

Page 1

CANopen Library User Manual
V1.04
April 2013
Page 2

Table of Contents
1. Introduction ......................................................................................................................................... 1
1.1. CANopen architecture ........................................................................................................ 1
1.2. Object Dictionary setting .................................................................................................... 4
1.2.1. Service Data Objects (SDO) ....................................................................................... 4
1.2.2. Process Data Objects (PDO) ....................................................................................... 5
1.2.3. SYNC setting .............................................................................................................. 7
1.2.4. Heartbeat ..................................................................................................................... 7
1.3. Reference ............................................................................................................................ 8
2. Advantech CANopen Protocol Library .............................................................................................. 9
2.1. Overview ............................................................................................................................. 9
2.2. Object Diagram ................................................................................................................. 10
2.3. Runtime Environment ........................................................................................................ 11
2.4. API Functions ................................................................................................................... 12
2.4.1. Overview ................................................................................................................... 12
2.4.2. Flow chart ................................................................................................................. 14
2.4.3. Definition and Structures .......................................................................................... 16
2.4.4. Error codes ................................................................................................................ 18
2.4.5. acoapi Functions ....................................................................................................... 23
3. Advantech CANopen Examples ....................................................................................................... 74
3.1. Overview ........................................................................................................................... 74
3.2. Example usage .................................................................................................................. 74
4. Advantech CANopen Network Utility ............................................................................................. 76
4.1. Overview ........................................................................................................................... 76
4.2. Configure CANopen Network .......................................................................................... 77
4.2.1. Create CANopen Network ........................................................................................ 77
4.2.2. Create slave node ...................................................................................................... 78
4.2.3. Configure Node ......................................................................................................... 79
4.2.4. Import EDS File ........................................................................................................ 79
4.2.5. Create new data type ................................................................................................. 79
4.2.6. Configure the communication parameters ................................................................ 80
4.2.7. Create and configure SDO ........................................................................................ 82
4.2.8. Create and configure PDO ........................................................................................ 82
4.2.9. Create manufacture variable ..................................................................................... 85
4.2.10. Save the configuration .............................................................................................. 86
4.3. Manger CANopen network ............................................................................................... 87
4.3.1. Enter run mode .......................................................................................................... 87
4.3.2. Monitor Node Data ................................................................................................... 88
4.3.3. Control Network ....................................................................................................... 90
4.3.4. Exit Run Mode .......................................................................................................... 92
APPENDIX ............................................................................................................................................... 93
Page 3
1. Introduction
1.1. CANopen architecture
CANopen, application layer communication protocol based on CAN bus, is widely used in distributed
industrial automation system, medical system, maritime system, etc. CANopen is made up of a
series of sub-protocol sets which can be divided into two parts. The first part is communication
sub-protocol set that defines the basic communication modes and objects of all the devices. This
part consists of DS-301, DS-302, DS-306, etc., among which DS-301 mainly describes
specifications and definitions of CANopen application layer communication objects and other
protocols are supplements to CANopen network on the basis of DS-301. The other part, device
sub-protocol set, defines the function and data definition of standard devices which are of different
types. These sub-protocols contain DS-401, DS-402, etc. Each device of CANopen describes its
property and functions in standard Electronic Data Sheets (EDS) files. CANopen devices must
strictly take the definitions in EDS files as their specifications and support perfect device exchange.
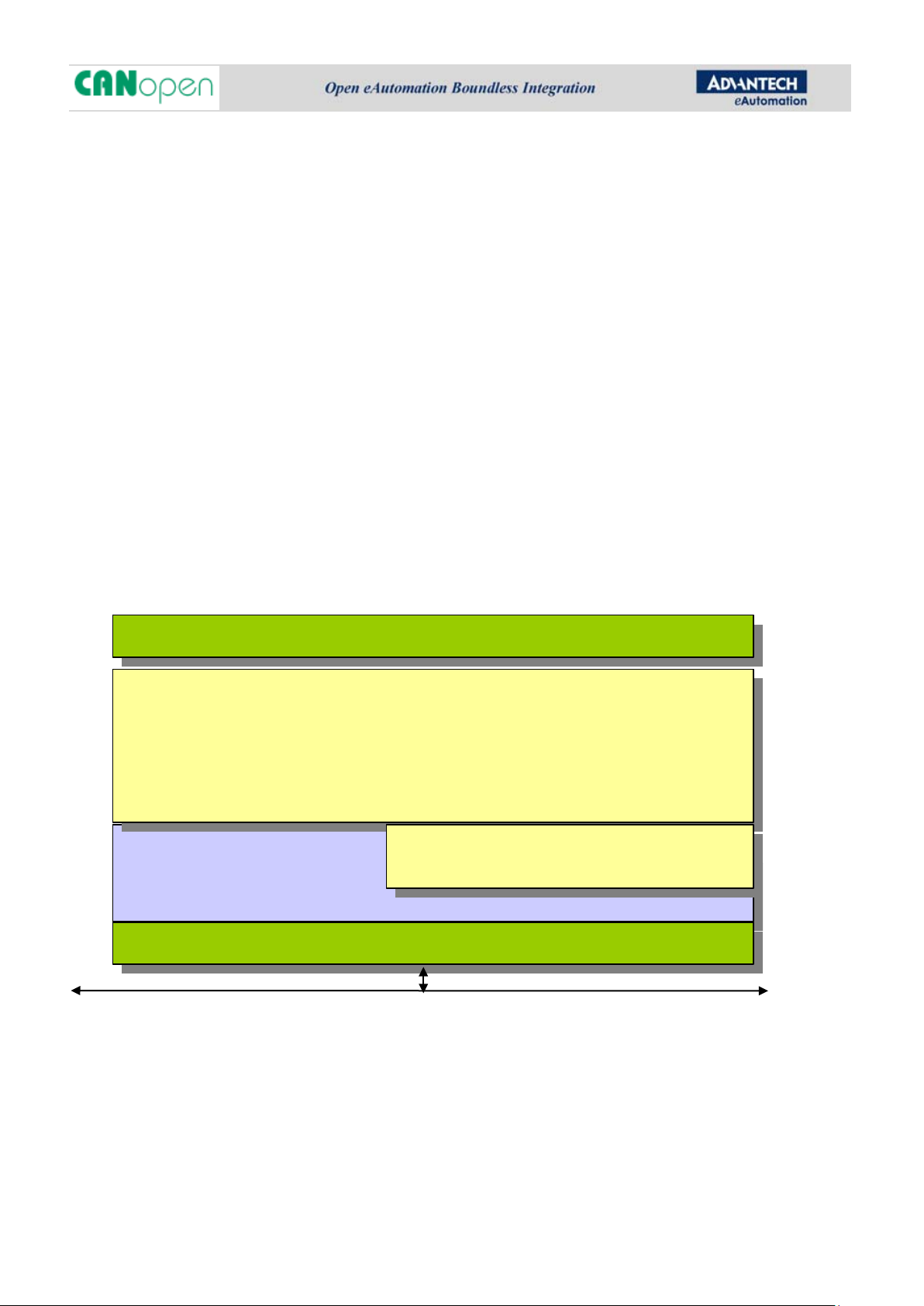
Application Layer
Device Profiles
CiA 401: D evice profile for generic I/O modules
CiA 402: Device profile for drives and motion control (servo controller, stepper
motor controller, frequency inverter)
…
DS-306 EDS spec for CANopen
CANopen DS-301,
DSP-302…
CAN Bus Driver Interface
CAN Bus
Basic communication objects of CANopen are:
OD (Object Dictionary), generated from the devices’ EDS files, and describes all properties and
communication objects of the device. It’s the core definition of CANopen devices. Object
- 1 -
Page 4

