

Allen-Bradley 842E-SIP1BA, 842E-SIP6BA, 842E-SIP3BA, 842E-SIP4BA, 842E-SIP2BA User Manual
...Page 1

User Manual
Original Instructions
EtherNet/IP™Absolute Encoder
Catalog Numbers 842E-SIP1BA. 842E-SIP2BA, 842E-SIP3BA, 842E-SIP4BA, 842E-SIP5BA, 842E-SIP6BA, 842E-SIP7BA,
842E-SIP8BA, 842E-SIP9BA, 842E-SIP10BA, 842E-SIP11BA, 842E-SIP12BA, 842E-MIP1BA, 842E-MIP2BA, 842E-MIP3BA,
842E-MIP4BA, 842E-MIP5BA, 842E-MIP6BA, 842E-MIP7BA, 842E-MIP8BA, 842E-MIP9BA, 842E-MIP10BA, 842E-MIP11BA,
842E-MIP12BA
Page 2
Important User Information
Read this document and the documents listed in the additional resources section about installation, configuration, and
operation of this equipment before you install, configure, operate, or maintain this product. Users are required to
familiarize themselves with installation and wiring instructions in addition to requirements of all applicable codes, laws,
and standards.
Activities including installation, adjustments, putting into service, use, assembly, disassembly, and maintenance are
required to be carried out by suitably trained personnel in accordance with applicable code of practice.
If this equipment is used in a manner not specified by the manufacturer, the protection provided by the equipment may
be impaired.
In no event will Rockwell Automation, Inc. be responsible or liable for indirect or consequential damages resulting from
the use or application of this equipment.
The examples and diagrams in this manual are included solely for illustrative purposes. Because of the many variables and
requirements associated with any particular installation, Rockwell Automation, Inc. cannot assume responsibility or
liability for actual use based on the examples and diagrams.
No patent liability is assumed by Rockwell Automation, Inc. with respect to use of information, circuits, equipment, or
software described in this manual.
Reproduction of the contents of this manual, in whole or in part, without written permission of Rockwell Automation,
Inc., is prohibited
Throughout this manual, when necessary, we use notes to make you aware of safety considerations.
WARNING: Identifies information about practices or circumstances that can cause an explosion in a hazardous
environment, which may lead to personal injury or death, property damage, or economic loss.
ATTENTION: Identifies information about practices or circumstances that can lead to personal injury or death, property
damage, or economic loss. Attentions help you identify a hazard, avoid a hazard, and recognize the consequence.
IMPORTANT Identifies information that is critical for successful application and understanding of the product.
Labels may also be on or inside the equipment to provide specific precautions.
SHOCK HAZARD: Labels may be on or inside the equipment, for example, a drive or motor, to alert people that dangerous
voltage may be present.
BURN HAZARD: Labels may be on or inside the equipment, for example, a drive or motor, to alert people that surfaces may
reach dangerous temperatures.
ARC FLASH HAZARD: Labels may be on or inside the equipment, for example, a motor control center, to alert people to
potential Arc Flash. Arc Flash will cause severe injury or death. Wear proper Personal Protective Equipment (PPE). Follow ALL
Regulatory requirements for safe work practices and for Personal Protective Equipment (PPE).
Page 3

Table of Contents
Preface
About This Document . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5
Who Should Use This Manual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5
Purpose of This Manual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5
Related Documentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5
Common Techniques Used in This Manual . . . . . . . . . . . . . . . . . . . . . . .6
Chapter 1
Safety Authorized Personnel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7
Correct Use. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7
General Safety Notes and Protective Measures . . . . . . . . . . . . . . . . . . . . .8
Environmental Protection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8
Chapter 2
Encoder Overview Overview of the Encoder. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .9
What Is an Encoder?. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .9
What Are the Different Kinds of Encoders? . . . . . . . . . . . . . . . . . . .9
842E Encoder Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Configurable Parameters. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
The Electronic Data Sheet File . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Operating Principle of the Encoder . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
The 842E-SIP-xxx EtherNet/IP Is a Single-turn Encoder . . . . . 11
The 842E-MIP-xxxEtherNet/IP Is a Multi-turn Encoder . . . . . 11
Scalable Resolution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
842E EtherNet/IP Is Firmware-flash Gradable Using
Control Flash . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Special Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
EtherNet/IP Overview Use of the Common Industrial Protocol . . . . . . . . . . . . . . . . . . . . . . . . 13
Rockwell Automation Publication 842E-UM001C-EN-P - September 2016 3
Chapter 3
TCP/IP and UDP/IP. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
MAC Address. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Communication Frame . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Understanding the Producer/Consumer Model . . . . . . . . . . . . . . . . . 15
Specifying the Requested Packet Interval . . . . . . . . . . . . . . . . . . . . . . . . 16
EtherNet/IP Topologies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Star Topology . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Linear Topology. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Device Level Ring Topology. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Endless Shaft Functionality . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Enabling Endless Shaft Functionality. . . . . . . . . . . . . . . . . . . . . . . . 18
Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
CIP Object Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
Position Sensor Object. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Page 4

Table of Contents
Identity Object. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
Assembly Object . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
I/O Assembly . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
I/O . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Config . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
Chapter 4
Installation Mechanical . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Shaft Rotation Direction. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Mounting with a Solid Shaft. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Mounting with a Hollow Shaft . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
Mechanical Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Electrical . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Electrical Wiring Instructions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Pin Assignments. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
Preset Push Button . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
Network Address Switches . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
Electrical Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
Configuring the Encoder for Your
EtherNet/IP Network
Configuring the 842 E Encoder
Using RSLogix 5000®
Chapter 5
Setting the IP Address . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Assigning the Last Octet in an IP Address Scheme of 192.168.1.xxx
Using the Network Address Switches . . . . . . . . . . . . . . . . . . . . . . 43
Assigning the IP Address Using BootP/DHCP . . . . . . . . . . . . . . 44
Chapter 6
Example: Installing the Hardware . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
Configuring the Encoder. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
Installing the Add-on Profile in RSLogix 5000. . . . . . . . . . . . . . . . . . . 49
General Tab. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
Ethernet Address . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
Module Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
Connection Tab. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
Module Info Tab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
Configuration Tab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
Internet Protocol Tab. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
Network Tab. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
Default Encoder Settings. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
Preset Function . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
RSLogix 5000 Controller Tags . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
4 Rockwell Automation Publication 842E-UM001C-EN-P -September 2016
Page 5

Table of Contents
Chapter 7
Diagnostics and Troubleshooting Status Indicators . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
Self-test Via EtherNet/IP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
Warnings, Alarms, and Errors Via EtherNet/IP. . . . . . . . . . . . . . . . . . 65
Warnings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
Alarms. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
Errors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
Appendix A
Installing the Add-on Profile Introduction. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
Performing the Installation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
Appendix B
RSLogix 5000® Sample Code Linear Scaling Example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
Installing Your Project. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
Using an Explicit Message Configuration to Set Preset
Encoder Value . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
Using an Explicit Message Configuration to Read Preset
Encoder Value . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
Using an Explicit Message Configuration to Obtain the Encoder
Run-time in Seconds . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
Rockwell Automation Publication 842E-UM001C-EN-P - September 2016 5
Page 6

Table of Contents
Notes:
6 Rockwell Automation Publication 842E-UM001C-EN-P -September 2016
Page 7
Preface
About This Document
Who Should Use This Manual
Purpose of This Manual
Read this section to familiarize yourself with the rest of the manual. It provides
information concerning:
• Who should use this manual
•The purpose of this manual
• Related documentation
• Conventions that are used in this manual
Use this manual if you are responsible for designing, installing, programming,
or troubleshooting control systems that use 842E EtherNet/IP encoder.
You should have a basic understanding of electrical circuitry and familiarity
with relay logic. If you do not, obtain the proper training before using this
product.
This manual is a reference guide for the 842E EtherNet/IP encoders. It
describes the procedures that you use to install, wire, and troubleshoot your
encoder. This manual:
• Gives you an overview of the 842E EtherNet/IP encoders
• Explains how to install and wire your encoder
Related Documentation
Common Techniques Used in
This Manual
The following documents contain additional information concerning
Rockwell Automation® products. To obtain a copy, contact your local
Rockwell Automation® office or Allen-Bradley distributor.
Resource Description
Installation Instructions
842E EtherNet/IP Multi-turn Encoders
EtherNet/IP Modules in Logix5000™ Control
Systems User Manual, publication ENET-UM001
Getting Results with RSLogix 5000®,
publication 9399-RLD300GR
Allen-Bradley® Industrial Automation Glossary,
AG-7. 1
Pub. # 10000169360
A manual on how to use EtherNet/IP modules with
Logix5000™ controllers and communicate with various devices
on the Ethernet network
Information on how to install and navigate RSLogix 5000®. The
guide includes troubleshooting information and tips on how to
use RSLogix 5000® effectively.
A glossary of industrial automation terms and abbreviations
The following conventions are used throughout this manual:
• Bulleted lists such as this one provide information, not procedural steps.
• Numbered lists provide steps or hierarchical information.
• Italic type is used for emphasis.
Rockwell Automation Publication 842E-UM001C-EN-P - September 2016 7
Page 8

Preface
Notes:
8 Rockwell Automation Publication 842E-UM001C-EN-P -September 2016
Page 9
Authorized Personnel
Chapter 1
Safety
This chapter deals with your own safety and the safety of the equipment
operators.
Read this chapter carefully before working with the 842E EtherNet/IP encoder
or the machine or system in which the 842E EtherNet/IP encoder is used.
ATT EN TI ON : Only authorized personnel can install, commission, and service
the 842E EtherNet/IP encoder.
Only trained and authorized Rockwell Automation® service personnel can make
repairs to the 842E EtherNet/IP encoder.
Correct Use
The following qualifications are necessary for the various tasks:
Activity Qualification
Mounting Basic technical training
Knowledge of the current safety regulations in the workplace
Electrical installation and
replacement
Commissioning, operation, and
configuration
Practical electr ical training
Knowledge of current electrical safety regulations
Knowledge on the use and operation of devices in the related application (for
example, industrial robots, storage, and conveyor technology)
Knowledge on the current safety regulations and the use and operation of
devices in the related application
Knowledge of automation systems (for example, Rockwell Automation®
ControlLogix® controller)
Knowledge of EtherNet/IP
Knowledge of the usage of automation software (for example, Rockwell
Automation RSLogix™)
The 842E EtherNet/IP Absolute Encoder is an instrument that is
manufactured in accordance with recognized industrial regulations. It also
meets the quality requirements as per ISO 9001:2008 and of an environment
management system as per ISO 14_001:2009.
Rockwell Automation Publication 842E-UM001C-EN-P - September 2016 9
An encoder is a device for mounting that cannot be used independently of its
foreseen function. For this reason, an encoder is not equipped with immediate
safety devices. As per statutory regulations, the operator of the system provides
considerations for the safety of personnel and systems. Due to its design, the
842E EtherNet/IP can only be operated within an EtherNet/IP network. It is
Page 10

Chapter 1 Safety
General Safety Notes and
Protective Measures
necessary to comply with the EtherNet/IP specifications and guidelines for
installing an EtherNet/IP network. If any modifications are made to the 842E
EtherNet/IP encoder, any warranty claim against Rockwell Automation is
rendered void.
ATT EN TI ON : Observe the following procedures to confirm the correct and
proper use of the 842E EtherNet/IP encoder.
Qualified personnel with knowledge of electronics, precision mechanics, and
control system programming install and maintain the encoder. It is necessary to
comply with the related standards for the technical safety stipulations.
All persons who install, operate, or maintain the device have to meet the safety
regulations:
• The operating instructions must always be available and must always be
followed.
• Unqualified personnel are not allowed to be present in the vicinity of the
system during installation.
• The system is to be installed in accordance with all applicable safety
regulations and the mounting instructions.
• All work safety regulations of the applicable countries are to be followed
during installation.
• Failure to follow all applicable health and safety regulations results in
personal injury or damage to the system.
• The current and voltage sources in the encoder are designed in accordance
with all applicable technical regulations.
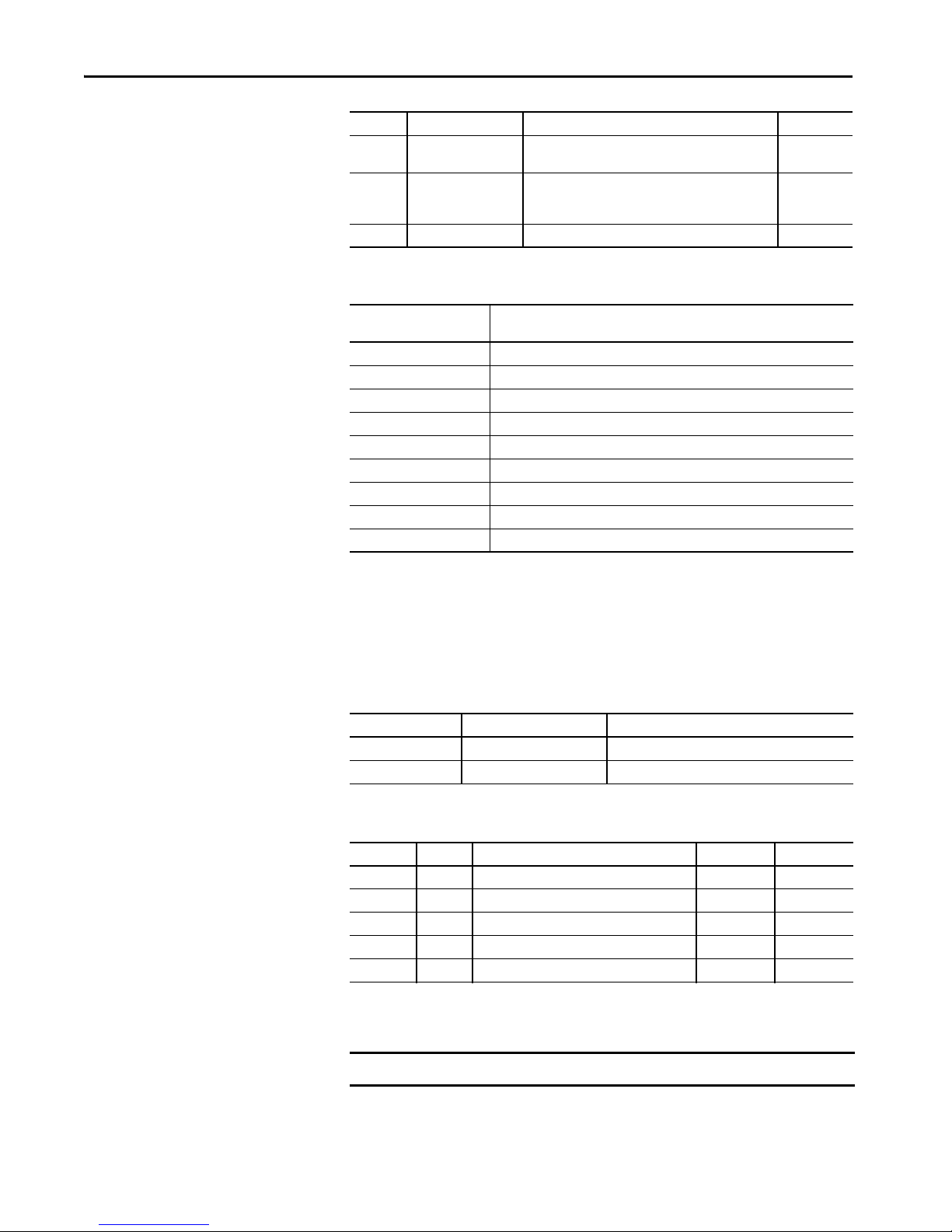
Environmental Protection
10 Rockwell Automation Publication 842E-UM001C-EN-P - September 2016
Note the following information on disposal.
Assembly Material Disposal
Packaging Cardboard Waste paper
Shaft Stainless steel Scrap metal
Flange Aluminum Scrap metal
Housing Aluminum Die-cast Scrap metal
Electronic assemblies Various Hazardous waste
Page 11

