

Analog Devices ADSP TS101S b Datasheet
a
TigerSHARC
®
Embedded Processor
ADSP-TS101S
KEY FEATURES
300 MHz, 3.3 ns instruction cycle rate
6M bits of internal—on-chip—SRAM memory
19 mm × 19 mm (484-ball) or 27 mm × 27 mm
(625-ball) PBGA package
Dual computation blocks—each containing an ALU, a multi-
plier, a shifter, and a register file
Dual integer ALUs, providing data addressing and pointer
manipulation
Integrated I/O includes 14-channel DMA controller, external
port, four link ports, SDRAM controller, programmable
flag pins, two timers, and timer expired pin for system
integration
1149.1 IEEE compliant JTAG test access port for on-chip
emulation
On-chip arbitration for glueless multiprocessing with up to
eight TigerSHARC processors on a bus
COMPUTATIONAL BLOCKS
SHIFTER
ALU
MULTIPLIER
X
REGISTER
FILE
32 × 32
128 128
DAB
DAB
128 128
Y
REGISTER
FILE
32 × 32
MULTIPLIER
ALU
SHIFTER
PROGRAM SEQUENCER
PC BTB IRQ
ADDR
IAB
FETCH
DATA ADDRESS GENERATION
INTEGER
32
128
32
128
32
128
I/O PROCESSOR
CONTROLLER
CONTROL/
STATUS/
TCBs
32
JALU
32 × 32 32 × 32
DMA
DMA ADDRESS
32
INTEGER
KALU
DMA DATA
KEY BENEFITS
Provides high performance Static Superscalar DSP opera-
tions, optimized for telecommunications infrastructure
and other large, demanding multiprocessor DSP
applications
Performs exceptionally well on DSP algorithm and I/O bench-
marks (see benchmarks in Table 1 and Table 2)
Supports low overhead DMA transfers between internal
memory, external memory, memory-mapped peripherals,
link ports, other DSPs (multiprocessor), and host
processors
Eases DSP programming through extremely flexible instruc-
tion set and high level language friendly DSP architecture
Enables scalable multiprocessing systems with low commu-
nications overhead
INTERNAL MEMORY
MEMORY
M0
64K × 32
AD
32 256
MEMORY
M1
64K × 3 2
AD
256
MEMORY
M2
64K × 32
AD
I/O ADDRESS
LINK DATA
M0 ADDR
M0 DATA
M1 ADDR
M1 DATA
M2 ADDR
M2 DATA
32
CONTROLLER
SDRAM CONTROLLER
EXTERNAL PORT
MULTIPROCESSOR
INTERFACE
HOST INTERFACE
INPUT FIFO
OUTPUT BUFFER
OUTPUT FIFO
CLUSTER BUS
ARBITER
LINK PORT
CONTROL/
STATUS/
BUFFERS
JTAG PORT
LINK
PORTS
6
32
ADDR
64
DATA
CNTRL
3
L0
8
3
L1
8
3
8
L2
3
8
L3
TigerSHARC and the TigerSHARC logo are registered trademarks of Analog Devices, Inc.
Rev. B
Information furnished by Analog Devices is believed to be accurate and reliable.
However, no responsibility is assumed by Analog Devices for its use, nor for any
infringements of patents or other rights of third parties that may result from its use.
Specifications subject to change without notice. No license is granted by implication
or otherwise under any patent or patent rights of Analog Devices. Trademarks and
registered trademarks are the property of their respective owners.
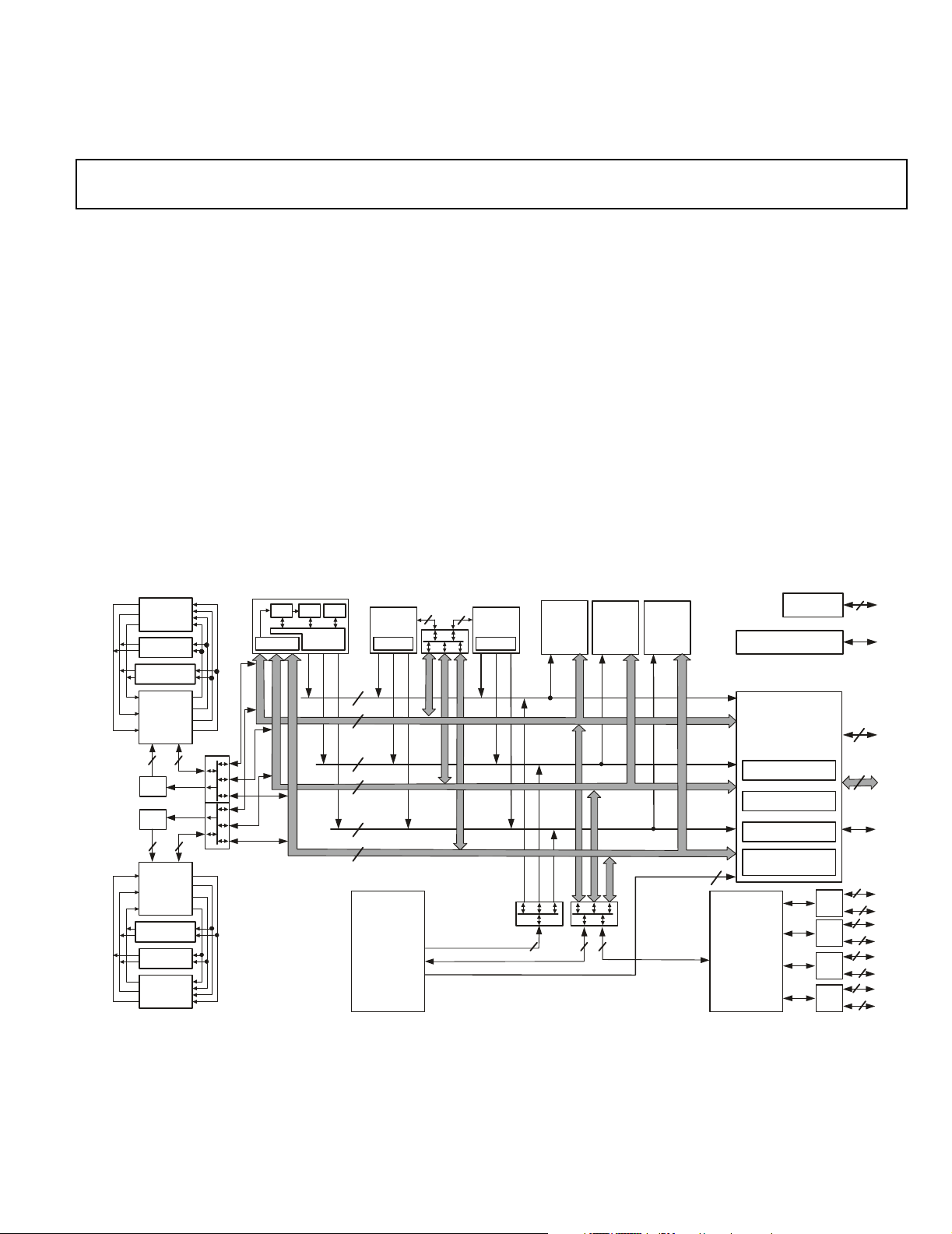
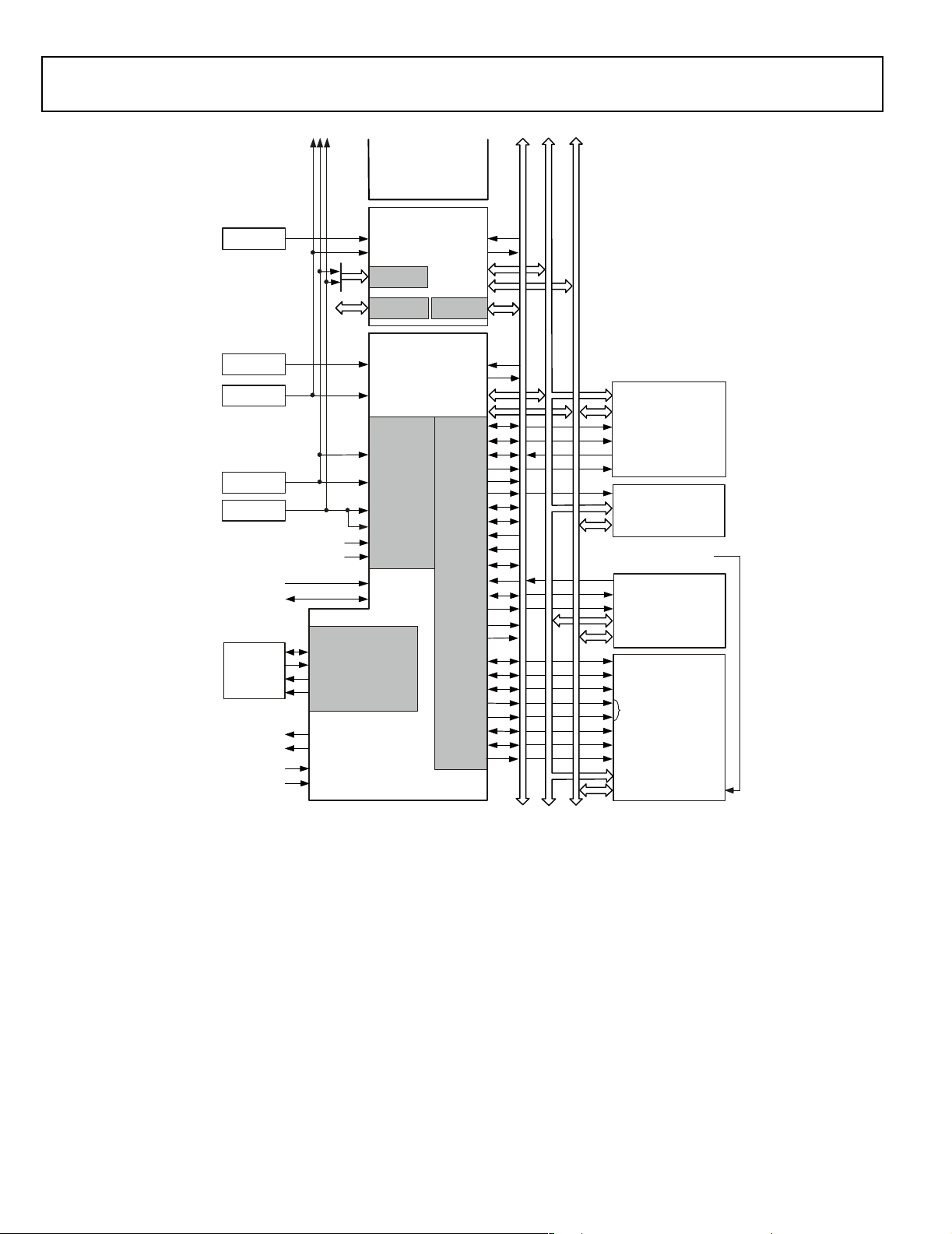
Figure 1. Functional Block Diagram
One Technology Way, P.O.Box 9106, Norwood, MA 02062-9106 U.S.A.
