

Athena C10, Platinum C10, Platinum M10, Platinum M300, Platinum M400 Communications Manual
...Page 1

COMMUNICATION MANUAL
Universal Digital Controller
C10
M10 – M300 – M400 – M5000
X100 – X400 – X5000 – X7000
ATHENA CONTROLS, INC.
5145, Campus Drive
Plymouth Meeting
Pennsylvania 19462-1129 U.S.A
Page 2

Copyright 1996 Athena Controls
All rights reserved
No part of this document may be stored in a retrieval system, or
transmitted in any form, electronic or mechanical, without prior written
permission of Athena Controls.
Athena Controls has used the best care and efforts in preparing this book
and believes the information in this publication are accurate. The Athena
Controls Products are subjected to continuous improvement, in the
pursuit the technological leadership, these improvements could require
changes to the information of this book. ATHENA CONTROLS reserves
the right to change such information without notice.
ATHENA CONTROLS makes no warranty of any kind, expressed or
implied, with regard to the documentation contained in this book.
ATHENA CONTROLS shall not be liable in any event - technical and
publishing error or omissions - for any incidental and consequential
damages, in connection with, or arising out of the use of this book.
TATION, AC PROGRAPH e AC EDIT, are trademarks of ATHENA
AC S
CONTROLS.
All the other tradenames or product name are trademark or registered
trademarks.
2
Page 3

C O N T E N T S
MODBUS PROTOCOL.................................................................................................................................... 6
1.
2. MESSAGE FORMAT.......................................................................................................................................6
2.1 CHARACTERS FORMAT .................................................................................................................................7
2.2 THE ADDRESS...............................................................................................................................................7
2.3 THE FUNCTION CODE ...................................................................................................................................7
2.4 THE CRC 16 ALGORITHM ............................................................................................................................7
2.4.1 CRC 16 Flow Chart.............................................................................................................................9
2.4.2 Visual Basic Calculate CRC16 example............................................................................................10
2.5 MESSAGE SYNCHRONISATION ....................................................................................................................10
3. THE MODBUS FUNCTIONS........................................................................................................................10
3.1 READ OUTPUT STATUS (01) .......................................................................................................................10
3.2 READ INPUT STATUS (02)...........................................................................................................................11
3.3 READ OUTPUT REGISTERS (03) ..................................................................................................................11
3.4 READ INPUT REGISTERS (04)......................................................................................................................11
3.5 FORCE SINGLE COIL (05)............................................................................................................................12
3.6 PRESET SINGLE REGISTER (06)...................................................................................................................12
3.7 READ STATUS (07) .....................................................................................................................................13
3.8 FORCE MULTIPLE COILS (15) .....................................................................................................................13
3.9 PRESET MULTIPLE REGISTERS (16) ............................................................................................................14
4. ERROR MANAGEMENT..............................................................................................................................14
4.1 ERROR CODES ............................................................................................................................................15
5. MODBUS ON ATHENA CONTROLS PLATINUM® INSTRUMENTS .................................................15
5.1 SERIAL COMMUNICATIONS PARAMETERS....................................................................................................15
5.2 COMMUNICATIONS TIME.............................................................................................................................15
5.3 DATA BASE ................................................................................................................................................16
5.4 BIT ZONE....................................................................................................................................................16
5.5 WORD ZONE ...............................................................................................................................................16
5.6 ASSIGNMENT OF THE PARAMETERS AND E2PROM .....................................................................................17
6. ELECTRICAL CONNECTIONS ..................................................................................................................17
6.1 GENERAL DESCRIPTION..............................................................................................................................17
6.2 COMMUNICATION CABLE LAYING RECOMMENDATIONS ............................................................................18
6.3 INSTRUMENTS WITH AN RS-485 INTERFACE (2 WIRE) ................................................................................18
6.3.1 References..........................................................................................................................................19
7. C10 / M10 CONTROLLERS.......................................................................................................................... 19
7.1 BIT ZONE....................................................................................................................................................19
7.2 READ STATUS.............................................................................................................................................20
7.3 WORD ZONE - PAGE 1 PARAMETERS ..........................................................................................................20
7.4 WORD ZONE - PAGE 2 CONFIGURATION.....................................................................................................21
7.5 TERMINATION AND POLARISATION.............................................................................................................22
8. M300 CONTROLLER ....................................................................................................................................22
8.1 BIT ZONE ....................................................................................................................................................22
8.2 READ STATUS.............................................................................................................................................23
8.3 WORD ZONE - PAGE 1 PARAMETERS ..........................................................................................................23
8.4 WORD ZONE - PAGE 2 CONFIGURATION.....................................................................................................24
8.5 TERMINATION AND POLARISATION.............................................................................................................26
3
Page 4

M400 CONTROLLER ....................................................................................................................................27
9.
9.1 BIT ZONE ....................................................................................................................................................27
9.2 READ STATUS.............................................................................................................................................27
9.3 WORD ZONE - PAGE 1 PARAMETERS ..........................................................................................................27
9.4 WORD ZONE - PAGE 2 CONFIGURATION .....................................................................................................28
9.5 TERMINATION AND POLARIZATION.............................................................................................................31
10. M5000 CONTROLLER ..............................................................................................................................31
10.1 BIT ZONE ....................................................................................................................................................31
10.2 READ STATUS.............................................................................................................................................32
10.3 WORD ZONE - PAGE 1 PARAMETERS ..........................................................................................................32
10.4 WORD ZONE - PAGE 2 CONFIGURATION .....................................................................................................33
10.5 WORD ZONE - PAGE 3 PROGRAMMER.........................................................................................................34
10.6 RS-485 CONFIGURATION DIP SWITCH .......................................................................................................39
11. X100 / X400 CONTROLLER .....................................................................................................................39
11.1 BIT ZONE....................................................................................................................................................39
11.2 READ STATUS.............................................................................................................................................40
11.3 WORD ZONE - PAGE 1 PARAMETERS..........................................................................................................40
11.4 WORD ZONE - PAGE 2 PARAMETERS..........................................................................................................41
11.5 WORD ZONE - PAGE 3 PROGRAM ...............................................................................................................42
11.6 WORD ZONE - PAGE 4 CONFIGURATION.....................................................................................................42
11.7 RS-485 CONFIGURATION DIP SWITCH .......................................................................................................46
12. X5000 CONTROLLER ...............................................................................................................................47
12.1 BIT ZONE ....................................................................................................................................................47
12.2 READ STATUS.............................................................................................................................................47
12.3 WORD ZONE - PAGE 1 PARAMETERS ..........................................................................................................48
12.4 WORD ZONE - PAGE 2 CONFIGURATION .....................................................................................................49
12.5 WORD ZONE - PAGE 3 PROGRAMMER.........................................................................................................50
12.6 RS-485 CONFIGURATION DIP SWITCH .......................................................................................................61
13. CONFIGURATION SOFTWARE FOR PLATINUM CONTROLLERS .............................................61
13.1 USE OF INSTRUMENTS WITH THE RS 485 COMMUNICATIONS OPTION .........................................................62
13.2 TO LOAD THE SOFTWARE ............................................................................................................................63
13.3 TO ENTER THE CONFIGURATION SOFTWARE ...............................................................................................64
13.4 CONFIGURATION SOFTWARE SETTINGS .......................................................................................................65
13.5 TO STORE THE SCREEN SETTINGS INTO THE INSTRUMENT............................................................................66
13.6 TO LOAD A CUSTOM SENSOR CONFIGURATION ............................................................................................66
13.7 TO CLONE SEVERAL INSTRUMENTS .............................................................................................................68
13.8 TO STORE THE SCREEN SETTINGS AS A FILE.................................................................................................68
13.9 TO RECALL A PREVIOUSLY STORED FILE .....................................................................................................69
13.10 PRINTING OF THE CONFIGURATION .........................................................................................................70
13.11 TREND MENU .........................................................................................................................................70
13.12 PROGRAMMED SETPOINT (ONLY IF THE PROGRAM OPTION IS PRESENT) .....................................................71
13.12.1 M5000 Controller ..........................................................................................................................71
13.12.2 X400 Controller.............................................................................................................................77
13.12.3 X5000 Controller...........................................................................................................................82
13.13 CONFIGURATION OF THE MASTER COMMUNICATIONS (ONLY X5000) ....................................................88
13.14 CONFIGURATION OF THE MATHEMATICAL / LOGICS OPERATIONS............................................................90
13.15 CONFIGURATION OF THE NUMERICAL CONSTANTS..................................................................................92
13.15.1 To modify the value of a constant ..................................................................................................93
13.15.2 To eliminate a constant..................................................................................................................94
13.15.3 Reading/writing of the configuration of the mathematical packet in the device............................94
13.15.4 Save the configuration of the mathematical packet on files ..........................................................94
13.16 DEFINITION OF THE PROFIBUS PARAMETERS (X5000 CONTROLLER ONLY) ...............................................94
13.16.1 How to insert the parameters in the configuration (X5000 controller only)...............................95
4
Page 5

13.16.2
13.16.3 How to save the configuration (X5000 controller only) ..............................................................103
13.16.4 How to send the configuration of the Profibus parameters (X5000 controller only)...............................103
13.16.5 How to receive the configuration of the Profibus parameters (X5000 controller only) ...............................104
14. RECOMMENDED RS-232 TO RS-485 CONVERTER ........................................................................106
14.1 ATHENA PART# 223A001401 RS-232 TO RS-485 OPTICALLY ISOLATED COMMUNICATIONS CONVERTER106
14.2 GENERAL INFORMATION..............................................................................................................................107
Parameters of the Data Base (X5000 controller only) ..................................................................97
5
Page 6
1. MODBUS Protocol
The Modbus protocol defines the format and method of communications
between a “master” which controls the system and one or more “slaves”
which respond to commands sent by the master. The Modbus defines
how the transmitter and reciever are identified, how messages are
exchanged and how errors are detected.
There may be one master and up to 247 slaves on a common line; this is
the protocol’s logical limit, the physical interface may limit the number of
devices further, for example, the standard RS485 interface handles a
maximum of 31 slaves connected on the line. Substituting the last device
on the line with a proper “repeater” or “bridge”, another 31 instruments
can be added to the line and so on up to the above mentioned limit (247).
All transactions are started by the master. A transaction may be a direct
question/reply to a single slave or broadcast in which the message is
sent to all the devices on the line and no answer is given. A transaction
consists of a single question/replay frame or a single broadcast
message/no answer frame.
Some of the characteristics of the protocol are not defined. These are:
standard interface, baud rate parity, number of bits.
The protocol also enables the user to choose between two
communications modes, ASCII and RTU (binary). Only the RTU mode is
implemented on ATHENA CONTROLS instruments as it is more efficient.
The Jbus protocol is functionally identical to Modbus and differs from it in
how the addresses are numbered: with Modbus the addresses are
numbered starting from zero) 0000= 1
start from one (0001=1
throughout all addresses. From here on, unless explicitly specified, even
though reference is made to Modbus, the description is valid for both.
st
address). This difference is maintained
st
address, while with Jbus they
2. Message Format
For communication to take place between the two devices, the message
must be put in a "packet". The packet leaves the transmitter through a
"port" and is "carried" along the line to a similar "port" on the receiver.
MODBUS establishes the format of this packet which includes, for both
the master and the slave:
• The address of the device with which the master has established the
connection (address 0 corresponds to a broadcast message sent to
all slave devices).
• The code of the function that is to be or has been performed.
• The data that is to be exchanged.
• The error check based on the CRC16 algorithm.
If a device detects an error in the message received (in the format, parity
or CRC16) the message is considered invalid and rejected, a slave that
detects an error in the message will therefore not take any action or
answer the question, such as when the address does not correspond to a
device on the line.
6
Page 7

2.1 Characters Format
The above mentioned packets referred to the transmitted character from
the PC or Supervisor.In this case this character cannot be modified
because they are set by Athena Controls. The default value is 8 , N, 1. It
means 8 data bits without parity check and with 1 stop bit.
2.2 The Address
As mentioned above, MODBUS transactions always involve the master,
which handles the line, and one slave at a time (except in the case of
broadcast messages). To identify the user to whom the message is sent,
the first character sent is a byte containing the numeric address of the
selected slave device. Each of the slaves will therefore be assigned a
different address that identifies it uniquely. The valid addresses range
from 1 to 247, while address 0, which cannot be assigned to a slave, set
at the start of the message sent by the master indicates that the message
is to be "broadcast", that is, sent to all the slaves at the same time.
Broadcast messages are exclusively those that do not require an answer
to carry out their function, i.e. assignments only.
2.3 The Function Code
The second character in the message identifies the function that is to be
performed in the message sent by the master, to which the slave
answers by sending back the same code to indicate that the function has
been performed. On ATHENA CONTROLS instruments, a subset of the
MODBUS functions has been implemented as follows:
• 01 Read Coil Status
• 02 Read Input Status
• 03 Read Holding Registers
• 04 Read Input registers
• 05 Force Single Coil
• 06 Preset Single register
• 07 Read Status
• 15 Force Multiple Coils
• 16 Preset Multiple Registers
In the implementation for ATHENA CONTROLS instruments, functions 01
and 02 are functionally identical and interchangeable, as are functions 03
and 04. For a full and detailed description of the functions, see chapter 3.
2.4 The CRC 16 Algorithm
The last two characters in the message contain the Cyclic Redundancy
Check based on the CRC16 algorithm. To calculate these two
characters, the message (address, function code and data without the
start, stop and parity bits) is considered as a single continuous binary
number whose most significant bit (MSB) is sent first. The message is
first multiplied by x16 (shifted to the left by 16 bits) and then divided by
16+215+22
2
integer part of the quotient is then rejected and the 16 bit remainder
(initialised at FFFFh at the start to avoid messages consisting exclusively
of zeros) is added on to the end of the message sent. The resulting
message, when divided by the same polynomial (2
receiving device must give zero as a remainder if no errors occurred (the
receiving device recalculates the CRC).
+1 expressed as a binary number (1100000000000101). The
16+215+22
+1) by the
7
Page 8

In reality, as the device that converts the data to be sent into serial form
(UART) sends the least significant bit (LSB) first instead of the MSB as it
should do for the CRC calculation, the CRC is carried out by inverting the
polynomial. In addition, as the MSB of the polynomial only affects the
quotient and not the remainder, the remainder is eliminated, thus giving
1010000000000001.
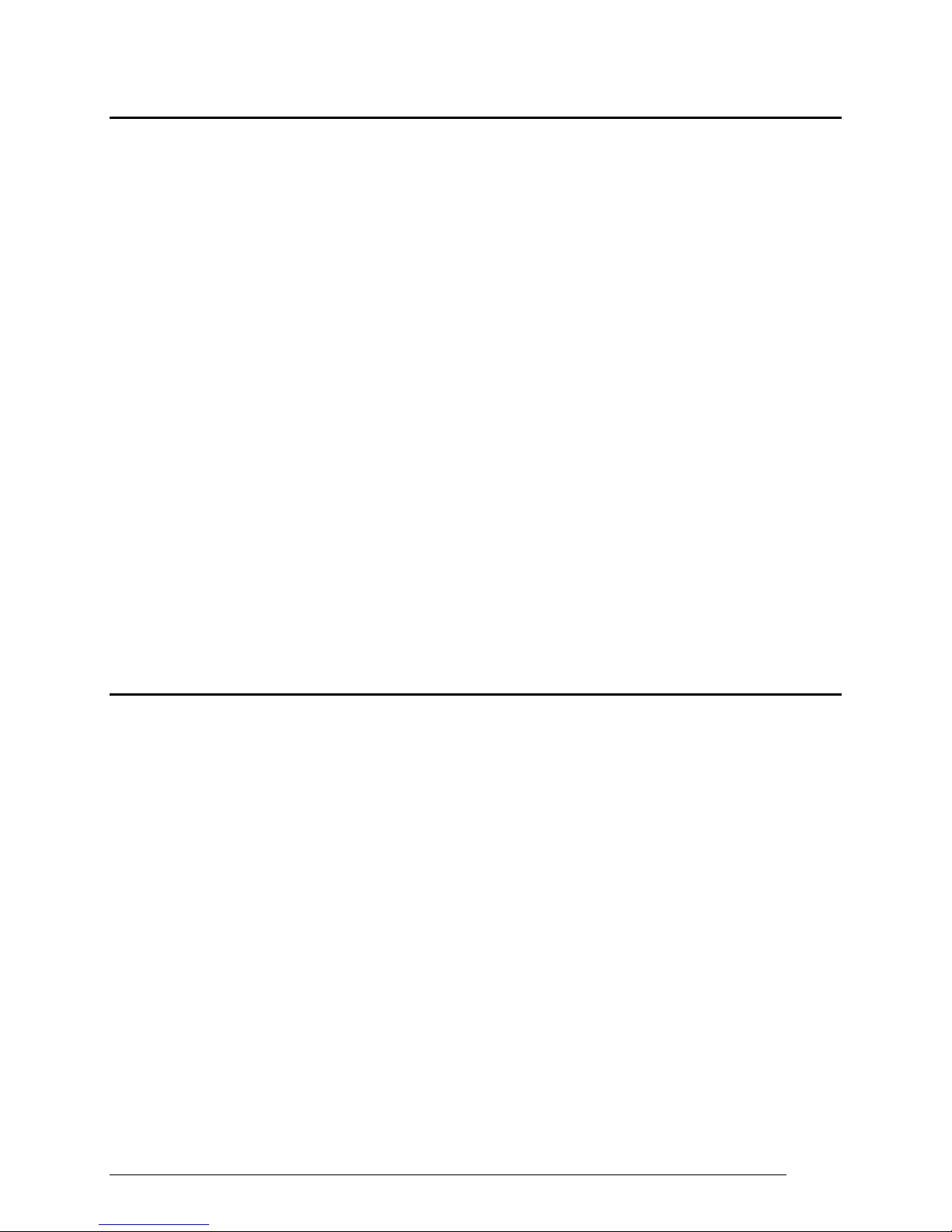
The step by step procedure for the CRC16 calculation is as follows:
1) Load a 16-bit register with FFFFh (all bits set to 1).
2) Execute the exclusive OR of the first character with the high order
byte in the register and place the result in the register.
3) Shift the register to the right by one bit.
4) If the bit that left the register on the right (flag) is a 1, execute the
exclusive OR of the polynomial 1010000000000001 with the
register.
5) Repeat steps 3 and 4 eight times.
6) Execute the exclusive OR of the next character with the high order
byte in the register and place the result in the register.
7) Repeat steps 3 to 6 for all the characters in the message.
8) The contents of the 16 bit register are the CRC code that is to be
added to the message.
8
Page 9
2.4.1 CRC 16 Flow Chart
CRC 16 XOR byte
NO
Hex FFFF
n = 0
Shift to right CRC 16
Carry
CRC 16 XOR Hex A001
CRC 16
CRC 16
YES
CRC 16
n = n + 1
NO
N > 7
NO
YES
Next Byte
End
message
YES
END
9
Page 10

