

ASURO ARX-03 User manual [cs]
Stavebnice programovatelného robota
ASURO ARX-03
Obj. č.: 19 14 51
Vážení zákazníci,
děkujeme Vám za Vaši důvěru a za nákup stavebnice programovatelného robota ASURO ARX-03.
ASURO je mobilní mini robot, kompletně programovatelný v jazyku C, který byl vyvinut ke
vzdělávacím účelům v oddělení robotiky a mechatroniky Německého centra pro letectví a
kosmonautiku. Sestavování stavebnice je jednoduché pro zkušené elektrotechniky a zvládnutelné pro
začátečníky. S výjimkou desky plošných spojů (DPS) se ke skládání používají jen standardní součásti.
K programování se používá jen volně dostupný software. Proto se ASURO výborně hodí jako projekt
pro zájemce o hobby elektroniku s ovládacím procesorem, pro vzdělávací projekty na školách a
univerzitách i pro centra vzdělávání dospělých. Ve všech fázích vývoje elektroniky robota a jeho
softwaru byly použity nástroje, které jsou volně dostupné pro soukromé použití, což dokazuje, že
roboty lze vytvořit i bez použití drahých nástrojů a mechanik.
ASURO je vybaven procesorem RISC a dvěma nezávisle ovládanými motory, optickou jednotkou pro
sledování dráhy pohybu, šesti přepínači pro detekci kolize, dvěma odometrickými senzory a sadou pro
infračervenou komunikaci, která umožňuje programování a dálkové ovládání přes PC (viz obr. 0.1).
UPOZORNĚNÍ
• Právo na vrácení výrobku ztrácíte po otevření plastových sáčků obsahujících jednotlivé části
a komponenty.
• Pozorně si přečtěte tento návod ještě předtím, než začnete robota skládat.
• Při manipulaci s nástroji zachovávejte opatrnost.
• Výrobek udržujte mimo dosah dětí. Neskládejte robota v přítomnosti malých dětí.
Mohly by se poranit nástroji, nebo spolknout malé části a komponenty.
• Zkontrolujte správnou polaritu baterií.
• Dejte pozor, aby byly baterie stále suché. Pokud se ASURO namočí, vyjměte baterie
a všechny části co nejlépe vysušte.
• Pokud nebudete robota delší čas používat, vyjměte z něj baterie.
Mechanická část
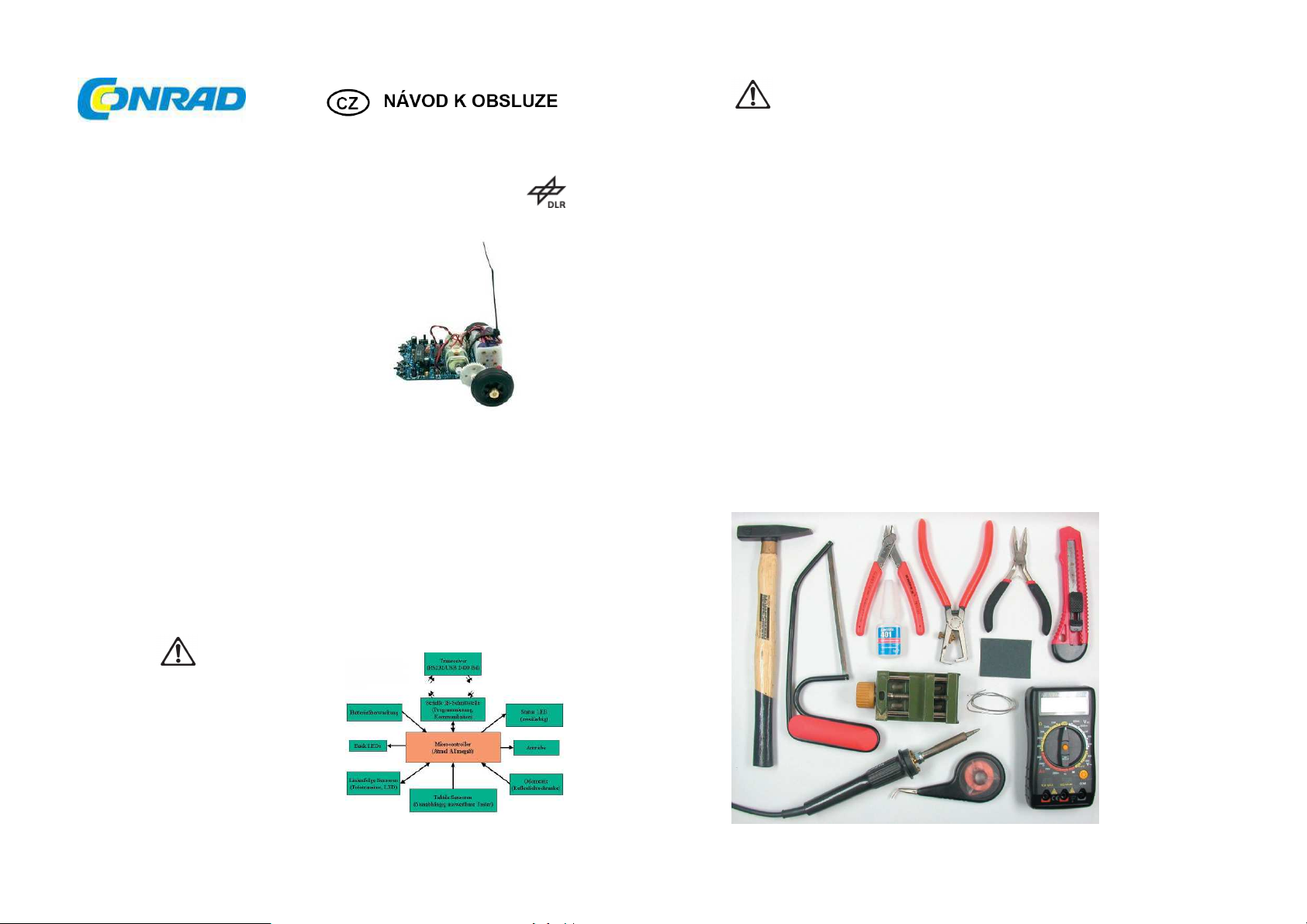
Potřebné nástroje
Kromě součástí stavebnice budete při sestavování robota ASURO potřebovat následující nástroje:
• Držák pro pájení ("Třetí ruka")
• Nůž s odlamovací čepelí
• Malé kladivo
• Jehlové kleště pro práci s elektronikou
• Štípačky na kabely
• Páječku, nebo pájecí stanici (přibližně 20 - 30 W)
• Pájecí drát (1 mm), pokud možno bez olova
• Odpájecí knot (2 - 3 mm) - jen pro odstranění přebytečné pájky
• Lepidlo (buď instantní jednosložkové lepidlo, nebo dvousložkové lepidlo, nebo pistole
pro tavné lepení)
• Počítač: laptop nebo osobní počítač (s operačním systémem Windows, nebo Linux)
• Volitelně: multimetr
* Pro volitelný vysílač - přijímač USB IR může být potřebný USB kabel A - B
Varovný symbol upozorňuje na paragrafy,
které vyžadují důkladné prostudování, aby se
zabránilo poškození některých komponentů nebo
poranění osob.
Všechny uživatele musíme upozornit, že ASURO
není hračka a neměl by se dostat do rukou dětí
mladších 3 let, protože obsahuje množství malých
součástí a hrozí nebezpečí jejich spolknutí.