Tel: 781/329-4700 www.analog.com
Fax: 781/326-8703 © 2004 Analog Devices, Inc. All rights reserved.

ADSP-TS101S
TABLE OF CONTENTS
General Description ................................................. 3
Dual Compute Blocks ............................................ 4
Data Alignment Buffer (DAB) .................................. 4
Dual Integer ALUs (IALUs) .................................... 4
Program Sequencer ............................................... 5
Interrupt Controller ........................................... 5
Flexible Instruction Set ........................................ 5
On-Chip SRAM Memory ........................................ 5
External Port
(Off-Chip Memory/Peripherals Interface) ................ 6
Host Interface ................................................... 6
Multiprocessor Interface ...................................... 7
SDRAM Controller ............................................ 7
EPROM Interface .............................................. 7
DMA Controller ................................................... 7
Link Ports ........................................................... 8
Timer and General-Purpose I/O ............................... 9
Reset and Booting ................................................. 9
Low Power Operation ............................................ 9
Clock Domains .................................................... 9
Output Pin Drive Strength Control ......................... 10
Power Supplies ................................................... 10
Filtering Reference Voltage and Clocks .................... 10
Development Tools ............................................. 10
Designing an Emulator-
Compatible DSP Board (Target) .......................... 11
Additional Information ........................................ 11
Pin Function Descriptions ....................................... 12
Pin States at Reset ............................................... 12
Pin Definitions ................................................... 12
Strap Pin Function Descriptions ................................ 19
Specifications ........................................................ 20
Recommended Operating Conditions ...................... 20
Electrical Characteristics ....................................... 20
Absolute Maximum Ratings .................................. 21
ESD Sensitivity ................................................... 21
Timing Specifications .......................................... 21
General AC Timing .......................................... 21
Link Ports Data Transfer
and Token Switch Timing ............................... 29
Output Drive Currents ......................................... 32
Test Conditions .................................................. 34
Output Disable Time ......................................... 34
Output Enable Time ......................................... 34
Capacitive Loading ........................................... 34
Environmental Conditions .................................... 36
Thermal Characteristics ..................................... 36
PBGA Pin Configurations ........................................ 36
Outline Dimensions ................................................ 43
Ordering Guide ..................................................... 44
REVISION HISTORY
12/04—Rev. A to Rev. B
Provides more information on clock signals (including a usable
jitter specification) in:
Reference Clocks—Core Clock (CCLK) Cycle Time ..... 22
Reference Clocks—Local Clock (LCLK) Cycle Time .... 22
Reference Clocks—System Clock (SCLK) Cycle Time . . 23
Reference Clocks—Test Clock (TCK) Cycle Time ....... 23
Updates input setup times for external port pins in:
AC Signal Specifications (for SCLK <16.7 ns) ............. 25
Rev. B | Page 2 of 44 | December 2004
GENERAL DESCRIPTION
ADSP-TS101S
The ADSP-TS101S TigerSHARC processor is an ultrahigh performance, static superscalar processor optimized for large signal
processing tasks and communications infrastructure. The DSP
combines very wide memory widths with dual computation
blocks—supporting 32- and 40-bit floating-point and 8-, 16-,
32-, and 64-bit fixed-point processing—to set a new standard of
performance for digital signal processors. The TigerSHARC
processor’s static superscalar architecture lets the processor execute up to four instructions each cycle, performing 24 fixedpoint (16-bit) operations or six floating-point operations.
Three independent 128-bit wide internal data buses, each
connecting to one of the three 2M bit memory banks, enable
quad word data, instruction, and I/O accesses and provide
14.4G bytes per second of internal memory bandwidth. Operat-
ing at 300 MHz, the ADSP-TS101S processor’s core has a 3.3 ns
instruction cycle time. Using its Single-Instruction, MultipleData (SIMD) features, the ADSP-TS101S can perform 2.4 billion 40-bit MACs or 600 million 80-bit MACs per second.
Table 1 and Table 2 show the DSP’s performance benchmarks.
Table 1. General-Purpose Algorithm Benchmarks
at 300 MHz
Clock
Benchmark Speed
32-bit algorithm, 600 million MACs/s peak performance
1024 point complex FFT (Radix 2) 32.78 µs 9,835
50-tap FIR on 1024 input 91.67 µs 27,500
Single FIR MAC 1.83 ns 0.55
16-bit algorithm, 2.4 billion MACs/s peak performance
256 point complex FFT (Radix 2) 3.67 µs 1,100
50-tap FIR on 1024 input 24.0 µs 7,200
Single FIR MAC 0.47 ns 0.14
Single complex FIR MAC 1.9 ns 0.57
I/O DMA transfer rate
External port 800M bytes/s n/a
Link ports (each) 250M bytes/s n/a
Cycles
Table 2. 3G Wireless Algorithm Benchmarks
Execution
Benchmark
Turbo decode
384 kbps data channel
Viterbi decode
12.2 kbps AMR
Complex correlation
3.84 Mcps4 with a spreading factor of 256
1
The execution speed is in instruction cycles per second.
2
This value is for six iterations of the algorithm. For eight iterations of the turbo
decoder, this benchmark is 67 MIPS.
3
Adaptive multi rate (AMR)
4
Megachips per second (Mcps)
3
voice channel
1
(MIPS)
51 MIPS
0.86 MIPS
0.27 MIPS
2
The ADSP-TS101S is code compatible with the other
TigerSHARC processors.
The Functional Block Diagram on Page 1 shows the ADSPTS101S processor’s architectural blocks. These blocks include:
• Dual compute blocks, each consisting of an ALU, multiplier, 64-bit shifter, and 32-word register file and associated
data alignment buffers (DABs)
•Dual integer ALUs (IALUs), each with its own 31-word
register file for data addressing
• A program sequencer with instruction alignment buffer
(IAB), branch target buffer (BTB), and interrupt controller
• Three 128-bit internal data buses, each connecting to one
of three 2M bit memory banks
•On-chip SRAM (6Mbit)
• An external port that provides the interface to host processors, multiprocessing space (DSPs), off-chip memory
mapped peripherals, and external SRAM and SDRAM
• A 14-channel DMA controller
• Four link ports
• Two 64-bit interval timers and timer expired pin
• A 1149.1 IEEE compliant JTAG test access port for on-chip
emulation
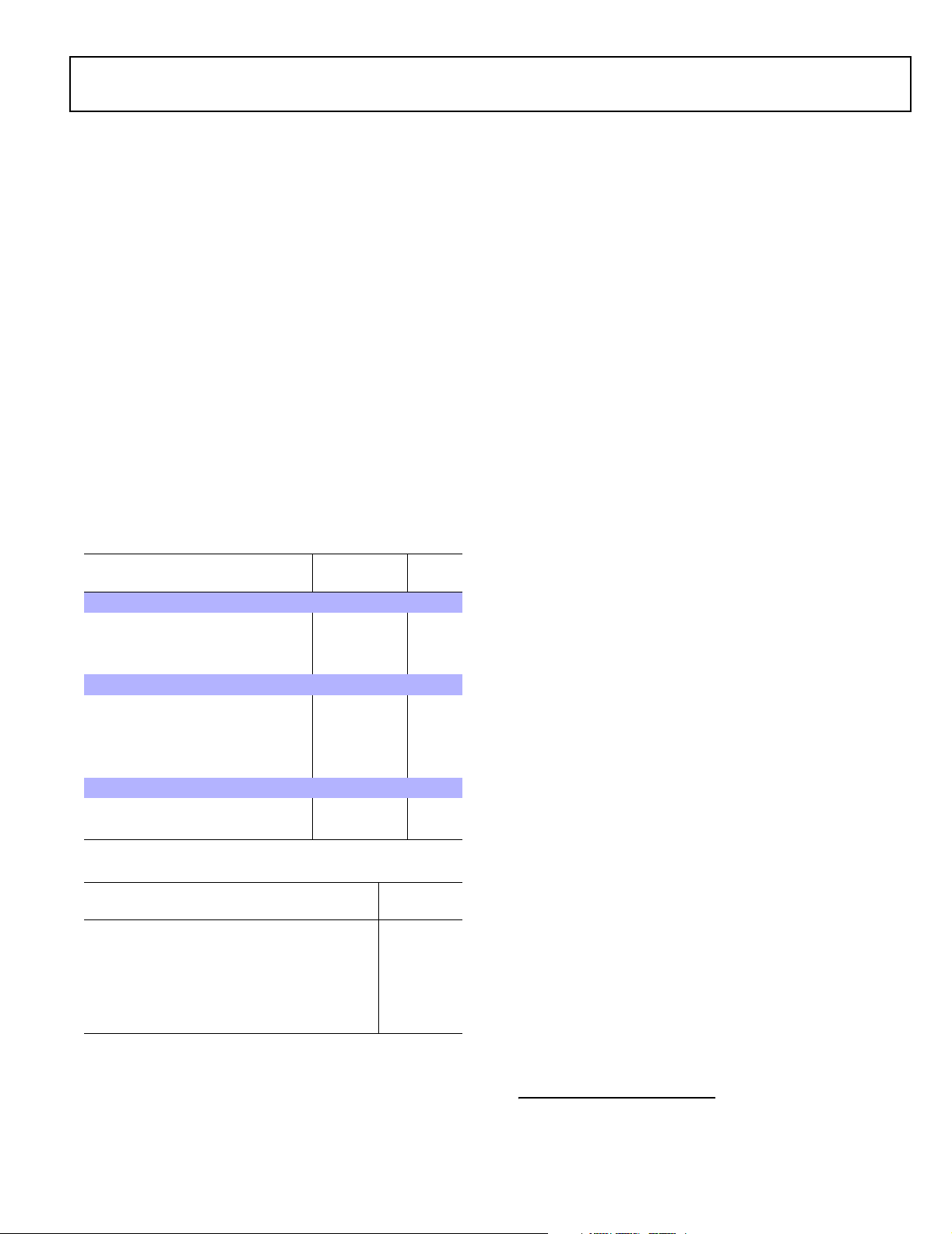
Figure 2 shows a typical single processor system with external
SDRAM. Figure 4 on Page 8 shows a typical multiprocessor
system.
