

High Common-Mode Voltage, Single-Supply
5V
OUTPUT
INDUCTIVE
LOAD
4 TERM
SHUNT
CLAMP
DIODE
BATTERY
14V
POWER
DEVICE
COMMON
NC = NO CONNECT
GND
NC
–IN
+IN
A1
+V
S
A2
OUT
AD8200
www.BDTIC.com/ADI
Difference Amplifier
AD8200
FEATURES
High Common-Mode Voltage Range –2 V to +24 V at a
5 V Supply Voltage
Operating Temperature Range
Die: –40C to +150C
Supply Voltage Range: 4.7 V to 12 V
Low-Pass Filter (One Pole or Two Pole)
EXCELLENT AC AND DC PERFORMANCE
1 mV Voltage Offset
10 ppm/C Typ Gain Drift
80 dB CMRR Min DC to 10 kHz
PLATFORMS
Transmission Control
Diesel Injection Control
Engine Management
Adaptive Suspension Control
Vehicle Dynamics Control
GENERAL DESCRIPTION
The AD8200 is a single-supply difference amplifier for amplifying
and low-pass filtering small differential voltages in the presence of
a large common-mode voltage. The input CMV range extends
from –2 V to +24 V at a typical supply voltage of 5 V.
The AD8200 is offered in die and packaged form. Both package
options are specified over wide temperature ranges, making the
AD8200 well suited for use in many automotive platforms. The
SOIC package is specified over a temperature range of –40°C to
+125°C. The die is specified from –40°C to +150°C.
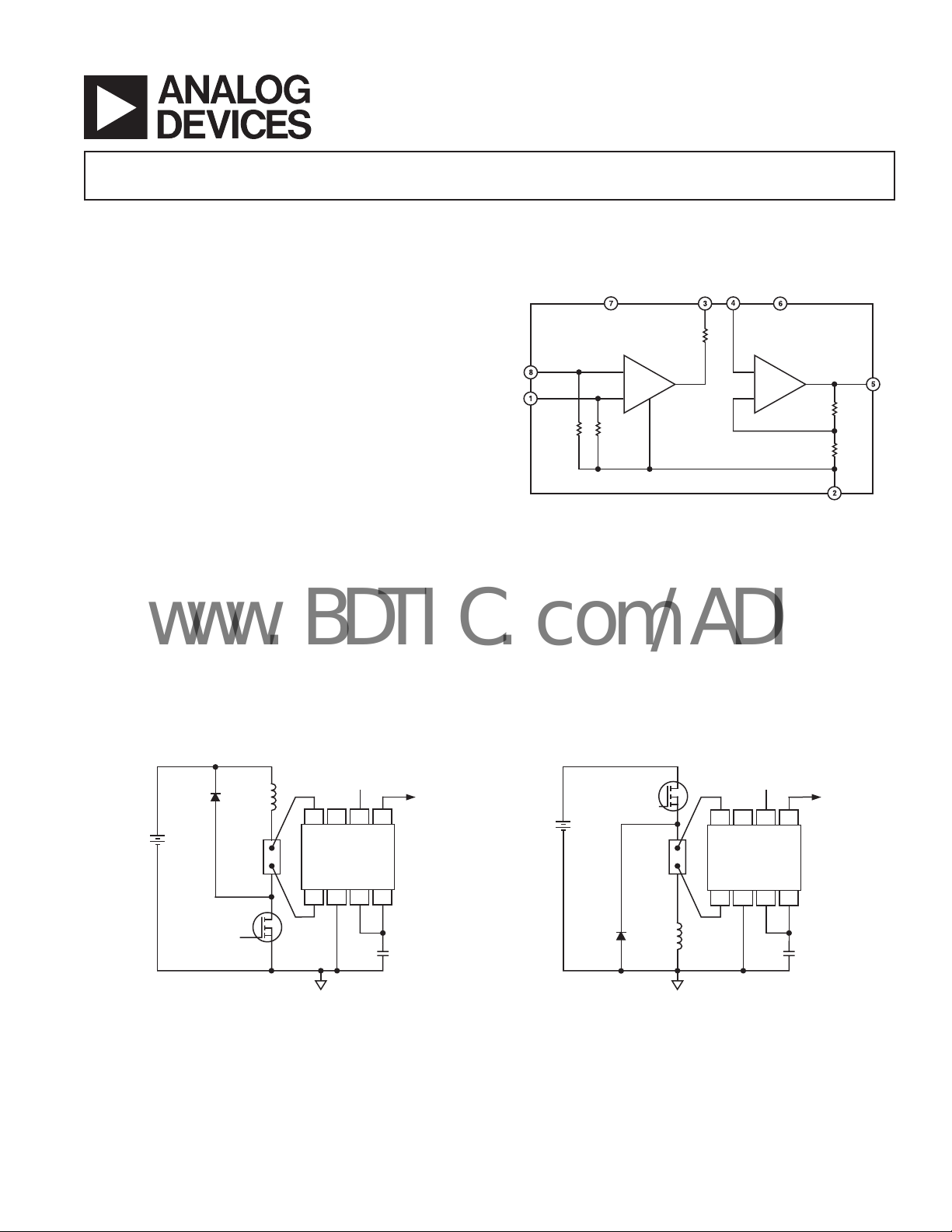
FUNCTIONAL BLOCK DIAGRAM
SOIC (R) Package
Die Form
+V
A2
S
AD8200
G =2
+IN
–IN
A2
10k
10k
GND
OUT
+IN
–IN
NC A1
100k
G =10
+IN
A1
–IN
200k200k
NC = NO CONNECT
Automotive platforms demand precision components for better
system control. The AD8200 provides excellent ac and dc performance that keeps errors to a minimum in the user’s system.
