

Page 1
Software Optimization
Guide
for
AMD64 Processors
25112Publication # 3.06Revision:
September 2005Issue Date:
Page 2

© 2001 – 2005 Advanced Micro Devices, Inc. All rights reserved.
The contents of this document are provided in connection with Advanced Micro Devices,
Inc. (“AMD”) products. AMD makes no representations or warranties with respect to the
accuracy or completeness of the contents of this publication and reserves the right to make
changes to specifications and product descriptions at any time without notice. No license,
whether express, implied, arising by estoppel or otherwise, to any intellectual property
rights is granted by this publication. Except as set forth in AMD’s Standard Terms and
Conditions of Sale, AMD assumes no liability whatsoever, and disclaims any express or
implied warranty, relating to its products including, but not limited to, the implied warranty of merchantability, fitness for a particular purpose, or infringement of any intellectual property right.
AMD’s products are not designed, intended, authorized or warranted for use as components in systems intended for surgical implant into the body, or in other applications
intended to support or sustain life, or in any other application in which the failure of
AMD’s product could create a situation where personal injury, death, or severe property or
environmental damage may occur. AMD reserves the right to discontinue or make changes
to its products at any time without notice.
Trademarks
AMD, the AMD Arrow logo, AMD Athlon, AMD Opteron, and combinations thereof, 3DNow! and AMD-8151 are trademarks of
Advanced Micro Devices, Inc.
HyperTransport is a licensed trademark of the HyperTransport Technology Consortium.
Microsoft is a registered trademark of Microsoft Corporation.
MMX is a trademark of Intel Corporation.
Other product names used in this publication are for identification purposes only and may be trademarks of their respective companies.
Page 3
25112 Rev. 3.06 September 2005
Software Optimization Guide for AMD64 Processors
Contents
Revision History . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .xv
Chapter 1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1
1.1 Intended Audience . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1
1.2 Getting Started Quickly . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1
1.3 Using This Guide . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2
1.4 Important New Terms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4
1.5 Key Optimizations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6
Chapter 2 C and C++ Source-Level Optimizations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7
2.1 Declarations of Floating-Point Values . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .9
2.2 Using Arrays and Pointers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .10
2.3 Unrolling Small Loops . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .13
2.4 Expression Order in Compound Branch Conditions . . . . . . . . . . . . . . . . . . . . . . . . .14
2.5 Long Logical Expressions in If Statements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .16
2.6 Arrange Boolean Operands for Quick Expression Evaluation . . . . . . . . . . . . . . . . . .17
2.7 Dynamic Memory Allocation Consideration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .19
2.8 Unnecessary Store-to-Load Dependencies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .20
2.9 Matching Store and Load Size . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .22
2.10 SWITCH and Noncontiguous Case Expressions . . . . . . . . . . . . . . . . . . . . . . . . . . . .25
2.11 Arranging Cases by Probability of Occurrence . . . . . . . . . . . . . . . . . . . . . . . . . . . . .28
2.12 Use of Function Prototypes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .29
2.13 Use of const Type Qualifier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .30
2.14 Generic Loop Hoisting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .31
2.15 Local Static Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .34
2.16 Explicit Parallelism in Code . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .35
2.17 Extracting Common Subexpressions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .37
2.18 Sorting and Padding C and C++ Structures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .39
2.19 Sorting Local Variables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .41
Contents iii
Page 4

Software Optimization Guide for AMD64 Processors
25112 Rev. 3.06 September 2005
2.20 Replacing Integer Division with Multiplication . . . . . . . . . . . . . . . . . . . . . . . . . . . . .43
2.21 Frequently Dereferenced Pointer Arguments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .44
2.22 Array Indices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .46
2.23 32-Bit Integral Data Types . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .47
2.24 Sign of Integer Operands . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .48
2.25 Accelerating Floating-Point Division and Square Root . . . . . . . . . . . . . . . . . . . . . . .50
2.26 Fast Floating-Point-to-Integer Conversion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .52
2.27 Speeding Up Branches Based on Comparisons Between Floats . . . . . . . . . . . . . . . .54
2.28 Improving Performance in Linux Libraries . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .57
Chapter 3 General 64-Bit Optimizations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .59
3.1 64-Bit Registers and Integer Arithmetic . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .60
3.2 64-Bit Arithmetic and Large-Integer Multiplication . . . . . . . . . . . . . . . . . . . . . . . . .62
3.3 128-Bit Media Instructions and Floating-Point Operations . . . . . . . . . . . . . . . . . . . .67
3.4 32-Bit Legacy GPRs and Small Unsigned Integers . . . . . . . . . . . . . . . . . . . . . . . . . .68
Chapter 4 Instruction-Decoding Optimizations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .71
4.1 DirectPath Instructions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .72
4.2 Load-Execute Instructions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .73
4.2.1 Load-Execute Integer Instructions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .73
4.2.2 Load-Execute Floating-Point Instructions with Floating-Point Operands . . .74
4.2.3 Load-Execute Floating-Point Instructions with Integer Operands . . . . . . . . .74
4.3 Branch Targets in Program Hot Spots . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .76
4.4 32/64-Bit vs. 16-Bit Forms of the LEA Instruction . . . . . . . . . . . . . . . . . . . . . . . . . .77
4.5 Take Advantage of x86 and AMD64 Complex Addressing Modes . . . . . . . . . . . . . .78
4.6 Short Instruction Encodings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .80
4.7 Partial-Register Reads and Writes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .81
4.8 Using LEAVE for Function Epilogues . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .83
4.9 Alternatives to SHLD Instruction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .85
4.10 8-Bit Sign-Extended Immediate Values . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .87
4.11 8-Bit Sign-Extended Displacements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .88
4.12 Code Padding with Operand-Size Override and NOP . . . . . . . . . . . . . . . . . . . . . . . .89
iv Contents
Page 5

25112 Rev. 3.06 September 2005
Software Optimization Guide for AMD64 Processors
Chapter 5 Cache and Memory Optimizations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .91
5.1 Memory-Size Mismatches . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .92
5.2 Natural Alignment of Data Objects . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .95
5.3 Cache-Coherent Nonuniform Memory Access (ccNUMA) . . . . . . . . . . . . . . . . . . . .96
5.4 Multiprocessor Considerations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .99
5.5 Store-to-Load Forwarding Restrictions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .100
5.6 Prefetch Instructions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .104
5.7 Streaming-Store/Non-Temporal Instructions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .112
5.8 Write-combining . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .113
5.9 L1 Data Cache Bank Conflicts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .114
5.10 Placing Code and Data in the Same 64-Byte Cache Line . . . . . . . . . . . . . . . . . . . . .116
5.11 Sorting and Padding C and C++ Structures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .117
5.12 Sorting Local Variables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .119
5.13 Memory Copy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .120
5.14 Stack Considerations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .122
5.15 Cache Issues when Writing Instruction Bytes to Memory . . . . . . . . . . . . . . . . . . . .123
5.16 Interleave Loads and Stores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .124
Chapter 6 Branch Optimizations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .125
6.1 Density of Branches . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .126
6.2 Two-Byte Near-Return RET Instruction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .128
6.3 Branches That Depend on Random Data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .130
6.4 Pairing CALL and RETURN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .132
6.5 Recursive Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .133
6.6 Nonzero Code-Segment Base Values . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .135
6.7 Replacing Branches with Computation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .136
6.8 The LOOP Instruction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .141
6.9 Far Control-Transfer Instructions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .142
Chapter 7 Scheduling Optimizations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .143
7.1 Instruction Scheduling by Latency . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .144
7.2 Loop Unrolling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .145
Contents v
Page 6

Software Optimization Guide for AMD64 Processors
25112 Rev. 3.06 September 2005
7.3 Inline Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .149
7.4 Address-Generation Interlocks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .151
7.5 MOVZX and MOVSX . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .153
7.6 Pointer Arithmetic in Loops . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .154
7.7 Pushing Memory Data Directly onto the Stack . . . . . . . . . . . . . . . . . . . . . . . . . . . .157
Chapter 8 Integer Optimizations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .159
8.1 Replacing Division with Multiplication . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .160
8.2 Alternative Code for Multiplying by a Constant . . . . . . . . . . . . . . . . . . . . . . . . . . .164
8.3 Repeated String Instructions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .167
8.4 Using XOR to Clear Integer Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .169
8.5 Efficient 64-Bit Integer Arithmetic in 32-Bit Mode . . . . . . . . . . . . . . . . . . . . . . . . .170
8.6 Efficient Implementation of Population-Count Function in 32-Bit Mode . . . . . . . .179
8.7 Efficient Binary-to-ASCII Decimal Conversion . . . . . . . . . . . . . . . . . . . . . . . . . . .181
8.8 Derivation of Algorithm, Multiplier, and Shift Factor for Integer
Division by Constants . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .186
8.9 Optimizing Integer Division . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .192
Chapter 9 Optimizing with SIMD Instructions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .193
9.1 Ensure All Packed Floating-Point Data are Aligned . . . . . . . . . . . . . . . . . . . . . . . . .195
9.2 Improving Scalar SSE and SSE2 Floating-Point Performance with MOVLPD and
MOVLPS When Loading Data from Memory . . . . . . . . . . . . . . . . . . . . . . . . . . . . .196
9.3 Use MOVLPx/MOVHPx Instructions for Unaligned Data Access . . . . . . . . . . . . .198
9.4 Use MOVAPD and MOVAPS Instead of MOVUPD and MOVUPS . . . . . . . . . . .199
9.5 Structuring Code with Prefetch Instructions to Hide Memory Latency . . . . . . . . . .200
9.6 Avoid Moving Data Directly Between
General-Purpose and MMX™ Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .206
9.7 Use MMX™ Instructions to Construct Fast Block-Copy
Routines in 32-Bit Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .207
9.8 Passing Data between MMX™ and 3DNow!™ Instructions . . . . . . . . . . . . . . . . . .208
9.9 Storing Floating-Point Data in MMX™ Registers . . . . . . . . . . . . . . . . . . . . . . . . . .209
9.10 EMMS and FEMMS Usage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .210
vi Contents
Page 7

25112 Rev. 3.06 September 2005
Software Optimization Guide for AMD64 Processors
9.11 Using SIMD Instructions for Fast Square Roots and Fast
Reciprocal Square Roots . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .211
9.12 Use XOR Operations to Negate Operands of SSE, SSE2, and
3DNow!™ Instructions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .215
9.13 Clearing MMX™ and XMM Registers with XOR Instructions . . . . . . . . . . . . . . . .216
9.14 Finding the Floating-Point Absolute Value of Operands of SSE, SSE2, and
3DNow!™ Instructions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .217
9.15 Accumulating Single-Precision Floating-Point Numbers Using SSE, SSE2,
and 3DNow!™ Instructions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .218
9.16 Complex-Number Arithmetic Using SSE, SSE2, and 3DNow!™ Instructions . . . .221
9.17 Optimized 4 × 4 Matrix Multiplication on 4 × 1 Column Vector Routines . . . . . . .230
Chapter 10 x87 Floating-Point Optimizations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .237
10.1 Using Multiplication Rather Than Division . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .238
10.2 Achieving Two Floating-Point Operations per Clock Cycle . . . . . . . . . . . . . . . . . .239
10.3 Floating-Point Compare Instructions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .244
10.4 Using the FXCH Instruction Rather Than FST/FLD Pairs . . . . . . . . . . . . . . . . . . . .245
10.5 Floating-Point Subexpression Elimination . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .246
10.6 Accumulating Precision-Sensitive Quantities in x87 Registers . . . . . . . . . . . . . . . .247
10.7 Avoiding Extended-Precision Data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .248
Appendix A Microarchitecture for AMD Athlon™ 64 and AMD Opteron™ Processors . .249
A.1 Key Microarchitecture Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .250
A.2 Microarchitecture for AMD Athlon™ 64 and AMD Opteron™ Processors . . . . . .251
A.3 Superscalar Processor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .251
A.4 Processor Block Diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .251
A.5 L1 Instruction Cache . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .252
A.6 Branch-Prediction Table . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .253
A.7 Fetch-Decode Unit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .254
A.8 Instruction Control Unit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .254
A.9 Translation-Lookaside Buffer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .254
A.10 L1 Data Cache . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .255
A.11 Integer Scheduler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .256
Contents vii
Page 8

Software Optimization Guide for AMD64 Processors
25112 Rev. 3.06 September 2005
A.12 Integer Execution Unit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .256
A.13 Floating-Point Scheduler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .257
A.14 Floating-Point Execution Unit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .258
A.15 Load-Store Unit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .258
A.16 L2 Cache . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .259
A.17 Write-combining . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .260
A.18 Buses for AMD Athlon™ 64 and AMD Opteron™ Processor . . . . . . . . . . . . . . . .260
A.19 Integrated Memory Controller . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .260
A.20 HyperTransport™ Technology Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .260
Appendix B Implementation of Write-Combining . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .263
B.1 Write-Combining Definitions and Abbreviations . . . . . . . . . . . . . . . . . . . . . . . . . . .263
B.2 Programming Details . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .264
B.3 Write-combining Operations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .264
B.4 Sending Write-Buffer Data to the System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .266
B.5 Write-Combining Optimization on Revision D and E
AMD Athlon™ 64 and AMD Opteron™ Processors . . . . . . . . . . . . . . . . . . . . . . . .266
Appendix C Instruction Latencies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .269
C.1 Understanding Instruction Entries . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .270
C.2 Integer Instructions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .273
C.3 MMX™ Technology Instructions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .303
C.4 x87 Floating-Point Instructions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .307
C.5 3DNow!™ Technology Instructions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .314
C.6 3DNow!™ Technology Extensions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .316
C.7 SSE Instructions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .317
C.8 SSE2 Instructions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .326
C.9 SSE3 Instructions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .342
Appendix D AGP Considerations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .345
D.1 Fast-Write Optimizations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .345
D.2 Fast-Write Optimizations for Graphics-Engine Programming . . . . . . . . . . . . . . . . .346
D.3 Fast-Write Optimizations for Video-Memory Copies . . . . . . . . . . . . . . . . . . . . . . .349
viii Contents
Page 9

25112 Rev. 3.06 September 2005
Software Optimization Guide for AMD64 Processors
D.4 Memory Optimizations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .351
D.5 Memory Optimizations for Graphics-Engine Programming
Using the DMA Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .352
D.6 Optimizations for Texture-Map Copies to AGP Memory . . . . . . . . . . . . . . . . . . . .353
D.7 Optimizations for Vertex-Geometry Copies to AGP Memory . . . . . . . . . . . . . . . . .353
Appendix E SSE and SSE2 Optimizations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .355
E.1 Half-Register Operations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .356
E.2 Zeroing Out an XMM Register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .357
E.3 Reuse of Dead Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .359
E.4 Moving Data Between XMM Registers and GPRs . . . . . . . . . . . . . . . . . . . . . . . . .360
E.5 Saving and Restoring Registers of Unknown Format . . . . . . . . . . . . . . . . . . . . . . .361
E.6 SSE and SSE2 Copy Loops . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .362
E.7 Explicit Load Instructions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .363
E.8 Data Conversion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .364
Index . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .367
Contents ix
Page 10

