

Page 1
Features
• High-performance, Low-power AVR
• Advanced RISC Architecture
– 133 Powerful Instructions – Most Single Clock Cycle Execution
– 32 x 8 General Purpose Working Registers + Peripheral Control Registers
– Fully Static Operation
– Up to 16 MIPS Throughput at 16 MHz
– On-chip 2-cycle Multiplier
• High Endurance Non-volatile Memory segments
– 128K Bytes of In-System Self-programmable Flash program memory
– 4K Bytes EEPROM
– 4K Bytes Internal SRAM
– Write/Erase cycles: 10,000 Flash/100,000 EEPROM
– Data retention: 20 years at 85°C/100 years at 25°C
– Optional Boot Code Section with Independent Lock Bits
In-System Programming by On-chip Boot Program
True Read-While-Write Operation
– Up to 64K Bytes Optional External Memory Space
– Programming Lock for Software Security
– SPI Interface for In-System Programming
• JTAG (IEEE std. 1149.1 Compliant) Interface
– Boundary-scan Capabilities According to the JTAG Standard
– Extensive On-chip Debug Support
– Programming of Flash, EEPROM, Fuses and Lock Bits through the JTAG Interface
• Peripheral Features
– Two 8-bit Timer/Counters with Separate Prescalers and Compare Modes
– Two Expanded 16-bit Timer/Counters with Separate Prescaler, Compare Mode and
Capture Mode
– Real Time Counter with Separate Oscillator
– Two 8-bit PWM Channels
– 6 PWM Channels with Programmable Resolution from 2 to 16 Bits
– Output Compare Modulator
– 8-channel, 10-bit ADC
8 Single-ended Channels
7 Differential Channels
2 Differential Channels with Programmable Gain at 1x, 10x, or 200x
– Byte-oriented Two-wire Serial Interface
– Dual Programmable Serial USARTs
– Master/Slave SPI Serial Interface
– Programmable Watchdog Timer with On-chip Oscillator
– On-chip Analog Comparator
• Special Microcontroller Features
– Power-on Reset and Programmable Brown-out Detection
– Internal Calibrated RC Oscillator
– External and Internal Interrupt Sources
– Six Sleep Modes: Idle, ADC Noise Reduction, Power-save, Power-down, Standby,
and Extended Standby
– Software Selectable Clock Frequency
– ATmega103 Compatibility Mode Selected by a Fuse
– Global Pull-up Disable
• I/O and Packages
– 53 Programmable I/O Lines
– 64-lead TQFP and 64-pad QFN/MLF
• Operating Voltages
– 2.7 - 5.5V for ATmega128L
– 4.5 - 5.5V for ATmega128
• Speed Grades
– 0 - 8 MHz for ATmega128L
– 0 - 16 MHz for ATmega128
®
8-bit Microcontroller
(1)
8-bit
Microcontroller
with 128K Bytes
In-System
Programmable
Flash
ATmega128
ATmega128L
Rev. 2467P–AVR–08/07
Page 2
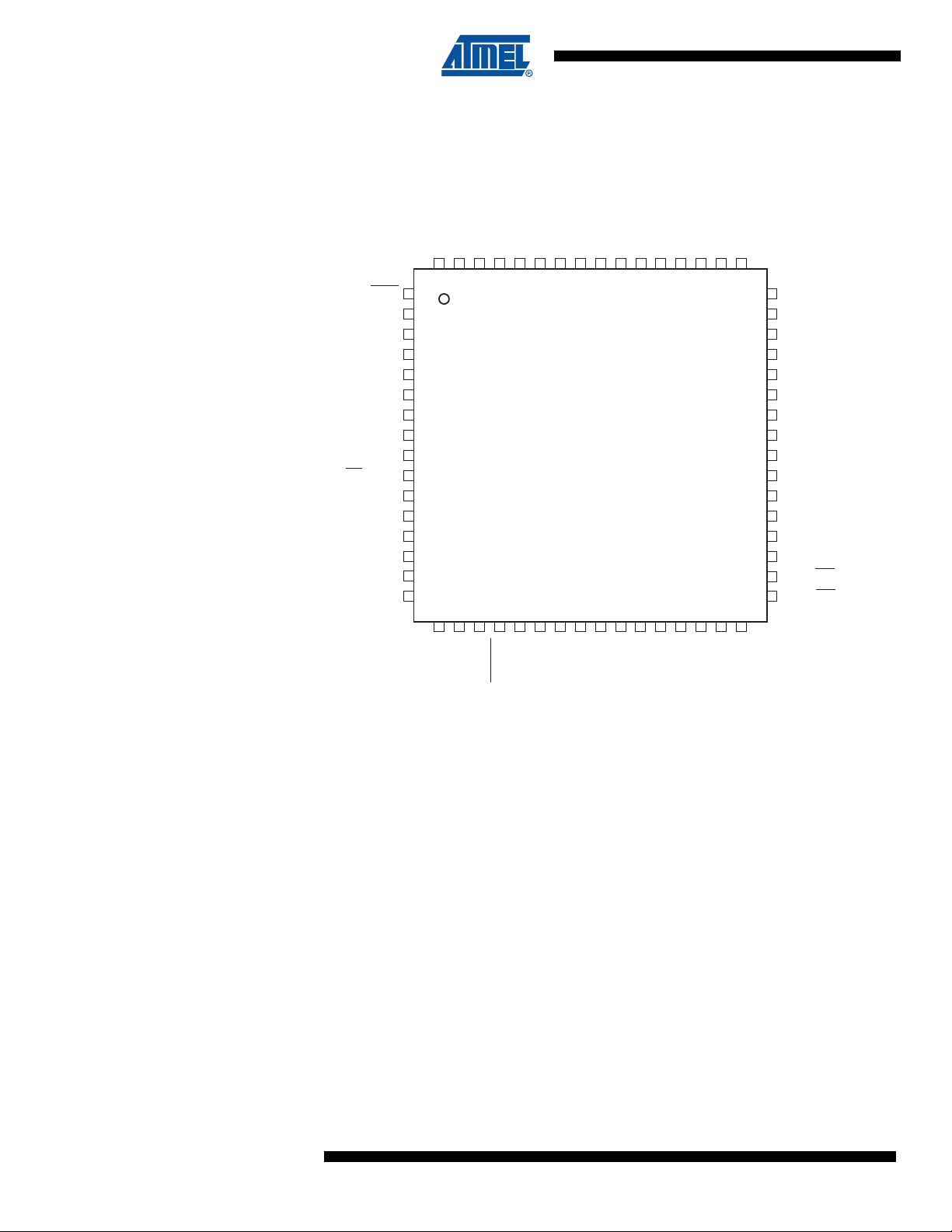
Pin Configurations
Figure 1. Pinout ATmega128
PEN
RXD0/(PDI) PE0
(TXD0/PDO) PE1
(XCK0/AIN0) PE2
(OC3A/AIN1) PE3
(OC3B/INT4) PE4
(OC3C/INT5) PE5
(T3/INT6) PE6
(ICP3/INT7) PE7
(SS) PB0
(SCK) PB1
(MOSI) PB2
(MISO) PB3
(OC0) PB4
(OC1A) PB5
(OC1B) PB6
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
AVCC
GND
64
63
17
18
AREF
PF0 (ADC0)
PF1 (ADC1)
62
61
60
19
20
21
PF2 (ADC2)
PF3 (ADC3)
PF4 (ADC4/TCK)
PF5 (ADC5/TMS)
59
58
57
56
22
23
24
25
PF6 (ADC6/TDO)
PF7 (ADC7/TDI)
GND
VCC
PA0 (AD0)
55
54
53
52
51
26
27
28
29
30
PA1 (AD1)
PA2 (AD2)
50
49
48
47
46
45
44
43
42
41
40
39
38
37
36
35
34
33
31
32
PA3 (AD3)
PA4 (AD4)
PA5 (AD5)
PA6 (AD6)
PA7 (AD7)
PG2(ALE)
PC7 (A15)
PC6 (A14)
PC5 (A13)
PC4 (A12)
PC3 (A11)
PC2 (A10)
PC1 (A9)
PC0 (A8)
PG1(RD)
PG0(WR)
VCC
GND
XTAL2
RESET
TOSC2/PG3
TOSC1/PG4
(OC2/OC1C) PB7
Note: The Pinout figure applies to both TQFP and MLF packages. The bottom pad under the QFN/MLF
package should be soldered to ground.
XTAL1
(SCL/INT0) PD0
(SDA/INT1) PD1
(RXD1/INT2) PD2
(T1) PD6
(ICP1) PD4
(TXD1/INT3) PD3
(T2) PD7
(XCK1) PD5
Overview The ATmega128 is a low-power CMOS 8-bit microcontroller based on the AVR enhanced RISC
architecture. By executing powerful instructions in a single clock cycle, the ATmega128
achieves throughputs approaching 1 MIPS per MHz allowing the system designer to optimize
power consumption versus processing speed.
2
ATmega128(L)
2467P–AVR–08/07
Page 3
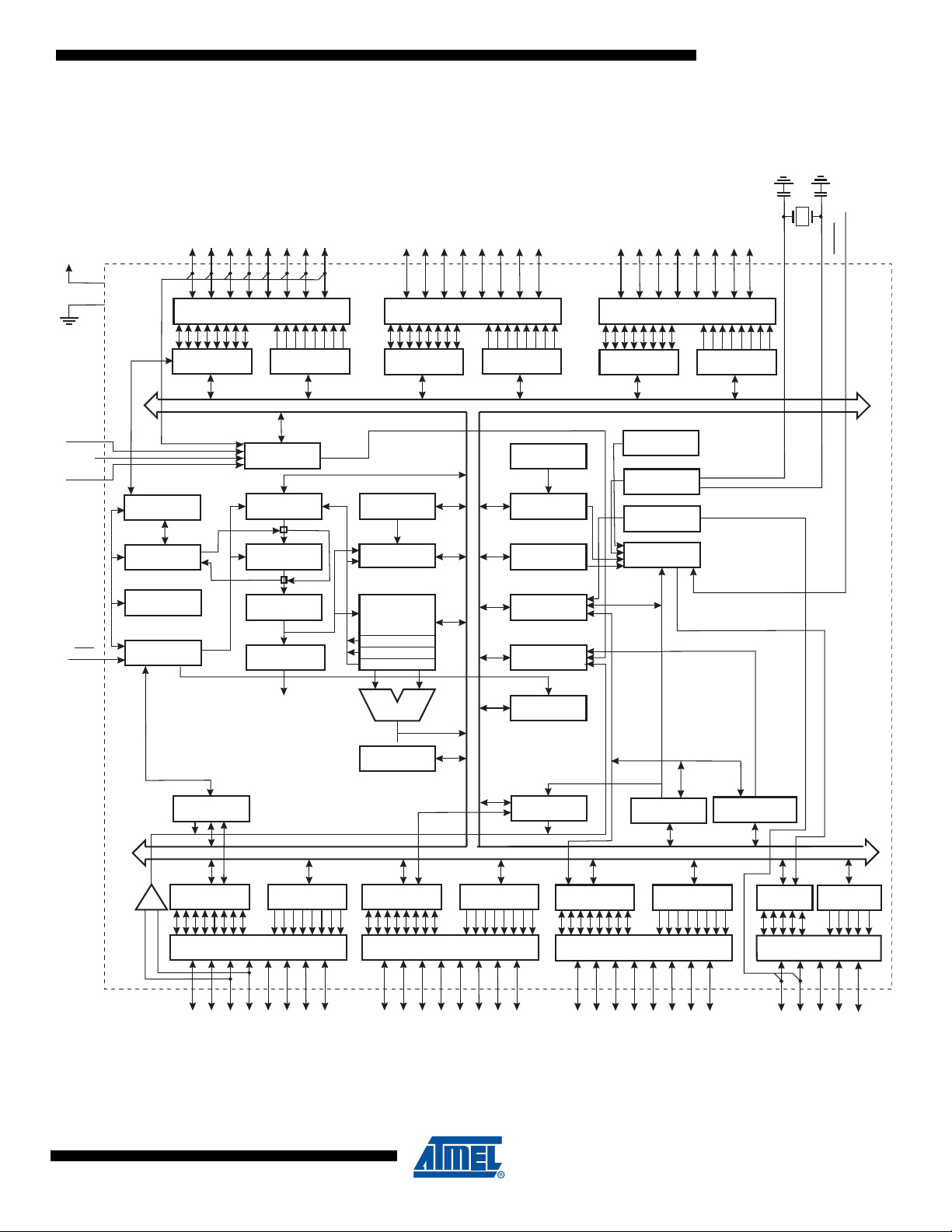
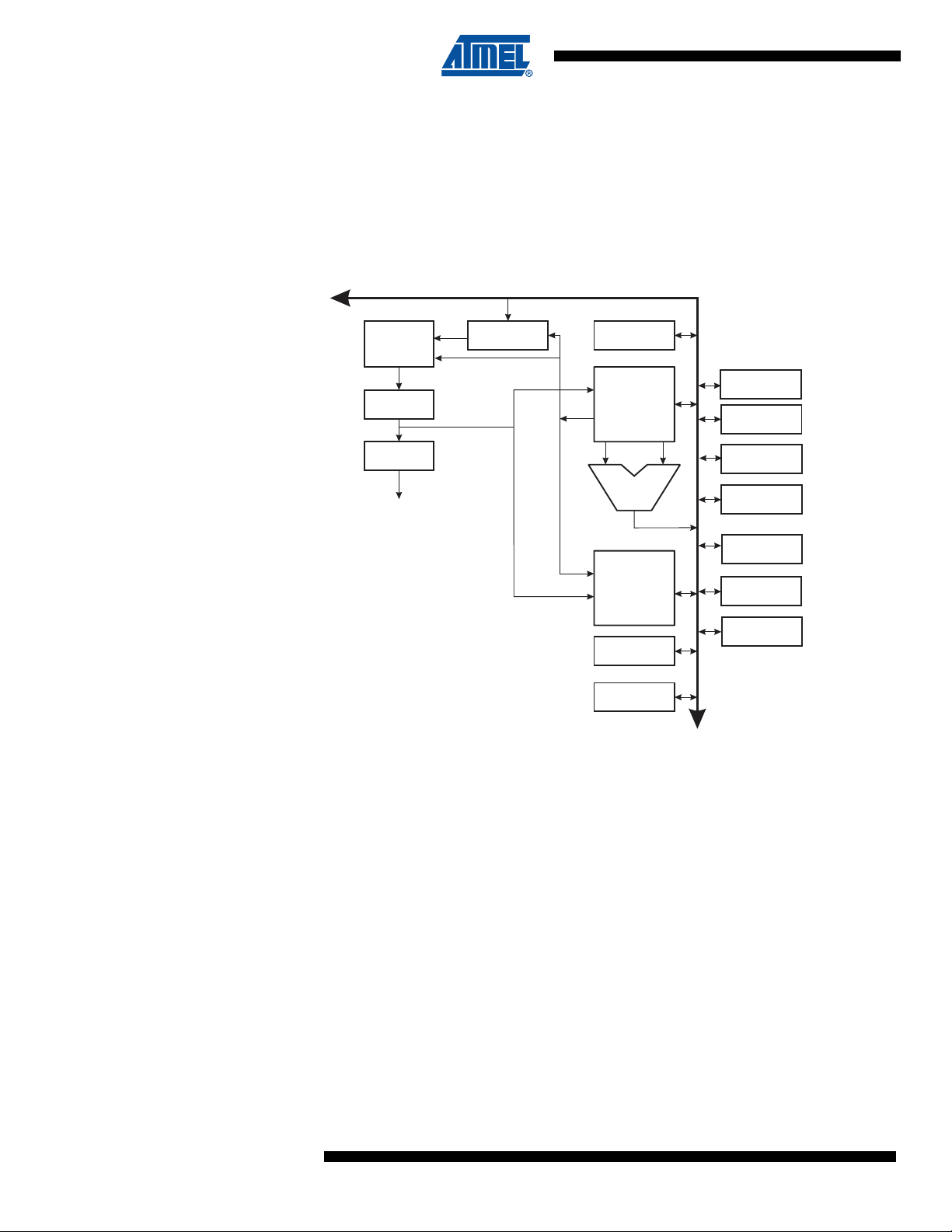
Block Diagram
Figure 2. Block Diagram
ATmega128(L)
VCC
GND
AVCC
AGND
AREF
PEN
DATA REGISTER
JTAG TAP
ON-CHIP DEBUG
BOUNDARY-
SCAN
PROGRAMMING
LOGIC
PORTF DRIVERS
PORTF
DATA DIR.
REG. PORTF
ADC
PROGRAM
COUNTER
PROGRAM
FLASH
INSTRUCTION
REGISTER
INSTRUCTION
DECODER
DATA REGISTER
PORTA
STACK
POINTER
SRAM
GENERAL
PURPOSE
REGISTERS
X
Y
Z
PA0 - PA7PF0 - PF7
PORTA DRIVERS
DATA DIR.
REG. PORTA
8-BIT DATA BUS
INTERNAL
OSCILLATOR
WATCHDOG
TIMER
MCU CONTROL
REGISTER
TIMER/
COUNTERS
INTERRUPT
UNIT
PORTC DRIVERS
DATA REGISTER
PORTC
CALIB. OSC
OSCILLATOR
OSCILLATOR
TIMING AND
CONTROL
PC0 - PC7
DATA DIR.
REG. PORTC
XTAL1
XTAL2
RESET
ANALOG
COMPARATOR
DATA REGISTER
+
-
USART0
PORTE
CONTROL
LINES
DATA DIR.
REG. PORTE
PORTE DRIVERS
ALU
STATUS
REGISTER
DATA REGISTER
PORTB
PORTB DRIVERS
PB0 - PB7PE0 - PE7
DATA DIR.
REG. PORTB
EEPROM
SPI
DATA REGISTER
PORTD
PORTD DRIVERS
PD0 - PD7
USART1
DATA DIR.
REG. PORTD
TWO-WIRE SERIAL
INTERFACE
DATA REG.
PORTG
DATA DIR.
REG. PORTG
PORTG DRIVERS
PG0 - PG4
2467P–AVR–08/07
3
Page 4

The AVR core combines a rich instruction set with 32 general purpose working registers. All the
32 registers are directly connected to the Arithmetic Logic Unit (ALU), allowing two independent
registers to be accessed in one single instruction executed in one clock cycle. The resulting
architecture is more code efficient while achieving throughputs up to ten times faster than conventional CISC microcontrollers.
The ATmega128 provides the following features: 128K bytes of In-System Programmable Flash
with Read-While-Write capabilities, 4K bytes EEPROM, 4K bytes SRAM, 53 general purpose I/O
lines, 32 general purpose working registers, Real Time Counter (RTC), four flexible
Timer/Counters with compare modes and PWM, 2 USARTs, a byte oriented Two-wire Serial
Interface, an 8-channel, 10-bit ADC with optional differential input stage with programmable
gain, programmable Watchdog Timer with Internal Oscillator, an SPI serial port, IEEE std.
1149.1 compliant JTAG test interface, also used for accessing the On-chip Debug system and
programming and six software selectable power saving modes. The Idle mode stops the CPU
while allowing the SRAM, Timer/Counters, SPI port, and interrupt system to continue functioning. The Power-down mode saves the register contents but freezes the Oscillator, disabling all
other chip functions until the next interrupt or Hardware Reset. In Power-save mode, the asynchronous timer continues to run, allowing the user to maintain a timer base while the rest of the
device is sleeping. The ADC Noise Reduction mode stops the CPU and all I/O modules except
Asynchronous Timer and ADC, to minimize switching noise during ADC conversions. In Standby
mode, the Crystal/Resonator Oscillator is running while the rest of the device is sleeping. This
allows very fast start-up combined with low power consumption. In Extended Standby mode,
both the main Oscillator and the Asynchronous Timer continue to run.
The device is manufactured using Atmel’s high-density nonvolatile memory technology. The Onchip ISP Flash allows the program memory to be reprogrammed in-system through an SPI serial
interface, by a conventional nonvolatile memory programmer, or by an On-chip Boot program
running on the AVR core. The boot program can use any interface to download the application
program in the application Flash memory. Software in the Boot Flash section will continue to run
while the Application Flash section is updated, providing true Read-While-Write operation. By
combining an 8-bit RISC CPU with In-System Self-Programmable Flash on a monolithic chip,
the Atmel ATmega128 is a powerful microcontroller that provides a highly flexible and cost effective solution to many embedded control applications.
ATmega103 and ATmega128 Compatibility
4
ATmega128(L)
The ATmega128 AVR is supported with a full suite of program and system development tools
including: C compilers, macro assemblers, program debugger/simulators, in-circuit emulators,
and evaluation kits.
The ATmega128 is a highly complex microcontroller where the number of I/O locations supersedes the 64 I/O locations reserved in the AVR instruction set. To ensure backward compatibility
with the ATmega103, all I/O locations present in ATmega103 have the same location in
ATmega128. Most additional I/O locations are added in an Extended I/O space starting from $60
to $FF, (i.e., in the ATmega103 internal RAM space). These locations can be reached by using
LD/LDS/LDD and ST/STS/STD instructions only, not by using IN and OUT instructions. The relocation of the internal RAM space may still be a problem for ATmega103 users. Also, the
increased number of interrupt vectors might be a problem if the code uses absolute addresses.
To solve these problems, an ATmega103 compatibility mode can be selected by programming
the fuse M103C. In this mode, none of the functions in the Extended I/O space are in use, so the
internal RAM is located as in ATmega103. Also, the Extended Interrupt vectors are removed.
The ATmega128 is 100% pin compatible with ATmega103, and can replace the ATmega103 on
current Printed Circuit Boards. The application note “Replacing ATmega103 by ATmega128”
describes what the user should be aware of replacing the ATmega103 by an ATmega128.
2467P–AVR–08/07
Page 5

ATmega128(L)
ATmega103 Compatibility Mode
By programming the M103C fuse, the ATmega128 will be compatible with the ATmega103
regards to RAM, I/O pins and interrupt vectors as described above. However, some new features in ATmega128 are not available in this compatibility mode, these features are listed below:
• One USART instead of two, Asynchronous mode only. Only the eight least significant bits of
the Baud Rate Register is available.
• One 16 bits Timer/Counter with two compare registers instead of two 16-bit Timer/Counters
with three compare registers.
• Two-wire serial interface is not supported.
• Port C is output only.
• Port G serves alternate functions only (not a general I/O port).
• Port F serves as digital input only in addition to analog input to the ADC.
• Boot Loader capabilities is not supported.
• It is not possible to adjust the frequency of the internal calibrated RC Oscillator.
• The External Memory Interface can not release any Address pins for general I/O, neither
configure different wait-states to different External Memory Address sections.
In addition, there are some other minor differences to make it more compatible to ATmega103:
• Only EXTRF and PORF exists in MCUCSR.
• Timed sequence not required for Watchdog Time-out change.
• External Interrupt pins 3 - 0 serve as level interrupt only.
• USART has no FIFO buffer, so data overrun comes earlier.
Unused I/O bits in ATmega103 should be written to 0 to ensure same operation in ATmega128.
Pin Descriptions
VCC Digital supply voltage.
GND Ground.
Port A (PA7..PA0) Port A is an 8-bit bi-directional I/O port with internal pull-up resistors (selected for each bit). The
Port A output buffers have symmetrical drive characteristics with both high sink and source
capability. As inputs, Port A pins that are externally pulled low will source current if the pull-up
resistors are activated. The Port A pins are tri-stated when a reset condition becomes active,
even if the clock is not running.
Port A also serves the functions of various special features of the ATmega128 as listed on page
73.
Port B (PB7..PB0) Port B is an 8-bit bi-directional I/O port with internal pull-up resistors (selected for each bit). The
Port B output buffers have symmetrical drive characteristics with both high sink and source
capability. As inputs, Port B pins that are externally pulled low will source current if the pull-up
resistors are activated. The Port B pins are tri-stated when a reset condition becomes active,
even if the clock is not running.
Port B also serves the functions of various special features of the ATmega128 as listed on page
74.
Port C (PC7..PC0) Port C is an 8-bit bi-directional I/O port with internal pull-up resistors (selected for each bit). The
Port C output buffers have symmetrical drive characteristics with both high sink and source
capability. As inputs, Port C pins that are externally pulled low will source current if the pull-up
2467P–AVR–08/07
5
Page 6

resistors are activated. The Port C pins are tri-stated when a reset condition becomes active,
even if the clock is not running.
Port C also serves the functions of special features of the ATmega128 as listed on page 77. In
ATmega103 compatibility mode, Port C is output only, and the port C pins are not tri-stated
when a reset condition becomes active.
Note: The ATmega128 is by default shipped in ATmega103 compatibility mode. Thus, if the parts are not
programmed before they are put on the PCB, PORTC will be output during first power up, and until
the ATmega103 compatibility mode is disabled.
Port D (PD7..PD0) Port D is an 8-bit bi-directional I/O port with internal pull-up resistors (selected for each bit). The
Port D output buffers have symmetrical drive characteristics with both high sink and source
capability. As inputs, Port D pins that are externally pulled low will source current if the pull-up
resistors are activated. The Port D pins are tri-stated when a reset condition becomes active,
even if the clock is not running.
Port D also serves the functions of various special features of the ATmega128 as listed on page
78.
Port E (PE7..PE0) Port E is an 8-bit bi-directional I/O port with internal pull-up resistors (selected for each bit). The
Port E output buffers have symmetrical drive characteristics with both high sink and source
capability. As inputs, Port E pins that are externally pulled low will source current if the pull-up
resistors are activated. The Port E pins are tri-stated when a reset condition becomes active,
even if the clock is not running.
Port E also serves the functions of various special features of the ATmega128 as listed on page
81.
Port F (PF7..PF0) Port F serves as the analog inputs to the A/D Converter.
Port F also serves as an 8-bit bi-directional I/O port, if the A/D Converter is not used. Port pins
can provide internal pull-up resistors (selected for each bit). The Port F output buffers have symmetrical drive characteristics with both high sink and source capability. As inputs, Port F pins
that are externally pulled low will source current if the pull-up resistors are activated. The Port F
pins are tri-stated when a reset condition becomes active, even if the clock is not running. If the
JTAG interface is enabled, the pull-up resistors on pins PF7(TDI), PF5(TMS), and PF4(TCK) will
be activated even if a Reset occurs.
The TDO pin is tri-stated unless TAP states that shift out data are entered.
Port F also serves the functions of the JTAG interface.
In ATmega103 compatibility mode, Port F is an input Port only.
Port G (PG4..PG0) Port G is a 5-bit bi-directional I/O port with internal pull-up resistors (selected for each bit). The
Port G output buffers have symmetrical drive characteristics with both high sink and source
capability. As inputs, Port G pins that are externally pulled low will source current if the pull-up
resistors are activated. The Port G pins are tri-stated when a reset condition becomes active,
even if the clock is not running.
Port G also serves the functions of various special features.
The port G pins are tri-stated when a reset condition becomes active, even if the clock is not
running.
In ATmega103 compatibility mode, these pins only serves as strobes signals to the external
memory as well as input to the 32 kHz Oscillator, and the pins are initialized to PG0 = 1, PG1 =
1, and PG2 = 0 asynchronously when a reset condition becomes active, even if the clock is not
running. PG3 and PG4 are oscillator pins.
6
ATmega128(L)
2467P–AVR–08/07
Page 7

ATmega128(L)
RESET Reset input. A low level on this pin for longer than the minimum pulse length will generate a
reset, even if the clock is not running. The minimum pulse length is given in Table 19 on page
51. Shorter pulses are not guaranteed to generate a reset.
XTAL1 Input to the inverting Oscillator amplifier and input to the internal clock operating circuit.
XTAL2 Output from the inverting Oscillator amplifier.
AVCC AVCC is the supply voltage pin for Port F and the A/D Converter. It should be externally con-
nected to V
through a low-pass filter.
AREF AREF is the analog reference pin for the A/D Converter.
PEN PEN is a programming enable pin for the SPI Serial Programming mode, and is internally pulled
high . By holding this pin low during a Power-on Reset, the device will enter the SPI Serial Programming mode. PEN
, even if the ADC is not used. If the ADC is used, it should be connected to V
CC
has no function during normal operation.
CC
2467P–AVR–08/07
7
Page 8

Resources A comprehensive set of development tools, application notes, and datasheets are available for
download on http://www.atmel.com/avr.
Note: 1.
Data Retention Reliability Qualification results show that the projected data retention failure rate is much less
than 1 PPM over 20 years at 85°C or 100 years at 25°C.
8
ATmega128(L)
2467P–AVR–08/07
Page 9
ATmega128(L)
About Code Examples
This datasheet contains simple code examples that briefly show how to use various parts of the
device. These code examples assume that the part specific header file is included before compilation. Be aware that not all C compiler vendors include bit definitions in the header files and
interrupt handling in C is compiler dependent. Please confirm with the C compiler documentation
for more details.
For I/O registers located in extended I/O map, “IN”, “OUT”, “SBIS”, “SBIC”, “CBI”, and “SBI”
instructions must be replaced with instructions that allow access to extended I/O. Typically
“LDS” and “STS” combined with “SBRS”, “SBRC”, “SBR”, and “CBR”.
2467P–AVR–08/07
9
Page 10
AVR CPU Core
Introduction This section discusses the AVR core architecture in general. The main function of the CPU core
is to ensure correct program execution. The CPU must therefore be able to access memories,
perform calculations, control peripherals and handle interrupts.
Architectural Overview
Figure 3. Block Diagram of the AVR Architecture
Flash
Program
Memory
Instruction
Register
Instruction
Decoder
Control Lines
Program
Counter
Direct Addressing
Indirect Addressing
Data Bus 8-bit
Status
and Control
32 x 8
General
Purpose
Registrers
ALU
Data
SRAM
EEPROM
I/O Lines
Interrupt
Unit
SPI
Unit
Watchdog
Timer
Analog
Comparator
I/O Module1
I/O Module 2
I/O Module n
10
In order to maximize performance and parallelism, the AVR uses a Harvard architecture – with
separate memories and buses for program and data. Instructions in the program memory are
executed with a single level pipelining. While one instruction is being executed, the next instruction is pre-fetched from the program memory. This concept enables instructions to be executed
in every clock cycle. The program memory is In-System Reprogrammable Flash memory.
The fast-access Register file contains 32 x 8-bit general purpose working registers with a single
clock cycle access time. This allows single-cycle Arithmetic Logic Unit (ALU) operation. In a typical ALU operation, two operands are output from the Register file, the operation is executed,
and the result is stored back in the Register file – in one clock cycle.
Six of the 32 registers can be used as three 16-bit indirect address register pointers for Data
Space addressing – enabling efficient address calculations. One of the these address pointers
can also be used as an address pointer for look up tables in Flash Program memory. These
added function registers are the 16-bit X-register, Y-register and Z-register, described later in
this section.
The ALU supports arithmetic and logic operations between registers or between a constant and
a register. Single register operations can also be executed in the ALU. After an arithmetic operation, the Status Register is updated to reflect information about the result of the operation.
ATmega128(L)
2467P–AVR–08/07
Page 11
ATmega128(L)
Program flow is provided by conditional and unconditional jump and call instructions, able to
directly address the whole address space. Most AVR instructions have a single 16-bit word format. Every program memory address contains a 16- or 32-bit instruction.
Program Flash memory space is divided in two sections, the Boot Program section and the
Application Program section. Both sections have dedicated Lock bits for write and read/write
protection. The SPM instruction that writes into the Application Flash Memory section must
reside in the Boot Program section.
During interrupts and subroutine calls, the return address Program Counter (PC) is stored on the
Stack. The Stack is effectively allocated in the general data SRAM, and consequently the stack
size is only limited by the total SRAM size and the usage of the SRAM. All user programs must
initialize the SP in the reset routine (before subroutines or interrupts are executed). The Stack
Pointer – SP – is read/write accessible in the I/O space. The data SRAM can easily be accessed
through the five different addressing modes supported in the AVR architecture.
The memory spaces in the AVR architecture are all linear and regular memory maps.
A flexible interrupt module has its control registers in the I/O space with an additional global
interrupt enable bit in the Status Register. All interrupts have a separate interrupt vector in the
interrupt vector table. The interrupts have priority in accordance with their interrupt vector position. The lower the interrupt vector address, the higher the priority.
The I/O memory space contains 64 addresses which can be accessed directly, or as the Data
Space locations following those of the Register file, $20 - $5F. In addition, the ATmega128 has
Extended I/O space from $60 - $FF in SRAM where only the ST/STS/STD and LD/LDS/LDD
instructions can be used.
ALU – Arithmetic
Logic Unit
The high-performance AVR ALU operates in direct connection with all the 32 general purpose
working registers. Within a single clock cycle, arithmetic operations between general purpose
registers or between a register and an immediate are executed. The ALU operations are divided
into three main categories – arithmetic, logical, and bit-functions. Some implementations of the
architecture also provide a powerful multiplier supporting both signed/unsigned multiplication
and fractional format. See the “Instruction Set” section for a detailed description.
Status Register The Status Register contains information about the result of the most recently executed arith-
metic instruction. This information can be used for altering program flow in order to perform
conditional operations. Note that the Status Register is updated after all ALU operations, as
specified in the Instruction Set Reference. This will in many cases remove the need for using the
dedicated compare instructions, resulting in faster and more compact code.
The status register is not automatically stored when entering an interrupt routine and restored
when returning from an interrupt. This must be handled by software.
The AVR status Register – SREG – is defined as:
Bit 76543210
I T H S V N Z C SREG
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value 0 0 0 0 0 0 0 0
2467P–AVR–08/07
11
Page 12