Typical offset and gain drift in the SOIC package are 6 µV/°C
and 10 ppm/°C, respectively. The device also delivers a minimum CMRR of 80 dB from dc to 10 kHz.
The AD8200 features an externally accessible 100 kΩ resistor at
the output of the preamp A1, which can be used for low-pass
filter applications and for establishing gains other than 20.
INDUCTIVE
CLAMP
DIODE
BATTERY
REV. B
Information furnished by Analog Devices is believed to be accurate and
reliable. However, no responsibility is assumed by Analog Devices for its
use, nor for any infringements of patents or other rights of third parties that
may result from its use. No license is granted by implication or otherwise
under any patent or patent rights of Analog Devices. Trademarks and
registered trademarks are the property of their respective owners.
14V
Figure 1. High Line Current Sensor
POWER
DEVICE
COMMON
4 TERM
SHUNT
LOAD
+IN
–IN
5V
+V
NC
S
AD8200
GND
A1
NC = NO CONNECT
OUTPUT
OUT
A2
Figure 2. Low Line Current Sensor
One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A.
Tel: 781/329-4700 www.analog.com
Fax: 781/326-8703 © 2003 Analog Devices, Inc. All rights reserved.

AD8200–SPECIFICATIONS
www.BDTIC.com/ADI
SINGLE SUPPLY
Parameter Condition Min Typ Max Min Typ Max Unit
SYSTEM GAIN
Initial 20 20 V/V
Error V
vs. Temperature 10 20 25 30 ppm/°C
VOLTAGE OFFSET
Input Offset (RTI) VCM = 0.15 V; 25°C–1 +1–1 +1mV
INPUT
Input Impedance
Differential 320 400 480 320 400 480 kΩ
Common-Mode 160 200 240 160 200 240 kΩ
CMV Continuous –2 +24 –2 +24 V
Common-Mode Rejection
PREAMPLIFIER
Gain 10 10 V/V
Gain Error –1 +1 –1 +1 %
Output Voltage Range 0.02 4.8 0.02 4.8 V
Output Resistance 97 100 103 97 100 103 kΩ
OUTPUT BUFFER
Gain 2 2 V/V
Gain Error –1 +1 –1 +1 %
Output Voltage Range 0.02 4.8 0.02 4.8 V
Output Resistance 2 2 Ω
DYNAMIC RESPONSE
3 dB Bandwidth 30 50 30 50 kHz
Slew Rate 0.22 0.22 V/µs
NOISE
0.1 Hz to 10 Hz 10 10 µV p-p
Spectral Density, 1 kHz, RTI 300 300 nV/√Hz
POWER SUPPLY
Operating Range 4.7 12 4.7 12 V
Quiescent Current vs. V
Temperature
PSRR VS = 4.7 V to 12 V 75 80 75 80 dB
TEMPERATURE RANGE
For Specified Performance –40 +125 –40 +150 °C
NOTES
1
Source imbalance < 2 Ω.
2
The AD8200 preamplifier exceeds 80 dB CMRR at 10 kHz. However, since the signal is available only by way of a 100 k Ω resistor, even the small amounts of pinto-pin capacitance between Pins 1, 8 and 3, 4 may couple an input common-mode signal larger than the greatly attenuated preamplifier output. The effect of pin-topin coupling may be neglected in all applications using filter capacitors at Node 3.
