


NAVIGATION AGRICOLE
Manuel Utilisateur
Correspondant à la Version Logicielle
2.5.xx
Cher Client,
Félicitations pour votre choix d’un Navigateur GPS AvMap.
Les solutions de navigation GPS AvMap sont fabriquées en Italie
depuis 1994.
Ce Manuel Utilisateur est mis à jour pour la version
logicielle 1.10.xx éditée en Février 2009 pour les
Navigateurs GPS AvMap G6 Farmnavigator:
G6 Farmnavigator
G6 Connect Farmnavigator
Votre Voyage, Notre Technologie

Index
1. Pour démarrer 4
1.1 Contenu du coffret 4
1.2 Description Produit 4
1.3 Montage 5
2. Menu principal Navigation Agricole 7
2.1 Champs 8
2.2 Rampes d’Arrosage 8
2.3 Réglages Navigation Agricole 9
2.3.1 Largeur de travail 10
2.3.2 Rampes d’Arrosage 10
2.3.3 Lignes de guidage 10
2.3.4 Décalage 10
2.3.5 Unités de Surface 11
2.3.6 Vitesse Minimale 11
2.3.7 Réglages généraux 11
2.4 Caméra 11
2.5 Volume et Luminosité 12
2.6 Bluetooth 12
3. Créer et Travailler un Champ 13
3.1 Créer un Champ 13
3.2 Travailler un champ 13
3.4 Positionner des Obstacles / Echantillons de sol 15
3.5 Dénir les Lignes de Guidage 15
3.5.1 Lignes de guidage Parallèle 17
3.5.2 Lignes de guidage Contour 17
3.5.3 Lignes de Trame 18
3.5.4 En cercle 18
3.6 Conduite Assistée 19
3.7 Utiliser le contrôle virtuel d’arrosage 20
4. Base de Données Champs 22
4.1 Editer les Champs 22
4.2 Exporter les données de Champs vers Google Earth 23
4.3 Imprimer la carte du champ à partir de Google Earth 27
4.4 Importer les données du champ 27
ANNEXE A: Le DOP 29
AvMap - 3
1. Pour démarrer
1.1 Contenu du coffret
• G6 Farmnavigator / G6 Connect Farmnavigator
• Chargeur 220 V
• Chargeur 12 V sur prise allume-cigare
• Récepteur GPS externe étanche
• Cadre caoutchouc de protection
• Support à ventouse
• Câble USB
• Antenne externe TV DVBT *
*Uniquement pour le modèle
G6 Connect Farmnavigator
4 - AvMap
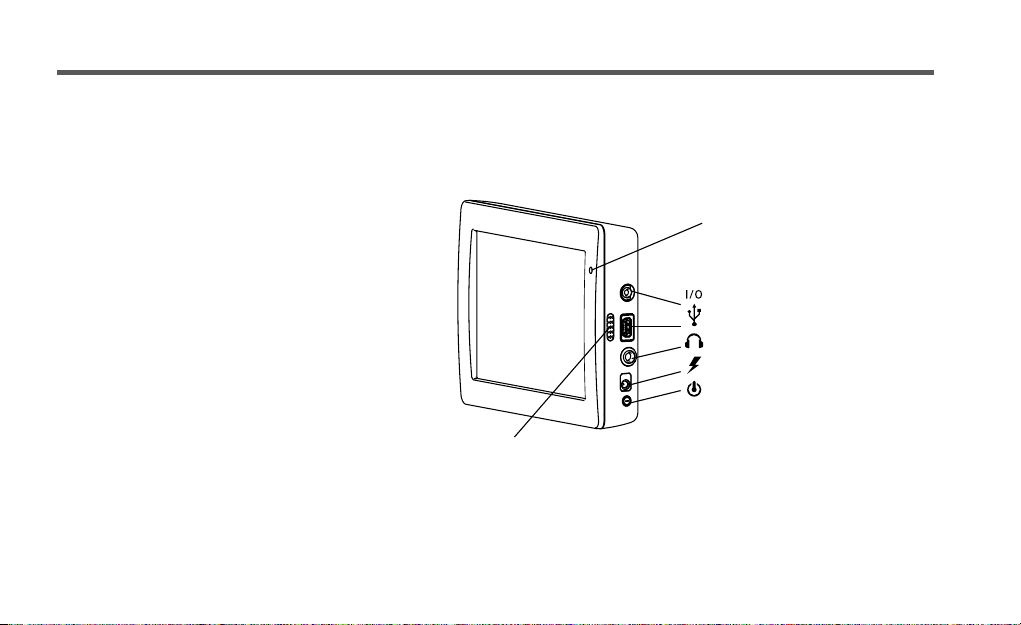
1.2 Description Produit
Microphone
Port Serie
Port USB Maître/Esclave
Sortie Audio
Connecteur Alimentation
Stand by
Haut-parleur
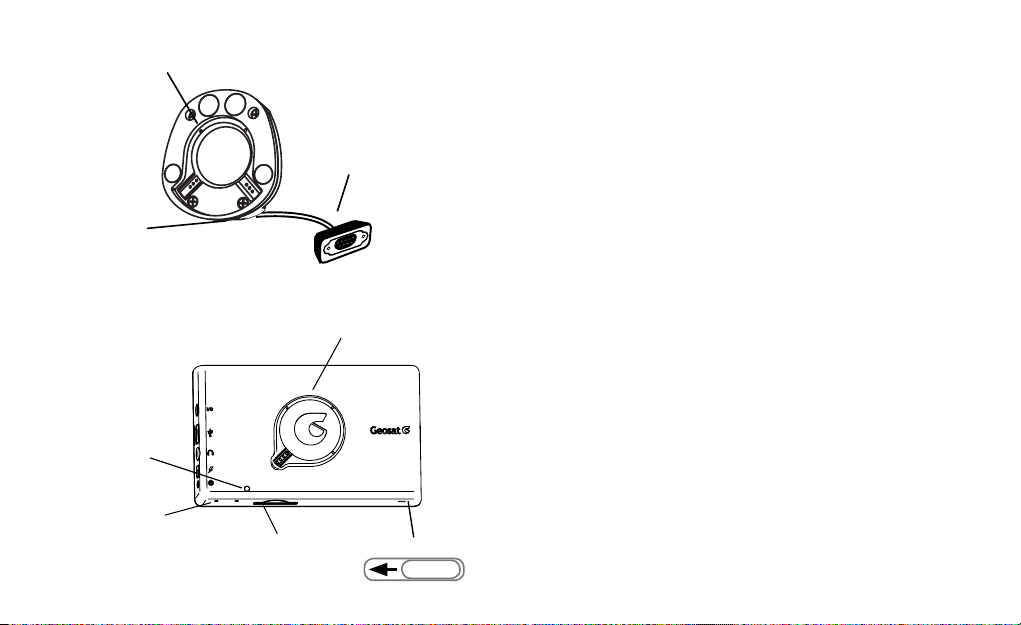
Support
Magnétique
Prise pour
connexion sur
source 12 V
allume-cigare
Capteur
de réglage
automatique
de luminosité
Reset
Prise externe
d’antenne GOS
Prise pour support
magnétique
Emplacement carte SD
ON -OFF
Farmnavigator
1.3 Montage