• Bit 7 – I: Global Interrupt Enable
The Global Interrupt Enable bit must be set for the interrupts to be enabled. The individual interrupt enable control is then performed in separate control registers. If the Global Interrupt Enable
Register is cleared, none of the interrupts are enabled independent of the individual interrupt
enable settings. The I-bit is cleared by hardware after an interrupt has occurred, and is set by
the RETI instruction to enable subsequent interrupts. The I-bit can also be set and cleared in
software with the SEI and CLI instructions, as described in the instruction set reference.
• Bit 6 – T: Bit Copy Storage
The Bit Copy instructions BLD (Bit LoaD) and BST (Bit STore) use the T-bit as source or destination for the operated bit. A bit from a register in the Register file can be copied into T by the
BST instruction, and a bit in T can be copied into a bit in a register in the Register file by the BLD
instruction.
• Bit 5 – H: Half Carry Flag
The Half Carry Flag H indicates a half carry in some arithmetic operations. Half carry is useful in
BCD arithmetic. See the “Instruction Set Description” for detailed information.
• Bit 4 – S: Sign Bit, S = N
The S-bit is always an exclusive or between the negative flag N and the two’s complement overflow flag V. See the “Instruction Set Description” for detailed information.
• Bit 3 – V: Two’s Complement Overflow Flag
The Two’s Complement Overflow Flag V supports two’s complement arithmetics. See the
“Instruction Set Description” for detailed information.
• Bit 2 – N: Negative Flag
⊕ V
General Purpose Register File
The Negative Flag N indicates a negative result in an arithmetic or logic operation. See the
“Instruction Set Description” for detailed information.
• Bit 1 – Z: Zero Flag
The Zero Flag Z indicates a zero result in an arithmetic or logic operation. See the “Instruction
Set Description” for detailed information.
• Bit 0 – C: Carry Flag
The Carry Flag C indicates a carry in an arithmetic or logic operation. See the “Instruction Set
Description” for detailed information.
The Register file is optimized for the AVR Enhanced RISC instruction set. In order to achieve the
required performance and flexibility, the following input/output schemes are supported by the
Register file:
• One 8-bit output operand and one 8-bit result input
• Two 8-bit output operands and one 8-bit result input
• Two 8-bit output operands and one 16-bit result input
• One 16-bit output operand and one 16-bit result input
Figure 4 on page 12 shows the structure of the 32 general purpose working registers in the
CPU.
Figure 4. AVR CPU General Purpose Working Registers
12
7 0 Addr.
ATmega128(L)
2467P–AVR–08/07
Page 13
ATmega128(L)
R0 $00
R1 $01
R2 $02
…
R13 $0D
General R14 $0E
Purpose R15 $0F
Working R16 $10
Registers R17 $11
…
R26 $1A X-register Low Byte
R27 $1B X-register High Byte
R28 $1C Y-register Low Byte
R29 $1D Y-register High Byte
R30 $1E Z-register Low Byte
R31 $1F Z-register High Byte
Most of the instructions operating on the Register file have direct access to all registers, and
most of them are single cycle instructions.
As shown in Figure 4, each register is also assigned a data memory address, mapping them
directly into the first 32 locations of the user Data Space. Although not being physically implemented as SRAM locations, this memory organization provides great flexibility in access of the
registers, as the X-, Y-, and Z-pointer Registers can be set to index any register in the file.
X-register, Y-register, and Z-register
The registers R26..R31 have some added functions to their general purpose usage. These registers are 16-bit address pointers for indirect addressing of the Data Space. The three indirect
address registers X, Y, and Z are described in Figure 5.
Figure 5. The X-, Y-, and Z-registers
15 XH XL 0
X - register 7 0 7 0
R27 ($1B) R26 ($1A)
15 YH YL 0
Y - register 7 0 7 0
R29 ($1D) R28 ($1C)
15 ZH ZL 0
Z - register 7 0 7 0
R31 ($1F) R30 ($1E)
In the different addressing modes these address registers have functions as fixed displacement,
automatic increment, and automatic decrement (see the Instruction Set Reference for details).
2467P–AVR–08/07
13
Page 14
Stack Pointer The Stack is mainly used for storing temporary data, for storing local variables and for storing
return addresses after interrupts and subroutine calls. The Stack Pointer Register always points
to the top of the Stack. Note that the Stack is implemented as growing from higher memory locations to lower memory locations. This implies that a Stack PUSH command decreases the Stack
Pointer.
The Stack Pointer points to the data SRAM stack area where the Subroutine and Interrupt
Stacks are located. This Stack space in the data SRAM must be defined by the program before
any subroutine calls are executed or interrupts are enabled. The Stack Pointer must be set to
point above $60. The Stack Pointer is decremented by one when data is pushed onto the Stack
with the PUSH instruction, and it is decremented by two when the return address is pushed onto
the Stack with subroutine call or interrupt. The Stack Pointer is incremented by one when data is
popped from the Stack with the POP instruction, and it is incremented by two when data is
popped from the Stack with return from subroutine RET or return from interrupt RETI.
The AVR Stack Pointer is implemented as two 8-bit registers in the I/O space. The number of
bits actually used is implementation dependent. Note that the data space in some implementations of the AVR architecture is so small that only SPL is needed. In this case, the SPH Register
will not be present.
Bit 151413121110 9 8
SP15 SP14 SP13 SP12 SP11 SP10 SP9 SP8 SPH
SP7 SP6 SP5 SP4 SP3 SP2 SP1 SP0 SPL
76543210
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value 0 0 0 0 0 0 0 0
00000000
RAM Page Z Select
Register – RAMPZ
Instruction Execution Timing
Bit 76543 2 1 0
– –– – – – – – RAMPZ0 RAMPZ
Read/Write R R R R R R R R/W
Initial Value 0 0 0 0 0 0 0 0
• Bits 7..1 – Res: Reserved Bits
These are reserved bits and will always read as zero. When writing to this address location,
write these bits to zero for compatibility with future devices.
• Bit 0 – RAMPZ0: Extended RAM Page Z-pointer
The RAMPZ Register is normally used to select which 64K RAM Page is accessed by the Zpointer. As the ATmega128 does not support more than 64K of SRAM memory, this register is
used only to select which page in the program memory is accessed when the ELPM/SPM
instruction is used. The different settings of the RAMPZ0 bit have the following effects:
RAMPZ0 = 0: Program memory address $0000 - $7FFF (lower 64K bytes) is
accessed by ELPM/SPM
RAMPZ0 = 1: Program memory address $8000 - $FFFF (higher 64K bytes) is
accessed by ELPM/SPM
Note that LPM is not affected by the RAMPZ setting.
This section describes the general access timing concepts for instruction execution. The AVR
CPU is driven by the CPU clock clk
, directly generated from the selected clock source for the
CPU
chip. No internal clock division is used.
14
ATmega128(L)
2467P–AVR–08/07
Page 15
ATmega128(L)
Figure 6 shows the parallel instruction fetches and instruction executions enabled by the Har-
vard architecture and the fast-access Register file concept. This is the basic pipelining concept
to obtain up to 1 MIPS per MHz with the corresponding unique results for functions per cost,
functions per clocks, and functions per power-unit.
Figure 6. The Parallel Instruction Fetches and Instruction Executions
T1 T2 T3 T4
clk
CPU
1st Instruction Fetch
1st Instruction Execute
2nd Instruction Fetch
2nd Instruction Execute
3rd Instruction Fetch
3rd Instruction Execute
4th Instruction Fetch
Figure 7 shows the internal timing concept for the Register file. In a single clock cycle an ALU
operation using two register operands is executed, and the result is stored back to the destination register.
Figure 7. Single Cycle ALU Operation
T1 T2 T3 T4
Reset and Interrupt Handling
clk
Total Execution Time
Register Operands Fetch
ALU Operation Execute
Result Write Back
CPU
The AVR provides several different interrupt sources. These interrupts and the separate reset
vector each have a separate program vector in the program memory space. All interrupts are
assigned individual enable bits which must be written logic one together with the Global Interrupt
Enable bit in the Status Register in order to enable the interrupt. Depending on the Program
Counter value, interrupts may be automatically disabled when Boot Lock bits BLB02 or BLB12
are programmed. This feature improves software security. See the section “Memory Program-
ming” on page 286 for details.
The lowest addresses in the program memory space are by default defined as the Reset and
Interrupt vectors. The complete list of vectors is shown in “Interrupts” on page 60. The list also
determines the priority levels of the different interrupts. The lower the address the higher is the
priority level. RESET has the highest priority, and next is INT0 – the External Interrupt Request
0. The interrupt vectors can be moved to the start of the boot Flash section by setting the IVSEL
bit in the MCU Control Register (MCUCR). Refer to “Interrupts” on page 60 for more information.
The Reset vector can also be moved to the start of the boot Flash section by programming the
BOOTRST fuse, see “Boot Loader Support – Read-While-Write Self-Programming” on page
273.
2467P–AVR–08/07
When an interrupt occurs, the Global Interrupt Enable I-bit is cleared and all interrupts are disabled. The user software can write logic one to the I-bit to enable nested interrupts. All enabled
interrupts can then interrupt the current interrupt routine. The I-bit is automatically set when a
Return from Interrupt instruction – RETI – is executed.
15
Page 16
There are basically two types of interrupts. The first type is triggered by an event that sets the
interrupt flag. For these interrupts, the Program Counter is vectored to the actual interrupt vector
in order to execute the interrupt handling routine, and hardware clears the corresponding interrupt flag. Interrupt flags can also be cleared by writing a logic one to the flag bit position(s) to be
cleared. If an interrupt condition occurs while the corresponding interrupt enable bit is cleared,
the interrupt flag will be set and remembered until the interrupt is enabled, or the flag is cleared
by software. Similarly, if one or more interrupt conditions occur while the global interrupt enable
bit is cleared, the corresponding interrupt flag(s) will be set and remembered until the global
interrupt enable bit is set, and will then be executed by order of priority.
The second type of interrupts will trigger as long as the interrupt condition is present. These
interrupts do not necessarily have interrupt flags. If the interrupt condition disappears before the
interrupt is enabled, the interrupt will not be triggered.
When the AVR exits from an interrupt, it will always return to the main program and execute one
more instruction before any pending interrupt is served.
Note that the Status Register is not automatically stored when entering an interrupt routine, nor
restored when returning from an interrupt routine. This must be handled by software.
When using the CLI instruction to disable interrupts, the interrupts will be immediately disabled.
No interrupt will be executed after the CLI instruction, even if it occurs simultaneously with the
CLI instruction. The following example shows how this can be used to avoid interrupts during the
timed EEPROM write sequence.
Assembly Code Example
in r16, SREG ; store SREG value
cli ; disable interrupts during timed sequence
sbi EECR, EEMWE ; start EEPROM write
sbi EECR, EEWE
out SREG, r16 ; restore SREG value (I-bit)
C Code Example
char cSREG;
cSREG = SREG; /* store SREG value */
/* disable interrupts during timed sequence */
__disable_interrupt();
EECR |= (1<<EEMWE); /* start EEPROM write */
EECR |= (1<<EEWE);
SREG = cSREG; /* restore SREG value (I-bit) */
16
ATmega128(L)
2467P–AVR–08/07
Page 17
ATmega128(L)
When using the SEI instruction to enable interrupts, the instruction following SEI will be executed before any pending interrupts, as shown in this example.
Assembly Code Example
sei ; set global interrupt enable
sleep; enter sleep, waiting for interrupt
; note: will enter sleep before any pending
; interrupt(s)
C Code Example
__enable_interrupt(); /* set global interrupt enable */
__sleep(); /* enter sleep, waiting for interrupt */
/* note: will enter sleep before any pending interrupt(s) */
Interrupt Response Time
The interrupt execution response for all the enabled AVR interrupts is four clock cycles minimum. After four clock cycles, the program vector address for the actual interrupt handling routine
is executed. During this 4-clock cycle period, the Program Counter is pushed onto the Stack.
The vector is normally a jump to the interrupt routine, and this jump takes three clock cycles. If
an interrupt occurs during execution of a multi-cycle instruction, this instruction is completed
before the interrupt is served. If an interrupt occurs when the MCU is in Sleep mode, the interrupt execution response time is increased by four clock cycles. This increase comes in addition
to the start-up time from the selected sleep mode.
A return from an interrupt handling routine takes four clock cycles. During these 4-clock cycles,
the Program Counter (two bytes) is popped back from the Stack, the Stack Pointer is incremented by two, and the I-bit in SREG is set.
2467P–AVR–08/07
17
Page 18

AVR ATmega128 Memories
This section describes the different memories in the ATmega128. The AVR architecture has two
main memory spaces, the Data Memory and the Program Memory space. In addition, the
ATmega128 features an EEPROM Memory for data storage. All three memory spaces are linear
and regular.
In-System Reprogrammable Flash Program Memory
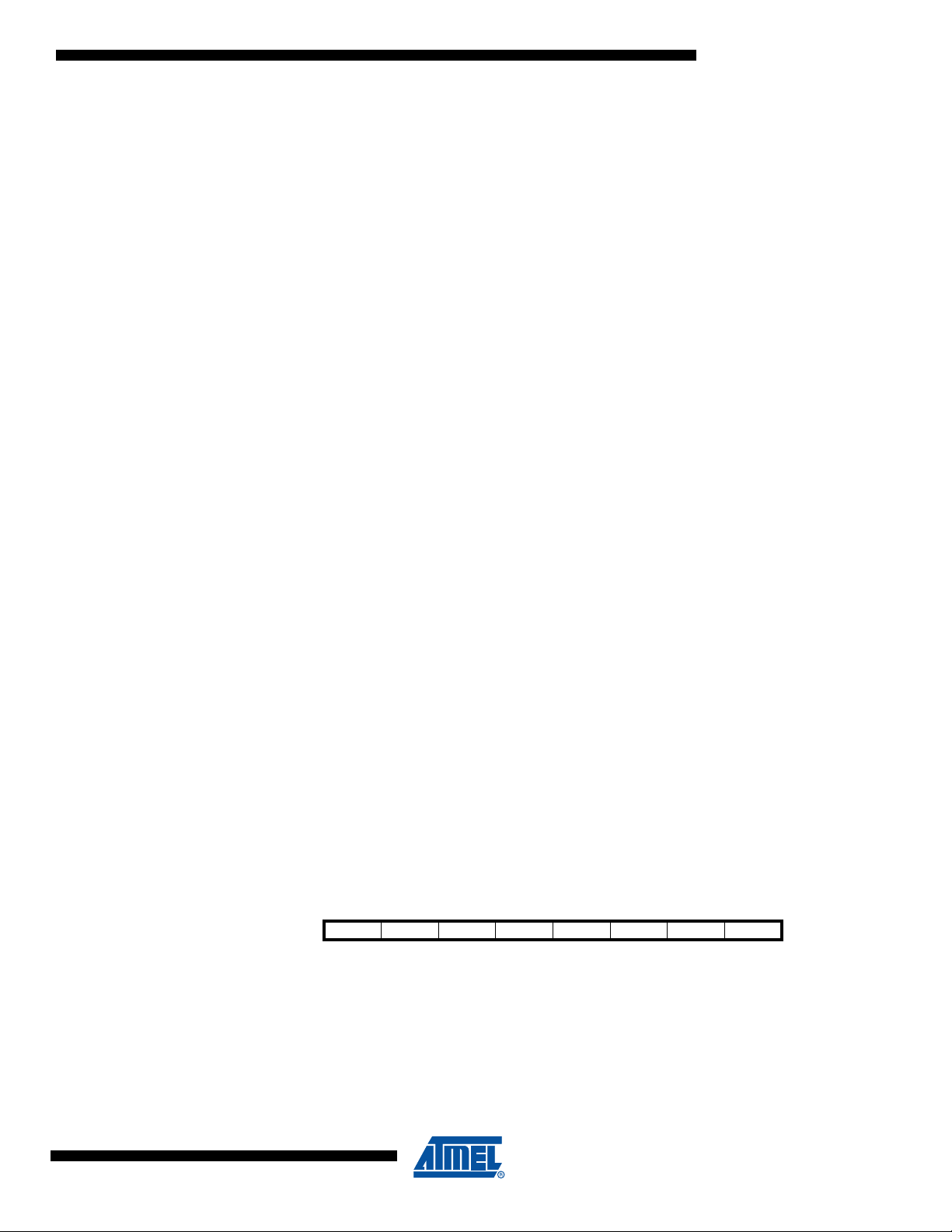
The ATmega128 contains 128K bytes On-chip In-System Reprogrammable Flash memory for
program storage. Since all AVR instructions are 16 or 32 bits wide, the Flash is organized as
64K x 16. For software security, the Flash Program memory space is divided into two sections,
Boot Program section and Application Program section.
The Flash memory has an endurance of at least 10,000 write/erase cycles. The ATmega128
Program Counter (PC) is 16 bits wide, thus addressing the 64K program memory locations. The
operation of Boot Program section and associated Boot Lock bits for software protection are
described in detail in “Boot Loader Support – Read-While-Write Self-Programming” on page
273. “Memory Programming” on page 286 contains a detailed description on Flash programming
in SPI, JTAG, or Parallel Programming mode.
Constant tables can be allocated within the entire program memory address space (see the LPM
– Load Program Memory and ELPM – Extended Load Program Memory instruction description).
Timing diagrams for instruction fetch and execution are presented in “Instruction Execution Tim-
ing” on page 14.
Figure 8. Program Memory Map
Program Memory
$0000
Application Flash Section
18
Boot Flash Section
$FFFF
ATmega128(L)
2467P–AVR–08/07
Page 19
ATmega128(L)
SRAM Data Memory
The ATmega128 supports two different configurations for the SRAM data memory as listed in
Table 1.
Table 1. Memory Configurations
Configuration Internal SRAM Data Memory External SRAM Data Memory
Normal mode 4096 up to 64K
ATmega103 Compatibility
mode
Figure 9 shows how the ATmega128 SRAM Memory is organized.
The ATmega128 is a complex microcontroller with more peripheral units than can be supported
within the 64 location reserved in the Opcode for the IN and OUT instructions. For the Extended
I/O space from $60 - $FF in SRAM, only the ST/STS/STD and LD/LDS/LDD instructions can be
used. The Extended I/O space does not exist when the ATmega128 is in the ATmega103 compatibility mode.
In normal mode, the first 4352 Data Memory locations address both the Register file, the I/O
Memory, Extended I/O Memory, and the internal data SRAM. The first 32 locations address the
Register file, the next 64 location the standard I/O memory, then 160 locations of Extended I/O
memory, and the next 4096 locations address the internal data SRAM.
In ATmega103 compatibility mode, the first 4096 Data Memory locations address both the Register file, the I/O Memory and the internal data SRAM. The first 32 locations address the Register
file, the next 64 location the standard I/O memory, and the next 4000 locations address the internal data SRAM.
4000 up to 64K
An optional external data SRAM can be used with the ATmega128. This SRAM will occupy an
area in the remaining address locations in the 64K address space. This area starts at the
address following the internal SRAM. The Register file, I/O, Extended I/O and Internal SRAM
occupies the lowest 4352 bytes in normal mode, and the lowest 4096 bytes in the ATmega103
compatibility mode (Extended I/O not present), so when using 64KB (65536 bytes) of External
Memory, 61184 Bytes of External Memory are available in normal mode, and 61440 Bytes in
ATmega103 compatibility mode. See “External Memory Interface” on page 26 for details on how
to take advantage of the external memory map.
When the addresses accessing the SRAM memory space exceeds the internal data memory
locations, the external data SRAM is accessed using the same instructions as for the internal
data memory access. When the internal data memories are accessed, the read and write strobe
pins (PG0 and PG1) are inactive during the whole access cycle. External SRAM operation is
enabled by setting the SRE bit in the MCUCR Register.
Accessing external SRAM takes one additional clock cycle per byte compared to access of the
internal SRAM. This means that the commands LD, ST, LDS, STS, LDD, STD, PUSH, and POP
take one additional clock cycle. If the Stack is placed in external SRAM, interrupts, subroutine
calls and returns take three clock cycles extra because the two-byte program counter is pushed
and popped, and external memory access does not take advantage of the internal pipe-line
memory access. When external SRAM interface is used with wait-state, one-byte external
access takes two, three, or four additional clock cycles for one, two, and three wait-states
respectively. Interrupts, subroutine calls and returns will need five, seven, or nine clock cycles
more than specified in the instruction set manual for one, two, and three wait-states.
The five different addressing modes for the data memory cover: Direct, Indirect with Displacement, Indirect, Indirect with Pre-decrement, and Indirect with Post-increment. In the Register file,
registers R26 to R31 feature the indirect addressing pointer registers.
2467P–AVR–08/07
The direct addressing reaches the entire data space.
19
Page 20
The Indirect with Displacement mode reaches 63 address locations from the base address given
by the Y- or Z-register.
When using register indirect addressing modes with automatic pre-decrement and post-increment, the address registers X, Y, and Z are decremented or incremented.
The 32 general purpose working registers, 64 I/O registers, and the 4096 bytes of internal data
SRAM in the ATmega128 are all accessible through all these addressing modes. The Register
file is described in “General Purpose Register File” on page 12.
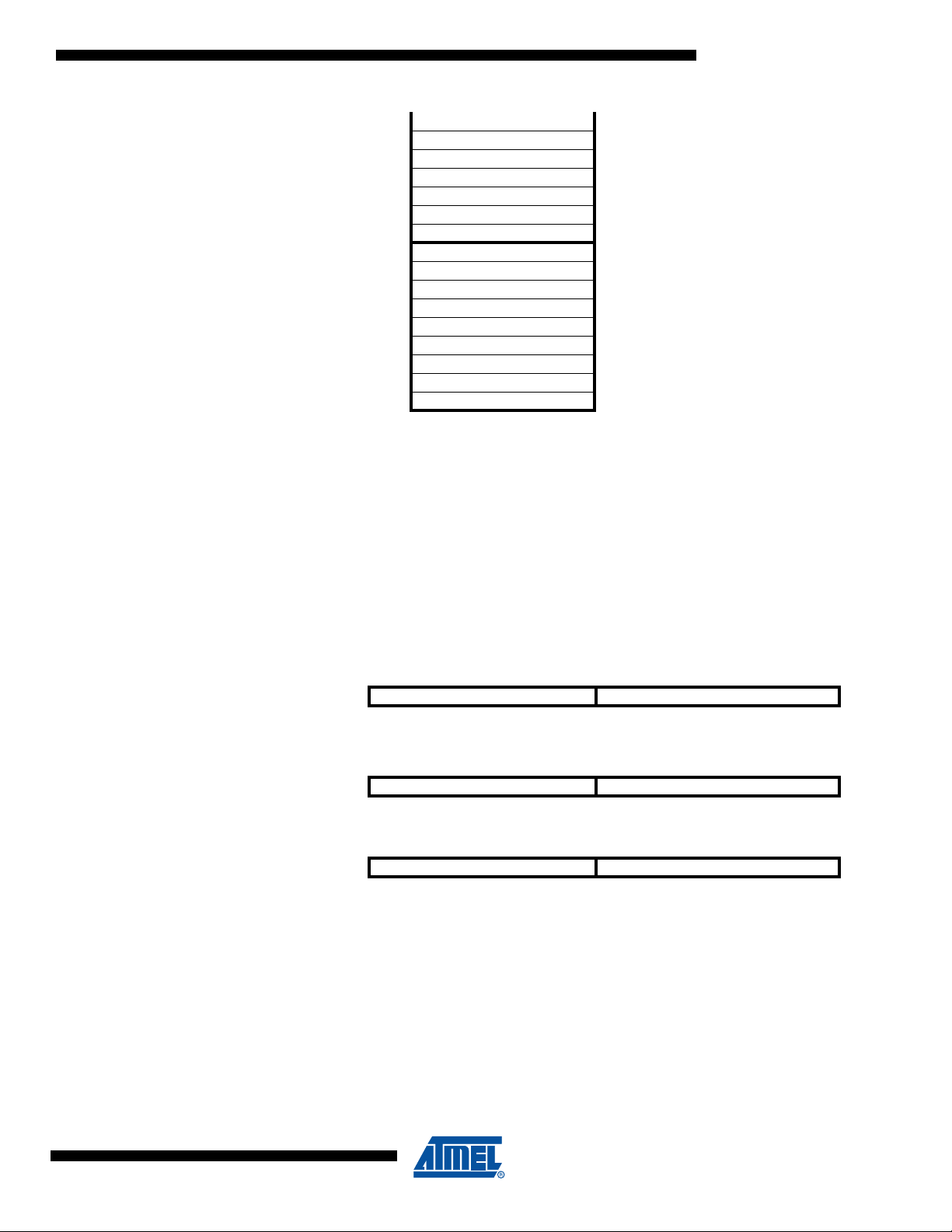
Figure 9. Data Memory Map
Memory Configuration A
Data Memory
32 Registers
64 I/O Registers
160 Ext I/O Reg.
Internal SRAM
(4096 x 8)
External SRAM
(0 - 64K x 8)
$0000 - $001F
$0020 - $005F
$0060 - $00FF
$0100
$10FF
$1100
$FFFF
Memory Configuration B
Data Memory
32 Registers
64 I/O Registers
Internal SRAM
(4000 x 8)
External SRAM
(0 - 64K x 8)
$0000 - $001F
$0020 - $005F
$0060
$0FFF
$1000
$FFFF
20
ATmega128(L)
2467P–AVR–08/07
Page 21
ATmega128(L)
Data Memory Access Times
EEPROM Data Memory
This section describes the general access timing concepts for internal memory access. The
internal data SRAM access is performed in two clk
cycles as described in Figure 10.
CPU
Figure 10. On-chip Data SRAM Access Cycles
T1 T2 T3
clk
CPU
Address
Data
WR
Data
RD
Compute Address
Memory access instruction
Address valid
Write
Read
Next instruction
The ATmega128 contains 4K bytes of data EEPROM memory. It is organized as a separate
data space, in which single bytes can be read and written. The EEPROM has an endurance of at
least 100,000 write/erase cycles. The access between the EEPROM and the CPU is described
in the following, specifying the EEPROM Address Registers, the EEPROM Data Register, and
the EEPROM Control Register.
“Memory Programming” on page 286 contains a detailed description on EEPROM programming
in SPI, JTAG, or Parallel Programming mode
EEPROM Read/Write Access
EEPROM Address
Register – EEARH and
EEARL
The EEPROM access registers are accessible in the I/O space.
The write access time for the EEPROM is given in Table 2. A self-timing function, however, lets
the user software detect when the next byte can be written. If the user code contains instructions
that write the EEPROM, some precautions must be taken. In heavily filtered power supplies, V
CC
is likely to rise or fall slowly on Power-up/down. This causes the device for some period of time
to run at a voltage lower than specified as minimum for the clock frequency used. See “Prevent-
ing EEPROM Corruption” on page 25. for details on how to avoid problems in these situations.
In order to prevent unintentional EEPROM writes, a specific write procedure must be followed.
Refer to the description of the EEPROM Control Register for details on this.
When the EEPROM is read, the CPU is halted for four clock cycles before the next instruction is
executed. When the EEPROM is written, the CPU is halted for two clock cycles before the next
instruction is executed.
Bit 15141312 11 10 9 8
– – – – EEAR11 EEAR10 EEAR9 EEAR8 EEARH
EEAR7 EEAR6 EEAR5 EEAR4 EEAR3 EEAR2 EEAR1 EEAR0 EEARL
7654 3 2 10
Read/Write R R R R R/W R/W R/W R/W
R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value 0 0 0 0 X X X X
XXXX X X XX
2467P–AVR–08/07
• Bits 15..12 – Res: Reserved Bits
These are reserved bits and will always read as zero. When writing to this address location,
write these bits to zero for compatibility with future devices.
• Bits 11..0 – EEAR11..0: EEPROM Address
21
Page 22
EEPROM Data
Register – EEDR
EEPROM Control
Register – EECR
The EEPROM Address Registers – EEARH and EEARL – specify the EEPROM address in the
4K bytes EEPROM space. The EEPROM data bytes are addressed linearly between 0 and
4096. The initial value of EEAR is undefined. A proper value must be written before the
EEPROM may be accessed.
Bit 76543210
MSB LSB EEDR
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value00000000
• Bits 7..0 – EEDR7.0: EEPROM Data
For the EEPROM write operation, the EEDR Register contains the data to be written to the
EEPROM in the address given by the EEAR Register. For the EEPROM read operation, the
EEDR contains the data read out from the EEPROM at the address given by EEAR.
Bit 76543210
– – – – EERIE EEMWE EEWE EERE EECR
Read/Write R R R R R/W R/W R/W R/W
Initial Value 0 0 0 0 0 0 X 0
• Bits 7..4 – Res: Reserved Bits
These bits are reserved bits in the ATmega128 and will always read as zero.
• Bit 3 – EERIE: EEPROM Ready Interrupt Enable
Writing EERIE to one enables the EEPROM Ready Interrupt if the I-bit in SREG is set. Writing
EERIE to zero disables the interrupt. The EEPROM Ready interrupt generates a constant interrupt when EEWE is cleared.
• Bit 2 – EEMWE: EEPROM Master Write Enable
The EEMWE bit determines whether setting EEWE to one causes the EEPROM to be written.
When EEMWE is written to one, writing EEWE to one within four clock cycles will write data to
the EEPROM at the selected address. If EEMWE is zero, writing EEWE to one will have no
effect. When EEMWE has been written to one by software, hardware clears the bit to zero after
four clock cycles. See the description of the EEWE bit for an EEPROM write procedure.
• Bit 1 – EEWE: EEPROM Write Enable
The EEPROM Write Enable Signal EEWE is the write strobe to the EEPROM. When address
and data are correctly set up, the EEWE bit must be set to write the value into the EEPROM.
The EEMWE bit must be set when the logical one is written to EEWE, otherwise no EEPROM
write takes place. The following procedure should be followed when writing the EEPROM (the
order of steps 3 and 4 is not essential):
1. Wait until EEWE becomes zero.
2. Wait until SPMEN in SPMCSR becomes zero.
3. Write new EEPROM address to EEAR (optional).
4. Write new EEPROM data to EEDR (optional).
5. Write a logical one to the EEMWE bit while writing a zero to EEWE in EECR.
6. Within four clock cycles after setting EEMWE, write a logical one to EEWE.
22
The EEPROM can not be programmed during a CPU write to the Flash memory. The software
must check that the Flash programming is completed before initiating a new EEPROM write.
Step 2 is only relevant if the software contains a boot loader allowing the CPU to program the
ATmega128(L)
2467P–AVR–08/07
Page 23
ATmega128(L)
Flash. If the Flash is never being updated by the CPU, step 2 can be omitted. See “Boot Loader
Support – Read-While-Write Self-Programming” on page 273 for details about boot
programming.
Caution: An interrupt between step 5 and step 6 will make the write cycle fail, since the
EEPROM Master Write Enable will time-out. If an interrupt routine accessing the EEPROM is
interrupting another EEPROM access, the EEAR or EEDR Register will be modified, causing the
interrupted EEPROM access to fail. It is recommended to have the global interrupt flag cleared
during the four last steps to avoid these problems.
When the write access time has elapsed, the EEWE bit is cleared by hardware. The user software can poll this bit and wait for a zero before writing the next byte. When EEWE has been set,
the CPU is halted for two cycles before the next instruction is executed.
• Bit 0 – EERE: EEPROM Read Enable
The EEPROM Read Enable Signal EERE is the read strobe to the EEPROM. When the correct
address is set up in the EEAR Register, the EERE bit must be written to a logic one to trigger the
EEPROM read. The EEPROM read access takes one instruction, and the requested data is
available immediately. When the EEPROM is read, the CPU is halted for four cycles before the
next instruction is executed.
The user should poll the EEWE bit before starting the read operation. If a write operation is in
progress, it is neither possible to read the EEPROM, nor to change the EEAR Register.
The calibrated Oscillator is used to time the EEPROM accesses. Table 2 lists the typical programming time for EEPROM access from the CPU.
Table 2. EEPROM Programming Time
Number of Calibrated RC
Symbol
EEPROM Write (from CPU) 8448 8.5 ms
Note: 1. Uses 1 MHz clock, independent of CKSEL-fuse settings.
Oscillator Cycles
(1)
Typ Programming Time
2467P–AVR–08/07
23
Page 24
The following code examples show one assembly and one C function for writing to the
EEPROM. The examples assume that interrupts are controlled (e.g., by disabling interrupts globally) so that no interrupts will occur during execution of these functions. The examples also
assume that no flash boot loader is present in the software. If such code is present, the
EEPROM write function must also wait for any ongoing SPM command to finish.
Assembly Code Example
EEPROM_write:
; Wait for completion of previous write
sbic EECR,EEWE
rjmp EEPROM_write
; Set up address (r18:r17) in address register
out EEARH, r18
out EEARL, r17
; Write data (r16) to data register
out EEDR,r16
; Write logical one to EEMWE
sbi EECR,EEMWE
; Start eeprom write by setting EEWE
sbi EECR,EEWE
ret
C Code Example
void EEPROM_write(unsigned int uiAddress, unsigned char ucData)
{
/* Wait for completion of previous write */
while(EECR & (1<<EEWE))
;
/* Set up address and data registers */
EEAR = uiAddress;
EEDR = ucData;
/* Write logical one to EEMWE */
EECR |= (1<<EEMWE);
/* Start eeprom write by setting EEWE */
EECR |= (1<<EEWE);
}
24
ATmega128(L)
2467P–AVR–08/07
Page 25
ATmega128(L)
The next code examples show assembly and C functions for reading the EEPROM. The examples assume that interrupts are controlled so that no interrupts will occur during execution of
these functions.
Assembly Code Example
EEPROM_read:
; Wait for completion of previous write
sbic EECR,EEWE
rjmp EEPROM_read
; Set up address (r18:r17) in address register
out EEARH, r18
out EEARL, r17
; Start eeprom read by writing EERE
sbi EECR,EERE
; Read data from data register
in r16,EEDR
ret
C Code Example
unsigned char EEPROM_read(unsigned int uiAddress)
{
/* Wait for completion of previous write */
while(EECR & (1<<EEWE))
;
/* Set up address register */
EEAR = uiAddress;
/* Start eeprom read by writing EERE */
EECR |= (1<<EERE);
/* Return data from data register */
return EEDR;
}
EEPROM Write During Power-down Sleep Mode
Preventing EEPROM Corruption
2467P–AVR–08/07
When entering Power-down sleep mode while an EEPROM write operation is active, the
EEPROM write operation will continue, and will complete before the write access time has
passed. However, when the write operation is completed, the Oscillator continues running, and
as a consequence, the device does not enter Power-down entirely. It is therefore recommended
to verify that the EEPROM write operation is completed before entering Power-down.
During periods of low V
the EEPROM data can be corrupted because the supply voltage is
CC,
too low for the CPU and the EEPROM to operate properly. These issues are the same as for
board level systems using EEPROM, and the same design solutions should be applied.
An EEPROM data corruption can be caused by two situations when the voltage is too low. First,
a regular write sequence to the EEPROM requires a minimum voltage to operate correctly. Secondly, the CPU itself can execute instructions incorrectly, if the supply voltage is too low.
EEPROM data corruption can easily be avoided by following this design recommendation:
Keep the AVR RESET active (low) during periods of insufficient power supply voltage. This can
be done by enabling the internal Brown-out Detector (BOD). If the detection level of the internal
BOD does not match the needed detection level, an external low V
Reset Protection circuit
CC
25
Page 26

