

Page 1

操作手册
RobotStudio
5.13
文档编号 3HAC032104-010
修订 : C
© Copyright 2008-2010 ABB. 保留所有权利。
Page 2

本手册中包含的信息如有变更,恕不另行通知,且不应视为 ABB 的承诺。ABB 对本手册
中可能出现的错误概不负责。
除非本手册中有明确规定,否则不应将其中的任何内容解释为 ABB 对个人损失、财产
损坏或具体适用性等做出任何担保或保证。
ABB 对因使用本手册及其中所述产品而引起的意外或间接伤害概不负责。
未经 ABB 书面许可,严禁复制或翻印本手册及其中的任何部分,不得将任何内容透露
给第三方,亦不得用于任何未经授权的用途。 违反本条款将会受到起诉。
本手册的副本可按时价向 ABB 购买。
版权所有 2008-2010 ABB,保留所有权利。
ABB AB
Robotics Products
721 68 V ä ster å s
瑞典
© Copyright 2008-2010 ABB. 保留所有权利。
Page 3
目表
概述 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
产品文档 , M2004 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
安全 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1 简介 15
1.1 概念和术语 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.1.1 硬件概念 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.1.2 RobotWare 概念 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.1.3 RAPID 概念 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
1.1.4 编程的概念 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
1.1.5 目标点与路径 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
1.1.6 坐标系 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
1.1.7 机器人轴的配置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
1.1.8 关于程序库、几何体和 CAD 文件 . . . . . . . . . . . . . . . . . . . . . . . 24
1.1.9 关于将 VSTA 用作 IDE . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
1.2 安装并许可 RobotStudio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
1.3 图形化界面 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
1.3.1 图形化界面 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
1.3.2 “开始”窗口 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
1.3.3 “布局”浏览器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
1.3.4 “路径和目标点”浏览器 . . . . . . . . . . . . . . . . . . . . . . . . . . 33
1.3.5 “建模”浏览器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
1.3.6 “在线”浏览器和 “离线”浏览器 . . . . . . . . . . . . . . . . . . . . . . 36
1.3.7 输出窗口 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
1.3.8 操作员窗口 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
1.3.9 文档管理器窗口 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
1.3.10 使用鼠标 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
1.3.11 选择项目 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
1.3.12 安装与拆除对象 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
1.3.13 键盘快捷键 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
2 如何构建工作站 53
2.1 构建新工作站的工作流程 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
2.2 创建传送带跟踪工作站 (两个机器人在同一个传送带上工作). . . . . . . . . . . . . . . . . . 55
2.2.1 两个机器人共享同一任务框架位置 . . . . . . . . . . . . . . . . . . . . . . 55
2.2.2 两个机器人系统使用不同的任务框架位置 . . . . . . . . . . . . . . . . . . . 57
2.3 自动创建带外轴的系统 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
2.4 手动创建带导轨运动的系统 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
2.4.1 手动创建带 RTT 或 IRBTx003 导轨的系统 . . . . . . . . . . . . . . . . . . . 61
2.4.2 手动创建带 IRBTx004 的系统 . . . . . . . . . . . . . . . . . . . . . . . . 62
2.5 虚拟控制器 (VC). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
2.5.1 启动虚拟控制器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
2.5.2 重启 VC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
2.6 工作站组件 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
2.6.1 导入工作站组件 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
2.6.2 转换 CAD 格式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
© Copyright 2008-2010 ABB. 保留所有权利。
2.6.3 故障排除和优化几何体 . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
2.7 建模 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
2.7.1 对象 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
2.7.2 机械装置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
2.7.3 工具和工具数据 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
2.7.4 设置对象的本地原点 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
33HAC032104-010 修订 : C
Page 4
目表
2.8 放置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
2.8.1 摆放物体 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
2.8.2 设置外轴 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
2.8.3 摆放机器人 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
3 如何进行机器人编程 81
3.1 机器人编程工作流程 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
3.2 工件坐标 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
3.3 微动控制机械装置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
3.4 目标点 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
3.5 路径 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
3.6 方向 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
3.7 RAPID 指令. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
3.8 测试位置和动作 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
3.9 MultiMove 系统编程 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
3.9.1 关于 MultiMove 系统编程. . . . . . . . . . . . . . . . . . . . . . . . . . . 99
3.9.2 创建 MultiMove . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .101
3.9.3 测试 MultiMove . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .102
3.9.4 调整动作行为 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .103
3.9.5 创建路径 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .105
3.9.6 外轴编程 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .106
3.10 加载 / 保存程序和模块 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .108
3.11 同步 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .109
3.12 使用 RAPID 编辑器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .110
4 如何仿真程序 113
4.1 仿真概述 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .113
4.2 检测碰撞 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .114
4.3 创建事件 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .116
4.4 仿真 I/O 信号 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .117
4.5 启用仿真监控 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .118
4.6 测量过程时间 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .119
5 部署和发行 121
5.1 复制程序 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .121
5.2 打包 / 解包 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .122
5.3 屏幕截图 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .123
6 在线操作 125
6.1 将 PC 连接至服务端口 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .125
6.2 网络设置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .127
6.3 用户授权系统 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .129
6.4 系统生成器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
6.4.1 系统生成器概述 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .131
6.4.2 查看系统属性 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .132
6.4.3 创建新系统 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .133
6.4.4 修改系统 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .136
6.4.5 复制系统 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .140
6.4.6 从备份创建系统 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .141
6.4.7 将系统下载至控制器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .142
6.4.8 创建引导启动安装 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .143
© Copyright 2008-2010 ABB. 保留所有权利。
4 3HAC032104-010 修订 : C
Page 5
6.4.9 离线使用系统生成器示例 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144
6.4.9.1 两个协调工作机器人的 MultiMove 系统 . . . . . . . . . . . . . . . . . 144
6.4.9.2 支持一个机器人和一个变位机外轴的系统 . . . . . . . . . . . . . . . . 146
6.4.9.3 带变位机系统的选项设置 . . . . . . . . . . . . . . . . . . . . . . . 148
6.5 处理 I/O . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149
6.6 配置系统 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 150
6.7 事件处理 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154
6.8 RAPID 在线查看 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
7 应用菜单 159
7.1 概述 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
7.2 新建工作站 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 160
7.3 屏幕抓图 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161
7.4 打包 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162
7.5 解包 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163
7.6 工作站演示 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164
7.7 RobotStudio 选项 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 166
8 “基本”选项卡 171
8.1 概述 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171
8.2 ABB 模型库 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172
8.3 导入模型库 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173
8.4 机器人系统 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 174
8.5 导入几何体 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 176
8.6 框架 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 177
8.6.1 框架 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 177
8.6.2 三点法创建框架 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 178
8.7 工件坐标 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 179
8.8 工具数据 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 180
8.9 目标点 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181
8.9.1 示教目标点 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181
8.9.2 创建目标点 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182
8.9.3 创建关节坐标 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183
8.9.4 沿边缘创建目标点 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 184
8.10 空路径 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 186
8.11 从曲线创建路径 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 187
8.12 MultiMove . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 189
8.13 示教指令 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 196
8.14 运动指令 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 197
8.15 动作指令 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 198
8.16 指令模板管理器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 199
8.17 Freehand 栏 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 201
8.17.1 移动 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 201
8.17.2 旋转 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202
8.17.3 手动控制关节 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203
8.17.4 手动线性 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 204
8.17.5 Multirobot 微动控制 . . . . . . . . . . . . . . . . . . . . . . . . . . . 205
© Copyright 2008-2010 ABB. 保留所有权利。
8.18 视角 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 206
目表
9 “建模”选项卡 207
9.1 概述 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 207
9.2 组件组 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 208
9.3 空部件 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 209
53HAC032104-010 修订 : C
Page 6
目表
9.4 Smart 组件 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 210
9.4.1 Smart 组件 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .210
9.4.2 Smart 组件编辑器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .211
9.4.3 组成选项卡 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .212
9.4.4 属性与连接选项卡 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .214
9.4.5 信号和连接选项卡 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .217
9.4.6 视图选项卡 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .220
9.4.7 基础 Smart 组件 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .221
9.4.8 属性编辑器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .236
9.4.9 仿真监视器窗口 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .237
9.5 固体 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .239
9.6 表面 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .242
9.7 曲线 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .244
9.8 边界 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .249
9.9 交叉 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .251
9.10 减去 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .252
9.11 结合 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .253
9.12 拉伸表面或曲线 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 254
9.13 从法线生成直线 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 255
9.14 测量组 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .256
9.15 创建机械装置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 257
9.16 创建工具 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263
10 “仿真”选项卡 265
10.1 概述 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .265
10.2 创建碰撞监控 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .266
10.3 仿真设定 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .267
10.4 事件管理器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .268
10.5 工作站逻辑 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .273
10.6 激活机械装置单元 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .274
10.7 仿真控制 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .275
10.8 I/O 仿真器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .276
10.9 监控 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .278
10.10 录制短片 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .279
10.11 传送带跟踪装置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 280
10.11.1 传送带跟踪 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .280
10.11.2 传送带仿真 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .281
11 “在线”和 “离线”选项卡 283
11.1 概述 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .283
11.2 在线和离线选项卡中的通用功能 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 284
11.2.1 事件 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .284
11.2.2 RAPID 编辑器. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .286
11.2.3 RAPID 文件管理 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 288
11.2.3.1 创建新模块 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .288
11.2.3.2 加载模块 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .289
11.2.3.3 模块另存为 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .290
11.2.3.4 加载程序 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .291
11.2.3.5 程序另存为 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .292
11.2.4 RAPID 任务. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 293
11.2.5 输入 / 输出 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 296
11.2.6 ScreenMaker . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .298
11.2.7 重启 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .300
© Copyright 2008-2010 ABB. 保留所有权利。
6 3HAC032104-010 修订 : C
Page 7
目表
11.2.8 备份和恢复 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 301
11.2.8.1 备份系统. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 301
11.2.8.2 由备份恢复系统 . . . . . . . . . . . . . . . . . . . . . . . . . . . 302
11.2.9 系统生成器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 303
11.2.10 配置编辑器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 304
11.2.11 加载参数 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 309
11.2.12 保存参数 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 310
11.2.13 安全配置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 311
11.3 在线特定功能 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 312
11.3.1 添加控制器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 312
11.3.2 请求写权限 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 313
11.3.3 释放写权限 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 314
11.3.4 验证 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 315
11.3.5 文件传送 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 316
11.3.6 示教器查看器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 318
11.3.7 导入选项 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 319
11.3.8 属性 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 320
11.3.9 转为离线 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 323
11.3.10 用户帐号 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 324
11.3.11 用户权限管理查看器 . . . . . . . . . . . . . . . . . . . . . . . . . . . 328
11.4 离线特定功能 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 331
11.4.1 同步到工作站 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 331
11.4.2 同步到虚拟控制器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 332
11.4.3 虚拟示教器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 333
11.4.4 运行模式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 334
11.4.5 控制面板 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 335
11.4.6 关机 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 336
11.4.7 设定任务框架 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 337
11.4.8 系统配置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 338
11.4.9 Encoder 单元 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 340
12 “Add-in”选项卡 341
12.1 概述 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 341
12.2 Visual Studio Tool for Applications . . . . . . . . . . . . . . . . . . . . . . 342
13 右键快捷菜单 (上下文菜单) 343
13.1 添加至路径 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 343
13.2 对准框架方向 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 344
13.3 对准目标点方向 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 345
13.4 安装 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 346
13.5 自动配置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 347
13.6 可达性测试 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 348
13.7 配置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 349
13.8 将框架转化为工件坐标 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 350
13.9 转换为圆弧运动 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 351
13.10 复制 / 应用方向 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 352
13.11 拆除 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 353
© Copyright 2008-2010 ABB. 保留所有权利。
13.12 执行移动指令 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 354
13.13 图形外观 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 355
13.14 插补路径 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 357
13.15 反转 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 358
13.16 跳转到目标点 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 359
13.17 已连接几何体 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 360
13.18 程序库组件 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 361
73HAC032104-010 修订 : C
Page 8
目表
13.19 机械装置手动关节 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .362
13.20 线性手动机械装置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .363
13.21 映射路径 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .364
13.22 映射 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .365
13.23 修改曲线 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .366
13.24 修改外轴 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .370
13.25 修改指令 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .371
13.26 修改机械装置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .372
13.27 修改工具数据 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .373
13.28 修改工件坐标 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .374
13.29 沿路径运动 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .375
13.30 移至姿态 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .376
13.31 放置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .377
13.32 删除未使用的目标点 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .379
13.33 重命名目标点 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .380
13.34 反转路径 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .381
13.35 旋转 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .382
13.36 旋转路径 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .383
13.37 设定本地原点 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .384
13.38 设置垂直于表面 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .385
13.39 设定位置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .386
13.40 工具补偿 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .387
13.41 转换路径 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .388
13.42 查看机器人目标 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .389
13.43 查看目标点处工具 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .390
14 ScreenMaker 选项卡 391
14.1 ScreenMaker 简介 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 391
14.1.1 概述 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .391
14.1.2 开发环境 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .394
14.2 管理 ScreenMaker 工程 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 405
14.2.1 概述 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .405
14.2.2 管理 ScreenMaker 工程 . . . . . . . . . . . . . . . . . . . . . . . . . . . 406
14.2.3 应用程序变量 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .414
14.2.4 窗体设计器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .415
14.2.5 数据连接 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .421
14.2.6 屏幕导航 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .426
14.3 教程 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 427
14.3.1 概述 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .427
14.3.2 设计 FlexArc 操作员面板的操作前提 . . . . . . . . . . . . . . . . . . . . .428
14.3.3 屏幕设计 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .429
14.3.4 创建和部署工程 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .435
14.4 常见问题 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .436
索引 443
© Copyright 2008-2010 ABB. 保留所有权利。
8 3HAC032104-010 修订 : C
Page 9

概述
关于本手册
手册用途
手册阅读对象
概述
本手册介绍了如何使用 RobotStudio 对机器人单元和工作站进行创建、编程和仿
真。它还对离线编程的术语和概念进行了简要的介绍。
RobotStudio 提供如下安装选择:
• 完整安装。
• 自定义安装, 允许用户自定义安装路径并选择安装内容。
• 最小安装, 仅安装 RobotStudio Online 模式。
使用 RobotStudio ( 包括在线和离线模式 ) 时应使用本手册。
本手册专供 RobotStudio 用户使用,如方案工程师,机械设计工程师,离线编程人
员, 机器人技师,技术服务人员,PLC 程序员,机器人程序员及机器人系统集成人
员。
操作前提
章节介绍
© Copyright 2008-2010 ABB. 保留所有权利。
读者应了解以下基本知识:
• 机器人编程
• Windows 一般操作
• 3D CAD 程序
本手册包含如下章节:
章节 内容
1. 简介 本章包括了安装说明,机器人和编程概念术语的介绍以及用户界面的概述。
2. 如何
3. 如何
4. 如何
5. 部署
6. 在线操作本章的介绍了最小化安装的基本功能, 其中包括如何创建系统 (以一个离线
本章介绍了如何在 RobotStudio 环境中构建工作站。
构建
其中包括如何导入及配置需要进行仿真的设备;如何测试可达性以找到最优化
工作
的工作站布局。
站
本章介绍了如何创建包括机器人运动,I/O 信号,过程指令及逻辑在内的
进行
RAPID 程序,以及如何测试及运行程序。
机器
人编
程
本章介绍了如何仿真和测试机器人程序。
仿真
程序
本章介绍了如何在虚拟控制器和真实的 IRC5 控制器之间传输系统;如何复制
及发
程序;如何打包工作站以便将其移动到 RobotStudio 所在的其他计算机上;
行
以及如何进行屏幕抓图。
系统为例);如何处理 I/O 信号及事件;如何配置系统。
下一页继续
93HAC032104-010 修订 : C
Page 10
概述
续前页
章节 内容
7. 应用菜单本章介绍了点击界面左上角 RobotStudio 图标后出现的菜单及菜单上的控件。
8. 基本
9. 建模
10.仿真
11.在线
12.Add-
13.快捷菜单本章介绍了右键快捷菜单上的控件和选项。
14.Scree
本章介绍了如何使用基本选项卡上的控件搭建工作站,创建系统,进行路径编
选项
程和摆放物体。
卡
本章介绍了如何使用建模选项卡上的控件创建及组合工作站构成部件,创建物
选项
体,测量以及进行其他 CAD 操作。
卡
本章介绍了如何使用仿真选项卡上的控件创建,配置,操作,监控及记录仿
选项
真。
卡
本章介绍了在线和离线选项卡上的控件。
和离
使用在线选项卡上的控件可以对真实控制器进行操作。
线选
使用离线选项卡上的控件可以进行对虚拟控制器的操作,如进行同步,配置,
项卡
指定在虚拟控制器上的任务等。
本章介绍了 PowerPac 控件和 VisualStudio Tools for Application (VSTA) 控
ins
件。
选项
卡
本章介绍了 ScreenMaker 开发工具,如何在 ScreenMaker 中操作工程,以及如
nMak
何使用该工具的各种菜单和按钮。
er 选
项卡
参考文档
参考文档 文档号
Product manualIRC5 3HAC021313-001
操作员手册 - IRC5 与 FlexPendant 3HAC16590-10
Technical reference manual - RAPID overview 3HAC16580-1
Technical reference manual - System Parameters 3HAC17076-1
Application manual - MultiMove 3HAC021272-001
Application manual - Conveyor Tracking 3HAC16587-1
© Copyright 2008-2010 ABB. 保留所有权利。
下一页继续
3HAC032104-010 修订 : C10
Page 11
修订信息
概述
续前页
版本号 描述
A 第一版为 RobotStudio 2008, 在客户活动日发布。
本版中包含了 RobotStudio
B 与 RobotStudio 5.12 一起发布。
本版中包括如下更新:
传送带跟踪 第 280 页
•
•
创建传送带跟踪 第 175 页
•
传送带仿真 第 281 页
•
两个机器人共享同一任务框架位置 第 55 页
•
两个机器人系统使用不同的任务框架位置 第 57 页
•
自动创建带外轴的系统 第 59 页
•
手动创建带 RTT 或 IRBTx003 导轨的系统 第 61 页
•
手动创建带 IRBTx004 的系统 第 62 页
•
操作员窗口 第 40 页
•
工作站演示 第 164 页
•
仿真录像 第 279 页
•
视角 第 206 页
•
已连接几何体 第 360 页
C 与 RobotStudio 5.13 一起发布:
• 将在线选项卡和离线选项卡的内容合并为一章。
• 将原 RobotStudio Online 手册中的信息添加至本版手册。
• 添加了关于 ScreenMaker 的内容,请参阅
增添了下列新的章节:
Smart 组件 第 210 页
•
•
仿真监视器窗口 第 237 页
•
文档管理器窗口 第 41 页
•
工作站逻辑 第 273 页
•
仿真设定 第 267 页
更新了与任务框架操作相关的内容:
• 更新了
• 更新了
• 更新了
修改任务框架 第 337 页
摆放机器人 第 80 页
从布局创建系统 第 174 页
Online
。文档内容根据新用户界面进行了调整。
ScreenMaker 第 298 页
。
© Copyright 2008-2010 ABB. 保留所有权利。
113HAC032104-010 修订 : C
Page 12
产品文档 , M2004
产品文档 , M2004
操纵器手册分类
产品手册
操纵器说明文档有多种。以下列表基于文档包含的信息进行分类, 而未考虑产品为
标准型还是选购型。
以下所有文档包含在文档 DVD 光盘中,可从 ABB 定购。这些文档适用于 M2004 操纵
器系统。
所有硬件、操纵器和控制柜在出厂时均附带产品手册。该手册包括以下内容:
• 安全信息
• 安装与调试 (介绍机械安装和电气连接)
• 维护 (介绍所需的预防性维护和维护间隔周期)
• 维修 (介绍所有建议的维修程序及零部件)
• 附加程序 (校准、停用)
• 参考信息 (产品手册、程序、工具清单和安全标准中所参考文档的文档编
号)
• 部件列表
• 折叠式插页或分解图
• 电路图
技术参考手册
应用手册
以下手册介绍了操纵器软件并包含相关参考信息:
• RAPID 概述:RAPID 编程语言概述
• RAPID 指令、功能和数据类型:所有 RAPID 指令、功能和数据类型的描述和语
法。
• RAPID Kernel: RAPID 编程语言的正式描述。
• 系统参数: 系统参数和配置工作流程说明。
特定的应用产品 (例如软件或硬件选项)在 应用手册 中介绍。一本应用手册可能
涵盖一个或多个应用产品。
应用手册通常包含以下信息:
• 应用产品的用途 (作用及使用场合)
• 内容 (如电缆、I/O 电路板、RAPID 指令、系统参数和计算机软件光盘)
• 如何使用应用产品
• 应用产品使用示例
© Copyright 2008-2010 ABB. 保留所有权利。
下一页继续
3HAC032104-010 修订 : C12
Page 13

