

Dual/Quad Input Network Clock
FEATURES
Supports Stratum 2 stability in holdover mode
Supports reference switchover with phase build-out
Supports hitless reference switchover
Automatic/manual holdover and reference switchover
2 pairs of reference input pins, with each pair configurable
as a single differential input or as 2 independent single-
ended inputs
Input reference frequencies from 1 kHz to 750 MHz
Reference validation and frequency monitoring (1 ppm)
Programmable input reference switchover priority
30-bit programmable input reference divider
2 pairs of clock output pins, with each pair configurable as
a single differential LVDS/LVPECL output or as 2 single-
ended CMOS outputs
Output frequencies up to 450 MHz
20-bit integer and 10-bit fractional programmable feedback
divider
Programmable digital loop filter covering loop bandwidths
from 0.001 Hz to 100 kHz
Optional low noise LC-VCO system clock multiplier
Optional crystal resonator for system clock input
On-chip EEPROM to store multiple power-up profiles
Software controlled power-down
64-lead LFCSP package
Generator/Synchronizer
AD9547
APPLICATIONS
Network synchronization
Cleanup of reference clock jitter
SONET/SDH clocks up to OC-192, including FEC
Stratum 2 holdover, jitter cleanup, and phase transient
control
Stratum 3E and Stratum 3 reference clocks
Wireless base stations, controllers
Cable infrastructure
Data communications
GENERAL DESCRIPTION
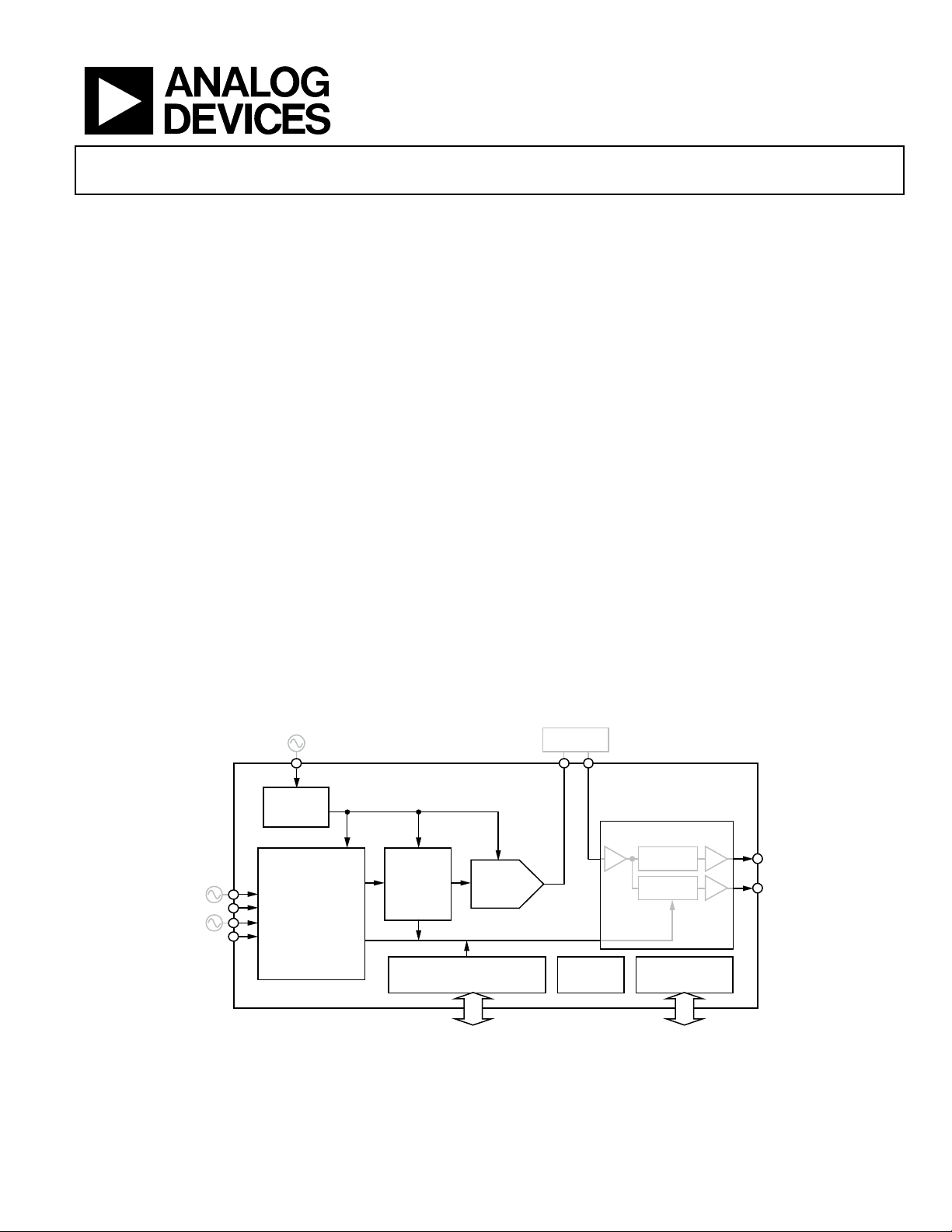
The AD9547 provides synchronization for many systems,
including synchronous optical networks (SONET/SDH). The
AD9547 generates an output clock that is synchronized to one
of two differential or four single-ended external input references.
The digital PLL allows for reduction of input time jitter or phase
noise associated with the external references. The AD9547
continuously generates a clean (low jitter), valid output clock,
even when all references fail, by means of digitally controlled
loop and holdover circuitry.
The AD9547 operates over an industrial temperature range of
−40°C to +85°C.
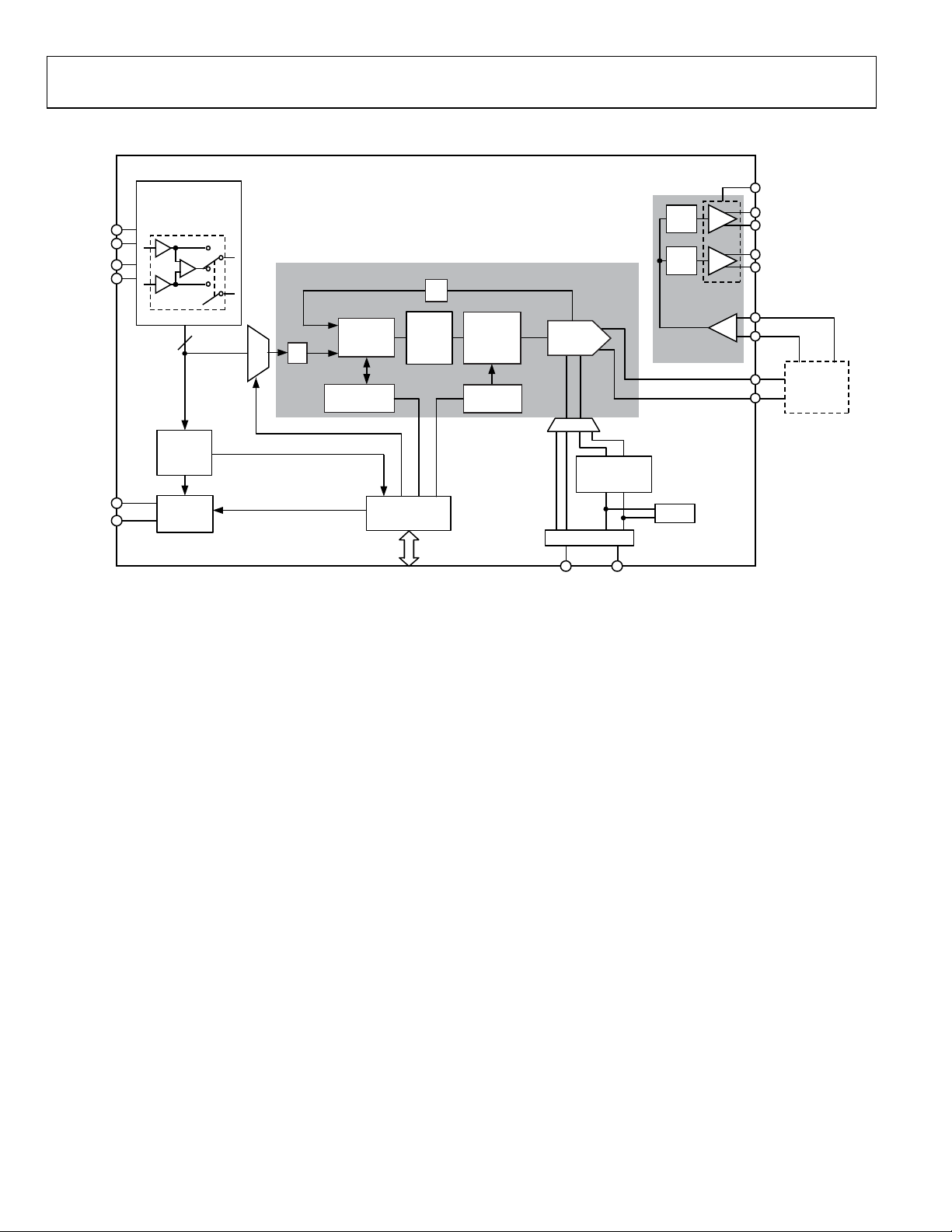
FUNCTIONAL BLOCK DIAGRAM
STABLE
SOURCE
CLOCK
MULTIPLIER
DIGITAL
REFERE NC E INPUT S
AND
MONITOR MUX
Rev. B
Information furnished by Analog Devices is believed to be accurate and reliable. However, no
responsibility is assumed by Analog Devices for its use, nor for any infringements of patents or other
rights of third parties that may result from its use. Specifications subject to change without notice. No
license is granted by implication or otherwise under any patent or patent rights of Analog Devices.
Trademarks and registered trademarks are the property of their respective owners.
PLL
SERIAL CONTROL INT ERFACE
(SPI or I
AD9547
DAC
2
C)
Figure 1.
ANALOG
FILTER
CLOCK DIST RIBUTION
CHANNEL 0
DIVIDER
CHANNEL 1
DIVIDER
SYNC
EEPROM
One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A.
Tel: 781.329.4700 www.analog.com
Fax: 781.461.3113 ©2009–2010 Analog Devices, Inc. All rights reserved.
STATUS AND
CONTROL P INS
08300-001

AD9547
TABLE OF CONTENTS
Features .............................................................................................. 1
Applications ....................................................................................... 1
General Description ......................................................................... 1
Functional Block Diagram .............................................................. 1
Revision History ............................................................................... 3
Specifications ..................................................................................... 4
Supply Voltage ............................................................................... 4
Supply Current .............................................................................. 4
Power Dissipation ......................................................................... 4
Logic Inputs (M0 to M7, RESET) ............................................... 5
Logic Outputs (M0 to M7, IRQ) ................................................ 5
System Clock Inputs (SYSCLKP, SYSCLKN)............................ 5
Distribution Clock Inputs (CLKINP, CLKINN) ...................... 6
Reference Inputs (REFA/REFAA, REFB/REFBB) .................... 7
Reference Monitors ...................................................................... 7
Reference Switchover Specifications .......................................... 8
Distribution Clock Outputs (OUT0, OUT1) ........................... 8
DAC Output Characteristics (DACOUTP, DACOUTN) ....... 9
Time Duration of Digital Functions ........................................ 10
Digital PLL .................................................................................. 10
Digital PLL Lock Detection ...................................................... 10
Holdover Specifications ............................................................. 10
Serial Port Specifications—SPI Mode ...................................... 11
Serial Port Specifications—I2C Mode ...................................... 12
Jitter Generation ......................................................................... 13
Absolute Maximum Ratings .......................................................... 14
ESD Caution ................................................................................ 14
Pin Configuration and Function Descriptions ........................... 15
Typical Performance Characteristics ........................................... 18
Input/Output Termination Recommendations .......................... 23
Getting Started ................................................................................ 24
Power-On Reset .......................................................................... 24
Initial M0 to M7 Pin Programming ......................................... 24
Device Register Programming .................................................. 24
Theory of Operation ...................................................................... 26
Overview ...................................................................................... 26
Reference Clock Inputs .............................................................. 27
Reference Monitors .................................................................... 27
Reference Profiles ....................................................................... 28
Reference Switchover ................................................................. 30
Rev. B | Page 2 of 104
Digital Phase-Locked Loop (DPLL) Core ............................... 32
Direct Digital Synthesizer (DDS) ............................................. 34
Tuning Word Processing ........................................................... 35
Loop Control State Machine ..................................................... 36
System Clock Inputs ................................................................... 37
SYSCLK PLL Multiplier ............................................................. 38
Clock Distribution ..................................................................... 40
Status and Control .......................................................................... 44
Multifunction Pins (M0 to M7) ............................................... 44
IRQ Pin ........................................................................................ 45
Watchdog Timer ......................................................................... 45
EEPROM ..................................................................................... 46
Serial Control Port ......................................................................... 50
SPI/I2C Port Selection ................................................................ 50
SPI Serial Port Operation .......................................................... 50
IC Serial Port Operation .......................................................... 54
I/O Programming Registers .......................................................... 57
Buffered/Active Registers .......................................................... 57
Autoclearing Registers ............................................................... 57
Register Access Restrictions ...................................................... 57
Register Map ................................................................................... 58
Register Bit Descriptions ............................................................... 67
Serial Port Configuration and Part Identification (Register
0x0000 to Register 0x0005) ....................................................... 67
System Clock (SYSCLK) (Register 0x0100 to Register 0x0108)
....................................................................................................... 68
General Configuration (Register 0x0200 to Register 0x0214)
....................................................................................................... 69
DPLL Configuration (Register 0x0300 to Register 0x031B) 72
Clock Distribution Output Configuration (Register 0x0400 to
Register 0x0417) ......................................................................... 74
Reference Input Configuration (Register 0x0500 to Register
0x0507) ......................................................................................... 76
Profile Registers (Register 0x0600 to Register 0x07FF) ........ 78
Operational Controls (Register 0x0A00 to Register 0x0A10)
....................................................................................................... 88
Status Readback (Register 0x0D00 to Register 0x0D19) ...... 92
Nonvolatile Memory (EEPROM) Control (Register 0x0E00 to
Register 0x0E03) ......................................................................... 94
EEPROM Storage Sequence (Register 0x0E10 to Register
0x0E3F) ........................................................................................ 95
Applications Information .............................................................. 98

AD9547
Power Supply Partitions ............................................................. 98
Thermal Performance ................................................................. 98
Calculating the Digital Filter Coefficients ............................... 99
REVISION HISTORY
11/10—Rev. A to Rev. B
Changes to Pulse Width High, t
SCLK to Valid SDIO and SDO, t
Changes to Addr 0x0002, Def Column, Table 36 and Addr
0x0003, Def Column, Table 36 ...................................................... 58
Changes to Addr 0x0632, Table 36 ............................................... 61
Changes to Addr 0x0680, Table 36 ............................................... 62
Changes to Addr 0x06B2, Table 36 ............................................... 63
Changes to Address 0x0002, Description, Table 39 .................... 67
Changes to Bit 7 and Bit 6, Table 78 ............................................. 78
Changes to Address 0x629 and Address 0x62A, Table 87, and
Bit 7 and Bit 6, Table 88 .................................................................. 80
Changes to Address 0x65B and Address 0x65C, Table 97, and
Bit 7 and Bit 6, Table 98 .................................................................. 82
Changes to Address 0x6A9 and Address 0x6AA, Table 107 ..... 84
Changes to Bit 7 and Bit 6, Table 108 ........................................... 85
Changes to Address 0x6DB and Address 0x6DC, Table 117 ..... 87
Parameter, Table 17 and
HIGH
Parameter, Table 17 ............ 11
DV
Outline Dimensions ...................................................................... 102
Ordering Guide ......................................................................... 102
9/10—Rev. 0 to Rev. A
Change to Frequency Range (CMOS), Single-Ended Operation
Parameter, Table 8 ............................................................................. 7
Added Low Loop Bandwidth Applications Using a
TCXO/OCXO Section and Choosing the System Clock
Oscillator Frequency Section ......................................................... 37
Moved System Clock Period Section ............................................ 39
7/09—Revision 0: Initial Version
Rev. B | Page 3 of 104
AD9547
SPECIFICATIONS
Minimum and maximum values apply for the full range of supply voltage and operating temperature variation. Typical values apply for
AVDD3 = DVDD3 = 3.3 V, AVDD = DVDD
SUPPLY VOLTAGE
Table 1.
