

Page 1
Ultra EFIS
Product model number: UX0EFS2xAM
Software: version 5.14 or more recent
Firmware: version 3.15 or more recent
User and Installation Manual
IMPORTANT: Before using this manual check if your Ultra product model number corresponds to the above model number.
Your journey, Our technology
Page 2
Page 3
AvMap Ultra EFISINDEX
1. Overview 4
2. Installation 5
2.1 Location 5
2.2 Mechanical installation 5
2.3 Connections & wiring 8
3. System Calibration 10
3.1 Horizon alignment calibration (AHRS) 10
3.2 Compass calibration (magnetometer) 11
4. System Operation 14
4.1 How to operate the unit 14
4.2 PFD mode 15
4.3 HSI display mode 17
4.4 SETUP mode 19
5. Software update 20
6. Alarms and Trouble shooting 20
7. Technical Specications 22
DISCLAIMER & WARNINGS
The information displayed by the Ultra is not certied for use for VFR or IFR ights.
The Ultra is meant as an aid to VFR navigation and is not a substitute for certied EFIS.
All critical ight information is presented for reference only and must be veried by the use.
The Ultra is not a substitute for on-board instruments.
The pilot in command assumes total responsibility and risk associated with the use of this
device and remains solely responsible for ying in safe conditions.
AvMap disclaims any liability deriving from an improper use of the device, in a way that
may violate the ight and navigation rules, regulations and safety.
Page 4
4 - User and Installation Manual
AvMap Ultra EFIS
User and Installation Manual - 5
AvMap Ultra EFIS
1. Overview
Ultra is a complete instrumentation system for primary ight display (PFD) and horizontal
situation indicator (HSI) functions. It is a rugged and reliable system designed for xed panel
installation.
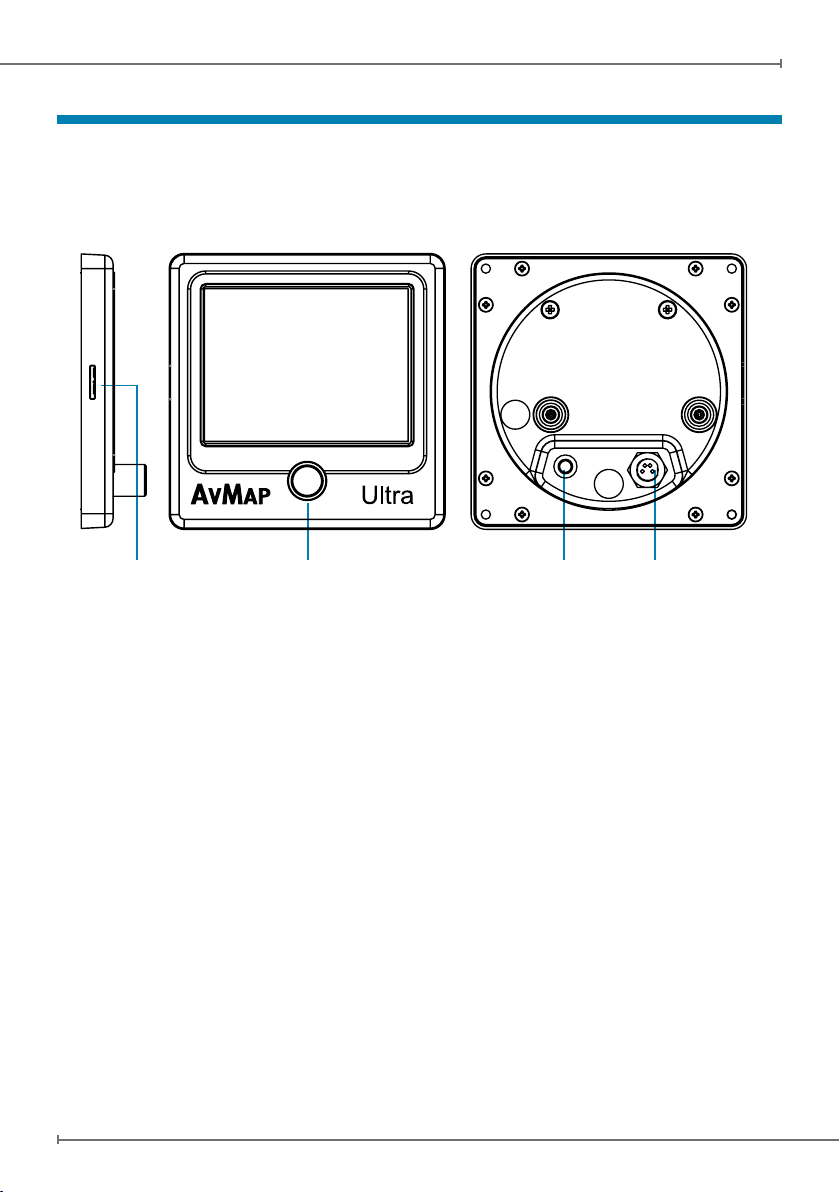
microSD
slot
Rotation knob
Power
& I/O cable
GPS receiver
connector
Figure 1
Note: For connection specications see Chapter 2.
ADAHRS
The core of the Ultra is the ADAHRS module. The ADAHRS module contains
solid-state gyros, accelerometers, magnetic eld sensors and air data
sensors, providing attitude, heading, altitude and airspeed data to the system.
In order to take full advantage of its functionality, the Pitot and Static ports should be
connected to the aircraft Pitot-static system.
GPS receiver
Connecting the external GPS receiver to the Ultra, the system provides the pilot with
navigation information on the HSI page , providing its position, direction and radials relative
to reference navigation points.
Preloaded navigation POI’s
Ultra is preloaded with Jeppesen navigation POI’s: Airports, NDB’s and VOR’s.
Coverage available: Europe-Africa, North America, South America, Asia-Australia.
The Jeppesen aeronautical database is updated every 28 days. Updates can be purchased
and downloaded at www.avmap.it.
Page 5

