

Page 1

Series 956
Series 955
INSTALLATION M
L
INEAR
D
ISPLACEMENT
T
RANSDUCERS
ANUAL
955DQ BRIK
GEN III WITH QUADRATURE OUTPUT
ABSOLUTE PROCESS CONTROL
KNOW WHERE YOU ARE... REGARDLESS
Includes 955DQ
Programming & Maintenance
Instructions Plus Accessory Guide
Page 2

Preface
This manual is divided into three chapters. Chapter 1
provides the hardware overview for the 955DQ Linear
Displacement Transducers (LDT). Chapter 2 provides
instructions for installing the LDT to a mounting bracket.
Chapter 3 provides an overview and wiring instructions.
To further assist you, a glossary is provided at the back of
the manual.
!
CAUTION
Disconnect Power Before Servicing. The
Gemco 955DQ LDT Contains No Serviceable
Components. Consult Factory for Repair or
Replacement.
AMETEK Automation & Process Technologies has
checked the accuracy of this manual at the time it was
approved for printing. However, this manual may not
provide all possible ways of installing and maintaining
the LDT. Any errors found in this manual or additional
possibilities to the installation and maintenance of
the LDT will be added in subsequent editions. Any
comments you may have for the improvement of this
manual are welcomed.
AMETEK reserves the right to revise and redistribute
the entire contents or selected pages of this manual.
All rights to the contents of this manual are reserved
by AMETEK. The BRIK is a registered trademark of
AMETEK.
2
1080 N. Crooks Road • Clawson, MI 48017 • 800.635.0289 • 248.435.0700 • Fax 248.435.8120 • www.AMETEKAPT.com
Page 3

Table of Contents
Chapter 1 Hardware Overview .......................................4
Chapter 2 Installing the LDT........................................... 6
2.1 Mounting Instructions ............................................................6
2.2 Mounting the Magnet Assembly ...........................................6
Chapter 3 Programming & Maintenance ........................7
3.1 Quadrature Output ................................................................7
3.2 Signal Connection Application Note ......................................7
3.3 Quadrature Output Resolution & Speed................................ 8
3.4 955DQ Wiring Connections...................................................9
3.5 Features ................................................................................16
3.6 955DQ ...................................................................................17
3.7 Troubleshooting for 955DQ ...................................................18
3.8 Catalog Numbering System ..................................................19
3.9 Specifications for 955DQ....................................................... 20
3.10 Accessories ..........................................................................21
Glossary ..........................................................................22
1080 N. Crooks Road • Clawson, MI 48017 • 800.635.0289 • 248.435.0700 • Fax 248.435.8120 • www.AMETEKAPT.com
3
Page 4
Chapter 1 Hardware Overview
Overview
The Series 955DQ BRIK with Quadrature Output is an
accurate, auto-tuning, non-contact, Linear Displacement
Transducer in an economical, low profile package. The
transducer utilizes our field proven magnetostrictive
technology to give absolute position, repeatable to .006%
of the sensing distance. The streamlined anodized
aluminum extrusion houses the sensing element and
electronics. The magnet moves over the sensing
element that determines the position and converts it to
incremental outputs.
Features
The 955DQ has a truly unique feature. This LDT has
auto-tuning capability, the ability to sense a magnet other
than the standard slide magnet and adjust its signal
strength accordingly.
There is an indicator LED that is located at the connector
end of the probe and provides visual status information
regarding the operation of the probe. Green indicates
proper or normal operation. Red indicates the loss of
the magnetic signal or a probe failure. When the probe
is in the normal mode of operation, the LED with remain
illuminated continuously.
encoder input or counter card, eliminating costly absolute
encoder converters and special PLC interface modules.
This model can be ordered with 1 to 9999 cycles per inch
of output resolution. The transducer features an input to
re-zero the probe “on the fly”. Another unique feature is
the “Burst” mode. An input on the transducer triggers a
data transfer of all the incremental position data relative
to the transducer’s absolute zero position. This is how
the incremental output can provide absolute functionality.
The “Burst” input can be used to achieve absolute
position updates when power is restored to the system
or anytime an update is needed to re-zero or home the
machine without having to move the machine.
LED Colors
Green Magnet is present and within the active range.
Red Fault, the LDT has lost its signal from the magnet or the
Yellow Used when in the communication/program mode.
magnet has moved into the Null or Dead zone.
Note: The series number on your LDT is a record of all
the specific characteristics that make up your unit. This
includes what interface type it is, its output signal and
range, the type of connector the unit uses, and stroke
length. For a translation of the model number, see
Section 3.8 Catalog Numbering System.
The 955DQ BRIK with Quadrature Output provides an
A quad B digital output signal that is proportional to the
position of the slide magnet assembly along the length
of the probe. The quadrature output makes it possible
to have a direct interface to virtually any incremental
4
1080 N. Crooks Road • Clawson, MI 48017 • 800.635.0289 • 248.435.0700 • Fax 248.435.8120 • www.AMETEKAPT.com
Page 5
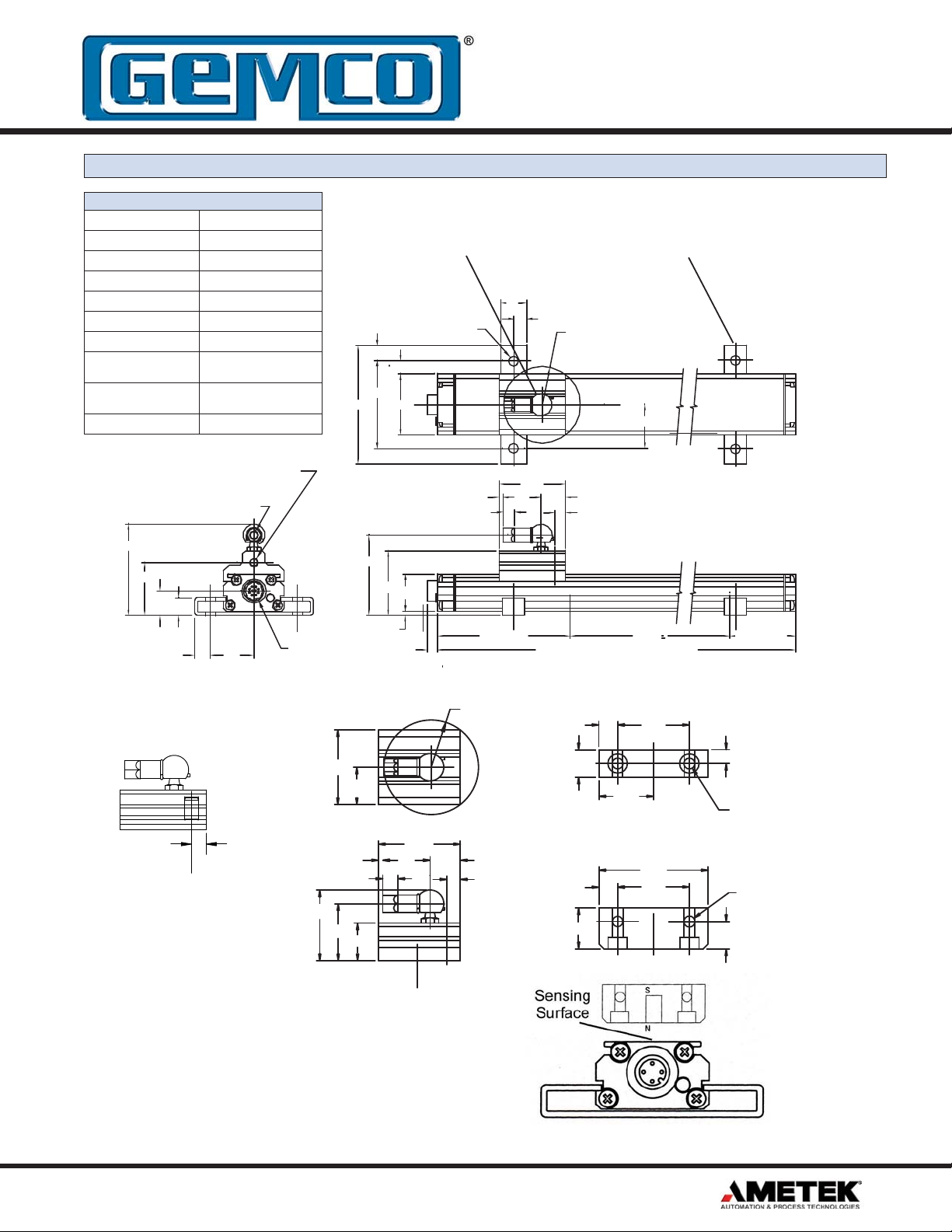
Figure 1.1 Dimension Drawing
Accessories
Item Part Number
Slide Magnet SD0521800
Float Magnet SD0522100
Mounting Foot SD0522000
6 Ft. Cable (Option H) SD0527700L6
12 Ft. Cable (Option H) SD0527700L12
25 Ft. Cable (Option H) SD0527700L25
6 Ft. 12 Pin
(Option E Connector)
12 Ft. 12 Pin
(Option E Connector)
Control Arm 955ARMXX (X = Inches)
2.06
1.19
.55
949023L6
949023L12
M5 X .56 DEEP
ALTERNATE MTG.
HOLE FOR LINKAGE
M5 X .40 DEEP
LINKAGE MTG. HOLE
.40
.98
.36
10 PIN MALE
CONNECTOR
A standard female swivel mounting arm is
provided with the slide magnet assembly.
For extensions and other options contact
AMETEK at 800-635-0289.
.22 MTG. HOLES
2 PER MTG. FOOT
.36
.30
1.97
1.372.68
1.80
1.45
.82
.10
Male Connector
.22
SLIDE MAGNET ASSEMBLY
P/N SD0521800
.60
.30
.87
.08
.28
3.00 NULL
R.87
360 ROTATION
Mounting Brackets (SD0522000) slide in the grooves on the
side of the extruded housing. When tightened down with
fastening hardware the mounting bracket clamps the unit into
place. It is recommended to use one mounting bracket on each
end and every three feet between.
R.87
360 ROTATION
1.00
1.50
.56
.25 TO CENTERLINE MAGNET SENSOR
2.00
L = NULL + STROKE + DEAD ZONE
STROKE
FLOATING MAGNET ASSEMBLY
P/N SD0522100
1.31
.34
1.50
DEADZONE
.50
1.00
TO CENTERLINE
OF MAGNET
.34
.75
2.00
1.31
.25
OF MAGNET SLUG
1.30
1.37
1.04
.08
.68
.28
.69
.87
1.50
.56
.25 TO CENTERLINE
OF MAGNET SENSOR
Note: The North Pole of the magnet
should be pointed towards the probe.
1080 N. Crooks Road • Clawson, MI 48017 • 800.635.0289 • 248.435.0700 • Fax 248.435.8120 • www.AMETEKAPT.com
.25
.20 THRU
.359 C’BORE
.21 DEEP
OTHER END
2 PLACES
.20 THRU
2 PLACES
.50
5
Page 6

