

ASURO ARX-03 User manual [fr]
Licence by DLR
ASURO
© DLR & AREXX
MODE D’EMPLOI
Fabricant
AREXX, Zwolle - PAYS BAS
JAMA, Taichung - TAIWAN
www.arexx.com
Modèle ARX-03
ASURO - 1 -
ASURO
Assemblage & Mise en Service
Introduction
ASURO est un petit robot mobile entièrement programmable en C qui a été développé à l’Institut de
Robotique et de Mécatronique du Centre allemand d’aéronautique et d’aérospatiale (DLR) à des ns
d’enseignement. Pour l’électronicien expérimenté, son assemblage est un jeu d’enfants. Pour le débutant,
il est tout à fait à sa portée. A l’exception des circuits imprimés, tous les composants sont des standards
disponibles dans le commerce. La programmation se fait uniquement avec des logiciels Freeware. ASURO
est donc idéal pour des techniciens amateurs qui souhaitent se lancer dans les circuits commandés par
processeur, des projets d’études, des formations continues ou des cours du soir pour adultes. Etant
donné que toute l’électronique fait appel à des logiciels Freeware (pour le domaine privé), ASURO apporte
la preuve qu’il est tout à fait possible de construire un robot opérationnel sans logiciels, technologie et
machines-outils compliqués et coûteux.
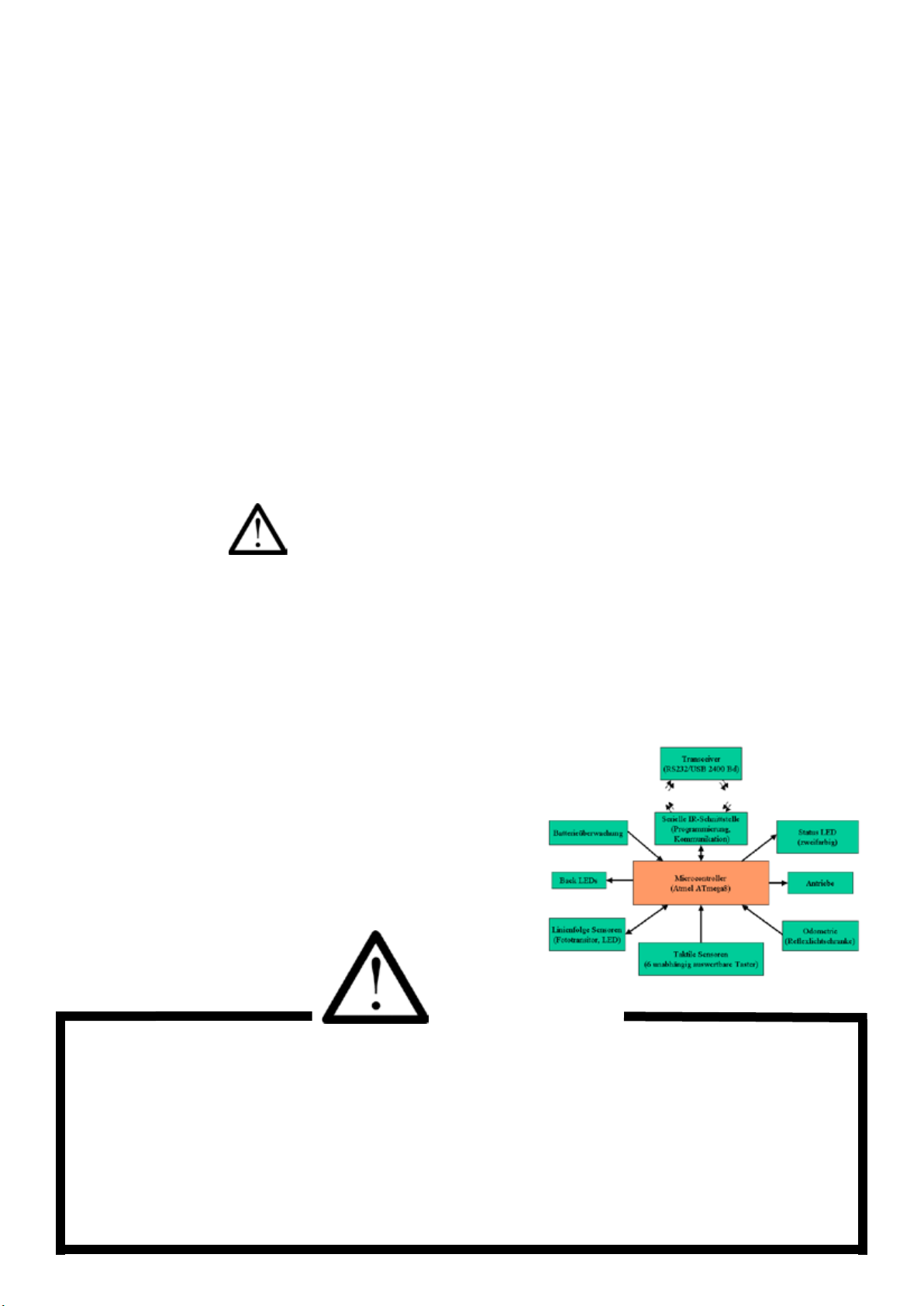
ASURO possède en plus de son processeur RISC deux moteurs à commande individuelle, un traceur de
ligne optique, six détecteurs de collision, deux odomètres pour les roues, trois afcheurs optiques et une
unité de communication à infrarouge qui permet la programmation et la télécommande à partir d’un PC
(voir g. 0.1).
Le point d’exclamation dans un triangle attire l’attention sur des consignes qu’il faut respecter
scrupuleusement sous peine de destruction du matériel ou de blessures.
Il va de soi que ASURO n’est pas un jouet et est interdit aux enfants de moins de trois ans car il contient
des douzaines de petites pièces qu’un enfant peut avaler.
Il ne vous reste plus qu’à préparer une balle de ping-pong et des piles ou des batteries et vous pouvez
commencer.
Ah oui, ASURO est le sigle pour « Another Small and Uhh… ? Robot from Oberpfaffenhofen » !
© DLR & AREXX
Fig. 0.1 SYNOPTIQUE ASURO
(Annexe E)
Oberpfaffenhofen 2004
Jan Grewe
Robin Gruber
WWW.DLR.DE
Mises en Garde
u Le droit de retourner le produit s’éteint avec l’ouverture des sachets contenant les pièces
et composants.
u Avant de commencer le montage, lire attentivement le mode d’emploi.
u Manier les outils avec prudence.
u Ne pas construire le robot en présence d’enfants en bas âge. Ils peuvent se blesser avec les outils
ou avaler de petits composants.
u Respecter la polarité de la pile.
u Ne pas mouiller ni la pile, ni le support de pile. Si le ASURO est mouillé, retirer la pile et
sécher toutes les pièces au mieux.
u En cas de non-utilisation pendant plus d’une semaine, il est recommandé de retirer la pile.
ASURO - 2 -

Table des matières
I. Mécanique 6
1. Outils nécessaires 6
2. Préparatifs mécaniques 7
2.1. Pignons 7
2.2. Balle de ping-pong 7
2.3. Détecteurs de roue 8
II. Electronique 9
3. Petit Manuel de Brasage 9
3.1. Panne, Brasage et Température 9
3.2. Préparation des Composants 10
3.3. Brasage des Composants 11
3.4. Dessoudage de composants mal montés 12
4. Implantation 13
4.1. Implantation du transmetteur infrarouge RS232 13
4.2. Transmetteur infrarouge USB ni 15
4.3. Implantation de la platine ASURO 16
4.4. Montage du moteur 20
4.5. Alimentation électrique 20
5. Mise en service et Test 21
5.1. Transmetteur infrarouge RS232 21
5.2. Transmetteur infrarouge USB 22
5.2.1. Windows 22
5.2.2. Linux 23
5.3. Mise en service de la platine ASURO 24
5.3.1. Eléments visuels 25
5.3.2. Phototransistors (T9, T10) 25
5.3.3. Commutateurs 26
5.3.4. Détecteur photoélectrique (Odométrie) 26
5.3.5.
5.3.6. Transmetteur IR 26
5.3.7. Fini? 27
Entraînements 26
ASURO - 3 -

6. Diagnostic de défaillance 28
6.1. Le transmetteur IR RS232 ne fonctionne pas 28
6.1.1. La touche et le signe afché ne concordent pas 28
6.1.2. Le programme Terminal n’édite pas de signes 28
6.1.3. Cela ne fonctionne toujours pas 28
6.2. Le transmetteur infrarouge USB ne fonctionne pas 28
6.2.1. Windows 28
6.2.2. Linux 28
6.3. Les LED arrières (D15, D16) ne luisent pas après la mise sous tension! 28
6.3.1. Aucune des deux LED ne luit 28
6.3.2. Seulement 1 LED sur les 2 s’allume 29
6.3.3. La LED d’état (D12) ne s’allume pas en 2 couleurs après la mise sous tension 29
6.4. Un élement d’afchage ne fonctionne pas 29
6.4.1. La LED d’état D12 ne fonctionne pas 29
6.4.2. La LED avant D11 ne fonctionne pas 29
6.4.3. La LED arrière gauche D15 ne fonctionne pas 30
6.4.4. La LED arrière droite D16 ne fonctionne pas 30
6.5. Le Détecteur odométrique (T9, T10) ne réagit pas 30
6.6. Un commutateur ne fonctionne pas correctement 30
6.6.1. Plusieurs commutateurs ont été actionnés 30
6.6.2. Le comportement de l’afchage indique une inversion des commutateurs 31
6.6.3. Il subsiste toujours un problème 31
6.7. Une barrière lumineuse réectrice ne fonctionne pas 31
6.7.1. Aucune des barrières lumineuses ne fonctionne 31
6.7.2. La barrière lumineuse gauche ne fonctionne pas 31
6.7.3. La barrière lumineuse droite ne fonctionne pas 31
6.8. Un e
ntraînement ne fonctionne pas 32
6.8.1. Aucun entraînement ne réagit 32
6.8.2. Le moteur gauche ne tourne pas du tout ou seulement dans un sens 32
6.8.3. Le moteur droit ne tourne pas du tout ou seulement dans un sens 32
6.8.4. Un moteur tourne dans le mauvais sens 32
6.9. Interface IR 32
6.9.1. ASURO n’émet pas de signaux 32
6.9.2. ASURO ne reçoit pas de signaux 32
6.9.3. Cela ne fonctionne toujours pas parfaitement 33
7. Derniers réglages 34
III. Informatique 35
8. Installation der Software und erste Schritte 35
8.1. Windows 35
8.1.1. Outil Flash 35
8.1.2. Installation de l’Editeur de programme et du Compileur 35
8.1.3. Copie des programmes de démonstration de CD ROM sur le disque dur 39
8.2. Linux 51
8.2.1. Outil Flash 51
8.2.2. Compiler 52
8.3. Flash - L’outil de Programmation d’ASURO 53
8.3.1. Fonctionnement du programme Flash 53
8.4. Erreurs Flash 54
8.5. Votre premier programme personel 54
ASURO - 4 -

9. C pour ASURO 56
9.1. Bases de la Programmation en C 56
9.1.1. Généralités 56
9.1.2. Variables et Types de données 57
9.1.3. Directives de Compilation 59
9.1.4. Conditions 59
9.1.5. Boucles 61
9.1.6. Fonctions (Templates) 62
9.1.7. Pointeurs et Vecteurs 64
9.2. Description des fonctions d’ASURO 65
9.2.1. void Init(void) 66
9.2.2. void StatusLED(uncaractèred char color) 66
9.2.3. void FrontLED(uncaractèred char status) 67
9.2.4. void BackLED(uncaractèred char left, uncaractèred char right) 67
9.2.5. void Sleep(uncaractèred char time72kHz) 67
9.2.6. void MotorDir(unsigned char left_dir, unsigned char right_dir) 67
9.2.7. void MotorSpeed(unsigned char left_speed, unsigned char right_speed) 68
9.2.8. void SerWrite(unsigned char *data, unsigned char length) 68
9.2.9. void SerRead(unsigned char *data, unsigned char length, unsigned int timeout) 68
9.2.10. void LineData(unsigned int *data) 69
9.2.11. void OdometrieData(unsigned int *data) 70
9.2.12. unsigned char PollSwitch(void) 71
IV. Annexes 72
A. Nomenclature 72
B. Schémas techniques ASURO 74
C. Transmetteur IR RS232 75
D. Transmetteur IR USB 76
E. Synoptique ASURO 77
F. Synoptique processeur AVR 77
G. Contenu ASURO 78
H. Informatique la partie électronique 79
I. Informatigue Colle 81
J. Code des couleurs pour les résistances ASURO 82
ASURO - 5 -

Partie I. Mécanique
1. Outils nécessaires
Pour le montage d’ASURO, il vous faut - en plus des composants - les outils et matériaux suivants:
Petit étau ou troisième main car 2 mains ne sont pas toujours sufsantes
Cutter ou scie
Petite pince
Une petite pince coupante de côté pour l’électronique
Eventuellement une pince à dénuder
Fer à souder : Il est recommandé d’utiliser un fer à souder pour l’électronique (env. 20W à 40W) ou une
station de soudage (au moins 50W)
Soudure : Brasure pour l’électronique de 1mm d’épaisseur, le cas échéant sans plomb
Fil à dessouder d’env. 2-3mm pour enlever la brasure aux endroits où elle ne doit pas se trouver
Papier de verre à grain n
Colle rapide, à deux composants ou à chaud
Eventuellement un petit marteau
Eventuellement un multimètre
Ordinateur : Portable ou PC avec Windows ou Linux
Fig. 1.1.: Outillage nécessaire
ASURO - 6 -
Mécanique
2. Préparatifs mécaniques
Avant de se lancer dans les travaux, il est impératif de vérier si toutes les pièces nécessaires
sont au complet. Le plus simple est de se servir de la nomenclature des pièces en annexe A.