User and Installation Manual - 5
AvMap Ultra EFIS
Micro SD card
A microSD card is included in the Ultra box. The microSD card is a blank card without data preloaded.
The microSD card should be used for software updates and data transfer from/to the Ultra
like updating the navigation POI’s.
Note: For more details see Chapter 4.
Rotation knob
The rotor plus centre click allow to switch from one mode to the other and to select different
menu option.
Note: For more details see Chapter 4 and 5.
2. Installation
The installation procedure is divided in the following steps:
•
Location
Mechanical installation •
Connections & wiring•
2.1 Location
The Ultra is designed to be installed on the aircrafts instrument panel.
It is assumed that the instrument panel is completely perpendicular to the level and straight
ight attitude.
In case the instrument panel is rotated the simple horizon alignment calibration procedure
is required.
Note: For calibration see Chapter 3.
IMPORTANT: The Ultra contains a magnetometer and other precision electrical sensors.
The location selected for installation should be clear of strong magnetic or electromagnetic
disturbances as much as possible. Avoid installing the Ultra near electronic equipment (other
digital EFIS, radios, transponders, etc), AC or variable DC cables, alternators, electrical
motors, ferrous materials, etc. In such cases the proper behaviour of the compass is not
guaranteed (i.e. the compass may be crossed as “out of order” or may give erroneous
indications).
Hint: use a hand-held compass to verify the magnetic disturbance in the area selected for
installation. If the needle shows relevant changes or unstable indication, the location is not
suitable for installation. Make sure to perform this test with all on-board electronic devices
switched ON.
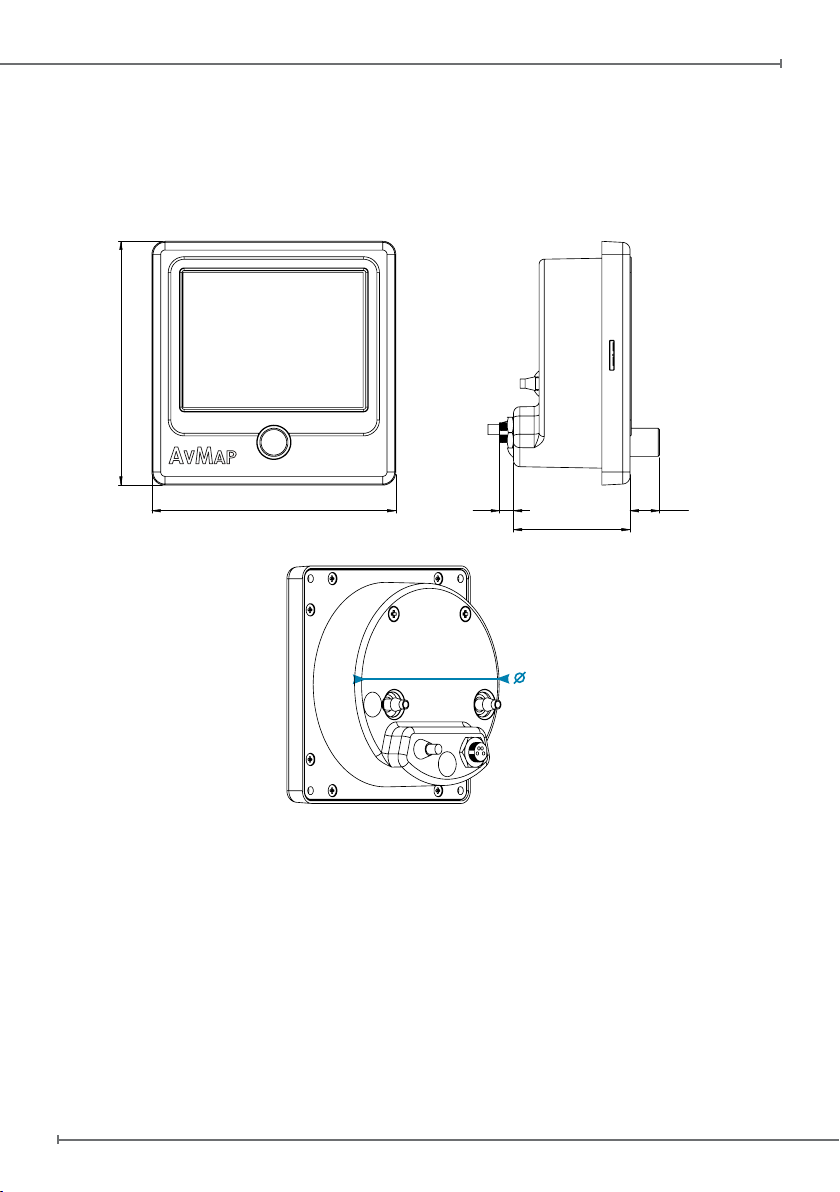
2.2 Mechanical installation
Make sure you have enough space on the front and behind the cockpit panel to install the
Ultra. Check the Ultra measurements on Figure 2.
Page 6
6 - User and Installation Manual
AvMap Ultra EFIS
User and Installation Manual - 7
AvMap Ultra EFIS
3.74” (95.3 mm)
3.74” (95.3 mm)
1. 77“ (45.5 mm)
0.43“
(11.5 mm)
0.19“
(5.5 mm)
A M
V AP
Ultra
0.43“
(11.5 mm)
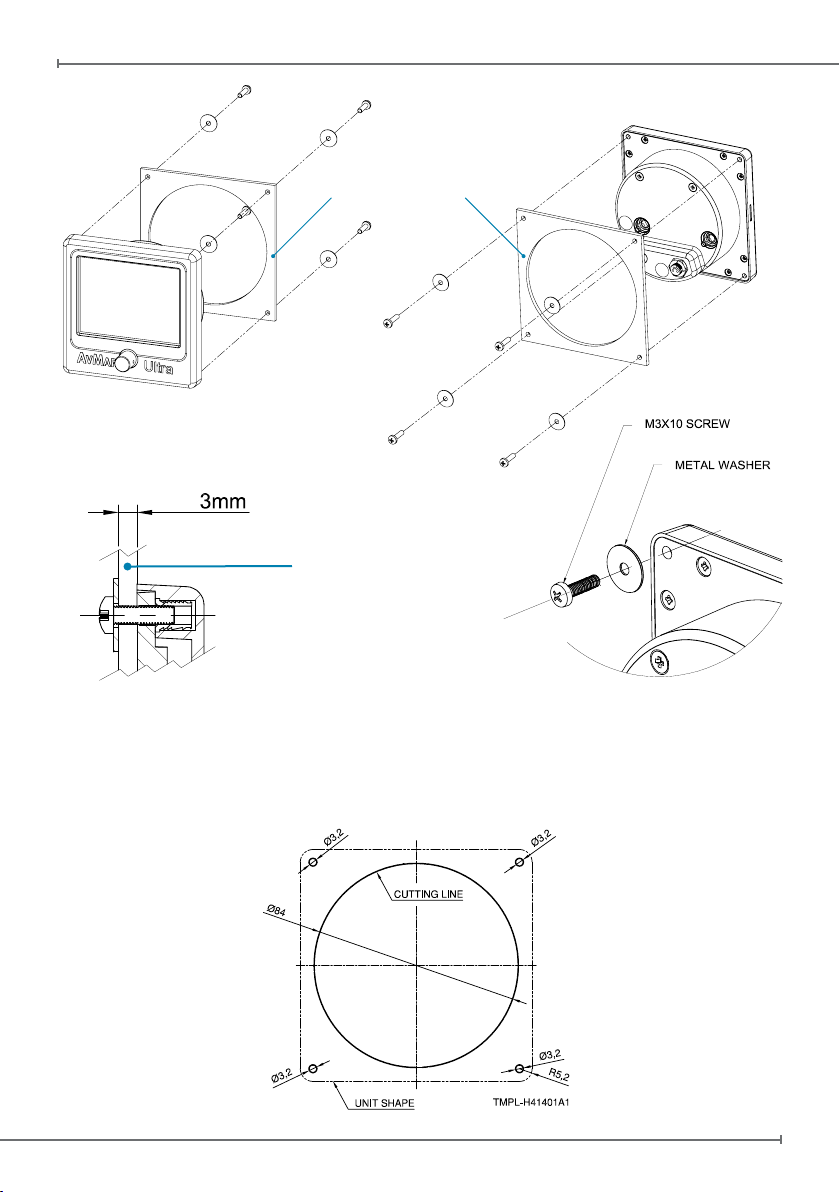
Ultra is designed to be installed in an 3.3” (84mm) diameter hole.
The instrument has to be installed from the front of the panel and screwed from behind the
panel according to Figure 3.
82 mm
The screw length that need to be used for panel installation depend on the panel thickness
and is based on the following formula:
7mm ≤ l - t ≤ 10mm
l = length of the screw
t = thickness of the panel
Use the screws and metal washer included in the box for standard panel thickness of up to 3mm. For
thicker instrument panels, use longer screws and use the formula to choose the right screw length.
Figure 2
Page 7
User and Installation Manual - 7
AvMap Ultra EFIS
Aircraft instrument panel
Panel thickness
Figure 3
IMPORTANT: Make sure you respect the screw length formula to avoid damaging the
plastic of the Ultra. Use light thread locker to prevent screw loosening with vibration.
Use the Cutting template, included in the box, to cut out the panel. (see Figure 4)
Figure 4
Page 8
8 - User and Installation Manual
AvMap Ultra EFIS
User and Installation Manual - 9
AvMap Ultra EFIS
Connections
On the back of the unit there are 3
connectors: the pitot port, the static port,
and the GPS antenna connector.
A free wires power and I/O cable allows
direct connection to main aircraft power
supply and to two external RS232
devices.
Connect the aircraft pitot line to the
port labelled PITOT and the aircraft
static line to the port labelled
STATIC. Make sure the tubes fit tightly
into the ULTRA. Use flexible plastic
tubes with an inside diameter of 5 mm
(0.2 inches).
Connect the GPS receiver included in
the box to the GPS port.
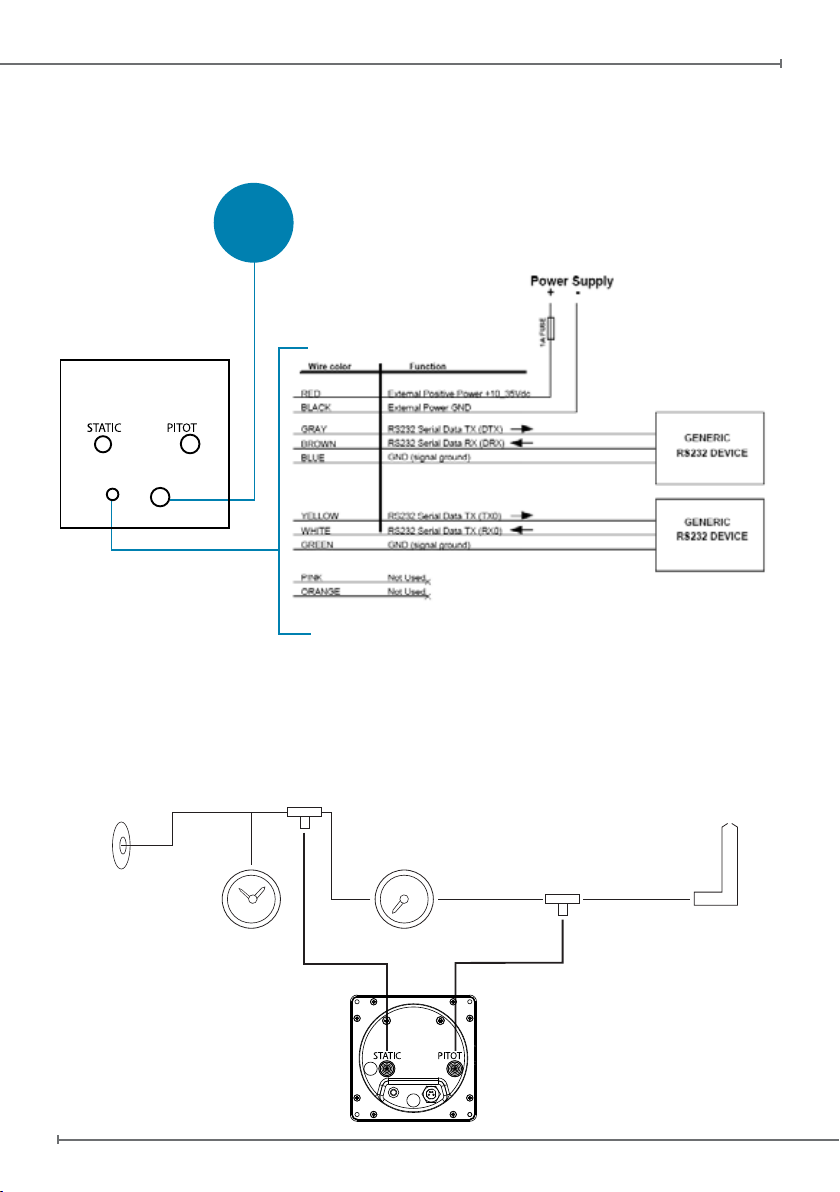
2.3 Connections & wiring
On the back of the unit there are 4 connectors: the Pitot port, the static port, the power supply
connector, and the GPS receiver connector (see Figure 5).
GPS
RECEIVER
Ultra EFIS
(rear view)
Power
GPS
& I/O
10 wires cable
Figure 5
Connection to the Pitot-static system
In order to display accurate speed and altitude data the Ultra needs to be connected to the
aircraft Pitot-static system. First of all remove the two caps protecting the STATIC and PITOT
ports. Installation along with other mechanical or digital altimeters and airspeed indicators is
supported by mean of a T coupler (not included in the Ultra box).
Static Port
Pitot TubeAirspeed IndicatorAltimeter
Figure 6
Page 9