Opatřete si prosím nějaké baterie a začněte se
skládáním.
A ještě něco: ASURO je jen jiný způsob jak říct:
"Další malý a unikátní robot z Oberpfaffenhofenu!"
Obr. 0.1 Blokové schéma ASURO (viz také příloha E)
Obr. 1.1 Potřebné nástroje
Příprava mechanické části
Nejdříve je potřebné zkontrolovat úplnost celé stavebnice. Seznam všech dílů je uveden v příloze A.
Dříve než přistoupíme k práci s elektronikou, musíme ještě provést určitou mechanickou přípravu.
Takže začínáme.
Pastorek motoru
Výkon motoru se převádí na převod pomocí malých ozubených kol (s ozubením 1,9 mm), které
se musí nasunout na nápravu motoru. Zaoblenou stranu ozubeného kola položte na rovný povrch
a nápravu motoru natlačte jemně do otvoru ozubeného kola, aniž byste přitom použili příliš síly.
Pro úplné zasunutí nápravy motoru do ozubeného kola můžete použít malé kladívko.
Položte ozubené kolo na nějaký měkčí povrch (např. kartonový papír) a kladívkem jemně
poklepejte na zadní stranu nápravy motoru (viz obr. 2.1).
Nápravy
Nápravy jsou vyrobeny z mosazné tyče. Potřebujeme dva páry náprav, v délce 24,5 mm, resp. 42,0
mm. Nápravy v patřičné délce jsou součástí dodávky.
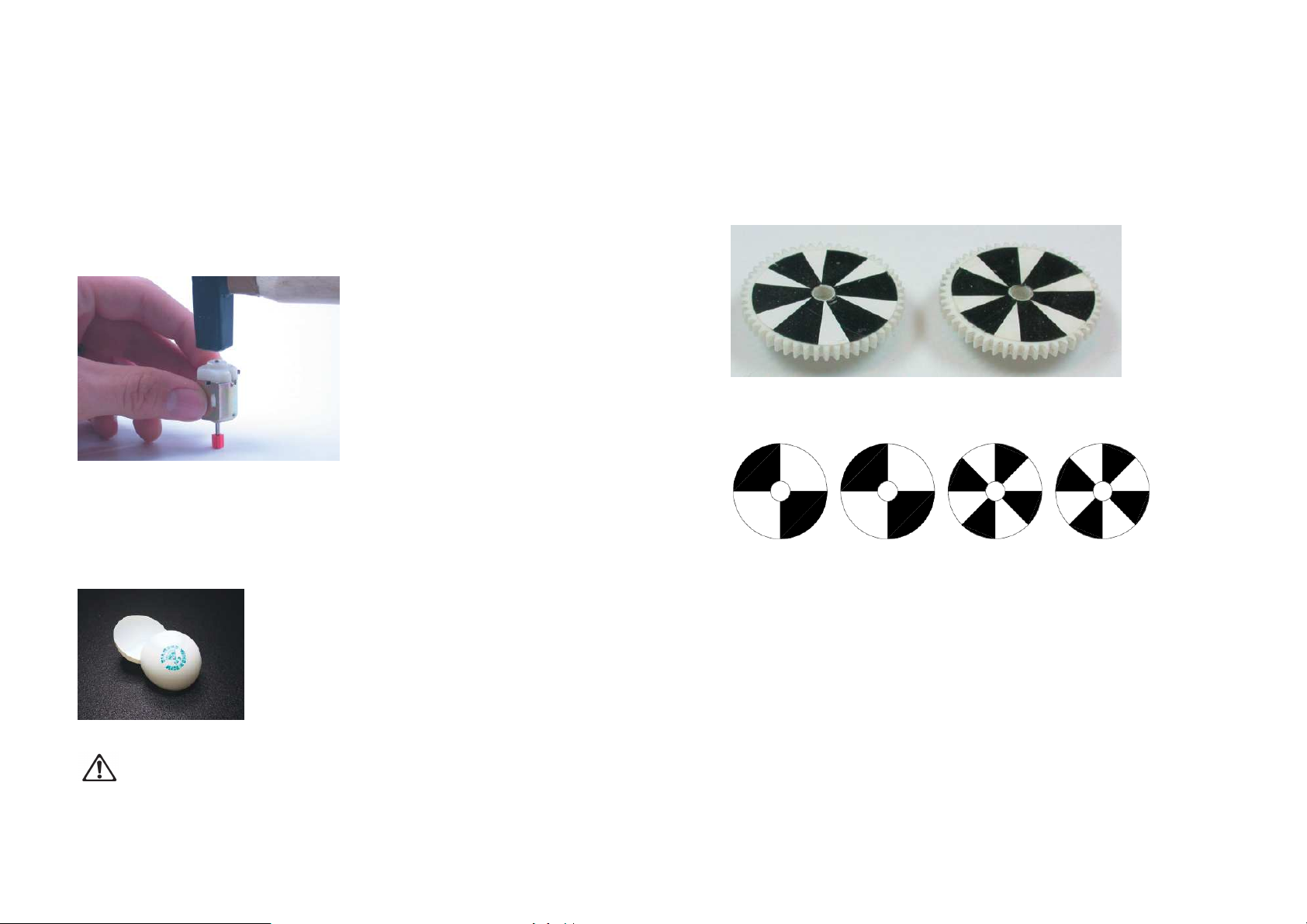
Senzory kol
Odometr, který se skládá z diody emitující světlo (LED) a fototranzistoru, směruje dopředu na černé
a bílé značky na ozubeném kole 50/10.
Kompletní sada nalepovacích terčíku odometru je součástí stavebnice. Nalepte je na ozubené kolo
50/10, jak ukazuje obrázek 2. 3. Kvůli kompatibilitě s jinými roboty ASURO (demo programy)
doporučujeme použít terčíky senzoru se 6 černými a bílými prvky.
Obr. 2.1: Montáž pastorku motoru.
Pingpongový míček
ASURO je navržen tak, aby se klouzal na půlce pingpongového míčku, který se musí připravit.
Nejlepší bude, když vezmete celý pingpongový míček a pilkou, nebo odlamovacím nožem jej
rozřežete na dvě půlky. Hrany rozřezaného míčku můžete vyčistit pilníkem nebo smirkovým papírem.
To je vše!
Obr. 2.2 Pingpongový míček
Nepoužívejte elektrické nástroje, jako např. elektrickou pilku, nebo elektrický nůž.
Pingpongový míček se může lehce vznítit.
Obr. 2. 3 Doporučované terčíky na ozubených kolech
Čím více prvků na terčík namalujete, tím přesněji se bude registrovat rychlost ozubeného kola a tím
lépe bude fungovat ovládání rychlosti. Velký počet černých a bílých prvků však snižuje rozdíly mezi
světlem a tmou (viz obr. 2. 4).
Obr. 3. 4: Příklady označení ozubených kol
Tím jste dokončili mechanickou přípravu.

Elektronická část
NEBEZPEČNÝ KONEC
Pokyny k pájení
ASURO má větší množství součástí určených k připojení (na rozdíl od menšího počtu součástek,
jejichž vývody se pájí přímo na povrch DPS. Obr. 3. 1 ukazuje nejmenší dostupné pouzdro procesoru
IC v ASURO a pouzdro, které se připojuje. Čip uvnitř obou pouzder je však stejný! I když je pájení
připojených součástí snadné a pohodlné, obzvláště nezkušené osoby musí zvážit některá preventivní
opatření.
