

Page 1
Engineer-to-Engineer Note EE-213
a
Technical notes on using Analog Devices DSPs, processors and development tools
Contact our technical support at dsp.support@analog.com and at dsptools.support@analog.com
Or vi sit our o n-li ne r esou rces htt p:/ /www.analog.com/ee-notes and http://www.analog.com/processors
Host Communication via the Asynchronous Memory Interface for
Blackfin® Processors
Contributed by Prashant Khullar and Jeff Sondermeyer Rev 2 – March 29, 2004
Introduction
This Engineer-to-Engineer Note discusses the
functionality and performance of an
asynchronous memory interface developed for
ADSP-BF531 / BF532 / BF533 Blackfin®
processors. The interface is designed to provide a
host port-like interface in applications that
require a Blackfin processor to be used in
conjunction with a host microcontroller. It can
also be used to connect two Blackfin processors
with minimal external circuitry. The maximum
throughput of this implementation is 14.8 MB/s
without concurrent bus activity and 8.3 MB/s
while concurrent DMA activity is taking place.
(e.g., simultaneous peripheral and memory
DMA).
Higher bandwidth interfacing can be
!
achieved with additional external logic
or by using other Blackfin peripherals
such as the SPORT, PPI, or external Bus
Grant/Request.
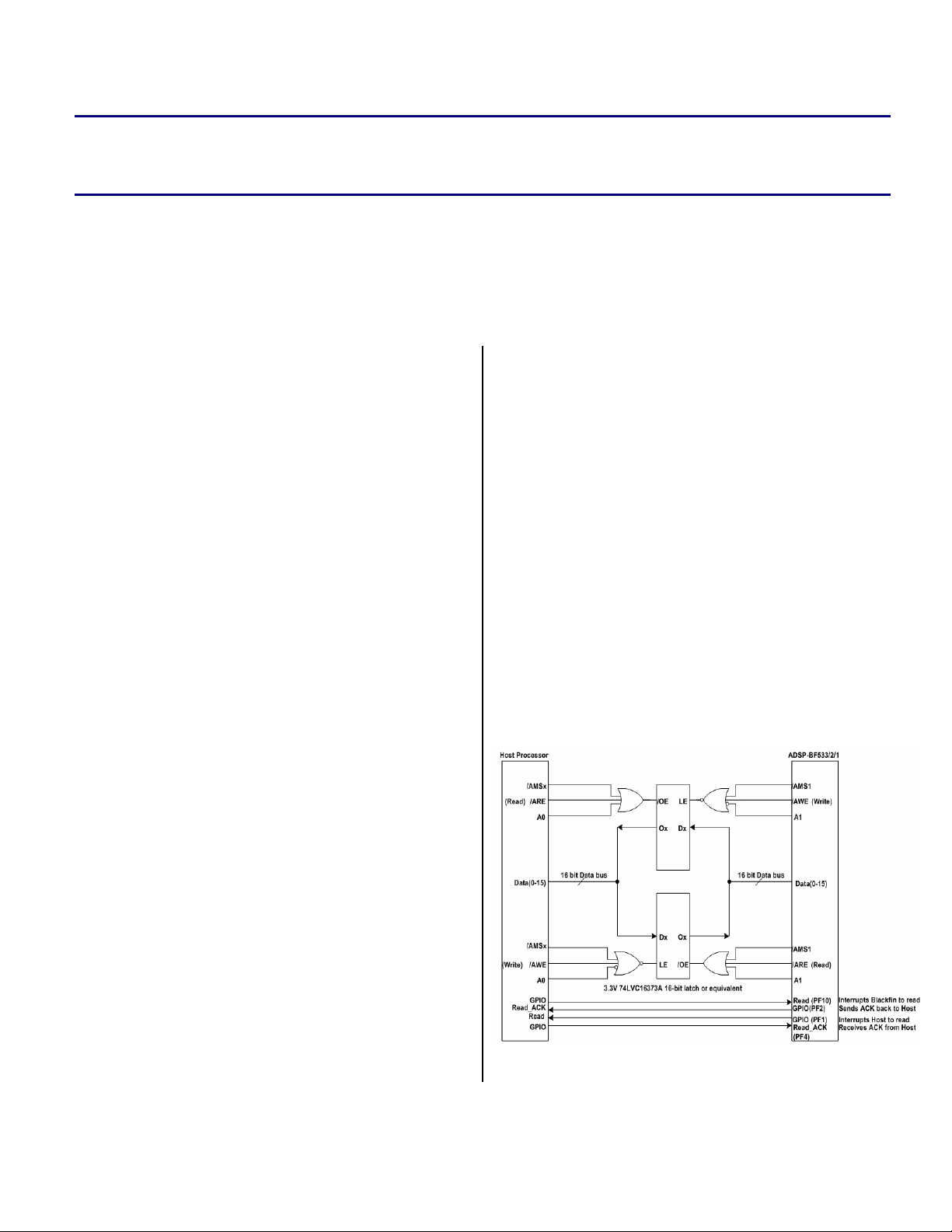
Reads and writes to the data bus on both ends are
regulated by the processor’s external bus
controller. The control signals are routed via the
combinational logic elements to the
LE and /OE
pins on the latches (see Figure 1). Four generalpurpose I/O pins are required for the
implementation on both the Blackfin and Host
processors. These are used to synchronize the
interrupt-driven data transfers. Each processor
must send and receive two types of interrupts: a
Read, and a Read_Ack. The former is issued by the
sending processor to indicate that a word of data
has been latched into the data bus and may be
read by the receiving processor. The latter is
issued by the receiving processor to indicate that
a word of data has been successfully read in and
that the sending processor may send another
word.
Hardware Components
The basic architecture of this interface is shown
in Figure 1. Two inexpensive 16-bit latches and
some combinational logic are necessary for
implementation. The host processor only requires
an asynchronous memory port to send and
receive data. Such an interface can be found on
most microcontrollers.
Figure 1. Host Interface Schematic
Copyright 2004, Analog Devices, Inc. All rights reserved. Analog Devices assumes no responsibility for customer product design or the use or application of