1. Fixer le support magnétique sur le support à
ventouse.
2. Monter le support à ventouse sur le pare-brise de
votre machine agricole. Merci de vous assurer que le
pare-brise est propre et exempt de graisse et humidier
la ventouse pour améliorer l’accrochage.
3. Raccorder le câble d’alimentation 12V à la prise du
support magnétique, et ensuite brancher le à la prise
d’allume-cigare de votre véhicule.
4. Raccorder le câble de l’antenne GPS au Connecteur 9
pins sortant du support magnétique.
5. Raccorder le câble d’antenne avec la vis reliant
l’antenne GPS et installer l’antenne au-dessus de l’axe
du volant. Si le toit de votre machine agricole n’est pas
fait en matériau magnétique (plastique, aluminium,...
), vous pouvez monter une plaque métallique (ou
équivalent) sur votre toit avec, par exemple, de la
AvMap - 5
Farmnavigator
colle.
6. Maintenant, vous pouvez installer le GPS Farmnavigator
sur son support magnétique et commencer à travailler.
ATTENTION: Ne JAMAIS enlever la carte mémoire SD
pendant que le logiciel fonctionne. Même si le produit est
en mode d’attente, le logiciel continue de fonctionner
en arrière-plan. TOUJOURS quitter le logiciel avec le
bouton de sortie dans le menu de navigation et attendre
jusqu’à ce que le produit afche le menu de démarrage.
Autrement, une erreur système sera générée en pouvant
causer des pertes de données importantes.
cause heavy data loss.
6 - AvMap
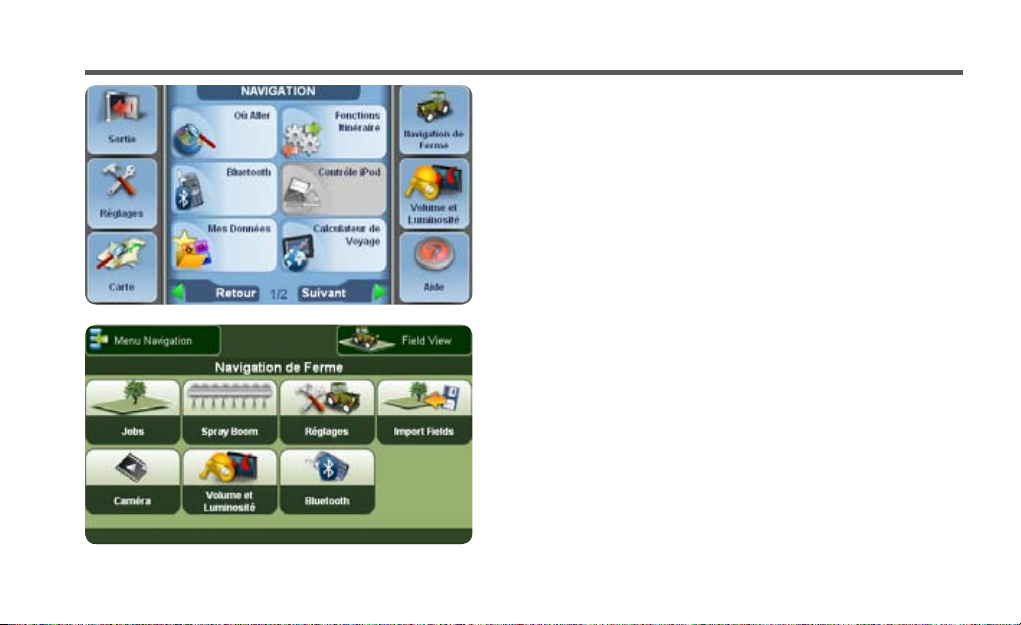
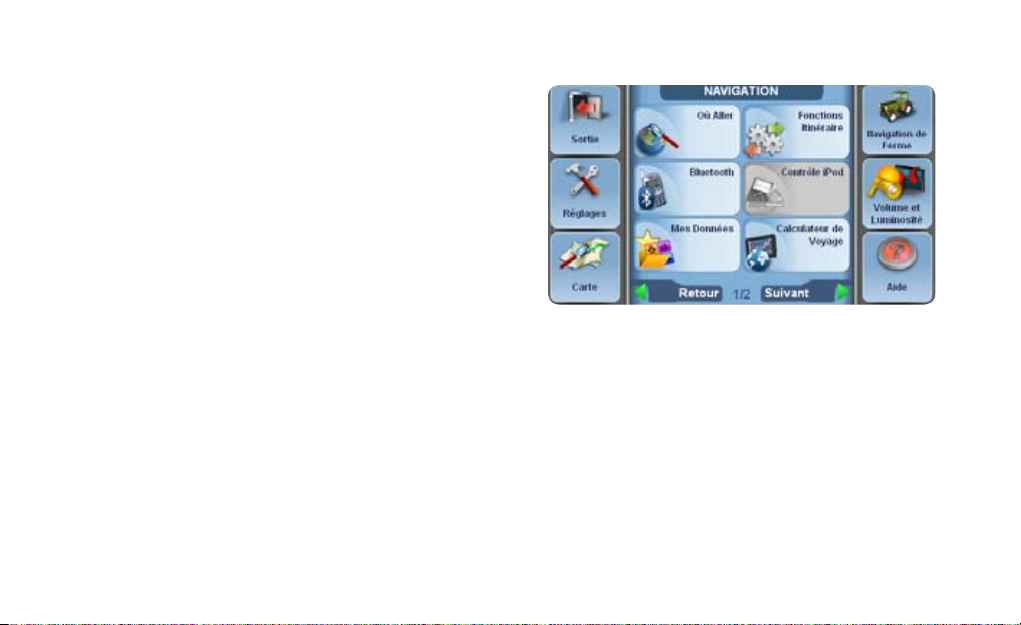
2. Menu principal Navigation Agricole
Pour utiliser les fonctions de Navigation Agricole, activer le
logiciel de navigation. Ouvrir le menu principal et activer le
bouton Navigation agricole dans le coin supérieur droit.
Dans le menu Navigation Agricole, vous trouvez les boutons
suivants.
• Champs
• Rampes d’arrosage
• Réglages
• Import Champs
• Caméra
• Volume et luminosité
• Bluetooth
Dans la barre supérieure, vous trouvez le bouton Vue
Champs qui ouvre le menu correspondant, et le bouton
Navigation Routière qui vous permet de retourner au menu
principal de navigation routière.
A partir du menu Vue Champ, vous pouvez ouvrir le menu
Navigation Agricole en activant le bouton avec l’icône de
tracteur dans le coin inférieur gauche de l’écran.
AvMap - 7
Farmnavigator
2.1 Champs
Dans le menu principal, activer le bouton Champs pour
