

Page 1
AN-525
a
APPLICATION NOTE
One Technology Way • P.O. Box 9106 • Norwood, MA 02062-9106 • 781/329-4700 • World Wide Web Site: http://www.analog.com
ADV601 Video Codec Design Considerations
by David Starr
OVERVIEW
This Applications note is for hardware and software designers starting an ADV601 design. Using this note and
the information in the ADV601 Video Codec data sheet
you can do the following:
Design ADV601-based video compression hardware.
Write software drivers and hardware diagnostic
programs.
Integrate your hardware into the PCI bus and your
software into Windows
The design examples in this application note refer to the
ADV601-based Videolab demonstration board, but you
can apply the techniques used in these examples to any
ADV601-based design. The software source code and
hardware schematics mentioned in this note are available on the Analog Devices computer products FTP site,
whose Uniform Resource Locator (URL) is:
ftp://ftp.analog.com/pub/dsp/adv601/
VCLK (VIDEO CLOCK) FREQUENCY FOR SQUARE AND
NONSQUARE PIXELS
The ADV601 uses the VCLK signal for internal processing,
DRAM timing and strobing in video data. The ADV601’s
internal PLL multiplies VCLK up to generate the DRAM
/CAS and /RAS timing. Use only the clock frequencies
listed on the data sheet under “Clock Pins,” even in
nonreal-time applications. You must set the mode control register bits P/N (PAL/NTSC) and SPE (Square Pixel
Enable) to match the selected VCLK frequency. For instance, if VCLK is 29.5 MHz, then set both P/N and SPE
equal to one for the ADV601 to function properly. If you
®
95.
intend to switch square pixel enable on and off, you must
also vary the clock frequency to match. Pulse-to-pulse jitter on VCLK should be less than 1 ns. The part is designed
to function with VCLK phase locked to the horizontal
sync. There is enough tolerance in the clock circuit to
track the horizontal timing variations caused by tape
speed variations (flutter and wow) on consumer grade
VHS video cassette recorders (VCRs).
COMPRESSED VIDEO DATA INTERFACE DESIGN ISSUES
The compressed video data bus must support a high
data rate. Raw video comes into the part at 12 to
14 Megapixels/sec. Video will come out of the part just