Software Optimization Guide for AMD64 Processors
25112 Rev. 3.06 September 2005
x Contents
Page 11
25112 Rev. 3.06 September 2005
Software Optimization Guide for AMD64 Processors
Tables
Table 1. Instructions, Macro-ops and Micro-ops ............................................................................5
Table 2. Optimizations by Rank......................................................................................................6
Table 3. Comparisons against Zero...............................................................................................55
Table 4. Comparisons against Positive Constant ..........................................................................55
Table 5. Comparisons among Two Floats.....................................................................................55
Table 6. Latency of Repeated String Instructions .......................................................................167
Table 7. L1 Instruction Cache Specifications by Processor........................................................253
Table 8. L1 Instruction TLB Specifications................................................................................255
Table 9. L1 Data TLB Specifications..........................................................................................255
Table 10. L2 TLB Specifications by Processor.............................................................................255
Table 11. L1 Data Cache Specifications by Processor..................................................................256
Table 12. Write-Combining Completion Events...........................................................................265
Table 13. Integer Instructions........................................................................................................273
Table 14. MMX™ Technology Instructions.................................................................................303
Table 15. x87 Floating-Point Instructions.....................................................................................307
Table 16. 3DNow!™ Technology Instructions.............................................................................314
Table 17. 3DNow!™ Technology Extensions ..............................................................................316
Table 18. SSE Instructions............................................................................................................317
Table 19. SSE2 Instructions..........................................................................................................326
Table 20. SSE3 Instructions..........................................................................................................342
Table 21. Clearing XMM Registers ..............................................................................................357
Table 22. Converting Scalar Values .............................................................................................364
Table 23. Converting Vector Values.............................................................................................365
Table 24. Converting Directly from Memory ...............................................................................365
Tables xi
Page 12

Software Optimization Guide for AMD64 Processors
25112 Rev. 3.06 September 2005
xii Tables
Page 13
25112 Rev. 3.06 September 2005
Software Optimization Guide for AMD64 Processors
Figures
Figure 1. Simple SMP Block Diagram...........................................................................................97
Figure 2. Dual-Core AMD Opteron™ Processor Configuration ...................................................97
Figure 3. Memory-Limited Code .................................................................................................109
Figure 4. Processor-Limited Code ...............................................................................................109
Figure 5. AMD Athlon™ 64 and AMD Opteron™ Processors Block Diagram .........................252
Figure 6. Integer Execution Pipeline............................................................................................256
Figure 7. Floating-Point Unit .......................................................................................................258
Figure 8. Load-Store Unit ............................................................................................................259
Figure 9. AGP 8x Fast-Write Transaction ...................................................................................346
Figure 10. Cacheable-Memory Command Structure .....................................................................347
Figure 11. Northbridge Command Flow ........................................................................................352
Figures xiii
Page 14

Software Optimization Guide for AMD64 Processors
25112 Rev. 3.06 September 2005
xiv Figures
Page 15
25112 Rev. 3.06 September 2005
Software Optimization Guide for AMD64 Processors
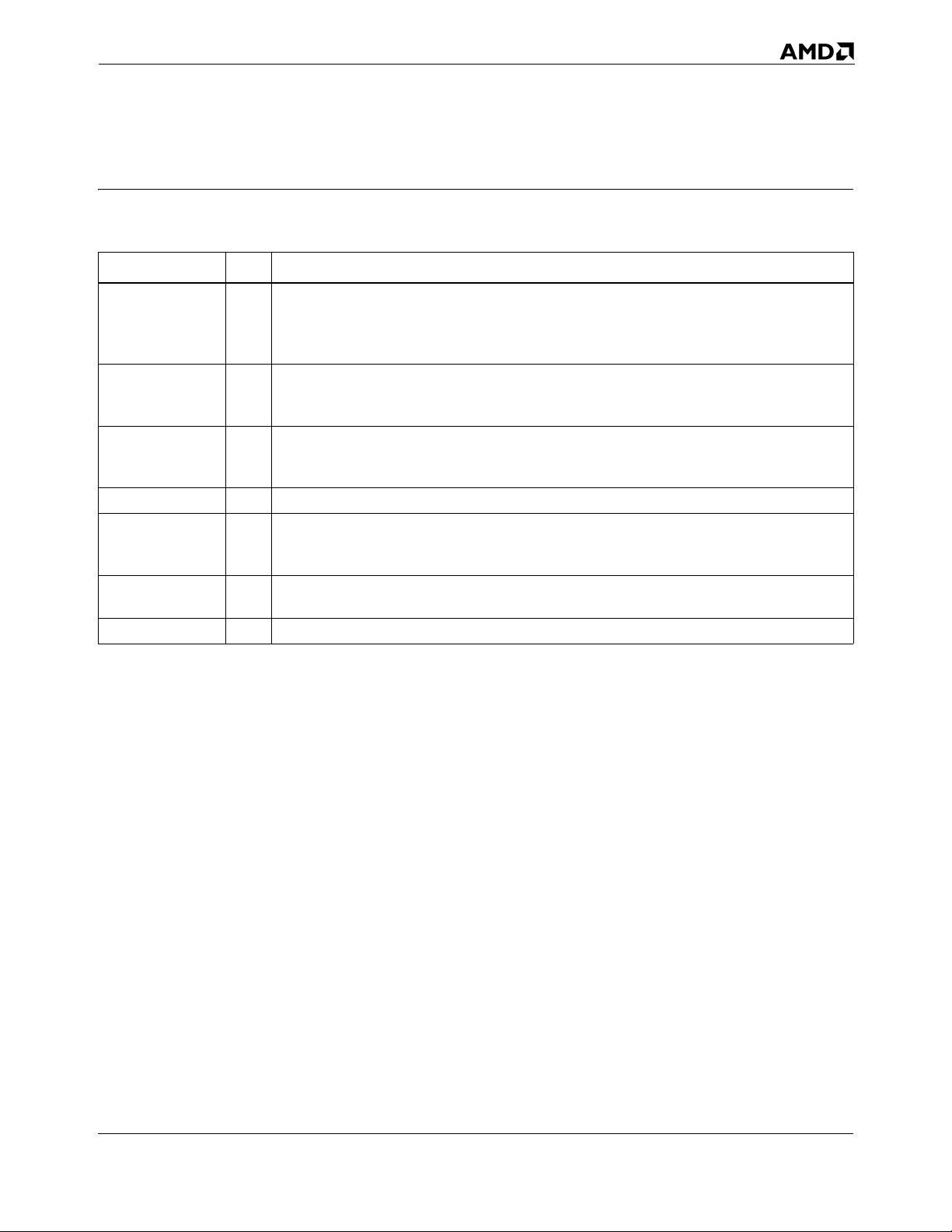
Revision History
Date Rev. Description
August 2005 3.06 Updated latency tables in Appendix C. Added section 8.9 on optimizing integer
division. Clarified the use of non-temporal PREFETCHNTA instruction in section
5.6. Added explanatory information to section 5.3 on ccNUMA. Added section 4.5
on AMD64 complx addressing modes. Added new section 5.13 on memory copies.
October 2004 3.05 Updated information on write-combining optimizations in Appendix B,
Implementation of Write-Combining; Added latency information for SSE3
instructions.
March 2004 3.04 Incorporated a section on ccNUMA in Chapter 5. Added sections on moving
unaligned versus unaligned data. Added to PREFETCHNTA information in Chapter
5. Fixed many minor typos.
September 2003 3.03 Made several minor typographical and formatting corrections.
July 2003 3.02 Added index references. Corrected information pertaining to L1 and L2 data and
instruction caches. Corrected information on alignment in Chapter 5, “Cache and
Memory Optimizations”. Amended latency information in Appendix C.
April 2003 3.01 Clarified section 2.22 'Array Indices'. Corrected factual errors and removed
misleading examples from Cache and Memory chapter..
April 2003 3.00 Initial public release.
Revision History xv
Page 16

Software Optimization Guide for AMD64 Processors
25112 Rev. 3.06 September 2005
xvi Revision History
Page 17
25112 Rev. 3.06 September 2005
Software Optimization Guide for AMD64 Processors
Chapter 1 Introduction
This guide provides optimization information and recommendations for the AMD Athlon™ 64 and
AMD Opteron™ processors. These optimizations are designed to yield software code that is fast,
compact, and efficient. Toward this end, the optimizations in each of the following chapters are listed
in order of importance.
This chapter covers the following topics:
Topic Page
Intended Audience 1
Getting Started Quickly 1
Using This Guide 2
Important New Terms 4
Key Optimizations 6
1.1 Intended Audience
This book is intended for compiler and assembler designers, as well as C, C++, and assemblylanguage programmers writing performance-sensitive code sequences. This guide assumes that you
are familiar with the AMD64 instruction set and the AMD64 architecture (registers and programming
modes). For complete information on the AMD64 architecture and instruction set, see the
multivolume AMD64 Architecture Programmer’s Manual available from AMD.com. Documentation
volumes and their order numbers are provided below.
Title Order no.
Volume 1 , Application Programming 24592
Volume 2 , System Programming 24593
Volume 3 , General-Purpose and System Instructions 24594
Volume 4 , 128-Bit Media Instructions 26568
Volume 5 , 64-Bit Media and x87 Floating-Point Instructions 26569
1.2 Getting Started Quickly
More experienced readers may skip to “Key Optimizations” on page 6, which identifies the most
important optimizations.
Chapter 1 Introduction 1
Page 18

Software Optimization Guide for AMD64 Processors
25112 Rev. 3.06 September 2005
1.3 Using This Guide
This chapter explains how to get the most benefit from this guide. It defines important new terms you
will need to understand before reading the rest of this guide and lists the most important optimizations
by rank.
Chapter 2 describes techniques that you can use to optimize your C and C++ source code. The
“Application” section for each optimization indicates whether the optimization applies to 32-bit
software, 64-bit software, or both.
Chapter 3 presents general assembly-language optimizations that improve the performance of
software designed to run in 64-bit mode. All optimizations in this chapter apply only to 64-bit
software.
The remaining chapters describe assembly-language optimizations. The “Application” section under
each optimization indicates whether the optimization applies to 32-bit software, 64-bit software, or
both.
Chapter 4 Instruction-Decoding Optimizations
Chapter 5 Cache and Memory Optimizations
Chapter 6 Branch Optimizations
Chapter 7 Scheduling Optimizations
Chapter 8 Integer Optimizations
Chapter 9 Optimizing with SIMD Instructions
Chapter 10 x87 Floating-Point Optimizations
Appendix A discusses the internal design, or microarchitecture, of the processor and provides
specifications on the translation-lookaside buffers. It also provides information on other functional
units that are not part of the main processor but are integrated on the chip.
Appendix B describes the memory write-combining feature of the processor.
Appendix C provides a complete listing of all AMD64 instructions. It shows each instruction’s
encoding, decode type, execution latency, and—where applicable—the pipe used in the floating-point
unit.
Appendix D discusses optimizations that improve the throughput of AGP transfers.
Appendix E describes coding practices that improve performance when using SSE and SSE2
instructions.
2 Introduction Chapter 1
Page 19
25112 Rev. 3.06 September 2005
Software Optimization Guide for AMD64 Processors
Special Information
Special information in this guide looks like this:
❖ This symbol appears next to the most important, or key, optimizations.
Numbering Systems
The following suffixes identify different numbering systems:
This suffix Identifies a
b Binary number. For example, the binary equivalent of the number 5 is written 101b.
d Decimal number. Decimal numbers are followed by this suffix only when the possibility of
confusion exists. In general, decimal numbers are shown without a suffix.
h Hexadecimal number. For example, the hexadecimal equivalent of the number 60 is
written 3Ch.
Typographic Notation
This guide uses the following typographic notations for certain types of information:
This type of text Identifies
italic Placeholders that represent information you must provide. Italicized text is also used
for the titles of publications and for emphasis.
monowidth Program statements and function names.
Providing Feedback
If you have suggestions for improving this guide, we would like to hear from you. Please send your
comments to the following e-mail address:
code.optimization@amd.com
Chapter 1 Introduction 3
Page 20