entrer dans la base de données des Champs, qui contient
les informations détaillées de chaque champ Ici, vous
pouvez créer un nouveau champ ou ouvrir un Champ
sauvegardé pour continuer de travailler sur ses données
Pour retourner au menu principal, activer le bouton
Retour dans le coin supérieur gauche.
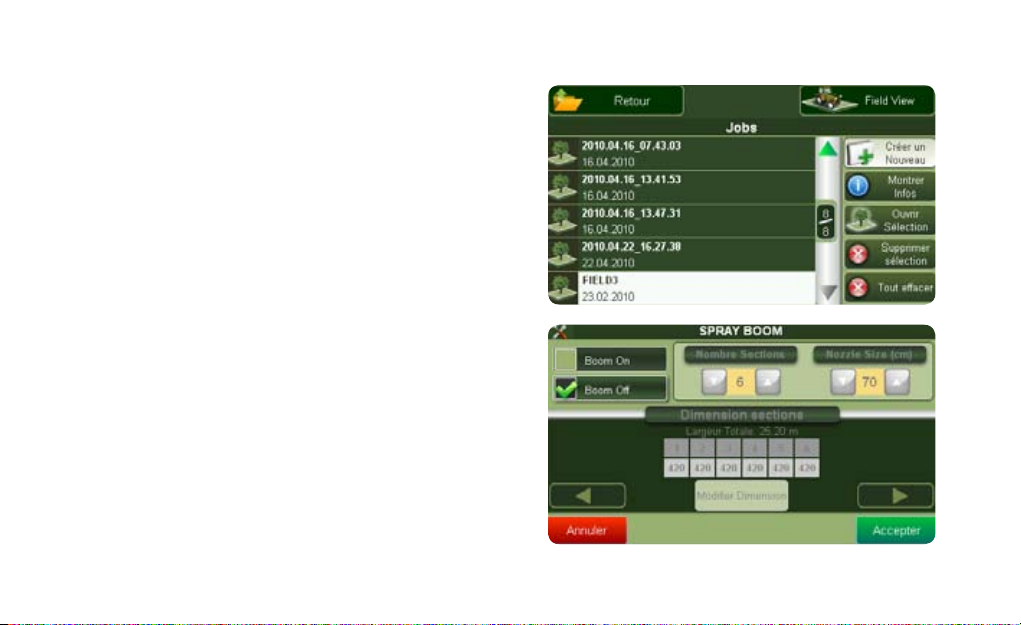
2.2 Rampes d’Arrosage
Ce bouton ouvre la page de réglage pour le contrôle
virtuel des rampes d’arrosage. Ici, vous pouvez régler la
longueur de votre système d’arrosage, le nombre exact
de segments, le nombre de buses et leur écartement.
La fonction de contrôle virtuel des rampes d’arrosage
peut être utilisée pour contrôler des systèmes d’arrosage
mais aussi d’autres machines telles que Semoirs et
Plantoirs qui travaillent de manière similaire. Vous
retrouvez le bouton Rampe Arrosage également dans le
8 - AvMap
Farmnavigator
menu Réglages.
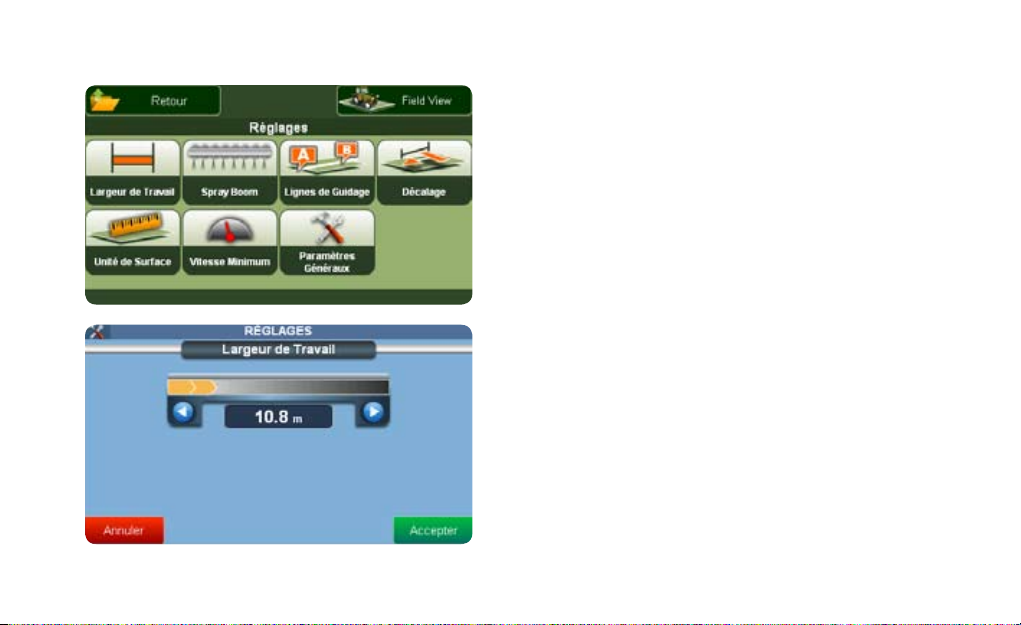
2.3 Réglages Navigation Agricole
Utiliser ce bouton pour modier les réglages en mode
Navigation Agricole. Dans cet écran, vous pouvez personnaliser
les fonctions Navigation Agricole pour qu’elles correspondent
à votre machine agricole et à ses équipements associés.
Les réglages concernent:
• Largeur de travail
• Rampes d’Arrosage
• Lignes de guidage
• Décalage
• Unités de surface
• Vitesse Minimum
• Réglages généraux
Pour retourner au menu principal, activer le bouton Retour
dans le coin supérieur gauche.
AvMap - 9
Farmnavigator
2.3.1 Largeur de travail
Ici, vous pouvez régler la largeur de travail de votre machine
agricole. Cette valeur est utilisée pour calculer la distance
entre les lignes de guidage. Attention: Si la commande virtuelle
d’arrosage est activée, cette valeur sera utilisée pour le calcul.
2.3.2 Rampes d’Arrosage
Le bouton Rampe Arrosage est également accessible depuis
le menu principal Navigation Agricole (par. 2.2). Voir Par. 3.7
pour savoir comment utiliser le contrôle virtuel des rampes
d’Arrosage.
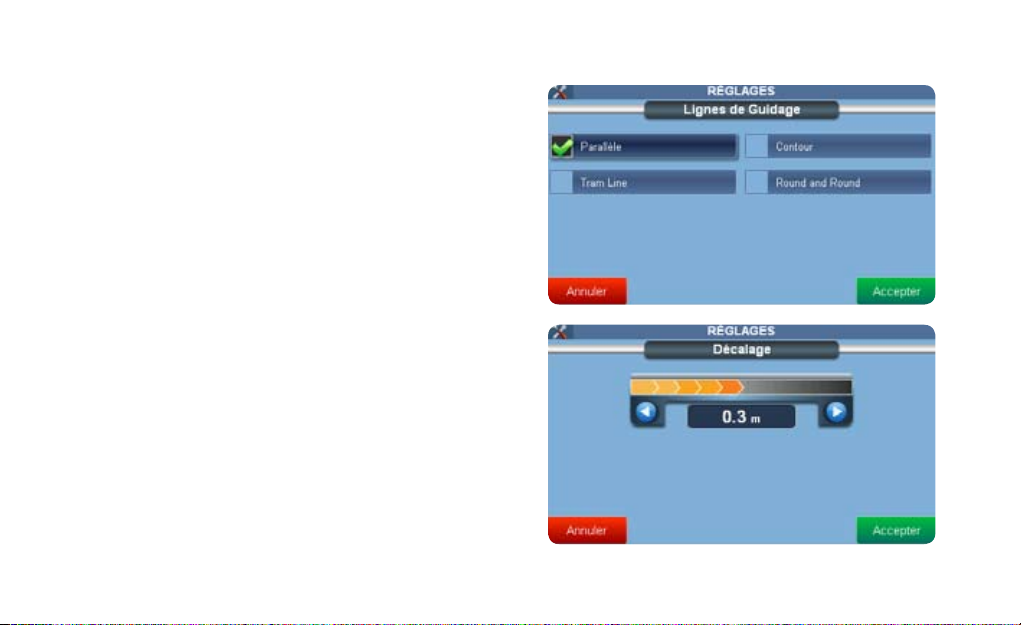
2.3.3 Lignes de guidage
Ici vous pouvez sélectionner 4 différents types de navigation
(voir par. 3.5).
2.3.4 Décalage
Ce réglage vous permet de déplacer virtuellement la position
de votre récepteur GPS vers l’avant ou l’arrière pour avoir plus
10 - AvMap