can be used. If a reset occurs while a write operation is in progress, the write operation will be
completed provided that the power supply voltage is sufficient.
I/O Memory The I/O space definition of the ATmega128 is shown in “Register Summary” on page 361.
All ATmega128 I/Os and peripherals are placed in the I/O space. All I/O locations may be
accessed by the LD/LDS/LDD and ST/STS/STD instructions, transferring data between the 32
general purpose working registers and the I/O space. I/O registers within the address range $00
- $1F are directly bit-accessible using the SBI and CBI instructions. In these registers, the value
of single bits can be checked by using the SBIS and SBIC instructions. Refer to the instruction
set section for more details. When using the I/O specific commands IN and OUT, the I/O
addresses $00 - $3F must be used. When addressing I/O registers as data space using LD and
ST instructions, $20 must be added to these addresses. The ATmega128 is a complex microcontroller with more peripheral units than can be supported within the 64 location reserved in
Opcode for the IN and OUT instructions. For the Extended I/O space from $60 - $FF in SRAM,
only the ST/STS/STD and LD/LDS/LDD instructions can be used. The Extended I/O space is
replaced with SRAM locations when the ATmega128 is in the ATmega103 compatibility mode.
For compatibility with future devices, reserved bits should be written to zero if accessed.
Reserved I/O memory addresses should never be written.
Some of the status flags are cleared by writing a logical one to them. Note that the CBI and SBI
instructions will operate on all bits in the I/O register, writing a one back into any flag read as set,
thus clearing the flag. The CBI and SBI instructions work with registers $00 to $1F only.
The I/O and peripherals control registers are explained in later sections.
External Memory Interface
Overview When the eXternal MEMory (XMEM) is enabled, address space outside the internal SRAM
With all the features the External Memory Interface provides, it is well suited to operate as an
interface to memory devices such as External SRAM and Flash, and peripherals such as LCDdisplay, A/D, and D/A. The main features are:
Four different wait-state settings (including no wait-state).
•
• Independent wait-state setting for different extErnal Memory sectors (configurable sector size).
• The number of bits dedicated to address high byte is selectable.
• Bus-keepers on data lines to minimize current consumption (optional).
becomes available using the dedicated External Memory pins (see Figure 1 on page 2, Table 27
on page 73, Table 33 on page 77, and Table 45 on page 85). The memory configuration is
shown in Figure 11.
26
ATmega128(L)
2467P–AVR–08/07
Page 27
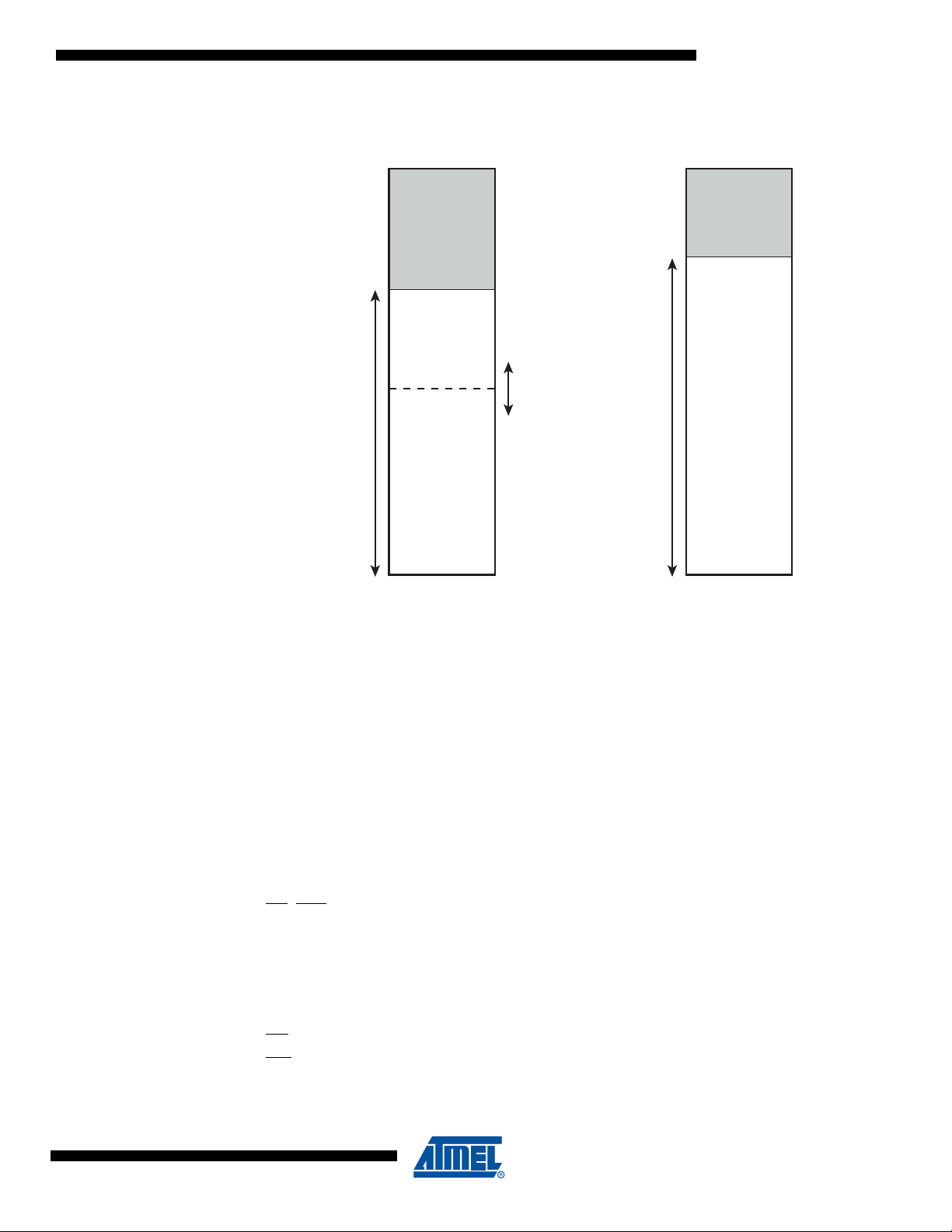
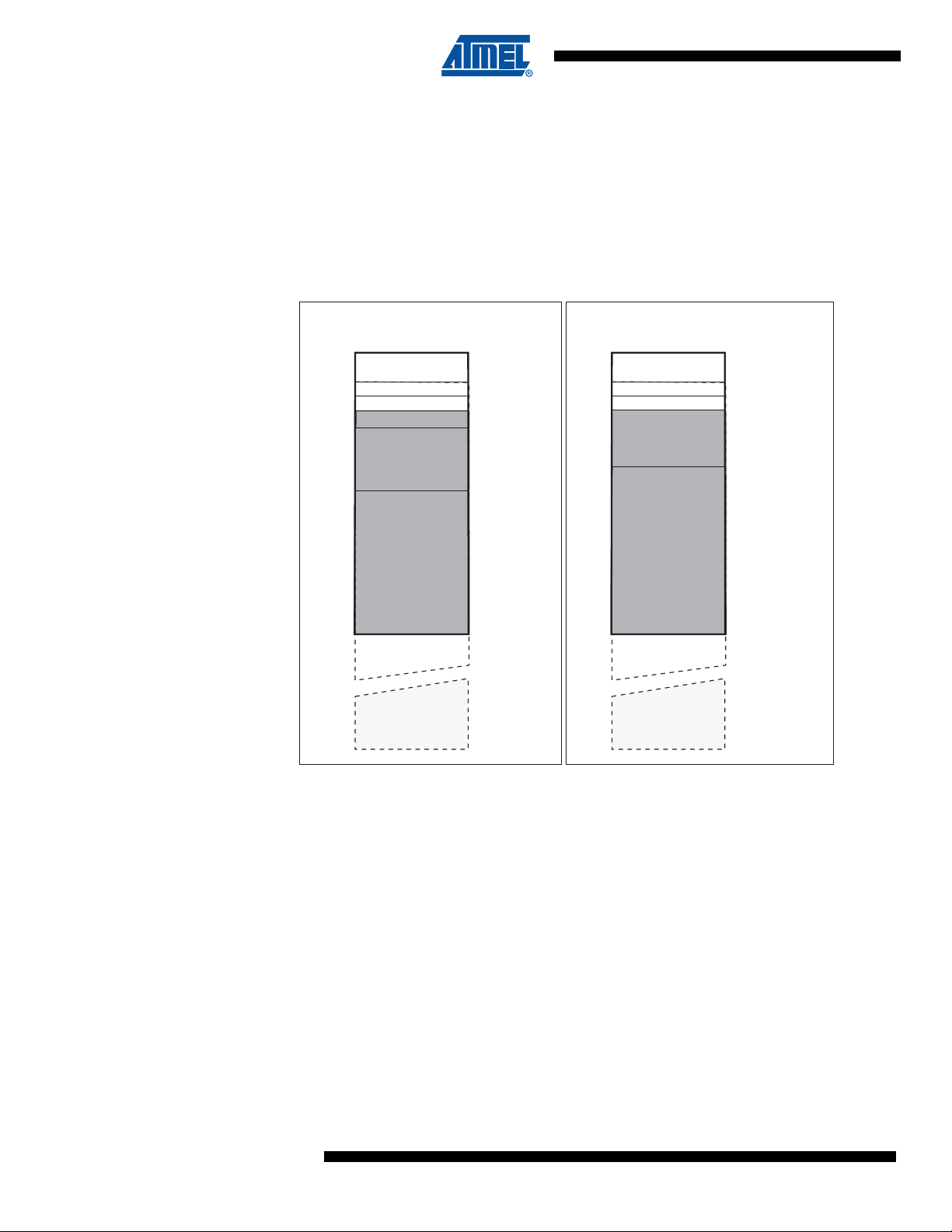
Figure 11. External Memory with Sector Select
ATmega128(L)
External Memory
(0-60K x 8)
Memory Configuration A
Internal memory
Lower sector
SRW01
SRW00
Upper sector
SRW11
SRW10
0x0000
0x10FF
0x1100
SRL[2..0]
0xFFFF
Memory Configuration B
0x0000
Internal memory
0x0FFF
0x1000
SRW10
External Memory
(0-60K x 8)
0xFFFF
ATmega103 Compatibility
Using the External Memory Interface
Note: ATmega128 in non ATmega103 compatibility mode: Memory Configuration A is available (Memory
Configuration B N/A)
ATmega128 in ATmega103 compatibility mode: Memory Configuration B is available (Memory
Configuration A N/A)
Both External Memory Control Registers (XMCRA and XMCRB) are placed in Extended I/O
space. In ATmega103 compatibility mode, these registers are not available, and the features
selected by these registers are not available. The device is still ATmega103 compatible, as
these features did not exist in ATmega103. The limitations in ATmega103 compatibility mode
are:
• Only two wait-states settings are available (SRW1n = 0b00 and SRW1n = 0b01).
• The number of bits that are assigned to address high byte are fixed.
• The External Memory section can not be divided into sectors with different wait-state
settings.
• Bus-keeper is not available.
•RD
, WR and ALE pins are output only (Port G in ATmega128).
The interface consists of:
• AD7:0: Multiplexed low-order address bus and data bus.
• A15:8: High-order address bus (configurable number of bits).
• ALE: Address latch enable.
•RD
•WR
: Read strobe.
: Write strobe.
2467P–AVR–08/07
27
Page 28
The control bits for the External Memory Interface are located in three registers, the MCU Control Register – MCUCR, the External Memory Control Register A – XMCRA, and the External
Memory Control Register B – XMCRB.
When the XMEM interface is enabled, the XMEM interface will override the setting in the data
direction registers that corresponds to the ports dedicated to the XMEM interface. For details
about the port override, see the alternate functions in section “I/O Ports” on page 66. The XMEM
interface will auto-detect whether an access is internal or external. If the access is external, the
XMEM interface will output address, data, and the control signals on the ports according to Fig-
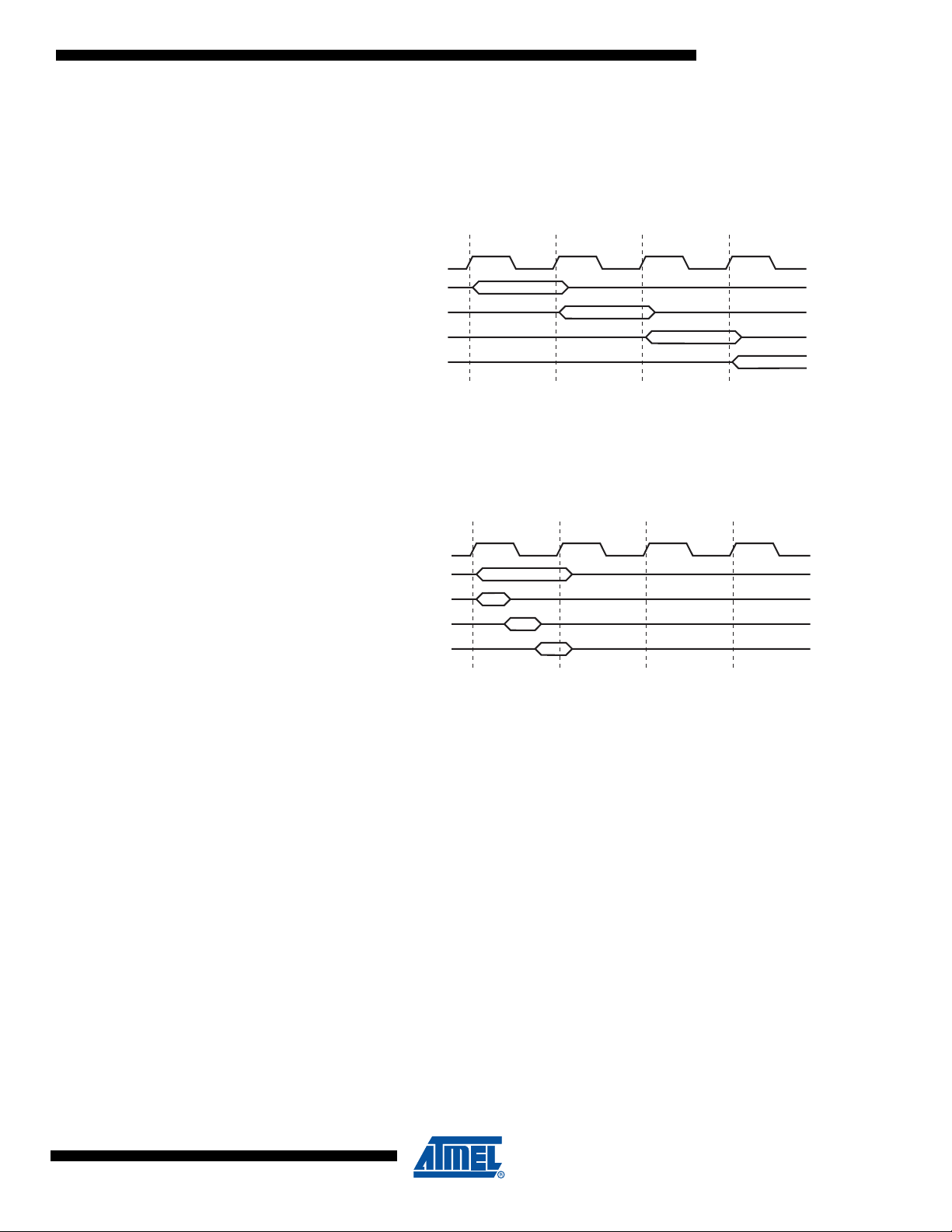
ure 13 (this figure shows the wave forms without wait-states). When ALE goes from high-to-low,
there is a valid address on AD7:0. ALE is low during a data transfer. When the XMEM interface
is enabled, also an internal access will cause activity on address, data and ALE ports, but the
RD
and WR strobes will not toggle during internal access. When the External Memory Interface
is disabled, the normal pin and data direction settings are used. Note that when the XMEM interface is disabled, the address space above the internal SRAM boundary is not mapped into the
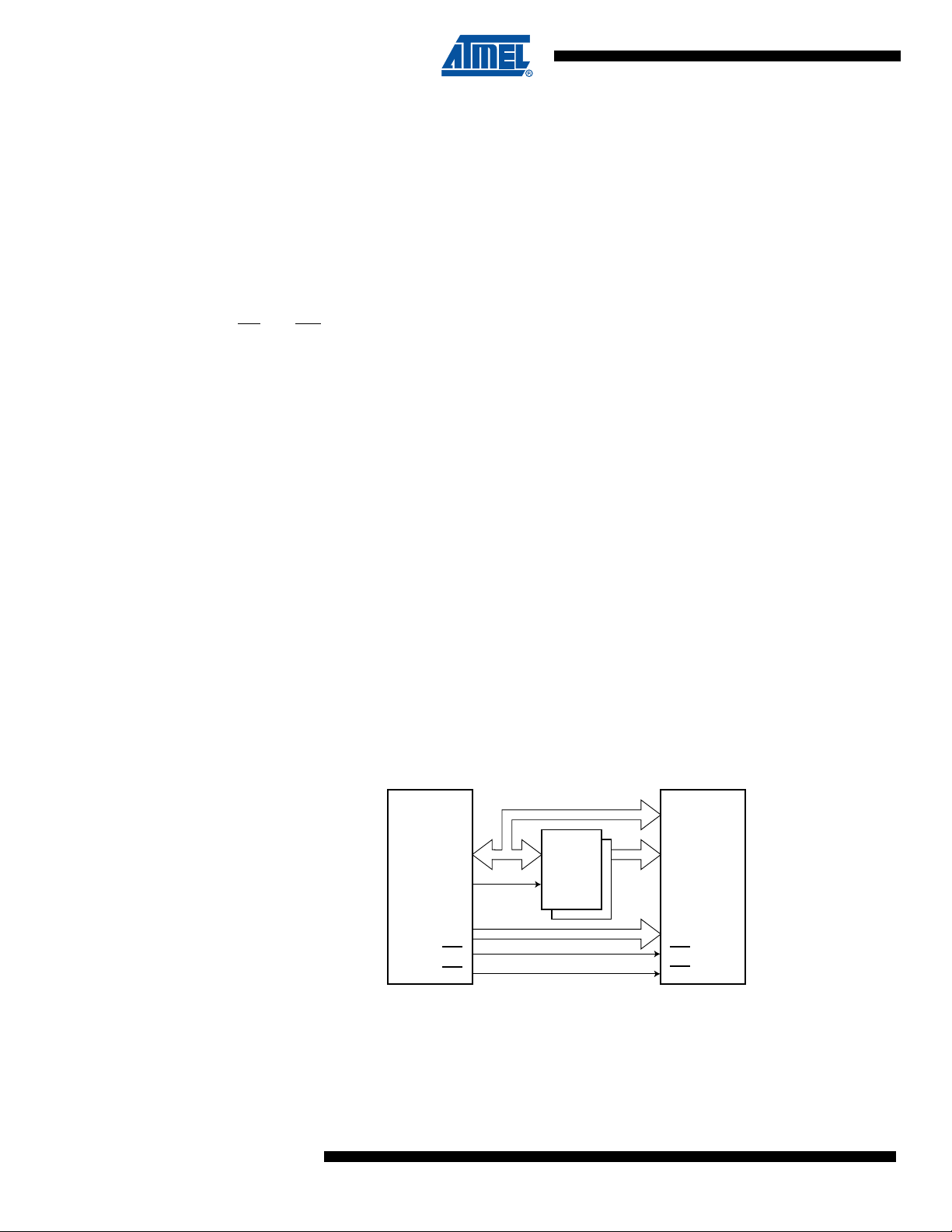
internal SRAM. Figure 12 illustrates how to connect an external SRAM to the AVR using an octal
latch (typically “74 x 573” or equivalent) which is transparent when G is high.
Address Latch Requirements
Due to the high-speed operation of the XRAM interface, the address latch must be selected with
care for system frequencies above 8 MHz @ 4V and 4 MHz @ 2.7V. When operating at conditions above these frequencies, the typical old style 74HC series latch becomes inadequate. The
External Memory Interface is designed in compliance to the 74AHC series latch. However, most
latches can be used as long they comply with the main timing parameters. The main parameters
for the address latch are:
• D to Q propagation delay (t
• Data setup time before G low (t
• Data (address) hold time after G low (
PD
).
).
SU
).
TH
The External Memory Interface is designed to guaranty minimum address hold time after G is
asserted low of t
137 through Tables 144 on pages 327 - 329. The D-to-Q propagation delay (t
= 5 ns. Refer to t
h
LAXX_LD/tLLAXX_ST
in “External Data Memory Timing” Tables
) must be taken
PD
into consideration when calculating the access time requirement of the external component. The
data setup time before G low (t
) must not exceed address valid to ALE low (t
SU
) minus PCB
AVLLC
wiring delay (dependent on the capacitive load).
Figure 12. External SRAM Connected to the AVR
D[7:0]
AD7:0
AVR
ALE
DQ
G
A[7:0]
SRAM
28
ATmega128(L)
A15:8
RD
WR
A[15:8]
RD
WR
2467P–AVR–08/07
Page 29
ATmega128(L)
Pull-up and Buskeeper
The pull-ups on the AD7:0 ports may be activated if the corresponding Port register is written to
one. To reduce power consumption in sleep mode, it is recommended to disable the pull-ups by
writing the Port register to zero before entering sleep.
The XMEM interface also provides a bus-keeper on the AD7:0 lines. The bus-keeper can be disabled and enabled in software as described in “External Memory Control Register B – XMCRB”
on page 33. When enabled, the bus-keeper will ensure a defined logic level (zero or one) on the
AD7:0 bus when these lines would otherwise be tri-stated by the XMEM interface.
Timing External Memory devices have different timing requirements. To meet these requirements, the
ATmega128 XMEM interface provides four different wait-states as shown in Table 4. It is important to consider the timing specification of the External Memory device before selecting the waitstate. The most important parameters are the access time for the external memory compared to
the set-up requirement of the ATmega128. The access time for the External Memory is defined
to be the time from receiving the chip select/address until the data of this address actually is
driven on the bus. The access time cannot exceed the time from the ALE pulse must be
asserted low until data is stable during a read sequence (See t
LLRL
+ t
RLRH
- t
in Tables 137
DVRH
through Tables 144 on pages 327 - 329). The different wait-states are set up in software. As an
additional feature, it is possible to divide the external memory space in two sectors with individual wait-state settings. This makes it possible to connect two different memory devices with
different timing requirements to the same XMEM interface. For XMEM interface timing details,
please refer to Table 137 to Table 144 and Figure 156 to Figure 159 in the “External Data Mem-
ory Timing” on page 327.
Note that the XMEM interface is asynchronous and that the waveforms in the following figures
are related to the internal system clock. The skew between the internal and external clock
(XTAL1) is not guarantied (varies between devices temperature, and supply voltage). Consequently, the XMEM interface is not suited for synchronous operation.
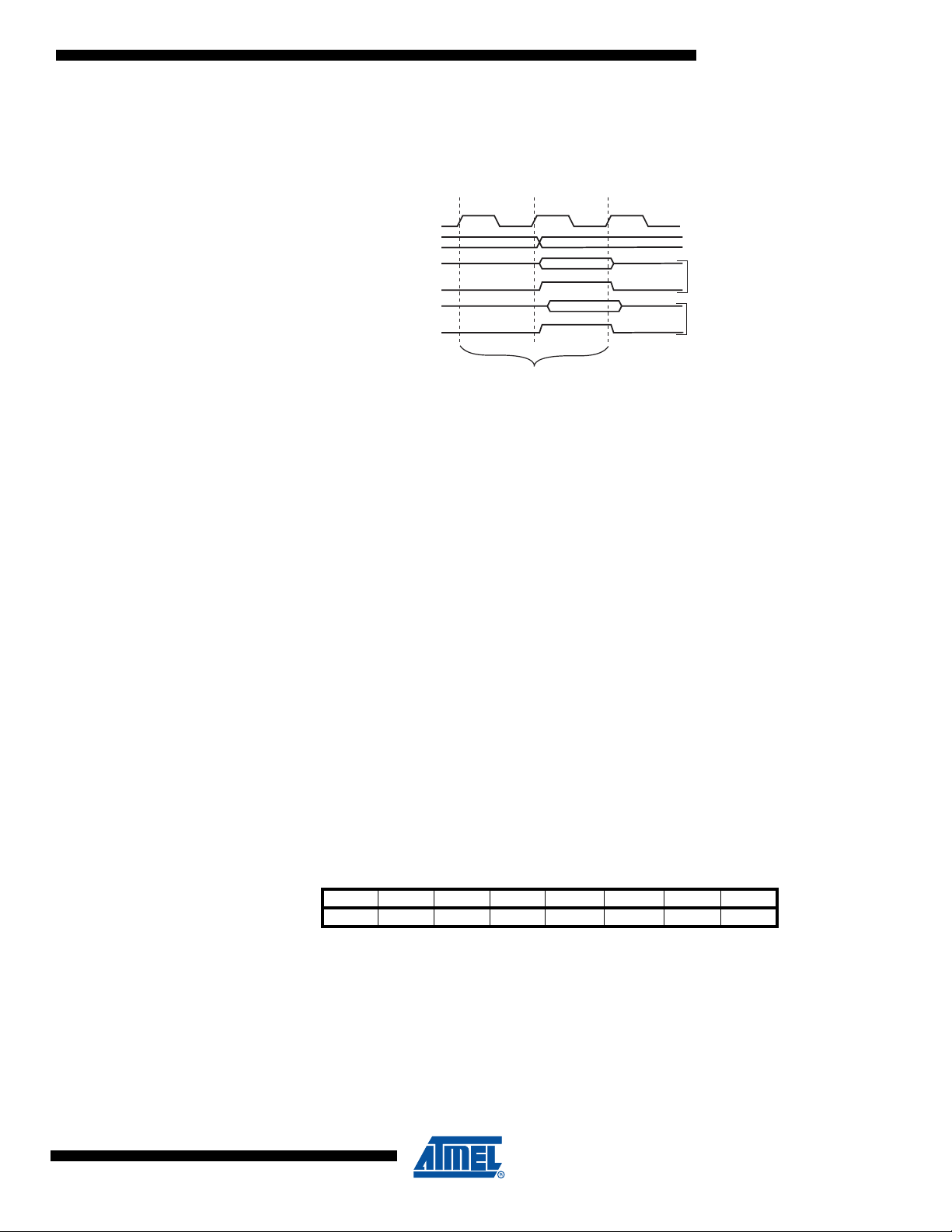
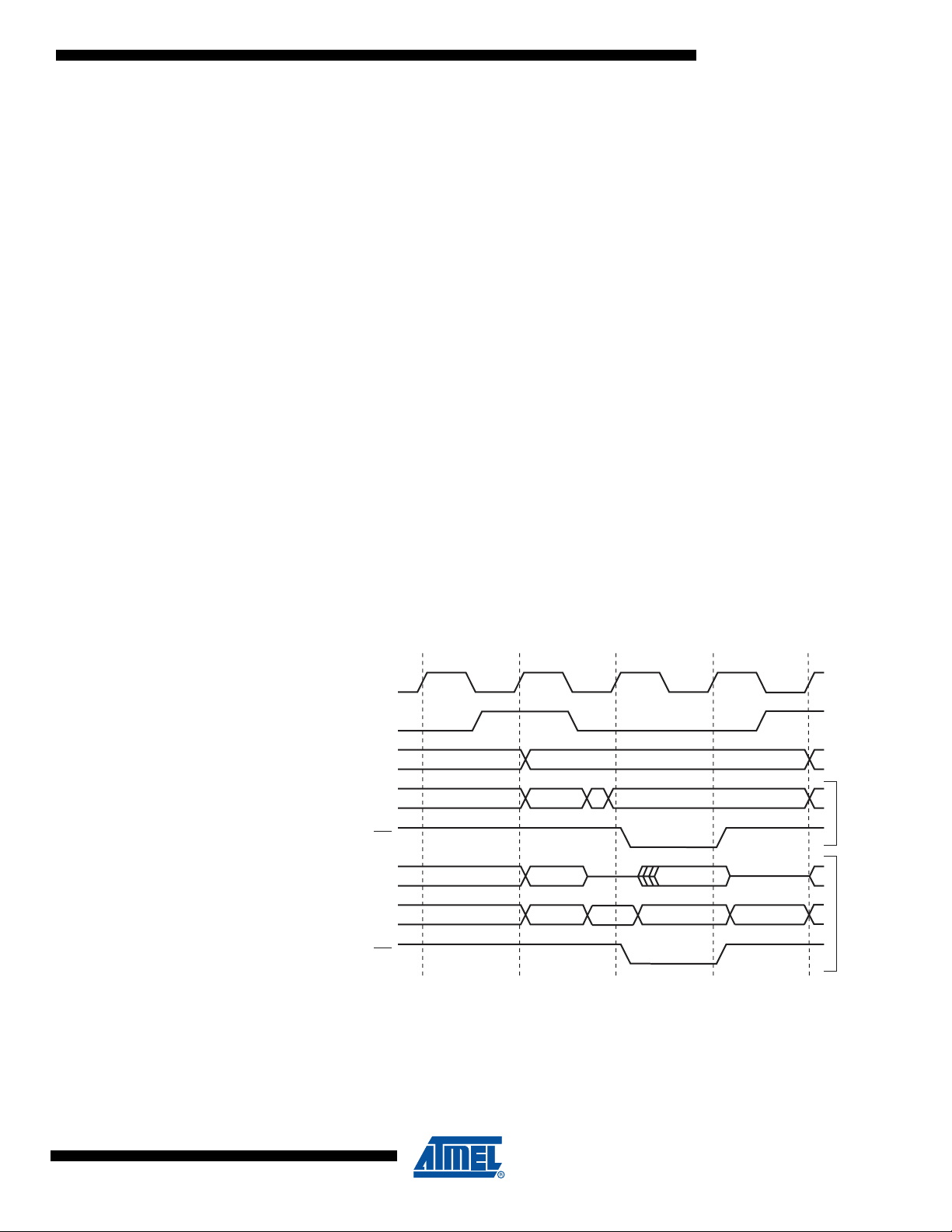
Figure 13. External Data Memory Cycles without Wait-state (SRWn1=0 and SRWn0=0)
T1 T2 T3
System Clock (CLK
DA7:0 (XMBK = 0)
DA7:0 (XMBK = 1)
CPU
ALE
A15:8
DA7:0
WR
RD
)
AddressPrev. addr.
Address DataPrev. data XX
DataPrev. data Address
XXXXX
DataPrev. data Address
Note: 1. SRWn1 = SRW11 (upper sector) or SRW01 (lower sector), SRWn0 = SRW10 (upper sector) or
SRW00 (lower sector). The ALE pulse in period T4 is only present if the next instruction
accesses the RAM (internal or external).
T4
XXXXXXXX
Write
Read
2467P–AVR–08/07
29
Page 30
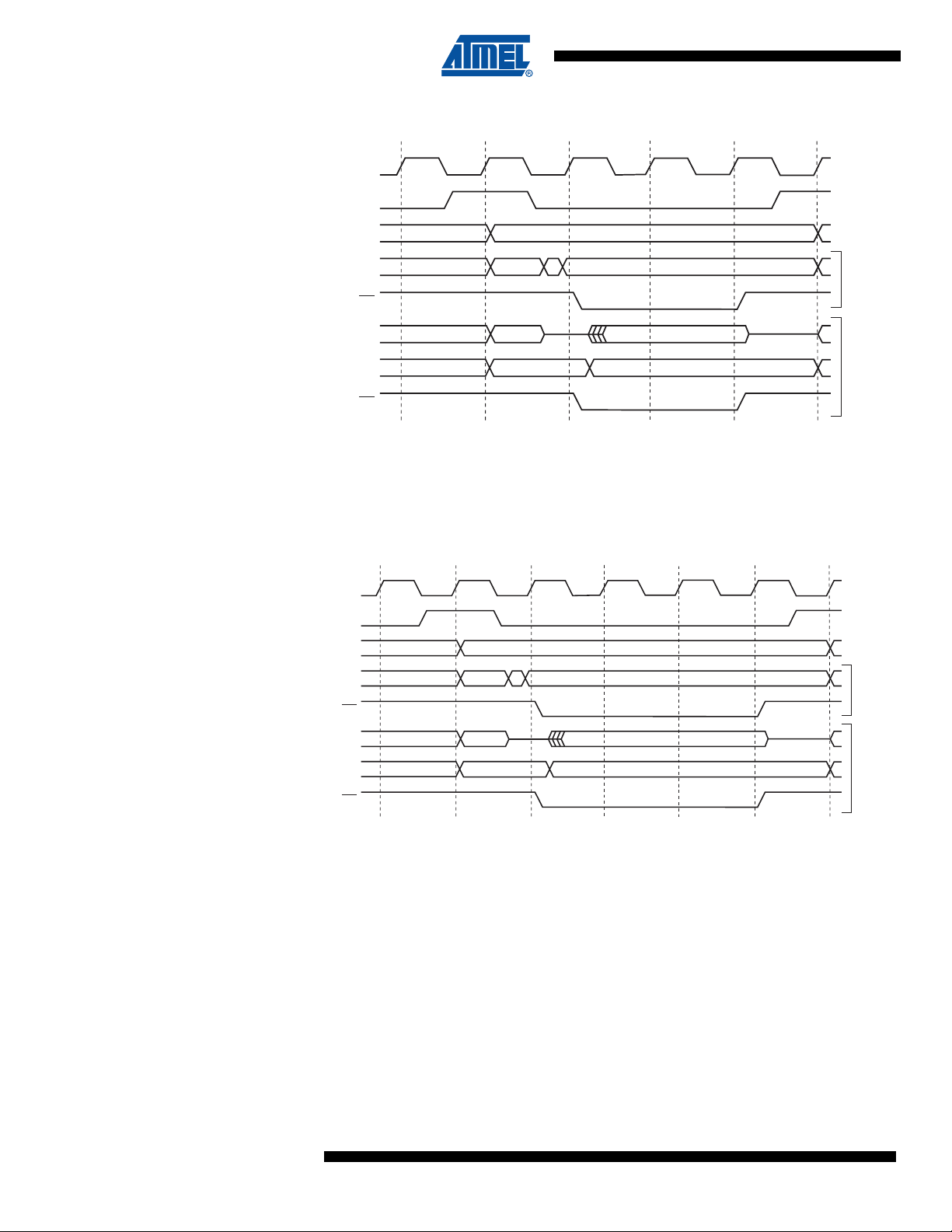
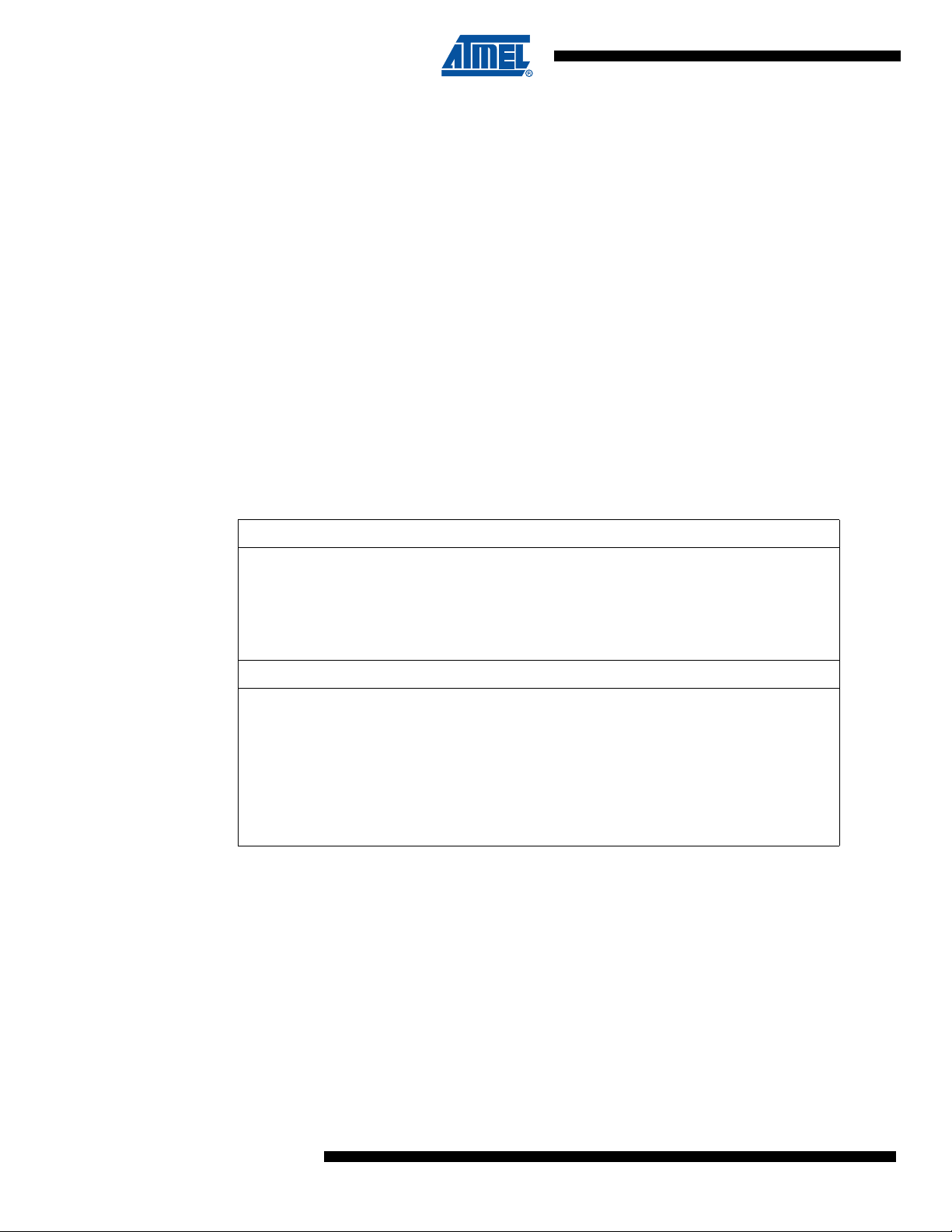
Figure 14. External Data Memory Cycles with SRWn1 = 0 and SRWn0 = 1
(1)
System Clock (CLK
DA7:0 (XMBK = 0)
DA7:0 (XMBK = 1)
CPU
ALE
A15:8
DA7:0
WR
RD
T1 T2 T3
)
AddressPrev. addr.
Address DataPrev. data XX
DataPrev. data Address
DataPrev. data Address
T4
T5
Write
Read
Note: 1. SRWn1 = SRW11 (upper sector) or SRW01 (lower sector), SRWn0 = SRW10 (upper sector) or
SRW00 (lower sector).
The ALE pulse in period T5 is only present if the next instruction accesses the RAM (internal
or external).
Figure 15. External Data Memory Cycles with SRWn1 = 1 and SRWn0 = 0
System Clock (CLK
CPU
T1 T2 T3
)
T4 T5
(1)
T6
ALE
A15:8
DA7:0
WR
DA7:0 (XMBK = 0)
DA7:0 (XMBK = 1)
RD
Address DataPrev. data XX
AddressPrev. addr.
Write
DataPrev. data Address
DataPrev. data Address
Read
Note: 1. SRWn1 = SRW11 (upper sector) or SRW01 (lower sector), SRWn0 = SRW10 (upper sector) or
SRW00 (lower sector).
The ALE pulse in period T6 is only present if the next instruction accesses the RAM (internal
or external).
30
ATmega128(L)
2467P–AVR–08/07
Page 31