Dictionary is composed of sequential object lists. Each object applies a 16-bit index as its
addressing. Each object can be made up of several elements or a single element uses an 8-bit subindex as its addressing.
SDO (Service Data Object) can access and configure Object Dictionary in remote nodes via index
and sub-index of Object Dictionary. The object that requests to access is regarded as Client, and
the object which is requested is Server. The length of request messages and response messages
remains 8 bytes, including SDO command (1 byte), index of the object to be accessed (2 bytes),
sub-index of the object to be accessed (1 byte) and 4 bytes of data to be transmitted. The SDO
protocol can transmit data of any size. If the data is over 4 bytes, the message will be segmented
into several parts.
The term SDO Read means SDO upload protocol, the client of a SDO uploads data from the server.
SDO Write means SDO download protocol; the client of a SDO downloads data to the server.
PDO (Process Data Object) is used for high speed data exchange. The length of transmitted data is
limited to 1-8 bytes. PDO contains many transmitting trigger ways, such as cycle transmitting
(synchronized, time driven), triggered by remote frame, triggered by particular events, etc.
NMT (Network Management) belongs to master-slave mode. One NMT master can correspond to
several NMT Slaves. NMT master detects status of each node of the network and completes status
conversion. It supports the function of monitoring the device’s status by heartbeat, Node guarding
or Life guarding. The diagram in Figure 1 illustrates the major states a slave node can be in. Starts
the CANopen network or power on a node, it goes into NMT state Initialisation. At the end of
initialization the slave node tries to transmit its boot-up message to NMT master to report that
boot-up has been finished and has entered pre-operation status. An NMT master can switch
individual slave node or all nodes back and forth between the three major states: Pre-operational,
Operational, and Stopped.
- 2 -
Page 5
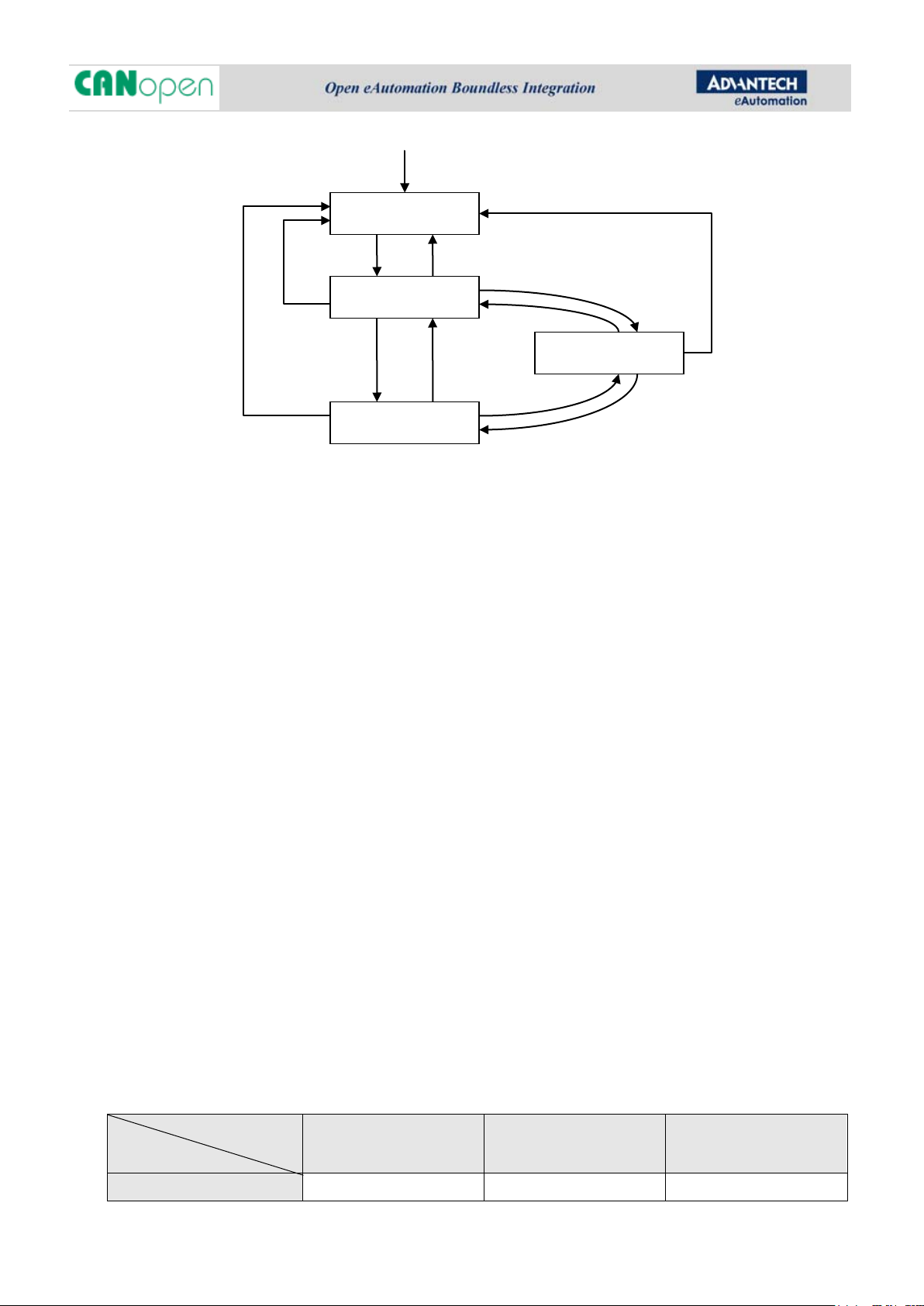
Initialisation
Pre-Operational
Stopped
Operational
Figure 1: State diagram of a node
SYNC (Synchronization) makes the devices in the network possess synchronous capability. Only
one node can produces the SYNC signal in a system as SYNC producer, which can be NMT master
or other slave node. It is the time period in microseconds with which the SY NC signal occurs; the
node has this value availa ble in the OD entry [1006h, 0 0h].
Heartbeat or Node Guarding is a method to detect the node is live or not, and retrieves the
status of a node. Recommend using heartbeat instead of node guarding less bandwidth, is more
flexible. The node as heartbeat producer transmits heartbeat message cyclically, consisting of a 1byte the current NMT state the node is in.
EMCY (Emergency) will be triggered if fatal errors occur inside the device, similar to error interru pt
mode.
The relation between NMT states and communication objects shows in Table 1: NMT states and
communication objects. It defines the communication objects can be serviced in the appropriate
NMT state if the CANopen devices support. For example: the PDO is a critical message can be
transmitted only in NMT state Operational otherwise can not.
Table 1: NMT states and communication objects
Object
State
PDO V
Pre-operational Operational Stopped
- 3 -
Page 6
SDO V V
SYNC V V
TIME V V
EMCY V V
NMT V V V
1.2. Object Dictionary setting
The object dictionary is generated from the EDS file, describes all properties and communication
object of the CANopen device. It is the core that the behavior of the CANop en device depends on.
Detail information reference CiA DS301 [1] Communication profile. This section describes how to
configure the Object Dictionary for a node to be a SDO client or SDO server, can transmit/receive
PDO message, and send SYNC message and heartbeat.
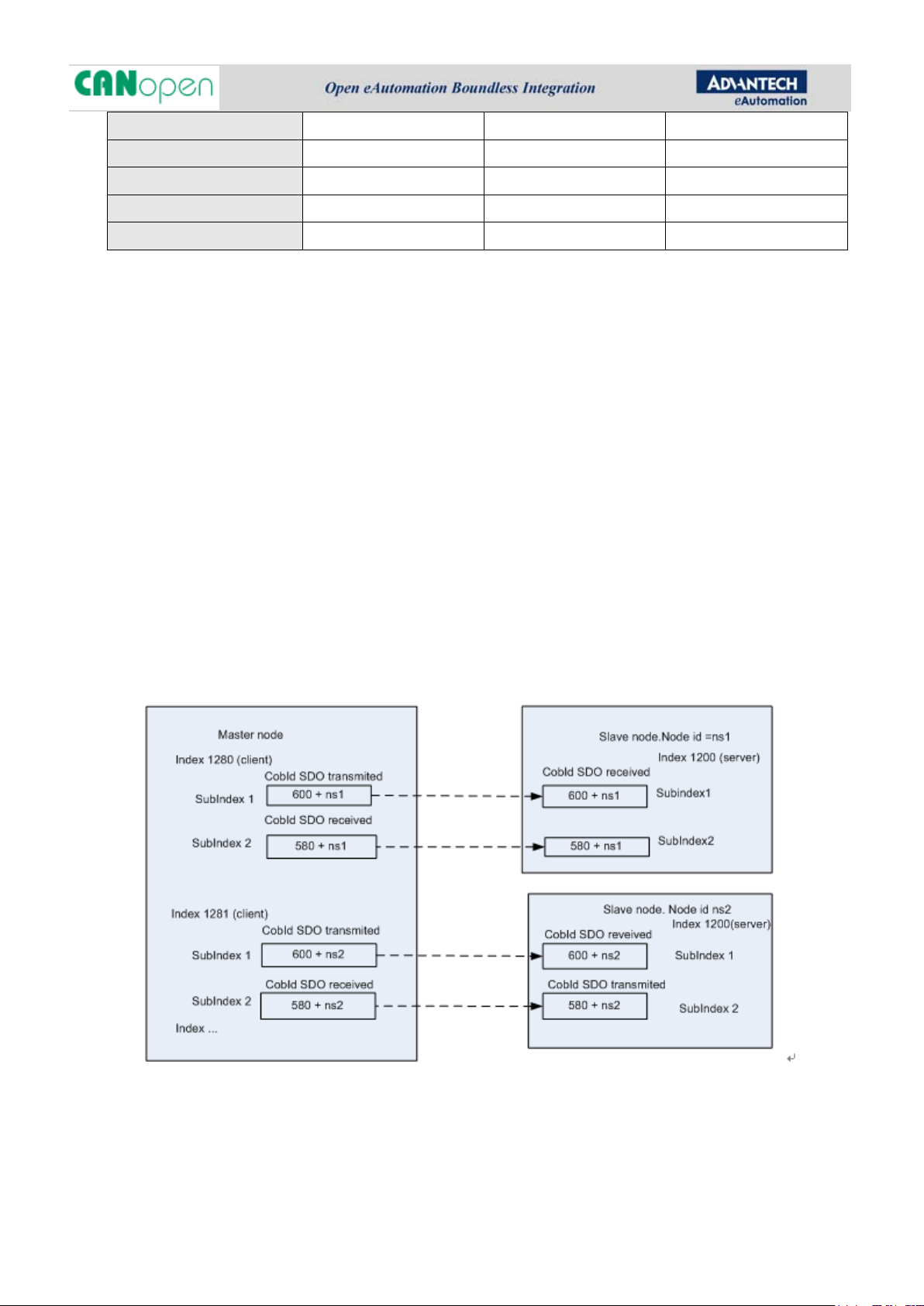
1.2.1. Service Data Objects (SDO)
Generally in CANopen network, each node implements only one SDO server (object 1200h) that
handles read and write request its object dictionary from other nodes as SDO client. SDO client
defined at object 1280h to 12FFh.
- 4 -
Page 7
1.2.2. Process Data Objects (PDO)
PDO can be distinguishing between Transmit Process Data Object (TPDO) and Receive P roces s Data
Object (RPDO). One node produces a PDO, which is a TPDO for that node. Other nodes receive the
PDO, which is an RPDO (consumer).
The communication parameters for a TPDO are at object dictionary of index 1800h to 19FFh
(indicating which CAN message is used for the PDO and how is it triggered), but index 1804h –
19FFh default are disabled by CiA DS301 [1]. And the mapping parameters are at index 1A00h to
1BFFh. acoapi library supports above 4 PDOs up to 512 PDOs. The COB-ID of above 4 PDOs can
be self-defined and/or using CAN2.0B CAN message format that means the 29-bit of COB-ID could
be 1, and lower 7 bit is defined as NodeId.
The transmit trigger method is defined in sub-index 02h transmission type. The value is 0-240 and
252 means that the PDO is transferred synchronously and cyclically. The transmission type 254
means that defined by manufacturer specific (manufacturer specific part of the object dictionary),
255 means defined by device profile. In transmission type 254 and 255 that can use event timer
for trigger in an elapsed timer that are in sub-index 05h of the TPDO, and also support Change-OfState (COS) transmission method simply transmits a TPDO message if the process data is in
changes else not transmits even the event timer or inhibited timer is expired .
PDO Parameters
Sub-index 00h Number of sub-index
01h COB-ID, 180h + NODE-ID
02h Transmission type: 0-255
03h Inhibit time, multiple of 100 μs
04h Reserved
Event timer, multiple of 1 ms
05h
0: disable
For example: A node that node identifier is 2h, another node is 5h. Figure 2: PDO Linking
illustrates the relation of the PDO linking that Node 2h transmits TPDO_1 to Node 5h, Node 5h
receives the PDO as RPDO and update the data to object dictionary of specified index and subindex.
- 5 -
Page 8
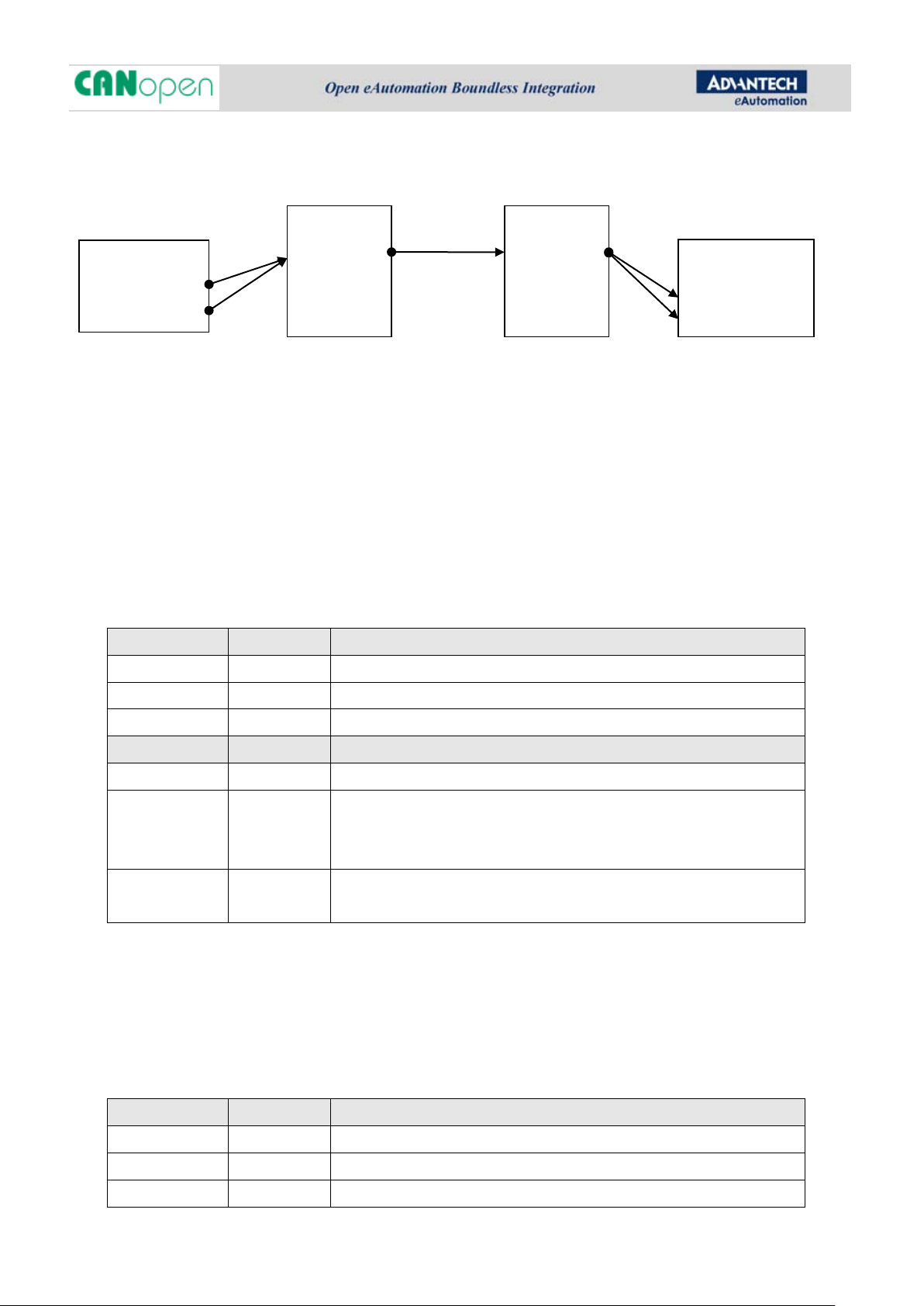
Node 2h OD
[6000h,03]
[2010h,21]
Node 2h
TPDO_1
TPDO_2
TPDO_3
Figure 2: PDO Linking
Node 5h
RPDO_1
RPDO_2
RPDO_3
Node 5h OD
[6000h,03]
[2010h,21]
Following is the example to describe how to set the value to the PDO in object dictionary.
TPDO setting example
A node with n ode id ent ifier 0x02, the PDO is transmitted on synchrony. It contains 6 bytes of data:
DataX (2 bytes) and DataY (4 bytes). DataX is defined at index 6000h sub-index 03h. DataY is
defined at index 0x2010 sub-index 21h. The result of object dictionary setting about TPDO1 is
shown in Table 2: TPDO1 setting example.
Table 2: TPDO1 setting example
Index [1800h] value description
Sub-index 00h 2
01h 0x182 180h + Node-ID 0x2
02h 200 the PDO is transmitted every reception of <200> SYNC
Index [1A00h] value description
Sub-index 00h 2 write the number of data embedded in the PDO (1byte)
01h 0x60000308 Where to find of data embedded and the size. (8 bytes)
Format: index(2 bytes) – sub-index(1 byte) – size in bits(1 byte)
DataX is at object [6000h, 03h] with 8 bits
02h 0x20102120 where to find the second data embedded an the size (8bytes)
DataY is at object [2010h, 21h] with 32 bits
RPDO setting example
Another node 0x05 needs to be configured to directly listen for the TPDO1 transmitted by node
0x02. RPDO1 of node 0x05 should be used to receive TPDO1 of node 0x02.
Table 3: RPDO setting example
Index [1400h] value description
Sub-index 00h 2
01h 0x182 180h + Node-ID 0x2
02h 200 the PDO is transmitted every reception of <200> SYNC
- 6 -
Page 9
Index [1600h] value description
Sub-index 00h 2 write the number of data embedded in the PDO (1byte)
01h 0x60000308 Where to find of data embedded and the size. (8 bytes)
Format: index(2 bytes) – sub-index(1 byte) – size in bits(1 byte)
DataX is at object [6000h, 03h] with 8 bits
02h 0x20102120 where to find the second data embedded an the size (8bytes)
DataY is at object [2010h, 21h] with 32 bits
1.2.3. SYNC setting
A node as SYNC producer broadcasts the synchronization object periodically, which provides the
basic network synchronization. The time period in μs between SYNC is defined at index 1006h
Communication cycle per iod of object dictionary. And mandatory if the node generates the SYNC
object, the allow bit 30 at object 1005h must to be set.
Table 4: SYNC COB-ID (1005h) setting exam ple
Index [1005h] value description
DefaultValue
0x00000080
or
0x40000080
Example: 11-bit SYNC COB-ID is 80h.
Bit 30 set to 0 means the node does not generate the SYNC object.
Bit 30 set to 1 means the node generates the SYNC object.
Table 5: Communicate Cycle Period (1006h) setting example
Index [1006h] value description
The time period is 0 means do not transmit the SYNC object. Other
DefaultValue 0 or
t
value in μs means the node generate the SYNC object in every <t>
μs if allow bit 30 is set at index 1005h.
Example: DefaultValue=0x001E8480, transmit every 2 seconds
1.2.4. Heartbeat
According to CiA DS301 [1], a CANopen node must support either heartbeat or node guarding
protocol that can be monitoring the node is live or not. The heartbeat protocol is preferred since
with the less bandwidth, so that the producer heartbeat time at index 1017h must be implemented.
Table 6: Producer Heartbeat Time (1017h) setting example
Index [1017h] value description
0
DefaultValue
or
The time period is 0 means disable transmission of heartbeat
message by the node. Other value specifies in milliseconds the time
- 7 -
Page 10
t between transmissions of heartbeat messages.
Example: DefaultValue=0x1388, the node transmits the heartbeat
message every 5 seconds.
Other nodes (heartbeat consumers) can monitor the node whether the heartbeat is transmitted in
specified time as heartbeat consumer time. If the heartbeat is not received within the heartbeat
consumer time, a heartbeat error event will be trigger. The index 1016h of object dictionary
specifies the maximum time to wait for a heartbeat from a specific node, which maximum 7Fh
nodes. The consumer heartbeat time should be greater than the producer heartbeat time.
Table 7: Consumer Heartbeat Time (1016h) setting example
Index [1016h] value Description
Sub-index 00h 1 Number of entries
01h 0x005A1122 Consumer heartbeat time
The format is: bit 0-15 heartbeat consumer time, bit 16-23
02h – 7Fh
monitored node id, bit 24-31 reserved (set to 0).
Example: DefaultValue=0x00051B58, This node must receives the
heartbeat message from the node 5h within 7 seconds, else trigger
a heartbeat error event for n od e 5.
1.3. Reference
1 [CiADS301] CANopen Application Layer and Communication Profile, CiA Draft Standard Proposal
301 Version 4.2, 7. Dec 2007
2 [CiADS203-1] CAN Application Layer for Industrial Application, CiA/DS203-1, Feb 1996
3 [CiADS306] Electronic data sheet specification for CANopen, CiA Draft Standard 306 Version 1.3,
01 Jan 2005
- 8 -
Page 11
Advantech CANopen Protocol Library
2. Advantech CANopen Protocol Library
2.1. Overview
Advantech CANopen Protocol Library (acoapi) provides a C application programming interface (API)
for accessing the CANopen network protocol stack of nodes. It is easy to use, configure, start and
monitor the CANopen devices careless CAN bus, developer just focused on CANopen application
functionality. The acoapi library architecture is shown in Figure 3, at present, the library practices
the specification DSP 301 v4.2 [1] defined by CiA, communication profile.
Advantech or vendors CANopen Tool, Utility, Manager
Advantech CANopen C-API DLL
Advantech CAN Bus Driver
CAN Bus
Figure 3: Advantech CANopen Protocol Architecture
Base on the acoapi library to develop a CANopen node as master or slaves, the functionality of
slaves and of a master specified by CANopen can configure and manage remote nodes is covered
by the library:
Read and write object dictionary (local or by SDO)
Control or monitor the node NMT state (NMT master)
PDO transmission mode: on request, by SYNC, time driven, event driven
Support 512 TPDOs and 512 RPDOs
SYNC producer and consumer
Heartbeat producer and consumer
- 9 -
Page 12
Emergency objects
The acoapi library uses event-driven to notify the a pplication to complete the tasks, indicate that
an event has occurred. For example: Notify the application when the NMT state of a master/slave
node has changed that can decide to do something in state changing, notify SYNC message
received or transmitted, or PDO frame transmitted, the C ANopen node object dictionary of object
index and sub-index data has changed, etc.
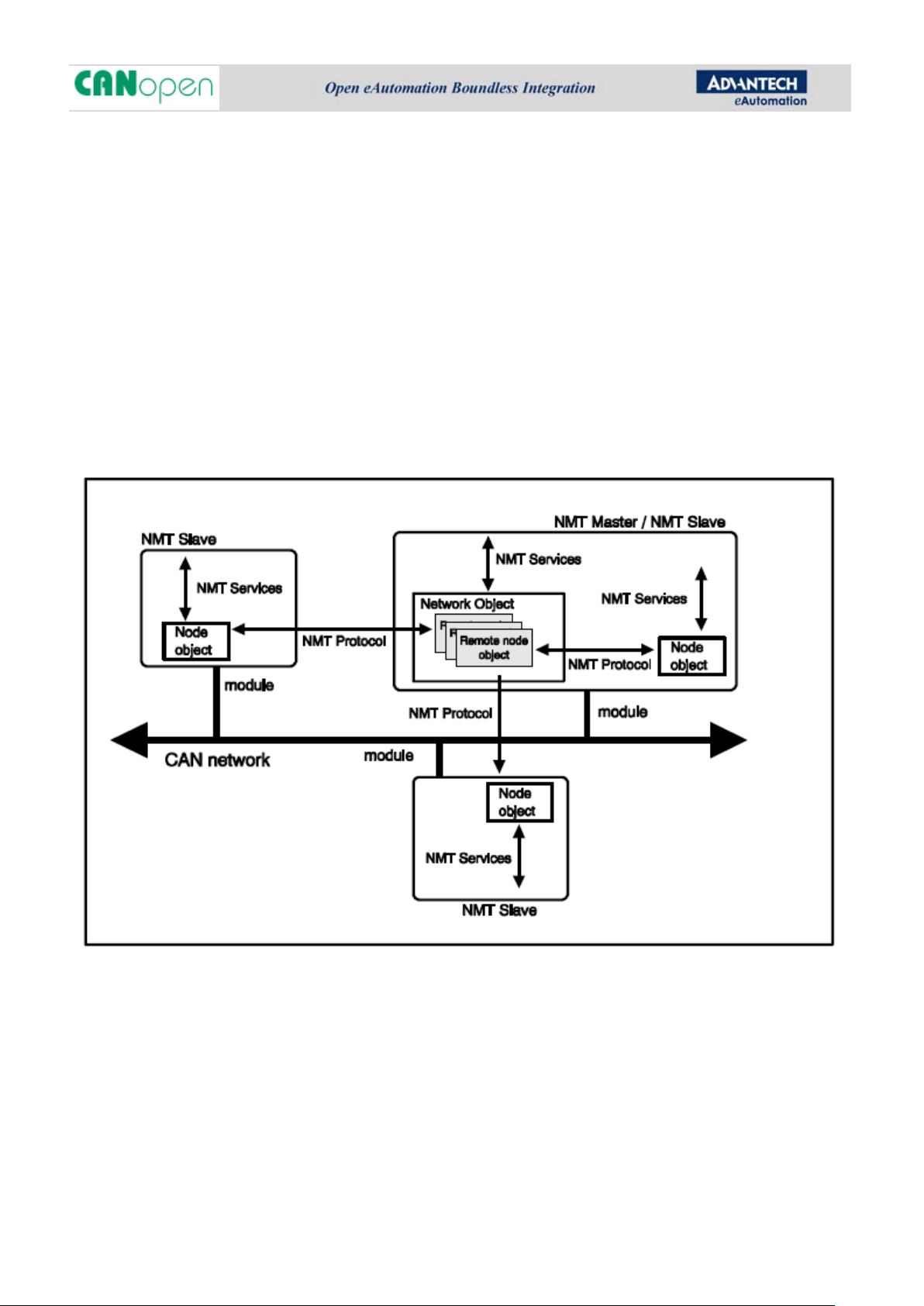
2.2. Object Diagram
The acoapi library references CiA DS203-1 NMT Service Specifica tion [2] to deal with the CANopen
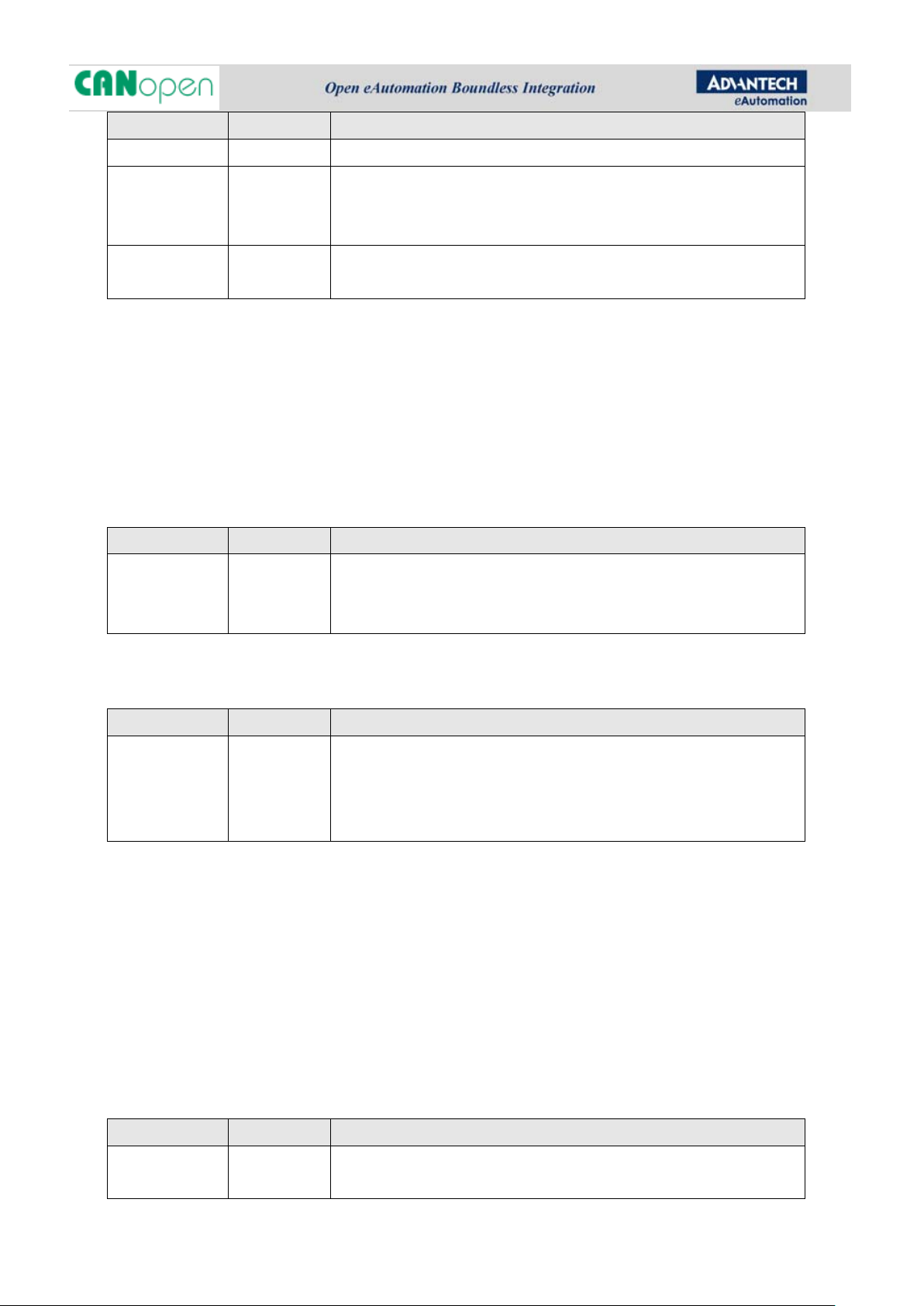
network aspect. Figure 4: The NMT model illustrates the NMT model of a CANopen network the
acoapi library implemented.
Figure 4: The NMT model
There are three objects to model a CANopen network:
The network object
The network object represents the set of all modules in a CANopen network that must include
one node, called master node, and at most 126 node objects specified by CiA DS301 [1]
(totally 127 nodes in CANopen network). It administers whole the life cycle of a CANopen
network through the master. In other word, the network object exists in master side.
- 10 -
Page 13

