

Page 1

Dynamixel
Closer to Real,
A
User’s Manual 2006-06-14
X-12
Page 2
DYNAMIXEL
Contents
AX-12
1. Summary
1-1. Overview and Characteristics of AX-12 Page 2
1-2. Main Specifications Page 3
2. Dynamixel Operation
2-1. Mechanical Assembly Page 4
2-2. Connector Assembly Page 5
2-3. Dynamixel Wiring Page 6
3. Communication Protocol
3-1. Communication Overview Page 9
3-2. Instruction Packet Page 10
3-3. Status Packet Page 10
3-4. Control Table Page 12
4. Instruction Set and Examples
4-1. WRITE_DATA Page 19
4-2. READ_DATA Page 20
4-3. REG WRITE and ACTION Page 2 0
4-4. PING Page 21
4-5. RESET Page 22
4-6. SYNCWRITE Page 23
5. Example
Appendix
Page 30
Page 24
1
Page 3
DYNAMIXEL
AX-12
1. Dynamixel AX-12
1-1. Overview and Characteristics of AX-12
Dynamixel AX-12 The Dynamixel series robot actuator is a smart, modular actuator that incorporates a
gear reducer, a precision DC motor and a control circuitry with networking functionality,
all in a single package. Despite its compact size, it can produce high torque and is
made with high quality materials to provide the necessary strength and structural
resilience to withstand large external forces. It also has the ability to detect and act
upon internal conditions such as changes in internal temperature or supply voltage.
The Dynamixel series robot actuator has many advantages over similar products.
Precision Control Position and speed can be controlled with a resolution of 1024 steps.
Compliance Driving The degree of compliance can be adjusted and specified in controlling position.
Feedback Feedback for angular position, angular velocity, and load torque are available.
Alarm System The Dynamixel series robot actuator can alert the user when parameters deviate from
user defined ranges (e.g. internal temperature, torque, voltage, etc) and can also handle
the problem automatically (e.g. torque off)
Communication Wiring is easy with daisy chain connecti on, and it support communication speeds u p to
1M BPS.
Distributed Control Position, velocity, compliance, and torque can be set with a single command packet,
thus enabling the main processor to control many Dynamixel units even with very few
resources.
Engineering Plastic The main body of the unit is made with high quality engineering plastic which enables it
to handle high torque loads.
Axis Bearing A bearing is used at the final axis to ensure no efficiency degradation with high external
loads.
Status LED The LED can indicate the error status to the user.
Frames A hinge frame and a side mount frame are included.
2
Page 4
DYNAMIXEL
AX-12
1-2. Main Specifications
AX-12
Weight (g) 55
Gear Reduction Ratio 1/254
Input Voltage (V) at 7V at 10V
Final Max Holding Torque(kgf.cm) 12 16.5
Sec/60degree 0.269 0.196
Resolution 0.35°
Operating Angle 300°, Endless Turn
Voltage 7V~10V (Recommended voltage: 9.6V)
Max. Current 900mA
Operate Temperature -5 ~ +85℃℃
Command Signal Digital Packet
Protocol Type Half duplex Asynchronous Serial Communication (8bit,1stop,No Parity)
Link (Physical) TTL Level Multi Drop (daisy chain type Connector)
ID 254 ID (0~253)
Communication Speed 7343bps ~ 1 Mbps
Feedback Position, Temperature, Load, Input Voltage, etc.
Material Engineering Plastic
3
Page 5
DYNAMIXEL
AX-12
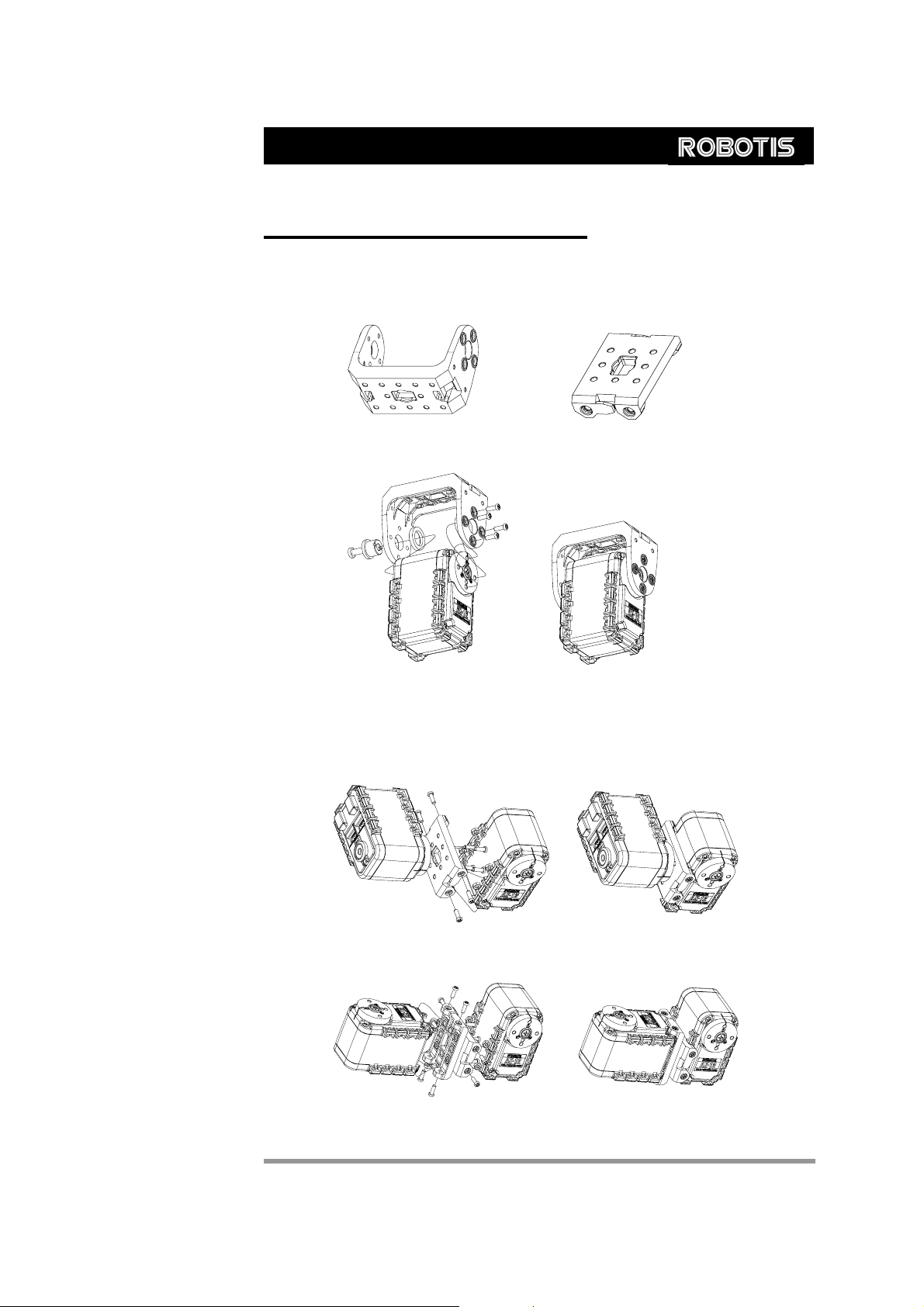
2. Dynamixel Operation
2-1. Mechanical Assembly
Frames Provided The two frames provided with AX-12 are shown below.
OF-12SH Installation The OF-12SH (hinge frame) can be installed on the AX-12 as the following.
OF-12S Installation The OF-12S (side mount frame) can be installed on the AX-12 as the following. The OF-
12S can be mounted on any of the three faces (left, right, or under side) of the AX-12
body as needed.
Horn2Body
Body2Body
OF-12SH OF-12S
Exploded view
Exploded view
Exploded view Assembled
Assembled
Assembled
4
Page 6