Parameter Min Typ Max Unit Test Conditions/Comments
DVDD3 3.135 3.30 3.465 V Pin 7, Pin 58
DVDD 1.71 1.80 1.89 V Pin 1, Pin 6, Pin 8, Pin 10, Pin 11, Pin 53, Pin 59, Pin 64
AVDD3 3.135 3.30 3.465 V Pin 16, Pin 33, Pin 43, Pin 49
3.3 V Supply (Typical) 3.135 3.30 3.465 V Pin 25, Pin 31
1.8 V Supply (Alternative) 1.71 1.80 1.89 V Pin 25, Pin 31
AVDD 1.71 1.80 1.89 V Pin 17, Pin 18, Pin 23, Pin 28, Pin 32, Pin 36, Pin 39, Pin 42, Pin 46, Pin 50
SUPPLY CURRENT
The test conditions for the maximum supply current are the same as the test conditions for the All Blocks Running section of Tab le 3 . The
test conditions for the typical supply current are the same as the test conditions for the Typical Configuration section of Tabl e 3.
Table 2.
Parameter Min Typ Max Unit Test Conditions/Comments
I
1.5 3 mA Pin 7, Pin 58
DVDD3
I
190 215 mA Pin 1, Pin 6, Pin 8, Pin 10, Pin 11, Pin 53, Pin 59, Pin 64
DVDD
I
52 70 mA Pin 16, Pin 33, Pin 43, Pin 49
AVDD3
3.3 V Supply (Typical) 24 55 mA Pin 25, Pin 31
1.8 V Supply (Alternative) 24 55 mA Pin 25, Pin 31
I
135 150 mA Pin 17, Pin 18, Pin 23, Pin 28, Pin 32, Pin 36, Pin 39, Pin 42, Pin 46, Pin 50
AVDD
= 1.8 V, TA = 25°C, I
= 20 mA (full scale), unless otherwise noted.
DAC
POWER DISSIPATION
Table 3.
Parameter Min Typ Max Unit Test Conditions/Comments
TYPICAL CONFIGURATION 800 1100 mW
ALL BLOCKS RUNNING 900 1250 mW
FULL POWER-DOWN 13 mW
INCREMENTAL POWER DISSIPATION
SYSCLK PLL Off −105 mW f
Input Reference On
Differential 7 mW
Single-Ended 13 mW
Output Distribution Driver On
LVDS 70 mW
LVPECL 75 mW
CMOS 65 mW Single 3.3 V CMOS output with a 10 pF load
1
f
is the frequency at the SYSCLKP and SYSCLKN pins.
SYSCLK
2
fS is the sample rate of the output DAC.
3
f
is the output frequency of the DDS.
DDS
= 20 MHz1; fS = 1 GHz2; f
f
SYSCLK
DDS
distribution output running at 122.88 MHz (all others powered
down); one input reference running at 100 MHz (all others
powered down)
= 20 MHz1; fS = 1 GHz2; f
f
SYSCLK
= 399 MHz3; all clock distribution
DDS
outputs configured as LVPECL at 399 MHz; all input references
configured as differential at 100 MHz; fractional-N active (R = 10,
S = 39, U = 9, V = 10)
Conditions = typical configuration; no external pull-up or pulldown resistors
Conditions = typical configuration; table values show the change
in power due to the indicated operation
= 1 GHz1; high frequency direct input mode
SYSCLK
= 122.88 MHz3; one LVPECL clock
Rev. B | Page 4 of 104
AD9547
LOGIC INPUTS (M0 TO M7, RESET)
Table 4.
Parameter Min Typ Max Unit Test Conditions/Comments
INPUT VOLTAGE
Input High Voltage (VIH) 2.1 V
Input Low Voltage (VIL) 0.8 V
INPUT CURRENT (I
INPUT CAPACITANCE (CIN) 3 pF
LOGIC OUTPUTS (M0 TO M7, IRQ)
Table 5.
Parameter Min Typ Max Unit Test Conditions/Comments
OUTPUT VOLTAGE
Output High Voltage (VOH) 2.7 V IOH = 1 mA
Output Low Voltage (VOL) 0.4 V IOL = 1 mA
IRQ LEAKAGE CURRENT Open-drain mode
Active Low Output Mode 1 µA VOH = 3.3 V
Active High Output Mode 1 µA VOL = 0 V
SYSTEM CLOCK INPUTS (SYSCLKP, SYSCLKN)
, I
) ±80 ±200 µA
INH
INL
Table 6.
Parameter Min Typ Max Unit Test Conditions/Comments
SYSTEM CLOCK PLL BYPASSED
Input Frequency Range 500 1000 MHz
Minimum Input Slew Rate 1000 V/µs Minimum limit imposed for jitter performance
Duty Cycle 40 60 %
Common-Mode Voltage 1.2 V Internally generated
Differential Input Voltage Sensitivity 100 mV p-p
Input Capacitance 2 pF Single-ended, each pin
Input Resistance 2.5 kΩ
SYSTEM CLOCK PLL ENABLED
PLL Output Frequency Range 900 1000 MHz
Phase Frequency Detector (PFD) Rate 150 MHz
Frequency Multiplication Range 6 255 Assumes valid system clock and PFD rates
VCO Gain 70 MHz/V
High Frequency Path
Input Frequency Range 100.1 500 MHz
Minimum Input Slew Rate 200 V/µs Minimum limit imposed for jitter performance
Frequency Divider Range 1 8 Binary steps (M = 1, 2, 4, 8)
Common-Mode Voltage
Differential Input Voltage Sensitivity 100 mV p-p
Input Capacitance 3 pF Single-ended, each pin
Input Resistance 2.5 kΩ
1 V Internally generated
Minimum voltage across pins is required to ensure
switching between logic states; the instantaneous
voltage on either pin must not exceed the supply rails;
ac ground the unused input to accommodate singleended operation
This is the minimum voltage required across the pins to
ensure switching between logic states; the
instantaneous voltage on either pin must not exceed
the supply rails; ac ground the unused input to
accommodate single-ended operation
Rev. B | Page 5 of 104
AD9547
Parameter Min Typ Max Unit Test Conditions/Comments
Low Frequency Path
Input Frequency Range 3.5 100 MHz
Minimum Input Slew Rate 50 V/µs Minimum limit imposed for jitter performance
Common-Mode Voltage 1.2 V Internally generated
Differential Input Voltage Sensitivity 100 mV p-p
Input Capacitance 3 pF Single-ended, each pin
Input Resistance 4 kΩ
Crystal Resonator Path
Crystal Resonator Frequency Range 10 50 MHz Fundamental mode, AT cut
Maximum Crystal Motional
Resistance
100 Ω See the System Clock Inputs section for recommendations
DISTRIBUTION CLOCK INPUTS (CLKINP, CLKINN)
Table 7.
Parameter Min Typ Max Unit Test Conditions/Comments
INPUT FREQUENCY RANGE 62.5 500 MHz
MINIMUM SLEW RATE 75 V/µs Minimum limit imposed for jitter performance
COMMON-MODE VOLTAGE 700 mV Internally generated
DIFFERENTIAL INPUT VOLTAGE SENSITIVITY 100 mV p-p
DIFFERENTIAL INPUT POWER SENSITIVITY −15 dBm
INPUT CAPACITANCE 3 pF
INPUT RESISTANCE 5 kΩ Each pin has a 2.5 kΩ internal dc bias resistance
This is the minimum voltage required across the pins to
ensure switching between logic states; the
instantaneous voltage on either pin must not exceed
the supply rails; ac ground the unused input to
accommodate single-ended operation
Capacitive coupling required; ac ground the unused
input to accommodate single-ended operation; the
instantaneous voltage on either pin must not exceed
the supply rails
Same as voltage sensitivity but specified as power into a
50 Ω load
Rev. B | Page 6 of 104
AD9547
REFERENCE INPUTS (REFA/REFAA, REFB/REFBB)
Table 8.
Parameter Min Typ Max Unit Test Conditions/Comments
DIFFERENTIAL OPERATION
Frequency Range
Sinusoidal Input 10 750 MHz
LVPECL Input 0.001 750 MHz
LVDS Input 0.001 750 MHz
Minimum Input Slew Rate 40 V/µs Minimum limit imposed for jitter performance
Common-Mode Input Voltage 2 V Internally generated
Differential Input Voltage
Sensitivity
Input Resistance 25 kΩ
Input Capacitance 3 pF
Minimum Pulse Width High 620 ps
Minimum Pulse Width Low 620 ps
SINGLE-ENDED OPERATION
Frequency Range (CMOS) 0.001 250 MHz
Minimum Input Slew Rate 40 V/µs Minimum limit imposed for jitter performance
Input Voltage High (VIH)
1.2 V to 1.5 V Threshold Setting 0.9 V
1.8 V to 2.5 V Threshold Setting 1.2 V
3.0 V to 3.3 V Threshold Setting 1.9 V
Input Voltage Low (VIL)
1.2 V to 1.5 V Threshold Setting 0.27 V
1.8 V to 2.5 V Threshold Setting 0.5 V
3.0 V to 3.3 V Threshold Setting 1.0 V
Input Resistance 45 kΩ
Input Capacitance 3 pF
Minimum Pulse Width High 1.5 ns
Minimum Pulse Width Low 1.5 ns
±65 mV
This is the minimum voltage required across the pins to
ensure switching between logic states; the instantaneous
voltage on either pin must not exceed the supply rails
REFERENCE MONITORS
Table 9.
Parameter Min Typ Max Unit Test Conditions/Comments
REFERENCE MONITOR
Loss of Reference Detection Time 1.2 NPDP NPDP = nominal phase detector period (NPDP = f
Frequency Out-of-Range Limits 9.54 × 10−7 0.1 ∆f/f
Programmable (lower bound subject to quality of SYSCLK)
REF
TIMERS
Validation Timer 0.001 65.535 sec Programmable in 1 ms increments
Redetect Timer 0.001 65.535 sec Programmable in 1 ms increments
1
f
is the frequency of the active reference; R is the frequency division factor determined by the R divider.
REF
Rev. B | Page 7 of 104
REF
/R)1
AD9547
REFERENCE SWITCHOVER SPECIFICATIONS
Table 10.
Parameter Min Typ Max Unit Test Conditions/Comments
MAXIMUM OUTPUT PHASE
PERTURBATION (PHASE BUILD-OUT
SWITCHOVER)
MAXIMUM TIME/TIME SLOPE
(HITLESS SWITCHOVER)
TIME REQUIRED TO SWITCH TO A NEW
REFERENCE
Hitless Switchover 5 NPDP
Phase Build-Out Switchover 3 NPDP
1
f
is the frequency of the active reference; R is the frequency division factor determined by the R divider.
REF
DISTRIBUTION CLOCK OUTPUTS (OUT0, OUT1)
Table 11.
