

ASURO ARX-03 User guide [de]
ASURO
ROBOTERBAUSATZ
AREXX, Zwolle - NIEDERLANDE
JAMA, Taichung - TAIWAN
www.arexx.com
© DLR & AREXX

ASURO - 2
WARNUNG
* Mit dem Öffnen der Plastikbeutel mit Komponenten und Bauteilen erlischt das Rückgaberecht.
* Lies vor dem Bauen zuerst die Bedienungsanleitung aufmerksam durch.
* Sei vorsichtig beim Handhaben der Werkzeuge.
* Baue nicht im Beisein kleiner Kinder. Die Kinder können sich an den Werkzeugen verletzen
oder kleine Komponenten und Teile in den Mund stecken.
* Achte auf die Polung der Batterien.
* Sorge dafür, dass die Batterien und die Batteriehalter trocken bleiben.
* Falls ASURO nass wird, entferne die Batterien.
* Entferne die Batterien, wenn der Roboter mehr als eine Woche ruht.
ASURO ist ein kleiner, frei in C programmierbarer mobiler Roboter, welcher am Deutschen
Zentrum für Luft- und Raumfahrt (DLR) im Institut für Robotik und Mechatronik für die Lehre
entwickelt wurde. Der Aufbau ist für den erfahrenen Elektroniker ein Kinderspiel und für den
Elektronikeinsteiger ohne weiteres durchzuführen. Es werden - bis auf die Platinen - nur
handelsübliche, mit normaler Feinmotorik handhabbare und leicht zu beschaffende Bauteile
verwendet. Ebenso erfolgt die Programmierung ausschließlich mit Freeware-Tools. ASURO
eignet sich daher ausgezeichnet für Hobbybastler, welche den Einstieg in prozessorgesteuerte
Schaltungen wagen wollen, für Schüler und Studentenprojekte, Fortbildungen oder
Volkshochschulkurse. Aufgrund der Tatsache, dass auch die gesamte Entwicklung der Elektronik
mit (für den privaten Bereich) Freeware-Werkzeugen möglich ist, tritt ASURO nebenbei auch
noch den Beweis an, dass man es auch ohne aufwändige und teure Software, Technik und
Werkzeugmaschinen in der Lage ist, funktionsfähige Roboter zu konstruieren.
ASURO besitzt neben seinem RISC-Prozessor, zwei Motoren, die unabhängig voneinander
angesteuert werden können, eine optische Linienfolgeeinheit, sechs Kollisionstaster, zwei
Drehzahlsensoren für die Räder, drei optische Anzeigen und eine Infrarot-Kommunikationseinheit,
welche die Programmierung und auch eine Fernsteuerung über einen PC ermöglicht (siehe
Abb.0.1).
Das Achtung-Symbol weist auf Abschnitte hin, die sehr sorgfältig beachtet werden
müssen, da Fehler zu zerstörter Hardware oder Gesundheit führen können.
Es sei auch noch darauf hingewiesen, dass ASURO natürlich kein Spielzeug und für Kinder unter
drei Jahren nicht geeignet ist, da hier dutzende Kleinteile verschluckt werden können.
Jetzt nur noch Batterien oder Akkus bereitlegen und los geht’s!
Ach ja, ASURO steht übrigens für “Another Small and Unique Robot from Oberpfaffenhofen”!
© DLR & AREXX
Jan Grewe
Robin Gruber
Abb.0.1 Blockschaldbild
Sehe auch Anhang E

ASURO - 3
Inhaltsverzeichnis
I. Mechanik 6
1. Erforderliches Werkzeug
6
2. Mechanische Vorarbeiten
7
2.1. Motorritzel 7
2.2. Tischtennisball
7
2.3. Radsensoren 8
II. Elektronik 9
3. Kleine Löt bel
9
3.1. Spitze, Zinn und Temperatur
9
3.2. Vorbereiten der Bauteile
10
3.3. Einlöten der Bauteile 11
3.4. Auslöten falsch eingebauter Teile 12
4. Bestückung 13
4.1. Bestückung des RS232-Infrarot-Transceivers
13
4.2. info USB-Infrarot-Transceivers 15
4.3. Bestückung der ASURO-Platine 16
4.4. Motormontage 20
4.5. Stromversorgung 20
5. Inbetriebnahme und Test
21
5.1. RS232-Infrarot-Transceiver
21
5.2. USB-Infrarot-Tranceiver
22
5.2.1. Windows 22
5.2.2. Linux 23
5.3. ASURO
24
5.3.1. Anzeigenelemente
25
5.3.2. Fototransistoren (T9, T10) 25
5.3.3. Schalter 26
5.3.4. Re exlichtschranke (Odometrie) 26
5.3.5. Antriebe 26
5.3.6. IR Schnittstelle 26
5.3.7. Alle Anzeigenelementen auf einmal 27
5.3.8. Fertig? 27

ASURO - 4
6. Fehlersuche 28
6.1. RS232-IR-Transceiver geht nicht !
28
6.1.1. Tastendruck und Zeichenausgabe stimmen nicht überein
28
6.1.2. Das Terminal-Programm gibt keine Zeichen aus
28
6.1.3. Es geht immer noch nicht 28
6.2. USB-Infrarot-Tranceiver funktioniert nicht
28
6.3. Back-LEDs (D15,D16) glimmen nach dem Einschalten nicht! 28
6.3.1. Keine der beiden Back-LEDs glimmt auf 28
6.3.2. Nur eine der beiden LED’s glimmt auf
29
6.3.3. Status-LED (D12) leuchtet nach dem Start nicht zweifarbig auf 29
6.4. Ein Anzeigenelement geht nicht
29
6.4.1. Status-LED D12 geht nicht 29
6.4.2. Front-LED D11 geht nicht
29
6.4.3. Linke Back-LED D15 geht nicht 30
6.4.4. Rechte Back-LED D16 geht nicht 30
6.5. Linienfolgesensor (T9, T10) reagiert nicht
30
6.6. Ein Schalter funktioniert nicht richtig 30
6.6.1. Angeblich ist eine Kombination aus Schaltern gedrückt worden
30
6.6.2. Die Anzeige verhält sich so, als seien Schalter vertauscht worden
31
6.6.3. Irgendwie funktioniert es immer noch nicht so richtig 31
6.7. Eine Re exlichtschranke funktioniert nicht
31
6.7.1. Keine der Re exlichtschranken funktioniert 31
6.7.2. Die linke Re exlichtschranke funktioniert nicht 31
6.7.3. Die rechte Re exlichtschranken funktioniert nicht 31
6.8. Ein Antrieb geht nicht 32
6.8.1. Kein Antrieb bewegt sich
32
6.8.2. Der linke Motor bewegt sich nicht bzw. nur in eine Richtung 32
6.8.3. Der rechte Motor bewegt sich nicht bzw. nur in eine Richtung 32
6.8.4. Ein Motor dreht in die falsche Richtung 32
6.9. IR-Schnittstelle 32
6.9.1. ASURO sendet keine Zeichen
32
6.9.2. ASURO empfängt keine Zeichen 32
6.9.3. Es geht immer noch nicht so richtig 33
7. Letzte Einstellarbeiten 34

ASURO - 5
III. Informatik 35
8. Installation der Software und erste Schritte 35
8.1. Windows 35
8.1.1. Flash-Tool
35
8.1.2. Installation des programmeditors und des compilers 35
8.2. Linux 51
8.2.1. Flash-Tool
51
8.2.2. Compiler 52
8.3. Flash - das ASURO-Programmier-Tool
53
8.3.1. Wie funktioniert das Flashen? 53
8.4. Flash Fehler 54
8.5. Erstes eigenes Programm 54
9. C für ASURO
56
9.1. Grundlagen der C-Programmierung 56
9.1.1. Allgemeines
56
9.1.2. Variablen und Datentypen
57
9.1.3. Compilerdirektiven 59
9.1.4. Bedingungen 59
9.1.5. Schleifen 61
9.1.6. Funktionen 62
9.1.7. Zeiger und Vektoren 64
9.2. Beschreibung der ASURO-Funktionen
65
9.2.1. void Init(void) 66
9.2.2. void StatusLED(unsigned char color) 66
9.2.3. void FrontLED(unsigned char status) 67
9.2.4. void BackLED(unsigned char left, unsigned char right) 67
9.2.5. void Sleep(unsigned char time72kHz) 67
9.2.6. void MotorDir(unsigned char left_dir, unsigned char right_dir) 67
9.2.7. void MotorSpeed(unsigned char left_speed, unsigned char right_speed) 68
9.2.8. void SerWrite(unsigned char *data, unsigned char length) 68
9.2.9. void SerRead(unsigned char *data, unsigned char length, unsigned int timeout) 68
9.2.10. void LineData(unsigned int *data) 69
9.2.11. void OdometrieData(unsigned int *data) 70
9.2.12. unsigned char PollSwitch(void) 71
IV. Anhänge
72
A. Stückliste 72
B. Schaltpläne ASURO
74
C. RS-232 IR Transceiver
75
D. USB IR-Transceiver
76
E. Blockschaldbild ASURO
77
F. Blockschaltbild PIC Processor
77
G. Lieferumfang ASURO
78

ASURO - 6
Teil I. Mechanik
1. Erforderliches Werkzeug
Um ASURO vernünftig zusammenbauen zu können, wird - außer den Bausatzteilen - folgendes Werkzeug
und Verbrauchsmaterial benötigt:
kleiner Schraubstock oder Dritte Hand: nicht immer sind zwei Hände ausreichend
Teppichmesser oder Säge
feine Zange
Seitenschneider: ein kleiner für Elektronik
evtl. Abisolierzange
Lötkolben: Hier sollte ein Elektronik-Lötkolben
(ca. 20W bis 40W) oder gleich eine Lötstation
(mind. 50W) verwendet werden.