The remote node object
Each slave node is managed by the NMT master is represented by a remote nod e object on
the network object.
The node object
A CANopen device in the network is considered as a node. The role of node can be master or
slave depended on its capability. Each node has uniquely node identifier in the network
defined in CiA DS301 [1].
For each slave there must exist one remote node object with the same node identifier on the
network object that master node in. A slav e node object and the remote node object that has the
same node identifier are called peers. A unique node identifier is assigned to a slave node object
and its peer by the master (network object). Master in the network object commu nicates w ith each
remote node object via CANopen protocol to its peer slave node.
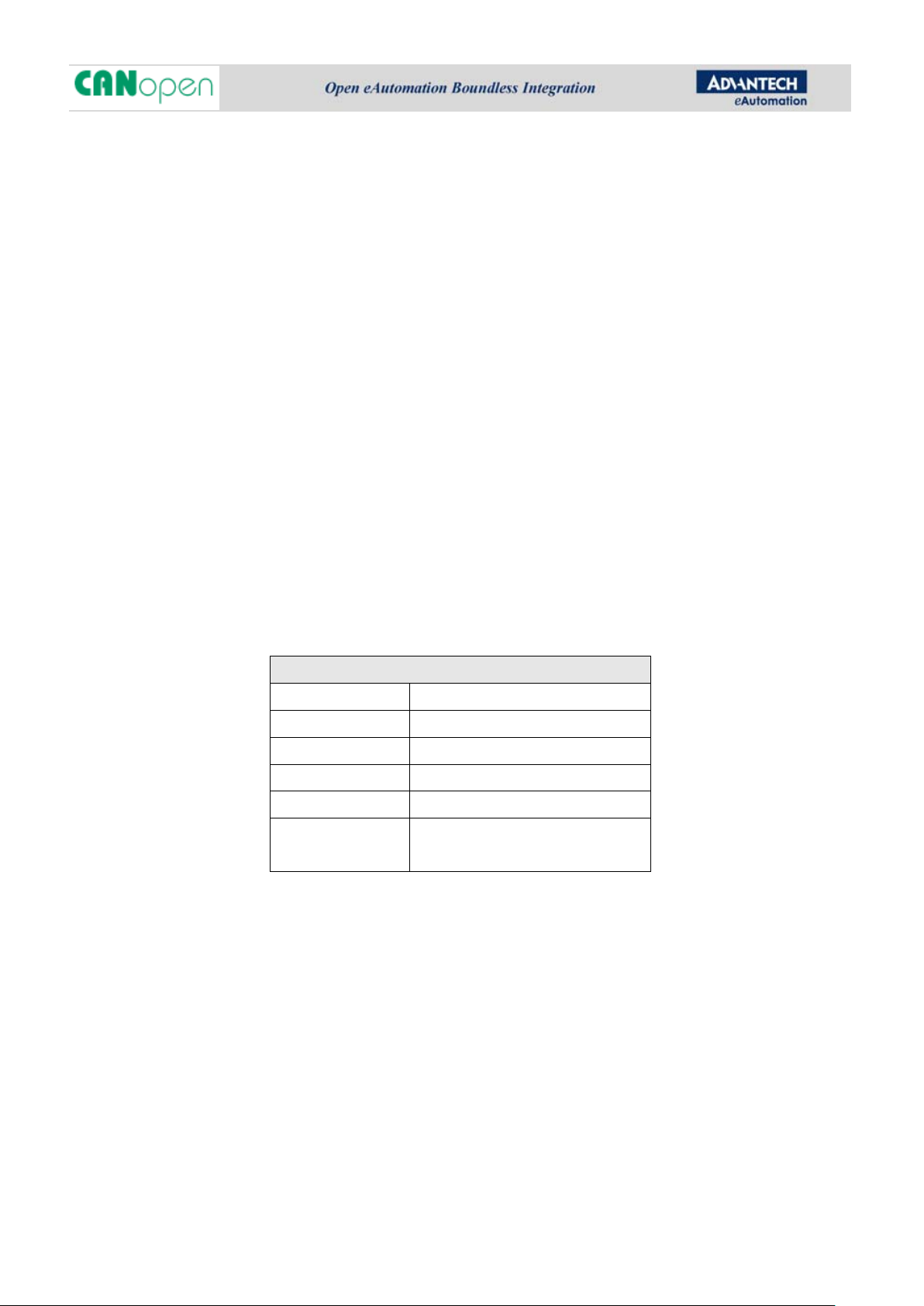
2.3. Runtime Environment
Windows 2000
Windows xp (32 bit and 64 bit)
Windows 2003 (32 bit and 64 bit)
Windows vista (32 bit and 64 bit)
Window 7 (32 bit and 64 bit)
- 11 -
Page 14
2.4. API Functions
2.4.1. Overview
The acoapi DLL implements a set of functions which together provide CANopen functionality. Each
function of first parameter is an object handles that pointer to master/slave node, remote node or
network object. Network ob ject is in master side for management the CANopen network; it must
need a master node for creating a CANopen network and at most 126 remote slave nodes includ ed,
totally nodes is 127 in CANopen network. Remote slave node can be inserted to network object
first before starting network, or inserted later if receiving the slave node boot-up message.
Table 8: acoapi function list
Function Description
Network object (Master side)
acoCreateNetwork Create a CANopen network topology, must input a Master Node
acoFreeNetwork Free network object instance and remote n od es
acoStartNetwork Start network, all nodes will be into Operational state
acoStopNetwork Stop network, all nodes will be into Stop state
acoStartRemoteNode Start a remote node by NodeId
acoStopRemoteNode Stop a remote node by NodeId
acoGetRemoteNodeId Get node id of remote object
acoGetRemoteNodeState Get the node state of remote object
acoGetRemoteNodeCount Get remote nodes count
acoGetRemoteNode Get remote node handle by NodeId
acoGetRemoteNodebyPos Get Remote node handle by position
acoRemoteNodeExist Check the Remote node is already exist in network object
acoNetworkAddSlave Add a Remote node into network object
acoNetworkRemoveSlave Remove a Remote node from network object
acoNetworkSetState Send a NMT message to a Slave to change its state
acoReqNodeGuard Request a Slave node the Node Guard message
acoRegBootupEvent Register an event while receiving slave boot-up frame
acoNetworkReadSDO Send SDO frame in async mode to read the object dictionary of remote
slave node, it will call specified callback function after receiving the
remote slave’s response
acoNetworkWriteSDO Send SDO frame in async mode to write the data to the object dictionary
of remote slave node, it will call specified callback function after
- 12 -
Page 15
completing the process
Node
acoCreateNode Create a node (Master/Slave) according
acoFreeNode Free a node and close the CAN port
acoOpenCANPort open the CAN port
acoCloseCANPort Close the CAN port
acoSetBaudrate Change the CAN port by specified baud rate.
acoNodeImportEDS Import the device profile and assign the node id
acoGetNodeId Get the node Id of the node object
acoSetNodeId Set the node id of the node object
acoGetNodeState Get the state of the node
acoStartNode Start a slave node into Pre-Operational state that waiting NMT message
acoStopNode Stop a slave node into Stop state
acoGetNodeRole Get node role (Master or Slave) by node handle
acoGetODentry Read local object dictionary info (SDO upload) or read remote slave node
of OD by SDO in sync method
acoSetODentry
acoReadSDO A slave node reads other slave node of OD by sending SDO frame in
acoWriteSDO A slave node writes the data to other slave node of OD by sending SDO
acoRegODDataChangedEvent Register an event for the entry [index, subindex] of Object Dictionary
acoUnRegODDataChangedEvent Un-register an event for the entry changed
acoRegGeneralEvent Register a call back function that for a general event
acoRegEmcyEvent Register an event for slave received EMCY message
acoSendEmcy Slave sends emergency message actively
Write data to local object dictionary (SDO download) or write remote
slave node of OD by SDO in sync method
async mode
frame in async mode
changed
acoSendData Transmit a specified data to other nodes
acoRegHeartbeatEvent Registers a callback function that will be called while receiving a
heartbeat message
acoRegHeartbeatErrorEvent Registers a callback function that will be called while detecting a
heartbeat error or node guard error occurs
acoRegRecvPDOEvent Registers an event is for receiving a PDO message.
acoSendPDOwithCOS Send TPDOs if any data has changed (Change-Of-State), only
transmission type 255 (0xFF) is supported yet.
- 13 -
Page 16
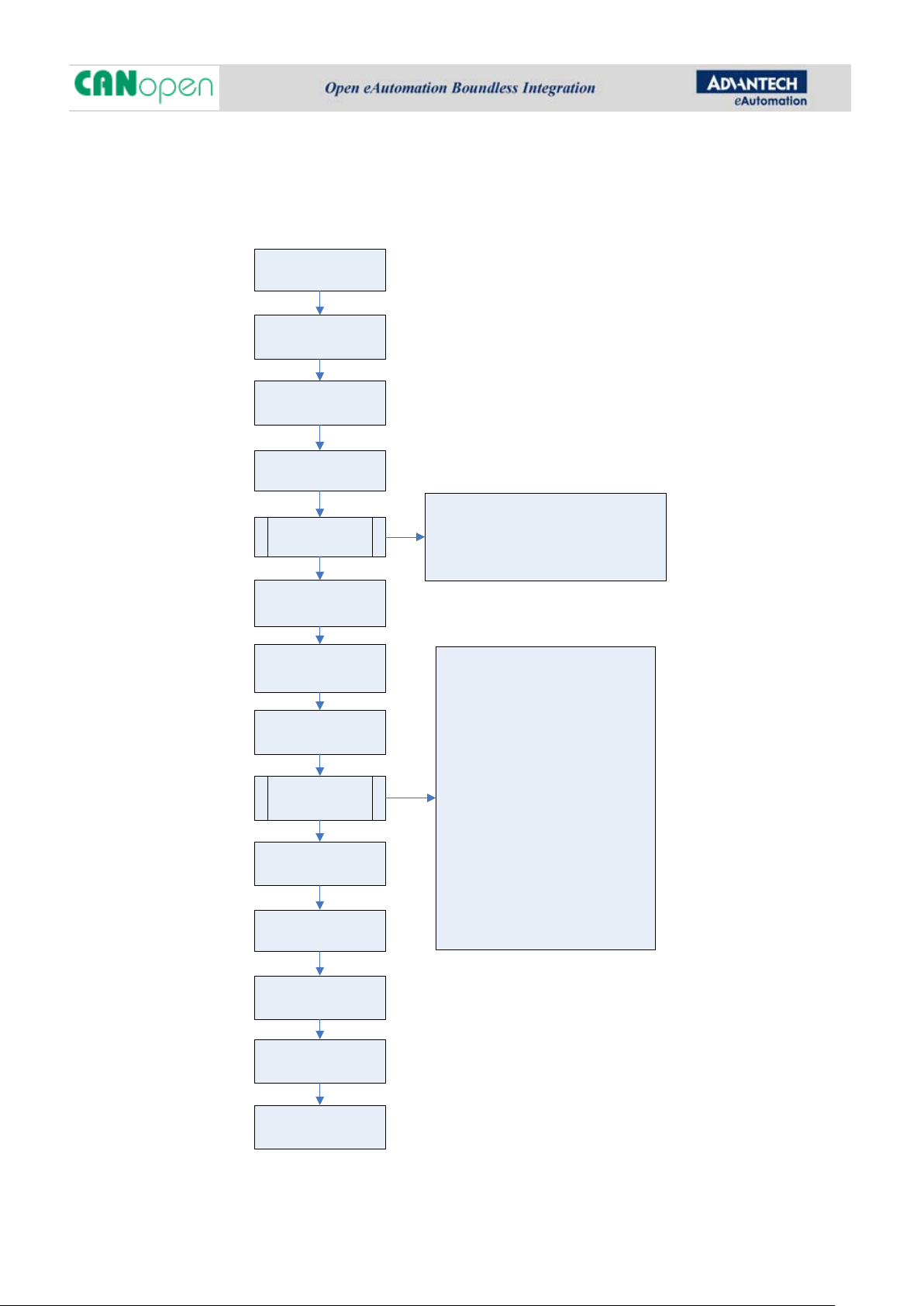
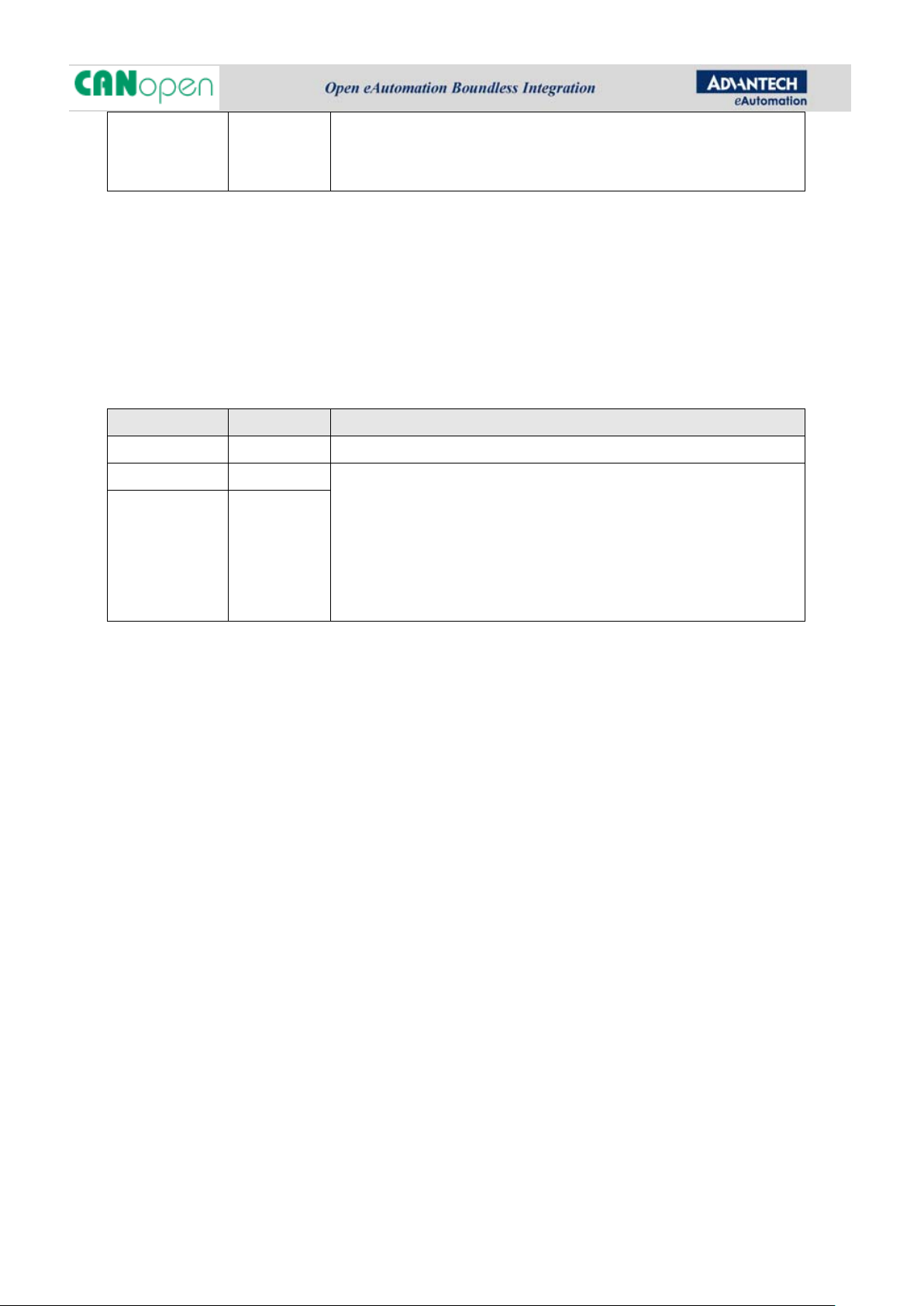
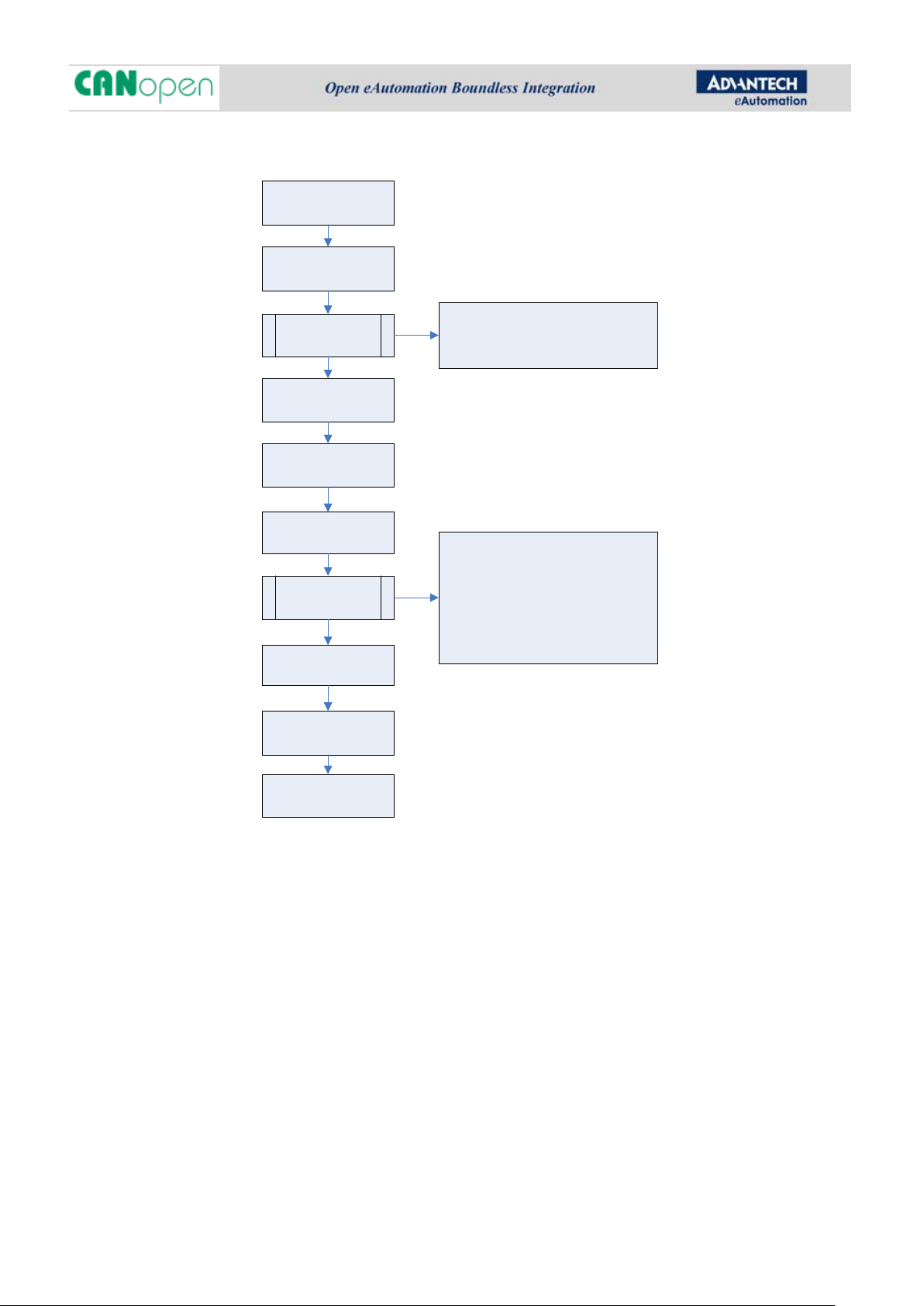
acoCreateNode
acoNodeImportEDS
acoCreateNetwork
acoNetworkAddSlave
Regist Event
acoRegHeartbeatErrorEvent
acoRegBootupEvent
acoRegODDataChangedEvent
acoRegGeneralEvent
acoOpenCANPort
acoStartNetwork
Run state
acoStopNetwork
acoNetworkRemoveSl
ave
acoFreeNetwork
acoCloseCANPort
acoFreeNode
acoGetNodeId
acoGetNodeState
acoGetNodeRole
acoReadSDO
acoWriteSDO
acoGetODentry
acoSetODentry
acoSendData
acoReqNodeGuard
acoStartRemoteNode
acoStopRemoteNode
acoRemoteNodeExist
acoGetRemoteNodebyPos
acoGetRemoteNode
acoGetRemoteNodeCount
acoSetNodeId
2.4.2. Flow chart
Master side
- 14 -
Page 17
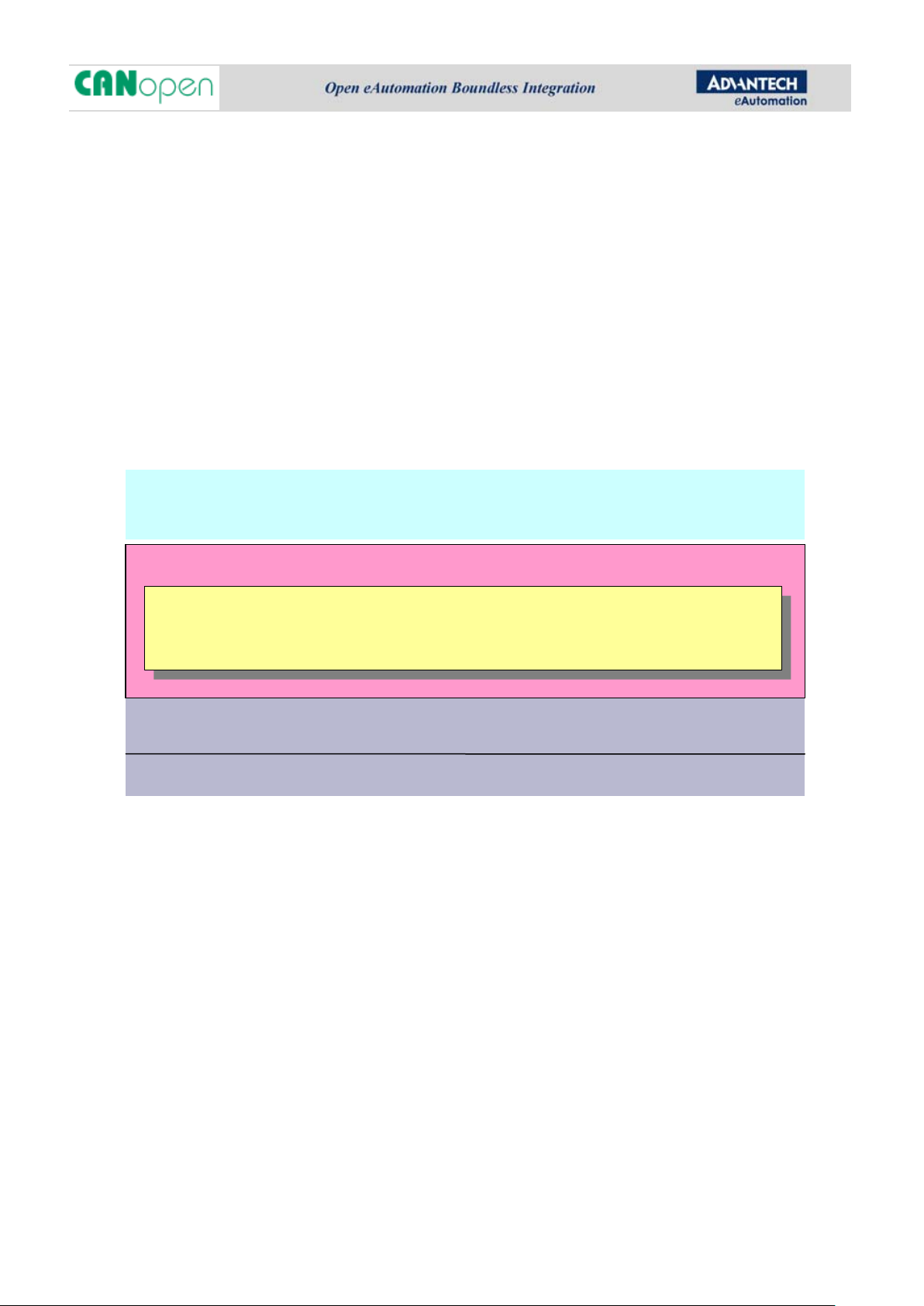
acoCreateNode
acoNodeImportEDS
Regist Event
acoRegHeartbeatErrorEvent
acoRegODDataChangedEvent
acoRegGeneralEvent
acoOpenCANPort
acoStartNode
Run state
acoStopNode
acoCloseCANPort
acoFreeNode
acoGetNodeId
acoSetNodeId
acoGetNodeState
acoGetNodeRole
acoGetODentry
acoSetODentry
acoSendData
acoSetNodeId
Slave side
- 15 -
Page 18
2.4.3. Definition and Structures
Definition Description
UNS8 A 8-bit unsigned char
UNS16 A 16-bit unsigned short integer
UNS32 A 32-bit unsigned long integer
NODEID_t Type definition of node identifier
HACONODE Pointer to slave node object
HACOMASTER Pointer to master node object
HACOREMOTE Pointer to remote node object
HACONODEOBJ Pointer to a node object, may be slave node object, master node object or remote
node object
HACONETWORK Pointer to network object
CBROADCAST_NODEID Node identifier is 0 for broadcast CANopen message
CINVALID_NODEID -1 indicates invalid node identifier
MAX_PORTNAME Maximum length of CAN port name
Object Dictionary Data Types
ACODT_BOOLEAN 0x01, Boolean
ACODT_INT8 0x02, a 8-bit integer
ACODT_INT16 0x03, a 16-bit integer
ACODT_INT32 0x04, a 32-bit integer
ACODT_UINT8 0x05, a 8-bit unsigned integer
ACODT_UINT16 0x06, a 16-bit unsigned integer
ACODT_UINT32 0x07, a 32-bit unsigned integer
ACODT_REAL32 0x08, a 32-bit real
ACODT_VISIBLE_STRING 0x09, visible string
ACODT_OCTET_STRING 0x0A, octet string
ACODT_UNICODE_STRING 0x0B, Unicode string
ACODT_TIME_OF_DAY 0x0C, TIME_OF_DAY structure
ACODT_TIME_DIFFERENCE 0x0D, TIM E_DIFFERENCE structure
ACODT_DOMAIN 0x0F, domain, an arbitrary large block of data
ACODT_INT24 0x10, a 24-bit integer
ACODT_REAL64 0x11, a 64-bit real
ACODT_INT40 0x12, a 40-bit integer
ACODT_INT48 0x13, a 48-bit integer
- 16 -
Page 19
ACODT_INT56 0x14, a 56-bit integer
ACODT_INT64 0x15, a 64-bit integer
ACODT_UINT24 0x16, a 24-bit unsigned integer
ACODT_UINT40 0x18, a 40-bit unsigned integer
ACODT_UINT48 0x19, a 48-bit unsigned integer
ACODT_UINT56 0x1A, a 56-bit unsigned integer
ACODT_UINT64 0x1B, a 64-bit unsigned integer
Enumerate and structures
enum enum_nodeRole {
Slave = 0x00,
Master = 0x01,
RemoteNode = 0x02,
UnknownRole = 0x0F,
};
typedef enum enum_node R o le e_ no d e Ro le;
enum enum_acoNodeState {
ns_Initialisation = 0x00,
ns_Stopped = 0x04,
ns_Operational = 0x05,
ns_Pre_operational = 0x7F,
ns_Unknown_state = 0x0F
};
typedef enum enum_acoNodeState e_acoNodeState;
enum enum_GeneralEventType {
The role of a node object:
Slave node object
Master node object
Remote node object
Unknown node object
The NMT state of a node:
NMT state Initialisation,
NMT state Stoppped,
NMT state Operational,
NMT state Pre-operational,
Unknown state
Identity a general event that with the same
function definition:
et_STATE_INITIALIZE = 0x00,
et_STATE_PREOPERATIONAL = 0x01,
et_STATE_OPERATIONAL = 0X02,
et_STATE_STOPPED = 0x03,
et_POST_SYNC = 0x04,
et_POST_PDO = 0x05,
};
typedef enum enum_GeneralEventType
e_GeneralEventType;
Application-defined callback function
Notify application-defined when a special event has occurs
- 17 -
the node enter NMT state Initialisation,
the node enter NMT state Pre-operational,
the node enter NMT state Operational,
the node enter NMT state Stopped,
the node transmitted or received a sync frame,
the node transmitted a PDO frame
Page 20
typedef void (*TCOnGeneralEvent)( HACONODE hNode , LPVOID pvArg );
Notify if the value with specified object index and sub-index of object dictionary has changed
typedef UNS32 (*TCOnODDataChangedEvent)
(HACONODE hNode, UNS16 wIndex, UNS8 SubIndex, UNS8 DataType, UNS32 DataLen, void * pData ,
LPVOID pvArg);
Notify if SDO READ request is responded or timeout o ccurs.
Typedef void (*TCOnReadSDOResult)
( HACONODEOBJ hNode, NODEID_t NodeId, UNS16 wIndex, UNS8 SubIndex,
UNS8 dataType, UNS32 dataLen, void* pData, UNS32 abortCode , LPVOID pvArg);
Notify if SDO WRITE request is responded or timeout occurs.
Typedef void (*TCOnWriteSDOResult)
( HACONODEOBJ hNode, NODEID_t NodeId, UNS16 wIndex, UNS8 SubIndex, UNS32 abortCode ,
LPVOID pvArg);
Notify if the slave node receives the emergency message from other nodes
typedef void (*TCOnPostEmcyEvent)
(HACONODE hNode, NODEID_t NodeID, UNS16 errCode, UNS8 errReg, UNS8 errManufacField[5],
LPVOID pvArg);
Notify while not receive heartbeat message wit hin the consumer heartbeat time.
Typedef void (*TCOnHeartbeatErrorEvent)(HACONODE hNode, NODEID_t NodeId , LPVOID pvArg);
Notify while receiving a heartbeat message from heartbeat producer (remote slave nodes.)
typedef void (*TCOnHeartbeatEvent)
(HACONODE hNode, NODEID_t NodeId, e_acoNodeState currState , LPVOID pvArg);
Notify while master receiving a slave boot up m essage.
Typedef void (*TCOnBootupEvent)(HACONODE hNode, NODEID_t NodeId , LPV OID pv A rg );
Notify while receiving a PDO message from another node.
typedef void (*TCOnRecvPDOEvent)
(HACONODE hNode, int rpdoIndex, UNS32 cobId, UNS8 bRTR, UNS8 size, void *pData, LPVOID
pvArg);
2.4.4. Error codes
acoapi error codes
Table 9: acoapi error codes
Definition Value Description
ACOERR_SUCCESS 0 Success
- 18 -
Page 21
ERROR_INVALID_DATA 13 The data or input parameter is invalid or NULL
ERROR_OUTOFMEMORY 14 Not enough memory to allocate
ACOERR_INVALID_EDS_CONTENT 0x25100001 Wrong EDS file content
ACOERR_SDO_READ_FAILED 0x25100002 SDO read operation failed. Ex: no SDO entry in EDS
ACOERR_SDO_WRITE_FAILED 0x25100003 SDO write operation failed
ACOERR_STATE_CHANGED_FAILED 0x25100004 Fail to change node state
ACOERR_INVALID_MASTER 0x25100005 Master node is not exist
ACOERR_INVALID_NODEID 0x25100006 Invalid node id, for example: node id is over
NMT_MAX_NODE_ID
ACOERR_INVALID_NODE 0x25100007 Invalid node object handle
ACOERR_REMOTE_NODEID_EXIST 0x25100008 The ID of remote node is exist
ACOERR_REMOTE_STATE_OPER 0x25100009 Remote node is in operational state that can not do this
operation
ACOERR_CANPORT_NOT_OPEN 0x2510000A CAN port can not open
ACOERR_NOT_SUPPORT 0x2510000B Do not support the function
ACOERR_REMOTE_NODES_OVER 0x2510000C Remote nodes count is over the limit in list, maximum
nodes are 127
ACOERR_NODEID_EXIST 0x2510000D The node id is exist in list
ACOERR_EMCY_FAILED 0x2510000E Generate a emergency code failed
ACOERR_LICENSE_INVALID 0x2510000F License failed. The acoapi library only supports
Advantech allowed products
ACOERR_TIMER_FULL 0x25100010 The timer is full that can not set alarm.
ACOERR_PDO_IN_INHIBIT_TIME 0x25100011 The TPDO exist inhibit time that can not transmit PDO
immediately.
ACOERR_PDO_COBID_29BIT 0x25100012 The 29-bit COB-ID should be 1.
ACOERR_PDO_TRANS_EVENT_INVALID 0x25100013 The transmission type of PDO is invalid to send. It
should be 255 for COS.
ACCERR_EXCEPTION 0x25100014 Exception occurs.
ACCERR_PDO_TRANS_FAILED 0x25100015 Can not transmit PDO, the node could be not in
Operational state, PDO offset invalid, or the object
SDO abort codes
SDO abort codes please see DS 301 v4.02 p.48.
- 19 -
dictionary of PDO data invalid.
Page 22
Table 10: SDO abort codes
Definition Value Description
ACOOD_SUCCESSFUL 0x00000000 Success
ACOOD_UNSUPPORT_OBJECT 0x06010000 Unsupported access to an object
ACOOD_READ_NOT_ALLOWED 0x06010001 Attempt to read a write-only object
ACOOD_WRITE_NOT_ALLOWED 0x06010002 Attempt to write a read-only object
ACOOD_NO_SUCH_OBJECT 0x06020000 Object does not exist in the Object Dictionary
ACOOD_NOT_MAPPABLE 0x06040041 Object cannot be mapped to the PDO
ACOOD_LENGTH_EXCEED 0x06040042 The number and length of the objects to be mapped
would exceed PDO length
ACOOD_PARAM_INCOMPATIBILITY 0x06040043 General parameter incompatibility
ACOOD_INTERNAL_INCOMPATIBILITY 0x06040047 General internal incompatibility in the device
ACOOD_HW_ERROR 0x06060000 Access failed d ue to h ar d w a re er ror
ACOOD_LENGTH_DATA_INVALID 0x06070010 Data type does not match. Length of service
parameter does not match
ACOOD_LENGTH_DATA_TOO_HIGH 0x06070012 Data type does not match. Length of service
parameter is too high
ACOOD_LENGTH_DATA_TOO_LOW 0x06070013 Data type does not match. Length of service
parameter is too low.
ACOOD_NO_SUCH_SUBINDEX 0x06090011 Subindex does not exist
ACOOD_VALUE_RANGE_EXCEED 0x06090030 Value range of parameter exceeded (write access
only)
ACOOD_VALUE_TOO_HIGH 0x06090031 Value of parameter written is too high
ACOOD_VALUE_TOO_LOW 0x06090032 Value of parameter written is too low
ACOOD_INVALID_MAX_VALUE 0x06090036 Maximum value is less than the minimum value.
ACOSDOABT_TOGGLE_NOT_ALTERNED 0x05030000
ACOSDOABT_TIMED_OUT 0x05040000
ACOSDOABT_UNKNOW_COMMAND 0x05040001 Client/Server command specifier not valid or unknown
ACOSDOABT_INVALID_BLOCK_SIZE 0x05040002 Invalid block size (block mode)
ACOSDOABT_INVALIC_SEQ_NUM 0x05040003 Invalid sequence number (block mode)
ACOSDOABT_CRC_ERROR 0x05040004 CRC error (block mode)
ACOSDOABT_OUT_OF_MEMORY 0x05040005 Size data exceed SDO_MAX_LENGTH_TRANSFERT
ACOSDOABT_GENERAL_ERROR 0x08000000 Error size of SDO message
ACOSDOABT_DATA_TRANS_STORE_ERROR 0x08000020 Data cannot be transferred or stored to the
application.
ACOSDOABT_LOCAL_CTRL_ERROR 0x08000021 Data cannot be transferred or stored to the
application because of local control
- 20 -
Page 23
Emergency error codes
Emergency error codes please see DS 301 v4.02 p.60.
Table 11: Emergency error codes
Definition Value Description
ACOEMCYERR_RESEST 0x0000 Error reset or No error
ACOEMCYERR_GENERIC 0x1000 Start code of Generic error
ACOEMCYERR_CURRENT 0x2000 Start code of Current
ACOEMCYERR_CURRENT_DEVICE_INPUT 0x2100 Current, device input side
ACOEMCYERR_CURRENT_DEVICE_INSIDE 0x2200 Current inside the device
ACOEMCYERR_CURRENT_DEVICE_OUTPUT 0x2300 Current, device output side
ACOEMCYERR_VOLTAGE 0x3000 Start code of Voltage
ACOEMCYERR_VOLTAGE_MAINS 0x3100 Main Voltage
ACOEMCYERR_VOLTAGE_INSIDE_DEVICE 0x3200 Voltage inside the device
ACOEMCYERR_VOLTAGE_OUTPUT 0x3300 Output voltage
ACOEMCYERR_TEMPERATURE 0x4000 Temperature
ACOEMCYERR_TEMPERATURE_AMBIENT 0x4100 Ambient temperature
ACOEMCYERR_TEMPERATURE_DEVICE 0x4200 Device temperature
ACOEMCYERR_DEVICE_HW 0x5000 Device hardware
ACOEMCYERR_DEVICE_SW 0x6000 Device software
ACOEMCYERR_DEVICE_SW_INTERNAL 0x6100 Internal software
ACOEMCYERR_DEVICE_SW_USER 0x6200 User software
ACOEMCYERR_DEVICE_SW_DATA 0x6300 Data set
ACOEMCYERR_ADDITIONAL_MODULES 0x7000 Additional modules
ACOEMCYERR_MONITOR 0x8000 Monitoring
ACOEMCYERR_MONITOR_COMMUN 0x8100 Start code of Monitoring Communication
ACOEMCYERR_MONITOR_CAN_OVERRUN 0x8110 CAN Overrun (Objects lost)
ACOEMCYERR_MONITOR_PASSIVE_MODE 0x8120 CAN in Error Passive Mode
ACOEMCYERR_MONITOR_GUARD 0x8130 Life guard error or heartbeat error
ACOEMCYERR_MONITOR_RECOVER_BUSOFF 0x8140 Recovered from bus off
ACOEMCYERR_MONITOR_COBID_COLLISION 0x8150 Transmit COB-ID collision
ACOEMCYERR_PROTOCOL 0x8200 Start code of Protocol error
ACOEMCYERR_PDO_LENGTH_INVALID 0x8210 PDO not processed due to length error
ACOEMCYERR_PDO_LENGTH_EXCEEDED 0x8220 PDO length exceeded
ACOEMCYERR_EXTERNAL 0x9000 External error
- 21 -
Page 24