Chapter 2 Installing the LDT
2.1 Mounting Instructions
The Series 955DQ can be mounted vertically or
horizontally using SD0522000 mounting brackets. The
mounting brackets slide in the grooves on the lower part
of the extrusion and clamp down when tightened. It is
recommended to use one mounting bracket on each end
and every three feet in between.
Ferro-magnetic material, (material readily magnetized)
should be placed no closer than .25” from the sensing
surface of the LDT.
2.2 Mounting the Magnet Assembly
Before mounting the magnet assembly, you should
consider the following
• Ferromagnetic material should not be placed closer
that 0.25” from the LDT’s sensing surface. Failure
to do so could cause erratic operation. Non-ferrous
materials, such as brass, copper, aluminum,
nonmagnetic stainless steel or plastics, can be
in direct contact with the magnet assembly and
sensing surface without producing any adverse
results.
• Make sure that the magnet is located within
the LDT’s active stroke area. Captive magnet
assemblies should be positioned so that they can
move freely over the entire area of the active stroke
without binding or pushing on the extrusion. Noncaptive magnet assemblies should be situated so
that the magnet is no further than 3/8” from the
sensing surface at any point in the floating magnet
assembly’s movement.
• When using the Floating Magnet assembly
(SD0522100), the magnet should be installed within
3/8” of the sensing surface. The magnet assembly
should also be installed in such a manner that
it remains an even distance from the aluminum
extrusion throughout the entire stroke. Improperly
installed magnets can result in output signal non-
linearity.
6
1080 N. Crooks Road • Clawson, MI 48017 • 800.635.0289 • 248.435.0700 • Fax 248.435.8120 • www.AMETEKAPT.com
Page 7
Chapter 3 Programming & Maintenance
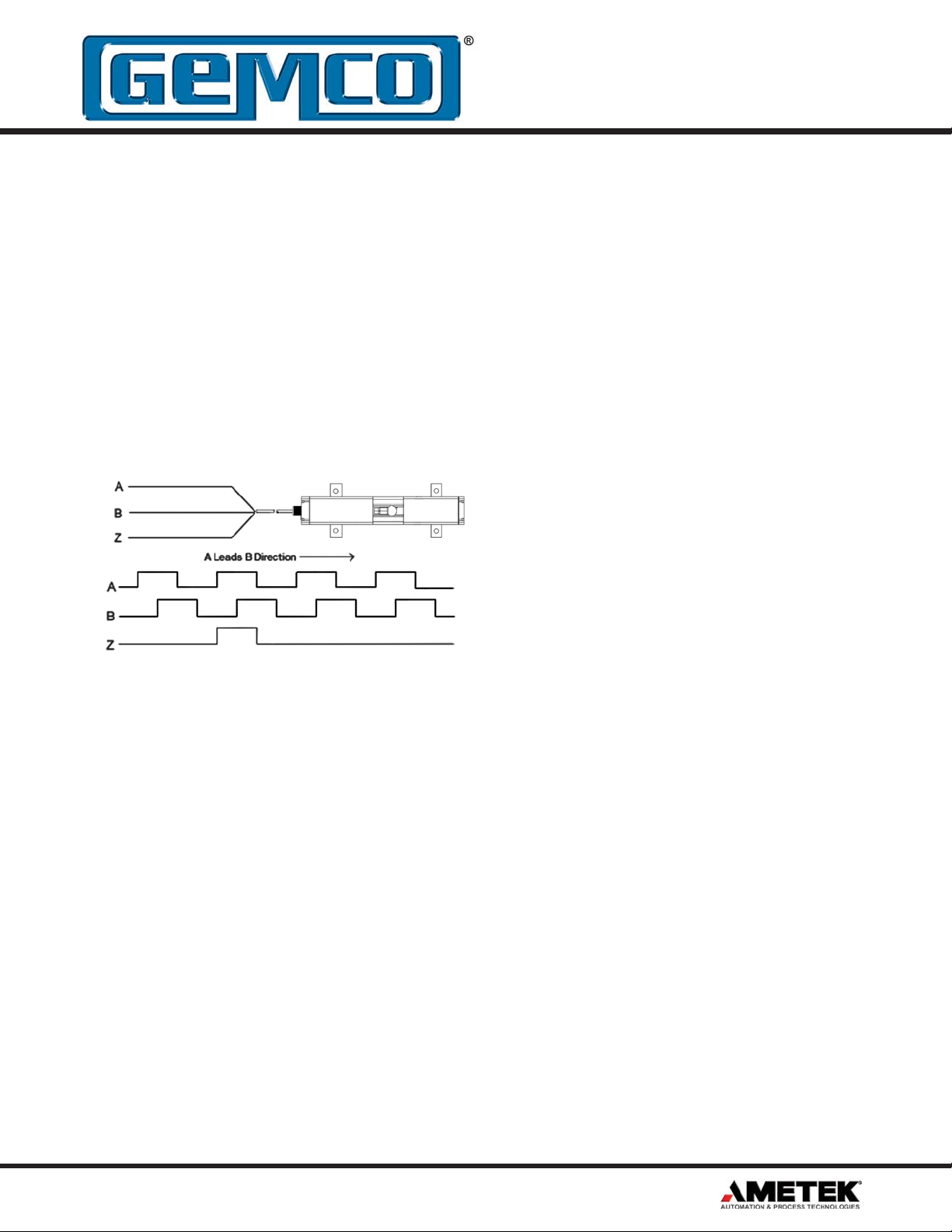
3.1 Quadrature Output
A new method of interfacing magnetostrictive transducers
offers customers an interface as common as analog
with the speed and accuracy of pulsed type signaling.
The GEMCO 955DQ LDT provides quadrature output
directly from the transducer to the controller (see drawing
below). The output from the transducer can be wired
directly to any incremental encoder input card, without
the need for a special converter module or PLC interface
card designed specifically for use with a pulsed output
magnetostrictive transducer.
The quadrature output provides absolute position data
in engineering units. This means that the need for the
calibration constant (wire speed) programming has been
removed, thereby eliminating the possibility of having an
improperly calibrated system. The output signal wires
are driven by differential line drivers, similar to the drivers
used in most magnetostrictive pulsed type transducers,
providing a high degree of noise immunity.
A unique feature of this transducer is a “burst” mode of
operation. An input on the transducer triggers a data
transfer of all the incremental position data relative to
the transducer’s absolute zero position. This can be
used to achieve absolute position updates when power
is restored to the system or anytime an update is needed
to re-zero or home the machine. Additionally, another
input to the transducer can be used to establish a “zero”
position for the transducer.
3.2 Signal Connection Application Note
Overview
This application note will clarify the input and output
signals of the 955DQ quadrature probe.
Inputs
The quadrature probe has two inputs, the “zero” and
“burst” inputs. These inputs are “single ended”. That is,
the connection for each input consists of only one wire,
the corresponding signal wire. For these (single ended)
inputs, the signal is measured with reference to the
power supply ground, which is sometimes referred to as
“common”.
The quadrature probe is available with either +24 VDC
level signal thresholds or TTL level thresholds. The
signal voltage level required to activate the input for the
+24 VDC level signal is proportional to the power supply
voltage that the customer is supplying to the probe. This
level is approximately 41% of the power supply voltage.
For example, if the power supply voltage powering the
probe is exactly 24 VDC, the threshold voltage would be
approximately 9.84 volts.The TTL level threshold signals
are activated when these inputs exceed the typical TTL
level threshold, which is 2.0 VDC.
Additionally, for the 24 VDC level signals, the customer
can specify either a “sourcing” or “sinking” type of input.
A “sourcing” input type is pulled high internal to the probe.
To activate a “sourcing” input, the customer must pull the
signal lower than the threshold voltage to activate the
input. A “sourcing” input is usually driven by a “sinking”
output or a switch connected to ground. A “sinking”
input type is pulled low internal to the probe. To activate
a “sinking” input, the customer must pull the signal
higher than the threshold voltage to activate the input. A
“sinking” input is usually driven by a “sourcing” output or
a switch connected to the power supply.
It is important that the customer drive the signal levels
much greater or lower than the threshold voltages.
Asserting a signal with a voltage level close to the
threshold voltage could induce multiple activations of that
input (or none at all) and therefore produce unexpected
results or probe readings.
1080 N. Crooks Road • Clawson, MI 48017 • 800.635.0289 • 248.435.0700 • Fax 248.435.8120 • www.AMETEKAPT.com
7
Page 8