操作员手册
产品文档 , M2004
续前页
操作员手册说明产品的实际操作过程。这类手册面向直接操作产品的人员,如生产
车间作业员、程序员和检修员。
除相应的操作过程外此类手册还应包括如下内容:
• 紧急安全信息
• 一般安全信息
• 使用入门, IRC5 and RobotStudio
• IRC5 与 FlexPendant
• RobotStudio
• RAPID 简介
• 用于控制器和操纵器的故障排除
© Copyright 2008-2010 ABB. 保留所有权利。
133HAC032104-010 修订 : C
Page 14
安全
安全
人员安全
安全守则
机器人速度慢,但是很重并且力度很大。 在机器人运动过程中的停顿和停止之后都
有可能发生危险。即使可以预测运动轨迹,但外部信号也可能改变操作, 会在没有
任何警告的情况下, 产生料想不到的运动。
因此, 在进入机器人工作区域前请确保所有安全守则都被严格执行。
在开始对机器人进行任何操作之前,请确保已经熟悉了解相关手册中的一般性安全
信息。
© Copyright 2008-2010 ABB. 保留所有权利。
3HAC032104-010 修订 : C14
Page 15
1 简介
1.1 概念和术语
1.1.1. 硬件概念
概述
标准硬件
1 简介
1.1.1. 硬件概念
本节简要介绍了普通 IRC5 机器人单元内的硬件。详细介绍请参阅
中指定的 IRC5 机器人相关手册。
下表列出了 IRC5 机器人单元内的标准硬件。
硬件 说明
机器人操纵器 ABB 工业机器人。
控制模块 包含控制操纵器动作的主要计算机。其中,包括 RAPID 的执行
和信号处理。一个控制模块可以连接至 1 到 4 个驱动模块。
驱动模块 包含电子设备的模块,这些电子设备可为操纵器的电机供电。
驱动模块最多可以包含 9 个驱动单元,每个单元控制一个操纵
器关节。标准机器人操纵器有六个关节,因此,每个机器人操
纵器通常使用一个驱动模块。
FlexController IRC5 机器人的控制器机柜。它包含供系统中每个机器人操纵器
使用的一个控制模块和一个驱动模块。
示教器 与控制模块相连的编程操纵台。
在示教器上编程就是在线编程。
工具 安装在机器人操纵器上,执行特定任务,如抓取、切削或焊接,
的设备。。通常安装在机器人操纵器上。 也可作为固定工具,
请参阅下文详细信息。
参考文档 第 10 页
可选硬件
© Copyright 2008-2010 ABB. 保留所有权利。
下表列出了 IRC5 机器人单元内可能用到的硬件。
硬件 说明
跟踪操纵器 用于放置机器人的移动平台,为其提供更大的工作空间。如果
控制模块可以控制跟踪操纵器的动作,那么该操纵器则被称为
“跟踪外轴”。
定位操纵器 通常用来放置工件或固定装置的移动平台。如果控制模块可以
控制定位操纵器的动作, 那么该操纵器则被称为 “外轴”。
FlexPositioner 用作定位操纵器的第二个机器人操纵器。与定位操纵器一样,
该操纵器也受控制模块的控制。
固定工具 处于固定位置的设备。机器人操纵器选取工件, 然后将其放到
该设备上执行特定任务,比如黏合、研磨或焊接。
工件 被加工的产品。
固定装置 一种构件,用于在特定位置放置工件,以便进行重复生产。
153HAC032104-010 修订 : C
Page 16
1 简介
1.1.2. RobotWare 概念
1.1.2. RobotWare 概念
概述
本节简要介绍了 RobotWare 的相关术语。详细说明请参阅
的 IRC5 机器人相关手册。
RobotWare
下表列出了使用 RobotStudio 时可能用到的 RobotWare 术语和概念。
概念 说明
RobotWare 从概念上讲,RobotWare 是指用于创建 RobotWare 系统的软件和
RobotWare DVD 光盘 随每个控制模块一起提供。光盘中包含 RobotWare 的安装程序
RobotWare 安装 在您工作的计算机上安装 RobotWare 时,会将特定版本的文件
RobotWare 许可密钥 在新建 RobotWare 系统或升级现有系统时使用。RobotWare 许
RobotWare 系统 一组软件文件,加载到控制器之后,这些文件可以启用控制机
RobotWare 版本 每个 RobotWare 版本都有一个主版本号和一个次版本号,两个
媒体库 媒体库是 PC 上的一个文件夹。每个 RobotWare 版本都存储在
参考文档 第 10 页
RobotWare 系统本身。
以及其他相关软件。相关说明请参阅光盘中的发布说明。
安装在媒体库中。RobotStudio 将会使用这些文件创建
RobotWare 系统。
安装 RobotStudio 时,只安装一个 RobotWare 版本。要仿真特
定的 RobotWare 系统,必须在 PC 上安装用于此特定
RobotWare 系统的 RobotWare 版本。
可密钥可以解除包含在系统中的 RobotWare 选项的锁定,还可
以确定构建 RobotWare 系统要使用的 RobotWare 密钥。
在 IRC5 系统中,存在三种类型的 RobotWare 密钥:
• 控制器密钥,用于指定控制器和软件选项。
• 驱动密钥,用于指定系统中的机器人。系统为所使用的
每个机器人分配了一个驱动密钥。
• 附加选项密钥,用于指定附加选项,比如变位机外轴。
使用虚拟许可密钥您可以选择任何 RobotWare 选项,但使用虚
拟许可密钥创建的 RobotWare 系统只能用于虚拟系统,如
RobotStudio。
器人系统的所有功能、配置、数据和程序。
RobotWare 系统使用 RobotStudio 创建。在 PC 和控制模块上都
可以保存和存储这些系统。
RobotWare 系统可以使用 RobotStudio 或示教器进行编辑。
版本号之间使用一个点进行分隔。支持 IRC5 的 RobotWare 版
本是 5.xx,其中 xx 表示次版本号。
每当 ABB 发布新型号机器人时,会发布新的 RobotWare 版本为
新机器人提供支持。
各自相应的文件夹中。
媒体库文件用于创建和实现各种不同的 RobotWare 选项。因
此,创建 RobotWare 系统或在虚拟控制器上运行这些系统时,
必须在媒体库中安装正确的 RobotWare 版本。
中指定
© Copyright 2008-2010 ABB. 保留所有权利。
3HAC032104-010 修订 : C16
Page 17
1.1.3. RAPID 概念
概述
RAPID 结构术语
1 简介
1.1.3. RAPID 概念
本节简要介绍了 RAPID 的基本术语。详细说明请参阅
IRC5 机器人相关手册。
下表列出了使用 RobotStudio 时可能遇到的 RAPID 术语。概念按照大小进行排序,
从最基本的概念开始。
概念 说明
数据声明 用于创建变量或数据类型的实例,如数值或工具数据。
指令 执行操作的实际代码命令,例如将数据设置为特定值或机器人
动作。指令只能在例行程序内创建。
移动指令 创建机器人动作。它们包含对数据声明中指定的目标点的引用,
以及用来设置动作和过程行为的参数。如果使用内嵌目标,将
在移动指令中声明位置。
动作指令 用于执行其它操作而非移动机器人的指令,比如设置数据或同
步属性。
例行程序 通常是一个数据声明集,后面紧跟一个实施任务的指令集。例
行程序可分为三类:程序、功能和陷阱例行程序。
程序 不返回值的指令集。
功能 返回值的指令集。
陷井 中断时触发的指令集。
模块 后面紧跟例行程序集的数据声明集。模块可以作为文件进行保
存、加载和复制。模块分为程序模块和系统模块。
程序模块 (.mod) 可在执行期间加载和卸载。
系统模块 (.sys) 主要用于常见系统特有的数据和例行程序,例如对所有弧焊机
器人通用的弧焊件系统模块。
程序文件 (.pgf) 在 IRC5 中,RAPID 程序是模块文件 (.mod) 和参考所有模块文
件的程序文件 (.pgf) 的集合。加载程序文件时,所有旧的程序
模块将被 .pgf 文件中参考的程序模块所替换。系统模块不受程
序加载的影响。
参考文档 第 10 页
中指定的
© Copyright 2008-2010 ABB. 保留所有权利。
173HAC032104-010 修订 : C
Page 18
1 简介
1.1.4. 编程的概念
1.1.4. 编程的概念
概述
编程概念
本节简要介绍了编程方面的术语。详细介绍请参阅
参考文档 第 10 页
中指定的编程
与 IRC5 机器人方面的手册。
下表列出了机器人编程中所用的术语和概念。
概念 说明
在线编程 与控制模块相连时的编程。该术语也指使用机器人创建位置和
动作。
离线编程 与机器人或控制模块断开连接时的编程。
真正离线编程 指 ABB Robotics 中关于将仿真环境与虚拟控制器相连的概念。
它不仅支持程序创建,而且支持程序测试和离线优化。
虚拟控制器 一种仿真 FlexController 的软件,可使控制机器人的同一软件
(RobotWare 系统)在 PC 上运行。该软件可使机器人在离线和
在线时的行为相同。
MultiMove 使用同一个控制模块运行多个机器人操纵器。
坐标系 用于定义位置和方向。对机器人进行编程时,可以利用不同坐
标系更加轻松地确定对象之间的相对位置。
Frame 即为坐标系。
工作对象校准 如果所有目标点都定义为工作对象坐标系的相对位置,则只需
在部署离线程序时校准工作对象即可。
© Copyright 2008-2010 ABB. 保留所有权利。
3HAC032104-010 修订 : C18
Page 19
1.1.5. 目标点与路径
概述
在 RobotStudio 中对机器人动作进行编程时, 需要使用目标点 (位置)和路径
(向目标点移动的指令序列)。
将 RobotStudio 工作站同步到虚拟控制器时,路径将转换为相应的 RAPID 程序。
目标点
目标点是机器人要达到的坐标。它包含以下信息:
信息 描述
位置 目标点在工件坐标系中的相对位置。
方向 目标点的方向,以工件坐标的方向为参照。当机器人达到目标
配置 用于指定机器人要如何达到目标点的配置值。详细信息请参阅
1.1.5. 目标点与路径
详情请参阅
点时,它会将 TCP 的方向对准目标点的方向。
详情请参阅
机器人轴的配置 第 22 页
坐标系 第 20 页
坐标系 第 20 页
。
。
。
1 简介
路径
移动指令
动作指令
目标点的相关信息同步到虚拟控制器后,将转换为数据类型为
robtarget
的实例。
路径指向目标点移动的指令顺序。 机器人将按路径中定义的目标点顺序移动。
路径信息同步到与虚拟控制器后将转换为例行程序。
移动指令包括:
• 参考目标点
• 动作数据,例如动作类型、速度和区域
• 参考工具数据
• 参考工作对象
动作指令是用于设置和更改参数的 RAPID 字符串。 动作指令可插入路径中的指令目
标之前、之后或之间。
© Copyright 2008-2010 ABB. 保留所有权利。
193HAC032104-010 修订 : C
Page 20
1 简介
1.1.6. 坐标系
1.1.6. 坐标系
概述
层次结构
大地坐标系
控制器大地坐标系
本节简要介绍了离线编程时常用的坐标系。在 RobotStudio 中,可以使用下面介绍
的所有坐标系,以及用户定义的坐标系,使对象和元素彼此关联。
坐标系以层次结构方式相互关联,其中每个坐标系的原点定义为其祖先坐标系内的
位置。下面从层次结构的顶部开始介绍常用的坐标系。
大地坐标系表示整个工作站或机器人单元。 这是与所有其它坐标系关联的层次结构
的顶部。
控制器大地坐标系是与一个控制器关联的所有坐标系的祖先。对于只有一个控制器
的工作站,控制器大地坐标系和大地坐标系通常一致。
任务框架坐标系
基坐标系
工具中心点坐标系
任务框架坐标系在工作站和机器人单元中非常有用,尤其是对多机器人和机械装置
的工作站。您可以为多个机械装置定义同一个任务框架坐标,或针对 MultiMove
Independent 工作站定义多个任务框架坐标。
工作站内的每个机器人都有一个基坐标系,该坐标系始终位于机器人的基座。
工具中心点坐标系也称为 TCP,它是工具的中心点。我们可以为一个机器人定义几
个不同的 TCP。所有机器人都在机器人工具安装点处有一个预定义的 TCP,其名称为
tool0
。
程序运行时,机器人会将 TCP 移动到编程位置。
© Copyright 2008-2010 ABB. 保留所有权利。
下一页继续
3HAC032104-010 修订 : C20
Page 21
工件坐标系
1 简介
1.1.6. 坐标系
续前页
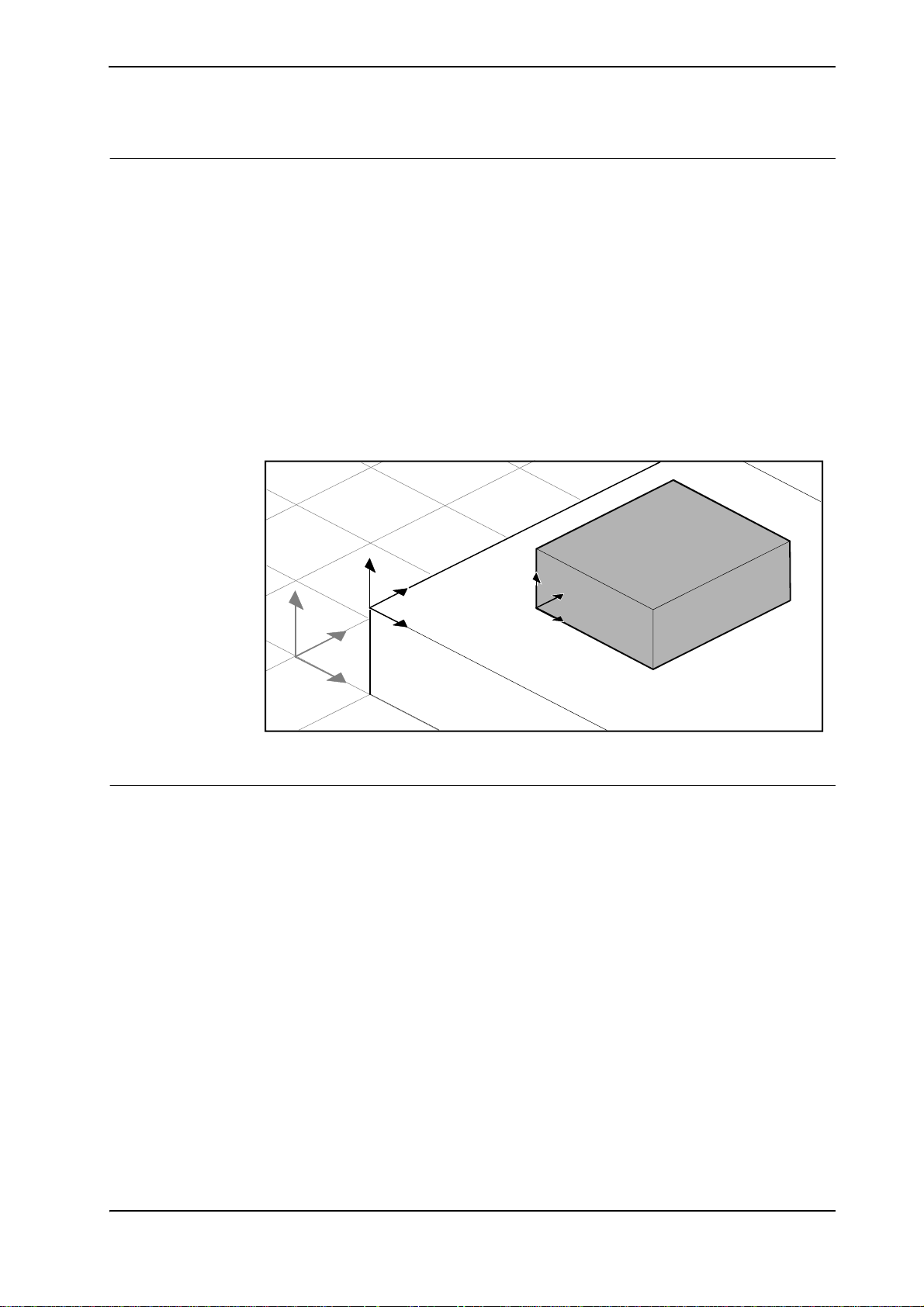
工件坐标系通常表示实际工件。它由两个坐标系构成:
中,后者是前者的子框架。对机器人进行编程时,所有目标点 (位置)都与工作对
象的对象框架相关。如果未指定其它工作对象,目标点将与默认的
wobj0 始终与机器人的基座保持一致。
如果工件的位置已经更改,使用工件坐标系可以轻松地调整机器人程序偏移。因此,
工件坐标可以用于校准离线程序。如果固定装置 / 工件在实际工作站内相对于机器
人的位置与离线工作站内的位置不相符,则只需调整工件坐标的位置即可。
工件坐标也用于调整动作。 如果工作对象与机械单元连接 (而系统使用
coordinated motions 选项),在机械单元移动工作对象时,机器人也能在工件坐标
系内找到目标点。
在下图中,灰色坐标系是大地坐标系,而黑色坐标系是工作对象的对象框架和用户
框架。这里,用户框架位于表格 / 固定装置处,而对象框架位于工件处。
用户框架
和
对象框架
Wobj0
关联,
。其
用户坐标系
© Copyright 2008-2010 ABB. 保留所有权利。
xx0500001519
用户坐标系简称为 UCS,根据您的需要创建相应的参照点。例如,可以在工件的策
略点处创建 UCS,以便于编程。
213HAC032104-010 修订 : C
Page 22
1 简介
1.1.7. 机器人轴的配置
1.1.7. 机器人轴的配置
轴配置
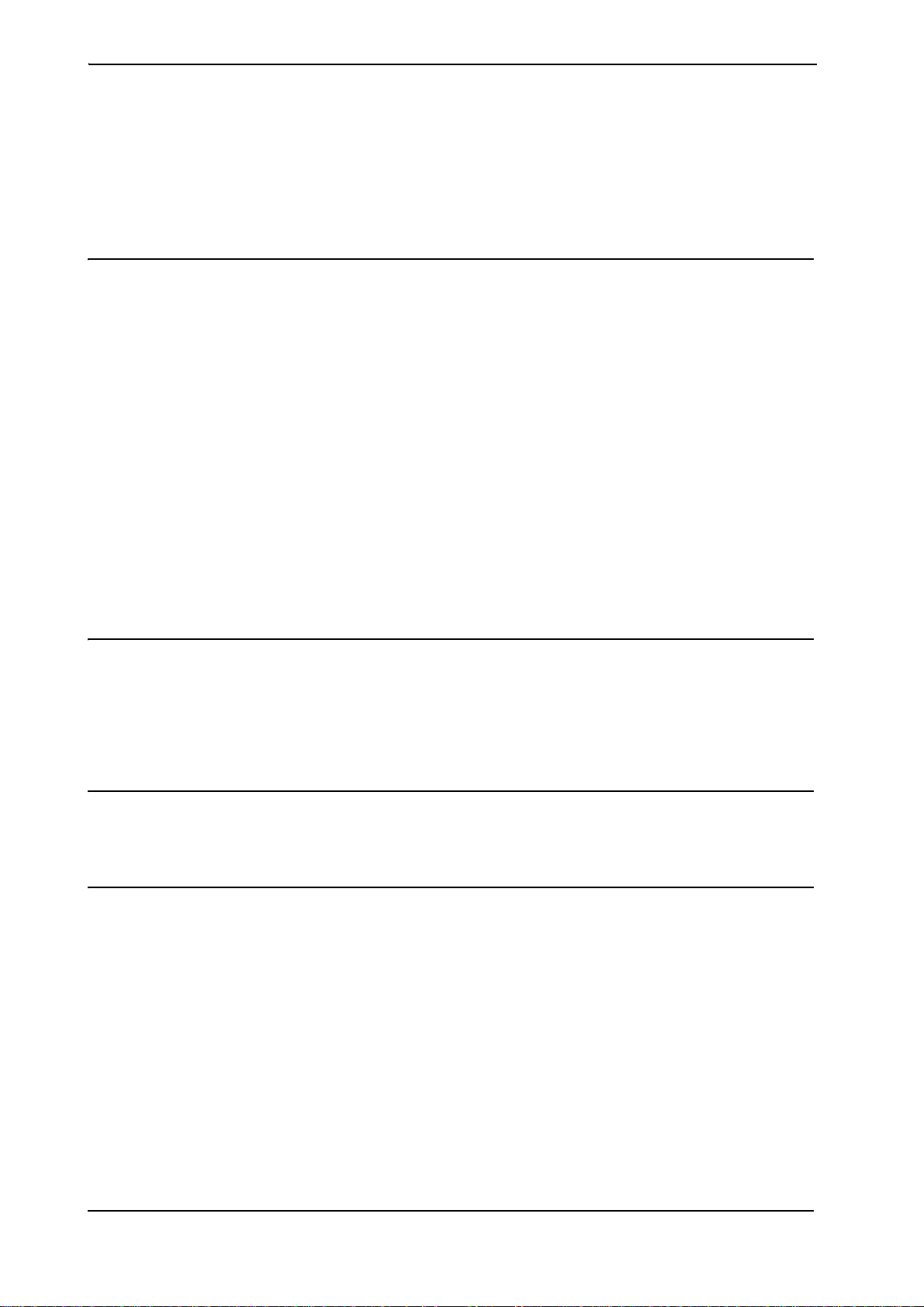
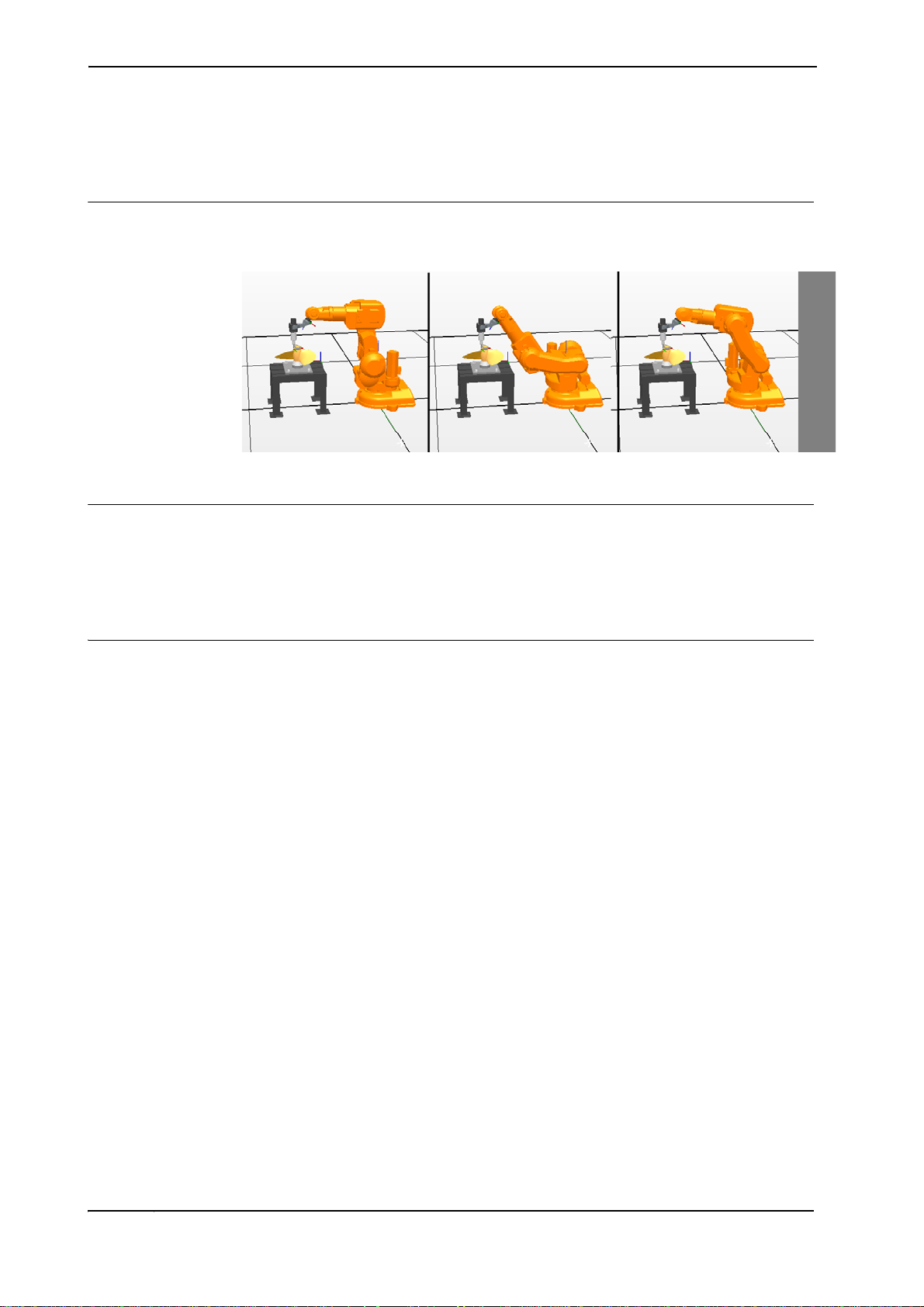
目标点定义并存储为 WorkObject 坐标系内的坐标。控制器计算出当机器人到达目标
点时轴的位置,它一般会找到多个配置机器人轴的解决方案。
xx0500002365
为了区分不同配置,所有目标点都有一个配置值,用于指定每个轴所在的四元数。
在目标点中存储轴配置
对于那些将机器人微动调整到所需位置之后示教的目标点,所使用的配置值将存储
在目标中。
凡是通过指定或计算位置和方位创建的目标,都会获得一个默认的配置值
(0,0,0.0),该值可能对机器人到达目标点无效。
与机器人轴配置有关的常见问题
在多数情况下,如果创建目标点使用的方法不是微动控制,则无法获得这些目标的
默认配置。
即便路径中的所有目标都已验证配置,如果机器人无法在设定的配置之间移动,运
行该路径时可能也会遇到问题。如果轴在线性移动期间移位幅度超过 90 度,可能会
出现这种情况。
重新定位的目标点会保留其配置,但是这些配置不再经过验证。因此,移动到目标
点时,可能会出现上述问题。
配置问题的常用解决方案
要解决上述问题,可以为每个目标点指定一个有效配置,并确定机器人可沿各个路
径移动。此外,可以关闭配置监控,也就是忽略存储的配置,使机器人在运行时找
到有效配置。如果操作不当,可能无法获得预期结果。
在某些情况下,可能不存在有效配置。为此,可行的解决方案是重新定位工件,重
新定位目标点 (如果过程接受),或者添加外轴以移动工件或机器人,从而提高可
到达性。
© Copyright 2008-2010 ABB. 保留所有权利。
下一页继续
3HAC032104-010 修订 : C22
Page 23