ACOEMCYERR_ADDITIONAL_FUNC 0xF000 Additional functions
ACOEMCYERR_DEVICE_SPECIFIC 0xFF00 Device specific
- 22 -
Page 25

2.4.5. acoapi Functions
acoCreateNode
Create Master or Slave CANopen node.
HACONODE acoCreateNode(
char *pCANDriverName
);
Parameters
pCANDriverName
[in] Input the CAN driver dll path and name. (Ignore)
Return Values
If the function succeeds, the return value is the master or slave node object handle. If the function fails, the
return value is NULL. The generality of failed reason could be allocating memory failed. Could call GetLastError()
to get the error code.
Remarks
Use the acoFreeNode() function to close an node object handle.
Example
HACONODE hSlaveNode = NULL;
hSlaveNode = acoCreateNode(NULL);
if (hSlaveNode)
printf(“Create Node SUCCESS.”);
else
printf(“Create Node failed: %x”, GetLastError());
acoFreeNode
Free the handle of a node that created by acoCreateNode(), the function will close the CAN port first if it is
opening .
void acoFreeNode(
- 23 -
Page 26

HACONODE hNode
);
Parameters
hNode
[in] Pointer to the Master or Slave node object handle that returned by acoCreateNode()
Return Values
None
Example
extern HACONODE hSlaveNode;
acoFreeNode(hSlaveNode);
hSlaveNode = NULL;
acoOpenCANPort
Open the CAN port by specified port name and then set the baud rate. Should be open the CAN port first before
start the CANopen network.
UNS32 acoOpenCANPort(
HACONODE hNode,
char *pPortName,
int kbits
);
Parameters
hNode
[in] Pointer to the Master or Slave node object handle that is the returned by acoCreateNode()
pPortName
[in] Specifies the CAN port name that is null-terminated string to open. For example, specify CAN1 , CAN2
as the CAN port.
kbits
[in] The baud rate (Kbits) of the CAN port. According to CiA Draft Standard 301 [1] recommend bit rates are
listed below:
Target value Setting value
10 Kbit/s 10
- 24 -
Page 27
20 Kbit/s 20
50 Kbit/s 50
125 Kbit/s 125
250 Kbit/s 250
500 Kbit/s 500
800 Kbit/s 800
1000 Kbit/s 1000
Return Values
If the function succeeds, the return value is ACOERR_SUCCESS. If the funct io n fails, please reference acoapi
error codes.
Remarks
Use the acoCloseCANPort() function to close the CAN port.
Example
UNS32 ret;
HACONODE hSlaveNode;
//Use acoOpenCANPort() to set CAN port name and baud rate.
hSlaveNode = acoCreateNode(NULL);
if (hSlaveNode)
{
printf("Create Node SUCCESS.");
if (acoNodeImportEDS(hSlaveNode, “\\slavedict-ok.eds”, 0x02) == ACOERR_SUCCESS)
{
printf("Import EDS file ok.");
// should be ImportEDS first than OpenCANPort
if ((ret = acoOpenCANPort(hSlaveNode, "CAN1:", 1000)) == ACOERR_SUCCESS)
printf("Open CAN1 ok.");
else
printf("Open CAN1 failed. %x", ret);
}else
printf("Import EDS file failed.");
}
- 25 -
Page 28
acoCloseCANPort
Close the CAN port.
UNS32 acoCloseCANPort(
HACONODE hNode
);
Parameters
hNode
[in] Pointer to the Master or Slave node object handle that is the returned by acoCreateNode()
Return Values
If the function succeeds, the return value is ACOERR_SUCCESS. If the function fails, please reference acoapi
error codes.
Example
extern HACONODE hSlaveNode;
if(hSlaveNode)
{
acoStopNode(hSlaveNode);
acoCloseCANPort(hSlaveNode);
acoFreeNode(hSlaveNode);
hSlaveNode = NULL;
}
acoSetBaudrate
Set the CAN port baud rate.
UNS32 acoSetBaudrate(
HACONODE hNode,
int kbits
);
Parameters
hNode
[in] Pointer to the Master or Slave node object handle that is the returned by acoCreateNode()
- 26 -
Page 29
kbits
[in] The baud rate (Kbits) of the CAN port. According to CiA Draft Standard 301 [1] recommend bit rates are
listed below:
Target value Setting value
10 Kbit/s 10
20 Kbit/s 20
50 Kbit/s 50
125 Kbit/s 125
250 Kbit/s 250
500 Kbit/s 500
800 Kbit/s 800
1000 Kbit/s 1000
Return Values
If the function succeeds, the return value is ACOERR_SUCCESS. If the function fails, please reference acoapi
error codes.
acoNodeImportEDS
Import the device profile for this node object handle and assig n the node id.
UNS32 acoNodeImportEDS(
HACONODE hNode,
char * pProfile,
NODEID_t * pNodeId
);
Parameters
hNode
[in] Pointer to the Master or Slave node object handle that is the returned by acoCreateNode().
pProfile
[in] Device profile path and file name.
pNodeId
[in, out] Specified the node id, or return the Id if included in Profile. Also can be changed by acoSetNodeId().
Maximum the number of node id is 127.
- 27 -
Page 30

