

Engineer-to-Engineer Note EE-304
r
a
Technical notes on using Analog Devices DSPs, processors and development tools
Visit our Web resources http://www.analog.com/ee-notes and http://www.analog.com/processors o
e-mail processor.support@analog.com or processor.tools.support@analog.com for technical support.
Using the Blackfin® Processor SPORT to Emulate a SPI Interface
Contributed by J.Galindo and Joe B. Rev 1 – November 10, 2006
Introduction
The Blackfin® family of embedded processors
supports numerous methods of booting
application code, including serial booting from
an SPI flash memory device. The Blackfin SPI
interface is limited to a maximum clock rate of
one-quarter the system clock (SCLK) rate. If the
SCLK is maximized to 133 MHz, this translates to
an SPI performance limitation of ~33 MHz.
However, there are serial flash devices capable
of speeds higher than this, and it is possible to
achieve serial clock speeds of up to ~66 MHz if
one of the Blackfin serial ports (SPORTs) is used
instead, as the maximum SPORT clock
frequency is SCLK/2.
Emulating the SPI Boot Process
If the intent is to boot from an SPI device whose
operating frequency exceeds the maximum
Blackfin SPI frequency of SCLK/4, the SPORT
interface may be an attractive alternative, as it
can run twice as fast as the SPI. However, since
SPORT booting is not supported by the Blackfin
processor boot ROM, the SPORT must be
configured/connected such that it can
successfully communicate with the SPI device
and have the ability to execute the boot process
normally automated by the boot ROM for the
SPI interface. This requires specific use of
hardware and configuration software, as well as
modification to the boot process itself.
This EE-Note describes how to use the Blackfin
SPORT to emulate an SPI interface and how to
then use that emulated hardware to boot an
application from an SPI memory device using the
SPI boot mode of the Blackfin processor. To
make the process work, one must first understand
the boot process of Blackfin processors and have
a fundamental understanding of the boot image
.ldr file) expected by the Blackfin boot ROM.
(
These concepts are discussed in ADSP-BF533
Blackfin Booting Process (EE-240)
[1]
.
This application was tested using the
VisualDSP++ 4.5® development tools and the
ADSP-BF537 EZ-KIT Lite® evaluation system,
but the concepts discussed apply to all members
of the Blackfin processor family.
Copyright 2006, Analog Devices, Inc. All rights reserved. Analog Devices assumes no responsibility for customer product design or the use or application of
customers’ products or for any infringements of patents or rights of others which may result from Analog Devices assistance. All trademarks and logos are property
of their respective holders. Information furnished by Analog Devices applications and development tools engineers is believed to be accurate and reliable, however
no responsibility is assumed by Analog Devices regarding technical accuracy and topicality of the content provided in Analog Devices Engineer-to-Engineer Notes.
Configuring/Connecting the Hardware
The master SPI boot mode is used for this
application. The master mode SPI interface
requires four signals: data in (
MISO), data out
(MOSI), clock (SCK), and chip-select (/SPISS).
Three of these four signals have evident
correlation to SPORT pins:
MOSI is the transmit data (DTxPRI)
MISO is the receive data (DRxPRI)
SCK is the clock (TSCLKx/RSCLKx)
The Blackfin SPORTs support both primary and
secondary transmit/receive data channels. The
primary pins (denoted by the PRI suffix) are
utilized when no secondary channel is required.
a
The Blackfin SPORTs also support dedicated
clock sources for both the transmitter and
receiver. In this application, the SPORT’s
transmit and receive logic are interfaced to the
same SPI memory device; therefore, the
transmitter and receiver clocks are shared, and
are thus connected together externally.
The pin in the SPI interface that has no
equivalent pin on the SPORT is the chip-select
signal, /SPISS. The /SPISS is the gating factor
for the SCK. As a slave SPI device, action is only
taken on SCK edges detected while the /SPISS
signal is being held active low by the bus master.