Avant de commencer la partie électronique, il faut effectuer quelques travaux mécaniques.
2.1. Pignons
Pour que les moteurs puissent transmettre leur force à l’engrenage, il faut monter les pignons (ce
sont les petites roues dentées présentant une perforation de 1,9mm et 10 dents) sur l’axe moteur.
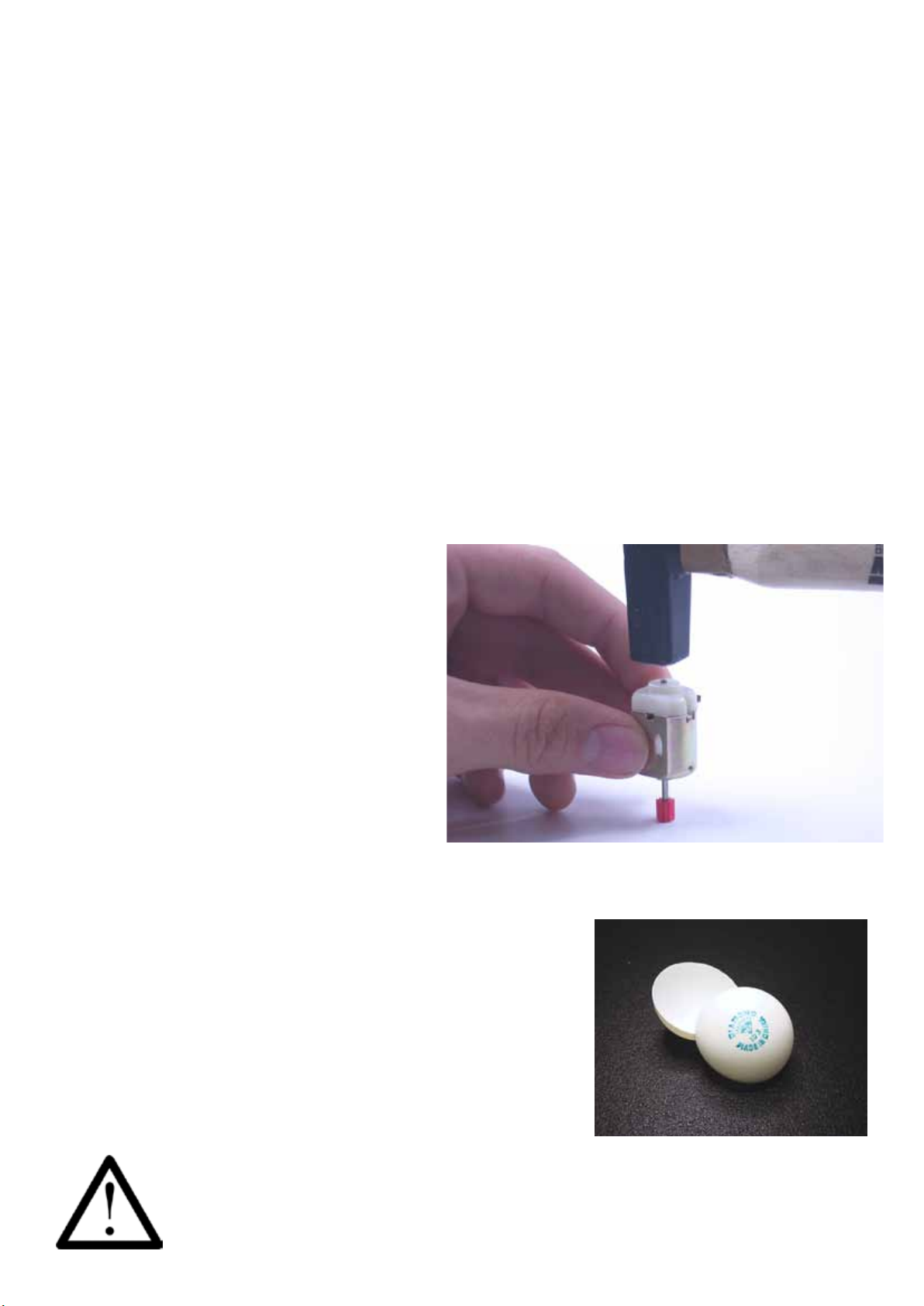
Si les pignons n’ont pas encore été montés sur les moteurs livrés, il faut le faire maintenant. A
cet effet, il faut placer un pignon sans forcer sur l’axe de chaque moteur. Il s’agit simplement
de le faire tenir sur l’axe. Posez ensuite le moteur avec le pignon vers le bas sur une surface
pas trop dure (plastique, carton, etc.) et tapotez doucement avec un petit marteau sur l’axe qui
dépasse sur le dessus jusqu’à ce que l’axe est complètement enfoncé dans le pignon (voir g.
2.1). Il est également possible d’enfoncer le pignon dans l’axe à l’aide d’un étau. Dans ce cas, il
faut cependant exercer la pression uniquement sur l’arbre moteur et non pas sur le boîtier ou les
roulements.
Fig. 2.1.: Montage des pignons sur l’axe moteur
2.2. Balle de ping-pong
ASURO doit glisser plus tard sur une demiballe de ping-pong qu’il faut fabriquer. Le
mieux est de prendre une balle entière et de la scier ou couper en deux à l’aide d’un cutter
(attention aux doigts !). Ecrêtez les bords à l’aide d’une lime ou d’un papier de verre.
Fig. 2.2.: Balle de ping-pong sciée en deux
Ne pas utiliser d’outils électriques en raison du risque d’incendie!
Informatique Colle expliquées au chapitre IV. Annexes J
ASURO - 7 -

Mécanique
2.3. Détecteurs de roue
Pour ne pas décevoir la diode luminescente et le transistor photoélectrique (barrière lumineuse
pour l’odométrie) qui se tourneront pas la suite en toute conance vers le premier engrenage,
il faut appliquer sur la face sans pignon des deux premières roues dentées (celles à 50 et à 10
dents) les autocollants à motif noir et blanc (voir g. 2.3.).
Fig. 2.3.: Montage der Radsensormuster
Plus le motif possède de segments, plus le nombre de tours de la roue dentée et donc la vitesse
d’ASURO sont déterminés avec précision. D’un autre côté, la différence mesurée entre clair et
sombre diminue.
Fig. 2.4.: Exemple de détecteurs
Voilà, la première partie est terminée. Les composants mécaniques sont tous prêts maintenant
Une courte pause...
Et on continue avec l’électronique.
ASURO - 8 -
Partie II. Electronique
3. Petit Manuel du Brasage
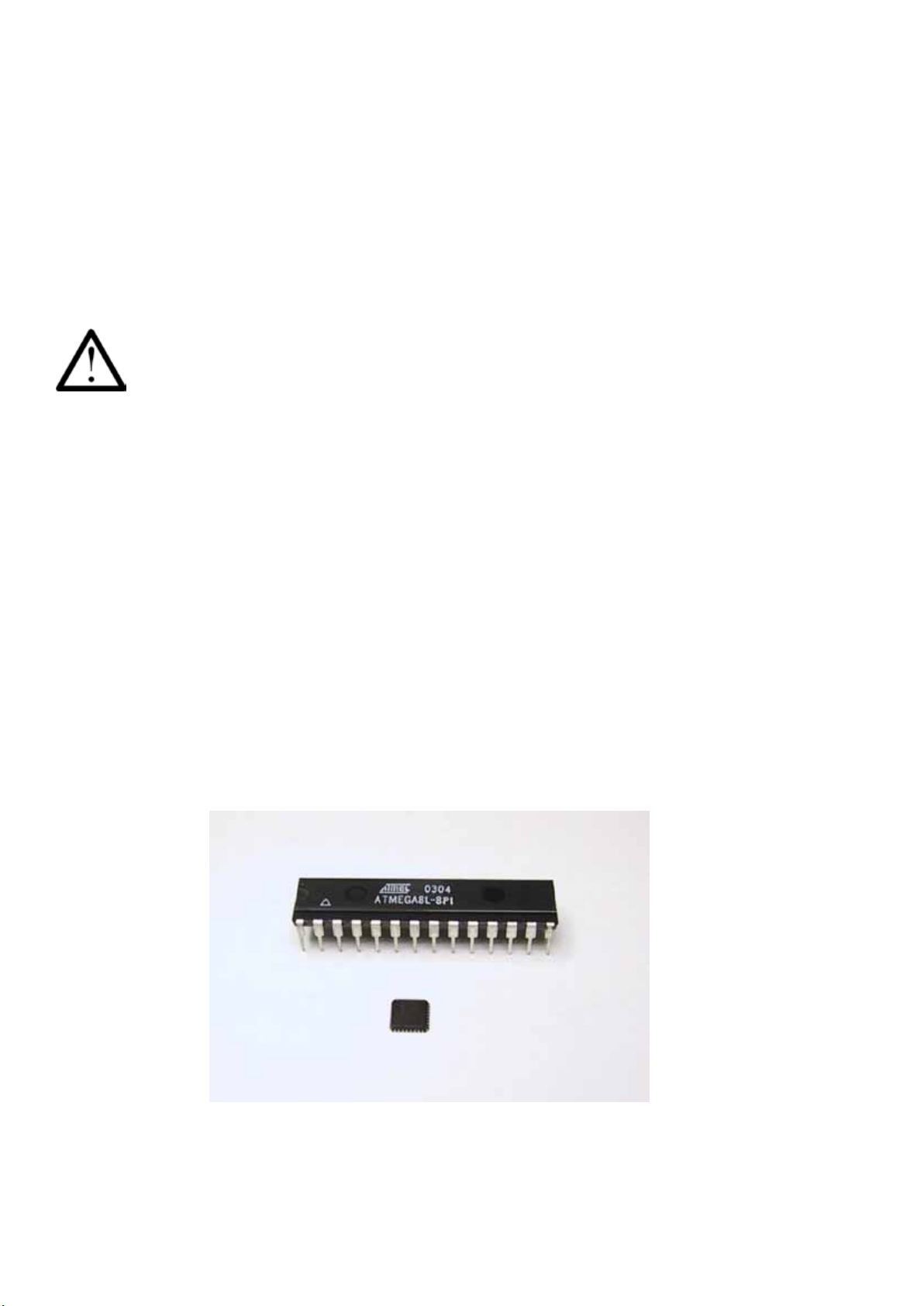
Bien qu’ASURO ne comporte que des composants câblés et se prête donc à merveille à
l’implantation manuelle à la différence des composants SMD implantés en surface (Fig. 3.1
montre la comparaison entre le boîtier le plus petit et le nôtre dans lequel le processeur d’ASURO
est disponible. La puce au silicium est la même dans les deux boîtiers !), il faut respecter certaines
consignes, surtout pour les soudeurs peu expérimentés.