Parameter Min Typ Max Unit Test Conditions/Comments
LVPECL MODE
Maximum Output Frequency 725 MHz
Rise/Fall Time1 (20% to 80%) 180 315 ps 100 Ω termination across output pins
Duty Cycle 45 55 %
Differential Output Voltage Swing
Common-Mode Output Voltage AVDD3 − 1.5 AVDD3 − 1.3 AVDD3 − 1.05 V Output driver static
LVDS MODE
Maximum Output Frequency 725 MHz
Rise/Fall Time1 (20% to 80%) 200 350 ps 100 Ω termination across the output pins
Duty Cycle 40 60 %
Differential Output Voltage Swing
Balanced (VOD) 247 454 mV
Unbalanced (∆VOD) 50 mV
Offset Voltage
Common Mode (VOS) 1.125 1.375 V Output driver static
Common-Mode Difference (∆VOS) 50 mV
Short-Circuit Output Current 13 24 mA Output driver static
CMOS MODE
Maximum Output Frequency
3.3 V Supply 10 pF load
Strong Drive Strength Setting 250 MHz
Weak Drive Strength Setting 25 MHz
1.8 V Supply 150 MHz
40 200 ps
Assumes a jitter-free reference; satisfies
Telcordia GR-1244-CORE requirements
315 65,535 ns/sec
Minimum/maximum values are programmable upper bounds; a minimum value
ensures <10% error; satisfies Telcordia
GR-1244-CORE requirements
NPDP = nominal phase detector period
(NPDP = f
NPDP = nominal phase detector period
(NPDP = f
Using internal current setting resistor
(nominal 3.12 kΩ)
630 770 910 mV
Magnitude of voltage across pins; output
driver static
Using internal current setting resistor
(nominal 3.12 kΩ)
Voltage swing between output pins;
output driver static
Absolute difference between voltage
swing of normal pin and inverted pin;
output driver static
Voltage difference between pins; output
driver static
Weak drive option not supported for
operating the CMOS drivers using a 1.8 V
supply
REF
REF
/R)1
/R)1
Rev. B | Page 8 of 104
AD9547
Parameter Min Typ Max Unit Test Conditions/Comments
Rise/Fall Time1 (20% to 80%) 10 pF load
3.3 V Supply
Strong Drive Strength Setting 0.5 2 ns
Weak Drive Strength Setting 8 14.5 ns
1.8 V Supply 1.5 2.5 ns
Duty Cycle 40 60 % 10 pF load
Output Voltage High (VOH)
AVDD3 = 3.3 V, IOH = 10 mA 2.6 V
AVDD3 = 3.3 V, IOH = 1 mA 2.9 V
AVDD3 = 1.8 V, IOH = 1 mA 1.5 V
Output Voltage Low (VOL)
AVDD3 = 3.3 V, IOL = 10 mA 0.3 V
AVDD3 = 3.3 V, IOL = 1 mA 0.1 V
AVDD3 = 1.8 V, IOL = 1 mA 0.1 V
OUTPUT TIMING SKEW 10 pF load
Between LVPECL Outputs 14 125 ps Rising edge only; any divide value
Between LVDS Outputs 13 138 ps Rising edge only; any divide value
Between CMOS (3.3 V) Outputs
Strong Drive Strength Setting 23 240 ps
Weak Drive Strength Setting 24 ps
Between CMOS (1.8 V) Outputs 40 ps Weak drive option not supported at 1.8 V
Between LVPECL Outputs and LVDS
Outputs
Between LVPECL Outputs and
CMOS Outputs
ZERO-DELAY TIMING SKEW ±5 ns
1
The listed values are for the slower edge (rising or falling).
14 140 ps
19 ps
Output driver static; strong drive
strength setting
Output driver static; strong drive
strength setting
Output relative to active input reference;
output distribution synchronization to
active reference feature enabled;
assumes manual phase offset
compensation of deterministic latency
DAC OUTPUT CHARACTERISTICS (DACOUTP, DACOUTN)
Table 12.
Parameter Min Typ Max Unit Test Conditions/Comments
FREQUENCY RANGE 62.5 450 MHz
OUTPUT OFFSET VOLTAGE 15 mV
VOLTAGE COMPLIANCE RANGE VSS − 0.5 0.5 VSS + 0.5 V
OUTPUT RESISTANCE 50 Ω
OUTPUT CAPACITANCE 5 pF
FULL-SCALE OUTPUT CURRENT 20 mA
GAIN ERROR −12 +12 % FS
Rev. B | Page 9 of 104
This is the single-ended voltage at either
DAC output pin (no external load) when
the internal DAC code is such that no
current is delivered to that pin
Single-ended; each pin has an internal
50 Ω termination to VSS
Programmable (8 mA to 31 mA; see the
DAC Output section)
AD9547
TIME DURATION OF DIGITAL FUNCTIONS
Table 13.
Parameter Min Typ Max Unit Test Conditions/Comments
EEPROM-TO-REGISTER DOWNLOAD TIME 25 ms
REGISTER-TO-EEPROM UPLOAD TIME 200 ms
MINIMUM POWER-DOWN EXIT TIME 10.5 µs Dependent on loop filter bandwidth
MAXIMUM TIME FROM ASSERTION OF THE RESET PIN
45 ns
TO THE M0 TO M7 PINS ENTERING HIGH
IMPEDANCE STATE
DIGITAL PLL
Table 14.
Parameter Min Typ Max Unit Test Conditions/Comments
PHASE FREQUENCY DETECTOR (PFD) INPUT
FREQUENCY RANGE
LOOP BANDWIDTH 0.001 1 × 105 Hz
PHASE MARGIN 30 89 Degrees Programmable design parameter
REFERENCE INPUT (R) DIVISION FACTOR 1 230 1, 2, …1,073,741,824
INTEGER FEEDBACK (S) DIVISION FACTOR 8 220 8, 9, …1,048,576
FRACTIONAL FEEDBACK DIVIDE RATIO 0 0.999 Maximum value = 1022/1023
1
f
is the frequency at the input to the phase-frequency detector.
PFD
2
fS is the sample rate of the output DAC.
3
f
is the frequency of the active reference; R is the frequency division factor determined by the R divider.
REF
0.001 10 MHz Maximum f
Using default EEPROM storage sequence
(see Register 0x0E10 to Register 0x0E3F)
Using default EEPROM storage sequence
(see Register 0x0E10 to Register 0x0E3F
= fS/100
PFD
1, 2
Programmable design parameter;
maximum f
LOOP
= f
/(20R)3
REF
DIGITAL PLL LOCK DETECTION
Table 15.
Parameter Min Typ Max Unit Test Conditions/Comments
PHASE LOCK DETECTOR
Threshold Programming Range 0.001 65.5 ns
Threshold Resolution 1 ps
FREQUENCY LOCK DETECTOR
Threshold Programming Range 0.001 16,700 ns Reference-to-feedback period difference
Threshold Resolution 1 ps
HOLDOVER SPECIFICATIONS
Table 16.
Parameter Min Typ Max Unit Test Conditions/Comments
FREQUENCY ACCURACY <0.01 ppm
Excludes frequency drift of SYSCLK source;
excludes frequency drift of input reference
prior to entering holdover
Rev. B | Page 10 of 104
AD9547
SERIAL PORT SPECIFICATIONS—SPI MODE
Table 17.
Parameter Min Typ Max Unit Test Conditions/Comments
CS
Input Logic 1 Voltage 2.0 V
Input Logic 0 Voltage 0.8 V
Input Logic 1 Current 30 µA
Input Logic 0 Current 110 µA
Input Capacitance 2 pF
SCLK Internal 30 kΩ pull-down resistor
Input Logic 1 Voltage 2.0 V
Input Logic 0 Voltage 0.8 V
Input Logic 1 Current 1 µA
Input Logic 0 Current 1 µA
Input Capacitance 2 pF
SDIO
As an Input
Input Logic 1 Voltage 2.0 V
Input Logic 0 Voltage 0.8 V
Input Logic 1 Current 1 µA
Input Logic 0 Current 1 µA
Input Capacitance 2 pF
As an Output
Output Logic 1 Voltage 2.7 V 1 mA load current
Output Logic 0 Voltage 0.4 V 1 mA load current
SDO
Output Logic 1 Voltage 2.7 V 1 mA load current
Output Logic 0 Voltage 0.4 V 1 mA load current
TIMING
SCLK
Clock Rate, 1/t
Pulse Width High, t
Pulse Width Low, t
40 MHz
CLK
10 ns
HIGH
12 ns
LOW
SDIO to SCLK Setup, tDS 3 ns
SCLK to SDIO Hold, tDH 0 ns
SCLK to Valid SDIO and SDO, tDV 15 ns
CS to SCLK Setup, tS
CS to SCLK Hold, tC
CS Minimum Pulse Width High
Internal 30 kΩ pull-up resistor
10 ns
0 ns
6 ns
Rev. B | Page 11 of 104
AD9547
SERIAL PORT SPECIFICATIONS—I2C MODE
Table 18.
Parameter Min Typ Max Unit Test Conditions/Comments
SDA (AS INPUT), SCL
Input Logic 1 Voltage 0.7 × DVDD3 V
Input Logic 0 Voltage 0.3 × DVDD3 V
Input Current −10 +10 µA For VIN = 10% to 90% of DVDD3
Hysteresis of Schmitt Trigger Inputs 0.015 × DVDD3 V
Pulse Width of Spikes That Must Be
Suppressed by the Input Filter, t
SP
50 ns
SDA (AS OUTPUT)
Output Logic 0 Voltage 0.4 V IO = 3 mA
Output Fall Time from V
IHmin
to V
20 + 0.1 C
ILmax
1
250 ns 10 pF ≤ Cb ≤ 400 pF
b
TIMING
SCL Clock Rate 400 kHz
Bus Free Time Between a Stop and Start
Condition, t
Repeated Start Condition Setup Time, t
Repeated Hold Time Start Condition, t
Stop Condition Setup Time, t
Low Period of the SCL Clock, t
High Period of the SCL Clock, t
SCL/SDA Rise Time, t
BUF
SU;STA
HD;STA
0.6 µs
SU;STO
1.3 µs
LOW
0.6 µs
R
HIGH
SCL/SDA Fall Time, tF 20 + 0.1 C
Data Setup Time, t
Data Hold Time, t
Capacitive Load for Each Bus Line, C
1
Cb is the capacitance (pF) of a single bus line.
100 ns
SU;DAT
100 ns
HD;DAT
1
400 pF
b
1.3 µs
0.6 µs
0.6 µs
20 + 0.1 C
1
300 ns
b
1
300 ns
b
No internal pull-up/pull-down
resistor
After this period, the first clock
pulse is generated
Rev. B | Page 12 of 104
AD9547
JITTER GENERATION
Table 19.
Parameter Min Typ Max Unit Test Conditions/Comments
CONDITIONS: f
= 100 Hz3
f
LOOP
= 8 kHz1, f
REF
= 155.52 MHz2,
DDS
Bandwidth: 100 Hz to 77 MHz 0.71 ps rms Random jitter
Bandwidth: 5 kHz to 20 MHz 0.34 ps rms Random jitter
Bandwidth: 20 kHz to 80 MHz 0.43 ps rms Random jitter
Bandwidth: 50 kHz to 80 MHz 0.43 ps rms Random jitter
Bandwidth: 4 MHz to 80 MHz 0.31 ps rms Random jitter
CONDITIONS: f
= 1 kHz3
f
LOOP
= 19.44 MHz1, f
REF
= 155.52 MHz2,
DDS
Bandwidth: 100 Hz to 77 MHz 1.05 ps rms Random jitter
Bandwidth: 5 kHz to 20 MHz 0.34 ps rms Random jitter
Bandwidth: 20 kHz to 80 MHz 0.43 ps rms Random jitter
Bandwidth: 50 kHz to 80 MHz 0.43 ps rms Random jitter
Bandwidth: 4 MHz to 80 MHz 0.32 ps rms Random jitter
CONDITIONS: f
= 1 kHz3
f
LOOP
= 19.44 MHz1, f
REF
= 311.04 MHz2,
DDS
Bandwidth: 100 Hz to 100 MHz 0.67 ps rms Random jitter
Bandwidth: 5 kHz to 20 MHz 0.31 ps rms Random jitter
Bandwidth: 20 kHz to 80 MHz 0.33 ps rms Random jitter
Bandwidth: 50 kHz to 80 MHz 0.33 ps rms Random jitter
Bandwidth: 4 MHz to 80 MHz 0.16 ps rms Random jitter
1
f
is the frequency of the active reference.
REF
2
f
is the output frequency of the DDS.
DDS
3
f
is the DPLL digital loop filter bandwidth.
LOOP
4
f
is the frequency at the SYSCLKP and SYSCLKN pins.
SYSCLK
5
fS is the sample rate of the output DAC.
= 50 MHz4 crystal; fS = 1 GHz5;
f
SYSCLK
Q-divider = 1; default SYSCLK PLL charge
pump current; results valid for LVPECL,
LVDS, and CMOS output logic types
= 50 MHz4 crystal; fS = 1 GHz5;
f
SYSCLK
Q-divider = 1; default SYSCLK PLL charge
pump current; results valid for LVPECL,
LVDS, and CMOS output logic types
= 50 MHz4 crystal; fS = 1 GHz5;
f
SYSCLK
Q-divider = 1; default SYSCLK PLL charge
pump current; results valid for LVPECL,
LVDS, and CMOS output logic types
Rev. B | Page 13 of 104
AD9547
ABSOLUTE MAXIMUM RATINGS
Table 20.
Parameter Rating
Analog Supply Voltage (AVDD) 2 V
Digital Supply Voltage (DVDD) 2 V
Digital I/O Supply Voltage
(DVDD3)
DAC Supply Voltage (AVDD3) 3.6 V
Maximum Digital Input Voltage −0.5 V to DVDD3 + 0.5 V
Storage Temperature Range −65°C to +150°C
Operating Temperature Range −40°C to +85°C
Lead Temperature
(Soldering 10 sec)
Junction Temperature 150°C
3.6 V
300°C
Stresses above those listed under Absolute Maximum Ratings
may cause permanent damage to the device. This is a stress
rating only; functional operation of the device at these or any
other conditions above those indicated in the operational
section of this specification is not implied. Exposure to absolute
maximum rating conditions for extended periods may affect
device reliability.
ESD CAUTION
Rev. B | Page 14 of 104
AD9547
PIN CONFIGURATION AND FUNCTION DESCRIPTIONS
DVDDM7M6M5M4
646362616059585756555453525150
DVDD
SCLK/SCL
SDIO
SDO
CS/SDA
DVDD
DVDD3
DVDD
RESET
DVDD
10
DVDD
11
VSS
VSS
AVDD3
12
13
14
15
16
DACOUTP
DACOUTN
NOTES
1. NC = NO CONNEC T.
2. THE EXPOSED PAD MUST BE CONNECTED TO GROUND (VSS).
PIN 1
1
INDICATOR
2
3
4
5
6
7
8
9
171819202122232425262728293031
AVDD
AVDD
VSS
CLKINN
DVDD
DVDD3M3M2M1M0
AD9547
TOP VIEW
(Not to Scale)
VSS
AVDD
CLKINP
OUT_RSET
AVDD3
DVDD
IRQNCAVDD
AVDD3
49
48
REFBB
47
REFB
46
AVDD
45
REFAA
44
REFA
43
AVDD3
42
AVDD
41
TDC_VRT
40
TDC_VRB
39
AVDD
38
SYSCLKP
37
SYSCLKN
36
AVDD
35
SYSCLK_LF
34
SYSCLK_VREG
33
AVDD3
32
AVDD
OUT0P
OUT0N
AVDD
OUT1P
AVDD3
OUT1N
Figure 2. Pin Configuration
Table 21. Pin Function Descriptions
Input/
Pin No.
1, 6, 8, 53, 59,
Output Pin Type Mnemonic Description
I Power DVDD 1.8 V Digital Supply.