Chapter 2
Encoder Overview
The 842E family of encoders uses EtherNet/IP technology to provide its data
to a programmable controller. These encoders include an embedded
EtherNet/IP switch to connect additional EtherNet/IP capable products in
series and/or support a Device Level Ring (DLR) topology for Ethernet media
redundancy.
The 842E is an ultra-high resolution encoder in single-turn and multi-turn
versions. These encoders have 18-bit single-turn resolution. The multi-turn has
an additional 12 bits for counting the number of revolutions.
Overview of the Encoder
What Is an Encoder?
Encoders can electronically monitor the position of a rotating shaft to measure
information such as speed, distance, RPM, and position. Rockwell
Automation® offers various light- and heavy-duty incremental and absolute
encoders. Our accessories help you easily install and efficiently use our
encoders.
What Are the Different Kinds of Encoders?
Incremental
A simple and cost-effective solution for a wide variety of applications,
incremental encoders electronically monitor the position or speed of a rotating
shaft. Encoder feedback is compatible with programmable controllers,
numerical controllers, motion controllers, and other position systems.
Rockwell Automation® offers light-duty and heavy-duty incremental encoders
for different shaft loads. Ruggedized incremental encoders are available with an
enclosure rating of NEMA Type 4 and IP66. Incremental encoders are also
available in solid and hollow shaft models for various mounting options.
Applications include: machine tools, packaging machinery, motion controls,
robotics, and DC drives.
Rockwell Automation Publication 842E-UM001C-EN-P - September 2016 11
Absolute
An absolute encoder has a unique digital output for each shaft position. The
use of absolute encoders assures that true position is always available, regardless
of power interruptions to the system. Absolute encoders can be single-turn or
multi-turn.
Page 12
Chapter 2 Encoder Overview
Multi-turn units assign a unique digital output for each shaft position across
multiple shaft rotations and have high-resolution capability. Rockwell
Automation absolute encoders are available with an enclosure rating of NEMA
Type 4 and IP66, and various mounting options. Applications include steel
mills, overhead cranes, punch presses, transfer lines, oil rigs, wind mills,
machine tools, and packaging.
Sine-cosine
A sine-cosine encoder is a position transducer, which uses two sensors, each 90°
out of phase from each other. Sine-cosine encoders are able to be used directly
by the drive or squared to provide a conventional A quad B digital signal.
Therefore, the sine-cosine encoder can be used as an absolute, sine-cosine, or
incremental feedback device.
Single-turn vs. Multi-turn
Absolute encoders are either single-turn or multi-turn. Single-turn encoders are
used if the absolute position of the shaft for one revolution is required. Multiturn encoders are used if the absolute position is required for multiple shaft
revolutions.
842E Encoder Features
The 842E EtherNet/IP encoder features include:
• Support for the encoder profile 22h (0x22) defined in the Common
Industrial Protocol (CIP
• Compatibility with star, linear, and Device Level Ring topology
• Robust nickel code disk for harsh ambient conditions
• Configurable resolution per revolution: 1 to 262,144
• High precision and availability
• Ball bearings are spaced 30 mm (1.18 in.) apart for longer life
• Face mount flange and servo flange/blind hollow shaft and through
hollow shaft
• 18-bit single turn resolution
• 30-bit total resolution multi-turn resolution
• Endless shaft
•ControlFLASH™ update compatible
IMPORTANT A Series A encoder cannot be updated to a Series B. A Series B encoder must
be purchased to update future firmware. Series A does not have
ControlFLASH update capability.
™), according to IEC 61784-1
12 Rockwell Automation Publication 842E-UM001C-EN-P - September 2016
Page 13
Encoder Overview Chapter 2
Configurable Parameters
The Electronic
Data Sheet File
Operating Principle of the
Encoder
The EtherNet/IP technology allows for certain encoder parameters to be
configured over the network.
•Count direction
•Counts per revolution
• Preset value
•Velocity output
• IP addressing
The electronic data sheet (EDS) file contains all information that is related to
the measuring-system-specific parameters and the operating modes of the 842E
EtherNet/IP encoders. The EDS file is integrated using the EtherNet/IP
network configuration tool to configure and place in operation the 842E
EtherNet/IP encoder
For more information, go to www.rockwellautomation.com/resources/eds/
and search on “842E.”
The 842E EtherNet/IP encoder acquires the position of rotating axes and
outputs the position in the form of a unique digital numeric value. Optical
acquisition of the rotary position value is from an internal coded disk.
The 842E-SIP-xxx EtherNet/IP Is a Single-turn Encoder
Single-turn encoders are used if the absolute position of the shaft for one
revolution is required.
The 842E-MIP-xxxEtherNet/IP Is a Multi-turn Encoder
Multi-turn encoders are used if the absolute position is required for multiple
shaft revolution.
Scalable Resolution
The steps per revolution and the total resolution can be scaled and adapted to
the related application.
The steps per revolution can be scaled in integers from 1…262,144. The total
n
resolution of the 842E-MIP Multi-turn EtherNet/IP encoder must be 2
the steps per revolution. This restriction is not relevant if the round axis or
endless shaft functionality is activated.
times
Rockwell Automation Publication 842E-UM001C-EN-P - September 2016 13
Page 14
Chapter 2 Encoder Overview
Special Features
Properties Encoder
Single-turn Multi-turn
Absolute Encoder in 60 mm (2.36 in.) design
Robust nickel code disk for harsh environment
High precision and reliability
Ball bearings are spaced 30 mm (1.18 in.) apart
High level of resistance to vibration
Optimal rotational accuracy
Compact design
Face mount flange, servo flange and blind
Hollow shaft
ControlFLASH upgradable
18-bit single-turn resolution (1 to 262,144 steps)
30-bit total resolution
12-bit multi-turn resolution (1…4,096 revolutions)
Round axis functionality/endless shaft functionality
■■
■■
■■
■■
■■
■■
■■
■■
■■
■■
■■
■
■
■
EtherNet/IP interface (as per IEC 61784-1)
Supports the encoder profile 22h defined in the CIP (Common Industrial
Protocol)
Device Level Ring (DLR)
■■
■■
■■
14 Rockwell Automation Publication 842E-UM001C-EN-P - September 2016
Page 15
Chapter 3
IP
UDP
TCP
HTTPFTP CIP
Ethernet
Process layer
Communication
layers
Explicit messagin
Implicit messagin
Physical layer
EtherNet/IP Overview
Ethernet Industrial Protocol (EtherNet/IP) is a frame-based computer
networking technology for local industrial area networks. It follows the seven
layers of the Open Systems Interconnection model:
OSI Model
Host Layers Layer Function
7. Application Network process to application
6. Presentation Data, encryption
Media
Layers
5. Session Inter-host communication
4. Transport Flow control, TCP/UDP
3. Network Internet protocol, logical addressing
2. Data Link Physical addressing
1. Physical Media, signal and binary transmission, peer-to-peer, multicast, unicast
Explicit and implicit messaging
Use of the Common
Industrial Protocol
EtherNet/IP implements the Common Industrial Protocol (CIP), the
application layer protocol specified for EtherNet/IP.
EtherNet/IP uses the CIP on the process layer. The 842E encoder meets the
requirements of the EtherNet/IP protocol according to IEC 61784-1 and the
requirement of the encoder profile.
g
Figure 1
g
Rockwell Automation Publication 842E-UM001C-EN-P - September 2016 15
Page 16
Chapter 3 EtherNet/IP Overview
Transmission sequence
Data field
Trailer
Header
Destination
Address
Source
Address
46...1500 Byte
The encoder is an I/O adapter in the EtherNet/IP. It receives and sends explicit
and implicit messages either cyclic or on request (polled).
TCP/IP and UDP/IP
EtherNet/IP uses TCP/IP or UDP/IP for communication. (TCP is
transmission control protocol and UDP is user datagram protocol.)
Implicit messaging is used for real-time communication between a
programmable logic controller (PLC) and the encoder in EtherNet/IP. With
implicit messaging a connection is established between exactly two devices
within the CIP protocol. Implicit messaging uses UDP/IP via port 2222.
Explicit Messaging is used in EtherNet/IP for communication that does not
need to take place in real time. Explicit Messaging uses TCP/IP; it is used, for
example, to transfer parameters from the PLC to the encoder.
MAC ID
Devices that originate or use data on the network have factory-assigned media
access control (MAC) addresses for unique identification. The MAC ID
(MAC ID) consists of 6 bytes. The first three bytes identify the manufacturer.
The last three bytes are unique to the device. An example of a MAC ID is
00:00:BC:C9: D7:14.
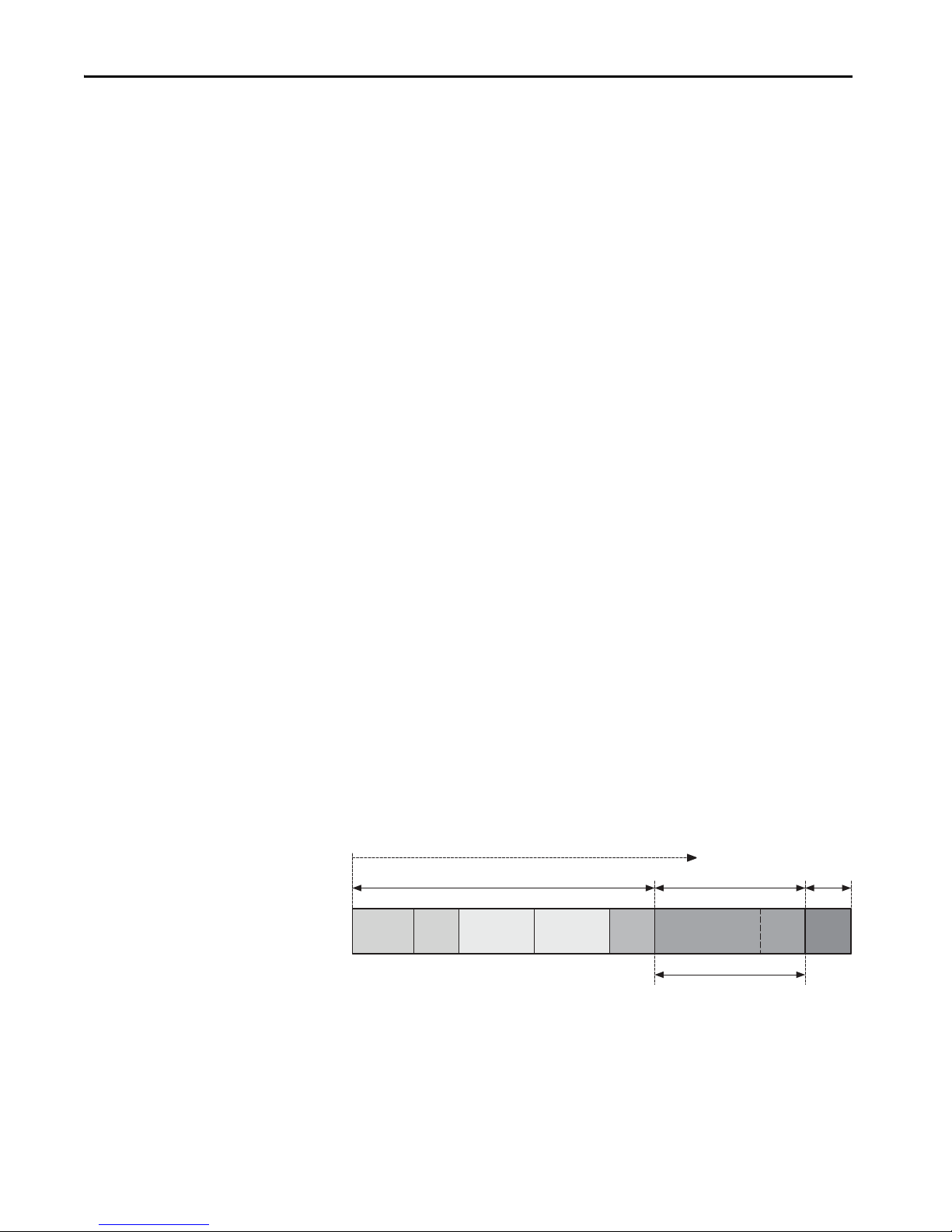
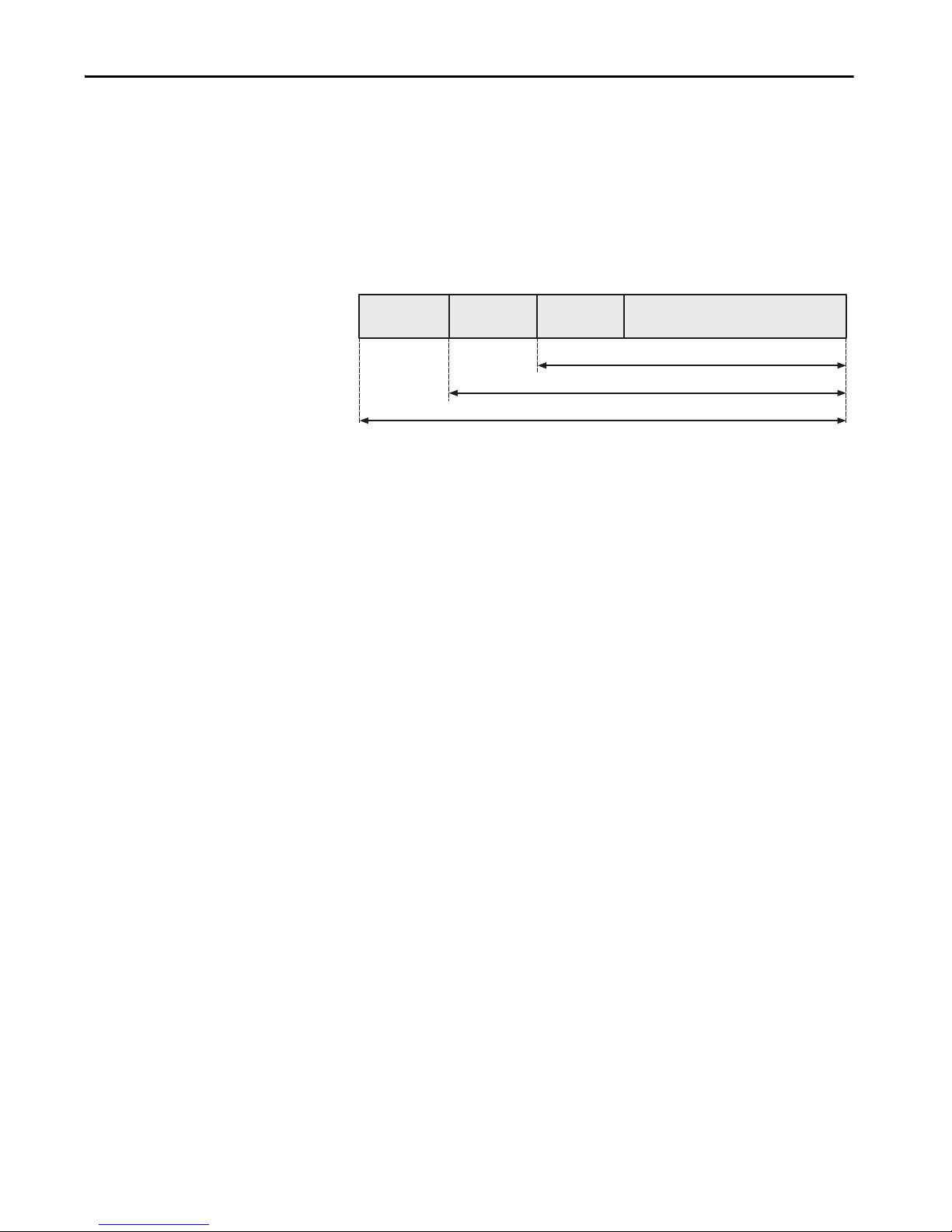
Communication Frame
EtherNet/IP is based on the standard Ethernet frame. The frame contains the
Ethernet header, the Ethernet data, and the Ethernet trailer. The MAC IDs of
the receiver (destination address) and of the source (source address) are
contained in the Ethernet header.
16 Rockwell Automation Publication 842E-UM001C-EN-P - September 2016
Figure 2
Page 17
EtherNet/IP Overview Chapter 3
IP header TCP/UDP header CIP header CIP data
CIP protocol
IP datagram
TCP segment or UDP datagram
The Ethernet data field consists of several nested protocols:
• The IP datagram is transported in the user data of the Ethernet data
field.
• The TCP segment or the UDP datagram is transported in the user data
of the IP datagram.
• The CIP protocol is transported in the user data of the TCP segment or
the UDP datagram.
Figure 3
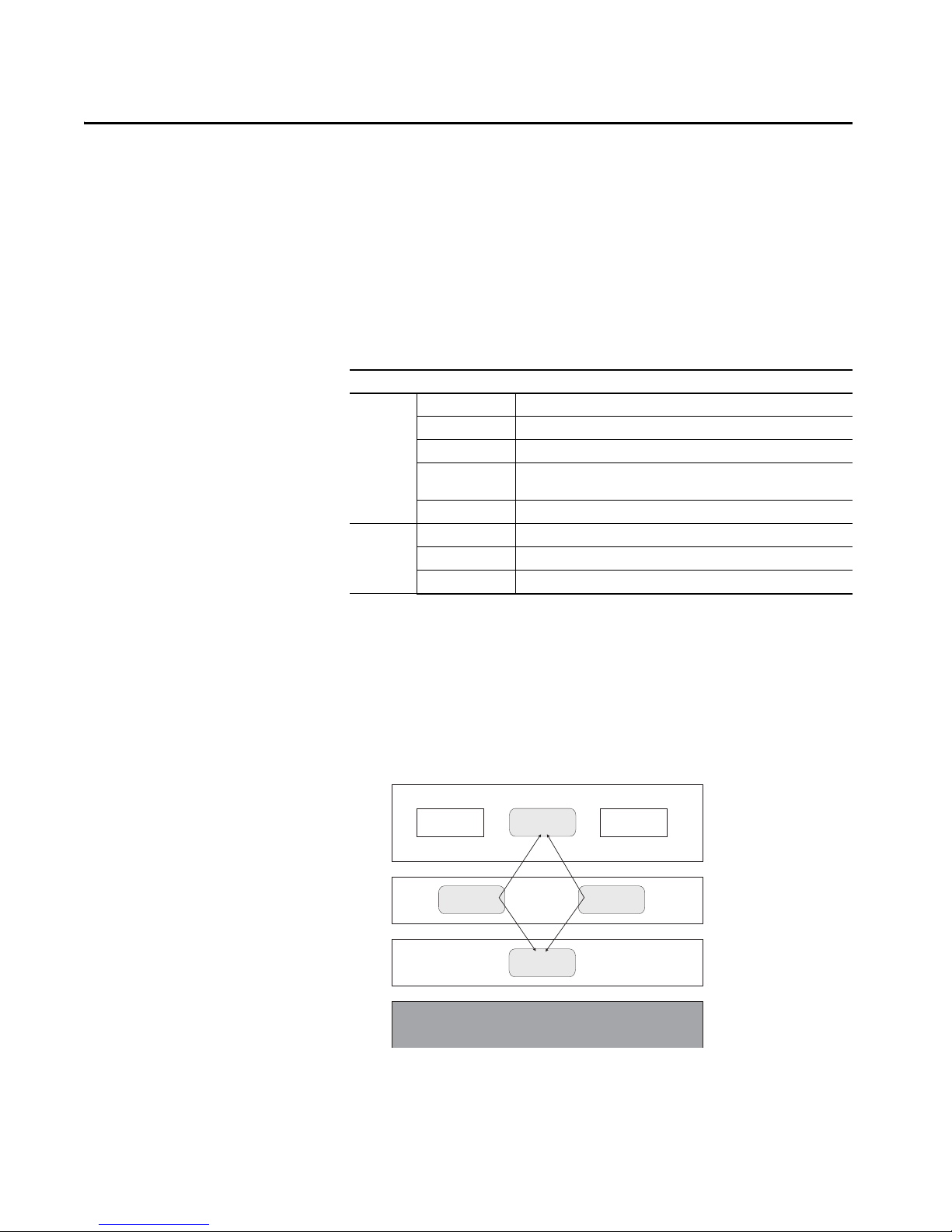
CIP is a message-based protocol that implements a relative path to send a
message from the “producing” device in a system to the “consuming” devices.
Understanding the
Producer/Consumer Model
The producing device contains the path information that steers the message
along the proper route to reach its consumers. Because the producing device
holds this information, other devices along the path simply pass this
information; they do not need to store it.
The Producer/Consumer model has two significant benefits:
• You do not need to configure routing table in the bridging modules,
which greatly simplifies maintenance and module replacement.
• You maintain full control over the route taken by each message, which
enables you to select alternative paths for the same end device.
The CIP “Producer/Consumer” networking model replaces the old source/
destination (“master/slave”) model. The Producer/Consumer model reduces
network traffic and increases speed of transmission. In traditional I/O systems,
controllers poll input modules to obtain their input status. In the CIP system,
the controller does not poll the input modules. Instead, they produce their data
either upon a change of state or periodically. The frequency of update depends
upon the options that are chosen during configuration and where on the
network the input module resides. The input module, therefore, is a producer
of input data and the controller is a consumer of the data.
Rockwell Automation Publication 842E-UM001C-EN-P - September 2016 17
The controller can also produce data for other controllers to consume. The
produced and consumed data is accessible by multiple controllers and other
devices over the EtherNet/IP network. This data exchange conforms to the
Producer/Consumer model.
Page 18
Chapter 3 EtherNet/IP Overview
Specifying the Requested
Packet Interval
EtherNet/IP Topologies
The requested packet interval (RPI) is the update rate that is specified for a
particular piece of data on the network. This value specifies how often to
produce the data for that device. For example, if you specify an RPI of 50 ms, it
means that every 50 ms the device sends its data to the controller or the
controller sends its data to the device.
RPIs are only used for devices that exchange data. For example, a
ControlLogix® EtherNet/IP bridge in the same chassis as the controller does
not require an RPI because it is not a data-producing member of the system; it
is used only as a bridge to remote modules.
The 842E encoders can be connected in any of three network topologies: star,
linear, or Device Level Ring (DLR).
IMPORTANT Rockwell Automation recommends that you use no more than 50 nodes on
one DLR or linear network. If your application requires more than 50 nodes,
we recommend that you segment the nodes into separate, but linked, DLR or
linear networks.
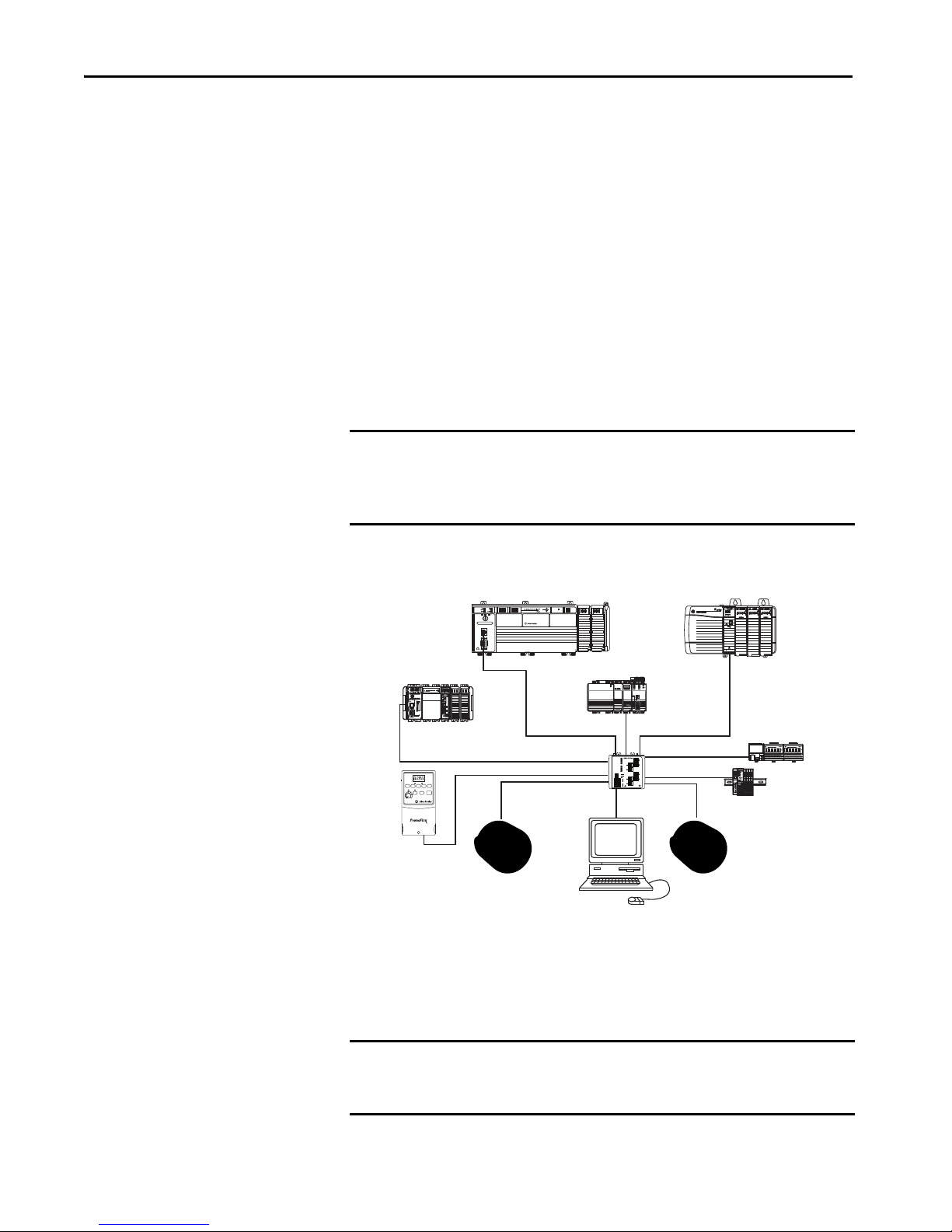
Star Topology
Figure 4
The star structure consists of a number of devices that are connected to a
central switch.
18 Rockwell Automation Publication 842E-UM001C-EN-P - September 2016
IMPORTANT When this topology is used, make the Ethernet connection on the 842E
encoder to the Link 1 connection. The Link 2 Ethernet connection must
remain unused.
Page 19
EtherNet/IP Overview Chapter 3
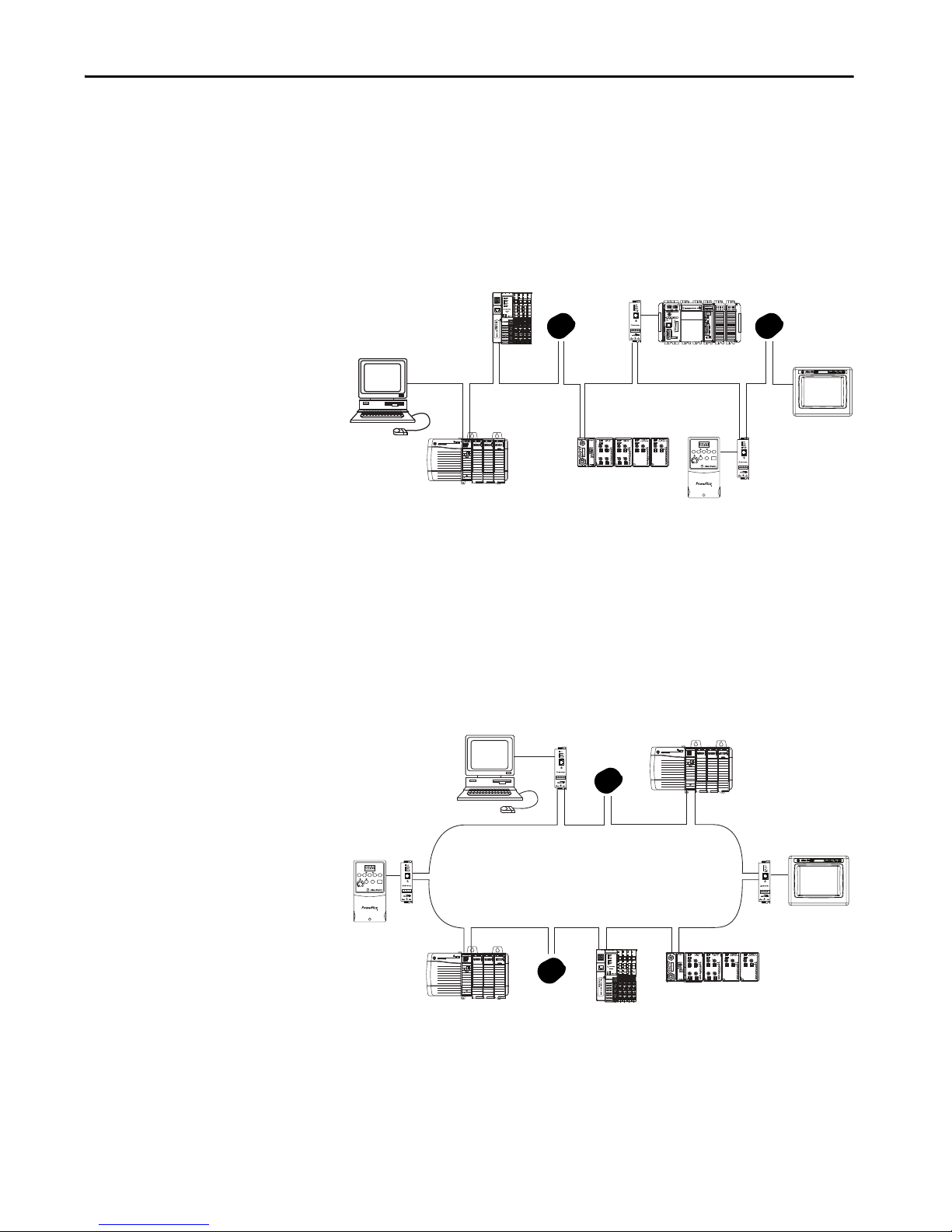
Linear Topology
The linear topology uses the embedded switching capability to form a daisychain style network that has a beginning and an end. Linear topology simplifies
installation and reduces wiring and installation costs, but a break in the
network disconnects all devices downstream from the break. When this
topology is used, both Ethernet connections on the encoder are used. For the
network connection use Link 1, Link 2, or both.
Figure 5
Device Level Ring Topology
A DLR network is a single-fault-tolerant ring network that is intended for the
interconnection of automation devices. DLR topology is advantageous as it
can tolerate a break in the network. If a break is detected, the signals are sent
out in both directions. With this topology, use both the Link 1 and Link 2
Ethernet connections on the 842E encoder.
Rockwell Automation Publication 842E-UM001C-EN-P - September 2016 19
Figure 6
Page 20