TM
†
The TigerSHARC processor uses a Static Superscalar
architecture. This architecture is superscalar in that the ADSP-TS101S
processor’s core can execute simultaneously from one to four
32-bit instructions encoded in a very large instruction word
(VLIW) instruction line using the DSP’s dual compute blocks.
Because the DSP does not perform instruction reordering at
run-time—the programmer selects which operations will execute in parallel prior to run-time—the order of instructions is
static.
With few exceptions, an instruction line, whether it contains
one, two, three, or four 32-bit instructions, executes with a
throughput of one cycle in an eight-deep processor pipeline.
For optimal DSP program execution, programmers must follow
the DSP’s set of instruction parallelism rules when encoding an
instruction line. In general, the selection of instructions that the
DSP can execute in parallel each cycle depends on the instruction line resources each instruction requires and on the source
and destination registers used in the instructions. The programmer has direct control of three core components—the IALUs,
the compute blocks, and the program sequencer.
The ADSP-TS101S, in most cases, has a two-cycle arithmetic
execution pipeline that is fully interlocked, so whenever a computation result is unavailable for another operation dependent
†
Static Superscalar is a trademark of Analog Devices, Inc.
Rev. B | Page 3 of 44 | December 2004
ADSP-TS101S
CLOCK
REFERENCE
SDRAM
MEMORY
(OPTIONAL)
CS
CLK
ADDR
RAS
CAS
DATA
DQM
WE
CKE
A10
LINK
DEVICES
(4 MAX)
(OPTIONAL)
ADSP-TS101S
LCLK_P
SCLK_P
S/LCLK_N
V
REF
LCLKRAT2–0
SCLKFREQ
IRQ3–0
FLAG3–0
ID2–0
MSSD
RAS
CAS
LDQM
HDQM
SDWE
SDCKE
SDA10
FLYBY
IOEN
LXDAT7–0
LXCLKIN
LXCLKOUT
LXDIR
TMR0E
BM
BUSLOCK
CONTROLIMP2–0
DS2–0
ADDR31–0
DATA63–0
WRH/WRL
MS1–0
BR7–0
BOFF
DMAR3–0
RESET JTAG
BMS
BRST
ACK
MSH
HBR
HBG
CPA
DPA
RD
BOOT
EPROM
(OPTIONAL)
CS
ADDR
DATA
MEMORY
(OPTIONAL)
ADDR
DATA
OE
WE
ACK
CS
HOST
PROCESSOR
INTERFACE
(OPTIONAL)
ADDR
DATA
DMA DEVICE
(OPTIONAL)
DATA
registers in the register file individually (word aligned), or
in sets of two (dual aligned) or four (quad aligned).
• ALU—the ALU performs a standard set of arithmetic operations in both fixed- and floating-point formats. It also
performs logic operations.
• Multiplier—the multiplier performs both fixed- and floating-point multiplication and fixed-point multiply and
accumulate.
• Shifter—the 64-bit shifter performs logical and arithmetic
shifts, bit and bit stream manipulation, and field deposit
and extraction operations.
• Accelerator—128-bit unit for trellis decoding (for example,
Viterbi and turbo decoders) and complex correlations for
communication applications.
Using these features, the compute blocks can:
• Provide 8 MACs per cycle peak and 7.1 MACs per cycle
sustained 16-bit performance and provide 2 MACs per
cycle peak and 1.8 MACs per cycle sustained 32-bit performance (based on FIR)
• Execute six single precision floating-point or execute 24
storing intermediate results. Instructions can access the
L
S
A
T
S
O
E
R
T
N
O
C
A
R
D
D
D
A
fixed-point (16-bit) operations per cycle, providing
1,800 MFLOPS or 7.3 GOPS performance
• Perform two complex 16-bit MACs per cycle
• Execute eight trellis butterflies in one cycle
Figure 2. Single Processor System with External SDRAM
on it, the DSP automatically inserts one or more stall cycles as
needed. Efficient programming with dependency-free instructions can eliminate most computational and memory transfer
data dependencies.
In addition, the ADSP-TS101S supports SIMD operations two
ways—SIMD compute blocks and SIMD computations.The
programmer can direct both compute blocks to operate on the
same data (broadcast distribution) or on different data (merged
distribution). In addition, each compute block can execute four
16-bit or eight 8-bit SIMD computations in parallel.
DUAL COMPUTE BLOCKS
The ADSP-TS101S has compute blocks that can execute computations either independently or together as a SIMD engine.
The DSP can issue up to two compute instructions per compute
block each cycle, instructing the ALU, multiplier, or shifter to
perform independent, simultaneous operations.
The compute blocks are referred to as X and Y in assembly syntax, and each block contains three computational units—an
ALU, a multiplier, a 64-bit shifter—and a 32-word register file.
• Register file—each compute block has a multiported
32-word, fully orthogonal register file used for transferring
data between the computation units and data buses and for
DATA ALIGNMENT BUFFER (DAB)
The DAB is a quad word FIFO that enables loading of quad
word data from nonaligned addresses. Normally, load instructions must be aligned to their data size so that quad words are
loaded from a quad aligned address. Using the DAB significantly improves the efficiency of some applications, such as FIR
filters.
DUAL INTEGER ALUS (IALUS)
The ADSP-TS101S has two IALUs that provide powerful
address generation capabilities and perform many general-purpose integer operations. Each of the IALUs:
• Provides memory addresses for data and update pointers
• Supports circular buffering and bit-reverse addressing
• Performs general-purpose integer operations, increasing
programming flexibility
• Includes a 31-word register file for each IALU
As address generators, the IALUs perform immediate or indirect (pre- and post-modify) addressing. They perform modulus
and bit-reverse operations with no constraints placed on memory addresses for the modulus data buffer placement. Each
IALU can specify either a single, dual, or quad word access from
memory.
The IALUs have hardware support for circular buffers, bit
reverse, and zero-overhead looping. Circular buffers facilitate
efficient programming of delay lines and other data structures
required in digital signal processing, and they are commonly
Rev. B | Page 4 of 44 | December 2004
ADSP-TS101S
used in digital filters and Fourier transforms. Each IALU provides registers for four circular buffers, so applications can set
up a total of eight circular buffers. The IALUs handle address
pointer wraparound automatically, reducing overhead, increasing performance, and simplifying implementation. Circular
buffers can start and end at any memory location.
Because the IALU’s computational pipeline is one cycle deep, in
most cases, integer results are available in the next cycle. Hardware (register dependency check) causes a stall if a result is
unavailable in a given cycle.
PROGRAM SEQUENCER
The ADSP-TS101S processor’s program sequencer supports:
• A fully interruptible programming model with flexible programming in assembly and C/C++ languages; handles
hardware interrupts with high throughput and no aborted
instruction cycles.
• An eight-cycle instruction pipeline—three-cycle fetch pipe
and five-cycle execution pipe—with computation results
available two cycles after operands are available.
• The supply of instruction fetch memory addresses; the
sequencer’s instruction alignment buffer (IAB) caches up
to five fetched instruction lines waiting to execute; the program sequencer extracts an instruction line from the IAB
and distributes it to the appropriate core component for
execution.
• The management of program structures and determination
of program flow according to JUMP, CALL, RTI, RTS
instructions, loop structures, conditions, interrupts, and
software exceptions.
• Branch prediction and a 128-entry branch target buffer
(BTB) to reduce branch delays for efficient execution of
conditional and unconditional branch instructions and
zero-overhead looping; correctly predicted branches that
are taken occur with zero-to-two overhead cycles, overcoming the three-to-six stage branch penalty.
• Compact code without the requirement to align code in
memory; the IAB handles alignment.
Interrupt Controller
The DSP supports nested and non-nested interrupts. Each
interrupt type has a register in the interrupt vector table. Also,
each has a bit in both the interrupt latch register and the interrupt mask register. All interrupts are fixed as either level
sensitive or edge sensitive, except the IRQ3–0
rupts, which are programmable.
The DSP distinguishes between hardware interrupts and software exceptions, handling them differently. When a software
exception occurs, the DSP aborts all other instructions in the
instruction pipe. When a hardware interrupt occurs, the DSP
continues to execute instructions already in the instruction pipe.
hardware inter-
Flexible Instruction Set
The 128-bit instruction line, which can contain up to four 32-bit
instructions, accommodates a variety of parallel operations for
concise programming. For example, one instruction line can
direct the DSP to conditionally execute a multiply, an add, and a
subtract in both computation blocks while it also branches to
another location in the program. Some key features of the
instruction set include:
• Enhanced instructions for communications infrastructure
to govern trellis decoding (for example, Viterbi and turbo
decoders) and despreading via complex correlations
• Algebraic assembly language syntax
• Direct support for all DSP, imaging, and video arithmetic
types, eliminating hardware modes
• Branch prediction encoded in instruction, enables zerooverhead loops
• Parallelism encoded in instruction line
• Conditional execution optional for all instructions
• User-defined, programmable partitioning between program and data memory
ON-CHIP SRAM MEMORY
The ADSP-TS101S has 6M bits of on-chip SRAM memory,
divided into three blocks of 2M bits (64K words × 32 bits). Each
block—M0, M1, and M2—can store program, data, or both, so
applications can configure memory to suit specific needs. Placing program instructions and data in different memory blocks,
however, enables the DSP to access data while performing an
instruction fetch.