Lötzinn: 1 mm dickes Elektroniklot, ggf. auch bleifrei
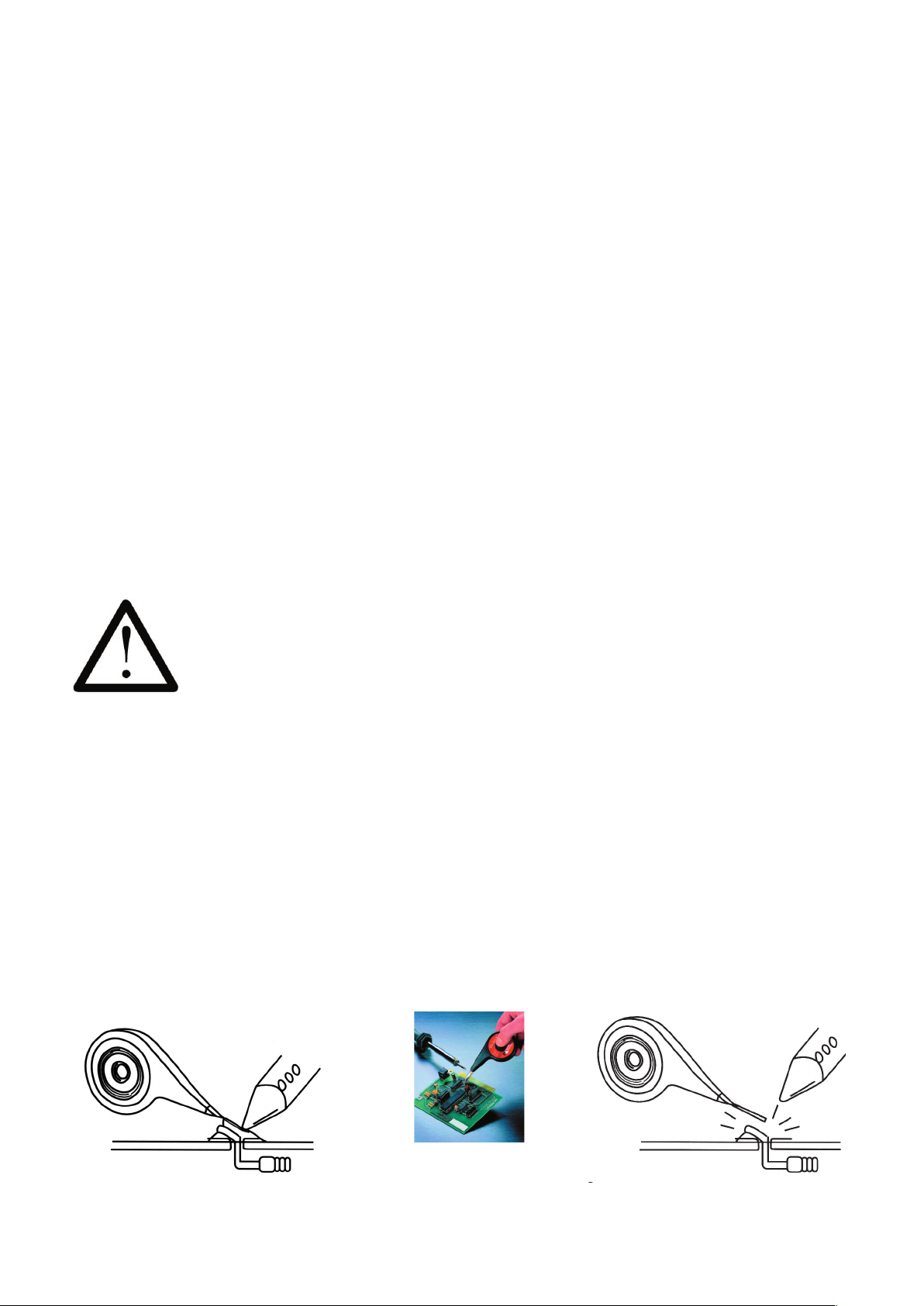
Entlötlitze: ca. 2-3mm breit, falls mal was nicht da landet, wo es hingehört
Schleifpapier mit feiner Körnung
Sekunden-, Zweikomponenten- oder Heißkleber
Evt. kleiner Hammer
Evtl. Multimeter
Computer: Laptop oder PC mit Windows oder Linux
Abbildung 1.1.: Erforderliches Werkzeug
ASURO - 7
2. Mechanische Vorarbeiten
Bevor die ersten Basteleien beginnen können, sollte unbedingt überprüft werden, ob alle
erforderlichen Teile vorhanden sind. Das kann am einfachsten anhand der Stückliste in Anhang
A geschehen. Bevor es an die Elektronik gehen kann, müssen noch ein paar mechanische
Tätigkeiten durchgeführt werden.
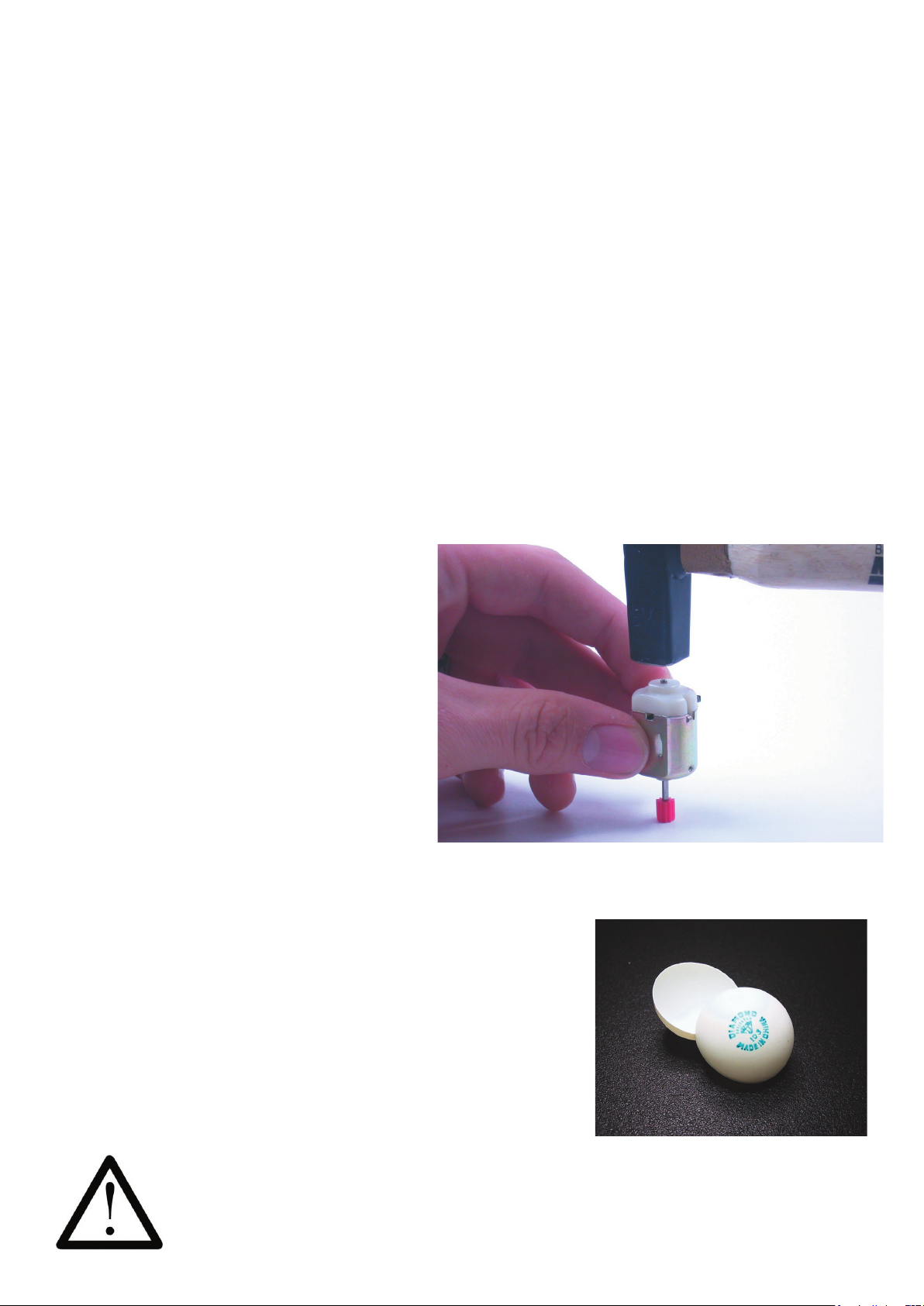
2.1. Motorritzel
Abbildung 2.1.: Motorritzelmontage
2.2. Tischtennisball
ASURO soll später auf einem halben Tischtennisball gleiten. Dieser ist herzustellen. Am
besten nimmt man einen ganzen Tischtennisball und sägt oder schneidet diesen mit einem
Teppichmesser (den Ball, nicht die Finger) auseinander. Die
Schnittkanten dann noch mit einer Feile oder Schleifpapier
entgraten.
Abbildung 2.2.: Zersägter Tischtennisball
Elektrowerkzeug darf wegen der Brandgefahr nicht verwendet werden!