Return Values
If the function succeeds, the return value is ACOERR_SUCCESS. If the function fails, the returns value is acoapi
error codes.
Remarks
EDS describes the behavior of CANopen device with respect to the contents of object dictionary. Its content
should be conforming to CANopen standard, necessary to avoid incomplete or erroneous data sheets. Else the
working model of the device in CANopen network may not running well as you expected. Use external test tool
called CANchkEDS.exe to check the valid content of EDS first before importing EDS, or use a configuration
utility to modify the content.
Example
Reference acoOpenCANPort() example.
acoGetNodeId
Get node identifier of the Master or Slave node object handle.
NODEID_t acoGetNodeId(
HACONODE hNode
);
Parameters
hNode
[in] Pointer to the Master or Slave node object handle that is the returned by acoCreateNode()
Return Values
Return the node identifier of the node object handle that be set by acoNodeImportEDS() or acoSetNodeId().
Return CINVALID_NODEID if node identifier does not set yet.
Remarks
Use acoGetRemoteNodeId() to get remote slave node identifier.
The node identifier is unique identifier for each CANopen device in the network, a value in the range of [1..127]
specified by CiA DS-301.
Example
extern HACONODE hSlaveNode;
- 28 -
Page 31

UNS32 NodeId;
if (hSlaveNode)
NodeId = acoGetNodeId(hSlaveNode);
acoSetNodeId
Assign a unique node identifier to the Master or Slave node object handle.
UNS32 acoSetNodeId(
HACONODE hNode,
NODEID_t NodeId
);
Parameters
hNode
[in] Pointer to the Master or Slave node object handle that returned by acoCreateNode().
NodeId
[in] Specified a unique node identifier in a range of [1..127].
Return Values
If the function succeeds, the return value is ACOERR_SUCCESS. If the function fails, please reference acoapi
error codes.
Remarks
The node identifier is unique identifier for each CANopen device in the network, a value in the range of [1..127]
specified by CiA DS-301.
Changing the node identifier, the related COB-ID included Node-ID of object dictionary will be updated too.
Example
extern HACONODE hSlaveNode;
UNS32 NodeId;
if (hSlaveNode)
{
if(acoSetNodeId(hSlaveNode, 0x02) == ACOERR_SUCCESS)
{
NodeId = acoGetNodeId(hSlaveNode);
}
- 29 -
Page 32

}
acoGetNodeState
Get the NMT state of the Master or Slave node object handle.
e_acoNodeState acoGetNodeState(
HACONODE hNode
);
Parameters
hNode
[in] Pointer to the Master or Slave node object handle that returned by acoCreateNode().
Return Values
Return the NMT state of the Master or Slave node object handle.
Remarks
The NMT state of the Slave node will be auto into Pre-Operational state after calling acoStartNode(). Later th e
state of the Slave node can be changed by receiving the NMT messages from a NMT master. If using
acoRegGeneralEvent() function to register a state changed event function, the event will be called by notify the
state has been changed and understand which current state is in.
Use acoGetRemoteNodeState() to get remote slave node of NMT state.
Example
extern HACONODE hSlaveNode;
e_acoNodeState NodeState;
if (hSlaveNode)
{
NodeState = acoGetNodeState(hSlaveNode);
if(NodeState == ns_Operational)
{
printf("The node'state is in Operational state.");
}
el se if(NodeState == ns_Pre_operational)
{
printf("The node'state is Pre_operational.");
}
- 30 -
Page 33

}
acoStartNode
St art the Slave node into Initialization and then Pre-Operational state to join the CANopen network.
UNS32 acoStartNode(
HACONODE hNode
);
Parameters
hNode
[in] Pointer to the Slave node object handle that returned by acoCreateNode().
Return Values
If the function succeeds, the return value is ACOERR_SUCCESS. If the function fails, please reference acoapi
error codes.
Remarks
Before starting the Slave node, calls acoImportEDS() to import EDS of device profile and calls
acoOpenCANPort() to open CAN port is necessary. The Slave node transmits a boot-up message to signal that
it has entered the state Pre-operational after Initializing, then it joins the CANopen network. Depending on NMT
state machine, the Slave node later waits the NMT command specifier from NMT master to switch its state.
Uses acoStopNode() function to enter the Stop state by local control.
Master node auto started by acoStartNetwork() and stopped by acoStopNetwork() that does not necessary to
call acoStartNode() or acoStopNode().
Example
HACONODE hSlaveNode=NULL;
//Use acoOpenCANPort() to set CAN port name and baud rate.
hSlaveNode = acoCreateNode(NULL);
if (hSlaveNode)
{
printf("Create Node SUCCESS.");
i f (acoNodeImportEDS(hSlaveNode, “\\slavedict-ok.eds”, 0x02) == ACOERR_SUCCESS)
{
printf("Import EDS file ok.");
- 31 -
Page 34
// should be ImportEDS first than OpenCANPort
if (acoOpenCANPort(hSlaveNode, "CAN1:", 1000) == ACOERR_SUCCESS)
{
printf("Open CAN1 ok.");
if (acoStartNode(hSlaveNode) == ACOERR_SUCCESS)
printf("StartNode success!");
else
{
printf("StartNode failed!");
acoCloseCANPort(hSlaveNode);
acoFreeNode(hSlaveNode);
hSlaveNode = NULL;
}
}
else
{
printf("Open CAN1 failed.");
acoFreeNode(hSlaveNode);
hSlaveNode = NULL;
}
}
else
{
printf("Import EDS file failed.");
acoFreeNode(hSlaveNode);
hSlaveNode = NULL;
}
}
acoStopNode
Stop the slave node i nto Stop state by local control.
UNS32 acoStopNode(
HACONODE hNode
);
Parameters
- 32 -
Page 35

hNode
[in] Pointer to the Slave node object handle that returned by acoCreateNode().
Return Values
If the function succeeds, the return value is ACOERR_SUCCESS. If the function fails, please reference acoapi
error codes.
Remarks
The Slave node can be call acoStopNode() that enter into Stop state by local control. But also in CANopen
network that means NMT master can transmit any NMT command to switch its state. Use acoCloseCANPort()
function that can exit the CANopen network without receiving any CAN frames.
Master node is stopped by acoStopNetwork() function that does not necessary to call acoStartNode() or
acoStopNode().
Example
extern HACONODE hSlaveNode;
If(hSlaveNode)
{
acoStopNode(hSlaveNode);
acoCloseCANPort(hSlaveNode);
acoFreeNode(hSlaveNode);
hSlaveNode = NULL;
}
acoGetNodeRole
Identifier the role of a node is Master, Slave or remote node.
e_nodeRole acoGetNodeRole(
HACONODEOBJ hNode
);
Parameters
hNode
[in] Pointer to the Master or Slave node object handle that returned by acoCreateNode() or pointer to
remote node object handle that returned by acoNetworkAddSlave().
Return Values
- 33 -
Page 36

Return the node role: Master, Slave, Remote Node or unknown role.
Example
extern HACONODE hSlaveNode;
if (acoGetNodeRole(hSlaveNode) == Master)
{
//To do.
}
else if (acoGetNodeRole(hSlaveNode) == Slave)
{
//To do.
}
acoGetODentry
Read an entry with specified index and sub-index f rom the local object dictionary. This function is a synchronous
method, it returns the result until completed or timeout occurs.
UNS32 acoGetODentry(
HACONODE hNode,
UNS16 wIndex,
UNS8 SubIndex,
UNS8 *pDataType,
UNS32 *pDataLen,
void* pData
);
Parameters
hNode
[in] Pointer to the Master or Slave node object handle that returned by acoCreateNode()
wIndex, SubIndex
[in] Which index (16bits) and sub-index (8bits) of entry in the object dictionary want to read.
pDataType
[out] the data type of the [index, sub-index] value. See data type constant in acodef.h.
pDataLen
- 34 -
Page 37

[in, out] Input is the memory size of the pData allocated; output is the real data length of pData. The input
data length should be equal to the length of [index, sub-index] value in object dictionary or zero for
retrieving the data as expect.
pData
[out] the data of [index, sub-index] value in object dictionary. If input is NULL, do not output the value,
return current data type and data length that the entry [index, sub-index] is.
Return Values
If the function succeeds, the return value is ACOOD_SUCCESSFUL. If the function fails, please reference acoapi
error codes and SDO abort codes.
Remarks
According to the content of object dictionary, need to check access type before reading the entry. Does not
allow to read the entry if the access type of [index, sub-index] is write-only (WO). Retrieve the data if the
[index, sub-index] permission of access type is read-only (RO) or read-write (RW).
Use acoSetODentry() function to write the data of [index, sub-index] in local object dictionary.
Asynchronous method, acoReadSDO() and acoWriteSDO() function is to read/write the data of [index, subindex] to remote object dictionary.
Example
extern HACONODE hSlaveNode;
UNS32 ret;
UNS8 data[16]={0};
UNS8 DataType=0;
UNS32 DataLen=8;
ret = acoGetODentry(hSlaveNode, 0x1017, 0, &DataType, &DataLen, &data);
if (ACOOD_SUCCESSFUL == ret)
printf ("ReadObjDict succ: DataType=%x, DataLen=%d ", DataType, DataLen);
else
printf (" ReadObjDict failed: %X", ret);
acoSetODentry
Write an entry to the local object dict i onary. This function is a synchronous method, it is blocked and returns the
result until the operation is complete or timeout occurs.
UNS32 acoSetODentry(
- 35 -
Page 38

HACONODE hNode,
UNS16 wIndex,
UNS8 SubIndex,
UNS8 DataType,
UNS32 DataLen,
void* pData
);
Parameters
hNode
[in] Pointer to the Master or Slave node object handle that returned by acoCreateNode().
wIndex, SubIndex
[in] Which index (16bits) and sub-index (8bits) of entry in the object dictionary want to write.
DataType
[in] the data type of the pData value. See data type constant in acodef.h.
DataLen
[in] the data length of the pData.
pData
[in] data
Return Values
If the function succeeds, the return value is ACOOD_SUCCESSFUL. If the function fails, please reference acoapi
error codes and SDO abort codes.
Remarks
According to the content of object dictionary, need to check access type before writing data to the entry. Does
not allow to update data of the entry if the access type of [index, sub-index] is read-only (RO). Can be
writeable if the [index, sub-index] permission of access type is write-only (WO) or read-write (RW).
Use acoGetODentry() function to read the data of [index, sub-index] in local object dictionary.
Synchronous read/write object dictionary means that the method is blocked until the operation is complete,
and then the method returns its data. Recommend that use synchronous method is well access in the local
object dictionary, but use asynchronous method is better by access remote object dictionary. Reference
acoReadSDO() and acoWriteSDO() functions.
Example
extern HACONODE hSlaveNode;
- 36 -
Page 39

UNS32 ret;
UNS8 data=255;
UNS8 DataType=ACODT_UINT8;
UNS32 DataLen=sizeof(data);
ret = acoSetODentry(hSlaveNode, 0x1800, 2, DataType, DataLen, &data);
if (ACOOD_SUCCESSFUL == ret)
printf ("WriteObjDict succ: DataType=%x, DataLen=%d, Data=%x ", DataType, DataLen, data);
else
printf ("WriteObjDict failed: %X", ret);
acoReadSDO
Read an entry with specified index and sub-index from remote object dictionary of specified node identifier
through SDO protocol. This function is an asynchronous method, it starts a task is returned immediately without
waiting for a result. When the task finishes, the library notifies the application that the message was successfully
processed and pass the result to the callback function.
UNS32 acoReadSDO (
HACONODE hNode,
NODEID_t NodeId,
UNS16 wIndex,
UNS8 SubIndex,
UNS8 DataType,
TCOnReadSDOResult pf
);
Parameters
hNode
[in] Pointer to the Master or Slave node object handle that returned by acoCreateNode()
NodeId
[in] specified a SDO server node identifier, read its object dictionary
wIndex, SubIndex
[in] Which index (16bits) and sub-index (8bits) of entry in the object dictionary want to read.
DataType
[in] the data type of the [index, sub-index] value. See data type constant in acodef.h.
pf
- 37 -
Page 40

[in] Pointer to the application-defined function of type TCOnReadSDOResult; represents the starting address
of the function. The function will be executed if SDO request is responded or timeout occurs.
Return Values
If the function succeeds, the return value is ACOOD_SUCCESSFUL. If the function fails, please reference acoapi
error codes or SDO abort codes.
Remarks
Asynchronous read/write object dictionary means that the function does not block the procedure, return
immediately. Application can continue doing other work. To be informed the callback function when receiving
the SDO responded or timeout occurs, pass the result of entry [index, sub-index] of object dictionary whose
node identifier is NodeId to the callback function, application would get the value of entry and SDO abort code
to understand the result of SDO request. If the operation is success, the abort code is ACOOD_SUCCESSFUL;
otherwise, SDO abort code is returned that defined by CiA DS-301 v4.02. The node with specified node
identifier must have the capability of SDO server; it is described in index 1200h – 127Fh of EDS.
According to the content of object dictionary, also need to check access type before reading the entry in
remote object dictionary. Does not allow to read the entry if the access type of [index, sub-index] is write-only
(WO). Retrieve the data if the [index, sub-index] permission of access type is read-only (RO) or read-write
(RW).
Use acoWriteSDO() function to write the data of entry [index, sub-index] to remote object dictionary which
specific node identifier.
A synchronous method, reference acoGetODentry() and acoSetODentry(). acoNetworkReadSDO() and
acoNetworkWriteSDO() are for network object to request the remot e s la v e no d e.
Example
extern HACONODE hSlaveNode;
void OnReadSDOResult(
HACONODEOBJ hNode, NODEID_t NodeId,
UNS16 wIndex, UNS8 bSubIndex, UNS8 dataType, UNS32 dataLen, void *pData, UNS32 abortCode,
LPVOID pvArg)
{
if (ACOOD_SUCCESSFUL == abortCode) {
UNS8 *ptr = (UNS8 *)pData;
printf(" ReadSDOResult: succ: [%04x:%02x] DataLen=%d, Data=%02x" \
, wIndex, bSubIndex, dataLen, *ptr);
} else
- 38 -
Page 41

printf("ReadSDOResult failed: %x", abortCode);
}
UNS32 ret;
UNS8 DataType=ACODT_UINT8;
NODEID_t OtherNode=0x05;
//*** access Object Dictionary: async method
ret = acoReadSDO(hSlaveNode, OtherNode, 0x1800, 0x02, DataType, OnReadSDOResult, NULL);
if (ACOOD_SUCCESSFUL == ret)
printf ("acoReadSDO succ.");
else
printf ("acoReadSDO failed: %X", ret);
acoWriteSDO
Write the value at the index and sub-index to remote object dictionary of the node whose node identifier is NodeId
through SDO protocol. This function is an asynchronous method, it starts a task is returned immediately without
waiting for a result. When the task finishes, the function notifies the application that the message was successfully
processed and pass the result to the callback function.
UNS32 acoWriteSDO (
HACONODE hNode,
NODEID_t NodeId,
UNS16 wIndex,
UNS8 SubIndex,
UNS8 DataType,
UNS32 DataLen,
void* pData
TCOnWriteSDOResult pf
);
Parameters
hNode
[in] Pointer to the Master or Slave node object handle that returned by acoCreateNode()
NodeId
[in] specified a SDO server node identifier, write to its object dictionary
- 39 -
Page 42

wIndex, SubIndex
[in] Which index (16bits) and sub-index (8bits) of entry in the object dictionary want to write.
DataType
[in] the data type of the pData value. See data type constant in acodef.h.
DataLen
[in] the data length of pData.
pData
[in] the data of [index, sub-index] value.
pf
[in] Pointer to the application-defined function of type TCOnWriteSDOResult; represents the starting address
of the function. The function will be executed if SDO request is responded or timeout occurs.
Return Values
If the function succeeds, the return value is ACOOD_SUCCESSFUL. If the function fails, please reference acoapi
error codes and SDO abort codes.
Remarks
Asynchronous read/write object dictionary means that the function does not block the procedure, return
immediately. Application can continue doing other work. To be informed the callback function when receiving
the SDO responded or timeout occurs, pass the result to the callback function, application would get the SDO
abort code to understand the result of SDO request. If the operation is success, the abort code is
ACOOD_SUCCESSFUL; otherwise, SDO abort code is returned defined by CiA DS-301 v4.02. The node with
specified node identifier must have the capability of server SDO; it is described in index 1200h – 127Fh of EDS.
According to the content of object dictionary, also need to check access type before writing the data to the
entry in remote object dictionary. Does not allow to write the entry if the access type of [index, sub-index] is
read-only (RO). Access type should be write-only (WO) or read-write (RW).
Use acoReadSDO() function to read the data of entry [index, sub-index] from remote object dictionary which
specific node identifier.
A synchronous method, reference acoGetODentry() and acoSetODentry(). acoNetworkReadSDO() and
acoNetworkWriteSDO() are for network object to request the remote slave node.
Example
void OnWriteSDOResult(
HACONODEOBJ hNode, NODEID_t NodeId,
UNS16 wIndex, UNS8 bSubIndex, UNS32 abortCode, LPVOID pvArg)
- 40 -
Page 43
{
if (ACOOD_SUCCESSFUL == abortCode) {
UNS8 *ptr = (UNS8 *)pData;
printf("WriteSDOResult: succ: [%04x:%02x] ", wIndex, bSubIndex);
} else
printf("WriteSDOResult failed: [%04x:%02x] err: %x", wIndex, bSubIndex, abortCode);
}
void main()
{
UNS32 re t;
UNS8 t ransType=0x255;
UNS8 DataType=ACODT_UINT8;
NODEID_t OtherNode=0x05, NodeId=0x02;
HACONODE hSlaveNode = acoCreateNode(NULL);
if (ACOERR_SUCCESS == (ret = acoNodeImportEDS(hSlaveNode, “slave.eds”, &N od eId)) )
{
if (ACOERR_SUCCESS == (ret = acoOpenCANPort(hSlaveNode, “CAN1:”, 1000)))
{ // should be ImportEDS first than OpenCANPort
if (ACOERR_SUCCESS == (ret = acoStartNode(hSlaveNode)))
{
//*** access Object Dictionary: async method
ret = acoWriteSDO(hSlaveNode, OtherNode, 0x1800, 0x02,
DataType, sizeof(transType), &transType, OnWriteSDOResult, NULL);
if (ACOOD_SUCCESSFUL == ret)
printf ("acoWriteSDO succ.");
else
printf ("acoWriteSDO failed: %X", ret);
}
acoStopNode(hSlaveNode);
acoCloseCANPort(hSlaveNode);
}
acoFreeNode(hSlaveNode);
hSlaveNode = NULL;
}
}
- 41 -
Page 44

acoRegODDataChangedEvent
Register an event for the local object dictionary entry; event will be called while the data of entry [index, sub-index]
is changed, pass the changed data of the entry to the application-defined function.
UNS32 acoRegODDataChangedEvent(
HACONODE hNode,
UNS16 wIndex,
UNS8 SubIndex,
TCOnODDataChangedEve nt c b ,
LPVOID pvArg
);
Parameters
hNode
[in] Pointer to the Master or Slave node object handle that returned by acoCreateNode().
wIndex, SubIndex
[in] Which index (16bits) and sub-index (8bits) of entry in the object dictionary want to monitor.
cb
[in] Pointers to the application-defined function to execute by the library while the data of the entry [index,
sub-index] of the object dictionary being changed.
pvArg
[in] Pointer to the data to be passed to the callback function or pointer to NULL; the type is a void that
allows the application to declare, define, and initialize a structure or argument to hold any information.
Return Values
If the function succeeds, the return value is ACOERR_SUCCESS. If the function fails, please reference acoapi
error codes.
Remarks
Application can monitor the data of local object dictionary with specific index and sub-index through register a
callback function without polling. If the data is changed without respect to by local or by remote SDO Client,
application can get notify and to do something. But if register too many callback function for the data changed,
it decreases the program efficiency.
Use acoUnRegODDataChangedEvent() to un-register the callback function.
Example
- 42 -
Page 45
UNS32 OnODDataChanged(HACONODE hNode, UNS16 wIndex, UNS8 SubIndex,
UNS8 DataType, U NS32 DataLen, void * pData, LPVOID pvArg)
{
//To do.
Re turn 0;
}
void RegNodeEvents(void)
{
acoRegODDataChangedEvent(hSlaveNode, 0x1800, 0x02, OnODDataChanged, NULL);
}
acoUnRegODDataChangedEvent
Un-register an event for the local object dictionary entry, do not get notify if the data is changed.
UNS32 acoUnRegODDataChangedEvent(
HACONODE hNode,
UNS16 wIndex,
UNS8 SubIndex
);
Parameters
hNode
[in] Pointer to the Master or Slave node object handle that returned by acoCreateNode().
wIndex, SubIndex
[in] Which index and subindex of the object dictionary
Return Values
If the function succeeds, the return value is ACOERR_SUCCESS. If the function fails, please reference acoapi
error codes.
Example
void UnRegNodeEvent()
{
acoUnRegODDataChangedEvent(hSlaveNode, 0x1800, 0x02);
}
- 43 -
Page 46

acoRegGeneralEvent
Register a callback function for general event that the node is in state changed, after transmitting or receiving
SYNC message or after transmitting PDO message synchronously.
UNS32 acoRegGeneralEvent(
HACONODE hNode,
e_GeneralEventType et,
TCOnGeneralEvent cb,
LPVOID pvArg
);
Parameters
hNode
[in] Pointer to the Master or Slave node object handle that returned by acoCreateNode().
et
[in] which event type being trigger an callback function. The event type can be node in initialization state,
preoperational state, and operational state, stop state, post SYNC and post PDO.
Notify event type Description
et_STATE_INITIALIZE the node is into NMT state Initialisation
et_STATE_PREOPERATIONAL the node is into NMT state Pre-operational
et_STATE_OPERATIONAL the node is into NMT state Operational
et_STATE_STOPPED th e node is into NMT state Stopped
et_STATE_SYNC the node transmits or receives a sync frame
et_STATE_POST_PDO the node transmits a PDO frame
cb
[in] Pointer to the application-defined function to be called by the library while specific the event is triggered.
typedef void (*TCOnGeneralEvent)( HACONODE hNode, LPVOID pvArg );
hNode argument is pointer to Master or Slave node object handle; indicates which the node enters this
event. pvArg argument [in] pointer to an argument that is passed through from the callback function.
pvArg
[in] Pointer to the data to be passed to the callback function or pointer to NULL; the type is a void that
allows the application to declare, define, and initialize a structure or argument to hold any information.
Return Values
If the function succeeds, the return value is ACOERR_SUCCESS. If the function fails, please reference acoapi
error codes.
- 44 -
Page 47