Farmnavigator
de précision dans le travail.
2.3.5 Unités de Surface
Ici, vous pouvez sélectionner l’unité de mesure:
Hectare = (km/h, m, cm,) - Acre = (imperial, mph, Foot, Inch)
2.3.6 Vitesse Minimale
Régler ici la vitesse minimum pour enregistrer les positions GPS
positions. Comme le GPS peut varier jusqu’à 10 m autour de
sa position sans bouger. Un réglage de 0.5 – 2 km/h de vitesse
minimale évite d’enregistrer ces variations qui faussent la
position réelle du GPS. Le réglage idéal standard est de 1 km/h
2.3.7 Réglages généraux
Dans ce menu, les réglages de base du produit, tels que
langue ou régles d’afchage, peuvent être modiés. Pour
plus d’informations sur les réglages généraux, vous reporter
au Manuel Utilisateur complet de navigation routière.
2.4 Caméra
AvMap - 11

Farmnavigator
Activer ce bouton pour afcher les images de la caméra
arrière. Sur le côté gauche, vous avez deux boutons.
Vue Champs: Activer ce bouton pour passer à l’écran de
gestion des Champs
Farmnavigator: Utiliser ce bouton pour retourner au menu
principal de navigation agricole.
2.5 Volume et Luminosité
Vous pôuvez ajuster ici la luminoisité de l’écran et le volume
des instructions vocales et des signaux sonores en activant les
èches à gauche ou à droite. Activer le bouton Accepter pour
conrmer et retourner au menu principal.
2.6 Bluetooth
Le modèle GPS Farmnavigator dispose également d’une
fonction Kit Mains Libres pour les téléphones Bluetooth. Merci de
consulter le Manuel Utilisateur complet de navigation routière
pour obtenir des instructions sur l’appairage et l’utilisation de
votre téléphone mobile avec le navigateur Farmnavigator.
12 - AvMap