Software Optimization Guide for AMD64 Processors
25112 Rev. 3.06 September 2005
1.4 Important New Terms
This section defines several important terms and concepts used in this guide.
Primitive Operations
AMD Athlon 64 and AMD Opteron processors perform four types of primitive operations:
• Integer (arithmetic or logic)
• Floating-point (arithmetic)
• Load
• Store
Internal Instruction Formats
The AMD64 instruction set is complex; instructions have variable-length encodings and many
perform multiple primitive operations. AMD Athlon 64 and AMD Opteron processors do not execute
these complex instructions directly, but, instead, decode them internally into simpler fixed-length
instructions called macro-ops. Processor schedulers subsequently break down macro-ops into
sequences of even simpler instructions called micro-ops, each of which specifies a single primitive
operation.
A macro-op is a fixed-length instruction that:
• Expresses, at most, one integer or floating-point operation and one load and/or store operation.
• Is the primary unit of work managed (that is, dispatched and retired) by the processor.
A micro-op is a fixed-length instruction that:
• Expresses one and only one of the primitive operations that the processor can perform (for
example, a load).
• Is executed by the processor’s execution units.
4 Introduction Chapter 1
Page 21
25112 Rev. 3.06 September 2005
Software Optimization Guide for AMD64 Processors
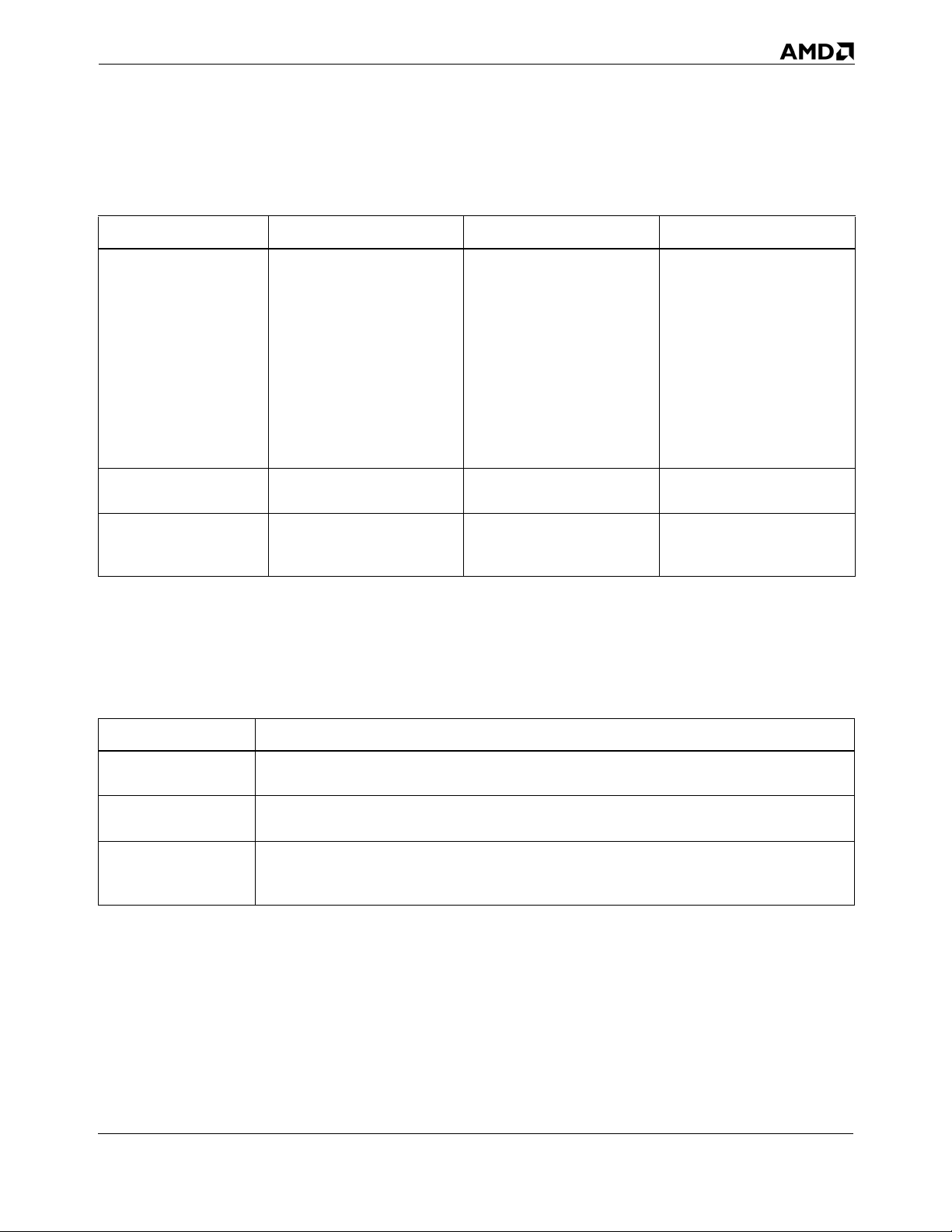
Table 1 summarizes the differences between AMD64 instructions, macro-ops, and micro-ops.
Table 1. Instructions, Macro-ops and Micro-ops
Comparing AMD64 instructions Macro-ops Micro-ops
Complexity Complex
A single instruction may
specify one or more of
each of the following
operations:
• Integer or floating-point
operation
• Load
•Store
Encoded length Variable (instructions are
different lengths)
Regularized
instruction fields
No (field locations and
definitions vary among
instructions)
Average
A single macro-op may
specify—at most—one
integer or floating-point
operation and one of the
following operations:
• Load
•Store
• Load and store to the
same address
Fixed (all macro-ops are
the same length)
Yes (field locations and
definitions are the same
for all macro-ops)
Simple
A single micro-op
specifies only one of the
following primitive
operations:
• Integer or floating-point
• Load
•Store
Fixed (all micro-ops are
the same length)
Yes (field locations and
definitions are the same
for all micro-ops)
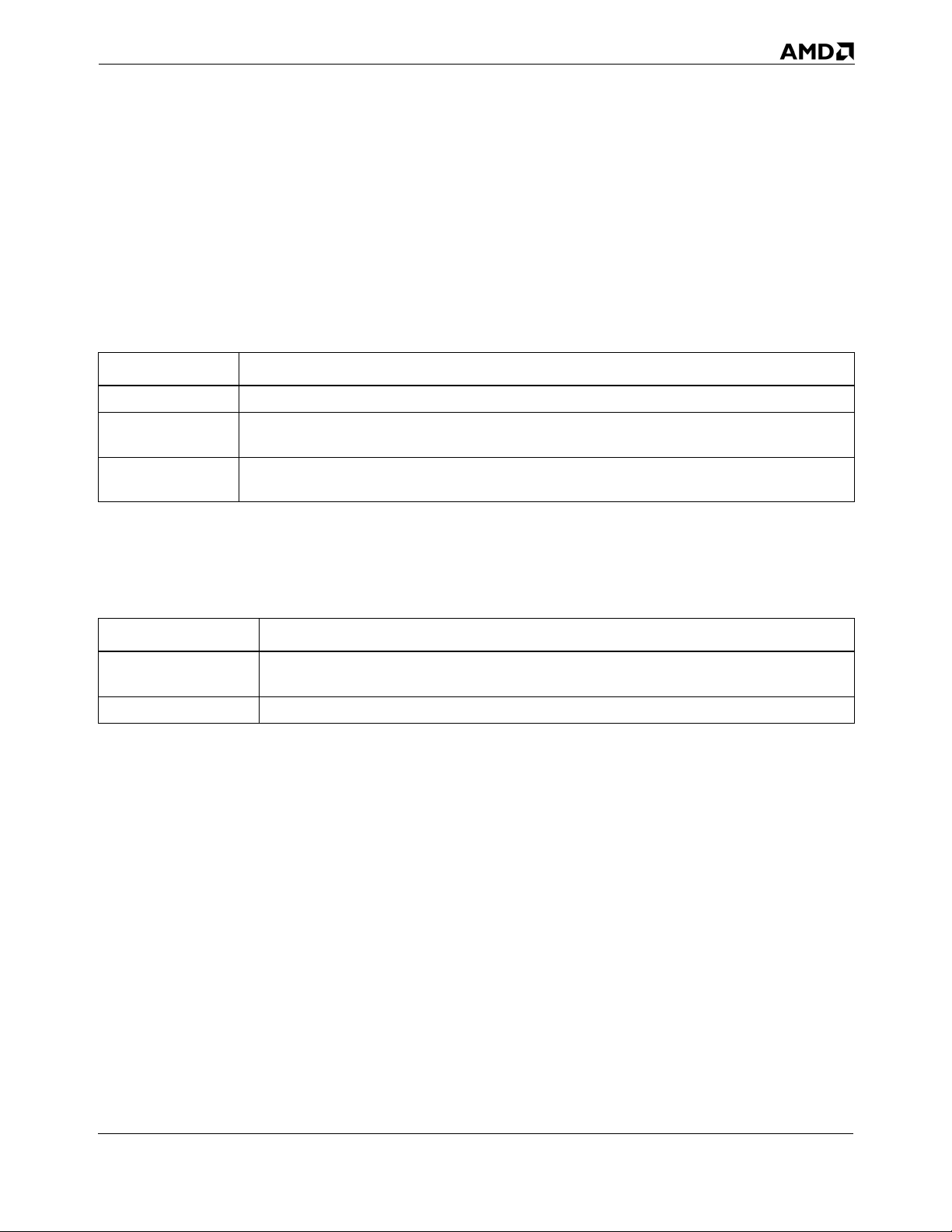
Types of Instructions
Instructions are classified according to how they are decoded by the processor. There are three types
of instructions:
Instruction Type Description
DirectPath Single A relatively common instruction that the processor decodes directly into one macro-op
in hardware.
DirectPath Double A relatively common instruction that the processor decodes directly into two macro-
ops in hardware.
VectorPath A sophisticated or less common instruction that the processor decodes into one or
more (usually three or more) macro-ops using the on-chip microcode-engine ROM
(MROM).
Chapter 1 Introduction 5
Page 22
Software Optimization Guide for AMD64 Processors
25112 Rev. 3.06 September 2005
1.5 Key Optimizations
While all of the optimizations in this guide help improve software performance, some of them have
more impact than others. Optimizations that offer the most improvement are called key optimizations.
Guideline
Concentrate your efforts on implementing key optimizations before moving on to other optimizations,
and incorporate higher-ranking key optimizations first.
Key Optimizations by Rank
Table 1 lists the key optimizations by rank.
Table 2. Optimizations by Rank
Rank Optimization Page
1 Memory-Size Mismatches 92
2 Natural Alignment of Data Objects 95
3 Memory Copy 120
4 Density of Branches 126
5 Prefetch Instructions 104
6 Two-Byte Near-Return RET Instruction 128
7 DirectPath Instructions 72
8 Load-Execute Integer Instructions 73
9 Load-Execute Floating-Point Instructions with Floating-Point Operands 74
10 Load-Execute Floating-Point Instructions with Integer Operands 74
11 Write-combining 113
12 Branches That Depend on Random Data 130
13 Half-Register Operations 356
14 Placing Code and Data in the Same 64-Byte Cache Line 116
6 Introduction Chapter 1
Page 23
25112 Rev. 3.06 September 2005
Software Optimization Guide for AMD64 Processors
Chapter 2 C and C++ Source-Level
Optimizations
Although C and C++ compilers generally produce very compact object code, many performance
improvements are possible by careful source code optimization. Most such optimizations result from
taking advantage of the underlying mechanisms used by C and C++ compilers to translate source
code into sequences of AMD64 instructions. This chapter includes guidelines for writing C and C++
source code that result in the most efficiently optimized AMD64 code.
This chapter covers the following topics:
Topic Page
Declarations of Floating-Point Values 9
Using Arrays and Pointers 10
Unrolling Small Loops 13
Expression Order in Compound Branch Conditions 14
Long Logical Expressions in If Statements 16
Arrange Boolean Operands for Quick Expression Evaluation 17
Dynamic Memory Allocation Consideration 19
Unnecessary Store-to-Load Dependencies 20
Matching Store and Load Size 22
SWITCH and Noncontiguous Case Expressions 25
Arranging Cases by Probability of Occurrence 28
Use of Function Prototypes 29
Use of const Type Qualifier 30
Generic Loop Hoisting 31
Local Static Functions 34
Explicit Parallelism in Code 35
Extracting Common Subexpressions 37
Sorting and Padding C and C++ Structures 39
Sorting Local Variables 41
Replacing Integer Division with Multiplication 43
Frequently Dereferenced Pointer Arguments 44
Array Indices 46
32-Bit Integral Data Types 47
Sign of Integer Operands 48
Chapter 2 C and C++ Source-Level Optimizations 7
Page 24
Software Optimization Guide for AMD64 Processors
Topic Page
Accelerating Floating-Point Division and Square Root 50
Fast Floating-Point-to-Integer Conversion 52
Speeding Up Branches Based on Comparisons Between Floats 54
25112 Rev. 3.06 September 2005
8 C and C++ Source-Level Optimizations Chapter 2
Page 25

25112 Rev. 3.06 September 2005
Software Optimization Guide for AMD64 Processors
2.1 Declarations of Floating-Point Values
Optimization
When working with single precision (float) values:
• Use the f or F suffix (for example, 3.14f) to specify a constant value of type float.
• Use function prototypes for all functions that accept arguments of type float.
Application
This optimization applies to:
• 32-bit software
• 64-bit software
Rationale
C and C++ compilers treat floating-point constants and arguments as double precision (double)
unless you specify otherwise. However, single precision floating-point values occupy half the
memory space as double precision values and can often provide the precision necessary for a given
computational problem.
Chapter 2 C and C++ Source-Level Optimizations 9
Page 26

Software Optimization Guide for AMD64 Processors
25112 Rev. 3.06 September 2005
2.2 Using Arrays and Pointers
Optimization
Use array notation instead of pointer notation when working with arrays.
Application
This optimization applies to:
• 32-bit software
• 64-bit software
Rationale
C allows the use of either the array operator ([]) or pointers to access the elements of an array.
However, the use of pointers in C makes work difficult for optimizers in C compilers. Without
detailed and aggressive pointer analysis, the compiler has to assume that writes through a pointer can
write to any location in memory, including storage allocated to other variables. (For example, *p and
*q can refer to the same memory location, while x[0] and x[2] cannot.) Using pointers causes
aliasing, where the same block of memory is accessible in more than one way. Using array notation
makes the task of the optimizer easier by reducing possible aliasing.
10 C and C++ Source-Level Optimizations Chapter 2
Page 27

25112 Rev. 3.06 September 2005
Software Optimization Guide for AMD64 Processors
Example
Avoid code, such as the following, which uses pointer notation:
typedef struct {
float x, y, z, w;
} VERTEX;
typedef struct {
float m[4][4];
} MATRIX;
void XForm(float *res, const float *v, const float *m, int numverts) {
float dp;
int i;
const VERTEX* vv = (VERTEX *)v;
for (i = 0; i < numverts; i++) {
dp = vv->x * *m++;
dp += vv->y * *m++;
dp += vv->z * *m++;
dp += vv->w * *m++;
*res++ = dp; // Write transformed x.
dp = vv->x * *m++;
dp += vv->y * *m++;
dp += vv->z * *m++;
dp += vv->w * *m++;
*res++ = dp; // Write transformed y.
dp = vv->x * *m++;
dp += vv->y * *m++;
dp += vv->z * *m++;
dp += vv->w * *m++;
*res++ = dp; // Write transformed z.
dp = vv->x * *m++;
dp += vv->y * *m++;
dp += vv->z * *m++;
dp += vv->w * *m++;
*res++ = dp; // Write transformed w.
++vv; // Next input vertex
m -= 16; // Reset to start of transform matrix.
}
}
Chapter 2 C and C++ Source-Level Optimizations 11
Page 28

Software Optimization Guide for AMD64 Processors
25112 Rev. 3.06 September 2005
Instead, use the equivalent array notation:
typedef struct {
float x, y, z, w;
} VERTEX;
typedef struct {
float m[4][4];
} MATRIX;
void XForm(float *res, const float *v, const float *m, int numverts) {
int i;
const VERTEX* vv = (VERTEX *)v;
const MATRIX* mm = (MATRIX *)m;
VERTEX* rr = (VERTEX *)res;
for (i = 0; i < numverts; i++) {
rr->x = vv->x * mm->m[0][0] + vv->y * mm->m[0][1] +
vv->z * mm->m[0][2] + vv->w * mm->m[0][3];
rr->y = vv->x * mm->m[1][0] + vv->y * mm->m[1][1] +
vv->z * mm->m[1][2] + vv->w * mm->m[1][3];
rr->z = vv->x * mm->m[2][0] + vv->y * mm->m[2][1] +
vv->z * mm->m[2][2] + vv->w * mm->m[2][3];
rr->w = vv->x * mm->m[3][0] + vv->y * mm->m[3][1] +
vv->z * mm->m[3][2] + vv->w * mm->m[3][3];
++rr; // Increment the results pointer.
++vv; // Increment the input vertex pointer.
}
}
Additional Considerations
Source-code transformations interact with a compiler’s code generator, making it difficult to control
the generated machine code from the source level. It is even possible that source-code transformations
aimed at improving performance may conflict with compiler optimizations. Depending on the
compiler and the specific source code, it is possible for pointer-style code to compile into machine
code that is faster than that generated from equivalent array-style code. Compare the performance of
your code after implementing a source-code transformation with the performance of the original code
to be sure that there is an improvement.
12 C and C++ Source-Level Optimizations Chapter 2
Page 29