Outputs
The quadrature probe has three outputs, the “A”, “B”
and “Z” outputs. These outputs are “differential” (also
known as “balanced”). That is, the connection for each
output consists of two signal wires. These are typically
described as the “+” and “-” signals. For example, the
“A” channel consists of “A+” and “A-”. The same applies
to the B and Z channels. For these (differential) outputs,
the signal is measured with reference to the other
signal (i.e. the difference or differential). For example;
if the “A+” signal voltage is greater than the “A-” signal,
channel “A” is a logic “1”. Conversely, if the “A+” signal
voltage is lower than the “A-” signal, channel “A” is a
logic “0”. Again, this applies to the B and Z channels as
well. Differential type signals are much less prone to
interference caused by electrical noise or ground loops
more often found in single ended signal connections.
The differential outputs of the A, B and Z channels are
at RS-422 signal levels on option D (output drivers)
units. RS-422 is a well known TIA/EIA standard and
common interface type for incremental encoders. The
RS-422 receiver channel (on the PLC or controller side
of the connection) typically has what is referred to as
a termination resistor connected across the “+” and “-”
signal pins. The value of the termination resistor is (by
RS-422 specifications) typically 100 ohms. However,
some receivers will work with greater resistance values
and some with no termination resistor at all. For proper
signal integrity, especially at higher data rates (i.e.
quadrature pulse frequency), a termination resistor of no
greater than 1K ohm is recommended.
Driving Single Ended Inputs
When using PLS’s or controllers that are not TTL
compatible output driver option “L” should be used.
Option “L” uses a 0L7272 line driver I.C. The output from
this driver will be 1 volt less than the LDT’s input power.
When physically connecting a differential output to a
single ended input, only use the “+” signal, leaving the
“-” signal unconnected. Do NOT connect the “-”
signals to ground. The “A+, “B+” and “Z+” signals
should be connected to their corresponding inputs.
Insulate and tie back the “-” signals. See figure 3-4 or
3-5, Single Ended Interface.
3.3 Quadrature Output
Resolution & Speed
The internal resolution of the 955DQ Gemco LDT is
0.001”. This would be represented to the encoder
input device by specifying an output resolution of 1,000
cycles per inch for the transducer. Although the typical
resolution is 1,000 cycles per inch (CPI), the transducer
can be ordered with virtually any CPI setting.
For a typical rotary type shaft encoder with incremental
quadrature output, the output frequency of the pulses is
governed by the resolution of the encoder (pulses per
turn) and the rotational speed (RPM) of the encoder. The
output pulses rate from the transducer is stretched out
over the LDT internal update time. The output frequency
must be specified so that it does not exceed the
maximum pulse rate of the encoder input card the sensor
is connected to. The output pulse frequency range can
be ordered from 1KHz to 1MHz.
A differential output can also be used to drive single
ended inputs. Special consideration must be given
to these types of applications. It should be noted the
main signal requirements for an RS-422 signal is the
differential voltage of the “+” relative to the “-” signals
and not necessarily the voltage level of any one of these
signals with respect to ground (or common). To meet
the RS-422 specification, this differential voltage only
needs to be +/- 0.2 volts. However, an RS-422 driver
will typically drive either the “+” or “-” signal to around 3.8
volts with respect to ground. This voltage is more than
sufficient to drive TTL level inputs as well as other low
level inputs. The input voltage level specifications of the
PLC or controller being used should be consulted for the
actual level required.
8
1080 N. Crooks Road • Clawson, MI 48017 • 800.635.0289 • 248.435.0700 • Fax 248.435.8120 • www.AMETEKAPT.com
Page 9
3.4 955DQ Wiring Connections
Once the LDT has been installed, wiring connections can
be made. There are two groups of connections you will
need to make. They are as follows:
• Power Supply Connections (including grounding
and shielding)
• LDT Input/Output Connections
Power Supply/Ground Connections
The 955DQ is available with two different connector
options, either Option H or Option E. Refer to the
part number labeled on your unit to determine which
connector you have. Always observe proper grounding
techniques such as single point grounding and isolating
high voltage (i.e. 120/240 VAC) from low voltage (10-30
VDC cables). Whenever possible, this cable should be
run in conduit by itself.
The power supply common, the cable shield and a
good earth ground should be connected together at the
location of the power supply common.
Figure 3.1 Power Supply Wiring
UNIPOLAR
Single ended
power supply
+13.5 to +30 VDC
+ COM
Pin 2 (red) Pin 1 (black) Connecter Option H
Pin 2 (brown) Pin 7 (blue) Connecter Option E
!
WARNING
Do not route the BRIK with Quadrature Output cable near
high voltage sources.
Option E: Uses a 12-Pin 12mm Euro Cordset with the
shield tied to the coupling nut. The 12-pin connector has
ten conductors of 24ga, with an aluminum/polyester/
aluminum foil with drain wire plus an overall braid of
tinned copper shield. Cable O.D. is .280. To reduce
electrical noise, the shield must be properly used.
Connect the cable’s shield to the controller system GND.
The connector shell on the probe is electrically connected
to the probe housing.
Option H: Uses a 10-Pin HRS connector. The 955DQ
BRIK with connector Option H uses a standard cable,
a multi-conductor Alpha 6334. It has ten conductors of
24ga, with an aluminum/polyester/aluminum foil with
drain wire plus an overall braid of tinned copper shield.
Cable O.D. is .270. To reduce electrical noise the shield
must be properly used. Connect the cable’s shield to
the controller system GND. The cable shield is not
connected at the transducer end.
1080 N. Crooks Road • Clawson, MI 48017 • 800.635.0289 • 248.435.0700 • Fax 248.435.8120 • www.AMETEKAPT.com
9
Page 10
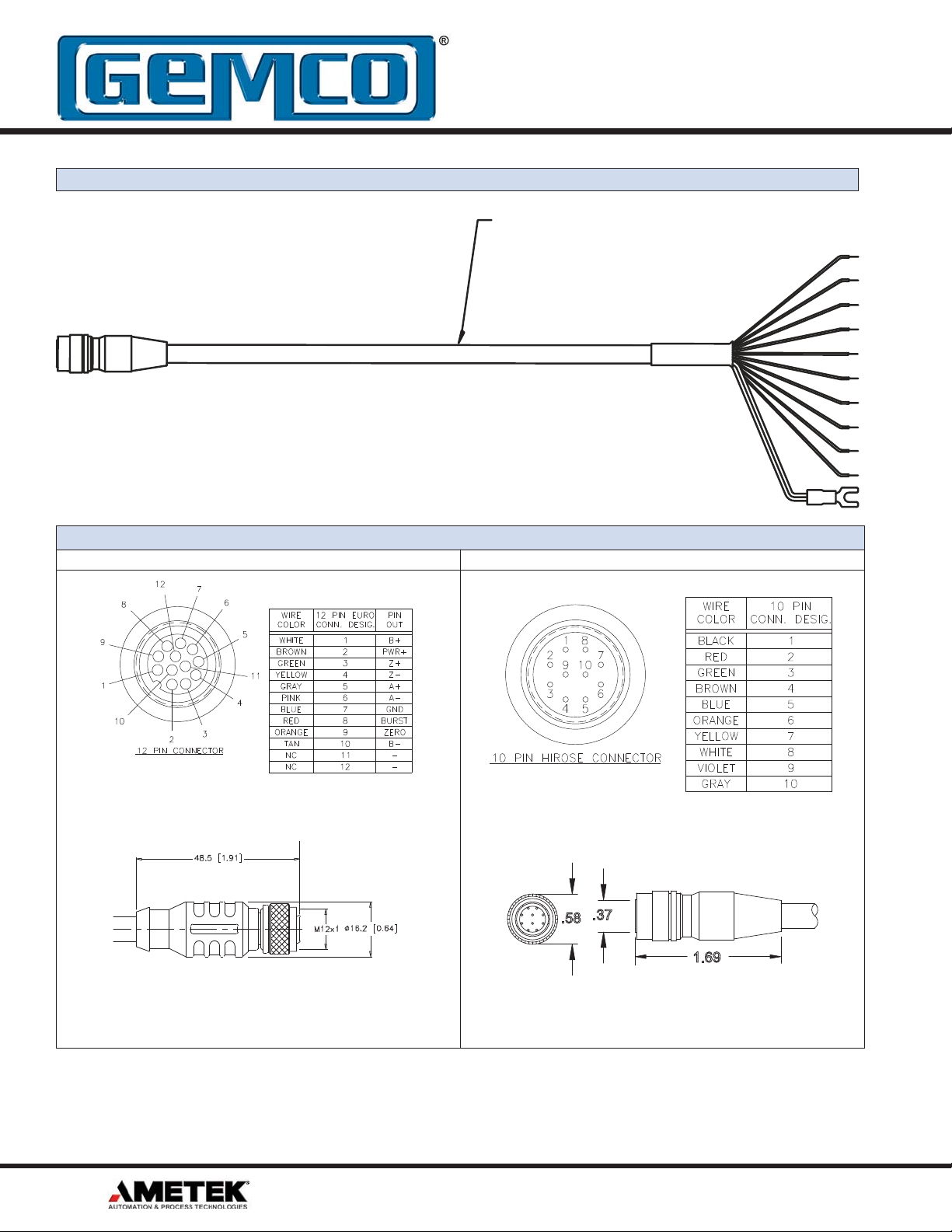
Figure 3.2 Power Supply Wiring
OPTION H
Part Number
SD0527700LXX
Wiring Diagram
Connector Option E Connector Option H
10
Connector View
12 Pin Micro 12mm
Euro Straight Cable
12 Pin Part Number: 949-023LXX
(X = Length in Feet)
Connector View
10 Pin Straight Cable
.37
.58
1.69
Part Number: SD0527700LXX
(X = Length in Feet)
1080 N. Crooks Road • Clawson, MI 48017 • 800.635.0289 • 248.435.0700 • Fax 248.435.8120 • www.AMETEKAPT
.com
Page 11