DYNAMIXEL
AX-12
2-2 . Connector Assembly
Assemble the connectors as shown below. Attach the wires to the terminals using the
correct crimping tool. If you do not have access to a crimping tool, solder the terminals to
the wires to ensure that they do not become loose during operation.
5
Page 7
DYNAMIXEL
AX-12
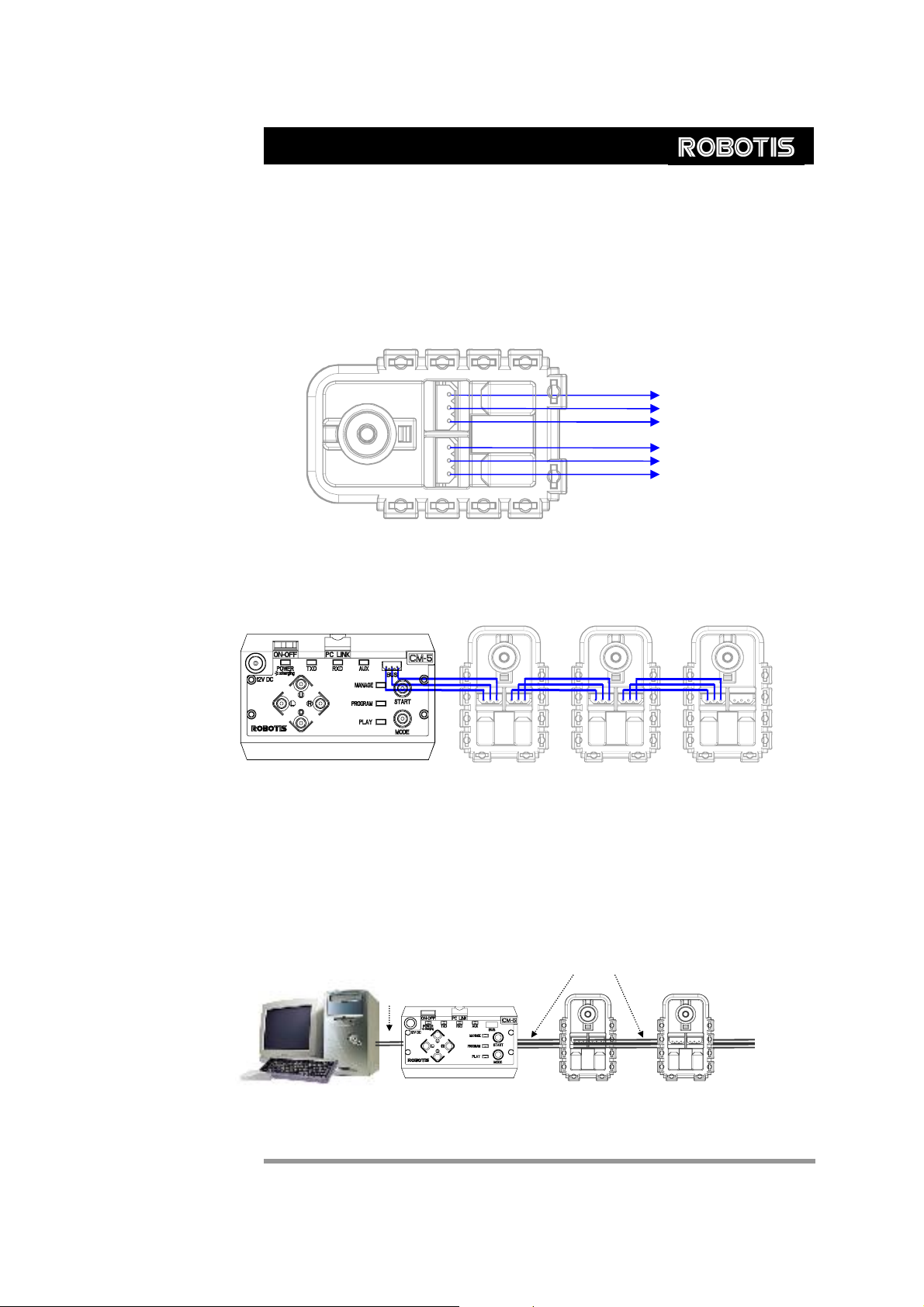
2-3. Dynamixel Wiring
Pin Assignment The connector pin assignments are as the following. The two connectors on the
Dynamixel are connected pin to pin, thus the AX-12 can be operated with only one
connector attached.
Wiring Connect the AX-2 actuators pin to pin as shown below. Many AX-12 actuators can be
controlled with a single bus in this manner.
Control Box “CM-5”
Main Controller To operate the Dynamixel actuators, the main controller must support TTL level half duplex
UART. A proprietary controller can be used, but the use of the Dynamixe l controller CM-5
is recommended.
PC LINK A PC can be used to control the Dynamixel via the CM-5 controller.
RS232
Level
TTL
Level
PC Dynamixels
CM-5
PIN1: GND
PIN2: VDD
PIN3: Data
PIN1: GND
PIN2: VDD
PIN3: Data
6
Page 8
DYNAMIXEL
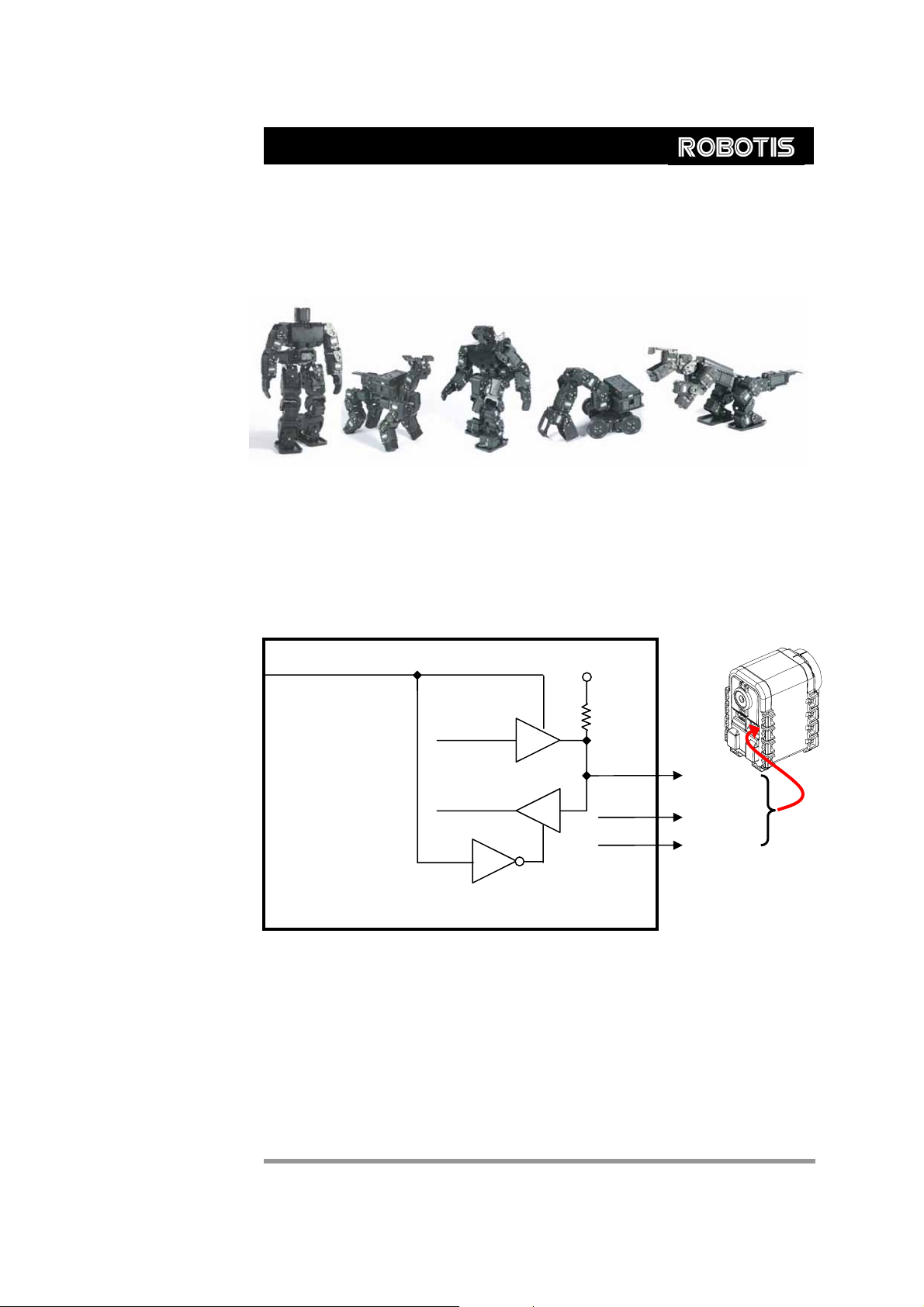
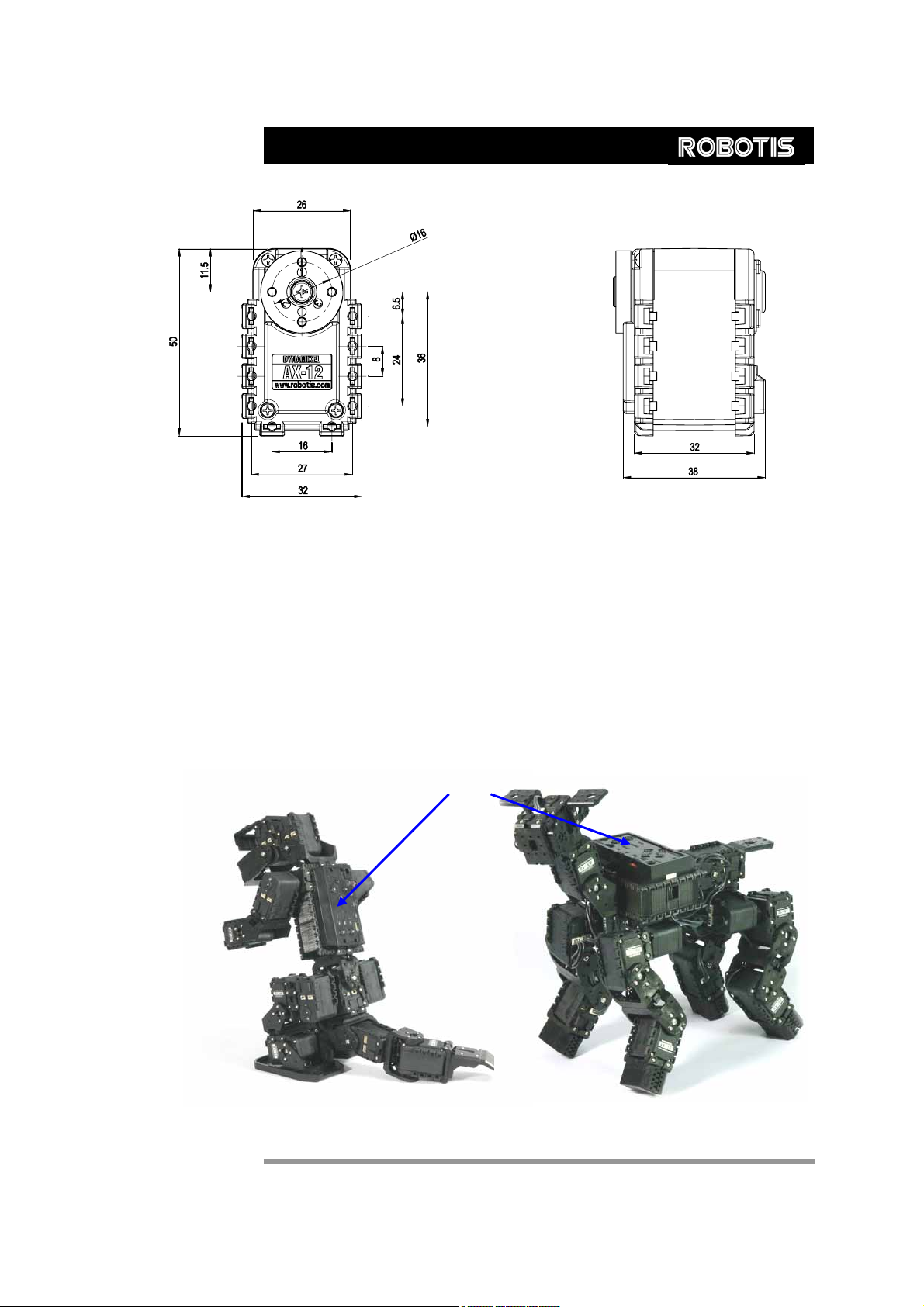
bioloid A robot can be built using only the CM-5 controller and a number of AX-12 actuators. An
Connection to UART To control the Dynamixel actuators, the main controller needs to convert its UART
AX-12
edutainment robotic kit named “Bioloid” is available which is based on the CM-5
controller and the AX-12 actuators.
An example of a robot built with Bioloid
For details, please refer to the Bioloid manual.
signals to the half duplex type. The recommended circuit diagram for this is shown
below.
DIRECTION_PORT
74HC126
TXD
74HC126
RXD
74HC04
CM-5 internal circuit (HALF DUPLEX UART)
The power is supplied to the Dynamixel actuator from the main controller through Pi n 1
and Pin 2 of the Molex3P connector. (The circuit shown above is presented only to
explain the use of half duplex UART. The CM-5 controller already has the above
circuitry built in, thus the Dynamixel actuators can be directly connected to it)
The direction of data signals on the TTL level TxD and RxD depends on the
DIRECTION_PORT level as the following.
5V
10K
DATA
9.6V
GND
DATA(PIN3)
VDD(PIN2)
GND(PIN1)
7
Page 9
r
DYNAMIXEL
Half Duplex UART A multi-drop method of connecting multiple Dynamixel actuators to a single node is
Caution Please ensure that the pin assignments are correct when connecting the Dynamixel
Connection Status Verification
Inspection If the above operation was not successful, then check the co nnector pin assi gn ment and
AX-12
• When the DIRECTION_PORT level is High: the signal TxD is output as Data
• When the DIRECTION_PORT level is Low: the signal Data is input as RxD
possible by using the half duplex UART. Thus a protocol that does not allow multiple
transmissions at the same time should be maintained when controlling the Dynamixel
actuators.
Main
Controlle
[Multi Drop Link]
actuators. Check the current consumption when powering on. T he current consumption
of a single Dynamixel actuator unit in standby mode should be no larger than 50mA
When power is applied to the Dynamixel actuator, the LED blinks twice to confirm its
connection.
the voltage/current limit of the power supply.
8
Page 10
r
r
DYNAMIXEL
AX-12
3. Communication Protocol
3-1. Communication Overview
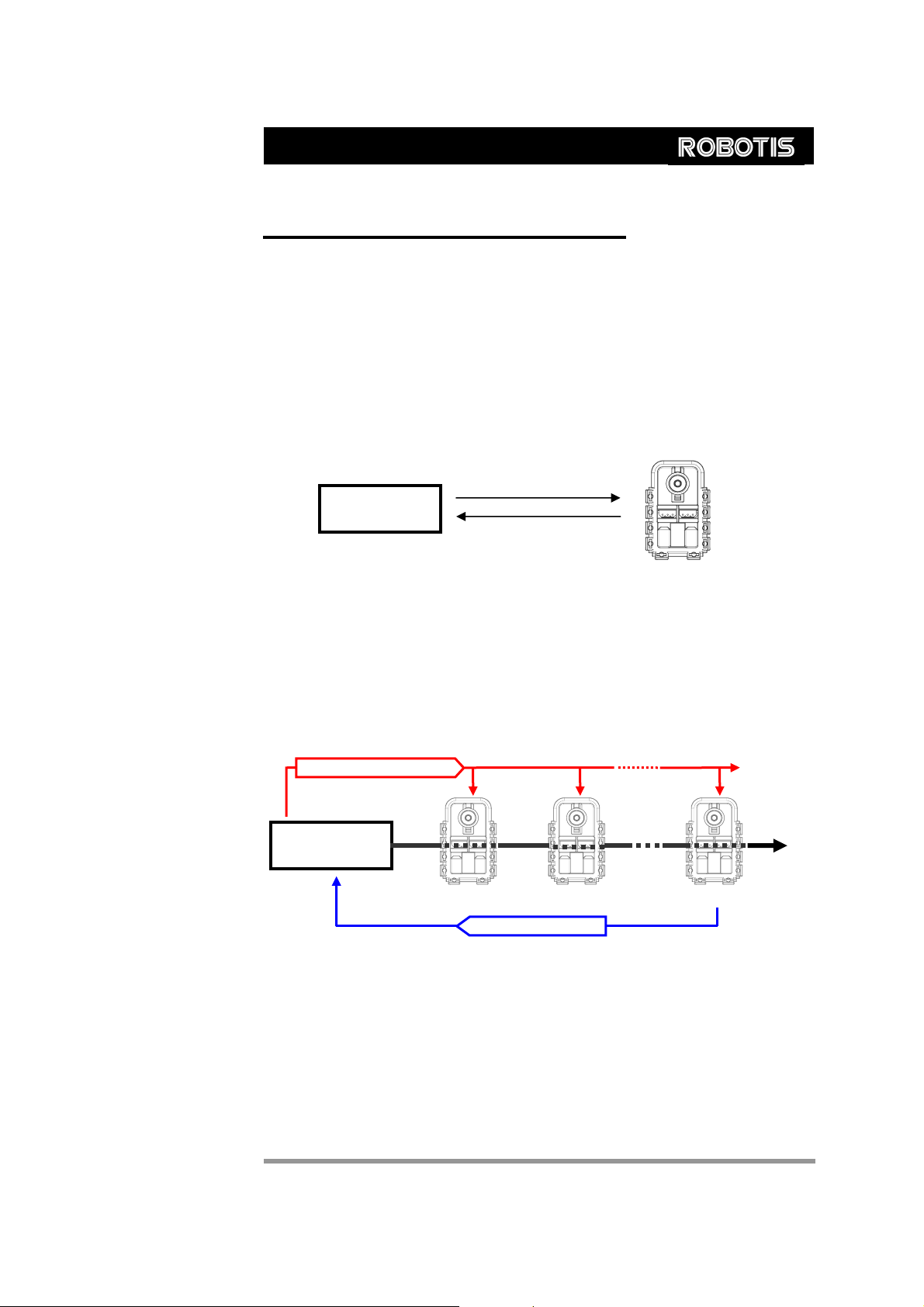
Packet The main controller communicates with the Dynamixel units by sending and receiving
data packets. There are two types of packets; the “Instruction Packet” (sent from the
main controller to the Dynamixel actuators) and the “Status Packet” (sent from the
Dynamixel actuators to the main controller.)
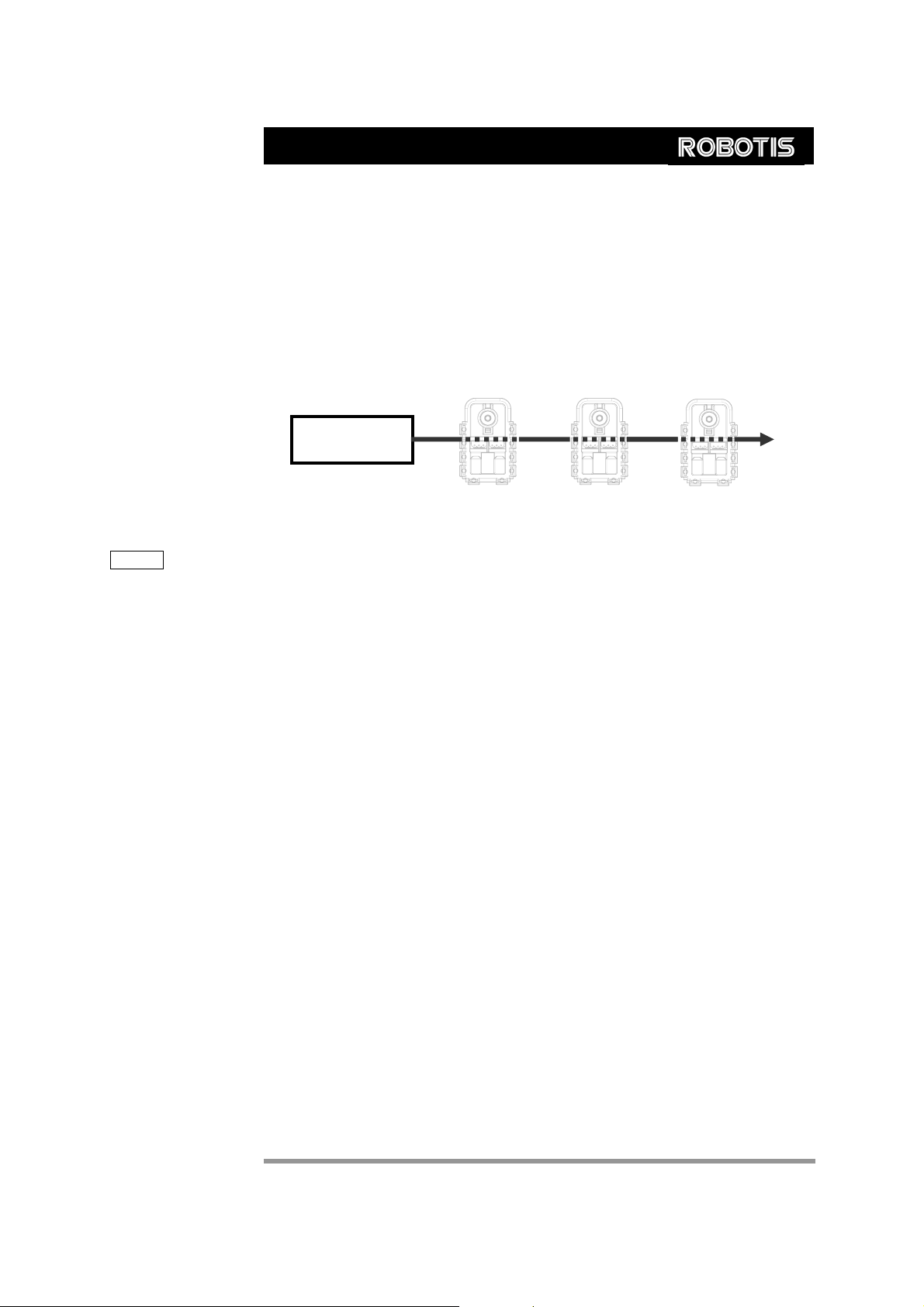
Communication For the system connectio n below, if the main controller sends an instruction packet with
the ID set to N, only the Dynamixel unit with this ID value will return its respective status
packet and perform the required instruction.
Unique ID If multiple Dynamixel units have the same ID value, multiple packets sent
Protocol The Dynamixel actuators communicate through asynchronous serial communication
Instruction Packet(ID=N)
Main
Controlle
simultaneously collide, resulting in communication problems. Thus, it is imperative that
no Dynamixel units share the same ID in a network node.
with 8 bit, 1 stop bit and no parity.
Main
Controlle
Instruction Packet
Status Packet
ID=0 ID=1 ID=N
Status Packet(ID=N)
9
Page 11
DYNAMIXEL
AX-12
3-2. Instruction Packet
The Instruction Packet is the packet sent by the main controller to the Dynamixel units
to send commands. The structure of the Instruction Packet is as the following.
Instruction Packet
0XFF 0XFF The two 0XFF bytes indicate the start of an incoming packet.
ID The unique ID of a Dynamixel unit. There are 254 available ID values, ranging from
Broadcasting ID ID 0XFE is the Broadcasting ID which indicates all of the conn ected Dynamixel units.
LENGTH The length of the packet where its value is “Number of parameters (N) + 2”
INSTRUCTION The instruction for the Dynamixel actuator to perform.
PARAMETER0…N Used if there is additional information needed to be sent other than the instruction itself.
CHECK SUM The computation method for the ‘Check Sum’ is as the following.
OXFF 0XFF ID LENGTH INSTRUCTION PARAMETER1 …PARAMETER N CHECK SUM
The meanings of each packet byte definition are as the following.
0X00 to 0XFD.
Packets sent with this ID apply to all Dynamixel units on the network. Thus packets sent
with a broadcasting ID will not return any status packets.
Check Sum = ~ (ID + Length + Instruction + Parameter1 + ... Parameter N)
If the calculated value is larger than 255, the lower byte is defined as the checksum
value.
~ represents the NOT logic operation.
3-3. Status Packet(Return Packet)
The Status Packet is the response packet from the Dynamixel units to the Main
Controller after receiving an instruction packet. The structure of the status packet is as
the following.
OXFF 0XFF ID LENGTH ERROR PARAMETER1 PARAMETER2… PARAMETER N CHECK SUM
10
Page 12
DYNAMIXEL
0XFF 0XFF The two 0XFF bytes indicate the start of the packet.
ID The unique ID of the Dynamixel unit returning the packet. The initial value is set to 1.
LENGTH The length of the packet where its value is “Number of parameters (N) + 2”
ERROR The byte repres enting errors sent from the Dynamixel unit. The meaning of each bit is
AX-12
The meanings of each packet byte definition are as the following.
as the following.
Bit Name Details
Bit 7 0 -
Set to 1 if an undefined instruction is sent or an action
Bit 6 Instruction Error
instruction is sent without a Reg_Write instruction.
Set to 1 if the specified maximum torque can't control the
Bit 5 Overload Error
applied load.
Bit 4 Checksum Error Set to 1 if the checksum of the instruction packet is incorrect.
Bit 3 Range Error Set to 1 if the instruction sent is out of the defined range.
Bit 2
Overheating
Error
Angle Limit
Bit 1
Error
Input Voltage
Bit 0
Error
PARAMETER0…N Used if additional information is needed.
CHECK SUM The computation method for the ‘Check Sum’ is as the following.
Check Sum = ~ (ID + Length + Instruction + Parameter1 + ... Parameter N)
If the calculated value is larger than 255, the lower byte is defined as the checksum
value. ~ represents the NOT logic operation.
Set to 1 if the internal temperature of the Dynamixel unit is
above the operating temperature range as defined in the
control table.
Set as 1 if the Goal Position is set outside of the range
between CW Angle Limit and CCW Angle
Limit.
Set to 1 if the voltage is out of the operating voltage range as
defined in the control table.
11
Page 13