25112 Rev. 3.06 September 2005
Software Optimization Guide for AMD64 Processors
2.3 Unrolling Small Loops
Optimization
Completely unroll loops that have a small fixed loop count and a small loop body.
Application
This optimization applies to:
• 32-bit software
• 64-bit software
Rationale
Many compilers do not aggressively unroll loops. Manually unrolling loops can benefit performance,
especially if the loop body is small, which makes the loop overhead significant.
Example
Avoid a small loop like this:
// 3D-transform: Multiply vector V by 4x4 transform matrix M.
for (i = 0; i < 4; i++) {
r[i] = 0;
for (j = 0; j < 4; j++) {
r[i] += m[j][i] * v[j];
}
}
Instead, replace it with its completely unrolled equivalent, as shown here:
r[0] = m[0][0] * v[0] + m[1][0] * v[1] + m[2][0] * v[2] + m[3][0] * v[3];
r[1] = m[0][1] * v[0] + m[1][1] * v[1] + m[2][1] * v[2] + m[3][1] * v[3];
r[2] = m[0][2] * v[0] + m[1][2] * v[1] + m[2][2] * v[2] + m[3][2] * v[3];
r[3] = m[0][3] * v[0] + m[1][3] * v[1] + m[2][3] * v[2] + m[3][3] * v[3];
Related Information
For information on loop unrolling at the assembly-language level, see “Loop Unrolling” on page 145.
Chapter 2 C and C++ Source-Level Optimizations 13
Page 30

Software Optimization Guide for AMD64 Processors
25112 Rev. 3.06 September 2005
2.4 Expression Order in Compound Branch Conditions
Optimization
In the most active areas of a program, order the expressions in compound branch conditions to take
advantage of short circuiting of compound conditional expressions.
Application
This optimization applies to:
• 32-bit software
• 64-bit software
Rationale
Branch conditions in C programs often consist of compound conditions consisting of multiple
boolean expressions joined by the logical AND (&&) and logical OR (||) operators. C compilers
guarantee short-circuit evaluation of these operators. In a compound logical OR expression, the first
operand to evaluate to true terminates the evaluation, and subsequent operands are not evaluated at all.
Similarly, in a logical AND expression, the first operand to evaluate to false terminates the evaluation.
Because of this short-circuit evaluation, it is not always possible to swap the operands of logical OR
and logical AND. This is especially true when the evaluation of one of the operands causes a side
effect. However, in most cases the order of operands in such expressions is irrelevant.
When used to control conditional branches, expressions involving logical OR and logical AND are
translated into a series of conditional branches. The ordering of the conditional branches is a function
of the ordering of the expressions in the compound condition and can have a significant impact on
performance. It is impossible to give an easy, closed-form formula on how to order the conditions.
Overall performance is a function of a variety of the following factors:
• Probability of a branch misprediction for each of the branches generated
• Additional latency incurred due to a branch misprediction
• Cost of evaluating the conditions controlling each of the branches generated
• Amount of parallelism that can be extracted in evaluating the branch conditions
• Data stream consumed by an application (mostly due to the dependence of misprediction
probabilities on the nature of the incoming data in data-dependent branches)
It is recommended to experiment with the ordering of expressions in compound branch conditions in
the most active areas of a program (so-called “hot spots,” where most of the execution time is spent).
14 C and C++ Source-Level Optimizations Chapter 2
Page 31

25112 Rev. 3.06 September 2005
Software Optimization Guide for AMD64 Processors
Such hot spots can be found through the use of profiling by feeding a typical data stream to the
program while doing the experiments.
Chapter 2 C and C++ Source-Level Optimizations 15
Page 32

Software Optimization Guide for AMD64 Processors
25112 Rev. 3.06 September 2005
2.5 Long Logical Expressions in If Statements
Optimization
In if statements, avoid long logical expressions that can generate dense conditional branches that
violate the guideline described in “Density of Branches” on page 126.
Application
This optimization applies to:
• 32-bit software
• 64-bit software
Rationale
Listing 1. Preferred for Data that Falls Mostly Within the Range
if (a <= max && a >= min && b <= max && b >= min)
If most of the data falls within the range, the branches will not be taken, so the above code is
preferred. Otherwise, the following code is preferred.
Listing 2. Preferred for Data that Does Not Fall Mostly Within the Range
if (a > max || a < min || b > max || b < min)
16 C and C++ Source-Level Optimizations Chapter 2
Page 33

25112 Rev. 3.06 September 2005
Software Optimization Guide for AMD64 Processors
2.6 Arrange Boolean Operands for Quick Expression Evaluation
Optimization
In expressions that use the logical AND (&&) or logical OR (||) operator, arrange the operands for
quick evaluation of the expression:
If the expression uses this
operator
&& (logical AND) False
|| (logical OR) True
Then arrange the operands from left to right in decreasing
probablity of being
Application
This optimization applies to:
• 32-bit software
• 64-bit software
Rationale
C and C++ compilers guarantee short-circuit evaluation of the boolean operators && and ||. In an
expression that uses &&, the first operand to evaluate to false terminates the evaluation; subsequent
operands are not evaluated. In an expression that uses ||, the first operand to evaluate to true terminates
the evaluation.
When used to control program flow, expressions involving && and || are translated into a series of
conditional branches. This optimization minimizes the total number of conditions evaluated and
branches executed.
Example 1
In the following code, the operands of && are not arranged for quick expression evaluation because the
first operand is not the condition case most likely to be false (it is far less likely for an animal name to
begin with a ‘y’ than for it to have fewer than four characters):
char animalname[30];
char *p;
p = animalname;
if ((strlen(p) > 4) && (*p == 'y')) { ... }
Chapter 2 C and C++ Source-Level Optimizations 17
Page 34

Software Optimization Guide for AMD64 Processors
25112 Rev. 3.06 September 2005
Because the odds that the animal name begins with a ‘y’ are comparatively low, it is better to put that
operand first:
if ((*p == 'y') && (strlen(p) > 4)) { ... }
Example 2
In the following code (assuming a uniform random distribution of i), the operands of || are not
arranged for quick expression evaluation because the first operand is not the condition most likely to
be true:
unsigned int i;
if ((i < 4) || (i & 1)) { ... }
Because it is more likely for the least-significant bit of i to be 1, it is better to put that operand first:
if ((i & 1) || (i < 4)) { ... }
18 C and C++ Source-Level Optimizations Chapter 2
Page 35

25112 Rev. 3.06 September 2005
Software Optimization Guide for AMD64 Processors
2.7 Dynamic Memory Allocation Consideration
Dynamic memory allocation—accomplished through the use of the malloc library function in C—
should always return a pointer that is suitably aligned for the largest base type (quadword alignment).
Where this aligned pointer cannot be guaranteed, use the technique shown in the following code to
make the pointer quadword aligned, if needed. This code assumes that it is possible to cast the pointer
to a long.
double *p;
double *np;
p = (double *)malloc(sizeof(double) * number_of_doubles + 7L);
np = (double *)((((long)(p)) + 7L) & (-8L));
Then use np instead of p to access the data. The pointer p is still needed in order to deallocate the
storage.
Application
This optimization applies to:
• 32-bit software
• 64-bit software
Chapter 2 C and C++ Source-Level Optimizations 19
Page 36

Software Optimization Guide for AMD64 Processors
25112 Rev. 3.06 September 2005
2.8 Unnecessary Store-to-Load Dependencies
A store-to-load dependency exists when data is stored to memory, only to be read back shortly
thereafter. For details, see “Store-to-Load Forwarding Restrictions” on page 100. The
AMD Athlon™ 64 and AMD Opteron™ processors contain hardware to accelerate such store-to-load
dependencies, allowing the load to obtain the store data before it has been written to memory.
However, it is still faster to avoid such dependencies altogether and keep the data in an internal
register.
Avoiding store-to-load dependencies is especially important if they are part of a long dependency
chain, as may occur in a recurrence computation. If the dependency occurs while operating on arrays,
many compilers are unable to optimize the code in a way that avoids the store-to-load dependency. In
some instances the language definition may prohibit the compiler from using code transformations
that would remove the store-to-load dependency. Therefore, it is recommended that the programmer
remove the dependency manually, for example, by introducing a temporary variable that can be kept
in a register, as in the following example. This can result in a significant performance increase.
Listing 3. Avoid
double x[VECLEN], y[VECLEN], z[VECLEN];
unsigned int k;
for (k = 1; k < VECLEN; k++) {
x[k] = x[k-1] + y[k];
}
for (k = 1; k < VECLEN; k++) {
x[k] = z[k] * (y[k] - x[k-1]);
}
Listing 4. Preferred
double x[VECLEN], y[VECLEN], z[VECLEN];
unsigned int k;
double t;
t = x[0];
for (k = 1; k < VECLEN; k++) {
t = t + y[k];
x[k] = t;
}
t = x[0];
for (k = 1; k < VECLEN; k++) {
t = z[k] * (y[k] - t);
x[k] = t;
}
20 C and C++ Source-Level Optimizations Chapter 2
Page 37

25112 Rev. 3.06 September 2005
Application
This optimization applies to:
• 32-bit software
• 64-bit software
Software Optimization Guide for AMD64 Processors
Chapter 2 C and C++ Source-Level Optimizations 21
Page 38

Software Optimization Guide for AMD64 Processors
25112 Rev. 3.06 September 2005
2.9 Matching Store and Load Size
Optimization
Align memory accesses and match addresses and sizes of stores and dependent loads.
Application
This optimization applies to:
• 32-bit software
• 64-bit software
Rationale
The AMD Athlon 64 and AMD Opteron processors contain a load-store buffer to speed up the
forwarding of store data to dependent loads. However, this store-to-load forwarding (STLF) inside the
load-store buffer occurs, in general, only when the addresses and sizes of the store and the dependent
load match, and when both memory accesses are aligned. For details, see “Store-to-Load Forwarding
Restrictions” on page 100.
It is impossible to control load and store activity at the source level so as to avoid all cases that violate
restrictions placed on store-to-load-forwarding. In some instances it is possible to spot such cases in
the source code. Size mismatches can easily occur when different-size data items are joined in a
union. Address mismatches could be the result of pointer manipulation.
The following examples show a situation involving a union of different-size data items. The examples
show a user-defined unsigned 16.16 fixed-point type and two operations defined on this type.
Function
portion of a fixed-point number. Listing 5 shows an inappropriate implementation of
which, when used on the result of
fixed_add adds two fixed-point numbers, and function fixed_int extracts the integer
fixed_int,
fixed_add, causes misalignment, address mismatch, or size
mismatch between memory operands, such that no store-to-load forwarding in the load-store buffer
takes place. Listing 6 shows how to properly implement fixed_int in order to allow store-to-load
forwarding in the load-store buffer.
Examples
Listing 5. Avoid
typedef union {
unsigned int whole;
struct {
unsigned short frac; /* Lower 16 bits are fraction. */
unsigned short intg; /* Upper 16 bits are integer. */
} parts;
} FIXED_U_16_16;
22 C and C++ Source-Level Optimizations Chapter 2
Page 39

25112 Rev. 3.06 September 2005
__inline FIXED_U_16_16 fixed_add(FIXED_U_16_16 x, FIXED_U_16_16 y) {
FIXED_U_16_16 z;
z.whole = x.whole + y.whole;
return (z);
}
__inline unsigned int fixed_int(FIXED_U_16_16 x) {
return((unsigned int)(x.parts.intg));
}
...
FIXED_U_16_16 y, z;
unsigned int q;
...
label1:
y = fixed_add (y, z);
q = fixed_int (y);
label2:
...
Software Optimization Guide for AMD64 Processors
The object code generated for the source code between label1 and label2 typically follows one of
these two variants:
; Variant 1
mov edx, DWORD PTR [z]
mov eax, DWORD PTR [y] ; -+
add eax, edx ; |
mov DWORD PTR [y], eax ; |
mov EAX, DWORD PTR [y+2] ; <+ Address mismatch--no forwarding in LSU
and EAX, 0FFFFh
mov DWORD PTR [q], eax
; Variant 2
mov edx, DWORD PTR [z]
mov eax, DWORD PTR [y] ; -+
add eax, edx ; |
mov DWORD PTR [y], eax ; |
movzx eax, WORD PTR [y+2] ; <+ Size and address mismatch--no forwarding in LSU
mov DWORD PTR [q], eax
Listing 6. Preferred
typedef union {
unsigned int whole;
struct {
unsigned short frac; /* Lower 16 bits are fraction. */
unsigned short intg; /* Upper 16 bits are integer. */
} parts;
} FIXED_U_16_16;
__inline FIXED_U_16_16 fixed_add(FIXED_U_16_16 x, FIXED_U_16_16 y) {
Chapter 2 C and C++ Source-Level Optimizations 23
Page 40

Software Optimization Guide for AMD64 Processors
FIXED_U_16_16 z;
z.whole = x.whole + y.whole;
return(z);
}
__inline unsigned int fixed_int(FIXED_U_16_16 x) {
return (x.whole >> 16);
}
...
FIXED_U_16_16 y, z;
unsigned int q;
...
label1:
y = fixed_add (y, z);
q = fixed_int (y);
label2:
...
25112 Rev. 3.06 September 2005
The object code generated for the source code between label1 and label2 typically looks like this:
mov edx, DWORD PTR [z]
mov eax, DWORD PTR [y]
add eax, edx
mov DWORD PTR [y], eax ; -+
mov eax, DWORD PTR [y] ; <+ Aligned (size/address match)--forwarding in LSU
shr eax, 16
mov DWORD PTR [q], eax
24 C and C++ Source-Level Optimizations Chapter 2
Page 41

25112 Rev. 3.06 September 2005
Software Optimization Guide for AMD64 Processors
2.10 SWITCH and Noncontiguous Case Expressions
Optimization
Use if-else statements in place of switch statements that have noncontiguous case expressions.
(Case expressions are the individual expressions to which the single switch expression is compared.)
Application
This optimization applies to:
• 32-bit software
• 64-bit software
Rationale
If the case expressions are contiguous or nearly contiguous integer values, most compilers translate
the switch statement as a jump table instead of a comparison chain. Jump tables generally improve
performance because:
• They reduce the number of branches to a single procedure call.
• The size of the control-flow code is the same no matter how many cases there are.
• The amount of control-flow code that the processor must execute is the same for all values of the
switch expression.
However, if the case expressions are noncontiguous values, most compilers translate the switch
statement as a comparison chain. Comparison chains are undesirable because:
• They use dense sequences of conditional branches, which interfere with the processor’s ability to
successfully perform branch prediction.
• The size of the control-flow code increases with the number of cases.
• The amount of control-flow code that the processor must execute varies with the value of the
switch expression.
Chapter 2 C and C++ Source-Level Optimizations 25
Page 42

Software Optimization Guide for AMD64 Processors
25112 Rev. 3.06 September 2005
Example 1
A switch statement like this one, whose case expressions are contiguous integer values, usually
provides good performance:
switch (grade)
{
case ‘A’:
...
break;
case ‘B’:
...
break;
case ‘C’:
...
break;
case ‘D’:
...
break;
case ‘F’:
...
break;
}
Example 2
Because the case expressions in the following switch statement are not contiguous values, the
compiler will likely translate the code into a comparison chain instead of a jump table:
switch (a)
{
case 8:
// Sequence for a==8
break;
case 16:
// Sequence for a==16
break;
...
default:
// Default sequence
break;
}
26 C and C++ Source-Level Optimizations Chapter 2
Page 43