Chapter 3 EtherNet/IP Overview
Endless Shaft Functionality
The endless-shaft feature is not supported for the single-turn encoder. This
functionality is applicable only for the multi-turn Ethernet encoders and
accessible only via messaging (not the AOP).
The round axis functionality or endless shaft functionality removes the
n
restriction that the total resolution must be 2
times the steps per revolution.
The shaft is considered an endless shaft.
The steps per revolution are not configured directly. Instead the nominator
and divisor for the number of revolutions are defined. The total measuring
range can be scaled from 1…1,073,741,824 as an integer.
The encoder supports the function for round axes. During this process, the
steps per revolution are set as a fraction. As a result, the total resolution does
n
not have to be configured to 2
times the steps per revolution and can also be a
decimal number. The output position value is adjusted with the zero point
correction, the counting direction set and the gearbox parameters entered.
Number of revolutions, nominator for the round axis functionality: The
nominator can be scaled from 1…2,048 as an integer. The default factory
setting for the nominator is 2,048.
Number of revolutions, divisor for the round axis functionality: The divisor
can be scaled from 1…65,535 as an integer. The default factory setting for the
divisor is 1.
Example:
A rotary table for a filling system is to be controlled. The number of filling
stations define the steps per revolution. There are nine filling stations. For the
precise measurement of the distance between two filling stations, 1000 steps
are required.
The transmission ratio of the rotary table gearing defines the number of
revolutions (= 12.5). The total resolution is then 9 × 1,000 = 9,000 steps to be
realized in 12.5 revolutions of the encoder. This ratio cannot be realized via the
n
steps per revolution and the total resolution, as the total resolution is not 2
times the steps per revolution. The application problem can be solved using the
round axis functionality. The steps per revolution are ignored here. The total
resolution and the nominator and divisor for the number of revolutions are
configured. 9,000 steps are configured as the total resolution. For the
nominator for the number of revolutions, 125 is configured, 10 as the divisor
(125/10 = 12.5). After 12.5 revolutions (that is after one complete revolution
of the rotary table), the encoder reaches the total resolution of 9,000.
20 Rockwell Automation Publication 842E-UM001C-EN-P - September 2016
Page 21

EtherNet/IP Overview Chapter 3
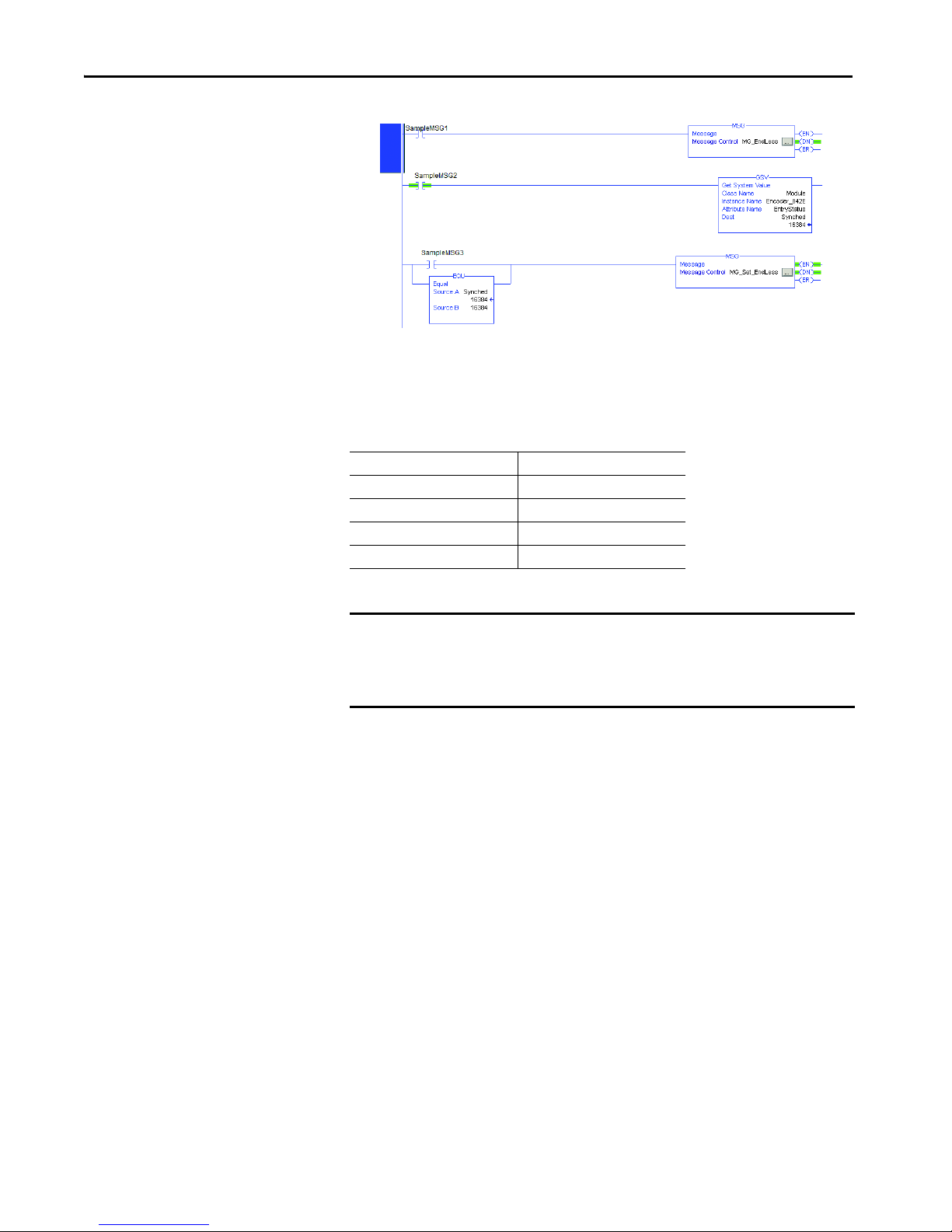
Enabling Endless Shaft Functionality
CIP message instructions must be used to configure the endless shaft
functionality. The following attributes must be set for the functionality to be
enabled.
• Attribute ID 0Eh, Scaling must be set to 1.
• Attribute ID 11 h, Total resolution must be set to between 1 …
536,870,912.
• Attribute ID 7Dh, Round axis functionality must be set to 1.
• Attribute ID 7Eh, Nominator (CNR_N) must be set to 1 … 2,048.
• Attribute ID 7Fh, Divisor (CNR_D) must be set to between 1 …
65,535.
Attribute 14 (e hex) Scaling function control
Rockwell Automation Publication 842E-UM001C-EN-P - September 2016 21
Figure 7
Attribute 125 (7d hex) Endless shaft functionality
Page 22