DYNAMIXEL
3-4. Control
Table
EEPROM
Area
RAM
Area
AX-12
Address Item Acces s Initial Value
0(0X00) Model Num ber(L) RD
1(0X01) Model Num ber(H) RD
2(0X02) Version of Firmw are RD
3(0X03) ID RD,WR
4(0X04) Baud Rate RD,WR
5(0X05) Return Delay Time RD,WR
6(0X06) CW Angle Limit(L) RD,WR
7(0X07) CW Angle Limit(H) RD,WR
8(0X08) CCW Angle Limit(L) RD,WR
9(0X09) CCW Angle Limit(H) RD,WR
10(0x0A) (Reserved) 11(0X0B) the Highest Lim it T emperature RD,WR
12(0X0C) the Lowest Lim it Voltage RD ,WR
13(0X0D) the Highest Limit Voltage RD ,WR
14(0X0E) Max Torque(L) RD,WR
15(0X0F) Max Torque(H) RD,WR
16(0X10) Status Return Level RD,WR
17(0X11) Alarm LE D RD,WR
18(0X12) Alarm S hutdown RD,WR
19(0X13) (Reserved) RD,WR
20(0X14) Down Calibration(L) RD
21(0X15) Down Calibration(H) R D
22(0X16) Up Calibration(L) RD
23(0X17) Up Calibration(H) RD
24(0X18) Torque Enable RD,WR
25(0X19) LED RD,WR
26(0X1A) CW Com pliance Margin RD,WR
27(0X1B) CCW Com pliance Margin RD,WR
28(0X1C) CW Compliance Slope RD,WR
29(0X1D) CC W Compliance Slope R D ,WR
30(0X1E) G oal Pos ition(L) R D ,WR
31(0X1F) Goal Position(H) RD,WR
32(0X20) Moving Speed(L) RD,WR
33(0X21) Moving Speed(H) RD,WR
34(0X22) Torque Limit(L) RD,WR
35(0X23) Torque Limit(H) RD,WR
36(0X24) Present Position(L) RD
37(0X25) Present Position(H) RD
38(0X26) Present Speed(L) RD
39(0X27) Present Speed(H) RD
40(0X28) Present Load(L) RD
41(0X29) Present Load(H) RD
42(0X2A) Present Voltage RD
43(0X2B) Present Tem perature RD
44(0X2C) Registered Instruction RD,WR
45(0X2D) (Res erved) -
46[0x2E) Moving RD
47[0x2F) Loc k RD ,WR
48[0x30) Punch(L) RD,WR
49[0x31) Punch(H) RD,WR
12(0x0C)
0(0x00)
?
1(0x01)
1(0x01)
250(0xFA)
0(0x00)
0(0x00)
255(0xFF)
3(0x03)
0(0x00)
85(0x55)
60(0X3C)
190(0xBE)
255(0XFF)
3(0x03)
2(0x02)
4(0x04)
4(0x04)
0(0x00)
?
?
?
?
0(0x00)
0(0x00)
0(0x00)
0(0x00)
32(0x20)
32(0x20)
[Addr36]value
[Addr37]value
0
0
[Addr14] value
[Addr15] value
?
?
?
?
?
?
?
?
0(0x00)
0(0x00)
0(0x00)
0(0x00)
32(0x20)
0(0x00)
12
Page 14