2.4.2 Visual Basic Calculate CRC16 example
Function CRC16(String As String) As String
Dim N As Integer, i As Integer, NByte As Integer
Dim CRC As Long, a As Byte
Dim Buffer As String
NByte = Len(String)
CRC = 65535
For i = 1 To NByte
a = Asc(Mid$(String, i, 1)) 'C(I)
CRC = (CRC Xor a) And &HFFFF
For N = 0 To 7
If CRC And 1 Then
CRC = (CRC \ 2)
CRC = (CRC Xor 40961)
Else
CRC = CRC \ 2
End If
Next
Next
Buffer = Right$("0000" + Hex$(CRC And &HFFFF), 4)
CRC16 = Chr$("&H" + Right$(Buffer, 2)) + Chr$("&H" + Left$(Buffer, 2))
End Function
2.5 Message Synchronisation
Message synchronisation between the transmitter and the receiver is
obtained by inserting a pause of at least 3.5 times the time of one
character between the messages. If the receiving device does not
receive for the time required for 3 characters, it considers the previous
message completed and concludes that the next byte received will be the
first of a new message and, consequently, an address.
3. The MODBUS Functions
3.1 Read Output Status (01)
This section provides a detailed description of the MODBUS functions
implemented on ATHENA CONTROLS instruments.
This function is used for requesting the ON or OFF status of binary
logical variables. Broadcast mode is not allowed.
Question
In addition to the address of the slave and the function code (01), the
message contains the starting address expressed in two bytes and the
number of bits to be read, also occupying two bytes. Address numbering
starts from zero (bit1 = 0) for MODBUS, or one (bit1 = 1) for JBUS.
10
Page 11
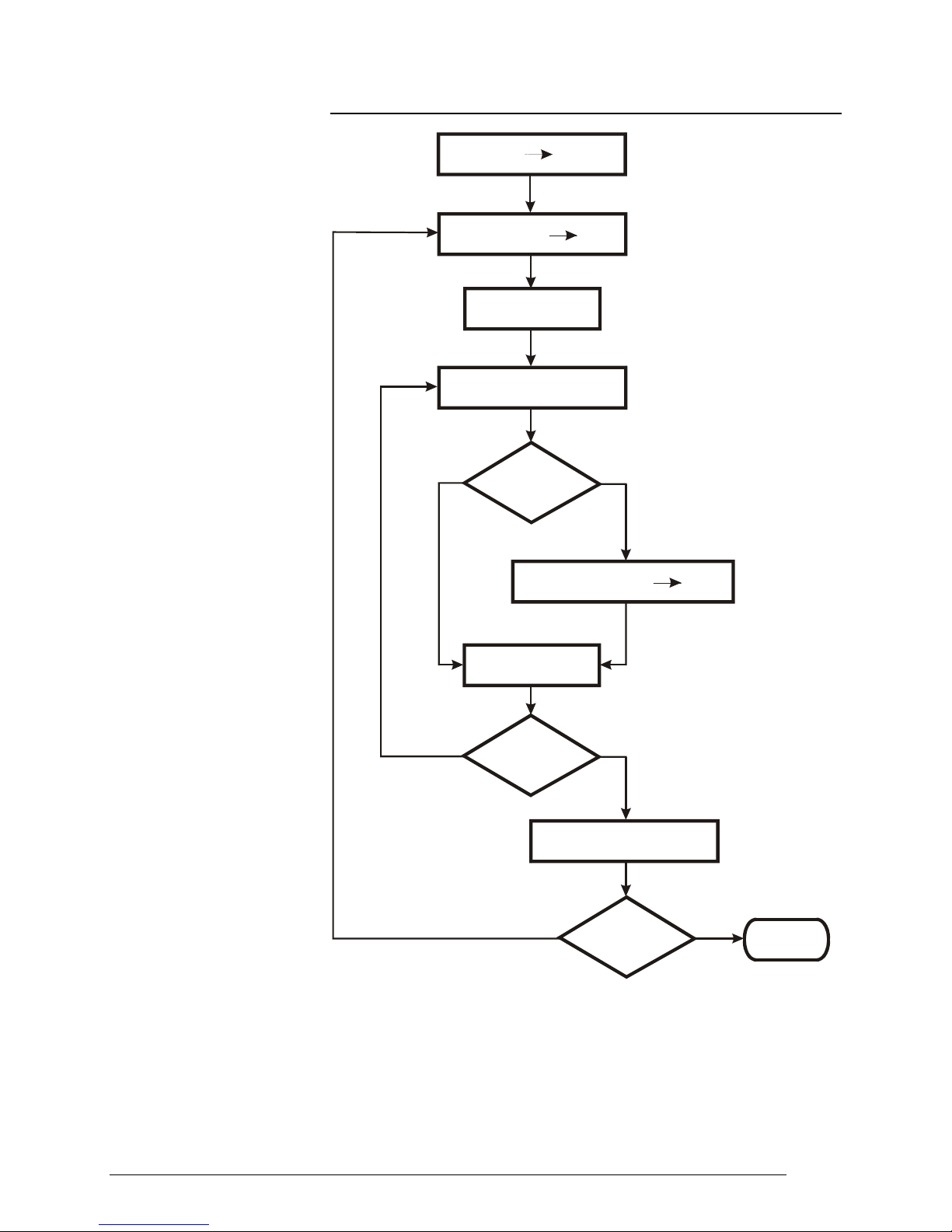
Example: Request for slave 17 to read bits 0004 to 0015.
ADDR FUNC
DATA
start
Addr HI
DATA
start
Addr LO
DATA
bit #
HI
DATA
bit #
LO
CRC
HI
CRC
LO
11 01 00 03 00 0C CE 9F
Answer
In addition to the address of the slave and the function code (01), the
message comprises a character containing the number of data bytes and
the characters containing data. The data are compacted, so one byte
contains the status of 8 bits, the least significant bit of the first byte must
contain the bit corresponding to the starting address and so on. If the
number of bits to be read is not a multiple of 8, the last character must be
completed with zeros in the most significant bits.
Example: Answer to the request indicated above.
ADDR FUNC
DATA
Byte
Count
DATA
bit
04..11
DATA
bit
12..15
CRC
HI
CRC
LO
11 01 02 CD 0B 6D 68
3.2 Read Input Status (02)
This function works in exactly the same way as the previous one.
3.3 Read Output Registers (03)
This function is used for requesting the value of 16-bit (word) registers
containing numeric variables. Broadcast mode is not allowed.
Question
In addition to the address of the slave and the function code (03), the
message contains the starting address expressed in two bytes and the
number of words to be read, also occupying two bytes. The maximum
number of words that may be read is 125. Address numbering starts from
zero (word1 = 0) for MODBUS, or one (word1 = 1) for JBUS.
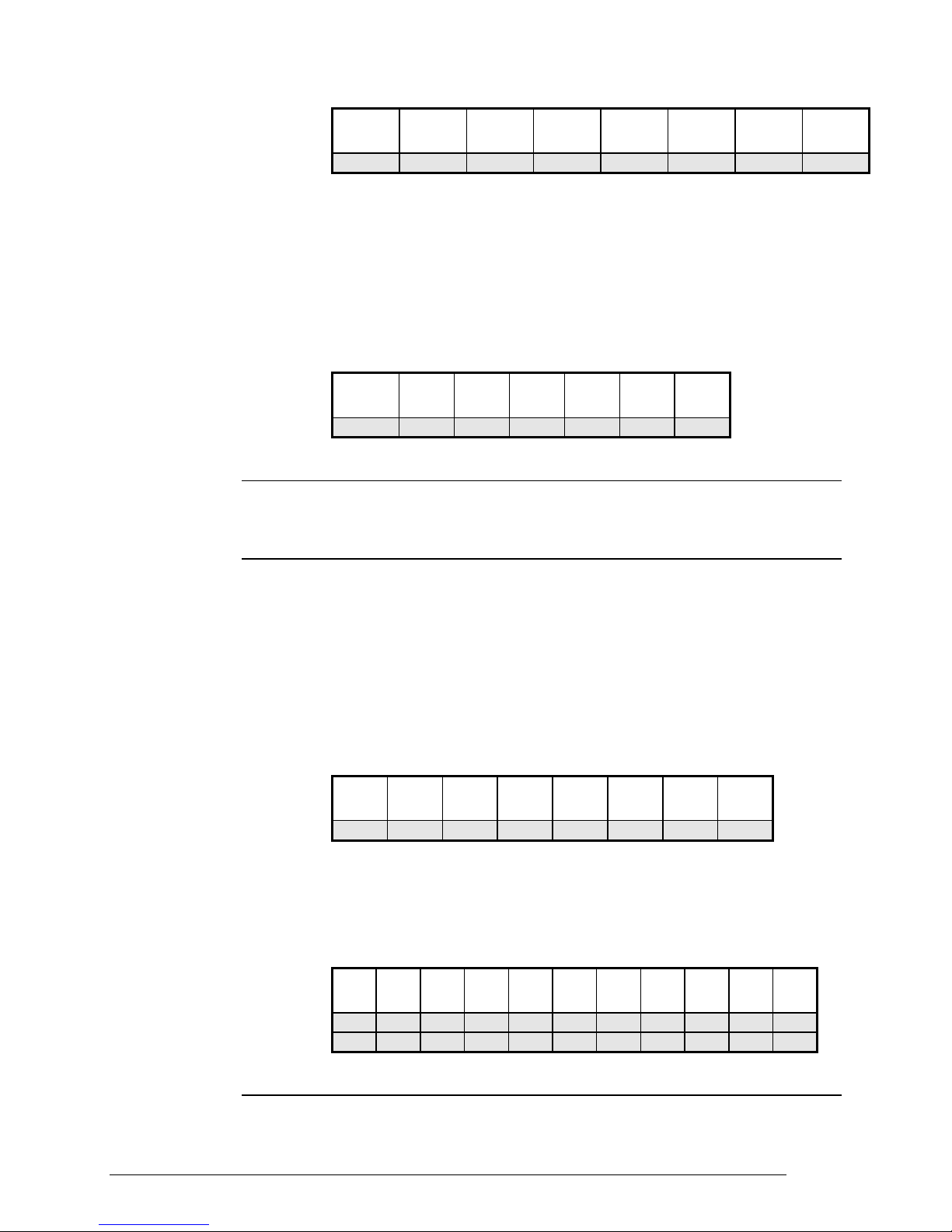
Example: Request for slave 25 to read registers 069 to 0071.
ADDR FUNC
DATA
start
Addr HI
DATA
start
Addr LO
DATA
word #
HI
DATA
word #
LO
CRC
HI
CRC
LO
19 03 00 44 00 03 46 06
Answer
In addition to the address of the slave and the function code (03), the
message comprises a character containing the number of data bytes and
the characters containing data. The registers require two bytes each, the
first of which contains the most significant byte.
Example: Answer to the request indicated above.
ADDR FUNC
DATA
Byte
Count
DATA
word
69 HI
DATA
word
69 LO
DATA
word
70 HI
DATA
word
70 LO
DATA
word
71 HI
DATA
word
71 LO
CRC
HI
CRC
LO
19 03 06 02 2B 00 00 00 64 AF 7A
3.4 Read Input Registers (04)
This function works in exactly the same way as the previous one.
11
Page 12
3.5 Force Single Coil (05)
This function is used for forcing the status of a single binary variable ON
or OFF. Broadcast mode is allowed.
Question
In addition to the address of the slave and the function code (05), the
message contains the address of the variable to be forced in two bytes
and two characters of which the first is set to FFh (255) to force it ON and
00h to force it OFF, while the second is always set to zero. Address
numbering starts from zero (bit1 = 0) for MODBUS, from one (bit1 = 1) for
JBUS.
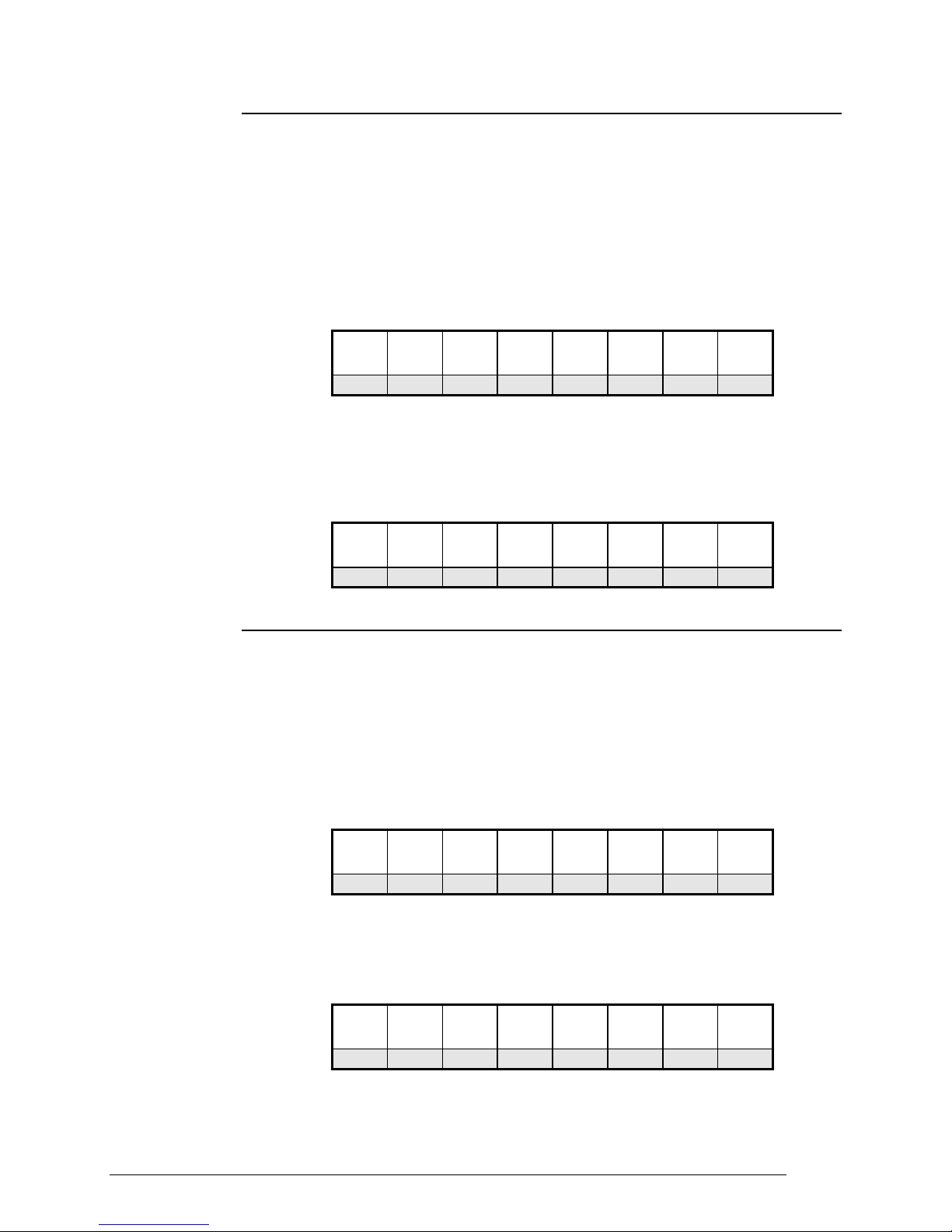
Example: Request to force bit 4 on slave 47 ON.
ADDR FUNC
DATA
bit #
HI
DATA
bit #
LO
DATA
ON/OFF
DATA
(zero)
CRC
HI
CRC
LO
2F 05 00 03 FF 00 7A 74
Answer
The answer consists in retransmitting the message received once the
variable has been changed.
Example: Answer to request mentioned above.
ADDR FUNC
DATA
bit #
HI
DATA
bit #
LO
DATA
ON/OFF
DATA
(zero)
CRC
HI
CRC
LO
2F 05 00 03 FF 00 7A 74
3.6 Preset Single Register (06)
This function is used for setting the value of a single 16-bit register.
Broadcast mode is allowed.
Question
In addition to the slave and the function code (06), the message contains
the address of the variable expressed in two bytes and the value to be
assigned. Address numbering starts from zero (word1 = 0) for MODBUS,
from one (word1 = 1) for JBUS.
Example: Request to force address 26 of slave 38 to 926.
ADDR FUNC
26 06 00 19 03 9E DF 82
Answer
The answer consists in retransmitting the message received once the
variable has been changed.
Example: Answer to request indicated above.
ADDR FUNC
26 06 00 19 03 9E DF 82
DATA
bit #
HI
DATA
bit #
HI
DATA
bit #
LO
DATA
bit #
LO
DATA
WORD
HI
DATA
WORD
HI
DATA
WORD
LO
DATA
WORD
LO
CRC
HI
CRC
HI
CRC
LO
CRC
LO
12
Page 13

3.7 Read Status (07)
This function is used for reading the status of eight predetermined bits
with a compacted message. Broadcast mode is not allowed.
Question
The message consists only of the slave address and the function code
(07).
Example: Request of the status of slave 25.
ADDR FUNC CRC
HI
CRC
LO
19 07 4B E2
Answer
In addition to the address of the slave and the function code (07), the
message comprises a character containing the status bits.
Example: Answer to the request indicated above.
ADDR FUNC
DATA
status
byte
CRC
HI
CRC
LO
19 07 6D 63 DA
3.8 Force Multiple Coils (15)
This function is used for forcing the status of each binary variable in a
consecutive block. Broadcast mode is allowed.
Question
In addition to the address of the slave and the function code (15), the
message contains the starting address expressed in two bytes, the
number of bits to be written, the number of bytes containing the data and
the data characters. The data are compacted, so one byte contains the
status of 8 bits, the least significant bit of the first byte must contain the
bit corresponding to the starting address and so on. If the number of bits
to be written is not a multiple of 8, the last character must be completed
with zeros in the most significant bits. Address numbering starts from
zero (bit1 = 0) for MODBUS, from one (bit1 = 1) for JBUS.
Example: Request to force 4 bits starting from address 1 on slave 12. Bits
1 and 4 forced to "1" and the others to "0".
ADDR FUNC
0C 0F 00 00 00 04 01 09 3F 09
Answer
In addition to the address of the slave and the function code (15), the
message contains the starting address and the number of bits written.
Example: Answer to request indicated above.
ADDR FUNC
0C 0F 00 00 00 04 55 15
DATA
start
Addr HI
DATA
Addr HI
start
DATA
start
Addr LO
DATA
Addr LO
start
DATA
bit #
HI
DATA
bit #
HI
DATA
bit #
LO
DATA
bit #
LO
DATA
Byte
Count
CRC
HI
DATA
bit
1..4
CRC
LO
CRC
HI
CRC
LO
13
Page 14
3.9 Preset Multiple Registers (16)
This function is used for setting the value of a consecutive block of 16-bit
registers. Broadcast mode is allowed. Question.
In addition to the address of the slave and the function code (16), the
message contains the starting address, the number of words to be
written, the number of bytes that contain data and the data characters.
Address numbering starts from zero (word1 = 0) for MODBUS, from one
(word1 = 1) for JBUS.
NOTE: In the ATHENA CONTROLS implementation, this function is
present for compatibility but does not permit more than 8 word to be
assigned.
Example: Request to set 1 word to value 268 at address 35 on slave 17.
ADDR FUNC
11 10 00 22 00 01 02 01 0C 6C 87
Answer
In addition to the address of the slave and the function code (16), the
message contains the starting address and the number of words written.
Example: Answer to the request indicated above.
ADDR FUNC
11 10 00 22 00 01 A3 53
DATA
start
Addr HI
DATA
start
Addr LO
DATA
start
Addr HI
DATA
word #
HI
DATA
start
Addr LO
DATA
word #
LO
DATA
Count
DATA
word #
HI
Byte
DATA
word
35 HI
DATA
word #
LO
DATA
word
35 LO
CRC
HI
CRC
HI
CRC
LO
CRC
LO
4. Error Management
In MODBUS there are two types of errors, handled in different ways:
transmission errors and operating errors. Transmission errors are errors
that change the format of the message, the parity (if used) or the CRC16.
A device that detects errors of this type in the message treats it as invalid
and gives no answer. When the format of the message is correct but the
function requested cannot be executed for some reason, an operating
error has occurred. When it detects this kind of error, the slave device
answers by sending an error message. This message consists of the
address, the code of the function requested, an error code and the CRC.
To indicate that the answer is an error message, the function code is
returned with the most significant bit set to "1".
Example: Request for slave 10 to read bit 1185.
ADDR FUNC
DATA
start
Addr HI
DATA
start
Addr LO
DATA
bit #
HI
DATA
bit #
LO
CRC
HI
CRC
LO
0A 01 04 A1 00 01 AC 63
Answer
The request is for the contents of bit 1185, which is not present on the
slave. The slave answers by sending error code "02" (ILLEGAL DATA
ADDRESS) and returns the function code 81h (129).
14
Page 15

Example: Error code in response to the request indicated above.
ADDR FUNC
DATA
Except.
Code
CRC
HI
CRC
LO
0A 81 02 B0 53
4.1 Error Codes
Although the MODBUS standard uses 8 error codes, the ATHENA
CONTROLS implementation of the protocol uses only four:
Code Name Meaning
01
02
ILLEGAL FUNCTION
ILLEGAL DATA
ADDRESS
03
07
ILLEGAL DATA VALUE
NAK - NEGATIVE
ACKNOWLEDGMENT
The function code received does not correspond
to a function allowed on the addressed slave.
The address to which the data field refers is not
an address allowed on the addressed slave.
The value to be assigned, specified in the data
field, is not allowed for this address.
The function cannot be performed under the
current operating conditions or an attempt has
been made to write in a read-only address.
5. MODBUS ON ATHENA CONTROLS PLATINUM® INSTRUMENTS
5.1 Serial communications parameters
The parameters are shown in the below table:
Parameter Parameter
code
Communications protocol
Serial address
Baud rate
Prot MbuS / JbuS
Addr 1 ... 247
baudr 1200, 2400, 4800, 9600, 19200
The protocol is chosen by means the M.buS o JbuS selection.
The address can be set among 1..247 and must be unique for each
instrument connected on the same line.
The Baud rate parameter enable a clear and simple communications
speed setting.
No Parity and stop bit must be set. They have already been set by the
manufacturer as follows:
Parity = none
Stop bit = 1
5.2 Communications time
The messages, as described in Chapter 2.4, must be exchanged with an
internal pause that is less than 3 times the time required for a character
to be exchanged, otherwise it would be interpreted as the end of the
message. The ATHENA CONTROLS instruments with the MODBUS
protocol are able to receive and transmit characters without an interval.
Between a master message and the following reply on the part of the
instrument there is a latent time lapse necessary for the completion of the
function. This is connected to the fact that, once a command has been
received, the instrument responds only after having completed the
Set up range
15
Page 16
requested function. To evaluate the lapse in time for different functions
≅
+
≅++
reference can be made to the following expressions:
Request:
where:
T
= Elapsed time.
L
T
= Time of a character.
C
T
= Variable time from 0 to 10mS which is dependent on the internal
S
processes.
Assignment:
where:
T
= Elapsed time.
L
T
= Time of a character.
C
T
= Variable time from 0 to 10mS which is dependent on the internal
S
processes.
T
= Multiple time of 25mS which is dependent on the number of bytes
W
to be written. For assignment of words, this time can be 0, 25 or 50 ms
depending on whether both one or none of the two bytes is equal to
the preceding value; for the assignment of bit T
0 to 100mS.
5.3 Data Base
The ATHENA CONTROLS instrument variables available for serial
communication through the MODBUS protocol are contained in two
distinct sections: the bit zone and the word zone.
5.4 Bit Zone
The bit zone is made up of 16 addressable bits that contain information
on the functioning status of the instruments. With some instruments,
certain bits are not used; the status request for these bits with the 01 and
02 functions is permitted but returns a fixed value of 0; these bits are
indicated in the tables by the presence of a hyphen "-". The assignment
of the bit status with the 05 and 15 functions is only allowed on
addresses in which this is possible, which condition is indicated by "R/W".
5.5 Word Zone
The word zone is made up of 128 addressable words that contain control
variables and the instrument parameters. With some instruments certain
words are not used; the request for the values of these words with the 03
and 04 functions is permitted but returns a fixed value of 0; these words
are indicated in the table by the presence of a hyphen "-". The
assignment of the word value with the 06 and 16 functions is only allowed
on addresses in which this is possible, which condition is indicated by
"R/W". The variables and parameters are coded as integer numbers with
a plus or minus sign (two's complement) without taking into account the
decimal point in the representation (for example: the Proportional Band
displayed on the screen with a decimal digit "25.0" is transmitted as 250).
Assignment is only allowed within the values assigned to each
parameter, any attempt to assign a value outside of those permitted
within the field, will cause the instrument to respond with an error
message and a an exception code equal to 3, and the assignment will not
be carried out.
T3TT
Lcs
T3TTT
Lcsw
it can be a value from
w,
16
Page 17