Figure 3.3 Wiring Diagram
Connector Option E Cable Assembly
Part Number 949-023LXX (X = Length in Feet)
Connector Option H Cable Assembly
Part Number SD0527700XX (X = Length in Feet)
PIN - 1 WHITE
PIN - 2 BROWN
PIN - 3 GREEN
PIN - 4 YELLOW
PIN - 5 GRAY
PIN - 6 PINK
PIN - 7 BLUE
PIN - 8 RED
PIN - 9 ORANGE
PIN - 10 TAN
B+
POWER +
Z+
Z-
A+
A-
GND
BURST INPUT
ZERO INPUT
B-
PIN - 1 BLACK
PIN - 2 RED
PIN - 3 GREEN
PIN - 4 BROWN
PIN - 5 BLUE
PIN - 6 ORANGE
PIN - 7 YELLOW
PIN - 8 WHITE
PIN - 9 VIOLET
PIN - 10 GRAY
COMMON
POWER +
Z+
Z-
A+
A-
B+
BURST INPUT
ZERO INPUT
B-
1080 N. Crooks Road • Clawson, MI 48017 • 800.635.0289 • 248.435.0700 • Fax 248.435.8120 • www.AMETEKAPT.com
11
Page 12
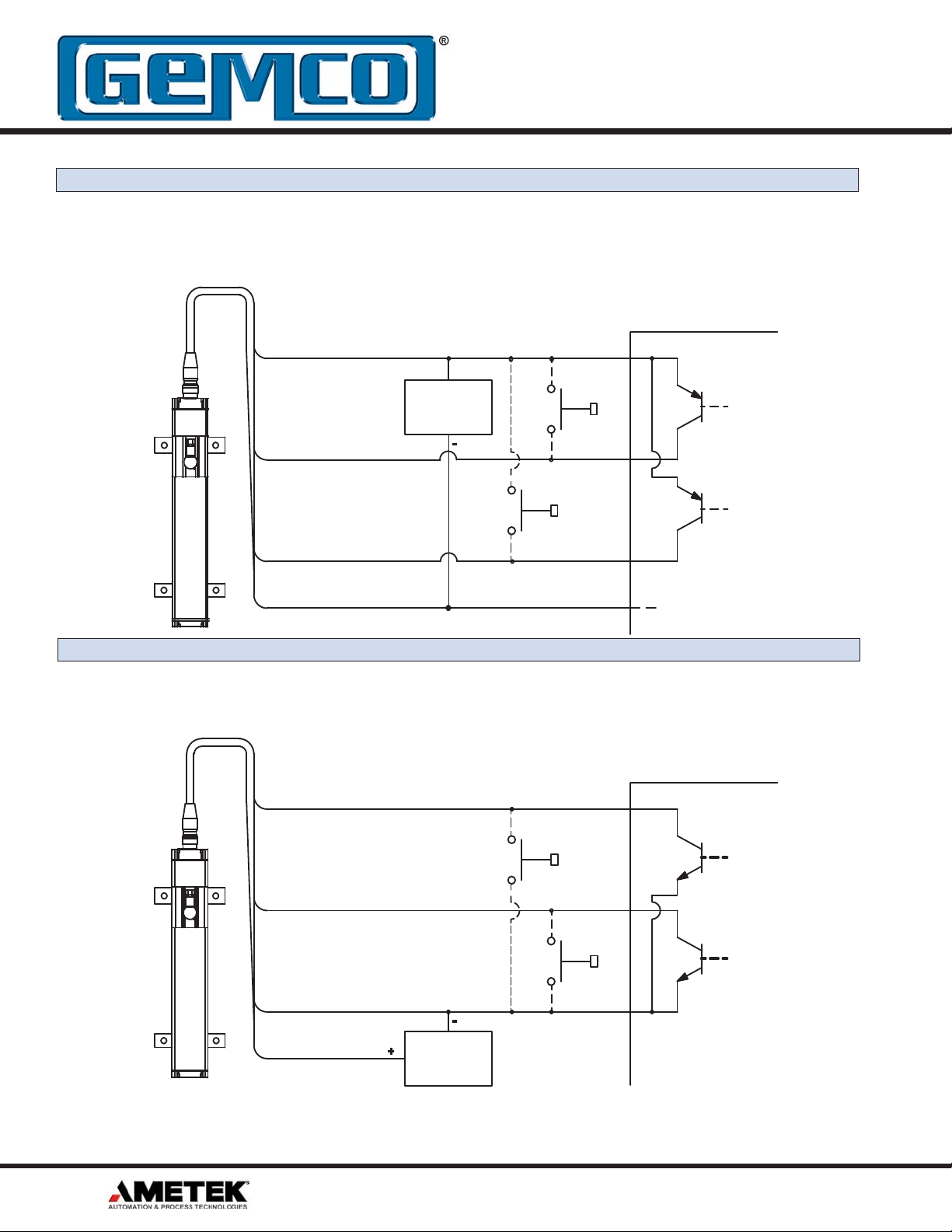
Figure 3.4a Option H Input Connections for Sinking Input
Part Number SD0527700LXX
CABLE ASSY
CABLE ASSY.
X = Length in Feet
P/N SD0527700LXX
Pin-2 RED
955QD
LDT
Pin-9 VIOLET
Pin-8 WHITE
Pin-1 BLACK
Figure 3.4b Option H Input Connections for Sourcing Input
+
POWER
POWER
SUPPLY
SUPPLY
13.5 TO 30V
10 TO 30V
-
TYPICAL SOURCING
OUTPUT INTERFACE
VSOURCE
ZERO
BURST
COMMON
Part Number SD0527700LXX
CABLE ASSY
CABLE ASSY.
X = Length in Feet
P/N SD0527700LXX
Pin-9 VIOLET
955QD
LDT
Pin-8 WHITE
Pin-1 BLACK
Pin-2 RED
+
-
POWER
POWER
SUPPLY
SUPPLY
13.5 TO 30V
10 TO 30V
TYPICAL SINKING
OUTPUT INTERFACE
ZERO
BURST
COMMON
12
1080 N. Crooks Road • Clawson, MI 48017 • 800.635.0289 • 248.435.0700 • Fax 248.435.8120 • www.AMETEKAPT
.com
Page 13
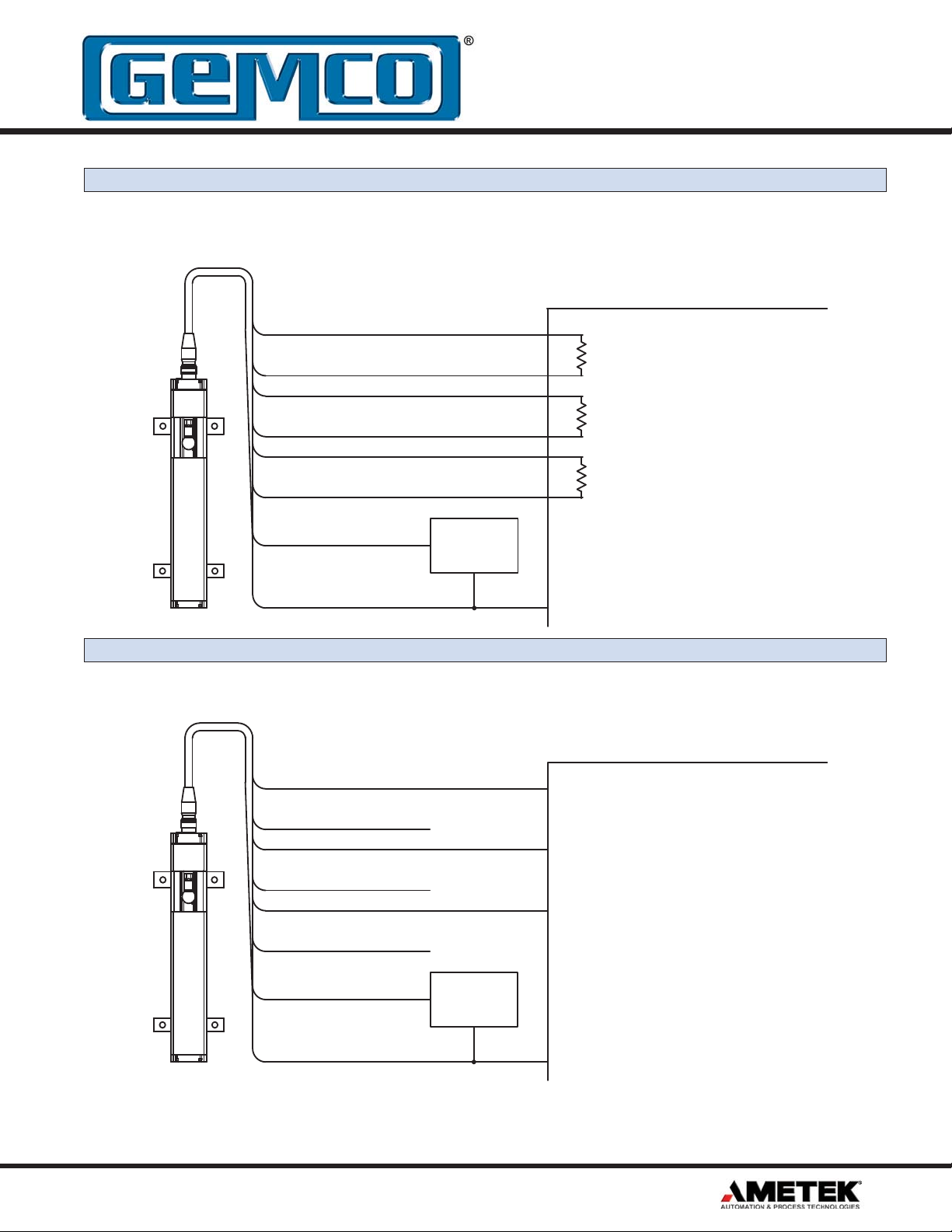
Figure 3.4c Option H Output Connections for Differential Interface
Part Number SD0527700LXX
X = Length in Feet
Pin-5 BLUE
CABLE ASSY
955QD
LDT
Pin-6 ORANGE
Pin-7 YELLOW
Pin-10 GRAY
Pin-3 GREEN
Pin-4 BROWN
Pin-2 RED
Pin-1 BLACK
Figure 3.4d Option H Output Connections for Single Ended Interface
Part Number SD0527700LXX
CABLE ASSY
X = Length in Feet
VSOURCE
COMMON
POWER
SUPPLY
13.5 TO 30V
TYPICAL DIFFERENTIAL INTERFACE
A+
*
COMMON
Rt
*
Rt
Rt
*
*
Rt is the termination resistor
Note:
typically used for RS-422 differential
connections. If these termination
resistors are not internal to the
controller, they should be installed
externally at the connector. If
these are not specified or included
with the controller, use 1K OHM
resistors.
A-
B+
B-
Z+
Z-
TYPICAL SINGLE ENDED INTERFACE
Pin-5 BLUE
**
A-
**
B-
**
Z-
N.C.
N.C.
N.C.
POWER
SUPPLY
13.5 TO 30V
955QD
LDT
Pin-6 ORANGE
Pin-7 YELLOW
Pin-10 GRAY
Pin-3 GREEN
Pin-4 BROWN
Pin-2 RED
Pin-1 BLACK
VSOURCE
COMMON
1080 N. Crooks Road • Clawson, MI 48017 • 800.635.0289 • 248.435.0700 • Fax 248.435.8120 • www.AMETEKAPT.com
A+
B+
Z+
**
COMMON
Tie back and insulate unused
Note:
A-, B- and Z- wires.
13
Page 14