64
2 I 3.3 V CMOS SCLK/SCL
3 I/O 3.3 V CMOS SDIO
Serial Programming Clock. Data clock for serial programming. SCLK is used for
SPI mode, and SCL is used for I
2
C® mode.
Serial Data Input/Output. When the device is in 4-wire mode, data is written
via this pin. In 3-wire mode, both data reads and writes occur on this pin.
There is no internal pull-up/pull-down resistor on this pin.
4 O 3.3 V CMOS SDO
Serial Data Output. Use this pin to read data in 4-wire mode (high impedance
in 3-wire mode). There is no internal pull-up/pull-down resistor on this pin.
5 I 3.3 V CMOS
/SDA SPI Mode.
CS
Chip Select (CS) Input. Active low. When programming a device, this pin must
be held low. In systems where more than one AD9547 is present, this pin enables
individual programming of each AD9547. In SPI mode, this pin has an internal
30 kΩ pull-up resistor.
2
C Mode.
I
Serial Data Line (SDA) Input/Output. In I
read operations and an input during write operations. There is no internal
pull-up resistor in I
2
C mode.
7, 58 I Power DVDD3 3.3 V I/O Digital Supply.
9 I 3.3 V CMOS RESET
Chip Reset. Assertion of this pin (active high) resets the device. This pin has an
internal 50 kΩ pull-down resistor.
10, 11 I Power DVDD
1.8 V DAC Decode Digital Supply. Isolate the supply associated with these
DVDD pins from the supply associated with the other DVDD pins.
12, 15, 19, 22 O Ground VSS Analog Ground. Connect to ground.
13 O
Differential
DACOUTP DAC Output. DACOUTP contains an internal 50 Ω pull-down resistor.
output
14 O
Differential
output
DACOUTN
Complementary DAC Output. DACOUTN contains an internal 50 Ω pull-down
resistor.
16 I Power AVDD3 3.3 V Analog (DAC) Power Supply.
17, 18 I Power AVDD 1.8 V Analog (DAC) Power Supply.
Rev. B | Page 15 of 104
08300-002
2
C Mode, this pin is an output during
AD9547
Input/
Pin No.
20 I
21 I
23 I Power AVDD 1.8 V Analog (Input Receiver) Power Supply.
24 O
25, 31 I Power AVDD3
26 O
27 O
28, 32 I Power AVDD 1.8 V Analog (Output Divider) Power Supply.
29 O
30 O
33 I Power AVDD3 3.3 V Analog (System Clock) Power Supply.
34 I SYSCLK_VREG
35 O SYSCLK_LF
36, 39 I Power AVDD 1.8 V Analog (System Clock) Power Supply.
37 I
38 I
40, 41 I
42 I Power AVDD 1.8 V Analog (Time-to-Digital Converter) Power Supply.
43, 49 I Power AVDD3 3.3 V Analog (Reference Input) Power Supply.
44 I
45 I
46, 50 I Power AVDD 1.8 V Analog (Reference Input) Power Supply.
Output Pin Type Mnemonic Description
Differential
input
Differential
input
Current set
resistor
LVPECL,
LVDS, or
CMOS
LVPECL,
LVDS, or
CMOS
LVPECL,
LVDS, or
CMOS
LVPECL,
LVDS, or
CMOS
Differential
input
Differential
input
Differential
input
Differential
input
CLKINN
CLKINP
OUT_RSET
OUT0P
OUT0N
OUT1P
OUT1N
SYSCLKN
SYSCLKP
TDC_VRB,
TDC_VRT
REFA
REFAA
Clock Distribution Input. In standard operating mode, this pin is connected to
the filtered DACOUTN output. This internally biased input is typically ac-coupled,
and, when configured as such, can accept any differential signal with a singleended swing of at least 400 mV.
Clock Distribution Input. In standard operating mode, this pin is connected to
the filtered DACOUTP output.
Connect an optional 3.12 kΩ resistor from this pin to ground (see the Output
Current Control with an External Resistor section).
Analog Supply for Output Driver. These pins are normally 3.3 V but can be
1.8 V. Pin 25 powers OUT0. Pin 31 powers OUT1. Apply power to these pins
even if the corresponding outputs (OUT0P/OUT0N, OUT1P/OUT1N) are not
used. See the Power Supply Partitions section.
Output 0. This output can be configured as LVPECL, LVDS, or single-ended
CMOS. LVPECL and LVDS operation require a 3.3 V output driver power
supply. CMOS operation can be either 1.8 V or 3.3 V, depending on the output
driver power supply.
Complementary Output 0. This output can be configured as LVPECL, LVDS, or
single-ended CMOS.
Output 1. This output can be configured as LVPECL, LVDS, or single-ended
CMOS. LVPECL and LVDS operation require a 3.3 V output driver power
supply. CMOS operation can be either 1.8 V or 3.3 V, depending on the output
driver power supply.
Complementary Output 1. This output can be configured as LVPECL, LVDS, or
single-ended CMOS.
System Clock Loop Filter Voltage Regulator. Connect a 0.1 F capacitor from
this pin to ground. This pin is also the ac ground reference for the integrated
external loop filter of the SYSCLK PLL multiplier (see the SYSCLK PLL Multiplier
section).
System Clock Multiplier Loop Filter. When using the frequency multiplier to
drive the system clock, an external loop filter can be attached to this pin.
Complementary System Clock Input. Complementary signal to SYSCLKP.
SYSCLKN contains internal dc biasing and should be ac-coupled with a 0.01 F
capacitor, except when using a crystal. When using a crystal, connect it across
SYSCLKP and SYSCLKN.
System Clock Input. SYSCLKP contains internal dc biasing and should be accoupled with a 0.01 F capacitor, except when using a crystal. When using a
crystal, connect it directly across SYSCLKP and SYSCLKN. Single-ended 1.8 V
CMOS is also an option but can introduce a spur if the duty cycle is not 50%.
When using SYSCLKP as a single-ended input, connect a 0.01 F capacitor
from SYSCLKN to ground.
Use capacitive decoupling on these pins (see Figure 36).
Reference A Input. This internally biased input is typically ac-coupled and,
when configured as such, can accept any differential signal with a singleended swing of up to 3.3 V. If dc-coupled, input can be LVPECL, CMOS, or LVDS.
Complementary Reference A Input. Complementary signal to the input provided on Pin 44. The user can configure this pin as a separate single-ended input.
Rev. B | Page 16 of 104
AD9547
Input/
Pin No.
47 I
48 I
51 I NC No Connection. This pin should be left floating.
52 O Logic IRQ Interrupt Request Line.
54, 55, 56, 57,
60, 61, 62, 63
EP O
Output Pin Type Mnemonic Description
Differential
input
Differential
input
I/O 3.3 V CMOS
Exposed
pad
REFB
REFBB
M0, M1, M2, M3,
M4, M5, M6, M7
Exposed pad The exposed pad must be connected to ground (VSS).
Reference B Input. This internally biased input is typically ac-coupled and,
when configured as such, can accept any differential signal with a single-ended
swing of up to 3.3 V. If dc-coupled, input can be LVPECL, CMOS, or LVDS.
Complementary Reference B Input. Complementary signal to the input provided
on Pin 47. The user can configure this pin as a separate single-ended input.
Configurable I/O Pins. These pins are configured under program control.
Rev. B | Page 17 of 104
AD9547
–
–
–
–
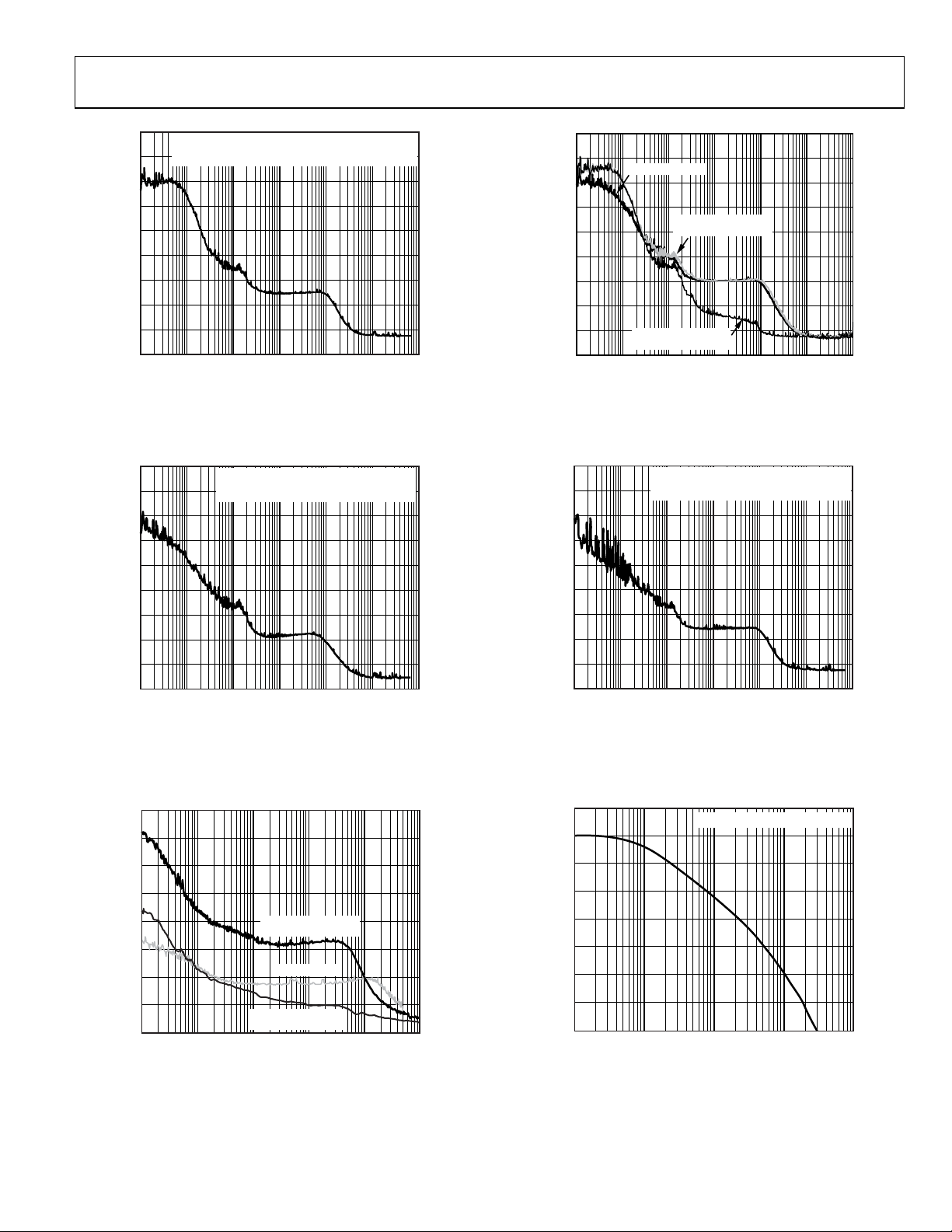
TYPICAL PERFORMANCE CHARACTERISTICS
f
= input reference clock frequency, fO = clock frequency, f
REF
DPLL loop bandwidth, PLL off = SYSCLK PLL bypassed, PLL on = SYSCLK PLL enabled, I
SYSCLK PLL loop filter. AVDD, AVDD3, and DVDD at nominal supply voltage, f
otherwise noted.