customers’ products or for any infringements of patents or rights of others which may result from Analog Devices assistance. All trademarks and logos are property
of their respective holders. Information furnished by Analog Devices Applications and Development Tools Engineers is believed to be accurate and reliable, however
no responsibility is assumed by Analog Devices regarding technical accuracy and topicality of the content provided in Analog Devices’ Engineer-to-Engineer Notes.
Page 2
a
Software Requirements
Data transfer via the asynchronous interface must
be controlled by an interrupt-driven software
routine running on both processors. Reads and
writes must be processed in interrupt service
routines (ISRs). Interrupt requests of both types
should be issued within the ISRs as well. The
appropriate flag pins can simply be toggled to
indicate interrupt requests.
Host-DSP API for Pointer versus Data
Using this interface, how do we distinguish
between address and data information? The
following paragraph describes one possible
method.
Note: In this case, assume all interrupts are
rising-edge-sensitive. When the host is sending
address data to the DSP, the host
can be left high until the host gets back a
Read_Ack from the DSP. In this way, when the
DSP still sees a high on the
Read interrupt pin, it
treats the incoming data as an address (a pointer
to where the following data is to be placed). At
that point, the host can send data, but this time it
toggles the
Read flag pin (high then low) so that
the DSP sees only a low on the
In the DSP
level of the
Read ISR, the code senses the logic
Read interrupt pin and sets up a new
address pointer or places data at the next pointer
location. This should be a clever way of
differentiating between address pointers (where
to put the following data) and the data itself. The
only other consideration is that since the
Blackfin external memory interface is only 16
bits wide, you need two 16-bit words to form a
32-bit address. In this way, the pointer/address
can place code anywhere within the Blackfin
memory map. To accomplish this, you set up and
initialize a bit to zero (
Read ISR so that the first time a new address is
encountered, the code sets
ADDR_BIT) in the DSP
ADDR_BIT and stores
the first 16 bits as the most significant word
(
MSW). Then, when the second 16 bits of the
Read flag pin
Read interrupt pin.
address arrive and ADDR_BIT = 1, it stores it as
the least significant word (LSW). Following the
receipt of the MSW, the bit is cleared in
preparation for the next address that arrives. The
reverse of this method is used for communicating
from DSP back to the host.