as fast at low compression ratios. The compression ratio
can vary from its programmed value, causing the video
data rate to increase (or decrease, but the increase
causes the difficulty). A slow compressed video bus will
cause the ADV601’s internal FIFO to underflow or overflow, resulting in lost frames on capture and torn frames
on playback. Difficulty may occur if the compressed
video bus is slower than 5 Megabytes/sec. The Analog
Devices evaluation board uses a Bus Master PCI bus interface capable of 16 Megabytes/sec.
Many applications capture and play back video to/from
hard disk. In this case the disk is the limiting factor in system throughput. However, if the disk and the ADV601 reside on the same bus (for example, a PCI bus system),
bus bandwidth may also be a factor. If the video goes
from the ADV601 card to main memory, and then from
main memory to disk, bus traffic is double what it would
be if the video went directly from the ADV601 to the disk
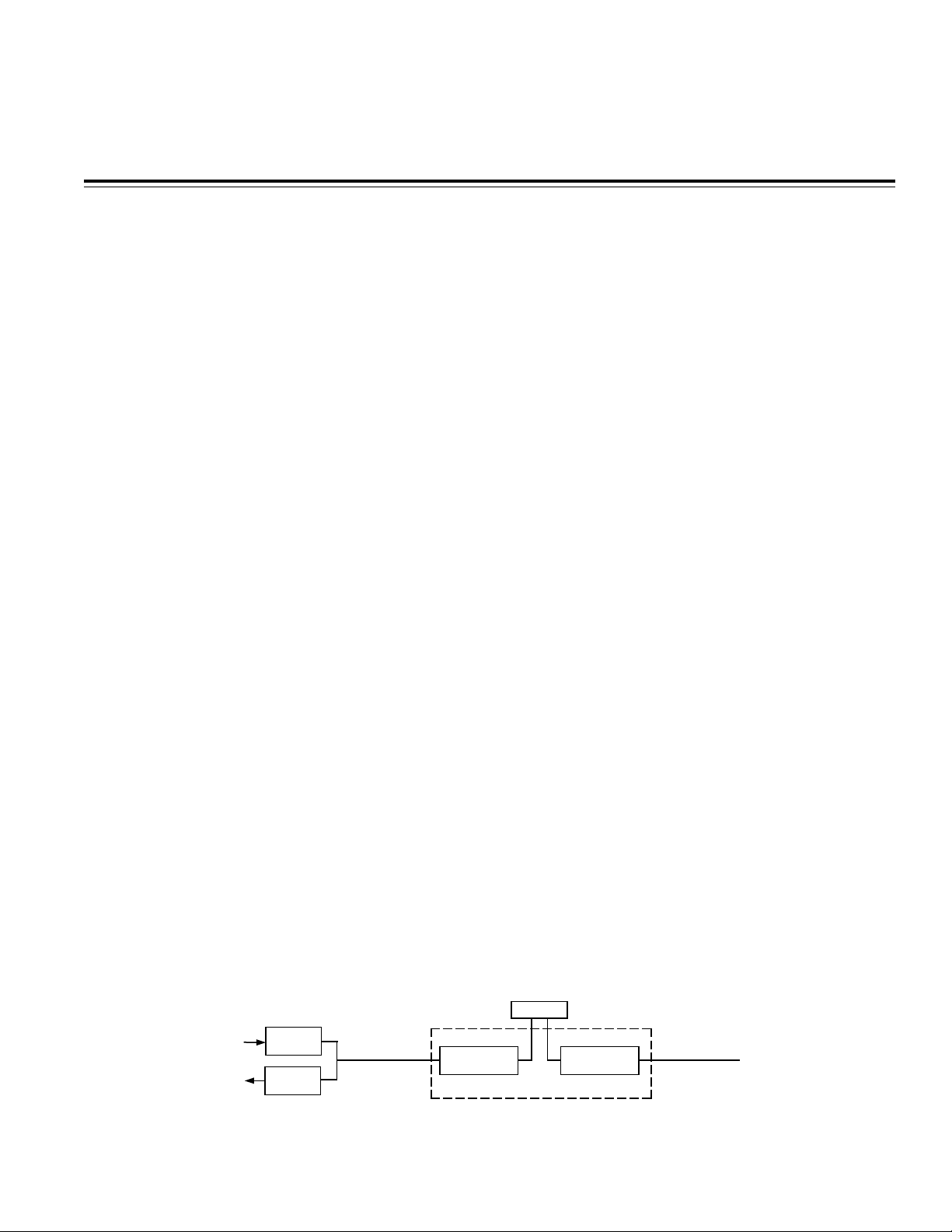
VIDEO
INPUT
VIDEO
OUTPUT
Windows is a registered trademark of Microsoft Corporation.
BIDIRECTIONAL
RAW VIDEO BUS
Figure 1. Video Signal Flow
WAVELET
TRANSFORM
DRAM
ADV601
HUFFMAN
CODER
BIDIRECTIONAL
COMPRESSED
VIDEO BUS
Page 2
AN-525
controller with no halfway stop in main memory. Burst
mode, where the hardware acquires the bus, asserts one
address and transfers a block of data, will give best performance. The bus hardware may not be fast enough if it
must acquire the bus and assert an address for each
word transfer.
FIFO STATUS SIGNALS FIFO_SRQ, FIFO_STP, FIFO_ERR,
FIFO_STP
FIFO_STP is a combined FULL and EMPTY pin. On encode it signals EMPTY, on decode it signals FULL. It
means stop moving data into or out of the FIFO.
FIFO_STP is asserted quite late and it can be difficult for
hardware to see the FIFO_STP signal in time to halt the
next FIFO transfer. In this case, an extra read will move
invalid data, and an extra write will trash a word already
inside the FIFO.
FIFO_SRQ
FIFO_SRQ is a combined NEARLY FULL and NEARLY
EMPTY bit. On Encode it signals NEARLY FULL, and
on DECODE is signals NEARLY EMPTY. NEARLY (the service request trigger point) is programmed by the FIFO
Control Register over the range 32 to 480 long words.