PHASE NOISE (dBc/Hz)
70
–80
–90
–100
–110
–120
–130
–140
–150
–160
INTEGRATED RMS JITTER (PHASE NOISE):
5kHz TO 20MHz: 173fs (–75.4d Bc )
20kHz TO 80MHz : 315 fs (–70.2dBc) ( EXTRAPOLATED)
100 1k 10k 100k 1M 10M 100M
FREQUENCY OFFSET (Hz)
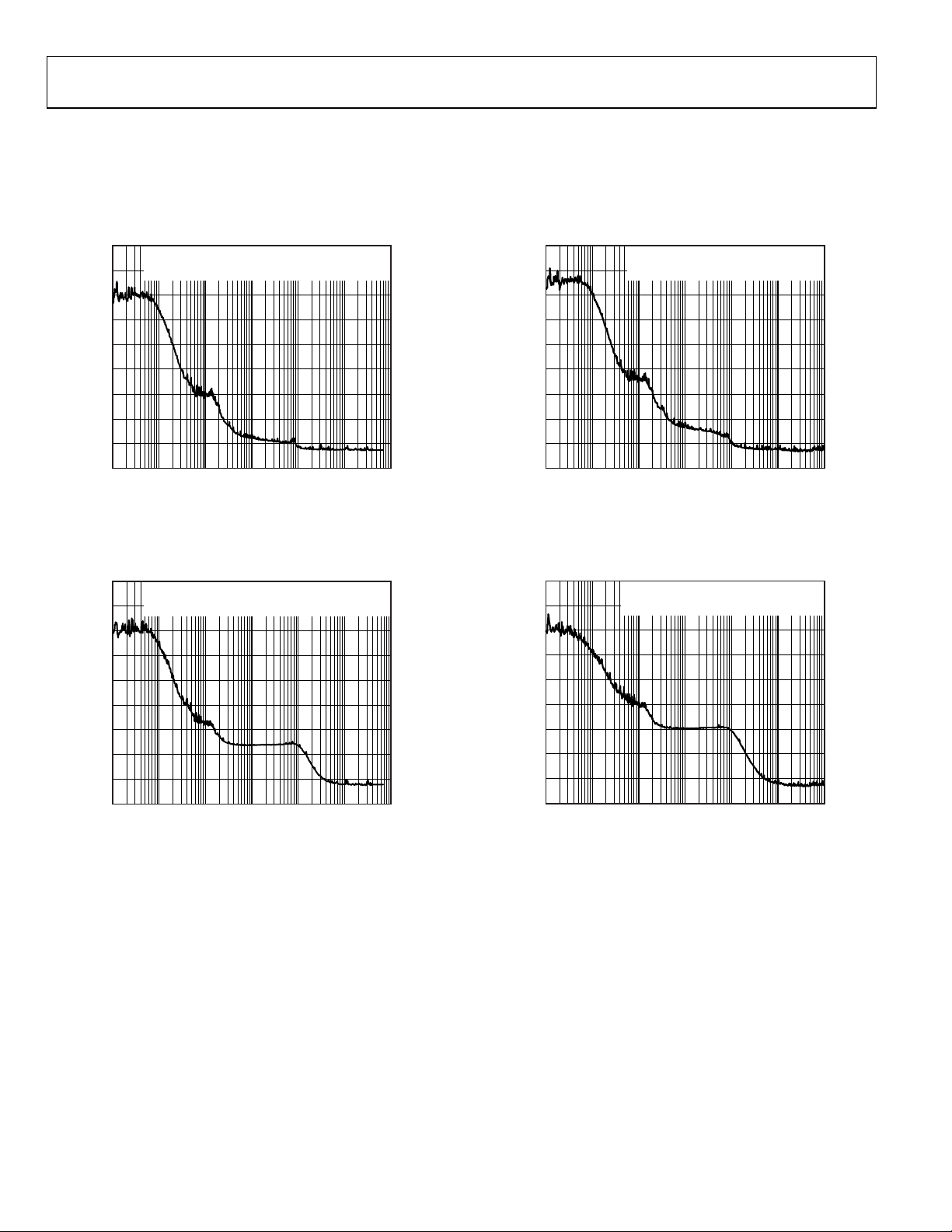
Figure 3. Additive Phase Noise (Output Driver = LVPECL),
f
= 19.44 MHz, fO = 155.52 MHz,
REF
LBW = 1 kHz, f
= 1 GHz, PLL Off
SYSCLK
= SYSCLK input frequency, fS =internal system clock frequency, LBW =
SYSCLK
= SYSCLK PLL charge pump current, LF =
CP
= 1 GHz, ICP = automatic mode, LF = internal, unless
S
70
–80
–90
–100
–110
–120
–130
PHASE NOISE (dBc/Hz)
–140
–150
–160
100 1k 10k 100k 1M 10M 100M
8300-068
INTEGRATED RMS JITTER (PHASE NOISE):
5kHz TO 20MHz: 103fs (–74.0dBc)
20kHz TO 80MHz: 160fs (–70.1dBc)
FREQUENCY OFFSET (Hz)
Figure 5. Additive Phase Noise (Output Driver = LVPECL),
f
= 19.44 MHz, fO = 311.04 MHz,
REF
LBW = 1 kHz, f
= 1 GHz, PLL Off
SYSCLK
8300-066
PHASE NOISE ( dBc/Hz)
70
–80
–90
–100
–110
–120
–130
–140
–150
–160
INTEGRATE D RMS JI T T E R (PHAS E NO I S E) :
5kHz TO 20MHz: 333fs (–69.8dBc)
20kHz TO 80MHz: 430fs (–67.6dBc) (EXTRAPO LATED)
100 1k 10k 100k 1M 10M 100M
FREQUENCY OFFSET (Hz)
Figure 4. Additive Phase Noise (Output Driver = LVPECL),
f
= 19.44 MHz, fO = 155.52 MHz,
REF
LBW = 1 kHz, f
= 50 MHz (Crystal), PLL On
SYSCLK
70
–80
–90
–100
–110
–120
–130
PHASE NOISE (dBc/Hz)
–140
–150
–160
100 1k 10k 100k 1M 10M 100M
8300-056
INTEGRAT E D RM S JITTER (P HASE NOISE):
5kHz TO 20MHz: 310fs (–64.4dBc)
20kHz TO 80MHz: 330fs (–63.9dBc)
FREQUENCY OFFSET (Hz)
08300-067
Figure 6. Additive Phase Noise (Output Driver = LVPECL),
= 19.44 MHz, fO = 311.04 MHz,
f
REF
LBW = 1 kHz, f
= 50 MHz (Crystal), PLL On
SYSCLK
Rev. B | Page 18 of 104
AD9547
–
–
–
–
–
PHASE NOISE (dBc/Hz)
70
–80
–90
–100
–110
–120
–130
–140
–150
–160
INTEGRATED RMS JITTER (PHASE NOISE):
5kHz TO 20MHz: 361fs (–69.0d Bc )
20kHz TO 80MHz : 441 fs (–67.3dBc) ( EXTRAPOLATED)
100 1k 10k 100k 1M 10M 100M
FREQUENCY OFFSET (Hz)
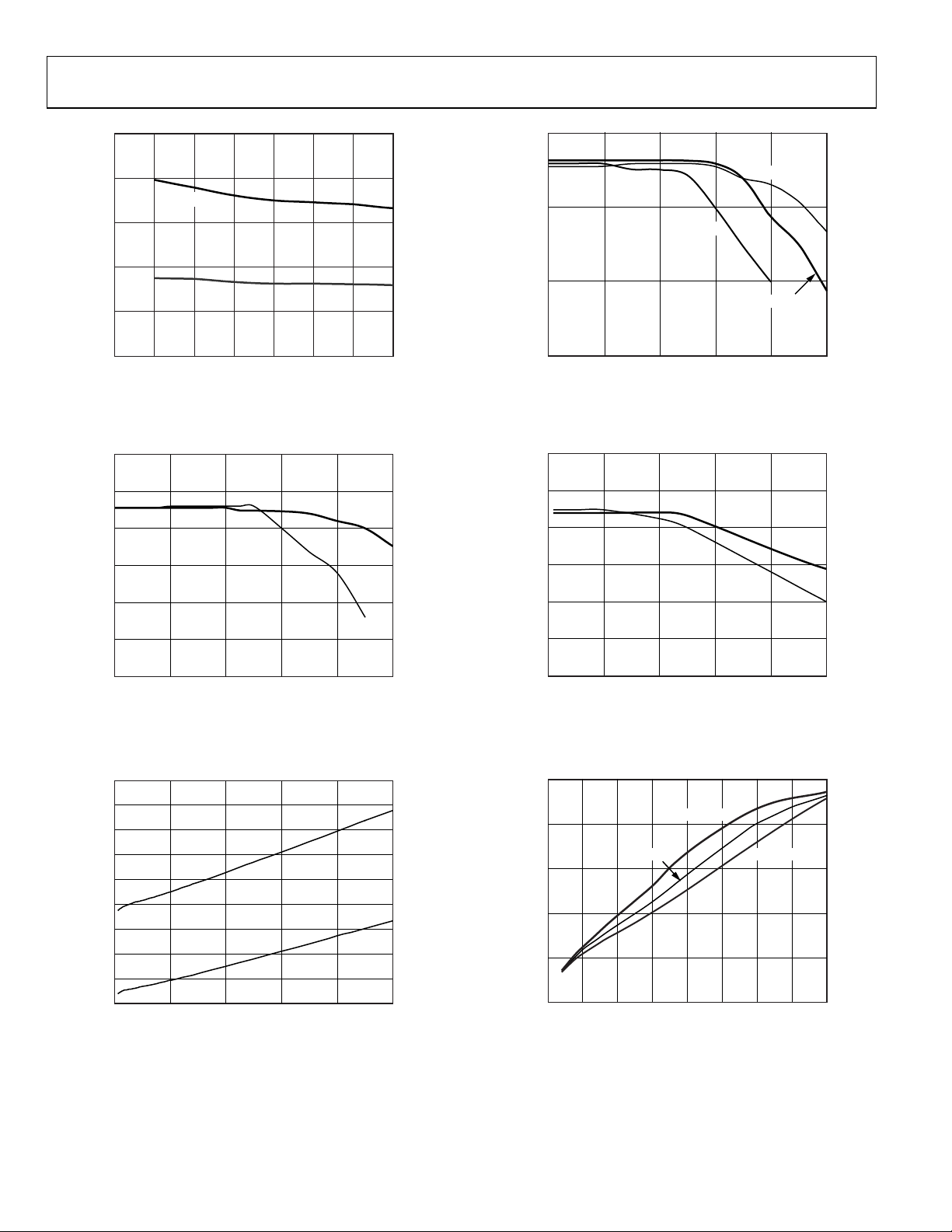
Figure 7. Additive Phase Noise (Output Driver = LVPECL),
= 19.44 MHz, fO = 155.52 MHz,
f
REF
LBW = 1 kHz, f
= 50 MHz, PLL On
SYSCLK
08300-069
70
–80
–90
–100
–110
–120
–130
PHASE NOISE ( dBc/Hz)
–140
–150
–160
100 1k 10k 100k 1M 10M 100M
50MHz CRYSTAL
ROHDE & SCHWARZ
SMA100 (50MHz)
ROHDE & SCHWARZ
SMA100 (1GHz)
FREQUENCY OFFSET (Hz)
Figure 10. Additive Phase Noise Comparison of SYSCLK Input Options
(Output Driver = LVPECL),
f
= 19.44 MHz, fO = 311.04 MHz, LBW = 1 kHz
REF
08300-058
70
–80
–90
–100
–110
–120
–130
PHASE NOISE (dBc/Hz)
–140
–150
–160
100 1k 10k 100k 1M 10M 100M
INTEGRATED RMS JITTER (PHASE NOISE):
12kHz TO 20MHz: 245f s ( –65.0dBc)
20kHz TO 80MHz: 300f s ( –64.3dBc)
FREQUENCY OFFSET (Hz)
Figure 8. Additive Phase Noise (Output Driver = LVPECL),
LBW = 1 kHz, f
2× Frequency Multiplier, I
90
–100
–110
–120
–130
–140
PHASE NOISE (dBc/Hz)
–150
–160
–170
100 1k 10k 100k 1M 10M
= 50 MHz (Crystal), PLL On with
SYSCLK
= 375 μA, LF = External (350 kHz)
CP
ROHDE & SCHWARZ
SMA100 (1GHz)
20MHz OCXO
ROHDE & SCHWARZ
SMA100 (50MHz)
FREQUENCY OF FSET (Hz)
= 19.44 MHz, fO = 155.52 MHz,
f
REF
Figure 9. Phase Noise of SYSCLK Input Sources
70
–80
–90
–100
–110
–120
–130
PHASE NOISE (dBc/Hz)
–140
–150
–160
100 1k 10k 100k 1M 10M 100M
8300-051
INTEGRATED RMS JITTER (PHASE NO I SE):
5kHz TO 20MHz: 336fs (–69.7d Bc)
20kHz TO 80MHz : 425fs (–67.6dBc)
FREQUENCY OFFSET (Hz)
8300-052
Figure 11. Additive Phase Noise (Output Driver = LVPECL),
= 8 kHz, fO = 155.52 MHz,
f
LBW = 100 Hz, f
10
0
–10
–20
–30
–40
CLOSED-LOOP GAIN (dB)
–50
–60
–70
10 100 1k 10k 100k
8300-053
REF
= 50 MHz (Crystal), PLL On
SYSCLK
CLOSED-LOOPPEAKING: 0.04dB
FREQUENCY OFFSET (Hz)
8300-047
Figure 12. Jitter Transfer Bandwidth, Output Driver = LVPECL,
= 19.44 MHz, fO = 155.52 MHz,
f
LBW = 100 Hz (Phase Margin = 88°), f
REF
= 1 GHz, PLL Off
SYSCLK
Rev. B | Page 19 of 104
AD9547
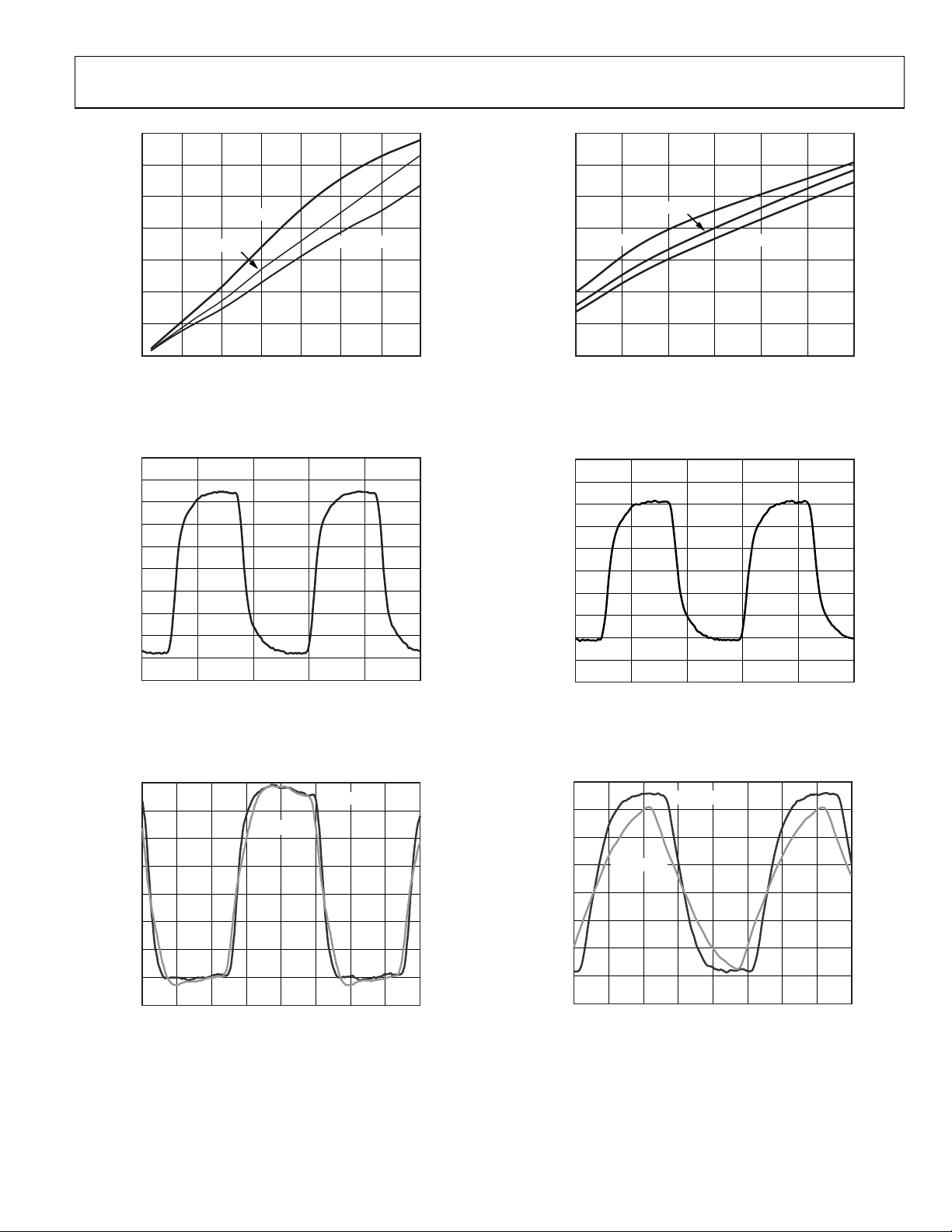
1.0
2.0
0.8
LVPECL
0.6
0.4
AMPLITUDE (V)
0.2
0
0 100 200 300 400 500 600 700
LVDS
FREQUENCY (MHz)
Figure 13. Amplitude vs. Toggle Rate,
LVPECL and LVDS
4.0
3.5
3.0
2.5
AMPLITUDE ( V )
2.0
10pF LO AD
20pF LOAD
5pF LO AD
1.5
20pF LOAD
AMPLITUDE (V)
1.0
10pF LOAD
0.5
0
8300-049
50 100 150 250200
FREQUENCY (MHz)
08300-062
Figure 16. Amplitude vs. Toggle Rate,
1.8 V CMOS
4.0
3.5
3.0
2.5
AMPLITUDE ( V )
2.0
5pF LOAD
10pF LOAD
1.5
1.0
0 100 200 300 400 500
FREQUENCY (M Hz)
Figure 14. Amplitude vs. Toggle Rate,