5.6 Assignment of the parameters and E2PROM
All the parameters modified from keyboard or assigned through serial
communication, come written in a permanent way in the EEPROM of the
instruments. Like known good, these components have limited writing
cycles beyond to which the component could be damaged. In our case
the number of cycles of writing are about 10.000 and also if this number
could appear limited, we must be held present that the writings during the
arc of life of the instrument don't arrive to overcome the thousand of
cycles. Different thing is when we talk about the serial communication. In
fact the computer could assign any parameter and with any frequency to
the regulators.
Being well aware of this fact, Athena Controls has provided to protect the
component in matter according to different hardware formality and
resources of the instruments. One of the protection made consists of the
fact to compare the new given with the datum already resident. If the two
data correspond, no writing doesn't happen in as not necessary and the
new given comes writing only and entirely if the two data disagree
between them.
Normally the datum that has a frequency of better writing it is the value of
Setpoint. In the instruments C10, M10 and M300 in as not furnished of
NOVRAM or buffered RAM, exists two formality of assignment of the
Setpoint that is:
1) Assignment to the Jbus address 2
2) Assignment to the Jbus address 5
With the first formality, the Setpoint could be assigned endless times
because it work in the RAM of the microprocessor but attention because
at the turning off of the regulator this datum comes lost for engage the
last value that had stayed written locally from keyboard or from the serial
to the Jbus address 5.
With the second formality the datum comes written in a permanent way
directly in the EEPROM of the instrument and the writing must be limited
to a real necessity.
The instruments of the series M5000, X100, X400, X5000 and X7000
possessing a different hardware structure, furnished that is of NOVRAM
or buffered RAM, they are not subdued to the limits previously exposed
and the assignments of the Setpoint to the Jbus addresses 2 or 5 don't
involve any difference. The two addresses come maintained active only
for a problem of compatibility with the preceding series.
6. Electrical Connections
6.1 General Description
All the Platinum® controllers may be fitted with a two wire (half duplex)
RS485 serial comm.s option. It makes the wiring simpler and enables a
larger connection length (maximum 1200 m).
The Platinum ® C10, M10, M300 and M400 instruments do not have any
line termination or polarisation system. If necessary a termination
resistance (120Ω ¼ W) must be connected to the terminals of the last
instrument of the line. In any case the polarisation is not possible.
The Platinum ® M5000, X100, X400 and X5000 instruments do have any
line termination or polarisation system. Please refere to the specific
chapter on these instruments.
17
Page 18
6.2 Communication Cable Laying Recommendations
In order to minimise interference caused by the external environment to
serial communication, and thus obtain maximum efficiency between the
supervisor and the instruments, a few essential technical precautions
must be taken.
The most important and easiest to implement of all is to separate the
power or power supply lines from the communication lines and lay them
as far as possible from remote-controlled switches, electromagnets,
powerful motors, etc. The same rule applies to the control panel in that it
is pointless to cable the control panel perfectly and then haphazardly
"throw" the cables into the channel or vice versa. If the communication
cables are extended to another control panel or other equipment, leave a
space in the terminal board, isolated from all the other cables (normally
towards the sides).
The type of cable used is of fundamental importance for the functioning of
the entire system. The most important condition to be respected is the
cable's capacity per meter (pF/m). The lower the capacity of the cable is
the longer the line can be. Consequently, power cables, shielded coaxial
cables and general channel cables are to be avoided under all
circumstances in that they have an extremely high capacity per metre. In
addition, to ensure high interference rejection, the cables must be twisted
and preferably provided with a metal shield to be connected to an
efficient ground socket (on one side only).
Two examples of cables with suitable characteristics produced by Belden
are indicated below:
A) Belden code 9729 Z = 100 Ω pF/m = 41
B) Belden code 9502 Z = 150 Ω pF/m = 98
6.3 Instruments with an RS-485 interface (2 wire)
The line requires twisted cable with a characteristic impedance of about
120 Ω.
Normally this type of connection uses a standard 4-wire communication
interface. The transmission and reception signals for the computer and
the communicating device (Tx+Rx+ and Tx-Rx-) can be paralleled,
resulting in a single duplex connection RTx+ and RTx-.
The communication port cannot usually work if it is connected in this way
as every time the supervisor is transmitting a message, it is also present
on the receiving port before awaiting the reply from the other devices. To
prevent this problem occurring, the supervisor uses the RTS (Request To
Send) signal from the communication port. Before beginning a
transmission, the supervisor “raises” the status of its RTS signal to inhibit
its receiver. When the transmission has ended, the supervisor brings the
RTS signal back to “zero” to re-enable its receiver. In the same way, the
devices connected to the supervisor must be able to manage the
direction of the message that is flowing, otherwise the communication will
fail. ATHENA CONTROLS controllers include this ability in their software.
There are commercially available interfaces for handling the RTS signal
at the hardware level, so that it is completely transparent and not
required by the communications software.
It is strongly recommended that the two ends of the link between the
various devices is correctly terminated, as shown in the following drawing
to demonstrate the principle.
18
Page 19
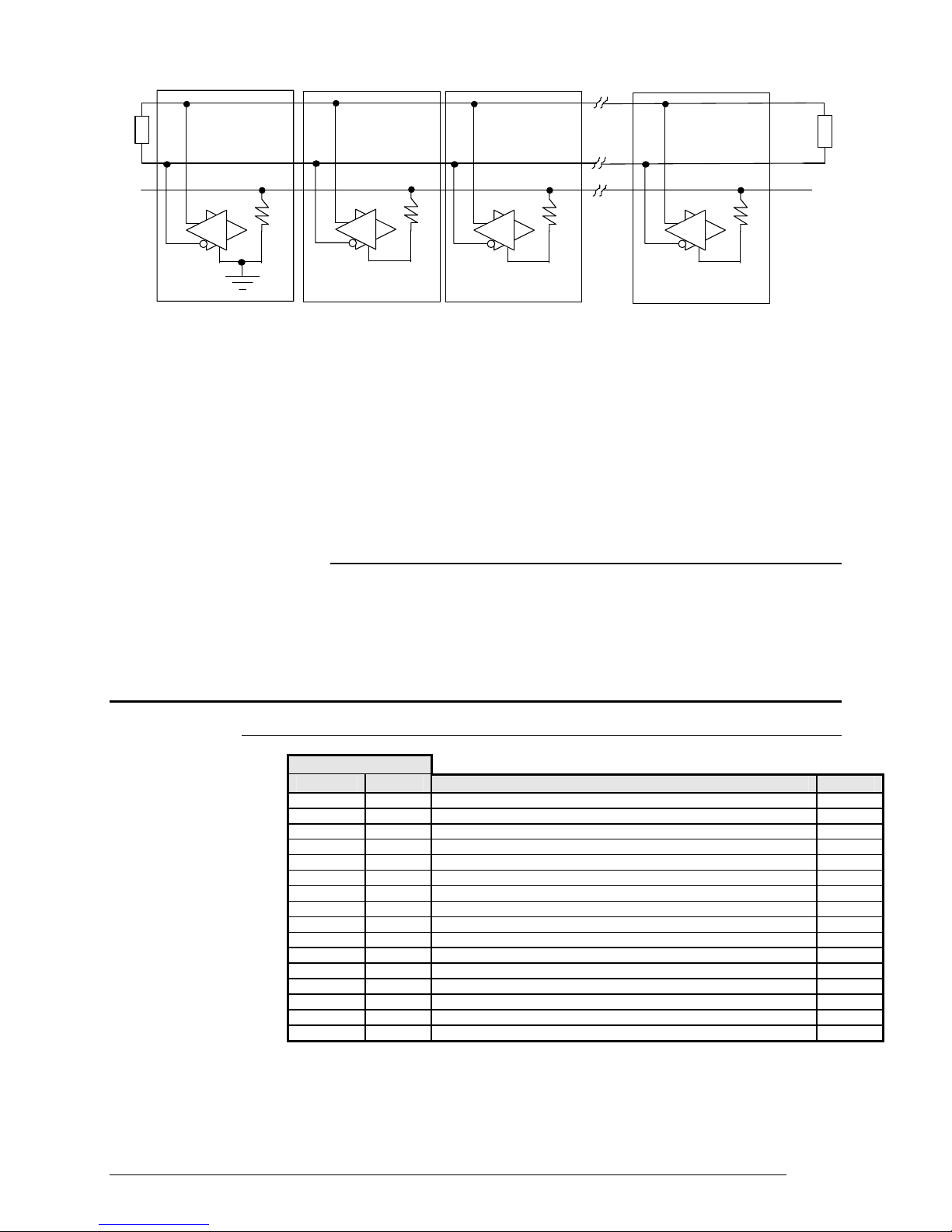
Rt
Supervisor
Rg
G/R
Device 1 Device 2 Device "n"
G/R
Rg
G/R
Rg
G/R
Rt
Co mmon
Rg
G = Transmitter
R = Receiver
G/R = Bi-directional (Receiver/Transmitter) buffer
Rt = Termination resistance: the transmitter can drives up to 32
receivers plus two 120 Ω resistors.
Rg = 100 Ω Resistor
From the above drawing it may be seen that a “star” connection is not
valid. Each branch would have to be terminated, which in turn would
reduce the overall the impedance of the line. In these conditions, the
signal level would be too low for reliable communications.
6.3.1 References
GOULD Gould Modbus Protocol Reference Guide
(PI-MBUS-300 Rev. B)
APRIL JbuS Specification
GLOBAL ENG. DOC. EIA STANDARD RS -485
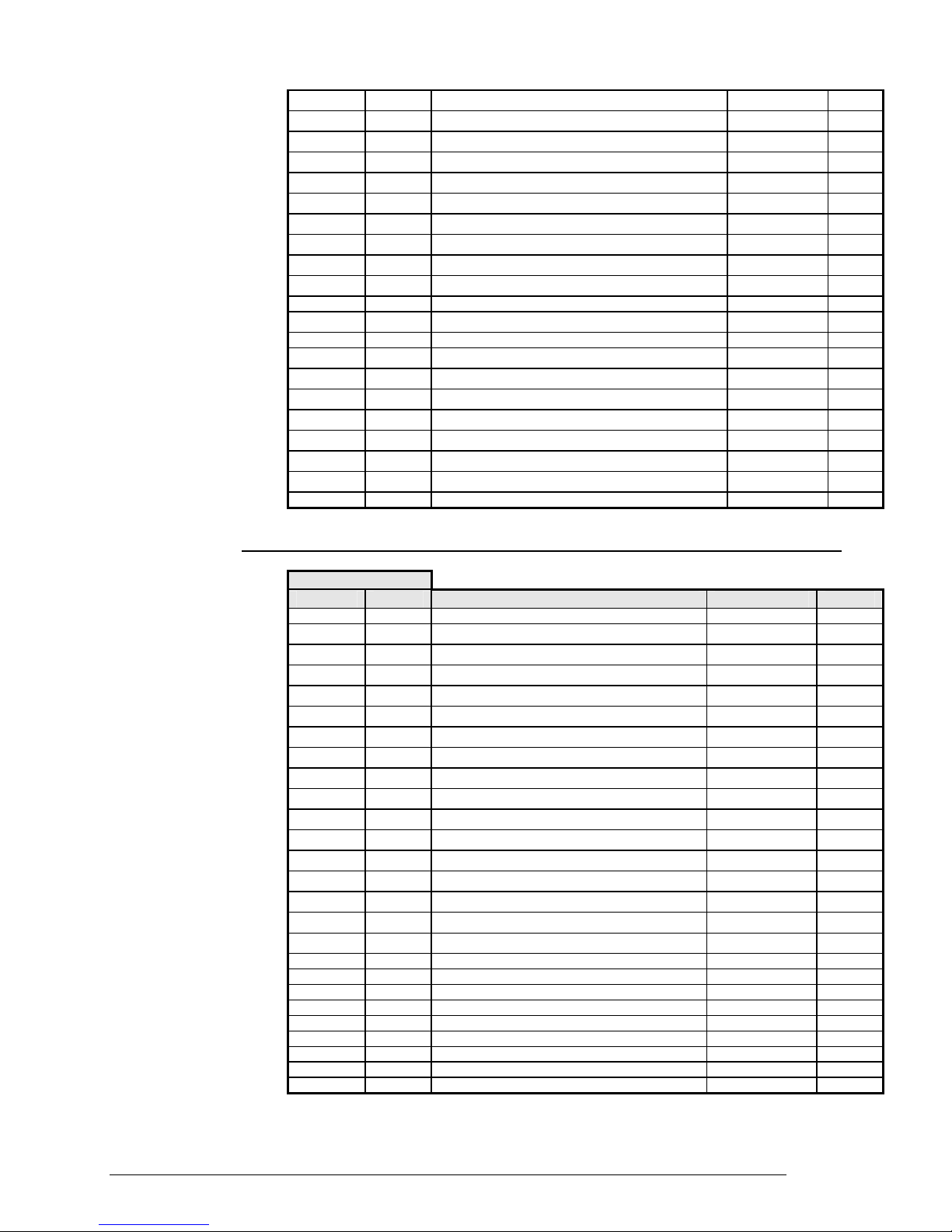
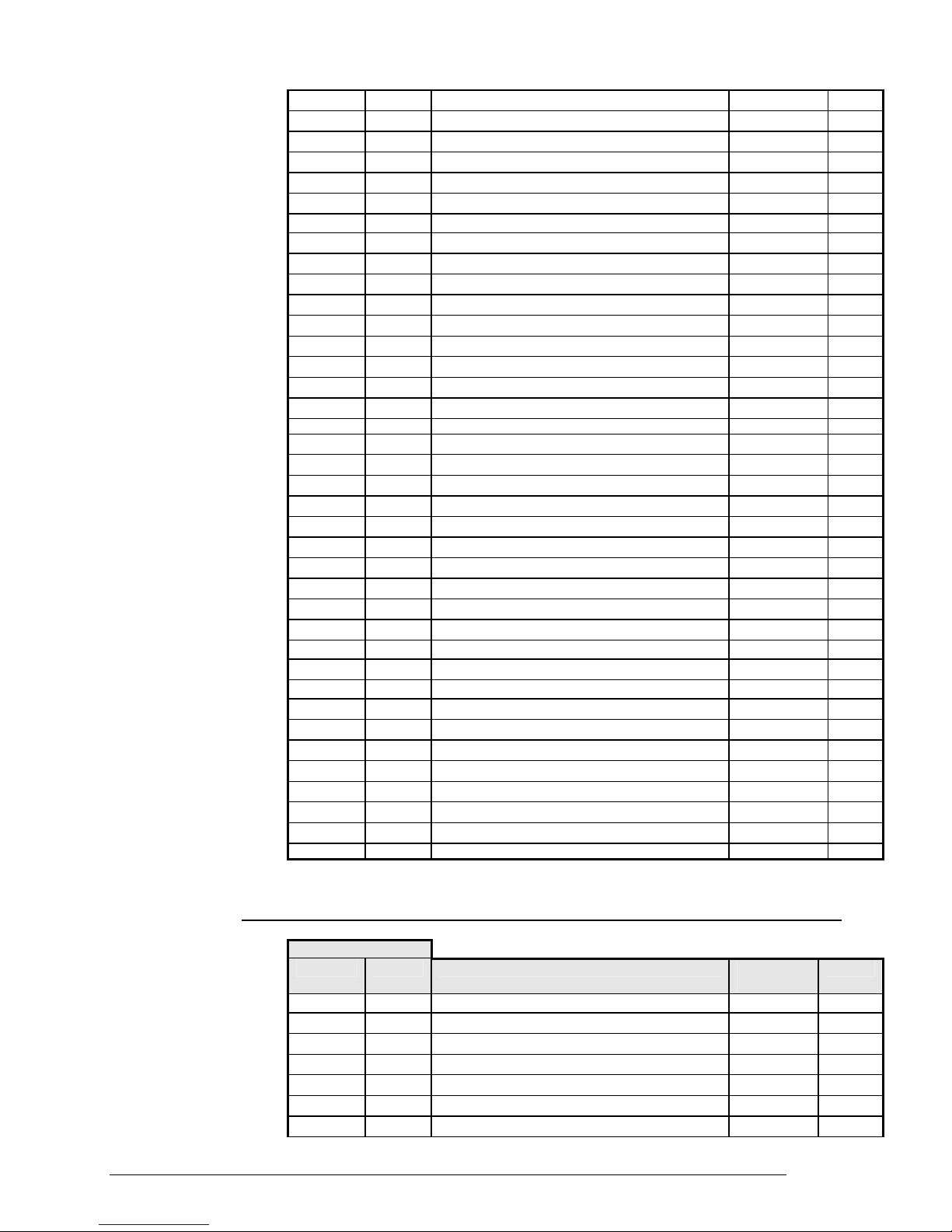
7. C10 / M10 Controllers
7.1 Bit Zone
Address
Modbus JbuS Variable Type
0 1 - 1 2 - 2 3 - 3 4 Main output condition (0 = OFF, 1 = ON) R
4 5 AL2 alarm status (0 = OFF, 1 = ON) R
5 6 AL3 alarm status (0 = OFF, 1 = ON) R
6 7 Out of range (0 = Normal operation, 1 = Safety) R
7 8 Auto-Tune (0 = OFF, 1 = Run) R
8 9 - -
9 10 Out of range (0 = Normal operation, 1 = Safety) R
10 11 - 11 12 - 12 13 - 13 14 - 14 15 - 15 16 - -
19
Page 20
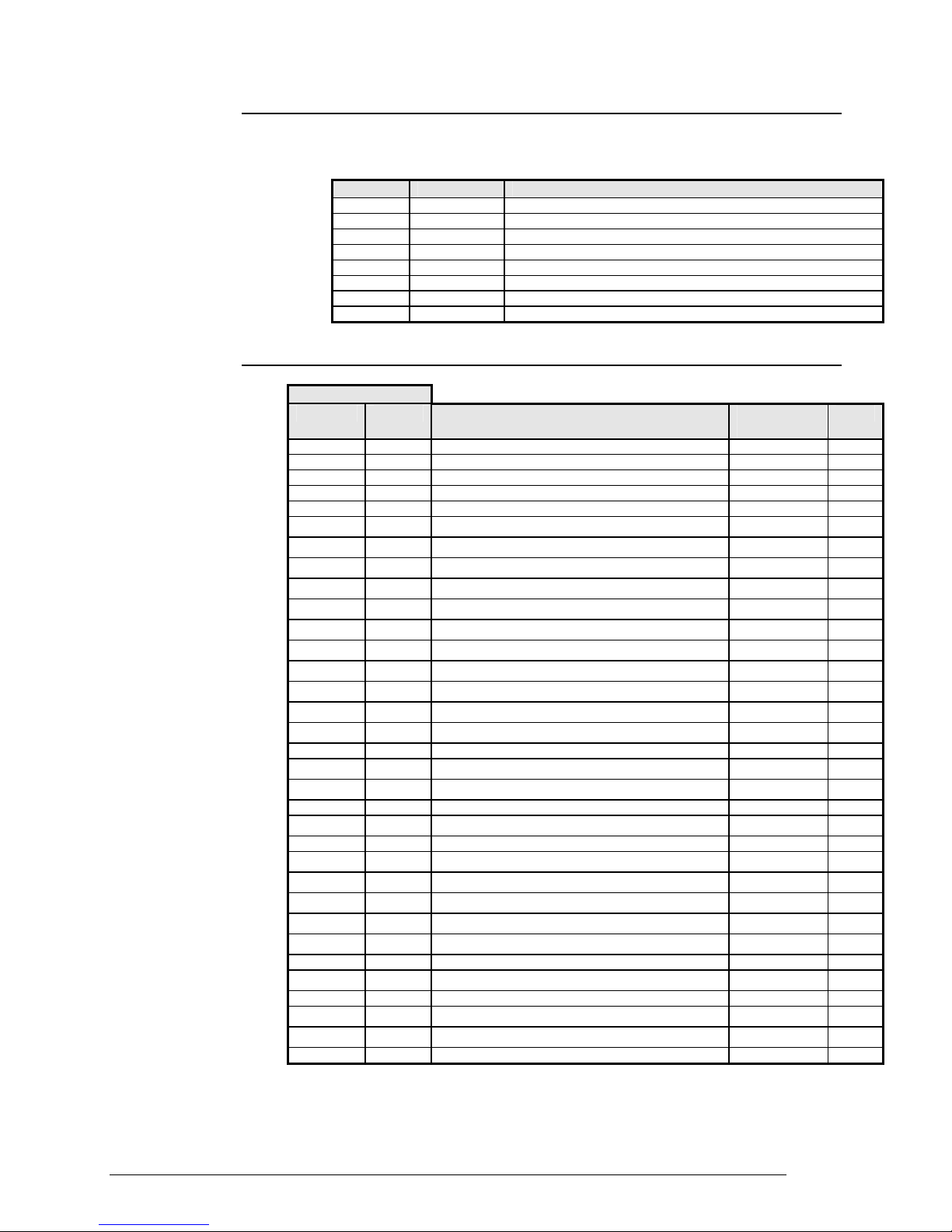
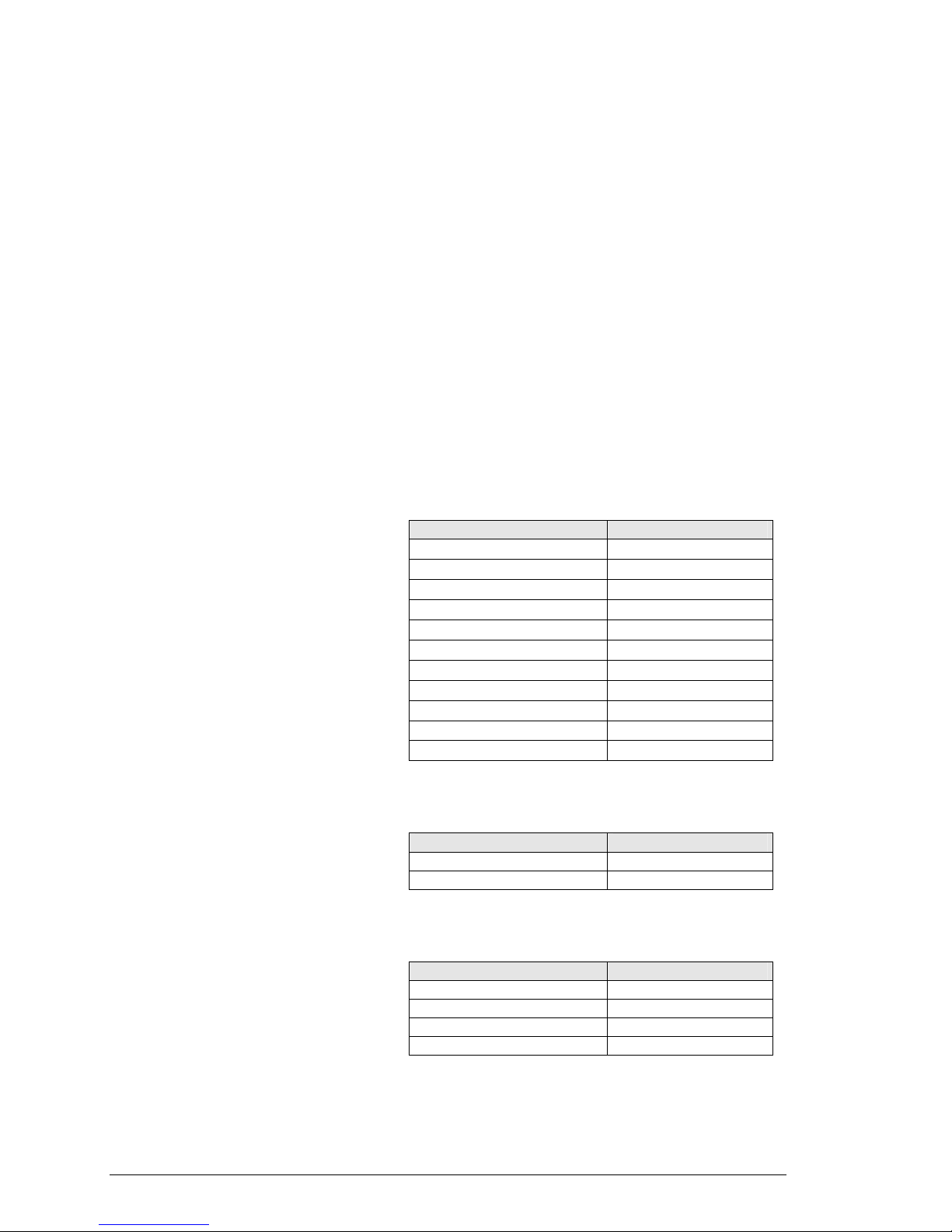
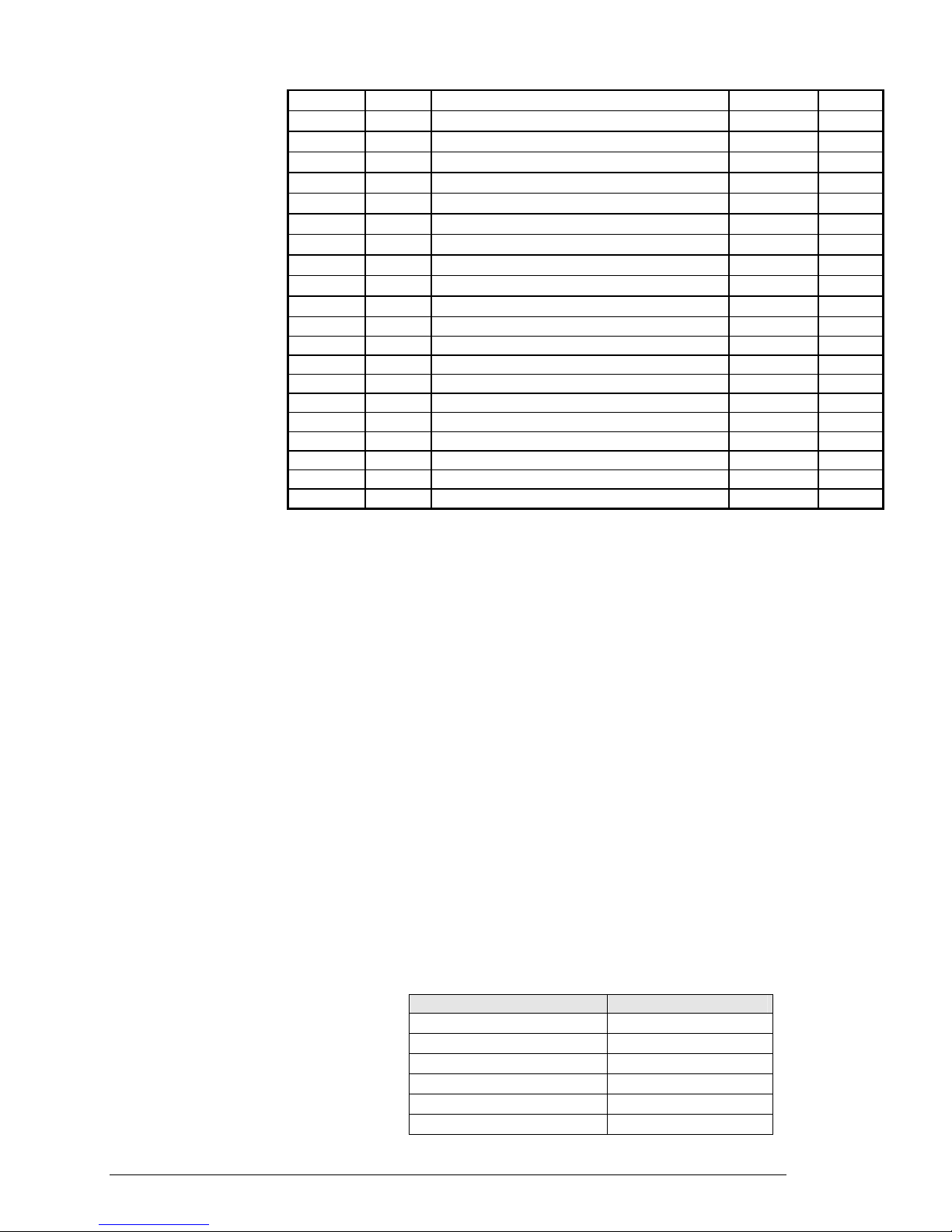
7.2 Read Status
Function 07 (Read Status) returns an eight bit status with the following
meanings:
Bit Address Variable
1 (LSB) 1 -
2 2 3 3 4 4 Main output condition (0 = OFF, 1 = ON)
5 5 AL2 alarm status (0 = OFF, 1 = ON)
6 6 AL3 alarm status (0 = OFF, 1 = ON)
7 7 Out of range (0 = Normal operation, 1 = Safety)
8 (MSB) 8 Auto-Tune (0 = OFF, 1 = Run)
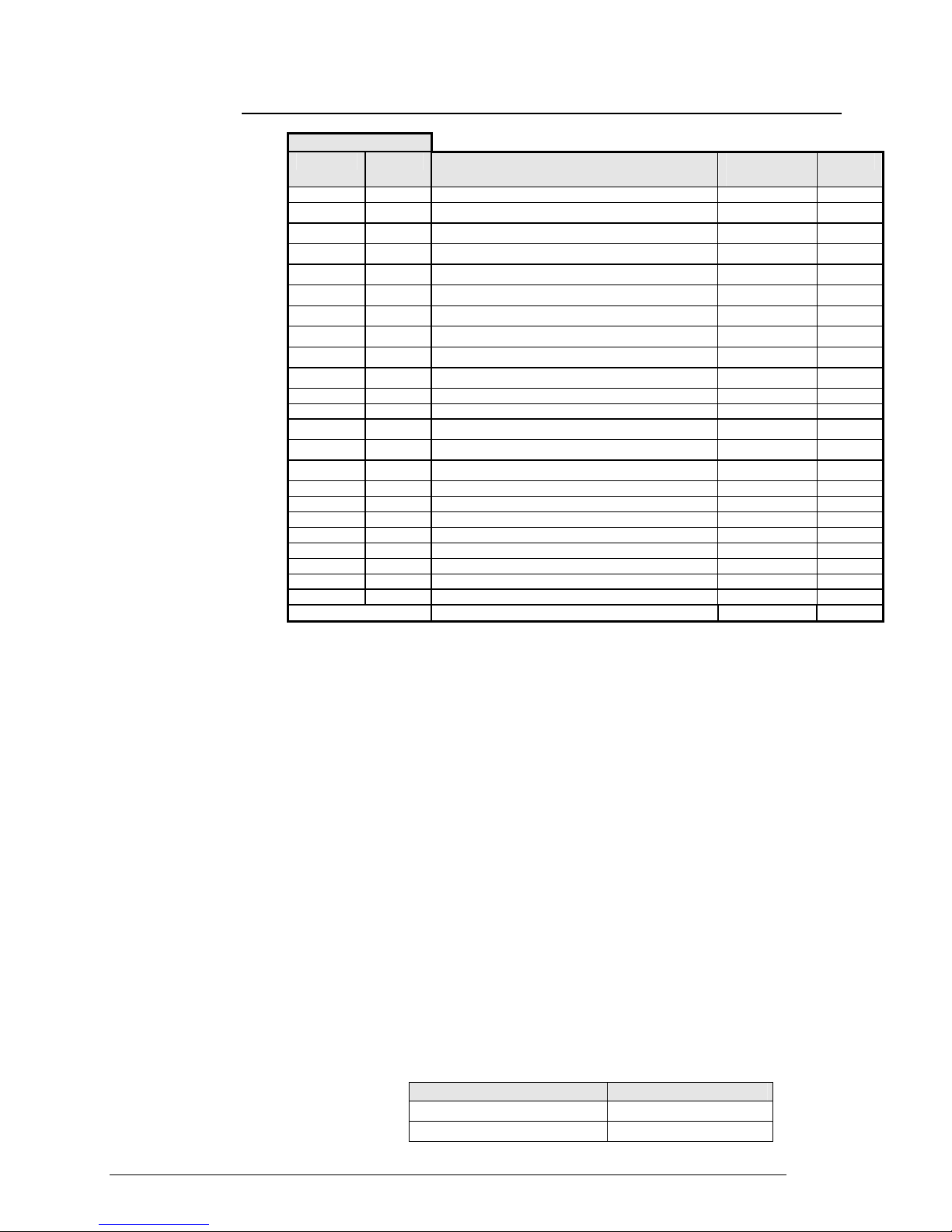
7.3 Word Zone - Page 1 Parameters
Address
Modbus JbuS Variable Parameter
Code
0 1 Process variable R
1 2 Setpoint R/W 1
2 3 Main output R
3 4 Target Setpoint R
4 5 Local Setpoint R/W 2
5 6 Proportional Band (Hysteresis ON - OFF) 3
6 7 Overshoot control
7 8 Integral time
8 9 Derivative time
9 10 Output cycling time
10 11 Low range
11 12 High range
12 13 AL2 Alarm threshold
13 14 AL3 Alarm threshold
14 15 AL2 Alarm Hysteresis
15 16 AL3 Alarm Hysteresis
16 .. 28 17 .. 29 - - -
29 30 Setpoint low limit
30 31 Setpoint high limit
31 32 - - 32 33 Main output high limit
33 34 - - 34 35 Setpoint ramp up
35 36 Setpoint ramp down
36 37 Input filter
37 38 Input shift
38 39 Auto-Tune enable
39 40 - - 40 41 Serial comm.s address
41 42 - - 42 43 Retransmission low range
43 44 Retransmission high range
44 .. 99 45 .. 100 - - -
P.b. (hy))
O.C.
t.i.
t.d.
t.c.
Sc.Lo
Sc.Hi
A2S.P
A3S.P
A2hy
A3hy
S.P. L
S.P. H
OP. H
Sl. u
Sl. d
t.FiL
In.Sh
tune
Addr
rt.Lo
rt.Hi
Type
R/W
R/W
R/W
R/W
R/W
R
R
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
20
Page 21
7.4 Word Zone - Page 2 Configuration
Address
Modbus JbuS Variable Parameter
100 101 - - 101 102 Configuration code
102 103 AL3 alarm configuration code
103 104 Engineering units
104 105 Decimal point
105 106 Low range for engineering units
106 107 High range for engineering units
107 108 Communications protocol
108 109 Baud rate
109 110 Retransmitted range
110 111 - - 111 112 - - 112 113 Password
113 114 RTX low range calibration value (Reserved)
114 115 RTX high range calibration value (Reserved)
115..119 116..120 - - 120 121 Factory code R(W) 5
121 122 Product code (“C1”) R 6
122 123 - - R
123 124 Software release R 6
124 125 - - R
125 126 Custom code R
126 127 - - 127 128 - - -
Notes:
1. Assignment of Setpoint to the address JbuS 2 writes the Computer
Setpoint. It is different from the Local Setpoint, which can be in any case
set by keypad.
Code
ConF
Con.2
unit
Sc.d.d
Sc.Lo
Sc.Hi
Prot
baud
retr
Code
CAL.3
CAL.4
Type
R/W 4
R/W 4
R/W
R/W 4
R/W 4
R/W 4
R/W 8
R/W 9
R/W
R/W
R/W
R/W
4/7
10
2. Assignment of Setpoint to the address JbuS 5 writes the Local Setpoint
(the previous value is lost).
3. In case of ON - OFF output (address JbuS 6) the proportional band is
substituted by the output Hysteresis.
4. All the configuration parameters are accepted, if valid, but not brought
into effect. To execute the reconfiguration procedure and bring the
changes into effect, the code 55AAh must be written at the address JbuS
121.
5. Address JbuS 121 is read only, but if the code 55AAh (21930d) is written
at this address, the configuration is brought into effect.
6. The JbuS 122 + 123 and 124 + 125 addresses contain the strings (of 4
characters) for the product and release codes: each address represents
two characters, the most significant byte in the word contains the ASCII
code of the second.
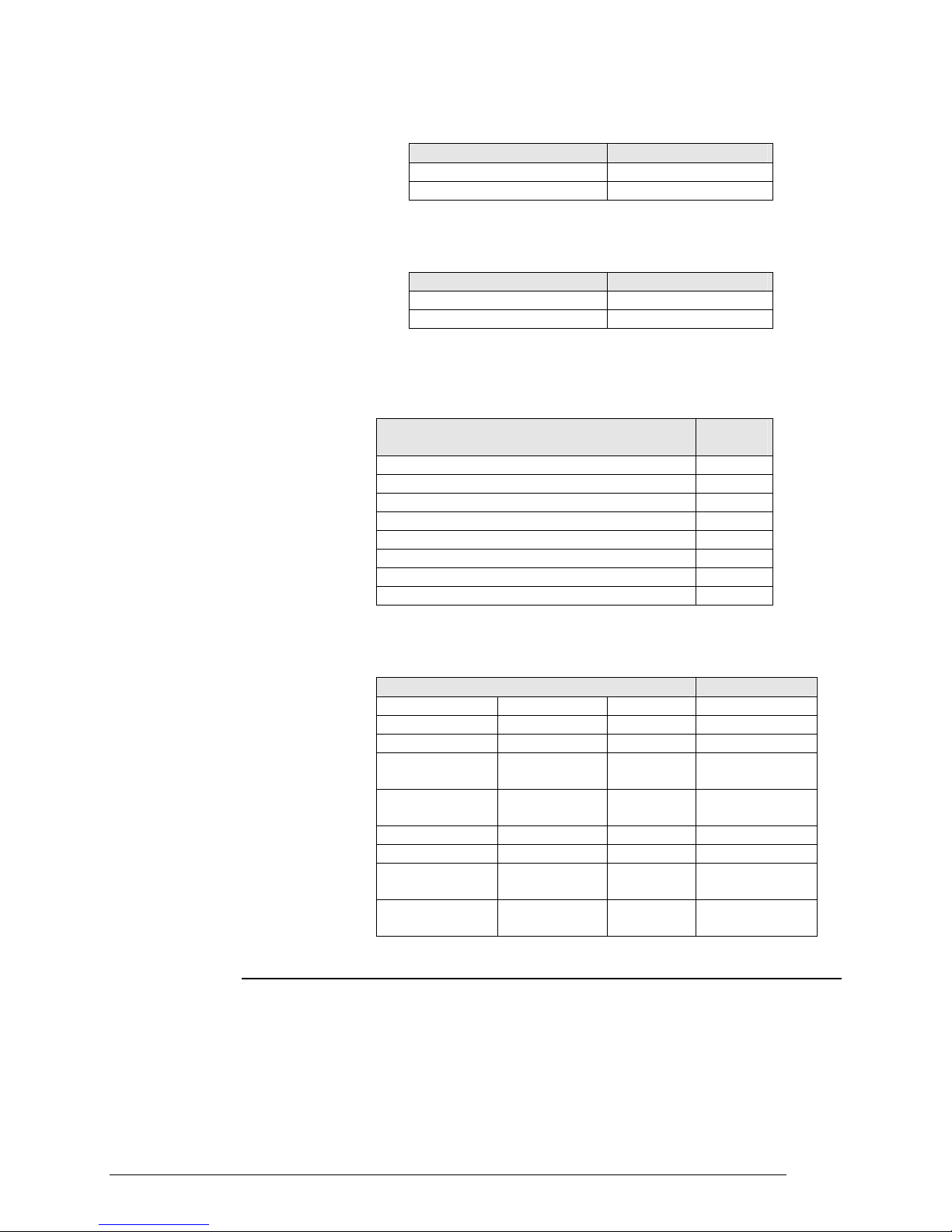
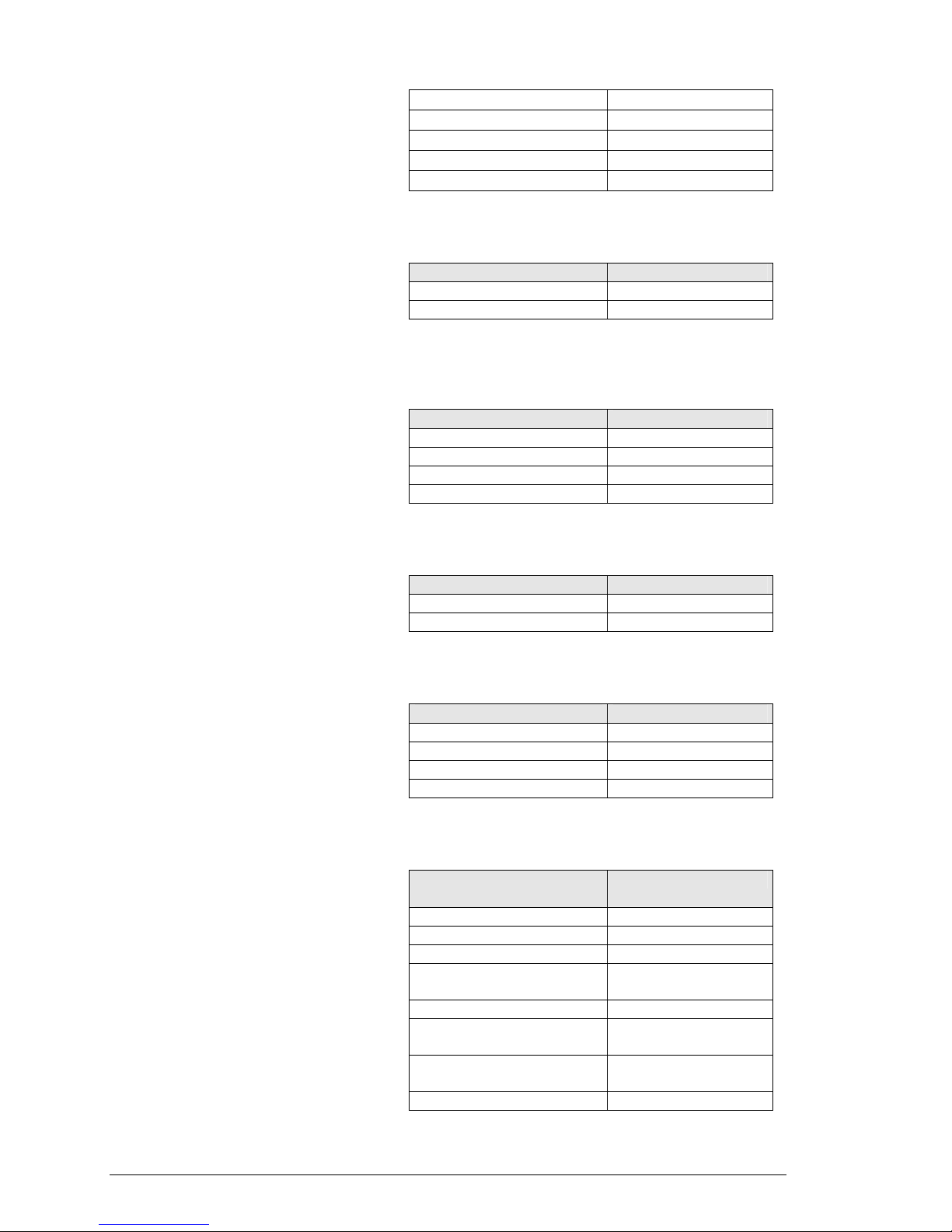
7. To select the engineering unit, the value between 0 and 10 must be
assigned as per the below table:
Engineering unit Serial value
°C
°F
0
1
21
Page 22
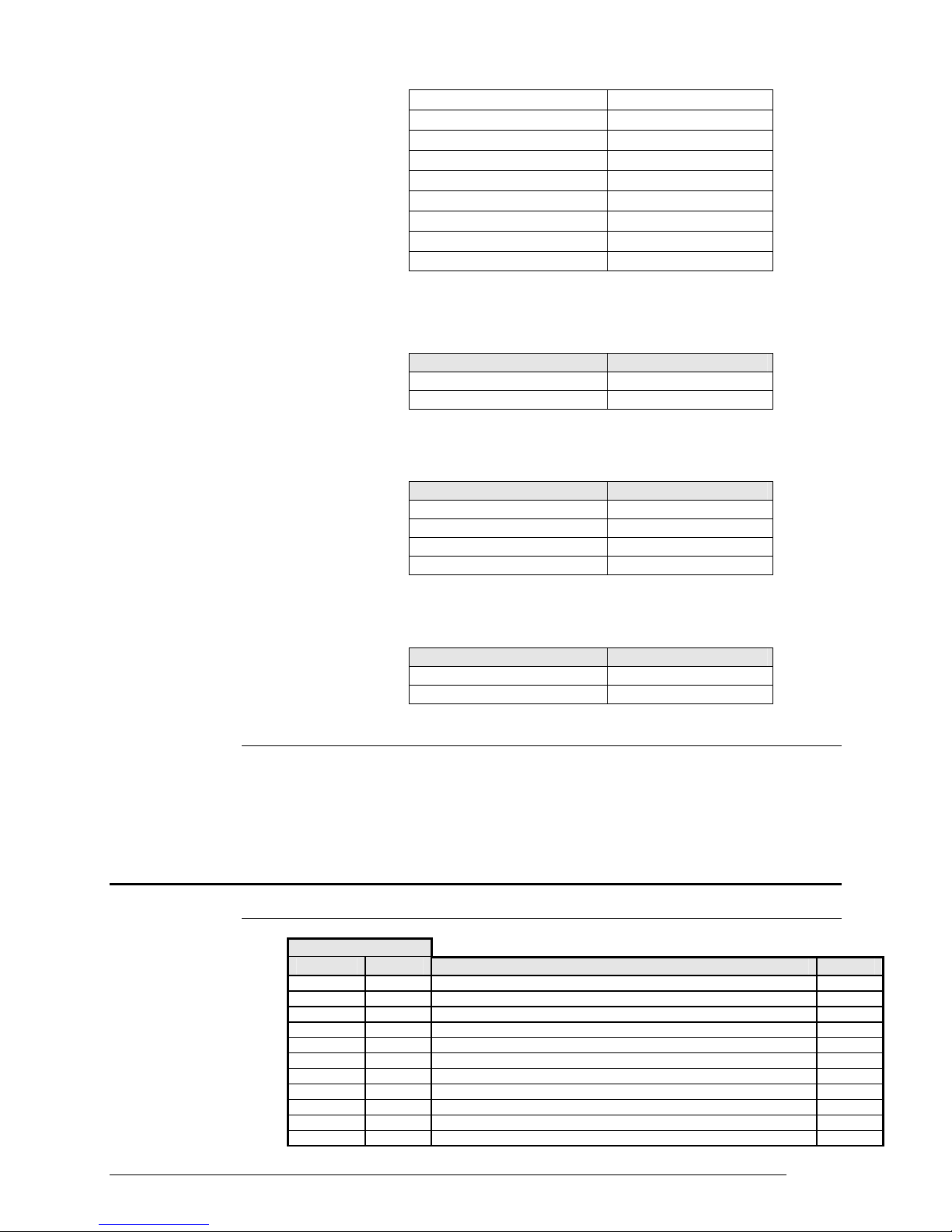
none
nU
U
nA
A
bar
PSI
rh
Ph
2
3
4
5
6
7
8
9
10
8. To select the protocol type, the value between 0 and 1 must be
assigned as per the below table:
Protocol type Serial value
Modbus 0
JbuS 1
9. To select the serial comm.s baud rate, the value between 0 and 3 must
be assigned as per the below table:
Baud Rate Serial value
1200 0
2400 1
4800 2
9600 3
10. To select the retransmission signal type, the value between 0 and 1
must be assigned as per the below table:
Retransm. signal type Serial value
0 .. 20 mA 0
4 .. 20 mA 1
7.5 Termination and Polarisation
The Platinum ® C10 and M10 instruments do not have any line
termination or polarisation system. If necessary a termination resistance
(120Ω ¼ W) must be connected to the terminals of the last instrument of
the line. In any case the polarisation is not possible.
8. M300 Controller
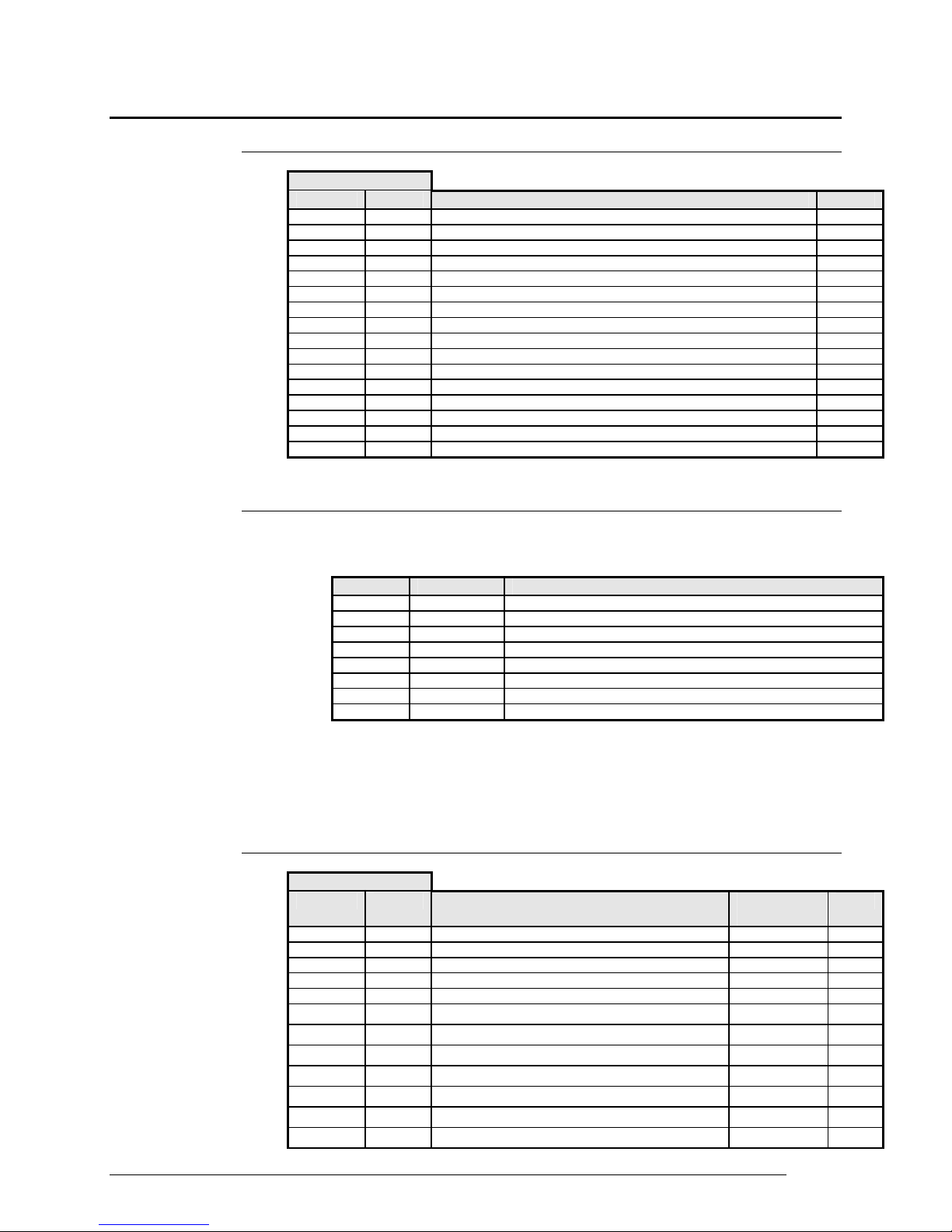
8.1 Bit zone
Modbus JbuS Variable Type
10 11 Keypad lock (0 = locked, 1 = unlocked) R/W
Address
0 1 Timer function status (0 = OFF, 1 = Run) 1 R/W
1 2 - 2 3 - 3 4 Main output condition (0 = OFF, 1 = ON) R
4 5 Alarm condition AL2 (0 = OFF, 1 = ON) R
5 6 Alarm condition AL3 (0 = OFF, 1 = ON) R
6 7 Out of range (0 = Normal operation, 1 = Safety) R
7 8 Auto-Tune (0 = OFF, 1 = Run) R
8 9 - 9 10 Out of range (0 = Normal operation, 1 = Safety) R
22
Page 23
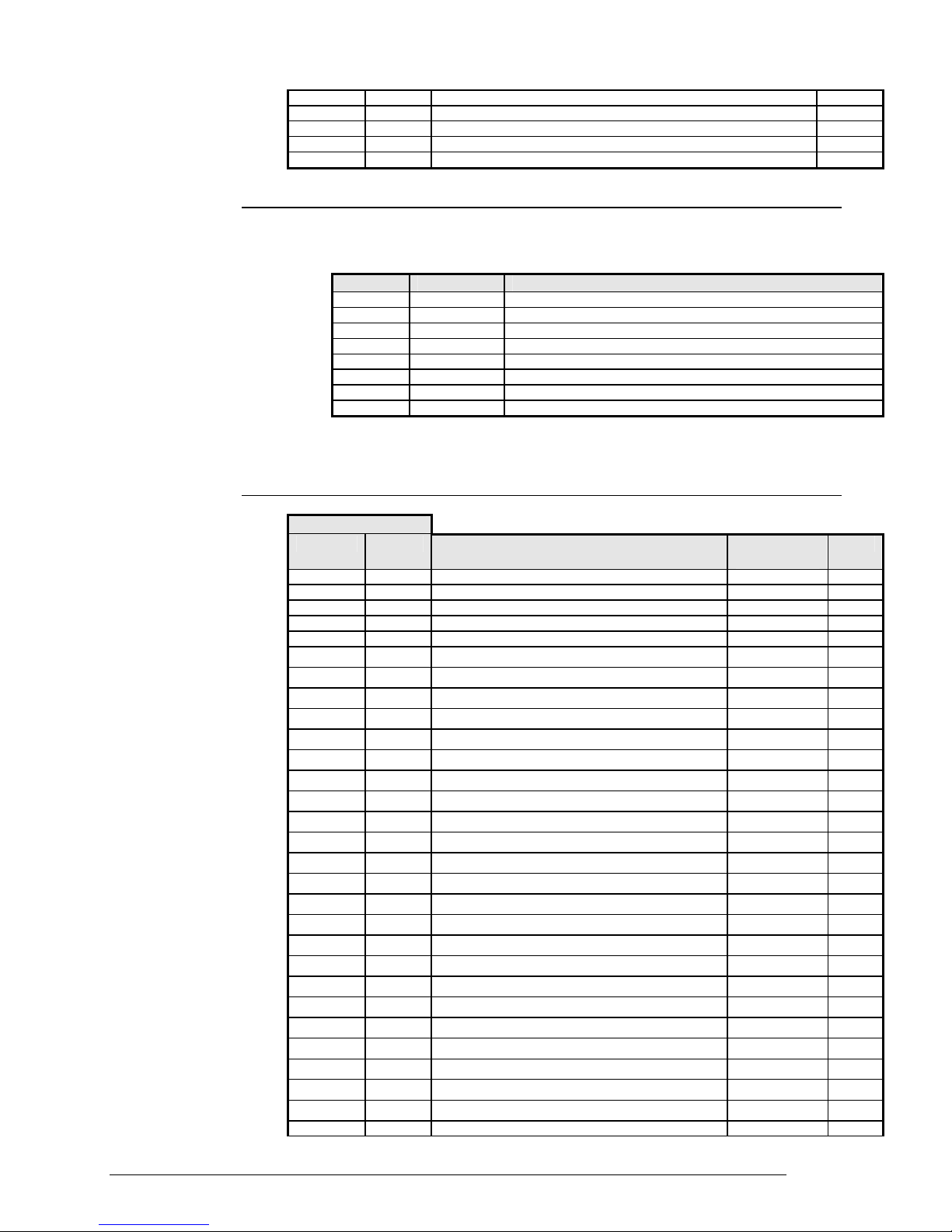
11 12 Outputs lock (0 = locked, 1 = unlocked) R/W
12 13 - 13 14 - 14 15 - 15 16 - -
8.2 Read Status
Function 07 (Read Status) returns an eight bit status with the following
meanings:
Bit Address Variable
1 (LSB) 1 Timer function status (0 = OFF, 1 = Run) 1
2 2 3 3 4 4 Main output condition (0 = OFF, 1 = ON)
5 5 Alarm condition AL2 (0 = OFF, 1 = ON)
6 6 Alarm condition AL3 (0 = OFF, 1 = ON)
7 7 Out of range (0 = Normal operation, 1 = Safety)
8 (MSB) 8 Auto-Tune (0 = OFF, 1 = Run)
Notes:
1. Only available with Timer option.
8.3 Word Zone - Page 1 Parameters
Address
Modbus JbuS Variable Parameter
0 1 Process variable R
1 2 Setpoint R/W 1
2 3 Main output R 2
3 4 Target Setpoint R/W 1
4 5 Local Setpoint R/W 3
5 6 Proportional Band (Hysteresis ON - OFF) 4
6 7 Overshoot control
7 8 Integral time
8 9 Derivative time
9 10 Cycle time
10 11 Low range
11 12 High range
12 13 AL2 Alarm threshold
13 14 AL3 Alarm threshold
14 15 AL2 Alarm Hysteresis
15 16 AL3 Alarm Hysteresis
16 17 Heat/cool proportional band
17 18 Heat/cool integral time
18 19 Heat/cool derivative time
19 20 Heat/cool dead band
20 21 Cool output cycling time
21 22 Cool output high limit
22 23 Motor travel time
23 24 Minimum output step
24 25 Timer setting
25 26 Stand-by Setpoint
26 27 Stand-by Setpoint of Timer
27 28 Soft-start output value
28 29 - - -
Code
P.b. (hy.)
O.C.
t.i.
t.d.
t.c.
Sc.Lo
Sc.Hi
A2S.P
A3S.P
A2hy
A2hy
P.b. C
t.i. C
t.d. C
d.bnd
t.c. C
OP.HC
MU.tM
MU.Hy
tiMe
S.P 2
tM.S.P
St.OP
Type
R/W
R/W
R/W
R/W
R/W
R
R
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
23
Page 24
29 30 Setpoint low limit
30 31 Setpoint high limit
31 32 Error dead band
32 33 Main output high limit
33 34 Output safety value
34 35 Setpoint ramp up
35 36 Setpoint ramp down
36 37 Input filter
37 38 Input shift
38 39 Auto-Tune enable
39 40 - - 40 41 Serial comm.s address
41 42 - - 42 43 Retransmission low range
43 44 Retransmission high range
44 45 start-up Setpoint
45 46 Start Up Holding time
46 47 start-up output high limit
47 48 Timer remaining time
48 49 Load current (CT option)
49 .. 99 50 .. 100 - - -
S.P. L
S.P. H
d.Err
OP. H
Sa.OP
Sl. u
Sl. d
t.FiL
In.Sh
tune
Addr
rt.Lo
rt.Hi
S.P.S.U
t.h.S.U
OP.HS
tM.r.
t.Cur
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R
8.4 Word Zone - Page 2 Configuration
Address
Modbus JbuS Variable Param. Code Type
100 101 - - 101 102 Configuration code
102 103 AL3 alarm configuration code
103 104 Engineering units
104 105 Decimal point
105 106 Low range for engineering units
106 107 High range for engineering units
107 108 Communication protocol
108 109 Baud rate
109 110 Retransmission range
110 111 Retransmission signal selection
111 112 Current transformer range
112 113 Password
113 114 RTX low range calibration value (Reserved)
114 115 RTX high range calibration value (Reserved)
115 116 Timer/Start-up operating mode
116 117 Timer action
117..119 118..120 - 120 121 Factory code R(W) 6
121 122 Product code ( “M3”) R 7
122 123 - 123 124 Software release R 7
124 125 - 125 126 Custom code R
126 127 - - 127 128 - - -
ConF
Con.2
unit
Sc.d.d
Sc.Lo
Sc.Hi
Prot
baud
retr
rtH
Ht.F.S
Code
CAL.3
CAL.4
t.Mod
t.Act
R/W 5
R/W 5
R/W
R/W 5
R/W 5
R/W 5
R/W 9
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
24
5/8
10
11
12
13
14
Page 25
Notes:
1. Assignment of Setpoint to the addresses JbuS 2 and 4 writes the
Computer Setpoint. It is different from the Local Setpoint, which can
be in any case set by keypad.
2. Assignment of output at the address JbuS 3 is only possible if the
Auto/Man option if fitted and when the controller is in Manual mode.
3. Assignment of Setpoint to the address JbuS 5 writes the Local
Setpoint (the previous value is lost).
4. In case of ON - OFF output (address JbuS 6) the proportional band
is substituted by the output Hysteresis.
5. All the configuration parameters are accepted, if valid, but not
brought into effect. To execute the reconfiguration procedure and
bring the changes into effect, the code 55AAh must be written at the
address JbuS 121.
6. Address JbuS 121 is read only, but if the code 55AAh (21930d) is
written at this address, the configuration is brought into effect.
7. The JbuS 122 + 123 and 124 + 125 addresses contain the strings (of
4 characters) for the product and release codes: each address
represents two characters, the most significant byte in the word
contains the ASCII code of the second.
8. To select the engineering unit, the value between 0 and 10 must be
assigned as per the below table:
Engineering unit Serial value
°C
°F
none
nU
U
nA
A
bar
PSI
rh
Ph
9. To select the protocol type, the value between 0 and 1 must be
assigned as per the below table:
Protocol type Serial value
Modbus 0
JbuS 1
10. To select the serial comm.s baud rate, the value between 0 and 3
must be assigned as per the below table:
Baud Rate Serial value
1200 0
2400 1
4800 2
9600 3
0
1
2
3
4
5
6
7
8
9
10
25
Page 26
11. To select the retransm. output range, the value between 0 and 1
must be assigned as per the below table:
Variable Serial value
0 .. 20 mA 0
4 .. 20 mA 1
12. To select the retransmitted variable (PV or SP), a value between 0
and 1 must be assigned as per the below table:
Variable Serial value
PV 0
SP 1
13. To select the Timer/Start-up operating mode, a value between 0 and
7 must be assigned as per the below table:
Timer/Start-up operating mode Serial
value
Disabled 0
Start-up 1
Counting inside band 2
Counting inside band / End mode OFF 3
Counting when launched 4
Counting when launched / End mode OFF 5
Counting disable when launched 6
Stand-by Setpoint 7
14. To select the Timer action, a value between 0 and 7 must be
assigned as per the below table:
Timer action Serial value
Launch OP3 status Time
By Keypad OFF Second 0
By Keypad ON Second 1
Key +
at power on
Key +
at power on
By Keypad OFF Minute 4
By Keypad ON Minute 5
Key +
at power on
Key +
at power on
OFF Second 2
ON Second 3
OFF Minute 6
ON Minute 7
8.5 Termination and Polarisation
The Platinum ® M300 instruments do not have any line termination or
polarisation system. If necessary a termination resistance (120Ω ¼ W)
must be connected to the terminals of the last instrument of the line.
In any case the polarisation is not possible.
26
Page 27
9. M400 Controller
9.1 Bit zone
9.2 Read Status
9.3 Word zone - Page 1 Parameters
Address
Modbus JbuS Variable Type
0 1 Timer function status (0 = OFF, 1 = Run) 1 R/W
1 2 Auto/Man (0 = Auto, 1 = Man) 2 R/W
2 3 - 3 4 Control output status (0 = OFF, 1 = ON) R
4 5 AL2 alarm status ( 0 = OFF, 1 = ON ) R
5 6 AL3 alarm status ( 0 = OFF, 1 = ON ) R
6 7 Out of range (0 = Normal operation, 1 = Safety) R
7 8 Auto Tuning ( 0=OFF 1=Run ) R
8 9 - -
9 10 Out of range (0 = Normal operation, 1 = Safety) R
10 11 Keypad lock (0 = locked, 1 = unlocked) R/W
11 12 Outputs lock (0 = locked, 1 = unlocked) R/W
12 13 Logic input #1 ( 0=Open 1=Close ) R
13 14 - 14 15 - 15 16 - -
Function 07 (Read Status) returns an eight bit status with the following
meanings:
Bit Address Variable
1 (LSB) 1 Timer function status (0 = OFF, 1 = Run) 1
2 2 Auto/Man (0 = Auto, 1 = Man) 2
3 3 4 4 Control output status (0 = OFF, 1 = ON)
5 5 Alarm 2 ( 0 = OFF, 1 = ON )
6 6 Alarm 3 ( 0 = OFF, 1 = ON )
7 7 Out of range (0 = Normal operation, 1 = Safety)
8 (MSB) 8 Auto Tune ( 0=Disabled 1=Run )
Notes:
1. Only available with Timer option.
2. Only available with Auto/Man function.
Address
Modbus JbuS Variable Parameter
Type
Code
0 1 Process variable - R
1 2 Setpoint - R/W 1
2 3 Main output - R(W) 2
3 4 Local Setpoint - R/W 1
4 5 Local Setpoint - R/W 3
5 6 Proportional Band (Hysteresis ON - OFF) 4
6 7 Overshoot Control
7 8 Integral time
8 9 Derivative time
9 10 Cycle time
10 11 Low range
11 12 High range
P.b. (hy.)
O.C.
t.i.
t.d.
t.c.
Sc.Lo
Sc.Hi
R/W
R/W
R/W
R/W
R/W
R
R
27
Page 28
12 13 AL2 alarm threshold
13 14 AL3 alarm threshold
14 15 AL2 alarm Hysteresis
15 16 AL3 alarm Hysteresis
16 17 Relative Cold Gain
17 18 Cool output Hysteresis (On-OFF only)
18 19 19 20 Heat/Cool dead band
20 21 Cool output cycling time
21 22 Cool output maximum value
22 23 Motor travel time
23 24 Minimum output step
24 25 Timer setting
25 26 Stand-by Setpoint
26 27 Soft start output high limit
27 28 Soft-start activation time
28 29 - - 29 30 Setpoint low limit
30 31 Setpoint high limit
31 32 PID Dead Band
32 33 Main output high limit
33 34 Output safety value
34 35 Setpoint ramp up
35 36 Setpoint ramp down
36 37 Input filter
37 38 Input shift
38 39 Start/Stop One shoot tuning ( 0=Stop 1=Run)
39 40 40 41 Serial comm.s address
41 42 42 43 Retransmission low range
43 44 Retransmission high range
44 45 Start-Up Setpoint
45 46 Start-Up Hold time
46 47 Output high milit during Start-up
47 48 Timer remaining time
48 49 Load current in ampere
49 - 99 50 - 100 - - -
A2S.P
A3S.P
A2hy
A2hy
r.C.Ga
Hy. C
-
d.bnd
t.c. C
OP.HC
MU.tM
MU.Hy
tiMe
tM.S.P
St.OP
St.tM
S.P. L
S.P. H
d.Err
OP. H
Sa.OP
Sl. u
Sl. d
t.FiL
In.Sh
tune
-
Addr
-
rt.Lo
rt.Hi
S.P.S.U
t.h.S.U
OP.HS
tM.r.
t.Cur
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R
9.4 Word zone - Page 2 Configuration
Address
Modbus JbuS Variable Parameter
Code
100 101 101 102 Configuration code
102 103 AL3 alarm configuration code
103 104 Engineering units
104 105 Decimal point
105 106 Low range for engineering units
106 107 High range for engineering units
-
ConF
Con.2
unit
Sc.d.d
Sc.Lo
Sc.Hi
Type
R/W 5
R/W 5
R/W
R/W 5
R/W 5
R/W 5
5/8
28
Page 29
107 108 Communications protocol
108 109 Baud rate
109 110 Retransmission range
110 111 Retransmission signal selection
111 112 Current transformer range
112 113 Password
113 114 RTX low range calibration value (Reserved)
114 115 RTX high range calibration value (Reserved)
115 116 Timer operating mode
116 117 Timer action
117 118 Digital input function
118 119 119 120 120 121 Factory code
121 122 Product code (“M4”) 7
122 123 123 124 Software release (p. es. “ 00A”) 7
124 125 125 126 Custom code
126 127 127 128 -
Prot
baud
retr
rtH
Ht.F.S
Code
CAL.3
CAL.4
t.Mod
t.Act
IL.Fn
-
-
-
-
-
R/W 9
10
R/W
11
R/W
12
R/W
R/W
R/W
R/W
R/W
13
R/W
14
R/W
15
R/W
-
-
R(W) 6
R
R
R
-
R
-
-
Notes:
1. Assignment of Setpoint to the addresses JbuS 2 and 4 writes the
Computer Setpoint. It is different from the Local Setpoint, which can
be in any case set by keypad.
2. Assignment of output at the address JbuS 3 is only possible if the
the Auto/Man option if fitted and when the controller is in Manual
mode.
3. Assignment of Setpoint to the address JbuS 5 writes the Local
Setpoint (the previous value is lost).
4. In case of ON - OFF output (address JbuS 6) the proportional band
is substituted by the output hysteresis.
5. All the configuration parameters are accepted, if valid, but not
brought into effect. To execute the reconfiguration procedure and
bring the changes into effect, the code 55AAh must be written at the
address JbuS 121.
6. Address JbuS 121 is read only, but if the code 55AAh (21930d) is
written at this address, the configuration is brought into effect.
7. The JbuS 122 + 123 and 124 + 125 addresses contain the strings
(of 4 characters) for the product and release codes: each address
represents two characters, the most significant byte in the word
contains the ASCII code of the second.
8. To select the engineering unit, the value between 0 and 10 must be
assigned as per the below table:
Engineering unit Serial value
°C
°F
none
nU
U
nA
0
1
2
3
4
5
29
Page 30
A
bar
PSI
rh
Ph
9. To select the protocol type, the value between 0 and 1 must be
assigned as per the below table:
Protocol type Serial value
Modbus 0
JbuS 1
10. To select the serial comm.s baud rate, the value between 0 and 3
must be assigned as per the below table:
Baud Rate Serial value
1200 0
2400 1
4800 2
9600 3
11. To select the retransm. output range, the value between 0 and 1
must be assigned as per the below table:
Variable Serial value
0 .. 20 mA 0
4 .. 20 mA 1
12. To select the retransmitted variable, a value between 0 and 3 must
be assigned as per the below table:
Variable Serial value
PV 0
SP 1
MV ( OP Heat ) 2
MVC ( OP Cool ) 3
13. To select the Timer/Start-up operating mode, a value between 0 and 7
must be assigned as per the below table:
Timer/Start-up operating
mode
Disabled 0
Start-up 1
Counting inside band 2
Counting inside band / End
mode OFF
Counting when launched 4
Counting when launched /
End mode OFF
Counting disable when
launched
Stand-by Setpoint 7
6
7
8
9
10
Serial value
3
5
6
30
Page 31