MIPS Calculation
The worst-case ISR latency for entering and
exiting an interrupt is 28 core clock (
cycles for Blackfin processors with a 10-stage
execution pipeline. This latency includes pipeline
refills and the return from interrupt (
specific minimum transfer rate is required, this
should be a high-priority interrupt that is “noninterruptible” to maintain a deterministic number
of cycles. Assuming we use the API method
discussed in the previous section, the worst case
latency from the beginning to the end of an
interrupt is 61
operation and 75
CCLK cycles for a single write
CCLK cycles for a single read
operation. Choosing an arbitrary transfer rate of
2.5 Mwords/s, we consume 75 cycles * 2.5M =
187 MIPS of DSP processing power moving a
single 16-bit word of data from the host to the
DSP in each interrupt.
It is evident from the above example that for any
transfer rate that is on the order of a Mega-word
per second, the number of MIPS consumed for
the method depicted in Figure 1 is prohibitive.
Therefore, under these conditions, adding a
multi-word FIFO between the Host and the DSP
is recommended. Obviously, the deeper the
FIFO, the fewer MIPS are consumed, because
more data is transferred in each interrupt and the
overhead is minimized. For a Kilo-word per
second transfer rate, a one-word FIFO is
adequate. An equation has emerged:
If we let
NPI = Number of read/writes Per Interrupt
(Note: this is equal to the FIFO depth)
NCS = Number of Context Saves/restores
CCLK)
RTI). If a
Host Communication via the Asynchronous Memory Interface for Blackfin® Processors (EE-213) Page 2 of 14
Page 3
a
RTR = Required Transfer Rate (Note: this must
be less than the 8.3MB/s for a FIFO depth of 1)
FIL = Fixed Interrupt Latency = 28
RLC = Read Latency Constant = 15
(Note: Wait = 1 system clock (
SCLKs and the minimum latency for an
asynchronous memory read is 2
CCLK/SCLK = 5/1)
WLC = Write Latency Constant = 0
CCLK cycles
CCLK cycles
SCLK), Hold = 2
SCLKs,
CCLKs (Note:
write operations do not stall the core)
GPR = General-Purpose Flag Read in Interrupt =
30
CCLKs or 0 CCLKs depending on whether you
use this method (Note:
CCLK/SCLK = 5/1)
DSP MIPs to read host =
[(FIL+RLC+NPI+GPR+(2*NCS))*RTR]/NPI
DSP MIPs to write host =
interface (PPI) and from L1 memory t o SDRAM
while waiting for interrupts. DMA traffic control
is used to optimize bus sharing during these
transfers. This second test case emulates the
Blackfin processor’s behavior in a scenario