FIFO_SRQ is easier to use for data transfer control than
FIFO_STP, because there is no penalty for moving one or
two words after FIFO_SRQ goes away. FIFO_SRQ will go
away at least 32 reads or writes before FULL or EMPTY
occurs. The size of each data transfer can be controlled
by programming NEARLY. Setting NEARLY to half full
(256 words) will cause the hardware to move at least 256
words for each service request. This can be advantageous if there is significant overhead required to set up
each bus transfer. Overhead might be arbitrating for the
bus, entering host interrupt service or asserting the data
address.
FIFO_SRQ can reoccur very rapidly. The host and the
ADV601 are racing each other through the FIFO. It is possible for the host to transfer a single word that clears the
FIFO service request and on the very next VCLK, the
ADV601 can transfer a word that sets the FIFO service
request again. FIFO_SRQ is asynchronous to the host
port. Take care not to violate setup and hold time
requirements of host port hardware.
FIFO_ERR
FIFO_ERR is a combined EMPTY and FULL pin. On
decode it signals EMPTY and on encode it signals FULL.
This is the reverse of FIFO_STP. When asserted, the host
is falling behind.
BIN WIDTH CALCULATION BASICS
Off-chip computation, either by the host or a dedicated
DSP, is required to control the compression ratio during
encode. The Wavelet transformer output is 16 bits wide.
To increase the compression ratio, some low order bits
must be discarded before the run length and Huffman
coders. This increases the length of the zero runs leading
to more data compression. The ADV601’s adaptive
quantizer discards low order bits by multiplying every
sample in the bin by a user-specified fraction, called the
reciprocal bin width. On playback, the sub-bands are
restored to proper size by multiplication by a userspecified coefficient called the bin width. Each of the 42
sub-bands has its own bin width and reciprocal Bin Width
Register. The bin widths are embedded in the compressed data stream during the encoding process. On
decode, the ADV601 extracts the bin widths from the
compressed data stream and multiplies each sample by
the bin width to bring it back up to proper size. Bin Width
Registers are of concern on encode only; nothing need be
put in the registers for decode.
Computation of a Bin Width Register is straightforward—
merely take the reciprocal of the corresponding reciprocal Bin Width Register. Remember that the reciprocal Bin
Width Registers are scaled 6.10 and the Bin Width Registers are scaled 8.8, and scale your reciprocal calculation
accordingly.
The number of bits required to encode an image varies
with the busyness of the image. A plain solid black field
will encode very compactly since there is no high frequency energy in the picture. The higher sub-bands are
all zero everywhere. On the other hand, something like a
close-up of a plaid shirt has a lot of high frequency energy and will call for more bits to encode. As the picture
gets busier, you need to use a smaller fraction in the reciprocal Bin Width Registers.
At the end of each field, the ADV601 supplies the bin
width computer with the sum of the squares of each subband as a measure of the busyness. These (and a few
other numbers) are referred to as “statistics.” As the sum
of the squares gets larger, the reciprocal bin widths need
to get smaller.
This bin width computation works best if done quickly.
The ADV601 will present the statistics just as vertical retrace is beginning. The bin width computer needs to read
all the statistics, compute 42 reciprocal bin widths and 42
bin widths, and write the new setting back into the
ADV601 before the next field starts. Next field starts in 20
horizontal line times or about 1.2 milliseconds. The computation needs to be repeated once per field, or
every 16 milliseconds. The computation load will be
about 1.2 milliseconds every 16 milliseconds or 7%. This
assumes that the bin width calculation is actually completed within the 1.2 millisecond deadline. If not, the
ADV601 will use the existing bin width setting on the new
field. Since one field is much like another field, no great
harm is done.
DIAGNOSTICS AND DEBUGGING STRATEGY
In testing out a new design it is important to get simple
things working before testing more complex features.
–2–
Page 3

AN-525
For instance, the host interface has to successfully write
the ADV601 mode control register before it is reasonable
to expect video data transfer to work. Listed below, in order, are the diagnostic tests used to bring up the Analog
Devices evaluation board.