Mechanik
ASURO - 8
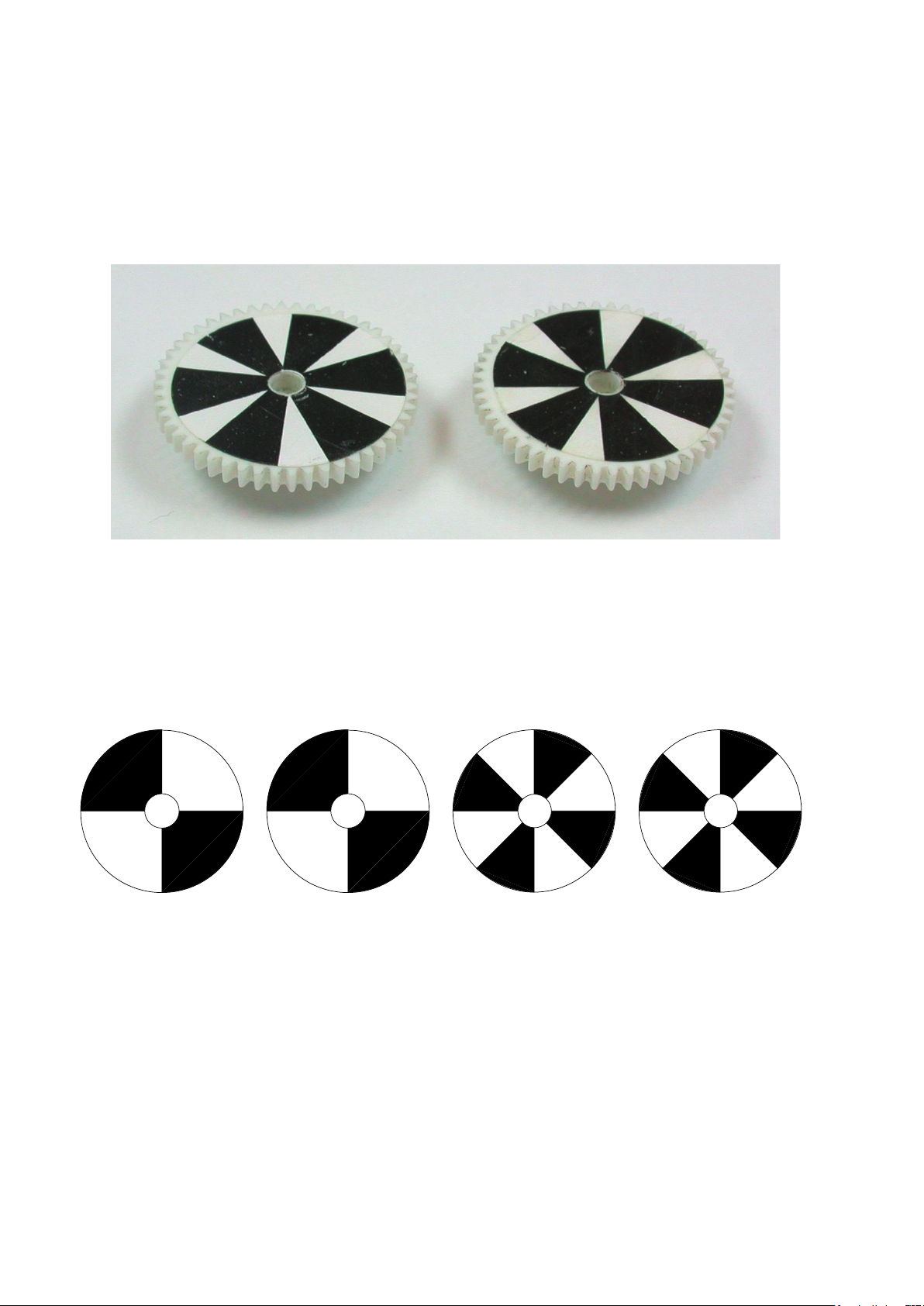
2.3. Radsensoren
vertrauensvoll Richtung erstem Getriebezahnrad wenden werden, wollen später nicht enttäuscht
werden. Daher bringt man auf das jeweils erste Getriebezahnrad (das mit mit den 50 und 10
Zähnen) auf der Seite ohne Abtriebsritzel noch die selbstklebenden Musterscheiben an (siehe
Abb.2.3.).
Je mehr Segmente das Muster besitzt, umso genauer lässt sich die Drehzahl des Zahnrades und
zwischen hell und dunkel geringer.
Abbildung 2.4.: Beispiel für Radsensoren
Damit ist der erste Teil geschafft. Die mechanischen Komponenten sind soweit alle fertig
vorbereitet.
Kurze Pause...
Jetzt geht es weiter mit der Elektronik.
Mechanik
Abbildung 2.3.: Montage der Radsensormuster

ASURO - 9
Teil II. Elektronik
3. Kleine Löt bel
Obwohl ASURO vollständig mit bedrahteten Bauteilen aufgebaut ist und damit - im Gegensatz zu
ober ächenmontierten SMD-Bauteilen (Abb.
3.1 zeigt den Vergleich zwischen dem kleinsten und
unserem Gehäuse, in dem ASUROs Prozessor erhältlich ist. Der eigentliche Siliziumchip ist in
beiden Gehäusen der gleiche!) - geradezu hervorragen von Hand zu bestücken ist, sollten vor
allem vom untrainierten Löter einige Hinweise beachtet werden.
Selbstverständlich ist auch, dass die zu bestückende Platine in jedem Fall stromlos sein muss.
Ausschalten läuft nicht unter stromlos! Batterien herausnehmen!
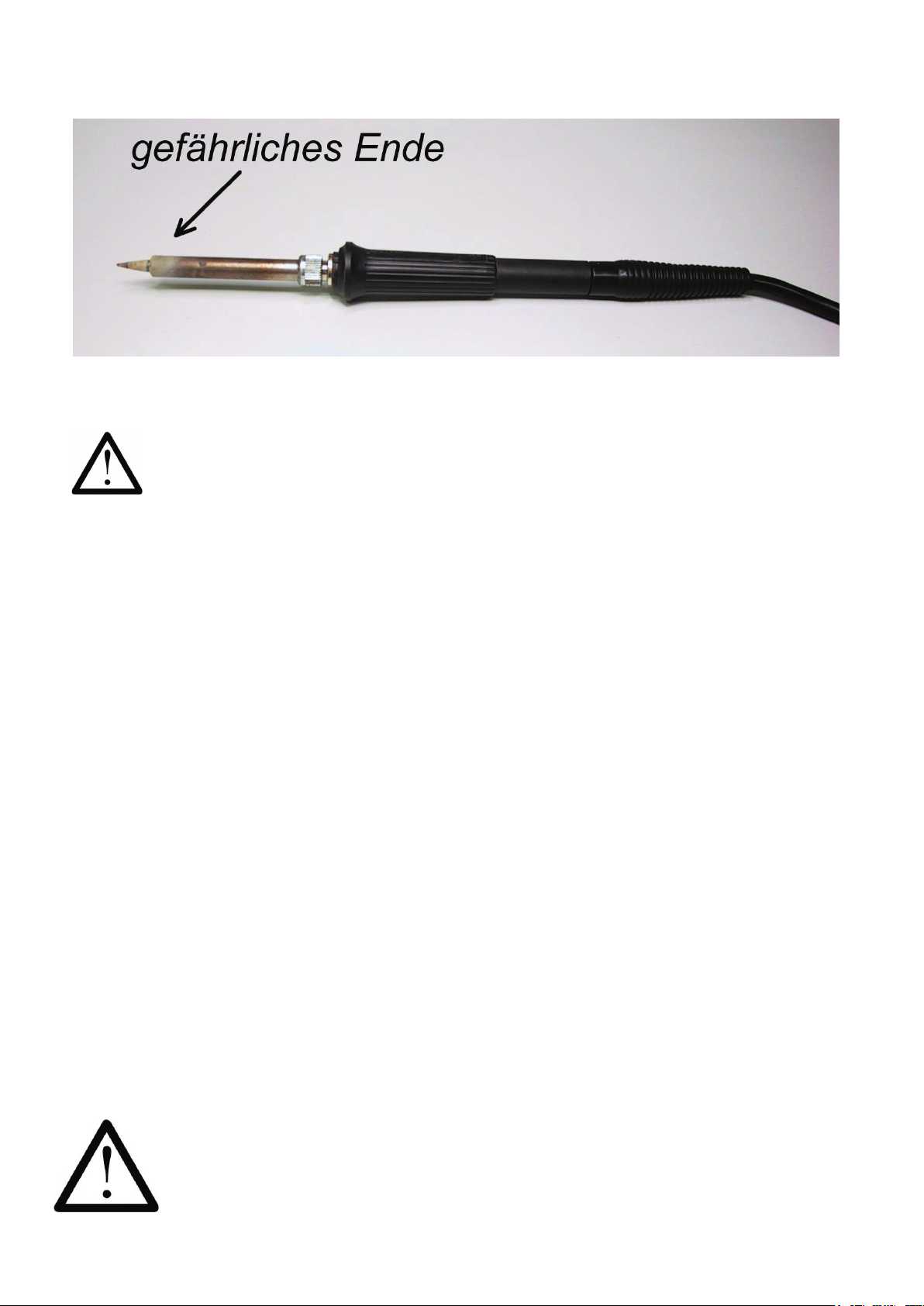
3.1. Spitze, Zinn und Temperatur
Abbildung 3.2 zeigt die für’s Löten wichtigste Grundlage!
Das gefährliche Ende sollte zum Löten eine Temperatur von ca. 360ºC bei bleihaltigem, ca. 390ºC
bei bleifreiem Lötzinn haben, zum Einlöten der Achsen kann sie etwas erhöht werden (420ºC). Für
Elektronikbestückung wie diese sollte eine bleistiftspitze Spitze verwendet werden, für die Achsen
kann man ggf. eine breitere Spitze nehmen.
Auch ist das Lötschwämmchen noch anzufeuchten (es darf nicht triefen) und die Spitze des
Lötkolbens mit etwas Lötzinn zu benetzen. Kurz bevor man den Lötkolben nach einer Pause oder
am Beginn des Lötens an die Lötstelle hält, oder wenn verschlackte Zinnrückstände am Lötkolben
stören, wischt man diese einfach am Lötschwämmchen ab.
Als Lötzinn sollte Elektroniklot mit 0,8 oder 1mm Durchmesser benutzt werden.
Abbildung 3.1.: Vergleich der größten und kleinsten Bauform in der der ATmega8L erhältlich ist.
ASURO - 10
Abbildung 3.2.: Grundlage des Lötens
Dämpfe, welche während des Lötprozesses entstehen sind langfristig eher ungesund
und sollten nach Möglichkeit nicht eingeatmet, besser noch abgesaugt werden!
Anderes Lötzinn als Elektroniklot oder säurehaltiges Flussmittel können die Schaltung zerstören!
3.2. Vorbereiten der Bauteile
Jeder, der schon mal Elektronik gelötet hat, kennt das Problem: man hat eigentlich immer eine
Hand zuwenig. Daher gibt’s ein paar Tricks, wie man die verschiedenen Bauteile bändigt, bis man
mit Lötkolben und Lötzinn gut hinkommt.
ASUROs Transistoren, Leuchtdioden, Fototransistoren, ICs, Taster, Schalter, Kondensatoren und
Jumper haben bereits die Anschlussenden in eine Richtung. Bei den Dioden und Widerständen
muss das erst noch erzeugt werden.
Alle Widerstände bei ASURO werden aus Platzgründen stehend eingelötet. Das heißt, ein
Beinchen bleibt wie es ist, das andere wird um 180º gebogen. Die Biegung sollte einen
Durchmesser von 2,5mm haben und erst in ein paar Millimeter Abstand vom Widerstandskörper
liegen, damit dieser nicht mechanisch belastet wird, was eine einwandfreie Funktion
beeinträchtigen könnte.
Beim späteren Einlöten gibt ein Kreis im Bestückungsdruck an, über welchem Loch der
Widerstandkörper zu liegen kommt und ein kleiner Stich in welches Loch der umgebogene Draht
gesteckt werden muss.
Die Dioden werden liegend eingebaut, d.h. beide Beinchen müssen (am besten mit einer
feinen Zange) um 90º abgewinkelt werden, und das in einem Abstand, damit sie leicht in die
entsprechenden Bohrungen in der Leiterplatte passen.
Beim Prozessor IC1 ATmega8, dem Gatterbaustein IC3 CD4081 und dem IR-Empfänger
IC2 SFH5110-36 handelt es sich um elektrostatisch gefährdete Bauteile.