Chapter 3 EtherNet/IP Overview
Figure 8
Attribute 126 (7e hex) Nominator
22 Rockwell Automation Publication 842E-UM001C-EN-P - September 2016
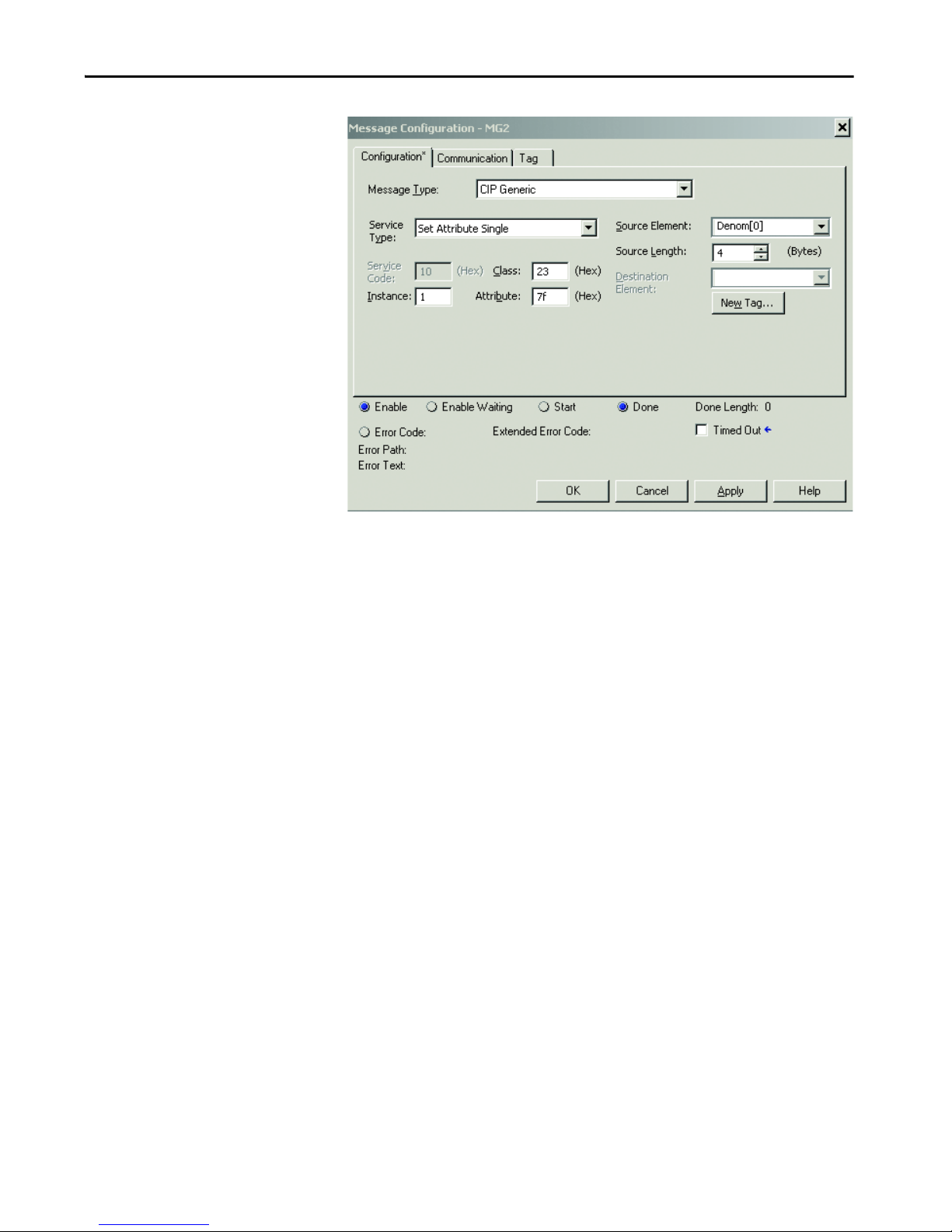
Figure 9
Attribute 127 (7f hex) Divisor
Page 23
EtherNet/IP Overview Chapter 3
Figure 10
Attribute 17 (11 hex) Total measuring range
Figure 11
Rockwell Automation Publication 842E-UM001C-EN-P - September 2016 23
Update your logic to verify that the encoder is in the RUNNING state before
executing the message instruction to set the endless shaft attribute. Otherwise
the attribute will not be maintained upon power cycle.
Page 24
Chapter 3 EtherNet/IP Overview
Figure 12
Features
Attribute 14 (e hex) Scaling Function Control (SFC)
Attribute 125 (7d hex) Endless Shaft Functionality (ESF)
Attribute 126 (7e hex Nominator (CNR_N)
Attribute 127 (7f hex)– Divisor (CNR_D)
Attribute 17 (11 hex) Total Measuring Range (CMR)
CIP Object Model
IMPORTANT Don’t make online scaling changes through the module profile unless the
encoder device is inhibited. When you execute online changes, an error
message is displayed; “Failed to modify properties. Failed to send
configuration data to the module.” Consequently changes are ignored.
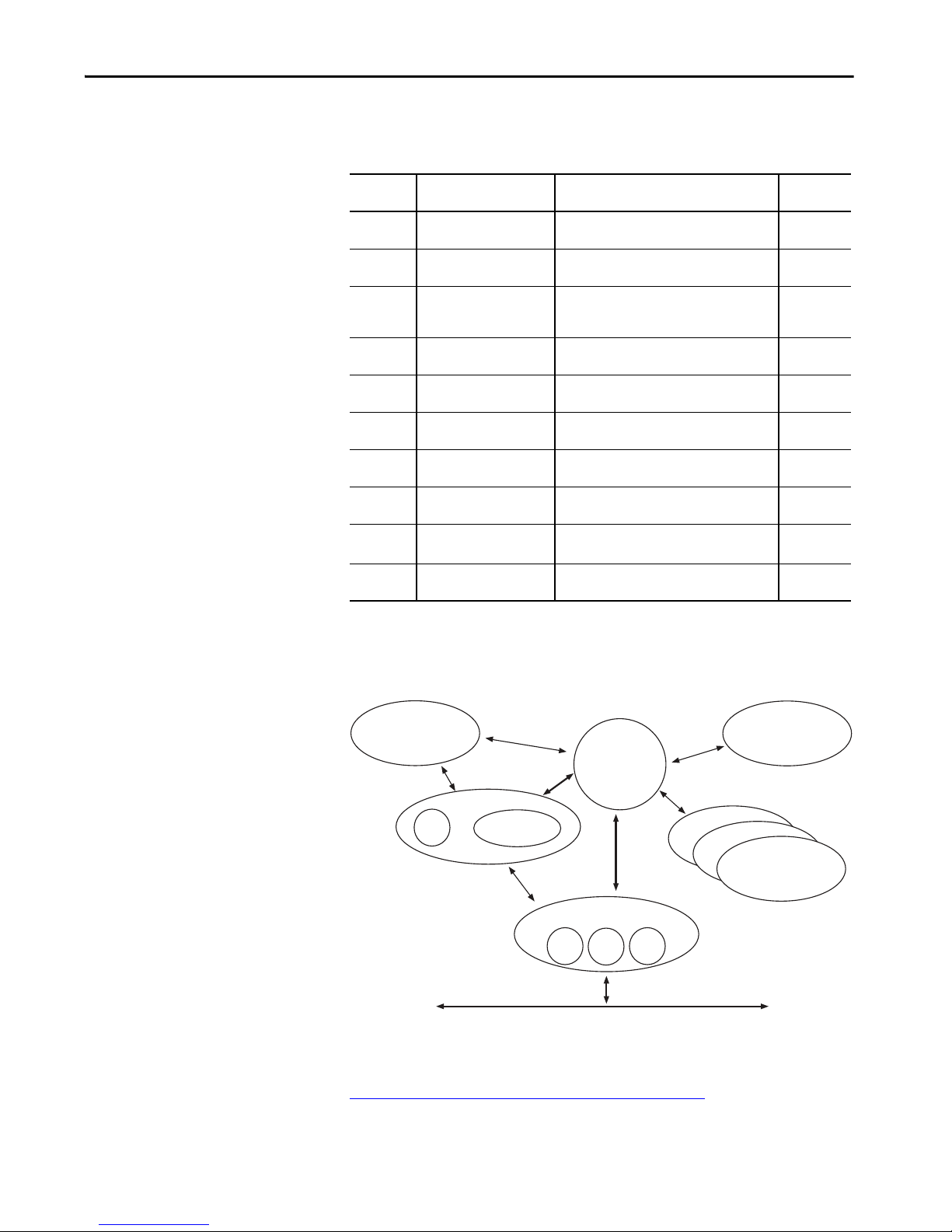
EtherNet/IP uses an object model for network communication wherein all
functions and data of a device are defined. The important terms are as follows:
Class: A class contains related objects of a device, which is organized in
instances.
Instance: An instance consists of different attributes that describe the
properties of the instance. Different instances of a class have the same services,
the same behavior, and the same attributes. They can, however, have different
values.
Attribute: The attributes represent the data that a device provides over
EtherNet/IP. The attributes include the current values of, for example, a
configuration or an input. Typical attributes are configuration and status
information.
24 Rockwell Automation Publication 842E-UM001C-EN-P - September 2016
Service: Services are used to access classes or the attributes of a class or to
generate specific events. These services execute defined actions such as reading
the attributes.
Page 25
EtherNet/IP Overview Chapter 3
23h Position Sensor
02h Message
Router
01h Identity
F6h
06h Connection Manager
04h Assembly
F4h
F5h
Network
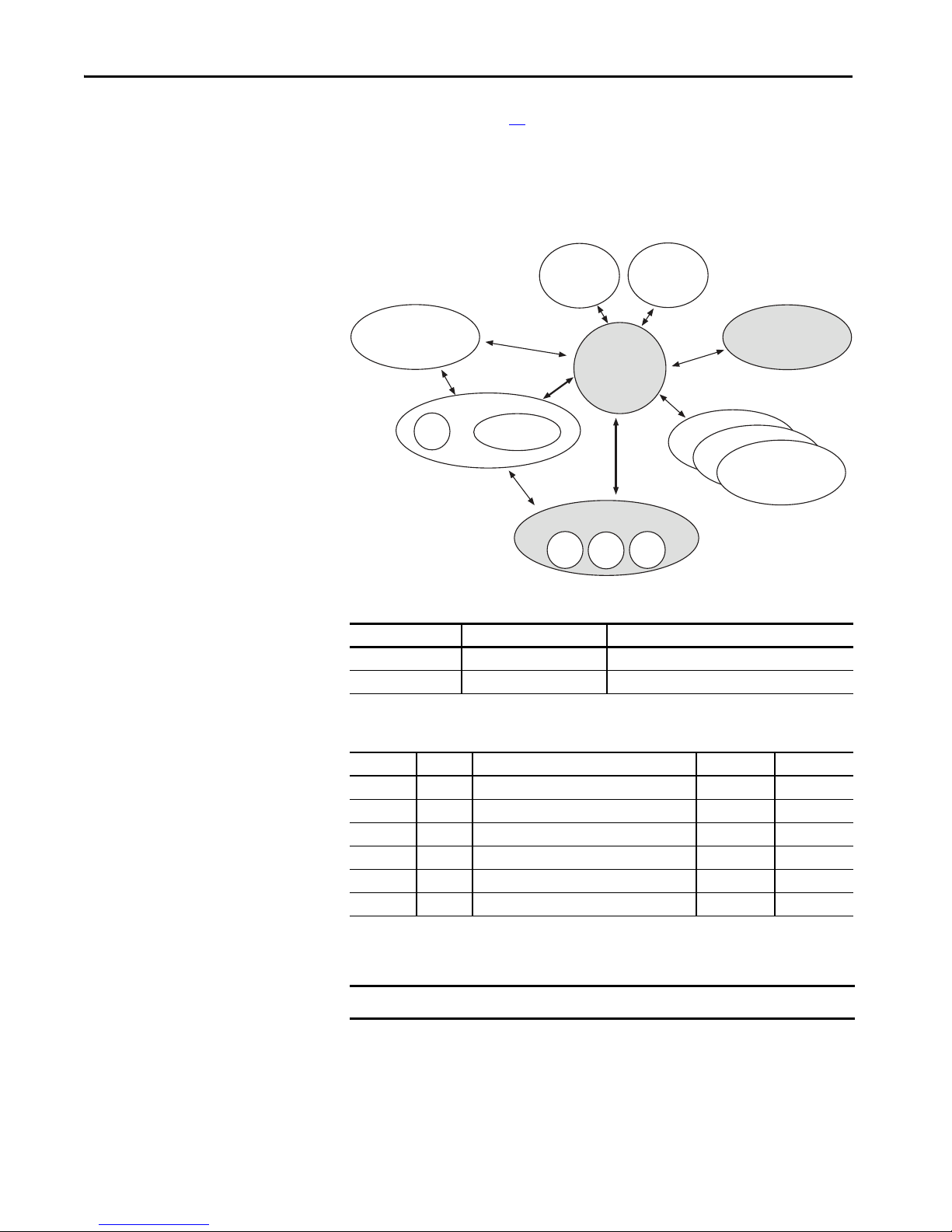
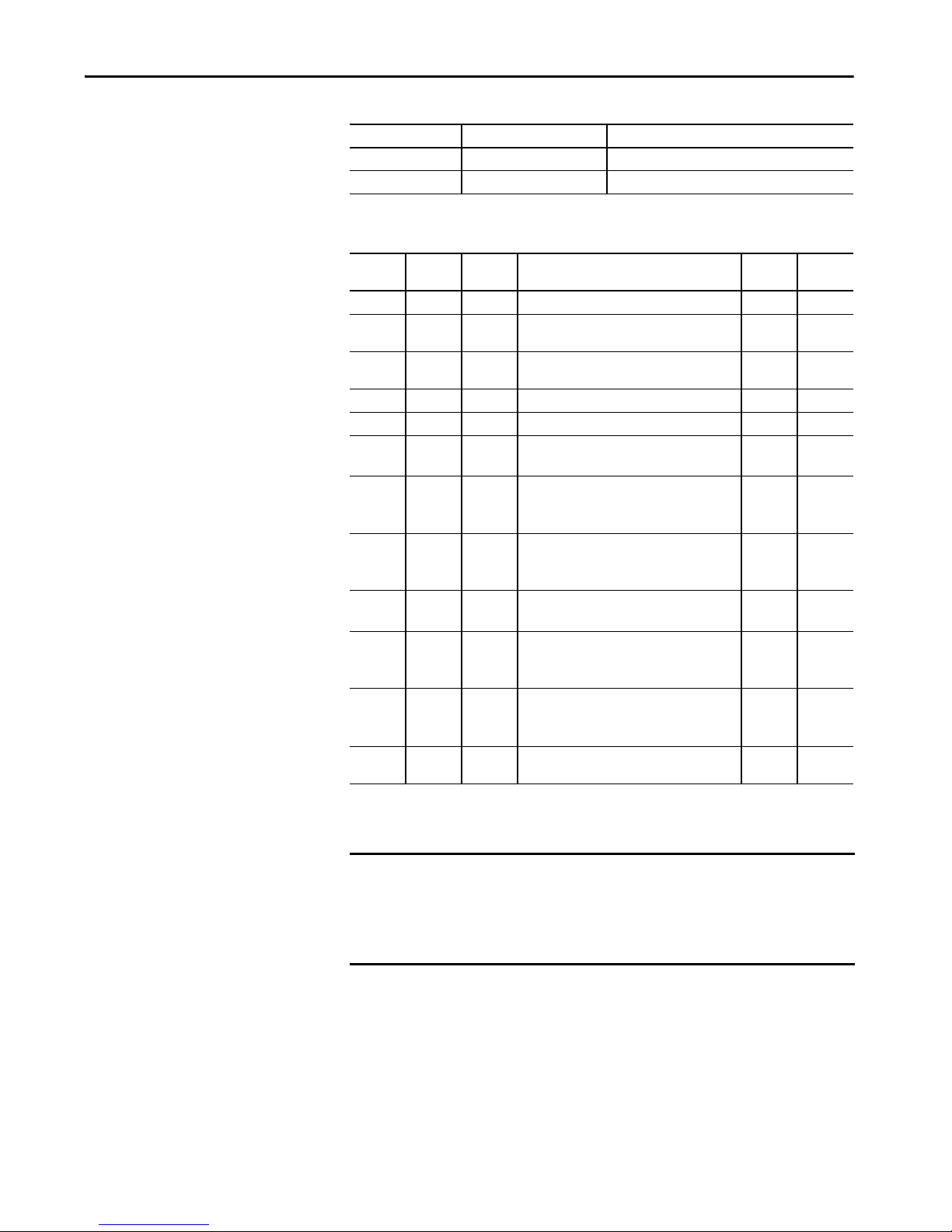
The 842E EtherNet/IP encoder supports the following classes of the encoder
profile:
Class Code Object Class Description Number of
0x01 Identity object Contains information on the node within the
0x02 Message router object Processes all messages and routes them to the
0x04 Assembly object
(I/O-assembly class)
0x06 Connection manager object Contains connection-specific attributes for
0x23 Position sensor object Administrates device-specific data like position
0x47 Device Level Ring (DLR) object Contains the configuration and status information
0x48 QoS object Contains mechanisms that are used to treat traffic
0xF4 Port object Contains implemented port types port numbers
0xF5 TCP/IP interface object Contains all attributes for configuring the TCP/IP
0xF6 Ethernet link object Contains connection-specific attributes like
network
appropriate objects
Assembles attributes (data) of various objects to
one object
Used for I/O messages
triggering, transport, and connection type
and counting direction
of the DLR protocol
streams with different relative priorities
and port names
interface
transmission rate, MAC ID, or duplex mode
Instances
1
1
7
1
1
1
1
1
1
3
Table 1 - Supported Classes
Position Sensor Object
Figure 13
The Class Instance Attributes for the position sensor object are provided in
Class Services of the Position Sensor Object
on page 34.
Rockwell Automation Publication 842E-UM001C-EN-P - September 2016 25
Page 26
Chapter 3 EtherNet/IP Overview
23h Position Sensor
02h Message
Router
01h Identity
F6h
06h Connection Manager
04h Assembly
F4h
F5h
Network
48h QoS
47h DLR
See Appendix B on page 75 for an example of how to use the position sensor
object to create an explicit message in RSLogix 5000®.
Identity Object
The device information and device parameters are opened via the instances.
Figure 14 - Connections for the Identity Object
Service Code Service Description
01h Get_Attribute_All Returns the values of all attributes
0Eh Get_Attribute_Single Returns the values of one attribute
Table 2 - Class Services of the Identity Object
Attribute ID Access Description Data Type Default Value
1 Get Object revision index UINT 0001h
2 Get Highest instance number within the class UINT 0001h
3 Get Number of object instances in this class UINT 0001h
4 Get Optional attribute list STRUCT —
6 Get Highest existing class attribute ID UINT 0007h
7 Get Highest implemented instance attribute UINT 0075h
Table 3 - Class Attributes of the Identity Object
IMPORTANT Class attribute 5 is not implemented.
26 Rockwell Automation Publication 842E-UM001C-EN-P - September 2016
Page 27
EtherNet/IP Overview Chapter 3
Service Code Service Description
01h Get_Attribute_All Returns the values of all attributes
0Eh Get_Attribute_Single Returns the values of one attribute
05h Reset Resets the device:
0 = The device is reinitialized (power on).
1 = The device is reinitialized (power on) and reset to
the factory settings.
Table 4 - Instance Services of the Identity Object
Attribute IDAccess Name Description Data
01h Get Vendor ID Manufacturer ID UINT
02h Get Device
Typ e
03h Get Product
Code
04h Get Revision Contains the firmware revision number in the
Get Major
Revision
Get Minor
Revision
05h Get Status Device status flags WORD See Tab le 6
06h Get Serial
Number
07h Get Product
Name
68 h Get Vendor Firmware revision in the FPGA (for example, 1.2.0) UDINT 00010200h
Device profile
22 h = Encoder
Vendor-specific product code
03h = Single-turn
04h = Multi-turn
format XX.XX
First part of the revision number, for example, 01
(depending on the release)
Last part of the revision number, for example, 02
(depending on the release)
Serial number in the format YY.WW.xxx
Y = Year
W = Week
x = Sequential number
For example, 0E.34.0001 (depending on release)
Product name Short_
Type
UINT 0022h
UINT
STRUCT
UINT 01h
UINT 02h
UDINT 0E340001h
String
Default
Value
AFx60AEth/IP
Table 5 - Instance Attributes of the Identity Object
Rockwell Automation Publication 842E-UM001C-EN-P - September 2016 27
Bit Name Description Default Value
0 Owned 0 = No connection to the master
1 — Reserved 0
2 Configured 0 = Device with standard configuration
3 — Reserved 0
4…7 Extended Device
Status field
8 Minor Recoverable
Status
9 Minor Unrecoverable
Status
1 = Connection to the master established
1 = No standard configuration
Vendor-specific status bits See Tab le 7
0 = No error
1 = Recoverable error (device not in error status)
0 = No error
1 = Recoverable error (device not in error status)
0
0
0
0
Table 6 - Bits of the Instance Attribute “Status”
Page 28
Chapter 3 EtherNet/IP Overview
Bit Name Description Default Value
10 Major Recoverable
Status
11 Major Unrecoverable
Status
12…15 — Reserved 0000
0 = No serious error
1 = Serious error that can be reset (device in error status)
0 = No serious error
1 = Serious error that cannot be reset (device in error
status)
0
0
Table 6 - Bits of the Instance Attribute “Status”
Assembly Object
Possible Combinations
Bit 4…7
0000 Device in self-test
0001 Firmware update in progress
0010 At least one connection error
0011 No I/O connection established
0100 Configuration in nonvolatile memory (EEPROM) failed
0101 Serious error, bit 10, or bit 11 = 1
0110 At least one connection in the “Run” operating mode
0111 At least one connection exists, all in “Idle” operating mode
1000…1111 Reserved
Description
Table 7 - Bits 4 of 7 of the Instance Attribute “Status”
The Assembly Object allows assembling of data attributes of other objects in
one single object. The 842E EtherNet/IP encoder supports only static
assemblies of attributes. For this reason, the number of instances is fixed.
Service Code Service Description
01h Get_Attribute_All Returns the values of all attributes
0Eh Get_Attribute_Single Returns the values of one attribute
28 Rockwell Automation Publication 842E-UM001C-EN-P - September 2016
Table 8 - Class Services of the Assembly Object
Attribute ID Access Description Data Type Default Value
1 Get Object revision index UINT 0002h
2 Get Highest instance number within the class UINT 006Ah
3 Get Number of object instances in this class UINT 0007h
6 Get Highest existing class attribute ID UINT 0007h
7 Get Highest implemented instance attribute UINT 0004h
Table 9 - Class Attributes of the Assembly Object
IMPORTANT Class attributes 4 and 5 are not implemented.
Page 29
EtherNet/IP Overview Chapter 3
Service Code Service Description
01h Get_Attribute_All Returns the values of all attributes
0Eh Get_Attribute_Single Returns the values of one attribute
Table 10 - Instance Services of the Assembly Object
Instance Attribute IDAccess Description Bits Bytes
1 3 Get Position value 32 4
2 3 Get Position value
Warning and alarm flags
3 3 Get Position value
Vel oci ty
4…5——— ——
100 3 Get Configuration data 224 28
101 3 Get Error
Position value
102 3 Get Error
Position value
Warning and alarm flags
103 3 Set/Get Error
Position value
Vel oci ty
101WS 3 Get Error
Position value
102WS 3 Get Error
Position value
Warning and alarm flags
103WS 3 Set/Get Error
Position value
Vel oci ty
110 3 Set/Get Dummy instance for the configuration data of a
“Listen-only” connection
32
8
32
32
32
32
32
32
8
32
32
32
32
32
32
32
8
32
32
32
00
5
8
8
9
12
8
9
12
Rockwell Automation Publication 842E-UM001C-EN-P - September 2016 29
Table 11 - Instance Attributes of the Assembly Object
IMPORTANT • Instances 4 and 5 from the encoder profile 22 h are not implemented.
• The instances 100 to 110 are manufacturer-specific assemblies.
• If the instances 101, 102, and 103 are used, then configuration assembly
100 is activated. If the instances 101WS, 102WS, and 103WS are used,
then configuration assembly 100 is not activated.
Page 30