25112 Rev. 3.06 September 2005
Software Optimization Guide for AMD64 Processors
To avoid a comparison chain and its undesirable effects on branch prediction, replace the switch
statement with a series of if-else statements, as follows:
if (a==8) {
// Sequence for a==8
}
else if (a==16) {
// Sequence for a==16
}
...
else {
// Default sequence
}
Related Information
For information on preventing branch-prediction interference at the assembly-language level, see
“Density of Branches” on page 126.
Chapter 2 C and C++ Source-Level Optimizations 27
Page 44

Software Optimization Guide for AMD64 Processors
25112 Rev. 3.06 September 2005
2.11 Arranging Cases by Probability of Occurrence
Optimization
Arrange switch statement cases by probability of occurrence, from most probable to least probable.
Application
This optimization applies to:
• 32-bit software
• 64-bit software
Rationale
Arranging switch statement cases by probability of occurrence improves performance when the
switch statement is translated as a comparison chain; this arrangement has no negative impact when
the statement is translated as a jump table.
Example
Avoid switch statements such as the following, in which the cases are not arranged by probability of
occurrence:
int days_in_month, short_months, normal_months, long_months;
switch (days_in_month) {
case 28:
case 29: short_months++; break;
case 30: normal_months++; break;
case 31: long_months++; break;
default: printf("Month has fewer than 28 or more than 31 days.\n");
}
Instead, arrange the cases to test for frequently occurring values first:
switch (days_in_month) {
case 31: long_months++; break;
case 30: normal_months++; break;
case 28:
case 29: short_months++; break;
default: printf("Month has fewer than 28 or more than 31 days.\n");
}
28 C and C++ Source-Level Optimizations Chapter 2
Page 45

25112 Rev. 3.06 September 2005
Software Optimization Guide for AMD64 Processors
2.12 Use of Function Prototypes
Optimization
In general, use prototypes for all functions.
Application
This optimization applies to:
• 32-bit software
• 64-bit software
Rationale
Prototypes can convey additional information to the compiler that might enable more aggressive
optimizations.
Chapter 2 C and C++ Source-Level Optimizations 29
Page 46

Software Optimization Guide for AMD64 Processors
25112 Rev. 3.06 September 2005
2.13 Use of const Type Qualifier
Optimization
For objects whose values will not be changed, use the const type qualifier.
Application
This optimization applies to:
• 32-bit software
• 64-bit software
Rationale
Using the const type qualifier makes code more robust and may enable the compiler to generate
higher-performance code. For example, under the C standard, a compiler is not required to allocate
storage for an object that is declared const, if its address is never used.
30 C and C++ Source-Level Optimizations Chapter 2
Page 47

25112 Rev. 3.06 September 2005
Software Optimization Guide for AMD64 Processors
2.14 Generic Loop Hoisting
Optimization
To improve the performance of inner loops, reduce redundant constant calculations (that is, loopinvariant calculations). This idea can also be extended to invariant control structures.
Application
This optimization applies to:
• 32-bit software
• 64-bit software
Rationale and Examples
The following example demonstrates the use of an invarient condition in an if statement in a for
loop. The second listing shows the preferred optimization.
Listing 7. (Avoid)
for (i...) {
if (CONSTANT0) {
DoWork0(i); // Does not affect CONSTANT0.
}
else {
DoWork1(i); // Does not affect CONSTANT0.
}
}
Listing 8. (Preferred Optimzation)
if (CONSTANT0) {
for (i...) {
DoWork0(i);
}
}
else {
for (i...) {
DoWork1(i);
}
}
The preferred optimization in Listing 8 tightens the inner loops by avoiding repetitious evaluation of a
known
if control structure. Although the branch would be easily predicted, the extra instructions and
decode limitations imposed by branching (which are usually advantageous) are saved.
Chapter 2 C and C++ Source-Level Optimizations 31
Page 48

Software Optimization Guide for AMD64 Processors
25112 Rev. 3.06 September 2005
To generalize the example in Listing 8 further for multiple-constant control code, more work may be
needed to create the proper outer loop. Enumeration of the constant cases reduces this to a simple
switch statement.
Listing 9.
for (i...) {
if (CONSTANT0) {
DoWork0(i); // Does not affect CONSTANT0 or CONSTANT1.
}
else {
DoWork1(i); // Does not affect CONSTANT0 or CONSTANT1.
}
if (CONSTANT1) {
DoWork2(i); // Does not affect CONSTANT0 or CONSTANT1.
}
else {
DoWork3(i); // Does not affect CONSTANT0 or CONSTANT1.
}
}
32 C and C++ Source-Level Optimizations Chapter 2
Page 49

25112 Rev. 3.06 September 2005
Software Optimization Guide for AMD64 Processors
Transform the loop in Listing 9 (by using the switch statement) into:
#define combine(c1, c2) (((c1) << 1) + (c2))
switch (combine(CONSTANT0 != 0, CONSTANT1 != 0)) {
case combine(0, 0):
for(i...) {
DoWork0(i);
DoWork2(i);
}
break;
case combine(1, 0):
for(i...) {
DoWork1(i);
DoWork2(i);
}
break;
case combine(0, 1):
for(i...) {
DoWork0(i);
DoWork3(i);
}
break;
case combine( 1, 1 ):
for(i...) {
DoWork1(i);
DoWork3(i);
}
break;
default:
break;
}
Some introductory code is necessary to generate all the combinations for the switch constant and the
total amount of code has doubled. However, the inner loops are now free of
cases where the
to greater parallelism than possible in the presence of intervening
DoWorkn functions are inlined, the successive functions have greater overlap, leading
if statements.
if statements. In ideal
The same idea can be applied to constant switch statements or to combinations of switch statements
and
if statements inside of for loops. The method used to combine the input constants becomes
more complicated but benefits performance.
However, the number of inner loops can also substantially increase. If the number of inner loops is
prohibitively high, then only the most common cases must be dealt with directly, and the remaining
cases can fall back to the old code in the default clause of the
switch statement. This situation is
typical of run-time generated code. While the performance of run-time generated code can be
improved by means similar to those presented here, it is much harder to maintain and developers must
do their own code-generation optimizations without the help of an available compiler.
Chapter 2 C and C++ Source-Level Optimizations 33
Page 50

Software Optimization Guide for AMD64 Processors
25112 Rev. 3.06 September 2005
2.15 Local Static Functions
Optimization
Declare as static functions that are not used outside the file where they are defined.
Application
This optimization applies to:
• 32-bit software
• 64-bit software
Rationale
Declaring a function as static forces internal linkage. Functions that are not declared as static
default to external linkage, which may inhibit certain optimizations—for example, aggressive
inlining—with some compilers.
34 C and C++ Source-Level Optimizations Chapter 2
Page 51

25112 Rev. 3.06 September 2005
Software Optimization Guide for AMD64 Processors
2.16 Explicit Parallelism in Code
Optimization
Where possible, break long dependency chains into several independent dependency chains that can
then be executed in parallel, exploiting the execution units in each pipeline.
Application
This optimization applies to:
• 32-bit software
• 64-bit software
Rationale and Examples
This is especially important to break long dependency chains into smaller executing units in floatingpoint code, whether it is mapped to x87, SSE, or SSE2 instructions, because of the longer latency of
floating-point operations. Because most languages (including ANSI C) guarantee that floating-point
expressions are not reordered, compilers cannot usually perform such optimizations unless they offer
a switch to allow noncompliant reordering of floating-point expressions according to algebraic rules.
Reordered code that is algebraically identical to the original code does not necessarily produce
identical computational results due to the lack of associativity of floating-point operations. There are
well-known numerical considerations in applying these optimizations (consult a book on numerical
analysis). In some cases, these optimizations may lead to unexpected results. In the vast majority of
cases, the final result differs only in the least-significant bits.
Listing 10. Avoid
double a[100], sum;
int i;
sum = 0.0f;
for (i = 0; i < 100; i++) {
sum += a[i];
}
Chapter 2 C and C++ Source-Level Optimizations 35
Page 52

Software Optimization Guide for AMD64 Processors
25112 Rev. 3.06 September 2005
Listing 11. Preferred
double a[100], sum1, sum2, sum3, sum4, sum;
int i;
sum1 = 0.0;
sum2 = 0.0;
sum3 = 0.0;
sum4 = 0.0;
for (i = 0; i < 100; i + 4) {
sum1 += a[i];
sum2 += a[i+1];
sum3 += a[i+2];
sum4 += a[i+3];
}
sum = (sum4 + sum3) + (sum1 + sum2);
Notice that the four-way unrolling is chosen to exploit the four-stage fully pipelined floating-point
adder. Each stage of the floating-point adder is occupied on every clock cycle, ensuring maximum
sustained utilization.
36 C and C++ Source-Level Optimizations Chapter 2
Page 53

25112 Rev. 3.06 September 2005
Software Optimization Guide for AMD64 Processors
2.17 Extracting Common Subexpressions
Optimization
Manually extract common subexpressions where C compilers may be unable to extract them from
floating-point expressions due to the guarantee against reordering of such expressions in the ANSI
standard.
Application
This optimization applies to:
• 32-bit software
• 64-bit software
Rationale
Specifically, the compiler cannot rearrange the computation according to algebraic equivalencies
before extracting common subexpressions. Rearranging the expression may give different
computational results due to the lack of associativity of floating-point operations, but the results
usually differ in only the least-significant bits.
Examples
Listing 12. Avoid
double a, b, c, d, e, f;
e = b * c / d;
f = b / d * a;
Listing 13. Preferred
double a, b, c, d, e, f, t;
t = b / d;
e = c * t;
f = a * t;
Listing 14. Avoid
double a, b, c, e, f;
e = a / c;
f = b / c;
Chapter 2 C and C++ Source-Level Optimizations 37
Page 54

Software Optimization Guide for AMD64 Processors
Listing 15. Example 2 (Preferred)
double a, b, c, e, f, t;
t = 1 / c;
e = a * t
f = b * t;
25112 Rev. 3.06 September 2005
38 C and C++ Source-Level Optimizations Chapter 2
Page 55

25112 Rev. 3.06 September 2005
Software Optimization Guide for AMD64 Processors
2.18 Sorting and Padding C and C++ Structures
Optimization
Sort and pad C and C++ structures to achieve natural alignment.
Application
This optimization applies to:
• 32-bit software
• 64-bit software
Rationale
In order to achieve better alignment for structures, many compilers have options that allow padding of
structures to make their sizes multiples of words, doublewords, or quadwords. In addition, to improve
the alignment of structure members, some compilers might allocate structure elements in an order that
differs from the order in which they are declared. However, some compilers might not offer any of
these features, or their implementations might not work properly in all situations.
By sorting and padding structures at the source-code level, if the first member of a structure is
naturally aligned, then all other members are naturally aligned as well. This allows, for example,
arrays of structures to be perfectly aligned.
Sorting and Padding C and C++ Structures
To sort and pad a C or C++ structure, follow these steps:
1. Sort the structure members according to their type sizes, declaring members with larger type sizes
ahead of members with smaller type sizes.
2. Pad the structure so the size of the structure is a multiple of the largest member’s type size.
Examples
Avoid structure declarations in which the members are not declared in order of their type sizes and the
size of the structure is not a multiple of the size of the largest member’s type:
struct {
char a[5]; \\ Smallest type size (1 byte * 5)
long k; \\ 4 bytes in this example
double x; \\ Largest type size (8 bytes)
} baz;
Chapter 2 C and C++ Source-Level Optimizations 39
Page 56

Software Optimization Guide for AMD64 Processors
25112 Rev. 3.06 September 2005
Instead, declare the members according to their type sizes (largest to smallest) and add padding to
ensure that the size of the structure is a multiple of the largest member’s type size:
struct {
double x; \\ Largest type size (8 bytes)
long k; \\ 4 bytes in this example
char a[5]; \\ Smallest type size (1 byte * 5)
char pad[7]; \\ Make structure size a multiple of 8.
} baz;
40 C and C++ Source-Level Optimizations Chapter 2
Page 57

25112 Rev. 3.06 September 2005
Software Optimization Guide for AMD64 Processors
2.19 Sorting Local Variables
Optimization
Sort local variables according to their type sizes, declaring those with larger type sizes ahead of those
with smaller type sizes.
Application
This optimization applies to:
• 32-bit software
• 64-bit software
Rationale
It can be helpful to presort local variables, if your compiler allocates local variables in the same order
in which they are declared in the source code. If the first variable is allocated for natural alignment, all
other variables are allocated contiguously in the order they are declared and are naturally aligned
without padding.
Some compilers do not allocate variables in the order they are declared. In these cases, the compiler
should automatically allocate variables that are naturally aligned with the minimum amount of
padding. In addition, some compilers do not guarantee that the stack is aligned suitably for the largest
type (that is, they do not guarantee quadword alignment), so that quadword operands might be
misaligned, even if this technique is used and the compiler does allocate variables in the order they
are declared.
Example
Avoid local variable declarations, when the variables are not declared in order of their type sizes:
short ga, gu, gi;
long foo, bar;
double x, y, z[3];
char a, b;
float baz;
Instead, sort the declarations according to their type sizes (largest to smallest):
double z[3];
double x, y;
long foo, bar;
float baz;
short ga, gu, gi;
Chapter 2 C and C++ Source-Level Optimizations 41
Page 58

Software Optimization Guide for AMD64 Processors
25112 Rev. 3.06 September 2005
Related Information
For information on sorting local variables at the assembly-language level, see “Sorting Local
Variables” on page 119.
42 C and C++ Source-Level Optimizations Chapter 2
Page 59

25112 Rev. 3.06 September 2005
Software Optimization Guide for AMD64 Processors
2.20 Replacing Integer Division with Multiplication
Optimization
Replace integer division with multiplication when there are multiple divisions in an expression. (This
is possible only if no overflow will occur during the computation of the product. The possibility of an
overflow can be determined by considering the possible ranges of the divisors.)
Application
This optimization applies to:
• 32-bit software
• 64-bit software
Rationale
Integer division is the slowest of all integer arithmetic operations.
Examples
Avoid code that uses two integer divisions:
int i, j, k, m;
m = i / j / k;
Instead, replace one of the integer divisions with the appropriate multiplication:
m = i / (j * k);
Chapter 2 C and C++ Source-Level Optimizations 43
Page 60