User and Installation Manual - 9
AvMap Ultra EFIS
Connect the Pitot line to the port labeled PITOT and the static line to the port labeled STATIC.
Make sure the tubes t tightly into the Ultra.
IMPORTANT: Use exible plastic tubes with an inside diameter of 5 mm (0,2 inches).
IMPORTANT: We recommend to test the Pitot-static system for leakage after any
alteration.
External GPS receiver connection
Connect the external GPS receiver, included in the box, on the back side of the Ultra to the
GPS port as shown on Figure 5.
The GPS receiver comes with a 1,5 meter cable and is designed for use inside the aircraft.
Note: an additional gps extension cable of 2 meter is available.
The GPS receiver can be mounted to any convenient surface that has a clear view of the
sky. It can be mounted on the aircraft’s dashboard using the included Velcro strip. The GPS
receiver must have a clear view of the sky in order to receive satellite signals. GPS uses “line
of sight” signals to locate and track satellites.
If the signals are obstructed by dense objects such as aluminum, steel or even heavy ice,
the Ultra will not operate properly. Signals may also be blocked by heated wind screens
(breglass, plexiglass and other plastics are normally transparent to GPS signals). If you
nd that the Ultra does not locate GPS FIX quickly or consistently, moving the location of the
GPS receiver a few inches often provides a better view of the sky.
Power supply
IMPORTANT: Power the Ultra from an 10 to 35 Vdc supply. Mount on the power wire
(RED) the 1A fuse holder, provided in the box, to protect against short circuits.
Serial Connection
The Ultra has serial RS232 connection ports to interface to an external device.
Note: current software 5.14 does not support serial in/out interface.
Page 10