DYNAMIXEL
Control Ta ble The Control Table contains information on the status and operation of the Dynamixel
RAM and EEPROM The data values for the RAM area will be set to the default initial values whenever the
Initial Value The Initial Value column on the right side of the control table shows the Factory Default
Address 0x00,0x01
Address 0x02
Address 0x03
Address 0x04
Speed (BPS) = 2000000 / (Address4 + 1)
Note A maximum Baud Rate error of 3% is within the tolerance of UART communication.
Caution The initial value of Baudrate is set to 1(1000000bps)
AX-12
actuator. The Dynamixel actuator is operated by writing values to its control table and its
status is checked by reading values off its control table.
power is turned on. However, the data values for the EEPROM area are non-volatile
and will still remain even after the power is turned off.
Values for the case of EEPROM area data, and shows the initial value when the power
is turned on for the case of RAM area data.
The following explains the meaning of data stored in each of the addresses in the
control table.
Model Number. For AX-12, this value is 0X000C (12).
Firmware Version.
ID. The unique ID number assigned to each Dynamixel actuators for identifying them.
Different IDs are required for each Dynamixel actuators that are on the same network.
Baud Rate. Determines the communication speed. The computation is done by the
following formula.
Data Value for each Major Baud Rate
Adress4 Hex Set BPS Goal BPS Error
1 0X01 1000000.0 1000000.0 0.000%
3 0X03 500000.0 500000.0 0.000%
4 0X04 400000.0 400000.0 0.000%
7 0X07 250000.0 250000.0 0.000%
9 0X09 200000.0 200000.0 0.000%
16 0X10 117647.1 115200.0 -2.124%
34 0X22 57142.9 57600.0 0.794%
103 0X67 19230.8 19200.0 -0.160%
207 0XCF 9615.4 9600.0 -0.160%
13
Page 15
DYNAMIXEL
Address 0x05 Return Delay Time. The time it takes for the Status Packet to return after the Instruction
Address 0x06,0x07,0x08,0x09
Address 0x0B
Address 0x0C,0x0D
Address 0x0E,0x0F, 0x22,0x23
Address 0X10
AX-12
Packet is sent. The delay time is given by 2uSec * Address5 value.
Operating Angle Limit. Sets the Dynamixel actuator’s operating angle range. T he Goal
Position needs to be within the range of: CW Angle Limit <= Goal Position <= CCW
Angle Limit. An Angle Limit Error will occur if the Goal Position is set outside this range
set by the operating angle limits.
the Highest Limit Temperature. The upper limit of the Dynamixel actuator’s operating
temperature. If the internal temperature of the Dynamixel actuator gets higher than this
value, the Over Heating Error Bit (Bit 2 of the Status Packet) will return the value 1, and
an alarm will be set by Address 17, 18. The values are in Degrees Celsius.
the Lowest (Highest) Limit Voltage. The upper and lower limits of the Dynamixel
actuator’s operating voltage. If the present voltage (Address 42) is out of the specified
range, a Voltage Range Error Bit (Bit 0 of the Status Packet) will return the value 1,
and an alarm will be set by Address 17, 18. The values are 10 times the actual voltage
value. For example, if the Address 12 value is 80, then the lower voltage limit is set to
8V.
Max Torque. The maximum torque output for the Dynamixel actuator. When this value
is set to 0, the Dynamixel actuator enters the Free Run mode. There are t wo locations
where this maximum torque limit is defined; in the EEPROM (Address 0X0E, 0x0F) and
in the RAM (Address 0x22, 0x23). When the power is turned on, the maximum torque
limit value defined in the EEPROM is copied to the location in the RAM. The torque of
the Dynamixel actuator is limited by the values located in the RAM (Address 0x22,
0x23).
Status Return Level. Determines whether the Dynamixel actuator will return a Status
Packet after receiving an Instruction Packet.
Address16
0
1 Respond only to READ_DATA instructions
2
Returning the Status Packet
Do not respond to any instructions
Respond to all instructions
14
Page 16

DYNAMIXEL
Address 0X11
Address 0X12
This function operates following the “OR” logical operation of all bits. However, unlike
Address 0x14~0x17
AX-12
In the case of an instruction which uses the Broadcast ID (0XFE) the Status Packet will
not be returned regardless of the Address 0x10 value.
Alarm LED . If the corresponding Bit is set to 1, the LED blinks when an Error occurs.
Bit Function
Bit 7 0
Bit 6 If set to 1, the LED blinks when an Instruction Error occurs
Bit 5 If set to 1, the LED blinks when an Overload Error occurs
Bit 4 If set to 1, the LED blinks when a Checksum Error occurs
Bit 3 If set to 1, the LED blinks when a Range Error occurs
Bit 2 If set to 1, the LED blinks when an Overheating Error occurs
Bit 1 If set to 1, the LED blinks when an Angle Limit Error occurs
Bit 0 If set to 1, the LED blinks when an Input Voltage Error occurs
This function operates following the “OR” logical operation of all bits. For example, if the
value is set to 0X05, the LED will blink when an Input Voltage Error occurs or when an
Overheating Error occurs. Upon returning to a normal condition from an error state, the
LED stops blinking after 2 seconds.
Alarm Shutdown. If the corresponding Bit is set to a 1, the Dynamixel actuator’s torque
will be turned off when an error occurs.
Bit Function
Bit 7 0
Bit 6
If set to 1, torque off when an Instruction Error occurs
Bit 5
If set to 1, torque off when an Overload Error occurs
Bit 4
If set to 1, torque off when a Checksum Error occurs
Bit 3
If set to 1, torque off when a Range Error occurs
Bit 2
If set to 1, torque off when an Overheating Error occurs
Bit 1
If set to 1, torque off when an Angle Limit Error occurs
Bit 0
If set to 1, torque off when an Input Voltage Error occurs
the Alarm LED, after returning to a normal condition, it maintains the torque off status.
To recover, the Torque Enable (Address0X18) needs to be reset to 1.
Calibration. Data used for compensating for the differences between the
potentiometers used in the Dynamixel units. The user cannot change this data.
The following (from Address 0x18) is in the RAM area.
15
Page 17

DYNAMIXEL
AX-12
Address 0x18 Torque Enable. When the power is first turned on, the Dynamixel actuator enters the
Torque Free Run condition (zero torque). Setting the value in Address 0x18 to 1 enables
the torque.
Address 0x19
LED. The LED turns on when set to 1 and turns off if set to 0.
Address 0x1A~0x1D
Compliance Margin and Slope. The compliance of the Dynamixel actuator is defined
by setting the compliance Margin and Slope. This feature can be utilized for absorbing
shocks at the output shaft. The following graph shows how each compliance value
(length of A, B, C & D) is defined by the Position Error and applied torque.
CW
Goal Position
CCW
CCW
Y axis:Output Torque
A : CCW Compliance Slope(Address0x1D)
B : CCW Compliance Margin(Address0x1B)
C : CW Compliance Margin(Address0x1A)
D : CW Compliance Slope (Address0x1C)
E : Punch(Address0x30,31)
A
B
E
E
CD
X axis:Position Error
CW
Address 0X1E,0x1F
Goal Position Requested angular position for the Dynamixel actuator output to move to.
Setting this value to 0x3ff moves the output shaft to the position at 300°.
(Goal Position = 0x1ff)
150°
(Goal Position = 0x3ff)
300°
300~360°
Invalid Angle
0°
(Goal Position = 0)
16
Page 18

DYNAMIXEL
Address 0x20,0x21 Moving Speed. Sets the angular velocity of the output moving to the Goal Position.
Address 0x24,0x25
Address 0x26,0x27
Address 0x28,0x29
Load Direction = 0 : CCW Load, Load Direction = 1: CW Load
Address 0x2A
Address 0x2B
Address 0x2C
Address 0x2E
Address 0x2F
Address 0x30,0x31
Endless Turn If both values for the CW Angle Limit and the CCW Angle Limit are set to 0, an Endless
AX-12
Setting this value to its maximum value of 0x3ff moves the output with an angular
velocity of 114 RPM, provided that there is enough power supplie d (The lowest velocity
is when this value is set to 1. When set to 0, the velocity is the largest possible for the
supplied voltage, e.g. no velocity control is applied.)
Present Position. Current angular position of the Dynamixel actuator output.
Present Speed. Current angular velocity of the Dynamixel actuator output.
Present Load. The magnitude of the load on the operating Dynam ixel actuator. Bit 10 is
the direction of the load.
BIT 15~11 10 9876543210
Value 0 Load Direction Load Value
Present Voltage. The voltage currently applied to the Dynamixel actuator. The value is
10 times the actual voltage. For example, 10V is represented as 100 (0x64).
Present Temperature. The internal temperature of the Dynamixel actuator in Degrees
Celsius.
Registered Instruction. Set to 1 when an instruction is assigned by the REG_WRITE
command. Set to 0 after it completes the assigned instruction by the Action command.
Moving. Set to 1 when the Dynamixel actuator is moving by its own power.
Lock. If set to 1, only Address 0x18 to 0x23 can be written to and other areas cannot.
Once locked, it can only be unlocked by turning the power off.
Punch. The minimum current supplied to the motor during operation. The initial value is
set to 0x20 and its maximum value is 0x3ff.
Turn mode can be implemented by setting the Goal Speed. This feature can be used for
implementing a continuously rotating wheel.
17
Page 19