14. To select the Timer action, a value between 0 and 7 must be
assigned as per the below table:
Timer action Serial value
Launch OP3 status Time
By Keypad OFF Second 0
By Keypad ON Second 1
Key + at power on OFF Second 2
Key + at power on ON Second 3
By Keypad OFF Minute 4
By Keypad ON Minute 5
Key + at power on OFF Minute 6
Key + at power on ON Minute 7
15. To select the digital input functions, a value between 0 and 4 must
be assigned as per the below table:
Digital input function Serial value
None 0
Keypad lock 1
Manual mode 2
Stand-by Setpoint 3
Timer launch 4
9.5 Termination and Polarization
The Platinum ® M400 instruments do not have any line termination or
polarization system. If necessary a termination resistance (120Ω ¼ W)
must be connected to the terminals of the last instrument of the line.
In any case the polarization is not possible.
10. M5000 Controller
10.1 Bit zone
Modbus JbuS Variable Type
0 1 Remote status (0=LOC, 1=REM) R/W
1 2 Auto/Man ( 0 = Auto 1 = Man ) R/W
2 3 AL3 alarm status ( 0 = OFF, 1 = ON ) R
3 4 AL4 alarm status ( 0 = OFF, 1 = ON ) R
4 5 AL1 alarm status ( 0 = OFF, 1 = ON ) R
5 6 AL2 alarm status ( 0 = OFF, 1 = ON ) R
6 7 Out of range (0 = Normal operation, 1 = Safety) R
7 8 Self Tuning ( 0=Disabled 1=Run ) R
8 9 - R
9 10 Out of range (0 = Normal operation, 1 = Safety) R
10 11 - 11 12 - 12 13 1st Stored setpoint R/W
13 14 2nd Stored setpoint R/W
14 15 - 15 16 - 16 17 IL1 Digital input status (0 = OFF, 1 = ON) R
17 18 IL2 Digital input status (0 = OFF, 1 = ON) R
18 19 - 19 20 - 20 21 Keys enable ( 0=Enabled 1=Disabled ) R/W
21 22 Slope enable ( 0=Disabled 1=Enabled ) R/W
Address
31
Page 32