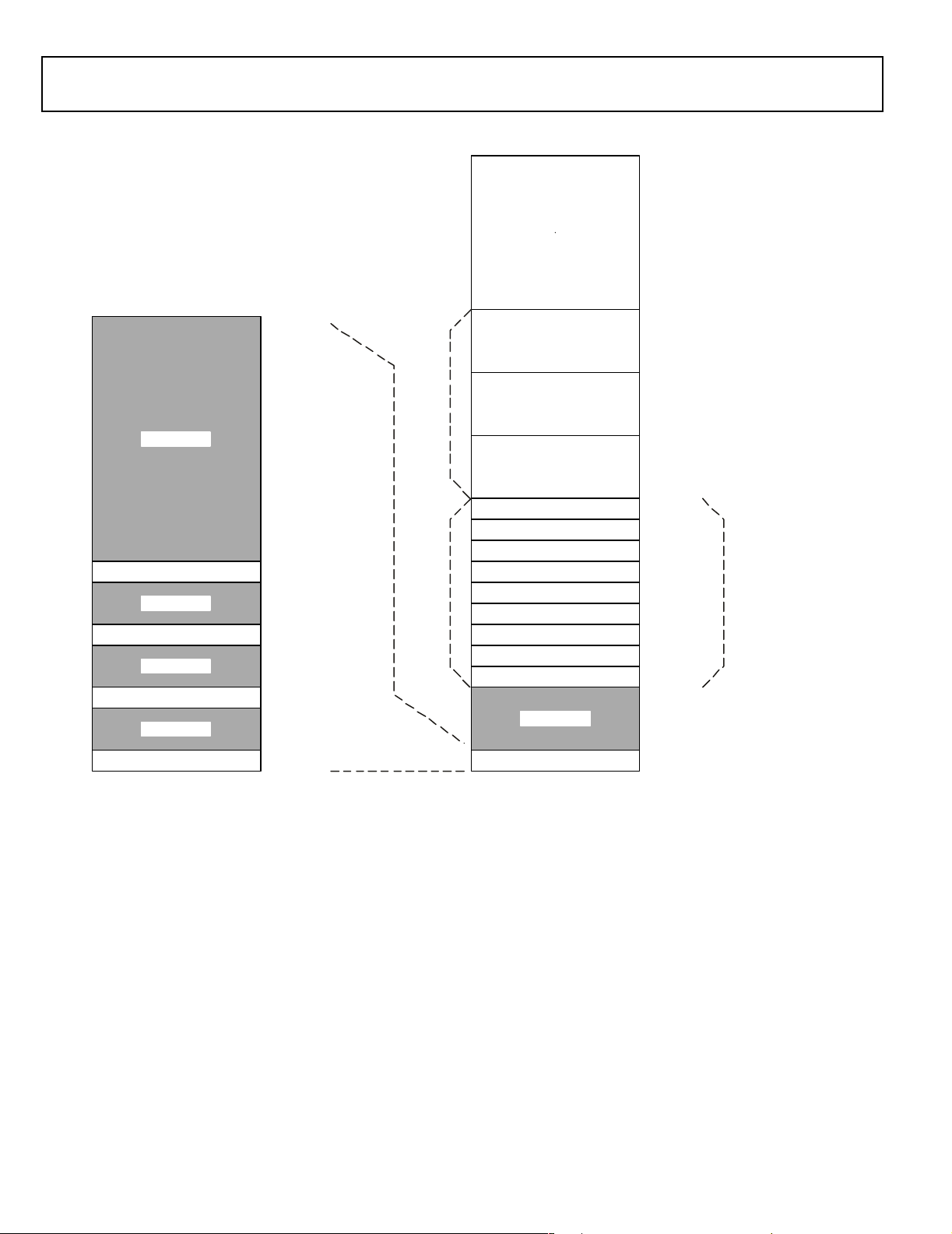
The DSP’s internal and external memory (Figure 3) is organized
into a unified memory map, which defines the location
(address) of all elements in the system.
The memory map is divided into four memory areas—host
space, external memory, multiprocessor space, and internal
memory—and each memory space, except host memory, is subdivided into smaller memory spaces.
Each internal memory block connects to one of the 128-bit wide
internal buses—block M0 to bus MD0, block M1 to bus MD1,
and block M2 to bus MD2—enabling the DSP to perform three
memory transfers in the same cycle. The DSP’s internal bus
architecture provides a total memory bandwidth of 14.4G bytes
per second, enabling the core and I/O to access eight 32-bit data
words (256 bits) and four 32-bit instructions each cycle. The
DSP’s flexible memory structure enables:
• DSP core and I/O access of different memory blocks in the
same cycle
• DSP core access of all three memory blocks in parallel—
one instruction and two data accesses
• Programmable partitioning of program and data memory
• Program access of all memory as 32-, 64-, or 128-bit
words—16-bit words with the DAB
• Complete context switch in less than 20 cycles (66 ns)
Rev. B | Page 5 of 44 | December 2004
ADSP-TS101S
INTERNAL SPACE
RE SER VE D
INTERNAL REGISTERS (UREGS)
RE SER VE D
INTERNAL MEMORY 2
RE SER VE D
INTERNAL MEMORY 1
RE SE RV E D
INTERNAL MEMORY 0
0x 003FF FFF
0x00300000
0x00280000
0x00200000
0x 00180 7FF
0x00180000
0x0010FFFF
0x00100000
0x0008FFFF
0x00080000
0x0000FFFF
0x00000000
GLOBAL SPACE
HOST
(MSH)
E
C
A
P
S
Y
R
O
M
E
M
L
A
N
R
E
T
X
E
E
C
A
P
S
Y
R
O
M
E
M
R
O
S
S
E
C
O
R
P
I
T
L
U
M
BANK 1
(MS1)
BANK 0
(MS0)
SDRAM
(MSSD)
PROC ESSOR I D 7
PROC ESSOR I D 6
PROC ESSOR I D 5
PROC ESSOR I D 4
PROC ESSOR I D 3
PROC ESSOR I D 2
PROC ESSOR I D 1
PROC ESSOR I D 0
BROADCAST
RESERVED
INTER NAL ME MORY
0xFFFFFFFF
0 x100 00000
0 x0C 0000 00
0 x080 00000
0 x040 00000
0 x03C 000 00
0 x038 00000
0 x034 00000
0 x030 00000
0 x02C 000 00
0 x028 00000
0 x024 00000
0 x020 00000
0 x01C 000 00
0x003FFFFF
0 x000 00000
EACH IS A COPY
OF INTERNAL SPACE
Figure 3. Memory Map
EXTERNAL PORT (OFF-CHIP MEMORY/PERIPHERALS INTERFACE)
The ADSP-TS101S processor’s external port provides the processor’s interface to off-chip memory and peripherals. The
4G word address space is included in the DSP’s unified address
space. The separate on-chip buses—three 128-bit data buses and
three 32-bit address buses—are multiplexed at the external port
to create an external system bus with a single 64-bit data bus
and a single 32-bit address bus. The external port supports data
transfer rates of 800M bytes per second over external bus.
The external bus can be configured for 32- or 64-bit operation.
When the system bus is configured for 64-bit operation, the
lower 32 bits of the external data bus connect to even addresses,
and the upper 32 bits connect to odd addresses.
Rev. B | Page 6 of 44 | December 2004
The external port supports pipelined, slow, and SDRAM protocols. Addressing of external memory devices and memory
mapped peripherals is facilitated by on-chip decoding of high
order address lines to generate memory bank select signals.
The ADSP-TS101S provides programmable memory, pipeline
depth, and idle cycle for synchronous accesses, and external
acknowledge controls to support interfacing to pipelined or
slow devices, host processors, and other memory-mapped
peripherals with variable access, hold, and disable time
requirements.
Host Interface
The ADSP-TS101S provides an easy and configurable interface
between its external bus and host processors through the external port. To accommodate a variety of host processors, the host
ADSP-TS101S
interface supports pipelined or slow protocols for accesses of the
host as slave. Each protocol has programmable transmission
parameters, such as idle cycles, pipe depth, and internal
wait cycles.
The host interface supports burst transactions initiated by a host
processor. After the host issues the starting address of the burst
and asserts the BRST
internally while the host continues to assert BRST
The host interface provides a deadlock recovery mechanism that
enables a host to recover from deadlock situations involving the
DSP. The BOFF
nism. When the host asserts BOFF
current transaction and asserts HBG
nal bus.
The host can directly read or write the internal memory of the
ADSP-TS101S, and it can access most of the DSP registers,
including DMA control (TCB) registers. Vector interrupts support efficient execution of host commands.
signal, the DSP increments the address
.