10 - User and Installation Manual
AvMap Ultra EFIS
User and Installation Manual - 11
AvMap Ultra EFIS
3. System Calibration
There are two type of calibration procedures;
1. Horizon alignment calibration
2. Compass calibration
3.1 Horizon alignment calibration (AHRS)
Scenario A – Horizon alignment calibration NOT required
It is assumed that the Ultra is installed in an instrument panel that is completely perpendicular
compared to the level & straight ight attitude and aligned with the lateral axis of the
airplane.
In this case no horizon alignment calibration is needed.
Level & Straight Flight Attitude
Lateral Axis
Longitude Axis
Figure 7
Normal or Vertical Axis
Scenario B - horizon alignment calibration required
In case the Ultra is installed in an instrument panel that is aligned with the aircraft lateral
axis, but not perpendicular to the straight & level ight attitude, the simple horizon alignment
calibration procedure must be executed.
Horizon alignment calibration procedure
Execute this calibration procedure to align the horizon line of the Ultra with the aircrafts
straight & level ight attitude.
The procedure needs to be performed on the ground and can be started from the “SYSTEM“
menu.
Set the aircraft in level and straight ight attitude by using jacks or blocks (or by asking a
friend to push or lift the tail and hold).
Enter the SETUP mode (see chapter 4 System operation) by keeping pressed the rotation
Page 11