DYNAMIXEL
Goal Speed Setting
Range Each data has a valid minimum and maximum values. Write instructions made outside
AX-12
BIT 15~11 10 9876543210
Value 0 Turn Direction Speed Value
Turn Direction = 0 : CCW Direction Turn, Load Direction = 1: CW Direction Turn
of these valid ranges will return an error. The following table summarizes the data range
for each register. 16 bit data registers are indicated with two bytes (L) and (H). Both
bytes need to be written at the same time as one instruction packet.
Write
Address
3(0X03) ID 1 0
4(0X04) Baud Rate 1 0
5(0X05) Return Delay Time 1 0
6(0X06) CW Angle Limit 2 0
8(0X08) CCW Angle Limit 2 0
11(0X0B) the Highest Limit Temperature 1 0
12(0X0C) the Lowest Limit Voltage 1 50(0x32)
13(0X0D) the Highest Limit Voltage 1 50(0x32)
14(0X0E) Max Torque 2 0
16(0X10) Status Return Level 1 0
17(0X11) Alarm LED 1 0
18(0X12) Alarm Shutdown 1 0
19(0X13) (Reserved) 1 0
24(0X18) Torque Enable 1 0
25(0X19) LED 1 0
26(0X1A) CW Compliance Margin 1 0
27(0X1B) CCW Compliance Margin 1 0
28(0X1C) CW Compliance Slope 1 1
29(0X1D) CCW Compliance Slope 1 1
30(0X1E) Goal Position 2 0
32(0X20) Moving Speed 2 0
34(0X22) Torque Limit 2 0
44(0X2C) Registered Instruction 1 0
47(0X2F) Lock 1 1
48(0X30) Punch 2 0
Writing Item
Length
(bytes)
Min Max
253(0xfd)
254(0xfe)
254(0xfe)
1023(0x3ff)
1023(0x3ff)
150(0x96)
250(0xfa)
250(0xfa)
1023(0x3ff)
2
127(0x7f)
127(0x7f)
1
1
1
254(0xfe)
254(0xfe)
254(0xfe)
254(0xfe)
1023(0x3ff)
1023(0x3ff)
1023(0x3ff)
1
1
1023(0x3ff)
[Control Table Data Range and Length for Writing]
18
Page 20

DYNAMIXEL
AX-12
4. Instruction Set and Examples
The following Instructions are available.
4-1. WRITE_DATA
Function To write data into the control table of the Dynamixel actuator
Length N+3 (N is the number of data to be written)
Instruction 0X03
Parameter1 Starting address of the location where the data is to be written
Parameter2 1st data to be written
Parameter3 2nd data to be written
Parameter N+1 Nth data to be written
Example 1
Instruction Function Value
PING No action. Used for obtaining a Status Packet 0x01 0
READ DATA Reading values in the Control Table 0x02 2
W RITE DATA Writing values to the Control Table 0x03 2 ~
REG WRITE
ACTION
RESET
SYNC WRITE
Similar to WR ITE_DATA, but stays in standby
mode until the ACION instruction is given
Triggers the action registered by the
REG_WR ITE instruction
Changes the control table values of the
Dynamixel actuator to the Factory Default Value
settin g s
Us e d fo r c o n tro llin g ma n y D y na mixe l a c tu a to r s
at the same time
Setting the ID of a connected Dynamixel actuator to 1
Write 1 to address 3 of the control table. The ID is transmitted using the Broadcasting ID
(0xFE).
Number of
Parameter
0x04 2 ~
0x05 0
0x06 0
0x83 4~
19
Page 21

DYNAMIXEL
Instruction Packet : 0XFF 0XFF 0XFE 0X04 0X03 0X03 0X01 0XF6`
ID LENGTH INSTRUCTION PARAMETERS CHECKSUM
AX-12
Because it was transmitted with a Broadcast ID (0XFE), no status packets are returned.
4-2. READ_DATA
Function Read data from the control table of a Dynamixel actuator
Length 0X04
Instruction 0X02
Parameter1 Starting address of the location where the data is to be read
Parameter2 Length of the data to be read
Example 2
ID LENGTH INSTRUCTION PARAMETERS . CHECKSUM
Status Packet : 0XFF 0XFF 0X01 0X03 0X00 0X20 0XDB
ID LENGTH ERROR PARAMETER1 CHECKSUM
Reading the internal temperature of the Dynamixel actuator with an ID of 1
Read 1 byte from address 0x2B of the control table.
Instruction Packet : 0XFF 0XFF 0X01 0X04 0X02 0X2B 0X01 0XCC`
The returned Status Packet will be as the following.
The data read is 0x20. Thus the current internal temperature of the Dyna mixel actuator
is approximately 32°C (0X20).
4-3. REG_WRITE과 ACTION
4-3-1. REG_WRITE
Function The REG_WRITE instruction is similar to the WRITE_DATA instruction, but the
20
Page 22

DYNAMIXEL
Length N+3 (N is the number of data to be written)
Instruction 0X04
Parameter1 Starting address of the location where the data is to be written
Parameter2 1st data to be written
Parameter3 2nd data to be written
Parameter N+1 Nth data to be written
AX-12
execution timing is different. When the Instruction Packet is received the values are
stored in the Buffer and the Write instruction is under a standby status. At this time, the
Registered Instruction register (Address 0x2C) is set to 1. After the Action Instruction
Packet is received, the registered Write instruction is finally executed.
4-3-2. ACTION
Function Triggers the action registered by the REG_WRITE instruction
Length 0X02
Instruction 0X05
Parameter NONE
The ACTION instruction is useful when multiple Dynamixel actuators need to move
simultaneously. When controlling multiple Dynamixel actuator units, slight time delays
can occur between the 1st and last units to receive an instruction. The Dynamixel
actuator handles this problem by using the ACTION instruction.
Broadcasting The Broadcast ID (0XFE) is used when sending ACTION instructions to more than two
Dynamixel actuators. Note that no packets are returned by this operation.
4-4. PING
Function Does not com mand any operations. Used for requestin g a status packet or to check the
existence of a Dynamixel actuator with a specific ID.
Length 0X02
Instruction 0X01
Parameter NONE
21
Page 23

DYNAMIXEL
Example 3
Instruction Packet : 0XFF 0XFF 0X01 0X02 0X01 0XFB`
ID LENGTH INSTRUCTION CHECKSUM
ID LENGTH ERROR CHECKSUM
Regardless of whether the Broadcasting ID is used or the Status Return Level (Address
AX-12
Obtaining the status packet of the Dynamixel actuator with an ID of 1
The returned Status Packet is as the following
Status Packet : 0XFF 0XFF 0X01 0X02 0X00 0XFC
16) is 0, a Status Packet is always returned by the PING instruction.
4-5. RESET
Function Changes the control table values of the Dynamixel actuator to the Factory Default Value
settings
Length 0X02
Instruction 0X06
Parameter NONE
Example 4
Instruction Packet : 0XFF 0XFF 0X00 0X02 0X06 0XF7`
ID LENGTH INSTRUCTION CHECKSUM
The returned Status Packet is as the following
Status Packet : 0XFF 0XFF 0X00 0X02 0X00 0XFD
ID LENGTH ERROR CHECKSUM
Resetting the Dynamixel actuator with an ID of 0
Note the ID of this Dynamixel actuator is now changed to 1 after the RESET instruction.
22
Page 24

DYNAMIXEL
AX-12
4-6. SYNC WRITE
Function Used for controlling many Dynamixel actuators at the same time. The communication
time decreases by the Synch Write instruction since many instructions can be
transmitted by a single instruction. However, you can use this instruction only when the
lengths and addresses of the control table to be written to are the same. Also, the
broadcasting ID needs to be used for transmitting.
ID 0XFE
Length (L + 1) * N + 4 (L: Data length for each Dynamixel actuator, N: The number of Dynamixel
actuators)
Instruction 0X83
Parameter1 Starting address of the location where the data is to be written
Parameter2 The length of the data to be written (L)
Parameter3 The ID of the 1st Dynamixel actuator
Parameter4 The 1st data for the 1st Dynamixel actuator
Parameter5 The 2nd data for the 1st Dynamixel actuator
…
Parameter L+3 The Lth data for the 1st Dynamixel actuator
Parameter L+4 The ID of the 2nd Dynamixel actuator
Parameter L+5 The 1st data for the 2nd Dynamixel actuator
Parameter L+6 The 2nd data for the 2nd Dynamixel actuator
…
Parameter 2L+4 The Lth data for the 2nd Dynamixel actuator
….
Example 5
Dynamixel actuator with an ID of 0: to position 0X010 with a speed of 0X150
Setting the following positions and velocities for 4 Dynamixel actuators
Dynamixel actuator with an ID of 1: to position 0X220 with a speed of 0X360
Dynamixel actuator with an ID of 2: to position 0X030 with a speed of 0X170
Dynamixel actuator with an ID of 0: to position 0X220 with a speed of 0X380
Instruction Packet : 0XFF 0XFF 0XFE 0X18 0X83 0X1E 0X04 0X00 0X10 0X00 0 X50
0X01 0X01 0X20 0X02 0X60 0X03 0X02 0X30 0X00 0X70 0X01 0X03 0X20 0X02 0X80
0X03 0X12
No status packets are returned since the Broadcasting ID was used.
Data for the 1st Dynamixel actuator
Data for the 2nd Dynamixel actuator
23
Page 25

DYNAMIXEL
AX-12
5. Example
For the following examples, we assume a Dynamixel actuator with an ID of 1 in Rese t
status and that the Baud rate is 57142 BPS.
Example 6
Instruction Packet Instruction = READ_DATA, Address = 0x00, Length = 0x03
Communication ->[Dynamixel]:F F FF 01 04 02 00 03 F5 (LEN:008)
<-[Dynamixel]:FF FF 01 05 00
Status Packet Result Model Number = 116 (0x74) (for the case of DX-116) Firmware Version = 0x08
Example 7
Instruction Packet Instruction = WRITE_DATA, Address = 0x03, DATA = 0x00
Communication ->[Dynamixel]:FF FF 01 04 03 03
<-[Dynamixel]:FF FF 01 02 00 FC (LEN:006)
Status Packet Result NO ERROR
Example 8
Instruction Packet Instruction = WRITE_DATA, Address = 0x04, DATA = 0x01
Communication ->[Dynamixel]:FF FF 00 04 03 04
<-[Dynamixel]:FF FF 00 02 00 FD (LEN:006)
Status Packet Result NO ERROR
Example 9
Reading the Model Number and Firmware Version of the Dynamixel actuator with
an ID of 1
74 00 08 7D (LEN:009)
Changing the ID to 0 for a Dynamixel actuator with an ID of 1
00 F4 (LEN:008)
Changing the Baud Rate of a Dynamixel actuator to 1M bps
01 F3 (LEN:008)
Resetting the Return Delay Time to 4 uSec for a Dynamixel actuator with an ID of
0
A Return Delay Time Value of 1 corresponds to 2uSec.
24
Page 26

DYNAMIXEL
Instruction Packet Instruction = WRITE_DATA, Address = 0x05, DATA = 0x02
Communication ->[Dynamixel]:FF FF 00 04 03 05
<-[Dynamixel]:FF FF 00 02 00 FD (LEN:006)
Status Packet Result NO ERROR
It is recommended to set the Return Delay Time to the minimum value allowed by the
Example 10
Instruction Packet Instruction = WRITE_DATA, Address = 0x08, DATA = 0xff, 0x01
Communication ->[Dynamixel]:FF FF 00 05 03 08
<-[Dynamixel]:FF FF 00 02 00 FD (LEN:006)
Status Packet Result NO ERROR
Example 11
Instruction Packet Instruction = WRITE_DATA, Address = 0x0B, DATA = 0x50
Communication ->[Dynamixel]:FF FF 00 04 03 0B
<-[Dynamixel]:FF FF 00 02 00 FD (LEN:006)
Status Packet Result NO ERROR
Example 12
Instruction Packet Instruction = WRITE_DATA, Address = 0x0C, DATA = 0x64, 0xAA
Communication ->[Dynamixel]:FF FF 00 05 03 0C
<-[Dynamixel]:FF FF 00 02 00 FD (LEN:006)
Status Packet Result NO ERROR
AX-12
02 F1 (LEN:008)
Main Controller.
Limiting the operating angle range to 0°~150° for a Dynamixel actuator w ith an ID
of 0
Since the CCW Angle Limit of 0x3ff corresponds to 300°, the angle 150° is represented
by the value 0x1ff
FF 01 EF (LEN:009)
Resetting the upper limit for the operating temperature to 80°C for a Dynamixel
actuator with an ID of 0
50 9D (LEN:008)
Setting the operating voltage to 10V ~ 17V for a Dynamixel actuator with an ID of 0
10V is represented by 100 (0x64), and 17V by 170 (0xAA).
64 AA DD (LEN:009)
25
Page 27