Most master SPI devices supply the SCK signal
only when they are placing data on the MOSI line,
but extraneous SCK transitions are ignored if the
/SPISS signal is transitioned to inactive high
before the extra SCK pulses are active. This builtin behavior is helpful because the SPORT
employs a continuous clock once the hardware
has been enabled and communications have
begun. The challenge is to make the SPORT
hardware handle the appropriate timing and
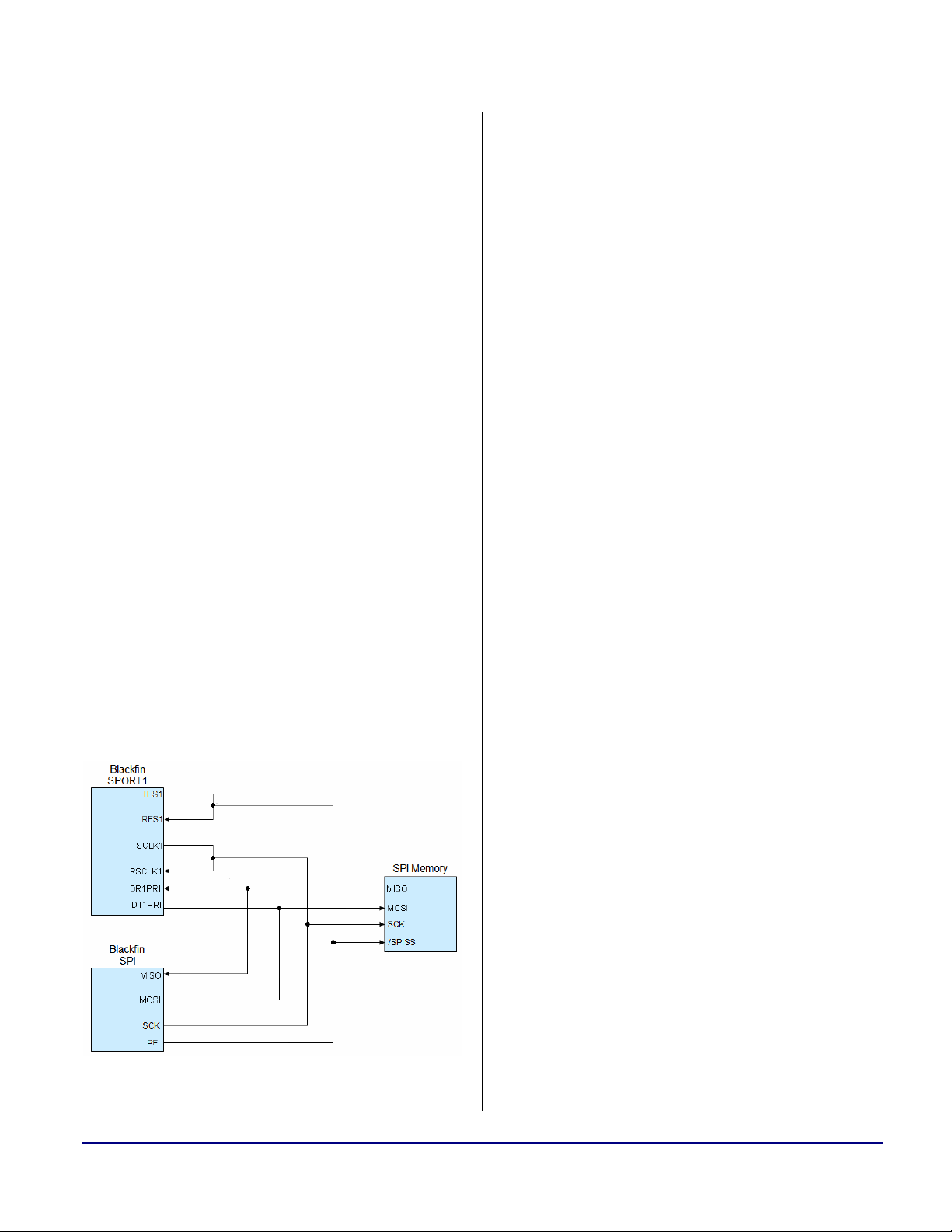
control of the /SPISS signal. To address this
need, the frame sync signals in the SPORT
interface are used. Figure 1 depicts how the
SPORT and SPI pins of the Blackfin processor
should be connected to each other and to the SPI
memory device.