ATmega128(L)
XMEM Register Description
MCU Control Register
– MCUCR
Figure 16. External Data Memory Cycles with SRWn1 = 1 and SRWn0 = 1
System Clock (CLK
DA7:0 (XMBK = 0)
DA7:0 (XMBK = 1)
CPU
ALE
A15:8
DA7:0
WR
)
T1 T2 T3
AddressPrev. addr.
Address DataPrev. data XX
DataPrev. data Address
DataPrev. data Address
RD
T4 T5 T6
(1)
T7
Write
Read
Note: 1. SRWn1 = SRW11 (upper sector) or SRW01 (lower sector), SRWn0 = SRW10 (upper sector) or
SRW00 (lower sector).
The ALE pulse in period T7 is only present if the next instruction accesses the RAM (internal
or external).
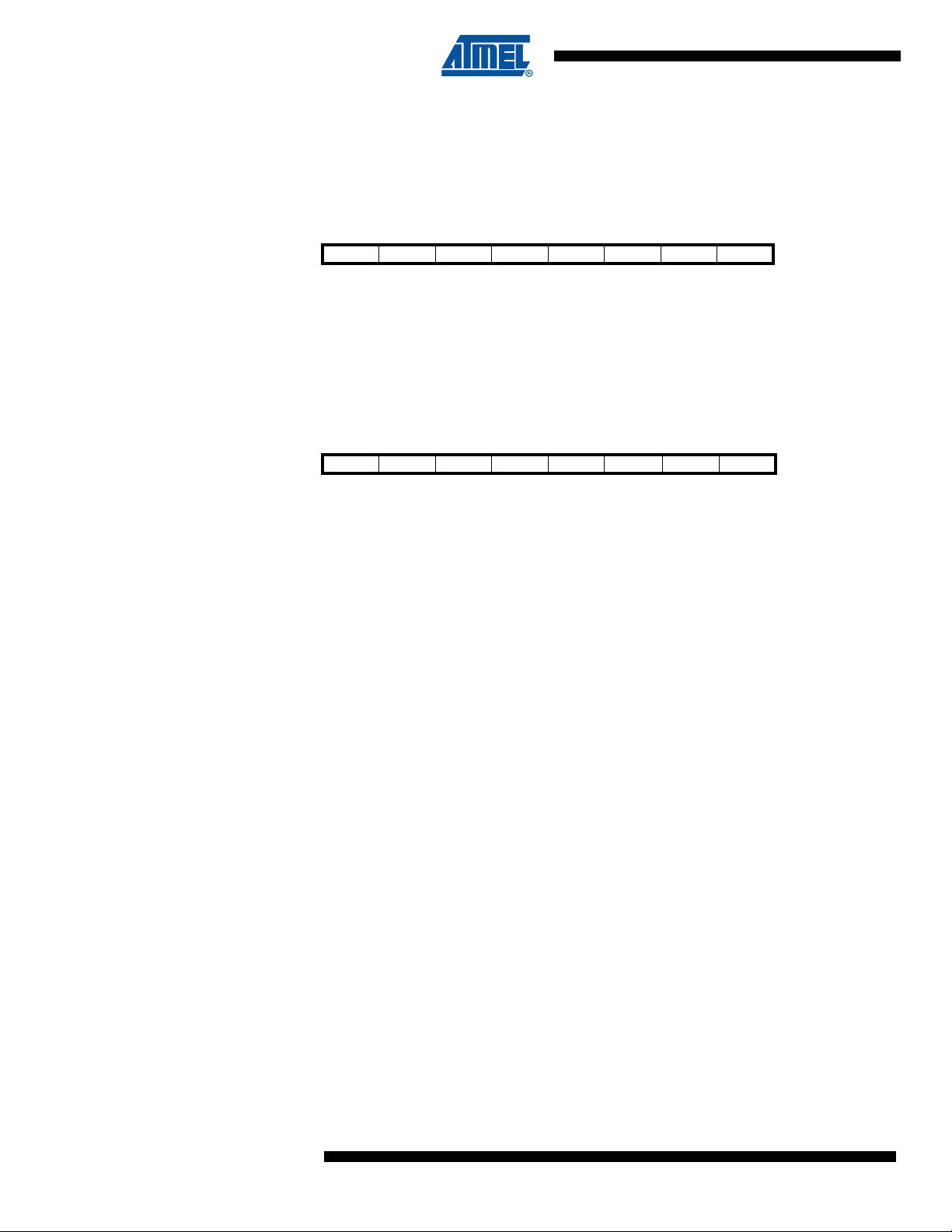
Bit 76543210
SRE SRW10
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value00000000
SE SM1 SM0 SM2 IVSEL IVCE MCUCR
External Memory
Control Register A –
XMCRA
• Bit 7 – SRE: External SRAM/XMEM Enable
Writing SRE to one enables the External Memory Interface.The pin functions AD7:0, A15:8,
ALE, WR
, and RD are activated as the alternate pin functions. The SRE bit overrides any pin
direction settings in the respective data direction registers. Writing SRE to zero, disables the
External Memory Interface and the normal pin and data direction settings are used.
• Bit 6 – SRW10: Wait-state Select Bit
For a detailed description in non-ATmega103 compatibility mode, see common description for
the SRWn bits below (XMCRA description). In ATmega103 compatibility mode, writing SRW10
to one enables the wait-state and one extra cycle is added during read/write strobe as shown in
Figure 14.
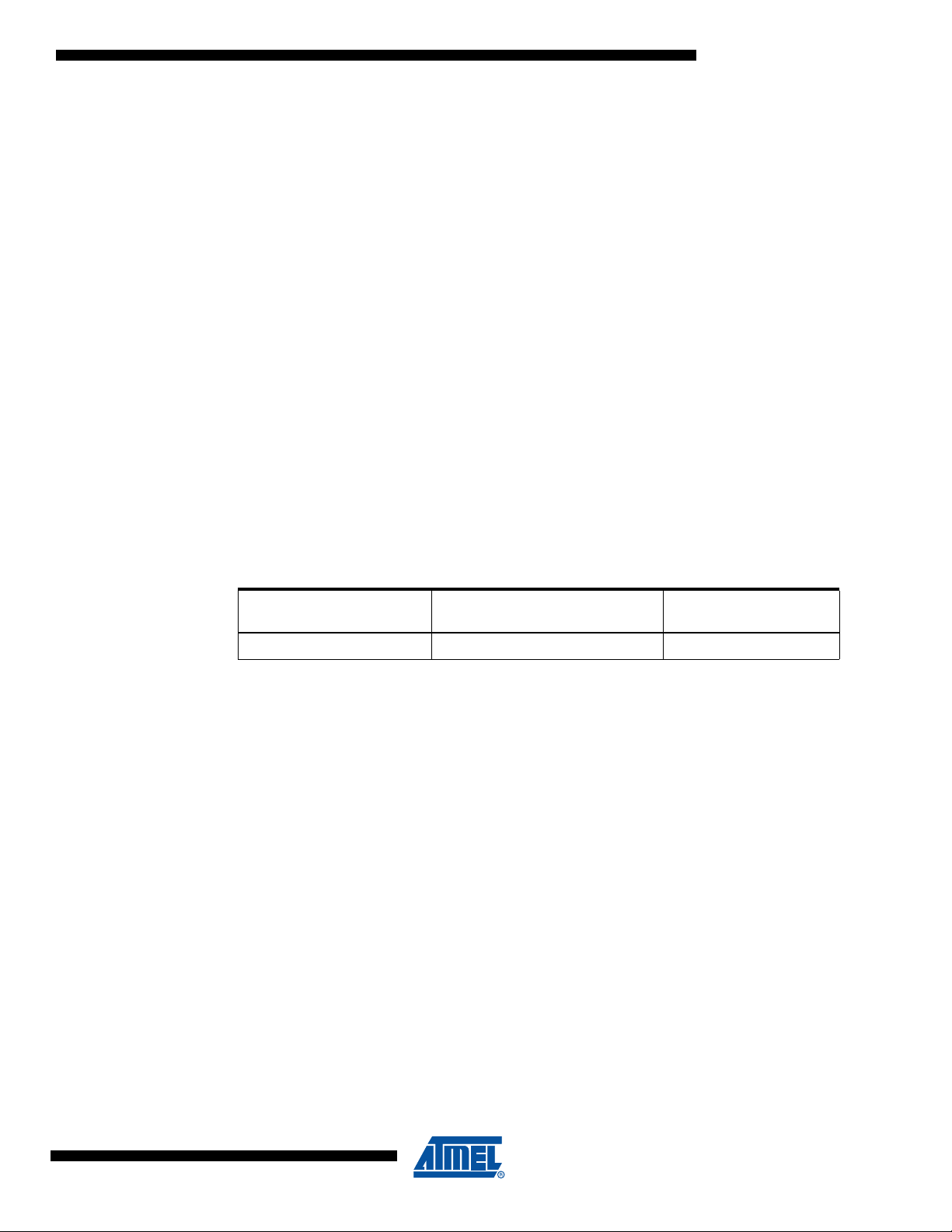
Bit 76543210
– SRL2 SRL1 SRL0 SRW01 SRW00 SRW11 – XMCRA
Read/Write R R/W R/W R/W R/W R/W R/W R
Initial Value00000000
• Bit 7 – Res: Reserved Bit
This is a reserved bit and will always read as zero. When writing to this address location, write
this bit to zero for compatibility with future devices.
• Bit 6..4 – SRL2, SRL1, SRL0: Wait-state Sector Limit
2467P–AVR–08/07
31
Page 32

It is possible to configure different wait-states for different External Memory addresses. The
external memory address space can be divided in two sectors that have separate wait-state bits.
The SRL2, SRL1, and SRL0 bits select the split of the sectors, see Table 3 and Figure 11. By
default, the SRL2, SRL1, and SRL0 bits are set to zero and the entire external memory address
space is treated as one sector. When the entire SRAM address space is configured as one sector, the wait-states are configured by the SRW11 and SRW10 bits.
Table 3. Sector limits with different settings of SRL2..0
SRL2 SRL1 SRL0 Sector Limits
0 0 0 Lower sector = N/A
Upper sector = 0x1100 - 0xFFFF
0 0 1 Lower sector = 0x1100 - 0x1FFF
Upper sector = 0x2000 - 0xFFFF
0 1 0 Lower sector = 0x1100 - 0x3FFF
Upper sector = 0x4000 - 0xFFFF
0 1 1 Lower sector = 0x1100 - 0x5FFF
Upper sector = 0x6000 - 0xFFFF
1 0 0 Lower sector = 0x1100 - 0x7FFF
Upper sector = 0x8000 - 0xFFFF
1 0 1 Lower sector = 0x1100 - 0x9FFF
Upper sector = 0xA000 - 0xFFFF
1 1 0 Lower sector = 0x1100 - 0xBFFF
Upper sector = 0xC000 - 0xFFFF
1 1 1 Lower sector = 0x1100 - 0xDFFF
Upper sector = 0xE000 - 0xFFFF
• Bit 1 and Bit 6 MCUCR – SRW11, SRW10: Wait-state Select Bits for Upper Sector
The SRW11 and SRW10 bits control the number of wait-states for the upper sector of the external memory address space, see Table 4.
• Bit 3..2 – SRW01, SRW00: Wait-state Select Bits for Lower Sector
The SRW01 and SRW00 bits control the number of wait-states for the lower sector of the external memory address space, see Table 4.
Table 4. Wait States
SRWn1 SRWn0 Wait States
0 0 No wait-states
0 1 Wait one cycle during read/write strobe
1 0 Wait two cycles during read/write strobe
1 1 Wait two cycles during read/write and wait one cycle before driving out
Note: 1. n = 0 or 1 (lower/upper sector).
For further details of the timing and wait-states of the External Memory Interface, see Figures
13 through Figures 16 for how the setting of the SRW bits affects the timing.
(1)
new address
• Bit 0 – Res: Reserved Bit
This is a reserved bit and will always read as zero. When writing to this address location, write
this bit to zero for compatibility with future devices.
32
ATmega128(L)
2467P–AVR–08/07
Page 33

External Memory
Control Register B –
XMCRB
ATmega128(L)
Bit 76543210
XMBK – – – – XMM2 XMM1 XMM0 XMCRB
Read/Write R/W R R R R R/W R/W R/W
Initial Value00000000
• Bit 7– XMBK: External Memory Bus-keeper Enable
Writing XMBK to one enables the bus keeper on the AD7:0 lines. When the bus keeper is
enabled, it will ensure a defined logic level (zero or one) on AD7:0 when they would otherwise
be tri-stated. Writing XMBK to zero disables the bus keeper. XMBK is not qualified with SRE, so
even if the XMEM interface is disabled, the bus keepers are still activated as long as XMBK is
one.
• Bit 6..4 – Res: Reserved Bits
These are reserved bits and will always read as zero. When writing to this address location,
write these bits to zero for compatibility with future devices.
• Bit 2..0 – XMM2, XMM1, XMM0: External Memory High Mask
When the External Memory is enabled, all Port C pins are default used for the high address byte.
If the full 60KB address space is not required to access the External Memory, some, or all, Port
C pins can be released for normal Port Pin function as described in Table 5. As described in
“Using all 64KB Locations of External Memory” on page 35, it is possible to use the XMMn bits to
access all 64KB locations of the External Memory.
Using all Locations of External Memory Smaller than 64 KB
Table 5. Port C Pins Released as Normal Port Pins when the External Memory is Enabled
XMM2 XMM1 XMM0 # Bits for External Memory Address Released Port Pins
0 0 0 8 (Full 60 KB space) None
0017 PC7
0106 PC7 - PC6
0115 PC7 - PC5
1004 PC7 - PC4
1013 PC7 - PC3
1102 PC7 - PC2
1 1 1 No Address high bits Full Port C
Since the external memory is mapped after the internal memory as shown in Figure 11, the
external memory is not addressed when addressing the first 4,352 bytes of data space. It may
appear that the first 4,352 bytes of the external memory are inaccessible (external memory
addresses 0x0000 to 0x10FF). However, when connecting an external memory smaller than 64
KB, for example 32 KB, these locations are easily accessed simply by addressing from address
0x8000 to 0x90FF. Since the External Memory Address bit A15 is not connected to the external
memory, addresses 0x8000 to 0x90FF will appear as addresses 0x0000 to 0x10FF for the external memory. Addressing above address 0x90FF is not recommended, since this will address an
external memory location that is already accessed by another (lower) address. To the Application software, the external 32 KB memory will appear as one linear 32 KB address space from
0x1100 to 0x90FF. This is illustrated in Figure 17. Memory configuration B refers to the
ATmega103 compatibility mode, configuration A to the non-compatible mode.
2467P–AVR–08/07
When the device is set in ATmega103 compatibility mode, the internal address space is 4,096
bytes. This implies that the first 4,096 bytes of the external memory can be accessed at
33
Page 34

addresses 0x8000 to 0x8FFF. To the Application software, the external 32 KB memory will
appear as one linear 32 KB address space from 0x1000 to 0x8FFF.
Figure 17. Address Map with 32 KB External Memory
Memory Configuration B
AVR Memory Map
Internal Memory
External 32K SRAM
0x0000
0x0FFF
0x1000
0x0000
0x10FF
0x1100
Memory Configuration A
AVR Memory Map
Internal Memory
External 32K SRAM
0x0000
0x10FF
0x1100
0x0000
0x0FFF
0x1000
0x7FFF
0x8000
0x90FF
0x9100
0xFFFF
External
Memory
(Unused)
0x7FFF
0x7FFF
0x8000
0x8FFF
0x9000
0xFFFF
External
Memory
(Unused)
0x7FFF
34
ATmega128(L)
2467P–AVR–08/07
Page 35

ATmega128(L)
Using all 64KB Locations of External Memory
Since the External Memory is mapped after the Internal Memory as shown in Figure 11, only
60KB of External Memory is available by default (address space 0x0000 to 0x10FF is reserved
for internal memory). However, it is possible to take advantage of the entire External Memory by
masking the higher address bits to zero. This can be done by using the XMMn bits and control
by software the most significant bits of the address. By setting Port C to output 0x00, and releasing the most significant bits for normal Port Pin operation, the Memory Interface will address
0x0000 - 0x1FFF. See the following code examples.
Assembly Code Example
; OFFSET is defined to 0x2000 to ensure
; external memory access
; Configure Port C (address high byte) to
; output 0x00 when the pins are released
; for normal Port Pin operation
ldi r16, 0xFF
out DDRC, r16
ldi r16, 0x00
out PORTC, r16
; release PC7:5
ldi r16, (1<<XMM1)|(1<<XMM0)
sts XMCRB, r16
; write 0xAA to address 0x0001 of external
; memory
ldi r16, 0xaa
sts 0x0001+OFFSET, r16
; re-enable PC7:5 for external memory
ldi r16, (0<<XMM1)|(0<<XMM0)
sts XMCRB, r16
; store 0x55 to address (OFFSET + 1) of
; external memory
ldi r16, 0x55
sts 0x0001+OFFSET, r16
C Code Example
(1)
(1)
2467P–AVR–08/07
#define OFFSET 0x2000
void XRAM_example(void)
{
unsigned char *p = (unsigned char *) (OFFSET + 1);
DDRC = 0xFF;
PORTC = 0x00;
XMCRB = (1<<XMM1) | (1<<XMM0);
*p = 0xaa;
XMCRB = 0x00;
*p = 0x55;
}
Note: 1. See “About Code Examples” on page 9.
Care must be exercised using this option as most of the memory is masked away.
35
Page 36

System Clock and Clock Options
Clock Systems and their Distribution
Figure 18 presents the principal clock systems in the AVR and their distribution. All of the clocks
need not be active at a given time. In order to reduce power consumption, the clocks to modules
not being used can be halted by using different sleep modes, as described in “Power Manage-
ment and Sleep Modes” on page 45. The clock systems are detailed below.
Figure 18. Clock Distribution
Asynchronous
Timer/Counter
General I/O
modules
clk
clk
ASY
ADC CPU Core RAM
clk
ADC
I/O
AVR Clock
Control Unit
Source clock
Clock
Multiplexer
clk
CPU
clk
FLASH
Reset Logic
Watchdog Timer
Watchdog clock
Watchdog
Oscillator
Flash and
EEPROM
CPU Clock – clk
I/O Clock – clk
I/O
Flash Clock – clk
36
ATmega128(L)
CPU
FLASH
Timer/Counter
Oscillator
External RC
Oscillator
External clock
Crystal
Oscillator
Low-Frequency
Crystal Oscillator
Calibrated RC
Oscillator
The CPU clock is routed to parts of the system concerned with operation of the AVR core.
Examples of such modules are the General Purpose Register File, the Status Register and the
data memory holding the Stack Pointer. Halting the CPU clock inhibits the core from performing
general operations and calculations.
The I/O clock is used by the majority of the I/O modules, like Timer/Counters, SPI, and USART.
The I/O clock is also used by the External Interrupt module, but note that some external interrupts are detected by asynchronous logic, allowing such interrupts to be detected even if the I/O
clock is halted. Also note that address recognition in the TWI module is carried out asynchronously when clk
is halted, enabling TWI address reception in all sleep modes.
I/O
The Flash clock controls operation of the Flash interface. The Flash clock is usually active simultaneously with the CPU clock.
2467P–AVR–08/07
Page 37

ATmega128(L)
Asynchronous Timer
Clock – clk
ADC Clock – clk
ASY
ADC
XTAL Divide Control
Register – XDIV
The Asynchronous Timer clock allows the Asynchronous Timer/Counter to be clocked directly
from an external 32 kHz clock crystal. The dedicated clock domain allows using this
Timer/Counter as a real-time counter even when the device is in sleep mode.
The ADC is provided with a dedicated clock domain. This allows halting the CPU and I/O clocks
in order to reduce noise generated by digital circuitry. This gives more accurate ADC conversion
results.
The XTAL Divide Control Register is used to divide the Source clock frequency by a number in
the range 2 - 129. This feature can be used to decrease power consumption when the requirement for processing power is low.
Bit 76543210
XDIVEN XDIV6 XDIV5 XDIV4 XDIV3 XDIV2 XDIV1 XDIV0 XDIV
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value 0 0 0 0 0 0 0 0
• Bit 7 – XDIVEN: XTAL Divide Enable
When the XDIVEN bit is written one, the clock frequency of the CPU and all peripherals (clk
clk
ADC
, clk
CPU
, clk
) is divided by the factor defined by the setting of XDIV6 - XDIV0. This bit
FLASH
I/O
can be written run-time to vary the clock frequency as suitable to the application.
• Bits 6..0 – XDIV6..XDIV0: XTAL Divide Select Bits 6 - 0
These bits define the division factor that applies when the XDIVEN bit is set (one). If the value of
these bits is denoted d, the following formula defines the resulting CPU and peripherals clock
frequency f
CLK
:
Source clock
f
CLK
----------------------------------=
129 d–
,
The value of these bits can only be changed when XDIVEN is zero. When XDIVEN is written to
one, the value written simultaneously into XDIV6..XDIV0 is taken as the division factor. When
XDIVEN is written to zero, the value written simultaneously into XDIV6..XDIV0 is rejected. As
the divider divides the master clock input to the MCU, the speed of all peripherals is reduced
when a division factor is used.
When the system clock is divided, Timer/Counter0 can be used with Asynchronous clock only. The frequency of the asynchronous clock must be lower than 1/4th of the frequency of the scaled down Source
clock. Otherwise, interrupts may be lost, and accessing the Timer/Counter0 registers may fail.
Clock Sources The device has the following clock source options, selectable by Flash fuse bits as shown
below. The clock from the selected source is input to the AVR clock generator, and routed to the
appropriate modules.
Table 6. Device Clocking Options Select
Device Clocking Option CKSEL3..0
External Crystal/Ceramic Resonator 1111 - 1010
External Low-frequency Crystal 1001
(1)
2467P–AVR–08/07
37
Page 38

Table 6. Device Clocking Options Select
Device Clocking Option CKSEL3..0
External RC Oscillator 1000 - 0101
Calibrated Internal RC Oscillator 0100 - 0001
External Clock 0000
Note: 1. For all fuses “1” means unprogrammed while “0” means programmed.
(1)
The various choices for each clocking option is given in the following sections. When the CPU
wakes up from Power-down or Power-save, the selected clock source is used to time the startup, ensuring stable Oscillator operation before instruction execution starts. When the CPU starts
from reset, there is as an additional delay allowing the power to reach a stable level before commencing normal operation. The Watchdog Oscillator is used for timing this real-time part of the
start-up time. The number of WDT Oscillator cycles used for each time-out is shown in Table 7.
The frequency of the Watchdog Oscillator is voltage dependent as shown in the “ATmega128
Typical Characteristics” on page 332.
Table 7. Number of Watchdog Oscillator Cycles
Typical Time-out (VCC = 5.0V) Typical Time-Out (VCC = 3.0V) Number of Cycles
4.1 ms 4.3 ms 4K (4,096)
65 ms 69 ms 64K (65,536)
Default Clock Source
The device is shipped with CKSEL = “0001” and SUT = “10”. The default clock source setting is
therefore the Internal RC Oscillator with longest startup time. This default setting ensures that all
users can make their desired clock source setting using an In-System or Parallel Programmer.
38
ATmega128(L)
2467P–AVR–08/07
Page 39

ATmega128(L)
Crystal Oscillator XTAL1 and XTAL2 are input and output, respectively, of an inverting amplifier which can be con-
figured for use as an On-chip Oscillator, as shown in Figure 19. Either a quartz crystal or a
ceramic resonator may be used. The CKOPT fuse selects between two different Oscillator
Amplifier modes. When CKOPT is programmed, the Oscillator output will oscillate will a full railto-rail swing on the output. This mode is suitable when operating in a very noisy environment or
when the output from XTAL2 drives a second clock buffer. This mode has a wide frequency
range. When CKOPT is unprogrammed, the Oscillator has a smaller output swing. This reduces
power consumption considerably. This mode has a limited frequency range and it can not be
used to drive other clock buffers.
For resonators, the maximum frequency is 8 MHz with CKOPT unprogrammed and 16 MHz with
CKOPT programmed. C1 and C2 should always be equal for both crystals and resonators. The
optimal value of the capacitors depends on the crystal or resonator in use, the amount of stray
capacitance, and the electromagnetic noise of the environment. Some initial guidelines for
choosing capacitors for use with crystals are given in Table 8. For ceramic resonators, the
capacitor values given by the manufacturer should be used.
Figure 19. Crystal Oscillator Connections
C2
C1
XTAL2
XTAL1
GND
The Oscillator can operate in three different modes, each optimized for a specific frequency
range. The operating mode is selected by the fuses CKSEL3..1 as shown in Table 8.
Table 8. Crystal Oscillator Operating Modes
Frequency Range
CKOPT CKSEL3..1
1 101
1 110 0.9 - 3.0 12 pF - 22 pF
1 111 3.0 - 8.0 12 pF - 22 pF
0 101, 110, 111 1.0 - 12 pF - 22 pF
Note: 1. This option should not be used with crystals, only with ceramic resonators.
(1)
(MHz)
0.4 - 0.9 –
Recommended Range for Capacitors
C1 and C2 for Use with Crystals
2467P–AVR–08/07
The CKSEL0 fuse together with the SUT1..0 fuses select the start-up times as shown in Table 9.
39
Page 40