如何表示配置
1 简介
1.1.7. 机器人轴的配置
续前页
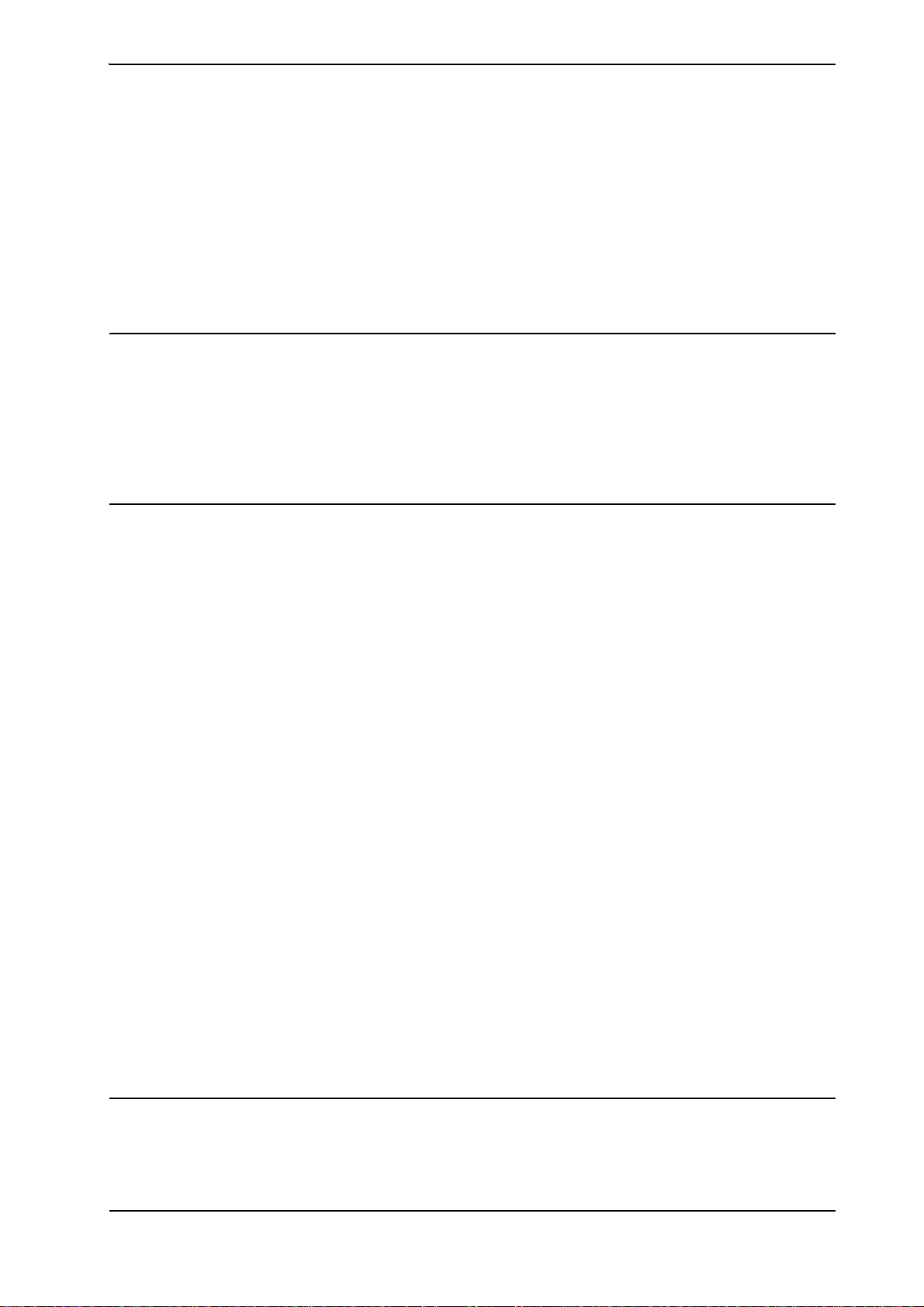
机器人的轴配置使用四个整数系列表示,用来指定整转式有效轴所在的象限。象限
的编号从 0 开始为正旋转 (逆时针),从 -1 开始为负旋转 (顺时针)。
对于线性轴,整数可以指定距轴所在的中心位置的范围 (以米为单位)。
六轴工业机器人的配置 (如 IRB 140)如下所示:
[0 -1 2 1]
第一个整数 (0) 指定轴 1 的位置: 位于第一个正象限内 (介于 0 到 90 度的旋
转)。
第二个整数 (-1) 指定轴 4 的位置: 位于第一个负象限内 (介于 0 到 -90 度的旋
转)。
第三个整数 (2) 指定轴 6 的位置: 位于第三个正象限内 (介于 180 到 270 度的
旋转)。
第四个整数 (1) 指定轴 x 的位置,这是用于指定与其它轴关联的手腕中心的虚拟
轴。
配置监控
关闭配置监控
打开配置监控
执行机器人程序时,可以选择是否监控配置值。如果关闭配置监控,将忽略使用目
标点存储的配置值,机器人将使用最接近其当前配置的配置移动到目标点。如果打
开配置监控,则只使用指定的配置伸展到目标点。
您可以分别关闭或打开关节和线性移动的配置监控,并由 ConfJ 和 ConfL 动作指令
控制。
如果在不使用配置监控的情况下运行程序,每执行一个周期时,得到的配置可能会
有所不同:机器人在完成一个周期后返回起始位置时,可以选择与原始配置不同的
配置。
对于使用线性移动指令的程序,可能会出现这种情况:机器人逐步接近关节限值,
但是最终无法伸展到目标点。
对于使用关节移动指令的程序,可能会导致完全无法预测的移动。
如果在使用配置监控的情况下运行程序,会强制机器人使用目标点中存储的配置。
这样,循环和运动便可以预测。但是,在某些情况下,比如机器人从未知位置移动
到目标点时,如果使用配置监控,可能会限制机器人的可到达性。
离线编程时,如果程序要使用配置监控执行,则必须为每个目标指定一个配置值。
© Copyright 2008-2010 ABB. 保留所有权利。
233HAC032104-010 修订 : C
Page 24
1 简介
1.1.8. 关于程序库、几何体和 CAD 文件
1.1.8. 关于程序库、几何体和 CAD 文件
概述
如果在 RobotStudio 中编程或仿真,需要使用工件和设备的模型。一些标准设备的
模型作为程序库或几何体随 RobotStudio 一起安装。如果拥有工件和自定义设备的
CAD 模型,也可以将这些模型作为几何体导入 RobotStudio。如果没有设备的 CAD
文件,可以在 RobotStudio 中创建该设备的模型。
几何体和程序库之间的区别
导入工作站的对象可以是几何体,也可以是程序库文件。
从根本上讲,几何体就是 CAD 文件。这些文件在导入后可以复制到 RobotStudio 工
作站。
程序库文件是指在 RobotStudio 中已另存为外部文件的对象。导入程序库时,将会
创建工作站至程序库文件的连接。因此,工作站文件不会像导入几何体时一样增加。
此外,除几何数据外,程序库文件可以包含 RobotStudio 特有的数据。例如,如果
将工具另存为程序库,工具数据将与 CAD 数据保存在一起。
如何构建几何体
导入及转换 CAD 文件
导入的几何体显示为“对象”浏览器中的一个部件。如果选择 RobotStudio 的建模
选项卡,可以看到该几何体的组件。
几何体的顶部节点称为部件。 部件包含各种物体,其类型可以是固体、表面或曲
线。
固体 是 3D 对象,包含各种表面。 真正的 3D 固体可以通过包含多个表面的一个物
体表示。
表面 是只有一个表面的 2D 对象。如果一个部件包含多个物体 (由 3D 对象构成),
而只有一个表面,且由 2D 表面创建,则该部件不是真正的 3D 固体。如果未正确创
建这些部件,可能会导致显示和图形编程问题。详细信息请参阅
何体 第 70 页
弯曲 物体,只使用 “建模”浏览器中的物体节点表示,不包含任何子节点。
使用 RobotStudio 中的建模选项卡时,可以通过添加、移动、重新排列或删除物体
来编辑部件。这样,便可通过删除不必要的物体来优化现有的部件,还可通过组合
多个物体来新建部件。
对于从 CAD 文件导入几何体,您可以使用 RobotStudio 的导入功能。 详细信息请参
阅
导入工作站组件 第 67 页
如果要将 CAD 文件转换为其它格式或要默认转换设置,再行导入,则可以使用导入
之前通过 RobotStudio 安装的 CAD 转换器。详细信息请参阅
页
。
。
。
故障排除和优化几
转换 CAD 格式 第 69
© Copyright 2008-2010 ABB. 保留所有权利。
下一页继续
3HAC032104-010 修订 : C24
Page 25
支持的 CAD 格式
1 简介
1.1.8. 关于程序库、几何体和 CAD 文件
续前页
部分 CAD 格式需要独立许可,才能使用 RobotStudio 导入或转换。 下表显示了支持
的 CAD 格式以及是否需要许可:
格式 文件扩展名 许可要求 默认目标格式
Acis,
支持读/写:V6到
R20
Iges,
支持读的版本到 5.3
支持写的版本:5.3
Step,
支持读:AP203 和
AP214 (仅支持几何
体)
支持写:AP214
Vdafs,
支持读:到 2.0
支持写:到 2.0
Catia V4,
支持读:4.1.9 到
4.2.4
Catia V5,
支持读:R2-R19
Pro/Engineer,
支持读:16 到
Wildfire3
Inventor,
支持读:6 到 2010
Vrml wrl, vrml,vrml1,
Jupiter, 到 6.4 jt No RsGfx
STL stl No RsGfx
PLY ply No RsGfx
3DStudio 3ds No RsGfx
sat No Iges, Step, Vdafs
igs, iges Yes Acis, Step, Vdafs
stp, step, p21 Yes Acis, Step, Vdafs
vda, vdafs Yes Acis, Iges, Step
model, exp Yes Acis, Iges, Step,
Vdafs
CATPart, CATProduct Yes Acis, Iges, Step,
Vdafs
prt, asm Yes Acis, Iges, Step,
Vdafs
ipt Yes Acis, Iges, Step,
Vdafs
No RsGfx
vrml2
数学表达与几何体
© Copyright 2008-2010 ABB. 保留所有权利。
在转换需许可的格式时, 需要源格式和目标格式的许可。
CAD 文件中的几何体通过数学式表达。 当该几何体导入 RobotStudio 时数学表达转
化为显示在图形窗口中的图形化表达,表达为图形窗口中的部件。
对于这种图形表达式,可以设置详情等级,进而减少大模型的文件大小和渲染时间,
并改善可能要放大的小模型的可视化显示效果。详情等级只影响可视化显示;从模
型创建的路径和曲线将准确反映其粗细设置。
您也可以将仅有简单图形表达而没有数学表达的文件导入。在这种情况下,
RobotStudio 的一些功能,如捕捉模式,由图形创建曲线等将不适用于此种类型的部
件。
有关细节等级的信息请参阅
RobotStudio 选项 第 166 页
。
253HAC032104-010 修订 : C
Page 26

1 简介
1.1.9. 关于将 VSTA 用作 IDE
1.1.9. 关于将 VSTA 用作 IDE
概述
RobotStudio 可将 Microsoft Visual Studio Tools for Applications (VSTA) 用
作集成开发环境 (IDE),使高级用户可以扩展和定制功能。例如,可以使用 C# 或
VB.Net 写入附加项,以便在执行期间创建工具栏或宏,调试代码或检查变量值。
此外,Add-ins 浏览器可以作为单个窗口,供 VSTA 附加项和 VSTA 之外
RobotStudio 特有的附加项 (即 PowerPacs)使用。
详情请参阅
Add-ins 类型
“Add-ins”浏览器可以提供以下附加项:
对象 描述
PowerPac 符合 RobotStudio 的规范要求,但是不属于 VSTA 系统本身的
VSTA 工作站附加项 已连接到工作站,并保存到工作站文件中的 VSTA 插件。
VSTA 用户附加项 尚未连接到工作站,且只在当前用户的计算机上处于活动状态
Visual Studio Tool for Applications 第 342 页
Add-in。
的 VSTA 插件。
。
使用 Add-In 浏览器的快捷菜单,可加载或自动加载 PowerPacs,而可从工作站添
加、加载、卸载、重新加载、自动加载、编辑、删除或移除 VSTA 插件。
© Copyright 2008-2010 ABB. 保留所有权利。
3HAC032104-010 修订 : C26
Page 27
1.2. 安装并许可 RobotStudio
安装 RobotStudio
注意! 在安装前请确保使用管理员帐号登录您要安装 RobotStudio 的 PC。
RobotStudio 提供以下两个功能级别:
• 基本版:提供所选的 RobotStudio 功能,如配置,编程和运行虚拟控制器。还
可以通过以太网对实际控制器进行编程,配置和监控等在线操作。
• 高级版:提供 RobotStudio 所有的离线编程功能和多机器人仿真功能。高级版
中包含基本版中的所有功能。要使用高级版需进行激活。
除高级功能外,您还可以选择 PowerPac 等附加功能以及 CAD 转换选项。
• PowerPac 针对不同的应用提供相应的增强功能。
• CAD 转换选项支持导入不同版本 CAD。
RobotStudio 提供如下安装选择:
• 最小化安装: 仅提供通过以太网对真实控制器进行编程,配置和监控的功能。
选择此选项进行安装,只有在线选项卡可用。
• 完整安装: 安装运行完整 RobotStudion 所需的所有功能。选择此安装选项,
您可以使用基本版和高级版的所有功能。
• 自定义安装: 安装用户自定义的功能。选择此安装选项,您可以选择不安装
您不需要的机器人库文件和 CAD 转换器。
1 简介
1.2. 安装并许可 RobotStudio
如何在 PC 上安装 RobotStudio
© Copyright 2008-2010 ABB. 保留所有权利。
步骤说明
1. 将安装机器人软件所需的 DVD 光盘插入 PC.
• 若 DVD 菜单自动运行, 请执行步骤 5。
• 若 DVD 菜单没有自动运行, 请执行步骤 2。
2. 在 开始 菜单上单击 运行。
3. 在 打开 框中, 在 DVD 盘符后输入 :\launch.exe。
例如:若光驱为 D 盘则输入 D:\launch.exe。
4. 单击 确定。
5. 从 DVD 菜单中选择所需的语言。
6. 在 DVD 菜单中,单击 安装。
7. 在安装菜单上单击 RobotStudio,打开安装向导。该安装向导会帮助您完成剩余的安装
步骤。
8. 按照安装向导上的说明, 选择 最小化安装 ,完整安装 或 自定义安装。
9. 安装 RobotWare。
在安装菜单上单击 RobotWare,打开安装向导。该安装向导会帮助您完成剩余的
RobotWare 安装步骤。
10. 注意! 步骤 9 和 10 为可选操作。安装导轨程序库。
在安装菜单上,单击 附加选项,打开浏览器。该浏览器上显示了导轨媒体库和其他可
用的选项的安装。
11. 双击 TrackMotion 文件夹中的 file Setup.exe 文件打开安装向导。
12. 在正确安装后请按下列步骤激活 RobotStudio。
注意 ! 在激活 RobotStudio 前, 您在 30 天的试用期内可以使用 RobotStudio 的高级功
能。最小化安装,或基本版功能的完整安装或自定义安装不需进行激活。
下一页继续
273HAC032104-010 修订 : C
Page 28
1 简介
1.2. 安装并许可 RobotStudio
续前页
激活 RobotStudio
若要持续使用 RobotStudio 所有功能,您需要激活您的 RobotStudio。
RobotStudio 产品激活系统基于微软的反盗版技术以确保软件产品被合法授权。
激活过程请确保该激活密钥被不超过许可证允许数目的个人电脑使用。
激活 RobotStudio
当安装完成后第一次启动 RobotStudio,您需要输入一个 25 位的激活码 (xxxxxxxxxx-xxxxx-xxxxx-xxxxx).
试用期
在输入激活码之前, 您在 30 天试用期内可使用软件的全部功能。
注意 ! 试用期自安装之日起。
安装激活密钥后, 您仅能使用您所购买的功能。
注意!在试用期期间激活产品,您将失去剩余的试用时间。
基本功能模式
试用期到期后,若没有及时激活产品, 则您仅能使用有限的基本功能。在基本功能
模式中,您只能使用在线功能和虚拟控制器的基本功能。基本功能模式不会损坏您
现有的文件和工作站。在激活后, 您就可以使用您所购买的所有功能了。
附注
您若仅需使用在线功能,如通过以太网与实际控制柜相连进行编程、配置、监测等
操作, 则不需激活。
通过网络自动激活或手动激活
激活向导提供了如下两种激活方式。
通过因特网自动激活 (推荐)
当您选择
授权服务器。 若您使用的合法的激活密钥并且没有超过许可证允许的最大安装数
目, 您的产品即被激活。
通过因特网激活时, 您的激活请求被发送至 ABB,随后您的许可密钥会自动安装,
安装完成后您的产品就可以使用了。当您选择通过因特网激活但是当前没有连接,
激活向导会提示您当前没有网络连接。
手动激活
如果安装 RobotStudio 的计算机没有网络连接,您需要选择
建一个授权文件。按照向导的提示信息进行操作, 输入激活密钥并保存授权请求文
件。使用移动存储工具如 USB 存储盘或软盘将该文件转移到有网络连接的计算机上。
登陆
http://www.101.abb.com/manualactivation/
的说明进行操作,您将得到一个授权文件。 将该授权文件保存并转移到安装有需要
激活产品的计算机上。重启激活向导,并选择
操作,选择您刚刚获得的授权文件进行安装。安装完成后您的产品即被激活。您的
产品可以使用了。
通过因特网激活 RobotStudio
后, 激活向导通过您的网络自动连接到 ABB
创建授权请求文件
进入手动激活页面。按照页面上
安装授权文件。
按照向导的说明进行
以创
© Copyright 2008-2010 ABB. 保留所有权利。
下一页继续
3HAC032104-010 修订 : C28
Page 29
稍后激活
如果你不想在安装后即刻激活您的产品,您可以选择稍后激活。
使用下列步骤启动激活向导。
如果您在激活过程中发现问题,请通过
mail 地址联系您当地的 ABB 客户支持代表。
步骤说明
1. 单击 RobotStudio 按钮 , 单击 RobotStudio 选项 按钮然后选择 授权。
2. 单击 激活向导 以打开激活向导。
3. 激活 RobotStudio 后, 您所订购的软件即拥有了合法授权。
当前安装的 RobotStudio 版本
当 RobotStudio 启动时,版本信息显示在开始页面上。
如何察看 RobotStudio 激活状态
1.2. 安装并许可 RobotStudio
www.abb.com/robotics
1 简介
续前页
上提供的电话及 e-
步骤说明
1. 单击 RobotStudio 按钮, 单击 RobotStudio 选项 按钮然后选择 授权。
2. 单击 查看已安装授权文件 来查看您当前授权文件的状态。
3. 若您已激活 RobotStudio, 您所订购的软件即拥有了合法授权。
© Copyright 2008-2010 ABB. 保留所有权利。
293HAC032104-010 修订 : C
Page 30
1 简介
1.3.1. 图形化界面
1.3 图形化界面
1.3.1. 图形化界面
概述
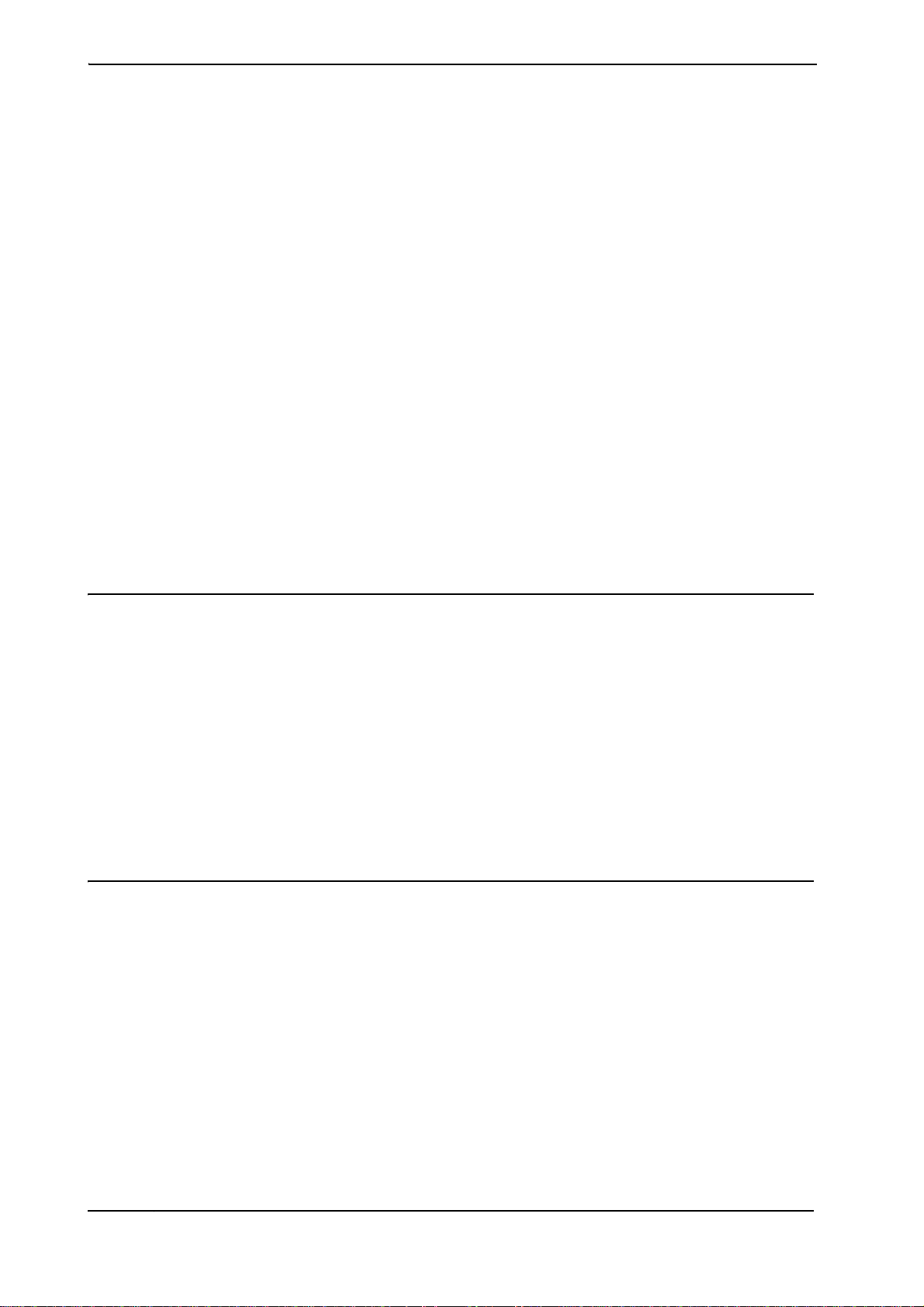
本节提供了对图形化界面上不同部分的介绍。
en0900000215
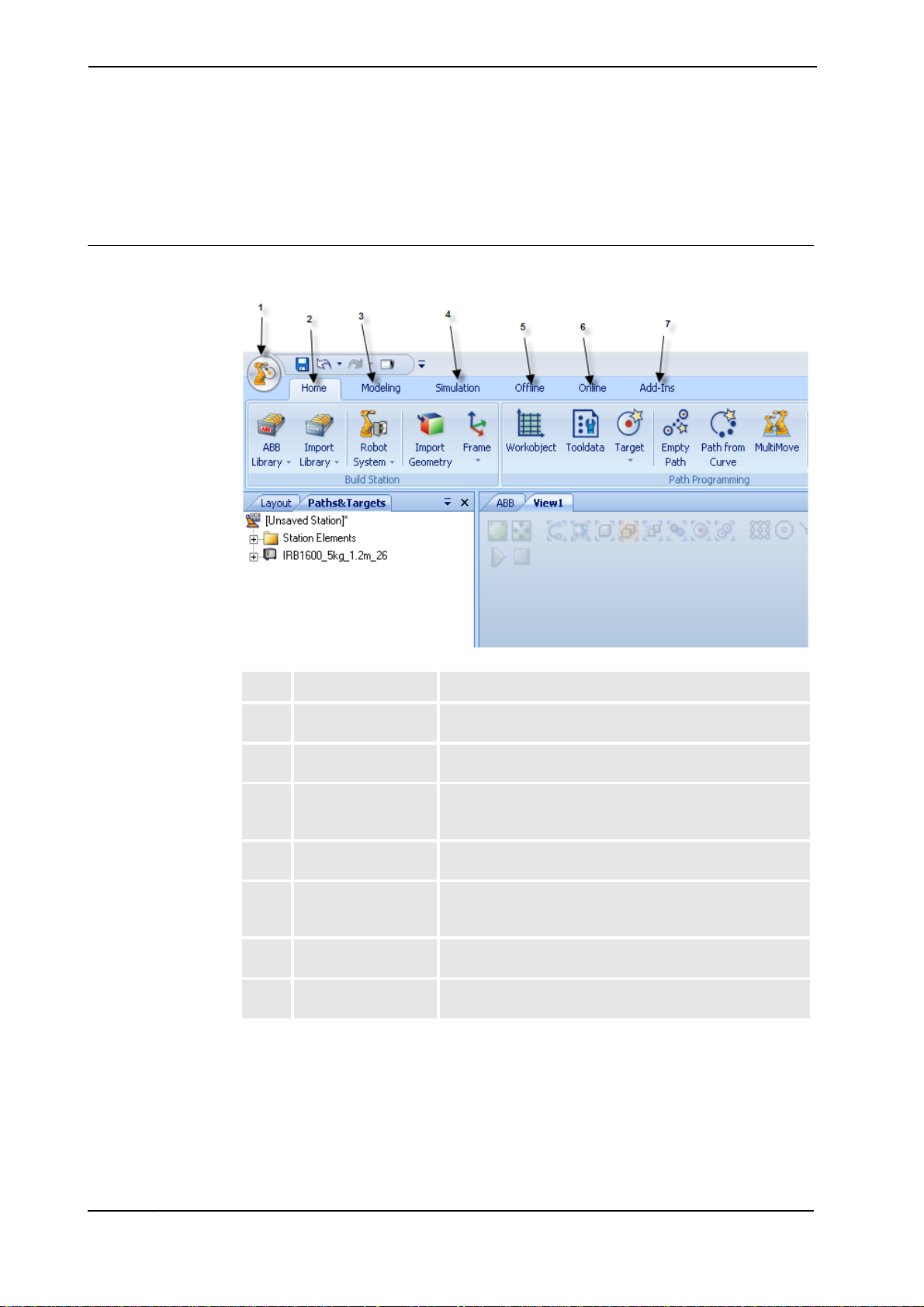
部件 描述
1 应用菜单 单击用户界面左上角的 RobotStudio 图标打开应用菜单。
请参阅
应用菜单 第 159 页
2 基本选项卡 包含搭建工作站,创建系统,编程路径和摆放物体所需的
控件。详细信息请参阅
3 建模选项卡 包含创建和分组工作站组件,创建实体,测量以及其他 CAD
操作所需的控件。详细信息请参阅
。
页
4 仿真选项卡 包含创建、控制、监控和记录仿真所需的控件。详细信息
请参阅
“仿真”选项卡 第 265 页
5 离线选项卡 包含对虚拟控制器 (VC)进行同步,配置和任务分配所需
的控件。详细信息请参阅
283 页
。
6 在线选项卡 包含对真实控制器进行操作所需的控件。详细信息请参阅
“在线”和 “离线”选项卡 第 283 页
7 Add-ins 选项卡 包含 PowerPac 和 VSTA 的相关控件。详细信息请参阅
“Add-in”选项卡 第 341 页
。
“基本”选项卡 第 171 页
“建模”选项卡 第 207
。
“在线”和 “离线”选项卡 第
。
。
。
© Copyright 2008-2010 ABB. 保留所有权利。
3HAC032104-010 修订 : C30
Page 31