Figure 3.5a Option E Input Connections for Sinking Input
CABLE ASSY
Part Number 949-023LXX
X = Length in Feet
Figure 3.5b Option E Input Connections for Sourcing Input
CABLE ASSY
Part Number 949-023LXX
X = Length in Feet
14
1080 N. Crooks Road • Clawson, MI 48017 • 800.635.0289 • 248.435.0700 • Fax 248.435.8120 • www.AMETEKAPT
.com
Page 15

Figure 3.5c Option E Output Connections for Differential Interface
CABLE ASSY
Part Number 949-023LXX
X = Length in Feet
Figure 3.5d Option E Output Connections for Single Ended Interface
CABLE ASSY
Part Number 949-023LXX
X = Length in Feet
1080 N. Crooks Road • Clawson, MI 48017 • 800.635.0289 • 248.435.0700 • Fax 248.435.8120 • www.AMETEKAPT.com
15
Page 16

3.5 Features
Automatic Gain Control
The Automatic Gain Control feature will automatically
search and find the magnet on power up, if power is
applied without a magnet on the LDT, the LED will turn
RED indicating no magnet signal is detected. Turn power
off and place magnet within the active stroke area. Reapply power.
When using the Floating Magnet assembly (SD0522100),
the magnet should be installed within 3/8” of the sensing
surface. The magnet assembly should also be installed
Burst Mode
so that it remains an even distance from the aluminum
extrusion throughout the entire stroke. Improperly
installed magnets can result in output signal non-linearity.
LED Colors
Green Magnet is present and within the active programmed
range.
Red Fault, the LDT has lost its signal from the magnet or the
magnet has moved into the Null or Dead zone.
Yellow Factory use only. Used to determine when the LDT is in
the programming mode.
This feature enables the system to be absolute even
though data transfer is through an “incremental” method.
In the event of power failure, the controller can be
programmed to automatically send a signal to the probe,
Zero Pulse
By sending a signal to the probe at any point in the
stroke, a new zero point can be established. When using
the burst input, the absolute position provided will be
relative to the programmed zero position. In probes with
volatile storage the zero point will be kept until a new
which will then respond with the current position data.
An input signal to the probe will cause a “burst” of data,
representing the absolute position, to be fed back to the
controller.
zero pulse is sent or until the probe loses power. Probes
with nonvolatile storage will store the zero position even if
you lose power. The nonvolatile zero can be set 100,000
times; the volatile zero can be set an infinite number of
times.
16
Signal Types Needed for Burst & Zero Inputs
E = Sinking (PLC Sourcing Outputs)
C = Sourcing (PLC Sinking Outputs)
T = TTL
See section 3.9 Specifications, for more information.
1080 N. Crooks Road • Clawson, MI 48017 • 800.635.0289 • 248.435.0700 • Fax 248.435.8120 • www.AMETEKAPT
.com
Page 17

3.6 955DQ
Frequency or Pulse Rate
Selecting the proper frequency in the LDT’s part number
is very important. The 955DQ has an internal update
time of 1 millisecond on LDT’s less than 60” in length and
approximately 2 milliseconds on the units greater than
60” in length. The LDT will stretch the amount of pulses
travelled over the update rate. All incremental pulses
must be transmitted before the LDT will interrogate itself
again. The frequency or pulse rate of the 955DQ is factory set from 1KHz - 1.00MHz, consult part number for
your model. The input for the PLC or display will determine the frequency needed.
Example: If your PLC High Speed counter card or display accepts a 1MHz encoder input, the choices are
A1 = 1KHz
A2 = 2KHz
A3 = 5KHz
F1 = 10KHz
F2 = 25KHz
F3 = 50KHz
F4 = 75KHz
F6 = 150KHz
F7 = 250KHz
F8 = 500KHz
F9 = 1.00MHz
F5 = 100KHz
Output Drivers
The 955DQ BRIK uses a 0L7272 line driver IC. Your LDT
was configured at the factory for either a TTL level output
or a 13.5 - 30 VDC level output. Refer to label on LDT for
your output type.
D = Differential RS-422 line driver, TTL compatible
L = Differential line driver 13.5 - 30VDC
V out = V in (LDT Power) -1 volt
Option D has a 5 volt TTL level output regardless of input
power.
Option L has an output of 1 volt less than probe input
power. This option is used when driving higher voltage
input cards and is not TTL compatible.
Note: If your controller’s maximum input frequency falls
between two available frequencies, choose the lower
frequency.
1080 N. Crooks Road • Clawson, MI 48017 • 800.635.0289 • 248.435.0700 • Fax 248.435.8120 • www.AMETEKAPT.com
17
Page 18