Das bedeutet, dass sie bereits durch bloßes Anfassen zerstört werden können,
sofern man vorher elektrisch geladen war, was beispielsweise durch Laufen über Teppiche
passieren kann. Vor dem Handhaben dieser Bauteile ist es ratsam, sich mit einem
Erdungsband zu erden oder zumindest ein Metallgehäuse eines Gerätes oder die Heizung
anzufassen.

ASURO - 11
Abbildung 3.3.: Bauteile mit passend gebogenen Beinchen
Abbildung 3.4.:
Herstellen einer sauberen Lötstelle
3.3. Einlöten der Bauteile
Sind die Bauteile vorbereitet, werden sie durch die durchkontaktierten Bohrungen in der
Leiterplatte gesteckt und - bei Teilen mit nur zwei oder drei Beinchen - diese auf der Unterseite der
Platine direkt an der Bohrung etwas auseinandergebogen (ca. 30º bis 40º sind ausreichend), so
dass sie nicht mehr herausfallen können.
Bei Bauteilen mit mehr Beinchen - wie den Sockeln für die ICs - reicht es, zwei diagonal
gegenüberliegende Beinchen nach außen zu biegen. Weiter als 45º weit biegen ist eher
unpraktisch, da man ein Teil - so man es doch einmal verkehrt eingebaut haben sollte - sonst
kaum mehr aus der Platine bekommt.
ASURO - 12
Sitzt das Bauteil fest, so erhitzt man mit der Lötkolbenspitze das Beinchen und das Lötauge
gleichzeitig und gibt an diese Stelle etwas Lötzinn zu. Dieses schmilzt nun und läuft in die
Bohrung. Es wird solange Zinn zugegeben, bis die Bohrung vollständig ausgefüllt ist (siehe
Abb.3.4). Danach nimmt man erst das Zinn und anschließend den Lötkolben weg und lässt die
Lötstelle erkalten. Keinesfalls darf das Bauteil während des Erkaltens bewegt werden, das würde
zu kalten Lötstellen und damit zu Wackelkontakten führen.
Bei Lötaugen, die an der Kupfer äche an Ober- und Unterseite angeschlossen sind, kann etwas
hartnäckigere Wärmezufuhr erforderlich sein, bis das Zinn in die Bohrung gelaufen ist.
Schlechte Lötstellen zeichnen sich durch kugelförmige Lötzinnansammlungen am Lötauge oder
eine matte (bei bleifreiem Lötzinn: sehr matte) Ober äche aus. Hier muss nachgebessert werden.
Um die Sockel oder andere Teile, welche ach auf der Platine au iegen sollen zu montieren, kann
folgender Trick verwendet werden: Das Bauteil wird zunächst an einem Beinchen angelötet.
Danach drückt man mit den Fingern von oben leicht auf das Teil und erwärmt nochmal die
Lötstelle
(Achtung: Das Bauteil kann dabei sehr heiß werden), sodass das Teil auf der Platine
aufsetzten kann. Anschließend werden die anderen Beine verlötet und die erste Lötstelle
nochmal zusammen mit etwas Zinn ver üssigt. Ist ein Teil festgelötet, werden die überstehenden
Drahtenden mit einem Seitenschneider knapp über der Platine abgezwickt, ohne dabei am
Beinchen zu ziehen.
Beim Abzwicken muss darauf geachtet werden, dass die eventuell weg iegenden
Drahtstücke niemanden gefährden können.