Deska plošných spojů musí být samozřejmě během pájení odpojena od napájení.
Nestačí jen vypnutí!! Odstraňte baterie a odpojte zdroje proudu.
Pájecí hrot, pájka a teplota
Obrázek 3. 2 ukazuje základy pájení. Horké místo pájeného zařízení dosahuje při pájení olověnou
pájkou teplotu kolem 360 ºC a při použití bezolovnatých pájek kolem 390 ºC, přičemž pájení náprav
lze provádět i při vyšších teplotách (420ºC). Elektronika by se měla pájet s miniaturním hrotem,
zatímco pro pájení náprav se musí použít hrotem s větší pájecí plochou.
Použijte lehce navlhčenou pájecí houbu a naneste trochu pájky na horký pájecí hrot.
Krátce před prvním použitím pájecího zařízení nebo po přestávce v pájení se musí
z pájecího hrotu odstranit stará pájka.
Použijte pájku s průměrem 0,8 nebo 1 mm pro práci s elektronikou.
Obr. 3. 1: Porovnání největšího a nejmenšího pouzdra pro čip ATmega8L
OBR. 3. 2: Základ pájení
Při pájení se vytváří kouř, který může poškodit zdraví. Nedýchejte vznikající plyny, resp.
pracujte pod odsavačem par. Používáním kalafuny, resp. pájky, která není určena pro
elektroniku, můžete zničit pájené komponenty.
Příprava částí
Pájení malých částí vyžaduje určitou zkušenost a fortel dostat s k místům pájení. Pokud jste už někdy
letovali, možno jste zjistili, že byste přitom potřebovali ještě jednu ruku (tento problém může částečně
vyřešit používání držáku, kterému se říká třetí ruka).
Některé součásti (tranzistory, LED, integrované obvody, přepínače, kondenzátory a propojky) jsou
již připraveny k nasazení na DPS, zatímco diody a rezistory musíte nejdříve připravit pro upevnění
na DPS.
Rezistory se do robota vkládají svisle. Jeden vývod rezistoru přitom nechte v původní poloze a druhý
ohněte o 180º. Aby se rezistor nepoškodil, musí se ohýbání provést v zakřivení s průměrem 2,5 mm
a ve vzdálenosti několika milimetrů od těla rezistoru.
Diody se vkládají ve vodorovné poloze. Oba vývody se přitom musí ohnout (např. kleštěmi) v takové
vzdálenosti, aby vedly do otvorů na DPS.
Prvky jako procesor IC1 ATmega, IC3 CD4081 a IR-přijímač IC2 SFH5110-36 jsou citlivé na
elektrostatický výboj. Pokud jste nabiti elektřinou (např. chozením po koberci), můžou se tyto
části poškodit pouhým dotykem, nebo dokonce když se k nim co i jen přiblížíte rukou. Před
manipulací s těmito komponenty byste se měli nejdříve vybít pomocí antistatického náramku.
Obr. 3. 3: Části se zahnutými vývody
A. Součástka
B. Vývod, pájecí podklad a ohnuté místo se musí
zahřívat současně
C. Pájka se musí dostat do otvoru
D. Pájka
E. Zahnutá část bez hran
F. Pájecí hrot
G. Dokonalý pájecí kužel
H. Zahnuté vývody, které zabrání, aby součástka
vypadla z DPS
I. Začátek ohybu v určité vzdálenosti od součástky
Obr. 3. 4: Vytvoření čistého pájecího spoje
Pájení součástek
Když jsou připraveny drátové vývody, je třeba připevnit součástky k metalizovaným otvorům na desce
plošných spojů (DPS) a součástky, které mají jen dva nebo tři vývody roztáhnout. Zahnutí vývodů
na zadní straně DPS zabrání, aby součástka vypadla. V případě součástek s více vývody, např. patic
pro integrované obvody, bude úplně postačovat, když se zahnou dva diagonálně proti sobě položené
vývody.
Po připevnění součástky zahřejte pájecím hrotem současně vývod a pájecí podklad. Zároveň musíte
přidat malé množství pájky. Roztavená pájka poteče do metalizovaného otvoru. Přidejte trochu pájky,
dokud nebude otvor zcela zaplněn (viz obr. 3. 4). Nyní odstraňte přebytečnou pájku a páječku.
Se součástkou ani s DPS nehýbejte, dokud spoj nevychladne a nebude pevný. Jestliže se během
tuhnutí spoje se součástkou pohne, bude to mít za následek, že spoj bude nespolehlivý a bude
docházet k občasným selháním.
Špatně letované spoje poznáte podle kulatých kapek pájky na podkladě nebo podle matného povrchu
(v případě bezolovnaté pájky bude povrch dokonce extrémně matný) a musí se letovat znova.
Při vkládání patic a jiných součástek, které se vkládají na DPS vodorovně, můžete použít následující
trik: Nejdříve přiletujte jen jeden vývod součástky. Poté zatlačte součástku lehce dolů, zatímco
zahříváte stejný podklad (Pozor: součástka může být velmi horká). Součástka si nyní sedne
na povrch desky a zůstane v pevné poloze. Nyní naletujte všechny ostatní kontakty a nakonec znova
nějakou extra pájkou ještě první kontakt.
Po přiletování součástky byste měli přebývající části vývodů useknout štípačkami. Vývody usekněte
těsně u DPS a dávejte přitom pozor, abyste vývody nevytrhli nebo na ně netlačili.
Při stříhání drátů dávejte pozor na odlétávající kousky ostrých okrajů drátů.
Svisle montované součástky se samozřejmě nesmějí navzájem dotýkat,
a pokud jste je umístili příliš blízko sebe, musí se ohnout od sebe.
Odpájení
Pokud se náhodou stane, že se součástka dostane na místo, kam nepatří, tak ji musíte odstranit.
Jak jste mohli očekávat, ASURO má oboustrannou DPS s metalizovanými otvory, díky čemuž je
odstraňování součástek jednodušší.
Může být pro vás užitečné:
Do pájky součástky, která se musí odstranit, přidejte trochu nové pájky. Když jsou všechny pájené
spoje součástky zahřáté, pokuste se kleštěmi odstranit součástku z DPS. Nakonec můžete pájku
snadno odstranit pomocí odsávacího knotu.
Odpájecí knot položte na pájku (viz krok 1 a 2, níže). Můžete tak udělat, dokud je ještě součástka na
DPS! Zahřejte zároveň knot i pájku. Po určitém zahřátí knot nasaje pájku do měděného pletence.
V tomto momentu odstraňte rychle páječku i knot.
Pokud zbyla ještě pájka na druhé straně otvoru, můžete ji odstranit stejným způsobem.
• IC2: Infračervený přijímač IC SFH5110-36, vhodnými kleštěmi ohněte vývody! Věnujte pozornost
polaritě (ohyb se musí udělat směrem ven)! Pozor: Součástka se může poškodit elektrostatickým
výbojem (ESD) nebo teplem při pájení!
• X1: 9 pol. Konektor SUB-D, pouzdro se musí osadit do blízkosti DPS. Přiletovat se musí také
připevňovací pásy.
• IC1: vložte NE555P, věnujte pozornost polaritě!
Krok 1
Přiložte měděný pletenec na pájku
komponentu, který se musí odstranit.