Specifications subject to change without notice.
(TA = 25C, VS = 5 V, VCM = 0 V, RL = 10 k.)
AD8200 SOIC AD8200 DIE
≥ 0.1 V dc –1 +1 –1 +1 %
O
= 0.15 V; 125°C (SOIC)
V
CM
+150°C (DIE) –2.5 +2.5 –3.5 +3.5 mV
VCM = 0.15 V; –40°C–2 +2–3 +3mV
1
VCM = 10 V
f = 1 kHz 80 80 dB
f = 10 kHz
O
2
= 0.1 V dc 0.25 1 0.25 1 mA
80 80 dB
REV. B–2–
AD8200
www.BDTIC.com/ADI
ABSOLUTE MAXIMUM RATINGS*
Supply Voltage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12.5 V
Transient Input Voltage (300 ms) . . . . . . . . . . . . . . . . . . 44 V
Continuous Input Voltage . . . . . . . . . . . . . . . . . . . . . . . . 35 V
Reversed Supply Voltage Protection . . . . . . . . . . . . . . . . 0.3 V
Operating Temperature
DIE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . –40°C to +150°C
SOIC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . –40°C to +125°C
Storage Temperature . . . . . . . . . . . . . . . . . . –65°C to +150°C
Output Short-Circuit Duration . . . . . . . . . . . . . . . . Indefinite
Lead Temperature Range (Soldering 60 sec) . . . . . . . . . 300°C
*Stresses beyond those listed under Absolute Maximum Ratings may cause perma-
nent damage to the device. This is a stress rating only; the functional operation of
the device at these or any other conditions above those indicated in the operational
sections of this specification is not implied. Exposure to absolute maximum rating
conditions for extended periods may affect device reliability.
ORDERING GUIDE
Model Temperature Range Package Description Package Option
AD8200YR –40°C to +125°C SOIC R-8
AD8200YR-Reel –40°C to +125°C SOIC R-8
AD8200YR-Reel-7 –40°C to +125°C SOIC R-8
AD8200YCHIPS –40°C to +150°CDIE Form
AD8200YCSURF –40°C to +150°CDIE Form
PIN CONFIGURATION
1
–IN
2
GND
TOP VIEW
3
A1
(Not to Scale)
A2
4
NC = NO CONNECT
