

Page 1
AVR430: MC300 Hardware User Guide
Features
• General-purpose power stage for DC and stepper motors
• Modular system with 2,54mm pin header connector for device boards
• Four half-bridges with independent control of high and low side
• Onboard voltage regulators for device board (5/3,3V) and Hall sensors (5V)
• Hall sensor, back-EMF and center voltage feedback to device board
• Shunt resistor feedback to device board
• Electric specifications:
- Driver circuit: Vin 10-20V
- Motor: Vm 0-40V, Im
• Dimension: 100x100mm
1 Introduction
The MC300 is a general-purpose power stage board able to drive brushless DC,
brushed DC and stepper motors. The board is designed to be a flexible platform for
developing motor control applications. Power and all signals needed for a controller
(AVR® CPU) are available on the left side of the board, giving a modular system
where boards with different microcontrollers can easily be connected.
Figure 1-1. MC300 Motor control driver board.
max
=6A
8-bit
Microcontrollers
Application Note
Rev. 8124C-AVR-10/08
Page 2

2 Hardware overview
2.1 Specifications
Please refer to schematics, layout and BOM available at http://www.atmel.com.
The MC300 motor control driver board is a power stage board intended for driving
BLDC and stepper motors. It has four half-bridges with independent control of high
and low sides. Each bridge has options for filtered/voltage divided feedback from its
output (EMF) and shunt resistor. There is also feedback from a common shunt
resistor, Vmotor (Vm) and Vneutral (Vn - center tap motor windings).
Four 8-pin 2,54mm (100mil) horizontal female pin headers on the left side of the
board form a system connector for device boards.
The board has an adjustable voltage regulator for Vcc, 3.3V or 5V, and this voltage is
available on the system connector. A 5V regulator powers the Hall sensors. Vm, Vin
and Vcc each have their own LED to indicate power.
MC300 maximum ratings with components as delivered:
Input:
• Vin: 10 – 20VDC
• Vm: 0 – 40VDC, Im
Output ratings:
• Vcc = 3.3/5V, I
• Vha = 5V, I
The driver stage consists of four half-bridges capable of 40V / 30A (Warning! Other
components such as shunt resistors limit the maximum current to 6A).
max
= 0.1A
max
= 6A
max
= 0.5A
2.1.1 Necessary precautions
2
AVR430
The gate voltage to the high side MOS is powered by a bootstrap capacitor. To