If the SPORT is configured to generate an active
low, late frame sync (as is required for every
word transmitted), the behavior of the transmit
frame sync pin (TFSx) is comparable to the
/SPISS signal. For internally generated, active
low, late framing, the
TFS signal is asserted low
in the same SPORT clock cycle as data is placed
DTxPRI, and the signal is held low for the
on
duration of the word being transmitted.
TFSx is
then de-asserted unless new data is ready to be
transmitted, in which case it is held in the active
low state. This is precisely the way the /SPISS
signal would be managed by an SPI master
device. The following assembly source code can
be used to configure the SPORT:
P1.H = HI(SPORT1_TCR1);
P1.L = LO(SPORT1_TCR1);
R3.L =
TCKFE|LATFS|LTFS|TFSR|ITFS|ITCLK;
W[P1] = R3;
The equivalent C code would be:
*pSPORT1_TCR1 =
TCKFE|LATFS|LTFS|TFSR|ITFS|ITCLK;
Booting Via the SPORT Interface
As stated previously, there is no native support
built into the boot ROM for booting over the
SPORT. Achieving this functionality requires the
boot sequence to begin booting over SPI, as
configured by the
BMODE pins, and then transfer
control to the SPORT to continue the boot
process over the faster SPORT interface.
To do this, there is a need for a secondary piece
of software, called a second-stage loader (SSL).
An SSL is simply a kernel that the boot ROM
loads and executes in place to complete the boot
process. This causes the boot ROM to load the
SSL code over SPI, at which point the boot ROM
is exited and execution starts at the beginning of
the SSL code section in memory. In the
.ldr
file, the SSL resides between any needed
Figure 1. SPORT/SPI Hardware Connections
Using the Blackfin® Processor SPORT to Emulate a SPI Interface (EE-304) Page 2 of 7