signal provides the deadlock recovery mecha-
, the DSP backs off the
and relinquishes the exter-
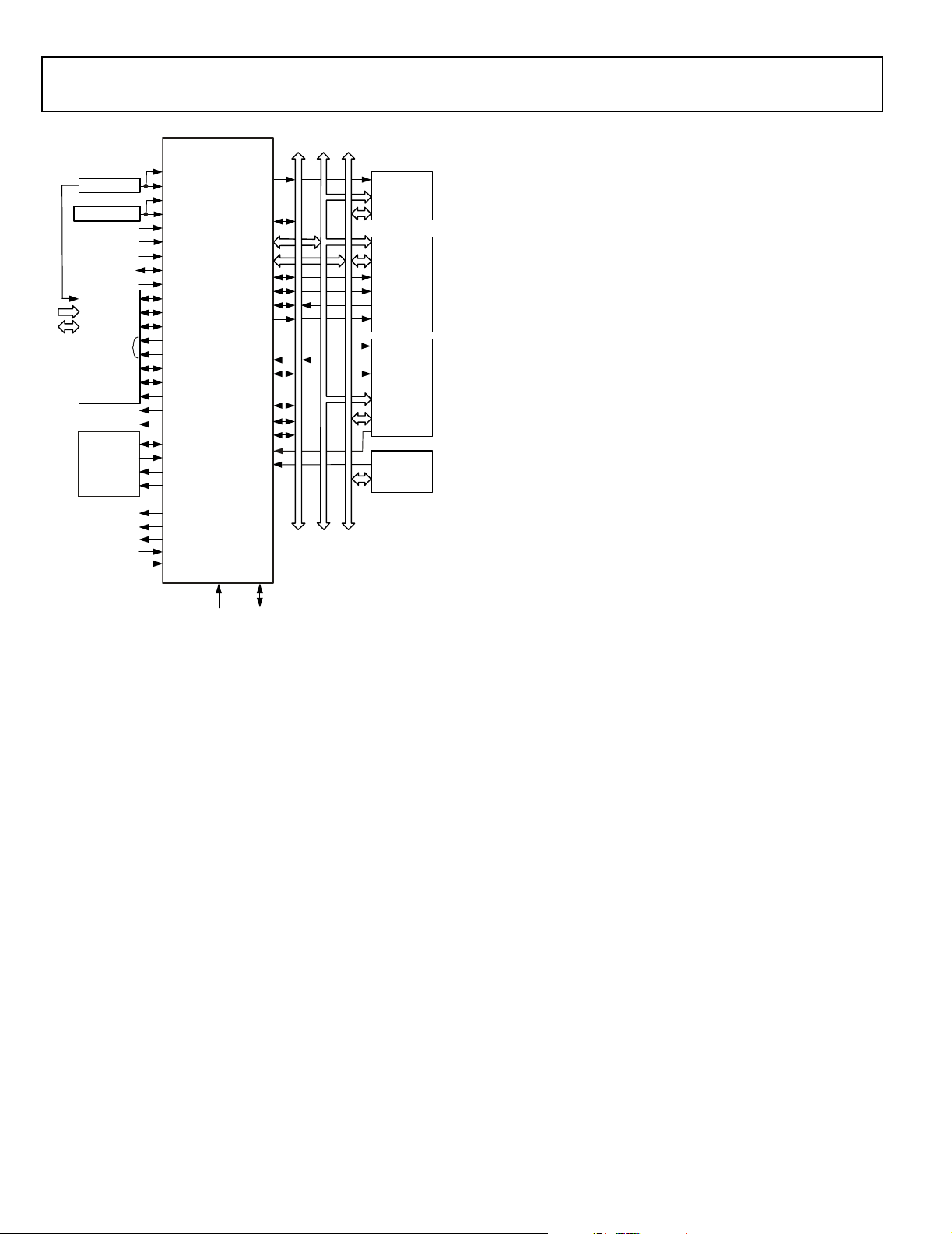
Multiprocessor Interface
The ADSP-TS101S offers powerful features tailored to multiprocessing DSP systems through the external port and link
ports. This multiprocessing capability provides highest bandwidth for interprocessor communication, including:
• Up to eight DSPs on a common bus
• On-chip arbitration for glueless multiprocessing
• Link ports for point-to-point communication
The external port and link ports provide integrated, glueless
multiprocessing support.
The external port supports a unified address space (see Figure 3)
that enables direct interprocessor accesses of each ADSPTS101S processor’s internal memory and registers. The DSP’s
on-chip distributed bus arbitration logic provides simple, glueless connection for systems containing up to eight ADSPTS101S processors and a host processor. Bus arbitration has a
rotating priority. Bus lock supports indivisible read-modifywrite sequences for semaphores. A bus fairness feature prevents
one DSP from holding the external bus too long.
The DSP’s four link ports provide a second path for interprocessor communications with throughput of 1G bytes per second.
The cluster bus provides 800M bytes per second throughput—
with a total of 1.8G bytes per second interprocessor bandwidth.
SDRAM Controller
The SDRAM controller controls the ADSP-TS101S processor’s
transfers of data to and from synchronous DRAM (SDRAM).
The throughput is 32 or 64 bits per SCLK cycle using the external port and SDRAM control pins.
The SDRAM interface provides a glueless interface with standard SDRAMs—16M bit, 64M bit, 128M bit, and 256M bit. The
DSP directly supports a maximum of 64M words × 32 bits of
SDRAM. The SDRAM interface is mapped in external memory
in the DSP’s unified memory map.
EPROM Interface
The ADSP-TS101S can be configured to boot from external
8-bit EPROM at reset through the external port. An automatic
process (which follows reset) loads a program from the EPROM
into internal memory. This process uses 16 wait cycles for each
read access. During booting, the BMS
EPROM chip select signal. The EPROM boot procedure uses
DMA Channel 0, which packs the bytes into 32-bit instructions.
Applications can also access the EPROM (write flash memories)
during normal operation through DMA.
The EPROM or flash memory interface is not mapped in the
DSP’s unified memory map. It is a byte address space limited to
a maximum of 16M bytes (24 address bits). The EPROM or
flash memory interface can be used after boot via a DMA.
pin functions as the
DMA CONTROLLER
The ADSP-TS101S processor’s on-chip DMA controller, with
14 DMA channels, provides zero-overhead data transfers without processor intervention. The DMA controller operates
independently and invisibly to the DSP’s core, enabling DMA
operations to occur while the DSP’s core continues to execute
program instructions. The DMA controller performs DMA
transfers between:
• Internal memory and external memory and memorymapped peripherals
• Internal memory of other DSPs on a common bus, a host
processor, or link port I/O
• External memory and external peripherals or link port I/O
• External bus master and internal memory or link port I/O
The DMA controller provides a number of additional features.
The DMA controller supports flyby transfers. Flyby operations
only occur through the external port (DMA Channel 0) and do
not involve the DSP’s core. The DMA controller acts as a conduit to transfer data from one external device to another
through external memory. During a transaction, the DSP:
• Relinquishes the external data bus
• Outputs addresses, memory selects (MS1–0
, and SDWE) and the FLYBY, IOEN, and RD/WR
CAS
strobes
•Responds to ACK
DMA chaining is also supported by the DMA controller. DMA
chaining operations enable applications to automatically link
one DMA transfer sequence to another for continuous transmission. The sequences can occur over different DMA channels
and have different transmission attributes.
The DMA controller also supports two-dimensional transfers.
The DMA controller can access and transfer two-dimensional
memory arrays on any DMA transmit or receive channel. These
transfers are implemented with index, count, and modify registers for both the X and Y dimensions.
, MSSD, RAS,
Rev. B | Page 7 of 44 | December 2004
ADSP-TS101S
001
000
RESET
CLOCK
REFERENCE
VOLTAGE
LINK
DEVICES
(4 MAX)
(OPTIONAL)
ID2–0
RESET
CLKS/REFS
ID2–0
RESET
CLKS/REFS
SCLK_P
LCLK_P
S/LCLK_N
V
REF
LCLKRAT2–0
SCLKFREQ
IRQ3–0
FLAG3–0
LINK
LXDAT7–0
LXCLKIN
LXCLKOUT
LXDIR
TMR0E
BM
CONTROLIMP2–0
DS2–0
ADSP-TS101 #7
ADSP-TS101 #6
ADSP-TS101 #5
ADSP-TS101 #4
ADSP-TS101 #3
ADSP-TS101 #2
ADSP-TS101 #1
ADDR31–0
DATA63–0
CONTROL
LINK
ADSP-TS101 #0
ADDR31–0
DATA63–0
BUSLOCK
DMAR3–0
CONTROL
BR7–2,0
BR1
BR7–1
BR0
RD
WRH/L
ACK
MS1–0
BMS
CPA
DPA
BOFF
BRST
HBR
HBG
MSH
FLYBY
IOEN
MSSD
RAS
CAS
LDQM
HDQM
SDWE
SDCKE
SDA10
L
S
S
O
R
T
N
O
C
L
O
R
T
N
O
C
A
E
T
R
A
D
D
D
A
S
S
A
E
T
R
A
D
D
D
A
ADDR
DATA
OE
WE
ACK
CS
CS
ADDR
DATA
ADDR
DATA
CS
RAS
CAS
DQM
WE
CKE
A10
ADDR
DATA
GLOBAL
MEMORY
AND
PERIPHERALS
(OPTIONAL)
BOOT
EPROM
(OPTIONAL)
CLOCK
HOST
PROCESSOR
INTERFACE
(OPTIONAL)
SDRAM
MEMORY
(OPTIONAL)
CLK
Figure 4. Shared Memory Multiprocessing System
The DMA controller performs the following DMA operations:
• External port block transfers. Four dedicated bidirectional
DMA channels transfer blocks of data between the DSP’s
internal memory and any external memory or memorymapped peripheral on the external bus. These transfers
support master mode and handshake mode protocols.
• Link port transfers. Eight dedicated DMA channels (four
transmit and four receive) transfer quad word data only
between link ports and between a link port and internal or
Rev. B | Page 8 of 44 | December 2004
external memory. These transfers only use handshake
mode protocol. DMA priority rotates between the four
receive channels.
• AutoDMA transfers. Two dedicated unidirectional DMA
channels transfer data received from an external bus master
to internal memory or to link port I/O. These transfers only
use slave mode protocol, and an external bus master must
initiate the transfer.
LINK PORTS
The DSP’s four link ports provide additional 8-bit bidirectional
I/O capability. With the ability to operate at a double data rate—
latching data on both the rising and falling edges of the clock—
ADSP-TS101S
running at 125 MHz, each link port can support up to
250M bytes per second, for a combined maximum throughput
of 1G bytes per second.
The link ports provide an optional communications channel
that is useful in multiprocessor systems for implementing point
to point interprocessor communications. Applications can also
use the link ports for booting.
Each link port has its own double-buffered input and output
registers. The DSP’s core can write directly to a link port’s transmit register and read from a receive register, or the DMA
controller can perform DMA transfers through eight (four
transmit and four receive) dedicated link port DMA channels.
Each link port has three signals that control its operation.
LxCLKOUT and LxCLKIN implement clock/acknowledge
handshaking. LxDIR indicates the direction of transfer and is
used only when buffering the LxDAT signals. An example application would be using differential low-swing buffers for long
twisted-pair wires. LxDAT provides the 8-bit data bus
input/output.
Applications can program separate error detection mechanisms
for transmit and receive operations (applications can use the
checksum mechanism to implement consecutive link port
transfers), the size of data packets, and the speed at which bytes
are transmitted.
Under certain conditions, the link port receiver can initiate a
token switch to reverse the direction of transfer; the transmitter
becomes the receiver and vice versa.
TIMER AND GENERAL-PURPOSE I/O
The ADSP-TS101S has a timer pin (TMR0E) that generates output when a programmed timer counter has expired. Also, the
DSP has four programmable general-purpose I/O pins
(FLAG3–0) that can function as either single bit input or output. As outputs, these pins can signal peripheral devices; as
inputs, they can provide the test for conditional branching.
RESET AND BOOTING
The ADSP-TS101S has two levels of reset (see reset specifications on Page 24):
• Power-up reset—after power-up of the system, and strap
options are stable, the RESET
• Normal reset—for any resets following the power-up reset
sequence, the RESET
pin must be asserted.