sustain the voltage over this capacitor the high side must be turned off for a short
time on a regular basis, allowing the capacitor to be recharged via a diode. Failing
to do so, for example. by keeping the high side permanently on, will cause the gate
voltage on the high side MOS to drop and the internal resistance to increase. If a high
current is going thru the high side MOS at this point the transistor will overheat and be
destroyed. The fuse will not prevent this from happening.
8124C-AVR-10/08
Page 3
2.2 Connections
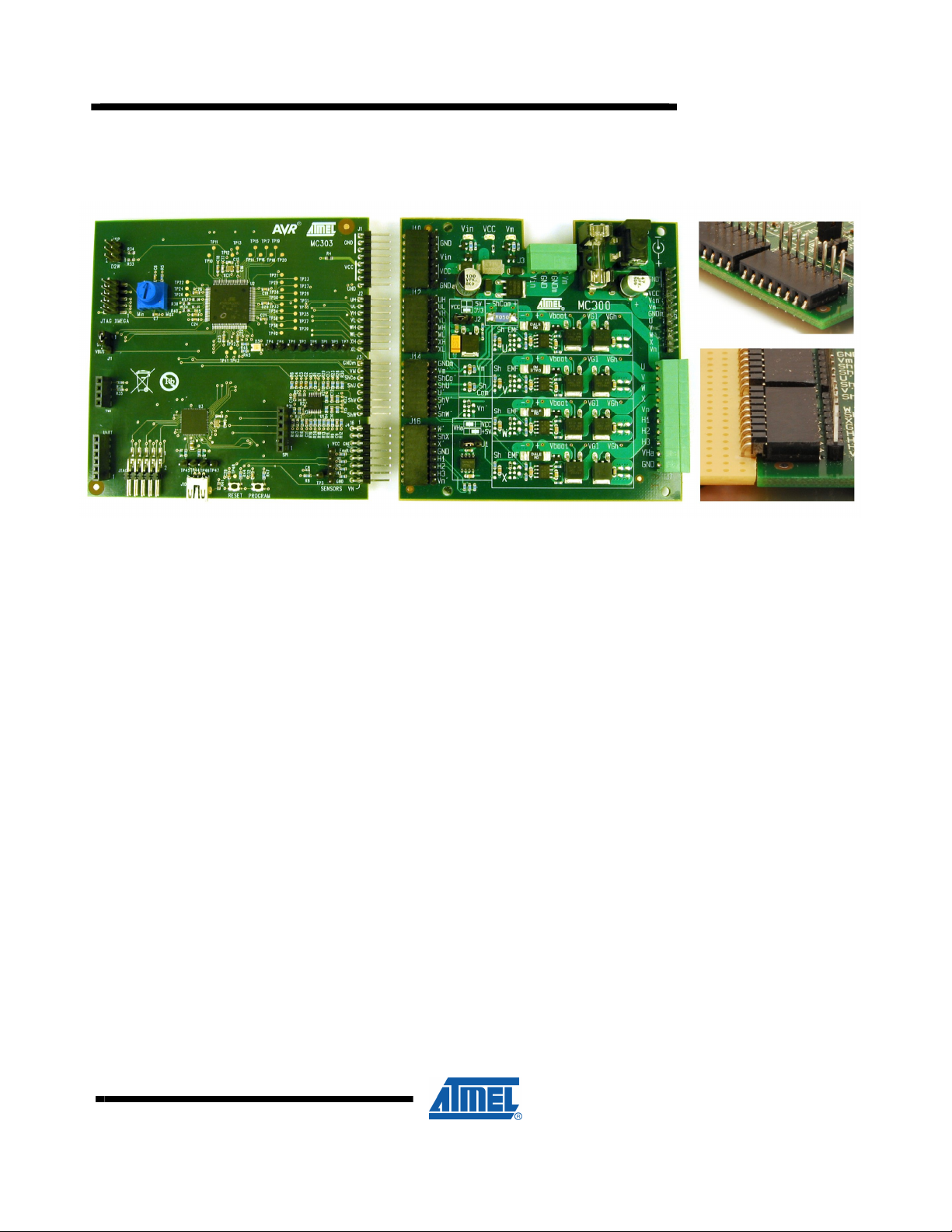
Figure 2-1. MC300 with device board, connector details and prototype board fitted.
2.2.1 Device board connector
The MC300 driver board can directly connect to an AVR device board. This is
accomplished by a horizontal female 0.1” pin header connector located on the left
side of the board, shown in Figure 2-1.
The device board interface on MC300 connector is split into four eight-pin connectors.
Electric schematics and mechanical specifications are shown in Figure 2-2 and
signal description in Table 2-2.
The connectors are mounted on the same 0.1” grid. The grid is positioned so the
connectors will fit an angled pin header on a prototype Vero-board, shown in Figure
2-1.
AVR430
2.2.2 Power and motor connectors
The board has two power connectors located on the top, one 4 pin 3.81mm connector
(J3) and one DC-jack (J5) with 2.0mm center tap. J3 allows for separate power inputs
to Vin and Vm, while J5 powers both Vin and Vm via diodes. Refer to chapter 4.1 for
more details.
The motor connector (J7), a 10 pin 3.81mm connector, is found on the lower right
side of the board. Signals and voltages associated with the motor are easy accessible
on the pin row (J6) above the motor connector. Refer to the schematics for signals
and pinout on J6 and J7.
8124C-AVR-10/08
3
Page 4
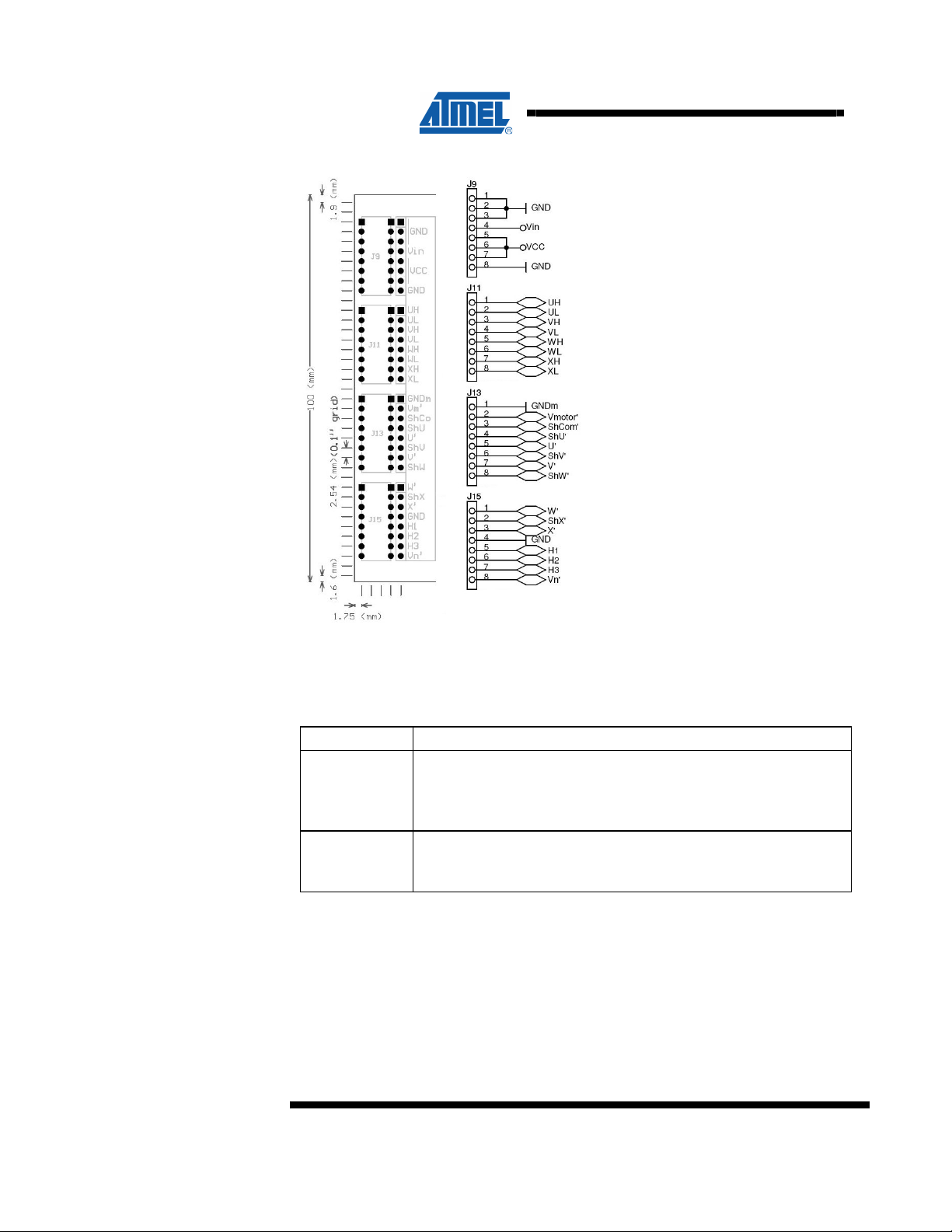
Figure 2-2. Device board connector mechanical specification and schematics.
2.3 Jumpers
Refer to component floorplan for location of jumpers.
Table 2-1. Jumpers and their functions.
Designator Use and settings
Selects voltage source to Hall sensors (VHa)
J1 open – VHa not connected
J1 pin 2 & 3 connected – VHa = Vcc
J1 (VHa)
J2 (VCC)
J1 pin 1 & 2 connected – VHa = 5V (from separate regulator)
Selects voltage from onboard regulated supply (Vcc).
J2 connected – Vcc = 3.3V
J2 open – Vcc = 5V
4
AVR430
8124C-AVR-10/08
Page 5

