

Page 1
PRODUCTS
AUTOMATION
Operator’s Manual
GROUP, INC.
DCR-1003
and
DCR-1004
Rev. A3, 10/08
Doc. 9002661
Automation Products Group, Inc.
APG...Providing tailored solutions for measurement applications
Tel: 1/888/525-7300 • Fax: 1/435/753-7490 • www .apgsensors.com • E-mail: sales@apgsensors.com
Page 2
DCR-1003 and DCR-1004 Rev. A3, 10/08
Table of Contents
Warranty ......................................................................................... 3
Introducing...................................................................................... 4
Understanding Ultrasonics............................................................. 5
Installation ...................................................................................... 7
Installing the DST Sensor ............................................................ 7
Installing the DCR-1003, 1004 .................................................. 10
Wiring............................................................................................ 11
Programming................................................................................ 13
Operation ................................................................................... 15
Filtering ..................................................................................... 16
Outputs ...................................................................................... 19
Applications ............................................................................... 25
Calibrations ............................................................................... 37
Utilities ...................................................................................... 38
Quick Reference Sheet .................................................................. 39
Troubleshooting ............................................................................ 41
Maintenance ................................................................................. 42
Specifications ................................................................................ 43
Automation Products Group, Inc.
2
APG...Providing tailored solutions for measurement applications
Tel: 1/888/525-7300 • Fax: 1/435/753-7490 • www.apgsensors.com • sales@apgsensors.com
Page 3
Rev. A3, 10/08 DCR-1003 and DCR-1004
• Warranty and Warranty Restrictions
APG warrants its products to be free from defects of material and workmanship
and will, without charge, replace or repair any equipment found defective upon
inspection at its factory, provided the equipment has been returned,
transportation prepaid, within 24 months from date of shipment from factory .
THE FOREGOING WARRANTY IS IN LIEU OF AND EXCLUDES ALL OTHER
WARRANTIES NOT EXPRESSLY SET FORTH HEREIN, WHETHER
EXPRESSED OR IMPLIED BY OPERATION OF LAW OR OTHER WISE
INCLUDING BUT NOT LIMITED T O ANY IMPLIED WARRANTIES OF
MERCHANT ABILITY OR FITNESS FOR A P AR TICULAR PURPOSE.
No representation or warranty, express or implied, made by any sales
representative, distributor, or other agent or representative of APG which is not
specifically set forth herein shall be binding upon APG. APG shall not be liable
for any incidental or consequential damages, losses or expenses directly or
indirectly arising from the sale, handling, improper application or use of the
goods or from any other cause relating thereto and APG’s liability hereunder, in
any case, is expressly limited to the repair or replacement (at APG’s option) of
goods.
Warranty is specifically at the factory. Any on site service will be provided at
the sole expense of the Purchaser at standard field service rates.
All associated equipment must be protected by properly rated electronic/
electrical protection devices. APG shall not be liable for any damage due to
improper engineering or installation by the purchaser or third parties. Proper
installation, operation and maintenance of the product becomes the
responsibility of the user upon receipt of the product.
Returns and allowances must be authorized by APG in advance. APG will
assign a Return Material Authorization (RMA) number which must appear on
all related papers and the outside of the shipping carton. All returns are subject
to the final review by APG. Returns are subject to restocking charges as
determined by APG’s “Credit Return Policy”.
Automation Products Group, Inc.
APG...Providing tailored solutions for measurement applications
Tel: 1/888/525-7300 • Fax: 1/435/753-7490 • www .apgsensors.com • sales@apgsensors.com
3
Page 4
DCR-1003 and DCR-1004 Rev. A3, 10/08
• Introducing
The DCR-1003, 1004 controllers with DST series sensors were specifically
designed to provide a rugged and reliable non-contact sensor system that is
easily programmed yet flexible enough to use in a wide range of applications.
The DCR-1003, 1004 controllers have a large display to show readings and
parameters. They also include a mode display to provide easy setup of the
programmable modes. The controller can be configured to monitor level, flow,
volume or differential. The DCR-1003 comes standard with four relay outputs.
The DCR-1004 or analog version, also includes a standard 4-20 mA output with
optional configurations of 0-20 mA or voltage outputs.
The DST series sensors are non-contact ultrasonic which measure the
distance to a surface through air. The standard DCR-1003, 1004 sensor is the
DST-1002. It is a totally sealed PVC sensor with a range of 25 ft. Several other
versions of DST are available to fit almost any application.
Typical applications include:
• Monitoring water levels in a well
• Monitoring open channel flow
• Determining material volume in a tank
• Taking differential measurements
• Obstacle avoidance
• Product dimensioning
Automation Products Group, Inc.
4
APG...Providing tailored solutions for measurement applications
Tel: 1/888/525-7300 • Fax: 1/435/753-7490 • www.apgsensors.com • sales@apgsensors.com
Page 5
Rev. A3, 10/08 DCR-1003 and DCR-1004
detection
area
beam spread
low sensitivity
and
pulses
high sensitivity
and
pulses
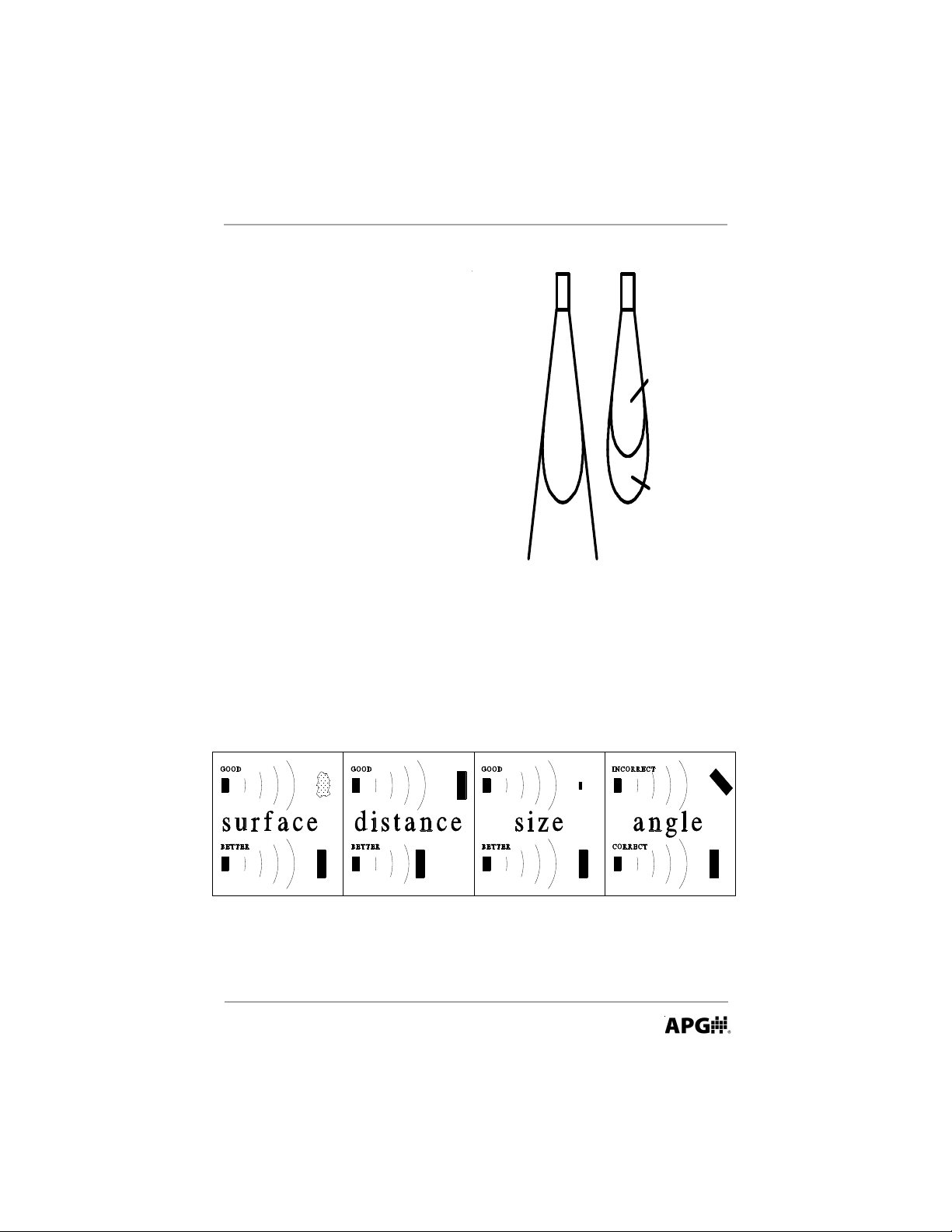
• Understanding Ultrasonics
Ultrasonic sensors measure distance
using a transducer to send out ultrasonic
bursts. Each burst contains a series of 120 pulsed sound waves that emit in the
shape of a cone, reflect off the target, and
are received by the sensor. The time
required for the sound burst to travel to
and from the target is converted into a
distance measurement by the sensor.
Ultrasonic sensing is affected by
several factors including the target
surface, distance, size, and angle. The
following considerations will help ensure
the best possible target conditions.
Surface
The ideal target surface is hard and smooth and perpendicular to the face of
the transducer. This surface will reflect a greater amount of signal than a soft,
sound wave absorbent surface. A target with poor sound wave reflection
characteristics will reduce the operating distance of the sensor and decrease its
accuracy.
Automation Products Group, Inc.
APG...Providing tailored solutions for measurement applications
Tel: 1/888/525-7300 • Fax: 1/435/753-7490 • www .apgsensors.com • sales@apgsensors.com
5
Page 6
DCR-1003 and DCR-1004 Rev. A3, 10/08
Distance
The shorter the distance from the sensor to an object, the stronger the
returning echo will be. Therefore, as the distance increases, the object requires
better reflective characteristics to return a sufficient echo.
Size
A large object will have a greater surface area to reflect the signal than a
small one, therefore, a large target will be detected at a greater distance than a
small target. The surface area recognized as the target is generally the portion
closest to the sensor.
Angle
The inclination of the object's surface facing the ultrasonic sensor affects the
reflectivity of the object. The portion perpendicular to the sensor returns the
echo. If the entire surface is at a great enough angle, the signal will be reflected
away from the sensor and no echo will be detected. Generally a target at an
angle greater than 5 degrees off perpendicular will not be detected.
Automation Products Group, Inc.
6
APG...Providing tailored solutions for measurement applications
Tel: 1/888/525-7300 • Fax: 1/435/753-7490 • www.apgsensors.com • sales@apgsensors.com
Page 7
Rev. A3, 10/08 DCR-1003 and DCR-1004
• Installation
Installing the DST Sensor
The DST sensor should be installed so that it has a clear sound path to the
intended target. The path should be free from obstructions and as open as
possible. Follow the guidelines mentioned in this manual under “Understanding
Ultrasonics”, found on page 5.
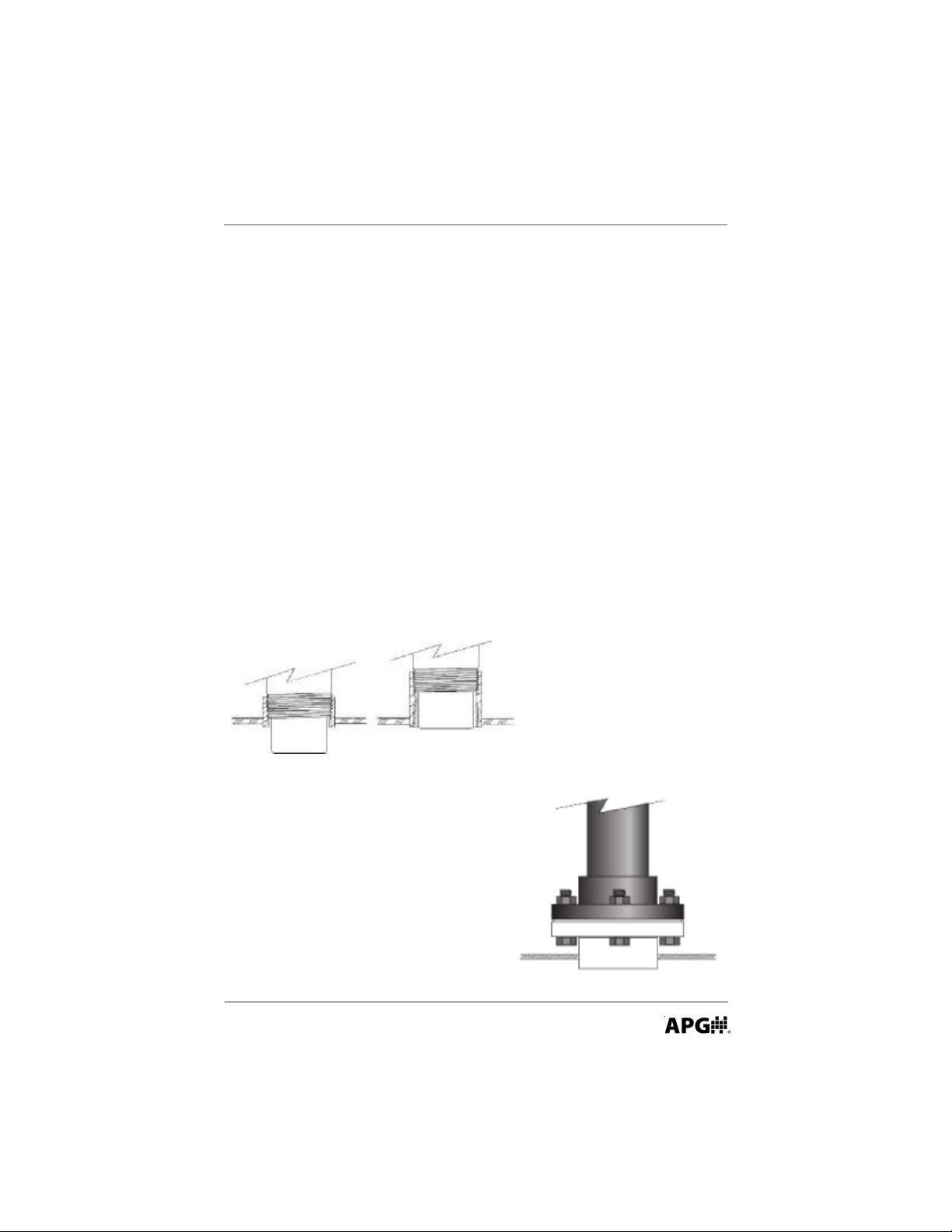
NPT and Flange Mounting
• Mounting in a coupler or half coupler welded to the top of tank. (see
drawings below)
• Coupling should extend through the top of tank.
• Coupler must be aligned perpendicular to the target level.
• Screw sensor in only hand tight.
• To avoid false Echoes, the coupler should be installed where there is a clear
sound path perpendicular to the detection surface and where the sound
path will not intersect vessel fill spouts, rough vessel walls, ladders…etc.
BEST GOOD
*Soft gasket
material is
recommended with
flange mounting.
Automation Products Group, Inc.
APG...Providing tailored solutions for measurement applications
Tel: 1/888/525-7300 • Fax: 1/435/753-7490 • www .apgsensors.com • sales@apgsensors.com
7
Page 8