Chapter 3 EtherNet/IP Overview
23 h Position Sensor
02h Message
Router
01h Identity
F6h
06h Connection Manager
04h Assembly
F4h
F5h
Network
48 h QoS
47 h DLR
I/O
I/O
I/O Assembly
The I/O data are retrieved/output via instances.
Figure 15 - Connections for the Configuration Assembly
Instance ByteBit 7Bit 6Bit 5Bit 4Bit 3Bit 2Bit 1Bit 0
1 0 Position value (least significant byte)
1Position value
2Position value
3 Position value (most significant byte)
2 0 Position value (least significant byte)
1Position value
2Position value
3 Position value (most significant byte)
4 Warning Alarm
3 0 Position value (least significant byte)
1Position value
2Position value
3 Position value (most significant byte)
4 Velocity value (least significant byte)
5 Velocity value
6 Velocity value
7 Velocity value (most significant byte)
Table 12 - Data Format of the Attributes of the I/O Assembly
30 Rockwell Automation Publication 842E-UM001C-EN-P - September 2016
Page 31

EtherNet/IP Overview Chapter 3
Instance ByteBit 7Bit 6Bit 5Bit 4Bit 3Bit 2Bit 1Bit 0
101/101WS 0 Fault header (least significant byte, see Table XX on page XXX)
1Fault header
2Fault header
3 Fault header (most significant byte)
4 Position value (least significant byte)
5Position value
6Position value
7 Position value (most significant byte)
102/102WS 0 Fault header (least significant byte, see Table XX on page XXX)
1Fault header
2Fault header
3 Fault header (most significant byte)
4 Position value (least significant byte)
5Position value
6Position value
7 Position value (most significant byte)
8 Warning Alarm
103/103WS 0 Fault header (least significant byte, see Table XX on page XXX)
1Fault header
2Fault header
3 Fault header (most significant byte)
4 Position value (least significant byte)
5Position value
6Position value
7 Position value (most significant byte)
8 Velocity value (least significant byte)
9 Velocity value
10 Velocity value
11 Velocity value (most significant byte)
Rockwell Automation Publication 842E-UM001C-EN-P - September 2016 31
Table 12 - Data Format of the Attributes of the I/O Assembly
Page 32

Chapter 3 EtherNet/IP Overview
Config
23h Position Sensor
02h Message
Router
01h Identity
F6h
06h Connection Manager
04h Assembly
F4h
F5h
Network
48h QoS
47h DLR
Figure 16 - Connections for the Configuration Assembly
32 Rockwell Automation Publication 842E-UM001C-EN-P - September 2016
Page 33

EtherNet/IP Overview Chapter 3
Instance ByteBit 7Bit 6Bit 5Bit 4Bit 3Bit 2Bit 1Bit 0
100 0 Not used
1 Not used
2 Not used
3 Not used
4 Steps per revolution CPR (least significant byte)
5CPR
6CPR
7 CPR (most significant byte)
8 Total resolution CMR (least significant byte)
9CMR
10 CMR
11 CMR (most significant byte)
12 Not used cw/ccw
13 Not used sc f
14 Not used raf
1
2
15 Not used
16 Nominator for the number of revolutions CNR_N (least significant byte)
17 CNR_N
18 CNR_N
19 CNR_N (most significant byte)
20 Divisor for the number of revolutions CNR_D (lease significant byte)
21 CNR_D
22 CNR_D
23 CNR_D (most significant byte)
24 Velocity measuring unit (least significant byte)
25 Velocity measuring unit (most significant byte)
26 Not used
27 Not used
Rockwell Automation Publication 842E-UM001C-EN-P - September 2016 33
Table 13 - Data Format for the Attributes for the Configuration Assembly
IMPORTANT • The structure of the configuration assembly is fixed.
• During the initialization of the encoder, it reads the data from the control
system.
1
Scaling function
2
Round axis functionality
Page 34

Chapter 3 EtherNet/IP Overview
Position Sensor Object
Instance Service Name Description
0x05 Reset Restart with all EEPROM parameters of the encoder, restart with the factory
0x0E Get_Attribute_Single Returns value of attribute
0x15
(21dec)
0x16
(22dec)
Restore Restore all parameter values from the non-volatile storage, customer
Save Save parameters to the non-vol atile storage
defaults
00: Restart Objec t– read all EEPROM parameters
01: set and save factory defaults and restart object– read all EEPROM
parameter
defaults
Table 14 - Class Services of the Position Sensor Object
Num
Required/
(dec)
Optional
1Required
(implemented)
2 Implemented Get Max instance INT Max. instance number of an
3 Implemented Get Number of
6 Implemented Get Maximum ID
7 Implemented Get Maximum ID
100 Get NV
Access
Name Data type Description Default
Rule
Get Revision INT Object revision no 0x00 02
0x00 01
0x00 01
0x00 7A
842eaa.bb
dd.mm.yy
(1)
instances
number class
attribute s
number
instance
attribute s
Encoder
firmware
version
object in this class
INT Number of object instances in
INT Highest implemented class ID 0x00 64
INT Highest implemented
ARRAY
of bytes
this class
instance attribute ID
aa.bb: major revision
minor revision
dd.mm.yy: day.month.year
Table 15 - Class Attributes of the Position Sensor Object
(1) Nonvolatile
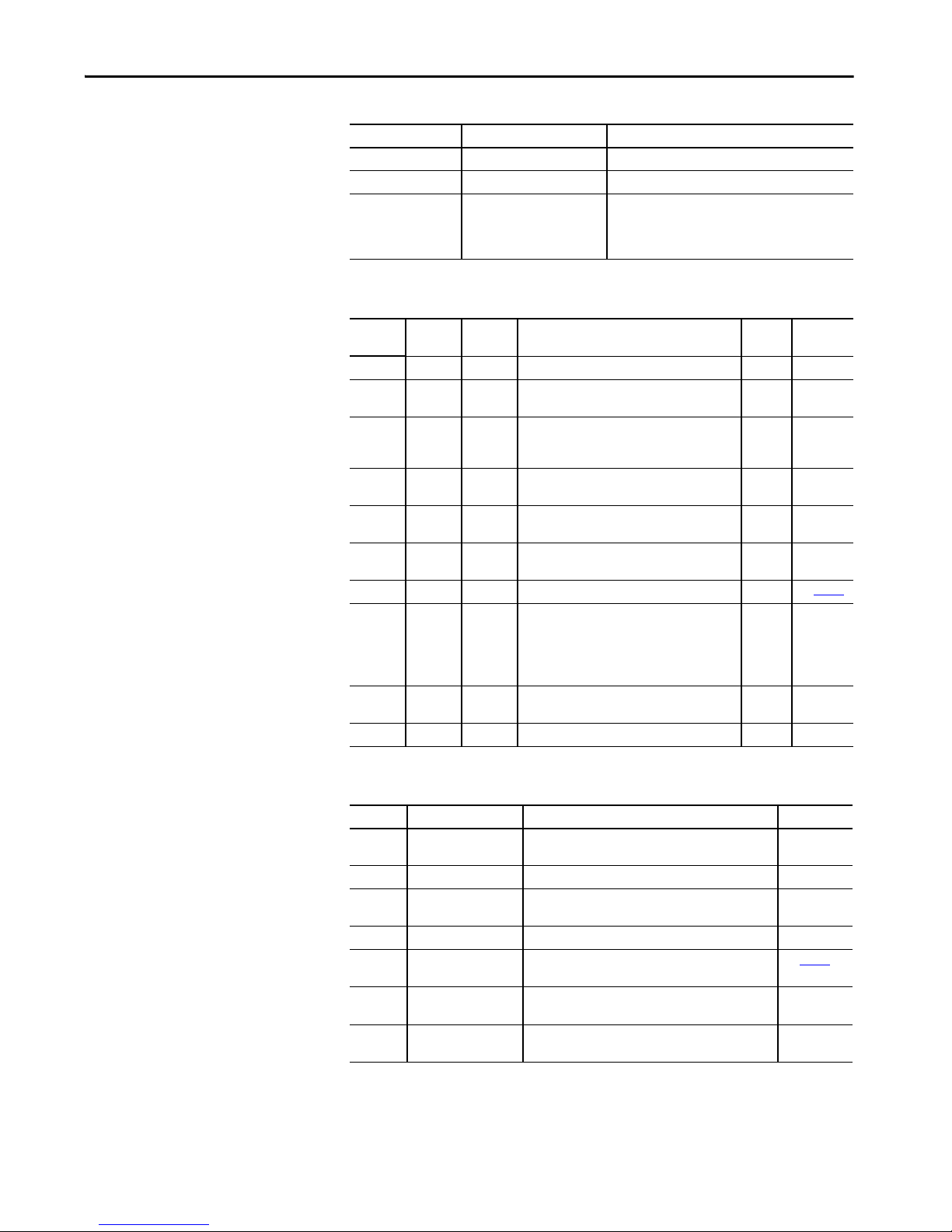
Instance Services of the position sensor object are automatically populated in
the explicit message instruction configuration
Instance Service name Description
0x0E Get_Attribute_Single Returns value of attribute
0x10 Set_Attribute_Single Sets value of attribute
Table 16 - Instance Services of the Position Sensor Object
34 Rockwell Automation Publication 842E-UM001C-EN-P - September 2016
Page 35