Remarks
Master or Slave node can be aware its current state by notify automatically, do not need to call
acoGetNodeState(). In application-defined NMT state-changed event callback function, application can do
something in the state. For example, Master can change transmission type of slave Transmit PDO as it’s
expects in state pre-operational callback function.
Example
extern HACONODE hSlaveNode;
void DoStateInitialization(HACONODE hNode, LPVOID pvArg)
{
//To do.
}
void DoStatePreoperational(HACONODE hNode, LPVOID pvArg)
{
//To do.
}
void DoStateOperational(HACONODE hNode, LPVOID pvArg)
{
//To do.
}
void DoStateStop(HACONODE hNode, LPVOID pvArg)
{
//To do.
}
void RegNodeEvents(void)
{
acoRegGeneralEvent(hSlaveNode, et_STATE_INITIALIZE, DoStateInitialization, NULL);
acoRegGeneralEvent(hSlaveNode, et_STATE_PREOPERATIONAL, DoStatePreoperational, NULL);
acoRegGeneralEvent(hSlaveNode, et_STATE_OPERATIONAL, DoStateOperational, NULL);
acoRegGeneralEvent(hSlaveNode, et_STATE_STOPPED, DoStateStop, NULL);
}
acoSendData
Transmit a raw message to other nodes.
UNS32 acoSendData(
- 45 -
Page 48
HACONODE hNode,
UNS32 CobId,
bool bRTR,
UNS32 dataLen,
void * pData
);
Parameters
hNode
[in] Pointer to the Master or Slave node object handle that returned by acoCreateNode().
CobId
[in] Specified Cob-ID of the CAN message. The format of Cob-ID is defined by CiA DS-301 v4.02:
10 7 6 0
Function Code Node-ID
bRTR
[in] Identify the message is Remote Transmission Request or not
dataLen
[in] the length of the pData, maximum length is 8 in CAN message.
pData
[in] the value to be sent
Return Values
If the function succeeds, the return value is ACOERR_SUCCESS. If the function fails, please reference acoapi
error codes.
Example
// Send NMT Node Guarding to Node 2
acoSendData(hSlaveNode, 0x702, 0, 0, NULL);
acoSendEmcy
Transmit an emergency message from an emergency producer on t he CANopen device. Emergency objects are
triggered by occurrence of a CANopen device int ernal error situation, and the error register (1001h) are specified;
- 46 -
Page 49

the messages shall contain the error field with pre-defined error and additional information.
UNS32 acoSendEmcy(
HACONODE hNode,
UNS16 errCode,
UNS8 errRegMask,
UNS16 addInfo
);
Parameters
hNode
[in] Pointer to the Master or Slave node object handle that returned by acoCreateNode().
errCode
[in] emergency error codes
errRegMask
[in] This value is filled in at the location of object 1001h (error register). That means it must include object
1001h in EDS.
addInfo
[in] Application-specific additional information is defined by other profile specifications.
Return Values
Bit M/O Meaning
0 M Generic error
1 O Current
2 O Voltage
3 O Temperature
4 O Communication error (overrun, error state)
5 O Device profile specific
6 O Reserved (always 0)
7 O Manufacturer-specific
If the function succeeds, the return value is ACOERR_SUCCESS. If the function fails, please reference acoapi
error codes.
Remarks
If CAN device internal triggers an error interrupt, acoapi library transmits an emergency message with FF00h
device specific error in errCodes, 11h communication error in error register. May use
acoRegODDataChangedEvent() to monitor object 1001h, 00h to understand whether emergency object is
- 47 -
Page 50

triggered and CAN device internal error occurs. The new error codes will be filled in at the top of th e array of
error codes (object 1003h) if supported.
After transmitting an emergency message, need to use acoResetEmcy() function to reset error, the CANopen
device enters the error free state and transmit an ‘reset error / no error’ emergency object. For example, a
node generates a temperature emergency (measured temperature exceeds the limits), only when the
temperature has returned within limits the node transmit another emergency message, this time
clearing/resetting the temperature emergency.
Use acoRegEmcyEvent() to register an event for the emergency consumer that the callback function will be
called if receiving a EMCY message.
Example
// Send emergency message active: temperature
acoSendEmcy (hSlaveNode, 0x4200, 0x08, 0);
acoResetEmcy
Deletes specific error code and clears corresponding bits in Error register. If all errors are clear, the CA Nopen
device enters the error Free State.
UNS32 acoResetEmcy(
HACONODE hNode,
UNS16 errCode
);
Parameters
hNode
[in] Pointer to the Master or Slave node object handle that returned by acoCreateNode().
errCode
[in] emergency error codes
Return Values
If the function succeeds, the return value is ACOERR_SUCCESS. If the function fails, please reference acoapi
error codes.
Remarks
After transmitting an emergency message, need to use acoResetEmcy() function to reset error, the CANopen
device enters the error free state and transmit an ‘reset error / no error’ emergency object.
- 48 -
Page 51

Example
// clear error 0x4200: temperature error
acoResetEmcy (hSlaveNode, 0x4200);
acoRegEmcyEvent
One or more emergency consumers (master or slaves) register an event for trigger if receiving an emergency
message from emergency producer (other nodes.)
UNS32 acoRegEmcyEvent(
HACONODE hNode,
TCOnPostEmcyEvent pf,
LPVOID pvArg
);
Parameters
hNode
[in] Pointer to the Master or Slave node object handle that returned by acoCreateNode().
pf
[in] Pointer to the application-defined function of type TCOnPostEmcyEvent; represents the starting address
of the function. The function would to be called by the library while the node receives an emergency
message.
TCOnPostEmcyEvent is a placeholder for the application-defined function name.
typedef void (*TCOnPostEmcyEvent)(HACONODE hNode , NODEID_t NodeID, UNS16 errCode, UNS8 errReg,
UNS8 errManufacField[5], LPVOID pvArg);
hNode argument [in] is the pointer to the node object handle is the same as hNode argument of
acoRegEmcyEvent() as a emergency consumer. NodeID argument [in] is the node identifier that which the
slave node producers the emergency message. errCode, errReg and errManufacField argument [in] is
emergency error codes and error register that the slave node producers. pvArg argument [in] pointer to an
argument that is passed through from the callback function.
pvArg
[in] Pointer to the data to be passed to the callback function or pointer to NULL; the type is a void that
allows the application to declare, define, and initialize a structure or argument to hold any information.
Return Values
If the function succeeds, the return value is ACOERR_SUCCESS. If the function fails, please reference acoapi
error codes.
- 49 -
Page 52

Example
void DoRecvEmcyEvent(HACONODE hNode, NODEID_t NodeID, UNS16 errCode, UNS8 errReg, UNS8
errManufacField[5], LPVOID pvArg)
{
printf("Receives an emergency message from Node[%d]: %04x %02x\r\n"), NodeID, errCode, errReg);
}
acoRegEmcyEvent(mp_hSlaveNode, DoRecvEmcyEvent, NULL);
acoRegHeartbeatEvent
Heartbeat consumer (the node) registers an event for trigger if receiving a heartbeat message from heartbeat
producer (remote slave nodes.)
UNS32 acoRegHeartbeatEvent (
HACONODE hNode,
TCOnHeartbeatEvent cb,
LPVOID pvArg
);
Parameters
hNode
[in] Pointer to the Master or Slave node object handle that returned by acoCreateNode().
cb
[in] Pointer to the application-defined function of type TCOnHeartbeatEvent; represents the starting address
of the function. The function would to be called by the library while master node receives a heartbeat
message.
typedef void (*TCOnHeartbeatEvent)(HACONODE hNode, NODEID_t NodeId, e_acoNodeState currState,
LPVOID pvArg);
hNode argument [in] is the pointer to the node object handle as a heartbeat consumer. NodeID argument
[in] is the node identifier that which the remote slave node producers the heartbeat message, currState
argument [in] is the current NMT state of the remote slave node. pvArg argument [in] pointer to an
argument that is passed through from the callback function.
pvArg
[in] Pointer to the data to be passed to the callback function or pointer to NULL; the type is a void that
allows the application to declare, define, and initialize a structure or argument to hold any information.
Return Values
- 50 -
Page 53

If the function succeeds, the return value is ACOERR_SUCCESS. If the function fails, please reference acoapi
error codes.
Remarks
A heartbeat producer transmits a heartbeat message cyclically; so the application-defined function would be
called cyclically. Therefore, be carefully using this function that may cause the system decrease the efficiency.
Through heartbeat message, can know the remote node it’s presently NMT state, generally used in NMT master
node.
The heartbeat producer time and heartbeat consumer time can be configurable via object dictionary (EDS). The
heartbeat protocol starts if the time value unequal to 0.
Example
extern HACONODE hMasterNode;
void DoHeartbeatEvent(HACONODE hNode, NODEID_t NodeId, e_acoNodeState curr State , LPVOID pvArg)
{
printf(“The remote node [%02x] is in state %x.”, NodeId, currState);
}
acoRegHeartbeatEvent(hMasterNode, DoHeartbeatEvent, NULL);
acoRegHeartbeatErrorEvent
Register an event for heartbeat error in network object; event will be called while not receive heartbeat message
within the heartbeat consumer time.
UNS32 acoRegHeartbeatErrorEvent(
HACONODE hNode,
TCOnHeartbeatErrorEvent cb,
LPVOID pvArg
);
Parameters
hNode
[in] Pointer to the Master or Slave node object handle that returned by acoCreateNode().
cb
- 51 -
Page 54

[in] Pointer to the application-defined function of type TCOnHeartbeatErrorEvent; represents the starting
address of the function. The function would to be called by the library while master node not receives a
heartbeat message within heartbeat consumer time, timeout occurs.
typedef void (*TCOnHeartbeatErrorEvent)(HACONODE hNode, NODEID_t NodeId, LPVOID pvArg);
hNode argument [in] is the pointer to the node object handle as a heartbeat consumer. NodeID argument
[in] indicates is the node identifier that does not receive a heartbeat message from the node within the
heartbeat consumer time. pvArg argument [in] pointer to an argument that is passed through from the
callback function.
pvArg
[in] Pointer to the data to be passed to the callback function or pointer to NULL; the type is a void that
allows the application to declare, define, and initialize a structure or argument to hold any information.
Return Values
If the function succeeds, the return value is ACOERR_SUCCESS. If the function fails, please reference acoapi
error codes.
Remarks
The configuration of about heartbeat consumer must be in object dictionary of object 1016h and sub-index 01h
above, so that the node just could be a heartbeat consumer. The value of heartbeat consumer time indicates
the expected heartbeat cycle times. If the heartbeat time is equal to 0, no heartbeat error event will be
triggered. If the heartbeat time is unequal 0, a heartbeat error event will be generated if the heartbeat is not
received within the heartbeat consumer time.
Example
extern HACONODE hMasterNode;
// CALLBACK function for Heartbeat error
void DoHeartbeatErrorEvent(HACONOD E h No d e, unsigned char id, LPVOID pvArg)
{
printf("Node[%x] Heartbeat error!", id);
}
//Register callback function for Heartbeat error event
acoRegHeartbeatErrorEvent(hMasterNode, DoHeartbeatErrorEvent, NULL);
- 52 -
Page 55

acoRegRecvPDOEvent
Register a event is for receiving a PDO message; This function should be called every time a PDO has received
from foreign nodes.
UNS32 acoRegRecvPDOEvent(
HACONODE hNode,
TCOnRecvPDOEvent cb,
LPVOID pvArg
);
Parameters
hNode
[in] Pointer to the Master or Slave node object hand le t h a t ret u rned by acoCreateNode().
cb
[in] Pointer to the application-defined function of type TCOnRecvPDOEvent; represents the starting address
of the function. The function would to be called by the library while the node receives a PDO message.
typedef void (*TCOnRecvPDOEvent)(HACONODE hNode, int rpdoIndex, UNS32 cobId, UNS8 bRTR, UNS8
size, void *pData, LPVOID pvArg);
hNode argument [in] is the pointer to the node object handle. rpdoIndex argument [in] indicates Which
RPDO offset [0..511] of the object dictionary [1400..15FF] to received. cobId argument [in] indicates the
COB-ID of the RPDO message. bRTR argument [in] is the RTR flag of RPDO message. size argument [in] is
the data length of pData in bytes. pData argument [in] is the data of RPDO mes sage. pvArg argument [in]
pointer to an argument that is passed through from the callback function.
pvArg
[in] Pointer to the data to be passed to the callback function or pointer to NULL; the type is a void that
allows the application to declare, define, and initialize a structure or argument to hold any information.
Return Values
If the function succeeds, the return value is ACOERR_SUCCESS. If the function fails, please reference acoapi
error codes.
Remarks
Example
extern HACONODE hMasterNode;
- 53 -
Page 56

// CALLBACK function for RPDO
void OnRecvPDOEvent(HACONODE hNode, int rpdoIndex, UNS32 cobId, UNS8 bRTR, UNS8 size, void *pData,
LPVOID pvArg)
{
int i, j;
u nsigned char *ptr = (unsigned char *)pData;
printf("RP DO[%d]: %04X; ", rpdoIndex+1, cobId);
for (i=0; i<size; i++)
printf("%02X ", ptr[i]);
}
//Register callback function for receiving PD O event
acoRegRecvPDOEvent(hMasterNode, OnRecvPDOEvent, NULL);
acoSendPDOwithCOS
Send PDOs if any data has changed (Change-Of-State), only transmission type 255 (0xFF) is supported yet. This
function should be called every time a PDO has changed and sent to foreign nodes immediately.
UNS32 acoSendPDOwithCOS(
HACONODE hNode,
int tpdoIndex
);
Parameters
hNode
[in] Pointer to the Master or Slave node object handle th a t ret u rned by acoCreateNode().
tpdoIndex
[in] Which TPDO offset [0..511] of the object dictionary [1800..19FF] to be sent if the data has changed, or
-1 for all TPDO.
Return Values
If the function succeeds, the return value is ACOERR_SUCCESS. If the function fails, please reference acoapi
error codes.
Remarks
- 54 -
Page 57

The change-of-state transmission method simply transmits a TPDO message if the process data in it changes
and transmission type is 255 (0xFF). But it could be affected by inhibited time if it exists. Even the data has
been changed but it may not send the TPDO until the inhibit time expired. So if the process data actually
changes several times while the timer is running not all of these changes will be transmitted, that means
potentially some process data is lost.
Example
// Send PDO immediately if transmission type is 255
int tpdoOffset = 0;
ret = acoSendPDOwithCOS(hSlaveNode, tpdoOffset);
acoCreateNetwork
Create a CANOpen network object in NMT master with the requested attributes.
HACONETWORK acoCreateNetwork(
HACOMASTER hMasterNode
);
Parameters
hMasterNode
[in] Assign a Master node for this CANopen network. A node created by acoCreateNode().
Return Values
If the function succeeds, the return value is a network object handle. If the function fails, the return value is
NULL. The generality of failed reason could be allocating memory failed.
Network object includes a Master node and remote node set. Master node should be ready first before creating
network object. Use acoFreeNetwork() to free network object.
Example
void DoBootupEvent(HACONODE hNode, NODEID_t id);
HACONETWORK hNetworkObj;
HACOMASTER hMasterNode;
NODEID_t MasterNode=0x01;
hMasterNode = acoCreateNode(NULL);
if (hMasterNode == NULL) return;
- 55 -
Page 58

if (ACOERR_SUCCESS == acoNodeImportEDS(hMasterNode, “Master.eds”, &MasterNode))
{
hNetworkObj = acoCreateNetwork(hMasterNode);
i f (hNetworkObj)
{
// register some events
acoRegBootupEvent(hNetworkObj, DoBootupEvent);
if (ACOERR_SUCCESS == acoOpenCANPort(hMasterNode, “CAN1:”, 1000))
{
acoStartNetwork(hNetworkObj);
// do something…
acoStopNetwork(hNetworkObj);
}
acoFreeNetwork(hNetworkObj);
}
}
acoFreeNode(hMasterNode);
void DoBootupEvent(HACONODE hNode, NODEID_t id)
{
if (!acoRemoteNodeExist(hNetworkObj, id))
{ // not exist in list
HACOREMOTE pRemoteNode = acoNetworkAddSlave(hNetworkObj, id, NULL);
i f (pRemoteNode)
{
// change RxPDO setting to receive Slave's PDO
UINT32 cobid=0x180 + id;
acoSetODentry(hMasterNode, 0x1400, 0x01, ACODT_UINT32, sizeof(cobid), &cobid);
}
}
// Start remote slave node into Operational state
acoStartRemoteNode(pNetworkObj, id);
}
acoFreeNetwork
Free CANopen network object and its rem ote nodes list. Before release the network object, it will stop all r em ote
- 56 -
Page 59

nodes first by broadcasting NMT stop message and then stop the master node.
void acoFreeNetwork(
HACONETWORK hNetworkObject
);
Parameters
hNetworkObject
[in] Pointer to network object handle that return by acoCreateNetwork().
Return Values
None
acoStartNetwork
Start the CANopen network to operation, start maste r node enter NMT state Operational and then start all remote
nodes in remote list by broadcasting NMT start remote node message.
UNS32 acoStartNetwork(
HACONETWORK hNetworkObject
);
Parameters
hNetworkObject
[in] Pointer to network object handle that returned by acoCreateNetwork().
Return Values
If the function succeeds, the return value is ACOERR_SUCCESS. If the function fails, please reference acoapi
error codes.
Remarks
Start CANopen network, master firstly enter NMT state Operational, and continue to demand other remote
slave nodes enter NMT state Operational if online. Offline remote slave nodes can be demanded if receiving the
boot up message, reference acoRegBootupEvent(). Call acoStartRemoteNode() only start remote slave node.
All of nodes must be in NMT state Operational can transmit PDO object. In other words, any process data can
be transferred the node must be in state Operational; else the process data can not be transferred.
Use acoStopNetwork() to stop CANopen network.
Table 12: NMT states and communication objects
- 57 -
Page 60

Object
State
PDO V
SDO V V
SYNC V V
TIME V V
EMCY V V
NMT V V V
Pre-operational Operational Stopped
Example
Reference to acoCreateNetwork() example.
acoStopNetwork
Stop the CANopen network, stop all remote nodes in remote list by broadcasting NMT stop message and then
stop master node, all of nodes would be enter NM T state Stopped.
UNS32 acoStartNetwork(
HACONETWORK hNetworkObject
);
Parameters
hNetworkObject
[in] Pointer to network object handle that returned by acoCreateNetwork().
Return Values
If the function succeeds, the return value is ACOERR_SUCCESS. If the function fails, please reference acoapi
error codes.
Example
Reference to acoCreateNetwork() example.
acoGetRemoteNodeCount
Return the number of remote nodes in network object of remote node list.
UNS32 acoGetRemoteNodeCount(
HACONETWORK hNetworkObject
- 58 -
Page 61