1.3.2. “开始”窗口
概述
开始窗口由以下几个选项卡组成:
选项卡 描述
1 简介
1.3.2. “开始”窗口
最近打开 ...
离线
最近连接的控制器
在线
信息 使用本选项卡获得帮助信息,浏览教程, 连接到在线社区,管
使用本选项卡打开并预览最近的工作站, 您可选择新建工作站
或打开一个已保存的工作站。
使用本选向卡打开最近的控制器,您可选择一键连接或添加一
个控制器。
理您的授权或浏览 RobotStudio 新闻。
© Copyright 2008-2010 ABB. 保留所有权利。
313HAC032104-010 修订 : C
Page 32
1 简介
1.3.3. “布局”浏览器
1.3.3. “布局”浏览器
概述
布局浏览器中分层显示工作站中的项目,如机器人和工具等。
图标
图标 节点 描述
xx0500001364
xx0500001365
机器人 工作站内的机器人。图标右下角的红锁表明对象
已连接至程序库。
工具 工具。
链接集合 包含对象的所有链接。
xx0500001366
xx0500001367
xx0500001478
xx0500001368
xx0500001369
xx0500001370
xx0500001371
链接 关节连接中的实际对象。每个链接由一个或多个
部件组成。
框架 包含对象的所有框架。
组件组 部件或其它组装件的分组,每组都有各自的坐标
系。它用来构建工作站。
部件 RobotStudio 中的实际对象。包含几何信息的部
件由一个或多个 2D 或 3D 实体组成。不包含几
何信息的部件 (例如,导入的 .jt 文件)为空。
碰撞集 包含所有的碰撞集。每个碰撞集包含两组对象。
对象组 包含接受碰撞检测的对象的参考信息。
碰撞集机械装置 碰撞集中的对象。
xx0500001479
xx0500001372
框架 工作站内的框架。
© Copyright 2008-2010 ABB. 保留所有权利。
3HAC032104-010 修订 : C32
Page 33

1.3.4. “路径和目标点”浏览器
概述
路径和目标点浏览器分层显示了非实体的各个项目。
图标
图标 节点 说明
工作站 RobotStudio 中的工作站。
xx0500001373
虚拟控制器 用来控制机器人的系统,例如真实的 IRC5 控制
xx0500001374
任务 包含工作站内的所有逻辑元素,例如目标、路
1 简介
1.3.4. “路径和目标点”浏览器
器。
径、工作对象、工具数据和指令。
© Copyright 2008-2010 ABB. 保留所有权利。
xx0500001375
工具数据集合 包含所有工具数据。
xx0500001376
工具数据 用于机器人或任务的工具数据。
xx0500001471
工件坐标与目标点 包含用于任务或机器人的所有工件坐标和目标
点。
xx0500001377
接点目标集合与接点目标 机器人轴的指定位置。
xx0500001477
工件坐标集合和工件坐标 工件坐标集合节点和该节点中包含的工件坐标。
xx0500001378
目标点 定义的机器人位置和旋转。目标点相当于 RAPID
程序中的 RobTarget。
xx0500001379
不带指定配置的目标点 尚未指定轴配置的目标点,例如,重新定位的目
标点或通过微动控制之外的方式创建的新目标
点。
xx0500001849
不带已找到配置的目标点 无法伸展到的目标点,即尚未找到该目标点的轴
配置。
xx0500001850
路径集合 包含工作站内的所有路径。
xx0500001380
下一页继续
333HAC032104-010 修订 : C
Page 34
1 简介
1.3.4. “路径和目标点”浏览器
续前页
图标 节点 说明
xx0500001381
xx0500001474
xx0500001851
xx0500001475
路径 包含机器人的移动指令。
线性移动指令 到目标点的线性 TCP 运动。如果尚未指定目标点
的有效配置,移动指令就会得到与目标点相同的
警告符号。
关节移动指令 目标点的关节动作。如果尚未指定目标的有效配
置,移动指令就会得到与目标点相同的警告符
号。
动作指令 定义机器人的动作,并在路径中的指定位置执
行。
© Copyright 2008-2010 ABB. 保留所有权利。
3HAC032104-010 修订 : C34
Page 35

1.3.5. “建模”浏览器
概述
建模浏览器显示了所有可编辑对象及其构成部件。
图标
图标 节点 说明
xx0600002704
xx0600002705
1 简介
1.3.5. “建模”浏览器
部件 与布局 浏览器中的对象对应的几何项目。
物体 包含各种部件的几何构成块。3D 物体包含多个表
面,2D 物体包含一个表面,而曲线物体不包含表
面。
表面 物体的表面
xx0600002706
© Copyright 2008-2010 ABB. 保留所有权利。
353HAC032104-010 修订 : C
Page 36

1 简介
1.3.6. “在线”浏览器和 “离线”浏览器
1.3.6. “在线”浏览器和 “离线”浏览器
概述
在线浏览器和离线浏览器分层显示了控制器和相应的配置元素。
图标
图标 节点 描述
控制器 包含连接至当前机器人监控窗口 (RobotView)的控制器。
xx0300000026
已连接控制器 表示已经连接至当前网络的控制器。
xx0300000027
正在连接的控制器 表示一个正在连接的控制器。
xx0400000677
xx0300000028
xx0600003287
xx0300000029
xx0300000030
已断开的控制器 表示断开连接的控制器。该控制器可能被关闭或从当前网络
断开。
拒绝登录 表示拒绝您登录请求的控制器。拒绝登录可能有以下原因:
• 您所使用的用户帐号没有登录权限。
• 太多客户端连接至当前控制器。
• 控制器的 RobotWare 版本比 RobotStudio 的 RobotWare
版本更新。
配置 包含配置主题。
主题 每个节点表示一个主题:
• Communication
• Controller
• I/O
• Man-machine communication
• Motion
事件日志 通过事件日志您可以查看或保存控制器事件信息。
xx0300000037
xx0300000434
xx0300000433
I/O 系统 表示控制器 I/O 系统。I/O 系统由 I/O 总线和 I/O 单组成。
© Copyright 2008-2010 ABB. 保留所有权利。
I/O 总线 I/O 总线连接一个或多个 I/O 单元。
下一页继续
3HAC032104-010 修订 : C36
Page 37

xx0300000432
xx0300000031
xx0300000032
xx0300000431
1 简介
1.3.6. “在线”浏览器和 “离线”浏览器
续前页
I/O 单元 I/O 单元指拥有端口的面板或其他设备,可以用来设置 I/O
信号。
RAPID 任务 包括控制器上活动状态的任务 (程序)。
任务 任务即为机器人程序,可已单独执行也可以和其他程序一起
执行。
程序由一组模块组成。
模块 包含程序模块或系统模块。
程序模块 程序模块包含一组数据声明和针对指定任务的例行程序。程
序模块中包含程序特定的数据。
xx0300000430
xx0300000428
xx
xx
xx0300000429
xx0300000034
系统模块 系统模块包含一组类型定义,数据声明和例行程序。系统模
块包含应用于机器人系统的数据,不论加载了任何程序模块
这些数据都不受影响。
加密模块 被锁住的模块,不能查看或编辑。
Nostepin 模块 在逐步执行时不能进入的模块。在程序逐步执行时,该模块
中的所有指令被视作一条指令。
Procedure 不返回值的例行程序。过程用作子程序。
Function 返回特定类型值的例行程序。
陷阱 对中断作出反映的例行程序。
xx0300000036
© Copyright 2008-2010 ABB. 保留所有权利。
xx0300000039
xx0300000038
文档文件夹 存储相应文档和文件的链接的文件夹。
文档链接 链接到文档。文档图标和 Windows 的文档图标一样。
373HAC032104-010 修订 : C
Page 38

1 简介
1.3.7. 输出窗口
1.3.7. 输出窗口
概述
“输出”选项卡布局
事件类型
输出窗口显示工作站内出现的事件的相关信息,例如,启动或停止仿真的时间。输
出窗口中的信息对排除工作站故障很有用。
输出选项卡包含两列:第一列说明事件,第二列说明生成消息的时间。每行是一则
消息。
按事件的严重程度分为三种事件类型:
事件类型 描述
信息 信息指一般系统事件,例如启动和停止程序、更改操作模式以
及开关电机。
信息消息不需要执行任何操作。它们在进行错误跟踪、统计数
据收集或用户触发的事件例行程序时很有用。
警告 警告是您需要关注的事件,但是,它没有非常严重,需要停止
进程或 RAPID 程序。
警告有时必须得到确认。警告通常表示,存在某种程度上需要
解决的基本问题。
错误 错误是防止机器人系统继续执行程序的事件。运行的进程或
RAPID 程序不能继续,因此将停止。
所有错误必须得到确认。大多数错误需要立即采取措施进行解
决。双击错误信息,可以显示详细信息框。
部分事件可以被激活以链接到相应的动作,帮助您解决导致该事件产生的问题。双
击该信息以激活链接。
如何处理输出窗口中的信息
目标 步骤
过滤事件 在输出窗口中右击鼠标,然后单击显示信息。选择您想要显示
保存到文件 右击您想要保存的信息, 单击保存到文件在对话框中指定文件
清空输出窗口 在输出窗口中右击鼠标, 然后单击清除。
控制器选项卡
控制器状态窗口显示了当前控制器的运行状态。
1. 系统名称 栏
2. 控制器名称 栏
的信息类型。全部、信息、警告、警告和错误。
名和存储地址,单击 保存。选择多条信息时,按 SHIFT 键同时
点击您想要的每条信息。
显示在控制器中运行的系统名称。
显示控制器名称。
© Copyright 2008-2010 ABB. 保留所有权利。
下一页继续
3HAC032104-010 修订 : C38
Page 39

1 简介
1.3.7. 输出窗口
续前页
3. 控制器状态 栏
显示控制器状态:
控制器状态 机器人状态
初始化 启动。启动后,处于电机停止状态。
电机停止 待机。机器人电机未启动。在机器人能移动前您需要首先开启
机器人电机。
电机开启 您可以开始微动控制机器人, 或运行机器人程序。
常规停止 由于安全保护装置链被打开造成的停止。如,机器人单元门被
打开。
紧急停止 由于紧急停止被激活造成的停止。
急停后等待电机开启 可以结束紧急停止状态。紧急停止不再处于激活状态,但状态
的转换还须等待确认。
系统故障 在出现系统故障时您需要热启动控制器。
4. 程序正在执行 栏
显示机器人是否正在运行程序。
© Copyright 2008-2010 ABB. 保留所有权利。
控制器状态 机器人状态
Running 正在运行程序。
Ready 程序已经加载,PP (程序执行起始点)已经设定, 可以开始运
行程序。
Stopped 程序已经加载,PP (程序执行起始点)已经设定, 可以开始运
行程序。
Unintialized 程序内存未初始化。这表明当前存在错误。
5. 操作模式 栏
显示控制器当前的操作模式。
控制器状态 机器人状态
Initializing 启动。当控制器启动后会转到控制器柜上所选中的模式。
Auto 可以开始运行生产程序。
在自动模式下您可以对控制器进行远程写入操作,您可以通过
RobotStudio Online 编辑程序,配置信息等。
Manual 机器人只能在 FlexPendant 上的使能键被激活的状态下移动。此
外, 机器人仅能减速移动。
在手动模式下无法远程访问控制器,除非您在 FlexPendant 授予
了访问权限。
Manual full speed 机器人在 FlexPendant 上的使能键被激活的状态下才能移动。
在手动模式下无法远程访问控制器,除非您在 FlexPendant 授予
了访问权限。
Waiting for
acknowledge
操作模式准备转为自动模式, 但模式转换还未被确认。
6. 登陆为
显示登陆到控制器的 PC 用户名称。
7. Access 栏
显示对控制器拥有访问权限的用户名, 以及当前是否可用。
393HAC032104-010 修订 : C
Page 40

1 简介
1.3.8. 操作员窗口
1.3.8. 操作员窗口
概述
激活操作员窗口
操作员窗口可以替代虚拟示教器中的类似功能, 在 RAPID 程序执行过程中与用户进
行通讯。该窗口显示的信息与虚拟示教器的 Operator Window 一致。
当 RAPID 程序在虚拟控制器上运行时,通过显示在示教器屏幕上的信息与操作员进
行通讯。操作员窗口整合了通讯功能,允许用户在不打开虚拟控制器的情况下也能
运行交互式的 RAPID 程序。
使用以下步骤激活操作员窗口:
1. 在应用菜单上单击 RobotStudio 选项。
2. 在左侧的导航栏中选择机器人:虚拟控制器。
3. 在右侧的虚拟控制器页面中选择 显示仿真操作窗口。
4. 单击 应用。
附注
RAPID 指令
当 显示仿真操作窗口 功能激活后,工作站内会自动为每个控制器生成操作员窗口。
操作员窗口的默认位置在图形窗口下。
操作员窗口支持的 RAPID 指令有:
• TPErase
• TPReadFK
• TPReadNum
• TPWrite
• UIAlphaEntry
• UIMsgBox
• UINumEntry
注意 ! 在操作员窗口执行这些指令时行为与虚拟示教器类似。
操作员窗口不支持的 RAPID 指令有:
• TPShow
• UIShow
• UINumTune
• UIListView
注意 ! 当在操作员窗口执行这些指令时,会出现错误信息提示您使用虚拟示教器。
附注
操作员窗口和虚拟示教器不能同时运行。
3HAC032104-010 修订 : C40
© Copyright 2008-2010 ABB. 保留所有权利。
Page 41

1.3.9. 文档管理器窗口
概述
使用文档管理器窗口您可以对大量的存储在不同地址的 RobotStudio 文档进行搜索
和浏览,如模型库文件,几何体等文档。
打开文档管理器窗口
1. 在 基本 选项卡上, 单击 导入模型库 然后在下拉菜单上选择 文档。
将打开 文档 窗口。
文档管理器窗口布局
文档管理器默认显示在界面的右手边。窗口上半部包括用来进行搜索和浏览文档位
置的控件。窗口下半部分由显示文档和文件夹的列表视图和状态栏组成。
控件 描述
1 简介
1.3.9. 文档管理器窗口
使用搜索模式
搜索 使用关键词或问题进行搜索,请参阅
浏览 显示文档位置的文件夹结构,请参阅
位置 选择文档位置,请参阅
文档位置窗口 第 44 页
使用搜索模式 第 41 页
使用浏览模式 第 43 页
。
1. 选择 搜索,然后在文本框中输入文字进行查询。
关于可用语法的详细描述请参阅
搜索语法 第 42 页
。
附注
下拉菜单中列出了最近十个查询的项目。
2. 单击展开按钮,使用附加控件。
使用该控件您可以指定作全局搜索或仅搜索指定的位置。
3. 选中 在结果中搜索 复选框,在上次搜索的结果中进行搜索。
附注
您在文本框中键入文字后搜索将会自动开始,或您单击搜索按钮 (放大镜图标)
开始搜索。在搜索进行过程中,放大镜图标会变为十字标,单击该图标可以取消
搜索。
。
。
© Copyright 2008-2010 ABB. 保留所有权利。
下一页继续
413HAC032104-010 修订 : C
Page 42
1 简介
1.3.9. 文档管理器窗口
续前页
搜索语法
在搜索区域,您还可以输入关键词和运算符进行高级搜索。
注意!关键词不能使用本地化的语言,
下表描述了如何使用关键词进行高级搜索:
关键词 描述
filename 搜索文件名。
title 搜索文档元数据标题栏内内容。
type 搜索文档元数据类型栏内内容。
对于程序库文件,请使用用户自定义的字段,如,Robot。 对于
其他文档,请使用 Windows 的文件类型描述,如,TEXT 文档。
author 搜索文档元数据作者栏内内容
comments 搜索文档元数据注释栏内内容
revision 搜索文档元数据版本栏内内容
date 搜索文档元数据最近修改日期栏内内容
使用冒号运算符时,搜索与输入的修改日期字符段相匹配的文
档。使用其他运算符时,对搜索字符段的解释请参考 .NET 的标
准。
size 搜索文档元数据大小 (以 KB 为单位)
and, or, parentheses (),
not
用于组合或反向查询。
示例
下表描述了如何使用运算符进行搜索:
运算符 描述
: 字段包含搜索字符串时为匹配项。
= 字段等于搜索字符串时为匹配项。
< 字段为小于搜索字符串时为匹配项。
> 字段为大于搜索字符串时为匹配项。
附注
• 引号可用于指定使用空格的字符串。空字符串请使用 ""。
• 所有搜索字段不区分大小写。
• 字段中不包括上述关键字的,将针对文件名和所有元数据进行搜索。
• 如果没有指定分组关键词,默认使用 "and"。
• 某些元数据 (如,title,author,comments 或 revision)不一定对所有类型
的文件适用。
• 1400 - 在文件名或任何元数据中包含 1400 字段的文档为匹配文档。
• not author:ABB - 在作者栏内不包含 ABB 字段的文档为匹配文档。
• size>1000 and date?1/2009 - 大于 1000KB,且最近修改日期在 1/1/2009 之前
的文档为匹配文档。
• IRBP comments="ABB Internal" - 在文件名或元数据中包含 IRBP 字段,且注
释栏内的内容为 ABB Internal 的文档为匹配文档。
© Copyright 2008-2010 ABB. 保留所有权利。
下一页继续
3HAC032104-010 修订 : C42
Page 43

使用浏览模式
1 简介
1.3.9. 文档管理器窗口
续前页
1. 在文档管理器窗口中选择 浏览 模式。
文档位置的文件夹结构将显示在界面上。
附注
文件夹的顶层为已配置的位置。如果位置不可用 (如脱机的网络位置),将显示
为不可用并且您无法打开该文件夹。在文本框中显示当前文件夹相对于根目录的
路径。
2. 您可以使用以下两种方式之一打开文件夹。
• 双击文档位置。
• 右击文档位置,从右键菜单上选择打开。
3. 单击 刷新 按钮,手动刷新文档内容。
查看结果
使用右键快捷菜单
© Copyright 2008-2010 ABB. 保留所有权利。
附注
如果文件夹使用网络地址或包含多个文档,刷新操作可能会花费较长的时间。在
刷新过程中,刷新图标变为十字标,单击该图标可以取消操作。
在浏览模式下,项目被分散到各个文件夹。文件夹和文档搜索结果以列表的形式显
示。
窗口底部的状态栏将显示搜索过程和搜索到的文档数量。 搜索结果根据不同的存储
位置分组显示在相应的标题下。
每个搜索到的文档由一个图标表示,文档标题和文件名以黑色字体显示。对程序库
文件,图标为屏幕截图或其他自定义图像。其他文档,图标为与该文件类型相关联
的图标。
在结果列表中,右击文档或文件夹,将显示如下菜单选项:
项目 描述
打开 打开所选的文件夹,程序库文件,或几何体文件,工作站文件
和文档:
• 文件夹,浏览所选文件夹。
• 程序库文件或几何体文件,将选中文件导入工作站 (如
果当前没有打开的工作站,将首先创建一个空工作站)。
• 工作站文件,打开工作站。
• 其他文档,打开所选文档。例如,当选中 .doc 文档时,
将打开 Microsoft Word 文档。
打开文件目录 使用 Windows 资源管理器中打开包含该文档的文件夹。
属性 打开显示所选文档完整元数据信息的对话框。
注意! 该操作对文件夹不适用。
下一页继续
433HAC032104-010 修订 : C
Page 44