Il va de soi que le circuit imprimé doit être absolument hors tension.
Eteindrenesigniepas‚horstension’!Ilfautenleverlespiles!
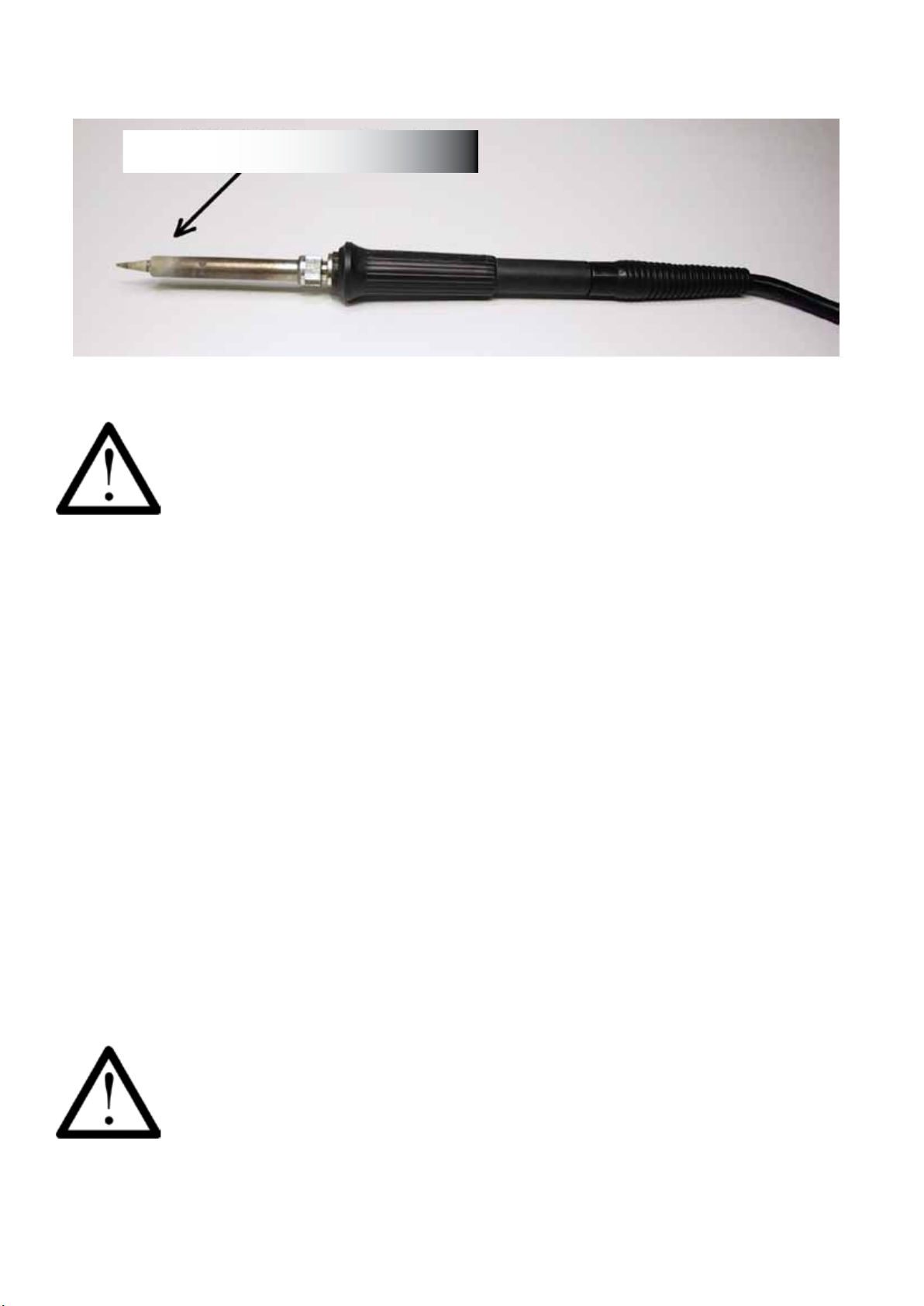
3.1. Panne, Brasage et Température
La Fig. 3.2 montre les bases les plus importantes du brasage!
L’extrémité dangereuse doit avoir une température de brasage d’env. 360°C pour une soudure à
teneur en plomb et env. 390°C pour une brasure sans plomb. Pour amorcer le brasage des axes,
elle peut être un peu plus élevée (420°C). Il est recommandé d’utiliser une panne pointue comme
un crayon de papier pour les implantations sur une platine électronique. Vous pouvez utiliser une
panne plus large pour les axes.
N’oubliez pas d’humidier l’éponge (elle ne doit pas goutter) et d’étamer la panne avec un peu de
soudure juste avant d’appliquer le fer à souder sur l’emplacement à braser après une pause ou au
début du brasage. Si des résidus de brasure sont restés accrochés à la panne, il faut simplement
les essuyer sur l’éponge.
Utilisez de la brasure électronique de 0,8 ou 1mm de diamètre.
Fig. 3.1.: Comparaison du boîtier le plus grand et le plus petit qui existe pour l’ATmega8L
ASURO - 9 -
Electronique
Embout dangereux
Fig. 3.2.: Bases du brasage
Desvapeursquiseformentpendantlebrasagesontnocifsàlongterme.Evitezdeles
respirer.Sipossible,aspirez-les!
Unautretypedebrasurequel’étaindebrasagepourl’électroniqueetdeuxàbase
d’aciderisquentdedétruirelecircuit!
3.2. Préparation des Composants
Toute personne ayant une expérience du brasage électronique, connait le problème : il manque
toujours une main. C’est pourquoi ils existent quelques astuces pour maîtriser les différents
composants jusqu’à ce que l’on sache se servir correctement d’un fer à souder et de brasure.
Les extrémités de connexion des transistors, diodes luminescentes, circuits imprimés,
commutateurs boutons, condensateurs et jumpers d’ASURO sont déjà dirigées dans un sens.
Cela reste encore à faire sur les diodes et les résistances.
Pour des raisons de place, toutes les résistances sont implantées à la verticale. Cela signie que
l’un des ls reste tel qu’il est et l’autre doit être courbé à 180°. La courbe devrait avoir un diamètre
de 2,5mm et se situer à quelques millimètres de distance de la résistance de façon à ne pas
exercer une force mécanique qui risquerait de diminuer son fonctionnement.
Lors du brasage ultérieur, un cercle sur le circuit imprimé indique au-dessus de quel trou la
résistance doit se placer et un petit trait dans quel trou il faut introduire le l courbé.
Les diodes sont implantées à l’horizontale, c’est-à-dire les deux ls doivent être pliés à 90° (si
possible au moyen d’une petite pince) à une distance qui permet de les implanter facilement dans
les perforations correspondant sur la platine.
Le processeur IC1 ATmega8, le composant IC3 CD4081 et le récepteur IR IC2
SFH5110-36sontsensiblesàl’électricitéstatique.
Celasigniequ’ilspeuventêtredétruitsparunsimplecontactsilapersonneestchargée
électriquement ce qui peut arriver en traversant simplement un tapis. Avant de manipuler
cescomposants,ilestconseillédeserelieràlaterreaumoyend’unrubandemasseou
toutdumoinstoucherleboîtiermétalliqued’unappareilouunradiateur.
ASURO - 10 -
Electronique
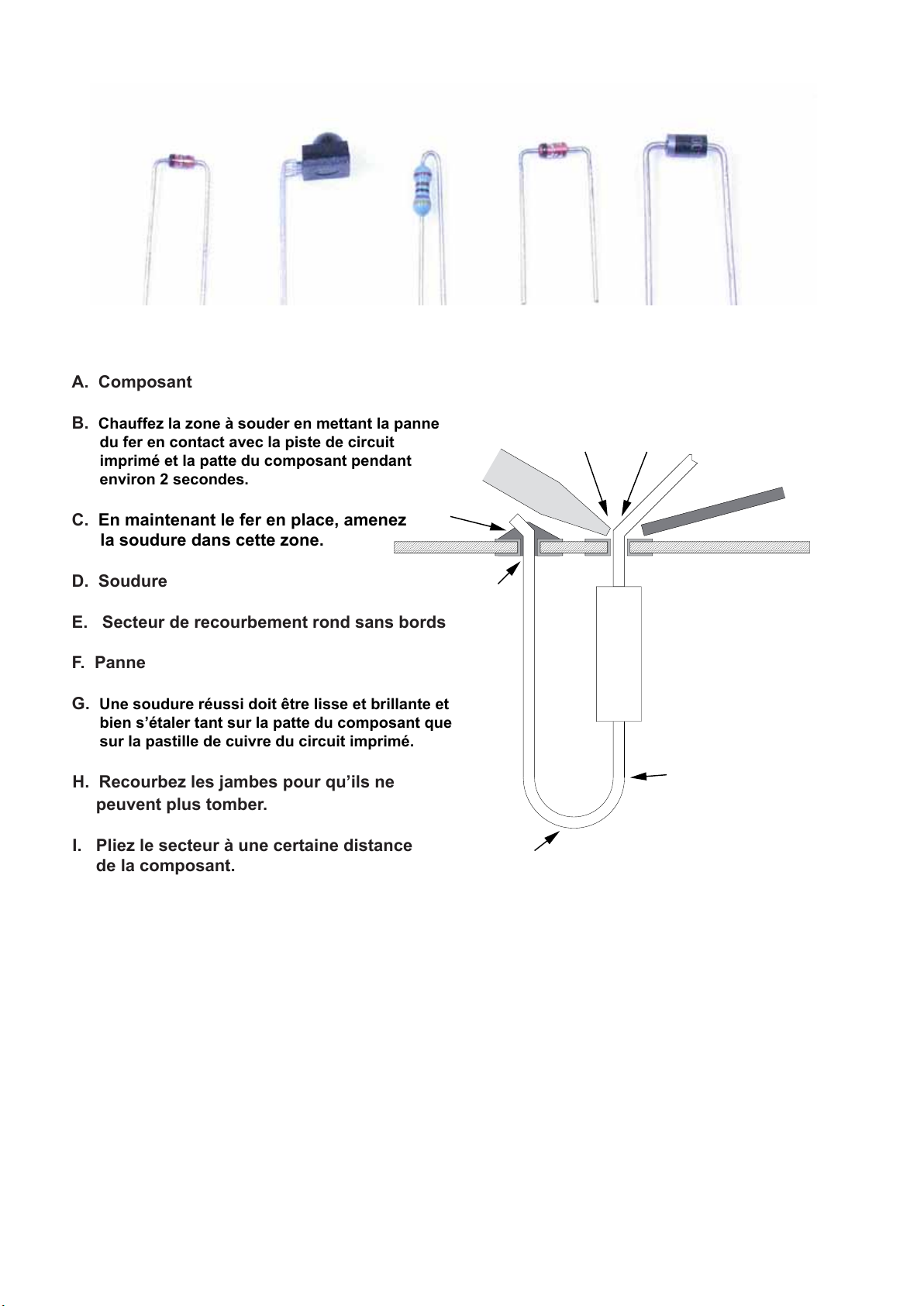
A. Composant
B. Chauffez la zone à souder en mettant la panne
du fer en contact avec la piste de circuit
imprimé et la patte du composant pendant
environ 2 secondes.
C. En maintenant le fer en place, amenez
la soudure dans cette zone.
D. Soudure
E. Secteur de recourbement rond sans bords
F. Panne
G. Une soudure réussi doit être lisse et brillante et
bien s’étaler tant sur la patte du composant que
sur la pastille de cuivre du circuit imprimé.