3.7 Troubleshooting for 955DQ
Troubleshooting describes common problems that
may occur when installing the LDT and offers possible
solutions to these problems. If, after reading this
appendix, you are unable to resolve a problem, contact
our technical support department at 1-800-635-0289.
General Checks
Make sure that the magnet is located within the LDT’s
active stroke area. Captive magnet assemblies should
be positioned so that they can move freely over the entire
area of the active stroke without binding or pushing on
the extrusion. Non-captive magnet assemblies should be
situated so that the magnet is no further than 3/8” from
the sensing surface at any point in the floating magnet
assembly’s movement.
Note: Ferromagnetic material (material readily
magnetized) should be located no closer than 0.25” from
the sensing surface of the LDT. This includes mounting
brackets, magnet spacers, magnet brackets, and
mounting screws. Ferromagnetic material can distort the
magnetic field, causing adverse operation or failure of the
LDT.
Check all LDT wires for continuity and/or shorts. It
is preferable that the cable between the LDT and the
interface device be one continuous run. If you are using
a junction box, it is highly recommended that the splice
junction box be free of AC and/or DC transient-producing
lines. The shield should be carried through the splice
and terminated at the interface device end.
Power Supply Check
This section will help you to determine if your power
supply is adequate for the LDT to operate properly, or if
the LDT’s cable has a short or open.
In order for the 955DQ to operate properly, the external
power supply must provide a level between 13.5 to
30 VDC. A power supply providing voltage above this
specified range may damage the LDT. A power supply
providing power below this specified range will not be
sufficient to power the LDT. When powering more than
one BRIK on a single power supply, remember that each
BRIK requires three (2.5) watts of power maximum (2
watts typical). The amount of current draw will vary
based on the input voltage used. To calculate the current
draw for a particular LDT, divide the LDT wattage by the
input voltage. For example, 2 watts divided by 24 VDC
equals 104 mA.
If your LDT is not operating properly, the LDT’s cable
may have an open or short, or the power supply is not
supplying sufficient power. To verify this, perform the
following steps:
1. Turn the power supply off.
2. Remove the mating connector from the LDT.
3. Turn the power supply on.
4. Using a digital voltmeter, check from power supply
common (GND) and Power Supply + (Vsource) from
the mating end of the cable for a level between +13.5
and +30 VDC.
If reading is between 13.5 and 30 VDC, turn power
supply off and go to step 7. If reading is below 13.5 VDC,