3.3 V CMOS (Strong Mode)
140
130
120
110
100
90
POWER (mW)
80
70
60
50
0 100 200 300 400 500
LVPECL
LVDS
FREQUENCY (M Hz)
Figure 15. Power Consumption vs. Frequency,
LVPECL and LVDS
(Single Channel)
1.5
1.0
0 102030405
8300-055
FREQUENCY (M Hz)
0
8300-063
Figure 17. Amplitude vs. Toggle Rate,
3.3 V CMOS (Weak Mode)
40
35
30
25
POWER (mW)
20
15
0 50 100 150 200
8300-064
10pF LOAD
20pF LOAD
FREQUENCY (MHz)
5pF LO AD
08300-061
Figure 18. Power Consumption vs. Frequency,
1.8 V CMOS
Rev. B | Page 20 of 104
AD9547
160
34
140
120
10pF LO AD
20pF LO AD
5pF LO AD
FREQUENCY ( M Hz )
100
80
POWER (mW)
60
40
20
0 50 100 150 200 250 300 350
Figure 19. Power Consumption vs. Frequency,
3.3 V CMOS (Strong Mode)
1.0
0.8
0.6
0.4
0.2
0
–0.2
–0.4
DIFFERENT IAL AMPLITUDE (V)
–0.6
–0.8
–1.0
012345
TIME (ns)
Figure 20. Output Waveform,
LVPECL (400 MHz)
32
30
28
20pF LO AD 5pF LOAD
26
POWER (mW)
24
22
20
10 15 20 25 30 35 40
08300-060
10pF LO AD
FREQUENCY ( M Hz )
08300-059
Figure 22. Power Consumption vs. Frequency,
3.3 V CMOS (Weak Mode)
0.5
0.4
0.3
0.2
0.1
0
–0.1
–0.2
DIFFERENT IAL AMPLITUDE (V)
–0.3
–0.4
–0.5
012345
08300-050
TIME (ns)
8300-048
Figure 23. Output Waveform,
LVDS (400 MHz)
3.5
3.0
2.5
2.0
1.5
1.0
AMPLITUDE (V)
0.5
0
–0.5
0246810121416
20pF LO AD
TIME (ns)
10pF LOAD
Figure 21. Output Waveform,
3.3 V CMOS (100 MHz, Strong Mode)
8300-057
Rev. B | Page 21 of 104
3.5
3.0
2.5
AMPLITUDE ( V )
2.0
1.5
1.0
0.5
0
–0.5
20 pF LOAD
0 1020304050607080
5pF LOAD
TIME (ns)
Figure 24. Output Waveform,
3.3 V CMOS (20 MHz, Weak Mode)
8300-046
AD9547
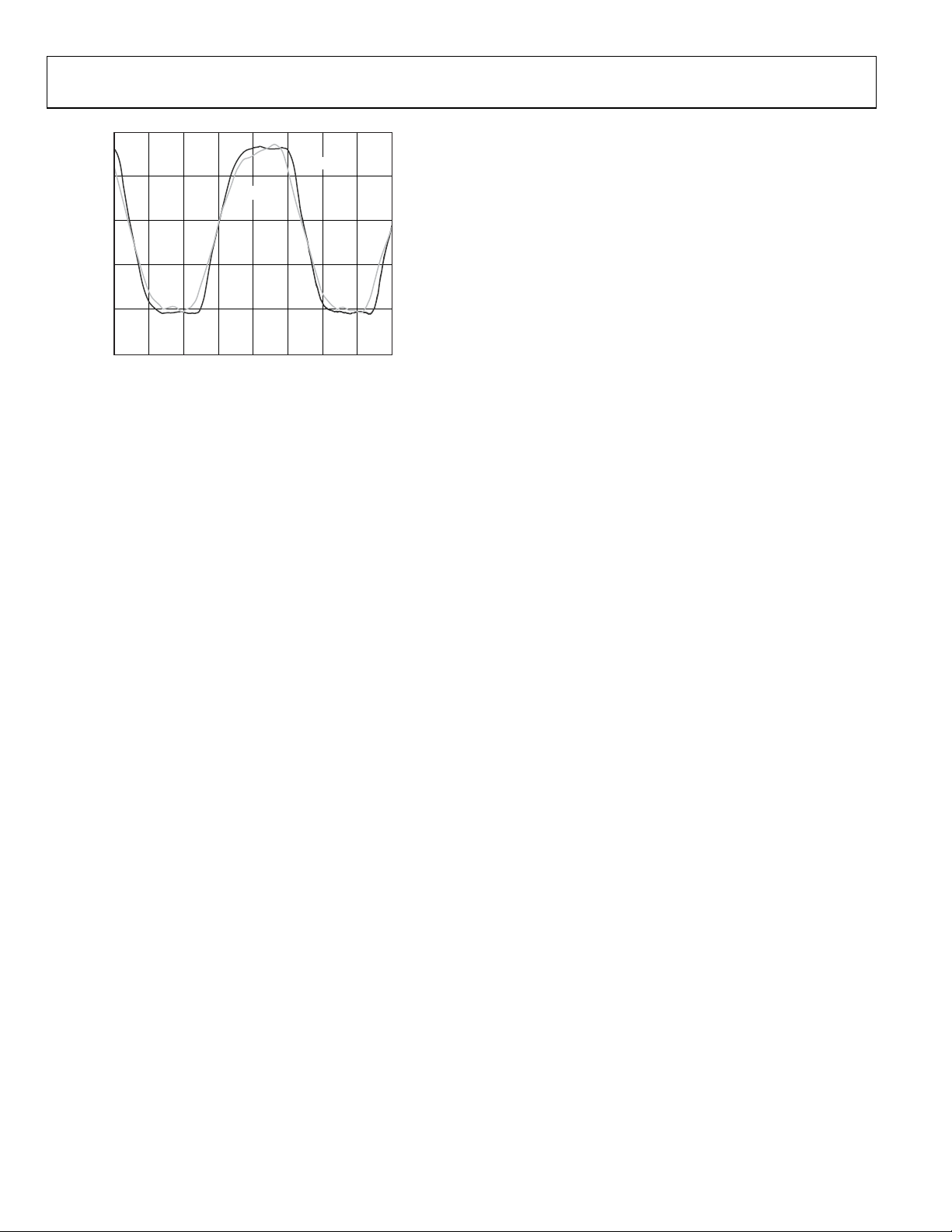
2.0
1.5
1.0
0.5
AMPLITUDE ( V)
0
–0.5
024
20pF LO AD
6 8 10 12 14 16
TIME (ns)
10pF LO AD
8300-065
Figure 25. Output Waveform,
1.8 V CMOS (100 MHz)
Rev. B | Page 22 of 104
AD9547
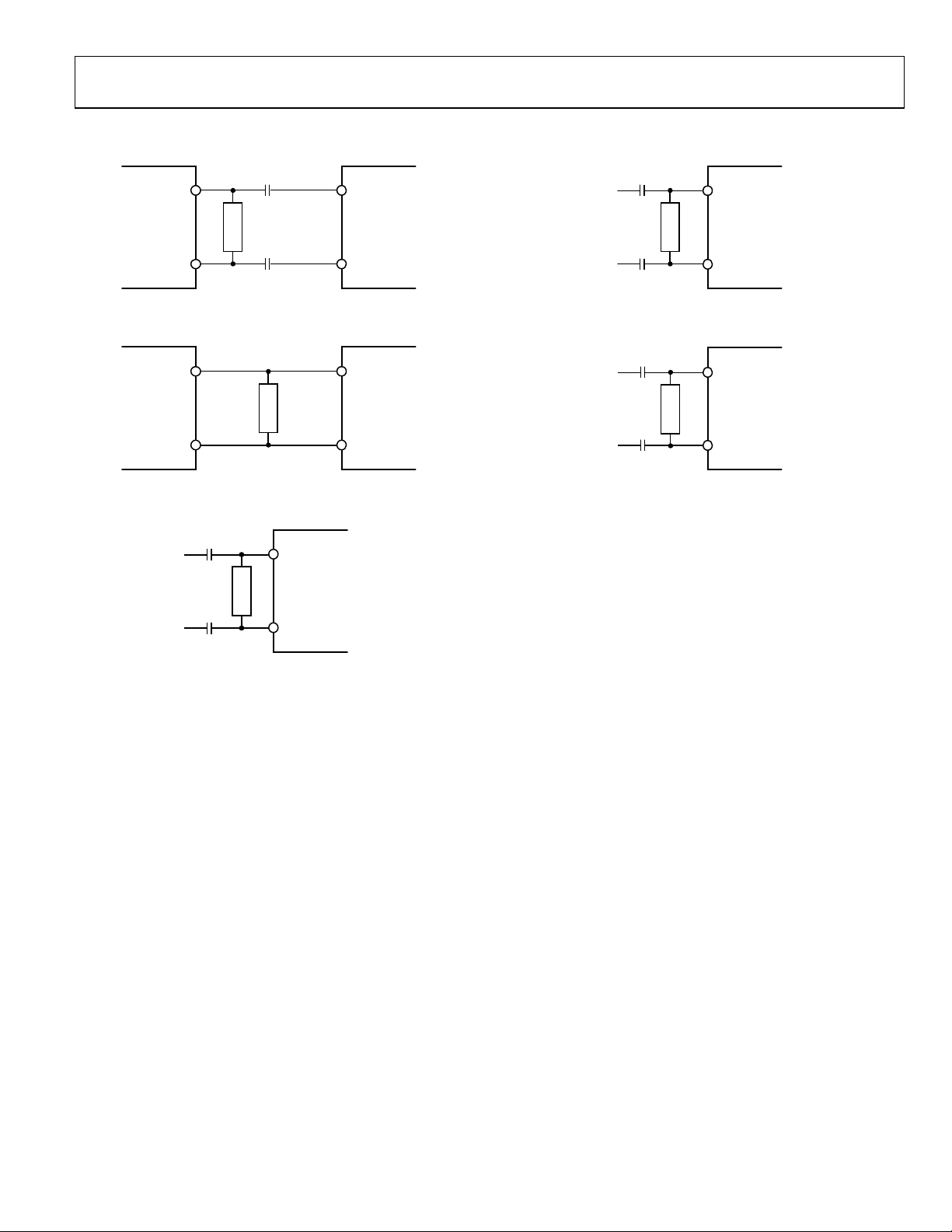
INPUT/OUTPUT TERMINATION RECOMMENDATIONS
0.1µF
0.1µF
AD9547
3.3V LVDS
OUTPUT
100Ω
IMPEDANCE
0.1µF
HIGH
INPUT
DOWNSTREAM
Figure 26. AC-Coupled LVDS or LVPECL Output Driver
AD9547
3.3V
LVPECL-
COMPATIBLE
OUTPUT
100Ω
DOWNSTREAM
Figure 27. DC-Coupled LVDS or LVPECL Output Driver
0.1µF
AD9547
SELF-BIASED
100Ω
REFERENCE
0.1µF
INPUT
(OPTIONAL)
Figure 28. Reference Input
DEVICE
DEVICE
08300-005
AD9547
(OPTIONAL)
SELF-BIASED
SYSCLKx
INPUT
08300-006
100Ω
0.1µF
08300-003
Figure 29. SYSCLKx Input
0.1µF
AD9547
(OPTIONAL)
SELF-BIASED
CLKINx
INPUT
08300-007
100Ω
0.1µF
08300-004
Figure 30. CLKINx Input
Rev. B | Page 23 of 104

AD9547
GETTING STARTED
POWER-ON RESET
The AD9547 monitors the voltage on the power supplies at powerup. When DVDD3 is greater than 2.35 V ± 0.1 V and DVDD
(Pin 1, Pin 6, Pin 8, Pin 53, Pin 59, and Pin 64) is greater than
1.4 V ± 0.05 V, the device generates a 75 ns reset pulse. The
power-up reset pulse is internal and independent of the RESET
pin. This internal power-up reset sequence eliminates the need for
the user to provide external power supply sequencing. Within 45 ns
after the leading edge of the internal reset pulse, the M0 to M7
multifunction pins function as high impedance digital inputs
and continue to do so until programmed otherwise.
INITIAL M0 TO M7 PIN PROGRAMMING
During a device reset (either via the power-up reset pulse or the
RESET pin), the multifunction pins (M0 to M7) function as
high impedance inputs, but upon removal of the reset condition,
level-sensitive latches capture the logic pattern present on the
multifunction pins. The AD9547 requires that the user supply
the desired logic state to the M0 to M7 pins by means of pull-up
and/or pull-down resistors (nominally 10 k to 30 k).
The initial state of the M0 to M7 pins following a reset is referred
to as FncInit, Bits[7:0]. Bits[7:0] of FncInit map directly to the
logic states of M[7:0], respectively. The three LSBs of FncInit
(FncInit, Bits[2:0]) determine whether the serial port interface
functions according to the SPI or the I
FncInit, Bits[2:0] = 000 selects the SPI interface. Any other value
selects the I
set to the value of FncInit, Bits[2:0].
The five MSBs of FncInit (FncInit, Bits[7:3]) determine the operation of the EEPROM loader. On the falling edge of RESET, if
FncInit, Bits[7:3] = 00000, then the EEPROM contents are not
transferred to the control registers and the device registers assume
their default values. However, if FncInit, Bits[7:3] ≠ 00000, then
the EEPROM controller transfers the contents of the EEPROM
to the control registers with CONDITION = FncInit, Bits[7:3]
(see the EEPROM section).