Krok 2
Odstraňte současně páječku i měděný
pletenec.
Zahřejte pletenec i pájku a pletenec
nasaje pájku.
Sestavování elektroniky
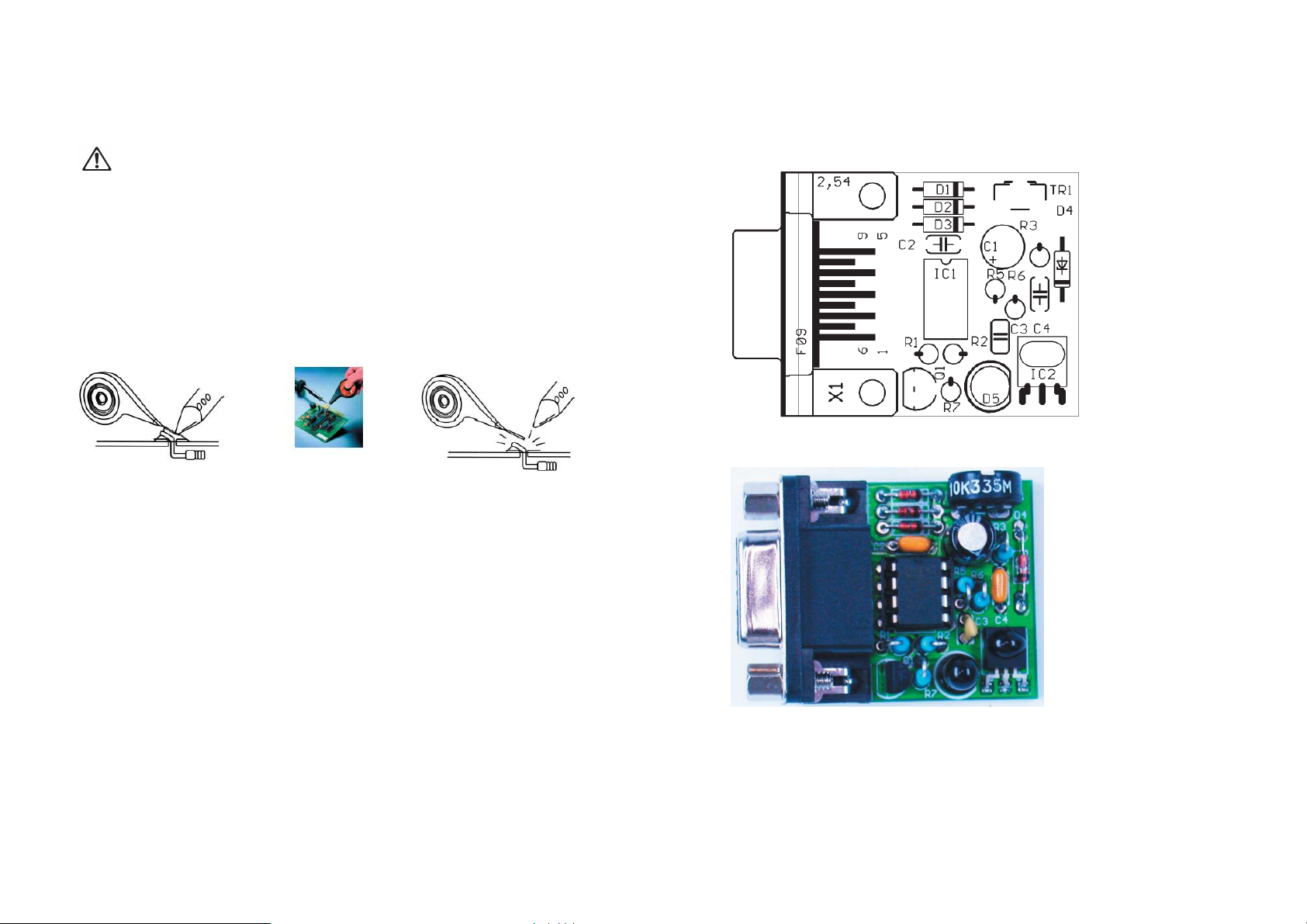
Sestavení infračerveného vysílače RS232
• IC1: Nejdříve vložte 8 pólovou patici. Označení polarity na patici (lehce asymetrické) musí
odpovídat označení příslušných symbolů na DPS.
• D1, D2, D3: 1N4148, věnujte pozornost polaritě! Přečtěte si popisky na součástkách a dávejte
pozor, abyste je nezaměnili za ZPD5.1 nebo BZX55-C5V1!
• D4: ZPD5.1 nebo BZX55-C5V1, věnujte pozornost polaritě! Přečtěte si popisky na součástkách
a dejte pozor, abyste je nezaměnili za IN4148!
• D5: SFH-415-U IR LED (černá dioda) - věnujte pozornost polaritě a zatlačte ji dolů na DPS.
• C1: 100 µF, alespoň 16 V, věnujte pozornost polaritě!
• C2, C4: keramický kondenzátor, 100 nF, potisk: 104
• C3: keramický kondenzátor, 680 pF, potisk: 681
• Q1: BC547 (A, B nebo C) nebo BC548 (A, B nebo C)
• R1, R5: 20 kΩ (červený, černý, oranžový, zlatý)
• R2: 4,7 kΩ (žlutý, fialový, červený, zlatý)
• R3: 470 Ω (žlutý, fialový, černý, zlatý)
• R6: 10 kΩ (hnědý, černý, oranžový, zlatý)
• R7: 220 Ω (červený, červený hnědý, zlatý)
• TR1: 10 kΩ rezistor s proměnnou hodnotou
Nakonec zkontrolujte, jestli na DPS nedošlo ke zkratům a k chybám v polaritě.
Zkontrolujte kvalitu pájených spojů a špatné spoje znovu přiletujte.
Obr. 4. 4: Sestavený IR vysílač
Pokud je vysílač RS-232-IR připraven k propojení s ostatními součástkami,
bude vypadat jako výše uvedený obrázek.