where a video application is passing encoded
data from the host to DSP and vice-versa. The
complete source code for these test cases is
included in Appendix B.
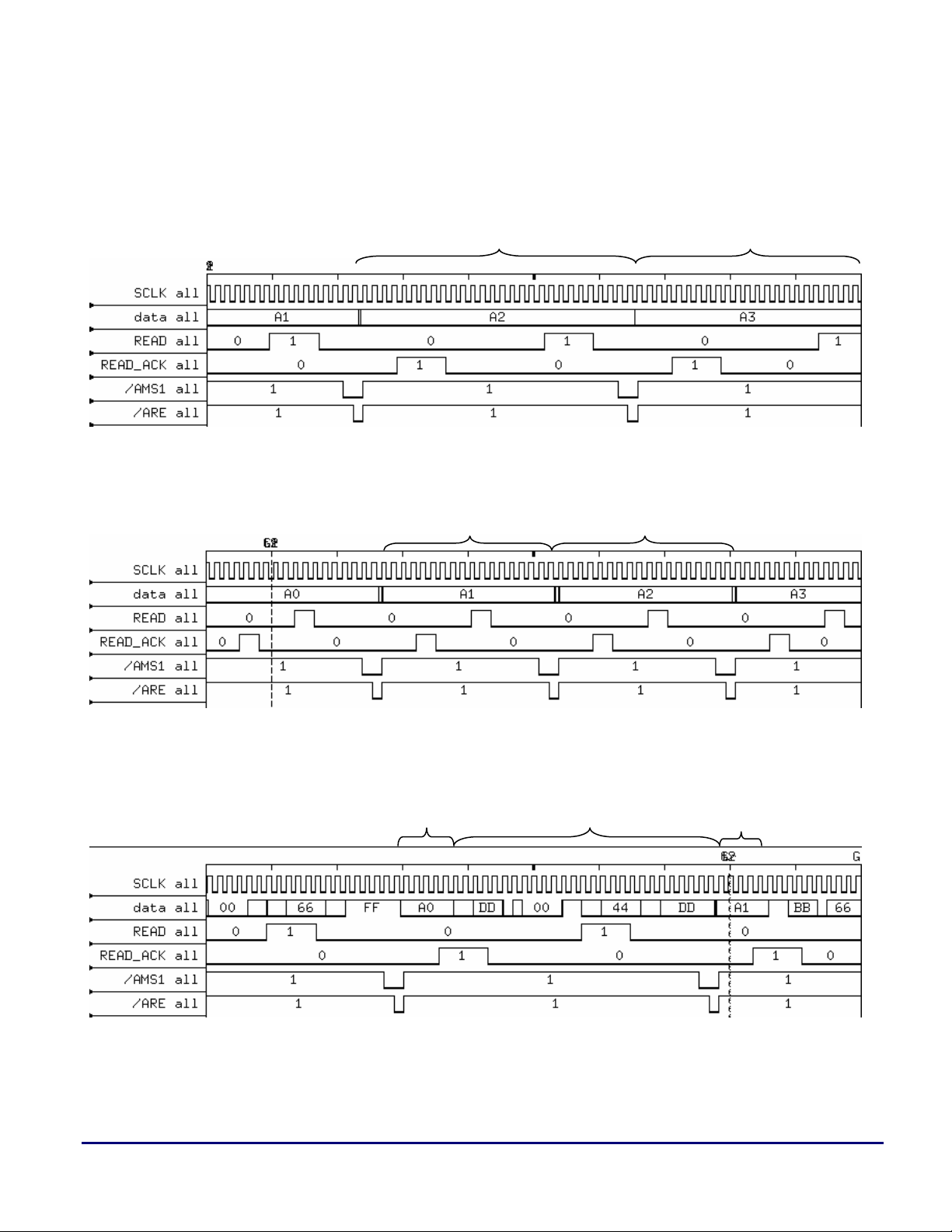
Additionally, if processor latencies are known
beforehand, a further performance enhancement
can be made. Specifically, the writing processor
can issue a ‘Read’ interrupt before it has actually
completed its data write sequence. Since the
reading processor has a known latency (in these
tests, an ADSP-BF533 with a 6-cycle latency)
involved in reading a flag-pin and triggering an
ISR, the correct data is present on the bus once it
is ready to read. Figures 2 and 3 illustrate the
effect of this modification.
[(FIL+WLC+NPI+GPR+(2*NCS))*RTR]/NPI
Example: NPI=8, NCS=2, RTR= 2.5Mwords/s
DSP MIPS to read host = [(28+15+8+30+4)
*2.5M]/8 = 26.5 MIPs with a GPIO read in the
ISR.
Performance Evaluation
The performance of the asynchronous host
interface was evaluated on a hardware prototype
interconnecting two ADSP-BF533 processors.
The software routines used to test the interface
are included in Appendix B of this document.
The interface was tested in two real-time
scenarios with another ADSP-BF533 processor
acting as the host device. In the first, both
processors simply idle until an interrupt request
is received which is then processed in the
appropriate ISR. In the second, one of the
processors performs auto-buffered DMAs from
external SDRAM to the parallel peripheral
Without interspersed DMA activity or the
performance enhancement, a complete 16-bit
word transfer across the host interface takes 28
system clock (
SCLK) cycles including the cycles
associated with signaling using general-purpose
I/O flags. With the performance enhancement,
this can be reduced to 18
SCLK cycles. With
interspersed bidirectional DMA, this increases to
32
SCLK cycles. At the maximum SCLK
frequency of 133 MHz, this translates to
throughputs of 9.5 MB/s, 14.8 MB/s, and
8.3 MB/s, respectively. In all cases, read and
write sequences are configured to be 2
SCLK
cycles in length. The time taken for a read/write
cycle to commence upon receiving an interrupt is
6
SCLK cycles without interspersed DMA and 12
SCLK cycles with interspersed DMA. Issuing a
flag-pin interrupt upon completion of a read or
write sequence involves a 4-cycle latency in all
cases. Figures 2 and 3 show snapshots of the data
bus and control logic taken with a logic analyzer
during transfer sequences in all test cases.