3. Créer et Travailler un Champ
3.1 Créer un Champ
Ouvrir le Menu Principal Farmnavigator et activer le bouton
Champs. Une liste de tous les champs enregistrés s’afche. Lors
de la 1ère utilisation, la liste est vide. Pour créer un nouveau
Champ, activer le bouton Nouveau. La Vue Champ s’ouvre.
3.2 Travailler un champ
Avant de commencer un travail sur un champ, ou avant
de commencer la mesure d’un champ, il est important de
régler la largeur de travail (la largeur de la machine que
vous utilisez),
1. Retourner au menu principal Navigation Agricole
2. Activer le bouton Réglages Agri
3. Activer le bouton Largeur Travail
4. Utiliser les èches gauche et droite pour ajuster à la
valeur souhaitée
5. Activer le bouton Accepter pour conrmer
Merci de lire le par. 2.3 pour les autres réglages.
AvMap - 13

Farmnavigator
Activer le bouton Vue Champ. Activer le bouton Début
Travail pour démarrer l’enregistrement des données
(surface travaillée, vitesse, périmètre et surface) qui
seront sauvegardés dans la Base de Données Champs.
Pour arrêter l’enregistrement de la surface travaillée,
activer le bouton ARRETER dans le coin inférieur gauche.
Vous pourrez de nouveau travailler sur ce champ à tout
moment en activant le bouton DEMARRER
ou en ré-ouvrant le champ dans la Base de Données.
3.3 Mesurer Périmètre et Surface
La 1ère opération que vous devez faire est de mesurer
le champ en conduisant sur tout le périmètre du champ.
Conduire quelques mètres d’abord puis activer le bouton
MESURER (avec une règle comme icône). La limite est
maintenant enregistrée depuis le point de départ (èche
rouge). Maintenant, conduisez autour du champ jusqu’à ce
que vous ayez atteint le point de départ, at ensuite activer
14 - AvMap