);
Parameters
hNetworkObject
[in] Pointer to network object handle that returned by acoCreateNetwork().
Return Values
Return the number of remote nodes in network object.
acoGetRemoteNode
Get remote node object handle by specified node identifier in remote node list.
HACOREMOTE acoGetRemoteNode(
HACONETWORK hNetworkObject,
NODEID_t NodeId
);
Parameters
hNetworkObject
[in] Pointer to network object handle that returned by acoCreateNetwork().
NodeId
[in] the node identifier of remote node.
Return Values
If the remote node with specified node identifier is exist in network object of remote node set, return value is
remote node handle. If it is not existing, return value is NULL.
Remarks
According to remote node object handle, use acoGetRemoteNodeId() function to get node identifier or use
acoGetRemoteNodeState() to get the current state of the remote node.
acoGetRemoteNodebyPos
Get remote node object at a specified position in remote node list.
HACOREMOTE acoGetRemoteNodebyPos(
HACONETWORK hNetworkObject,
- 59 -
Page 62

size_t _Pos
);
Parameters
hNetworkObject
[in] Pointer to network object handle that returned by acoCreateNetwork().
_Pos
[in] the index number of the remote node. The base is 0.
Return Values
The return value specifies the remote node object in the remote node list of position. If the position is over the
number of remote nodes, return value is NULL.
Example
extern HACONETWORK hNetworkObj;
void DoMasterInitialization(HACOMASTER hMaster)
{
// Update Master Local Object Dictionary : RPDO 0x1400~0x1403
// to Receive TPDO which node id allowed
UNS32 CcobID[] = {0x200, 0x300, 0x400, 0x500};
for (unsigne d int i=0; i<min(4, acoGetRemoteNodeCount(hNetworkObj)); i++)
{
HACOREMOTE hRemote = acoGetRemoteNodebyPos(hNetworkObj, i);
UNS32 cob=CcobID[i] + acoGetRemoteNodeId(hRemote);
acoSetODentry(hMaster, 0x1400+i, 1, ACODT_UINT32, sizeof(cob), &cob);
}
}
acoGetRemoteNodeId
Get node identifier of the remote node object handle.
NODEID_t acoGetRemoteNodeId(
HACOREMOTE hRemoteNode
);
Parameters
- 60 -
Page 63

hRemoteNode
[in] Pointer to remote node object handle.
Return Values
Return the node identifier of the remote node object handle that be set by acoNetworkAddSlave(). Return
CINVALID_NODEID if remote node object is invalid.
Remarks
The node identifier is unique identifier for each CANopen device in the network, a value in the range of [1..127]
specified by CiA DS-301.
Example
Reference to acoGetRemoteNodebyPos() example.
acoRemoteNodeExist
Check the node identifier whether exist in remote node list or not.
BOOL acoRemoteNodeExist(
HACONETWORK hNetworkObject,
NODEID_t NodeId
);
Parameters
hNetworkObject
[in] Pointer to network object handle that returned by acoCreateNetwork().
NodeId
[in] Specified a unique node identifier in a range of [1..127].
Return Values
Nonzero indicates the remote node with specified node identifier exists in remote node list of network object.
Zero indicates the node identifier does not exist in remote node list.
Example
Reference to acoCreateNetwork() example.
- 61 -
Page 64

acoNetworkAddSlave
NMT master creates a remote node object with the requested attributes and inserts it to the remote node set of
the network object.
HACOREMOTE acoNetworkAddSlave(
HACONETWORK hNetworkObject,
NODEID_t NodeId,
char *pFileName
);
Parameters
hNetworkObject
[in] Pointer to network object handle that returned by acoCreateNetwork().
NodeId
[in] a node identifier.
pFileName
[in] Device profile path and file name of remote slave node, it can be NULL.
Return Values
If the function succeeds, the return value is a remote node object handle. If the function fails, the return value
is NULL, Call GetLastError() to get error code.
Remarks
The node identifier should be a unique value in a range of [1..127] defined by CiA DS-301. So that the
maximum count of the remote nodes in network object is 126, one node identifier is reserved for Master node.
If the number is over the limit, get error code.
Inserting a node to remote node list, the remote node list in network object would re-sort by node identifier so
that the memory location would be rearranged. If the application keeps the pointer of the remote node, that
caused to pointer to different remote node. Therefore, recommends that call acoGetRemoteNode() or
acoGetRemoteNodebyPos() each time to retrieve the current pointer of the remote node object from the list, do
not keep the pointer of the remote node.
Example
Reference to acoCreateNetwork() example.
- 62 -
Page 65

acoNetworkRemoveSlave
NMT master removes the remote node object i dentified by NodeId from the remote node list of the network obje ct .
NMT master demands the remote node would be enter the NMT state Stopped and then remove it from list.
UNS32 acoNetworkRemoveSlave(
HACONETWORK hNetworkObject,
NODEID_t NodeId
);
Parameters
hNetworkObject
[in] Pointer to network object handle that returned by acoCreateNetwork().
NodeId
[in] a node identifier in a range of [1..127].
Return Values
If the function succeeds, the return value is ACOERR_SUCCESS. If the function fails, please reference acoapi
error codes.
Remarks
Before removing the remote node from list in network object, firstly transmitting NMY message to the remote
slave node entered NMT state Stopped and then remote it from list. The remote node list in network object
would re-sort by node identifier so that the memory location would be rearranged. If the application keeps the
pointer of the remote node, that caused to pointer to different remote node. Therefore, recommends that call
acoGetRemoteNode() or acoGetRemoteNodebyPos() each time to retrieve the current pointer of the remote
node object from the list, do not keep the pointer of the remote node.
Example
extern HACONETWORK hNetworkObj;
// remove node identifier 0x02 from list
acoNetworkRemoveSlave(hNetworkObj, 0x02);
acoNetworkSetState
NMT master change the remote slave node to new state by NMT message. Node identifier is 0 means
- 63 -
Page 66

broadcasting NMT message to all rem ote slave nodes to change its state.
UNS32 acoNetworkSetState(
HACONETWORK hNetworkObject,
NODEID_t NodeId,
e_acoNodeState newState
);
Parameters
hNetworkObject
[in] Pointer to network object handle that returned by acoCreateNetwork().
NodeId
[in] the remote slave node identifier in range [0..127], 0 means all remote slave nodes.
newState
[in] the new NMT state.
Return Values
If the function succeeds, the return value is ACOERR_SUCCESS. If the function fails, please reference acoapi
error codes.
Example
extern HACONETWORK hNetworkObj;
// Set remote node 0x02 to NMT state Operational
acoNetworkSetState(hNetworkObj, 0x02, ns_Operational);
acoGetRemoteNodeState
Get the NMT state of the specif i ed remote node object handle that kept in NMT master side, not really remote
slave node state.
e_acoNodeState acoGetRemoteNodeState(
HACOREMOTE hRemoteNode
);
Parameters
hNetworkObject
[in] Pointer to network object handle that returned by acoCreateNetwork().
- 64 -
Page 67

Return Values
Return the currently NMT state of the remote node. If return value is ns_Unknown_state, indicates the remote
slave node may be offline that can not response any message or just request its node guard message and
waiting its NMT state.
acoReqNodeGuard
NMT master request the remote slave node an extra a node guard message. If the slave replies the node guard
message, the state of the remote nod e wi ll be updated in network object.
UNS32 acoReqNodeGuard(
HACONETWORK hNetworkObject,
NODEID_t NodeId
);
Parameters
hNetworkObject
[in] Pointer to network handle that created by acoCreateNetwork().
NodeId
[in] the remote slave node identifier in range [0..127], 0 means all remote slave nodes.
Return Values
If the function succeeds, the return value is ACOERR_SUCCESS. If the function fails, please reference acoapi
error codes.
Remarks
NMT master application transmit guarding requests single to remote slave node or all nodes, the state of asked
remote nodes in network object would be into ns_Unknown_state state, update the newly state until the
guarding is achieved if the slave node supports node guarding protocol. For a later a cycle of CAN message,
Call acoGetRemoteNodeState() to get the latest state of remote slave node.
The state of remote slave nodes update cyclically if the device supports the heartbeat mechanism, does not
need to request the node guarding alone. The heartbeat mechanism for a device is established by cyclically
transmitting the heartbeat message by the heartbeat producer. If the heartbeat cycle fails for the heartbeat
producer, the heartbeat consumer will be informed the event, reference acoRegHeartbeatErrorEvent().
Example
extern HACONETWORK hNetworkObj;
- 65 -
Page 68

extern HACOREMOTE hRemoteNode;
//Set remote node to Operational
acoReqNodeGuard (hNetworkObj, 0x02);
// wait a moment for the guarding message responsed
Sleep(1000L);
e_acoNodeState NodeState = acoGetRemoteNodeState(hRemoteNode);
switch(NodeState)
{
case ns_Initialisation:
printf("Remote node state: Initialisation");
break;
case ns_Pre_operational:
printf("Remote node state: Pre_operational");
break;
case ns_Operational:
printf("Remote node state: Operational");
break;
case ns_Stopped:
printf(" Remote node state: Stopped");
break;
default:
printf("Remote node state: invalid state");
break;
}
acoStartRemoteNode
The NMT master uses the NMT service start remote node specified by node identifier to change the NMT state.
The state of the remote slave node shall be entering NMT state Operatio nal.
UNS32 acoStartRemoteNode(
HACONETWORK hNetworkObject,
NODEID_t NodeId
);
Parameters
hNetworkObject
- 66 -
Page 69

[in] Pointer to network handle that created by acoCreateNetwork().
NodeId
[in] the remote slave node identifier in a range [0..127]. CBROADCAST_NODEID (0) means broadcast NMT
start remote node message to all online remote nodes.
Return Values
If the function succeeds, the return value is ACOERR_SUCCESS. If the function fails, please reference acoapi
error codes.
Remarks
By broadcasting NMT start remote node message, all remote slave nodes shall be enter NMT state Operational
even if the remote node is not exist in the remote node list of network object. Therefore, application needs to
maintain the remote node list in the network object by self. The service start remote node is unconfirmed, can
not get really the NMT state after starting, application can use other method to know which state the remote
node in, for example: heartbeat protocol.
Need to use acoStartNetwork() firstly to start CANopen network and master node. Use acoStopRemoteNode()
to stop a remote node.
Example
extern HACONETWORK hNetworkObj;
//Start remote node 0x02
acoStartRemoteNode(hNetworkObj, 0x02);
acoStopRemoteNode
The NMT master uses the NMT service stop remote node specified node specified to change NMT state. The
state of the remote slave node shall be entering NMT state Stopped.
UNS32 acoStopRemoteNode(
HACONETWORK hNetworkObject,
NODEID_t NodeId
);
Parameters
hNetworkObject
- 67 -
Page 70

[in] Pointer to network handle that created by acoCreateNetwork().
NodeId
[in] the remote slave node identifier in a range [0..127]. CBROADCAST_NODEID (0) means broadcast NMT
start remote node message to all online remote nodes .
Return Values
If the function succeeds, the return value is ACOERR_SUCCESS. If the function fails, please reference acoapi
error codes.
Example
extern HACONETWORK hNetworkObj;
//Start remote node 0x02
acoStopRemoteNode(hNetworkObj, 0x02);
acoRegBootupEvent
Register an event for receiving Slave boot up message in network object; event will be called while master
receiving a slave boot up message.
UNS32 acoRegBootupEvent(
HACONETWORK hNetworkObject,
TCOnBootupEvent cb,
LPVOID pvArg
);
Parameters
hNetworkObject
[in] Pointer to network handle that created by acoCreateNetwork().
cb
[in] Pointer to the application-defined function of type TCOnBootupEvent; represents the starting address of
the function. Library will call this function while the master receiving a slave node boot up frame.
typedef void (*TCOnBootupEvent)(HACONODE hNode, NODE ID_t NodeId, LPVOID pvArg);
hNode argument [in] is the pointer to the master node object handle. NodeID argument [in] is the slave
node with the node identifier transmits a boot-up message. pvArg argument [in] pointer to an argument
that is passed through from the callback function.
pvArg
- 68 -
Page 71

[in] Pointer to the data to be passed to the callback function or pointer to NULL; the type is a void that
allows the application to declare, define, and initialize a structure or argument to hold any information.
Return Values
If the function succeeds, the return value is ACOERR_SUCCESS. If the function fails, please reference acoapi
error codes.
Remarks
The NMT slave transmits a boot-up message to indicate the state transition occurred from the NMT state
Initialisation to the NMT state Pre-operational. It is ready to CANopen network. In application-defined function,
Master can change the object dictionary settings of remote slave node by SDO request, or request the rem ote
slave node enter the NMT state Operational to start operation.
Example
Reference acoCreateNetwork() example.
acoNetworkReadSDO
Read an entry with specified index and sub-index from remote object dictionary of specified node identifier
through SDO protocol. This function is an asynchronous method, it starts a task is returned immediately without
waiting for a result. When the task finishes, the library notifies the application that the message was successfully
processed and pass the result to the callback function.
UNS32 acoNetworkReadSDO(
HACONETWORK hNetworkObject,
NODEID_t NodeId,
UNS16 wIndex,
UNS8 SubIndex,
UNS8 DataType,
TCOnReadSDOResult pf
);
Parameters
hNetworkObject
[in] Pointer to network handle that created by acoCreateNetwork().
NodeId
[in] specified a SDO server node identifier, read its object dictionary
- 69 -
Page 72

wIndex, SubIndex
[in] Which index (16bits) and sub-index (8bits) of entry in the object dictionary want to read.
DataType
[in] the data type of the [index, sub-index] value. See data type constant in acodef.h.
pf
[in] Pointer to the application-defined function of type TCOnReadSDOResult; represents the starting address
of the function. The function will be executed if SDO request is responded or timeout occurs.
Return Values
If the function succeeds, the return value is ACOERR_SUCCESS. If the function fails, please reference acoapi
error codes.
Remarks
This asynchronous function is for the master node asks other remote slave node the value of object dictionary
with object index and sub-index. The application-defined function of type TCOnReadSDOResult will be called if
receiving the responded value of specified wIndex and sub-index from the remote slave node as SDO server.
Therefore, SDO parameters should be described in both master node and remote slave node at object
dictionary of object 1280h to 12FFh SDO client parameter, and object 1200h to 127Fh SDO server parameter.
Else there is not receiving any responded message from the remote slave node.
typedef void (*TCOnReadSDOResult)( HACONODEOBJ hNode, NODEID_t NodeId, UNS16 wIndex, UNS8
SubIndex, UNS8 dataType, UNS32 dataLen, void* pData, UNS32 abortCode);
hNode argument [in] is the pointer to the remote slave node object handle with node identifier is NodeID.
NodeID argument [in] is the remote slave node identifier. wIndex and SubIndex arguments [in] indicate which
object to be read. dataType argument [in] indicates the data type of the pData. dataLen argument [in] is the
data length of pData. pData argument [in] is the data of object [index, sub-index]. abortCode argument is the
return value, ACOOD_SUCCESSFUL means success, else get fails, reference acoapi error codes and SDO abort
codes.
Reference acoReadSDO() and acoWriteSDO().
Example
extern HACONETWORK hNetworkObj;
void OnReadSDOResult(
HACONODEOBJ hNode, NODEID_t NodeId,
UNS16 wIndex, UNS8 bSubIndex, UNS8 dataType, UNS32 dataLen, void *pData, UNS32 abortCode)
{
- 70 -
Page 73

if (ACOOD_SUCCESSFUL == abortCode) {
UNS8 *ptr = (UNS8 *)pData;
printf(" ReadSDOResult: succ: Remote node [%02x] object [%04x:%02x] DataLen=%d,
Data=%02x"
, NodeId, wIndex, bSubIndex, dataLen, *ptr);
} else
printf(" ReadSDOResult failed: %x", abortCode);
}
//*** access Object Dictionary: async method
acoNetworkReadSDO(hNetworkObj, 0x02, 0x1800, 0x02, ACODT_UINT8, OnReadSDOResult);
acoNetworkWriteSDO
Write the value at the index and sub-index to remote object dictionary of the node whose node identifier is NodeId
through SDO protocol. This function is an asynchronous method, it starts a task is returned immediately without
waiting for a result. When the task finishes, the function notifies the application that the message was successfully
processed and pass the result to the call back function.
UNS32 acoNetworkWriteSDO(
HACONETWORK hNetworkObject,
NODEID_t NodeId,
UNS16 wIndex,
UNS8 SubIndex,
UNS8 DataType,
UNS32 DataLen,
void *pData,
TCOnWriteSDOResult pf
);
Parameters
hNetworkObject
[in] Pointer to network handle that created by acoCreateNetwork().
NodeId
[in] specified a SDO server node identifier, write to its object dictionary
wIndex, SubIndex
[in] Which index (16bits) and sub-index (8bits) of entry in the object dictionary want to write.
- 71 -
Page 74

DataType
[in] the data type of the pData value. See data type constant in acodef.h.
DataLen
[in] the data length of pData.
pData
[in] the data of [index, sub-index] value.
pf
[in] Pointer to the application-defined function of type TCOnWriteSDOResult; represents the starting address
of the function. The function will be executed if SDO request is responded or timeout occurs.
Return Values
If the function succeeds, the return value is ACOOD_SUCCESSFUL. If the function fails, please reference acoapi
error codes and SDO abort codes.
Remarks
This asynchronous function is for the master node writes the value of object dictionary with object index and
sub-index to other remote slave node. The application-defined function of type TCOnWriteSDOResult will be
called if receiving the responded from the remote slave node as SDO server. Therefore, SDO parameters
should be described in both master node and remote slave node at object dictionary of object 1280h to 12FFh
SDO client parameter, and object 1200h to 127Fh SDO server parameter. Else there is not receiving any
responded message from the remote slave node.
typedef void (*TCOnWriteSDOResult)( HACONODEOBJ hNode, NODEID_t NodeId, UNS16 wIndex, UNS8
SubIndex, UNS32 abortCode);
hNode argument [in] is the pointer to the remote slave node object handle with node identifier is NodeID.
NodeID argument [in] is the remote slave node identifier. wIndex and SubIndex arguments [in] indicate which
object to be write. abortCode argument is the return value, ACOOD_SUCCESSFUL means success, else get fails,
reference acoapi error codes and SDO abort codes.
Reference acoReadSDO() and acoWriteSDO().
Example
extern HACONETWORK hNetworkObj;
void OnWriteSDOResult(
HACONODEOBJ hNode, UNS8 NodeId, UNS16 wIndex, UNS8 bSubIndex, UNS32 abortCode)
{
if (ACOOD_SUCCESSFUL == abortCode) {
- 72 -
Page 75

printf(" WriteSDOResult: succ: RemoteNode[%02x] object [%04x:%02x] \n\r" \
, NodeId, wIndex, bSubIndex);
} else
printf (" WriteSDOResult failed: %X", abortCode);
}
UNS8 data=255;
//*** access Object Dictionary: async method
ret = acoNetworkWriteSDO(hNetworkObj, 0x02, 0x1800, 2,
ACODT_UINT8, sizeof(data), &data, OnWriteSDOResult);
- 73 -
Page 76

3. Advantech CANopen Examples
3.1. Overview
Advantech CANopen provides C#, VB.NET, VC.NET, VC and BCB examples for your reference.
The C#, VB.NET, VC.NET examples are developed by Microsoft Visual Studio 2005.
The VC examples are developed by VC6.0.
The BCB examples are developed by Borland C++ Builder 6.0
There are tow examples for each language :acoMaster and acoSlave.
acoMaster example use MasterDict-1-ok.eds as its EDS file.
acoSlave example use SlaveDict-1-ok.eds as its EDS file.
3.2. Example usage
When user installs the advantech windows CANopen package, all examples will be installed in
C:\Program Files\Advantech\Advantech CANopen by default.
Click the acoMaster to run the acoMaster example.
- 74 -
Page 77

Figure 5: Master Example Main Window
Click the acoSlave to run the acoSlave example.
Figure 6: Slave Example Main Window
- 75 -
Page 78

4. Advantech CANopen Network Utility
4.1. Overview
The Advantech CANopen network utility is a utility to configure CANopen network node, to control
and monitor the whole CANopen network. The main functions of Advantech CANopen Network
Utility can be described as follows.
An EDS file editor:configure network nodes, export EDS file that needed by CANopen library
API when user develop application based on CANopen library.
CANopen network manger: user can use the utility to create a CANopen network and do a
simple test, it can also to control and monitor the CANopen network.
The following picture is the main window of this utility.
Figure 7: Main frame of utility
- 76 -
Page 79