H. Recourbez les jambes pour qu’ils ne
peuvent plus tomber.
I. Pliez le secteur à une certaine distance
de la composant.
Fig. 3.3.: Composants avec des ls pliés correctement
3.3. Brasage des composants
B
H
F
G
C
A
I
E
Fig. 3.4.:
Réalisation d’un point de brasure propre
D
Lorsque les composants ont été préparés, il faut les passer dans les perforations sur la platine.
Pour les composants n’ayant que 2 ou 3 ls, pliez les ls en dessous de la platine directement à
l’endroit de la perforation (env. 30 à 40° sont sufsants) pour qu’ils ne peuvent plus tomber.
Quant aux composants possédant plus de ls tels que les sockets pour les circuits imprimés, il
suft de plier les deux ls opposés vers l’extérieur. Ne pliez pas les ls à plus de 45° car en cas
d’erreur, il devient très difcile de les retirer.
ASURO - 11 -

Electronique
Lorsque le composant a été xé, il faut chauffer simultanément le l et la pastille au moyen de
la panne du fer à souder, en ajoutant un peu de l de soudure à cet endroit. Celui-ci fusionne
et s’écoule dans la perforation. Il faut ajouter du l de soudure jusqu’à ce que la perforation soit
complètement fermée (voir g. 3.4). Ensuite il faut retirer d’abord le l de soudure et ensuite le
fer et attendre le refroidissement de l’emplacement. Il ne faut en aucun cas bouger le composant
pendant le refroidissement an d’éviter des faux contacts par la suite.
Les pastilles qui sont connectées sur la surface cuivrée au dessus et en dessous peuvent
demander un peu plus d’apport thermique jusqu’à ce que le l de soudure se soit écoulé dans la
perforation.
Les mauvaises brasures se reconnaissent par des dépôts de soudure ronds sur la pastille ou une
surface mate (ou très mate pour la soudure sans plomb). Il faut les rattraper.
Pour implanter les sockets ou autres pièces qui doivent être couchées à plat sur la platine, il existe
une astuce : Il faut d’abord braser un seul l du composant. Ensuite on appuie légèrement avec
les doigts sur la pièce et chauffe encore une fois la soudure (Attention : La pièce peut devenir très
chaude), pour que la pièce puisse se poser sur la platine. Ensuite il faut braser les autres ls et
liquéer encore une fois la première brasure avec un peu de l de soudure. Lorsque le composant
est brasé, les extrémités des ls qui dépassent doivent être coupées à ras de la platine au moyen
d’une pince coupante de côté, sans tirer sur le l.
Lorsquevouscoupezlesls,veillezàneblesserpersonneavecleslsquisontéjectés.
Evidemment les composants sur le côté supérieur de la platine ne doivent pas se
toucher.Aubesoin,ilfautlesredresser.
3.4. Dessoudage de composants mal montés
Si un composant a été mal implanté, il faut le retirer. Comme ASURO possède une platine double face
avec des perforations à double contact, l’entreprise n’est pas facile.
La procédure suivante a fait ses preuves :
D’abord il faut liquéer tous les points de brasage du composant en question (éventuellement à apportant
encore un peu de l de soudure) et retirer le composant à l’aide d’une pince. Ensuite, il faut dégager les
trous à l’aide d’une tresse à dessouder.
A cet effet, il faut placer la tresse à dessouder sur l’emplacement de la soudure et chauffer les deux jusqu’à
ce que la tresse ait absorbé la soudure. Ensuite, il faut retirer le fer à souder et le l de soudure. Il peut
s’avérer utile d’absorber aussi le l de soudure sur l’autre face.
1.
Poser la tresse à dessouder sur la
soudure et chauffer les deux en même
temps.
Tresse à dessouder professionnelle
2.
Retirer le fer à souder et la tresse dès que
la tresse a absorbé la soudure.
ASURO - 12 -

Electronique
4. Implantation
Avez-vous lu les consignes du brasage? Vraiment?
NOTICE! Le nouveau ASURO (de 2011) n'a plus un transmeteur infrarouge RS232
Montage des componants au chapitre IV, Annexes H en page 78
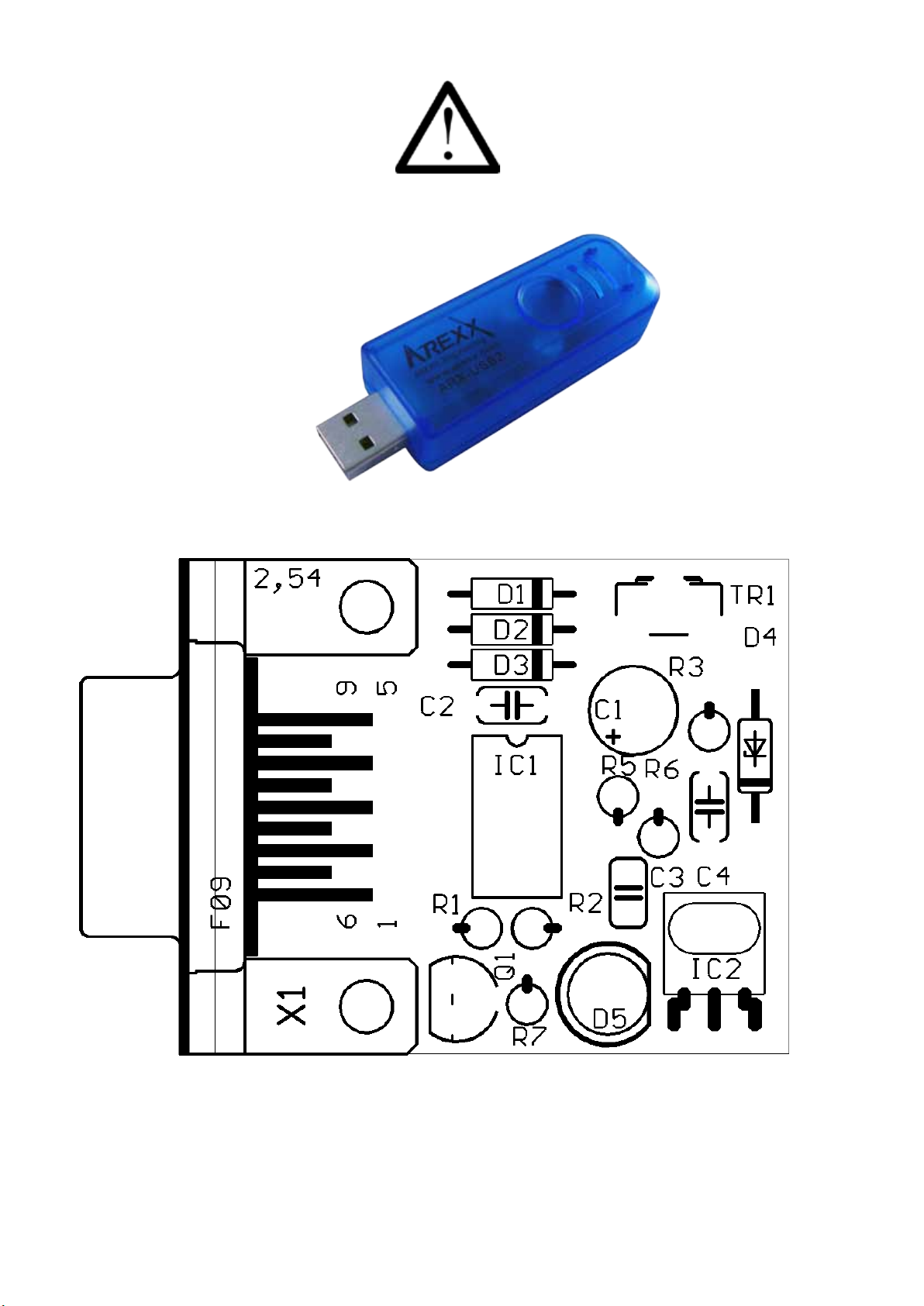
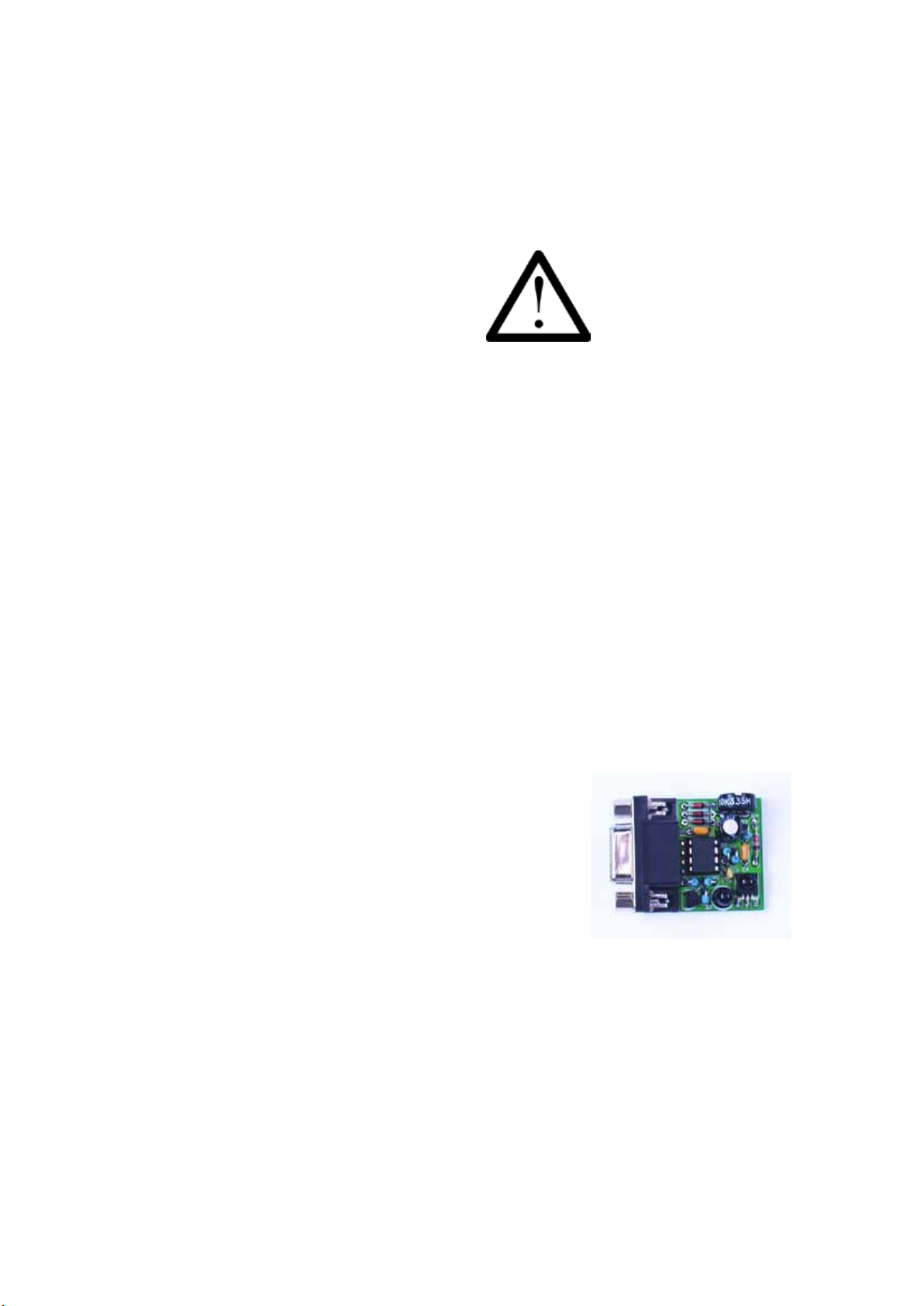
4.1. Implantation du transmetteur infrarouge RS232
• IC1: On commencer par souder uniquement le socket à 8 broches dont la polarité doit
correspondre à la polarité marquée sur la platine.