Farmnavigator
de nouveau le bouton MESURER. Maintenant, activer
encore le bouton MESURER. Les limites du Champ sont
maintenant enregistrées et la surface est calculée. Cette
information est enregistrée dans la Base de Données.
3.4 Positionner des Obstacles / Echantillons de sol
Pendant que vous travaillez un champ, vous pouvez
enregistrer les positions d’échantillons de sol ou
d’obstacles, tels que des arbres ou des trous.
Pour sauvegarder une position, allez aussi près que possible
de l’objet concerné et activer le bouton OBSTACLE (avec un
cône orange comme icône). Les positions des obstacles et
échantillons de sol sont maintenant sauvegardées dans la
Base de Données Champs et sont représentées sur la carte
avec une icône de cône orange et un numéro progressif.
3.5 Dénir les Lignes de Guidage
Une fois que vous avez créé le champ, mesuré son périmètre
AvMap - 15

Farmnavigator
et sa surface, et sauvegardé les obstacles, vous pouvez
continuer votre travail en utilisant la fonction de Conduite
Assistée (A.k.a. barre lumineuse de navigation).
L’enregistrement du périmètre et de la ligne de référence
peut être réalisé en une étape.
Pour utiliser la conduite à l’assistance, vous avez besoin de
dénir les lignes de guidage.
1.Ouvrir le menu principal de navigation agricole
2.Activer le bouton Réglages
3.Activer Lignes Guidage
4.Choisir parmi les 4 différents types de lignes de guidage
en activant l’option choisie:
• Parallèle
• Contour
• Trame
• En cercle
5. Conrmer en activant le bouton Accepter
6. Activer Vue Champ dans le coin supérieur droit
16 - AvMap

Farmnavigator
3.5.1 Lignes de guidage Parallèle
Les lignes de guidage parallèles sont idéales pour les
champs avec des limites droites. En conduisant la 1ère
ligne de référence, positionner le point A au début du
tracé en en activant le bouton A. Le point de départ est
afché sur la carte par un carré orange avec la lettre “A”
à lintérieur. Une fois le point A déni, le bouton B va
apparaître. Quand vous atteignez l’extrêmité du champ,
dénir le point B en activant le bouton B. Le point B est
afché sur la carte comme le point A. Ces deux points sont
utilisés pour dessiner la ligne droite de référence et les
lignes de guidage parallèles à une distance précèdemment
dénie comme largeur de travail.
3.5.2 Lignes de guidage Contour
Les lignes de guidage Contour sont utilisées pour les
champs avec des limites en courbes. Dénir le point
A puis conduire la 1ère ligne de référence et ensuite
AvMap - 17

Farmnavigator
juste avant d’atteindre l’extrêmité du champ en réglant
le point B. Le GPS Farmnavigator enregistrera chaque
position et dessinera la ligne exacte de conduite et
les lignes parallèles correspondantes à la distance
précèdemment dénie comme largeur de travail ou
largeur de pulvérisation.
3.5.3 Lignes de Trame
Cette Option est utilisée pour travailler des champs où
des lignes de trame ont déjà été faites (dans les vignobles
par exemple). Dans ce mode, le GPS Farmnavigator ne
vous guide pas mais il montre la surface travaillée et vous
permet d’utiliser le contrôle virtuel de pulvérisation.
3.5.4 En cercle
En dénissant les lignes de guidage en cercle, vous pouvez
créer des lignes concentriques en partant de l’extérieur
du champ jusqu’à son centre. Activer le bouton A, puis
commencer de conduire le long du périmètre extérieur
18 - AvMap

Farmnavigator
et activer le bouton B quand vous l’avez terminé: le
logiciel dessinera alors des lignes concentriques jusqu’au
centre du champ.
3.6 Conduite Assistée
Après avoir déni les lignes de guidage, l’aide à la
navigation est afchée au-dessus de la carte. L’aide à la
navigation montre, à l’aide de deux èches directionnelles
dans quelle direction le volant doit être tourné pour corriger
la trajectoire et conduire sur la ligne de guidage calculé.
L’écart entre la position du véhicule et la ligne de guidage
est afchée entre les deux èches en m (mètre) et cm
(centimètres) pour permettre des corrections très précises.
Sur le côté gauche, il y a 3 cases d’informations indiquant la
distance parcourue, la vitesse et le DOP (précision du GPS).
Pour information sur le DOP, lire l’Annexe A.
Une fois que le travail est terminé, activer le bouton
ARRETER. La surface travaillée (mise en surbrillance
AvMap - 19

