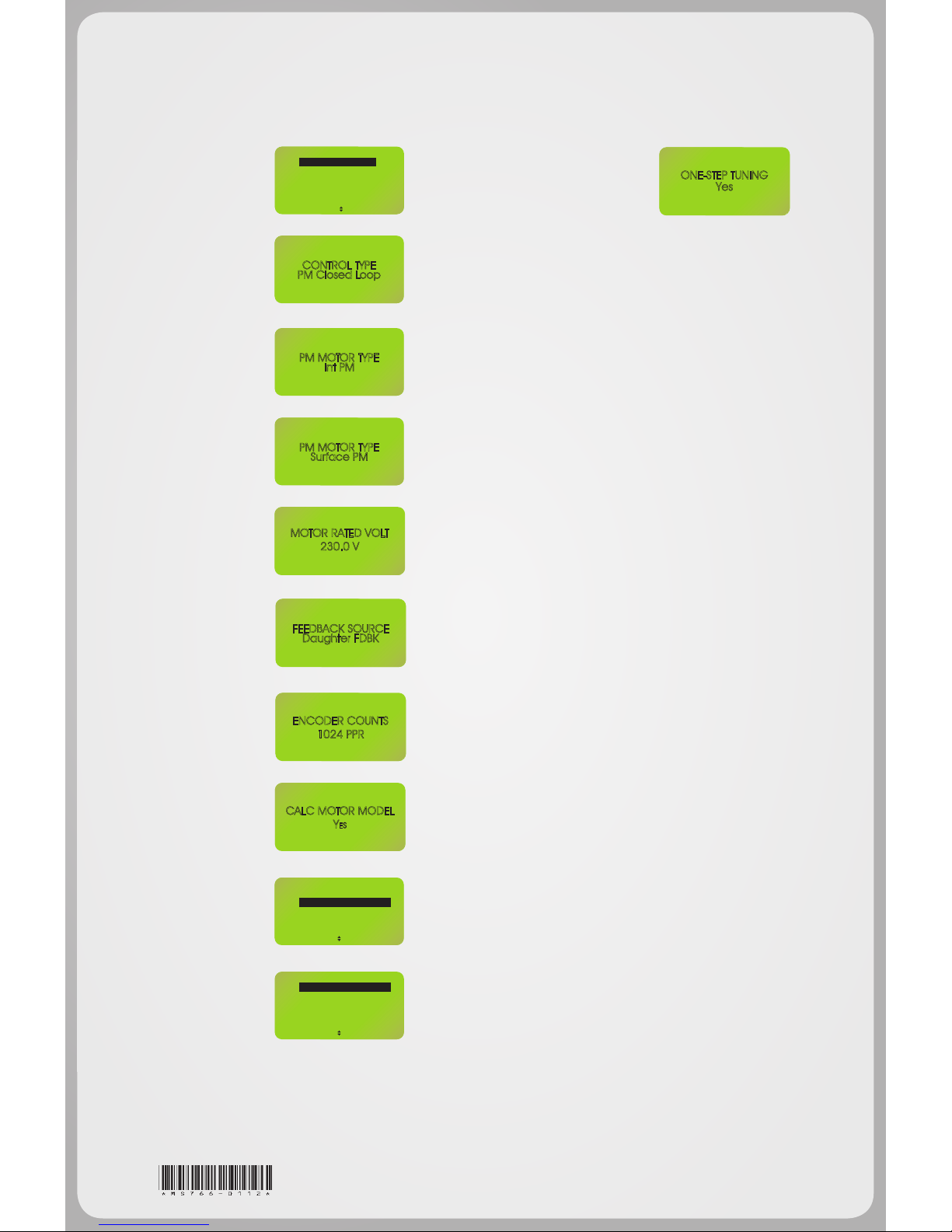
Auto Tuning Procedure
For PM Closed Loop Control Type:
1) Press MENU.
Scroll to BASIC PARAMS.
Press ENTER.