4.2. Configure CANopen Network
4.2.1. Create CANopen Network
Firstly, Create the CANopen network, Click the “File->New CANopen NetWork” menu item, the
utility will display a wizard to create network, user only need to input network name, master node
device, master node id, network baud rate. These setting can also be changed after network is
created.
Figure 8: Step 1 of Create Network Wizard
If user wants to set more about new network before create network, click the “Advanced Setting”
button, advanced setting dialog support create network From EDS File, and user also can set the
SDO, PDO number for master node, the setting dialog as follows.
Figure 9: Step 2 of Create Network Wizard
Click “OK” button, a new CANopen network will be created according to the user’s setting. The left
view of the utility shows the structure of the new network as follows.
- 77 -
Page 80

Figure 10: CANopen Network Tree View
When create CANopen network, only the master node is create in new network, user should to add
slave node.
4.2.2. Create slave node
Select the “Slave Nodes ” node, right click the mouse, a menu will display as follows.
Figure 11: Add Slave Node Menu
There are two ways to create slave node, from EDS file or create empty slave node.
When clicking the “Add Slave Node”, the following dialog will be displayed.
- 78 -
Page 81
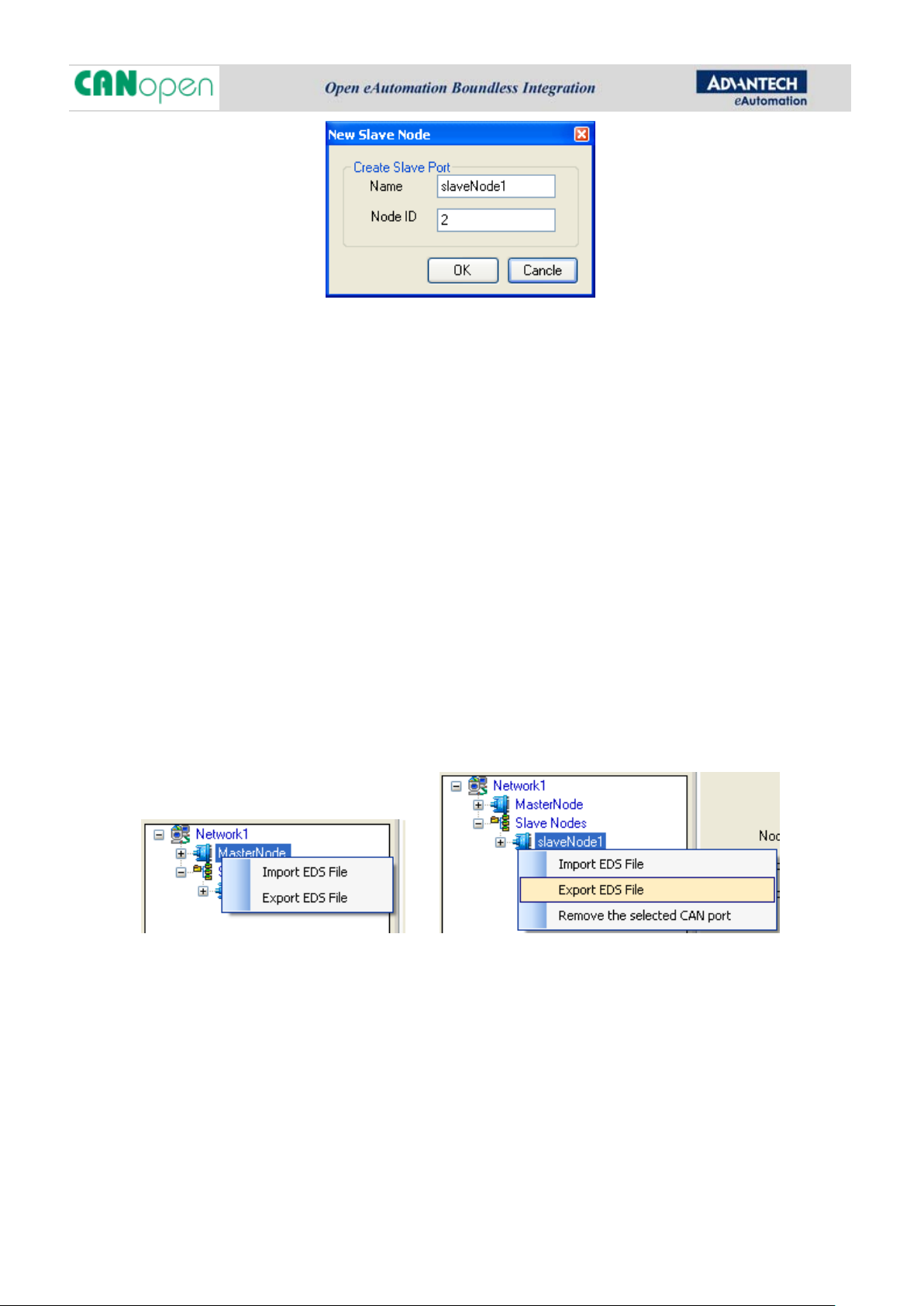
Figure 12: Add Save Node Dialog
User input the name and node id, click “OK”, and th en the empty slave node will be created and
add to network.
When clicking the “Add Slave Node from EDS File”, user should give an EDS file path then the slave
node will be created according to EDS file and add to network.
4.2.3. Configure Node
After create network and add slave node, user can configure them further, for example, create new
data type, add communication parameters, PDO, SDO and so on, modify the setting, even import
another EDS file for the master node or slave node. After finishing the configuration, the network
configuration can be saved; each port configuration can export to EDS file.
4.2.4. Import EDS File
Figure 13: Import EDS File for Master Node and Slave Node
User can import EDS file to configure each CAN node. After import EDS file, the original
configuration is replace by the new EDS file.
4.2.5. Create new data type
User can define new data type and use it when adding manufacture data, select the “Data Type”
tree node of the CAN port, right click the mo use, and then click the “Create New Type” menu item.
- 79 -
Page 82

Figure 14: Create New Data Type Menu
User can input the new data type name and index, the index value must be between 0x40 and
0xFFF.For example, we create a new data type named “AI” in index 0x40.
Figure 15: Create New Data Type
Click “OK” button,new data type is created.
Right click mouse and choose “Add New Variable” menu to add data member to the new data type.
For example, add AI1, AI2, AI3, AI3 variables to AI.
Figure 16: add data member to new data type
How to use the new data type will b e introduced in later section.
4.2.6. Configure the communication parameters
Select the “Communication Parameters” tree node, right click the mouse and click “Add/Remove
Communication” menu item.
- 80 -
Page 83

Figure 17: Add/Remove Communication Menu Item
Then a dialog displays and user can add or remove the communication parameters.
Figure 18: Add/Remove Communication Dialog
Click “OK”, the select communication parameters will be added to CANopen network, user then can
to configure them.
- 81 -
Page 84

Figure 19: configure communication parameters
4.2.7. Create and configure SDO
User can add SDO server or SDO client by click “Add SDO Server” or “Add SDO Client”, and then
user need to configure the new SDO Server and SDO Client.
Figure 20: Add SDO Client and SDO Server Menu
Figure 21: Configure SDO Parameter
4.2.8. Create and configure PDO
User can add transmit PDO or receive PDO by click “Add Receive PDO” or “Add Transmit PDO”
- 82 -
Page 85

menu item,and then user need to configure the new PDO to meet the user’s requirement.
Figure 22: Add PDO Menu Item
The following picture is the PDO parameters configuration window.
Figure 23: PDO Configuration
The following picture is the mapping data configuration window.
- 83 -
Page 86

Figure 24: Add PDO Mapping Variable
User can remove PDO by click “Remove this PDO” menu item, and also can change PDO
parameters number by click “PDO parameter Configuration”.
Figure 25: PDO Parameter Configuration Menu Item
The following picture is the dialog to add or remove the PDO parameters.
- 84 -
Page 87

Figure 26: PDO Parameter Configuration Dialog
4.2.9. Create manufacture variable
User can add manufacture data by “Add Mapping Variable” menu item. The following dialog will
display.
Figure 27: Add Manufacture Data variable
User can add variable, array and record data.
If add record, the new data type created by user can be used here.
Manufacture data’s index must be between 0x2000 to 0x5FFF, they often will be used by PDO.
- 85 -
Page 88

Figure 28: Add Manufacture Data V ariable
4.2.10. Save the configuration
After finished configuration, user can save the whole network by “File->Save Project” or “File Save
Project As” menu item. The saved project file can also be opened by utility for later use if need.
If user only needs to save one node setting, “Export EDS file” is the way. The EDS file is also need
for CANopen application development based on acoapi library, so user can edit and export the EDS
file in the utility for later use.
The export EDS file can be imported if needed.
Figure 33: Import and Export EDS File
- 86 -
Page 89

Figure 34: Save the Network Configuration
4.3. Manger CANopen network
4.3.1. Enter run mode
Utility can enter run mode to manger the CANopen network, it control and monitor the whole
CANopen network by sending CANopen messages to slaves through Master node, that is to say, We
can get slave node state, node id, PDO data value, read and write the local or remote object
dictionary.
Click “Run” menu item to enter the run mode and start the whole CANopen network after
configuration.
Figure 35: Enter Run Mode
The main window of running mode is as follows.
- 87 -
Page 90

Figure 36: Run Mode Main Window
4.3.2. Monitor Node Data
Then user can select master node or slave node to monitor its data.
The following picture is the slave node monitor view. We can see its state and PDO data.
Please note that the utility can only control the network through master node, user should run
slave node application to communicate with the utility if necessary, for example to run
example in the slave node, and then the utility can communication with slave node opened by
acoSlave. Utility can also communicate with other manufacture CAN device base on CANopen
protocol.
The following pictu r e is slave node monitor view.
acoSlave
- 88 -
Page 91

Figure 37: Run Mode Slave Node Window
The following picture is Master node monitor view.
- 89 -
Page 92
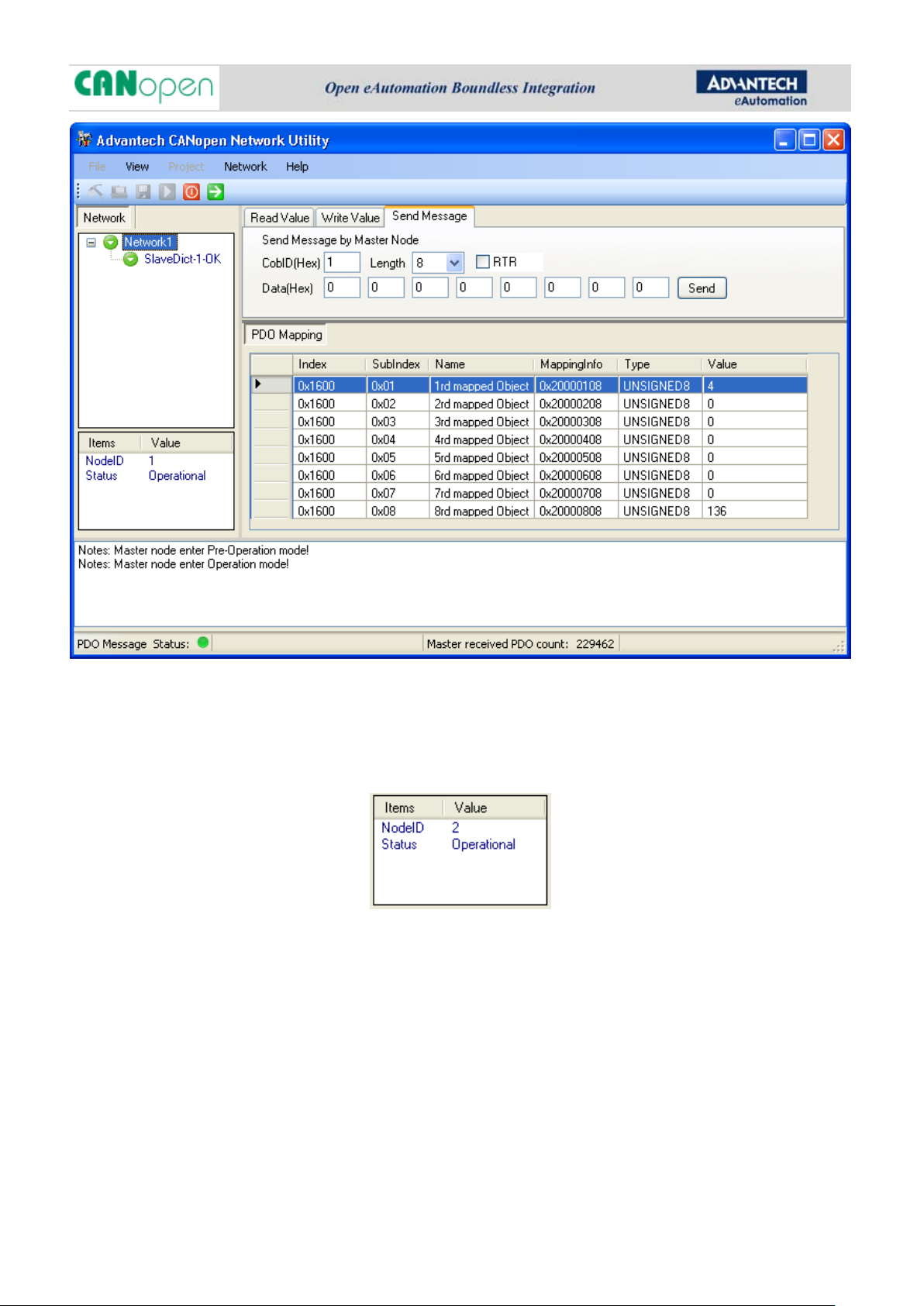
Figure 38: Run Mode Master Node Window
From above Figure, we can see left-top view of the utility show the CANopen network topology
structure, when use select one node, its node id and status will be shown as follows.
Figure 39: Node State View
The right view display the selected node PDO Mapping data value, if any data changed, this
monitor view will update the data value in time.
4.3.3. Control Network
Master Node can send message to any node in the network by “send message” function tab. The
entire node in the network (Master or slave) can read value from object dictionary by “Read Value”
- 90 -
Page 93

function in second tab and write value to node object dictionary by “Write Value” function in third
tab page.
The following picture is send message tab.
Figure 40: Send Message View
The following picture is read value tab. User can read the local or remote object dictionary as
follows, only input the index and sub index then click the “Read” button.
Figure 41: Read Message View
The following pictu r e is write value tab. User can write the local or remote object dictionary as
follows, only input the index and sub index then click the “Write” button.
Figure 42: Write Message View
User can use the menu to change the remote node state.
- 91 -
Page 94

Figure 43: Change slave node state
4.3.4. Exit Run Mode
Click “Network->Exit Run Mode” to exit run mode, then it will return configuration mode, user can
configure the network again.
Figure 44: Exit Run Mode
- 92 -
Page 95

APPENDIX
This appendix describes all the Objects and Data types supported by Advantech CANopen stack.
Data type support list
Data Type according to Object Dictionary Data Types of CANopen DS 301 v4.02 p.80.
Data Type Value Comment
BOOLEAN 0x01
INT8 0x02 a 8-bit integer
INT16 0x03 a 16-bit integer
INT32 0x04 a 32-bit integer
UINT8 0x05 a 8-bit unsigned integer
UINT16 0x06 a 16-bit unsigned integer
UINT32 0x07 a 32-bit unsigned integer
REAL32 0x08 a 32-bit real
Boolean,1-bit
COB-ID support list
COB-ID according to pre-defined connection of CANopen DS 301 v4.02 p.77.
Object COB-IDs Index
NMT 0 SYNC 128(80h) 1005h
EMERGENCY 129 (81h) – 255 (FFh) 1014h
TxPDO1 385 (181h) – 511 (1FFh) 1800h
RxPDO1 513 (201h) – 639 (27Fh) 1400h
TxPDO2 641 (281h) – 767 (2FFh) 1801h
RxPDO2 769 (301h) – 895 (37Fh) 1401h
TxPDO3 897 (381h) – 1023 (3FFh) 1802h
RxPDO3 1025 (401h) – 1151 (47Fh) 1402h
TxPDO4 1153 (481h) – 1279 (4FFh) 1803h
RxPDO4 1281 (501h) – 1407 (57Fh) 1403h
SDO Server 1409 (581h) – 1535 (5FFh) 1200h
SDO Client 1537 (601h) – 1663 (67Fh) 1200h
NMT Error Control 1793 (701h) – 1919 (77Fh) -
- 93 -
Page 96
Object Support list
Object according to Overview Object Dictionary Entries f or Co mmunication of CANopen DS 301
v4.02 p.84.
Object List Default Value Value Range
[1000] Device Type 0 ro
[1001] Error Register 0 ro
[100C] Guard time 0 ro
[100D] Life time factor 0 ro
[1018] Identity
[1018sub0] number of entries 4 ro
[1018sub1] Vendor ID 0x251 ro
[1018sub2] Product Code 0xE2AE ro
[1018sub3] Revision Number 0xA005 ro
[1018sub4] Serial Number 0 ro
[1003] Pre-defined Error Field
[1003sub1] number of errors 0 rw, Read:0 –0xfe;
Write:0
[1003sub1] Standard Error Field NO ro
[1005] SYNC COB ID
[1006] Communication / Cycle Period 0
[1014] COB-ID EMCY
[1016] Consumer Heartbeat Time
0x80
$NODEID+0x80
rw,0x80, 0x40000080
rw, >1 millisecond
ro
[1016sub0] number of errors Time 1
[1016sub1] To [1016sub7F]
[1017] Producer Heartbeat Time 0 rw
[1200] Server SDO Parameter 1 SDO Server
[1200sub0] Number of Entries 2 ro
NO
0
- 94 -
ro, 1–127
rw,
Page 97

[1200sub1] COBID Client to Server 0x600 + $NODEID ro
[1200sub2] COBID Server to Client 0x580 + $NODEID ro
[1280h - 12FFh] Client SDO Parameter 127 SDO Clients
[1280h - 12FFh sub0] number of
3 ro
entries
[1280h - 12FFh sub1] COBID
0x80000000 rw, 0x601-0x67F
Client to Server
[1280h - 12FFh sub2] COBID
0x80000000 rw, 0x581-0x5FF
Server to Client
[1280h - 12FFh sub3] NODEID of
No rw, 0x1-0x7F
the SDO Server
[1400-15FF] RxPDO Parameter 512 RxPDO
[1400-15FF sub0] largest sub-index
5 ro
supported
[1400-15FF sub1] COB-ID used by PDO 1400h: 200h + $Node-ID, rw,1400h: 200h +$Node-ID,
80000200h+$Node-ID
1401h: 300h + $Node-ID, rw, 1401h: 300h + $Node-
ID,
80000300h+$Node-ID
1402h: 400h + $Node-ID, rw, 1402h: 400h + $Node-
ID,
80000400h+$Node-ID
1403h: 500h +$ Node-ID rw, 1403h: 500h + $Node-
ID,
80000500h+$Node-ID
…… ……
[1400-15FF sub2] transmission type NO rw
[1400-15FF sub3] inhibit time 0 rw
[1400-15FF sub4] compatibility entry 0 rw
[1400-15FF03sub5] event timer 0 rw
[1600-17FF] RxPDO Mapping 512 RxPDO
- 95 -
Page 98

[1600-17FF sub0] number of mapped
application objects in PDO
[1600-17FFsub1h–40h] PDO
mapping for the nth application object to
be mapped
[1800-19FF] TxPDO Parameter
[1800-19FF sub0] largest sub-index
supported
[1800-19FF sub1] COB-ID used by
PDO
NO rw,1-40h
NO rw
512 TxPDO
5 ro
1800h: 180h + $Node-ID, rw 1800h: 180h + $Node-
ID,
80000180h+$Node-ID
1801h: 280h + $Node-ID, rw 1801h: 280h + $Node-
ID,
80000280h+$Node-ID
1802h: 380h + $Node-ID, rw 1802h: 380h + $Node-
ID,
80000380h+$Node-ID
1803h: 480h + $Node-ID rw 1803h: 480h + $Node-
ID,
80000480h+$Node-ID
…… ……
[1800-19FF sub2] transmission type
[1800-19FF sub3] inhibit time
[1800-19FF sub4] reserved
[1800-19FF sub5] event timer
NO rw
0
rw
0 rw
0 rw
[1A00-1BFF] transmit PDO mapping 512 TxPDO
[1A00-1BFF sub0] NO ro, 1-40h
[1A00-1BFF sub1h–40h]
NO
ro
- 96 -
 Loading...
Loading...