16-Bit Data Interface (Bin Width Register) Test
First check the data interface into the part. If the data is not
getting into and out of the part reliably, almost anything
can go wrong. Data errors can cause the part’s internal registers to program with unexpected values, causing unexpected operation. For instance, failure to set the encode/
decode bit as intended will cause the part to drive an unexpected bus. Consider configuring the hardware for video
capture. The video A/D will drive the raw video bus. If a
data error causes the ADV601 to come up in decode mode
by mistake, it too will drive the raw video data bus, causing
both parts to get hot (or worse). The possibilities for unexpected behavior are broad, and defy analysis.
Test the data interface by writing data into the part and
reading it back. Data read back shall match data written
in. The 16-bit wide bin width and reciprocal Bin Width
Registers are read/write, and hence testable, unlike other
registers such as the mode control register. The bin width
and reciprocal bin width registers, have addresses 100 to
153 (hex). The test should prove that each bit in each register can store both a one and a zero. It should prove that
all 84 registers are unique by storing a different test value
into each one and reading it back. The test should write
all 84 registers and then read all of them back. It must not
write one, read one and move to the next. It should take
advantage of the auto incrementing feature of the Indirect Address Register to write and read all 84 registers in
one swoop. Example code is in file wavetest.c (a part of
601test), and adv601.c (a part of 601cman). This code is
on the Videolab CD-ROM and on the ADV601 FTP site.
As soon the Bin Width Register test runs once, put the
program into a loop and test repeatedly. The new design
should run overnight with no errors before the data interface can be considered free of timing errors.
A successful Bin Width Register test verifies the indirect
address register, the indirect data register, the low 16 bits
of the data bus , and the following pins, byte enables BE0
and BE1, addresses ADR0 and ADR1, CS, WR, RD and
ACK. The ADV601 host interface handles all registers
identically, so Bin Width Register test success gives confidence that writes to other read only registers function
properly. Bin Width Register test failure suggests that
other registers may not read or write properly, which
throws doubt on the results of any other tests.
32-Bit Data Interface (FIFO) Test
A read/write test of the FIFO will verify all 32 bits of the
data bus since the FIFO port is 32 bits wide. Use the same
test data patterns as the Bin Width Register test uses, for
the same reasons. The procedure for writing test data
into the ADV601 FIFO is the same as for any video data.
Reset the part, initialize it in decode mode, and write the
FIFO data port until the FIFO is full. Write 512 long words
and read them back. Read back requires the chip be
placed into a special test mode. Do this by resetting the
chip, and putting it into encode mode. Set the 100 bit in
the FIFO control register. Example code is in 601 test
module wavetest.c Then just read the FIFO port. Resetting the chip merely zeroes the FIFO read and write pointers. Data in the FIFO is not altered. Again, after the test
runs once, by hand, loop it over night to detect intermittent errors. It took some time to resolve all the PCI bus
interface problems on the Analog Devices Videolab design. As above, failure of the FIFO test suggests that the
interface is dropping bits and corrupting the video. This
casts doubt on the results of any other tests. The FIFO
test will fail if the host cannot access the ADV601 control
registers which the Bin Width Register test checks out.
Color Ramp Test
Color Ramp tests video decoding, which is easier than
encoding. Color ramp is a simple ramp in both Luma and
Chroma. This special case encodes VERY compactly,
only 2440 bytes are required to encode a complete frame
of video. This is small enough to fit into the memory of
any microprocessor. Putting the test pattern into
memory sidesteps all problems of disk speed, disk latency, seek time, thermal recalibration time, disk fragmentation, and bus contention. Your test program
merely keeps loading the color ramp pattern into the
ADV601 FIFO whenever the part asserts FIFO Service Request. It has a whole frame time (33 milliseconds) to load
2440 bytes, for a very modest data rate of 74 Kilobytes
per second. The test passes when the color ramp pattern
appears on the video monitor. The color ramp test should
run forever (at least over night) to detect intermittent
problems. Color ramp exercises the complete video decode path through the ADV601, plus the video decoder, if
your design has one. If color ramp runs but captured
video does not, the problem is either speed (host can’t
load FIFO fast enough) or encode. The color ramp data
can be found in file c_ramp.c, a part of the 601test program available on the FTP site.