Table 2-2. MC300 device board connector signal description.
Pin Located Name Direction Description
1 J9p1 GND -
2 J9p2 GND - System ground (Vin/VCC)
3 J9p3 GND -
4 J9p4 Vin Output Input power Vin (10-20V)
5 J9p5 VCC Output
6 J9p6 VCC Output Regulated power Vcc (3.3V/5V)
7 J9p7 VCC Output
8 J9p8 GND - System ground (Vin/VCC)
9 J11p1 UH Input Phase U Highside control input
10 J11p2 UL Input Phase U Lowside control input
11 J11p3 VH Input Phase V Highside control input
12 J11p4 VL Input Phase V Lowside control input
13 J11p5 WH Input Phase W Highside control input
14 J11p6 WL Input Phase W Lowside control input
15 J11p7 XH Input Phase X Highside control input
16 J11p8 XL Input Phase X Lowside control input
AVR430
17 J13p1 GNDm - Motor ground (Vmotor)
18 J13p2 Vmotor’ Output Vmotor filtered/divided
19 J13p3 ShCom’ Output Voltage over ShCom filtered/divided
20 J13p4 ShU’ Output Voltage over ShU filtered/divided
21 J13p5 U’ Output BackEMF phase U filtered/divided
22 J13p6 ShV’ Output Voltage over ShV filtered/divided
23 J13p7 V’ Output BackEMF phase V filtered/divided
24 J13p8 ShW’ Output Voltage over ShW filtered/divided
25 J15p1 W’ Output BackEMF phase W filtered/divided
26 J15p2 ShX’ Output Voltage over ShX filtered/divided
27 J15p3 X’ Output BackEMF phase X filtered/divided
28 J15p4 GND - System ground (Vin/VCC)
29 J15p5 H1 Output Hall sensor 1 signal
30 J15p6 H2 Output Hall sensor 2 signal
31 J15p7 H3 Output Hall sensor 3 signal
32 J15p8 Vn’ Output Vn (neutral point) filtered/divided
8124C-AVR-10/08
5
Page 6