Software Optimization Guide for AMD64 Processors
25112 Rev. 3.06 September 2005
2.21 Frequently Dereferenced Pointer Arguments
Optimization
Avoid dereferenced pointer arguments inside a function.
Application
This optimization applies to:
• 32-bit software
• 64-bit software
Rationale
Because the compiler has no knowledge of whether aliasing exists between the pointers, such
dereferencing cannot be “optimized away” by the compiler. Since data may not be maintained in
registers, memory traffic can significantly increase.
Many compilers have an “assume no aliasing” optimization switch. This allows the compiler to
assume that two different pointers always have disjoint contents and does not require copying of
pointer arguments to local variables. If your compiler does not have this type of optimization, then
copy the data pointed to by the pointer arguments to local variables at the start of the function and if
necessary copy them back at the end of the function.
Examples
Listing 16. Avoid
// Assumes pointers are different and q != r.
void isqrt(unsigned long a, unsigned long *q, unsigned long *r) {
*q = a;
if (a > 0) {
while (*q > (*r = a / *q)) {
*q = (*q + *r) >> 1;
}
}
*r = a - *q * *q;
}
44 C and C++ Source-Level Optimizations Chapter 2
Page 61

25112 Rev. 3.06 September 2005
Software Optimization Guide for AMD64 Processors
Listing 17. Preferred
// Assumes pointers are different and q != r.
void isqrt(unsigned long a, unsigned long *q, unsigned long *r) {
unsigned long qq, rr;
qq = a;
if (a > 0) {
while (qq > (rr = a / qq)) {
qq = (qq + rr) >> 1;
}
}
rr = a - qq * qq;
*q = qq;
*r = rr;
}
Chapter 2 C and C++ Source-Level Optimizations 45
Page 62

Software Optimization Guide for AMD64 Processors
25112 Rev. 3.06 September 2005
2.22 Array Indices
Optimization
The preferred type for array indices is ptrdiff_t.
Application
This optimization applies to:
• 32-bit software
• 64-bit software
Rationale
Array indices are often used with pointers while doing arithmetic. Using ptrdiff_t produces more
portable code and will generally provide good performance.
46 C and C++ Source-Level Optimizations Chapter 2
Page 63

25112 Rev. 3.06 September 2005
Software Optimization Guide for AMD64 Processors
2.23 32-Bit Integral Data Types
Optimization
Use 32-bit integers instead of integers with smaller sizes (16-bit or 8-bit).
Application
This optimization applies to 32-bit software.
Rational
Be aware of the amount of storage associated with each integral data type.
Chapter 2 C and C++ Source-Level Optimizations 47
Page 64

Software Optimization Guide for AMD64 Processors
25112 Rev. 3.06 September 2005
2.24 Sign of Integer Operands
Optimization
Where there is a choice of using either a signed or an unsigned type, take into consideration that some
operations are faster with unsigned types while others are faster for signed types.
Application
This optimization applies to:
• 32-bit software
Rationale
In many cases, the type of data to be stored in an integer variable determines whether a signed or an
unsigned integer type is appropriate. For example, to record the weight of a person in pounds, no
negative numbers are required, so an unsigned type is appropriate. However, recording temperatures
in degrees Celsius may require both positive and negative numbers, so a signed type is needed.
Integer-to-floating-point conversion using integers larger than 16 bits is faster with signed types, as
the AMD64 architecture provides instructions for converting signed integers to floating-point but has
no instructions for converting unsigned integers. In a typical case, a 32-bit integer is converted by a
compiler to assembly as follows:
Examples
Listing 18. (Avoid)
double x; ====> mov [temp+4], 0
unsigned int i; mov eax, i
mov [temp], eax
x = i; fild QWORD PTR [temp]
fstp QWORD PTR [x]
The preceding code is slow not only because of the number of instructions, but also because a size
mismatch prevents store-to-load forwarding to the FILD instruction. Instead, use the following code:
Listing 19. (Preferred)
double x; ====> fild DWORD PTR [i]
int i; fstp QWORD PTR [x]
x = i;
Computing quotients and remainders in integer division by constants is faster when performed on
unsigned types. The following typical case is the compiler output for a 32-bit integer divided by 4:
48 C and C++ Source-Level Optimizations Chapter 2
Page 65

25112 Rev. 3.06 September 2005
Listing 20. Example 2 (Avoid)
int i; ====> mov eax, i
cdq
i = i / 4; and edx, 3
add eax, edx
sar eax, 2
mov i, eax
Listing 21. Example 2 (Preferred)
unsigned int i; ====> shr i, 2
i = i / 4;
In summary, use unsigned types for:
• Division and remainders
• Loop counters
• Array indexing
Software Optimization Guide for AMD64 Processors
Use signed types for:
• Integer-to-floating-point conversion
Chapter 2 C and C++ Source-Level Optimizations 49
Page 66

Software Optimization Guide for AMD64 Processors
25112 Rev. 3.06 September 2005
2.25 Accelerating Floating-Point Division and Square Root
Optimization
In applications that involve the heavy use of single precision division and square root operations, it is
recommended that you port the code to SSE or 3DNow!™ inline assembly or use a compiler that can
generate SSE or 3DNow! technology code. If neither of these methods are possible, the x87 FPU
control word register precision control specification bits (PC) can be set to single precision to improve
performance. (The processor defaults to double-extended precision. See AMD64 Architecture
Programmer’s Manual Volume 1: Application Programming (order# 24592) for details on the FPU
control register.)
Application
This optimization applies to 32-bit software.
Rationale
Division and square root have a much longer latency than other floating-point operations, even though
the AMD Athlon 64 and AMD Opteron processors provide significant acceleration of these two
operations. In some application programs, these operations occur so often as to seriously impact
performance. If code has hot spots that use single precision arithmetic only (that is, all computation
involves data of type float) and for some reason cannot be ported to 3DNow! code, the following
technique may be used to improve performance.
The x87 FPU has a precision-control field as part of the FPU control word. The precision-control
setting determines rounding precision of instruction results and affects the basic arithmetic
operations, including division and the extraction of square root. Division and square root on the
AMD Athlon 64 and AMD Opteron processors are only computed to the number of bits necessary for
the currently selected precision. Setting precision control to single precision (versus the Win32
default of double precision) lowers the latency of those operations.
The Microsoft® Visual C environment provides functions to manipulate the FPU control word and
thus the precision control. Note that these functions are not very fast, so insert changes of precision
control where it creates little overhead, such as outside a computation-intensive loop. Otherwise, the
overhead created by the function calls outweighs the benefit from reducing the latencies of divide and
square-root operations. For more information on this topic, see AMD64 Architecture Programmer's
Manual Volume 1: Application Programming (order# 24592).
The following example shows how to set the precision control to single precision and later restore the
original settings in the Microsoft Visual C environment.
50 C and C++ Source-Level Optimizations Chapter 2
Page 67

25112 Rev. 3.06 September 2005
Software Optimization Guide for AMD64 Processors
Examples
Listing 22.
/* Prototype for _controlfp function */
#include <float.h>
unsigned int orig_cw;
/* Get current FPU control word and save it. */
orig_cw = _controlfp(0, 0);
/* Set precision control in FPU control word to single precision.
This reduces the latency of divide and square-root operations. */
_controlfp(_PC_24, MCW_PC);
/* Restore original FPU control word. */
_controlfp(orig_cw, 0xfffff);
Chapter 2 C and C++ Source-Level Optimizations 51
Page 68

Software Optimization Guide for AMD64 Processors
25112 Rev. 3.06 September 2005
2.26 Fast Floating-Point-to-Integer Conversion
Optimization
Use 3DNow! PF2ID instruction to perform truncating conversion to accomplish rapid floating-pointto-integer conversion, if the floating-point operand is a type float.
Application
This optimization applies to 32-bit software.
Rationale
Floating-point-to-integer conversion in C programs is typically a very slow operation. The semantics
of C and C++ demand that the conversion use truncation. If the floating-point operand is of type
float, and the compiler supports 3DNow! code generation, then the 3DNow! PF2ID instruction,
which performs truncating conversion, can be utilized by the compiler to accomplish rapid floatingpoint-to-integer conversion.
Note: The PF2ID instruction does not provide conversion compliant with the IEEE-754 standard.
Some operands of type float (IEEE-754 single precision) such as NaNs, infinities, and
denormals, are either unsupported or not handled in compliance with the IEEE-754 standard
by 3DNow! technology.
For double precision operands, the usual way to accomplish truncating conversion involves the
following algorithm:
1. Save the current x87 rounding mode (this is usually round to nearest or even).
2. Set the x87 rounding mode to truncation.
3. Load the floating-point source operand and store the integer result.
4. Restore the original x87 rounding mode.
This algorithm is typically implemented through the C run-time library function
ftol. While the
AMD Athlon 64 and AMD Opteron processors have special hardware optimizations to speed up the
changing of x87 rounding modes and therefore
ftol, calls to ftol may still tend to be slow.
For situations where very fast floating-point-to-integer conversion is required, the conversion code in
Listing 24 on page 53 may be helpful. This code uses the current rounding mode instead of truncation
when performing the conversion. Therefore, the result may differ by 1 from the
replacement code adds the “magic number” 2
52+251
to the source operand, then stores the double
ftol result. The
precision result to memory and retrieves the lower doubleword of the stored result. Adding the magic
number shifts the original argument to the right inside the double precision mantissa, placing the
binary point of the sum immediately to the right of the least-significant mantissa bit. Extracting the
lower doubleword of the sum then delivers the integral portion of the original argument.
52 C and C++ Source-Level Optimizations Chapter 2
Page 69

25112 Rev. 3.06 September 2005
Software Optimization Guide for AMD64 Processors
The following conversion code causes a 64-bit store to feed into a 32-bit load. The load is from the
lower 32 bits of the 64-bit store, the one case of size mismatch between a store and a dependent load
that is specifically supported by the store-to-load-forwarding hardware of the AMD Athlon 64 and
AMD Opteron processors.
Examples
Listing 23. Slow
double x;
int i;
i = x;
Listing 24. Fast
#define DOUBLE2INT(i, d) \
{double t = ((d) + 6755399441055744.0); i = *((int *)(&t));}
double x;
int i;
DOUBLE2INT(i, x);
Chapter 2 C and C++ Source-Level Optimizations 53
Page 70

Software Optimization Guide for AMD64 Processors
25112 Rev. 3.06 September 2005
2.27 Speeding Up Branches Based on Comparisons Between Floats
Optimization
Store operands of type float into a memory location and use integer comparison with the memory
location to perform fast branches in cases where compilers do not support fast floating-point
comparison instructions or 3DNow! code generation.
Application
This optimization applies to 32-bit software.
Rationale
Branches based on floating-point comparisons are often slow. The AMD Athlon 64 and
AMD Opteron processors support the FCOMI, FUCOMI, FCOMIP, and FUCOMIP instructions that
allow implementation of fast branches based on comparisons between operands of type double or
type float. However, many compilers do not support generating these instructions. Likewise,
floating-point comparisons between operands of type float can be accomplished quickly by using
the 3DNow! PFCMP instruction if the compiler supports 3DNow! code generation.
Many compilers only implement branches based on floating-point comparisons by using FCOM or
FCOMP to compare the floating-point operands, followed by FSTSW AX in order to transfer the x87
condition-code flags into EAX. The subsequent branch is then based on the contents of the EAX
register. Although the AMD Athlon 64 and AMD Opteron processors have acceleration hardware to
speed up the FSTSW instruction, this process is still fairly slow.
Branches Dependent on Integer Comparisons Are Fast
One alternative for branches dependent upon the outcome of the comparison of operands of type
float is to store the operand(s) into a memory location and then perform an integer comparison with
that memory location. Branches dependent on integer comparisons are very fast. It should be noted
that the replacement code uses a load dependent on an immediately prior store. If the store is not
doubleword-aligned, no store-to-load-forwarding takes place, and the branch is still slow. Also, if
there is a lot of activity in the load-store queue, forwarding of the store data may be somewhat
delayed, thus negating some of the advantages of using the replacement code. It is recommended that
you experiment with the replacement code to test whether it actually provides a performance increase
in the code at hand.
The replacement code works well for comparisons against zero, including correct behavior when
encountering a negative zero as allowed by the IEEE-754 standard. It also works well for comparing
54 C and C++ Source-Level Optimizations Chapter 2
Page 71

25112 Rev. 3.06 September 2005
Software Optimization Guide for AMD64 Processors
to positive constants. In that case, the user must first determine the integer representation of that
floating-point constant. This can be accomplished with the following C code snippet:
float x;
scanf("%g", &x);
printf("%08X\n", (*((int *)(&x))));
The replacement code is IEEE-754 compliant for all classes of floating-point operands except NaNs.
However, NaNs do not occur in properly working software.
Examples
Intial definitions:
#define FLOAT2INTCAST(f) (*((int *)(&f)))
#define FLOAT2UINTCAST(f) (*((unsigned int *)(&f)))
Table 3: Comparisons against Zero
Use this … Instead of this.
if (FLOAT2UINTCAST(f) > 0x80000000U) if (f < 0.0f)
if (FLOAT2INCAST(f) <= 0) if (f <= 0.0f)
if (FLOAT2INTCAST(f) > 0) if (f > 0.0f)
if (FLOAT2UINTCAST(f) <= 0x80000000U) if (f >= 0.0f)
Table 4: Comparisons against Positive Constant
Use this … Instead of this.
if (FLOAT2INTCAST(f) < 0x40400000) if (f < 3.0f)
if (FLOAT2INTCAST(f) <= 0x40400000) if (f <= 3.0f)
if (FLOAT2INTCAST(f) > 0x40400000) if (f > 3.0f)
if (FLOAT2INTCAST(f) >= 0x40400000) if (f >= 3.0f)
Table 5: Comparisons among Two Floats
Use this … Instead of this.
float t = f1 - f2;
if (FLOAT2UINTCAST(t) > 0x80000000U)
if (f1 < f2)
Chapter 2 C and C++ Source-Level Optimizations 55
Page 72

Software Optimization Guide for AMD64 Processors
Table 5: Comparisons among Two Floats
Use this … Instead of this.
25112 Rev. 3.06 September 2005
float t = f1 - f2;
if (FLOAT2INTCAST(t) <= 0)
float t = f1 - f2;
if (FLOAT2INTCAST(t) > 0)
float t = f1 - f2;
f (FLOAT2UINTCAST(f) <= 0x80000000U)
if (f1 <= f2)
if (f1 > f2)
if (f1 >= f2)
56 C and C++ Source-Level Optimizations Chapter 2
Page 73

25112 Rev. 3.06 September 2005
Software Optimization Guide for AMD64 Processors
2.28 Improving Performance in Linux Libraries
Optimization
If interposition is not important to a particular application, then, if using ld in the binutils package,
you can make use of a linker option that results in references to public global routines inside the
library that cannot be overridden.
Application This optimization applies to:
• 32-bit software
• 64-bit software
Rationale
Dynamically loadable libraries are a versatile feature of the Linux operating system. They allow one
or more symbols in one library to override the same symbol in another library. Known as
interposition, this ability makes customizations and probing seamless. Interposition is implemented
by means of a procedure linkage table (PLT). The PLT is so flexible that even references to an
overridden symbol inside the library end up referencing the overriding symbol. However, the PLT
imposes a performance penalty by requiring all function calls to public global routines to go through
an extra step that increases the chances of cache misses and branch mispredictions. This is
particularly severe for C++ classes whose methods typically refer to other methods in the same class.
Examples
When using ld, include the following command line option:
-Bsymbolic
If using gcc to build a library, add this option to the command-line:
-Wl,-Bsymbolic
Chapter 2 C and C++ Source-Level Optimizations 57
Page 74