• D1, D2, D3: 1N4148, respectez la bonne polarité! Ne pas confondre avec le ZPD5.1 ou
BZX55-C5V1 (Impression)!
• D4: ZPD5.1 ou BZX55-C5V1, respectez la bonne polarité!
Ne pas confondre avec le 1N4148 (Impression)!
• C2, C4: 100nF céramique, Impression: 104
• C3: 680pF céramique, impression: 681
• Q1: BC547 (A,B ou C) ou BC548 (A,B ou C)
• R1, R5: 20k Ohms, 5% (rouge, noir, orange, doré)
• R2: 4.7k Ohms, 5% (jaune, violet, rouge, doré)
• R3: 470 Ohms, 5% (jaune, violet, marron, doré)
• R6: 10k Ohms, 5% (marron, noir, orange, doré)
• R7: 220 Ohms (rouge, rouge, marron, doré)
• C1: 100 μF/ au moins 16V, respectez la bonne polarité!
• TR1: condensateur 10k Ohms
• D5: SFH 415-U LED IR (boîtier noir), respectez la bonne polarité!
Le boîtier doit reposer à plat sur la platine!
Le nouveau ASURO
(de 2011) n’a plus
un transmeteur
infrarouge RS232
• IC2: SFH5110-36 CI récepteur IR, plier les ls avec une pince!
Respectez la bonne polarité (la face bombée doit être orientée vers le dessus), Attention:
Sensibilité électrostatique et –avis aux soudeurs débutants – sensible à la chaleur !
• X1: Fiche Sub-D femelle à 9 contacts, Le boîtier doit reposer à plat sur la platine.
Il faut également souder les languettes de xation !
• IC1: Insérer le NE555P, respecter la polarité indiquée (nez ou cercle)!
ASURO - 13 -
Electronique
Le nouveau ASURO (de 2011) n’a plus un transmeteur infrarouge RS232
Fig. 4.1a.: Implantation du transmetteur infrarouge USB
Fig. 4.1b.: Implantation du transmetteur infrarouge RS232
Jetez un dernier regard critique sur les soudures et vériez la bonne liaison et l’absence de courts-
circuits et rattrapez les défauts le cas échéant.
Fini!
Electronique
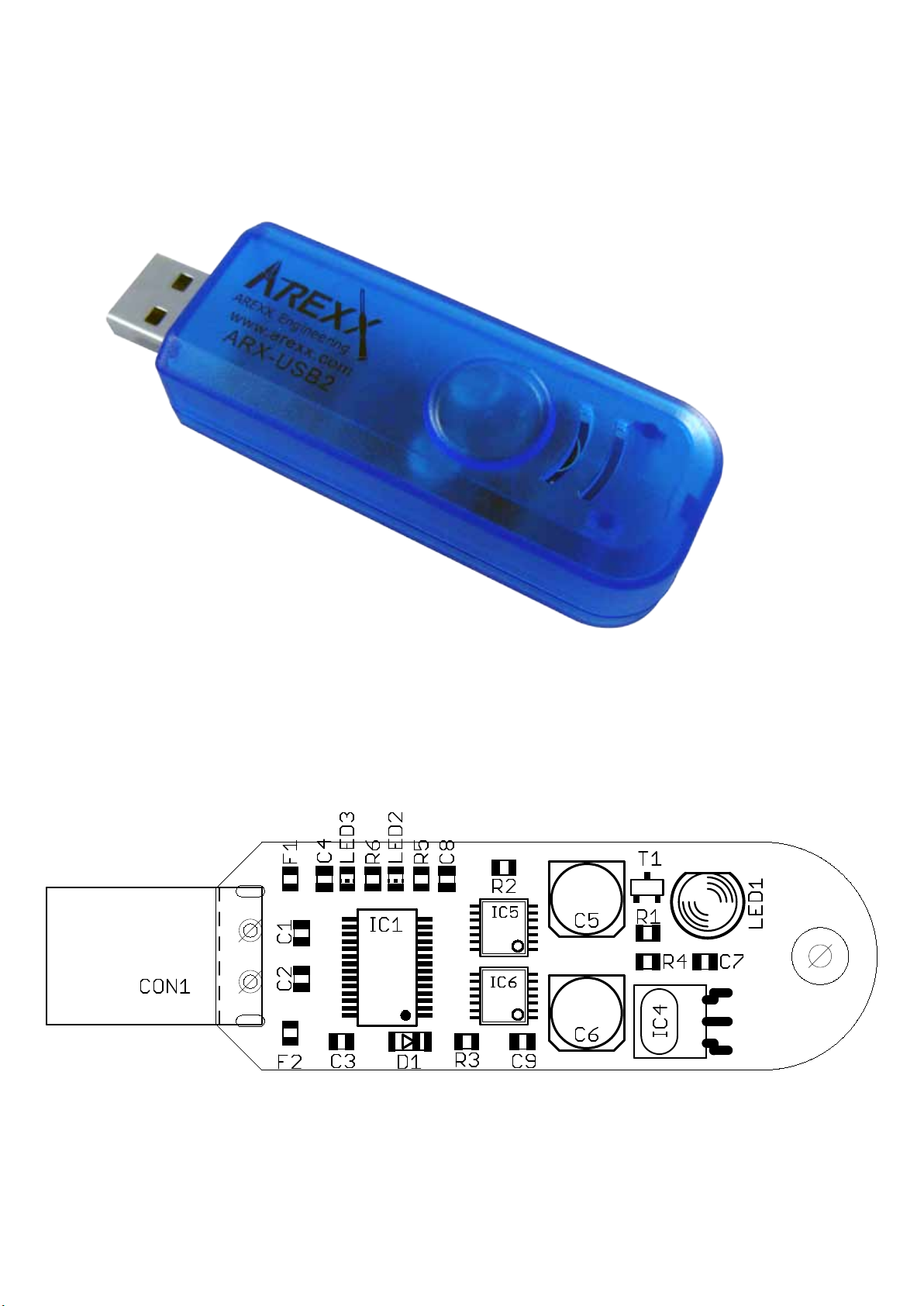
4.2. Transmetteur Infrarouge USB ni
Un transmetteur IR USB ni est disponible en option.
Fig. 4.2.: Transmetteur Infrarouge USB
Fig. 4.3.: Vue de dessus du transmetteur Infrarouge USB
Electronique
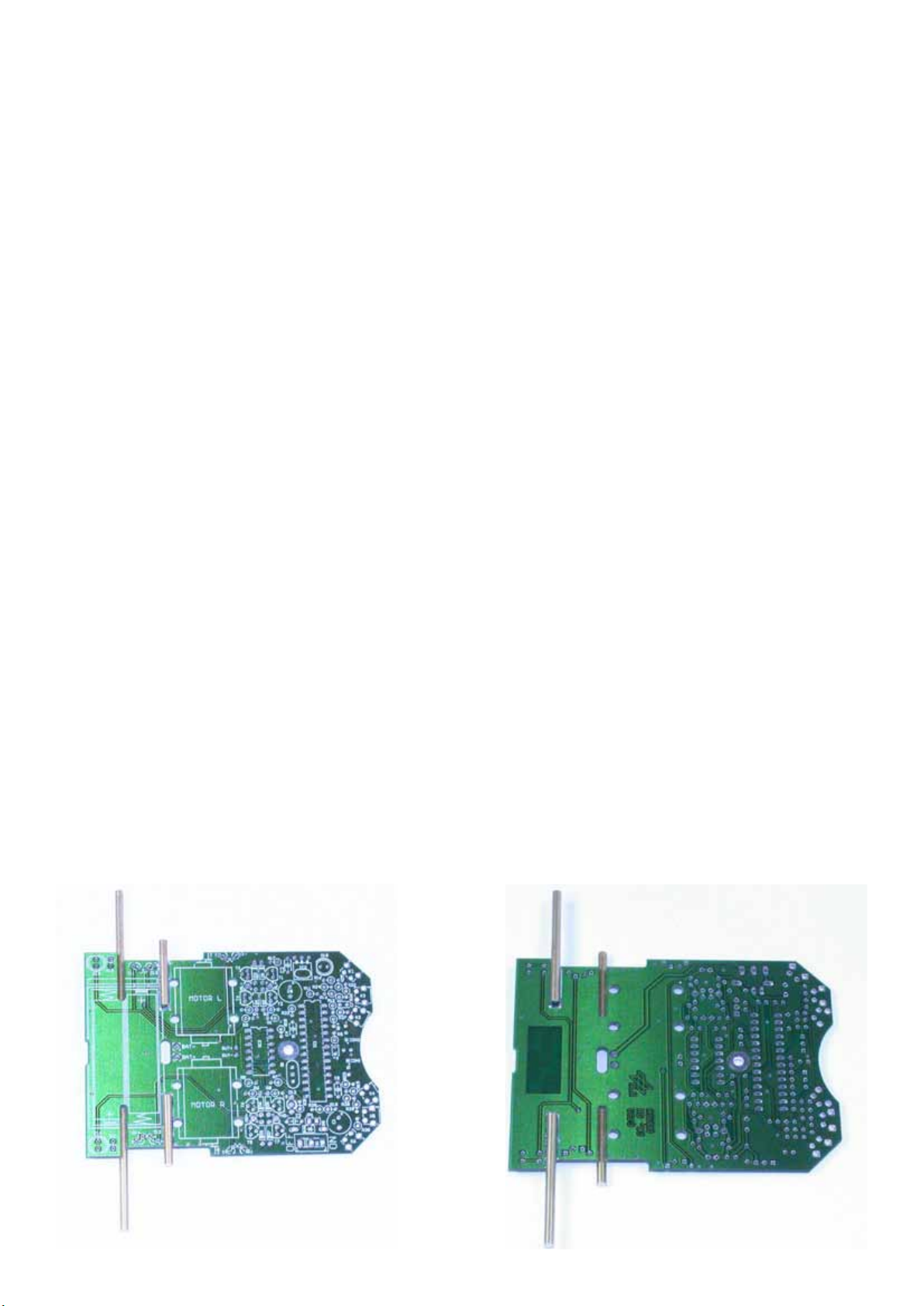
4.3. Implantation de la platine ASURO
Les deux axes plus longs pour le deuxième niveau d’engrenage sont soudés ou collés sur le dessous. La soudure est préférable car les corrections sont plus simples à effectuer et le refroidissement est plus rapide que d’attendre que la colle ait prise.
Les deux axes plus courts se placent sur le dessus et plus en direction du centre de la platine.
Avant l’implantation, vous pouvez nettoyer les axes à l’endroit de la colle ou de la soudure (pas
sur la surface de roulement) avec du papier de verre très n (grain 240 ou plus) pour qu’ils absorbent mieux la colle ou le l de soudure. Si vous décidez de souder, il est recommandé de procéder
de la manière suivante :
Fixez d’abord les axes plus longs. A cet effet, posez la platine sur le dessus et placez l’axe jusqu’à
la butée dans la fente. L’axe doit reposer sur toute la longueur. Etamez la panne et appuyez l’axe
avec la panne sur la platine. Dès que l’axe est chaud, ajoutez du l de soudure aux points de
contact. De cette façon vous reliez l’axe à la platine. Dès que l’axe a été soudée tout autour, il faut
le pousser davantage avec un tournevis sur la platine et retirer le fer à souder. Pour souder l’axe,
il est conseillé d’augmenter la température du fer (env. 420°C) et d’utiliser une panne large d’env.
3mm. Pour les composants électroniques, il faut bien sûr baisser la température à env. 360°C.
Lorsque l’ensemble est refroidi, il faut souder le deuxième axe sur le dessous de la platine. Ensuite, c’est le tour des deux axes sur le dessus.
La g. 4.5 représente la platine après le montage des axes.
Lorsque les axes sont refroidis, il faut insérer les roues dentées. Les dents des roues doivent
mordre proprement et les roues doivent tourner facilement. Si ce n’est pas le cas, les axes ont été
soudés de travers et doivent être redressés (ce n’est pas une punition mais un exercice) ou alors
des résidus de soudure se trouvent dans la partie à l’extérieur de la platine et doivent être retirés.