EtherNet/IP Overview Chapter 3
Attribute ID
(dec)
1 1 Get V Number of attributes INT Number of supported attributes in this
Attribute ID
(hex)
Access
rule
NV /
(1)
Name Data type Description Min. / Max.
(2)
V
(default)
0x0039
class
2 2 Get V Attribute list ARRAY
List of supported attributes –
of byte
10 A Get V Position value signed DINT Current position value (32 Bits) none
11 B Get NV Position sensor type
(see following table, encoder ID)
12 C Set NV Direction counting toggle, code
sequence (CS)
INT Device Type
0x01: Single-turn absolute encoder
0x02: Multi-turn absolute encoder
BOOL Definition of direction of incrementing
counts (10)
Min 0x00 01
Max 0x00 02
(0x00 02)
(0: CW)
0: CW
1:CCW
13 D Set NV Commissioning diagnostic
control (encoder position test)
14 E Set NV Scaling function control (SFC) BOOL ON: 1 calc. value (from 16+42)
BOOL ON: 1 Encoder diagnostics possible
OFF: 0 No diagnostics implemented
(OFF: 0)
(OFF: 0)
OFF: 0 phys. resolution [steps]
15 F Set NV Position format ENG
UNIT
Format of position value
(for example, arcsec or steps)
(0x1001)
Engineering unit: 0x1001 (counts)
16 10 Set NV Counts per range DINT Number of requested steps per
revolution.
Min 0x00 00 00 01
Max 0x00 04 00 00
(0x00 04 00 00)
17 11 Set NV Total measuring range DINT Total resolution Min / Max
0x00 00 00 01 /
n
* Attr.16
Max. 2
18 12 Set NV Position measuring increment DINT Minimum resolution in steps (is always
(0x00 00 00 01)
0x00 01)
19 13 Set NV Preset value DINT The preset value is set to the current
position value
Min / Max
0x00 00 00 00 /
Attr.17 - 1
(0x00 00 00 00)
21 15 Get V Position status register BYTE State of the software limit switch
(0x00)
Bit 0: Out of range
Bit 1: Range overflow
Bit: 2: Range underflow
Bit 3…7 reserved
22 16 Set NV Position low limit DINT Lower limit for position 0x00 00 00 00
23 17 Set NV Position high limit DINT Upper limit for position 0x3F FF FF FF
24 18 Get V Velocity value DINT Current velocity (32 Bits) Format (25) and (26)
25 19 Set NV Velocity format ENG
INT
Format of velocity value
0x1F04 counts/s
(0x1F0F)
0x1F0E revs/s
0x1F0F revs/min
26 1A Set NV Velocity resolution DINT Minimum resolution of velocity value
(0x00 00 00 01)
(24)
27 1B Set NV Minimum velocity setpoint DINT Minimum velocity setpoint for setting
(0x00 00 00 00)
warning flag (47)
28 1C Set NV Maximum velocity setpoint DINT Maximum velocity setpoint for setting
(0x3F FF FF FF)
warning flag (47)
29 1D Get V Acceleration value DINT Current acceleration (32 Bits) Format (30) and (31)
Table 17 - Instance Attributes of the Position Sensor Object
Rockwell Automation Publication 842E-UM001C-EN-P - September 2016 35
Page 36

Chapter 3 EtherNet/IP Overview
NV /
Attribute ID
(dec)
Attribute ID
(hex)
Access
rule
(1)
30 1E Set NV Acceleration format ENG
Name Data type Description Min. / Max.
(2)
V
Format of acceleration value
UNIT
0x0810: cps/s
(default)
(0x0810)
0x0811: rpm/s
0x0812: rps/s
31 1F Set NV Acceleration resolution DINT Minimum resolution of acceleration
(0x00 00 00 01)
value
32 20 Set NV Minimum acceleration setpoint DINT Minimum acceleration setpoint (0x00 00 00 00)
33 21 Set NV Maximum acceleration setpoint DINT Maximum acceleration setpoint 0x3F FF FF FF
41 29 Get V Operating status BYTE Operating status encoder
Bit 0: Direct. 0 (inc.) 1 (dec.)
Bit 1: Scaling 0 (off) 1 (on)
Bit: 2…4 Reserved
Bit: 5: Diag. 0 (off) 1 (on)
Bit 6…7 manuf. spec.
42 2A Get NV Physical resolution span (PRS) DINT Number of steps per rev
(0x00 04 00 00)
(single-turn part)
43 2B Get NV Physical resolution
number of spans
INT Number of revolutions
(multi-turn part)
(0x00 01) single-turn
(0x10 00) multi-turn
44 2C Get V Alarms WORD Flags for alarms (errors)
45 2D Get NV Supported alarms WORD Information on supported alarms 0x3003
46 2E Get V Alarm flag BOOL Indication of set alarm 0: OK
1: Alarm error
47 2F Get V Warnings WORD Flags for warnings
48 30 Get NV Supported warnings WORD Information on supported warnings 0x673C
49 31 Get V Warning flag BOOL Indication of set warning 0: OK
1: Warning Flag
50 32 Get NV Operating time DINT Storage of operating time counter
0
[0,1h], the format of the counter is
second.
51 33 Get NV Offset value DINT Offset value is calculated when using
0x00 00 00 00
preset function
100 64 Get V Temperature value INT Current temperature value
-40…100°C or -40…212°F
Accuracy of the temperature sensor is
0xF0 60
0x27 10
(-4000… +10000)
about ± 5 °C (±9 °F).
101 65 Set NV Temperature value format ENG
UNIT
Format of temp erature value
°C or °F (Fahrenheit)
(0x1200)
0x1200: °C
0x1201: °F
102 66 Set NV Temperature resolution DINT Minimum resolution of temperature
(0x00000001)
value
[°C/100] or [(°F)/100]
103 67 Set NV Minimum temperature value
setpoint
INT Minimum temperature setpoint
(-40…100°C, -40…212°F)
0xF0 60
(-4000)
104 68 Set NV Maximum temperature value
105 69 Get V Fault header
Table 17 - Instance Attributes of the Position Sensor Object
36 Rockwell Automation Publication 842E-UM001C-EN-P - September 2016
setpoint
(see Sensor error table)
INT Maximum temperature setpoint
(-40…100°C, -40…212°F)
DINT Flags of encoder sensor errors and
warnings
0x27 10 (+10000)
or 0x52D0
(+21200)
0x00 00 00 00
Page 37

EtherNet/IP Overview Chapter 3
NV /
Attribute ID
(dec)
Attribute ID
(hex)
Access
rule
(1)
106 6A Set NV Slave sign of life DINT Flags for encoder functionalities
Name Data type Description Min. / Max.
(2)
V
(default)
0x0000500
(Bit field):
Bit 0: Slave sign of life (on/off )
Bit 1…7: not used
Bit 8…15: UpdateFactor (1…127)
Bit 16…31: not used
107 6B Get NV Encoder motion time DINT Storage of the motion time. This
0
counter is incrementing if the encoder
is in rotation [sec].
108 6C Get NV Encoder operating time [second] DINT Storage of the operating time. This
0
counter is incrementing if the encoder
is powered on [sec].
109 6D Get NV Max velocity
RA [cnts/ms]
110 6E Get NV Max acceleration [cnts/(ms)2] DINT Storage of the maximum acceleration
DINT Storage of the maximum velocity of
the encoder in operational state.
0
0
of the encoder in operational state.
111 6F Get NV Max temp [°C/100] DINT Storage of the maximum temperature
2000
of the encoder in operational state
112 70 Get NV Min temp [°C/100] DINT Storage of the minimum temperature
2000
of the encoder in operational state
113 71 Get NV Number of startups DINT Storage of the number of startups
0
(power-on) cycles
114 72 Get V light-emitting diode current
value [µ A]
INT Current light-emitting diode current
[µA]
200…25.000
(0)
Range: 200…25.000
115 73 Get NV Max current value [µA] INT Max. light-emitting diode current [µA] 1.500
116 74 Get NV Min current value [µA] INT Min. light-emitting diode current [µA] 1.500
117 0X75 Get V Direction change counter UDINT Direction change counter, this counter
0
is incrementing if the encoder is
changing the direction, for example,
cw to ccw or ccw to cw.
118 0x76 Get V Rotation counter-forward UDINT Rotation counter (0) (forward
0
counter), this counter increments if the
encoder was moving from standstill to
a positive direction (cw).
119 0x77 Get V Rotation counter-backwards UDINT Rotation counter (1) (backwards
0
counter), this counter increments if the
encoder was moving from standstill to
a negative direction (ccw).
120 0x78 Get V Power supply voltage (mV) UINT Current supply voltage (mV)
Range: 9.500…30.500
9,500
30,500
(24,000)
121 0x79 Get V Maximum power supply voltage
(V)
UINT Maximum power supply voltage, this
value is stored to the EEPROM data.
0
33
(0)
122 0x7A Get V Preset offset value DINT Vendor-specific attribute:
(00000000)
Offset value is calculated when using
the preset function.
125 0x7D Set NV Endless shaft functionality BOOL Encoder scaling with endless shaft
(0)
(only with a multi-turn). 0: OFF,
1: ON
126 0x7E Set NV Number of rotations, nominator UDINT This parameter is used if the parameter
“endless shaft functionality” is set
(1:ON)
1
2,048
(2,048)
Table 17 - Instance Attributes of the Position Sensor Object
Rockwell Automation Publication 842E-UM001C-EN-P - September 2016 37
Page 38

Chapter 3 EtherNet/IP Overview
Attribute ID
(dec)
Attribute ID
(hex)
Access
rule
NV /
(1)
Name Data type Description Min. / Max.
(2)
V
127 0x7F Set NV Number of rotations, divisor UDINT This parameter is used if the parameter
“endless shaft functionality” is set
(1:ON)
128 0x80 Set NV Velocity filter integration time UDINT Velocity filter taps, integration time.
Value is stored in EEPROM.
129 0x81 Set NV Velocity filter bandwidth UDINT Controls the bandwidth of the l ow pass
filter that is applied to the raw velocity
signal from feedback. EEPROM
parameter:
0: attribute disabled
1…1000: recommended bandwidth
(Hz)
130 0x82 Set NV Accele ration filter integration
time
UDINT Acceleration filter taps, integration
time
131 0x83 Set NV Acceleration filter bandwidth UDINT Controls the bandwidth of the low pass
filter that is applied to the raw
acceleration signal from feedback.
132 0x84 Set NV Velocity hysteresis UDINT Get and set the hysteresis of the
velocity
133 0x85 Set NV Acceleration hysteresis UDINT Get and set the hysteresis of the
acceleration
(1) You can do a Get of all Set values, as shown in Appendix B, page 75
. It is always good programming practice to do a Get after setting a value to verify the Set command was
successful.
(2) Nonvolatile/volatile
(default)
1
65,535
(1)
0
128
(1)
0
1000
(100)
0
128
(1)
0
1000
(100)
0
3ffffff
(0)
0
3FFFFFF
(0)
Table 17 - Instance Attributes of the Position Sensor Object
38 Rockwell Automation Publication 842E-UM001C-EN-P - September 2016
Page 39

Installation
Chapter 4
Mechanical
This chapter describes how to install the 842E EtherNet/IP Encoder.
Also refer to the installation sheet provided in the box, Publication No.
100000169360.
Shaft Rotation Direction
When you view the encoder from the shaft side, the shaft rotation is clockwise
(CW) or counterclockwise (CCW), as shown.
Figure 1
Rockwell Automation Publication 842E-UM001C-EN-P - September 2016 39
Mounting with a Solid Shaft
1. Be sure to select the proper size flexible coupling clamp to mate to the
encoder shaft, for example, 845–FC–*–*. See our website at http://
ab.rockwellautomation.com/Motion-Control/Encoders for encoder
accessories.
ATT EN TI ON : Do not rigidly connect the encoder shaft to the machine. A rigid
connection causes premature failure of the encoder or machine bearings.
Always use a flexible coupling.
2. To determine the encoder mounting hole locations, use the dimension
drawings in the installation instructions (see “Related Documentation”
on page 7
3. Slide the flexible coupling onto the shaft, but do not tighten the set
screws.
).
Page 40

Chapter 4 Installation
4. Mount the encoder and tighten with three size M4 mounting screws
(not supplied).
5. Center the flexible coupling and tighten the set screws.
6. Rotate the machine slowly and verify that the flexible coupling is not
deforming beyond specifications.
7. Align machine to its mechanical zero or home position.
8. Remove the screw cover on the back of the encoder and press the preset
push button to change the preset value to the current shaft position
value. (The factory preset value is zero.)
9. Replace the screw cover.
Mounting with a Hollow Shaft
IMPORTANT Be sure that the mating shaft is chamfered and grease-free.
1. Loosen the screw on the clamping ring with a 2.5 mm (0.098 in.) star
driver.
2. Slide the encoder onto the mating shaft until the flex mount rests on the
machine surface.
ATT EN TI ON : The encoder slides freely onto the shaft; if not, do not force.
Check the shaft for interferences such as gouges, burrs, rust, or size.
3. Hold encoder firmly and mark the two mounting holes. (If mounting
holes exist, proceed to Step 6.)
4. Slide the encoder off. To accept M4 (or equivalent) screws, drill, and tap
the marked holes.
5. Slide the encoder back onto the shaft until the flex mount rests on the
machine surface.
6. Attach the encoder with two M4 (or equivalent) screws.
IMPORTANT Do not stress the flex mount while tightening the screws.
7. Tighten the clamping ring screw to 1.1 Nm (10 in–lb).
40 Rockwell Automation Publication 842E-UM001C-EN-P - September 2016
8. Align machine to its mechanical zero or home position.
9. Remove the screw cover on the back of the encoder and press the preset
push button to change the preset value to the current shaft position
value. (The factory preset value is zero.)
10. Replace the screw cover.
Page 41

Electrical
Net
Mod
Link 1
Link 2
Encoder
Network
Address
Switches
x1
x10
x100
Reset
Button
Power Connec tion
Link 2 Connection
Network Address
Switches
Link 1 Connection
Preset Push Button
Installation Chapter 4
Mechanical Specifications
Face mount flange 10 x 19 mm (0.39 x 0.75 in.)
Servo flange 6 x 10 mm (0.24 x 0.39 in.)
Blind hollow shaft 8, 10, 12, 15 mm and 1/4, 1/2, 3/8, 5/8 in.
ATT EN TI ON : Switch off the power supply. The machine/system could
unintentionally start while you are connecting the devices.
Confirm that the entire machine/system is disconnected during the electrical
installation.
ATT EN TI ON : Commissioning requires a thorough check by authorized
personnel.
Before you operate a system that is equipped with the 842E EtherNet/IP
absolute encoder, make sure that the system is checked and released by
authorized personnel.
Read more in Chapter 1, Safety.
Electrical Wiring Instructions
Three electrical connections are on the back of the housing.
A 4-pin M12 connector is used for the power supply connection.
Two 4-pin M12 connectors are used for the Ethernet connection. The Link 1
connection is used for star networks. For ring networks, use both the Link 1
and Link 2 connectors. In a linear network, use Link 1, Link 2, or both
connectors.
Rockwell Automation Publication 842E-UM001C-EN-P - September 2016 41
Figure 2
Page 42

Chapter 4 Installation
Pin Assignments
Pin Signal Mating Cable
Wire Color
1 Versus Brown Supply voltage 10…30V DC
2WhiteDo not use
3 GND Blue 0V DC (ground)
4BlackDo not use
Table 1 - Voltage Supply
Pin Signal Mating Cable
Wire Color
1TxD+White orangeEthernet
2 RxD+ White green Ethernet
3 TxD– Orange Ethernet
4RxD–Green Ethernet
Table 2 - Ethernet Link Connections – Link 1 and Link 2
Function
Function
Preset Push Button
ATT EN TI ON : Pressing the preset push button results in a change of position
reading.
The change in position causes unexpected motion, which could result in
personal injury or damage to the product or equipment.
IMPORTANT Press the preset button briefly, no longer than one second.
To preset the position of the encoder, remove the screw cover from the back of
the encoder and briefly press the Preset button inside (see figure on page 41
and “Preset Function” on page 62
).
Network Address Switches
You can use the three Network Address switches to set the IP address of the
encoder (see Figure 3 on page 47
42 Rockwell Automation Publication 842E-UM001C-EN-P - September 2016
and “Setting the IP address” on page 45).
Page 43

Electrical Specifications
Operating voltage 10…30V DC
Power consump tion 3 W
Load current 200 mA
Resolution per revolution 262,144
Revolutions 4,096
Repeat accuracy ±0.002°
Error limit ±0.03°
Code direction CW or CCW programmable
Interface EtherNet/IP per IEC 61784-1
Transmission speed 100 MBits/s
Duplex Full or half
Installation Chapter 4
Rockwell Automation Publication 842E-UM001C-EN-P - September 2016 43
Page 44

Chapter 4 Installation
Notes:
44 Rockwell Automation Publication 842E-UM001C-EN-P - September 2016
Page 45

Chapter 5
Configuring the Encoder for Your EtherNet/IP
Network
Setting the IP Address
The 842E encoder is shipped with the network address switches set to 888. Use
one of these two methods to assign an IP address.
1. To set the last octet of the IP address (192.168.1.xxx) use the network
address switches (see Figure 2 on page 41
2. Use the network address switches to enable BOOTP / DHCP and use a
BOOTP utility or DHCP server to assign the IP address of the unit on
powerup.
) on the encoder.
Assigning the Last Octet in an IP Address Scheme of 192.168.1.xxx
Using the Network Address Switches
1. Set the three network address switches to 999.
2. Cycle power to the encoder.
3. Set the three network address switches to a valid address of 001 – 254.
4. Cycle power to the encoder.
5. The encoder powers up with the IP address set to 192.168.1.xxx, where
xxx is the position of the three network address switches.
Rockwell Automation Publication 842E-UM001C-EN-P - September 2016 45
Network Address Switches Set to 123
x100
Figure 1
x10
x1
Page 46