DYNAMIXEL
Example 13 Setting the maximum torque to 50% of its maximum possible value for a
Instruction Packet Instruction = WRITE_DATA, Address = 0x0E, DATA = 0xff, 0x01
Communication ->[Dynamixel]:FF FF 00 05 03 0E FF 01 E9 (LEN:009)
<-[Dynamixel]:FF FF 00 02 00 FD (LEN:006)
Status Packet Result NO ERROR
To verify the effect of the adjusted Max Torque value, the po wer needs to be turned off
Example 14
Instruction Packet Instruction = WRITE_DATA, Address = 0x10, DATA = 0x00
Communication ->[Dynamixel]:F F FF 00 04 03 10 00 E8 (LEN:008)
<-[Dynamixel]:FF FF 00 02 00 FD (LEN:006)
Status Packet Result NO ERROR
The Status Packet is not returned starting with the following instruction.
Example 15
Instruction Packet Instruction = WRITE_DATA, Address = 0x11, DATA = 0x04, 0x04
Communication ->[Dynamixel]:FF FF 00 05 03 11
<-[Dynamixel]:FF FF 00 02 00 FD (LEN:006)
Status Packet Result NO ERROR
Example 16
Instruction Packet Instruction = WRITE_DATA, Address = 0x18, DATA = 0x01, 0x01
AX-12
Dynamixel actuator with an ID of 0
Set the MAX Torque value located in the ROM area to 0x1ff which is 50% of the
maximum value 0x3ff.
and then on.
Set the Dynamixel actuator with an ID of 0 to never return a Status Packet
Set the Alarm to blink the LED and Shutdown (Torque off) the actuator when the
operating temperature goes over the set limit
Since the Overheating Error is Bit 2, set the Alarm value to 0x04.
04 04 DE (LEN:009)
Turn on the LED and Enable Torque for a Dynamixel actuator with an ID of 0
26
Page 28

DYNAMIXEL
AX-12
Communication ->[Dynamixel]:FF FF 00 05 03 18
01 01 DD (LEN:009)
<-[Dynamixel]:FF FF 00 02 00 FD (LEN:006)
Status Packet Result NO ERROR
You can verify the Torque Enabled status by trying to move the output of the actuator by
hand.
Example 17
Setting the Compliance Margin to 1 and Compliance Slope to 0x40 for a
Dynamixel actuator with an ID of 0
Compliance The Angle Error and Torque Output can be represented with the following graph.
Goal Position CW
CCW
CW
X:Angle Error
CCW
Even if the position deviates a little from the goal position in the CW direction, a large
amount of torque is generated in the CCW direction to compensate for this. However,
since inertia must be considered, a realistic implementation differs from this approach.
Considering this, the given conditions can be represented by the following graph.
CW Goal Position
CCW
Output Torque
CCW
CW
Angle(Position)
A
B
D C
A : CCW Compliance Slope (Address0x1D) = 0x40 (about 18.8°)
B : CCW Compliance Margin (Address0x1B) = 0x01 (about 0.29°)
C : CW Compliance Margin (Address0x01A) = 0x01 (about 0.29°)
D : CW Compliance Slop e (Address0x1C) = 0x40 (about 18.8°)
27
Page 29

DYNAMIXEL
Instruction Packet Instruction = WRITE_DATA, Address = 0x1A, DATA = 0x01, 0x01, 0x40, 0x40
Communication ->[Dynamixel]:FF FF 00 07 03 1A 01 01 40 40 59 (LEN:011)
<-[Dynamixel]:FF FF 00 02 00 FD (LEN:006)
Status Packet Result NO ERROR
The Compliance Slope takes effect with discrete steps of 2
Example 18
Instruction Packet Instruction = WRITE_DATA, Address = 0x1E, DATA = 0x00, 0x02, 0x00, 0x02
Communication ->[Dynamixel]:F F FF 00 07 03 1E 00 02 00 02 D3 (LEN:011)
<-[Dynamixel]:FF FF 00 02 00 FD (LEN:006)
Status Packet Result NO ERROR
Example 19
Instruction Packet ID=0, Instruction = REG_WRITE, Address = 0x1E, DATA = 0x00, 0x00
ID=1, Instruction = REG_WRITE, Address = 0x1E, DATA = 0xff, 0x03
ID=0xfe(Broadcasting ID), Instruction = ACTION,
Communication ->[Dynamixel]:F F FF 00 05 04 1E 00 00 D8 (LEN:009)
<-[Dynamixel]:FF FF 00 02 00 FD (LEN:006)
->[Dynamixel]:FF FF 01 05 04 1E FF 03 D5 (LEN:009)
<-[Dynamixel]:FF FF 01 02 00 FC (LEN:006)
->[Dynamixel]:FF FF FE 02 05 FA (LEN:006)
<-[Dynamixel]: //No return packet against broadcasting ID
Status Packet Result NO ERROR
AX-12
n
(n is integer). Thus any
Compliance value between 0x11 and 0x20 has identical effects.
Position the output of a Dynamixel actuator with an ID of 0 to 180° with an angular
velocity of 057RPM
Set Address 0x1E (Goal Position) to 0x200 and Address 0x20 (Moving Speed) to 0x200.
Position the output of a Dynamixel actuator with an ID of 0 to 0° and Position the
output of a Dynamixel actuator with an ID of 1 to 300°, and initiate the movement
at the same time.
If the WRITE_DATA is used, the movement of the two actuators cannot be initiate at the
same time, thus the REG_WRITE and ACTION instructions should be used instead.
28
Page 30

DYNAMIXEL
Example 20
Instruction Packet Instruction = WRITE_DATA, Address = 0x2F, DATA = 0x01
Communication ->[Dynamixel]:FF FF 00 04 03 2F
<-[Dynamixel]:FF FF 00 02 00 FD (LEN:006)
Status Packet Result NO ERROR
Once locked, the only way to unlock it is to remove the power.
<-[Dynamixel]:FF FF 00 02 08 F5 (LEN:006)
Example 21
Instruction Packet Instruction = WRITE_DATA, Address = 0x30, DATA = 0x40, 0x00
Communication ->[Dynamixel]:FF FF 00 05 03 30
<-[Dynamixel]:FF FF 00 02 00 FD (LEN:006)
Status Packet Result NO ERROR
AX-12
Lock all addresses except for Address 0x18 ~ Address0x23 for a Dynamixel
actuator with an ID of 0
Set Address 0x2F (Lock) to 1.
01 C8 (LEN:008)
If an attempt is made to access any locked data, an error is returned.
->[Dynamixel]:FF FF 00 05 03 30 40 00 87 (LEN:009)
Range Error
Set the minimum power (Punch) to 0x40 for a Dynamixel actuator with an ID of 0
40 00 87 (LEN:009)
29
Page 31

DYNAMIXEL
AX-12
Appendix
Half duplex UART Half duplex UART is a serial communication protocol where both TxD and RxD cannot
be used at the same time. This method is generally used when many devices need to
be connected to a single bus. Since more than one device are connected to the same
bus, all the other devices need to be in input mode while one device is transmitting. The
Main Controller that controllers the Dynamixel actuators sets the communication
direction to input mode, and only when it is transmitting an Instruction Packet, it
changes the direction to output mode.
Return Delay Time The time it takes for the Dynamixel actuator to return the Status Packet after receiving
an Instruction Packet. The Default Value is 160 uSec and can be changed via the
Control Table at Address 5. The Main Controller needs to change the Direction Port t o
input mode during the Return Delay Time after sending an instruction packet.
Tx,Rx Direction For Half Duplex UART, the transmission ending timing is important to change the
direction to receiving mode. The bit definitions within the register that indicates
UART_STATUS are as the following
TXD_BUFFER_READY_BIT: Indicates that the transmission DATA can be loaded into
the Buffer. Note that this only means that the SERIAL TX BUFFER is empty, and does
not necessarily mean that the all the data transmitted before has left the CPU.
TXD_SHIFT_REGISTER_EMPTY_BIT: Set when all the Transmission Data has
completed its transmission and left the CPU.
The TXD_BUFFER_READY_BIT is used when one byte is to be transmitted via the
serial communication channel, and an example is shown belo w.
TxDByte(byte bData)
{
while(!TXD_BUFFER_READY_BIT); //wait until data can be loaded.
SerialTxDBuffer = bData; //data load to TxD buffer
}
RS485 Direction Output Duration
Instruction Packet Status Packet
Return Delay Time
30
Page 32

DYNAMIXEL
The following is an example program that sends an Instruction Packet.
LINE 1 DIRECTION_PORT = TX_DIRECTION;
LINE 2 TxDByte(0xff);
LINE 3 TxDByte(0xff);
LINE 4 TxDByte(bID);
LINE 5 TxDByte(bLength);
LINE 6 TxDByte(bInstruction);
LINE 7 TxDByte(Parameter0); TxDByte(Parameter1); …
LINE 8 DisableInterrupt(); // interrupt should be disa ble
LINE 9 TxDByte(Checksum); //last TxD
LINE 10 while(!TXD_SHIFT_REGISTER_EMPTY_BIT); //Wait till last data bit has been sent
LINE 11 DIRECTION_PORT = RX_DIRECTION; //Direction change to RXD
LINE 12 EnableInterrupt(); // enable interrupt again
Please note the important lines between LINE 8 and LINE 12. Line 8 is necessary since
Byte to Byte Time The delay time between bytes when sending an instruction packet. If the delay time is
AX-12
When changing the direction, the TXD_SHIFT_REGISTER_EMPTY_BIT must be
checked.
an interrupt here may cause a delay longer than the return delay time and corruption to
the front of the status packet may occur.
over 100ms, then the Dynamixel actuator recognizes this as a communic ation problem
and waits for the next header (0xff 0xff) of a packet again.
Byte To Byte Time
The following is the source code of a program (Example.c) that accesses the Dynamixel
actuator using the Atmega 128.
31
Page 33