Host Communication via the Asynchronous Memory Interface for Blackfin® Processors (EE-213) Page 3 of 14
Page 4
a
Conclusion
At a transfer rate of over 8 MB/s with full
parallel DMA activity, this scheme can handle
complex video algorithms. It is a very low-cost
parallel approach that is fully asynchronous and
bidirectional.
Host Communication via the Asynchronous Memory Interface for Blackfin® Processors (EE-213) Page 4 of 14
Page 5
Appendix A. Timing Plots
a
Figure 2. Asynchronous Transfer without Performance Enhancement (Reading Processor’s View)
Async Data Async Data
Async Data Async Data
Figure 3. Asynchronous Transfer with Performance Enhancement (Reading Processor’s View)
Async Bi-Directional DMA Activity with Async
Figure 4. Asynchronous Data Transfer with Background DMA Activity (Reading Processor’s View)
Host Communication via the Asynchronous Memory Interface for Blackfin® Processors (EE-213) Page 5 of 14
Data Traffic Control Data
Page 6

a
Appendix B. Code Listings
asyncreader.asm
/*******************************************************************************
*
* Copyright (c) 2003 Analog Devices Inc. All rights reserved.
*
*******************************************************************************/
// Asynchronous Memory Interface Test Code
//
// READ routine
//
// Last modified: 09/19/2003
#include "defBF533.h"
.section L1_code;
.global _main;
_main:
/* Assign 2 input (PF10, PF4) and 2 output flags (PF1, PF2) */
P0.L = lo(FIO_DIR);
P0.H = hi(FIO_DIR);
R0.L = 0x0006;
W[P0] = R0.L;
/* Enable input flagpins (PF10, PF4) */
P0.L = lo(FIO_INEN);
P0.H = hi(FIO_INEN);
R0.L = 0x0410;
W[P0] = R0.L;
/* Enable input flagpin 4 for Interrupt A generation */
P0.L = lo(FIO_MASKA_S);
P0.H = hi(FIO_MASKA_S);
R0.L = 0x0010;
W[P0] = R0.L;
/* Enable input flagpin 10 for Interrupt B generation */
P0.L = lo(FIO_MASKB_S);
P0.H = hi(FIO_MASKB_S);
R0.L = 0x0400;
W[P0] = R0.L;
/* Set ISR Address for PF interrupts*/
P0.L = lo(EVT12);
P0.H = hi(EVT12);
R0.H = _ASYNC_READ;
R0.L = _ASYNC_READ;
[P0] = R0;
Host Communication via the Asynchronous Memory Interface for Blackfin® Processors (EE-213) Page 6 of 14
Page 7

/* Initialize EBIU */
P0.L = lo(EBIU_AMBCTL1);
P0.H = hi(EBIU_AMBCTL1);
R0.L = 0x1112; /* Set Read/Write sequences to be 2 SCLKs in length*/
R0.H = 0x1112; /* 1 SCLK setup + 1 SCLK read/write */
[P0] = R0;
SSYNC;
P0.L = lo(EBIU_AMGCTL);
P0.H = hi(EBIU_AMGCTL);
R0.L = 0x00f6;
W[P0] = R0;
SSYNC;
/* Initialize asynchronous write data and address */
R3 = 0x0000 (z);
R2 = 0x0001 (z);
P2.L = 0x0000;
P2.H = 0x2020;
/* Initialize Pointer to SIC event register */
P3.L = lo(SIC_ISR);
P3.H = hi(SIC_ISR);
P4.L = lo(FIO_FLAG_D);
P4.H = hi(FIO_FLAG_D);