DCR-1003 and DCR-1004 Rev. A3, 10/08
Top of Tank
Stand Pipe
10-45
o
CUT
Stand Pipe Mounting
The stand pipe should be as large in diameter and as short in length as
possible. Mount the sensor above the highest anticipated material by at least
the published blanking distance.
The stand pipe should be seamless to provide a smooth path for the sound
waves to propagate into the tank. Because the sound waves will concentrate
along the inside wall of the pipe, any seams from couplers, nipples, and welds
will cause echo returns that will be picked up by the sensor. The sensor
blanking will need to be changed to a distance greater than the length of the
pipe (found on page 15; mode 5).
The end of the stand pipe should extend inside the tank and be cut to a 45°
angle. Make sure that the cut is clean and free from burs. If the standpipe is cut
at 90°, there will develop a standing wave echo at the end of the pipe that will be
seen by the sensor as a target. If a 45° cut is not feasible in your application,
then the cut should be made as close to 45° as possible (often, even a 10° cut
will shrink the standing wave enough to allow the sensor to see past it).
To avoid false Echoes, the stand pipe should be installed where there is a
clear sound path perpendicular to the detection surface and where the sound
path will not intersect vessel fill spouts, rough vessel walls, ladders…etc. Any
angle off perpendicular will degrade the performance of the sensor .
Automation Products Group, Inc.
8
APG...Providing tailored solutions for measurement applications
Tel: 1/888/525-7300 • Fax: 1/435/753-7490 • www.apgsensors.com • sales@apgsensors.com
Page 9
Rev. A3, 10/08 DCR-1003 and DCR-1004
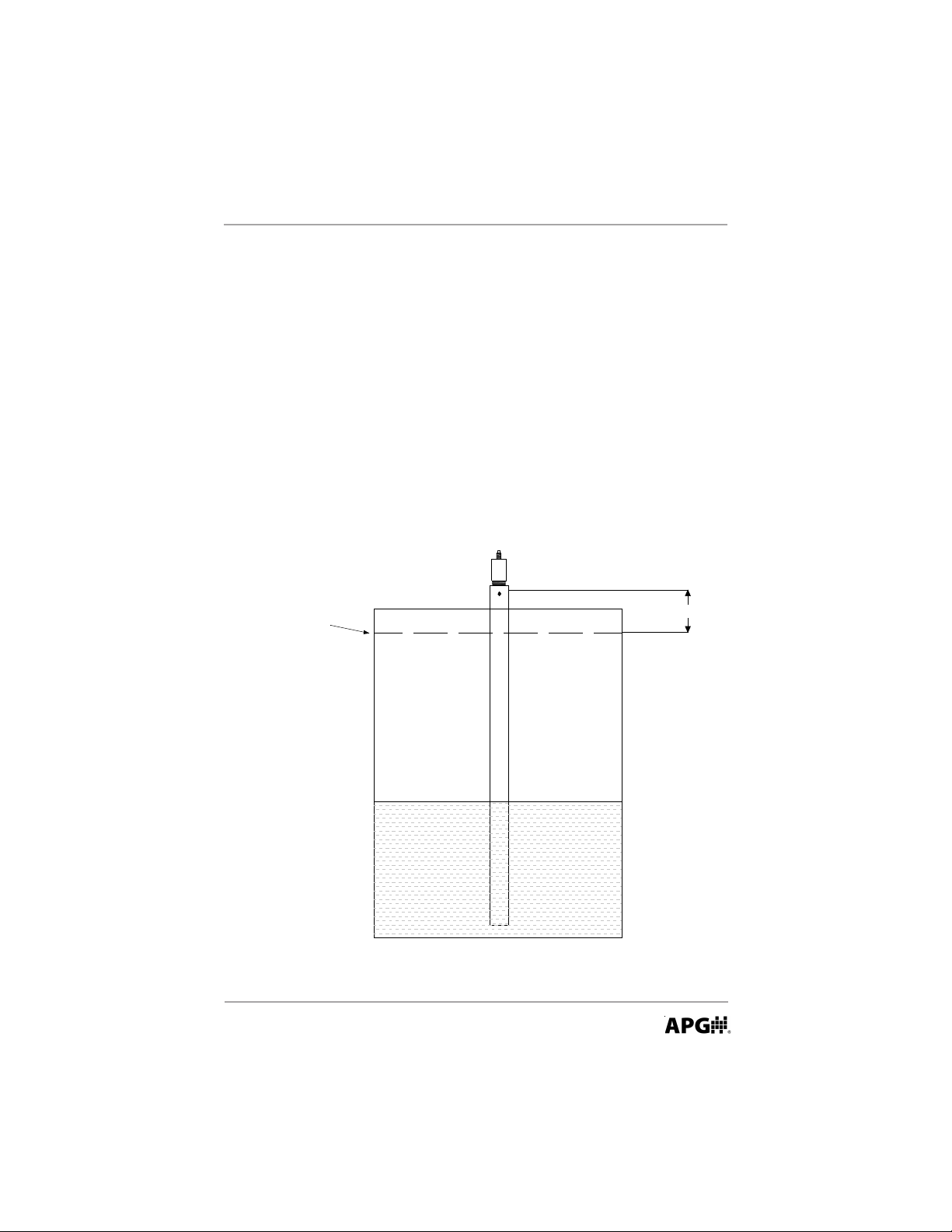
Minimum Blanking Distance
Highest Anticipated
Tank Level
Stilling Well Mounting
Provides access to difficult areas and eliminates problems with foam.
• Extend the pipe above the highest anticipated level by at least the
published blanking distance.
• Provide a vent hole at the top of the tube. Keep the hole inside the blanking
distance of the sensor to prevent false echoes.
• Use only in liquid materials that will not leave deposits on the inside of the
pipe (material build-up will result in false echoes).
• Pipe must have smooth walls and should be seamless to provide a smooth
path for the sound waves to propagate into the tank. Because the sound
waves will concentrate along the inside wall of the pipe, any seams from
couplers, nipples, and welds will cause echo returns that will be picked up
by the sensor.
Automation Products Group, Inc.
APG...Providing tailored solutions for measurement applications
Tel: 1/888/525-7300 • Fax: 1/435/753-7490 • www .apgsensors.com • sales@apgsensors.com
9
Page 10
DCR-1003 and DCR-1004 Rev. A3, 10/08
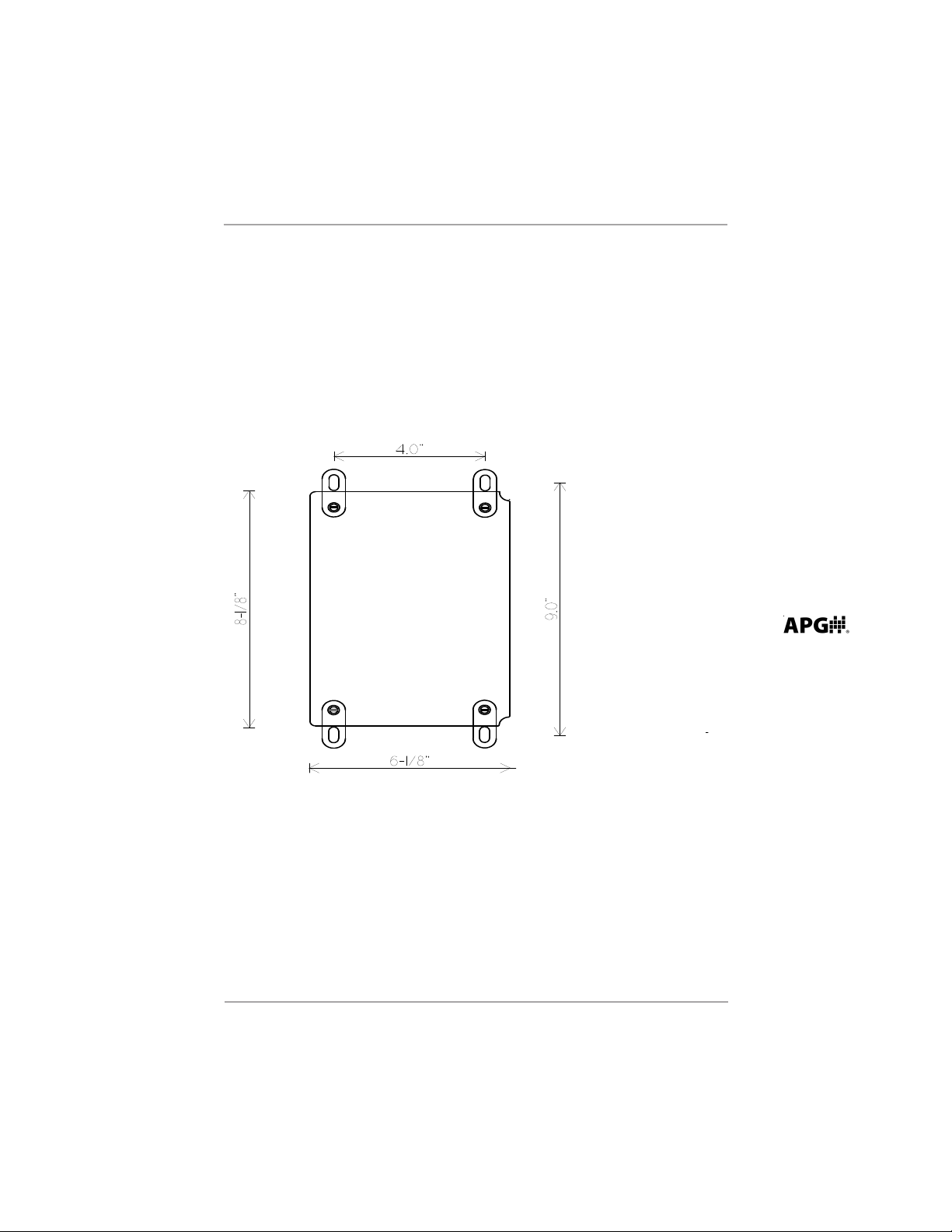
Installing the DCR-1003, 1004
The DCR-1003, 1004 should be installed using the 4 mounting feet provided.
The enclosure must be mounted out of direct sunlight and should have good
clearance to the left for opening the hinged cover.
10
DCR-1003 and DCR-1004 Mounting Dimensions
Automation Products Group, Inc.
APG...Providing tailored solutions for measurement applications
Tel: 1/888/525-7300 • Fax: 1/435/753-7490 • www.apgsensors.com • sales@apgsensors.com
Page 11
Rev. A3, 10/08 DCR-1003 and DCR-1004
• Wiring
Step 1: Connect the DST to the DCR Controller using RG-6 coaxial cable
with ‘F’ series connectors. If more than one DST is to be connected for a
differential application, the two sensors should be connected to the DCR using
an external splitter.