AD8200
8
+IN
7
NC
6
+V
S
5
OUT
CAUTION
ESD (electrostatic discharge) sensitive device. Electrostatic charges as high as 4000 V readily
accumulate on the human body and test equipment and can discharge without detection. Although the
AD8200 features proprietary ESD protection circuitry, permanent damage may occur on devices
subjected to high energy electrostatic discharges. Therefore, proper ESD precautions are recommended
to avoid performance degradation or loss of functionality.
METALLIZATION PHOTOGRAPH
+V
S
6
OUT5
+IN
–IN 1
8
REV. B
2
GND
–3–
3
A1
A24
AD8200–Typical Performance Characteristics
www.BDTIC.com/ADI
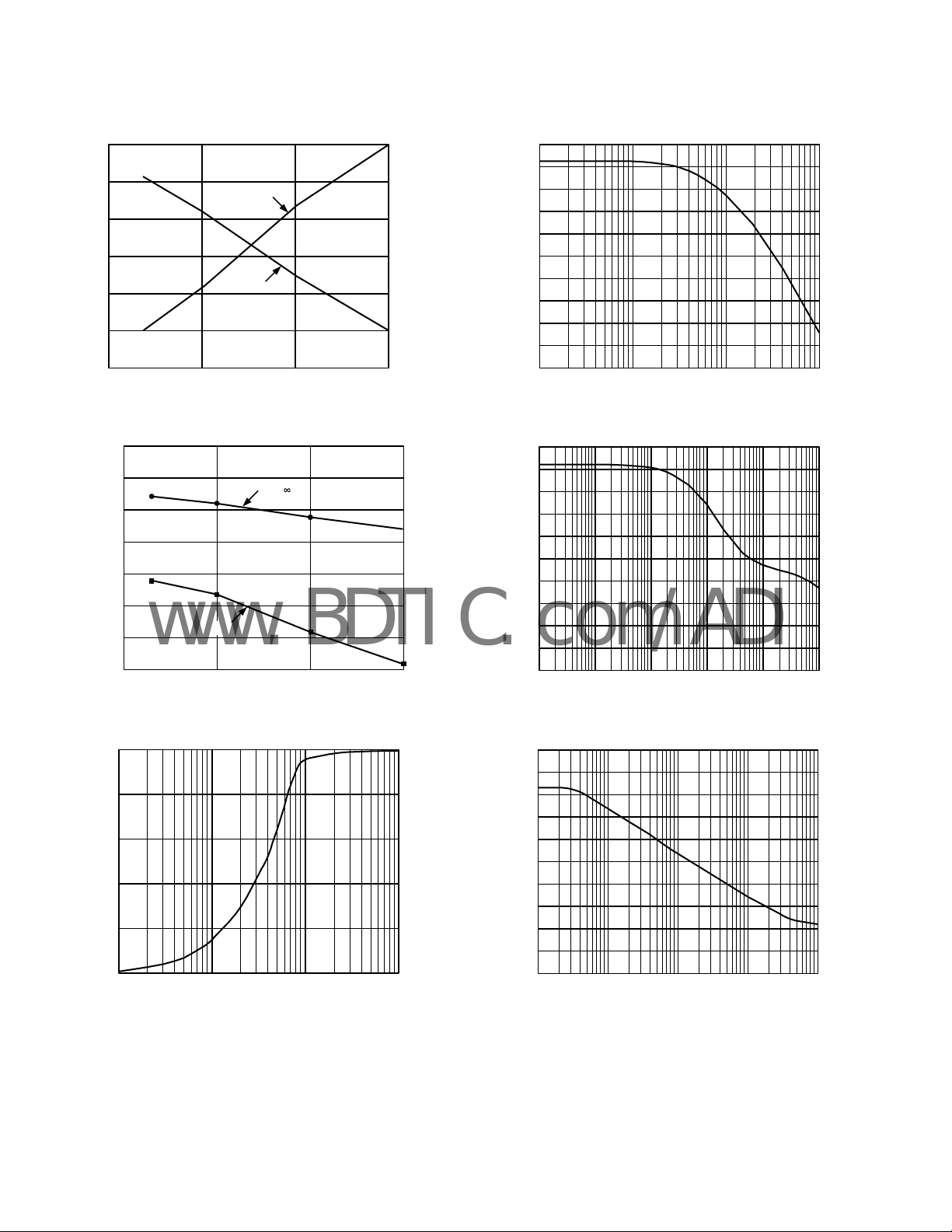
(TA = 25C, VS = 5 V, VCM = 0 V, RL = 10 k, unless otherwise noted.)
30
25
20
15
10
5
POSITIVE COMMON-MODE RANGE – V
0
253
SUPPLY VOLTAGE – V
+V
CM
–V
CM
4
TPC 1. Input Common-Mode Range vs. Supply
0
–2
–4
–6
–8
–10
NEGATIVE COMMON-MODE RANGE – V
–12
30
25
20
15
10
5
GAIN – dB
0
–5
–10
–15
–20
1k
10k 100k 1M
FREQUENCY – Hz
TPC 4. Gain vs. Frequency
0
–5
–10
–15
–20
–25
OUTPUT VOLTAGE – mV
–30
–35
2
RL = 10k TO GND
RL =
SUPPLY VOLTAGE – V
4
53
TPC 2. Output Voltage – VS vs. Supply
5
4
3
2
OUTPUT VOLTAGE – V
1
0
10
100 1k 10k
LOAD RESISTANCE –
TPC 3. Output Voltage Swing vs. Load Resistance
100
95
90
85
80
75
CMRR – dB
70
65
60
55
50
10
100 100k
1k 10k 1M
FREQUENCY – Hz
TPC 5. Common-Mode Rejection Ratio vs. Frequency
100
90
80
70
60
50
PSRR – dB
40
30
20
10
0
10
100 10k1k 100k
FREQUENCY – Hz
TPC 6. Power Supply Rejection Ratio vs. Frequency
REV. B–4–

AD8200
www.BDTIC.com/ADI
TEK RUN: 2.5MS/s HI RES
V
, RL = 10k
OUT
1
V
IN
2
CH1 500mV 50mV M 20s CH1 1.5VCH2
T
TPC 7. Pulse Response
THEORY OF OPERATION
The AD8200 consists of a preamp and buffer arranged as shown
in Figure 3. Like-named resistors have equal values.