Chapter 5 Configuring the Encoder for Your EtherNet/IP Network
Assigning the IP Address Using BOOTP/DHCP:
Verify that the encoder MAC ID is in the relationship list in the BOOTP
Utility or DHCP server before attempting to assign the encoder an IP address.
1. Set the three network address switches to 999 and cycle power.
2. Set the three network address switches to 000 and cycle power.
3. The encoder powers up and request an IP address from a BOOTP/
DHCP server.
4. If the encoder MAC ID is in the relationship list, the BOOTP/DHCP
server assigns the associated IP address to the corresponding MAC ID.
46 Rockwell Automation Publication 842E-UM001C-EN-P - September 2016
Figure 2
Setting of
Network Address Switches Function
001…254 Sets last octet of the IP address to the value indicated (xxx in 192.168.1.xxx)
888 Restores all factory default settings in the encoder and clears its IP address
999 Clears the encoder IP address
Table 1 - Function of Network Address Switch Settings
ATT EN TI ON : Disable DHCP after the new network address is set (see next
step).
When the DHCP is disabled, it prevents unexpected resetting of the network
address, which could result in unintended machine motion or loss of process
control.
Page 47

Configuring the Encoder for Your EtherNet/IP Network Chapter 5
5. Disable DHCP: highlight it by clicking once on the encoder in the
relation list. Then click Disable BOOTP/DHCP to instruct the 842E
encoder to retain the IP address at the next power cycle.
Wait for the status message to show that the command was successfully
sent. If the message does not appear, repeat this step.
Figure 3
6. Click File > Save As to save the relationship, if desired.
7. Cycle the power to the 842E encoder. You no longer see that the 842E
encoder appears in the request history panel.
From a DOS prompt, you can ping the new address. The response is four
packets sent, four packets received, and zero lost.
Figure 4
Rockwell Automation Publication 842E-UM001C-EN-P - September 2016 47
Page 48

Chapter 5 Configuring the Encoder for Your EtherNet/IP Network
Notes:
48 Rockwell Automation Publication 842E-UM001C-EN-P - September 2016
Page 49

Chapter 6
Configuring the 842 E Encoder Using
RSLogix 5000®
This chapter guides you through the steps that are required to configure your
encoder using RSLogix 5000 software. The modules that are presented in this
chapter are configured using RSLogix 5000 software, version 20.
Example: Installing the
Hardware
In this example, a CompactLogix™ chassis contains the L35E processor in slot 1
and a built-in EtherNet/IP connection. The encoder is connected to a Stratix®
6000 Ethernet switch.
Figure 1
Rockwell Automation Publication 842E-UM001C-EN-P - September 2016 49
To work along with this example, install your system as shown.
• Verify the IP addresses for your programming terminal and 842E
encoder.
• Verify that you connected all wiring and cabling properly.
• Be sure that you configured your communication driver (for example,
AB_ETH-1 or AB-ETHIP-1) in the RSLinx
® software.
Page 50

Chapter 6 Configuring the 842 E Encoder Using RSLogix 5000®
Configuring the Encoder
You must configure your encoder upon installation. The encoder does not
work until it has been configured with at least the default configuration.
RSLogix 5000 Configuration Software
You must use RSLogix 5000, version 18 or later to set configuration for your
encoder. The instructions in this chapter use version 20.
There is an option to accept the default configuration for your encoder or to
write point level configuration specific to your application. Both options are
explained in detail, including views of software screens, in this chapter.
Checking the Integration in EtherNet/IP Via RSLinx® Classic
With the aid of the tool RSLinx® Classic, you can again check whether the IP
address set detects the control system.
The EDS file (electronic data sheet) contains all information that is related to
the parameters and the operating modes of the EtherNet/IP encoder (go to
www.rockwellautomation.com/resources/eds/
The Electronic Data Sheet File
on page 13). Use the EDS hardware installation
and search on “842E,” also see
tool in the tools menu of RSLinx Classic software to register the EDS file.
1. Start RSLinx Classic (as a rule on the Start menu on your PC/notebook
in Rockwell Software®, RSLinx, RSLinx Classic).
2. Click the RSWho button in the program.
Figure 2
50 Rockwell Automation Publication 842E-UM001C-EN-P - September 2016
Page 51

Configuring the 842 E Encoder Using RSLogix 5000® Chapter 6
3. Then open the path AB_ETHIP1, Ethernet. The encoder can be seen
with its IP address.
Figure 3
4. Install the Add-on Profile according to the instructions in Appendix A,
page 71
.
Installing the Add-on Profile
in RSLogix 5000
IMPORTANT Before proceeding, install the Add-on Profile (see Appendix A, page 71).
After you install the encoder Add-on Profile (see Appendix A, page 71), install
the Add-on Profile; here is an example of the setup procedure.
1. Open RSLogix 5000.
2. Click File>New.
Figure 4
Rockwell Automation Publication 842E-UM001C-EN-P - September 2016 51
Page 52

Chapter 6 Configuring the 842 E Encoder Using RSLogix 5000®
Figure 5
3. Enter the new controller information.
4. Right-click on the Ethernet port of the controller and select New
Module.
52 Rockwell Automation Publication 842E-UM001C-EN-P - September 2016
Figure 6
Page 53

Configuring the 842 E Encoder Using RSLogix 5000® Chapter 6
5. Select the desired 842E encoder and click Create.
Figure 7
6. Close the select module type dialog box.
7. To complete the Add-on Profile, continue to the next sections.
General Tab
1. Enter a name for the encoder. In this example, the name is Encoder_1.
You have multiple encoders or other modules, so be sure to give each a
brief but descriptive name. The name that you assign to the encoder
appears in the controller organizer I/O tree. The name also appears in
the description of tags.
2. Enter a description of the encoder function.
3. Set the IP address for the encoder. In this example, the address is
192.168.1.123. The 123 reflects the address of the network address
switches on the 842E.
Rockwell Automation Publication 842E-UM001C-EN-P - September 2016 53
Page 54

Chapter 6 Configuring the 842 E Encoder Using RSLogix 5000®
Figure 8
IPAddress
When the controller is offline, the IP address can be set. You have three
options:
• When a private network is used, click the Private Network radio
button. Enter a value of 1…254 for the last segment (octet) of the
address. Be sure not to duplicate the address of an existing device. In the
preceding example, the address of the EtherNet/IP encoder is
192.168.1.123.
54 Rockwell Automation Publication 842E-UM001C-EN-P - September 2016
Figure 9
• When multiple networks exist, you choose to set the address to some
other value. When offline, simply click the IP address radio button and
enter the desired address.
Page 55

Configuring the 842 E Encoder Using RSLogix 5000® Chapter 6
Figure 10
• Click the Host Name radio button and type in the name of the host. In
the example below, the host name is QPACK4.
Figure 11
Rockwell Automation Publication 842E-UM001C-EN-P - September 2016 55
Page 56

Chapter 6 Configuring the 842 E Encoder Using RSLogix 5000®
Module Definition
You do not have to change the default values. If necessary, follow the steps
below to change series, revision, electronic keying, connection, and/or input
data.
1. On the General tab, click the Change button. The module definition
window opens.
Figure 12
2. To complete the Add-on Profile, click the arrows at the right of each box
to access pull-down menus.
• The connection pull-down menu allows you to select either a Data or
Listen Only connection (see definitions, below).
• The Input data pull-down menu allows you to select position, positionstatus, or position-velocity (see “RSLogix 5000 Controller Tags”
page 63
for more information).
on
3. Click OK to accept the changes (or Cancel to retain the original
settings). See the definitions below. Click Help for more information.
Data: This type of connection is used to read data from the encoder without
controlling the outputs. This connection is not dependent on any other
connection.
Listen Only: This type of connection is dependent on another connection to
exist. If that connection is closed, the listen-only connection is closed as well.
56 Rockwell Automation Publication 842E-UM001C-EN-P - September 2016
Page 57

Connection Tab
Configuring the 842 E Encoder Using RSLogix 5000® Chapter 6
Figure 13
You do not have to change any settings on the Connection tab. For reference,
the settings are:
Requested Packet Interval: Specify the number of milliseconds between
requests for information from the controller to the encoder. The encoder
provides data on a shorter interval, but if no data is received the controller asks
the encoder for a status update. Minimum setting is 4 ms and the maximum
setting is 750 ms.
Inhibit Module: When checked, the controller ignores all information from
the encoder any time it is polled.
Major fault on controller if connection fails while in run mode: Check this
box if a connection failure is considered a major fault.
Use Unicast Connection over EtherNet/IP: Unicast connections are pointto-point connections. Multicast connections are considered one to many.
Unicast reduces the amount of network bandwidth used.
Module fault: Fault messages appear in this box.
Rockwell Automation Publication 842E-UM001C-EN-P - September 2016 57
Page 58

Chapter 6 Configuring the 842 E Encoder Using RSLogix 5000®
Module Info Tab
Figure 14
The Module Info tab contains read-only data that is populated when the
controller goes on line (a program is downloaded or uploaded from the
controller).
The left panel, Identification, shows the vendor, product type, product code,
revision level, serial number, and product name.
The right panel, Status, shows the fault status, internal state (that is, run mode)
and whether the file is owned and Module Identity.
The Refresh and Reset Module buttons are active when the controller is on
line.
Refresh: Click this button to refresh the data in the window.
Reset Module: Click this button with care as it disconnects the module
momentarily and control is interrupted. A warning window appears: “Click
Ye s or No as needed. Click Help for further information.”
58 Rockwell Automation Publication 842E-UM001C-EN-P - September 2016
Page 59

Configuration Tab
Configuring the 842 E Encoder Using RSLogix 5000® Chapter 6
Figure 15
The Configuration tab is used to configure the encoder scaling, direction, and
set velocity units. Click the Enable Scaling checkbox to change the encoder
resolution. Use the Direction drop down box to set the direction of the
encoder (check the definition in the old user manual). Use the velocity units to
set the velocity units of the encoder.
Scaling makes it possible to scale the steps per revolution and the total
resolution (see Linear Scaling Example on page 75
in Appendix B).
If the Enable Scaling box is checked, the values can be entered for the steps per
revolution and the total resolution applied.
Direction: The direction of rotation (increase position value), viewed on the
shaft, can be set to clockwise or counterclockwise.
• Clockwise = increase position value on clockwise revolution of the shaft
• Counterclockwise = increase position value on counterclockwise
revolution of the shaft.
Vel oc it y u ni ts : Use this parameter to define the units in which the velocity is
transmitted. The options are the following:
• Counts/sec
• Revolutions/sec
• Revolutions/min
Rockwell Automation Publication 842E-UM001C-EN-P - September 2016 59
Page 60

Chapter 6 Configuring the 842 E Encoder Using RSLogix 5000®
Internet Protocol Tab
Figure 16
For this user manual, the user is expected to use a private address, that is, an
address of 192.168.1.xxx. This window is automatically populated with the
data.
60 Rockwell Automation Publication 842E-UM001C-EN-P - September 2016
Page 61

Network Tab
Configuring the 842 E Encoder Using RSLogix 5000® Chapter 6
Figure 17
The Net work tab contains read-only data that is populated when the
controller goes online.
Network Topology: Displays the current network topology as either linear/
star or ring.
Network Status: Displays the current network status as normal, ring fault, or
unexpected loop detected.
The Refresh Communication link appears when communication with the
encoder has failed. Click Refresh Communication to attempt to restart
communication with the encoder.
Rockwell Automation Publication 842E-UM001C-EN-P - September 2016 61
Page 62

Chapter 6 Configuring the 842 E Encoder Using RSLogix 5000®
Configuration
Default Encoder Settings
The 842E EtherNet/IP encoder is supplied with the following parameters:
• Direction = clockwise
• Scaling = none
• Steps per revolution = 262,144
• Total resolution = 1,073,741,823
• Preset = 0
• Velocity unit = rpm
Preset Function
The 842E encoder position value is set to zero when the preset function is
executed (by the preset push button or EtherNet/IP). This predefined value is
stored in the EEPROM. The factory default preset value is zero.
ATT EN TI ON : The preset function results in a change of position reading. The
change of position reading, causes unexpected motion, which could result in
personal injury and damage to the product or equipment. During preset,
steps are taken to confirm that the shaft is stationary and remains so.
The preset function is not intended for use in dynamic parameter setting
operations, but as an electronic adjustment function during commissioning.
Rather, it allocates a specific value to the mechanical rotary position of the
842E encoder. For example, the encoder zero position can be adjusted to the
zero point of the machine.
If the EtherNet/IP sets the preset value, the value must be within the total
working range that is configured (steps per revolution and number of
revolutions).
The preset push button (see Figure 2 on page 41
page 42) is only operated when the encoder is powered and the green status
indicator is blinking or steady.
IMPORTANT Press the preset button briefly, no longer than one second.
and Preset Push Button on
62 Rockwell Automation Publication 842E-UM001C-EN-P - September 2016
Page 63

Configuring the 842 E Encoder Using RSLogix 5000® Chapter 6
RSLogix 5000 Controller Tags
During the encoder installation, the encoder tags are automatically loaded as
controller tags. Making the tags available for all programs.
In the controller organizer, click the Controller Tags.
Figure 18
The categories of tags appear. The tag name is composed of the encoder name
followed by a:
• :“C” for configuration
• :“I” for input
Configuration Image Table and Tags
Expand Enc_1: C by clicking “+.” Showing the configuration image table,
which has the following tags:
Enc_1: C.Counterclockwise: Configuration status of the direction of the
count as defined in the encoder profile.
Enc_1: C.VelocityUnits: Velocity units status of the encoder as defined in the
encoder profile.
Rockwell Automation Publication 842E-UM001C-EN-P - September 2016 63
Input Image Table and Tags
Expand Enc_1: I by clicking “+.” Shows the input image table, which has the
following tags:
Page 64

Chapter 6 Configuring the 842 E Encoder Using RSLogix 5000®
Figure 19
Enc_1: I.Fault: Fault status of the encoder.
Enc_1: I.Position: Position status of the encoder. If position-status is selected
from the input data selection in the encoder definition, you also see alarms and
warning status.
Enc_1: I.Velocity: Velocity status of the encoder is also included when
selecting velocity-status from input data selection in the encoder definition.
64 Rockwell Automation Publication 842E-UM001C-EN-P - September 2016
Page 65

Chapter 7
Net
Encoder
Mod
Link 1
Screw Cover
Link 2
Diagnostics and Troubleshooting
This chapter describes the diagnostic process to correct and clear fault
conditions on the 842E encoder.
ATT EN TI ON : Cease operation if the cause of the malfunction has not been
identified.
Stop the machine if you cannot clearly identify the error and/or if you cannot
safely rectify the malfunction.
Status Indicators
The Mod status indicator shows the device status. The Net status indicator
shows the status of the CIP connection. The Encoder status indicator shows
the status of the internal measuring device in the 842E EtherNet/IP encoder.
Five status indicators provide status information on the back of the encoder.
The figure shows their location and the tables describe their status.
Figure 1 -
Read the status indicators according to the following tables.
Rockwell Automation Publication 842E-UM001C-EN-P - September 2016 65
Status Indicator Net Description
OFF No power
Green blinking No connection
Green The device has an IP address and a CIP connection.
or
No IP address
The device has an IP address but no CIP connection.
Page 66

Chapter 7 Diagnostics and Troubleshooting
Status Indicator Net Description
Red blinking Warning, connection time-out
Cleared by reset or a new connection
Red Error
IP address has been assigned to another device already.
Green/Red blinking Self-test at power-on
Status Indicator Mod Description
OFF No power
Green Device operational
Green blinking Standby/device not configured, no IP address assigned
Red blinking Warning, but device still operational
or
Firmware u pdate in progress
Red Error, device not operational
Green/red blinking Self-test at power-on
Status Indicator Encoder Description
OFF No power
or
No IP address
Green blinking Warning
Wrong parameter
Green Device operational
Red blinking Warning, but device still operational
or
Firmware update in progress
Red Error
Encoder error
Green / red blinking Self-test at power-on
66 Rockwell Automation Publication 842E-UM001C-EN-P - September 2016
Page 67

Diagnostics and Troubleshooting Chapter 7
Ethernet Link Status Indicators Link 1 and 2
The Ethernet link status indicators, Link 1, and Link 2, display the status of the
physical connection on the Ethernet interface.
Self-test Via EtherNet/IP
Warnings, Alarms, and Errors
Via EtherNet/IP
Link 1 or Link 2 Status
Indicators
OFF No link / power off
Green solid Ethernet connection is established
Green blinking Data transmission TxD/RxD
Amber solid Interface port is locked
Amber blinking Data collisions
Description
Electromagnetic interference (EMI) can cause incorrect operations or errors in
the position value. Without a self-test, an immediate position change occurs on
power-up.
Use the position sensor object triggers a self-test with attribute 13, see CIP
Object Model on page 24. During this test, the sensor and the most important
functions are tested automatically. If an error occurs, bit 27 in the fault header
is set.
ATT EN TI ON : It is imperative to evaluate the alarms in your application.
If there is a serious error, incorrect position values are output. This change could
cause an unexpected movement that results in a hazard for persons or damage
to the system or other objects.
Rockwell Automation Publication 842E-UM001C-EN-P - September 2016 67
Within EtherNet/IP warnings, alarms, and errors can be retrieved using
implicit messages and also explicit messages.
Alarms and warnings for the encoder can be read via the position sensor object
with the aid of the attributes.
For errors, alarms, and warning the following applies:
Bit status = 0: no error, alarm, or warning
Bit status =1: error, alarm, or warning present
In addition, the Net status indicator illuminates red continuously.
Page 68