/* Initalize SDRAM registers. */
//SDRAM Refresh Rate Control Register
P0.L = lo(EBIU_SDRRC);
P0.H = hi(EBIU_SDRRC);
R0.L = 0x0817;
W[P0] = R0.L;
//SDRAM Memory Bank Control Register
P0.L = lo(EBIU_SDBCTL);
P0.H = hi(EBIU_SDBCTL);
R0.L = 0x0013;
W[P0] = R0.L;
//SDRAM Memory Global Control Register
P0.L = lo(EBIU_SDGCTL);
P0.H = hi(EBIU_SDGCTL);
R0.L = 0x998d;
R0.H = 0x0091;
[P0] = R0;
//DMA0_START_ADDR
R0.L = 0x0;
R0.H = 0x0;
P0.L = lo(DMA0_START_ADDR);
P0.H = hi(DMA0_START_ADDR);
[P0] = R0;
a
Host Communication via the Asynchronous Memory Interface for Blackfin® Processors (EE-213) Page 7 of 14
Page 8

//DMA0_CONFIG
R0.L = 0x1000; // Autobuffer mode, no DMA Interrupts
P0.L = lo(DMA0_CONFIG);
P0.H = hi(DMA0_CONFIG);
W[P0] = R0.L;
//DMA0_X_COUNT
R0.L = 0xC;
P0.L = lo(DMA0_X_COUNT);
P0.H = hi(DMA0_X_COUNT);
W[P0] = R0.L;
//DMA0_X_MODIFY
R0.L = 0x1;
P0.L = lo(DMA0_X_MODIFY);
P0.H = hi(DMA0_X_MODIFY);
W[P0] = R0.L;
/* PPI Control Register: Output direction, 656 mode. */
P0.L = lo(PPI_CONTROL);
P0.H = hi(PPI_CONTROL);
R0.L = 0x2;
W[P0] = R0.L;
P1 = 0x0000 (z); // base of SDRAM
R0.L = 0xBBBB;
R0.H = 0xAAAA;
[P1++] = R0;
R0.L = 0xDDDD;
R0.H = 0xCCCC;
[P1++] = R0;
R0.L = 0xFFFF;
R0.H = 0xEEEE; // Write known Patterns to SDRAM
[P1++] = R0;
P1.L = 0x0000;
P1.H = 0xFF80; // Base of L1 Data Bank A
R0.L = 0x1122; // known words
R0.H = 0x3344;
[P1++] = R0;
R0.L = 0x5566;
R0.H = 0x1122;
[P1++] = R0;
R0.L = 0x3344;
R0.H = 0x5566;
[P1++] = R0;
/* Set up MemDMA from L1 to SDRAM */
/* MDMA_S0 Start Address */
R0.L = 0x0000;
R0.H = 0xFF80;
P0.L = lo(MDMA_S0_START_ADDR);
P0.H = hi(MDMA_S0_START_ADDR);
[P0] = R0;
/* MDMA_S0_X_COUNT */
R0.L = 0xC;
a
Host Communication via the Asynchronous Memory Interface for Blackfin® Processors (EE-213) Page 8 of 14
Page 9

P0.L = lo(MDMA_S0_X_COUNT);
P0.H = hi(MDMA_S0_X_COUNT);
W[P0] = R0.L;
/* MDMA_S0_X_MODIFY */
R0.L = 0x1;
P0.L = lo(MDMA_S0_X_MODIFY);
P0.H = hi(MDMA_S0_X_MODIFY);
W[P0] = R0.L;
/* MDMA_D0 Start Address */
R0.L = 0x0010;
R0.H = 0x0000;
P0.L = lo(MDMA_D0_START_ADDR);
P0.H = hi(MDMA_D0_START_ADDR);
[P0] = R0;
/* MDMA_D0_X_COUNT */
R0.L = 0xC;
P0.L = lo(MDMA_D0_X_COUNT);
P0.H = hi(MDMA_D0_X_COUNT);
W[P0] = R0.L;
/* MDMA_D0_X_MODIFY */
R0.L = 0x1;
P0.L = lo(MDMA_D0_X_MODIFY);
P0.H = hi(MDMA_D0_X_MODIFY);
W[P0] = R0.L;
/* Enable system PF and PPI DMA interrupts */
P0.L = lo(SIC_IMASK);
P0.H = hi(SIC_IMASK);
R0 = [P0];
bitset(r0,8);
bitset(r0,19);
bitset(r0,20);
[P0] = R0;
/* Enable core PF and PPI DMA interrupts */
P0.L = lo(IMASK);
P0.H = hi(IMASK);
R0 = [P0];
bitset (R0,8);
bitset(R0,12);
[P0] = R0; // All inits are complete and interrupts are enabled after
// this line. You may insert a software breakpoint here for
// testing purposes.