The preamp incorporates a dynamic bridge (subtractor) circuit.
Identical networks (within the shaded areas), consisting of R
, RC, and RG, attenuate input signals applied to Pins 1 and 8.
R
B
,
A
Note that when equal amplitude signals are asserted at inputs 1
and 8, and the output of A1 is equal to the common potential
(i.e., zero), the two attenuators form a balanced-bridge network.
When the bridge is balanced, the differential input voltage at
A1, and thus its output, will be zero.
Any common-mode voltage applied to both inputs will keep the
bridge balanced and the A1 output at zero. Because the resistor
networks are carefully matched, the common-mode signal rejection approaches this ideal state.
However, if the signals applied to the inputs differ, the result is a
difference at the input to A1. A1 responds by adjusting its output
to drive R
, by way of RG, to adjust the voltage at its inverting
B
input until it matches the voltage at its noninverting input.
By attenuating voltages at Pins 1 and 8, the amplifier inputs are
held within the power supply range, even if Pin 1 and Pin 8
input levels exceed the supply, or fall below common (ground.)
The input network also attenuates normal (differential) mode
voltages. R
and RG form an attenuator that scales A1 feedback,
C
forcing large output signals to balance relatively small differential inputs. The resistor ratios establish the preamp gain at 10.
Because the differential input signal is attenuated, and then
amplified to yield an overall gain of 10, the amplifier A1 operates at a higher noise gain, multiplying deficiencies such as input
offset voltage and noise with respect to Pins 1 and 8.
+IN
R
R
R
R
G
–IN
R
A
A
A1
R
R
CM
R
B
B
R
R
G
C
C
CM
A3
100k
(TRIMMED)
AD8200
A2
R
F
R
F
TEK RUN: 2.5MS/s AVERAGE
1
V
, RL = 10k
OUT
MAGNIFIED V
V
3
2
CH1 1V CH 2 10mV M 20s CH1 1.36V
CH3 100mV
IN
OUT
TPC 8. Settling Time
To minimize these errors while extending the common-mode
range, a dedicated feedback loop is employed to reduce the
range of common-mode voltage applied to A1, for a given overall range at the inputs. By offsetting the range of voltage applied
to the compensator, the input common-mode range is also offset
to include voltages more negative than the power supply. Amplifier A3 detects the common-mode signal applied to A1 and
adjusts the voltage on the matched R
resistors to reduce the
CM
common-mode voltage range at the A1 inputs. By adjusting the
common voltage of these resistors, the common-mode input
range is extended while, at the same time, the normal mode
signal attenuation is reduced, leading to better performance
referred to input.
The output of the dynamic bridge taken from A1 is connected
to Pin 3 by way of a 100 kΩ series resistor, provided for low-
pass filtering and gain adjustment. The resistors in the input
networks of the preamp and the buffer feedback resistors are
ratio-trimmed for high accuracy.
The output of the preamp drives a gain-of-two buffer-amplifier
A2, implemented with carefully matched feedback resistors R
.
F
The two-stage system architecture of the AD8200 enables the
user to incorporate a low-pass filter prior to the output buffer.
By separating the gain into two stages, a full-scale rail-to-rail
signal from the preamp can be filtered at Pin 3, and a half-scale
signal resulting from filtering can be restored to full scale by the
output buffer amp. The source resistance seen by the inverting
input of A2 is approximately 100 kΩ, to minimize the effects of
A2’s input bias current. However, this current is quite small and
errors resulting from applications that mismatch the resistance
are correspondingly small.
APPLICATIONS
The AD8200 difference amplifier is intended for applications
where it is required to extract a small differential signal in the
presence of large common-mode voltages. The input resistance
is nominally 200 kΩ, and the device can tolerate common-mode
voltages higher than the supply voltage and lower than ground.
The open collector output stage will source current to within
20 mV of ground.
COM
Figure 3. Simplified Schematic
REV. B
–5–

AD8200
www.BDTIC.com/ADI
CURRENT SENSING
High Line, High Current Sensing
Basic automotive applications making use of the large commonmode range are shown in Figures 1 and 2. The capability of the
device to operate as an amplifier in primary battery supply circuits
is shown in Figure 1; Figure 2 illustrates the ability of the device
to withstand voltages below system ground.
Low Current Sensing
The AD8200 can also be used in low current sensing applications, such as the 4–20 mA current loop shown in Figure 4. In
such applications, the relatively large shunt resistor can degrade
the common-mode rejection. Adding a resistor of equal value in
the low impedance side of the input corrects for this error.