Sestavení IR USB vysílače
Obr. 4. 2: Infračervený USB vysílač
Obr. 4. 3: Strana s komponenty IR USB vysílače Obr. 4. 4: Spodní strana IR USB vysílače
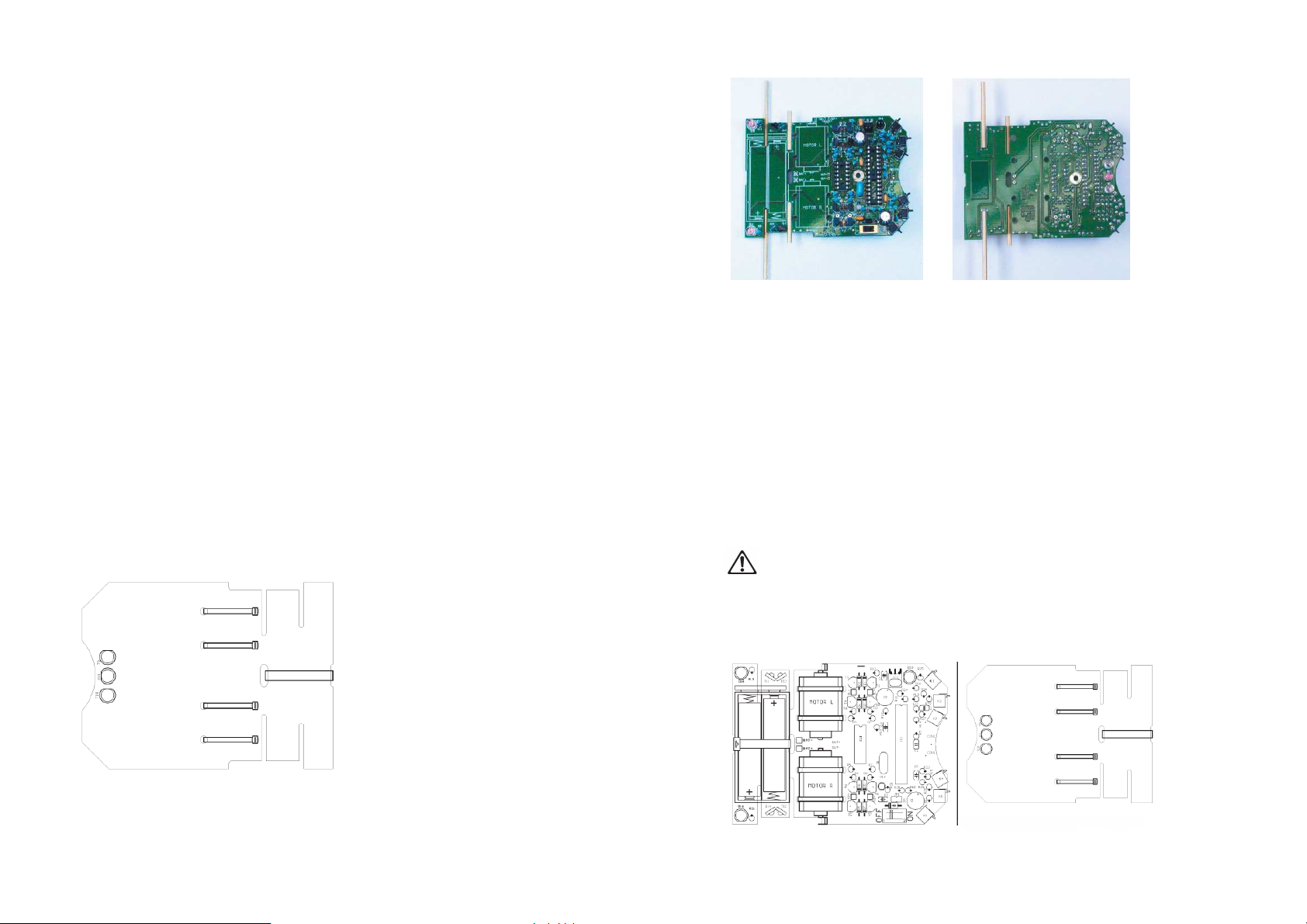
Vkládání součástek na desku plošných spojů robota ASURO
Dvě delší nápravy, které budou potřebné k druhé části převodovky, se přiletují, nebo přilepí
na spodní stranu DPS. Nejlepším řešením bude pájení, protože spoj ztvrdne mnohem rychleji
než při lepení a pokud to bude potřebné, můžete jej později vždy snadno opravit.
Dvě kratší nápravy se musí připevnit na horní stranu DPS blíže ke středu desky. Před připojením
se nápravy musí vyčistit na pájené, nebo lepené straně (ale ne na straně kde jsou kola) jemným
sirkovým papírem (číslo zrnitosti 240 nebo vyšší), aby se zlepšila přilnavost pájky, resp. lepidla.
Pokud se rozhodnete pro pájení těchto částí, postupujte podle následujících kroků:
Nejdříve se připojí delší nápravy. Položte DPS na stůl, spodní stranou nahoru a delší nápravu vložte
do žlábku. Zatlačte ji celkem až na konec žlábku. Náprava by měla ležet rovně v délce žlábku.
Namočte pájecí hrot do nějaké pájky a zatlačte jej na nápravu. Když se náprava zahřeje, musíte přidat
pájku na pájený podklad pod nápravou. Po dokončení pájení můžete dát páječku pryč, zatímco
pomocí šroubováku tlačíte nápravu směrem dolů, dokud pájený spoj zcela nevychladne.
Opakujte stejný postup pro připojení druhé dlouhé nápravy. Otočte DPS a zopakujte celý proces
i s oběma krátkými nápravami. Na obr. 4. 3 je zobrazena DPS se 4 připojenými nápravami.
Po ochlazení se k nápravám můžou připojit kola. Ozubena kola musí přesně sedět a kola se musí
snadno otáčet. Jestliže se kola neotáčejí lehce, byly zřejmě nápravy připojeny chybně a celou operaci
budete muset opakovat. V případě, že na povrchu nápravy zůstaly v části pro připevnění kol
připevněny nějaké zbytky pájky, musí se odstranit smirkovým papírem, nebo jemným pilníkem.
Pokud se kola otáčejí lehce, můžete je odstranit a dát na stranu, aby se na DPS mohly vkládat
elektronické součástky.
Obr. 4. 3: DPS ASURO s připevněnými nápravami
Obr. 4. 2: Pohled na vkládání součástek na horní stranu DPS-ASURO
• IC1: Nejdříve vložte jenom patici (buď jednu patici DIP s 28 konektory, nebo dvě patice DIP14).
Věnujte pozornost polaritě! Označení polarity na patici a symboly polarity na DPS jsou trochu
asymetrické!
• IC3: Opět vložte jenom patici (DIP14). Věnujte pozornost polaritě! Označení polarity na patici
a symboly polarity na DPS jsou trochu asymetrické!
• K1, K2, K3, K4, K5, K6: Senzorové spínače, které se musí namontovat plochou na povrch DPS!
• Q1: Rezonátor 8 MHz
• D1, D2, D3, D4, D5, D6, D7, D8: Dioda 1N4148; věnujte pozornost polaritě!
• D9: N4001; věnujte pozornost polaritě!
• JP1: Propojka; Krátké kolíky, které se budou pájet. Zatím nepoužijte spojovací prvek propojky.
• D12: Dvoubarevná LED, průměr 3 mm, tři vývody; věnujte pozornost polaritě! (polarita se může
lišit součástka od součástky, ale nejkratší vývod se musí vložit čtvercového pájeného podkladu)!
• C2, C3, C4, C5: 100 nF, keramika; Potisk: 104
• C6, C7: 4,7 nF, keramika; Potisk: 472
• T1, T3, T5, T7: BC327-40 nebo BC328-40
• T2, T4, T6, T8: BC337-40 nebo BC338-40
• R1, R2, R3, R4, R5, R6, R7, R8, R19, R21, R24: 1 kΩ (hnědý, černý, červený, zlatý)
• R9, R16: 220 Ω (červený, červený, hnědý, zlatý)
• R10, R17, R22, R31: 470 Ω (žlutý, fialový, hnědý, zlatý)
• R11: 100 Ω (hnědý, černý, hnědý, zlatý)
• R12: 12 kΩ (hnědý, červený, oranžový, zlatý)
• R13: 10 kΩ (hnědý, černý, oranžový, zlatý)
• R14, R15: 20 kΩ (červený, černý, oranžový, zlatý)
• R18, R20: 4,7 kΩ (žlutý, fialový, červený, zlatý)
• R23: 1 MΩ (hnědý, černý, zelený, zlatý)
• R25, R26, R32: 2 kΩ (červený, černý, černý, hnědý, hnědý)
• R27: 8,2 kΩ (šedý, červený, černý, hnědý, hnědý)
• R28: 16 kΩ (hnědý, modrý, černý, červený, hnědý)
• R29: 33 kΩ (oranžový, oranžový, černý, červený, hnědý)
• R30: 68 kΩ (modrý, šedý, černý, červený, hnědý)
• C1, C8: Elco 220_F 10 V nebo vyšší hodnoty; věnujte pozornost polaritě!