1 简介
1.3.9. 文档管理器窗口
续前页
使用拖拽功能
注意!双击项目将程序库文件导入或打开文件。
在结果列表中,在空白区域右击,将显示下列菜单选项,使用这些控件对文档进行
分组分类:
项目 描述
分组 如何将文件分组。
有以下可选项:
• 位置
• 文件夹
• 类型
分类 在组内如何将文档分类。
有以下可选项:
• 名称
• 日期
• 大小
升序或降序 项目以递增或递减的顺序排列。
您可以通过拖拽,将项目由搜索结果列表拖拽到图形窗口或布局浏览器的相应节点
下,将程序库文件或几何体文件导入工作站。
• 当将项目拖拽至布局浏览器,该组件将显示为工作站,组件组或 Smart 组件的
子节点。
• 当将项目拖拽至图形窗口时,组件将摆放在您放开组件的工作站地面上。您也
可以启用捕捉网格或在拖拽的同时按住 ALT 键,将组件放置在 UCS 网格上。
文档位置窗口
文档位置窗口布局
使用以下方式之一打开文档位置窗口:
1. 在文档管理器窗口选择 位置。
2. 单击 RobotStudio 图标,然后选择 RobotStudio 选项,选择 概述 下的 文件
与文件夹。单击 文档位置。
3. 在 基本 选项卡上,单击 导入模型库, 然后在下拉菜单上选择 位置。
该窗口由菜单栏和显示配置位置的列表组成。列表显示了位置的一般信息。菜单栏
中包括如下控件:
控件 描述
位置 下拉菜单中包含以下选项:
• 导入:打开对话框,导入包含有文档位置的 XML 文件。如
果要导入的位置已经存在,您可以选择保留或删除已存
在位置。
• 导出:打开对话框,将所选位置信息导出为 XML 文件。
• 复位为默认值:复位为默认位置 (ABB 图形库,用户图
形库,和用户几何体)
添加位置 打开添加文档位置的对话框。默认仅有一种位置类型可用。
详情请参阅
删除 删除所选位置。
编辑 打开对话框修改所选位置,详情参阅
文件系统位置 第 45 页
。
文件系统位置 第 45 页
© Copyright 2008-2010 ABB. 保留所有权利。
。
下一页继续
3HAC032104-010 修订 : C44
Page 45
文件系统位置
1 简介
1.3.9. 文档管理器窗口
续前页
1. 单击 添加地址 然后从下拉列表中选择 文件地址。将打开 文件系统 对话框。
对话框 包含以下控件:
控件 描述
位置名称 指定与地址关联的名称。
路径 指定文件系统地址。该地址可以为本地地址或网络地址。
过滤器 指定过滤器,在搜索或浏览时只有一部分文件可见。不同文件
类型可用分号隔开。如果该框为空,将显示所有文档。
从网络缓冲文件数据 选中该复选框网络地址的程序库文件或集合体文件将首先被复
制到本地文件夹然后在导入工作站,而非直接由网络地址导入。
这样可以保证在断网的情况下,来自网络地址的文件仍然可以
被打开。该选项仅适用于网络地址。
目录 指定存储网络文档的本地目录。该地址需为本地目录。
显示缩略图 选中该复选框将地址中包含的内容在指定的选项卡菜单上显示
为图像集。
形式 • 平铺 - 选中该项,文档将显示在同一图像集,相应的子文
件夹标题下。
• 递归 - 选中该选项,文档将根据文件夹结构显示在不同的
子菜单中。
包括所有的搜索位置 指定搜索是否覆盖所有启用的地址。
© Copyright 2008-2010 ABB. 保留所有权利。
453HAC032104-010 修订 : C
Page 46
1 简介
1.3.10. 使用鼠标
1.3.10. 使用鼠标
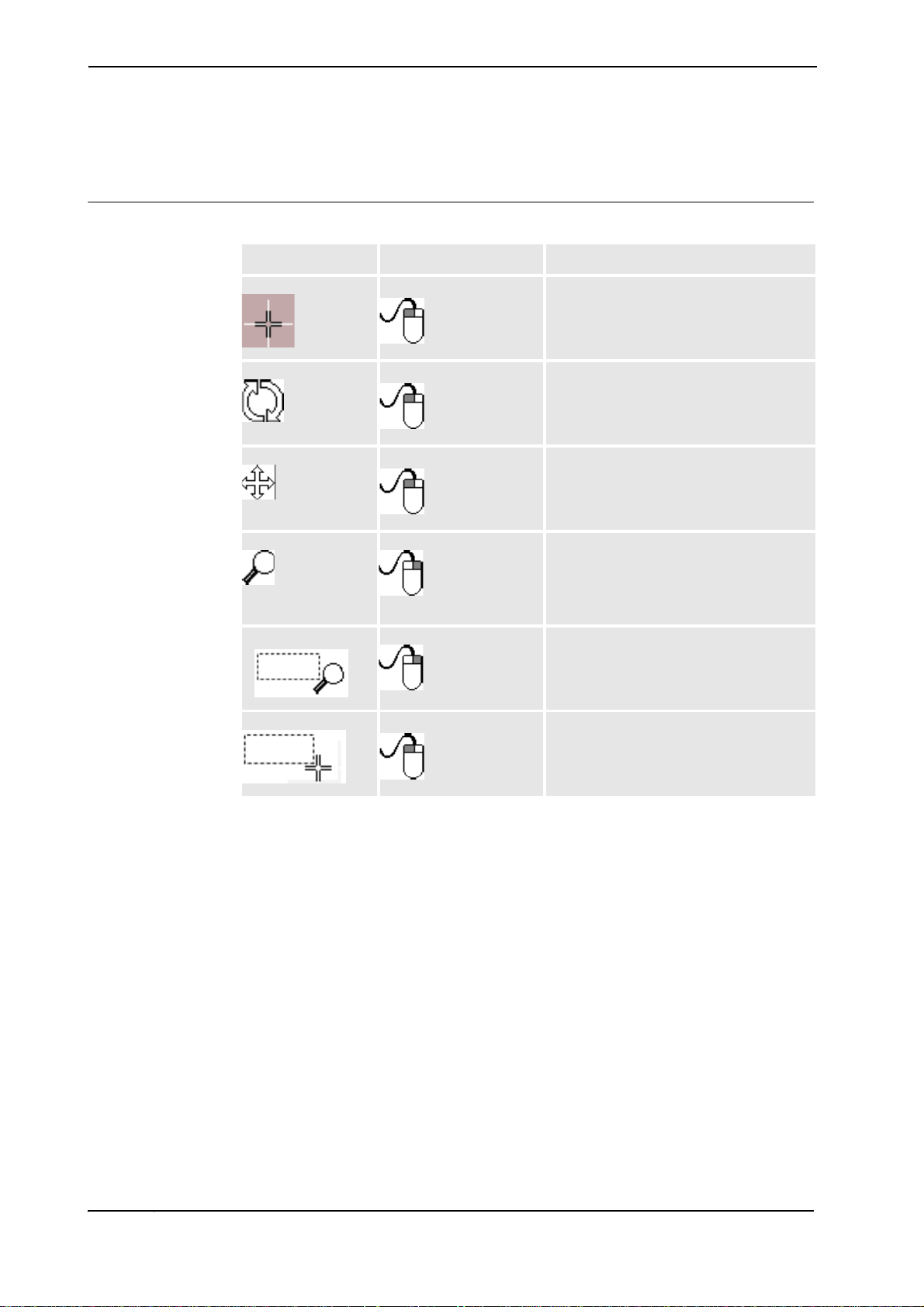
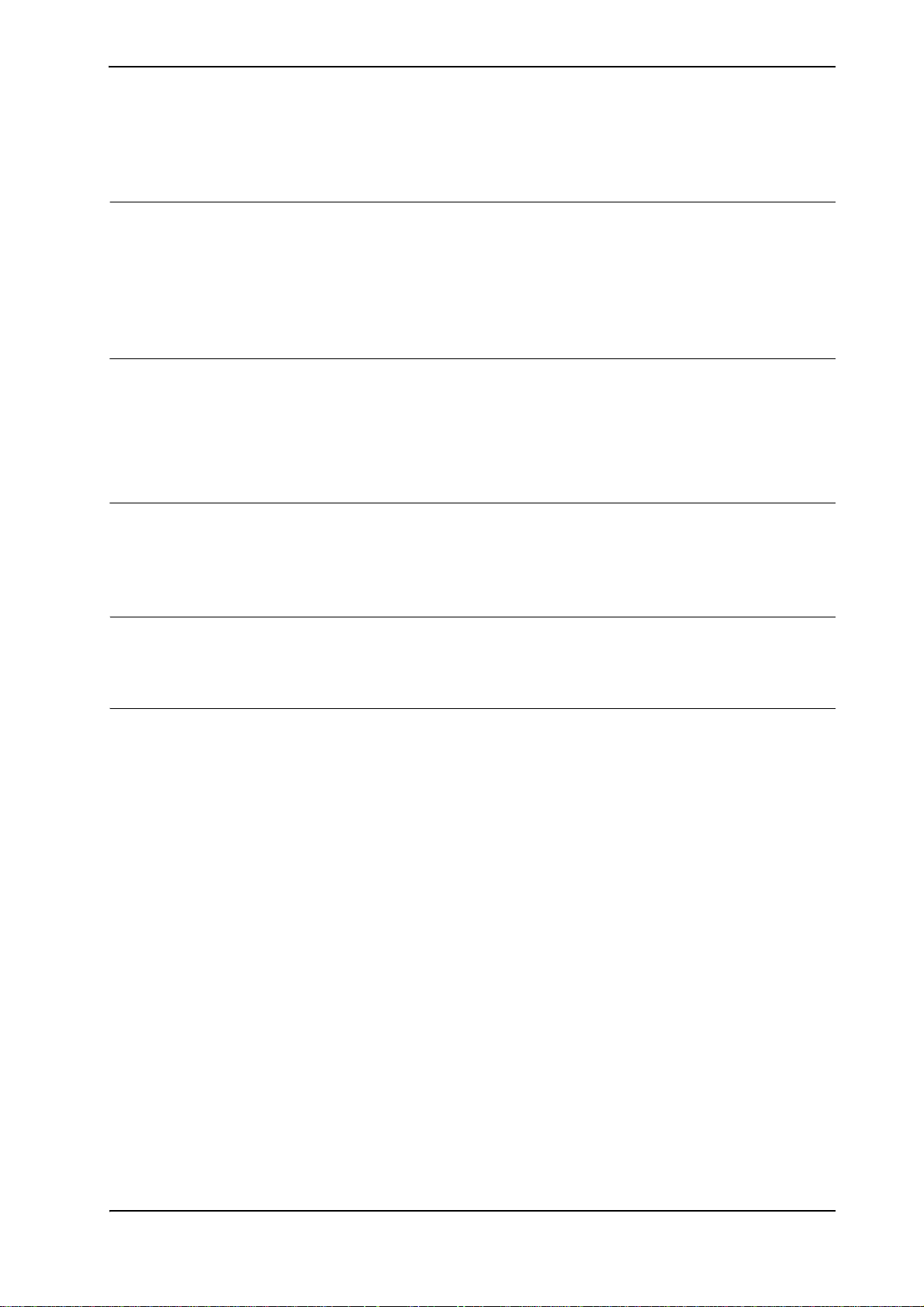
使用鼠标导航图形窗口
下表介绍了如何使用鼠标导航图形窗口:
要 使用键盘 / 鼠标组合 描述
选择项目
xx0500002417 xx0500002421
旋转工作站
xx0500002424
平移工作站
xx0500002422
缩放工作站
xx0500002426
使用窗口缩放
xx0500002425
使用窗口选择
CTRL + SHIFT +
xx0500002421
CTRL +
xx0500002421
CTRL +
xx0500002423
SHIFT +
xx0500002423
SHIFT +
只需单击要选择的项目即可。要选择多个
项目,请按 CTRL 键的同时单击新项目。
按 CTRL + SHIFT 并鼠标左键的同时,拖动
鼠标对工作站进行旋转。
有了三键鼠标,可以使用中间键和右键替
代键盘组合。
按 CTRL 键和鼠标左键的同时,拖动鼠标
对工作站进行平移。
按 CTRL 键和鼠标右键的同时,将鼠标拖
至左侧可以缩小。将鼠标拖至右侧可以放
大。
有了三键鼠标,还可以使用中间键替代键
盘组合。
按 SHIFT 键并鼠标右键的同时,将鼠标拖
过要放大的区域。
按 SHIFT 并鼠标左键的同时,将鼠标拖过
该区域,以便选择与当前选择层级匹配的
所有项目。
xx0500002428
xx0500002421
© Copyright 2008-2010 ABB. 保留所有权利。
3HAC032104-010 修订 : C46
Page 47
1.3.11. 选择项目
概述
若要通过移动工作站中的各个项目来实现要求的工作站布局,您需要首先确定选择
层级。确定选择层级后,您可以只选择特定类型的项目,或对象的指定部分。
可选层级包括曲线、表面、物体、部件、机械装置、组、目标点 / 框架和路径。其
中目标点 / 框架和路径可以和其它选择层级组合。多个对象也可以组合在一起成为
一组,请参阅
在图形窗口中选择一个项目
使用以下步骤在图形窗口中选择一个项目:
1. 在图形窗口上方,单击相应的图标确定选择层级。
2. 单击相应的图标确定捕捉模式。(可选步骤)
3. 在图形窗口中单击您想要选择的项目,该项目被突出显示。
组件组 第 208 页
1 简介
1.3.11. 选择项目
.
在图形窗口中选择多个项目
使用以下步骤在图形窗口中选择多个项目:
1. 按 SHIFT 键 , 同时在图形窗口中,按对角线拖动鼠标选中包含有您想要选择的对
在浏览器中选择一个项目
使用以下步骤在浏览器中选择一个项目:
1. 单击项目, 被选项目在浏览器中被突出显示。
在浏览器中选择多个项目
使用以下步骤在浏览器中选择多个项目:
1. 确保所选项目均疏通种类型,且位于层次结构的同一分支中,否则这些项目将无
2. 执行以下操作之一:
象的区域。
法操作。
• 选择相邻项目:在浏览器中, 按住 SHIFT 键, 单击第一个和最后一个项目。
所有项目被突出显示。
• 选择单个项目:在浏览器中,按住 CTRL 键同时单击要选择的项目。所有项目
将会突出显示。
© Copyright 2008-2010 ABB. 保留所有权利。
473HAC032104-010 修订 : C
Page 48

1 简介
1.3.12. 安装与拆除对象
1.3.12. 安装与拆除对象
概述
您可以将一个对象 (子对象)安装到另一个对象 (父对象)上。 安装可以在部件级
或装置级创建。将对象连接到父对象后,移动父对象也就移动了子对象。
最常见的安装是将工具安装到机器人上。操作步骤请参阅
353 页
安装 第 346 页 和拆除 第
。
© Copyright 2008-2010 ABB. 保留所有权利。
3HAC032104-010 修订 : C48
Page 49
1.3.13. 键盘快捷键
键盘快捷键
© Copyright 2008-2010 ABB. 保留所有权利。
下表列出了键盘快捷键:
命令 组合键
通用
激活菜单栏 F10
打开 API 帮助文档 ALT + F1
打开帮助文档 F1
打开虚拟示教器 CTRL + F5
切换窗口 CTRL + TAB
一般命令
添加工作站系统 F4
打开工作站 CTRL + O
屏幕截图 CTRL + B
示教运动指令 CTRL + SHIFT + R
示教目标点 CTRL + R
Toggle View Representation F7
一般编辑操作
复制 CTRL + C
剪切 CTRL + X
粘贴 CTRL + V
重做 CTRL + Y
刷新 F5
重命名 F2
选择全部 CTRL + A
撤销 CTRL + Z
导入几何体 CTRL + G
导入模型库 CTRL + J
创建新工作站 CTRL + N
保存工作站 CTRL + S
编辑器 Intellisense
完成单词 CTRL + SPACEBAR
参数信息 CTRL + I
PickList CTRL + SHIFT + SPACEBAR
程序编辑器命令
开始执行程序 F8
步入 F11
跳出 SHIFT + F11
跳过 F12
停止 SHIFT + F8
1 简介
1.3.13. 键盘快捷键
下一页继续
493HAC032104-010 修订 : C
Page 50
1 简介
1.3.13. 键盘快捷键
续前页
命令 组合键
触发断点 F9
应用改变 CTRL + SHIFT + S
打印 CTRL + P
程序编辑器热键
复制 CTRL + Insert
剪切 SHIFT + Delete
剪切已标记的行 CTRL + L
删除已标记的行 CTRL + SHIFT + L
删除光标前的单词 CTRL + BACKSPACE
删除光标后的单词 CTRL + Delete
缩进 Tab
将所选字母转为小写 CTRL + U
将所选字母转为大写 CTRL + SHIFT + U
移到文档起始位置 CTRL + Home
移到当前行的起点 Home
移到文档的末尾 CTRL + End
移到当前行的末尾 End
移到下一个单词 CTRL + Right
移到前一个单词 CTRL + Left
移到可见内容的底部 CTRL + Page Down
移到可见内容的顶部 CTRL + Page Up
在所选行上面打开空白行 CTRL + Enter
在所选行下面打开空白行 CTRL + SHIFT + Enter
Outdent SHIFT + TAB
粘贴 SHIFT + Insert
重做 CTRL + SHIFT + Z
向下滚动 CTRL + Down
向上滚动 CTRL + Up
选中程序块 - 由光标向下选中 ALT + SHIFT + Down
选中程序块 - 由光标向左选中 ALT + SHIFT + Left
选中程序块 - 由光标向右选中 ALT + SHIFT + Right
选中程序块 - 光标到下一个单词 CTRL + ALT + SHIFT + Right
选中程序块 - 光标到上一个单词 CTRL + ALT + SHIFT + Left
选中程序块 - 由光标向上选中程序组 ALT + SHIFT + Up
选中光标下面的内容 SHIFT + Down
选中光标左侧的内容 SHIFT + Left
选中向下页 SHIFT + Page Down
选中向上页 SHIFT + Page Up
选中光标右侧的内容 SHIFT + Right
选中由光标处至文档开始的内容 CTRL + SHIFT + Home
选中由光标到行起始的内容 SHIFT + Home
选中由光标到文档末尾的内容 CTRL + SHIFT + End
3HAC032104-010 修订 : C50
© Copyright 2008-2010 ABB. 保留所有权利。
下一页继续
Page 51

1.3.13. 键盘快捷键
命令 组合键
选中由光标到行末尾的内容 SHIFT + End
选中由光标到下一个单词的内容 CTRL + SHIFT + Right
选中由光标到上一个单词的内容 CTRL + SHIFT + Left
选中由光标到可见底部的内容 CTRL + SHIFT + Page Down
选中由光标到可见顶部的内容 CTRL + SHIFT + Page Up
向上选中 SHIFT + Up
选中单词 CTRL + SHIFT + W
在插入和覆盖模式间转换 Insert
调换字符顺序 CTRL + T
调换行顺序 CTRL + ALT + SHIFT + T
调换单词顺序 CTRL + SHIFT + T
1 简介
续前页
© Copyright 2008-2010 ABB. 保留所有权利。
513HAC032104-010 修订 : C
Page 52

1 简介
1.3.13. 键盘快捷键
© Copyright 2008-2010 ABB. 保留所有权利。
3HAC032104-010 修订 : C52
Page 53
2 如何构建工作站
2.1. 构建新工作站的工作流程
概述
概述了如何通过导入必需的设备来构建工作站,从而创建和仿真机器人程序。
在本概述中,第一部分介绍了使用系统创建工作站所需的多种方案。第二部分介绍
了如何导入或创建要使用的对象。第三部分介绍了通过确定机器人和其它设备的最
佳位置优化工作站布局所需的工作流程。
在大多数情况下,建议从头至尾执行工作流程,即便可以采用其它顺序,也应如此。
使用系统创建工作站
下表介绍了使用系统创建工作站所需的方案。
具体操作步骤请参阅
新建工作站 第 160 页
2 如何构建工作站
2.1. 构建新工作站的工作流程
。
手动启动虚拟控制器
导入工作站组件
© Copyright 2008-2010 ABB. 保留所有权利。
活动 描述
使用模板系统创建工作站 如果要新建包含机器人的工作站以及到基本系统模板的链接,
这是最简单的一种方法。
使用现有系统创建工作站 根据现有系统新建包含一个或多个机器人的工作站。
创建不含系统的工作站 高级用户可以从头构建工作站,然后向其中添加新系统或现有
系统。
下表介绍了手动启动系统的多种方式。根据您工作站的情况选择相应的操作步骤。
活动 描述
手动将模型库连接至 VC 请参阅
重启 VC 请参阅
启动虚拟控制器 第 63 页
重启 VC 第 65 页
。
。
下表介绍了导入工作站组件的工作流程。根据您的需要选择相应的操作步骤。
具体操作步骤请参阅
导入工作站组件 第 67 页
。
活动 描述
导入机器人模型 请参阅
导入工具 请参阅
导入变位机 请参阅
导入导轨 请参阅
导入其它设备 如果您有要导入设备的 CAD 模型,请参阅
该设备。 您也可以使用 RobotStudio 创建一个模型。请参阅
第74页
添加工件 如果您有要导入工件的 CAD 模型,请参阅
工件。 您也可以使用 RobotStudio 创建一个工件模型。请参阅
72 页
机器人系统 第 174 页
导入模型库 第 173 页
ABB 模型库 第 172 页
导入模型库 第 173 页
。
。
。
。
。
。
导入模型库 第 173 页
机械装置
工件坐标 第 179 页
导入该
对象 第
导入
下一页继续
533HAC032104-010 修订 : C
Page 54

2 如何构建工作站
2.1. 构建新工作站的工作流程
续前页
摆放对象和机械装置
下表介绍了如何摆放工作站组件。
活动 描述
摆放物体 如果您是为真实工作站创建模型,请先将已知位置的设备摆放
安装工具 将工具安装至机器人, 请参阅
将机器人安装至导轨 如果当前工作站中使用了导轨,请将机器人安装至导轨。请参阅
将工件安装到变位机 如果当前工作站中使用了变位机, 请将工件安装到变位机。请参
测试可达性 检测机器人是否能到达工件上的关键点。如果您对机器人到达目
好。然后为不知道其在真实工作站中位置的设备寻找合适的摆放
位置。请参阅
安装 第 346 页
安装 第 346 页
阅
标位置的到达性及姿态满意,您可以对工作站进行进一步的编
程。否则,请继续调整位置,或使用下文中描述的其他工具保证
可达性。请参阅
放置 第 377 页 和设置外轴 第 78 页
安装 第 346 页
。
.
测试位置和动作 第 97 页
.
。
。
© Copyright 2008-2010 ABB. 保留所有权利。
3HAC032104-010 修订 : C54
Page 55

2.2.1. 两个机器人共享同一任务框架位置
2.2 创建传送带跟踪工作站 (两个机器人在同一个传送带上工作)
2.2.1. 两个机器人共享同一任务框架位置
概述
本节描述了两个机器人系统共享同一任务框架位置的情形。两个机器人系统中机械
装置的 baseframe 使用同一任务框架位置。
操作前提
• 两个都拥有传送带跟踪选项的机器人 (system 1 and system 2)
• 传送带装置 (需保存为库文件)
创建传送带跟踪工作站
注意!如何创建传送带机械装置,请参阅
1. 将一个现有的机器人系统 (system 1)添加至当前工作站。请参阅
第174页
注意 ! 在启动该系统后,当要求选择库文件时,请选择您所需要的已保存的传送
带装置库文件。
。
创建传送带机械装置 第 257 页
2 如何构建工作站
。
机器人系统
2. 修改机器人和传送带 baseframe 的位置。
1. 将机械单元 (传送带 / 机器人)移动到新的位置。
2. 更新传送带 / 机器 baseframe 位置。请参阅
3. 重复以上步骤更新机器人 baseframe 位置。
4. 在 系统配置 窗口中,单击 确定。当提示您是否需要重启系统时,单击 是。
关闭 系统配置 窗口。
3. 将另一个已创建的机器人系统 (system 2) 添加至当前工作站。请参阅
统 第 174 页
注意 ! 在启动系统后,当要求选择程序库文件时,请选择和 System1 同样的库文
件。如果 System1 和 System2 使用同样的传送带文件,稍后,传送带库文件将从
工作站移除。
。
更新 Baseframe 位置 第 338 页
机器人系
。
© Copyright 2008-2010 ABB. 保留所有权利。
下一页继续
553HAC032104-010 修订 : C
Page 56

2 如何构建工作站
2.2.1. 两个机器人共享同一任务框架位置
续前页
4. 将两个系统 (system1 和 system2)都连接至同一个传送带程序库文件。
1. 在 离线 浏览器中选中 system2,单击 系统配置 按钮打开 system2 的系统配
置对话框。
2. 在层级树视图中选择程序库文件的节点。
3. 选择 从工作站中选择 , 单击 更改。选择程序库 对话框打开。
4. 选择与 system1 使用的同一个传送带程序库文件。单击 确定。
注意 ! 现在两个系统都使用了同一个传送带程序库文件,原来连接到 system2 的
程序库文件将从当前工作站中移除。
5. 修改 system2 机器人的 baseframe 位置。
1. 将机械装置 (即机器人)移动至新位置。
2. 更新机器人 baseframe 位置, 请参阅
3. 重复以上步骤更新机器人 baseframe 位置。
4. 在 系统配置 窗口中,单击 确定。当提示您是否需要重启系统时,单击 是。
关闭 系统配置 窗口。
更新 Baseframe 位置 第 338 页
。
© Copyright 2008-2010 ABB. 保留所有权利。
3HAC032104-010 修订 : C56
Page 57

2.2.2. 两个机器人系统使用不同的任务框架位置
概述
本节介绍了任务框架坐标不同的机器人系统进行同步情形。也就是说传送带机械单
元的 Baseframe 在两个机器人系统中有不同的值。
操作前提
两个都拥有传送带跟踪选项的机器人 (system 1 and system 2)
2 如何构建工作站
2.2.2. 两个机器人系统使用不同的任务框架位置
创建传送带跟踪工作站
注意!如何创建传送带机械装置,请参阅
1. 将一个已有的机器人系统 (system1)添加到工作站,请参阅
页
。
注意!在启动系统后,当要求选择程序库文件时,请选择已保存的传送带库文
件。
2. 修改机器人和传送带的 Baseframe。
1. 将机械单元 (传送带 / 机器人)移动到新位置。
2. 请参阅
3. 重复以上步骤更新机器人 baseframe 位置。
4. 在 系统配置 窗口单击 确定。当提示是否要重启系统时,单击 是。关 闭 系统
配置 窗口。
3. 将一个已有机器人系统 (system2)添加至工作站,请参阅
页
。
注意!在启动系统后,当要求选择程序库文件时,请选择和 System1 同样的库文
件。如果 System1 和 System2 使用同样的传送带文件,稍后,传送带库文件将从
工作站移除。
4. 进行更新,使两个系统 (system1 和 system2)都使用同一个传送带库文件。
更新 Baseframe 位置 第 338 页
创建传送带机械装置 第 257 页
机器人系统 第 174
更新传送带 / 机器人的 Baseframe.
机器人系统 第 174
。
© Copyright 2008-2010 ABB. 保留所有权利。
1. 在 离线 浏览器上,单击 系统配置 打开 System2 的系统配置窗口。
2. 在层级树视图中选择库文件节点。
3. 选择 从工作站中选择, 然后单击 更改 打开 选择程序库 对话框。
4. 选择与 system1 同样的程序库文件,单击 确定。
注意 ! 现在两个系统都使用了同一个传送带程序库文件,原来连接到 system2 的
程序库文件从当前工作站中移除。
5. 修改传送带的任务框架坐标位置,请参阅
注意!在修改任务框架坐标前,确保传送带节点在大地坐标系下。修改后将传送
带移到修改任务框架坐标前的节点位置。
设定任务框架 第 337 页
。
下一页继续
573HAC032104-010 修订 : C
Page 58