Step 2: To obtain access to the DCR’S terminal strip, open the DCR’s
plexiglass cover and raise the hinged panel by loosening the knurled thumb
screws.
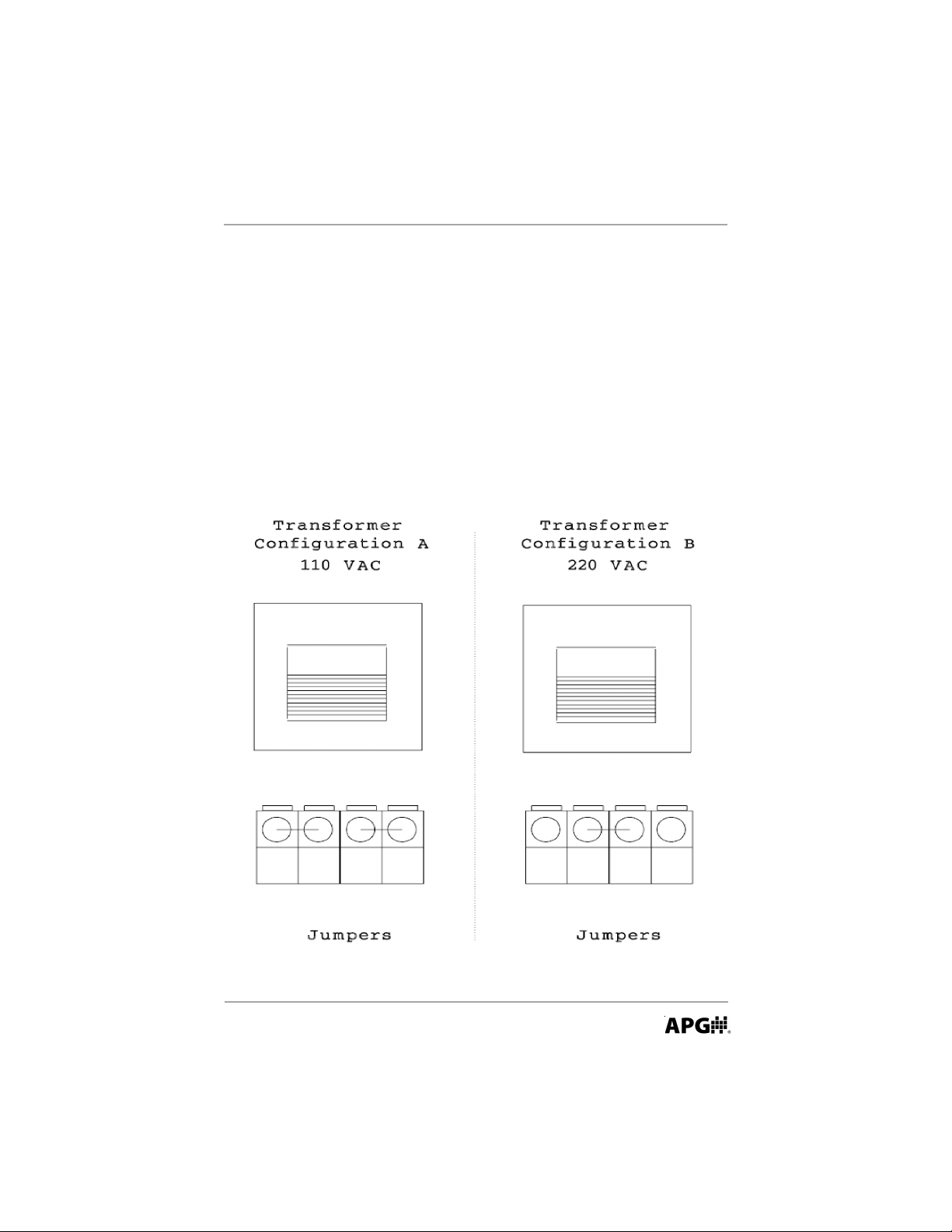
Step 3: The DCR-1003, 1004 is shipped from the factory configured for 100-
120 VAC input power. If 200-230 VAC is to be used, change the jumpers
configuration to 220 VAC as shown in the diagram below.
Automation Products Group, Inc.
APG...Providing tailored solutions for measurement applications
Tel: 1/888/525-7300 • Fax: 1/435/753-7490 • www .apgsensors.com • sales@apgsensors.com
11
Page 12
DCR-1003 and DCR-1004 Rev. A3, 10/08
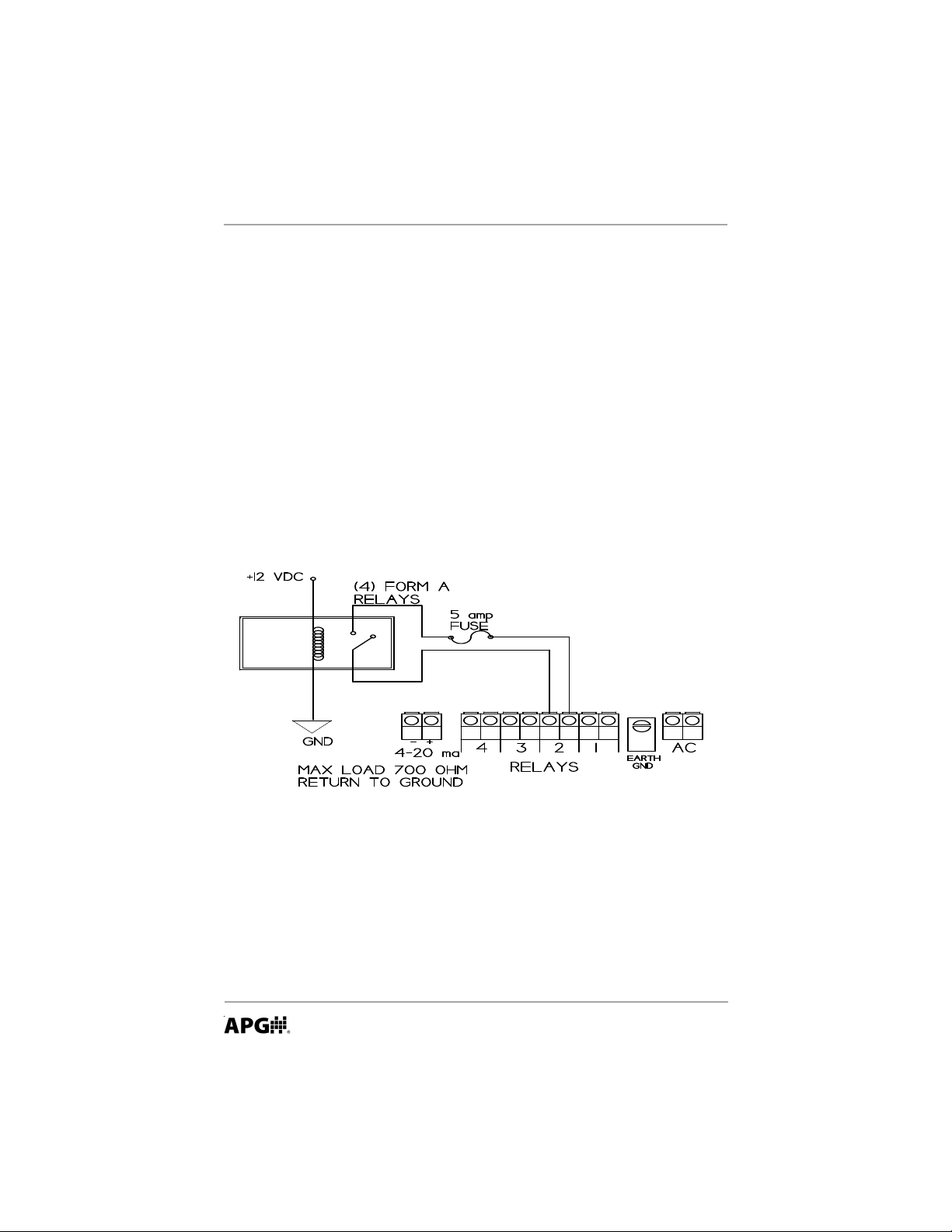
Step 4: Wires can be pulled into the DCR-1003, 1004 through the strain
reliefs on the enclosure, or the strain reliefs may be removed and 1/2 in.
conduit used in their place.
The spring loaded terminal can be wired using solid or stranded wire
between 16 - 20 AWG . Wires should be stripped, leaving a .4 in. bare wire. The
wires can then be inserted into the terminal by depressing the associated
orange lever with a #5 1/8 in. screwdriver. While the lever is depressed, the
conductor should be pushed into the terminal until it bottoms out. The lever
should then be released, securing the conductor in the terminal.
Follow the legend on the circuit board when wiring the DCR. The DCRController should never be used without the earth ground terminal being
connected.
Step 5: Perform an internal check to ensure that all wires are properly
connected and secured.
Step 6: Close the hinged panel and make the power connection. The LED
display should turn on and the COM light illuminate.
Automation Products Group, Inc.
12
APG...Providing tailored solutions for measurement applications
Tel: 1/888/525-7300 • Fax: 1/435/753-7490 • www.apgsensors.com • sales@apgsensors.com
Page 13
Rev. A3, 10/08 DCR-1003 and DCR-1004
• Programming
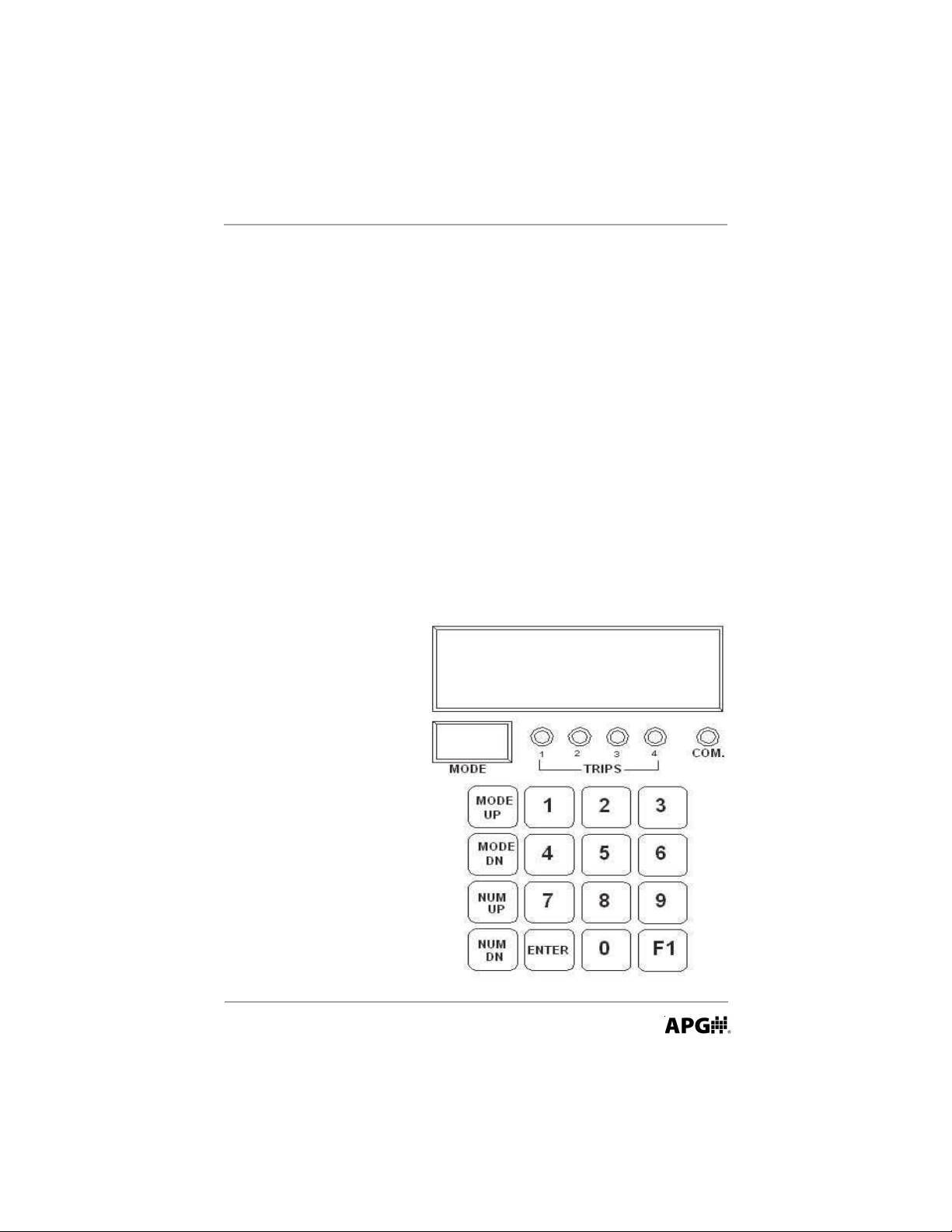
The DCR-1003, 1004 has a four-digit LED readout, a two-digit display showing
the modes, and four lights labeled TRIPS 1, 2, 3, and 4. These lights indicate the
status of the relays. The keypad, located under the clear cover, is used to
program the DCR-1003, 1004. The front cover makes reading the displays easy
while preventing the buttons on the keypad from being accidentally bumped.
The different modes of the DCR-1003, 1004 can be easily accessed using the
mode buttons, MODE UP and MODE DN. They operate similar to a digital
watch. To cycle forward through the modes, hold down the MODE UP key. To
cycle backward through the modes, hold down the MODE DN key .
To select a mode, press the MODE UP or MODE DN key until the desired
mode number is displayed. Pressing either the NUM UP, NUM DN, or one of the
numeric keys will display the selected mode setting on the large LED display.
To change the selected mode setting, hold down the NUM UP or NUM DN
key until the desired setting is displayed. If the setting is not a menu item, such
as a multiplier or distance, then it may be keyed using the numeric keypad. To
change non-numeric values
(i.e.., ON, OFF , NEG, POS) or
a menu number, use the
NUM UP and NUM DN
keys.
Enter the new value by
pressing the ENTER key or
either of the mode keys. The
display will then show the
DST distance reading.
To leave a mode without
entering the setting, press
the function key, F1, and the
DCR-1003, 1004 will return to
displaying the DST reading.
Automation Products Group, Inc.
APG...Providing tailored solutions for measurement applications
Tel: 1/888/525-7300 • Fax: 1/435/753-7490 • www .apgsensors.com • sales@apgsensors.com
13
Page 14