Table 9. Start-up Times for the Crystal Oscillator Clock Selection
Start-up Time from
Power-down and
CKSEL0 SUT1..0
0
0
0
0
1
1
1
1
Notes: 1. These options should only be used when not operating close to the maximum frequency of the
00 258 CK
01 258 CK
10 1K CK
11 1K CK
00 1K CK
01 16K CK – Crystal Oscillator, BOD
10 16K CK 4.1 ms Crystal Oscillator, fast
11 16K CK 65 ms Crystal Oscillator,
device, and only if frequency stability at start-up is not important for the application. These
options are not suitable for crystals.
2. These options are intended for use with ceramic resonators and will ensure frequency stability
at start-up. They can also be used with crystals when not operating close to the maximum frequency of the device, and if frequency stability at start-up is not important for the application.
Power-save
(1)
(1)
(2)
(2)
(2)
Additional Delay
from Reset (V
= 5.0V) Recommended Usage
4.1 ms Ceramic resonator, fast
65 ms Ceramic resonator,
– Ceramic resonator,
4.1 ms Ceramic resonator, fast
65 ms Ceramic resonator,
CC
rising power
slowly rising power
BOD enabled
rising power
slowly rising power
enabled
rising power
slowly rising power
Low-frequency Crystal Oscillator
External RC Oscillator
To use a 32.768 kHz watch crystal as the clock source for the device, the Low-frequency Crystal
Oscillator must be selected by setting the CKSEL fuses to “1001”. The crystal should be connected as shown in Figure 19. By programming the CKOPT fuse, the user can enable internal
capacitors on XTAL1 and XTAL2, thereby removing the need for external capacitors. The internal capacitors have a nominal value of 36 pF.
When this Oscillator is selected, start-up times are determined by the SUT fuses as shown in
Table 10.
Table 10. Start-up Times for the Low-frequency Crystal Oscillator Clock Selection
Start-up Time from
Power-down and
SUT1..0
00 1K CK
01 1K CK
10 32K CK 65 ms Stable frequency at start-up
11 Reserved
Note: 1. These options should only be used if frequency stability at start-up is not important for the
Power-save
(1)
(1)
application.
Additional Delay
from Reset (V
5.0V) Recommended Usage
4.1 ms Fast rising power or BOD enabled
65 ms Slowly rising power
CC
=
For timing insensitive applications, the External RC configuration shown in Figure 20 can be
used. The frequency is roughly estimated by the equation f = 1/(3RC). C should be at least 22
40
ATmega128(L)
2467P–AVR–08/07
Page 41
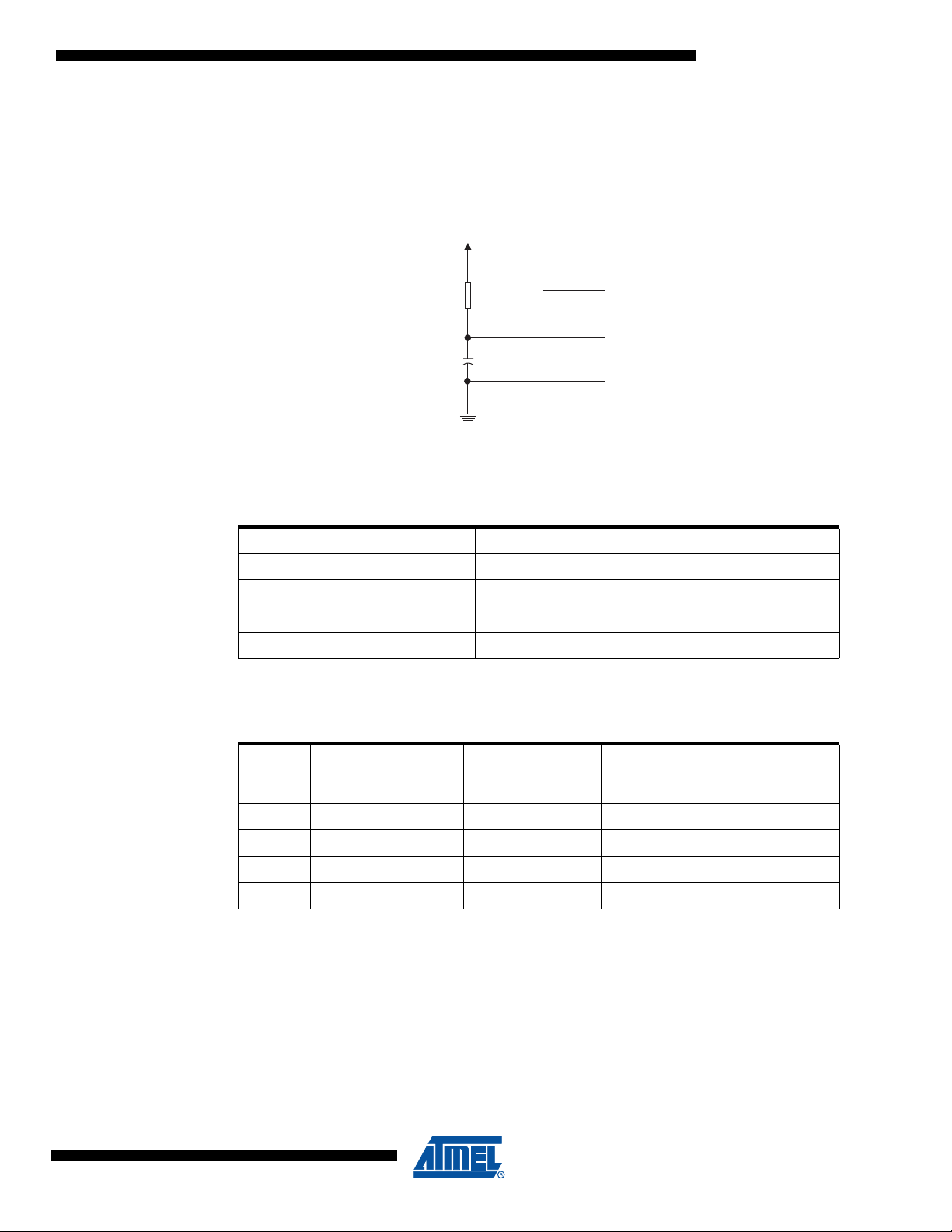
ATmega128(L)
pF. By programming the CKOPT fuse, the user can enable an internal 36 pF capacitor between
XTAL1 and GND, thereby removing the need for an external capacitor. For more information on
Oscillator operation and details on how to choose R and C, refer to the External RC Oscillator
application note.
Figure 20. External RC Configuration
CC
V
R
NC
XTAL2
XTAL1
C
GND
The Oscillator can operate in four different modes, each optimized for a specific frequency
range. The operating mode is selected by the fuses CKSEL3..0 as shown in Table 11.
Table 11. External RC Oscillator Operating Modes
CKSEL3..0 Frequency Range (MHz)
0101 0.1 - 0.9
0110 0.9 - 3.0
0111 3.0 - 8.0
1000 8.0 - 12.0
When this Oscillator is selected, start-up times are determined by the SUT fuses as shown in
Table 12.
Table 12. Start-Up Times for the External RC Oscillator Clock Selection
2467P–AVR–08/07
Start-up Time from
Power-down and
SUT1..0
00 18 CK – BOD enabled
01 18 CK 4.1 ms Fast rising power
10 18 CK 65 ms Slowly rising power
11 6 CK
Note: 1. This option should not be used when operating close to the maximum frequency of the device.
Power-save
(1)
Additional Delay
from Reset
(VCC = 5.0V) Recommended Usage
4.1 ms Fast rising power or BOD enabled
41
Page 42
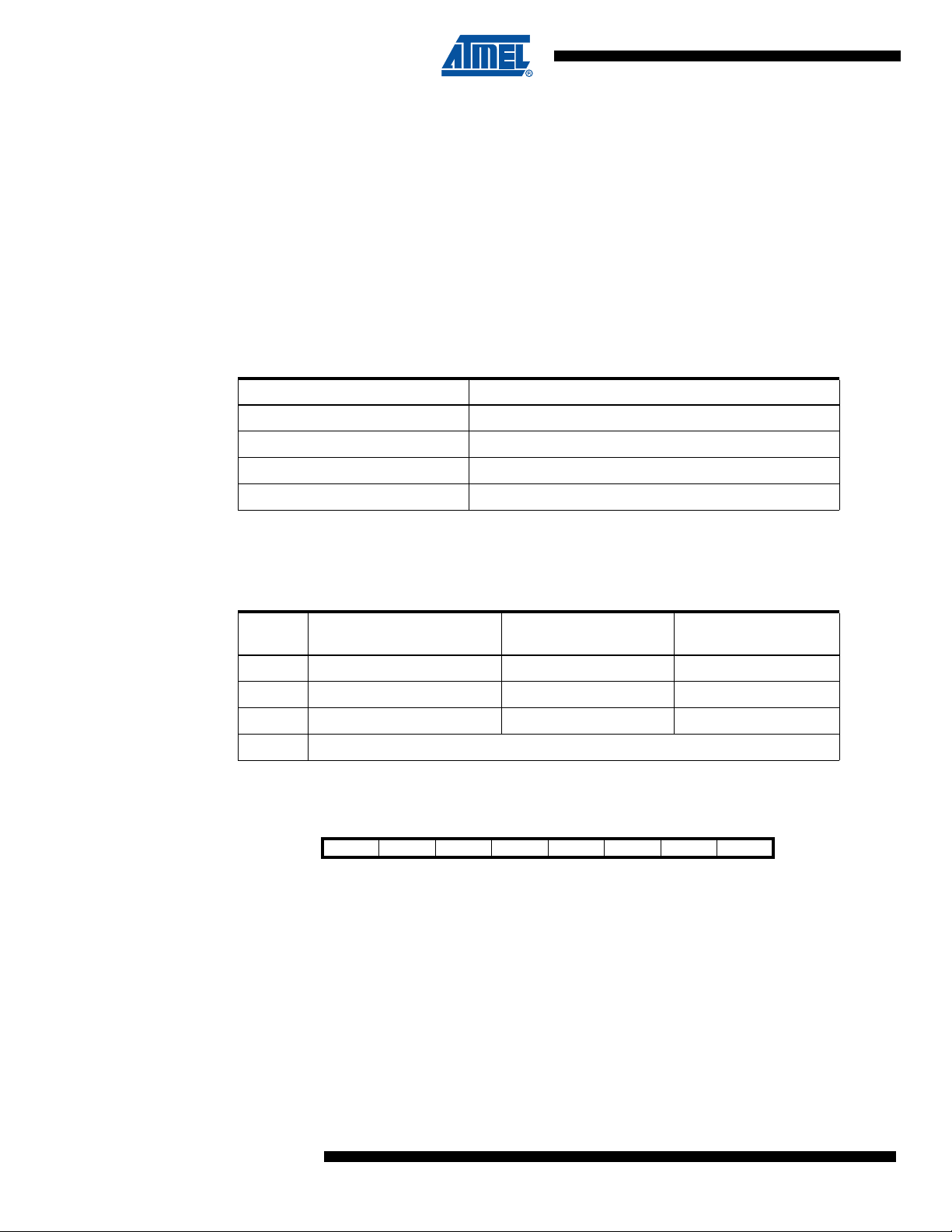
Calibrated Internal RC Oscillator
The Calibrated Internal RC Oscillator provides a fixed 1.0, 2.0, 4.0, or 8.0 MHz clock. All frequencies are nominal values at 5V and 25°C. This clock may be selected as the system clock by
programming the CKSEL fuses as shown in Table 13. If selected, it will operate with no external
components. The CKOPT fuse should always be unprogrammed when using this clock option.
During Reset, hardware loads the calibration byte for the 1MHz oscillator into the OSCCAL Register and thereby automatically calibrates the RC Oscillator. At 5V, 25°C and 1.0 MHz Oscillator
frequency selected, this calibration gives a frequency within ± 3% of the nominal frequency.
Using calibration methods as described in application notes available at www.atmel.com/avr it is
possible to achieve ± 1% accuracy at any given V
and Temperature. When this Oscillator is
CC
used as the chip clock, the Watchdog Oscillator will still be used for the Watchdog Timer and for
the Reset Time-out. For more information on the pre-programmed calibration value, see the section “Calibration Byte” on page 289.
Table 13. Internal Calibrated RC Oscillator Operating Modes
CKSEL3..0 Nominal Frequency (MHz)
(1)
0001
0010 2.0
0011 4.0
0100 8.0
Note: 1. The device is shipped with this option selected.
1.0
When this Oscillator is selected, start-up times are determined by the SUT fuses as shown in
Table 14. XTAL1 and XTAL2 should be left unconnected (NC).
Oscillator Calibration
Register – OSCCAL
Table 14. Start-up Times for the Internal Calibrated RC Oscillator Clock Selection
Start-up Time from Power-
SUT1..0
00 6 CK – BOD enabled
01 6 CK 4.1 ms Fast rising power
(1)
10
11 Reserved
Notes: 1. The device is shipped with this option selected.
Bit 76543210
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value Device Specific Calibration Value
Note: OSCCAL Register is not available in ATmega103 compatibility mode.
down and Power-save
6 CK 65 ms Slowly rising power
CAL7 CAL6 CAL5 CAL4 CAL3 CAL2 CAL1 CAL0 OSCCAL
Additional Delay from
Reset (VCC = 5.0V) Recommended Usage
• Bits 7..0 – CAL7..0: Oscillator Calibration Value
Writing the calibration byte to this address will trim the Internal Oscillator to remove process variations from the Oscillator frequency. During Reset, the 1 MHz calibration value which is located
in the signature row high byte (address 0x00) is automatically loaded into the OSCCAL Register.
If the internal RC is used at other frequencies, the calibration values must be loaded manually.
This can be done by first reading the signature row by a programmer, and then store the calibration values in the Flash or EEPROM. Then the value can be read by software and loaded into
the OSCCAL Register. When OSCCAL is zero, the lowest available frequency is chosen. Writing
non-zero values to this register will increase the frequency of the Internal Oscillator. Writing $FF
42
ATmega128(L)
2467P–AVR–08/07
Page 43
ATmega128(L)
to the register gives the highest available frequency. The calibrated Oscillator is used to time
EEPROM and Flash access. If EEPROM or Flash is written, do not calibrate to more than 10%
above the nominal frequency. Otherwise, the EEPROM or Flash write may fail. Note that the
Oscillator is intended for calibration to 1.0, 2.0, 4.0, or 8.0 MHz. Tuning to other values is not
guaranteed, as indicated in Table 15.
Table 15. Internal RC Oscillator Frequency Range.
Min Frequency in Percentage of
OSCCAL Value
$00 50 100
$7F 75 150
$FF 100 200
Nominal Frequency (%)
Max Frequency in Percentage of
Nominal Frequency (%)
External Clock To drive the device from an external clock source, XTAL1 should be driven as shown in Figure
21. To run the device on an external clock, the CKSEL fuses must be programmed to “0000”. By
programming the CKOPT fuse, the user can enable an internal 36 pF capacitor between XTAL1
and GND.
Figure 21. External Clock Drive Configuration
EXTERNAL
CLOCK
SIGNAL
2467P–AVR–08/07
When this clock source is selected, start-up times are determined by the SUT fuses as shown in
Table 16.
Table 16. Start-up Times for the External Clock Selection
Start-up Time from Power-
SUT1..0
00 6 CK – BOD enabled
01 6 CK 4.1 ms Fast rising power
10 6 CK 65 ms Slowly rising power
11 Reserved
down and Power-save
Additional Delay from
Reset (VCC = 5.0V) Recommended Usage
When applying an external clock, it is required to avoid sudden changes in the applied clock frequency to ensure stable operation of the MCU. A variation in frequency of more than 2% from
one clock cycle to the next can lead to unpredictable behavior. It is required to ensure that the
MCU is kept in Reset during such changes in the clock frequency.
43
Page 44

Timer/Counter Oscillator
For AVR microcontrollers with Timer/Counter Oscillator pins (TOSC1 and TOSC2), the crystal is
connected directly between the pins. No external capacitors are needed. The Oscillator is optimized for use with a 32.768 kHz watch crystal. Applying an external clock source to TOSC1 is
not recommended.
Note: The Timer/Counter Oscillator uses the same type of crystal oscillator as Low-Frequency Oscillator
and the internal capacitors have the same nominal value of 36 pF.
44
ATmega128(L)
2467P–AVR–08/07
Page 45

ATmega128(L)
Power Management and Sleep Modes
MCU Control Register
– MCUCR
Sleep modes enable the application to shut down unused modules in the MCU, thereby saving
power. The AVR provides various sleep modes allowing the user to tailor the power consumption to the application’s requirements.
To enter any of the six sleep modes, the SE bit in MCUCR must be written to logic one and a
SLEEP instruction must be executed. The SM2, SM1, and SM0 bits in the MCUCR Register
select which sleep mode (Idle, ADC Noise Reduction, Power-down, Power-save, Standby, or
Extended Standby) will be activated by the SLEEP instruction. See Table 17 for a summary. If
an enabled interrupt occurs while the MCU is in a sleep mode, the MCU wakes up. The MCU is
then halted for four cycles in addition to the start-up time, it executes the interrupt routine, and
resumes execution from the instruction following SLEEP. The contents of the register file and
SRAM are unaltered when the device wakes up from sleep. If a reset occurs during sleep mode,
the MCU wakes up and executes from the Reset Vector.
Figure 18 on page 36 presents the different clock systems in the ATmega128, and their distribu-
tion. The figure is helpful in selecting an appropriate sleep mode.
The MCU Control Register contains control bits for power management.
Bit 76543210
SRE SRW10 SE SM1 SM0 SM2 IVSEL IVCE MCUCR
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value00000000
• Bit 5 – SE: Sleep Enable
The SE bit must be written to logic one to make the MCU enter the Sleep mode when the
SLEEP instruction is executed. To avoid the MCU entering the Sleep mode unless it is the programmers purpose, it is recommended to write the Sleep Enable (SE) bit to one just before the
execution of the SLEEP instruction and to clear it immediately after waking up.
• Bits 4..2 – SM2..0: Sleep Mode Select Bits 2, 1, and 0
These bits select between the six available sleep modes as shown in Table 17.
Table 17. Sleep Mode Select
SM2 SM1 SM0 Sleep Mode
000Idle
0 0 1 ADC Noise Reduction
010Power-down
011Power-save
100Reserved
101Reserved
110Standby
1 1 1 Extended Standby
Note: 1. Standby mode and Extended Standby mode are only available with external crystals or
resonators.
(1)
(1)
2467P–AVR–08/07
45
Page 46

Idle Mode When the SM2..0 bits are written to 000, the SLEEP instruction makes the MCU enter Idle
mode, stopping the CPU but allowing SPI, USART, Analog Comparator, ADC, Two-wire Serial
Interface, Timer/Counters, Watchdog, and the interrupt system to continue operating. This sleep
mode basically halts clk
Idle mode enables the MCU to wake up from external triggered interrupts as well as internal
ones like the Timer Overflow and USART Transmit Complete interrupts. If wake-up from the
Analog Comparator interrupt is not required, the Analog Comparator can be powered down by
setting the ACD bit in the Analog Comparator Control and Status Register – ACSR. This will
reduce power consumption in Idle mode. If the ADC is enabled, a conversion starts automatically when this mode is entered.
CPU
and clk
, while allowing the other clocks to run.
FLASH
ADC Noise Reduction Mode
When the SM2..0 bits are written to 001, the SLEEP instruction makes the MCU enter ADC
Noise Reduction mode, stopping the CPU but allowing the ADC, the External Interrupts, the
Two-wire Serial Interface address watch, Timer/Counter0 and the Watchdog to continue
operating (if enabled). This sleep mode basically halts clk
I/O
, clk
CPU
, and clk
, while allowing
FLASH
the other clocks to run.
This improves the noise environment for the ADC, enabling higher resolution measurements. If
the ADC is enabled, a conversion starts automatically when this mode is entered. Apart form the
ADC Conversion Complete interrupt, only an External Reset, a Watchdog Reset, a Brown-out
Reset, a Two-wire Serial Interface address match interrupt, a Timer/Counter0 interrupt, an
SPM/EEPROM ready interrupt, an External Level Interrupt on INT7:4, or an External Interrupt on
INT3:0 can wake up the MCU from ADC Noise Reduction mode.
Power-down Mode When the SM2..0 bits are written to 010, the SLEEP instruction makes the MCU enter Power-
down mode. In this mode, the External Oscillator is stopped, while the External Interrupts, the
Two-wire Serial Interface address watch, and the Watchdog continue operating (if enabled).
Only an External Reset, a Watchdog Reset, a Brown-out Reset, a Two-wire Serial Interface
address match interrupt, an External Level Interrupt on INT7:4, or an External Interrupt on
INT3:0 can wake up the MCU. This sleep mode basically halts all generated clocks, allowing
operation of asynchronous modules only.
Note that if a level triggered interrupt is used for wake-up from Power-down mode, the changed
level must be held for some time to wake up the MCU. Refer to “External Interrupts” on page 90
for details.
When waking up from Power-down mode, there is a delay from the wake-up condition occurs
until the wake-up becomes effective. This allows the clock to restart and become stable after
having been stopped. The wake-up period is defined by the same CKSEL fuses that define the
Reset Time-out period, as described in “Clock Sources” on page 37.
Power-save Mode When the SM2..0 bits are written to 011, the SLEEP instruction makes the MCU enter Power-
save mode. This mode is identical to Power-down, with one exception:
If Timer/Counter0 is clocked asynchronously, i.e., the AS0 bit in ASSR is set, Timer/Counter0
will run during sleep. The device can wake up from either Timer Overflow or Output Compare
event from Timer/Counter0 if the corresponding Timer/Counter0 interrupt enable bits are set in
TIMSK, and the global interrupt enable bit in SREG is set.
If the Asynchronous Timer is NOT clocked asynchronously, Power-down mode is recommended
instead of Power-save mode because the contents of the registers in the asynchronous timer
should be considered undefined after wake-up in Power-save mode if AS0 is 0.
46
This sleep mode basically halts all clocks except clk
modules, including Timer/Counter0 if clocked asynchronously.
ATmega128(L)
, allowing operation only of asynchronous
ASY
2467P–AVR–08/07
Page 47

ATmega128(L)
Standby Mode When the SM2..0 bits are 110 and an External Crystal/Resonator clock option is selected, the
SLEEP instruction makes the MCU enter Standby mode. This mode is identical to Power-down
with the exception that the Oscillator is kept running. From Standby mode, the device wakes up
in 6 clock cycles.
Extended Standby Mode
When the SM2..0 bits are 111 and an external crystal/resonator clock option is selected, the
SLEEP instruction makes the MCU enter Extended Standby mode. This mode is identical to
Power-save mode with the exception that the Oscillator is kept running. From Extended Standby
mode, the device wakes up in six clock cycles.
Table 18. Active Clock Domains and Wake Up Sources in the Different Sleep Modes
Active Clock Domains Oscillators Wake Up Sources
Main Clock
Sleep
Mode clk
CPU
clk
FLASH
clkIOclk
ADC
clk
ASY
Source
Enabled
Idle X X X X X
ADC
Noise
XX X X
Reduction
Powerdown
Powersave
Standby
Extended
Standby
(1)
(1)
(2)
X
XX
(2)
X
XX
Notes: 1. External Crystal or resonator selected as clock source
2. If AS
0 bit in ASSR is set
3. Only INT3:0 or level interrupt INT7:4
Timer
Osc
Enabled INT7:0
(2)
(2)
(2)
X
(2)
XX X XXX
(3)
X
(3)
X
(3)
X
(3)
(3)
X
TWI
Address
Match Timer 0
XX XX
X
XX
X
XX
SPM/
EEPROM
Ready ADC
(2)
(2)
Other
I/O
2467P–AVR–08/07
47
Page 48

Minimizing Power Consumption
There are several issues to consider when trying to minimize the power consumption in an AVR
controlled system. In general, sleep modes should be used as much as possible, and the sleep
mode should be selected so that as few as possible of the device’s functions are operating. All
functions not needed should be disabled. In particular, the following modules may need special
consideration when trying to achieve the lowest possible power consumption.
Analog to Digital Converter
Analog Comparator When entering Idle mode, the Analog Comparator should be disabled if not used. When entering
Brown-out Detector If the Brown-out Detector is not needed in the application, this module should be turned off. If the
Internal Voltage Reference
If enabled, the ADC will be enabled in all sleep modes. To save power, the ADC should be disabled before entering any sleep mode. When the ADC is turned off and on again, the next
conversion will be an extended conversion. Refer to “Analog to Digital Converter” on page 230
for details on ADC operation.
ADC Noise Reduction mode, the Analog Comparator should be disabled. In the other sleep
modes, the Analog Comparator is automatically disabled. However, if the Analog Comparator is
set up to use the Internal Voltage Reference as input, the Analog Comparator should be disabled in all sleep modes. Otherwise, the Internal Voltage Reference will be enabled,
independent of sleep mode. Refer to “Analog Comparator” on page 227 for details on how to
configure the Analog Comparator.
Brown-out Detector is enabled by the BODEN fuse, it will be enabled in all sleep modes, and
hence, always consume power. In the deeper sleep modes, this will contribute significantly to
the total current consumption. Refer to “Brown-out Detector” on page 48 for details on how to
configure the Brown-out Detector.
The Internal Voltage Reference will be enabled when needed by the Brown-out Detector, the
Analog Comparator or the ADC. If these modules are disabled as described in the sections
above, the internal voltage reference will be disabled and it will not be consuming power. When
turned on again, the user must allow the reference to start up before the output is used. If the
reference is kept on in sleep mode, the output can be used immediately. Refer to “Internal Volt-
age Reference” on page 54 for details on the start-up time.
Watchdog Timer If the Watchdog Timer is not needed in the application, this module should be turned off. If the
Watchdog Timer is enabled, it will be enabled in all sleep modes, and hence, always consume
power. In the deeper sleep modes, this will contribute significantly to the total current consumption. Refer to “Watchdog Timer” on page 55 for details on how to configure the Watchdog Timer.
Port Pins When entering a sleep mode, all port pins should be configured to use minimum power. The
most important thing is then to ensure that no pins drive resistive loads. In sleep modes where
48
the both the I/O clock (clk
device will be disabled. This ensures that no power is consumed by the input logic when not
needed. In some cases, the input logic is needed for detecting wake-up conditions, and it will
then be enabled. Refer to the section “Digital Input Enable and Sleep Modes” on page 70 for
details on which pins are enabled. If the input buffer is enabled and the input signal is left floating
or have an analog signal level close to V
ATmega128(L)
) and the ADC clock (clk
I/O
/2, the input buffer will use excessive power.
CC
) are stopped, the input buffers of the
ADC
2467P–AVR–08/07
Page 49

ATmega128(L)
JTAG Interface and On-chip Debug System
If the On-chip debug system is enabled by the OCDEN Fuse and the chip enter Power down or
Power save sleep mode, the main clock source remains enabled. In these sleep modes, this will
contribute significantly to the total current consumption. There are three alternative ways to
avoid this:
• Disable OCDEN Fuse.
• Disable JTAGEN Fuse.
• Write one to the JTD bit in MCUCSR.
The TDO pin is left floating when the JTAG interface is enabled while the JTAG TAP controller is
not shifting data. If the hardware connected to the TDO pin does not pull up the logic level,
power consumption will increase. Note that the TDI pin for the next device in the scan chain contains a pull-up that avoids this problem. Writing the JTD bit in the MCUCSR register to one or
leaving the JTAG fuse unprogrammed disables the JTAG interface.
2467P–AVR–08/07
49
Page 50

System Control and Reset
Resetting the AVR During Reset, all I/O registers are set to their initial values, and the program starts execution
from the Reset Vector. The instruction placed at the Reset Vector must be a JMP – absolute
jump – instruction to the reset handling routine. If the program never enables an interrupt
source, the interrupt vectors are not used, and regular program code can be placed at these
locations. This is also the case if the Reset Vector is in the Application section while the interrupt
vectors are in the Boot section or vice versa. The circuit diagram in Figure 22 shows the reset
logic. Table 19 defines the electrical parameters of the reset circuitry.
The I/O ports of the AVR are immediately reset to their initial state when a reset source goes
active. This does not require any clock source to be running.
After all reset sources have gone inactive, a delay counter is invoked, stretching the internal
reset. This allows the power to reach a stable level before normal operation starts. The time-out
period of the delay counter is defined by the user through the CKSEL fuses. The different selections for the delay period are presented in “Clock Sources” on page 37.
Reset Sources The ATmega128 has five sources of reset:
• Power-on Reset. The MCU is reset when the supply voltage is below the Power-on Reset
threshold (V
• External Reset. The MCU is reset when a low level is present on the RESET
than the minimum pulse length.
• Watchdog Reset. The MCU is reset when the Watchdog Timer period expires and the
Watchdog is enabled.
• Brown-out Reset. The MCU is reset when the supply voltage V
Reset threshold (V
• JTAG AVR Reset. The MCU is reset as long as there is a logic one in the Reset Register,
one of the scan chains of the JTAG system. Refer to the section “IEEE 1149.1 (JTAG)
Boundary-scan” on page 252 for details.
POT
).
) and the Brown-out Detector is enabled.
BOT
pin for longer
is below the Brown-out
CC
50
ATmega128(L)
2467P–AVR–08/07
Page 51

Figure 22. Reset Logic
ATmega128(L)
DATA BUS
PEN
BODEN
BODLEVEL
RESET
DQ
L
Pull-up Resistor
Power-On Reset
Circuit
Pull-up Resistor
SPIKE
FILTER
JTAG Reset
Register
Q
Reset Circuit
Watchdog
Timer
Watchdog
Oscillator
Clock
Generator
CKSEL[3:0]
SUT[1:0]
Brown-Out
Reset Circuit
MCU Control and Status
Register (MCUCSR)
JTRF
BORF
PORF
WDRF
EXTRF
CK
Delay Counters
COUNTER RESET
TIMEOUT
Table 19. Reset Characteristics
Symbol Parameter Condition Min Typ Max Units
Power-on Reset
Threshold Voltage
(rising)
V
V
V
V
POT
RST
t
RST
BOT
t
BOD
HYST
Power-on Reset
Threshold Voltage
(falling)
(1)
RESET Pin Threshold
Voltage
Pulse width on RESET
Pin
Brown-out Reset
Threshold Voltage
(2)
Minimum low voltage
period for Brown-out
Detection
Brown-out Detector
hysteresis
0.2 V
1.5 µs
BODLEVEL = 1 2.4 2.6 2.9
BODLEVEL = 0 3.7 4.0 4.5
BODLEVEL = 1 2 µs
BODLEVEL = 0 2 µs
Notes: 1. The Power-on Reset will not work unless the supply voltage has been below V
2. V
may be below nominal minimum operating voltage for some devices. For devices where
BOT
this is the case, the device is tested down to V
CC
= V
1.4 2.3 V
1.3 2.3 V
CC
0.85 V
CC
100 mV
POT
during the production test. This guar-
BOT
V
V
(falling)
2467P–AVR–08/07
51
Page 52

antees that a Brown-out Reset will occur before VCC drops to a voltage where correct
operation of the microcontroller is no longer guaranteed. The test is performed using
BODLEVEL=1 for ATmega128L and BODLEVEL=0 for ATmega128. BODLEVEL=1 is not
applicable for ATmega128.
Power-on Reset A Power-on Reset (POR) pulse is generated by an On-chip detection circuit. The detection level
is defined in Table 19. The POR is activated whenever V
is below the detection level. The
CC
POR circuit can be used to trigger the Start-up Reset, as well as to detect a failure in supply
voltage.
A Power-on Reset (POR) circuit ensures that the device is reset from Power-on. Reaching the
Power-on Reset threshold voltage invokes the delay counter, which determines how long the
device is kept in RESET after V
when V
decreases below the detection level.
CC
rise. The RESET signal is activated again, without any delay,
CC
Figure 23. MCU Start-up, RESET
V
V
CC
RESET
TIME-OUT
INTERNAL
RESET
POT
V
RST
Figure 24. MCU Start-up, RESET
V
V
CC
RESET
TIME-OUT
POT
Tied to VCC.
t
TOUT
Extended Externally
V
RST
t
TOUT
INTERNAL
RESET
External Reset An External Reset is generated by a low level on the RESET
minimum pulse width (see Table 19) will generate a reset, even if the clock is not running.
Shorter pulses are not guaranteed to generate a reset. When the applied signal reaches the
52
Reset Threshold Voltage – V
Time-out period t
ATmega128(L)
has expired.
TOUT
on its positive edge, the delay counter starts the MCU after the
RST
pin. Reset pulses longer than the
2467P–AVR–08/07
Page 53

Figure 25. External Reset During Operation
CC
ATmega128(L)
Brown-out Detection ATmega128 has an On-chip Brown-out Detection (BOD) circuit for monitoring the V
ing operation by comparing it to a fixed trigger level. The trigger level for the BOD can be
selected by the fuse BODLEVEL to be 2.7V (BODLEVEL unprogrammed), or 4.0V (BODLEVEL
programmed). The trigger level has a hysteresis to ensure spike free Brown-out Detection. The
hysteresis on the detection level should be interpreted as V
V
BOT
- V
HYST
/2.
BOT+
= V
BOT
+ V
HYST
/2 and V
The BOD circuit can be enabled/disabled by the fuse BODEN. When the BOD is enabled
(BODEN programmed), and V
26), the Brown-out Reset is immediately activated. When V
(V
in Figure 26), the delay counter starts the MCU after the time-out period t
BOT+
decreases to a value below the trigger level (V
CC
increases above the trigger level
CC
expired.
The BOD circuit will only detect a drop in V
longer than t
given in Table 19.
BOD
if the voltage stays below the trigger level for
CC
Figure 26. Brown-out Reset During Operation
V
CC
RESET
TIME-OUT
V
BOT-
V
BOT+
t
TOUT
level dur-
CC
in Figure
BOT-
TOUT
BOT-
has
=
2467P–AVR–08/07
INTERNAL
RESET
53
Page 54
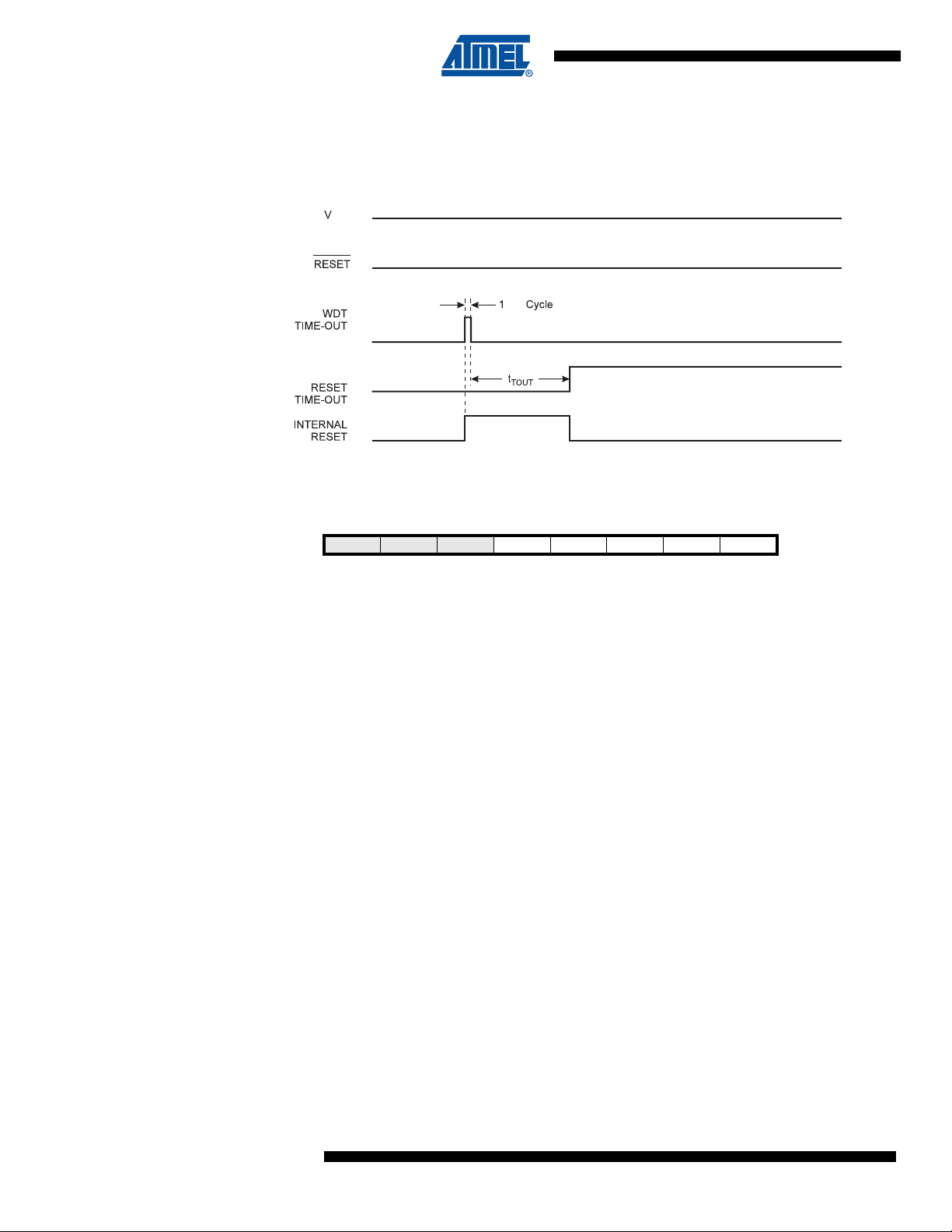
Watchdog Reset When the Watchdog times out, it will generate a short reset pulse of 1 CK cycle duration. On the
falling edge of this pulse, the delay timer starts counting the Time-out period t
. Refer to page
TOUT
55 for details on operation of the Watchdog Timer.
Figure 27. Watchdog Reset During Operation
CC
CK
MCU Control and
Status Register –
MCUCSR
The MCU Control and Status Register provides information on which reset source caused an
MCU reset.
Bit 76543210
JTD – – JTRF WDRF BORF EXTRF PORF MCUCSR
Read/Write R/W R R R/W R/W R/W R/W R/W
Initial Value 0 0 0 See Bit Description
Note that only EXTRF and PORF are available in ATmega103 compatibility mode.
• Bit 4 – JTRF: JTAG Reset Flag
This bit is set if a reset is being caused by a logic one in the JTAG Reset Register selected by
the JTAG instruction AVR_RESET. This bit is reset by a Power-on Reset, or by writing a logic
zero to the flag.
• Bit 3 – WDRF: Watchdog Reset Flag
This bit is set if a Watchdog Reset occurs. The bit is reset by a Power-on Reset, or by writing a
logic zero to the flag.
• Bit 2 – BORF: Brown-out Reset Flag
This bit is set if a Brown-out Reset occurs. The bit is reset by a Power-on Reset, or by writing a
logic zero to the flag.
• Bit 1 – EXTRF: External Reset Flag
This bit is set if an External Reset occurs. The bit is reset by a Power-on Reset, or by writing a
logic zero to the flag.
• Bit 0 – PORF: Power-On Reset Flag
Internal Voltage Reference
54
ATmega128(L)
This bit is set if a Power-on Reset occurs. The bit is reset only by writing a logic zero to the flag.
To make use of the reset flags to identify a reset condition, the user should read and then reset
the MCUCSR as early as possible in the program. If the register is cleared before another reset
occurs, the source of the reset can be found by examining the reset flags.
ATmega128 features an internal bandgap reference. This reference is used for Brown-out
Detection, and it can be used as an input to the Analog Comparator or the ADC. The 2.56V reference to the ADC is generated from the internal bandgap reference.
2467P–AVR–08/07
Page 55

ATmega128(L)
Voltage Reference Enable Signals and Start-up Time
The voltage reference has a start-up time that may influence the way it should be used. The
start-up time is given in Table 20. To save power, the reference is not always turned on. The reference is on during the following situations:
1. When the BOD is enabled (by programming the BODEN fuse).
2. When the bandgap reference is connected to the Analog Comparator (by setting the
ACBG bit in ACSR).
3. When the ADC is enabled.
Thus, when the BOD is not enabled, after setting the ACBG bit or enabling the ADC, the user
must always allow the reference to start up before the output from the Analog Comparator or
ADC is used. To reduce power consumption in Power-down mode, the user can avoid the three
conditions above to ensure that the reference is turned off before entering Power-down mode.
Table 20. Internal Voltage Reference Characteristics
Symbol Parameter Min Typ Max Units
V
BG
t
BG
I
BG
Bandgap reference voltage 1.15 1.23 1.40 V
Bandgap reference start-up time 40 70 µs
Bandgap reference current consumption 10 µA
Watchdog Timer The Watchdog Timer is clocked from a separate On-chip Oscillator which runs at 1 Mhz. This is
the typical value at V
controlling the Watchdog Timer prescaler, the Watchdog Reset interval can be adjusted as
shown in Table 22 on page 57. The WDR – Watchdog Reset – instruction resets the Watchdog
Timer. The Watchdog Timer is also reset when it is disabled and when a Chip Reset occurs.
Eight different clock cycle periods can be selected to determine the reset period. If the reset
period expires without another Watchdog Reset, the ATmega128 resets and executes from the
Reset Vector. For timing details on the Watchdog Reset, refer to page 54.
= 5V. See characterization data for typical values at other VCC levels. By
CC
To prevent unintentional disabling of the Watchdog or unintentional change of time-out period, 3
different safety levels are selected by the Fuses M103C and WDTON as shown in Table 21.
Safety level 0 corresponds to the setting in ATmega103. There is no restriction on enabling the
WDT in any of the safety levels. Refer to “Timed Sequences for Changing the Configuration of
the Watchdog Timer” on page 58 for details.
2467P–AVR–08/07
55
Page 56