2 如何构建工作站
2.2.2. 两个机器人系统使用不同的任务框架位置
续前页
6. 修改 system2 机器人 Baserame 位置。
重复步骤 2 修改 system2 机器人的 baseframe。
1. 将机械单元 (机器人)移动到新位置。
2. 请参阅
3. 在 系统配置 窗口,单击 确定,当要求重启系统时请单击 是。关闭 系统配
7. 修改 System2 的传送带 baseframe。
1. 在 离线 浏览器上,打开 system2 的 系统配置 窗口。
2. 在层级树视图中选择传送带。将显示传送带 Baseframe 属性。
3. 选择 使用当前工作站数值 以更新控制器上机器人的 Baseframe 值。
4. 清除 启动时检查 Baseframe 复选框。
5. 在 系统配置 窗口,单击 确定,当要求重启系统时请单击 是。关闭 系统配
注意!清除 启动时检查 Baseframe 复选框后,RobotStudio 不会在每次启动控制
器时检查控制器和工作站中的 Baseframe 的值是否一致。这样可以避免修改传送
带位置。
注意!如果两个机器人系统使用在传送带上的同一个部件,请保证则该部件相对
于传送带的工件坐标的位置一致。
更新 Baseframe 位置 第 338 页
置。
置。
更新机器人 baseframe 位置。
© Copyright 2008-2010 ABB. 保留所有权利。
3HAC032104-010 修订 : C58
Page 59

2.3. 自动创建带外轴的系统
自动创建带外轴的系统
1. 将所需的机器人,变位机和导轨的库文件导入 RobotStudio 工作站。请参阅
模型库 第 173 页
注意!如果选择了机器人和导轨,请将机器人安装至导轨。请参阅
页
。
附注
机器人系统在导轨独立的任务或机器人任务中支持下列长度在 1.7 米到 19.7 米
的导轨。根据不同的操纵器类型,系统在每个任务中支持一个到三个导轨。但是
对 IRBX004,每个系统内只能使用一个此类型的导轨。
• IRBT4003
• IRBT4004
• IRBT6003
• IRBT6004
2 如何构建工作站
2.3. 自动创建带外轴的系统
导入
。
安装 第 346
• IRBT7003
• IRBT7004
• RTT_Bobin
• RTT_Marathon
• Paint Rail
2. 由布局创建系统,请参阅
附注
要创建带 IRBT4004,IRBT6004 或 IRBT7004 的机器人系统,请确保安装了
TrackMotion 媒体库,详细信息请参阅
机器人系统 第 174 页
安装并许可 RobotStudio 第 27 页
。
。
© Copyright 2008-2010 ABB. 保留所有权利。
下一页继续
593HAC032104-010 修订 : C
Page 60
2 如何构建工作站
2.3. 自动创建带外轴的系统
续前页
支持的外轴配置
下表显示了不同外轴配置组合:
组合
变位机类型
A B C D K L 2xL R
一个 IRB (变位机在同一任
务内)
一个 IRB (变位机在单独的
任务中)
两个 IRB (变位机在单独的
任务中)
一个 IRB 使用动作跟踪 (变
位机在同一任务中)
一个 IRB 使用动作跟踪 (变
位机在单独的任务中)
两个 IRB 使用动作跟踪 (变
位机在单独的任务中)
• Y - 支持组合
• N - 不支持组合
• YX - 支持组合但需要手动映射机械装置单元和关节
附注
从布局创建系统功能仅支持 RTT 和 IRBTx003 型号的导轨和变位机组合。也就是说,
IRBTx004 不支持和定位机的组合。
手动映射机械装置单元和关节
如果当前系统包含多个机械装置,需要在系统配置中检查任务数和机械装置的框架
坐标。
1. 在 离线 浏览器上,单击 系统配置 打开对话框。
Y Y Y Y Y Y Y Y
Y Y Y Y Y Y Y Y
Y Y Y Y Y Y N Y
Y N N N YX Y Y N
Y N N N YX Y Y N
Y N N N YX Y N N
2. 在层级树视图中选择机器人节点。
该节点的属性页面包含映射关节和设定轴的控件。
3. 单击 修改 打开对话框。
4. 手动映射机械装置单元和机械装置节点,单击 应用。
5. 修改机械单元的 baseframe 位置。请参阅
更新 Baseframe 位置 第 338 页
。
© Copyright 2008-2010 ABB. 保留所有权利。
3HAC032104-010 修订 : C60
Page 61
2.4 手动创建带导轨运动的系统
2.4.1. 手动创建带 RTT 或 IRBTx003 导轨的系统
手动创建带 RTT 或 IRBTx003 的系统
使用以下步骤手动创建包含 RTT Bobin,RTT Marathon 或 IRBT4003,IRBT6003 或
IRBT7003 的系统。
1. 创建并启动一个新系统,请参阅
操作 描述
2 如何构建工作站
2.4.1. 手动创建带 RTT 或 IRBTx003 导轨的系统
创建新系统 第 133 页
。
1 选择所需的机器人类型
(IRB6600)。
2 选择外轴配置。 使用 系统生成器 打开 新控制器系统 向导,在 修
3 单击 完成。 关闭 修改选项 页面。
2. 将系统添加至工作站,请参阅
使用 系统生成器 打开 新控制器系统 向导,在 修
改选项 页面中,向下翻页至 DriveModule1 ->
Drive module aplication,然后展开 ABB
Standard manipulator 选项,选择 Manipulator
Type (IRB6600)。
改选项 页面中,向下翻页至 DriveModule1 ->
Additional axes configuration 组, 展开 Add
axes IRB/drive module 6600 选项然后选择 7704 Drive W in pos Y2。
注意!要选择选项 770-4 Drive W in pos Y2 和
Drive Module 和 Position,必须已选择了
Additional axes configuration。请确保在任何
位置至少选择了一个驱动。
添加系统 第 64 页
。
3. 将机器人 (IRB6600)相应的导轨配置文件和所需的导轨模型导入工作站,请参
阅
为当前系统添加导轨 第 67 页
。
注意!在 选择库文件 组中,请选择一个已存在的导轨或导入一个导轨。
注意!如果没有选择正确的外轴配置,可能会造成系统启动失败。
4. 指定该 baseframe 是否被其他机械装置移动。
1. 在 离线 浏览器上,单击 系统配置 以打开对话框。
2. 从层级树视图中选择 ROB_1 节点。
3. 在 Baseframe moved by 列表中,选择 导轨。
4. 单击 确定。 当要求重启系统时,单击 是,关闭 系统配置 窗口。
© Copyright 2008-2010 ABB. 保留所有权利。
613HAC032104-010 修订 : C
Page 62

2 如何构建工作站
2.4.2. 手动创建带 IRBTx004 的系统
2.4.2. 手动创建带 IRBTx004 的系统
概述
要配置 IRBT4004,IRBT6004 或 IRBT7004,必须安装 TrackMotion 媒体库。请参阅
安装并许可 RobotStudio 第 27 页
手动创建带 IRBTx004 导轨的系统
1. 创建并启动一个新系统,请参阅
操作 描述
。
创建新系统 第 133 页
。
1 添加 IRBTx004 附加选项。 请参阅
2 选择所需的机器人 (IRB6600)。 使用 系统生成器 打开 新控制器系统 向导,在
3 选择 Additional axes
configuration。
4 选择所需的导轨 (IRBT6004)。 在 修改选项 页面, 向下翻页至 TRACK,然后展开
5 单击 完成。 关闭 修改选项 页面。
2. 将系统添加至工作站,请参阅
添加系统 第 64 页
3. 将所需的导轨模型添加值工作站,请参阅
添加选项 第 134 页
注意!浏览并选择媒体库 5.XX.YYY 中的许可文件
(.kxt)。5.XX 表示最近使用的 RobotWare 版本。
修改选项 页面中,向下翻页至 DriveModule1 ->
Drive module aplication,然后展开 ABB
Standard manipulator 选项,选择 Manipulator
Type (IRB6600)。
在 修改选项 页面,向下翻页至 DriveModule1 ->
Additional axes configuration 组,然后展开
Add axes IRB/drive module 6600 选项然后选择
770-4 Drive W in pos Y2 选项。
注意!要选择选项 770-4 Drive W in pos Y2 和
Drive Module 和 Position,必须已选择了
Additional axes configuration。请确保在任何
位置至少选择了一个驱动。
Drive module for Track motion 组。选择
DriveModule1 -> Trakc Motion Type -> IRBT6004
-> IRB Orientation on Track -> Standard
carriage in Line -> Select Track Motion
Length -> 1.7m( 或其他值 )。
。
。
为当前系统添加导轨 第 67 页
。
注意!
1. 在 选择库文件 组内,单击 其他 以导入不同的导轨库文件。
2. 单击 确定。 当要求重启系统时,单击 是。关闭 系统配置 窗口。
3HAC032104-010 修订 : C62
© Copyright 2008-2010 ABB. 保留所有权利。
Page 63

2.5 虚拟控制器 (VC)
2.5.1. 启动虚拟控制器
概述
RobotStudio 使用虚拟控制器运行机器人。虚拟控制器既可运行真实机器人的系统,
也可运行用于测试和评估的特定虚拟系统。虚拟控制器与控制器使用的软件相同,
可以计算机器人动作,处理 IO 信号和执行 RAPID 程序。
启动虚拟控制器时,需要指出虚拟控制器上运行的系统。因为系统包含有关所使用
的机器人的信息以及机器人程序和配置这类重要数据,所以必须为工作站选择正确
的系统。
启动 VC
下表描述了启动 VC 的不同方式。
启动方式 描述
2 如何构建工作站
2.5.1. 启动虚拟控制器
自动启动
创建工作站后
自动启动
添加系统到现有工作站后
手动启动
连接一个已导入的程序库
文件
通常情况下,在创建了一个新的工作站之后 VC 会自动启动。系
统所需的机器人和相关的库文件将会导入工作站。
如果您的工作站使用了多个系统或您打开了一个不含系统的工
作站, 您可以添加系统至当前打开的工作站。系统所需的机器
人和相关的库文件也会随之导入工作站。
如果您已经导入一个机器人库文件在当前系统中使用,在启动
时您可以将程序库与控制器连接,而不用再导入新的程序库文
件。
如果您手动导入机器人库文件并在当前系统中使用,在启动时
您可以将程序库与控制器连接,而不用导入新的程序库文件。
请确保该程序库文件连接到一个单一的机器人系统,且在不能
连接至其他 VC。
© Copyright 2008-2010 ABB. 保留所有权利。
下一页继续
633HAC032104-010 修订 : C
Page 64

2 如何构建工作站
2.5.1. 启动虚拟控制器
续前页
添加系统
要在新的虚拟控制器中启动系统并自动导入系统所用的机器人,请执行以下步骤:
1. • 如果您打开了 选择系统 对话框, 请继续执行下一步。
• 如果您为打开 选择系统 对话框, 请转到 控制器 菜单, 并单击 添加系统。
2. 取决于要在虚拟控制器上启动的系统是否已准备好,执行以下操作之一。
活动 描述
创建并启动现有系统的拷贝
计划添加工作站特有的配置或程序时, 建议
执行此操作。
按原样启动现有系统
当您已为工作站创建特定系统时,此操作很
有用。
如果不计划创建工作站特有的配置或程序,
且需要快速启动,此操作也是很有用的。
修改和启动现有系统
这种方法可以用来添加或更改系统选项,例
如添加或替换机器人和外轴。
构建和启动新系统
使用此选项,可以通过 RobotWare 密钥或虚
拟密钥构建和启动全新系统。
从 选择系统库 列表中,选择包含要使用系统
的电脑上的文件夹。 从找到的系统 列表中选
择要复制的系统,然后单击复制。 在 拷贝系
统对话框中,输入系统名称并单击 确定。
从 选择系统库 列表中,选择包含要使用系统
的电脑上的文件夹。
从 选择系统库 列表中,选择包含要修改系统
的电脑上的文件夹。 从 找到的系统 列表中
选择要修改的系统,然后单击 修改。这会启
动 系统生成器, 您可以从中进行修改。 详情
修改系统 第 136 页
请参阅
单击 创建 以启动系统生成器, 从中建立新
系统。 有关创建系统的详情请参阅
统 第 133 页
。
3. 在 找到的系统 列表中,选择您所需要的系统, 单击 确定。
。
创建新系
© Copyright 2008-2010 ABB. 保留所有权利。
3HAC032104-010 修订 : C64
Page 65
2.5.2. 重启 VC
概述
操作前提
何时重启虚拟控制器
热启动
2 如何构建工作站
2.5.2. 重启 VC
本节描述了在何时何种情况下您需要在 RobotStudio 中重启虚拟控制器。请参阅
启 第 300 页
要重启控制器,需满足以下条件:
• 您有控制器的写入权限。
• 对于高级方式的重启如 X-start 和 C-start,您要有使用示教器权限。
某些操作在重启控制器后才能生效。在操作过程中 RobotStudio 会提示您何时需要
重启系统。
通常,您需要在如下情况下热启动虚拟控制器:
。
重
冷启动
高级重启方式
高级重启方式选项
© Copyright 2008-2010 ABB. 保留所有权利。
• 您修改了该虚拟控制器中的任何机器人的 baseframe。
• 您使用配置编辑器修改了机器人配制或加载了新的配置文件。
• 您在当前系统添加了新的硬件或选项。
• 发生系统故障。
要将系统恢复至创建时状态,冷启动非常有用。冷启动会删除之前添加至系统的所
有 RAPID 程序,数据和自定义的配置。
除热启动和冷启动之外,还有一些高级重启方式,请参阅
页
。
高级重启方式选项 第 65
您可以使用如下高级重启方式重启控制器:
选项 描述
I- 启动 重启控制器后使用当前系统,并恢复默认设置。
使用这种启动方式将会删除对机器人配置所做的修改。启动后
当前系统将恢复到刚刚导入工作站时的状态 (空系统)。
P- 启动 重启控制器后使用当前系统,并重新设置 RAPID。
使用这种启动方式将会删除所有 RAPID 程序模块。该启动方式
在恢复错误修改程序以致程序无效的系统时非常有用。例如当
程序所使用的系统参数被修改时。
X- 启动 保存当前系统并启动引导程序。
该方法保存了当前系统的设置,并启动了引导程序,这样您可
以选择启动一个新的系统。您也可以使用引导程序重新配置控
制器网络设置。
下一页继续
653HAC032104-010 修订 : C
Page 66

2 如何构建工作站
2.5.2. 重启 VC
续前页
选项 描述
C- 启动 删除当前系统并启动引导程序。
使用这种重启方式删除当前系统并启动引导程序,这样您可以
选择启动一个新系统。您也可以使用引导程序重新配置控制器
网络设置。
B- 启动 重启当前系统并使用最近的正常配置。使用这种重启方式将系
统状态恢复到最近的正常配置。
© Copyright 2008-2010 ABB. 保留所有权利。
3HAC032104-010 修订 : C66
Page 67

2.6 工作站组件
2.6.1. 导入工作站组件
导入机器人模型
本节介绍如何把未带控制器的机器人模型导入您的工作站。
如果机器人未连接至控制器,则不能进行编程。要导入连接至虚拟控制器的机器人,
请为机器人配置一个系统,并在虚拟控制器中将系统启动。有关详细信息,请分别
参阅
要导入机器人模型,在 基本 选项卡上单击 机器人系统, 从列表中选择您所需的机
器人模型。
导入工具
工具是在工件上使用的特殊对象,例如弧焊枪或夹具。要在机器人程序中获得正确
动作,必须在工具数据中指定工具。在工具数据中,最为重要的部分是 TCP,它是
工具中心点相对于机器人手腕 (与默认工具
创建新系统 第 133 页 和启动虚拟控制器 第 63 页
tool0
相同)的位置。
2 如何构建工作站
2.6.1. 导入工作站组件
。
导入变位机
为当前系统添加导轨
导入之后,工具将与机器人无关。因此,为了使工具随机器人一起移动,必须将其
连接至机器人。
要导入工具,在 基本 选项卡上单击 工具, 从列表中选择您所需的工具。
要导入变位机, 在 基本 选项卡上单击 ABB 模型库,在变位机列表中选择您所需的
项目。
要添加导轨,请执行以下步骤:
附注
以下操作步骤不适用于带 IRB4004,IRB6007 和 IRB7004 的机器人系统。这些系统需
要使用 TrackMotion 媒体库进行配置不能通过加载单独的配置文件进行配置。详细
信息请参阅
1. 在虚拟控制器中,选择在空工作站或一个已存在的工作站中启动一个系统,请参
阅
2. 在 布局 浏览器中,选择要添加导轨的系统。
3. 在 离线 选项卡上,单击 系统配置。
安装并许可 RobotStudio 第 27 页
机器人系统 第 174 页
。
。
© Copyright 2008-2010 ABB. 保留所有权利。
下一页继续
673HAC032104-010 修订 : C
Page 68

2 如何构建工作站
2.6.1. 导入工作站组件
续前页
4. 单击 添加 将导轨参数添加至当前工作站。浏览至导轨的参数文件 (.cfg)然后
单击 打开。
如果您的导轨使用特定的文件,请导入该特定文件。否则,RobotStudio 默认安
装了一些标注导轨的参数文件。您可以在 RobotStudio 安装文件夹内的 ABB
Library/Tracks 文件夹下找到这些文件。 ABB Library 文件夹也可以通过打开对
话框左侧的快速启动栏开以添加参数文件。
每个参数文件名称会显示其所支持的导轨类型。第一部分显示导轨长度,第二部
分显示导轨数目。
例如,TRACK_1_7.cfg 文件支持所有长度为 1.7 米的导轨,其所在的系统必仅包
含一个任务。对 MultiMove 系统或其他有多个任务的系统,使用符合其任务数目
的配置文件。
例如,如果在如下 MultiMove 系统中,导轨长度 19.9 米,机器人安装到导轨,
且该机器人连接到 4 个不同的任务,您需要选择 TRACK_19_9Task4.cfg 文件。
5. 在 系统配置 窗口,单击 确定。当要求重启系统时,请单击 是。
6. 在重启时,列表中将显示与该配置文件兼容的所有导轨。选择您所需的导轨,单
击 确定。
在重启后,导轨将显示在工作站中,请将机器人安装到轨道上。
导入程序库文件,几何体或设备
程序库部件是单独保存的 RobotStudio 对象。通常情况下,程序库文件中的组件被
锁住不能进行编辑。
几何体是您导入并在 RobotStudio 中使用的 CAD 数据。请参阅
和 CAD 文件 第 24 页
要导入库文件,几何体或设备,请参阅
查看可导入的 CAD 格式列表。
导入模型库 第 173 页
关于程序库、几何体
。
© Copyright 2008-2010 ABB. 保留所有权利。
3HAC032104-010 修订 : C68
Page 69

2.6.2. 转换 CAD 格式
概述
CAD 转换器默认与 RobotStudio 一起安装。通常情况下您无需在将 CAD 文件导入
RobotStudio 前对其进行转换。但在转换多个文件或进行自定义转换时,CAD 转换器
非常有帮助。
操作前提
大部分文件格式需要独立的许可文件。详情请参阅
第24页
启动 CAD 转换器
单击 开始 菜单,指向 程序,ABB Industrial IT,Robotics IT,然后单击 CAD
Converter。
转换 CAD 文件
请使用以下步骤转换 CAD 文件:
2 如何构建工作站
2.6.2. 转换 CAD 格式
关于程序库、几何体和 CAD 文件
。
转换设置
1. 单击 添加文件,然后选择要转换的文件。如有需要,可以多次使用 添加文件 按
钮 从不同的地址添加文件。
文件添加至网格中,每个文件各占一行。
2. 如有需要,单击相应的行修改文件名称或目标格式。
3. 在 目标目录 框中,指定将新文件保存至哪个文件夹。
4. 如有需要,单击 设置 更改转换设置。关于转换设置的详细信息,请参阅
置 第 69 页
。
转换设
5. 单击 转换文件。
下表详述了转换设置:
设置 描述
Acis 保存文件格式 在使用 ACIS 作为目标格式时,选择所需的 ACIS 版本。
启用恢复 转换器是否试图修复几何体。仅适用于指定格式。
转换隐藏 / 未显示的实体 选择是否转换未显示的实体。仅适用于指定格式。
VRML/STL 比例因素 在单元中经常创建 VRML 和 STL 需要修改它们的尺寸。
退出时删除所有生成的日
志文件
在退出 CAD 转换器时删除所有日志文件。
© Copyright 2008-2010 ABB. 保留所有权利。
693HAC032104-010 修订 : C
Page 70
2 如何构建工作站
2.6.3. 故障排除和优化几何体
2.6.3. 故障排除和优化几何体
概述
工作站内的几何体和 CAD 模型的特征可能会对使用 RobotStudio 执行操作产生很大
影响,它既可简化对象编程,又可提升仿真性能。
以下是部分几何体故障排除指南。
故障 信息
在图形窗口内作出选择时,
指针就会捕捉对象的错误
部件。
图形窗口的刷新或更新较慢。这个问题可能是由于计算机性能对于工作站内几何体文件的大
几何体部件是不可见的。 如果从某些角度看不见几何体的部件,可能原因是对象由 2D 表
这个问题可能是由于捕捉模式设置错误、选择不精确、几何体
信息隐藏或缺乏所致。要解决这些问题,请执行以下操作:
• 检查选择层级和捕捉模式设置。有关详细信息,请分别
选择项目 第 47 页
参阅
• 选择之后,请缩放并旋转对象,以便可以在对象
击。
• 检查对象是否已隐藏可能影响捕捉的细节。删除编程或
仿真时不必要的细节。有关详细信息,请参阅
第73页
• 部分文件格式仅包含图形演示,并未包含几何数据。 从
同时包含有几何数据的文件格式导入几何体。 有关详
情,请参阅
小不够高所致。
要减少几何文件的尺寸,请执行下列步骤之一:
• 渲染几何体时请使用较低的细节等级。 有关详情,请参
阅
• 通过使用 “变形”功能,可以自动简化混合、斜面和孔
洞。 这可以大大减少图形混合,加速仿真并减少内存用
量。
• 检查对象是否拥有不必要的细节。删除编程或仿真时不
必要的细节。有关详细信息,请参阅
页
面组成,且
背面剔除是只能从前面看见对象的表面,如果对象 (或其任何
面)的方位不同,将看不见这些对象。
要解决此问题,请执行下列操作之一:
• 转换至建模模式,然后颠倒显示错误的表面方向。此
时,不仅可以更正显示问题,而且可以减少在图形编程
期间出现方位错误的可能性。有关详细信息,请参阅
转 第 358 页
• 关闭特定对象的背面剔除。此时,可以正确显示对象,
但是不会影响表面的方向。如果执行图形编程时要使用
该表面,这样做可能会导致问题。有关详细信息,请参
阅
• 关闭工作站内所有对象的背面剔除。此时,可以正确显
示对象,但是不会影响表面的方向。如果执行图形编程
时要使用该表面,这样做可能会导致问题。同时,会降
低图形处理的性能。有关详细信息,请参阅
。
关于程序库、几何体和 CAD 文件 第 24 页
图形外观 第 355 页
。
背面剔除
选项已打开。
和
转换部件所有表面方向 第 71 页
停用单一对象的背面剔除 第 71 页
除的通用设置 第 71 页
。
。
。
内部
修改部件
修改部件 第 73
。
。
更改背面剔
单
反
。
© Copyright 2008-2010 ABB. 保留所有权利。
下一页继续
3HAC032104-010 修订 : C70
Page 71

转换部件所有表面方向
请使用以下步骤转换部件所有表面方向:
1. 选择您想要转换其表面方向的部件。
2. 在 修改 选项卡上,单击 图形外观。
3. 在 渲染 选项卡上单击 翻转法线,然后单击 确定。
停用单一对象的背面剔除
请使用以下步骤改变单一对象的背面剔除设置:
1. 选择要更改其背面剔除设置的部件。
2. 在 修改 选项卡上,单击 图形外观。
3. 在 渲染 选项卡上,清空 背面剔除 复选框 然后单击 确定。此时,将会显示对
更改背面剔除的通用设置
背面剔除的通用设定会影响尚未单独进行背面剔除设定的新对象和现有对象。
2 如何构建工作站
2.6.3. 故障排除和优化几何体
续前页
象的各个表面,不管通用的设置是否选中背面剔除的状态。
1. 在应用菜单上,单击 RobotStudio 选项。
2. 在左侧的导航栏中,选择 图形:性能。
3. 在 性能 页面,选中或清除 剔除背向三角形 复选框,然后单击 确定。
© Copyright 2008-2010 ABB. 保留所有权利。
713HAC032104-010 修订 : C
Page 72