10
1%
+IN
+
10
1%
–IN
5V
+V
NC
S
AD8200
GND
A1
NC = NO CONNECT
OUTPUT
OUT
A2
Figure 4. 4–20 mA Current Loop Receiver
GAIN ADJUSTMENT
The default gain of the preamplifier and buffer are ⫻10 and ⫻2,
respectively, resulting in a composite gain of ⫻20. With the
addition of external resistor(s) or trimmer(s), the gain may be
lowered, raised, or finely calibrated.
Gains Less than 20
Since the preamplifier has an output resistance of 100 kΩ, an external resistor connected from Pins 3 and 4 to GND will decrease the
gain by a factor R
V
DIFF
2
V
V
CM
DIFF
2
/(100 kΩ + R
EXT
AD8200
100k
) (see Figure 5).
EXT
+V
S
NC+IN
OUT+V
S
10k10k
OUT
20R
R
EXT
= 100k
EXT
+ 100k
GAIN
20 – GAIN
GAIN =
R
EXT
A2A1GND–IN
R
EXT
Gains Greater than 20
Connecting a resistor from the output of the buffer amplifier to
its noninverting input, as shown in Figure 6, will increase the
/(R
gain. The gain is now multiplied by the factor R
100 kΩ); for example, it is doubled for R
EXT
= 200 kΩ. Overall
EXT
EXT
–
gains as high as 50 are achievable in this way. Note that the
accuracy of the gain becomes critically dependent on resistor
value at high gains. Also, the effective input offset voltage at
Pins 1 and 8 (about six times the actual offset of A1) limits the
part’s use in very high gain, dc-coupled applications.
+V
S
+V
NC+IN
V
DIFF
2
V
V
CM
DIFF
2
NC = NO CONNECT
AD8200
100k
GND
OUT
S
10k10k
R
EXT
A2A1–IN
GAIN =
R
EXT
OUT
R
EXT
= 100k
20R
EXT
– 100k
GAIN – 20
GAIN
Figure 6. Adjusting for Gains Greater than 20
GAIN TRIM
Figure 7 shows a method for incremental gain trimming using a
trimpot and external resistor R
EXT
.
The following approximation is useful for small gain ranges
∆ΩGMR
≈÷
10 %
()
Thus, the adjustment range would be ±2% for R
±10% for R
V
= 1 MΩ, and so on.
EXT
V
DIFF
2
V
CM
DIFF
2
NC = NO CONNECT
+IN
–IN
5V
+V
NC
AD8200
GND
A1
EXT
S
OUT
= 5 MΩ;
EXT
OUT
A2
R
EXT
GAIN TRIM
20k MIN
Figure 7. Incremental Gain Trim
NC = NO CONNECT
Figure 5. Adjusting for Gains Less than 20
The overall bandwidth is unaffected by changes in gain using
this method, although there may be a small offset voltage due to
the imbalance in source resistances at the input to the buffer. In
many cases this can be ignored, but if desired, can be nulled by
inserting a resistor equal to 100 kΩ minus the parallel sum of
and 100 kΩ, in series with Pin 4. For example, with R
R
EXT
EXT
= 100 kΩ (yielding a composite gain of ⫻10), the optional offset
nulling resistor is 50 kΩ (see Figure 11.)
REV. B–6–

AD8200
40LOG (f2/f1)
f
1
ATTENUATION
f
2
f
2
2
/f
1
FREQUENCY
A 1-POLE FILTER, CORNER f1, AND
A 2-POLE FILTER, CORNER f
2
, HAVE
THE SAME ATTENUATION –40LOG (f
2/f1
)
AT FREQUENCY f
2
2
/f
1
20dB/DECADE
40dB/DECADE
www.BDTIC.com/ADI
Internal Signal Overload Considerations
When configuring gain for values other than 20, the maximum
input voltage with respect to the supply voltage and ground
must be considered, since either the preamplifier or the output
buffer will reach its full-scale output (approximately V
– 0.2 V)
S
with large differential input voltages. The input of the AD8200
is limited to (V
– 0.2) ÷ 10, for overall gains ≤10, since the
S
preamplifier, with its fixed gain of ×10, reaches its full-scale
output before the output buffer. For gains greater than 10, the
swing at the buffer output reaches its full scale first and limits
the AD8200 input to (V
– 0.2) ÷ G, where G is the overall gain.