Table 21. WDT Configuration as a Function of the Fuse Settings of M103C and WDTON.
How to
Safety
M103C WDTON
Unprogrammed Unprogrammed 1 Disabled Timed
Unprogrammed Programmed 2 Enabled Always enabled Timed
Level
WDT Initial
State
How to Disable
the WDT
sequence
Change
Time-out
Timed
sequence
sequence
Watchdog Timer
Control Register –
WDTCR
Programmed Unprogrammed 0 Disabled Timed
sequence
Programmed Programmed 2 Enabled Always enabled Timed
No
restriction
sequence
Figure 28. Watchdog Timer
WATCHDOG
OSCILLATOR
Bit 76543210
– – – WDCE WDE WDP2 WDP1 WDP0 WDTCR
Read/Write R R R R/W R/W R/W R/W R/W
Initial Value00000000
56
• Bits 7..5 – Res: Reserved Bits
These bits are reserved bits in the ATmega128 and will always read as zero.
• Bit 4 – WDCE: Watchdog Change Enable
This bit must be set when the WDE bit is written to logic zero. Otherwise, the Watchdog will not
be disabled. Once written to one, hardware will clear this bit after four clock cycles. Refer to the
description of the WDE bit for a Watchdog disable procedure. In Safety Level 1 and 2, this bit
must also be set when changing the prescaler bits. See “Timed Sequences for Changing the
Configuration of the Watchdog Timer” on page 58.
• Bit 3 – WDE: Watchdog Enable
When the WDE is written to logic one, the Watchdog Timer is enabled, and if the WDE is written
to logic zero, the Watchdog Timer function is disabled. WDE can only be cleared if the WDCE bit
has logic level one. To disable an enabled Watchdog Timer, the following procedure must be
followed:
ATmega128(L)
2467P–AVR–08/07
Page 57

ATmega128(L)
1. In the same operation, write a logic one to WDCE and WDE. A logic one must be written
to WDE even though it is set to one before the disable operation starts.
2. Within the next four clock cycles, write a logic 0 to WDE. This disables the Watchdog.
In safety level 2, it is not possible to disable the Watchdog Timer, even with the algorithm
described above. See “Timed Sequences for Changing the Configuration of the Watchdog
Timer” on page 58.
• Bits 2..0 – WDP2, WDP1, WDP0: Watchdog Timer Prescaler 2, 1, and 0
The WDP2, WDP1, and WDP0 bits determine the Watchdog Timer prescaling when the Watchdog Timer is enabled. The different prescaling values and their corresponding Timeout Periods
are shown in Table 22.
Table 22. Watchdog Timer Prescale Select
Number of WDT
WDP2 WDP1 WDP0
0 0 0 16K (16,384) 14.8 ms 14.0 ms
0 0 1 32K (32,768) 29.6 ms 28.1 ms
0 1 0 64K (65,536) 59.1 ms 56.2 ms
0 1 1 128K (131,072) 0.12 s 0.11 s
1 0 0 256K (262,144) 0.24 s 0.22 s
1 0 1 512K (524,288) 0.47 s 0.45 s
1 1 0 1,024K (1,048,576) 0.95 s 0.9 s
1 1 1 2,048K (2,097,152) 1.9 s 1.8 s
Oscillator Cycles
Typical Time-out
at VCC = 3.0V
Typical Time-out
at VCC = 5.0V
2467P–AVR–08/07
57
Page 58
The following code example shows one assembly and one C function for turning off the WDT.
The example assumes that interrupts are controlled (e.g. by disabling interrupts globally) so that
no interrupts will occur during execution of these functions.
Assembly Code Example
WDT_off:
; Reset WDT
wdr
in r16, WDTCR
; Write logical one to WDCE and WDE
ori r16, (1<<WDCE)|(1<<WDE)
out WDTCR, r16
; Turn off WDT
ldi r16, (0<<WDE)
out WDTCR, r16
ret
C Code Example
void WDT_off(void)
{
/* Reset WDT*/
__watchdog_reset();
/* Write logical one to WDCE and WDE */
WDTCR |= (1<<WDCE) | (1<<WDE);
/* Turn off WDT */
WDTCR = 0x00;
}
Timed Sequences for Changing the Configuration of the Watchdog Timer
The sequence for changing configuration differs slightly between the three safety levels. Separate procedures are described for each level.
Safety Level 0 This mode is compatible with the Watchdog operation found in ATmega103. The Watchdog
Timer is initially disabled, but can be enabled by writing the WDE bit to 1 without any restriction.
The time-out period can be changed at any time without restriction. To disable an enabled
Watchdog Timer, the procedure described on page 56 (WDE bit description) must be followed.
Safety Level 1 In this mode, the Watchdog Timer is initially disabled, but can be enabled by writing the WDE bit
to 1 without any restriction. A timed sequence is needed when changing the Watchdog Time-out
period or disabling an enabled Watchdog Timer. To disable an enabled Watchdog Timer, and/or
changing the Watchdog Time-out, the following procedure must be followed:
1. In the same operation, write a logic one to WDCE and WDE. A logic one must be written
to WDE regardless of the previous value of the WDE bit.
2. Within the next four clock cycles, in the same operation, write the WDE and WDP bits as
desired, but with the WDCE bit cleared.
Safety Level 2 In this mode, the Watchdog Timer is always enabled, and the WDE bit will always read as one. A
timed sequence is needed when changing the Watchdog Time-out period. To change the
Watchdog Time-out, the following procedure must be followed:
58
ATmega128(L)
2467P–AVR–08/07
Page 59
ATmega128(L)
1. In the same operation, write a logical one to WDCE and WDE. Even though the WDE
always is set, the WDE must be written to one to start the timed sequence.
2. Within the next four clock cycles, in the same operation, write the WDP bits as desired,
but with the WDCE bit cleared. The value written to the WDE bit is irrelevant.
2467P–AVR–08/07
59
Page 60

Interrupts This section describes the specifics of the interrupt handling as performed in ATmega128. For a
general explanation of the AVR interrupt handling, refer to “Reset and Interrupt Handling” on
page 15.
Interrupt Vectors in ATmega128
Table 23. Reset and Interrupt Vectors
Vector
No.
1 $0000
2 $0002 INT0 External Interrupt Request 0
3 $0004 INT1 External Interrupt Request 1
4 $0006 INT2 External Interrupt Request 2
5 $0008 INT3 External Interrupt Request 3
6 $000A INT4 External Interrupt Request 4
7 $000C INT5 External Interrupt Request 5
8 $000E INT6 External Interrupt Request 6
9 $0010 INT7 External Interrupt Request 7
10 $0012 TIMER2 COMP Timer/Counter2 Compare Match
11 $0014 TIMER2 OVF Timer/Counter2 Overflow
12 $0016 TIMER1 CAPT Timer/Counter1 Capture Event
13 $0018 TIMER1 COMPA Timer/Counter1 Compare Match A
14 $001A TIMER1 COMPB Timer/Counter1 Compare Match B
15 $001C TIMER1 OVF Timer/Counter1 Overflow
16 $001E TIMER0 COMP Timer/Counter0 Compare Match
Program
Address
(2)
Source Interrupt Definition
(1)
RESET
External Pin, Power-on Reset, Brown-out Reset,
Watchdog Reset, and JTAG AVR Reset
60
17 $0020 TIMER0 OVF Timer/Counter0 Overflow
18 $0022 SPI, STC SPI Serial Transfer Complete
19 $0024 USART0, RX USART0, Rx Complete
20 $0026 USART0, UDRE USART0 Data Register Empty
21 $0028 USART0, TX USART0, Tx Complete
22 $002A ADC ADC Conversion Complete
23 $002C EE READY EEPROM Ready
24 $002E ANALOG COMP Analog Comparator
25 $0030
26 $0032
27 $0034
28 $0036
29 $0038
30 $003A
ATmega128(L)
(3)
TIMER1 COMPC Timer/Countre1 Compare Match C
(3)
TIMER3 CAPT Timer/Counter3 Capture Event
(3)
TIMER3 COMPA Timer/Counter3 Compare Match A
(3)
TIMER3 COMPB Timer/Counter3 Compare Match B
(3)
TIMER3 COMPC Timer/Counter3 Compare Match C
(3)
TIMER3 OVF Timer/Counter3 Overflow
2467P–AVR–08/07
Page 61

Table 23. Reset and Interrupt Vectors (Continued)
ATmega128(L)
Vector
No.
31 $003C
32 $003E
33 $0040
34 $0042
35 $0044
Program
Address
(2)
Source Interrupt Definition
(3)
USART1, RX USART1, Rx Complete
(3)
USART1, UDRE USART1 Data Register Empty
(3)
USART1, TX USART1, Tx Complete
(3)
TWI Two-wire Serial Interface
(3)
SPM READY Store Program Memory Ready
Notes: 1. When the BOOTRST fuse is programmed, the device will jump to the Boot Loader address at
reset, see “Boot Loader Support – Read-While-Write Self-Programming” on page 273.
2. When the IVSEL bit in MCUCR is set, interrupt vectors will be moved to the start of the Boot
Flash section. The address of each interrupt vector will then be address in this table added to
the start address of the boot Flash section.
3. The Interrupts on address $0030 - $0044 do not exist in ATmega103 compatibility mode.
Table 24 shows Reset and interrupt vectors placement for the various combinations of
BOOTRST and IVSEL settings. If the program never enables an interrupt source, the interrupt
vectors are not used, and regular program code can be placed at these locations. This is also
the case if the Reset Vector is in the Application section while the interrupt vectors are in the
Boot section or vice versa.
Table 24. Reset and Interrupt Vectors Placement
BOOTRST IVSEL Reset Address Interrupt Vectors Start Address
1 0 $0000 $0002
1 1 $0000 Boot Reset Address + $0002
0 0 Boot Reset Address $0002
0 1 Boot Reset Address Boot Reset Address + $0002
Note: The Boot Reset Address is shown in Table 112 on page 284. For the BOOTRST fuse “1” means
unprogrammed while “0” means programmed.
2467P–AVR–08/07
61
Page 62

The most typical and general program setup for the Reset and Interrupt Vector Addresses in
ATmega128 is:
Address LabelsCode Comments
$0000 jmp RESET ; Reset Handler
$0002 jmp EXT_INT0 ; IRQ0 Handler
$0004 jmp EXT_INT1 ; IRQ1 Handler
$0006 jmp EXT_INT2 ; IRQ2 Handler
$0008 jmp EXT_INT3 ; IRQ3 Handler
$000A jmp EXT_INT4 ; IRQ4 Handler
$000C jmp EXT_INT5 ; IRQ5 Handler
$000E jmp EXT_INT6 ; IRQ6 Handler
$0010 jmp EXT_INT7 ; IRQ7 Handler
$0012 jmp TIM2_COMP ; Timer2 Compare Handler
$0014 jmp TIM2_OVF ; Timer2 Overflow Handler
$0016 jmp TIM1_CAPT ; Timer1 Capture Handler
$0018 jmp TIM1_COMPA; Timer1 CompareA Handler
$001A jmp TIM1_COMPB; Timer1 CompareB Handler
$001C jmp TIM1_OVF ; Timer1 Overflow Handler
$001E jmp TIM0_COMP ; Timer0 Compare Handler
$0020 jmp TIM0_OVF ; Timer0 Overflow Handler
$0022 jmp SPI_STC ; SPI Transfer Complete Handler
$0024 jmp USART0_RXC; USART0 RX Complete Handler
$0026 jmp USART0_DRE; USART0,UDR Empty Handler
$0028 jmp USART0_TXC; USART0 TX Complete Handler
$002A jmp ADC ; ADC Conversion Complete Handler
$002C jmp EE_RDY ; EEPROM Ready Handler
$002E jmp ANA_COMP ; Analog Comparator Handler
$0030 jmp TIM1_COMPC; Timer1 CompareC Handler
$0032 jmp TIM3_CAPT ; Timer3 Capture Handler
$0034 jmp TIM3_COMPA; Timer3 CompareA Handler
$0036 jmp TIM3_COMPB; Timer3 CompareB Handler
$0038 jmp TIM3_COMPC; Timer3 CompareC Handler
$003A jmp TIM3_OVF ; Timer3 Overflow Handler
$003C jmp USART1_RXC; USART1 RX Complete Handler
$003E jmp USART1_DRE; USART1,UDR Empty Handler
$0040 jmp USART1_TXC; USART1 TX Complete Handler
$0042 jmp TWI ; Two-wire Serial Interface Interrupt Handler
$0044 jmp SPM_RDY ; SPM Ready Handler
;
$0046 RESET:ldir16, high(RAMEND); Main program start
$0047 out SPH,r16 ; Set stack pointer to top of RAM
$0048 ldi r16, low(RAMEND)
$0049 out SPL,r16
$004A sei ; Enable interrupts
$004B <instr> xxx
... ... ... ...
62
ATmega128(L)
2467P–AVR–08/07
Page 63

ATmega128(L)
When the BOOTRST fuse is unprogrammed, the Boot section size set to 8K bytes and the
IVSEL bit in the MCUCR Register is set before any interrupts are enabled, the most typical and
general program setup for the Reset and Interrupt Vector Addresses is:
Address LabelsCode Comments
$0000 RESET:ldi r16,high(RAMEND); Main program start
$0001 out SPH,r16 ; Set stack pointer to top of RAM
$0002 ldi r16,low(RAMEND)
$0003 out SPL,r16
$0004 sei ; Enable interrupts
$0005 <instr> xxx
;
.org $F002
$F002 jmp EXT_INT0 ; IRQ0 Handler
$F004 jmp EXT_INT1 ; IRQ1 Handler
... ... ... ;
$F044 jmp SPM_RDY ; Store Program Memory Ready Handler
When the BOOTRST fuse is programmed and the Boot section size set to 8K bytes, the most
typical and general program setup for the Reset and Interrupt Vector Addresses is:
Address LabelsCode Comments
.org $0002
$0002 jmp EXT_INT0 ; IRQ0 Handler
$0004 jmp EXT_INT1 ; IRQ1 Handler
... ... ... ;
$0044 jmp SPM_RDY ; Store Program Memory Ready Handler
;
.org $F000
$F000 RESET: ldi r16,high(RAMEND); Main program start
$F001 out SPH,r16 ; Set stack pointer to top of RAM
$F002 ldi r16,low(RAMEND)
$F003 out SPL,r16
$F004 sei ; Enable interrupts
$F005 <instr> xxx
2467P–AVR–08/07
When the BOOTRST fuse is programmed, the Boot section size set to 8K bytes and the IVSEL
bit in the MCUCR Register is set before any interrupts are enabled, the most typical and general
program setup for the Reset and Interrupt Vector Addresses is:
Address Labels Code Comments
;
.org $F000
$F000 jmp RESET ; Reset handler
$F002 jmp EXT_INT0 ; IRQ0 Handler
$F004 jmp EXT_INT1 ; IRQ1 Handler
... ... ... ;
$F044 jmp SPM_RDY ; Store Program Memory Ready Handler
$F046 RESET: ldi r16,high(RAMEND); Main program start
$F047 out SPH,r16 ; Set stack pointer to top of RAM
$F048 ldi r16,low(RAMEND)
63
Page 64

$F049 out SPL,r16
$F04A sei ; Enable interrupts
$F04B <instr> xxx
Moving Interrupts Between Application and Boot Space
MCU Control Register
– MCUCR
The General Interrupt Control Register controls the placement of the interrupt vector table.
Bit 76543210
SRE SRW10 SE SM1 SM0 SM2 IVSEL IVCE MCUCR
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value00000000
• Bit 1 – IVSEL: Interrupt Vector Select
When the IVSEL bit is cleared (zero), the interrupt vectors are placed at the start of the Flash
memory. When this bit is set (one), the interrupt vectors are moved to the beginning of the Boot
Loader section of the flash. The actual address of the start of the Boot Flash section is determined by the BOOTSZ fuses. Refer to the section “Boot Loader Support – Read-While-Write
Self-Programming” on page 273 for details. To avoid unintentional changes of interrupt vector
tables, a special write procedure must be followed to change the IVSEL bit:
1. Write the Interrupt Vector Change Enable (IVCE) bit to one.
2. Within four cycles, write the desired value to IVSEL while writing a zero to IVCE.
Interrupts will automatically be disabled while this sequence is executed. Interrupts are disabled
in the cycle IVCE is set, and they remain disabled until after the instruction following the write to
IVSEL. If IVSEL is not written, interrupts remain disabled for four cycles. The I-bit in the Status
Register is unaffected by the automatic disabling.
Note: If interrupt vectors are placed in the Boot Loader section and Boot Lock bit BLB02 is programmed,
interrupts are disabled while executing from the Application section. If interrupt vectors are placed
in the Application section and Boot Lock bit BLB12 is programed, interrupts are disabled while
executing from the Boot Loader section. Refer to the section “Boot Loader Support – Read-While-
Write Self-Programming” on page 273 for details on Boot Lock bits.
64
ATmega128(L)
2467P–AVR–08/07
Page 65

ATmega128(L)
• Bit 0 – IVCE: Interrupt Vector Change Enable
The IVCE bit must be written to logic one to enable change of the IVSEL bit. IVCE is cleared by
hardware four cycles after it is written or when IVSEL is written. Setting the IVCE bit will disable
interrupts, as explained in the IVSEL description above. See Code Example below.
Assembly Code Example
Move_interrupts:
; Enable change of interrupt vectors
ldi r16, (1<<IVCE)
out MCUCR, r16
; Move interrupts to boot flash section
ldi r16, (1<<IVSEL)
out MCUCR, r16
ret
C Code Example
void Move_interrupts(void)
{
/* Enable change of interrupt vectors */
MCUCR = (1<<IVCE);
/* Move interrupts to boot flash section */
MCUCR = (1<<IVSEL);
}
2467P–AVR–08/07
65
Page 66

I/O Ports
Introduction All AVR ports have true Read-Modify-Write functionality when used as general digital I/O ports.
This means that the direction of one port pin can be changed without unintentionally changing
the direction of any other pin with the SBI and CBI instructions. The same applies when changing drive value (if configured as output) or enabling/disabling of pull-up resistors (if configured as
input). Each output buffer has symmetrical drive characteristics with both high sink and source
capability. The pin driver is strong enough to drive LED displays directly. All port pins have individually selectable pull-up resistors with a supply-voltage invariant resistance. All I/O pins have
protection diodes to both V
teristics” on page 318 for a complete list of parameters.
Figure 29. I/O Pin Equivalent Schematic
and Ground as indicated in Figure 29. Refer to “Electrical Charac-
CC
R
PU
Pxn
C
PIN
All registers and bit references in this section are written in general form. A lower case “x” represents the numbering letter for the port, and a lower case “n” represents the bit number. However,
when using the register or bit defines in a program, the precise form must be used. For example,
PORTB3 for bit no. 3 in Port B, here documented generally as PORTxn. The physical I/O registers and bit locations are listed in “Register Description for I/O Ports” on page 87.
Three I/O memory address locations are allocated for each port, one each for the Data Register
– PORTx, Data Direction Register – DDRx, and the Port Input Pins – PINx. The Port Input Pins
I/O location is read only, while the Data Register and the Data Direction Register are read/write.
In addition, the Pull-up Disable – PUD bit in SFIOR disables the pull-up function for all pins in all
ports when set.
Using the I/O port as General Digital I/O is described in “Ports as General Digital I/O” on page
67. Most port pins are multiplexed with alternate functions for the peripheral features on the
device. How each alternate function interferes with the port pin is described in “Alternate Port
Functions” on page 71. Refer to the individual module sections for a full description of the alter-
nate functions.
See Figure
"General Digital I/O" for
Logic
Details
66
Note that enabling the alternate function of some of the port pins does not affect the use of the
other pins in the port as General Digital I/O.
ATmega128(L)
2467P–AVR–08/07
Page 67

ATmega128(L)
Ports as General Digital I/O
The ports are bi-directional I/O ports with optional internal pull-ups. Figure 30 shows a functional
description of one I/O port pin, here generically called Pxn.
Figure 30. General Digital I/O
Pxn
(1)
SLEEP
SYNCHRONIZER
DLQ
D
PINxn
Q
PUD
Q
D
DDxn
Q
CLR
RESET
Q
D
PORTxn
Q
CLR
RESET
Q
Q
WDx
RDx
WPx
RRx
RPx
DATA BUS
clk
I/O
PUD: PULLUP DISABLE
SLEEP: SLEEP CONTROL
clk
: I/O CLOCK
I/O
Note: 1. WPx, WDx, RRx, RPx, and RDx are common to all pins within the same port. clk
WDx: WRITE DDRx
RDx: READ DDRx
WPx: WRITE PORTx
RRx: READ PORTx REGISTER
RPx: READ PORTx PIN
, SLEEP,
I/O
and PUD are common to all ports.
Configuring the Pin Each port pin consists of three Register bits: DDxn, PORTxn, and PINxn. As shown in “Register
Description for I/O Ports” on page 87, the DDxn bits are accessed at the DDRx I/O address, the
PORTxn bits at the PORTx I/O address, and the PINxn bits at the PINx I/O address.
The DDxn bit in the DDRx Register selects the direction of this pin. If DDxn is written logic one,
Pxn is configured as an output pin. If DDxn is written logic zero, Pxn is configured as an input
pin.
If PORTxn is written logic one when the pin is configured as an input pin, the pull-up resistor is
activated. To switch the pull-up resistor off, PORTxn has to be written logic zero or the pin has to
be configured as an output pin. The port pins are tri-stated when a Reset condition becomes
active, even if no clocks are running.
If PORTxn is written logic one when the pin is configured as an output pin, the port pin is driven
high (one). If PORTxn is written logic zero when the pin is configured as an output pin, the port
pin is driven low (zero).
2467P–AVR–08/07
When switching between tri-state ({DDxn, PORTxn} = 0b00) and output high ({DDxn, PORTxn}
= 0b11), an intermediate state with either pull-up enabled ({DDxn, PORTxn} = 0b01) or output
67
Page 68

low ({DDxn, PORTxn} = 0b10) must occur. Normally, the pull-up enabled state is fully acceptable, as a high-impedant environment will not notice the difference between a strong high driver
and a pull-up. If this is not the case, the PUD bit in the SFIOR Register can be written to one to
disable all pull-ups in all ports.
Switching between input with pull-up and output low generates the same problem. The user
must use either the tri-state ({DDxn, PORTxn} = 0b00) or the output high state ({DDxn, PORTxn}
= 0b11) as an intermediate step.
Table 25 summarizes the control signals for the pin value.
Table 25. Port Pin Configurations
PUD
DDxn PORTxn
0 0 X Input No Tri-state (Hi-Z)
0 1 0 Input Yes
0 1 1 Input No Tri-state (Hi-Z)
1 0 X Output No Output Low (Sink)
1 1 X Output No Output High (Source)
(in SFIOR) I/O Pull-up Comment
Pxn will source current if ext. pulled
low.
Reading the Pin Value Independent of the setting of Data Direction bit DDxn, the port pin can be read through the
PINxn Register bit. As shown in Figure 30, the PINxn Register bit and the preceding latch constitute a synchronizer. This is needed to avoid metastability if the physical pin changes value near
the edge of the internal clock, but it also introduces a delay. Figure 31 shows a timing diagram of
the synchronization when reading an externally applied pin value. The maximum and minimum
propagation delays are denoted t
pd,max
and t
respectively.
pd,min
Figure 31. Synchronization when Reading an Externally Applied Pin Value
SYSTEM CLK
INSTRUCTIONS
XXXXXX
in r17, PINx
SYNC LATCH
PINxn
r17
0x00
t
pd, max
t
pd, min
0xFF
Consider the clock period starting shortly after the first falling edge of the system clock. The latch
is closed when the clock is low, and goes transparent when the clock is high, as indicated by the
68
ATmega128(L)
2467P–AVR–08/07
Page 69

ATmega128(L)
shaded region of the “SYNC LATCH” signal. The signal value is latched when the system clock
goes low. It is clocked into the PINxn Register at the succeeding positive clock edge. As indicated by the two arrows t
between ½ and 1½ system clock period depending upon the time of assertion.
When reading back a software assigned pin value, a nop instruction must be inserted as indi-
cated in Figure 32. The out instruction sets the “SYNC LATCH” signal at the positive edge of the
clock. In this case, the delay t
Figure 32. Synchronization when Reading a Software Assigned Pin Value
SYSTEM CLK
and t
pd,max
through the synchronizer is one system clock period.
pd
, a single signal transition on the pin will be delayed
pd,min
r16
INSTRUCTIONS
SYNC LATCH
PINxn
r17
out PORTx, r16
0xFF
nop in r17, PINx
0x00
t
pd
0xFF
2467P–AVR–08/07
69
Page 70

The following code example shows how to set port B pins 0 and 1 high, 2 and 3 low, and define
the port pins from 4 to 7 as input with pull-ups assigned to port pins 6 and 7. The resulting pin
values are read back again, but as previously discussed, a nop instruction is included to be able
to read back the value recently assigned to some of the pins.
Assembly Code Example
...
; Define pull-ups and set outputs high
; Define directions for port pins
ldi r16,(1<<PB7)|(1<<PB6)|(1<<PB1)|(1<<PB0)
ldi r17,(1<<DDB3)|(1<<DDB2)|(1<<DDB1)|(1<<DDB0)
out PORTB,r16
out DDRB,r17
; Insert nop for synchronization
nop
; Read port pins
in r16,PINB
...
C Code Example
unsigned char i;
...
/* Define pull-ups and set outputs high */
/* Define directions for port pins */
PORTB = (1<<PB7)|(1<<PB6)|(1<<PB1)|(1<<PB0);
DDRB = (1<<DDB3)|(1<<DDB2)|(1<<DDB1)|(1<<DDB0);
/* Insert nop for synchronization*/
__no_operation();
/* Read port pins */
i = PINB;
...
(1)
(1)
Digital Input Enable and Sleep Modes
70
ATmega128(L)
Note: 1. For the assembly program, two temporary registers are used to minimize the time from pull-
ups are set on pins 0, 1, 6, and 7, until the direction bits are correctly set, defining bit 2 and 3
as low and redefining bits 0 and 1 as strong high drivers.
As shown in Figure 30, the digital input signal can be clamped to ground at the input of the
schmitt-trigger. The signal denoted SLEEP in the figure, is set by the MCU Sleep Controller in
Power-down mode, Power-save mode, Standby mode, and Extended Standby mode to avoid
high power consumption if some input signals are left floating, or have an analog signal level
close to V
CC
/2.
SLEEP is overridden for port pins enabled as External Interrupt pins. If the External Interrupt
Request is not enabled, SLEEP is active also for these pins. SLEEP is also overridden by various other alternate functions as described in “Alternate Port Functions” on page 71.
If a logic high level (“one”) is present on an Asynchronous External Interrupt pin configured as
“Interrupt on Rising Edge, Falling Edge, or Any Logic Change on Pin” while the external interrupt
is not enabled, the corresponding External Interrupt Flag will be set when resuming from the
above mentioned sleep modes, as the clamping in these sleep modes produces the requested
logic change.
2467P–AVR–08/07
Page 71

ATmega128(L)
Unconnected pins If some pins are unused, it is recommended to ensure that these pins have a defined level. Even
though most of the digital inputs are disabled in the deep sleep modes as described above, floating inputs should be avoided to reduce current consumption in all other modes where the digital
inputs are enabled (Reset, Active mode and Idle mode).
The simplest method to ensure a defined level of an unused pin, is to enable the internal pull-up.
In this case, the pull-up will be disabled during reset. If low power consumption during reset is
important, it is recommended to use an external pull-up or pull-down. Connecting unused pins
directly to V
accidentally configured as an output.
or GND is not recommended, since this may cause excessive currents if the pin is
CC
Alternate Port Functions
Most port pins have alternate functions in addition to being general digital I/Os. Figure 33 shows
how the port pin control signals from the simplified Figure 30 can be overridden by alternate
functions. The overriding signals may not be present in all port pins, but the figure serves as a
generic description applicable to all port pins in the AVR microcontroller family.
Figure 33. Alternate Port Functions
Pxn
(1)
1
0
1
0
1
0
1
0
PUOExn
PUOVxn
DDOExn
DDOVxn
PVOExn
PVOVxn
DIEOExn
DIEOVxn
SLEEP
SYNCHRONIZER
SET
DLQ
D
PINxn
Q
CLR
PUD
D
Q
DDxn
Q
CLR
RESET
D
Q
PORTxn
Q
CLR
RESET
Q
Q
CLR
WDx
RDx
WPx
RRx
RPx
clk
DATA BUS
I/O
2467P–AVR–08/07
DIxn
AIOxn
PUOExn: Pxn PULL-UP OVERRIDE ENABLE
PUOVxn: Pxn PULL-UP OVERRIDE VALUE
DDOExn: Pxn DATA DIRECTION OVERRIDE ENABLE
DDOVxn: Pxn DATA DIRECTION OVERRIDE VALUE
PVOExn: Pxn PORT VALUE OVERRIDE ENABLE
PVOVxn: Pxn PORT VALUE OVERRIDE VALUE
DIEOExn: Pxn DIGITAL INPUT-ENABLE OVERRIDE ENABLE
DIEOVxn: Pxn DIGITAL INPUT-ENABLE OVERRIDE VALUE
SLEEP: SLEEP CONTROL
PUD: PULLUP DISABLE
WDx: WRITE DDRx
RDx: READ DDRx
RRx: READ PORTx REGISTER
WPx: WRITE PORTx
RPx: READ PORTx PIN
clk
: I/O CLOCK
I/O
DIxn: DIGITAL INPUT PIN n ON PORTx
AIOxn: ANALOG INPUT/OUTPUT PIN n ON PORTx
Note: 1. WPx, WDx, RLx, RPx, and RDx are common to all pins within the same port. clk
and PUD are common to all ports. All other signals are unique for each pin.
, SLEEP,
I/O
71
Page 72

Table 26 summarizes the function of the overriding signals. The pin and port indexes from Figure 33 are not shown in the succeeding tables. The overriding signals are generated internally in
the modules having the alternate function.
Table 26. Generic Description of Overriding Signals for Alternate Functions.
Signal
Name Full Name Description
PUOE Pull-up
Override Enable
PUOV Pull-up
Override Value
DDOE Data Direction
Override Enable
DDOV Data Direction
Override Value
PVOE Port Value
Override Enable
PVOV Port Value
Override Value
DIEOE Digital Input
Enable Override
Enable
DIEOV Digital Input
Enable Override
Valu e
DI Digital Input This is the Digital Input to alternate functions. In the
AIO Analog
Input/output
If this signal is set, the pull-up enable is controlled by the
PUOV signal. If this signal is cleared, the pull-up is
enabled when {DDxn, PORTxn, PUD} = 0b010.
If PUOE is set, the pull-up is enabled/disabled when
PUOV is set/cleared, regardless of the setting of the
DDxn, PORTxn, and PUD Register bits.
If this signal is set, the Output Driver Enable is controlled
by the DDOV signal. If this signal is cleared, the Output
driver is enabled by the DDxn Register bit.
If DDOE is set, the Output Driver is enabled/disabled
when DDOV is set/cleared, regardless of the setting of the
DDxn Register bit.
If this signal is set and the Output Driver is enabled, the
port value is controlled by the PVOV signal. If PVOE is
cleared, and the Output Driver is enabled, the port Value
is controlled by the PORTxn Register bit.
If PVOE is set, the port value is set to PVOV, regardless of
the setting of the PORTxn Register bit.
If this bit is set, the Digital Input Enable is controlled by the
DIEOV signal. If this signal is cleared, the Digital Input
Enable is determined by MCU-state (Normal mode, Sleep
modes).
If DIEOE is set, the Digital Input is enabled/disabled when
DIEOV is set/cleared, regardless of the MCU state
(Normal mode, Sleep modes).
figure, the signal is connected to the output of the schmitt
trigger but before the synchronizer. Unless the Digital
Input is used as a clock source, the module with the
alternate function will use its own synchronizer.
This is the Analog Input/output to/from alternate functions.
The signal is connected directly to the pad, and can be
used bi-directionally.
72
The following subsections shortly describes the alternate functions for each port, and relates the
overriding signals to the alternate function. Refer to the alternate function description for further
details.
ATmega128(L)
2467P–AVR–08/07
Page 73