2 如何构建工作站
2.7.1. 对象
2.7 建模
2.7.1. 对象
概述
创建框架
创建固体
本节介绍如何创建或修改几何对象。 大部分操作均在 RobotStudio 建模模式下执
行。
框架是一种通用坐标系,可以在定位对象时用作参照。通用框架也可转换为特殊类
型的坐标系,比如工件坐标或工具中心点。
详细操作过程请参阅
使用创建固体命令,可以创建和构建不含 CAD 文件或程序库的对象模型,还可以创
建原始固体。这些物体以后可以合并成较为复杂的物体。
详细操作过程请参阅
框架 第 177 页 和三点法创建框架 第 178 页
固体 第 239 页
。
。
创建表面
创建曲线
修改曲线
创建边框
由法线创建直线
详细操作过程请参阅
使用基于对象几何体的目标点创建路径时,曲线就是 RobotStudio 使用的几何对
象。例如,如果要使机器人沿对象边缘运行,可以先沿边界创建一条曲线,然后沿
该曲线生成一个完整路径,而不是手动寻找和创建所需的目标点。
如果工件的 CAD 模型 / 几何体原先不含有曲线,您可以创建在 RobotStudio 中创建
曲线。
详细操作过程请参阅
使用基于对象几何体的目标点创建路径时,曲线就是 RobotStudio 使用的几何对
象。通过在编程前优化曲线,可以减少对生成路径的调试次数。
详细操作过程请参阅
详细操作过程请参阅
您可以创建垂直于表面的直线。
详细操作过程请参阅
表面 第 242 页
曲线 第 244 页
修改曲线 第 366 页
边界 第 249 页
。
。
。
。
从法线生成直线 第 255 页
。
© Copyright 2008-2010 ABB. 保留所有权利。
拉伸表面或曲线
您可以通过拉伸表面或曲线形成 3D 物体以创建固体。您可以沿向量或曲线拉伸。
详细操作过程请参阅
拉伸表面或曲线 第 254 页
。
下一页继续
3HAC032104-010 修订 : C72
Page 73

修改部件
修改程序库组件
2 如何构建工作站
2.7.1. 对象
续前页
导入几何体或创建对象时,均将其作为一个部件。但是,一个部件可以包含多个物
体。在 RobotStudio 的 建模 模式下,可以通过添加、移动和删除物体来修改部件。
要修改部件,请执行以下步骤:
1. 在 建模 浏览器中,展开您要修改部件的节点。 参照下列说明修改部件:
目标 操作说明
删除物体 选中物体并按 DEL 键。
将物体从一个部件移动到
另一个部件
将物体相对于另一个物体移动选择物体,然后使用任一个常见命令移动物体。详细信息清参
作为外部文件,程序库只与工作站链接。因此,要修改导入的程序库组件,必须首
先断开该链接,然后重新建立。详细操作请参阅
拖动物体或使用复制和粘贴命令。这些命令在右键快捷菜单中。
阅
摆放物体 第 77 页
。
程序库组件 第 361 页
。
© Copyright 2008-2010 ABB. 保留所有权利。
733HAC032104-010 修订 : C
Page 74

2 如何构建工作站
2.7.2. 机械装置
2.7.2. 机械装置
工作流程
本节介绍了如何新建机械装置,即机器人、工具、外轴或设备的图形表达式。机械
装置的各种部件沿轴或绕轴移动。
创建机械装置取决于构建树型结构中的主要节点。四个节点分别是链接、关节、框
架 / 工具和校准,他们最初标为红色。每个节点都配置有足够的子节点使其有效时,
标记变成绿色。一旦所有节点都变得有效,即可将机械装置视作可以进行编译,因
此,可以进行创建。有关其它有效性标准,请参阅下表。
节点 有效性标准
链接 • 它包含多个子节点。
• BaseLink 已设置。
• 所有的链接部件都仍在工作站内。
关节 • 必须至少有一个关节处于活动状态且有效。
框架 / 工具数据 • 至少存在一个框架 / 工具数据。
• 对于设备,不需要框架。
校准 • 对于机器人,只需一项校准。
• 对于外轴,每个关节需要一项校准。
• 对于工具或设备,接受校准,但不必须。
依赖性 • 无。
机械装置建模器的修改模式具有下面两个用途:一是在树型结构中对可编辑的机械
装置进行修改,二是完成对新的或修改的机械装置的建模。
建议您从上到下对树形结构中的每个主要节点进行配置。根据当前状态,右键单击
或双击要添加、编辑或删除的节点或子节点。
详细操作过程请参阅
创建机械装置 第 257 页
。
© Copyright 2008-2010 ABB. 保留所有权利。
3HAC032104-010 修订 : C74
Page 75

2.7.3. 工具和工具数据
概述
要仿真机器人工具,需要工具的工具数据。如果导入预定义的工具,或使用 创建工
具向导 创建工具,将会自动创建工具数据;否则,必须自行创建工具数据。
工具数据可以简化与工具有关的编程工作。通过为各种工具单独定义工具数据集,
可以使用不同工具运行同一个机器人程序:只需定义新的工具数据即可。工具数据
包含移动和仿真工具所需的信息。
下文介绍了两种在 RobotStudio 中创建工具数据的方法:
• 创建或修改工具数据请分别参阅
• 创建现有几何体的工具数据。请参阅
创建和设置固定工具
本节介绍了固定工具的创建方式。 有关创建机器人握住工具的详情,请参阅
具 第 263 页
使用固定工具时,机器人握住并移动与该工具相关的工件。因此,必须正确设置工
具数据和工作对象。
要创建固定工具的工具数据,请执行下列操作:
2 如何构建工作站
2.7.3. 工具和工具数据
工具数据 第 180 页 和修改工具数据 第 373
页
。此时,将会创建编程必需的所有数据,但是在仿真过程中没有可视化工
具。
创建工具 第 263 页
。
。
创建工
© Copyright 2008-2010 ABB. 保留所有权利。
1. 导入表示工具的几何体或程序库, 请参阅
如果当前没有几何体或程序库但知道具体位置,可以跳过此步。该工具可以进行
编程,但不会显示在工作站内。
2. 创建工具的工具数据,请参阅
请确保将 机器人握住工具 选项设置为 false。
3. 创建一个由机器人移动的工件。请参阅
请确保将 机器人握住工件 选项设置为 true。
4. 如果拥有工件的几何体或程序库组件,请将其安装到机器人。请参阅
页
。
工具数据 第 180 页
导入几何体 第 176 页
。
工件坐标 第 179 页
。
。
安装 第 346
753HAC032104-010 修订 : C
Page 76
2 如何构建工作站
2.7.4. 设置对象的本地原点
2.7.4. 设置对象的本地原点
概述
每个对象都有各自的坐标系,我们称之为本地坐标系,对象的尺寸都在此坐标系中
定义。如果使用其它坐标系对象作为参考表示位置,则该位置是所用的这个坐标系
的原点。
使用 “设置本地原点”命令可重新定位对象的本地坐标系,而非对象本身。
详细操作过程请参阅
设定本地原点 第 384 页
。
© Copyright 2008-2010 ABB. 保留所有权利。
3HAC032104-010 修订 : C76
Page 77

2.8 放置
2.8.1. 摆放物体
概述
2 如何构建工作站
2.8.1. 摆放物体
要实现工作站所需的布局,需要导入或创建对象,并相应地放置对象,如果适用,
再安装到其它对象上。
放置对象就是设置对象的位置和旋转。如果要将对象安装到机器人或其它机械装置,
会将这些对象自动动放置到各自关联的关节。
下表描述了关于物体摆放的操作:
活动 描述
摆放对象 将对象放置在工作站的指定的位置中,请参阅
and
设定位置 第 386 页
旋转对象 为了实现所需的布局,可以对工作站中的对象进行旋转,请参
阅
旋转 第 382 页
测量距离或角度 测量功能可计算您从图形窗口中选择的点之间的距离、角度和
直径。
使用测量功能时,输出 窗口中会显示有关如何继续操作的结果
和说明。请参阅
创建组件群 将在浏览器中有关联的物体组成组件群。请参阅
.
页
安装或拆除物体 如果对象要供机器人随意使用,如工具,则必须安装至机器
人,请参阅
微动机器人 通过微动控制,可以移动机器人。此外,可以定位机器人轴,
请参阅
修改任务框架 修改任务框架会改变当前工作站中控制器和与其相联的机器人
和其他设备的位置。
在默认情况下,控制柜世界坐标系与工作站世界坐标系一致。
对只有一个控制柜的工作站,这种默认设置方便您进行位置修
改和任务框架设定。请参阅
但当工作站中包含多个控制柜时, 或当您需要在一个现有的工
作站中重新摆放控制柜,请参阅
修改 baseframe 位置 通过修改 baseframe 位置,可以设置控制器大地坐标系和机械
单元的 baseframe 之间的偏移。如果多个机械单元属于同一个
控制器 (例如 MultiMove 系统中的多个机器人),或者使用的
是定位器外轴,必须执行上述操作。 详细操作过程请参阅
微动控制机械装置 第 83 页
配置 第 338 页
测量组 第 256 页
安装 第 346 页 和拆除 第 353 页
.
.
。
。
。
设定任务框架 第 337 页
系统配置 第 338 页
放置 第 377 页
组件组 第 208
。
。
系统
© Copyright 2008-2010 ABB. 保留所有权利。
773HAC032104-010 修订 : C
Page 78

2 如何构建工作站
2.8.2. 设置外轴
2.8.2. 设置外轴
概述
操作前提
将机器人安装至导轨
当在 RobotStudio 工作站中的启动带导轨或变位的系统时,必须对该系统进行设
置,加载导轨或变位机,并使动作有效。
系统应当支持导轨或变位机外轴, 请参阅
第 146 页
将机器人安装至导轨, 请执行下列操作:
1. 在 布局 浏览器中, 将机器人图标拖拽至导轨图标。
2. 当对话框显示
位置同步。如果您希望对机器人和导轨进行各自独立的编程,单击 否。
。
是否将机器人与导轨进行同步?
支持一个机器人和一个变位机外轴的系统
时 , 单击 是 使导轨位置与机器人
将变位机放置到工作站
将物体安装至变位机
3. 当提示您是否需要重启控制器时 , 单击 是。
导轨已被添加至系统, 您可以开始对导轨编程了。关于如何对导轨进行编程, 请
参阅
外轴编程 第 106 页
注意
系统冷启动后,以上设置将被删除,您需要重新执行以上操作。
将变位机放置到工作站,请执行以下操作:
1. 使用任一放置和移动对象所用的一般功能将定位器移动到所需位置。 请参阅
物体 第 77 页
2. 修改变位机除 INTERCH 单元 (如果存在)外每个机械单元的 baseframe 位置。
若询问您是否希望重新启动系统时,单击 Yes。
请参阅
导入工作站组件 第 67 页
重启之后,将会使用变位机的新位置更新系统。继续将固定装置和工作对象安装
至变位机。
要在定位器握住的工件上的进行机器人动作编程,必须在安装到定位器的工件上创
建目标点。为了实现全面的可视化仿真,还应连接定位器移动的 CAD 模型。要安装
工件,请执行以下步骤:
。
。
摆放
。
1. 如果若工作站中尚无固定装置和工件的模型,请将其导入。 请参阅
件 第 67 页
2. 连接固定装置与定位机,请参阅
位置时,单击 否。
如果定位器有多个工作站,系统将会问您要将对象连接到哪一个工作站上
。
安装与拆除对象 第 48 页
。 询问是否要保持当前
3HAC032104-010 修订 : C78
导入工作站组
© Copyright 2008-2010 ABB. 保留所有权利。
下一页继续
Page 79

2 如何构建工作站
2.8.2. 设置外轴
续前页
3. 将工件安装到固定装置上。 询问是否要保持当前位置时,请回答 否。
4. 将要在其中进行工件编程的工作对象连接到固定装置、工件或定位器。如果已定
义工件或固定装置的校准位置,最好使用该对象。如果系统询问是否要保留当前
位置,请回答否。
变位机已被添加至系统, 您可以开始对变位机的编程了。关于如何对变位机进行
编程, 请参阅
提示
如果定位机属于包含多个工作站的可互换类型,可以将固定装置、工件或工作对象
分别连接到每个工作站凸缘,也可以使用一个工作对象集。通过各种事件,可以将
该对象集连接到不同凸缘,或从中提取该对象集。
注意
系统冷启动后,以上设置将被删除,您需要重新执行以上操作。
外轴编程 第 106 页
。
© Copyright 2008-2010 ABB. 保留所有权利。
793HAC032104-010 修订 : C
Page 80

2 如何构建工作站
2.8.3. 摆放机器人
2.8.3. 摆放机器人
概述
当移动与 VC 相连的机器人时,也需修改与机器人相关联的任务框架或其他固定的
RAPID 对象 (如,工具坐标或工件坐标)。
操作前提
当前工作站中存在机器人,且机器人已连接至 VC,请参阅
53 页
使用工具移动机器人位置
1. 使用以下方式修改与 VC 相连的机器人的 Baseframe 位置:
使用系统创建工作站 第
。
• 修改位置,请参阅
• 使用一点法,两点法,三点法,框架法或两个框架摆放物体,请参阅
第377页
。
设定位置 第 386 页
。
放置项目
• 旋转,请参阅
2. 单击 应用。
当出现提示信息 您是否要移动任务框架?单击 是 或 否。
• 单击 是 移动 task frame,baseframe 保持与 task frame 的相对位置。
• 单击 否 移动 baseframe,且 baseframe 相对于 task frame 的位置会发生改
变。
附注
如果任务中包含固定的 RAPID 对象 (如工具数据,工件坐标),将出现下列提示信
息您是否要保留所有固定 RAPID 对象的位置?
• 单击 是 保留所有固定 RAPID 对象在全局坐标中的位置。
• 单击 否 跟随 baseframe 移动 (保留相对于 baseframe 的坐标位置)。安装到
其他对象上的工件不会受影响。
如果 VC 的 baseframe 配置更新了,需要重启 VC 才能启用更改。也就是说当
baseframe 与 task frame 的相对位置发生变化,将显示以下信息 您是否要更新控制
器配置并重启控制器?
• 单击 是 重启控制器并更新连接的 VC 上的 baseframe 配置。
• 单击 否 则 VC 的 baseframe 与控制器上的信息不一致。
使用 FreeHand 移动或旋转机器人
1. 使用以下 FreeHand 的选项对连接至 VC 的机器人的 Baseframe 位置进行修改。
• 移动,请参阅
• 旋转,请参阅
旋转 第 382 页
。
移动项目 第 201 页
旋转 第 382 页
。
。
关于更新机器人 baseframe 的详情,请参阅
2. 在输出窗口中将出现相应的提示信息。
更新 Baseframe 位置 第 338 页
3HAC032104-010 修订 : C80
。
© Copyright 2008-2010 ABB. 保留所有权利。
Page 81
3 如何进行机器人编程
3.1. 机器人编程工作流程
概述
建议您从头至尾完成整个操作,即使在大多数情况下可以使用其他操作顺序也建议
您完成整个工作流程。
使用同步命令,可以保存和加载包含 RAPID 模块的文本文件,还可以从工作站创建
RAPID 程序。
操作前提
为机器人创建程序之前,应该首先创建机器人工作站,包括机器人、工件和固定装
置等设备。
机器人编程
下表介绍了机器人编程使,执行特定任务的工作流程。
3 如何进行机器人编程
3.1. 机器人编程工作流程
任务 描述
创建目标点和路径 创建机器人执行工作任务所需的目标点和路径。
要创建目标点和路径,请执行以下操作之一:
• 创建与所需形状匹配的曲线。此后,使用 从曲线创建
生成路径,并根据已有的形状创建目标点。请参阅
和
第 244 页
• 在请求位置处创建目标点,然后创建路径,并在其中插
入创建的目标点。请参阅
检查目标点方向 定义目标点时请确保该点的定义能高效的执行任务。如果不合
要求,请重新调整目标点的方向,直到满意为止。请参阅
第89页
检查可达性 检查机器人和工具是否能到达路径内的所有目标点。请参阅
试位置和动作 第 97 页
将程序与虚拟控制器同步 从 RobotStudio 项目中生成 RAPID 代码并启用仿真程序。
执行基于文本的编辑 如果需要编辑由 RobotStudio 创建的指令或数据,可以启动程
序编辑器。请参阅
碰撞检测 检查机器人或工具是否与周围的设备或固定装置发生碰撞。如
果发生碰撞,请调整位置或方向,直到不碰撞为止。请参阅
测碰撞 第 114 页
测试程序 沿路径移动来测试程序。请参阅
。
从曲线创建路径 第 187 页
创建目标点 第 182 页
。
使用 RAPID 编辑器 第 110 页
。
测试位置和动作 第 97 页
。
。
曲线
。
方向
测
检
。
© Copyright 2008-2010 ABB. 保留所有权利。
813HAC032104-010 修订 : C
Page 82

3 如何进行机器人编程
3.2. 工件坐标
3.2. 工件坐标
创建工件坐标
工件坐标是用来描述工件位置的坐标系。工件坐标由两个框架构成:用户框架和对
象框架。所有的编程位置将与对象框架关联,对象框架与用户框架关联,而用户框
架与大地坐标系关联。
xx0500001519
详细操作信息请参阅
修改工件坐标
详细操作过程请参阅
将现有框架转为工件坐标
您可以使用现有的框架创建工件坐标。转化后的工件坐标与所选框架有同样的名称
位置。
详细操作过程请参阅
由点创建框架
您可以通过选择坐标轴上的点来创建框架,RobotStuio 能自动计算出框架原点的位
置和方向。
详细操作过程请参阅
工件坐标 第 179 页
修改工件坐标 第 374 页
。
。
将框架转化为工件坐标 第 350 页
三点法创建框架 第 178 页
。
。
© Copyright 2008-2010 ABB. 保留所有权利。
3HAC032104-010 修订 : C82
Page 83

3.3. 微动控制机械装置
微动控制机器人
要检查机器人是否能到达工件上的所有位置,您可以在 Freehand 模式下使用鼠标或
使用微动控制对话框对机器人的 TCP 或关节进行微动控制。要使机器人微动至极
限,最好使用微动控制对话框。
操作目标 操作说明
3 如何进行机器人编程
3.3. 微动控制机械装置
操作前提
微动机械装置
微动控制机器人关节 Freehand 操作请参阅
微动控制对话框操作请参阅
微动控制机器人 TCP Freehand 操作请参阅
微动控制对话框操作请参阅
手动控制关节 第 203 页
机械装置手动关节 第 362 页
手动线性 第 204 页
。
线性手动机械装置 第 363 页
。
.
。
要微动控制机器人 TCP, 需要首先启动 VC。
功能 描述
Mutlirobot 微动控制 使用 multirobot 微动控制时,所选的所有机械均将遵照已进行
微动控制的 TCP 设置。
Multirobot 微动控制适用于所有类型的微动控制。
Multirobot 微动控制 第 205 页
请参阅
使用锁定的 TCP 进行微动控制微动控制使用锁定 TCP 移动机器人 (如跟踪外轴)的机械装置
时,机器人将会重新定位,使 TCP 的位置不会发生更改,即便
其 baseframe 移动,也是如此。
微动控制使用锁定 TCP 移动工作对象的外轴时,机器人将会重
新定位,以便其 TCP 在使用 multirobot 微动控制时与工作对
象保持一致。
已锁定的 TCP 在微动控制与机器人所属任务相同的机械时可
用。
请参阅
机械装置手动关节 第 362 页
。
。
© Copyright 2008-2010 ABB. 保留所有权利。
833HAC032104-010 修订 : C
Page 84

3 如何进行机器人编程
3.4. 目标点
3.4. 目标点
创建目标点
您可以在创建目标点对话框中输入目标点的位置或在图形窗口中单击手动新建目标
点。
目标点将创建在当前使用的工作对象内。
详细操作过程请参阅
创建接点目标
接点目标规定了机器人轴位置。
详细操作过程请参阅
示教目标点
通过在活动 TCP 上微动控制机器人和示教目标点,可以新建目标点。示教的目标点
使用微动控制到目标点时所用的轴配置来创建。
目标将创建在当前使用的工作对象内。
详细操作过程请参阅
修改目标点位置
使用修改位置命令可以修改目标点的位置和方向。
详细操作过程请参阅
使用 ModPos 修改目标点
通过将机器人微动控制到新的位置,可以修改现有目标点的位置。通过为路径中的
目标点选择运动指令,可以使用 ModPos 命令将目标点移动到当前使用的工具的
TCP。
执行 ModPos 时,运动指令所参照的目标点将会使用以下信息更新:
创建目标点 第 182 页
创建关节坐标 第 183 页
示教目标点 第 181 页
。
。
。
设定位置 第 386 页 和旋转 第 382 页
。
• 与当前使用的工具的 TCP 对应的位置和方位
• 当前使用的机器人的当前配置
• 当前使用的机器人所有活动外轴的当前位置和方位值
注意:如要线性微动控制机器人,必须运行该机器人的虚拟控制器。 详情请参阅
动虚拟控制器 第 63 页
。
下一页继续
3HAC032104-010 修订 : C84
启
© Copyright 2008-2010 ABB. 保留所有权利。
Page 85

重命名目标点
删除未使用的目标点
3 如何进行机器人编程
3.4. 目标点
续前页
您可以使用重命名命令同时修改几个目标点的名称。您可以选择单独修改每个目标
点的名称,也可以选择同时重命名一条或几条路径中的所有目标点。
目标点的新名称由可选前缀、递增数字和可选后缀组成。
详细操作过程请参阅
重命名目标点时,请确保新目标点名称符合命名规则。目标点名称必须:
• 以 ISO 8859-1 编码中的字母字符开始 (即英语字母表中的普通字母)
• 少于 16 个字符
• 避免使用空字符串
• 不在 RAPID 中包含任何非法字符。请参阅
得详细信息。
如果在编程期间删除或更改路径或运动指令,其中的大量目标点将不再使用。在任
何指令中,都不再使用这些目标点。要使工作对象及其目标更加便于抓取,可以删
除不再使用的所有目标点。
详细操作过程请参阅
重命名目标点 第 380 页
。
RAPID reference manual
删除未使用的目标点 第 379 页
,以 便 获
.
© Copyright 2008-2010 ABB. 保留所有权利。
853HAC032104-010 修订 : C
Page 86

3 如何进行机器人编程
3.5. 路径
3.5. 路径
创建空路径
路径由一组包含运动指令的目标点组成。机器人将沿着这组目标点进行移动。在当
前活动的任务中创建空路径请参阅
由曲线生成路径
如果工件的曲线或轮廓与要创建的路径相符,便可自动创建路径。使用由曲线生成
路径命令 , 沿线现有曲线添加目标点和指令完成整个路径。
路径将创建在活动的任务中。
创建的目标点方向将会与 选项 对话框内的接近 / 行程矢量设置一致。
要由曲线生成路径,首先必须已在工作站内创建曲线。
空路径 第 186 页
.
详细操作过程请参阅
为路径设置机器人轴配置
当机器人在目标点之间移动时,有多种机器人轴配置值方案。使用配置监控执行运
动指令时,必须执行此项操作。
示教的目标点已经验证了配置,但是以其它方式创建的目标点没有验证。此外,重
新定位的目标点会丢失其配置。在 RobotStudio 中,配置无效的目标点标有黄色警
告符号。有关详细配置信息,请参阅
为路径内所有的目标点设置轴配置请参阅
为单独的目标点设置轴配置请参阅
反转路径
反转路径命令可以改变路径内目标点的序列,使机器人从最后一个目标点移动到第
一个目标点。反转路径时,您可以选择仅反转目标点顺序或翻转整个运动过程。
详细操作过程请参阅
附注
反转路径时,将会删除原始路径。如果要保留这些路径,反转之前,必须进行备份
附注
反转路径时,只处理移动指令。动作指令 (如果存在)必须在反转之后手动插入。
从曲线创建路径 第 187 页
机器人轴的配置 第 22 页
自动配置 第 347 页
配置 第 349 页
反转路径 第 381 页
。
。
。
。
。
旋转路径
转换路径
通过旋转路径命令,您可以旋转整个路径并移动路径所使用的目标点。旋转路径时,
路径中目标点轴的配置将会丢失。
在启动旋转路径命令前,必须存在可以绕其旋转的框架或目标点。
详细操作过程请参阅
转换路径功能可移动路径和包含的所有目标
详细操作过程请参阅
旋转路径 第 383 页
转换路径 第 388 页
。
。
下一页继续
3HAC032104-010 修订 : C86
© Copyright 2008-2010 ABB. 保留所有权利。
Page 87