initialization code to set up external memory and
the actual application code, as shown in Figure 2.
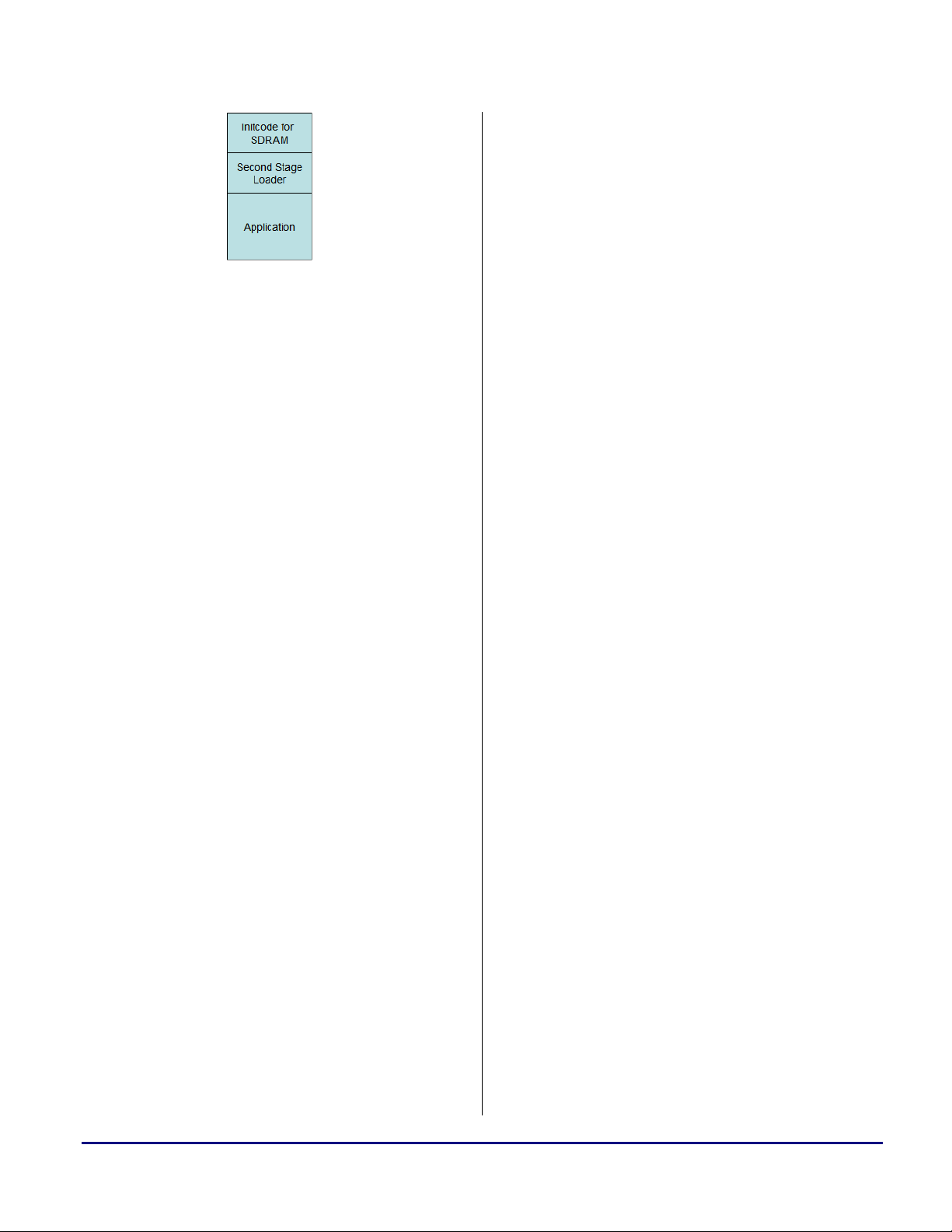
Figure 2. Loader File (.LDR) Content
In this particular application, the SSL consists of
the required initialization code for the SPORT
interface, as well as the SPORT version of the
SPI boot code found in the boot ROM, which is
required to proceed with booting the actual
application that is still out in the SPI memory at
the time the SSL is executed.
Ideally, this can be handled by placing all
SPORT initialization code into the SSL and
tagging it as an init block in the boot stream (as
described in EE-240), such that it boots over SPI,
executes in place, and then completes the boot
process via the SPORT while executing the SSL
on-chip. However, this is a problem because the
boot process simply moves instructions/data via
DMA from blocks of SPI memory to blocks of
Blackfin memory, be it internal instruction/data
RAM or external SDRAM.
When the boot stream gets to the input block
destined for the top of on-chip Blackfin L1
instruction memory, the SSL that is currently
executing this boot code will be overwritten.
This behavior is usually not a factor because the
on-chip boot ROM is in a protected memory
region that is not writeable by the DMA
sequence used to move the application code into
on-chip memory. However, when executing init
block code out of unprotected on-chip memory,
this overwrite will compromise the boot process
and result in an invalid processor state because
the code that is booted in via DMA replaces the
currently executing SSL code, which has not
completed executing yet. This will cause
undesired execution of newly booted instructions
before the boot itself has completed.