Bin Width and Reciprocal Bin Width Register Settings
To get the chip up and encoding initially, load the bin
width and reciprocal Bin Width Registers with one
“canned” set of values that will quantize each frame
heavily (high compression). The high compression will
reduce the data rate out the compressed data port (FIFO)
and avoid FIFO overrun if the host is slow for some reason. Successful video capture means the captured video
plays back properly. After successful capture, then it is
time to enable the statistics ready interrupt, read the statistics, and compute a new set of bin widths for each
frame. This interrupt service can be tricky to get right.
–3–
Page 4
AN-525
Errors can cause the part to output data furiously, causing a FIFO overrun. “Canned” bin width sets can be
found on the FTP site.
AVOID BUS FIGHTS
Both the raw and compressed video buses (VDATA and
DATA) are bidirectional buses, the ADV601 can either
read them or write them. The design must insure that two
chips do not drive the same bus at the same time, especially when coming out of reset or switching between
encode and decode. The ADV601 comes out of reset
reading the VDATA bus. If you rely upon software to initialize chips consider what will happen when the software fails. The ENC pin out of the ADV601 goes low when
the part is driving the VDATA bus, and can be used as
output enable for the other chips on the bus.
TEST POINTS AND LEDS
On a new design it will be necessary to observe each pin
of the ADV601 with a logic analyzer. The first Analog
Devices Videolab board had four 40-pin headers right on
the board. If headers won’t fit, Ironwood Electronics
makes a series of “chip extenders” that give logic analyzer access. Placing LEDs on the following pins can
greatly speed up hardware and software debug.
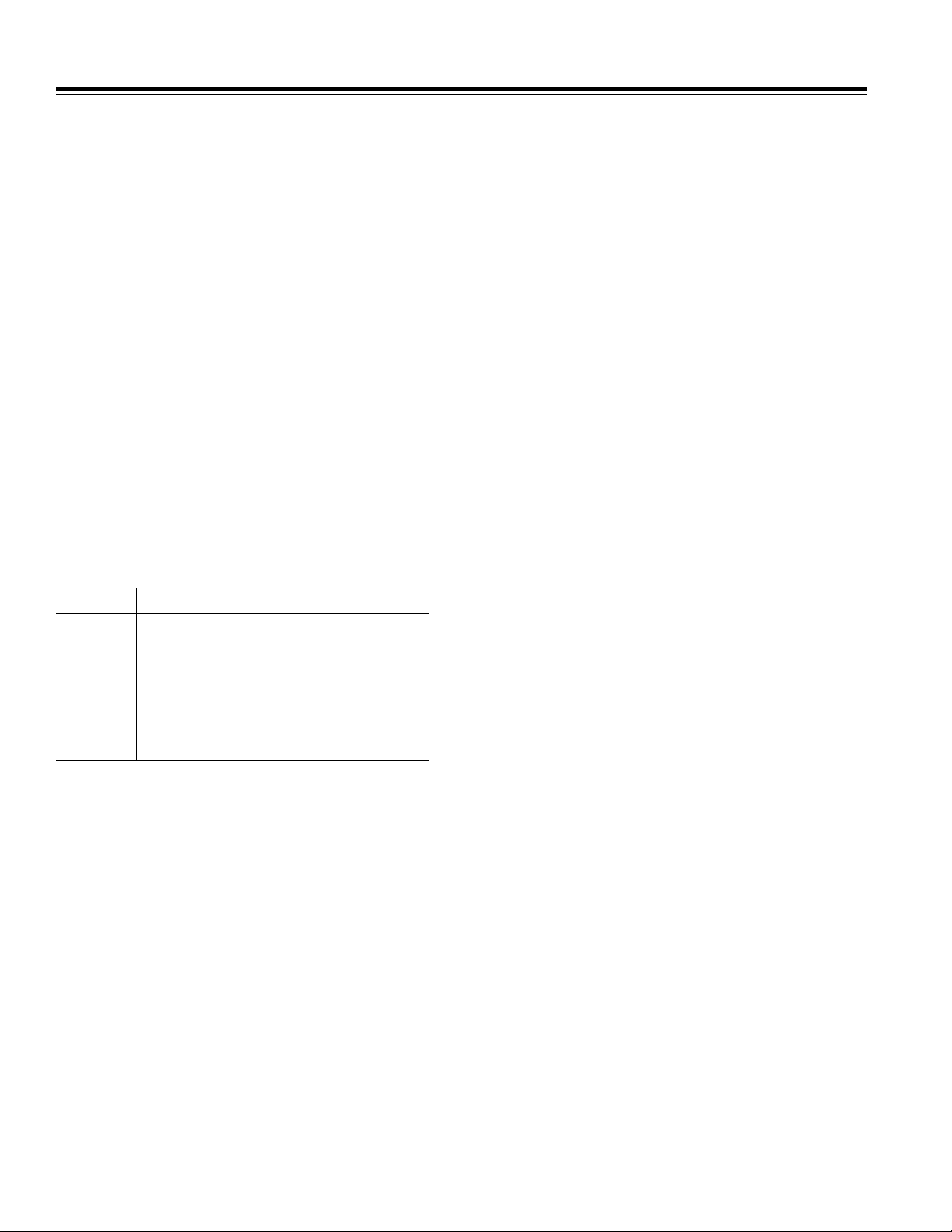
Pin Name LED Indication
FIELD Glows 1/2 bright when video is running.