• IC2: Infračervený přijímač-IC SFH5110-36, Vývody ohněte jehlovými kleštěmi! Věnujte pozornost
polaritě (strana se zakřivením ve tvaru kupole musí být směrovat směrem ven)! Pozor: Součástka
se může poškodit elektrostatickým výbojem (ESD) nebo teplem při pájení!
• D10: SFH 415-U IR-LED 5 mm; černé pouzdro; věnujte pozornost polaritě! Pouzdro se musí
usadit vedle DPS.
• T11, T12: LPT80A, fototranzistor, bezbarvé pouzdro; věnujte pozornost polaritě! Pouzdro se musí
usadit vedle DPS.
• D13, D14: IRL80A, IR-LED, růžové pouzdro; pouzdro se musí usadit vedle DPS. Věnujte
pozornost polaritě!
• D15, D16: LED 5 mm, červené, růžové, resp. červené pouzdro. Věnujte pozornost polaritě! (krátký
vývod se musí vložit na značku)!
• S1: Přepínač On/Off
Budou potřebné ještě tři další součástky (které slouží pro sledování dráhy), ale budou se vkládat na
spodní stranu DPS a musí se pájet na horní straně (viz obr. 4. 5).
• T9, T10: Fototranzistor SFH300 5 mm. Věnujte pozornost polaritě! Tyto komponenty se musí
ukládat ve stejné vzdálenosti od DPS.
• D11: 5 mm LED, červená, červené nebo červenohnědé pouzdro; Věnujte pozornost polaritě!
(krátký vývod se musí vložit na značku)!
Na obr. 4. 6 je přehled DPS se všemi do této chvíle vloženými součástkami při pohledu seshora
a zespodu.
Obr. 4. 6: Kompletně osazena horní a spodní strana DPS
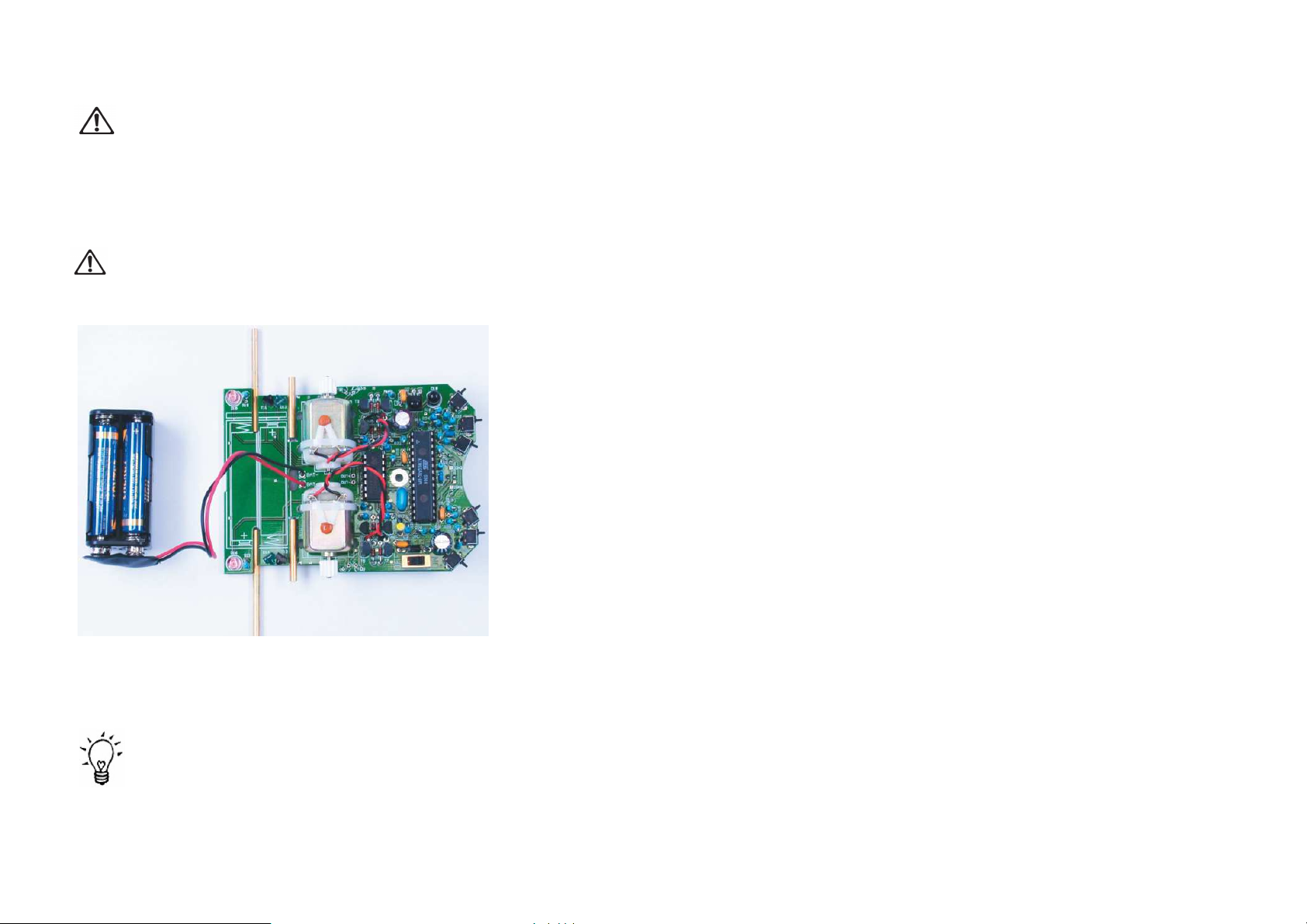
Připojení motorů
Po dokončení vkládání součástek na DPS musíme připojit kabely k motorům a motory dočasně
připojit, abychom provedli několik zkoušek.
Pro napájení motorů elektrickou energií budeme pro každou svorku potřebovat 70 mm červený
a černá drát. Čtyři dráty určené pro dva motory se musí na obou koncích odizolovat asi v délce
4 mm. Konce drátů musíte zkroutit a předběžně přiletovat nějakou pájkou. Přebytečné kousky
pájky, které zůstanou na konci drátů, můžete uříznout štípacími kleštěmi. Pájením se připojí červený
drát ke svorce motoru označené tečkou, nebo znakem plus. Černý drát se připojí k druhé svorce.
Dráty motorů se mohou zakroutit (není to nezbytné, ale snižuje se tím citlivost na elektromagnetické
rušení a vypadá to lépe…).
Červený drát motoru na levé straně se musí přiletovat k portu označenému jako "ML+", černý drát
k portu "ML-", červený drát na pravé straně se musí přiletovat k portu "MR+" a černý drát k portu
"MR-". Dále musíme motory dočasně připojit k DPS vázací páskou kabelů. Vázací pásky, které jsou
součástí dodávky, prostrčte přes dva otvory. V této fázi bude postačovat, když upevníte jenom
2 vnitřní vázací pásky.