DCR-1003 and DCR-1004 Rev. A3, 10/08
Mode Sequence
For best results when programming your DCR, follow the steps below.
Following the steps in sequence will eliminate most of the problems
encountered when setting up the DCR controller.
1. MODES 1-2 Determine units to be displayed
2. MODES 4-6 Determine settings to get a reliable distance reading
on your target
3. MODES 7-10 Determine appropriate filtering for your application
4. MODE 3 Select application type *(MODE 2 will need to be
adjusted for volume and flow applications)
1. Distance: skip to step 5
2. Volume: setup Modes 29-35
3. Differential: setup Modes 36-37
4. Open Channel Flow: setup Modes 38-43
5. MODES 12-23 Setup relay outputs (disable relays that are not used in
your application)
6. MODES 24-26 Setup analog output
7. MODE 44 Set temperature compensation
8. Advanced setup *(not required in most applications) MODES 27-28,
45-48
14
Automation Products Group, Inc.
APG...Providing tailored solutions for measurement applications
Tel: 1/888/525-7300 • Fax: 1/435/753-7490 • www.apgsensors.com • sales@apgsensors.com
Page 15

Rev. A3, 10/08 DCR-1003 and DCR-1004
Operation
The operation modes are used to do basic initialization of the DCR.
MODE DESCRIPTION PARAMETERS EXPLANATION
1 Units Range = 1 - 3 Selects the units to be
1 - inches displayed
2 - feet Select by NUM UP or
3 - meters NUM DN
Default = 2
2 Decimal Point Range = 0000.- 0.000 Selects the decimal point
Default = 00.00 position
Select by NUM UP or
NUM DN
3 Operating Mode Range = 1 - 4 Selects mode of measure-
1 - distance ment for the application
2 - volume Select by NUM UP or
3 - differential NUM DN
4 - open channel flow
Default = 1
4 Sensitivity Units = % Sets sensitivity as a
Range = 0 - 100 percentage of maximum
If using a DST version 2000 sensor, Mode 4 will display the sensor selected
sensitivity. The sensitivity is not user adjustable.
5 Blanking Units = mode 1 Sets a dead zone in front
Distance Range = 0 - 36 ft. of the DST where echoes
Default=see sensor are ignored. Minimum blanking
specs is predetermined with the DST
series sensor and should not be
set lower than the sensor spec.
6 Pulses Default=see sensor Sets the number of pulse waves
specs sent out in each ultrasonic burst
Range = 1-20 (adjusts strength of transmitting
signal).
If using a DST version 2000 sensor, Mode 6 will display the sensor selected
pulse setting. The pulse setting is not user adjustable.
Automation Products Group, Inc.
APG...Providing tailored solutions for measurement applications
Tel: 1/888/525-7300 • Fax: 1/435/753-7490 • www .apgsensors.com • sales@apgsensors.com
15
Page 16