FIFO_SRQ Activity when video is running.
HIRQ Activity when video is running. Full
bright after software crash.
ENC Verifies that software put the part into
encode mode at the right time.
RESET Signals unexpected reset.
FIFO_ERR Should never happen.
HARDWARE VS. SOFTWARE RESET
The ADV601 has both a hardware reset pin, and a reset
bit in the mode control register. Hardware reset must be
asserted once at power up. Driver software will be easier
to write if it too can assert hardware reset as a way of
placing the chip into a known initial state. The hardware
reset bit loads initial values into all the ADV601 registers
that have defined initial values. Asserting the software
reset bit in the mode control register makes the chip stop
processing video and permits changes to the mode control register. It does NOT load initial values into registers.
You must stop video processing with the software reset
bit before changing video processing via the mode control register. You should assert software reset, then change
the mode control register bits (and load all the other registers too) and then clear the software reset bit.
INTERRUPTS
The ADV601 asserts a single interrupt (HIRQ) to signal
many different things. The host program reads the interrupt mask/status register to determine why the ADV601
required attention. There are many reasons (six to be exact). Reading the interrupt mask/status register clears
and rearms all of the interrupts. In other words, reading
the register acknowledges the interrupt to the ADV601
saying, in effect, “I’ve seen you, now go away and interrupt me again the next time it happens.” This has two
side effects on host software. First, reading the register
clears the bits, so a second read of the register won’t return the same data. Second, if the condition causing the
interrupt reoccurs or another condition occurs, the chip
will interrupt again. An interrupt routine might do the following things:
Insure that it won’t be reentered if the interrupt stays
“hot” or is reasserted during interrupt service.
Read the interrupt status register once, and service all the
things that need service. For instance sooner or later both
statistics ready and FIFO service request will occur at the
same time.
When all servicing is done, read the interrupt status register one more time in case something came up during
service time. If so, service the new condition.
Avoid becoming stuck in interrupt service if the interrupt
stays “hot” no matter how much service the part is given.
CRUCIAL WIN 95 SETTINGS
You may be able to correct FIFO under runs or over runs
(FIFO_ERR bit gets set) by turning off CD-ROM auto insert
notification in Win 95. Go to “Settings” then “Control
Panel”. Click on “System” (a blue screen computer icon).
Click on the “Device Manager” tab. This will display all
the devices on the system. Click on the CD-ROM icon,
which should then expand one level. Go down and click
on “Properties.” Pick the “Settings” tab. Clear the check
mark in the “Auto Insert Notification” box.
It may also be necessary to remove the Win 95 “handicapped accessibility” option. While still on the “Control
Panel” click on “Add/Remove Programs.” Select the
“Windows Setup” tab. Remove the “Accessibility Options” (icon of a wheelchair). These two changes cured
FIFO overruns that occurred every ten seconds and
every five minutes.
E3171–.5–3/98
PRINTED IN U.S.A.
–4–
 Loading...
Loading...