22 23 Hold PV ( 0=Disabled 1=Enabled ) R/W
23 24 OP1 forced status by serial comm.s ( 0 = OFF 1 = On ) R/W 19
24 25 OP2 forced status by serial comm.s ( 0 = OFF 1 = On ) R/W 19
25 26 OP3 forced status by serial comm.s ( 0 = OFF 1 = On ) R/W 19
26 27 OP4 (logic) forced status by serial comm.s ( 0 = OFF 1 = On ) R/W 19
10.2 Read Status
Function 07 (Read Status) returns an eight bit status with the following
meanings:
Bit Address Variable
1 (LSB) 1 Local setpoint/Remote ( 0 = Local 1 = Remote )
2 2 Auto/Man ( 0 = Auto 1 = Man )
3 3 AL3 alarm status ( 0 = OFF, 1 = ON )
4 4 AL4 alarm status ( 0 = OFF, 1 = ON )
5 5 AL1 alarm status ( 0 = OFF, 1 = ON )
6 6 AL2 alarm status ( 0 = OFF, 1 = ON )
7 7 Out of range (0 = Normal operation, 1 = Safety)
8 (MSB) 8 Self Tuning ( 0=Disabled 1=Run )
10.3 Word zone - Page 1 Parameters
Address
Modbus JbuS Variable Parameter
Code
0 1 PV Process variable
1 2 SP Setpoint
2 3 MV Main output
3 4 SPT Target setpoint
4 5 SPL Local setpoint
5 6 Proportional Band (Hysteresis ON - OFF)
6 7 Overshoot Control
7 8 Integral time
8 9 Derivative time
9 10 Cycle time
10 11 Low range
11 12 High range
12 13 AL1 alarm threshold
13 14 AL2 alarm threshold
14 15 AL3 alarm threshold
15 16 AL4 alarm threshold
16 17 AL1 alarm hysteresis Up
17 18 AL1 alarm hysteresis Down
18 19 AL2 alarm hysteresis Up
19 20 AL2 alarm hysteresis Down
20 21 AL3 alarm hysteresis Up
21 22 AL3 alarm hysteresis Down
22 23 AL4 alarm hysteresis Up
23 24 AL4 alarm hysteresis Down
24 25 Heat/cool proportional band
25 26 Heat/cool integral time
26 27 Heat/cool derivative time
27 28 Cool output cycling time
28 29 Output minimum step
29 30 Setpoint low limit
-
-
-
-
-
P.b. (Hy)
O.C.
t.i.
t.d.
t.c.
Sc.1o
Sc.hi
1***
2***
3***
4***
Hy1u
Hy1d
Hy2u
Hy2d
Hy3u
Hy3d
Hy4u
Hy4d
P.b. C
t.i. C
t.d. C
tc.C
MU.tM
SPLl.
Type
R
R
R/W 1
R/W 2
R/W 2
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
32
Page 33

30 31 Setpoint high limit
31 32 Main output low limit
32 33 Main output high limit
33 34 Cool output maximum value
34 35 Setpoint ramp up
35 36 Setpoint ramp down
36 37 Input filter
37 38 Input shift
38 39 Start/Stop One shoot tuning ( 0=Stop 1=Run)
39 40 Start/Stop Adaptive ( 0=Stop 1=Run)
40 41 Serial comm.s address
41 42 Communication protocol ( 0=Modbus 1=JbuS)
42 43 Baud rate
43 44 Remote setpoint
44 45 Soft start time
45 46 Soft start output high limit
46 47 Control output maximum speed
47 48 Cool output maximum speed
48 49 CT current
49 50 Sampling time
50 51 Manual Reset
51 52 Configuration password
52 53 Internal servomotor position
53 54 Heat/Cool dead band
54 55 Access password
55 56 Proportional band (Adaptive)
56 57 Integral time (Adaptive) ( Deriv=1/4 Ti)
57 58 1st stored setpoint
58 59 2nd stored setpoint
59 60 Remote setpoint bias
60 61 Remote setpoint ratio
61 62 Motor travel time
62 63 Target setpoint
63 64 PID Dead Band
SPL.H.
OP.l
OP.H
OP.CH
5l.u
5l.d
t.Fil
1n.Sh
tune
AdPt
Addr
Prot
baud
-
5t.tn
5t.OP
OP.r
OP.rC
Tcur
tSan
Mre5
CPA5
-
d.bnd
PAS5
Pb.
t.i.
5P.1
5P.2
biaS
rtio
MU.tM
t.5P
d.Err
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R
R/W
R/W
R/W
R
R/W
R/W
R 3
R 3
R/W
R/W
R/W
R/W
R/W
R
R/W
10.4 Word zone - Page 2 Configuration
Address
Modbus JbuS Variable Parameter
Code
100 101 Input configuration
101 102 Square root ( 0 = No 1= Yes )
102 103 Decimal point ( 0 .. 3 )
103 104 Low range for engineering units
104 105 High range for engineering units
105 106 Engineering units
106 107 Control type
107 108 OP output type
108 109 Cool output type
109 110 Retransmission type
110 111 Retransmission output
Inp
5qr
5C.dd
5C.lo
5C.Hi
Unit
01ty
0P.1
0P.2
rtH
0.r.ty
Type
R/W 4
R/W
R/W
R/W
R/W
R/W 5
R/W 6
R/W 7
R/W 7
R/W 8
R/W 9
33
Page 34

111 112 Retransmission low range
112 113 Retransmission high range
113 114 Auto/Man enable
114 115 Remote input configuration
115 116 Setpoint configuration
116 117 -
117 118 Access level
118 119 119 120 Safety output (-100 .. 100 101 = OFF )
120 121 Factory code
121 122 Product code ( "P "program ," " no program)
122 123 Product code ( “M5”)
123 124 1st byte product code
124 125 2nd byte product code
125 126 Custom code
126 127 AL1 alarm configuration
127 128 AL1 alarm output
128 129 AL1 alarm latching ( 0 = No 1= Yes )
129 130 AL1 alarm blocking ( 0 = No 1= Yes )
130 131 AL2 alarm configuration
131 132 AL2 alarm output
132 133 AL2 alarm latching ( 0 = No 1= Yes )
133 134 AL2 alarm blocking ( 0 = No 1= Yes )
134 135 AL3 alarm configuration
135 136 AL3 alarm output
136 137 AL3 alarm latching ( 0 = No 1= Yes )
137 138 AL3 alarm blocking ( 0 = No 1= Yes )
138 139 AL4 alarm configuration
139 140 AL4 alarm output
140 141 AL4 alarm latching ( 0 = No 1= Yes )
141 142 AL4 alarm blocking ( 0 = No 1= Yes )
142 143 IL1 digital input configuration
143 144 IL2 digital input configuration
144 145 Setpoint slope unit
145 146 On status CT alarm configuration ( 0=OFF 1=On )
146 147 CT maximum value
147 148 Linearization enable ( 0 = OFF 1= Enabled )
10.5 Word zone - Page 3 Programmer
Address
Modbus JbuS Variable Parameter
148 149 Program status
149 150 N° of segments
150 151 Allowed deviation
151 152 Recover action type after blackout
152 153 Time unit
153 154 Cycles
154 155 Segment 0 – Time
155 156 Segment 0 – Setpoint
156 157 Segment 0
20
digital output
rt.lo
rt.Hi
E.AMn
rS.In
rSPC
-
OPer
-
5.Out
-
-
-
-
-
-
Al.1
A1.Ou
ltch
bloc
Al.2
A2.Ou
ltch
bloc
Al.3
A3.Ou
ltch
bloc
Al.4
A4.Ou
ltch
bloc
1L1
1L2
5.P.t.M
Ht.On
Ht.F.C
CHar
Code
5tat
n.5eg
band
-
Unit
Cyc.
ti.0
5P.0
d0.0
R/W
R/W
R/W
R/W 11
R/W 10
-
R/W 12
-
R/W
R
R 18
R 18
R 18
R 18
R
R/W 13
R/W 14
R/W
R/W
R/W 13
R/W 13
R/W
R/W
R/W 13
R/W 14
R/W
R/W
R/W 13
R/W 14
R/W
R/W
R/W 15
R/W 15
R/W
R/W
R/W
R/W
Type
R/W 16
R/W
R/W
R/W 21
R/W 17
R/W
R/W
R/W
R/W
34
Page 35

157 158 Segment 1 – Time
158 159 Segment 1 – Setpoint
159 160 Segment 1
160 161 Segment 2 – Time
161 162 Segment 2 – Setpoint
162 163 Segment 2
163 164 Segment 3 – Time
164 165 Segment 3 – Setpoint
165 166 Segment 3
166 167 Segment 4 – Time
167 168 Segment 4 – Setpoint
168 169 Segment 4
169 170 Segment 5 – Time
170 171 Segment 5 – Setpoint
171 172 Segment 5
172 173 Segment 6 – Time
173 174 Segment 6 – Setpoint
174 175 Segment 6
175 176 Segment 7 – Time
176 177 Segment 7 – Setpoint
177 178 Segment 7
178 179 Segment 8 – Time
179 180 Segment 8 – Setpoint
180 181 Segment 8
181 182 Segment 9 – Time
182 183 Segment 9 – Setpoint
183 184 Segment 9
184 185 Segment 10 – Time
185 186 Segment 10 - Setpoint
186 187 Segment 10
187 188 Segment 11 – Time
188 189 Segment 11 - Setpoint
189 190 Segment 11
190 191 Segment 12 – Time
191 192 Segment 12 - Setpoint
192 193 Segment 12
193 194 Segment 13 – Time
194 195 Segment 13 - Setpoint
195 196 Segment 13
196 197 Segment 14 – Time
197 198 Segment 14 - Setpoint
198 199 Segment 14
199 200 Segment F – Time
200 201 Segment F – Setpoint
20
digital output
20
digital output
20
digital output
20
digital output
20
digital output
20
digital output
20
digital output
20
digital output
20
digital output
20
digital output
20
digital output
20
digital output
20
digital output
20
digital output
ti.1
5P.1
d0.1
ti.2
5P.2
d0.2
ti.3
5P.3
d0.3
ti.4
5P.4
d0.4
ti.5
5P.5
d0.5
ti.6
5P.6
d0.6
ti.7
5P.7
d0.7
ti.8
5P.8
d0.8
ti.9
5P.9
d0.9
ti.10
5P.10
d0.10
ti.11
5P11
d0.11
ti.12
5P.12
d0.12
ti.13
5P.13
d0.13
ti.14
5P.14
d0.14
5PF
d0.F
Note:
1. The OP1 value can only be assigned when the controller is working
in Manual mode.
2. The Local Setpoint (Wloc) can be read at the both JbuS addresses 4
and 5. It only depend on the compatibility with the other Athena
Controls instruments.
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
35
Page 36

3. The above parameters can only be read when the Adaptive Tuning is
launched. The Td derivative time is not shown but it can be simply
calculated as the ¼ of the Ti integral time (Td = Ti/4).
4. To select the Input type, the value between 0 and 15 must be
assigned as per the below table:
Input Type Serial Value
TC J
TC L
TC K
TC S
TC R
TC T
TC Custom 6
RTD 1 7
RTD 2 8
Delta T 9
0 .. 50 mV 10
0 .. 5 V 11
1 .. 5 V 12
0 .. 10 V 13
0 .. 20 mA 14
4 .. 20 mA 15
5. To select the engineering unit, the value between 0 and 9 must be
assigned as per the below table:
Engineering Unit Serial Value
None
°C
°F
MA
MU
U
Bar
PSI
Rh
Ph
6. To select the control mode, the value between 0 and 8 must be
assigned as per the below table:
Control Mode Serial Value
On/OFF reverse action 0
On/OFF direct action 1
PID direct action 2
PID reverse action 3
Valve Drive direct action 4
Valve Drive reverse action 5
Heat/Cool Linear 6
Heat/Cool Oil 7
Heat/Cool Water 8
0
1
2
3
4
5
0
1
2
3
4
5
6
7
8
9
36
Page 37

7. To select the Output type, the value between 0 and 10 must be
assigned as per the below table:
Output Type Serial Value
Not active 0
Relay 1
Logic 5
0 .. 5 V 6
1 .. 5 V 7
0 .. 10 V 8
0 .. 20 mA 9
4 .. 20 mA 10
8. To select the retransmission content the value between 0 and 2 must
be assigned as per the below table:
Retransmission Serial Value
None 0
P.V. 1
S.P. 2
9. To select the retransmission signal, the value between 6 and 10 must
be assigned as per the below table:
Retransmission signal Serial Value
0 .. 5 V 6
1 .. 5 V 7
0 .. 10 V 8
0 .. 20 mA 9
4 .. 20 mA 10
10. To select the Setpoint type, the value between 0 and 4 must be
assigned as per the below table:
Setpoint Type Serial Value
Local only 0
Remote only 1
Local / Remote 2
Local + Trim 3
Remote + Trim 4
11. To select the Remote Setpoint signal, the value between 11 and 15
must be assigned as per the below table:
Remote Setpoint Signal Serial Value
0 .. 5 V 11
1 .. 5 V 12
0 .. 10 V 13
0 .. 20 mA 14
4 .. 20 mA 15
12. To select the Access Level, the value between 0 and 2 must be
assigned as per the below table:
Access Level Serial value
Full 0
Operator 1
Edit 2
37
Page 38