Special Function IO
Register – SFIOR
ATmega128(L)
Bit 7 6 5 4 3 2 1 0
TSM – – – ACME PUD PSR0 PSR321 SFIOR
Read/Write R/W R R R R/W R/W R/W R/W
Initial Value 0 0 0 0 0 0 0 0
• Bit 2 – PUD: Pull-up disable
When this bit is written to one, the pull-ups in the I/O ports are disabled even if the DDxn and
PORTxn Registers are configured to enable the pull-ups ({DDxn, PORTxn} = 0b01). See “Con-
figuring the Pin” on page 67 for more details about this feature.
Alternate Functions of Port A
The Port A has an alternate function as the address low byte and data lines for the External
Memory Interface.
Table 27. Port A Pins Alternate Functions
Port Pin Alternate Function
PA7 AD7 (External memory interface address and data bit 7)
PA6 AD6 (External memory interface address and data bit 6)
PA5 AD5 (External memory interface address and data bit 5)
PA4 AD4 (External memory interface address and data bit 4)
PA3 AD3 (External memory interface address and data bit 3)
PA2 AD2 (External memory interface address and data bit 2)
PA1 AD1 (External memory interface address and data bit 1)
PA0 AD0 (External memory interface address and data bit 0)
Table 28 and Table 29 relates the alternate functions of Port A to the overriding signals shown in
Figure 33 on page 71.
Table 28. Overriding Signals for Alternate Functions in PA7..PA4
Signal
Name PA7/AD7 PA6/AD6 PA5/AD5 PA4/AD4
PUOE SRE SRE SRE SRE
(1)
PUOV ~(WR
DDOE SRE SRE SRE SRE
DDOV WR
| ADA
PORTA7 • PUD
| ADA WR | ADA WR | ADA WR | ADA
) •
~(WR | ADA) •
PORTA6 • PUD
~(WR | ADA) •
PORTA5 • PUD
~(WR | ADA) •
PORTA4 • PUD
2467P–AVR–08/07
PVOE SRE SRE SRE SRE
PVOV A7 • ADA | D7
OUTPUT • WR
DIEOE 0 0 0 0
DIEOV 0 0 0 0
DID7 INPUTD6 INPUTD5 INPUTD4 INPUT
AIO – – – –
Note: 1. ADA is short for ADdress Active and represents the time when address is output. See “Exter-
nal Memory Interface” on page 26 for details.
A6 • ADA | D6
OUTPUT • WR
A5 • ADA | D5
OUTPUT • WR
A4 • ADA | D4
OUTPUT • WR
73
Page 74
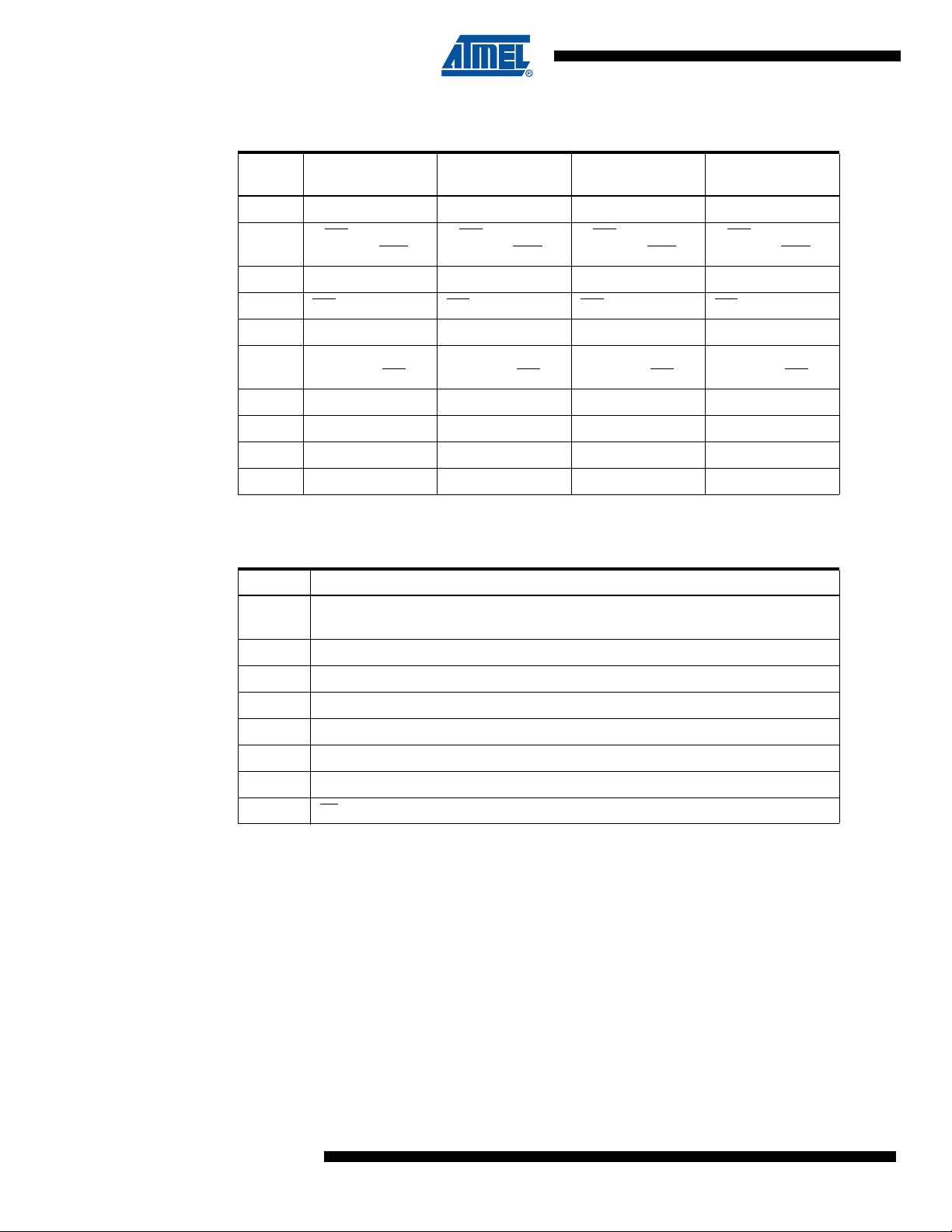
Table 29. Overriding Signals for Alternate Functions in PA3..PA0
Signal
Name PA3/AD3 PA2/AD2 PA1/AD1 PA0/AD0
PUOE SRE SRE SRE SRE
PUOV ~(WR | ADA) •
PORTA3 • PUD
DDOE SRE SRE SRE SRE
DDOV WR
PVOE SRE SRE SRE SRE
PVOV A3 • ADA | D3
DIEOE 0 0 0 0
DIEOV 0 0 0 0
DI D3 INPUT D2 INPUT D1 INPUT D0 INPUT
AIO – – – –
| ADA WR | ADA WR | ADA WR | ADA
OUTPUT • WR
~(WR | ADA) •
PORTA2 • PUD
A2• ADA | D2
OUTPUT • WR
~(WR | ADA) •
PORTA1 • PUD
A1 • ADA | D1
OUTPUT • WR
~(WR | ADA) •
PORTA0 • PUD
A0 • ADA | D0
OUTPUT • WR
Alternate Functions of Port B
The Port B pins with alternate functions are shown in Table 30.
Table 30. Port B Pins Alternate Functions
Port Pin Alternate Functions
(1)
PB7
PB6 OC1B (Output Compare and PWM Output B for Timer/Counter1)
PB5 OC1A (Output Compare and PWM Output A for Timer/Counter1)
PB4 OC0 (Output Compare and PWM Output for Timer/Counter0)
PB3 MISO (SPI Bus Master Input/Slave Output)
PB2 MOSI (SPI Bus Master Output/Slave Input)
PB1 SCK (SPI Bus Serial Clock)
PB0 SS
Note: 1. OC1C not applicable in ATmega103 compatibility mode.
OC2/OC1C
Compare and PWM Output C for Timer/Counter1)
(SPI Slave Select input)
(Output Compare and PWM Output for Timer/Counter2 or Output
The alternate pin configuration is as follows:
• OC2/OC1C, Bit 7
OC2, Output Compare Match output: The PB7 pin can serve as an external output for the
Timer/Counter2 Output Compare. The pin has to be configured as an output (DDB7 set “one”) to
serve this function. The OC2 pin is also the output pin for the PWM mode timer function.
74
OC1C, Output Compare Match C output: The PB7 pin can serve as an external output for the
Timer/Counter1 Output Compare C. The pin has to be configured as an output (DDB7 set (one))
to serve this function. The OC1C pin is also the output pin for the PWM mode timer function.
ATmega128(L)
2467P–AVR–08/07
Page 75

ATmega128(L)
• OC1B, Bit 6
OC1B, Output Compare Match B output: The PB6 pin can serve as an external output for the
Timer/Counter1 Output Compare B. The pin has to be configured as an output (DDB6 set (one))
to serve this function. The OC1B pin is also the output pin for the PWM mode timer function.
• OC1A, Bit 5
OC1A, Output Compare Match A output: The PB5 pin can serve as an external output for the
Timer/Counter1 Output Compare A. The pin has to be configured as an output (DDB5 set (one))
to serve this function. The OC1A pin is also the output pin for the PWM mode timer function.
• OC0, Bit 4
OC0, Output Compare Match output: The PB4 pin can serve as an external output for the
Timer/Counter0 Output Compare. The pin has to be configured as an output (DDB4 set (one)) to
serve this function. The OC0 pin is also the output pin for the PWM mode timer function.
• MISO – Port B, Bit 3
MISO: Master Data input, Slave Data output pin for SPI channel. When the SPI is enabled as a
master, this pin is configured as an input regardless of the setting of DDB3. When the SPI is
enabled as a slave, the data direction of this pin is controlled by DDB3. When the pin is forced to
be an input, the pull-up can still be controlled by the PORTB3 bit.
• MOSI – Port B, Bit 2
MOSI: SPI Master Data output, Slave Data input for SPI channel. When the SPI is enabled as a
slave, this pin is configured as an input regardless of the setting of DDB2. When the SPI is
enabled as a master, the data direction of this pin is controlled by DDB2. When the pin is forced
to be an input, the pull-up can still be controlled by the PORTB2 bit.
• SCK – Port B, Bit 1
SCK: Master Clock output, Slave Clock input pin for SPI channel. When the SPI is enabled as a
slave, this pin is configured as an input regardless of the setting of DDB1. When the SPI is
enabled as a master, the data direction of this pin is controlled by DDB1. When the pin is forced
to be an input, the pull-up can still be controlled by the PORTB1 bit.
•SS
– Port B, Bit 0
SS
: Slave Port Select input. When the SPI is enabled as a slave, this pin is configured as an
input regardless of the setting of DDB0. As a slave, the SPI is activated when this pin is driven
low. When the SPI is enabled as a master, the data direction of this pin is controlled by DDB0.
When the pin is forced to be an input, the pull-up can still be controlled by the PORTB0 bit.
Table 31 and Table 32 relate the alternate functions of Port B to the overriding signals shown in
Figure 33 on page 71. SPI MSTR INPUT and SPI SLAVE OUTPUT constitute the MISO signal,
while MOSI is divided into SPI MSTR OUTPUT and SPI SLAVE INPUT.
2467P–AVR–08/07
75
Page 76

Table 31. Overriding Signals for Alternate Functions in PB7..PB4
Signal Name PB7/OC2/OC1C PB6/OC1B PB5/OC1A PB4/OC0
PUOE 0 0 0 0
PUOV 0 0 0 0
DDOE 0 0 0 0
DDOV 0 0 0 0
(1)
PVOE OC2/OC1C ENABLE
PVOV OC2/OC1C
(1)
OC1B ENABLE OC1A ENABLE OC0 ENABLE
OC1B OC1A OC0B
DIEOE 0 0 0 0
DIEOV 0 0 0 0
DI – – – –
AIO – – – –
Note: 1. See “Output Compare Modulator (OCM1C2)” on page 161 for details. OC1C does not exist in
ATmega103 compatibility mode.
Table 32. Overriding Signals for Alternate Functions in PB3..PB0
Signal
Name PB3/MISO PB2/MOSI PB1/SCK PB0/SS
PUOE SPE • MSTR SPE • MSTR SPE • MSTR SPE • MSTR
PUOV PORTB3 • PUD PORTB2 • PUD PORTB1 • PUD PORTB0 • PUD
DDOE SPE • MSTR SPE • MSTR SPE • MSTR SPE • MSTR
DDOV 0 0 0 0
PVOE SPE • MSTR
SPE • MSTR SPE • MSTR 0
PVOV SPI SLAVE OUTPUT SPI MSTR OUTPUT SCK OUTPUT 0
DIEOE 0 0 0 0
DIEOV 0 0 0 0
DI SPI MSTR INPUT SPI SLAVE INPUT SCK INPUT SPI SS
AIO – – – –
76
ATmega128(L)
2467P–AVR–08/07
Page 77

ATmega128(L)
Alternate Functions of Port C
In ATmega103 compatibility mode, Port C is output only. The ATmega128 is by default shipped
in compatibility mode. Thus, if the parts are not programmed before they are put on the PCB,
PORTC will be output during first power up, and until the ATmega103 compatibility mode is disabled. The Port C has an alternate function as the address high byte for the External Memory
Interface.
Table 33. Port C Pins Alternate Functions
Port Pin Alternate Function
PC7 A15
PC6 A14
PC5 A13
PC4 A12
PC3 A11
PC2 A10
PC1 A9
PC0 A8
Table 34 and Table 35 relate the alternate functions of Port C to the overriding signals shown in
Figure 33 on page 71.
Table 34. Overriding Signals for Alternate Functions in PC7..PC4
Signal
Name PC7/A15 PC6/A14 PC5/A13 PC4/A12
PUOE SRE • (XMM
PUOV 0 0 0 0
DDOE SRE • (XMM<1) SRE • (XMM<2) SRE • (XMM<3) SRE • (XMM<4)
DDOV 1 1 1 1
PVOE SRE • (XMM<1) SRE • (XMM<2) SRE • (XMM<3) SRE • (XMM<4)
PVOV A15 A14 A13 A12
DIEOE 0 0 0 0
DIEOV 0 0 0 0
DI – – – –
AIO – – – –
Note: 1. XMM = 0 in ATmega103 compatibility mode.
(1)
<1) SRE • (XMM<2) SRE • (XMM<3) SRE • (XMM<4)
2467P–AVR–08/07
77
Page 78
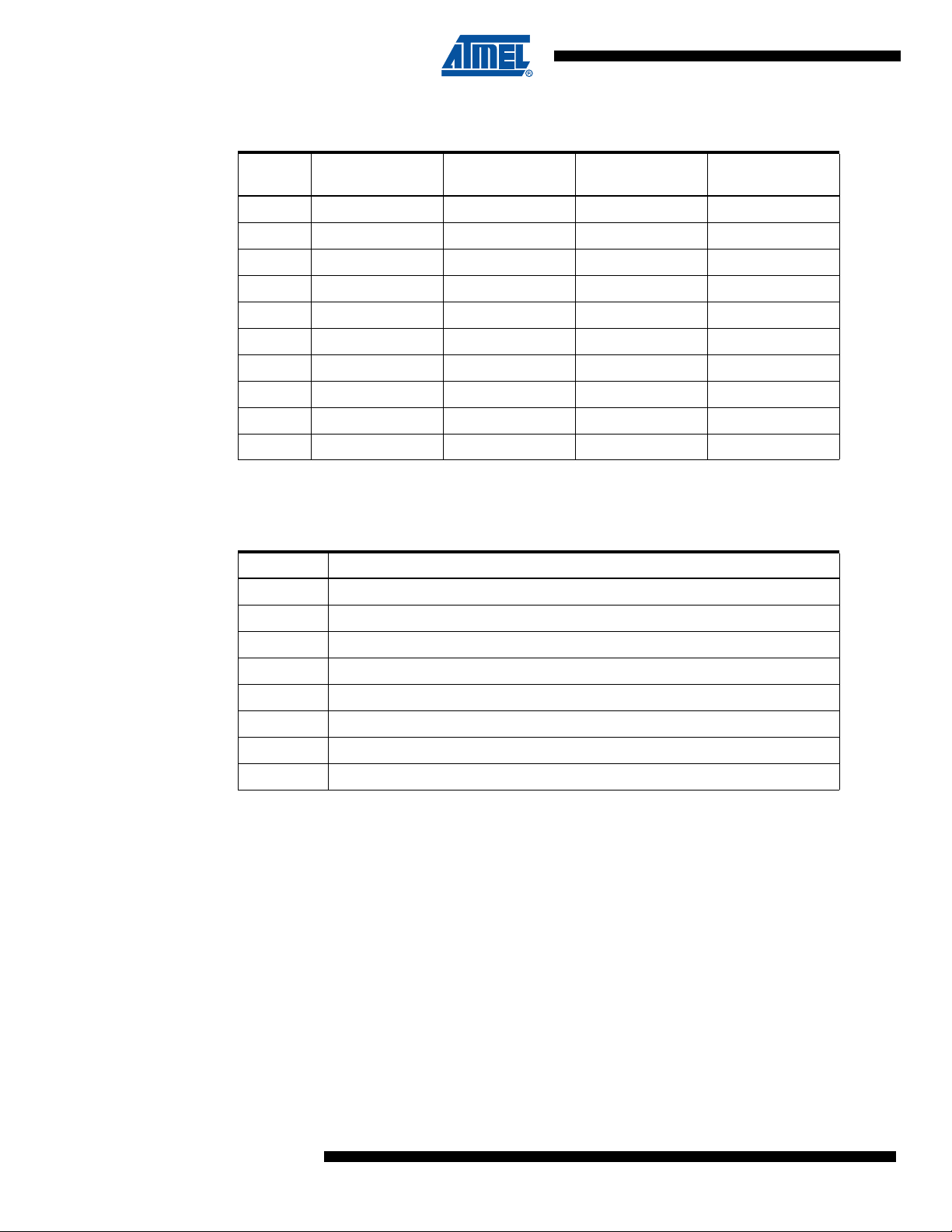
Table 35. Overriding Signals for Alternate Functions in PC3..PC0
Signal
Name PC3/A11 PC2/A10 PC1/A9 PC0/A8
PUOE SRE • (XMM<5) SRE • (XMM<6) SRE • (XMM<7) SRE • (XMM<7)
PUOV0000
DDOE SRE • (XMM<5) SRE • (XMM<6) SRE • (XMM<7) SRE • (XMM<7)
DDOV 1 1 1 1
PVOE SRE • (XMM<5) SRE • (XMM<6) SRE • (XMM<7) SRE • (XMM<7)
PVOV A11 A10 A9 A8
DIEOE0000
DIEOV0000
DI––––
AIO––––
Note: 1. XMM = 0 in ATmega103 compatibility mode.
(1)
Alternate Functions of Port D
The Port D pins with alternate functions are shown in Table 36.
Table 36. Port D Pins Alternate Functions
Port Pin Alternate Function
PD7 T2 (Timer/Counter2 Clock Input)
PD6 T1 (Timer/Counter1 Clock Input)
(1)
PD5 XCK1
PD4 ICP1 (Timer/Counter1 Input Capture Pin)
PD3 INT3/TXD1
PD2 INT2/RXD1
PD1 INT1/SDA
PD0 INT0/SCL
Note: 1. XCK1, TXD1, RXD1, SDA, and SCL not applicable in ATmega103 compatibility mode.
(USART1 External Clock Input/Output)
(1)
(External Interrupt3 Input or UART1 Transmit Pin)
(1)
(External Interrupt2 Input or UART1 Receive Pin)
(1)
(External Interrupt1 Input or TWI Serial DAta)
(1)
(External Interrupt0 Input or TWI Serial CLock)
The alternate pin configuration is as follows:
• T2 – Port D, Bit 7
T2, Timer/Counter2 counter source.
• T1 – Port D, Bit 6
T1, Timer/Counter1 counter source.
• XCK1 – Port D, Bit 5
78
XCK1, USART1 External clock. The Data Direction Register (DDD4) controls whether the clock
is output (DDD4 set) or input (DDD4 cleared). The XCK1 pin is active only when the USART1
operates in Synchronous mode.
ATmega128(L)
2467P–AVR–08/07
Page 79

ATmega128(L)
• ICP1 – Port D, Bit 4
ICP1 – Input Capture Pin1: The PD4 pin can act as an Input Capture Pin for Timer/Counter1.
• INT3/TXD1 – Port D, Bit 3
INT3, External Interrupt source 3: The PD3 pin can serve as an external interrupt source to the
MCU.
TXD1, Transmit Data (Data output pin for the USART1). When the USART1 Transmitter is
enabled, this pin is configured as an output regardless of the value of DDD3.
• INT2/RXD1 – Port D, Bit 2
INT2, External Interrupt source 2. The PD2 pin can serve as an External Interrupt source to the
MCU.
RXD1, Receive Data (Data input pin for the USART1). When the USART1 receiver is enabled
this pin is configured as an input regardless of the value of DDD2. When the USART forces this
pin to be an input, the pull-up can still be controlled by the PORTD2 bit.
• INT1/SDA – Port D, Bit 1
INT1, External Interrupt source 1. The PD1 pin can serve as an external interrupt source to the
MCU.
SDA, Two-wire Serial Interface Data: When the TWEN bit in TWCR is set (one) to enable the
Two-wire Serial Interface, pin PD1 is disconnected from the port and becomes the Serial Data
I/O pin for the Two-wire Serial Interface. In this mode, there is a spike filter on the pin to suppress spikes shorter than 50 ns on the input signal, and the pin is driven by an open drain driver
with slew-rate limitation.
•INT0/SCL – Port D, Bit 0
INT0, External Interrupt source 0. The PD0 pin can serve as an external interrupt source to the
MCU.
SCL, Two-wire Serial Interface Clock: When the TWEN bit in TWCR is set (one) to enable the
Two-wire Serial Interface, pin PD0 is disconnected from the port and becomes the Serial Clock
I/O pin for the Two-wire Serial Interface. In this mode, there is a spike filter on the pin to suppress spikes shorter than 50 ns on the input signal, and the pin is driven by an open drain driver
with slew-rate limitation.
Table 37 and Table 38 relates the alternate functions of Port D to the overriding signals shown in
Figure 33 on page 71.
2467P–AVR–08/07
79
Page 80

Table 37. Overriding Signals for Alternate Functions PD7..PD4
Signal Name PD7/T2 PD6/T1 PD5/XCK1 PD4/ICP1
PUOE 0 0 0 0
PUOV 0 0 0 0
DDOE 0 0 0 0
DDOV 0 0 0 0
PVOE 0 0 UMSEL1 0
PVOV 0 0 XCK1 OUTPUT 0
DIEOE 0 0 0 0
DIEOV 0 0 0 0
DI T2 INPUT T1 INPUT XCK1 INPUT ICP1 INPUT
AIO – – – –
Table 38. Overriding Signals for Alternate Functions in PD3..PD0
Signal Name PD3/INT3/TXD1 PD2/INT2/RXD1 PD1/INT1/SDA PD0/INT0/SCL
PUOE TXEN1 RXEN1 TWEN TWEN
PUOV 0 PORTD2 • PUD
DDOE TXEN1 RXEN1 TWEN TWEN
DDOV 1 0 SDA_OUT SCL_OUT
PVOE TXEN1 0 TWEN TWEN
PORTD1 • PUD PORTD0 • PUD
(1)
PVOV TXD1 0 0 0
DIEOE INT3 ENABLE INT2 ENABLE INT1 ENABLE INT0 ENABLE
DIEOV 1 1 1 1
DI INT3 INPUT INT2 INPUT/RXD1 INT1 INPUT INT0 INPUT
AIO – – SDA INPUT SCL INPUT
Note: 1. When enabled, the Two-wire Serial Interface enables Slew-Rate controls on the output pins
PD0 and PD1. This is not shown in this table. In addition, spike filters are connected between
the AIO outputs shown in the port figure and the digital logic of the TWI module.
80
ATmega128(L)
2467P–AVR–08/07
Page 81
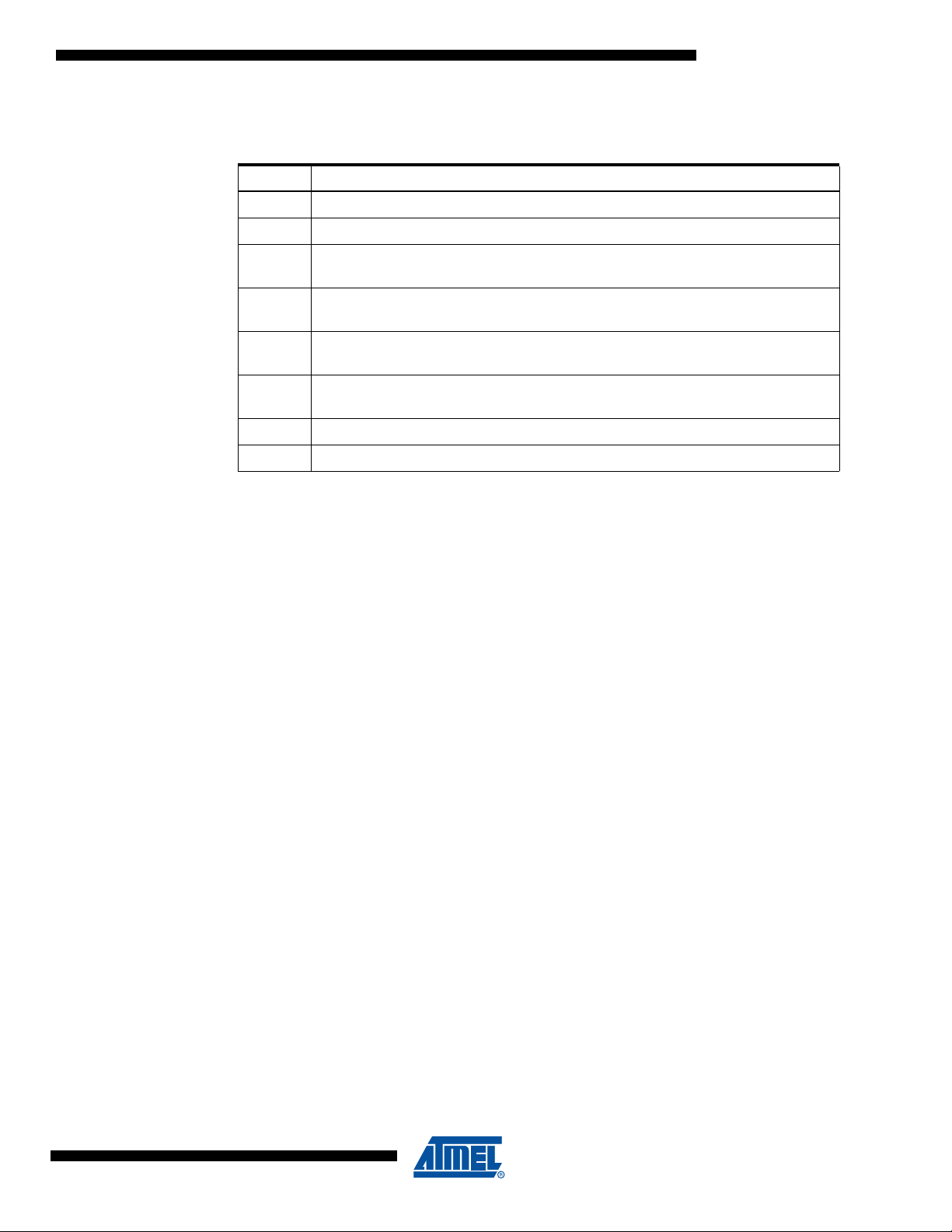
ATmega128(L)
Alternate Functions of Port E
The Port E pins with alternate functions are shown in Table 39.
Table 39. Port E Pins Alternate Functions
Port Pin Alternate Function
PE7 INT7/ICP3
PE6 INT6/ T3
PE5
PE4
PE3
PE2
PE1 PDO/TXD0 (Programming Data Output or UART0 Transmit Pin)
PE0 PDI/RXD0 (Programming Data Input or UART0 Receive Pin)
Note: 1. ICP3, T3, OC3C, OC3B, OC3B, OC3A, and XCK0 not applicable in ATmega103 compatibility
INT5/OC3C
for Timer/Counter3)
INT4/OC3B
Timer/Counter3)
AIN1/OC3A
Output A for Timer/Counter3)
AIN0/XCK0
input/output)
mode.
(1)
(External Interrupt 7 Input or Timer/Counter3 Input Capture Pin)
(1)
(External Interrupt 6 Input or Timer/Counter3 Clock Input)
(1)
(External Interrupt 5 Input or Output Compare and PWM Output C
(1)
(External Interrupt4 Input or Output Compare and PWM Output B for
(1)
(Analog Comparator Negative Input or Output Compare and PWM
(1)
(Analog Comparator Positive Input or USART0 external clock
• INT7/ICP3 – Port E, Bit 7
INT7, External Interrupt source 7: The PE7 pin can serve as an external interrupt source.
ICP3 – Input Capture Pin3: The PE7 pin can act as an Input Capture Pin for Timer/Counter3.
• INT6/T3 – Port E, Bit 6
INT6, External Interrupt source 6: The PE6 pin can serve as an external interrupt source.
T3, Timer/Counter3 counter source.
• INT5/OC3C – Port E, Bit 5
INT5, External Interrupt source 5: The PE5 pin can serve as an External Interrupt source.
OC3C, Output Compare Match C output: The PE5 pin can serve as an External output for the
Timer/Counter3 Output Compare C. The pin has to be configured as an output (DDE5 set “one”)
to serve this function. The OC3C pin is also the output pin for the PWM mode timer function.
• INT4/OC3B – Port E, Bit 4
INT4, External Interrupt source 4: The PE4 pin can serve as an External Interrupt source.
OC3B, Output Compare Match B output: The PE4 pin can serve as an External output for the
Timer/Counter3 Output Compare B. The pin has to be configured as an output (DDE4 set (one))
to serve this function. The OC3B pin is also the output pin for the PWM mode timer function.
• AIN1/OC3A – Port E, Bit 3
AIN1 – Analog Comparator Negative input. This pin is directly connected to the negative input of
the Analog Comparator.
OC3A, Output Compare Match A output: The PE3 pin can serve as an External output for the
Timer/Counter3 Output Compare A. The pin has to be configured as an output (DDE3 set “one”)
to serve this function. The OC3A pin is also the output pin for the PWM mode timer function.
• AIN0/XCK0 – Port E, Bit 2
2467P–AVR–08/07
AIN0 – Analog Comparator Positive input. This pin is directly connected to the positive input of
the Analog Comparator.
81
Page 82

XCK0, USART0 External clock. The Data Direction Register (DDE2) controls whether the clock
is output (DDE2 set) or input (DDE2 cleared). The XCK0 pin is active only when the USART0
operates in Synchronous mode.
• PDO/TXD0 – Port E, Bit 1
PDO, SPI Serial Programming Data Output. During Serial Program Downloading, this pin is
used as data output line for the ATmega128.
TXD0, UART0 Transmit pin.
• PDI/RXD0 – Port E, Bit 0
PDI, SPI Serial Programming Data Input. During Serial Program Downloading, this pin is used
as data input line for the ATmega128.
RXD0, USART0 Receive Pin. Receive Data (Data input pin for the USART0). When the
USART0 receiver is enabled this pin is configured as an input regardless of the value of DDRE0.
When the USART0 forces this pin to be an input, a logical one in PORTE0 will turn on the internal pull-up.
Table 40 and Table 41 relates the alternate functions of Port E to the overriding signals shown in
Figure 33 on page 71.
Table 40. Overriding Signals for Alternate Functions PE7..PE4
Signal
Name PE7/INT7/ICP3 PE6/INT6/T3 PE5/INT5/OC3C PE4/INT4/OC3B
PUOE 0 0 0 0
PUOV 0 0 0 0
DDOE 0 0 0 0
DDOV 0 0 0 0
PVOE 0 0 OC3C ENABLE OC3B ENABLE
PVOV 0 0 OC3C OC3B
DIEOE INT7 ENABLE INT6 ENABLE INT5 ENABLE INT4 ENABLE
DIEOV 1 1 1 1
DI INT7 INPUT/ICP3
INPUT
AIO – – – –
INT7 INPUT/T3
INPUT
INT5 INPUT INT4 INPUT
82
ATmega128(L)
2467P–AVR–08/07
Page 83
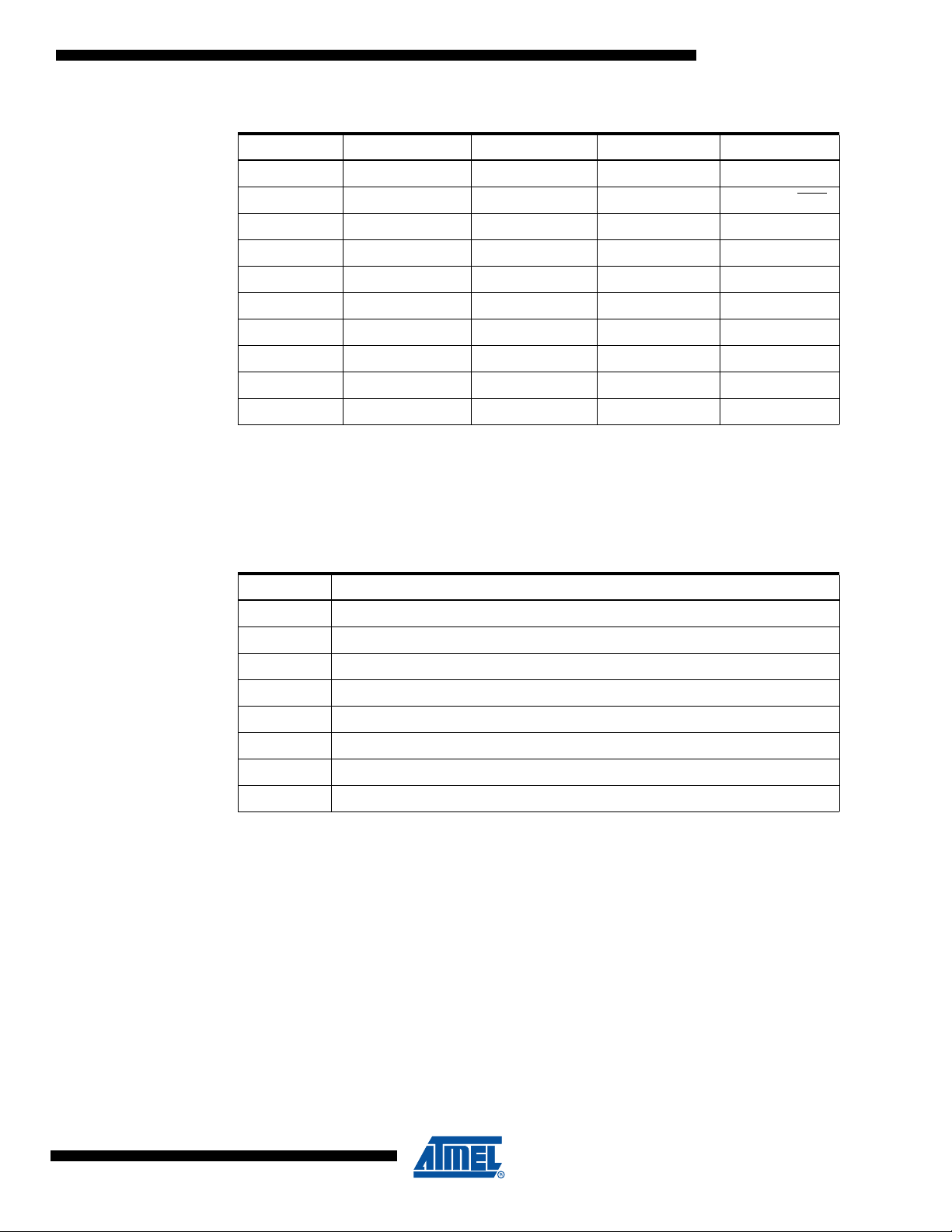
ATmega128(L)
Table 41. Overriding Signals for Alternate Functions in PE3..PE0
Signal Name PE3/AIN1/OC3A PE2/AIN0/XCK0 PE1/PDO/TXD0 PE0/PDI/RXD0
PUOE 0 0 TXEN0 RXEN0
PUOV 0 0 0 PORTE0 • PUD
DDOE 0 0 TXEN0 RXEN0
DDOV 0 0 1 0
PVOE OC3B ENABLE UMSEL0 TXEN0 0
PVOV OC3B XCK0 OUTPUT TXD0 0
DIEOE 0 0 0 0
DIEOV 0 0 0 0
DI 0 XCK0 INPUT – RXD0
AIO AIN1 INPUT AIN0 INPUT – –
Alternate Functions of Port F
The Port F has an alternate function as analog input for the ADC as shown in Table 42. If some
Port F pins are configured as outputs, it is essential that these do not switch when a conversion
is in progress. This might corrupt the result of the conversion. In ATmega103 compatibility mode
Port F is input only. If the JTAG interface is enabled, the pull-up resistors on pins PF7(TDI),
PF5(TMS), and PF4(TCK) will be activated even if a Reset occurs.
Table 42. Port F Pins Alternate Functions
Port Pin Alternate Function
PF7 ADC7/TDI (ADC input channel 7 or JTAG Test Data Input)
PF6 ADC6/TDO (ADC input channel 6 or JTAG Test Data Output)
PF5 ADC5/TMS (ADC input channel 5 or JTAG Test Mode Select)
PF4 ADC4/TCK (ADC input channel 4 or JTAG Test ClocK)
PF3 ADC3 (ADC input channel 3)
PF2 ADC2 (ADC input channel 2)
PF1 ADC1 (ADC input channel 1)
PF0 ADC0 (ADC input channel 0)
• TDI, ADC7 – Port F, Bit 7
ADC7, Analog to Digital Converter, Channel 7
.
TDI, JTAG Test Data In: Serial input data to be shifted in to the Instruction Register or Data Register (scan chains). When the JTAG interface is enabled, this pin can not be used as an I/O pin.
• TDO, ADC6 – Port F, Bit 6
2467P–AVR–08/07
ADC6, Analog to Digital Converter, Channel 6
.
TDO, JTAG Test Data Out: Serial output data from Instruction Register or Data Register. When
the JTAG interface is enabled, this pin can not be used as an I/O pin.
The TDO pin is tri-stated unless TAP states that shift out data are entered.
• TMS, ADC5 – Port F, Bit 5
ADC5, Analog to Digital Converter, Channel 5
.
83
Page 84