either your power supply is not providing enough power
or the LDT’s cable possibly has a short/open. Readings
of no voltage or minimal voltage (less than 5 volts) may
be due to short/open in the cable. If reading is not
between 13.5 and 30 VDC, go to step 5. If reading is
above 30 VDC, adjust power supply or replace.
5. Turn the power supply off.
6. Check the continuity of the individual wires of the
cable between the power supply and the LDT. Check
for continuity from one end of the cable to the other.
Also verify that no shorts exist between pins.
7. Reconnect the mating connector to the LDT.
8. Turn power supply on.
9. Using a digital voltmeter, check the power supply’s “+”
and “-” terminals for a voltage between
13.5 and 30 VDC.
Low voltage readings may indicate a power supply with
a wattage (current) rating that is too low. (Each LDT
requires 2.5 watts). If the cabling checks out in step 6
and your voltage is below 13.5 VDC, check your power
supply current rating. If voltage is between 13.5 to 30
VDC and the LDT is still inoperative, contact factory.
18
1080 N. Crooks Road • Clawson, MI 48017 • 800.635.0289 • 248.435.0700 • Fax 248.435.8120 • www.AMETEKAPT
.com
Page 19
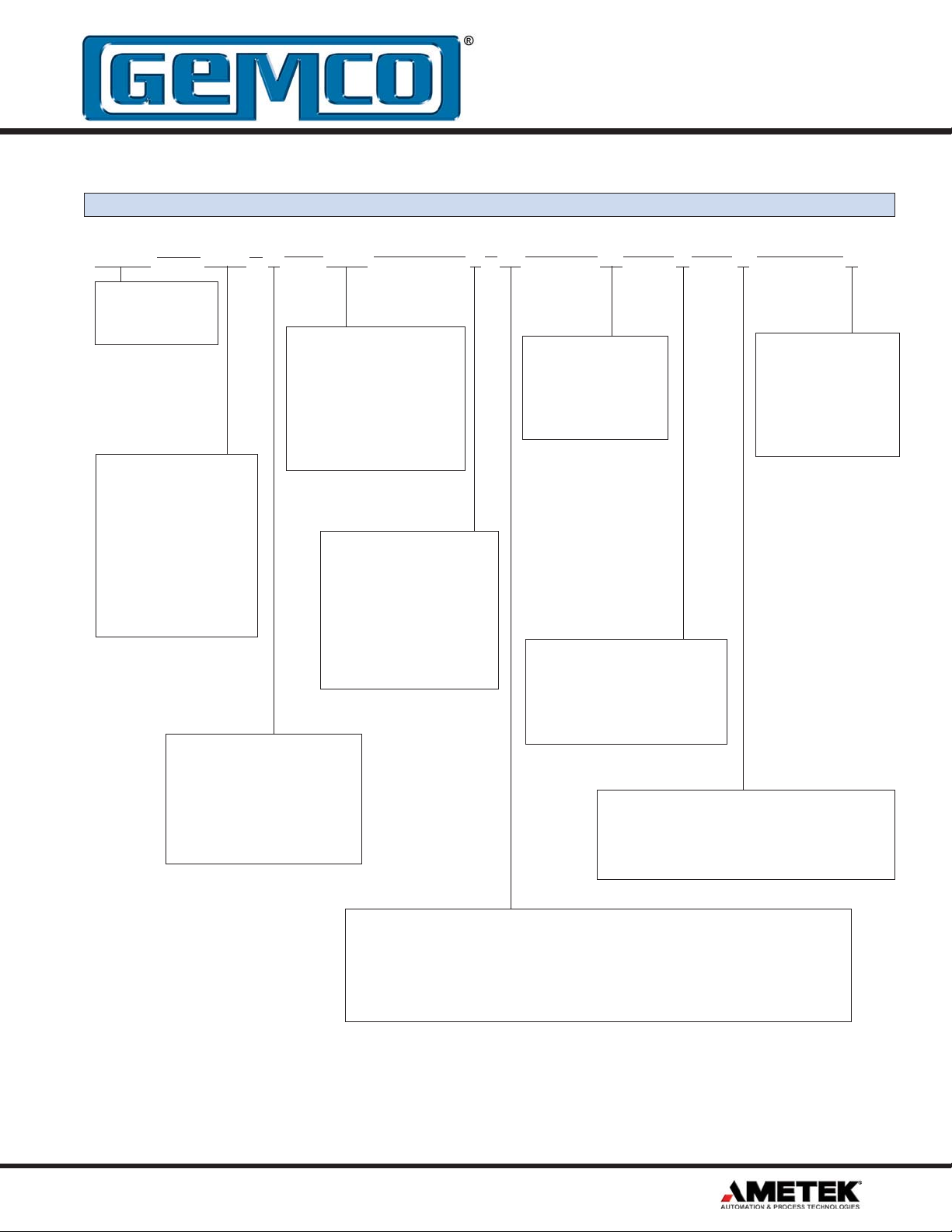
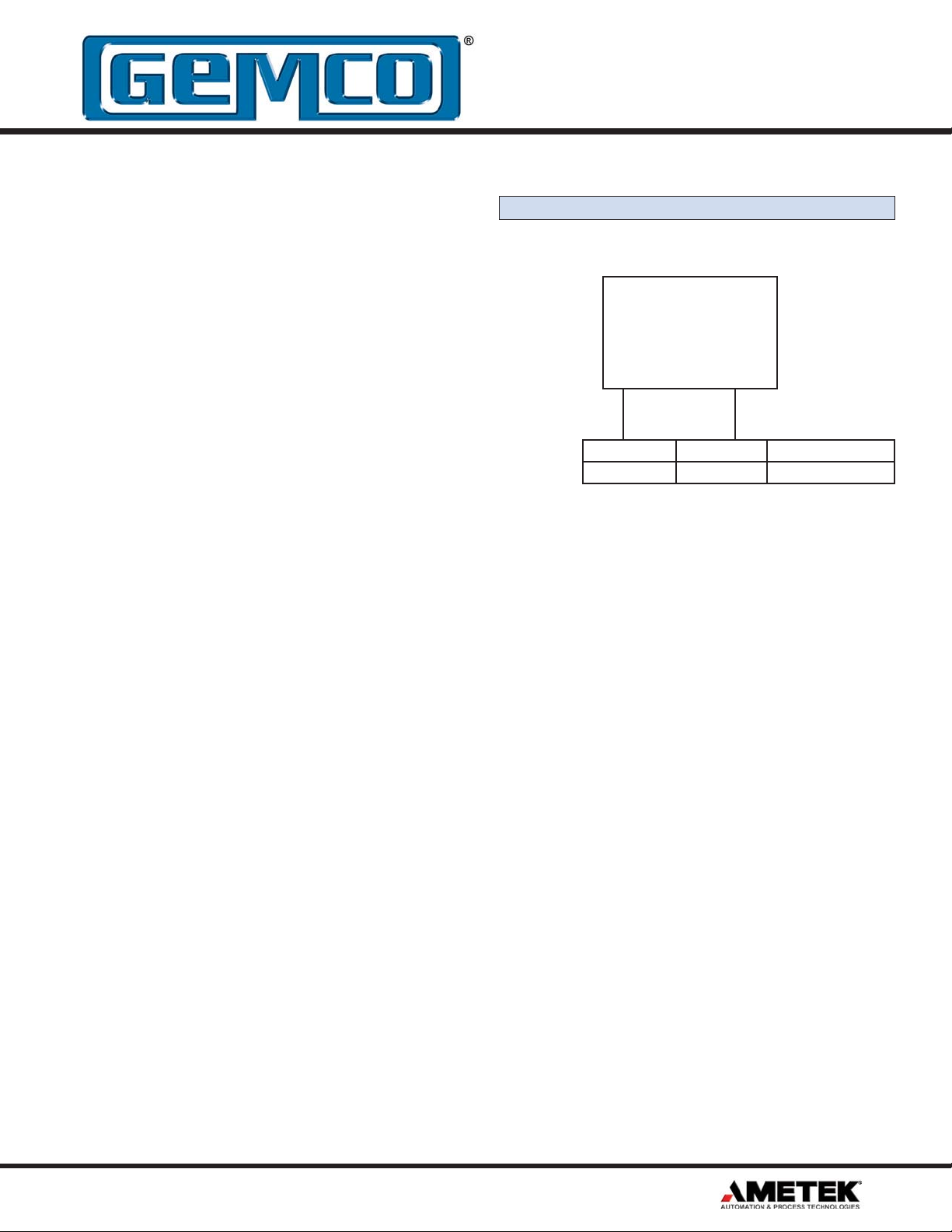
3.8 Catalog Numbering System
Part Numbering
955DQ 0120 E 1000 E F7 X1 N D X
955DQ BRIK
Quadrature
Output
Stroke Length
Insert stroke length to 0.1
inch. Enter as a four-place
number. Example A 12.0”
stroke enters as 0120. To
convert a metric stroke in
millimeters, multiply millimeter value by 0.03937
to arrive at inch value.
Connector Style
H = HRS
Environmental Connector
E = Euro 12 Pin,
12mm Connector.
Consult factory for others.
Output Resolution
Cycles per inch, maximum
internal resolution is .001
inches. 1000 standard (Available range is 0001 through
9999). Consult factory for for
ranges above 9999.
Input Type
E = Sinking
(Typically used with sourcing
output type)
C = Sourcing
(Typically used with sinking
output type)
T = TTL Level
Output Mode
X1 = X1 Quadrature
D1 = Dual Magnet,
Difference between
magnets.
Zero Offset Storage
V = Volatile (nonretentive)
N = Nonvolatile
(retentive, 100,000 storage cycles
maximum)
Output Drivers
D = Differential RS422 line driver, TTL compatible.
L = Differential line driver 13.5 to 30 VDC,
V out = V in (LDT Power) - 1 Volt.
Options
X = None
E = Wet environment.
Electronics sealed to
IP68 Rating. Connector
Option E only.
Quadrature Cycle Output
Frequency Range
A1 = 1 KHz
A2 = 2 KHz
A3 = 5 KHz
F1 = 10 KHz
F2 = 25 KHz
F3 = 50 KHz
F4 = 75 KHz
F5 = 100 KHz
F6 = 150 KHz
F7 = 250 KHz
F8 = 500 KHz
F9 = 1.0 MHz
Note: Contact our Technical Support at 1-800-635-0289
for custom configurations.
1080 N. Crooks Road • Clawson, MI 48017 • 800.635.0289 • 248.435.0700 • Fax 248.435.8120 • www.AMETEKAPT.com
19
Page 20