3 PCB
3.1 PCB Layout
The MC300 is organized as shown in Figure 3-1. Most signals, important components
and jumper information are written on the silk screen. For individual component
placement refer to the component floorplan.
Figure 3-1. MC300 PCB layout.
In Figure 3-1 the following areas are marked:
1. Device board connector.
2. Power connectors
3. Motor connector
4. Phase area
5. Indicator LEDs for power
6
AVR430
8124C-AVR-10/08
Page 7

3.1.1 Phase area
AVR430
Each phase has its own area with a frame drawn on silkscreen. In Figure 3-2 the area
for phase ‘V’ is shown, and everything inside this frame regards this phase only.
Figure 3-2. Phase ‘V’ area on MC300 PCB.
From the left we see:
1. Shunt filter/damping block – denoted ‘Sh’
2. Back EMF filter/damping block – denoted ‘EMF’
3. Shunt resistor testpoints – denoted ‘-‘ and ‘+’ (above shunt resistor)
4. Bootstrap voltage testpoint – denoted ‘Vboot’
5. MOS Gate voltage testpoints – denoted ‘VGl’ (low side) and ‘VGh’ (high side)
3.1.2 Common shunt and filters/dividers
The common shunt (R62) with testpoints is found above phase ‘U’ and denoted
‘ShCom’. Filters/dividers for Vm, ShCom and Vn are found on the left of the phase
areas.
3.2 Schematics, component floorplan and bill of materials
The schematics, component floorplan and bill of materials (BOM) for MC300 are
found as separate PDF files distributed with this application note, they can be
downloaded from http://www.atmel.com.
8124C-AVR-10/08
7
Page 8

4 Detailed description
4.1 Power
4.1.1 Input
The MC300 has two power circuits. Vin for powering driver ICs and voltage
regulators, and Vmotor (Vm) for powering the output stage (MOSFETs). The separate
power supply for the motor, Vm, allows the use of motor voltages outside the voltage
range of the driver ICs. This also isolates noise generated by the output stage/motor.
There is a separate ground plane for each power circuit, GND for Vin and GNDmotor
(GNDm) for Vm. This is done to separate the high currents to the motor from the rest.
The ground planes are connected together at one single point, under the J3
connector (shown in Figure 4-1).
A regulated power supply for Vcc is included on the board. The voltage for Vcc is
selectable by J2, if open Vcc = 5V and if set Vcc = 3.3V.
The MC300 can be powered in two ways. With J3, a four pin 3,81mm pitch connector,
separate power supplies can be connected to Vin and Vm. But it is also possible to
power the MC300 from a single DC-Jack connector, J5. J5 is connected to Vin and
Vm via diodes as shown in Figure 4-1. When J5 is used as power input, the supply
voltage must not exceed 20V and maximum current is 5A.
Figure 4-1. MC300 Power input.
4.1.2 Fuses
Vin is protected by a resettable 0,75A polyfuse (F1). If the current through it exceeds
0,75A, the fuse will heat up and go into a high resistance mode for as long as the load
is retained, and will reset when allowed to cool down.
A socket mounted 6,3A 5x20 mm fuse protects Vm (F2). Using a socket mounted
fuse allows the user to replace and change it easily. When developing software it is
also practical to not power the output stages until correct operation of the software is
ensured, and this can be done by simply removing the fuse.
4.1.3 LEDs
Vcc, Vin and Vm each have their own green LED to indicate if voltage is present. The
Vcc LED (D3) is connected to Vcc by a resistor and hence it will emit less light when
Vcc is 3,3V. Vin and Vm LEDs (D1 and D2) have a constant current sources, so they
have a constant intensity even if Vin or Vm changes.
8
AVR430
8124C-AVR-10/08
Page 9