Le mieux est de se servir d’une lime ne ou de papier de verre.
Quand tout s’insère correctement, mettez de côté les roues dentées pour implanter tous les autres
composants à leur emplacement dédié sur la platine.
Montage des componants au chapitre IV, Annexes H en page 78
Fig. 4.5.:
Platine d’ASURO après le montage
des axes
ASURO - 16 -
Electronique
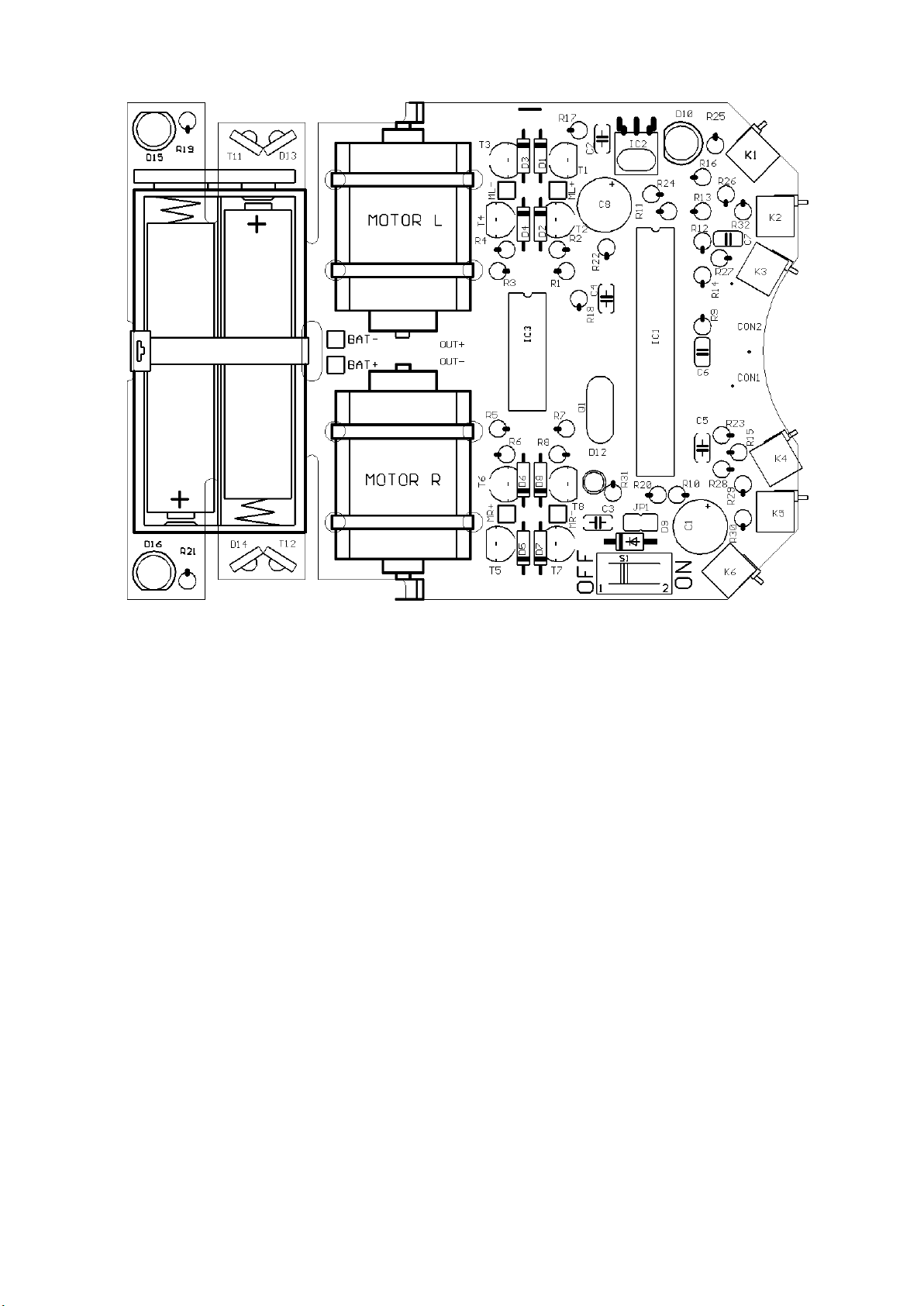
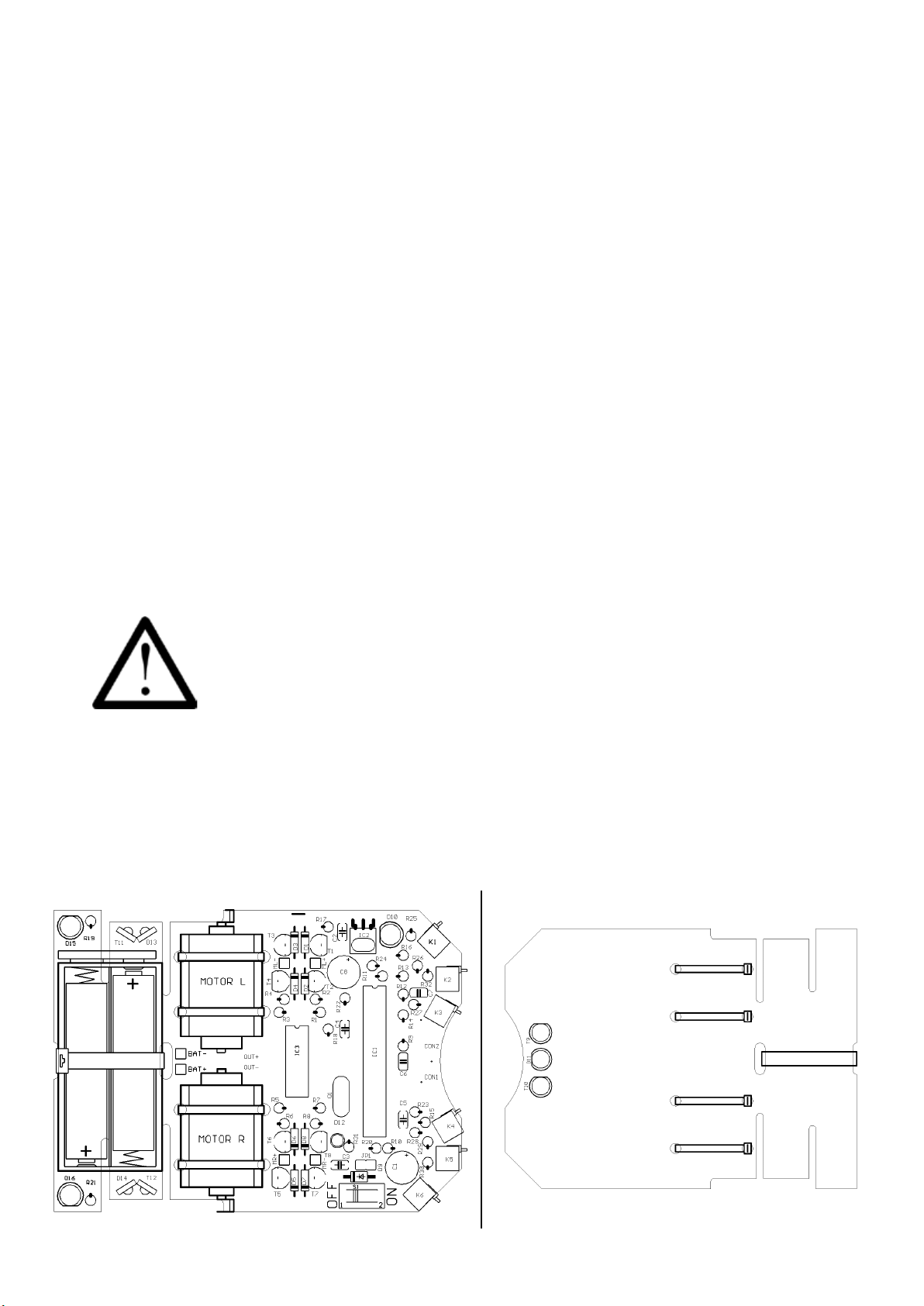
Fig. 4.6.: Implantation sur le dessus de la platine principale d’ASURO
L’implantation se fait dans l’ordre suivant:
• IC1: D’abord seulement le socket. Il faut monter soit un 28 broches (si disponible) ou deux à
14 broches l’un derrière l’autre. Respectez la bonne polarité (l’encoche est dirigée vers l’encoche
de l’impression d’implantation sur la platine) !
• IC3: Seulement le socket, 14 broches. Respectez la bonne polarité (l’encoche est dirigée vers
l’encoche de l’impression d’implantation sur la platine)!
• K1, K2, K3, K4, K5, K6: Capteurs. A placer le plus droit possible sur la platine !
• Q1; Oscillateur 8MHz
• D1, D2, D3, D4, D5, D6, D7, D8: 1N4148; respectez la bonne polarité!
• D9: 1N4001; respectez la bonne polarité!
• JP1: Connecteur à 2 broches. Les broches courtes sont soudées, le cavalier correspondant n’est
pas encore implanté!
• D12: LED bicolore, diamètre 3mm, trois ls de connexion. Attention à la polarité.
(Le repérage peut être différent. Dans tous les cas : le l le plus court doit aller dans le tracé
carré)!
Code des couleurs pour les
• C2, C3, C4, C5: 100nF céramique; impression: 104
• C6, C7: 4,7nF céramique; impression: 472
ASURO - 17 -
résistances ASURO sont
expliquées au chapitre IV.
Annexes J le page 82

Electronique
• T1, T3, T5, T7: BC327-40 ou BC328-40
• T2, T4, T6, T8: BC337-40 ou BC338-40
• R1, R2, R3, R4, R5, R6, R7, R8, R19, R21: 1k Ohm, 5% (marron, noir, rouge, doré)
• R9, R16: 220 Ohms, 5% (rouge, rouge, marron, doré)
• R10, R17, R22, R31: 470 Ohms, 5% (jaune, violet, marron, doré)
• R11: 100 Ohms, 5% (marron, noir, marron, doré) pour
par une L1 inductane de 10μH coil (marron, noir, noir, argent)
R11, la résistance de 100Ω est remplacée
• R12: 12k Ohms, 1% (marron, rouge, noir, rouge, marron)
• R13: 10k Ohms, 1% (marron, noir, noir, rouge, marron)
• R14, R15: 20k Ohms, 5% (rouge, noir, orange, doré)
Code des couleurs pour les
résistances ASURO sont
expliquées au chapitre IV.
Annexes J le page 82
• R18, R20: 4,7k Ohms, 5% (jaune, violet, rouge, doré)
• R23: 1M Ohm, 5% (marron, noir, vert, doré)
• R24: 1k Ohm, 1% (marron, noir, noir, marron, marron)
• R25, R26, R32: 2k Ohms, 1% (rouge, noir, noir, marron, marron)
• R27: 8,2k Ohms, 1% (gris, rouge, noir, marron, marron)
• R28: 16k Ohms, 1% (marron, bleu, noir, rouge, marron)
• R29: 33k Ohms, 1% (orange, orange, noir, rouge, marron)
• R30: 68k Ohms, 1% (bleu, gris, noir, rouge, marron)
• C1, C8: Elko 220 μF 10V ou plus, respectez la bonne polarité!
• IC2: SFH5110-36 CI transmetteur infrarouge, plier les ls à l’aide d’une pince! Respectez la
bonne polarité (Côté bombée vers le haut).
Attention:
Sensibilité électrostatique et –avis aux soudeurs débutants – sensible à la chaleur !
• D10: SFH 415-U IR-LED 5mm; boîtier noir. Respectez la bonne polarité! Le boîtier doit reposer
sur la platine!
• T11, T12: LPT80A, Transistor photoélectrique. Boîtier incolore doit reposer sur la platine.
Respectez la bonne polarité!
• D13, D14: IRL80A, IR-LED, Boîtier rose doit reposer sur la platine. Respectez la bonne polarité!
• D15, D16: LED 5mm rouge, boîtier rouge, respectez la bonne polarité
(l court sur la face repérée)!