2
C port, with the three LSBs of the I2C bus address
2
C protocol. Specifically,
DEVICE REGISTER PROGRAMMING
The initial state of the M0 to M7 pins establishes the serial I/O
port protocol (SPI or I
tocol, and assuming that an EEPROM download is not used,
program the device according to the recommended sequence
that follows.
1. Program the system clock functionality.
The system clock parameters reside in the 0x100 register
address space. They include the following:
• System clock PLL controls
• System clock period
• System clock stability timer
It is essential to program the system clock period because many
of the AD9547 subsystems rely on this value. It is highly recom-
2
C). Using the appropriate serial port pro-
Rev. B | Page 24 of 104
mended that the system clock stability timer be programmed, as
well. This is especially important when using the system clock PLL
but also applies if using an external system clock source, especially
if the external source is not expected to be completely stable when
power is applied to the AD9547.
2. Initialize the system clock.
After the system clock functionality is programmed, issue an I/O
update using Register 0x0005, Bit 0 to invoke the system clock
settings.
3. Calibrate the system clock (only if using SYSCLK PLL).
Set the calibrate system clock bit in the cal/sync register
(Address 0x0A02, Bit 0) and issue an I/O update. Then clear the
calibrate system clock bit and issue another I/O update. This
action allows time for the calibration to proceed while programming the remaining device registers.
4. Program the multifunction pins (optional).
This step is required only if the user intends to use any of the
multifunction pins for status or control. The multifunction pin
parameters reside in the 0x0200 register address space. The
default configuration of the multifunction pins is as undesignated
high impedance input pins.
5. Program the IRQ functionality (optional).
This step is required only if the user intends to use the IRQ feature.
IRQ control resides in the 0x0200 register address space. It includes
the following:
• IRQ pin mode control
• IRQ mask
The IRQ mask default values prevent interrupts from being
generated. The IRQ pin mode default is open-drain NMOS.
6. Program the watchdog timer (optional).
This step is required only if the user intends to use the watchdog
timer. Watchdog timer control resides in the 0x0200 register
address space. The watchdog timer is disabled by default.
7. Program the DAC full-scale current (optional).
This step is required only if the user intends to use a full-scale
current setting other than the default value. DAC full-scale
current control resides in the 0x0200 register address space.
8. Program the digital phase-locked loop (DPLL).
The DPLL parameters reside in the 0x0300 register address
space. They include the following:
• Free-run frequency (DDS frequency tuning word)
• DDS phase offset
• DPLL pull-in range limits
• DPLL closed-loop phase offset
• Phase slew control (for hitless reference switching)
• Tuning word history control (for holdover operation)

AD9547
9. Program the clock distribution outputs.
The clock distribution parameters reside in the 0x0400 register
address space. They include the following:
• Output power-down control
• Output enable (disabled by default)
• Output synchronization
• Output mode control
• Output divider functionality
• Program the reference inputs.
10. The reference input parameters reside in the 0x0500
register address space. They include the following:
• Reference power-down
• Reference logic family
• Reference profile assignment control
• Phase build-out control
11. Program the reference profiles.
The reference profile parameters reside in the 0x0600 and
0x0700 register address spaces. They include the following:
• Reference priority
• Reference period
• Reference period tolerance
• Reference validation timer
• Reference redetect timer
• Digital loop filter coefficients
• Reference prescaler (R divider)
• Feedback dividers (S, U, and V)
• Phase and frequency lock detector controls
12. Generate reference acquisition.
After the registers are programmed, issue an I/O update using
Register 0x0005, Bit 0 to invoke all of the register settings that have
been programmed up to this point.
If the settings are programmed for manual profile assignment,
the DPLL locks to the first available reference that has the highest
priority. If the settings are programmed for automatic profile
assignment, then write to the reference profile selection register
(Address 0x0A0D) to select the state machines that require starting.
Next, issue an I/O update (Address 0x0005, Bit 0) to start the
selected state machines. Upon completion of the reference
detection sequence, the DPLL locks to the first available
reference with the highest priority.
13. Generate the output clock.
If the registers are programmed for automatic clock distribution
synchronization via DPLL phase or frequency lock, the synthesized
output signal appears at the clock distribution outputs (assuming
that the output is enabled and the DDS output signal has been
routed to the CLKINx input pins). Otherwise, set and then clear
the sync distribution bit (Address 0x0A02, Bit 1) or use a multifunction pin input (if programmed accordingly) to generate
a clock distribution sync pulse, which causes the synthesized
output signal to appear at the clock distribution outputs.
Rev. B | Page 25 of 104
AD9547
THEORY OF OPERATION
AD9547
OUT_RSET
OUT0P
OUT0N
OUT1P
OUT1N
CLKINP
CLKINN
EXTERNAL
ANALOG
FILTER
REFA
REFAA
REFB
REFBB
M0 TO M7
IRQ
DIFFERENTIAL
OR
SINGLE-ENDED
2 OR 4
INPUT
REF
MONITOR
IRQ AND
STATUS
LOGIC
DIGITAL PLL CORE
÷R
TDC/PFD
PHASE
CONTROLLER
PROG.
DIGITAL
LOOP
FILTER
CONTROL
LOGIC
÷S
TW CLAMP
AND
HISTORY
HOLDOVER
LOGIC
DDS/DAC
LOW NOISE
CLOCK
MULTIPLIER
SYSCLK PORT
POST
DIV
POST
DIV
CLOCK
DISTRIBUTION
AMP
DIGITAL
INTERFACE
Figure 31. Detailed Block Diagram
OVERVIEW
The AD9547 provides clocking outputs that are directly related
in phase and frequency to the selected (active) reference but with
jitter characteristics primarily governed by the system clock. The
AD9547 supports up to four reference inputs and a wide range of
reference frequencies. The core of this product is a digital phaselocked loop (DPLL). The DPLL has a programmable digital loop
filter that greatly reduces jitter transferred from the active
reference to the output. The AD9547 supports both manual and
automatic holdover modes. While in holdover mode, the AD9547
continues to provide an output as long as the DAC sample clock
is present. The holdover output frequency is a time average of
the output frequency history just prior to the transition to the
holdover condition.
The device offers manual and automatic reference switchover
capability if the active reference is degraded or fails completely.
A direct digital synthesizer (DDS) and integrated DAC constitute
a digitally controlled oscillator (DCO). The DCO output is
a sinusoidal signal (450 MHz maximum) at a frequency that is
determined by the active reference frequency and the programmed
values of the reference prescaler (R) and feedback divider (S).
Although not explicitly shown in Figure 31, the S divider has
both an integer and fractional component, which is similar to
a fractional-N synthesizer.
SYSCLKN SYSCLKP
The SYSCLKx input provides the sample clock for the DAC, which
is either a directly applied high frequency source or a low frequency
source coupled with the integrated PLL-based frequency multiplier.
The low frequency option also allows for the use of a crystal
resonator connected directly across the SYSCLKx inputs.
The DAC output routes directly off chip where an external filter
removes the sampling artifacts before returning the signal on chip
at the CLKINx inputs. Once on chip, an integrated comparator
converts the filtered sinusoidal signal to a clock signal (square
wave) with very fast rise and fall times.
The clock distribution section provides two output drivers. Each
driver is programmable either as a single differential LVPECL/
LVDS output or as a dual single-ended CMOS output. Furthermore, a dedicated 30-bit programmable divider precedes each
driver. The clock distribution section operates at up to 725 MHz.
This enables use of a band-pass reconstruction filter (for example,
a SAW filter) to extract a Nyquist image from the DAC output
spectrum, thereby allowing output frequencies that exceed the
typical 450 MHz limit at the DAC output.
08300-009
Rev. B | Page 26 of 104

AD9547
REFERENCE CLOCK INPUTS
Two pairs of pins provide access to the reference clock receivers.
Each pair is configurable either as a single differential receiver
or as two independent single-ended receivers. To accommodate
input signals with slow rising and falling edges, both the differential
and single-ended input receivers employ hysteresis. Hysteresis also
ensures that a disconnected or floating input does not cause the
receiver to oscillate spontaneously.
When configured for differential operation, the input receivers
accommodate either ac- or dc-coupled input signals. The receiver
is internally dc biased to handle ac-coupled operation.
When configured for single-ended operation, the input receivers
exhibit a pull-down load of 45 kΩ (typical). Three user-programmable threshold voltage ranges are available for each single-ended
receiver.
REFERENCE MONITORS
The reference monitors depend on a known and accurate system
clock period. Therefore, the functioning of the reference monitors
is not reliable until the system clock is stable. To avoid an incorrect
valid indication, the reference monitors indicate fault status until
the system clock stability timer expires (see the System Clock
Period section).
Reference Period Monitor
Each reference input has a dedicated monitor that repeatedly
measures the reference period. The AD9547 uses the reference
period measurements to determine the validity of the reference
based on a set of user provided parameters in the profile register
area of the register map (see the Profile Registers (Register
0X0600 to Register 0X07FF) section). The AD9547 also uses the
reference period monitor to assign a particular reference to a
profile when the user programs the device for automatic profile
assignment.
The monitor works by comparing the measured period of a particular reference input against the parameters stored in the profile
register assigned to that same reference input. The parameters
include the reference period, an inner tolerance, and an outer
tolerance. A 40-bit number defines the reference period in units
of femtoseconds (fs). The 40-bit range allows for a reference period
entry of up to 1.1 ms (909 Hz). A 20-bit number defines the inner
and outer tolerances. The value stored in the register is the reciprocal of the tolerance specification. For example, a tolerance
specification of 50 ppm yields a register value of 1/(50 ppm) =
1/0.000050 = 20,000 (0x04E20).
The use of two tolerance values provides hysteresis for the monitor
decision logic. The inner tolerance applies to a previously faulted
reference and specifies the largest period tolerance that a previously
faulted reference can exhibit before it qualifies as nonfaulted.
The outer tolerance applies to an already nonfaulted reference and
specifies the largest period tolerance that a nonfaulted reference
can exhibit before being faulted.
To produce decision hysteresis, the inner tolerance must be less
than the outer tolerance. That is, a faulted reference must meet
tighter requirements to become nonfaulted than a nonfaulted
reference must meet to become faulted.
Reference Validation Timer
Each reference input has a dedicated validation timer. The
validation timer establishes the amount of time that a previously
faulted reference must remain fault free before the AD9547
declares it to be nonfaulted. The timeout period of the validation
timer is programmable via a 16-bit register (see the validation
register contained within each of the eight profile registers in
the register map, Address 0x0600 to Address 0x07FF). The
16-bit number stored in the validation register represents units
of milliseconds, which yields a maximum timeout period of
65,535 ms.
Note that a validation period of zero must be programmed to
disable the validation timer. With the validation timer disabled,
the user must validate a reference manually via the force validation timeout register (Address 0x0A0E).
Reference Redetect Timer
Each reference input has a dedicated redetect timer. The redetect
timer is useful only when the device is programmed for automatic
profile selection. The redetect timer establishes the amount of
time that a reference must remain faulted before the AD9547
attempts to reassign it to a new profile. The timeout period of
the redetect timer is programmable via a 16-bit register (see the
redetect timer register contained within each of the eight profile
registers in the register map, Address 0x0600 to Address 0x07FF).
The 16-bit number stored in the redetect timer register represents
units of milliseconds, which yields a maximum timeout period
of 65,535 ms.
Note that a timeout period of 0 must be programmed to disable the
redetect timer.
Rev. B | Page 27 of 104
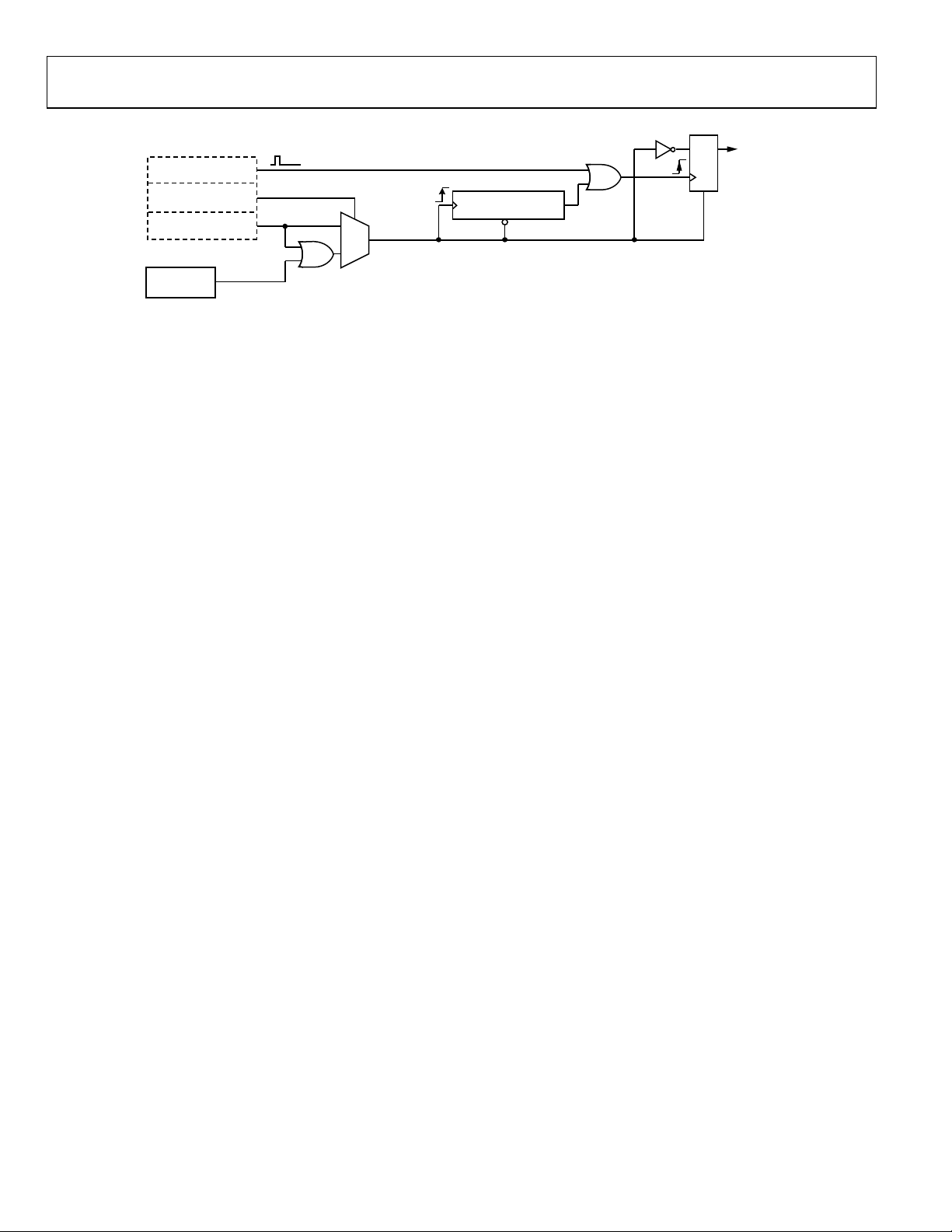
AD9547
REGISTER CONTROL BI TS
FORCE VALI DATION
TIMEOUT
REF MONITOR
BYPASS
REF MONITOR
OVERRIDE
REFERENCE
MONITOR
REF FAULT
REFERENCE VALIDATION LOGIC
(4 COPIES, 1 PER REFERENCE INPUT)
1
FAULTED
0
Figure 32. Reference Validation Override
Reference Validation Override Control
Register 0x0A0E to Register 0x0A10 provide the user with the
ability to override the reference validation logic, enabling a
certain level of troubleshooting capability. Each of the four
input references has a dedicated block of validation logic, as
shown in Figure 32. The state of the valid signal at the output
defines a particular reference as valid (1) or not valid (0), which
includes the validation period (if activated) as prescribed by the
validation timer. The override controls are the three control bits
on the left side of the diagram.