Die auf der Oberseite der Platine stehenden Teile dürfen sich natürlich keinesfalls mit den
Anschlüssen berühren. Eventuell müssen diese geradegebogen werden.
professionelle
sobald die Litze das Lötzinn aufgesaugt
wieder raus. Da ASURO - wie schon erwähnt - eine doppelseitige Platine mit durchkontaktierten Löchern
Zunächst ver üssigt man alle Lötstellen des betreffenden Bauteile (gegebenenfalls mit Zugabe von etwas
weiterem Lötzinn) gleichzeitig und zieht das Bauteil mit einer Zange aus der Platine. Anschließend befreit
sein, auch nochmal von der Oberseite aus das Lötzinn abzusaugen.
ASURO - 13
4. Bestückung
Löt bel gelesen? Wirklich? Na gut, los geht’s!
4.1. Bestückung des RS232-Infrarot-Transceivers
• IC1: Hier wird zunächst nur der 8-polige Sockel eingelötet. Dieser besitzt eine
Richtungsmarkierung, welche mit der Markierung auf der Platine übereinstimmen
muss.
• D1, D2, D3: 1N4148, auf richtige Polung achten! Nicht verwechseln mit ZPD5.1 oder
BZX55-C5V1 (Aufdruck)!
•D4: ZPD5.1 oder BZX55-C5V1, auf richtige Polung achten!
Nicht verwechseln mit 1N4148 (Aufdruck)!
• C2, C4: 100nF keramisch, Aufdruck: 104
• C3: 680pF keramisch, Aufdruck: 681
• Q1: BC547 (A,B oder C) oder BC548 (A,B oder C)
• R1, R5: 20k Ohm , 5% (rot, schwarz, orange, gold)
• R2: 4.7k Ohm, 5% (gelb, violett, rot, gold)
• R3: 470 Ohm, 5% (gelb, violett, braun, gold)
• R6: 10k Ohm, 5% (braun, schwarz, orange, gold)
• R7: 220 Ohm (rot, rot, braun, gold)
• C1: 100 µF/ mindestens 16V, auf richtige Polung achten!
• TR1: 10k Ohm Trimmer
• D5: SFH 415-U IR-LED (schwarzes Gehäuse), auf richtige Polung achten!
Gehäuse sollte auf der Platine au iegen!
• IC2: SFH5110-36 Infrarot-Empfänger-IC, Beinchen mit Zange abwinkeln!
Auf richtige Polung achten (Seite mit Wölbung muss nach oben weisen), Achtung:
elektrostatisch gefährdet und - Hinweis für die Hobbyschweißer - hitzeemp ndlich!
• X1: 9pol. SUB-D Buchse, Gehäuse muss auf der Platine au iegen, auch die
Befestigungslaschen müssen angelötet werden!
• IC1: NE555P einstecken, Richtungsmarkierung (Nase oder Kreis) beachten!

Abbildung 4.1.: Bestückung des RS232- Infrarot-Transceivers
Nun nochmal mit kritischem Blick die Lötstellen auf gute Verbindung oder Kurzschlüsse
überprüfen und ggf. nachbessern.
Fertig!
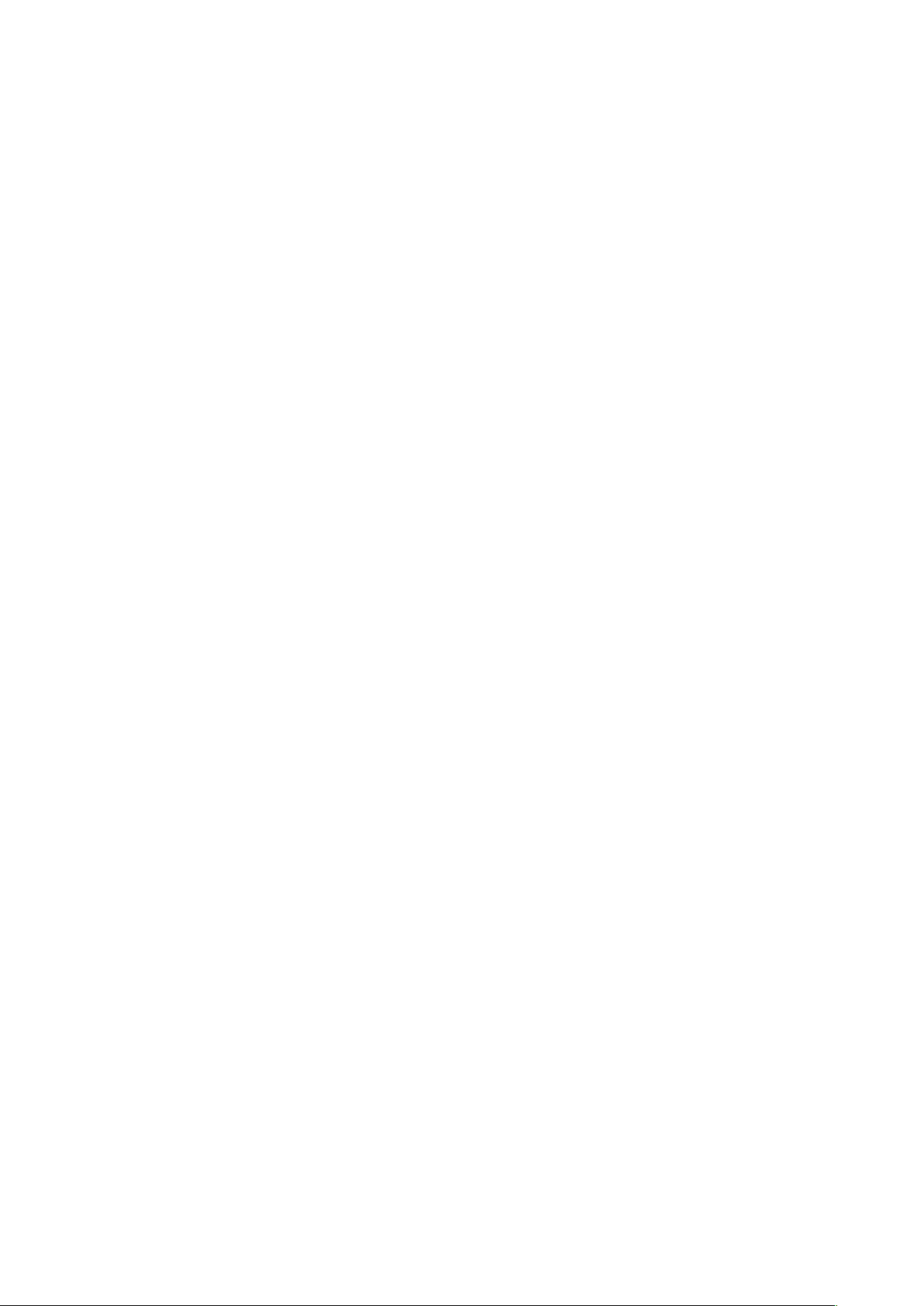
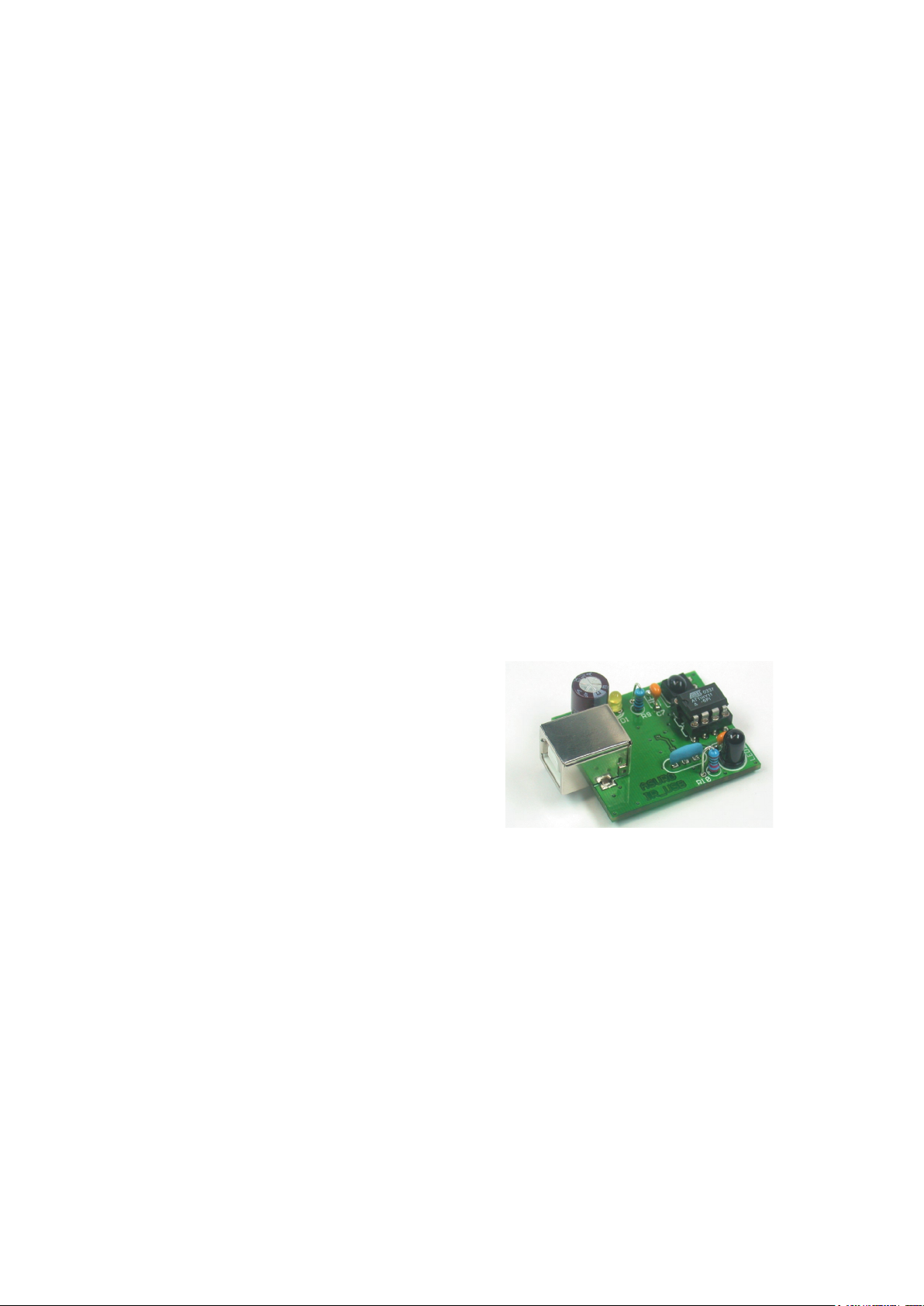
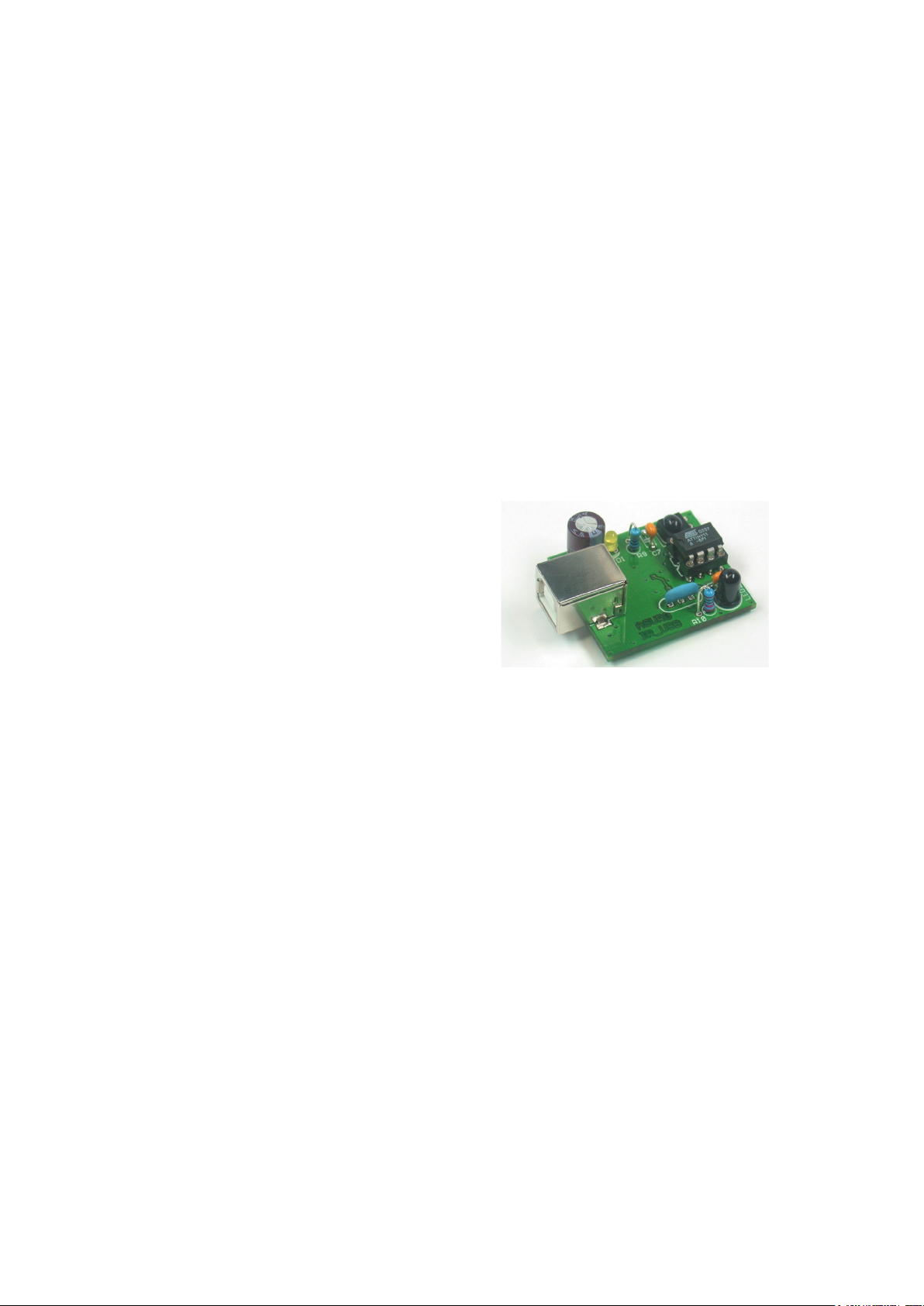
4.2. Fertiggerät USB-Infrarot-Transceiver
Optional ist ein USB-IR-Transceiver als Fertiggerät lieferbar.
Abbildung 4.2.: USB Infrarot-Transceivers
Abbildung 4.4.: Unterseite des USB Infrarot-Transceivers
Abbildung 4.3.: Oberseite des USB Infrarot-Transceivers

ASURO - 16
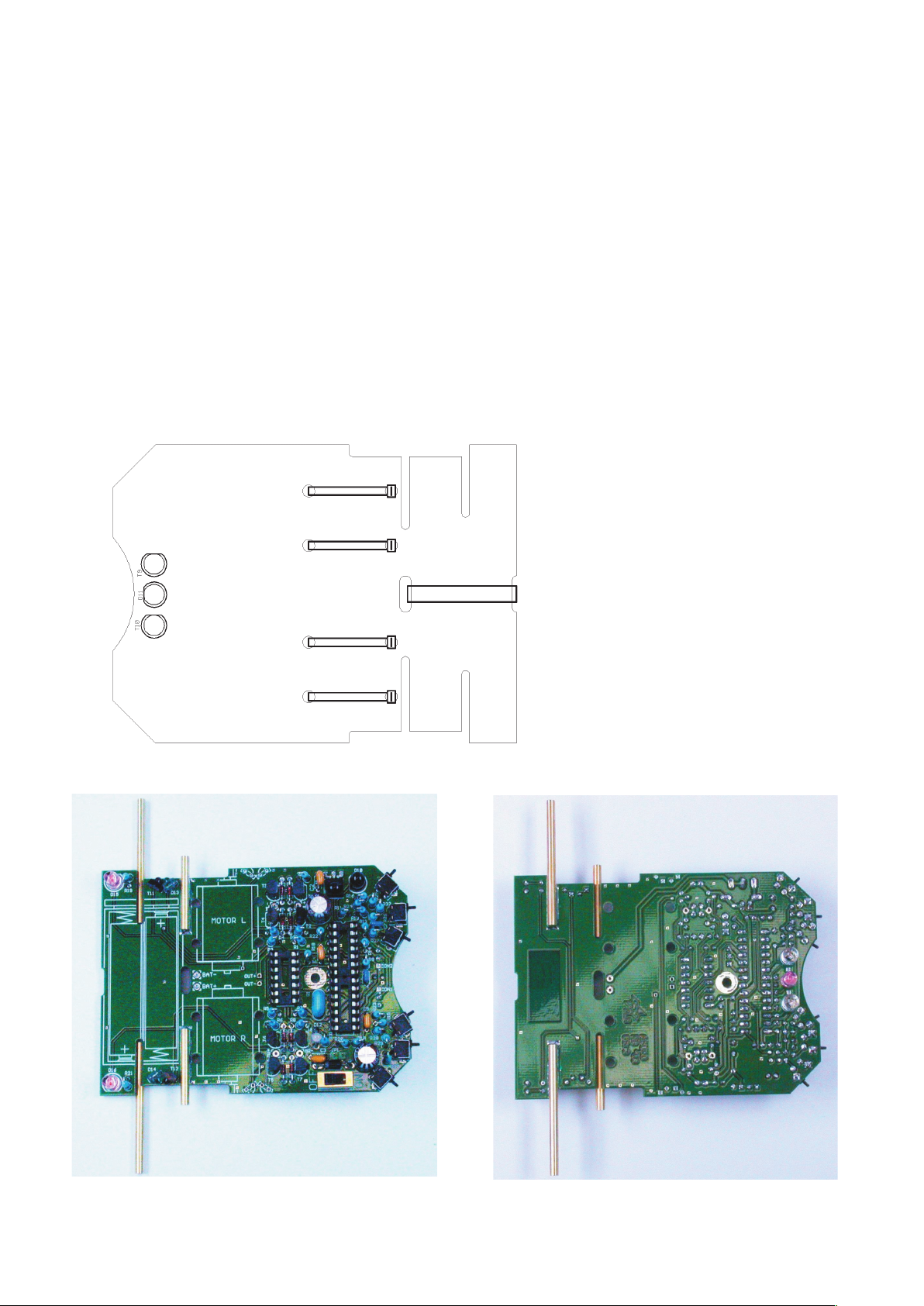
4.3. Bestückung der ASURO-Platine
Die zwei längeren Achsen, die für die zweite Getriebestufe erforderlich sind, werden auf der
Unterseite angelötet oder geklebt.