13. To select the Alarm Function, the value between 0 and 7 must be
assigned as per the below table:
Alarm Function Serial Value
Disabled 0
Absolute active high 1
Absolute active low 2
Deviation active high 3
Deviation active low 4
Band active out 5
Heater break 6
Loop break alarm 7
N.B. Index 7 is available for first alarm output.
14. To select the Alarm output, the value between 1 and 3 must be
assigned as per the below table:
Alarm output Serial Value
OP 1 1
OP 2 2
OP 3 3
15. To select the Digital input function, the value between 0 and 8 must
be assigned as per the below table:
Digital Input function Serial Value
Disabled 0
Local / Remote 1
Auto / Manual 2
1st Mem. Setpoint 3
2nd Mem. Setpoint 4
Keypad lock 5
Slopes Inhibition 6
PV Hold 7
Program Run/Hold 8
16. To select the Program Status, the value between 0 and 4 must be
assigned as per the below table:
Program Status Serial Value
Reset 0
Hold 1
Run 2
Hold Back (note) 3
Program End 4
Note. This function is automatically activated every time the PV exceed
the band limits set in each segment of the running program.
17. To select the Time base, the value between 0 and 2 must be
assigned as per the below table:
Time Base Serial Value
Second 0
Minute 1
Hour 2
38
Page 39

18. The JbuS 122 + 123 and 124 + 125 addresses contain the strings (of
4 characters) for the product and release codes: each address
represents two characters, the most significant byte in the word
contains the ASCII code of the second.
19. These particular conditions can be activated if the corresponding
outputs are specifically configured for it.
20. To configure the digital outputs status related to the setpoint
programmer option, the value between 0 and 2 must be assigned as
per the below table:
Digital output Status Serial Value
OFF 0
Open 1
Close 2
21. To select the Run Program after Hold condition, the value between 0
and 4 must be assigned as per the below table:
Re-start status of the
Serial Value
program
Run 0
Reset 1
Ramp 2
10.6 RS-485 Configuration Dip Switch
On the RS485 board a 4 position dip Switch is provided. It enables the
correct hardware configuration of the instrument serial comm.s port as
follows:
Position On OFF
1 Polarisation +5Vcc Polarisation excluded
2 Termination set Termination excluded
3 Polarisation 0 Vcc Polarisation excluded
4 - -
11. X100 / X400 CONTROLLER
11.1 Bit Zone
Modbus JbuS Variable Type
Address
0 1 Remote status (0=LOC, 1=REM) 1 or program (0=LOC, 1=RUN) 2 R/W
1 2 Auto/Man (0 = Auto, 1 = Man) 3 R/W
2 3 OP4 digital output status (0 = OFF, 1 = ON) R
3 4 OP1 digital output status (0 = OFF, 1 = ON) R
4 5 OP2 digital output status (0 = OFF, 1 = ON) R
5 6 OP3 digital output status (0 = OFF, 1 = ON) R
6 7 Out of range (0 = Normal, 1 = Safety) R
7 8 Auto-Tune (0 = OFF, 1 = Run) R
8 9 Timer status (0 = OFF, 1 = Run) 4 R/W
9 10 Out of range (0 = Normal, 1 = Safety) R
39
Page 40

10 11 Keypad lock (0 = locked, 1 = unlocked) R/W
11 12 Outputs lock (0 = locked, 1 = unlocked) R/W
12 13 IL1 Digital input status (0 = OFF, 1 = ON) R
13 14 IL2 Digital input status (0 = OFF, 1 = ON) R
14 15 IL3 Digital input status (0 = OFF, 1 = ON) R
15 16 - -
11.2 Read Status
Function 07 Read Status returns an eight bit status with the following
meaning:
Bit Address Variable
1 (LSB) 1 Remote 1 or program
2 2 Auto/Man (0 = Auto, 1 = Man) 3
3 3 OP4 output status (0 = OFF, 1 = ON)
4 4 OP1 output status (0 = OFF, 1 = ON)
5 5 OP2 output status (0 = OFF, 1 = ON)
6 6 OP3 output status (0 = OFF, 1 = ON)
7 7 Out of range (0 = Normal, 1 = Safety)
8 (MSB) 8 Auto-Tune (0 = OFF, 1 = Run)
Notes:
1. Available when configured as Local + Remote Setpoint only
2. Available when configured as programmed Setpoint only.
2
status
3. With Timer option only.
11.3 Word Zone - Page 1 Parameters
Address
Modbus JbuS Variable Parameter
code
0 1 PV process variable
1 2 SP Setpoint
2 3 MV main control output
3 4 SPT target Setpoint
4 5 SPL local Setpoint
5 6 Proportional band (Hysteresis ON - OFF) 4
6 7 Overshoot control
7 8 Integral time
8 9 Derivative time
9 10 Cycle time
10 11 Low range
11 12 High range
12 13 AL2 alarm threshold
13 14 AL3 alarm threshold
14 15 AL2 alarm hysteresis
15 16 AL3 alarm hysteresis
16 17 Cool relative gain
17 18 Cool output hysteresis (On-OFF only)
18 19 19 20 Dead band
20 21 Cool cycle time
21 22 Cool control output high limit
22 23 Motor travel time
P.b. (hy.)
O.C.
t.i.
t.d.
t.c.
Sc.Lo
Sc.Hi
A2S.P
A3S.P
A2hy
A3hy
r.C.Ga
Hy. C
-
d.bnd
t.c. C
OP.HC
MU.tM
Type
R
R/W 1
R(/W) 2
R/W 1
R/W 3
R/W
R/W
R/W
R/W
R/W
R
R
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
40
Page 41

23 24 Minimum output step
24 25 Timer setting
25 26 Stand-by Setpoint
26 27 Soft-satrt output value
27 28 Soft-start activation time
28 29 Manual reset
29 30 Setpoint low limit
30 31 Setpoint high limit
31 32 Error dead band
MU.Hy
tiMe
S.P.Sb
St.OP
St.tM
M.reS
S.P. L
S.P. H
d.Err
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
11.4 Word Zone - Page 2 Parameters
Address
Modbus JbuS Variable Parameter
code
32 33 Control output high limit
33 34 Output safety value
34 35 Setpoint ramp up
35 36 Setpoint ramp down
36 37 Filter time constant
37 38 Input shift
38 39 Tune run/stop
39 40 40 41 Serial comm.s address
41 42 -
42 43 Retransmission low range
43 44 Retransmission high range
44 45 Start-up Setpoint
45 46 Hold time
46 47 Output high limit during Strat-up
47 48 Timer remaining time
48 49 Load current in Ampere
49 50 Setpoint selection
50 51 1st stored Setpoint
51 52 2nd stored Setpoint
52 53 53 54 Ratio Setpoint
54 55 Bias Setpoint
55 56 56 57 AL1 alarm threshold
57 58 AL1 alarm hysteresis
58 59 AL1 latching and blocking functions
59 60 AL2 latching and blocking functions
60 61 AL3 latching and blocking functions
61..63 62..64 -
OP. H
SA.OP
Sl. u
Sl. d
t.FiL
In.Sh
tune
-
Addr
-
rt.Lo
rt.Hi
S.P.S.U
t.h.S.U
OP.HS
tM.r.
t.Cur
S.SEL
S.P. 1
S.P. 2
-
rtio
biaS
-
A1S.P
A1hy
A1Lb
A2Lb
A3Lb
-
Type
R/W
R/W
R/W
R/W
R/W
R/W
R/W
-
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R
R
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
-
21
21
21
41
Page 42

11.5 Word Zone - Page 3 Program
Address
Modbus JbuS Variable Parameter
Type
code
64 65 Program status
65 66 Restart after a power OFF
66 67 Time units
67 68 Number of segments
68 69 Number of program cycles
69 70 Allowed deviation
70 71 Segment “0” time
71 72 Segment “0” Setpoint
72 73 Segment “0” OP3 digital output
73 74 Segment “1” time
74 75 Segment “1” Setpoint
75 76 Segment “1” OP3 digital output
76 77 Segment “2” time
77 78 Segment “2” Setpoint
78 79 Segment “2” OP3 digital output
79 80 Segment “3” time
80 81 Segment “3” Setpoint
81 82 Segment “3” OP3 digital output
82 83 Segment “4” time
83 84 Segment “4” Setpoint
84 85 Segment “4” OP3 digital output
85 86 Segment “5” time
86 87 Segment “5” Setpoint
87 88 Segment “5” OP3 digital output
88 89 Segment “6” time
89 90 Segment “6” Setpoint
90 91 Segment “6” OP3 digital output
91 92 Segment “End” Setpoint
92 93 Segment “End” OP3 digital output
93..99 94..100 -
Stat
FaiL
Unit
n.Seg
Cyc.
band
ti. 0
S.P. 0
dO. 0
ti. 1
S.P. 1
dO. 1
ti. 2
S.P. 2
dO. 2
ti. 3
S.P. 3
dO. 3
ti. 4
S.P. 4
dO. 4
ti. 5
S.P. 5
dO. 5
ti. 6
S.P. 6
dO. 6
S.P. F
dO. F
-
R/W 8
R/W 9
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
-
10
20
20
20
20
20
20
20
20
11.6 Word Zone - Page 4 Configuration
Address
Modbus JbuS Variable Parameter
code
100 101 Remote Setpoint range
101 102 1° version configuration
102 103 2° version configuration
103 104 Engineering units
104 105 Number of decimals
105 106 Low range
106 107 High range
107 108 Communications protocol
108 109 Baud rate
109 110 Continuous control output range
110 111 Retransmission output selection
rS.In
Con.1
Con.2
unit
Sc.d.d
Sc.Lo
Sc.Hi
Prot
baud
retr
rtH
Type
R/W
R/W 5
R/W 5
R/W
R/W 5
R/W 5
R/W 5
R/W
R/W
R/W
R/W
42
5/11
5/12
13
14
15
16
Page 43

111 112 CT primary high range
112 113 Password
113 114 Retransm. calibration low range (for Athena
Controls only)
114 115 Retransm. calibration high range (for Athena
Controls only)
115 116 Timer setting
116 117 Timer action
117 118 IL1 digital input function
118 119 IL2 digital input function
119 120 IL3 digital input function
Ht.F.S
Code
CAL.3
CAL.4
t.Mod
t.Act
IL1
IL2
IL3
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
17
18
19
19
19
Address
Modbus JbuS Variable Parameter
code
120 121 Manufacturer code (600 for Athena Controls) R(W) 6
121 122 Product code (“X1” or X3”) note X3=X400 product R
122 123 R
123 124 Release code (p. es. “ 00A”) 7 R
124 125 R
125 126 Custom code R
126 127 - - 127 128 - - -
Type
Notes:
1. Assignment of Setpoint to the addresses JbuS 2 and 4 writes the
Computer Setpoint. It is different from the Local Setpoint, which can
be in any case set by keypad.
2. Assignment of output at the address JbuS 3 is only possible if the the
Auto/Man option if fitted and when the controller is in Manual mode.
3. Assignment of Setpoint to the address JbuS 5 writes the Local
Setpoint (the previous value is lost).
4. In case of ON - OFF output (address JbuS 6) the proportional band
is substituted by the output hysteresis.
5. All the configuration parameters are accepted, if valid, but not
brought into effect. To execute the reconfiguration procedure and
bring the changes into effect, the code 55AAh must be written at the
address JbuS 121.
6. Address JbuS 121 is read only, but if the code 55AAh (21930d) is
written at this address, the configuration is brought into effect.
7. The JbuS 122 + 123 and 124 + 125 addresses contain the strings (of
4 characters) for the product and release codes: each address
represents two characters, the most significant byte in the word
contains the ASCII code of the second.
8. To select the program status, the value between 0 and 4 must be
assigned as per the below table:
Program status Serial value
Reset 0
Hold 1
Run 2
Hold / Back (note) 3
Program end 4
Note: If the PV controlled input value exceeds the band, the
controller switches automatically to this mode.
43
Page 44

9. To select the re-start status of the program after a power failure, the
value between 0 and 2 must be assigned as per the below table:
Re-start status of the
program
Continue 0
Reset 1
Ramp 2
10. To select the program time unit, the value between 0 and 2 must be
assigned as per the below table:
Program time unit Serial value
Second 0
Minute 1
Hour 2
11. To select the remote setpoint input type, the value between 0 and 4
must be assigned as per the below table:
Remote Setpoint input type Serial value
0 .. 5 V 0
1 .. 5 V 1
0 .. 10 V 2
0 .. 20 mA 3
4 .. 20 mA 4
12. To select the engineering unit, the value between 0 and 10 must be
assigned as per the below table:
Engineering unit Serial value
°C
°F
none
nU
U
nA
A
bar
PSI
rh
Ph
13. To select the protocol type, the value between 0 and 1 must be
assigned as per the below table:
Protocol type Serial value
Modbus 0
JbuS 1
Serial value
0
1
2
3
4
5
6
7
8
9
10
44
Page 45

14. To select the serial comm.s baud rate, the value between 0 and 3
must be assigned as per the below table:
Baud Rate Serial value
1200 0
2400 1
4800 2
9600 3
15. To select the OP5 retransm. output range, the value between 0 and 1
must be assigned as per the below table:
Variable Serial value
0…20mA 0
4…20mA 1
16. To select the retransmitted variable (PV or SP), a value between 0
and 1 must be assigned as per the below table:
Variable Serial value
PV 0
SP 1
17. To select the Timer/Start-up operating mode, a value between 0 and
7 must be assigned as per the below table:
Timer/Start-up operating mode Serial value
Disabled 0
Start-up 1
Counting inside band 2
Counting inside band / End mode OFF 3
Counting when launched 4
Counting when launched / End mode OFF 5
Counting disable when launched 6
Stand-by Setpoint 7
18. To select the Timer action, a value between 0 and 7 must be
assigned as per the below table:
Timer action Serial value
Launch OP3 status Time
By Keypad OFF Second 0
By Keypad ON Second 1
Key +
at power on
Key +
at power on
By Keypad OFF Minute 4
By Keypad ON Minute 5
Key +
at power on
Key +
at power on
OFF Second 2
ON Second 3
OFF Minute 6
ON Minute 7
45
Page 46

19. To select the digital input functions, a value between 0 and 9 must be
assigned as per the below table:
Digital input function Serial value
Not used 0
Keypad lock 1
Measure hold 2
Manual mode 3
Remote mode 4
1st stored Setpoint 5
2nd stored Setpoint 6
Local Setpoint 7
Run Timer 8
Run/stop of a program 9
20. The possible OP3 status conditions when related to the program are
below listed:
OP3 status when related to the
program
No action 0
Open 1
Closed 2
21. To select the alarm function, a value between 0 and 3 must be
assigned as per the below table:
Alarm function Serial value
No action 0
Latching 1
Blocking 2
Latching / Blocking 3
Serial value
11.7 RS-485 Configuration Dip Switch
On the RS485 board a 4 position dip Switch is provided. It enables the
correct hardware configuration of the instrument serial comm.s port as
follows:
Position On OFF
1 Polarisation +5Vcc Polarisation excluded
2 Termination set Termination excluded
3 Polarisation 0 Vcc Polarisation excluded
4 - -
46
Page 47

12. X5000 CONTROLLER
12.1 Bit zone
Address
Modbus JbuS Variable Type
0 1 Remote status (0=LOC, 1=REM) R/W
1 2 Auto / Manual ( 0 = Auto, 1 = Manual ) R/W
2 3 AL3 alarm status (0 = OFF, 1 = ON) R
3 4 AL4 alarm status (0 = OFF, 1 = ON) R
4 5 AL1 alarm status (0 = OFF, 1 = ON) R
5 6 AL2 alarm status (0 = OFF, 1 = ON) R
6 7 Out of range ( 0 = Normal operation, 1 = Safety) R
7 8 Auto-Tune ( 0 = Disabled, 1 = Run) R
8 9 - 9 10 Out of range ( 0 = Normal operation, 1 = Safety) R
10..11 11..12 - 12 13 Local stored Setpoint R/W
13 14 1st stored Setpoint R/W
14 15 2nd stored Setpoint R/W
15 16 3rd stored Setpoint R/W
16 17 IL1 Digital input status (0=OFF, 1=ON) R
17 18 IL2 Digital input status (0=OFF, 1=ON) R
18 19 IL3 Digital input status (0=OFF, 1=ON) R
19 20 - 20 21 Keypad lock (0=locked, 1=unlocked) R/W
21 22 Slope inhibition by serial comm.s R/W
22 23 PV Hold by serial comm.s R/W
23 24 OP1 forced status by serial comm.s(0=OFF, 1=ON) R/W 1
24 25 OP2 forced status by serial comm.s(0=OFF, 1=ON) R/W 1
25 26 OP3 forced status by serial comm.s(0=OFF, 1=ON) R/W 1
26 27 OP4 forced status by serial comm.s(0=OFF, 1=ON) R/W 1
27 28 OP5 (logic) forced status by serial comm.s(0=OFF, 1=ON) R/W 1
28 29 Output forcing value R/W
29 30 1st Program Run/Reset R/W
30 31 2nd Program Run/Reset R/W
31 32 3rd Program Run/Reset R/W
32 33 4th Program Run/Reset R/W
12.2 Read Status
Function 07 ( Read Status ) returns an eight bit status with the following
meanings:
Bit Address Variable
1 (LSB) 1 Remote status (0=LOC, 1=REM)
2 2 Auto / Manual ( 0 = Auto, 1 = Manual )
3 3 OP4 alarm status (0 = OFF, 1 = ON)
4 4 OP3 alarm status (0 = OFF, 1 = ON)
5 5 OP2 alarm status (0 = OFF, 1 = ON)
6 6 OP1 alarm status (0 = OFF, 1 = ON)
7 7 Out of range ( 0 = Normal operation, 1 = Safety)
8 (MSB) 8 Auto-Tune ( 0 = Disabled, 1 = Run)
47
Page 48

12.3 Word zone - Page 1 Parameters
Address
Modbus JbuS Variable Parameter
Code
0 1 PV process variable - R
1 2 SP Setpoint - R
2 3 MV Main control output - R(/W) 2
3 4 SPL local Setpoint - R/W
4 5 SPL local Setpoint - R/W 3
5 6 Proportional band (Hysteresis ON - OFF)
6 7 Overshoot control
7 8 Integral time
8 9 Derivative time
9 10 Cycle time
10 11 Low range
11 12 High range
12 13 AL1 alarm threshold
13 14 AL2 alarm threshold
14 15 AL3 alarm threshold
15 16 AL4 alarm threshold
16 17 AL1 alarm high hysteresis
17 18 AL1 alarm low hysteresis
18 19 AL2 alarm high hysteresis
19 20 AL2 alarm low hysteresis
20 21 AL3 alarm high hysteresis
21 22 AL3 alarm low hysteresis
22 23 AL4 alarm high hysteresis
23 24 AL4 alarm low hysteresis
24 25 Cool proportional band
25 26 Cool integral time
26 27 Cool derivative time
27 28 Cool cycle time
28 29 Minimum output step
29 30 Setpoint low limit
30 31 Setpoint high limit
31 32 Control ouput low limit
32 33 Control output high limit
33 34 Cool control output high limit
34 35 Slope up
35 36 Slope down
36 37 Filter time constant
37 38 Input Shift
38 39 AutoTune ( 0 = Stop, 1 = Run )
39 40 Adaptive Tune ( 0 = Stop, 1 = Run )
40 41 Serial comm.s SLAVE address
41 42 Serial comm.s SLAVE protocol
42 43 SLAVE baud rate
43 44 Remote Setpoint - R
44 45 Soft-Start activation time
45 46 Soft-Start output value
46 47 Control output maximum speed
47 48 Cool Control output maximum speed
P.b. (hy.)
O.C.
t.i.
t.d.
t.c.
Sc.Lo
Sc.Hi
A1S.P
A2S.P
A3S.P
A4S.P
hy.1u
hy.1d
hy.2u
hy.2d
hy.3u
hy.3d
hy.4u
hy.4d
P.b. C
t.i. C
t.d. C
t.c. C
MU.Hy
S.P. L
S.P. H
OP. L
OP. H
OP.C.H
Sl. u
Sl. d
t.FiL
In.Sh
tune
AdPt
Add.S
Pro.S
bdr.S
St.tM
St.OP
OP.r
OP.rC
Type
R/W
R/W
R/W
R/W
R/W
R
R
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
3
48
Page 49

48 49 Control output forcing value
49 50 Sampling time
50 51 Manual Reset
51 52 Configuration Password
52 53 Internal servomotor position - R
53 54 Dead band
54 55 Password Level access
55 56 Adaptive Proportional band
56 57 Adaptive Integral time
57 58 1st stored Setpoint
58 59 2nd stored Setpoint
59 60 3rd stored Setpoint
60 61 Remote Setpoint Bias
61 62 Ratio Setpoint
62 63 Motor travel time
63 64 SPT Target Setpoint
64 65 Read Status - R
65 66 MASTER enable
66 67 MASTER baud rate
67 68 Serial comm.s MASTER protocol
68 69 Profibus Dp address
69 70 Cold junction temperature ( for TC only ) - R
70 71 Running program status - R 5
71 72 Program selection - R
72 73 Running program number - R
73 74 1st Program Run/Reset - R/W 6
74 75 2nd Program Run/Reset - R/W 6
75 76 3rd Program Run/Reset - R/W 6
76 77 4th Program Run/Reset - R/W 6
77..78 78..79 - - 79 80 Error dead band
80..99 81..100 - - -
F.Out
t.San
M.reS
C.PASS
d.bnd
A.PASS
P.b.
t.i.
S.P. 1
S.P. 2
S.P. 3
biaS
rtio
MU.tM
t.S.P.
MaSt
bdr.M
Pro.M
Add.P
d.Err
R/W
R/W
R/W
R/W
R/W
R/W
R 4
R 4
R/W
R/W
R/W
R/W
R/W
R/W
R
R/W
R/W
R/W
R/W
R/W
12.4 Word zone - Page 2 Configuration
Address
Modbus JbuS Variable Parameter
Code
100 101 Input type
101 102 Square root ( 0 = OFF, 1 = On )
102 103 N° of decimals
103 104 Low range
104 105 High range
105 106 Engineering units
106 107 Control type
107 108 Main output (Heat)
108 109 Secondary output (Cool)
109 110 1st retransmitted output selection
110 111 1st retransmission output
111 112 1st retransmission low range
112 113 1st retransmission high range
113 114 Auto / Manual ( 0 = OFF, 1 = On )
114 115 Remote Setpoint input
115 116 Setpoint type
In P.
5Mr
5c.dd
5c.Lo
5c.Hi
Unit
Cn.ty
M.COP
S.C.OP
rt. 1
O.r.t.1
rt.L.1
rt.H.1
E.AMn
r5.In
S.P.ty
Type
R/W 7
R/W
R/W
R/W
R/W
R/W 8
R/W 9
R/W 10
R/W 11
R/W 12
R/W 13
R/W
R/W
R/W
R/W 14
R/W 15
49
Page 50

116 117 Store Setpoint Tracking
117 118 Level access
118 119 OP5 Cool output ( 0 = No, 1 = Yes )
119 120 Main output safety value
120 121 Factory code (600 = Athena Controls) - R
121 122 1st byte product code ( X5 ) - R 17
122 123 2nd byte product code - R 17
123 124 1st byte release code - R 17
124 125 2nd byte release code - R 17
125 126 Customer code - R
126 127 AL1 alarm type
127 128 AL1 addressing
128 129 AL1 alarm Latching
129 130 AL1 alarm Blocking
130 131 AL2 alarm type
131 132 AL2 addressing
132 133 AL2 alarm Latching
133 134 AL2 alarm Blocking
134 135 AL3 alarm type
135 136 AL3 addressing
136 137 AL3 alarm Latching
137 138 AL3 alarm Blocking
138 139 AL4 alarm type
139 140 AL4 addressing
140 141 AL4 alarm Latching
141 142 AL4 alarm Blocking
142 143 IL1 digital input function
143 144 IL2 digital input function
144 145 Time unit of Setpoint slope
145 146 CT alarm configuration ( 0 = OFF 1= On )
146 147 -
147 148 Linearisation ( 0 = OFF 1= On )
148 149 IL3 digital input function
149 150 2nd retransmitted output selection
150 151 2nd retransmission output
151 152 2nd retransmission low range
152 153 2nd retransmission high range
153..179 154..180 -
S.P.tr
Ac.Le
C.O.P.S
S.Out
AL. 1
A1.0u
Ltch
bLoc
AL. 2
A2.0u
Ltch
bLoc
AL. 3
A3.0u
Ltch
bLoc
AL. 4
A4.0u
Ltch
bLoc
IL 1
IL 2
S.P.tM
Ht.On
-
Char
IL 3
rt. 2
O.r.t.2
rt.L.2
rt.H.2
-
R/W
R/W 16
R/W
R/W
R/W 18
R/W 19
R/W
R/W
R/W 18
R/W 19
R/W
R/W
R/W 18
R/W 19
R/W
R/W
R/W 18
R/W 19
R/W
R/W
R/W 20
R/W 20
R/W 21
R/W
-
R/W
R/W 20
R/W 22
R/W 23
R/W
R/W
-
12.5 Word zone - Page 3 Programmer
Address
Modbus JbuS Variable Parameter
Code
180 181
181 182
182 183
183 184
184 185
185 186 Prog. 1 segment 0 - Time
186 187 Prog. 1 segment 0 - Setpoint
187 188 Prog. 1 segment 0 - OP3 digital output
188 189 Prog. 1 segment 0 - OP4 digital output
Prog. 1 Power Failure
Prog. 1 Time units
Prog. 1 cycles
Prog. 1 n° of segments
Prog. 1 Allowed deviation
FAiL
Unit
Cyc.
n.Seg
band
ti. 0
S.P. 0
OP. 3
OP. 4
Type
R/W 24
R/W 25
R/W
R/W
R/W
R/W
R/W
R/W 26
R/W 26
50
Page 51