DYNAMIXEL
C Language Example : Dinamixel access with Atmega128
/*
* The Example of Dynamixel Evaluation with Atmega128
* Date : 2005.5.11
* Author : BS KIM
*/
/*
* included files
*/
#define ENABLE_BIT_DEFINITIONS
//#include <io.h>
#include <inttypes.h>
#include <avr/io.h>
#include <avr/interrupt.h>
#include <avr/signal.h>
#define cbi(REG8,BITNUM) REG8 &= ~(_BV(BITNUM))
#define sbi(REG8,BITNUM) REG8 |= _BV(BITNUM)
typedef unsigned char byte;
typedef unsigned int word;
#define ON 1
#define OFF 0
#define _ON 0
#define _OFF 1
//--- Control Table Address --//EEPROM AREA
#define P_MODEL_NUMBER_L 0
#define P_MODOEL_NUMBER_H 1
#define P_VERSION 2
#define P_ID 3
#define P_BAUD_RATE 4
#define P_RETURN_DELAY_TIME 5
#define P_CW_ANGLE_LIMIT_L 6
#define P_CW_ANGLE_LIMIT_H 7
#define P_CCW_ANGLE_LIMIT_L 8
#define P_CCW_ANGLE_LIMIT_H 9
#define P_SYSTEM_DATA2 10
#define P_LIMIT_TEMPERATURE 11
#define P_DOWN_LIMIT_VOLTAGE 12
#define P_UP_LIMIT_VOLTAGE 13
#define P_MAX_TORQUE_L 14
#define P_MAX_TORQUE_H 15
#define P_RETURN_LEVEL 16
#define P_ALARM_LED 17
#define P_ALARM_SHUTDOWN 18
#define P_OPERATING_MODE 19
#define P_DOWN_CALIBRATION_L 20
#define P_DOWN_CALIBRATION_H 21
#define P_UP_CALIBRATION_L 22
#define P_UP_CALIBRATION_H 23
#define P_TORQUE_ENABLE (24)
#define P_LED (25)
#define P_CW_COMPLIANCE_MARGIN (26)
#define P_CCW_COMPLIANCE_MARGIN (27)
#define P_CW_COMPLIANCE_SLOPE (28)
#define P_CCW_COMPLIANCE_SLOPE (29)
#define P_GOAL_POSITION_L (30)
#define P_GOAL_POSITION_H (31)
#define P_GOAL_SPEED_L (32)
#define P_GOAL_SPEED_H (33)
#define P_TORQUE_LIMIT_L (34)
#define P_TORQUE_LIMIT_H (35)
#define P_PRESENT_POSITION_L (36)
#define P_PRESENT_POSITION_H (37)
#define P_PRESENT_SPEED_L (38)
#define P_PRESENT_SPEED_H (39)
#define P_PRESENT_LOAD_L (40)
#define P_PRESENT_LOAD_H (41)
#define P_PRESENT_VOLTAGE (42)
#define P_PRESENT_TEMPERATURE (43)
AX-12
#define P_REGISTERED_INSTRUCTION (44)
#define P_PAUSE_TIME (45)
#define P_MOVING (46)
#define P_LOCK (47)
#define P_PUNCH_L (48)
#define P_PUNCH_H (49)
//--- Instruction --#define INST_PING 0x01
#define INST_READ 0x02
#define INST_WRITE 0x03
#define INST_REG_WRITE 0x04
#define INST_ACTION 0x05
#define INST_RESET 0x06
#define INST_DIGITAL_RESET 0x07
#define INST_SYSTEM_READ 0x0C
#define INST_SYSTEM_WRITE 0x0D
#define INST_SYNC_WRITE 0x83
#define INST_SYNC_REG_WRITE 0x84
#define CLEAR_BUFFER gbRxBufferReadPointer = gbRxBufferWritePointer
#define DEFAULT_RETURN_PACKET_SIZE 6
#define BROADCASTING_ID 0xfe
#define TxD8 TxD81
#define RxD8 RxD81
//Hardware Dependent Item
#define DEFAULT_BAUD_RATE 34 //57600bps at 16MHz
////// For CM-5
#define RS485_TXD PORTE &= ~_BV(PE3),PORTE |= _BV(PE2)
#define RS485_RXD PORTE &= ~_BV(PE2),PORTE |= _BV(PE3)
/*
////// For CM-2
#define RS485_TXD PORTE |= _BV(PE2); //_485_DIRECTION = 1
#define RS485_RXD PORTE &= ~_BV(PE2);//PORT_485_DIRECTION = 0
*/
//#define TXD0_FINISH UCSR0A,6 //This bit is for checking TxD Buffer
//#define TXD1_FINISH UCSR1A,6
#define SET_TxD0_FINISH sbi(UCSR0A,6)
#define RESET_TXD0_FINISH cbi(UCSR0A,6)
#define CHECK_TXD0_FINISH bit_is_set(UCSR0A,6)
#define SET_TxD1_FINISH sbi(UCSR1A,6)
#define RESET_TXD1_FINISH cbi(UCSR1A,6)
#define CHECK_TXD1_FINISH bit_is_set(UCSR1A,6)
#define RX_INTERRUPT 0x01
#define TX_INTERRUPT 0x02
#define OVERFLOW_INTERRUPT 0x01
#define SERIAL_PORT0 0
#define SERIAL_PORT1 1
#define BIT_RS485_DIRECTION0 0x08 //Port E
#define BIT_RS485_DIRECTION1 0x04 //Port E
#define BIT_ZIGBEE_RESET PD4 //out : default 1 //PORTD
#define BIT_ENABLE_RXD_LINK_PC PD5 //out : default 1
#define BIT_ENABLE_RXD_LINK_ZIGBEE PD6 //out : default 0
#define BIT_LINK_PLUGIN PD7 //in, no pull up
void TxD81(byte bTxdData);
void TxD80(byte bTxdData);
void TxDString(byte *bData);
void TxD8Hex(byte bSentData);
void TxD32Dec(long lLong);
byte RxD81(void);
void MiliSec(word wDelayTime);
void PortInitialize(void);
void SerialInitialize(byte bPort, byte bBaudrate, byte bInterru
byte TxPacket(byte bID, byte bInstruction, byte bParameterLength);
byte RxPacket(byte bRxLength);
void PrintBuffer(byte *bpPrintBuffer, byte bLength);
//PORT_485_DIRECTION = 1
//PORT_485_DIRECTION = 0
in CPU is empty or not.
pt);
32
Page 34

DYNAMIXEL
// --- Gloval Variable Number --volatile byte gbpRxInterruptBuffer[256];
byte gbpParameter[128];
byte gbRxBufferReadPointer;
byte gbpRxBuffer[128];
byte gbpTxBuffer[128];
volatile byte gbRxBufferWritePointer;
int main(void)
{
byte bCount,bID, bTxPacketLength,bRxPacketLength;
PortInitialize(); //Port In/Out Direction Definition
RS485_RXD; //Set RS485 Direction to Input State.
SerialInitialize(SERIAL_PORT0,1,RX_INTERRUPT);//RS485
SerialInitialize(SERIAL_PORT1,DEFAULT_BAUD_RATE,0); //RS232
gbRxBufferReadPointer = gbRxBufferWritePointer = 0; //RS485
sei(); //Enable Interrupt -- Compiler Function
TxDString("\r\n [The Example of Dynamixel Evaluation with
//Dynamixel Communication Function Execution Step.
// Step 1. Parameter Setting (gbpParameter[]). In case of no parameter
// Step 2. TxPacket(ID,INSTRUCTION,LengthOfParameter); --Total
// Step 3. RxPacket(ExpectedReturnPacketLength); -- Real RxPacket
// Step 4 PrintBuffer(BufferStartPointer,LengthForPrinting);
bID = 1;
TxDString("\r\n\n Example 1. Scanning Dynamixels(0~9). -- Any Key to
for(bCount = 0; bCount < 0x0A; bCount++)
{
bTxPacketLength = TxPacket(bCount,INST_PING,0);
bRxPacketLength = RxPacket(255);
TxDString("\r\n TxD:"); PrintBuffer(gbpTxBuffer,bTxPacketLength);
TxDString(", RxD:"); PrintBuffer(gbpRxBuffer,bRxPacketLength);
if(bRxPacketLength == DEFAULT_RETURN_PACKET_SIZE)
{
TxDString(" Found!! ID:");TxD8Hex(bCount);
bID = bCount;
}
}
TxDString("\r\n\n Example 2. Read Firmware Version. -- Any Key to
gbpParameter[0] = P_VERSION; //Address of Firmware Version
gbpParameter[1] = 1; //Read Length
bTxPacketLength = TxPacket(bID,INST_READ,2);
bRxPacketLength =
TxDString("\r\n TxD:"); PrintBuffer(gbpTxBuffer,bTxPacketLength);
TxDString("\r\n RxD:"); PrintBuffer(gbpRxBuffer,bRxPacketLength);
if(bRxPacketLength == DEFAULT_RETURN_PACKET_SIZE+gbpParameter[1])
{
TxDString("\r\n Return Error : ");TxD8Hex(gbpRxBuffer[4]);
TxDString("\r\n Firmware Version : ");TxD8Hex(gbpRxBuffer[5]);
}
TxDString("\r\n\n Example 3. LED ON -- Any Key to Continue.");
gbpParameter[0] = P_LED; //Address of LED
gbpParameter[1] = 1; //Writing Data
bTxPacketLength = TxPacket(bID,INST_WRITE,2);
bRxPacketLength = RxPacket(DEFAULT_RETURN_PACKET_SIZE);
TxDString("\r\n TxD:"); PrintBuffer(gbpTxBuffer,bTxPacketLength);
TxDString("\r\n RxD:"); PrintBuffer(gbpRxBuffer,bRxPacketLength);
Initializing(RxInterrupt)
Initializing(None Interrupt)
RxBuffer Clearing.
ATmega128,GCC-AVR]");
instruction(Ex. INST_PING), this step is not
needed.
TxPacket Length is returned
Length is returned
Continue."); RxD8();
Continue."); RxD8();
RxPacket(DEFAULT_RETURN_PACKET_SIZE+gbpParameter
[1]);
RxD8();
AX-12
TxDString("\r\n\n Example 4. LED OFF -- Any Key to Continue.");
gbpParameter[0] = P_LED; //Address of LED
gbpParameter[1] = 0; //Writing Data
bTxPacketLength = TxPacket(bID,INST_WRITE,2);
bRxPacketLength = RxPacket(DEFAULT_RETURN_PACKET_SIZE);
TxDString("\r\n TxD:"); PrintBuffer(gbpTxBuffer,bTxPacketLength);
TxDString("\r\n RxD:"); PrintBuffer(gbpRxBuffer,bRxPacketLength);
TxDString("\r\n\n Example 5. Read Control Table. -- Any Key to
gbpParameter[0] = 0; //Reading Address
gbpParameter[1] = 49; //Read Length
bTxPacketLength = TxPacket(bID,INST_READ,2);
bRxPacketLength =
TxDString("\r\n TxD:"); PrintBuffer(gbpTxBuffer,bTxPacketLength);
TxDString("\r\n RxD:"); PrintBuffer(gbpRxBuffer,bRxPacketLength);
if(bRxPacketLength == DEFAULT_RETURN_PACKET_SIZE+gbpParameter
{
TxDString("\r\n");
for(bCount = 0; bCount < 49; bCount++)
{
TxD8('[');TxD8Hex(bCount);TxDString("]:");
}
}
TxDString("\r\n\n Example 6. Go 0x200 with Speed 0x100 -- Any Key to
gbpParameter[0] = P_GOAL_POSITION_L; //Address of Firmware Version
gbpParameter[1] = 0x00; //Writing Data P_GOAL_POSITION_L
gbpParameter[2] = 0x02; //Writing Data P_GOAL_POSITION_H
gbpParameter[3] = 0x00; //Writing Data P_GOAL_SPEED_L
gbpParameter[4] = 0x01; //Writing Data P_GOAL_SPEED_H
bTxPacketLength = TxPacket(bID,INST_WRITE,5);
bRxPacketLength = RxPacket(DEFAULT_RETURN_PACKET_SIZE);
TxDString("\r\n TxD:"); PrintBuffer(gbpTxBuffer,bTxPacketLength);
TxDString("\r\n RxD:"); PrintBuffer(gbpRxBuffer,bRxPacketLength);
TxDString("\r\n\n Example 7. Go 0x00 with Speed 0x40 -- Any Key to
gbpParameter[0] = P_GOAL_POSITION_L; //Address of Firmware Version
gbpParameter[1] = 0x00; //Writing Data P_GOAL_POSITION_L
gbpParameter[2] = 0x00; //Writing Data P_GOAL_POSITION_H
gbpParameter[3] = 0x40; //Writing Data P_GOAL_SPEED_L
gbpParameter[4] = 0x00; //Writing Data P_GOAL_SPEED_H
bTxPacketLength = TxPacket(bID,INST_WRITE,5);
bRxPacketLength = RxPacket(DEFAULT_RETURN_PACKET_SIZE);
TxDString("\r\n TxD:"); PrintBuffer(gbpTxBuffer,bTxPacketLength);
TxDString("\r\n RxD:"); PrintBuffer(gbpRxBuffer,bRxPacketLength);
TxDString("\r\n\n Example 8. Go 0x3ff with Speed 0x3ff -- Any Key to
gbpParameter[0] = P_GOAL_POSITION_L; //Address of Firmware Version
gbpParameter[1] = 0xff; //Writing Data P_GOAL_POSITION_L
gbpParameter[2] = 0x03; //Writing Data P_GOAL_POSITION_H
gbpParameter[3] = 0xff; //Writing Data P_GOAL_SPEED_L
gbpParameter[4] = 0x03; //Writing Data P_GOAL_SPEED_H
bTxPacketLength = TxPacket(bID,INST_WRITE,5);
bRxPacketLength = RxPacket(DEFAULT_RETURN_PACKET_SIZE);
TxDString("\r\n TxD:"); PrintBuffer(gbpTxBuffer,bTxPacketLength);
TxDString("\r\n RxD:"); PrintBuffer(gbpRxBuffer,bRxPacketLength);
TxDString("\r\n\n Example 9. Torque Off -- Any Key to Continue.");
gbpParameter[0] = P_TORQUE_ENABLE; //Address of LED
gbpParameter[1] = 0; //Writing Data
bTxPacketLength = TxPacket(bID,INST_WRITE,2);
bRxPacketLength = RxPacket(DEFAULT_RETURN_PACKET_SIZE);
TxDString("\r\n TxD:"); PrintBuffer(gbpTxBuffer,bTxPacketLength);
TxDString("\r\n RxD:"); PrintBuffer(gbpRxBuffer,bRxPacketLength);
TxDString("\r\n\n End. Push reset button for repeat");
RxD8();
Continue."); RxD8();
RxPacket(DEFAULT_RETURN_PACKET_SIZE+gbpParameter
[1]);
[1])
TxD8Hex(gbpRxBuffer[bCount+5]);TxD8(' ');
Continue."); RxD8();
Continue."); RxD8();
Continue."); RxD8();
RxD8();
33
Page 35