S
LOW-PASS FILTERING
In many transducer applications, it is necessary to filter the
signal to remove spurious high frequency components, including
noise, or to extract the mean value of a fluctuating signal with a
peak-to-average ratio (PAR) greater than unity. For example, a
full-wave rectified sinusoid has a PAR of 1.57, a raised cosine
has a PAR of 2, and a half-wave sinusoid has a PAR of 3.14.
Signals having large spikes may have PARs of 10 or more.
When implementing a filter, the PAR should be considered so
the output of the AD8200 preamplifier (A1) does not clip before
A2, since this nonlinearity would be averaged and appear as an
error at the output. To avoid this error, both amplifiers should
be made to clip at the same time. This condition is achieved
when the PAR is no greater than the gain of the second amplifier (2 for the default configuration). For example, if a PAR of 5
is expected, the gain of A2 should be increased to 5.
Low-pass filters can be implemented in several ways using the
features provided by the AD8200. In the simplest case, a singlepole filter (20 dB/decade) is formed when the output of A1 is
connected to the input of A2 via the internal 100 kΩ resistor by
strapping Pins 3 and 4 and a capacitor added from this node to
ground, as shown in Figure 8. If a resistor is added across the
capacitor to lower the gain, the corner frequency will increase; it
should be calculated using the parallel sum of the resistor and
100 kΩ.
5V
V
DIFF
2
V
V
CM
DIFF
2
+IN
–IN
+V
NC
AD8200
GND
S
A1
OUT
A2
OUT
1
F
=
C
2C10
C IN FARADS
5
5V
V
DIFF
2
V
V
CM
DIFF
2
NC = NO CONNECT
+IN
–IN
+V
NC
AD8200
GND
A1
OUT
S
A2
255k
C
= 1Hz – F
F
C
OUT
C
Figure 9. 2-Pole Low-Pass Filter
A 2-pole filter (with a roll-off of 40 dB/decade) can be implemented
using the connections shown in Figure 9. This is a Sallen-Key
form based on a ×2 amplifier. It is useful to remember that a 2-pole
filter with a corner frequency f
have the same attenuation at the frequency (f
at f
1
attenuation at that frequency is 40 log (f
and a 1-pole filter with a corner
2
2/f1
2
/f1). The
2
). This is illustrated
in Figure 10. Using the standard resistor value shown and equal
capacitors (Figure 9), the corner frequency is conveniently scaled at
1 Hz-µF (0.05 µF for a 20 Hz corner). A maximally flat response
occurs when the resistor is lowered to 196 kΩ and the scaling is
then 1.145 Hz-µF. The output offset is raised by approximately
5 mV (equivalent to 250 V at the input pins).
Figure 10. Comparative Responses of 1-Pole and
2-Pole Low-Pass Filters
C
NC = NO CONNECT
Figure 8. A Single-Pole, Low-Pass Filter Using the
Ω
Internal 100 k
If the gain is raised using a resistor, as shown in Figure 8, the
Resistor
corner frequency is lowered by the same factor as the gain is
raised. Thus, using a resistor of 200 kΩ (for which the gain
would be doubled), the corner frequency is now 0.796 Hz-µF,
(0.039 µF for a 20 Hz corner frequency.)
REV. B
–7–

AD8200
www.BDTIC.com/ADI
HIGH-LINE CURRENT SENSING WITH LPF AND GAIN ADJUSTMENT
Figure 11 is another refinement of Figure 1, including gain
adjustment and low-pass filtering.
BATTERY
CLAMP
DIODE
14V
NC = NO CONNECT
4 TERM
SHUNT
POWER
DEVICE
INDUCTIVE
LOAD
+IN
COMMON
–IN
5V
+V
OUT
NC
S
AD8200
GND
A1
A2
NULL
C
5% CALIBRATION RANGE
= 0.796Hz–F
F
C
(0.22F FOR f = 3.6 Hz)
V
OS/IB
OUTPUT
4V/AMP
191k
20k
Figure 11. High-Line Current Sensor Interface; Gain = ×40,
Single-Pole, Low-Pass Filter
A power device that is either ON or OFF controls the current in
the load. The average current is proportional to the duty cycle of
the input pulse and is sensed by a small value resistor. The
average differential voltage across the shunt is typically 100 mV,
although its peak value will be higher by an amount that depends
on the inductance of the load and the control frequency. The
common-mode voltage, on the other hand, extends from roughly
1 V above ground, when the switch is ON, to about 1.5 V
above the battery voltage, when the device is OFF, and the
clamp diode conducts. If the maximum battery voltage spikes
up to 20 V, the common-mode voltage at the input can be as
high as 21.5 V.