A solution to this problem is to place the SSL in
external SDRAM and to change the address
where the boot kernel jumps to after completion
from the top of L1 memory to the address of the
SSL code itself. The nature of the boot ROM is
to set a default reset address in the Event Vector
Table location for the reset vector, which is
stored in the EVT1 register. For some processors,
this address is 0xFFA00000. For the smaller
memory derivative processors, the reset address
is 0xFFA08000. If the application wants to set an
explicit address, an overwrite of the EVT1
register can be done in the code that is located in
the init block. The code sequence to overwrite
the EVT1 register is as follows, and it can be
found in the SDRAM_InitCode.asm file in the
associated .ZIP archive
p0.h = hi(EVT1);
p0.l = lo(EVT1);
r0.h = START_OF_SSL_H;
r0.l = START_OF_SSL_L;
[p0] = r0;
ssync;
Using this scheme, the init block boots over SPI
and executes on-chip, setting up the SDRAM
interface timing appropriate for the application
and reconfiguring the reset address to be the
beginning of the SSL code. The SSL code is then
booted and resolved to SDRAM, which spares
the application from being forced to reserve
valuable on-chip memory. After the init block
and the SSL code are loaded, the boot kernel
finishes and jumps into SDRAM, where the rest
of the boot process is completed via the SPORT
pins, as controlled by the SSL.
This boot process will not be corrupted
L
The SSL code is 925 bytes in size, and should
reside in a portion of SDRAM that is guaranteed
to be unused by the application being booted.
An easy way to do this is by making a small
change to the application’s
as long as the actual application does
not overwrite the section of SDRAM
that the SSL is resolved to.
[2]
:
.ldf file to reserve a
a
Using the Blackfin® Processor SPORT to Emulate a SPI Interface (EE-304) Page 3 of 7

a
small block of SDRAM for the SSL in the
memory definition section, and then map nothing
to that segment of memory. Using the default
ADSP-BF537 .ldf file as an example:
MEMORY
{
MEM_SDRAM0_BANK0 { START(0x00000004) END(0x00FFFFFF) TYPE(RAM) WIDTH(8) }
MEM_SDRAM0_BANK1 { START(0x01000000) END(0x01FFFFFF) TYPE(RAM) WIDTH(8) }
MEM_SDRAM0_BANK2 { START(0x02000000) END(0x02FFFFFF) TYPE(RAM) WIDTH(8) }
// Comment out the original MEM_SDRAM0_BANK3 definition below
// MEM_SDRAM0_BANK3 { START(0x03000000) END(0x03FFFFFF) TYPE(RAM) WIDTH(8) }
// Replace it with a newly defined BANK3 with a reserved 925 bytes at the end for the SSL
MEM_SDRAM0_BANK3 { START(0x03000000) END(0x03FFFC5F) TYPE(RAM) WIDTH(8) }
// MEM_RESERVE_SSL { START(0x03FFFC60) END(0x03FFFFFF) TYPE(RAM) WIDTH(8) }
} /* MEMORY */
Figure 3. Modifications to Default ADSP-BF537 .LDF File to Reserve Space for SSL Code
As shown in Figure 3, these modifications to the
.ldf file free the upper 925 bytes of SDRAM for
the SSL to occupy during the boot sequence. If
the memory is not defined in the .ldf file, it is
unusable to the application and will therefore be
protected memory. To change where the SSL
code is resolved in SDRAM, the above example
can be modified appropriately to reserve the
block of memory, and then the SSL project itself
would need to be adjusted to resolve the SSL to
the desired memory range.