The main feature to note is that when faulted = 1, the output latch
is reset, which forces valid = 0 (indicating an invalid reference),
regardless of the state of any other signal. Under the default condition (that is, all three control bits are set to 0), the reference
monitor is the primary source of the validation process. This is
because, under the default condition, the ref fault signal from the
reference monitor is identical to the faulted signal.
The function of the faulted signal is fourfold.
• When faulted = 1, valid = 0, regardless of the state of any
other control signal. Therefore, faulted = 1 indicates an
invalid reference.
• When the faulted signal transitions from 0 to 1 (that is, from
not faulted to faulted), the validation timer is momentarily
reset, which means that, when it is enabled, it must exhaust its
full counting sequence before it expires.
• When faulted = 0 (that is, the reference is not faulted), the
validation timer is allowed to perform its timing sequence.
When faulted = 1 (that is, the reference is faulted), the
validation timer is reset and halted.
• The faulted signal passes through an inverter, which converts
it to a not faulted signal that appears at the input of the valid
latch. This allows the valid latch to capture the state of the
not faulted signal when the validation timer expires.
The reference monitor bypass control bit (Address 0x0A10) enables
bypassing of the reference fault signal generated by the reference
monitor. When the reference monitor bypass bit = 1, the state of the
faulted signal is dictated by the reference monitor override control
bit. This is useful when the user relies on an external reference
monitor rather than the internal monitor resident in the device.
DQ
VALID
VALIDATION TIMER
R
EN
TIMEOUT
R
08300-010
The user programs the reference monitor override bit based on
the status of the external monitor. On the other hand, when the
reference monitor bypass bit = 0, the reference monitor override
control bit (Address 0x0A0F) allows the user to manually test
the operation of both the valid latch and the validation timer.
In this case, the user relies on the signal generated by the internal
reference monitor (reference fault) but uses the reference monitor
override bit to emulate a faulted reference. That is, when the
reference monitor override bit = 1, faulted = 1, but when the
reference monitor override bit = 0, faulted = reference fault.
In addition, the user can emulate a timeout of the validation timer
via the force validation timeout control register at Address 0x0A0E.
Writing a Logic 1 to this autoclearing bit triggers the valid latch,
which is identically equivalent to a timeout of the validation timer.
REFERENCE PROFILES
The AD9547 has eight independent profile registers. A profile
register contains 50 bytes that establish a particular set of device
parameters. Each of the four input references can be assigned to
any one of the eight profiles (that is, more than one reference can
be assigned to the same profile). The profiles allow the user to
prescribe the specific device functionality that should take effect
when one of the input references assigned to a profile becomes the
active reference. Each profile register has the same format and
stores the following device parameters:
• Reference priority
• Reference period value (in femtoseconds (fs))
• Inner tolerance value (1/tolerance)
• Outer tolerance value (1/tolerance)
• Validation timer value (milliseconds (ms))
• Redetect timer value (milliseconds (ms))
• Digital loop filter coefficients
• Reference prescaler setting (R divider)
• Feedback divider settings (S, U, and V)
• DPLL phase lock detector threshold level
• DPLL phase lock detector fill rate
• DPLL phase lock detector drain rate
• DPLL frequency lock detector threshold level
• DPLL frequency lock detector fill rate
• DPLL frequency lock detector drain rate
Rev. B | Page 28 of 104
AD9547
Reference-to-Profile Assignment Control
The user can manually assign a reference to a profile or let the
device make the assignment automatically. The manual reference
profile selection register (Address 0x0503 and Address 0x0504)
is used to program whether a reference-to-profile assignment is
manual or automatic. The manual reference profile selection register is a 2-byte register partitioned into four half bytes (or nibbles).
The four nibbles form a one-to-one correspondence with the four
reference inputs: one nibble for REF A, the next for REF AA, and
so on. For a reference configured as a differential input, however,
the device ignores the nibble associated with the two-letter input.
For example, if the B reference is differential, only the REF B nibble
matters (the device ignores the REF BB nibble).
The MSB of each nibble is the manual profile bit, whereas the
three LSBs of each nibble identify one of the eight profiles (0 to 7).
A Logic 1 for the manual profile bit assigns the associated reference to the profile identified by the three LSBs of the nibble.
A Logic 0 for the manual profile bit configures the associated
reference for automatic reference-to-profile assignment (the
three LSBs are ignored in this case). Note that references
configured for automatic reference-to-profile assignment
require activation (see the Reference-to-Profile Assignment
State Machine section).
Reference-to-Profile Assignment State Machine
The functional flexibility of the AD9547 resides in the way that
it assigns a particular input reference to one of the eight reference
profiles. The reference-to-profile assignment state machine effectively builds a reference-to-profile table that maps the index of
each input reference to a profile (see Ta ble 2 2).
Table 22. Reference-to-Profile Table
Reference Input Reference Index Profile
A 0 Profile # (or null)
AA 1 Profile # (or null)
B 2 Profile # (or null)
BB 3 Profile # (or null)
Each entry in the profile column consists of a profile number
(0 to 7) or a null value. A null value appears when a referenceto-profile assignment does not exist for a particular reference
input (following a reset, for example). The information in Table 2 2
appears in the register map (Register 0x0D0C to Register 0x0D0F)
so that the user has access to the reference-to-profile assignments
on a real-time basis. Register 0x0D0C contains the information for
REF A, Register 0x0D0D contains the information for REF AA,
Register 0x0D0E for REF B, and Register 0x0D0F for REF BB. Bit 7
of each register is the null indicator for that particular reference.
If Bit 7 = 0, the pro-file assignment for that particular reference is
null. If Bit 7 = 1, that particular reference is assigned to the profile
(0 to 7) identified by Bits[6:4]. Note that Bits[6:4] are meaningless unless Bit 7 = 1.
Rev. B | Page 29 of 104
Following a reset, the reference-to-profile assignment state machine
is inactive to avoid improperly assigning a reference to a profile
before the system clock stabilizes. The state machine relies on
accurate information from the reference monitors, which, in turn,
rely on a stable system clock. Because the reference-to-profile
assignment state machine is inactive at power-up, the user must
initiate it manually by writing to the reference profile selection
register (Address 0x0A0D). The state machine activates immediately, unless the system clock is not stabilized. In that case,
activation occurs upon expiration of the system clock stability
timer. Note that initialization of the state machine is on a perreference basis. That is, each reference input is associated with an
independent initialization control bit.
When initialized for processing a reference, the state machine
continuously monitors that reference until the occurrence of a
device reset. This is true even when the user programs a reference
for manual profile selection, in which case the state machine
associated with that particular reference operates with its activity
masked. The masked background activity allows for seamless
operation if the user subsequently reprograms the reference for
automatic profile selection.
Reference-to-Profile Assignment
When a reference is programmed for manual profile assignment
(see Register 0x0503 to Register 0x0504), the reference-to-profile
assignment state machine puts the programmed manual profile
number into the profile column of the reference-to-profile table
(see Tabl e 22) in the row associated with the appropriate reference.
However, when the user programs a reference for automatic profile
assignment, the state machine must determine which profile to
assign to the reference, as explained in the following paragraphs.
If a null entry appears in the reference-to-profile table for a particular input reference, the validation logic for that reference enters
a period estimation mode. Note that a null entry is the default
state following a reset, but it also occurs when a reference redetect
timer expires. The period estimation mode enables the validation
logic to make a blind estimate of the period of the input reference
with a tolerance of 0.1%. The validation logic remains in the period
estimation mode until it successfully estimates the reference period.
Upon a successful reference period measurement by the validation logic, the state machine compares the measured period
to the nominal reference period programmed into each of the
eight profiles. The state machine assigns the reference to the
profile with the closest match to the measured period. If more
than one profile exactly matches the reference period, the state
machine chooses the profile with the lowest numeric index. For
example, if the reference period in both Profile 3 and Profile 5
matches the measured period, Profile 3 is given the assignment.
To safeguard against making a poor reference-to-profile assignment, the state machine ensures that the measured reference period
is within 6.25% of the nominal reference period that appears in
the closest match profile. Otherwise, the state machine does not
make a profile assignment and leaves the null entry in the reference-to-profile table.

AD9547
As long as there are input references programmed for automatic
profile assignment, and for which the profile assignment is null,
the state machine continues to cycle through those references
searching for a profile match. Furthermore, unless an input
reference is assigned to a profile, it is considered invalid and
excluded as a candidate for a reference switchover.
REFERENCE SWITCHOVER
An attractive feature of the AD9547 is its versatile reference
switchover capability. The flexibility of the reference switchover
functionality resides in a sophisticated prioritization algorithm
coupled with register-based controls. This scheme provides the
user with maximum control over the state machine that handles
reference switchover.
The main reference switchover control resides in the loop mode
register (Address 0x0A01). The user selection mode bits (Bits[4:3])
allow the user to select one of the reference switchover state
machine’s four operating modes, as follows:
• Automatic mode (Address 0x0A01, Bits[4:3] = 00)
• Fallback mode (Address 0x0A01, Bits[4:3] = 01)
• Holdover mode (Address 0x0A01, Bits[4:3] = 10)
• Manual mode (Address 0x0A01, Bits[4:3] = 11)
In automatic mode, a fully automatic, priority-based algorithm
selects the active reference. When programmed for automatic
mode, the device ignores the user reference selection bits (Register
0x0A01, Bits[1:0]). However, when programmed for any of the
other three modes, the device uses the user reference bits. They
specify a particular input reference (00 = REF A, 01 = REF AA ,
10 = REF B, 11 = REF BB).
In fallback mode, the user reference is the active reference when
it is valid. Otherwise, the device switches to a new reference using
the automatic priority-based algorithm.
In holdover mode, the user reference is the active reference when
it is valid. Otherwise, the device switches to holdover mode.
In manual mode, the user reference is the active reference whether
it is valid or not. Note that, when using this mode, the user must
program the reference-to-profile assignment (see Register 0x0503
and Register 0x0504) as manual for the particular reference that
is declared as the user reference. The reason is that if the user reference fails and its redetect timer expires, its profile assignment
(shown in
reference (user reference) does not have an assigned profile, which
places the AD9547 into an undefined state.
The user also has the option to force the device directly into
holdover or free-run operation via the user holdover and user
free-run bits (Register 0x0A01, Bits[6:5]). In free-run mode, the
free-running frequency tuning word register (Address 0x0300
to Address 0x0305) defines the DDS output frequency.
In holdover mode, the DDS output frequency depends on the
holdover control settings (see the Holdover section).
Tabl e 22 ) becomes null. This means that the active
Automatic Priority-Based Reference Switchover
The AD9547 has a two-tiered, automatic, priority-based algorithm
that is in effect for both automatic and fallback reference switchover. The algorithm relies on the fact that each reference profile
contains both a selection priority and a promoted priority. The
selection and promoted priority values range from 0 (highest
priority) to 7 (lowest priority). The selection priority determines
the order in which references are chosen as the active reference.
The promoted priority is a separate priority value given to a
reference only after it becomes the active reference.
An automatic reference switchover occurs on failure of the active
reference or when a previously failed reference becomes valid
and its selection priority is higher than the promoted priority
of the currently active reference (assuming that the automatic or
fallback reference switchover is in effect). When performing an
automatic reference switchover, the AD9547 chooses a reference
based on the priority settings within the profiles. That is, the device
switches to the reference with the highest selection priority (lowest
numeric priority value). It does so by using the reference-to-profile
table (see Tab l e 22) to determine the reference associated with
the profile exhibiting the highest priority.
If multiple references share the same profile, the device chooses
the reference having the lowest index value. For example, if the
A, B, and BB references (Index 0, Index 2, and Index 3, respectively)
share the same profile, a switchover to Reference A occurs because
Reference A has the lowest index value. Note, however, that only
valid references are included in switchover of the selection process.
The switchover control logic ignores any reference with a status
indication of invalid.
The promoted priority parameter allows the user to assign a higher
priority to a reference after it becomes the active reference. For
example, suppose that two references have a selection priority of 3
and a promoted priority of 1, and the remaining references have
a selection priority of 2 and a promoted priority of 2. Now, assume
that one of the Priority 3 references becomes active because all
of the Priority 2 references have failed. Sometime later, however,
a Priority 2 reference becomes valid. The switchover logic normally
attempts to automatically switch over to the Priority 2 reference
because it has higher priority than the presently active Priority 3
reference. However, because the Priority 3 reference is active, its
promoted priority of 1 is in effect. This is a higher priority than
the newly validated reference’s priority of 2, so the switchover does
not occur. This mechanism enables the user to give references
preferential treatment while they are selected as the active reference. An example of promoted vs. nonpromoted priority switching
appears in state diagram form in Figure 33. Figure 34 shows a
block diagram of the interrelationship between the reference
inputs, monitors, validation logic, profile selection, and priority
selection functionality.
Rev. B | Page 30 of 104
 Loading...
Loading...