Die beiden kürzeren liegen auf der Oberseite und weiter Richtung Platinenmitte. Vor dem Einbau
kann man die Achsen an der zu lötenden oder zu klebenden Stelle (nicht auf der Lauf äche) noch
mit einem sehr feinen Schleifpapier (240er Körnung oder mehr) säubern, dann nehmen diese
das Zinn oder den Kleber besser an. Entscheidet man sich für’s Löten emp ehlt sich folgendes
Vorgehen:
Zuerst werden die längeren Achsen befestigt. Dazu legt man die Platine auf die Oberseite, legt die
entsprechende Achse bis zum Anschlag in den ausgefrästen Schlitz. Dabei muss die Achse auf
der ganzen Länge au iegen. Dann verzinnt man die Lötkolbenspitze und drückt damit die Achse
auf die Platine. Sobald die Achse heiß ist, gibt man Lötzinn an den Au agestellen dazu und
verbindet so Achse und Platine. Ist die Achse rundum angelötet, drückt man die Achse mit einem
Schraubendreher weiter auf die Platine und nimmt den Lötkolben weg.
Ist das Ganze erkaltet, lötet man die zweite lange Achse auf der Platinenunterseite fest, danach
kommen nach gleichem Prinzip die Achsen auf der Oberseite dran. Abbildung 4.5. zeigt die Platine
mit montierten Achsen.
Sind die Achsen abgekühlt, werden die Getrieberäder aufgesteckt. Die Zähne der Getrieberäder
müssen gut ineinandergreifen und die Räder müssen sich leicht drehen lassen. Ist dies nicht
der Fall sind entweder die Achsen schief eingelötet und müssen neu ausgerichtet werden (nicht
zur Strafe, nur zur Übung), oder auf den Achsen be ndet sich im Bereich außerhalb der Platine
Lötzinnreste, welche entfernt werden müssen.
Dies geschieht am besten mit einer feinen Feile oder Schmirgelpapier.
Passt alles, werden die Getrieberäder erst mal wieder beiseite gelegt und die restlichen Bauteile
bekommen auf der Platine ihren zukünftigen Arbeitsplatz zugewiesen.
Abbildung 4.5.:
ASURO-Platine mit montierten Achsen
ASURO - 17
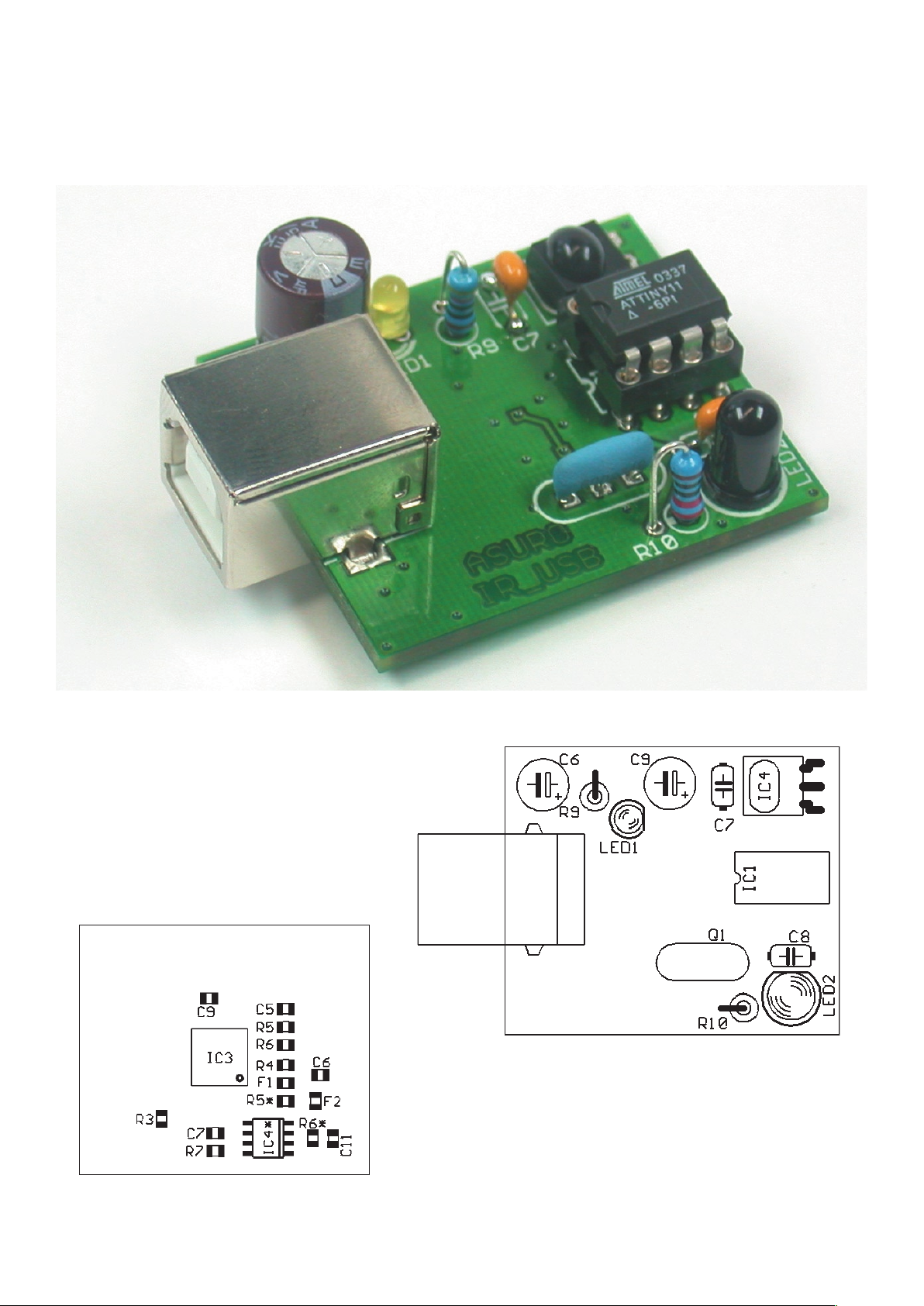
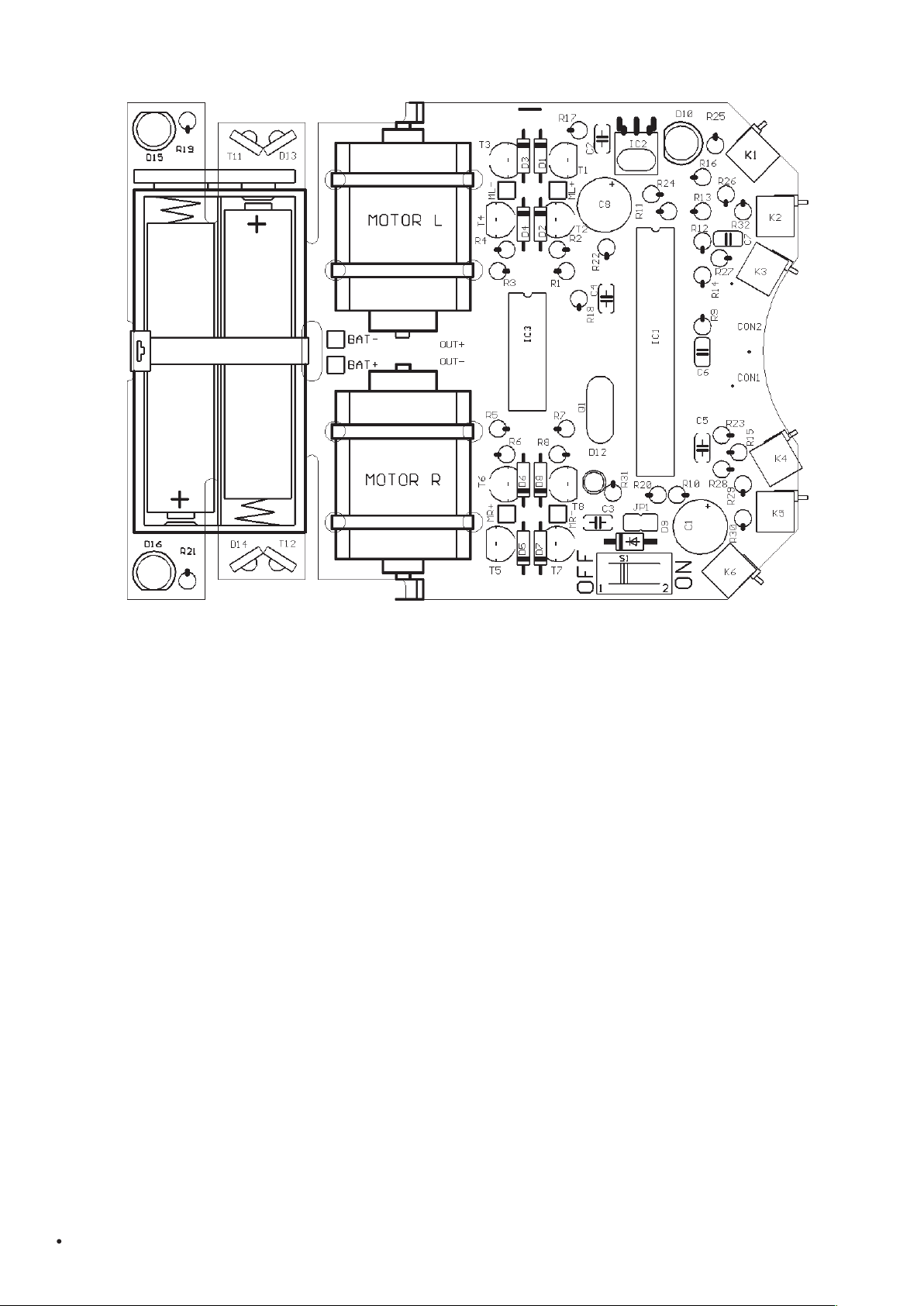
In folgender Reihenfolge wird bestückt:
• IC1: erstmal nur der Sockel, hier werden entweder ein 28poliger (wenn vorhanden) oder zwei
14polige hintereinander eingebaut; auf richtige Polung achten (Kerbe zeigt in Richtung der
Kerbe vom Bestückungsdruck auf der Platine)!