4.1.4 Hall sensors
4.2 Half bridges
AVR430
VHall (VHa) is available on J7 as power source for Hall sensors, typically found on
BLDC motors. With J1 VHa can be connected to Vcc or to a 5V regulator (U2). A
separate 5V regulator for the Hall sensors is included so Vcc can be 3,3V while using
Hall sensors, since most Hall sensors will not work on 3,3V.
The half bridge consists of two n-channel power MOSFETs, driven by an integrated
high and low side driver IC (IR2101S). The integrated driver IC is powered from Vin
and provides gate voltages to the high and low side power MOSFETs. Schematics for
the half bridge for phase U is shown in Figure 4-2
Figure 4-2. Phase U half bridge.
4.2.1 High side driving considerations
The high side of the half-bridge uses a bootstrap circuit. This means the duty cycle
and the on-time are limited by the requirement to refresh the charge in the bootstrap
capacitor. If the driving logic fails to do this, the gate voltage to the high side MOS will
decrease and the RDS will increase. This may result in high power dissipation in the
high side MOS, and consequently destroy it.
Refer with IR2101S datasheets for detailed information about the bootstrap circuit.
4.2.2 Test points
Each half bridge has several testpoints to allow for measurements. MOS gate
voltages for high (VGh) and low-side (VGl) and bootstrap voltage (Vboot) are
available. Both sides of the shunt resistors (- and +) can also be measured.
9
8124C-AVR-10/08
Page 10

4.3 Shunts
The board is shipped with a common shunt resistor (ShCom - R62) of 0,050 ohm and
the four phase shunt resistors are zero ohm resistors, shown in Figure 4-3. This
allows for measurement of the total current going to ground via all half bridges.
Figure 4-3. Shunt resistor network.
If current measurements of separate phases are required, the common shunt should
be changed to a zero ohm resistor and the zero ohm resistors on each phase (ShU R27, ShV - R38, ShW - R49 and ShX - R64) should be replaced with appropriate
shunt resistors.
4.3.1 Shunt feedback filters
The voltages over the shunt resistors (ShCom/ShU/V/W/X) are fed to a filter/damping
block, ShU as shown in Figure 4-4. The board is shipped with a filter that consists of a
10k ohm resistor in series with a 10nF capacitor, resulting in a low pass filter with a
1,6kHz cutoff frequency. The signal from the filters (ShCom’/ShU’/V’/W’/X’) are
available on the device board interface.
Figure 4-4. Filter/damping block for shunt feedback.
10
AVR430
8124C-AVR-10/08
Page 11

4.4 Back-EMF
4.4.1 Back-EMF feedback filters
AVR430
For sensorless applications, the driving logic uses back EMF from the motor’s phases
to keep track of the motor position. To observe the back EMF from a phase, the
phase is left floating, i.e. with the high or low side MOS not powered, and the voltage
on the phase is read. For motors with center tap, Vn (V neutral) provides feedback to
device board.
Each phase (U/V/W/X) and the center tap (Vn) are fed via a filter/damping block to
the device board interface. The block for phase U is shown in Figure 4-5. The board
is shipped with a zero ohm resistor, so it has no damping/filter function. The signals
are named U’, V’, W’, X’ and Vn’ after going through the filter blocks.
Vmotor (Vm) is also fed thru a filter/damping block, and is available on the device
board interface as Vm’.
Figure 4-5. Filter/damping block for back-EMF feedback.
8124C-AVR-10/08
11
Page 12