The DSP can be reset internally (core reset) by setting the
SWRST bit in SQCTL. The core is reset, but not the external
port or I/O.
pin must be asserted (low).
After reset, the ADSP-TS101S has four boot options for beginning operation:
• Boot from EPROM. The DSP defaults to EPROM booting
when the BMS
pin strap option is set low. See Strap Pin
Function Descriptions on Page 19.
• Boot by an external master (host or another ADSPTS101S). Any master on the cluster bus can boot the
ADSP-TS101S through writes to its internal memory or
through autoDMA.
• Boot by link port. All four receive link DMA channels are
initialized after reset to transfer a 256-word block to internal memory address 0 to 255, and to issue an interrupt at
the end of the block (similar to EP DMA). The corresponding DMA interrupts are set to address zero (0).
• No boot—Start running from an external memory. Using
the “no boot” option, the ADSP-TS101S must start running
from an external memory, caused by asserting one of the
IRQ3–0
interrupt signals.
The ADSP-TS101S core always exits from reset in the idle state
and waits for an interrupt. Some of the interrupts in the interrupt vector table are initialized and enabled after reset.
LOW POWER OPERATION
The ADSP-TS101S can enter a low power sleep mode in which
its core does not execute instructions, reducing power consumption to a minimum. The ADSP-TS101S exits sleep mode
when it senses a falling edge on any of its IRQ3–0
interrupt
inputs. The interrupt, if enabled, causes the ADSP-TS101S to
execute the corresponding interrupt service routine. This feature is useful for systems that require a low power standby
mode.
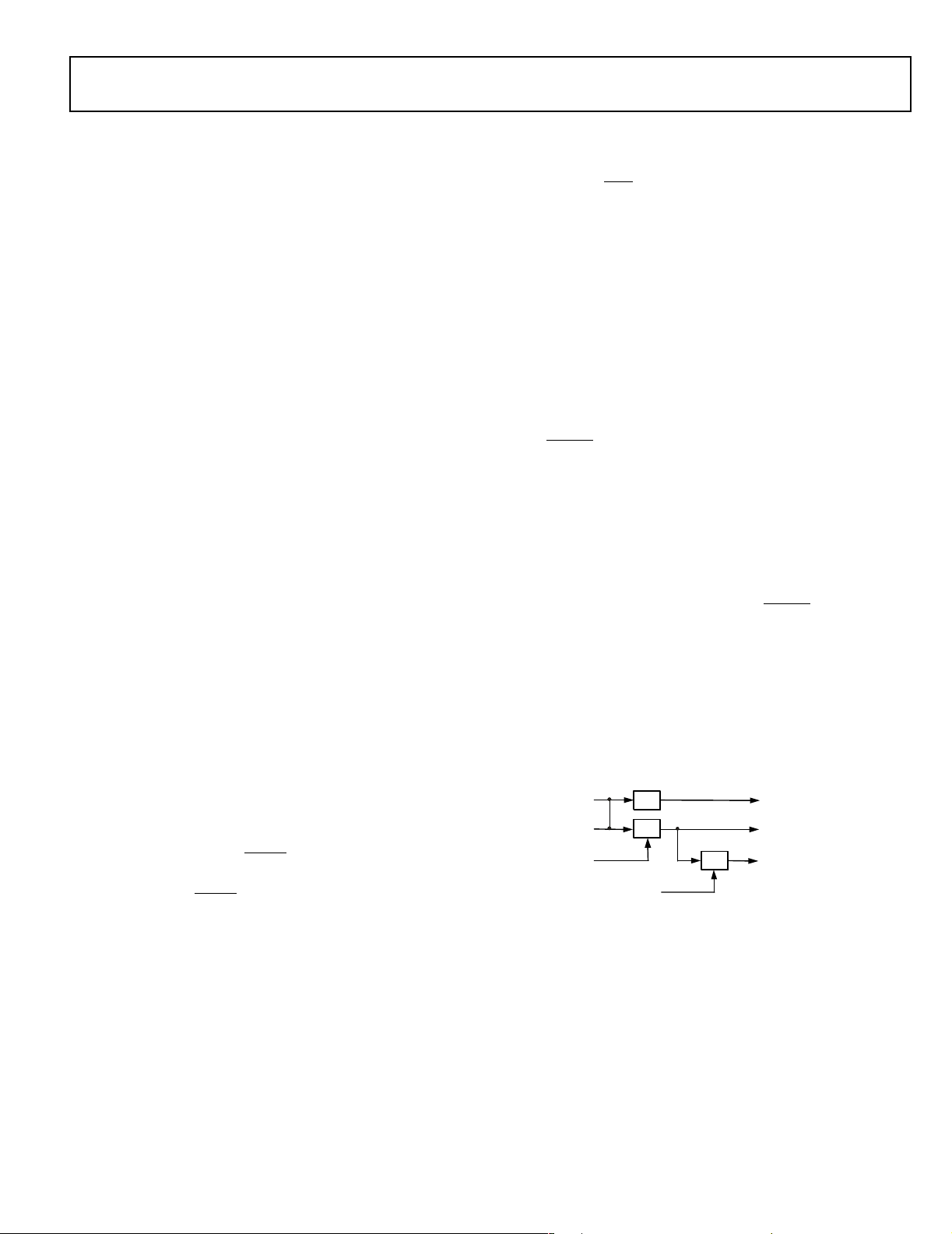
CLOCK DOMAINS
As shown in Figure 5, the ADSP-TS101S has two clock inputs,
SCLK (system clock) and LCLK (local clock).
SCLK_P
LCLK_P
LCLKRATx
LCTLx REGISTER
DLL
DLL
PLL
DLL
SPD BITS,
Figure 5. Clock Domains
/LR
DLL
These inputs drive its two major clock domains:
• SCLK (system clock). Provides clock input for the external
bus interface and defines the ac specification reference for
the external bus signals. The external bus interface runs at
1× the SCLK frequency. A DLL locks internal SCLK to
SCLK input.
• LCLK (local clock). Provides clock input to the internal
clock driver, CCLK, which is the internal clock for the core,
internal buses, memory, and link ports. The instruction
EXTERNAL INTERFACE
CCLK
(INSTRUCTION RATE)
LxCLKOUT/LxCLKIN
(LINK PORT RATE)
Rev. B | Page 9 of 44 | December 2004
ADSP-TS101S
execution rate is equal to CCLK. A PLL from LCLK generates CCLK which is phase-locked. The LCLKRAT pins
define the clock multiplication of LCLK to CCLK (see
Table 4). The link port clock is generated from CCLK via a
software programmable divisor. RESET
must be asserted
until LCLK is stable and within specification for at least
2 ms. This applies to power-up as well as any dynamic
modification of LCLK after power-up. Dynamic modification may include LCLK going out of specification as long as
RESET
is asserted.
Connecting SCLK and LCLK to the same clock source is a
requirement for the device. Using an integer clock multiplication value provides predictable cycle-by-cycle operation, a
requirement of fault-tolerant systems and some multiprocessing systems.
Noninteger values are completely functional and acceptable for
applications that do not require predictable cycle-by-cycle
operation.
OUTPUT PIN DRIVE STRENGTH CONTROL
Pins CONTROLIMP2-0 and DS2-0 work together to control
the output drive strength of two groups of pins, the
Address/Data/Control pin group and the Link pin group.
CONTROLIMP2-0 independently configures the two pin
groups to the maximum drive strength or to a digitally controlled drive strength that is selectable by the DS2-0 pins (see
Table 13 on Page 18). If the digitally controlled drive strength is
selected for a pin group, the DS2-0 pins determine one of eight
strength levels for that group (see Table 14 on Page 18). The
drive strength selected varies the slew rate of the driver. Drive
strength 0 (DS2-0 = 000) is the weakest and slowest slew rate.
Drive strength 7 (DS2-0 = 111) is the strongest and fastest slew
rate.
The stronger drive strengths are useful for high frequency
switching while the lower strengths may allow use of a relaxed
design methodology. The strongest drive strengths have a larger
di/dt and thus require more attention to signal integrity issues
such a ringing, reflections and coupling. Also a larger di/dt can
increase external supply rail noise, which impacts power supply
and power distribution design.
The drive strengths for the EMU
, CPA, and DPA pins are not
controllable and are fixed to the maximum level.
For drive strength calculation, see Output Drive Currents on
Page 32.
POWER SUPPLIES
The ADSP-TS101S has separate power supply connections for
internal logic (V
) power supply. The internal (VDD) and analog (V
(V
DD_IO
supplies must meet the 1.2 V requirement. The I/O buffer
(V
) supply must meet the 3.3 V requirement.
DD_IO
The analog supply (V
produce a stable clock, systems must provide a clean power supply to power input V
bypassing the V
), analog circuits (V
DD
) powers the clock generator PLLs. To
DD_A
. Designs must pay critical attention to
DD_A
supply.
DD_A
), and I/O buffer
DD_A
DD_A
)
The required power-on sequence for the DSP is to provide V
(and V
) before V
DD_A
DD_IO
.