DYNAMIXEL
while(1);
}
void PortInitialize(void)
{
DDRA = DDRB = DDRC = DDRD = DDRE = DDRF = 0; //Set all port to
PORTB = PORTC = PORTD = PORTE = PORTF = PORTG = 0x00; //PortData
cbi(SFIOR,2); //All Port Pull Up ready
DDRE |= (BIT_RS485_DIRECTION0|BIT_RS485_DIRECTION1); //set output
DDRD |=
PORTD &= ~_BV(BIT_LINK_PLUGIN); // no pull up
PORTD |= _BV(BIT_ZIGBEE_RESET);
PORTD |= _BV(BIT_ENABLE_RXD_LINK_PC);
PORTD |= _BV(BIT_ENABLE_RXD_LINK_ZIGBEE);
}
/*
TxPacket() send data to RS485.
TxPacket() needs 3 parameter; ID of Dynamixel, Instruction byte,
TxPacket() return length of Return packet from Dynamixel.
*/
byte TxPacket(byte bID, byte bInstruction, byte bParameterLength)
{
byte bCount,bCheckSum,bPacketLength;
gbpTxBuffer[0] = 0xff;
gbpTxBuffer[1] = 0xff;
gbpTxBuffer[2] = bID;
gbpTxBuffer[3] = bParameterLength+2;
gbpTxBuffer[4] = bInstruction;
for(bCount = 0; bCount < bParameterLength; bCount++)
{
gbpTxBuffer[bCount+5] = gbpParameter[bCount];
}
bCheckSum = 0;
bPacketLength = bParameterLength+4+2;
for(bCount = 2; bCount < bPacketLength-1; bCount++) //except
{
bCheckSum += gbpTxBuffer[bCount];
}
gbpTxBuffer[bCount] = ~bCheckSum; //Writing Checksum with Bit
RS485_TXD;
for(bCount = 0; bCount < bPacketLength; bCount++)
{
sbi(UCSR0A,6);//SET_TXD0_FINISH;
TxD80(gbpTxBuffer[bCount]);
}
while(!CHECK_TXD0_FINISH); //Wait until TXD Shift register empty
RS485_RXD;
return(bPacketLength);
}
/*
RxPacket() read data from buffer.
RxPacket() need a Parameter; Total length of Return Packet.
RxPacket() return Length of Return Packet.
*/
byte RxPacket(byte bRxPacketLength)
{
#define RX_TIMEOUT_COUNT2 3000L
#define RX_TIMEOUT_COUNT1 (RX_TIMEOUT_COUNT2*10L)
unsigned long ulCounter;
byte bCount, bLength, bChecksum;
byte bTimeout;
input direction first.
initialize to 0
the bit RS485direction
(BIT_ZIGBEE_RESET|BIT_ENABLE_RXD_LINK_PC|BIT_ENA
BLE_RXD_LINK_ZIGBEE);
Length of parameters.
//Length(Paramter,Instruction,Checksum)
0xff,checksum
Inversion
AX-12
bTimeout = 0;
for(bCount = 0; bCount < bRxPacketLength; bCount++)
{
ulCounter = 0;
while(gbRxBufferReadPointer == gbRxBufferWritePointer)
{
if(ulCounter++ > RX_TIMEOUT_COUNT1)
{
bTimeout = 1;
break;
}
}
if(bTimeout) break;
gbpRxBuffer[bCount] =
}
bLength = bCount;
bChecksum = 0;
if(gbpTxBuffer[2] != BROADCASTING_ID)
{
if(bTimeout && bRxPacketLength != 255)
{
TxDString("\r\n [Error:RxD Timeout]");
CLEAR_BUFFER;
}
if(bLength > 3) //checking is available.
{
if(gbpRxBuffer[0] != 0xff || gbpRxBuffer[1] != 0xff )
{
TxDString("\r\n [Error:Wrong Header]");
CLEAR_BUFFER;
return 0;
}
if(gbpRxBuffer[2] != gbpTxBuffer[2] )
{
TxDString("\r\n [Error:TxID != RxID]");
CLEAR_BUFFER;
return 0;
}
if(gbpRxBuffer[3] != bLength-4)
{
TxDString("\r\n [Error:Wrong Length]");
CLEAR_BUFFER;
return 0;
}
for(bCount = 2; bCount < bLength; bCount++) bChecksum +=
if(bChecksum != 0xff)
{
TxDString("\r\n [Error:Wrong CheckSum]");
CLEAR_BUFFER;
return 0;
}
}
}
return bLength;
}
/*
PrintBuffer() print data in Hex code.
PrintBuffer() needs two parameter; name of Pointer(gbpTxBuffer,
*/
void PrintBuffer(byte *bpPrintBuffer, byte bLength)
{
byte bCount;
for(bCount = 0; bCount < bLength; bCount++)
{
TxD8Hex(bpPrintBuffer[bCount]);
TxD8(' ');
}
TxDString("(LEN:");TxD8Hex(bLength);TxD8(')');
}
gbpRxInterruptBuffer[gbRxBufferReadPointer++];
gbpRxBuffer[bCount];
gbpRxBuffer)
34
Page 36

DYNAMIXEL
}
/*
Print value of Baud Rate. /*
*/ TXD81() send data to USART 1.
void PrintBaudrate(void) */
{ void TxD81(byte bTxdData)
TxDString("\r\n
TxDString(" RS485:");TxD32Dec((16000000L/8L)/((long)UBRR0L+1L) );
} /*
TXD32Dex() change data to decimal number system
*/
/*Hardware Dependent Item*/ void TxD32Dec(long lLong)
#define TXD1_READY bit_is_set(UCSR1A,5)
#define TXD1_DATA (UDR1) long lTmp,lDigit;
#define RXD1_READY bit_is_set(UCSR1A,7) bPrinted = 0;
#define RXD1_DATA (UDR1) if(lLong < 0)
{
#define TXD0_READY bit_is_set(UCSR0A,5) lLong = -lLong;
#define TXD0_DATA (UDR0) TxD8('-');
#define RXD0_READY bit_is_set(UCSR0A,7) }
#define RXD0_DATA (UDR0) lDigit = 1000000000L;
for(bCount = 0; bCount < 9; bCount++)
/* {
SerialInitialize() set Serial Port to initial state. lTmp = (byte)(lLong/lDigit);
Vide Mega128 Data sheet about Setting bit of register. if(lTmp)
SerialInitialize() needs port, Baud rate, Interrupt value. {
TxD8(((byte)lTmp)+'0');
*/ bPrinted = 1;
void SerialInitialize(byte bPort, byte bBaudrate, byte bInterrupt) }
{ else if(bPrinted) TxD8(((byte)lTmp)+'0');
if(bPort == SERIAL_PORT0) lLong -= ((long)lTmp)*lDigit;
{ lDigit = lDigit/10;
UBRR0H = 0; UBRR0L = bBaudrate; }
UCSR0A = 0x02; UCSR0B = 0x18; lTmp = (byte)(lLong/lDigit);
if(bInterrupt&RX_INTERRUPT) sbi(UCSR0B,7); // RxD interrupt enable /*if(lTmp)*/ TxD8(((byte)lTmp)+'0');
UCSR0C = 0x06; UDR0 = 0xFF; }
sbi(UCSR0A,6);//SET_TXD0_FINISH; // Note. set 1, then 0 is read
} /*
else if(bPort == SERIAL_PORT1) TxDString() prints data in ACSII code.
{ */
UBRR1H = 0; UBRR1L = bBaudrate; void TxDString(byte *bData)
UCSR1A = 0x02; UCSR1B = 0x18; {
if(bInterrupt&RX_INTERRUPT) sbi(UCSR1B,7); // RxD interrupt enable while(*bData)
UCSR1C = 0x06; UDR1 = 0xFF; {
sbi(UCSR1A,6);//SET_TXD1_FINISH; // Note. set 1, then 0 is read TxD8(*bData++);
} }
} }
/* /*
TxD8Hex() print data seperatly. RxD81() read data from UART1.
ex> 0x1a -> '1' 'a'. RxD81() return Read data.
*/ */
void TxD8Hex(byte bSentData) byte RxD81(void)
{ {
byte bTmp; while(!RXD1_READY);
return(RXD1_DATA);
bTmp =((byte)(bSentData>>4)&0x0f) + (byte)'0'; }
if(bTmp > '9') bTmp += 7;
TxD8(bTmp); /*
bTmp =(byte)(bSentData & 0x0f) + (byte)'0'; SIGNAL() UART0 Rx Interrupt - write data to buffer
if(bTmp > '9') bTmp += 7; */
TxD8(bTmp); SIGNAL (SIG_UART0_RECV)
} {
gbpRxInterruptBuffer[(gbRxBufferWritePointer++)] = RXD0_DATA;
/*
TxD80() send data to USART 0.
*/
void TxD80(byte bTxdData)
{
while(!TXD0_READY);
TXD0_DATA = bTxdData;
RS232:");TxD32Dec((16000000L/8L)/((long)UBRR1L+1
L) ); TxDString(" BPS,");
TxDString(" BPS");
//(UCSR1A_Bit5)
AX-12
{
while(!TXD1_READY);
TXD1_DATA = bTxdData;
}
{
byte bCount, bPrinted;
}
35
Page 37

DYNAMIXEL
Connector Company Name : Molex
Pin Number: 4
Model Number
Temperature range : -40°C to +105°C
Contact Insertion Force-max : 14.7N (3.30 lb)
Contact Retention Force-min : 14.7N (3.30 lb)
Female Connector
Male Connector
AX-12
Molex Part Number Old Part Number
Male 22-03-5045 5267-03
Female 50-37-5043 5264-03
www.molex.com or www.molex.co.jp for more detail information
Pin No.1
36
Page 38
DYNAMIXEL
Dimension
CM-5 Dedicated AX-12 control box. Able to control 30 AX-12 actuators.
AX-12
6 push buttons (5 for selection, 1 for reset)
Optional installable wireless devices available
Battery compartment (AA x 8) with recharging capability (when connected to an external
SMPS)
CM-5
37
 Loading...
Loading...