• IC3: auch nur der Sockel, 14polig; auf richtige Polung achten (Kerbe zeigt in Richtung der
Kerbe vom Bestückungsdruck auf der Platine)!
• K1, K2, K3, K4, K5, K6: Sensortaster; müssen möglichst gerade auf der Platine au iegen!
• Q1; Schwinger 8MHz
D1, D2, D3, D4, D5, D6, D7, D8: 1N4148; auf richtige Polung achten!
• D9: 1N4001; auf richtige Polung achten!
• JP1: zweipoliger Pfostenstecker; die kurzen Pins werden eingelötet, der zugehörige Jumper
wird noch nicht aufgesteckt!
• D12: zweifarbige LED, 3mm Durchmesser, drei Anschlussbeinchen, auf
Polung achten
(Markierung kann unterschiedlich sein, in jedem Fall: kürzestes Beinchen muss in
quadratisches Pad)!
• C2, C3, C4, C5: 100nF keramisch; Aufdruck: 104
C6, C7: 4,7nF keramisch; Aufdruck: 472
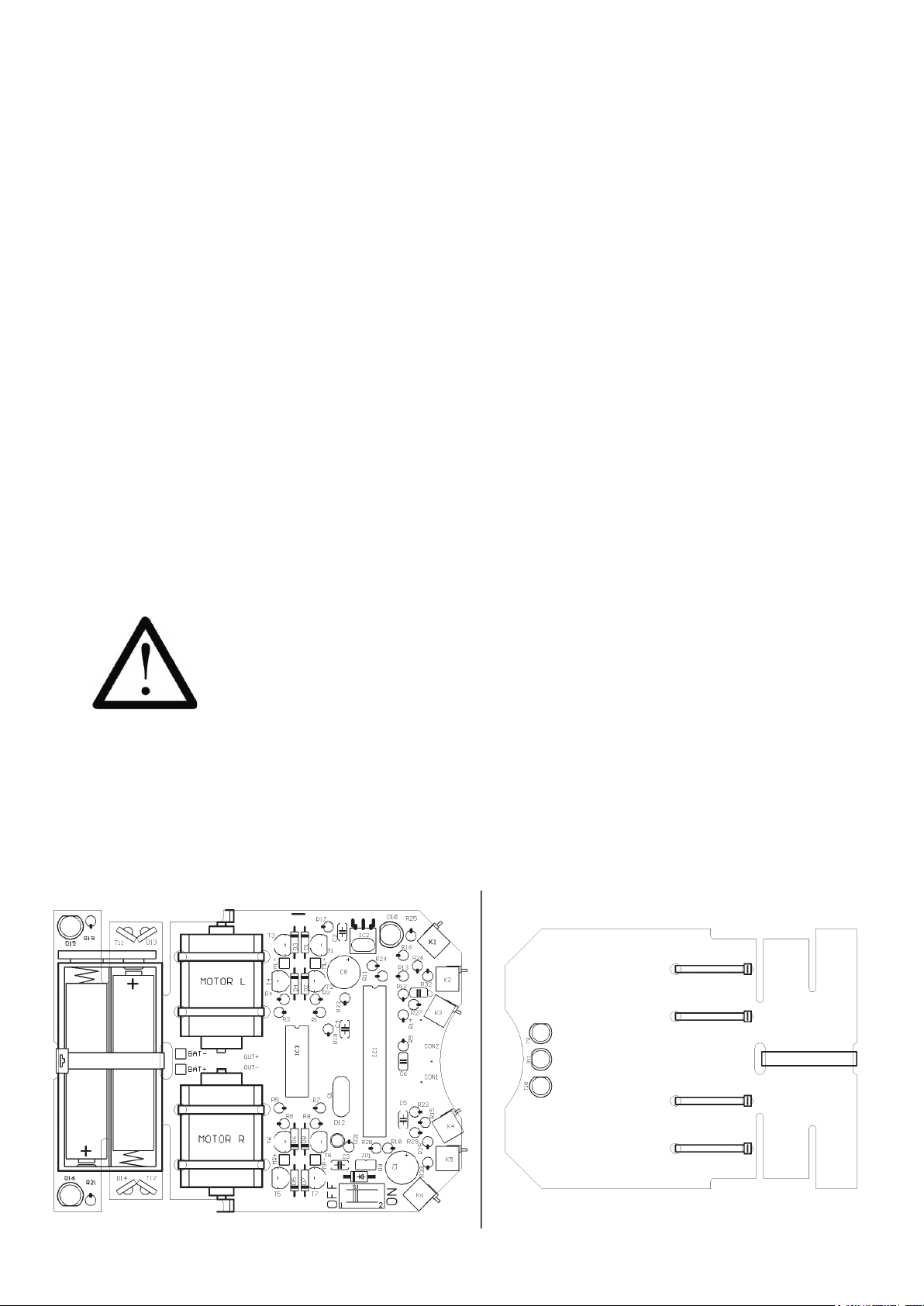
Abbildung 4.6.: Bestückung ASURO Hauptplatine auf der Oberseite

ASURO - 18
• T1, T3, T5, T7: BC327-40 oder BC328-40
• T2, T4, T6, T8: BC337-40 oder BC338-40
• R1, R2, R3, R4, R5, R6, R7, R8, R19, R21, R24: 1k Ohm, 5% (braun, schwarz, rot, gold)
• R9, R16: 220 Ohm, 5% (rot, rot, braun, gold)
• R10, R17, R22, R31: 470 Ohm, 5% (gelb, violett, braun, gold)
• R11: 100 Ohm, 5% (braun, schwarz, schwarz, gold)
• R12: 12k Ohm, 1% (braun, rot, schwarz, rot, braun)
• R13: 10k Ohm, 1% (braun, schwarz, schwarz, rot, braun)
• R14, R15: 20k Ohm, 5% (rot, schwarz, orange, gold)
• R18, R20: 4,7k Ohm, 5% (gelb, violett, rot, gold)
• R23: 1M Ohm, 5% (braun, schwarz, grün, gold)
• R25, R26, R32: 2k Ohm, 1% (rot, schwarz, schwarz, braun, braun)
• R27: 8,2k Ohm, 1% (grau, rot, schwarz, braun, braun)
• R28: 16k Ohm, 1% (braun, blau, schwarz, rot, braun)
• R29: 33kΩ Ohm, 1% (orange, orange, schwarz, rot, braun)
• R30: 68kΩ Ohm, 1% (blau, grau, schwarz, rot, braun)
• C1, C8: Elko 220 F 10V oder mehr, auf richtige Polung achten!
• IC2: SFH5110-36 Infrarot-Empfänger-IC, Beinchen mit Zange abwinkeln! Auf richtige Polung
achten (Seite mit Wölbung muss nach oben weisen) Achtung: elektrostatisch gefährdet
und - wieder der Hinweis für die Hobbyschweißer - hitzeemp ndlich!
• D10: SFH 415-U IR-LED 5mm; schwarzes Gehäuse; auf richtige Polung achten! Gehäuse
sollte auf der Platine au iegen!
• T11, T12: LPT80A, Fototransistor, farbloses
Gehäuse muss auf Platine au iegen, auf richtige Polung achten!
• D13, D14: IRL80A, IR-LED, rosafarbenes, Gehäuse
muss auf Platine au iegen, auf richtige Polung achten!
• D15, D16: LED 5mm rot, rotes Gehäuse, auf richtige Polung achten
(kurzes Bein an markierte Seite)!
• S1: Ein-Aus-Schalter
ASURO - 19
Drei weitere Bauteile werden noch benötigt (sie ermöglichen das Folgen einer Linie), allerdings
werden sie auf der Unterseite der Platine angebracht und von oben her eingelötet (siehe Abb.
4.7.):
• T9, T10: SFH300, Fototransistor 5mm, auf richtige Polung achten!
Diese stehen leicht von der Platine ab.
• D11: LED 5mm rot, rotes Gehäuse, auf richtige Polung achten
(kurzes Bein an markierte Seite)!
Abbildung 4.8. zeigt die soweit bestückte Platine von oben und unten.
Das war’s! Mehr elektronische Bauteile werden nicht benötigt.
Als nächstes werden die elektromechanischen und mechanischen Komponenten montiert.
Abbildung 4.8.: ASURO bestückt von oben und unten
Abbildung 4.7.:
Bestückung der ASURO-Platine auf
der Unterseite
ASURO - 20
4.4. Motormontage
Wenn die Bestückung der ASURO-Platine abgeschlossen ist, müssen nur noch die Motoren mit
Kabeln versehen und provisorisch befestigt werden.
Zum Anschluss der Motoren wird je ein schwarzes und rotes ca. 70mm langes Kabel mit
vorbereitet, so isoliert man die Enden ca. 4mm lang ab, verdrillt sie und verzinnt sie anschließend,
Falls störende
Lötzinnreste am Kabelende übrigbleiben, können diese mit einem Seitenschneider abgeschnitten
werden. Das rote Kabel wird nun an den mit einem roten Punkt oder Pluszeichen markierten
Motoranschluss gelötet, das schwarze an den anderen.
Die Motoranschlusskabel jedes Motors werden noch ver ochten (muss nicht sein, bringt aber
Vorteile bei der elektromagnetischen Verträglichkeit und schaut auch erheblich besser aus...).
Das rote Anschlusskabel des linken Motors wird in “ML+” und das schwarze in “ML-”, das rote des
rechten Motors in ”MR+” und das schwarze in ”MR-” eingelötet.