• S1: Interrupteur Marche/Arrêt
ASURO - 18 -
Electronique
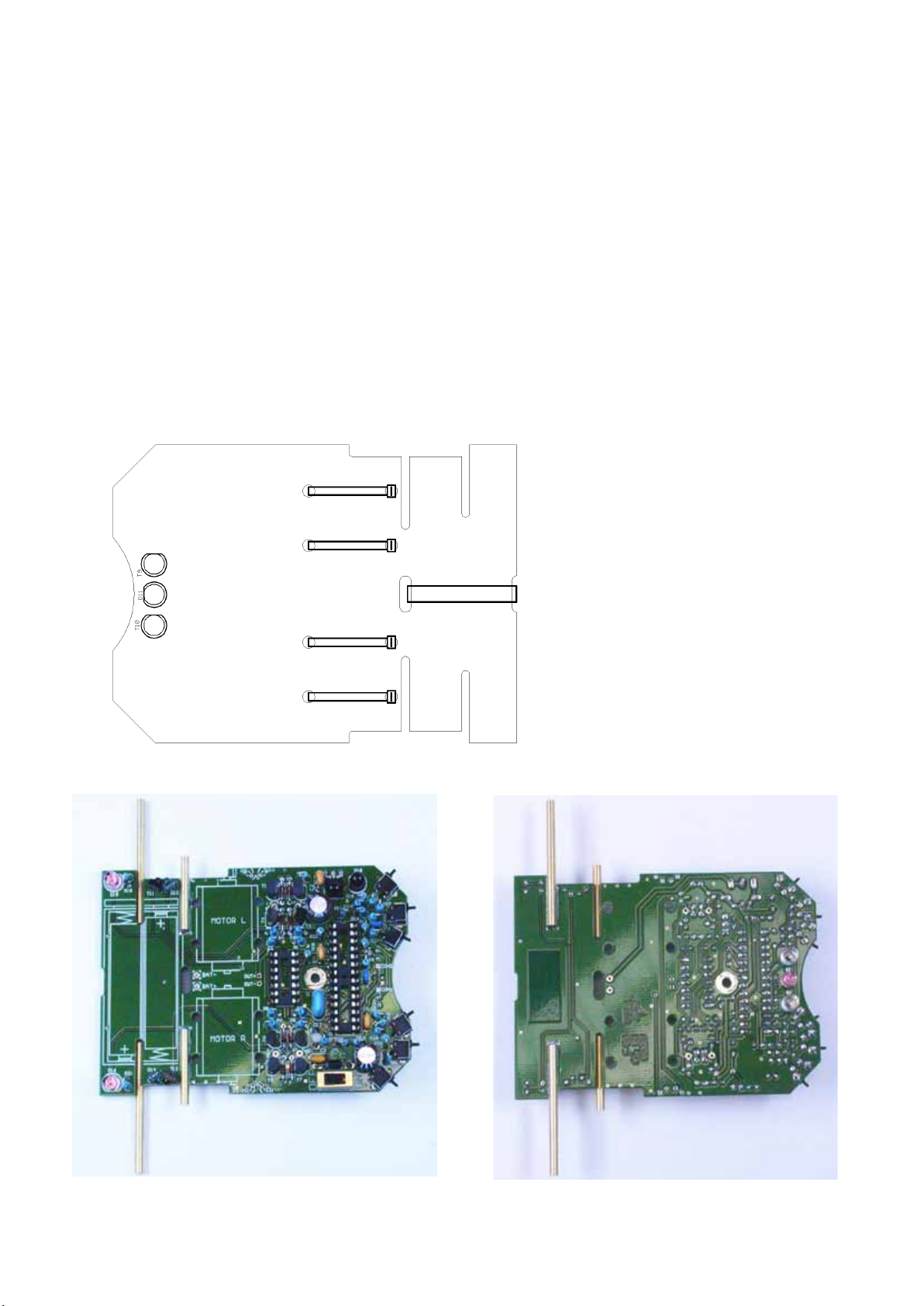
Il manque encore trois composants (ils permettent de suivre un tracé). Il faut cependant les implanter sur le dessous
de la platine et les souder par le dessus voir g.4.7.):
• T9, T10: SFH300, Transistor photoélectrique 5mm, respectez la bonne polarité!
Ils sont légèrement écartés de la platine.
• D11: LED 5mm rouge, boîtier rouge, respectez la bonne polarité (l court sur la face repérée)!
Fig. 4.8. présente la platine implantée jusqu’à présent par le dessus et le dessous
Voilà, c’était tout ce qu’il fallait en matière de composants électroniques.
Maintenant il faut monter les composants électromécaniques et mécaniques.
Fig. 4.7.:
Implantation de la face inférieure de la
platine d’ASURO
Fig. 4.8.: ASURO implanté par le dessus et le dessous
ASURO - 19 -
Electronique
4.4. Montage du moteur
Lorsque l’implantation de la platine d’ASURO est terminée, il n’y a plus qu’à monter les câbles sur
les moteurs et les xer provisoirement.
Pour la connexion du moteur, il vous faut un câble noir et un rouge d’env. 70mm de longueur
avec des extrémités dénudées et étamées. Si les câbles fournis n’ont pas encore été préparés,
vous devez dénuder le câble aux extrémités sur une longueur d’env. 4mm, le tourner et l’étamer
en le mettant en contact avec le fer à souder et un peu de l de soudure. Vous pouvez ensuite
retirer les résidus gênants de soudure au moyen d’une pince coupante de côté.
Soudez maintenant le câble rouge sur le côté du moteur marqué d’un point rouge ou d’un signe «
Plus » et le câble noir sur l’autre.
Les câbles de branchement de chaque moteur sont ensuite entrelacés (ce n’est pas indispensable
mais apporte des avantages en matière de compatibilité électromagnétique et est d’un plus bel
aspect…).
Le câble rouge du moteur gauche est soudé dans „ML+“ et le noir dans „ML-„; le câble rouge du
moteur droit est soudé dans « MR+ » et le noir dans « MR-« .
Maintenant il faut installer provisoirement les moteurs sur la platine. A cet effet, il faut passer le
collier de câble dans les trous de la platine à côté des moteurs de façon à ce que les têtes des
colliers restent en dessous de la platine et passer le collier autour des moteurs.
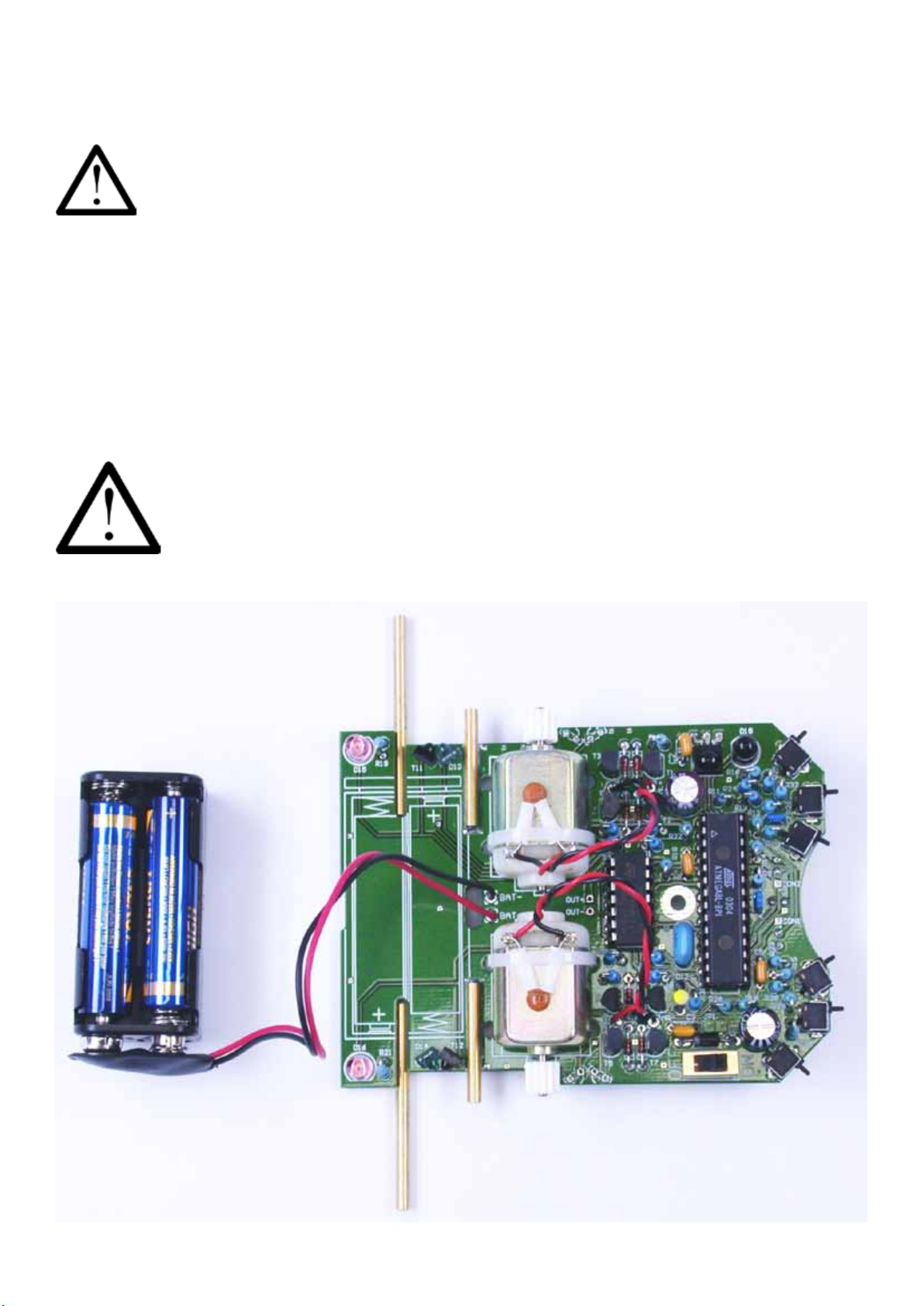
4.5. Alimentation électrique
Si ASURO doit être alimenté par piles, le cavalier JP1 doit impérativement être
ouvert!Sivousutilisezdesbatteries,ilfautlefermer.Unemauvaisepolaritédes
batterieslorsquelecavalierestfermédétruitl’électronique!
Le câble rouge du support de piles est soudé (sans les piles) dans BAT+ et le câble noir dans
BAT-. Vériez ensuite que l’interrupteur est en position OFF et que les 4 piles ou batteries sont
insérées avec la bonne polarité dans le support. Il faut xer le support de piles tout de suite ou
après la mise en service en passant le plus long collier de câbles (amovible) par le trou dans la
platine.
ASURO - 20 -
Electronique
5. Mise en service et Test
Enn tout est monté et l’aventure peut commencer. Cependant, il faut chercher, trouver et éliminer
les erreurs qui se sont glissées et cela sans faire trop de dégâts.
5.1. Transmetteur Infrarouge RS232
NOTICE
Le nouveau ASURO
(de 2011) n’a plus
un transmeteur
infrarouge RS232
Cette mise en service ne s’applique qu’au transmetteur RS232 à infrarouge.
Tout d’abord il faut vérier le bon fonctionnement du transmetteur IR RS232 puisque nous en
aurons besoin par la suite pour l’auto-test du véhicule. A cet effet, le transmetteur RS232 sera
branché sur une interface série libre au moyen de la rallonge sérielle fournie.
Ensuite, il faut démarrer le programme Terminal de Windows « Hyper Terminal » (sous Linux
p.ex. « Minicom »). Normalement, vous le trouverez sous Démarrer --> Tous les Programmes -->
Accessoires --> Communications --> Hyper Terminal. S’il ne s’y trouve pas, vous devez l’installer
à partir du CD Windows.