Software Optimization Guide for AMD64 Processors
25112 Rev. 3.06 September 2005
58 C and C++ Source-Level Optimizations Chapter 2
Page 75

25112 Rev. 3.06 September 2005
Software Optimization Guide for AMD64 Processors
Chapter 3 General 64-Bit Optimizations
In long mode, the AMD64 architecture provides both a compatibility mode, which allows a 64-bit
operating system to run existing 16-bit and 32-bit applications, and a 64-bit mode, which provides
64-bit addressing and expanded register resources to support higher performance for recompiled
64-bit programs. This chapter presents general optimizations that improve the performance of
software designed to run in 64-bit mode. Therefore, all optimizations in this chapter apply only to
64-bit software.
This chapter covers the following topics:
Topic Page
64-Bit Registers and Integer Arithmetic 60
64-Bit Arithmetic and Large-Integer Multiplication 62
128-Bit Media Instructions and Floating-Point Operations 67
32-Bit Legacy GPRs and Small Unsigned Integers 68
Chapter 3 General 64-Bit Optimizations 59
Page 76

Software Optimization Guide for AMD64 Processors
25112 Rev. 3.06 September 2005
3.1 64-Bit Registers and Integer Arithmetic
Optimization
Use 64-bit registers for 64-bit integer arithmetic.
Rationale
Using 64-bit registers instead of their 32-bit equivalents can dramatically reduce the amount of code
necessary to perform 64-bit integer arithmetic.
Example 1
This code performs 64-bit addition using 32-bit registers:
; Add ECX:EBX to EDX:EAX, and place sum in EDX:EAX.
00000000 03 C3 add eax, ebx
00000002 13 D1 adc edx, ecx
Using 64-bit registers, the previous code can be replaced by one simple instruction (assuming that
RAX and RBX contain the 64-bit integer values to add):
00000000 48 03 C3 add rax, rbx
Although the preceding instruction requires one additional byte for the REX prefix, it is still one byte
shorter than the original code. More importantly, this instruction still has a latency of only one cycle,
uses two fewer registers, and occupies only one decode slot.
60 General 64-Bit Optimizations Chapter 3
Page 77

25112 Rev. 3.06 September 2005
Software Optimization Guide for AMD64 Processors
Example 2
To perform the low-order half of the product of two 64-bit integers using 32-bit registers, a procedure
such as the following is necessary:
; In: [ESP+8]:[ESP+4] = multiplicand
; [ESP+16]:[ESP+12] = multiplier
; Out: EDX:EAX = (multiplicand * multiplier) % 2^64
; Destroys: EAX, ECX, EDX, EFlags
llmul PROC
mov edx, [esp+8] ; multiplicand_hi
mov ecx, [esp+16] ; multiplier_hi
or edx, ecx ; One operand >= 2^32?
mov edx, [esp+12] ; multiplier_lo
mov eax, [esp+4] ; multiplicand_lo
jnz twomul ; Yes, need two multiplies.
mul edx ; multiplicand_lo * multiplier_lo
ret ; Done, return to caller.
twomul:
imul edx, [esp+8] ; p3_lo = multiplicand_hi * multiplier_lo
imul ecx, eax ; p2_lo = multiplier_hi * multiplicand_lo
add ecx, edx ; p2_lo + p3_lo
mul dword ptr [esp+12] ; p1 = multiplicand_lo * multiplier_lo
add edx, ecx ; p1 + p2_lo + p3_lo = result in EDX:EAX
ret ; Done, return to caller.
llmul ENDP
Using 64-bit registers, the entire product can be produced with only one instruction:
; Multiply RAX by RBX. The 128-bit product is stored in RDX:RAX.
00000000 48 F7 EB imul rbx
Related Information
For more examples of 64-bit arithmetic using only 32-bit registers, see “Efficient 64-Bit Integer
Arithmetic in 32-Bit Mode” on page 170.
Chapter 3 General 64-Bit Optimizations 61
Page 78

Software Optimization Guide for AMD64 Processors
25112 Rev. 3.06 September 2005
3.2 64-Bit Arithmetic and Large-Integer Multiplication
Optimization
Use 64-bit arithmetic for integer multiplication that produces 128-bit or larger products.
Background
Large-number multiplications (those involving 128-bit or larger products) are utilized in
cryptography algorithms, which figure importantly in e-commerce applications and secure
transactions on the Internet. Processors cannot perform large-number multiplication natively; they
must break the operation into chunks that are permitted by their architecture (32-bit or 64-bit
additions and multiplications).
Rationale
Using 64-bit rather than 32-bit integer operations dramatically reduces the number of additions and
multiplications required to compute large products. For example, computing a 1024-bit product using
64-bit arithmetic requires fewer than one quarter the number of instructions required when using
32-bit operations:
Comparing... 32-bit arithmetic 64-bit arithmetic
Number of multiplications 256 64
Number of additions with carry 509 125
Number of additions 255 63
In addition, the processor performs 64-bit additions just as fast as it performs 32-bit additions, and the
latency of 64-bit multiplications is only slightly higher than for 32-bit multiplications. (The processor
is capable of performing a 64-bit addition each clock cycle and a 64-bit multiplication every other
clock cycle.)
Example
Consider the multiplication of two unsigned 64-bit numbers a and b, represented in terms of 32-bit
numbers a1:a0 and b1:b0.
a = a1 * 232 + a0
b = b1 * 232 + b0
The product of a and b, c, can be expressed in terms of products of the 32-bit components, as follows:
64
c = (a1 * b1) * 2
+ (a1 * b0 + a0 * b1) * 232 + (a0 * b0)
62 General 64-Bit Optimizations Chapter 3
Page 79

25112 Rev. 3.06 September 2005
Software Optimization Guide for AMD64 Processors
Each of the products of the components of a and b (for example, a1 * b1) is composed of 64 bits—an
upper 32 bits and a lower 32 bits. it is convenient to represent these individual products as d, e, f, and
g, as follows:
a0 * b0 = d1:d0 = d1 * 232 + d0
a1 * b0 = e1:e0 = e1 * 232 + e0
a0 * b1 = f1:f0 = f1 * 232 + f0
a1 * b1 = g1:g0 = g1 * 232 + g0
Substitution yields the following equation:
c = (g1 * 232 + g0) * 264 + (e1 * 232 + e0 + f1 * 232 + f0) * 232 + (d1 * 232 + d0)
Simplifying yields this equation:
c = g1 * 296 + (e1 + f1 + g0) * 264 + (d1 + e0 + f0) * 232 + d0
it is convenient to represent the terms that are multiplied by each power of 2 as c3, c2, c1, and c0, as
follows:
g1 = c3
e1 + f1 + g0 = c2
d1 + e0 + f0 = c1
d0 = c0
Substituting again yields:
c = c3 * 296 + c2 * 264 + c1 * 232 + c0
Chapter 3 General 64-Bit Optimizations 63
Page 80

Software Optimization Guide for AMD64 Processors
25112 Rev. 3.06 September 2005
The following procedure performs 64-bit unsigned integer multiplication, as previously illustrated
using 32-bit integer operations:
; 32bitalu_64x64(int *a, int *b, int *c);
;
; TO ASSEMBLE INTO *.obj DO THE FOLLOWING:
; ml.exe -coff -c 32bitalu_64x64.asm
;
.586
.K3D
.XMM
_DATA SEGMENT
tempESP dd 0
_DATA ENDS
_TEXT SEGMENT
ASSUME DS:_DATA
PUBLIC _32bitalu_64x64
_32bitalu_64x64 PROC NEAR
;==============================================================================
; Save the register state. Registers EAX, ECX, and EDX are considered volatile
; and assumed to be changed, while the registers below must be preserved.
push ebp
mov ebp, esp
;==============================================================================
; Parameters passed into routine:
; [ebp+8] = ->a
; [ebp+12] = ->b
; [ebp+16] = ->c
;==============================================================================
push ebx
push esi
push edi
;==============================================================================
mov esi,[ebp+8] ; ESI = ->a
mov edi,[ebp+12] ; EDI = ->b
mov ecx,[ebp+16] ; ECX = ->c
push ebp
mov [tempESP], esp
;==============================================================================
; Multiply 64-bit numbers a and b, each of which is composed of two 32-bit
; components:
; a = a1 * 2^32 + a0
; b = b1 * 2^32 + b0
mov eax,[esi] ; EAX = a0
mov edx,[edi] ; EDX = b0
mul edx ; EDX:EAX = a0*b0 = d1:d0
mov ebx,edx ; EDX = d1
mov [ecx],eax ; c0 = EAX
xor esp,esp ; ESP = 0
xor ebp,ebp ; EBP = 0
64 General 64-Bit Optimizations Chapter 3
Page 81

25112 Rev. 3.06 September 2005
mov eax,[esi+4] ; EAX = a1
mov edx,[edi] ; EDX = b0
mul edx ; EDX:EAX = a1*b0 = e1:e0
add ebx,eax ; EBX = d1 + e0
adc ebp,edx ; EBP = e1 + possible carry from d1+e0
adc esp,0 ; Collect possible carry into c3.
mov eax,[esi] ; EAX = a0
mov edx,[edx+4] ; EDX = b1
mul edx ; EDX:EAX = a0*b1 = f1:f0
add ebx,eax ; EBX = d1 + e0 + f0
adc ebp,edx ; EBP = e1 + f1 + carry
adc esp,0 ; Collect possible carry into c3.
mov [ecx+4],ebx ; c1 = d1 + e0 + f0
mov eax,[esi+4] ; EAX = a1
mov edx,[edi+4] ; EDX = b1
mul edx ; EDX:EAX = a1*b1 = g1:g0
add ebp,eax ; EBP = e1 + f1 + g0 + carry
adc esp,edx ; ESP = g1 + carry
mov [ecx+8],ebp ; c2 = e1 + f1 + g0 + carry
mov [ecx+12],esp ; c3 = g1 + carry
;==============================================================================
; Restore the register state.
mov esp, [tempESP]
pop ebp
pop edi
pop esi
pop ebx
mov esp, ebp
pop ebp
;==============================================================================
ret
_32bitalu_64x64 ENDP
_TEXT ENDS
END
Software Optimization Guide for AMD64 Processors
Chapter 3 General 64-Bit Optimizations 65
Page 82

Software Optimization Guide for AMD64 Processors
25112 Rev. 3.06 September 2005
To improve performance and substantially reduce code size, the following procedure performs the
same 64-bit integer multiplication using 64-bit instead of 32-bit operations:
; 64bitalu_64x64(int *a, int *b, int *c);
;
; TO ASSEMBLE INTO *.obj DO THE FOLLOWING:
; ml64.exe -c 64bitalu_64x64.asm
;
_TEXT SEGMENT
64bitalu_64x64 PROC NEAR
;==============================================================================
; Parameters passed into routine:
; rcx = ->a
; rdx = ->b
; r8 = ->c
;==============================================================================
mov rax, [rcx] ; RAX = [a0]
mul [rdx] ; Multiply [a0] by [b0] such that
; RDX:RAX = [c1]:[c0].
mov [r8], rax ; Store 128-bit product of a and b.
mov [r8+8], rdx
;==============================================================================
ret
64bitalu_64x64 ENDP
END
66 General 64-Bit Optimizations Chapter 3
Page 83

25112 Rev. 3.06 September 2005
Software Optimization Guide for AMD64 Processors
3.3 128-Bit Media Instructions and Floating-Point Operations
Optimization
Use 128-bit media (SSE and SSE2) instructions instead of x87 or 64-bit media (MMX™ and
3DNow!™ technology) instructions for floating-point operations.
Rationale
In 64-bit mode, the processor provides eight additional XMM registers (XMM8–XMM15) for a total
of 16. These extra registers can substantially reduce register pressure in floating-point code written
using 128-bit media instructions.
Although the processor fully supports the x87 and 64-bit media instructions, there are only eight
registers available to these instructions (ST(0)–ST(7) or MMX0–MMX7, respectively).
Chapter 3 General 64-Bit Optimizations 67
Page 84

Software Optimization Guide for AMD64 Processors
25112 Rev. 3.06 September 2005
3.4 32-Bit Legacy GPRs and Small Unsigned Integers
Optimization
Use the 32-bit legacy general-purpose registers (EAX through ESI) instead of their 64-bit extensions
to store unsigned integer values whose range never requires more than 32 bits, even if subsequent
statements use the 32-bit value in a 64-bit operation. (For example, use ECX instead of RCX until you
need to perform a 64-bit operation; then use RCX.)
Rationale
In 64-bit mode, the machine-language representation of many instructions that operate on 64-bit
register operands requires a REX prefix byte, which increases the size of the code. However,
instructions that operate on a 32-bit legacy register operand do not require the prefix and have the
desirable side-effect of clearing the upper 32 bits of the extended register to zero. For example, using
the AND instruction on ECX clears the upper half of RCX.
Caution
Because the assembler also uses a REX prefix byte to encode the 32-bit sizes of the eight new 64-bit
general-purpose registers (R8D–R15D), you should only use one of the original eight generalpurpose registers (EAX through ESI) to implement this technique.
Example
The following example illustrates the unnecessary use of 64-bit registers to calculate the number of
bytes remaining to be copied by an aligned block-copy routine after copying the first few bytes having
addresses not meeting the routine’s 8-byte-alignment requirements. The first two statements, after the
program comments, use the 64-bit R10 register—presumably, because this value is later used to
adjust a 64-bit value in R8—even though the range of values stored in R10 take no more than four bits
to represent. Using R10 instead of a smaller register requires a REX prefix byte (in this case, 49),
which increases the size of the machine-language code.
; Input:
; R10 = source address (src)
; R8 = number of bytes to copy (count)
49 F7 DA neg r10 ; Subtract the source address from 2^64.
49 83 E2 07 and r10, 7 ; Determine how many bytes were copied separately.
4D 2B C2 sub r8, r10 ; Subtract the number of bytes already copied from
; the number of bytes to copy.
68 General 64-Bit Optimizations Chapter 3
Page 85

25112 Rev. 3.06 September 2005
Software Optimization Guide for AMD64 Processors
To improve code density, the following rewritten code uses ECX until it is absolutely necessary to use
RCX, eliminating two REX prefix bytes:
F7 D9 neg ecx ; Subtract the source address from 2^32 (the processor
; clears the high 32 bits of RCX).
83 E1 07 and ecx, 7 ; Determine how many bytes were copied separately.
4C 2B C1 sub r8, rcx ; Subtract the number of bytes already copied from
; the number of bytes to copy.
Chapter 3 General 64-Bit Optimizations 69
Page 86