DCR-1003 and DCR-1004 Rev. A3, 10/08
Filtering (Modes 7-9)
The filtering modes are provided to adjust how fast the system will respond
to target changes. The default settings should be appropriate for most level
applications. However, the filtering can be changed to increase or decrease
reaction time to keep up with fast moving targets and filter out unwanted
targets.
MODE DESCRIPTION PARAMETERS EXPLANATION
7 Sample Rate Units = seconds
Delay Range = 0.075 – 1.0 sec.
Default = .250 seconds
Sets the delay between each
sample (or reading) taken by
sensor
8 Samples Range = 1 - 50
Averaged Default = 20 samples
9 Out-of-Range Range = 1-50
Samples Default = 10 samples
10 Window Units = mode 1
Range = 0 - 20 ft.
Default = 2.00 ft.
Sets the number of samples to be
saved in the buffer memory and
averaged together. The average
is then displayed as the output
(distance, volume, or flow).
Samples are sent to the buffer on
a First-In-First-Out (FIFO)
basis. When the number of
samples in the buffer is equal to
the number entered in mode 8,
the samples are averaged and the
result is displayed as the output.
Sets the number of consecutive
sample readings outside the
*window that will be ignored
before the new target is
accepted. If a target is detected
outside the window and is
sampled in succession the
number of times entered in mode
9, then it will be accepted as a
target by the sensor. *(see mode
10)
Sets the window of target
acceptance. The window is equal
to + or – the value entered in
mode 10 from the current
16
Automation Products Group, Inc.
APG...Providing tailored solutions for measurement applications
Tel: 1/888/525-7300 • Fax: 1/435/753-7490 • www.apgsensors.com • sales@apgsensors.com
Page 17

Rev. A3, 10/08 DCR-1003 and DCR-1004
distance reading. If a target is
sampled outside of this window
it will be ignored until it is
consecutively sampled the
number of times set in mode 9.
When the sensor accepts a new
target, the window automatically
shifts to the new target.
11 Loss of Echo Units = seconds
Range = 0 - 9999
Default = 5
Sets the delay before the output
will show a loss of echo
condition. A loss of echo
condition exists when the sensor
looses all targets (receives no
echo returns). Loss of echo
condition will result in a display
reading of “0” in volume and
flow modes, or the maximum
distance of the sensor in distance
mode.
Example 1: Rapid Level Changes
If the DCR-1003, 1004 filtering is too slow and the level to be monitored is
changing rapidly, the display will seem to jump between readings instead of
scrolling smoothly as the level changes. To reduce the filtering and quicken the
response, modes 7 to 10 should be changed.
Filtering Guideline 1 - Target Level Rate of Change
A smooth and steady outputs and display reading of the target is almost
always desirable. If the level being monitored is changing rapidly and the
filtering is set too slow, the display will jump between readings instead of
scrolling smoothly as the level changes. However, if the level is changing
slowly and the filtering is set too fast, the display will track even small waves
and ripples, resulting in a constant variation in the output.
Automation Products Group, Inc.
APG...Providing tailored solutions for measurement applications
Tel: 1/888/525-7300 • Fax: 1/435/753-7490 • www .apgsensors.com • sales@apgsensors.com
17
Page 18

DCR-1003 and DCR-1004 Rev. A3, 10/08
MODE DESCRIPTION
7 Set the sample rate delay as high as is practical in your application to allow
more time for the previous sound wave to dissipate before transmitting the
next wave. This will minimize the chances of multiple-echo interference.
8 Set the samples averaged as high as is practical in your application to help
minimize the effects of waves and ripples on a liquid target. A greater number
of target readings averaged together will result in a more stable displayed
output of a wavy surface.
9 Set the out-of-range samples as high as is practical in your application to
filter out unwanted intermittent objects and still assure the intended target is
being tracked smoothly.
10 Set the window as small as is practical in your application to help isolate the
intended target (rarely needs to be set to less than 0.33 ft.). A smooth slower
moving surface will allow for a small window setting, while a wavy and fast
moving surface will require a larger window setting.
Filtering Guideline 2 - Ignoring Intermittent Obstacles
To prevent splashing, agitators, or other intermittent objects from being
detected even though they are occasionally in the ultrasonic detection beam
MODE DESCRIPTION
7 & 9 Modes 7 and 9 should be increased. If the sample rate delay (Mode 7) is set to
0.250 seconds, and the out-of-range samples (mode 9) is set to 10, then the
DCR will require only 10*0.250 or 2.5 consecutive second of readings
outside the window (mode 10) before the new target will be recognized. If the
numbers are increased to 0.500 seconds and 40 out-of-range samples, then the
DCR will require a much greater time of 0.500*40 or 20 consecutive second
of readings outside the window before the new target will be recognized.
10 Should be kept to a small value to help qualify only echoes from the target
surface.
Automation Products Group, Inc.
18
APG...Providing tailored solutions for measurement applications
Tel: 1/888/525-7300 • Fax: 1/435/753-7490 • www.apgsensors.com • sales@apgsensors.com
Page 19

Rev. A3, 10/08 DCR-1003 and DCR-1004
Outputs
The DCR-1003 comes standard with 4 relay outputs fused at 5 A each. The
DCR-1004 is equipped with relays and an analog output. Detailed explanations
of the two output types are given in the RELAY and ANALOG sections.
RELAY
The four relays are fully programmable for ‘BEGIN’ and ‘END’ points and
‘TYPE’ of operation. The LEDs on the DCR indicate the status of the normally
open relays. When the LED is on, the relays are energized and the contact is
closed. For performing a distance to level measurement the zero point of
distance will be at the transducer. For volumetric or open channel monitoring,
the zero point will be at the empty point of the tank or flume. For distance
measurements the relay trip points will be programmed in the units selected in
mode 1. For volumetric or flow, the relays are in volume or flow.
MODE DESCRIPTION PARAMETERS EXPLANATION
12 Begin Trip 1 Units = mode 1 Sets the begin point
Default = 2.5 ft. of Trip 1
13 End Trip 1 Units = mode 1/mode 3 Sets the end point
Default = 2.9 ft. of Trip 1
14 Trip 1 Type Range = 0 - 7 Selects the type of
0 - near function Trip 1 will
1 - exclusive perform
2 - hysteresis near
3 - far Set by NUM UP or NUM
4 - inclusive NUM DN
5 - hysteresis far
6 - disable
7 - fail-safe
Default = 0
15 Begin Trip 2 Units = mode 1/mode 3 Sets the begin point
Default = 3 ft. of Trip 2
16 End Trip 2 Units = mode 1/mode 3 Sets the end point of
Default = 3.4 ft. of Trip 2
Automation Products Group, Inc.
APG...Providing tailored solutions for measurement applications
Tel: 1/888/525-7300 • Fax: 1/435/753-7490 • www .apgsensors.com • sales@apgsensors.com
19
Page 20

DCR-1003 and DCR-1004 Rev. A3, 10/08
17 Trip 2 Type Range = 0 - 7 Selects the type of function
Default = 0 function Trip 2 will perform
18 Begin Trip 3 Units = mode 1/mode 3 Sets the begin point
Default = 3.50 ft. of Trip 3
19 End Trip 3 Units = mode 1/mode 3 Sets the end point
Default = 3.90 ft. of Trip 3
20 Trip 3 Type Range = 0 - 7 Selects the type of function
Default = 0 Trip 3 will perform
21 Begin Trip 4 Units = mode 1/mode 3 Sets the begin point
Default = 4.0 ft. of Trip 4
22 End Trip 4 Units = mode 1/mode 3 Sets the end point of
Default = 4.40 ft. of Trip 4
23 Trip 4 Type Range = 0 - 7 Selects the type of function
Default = 0 Trip 4 will perform
20
Automation Products Group, Inc.
APG...Providing tailored solutions for measurement applications
Tel: 1/888/525-7300 • Fax: 1/435/753-7490 • www.apgsensors.com • sales@apgsensors.com
Page 21

Off
On
Off
On
On
On
Off
Off
On
Off
On
Off
Off
On
Off
On
On
On
Off
Off
ZERO BEGIN END
Type 0:
Near
Type 1:
Exclusive
Type 2:
Type 3:
Far
Type 4:
Inclusive
Type 5:
Hysteresis Far
Type 6:
Hysteresis Near
Trip Point Disable
loss of echo, or loss of power.
an error is detected in communication,
Type 7: Relay remains closed (trip light on) unless
NOTE: The Zero line represents the face of the sensor
when operating in "Distance" mode and the bottom of
the tank when indicating volume or level.
Rev. A3, 10/08 DCR-1003 and DCR-1004
Trip Type Explanation
APG...Providing tailored solutions for measurement applications
Tel: 1/888/525-7300 • Fax: 1/435/753-7490 • www .apgsensors.com • sales@apgsensors.com
Automation Products Group, Inc.
21
Page 22