User and Installation Manual - 11
AvMap Ultra EFIS
knob for 5 seconds and release it.
Push again the rotor knob, select “CALIBRATE” to enter the calibration menu and select
“HORIZON” to enter the horizon menu.
In the horizon menu select “ZERO” to calibrate the horizon. After about 2 minutes the horizon
line of the Ultra is aligned with the aircrafts straight & level ight attitude.
IMPORTANT: If after the rst attempt the horizon is not aligned with the aircrafts straight &
level ight attitude, execute the horizon calibration again but before executing the calibration
rst restore the horizon to “DEFAULT” in the horizon menu.
IMPORTANT: If you want to restore horizon calibration to the factory default (scenario A),
select “DEFAULT” in the horizon menu.
IMPORTANT: After a cold startup of the device it may happen that the horizon shows an
offset with respect to proper calibration. Wait 2 minutes to let the electronic sensors stabilize
before operating the system.
3.2 Compass calibration (magnetometer)
The purpose of this procedure is to compensate magnetic disturbances the Ultra is subject
to, due to aircraft metal structures and electromagnetic components. These disturbances, if
not compensated, could alter the heading value provided by the system.
For this reason the magnetometer is disabled before the magnetometer calibration procedure
is executed.
The procedure requires to point the aircraft nose in 4 directions (north, east, south and west
oriented to magnetic north). The total duration for this procedure is about 20 minutes.
IMPORTANT: When the magnetometer of the Ultra is not enabled the Ultra uses GPS
source to show COG (course over ground) on the compass. To enable compass heading it
is necessary to calibrate the magnetometer. In case both GPS and magnetometer sources
are lost the compass becomes RED and is out of order.
IMPORTANT: Before you proceed with the compass calibration, make sure that the horizon
line of the Ultra is aligned with the aircrafts straight & level ight attitude (see paragraph 3.1)
IMPORTANT: The compass calibration procedure must be executed in an open eld clean
of magnetic disturbances (we recommend at the compass rose of your airport).
Note: Most airports have a compass rose, which is a series of lines marked out on a ramp
or maintenance run up area where there is no magnetic interference. Lines, oriented to
magnetic north, are painted every 30° which is used to perform a compass calibration.
Compass calibration procedure:
STEP 1: Prepare aircraft position and system
Page 12

12 - User and Installation Manual
AvMap Ultra EFIS
User and Installation Manual - 13
AvMap Ultra EFIS
Taxi the aircraft to the airports compass rose or an open eld free from magnetic
disturbances.
Have the aircraft nose pointed to the magnetic north (0°) radial on the airport compass
rose.
Note: use a magnetic compass for your reference if you execute the procedure in an open
eld free from magnetic disturbances).
Set the aircraft in level and straight ight attitude by using jacks or blocks.
Note: Make sure that the horizon line of the Ultra is aligned with the aircrafts straight & level
ight attitude.
IMPORTANT: Perform this test with all on-board electronic devices switched ON.
IMPORTANT: Let the Ultra system warm up and stabilize for about 5 minutes before
starting the calibration.
IMPORTANT: Check on the HSI display if the Ultra receives a GPS x.
Note: in case of no GPS reception the Ultra reports on the PFD and HSI page in RED “NO
GPS”.
STEP 2: Calibration calculation for north direction
Enter the SETUP mode by keeping the rotation knob pressed for 5 seconds and release
(see chapter 4 for further details). Push again the rotor knob, select “CALIBRATE” to enter
the calibration menu, then select “COMPASS” and select “CALIBRATE” (“Mag clear done”
message will pop up on the display).
The Ultra display shows: “Point to NORTH. Press NEXT when ready”.
Make sure that the aircraft nose is pointed to the magnetic north (0°) radial on the airport
compass rose and make sure that the aircraft is not moving. Then conrm by pressing
“NEXT”.
Note: The calibration calculation for north direction will start and a counter will inform of the
progress.
STEP 3: Calibration calculation for east direction
The Ultra display shows: “Point to EAST. Press NEXT when ready”.
Have the aircraft nose pointed to the magnetic east (90°) radial on the airport compass
rose.
Set the aircraft in level and straight ight attitude by using jacks or blocks.
Let the system stabilize for about 30 seconds and make sure that the aircraft is not moving.
Then conrm by pressing “NEXT”.
Note: The calibration calculation for east direction will start and a counter will inform of the
progress.
STEP 4: Calibration calculation for south direction
The Ultra display shows: “Point to SOUTH. Press NEXT when ready”.
Have the aircraft nose pointed to the magnetic south (180°) radial on the airport compass
Page 13

User and Installation Manual - 13
AvMap Ultra EFIS
rose.
Set the aircraft in level and straight ight attitude by using jacks or blocks.
Let the system stabilize for about 30 seconds and make sure that the aircraft is not moving.
Then conrm by pressing “NEXT”.
Note: The calibration calculation for south direction will start and a counter will inform of the
progress.
STEP 5: Calibration calculation for west direction
The Ultra display shows: “Point to WEST. Press NEXT when ready”.
Have the aircraft nose pointed to the magnetic west (270°) radial on the airport compass
rose.
Set the aircraft in level and straight ight attitude by using jacks or blocks.
Let the system stabilize for about 30 seconds and make sure that the aircraft is not moving.
Then conrm by pressing “NEXT”.
Note: The calibration calculation for west direction will start and a counter will inform of the
progress.
STEP 6: Check compass calibration
At the end of the calibration process the Ultra will conrm if the magnetometer is calibrated
successfully.
The message “Calibration done” will pop up.
Note: In the SETUP page after COM 1 will be written “ENABLED MAG”.
IMPORTANT: Don’t power off the system. Let the system stabilize for about 15 minutes
before moving the aircraft.
Note: In the “SETUP” menu you can choose to display compass heading in reference to
magnetic north or true north (see chapter 4).
Note: If the calibration fails or the compass indicator is not enabled, repeat the calibration
procedure. If several calibration attempts fails review the installation location of the
Ultra. Magnetic disturbance could be too high in the area selected.
Page 14