189 190 Prog. 1 segment 1 - Time
190 191 Prog. 1 segment 1 - Setpoint
191 192 Prog. 1 segment 1 - OP3 digital output
192 193 Prog. 1 segment 1 - OP4 digital output
193 194 Prog. 1 segment 2 - Time
194 195 Prog. 1 segment 2 - Setpoint
195 196 Prog. 1 segment 2 - OP3 digital output
196 197 Prog. 1 segment 2 - OP4 digital output
197 198 Prog. 1 segment 3 - Time
198 199 Prog. 1 segment 3 - Setpoint
199 200 Prog. 1 segment 3 - OP3 digital output
200 201 Prog. 1 segment 3 - OP4 digital output
201 202 Prog. 1 segment 4 - Time
202 203 Prog. 1 segment 4 - Setpoint
203 204 Prog. 1 segment 4 - OP3 digital output
204 205 Prog. 1 segment 4 - OP4 digital output
205 206 Prog. 1 segment 5 - Time
206 207 Prog. 1 segment 5 - Setpoint
207 208 Prog. 1 segment 5 - OP3 digital output
208 209 Prog. 1 segment 5 - OP4 digital output
209 210 Prog. 1 segment 6 - Time
210 211 Prog. 1 segment 6 - Setpoint
211 212 Prog. 1 segment 6 - OP3 digital output
212 213 Prog. 1 segment 6 - OP4 digital output
213 214 Prog. 1 segment 7 - Time
214 215 Prog. 1 segment 7 - Setpoint
215 216 Prog. 1 segment 7 - OP3 digital output
216 217 Prog. 1 segment 7 - OP4 digital output
217 218 Prog. 1 segment 8 - Time
218 219 Prog. 1 segment 8 - Setpoint
219 220 Prog. 1 segment 8 - OP3 digital output
220 221 Prog. 1 segment 8 - OP4 digital output
221 222 Prog. 1 segment 9 - Time
222 223 Prog. 1 segment 9 - Setpoint
223 224 Prog. 1 segment 9 - OP3 digital output
224 225 Prog. 1 segment 9 - OP4 digital output
225 226 Prog. 1 segment 10 - Time
226 227 Prog. 1 segment 10 - Setpoint
227 228 Prog. 1 segment 10 - OP3 digital output
228 229 Prog. 1 segment 10 - OP4 digital output
229 230 Prog. 1 segment 11 - Time
230 231 Prog. 1 segment 11 - Setpoint
231 232 Prog. 1 segment 11 - OP3 digital output
232 233 Prog. 1 segment 11 - OP4 digital output
233 234 Prog. 1 segment 12 - Time
234 235 Prog. 1 segment 12 - Setpoint
235 236 Prog. 1 segment 12 - OP3 digital output
236 237 Prog. 1 segment 12 - OP4 digital output
237 238 Prog. 1 segment 13 - Time
238 239 Prog. 1 segment 13 - Setpoint
239 240 Prog. 1 segment 13 - OP3 digital output
ti. 1
S.P. 1
OP. 3
OP. 4
ti. 2
S.P. 2
OP. 3
OP. 4
ti. 3
S.P. 3
OP. 3
OP. 4
ti. 4
S.P. 4
OP. 3
OP. 4
ti. 5
S.P. 5
OP. 3
OP. 4
ti. 6
S.P. 6
OP. 3
OP. 4
ti. 7
S.P. 7
OP. 3
OP. 4
ti. 8
S.P. 8
OP. 3
OP. 4
ti. 9
S.P. 9
OP. 3
OP. 4
ti.10
S.P.10
OP. 3
OP. 4
ti.11
S.P.11
OP. 3
OP. 4
ti.12
S.P.12
OP. 3
OP. 4
ti.13
S.P.13
OP. 3
R/W
R/W
R/W 26
R/W 26
R/W
R/W
R/W 26
R/W 26
R/W
R/W
R/W 26
R/W 26
R/W
R/W 26
R/W 26
R/W
R/W
R/W
R/W 26
R/W 26
R/W
R/W
R/W 26
R/W 26
R/W
R/W
R/W 26
R/W 26
R/W
R/W
R/W 26
R/W 26
R/W
R/W
R/W 26
R/W 26
R/W
R/W
R/W 26
R/W 26
R/W
R/W
R/W 26
R/W 26
R/W
R/W
R/W 26
R/W 26
R/W
R/W
R/W 26
51
Page 52

240 241 Prog. 1 segment 13 - OP4 digital output
241 242 Prog. 1 segment 14 - Time
242 243 Prog. 1 segment 14 - Setpoint
243 244 Prog. 1 segment 14 - OP3 digital output
244 245 Prog. 1 segment 14 - OP4 digital output
245 246 Prog. 1 segment F - Setpoint
246 247 Prog. 1 segment F - OP3 digital output
247 248 Prog. 1 segment F - OP4 digital output
248 249
249 250
250 251
251 252
252 253
253 254 Prog. 2 segment 0 - Time
254 255 Prog. 2 segment 0 - Setpoint
255 256 Prog. 2 segment 0 - OP3 digital output
256 257 Prog. 2 segment 0 - OP4 digital output
257 258 Prog. 2 segment 1 - Time
258 259 Prog. 2 segment 1 - Setpoint
259 260 Prog. 2 segment 1 - OP3 digital output
260 261 Prog. 2 segment 1 - OP4 digital output
261 262 Prog. 2 segment 2 - Time
262 263 Prog. 2 segment 2 - Setpoint
263 264 Prog. 2 segment 2 - OP3 digital output
264 265 Prog. 2 segment 2 - OP4 digital output
265 266 Prog. 2 segment 3 - Time
266 267 Prog. 2 segment 3 - Setpoint
267 268 Prog. 2 segment 3 - OP3 digital output
268 269 Prog. 2 segment 3 - OP4 digital output
269 270 Prog. 2 segment 4 - Time
270 271 Prog. 2 segment 4 - Setpoint
271 272 Prog. 2 segment 4 - OP3 digital output
272 273 Prog. 2 segment 4 - OP4 digital output
273 274 Prog. 2 segment 5 - Time
274 275 Prog. 2 segment 5 - Setpoint
275 276 Prog. 2 segment 5 - OP3 digital output
276 277 Prog. 2 segment 5 - OP4 digital output
277 278 Prog. 2 segment 6 - Time
278 279 Prog. 2 segment 6 - Setpoint
279 280 Prog. 2 segment 6 - OP3 digital output
280 281 Prog. 2 segment 6 - OP4 digital output
281 282 Prog. 2 segment 7 - Time
282 283 Prog. 2 segment 7 - Setpoint
283 284 Prog. 2 segment 7 - OP3 digital output
284 285 Prog. 2 segment 7 - OP4 digital output
285 286 Prog. 2 segment 8 - Time
286 287 Prog. 2 segment 8 - Setpoint
287 288 Prog. 2 segment 8 - OP3 digital output
288 289 Prog. 2 segment 8 - OP4 digital output
289 290 Prog. 2 segment 9 - Time
290 291 Prog. 2 segment 9 - Setpoint
Prog. 2 Power Failure
Prog. 2 Time units
Prog. 2 cycles
Prog. 2 n° of segments
Prog. 2 Allowed deviation
OP. 4
ti.14
S.P.14
OP. 3
OP. 4
S.P. F
OP. 3
OP. 4
FAiL
Unit
Cyc.
n.Seg
band
ti. 0
S.P. 0
OP. 3
OP. 4
ti. 1
S.P. 1
OP. 3
OP. 4
ti. 2
S.P. 2
OP. 3
OP. 4
ti. 3
S.P. 3
OP. 3
OP. 4
ti. 4
S.P. 4
OP. 3
OP. 4
ti. 5
S.P. 5
OP. 3
OP. 4
ti. 6
S.P. 6
OP. 3
OP. 4
ti. 7
S.P. 7
OP. 3
OP. 4
ti. 8
S.P. 8
OP. 3
OP. 4
ti. 9
S.P. 9
R/W 26
R/W
R/W
R/W 26
R/W 26
R/W
R/W 26
R/W 26
R/W 24
R/W 25
R/W
R/W
R/W
R/W
R/W
R/W 26
R/W 26
R/W
R/W
R/W 26
R/W 26
R/W
R/W
R/W 26
R/W 26
R/W
R/W
R/W 26
R/W 26
R/W
R/W
R/W 26
R/W 26
R/W
R/W
R/W 26
R/W 26
R/W
R/W
R/W 26
R/W 26
R/W
R/W
R/W 26
R/W 26
R/W
R/W
R/W 26
R/W 26
R/W
R/W
52
Page 53

291 292 Prog. 2 segment 9 - OP3 digital output
292 293 Prog. 2 segment 9 - OP4 digital output
293 294 Prog. 2 segment 10 - Time
294 295 Prog. 2 segment 10 - Setpoint
295 296 Prog. 2 segment 10 - OP3 digital output
296 297 Prog. 2 segment 10 - OP4 digital output
297 298 Prog. 2 segment 11 - Time
298 299 Prog. 2 segment 11 - Setpoint
299 300 Prog. 2 segment 11 - OP3 digital output
300 301 Prog. 2 segment 11 - OP4 digital output
301 302 Prog. 2 segment 12 - Time
302 303 Prog. 2 segment 12 - Setpoint
303 304 Prog. 2 segment 12 - OP3 digital output
304 305 Prog. 2 segment 12 - OP4 digital output
305 306 Prog. 2 segment 13 - Time
306 307 Prog. 2 segment 13 - Setpoint
307 308 Prog. 2 segment 13 - OP3 digital output
308 309 Prog. 2 segment 13 - OP4 digital output
309 310 Prog. 2 segment 14 - Time
310 311 Prog. 2 segment 14 - Setpoint
311 312 Prog. 2 segment 14 - OP3 digital output
312 313 Prog. 2 segment 14 - OP4 digital output
313 314 Prog. 2 segment F - Setpoint
314 315 Prog. 2 segment F - OP3 digital output
315 316 Prog. 2 segment F - OP4 digital output
316 317
317 318
318 319
319 320
320 321
321 322 Prog. 3 segment 0 - Time
322 323 Prog. 3 segment 0 - Setpoint
323 324 Prog. 3 segment 0 - OP3 digital output
324 325 Prog. 3 segment 0 - OP4 digital output
325 326 Prog. 3 segment 1 - Time
326 327 Prog. 3 segment 1 - Setpoint
327 328 Prog. 3 segment 1 - OP3 digital output
328 329 Prog. 3 segment 1 - OP4 digital output
329 330 Prog. 3 segment 2 - Time
330 331 Prog. 3 segment 2 - Setpoint
331 332 Prog. 3 segment 2 - OP3 digital output
332 333 Prog. 3 segment 2 - OP4 digital output
333 334 Prog. 3 segment 3 - Time
334 335 Prog. 3 segment 3 - Setpoint
335 336 Prog. 3 segment 3 - OP3 digital output
336 337 Prog. 3 segment 3 - OP4 digital output
337 338 Prog. 3 segment 4 - Time
338 339 Prog. 3 segment 4 - Setpoint
339 340 Prog. 3 segment 4 - OP3 digital output
340 341 Prog. 3 segment 4 - OP4 digital output
341 342 Prog. 3 segment 5 - Time
Prog. 3 Power Failure
Prog. 3 Time units
Prog. 3 cycles
Prog. 3 n° of segments
Prog. 3 Allowed deviation
OP. 3
OP. 4
ti.10
S.P.10
OP. 3
OP. 4
ti.11
S.P.11
OP. 3
OP. 4
ti.12
S.P.12
OP. 3
OP. 4
ti.13
S.P.13
OP. 3
OP. 4
ti.14
S.P.14
OP. 3
OP. 4
S.P. F
OP. 3
OP. 4
FAiL
Unit
Cyc.
n.Seg
band
ti. 0
S.P. 0
OP. 3
OP. 4
ti. 1
S.P. 1
OP. 3
OP. 4
ti. 2
S.P. 2
OP. 3
OP. 4
ti. 3
S.P. 3
OP. 3
OP. 4
ti. 4
S.P. 4
OP. 3
OP. 4
ti. 5
R/W 26
R/W 26
R/W
R/W
R/W 26
R/W 26
R/W
R/W
R/W 26
R/W 26
R/W
R/W
R/W 26
R/W 26
R/W
R/W
R/W 26
R/W 26
R/W
R/W
R/W 26
R/W 26
R/W
R/W 26
R/W 26
R/W 24
R/W 25
R/W
R/W
R/W
R/W
R/W
R/W 26
R/W 26
R/W
R/W
R/W 26
R/W 26
R/W
R/W
R/W 26
R/W 26
R/W
R/W
R/W 26
R/W 26
R/W
R/W
R/W 26
R/W 26
R/W
53
Page 54

342 343 Prog. 3 segment 5 - Setpoint
343 344 Prog. 3 segment 5 - OP3 digital output
344 345 Prog. 3 segment 5 - OP4 digital output
345 346 Prog. 3 segment 6 - Time
346 347 Prog. 3 segment 6 - Setpoint
347 348 Prog. 3 segment 6 - OP3 digital output
348 349 Prog. 3 segment 6 - OP4 digital output
349 350 Prog. 3 segment 7 - Time
350 351 Prog. 3 segment 7 - Setpoint
351 352 Prog. 3 segment 7 - OP3 digital output
352 353 Prog. 3 segment 7 - OP4 digital output
353 354 Prog. 3 segment 8 - Time
354 355 Prog. 3 segment 8 - Setpoint
355 356 Prog. 3 segment 8 - OP3 digital output
356 357 Prog. 3 segment 8 - OP4 digital output
357 358 Prog. 3 segment 9 - Time
358 359 Prog. 3 segment 9 - Setpoint
359 360 Prog. 3 segment 9 - OP3 digital output
360 361 Prog. 3 segment 9 - OP4 digital output
361 362 Prog. 3 segment 10 - Time
362 363 Prog. 3 segment 10 - Setpoint
363 364 Prog. 3 segment 10 - OP3 digital output
364 365 Prog. 3 segment 10 - OP4 digital output
365 366 Prog. 3 segment 11 - Time
366 367 Prog. 3 segment 11 - Setpoint
367 368 Prog. 3 segment 11 - OP3 digital output
368 369 Prog. 3 segment 11 - OP4 digital output
369 370 Prog. 3 segment 12 - Time
370 371 Prog. 3 segment 12 - Setpoint
371 372 Prog. 3 segment 12 - OP3 digital output
372 373 Prog. 3 segment 12 - OP4 digital output
373 374 Prog. 3 segment 13 - Time
374 375 Prog. 3 segment 13 - Setpoint
375 376 Prog. 3 segment 13 - OP3 digital output
376 377 Prog. 3 segment 13 - OP4 digital output
377 378 Prog. 3 segment 14 - Time
378 379 Prog. 3 segment 14 - Setpoint
379 380 Prog. 3 segment 14 - OP3 digital output
380 381 Prog. 3 segment 14 - OP4 digital output
381 382 Prog. 3 segment F - Setpoint
382 383 Prog. 3 segment F - OP3 digital output
383 384 Prog. 3 segment F - OP4 digital output
384 385
385 386
386 387
387 388
388 389
389 390 Prog. 4 segment 0 - Time
390 391 Prog. 4 segment 0 - Setpoint
391 392 Prog. 4 segment 0 - OP3 digital output
392 393 Prog. 4 segment 0 - OP4 digital output
Prog. 4 Power Failure
Prog. 4 Time units
Prog. 4 cycles
Prog. 4 n° of segments
Prog. 4 Allowed deviation
S.P. 5
OP. 3
OP. 4
ti. 6
S.P. 6
OP. 3
OP. 4
ti. 7
S.P. 7
OP. 3
OP. 4
ti. 8
S.P. 8
OP. 3
OP. 4
ti. 9
S.P. 9
OP. 3
OP. 4
ti.10
S.P.10
OP. 3
OP. 4
ti.11
S.P.11
OP. 3
OP. 4
ti.12
S.P.12
OP. 3
OP. 4
ti.13
S.P.13
OP. 3
OP. 4
ti.14
S.P.14
OP. 3
OP. 4
S.P. F
OP. 3
OP. 4
FAiL
Unit
Cyc.
n.Seg
band
ti. 0
S.P. 0
OP. 3
OP. 4
R/W
R/W 26
R/W 26
R/W
R/W
R/W 26
R/W 26
R/W
R/W
R/W 26
R/W 26
R/W
R/W
R/W 26
R/W 26
R/W
R/W
R/W 26
R/W 26
R/W
R/W
R/W 26
R/W 26
R/W
R/W
R/W 26
R/W 26
R/W
R/W
R/W 26
R/W 26
R/W
R/W
R/W 26
R/W 26
R/W
R/W
R/W 26
R/W 26
R/W
R/W 26
R/W 26
R/W 24
R/W 25
R/W
R/W
R/W
R/W
R/W
R/W 26
R/W 26
54
Page 55

393 394 Prog. 4 segment 1 - Time
394 395 Prog. 4 segment 1 - Setpoint
395 396 Prog. 4 segment 1 - OP3 digital output
396 397 Prog. 4 segment 1 - OP4 digital output
397 398 Prog. 4 segment 2 - Time
398 399 Prog. 4 segment 2 - Setpoint
399 400 Prog. 4 segment 2 - OP3 digital output
400 401 Prog. 4 segment 2 - OP4 digital output
401 402 Prog. 4 segment 3 - Time
402 403 Prog. 4 segment 3 - Setpoint
403 404 Prog. 3 segment 3 - OP3 digital output
404 405 Prog. 3 segment 3 - OP4 digital output
405 406 Prog. 3 segment 4 - Time
406 407 Prog. 3 segment 4 - Setpoint
407 408 Prog. 3 segment 4 - OP3 digital output
408 409 Prog. 3 segment 4 - OP4 digital output
409 410 Prog. 3 segment 5 - Time
410 411 Prog. 3 segment 5 - Setpoint
411 412 Prog. 3 segment 5 - OP3 digital output
412 413 Prog. 3 segment 5 - OP4 digital output
413 414 Prog. 3 segment 6 - Time
414 415 Prog. 3 segment 6 - Setpoint
415 416 Prog. 3 segment 6 - OP3 digital output
416 417 Prog. 3 segment 6 - OP4 digital output
417 418 Prog. 3 segment 7 - Time
418 419 Prog. 3 segment 7 - Setpoint
419 420 Prog. 3 segment 7 - OP3 digital output
420 421 Prog. 3 segment 7 - OP4 digital output
421 422 Prog. 3 segment 8 - Time
422 423 Prog. 3 segment 8 - Setpoint
423 424 Prog. 3 segment 8 - OP3 digital output
424 425 Prog. 3 segment 8 - OP4 digital output
425 426 Prog. 3 segment 9 - Time
426 427 Prog. 3 segment 9 - Setpoint
427 428 Prog. 3 segment 9 - OP3 digital output
428 429 Prog. 3 segment 9 - OP4 digital output
429 430 Prog. 3 segment 10 - Time
430 431 Prog. 3 segment 10 - Setpoint
431 432 Prog. 3 segment 10 - OP3 digital output
432 433 Prog. 3 segment 10 - OP4 digital output
433 434 Prog. 3 segment 11 - Time
434 435 Prog. 3 segment 11 - Setpoint
435 436 Prog. 3 segment 11 - OP3 digital output
436 437 Prog. 3 segment 11 - OP4 digital output
437 438 Prog. 3 segment 12 - Time
438 439 Prog. 3 segment 12 - Setpoint
439 440 Prog. 3 segment 12 - OP3 digital output
440 441 Prog. 3 segment 12 - OP4 digital output
441 442 Prog. 3 segment 13 - Time
442 443 Prog. 3 segment 13 - Setpoint
443 444 Prog. 3 segment 13 - OP3 digital output
ti. 1
S.P. 1
OP. 3
OP. 4
ti. 2
S.P. 2
OP. 3
OP. 4
ti. 3
S.P. 3
OP. 3
OP. 4
ti. 4
S.P. 4
OP. 3
OP. 4
ti. 5
S.P. 5
OP. 3
OP. 4
ti. 6
S.P. 6
OP. 3
OP. 4
ti. 7
S.P. 7
OP. 3
OP. 4
ti. 8
S.P. 8
OP. 3
OP. 4
ti. 9
S.P. 9
OP. 3
OP. 4
ti.10
S.P.10
OP. 3
OP. 4
ti.11
S.P.11
OP. 3
OP. 4
ti.12
S.P.12
OP. 3
OP. 4
ti.13
S.P.13
OP. 3
R/W
R/W
R/W 26
R/W 26
R/W
R/W
R/W 26
R/W 26
R/W
R/W
R/W 26
R/W 26
R/W
R/W
R/W 26
R/W 26
R/W
R/W
R/W 26
R/W 26
R/W
R/W
R/W 26
R/W 26
R/W
R/W
R/W 26
R/W 26
R/W
R/W
R/W 26
R/W 26
R/W
R/W
R/W 26
R/W 26
R/W
R/W
R/W 26
R/W 26
R/W
R/W
R/W 26
R/W 26
R/W
R/W
R/W 26
R/W 26
R/W
R/W
R/W 26
55
Page 56

444 445 Prog. 3 segment 13 - OP4 digital output
445 446 Prog. 3 segment 14 - Time
446 447 Prog. 3 segment 14 - Setpoint
447 448 Prog. 3 segment 14 - OP3 digital output
448 449 Prog. 3 segment 14 - OP4 digital output
449 450 Prog. 3 segment F - Setpoint
450 451 Prog. 3 segment F - OP3 digital output
451 452 Prog. 3 segment F - OP4 digital output
OP. 4
ti.14
S.P.14
OP. 3
OP. 4
S.P. F
OP. 3
OP. 4
R/W 26
R/W
R/W
R/W 26
R/W 26
R/W
R/W 26
R/W 26
Notes:
1. This function may be used only with a suitable configuration outputs
are set properly.
2. The OP1 value can be only assigned when the controller is working
in Manual mode.
3. The Local Setpoint (Wloc) can be read at the both JbuS addresses 4
and 5. It only depend on the compatibility with the other Athena
Controls instruments.
4. The above parameters can only be read when the Adaptive Tuning is
launched. The Td derivative time is not shown but it can be simply
calculated as the ¼ of the Ti integral time (Td = Ti/4).
5. When the Program status is requested, the instrument replies as per
the below table:
Program status Serial value
Reset 0
Run 1
Hold 2
Automatic Hold 3
Program End 4
6. To select the Program command, the value between 0 and 1 must be
assigned as per the below table:
Program command Serial value
Reset 0
Start 1
7. To select the input type, the value between 0 and 24 must be
assigned as per the below table:
Input type Serial value
TC J 0
TC K 1
TC L 2
TC S 3
TC R 4
TC T 5
TC B 6
TC N 7
TC NI 8
TC W3% 9
TC W5% 10
TC E 11
Custom 12
RTD 1 13
56
Page 57

RTD 2 14
Delta T 15
0 .. 50 mV 16
0 .. 300 mV 17
0 .. 5 V 18
1 .. 5 V 19
0 .. 10 V 20
0 .. 20 mA 21
4 .. 20 mA 22
2 KHz Frequency 23
20 KHz Frequency 24
8. To select the engineering unit, the value between 0 and 10 must be
assigned as per the below table:
Engineering unit Serial value
none 0
°C 1
°F 2
mA 3
mV 4
V 5
bar 6
PSI 7
rh 8
Ph 9
Hz 10
9. To select the Control type & action, the value between 0 and 8 must
be assigned as per the below table:
Control type Action Serial value
On / OFF Reverse 0
On / OFF Direct 1
P.I.D. Direct 2
P.I.D. Reverse 3
Valve drive P.I.D. Direct 4
Valve drive P.I.D. Reverse 5
Heat/Cool Linear 6
Heat/Cool Oil 7
Heat/Cool Water 8
10. To select the Main output (Heat), the value between 0 and 11 must
be assigned as per the below table:
Main output (Heat) Serial value
none 0
Relay / Triac 1
Logic 6
0 .. 5 V 7
1 .. 5 V 8
0 .. 10 V 9
0 .. 20 mA 10
4 .. 20 mA 11
57
Page 58

11. To select the Secondary output (Cool), the value between 0 and 11
must be assigned as per the below table:
Secondary output
Serial value
(Cool)
none 0
Relay / Triac 2
Logic 6
0 .. 5 V 7
1 .. 5 V 8
0 .. 10 V 9
0 .. 20 mA 10
4 .. 20 mA 11
12. To select the 1
st
retransmitted output selection, the value between 0
and 2 must be assigned as per the below table
1st retransmitted output
Serial value
selection
none 0
Provess variable 1
Setpoint 2
13. To select the 1
st
retransmission output, the value between 7 and 11
must be assigned as per the below table:
1st retransmission
Serial value
output
0 .. 5 V 7
1 .. 5 V 8
0 .. 10 V 9
0 .. 20 mA 10
4 .. 20 mA 11
14. To select the remote Setpoint input, the value between 18 and 22
must be assigned as per the below table:
Remote Setpoint input Serial value
0 .. 5 V 18
1 .. 5 V 19
0 .. 10 V 20
0 .. 20 mA 21
4 .. 20 mA 22
15. To select the Setpoint type, the value between 0 and 5 must be
assigned as per the below table:
Setpoint type Serial value
Local only 0
Remote only 1
Local/Remote only 2
Local - Trim 3
Remote - Trim 4
Setpoint Programmer
5
(option)
58
Page 59