First, select the region of memory that the SSL
Finally, change the reset address in the EVT1
register, as shown in
#define START_OF_SSL_L 0xFC60
#define START_OF_SSL_H 0x03FF
/*******SSL Execution Setup**********/
p0.h = hi(EVT1);
p0.l = lo(EVT1);
r0.h = START_OF_SSL_H;
r0.l = START_OF_SSL_L;
[p0] = r0;
ssync;
SDRAM_InitCode.asm:
will map to and reserve it in the application’s
.ldf file (ADSP-BF537.ldf), as shown in
Figure 3. Next, the SSL's .ldf file
Contents of Associated .ZIP File
(SSL_Linker_Description_File.ldf) must be
modified to resolve the SSL code to the same
memory region by changing the
START and END
addresses of the SEG_LDR segment to be the
range defined in ADSP-BF537.ldf as the
memory region to protect. For example, if the
application uses a smaller SDRAM, the end of
In the associated .ZIP file, there are four
executable files:
C_Talkthrough_I2S.dxe
SDRAM_InitCode.dxe
ssl.dxe
SPIDriver.dxe
SDRAM may reside at 0x01FFFFFF, as shown
in Figure 4:
C_Talkthrough_I2S.dxe
MEMORY
{
JMP_LDR { TYPE(RAM) START(0xFFA00000)
END(0xFFA0000F) WIDTH(8) }
SEG_LDR { TYPE(RAM) START(0x01FFFC60)
END(0x01FFFFFF) WIDTH(8) }
}
The C_Talkthrough_I2S.dxe file is the
executable file for the actual application code. It
is the audio talkthrough application that is
supplied with the ADSP-BF537 EZ-KIT Lite,
which simply uses SPORT DMA to take in an
audio stream via the DAC, copies the data to an
Figure 4. SSL Linker Description File
output buffer, and then uses SPORT DMA to
Using the Blackfin® Processor SPORT to Emulate a SPI Interface (EE-304) Page 4 of 7

a
send the output buffer through the ADC to the
audio output on the board.
SDRAM_InitCode.dxe
The SDRAM_InitCode.dxe file is the executable
file for the code required to configure the
SDRAM that is present on the ADSP-BF537 EZKIT Lite, given the default PLL settings and the
25-MHz CLKIN used on the EZ-KIT Lite board.
This code would need to be tailored to the target
hardware in order to work properly. If this step is
required, a new .dxe file will need to be
generated from the modified source code.
Since the SPI, SPORT, and SDRAM interfaces
are in the SCLK domain, the speed at which the
application can boot will depend on how the
hardware is configured. If the PLL registers that
govern the CCLK and SCLK frequencies are
modified as part of the SDRAM init block, faster
SPI/SPORT/SDRAM speeds can be realized, and
the boot speed can be optimized. For example,
the code in Figure 5 can be added to the
SDRAM_InitCode.asm source file to increase the
CLKIN multiplier (MSEL) to 18 from the default
setting of 10:
Finally, the beginning address of the SSL code is
also specified in the init code. This address must
match the SEG_LDR start address of the secondstage loader.
ssl.dxe
The ssl.dxe file is the executable for the
second-stage loader, which is required to transfer
control of the boot process from the SPI to the
SPORT. This code would only be modified if the
user wished to resolve the SSL to an address
other than 0x03FFFC60, or if a different SPI
device other than the STMicroelectronics
M25P32 is used. If either is desired, this
executable would need to be regenerated using
the modified SecondStageLoader.asm source
code.
SPIDriver.dxe
The SPIDriver.dxe file is the flash programmer
driver developed specifically for this application.
This driver was developed for the
STMicroelectronics M25P32 SPI flash memory
device; however, it can be modified to work with
any serial memory device.
/************************************/
/*Initialize Phase Lock Loop for MAX*/
/*SPORT speed */
/************************************/
INIT_PLL:
[--SP] = RETS;
[--SP] = R3;
R3 = 0x0001(Z);
W[P1 + LO(SIC_IWR)] = R3;
// Change MSEL in PLL_CTL to
// increase CCLK
R3.L = 0x2400;
W[P1 + LO(PLL_CTL)] = R3;
IDLE;
R3 = [SP++];
RETS = [SP++];
RTS;
INIT_PLL.END:
Figure 5. SDRAM_InitCode .asm Code Snippet
Using the Blackfin® Processor SPORT to Emulate a SPI Interface (EE-304) Page 5 of 7
Generating the Loader File
To utilize the contents of the associated .ZIP
file, first save the contents to a working directory
(e.g., C:\Project_Name).
Once the
populated, open the
project file. On the
Options
Options
Loader file. This is the master project that
will be utilized to generate the single cohesive
.ldr file necessary for the application to boot as
intended.