4.5 Upgrading the MC300
4.5.1 Voltage limitations
As the board is shipped, its limitations are Vm
=40V and Im
max
=6A. These limits can
max
be increased by replacing the relevant components (not included).
If a Vm
higher than 40V is required, then some components must be changed on
max
the board. Components limiting Vm, listed with lowest voltage ratings first, are shown
in Table 4-1.
Table 4-1. Components influenced by Vm.
Component designator(s) Component name Limiting parameter
Q3, Q4, Q5, Q6, Q7, Q8, Q9 & Q10 IRFR3504 V
C10, C19, C26 & C33 100nF V
Q2 2N7002 V
C14 47uF/63V V
D8, D12, D13 & D14 BAS16 V
D9 10MQ100N V
D11 12CWQ10FN V
C7 10nF V
R7 100kOhm Pmax = 0.1W -> Vm = 108V
= 40V
DSS
= 50V
max
= 60V
DSmax
= 63V
max
= 85V
RRM
= 100V
RRM
= 100V
RRM
= 100V [2]
max
The integrated bridge drivers (IR2101S) can handle up to 600V, but the layout of the
PCB (spacing between tracks) should be considered before operation at high
voltages.
If filters/dividers for Vm, U, V, W, or X have been mounted, verify that they can handle
Vm.
4.5.2 Current limitations
For an Im > 5A, use power connector J3 and not DC-Jack J5. If an Im
6A is required, components listed in Table 4-2 are affected.
Table 4-2. Components conducting Im.
Component designator(s) Component name Limiting parameter
R62 50mOhm 2W I
J3 & J7 MC1,5/x-G-3,81 I
Q3, Q4, Q5, Q6, Q7, Q8, Q9 & Q10 IRFR3504 ID = 30A
Notes: 1. The pad/track area around R62 is not 300mm2 as required by datasheet for
handling 2W. Reducing P to 1,8W gives I
4.5.3 Additional decoupling capacitors on Vm
The board has provision for some extra decoupling capacitors on Vm. They are found
close to the MOS bridges (C11, C12, C20, C21, C27, C28, C34 and C35), and one
close to the power input (C13).
12
AVR430
= sqrt(P/R) = 6,0A
max
= 8A
max
= sqrt(P/R) = 6,0A.
max
larger than
max
(1)
8124C-AVR-10/08
Page 13

D
Headquarters International
Atmel Corporation
2325 Orchard Parkway
San Jose, CA 95131
USA
Tel: 1(408) 441-0311
Fax: 1(408) 487-2600
Disclaimer: The information in this document is provided in connection with Atmel products. No license, express or implied, by estoppel or otherwise, to any
intellectual property right is granted by this document or in connection with the sale of Atmel products. EXCEPT AS SET FORTH IN ATMEL’S TERMS AND
CONDITIONS OF SALE LOCATED ON ATMEL’S WEB SITE, ATMEL ASSUMES N O LIABILITY WHATSOEVER AND DISCLAIMS ANY EXPRESS, IMPLIED
OR STATUTORY WARRANTY R ELATING TO ITS PRODUCTS INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTY OF MERCHANTABILITY,
FITNESS FOR A P ARTICULAR PURPOSE, OR NON-INFRINGEMENT. IN NO EVENT SHALL ATMEL BE LIABLE FOR ANY DIRECT, INDIRECT,
CONSEQUENTIAL, PUNITIVE, SPECIAL OR INCIDENTAL DAMAGES (INCLUDING, WITHOUT LIMITATION, D AMAGES FOR LOSS OF PROFITS,
BUSINESS INTERRUPTION, OR LOSS OF INFORMATION) ARISING OUT OF THE USE OR INABILITY TO USE THIS DOCUMENT, EVEN IF ATMEL HAS
BEEN ADVISED OF THE POSSIBILITY OF SUCH DAMAGES. Atmel makes no representations or warranties with respect to the accuracy or completeness of the
contents of this document and reserves the right to make changes to specifications and product descriptions at any tim e without notice. Atmel does not make any
commitment to update the information contained herein. Unless specifically provided otherwise, Atmel products are not suitable for, and shall not be used in,
automotive applications. Atmel’s products are not intended, authorized, or warranted for use as components in applications intended to support or sustain life.
© 2008 Atmel Corporation. All rights reserved. Atmel®, logo and combinations thereof, AVR® and others, are the registered trademarks or
trademarks of Atmel Corporation or its subsidiaries. Other terms and product names may be trademarks of others.
isclaimer
Atmel Asia
Room 1219
Chinachem Golden Plaza
77 Mody Road Tsimshatsui
East Kowloon
Hong Kong
Tel: (852) 2721-9778
Fax: (852) 2722-1369
Product Contact
Web Site
www.atmel.com
Literature Request
www.atmel.com/literature
Atmel Europe
Le Krebs
8, Rue Jean-Pierre Timbaud
BP 309
78054 Saint-Quentin-enYvelines Cedex
France
Tel: (33) 1-30-60-70-00
Fax: (33) 1-30-60-71-11
Technical Support
avr@atmel.com
Atmel Japan
9F, Tonetsu Shinkawa Bldg.
1-24-8 Shinkawa
Chuo-ku, Tokyo 104-0033
Japan
Tel: (81) 3-3523-3551
Fax: (81) 3-3523-7581
Sales Contact
www.atmel.com/contacts
8124C-AVR-10/08
 Loading...
Loading...