DCR-1003 and DCR-1004 Rev. A3, 10/08
10 ft
4 ft
1 ft
6 ft
9 ft
Example 3- Relay Settings for Distance to Level
A 10 ft deep lift station requires that a pump turn on when a level is closer
than 6 ft. to the DST. The pump
must stay on until the level
drops to 9 ft. from the DST . An
alarm relay is to be energized
under normal operation and
should open for failure in power,
communication, invalid readings,
high level closer than 5 ft., or
loss of echo.
To program the DCR-1003,
1004 for this application, the
following modes must be set:
MODE VALUE DESCRIPTION
Operation
5 2.00 Do not set closer than the minimum distance recommended for
the DST sensor type being used
Relay
12 6.00 Set the pump begin point at 6 ft. from the DST
13 9.00 Set the pump end point at 9 ft. from the DST
14 2 Use the hysteresis near type of gate to keep the pump on while
pumping the level down
15 5.00 Begin the alarm trip point at 5 ft.
16 10.00 End the alarm trip point at 10 ft. because any reading greater
will indicate loss of echo or communication
17 4 Any signal higher than 5 ft. or lower than 10 ft. will cause the
alarm relay to open
Automation Products Group, Inc.
22
APG...Providing tailored solutions for measurement applications
Tel: 1/888/525-7300 • Fax: 1/435/753-7490 • www.apgsensors.com • sales@apgsensors.com
Page 23

Rev. A3, 10/08 DCR-1003 and DCR-1004
10 ft
4 ft
1 ft
6 ft
9 ft
Example 4- Relay Settings For Product Level Rather than Distance to Level
A 10 ft. deep lift station requires
that a pump turn on when a level
reaches 4 ft. and stay on until the
level drops to 1 ft. from the
bottom of the station. An alarm
relay is to be energized under
normal operation and should open
for failure in power,
communication, invalid readings,
high level above 5 ft., or loss of
echo.
To program the DCR-1003, 1004
for this application, the following
modes must be set:
MODE VALUE DESCRIPTION
Operation
3 2 Select Volumetric Monitoring for this application so the display
will read the distance from the tank bottom to the level
5 2.00 Do not set closer than the minimum distance recommended for
the DST sensor type being used
Relay
12 1.00 Set the pump begin point at 1 ft. from the bottom
13 4.00 Set the pump end point at 4 ft. from the bottom
14 5 Use the hysteresis far type of trip to keep the pump on while
pumping the level down
15 0.00 Begin the alarm trip point at the bottom because any signal
below the zero point will indicate loss of echo or
communication
16 5.00 End the alarm trip point at 5 ft. for high level alarm
17 4 Any signal higher than 5 ft. or lower than 0 ft. will cause the
alarm relay to open
Volume
29 1 Flat bottom tank
32 10 Distance from sensor to bottom of tank. The Controller
subtracts the measured distance from the Tank Span to display
product level.
Automation Products Group, Inc.
APG...Providing tailored solutions for measurement applications
Tel: 1/888/525-7300 • Fax: 1/435/753-7490 • www .apgsensors.com • sales@apgsensors.com
23
Page 24

DCR-1003 and DCR-1004 Rev. A3, 10/08
ANALOG
The analog output is only available on controller model DCR-1004. The
analog circuit comes standard with 4-20 mA, but may be configured for 0-20
mA. A hardware change will allow 0-5 V, or 0-10 V as the output.
The desired analog output should first be selected in mode 24. The two end
points must then be entered. For performing a distance to level measurement,
the zero point of distance will be at the transducer and the 4-20 limits will be
programmed in the same units as mode 1. For volumetric or open channel
monitoring, the zero point will be at the empty point of the tank or flume and
the end points must be set in the units used in the volume or flow measurement.
Keep this in mind when referring to the diagram below.
MODE DESCRIPTION PARAMETERS EXPLANATION
24 Analog Output Range = 0 - 1 Selects the type of analog output
Select 0 = 4 to 20mA output to be used
1 = 0 to 20mA Set by NUM UP or NUM DN
Default = 0
25 0,4 mA Distance Units = mode 1 Sets the minimum distance of
Default = 3.00 ft. the analog output slope
26 20 mA Distance Units = mode 1 Sets the maximum distance of
Default = 4.00 ft. the analog output slope
27 0,4 mA Calibration Fine tunes the minimum current
sourced on the analog output
28 20 mA Calibration Fine tunes the maximum current
sourced on the analog output
Automation Products Group, Inc.
24
APG...Providing tailored solutions for measurement applications
Tel: 1/888/525-7300 • Fax: 1/435/753-7490 • www.apgsensors.com • sales@apgsensors.com
Page 25

Rev. A3, 10/08 DCR-1003 and DCR-1004
Applications
The DCR Controller can be configured for four different types of
applications. They are:
• Distance: Measuring the distance to an object
• Volume: Determining the volume, or level of a product in a tank
• Differential: Calculating the differential measurement between two levels
or measurements
• Open Channel Flow: Taking flow rate measurements over a weir or flume
DISTANCE
Measuring the distance to a target is the most basic application. The DCR
Controller will do this without any special settings. The zero distance point is .5
inches behind the face of the DST-X002 and DST-X003, at the transducer face
on the DST-X001.
Example 5: Distance Measurement
A batch plant operator needs a display to show the level of rock in a hopper 5
meters deep.
To program the DCR-1003, 1004 for this application, the following values
must be entered in the modes indicated. Many of them are the same as the
preset values but are shown again for example purposes.
MODE VALUE DESCRIPTION
Operation
1 3 Set units to meters because the output is to be displayed in
meters
2 .0 Change the display so that it will have a 10 cm resolution
3 1 Select distance monitoring for application
4 80 Adjust percent of sensitivity with 100 being maximum
5 .60 Do not set closer than the minimum blanking spec. for the DST
sensor.
Automation Products Group, Inc.
APG...Providing tailored solutions for measurement applications
Tel: 1/888/525-7300 • Fax: 1/435/753-7490 • www .apgsensors.com • sales@apgsensors.com
25
Page 26

DCR-1003 and DCR-1004 Rev. A3, 10/08
VOLUME
A very popular use for the DCR-1003, 1004 is to do volumetric conversions
for the amount of product in a tank. If 0 is selected as the tank type , the zero
point is at the DST, and the display will show the distance to the product. If
tank type 1 - 5 are selected, the zero point is the bottom of the tank, and the
display will show how much product is in the tank.
MODE DESCRIPTION PARAMETERS EXPLANATION
29 Tank Type Range = 0 - 5 Selects the type of tank
0 - distance to level to be monitored
1 - level indication Set by NUM UP or NUM DN
2 - horizontal flat ends
3 - horizontal with
spherical ends.
4 - spherical tank
5 - conical bottom
Default = 0
Converting the output into units of volume other than (ft.3), (in.3) ,or (m3)
(determined in mode 1) is often preferred. T o accomplish this, a conversion
factor needs to be entered into modes 30 and 31. For example, converting the
output from cubic inches to liters requires a conversion factor of 0.0164 (1 in.
= 0.0164 liters). If you are using tank type 1, you must multiply the area of
the bottom of the tank by the conversion factor and enter the result into modes
30 and 31. For example, if you have a flat-bottom tank (type1) with a diameter
of 110 in, you must first figure the area of the tank bottom. (Area of a circle = tt
x r2) 3.1415 x 552 = 9503.0375 IN2. The area is then multiplied by a conversion
factor. 9503.0375 x 0.0164 = 155.8498. This is the number you would enter
into modes 30 and 31. This is only necessary with tank type 1. If one of tank
mode 2-5 is selected, then the only the conversion factor needs to be entered in
modes 30 and 31. For example, to convert from (ft.3) to gallons will require a
conversion factor of 7.4805 (1 ft.3 = 7.4805 gallons) to be entered into modes
30 and 31. Using the values entered in modes 30-35, along with the measured
distance to the level, the DCR calculates the volume in gallons.
3
30 Constant Above Range = 0 - 9999 Sets the portion of the multiplier
Decimal Point Default = 1 above the decimal point. Used
for converting between units of
volume. The relay and analog
outputs must be programmed in
the same units used here.
31 Constant Below Range = .0000 - .9999 Sets the portion of the multiplier
Automation Products Group, Inc.
26
APG...Providing tailored solutions for measurement applications
Tel: 1/888/525-7300 • Fax: 1/435/753-7490 • www.apgsensors.com • sales@apgsensors.com
Page 27

Rev. A3, 10/08 DCR-1003 and DCR-1004
Decimal Point Default = .0000 below the decimal point.
32 Span Units = mode 1 Sets the empty distance from
Default = 12.00 ft. the transducer
33 Tank Length Units = mode 1 Sets the length of a horizontal
Default = 10.00 ft. tank or the length to a conical
bottom
34 Length of Units = mode 1 Sets the length of the bottom
Spherical Ends Default = 2.00 ft. cone or spherical or Cone ends
(tank type 3 or 5)
35 Tank Radius Units = mode 1 Sets the radius of the cylinder
Default = 5.00 ft. (not used in tank type 0 or 1)
Automation Products Group, Inc.
APG...Providing tailored solutions for measurement applications
Tel: 1/888/525-7300 • Fax: 1/435/753-7490 • www .apgsensors.com • sales@apgsensors.com
27
Page 28

DCR-1003 and DCR-1004 Rev. A3, 10/08
3 ft.
10 ft.
5 ft.
6 ft.
1.2 ft.
V olume Example 1
Gallons of diesel fuel need to be displayed in the horizontal tank with
spherical ends shown below.
To program the DCR for this application will require the following steps:
MODE VALUE DESCRIPTION
1 2 Set the units to feet.
4-10 --- Determine settings to achieve reliable reading of the target.
3 2 Select volume as operating mode
2 0000. Move the decimal point to the far right. The tank has a
capacity of more than 1500 gallons and we need 4-digits above
the decimal to display the volume.
29 3 Choose tank type 3
30 7 The conversion factor for *ft.3 to gallons is 7.4805. The portion
of the conversion factor above the decimal point is 7
31 4805 The portion of the conversion factor below the decimal point is
4805
32 6 Set the span. This is the distance from the sensor face to the
bottom of the tank in *feet.
33 10 Set the tank length between the spherical end in *feet.
34 1.2 Set length of spherical ends to 1.2 *ft.
35 2.5 Set the tank radius to 2.5 *ft.
12-26 --- Set outputs. Must be setup in gallons.
*Because the units set in mode 1 are set to feet, any
tank dimensions entered must also
be in feet.
This does NOT include output settings, outputs are setup in the units of volume being
used.
APG...Providing tailored solutions for measurement applications
28
Automation Products Group, Inc.
Tel: 1/888/525-7300 • Fax: 1/435/753-7490 • www.apgsensors.com • sales@apgsensors.com
Page 29