16. To select the Access level, the value between 0 and 2 must be
assigned as per the below table:
Access level Serial value
Full 0
Operator 1
Edit 2
17. The JbuS 122 + 123 and 124 + 125 addresses contain the strings (of
4 characters) for the product and release codes: each address
represents two characters, the most significant byte in the word
contains the ASCII code of the second.
18. To select the alarm type, the value between 0 and 6 must be
assigned as per the below table:
Alarm type Serial value
Not used 0
Absolute High active 1
Absolute Low active 2
Deviation High active 3
Deviation Low active 4
Band Out active 5
Loop Break Alarm 6
19. To select the output assignment, the value between 1 and 4 must be
assigned as per the below table:
Output assignment Serial value
OP1 1
OP2 2
OP3 3
OP4 4
20. To select the Digital input function, the value between 0 and 15 must
be assigned as per the below table:
Digital input function Serial value
Not used 0
Local/Remote 1
Auto/Manual 2
1st stored Setpoint 3
2nd stored Setpoint 4
3rd stored Setpoint 5
Keypad lock 6
Setpoint slopes disable 7
Measure Hold 8
Output forcing mode 9
1st Program selection 10
2nd Program selection 11
3rd Program selection 12
4th Program selection 13
Program Run/Stop 14
Program Reset 15
59
Page 60

21. To select the slopes time unit, the value between 0 and 2 must be
assigned as per the below table:
Slopes time unit Serial value
Second 0
Minute 1
Hour 2
22. To select the 2
nd
retransmitted output selection, the value between 0
and 2 must be assigned as per the below table:
2nd retransmitted
Serial value
output selection
None 0
Process variable 1
Setpoint 2
23. To select the 2
nd
retransmission output, the value between 7 and 11
must be assigned as per the below table:
2nd retransmission
Serial value
output
0 .. 5 V 7
1 .. 5 V 8
0 .. 10 V 9
0 .. 20 mA 10
4 .. 20 mA 11
24. To select the Power fail, the value between 0 and 2 must be
assigned as per the below table:
Power Fail Serial value
Continue 0
Reset 1
Ramp 2
25. To select the Segment time basis, the value between 0 and 2 must
be assigned as per the below table:
Segment time basis Serial value
Second 0
Minute 1
Hour 2
26. To select the logic output status of segment #, the value between 0
and 2 must be assigned as per the below table:
Logic output status of
Serial value
segment #
Closed 0
Open 1
disabled 2
60
Page 61

12.6 RS-485 Configuration Dip Switch
On the RS485 board a 4 position dip Switch is provided. It enables the
correct hardware configuration of the instrument serial comm.s port as
follows:
Position On OFF
1 Polarisation +5Vcc Polarisation excluded
2 Termination set Termination excluded
3 Polarisation 0 Vcc Polarisation excluded
4 - -
13. Configuration software for Platinum controllers
The configuration software APG2SW4 can be used with all the Platinum
instruments: C10, M10, M300, M400, M5000, X100, X400 and X5000,
even those without the RS 485 communications option.
Instruments C10, M10, M300 and M400 without
communications option can be configured using this software, but the
special cable APG2SCI, (available separately), will be required to
interface between the computer port and the instrument.
For instruments C10, M10, M300 and M400 without
communications option, connect the special cable APG2SCI to a spare
port on the computer and the crimp connectors to terminals 10 – brown
and 11 – black on the instrument. The computer and the instrument
should be turned off during this procedure.
For instruments C10, M10, M300 and M400, terminals 10 and 11 are
also the SSR drive voltage output. To avoid a communication error, open
circuit the sensor input terminals, to prevent the SSR drive output from
turning on. Also, for previously configured instruments, ensure that the
configuration code, ‘ConF’ ends in a ‘0’ e.g. 2000
off and that the SSR drive voltage output is not used as main output.
the RS 485
the RS 485
, i.e. Alarm 2 is turned
61
Page 62

13.1 Use of instruments with the RS 485 communications option
For instruments C10, M10, M300 and M400 with
communications option, the connection must be made using an isolated
RS 232C to RS 485 (2 wires) converter and a standard RS 232C cable.
To use instruments C10, M10, M300 and M400 with
communications option using an RS 232C to RS 485 converter, connect
a standard RS 232C cable between a spare port on the computer and the
RS 232C port of the converter. Connect the RS 485 terminals of the
converter to terminals 7 (+) and 8 (–) of the instrument. Please note that
the converter must be isolated and handle the RTS signal. The Athena
223A001401 RS 232C to RS 485 converters is suitable to perform this
function. The computer, converter and the instrument should be turned
off during this procedure.
For instruments M5000, X100, X400, and X5000 with
communications option, connect a standard RS 232C cable between the
computer and an isolated RS 232C to RS 485 converter as above. The
computer and the converter should be turned off during this procedure.
When running RS 485 cables a long distance, up to 1200 meters, a
specific data transfer cable should be used with a low capacitance per
metre. As lower is the capacitance per metre, as longer can be the cable
length. Suitable cables are as follows:
Belden type 9729 Impedance 100Ω Capacitance = 41pF/m
Belden type 9502 Impedance 150Ω Capacitance = 98pF/m
For instruments M5000, X100, X400, and X5000 with
communications option, connect the RS 485 terminals of the RS 232C to
RS 485 converter to the terminals of the instrument as shown in the table
below. The computer, the converter and the instrument should be turned
off during this procedure.
Controller Instrument
terminal N°
M5000 7 +
M5000 8 M5000 9 Common
X100 1 +
X100 2 X100 3 Common
X400 1 +
X400 2 -
X400 3 Common
X5000 13 +
X5000 14 X5000 15 Common
For instruments M5000, X100, X400 and X5000 without
communications option, connect a standard RS232C cable to a spare
port on the computer and the appropriate wires to the instrument as
shown in the table below. The computer and the instrument should be
turned off during this procedure.
the RS 485
RS-485
terminal
the RS 485
the RS 485
the RS 485
the RS 485
62
Page 63

Controller Instrument
M5000 7 2 3
M5000 8 3 2
M5000 9 5 7
X100 1 2 3
X100 2 3 2
X100 3 5 7
X400 1 2 3
X400 2 3 2
X400 3 5 7
X5000 13 2 3
X5000 14 3 2
X5000 15 5 7
Turn on the power to the computer and the instrument (and the RS 232C
to RS 485 converter if used).
13.2 To load the software
Insert the CD-ROM. The installation page should open automatically if
autorun is active; if not, access your CD-ROM and double click the
“install.exe” icon file.
terminal N°
9-Way port
Pin N°
25-Way
port Pin N°
63
Page 64

13.3 To enter the configuration software
After loading the software, enter the program by clicking: ‘Start’;
‘P
rograms’; ‘Athena Controls DIN Controllers’ and then clicking on the
required instrument, e.g. ‘M300’.
64
Page 65

13.4 Configuration software settings
Click on ‘Comms’ and ‘Port’ and ensure that the port number
corresponds to the one being used on the computer. Click on the correct
port number if there is a check mark by the wrong setting.
Click on ‘Comms’ and ‘BaudRate’ and ensure that it is set to 9600 for
instruments without
with RS 485, ensure that the setting in the configuration software is the
same as in the instrument. Correct if there is a check mark by the wrong
value.
the RS 485 communications option. For instruments
Click on ‘Comms’ and ‘Protocol’ and ensure that it is set to ‘Jbus’ for
instruments without
RS 485, ensure that the setting in the configuration software is the
with
same as in the instrument. Correct if there is a mark by the wrong
setting.
Click on the tabs ‘Configuration’, ‘Parameters’ and ‘Access’ and select
the settings required.
For a detailed description of all parameters, please see the instrument
instruction manual.
the RS 485 communications option. For instruments
65
Page 66

13.5 To store the screen settings into the instrument
Click on the tab ‘Download Cnf’. Click on the floppy disk ‘icon’ under the
heading ‘Parameters and Configuration’ to store the screen settings into
the instrument.
13.6 To load a custom sensor configuration
Click on the tab ‘Download Cnf’. Click on ‘Open’ under the heading
‘Custom TC’ if it is required to load a custom sensor configuration from
the selection of stored characteristics.
66
Page 67

The following custom sensor file options are available:
File name Sensor Type Range Instrument
b.cst
d.cst Thermocouple type B 0 .. 1800 °C
e.cst Thermocouple type N 0 .. 1300 °C
f.cst RTD Pt100 0.0 .. 200.0 °C no M5000,X5000,X7000
g.cst Thermocouple type E -200…+400 °C
h.cst TC constant reading = 50 0 .. 100 °C no M5000,X5000,X7000
l.cst RTD Pt100 -99.9 .. 600.0 °C no M5000,X5000,X7000
isn.cst ZIS-01/KR0.200 -50 .. 200 °C
isr.cst ZIS-01/KR 0.200 0 .. 200 °C
iss.cst ZIS-1X/KS 0.650
isy.cst ZIS-01/KR 0.200 0 .. 400 °C
m.cst Thermocouple type J 0.0 .. 50.0 °C no M5000
i.cst custom configuration
iso.cst custom IR sensor
isp.cst custom IR sensor
isq.cst custom IR sensor
ist.cst custom IR sensor
isu.cst custom IR sensor
isv.cst custom IR sensor
isw.cst custom IR sensor
isx.cst custom IR sensor
isz.cst custom IR sensor
∆T (2 x RTD Pt100)
ZIS-3X/KS 0.650
-50 .. +50 °C no M5000,X5000,X7000
0 .. 650 °C
0 .. 650 °C
Click on the required configuration and select ‘OK’. Click on the floppy
disk ‘icon’ under the heading ‘Custom TC’ to store the new custom
sensor configuration into the instrument.
67
Page 68

13.7 To clone several instruments
To clone several instruments from one that has been programmed with required
values, connect this instrument to the computer according to the instructions
above. Click on the tab ‘Upload Cnf’. Click on the floppy disk ‘icon’ under the
heading ‘Upload Configuration’, to copy the instrument settings onto the screen.
Turn off the power to the instrument, un-plug it from its housing, plug-in a new
instrument and turn on the power. Click on the tab ‘Download Cnf’. Click on the
floppy disk ‘icon’ under the heading ‘Parameters and Configuration’ to store the
screen settings into the instrument. Another new instrument can be plugged in
and the floppy disk ‘icon’ clicked again if required.
13.8 To store the screen settings as a file
To store the screen settings as a file, which can be saved as a
permanent record and used at a later date to copy into another controller,
click on ‘F
window. In either case, a ‘Save as’ window will open, with a highlighted
file name shown as *.M300 (for M300 controller), *.M400 (for M400
controller), *.c10 (for C10 or M10 controllers), *.M5000 (for M5000
controllers), etc. Over-type the * with the filename required, leaving the
.m300, .c10, etc. as the file extension, as in normal Windows
Click ‘OK’. In any case the program sets automatically the suffix of the
corresponding instrument.
ile’ and then ‘Save’, or click on the save ‘icon’ at the top of the
practice.
68
Page 69

Simultaneously when saving the binary format of the configuration, the
program writes, with the same path, a text file which includes the
configuration parmeters.
13.9 To recall a previously stored file
To recall a previously stored file, click on ‘File’ and then ‘Open’, or click
on the open ‘icon’ at the top of the window. In either case, an ‘Open’
window will appear, which will list all previously stored file names with the
file extension appropriate to the controller as listed above. Click on the
file required and then click ‘OK’. The file can be downloaded to a
controller if required, as described above.
69
Page 70

13.10 Printing of the configuration
To print the present configuration of the instrument: select “file” from the
main window, select “Print C
onf” from the menu
The following will be printed: all the configuration tab sheets; all the parameter tab
sheets; the Access page.
The printing will be equal to the “print screen”.
13.11 Trend Menu
The trend menu is available on the main page of the configuration
software. The trend menu allows to visualise the time trend (the time
scale is available as “number of acquisitions”) of the process variable
(PV), of the Set point and of the Output of the connected instrument on a
graphic page.
The trend scale can be set by using the “MAX” and “MIN” values.
The time scale is available as “number of acquisitions”.
The time interval between two acquisitions (milliseconds) can be set
under the “Timeout” function.
70
Page 71

Functions of the buttons:
- Close
return to the configuration software main window
- Zoom out
Visualization from the start of the data acquisition till the present time.
The time scale is changed automatically
- Reset
the data acquisition starts again. The old data are lost.
- Stop
the data acquisition is stopped. The old data are maintained.
- Print
the visualised trend page is printed
The trend scale can be set by using the “MAX” and “MIN” values..
Max: Trend scale High Limit
Min: Trend scale Low Limit
Enable scale limits change: if enabled, in case one of the monitored
variables exceeds the trend scale “MAX” / “MIN” limits, the scale is
automatically expanded.
Timeout: time interval between two acquisitions from the instrument
(milliseconds).
Note: Area available for the user notes. Notes can be printed. Notes are
lost when the configuration software is closed.
When the configuration software is closed all the trend data and the
notes are lost.
13.12 Programmed setpoint (only if the program option is present)
13.12.1 M5000 Controller
New program
1 configure the serial communication parameters.
2 select the “Programmed setpoint” card push-button:
the Programmed Setpoint menu is displayed:
71
Page 72

and the commands to select the program state appear in the
“Programmed Setpoint” card:
From the “Programmed setpoint” menu select New/Modify
New Setpoint programs can be created and saved in this window or
already existing programs loaded from the Menu File, for any
modifications.
72
Page 73

To create a new program:
1. select one of the items of the “Recover action after blackout”
parameter
2. select an item of the “time unit” parameter
3. select the number of segments which make up the program (minimum
1, maximum 14)
4. select the number of program cycles (from 0 to 9999, where 0
indicates infinite cycles) and enter the dead band value.
The decimals number, as already set in the Configuration – Config.
Configurator input, is also displayed.
To limit the Setpoint to the full programmed setpoint range select “SP
limit full range” from the Programmed setpoint menu.
For each segment set:
- time
- Setpoint value
- OP3 output state.
At the end of the setting press:
- Enter: to validate the data entered
- Cancel: to quit the screen without saving
- Print: to print the window containing the data entered.
Or select Setpoint Profile from the menu.To display the window of the
setpoint profile of the data entered in the New/Modify page program:
Press “Print” to print the window.
73
Page 74

Enter program to the instrument
On selecting Enter on the Programmed setpoint menu the Setpoint
program can be sent to instrument M5000. The window will display:
On selecting the Enter button the following window displays:
Once the enter phase has finished the window is displayed
74
Page 75

Receiving program at the instrument
On selecting Receive from the Programmed setpoint menu the Setpoint
program can be received from instrument M5000. The window dislays:
When the reception has finished the window is displayed
and then :
where a name can be assigned to the file which will contain the program
just received.
75
Page 76

Programmed setpoint card
The Programmed setpoint card contains the commands to run, pause or
stop the program.
Select the corresponding command and press “Enter” to run it.
76
Page 77

13.12.2 X400 Controller
New program
1. configure the serial communication parameters.
2. check that there is the “Programmed setpoint” option:
To check the active options:
1. select the “Accesses” card
2. press “Check options”: if “Program Enabled” is present.
3. select the “Receive” card and detect the configuration
In the Configuration – Conf Codes 2 card, select Programmable in the
Setpoint Type parameter.
77
Page 78

When the selection has been made the Programmed Setpoint menu is
enabled.
From the “Programmed setpoint” menu select New/Modify.
New Setpoint programs can be created and saved in this window or
already existing programs loaded from the Menu File, for any
modifications.
To create a new program:
1. select one of the items of the “Recover action after blackout”
parameter
2. select an item of the “time unit” parameter
3. select the number of segments which make up the program (minimum
1, maximum 6)
4. select the number of program cycles (from 0 to 9999, where 0
indicates infinite cycles) and enter the dead band value.
The decimals number, as already set in the Configuration – Config.
Configurator input, is also displayed.
To limit the Setpoint to the full programmed setpoint range select “SP
limit full range” from the Programmed setpoint menu.
For each segment set:
- time
- Setpoint value
- OP3 output state.
At the end of the setting press:
- Enter: to validate the data entered
- Cancel: to quit the screen without saving
- Print: to print the window containing the data entered.
Or select Setpoint Profile from the menu.
78
Page 79

To display the window of the setpoint profile of the data entered in the
New/Modify page program:
Press “Print” to print the window.
Enter program to the instrument
On selecting Enter on the Programmed setpoint menu the Setpoint
program can be sent to instrument X400. The window will display:
79
Page 80

On selecting the Enter button the following window displays:
Once the enter phase has finished the window is displayed
Receiving program at the instrument
On selecting Receive from the Programmed setpoint menu the Setpoint
program can be received from instrument X400. The window dislays:
When the reception has finished the window is displayed
80
Page 81

and then:
where a name can be assigned to the file which will contain the program
just received.
Programmed setpoint card
The Programmed setpoint card contains the commands to run, pause or
stop the program.
Select the corresponding command and press “Enter” to run it.
81
Page 82

13.12.3 X5000 Controller
New program
1. configure the serial communication parameters.
2. select the “Receive configuration” card: if the instrument has the
program option, in the Configuration – Config. Setpoint card the
Type of Programmed Setpoint can also be selected
3 select the “Programmed setpoint” card”:
The Programmed Setpoint menu is displayed:
82
Page 83

and the commands to select the program state appear in the
“Programmed Setpoint” card:
From the “Programmed setpoint” menu select New/Modify
New Setpoint programs can be created and saved in this window or
already existing programs loaded from the Menu File, for any
modifications.
To create a new program:
1. select one of the items of the “Recover action after blackout”
parameter
2. select an item of the “time unit” parameter
3. select the number of segments which make up the program (minimum
1, maximum 14)
4. select the number of program cycles (from 0 to 9999, where 0
indicates infinite cycles) and enter the dead band value.
83
Page 84

The decimals number, as already set in the Configuration – Config.
Configurator input, is also displayed.
To limit the Setpoint to the full programmed setpoint range select “SP
limit full range” from the Programmed setpoint menu.For each segment
set:
- time
- Setpoint value
- OP3 and OP4 output state.
At the end of the setting press:
- Enter: to validate the data entered
- Cancel: to quit the screen without saving
- Print: to print the window containing the data entered.
Or select Setpoint Profile from the menu.
To display the window of the setpoint profile of the data entered in the
New/Modify page program:
Press “Print” to print the window.
84
Page 85

Enter program to the instrument
On selecting Enter on the Programmed setpoint menu the Setpoint
program can be sent to instrument X5000. The window will display:
On selecting the Enter button the following window displays:
Once the enter phase has finished the window is displayed
85
Page 86

Receiving program at the instrument
On selecting Receive from the Programmed setpoint menu the Setpoint
program can be received from instrument X5000. The window dislays:
When the reception has finished the window is displayed
and then:
where a name can be assigned to the file which will contain the program
just received.
86
Page 87

Programmed setpoint card
The Programmed setpoint card contains the commands to run, pause or
stop the program.
Select the corresponding command and press “Enter” to run it.
87
Page 88

13.13 Configuration of the Master communications (only X5000)
Select the menu "Math/ Master". Is visualized the window "Master
Communications and Math Editor".
Select the card "Master Communications".
Select in the list "Slave Address" under "Write To" the address of the
device on which you want to transfer the parameter.
To insert a new connection activate the button "Add".
Select in the list "Slave Address" under "Read From" the address of the
device from which a parameter wants to be read (N.B. the admitted
addresses are between 1 and 247; 256 is the address of the device
master!).
Select in the list "Datum Address" under "Read From" the address of the
parameter that wants to be read on the device.
N.B. The admitted addresses are between 1 and 256 (modbus) or
between 0 and 255 (jbus); besides are visualized the variable
(VAR_1..VAR_16) and the constants configurated
(CONST_1..CONST_16).
88
Page 89

N.B. The admitted addresses are between 1 and 247; 256 is the address
of the device master; 0 is the BROADCAST address for transfer the
parameter to all the connected devices!
Select in the list "Datum Address" under "Write To" the address where
you want to transfer the parameter.
N.B. The admitted addresses are between 1 and 256 (modbus) or
between 0 and 255 (jbus); besides are visualized the variable
configurated (VAR_1..VAR_16).
Press the button "OK" for confirm the immission or press the button
"CANCEL" for cancel the immission.
To modify the values of a connection previously introduced, select it
with a click of the mouse.
Press the button "Modify".
Is visualized the window "Master Communications Edit" with the values of
the selected connection.
Modify the values as in demand, acting in the same way for the insertion
of a new connection.
89
Page 90

At the end press the button "OK" to confirm the modifications or press the
button "CANCEL" to cancel it.
To eliminate a connection previously introduced, select it with a click of
the mouse in the same way for the modification and press the button
"Delete".
At the end of the configuration of the Master communications, press the
button "CLOSE" to return to the window of the configurator.
13.14 Configuration of the mathematical / logics operations
Select the menu "Math/ Master." The "Master Communications and Math
Editor" window appears .
Select the card "Math Package".
To insert a new operation activate the button "Add".
Select in the list "Result" the address of the variable in which the result of
the operation wants to be memorized: the admitted addresses are
between 1 and 256 (modbus) or between 0 and 255 (jbus); besides are
visualized the variable (VAR_1..VAR_16) to disposition.
90
Page 91

Select in the list "Operand A" the address of the parameter that wants to
be used like first operand: the admitted addresses are between 1 and
256 (modbus) or between 0 and 255 (jbus); besides are visualize the
variabled (VAR_1..VAR_16) and the constants configured
(CONST_1..CONST_16).
Select in the list "Operator" the symbol of the desired operation; the
possible operations are: sum (+), subtraction (-), multiplication (*),
division (/), greater than (>) and less than (<).
Select in the list "Operand B" the address of the parameter that wants to
be used like second operand: the admitted addresses are between 1
and 256 (modbus) or between 0 and 255 (jbus); besides are visualized
the variable (VAR_1..VAR_16) and the constants configured
(CONST_1..CONST_16).
Press the button "OK" confirm the immission or press the button
"CANCEL" to cancel the immission.
For modify the operands of an operation previously introduced, select it
with a click of the mouse.
Press the button "Modify".
Is visualized the window "Math Pack Edit" with the values of the selected
operation.
91
Page 92

Modify the values as in demand, acting in the same way for the insertion
of a new operation.
At the end press the button "OK" to confirm the modifications or press the
button "CANCEL" to cancel it.
To eliminate an operation previously introduced, select it with a click of
the mouse like for the modification and press the button "Delete".
At the end of the configuration of the mathematical packet, press the
button "Close" to return to the window of the configurator.
13.15 Configuration of the numerical constants
Select the menu "Math/ Master." The window appears "Master
Communications and Math Editor".
Select the card "Constants".
Activate the button "Add" for insert a new constant.
92
Page 93

Select one of the 16 constants (CONST_1_CONST_16) to define in the
list and insert his value in the underlying window (N.B. in the case of real
values pay attention to the symbol shaped in Windows like decimal
separator: point for the Italian versions, comma for the others!) Press the
button "OK" to confirm the immission.
Press the button "CANCEL" to cancel the immission.
13.15.1 To modify the value of a constant
To modify the value of a constant previously introduced, select it with a
click of the mouse.
Press the button "Modify".
Is visualized the window "Constants Editor" with the value of the selected
constant.
Insert the new value requested (N.B. it is not possible modify the name of
the constant).
At the end press the button "OK" to confirm the modifications or press the
button "CANCEL" to cancel it.
93
Page 94

13.15.2 To eliminate a constant
To eliminate a constant previously introduced, select it with a click of the
mouse like for the modification and press the button "Delete".
At the end of the configuration of the mathematical constants, press the
button "Close" for return to the window of the configurator.
13.15.3 Reading/writing of the configuration of the
mathematical packet in the device
The download of the configuration of the mathematical packet and of the
master communications comes effected automatically when you take
place the download of the configuration and of the parametrizzation (see
what explained above).
13.15.4 Save the configuration of the mathematical
packet on files
The saving on files of the configuration of the mathematical packet and of
the master communications comes effected automatically when you take
place the saving of the configuration and of the parametrizzation (see
what explained above).
13.16 Definition of the Profibus parameters (X5000 controller only)
The definition of the parameters consists to define the packet of
supervision of the PLC or of the PC: define the parameters that will be
read and write.
This phase is done using the software of configuration of the Profibus.
This software cretes two file:
1) one for the master: the GSD file
2) one for the regulator X5000
The GSD file of the master must be used in the software of configuration
of the same master.
The file for the instrument X5000 must be sended by serial comunication
to the regulator.
For perform the software of configuration of the Profibus, after have
started the Configurator, it is necessary select the Configuration voice
from the Profibus menu (see figure 1).
Figure 1
94
Page 95

It comes as visualized the principal window of the program.
From the menu File select:
the New voice for create a new configuration, the Open voice for open a
created configuration previously (see figure 2).
Figure 2
If the Open voice is selected appears the following window (figure 3)
Figure 3
Select the desired line and press the button Open
13.16.1 How to insert the parameters in the configuration
(X5000 controller only)
From the Data Base of the variable select the parameter interested with a
click of the left key of the mouse.
If the selected parameter will be red press the button
Read writing.
If the selected parameter will be written press the button
the Write writing (figure 4).
set under the
set under
95
Page 96

Figure 4
To eliminate a parameter inserted select the parameter and press the
Delete button (see figure 5):
Figure 5
For eliminate all the inserted parameters press the Clear button (figure 6):
Confirm pressing the OK button or annul the operation pressing the Cancel button.
Figure 6
96
Page 97

13.16.2 Parameters of the Data Base (X5000 controller only)
In succession have brought the available parameters divided for groups.
Home parameters (figure 7):
Figure 7
Parameters Setpoint (figure 8):
Figure 8
97
Page 98

Parameters Alarm (figure 9):
Figure 9
PID Parameters (figure 10):
Figure 10
98
Page 99

Input Parameters (figure 11):
Figure 11
Output Parameters (figure 12):
Figure 12
99
Page 100

Comm Parameters (figure 13):
Figure 13
Tune Parameters (figure 14):
Figure 14
100
 Loading...
Loading...