At this point the display shows
CONTROL TYPE F1601,– the
default value is "PM Closed
Loop" – press DOWN arrow to
continue tuning.
2) PM MOTOR TYPE Default value is Int PM. Press
DOWN arrow to continune
or press ENTER then UP or
DOWN to change MOTOR
TYPE to SURFACE PM - press
ENTER to select then DOWN
arrow to continue.
3) Enter values from the motor
nameplate for each of the
following "MOTOR DATA"
parameters. Press ENTER to
begin editing – after each value
is programmed, press ENTER
then DOWN arrow for the next
item.
• MOTOR RATED VOLT
• MOTOR RATED AMPS
• MOTOR RATED SPD
• MOTOR RATED FREQ
4) FEEDBACK SOURCE –
(Standard VS1SD drives factory
setting is "Daughter FDBK") –
press DOWN arrow.
5) ENCODER COUNTS
– Press DOWN arrow to skip
this parameter to continue.
Note: Contact Baldor if an
encoder must be used for your
application.
6) Scroll to CALC MOTOR
MODEL – press ENTER – select
YES – press ENTER.
7) After CALC MOTOR MODEL
is complete, press F2 to exit
MOTOR DATA and BASIC
PARAMS to return to the menu.
8) ENABLE DRIVE, (Close J2-8
– J3-24 circuit).
9) Scroll to ADVANCED PROG
– press ENTER.
10) Scroll to LEVEL 2 BLOCKS
– press ENTER
(Note: Procedure requires that load be decoupled from motor shaft. See details below if this is not possible.
11) Scroll to AUTO TUNE –
press ENTER
12) Skip ANA OFFSET TRIM –
Scroll to ONE-STEP TUNING
– press ENTER – select Yes –
press ENTER.
The ONE-STEP TUNING will
take approx. 3-4 minutes to
complete.
13) After the static portion of
AUTO TUNE is complete, the
display will alternately show
STATIC TEST DONE – ROTARY
FOLLOW and PRESS ENTER
FOR FEEDBACK ALIGN. Select
one of the following:
a) if the motor is coupled to the
load, press F2 to exit AUTO
TUNING
b) If the motor is not coupled
to the load, press ENTER to
begin rotation tuning. The rst
test is "FEEDBACK ALIGN" –
press ENTER.
14) After "FEEDBACK ALIGN"
TEST PASSED – press ENTER
for "FLUX CUR TUNE".
15) After "FLUX CUR TUNE"
TEST PASSED – press ENTER
for "SPD LOOP TUNE".
16) After "SPD LOOP TUNE"
TEST PASSED – press ENTER
for "END OF TEST".
17) Press F2 to return to the
MENU – press F1 to return to
the STATUS display.
18) It may be possible to
improve the speed loop after
the motor is coupled to the load
by manual tuning of the Speed
Prop Gain (P1635), Speed Int
Gain (P1636) and Speed Diff
Gain (P1637).
Note: It is not recommended to
perform SPEED LOOP Autotune
while the load is coupled to the
motor.
BASIC MOTOR CONTROL
CONTROL TYPE
PM Closed Loop
STATUS F1601T1 BACK
BASIC MOTOR CONTROL
MOTOR RATED VOLT
230.0 V
STATUS F2401T1 BACK
BASIC MOTOR DATA
FEEDBACK SOURCE
Daughter FDBK
STATUS F2409T1 BACK
BASIC MOTOR DATA
ENCODER COUNTS
1024 PPR
STATUS F2408T1 BACK
MS766 Jan. 2012
BASIC MOTOR CONTROL
PM MOTOR TYPE
Int PM
STATUS F1677T1 BACK
BASIC MOTOR CONTROL
PM MOTOR TYPE
Surface PM
STATUS F1677T1 BACK
BASIC MOTOR DATA
CALC MOTOR MODEL
YES
STATUS F2414T1 BACK
PROG AUTO TUNE
ONE-STEP TUNING
Yes
BASIC F2902 BACK
 Loading...
Loading...