Rev. A3, 10/08 DCR-1003 and DCR-1004
6 ft. 9 in.
11 ft. 9 in.
8 ft.
V olume Example 2
Liters of water need to be displayed in
the cylindrical flat bottom tank shown
below.
MODE VALUE DESCRIPTION
1 2 Set units to feet
4-10 --- Determine settings to
achieve reliable reading
of the target.
3 2 Select volume as
operating mode.
2 0000. Move the decimal
point to the far right.
The tank has a capacity of more than 15,000 liters. Because we
can't display 15000 with 4-digits, we will have to display the
output in 10's of liters. (A reading of 1200 would represent
12000 liters)
29 1 Select flat bottom tank
The conversion factor for ft3 to liters is 28.317 Because this is
a flat bottom tank (type 1), we need to multiply the area of the
flat bottom by the conversion factor. area = tt x r2 = 3.1415 x 4
= 50.264 ft.2 area x conversion factor = 50.264 x 28.317 =
1423.3257 Because the display is limited to 4 digits it becomes
necessary to display 10's of liter. To do this we must shift the
decimal point of the conversion one place to the left. The
conversion to be entered into modes 30,31 becomes 142.3325.
2
30 142 Set the conversion above the decimal point
31 3325 Set the conversion below the decimal point
32 11.75 Set the span in *feet. This is the distance from the sensor face
to the bottom of the tank (9 in. = 0.75 ft.)
33-35 --- No settings are necessary. Because we selected tank type 1,
modes 33-35 are not used and any number in these modes will
be ignored by the DCR.
12-26 --- Set outputs. Must be setup in liters for this example.
*Because the units set in mode 1 are set to feet, any
tank dimensions entered must also
be in feet.
This does NOT include output settings, outputs are setup in the units of volume being
used.
Automation Products Group, Inc.
APG...Providing tailored solutions for measurement applications
Tel: 1/888/525-7300 • Fax: 1/435/753-7490 • www .apgsensors.com • sales@apgsensors.com
29
33
Page 30

DCR-1003 and DCR-1004 Rev. A3, 10/08
DIFFERENTIAL
The DCR-1003, 1004 can determine the difference between two levels. This is
accomplished by installing two DST s at the same height, one over each level to
be monitored. The DST s are then programmed as different sensor numbers, # 1
and # 2. The DCR-Controller will take the two level readings and display the
difference.
MODE DESCRIPTION PARAMETERS EXPLANATION
36 Change Sensor Units = sensor # Selects which number to assign
Number Range = 1 - 2 to the sensor connected to the
Default = none DCR.
ONLY ONE SENSOR SHOULD BE Set by NUM UP or NUM DN
CONNECTED WHEN USING THIS MODE
37 Display Control Units = sensor # Selects which sensor distance
Range = 0 - 2 will be displayed. Default is the
0 - display differential difference between DST #1 and
1 - display sensor #1 DST #2.
2 - display sensor #2
Default = 0
Example 7: Differential Reading
A mechanical rake is to be engaged for cleaning a screen when the upstream
level is 2 feet higher than the downstream level. To program the DCR-1003, 1004
for this application, the following modes must be changed from their preset
values.
MODE VALUE DESCRIPTION
Operation
3 3 Select Differential Monitoring for application
5 2.00 Do not set closer than the minimum distance
recommended for the DST sensor type being used
Relay
12 2.00 Begin trip point # 1 when the difference between levels is
greater than 2 ft.
13 3.00 Set the end point beyond the begin point
14 3 Set the trip type to ‘far’, meaning the relay will energize for
display readings greater than 2 ft.
Automation Products Group, Inc.
30
APG...Providing tailored solutions for measurement applications
Tel: 1/888/525-7300 • Fax: 1/435/753-7490 • www.apgsensors.com • sales@apgsensors.com
Page 31

Rev. A3, 10/08 DCR-1003 and DCR-1004
MODE
TRIPS
1 2 3 4
COM
MODE
UP
MODE
DN
NUM
NUM
UP
3
7 9
0 F1
ENTER
DN
8
64
1 2
5
INSTRUMENTS.
LOG AN UTAH
Differential
CONNECT ONLY ONE OF THE DST SENSORS TO THE DCR-1003, 1004
36 2 Program the DST that is connected to the DCR-Controller to
be sensor # 2. The other DST will be sensor # 1 as set at the
factory
CONNECT BOTH DST SENSORS TO THE DCR- CONTROLLER BY USING THE
COAXIAL SPLITTER (obtained from APG)
37 1 The display will show the distance from DST # 1 to the level.
Confirm that the DST is detecting the proper level
37 2 The display will show the distance from DST # 2 to the level.
Confirm that the DST is detecting the proper level
37 0 Display the differential measurement between DST # 1 and # 2
Automation Products Group, Inc.
APG...Providing tailored solutions for measurement applications
Tel: 1/888/525-7300 • Fax: 1/435/753-7490 • www .apgsensors.com • sales@apgsensors.com
31
Page 32

DCR-1003 and DCR-1004 Rev. A3, 10/08
3-4H MINIMUM
SENSOR
LOCATION
CREST
MIN. CREST 2-3H
MIN. BLANKING DIST.
RECTANGULAR WEIR
MAX HEAD, H
OPEN CHANNEL FLOW
The DCR-1003, 1004 and DST ultrasonic system can be used to compute the
flow of a liquid in an open channel such as rivers, canals, and partially filled
conduits. The flow is determined by using the DCR/DST system to measure the
liquid level upstream from a weir or flume. Weirs and flumes are simply special
shaped dams or restrictors built in a channel. Each type of weir or flume has an
associated equation for calculating flow. By programming the specified
constants into the DCR Controller and installing the DST sensor to monitor the
upstream depth of the weir or flume, an exact flow measurement can be
continually obtained. All relay and analog outputs must be programmed in the
units of flow .
The standard flow equation for a weir or flume is:
The equation for the weir or flume being used can be obtained from the
respective manufacturer. Two examples will show how the DCR/DST system can
monitor flow.used to convert distance to flow.
32
Q = KH^X
where Q = flow
K = constant
H = head, or water depth to zero point
X = exponent
APG...Providing tailored solutions for measurement applications
Tel: 1/888/525-7300 • Fax: 1/435/753-7490 • www.apgsensors.com • sales@apgsensors.com
Automation Products Group, Inc.
Page 33

Rev. A3, 10/08 DCR-1003 and DCR-1004
MODE DESCRIPTION PARAMETERS EXPLANATION
38 Constant Above Range = 0 - 9999 Sets the portion of the multiplier
Decimal Point Default = 1 (K) above the decimal point,
used for converting distance to
flow
39 Constant Below Range = .0000 - .9999 Sets the portion of the multiplier
Decimal Point Default = .0000 (K) below the decimal point,
used for converting distance to
flow
40 Decimal Point Range = 0000. - 0.000 Sets the decimal point position
Default = 00.00 of the display. Same as mode 4.
41 Span Units = mode 1 Sets the measured distance
Range = 0.000 - 9999 from .5" behind the DST
Default = 12.00 feet face to the zero flow level
42 Exponent Above Range = 0 - 9999 Sets the portion of the exponent
Decimal Point Default = 1 (X) above the decimal point,
used to convert distance to flow
43 Exponent Below Range = .0000 - .9999 Sets the portion of the exponent
Decimal Point Default = 0 (X) below the decimal point,
used to convert distance to flow
Automation Products Group, Inc.
APG...Providing tailored solutions for measurement applications
Tel: 1/888/525-7300 • Fax: 1/435/753-7490 • www .apgsensors.com • sales@apgsensors.com
33
Page 34

DCR-1003 and DCR-1004 Rev. A3, 10/08
Example 8: Weir
The inlet flow to an irrigation reservoir is to be monitored and displayed in
cubic feet per second (CFS). A 5 ft. rectangular weir without end contractions is
to be used as the primary measuring device.
The associated flow equation for the 5 ft. weir is:
Flow in CFS = 16.65 * H^1.5
where H = the height of the pool above the weir crest
By mounting the DST sensor more than 2.00 ft. above the maximum pool
height, and locating the sensor upstream from the weir crest as recommended
for this weir type, the flow can be calculated.
*NOTE: The DCR-1004 does NOT work with contracted-end weirs.
To program the DCR-1003, 1004 for this application, the following modes
must be set:
MODE VALUE DESCRIPTION
Operation
3 4 Select Open Channel Monitoring for application
5 2.00 Do not set closer than the minimum distance
recommended for the DST sensor type being used
Open Channel Flow
38 16 Constant ‘K’ above the decimal point
39 6500 Constant ‘K’ below the decimal point
40 .00 Secimal to two places
41 SPAN Distance from .5 in. behind the transducer face to the top of the
weir crest using a tape measure
42 1 Exponent ‘X’ above the decimal point
43 5000 Exponent ‘X’ below the decimal point
Automation Products Group, Inc.
34
APG...Providing tailored solutions for measurement applications
Tel: 1/888/525-7300 • Fax: 1/435/753-7490 • www.apgsensors.com • sales@apgsensors.com
Page 35

Rev. A3, 10/08 DCR-1003 and DCR-1004
.6 METERS
SPAN
REQUIRED BLANKING DIST.
Example 9: Flume
A 1 meter wide cutthroat flume has been installed on the outlet of a water
treatment plant. Flow is to be displayed in liters/sec. (LPS).
The associated flow equation for the 1 meter flume is:
Flow in LPS = 11.48 * H^1.56
where H is the upstream head measurement as specified
for this flume type.
To program the DCR-1003, 1004 for this application, the following modes
must be set:
MODE VALUE DESCRIPTION
Operation
1 3 Set units to meters because the output is to be displayed in liters
per second.
3 4 Select Open Channel Monitoring for application
5 0.60 m Do not set closer than the minimum blanking distance
recommended for the DST sensor type being used
Open Channel Flow
38 11 Constant ‘K’ above the decimal point
39 4800 Constant ‘K’ below the decimal point
40 .0 Decimal to one place
41 SPAN Distance from .5 in. behind the transducer face to the bottom of
the flume using a tape measure
42 1 Exponent ‘X’ above the decimal point
43 5600 Exponent ‘X’ below the decimal point
Automation Products Group, Inc.
APG...Providing tailored solutions for measurement applications
Tel: 1/888/525-7300 • Fax: 1/435/753-7490 • www .apgsensors.com • sales@apgsensors.com
35
Page 36