3.9 Specifications for 955DQ
Null Zone
Dead Zone
Extrusion Assembly
Connector
Sensor Length
Agency Approval
Shock & Vibration
Input Voltage
Current Draw
Nonlinearity
Repeatability
Hysteresis
Operating Temperature
Storage Temperature
Drivers
Option D
General Specifications
3.00”
2.00”
Anodized Aluminum with gasket seals, IP 67, IP 68 Optional
Option H - HRS-Style Standard (quick connect/disconnect) Connector
Option E - 12 Pin, 12mm Euro Style Connector
5” to 180”
CE
Random Vibration MIL-STD 810E, 10Grms random, 20Hz - 2K Hz
Shock Tested to 40G
Electrical Specifications
Unipolar 13.5 to 30 VDC
2.5 watts maximum
+/- 0.05% of full stroke
+/- 0.006% of full stroke
+/- 0.02% of full stroke
-20° to 70° C
-40° to 85° C
1. Quadrature A RS-422 differential
2. Quadrature B RS-422 differential
3. Zero (index) position RS-422 differential
Maximum 5 volts, minimum 2 volts into a 50 ohm load (TTL compatible)
Option L
Digital Input
Update Time
1. Quadrature A differential line driver
2. Quadrature B differential line driver
3. Zero (index) position differential line driver
Maximum 30 VDC, min 13.5 VDC, driver 0L7272
V out = V in (LDT Power) - 1 volt
1. Zero position set 5 - 30 volts Source or Sink
2. Burst mode input 5 - 30 volts Source or Sink
Input impedance 5 K ohms
Sink threshold Input < 0.41 * Power Supply Voltage
i.e. 0.41 x 24 VDC Power Supply = < 9.84 VDC
Source threshold Input > 0.41 * Power Supply Voltage
i.e. 0.41 x 24 VDC Power Supply = > 9.84 VDC
TTL threshold Input > 2.1 Volts
40” or less
4
1” to 100” 2mS (Stroke Lengths 41” to 100”)
101” to 150” 3mS (Stroke Lengths 101” to 150”)
151” to 180” 4mS (Stroke Lengths 151” to 180”)
Specifications are subject to change and are based on a typical 36” LDT
1mS (Stroke Lengths 5” to 40”)
20
1080 N. Crooks Road • Clawson, MI 48017 • 800.635.0289 • 248.435.0700 • Fax 248.435.8120 • www.AMETEKAPT
.com
Page 21

3.10 Accessories
OF MAGNET SLUG
Mounting Foot
Part Number SD0522000
0.2
(4 Holes)
.6
.3
Slide Magnet Assembly
Part Number SD0521800
1.37
.68
.25
.08
.28
1.30
1.04
.69
.87
R.87
360 ROTATION
1.50
.56
.25 TO
CENTERLINE
OF MAGNET
SENSOR
Cable Option H
Part Number SD0527700LXX
X = Length in Feet
.34
.50
1.00
TO CENTERLINE
OF MAGNET
.34
.75
Floating Magnet Assembly
Part Number SD0522100
1.31
.25
.20 THRU
.359 C’BORE
.21 DEEP
OTHER END
2 PLACES
2.00
1.31
.50
.20 THRU
2 PLACES
Cable Option E
Part Number 949-023LXX
X = Length in Feet
1.9
.4
2.6
.58
.37
1.69
1080 N. Crooks Road • Clawson, MI 48017 • 800.635.0289 • 248.435.0700 • Fax 248.435.8120 • www.AMETEKAPT.com
21
Page 22

955DQ Glossary
Active Stroke Area The area on the extrusion between the Null and Dead Zone on which the magnet assembly
Burst Input An input signal to the probe will cause a “burst” of data, representing the absolute position to be
Dead Zone
Floating Magnet
Incremental
Input Type
Non-volatile
Null Zone
Output Driver
Output Resolution Used to determine amount of pulses per inch.
Quadrature
Quadrature Cycle Output Frequency
RS-422 Differential
Slide Magnet Assembly
moves.
fed to the controller.
An area usually 2” from the end of the extrusion where sensing of the magnet is not possible.
A non-ferrous assembly that contains the magnet that moves across the LDT’s sensing surface
in a non-contact manner.
A relative position feedback device whose signal is always referenced to the zero position. The
LDT produces a digital, square wave pulse train that is fed into an up/down counter chip or
clock to derive position.
Used to determine input type for “burst” and “zero” modes. i.e.; sinking, sourcing or TTL.
Position is held in memory and will not be lost on power down.
An area usually covering 3.00” on the extrusion beginning at the connector end.
Used to determine output type of A, B and Z.
Two output channels out of phase by 90 electrical degrees.
The maximum frequency at which the pulse rate is transmitted out of the probe.
Differential line driver.
A non-ferrous assembly that moves across the LDT’s sensing surface.
Unipolar
Volatile
Wire Speed
Zero Pulse
A power supply that provides a single voltage.
Position held in memory that is lost on power down.
The average time it takes a pulse to travel one inch on the LDT’s wire.
By sending a signal to the probe at any time in the stroke a new zero point can be established.
22
1080 N. Crooks Road • Clawson, MI 48017 • 800.635.0289 • 248.435.0700 • Fax 248.435.8120 • www.AMETEKAPT
.com
Page 23

Notes:
1080 N. Crooks Road • Clawson, MI 48017 • 800.635.0289 • 248.435.0700 • Fax 248.435.8120 • www.AMETEKAPT.com
23
Page 24

Other Products
Copyright 2004 by AMETEK AUTOMATION & PROCESS TECHNOLOGIES.
All Rights Reserved. Made in the USA.
1080 N. Crooks Road, Clawson, MI 48017-1097
Phone 248-435-0700 Toll Free 800-635-0289
Fax 248-435-8120 www.AMETEKAPT.com
955DQ.M1R1
3/08.Z169
PQ
 Loading...
Loading...