Farmnavigator
en vert) est sauvegardée dans la page correspondante
du Champ dans la Base de Données des Champs. Vous
pourrez alors ouvrir le champ et continuer le travail.
3.7 Utiliser le contrôle virtuel d’arrosage
Le GPS Farmnavigator inclue un contrôle virtuel des rampes
d’arrosage. Cette fonction peut être utilisée pour contrôler
des systèmes d’arrosage mais aussi d’autres équipements tels
que des semoirs ou des épandeurs qui travaillent de façon
similaire. Lorsque vous pulvérisez des produits chimiques dans
un champ, il est très important de contrôler la surface traitée
et d’éviter de traiter deux fois la même parcelle de terrain.
Le logiciel du GPS Farmnavigator dessinera votre arrosage,
reproduisant le nombre exact de sections et de buses et il
vous aidera à activer ou non les différentes sections.
Pour utiliser cette fonction, activer le bouton Rampe Arrosage
et ensuite activer le bouton Activer Rampe Arrosage.
ATTENTION: Quand le contrôle virtuel de rampe d’arrosage
est activé, ses réglages sont utilisés pour calculer la largeur
20 - AvMap

Farmnavigator
de travail, en ignorant la largeur réglée dans la page Largeur
de travail (par. 2.3.1).
Maintenant, vous pouvez dénir le nombre de sections et la
largeur de chaque buse en utilisant les boutons Flèches.
Les sections sont afchées avec des carrés numérotés. Vous
pouvez sélectionner chaque section et modier sa largeur en
activant le bouton Modier Dimension. Utiliser les èches pour
ajuster le nombre de buses et conrmer pour sauvegarder les
réglages et continuer avec la section suivante.
Ces réglages sont sauvegardés même si le contrôle virtuel
de rampe d’arrosage est désactivé. Si le contrôle virtuel
de rampe d’arrosage a été déni et activé, les différentes
sections sont afchées sous la forme de “LEDs” allumées
dans la page Vue Champ. Chaque “LED” montre si la section
spécique doit être activée ou non par l’opérateur. Jaune
signie que la rampe d’arrosage peut être ouverte, Rouge
indique que la section recouvre une surface déjà traitée et
devrait permettre ainsi à l’opérateur de la désactiver.
AvMap - 21

4. Base de Données Champs
Pour ouvrir la Base de Données Champs, aller dans le menu
Navigation Agricole et activer le bouton Champs. Un tableau
avec chaque champ sauvegardé est afché. Sélectionner
dans le tableau le champ concerné et activer Ouvrir, puis
activer Voir Infos pour visualiser toutes les informations.
Les informations disponibles vous renseignent sur la forme
du champ, le temps de travail, la surface, la surface
travaillée, la vitesse maximale et le niveau maximal de
Valeur DOP. Click Select to switch to the next submenu.
4.1 Editer les Champs
Pour éditer les données enregistrées sur le champ, ouvrir la
page d’informations complètes et activer le bouton Options.
Le menu des options inclue les boutons suivants:
Ouvrir:Vous pouvez ouvrir des champs déjà travaillés et
continuer à les travailler.
Renommer:Quand un champ a été créé, il est automatiquement
nommé avec les données de création. Cette oiption vous
permet de renommer le champ selon vos souhaits.
22 - AvMap

Farmnavigator
Effacer Obstacles: Si vous avez enregistré des obstacles ou des
échantillons de sol, vous pouvez les suppprimer avec cette
option.
Effacer Surface Travaillée: Si vous souhaitez démarrer un
nouveau travail sur un champ déjà travaillé, vous pouvez
effacer la surface travaillée. Le périmètre, la surface totale et
les positions des obstacles enregistrés seront conservés.
Supprimer: Le champ complet est supprimé avec cette
commande.
Exporter:Ouvrir le champ puis activer ce bouton pour créer
un chier “.kmz”, chier que vous pourrez ouvrir dans Google
Earth. Le chier est enregistré dans le répertoire CHAMPS de la
carte mémoire SD.
4.2 Exporter les données de Champs vers
Google Earth
Vous pouvez exporter chaque champ créé et travaillé avec le GPS
G6 Farmnavigator et le visualiser dans Google Earth.
1. Ouvrir la Base de Données Champs, sélectionner le champ
AvMap - 23

Farmnavigator
que vous souhaitez exporter et l’ouvrir en activant le bouton
Ouvrir. ATTENTION: pour exporter un champ, celui-ci doit avoir
été ouvert.
2. Retourner dans la Base de Données, sélectionner le Champ
et activer le bouton Voir Infos, activer Options puis Exporter.
(Si le champ n’a pas été ouvert, alors le bouton d’export est
grisé). Le GPS G6 Farmnavigator convertira les informations
du champ au format *.Kmz,, qui est compatible avec Google
Earth. Ces chiers seront sauvegardés dans la carte SD dans le
répertoire Champs.
3. Connecter le GPS G6 Farmnavigator au PC avec le câble USB
fourni, sans mettre sous tension le navigateur, l’image USB
apparaîtra sur l’écran du navigateur. Le PC verra le GPS G6
Farmnavigator comme un support de mémoire externe et une
fenêtre s’ouvrira automatiquement.
4. Dans la fenêtre, ouvrir le répertoire Champs, il contient
un chier pour chaque champ sauvegardé ainsiu que les chiers
*.Kmz. Copier le chier *.Kmz et coller le dans un répertoire que
vous aurez créé sur votre PC pour ce besoin.
24 - AvMap