To produce a full-scale output of 4 V, a gain ×40 is used, adjustable by ±5% to absorb the tolerance in the shunt. There is
sufficient headroom to allow 10% overrange (to 4.4 V). The
roughly triangular voltage across the sense resistor is averaged
by a 1-pole, low-pass filter, here set with a corner frequency =
3.6 Hz, which provides about 30 dB of attenuation at 100 Hz. A
higher rate of attenuation can be obtained using a 2-pole filter
having f
= 20 Hz, as shown in Figure 12. Although this circuit
C
uses two separate capacitors, the total capacitance is less than
half that needed for the 1-pole filter.
DRIVING CHARGE REDISTRIBUTION A/D CONVERTERS
When driving CMOS ADCs, such as those embedded in
popular microcontrollers, the charge injection (⌬Q) can cause
a significant deflection in the output voltage of the AD8200.
Though generally of short duration, this deflection may persist
until after the sample period of the ADC has expired, due to the
relatively high open-loop output impedance of the AD8200.
Including an R-C network in the output can significantly reduce
the effect. The capacitor helps to absorb the transient charge,
effectively lowering the high frequency output impedance of the
AD8200. For these applications, the output signal should be
– C
taken from the midpoint of the R
LAG
combination as
LAG
shown in Figure 13.
Since the perturbations from the analog-to-digital converter are
small, the output impedance of the AD8200 will appear to be
low. The transient response will, therefore, have a time constant
governed by the product of the two LAG components, C
. For the values shown in Figure 13, this time constant is
R
LAG
LAG
×
programmed at approximately 10 µs. Therefore, if samples are
taken at several tens of microseconds or more, there will be
negligible charge “stack-up.”
5V
+IN
–IN
AD8200
A2
10k
10k
R
1k
LAG
C
LAG
0.01F
MICROPROCESSOR
A/D
Figure 13. Recommended Circuit for Driving CMOS A/D
BATTERY
CLAMP
DIODE
14V
NC = NO CONNECT
4 TERM
SHUNT
POWER
DEVICE
INDUCTIVE
LOAD
COMMON
+IN
–IN
5V
+V
NC
AD8200
GND
OUT
S
A1
A2
C
F
(0.05F FOR f
127k
= 1Hz–F
C
OUTPUT
432k
C
50k
= 20Hz)
C
Figure 12. Illustration of 2-Pole Low-Pass Filtering
REV. B–8–

OUTLINE DIMENSIONS
www.BDTIC.com/ADI
8-Lead Standard Small Outline Package [SOIC]
Narrow Body
(R-8)
Dimensions shown in millimeters and (inches)
5.00 (0.1968)
4.80 (0.1890)
4.00 (0.1574)
3.80 (0.1497)
85
6.20 (0.2440)
5.80 (0.2284)
41
AD8200
1.27 (0.0500)
0.25 (0.0098)
0.10 (0.0040)
COPLANARITY
0.10
CONTROLLING DIMENSIONS ARE IN MILLIMETERS; INCH DIMENSIONS
(IN PARENTHESES) ARE ROUNDED-OFF MILLIMETER EQUIVALENTS FOR
REFERENCE ONLY AND ARE NOT APPROPRIATE FOR USE IN DESIGN
BSC
SEATING
PLANE
COMPLIANT TO JEDEC STANDARDS MS-012AA
1.75 (0.0688)
1.35 (0.0532)
0.51 (0.0201)
0.31 (0.0122)
0.25 (0.0098)
0.17 (0.0067)
0.50 (0.0196)
0.25 (0.0099)
8ⴗ
0ⴗ
1.27 (0.0500)
0.40 (0.0157)
ⴛ 45ⴗ
REV. B
–9–

AD8200
www.BDTIC.com/ADI
Revision History
Location Page
11/03—Data Sheet Changed from REV. A to REV. B.
Change to FEATURES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
Change to SPECIFICATIONS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
Change to ORDERING GUIDE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
Change to OUTLINE DIMENSIONS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
6/02—Data Sheet Changed from REV. 0 to REV. A.
Change to ORDERING GUIDE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
REV. B–10–

–11–
www.BDTIC.com/ADI

C02054–0–11/03(B)
www.BDTIC.com/ADI
–12–
 Loading...
Loading...