Les programmes de terminal datent en fait encore de l’époque des modems et avant lorsque les
communications avec d’autres ordinateurs se faisaient fréquemment par le biais de l’interface
série. Aujourd’hui ils sont surtout utilisés pour se logger en base texte sur un autre ordinateur par
Internet. Après le démarrage de Hyper Terminal, le programme demande un nom pour la nouvelle
connexion. Ici, vous pouvez saisir ASURO et sélectionner un symbole de votre choix. Dans la
fenêtre suivante, vous devez sélectionner sous « Se connecter en utilisant : » l’interface COM sur
laquelle vous avez branché le transmetteur. Après avoir cliqué sur OK, vous sélectionnez
• Bits par seconde: 2400
• Bits de données: 8
• Parité: Aucune
• Bits d’arrêt: 1
• Contrôle de ux: Aucun
Conrmer avec “OK”.
Tenez maintenant le transmetteur IR à env. 10cm au dessus d’une feuille de papier blanche. Les
composants sont face au papier. Tapez maintenant quelques touches sur le clavier. Le programme
Terminal devrait afcher ces touches. Le transmetteur IR envoie la pression sur la touche par le
biais de la diode IR (D5). Le signal rééchi par le papier est transmis au CI récepteur (IC2) et de
là au PC. Si aucun caractère ou des caractères erronés s’afchent, vous pouvez tourner douce-
ment avec un petit tournevis le trimmer entre sa butée gauche et droite et appuyer à nouveau sur
quelques touches, jusqu’à ce que les bons caractères s’afchent.
L’ensemble ne fonctionne pas comme décrit ? Dommage. Cela signie qu’il y a une erreur qu’il
faut corriger (voir chapitre 6.1).
Pour être tout à fait sûr, vous pouvez débrancher le transmetteur IR et appuyer à nouveau sur
quelques touches. Aucun caractère ne doit s’afcher.
ASURO - 21 -

Electronique
5.2. Transmetteur Infrarouge USB
Cette mise en service ne s’applique qu’au transmetteur Infrarouge USB.
5.2.1 Windows
Le transmetteur USB est branché sur un port USB lire au moyen du cordon USB. Le message
s’afche:
“Un nouveau matériel a été détecté: AREXX ASURO USB-IR-Transceiver”
Installez ensuite le driver USB à partir du CD d’ASURO. Si l’ordinateur ne trouve pas
automatiquement le driver, sélectionnez le répertoire (D : représente ici le lecteur CD-ROM)
D:\Windows\USB_Driver” . Vous aurez éventuellement besoin des droits d’administrateur. Dans
ce cas, fermez la session et ouvrez une nouvelle session en tant qu’administrateur. Maintenant un
driver est installé qui permet d’adresser le transmetteur USB sous Windows comme une interface
série normale.
Si tout cela s’est passé sans problème, vous pouvez démarrer le programme „Hyper Terminal“,
en indiquant comme nom de connexion ASUROUSB et en choisissant un symbole. Dans la
fenêtre suivante « Se connecter en utilisant : », vous sélectionnez la dernière interface COM libre.
Appuyez sur « OK » et sélectionnez :
• Bits par seconde: 2400
• Bits de données: 8
• Parité: Aucune
• Bits d’arrêt: 1
• Contrôle de ux: Aucun
Conrmer avec “OK”.
Contrairement à l’ancien transmetteur IR USB et au transmetteur IR USB V1.0, le nouveau trans-
metteur IR USB supprime son propre écho. C’est un net avantage dans la transmission de don-
nées, cependant, l’autotest par réexion dans l’HyperTerminal ne fonctionne plus. Vous pouvez
vérier malgré tout la bonne installation du driver par le fait que la LED de transmission verte
clignote pendant la transmission de données ou lors d’une saisie dans l’HyperTerminal.
Les fonctions du transmetteur IR USB ont été contrôlées d’usine et une défaillance est très peu
probable. Si vous souhaitez néanmoins effectuer un test, vous pouvez utiliser le programme
d’autotest d’ASURO qui démarre lors d’un contact visuel avec le transmetteur IR USB. Vous pouvez alors observer les sorties dans le programme du terminal (2400 bauds, 8 bits de données, 1
bit de stop, pas de parité, connexion établie). Lorsque l’autotest atteint le test du transmetteur IR
(la LED sur ASURO clignote en jaune), vous pouvez envoyer des signes à partir du programme du
terminal auxquels le robot répond par le signe suivant de l’alphabet“.
Pendant la transmission, la LED jaune clignote et pendant la réception, la LED verte reste allumée. Le transmetteur ne peut pas lire son propre écho et vous avez donc besoin d’ASURO
pendant l’autotest pour le tester.
Si cela ne fonctionne pas, continuez à lire à partir du chapitre 6.2.
Si tout a bien fonctionné, vous pouvez continuer avec la mise en service de la platine ASURO.
ASURO - 22 -

Electronique
5.2.2 Linux
Le transmetteur USB est branché sur un port USB libre au moyen du cordon USB. Vous
entendrez un petit ‘Bip’ lorsque Linux a reconnu le transmetteur. An de vérier si l’appareil a été
correctement identié, vous pouvez consulter l’inscription correspondante dans le répertoire proc:
foo@bar:/>cat /proc/tty/driver/usb-serial
Ce qui doit générer une édition qui comporte au moins les inscriptions suivantes (au lieu du “0:”
Cela peut aussi être “1:”, “2:” etc.):
usbserinfo:1.0 driver:v1.4
0: module:ftdi_sio name:”FTDI 8U232AM Compatible” vendor:0403 product:6001
num_ports:1 port:1 path:usb-00:11.2-1
Pour effectuer un test, vous devez congurer Minicom sur l’interface /dev/ttyUSB0 (ou 1, 2 etc...)
et les paramètres suivants:
• Bits par seconde: 2400
• Bits de données: 8
• Parité: Aucune
• Bits d’arrêt: 1
• Contrôle de ux: Aucun
Conrmer avec “OK”.
Pour cela, il faut éventuellement avoir les droits de source.
Il peut également être nécessaire d’accorder des droits de lecture et d’écriture à l’utilisateur ou au
groupe d’utilisateurs souhaités sur le Device /dev/ttyUSB?. Ceci peut se faire avec un chmod u+rw
/dev/ ttyUSB0 (ou 1, 2...) ou chmod g+rw /dev/ttyUSB0 (également avec des droits de source).
Tenez maintenant le transmetteur avec la face de la diode luminescente vers le bas à 10cm au-
dessus d’une feuille de papier blanche. Si vous utilisez le transmetteur sans boîtier, vous ne devez
tenir la platine que par la che ou au bord an de ne pas perturber le circuit.
Tapez maintenant sur quelques touches dans le programme Terminal. La LED jaune sur la platine
doit clignoter et les touches tapées doivent s’afcher sur l’écran.
Contrairement à l’ancien transmetteur IR USB et au transmetteur IR USB V1.0, le nouveau trans-
metteur IR USB supprime son propre écho. C’est un net avantage dans la transmission de don-
nées, cependant, l’autotest par réexion dans l’HyperTerminal ne fonctionne plus. Vous pouvez
vérier malgré tout la bonne installation du driver par le fait que la LED de transmission verte
clignote pendant la transmission de données ou lors d’une saisie dans l’HyperTerminal.
Les fonctions du transmetteur IR USB ont été contrôlées d’usine et une défaillance est très peu
probable. Si vous souhaitez néanmoins effectuer un test, vous pouvez utiliser le programme
d’autotest d’ASURO qui démarre lors d’un contact visuel avec le transmetteur IR USB. Vous pouvez alors observer les sorties dans le programme du terminal (2400 bauds, 8 bits de données, 1
bit de stop, pas de parité, connexion établie). Lorsque l’autotest atteint le test du transmetteur IR
(la LED sur ASURO clignote en jaune), vous pouvez envoyer des signes à partir du programme du
terminal auxquels le robot répond par le signe suivant de l’alphabet“.
Pendant la transmission, la LED jaune clignote et pendant la réception, la LED verte reste allumée. Le transmetteur ne peut pas lire son propre écho et vous avez donc besoin d’ASURO
pendant l’autotest pour le tester.
Si cela ne fonctionne pas, continuez à lire à partir du chapitre 6.2.
Si tout a bien fonctionné, vous pouvez continuer avec la mise en service de la platine ASURO.
ASURO - 23 -
Electronique
5.3. Mise en service de la platine ASURO
Le processeur (IC1) n’a pas encore été installé à ce stade !
Maintenant croisez les doigts et mettez l’interrupteur sur ON. Les deux LED (D15, D16) devraient
luire faiblement. Si ce n’est pas le cas, mettez immédiatement l’interrupteur principal sur OFF
et continuez à lire à partir du chapitre 6.3. Tout va bien ? Alors, mettez l’interrupteur sur OFF et
implantez l’IC1 (processeur) et l’IC3 (composant AND) (voir Fig. 5.1).
Eventuellement il faut plier un peu les contacts des CI pour que tous les contacts puissent
s’insérer dans la bonne position dans le socle. Le mieux est de prendre le CI sur le côté et
appuyer les contacts légèrement contre le bord d’une table.
Le processeur IC1 ATmega8, le composant IC3 CD4081 et le récepteur IR IC2
SFH5110-36sontsensiblesàl’électricitéstatique.
Celasigniequ’ilspeuventêtredétruitsparunsimplecontactsilapersonneest
chargée électriquement ce qui peut arriver en traversant simplement un tapis.
Avant de manipuler ces composants, il est conseillé de se relier à la terre au moyen
d’unrubandemasseoutoutdumoinstoucherleboîtiermétalliqued’unappareilou
un radiateur.
Fig. 5.1.: ASURO après l’implantation des CI
ASURO - 24 -
Electronique
Implanter le straps (J1) uniquement en cas d’alimentation par batterie. Les fentes des IC doivent
correspondre à la fente du socle s’il a été correctement implanté. Le processeur a déjà été pro-
grammé d’usine avec un auto-test et vériera tous les composants après la mise sous tension.
An d’éviter les problèmes, lisez d’abord complètement le chapitre suivant avant la mise sous ten-
sion et revenez ensuite sur ce passage.
Allons-y ! Mettez l’interrupteur sur ON et ne perdez pas ASURO de vue.
Si le programme Hyper Terminal (Windows) ou Minicom (Linux) tourne, le transmetteur
IR est branché et ASURO est sous étroite observation, vous pouvez suivre l’auto-test
sur l’écran.
5.3.1. Eléments visuels
La LED d’état (D12) s’allume brièvement en orange et les « LEDs arrières» (D15, D16) luisent
également mais très faiblement. Si ce n’est pas le cas, mettez l’interrupteur immédiatement sur
OFF (voir chapitre 6.3.3). Ceci était la phase Boot d’ASURO. Maintenant tous les éléments visuels
sont vériés individuellement pendant env. 3 secondes dans l’ordre suivant:
• LED d’état (D12) verte
• LED d’état (D12) rouge
• LED avant (D11) sur le dessous d’ASURO
• LED arrière (D15) gauche
• LED arrière (D16) droit
• Tous les éléments visuels en même temps
Si, contre toute attente, une erreur se produit, il faut immédiatement éteindre ASURO et corriger
l’erreur (voir chapitre 6.4), puisque tous les éléments visuels qui viennent d’être testés, sont
indispensables pour les autres tests.
5.3.2. Phototransistors (T9, T10)
Après le test des éléments visuels, la LED d’état (D12) doit s’allumer en vert. Ceci signie que
les phototransistors sont maintenant vériés (env. 10 secondes) qui se trouvent sur le dessous
d’ASURO et qui sont nécessaires pour suivre un tracé. Lorsque les phototransistors (T9, T10) sont
éclairés, la LED arrière (D15, D16) correspondante doit s’allumer et s’éteindre lorsque le transistor
n’est plus éclairé. Le transistor droit (T10) dépend de la LED arrière droite (D16) et le transistor
gauche (T9) de la LED arrière gauche (D15). Il est possible que la LED arrière continue à luire
faiblement à l’état éteint. Ceci est normal. En cas d’erreur, l’auto-test peut se poursuivre et l’erreur
peut être corrigée ultérieurement.
ASURO - 25 -
 Loading...
Loading...