DCR-1003 and DCR-1004 Rev. A3, 10/08
Temperature Compensation
As air temperature changes, so does the speed of sound. This change can
cause .18% drift in distance for every °C change. Mode 44 allows
compensation in the readings for this change. The DST contains an internal
thermistor which measures temperature in degrees F. By turning temperature
compensation on, the effects of temperature changes may be reduced by 50%.
For the DST temperature sensor to operate properly, it must be shielded from
radiant heat. Because the temperature sensor is internal to the DST, it requires
several minutes to react to air temperature changes.
MODE DESCRIPTION PARAMETERS EXPLANATION
44 Temperature Range = OFF, ON, Selects internal temperature
Compensation temp in F compensation for changes in the
Default = OFF speed of sound, on, off, or view
sensor temperature set by NUM
UP or NUM DN
36
Automation Products Group, Inc.
APG...Providing tailored solutions for measurement applications
Tel: 1/888/525-7300 • Fax: 1/435/753-7490 • www.apgsensors.com • sales@apgsensors.com
Page 37

Rev. A3, 10/08 DCR-1003 and DCR-1004
Calibration
For most open air applications, the factory-set calibration should be correct.
Variations between the distance measured by the DCR/DST System and the
actual distance are caused by environmental conditions such as temperature,
humidity, or chemical atmospheres. These environments can be compensated
for by using a calibration factor which alters the reading to match the
application conditions.
MODE DESCRIPTION PARAMETERS EXPLANATION
45 Distance Offset Units = mode 1 Sets an offset for the display
Range = 0.000 - 9999 when measuring distance to a
Default = 0 level
46 Offset Polarity Range = NEG, POS Selects the direction of the
Default = NEG offset, adds or subtracts offset to
reading, set by NUM UP or
NUM DN
47 Calibration Range = 0 - 9999 Sets the integer portion of the
Above the Default = 1 calibration factor
Decimal Point
48 Calibration Range = .0000 - .9999 Sets the fractional portion of the
Below the Default = 0 calibration factor
Decimal Point
Example 11: Calibration
1 Point Calibration
The Calibration Factor is used to bring the displayed reading in line with the
measured distance. To obtain the measured distance, measure from the level to
be detected to .5 in. behind the DST face. (.5 in. behind the DST face is the
electrical zero of the sensor.) The calibration factor is determined by dividing
the actual distance measured, by the displayed distance. Enter this number in
the calibration modes 45 and 46.
2 Point Calibration
If a more precise calibration is required, a two point calibration should be
used. This is accomplished by using the linear equation of Y = AX + B where;
Automation Products Group, Inc.
APG...Providing tailored solutions for measurement applications
Tel: 1/888/525-7300 • Fax: 1/435/753-7490 • www .apgsensors.com • sales@apgsensors.com
37
Page 38

DCR-1003 and DCR-1004 Rev. A3, 10/08
Y = measured distance X = DCR Reading
A = Multiplier B = Offset
The multiplier (A) can be determined by taking ultrasonic readings at two
known distances and dividing the difference of the known distances (D) by the
difference of the ultrasonic (U) readings (A) = (D2-D1)/ (U2-U1) where;
D2 = far known distance U2 = Ultrasonic reading at D
D1 = close known distance U1 = Ultrasonic reading at D
2
1
Enter this multiplier in Modes 47 and 48. The multiplier can then be entered
in the above equation to calculate the offset B = D2 - (A)U2. The offset should
be entered using Modes 45 and 46.
Utilities
Reset
When the DCR is powered up, ‘NO’ is loaded in mode 49. This saves the
user-selected modes into the DCR. If the mode adjustments get scrambled or if
the factory preset values are wanted, press the NUM UP key. If ‘YES’ is
entered, the DCR will perform a reset, loading all the modes with the default
parameters.
MODE DESCRIPTION PARAMETERS EXPLANATION
49 Reset Range = no - yes Reset the mode parameters to
Default = no their factory preset values
(default)
Set by NUM UP or NUM DN
Software Version
Mode 50 displays the software version for the DCR. The value corresponds
to the operating version and the approximate date of manufacture.
MODE DESCRIPTION PARAMETERS EXPLANATION
50 Software Version Displays the software version
Automation Products Group, Inc.
38
APG...Providing tailored solutions for measurement applications
Tel: 1/888/525-7300 • Fax: 1/435/753-7490 • www.apgsensors.com • sales@apgsensors.com
Page 39

Rev. A3, 10/08 DCR-1003 and DCR-1004
• Quick Reference Sheet
MODE DESCRIPTION PARAMETERS
Operation
1 Units ________________________
2 Decimal Point ________________________
3 Operating Mode ________________________
4 Sensitivity ________________________
5 Blanking ________________________
6 Pulses ________________________
Filtering
7 Sample Rate ________________________
8 Samples Averaged ________________________
9 Out-of-Range Sample ________________________
10 Out-of-Range Span ________________________
11 Loss of Echo Delay ________________________
Relay
12 Begin Trip 1 ________________________
13 End Trip 1 ________________________
14 Trip 1 Type ________________________
15 Begin Trip 2 ________________________
16 End Trip 2 ________________________
17 Trip 2 Type ________________________
18 Begin Trip 3 ________________________
19 End Trip 3 ________________________
20 Trip 3 Type ________________________
21 Begin Trip 4 ________________________
22 End Trip 4 ________________________
23 Trip 4 Type ________________________
Analog
24 Analog Output ________________________
25 0 or 4 mA Distance ________________________
26 20 mA Distance ________________________
Automation Products Group, Inc.
APG...Providing tailored solutions for measurement applications
Tel: 1/888/525-7300 • Fax: 1/435/753-7490 • www .apgsensors.com • sales@apgsensors.com
39
Page 40

DCR-1003 and DCR-1004 Rev. A3, 10/08
MODE DESCRIPTION PARAMETERS
Analog (continued)
27 0 or 4 mA Trim ________________________
28 20 mA Trim ________________________
Volume
29 Tank Type ________________________
30 Mult Above ________________________
31 Mult Below ________________________
32 Span ________________________
33 Tank Length ________________________
34 Sphere. Length ________________________
35 Tank Radius ________________________
Differential
36 Change Senor # ________________________
37 Display Control ________________________
Open Channel Flow
38 Constant Above ________________________
39 Constant Below ________________________
40 Decimal Point ________________________
41 Tank Span ________________________
42 Exponent Above ________________________
43 Exponent Below ________________________
Calibration
44 Temp Comp ________________________
45 Distance Offset ________________________
46 Offset Polarity ________________________
47 Calibration Above ________________________
48 Calibration Below ________________________
Utilities
49 Reset ________________________
50 Software Version ________________________
Automation Products Group, Inc.
40
APG...Providing tailored solutions for measurement applications
Tel: 1/888/525-7300 • Fax: 1/435/753-7490 • www.apgsensors.com • sales@apgsensors.com
Page 41

Rev. A3, 10/08 DCR-1003 and DCR-1004
• Trouble Shooting
The DCR-1003, DCR-1004 and DST sensor are a rugged, reliable level
measurement system that is easy to install and setup. But occasionally problems
will occur during set up. A list of symptoms and possible corrective actions are
provided for troubleshooting.
SYMPTOM CAUSE ACTION
DISTANCE DISPLAY ON Short circuit • Verify coaxial connections
COM. LED IS OFF on the transducer and wiring on cable or connector
• Sensor failure
COM. LED FLASHING Communication • Check coaxial cable and
EVERY .5 SECONDS error connectors for tight connection
• Sensor failure in communication
circuit
COM. LED FLASHING Loss of echo • Poor target characteristics see
EVERY SECOND “understanding ultrasonics”
section
• Sensor failure in transducer circuit
DISPLAY READS ---- Display overflow • Change calibration, multiplier, or
decimal point position
• DST & DCR are incompatible,
upgrade DST software
DISPLAY WILL NOT Sensor is seeing the • Remove detected object at
CHANGE BUT LEVEL wrong target measured distance
DOES • Mount the sensor away from tank
seams or obstructions
DISPLAY WILL ONLY Sensor is receiving • Check transducer installation for
READ AT CLOSE strong echoes in its smooth sound propagation into
DISTANCE blanking distance tank or to desired target
• Increase blanking distance mode 2
Automation Products Group, Inc.
APG...Providing tailored solutions for measurement applications
Tel: 1/888/525-7300 • Fax: 1/435/753-7490 • www .apgsensors.com • sales@apgsensors.com
41
Page 42

DCR-1003 and DCR-1004 Rev. A3, 10/08
• Maintenance
The DCR-1003, 1004 controller and DST sensor do not require maintenance.
However, a periodic visual inspection of the system would be in order.
The DST should be kept as clean as possible for optimum performance. Dust
buildup may be removed from the transducer with a cloth or by low pressure
air. The DST-PVC can be cleaned with soap and water.
If the DST is visibly effected by the environment, a different type of
transducer may be required.
42
Automation Products Group, Inc.
APG...Providing tailored solutions for measurement applications
Tel: 1/888/525-7300 • Fax: 1/435/753-7490 • www.apgsensors.com • sales@apgsensors.com
Page 43

Rev. A3, 10/08 DCR-1003 and DCR-1004
• Specifications
DCR-1003 DCR-1004
Outputs 4 relays (5 A 110 VAC) 4 relays (5 A 110 VAC)
with 4-20 mA or 0-20 mA
Supply Voltage 110-220 VAC 110-220 VAC
Total Current Draw 0.1 A 0.1 A
Housing fiberglass fiberglass
Rating NEMA 4X, IP65 NEMA 4X, IP65
Dimensions 8.5 x 6.5 x 4.25 in. 8.5 x 6.5 x 4.25 in.
(216 x 165 x 108 mm) (216 x 165 x 108 mm)
Resolution maximum of .01 in. maximum of .01 in.
(.25 mm) (.25 mm)
Display 4 character digital LED 4 character digital LED
Operating Temp. -30 to 50°C -30 to 50°C
Connector Terminal Strip Terminal Strip
Sample Rate 1-12 Hz 1-12 Hz
Programmable Settings microprocessor microprocessor
controlled modes controlled modes
Sensor Connector F connector F connector
Automation Products Group, Inc.
APG...Providing tailored solutions for measurement applications
Tel: 1/888/525-7300 • Fax: 1/435/753-7490 • www .apgsensors.com • sales@apgsensors.com
43
Page 44

AUTOMATION
APG...Providing tailored solutions
for measurement applications
Automation Products Group, Inc.
T el: 1/888/525-7300
Fax: 1/435/753-7490
e-mail: sales@apgsensors.com
www.apgsensors.com
GROUP, INC.
1/435/753-7300
PRODUCTS
Automation Products Group, Inc.
1025 W. 1700 N.
Logan, UT 84321
 Loading...
Loading...