In the dialog box's tree control (left side), click
Options (under Load); this opens the
Project:Load:Options page. In Boot Mode,
C:\Project_Name directory is
ssl.dpj VisualDSP++
Project page of the Project
dialog box (Project->Project
), verify that the project target type is

select SPI; in Boot Format, select Intel hex;
Output Width, select 8-bit. These options
in
properly configure the loader utility to create an
image compatible with the SPI flash device
chosen.
a
Populate the
the init code executable:
“C:\Project_Name\SDRAM Init Code
(ASM)\Debug\SDRAM_InitCode.dxe”
This instructs the loader utility to tag the
SDRAM_InitCode.dxe executable as an init
block in the
booted and executed in place prior to continuing
the boot process.
L
In the Additional options field, provide the
application executable itself:
“C:\Project_Name\Audio Codec
Talkthrough (C)\Debug\
C_Talkthrough_I2S.dxe”
By placing additional executables in the
Additional options box, the loader is being
instructed to append additional .dxe files to the
.ldr file in the order in which they appear in this
box. The .dxe file for the project being built is
placed in the .ldr file first, immediately after
the init code block, and is then followed by any
.dxe files specified here.
Initialization file field with
.ldr file, which will allow it to be
In these dialog boxes, double-quotes are
required around all path names that
contain the space bar character.
Figure 6. Loader File Configuration
Programming the SPI Flash Device
Once the .ldr file has been properly generated,
the next step is to program it into the SPI
memory. Use the SPIDriver.dxe flash
programmer driver in the associated .ZIP file by
choosing Tools->Flash Programmer in
VisualDSP++. Then browse for the driver by
name, as shown in Figure 7.
Finally, set
“C:\Project_Name\combination.ldr”
This process is summarized in Figure 6 which
shows the project options configured for the ssl
project.
Click
combination.ldr will appear in the
C:\Project_Name directory.
Using the Blackfin® Processor SPORT to Emulate a SPI Interface (EE-304) Page 6 of 7
Output file to:
OK and build the project. The output file
Figure 7. Driver Page of Flash Programmer Window
Click the Programming tab. Then select Erase
affected
options
Select the sectors that need to be erased (these
(under Pre-program erase
) and select Intel Hex in File format.

a
will vary depending on the size of the
combination.ldr file), and ensure that Data
specifies the path and file name of the .ldr
file
file:
C:\Project_Name\combination.ldr
Click the Programming tab and verify that the
Message center box indicates success, as
shown in Figure 8.
Figure 8. Flash Programmer Window
The application is now programmed into the SPI
flash memory. If the emulator is disconnected,
resetting the board will result in a successful
boot of the application, in which the SPI port is
utilized for the initialization process and the
faster SPORT interface is employed for the rest
of the boot sequence.
Conclusions
The SPORT interface of the Blackfin processor
can be configured to act like a master SPI device.
Because of this, booting over the SPORT can be
achieved if proper care is given to the boot
process and if the necessary precautions are
taken with respect to hardware. Since the SPORT
is capable of functioning at double the operating
frequency of the Blackfin SPI port, the SPORT
can be used to interface to faster SPI memory
devices that normally would not be utilized to
their capacity by the native SPI port, given the
speed limitation of SCLK/4 that is resident on the
SPI hardware.
References
[1] ADSP-BF533 Blackfin Booting Process (EE-240). Rev 3, January 2005. Analog Devices, Inc.
[2] Associated ZIP File. Rev 1, October 2006. Analog Devices, Inc.
[3] ADSP-BF537 Blackfin Processor Hardware Reference. Rev 3.1, May 2005. Analog Devices, Inc.
Document History
Revision Description
Rev 1 – November 10, 2006
by J. Galindo & Joe B.
Initial Release
Using the Blackfin® Processor SPORT to Emulate a SPI Interface (EE-304) Page 7 of 7
 Loading...
Loading...