/* Set up DMA Traffic Control */
R0.L = 0x2222;
P0.L = 0x0B0C;
P0.H = 0xFFC0;
W[P0] = R0.L;
//Enable MemDMA Source
R0.L = 0x1001;
a
Host Communication via the Asynchronous Memory Interface for Blackfin® Processors (EE-213) Page 9 of 14
Page 10

P0.L = lo(MDMA_S0_CONFIG);
P0.H = hi(MDMA_S0_CONFIG);
//W[P0] = R0.L; // Uncomment this line to enable MemDMA from L1
// memory to SDRAM
ssync;
//Enable MemDMA Destination
R0.L = 0x1003;
P0.L = lo(MDMA_D0_CONFIG);
P0.H = hi(MDMA_D0_CONFIG);
//W[P0] = R0.L; // Uncomment this line to enable MemDMA from L1
// memory to SDRAM
//Enable Peripheral DMA
P0.L = lo(DMA0_CONFIG);
P0.H = hi(DMA0_CONFIG);
R0.L = W[P0];
bitset(R0,0);
//W[P0] = R0.L; // Uncomment this line to enable autobuffered DMA transfers
// from SDRAM to PPI
ssync;
//Enable PPI
P0.L = lo(PPI_CONTROL);
P0.H = hi(PPI_CONTROL);
R0.L = W[P0];
bitset(R0,0);
//W[P0] = R0.L; // Uncomment this line to enable autobuffered DMA transfers
// from SDRAM to the PPI
ssync;
wait:
jump wait;
/* Perform reads in an ISR */
_ASYNC_READ:
/* Read from Latch */
R3 = W[P2] (z);
/* Send Read_Ack to Host */
R0.L = 0x2;
W[P4] = R0.L;
ssync;
R0.L = 0x0;
W[P4] = R0.L;
RTI;
_main.end:
a
Listing 1. asyncreader.asm
Host Communication via the Asynchronous Memory Interface for Blackfin® Processors (EE-213) Page 10 of 14
Page 11

a
asyncwriter.asm
/******************************************************************************
*
* Copyright (c) 2003 Analog Devices Inc. All rights reserved.
*
*******************************************************************************/
// Asynchronous Memory Interface Test Code
//
// WRITE routine
//
// Last modified: 09/19/2003
#include "defBF533.h"
.section L1_code;
.global _main;
_main:
/* Assign 2 input (PF10, PF4) and 2 output flags (PF1, PF2) */
P0.L = lo(FIO_DIR);
P0.H = hi(FIO_DIR);
R0.L = 0x0006;
W[P0] = R0.L;
/* Enable input flagpins (PF10, PF4) */
P0.L = lo(FIO_INEN);
P0.H = hi(FIO_INEN);
R0.L = 0x0410;
W[P0] = R0.L;
/* Enable input flagpin 4 for Interrupt A generation */
P0.L = lo(FIO_MASKA_S);
P0.H = hi(FIO_MASKA_S);
R0.L = 0x0010;
W[P0] = R0.L;
/* Enable input flagpin 10 for Interrupt B generation */
P0.L = lo(FIO_MASKB_S);
P0.H = hi(FIO_MASKB_S);
R0.L = 0x0400;
W[P0] = R0.L;
/* Set ISR Address for PF interrupts*/
P0.L = lo(EVT12);
P0.H = hi(EVT12);
R0.H = _ASYNC_WRITE;
R0.L = _ASYNC_WRITE;
[P0] = R0;
/* Initialize EBIU */
P0.L = lo(EBIU_AMBCTL1);
Host Communication via the Asynchronous Memory Interface for Blackfin® Processors (EE-213) Page 11 of 14
Page 12

P0.H = hi(EBIU_AMBCTL1);
R0.L = 0x1112; /* Set Read/Write sequences to be 2 SCLKs in length*/
R0.H = 0x1112; /* 1 SCLK setup + 1 SCLK read/write */
[P0] = R0;
SSYNC;
P0.L = lo(EBIU_AMGCTL);
P0.H = hi(EBIU_AMGCTL);
R0.L = 0x00f6;
W[P0] = R0;
SSYNC;
/* Initialize asynchronous write data and address */
R3 = 0x0000 (z);
R2 = 0x0001 (z);
P2.L = 0x0000;
P2.H = 0x2020;
/* Initialize Pointer to SIC event register */
P3.L = lo(SIC_ISR);