Farmnavigator
5. Si Google Earth est installé sur votre PC, il vous suft de cliquer sur le nom du chier *.Kmz pour l’ouvrir. (Télécharger
gratuitement Google Earth à partir de http://earth.google.com/).
Il vous sera alors possible de visualiser, sur la carte Google Earth, le périmétre du champ avec une ligne de contour de couleur
AvMap - 25

Farmnavigator
et les obstacles sauvegardés dans le champ.
La fenêtre “Lieux” montre toutes les données relatives au champ (surface et positions des obstacles). Cliquer sur le nom des
Champs ou sur l’icône d’information pour visualiser davantage de données concernant le travail du champ (durée de travail,
26 - AvMap

Farmnavigator
DOP maxi, réglages largeur travail,.. . ).
4.3 Imprimer la carte du champ à partir de
Google Earth
Vous pouvez imprimer la carte de vos champs avec toutes les
informations associées.
1. Cliquer sur le nom du champ dans la fenêtre des lieux.
2. Cliquer sur Menu Fichier, puis sur Imprimer.
3. La fenêtre de dialogue Impression s’ouvre. Sélectionner le
second et ensuite sur le bouton Imprimer.
Google Earth imprimera la carte du champ et ses données
associées.
4.4 Importer les données du champ
Vous pouvez transférer la Base de Données des Champs depuis
un GPS G6 Farmnavigator vers un autre, en exportant les
données et ensuite en les important dans l’autre navigateur.
1. Pour exporter les chiers, suivre la procédure décrite au par.
4.2, jusqu’à l’étape 4.
AvMap - 27

Farmnavigator
2. Pour importer le chier, veuillez connecter le GPS G6
Farmnavigator dans lequel vous souhaitez importer les données
depuis le PC avec le câble USB fourni. Ne pas alimenter le
navigateur. L’image USB apparaîtra sur l’écran du navigateur.
Le PC voit le GPS G6 Farmnavigator comme un support
mémoire externe et la fenêtre disque amovible s’ouvre
automatiquement.
3. Copier et Coller dans le répertoire d’importation Champs du
GPS G6 Farmnavigator les chiers *.Kmz précedemment copiés
sur le PC
4. Quand la, procédure est terminée, fermer la fenêtre et
débrancher avec précaution les composants.
5. Mettre en marche le GPS Farmnavigator et ouvrir le menu
principal. Activer le bouton Importer Champs pour voir la liste
des chiers *.Kmz, sélectionner le chier et activer le bouton
Import sur la droite pour ajouter le champ dans la base de
données.
6. Retourner au menu principal et activer le bouton Champs : le
champ importé a été ajouté à la liste.
28 - AvMap

ANNEXE A: Le DOP
L’indicateur DOP (Dilution of precision) est un paramètre indiquant le niveau de précision du GPS
Les erreurs de position qu’un récepteur GPS donnent sont dues principalmeent à deux facteurs : la précision avec
laquelle la distance de chaque satellite GPS est connu et la géométrie des satellites. Les erreurs de distance peuvent
être compensées en utilisant WAAS, et d’autres techniques: les GPS Farmnavigator sont équipés avec une antenne
étanche externe spéciale avec un récepteur U-Blox compatible DGPS WAAS/EGNOS. Mais la précision maximale de
positionnement que vous pouvez obtenir est limitée par la géométrie des satellites GPS qui varie durant la journée.
Le signal de chaque satellite GPS a un niveau de précision qui dépend du positionnement relatif des satellites, ces
précisions peuvent être combinées pour obtenir une plus grande précision. Une faible valeur de DOP représente une
meilleure précision de positionnement grâce au plus grand angle de séparation des satellites entre eux pour calculer
la position d’un GPS. Plus la valeur de DOPest élevée, plus grande est l’erreur possible de précision sur la position.
D’autres facteurs qui peuvent augmenter la valeur effectiive de DOP sont les obstacles telles que des montagnes
proches ou des bâtiments.
Il est important de connaître la valeur de DOP à chaque instant car cette information vous permet le niveau de
conance que vous pouvez avoir dans la précision de votre GPS à un instant donné. Si la valeur de DOP est mauvaise,
vous pouvez considérer d’attendre un meilleur niveau de DOP pour commencer votre travail.
AvMap - 29

Farmnavigator
Description des Valeurs caractéristiques de DOP
1 Idéal - Ceci représente le plus haut niveau possible de conance
Excellent – A ce niveau de conance , les mesures de positionnement sont considérées comme
1-2
sufsamment précises pour toutes les applications sauf les plus sensibles
2-5 Bon
Modéré - Les mesures de positionnement sont utilisables pour les calculs , mais la qualité de la
5-10
mesure devrait être améliorée et une vue plus ouverte du ciel est recommandée
10-20
SATCONSYSTEM
Bundesstr. 7
97531 Obertheres
Germania
Tel.: +49 (0) 9521/7072
Fax: +49 (0) 9521/1350
info@satconsystem.de
30 - AvMap
Faible - Représente un niveau de conance faible et les mesures de positionnement devraient
être ignorées ou utilisées uniquement pour une indication grossière de la position actuelle
>20 Très faible – A ce niveau , les mesures sont imprécises et inutilisables
www.farmnavigator.com
AvMap s.r.l.
Viale Zaccagna 6
54033 Carrara (MS)
Italia
farmnavigator@avmap.it


www.farmnavigator.com
 Loading...
Loading...