14 - User and Installation Manual
AvMap Ultra EFIS
User and Installation Manual - 15
AvMap Ultra EFIS
AM
V AP
All�prints�are�in�WHITE
Ultra
AM
V AP
All�prints�are�in�WHITE
Ultra
4. System Operation
4.1 How to operate the unit
The Ultra contains three display modes:
1. PFD mode
2. HSI mode
3. SETUP mode
The rotor plus centre click allow to switch from one mode to the other and to select
different menu option.
At start up the disclaimer page is shown. In the disclaimer page rotate the knob (or push
once the rotation knob) to read the disclaimer and confirm by pushing once the rotation
knob to enter the PFD mode.
SETUP
CALIBRATE
DATABASE
Setup Menu PFD Menu
While in PFD mode, pushing once the rotation knob an option menu window appears on
the display. Rotate the knob to select a menu and conrm by pushing the rotation knob.
The option menu window disappears if the rotation knob has not been operative for
more than 5 seconds.
While in PFD mode, you can enter the HSI mode by pushing the rotation knob, select
HSI rotating the knob and confirm by pushing again the rotation knob. To go back to the
PFD display mode push the rotation knob, select PFD and confirm by pushing again
the rotation knob.
To enter the SETUP mode from either the PFD or HSI mode keep the rotation knob
pressed for 5 seconds.
HSI
QNH
Figure 8
Page 15

User and Installation Manual - 15
AvMap Ultra EFIS
4.2 PFD mode
The PFD shows critical flight information like attitude, airspeed, altitude, as well as
other less critical flight variables like turn coordination, heading, load factor. A detailed
explanation of each instrument is given in Figure 9.
Heading Bug
HDG (Heading)
or COG (Course
over ground)
Air Speed
Indicator
Trajectory
Vector
Aircraft Compass
Air Speed
Ranges
Heading
Side Slip Indicator
G-Meter
Vertical Speed
Altimeter
Kollsman
Window
(hPa or inHg)
Figure 9
Attitude is displayed with a standard coloured artificial horizon. An aircraft symbol is
used to indicate the aircraft’s nose orientation.
A trajectory vector is displayed with a circle and three lines; the trajectory vector
indicates the aircrafts real path with respect to the horizon and the aircraft’s nose.
Pitch indicator is displayed by markers that are horizontal with the horizon and are
equally divided with 10 degrees pitch of separation between the lines.
Roll indicator is displayed by markers of 10, 20, 30, 45 and 60 degrees of roll.
Indicated Air Speed (IAS) is shown in number representation as well as on
a vertical tape. The tape also displays four coloured lines for operating arcs;
white from the stall speed in dirty configuration (Vs0) to the maximum flap
extension speed (Vfe), green from the stall speed in clean configuration (Vs1) to
the maximum cruise speed (Vno), yellow from the maximum cruise speed (Vno) to
the never to exceed speed (Vne), and red from the never to exceed speed (Vne) and
higher.
Note: Aircraft specific V-Speed reference values can be entered in the “SETUP” menu
(see paragraph 4.4).
Note: In the “SETUP” menu select your preference unit for speeds: knots, kph, mph, m/s.
Page 16

16 - User and Installation Manual
AvMap Ultra EFIS
User and Installation Manual - 17
AvMap Ultra EFIS
Altitude is shown in number representation as well as on a vertical tape. Underneath the
tape there is a Kollsmann window where the user can adjust the QNH setting.
Note: In the “SETUP” menu select your preference unit for altitude: feet (ft), meter (m).
Side Slip Indicator is shown with a standard ball indicator. The ball centered on the
inner markers corresponds to the aircraft not side slipping.
Heading is shown in degrees with respect to magnetic north or true north. The Ultra
contains an internal world magnetic model that allows it to calculate the local magnetic
deviation and dip. A vertical card compass is also displayed for fast heading reference.
Note: in the “SETUP” menu you can choose reference with respect to magnetic north
or true north.
Course over Ground (COG) is shown on the compass instead of heading in case the
magnetometer is not calibrated or when the magnetometer has an failure. The COG
data is based on GPS source.
Note: If the compass source is GPS, the device shows “COG” aside the compass. If
the compass source is the magnetometer, the device shows “HDG” aside the compass.
Both can be shown in reference to magnetic north or true north.
QNH setting
When the Ultra is in PFD mode the pressure reference for the altimeter can be selected
by pushing the rotation knob.
Select “QNH” to enter the QNH menu.
Select “BARO” to set the standard atmosphere: QNH value is equal to 1013,25 hPa or
29.92 inch of mercury.
Select “MAN” to set manually local air pressure at mean sea level (QNH value).
Aircraft specific V-speed reference values
Set the aircraft specific V-speed values to get the right information on the air speed
ranges bar.
Refer to the aircraft operating manual to find the correct values of your aircraft.
To change V-speed reference values go to the SETUP mode by pressing the rotation
knob for 5 seconds.
Select “SETUP” to enter the setup menu and select “SPEEDS” to enter the V-speed
reference values shown on the bottom of the SETUP mode.
Rotate the rotation knob to change values and push the rotation knob to confirm.
V-speed values
Vne Never to exceed speed
Vn0 Maximum cruise speed
Vs0 Stall speed with aps & landing gear deployed
Vfe Maximum aps extended speed
Vs1 Stall speed with aps & landing gear retracted
Page 17