Software Optimization Guide for AMD64 Processors
25112 Rev. 3.06 September 2005
70 General 64-Bit Optimizations Chapter 3
Page 87

25112 Rev. 3.06 September 2005
Software Optimization Guide for AMD64 Processors
Chapter 4 Instruction-Decoding
Optimizations
The optimizations in this chapter are designed to help maximize the number of instructions that the
processor can decode at one time.
The instruction fetcher of both the AMD Athlon™ 64 and AMD Opteron™ processors reads 16-byte
packets from the L1 instruction cache. These packets are 16-byte aligned. The instruction bytes are
then merged into a 32-byte pick window. On each cycle, the in-order front-end engine selects up to
three AMD64 instructions for decode from the pick window.
This chapter covers the following topics:
Topic Page
DirectPath Instructions 72
Load-Execute Instructions 73
Load-Execute Integer Instructions 73
Load-Execute Floating-Point Instructions with Floating-Point Operands 74
Load-Execute Floating-Point Instructions with Integer Operands 74
Branch Targets in Program Hot Spots 76
32/64-Bit vs. 16-Bit Forms of the LEA Instruction 77
Short Instruction Encodings 80
Partial-Register Reads and Writes 81
Using LEAVE for Function Epilogues 83
Alternatives to SHLD Instruction 85
8-Bit Sign-Extended Immediate Values 87
8-Bit Sign-Extended Displacements 88
Code Padding with Operand-Size Override and NOP 89
Chapter 4 Instruction-Decoding Optimizations 71
Page 88

Software Optimization Guide for AMD64 Processors
25112 Rev. 3.06 September 2005
4.1 DirectPath Instructions
Optimization
❖ Use DirectPath instructions rather than VectorPath instructions. (To determine the type of an
instruction—either DirectPath or VectorPath—see Appendix C, “Instruction Latencies.”)
Application
This optimization applies to:
• 32-bit software
• 64-bit software
Rationale
DirectPath instructions minimize the number of operations per AMD64 instruction, thus providing
for optimally efficient decode and execution. Up to three DirectPath Single instructions, or one and a
half DirectPath Double instructions, can be decoded per cycle. VectorPath instructions block the
decoding of DirectPath instructions.
The AMD Athlon 64 and AMD Opteron processors implement the majority of instructions used by a
compiler as DirectPath Single and DirectPath Double instructions. However, assembly writers must
still take into consideration the use of DirectPath versus VectorPath instructions.
72 Instruction-Decoding Optimizations Chapter 4
Page 89

25112 Rev. 3.06 September 2005
Software Optimization Guide for AMD64 Processors
4.2 Load-Execute Instructions
A load-execute instruction is an instruction that loads a value from memory into a register and then
performs an operation on that value. Many general purpose instructions, such as ADD, SUB, AND,
etc., have load-execute forms:
add rax, QWORD PTR [foo]
This instruction loads the value foo from memory and then adds it to the value in the RAX register.
The work performed by a load-execute instruction can also be accomplished by using two discrete
instructions—a load instruction followed by an execute instruction. The following example employs
discrete load and execute stages:
mov rbx, QWORD PTR [foo]
add rax, rbx
The first statement loads the value foo from memory into the RBX register. The second statement
adds the value in RBX to the value in RAX.
The following optimizations govern the use of load-execute instructions:
• Load-Execute Integer Instructions on page 73.
• Load-Execute Floating-Point Instructions with Floating-Point Operands on page 74.
• Load-Execute Floating-Point Instructions with Integer Operands on page 74.
4.2.1 Load-Execute Integer Instructions
Optimization
❖ When performing integer computations, use load-execute instructions instead of discrete load
and execute instructions. Use discrete load and execute instructions only to avoid scheduler stalls for
longer executing instructions and to explicitly schedule load and execute operations.
Application
This optimization applies to:
• 32-bit software
• 64-bit software
Rationale
Most load-execute integer instructions are DirectPath decodable and can be decoded at the rate of
three per cycle. Splitting a load-execute integer instruction into two separate instructions reduces
decoding bandwidth and increases register pressure, which results in lower performance.
Chapter 4 Instruction-Decoding Optimizations 73
Page 90

Software Optimization Guide for AMD64 Processors
25112 Rev. 3.06 September 2005
4.2.2 Load-Execute Floating-Point Instructions with Floating-Point
Operands
Optimization
❖ When performing floating-point computations using floating-point (not integer) source operands,
use load-execute instructions instead of discrete load and execute instructions.
Application
This optimization applies to:
• 32-bit software
• 64-bit software
Rationale
Using load-execute floating-point instructions that take floating-point operands improves
performance for the following reasons:
• Denser code allows more work to be held in the instruction cache.
• Denser code generates fewer internal macro-ops, allowing the floating-point scheduler to hold
more work, which increases the chances of extracting parallelism from the code.
Example
Avoid code like this, which uses discrete load and execute instructions:
movss xmm0, [float_var1]
movss xmm12, [float_var2]
mulss xmm0, xmm12
Instead, use code like this, which uses a load-execute floating-point instruction:
movss xmm0, [float_var1]
mulss xmm0, [float_var2]
4.2.3 Load-Execute Floating-Point Instructions with Integer Operands
Optimization
❖ Avoid x87 load-execute floating-point instructions that take integer operands (FIADD, FICOM,
FICOMP, FIDIV, FIDIVR, FIMUL, FISUB, and FISUBR). When performing floating-point
computations using integer source operands, use discrete load (FILD) and execute instructions
instead.
74 Instruction-Decoding Optimizations Chapter 4
Page 91

25112 Rev. 3.06 September 2005
Software Optimization Guide for AMD64 Processors
Application
This optimization applies to:
• 32-bit software
• 64-bit software
Rationale
The load-execute floating-point instructions that take integer operands are VectorPath instructions and
generate two micro-ops in a cycle, while discrete load and execute intructions enable a third
DirectPath instruction to be decoded in the same cycle. In some situations, these optimizations can
also reduce execution time if FILD can be scheduled several instructions ahead of the arithmetic
instruction in order to cover the FILD latency.
Example
Avoid code such as the following, which uses load-execute floating-point instructions that take
integer operands:
fld QWORD PTR [foo] ; Push foo onto FP stack [ST(0) = foo].
fimul DWORD PTR [bar] ; Multiply bar by ST(0) [ST(0) = bar * foo].
fiadd DWORD PTR [baz] ; Add baz to ST(0) [ST(0) = baz + (bar * foo)].
Instead, use code such as the following, which uses discrete load and execute instructions:
fild DWORD PTR [bar] ; Push bar onto FP stack.
fild DWORD PTR [baz] ; Push baz onto FP stack.
fld QWORD PTR [foo] ; Push foo onto FP stack.
fmulp st(2), st ; Multiply and pop [ST(1) = foo * bar, ST(0) = baz].
faddp st(1), st ; Add and pop [ST(0) = baz + (foo * bar)].
Chapter 4 Instruction-Decoding Optimizations 75
Page 92

Software Optimization Guide for AMD64 Processors
25112 Rev. 3.06 September 2005
4.3 Branch Targets in Program Hot Spots
Optimization
In program “hot spots” (as determined by either profiling or loop-nesting analysis), branch targets
should be placed at or near the beginning of code windows that are 16-byte aligned. The smaller the
basic block, the more beneficial this optimization will be.
Application
This optimization applies to:
• 32-bit software
• 64-bit software
Rationale
Aligning branch targets maximizes the number of instructions in the pick window and preserves
instruction-cache space in branch-intensive code outside such hot spots.
76 Instruction-Decoding Optimizations Chapter 4
Page 93

25112 Rev. 3.06 September 2005
Software Optimization Guide for AMD64 Processors
4.4 32/64-Bit vs. 16-Bit Forms of the LEA Instruction
Optimization
Use the 32-bit or 64-bit forms of the Load Effective Address (LEA) instruction rather than the 16-bit
form.
Application
This optimization applies to:
• 32-bit software
• 64-bit software
Rationale
The 32-bit and 64-bit LEA instructions are implemented as DirectPath operations with an execution
latency of only two cycles. The 16-bit LEA instruction, however, is a VectorPath instruction, which
lowers the decode bandwidth and has a longer execution latency.
Chapter 4 Instruction-Decoding Optimizations 77
Page 94

Software Optimization Guide for AMD64 Processors
25112 Rev. 3.06 September 2005
4.5 Take Advantage of x86 and AMD64 Complex Addressing Modes
Optimization
When porting from other architectures, or, perhaps, if you are just new to x86 assembly language,
remember that the x86 architecture provides many complex addressing modes. By building the
effective address in one instruction, the instruction count can sometimes be reduced, leading to better
code density and greater decode bandwidth. Refer to the the section on effective addresses in the
AMD64 Architecture Programmer's Manual Volume 1: Application Programming for more detailed
information on how effective addresses are formed.
Application
This optimization applies to:
• 32-bit software
• 64-bit software
Rationale
When building the effective address you sometimes seem to require numerous instructions when there
is a base address (such as the base of an array) an index and perhaps a displacement. But x86
architecture can often handle all of this in one instruction. This can lead to reduced code size and
fewer instructions to decode. As always, attention should be paid to total instruction length, latencies
and whether or not the instruction choices are DirectPath (fastest) or VectorPath (slower).
Example
This first instruction sequence of 5 instructions and a total latency count of 8 can be replaced by one
instruction.
Number of Bytes Latency Instruction
31 movl %r10d,%r11d
82
31
53
21
leaq 0x68E35,rcx
addq %rcx,%r11
movb (%r11,%r13),%cl
cmpb %al,%cl
The following instruction replaces the functionality of the above sequence.
78 Instruction-Decoding Optimizations Chapter 4
Page 95

25112 Rev. 3.06 September 2005
Number of Bytes Latency Instruction
Software Optimization Guide for AMD64 Processors
84 cmpb %al,
Example
These two instructions can be replaced by one instruction.
movl 0x4c65a,%r11
movl (%r11,%r8,8),%r11
becomes:
movl 0x4c65a(,%r8,8),%r11
0x68e35(%r10,%r13)
Chapter 4 Instruction-Decoding Optimizations 79
Page 96

Software Optimization Guide for AMD64 Processors
25112 Rev. 3.06 September 2005
4.6 Short Instruction Encodings
Optimization
Use instruction forms with shorter encodings rather than those with longer encodings. For example,
use 8-bit displacements instead of 32-bit displacements, and use the single-byte form of simple
integer instructions instead of the 2-byte opcode-ModRM form.
Application
This optimization applies to:
• 32-bit software
• 64-bit software
Rationale
Using shorter instructions increases the number of instructions that can fit into the L1 instruction
cache and increases the average decode rate.
Example
Avoid the use of instructions with longer encodings, such as those shown here:
81 C0 78 56 34 12 add eax, 12345678h ; 2-byte opcode form (with ModRM)
81 C3 FB FF FF FF add ebx, -5 ; 32-bit immediate value
0F 84 05 00 00 00 jz label1 ; 2-byte opcode, 32-bit immediate value
Instead, choose instructions with shorter encodings, like these:
05 78 56 34 12 add eax, 12345678h ; 1-byte opcode form
83 C3 FB add ebx, -5 ; 8-bit sign-extended immediate value
74 05 jz label1 ; 1-byte opcode, 8-bit immediate value
80 Instruction-Decoding Optimizations Chapter 4
Page 97

25112 Rev. 3.06 September 2005
Software Optimization Guide for AMD64 Processors
4.7 Partial-Register Reads and Writes
Optimization
Avoid partial register reads and writes.
Application
This optimization applies to:
• 32-bit software
• 64-bit software
Rationale
In order to handle partial register writes, the processor’s execution core implements a data merging
scheme.
In the execution unit, an instruction that writes part of a register merges the modified portion with the
current state of the other part of the register. Therefore, the dependency hardware can potentially
force a false dependency on the most recent instruction that writes to any part of the register.
In addition, an instruction that has a read dependency on any part of a given architectural register has
a read dependency on the most recent instruction that modifies any part of the same architectural
register.
Example 1
Avoid code such as the following, which writes to only part of a register:
mov al, 10 ; Instruction 1
mov ah, 12 ; Instruction 2 has a false dependency on instruction 1.
; Instruction 2 merges new AH with current EAX register
; value forwarded by instruction 1.
Example 2
Avoid code such as the following, which both reads and writes only parts of registers:
mov bx, 12h ; Instruction 1
mov bl, dl ; Instruction 2 has a false dependency on the completion
; of instruction 1.
mov bh, cl ; Instruction 3 has a false dependency on the completion
; of instruction 2.
mov al, bl ; Instruction 4 depends on the completion of instruction 2.
Chapter 4 Instruction-Decoding Optimizations 81
Page 98

Software Optimization Guide for AMD64 Processors
Example 3
Avoid:
mov al, bl
Preferred:
movzx eax, bl
Example 4
Avoid:
mov al, [ebx]
Preferred:
movzx eax, byte ptr [ebx]
Example 5
Avoid:
mov al, 01h
25112 Rev. 3.06 September 2005
Preferred:
mov eax, 00000001h
Example 6
Avoid:
movss xmm1, xmm2
Preferred:
movaps xmm1, xmm2
82 Instruction-Decoding Optimizations Chapter 4
Page 99

25112 Rev. 3.06 September 2005
Software Optimization Guide for AMD64 Processors
4.8 Using LEAVE for Function Epilogues
Optimization
The recommended optimization for function epilogues depends on whether the function allocates
local variables.
If the function Then
Allocates local variables Replace the traditional function epilogue with the LEAVE instruction.
Does not allocate local variables Do no use function prologues or epilogues. Access function
arguments and local variables through rSP.
Application
This optimization applies to:
• 32-bit software
• 64-bit software
Rationale
Functions That Allocate Local Variables
The LEAVE instruction is a single-byte instruction and saves 2 bytes of code space over the
traditional epilogue. Replacing the traditional sequence with LEAVE also preserves decode
bandwidth.
Functions That Do not Allocate Local Variables
Accessing function arguments and local variables directly through ESP frees EBP for use as a
general-purpose register.
Background
The function arguments and local variables inside a function are referenced through a so-called frame
pointer. In AMD64 code, the base pointer register (rBP) is customarily used as a frame pointer. You
set up the frame pointer at the beginning of the function using a function prologue:
push ebp ; Save old frame pointer.
mov ebp, esp ; Initialize new frame pointer.
sub esp,
; function allocates local variables).
n
; Allocate space for local variables (only if the
Chapter 4 Instruction-Decoding Optimizations 83
Page 100

Software Optimization Guide for AMD64 Processors
25112 Rev. 3.06 September 2005
Function arguments on the stack can now be accessed at positive offsets relative to rBP, and local
variables are accessible at negative offsets relative to rBP.
Example
The traditional function epilogue looks like this:
mov esp, ebp ; Deallocate local variables (only if space was allocated).
pop ebp ; Restore old frame pointer.
Replace the traditional function epilogue with a single LEAVE instruction:
leave
84 Instruction-Decoding Optimizations Chapter 4
 Loading...
Loading...