TMS, JTAG Test Mode Select: This pin is used for navigating through the TAP-controller state
machine. When the JTAG interface is enabled, this pin can not be used as an I/O pin.
• TCK, ADC4 – Port F, Bit 4
ADC4, Analog to Digital Converter, Channel 4
.
TCK, JTAG Test Clock: JTAG operation is synchronous to TCK. When the JTAG interface is
enabled, this pin can not be used as an I/O pin.
• ADC3 – ADC0 – Port F, Bit 3..0
Analog to Digital Converter, Channel 3..0.
Table 43. Overriding Signals for Alternate Functions in PF7..PF4
Signal
Name PF7/ADC7/TDI PF6/ADC6/TDO PF5/ADC5/TMS PF4/ADC4/TCK
PUOE JTAGEN JTAGEN JTAGEN JTAGEN
PUOV 1 0 1 1
D D OE J TA GE N J TA GE N J TA GE N J TA GE N
DDOV 0 SHIFT_IR +
SHIFT_DR
PVOE 0 JTAGEN 0 0
PVOV 0 TDO 0 0
D I EO E J TAG E N J TAG E N J TAG E N J TAG E N
DIEOV 0 0 0 0
DI – – – –
00
AIO TDI/ADC7 INPUT ADC6 INPUT TMS/ADC5
INPUT
TCKADC4 INPUT
Table 44. Overriding Signals for Alternate Functions in PF3..PF0
Signal Name PF3/ADC3 PF2/ADC2 PF1/ADC1 PF0/ADC0
PUOE0000
PUOV0000
DDOE0000
DDOV0000
PVOE0000
PVOV0000
DIEOE0000
DIEOV0000
DI––––
AIO ADC3 INPUT ADC2 INPUT ADC1 INPUT ADC0 INPUT
84
ATmega128(L)
2467P–AVR–08/07
Page 85

ATmega128(L)
Alternate Functions of Port G
In ATmega103 compatibility mode, only the alternate functions are the defaults for Port G, and
Port G cannot be used as General Digital Port Pins. The alternate pin configuration is as follows:
Table 45. Port G Pins Alternate Functions
Port Pin Alternate Function
PG4 TOSC1 (RTC Oscillator Timer/Counter0)
PG3 TOSC2 (RTC Oscillator Timer/Counter0)
PG2 ALE (Address Latch Enable to external memory)
PG1 RD (Read strobe to external memory)
PG0 WR
(Write strobe to external memory)
• TOSC1 – Port G, Bit 4
TOSC1, Timer Oscillator pin 1: When the AS0 bit in ASSR is set (one) to enable asynchronous
clocking of Timer/Counter0, pin PG4 is disconnected from the port, and becomes the input of the
inverting Oscillator amplifier. In this mode, a Crystal Oscillator is connected to this pin, and the
pin can not be used as an I/O pin.
• TOSC2 – Port G, Bit 3
TOSC2, Timer Oscillator pin 2: When the AS0 bit in ASSR is set (one) to enable asynchronous
clocking of Timer/Counter0, pin PG3 is disconnected from the port, and becomes the inverting
output of the Oscillator amplifier. In this mode, a Crystal Oscillator is connected to this pin, and
the pin can not be used as an I/O pin.
• ALE – Port G, Bit 2
ALE is the external data memory Address Latch Enable signal.
•RD
– Port G, Bit 1
RD
is the external data memory read control strobe.
•WR
– Port G, Bit 0
WR
is the external data memory write control strobe.
Table 46 and Table 47 relates the alternate functions of Port G to the overriding signals shown in
Figure 33 on page 71.
Table 46. Overriding Signals for Alternate Functions in PG4..PG1
Signal Name PG4/TOSC1 PG3/TOSC2 PG2/ALE PG1/RD
PUOE AS0 AS0 SRE SRE
PUOV 0 0 0 0
DDOE AS0 AS0 SRE SRE
DDOV 0 0 1 1
PVOE 0 0 SRE SRE
PVOV 0 0 ALE RD
DIEOE AS0 AS0 0 0
DIEOV 0 0 0 0
DI – – – –
AIO T/C0 OSC INPUT T/C0 OSC OUTPUT – –
2467P–AVR–08/07
85
Page 86

Table 47. Overriding Signals for Alternate Functions in PG0
Signal Name PG0/WR
PUOE SRE
PUOV 0
DDOE SRE
DDOV 1
PVOE SRE
PVOV WR
DIEOE 0
DIEOV 0
DI –
AIO –
86
ATmega128(L)
2467P–AVR–08/07
Page 87

Register Description for I/O Ports
ATmega128(L)
Port A Data Register –
PORTA
Port A Data Direction
Register – DDRA
Port A Input Pins
Address – PINA
Port B Data Register –
PORTB
Port B Data Direction
Register – DDRB
Bit 76543210
PORTA7 PORTA6 PORTA5 PORTA4 PORTA3 PORTA2 PORTA1 PORTA0 PORTA
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value00000000
Bit 76543210
DDA7 DDA6 DDA5 DDA4 DDA3 DDA2 DDA1 DDA0 DDRA
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value00000000
Bit 7 6543210
PINA7 PINA6 PINA5 PINA4 PINA3 PINA2 PINA1 PINA0 PINA
Read/WriteR RRRRRRR
Initial Value N/A N/A N/A N/A N/A N/A N/A N/A
Bit 76543210
PORTB7 PORTB6 PORTB5 PORTB4 PORTB3 PORTB2 PORTB1 PORTB0 PORTB
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value00000000
Bit 76543210
DDB7 DDB6 DDB5 DDB4 DDB3 DDB2 DDB1 DDB0 DDRB
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value00000000
Port B Input Pins
Address – PINB
Port C Data Register –
PORTC
Port C Data Direction
Register – DDRC
2467P–AVR–08/07
Bit 76543210
PINB7 PINB6 PINB5 PINB4 PINB3 PINB2 PINB1 PINB0 PINB
Read/WriteRRRRRRRR
Initial Value N/A N/A N/A N/A N/A N/A N/A N/A
Bit 76543210
PORTC7 PORTC6 PORTC5 PORTC4 PORTC3 PORTC2 PORTC1 PORTC0 PORTC
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value00000000
Bit 76543210
DDC7 DDC6 DDC5 DDC4 DDC3 DDC2 DDC1 DDC0 DDRC
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value00000000
87
Page 88
Port C Input Pins
Address – PINC
Bit 76543210
PINC7 PINC6 PINC5 PINC4 PINC3 PINC2 PINC1 PINC0 PINC
Read/WriteRRRRRRRR
Initial Value N/A N/A N/A N/A N/A N/A N/A N/A
In ATmega103 compatibility mode, DDRC and PINC Registers are initialized to being Push-Pull
Zero Output. The port pins assumes their initial value, even if the clock is not running. Note that
the DDRC and PINC Registers are available in ATmega103 compatibility mode, and should not
be used for 100% back-ward compatibility.
Port D Data Register –
PORTD
Port D Data Direction
Register – DDRD
Port D Input Pins
Address – PIND
Port E Data Register –
PORTE
Port E Data Direction
Register – DDRE
Bit 76543210
PORTD7 PORTD6 PORTD5 PORTD4 PORTD3 PORTD2 PORTD1 PORTD0 PORTD
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value00000000
Bit 76543210
DDD7 DDD6 DDD5 DDD4 DDD3 DDD2 DDD1 DDD0 DDRD
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value00000000
Bit 76543210
PIND7 PIND6 PIND5 PIND4 PIND3 PIND2 PIND1 PIND0 PIND
Read/WriteRRRRRRRR
Initial Value N/A N/A N/A N/A N/A N/A N/A N/A
Bit 76543210
PORTE7 PORTE6 PORTE5 PORTE4 PORTE3 PORTE2 PORTE1 PORTE0 PORTE
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value00000000
Bit 76543210
DDE7 DDE6 DDE5 DDE4 DDE3 DDE2 DDE1 DDE0 DDRE
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value00000000
Port E Input Pins
Address – PINE
Port F Data Register –
PORTF
88
ATmega128(L)
Bit 76543210
PINE7 PINE6 PINE5 PINE4 PINE3 PINE2 PINE1 PINE0 PINF
Read/WriteRRRRRRRR
Initial Value N/A N/A N/A N/A N/A N/A N/A N/A
Bit 76543210
PORTF7 PORTF6 PORTF5 PORTF4 PORTF3 PORTF2 PORTF1 PORTF0 PORTF
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value00000000
2467P–AVR–08/07
Page 89

ATmega128(L)
Port F Data Direction
Register – DDRF
Port F Input Pins
Address – PINF
Port G Data Register –
PORTG
Port G Data Direction
Register – DDRG
Bit 76543210
DDF7 DDF6 DDF5 DDF4 DDF3 DDF2 DDF1 DDF0 DDRF
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value00000000
Bit 76543210
PINF7 PINF6 PINF5 PINF4 PINF3 PINF2 PINF1 PINF0 PINF
Read/WriteRRRRRRRR
Initial Value N/A N/A N/A N/A N/A N/A N/A N/A
Note that PORTF and DDRF Registers are not available in ATmega103 compatibility mode
where Port F serves as digital input only.
Bit 76543210
–––
Read/Write R R R R/W R/W R/W R/W R/W
Initial Value00000000
Bit 76543210
– – – DDG4 DDG3 DDG2 DDG1 DDG0 DDRG
Read/Write R R R R/W R/W R/W R/W R/W
Initial Value00000000
PORTG4 PORTG3 PORTG2 PORTG1 PORTG0 PORTG
Port G Input Pins
Address – PING
Bit 76543210
– – – PING4 PING3 PING2 PING1 PING0 PING
Read/WriteRRRRRRRR
Initial Value 0 0 0 N/A N/A N/A N/A N/A
Note that PORTG, DDRG, and PING are not available in ATmega103 compatibility mode. In the
ATmega103 compatibility mode Port G serves its alternate functions only (TOSC1, TOSC2, WR
RD
and ALE).
,
2467P–AVR–08/07
89
Page 90
External Interrupts
External Interrupt
Control Register A –
EICRA
The External Interrupts are triggered by the INT7:0 pins. Observe that, if enabled, the interrupts
will trigger even if the INT7:0 pins are configured as outputs. This feature provides a way of generating a software interrupt. The External Interrupts can be triggered by a falling or rising edge or
a low level. This is set up as indicated in the specification for the External Interrupt Control Registers – EICRA (INT3:0) and EICRB (INT7:4). When the external interrupt is enabled and is
configured as level triggered, the interrupt will trigger as long as the pin is held low. Note that
recognition of falling or rising edge interrupts on INT7:4 requires the presence of an I/O clock,
described in “Clock Systems and their Distribution” on page 36. Low level interrupts and the
edge interrupt on INT3:0 are detected asynchronously. This implies that these interrupts can be
used for waking the part also from sleep modes other than Idle mode. The I/O clock is halted in
all sleep modes except Idle mode.
Note that if a level triggered interrupt is used for wake-up from Power-down mode, the changed
level must be held for some time to wake up the MCU. This makes the MCU less sensitive to
noise. The changed level is sampled twice by the Watchdog Oscillator clock. The period of the
Watchdog Oscillator is 1 µs (nominal) at 5.0V and 25°C. The frequency of the Watchdog Oscillator is voltage dependent as shown in the “Electrical Characteristics” on page 318. The MCU will
wake up if the input has the required level during this sampling or if it is held until the end of the
start-up time. The start-up time is defined by the SUT fuses as described in “Clock Systems and
their Distribution” on page 36. If the level is sampled twice by the Watchdog Oscillator clock but
disappears before the end of the start-up time, the MCU will still wake up, but no interrupt will be
generated. The required level must be held long enough for the MCU to complete the wake up to
trigger the level interrupt.
Bit 76543210
ISC31 ISC30 ISC21 ISC20 ISC11 ISC10 ISC01 ISC00 EICRA
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value00000000
This Register can not be reached in ATmega103 compatibility mode, but the initial value defines
INT3:0 as low level interrupts, as in ATmega103.
• Bits 7..0 – ISC31, ISC30 – ISC00, ISC00: External Interrupt 3 - 0 Sense Control Bits
The External Interrupts 3 - 0 are activated by the external pins INT3:0 if the SREG I-flag and the
corresponding interrupt mask in the EIMSK is set. The level and edges on the external pins that
activate the interrupts are defined in Table 48. Edges on INT3..INT0 are registered asynchronously. Pulses on INT3:0 pins wider than the minimum pulse width given in Table 49 will
generate an interrupt. Shorter pulses are not guaranteed to generate an interrupt. If low level
interrupt is selected, the low level must be held until the completion of the currently executing
instruction to generate an interrupt. If enabled, a level triggered interrupt will generate an interrupt request as long as the pin is held low. When changing the ISCn bit, an interrupt can occur.
Therefore, it is recommended to first disable INTn by clearing its Interrupt Enable bit in the
EIMSK Register. Then, the ISCn bit can be changed. Finally, the INTn interrupt flag should be
cleared by writing a logical one to its Interrupt Flag bit (INTFn) in the EIFR Register before the
interrupt is re-enabled.
Table 48. Interrupt Sense Control
ISCn1 ISCn0 Description
0 0 The low level of INTn generates an interrupt request.
(1)
90
ATmega128(L)
2467P–AVR–08/07
Page 91
ATmega128(L)
External Interrupt
Control Register B –
EICRB
Table 48. Interrupt Sense Control
ISCn1 ISCn0 Description
01Reserved
1 0 The falling edge of INTn generates asynchronously an interrupt request.
1 1 The rising edge of INTn generates asynchronously an interrupt request.
Note: 1. n = 3, 2, 1or 0.
When changing the ISCn1/ISCn0 bits, the interrupt must be disabled by clearing its Interrupt
Enable bit in the EIMSK Register. Otherwise an interrupt can occur when the bits are changed.
(1)
Table 49. Asynchronous External Interrupt Characteristics
Symbol Parameter Condition Min Typ Max Units
t
INT
Bit 76543210
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value00000000
Minimum pulse width for
asynchronous external interrupt
ISC71 ISC70 ISC61 ISC60 ISC51 ISC50 ISC41 ISC40 EICRB
50 ns
• Bits 7..0 – ISC71, ISC70 - ISC41, ISC40: External Interrupt 7 - 4 Sense Control Bits
The External Interrupts 7 - 4 are activated by the external pins INT7:4 if the SREG I-flag and the
corresponding interrupt mask in the EIMSK is set. The level and edges on the external pins that
activate the interrupts are defined in Table 50. The value on the INT7:4 pins are sampled before
detecting edges. If edge or toggle interrupt is selected, pulses that last longer than one clock
period will generate an interrupt. Shorter pulses are not guaranteed to generate an interrupt.
Observe that CPU clock frequency can be lower than the XTAL frequency if the XTAL divider is
enabled. If low level interrupt is selected, the low level must be held until the completion of the
currently executing instruction to generate an interrupt. If enabled, a level triggered interrupt will
generate an interrupt request as long as the pin is held low.
External Interrupt
Mask Register –
EIMSK
2467P–AVR–08/07
Table 50. Interrupt Sense Control
ISCn1 ISCn0 Description
0 0 The low level of INTn generates an interrupt request.
0 1 Any logical change on INTn generates an interrupt request
10
11
Note: 1. n = 7, 6, 5 or 4.
When changing the ISCn1/ISCn0 bits, the interrupt must be disabled by clearing its Interrupt
Enable bit in the EIMSK Register. Otherwise an interrupt can occur when the bits are changed.
Bit 76543210
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value00000000
The falling edge between two samples of INTn generates an interrupt
request.
The rising edge between two samples of INTn generates an interrupt
request.
INT7 INT6 INT5 INT4 INT3 INT2 INT1 IINT0 EIMSK
(1)
• Bits 7..0 – INT7 – INT0: External Interrupt Request 7 - 0 Enable
91
Page 92

External Interrupt Flag
Register – EIFR
When an INT7 – INT0 bit is written to one and the I-bit in the Status Register (SREG) is set
(one), the corresponding external pin interrupt is enabled. The Interrupt Sense Control bits in the
External Interrupt Control Registers – EICRA and EICRB – defines whether the external interrupt is activated on rising or falling edge or level sensed. Activity on any of these pins will trigger
an interrupt request even if the pin is enabled as an output. This provides a way of generating a
software interrupt.
Bit 76543210
INTF7 INTF6 INTF5 INTF4 INTF3 INTF2 INTF1 IINTF0 EIFR
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value00000000
• Bits 7..0 – INTF7 - INTF0: External Interrupt Flags 7 - 0
When an edge or logic change on the INT7:0 pin triggers an interrupt request, INTF7:0 becomes
set (one). If the I-bit in SREG and the corresponding interrupt enable bit, INT7:0 in EIMSK, are
set (one), the MCU will jump to the interrupt vector. The flag is cleared when the interrupt routine
is executed. Alternatively, the flag can be cleared by writing a logical one to it. These flags are
always cleared when INT7:0 are configured as level interrupt. Note that when entering sleep
mode with the INT3:0 interrupts disabled, the input buffers on these pins will be disabled. This
may cause a logic change in internal signals which will set the INTF3:0 flags. See “Digital Input
Enable and Sleep Modes” on page 70 for more information.
92
ATmega128(L)
2467P–AVR–08/07
Page 93

ATmega128(L)
8-bit Timer/Counter0 with PWM and Asynchronous Operation
Timer/Counter0 is a general purpose, single channel, 8-bit Timer/Counter module. The main
features are:
Single Channel Counter
•
• Clear Timer on Compare Match (Auto Reload)
• Glitch-free, Phase Correct Pulse Width Modulator (PWM)
• Frequency Generator
• 10-bit Clock Prescaler
• Overflow and Compare Match Interrupt Sources (TOV0 and OCF0)
• Allows Clocking from External 32 kHz Watch Crystal Independent of the I/O Clock
Overview A simplified block diagram of the 8-bit Timer/Counter is shown in Figure 34. For the actual place-
ment of I/O pins, refer to “Pin Configurations” on page 2. CPU accessible I/O registers, including
I/O bits and I/O pins, are shown in bold. The device-specific I/O register and bit locations are
listed in the “8-bit Timer/Counter Register Description” on page 104.
Figure 34. 8-bit Timer/Counter Block Diagram
TCCRn
Timer/Counter
TCNTn
=
count
clear
direction
= 0
Control Logic
TOPBOTTOM
=
0xFF
clk
Tn
Prescaler
OCn
(Int.Req.)
Wavefor m
Generation
T/C
Oscillator
TOVn
(Int.Req.)
clk
I/O
OCn
TOSC1
TOSC2
OCRn
DATA B U S
clk
I/O
clk
ASY
Status flags
Synchronized Status flags
ASSRn
asynchronous mode
select (ASn)
Synchronization Unit
Registers The Timer/Counter (TCNT0) and Output Compare Register (OCR0) are 8-bit registers. Interrupt
request (shorten as Int.Req.) signals are all visible in the Timer Interrupt Flag Register (TIFR).
All interrupts are individually masked with the Timer Interrupt Mask Register (TIMSK). TIFR and
TIMSK are not shown in the figure since these registers are shared by other timer units.
The Timer/Counter can be clocked internally, via the prescaler, or asynchronously clocked from
the TOSC1/2 pins, as detailed later in this section. The asynchronous operation is controlled by
the Asynchronous Status Register (ASSR). The Clock Select logic block controls which clock
source the Timer/Counter uses to increment (or decrement) its value. The Timer/Counter is inac-
93
2467P–AVR–08/07
Page 94

tive when no clock source is selected. The output from the clock select logic is referred to as the
timer clock (clk
T0
).
The double buffered Output Compare Register (OCR0) is compared with the Timer/Counter
value at all times. The result of the compare can be used by the waveform generator to generate
a PWM or variable frequency output on the Output Compare Pin (OC0). See “Output Compare
Unit” on page 95. for details. The compare match event will also set the compare flag (OCF0)
which can be used to generate an output compare interrupt request.
Definitions Many register and bit references in this document are written in general form. A lower case “n”
replaces the Timer/Counter number, in this case 0. However, when using the register or bit
defines in a program, the precise form must be used (i.e., TCNT0 for accessing Timer/Counter0
counter value and so on).
The definitions in Table 51 are also used extensively throughout the document.
Table 51. Definitions
BOTTOM The counter reaches the BOTTOM when it becomes zero (0x00).
MAX The counter reaches its MAXimum when it becomes 0xFF (decimal 255).
TOP The counter reaches the TOP when it becomes equal to the highest
value in the count sequence. The TOP value can be assigned to be the
fixed value 0xFF (MAX) or the value stored in the OCR0 Register. The
assignment is dependent on the mode of operation.
Timer/Counter Clock Sources
The Timer/Counter can be clocked by an internal synchronous or an external asynchronous
clock source. The clock source clk
is by default equal to the MCU clock, clk
T0
. When the AS0
I/O
bit in the ASSR Register is written to logic one, the clock source is taken from the Timer/Counter
Oscillator connected to TOSC1 and TOSC2. For details on asynchronous operation, see “Asyn-
chronous Status Register – ASSR” on page 107. For details on clock sources and prescaler, see
“Timer/Counter Prescaler” on page 110.
Counter Unit The main part of the 8-bit Timer/Counter is the programmable bi-directional counter unit. Figure
35 shows a block diagram of the counter and its surrounding environment.
Figure 35. Counter Unit Block Diagram
DATA BU S
count
TCNTn Control Logic
clear
direction
topbottom
TOVn
(Int.Req.)
clk
Tn
Prescaler
T/C
Oscillator
clk
TOSC1
TOSC2
I/O
94
ATmega128(L)
2467P–AVR–08/07
Page 95

Signal description (internal signals):
count Increment or decrement TCNT0 by 1.
direction Selects between increment and decrement.
clear Clear TCNT0 (set all bits to zero).
ATmega128(L)
Output Compare Unit
clk
T0
top Signalizes that TCNT0 has reached maximum value.
bottom Signalizes that TCNT0 has reached minimum value (zero).
Depending on the mode of operation used, the counter is cleared, incremented, or decremented
at each timer clock (clk
selected by the clock select bits (CS02:0). When no clock source is selected (CS02:0 = 0) the
timer is stopped. However, the TCNT0 value can be accessed by the CPU, regardless of
whether clk
count operations.
The counting sequence is determined by the setting of the WGM01 and WGM00 bits located in
the Timer/Counter Control Register (TCCR0). There are close connections between how the
counter behaves (counts) and how waveforms are generated on the output compare output
OC0. For more details about advanced counting sequences and waveform generation, see
“Modes of Operation” on page 98.
The Timer/Counter overflow (TOV0) flag is set according to the mode of operation selected by
the WGM01:0 bits. TOV0 can be used for generating a CPU interrupt.
The 8-bit comparator continuously compares TCNT0 with the Output Compare Register
(OCR0). Whenever TCNT0 equals OCR0, the comparator signals a match. A match will set the
output compare flag (OCF0) at the next timer clock cycle. If enabled (OCIE0 = 1), the output
compare flag generates an output compare interrupt. The OCF0 flag is automatically cleared
when the interrupt is executed. Alternatively, the OCF0 flag can be cleared by software by writing a logical one to its I/O bit location. The waveform generator uses the match signal to
generate an output according to operating mode set by the WGM01:0 bits and compare output
mode (COM01:0) bits. The max and bottom signals are used by the waveform generator for handling the special cases of the extreme values in some modes of operation (“Modes of Operation”
on page 98). Figure 36 shows a block diagram of the output compare unit.
Timer/Counter clock.
). clkT0 can be generated from an external or internal clock source,
T0
is present or not. A CPU write overrides (has priority over) all counter clear or
T0
2467P–AVR–08/07
95
Page 96

Figure 36. Output Compare Unit, Block Diagram
DATA BUS
OCRn
TCNTn
= (8-bit Comparator )
OCFn (Int.Req.)
top
bottom
FOCn
The OCR0 Register is double buffered when using any of the Pulse Width Modulation (PWM)
modes. For the normal and Clear Timer on Compare (CTC) modes of operation, the double buffering is disabled. The double buffering synchronizes the update of the OCR0 Compare Register
to either top or bottom of the counting sequence. The synchronization prevents the occurrence
of odd-length, non-symmetrical PWM pulses, thereby making the output glitch-free.
The OCR0 Register access may seem complex, but this is not case. When the double buffering
is enabled, the CPU has access to the OCR0 buffer Register, and if double buffering is disabled
the CPU will access the OCR0 directly.
Waveform Generator
WGMn1:0
COMn1:0
OCxy
Force Output Compare
Compare Match Blocking by TCNT0 Write
Using the Output Compare Unit
96
ATmega128(L)
In non-PWM waveform generation modes, the match output of the comparator can be forced by
writing a one to the Force Output Compare (FOC0) bit. Forcing compare match will not set the
OCF0 flag or reload/clear the timer, but the OC0 pin will be updated as if a real compare match
had occurred (the COM01:0 bits settings define whether the OC0 pin is set, cleared or toggled).
All CPU write operations to the TCNT0 Register will block any compare match that occurs in the
next timer clock cycle, even when the timer is stopped. This feature allows OCR0 to be initialized
to the same value as TCNT0 without triggering an interrupt when the Timer/Counter clock is
enabled.
Since writing TCNT0 in any mode of operation will block all compare matches for one timer clock
cycle, there are risks involved when changing TCNT0 when using the output compare channel,
independently of whether the Timer/Counter is running or not. If the value written to TCNT0
equals the OCR0 value, the compare match will be missed, resulting in incorrect waveform generation. Similarly, do not write the TCNT0 value equal to BOTTOM when the counter is
downcounting.
The setup of the OC0 should be performed before setting the Data Direction Register for the port
pin to output. The easiest way of setting the OC0 value is to use the force output compare
2467P–AVR–08/07
Page 97

ATmega128(L)
(FOC0) strobe bit in normal mode. The OC0 Register keeps its value even when changing
between waveform generation modes.
Be aware that the COM01:0 bits are not double buffered together with the compare value.
Changing the COM01:0 bits will take effect immediately.
Compare Match Output Unit
The Compare Output mode (COM01:0) bits have two functions. The waveform generator uses
the COM01:0 bits for defining the Output Compare (OC0) state at the next compare match. Also,
the COM01:0 bits control the OC0 pin output source. Figure 37 shows a simplified schematic of
the logic affected by the COM01:0 bit setting. The I/O registers, I/O bits, and I/O pins in the figure are shown in bold. Only the parts of the General I/O Port Control Registers (DDR and PORT)
that are affected by the COM01:0 bits are shown. When referring to the OC0 state, the reference
is for the internal OC0 Register, not the OC0 pin.
Figure 37. Compare Match Output Unit, Schematic
COMn1
COMn0
FOCn
Waveform
Generator
DQ
1
OCn
DQ
PORT
DATA BU S
DQ
0
OCn
Pin
Compare Output Mode and Waveform Generation
clk
I/O
DDR
The general I/O port function is overridden by the output compare (OC0) from the waveform
generator if either of the COM01:0 bits are set. However, the OC0 pin direction (input or output)
is still controlled by the Data Direction Register (DDR) for the port pin. The Data Direction Register bit for the OC0 pin (DDR_OC0) must be set as output before the OC0 value is visible on the
pin. The port override function is independent of the waveform generation mode.
The design of the output compare pin logic allows initialization of the OC0 state before the output is enabled. Note that some COM01:0 bit settings are reserved for certain modes of
operation. See “8-bit Timer/Counter Register Description” on page 104.
The waveform generator uses the COM01:0 bits differently in normal, CTC, and PWM modes.
For all modes, setting the COM01:0 = 0 tells the Waveform Generator that no action on the OC0
Register is to be performed on the next compare match. For compare output actions in the nonPWM modes refer to Table 53 on page 105. For fast PWM mode, refer to Table 54 on page 105,
and for phase correct PWM refer to Table 55 on page 106.
A change of the COM01:0 bits state will have effect at the first compare match after the bits are
written. For non-PWM modes, the action can be forced to have immediate effect by using the
FOC0 strobe bits.
2467P–AVR–08/07
97
Page 98

Modes of Operation
The mode of operation, i.e., the behavior of the Timer/Counter and the output compare pins, is
defined by the combination of the Waveform Generation mode (WGM01:0) and Compare Output
mode (COM01:0) bits. The Compare Output mode bits do not affect the counting sequence,
while the Waveform Generation mode bits do. The COM01:0 bits control whether the PWM output generated should be inverted or not (inverted or non-inverted PWM). For non-PWM modes
the COM01:0 bits control whether the output should be set, cleared, or toggled at a compare
match (See “Compare Match Output Unit” on page 97.).
For detailed timing information refer to “Timer/Counter Timing Diagrams” on page 102.
Normal Mode The simplest mode of operation is the normal mode (WGM01:0 = 0). In this mode the counting
direction is always up (incrementing), and no counter clear is performed. The counter simply
overruns when it passes its maximum 8-bit value (TOP = 0xFF) and then restarts from the bottom (0x00). In normal operation the Timer/Counter overflow flag (
timer clock cycle as the TCNT0 becomes zero. The
TOV0 flag in this case behaves like a ninth
TOV0) will be set in the same
bit, except that it is only set, not cleared. However, combined with the timer overflow interrupt
that automatically clears the
TOV0 flag, the timer resolution can be increased by software. There
are no special cases to consider in the normal mode, a new counter value can be written
anytime.
The output compare unit can be used to generate interrupts at some given time. Using the output compare to generate waveforms in normal mode is not recommended, since this will occupy
too much of the CPU time.
Clear Timer on Compare Match (CTC) Mode
In Clear Timer on Compare or CTC mode (WGM01:0 = 2), the OCR0 Register is used to manipulate the counter resolution. In CTC mode the counter is cleared to zero when the counter value
(TCNT0) matches the OCR0. The OCR0 defines the top value for the counter, hence also its
resolution. This mode allows greater control of the compare match output frequency. It also simplifies the operation of counting external events.
The timing diagram for the CTC mode is shown in Figure 38. The counter value (TCNT0)
increases until a compare match occurs between TCNT0 and OCR0, and then counter (TCNT0)
is cleared.
Figure 38. CTC Mode, Timing Diagram
OCn Interrupt Flag Set
TCNTn
OCn
(Toggle)
Period
1 4
2 3
(COMn1:0 = 1)
98
An interrupt can be generated each time the counter value reaches the TOP value by using the
OCF0 flag. If the interrupt is enabled, the interrupt handler routine can be used for updating the
TOP value. However, changing the TOP to a value close to BOTTOM when the counter is running with none or a low prescaler value must be done with care since the CTC mode does not
have the double buffering feature. If the new value written to OCR0 is lower than the current
ATmega128(L)
2467P–AVR–08/07
Page 99

ATmega128(L)
value of TCNT0, the counter will miss the compare match. The counter will then have to count to
its maximum value (0xFF) and wrap around starting at 0x00 before the compare match can
occur.
For generating a waveform output in CTC mode, the OC0 output can be set to toggle its logical
level on each compare match by setting the Compare Output mode bits to Toggle mode
(COM01:0 = 1). The OC0 value will not be visible on the port pin unless the data direction for the
pin is set to output. The waveform generated will have a maximum frequency of f
when OCR0 is set to zero (0x00). The waveform frequency is defined by the following equation:
f
f
OCn
-----------------------------------------------=
2 N 1 OCRn+()⋅⋅
clk_I/O
The N variable represents the prescale factor (1, 8, 32, 64, 128, 256, or 1024).
OC0
= f
clk_I/O
/2
As for the normal mode of operation, the
TOV0 flag is set in the same timer clock cycle that the
counter counts from MAX to 0x00.
Fast PWM Mode The fast Pulse Width Modulation or fast PWM mode (WGM01:0 = 3) provides a high frequency
PWM waveform generation option. The fast PWM differs from the other PWM option by its single-slope operation. The counter counts from BOTTOM to MAX then restarts from BOTTOM. In
non-inverting Compare Output mode, the output compare (OC0) is cleared on the compare
match between TCNT0 and OCR0, and set at BOTTOM. In inverting Compare Output mode, the
output is set on compare match and cleared at BOTTOM. Due to the single-slope operation, the
operating frequency of the fast PWM mode can be twice as high as the phase correct PWM
mode that uses dual-slope operation. This high frequency makes the fast PWM mode well suited
for power regulation, rectification, and DAC applications. High frequency allows physically small
sized external components (coils, capacitors), and therefore reduces total system cost.
In fast PWM mode, the counter is incremented until the counter value matches the MAX value.
The counter is then cleared at the following timer clock cycle. The timing diagram for the fast
PWM mode is shown in Figure 39. The TCNT0 value is in the timing diagram shown as a histogram for illustrating the single-slope operation. The diagram includes non-inverted and inverted
PWM outputs. The small horizontal line marks on the TCNT0 slopes represent compare
matches between OCR0 and TCNT0.
2467P–AVR–08/07
99
Page 100

Figure 39. Fast PWM Mode, Timing Diagram
TCNTn
OCRn Interrupt Flag Set
OCRn Update
and
TOVn Interrupt Flag Set
OCn
OCn
Period
1
2 3
The Timer/Counter overflow flag (
4 5 6 7
TOV0) is set each time the counter reaches Max If the interrupt
(COMn1:0 = 2)
(COMn1:0 = 3)
is enabled, the interrupt handler routine can be used for updating the compare value.
In fast PWM mode, the compare unit allows generation of PWM waveforms on the OC0 pin. Setting the COM01:0 bits to 2 will produce a non-inverted PWM and an inverted PWM output can
be generated by setting the COM01:0 to 3 (See Table 54 on page 105). The actual OC0 value
will only be visible on the port pin if the data direction for the port pin is set as output. The PWM
waveform is generated by setting (or clearing) the OC0 Register at the compare match between
OCR0 and TCNT0, and clearing (or setting) the OC0 Register at the timer clock cycle the
counter is cleared (changes from MAX to BOTTOM).
The PWM frequency for the output can be calculated by the following equation:
f
clk_I/O
f
OCnPWM
------------------=
N 256⋅
The N variable represents the prescale factor (1, 8, 32, 64, 128, 256, or 1024).
The extreme values for the OCR0 Register represent special cases when generating a PWM
waveform output in the fast PWM mode. If the OCR0 is set equal to BOTTOM, the output will be
a narrow spike for each MAX+1 timer clock cycle. Setting the OCR0 equal to MAX will result in a
constantly high or low output (depending on the polarity of the output set by the COM01:0 bits.)
100
A frequency (with 50% duty cycle) waveform output in fast PWM mode can be achieved by setting OC0 to toggle its logical level on each compare match (COM01:0 = 1). The waveform
generated will have a maximum frequency of f
ture is similar to the OC0 toggle in CTC mode, except the double buffer feature of the output
compare unit is enabled in the fast PWM mode.
ATmega128(L)
oc0
= f
/2 when OCR0 is set to zero. This fea-
clk_I/O
2467P–AVR–08/07
 Loading...
Loading...