User and Installation Manual - 17
AvMap Ultra EFIS
4.3 HSI display mode
The HSI shows navigation data: position, distance, directions, and radials relative to
reference navigation points. Figure 10 shows the data layout on the screen:
Heading Bug
Current Position
VOR
indicator
Heading
Heading Bug
ADF
Indicator
ADF Info boxVOR Info box
Wind
(Estimated)
IAS
Ground Speed
Figure 10
Heading is shown in degrees with respect to magnetic north or true north. The Ultra
contains an internal world magnetic model that allows it to calculate the local magnetic
deviation and dip. A vertical card compass is also displayed for fast heading reference.
Note: in the “SETUP” menu you can choose reference with respect to magnetic north
or true north.
Course over Ground (COG) is shown on the compass instead of heading in case the
magnetometer is not calibrated or when the magnetometer has an failure. The COG
data is based on GPS source.
Note: If the compass source is GPS, the device shows “COG” aside the compass. If
the compass source is the magnetometer, the device shows “HDG” aside the compass.
Both can be shown in reference to magnetic north or true north.
Current Position is shown in latitude/longitude format. The Ultra can calculate position
even in the absence of GPS. In absence of GPS fix the position indicator change in
RED.
Wind data is approximated and displayed by the system when suitable GPS, compass
and IAS data are available. Wind direction is referred to the direction where the wind is
coming from.
Note: The speed units selected in the “SETUP” menu are also applied to wind speed.
Note: Without compass calibration (see chapter 3) wind data are not available.
Page 18

18 - User and Installation Manual
AvMap Ultra EFIS
User and Installation Manual - 19
AvMap Ultra EFIS
Ground Speed (GS) data is based on GPS source. The Ultra can calculate ground
speed even in the absence of GPS, with degraded quality; this is indicated by a change
in colour (RED) in the ground speed indicator.
Note: In the “SETUP” menu select your preference unit for speeds: knots, kph, mph or
m/s.
Automatic Direction Finder (ADF) is shown with a standard double line needle in
green color. The ADF info box of the navigation POI (Airport, VOR or NDB), used to
calculate distance and direction is shown in the bottom right corner. The ADF info box
includes the ADF bearing, POI ID, distance (in nm, km or miles), POI name, and two
frequencies. The ADF continuously displays the relative bearing from the aircraft to the
selected ADF point.
Note: The ADF function on the Ultra is a digital version of the traditional ADF instrument.
The Ultra calculates the ADF bearing from its GPS position and coordinates of the
selected ADF destination point (from the preloaded POI database).
VOR (VHF omnidirectional range) is shown with a standard single line needle in
yellow colour. The VOR indicator is complete, with course deviation indicator (CDI) and
to/from flag. The VOR info box of the navigation POI used to calculate distance and
direction is shown in the bottom left corner. The VOR info box displayed includes the
VOR radial, POI ID, distance (in nm, km or miles), POI name, and two frequencies.
Note: The VOR function on the Ultra is a digital version of the traditional VOR instrument.
The course deviation indicator and TO/FROM flag are based on the selected radial, its
GPS position, aircraft heading and the coordinates of the selected VOR destination
point (from the preloaded POI database).
VOR navigation settings
When the Ultra is in HSI mode press the rotation knob to enter the HSI menu.
Select “VOR” to enter the VOR menu:
In the “VOR” menu you can select OBS (Omni Bearing Selector), POI, OFF. In the POI
menu you can select an Airport (ARPT), VOR and NDB as your navigation point.
Select OBS to set the desired course. Select OFF to disable VOR Navigation and clean
the display information.
ADF navigation settings
In the “HSI” menu, select “ADF” to enter the “ADF” menu.
In the “ADF” menu you can select an Airport (ARPT), VOR and NDB as your navigation
point. Select OFF to disable ADF navigation and clean the display information.
Heading bug
In the “HSI” menu, select “BUG” to setup the heading bug on the HSI. Use the rotation
knob to select the bug direction and confirm by pressing the rotation knob. The bug is
shown on the compass in magenta colour, both on the HSI and PFD display.
Page 19

User and Installation Manual - 19
AvMap Ultra EFIS
4.4 SETUP mode
To enter the SETUP mode from either the PFD or HSI mode keep the rotation knob
pressed for 5 seconds.
The SETUP mode provides you information regarding the software version, enabled
COM ports, V-speed values and display brightness.
In the SETUP mode push the rotation knob to enter the “SETUP” menu:
In the “SETUP” menu you can enter the following menu’s:
• CALIBRATE: To calibrate the compass and the horizon.
• DATABASE: To update the navigation POI’s.
• SETUP: To change display brightness, configure the aircraft specific V-speed values
and change units measurements.
Note: For compass and horizon calibration see Chapter 3.
Aircraft Specific V-speed reference values
Select “SPEEDS” in the “SETUP” menu to enter the V-speed reference values shown
on the bottom of the SETUP mode.
Rotate the rotation knob to change values and push the rotation knob to confirm.
Refer to the aircraft operating manual to find the correct values of your aircraft.
Navigation POI management
Ultra is preloaded with Jeppesen navigation POI’s: Airports, NDB’s and VOR’s.
In the “DATABASE” menu you can choose “IMPORT” to update navigation POI’s on the
Ultra through the microSD card. Make sure the microSD card is inserted in the Ultra.
Note: To update the navigation POI’s on your Ultra visit www.avmap.it or contact
orders@avmap.it. Follow the update instructions that are provided together with the
POI purchase.
Display brightness
Select “BRIGHTNESS” in the “SETUP” menu to adjust the display brightness. Use
the rotation knob to change the display brightness and confirm by pushing the rotation
knob.
Units measurement settings
To change units measurement select “UNITS” in the “SETUP” menu.
You can change the following units measurements:
- NORTH: compass heading can be set in degrees with respect to magnetic north or
true north.
- PRESSURE: barometric pressure can be set in hPa or inHg.
- SPEED: All speed referred information (IAS, wind speed, ground speed, vertical speed,
aircraft V-speed range) can be set in knots, kph, mph or m/s.
- ALTITUDE: Altitude can be set in feet or meters.
- DISTANCE: Distance to an VOR or ADF navigation point can be set in nm, miles or km.
Page 20