P3.H = hi(SIC_ISR);
P4.L = lo(FIO_FLAG_D);
P4.H = hi(FIO_FLAG_D);
/* Initalize SDRAM registers. */
//SDRAM Refresh Rate Control Register
P0.L = lo(EBIU_SDRRC);
P0.H = hi(EBIU_SDRRC);
R0.L = 0x0817;
W[P0] = R0.L;
//SDRAM Memory Bank Control Register
P0.L = lo(EBIU_SDBCTL);
P0.H = hi(EBIU_SDBCTL);
R0.L = 0x0013;
W[P0] = R0.L;
//SDRAM Memory Global Control Register
P0.L = lo(EBIU_SDGCTL);
P0.H = hi(EBIU_SDGCTL);
R0.L = 0x998d;
R0.H = 0x0091;
[P0] = R0;
//DMA0_START_ADDR
R0.L = 0x0;
R0.H = 0x0;
P0.L = lo(DMA0_START_ADDR);
P0.H = hi(DMA0_START_ADDR);
[P0] = R0;
//DMA0_CONFIG
R0.L = 0x1000; // Autobuffer mode, no DMA Interrupts
P0.L = lo(DMA0_CONFIG);
P0.H = hi(DMA0_CONFIG);
a
Host Communication via the Asynchronous Memory Interface for Blackfin® Processors (EE-213) Page 12 of 14
Page 13

W[P0] = R0.L;
//DMA0_X_COUNT
R0.L = 0xC;
P0.L = lo(DMA0_X_COUNT);
P0.H = hi(DMA0_X_COUNT);
W[P0] = R0.L;
//DMA0_X_MODIFY
R0.L = 0x1;
P0.L = lo(DMA0_X_MODIFY);
P0.H = hi(DMA0_X_MODIFY);
W[P0] = R0.L;
/* PPI Control Register: Output direction, 656 mode. */
P0.L = lo(PPI_CONTROL);
P0.H = hi(PPI_CONTROL);
R0.L = 0x2;
W[P0] = R0.L;
P1 = 0x0000 (z); // base of SDRAM
R0.L = 0xBBBB;
R0.H = 0xAAAA;
[P1++] = R0;
R0.L = 0xDDDD;
R0.H = 0xCCCC;
[P1++] = R0;
R0.L = 0xFFFF;
R0.H = 0xEEEE; // Write known Patterns to SDRAM
[P1++] = R0;
/* Enable system PF and PPI DMA interrupts */
P0.L = lo(SIC_IMASK);
P0.H = hi(SIC_IMASK);
R0 = [P0];
bitset(r0,8);
bitset(r0,19);
bitset(r0,20);
[P0] = R0;
/* Enable core PF and PPI DMA interrupts */
P0.L = lo(IMASK);
P0.H = hi(IMASK);
R0 = [P0];
bitset (R0,8);
bitset(R0,12);
[P0] = R0; // All inits are complete and interrupts are enabled after this
// line
// You may insert a software breakpoint here for testing purposes.
//Enable DMA
P0.L = lo(DMA0_CONFIG);
P0.H = hi(DMA0_CONFIG);
R0.L = W[P0];
bitset(R0,0);
//W[P0] = R0.L; // Uncomment this line to enable DMA from SDRAM to PPI
a
Host Communication via the Asynchronous Memory Interface for Blackfin® Processors (EE-213) Page 13 of 14
Page 14

ssync;
//Enable PPI
P0.L = lo(PPI_CONTROL);
P0.H = hi(PPI_CONTROL);
R0.L = W[P0];
bitset(R0,0);
//W[P0] = R0.L; // Uncomment this line to enable DMA from SDRAM to PPI
ssync;
wait:
jump wait;
/* Perform writes in an ISR */
_ASYNC_WRITE:
/* Write to Latch */
W[P2] = R2;
ssync; // Comment this line to engage performance enhancement
R2+=1;
/* Inform Host of available data */
R0.L = 0x4;
W[P4] = R0.L;
ssync;
R0.L = 0x0;
W[P4] = R0.L;
RTI;
_main.end:
a
Listing 2. asyncwriter.asm
References
[1] ADSP-BF533 Blackfin Processor Hardware Reference. Revision 1.0, December 2003. Analog Devices, Inc.
Document History
Revision Description
Rev 2 – March 29, 2004
by J. Sondermeyer
Rev 1 – October 21, 2003
by P. Khullar
Host Communication via the Asynchronous Memory Interface for Blackfin® Processors (EE-213) Page 14 of 14
Added Host-DSP API method
Added MIPS Calculation section
Initial Release
 Loading...
Loading...