Napájení
Pokud se má ASURO vybavit a provozovat s bateriemi, musí se v každém případě otevřít
propojka JP1! Jestliže se rozhodnete požívat nabíjecí akumulátory, propojka se musí zavřít.
Opačným uložením článků při zavřené propojce se zničí elektronické součástky!
Červený drát držáku baterií přiletujte ke svorce "BAT+" a černý drát ke svorce "BAT-". Dávejte pozor,
aby byl přepínač ON/OFF v poloze OFF. Čtyři napájecí články vložte při dodržení správné polarity do
schránky pro baterie. Nyní, nebo po dokončení zkoušek se schránka s bateriemi musí pomocí větší
vázací pásky připevnit k otvoru v DPS.
Obr. 4. 5: Vkládání součástek na spodní stranu DPS-ASURO
Obr. 4. 7: Pohled na horní a spodní stranu DPS

Příprava k uvedení do provozu
Po dokončení montáže uvedeme robota do pohybu. Nejdříve však musíme najít a odstranit chyby,
ke kterým mohlo dojít v předchozí fázi, aby se žádná součástka nepoškodila.
Infračervený vysílač RS232
Následující provozní zkouška se týká jenom infračerveného vysílače RS232 (obr. 4. 8). Nejdříve
ze všeho se musí IR vysílač RS232 zkontrolovat, protože jej budeme potřebovat k dalšímu kroku,
který představuje samočinný test systému. K této zkoušce připojte IR vysílač pomocí přiloženého
9 - pólového prodlužovacího kabelu k volnému sériovému portu PC a ve Windows otevřete program
"Hyperterminal" (nebo "Minicom" v Linuxu). Za normálních okolností byste měli tento program najít
v kategorii Addons --> Communication --> Hyperterminal. Není-li program dostupný, můžete
jej nainstalovat z CD s Windows.
Po otevření programu Hyperterminal budete vyzváni k určení názvu připojení. Můžete si zvolit
ASURO, nebo nějaký jiný název. V dalším okně vyberte "connect by" (způsob připojení) a COM
rozhraní, ke kterému byl vysílač v předchozím kroku připojen.
Poté stiskněte "OK" a zvolte následující nastavení:
• Bits pro Second: 2400
• Databits: 8
• Parity: none
• Stopbits: 1
• Flowcontrol: none
Znovu stiskněte "OK" pro potvrzení nastavení.
Podržte IR vysílač ve vzdálenosti 10 cm nad listem bílého papíru. Strana s komponenty musí
směrovat k papíru.
Stiskněte několik kláves na počítačovém terminálu.
Program terminálu by měl normálně zobrazovat symboly kláves. IR vysílač přenáší symboly kláves
pomocí IR diody (D5), přenášený signál se odráží od povrchu papíru a směruje zpět na přijímač
integrovaného obvodu (IC2), z kterého se vrací zpět do počítače. Pokud se symboly nezobrazují,
nebo se zobrazují špatné symboly, opatrně otočte trimrem v rozmezí jeho krajních poloh.
Miniaturním šroubovákem poklepejte v každé poloze trimru na několik kláves, dokud se nezobrazí
správné symboly.
Pokud se vám operace nedaří, máme problém s obvodem, který se musí vyřešit (viz níže "Závada
na IR vysílači RS232").
Po této zkoušce by se měl IR vysílač odstranit a znovu poklepejte na několik kláves. Teď by se
na displeji už neměly zobrazovat žádné symboly.
Infračervený USB vysílač
Tato operace se týká jenom USB IR vysílače.
POZOR! USB IR vysílač nemá žádné pouzdro a proto je velmi citlivý na elektrostatické výboje.
Předtím než jej začnete požívat, vybijte se dotykem kovové schránky počítače, nebo jiného
zemnícího bodu. Další možností je zabudovat IR vysílač do průhledného pouzdra, aby byl chráněn.
Windows
Následující provozní zkouška se vztahuje jen na USB IR vysílač.
Nejdříve se musí IR vysílač zkontrolovat, protože jej budeme potřebovat k dalšímu kroku, který
představuje samočinný test systému. K této zkoušce připojte IR vysílač pomocí USB kabelu k volnému
USB portu na PC.
Objeví se zpráva, že byl nalezen nový hardware: “NEW HARDWARE WAS FOUND”: AREXX ASURO
USB-IR-TRANSCEIVER.
Nyní můžete z ASURO CD nainstalovat USB ovladač. Pokud nebude ovladač nalezen automaticky,
vyberte jej na CD manuálně z CD\windows\USB Driver,(k této operaci budete potřebovat oprávnění
správce systému). Po instalaci ovladače můžete přistoupit k USB vysílači jako k běžnému sériovému
portu.
Obr. 4. 8: IR vysílač RS232
Po otevření programu Hyperterminal budete vyzváni k určení názvu připojení. Můžete si zvolit ASURO
USB, nebo nějaký jiný název. V dalším okně vyberte "connect by" (způsob připojení) a COM rozhraní,
ke kterému byl vysílač v předchozím kroku připojen.
Poté stiskněte "OK" a zvolte následující nastavení:
• Bits pro Second: 2400
• Databits: 8
• Parity: none
• Stopbits: 1
• Flowcontrol: none
Znovu stiskněte "OK" pro potvrzení nastavení.
Podržte IR vysílač ve vzdálenosti 10 cm nad listem bílého papíru. Strana s komponenty musí
směrovat k papíru.
Stiskněte několik kláves na počítačovém terminálu.
Program terminálu by měl normálně zobrazovat symboly kláves. IR vysílač přenáší symboly kláves
pomocí IR diody (D5), přenášený signál se odráží od povrchu papíru a směruje zpět na přijímač
integrovaného obvodu (IC2), z kterého se vrací zpět do počítače. Pokud se symboly nezobrazují,
nebo se zobrazují špatné symboly, opatrně otočte trimrem v rozmezí jeho krajních poloh. Miniaturním
šroubovákem udeřte v každé poloze trimru na několik kláves, dokud se nezobrazí správné symboly.
Pokud se vám operace nedaří, máme problém s obvodem, který se musí vyřešit (viz níže "Závada
na IR vysílači RS232").
Linux
Následující provozní zkouška se vztahuje jen na USB IR vysílač v prostředí Linux.
Nejdříve se musí IR vysílač zkontrolovat, protože jej budeme potřebovat k dalšímu kroku, který
představuje samočinný test systému. K této zkoušce připojte IR vysílač pomocí USB kabelu k volnému
USB portu na PC. Krátké pípnutí potvrdí, že Linux detekoval IR vysílač. Pro jistotu zkontrolujte, jestli
se v proc-declaration zobrazuje následující zpráva:
foo@bar:/>cat /proc/tty/driver/usb-serial
Je tam také následující zadání ("0" v našem příkladě může být nahrazena "1" nebo "2"):
usbserinfo:1.0 driver:v1.4
0: module:ftdi_sio name:”FTDI 8U232AM Compatible” vendor:0403 product:6001
num_ports:1 port:1 path:usb-00:11.2-1
Ke zkušebním účelům musíte nakonfigurovat rozhraní Minicom /dev/ttyUSB0 (nebo 1, 2 usw…)
podle následujícího nastavení:
• Bits pro Second: 2400
• Databits: 8
• Parity: none
• Stopbits: 1
• Flowcontrol: none
Znovu stiskněte "OK" pro potvrzení nastavení.