20 - User and Installation Manual
AvMap Ultra EFIS
User and Installation Manual - 21
AvMap Ultra EFIS
5. Software update
Download the software update file from www.avmap.it and copy the software file on the
mSD card.
Insert the microSD card into the Ultra while the Ultra is turned OFF.
Turn the Ultra ON providing power supply to the device.
A message will show on the display: “COPY NEW BINARY?”.
Push once the rotation Knob and select “YES” to update the Ultra with the new software,
or select “NO” if you don’t want to proceed with the update.
After the update process the Ultra starts up as usual. Check the software version in the
“SETUP” mode.
6. Alarms and Trouble shooting
Magnetometer not calibrated or not operating correctly
When the magnetometer is either not calibrated or not operating correctly, the compass
on the PFD and HSI display becomes RED.
It can occur sporadically during flight and it is not problematic, as the unit continues to
estimate heading correctly using gyroscopic and other internal means. Magnetometer
failures on start-up or during prolonged periods lead to incorrect heading readings.
What to do?
Perform magnetometer calibration. If the problem persists, and the magnetometer is
external, check connection. If problem persists, relocate magnetometer in the aircraft
according to installation instructions and recalibrate. If problem still persists, external
magnetometer or unit might require service.
GPS failure
During the Ultra start-up and until a GPS fix is acquired, the GPS position field on
the HSI display will indicate GPS error in RED. If the GPS fails during operation, the
same condition is indicated. The unit can continue calculating position with degraded
precision in absence of GPS.
What to do?
Allow for some time (up to 3 minutes) for the GPS to acquire first fix. If failure persists
after this point, verify GPS antenna connection.
AHRS failure
When the PFD display mode becomes totally RED there is a AHRS failure. This failure
occurs when the unit exceeds any of the following limits: 1600deg/s (all axis) and 8g
(all axis).
What to do?
This failure should only occur during high dynamics in flight. The unit will accumulate
Page 21

User and Installation Manual - 21
AvMap Ultra EFIS
error in the attitude estimation during these high dynamic conditions, but this error is
automatically reduced and eliminated even on dynamic conditions (provided limits are
not continuously exceeded). If this failure occurs in non-high dynamic conditions, unit
requires service.
Altimeter failure
When the altimeter in the unit is either out of range or not operating correctly the
altimeter tape becomes RED.
What to do?
If the altitude is within the limits of the unit (as quoted in the specifications), check for a
static port blockage. If the static port is not obstructed, the unit requires service.
Unit failure
When the PFD and HSI display modes show a RED cross the system is not operative.
This failure indicates that the sensor system on the unit is no longer speaking to the
symbol generator CPU.
What to do?
This problem can occur because the unit is configured wrong, because the software
on the device inside it has been erased, or because of an internal failure. The first
two causes can be solved by updating the software with the latest available software
version. If a software update doesn’t resolve the failure the Ultra requires service at
AvMap facility.
Page 22

AvMap Ultra EFIS
7. Technical Specifications
Software:
• Advanced data fusion capability
• Airspeed and Altitude from Pitot-static system
• Attitude (roll, pitch and heading) and side slip
• Wind indicator
• Clear HSI with Course Deviation Indicator (CDI)
• Altimeter reference, Heading reference, Aircraft specific V-speed
reference values
• Preloaded with Jeppesen navigation POI’s (APT, VOR, NDB) for navigation back-up
(4 coverages available: North America, South America, Europe-Africa, Asia- Australia)
• Exceptional navigation capability in case of loss of GPS signal
• Load factor (G-meter)
Hardware:
• Dimensions: 95 x 95 x 49.5 mm (3.74” x 3.74” x 1.95”)
• Diameter: 82 mm (3.23”); Installing diameter: 84 mm (3.3”)
• Weight: 145 g (5.1 oz)
• Display: 3.5”; 320 x 240 pixels, brightness 500 cd/m2
• Operational temperature: -20 °C to + 70 °C / -4 °F to +158 °F
• 3-axis gyros, accelerometers and magnetometers
• Acceleration range (3 axis): +/- 8 g
• Rotation range: +/- 1600 deg/s
• Air data sensors: range 10 to 215 kts, -1000 to 40000 ft
• UAV Navigation® Motion processor
• Micro SD slot
• 1.5 m (59”) free wires power supply cable (10/35 VDC)
• 3 serial ports RS-232
• Consumption @ 12 V DC: 100 mA nominal
Included accessories:
• GPS receiver U-Blox NEO 6Q with 1.5 m (59”) cable
• Mounting KIT (Cutting template, 4x metal washers and 4x screws)
• 1x 1A fuse holder
• Blank microSD card
• Microfiber cleaner cloth
22 - User and Installation Manual
Page 23

Page 24

Ultra EFIS
www.avmap.it
www.avmap.us
www.avmap.com.br
MAEFSAM0AE040
ÑMAEFSAM0AE040zÓ
 Loading...
Loading...