补偿工具半径的路径
路径插值
3 如何进行机器人编程
3.5. 路径
续前页
您可以偏移路径,以便于补偿旋转工具的半径。由于路径中的目标点已发生移动,
则目标点中的轴配置信息将会丢失。
详细操作过程请参阅
内插功能可以重新定向路径中的目标点,使起始目标点和终止目标点之间的方位差
均匀分布在目标点之间。内插既可以是线性内插,也可以是绝对内插。
线性内插根据目标点沿路径长度的位置均匀地分布方位差。
绝对内插根据目标点在路径中的序列均匀地分布方位差。
下面举例说明了线性内插和绝对内插的区别。
内插功能可以重新定向路径中的目标,使起始目标和终止目标之间的方位差均匀分
布在目标之间。内插既可以是线性内插,也可以是绝对内插。
工具补偿 第 387 页
。
没有内插
线性内插
详细操作过程请参阅
插补路径 第 357 页
。
这是任何内插前的路径。请注意,最后一个目标点的方位与其它目标点不同。
xx0500002029
这是进行线性内插后的同一路径。
xx0500002030
请注意,目标点的方位视它们相对于起始目标点和结束目标点的位置而定。
如果目标点已移动,且重新运行线性内插,可能会根据其新位置重新定位该目标点。
如果新目标点已插入现有目标点之间,且重新运行线性内插,可能不会影响现有目
标点的方位。
© Copyright 2008-2010 ABB. 保留所有权利。
下一页继续
873HAC032104-010 修订 : C
Page 88

3 如何进行机器人编程
3.5. 路径
续前页
绝对内插
这是绝对内插后的同一路径。
xx0500002031
请注意,目标点的方位根据它们在路径中的序列确定:无论位置如何,每个目标点
都会均匀地重新定位。
如果目标点已移动,且重新运行绝对内插,可能不会影响方位。
如果新目标点已插入现有目标点之间,且重新运行绝对内插,可能会更改所有目标
点的方位。
映射路径
映射路径功能可以移动路径和其中包含的所有目标点。
详细操作过程请参阅
映射路径 第 364 页
。
© Copyright 2008-2010 ABB. 保留所有权利。
3HAC032104-010 修订 : C88
Page 89
3.6. 方向
概述
无序方向
3 如何进行机器人编程
3.6. 方向
本节概述了可以自动修改目标点方向的工具。
在 RobotStudio 中从曲线创建路径时,目标点取决于曲线特性和周围的表面。下面
举例说明了一个目标点方向混乱的路径,以及不同工具对目标点的影响。
在下面的路径中,目标点方位没有进行排序。系统已经使用目标处的 “查看工具”
功能说明目标点指向不同的方向。
垂直于表面的目标点效果
© Copyright 2008-2010 ABB. 保留所有权利。
xx0500001864
在下图中,已将先前随机定位的目标点设置为垂直于路径右侧的圆形平面。请注意
目标 Z 轴的方向是如何与表面垂直的;目标点并未以其它方向旋转。
xx0500001865
下一页继续
893HAC032104-010 修订 : C
Page 90

3 如何进行机器人编程
3.6. 方向
续前页
将目标方向设置为垂直于表面
将目标方位设置为垂直于表面就是要使其与表面成直角。 可通过两种方法将目标与
表面垂直:
• 可将整个表面用作垂直参照。 目标将定位为与表面上最近的点垂直。 整个表
• 表面上的特定点可以用作法线参照物。无论到表面上最近点的法线是否拥有其
如果导入对象不含几何体 (例如 .jt 文件),则只能参照表面上的指定点。
详细操作过程请参阅
对齐目标点的效果
在下图中,如果先前定位目标点时,其 Z 轴垂直于表面而 X 和 Y 轴方向随机,则
表示已经通过对准目标绕 X 轴的方向与锁定的 Z 轴对目标点进行排列。路径中的一
个目标点已用作参照物。
面为默认表面参照。
它方位,经过定位,目标都能与此点垂直。
设置垂直于表面 第 385 页
。
对齐目标点方向
xx0500001866
您可以使用对齐目标点方向命令,对齐选定目标点使之绕一个轴的旋转而无需更改
绕其它轴的旋转。
详细操作过程请参阅
对准目标点方向 第 345 页
。
您也可以用相同的方法对齐普通框架。
下一页继续
3HAC032104-010 修订 : C90
© Copyright 2008-2010 ABB. 保留所有权利。
Page 91

复制和应用方向的效果
3 如何进行机器人编程
3.6. 方向
续前页
在下图中,先前随机定位的的目标点现已通过将一个目标点的确切方向复制给其它
所有目标点进行排列。这种方法可以快速固定可行的处理方位。其中,接近、行程
或旋转方向的变化既不影响工件的形状,也不会受工件形状的影响。
复制和应用对象的方向
xx0500001867
对准不同框架的一种简单方法是,将方向从一个对象传送给另一个对象,这有助于
简化机器人编程。
详细操作过程请参阅
复制 / 应用方向 第 352 页
。
© Copyright 2008-2010 ABB. 保留所有权利。
913HAC032104-010 修订 : C
Page 92
3 如何进行机器人编程
3.7. RAPID 指令
3.7. RAPID 指令
运动指令和动作指令
对于 RAPID 编程,RobotStudio 的主要优势在于动作编程。
运动指令是对机器人以指定的方式移动至指定目标点的一种指令。 通过
RobotStudio,您可以三种方式创建运动指令:
方法 描述
根据现有目标点创建运动指令根据 路径和目标点 浏览器中选择的一个或多个目标点创建运
创建运动指令和相应的目标点立即创建运动指令和相应的目标点。目标点的位置可从图形窗
示教运动指令 调整运动指令在机器人的当前位置创建一个运动指令和一个相
动指令。 详细操作过程请参阅
口选择,也可以数字形式键入。详细操作过程请参阅
令 第 197 页
应的目标点。 调整运动指令也可把当前配置和目标点存储在一
起。详细操作过程请参阅
。
添加至路径 第 343 页
示教指令 第 196 页
。
运动指
。
修改指令
除运动指令外,也可从 RobotStudio 创建和插入动作指令。RobotStudio 中可用的
动作指令限于影响机器人动作的常用指令。要在程序中插入其它动作指令或其它类
型的 RAPID 代码,可以使用程序编辑器。详细信息请参阅
动作指令 第 198 页
。
下表列出了可从 RobotStudio 创建的动作指令。详细信息请参阅 RAPID Reference
Manual。
动作指令 描述
ConfL 开 / 关 ConfL 指定了是否在线性运动期间监控机器人的配置。将 ConfL
设置为关闭时,机器人可以使用编程配置之外的配置在执行程
序期间移动到目标点。
ConfJ 开 / 关 ConfJ 指定了是否在接点运动期间监控机器人的配置。将
ConfJ 设置为关闭时,机器人可以使用编程配置之外的配置在
执行程序期间移动到目标点。
Actunit
DeactUnit
ConfJ 开 / 关 ConfJ 指定了是否在接点运动期间监控机器人的配置。将 ConfJ
Actunit 单元名称
DeactUnit
单元名称
单元名称
单元名称
Actunit 启用
Deactunit 停用
设置为关闭时,机器人可以使用编程配置之外的配置在执行程
序期间移动到目标点。
Actunit 启用
Deactunit 停用
单元名称
单元名称
单元名称
单元名称
所指定的机械单元。
所指定的机械单元。
所指定的机械单元。
所指定的机械单元。
大多数指令都有用于指定指令执行方式的变元。例如, MoveL 指令的变元用于指定
机器人移动至目标点的速度和准确性。
详细操作过程请参阅
修改指令 第 371 页
。
部分变元是从虚拟控制器读取的。 如果虚拟控制器未启动,则仅可修改存储在工作
站内的变元。
下一页继续
3HAC032104-010 修订 : C92
© Copyright 2008-2010 ABB. 保留所有权利。
Page 93

转换为圆弧运动
要创建指令目标点的圆弧运动,则您必须把动作类型转换为圆弧运动 (即, RAPID
内的 MoveC)。
圆弧运动通过两条指令定义,第一个动作指令是中途点,第二个动作指令包含圆弧
运动的终点。
循环动作仅能用于开口圆弧,而不能用于闭合圆。 如要创建封闭圆的路径,请使用
两个循环动作。
详细操作过程请参阅
创建控制 I/O 信号的 RAPID 指令
要控制机器人程序中的 I/O 信号,可以使用设置这些信号的 RAPID 命令。这些信号
可以通过 RobotStudio
建,前提是先为设置信号的指令创建指令模板。有关控制 I/O 信号的指令的详细信
息,请参阅
要添加设置 I/O 信号的 RAPID 指令,请执行以下步骤:
1. 将您想要添加指令的系统同步至虚拟控制器。请参阅
2. 在编程模式下,选择要编辑的模块并右键单击,然后单击 编辑程序。
转换为圆弧运动 第 351 页
Online
中的 RAPID 编辑器创建,也可在 RobotStudio 中直接创
RAPID reference manual
。
。
3 如何进行机器人编程
3.7. RAPID 指令
续前页
同步 第 109 页
。
3. 在程序编辑器中,添加用于设置信号的指令。
4. 添加完指令之后,重新使虚拟控制器中的任务和路径与工作站同步。
使用设置 I/O 信号的交叉连接和组
您也可以创建交叉连接和信号组,以便可以通过一个信号设置其它多个信号的值。
有关交叉连接和信号组的详细信息,请参阅
要使一个信号可以设置多个其它信号,请执行以下步骤:
1. 申请写访问权限,并在配置编辑器中打开配置主题的 I/O,为要创建的交叉连接
指令模板
指令模板包含一组预先定义的变元值,可以在使用模板创建指令时使用。在虚拟控
制器上运行的系统中,可以为所有指令创建模板。要查看哪些指令可用及其变元的
作用,请参阅适于所用 RobotWare 版本的 “RAPID 参考手册”,以及软件选项手册
中的相关参考章节 (如果已在系统上安装软件选项)。
移动指令模板
令模板。
过程模板
动指令定义)。
要新建移动指令模板,请首先为某个过程新建一个过程模板。而该过程使用要为其
创建模板的类型移动指令。如果不存在这种过程,必须首先新建一个过程定义。
© Copyright 2008-2010 ABB. 保留所有权利。
如果要创建模板的指令类型不存在
创建指令说明时,由于可用指令类型从系统读取,虚拟控制器必须处于运行状态。
和组添加配置实例。
通常属于
是
过程定义
System parameters reference manual
过程模板
的实例,过程模板定义了过程可能用到的移动指令类型 (移
。过程模板包含过程可能用到的每类移动指令的指
移动指令定义
,必须首先对其进行创建。
。
方法 描述
使用移动指令模板创建过
程模板 第 94 页
移动指令通常与过程相关。
下一页继续
933HAC032104-010 修订 : C
Page 94

3 如何进行机器人编程
3.7. RAPID 指令
续前页
方法 描述
指令模板管理器
创建移动指令说明 第95 页
编辑指令模板 第 95 页
创建过程定义 第 95 页
创建动作指令模板 第95 页
创建动作指令说明 第96 页
要为树视图中不存在的其它指令创建模板,必须首先创建指令
说明。该指令说明可以定义指令应有的变元。
XXX
XXX
XXX
要为树视图中不存在的其它指令创建模板,必须首先创建指令
说明。该指令说明可以定义指令应有的变元。
模板可以在下面四个层级导入和导出:任务、移动指令说明、动作指令说明和过程
定义。导入和导出模板文件的默认目录是 My Documents/RobotStudio。如果只选择
其它目录,将会使该目录作为默认目录。默认文件格式为 .xml。
执行验证过程时,可以检查重复名称、不完整的过程定义和虚拟控制器等同性。导
入模板文件或重命名或删除节点之后,将会自动执行该过程。
详细操作过程请参阅
指令模板管理器 第 199 页
。
指令模板管理器用来提供对除 RobotStudio 默认之外的指令的支持。
例如,有 RobotWare Dispense 选项的机器人系统内需要与粘合相关的指令如
和
DispC
。您可以使用指令模板管理器手动添加此类指令的指令模板。指令模板还
DispL
可以被导出为 XML 格式的文件并可以重复使用。
指令模板支持下列 RobotWare 选项:
• Cap (Continuous Application Process)
• Disp (Dispense)
• Trigg (Fixed Position Events)
• Spot Pneumatic
• Spot Servo
• Spot Servo Equalizing
• Paint
RobotStudio 提供了预定义的 XML 文件, 可以导入并在有上述的 RobotWare 选项的
控制器系统内使用。这些 XML 文件内既包含有移动指令也有动作指令。
注意!建议在使用 RobotWare Arc 时,同时使用 RobotStudio ArcWelding
PowerPac。
使用移动指令模板创建过程模板
1. 在 基本 选项卡上, 从 任务 下拉列表中选择您想要创建机器人指令模板的任务。
2. 在 创建 菜单上,单击 指令模板管理器 打开指令模板页面。
3. 在页面左侧的 指令模板 树视图上,确保创建模板的移动指令类型存在移动指令
定义,如果不存在的话,请按照
4. 确保存在使用要为其创建模板的移动指令类型的过程定义。如果不存在,请按照
创建过程定义 第 95 页
5. 右击想要为其创建新模板的
创建移动指令说明 第 95 页
中的步骤进行创建。
过程定义
, 并单击 创建过程定义。
中的步骤进行创建。
© Copyright 2008-2010 ABB. 保留所有权利。
下一页继续
3HAC032104-010 修订 : C94
Page 95

创建移动指令说明
3 如何进行机器人编程
3.7. RAPID 指令
续前页
6. 在 创建过程定义 对话框内,使用 ASCII 字符集内的字符输入新模板的名称,并
单击创建。 现已创建带有一组移动指令模板的新过程模板节点。
7. 每次选择一个新的模板,在树视图右侧的变元网格中,设置根据该模板新建指令
时所应用的变元数值。单击该网格底部的 应用更改 完成每个模板的创建。有关
可用变元及其作用的详情, 请参阅
项手册
所述软件选项指令。
要创建指令说明, 请执行下列步骤:
1. 右击 移动指令 节点, 单击 创建移动指令说明 以打开 创建移动指令说明 对话
框。
2. 在 控制器说明 列表中,选择您想要添加说明的指令。 通过 RobotWare 和软件选
项安装在控制器上的所有指令都可用。
3. 在 动作类型 列表中 选择指令的动作类型。
4. 也可以在 信息文本 框内输入对指令的注释。
RAPID 参考手册
内的
普通 RAPID 指令及选
编辑指令模板
创建过程定义
5. 单击 创建,指令说明便显示在树视图中,而其设置信息显示在网格内。
6. 在指令网格内设置 Point Type 值。 如有必要,同时更改其它设置。
7. 更改设置后,单击网格视图底部的 应用更改。
要编辑指令模板, 请执行下列步骤:
1. 在 基本 选项卡上, 从 任务 下拉列表中选择您想要编辑的机器人指令模板的任
务。
2. 在 创建 菜单上,单击 指令模板编辑器。将在工作区域打开指令模板页面。
3. 在页面左侧的 指令模板 树视图上,选择您想要编辑的模板。
4. 在树视图右侧的变元网格中,设置您在根据模板创建新的指令时所应用的变元
值。 单击网格底部的 应用更改 完成操作。
有关可用变元及其作用的详情,请参阅“RAPID 参考手册” 内的 “ 普通 RAPID
指令及选项手册” 所述软件选项指令。
要创建过程定义,请执行以下步骤 :
1. 确保存在要为其创建模板的移动指令类型的移动指令定义。如果不存在,请按照
创建移动指令中的步骤进行创建。
2. 右击 过程定义 节点,并单击 创建过程定义。 将打开 创建过程定义 对话框。
3. 在 创建过程定义 对话框内输入过程定义的名称,及第一个过程模板的名称,然
后选择要使用的移动指令类型。 单击创建完成操作。
© Copyright 2008-2010 ABB. 保留所有权利。
创建动作指令模板
要创建动作指令模板, 请执行以下步骤:
1. 在 基本 选项卡上, 从 任务 下拉列表中选择您想要创建指令模板的机器人任务。
2. 在 基本 选项卡上,单击 指令模板管理器。
下一页继续
953HAC032104-010 修订 : C
Page 96
3 如何进行机器人编程
3.7. RAPID 指令
续前页
3. 在该页面左侧的 指令模板 树视图中,右键单击要新建模板的指令说明 (与
4. 在 创建动作指令模板 对话框输入新模板的名称,并单击 创建。 新模板现已创建
5. 选择新模板,并在树视图右侧的变元网格内设置您在根据模板创建新指令时所应
6. 在 创建动作指令模板 对话框输入新模板的名称,并单击 创建。 新模板现已创建
7. 选择新模板,并在树视图右侧的变元网格内设置您在根据模板创建新指令时所应
“RAPID 参考手册”中描述的指令相符),然后单击 创建动作指令模板。
如果树视图中不存在指令描述,请遵照
建指令描述。
在其所属的指令描述节点下。
用的变元值。 单击网格底部的 应用更改 完成操作。
有关可用变元及其作用的详情,请参阅 “RAPID 参考手册” 内的 “ 普通 RAPID
指令及选项手册” 所述软件选项指令。
在其所属的指令描述节点下。
用的变元值。 单击网格底部的 应用更改 完成操作。
有关可用变元及其作用的详情,请参阅 “RAPID 参考手册” 内的 “ 普通 RAPID
指令及选项手册” 所述软件选项指令。
创建动作指令说明 第 96 页
所述步骤创
创建动作指令说明
执行以下步骤创建动作指令描述:
1. 右击 动作指令 节点, 然后单击 创建动作指令说明 和 创建指令说明 对话框。
2. 在 控制器说明 列表中,选择您想要添加说明的指令。 通过 RobotWare 和软件选
项安装在控制器上的所有指令都可用。
3. 您也可以在 信息文本 (可选) 框中输入对该指令的注释。
4. 单击 创建。指令说明将显示在树视图中,其设置显示在页面右侧的网格中。
更改设置后 (如必要),单击网格视图底部的 应用更改。
5. 继续为指令说明创建模板,如
创建动作指令模板 第 95 页
中所述。
© Copyright 2008-2010 ABB. 保留所有权利。
3HAC032104-010 修订 : C96
Page 97

3.8. 测试位置和动作
概述
RobotStudio 提供了几项测试机器人如何到达或移动到目标点的功能,可以帮助您在
创建工作站和编程时找到最优化的布局。
下文简要介绍了用来测试可达性和动作的相关功能。
测试可达性
测试可达性功能通过改变所选目标点框架在图形窗口中的颜色以显示机器人是否能
到达该点完成相应的动作指令。 可达目标点框架被标识为绿色,不可达为红色,目
标点位置可达但方向不可达为黄色。
此项功能可以同时测试多个目标点的可达性,因此在创建工作站时非常有帮助。 详
细操作过程请参阅
跳转到目标点
“跳转到目标点” 可以测试机器人是否可以伸展到特定位置。此项功能在构建工作
站时很有用的:通过在工件上的关键位置创建目标并将机器人跳转至这些目标,可
以提前获知项目的定位是否正确。详细信息请参阅
可达性测试 第 348 页
3 如何进行机器人编程
3.8. 测试位置和动作
.
跳转到目标点 第 359 页
。
查看目标点处机器人
查看目标点处工具
执行移动指令
沿路径移动
移至姿态
© Copyright 2008-2010 ABB. 保留所有权利。
启动 “ 查看目标处机器人” 后,如果选定一个机器人,将会使用工具将该机器人定
位到目标点处。如果多个机器人轴配置有可能伸展到目标,在跳转至目标点之前,
机器人将使用最接近该配置的一个配置。详情请参阅
“ 查看目标点处工具” 可以在目标点处显示工具,而不检查机器人是否可以到达该
目标点。由于目标点的方向会影响可达性和过程性能,所以,此测试对构建工作站
和机器人编程很有用的。详细信息请参阅
“ 执行移动指令” 可以测试机器人是否可以伸展到具有编程动作属性的特定位置。
此项功能对测试编程期间的动作是很有用的。详细信息请参阅
页
。
“ 沿路径移动” 可以执行路径中的所有移动指令。因此,它是比 “ 执行” 移动指
令更为完整的测试,但不如全面仿真完整,因为它忽略了移动指令之外的 RAPID 代
码。详细信息请参阅
移至姿态就是在不使用虚拟控制器的情况下按预定时间将机械装置移至预定接点值。
必须仿真外部设备 (如夹具或传送带)的运动时,此项功能是很有用的。详细信息
请参阅
移至姿态 第 376 页
沿路径运动 第 375 页
。
查看目标点处工具 第 390 页
。
查看机器人目标 第 389 页
。
执行移动指令 第 354
。
下一页继续
973HAC032104-010 修订 : C
Page 98

3 如何进行机器人编程
3.8. 测试位置和动作
续前页
仿真程序
仿真程序是指在虚拟控制器上运行程序,如同在真实的控制器上运行一样。它是最
完整的测试。借助该测试,可以了解机器人如何通过事件和 I/O 信号与外部设备进
行交互。详细信息请参阅
改善可达性
如果机器人不能到达目标点或您对机器人动作不满意,请尝试执行下列操作以改善
可达性:
仿真设定 第 267 页
请将 ConfL 或 ConfJ 设置为 off,以便使机器人可使用新配置达到目标。
改变目标方向。
更改机器人或工件的位置。
使用带有跟踪外轴的系统增加机器人的范围。
使用带有定位器外轴的系统,使不同的目标处于不同的工件位置。
。
© Copyright 2008-2010 ABB. 保留所有权利。
3HAC032104-010 修订 : C98
Page 99

3.9 MultiMove 系统编程
3.9.1. 关于 MultiMove 系统编程
关于 MultiMove
借助 MultiMove 功能,可以创建和优化用于 MultiMove 系统的程序。在 MultiMove
系统中,一个机器人或定位机握住工件,而其它机器人在工件上操作。下面概述了
使用 RobotStudio 对 MulitMove 系统进行编程时所需的主要工作流程,请参考本节
后文中提供的详细说明。
操作前提
如要使用 MultiMove 功能,则必须满足以下条件:
• 运行 MultiMove 系统的虚拟控制器已在 RobotStudio 中启动。如何创建
MutliMove 系统的示例,请参阅
页
。
• 系统所使用的所有坐标系和工具。
3 如何进行机器人编程
3.9.1. 关于 MultiMove 系统编程
两个协调工作机器人的 MultiMove 系统 第 144
工作流程
• 工具沿其移动的路径。 此路径必须在属于工具机器人且连接至工件机器人上
的工作对象内创建。 如果在启动 MultiMove 功能之前,还未执行次操作,向
导将指引完成连接工作对象。
有关 RAPID 程序和 RobotWare 系统内的 MultiMove 的详细信息,请参阅
application manual
。
MultiMove
这是使用 MultiMove 功能创建 MutliMove 程序的典型工作流程:
操作 描述
设置 MultiMove 选择要在程序中使用的机器人和路径,请参阅
。
页
测试 MultiMove 执行沿路径的动作指令,请参阅
调整动作行为 调整动作行为,如 TCP 动作的系统规定参数和容差,请参阅
行为 第 103 页
创建程序 为机器人生成任务, 请参阅
。
测试 MultiMove 第 102 页
创建路径 第 105 页
创建 MultiMove 第 101
。
。
调整动作
© Copyright 2008-2010 ABB. 保留所有权利。
下一页继续
993HAC032104-010 修订 : C
Page 100

3 如何进行机器人编程
3.9.1. 关于 MultiMove 系统编程
续前页
附加操作
除了使用计算和创建优化 MulitMove 路径的功能之外,还可结合使用 RobotStudio
中的常见编程工具和专门用于 MultiMove 编程的一组工具对 MulitMove 进行手动编
程。
下文概述了手动编程 MulitMove 的主要操作。并非需要执行所有的操作,但是,这
些操作的执行顺序取决于工作站和目标的内容。
操作 描述
创建任务列表
Syncidents
添加和更新 ID
变元至要同步
的指令
添加和调整同
步指令至路径
示教
MultiMove 指
令
此数据指定了要互相同步的任务和路径。请分别参阅
第 194 页 和“创建 SyncIdent”工具 第 195 页
要向指令中添加 ID,可以使用以下方法之一:
“重新计算 ID”工具 第 194 页
使用
使用
“将路径转换为 MultiMove 路径”工具 第 194 页
指令添加 ID。
将 SyncMoveon/Off 或 WaitSyncTask 指令分别添加到路径中,以便同
步并设置其任务列表和 Symcident 参数。请参阅
您也可以将所有机器人微动控制到所需的位置,然后将指令调整到新的同步
路径。请参阅
MultiTeach 选项卡 第 191 页
为路径中已经同步的指令添加 ID。
“创建任务列表”工具
。
向路径中尚未同步的
创建动作指令 第 198 页
。
.
© Copyright 2008-2010 ABB. 保留所有权利。
3HAC032104-010 修订 : C100
 Loading...
Loading...