Je možné, že budete potřebovat kořenová práva.
Možná že k novému zařízení budete muset deklarovat práva pro zápis a čtení pro uživatele,
nebo skupinu dev/ttyUSB?. Můžete tak učinit pomocí chmod u+rw /dev/ttyUSB0 (nebo 1, 2…),
nebo chmod g+rw /dev/ttyUSB0 (opět budete samozřejmě potřebovat právo správce.
Podržte IR vysílač ve vzdálenosti 10 cm nad listem bílého papíru. Strana s komponenty musí
směrovat k papíru.
Stiskněte několik kláves na počítačovém terminálu.
Program terminálu by měl normálně zobrazovat symboly kláves. IR vysílač přenáší symboly kláves
pomocí IR LED (D5), přenášený signál se odráží od povrchu papíru a směruje zpět na přijímač
integrovaného obvodu (IC2), z kterého se vrací zpět do počítače. Pokud se symboly nezobrazují,
nebo se zobrazují špatné symboly, opatrně otočte trimrem v rozmezí jeho krajních poloh. Miniaturním
šroubovákem udeřte v každé poloze trimru na několik kláves, dokud se nezobrazí správné symboly.
Provoz robota ASURO
Nevkládejte zatím procesor (IC1)!
Nyní buďte opatrní a přepínač ON/OFF dejte do polohy ON. Obě zadní diody (D15, D16) by se měly
slabě rozsvítit. V opačném případě systém okamžitě vypněte a pokračujte ve čtení níže uvedené části
"Zadní diody se při spuštění nerozsvítí". Pokud se diody rozsvítily, vypněte systém a vložte IC1
(procesor) a IC3 (AND Gate), viz obr. 5. 1.
Někdy je potřebné vývody IC opatrně ohnout, aby je bylo možné vložit do kontaktních otvorů na patici.
To lze snadno provést, pokud vezmete IC a jednu stranu s vývody zatlačíte vodorovně na rovný
povrch stolu.
Obr. 5. 1: ASURO po instalaci IC
Nyní vložte propojku (J1) pro nabíjecí akumulátory. Značky polarity na IC se musí zarovnat
se značkami na paticích a na DPS. Procesor při spuštění provede samočinný test a zkontroluje
všechny komponenty. Abyste se vyhnuli těžkostem, doporučujeme přečíst si nejdříve následující
část návodu a až poté systém zapnout a vrátit se k této části. V této chvíli začneme s testováním.
Zapněte robota a odteď z robota nespouštějte oči.
Jak Procesor IC1 ATmega8, tak Gate IC3 CD4081 jsou elektrostaticky citlivé součástky.
Mohou se zničit, pokud se jich dotknete, aniž jste se zbavili elektrostatické energie, kterou
lehce získáte např. chozením po nevodivé podlaze. Předtím než začnete s těmito součástkami
pracovat, není na škodu natáhnout si elektrostatický náramek, nebo se alespoň dotknout
kovové skříně uzemněného zařízení, nebo radiátoru.
Pokud je aktivní program Hyperterminal (Windows), nebo Minicom (Linux)
a mezi ASURO a IR vysílačem je viditelný kontakt, můžete samočinný test
sledovat na obrazovce počítače.
Světelné Indikátory
LED kontrolka stavu (D12) se krátce rozsvítí oranžově a budou také svítit zadní LED (D15, D16),
i když jen matně. Pokud se některá z LED kontrolek nerozsvítí, vypněte okamžitě robota a začněte
hledat příčinu chyby (viz níže "LED kontrolka stavu se po startu nerozsvítí"). Právě jste viděli
bootovací sekvenci robota. V další fázi se postupně po 3 sekundách zkontrolují všechny ostatní
zobrazovací prvky v následujícím pořadí:
• LED kontrolka stavu (D12) zelená
• LED kontrolka stavu (D12) červená
• Přední LED (D11) ve spodní části robota
• Zadní LED (D15) vlevo
• Zadní LED (D16) vpravo
• Všechny indikátory současně
Objeví-li se chyba, robota okamžitě vypněte a začněte hledat příčinu chyby (viz níže "Světelné
indikátory nepracují"), protože všechny světelné indikátory hrají důležitou roli v následujících testech.
Fototranzistory (T9, T10)
Po dokončení testů by měla LED kontrolka stavu (D12) svítit zeleně a jasně indikovat, že se nyní asi
10 sekund testují fototranzistory na spodní straně robota, které jsou zodpovědné za sledování dráhy.
Zatímco jsou fototranzistory (T9, T10) osvětleny, zapnou se příslušné zadní LED (D15, D16) a ztlumí
se, jakmile se světlo vypne (pravý fototranzistor (T10) > pravá zadní LED (D16); levý fototranzistor
(T9) > levá zadní LED (D15). Všechno je v pořádku, pokud se zadní LED po odstranění světla
nevypínají úplně, ale stále tlumeně svítí. Samočinný test může pokračovat, i když se objeví chyba
a její odstranění se může odložit.
Spínače
ASURO je nehybný a světelné indikátory jsou tmavé. To je dobré znamení! Nyní jsme připraveni
asi 15 sekund kontrolovat tlačítka. Jednoduše tlačítka stiskněte a sledujte, jestli se něco děje.
Výsledek by měl vypadat následovně:
K1 > Stavová LED (D12) se rozsvítí zeleně
K2 > Stavová LED (D12) se rozsvítí červeně
K3 > Zapne se přední LED na spodní straně
K4 > Zadní LED vlevo (D15)
K5 > Zadní LED vpravo (D16)
K6 > Začne běžet levý motor (v opačném případě může pokračovat samočinný test).
Motory se zkontrolují později a chyby v těchto prvcích lze odstranit pomocí testů, které jsou
popsány níže v části "Jeden motor se nepohybuje").
Stisknutím několika tlačítek se aktivuje příslušná kombinace signálů. V případě chyby může
samočinný test pokračovat a odstranění chyby lze odložit.
Odometer
Nyní začne svítit LED sledování trasy (D11). Signál indikuje začátek dalšího testu (15 sekund),
během kterého se zkontrolují oba odometry (každý z nich se skládá z LED a z fototranzistoru).
Přidržení listu bílého papíru před senzory způsobí rozsvícení stavové LED. Nejdříve podržte list papíru
před levým senzorem (T11) > rozsvítí se zelená LED (D12). Poté podržte list papíru před pravým
senzorem (T12) > rozsvítí se červená LED (D12). Odstranění papíru bude mít za následek vypnutí
stavové LED. Odometry jsou v pořádku, pokud jsou aktivní meze on/off na levé a na pravé straně.
V případě chyby může samočinný test pokračovat a odstranění chyby lze odložit.
Motor
Obě zadní LED (D15, D16) jsou zapnuty a signalizují poslední test, který trvá asi 15 sekund.
Kontrola motoru je intenzivní. Levý motor se nastartuje směrem dopředu z nulové rychlosti na
maximální rychlost a přejde zase zpět na nulovou rychlost. Poté se směr otočí a rychlost bude
akcelerovat z nuly na maximum a znovu zpět na nulu. Motor na pravé straně se zkontroluje
stejným způsobem. Po kontrole jednotlivých motorů se provede kontrola obou motorů současně.
Ještě jednou opakujeme naší poznámku: V případě chyby může samočinný test pokračovat
a odstranění chyby lze odložit.
 Loading...
Loading...