DD
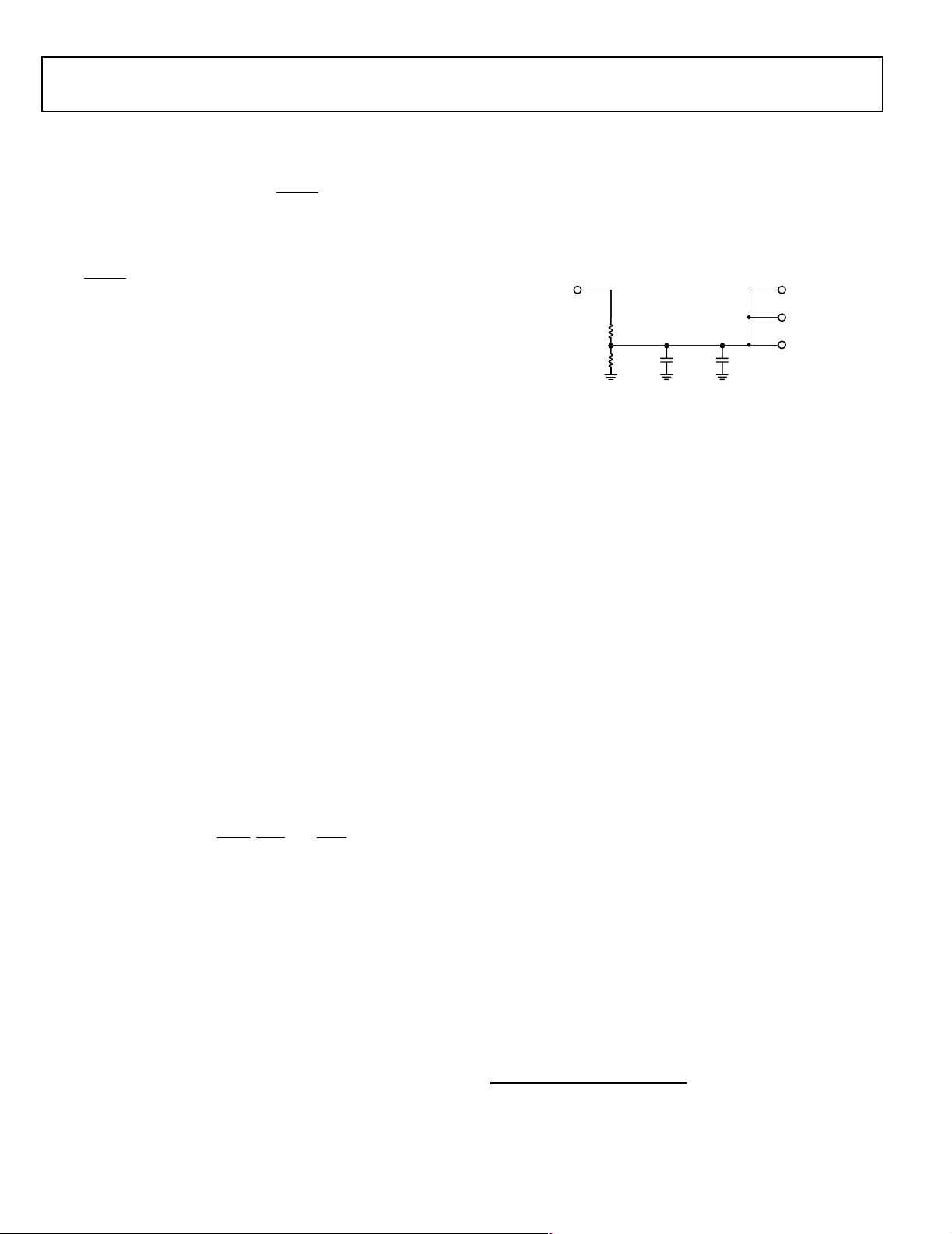
FILTERING REFERENCE VOLTAGE AND CLOCKS
Figure 6 shows a possible circuit for filtering V
LCLK_N. This circuit provides the reference voltage for the
switching voltage, system clock, and local clock references.
V
DD_IO
R1
R2 C1 C2
V
SS
R1: 2k⍀ SERIES RESISTOR
R2: 1.67k⍀ SERIES RESIST OR
C1: 1F CAPACITOR (SMD)
C2: 1nF CAPACITOR (HF SMD) PLACED CLOSE TO DSP’S PINS
Figure 6. V
, SCLK_N, and LCLK_N Filter
REF
, SCLK_N, and
REF
V
REF
SCLK_N
LCLK_N
DEVELOPMENT TOOLS
The ADSP-TS101S is supported with a complete set of
CROSSCORE
including Analog Devices emulators and VisualDSP++
opment environment. The same emulator hardware that
supports other TigerSHARC processors also fully emulates the
ADSP-TS101S.
The VisualDSP++ project management environment lets programmers develop and debug an application. This environment
includes an easy to use assembler (which is based on an algebraic syntax), an archiver (librarian/library builder), a linker, a
loader, a cycle-accurate instruction-level simulator, a C/C++
compiler, and a C/C++ run-time library that includes DSP and
mathematical functions. A key point for these tools is C/C++
code efficiency. The compiler has been developed for efficient
translation of C/C++ code to DSP assembly. The DSP has architectural features that improve the efficiency of compiled C/C++
code.
The VisualDSP++ debugger has a number of important features. Data visualization is enhanced by a plotting package that
offers a significant level of flexibility. This graphical representation of user data enables the programmer to quickly determine
the performance of an algorithm. As algorithms grow in complexity, this capability can have increasing significance on the
designer’s development schedule, increasing productivity. Statistical profiling enables the programmer to nonintrusively poll
the processor as it is running the program. This feature, unique
to VisualDSP++, enables the software developer to passively
gather important code execution metrics without interrupting
the real-time characteristics of the program. Essentially, the
developer can identify bottlenecks in software quickly and
†
CROSSCORE is a registered trademark of Analog Devices, Inc.
‡
VisualDSP++ is a registered trademark of Analog Devices, Inc.
®
†
software and hardware development tools,
®
‡
devel-
Rev. B | Page 10 of 44 | December 2004

ADSP-TS101S
efficiently. By using the profiler, the programmer can focus on
those areas in the program that impact performance and take
corrective action.
Debugging both C/C++ and assembly programs with the
VisualDSP++ debugger, programmers can:
• View mixed C/C++ and assembly code (interleaved source
and object information)
• Insert breakpoints
• Set conditional breakpoints on registers, memory,
and stacks
• Trace instruction execution
• Perform linear or statistical profiling of program execution
• Fill, dump, and graphically plot the contents of memory
• Perform source level debugging
• Create custom debugger windows
The VisualDSP++ IDDE lets programmers define and manage
DSP software development. Its dialog boxes and property pages
let programmers configure and manage all of the TigerSHARC
development tools, including the color syntax highlighting in
the VisualDSP++ editor. This capability permits programmers
to:
• Control how the development tools process inputs and
generate outputs
• Maintain a one-to-one correspondence with the tool’s
command line switches
The VisualDSP++ Kernel (VDK) incorporates scheduling and
resource management tailored specifically to address the memory and timing constraints of DSP programming. These
capabilities enable engineers to develop code more effectively,
eliminating the need to start from the very beginning, when
developing new application code. The VDK features include
threads, critical and unscheduled regions, semaphores, events,
and device flags. The VDK also supports priority-based, preemptive, cooperative, and time-sliced scheduling approaches. In
addition, the VDK was designed to be scalable. If the application
does not use a specific feature, the support code for that feature
is excluded from the target system.
Because the VDK is a library, a developer can decide whether to
use it or not. The VDK is integrated into the VisualDSP++
development environment, but can also be used via standard
command line tools. When the VDK is used, the development
environment assists the developer with many error-prone tasks
and assists in managing system resources, automating the generation of various VDK-based objects, and visualizing the
system state, when debugging an application that uses the VDK.
VCSE is Analog Devices technology for creating, using, and
reusing software components (independent modules of substantial functionality) to quickly and reliably assemble software
applications. It is also used for downloading components from
the Web, dropping them into the application, and publishing
component archives from within VisualDSP++. VCSE supports
component implementation in C/C++ or assembly language.
Use the expert linker to visually manipulate the placement of
code and data on the embedded system. View memory utilization in a color-coded graphical form, easily move code and data
to different areas of the DSP or external memory with a drag of
the mouse, examine run-time stack and heap usage. The expert
linker is fully compatible with existing linker definition file
(LDF), allowing the developer to move between the graphical
and textual environments.
Analog Devices DSP emulators use the IEEE 1149.1 JTAG Test
Access Port of the ADSP-TS101S processor to monitor and control the target board processor during emulation. The emulator
provides full speed emulation, allowing inspection and modification of memory, registers, and processor stacks. Nonintrusive
in-circuit emulation is assured by the use of the processor’s
JTAG interface—the emulator does not affect target system
loading or timing.
In addition to the software and hardware development tools
available from Analog Devices, third parties provide a wide
range of tools supporting the TigerSHARC processor family.
Hardware tools include TigerSHARC processor PC plug-in
cards. Third party software tools include DSP libraries, realtime operating systems, and block diagram design tools.
DESIGNING AN EMULATORCOMPATIBLE DSP BOARD (TARGET)
The Analog Devices family of emulators are tools that every
DSP developer needs to test and debug hardware and software
systems. Analog Devices has supplied an IEEE 1149.1 JTAG test
access port (TAP) on each JTAG DSP. The emulator uses the
TAP to access the internal features of the DSP, allowing the
developer to load code, set breakpoints, observe variables,
observe memory, and examine registers. The DSP must be
halted to send data and commands, but once an operation has
been completed by the emulator, the DSP system is set running
at full speed with no impact on system timing.
To use these emulators, the target board must include a header
that connects the DSP’s JTAG port to the emulator.
For details on target board design issues including mechanical
layout, single processor connections, multiprocessor scan
chains, signal buffering, signal termination, and emulator pod
logic, see the EE-68: Analog Devices JTAG Emulation Technical
Reference on the Analog Devices website (www.analog.com)—
use site search on “EE-68.” This document is updated regularly
to keep pace with improvements to emulator support.
ADDITIONAL INFORMATION
This data sheet provides a general overview of the ADSPTS101S processor’s architecture and functionality. For detailed
information on the ADSP-TS101S processor’s core architecture
and instruction set, see the ADSP-TS101 TigerSHARC Processor
Programming Reference and the ADSP-TS101 TigerSHARC Processor Hardware Reference. For detailed information on the
development tools for this processor, see the VisualDSP++
User’s Guide for TigerSHARC Processors.
Rev. B | Page 11 of 44 | December 2004
ADSP-TS101S
PIN FUNCTION DESCRIPTIONS
While most of the ADSP-TS101S processor’s input pins are normally synchronous—tied to a specific clock—a few are
asynchronous. For these asynchronous signals, an on-chip synchronization circuit prevents metastability problems. The
synchronous ac specification for asynchronous signals is used
only when predictable cycle-by-cycle behavior is required.
All inputs are sampled by a clock reference, therefore input
PIN STATES AT RESET
The output pins can be three-stated during normal operation.
The DSP three-states all outputs during reset, allowing these
pins to get to their internal pull-up or pull-down state. Some
output pins (control signals) have a pull-up or pull-down that
maintains a known value during transitions between different
drivers.
specifications (asynchronous minimum pulse widths or synchronous input setup and hold) must be met to guarantee
recognition.