Jetzt müssen noch die Motoren provisorisch auf der Platine befestigt werden. Dazu zieht man
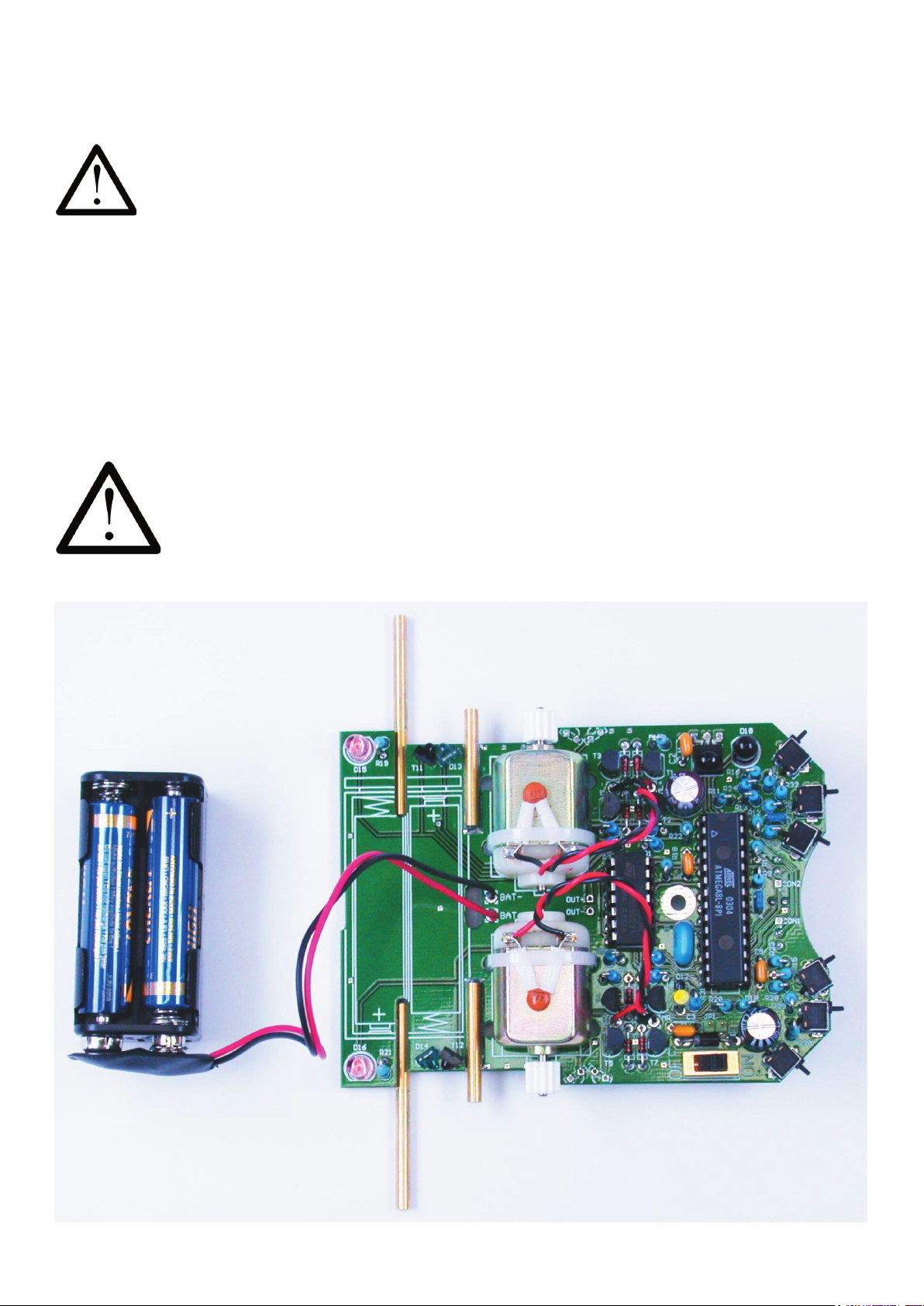
4.5. Stromversorgung
Wenn ASURO mit Batterien versorgt werden soll, ist der Jumper JP1 unbedingt
zu öffnen! Werden Akkus verwendet, so ist er zu schließen. Eine Falschpolung
der Akkus bei geschlossenem Jumper führt zur Zerstörung der Elektronik!
Der Batteriehalter wird (ohne die Batterien) mit seinem roten Kabel in BAT+ und seinem
schwarzen in BAT- festgelötet. Danach wird sichergestellt, dass der Schalter auf OFF steht und
die vier Batterien bzw. Akkus polungsrichtig in den Batteriehalter eingelegt. Der Batteriehalter wird
jetzt gleich oder nach der Inbetriebnahme mit dem größeren (wieder lösbaren) Kabelbinder durch
das Loch in der Platine befestigt.

ASURO - 21
5. Inbetriebnahme und Test
Endlich ist alles zusammengebaut und der Fahrspaß kann beginnen. Zunächst müssen aber noch
die zuvor eingebauten Fehler gesucht, gefunden und beseitigt werden, ohne dabei allzu großen
Schaden anzurichten.
5.1. RS232-Infrarot-Transceiver
Diese Inbetriebnahme gilt nur für den RS232-IR-Transceiver.
Als erstes sollte der RS232-IR-Transceiver auf seine volle Funktionsfähigkeit überprüft werden, da
dieser später für den Selbsttest des Fahrzeugs benötigt wird.
Dazu wird der RS232-IR-Transceiver über das mitgelieferte serielle Verlängerungskabel an eine
freie serielle Schnittstelle angeschlossen.
Danach startet man das Terminal-Programm von Windows “Hyperterminal” (unter Linux
beispielsweise “Minicom”). Normalerweise ndet man es unter Start --> Programme --> Zubehör
--> Kommunikation --> Hyperterminal. Falls es nicht vorhanden ist, muss man es von der
Windows-CD nachinstallieren.
Terminalprogramme stammen eigentlich noch aus der Zeit des Modems und davor, als man
häu ger über die serielle Schnittstelle mit anderen Rechnern kommunizierte. Heutzutage werden
sie vorwiegend dann benutzt, wenn man sich über das Internet rein textbasiert auf einem anderen
Rechner einloggen will.
Nach dem Start von Hyperterminal fragt das Programm nach einem Namen für die neue
Verbindung. Hier kann man ASURO eingeben und ein beliebiges Symbol auswählen. Im nächsten
Fenster wählt man bei “Verbinden über:” die COM-Schnittstelle aus, an der der Transceiver
angeschlossen worden ist. Nach Drücken auf “OK” wählt man
• Bits pro Sekunde: 2400
• Datenbits: 8
• Parität: keine
• Stoppbits: 1
• Flusssteuerung: kein
Danach wieder bestätigen mit “OK”.
Nun den IR-Transceiver ca. 10 cm über ein weißes Blatt Papier halten. Die Bauteile zeigen zum
Papier. Nun munter ein paar Tasten auf der PC-Tastatur gedrückt und das Terminal-Programm
sollte diese Tasten anzeigen. Der IR-Transceiver sendet dabei den Tastendruck über die IRDiode (D5), das am Papier re ektierte Signal trifft auf das Empfänger-IC (IC2) und wird zum
PC übertragen. Kommen gar keine oder falsche Zeichen an, so kann man mit einem kleinen
Schraubenzieher vorsichtig den Trimmer zwischen seinem linken und rechten Anschlag verdrehen
und wieder ein paar Tasten drücken, bis korrekte Zeichen erscheinen.
Das Ganze funktioniert nicht so wie beschrieben? Schade, hier muss wohl ein Fehler vorliegen,
der behoben werden sollte (siehe Abschnitt 6.1).
Zur Sicherheit kann man abschließend den IR-Transceiver wieder abstecken und nochmal ein
paar Tasten drücken. Nun dürfen keine Zeichen mehr erscheinen.
ASURO - 22
5.2. USB-Infrarot-Tranceiver
Achtung! Der ungehäuste USB-Infrarot-Transceiver ist emp ndlich gegen elektrostatische
AREXX ASURO USB-IR-Transceiver”
Administrator erneu anmelden. Es wird nun ein Treiber installiert, damit man unter Windows den
• Bits pro Sekunde: 2400
• Datenbits: 8
• Parität: keine
• Stoppbits: 1
• Flusssteuerung: kein
Danach wieder bestätigen mit “OK”.
Terminalprogramm einige Tasten. Dabei muss die gelbe Leuchtdiode auf der Platine blinken und
ASURO - 23
foo@bar:/>cat /proc/tty/driver/usb-serial
Was eine Ausgabe produzieren muss, die mindestens folgende Einträge aufweist (statt der “0:”
Zum Ausprobieren kon guriert man Minicom auf die Schnittstelle /dev/ttyUSB0 (oder 1, 2 usw...)
• Bits pro Sekunde: 2400
• Datenbits: 8
• Parität: keine
• Stoppbits: 1
• Flusssteuerung: kein
Danach wieder bestätigen mit “OK”.
ttyUSB0 (oder 1, 2...) oder chmod g+rw /dev/ttyUSB0 (auch mit root-Rechten) erfolgen.
ASURO - 24
5.3.
Der Prozessor (IC1) ist zu diesem Zeitpunkt noch nicht eingebaut!
Jetzt die Nackenhaare sträuben, und den Schalter auf ON stellen. Die beiden Back-LEDs
(D15, D16) sollten nun beide leicht glimmen. Ist dies nicht der Fall den Hauptschalter sofort auf
OFF stellen und in Abschnitt
6.3 weiterlesen. Klappt’s? Dann Schalter auf OFF stellen und IC1
(Prozessor) sowie IC3 (AND Gatter) einsetzen (siehe Abb.
5.1).
Evtl. müssen die Beinchen der ICs noch vorsichtig gebogen werden, damit alle Beinchen die
vorgesehene angestammte Position im Sockel einnehmen können. Das klappt am besten, wenn
man das IC seitlich nimmt und die Beinchen leicht gegen eine Tischkante drückt.
Beim Prozessor IC1 ATmega8 und dem Gatterbaustein IC3 CD4081 handelt es
sich um elektrostatisch gefährdete Bauteile. Das bedeutet, dass sie bereits durch
bloßes Anfassen zerstört werden können, sofern man vorher elektrisch geladen
war, was beispielsweise durch Laufen über Teppiche passieren kann. Vor dem
Handhaben dieser Bauteile ist es ratsam, sich mit einem Erdungsband zu erden
oder zumindest das Metallgehäuse eines Gerätes oder die Heizung anzufassen.
Abbildung 5.1.: ASURO nach Einbau der ICs
 Loading...
Loading...