Chapter 7 Diagnostics and Troubleshooting
Warnings
Bit Warning Description FALSE (0)
0 Frequency exceeded Max. velocity exceeded OK Exceeded
1 Light control reserve Status indicator current critical OK Out of
2 CPU watchdog Not implemented Always 0 –
3 Operating time limit warning Operating time limit is reached Always 0 –
4 Battery charge Not implemented Always 0 –
5 Reference point Not implemented Always 0 –
6 Minimum velocity flag Minimum velocity setpoint reached OK Fall below
7 Maximum velocity flag Maximum velocity setpoint reached OK Exceeded
8 Minimum acceleration flag Minimum acceleration setpoint reached OK Fall below
9 Maximum acceleration flag Maximum acceleration setpoint reached OK Exceeded
10 Position limits exceeded Max. position exceeded OK Exceeded
11 Reserved by CIP – Always 0 –
12 Reserved by CIP – Always 0 –
13 Vendor:
Temperature out of range
14 Vendor: over / under voltage
(9.700…30.300mV)
Temperature setpoints reached OK Out of
Voltage setpoints reached OK Out of
(47)
TRUE (1)
(47)
Range
Range
Range
Table 1 - Supported Warnings (Attribute 47+48)
Alarms
The alarm type is coded in a bit field of attributes 44 and 45. If one of the bits
listed below is set, the alarm flag (attribute 47) is also set.
If, for example, the velocity or temperature drop below/exceed the limit values,
the warning flag is set (attribute 49 position sensor object).
In addition, the Net status indicator blinks red.
The warning type is coded in a bit field of attributes 47 and 48.
Note: The position value continues to be correctly calculated; the encoder is
therefore still ready for operation.
68 Rockwell Automation Publication 842E-UM001C-EN-P - September 2016
Page 69

Diagnostics and Troubleshooting Chapter 7
Bit Description Description FALSE (0)
(44)
0 Position ERROR Position error Ok ERROR
1 Diagnostic ERROR Diagnostic error Ok ERROR
2…11 Reserved by CIP – – –
12 Vendor: checksum ERROR Checksum error Ok ERROR
13 Vendor: startup ERROR Startup error Ok ERROR
14…15 Vendor specific – – –
TRUE (1)
(44)
Table 2 - Supported Alarms (Attribute 44+45)
Errors
Faul t
Header
[byte]
Bit Name Description
0 0 Over temperature controller Temperature value of the microcontroller is
1 Over temperature sensor Temperature value of the sensor is out of
2 Light control reserve Indicator current is not correct
3 Voltage detection Over/Under voltage detection (fall below/
4 Frequency exceeded. Speed too high (limit exceeded)
5 Velocity exceeded Minimum/maximum velocity setpoint
6 Acceleration exceeded Minimum/maximum acceleration setpoint
7 Position limits exceeded Minimum/maximum position setpoint
1 8 Position error Amplitude error single
9 Position error Amplitude error multiple
10 Position error Vector length single
11 Position error Vector length multiple
…
14 Reserved
12
15 Reser ved
out of range
range
exceeded the limit)
reached
reached
reached
Vector leng th (Si n
Vector leng th (Si n
2
+ cos2)
2
+ cos2)
Rockwell Automation Publication 842E-UM001C-EN-P - September 2016 69
Table 3 - Sensor Error Table
Page 70

Chapter 7 Diagnostics and Troubleshooting
Faul t
Header
[byte]
2 16 Position error LY digital random error and LY MFP5 error
3 24 Position or memor y error Memory or EEPROM Check Sum error
Bit Name Description
(single position)
17 Position error Position multi-turn error, synchronization
18 Position error Position multi-turn error, synchronization
(quad-single)
19 Position error Position multi-turn error, internal interface
20 Position error Position multi-turn error FRAM (magnitude)
21 Reser ved Always 0
22 Reser ved
23 Reser ved
25 Memory error Memory or EEPROM I2C error
26 Start-up error Start-up error
27 Diagnostic error This flag is set if the encoder detects a
diagnostic error.
28 Reser ved
29 Sanity-check flag This flag is set if the encoder detec ts a
diagnostic error.
30 Slave sign of life This functionality is active if byte 0 of attribute
106 is set.
31 Reser ved
Table 3 - Sensor Error Table
The following error messages stem from the RSLogix 5000® software.
Error Code Message Possible Cause
16#0108 Connection-request error
connection type (multi-cast/unicast) not supported.
16#0114 Electronic keying mismatched:
electronic keying product code
and/or vendor ID mismatched.
16#0127 Connection request error: invalid
output size.
16#0204 Connection request error:
connection time-out.
Table 4 - Error Messages
Check whether the configuration assembly (instance 100 of
the Assembly Object) is activated. If yes, check whether the
configuration data are correctly and fully configured in this
assembly (see Figure xx on page 55).
Check whether the wrong EDS file has been selected (for
example, single-turn instead of multi-turn or vice versa).
Check whether the correct communication format for the
control system is used. The default value in the control system
is “Data-DINT.” The encoder requires the communication
format: “Input Data-DINT.”
Check the supply voltage on the encoder.
Check the Ethernet cables for the encoder for open circuit.
Check whether the IP address of the encoder matches the IP
address that is saved in the control system. Possible causes:
• The address switches are not engaged correctly.
• The encoder has lost the IP address that is assigned to it
after switching back on.
70 Rockwell Automation Publication 842E-UM001C-EN-P - September 2016
Page 71

Installing the Add-on Profile
Appendix A
Introduction
Performing the Installation
This appendix shows how to install the Add-on Profile (AOP) of the encoder
with the RSLogix 5000® program. Add-on Profiles are files that users add to
their Rockwell Automation® library. These files contain the pertinent
information for configuring a device that is added to the Rockwell
Automation® network.
The Add-on Profile simplifies the setup of devices because it presents the
necessary fields in an organized fashion. The AOP allows you to install and
configure your systems in a quick and efficient manner.
The Add-on Profile is a folder, which contains numerous files for the device. It
comes as an installation package.
Install the Add-on Profile following the on-screen instructions.
1. In the file explorer, locate the directory where the installation files were
extracted.
2. Click MPSetup.exe.
3. Extract the zip file to a local directory on your computer.
4. To begin the installation, double-click MPSetup.exe.
Rockwell Automation Publication 842E-UM001C-EN-P - September 2016 71
Figure 1
Page 72

Appendix A Installing the Add-on Profile
5. At the welcome screen, click Next.
Figure 2
6. To accept the licensing terms, click the radio button, then click Next.
Figure 3
72 Rockwell Automation Publication 842E-UM001C-EN-P - September 2016
Page 73

Installing the Add-on Profile Appendix A
7. Click the Install radio button and then click Next.
Figure 4
8. Click Install to begin the installation.
Rockwell Automation Publication 842E-UM001C-EN-P - September 2016 73
Figure 5
Page 74

Appendix A Installing the Add-on Profile
9. Click Next to install the Add-on Profile files.
Figure 6
10. Click Finish to complete the installation.
Figure 7
74 Rockwell Automation Publication 842E-UM001C-EN-P - September 2016
Page 75

Appendix B
RSLogix 5000® Sample Code
This appendix gives examples of using your encoder, including how to use
RSLogix 5000 to set and read parameters.
Linear Scaling Example
• Linear Scaling Example
• Installing Your Project
• Using an Explicit Message Configuration to Set Preset Encoder Value
on page 82
• Using an Explicit Message Configuration to Read Preset Encoder Value
on page 86
• Using an Explicit Message Configuration to Obtain the Encoder
Runtime in Seconds on page 91
A linear cart is to be controlled using ball screw slide. The cart will stop after
1m (3.28 ft) of travel for loading and unloading. For precise measurement of
the distance between stops, 10,000 steps are required.
The cart travels 20 mm (0.79 in.) for one revolution of the encoder, which
brings the number of rotations the encoder turns for 1 m (3.28 ft) of travel
distance to 50. For a resolution of 10,000 steps per meter, the encoder requires
200 steps per revolution.
, next section
on page 76
Rockwell Automation Publication 842E-UM001C-EN-P - September 2016 75
There are three stops along the 3 m (9.84 ft) track, so our total resolution must
be at least 3 x 10,000 = 30,000 steps to cover the length of the track. For the
scaling function, our total resolution must be
n
x CPR
2
Or in this case
8
2
x 200 = 51,200
Page 76

Appendix B RSLogix 5000® Sample Code
Install the Configuration tab as follows.
1. Set Parameter Scaling to Enable.
2. Set Counts per Revolution to 200.
3. Tot al Me as ur ing R an ge is 51,200.
4. Position the slide/encoder to a known start position.
5. Set the preset value. The encoder retains the preset value through a
machine cycle.
Installing Your Project
1. Create a program file. Select the processor revision and name the project
file. In this example, the CompactLogix™ 1769-L35E V20 was used.
76 Rockwell Automation Publication 842E-UM001C-EN-P - September 2016
Figure 1
Page 77

RSLogix 5000® Sample Code Appendix B
2. In the controller organizer, right-click Ethernet Communication
Adapter and select Properties.
Figure 2
Rockwell Automation Publication 842E-UM001C-EN-P - September 2016 77
Page 78

Appendix B RSLogix 5000® Sample Code
3. Configure the controller IP address, this example uses 192.168.1.100.
Click Apply, then OK.
Figure 3
4. Right-click Ethernet Network and select New Module.
78 Rockwell Automation Publication 842E-UM001C-EN-P - September 2016
Figure 4
Page 79

RSLogix 5000® Sample Code Appendix B
5. Find the encoder Add-on Profiles under specialty modules. Select the
Add-on Profile for either Multi-turn Encoder or Single-turn Encoder,
then click Create.
Figure 5
6. The encoder Add-on Profile configuration then launches. Name the
encoder (In this example it is My_842E). Configure the encoder IP
address at 192.168.1.101.
Rockwell Automation Publication 842E-UM001C-EN-P - September 2016 79
Page 80

Appendix B RSLogix 5000® Sample Code
Figure 6
7. Click the Configuration tab and set it up as shown per the linear scaling
example on page 75
. Click Apply, then OK.
Figure 7
80 Rockwell Automation Publication 842E-UM001C-EN-P - September 2016
Page 81

RSLogix 5000® Sample Code Appendix B
8. The encoder can now be seen as configured on the Ethernet network in
the controller organizer.
Figure 8
9. The project can then be downloaded to the controller.
Rockwell Automation Publication 842E-UM001C-EN-P - September 2016 81
Page 82

Appendix B RSLogix 5000® Sample Code
Using an Explicit Message
Configuration to Set Preset
Encoder Value
ATT EN TI ON : The preset function results in a change of position reading. The
change can cause unexpected motion, which could result in personal injury
and damage to the product or equipment. During preset, steps are taken to
confirm that the shaft is stationary and remains so.
In this example, a value is sent to the preset attribute in the encoder. The
encoder stores the preset value that is sent in nonvolatile memory. When you
store the preset value it applies the preset value to the encoder position value.
The following program fragment sends an explicit message and confirms the
message reception.
1. Create a message data type named Preset_Message and a DINT named
Preset_Value.
82 Rockwell Automation Publication 842E-UM001C-EN-P - September 2016
Figure 9
Page 83

RSLogix 5000® Sample Code Appendix B
2. Add an MSG instruction to the program and browse to the
Preset_Message data type created in step 1. Then to configure it,
double-click the gray box on the message instruction.
Figure 10
3. Use the Position Sensor Object to find the values you want to use to
send an explicit message. In the Configuration tab select:
Message type: CIP generic
Service type: Set attribute single
Service Code: (Automatically populated)
Source element: Preset_value (browse to this tag).
Source length: 4
Instance: 1
Class: 23*
Attribute: 13*
*hexadecimal values
Rockwell Automation Publication 842E-UM001C-EN-P - September 2016 83
Page 84

Appendix B RSLogix 5000® Sample Code
4. In the Communication tab, browse to the encoder on the Ethernet
network, then click OK.
Figure 11
5. The Ta g tab is populated for the Preset_Message
84 Rockwell Automation Publication 842E-UM001C-EN-P - September 2016
Page 85

RSLogix 5000® Sample Code Appendix B
Figure 12
6. To initialize the message instruction, add a normally open contact and a
one-shot instruction.
Figure 13
Rockwell Automation Publication 842E-UM001C-EN-P - September 2016 85
Page 86

Appendix B RSLogix 5000® Sample Code
7. After you enter a value into the Preset_Value DINT and toggle the
preset contact, the message instruction presets the current count value of
the encoder. The position value is changed to the preset value you set.
Using an Explicit Message
Configuration to Read Preset
Encoder Value
Figure 14
IMPORTANT Always do a Get after a Set to verify that the value was changed.
1. Create a message data type named Read_Preset and a DINT named
Preset_Value_Read.
86 Rockwell Automation Publication 842E-UM001C-EN-P - September 2016
Page 87

RSLogix 5000® Sample Code Appendix B
Figure 15
2. Add an MSG instruction to the program and browse to the Read_Preset
data type created in step 1. To configure it, double-click the gray box on
the message instruction.
Rockwell Automation Publication 842E-UM001C-EN-P - September 2016 87
Figure 16
Page 88

Appendix B RSLogix 5000® Sample Code
3. In the Configuration tab select:
Message type: CIP generic
Service type: Get attribute single
Service Code: (automatically populated)
Source element: Preset_Value_Read (browse to this tag).
Instance: 1
Class: 23*
Attribute: 13*
* hexadecimal values
4. In the Communication tab, browse to the encoder on the Ethernet
network, then click OK.
88 Rockwell Automation Publication 842E-UM001C-EN-P - September 2016
Figure 17
Page 89

RSLogix 5000® Sample Code Appendix B
5. The Tag tab is populated for the Read_Preset.
Figure 18
6. To initialize the message instruction, add a normally open contact and a
one-shot instruction.
Rockwell Automation Publication 842E-UM001C-EN-P - September 2016 89
Figure 19
Page 90

Appendix B RSLogix 5000® Sample Code
7. Toggle the Get_preset contact, the message instruction returns the
preset value form the encoder into Preset_Value_Read DINT.
Figure 20
90 Rockwell Automation Publication 842E-UM001C-EN-P - September 2016
Page 91

RSLogix 5000® Sample Code Appendix B
Using an Explicit Message
Configuration to Obtain the
Encoder Runtime in Seconds
This example is similar to the previous one, “Using an Explicit Message
Configuration to Read Preset Encoder Value” on page 86.
1. Create a message data type named Run_Time_Message and a DINT
named Run_Time Second.
Figure 21
Rockwell Automation Publication 842E-UM001C-EN-P - September 2016 91
Page 92

Appendix B RSLogix 5000® Sample Code
2. Add an MSG function block to the program, browse to the
Run_Time_Message data type created in step 1. To configure the
message instruction, double-click the gray box.
Figure 22
3. In the Configuration tab select:
Message type - CIP Generic
Service Type - Get Attribute Single
Service Code - (Automatically populated)
Destination Element - Run_Time_Seconds (browse to this tag)
Instance - 1
Class - 23*
Attribute 32*
* hexadecimal values
92 Rockwell Automation Publication 842E-UM001C-EN-P - September 2016
Page 93

RSLogix 5000® Sample Code Appendix B
4. In the Communication tab, browse to the encoder on the Ethernet
network, then click OK.
Figure 23
5. The Ta g tab is populated f or the Run_Time_Message.
Rockwell Automation Publication 842E-UM001C-EN-P - September 2016 93
Page 94

Appendix B RSLogix 5000® Sample Code
Figure 24
6. To initialize the message instruction, add a normally open contact and a
one-shot instruction.
Figure 25
To gg l e t he Get_Run_Time contact to initiate the message instruction and
return the current runtime in seconds into Run_Time Seconds DINT.
94 Rockwell Automation Publication 842E-UM001C-EN-P - September 2016
Figure 26
Page 95

Notes:
RSLogix 5000® Sample Code Appendix B
Rockwell Automation Publication 842E-UM001C-EN-P - September 2016 95
Page 96

Rockwell Automation Support
Use the following resources to access support information.
Documentation Feedback
Your comments will help us serve your documentation needs better. If you have any suggestions on how to improve this document, complete the
How Are We Doing ? form at http://literature.rockwellautomation.com/idc/groups/literature/documents/du/ra-du002_-en-e.pdf
.
Technical Support Center
Knowledgebase Articles, How-to Videos, FAQs, Chat, User
Forums, and Product Notification Updates.
https://rockwellautomation.custhelp.com/
Local Technical Support Phone Numbers Locate the phone number for your country. http://www.rockwellautomation.com/global/support/get-support-now.page
Direct Dial Codes
Find the Direct Dial Code for your product. Use the code to
route your call directly to a technical support engineer.
http://www.rockwellautomation.com/global/support/direct-dial.page
Literature Library
Installation Instructions, Manuals, Brochures, and
Technical Data.
http://www.rockwellautomation.com/global/literature-library/overview.page
Product Compatibility and Download
Center (PCDC)
Get help determining how products interact, check
features and capabilities, and find associated firmware.
http://www.rockwellautomation.com/global/support/pcdc.page
.
Rockwell Otomasyon Ticaret A.Ş., Kar Plaza İş Merkezi E Blok Kat:6 34752 İçerenköy, İstanbul, Tel: +90 (216) 5698400
Rockwell Automation maintains current product environmental information on its website at http://ww w.rockwellautomation.com/rockwellautomation/about-us/sustainability-ethics/product-environmental-compliance.page.
Allen-Bradley, Rockwell Software, and Rockwell Automation are trademarks of Rockwell Automation, Inc.
Trademarks not belonging to Rockwell Automation are property of their resp ective companies.
Publication 842E-UM001C-EN-P - September 2016
Supersedes Publication 842E-UM001B-EN-P - April 2015 Copyright © 2016 Rockwell Auto mation, Inc. All rights reserved. Pr inted in the U.S.A.
 Loading...
Loading...