PIN DEFINITIONS
The Type column in the following pin definitions tables
describes the pin type, when the pin is used in the system. The
Term (for termination) column describes the pin termination
type if the pin is not used by the system. Note that some pins are
always used (indicated with au symbol).
Table 3. Pin Definitions—Clocks and Reset
Signal Type Term Description
LCLK_N I au Local Clock Reference. Connect this pin to V
as shown in Figure 6.
REF
LCLK_P I au Local Clock Input. DSP clock input. The instruction cycle rate = n × LCLK, where n is user-
programmable to 2, 2.5, 3, 3.5, 4, 5, or 6. For more information, see Clock Domains on Page 9.
LCLKRAT2–0
1
I (pd2) au LCLK Ratio. The DSP’s core clock (instruction cycle rate) = n × LCLK, where n is user-program-
mable to 2, 2.5, 3, 3.5, 4, 5, or 6 as shown in Table 4. These pins must have a constant value while
the DSP is powered.
SCLK_N I au System Clock Reference. Connect this pin to V
as shown in Figure 6.
REF
SCLK_P I au System Clock Input. The DSP’s system input clock for cluster bus. This pin must be connected
to the same clock source as LCLK_P. For more information, see Clock Domains on Page 9.
SCLKFREQ
3
I (pu2) au SCLK Frequency. SCLKFREQ = 1 is required. The SCLKFREQ pin must have a constant value while
the DSP is powered.
RESET
I/A au Reset. Sets the DSP to a known state and causes program to be in idle state. RESET must be
asserted at specified time according to the type of reset operation. For details, see Reset and
Booting on Page 9.
Type column symbols: A = asynchronous; G = ground; I = input; O = output; o/d = open drain output; P = power supply;
pd = internal pull-down approximately 100 k
Term (for termination) column symbols: epd = external pull-down approximately 10 k
, nc = not connected; au = always used.
to V
DD-IO
1
The internal pull-down may not be sufficient. A stronger pull-down may be necessary.
2
See Electrical Characteristics on Page 20 for maximum and minimum current consumption for pull-up and pull-down resistances.
3
The internal pull-up may not be sufficient. A stronger pull-up may be necessary.
Ω; pu = internal pull-up approximately 100 kΩ; T = three-state
Ω to V
; epu = external pull-up approximately 10 kΩ
SS
Table 4. LCLK Ratio
LCLKRAT2–0 Ratio
000 (default) 2
001 2.5
010 3
011 3.5
100 4
101 5
110 6
111 Reserved
Rev. B | Page 12 of 44 | December 2004
Table 5. Pin Definitions—External Port Bus Controls
ADSP-TS101S
Signal Type Term Description
ADDR31–0
1
I/O/T nc Address Bus. The DSP issues addresses for accessing memory and peripherals on these pins. In
a multiprocessor system, the bus master drives addresses for accessing internal memory or I/O
processor registers of other ADSP-TS101S processors. The DSP inputs addresses when a host or
another DSP accesses its internal memory or I/O processor registers.
DATA63–0
RD
1
2
I/O/T nc External Data Bus. Data and instructions are received, and driven by the DSP, on these pins.
I/O/T (pu3)nc Memory Read. RD is asserted whenever the DSP reads from any slave in the system, excluding
SDRAM. When the DSP is a slave, RD is an input and indicates read transactions that access its
internal memory or universal registers. In a multiprocessor system, the bus master drives RD.
pin changes concurrently with ADDR pins.
The RD
WRL
2
I/O/T (pu3) nc Write Low. WRL is asserted in two cases: When the ADSP-TS101S writes to an even address word
of external memory or to another external bus agent; and when the ADSP-TS101S writes to a
32-bit zone (host, memory, or DSP programmed to 32-bit bus). An external master (host or DSP)
asserts WRL
bus master drives WRL
slave, WRL
for writing to a DSP’s low word of internal memory. In a multiprocessor system, the
. The WRL pin changes concurrently with ADDR pins. When the DSP is a
is an input and indicates write transactions that access its internal memory or
universal registers.
2
WRH
I/O/T (pu3) nc Write High. WRH is asserted when the ADSP-TS101S writes a long word (64 bits) or writes to an
odd address word of external memory or to another external bus agent on a 64-bit data bus.
An external master (host or another DSP) must assert WRH
for writing to a DSP’s high word of
64-bit data bus. In a multiprocessing system, the bus master drives WRH. The WRH pin changes
concurrently with ADDR pins. When the DSP is a slave, WRH
is an input and indicates write
transactions that access its internal memory or universal registers.
ACK I/O/T epu Acknowledge. External slave devices can deassert ACK to add wait states to external memory
accesses. ACK is used by I/O devices, memory controllers, and other peripherals on the data
phase. The DSP can deassert ACK to add wait states to read accesses of its internal memory. The
ADSP-TS101S does not drive ACK during slave writes. Therefore, an external (approximately
10 kΩ) pull-up is required.
2, 4
BMS
O/T
(pu/pd3)
au Boot Memory Select. BMS is the chip select for boot EPROM or flash memory. During reset, the
DSP uses BMS as a strap pin (EBOOT) for EPROM boot mode. When the DSP is configured to
boot from EPROM, BMS
is active during the boot sequence. Pull-down enabled during RESET
(asserted); pull-up enabled after RESET (deasserted). In a multiprocessor system, the DSP bus
master drives BMS. For details see Reset and Booting on Page 9 and the EBOOT signal
description in Table 16 on Page 19.
MS1–0
2
O/T (pu3)nc Memory Select. MS0 or MS1 is asserted whenever the DSP accesses memory banks 0 or 1,
respectively. MS1–0 are decoded memory address pins that change concurrently with ADDR
pins. When ADDR31:26 = 0b000010, MS0 is asserted. When ADDR31:26 = 0b000011, MS1 is
asserted. In multiprocessor systems, the master DSP drives MS1–0
.
Type column symbols: A = asynchronous; G = ground; I = input; O = output; o/d = open drain output; P = power supply;
pd = internal pull-down approximately 100 k
Term (for termination) column symbols: epd = external pull-down approximately 10 k
, nc = not connected; au = always used.
to V
DD-IO
Ω; pu = internal pull-up approximately 100 kΩ; T = three-state
Ω to V
; epu = external pull-up approximately 10 kΩ
SS
Rev. B | Page 13 of 44 | December 2004
ADSP-TS101S
Table 5. Pin Definitions—External Port Bus Controls (Continued)
Signal Type Term Description
2
MSH
2
BRST
Type column symbols: A = asynchronous; G = ground; I = input; O = output; o/d = open drain output; P = power supply;
pd = internal pull-down approximately 100 k
Term (for termination) column symbols: epd = external pull-down approximately 10 k
, nc = not connected; au = always used.
to V
DD-IO
1
The address and data buses may float for several cycles during bus mastership transitions between a TigerSHARC processor and a host. Floating in this case means that these
inputs are not driven by any source and that dc-biased terminations are not present. It is not necessary to add pull-ups as there are no reliability issues and the worst-case
power consumption for these floating inputs is negligible. Unconnected address pins may require pull-ups or pull-downs to avoid erroneous slave accesses, depending on
the system. Unconnected data pins may be left floating.
2
The internal pull-up may not be sufficient. A stronger pull-up may be necessary.
3
See Electrical Characteristics on Page 20 for maximum and minimum current consumption for pull-up and pull-down resistances.
4
The internal pull-down may not be sufficient. A stronger pull-down may be necessary.
Table 6. Pin Definitions—External Port Arbitration
Signal Type Term Description
BR7–0
1
ID2–0
1
BM
BOFF
BUSLOCK
3
HBR
Type column symbols: A = asynchronous; G = ground; I = input; O = output; o/d = open drain output; P = power supply;
pd = internal pull-down approximately 100 k
Term (for termination) column symbols: epd = external pull-down approximately 10 k
, nc = not connected; au = always used.
to V
DD-IO
O/T (pu3) nc Memory Select Host. MSH is asserted whenever the DSP accesses the host address space
(ADDR31:28 ≠ 0b0000). MSH is a decoded memory address pin that changes concurrently with
ADDR pins. In a multiprocessor system, the bus master DSP drives MSH.
I/O/T (pu3) nc Burst. The current bus master (DSP or host) asserts this pin to indicate that it is reading or writing
data associated with consecutive addresses. A slave device can ignore addresses after the first
one and increment an internal address counter after each transfer. For host-to-DSP burst
accesses, the DSP increments the address automatically while BRST
Ω; pu = internal pull-up approximately 100 kΩ; T = three-state
Ω to V
; epu = external pull-up approximately 10 kΩ
SS
is asserted.
I/O epu Multiprocessing Bus Request Pins. Used by the DSPs in a multiprocessor system to arbitrate for
bus mastership. Each DSP drives its own BRx line (corresponding to the value of its ID2–0 inputs)
and monitors all others. In systems with fewer than eight DSPs, set the unused BRx
pins high.
I (pd2) au Multiprocessor ID. Indicates the DSP’s ID. From the ID, the DSP determines its order in a multi-
processor system. These pins also indicate to the DSP which bus request (BR0–BR7) to assert
when requesting the bus: 000 = BR0, 001 = BR1, 010 = BR2, 011 = BR3, 100 = BR4, 101 = BR5,
110 = BR6
, or 111 = BR7. ID2–0 must have a constant value during system operation and can
change during reset only.
O (pd2) au Bus Master. The current bus master DSP asserts BM. For debugging only. At reset this is a strap
pin. For more information, see Table 16 on Page 19.
I epu Back Off. A deadlock situation can occur when the host and a DSP try to read from each other’s
bus at the same time. When deadlock occurs, the host can assert BOFF to force the DSP to
relinquish the bus before completing its outstanding transaction, but only if the outstanding
transaction is to host memory space (MSH
).
O/T (pu2) nc Bus Lock Indication. Provides an indication that the current bus master has locked the bus.
I epu Host Bus Request. A host must assert HBR to request control of the DSP’s external bus. When
HBR
is asserted in a multiprocessing system, the bus master relinquishes the bus and asserts
once the outstanding transaction is finished.
HBG
Ω; pu = internal pull-up approximately 100 kΩ; T = three-state
Ω to V
; epu = external pull-up approximately 10 kΩ
SS
Rev. B | Page 14 of 44 | December 2004
 Loading...
Loading...